Matteo Luca Ruggiero
DISAT@Politecnico di Torino
Fisica 1
Anno Accademico 2011/2012
(2 Aprile - 13 Aprile 2012)
1 ESERCIZI SVOLTI AD ESERCITAZIONE
Sintesi
1
Abbiamo studiato la cinematica dei sistemi in
moto relativo, calcolando esplicitamente le leggi
di trasformazione della velocità (ando particolare enfasi al moto di un corpo rigido)e accelerazione. Questo ci ha permesso di studiare
la dinamica relativa, introducendo il concetto di forze inerziali (forza di trascinamento e di
Coriolis). Abbiamo studiato la geometria delle masse, introducendo la definizione di centro
di massa e momento di inerzia di una distribuzione discreta e continua di masse. Infine,
abbiamo introdotto la definizione di quantità
di moto, momento delle forze, momento
angolare.
Esercizi svolti ad Esercitazione
Esercizio 4.1
Figura 1: Esercizio 4.1
Un corpo di massa m1 puo’ scorrere (senza attrito) su una superficie orizzontale, in presenza del campo gravitazionale terrestre g. Due fili inestensibili
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
B [email protected] Pagina 2
1 ESERCIZI SVOLTI AD ESERCITAZIONE
e di massa trascurabile lo collegano,tramite due carrucole fisse e lisce, con
due corpi di massa m2 e m3 .
Calcolare l’accelerazione del corpo di massa m1 supponendo che sia m1 = m2
e m3 = 5m2 .
Soluzione Commentata. In figura 2 sono riportate le forza agenti sui tre
corpi, ciò che ci permette di scrivere le equazioni del moto
m1 a1 = m1 g + N + T1 + T′1
m2 a2 = m2 g + T2
m3 a3 = m3 g + T3
(1)
(2)
(3)
In particolare, sulla massa m1 agiscono la forza peso, la reazione vincolare
del piano, e le tensioni delle funi, viceversa sulle masse m2 e m3 agiscono solo
la forza peso e le tensioni delle funi.
Figura 2: Esercizio 4.1, Forze Agenti
Scelti gli assi come in figura, osserviamo che la massa m1 può muoverso
solo parallelamente all’asse x, mentre le altre due (supponendo che il filo
resti sempre teso, cosa che facciamo senz’altro) possono muoversi solo lungo
l’asse y. Questo ci permette di proiettare le equazioni (1-3) lungo gli assi,
per ottenere
m1 a1x = T1′ − T1
m1 a1y = −m1 g + N
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
(4)
(5)
B [email protected] Pagina 3
1 ESERCIZI SVOLTI AD ESERCITAZIONE
m2 a2x = 0
m2 a2y = −m2 g + T2
(6)
(7)
m3 a3x = 0
m3 a3y = −m3 g + T3
(8)
(9)
Imponendo che a1y = a2x = a3x = 0, otteniamo
N
m1 a1x
m2 a2y
m3 a3y
=
=
=
=
m1 g
T1′ − T1
−m2 g + T2
−m3 g + T3
(10)
(11)
(12)
(13)
Il sistema di 3 equazioni (11-13) contiene le 7 incognite a1x , a2y , a3y , T1′ , T1 , T2 , T3 .
Esso si può risolvere osservando che sussistono le seguenti relazioni T1 = T2 ,
T3 = T1′ , perché le fune sono ideali. Inoltre, osserviamo che se la massa m1 si
muove verso destra di un tratto infintesimo dx1 , le altre due masse masse si
spostano di tratti di lunghezza uguale (perché le funi sono rigide), secondo
2
2
2
le relazioni: dy2 = dx1 = −dy3 . Questo implica ddty22 = ddtx21 = − ddty23 , ovvero a2y = a1x = −a3y . Andando a sostituire nel sistema (11-13), otteniamo
(ponendo a1x = a)
m1 a = T3 − T2
m2 a = −m2 g + T2
m3 a = m3 g − T3
(14)
(15)
(16)
(2m3 +m1 )g
3 −m2 )g
1 +2m2 )g
Da cui a = m(m
, T2 = m2 m
, T3 = m3 m(m1 +m
. Con i valori
1 +m2 +m3
1 +m2 +m3
2 +m3
11
15
4
del problema a = 7 g, T2 = 7 m1 g, T3 = 7 m1 g.
