Relatività speciale
18 Relatività speciale
Introduzione
La Teoria della Relatività descrive le relazioni che esistono tra entità fisiche
misurate da differenti osservatori che siano in moto uno rispetto all’altro (moto
relativo). Deve il suo nome in quanto rifiuta il concetto di moto assoluto, ossia non
ammette l’esistenza di un sistema di riferimento (SDR) in quiete assoluta, e riconosce
che solo il moto relativo ha significato fisico.
La Teoria della Relatività è stata sviluppata in due fasi.
• Nella prima fase, chiamata Relatività Speciale (o Ristretta), le leggi della fisica sono
formulate in sistemi di riferimento inerziali, e quindi tra osservatori in moto rettilineo
uniforme uno rispetto all’altro.
• Nella seconda fase (Relatività Generale) la teoria viene generalizzata a tutti i tipi di
osservatori, cioè le leggi della fisica sono formulate per osservatori qualsiasi, i quali si
possono muovere in modo arbitrario (ruotante, accelerato, ecc.).
Entrambe le teorie sono state formulate da Albert Einstein (1905 e 1916), ma
va detto che nel caso della Relatività Speciale molti risultati e conclusioni erano stati
già enunciati da altri fisici, in particolare da e soprattutto da Poincarè.
Relatività Speciale
- Ha rivoluzionato i concetti di spazio e di tempo, inquadrandoli in un’unica realtà (lo
spazio-tempo) nella quale l’estensione spaziale dei corpi e lo scorrere del tempo
dipendono e quindi variano tra osservatori in moto relativo. Essenzialmente, lo spazio
ed il tempo sono come le componenti x ed y di un vettore, che assumono valori
diversi a seconda del sistema di riferimento dell’osservatore.
- Su questa scia anche la quantità di moto, l’energia e la massa sono visti come aspetti
diversi della stessa entità (I œ 7- # ).
Relatività Generale
- Ha ulteriormente rivoluzionato i concetti di spazio e di tempo;
- Fornisce un’interpretazione nuova della forza di gravitazione.
Lo spazio-tempo è curvo; l’apparente attrazione dei corpi è una conseguenza del loro
moto libero nello spaziotempo curvo; a sua volta la curvatura dello spazio tempo è
generata dalla presenza dei corpi (dalla loro massa-energia), nonchè dalla curvatura
stessa — come dei corpi posati su un telo elastico lo deformano, ed altri corpi che si
muovano sul telo vengono deviati da queste deformazioni.
La relatività galileiana
La teoria maxwelliana dell'elettromagnetismo e la scoperta della natura
elettromagnetica della luce fecero riaffiorare un problema che sembrava
definitivamente risolto da Galileo. Nel celebre scritto Dialogo dei massimi sistemi
Galileo afferma che le leggi fisiche risultano le stesse per chi le sperimenta in un
laboratorio fisso e per chi le sperimenta in un laboratorio in moto rettilineo uniforme
(relatività galileiana). Naturalmente Galileo si riferisce ai fenomeni che erano noti al
suo tempo, cioè in sostanza ai fenomeni meccanici.
La variabile "tempo"
Nei problemi di fìsica intervengono generalmente le quattro variabili
indipendenti B, C , D , >: le prime definiscono un punto dello spazio, la > definisce un
Anno accademico 2011/2012
1
Relatività speciale
istante. Una quaterna di valori B, C, D , > definisce un "punto-istante", cioè un punto
dello spazio considerato in un determinato istante; per comodità si chiamano spesso
"coordinate spaziali" B, C, D , "coordinata temporale" >, così che un punto-istante
è definito da quattro "coordinate". Chiameremo "evento" un qualsiasi fenomeno
che si svolga in uno spazio talmente ristretto ed in un tempo cosi breve, da poterlo
considerare caratterizzato dal punto-istante in cui avviene.
Esaminiamo ora più da vicino come si devono intendere definite fìsicamente
le quantità B, C, D , > che caratterizzano un evento, cioè esaminiamo quali esperienze
(sia pure ideali, cioè eseguite con una precisione impossibile in pratica) si devono
immaginare effettuate per dare un significato ai numeri B, C, D , >. Per le coordinate
spaziali B, C, D , la cosa è abbastanza semplice. Immagineremo scelto un sistema di
riferimento costituito da assi ortogonali uscenti da un punto O, ed una unità di misura
costituita da un regolo rigido. Condotta da P la PP0 , poi la P0 P', riportando il regolo
su OP' si ha B, e così per C e D .
Figura 14.1
Per la > occorre un'analisi più delicata. Si può immaginare realizzato un orologio, cioè
un sistema meccanico di cui un organo si muove di moto uniforme. Per mezzo di esso
potremo definire l'unità di tempo e, fissata a piacere l'origine dei tempi, potremo
leggere sull'orologio la > di qualsiasi evento che si svolga nel luogo stesso dove
l'orologio si trova. Ma è essenziale osservare che, se trasportiamo l'orologio da un
posto all'altro, non possiamo esser certi che il trasporto non influisca sul moto della
lancetta, perché non sappiamo "a priori" come il moto d'insieme di un sistema
meccanico influisca sui suoi movimenti interni. Se dunque non vogliamo introdurre
postulati arbitrati, dovremo immaginare collocati tanti orologi identici in tutti i punti
dello spazio dove si svolgono degli eventi di cui ci interessa il tempo, e leggere la > di
ogni evento sempre sull'orologio locale. Poiché gli orologi sono identici essi avranno
lo stesso andamento, ma è evidente che l'origine dei tempi si potrà fissare
arbitrariamente su un orologio solo (per es., quello dell'origine degli assi O), mentre
gli altri dovranno essere regolati inizialmente su quello. Sorge dunque il problema di
"trasportare l'ora" da un posto all'altro, cioè di definire la contemporaneità di due
eventi distanti nello spazio. Nella vita pratica la questione non si presenta perché o si
trascura l'eventuale influenza del trasporto sull'andamento dell'orologio, e si trasporta
addirittura l'orologio, o si ricorre alla trasmissione di segnali elettromagnetici o (per
piccole distanze) si guarda addirittura l'orologio lontano, cioè si ricorre alla
trasmissione della luce: e sia le onde hertziàne che la luce si considerano nella pratica
come messaggeri istantanei. Ma in realtà non lo sono, nè siamo autorizzati a postulare
che vi siano in natura fenomeni che si propagano istantaneamente in senso rigoroso. E
quindi, per dare una definizione concettualmente soddisfacente della variabile >,
bisogna tener conto del tempo impiegato dalla propagazione anche per piccole
distanze.
