CNR-ISSIA u.o.s. di Palermo
Istituto di Studi sui Sistemi Intelligenti per l'Automazione
Via Dante, 12 - 90141 Palermo (Italy)
Tel. +39 091 6113513 Fax +39 091 6113028
Rapporto tecnico n. 420 anno 2014
Miglioramento delle prestazioni dinamiche di un convertitore
boost PFC mediante azione feedforward ed osservatori MRAS
Autori:
S. M. Collura, M. C. Di Piazza, M. Luna, A. Sauro, S. G. Scordato, G. Vitale
“Esemplare fuori commercio per il deposito legale agli effetti della Legge 15 aprile 2004, n. 106”
Gli autori sono i soli responsabili del contenuto di questo rapporto tecnico
Data di creazione: 1 settembre 2014
Prima distribuzione al pubblico e deposito legale: 23 settembre 2014
Ig
L
D
rL
Q
Vs
C
R
VOUT
Vg
rC
C.F. 80054330586
P.I. 02118311006
Sede legale: Via G. Amendola 122/D-I – 70126 Bari (Italy) Tel. +39 080 5929429 Fax +39 080 5929460
INDICE
Introduzione ....................................................................................................................................... 3
Glossario ............................................................................................................................................ 4
1. Lo stadio di potenza del convertitore boost PFC ........................................................................... 5
2. Implementazione del controllo....................................................................................................... 8
2.1 Taratura del regolatore PI................................................................................................. 8
2.2 Aggiunta di un’azione feedforward.................................................................................. 9
3. Scelta degli osservatori model-based ........................................................................................... 13
4. Verifiche sperimentali .................................................................................................................. 18
5. Conclusioni e sviluppi futuri ........................................................................................................ 22
Ringraziamenti ................................................................................................................................ 22
Riferimenti bibliografici .................................................................................................................. 23
All rights reserved. Part of this paper may be reproduced with the authorization of the authors and quoting the source.
Tutti i diritti riservati. Parti di questo rapporto possono essere riprodotte previa autorizzazione citando la fonte.
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
2
INTRODUZIONE
La necessità di avere edifici e abitazioni sostenibili, energeticamente efficienti, dotati di sistemi di
produzione di energia elettrica da fonti rinnovabili e capaci di parziale autosufficienza energetica, fa
sì che venga impiegato un numero sempre più elevato di convertitori elettronici di potenza. Essi
adattano le caratteristiche della sorgente (rete elettrica nazionale, fonti rinnovabili o accumulatori) a
quelle del carico (o del sistema di accumulo), modificandone la tensione, la corrente e la frequenza.
Le sorgenti possono essere AC o DC e, nel caso di sorgenti rinnovabili, presentano livelli di
tensione e correnti variabili in dipendenza dalle grandezze meteo-climatiche. Di contro il carico
richiede livelli di tensione costanti a fronte di variazioni anche brusche della potenza assorbita.
Inoltre, ormai diversi carichi funzionano intrinsecamente in DC e i relativi convertitori sono spesso
integrati nell’apparecchio (PC, TV, telefoni, ma anche lavatrici con motori controllati mediante
inverter).
Per questo motivo, la comunità scientifica e, in particolare l’u.o.s. di Palermo dell’ISSIA (Istituto di
Studi sui Sistemi Intelligenti per l’Automazione) del CNR (Consiglio Nazionale delle Ricerche),
stanno investigando la possibilità di sfruttare sistemi di distribuzione dell’energia elettrica in
corrente continua (DC) all’interno di edifici e abitazioni con il vantaggio di ridurre il numero di
stadi di conversione, le conseguenti perdite e, potenzialmente, abbattere i costi di impianto e di
esercizio. Tuttavia, la conversione AC/DC prevede l'utilizzo di un raddrizzatore, ossia un
convertitore di potenza, il cui impiego presenta degli svantaggi in termini di sfasamento tra tensione
di rete e corrente assorbita, di distorsione armonica e di inquinamento della rete lato AC.