Esercizio 4.2 (da S. Longhi, M. Nisoli, R. Osellame, S.
Stagira “Fisica Sperimentale”)
Due masse M e m, con m > M sono collegate, e sono libere di muoversi
su un piano inclinato avente angolo di inclinazione α. Il piano inclinato ha
coefficienti di attrito µS e µD . Si ponga m=10 Kg, M=5 Kg, α = π/6 e
µS = 0.5, µD = 0.3.
Si studi il sistema, determinando se è in equilibrio e, in caso contrario, si
studi il moto dei due corpi.
Soluzione: Il sistema non è in equilibrio, e si muove in modo tale che la
α−µd M cos α)
massa m scende, con un’accelerazione a = g(m−M sinm+M
≃ 4 m/s2 .
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
B [email protected] Pagina 4
1 ESERCIZI SVOLTI AD ESERCITAZIONE
Figura 3: Esercizio 4.2
Esercizio 4.3
Figura 4: Esercizio 4.4
Due corpi di identica massa m si muovono lungo un piano inclinato, avente
angolo di inclinazione α. Fra il corpo A e il piano c’è attrito, con coefficiente
di attrito dinamico µd , mentre non agisce alcuna forza di attrito sul corpo
B. I due corpi sono collegati da una fune ideale, che resta sempre tesa.
(1) Calcolare la tensione nella fune (2) Calcolare per quale valore di α i due
corpi si muovono a velocità costante.
Soluzione: (1) T = m µ2d g cos α. (2) Deve essere tan α = µ2d .
Esercizio 4.4 (da Focardi, Massa, Uguzzoni, “Fisica Generale”)
Un piccolo corpo di massa m viene posto sul piatto di un giradischi, a distanza
pari a d = 12 cm dall’asse di rotazione. Si osserva che esso resta fermo sul
piatto se il piatto ruota a 33 giri al minuto, mentre scivola via se il piatto
ruota a 45 giri al minuto.
Che cosa possiamo dedurre sul coefficiente di attrito fra il piatto del giradischi
e l’oggetto?
Soluzione: Indicando con ω33 , ω45 le velocità angolari quando il disco gira,
2 d
ω45
ω2 d
≤
µ
, ovvero 0.14 ≤ µs <
rispettivamente, a 33 e 45 giri, otteniamo 33
s
g
g
0.27.
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
B [email protected] Pagina 5
1 ESERCIZI SVOLTI AD ESERCITAZIONE
Esercizio 4.5 (da Focardi, Massa, Uguzzoni, “Fisica Generale”)
Determinare la massima velocità con cui un’automobile può percorre una
curva senza slittare √
Soluzione. vmax = µs gd, essendo d il raggio di curvatura e µs il coefficiente di attrito statico.
Determinare di quanto deve essere sopraelevata una strada per permettere
ad una automobile di percorrerla senza slittare alla velocità v0 , indipendentemente dalle condizioni di strada e pneumatici (trascurando quindi l’attrito)
v2
Soluzione. Deve essere tan α = dg
, essendo d il raggio di curvatura.
Esercizio 4.6
Figura 5: Esercizio 4.6
Il dispositivo in figura 5 è costituito da due corpi di massa m1 , m2 collegati
da una fune di ideale, la quale si avvolge su una puleggia liscia e di massa
trascurabile: tale dispositivo prende il nome di macchina di Atwood. Si
ponga m1 = 1 kg, m2 = 4 kg.