Per conoscere la correzione da apportarsi alle letture, a causa del tempo di
propagazione della luce, bisogna conoscere la velocità, - , di questa. Ma non possiamo
Anno accademico 2011/2012
2
Relatività speciale
pensare di misurarla, facendo andare un segnale luminoso da un punto A ad un punto
B e misurando il tempo impiegato, perché dovremmo aver già definito il criterio per
confrontare l'orologio di B con quello di A. Dovremo invece far riflettere il segnale su
uno specchio in B, farlo tornare in A e misurare (sull'orologio di A) il tempo di andata
e ritorno. Ciò presuppone che la velocità sia la stessa nei due sensi (come poi
dimostrato accadere): ammettiamo che sia verifìcata. Allora l'esperienza ci permette
di misurare la velocità - , e quindi possiamo trasportare l'ora dall'orologio campione O
a qualsiasi altro orologio P: potremo, per esempio, far partire da O un segnale
luminoso quando l'orologio di O segna zero e, quando il segnale giunge in P, mettere
la lancetta dell'orologio P sull'ora OP/- .
Così è definita la variabile > in qualsiasi punto dello spazio. Si riconosce che
questo equivale a dare il seguente criterio per definire la contemporaneità di due
eventi in due punti distanti O e P: si facciano partire due segnali luminosi da O e da P
quando si verìficano i due eventi: se questi segnali giungono contemporaneamente nel
punto medio del segmento OP i due eventi si diranno contemporanei.
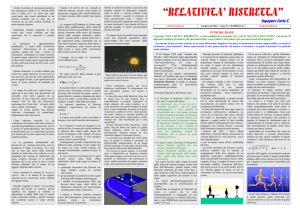
Cambiamento del sistema di riferimento.
Ci proponiamo ora lo studio comparativo dei fenomeni fisici come appaiono a
due osservatori K, K' in moto rettilineo ed uniforme uno rispetto all'altro. Per
precisare questa idea introdurremo due sistemi di assi, un sistema K (origine O, assi
B, C, D ) ed un sistema K' (origine O', assi B', C', D ' in moto uno rispetto all'altro: per
Figura 14.2
comodità li disporremo come in figura: assi B ed B' coincidenti, assi C ed C ' paralleli e
così D e D ' e supporremo che O' scorra lungo l'asse B con velocità costante @. Ciascun
osservatore riferisce i fenomeni al proprio sistema, e, per trattare i due osservatori in
modo simmetrico, dobbiamo supporre che ciascuno misuri le coordinate con un
proprio regolo unità: i due regoli però dovranno essere "uguali", con che intendiamo
di identica costituzione fìsica e chimica e, naturalmente, nelle stesse condizioni
fìsiche rispetto al relativo osservatore. Restano così definite, per ciascun evento, le
coordinate spaziali relative a K (B, C, D ) e quelle relative a K' (B', C', D ').
Analogamente, per definire le coordinate temporali, supporremo che ciascun
osservatore abbia un proprio sistema di orologi (fìssi rispetto ai propri assi e
distribuiti in tutto lo spazio) di identica struttura e regolati su un proprio orologio
campione: fisseremo le origini dei tempi in modo che i due orologi campione segnino
zero all'istante in cui O' passa per O. La regolazione degli orologi lontani con
l'orologio campione deve poi essere fatta da ciascun osservatore con le precauzioni
accennate in precedenza. In ogni punto dello spazio potrà quindi trovarsi un orologio
del sistema K ed uno del sistema K' (mobile rispetto a quello) ed un evento qualsiasi
avrà quindi una coordinata temporale > per l'osservatore K ed una >' per K': essendosi
definiti separatamente i significati di > e >' non possiamo a priori affermare che risulti
> œ >'.
Anno accademico 2011/2012
3
Relatività speciale
Quali sono le relazioni analitiche tra le coordinate B, C, D , > di un evento e le
coordinate B', C', D ', >' dello stesso evento?
Fisica classica e fisica relativistica.
L'analisi rigorosa del significato delle variabili B, C, D , >, fatta nei paragrafi
precedenti, è stata introdotta da Einstein nel 1905, ed, insieme ad altre considerazioni,
ha messo in, luce che la fìsica costruita fino allora era stata inavvertitamente fondata
su alcuni postulati che venivano ammessi senza nemmeno enunciarli ma che,
enunciati e sottoposti ad un attento esame, non appaiono affatto evidenti. Uno di
questi (che era implicito nell'uso fatto fino allora della variabile >) era il postulato che
dovesse esistere (benché non conosciuto) un modo per trasmettere a distanza dei
segnali con velocità infinita: in tal caso la definizione del tempo nei vari luoghi non
richiederebbe alcuna discussione, e, per i due sistemi di riferimento K, K' in moto
l'uno rispetto all'altro, darebbe senz'altro > œ >'. La fisica classica considerava
evidente che dovesse essere > œ >', ma tale evidenza non ha altra ragione psicologica
se non quella che esiste un agente fisico - la luce - la cui propagazione nella
esperienza della vita comune (su cui si forma la nostra intuizione) si può praticamente
considerare istantanea.
Per ragioni analoghe, la fisica classica ammetteva tacitamente il postulato che,
se i due osservatori K e K' fanno simultaneamente delle misure di lunghezza sopra lo
stesso oggetto, essi debbono trovare lo stesso risultato. Ma riflettendo un poco su
questo postulato ci sì accorge che la sua apparente evidenza è del tutto illusoria e che
non vi è invece alcuna ragione logica per cui esso debba essere vero. Si tratti, per
esempio, della lunghezza di una sbarra rigida, disposta lungo l'asse B ed
accompagnante l'osservatore K'. Per questi l'operazione consiste semplicemente nel
riportare lungo la sbarra data il regolo unità, od una sua parte aliquota, il numero
necessario dì volte: per K, invece, l'operazione consiste nel segnare sull'asse B la
posizione dei due estremi della sbarra in uno stesso istante, e poi misurare (col
proprio regolo unità) la distanza fra i due segni (come si vede, la definizione è
collegata alla definizione di contemporaneità). Si tratta dunque di operazioni
essenzialmente diverse e se si vuole dare un senso preciso alle parole "lunghezza della
sbarra" si deve adottare per definirla uno solo dei due procedimenti: per esempio,
quello dell'osservatore che accompagna la sbarra (la "lunghezza di quiete"). L'altro
procedimento definisce, a rigore, un'altra grandezza fìsica ("lunghezza della sbarra in
moto con velocità @") e non c'è a priori nessuna ragione perché debba dare lo stesso
risultato.