La soluzione a questo problema è la correzione del fattore di potenza (PF) del raddrizzatore
attraverso metodi passivi o attivi. Tra i metodi attivi, una possibilità è offerta dal convertitore boost
PFC (Power Factor Correction). Con riferimento a tale convertitore, è possibile migliorare le
prestazioni dinamiche già ottenute in letteratura mediante la modifica del suo schema di controllo
classico. In particolare, sarà introdotta un’azione di feed-forward, a partire da grandezze elettriche
stimate mediante un controllo adattativo basato su modello di riferimento (MRAS).
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
3
GLOSSARIO
SIMBOLO
Co
Capacità d'uscita
fsw
̅
(
)
KV
Lb
rC
rL
Ro
Vref
ΔV%
DESCRIZIONE
Duty cycle
Frequenza di switching
)
Complemento a uno del duty cycle, (
Funzione di trasferimento dell'anello di corrente
Corrente sulla capacità
Corrente d'ingresso del boost
Corrente sull'induttore nell'off
Corrente sul carico
Fattore di guadagno integrale
Fattore di guadagno proporzionale
Fattore di scala del sensore di tensione
Induttanza
Margine di fase
Potenza d'uscita
Resistenza parassita di Co
Resistenza emulata dal boost
Resistenza parassita di Lb
Resistenza di carico
Resistenza di sense
Valore massimo della tensione a valle del ponte raddrizzatore
Tensione d'ingresso del boost
Tensione in uscita dal controllore
Tensione in uscita dal blocco di controllo feedforward
Tensione d'uscita del boost
Tensione ai capi dello switch
Tensione di riferimento DC
Valore massimo del ripple di tensione, rispetto alla Vref
Frequenza di cross over
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
4
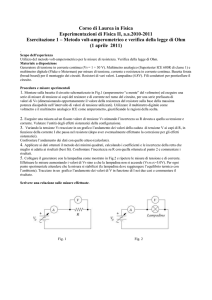
1. LO STADIO DI POTENZA DEL BOOST PFC
Lo schema per la correzione attiva del fattore di potenza di un raddrizzatore a diodi mediante
convertitore boost PFC è quello mostrato in Fig. 1 [1,2].
Ig
L
D
rL
Q
Vs
C
R
VOUT
Vg
rC
Fig. 1 Schema del convertitore boost PFC.
Esso risulta composto da due elementi in cascata:
un raddrizzatore a diodi, il cui schema elettrico e i relativi andamenti delle grandezze
d'interesse sono riportate in Fig. 2;
un convertitore boost, mostrato in Fig.3.
Fig. 2 a) Schema elettrico del raddrizzatore a diodi. b) Andamenti delle grandezze elettriche
L
VIN
D
rL
S
C
R
VOUT
rC
Fig. 3 Convertitore boost
Come si evince dalla Fig. 2b, il raddrizzatore a diodi richiede alla rete una corrente impulsiva,
sfasata rispetto alla tensione di rete e caratterizzata da un significativo contenuto armonico. Di
contro, la norma. D’altra parte, la normativa sulla Power Quality impone limiti molto severi per
contrastare l’inquinamento armonico. In particolare, soltanto per apparecchiature di potenza
inferiore a 75 W non è necessario effettuare il controllo del fattore di potenza, mentre per potenze
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
5
maggiori occorre attenersi alla norma EN61000-3-2, che regolamenta anche il livello delle
armoniche fino alla trentanovesima [3].
Per quanto concerne il convertitore boost, si tratta di un convertitore DC/DC a commutazione, di
tipo step-up, che consente di disporre di un’uscita a tensione superiore a quella di ingresso ed il cui
guadagno statico è il seguente:
Vout
1
Vin 1 D
(1)
Il significato di ciascun simbolo utilizzato è spiegato nel Glossario.
Al fine di implementare la correzione del fattore di potenza occorre che la forma d’onda della
corrente di ingresso segua, ad una certa scala, l’andamento sinusoidale della tensione di rete. In tal
modo il convertitore è visto dalla rete come una resistenza di valore dipendente dalla potenza
assorbita:
Re
V gm 2
Pout
(2)
E’ necessario, pertanto, prevedere uno schema di controllo di tipo current mode (CM). Inoltre, al
fine di regolare il valore della tensione DC di uscita, è necessario prevedere anche un anello di
tensione, esternamente a quello di corrente.