(1) Calcolare l’accelerazione del sistema. (2) Calcolare la tensione nella fune
e la reazione del gancio che sostiene la puleggia.
m2
2 −m1
Soluzione: (1) a = m
g, T = mm11+m
g, R = 2T , essendo T la tensione
m1 +m2
2
nella fune e R la reazione che il gancio esercita sulla puleggia.
Esercizio 4.7
Una pallina di massa m si muove lungo un asse orizzontale liscio; essa è
collegata tramite due molle a due punti P1 , P2 , tali che P1 P2 = 4l0 ; le due
molle hanno medesima lunghezza a riposo l0 , e costanti elastiche k1 , k2 .
Calcolare la posizione di equilibrio
Se la pallina viene spostata di un tratto l dalla posizione di equilibrio e
lasciata libera di muoversi, partendo con velocità nulla:
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
B [email protected] Pagina 6
1 ESERCIZI SVOLTI AD ESERCITAZIONE
Figura 6: Esercizio 4.7
(1) Studiare il moto della pallina (2) Calcolare la velocità della pallina quando
passa per la posizione di equilibrio.
Soluzione Commentata. Sulla pallina agiscono le forze descritte in figura
7, ovvero la forza peso mg, la reazione vincolare N del piano, perpendicolare
ad esso, e le due forze elastiche F1 , F2 .
Figura 7: Esercizio 4.7: forze agenti.
Possiamo pertanto scrivere la legge del moto
ma = mg + N + F1 + F2
(17)
Figura 8: Esercizio 4.7: scelta degli assi cartesiani
Scegliami gli assi x, y come in figura 8, di conseguenza la componente
dell’equazione (17) lungo l’asse y diventa
mÿ = N − mg
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
(18)
B [email protected] Pagina 7
1 ESERCIZI SVOLTI AD ESERCITAZIONE
da cui, non essendoci moto nella direzione y deduciamo N = mg. Per scrivere
le componenti della forza elastica lungo la direzione del moto, scegliamo
l’asse x come in figura, con origine nel punto P1 . Se la posizione della massa
m è individuata dalla coordinata x, la molla di sinistra, avente costante
elastica k1 , eserciterà una forza F1 = −k (x − l0 ), mentre la molla di destra,
avente costante elastica k2 , eserciterà una forza F2 = k2 (4l − x − l). Di
conseguenza, nella direzione del moto scriviamo l’equazione differenziale
mẍ = −k (x − l0 ) + k2 (4l − x − l) .
(19)
Per ottenere la posizione di equilibrio basta imporre ẍ = 0, da cui si ricava
xeq =
k1 l0 + 3k2 l0
k1 + k2
(20)
(1) Osserviamo che l’equazione del moto (19), tenendo conto della definizione
della posizione di equilibrio (20) si può scrivere nella forma
mẍ = − (k1 + k2 ) (x − xeq ) ,
(21)
mz̈ + kz = 0,
(22)
.
ovvero, ponendo z = x−xeq , k = k1 +k2 , il moto è armonico per la coordinata
z, sotto l’effetto della costante elastica efficace k:
la cui soluzione è
z(t) = A sin (ωt + ϕ) ,
p
con ω = k/m. Per la velocità otteniamo
ż(t) = ωA cos (ωt + ϕ)
(23)
(24)
Imponendo le condizioni iniziali z(t = 0) = x(t = 0) − xeq = l, e ż(t = 0) =
ẋ(t = 0), si ottiene A = l, ϕ = π/2, per cui
z(t) = l sin (ωt + π/2)
(25)
ż(t) = lω cos (ωt + π/2)
(26)
(2) Nella posizione di equilibrio, si ha z = 0: la prima volta che l’argomento
della funzione seno in (25) si annulla è quando ωt + π/2 = π. Andando a
sostituire nell’espressione della velocità (26), si ha infine ż = −lω.
