Circuiti del II ordine
•Contengono due elementi dinamici
•Il loro comportamento è rappresentato da un’equazione
differenziale del II ordine.
Equazioni di stato
Casi patologici
1
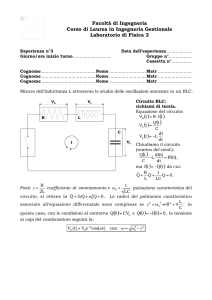
Circuito RLC serie autonomo
i
R
v(0+)=v(0-)=V0
i(0+)=i(0-)=I0
L
C
di
+
+v =0
Ri
L
dt
i = C dv
dt
v
di
R
1
=− i− v
dt
L
L
dv 1
= i
dt C
eqni di stato
di
d 2i dv
R +L 2 +
= 0;
dt
dt
dt
d 2i
di i
L 2 +R + =0
dt
dt C
1
d 2i R di
+
+
i=0
2
dt
L dt LC
Occorre conoscere 2 c.i.: i (0) = I 0 ,
RI 0 + L
di
+ V0 = 0
dt t =0
di
1
= − (RI 0 + V0 )
dt t =0
L
di (0)
=?
dt
2
R
1
λ + λ+
=0
L
LC
2
Equazione caratteristica
2
λ1, 2
R
1
R
=−
± −
2L
2 L LC
λ1, 2 = −α ± α 2 − ω02
Frequenza libere o naturali
[ ]
R
−1
Fattore di smorzamento
α
=
s
2L
ω0 = 1
Pulsazione di risonanza
LC
1
d 2i R di
+
+
i=0
2
dt
L dt LC
d 2i
di
2
+
2
α
+
ω
0i = 0
2
dt
dt
1. α > ω 0
Caso sovrasmorzato
2. α = ω0
Caso di smorzamento critico
3. α < ω0
Caso sottosmorzato
4. α = 0
Caso senza smorzamento
3
1. α > ω 0
R
>
2L
1
LC
Caso sovrasmorzato
4L
C> 2
R
λ1, 2 ∈ ℜ −
Radici reali negative e
distinte
i (t ) = A1e λ1t + A2 e λ2t → 0 al crescere di t
i (t ) = e − t − e −3t
i (t )
e −t
− e −3t
Risposta
sovrasmorzata
La risposta è la
somma di 2
esponenziali,
ciascuna con la sua
costante di tempo
4
2. α = ω0
R
=
2L
1
LC
Caso di smorzamento critico
4L
C= 2
R
R Radici reali
λ1 = λ2 = −α = −ω0 = −
e
2 L coincidenti
i (t ) = A1e −αt + A2 e −αt = A3e −αt
Non può essere la soluzione 2 c.i. ma una sola costante!!!
con A3 = A1 + A2
d 2i R di
i
d 2i
di
2
0
2
i=0
α
α
+
+
=
→
+
+
2
2
dt
L dt LC
dt
dt
d di
di
+ αi + α + α i = 0
dt dt
dt
di
df
+ αf = 0 → f = Ae λt
Posto f = + αi →
dt
dt
di
d −αt
−αt
−αt di
−αt
(
+ e αi = A1
Ae = + αi e
e i ) = A1
dt
dt
dt
e −αt i = A1t + A2
5
i = ( A1t + A2 )e −αt
i (t ) = (t + 1)e −3t
e
−3 t
i (t )
te −3t
Risposta
criticamente
smorzata
6
2. α < ω0 Caso sottosmorzato
R
<
2L
1
LC
ωd = ω − α
2
0
4L
C< 2
R
λ1, 2 = −α ± − (ω02 − α 2 ) = −α ± jωd
Radici complesse coniugate
Frequenza naturale smorzata
2
{
}
i (t ) = A1e (−α + jωd )t + A1*e (−α − jωd )t = 2ℜe A1e jφ e (−α + jωd )t =
{
}
2ℜe A1e (−α + j (ωd +φ ))t = Ae −αt cos(ωd t + φ ) =
= e −αt [cos(ωd t )A cos(φ ) − sen(ωd t )Asen(φ )] =
= e −αt [B1 cos(ωd t ) + B2 sen(ωd t )]
Risposta oscillatoria smorzata esponenzialmente
τ=1/α
T=2π/ωd
7
i (t ) = e −αt [B1 cos(ωd t ) + B2 sen(ωd t )] = Ae −αt cos(ωd t + φ )
i (t ) = e − t / 4 ⋅ cos (3t )
B2
A = B1 + B2 ; φ = −atan
B1
B1 = A cos(φ ); B2 = − Asen(φ )
2
2
Caso senza smorzamento
4. α = 0
λ1, 2 = ± − (ω02 ) = ± jω0 = ± jωd
i (t ) = [B1 cos(ω0t ) + B2 sen(ω0t )] = A cos(ω0t + φ )
8
R
α =−
= 0 ⇒ R = 0 → circuito LC senza perditesolo in teoria
2L
i
C
v
L
i (t ) = A cos(ω0t + φ )
di
v(t ) = − L = LAω0 sen(ω0t + φ )