Fig. 4 Schema di controllo di un boost PFC
E’ possibile dimostrare che, al fine di garantire il corretto funzionamento da PFC, ovvero di imporre
una corrente di ingresso sinusoidale, la legge di variazione del duty cycle deve essere la seguente
[4]:
D 1
I g RS
Vm
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
(3)
6
Essa è funzione del valore
fornito in uscita dal controllore di tensione. Si può notare come una
variazione di duty-cycle comporti anche una variazione della corrente sull'induttore e, pertanto, si
ha un controllo indiretto sulla corrente, che, come si vedrà successivamente, è di fondamentale
importanza in un convertitore di tipo step-up.
In Fig. 4 è mostrato lo schema di controllo di un boost PFC, dove è possibile notare
l'implementazione dell'equazione (3). Il blocco 'PI compensator' rappresenta invece il controllo sulla
tensione d'uscita: confrontando quest'ultima e la tensione di riferimento (opportunamente scalata di
un fattore
per renderla adeguata al sistema di controllo) si calcola l'errore, che deve essere
processato per far in modo che il sistema regoli la tensione di uscita esattamente al valore
desiderato. L'uscita del controllore,
, permette di scrivere la legge di modulazione dello switch,
abbassando o innalzando il valore di duty cycle per compensare le variazioni della tensione d'uscita,
oltre che per garantire un fattore di potenza unitario.
I componenti elettronici e gli altri parametri del convertitore boost PFC sono stati dimensionati
utilizzando i criteri e le formule noti in letteratura [1], a partire dalle specifiche di Tabella 1. In
Tabella 2, invece, vengono riassunti tutti i parametri del convertitore boost PFC progettato.
Tabella 1. Parametri di progetto del boost PFC
Simbolo
Descrizione
Valore
Vgm
Valore di picco della tensione d'ingresso
311 [V]
Vref
Tensione di riferimento DC
400 [V]
Pout
Potenza d'uscita
1 [kW]
ΔV%
Max ripple
5% Vref
Simbolo
Tabella 2. Parametri nominali del boost PFC
Descrizione
Valore
fsw
Frequenza di switching
50 [kHz]
Rs
Resistenza di sense
0.2 [ ]
Lb
Induttanza
rL
Resistenza parassita di Lb
0.5 [ ]
Co
Capacità d'uscita
3.3 [mF]
rC
Resistenza parassita di Co
50 [m ]
Ro
Resistenza di carico
KV
Fattore di scala del sensore di tensione
IGBT
IGBT STGW20NC60
diodo
STTH12R06D
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
4 [mH]
1/31100
7
2. IMPLEMENTAZIONE DEL CONTROLLO
2.1 Taratura del regolatore PI
Come detto, lo schema di controllo prevede un anello esterno di tensione e un anello interno di
corrente (più veloce), la cui presenza è necessaria per compensare l'azione dello zero positivo
introdotto dall'induttore direttamente collegato all'alimentazione, permettendo in tal modo un
aumento della banda passante.
Il regolatore PI dell’anello di tensione, la cui funzione di trasferimento è:
H ( s) K P
Ki
s
(4)
è stato tarato imponendo un margine di fase pari a 60° alla frequenza di crossover di 5 Hz (una
decade prima rispetto alla frequenza di rete) attraverso le seguenti formule [5,6]:
m 180 GL ( jco )
KP
co TD
cos
| G L ( jco ) |
1
co Ti
tan
Ti 4TD
(5a)
(5b)
(5c)
(5d)
dalle quali si sono ottenuti i seguenti parametri:
K P 1655
(6a)
K i 4.4 104
(6b)
Ti 37.6 ms
(6c)
Al fine di verificare le prestazioni del sistema di controllo, è stata effettuata una simulazione in
ambiente Matlab/Simulink, i cui risultati sono mostrati in Fig. 5. Con riferimento a tale figura, gli
andamenti di tensione e corrente d'ingresso e della tensione d'uscita mostrano il corretto
funzionamento del boost PFC.