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
B [email protected] Pagina 8
3 QUESITI PROPOSTI
2
Esercizi Proposti
2.1
Esercizio P.4.1
Un ascensore scende con un’accelerazione pari ad un quinto dell’accelerazione di gravità. Sia h l’altezza dell’ascensore. Una pallina viene lanciata dal
pavimento dell’ascensore verso l’alto con velocità di modulo v, misurata relativamente all’ascensore.
(1) Determinare le condizioni che devono sussistere affinché la pallina raggiunga il soffitto. (2) Supponendo che la pallina raggiunga il soffitto, si calcoli
il tempo impiegato a raggiungere il soffitto e a tornare poi a terra.
2.2
Esercizio P.4.2
Calcolare il momento di inerzia di una guscio sferico di raggio R e massa M,
e di una sfera di raggio R e massa M.
3
Quesiti Proposti
4.1 Una bilancia a bracci è in equilibrio con due pesini m1 e m2 , in un
sistema di riferimento inerziale.
1. La bilancia continua ad essere in equilibrio in un ascensore che sale
verso l’alto, con accelerazione costante.
2. La bilancia continua non è più in equilibrio in un ascensore che sale
verso l’alto, con accelerazione costante
3. La bilancia continua non è più in equilibrio in un ascensore che scende
verso il basso, con accelerazione costante
4. La bilancia continua non è più in equilibrio sulla Luna
4.2
Si considerino 4 corpi puntiformi di massa m ai vertici di un
quadrato di lato L. Il momento di inerzia rispetto al punto di incontro delle
diagonali del quadrato vale
1. I = mL2
2. I = 2mL2
√
3. I = m 2L2
4. I = mL2 /2
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
B [email protected] Pagina 9
3 QUESITI PROPOSTI
1
2
3
4
Figura 9: Quesito 4.4
4.3 Si consideri una giostra, costituita da una piattaforma che gira a
velocità angolare costante.
1. Un bambino che cammina dal bordo verso il centro, è soggetto a forze
inerziali dirette radialmente.
2. Un bambino che cammina dal bordo verso il centro, è può restare
in equilibrio perché la forza d’attrito radiale equilibra tutte le forze
inerziali.
3. Un bambino che cammina dal centro verso il bordo, è soggetto a forze
inerziali dirette radialmente.
4. La risultante delle forze inerziali ha una componente nel piano, ortogonale alla direzione del moto del bambino
4.4 Una palla da bowling cade accidentalmente fuori dallo scompartimento carico di un aereo che vola in direzione orizzontale con velocità costante. Rispetto ad un passeggero dell’aereo, quale dei percorsi 1 – 4 seguirà
la palla da bowling immediatamente dopo aver lasciato l’aereo?
1. 1
2. 2
3. 3
4. 4
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
B [email protected] 10
4 SOLUZIONI DEGLI ESERCIZI PROPOSTI
4.5
Consideriamo un disco di massa M e raggio R.
1. Il suo centro di massa coincide sempre con il centro del disco
2. Il suo centro di massa coincide con il centro del disco se lo spessore è
trascurabile
3. Se il disco non è omogeneo, il centro di massa può non coincidere con
il centro del disco
4. Se il disco non è omogeneo, il centro di massa sicuramente non coincide
con il centro del disco
4
Soluzioni degli Esercizi Proposti
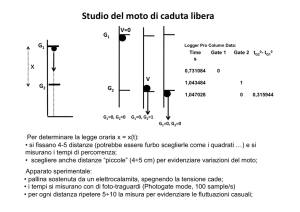
Esercizio P.3.1
Un grave di massa m viene lasciato cadere, con velocita’ iniziale nulla, sotto
l’azione della forza peso da una quota h.
Calcolare il tempo di caduta e la velocita’ di impatto col terreno.
Considerare poi il caso in cui si tenga conto anche della resistenza dell’aria,
che supponiamo essere proporzionale alla velocita’, con costante di proporzionalita’ k.
Risolvere le equazioni del moto in questo caso, e confrontare le soluzioni ottenute con quelle che si ottengono in assenza di attrito dell’aria
Soluzione Commentata.