dt
1 2 1 2 1 2
1
2
Li + Cv = LA cos 2 (ω0t + φ ) + CL2 A2ω0 sen 2 (ω0t + φ ) =
2
2
2
2
1
1
1
= LA2 cos 2 (ω0t + φ ) + LA2 sen 2 (ω0t + φ ) = LA2 cos 2 (ω0t + φ ) + sen 2 (ω0t + φ ) =
2
2
2
1 2
LA = costante
2
w(t ) =
[
]
L’energia del circuito non dipende dal tempo: quando l’energia
nel condensatore aumenta, l’energia nell’induttore diminuisce
9
e viceversa
Smorzamento: graduale perdita dell’energia immagazzinata,
dovuta alla presenza di resistori.
Il fattore di smorzamento α determina la rapidità con la quale la
risposta si smorza.
R=0
α=0 circuito LC con ω0=1/LC;
α<ω0 risposta oscillatoria
Circuito
senza perdite
R≠0 risposta smorzata, sovrasmorzata, criticamente
smorzata, sottosmorzata
Oscillazioni: dovute allo scambio continuo di energia tra
induttori e condensatori
La risposta sovrasmorzata e quella criticamente smorzata sono simili.
La risposta sovrasmorzata ha la massima velocità di decadimento e non
ha oscillazioni
La risposta criticamente smorzata ha la minima velocità di decadimento
10
Circuito RLC parallelo autonomo
i
I0
R
LKC
L
C
v
t
v 1
dv
+ ∫ vdt + C
=0
R L −∞
dt
1
1
λ +
λ+
=0
RC
LC
2
V0
Occorre conoscere 2 c.i.: v(0) = V0 ,
V0
dv
+ I0 + C
=0
R
dt t =0
d 2v
v
1 dv
+
+
=0
dt 2 RC dt LC
dv
1
(V0 + RI 0 )
=−
dt t =0
RC
dv(0)
=?
dt
2
λ1, 2 = −
1
1
1
±
−
2 RC
2 RC LC
λ1, 2 = −α ± α 2 − ω02
α=
1
; ω0 =
2 RC
1
LC
11
1. α > ω 0
Caso sovrasmorzato
1
>
2 RC
L > 4 R 2C λ1, 2 ∈ ℜ −
1
LC
i (t ) = A1e λ1t + A2 e λ2t → 0
al crescere di t
2. α = ω0
Caso con smorzamento critico
1
=
2 RC
L = 4 R 2C λ1 = λ2
1
LC
i (t ) = ( A1 + A2t )e −αt
al crescere di t
12
3. α < ω 0
Caso sottosmorzato
1
<
2 RC
L < 4 R 2C λ1, 2 ∈ −α ± jωd
1
LC
2
ω d = ω0 − α 2
v(t ) = e −αt ( A1 cos(ωd t ) + A2 sen(ωd t ))
13
Risposta al gradino di un circuito RLC serie
t=0
R
i
Per t>0
L
Vs
d 2v
Vs
1 dv v
+
+
=
dt 2 RC dt LC LC
v(t ) = vtransitoria + vregime
C
v
sovrasmorzata
vtrans (t ) = A1e λ1t + A2 e λ2t
a smorzamento critico
vtrans (t ) = ( A1 + A2t )e −αt
vtrans (t ) = e −αt ( A1 cos(ωd t ) + A2 sen(ωd t )) sottosmorzata
vreg = v(∞ ) = Vs
A1
e
A2
dv
si determinano dalle c.i. v(0),
dt t =0
14
Risposta al gradino di un circuito RLC parallelo
t=0
i
I0
Is
R
Per t>0
L
C
v
d 2i
i
Is
1 di
+
+
=
dt 2 RC dt LC LC
i (t ) = itransitoria + iregime
sovrasmorzata
itrans (t ) = A1e λ1t + A2 e λ2t
a smorzamento critico
itrans (t ) = ( A1 + A2t )e −αt
itrans (t ) = e −αt ( A1 cos(ωd t ) + A2 sen(ωd t )) sottosmorzata
ireg = i (∞ ) = I s
A1
e
A2
di
si determinano dalle c.i. i (0),
dt
t =0
15
Equazioni di stato
dx
= Ax + Bu
dt
y = Cx + Du
dx1
u1
y1
dt
dx
; A(n × n ) u = ; B(n × k ); y = ; C(h × n );
=
dt
dxn
uk
yh
dt
D(h × k );
x è il vettore di stato, A è la matrice di stato, u è il vettore di
ingresso, y è il vettore di uscita.