Il punto di vista della "fisica relativista" consiste nel lasciare, in principio,
impregiudicata la questione della validità o meno dei detti postulati, (e quindi
definire, come abbiamo fatto, la contemporaneità, la lunghezza, etc., in modo
indipendente da essi) e nell'introdurre poi, in luogo di essi, due altri postulati,
direttamente suggeriti dall'esperienza, ma non da quella grossolana dei sensi, bensì da
raffìnatissime esperienze di laboratorio. Le conseguenze che si deducono, nei vari
campi della fisica, dai postulati della teoria della relatività differiscono in generale da
quelle della fìsica classica, ma le differenze sono, per lo più, di entità piccolissima
così che la fìsica classica conserva il suo valore pratico nella maggioranza dei casi. In
certi casi, però, il divario fra le due teorie diviene accessibile all'esperienza, ed i
risultati sperimentali non hanno finora mai smentito le previsioni della teoria della
relatività.
Anno accademico 2011/2012
4
Relatività speciale
Torniamo al questio di trovare le relazioni analitiche tra le coordinate B, C , D , >
di un evento in K e le coordinate B', C', D ', >' dello stesso evento in K'.
Senza perdere in generalità supponiamo che gli assi x e x' coincidano e che y,
y' e z, z' si mantengano rispettivamente paralleli. I due osservatori dispongono
ciascuno di un orologio. Gli orologi vengono accordati in modo che segnino l'istante
> œ ! al momento in cui O' passa per O. La distanza di O' da O a un generico istante >
sarà dunque pari a @>.
Supponiamo ora che in un punto P dello spazio si verifìchi un evento istantaneo.
L'osservatore in K dirà che l'evento si è verifìcato nel punto x, y, z all'istante t, mentre
l'osservatore in K' dirà che l'evento si è verifìcato nel punto x', y', z' all'istante t'.
Sussiste evidentemente la relazione
Bw œ B @> ; Cw œ C ; D w œ D ; >w œ >
(II.44)
Si suol dire che queste equazioni costituiscono la trasformazione di Galileo. Il nome
deriva in realtà da concetti che, come vedremo, maturarono solo tre secoli dopo
Galileo. Come si vede si tratta di una trasformazione lineare tra Bß Cß Dß > e Bw ß Cw ß D w ß >w .
Vediamo che cosa comporta la trasformazione di Galileo nei riguardi delle
leggi della meccanica. Supponiamo che il punto P si muova, cioè occupi posizioni
diverse in tempi diversi (con continuità). Allora x, y e z saranno funzioni di t.
L'osservatore in K misurerà una velocità Z , le cui componenti saranno
ZB œ .BÎ.>à ZC œ .CÎ.>à ZD œ .DÎ.>
(II.45)
mentre l'osservatore in K' misurerà una velocità Z w data da
ZBw œ .B'Î.>'à ZCw œ .C'Î.>'à ZDw œ .D 'Î.>'
(II.46)
In queste ultime equazioni potremo scrivere t al posto di t', in virtù dell'ultima delle
(II.44). Allora avremo
ZBw œ
.ÐB @>Ñ
.B .Ð@>Ñ
œ
à ZCw œ .C'Î.>'à ZDw œ .D 'Î.>'
.>
.>
.>
(II.47)
Dato che .Ð@>ÑÎ.> œ @, paragonando con le (II.45), otteniamo
ZBw œ ZB @à
ZCw œ ZC ; Zzw œ Zz
(II.48)
Queste sono le equazioni di trasformazione della velocità nel passaggio da un sistema
all'altro. I due osservatori non ottengono lo stesso risultato misurando la velocità di P.
La velocità pertanto non è invariante per trasformazione di Galileo. Poiché @ è
costante, ne consegue che se Z é costante, lo è anche Z w . Pertanto la legge di inerzia,
se è valida per K, è valida anche per K'. Un corpo non soggetto a forze si muove di
moto rettilineo uniforme sia in K, sia in K'.
Anno accademico 2011/2012
5
Relatività speciale
Passiamo all'accelerazione: essa sarà + per K e +w per K'. Poiché @ è una
costante, la sua derivata è nulla, e otteniamo subito
.ZBw Î.> œ .ZB Î.>;
.Zyw Î.> œ .Zy Î.>; .Zzw Î.> œ .Zz Î.>
(II.49)
Tutte le componenti dell'accelerazione sono invarianti. Pertanto l'accelerazione è
invariante; K e K' misurano la stessa accelerazione per P.
Supponiamo ora di sottoporre un corpo di massa 7 a una forza J . Se J ha la
forma J œ 7+ per K, la seconda legge della dinamica ha la stessa forma J w œ 7w +w
per K' (anzi risulta pure che 7 œ 7w , cioè la massa è invariante).
Dunque le tre leggi della meccanica e pertanto tutta la meccanica classica sono
invarianti per trasformazione di Galileo. Non è quindi possibile rivelare con
esperienze di meccanica, compiute dentro un sistema, se il sistema è fisso o si muove
di moto rettilineo uniforme.
Ma allora che senso ha dire che un sistema è fisso e che un altro è in moto
rettilineo uniforme? Nell'ambito della meccanica non c'è modo di verificare queste
affermazioni. Ciononostante Newton rimase attaccato al concetto di spazio assoluto e
di tempo assoluto. Secondo tale concezione esiste uno spazio immoto, indipendente
dall'osservatore, rispetto al quale i corpi si muovono o stanno fermi. Similmente il
tempo scorre al di fuori di noi con un ritmo inesorabile, indipendente dal sistema nel
quale lo si misura. Da osservare che Newton affermava l'esistenza della quiete e del
moto assoluti proprio nel momento in cui scriveva delle leggi che sono identiche per
chi sta fermo e per chi si muove (di moto rettilineo uniforme), cioè leggi che rendono
impossibile accertare con mezzi meccanici chi si muove e chi sta fermo.