a)
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
8
b)
Fig. 5. a) Andamento di tensione e corrente d'ingresso. b) andamento della tensione d'uscita
2.2 Aggiunta di un’azione feedforward
Come anticipato nell’introduzione, il convertitore boost PFC non è caratterizzato da prestazioni
dinamiche soddisfacenti, soprattutto all’aumentare della taglia di potenza. Ciò è dovuto
all’incremento delle costanti di tempo del sistema, legate ai valori di induttanza e capacità dei
componenti utilizzati. Questi ultimi, infatti, dovranno essere via via più elevati all’aumentare dei
valori nominali di corrente e tensione, e quindi della potenza del convertitore. Per tale motivo, al
crescere della potenza si deve ridurre anche la banda del regolatore PI, con conseguente
decadimento delle prestazioni dinamiche del convertitore.
Al fine di superare tale inconveniente, è possibile modificare lo schema di controllo classico,
introducendo un’azione di feedforward (FF) [4]. Tale azione predittiva, per la quale il controllore
agisce in modo da prevenire gli effetti dovuti ai disturbi, viene ricavata a partire dalla
considerazione che il convertitore sia trasparente alla potenza, cioè trascurando tutte le resistenze
parassite del circuito, le quali introducono perdite. Pertanto, si ha:
Vref I o
V gm I gm
Vref I o
Vm, ff
2
(7a)
2
V gm 2
(7b)
2 Re
Vref
2 I o RS
V gm
2
(7c)
La relazione (7c) mostra che è possibile correggere l'uscita del regolatore dell'anello di tensione per
ripristinare rapidamente lo squilibrio tra le potenze di ingresso e di uscita a fronte di disturbi quali le
variazioni della tensione di riferimento (
), di ampiezza della tensione d'ingresso (
) e di
corrente assorbita dal carico ( ). Di fatto, poiché il regolatore di tensione è lento, ad ogni transitorio
si manifesta un ritardo nel ristabilire l'equilibrio di potenza. Questo provoca la scarica o la
sovraccarica momentanea del condensatore di uscita che si riflette come sotto o sovraelongazioni
della tensione d'uscita,
. La durata del transitorio potrebbe essere notevolmente ridotta se la
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
9
potenza in ingresso cambiasse con la stessa rapidità con cui varia la potenza di uscita, per ristabilire
l'equilibrio. Ciò richiede che la
vari velocemente e a tal fine, si può introdurre un percorso più
rapido (feedforward) in parallelo al regolatore di tensione. In tal modo il regolatore PI si limita ad
assorbire le non linearità e gli errori di misura, assicurando precisione a regime. Lo schema di
controllo con azione di feedforward è mostrato in Fig. 6.
Fig. 6. Schema di controllo FF per boost PFC
Il miglioramento conseguibile mediante l’azione di FF è stato testato attraverso delle simulazioni in
Matlab/Simulink in corrispondenza a tre diversi scenari: variazione di carico, variazione della
tensione d'ingresso e variazione della tensione di riferimento.
A titolo esemplificativo si riporta in Fig. 7 lo schema Simulink utilizzato per verificare la risposta in
corrispondenza ad una variazione a gradino del carico dal 50% del valore di potenza nominale al
valore di potenza massima, ossia da 500 W a 1000 W. I risultati delle simulazioni con e senza
feedforward, ottenute variando manualmente il relativo switch, sono mostrati in Fig. 8.
Come si può notare, nel caso di azione predittiva con FF il segnale in uscita dal sistema di controllo,
, varia istantaneamente in corrispondenza alla variazione a gradino del carico e, pertanto, il
sistema va a regime molto più velocemente: la variazione della corrente in ingresso,
, che prima
avveniva in circa 200 ms, con l'azione FF diventa praticamente istantanea.
