Capitolo 3
Risultati:comportamento statico e dinamico del sistema muscolo
Capitolo 3
Risultati: Comportamento
Statico e Dinamico Del
Sistema Muscolo
47
Capitolo 3
Risultati:comportamento statico e dinamico del sistema muscolo
3.1 Introduzione
Il modello è stato validato cercando di replicare una serie di risultati sperimentali
riguardanti : i) le caratteristiche isometriche ii) le caratteristiche viscoelastiche, iii)
le caratteristiche di produzione di forza. E’ importante che l’osservazione del
comportamento del modello sia effettuata seguendo rigorosamente il setting ed i
parametri dell’esperimento.
3.2 Comportamento isometrico con e senza riflesso
La prima serie di esperimenti ha riguardato la risposta del modello agli stiramenti
con e senza riflesso. Sappiamo che l’andamento della forza in funzione dello
stiramento è di tipo esponenziale. In genere questo tipo di esperimento si effettua
tirando il muscolo molto lentamente ed andando a misurare la forza di richiamo
che esso produce per diversi valori dell’attivazione. Per questi test abbiamo
utilizzato valori di lunghezza e forza normalizzati. Il segnale in ingresso al
muscolo (lunghezza) è una rampa, con una pendenza molto bassa quindi con una
bassa velocità di stiramento. Abbiamo poi misurato la forza prodotta dal muscolo.
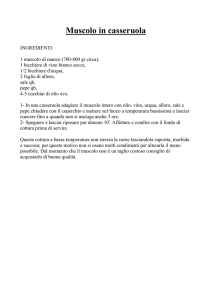
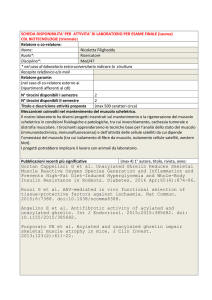
Nel caso senza riflesso otteniamo degli andamenti come mostrato in figura 3.1.
Nel range di lunghezze più propriamente fisiologico che va da 0.75 a 1.2 L0 si
osserva un andamento esponenziale per basse attivazione; mentre per più alte
attivazioni si ha un andamento quasi lineare. L’inserimento della circuiteria del
riflesso di stiramento dovrebbe portare ad avere l’andamento in forma
esponenziale per un più ampio range delle attivazioni muscolari. Infatti, per
effetto dello stiramento, i fusi neuromuscolari contribuiscono ad aumentare
l’entità dell’attivazione muscolare. Dunque il livello di attivazione che in un
modello senza riflesso rimane costante, ora viene continuamente modulato
48
Capitolo 3
Risultati:comportamento statico e dinamico del sistema muscolo
dall’effetto dei fusi neuromuscolari in funzione sia dello stiramento che della
velocità con cui esso avviene.
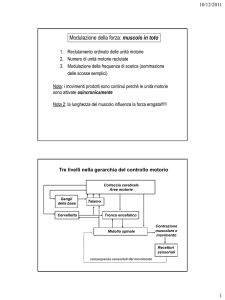
Fig 3.1 Valori della forza prodotti dal modello al variare della lunghezza per diversi valori
dell’input Nin (0.01, 0.1, 0.3, 0.6, 0.9) e con un valore Nr pari a 0.05
E’ da tenere presente che anche una contrazione isometrica può essere influenzata
dalla presenza dell’arco riflesso: infatti, anche se non si ha un cambiamento dello
stato complessivo del muscolo (lunghezza), si ha una variazione degli stati degli
elementi del muscolo; in particolare avremo un accorciamento dell’elemento
contrattile ed un pari allungamento dell’elemento serie. Entrambe queste
variazioni influenzano la risposta dei fusi e dell’organo tendineo del Golgi.
49
Capitolo 3
Risultati:comportamento statico e dinamico del sistema muscolo
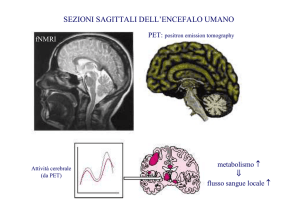
Fig 3.2 Modello muscolare closed loop , il riflesso di stiramento produce intorno alla lunghezza di
riposo una maggiore forza, per poi scomparire ed andare ad uniformarsi per alti livelli di
stiramento.
E’ visibile, per valori nell’intorno di 1 della lunghezza, l’andamento esponenziale
prodotto dal riflesso muscolare.