Figura 10:
Si tratta di risolvere le equazioni del moto per un moto unidimensionale.
Nel sistema di riferimento solidale col suolo, scegliamo un asse x orientato
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
B [email protected] 11
4 SOLUZIONI DEGLI ESERCIZI PROPOSTI
verticalmente (vedere figura 10). L’equazione del moto, ossia la seconda legge
della dinamica, si scrive
ma = mg
(27)
Proiettandola nella direzione dell’asse x, si ottiene
mẍ = mg ⇔ ẍ = g
(28)
Nel caso del problema che stiamo studiando, scegliendo t0 = 0 e imponendo
x(0) = x0 = 0 v(0) = v0 = 0
l’equazione del moto risulta essere, semplicemente:
1
x(t) = gt2
2
(29)
e la corrispondente legge di variazione della velocita’
v(t) = gt
(30)
Il tempo di caduta t̄ si ottiene imponendo x = h, e dalla (29) si ricava
s
2h
t̄ =
g
e la corrispondente velocita’ risulta
v(t̄) =
p
2gh
Nel caso in cui si tenga conto della resistenza dell’aria, l’equazione del moto
si scrive nella forma
ma = mg + Fr
(31)
e proiettando lungo l’asse x, si ha:
mẍ = mg − k ẋ
(32)
Anche questa equazione si puo’ integrare per separazione delle variabili (o
usando il metodo generale descritto nell’esercizio precedente). Ad esempio,
ponendo ẋ = v, ẍ = v̇ = dv/dt, dalla (32) si ha
v̇ = g −
Fisica 1
m Home Page di ML Ruggiero
dv
k
v⇔
= dt
k
m
g−m
v
T 0110907329
(33)
B [email protected] 12
4 SOLUZIONI DEGLI ESERCIZI PROPOSTI
e integrando
Z
da cui
ln
v
v0
dv ′
=
k ′
v
g−m
Z
t
dt′
t0
k
v(t)
g−m
k
= − (t − t0 )
k
m
g − m v0
Essendo nel nostro caso, t0 = 0, v0 = 0, si ottiene
ln
g−
k
v(t)
m
g
=−
k
t
m
o, piu’ esplicitamente
k
m −t m
v(t) = g 1 − e
(34)
k
Procedendo ad una successiva integrazione, ponendo v = dx/dt, si ottiene
la legge oraria
k
2
−t m
x(t) = τ gt + τ g e
−1
(35)
dove abbiamo introdotto τ = m/k. Notiamo che per t → ∞, la (35) si riduce
a
m
(36)
x(t) = gt
k
Per t → 0, invece, si ottiene
1
x(t) = gt2
2
(37)
dove si e’ sviluppato l’esponenziale
k
e−t m ≃ 1 − t
1 k2
k
+ t2 2
m 2 m
, detta velocita’
La (36) corrisponde ad un moto con velocita’ costante vl = mg
k
limite, che corrisponde a ẍ = 0 nella (32).
La (37), corrisponde al caso di moto incipiente: il moto avviene come se non
ci fosse la resistenza dell’aria, i cui effetti si fanno sentire solo dopo un tempo
caratteristico τ = m/k.
Esercizio P.3.2
Un punto materiale, di massa m, puo’ scorrere su una guida orizzontale
rettilinea (Figura 11), avente coefficiente di attrito dinamico µD . E’ soggetto
a una forza di tipo elastico, della forma F = −kr, dove r e’ la distanza
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
B [email protected] 13
4 SOLUZIONI DEGLI ESERCIZI PROPOSTI
Figura 11: Esercizio P.3.2
del punto materiale mobile da un punto fisso O, posto a distanza d dalla
guida. A t = 0, il punto materiale e’ fermo a distanza l da C, nel punto P0 ;
viene quindi lasciato libero di muoversi (lungo la guida), e raggiunge dopo
un tempo τ il punto C, per poi fermarsi in B.