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
10
t
Clock
To Workspace
1
Vo
den(s)
>=
d
Transfer Fcn
Ig
Relational
Operator
Vs
BOOST
Vg
Rs
Sawtooth
Generator
Rs
Io
Is
Rload
cosfi
Vo
Io
Vm
Step_load
Is
Divide
Kv
Kv
prova
Vg1
PI
Io
To Workspace1
1
Vm_(VC)
Out1
Kv2
In1
2
Kv
Vo
Vo
D
Out
To Workspace2
In
Io
Vm_(FF)
Rs
Vm_f f
remove zero1
2
Manual Switch
0
Rs
Vo
1
Vgm
Vgm
Feed_Forward
Vm
To Workspace3
Is
To Workspace4
Fig. 7. Schema a blocchi per l'analisi della risposta alla variazione di carico
a)
b)
Fig. 8. Simulazioni per variazioni di carico a) controllo tradizionale; b) con feedforward
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
11
Dalle ulteriori simulazioni fatte si nota un simile incremento delle prestazioni dinamiche per
variazione della tensione di ingresso. Nel caso di variazione della tensione di riferimento non si
registra, invece, nessun significativo miglioramento. Al contrario, si osserva un leggero incremento
dell'ampiezza delle sovra e sottoelongazioni della tensione d'uscita,
. Tale effetto, dovuto
all'incremento dell'effettivo guadagno proporzionale del PI, causato dall'azione di feedforward, era
atteso. Ad ogni modo, ciò non costituisce un problema in quanto, durante il normale funzionamento
del convertitore, la tensione di riferimento rimane costante.
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
12
3. SCELTA DEGLI OSSERVATORI MODEL-BASED
E' opportuno osservare che, affinché l'azione predittiva del controllore sia efficace, è necessario che
esso riceva informazioni corrette e tempestive sulle grandezze di disturbo, cioè la corrente d'uscita e
la tensione d'ingresso del boost. Nel caso in esame, tali grandezze non sono utilizzate nello schema
di controllo classico; occorrerebbero, dunque, dei sensori aggiuntivi, ma in questo modo il sistema
diventerebbe sicuramente più ingombrante, più costoso e meno affidabile.
Per rendere il sistema di tipo sensorless si può ricorrere, pertanto, ad una stima di tali grandezze
effettuata per mezzo della teoria degli osservatori. Come primo tentativo si è provato ad utilizzare
un osservatore di Luenberger esteso, in quanto il sistema è non lineare [7]. Tuttavia, si è notato che
nel caso in esame la formulazione di tale osservatore conduce ad un sistema anticausale. Ciò è
dovuto alla presenza dell’induttore di ingresso direttamente collegato all’alimentazione, cioè alla
grandezza da stimare. Pertanto, ci si è orientati verso la famiglia di osservatori di tipo MRAS
(Model Reference Adaptive System), ossia sistemi adattativi basati su un modello di riferimento
[8]. In essi i parametri sono continuamente aggiornati in accordo ad un'opportuna legge di
variazione e la grandezza viene stimata in funzione dell'errore fra un modello di riferimento e un
modello adattativo. Lo schema più diffuso è quello di Fig. 9.
Modello di
Riferimento
Ymisurata
+
e
Regolatore
-
u
Modello
Adattativo
Y
m
Fig. 9. Schema di controllo MRAS
Il modello di riferimento, RM (Reference Model), è un sistema dinamico non lineare, la cui uscita
dipende dalle grandezze in uscita dal processo, ma non dalla variabile da stimare; il modello
adattativo, AM (Adaptive Model), è un sistema dinamico non lineare, la cui uscita dipende anche
dalla variabile da stimare, m. Tale variabile è considerata come un parametro che viene adattato
dalla legge di adattamento. L'ingresso dell’AM è lo stesso del RM; lo stato è una stima dello stato
del RM.
Il meccanismo di adattamento è costituito da una parte algebrica, che calcola l'errore di stima in
funzione dell'errore fra lo stato del RM e lo stato dell’AM. Tale errore è l'ingresso della parte
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
13
dinamica, che permette di ottenere la stima della grandezza mediante il meccanismo di adattamento.