Il vettore di uscita y è in ogni istante combinazione lineare del
vettore di ingresso e dello stato nello stesso istante.
16
La relazione ingresso-uscita
n
n −1
d y
d y
dy
an
+ a n −1 n −1 + ..... a 1
+ a0 y =
n
dt
dt
dt
Ingresso e uscita
m
m −1
d u
d u
du
scalari
= bm
+
b
+
.....
b
+
b
u
n −1
1
0
m
m −1
h=k=1
dt
dt
dt
y = Cx + Du
( )
( )
( )
→ y 0 + = Cx 0 + + Du 0 +
dy
dx
du
du
=C
+D
= CAx + CBu + D
→
dt
dt
dt
dt
du
dy
+
+
→
= CAx 0 + CBu 0 + D
dt 0+
dt 0+
( )
( )
17
Equazioni differenziali ordinarie
Condizioni per u(t)
•identicamente nullo per t<t0 con t0 al finito
•in ogni istante deve assumere valori reali
•in ogni istante deve essere specificato in modo non ambiguo
Hp: noto u(t) per t>t0
noti y(t) e le sue n-1 derivate in t=t0+
y (t ) = yoa (t ) + y p (t )
per t > t 0
an λn + an −1λn −1 + .... + a0 = 0 eq. caratteristica
a) radici reali distinte λ1 , λ2 ,......, λn
yoa (t ) = C1e λ1t + C2 e λ2t + ... + Cn e λnt
b) se si hanno k radici reali coincidenti, i corrispondenti termini sono :
(
yoa (t ) = e λk t C + C1t + ... + Ck −1t k −1
)
18
c) se si hanno M coppie uguali di radici complesse coniugate
λ = a ± jb, i corrispondenti termini sono :
[(
)
(
)
yoa (t ) = e at A1 + A2t + ... + AM t M −1 cos(bt ) + B1 + B2t + ... + BM t M −1 sin(bt )
per una coppia di radici complesse coniugate a ± jb
yoa (t ) = e at [A cos(bt ) + B sin(bt )]
per radici immaginarie pure ± jb
yoa (t ) = [ A cos(bt ) + B sin(bt )]
19
]
FREQUENZE LIBERE
sono le radici dell’equazione caratteristica
hanno le dimensioni dell’inverso di un tempo
sono indipendenti dall’ingresso (si pone u(t)=0), per questo prendono il
nome di libere
il loro inverso 1/ λ=τ sono le costanti di tempo
se tutte le λ sono a parte reale negativa, dopo un tempo
sufficientemente lungo i termini Aeλt si attenuano e l’uscita del circuito
segue l’ingresso.
ℑm(λ)
ℜe(λ)
se ℜe{λi } < 0 ∀i
se ∃i ∋ ℜe{λi } = 0
se ∃i ∋ ℜe{λi } > 0
se
ℜe{λi } < 0 ∀i la risposta transitoria
converge a zero dopo un certo tempo.
Per t→∞ rimane la sola risposta di regime
RETE ASSOLUTAMENTE STABILE
RETE SEMPLICEMENTE STABILE
RETE INSTABILE
20
Per il calcolo dell’integrale particolare non esiste un metodo generale. In
casi particolari (ingresso polinomiale, cisoidale, etc.) il calcolo e’ agevole.