50
Capitolo 3
Risultati:comportamento statico e dinamico del sistema muscolo
3.3 Caratteristiche visco-elastiche
Il comportamento del modello dipende da una grande quantità di parametri. Per la
maggior parte di essi esistono in letteratura stime dirette. Nel caso dei parametri
relativi ai guadagni dei sottosistemi rappresentanti il riflesso di stiramento e
dell’organo tendineo del Golgi, è stato preso in considerazione l’esperimento di
Lin & Rymer 1998; essi hanno misurato la risposta del muscolo a variazioni di
lunghezza attraverso carichi inerziali in presenza o meno del riflesso muscolare.
Da questi esperimenti sembra che il riflesso muscolare compensi parte della non
linearità del muscolo, facendolo passare da un comportamento prevalentemente
viscoso (senza riflesso) ad uno con caratteristiche prevalentemente elastiche (con
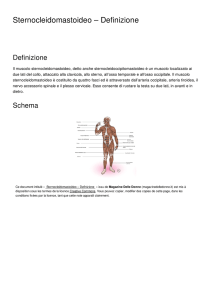
riflesso). Per riprodurre l’esperimento, abbiamo utilizzato lo schema in figura 3.4
Fig 3.4 Schema della replica dell’esperimento di Lin e Rymer. L’impulso di forza esterno
perturba il sistema a cui è attaccata una massa.
51
Capitolo 3
Risultati:comportamento statico e dinamico del sistema muscolo
Il muscolo è inizialmente stirato mediante un carico costante in modo da ottenere
un allungamento di circa il 10% rispetto alla lunghezza di riposo. La velocità
iniziale Vo è di 0.09 m/s. Al sistema viene applicata una perturbazione impulsiva
F(t)
(3.1)
x(t ) =
1
M
∫∫ F (t)dt + ∫V dt
0
Dove x(t) è lo spostamento, M la massa, F la forza e Vo la velocità iniziale della
massa. La forza F(t) è la forza netta prodotta dal sistema, cioè non considerando la
forza Fo inserita per allungare il muscolo fino alla condizione voluta.
(3.2)
F (t ) = Fm(t ) − F0 (t )
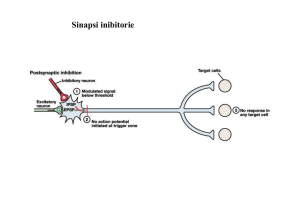
Fig 3.5 Confronto tra presenza del riflesso(------) e ariflesso (- - - - -) con lo stesso carico e
velocità iniziali. La perturbazione sotto forma di forza parte a 4.3 s con il muscolo
inizialmente stirato dalla sua posizione naturale.
52
Capitolo 3
Risultati:comportamento statico e dinamico del sistema muscolo
I risultati ottenuti sono qualitativamente simili a quelli sperimentali di Lin &
Ryner (1998), il che suggerisce che il modello con riflesso costituisca un adeguato
strumento di analisi della meccanica muscolare. Inoltre la frequenza di
oscillazione della risposta poco smorzata è di 3 Hz che è consistente con quella
misurata sperimentalmente (2-4 Hz). Anche se il nostro scopo era quello di
regolare i guadagni dello spindle per ottimizzare il sistema, proviamo comunque a
dare una lettura dei dati ottenuti da questo esperimento. Il mantenimento posturale
spesso richiede che un arto perturbato ritorni alla sua condizione iniziale
(regolazione in lunghezza) e che la sua velocità sia rapidamente smorzata
(regolazione della velocità). Il muscolo senza riflesso non soddisfa la prima
ipotesi, ma si comporta molto bene per quanto riguarda la seconda, introducendo
un comportamento viscoso. Per contro, il muscolo con riflesso si comporta meglio
nel recuperare la posizione perturbata in virtù delle sue dominanti caratteristiche
elastiche. Da un punto di vista meccanico passare da un comportamento elastico
ad uno viscoso (e viceversa) può essere un grosso vantaggio per compiere nel
migliore dei modi tasks differenti. E’ noto che il CNS può modulare il riflesso di
stiramento durante i movimenti naturali (Stein and Capaday 1988); il
cambiamento attraverso questi estremi può generare l’impedenza meccanica
ottima a soddisfare la lunghezza e velocità richieste per un determinato task.
53