La legge di adattamento è tale da garantire la stabilità dello schema MRAS, che effettua la stima in
modo da portare e mantenere l'errore di stima circa a zero. In tal caso l'uscita dell’AM coincide con
quella del RM e la grandezza stimata coincide con quella vera.
Il regolatore dello schema di Fig. 9 è solitamente un tradizionale PI oppure un regolatore di tipo
sliding mode. Con questo termine si fa riferimento a un tipo di controllore a struttura variabile in
retroazione di stato, che modifica il comportamento di un sistema non lineare forzandolo con un
segnale di controllo in alta frequenza. Il suo principio di funzionamento consiste nel controllare il
sistema in modo che esso raggiunga una superficie detta di sliding, che rappresenta il riferimento
del sistema di controllo [9]. Per ottenere ciò, il sistema viene forzato con un segnale di controllo
discontinuo, che spingerà le traiettorie del sistema in direzione della superficie di sliding; queste
oscilleranno intorno alla superficie e l'ampiezza delle oscillazioni sarà tanto più piccola quanto
maggiore sarà la frequenza del segnale di controllo.
Un tipico esempio di controllo sliding mode è quello isteretico, in cui il controllo si ottiene
confrontando il valore istantaneo di una grandezza con un valore di riferimento; quando il valore
effettivo si discosta da quello di riferimento oltre i limiti imposti dalla banda di tolleranza, si
verifica la commutazione dell'uscita del regolatore, il quale comincia ad oscillare.
Nel caso in esame sono state valutate in simulazione le prestazioni di diversi osservatori di tipo
MRAS, che differiscono per il tipo di RM e AM utilizzati, nonché per la tipologia di regolatore (PI
oppure sliding mode).
In generale, i migliori risultati sono stati ottenuti sempre con l’utilizzo di regolatori sliding mode,
dal momento che, per quanto precedentemente detto, la banda del regolatore PI non può essere
aumentata a dismisura. Di contro, la grandezza stimata mediante regolatore sliding mode presenta
un ripple ad alta frequenza, che può essere facilmente eliminato mediante un filtro passa basso con
costante di tempo non troppo elevata.
Per quanto concerne la stima della tensione di ingresso, è possibile considerare come input dello
stimatore la tensione sullo switch oppure la corrente sull’induttore. La simulazione ha consentito di
verificare che il migliore risultato si ottiene in quest’ultimo caso. Le equazioni dell’osservatore sono
basate sulla maglia di ingresso del convertitore boost, riportata in Fig. 10, e conducono allo schema
a blocchi di Fig. 11.
Dall'analisi circuitale dello schema di Fig. 10 viene ricavata la funzione di trasferimento,
partire dalla quale si ricostruisce
, a
e la si confronta con quella misurata. L'errore viene dato in
ingresso al regolatore che restituisce il valore di
.
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
14
Fig. 10. Maglia d'ingresso del convertitore boost
Fig. 11. Schema a blocchi per la stima della tensione d'ingresso tramite la conoscenza della corrente sull’induttore
I risultati delle simulazioni sono mostrati in Fig. 12. Come si può notare, la grandezza stimata
dall’osservatore MRAS con sliding mode è praticamente indistinguibile dalla grandezza reale.
Inoltre, è possibile osservare che fin da subito la stima converge al valore reale, rispetto ai 10 ms
necessari all'osservatore MRAS con regolatore PI.
Fig. 12. Andamenti della tensione di ingresso reale e stimata dall’osservatore MRAS +
regolatore sliding mode.
Per quanto concerne la stima della corrente di uscita, è possibile considerare come input dello
stimatore la corrente sull’induttore oppure la tensione di uscita. La simulazione ha consentito di
verificare che il migliore risultato si ottiene in quest’ultimo caso. Le equazioni dell’osservatore sono
basate sulla maglia di uscita del convertitore boost, riportata in Fig. 13, e conducono allo schema a
blocchi di Fig. 14.
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
15
Fig. 13. Maglia di uscita del convertitore boost
Fig. 14. Schema a blocchi per la stima della corrente di uscita tramite la conoscenza della tensione di uscita
Dall'analisi circuitale della maglia di Fig. 13 viene ricavata la funzione di trasferimento, , a partire
dalla quale si ricostruisce
e la si confronta con quella misurata. L'errore viene dato in ingresso al
regolatore che restituisce il valore di
.