Noto l’andamento dell’integrale si determinano i coefficienti imponendo il
soddisfacimento della Relazione I/O
y (t ) = yoa (t ) + y p (t )
Le costanti di integrazione Ai si determinano imponendo le condizioni iniziali
y (0 + ),
dy
,
dt 0+
d2y
, • ••,
2
dt 0+
d n −1 y
dt n −1 0+
SI POSSONO DETERMINARE LE CONDIZIONI INIZIALI NOTO LO
STATO DEL CIRCUITO IN 0+
Ma come trovo lo stato in 0+??
21
Stato in 0+
Casi patologici
Ordine di un circuito
22
Proprietà
La tensione ai morsetti di un condensatore è una funzione
continua (in senso matematico)
vC (t0− ) = vC (t0+ ) per ogni t0
Il condensatore si oppone
i(t)
a variazioni istantanee
v(t)
+∞
della tensione
t
t
−∞
Analogamente
La corrente nell’induttore è una funzione continua (in senso
matematico)
( )
( )
iL t0− = iL t0+
per ogni t0
23
Casi in cui la continuità sembra violata
( )
t=0
vC(t)
12 V
R
12 V
vC 0 − = 0
( )
+
La chiusura dell’interruttore impone vC 0 = 12 V
La tensione sul condensatore sembra passare
istantaneamente da 0 a 12 V. Ciò è dovuto al
fatto che il circuito è un modello semplificato.
Maglia CERete degenere
t=0
vC (t)
Modello più realistico con la resistenza dei fili
e dell’interruttore chiuso.
La tensione sul condensatore passa
gradualmente da 0 a 12 V.
Rete non degenere
24
( )
iL 0 − ≠ 0
t=0
R
L’ apertura dell’interruttore impone
i(t)
12 V
L
( )
iL 0 + = 0
La corrente sembra discontinua. Ciò è dovuto al
fatto che non sempre un interruttore aperto è un
circuito aperto. Per un breve intervallo dopo
l’apertura si verifica una scarica elettrica.
La tensione ai capi dell’interruttore provoca
un’accelerazione degli ioni nell’aria che separa i
contatti.
Le collisioni con le molecole d’aria liberano altri
ionicorrente scarica.
Se p=1 atm
Vscarica= 3kV/mm
Perciò la corrente si annulla in un tempo molto breve rimanendo continua.
25
Rete degenere: rete che contiene maglie di soli generatori di
tensione e condensatori, o cocicli di soli generatori di corrente e
induttori (casi patologici)
TEOREMA
In una rete non degenere
LE VARIABILI DI STATO SONO MENO DISCONTINUE DELL’INGRESSO
CONSEGUENZA:
QUANDO SI APPLICA UN INGRESSO CHE HA
NELL’ISTANTE INIZIALE UNA DISCONTINUITA’ DI Ia
SPECIE, LE VARIABILI DI STATO SI CONSERVANO
TRA 0- E 0+
SALVO PER I CASI IN CUI LA RETE E’ DEGENERE
26
Rete non degenere
dx
= Ax + Bu
dt
y = Cx + Du
In molti casi le componenti di u presentano delle discontinuità
all’istante t=0.
Il vettore di stato è continuo o discontinuo?