La relatività einsteiniana
La nascita dell'elettromagnetismo e la sintesi maxwelliana sembrarono dare
ragione alla concezione assolutistica di Newton. Notiamo che la relatività galileiana
non afferma che rispetto ai moti rettilinei uniformi sono invarianti tutte le grandezze
fisiche; afferma invece che sono invarianti le leggi generali, che le legano. Del resto
la velocità non è invariante (e pertanto non sono invarianti la quantità di moto,
l'energia cinetica, ecc.), ma la meccanica può basarsi tutta su tre assiomi in cui
compare solo l'accelerazione, oltre alla forza e alla massa, e pertanto le sue leggi
generali sono invarianti.
Diversa è la situazione per le equazioni di Maxwell. In esse (cioè nelle leggi
generali) compare in modo essenziale la velocità della luce. Se vale la trasformazione
di Galileo, le equazioni di Maxwell non sono invarianti. Ne consegue che, passando
da un sistema fisso ad uno in moto rettilineo uniforme, le leggi dell'elettrodinamica e,
in particolare, dell'ottica cambierebbero. Sarebbe, qiuindi, possibile mediante
esperienze di elettromagnetismo o di ottica accorgersi del moto del sistema di
riferimento. In particolare si è pensato di poter rivelare in questo modo il moto della
Terra nello spazio (moto considerato in prima approssimazione come traslazione
rettilinea uniforme).
II problema matematico dell'invarianza si presentava parallelamente a quello
físico dell'etere. Maxwell aveva dimostrato che la luce é una propagazione ondosa di
carattere elettromagnetico, ma era chiara l'analogia con i fenomeni ondosi meccanici,
noti anteriormente (onde sismiche, onde sonore, onde superficiali nei liquidi, ecc.).
Alla base di tutti questi fenomeni sta 1'esistenza di un mezzo continuo del quale le
particelle materiali oscillano. Pertanto in tutti questi casi esiste una sostanza materiale
rispetto alla quale ha senso dire se ci muoviamo o se stiamo fermi. Rispetto al sistema
Anno accademico 2011/2012
6
Relatività speciale
in cui si propagano le onde é perfettamente lecito specificare se 1'osservatore é in
quiete o in movimento. Allora ci si chiese: in che mezzo si propagano le onde
elettromagnetiche? É escluso che sia uno dei mezzi materiali usuali, poiché le onde
elettromagnetiche si propagano anche nel vuoto. Fu per questo escogitata una speciale
sostanza, 1'etere. L'etere doveva essere molto diverso dalle altre sostanze materiali:
doveva essere tanto tenue da penetrare in tutti i corpi e doveva essere capace di
trasmettere le vibrazioni luminose. E poiché le vibrazioni luminoso sono trasversali,
cioè perpendicolari alla direzione di propagazione, 1'etere doveva addirittura avere
una proprietà dei corpi solidi.
II problema di rivelare il moto di un osservatore rispetto all'etere era
intimamente collegato a quello di scoprire se e in qual modo la velocità della luce si
componeva con quella dell'osservatore. Poiché la velocità della luce é terribilmente
elevata rispetto a quella con cui si poteva muovere 1'osservatore, si ricorse al moto
della Terra nello spazio. Rispetto al sistema solare la sua velocità é di 30 km/s. Si
tratta di una velocità diecimila volte più piccola di quella della luce, pur tuttavia si
poteva sperare di rivelarla. É ciò che si propose di fare A. A. Michelson, realizzando
con E. W. Morley nel 1887 una celebre esperienza interferometrica, ripetuta
successivamente con sempre migliore precisione. Risultò che la velocità della luce
non si compone con quella della Terra: in qualunque direzione si propaghi la luce
rispetto al moto della Terra, la sua velocità é la stessa.
La via d'uscita dalle difficoltà fu trovata da A. Einstein nel 1905. Ma vanno
notati almeno due fatti che non hanno solo un'importanza storica. II primo fatto é che
Michelson per molti anni dopo la sua esperienza continuò a credere nell'etere. II
secondo é che Einstein, com'egli stesso ebbe a dichiarare, non fu affatto spinto a
elaborare la sua teoria dall'esperienza di Michelson. Eppure si trattò di una esperienza
che molti considerarono cruciale per la relatività.
La relatività galileiana non si applica a qualsiasi moto, ma soltanto al moto
rettilineo uniforme. Dobbiamo pertanto concludere che esistono dei sistemi di
riferimento rispetto ai quali valgono le leggi della meccanica newtoniana e dei sistemi
rispetto ai quali non valgono. I primi sogliono chiamarsi sistemi inerziali. La relatività
galileiana consiste nell'affermazione che un sistema che si muove di moto rettilineo
uniforme rispetto a un sistema inerziale é inerziale. La Terra é un sistema inerziale
soltanto quando non si vada al di là di una certa precisione nelle misure. Ciò é dovuto
alla rotazione del nostro pianeta attorno al suo asse. La cosa può essere messa in
evidenza mediante il pendolo di Foucault: dalla meccanica newtoniana consegue che
un pendolo, una volta messo in moto, oscilla in un piano fisso. Invece un pendolo
sulla Terra appare oscillare in un piano che ruota lentamente in senso contrario alla
rotazione terrestre. Si suole dire che un sistema inerziale deve conservare il suo
orientamento rispetto al cielo delle stelle fisse. Comunque le osservazioni suggerite da
Galileo non erano di tale precisione da rivelare la non inerzialità del sistema terrestre.
Einstein comincia con 1'estendere il principio di relatività ai fenomeni
elettromagnetici, postulando che
I) in tutti i sistemi inerziali valgono le stesse leggi fisiche.
A questo postulato Einstein ne aggiunse un secondo, quello dell'
II) invarianza della velocità della luce
la luce si propaga nello spazio vuoto sempre con una definita velocità - che é
indipendente dallo stato di moto del corpo emittente.
É facile vedere che, se é valido questo secondo postulato, il concetto di
contemporaneità o simultaneità diventa relativo, in quanto dipende dal sistema nel
Anno accademico 2011/2012
7
Relatività speciale
quale si trova 1'osservatore. Infatti, si consideri la nave di Galileo: in un punto del
ponte equidistante dalla prua e dalla poppa si accenda una lampada. Per chi sta sulla
nave la luce metterà lo stesso tempo per raggiungere la prua e la poppa. Pertanto per
tale osservatore i due eventi: A = (arrivo della luce a prua) e B = (arrivo della luce a
poppa) sono contemporanei. Per un osservatore fermo a terra, invece, mentre la luce
viaggia, la prua fugge dinanzi ad essa mentre la poppa si avanza verso di essa.