Calcolare (1) la distanza dal punto C del punto in cui l’accelerazione si
annulla; (2) il tempo τ ; (3) la distanza del punto B dal punto C; (4) il
valore minimo del coefficiente di attrito statico affinche’ il punto materiale
resti fermo in B. (Dati Numerici: d = 20cm, m = 50Kg, µD = 0.01, k =
50N/m, l = 50cm.)
In figura 11, a sinistra, e’ descritta la situazione geometrica del problema,
con i dati che si desumono dalla traccia. E’ conveniente, a questo punto, introdurre un sistema di riferimento nel quale studieremo la dinamica del punto
materiale. Scegliamo un riferimento solidale con la guida o, e’ lo stesso, con
il punto O: cio’ vuol dire che la guida e’ sempre ferma nel nostro riferimento
fisico. E’ opportuno introdurre una parametrizzazione del riferimento fisico
scelto, ossia delle coordinate che identificano i suoi punti: scegliamo a questo fine un sistema di coordinate cartesiane ortogonali xy, con l’origine in O
(vedere figura 11, a destra).
Scriviamo l’equazione del moto, ovvero la II equazione di Newton facendo
riferimento alla figura 12, nella quale sono riportate le forze che agiscono sul
punto materiale, ossia la forza peso, la forza elastica, la reazione normale del
vincolo e la forza di attrito:
ma = mg + Fe + T + Fa
(38)
Le componenti di ciascuna forza lungo gli assi x, y sono:
mg ⇒ (0, −mg)
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
B [email protected] 14
4 SOLUZIONI DEGLI ESERCIZI PROPOSTI
Figura 12: Esercizio P.3.2: forze agenti
Fe = −kr ⇒ (−kx, −ky)
T ⇒ (0, T )
Fa ⇒ (Fa , 0)
Proiettiamo quindi la (38) sugli assi cartesiani, per ottenere
mẍ = −kx + Fa
mÿ = −mg − kd + T
(39)
(40)
Nella (39) Fa e’ il modulo della forza, il cui verso e’ positivo (ovvero
concorde con il verso dell’asse x) in quanto la forza di attrito si oppone al
moto e, nella fase che a noi interessa, ovvero il moto da P0 a B, questo
moto avviene nella direzione negativa dell’asse x. Se poi volessimo studiare
la fase successiva all’inversione del moto, la forza di attrito sarebbe orientata
in verso opposto.
La presenza del vincolo impone che il moto abbia un unico grado di
liberta’, descritto dalla coordinata lagrangiana x; in particolare, dal fatto
che y = cost = d → ÿ = 0, si ricava
T = mg + kd
(41)
ossia il valore (costante) della componente normale della reazione vincolare.
Dato che, durante il moto, la componente tangenziale (la forza di attrito) e’
legata alla componente normale dalla relazione
Fa
= µD
T
si ottiene
Fa = µD T = µD (mg + kd)
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
B [email protected] 15
4 SOLUZIONI DEGLI ESERCIZI PROPOSTI
e andando a sostituire nella (39), la componente x dell’equazione del moto si
scrive nella forma
mẍ = −kx + µD (mg + kd) ⇔ ẍ + ω 2 x = µD (g + ω 2 d)
(42)
dove si e’ posto ω 2 = k/m.
La (42) e’ un’equazione differenziale lineare del secondo ordine a coefficienti costanti, per la funzione x(t). La soluzione generale dell’equazione
differenziale (42) si scrive nella forma
x(t) = x1 (t) + x0 (t)
dove x0 (t) e’ una soluzione dell’equazione omogena associata
ẍ + ω 2 x = 0
e x1 (t) e’ una soluzione particolare della (42). In questo caso, essendo il secondo membro costante, possiamo cercare una soluzione particolare costante:
x1 = α
ẍ1 = 0
Andando a sostituire x1 nella (42) si ottiene
ω 2 α = µD (g + ω 2 d)
da cui si ricava α = (µD (g + ω 2 d))/ω 2.