u (0 − ) ≠ u (0 + )
u(t)
0+
0 +ε
lim
ε →0
ε
ε
u (t )dt = 0
∫ε u (t )dt = lim
∫
ε
0−
→0
0−
t
Integrando l’eqne di stato tra 0- e 0+
0+
0+
0−
0−
∫ dx = ∫ (Ax + Bu )dt
( ) ( )
0+
0+
0−
0−
( ) ( )
x 0 + − x 0 − = ∫ Axdt + ∫ Budt = 0 + 0 ⇒ x 0 + = x 0 −
Lo stato di una rete non degenere è continuo anche se l’ingresso è
discontinuo
27
vc1
ESEMPIO - MAGLIA CE
( )
C1
u(t)
( )
vc1 0 − = vc 2 0 − = 0
C2
vc2
vc1 + vc 2 = u
R
Non sono indipendenti
vc 2
dvc1
dvc 2
− C1
+ C2
=0
R
dt
dt
vc 2
d (u − vc 2 )
dv
− C1
+ C2 c 2 = 0
R
dt
dt
(C1 + C2 ) dvc 2 + vc 2 = C1 du
R
dt
dt
u (t ) = Eδ −1 (t )
Integrando l’eqne di stato tra 0- e 0+
0+
0+
0+
vc 2
+
−
+
−
(
)
(
)
C
+
C
dv
+
dt
=
C
du
→
C
+
C
v
0
−
v
0
=
C
u
0
−
u
0
1
2
c
2
1
1
2
c
2
c
2
1
∫
∫R
∫
0−
0−
0−
( )
vc 2 0 + =
( ( )
( ))
( ( ) ( ))
( )
C1
E ≠ vc 2 0 −
C1 + C2
28
COCICLO LA
( )
L1
a(t)
( )
iL1 0 − = iL 2 0 − = 0
Non sono indipendenti
L2
iL1
iL1 + iL 2 = a
iL2 R
a (t ) = Aδ −1 (t )
0+
0+
0+
0−
0−
0−
diL1
di
= L2 L 2 + RiL 2
dt
dt
d (a − iL 2 )
di
= L2 L 2 + RiL 2
L1
dt
dt
(L1 + L2 ) diL 2 + RiL 2 = L1 da
dt
dt
L1
+
−
+
−
(
)
(
)
L
+
L
di
+
Ri
dt
=
L
da
→
L
+
L
(
i
(
0
)
−
i
(
0
)
)
=
L
(
a
(
0
)
−
a
(
0
))
1
2
c
2
L
2
1
1
2
L
2
L
2
1
∫
∫
∫
( )
iL 2 0 + =
( )
L1
A ≠ iL 2 0 −
L1 + L2
29
Ordine di un circuito
Sembrerebbe che esista una corrispondenza tra l’ordine del circuito ed il
numero di componenti dinamici
Es. : CIRCUITO DEL Iº ORDINE – VARIABILE DI STATO vc – EQ. DIFF.
DEL Iº ORDINE
Tuttavia il legame non e’ sempre uno a uno.
Per stabilire l’ordine di un circuito occorre verificare il numero di condizioni
iniziali (vc e iL) indipendenti che possiamo imporre all’istante t=0.
In generale il numero di condizioni iniziali indipendenti coincide col numero
di elementi dinamici, a meno che non esistano vincoli tra le vc oppure tra le
iL dovuti alle leggi di Kirchhoff.
Per i circuiti passivi l’ordine n del circuito è
n=nD-nC-nL
nD n. elementi dinamici
nC n. di maglie CE contenenti soli capacitori e gen. di tensione
nL n. di cocicli LA contenenti soli induttori e gen. di corrente
30
Noto : stato in 0 - : nullo
ESEMPIO
R1
v1
e(t)
C1
C3
v3
e(t ) = f (t ) ⋅ δ −1 (t ) con f (0 + ) ≠ 0
C2
v2
Maglia C-E
R2
e = v1 + v2 + v3
dv3
dv1 v1
+
= C3
C1
dt