Pertanto si avrà prima l'evento B e poi 1'evento A. Se ne conclude che due eventi che
sono contemporanei per chi sta sulla nave non lo sono in generale per chi sta a terra.
Einstein capì che bisognava rivedere il concetto di tempo, abbandonando il
tempo assoluto, newtoniano. Bisognava rendersi conto con metodologia operativa di
come si misura il tempo e di come si sincronizzano gli orologi nei diversi sistemi
inerziali. Fu questa la chiave che consentì di aprire la porta della relatività e di
arrivare a costruire tutta la mirabile teoria.
La trasformazione di Lorentz.
Lo spazio e il tempo sono certamente enti fisici di carattere particolare, e in un
certo senso, privilegiato, rispetto a tutti gli altri. Infatti per descrivere un qualsiasi
fenomeno fisico é necessario specificare luoghi e tempi nei quali si svolge. Questa
natura singolare dello spazio e del tempo ha sempre attratto 1'attenzione degli
scienziati e dei filosofi, che li hanno considerati o come un substrato nel quale é calata
la realtà (Newton) o come un substrato nel quale noi caliamo la realtà (Kant). Lo
spazio e il tempo newtoniao sono assoluti e non dipendono dall'osservatore. Per lo
spazio si credette di trovare questo riferimento assoluto nell'etere. Un corpo si muove
o sta fermo rispetto all'etere: due eventi distanti nel tempo possono aver luogo in uno
stesso punto dell'etere.
Sparito 1'etere, cominciò ad essere evidente ciò che era stato sospettato da
molti, che cioè non avesse senso parlare di due eventi che avvengono nello stesso
luogo in tempi diversi, se non facendo riferimento a un dato sistema nel quale si
osserva. Dunque, allo stato delle nostre conoscenze, l'identità assoluta di luogo in
tempi diversi non ha significato fisico.
Quando Einstein mostrò che viceversa non ha senso assoluto nemmeno la
contemporaneità in luoghi diversi, cominciò ad apparire evidente prima di tutto che vi
é una certa simmetria fra lo spazio e il tempo e inoltre che essi sono molto più
intimamente collegati fra loro di quanto si era pensato precedentemente.
Con Minkowski lo spazio-tempo o cronótopo è un continuo unico, non
separabile nella parte spaziale e in quella temporale, se non rispetto a un dato
osservatore. Alla considerazione dei punti dello spazio va sostituita quella degli eventi
dello spazio-tempo, ciascuno individuato dalle quattro coordínate x, y, z, t. Pertanto lo
spazio-tempo é un continuo quadridimensionale.
Le trasformazioni fra le quattro coordinate che deve eseguirsi nel passaggio
dal sistema inerziale K al sistema inerziale K' per la quale le equazioni di Maxwell
risultano invarianti furono trovate da Lorentz nel 1904:
Bw œ
B -">
È" " #
;
Cw œ C
(II.50)
Anno accademico 2011/2012
8
Relatività speciale
Dw œ D
>w œ
;
> 3" BÎÈ" " #
con " œ @Î-Þ Il lavoro di Lorentz precede, quindi, quello di Einstein sull'argomento,
ma Lorentz non ne comprese la loro reale portata e soprattutto esse non furono
adeguatamente spiegate dal punto di vista concettuale: le trasformazioni avevano un
senso quasi puramente matematico, non escludevano la possibilità di un sistema fisso
assoluto e non discendevano quindi dal principio di relatività.
La trasformazione di Galileo (II.44) è chiaramente il limite a cui tende la
(II.50) quando @ è trascurabile rispetto a - , cioè quasi tutti i casi pratici della
meccanica.
Le trasformazioni di Lorentz sono una trasformazione ortogonale (nell'algebra
lineare, una trasformazione ortogonale è una trasformazione lineare di uno spazio euclideo che
preserva il prodotto scalare)
Bw4 œ " +45 B5
%
(II.51)
" 5
dove i coefficienti +45 obbediscono alle condizioni
" +45 +65 œ $46
" +54 +56 œ $46
e
5
5
Il risultato di Lorentz fornisce il seguente specchio:
:
Î
Ð
¼+45 ¼ œ ÐÐ
Ð
Ï
(II.52)
È"" #
"
!
!
!
!
"
!
!
!
"
!
-3"
È"" #
3"
È"" #
!
!
È"" #
"
Ñ
Ó
Ó
Ó
Ó
Ò
(II.53)
------------------------------------------------------Derivazione della trasformazione di Lorentz.
Supponiamo che un'onda elettromagnetica sferica venga emessa da O all'istante > œ ! in cui O
coincide con O'. Un osservatore che si trovi su K vedrà l'onda propagarsi come una sfera di equazione:
B# C# D # - # ># œ !
(a.1)
Ma la velocità - è la stessa per i due sistemi, quindi il principio di relatività esige che un osservatore
situato in O w veda l'onda propagarsi secondo la sfera
B'# C'# D '# - # >'# œ !
(a.2)
I primi membri di queste equazioni ricordano il quadrato della distanza di un punto dall'origine, in uno
spazio a 4 dimensioni (cronotopo), salvo che l'ultimo termine è negativo anziché positivo (si dice per
questo che il cronotopo e pseudoeuclideo). Ciò induce a prendere come coordinate del cronotopo le
seguenti:
B" œ B ; B# œ C ; B$ œ D ; B% œ 3->
(a.3)
chiamate a volte coordinate di universo. Allora le (II.50), (II.51) si scrivono
Anno accademico 2011/2012
9
Relatività speciale
" B4 B4 œ ! ; " B'4 B'4 œ !
%
%
" 4
" 4
(a.4)
Come è noto, il quadrato della distanza dall'origine !4 B4 B4 è invariante rispetto ad una trasformazione
ortogonale. Ciò induce a supporre che la trasformazione cercata sia ortogonale:
Bw4 œ " +45 B5
%
(a.5)
" 5
con le +45 che obbediscono alle condizioni (II.52). Ora appare necessario che la seconda e la terza delle
(II.44) siano conservate. Infatti la simmetria richiede che per C œ ! si ottenga sempre Cw œ ! e
analogamente per la D , mentre d'altra parte non si può ammettere che cambi la scala di C e D , dato che
ciò assegnerebbe una assurda distinzione fra K e K'. Inoltre C e D non possono comparire nella prima e
nella quarta delle (II.44), perche per B œ > œ ! si deve ottenere B' œ >' œ !. Pertanto delle sedici +45 ,
potranno essere diverse da zero soltanto +"" ; +"% ; +41 ; +44 ; e +22 œ +$$ œ ". Le condizioni di
ortogonalità forniscono allora
#
#
+""
+"%
œ " ; +4#" +4#% œ " ; +"" +%" +"% +%% œ !