I risultati della simulazione sono mostrati in Fig. 15. Anche in questo caso la grandezza stimata
dall’osservatore MRAS con sliding mode è praticamente indistinguibile dalla grandezza reale.
Inoltre, è possibile osservare che il transitorio di stima dura soltanto 2.5 ms.
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
16
a)
b)
Fig. 15. a) Andamento della corrente d'uscita reale e stimata dall’osservatore MRAS +
regolatore sliding mode. b) Transitorio di stima.
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
17
4. VERIFICHE SPERIMENTALI
Dopo aver realizzato il PCB (Printed Circuit Board) del circuito è stato verificato, tramite opportune
prove sperimentali, il corretto funzionamento del convertitore boost a catena aperta e a catena
chiusa senza la correzione del fattore di potenza. Visto l’esito positivo di tali prove, è stato
verificato sperimentalmente il corretto funzionamento del convertitore boost con funzione di PFC.
A tal fine è stato allestito un opportuno banco di prova, mostrato in Fig. 16.
Come si può notare, il prototipo di convertitore è stato collegato ad un sistema di sviluppo dSPACE
DS1103 PPC Controller Board basato su microprocessore di tipo DSP, su cui è stato implementato
l’algoritmo di controllo. Il principale vantaggio di questo tipo di sistemi è la possibilità di
manipolare segnali analogici e digitali in tempo reale a velocità elevate. Nel caso in esame sono
stati utilizzati quattro ingressi analogici per la conversione A/D (tensioni e correnti di ingresso e di
uscita) ed un'uscita digitale di tipo PWM (segnale di pilotaggio dello switch).
Le verifiche sono state effettuate a tensione e potenza ridotta, scalando proporzionalmente le
grandezze elettriche del sistema. In particolare è stato utilizzato un trasformatore di isolamento con
rapporto 400 V/110 V, che ha consentito di disporre di una tensione di alimentazione AC con un
valore di picco di circa 90 V. Il valore di riferimento per la tensione di carico è stato impostato,
invece, a 115 V. Il sistema è stato provato utilizzando un carico variabile elettronicamente, modello
Sorensen SLHACDC 500V 6A 1800W, impostandolo su valori di resistenza pari a 27 Ω e 133 Ω,
corrispondenti rispettivamente a livelli di potenza pari al 50% e al 10% della potenza nominale.
In particolare, è stato verificato sperimentalmente il comportamento del sistema, con e senza azione
di feedforward, in risposta alla commutazione tra i due livelli di carico. Gli andamenti delle
grandezze elettriche più significative del sistema nei due scenari sono riportati nelle Figg. 17 e 18.
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
18
Fig. 16. Banco di prova per la verifica sperimentale
Come è possibile notare, il sistema all’accensione con carico pari a 100 W va a regime in circa
250 ms. La tensione e la corrente di ingresso sono perfettamente in fase e quest’ultima presenta un
basso contenuto armonico, confrontabile con quello riscontrato senza azione di feedforward.
Applicando un gradino di carico in salita al tempo t=300 ms, il sistema va a regime in circa 200 ms
con il solo regolatore PI ed in circa 150 ms con l’aggiunta dell’azione di feedforward. Si riscontra
che la stima della corrente di uscita e della tensione di ingresso si mantiene valida durante le
commutazioni di carico.
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
19
a)
b)
c)
Fig. 17. Segnali acquisiti nella prova senza azione di feedforward.
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
20
a)
b)
c)
d)
Fig. 18. Segnali acquisiti nella prova con azione di feedforward.
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
21
5. CONCLUSIONI E SVILUPPI FUTURI
Nel presente lavoro è stato progettato, realizzato e verificato, sia in simulazione che
sperimentalmente, un prototipo di convertitore boost PFC da 1 kW di potenza. Inoltre, allo scopo di
ottenere un migliore compromesso tra prontezza del sistema e distorsione della corrente di ingresso,
è stata aggiunta allo schema di controllo classico un’azione di tipo feed-forward per migliorare le
prestazioni dinamiche per variazioni di carico e di tensione di ingresso. Tale azione viene realizzata
a partire dalla stima di due grandezze elettriche, ottenuta mediante un controllo adattativo basato su
modello di riferimento (MRAS) utilizzando la tecnica sliding-mode.