dt R1
dv3
dv2 v2
C 2 dt + R = C3 dt
2
dv1
dv2 v1
de
(
)
+
+
+
=
C
C
C
C
2
3
3
1
dt
dt R1
dt
dv
dv
v
de
C3 1 + (C 2 + C3 ) 2 + 2 = C3
dt
dt R2
dt
Eq. di stato
31
ESEMPIO (Cnt)
Integriamole tra 0 - e 0 +
(C1 + C 2 )v1 (0 + ) + C3v2 (0 + ) = C3e(0 + )
C3v1 (0 + ) + (C 2 + C3 )v2 (0 + ) = C3e(0 + )
C 2 C3
+
+
(
0
)
(
0
)
=
e
v
1
C1C 2 + C1C3 + C 2C3
lo stato non si conserva
C
C
1 3
v2 (0 + ) =
e( 0 + )
C1C 2 + C1C3 + C 2C3
Ricaviamo la relazione I/O
C1C 2 + C1C3 + C 2 C3 d 2 v1 1
1 C1 + C3 dv1
1
+
v1 =
+
+
2
C3 (C 2 + C3 )
dt
R1C3 R2 C3 C 2 + C3 dt R1 R2 C3 (C 2 + C3 )
C2 d 2 e
de
+
R2 (C 2 + C3 ) dt C 2 + C3 dt 2
1
n=m
32
Noto : stato in 0 - : nullo
ESEMPIO
R1
v1
e(t)
C1
C3
v3
e(t ) = f (t ) ⋅ δ −1 (t ) con f (0 + ) ≠ 0
C2
v2
Maglia C-E
R2
e = v1 + v2 + v3
dv3
dv1 v1
+
= C3
C1
dt R1
dt
dv3
dv2 v2
C 2 dt + R = C3 dt
2
dv1
dv2 v1
de
(
)
+
+
+
=
C
C
C
C
2
3
3
1
dt
dt R1
dt
dv
dv
v
de
C3 1 + (C 2 + C3 ) 2 + 2 = C3
dt
dt R2
dt
Eq. di stato
33
ESEMPIO (Cnt)
Integriamole tra 0 - e 0 +
(C1 + C 2 )v1 (0 + ) + C3v2 (0 + ) = C3e(0 + )
C3v1 (0 + ) + (C 2 + C3 )v2 (0 + ) = C3e(0 + )
C 2 C3
+
+
(
0
)
(
0
)
=
e
v
1
C1C 2 + C1C3 + C 2C3
lo stato non si conserva
C
C
1 3
v2 (0 + ) =
e( 0 + )
C1C 2 + C1C3 + C 2C3
Ricaviamo la relazione I/O
C1C 2 + C1C3 + C 2 C3 d 2 v1 1
1 C1 + C3 dv1
1
+
v1 =
+
+
2
C3 (C 2 + C3 )
dt
R1C3 R2 C3 C 2 + C3 dt R1 R2 C3 (C 2 + C3 )
C2 d 2 e
de
+
R2 (C 2 + C3 ) dt C 2 + C3 dt 2
1
n=m
34
ESEMPIO
vc
a(t)
Noto : stato in 0 - : nullo
C
i1
L1
R
i2
a(t ) = f (t ) ⋅ δ −1 (t ) con f (0 + ) ≠ 0
a(t ) = i1 + i2
Le variabili di stato effettive
L2
sono due
Co-ciclo L-A
di1 da di2
dt = dt − dt
a(t ) = i1 + i2
di
di
di2
di2
1
1
⇒
=
+
⇒
=
+
L
Ri
L
L
Ri
L
1
1
2
2
2
2
dt
dt
dt
dt
dv
dv
a(t ) = C c
a (t ) = C c
dt
dt
di2
di2
di2
da
da
(
)
+
+
=
−
=
+
L
L
Ri
L
L
L
Ri
L
1
2
2
1
1
2
1
1 dt
dt
dt ⇒
dt
dt ⊗
dv
dv
a(t ) = C c
a(t ) = C c
dt
dt
35
Esempio (Cnt)
Condizioni in 0 + : dalle ⊗ integrando fra 0 - e 0 + :
L1
+
( L1 + L2 )i2 (0 ) = L1a(0 ) = L1 f (0 ) i2 (0 ) =
f (0 + )
⇒
L1 + L2
+
0 = Cvc (0 )
+
(
0
)=0
v
c
L1
L2
+
+
+
+
+
(
0
)
=
f
i1 (0 ) = a(0 ) − i2 (0 ) = f (0 ) 1 −
L1 + L2 L1 + L2
+
+
+
36
Esempio (Cnt)
Ingresso a gradino : a(t) = Aδ-1(t)
dalle ⊗ si ha :
di2
( L1 + L2 )