(a.6)
Esigendo poi che la trasformazione sia diretta (senza riflessioni) scriveremo che il determinante delle
+45 sia uguale ad uno, cioè porremo:
+"" +%% +"% +%" œ "
(a.7)
Apparentemente abbiamo quattro equazioni in quattro incognite. Ma l'ultima, salvo il segno, è
conseguenza delle prime tre, per cui ci rimarrà un parametro arbitrario. Moltiplicando la terza
2
equazione per +"" si ottiene +""
+%" +"% +"" +%% œ !. Sostituendo nell'ultimo termine il valore di +"" +%%
2
2
tratto dalla quarta si ha: +"" +%" +"%
+%" +"% œ !, quindi per la prima +"% œ +%" . Similmente
2
moltiplicando la quarta per +"" si ha +""
+%% +"% +"" +%" œ +"" e sostituendo il valore di +"" +%" tratto
2
2
dalla terza, otteniamo: +""
+%% +"%
+%% œ +"" , da cui, per la prima, +%% œ +"" .
Poniamo poi arbitrariamente +"" œ "ÎÈ" " # dove dove " è il parametro libero. Otterremo
+%% œ "ÎÈ" " # , +"% œ „ 3" È" " # +%" œ … 3" È" " # col che tutte e quattro l'equazioni
rimangono soddisfatte. Potremo togliere il doppio segno, dato che " può essere positiva o negativa e
avremo per le +45 il quadro (II.53).
Allora la trasformazione dalle B3 alle B'3 si scriverà:
Bw" œ
B" 3" B%
È" " #
;
B#w œ B#
(a.8)
Bw$ œ B$
;
B%w œ
B4 3" B"
È" " #
La trasformazione è reale se " è reale e minore di ".
Si osservi ora che per l'origine O' dovrà aversi Bw œ ! e B œ @>. Pertanto la prima delle (II.50)
esige che sia:
@
"œ
(a.9)
-
------------------------------------------------------Sì noti che per l'origine O si ha B œ !, pertanto dalle (II.50) viene
w
B œ @>ÎÈ" " # e >w œ >ÎÈ" " # e quindi Bw œ @>w . Ne consegue che mentre
per un osservatore in K il punto O' si muove con velocità @, per un osservatore in K' il
punto O si nuovo con velocità @.
Si noterá che al posto di > abbiamo posto 1'espressione ->. Ció per due ragioni.
Prima di tutto é bene che le coordínate siano omogenee fra loro e pertanto bisogna
dare alla quarta coordinata le dimensioni di una lunghezza, come avviene per le altre
Anno accademico 2011/2012
10
Relatività speciale
tre. In secondo luogo risulta che rispetto a quella che potremo chiamare una scala
naturale, noi misuriamo abitualmente il tempo con unitá di misura troppo grandi.
Tutto diventa piú armonico e simmetrico se si prende per unitá di misura del tempo il
tempo che la luce impiega a percorrere un cm. É precisamente ció che avviene se a >
sostituiamo ->.
Relatività della contemporaneità.
Una prima conseguenza notevole della trasformazione di Lorentz è che la
contemporaneità di due eventi (non coincidenti anche nel luogo) è relativa al sistema
di riferimento, vale a dire, due eventi che per l'osservatore K sono contemporanei (ma
che avvengono in luoghi diversi) non sono in genere contemporanei per K', e
viceversa. Supponiamo infatti, che per l'osservatore K uno dei due eventi, A, accada
in O (BE , CE , DE œ !), l'altro, B, in un punto di coordinate BB , CB , DB , entrambi al
tempo >E œ >F œ !Þ Gli stessi eventi avranno, per K', le coordinate B'E , C 'E , D 'E , >'E
B'B , C'B , D 'B , >'F ricavabili dalle precedenti con le formule (II.50), di cui, in
particolare, l'ultima ci da
>wE œ !à
w
>F
œ
" BF ÎÈ" " #
Come si vede, in generale non risulta >'B = >'A . Soltanto se BF œ !, cioè se i due punti
dove avvengono gli eventi hanno la stessa ascissa, o in particolare coincidono, i due
eventi contemporanei per K lo sono anche per K'.
Contrazione di lunghezze e dilatazione di tempi.
Si consideri un regolo parallelo all'asse B, che sia fisso in O ', cioé viaggi con
esso alla velocitá @ rispetto a O . Un osservatore in O ' misuri le ascisse degli estremi
del regolo, trovando i valori B'" e B'# . Concluderá che la lunghezza del regolo è
P' œ B'# B'" . Altrettanto potrà fare 1'osservatore in O , trovando la lunghezza
P œ B# B" . Ma dato che il regolo si muove rispetto a O , le due ascisse B" e B#
dovranno essere misurate allo stesso istante. Dovrà naturalmente trattarsi dello stesso
istante per O , cioé di uno stesso valore di >. Poniamo che sia per esempio l'istante
> œ !. Ponendo > œ ! nella prima delle (II.50), si ottiene
Bw" œ B" ÎÈ" " # e
da cui
B2w œ B2 ÎÈ" " #
P œ Pw È " " # Pw
(II.54)
Dunque 1'osservatore in O troverà per il regolo la lunghezza P' moltiplicata per il
fattore È" " # , che è sempre minore di ". Allora 1'osservatore avrá 1'impressione
che, per effetto del moto, il regolo si contragga nella detta proporzione. É questa la
contrazione giá postulata da H. A. Lorentz e G. F. Fitzgerald come ipotesi ad hoc per
spiegare 1'esito negativo dell'esperienza di Michelson. Ora essa non é piú una
stranissima proprietá dei corpi materiali, bensí una conseguenza del1'analisi operativa
della misura delle lunghezze e dei tempi.