La soluzione dell’equazione differenziale omogenea
ẍ + ω 2 x = 0
ha la forma
x0 (t) = A cos (ωt + ϕ)
(43)
e dipende dalle due costanti arbitrarie A, ϕ. La soluzione dell’equazione del
moto (42) si scrive, allora nella forma
x(t) = A cos (ωt + ϕ) + µD
g + ω2d
ω2
(44)
e le costanti abritrarie si fissano imponendo le condizioni iniziali
x(0) = l ẋ(0) = 0
Da cui si ricava
A = l − µD
Fisica 1
m Home Page di ML Ruggiero
g + ω2d
;
ω2
T 0110907329
ϕ=0
B [email protected] 16
4 SOLUZIONI DEGLI ESERCIZI PROPOSTI
Quindi, la legge oraria del moto del punto materiale verso B e’ data da
g + ω2d
g + ω2d
cos ωt + µD
x(t) =
l − µD
ω2
ω2
y(t) = d
(45)
Per rispondere alla domanda 1, imponiamo l’equilibrio, ossia ẍ = 0 e dalla
(39) si ricava Fa = kx̄, quindi la coordinate del punto in cui l’accelerazione
e’ nulla e’
mg + kd
x̄ = µD
= 10cm
k
Per rispondere alla domanda 2, utilizziamo il fatto che in C x = 0. Dalla
legge oraria (45) si ottiene
cos ωτ = −
x̄
l − x̄
da cui si ricava τ ≃ 1.82s. La coordinata del punto B (domanda 3) si ottiene
imponendo che sia ẋ(t) = 0, da cui
ẋ(t) = −ω(l − x̄) sin ωt
da cui ẋ(t) = 0 → ωt = π, avendo scartato la soluzione t = 0. Ponendo ora
ωt = π nell’equazione del moto (45) si ottiene
xB = x(t = π/ω) ⇒ xB = 2x̄ − l = −30cm
Affinche’ il punto materiale resti fermo in B, la forza di attrito statico deve
compensare la forza di richiamo elastica. Essendo il valore massimo che puo’
assumore la forza di attrito statico pari a Fa ≤ µS T , si ottiene
Fa = k|xB | Fa ≤ µS T ⇒ µS ≥
k|xB |
≃ 3 ∗ 10−2
T
dove T e’ stato ricavato in precedenza dalla (40).
Esercizio P.3.3
Un punto materiale di massa m e’ posto su un piano orizzontale ed e’ legato ad un filo inestensibile di lunghezza l, carico di rottura FR e massa
trascurabile; l’altro estremo del filo e’ fissato al punto O della superficie di
un cilindro fisso, su cui il filo e’ libero di avvolgersi. Il raggio del cilindro e’
R. Nell’istante iniziale, il filo giace lungo l’asse x (vedere figura 13) e viene
impressa al punto materiale la velocità v0 , ortogonale al filo.
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
B [email protected] 17
4 SOLUZIONI DEGLI ESERCIZI PROPOSTI
Figura 13: Esercizio P.3.3
(1)Dimostrare che il modulo della velocita’ del punto materiale e’ costante.
(2) Calcolare, inoltre, l’angolo θR di cui e’ ruotato il punto materiale nell’istante tR di rottura del filo.
Soluzione Commentata. Nell’istante inziale, il filo giace lungo l’asse x
(vedere figura 13) e viene impressa al punto materiale la velocita’ v0 , ortogonale al filo. Dimostrare che il modulo della velocita’ del punto materiale e’
costante. Calcolare, inoltre, l’angolo θR di cui e’ ruotato il punto materiale
nell’istante tR di rottura del filo.
Scegliamo un sistema di riferimento solidale con il disco. In questo esercizio vedremo come la scelta delle coordinate in questo riferimento sia cruciale
nella semplificazione della descrizione del moto. L’equazione del moto si
scrive tenendo presente che l’unica forza che agisce sul punto materiale e’ la
tensione del filo:
ma = T
(46)
Proiettiamo l’equazione (46) sui versori intrinseci tangente τ̂ e normale
n̂ (vedere figura 14), la cui direzione varia in ogni istante, durante il moto.