Il sistema è stato validato inizialmente mediante simulazioni in ambiente Simulink e
successivamente sperimentalmente, mediante un opportuno banco di prova basato su sistema
dSPACE. In particolare, è stato verificato il comportamento del sistema, con e senza azione di
feedforward, in risposta alla commutazione tra due livelli di carico corrispondenti al 50% e al 10%
della potenza nominale. Gli andamenti delle grandezze elettriche più significative del sistema
mostrano che la tensione e la corrente di ingresso sono sempre perfettamente in fase e che
quest’ultima presenta un contenuto armonico praticamente invariato quando si inserisce l’azione di
feedforward. Di contro, grazie all’azione predittiva, si ottiene una riduzione del 25% del tempo di
risposta del convertitore a fronte di variazioni di carico.
Infine, si riscontra che la stima della corrente di uscita e della tensione di ingresso si mantiene
valida durante le commutazioni di carico.
La verifica del comportamento del sistema, con e senza azione di feedforward, in risposta a
variazioni di tensione di ingresso sarà oggetto di future attività.
RINGRAZIAMENTI
Questo rapporto tecnico è relativo ad attività afferenti ai seguenti progetti di ricerca:
1. RITmare, Ricerca ITaliana per il mare (Italian Research for the sea), CUP:B91J11000740001;
2. TESEO, Tecnologie ad alta Efficienza per la Sostenibilità Energetica ed ambientale On-board
(High efficiency technologies for on-board energy and environmental sustainability), CUP:
B61C12000850005;
3. CNR per il Mezzogiorno (Advanced Technologies for Energy Efficiency and Sustainable
Mobility), CUP: B51J10001290001.
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
22
RIFERIMENTI BIBLIOGRAFICI
[1]
N. Mohan, T. M. Undeland, W. P. Robbins, “Power Electronics”, 3rd ed., John Wiley & Sons Inc.,
2005.
[2]
R. W. Erickson, D. Maksimovic, “Fundamentals of Power Electronics”, 2nd ed., Kluwer Academic
Publishers, 2003.
[3]
CEI EN 61000-3-12 (CEI 210-81) standard, “Limiti per le correnti armoniche prodotte da
apparecchiature collegate alla rete pubblica a bassa tensione aventi correnti di ingresso maggiori a 16
A e minore uguale a 75 A per fase”.
[4]
R. Ghosh, G. Narayanan, “Generalized Feedforward Control of Single-Phase PWM Rectifiers Using
Disturbance Observers”, IEEE Trans. on Industrial Electronics, Vol. 54, no. 2, pp. 984-993, April
2007.
[5]
A. Amirahmadi, A. Dastfan, S.M.R. Rafei, “Design of a PFC rectifier with fast start up response and
low input current distortion”, International Conference on Renewable Energies and Power Quality
(ICREPQ’10), Granada (Spain), pp. 23-25, 2010.
[6]
J. Lazar, S. Cuk, “Feedback loop analysis for AC/DC rectifiers operating in discontinuous
conduction mode”, Proc. of 11th Annual Applied Power Electronics Conference and Exposition,
(APEC), vol. 2, pp. 797 – 806, 3-7 Mar 1996.
[7]
B. Friedland, “The Control Handbook”, 2nd ed., Chapter 15, William S. Levine, 2011.
[8]
K. Astrom, “Adaptive Control”, Dover, pp. 25–26, 2008.
[9]
M. Comanescu, L. Xu, “Sliding-Mode MRAS Speed Estimators for Sensorless Vector Control of
Induction Machine”, IEEE Trans. on Industrial Electronics, Vol. 53, no. 1, pp. 146-153, Feb. 2006.
Rapporto Tecnico RT – ISSIA – PA – N. 420 – 2014
23