Supponiamo ora che due eventi successivi si verifichino in O ', per esempio in
O'. L'osservatore in O ' registrerà per essi gli istanti >w" e >2w e concluderá che sono
separati dall'intervallo di tempo X w œ >#w >1w . Il punto O' ha Bw œ !: ponendo Bw œ !
nella prima delle (II.50) si ottiene B œ @> (come era ovvio). Sostituendo questo valore
Anno accademico 2011/2012
11
Relatività speciale
di B nel1'ultima delle (II.50), si arriva a scrivere >w œ >È" " # . Quindi se >" e >#
sono gli istanti misurati da O , si ha >1 œ >w" ÎÈ" " # e >2 œ >2w ÎÈ" " # . Facendo la
differenza si trova 1'intervallo di tempo X œ ># >" quale appare a O :
Xw
X œ
Xw
È" " #
(II.55)
Dunque all'osservatore fisso nel sistema nel quale si svolgono gli eventi, 1'intervallo
di tempo appare piú corto. Viceversa per l'osservatore rispetto al quale il sistema nel
quale si svolgono gli eventi si muove, il tempo diviene piú lungo. É questo il
famosissimo fenomeno della dilatazione relativistica dei tempi.
Gli eventi di cui ci siamo occupati possono essere costituiti semplicemente
dall'arrivo delle lancette dell'orologio di K' su determinate posizioni del quadrante.
Pertanto 1'osservatore in K vedrá che 1'orologio di K' ritarda rispetto al suo. Questo
fatto ha avuto molteplici conferme, anche quantitative.
II tempo misurato da un orologio fisso in K' si chiama tempo proprio di K', 7 .
Esso é il tempo piú breve fra quelli che diversi osservatori misurano intercorrere fra
gli eventi che si svolgono in uno stesso luogo di K'. Per la (II.50) il tempo proprio 7 di
un sistema K' si ottiene dal tempo > misurato da un sistema K rispetto al quale K' si
muove con velocitá @, con la relazione
7 œ > Ê"
@#
-#
(II.56)
Il tempo proprio é evidentemente invariante.
La trasformazione di Lorentz, essendo una trasformazione ortogonale, deve
rappresentare una generalizzazione di una rotazione degli assi di riferimento dello
spazio tridimensionale. Infatti introduciamo l'angolo immaginario : con
-9=: œ
"
3"
; =38: œ
; >1: œ 3"
#
È" "
È" " #
(II.57)
Allora la prima e l'ultima delle (II.60) forniscono:
Bw" œ B" -9=: B% =38: : B%w œ B" =38: B% -9=:
(II.58)
Dunque la trasformazione di Lorentz può pensarsi come una rotazione del piano
B" ß B% di un angolo immaginario :.
Composizione delle velocità
Consideriamo un sistema K' animato di velocità @" rispetto a K e un sistema
K'' animato di velocità @# (anch'essa parallela ad x) rispetto a K'. L'angolo di rotazione
corrispondente al passaggio da K a K' sarà dato da >1:" œ 3@" Î- , quello relativo al
passaggio da K' a K'' da >1:# œ 3@# Î- . Se @ e la velocità di K'' rispetto a K, l'angolo
corrispondente sarà dato da >1: œ 3@Î- . Ma l'angolo della rotazione risultante è
uguale alla somma degli angoli delle rotazioni componenti, per cui : œ :" :# e
quindi
3 @-" 3 @-#
@
3 >1Ð:" :# Ñ œ
" @-" @# #
Anno accademico 2011/2012
12
Relatività speciale
In definitiva si ha:
@œ
@" @#
@ @
" -" # #
(II.59)
E' questo il celebre teorema di somma di due velocità parallele, che si riduce a quello
classico @ œ @" @# solo quando le velocità componenti siano molto piccole rispetto
a - . E' facile vedere che sommando ad una @" - una qualsiasi velocità @# - si
ottiene sempre una velocità @ - . Pertanto non è possibile raggiungere e superare la
velocità della luce per aggiunta di successive velocità a un mobile. La velocità della
luce è una velocità limite.
Invarianza delle leggi della fisica.
Occupiamoci ora del principio di relativitá per cui le leggi della física
dovrebbero essere le stesse in tutti i sistemi inerziali.
Torniamo per un momento allo spazio a tre dimensioni e consideriamo in esso
un corpo di massa 7, soggetto alla forza J . Per la seconda legge della dinamica il
corpo acquisterá un'accelerazione, tale che J œ 7+. Se prendiamo tre assi cartesiani
ortogonali Bß Cß D , possiamo scomporre i vettori nelle loro componenti. Allora la legge
da luogo alle tre equazioni: JB œ 7+B , JC œ 7+C , Jz œ 7+z . Se ora facciamo
compiere alla terna di assi di riferimento una rotazione attorno all'origine, in modo da
cambíarne 1'orientamento, le componenti JB , +B , ecc. dei vettori cambieranno
evidentemente di valore, secondo precise leggi (dette di covarianza), che dipendono
dagli angoli di cui sono ruotati gli assi. Non stiamo qui a descrivere dettagliatamente
tali leggi ma é ovvio che esse sono le stesse leggi di trasformazione a cui vanno
soggette le coordínate di un punto P. Infatti le coordínate di P non sono altro che le
componenti del vettore OP, che va dall'origine O degli assi a P.
Le componenti dei vettori variano, ma la legge J œ 7+, essendo una legge
vettoriale, concerne enti che non dipendono in alcun modo dall'orientamento degli
assi e rimarrà invariata. Se una legge física, quindi, é espressa mediante
un'eguaglianza fra vettori, essa rimane la stessa comunque sia orientato l'osservatore.
Queste considerazioni sono banali finché si resta nello spazio a tre dimensioni,
dato che un vettore in esso é direttamente intuibile come segmento orientato, senza
passare attraverso le sue tre componenti. Diverso é il caso per il cronotopo. In esso
possiamo pensare che esistano dei vettori, che ora chiameremo quadrivettori; ma non
possiamo vederli. Possiamo soltanto studiarli considerando le loro quattro
componenti. Per sapere se quattro numeri (misure di grandezze fisiche) rappresentano
un quadrivettore bisognerà sincerarsi se hanno rispetto alle rotazioni degli assi la
necessaria covarianza. In questo modo (e solo in questo modo) riusciamo a
riconoscere dei quadrivettori nel cronotopo. Una legge espressa mediante
un'eguaglianza fra quadrivettori é invariante per rotazione degli assi. Ora noi
sappiamo che il passaggio da un sistema inerziale a un altro corrisponde
semplicemente a una certa rotazione degli assi nel cronotopo (trasformazione di
Lorentz). Ne concludiamo che le leggi della fisica, se scritta in forma quadrivettoriale,
sono invarianti nel passaggio da un sistema inerziale a un altro. E prtanto il principio
di relatività verrà soddisfatto se riusciremo a scrivere tutte le leggi della fisica in tale
forma.