Ponendo aτ = a · τ̂ e an = a · n̂ si ottiene
maτ = 0
man = T
(47)
Durante il moto, la componente tangenziale della accelerazione e’ sempre
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
B [email protected] 18
4 SOLUZIONI DEGLI ESERCIZI PROPOSTI
Figura 14:
nulla. Essendo inoltre
d|v|
dt
dalla prima delle (47) si ottiene |v| = cost: di conseguenza, il modulo della
velocita’ e’ costante nel moto. Usiamo coordinate polari, e scegliamo come polo (mobile) il punto K di contatto del filo col disco (vedere fig. 15).
L’espressione dell’accelerazione normale e’ data da
aτ =
v2
an =
r(t)
dalla seconda delle (47), tenendo presente che v = cost = v0 si ottiene
T =m
v02
r
(48)
Esprimendo la coordinata r in funzione dell’angolo di avvolgimento (vedere
fig. 16) r = l − Rθ si ha
v02
T =m
(49)
l − Rθ
Quello che accade e’ che, man mano che il filo si avvolge, r diventa sempre
piu’ piccolo e di conseguenza aumenta la tensione del filo: quando questa
raggiunge il carico di rottura, il filo si spezza. Il corrispondente θR si ottiene
imponendo T = FR nella (49), da cui
θR =
Fisica 1
m Home Page di ML Ruggiero
m v02
l
−
R R FR
T 0110907329
B [email protected] 19
5 SOLUZIONI DEI QUESITI PROPOSTI
Figura 15:
Figura 16:
5
Soluzioni dei Quesiti Proposti
3.1
Un punto materiale sta viaggiando su una guida circolare.
1. Posso affermare che se la velocità è costante in modulo, esso non è
soggetto ad alcuna forza
2. Posso affermare che se la velocità è costante in modulo, esso non è
soggetto ad una forza tangenziale ∗
3. Posso affermare che non agiscono forze su di esso se la guida è liscia
4. Posso affermare che non agiscono forze su di esso se trascuro ogni attrito
3.2 Consideriamo il moto di una pallina nello spazio tridimensionale,
e supponiamo che essa sia vincolata a muoversi in un piano inclinato.
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
B [email protected] 20
5 SOLUZIONI DEI QUESITI PROPOSTI
1. La pallina ha due gradi di libertà
2. La pallina ha un grado di libertà
3. La pallina ha tre gradi di libertà ∗
4. Per conoscere i gradi di libertà è necessaria conoscere le forze agenti
3.3 Un’automobile di massa M trascina dietro di se un rimorchio di
massa M/2. Schematizzando il gancio che unisce l’automobile al rimorchio
come perfettamente rigido e trascurando ogni attrito, se F è la forza che il
motore dell’auto sprigiona nella direzione del moto:
1. Il rimorchio è anche esso soggetto ad una forza di modulo pari ad F
nella direzione del moto
2. Il rimorchio si muove con accelerazione maggiore di quella dell’automobile
3. Il rimorchio si muove con accelerazione minore di quella dell’automobile
4. Il rimorchio è soggetto ad una forza di modulo minore di F , nella
direzione del moto ∗
3.4 Una pallina di massa m si muove su un piano orizzontale privo di
attrito, essendo legata ad una molla di costante elastica k.
1. Quando la compressione della molla è massima la velocità della pallina
è massima
2. Quando l’allungamento della molla è massimo, la velocità della pallina
è massima
3. Quando ha lunghezza pari alla sua lunghezza di riposo, il modulo della
velocità è massimo ∗
4. Quando ha lunghezza pari alla sua lunghezza di riposo, il modulo della
velocità è nullo
Fisica 1
m Home Page di ML Ruggiero
T 0110907329
B [email protected] 21