+ Ri2 = 0 ⇒ i2 p = 0
dt
R
( L1 + L2 )λ + R = 0 ⇒ λ = −
freq. libera
L1 + L2
i2 (t ) = Ke λt
i 2 (0 + ) =
L1
L1
A = K ⇒ i2 (t ) =
Ae
L1 + L2
L1 + L2
1
vc (t ) =
C
−
R
t
L1 + L2
t>0
t
A
A ⋅ dτ + vc (0 ) = t
C
+
∫
0
+
R
t
−
L
1
i1 (t ) = a (t ) − i2 (t ) = A1 −
Ae L1 + L2
L1 + L2
t >0
t>0
37
Esempio (Cnt)
AL1/(L1+L2)
vc(t)
i2(t)
A
AL2/(L1+L2)
38
Esempio ()
Ingresso cosinusoidale : a(t) = A cos(ϖ 0t )δ-1(t)
R
λ=−
L1 + L2
A
a(t)
i2 p (t ) = H cosϖ 0t + K sin ϖ 0t
di2 p
dt
= ϖ 0 [− H sin ϖ 0t + K cosϖ 0t ]
di2
da
( L1 + L2 )
+ Ri2 = L1
dt
dt
( L1 + L2 )ϖ 0 [− H sin ϖ 0t + K cosϖ 0t ] + R[H cosϖ 0t + K sin ϖ 0t ] =
= L1 A(−ϖ 0 sin ϖ 0t )
eguagliando i termini in seno e coseno :
-ϖ ( L + L ) H + RK = -ϖ L A
0
1
2
0 1
− ϖ 0 ( L1 + L2 ) K
H=
ϖ 0 ( L1 + L2 ) K + RH = 0 ⇒
R
39
Esempio (Cnt)
− ϖ 0 L1 AR
K = 2
ϖ 0 2 ( L1 + L2 ) 2
R + ϖ 0 2 ( L1 + L2 ) 2
+ R K = −ϖ 0 L1 A ⇒
2
ϖ
R
0 L1 ( L1 + L2 ) A
H =
2
2
2
ϖ
(
)
R
L
L
+
+
0
1
2
i2 p =
ϖ 0 L1 A
2
2
R + ϖ 0 ( L1 + L2 )
2
[ϖ 0 ( L1 + L2 ) cosϖ 0t − R sin ϖ 0t ]
i2 = Ne λt + i2 p
i 2 (0 + ) = N + i 2 p ( 0 + ) ⇒ N = i 2 ( 0 + ) − i 2 p ( 0 + ) ⇒ N =
L1
A − i 2 p (0 + )
( L1 + L2 )
2
L
λt
ϖ
0 L1 ( L1 + L2 )
1
− 2
e +
2
2
(
L
+
L
)
R + ϖ 0 ( L1 + L2 )
1
2
i2 (t ) = A
ϖ 0 L1
[
]
ϖ
(
L
+
L
)
cos
ϖ
t
−
R
sin
ϖ
t
0 1
2
0
0
2
2
2
R
+
ϖ
(
L
+
L
)
0
1
2
1
vc = vc (0 + ) +
C
t
1
a (τ ) dτ =
C
+
∫
0
t
∫
0+
A cos(ϖ 0τ )dτ =
1
A sin(ϖ 0 t )
ϖ 0C
40
Esempio (Cnt)
A/ω0C vc
t
i2(0)- i2p(0)
i2tras
i2p
i2p(0)
t
L1 + L 2
Per t >>
i2 coincide con i2 p ⇒ regime sinusoidale
R
41
Esempio (Cnt)
Ingresso a rampa : a(t) = Btδ-1(t)
La risposta alla rampa e'l'integrale della risposta al gradino :
R
R
t
−
t
−
L
L
+
L
L
+
1
2
i2 g L1e
AL1e 1 2
=
i2 g =
⇒ δ-1(t) ⇒ A
Gradino : Aδ-1(t) ⇒
L1 + L2
L1 + L2
vcg 1
A
=
v
t
= t
cg
C
A C
t − R τ
BL1 L1 + L2 λt
i2 r = BL1
e L1 + L2 dτ =
−
e −1
L1 + L2
L1 + L2
R
0
Rampa : Btδ-1(t) ⇒
t
B
1B 2
=
⋅
=
v
τ
d
τ
t
cr
C
2C
0
i2r
vcr
[
∫
]
∫
BL1/R
42
Esempio (Cnt)
u(t)
Ingresso Triangolar e :
per t < T
Btδ-1(t)
a(t) =
per t > T
0
a(t) = Btδ-1(t) − B(t − T )δ-1(t − T) − BTδ-1(t − T)
Gradino : δ-1(t) ⇒ i2 g =
Rampa : tδ-1(t) ⇒ i2 r
L1
e
L1 + L2
−
R
t
L1 + L2
BT
T
δ-1(t)
R
t
−
L1
1 − e L1 + L2 δ-1(t)
=
R
i2 = Bi2 r − Bi2 r (t − T ) − BTi2 g (t − T )
43