Vettori nello spazio-tempo
Anno accademico 2011/2012
13
Relatività speciale
I vettori e i tensori sono enti invarianti per trasformazione ortogonale. Le loro
componenti si trasformano in un sistema all'altro secondo la ben nota legge delle
trasformazioni ortogonali, ovvero, nel caso di un vettore secondo
Z4w œ "5 +45 Z5
(II.60)
dove le +45 obbediscono alle condizioni (II.52). Nello spazio-tempo un vettore Z avrà
quattro componenti Z" , Z# , Z$ , Z% e verrà chiamato quadrivettore. Le prime tre
componenti saranno chiamate componenti spaziali, mentre Z% sarà la componente
temporale. Poiché il passaggio da un sistema inerziale K ad un altro K' implica una
trasformazione di Lorentz, ovvero una rotazione nel cronotopo, anche le componenti
dei quadrivettori si trasformeranno in un sistema all'altro secondo la legge (II.60).
Nel caso specifico già considerato si otterrà per la (a.8):
Z"w œ
Z " 3" Z %
È" " #
;
Z#w œ Z#
(II.61)
Z$w œ Z$
;
Z%w œ
Z 4 3" Z "
È" " #
Se indichiamo con Z¼ e Zl rispettivamente i componenti di Z paralleli e perpendicolari
a @ le (II.61) si possono riscrivere nella seguente forma
Z '¼ œ
Z ¼ 3" Z %
È" " #
;
Zl w œ Zl ; Z%w œ
Z4 3@ † Z ÎÈ" " #
(II.62)
Un caso particolare di quadrivettore è rappresentato dal raggio vettore r di un evento
rispetto all'origine, di componenti B" , B# , B$ , B% œ 3->. II quadrato r # œ ! B5 B5 è
5
invariante per la trasformazione ortogonale. Dato che B% è immaginaria, r # potrà
essere positiva o negativa. Nel primo caso si dirà che si tratta di un vettore di tipo
spaziale (perché un caso particolare è la distanza spaziale dall'origine di un evento
che si verifica a > œ !) mentre nel secondo oaso si parlerà di vettore di tipo temporale
(perché un caso particolare è l'intervallo di tempo tra gli eventi 0,0,0,0 e 0,0,0,>). La
definizione di vettore spaziale o temporale si lascia estendere a qualsiasi quadrivettore
@. Poiché @# è invariante, nessuna trasformazione di Lorentz potrà trasformare un
vettore spaziale in uno temporale e viceversa. Invece si vede che, se @ è spaziale si
potrà sempre con un'opportuna trasformazione di Lorentz ottenere @% œ !, mentre se è
temporale si potrà sempre ottenere @" œ @# œ @$ œ !. Per due eventi separati da un
vettore spaziale esiste sempre un sistema inerziale nel quale sono contemporanei,
mentre per due eventi separati da un vettore temporale esiste sempre un sistema
inerziale nel quale i due luoghi coincidono.
Alcuni quadrivettori
Quadrivettore quantità di moto
Un quadrivettore di fondamentale importanza è il quadrivettore quantità di
moto, che si ottiene nel modo seguente. Domandiamoci: è possibile che le tre
componenti della quantità di moto : œ 7@ costituiscano le prime tre componenti di
un quadrivettore? Avremo:
Anno accademico 2011/2012
14
Relatività speciale
:B œ 7
.B
.C
.D
; :C œ 7
; :D œ 7
.>
.>
.>
dove .B, .C , .D rappresentano gli incrementi delle coordinate della particella durante
il tempo .>, cosicchè @B œ .BÎ.>, @C œ .CÎ.>, @D œ .DÎ.>. Ora .B, .C, .D hanno la
stessa varianza di B, C, D o di B" , B# , B$ del cronotopo, cioè delle prime tre
componenti di un quadrivettore. Allora bisognerebbe che .> fosse invariante, ma .>
varia invece come la quarta componente di un quadrivettore, dato che si ha
3-.> œ .B% . A questo si ovvia sostituendo a .> l'elemento di tempo proprio . 7 della
particella . 7 œ .>È" " # . (*) Questo è invariante, pertanto le tre grandezze
P" œ
7@B
É"
@#
-#
; P# œ
7@C
É"
@#
-#
; P$ œ
7@D
É"
@#
-#
(II.63)
costituiscono le prime tre componenti di un quadrivettore.
----------------------------------(*) Si ricordi che . 7 rappresenta l'intervallo di tempo intercorrente fra due eventi coincidenti con la
particella, misurato in un sistema solidale con la particella. Invece .> è l'intervallo misurato tra gli
stessi eventi da un osservatore rispetto al quale la particella si muove con velocità @.
----------------------------------Quando @Î- è molto piccolo P" , P2 , P3 coincidono con le componenti :B , :C ,
:D dell'ordinaria quantità di moto. Si conviene allora di ridefinire la quantità di moto
così
7@
:œ
(II.64)
#
É" @-#
Non si contravviene così alla meccanica classica. Vediamo ora cosa rappresenta la
quarta componente di questo quadrivettore. Si ha
P% œ 7
.B%
3œ7
.7
É"
@#
3
œ I
-
(II.65)
-#
avendo posto per comodità
Iœ
7- #
É"
@#
-#
(II.66)
Quando la particella è in quiete, si ha per I il valore
I0 œ 7- #
(II.67)
Quando la particella si muove, I aumenta a causa del denominatore della (II.66). Se
@Î- è molto piccolo, la (II.66) diventa
I ¶ 7- # Ð"
" #
" @#
Ñ
œ
I
7@
!
#
# -#
(II.68)
Dunque, quando la particella acquista la velocità @, la grandezza I aumenta della
quantità "# 7@# , che altro non è che l'energia cinetica. Quindi, la particella quando sta
ferma ha un'energia di riposo I! data dalla (II.67) e proporzionale alla sua massa;
Anno accademico 2011/2012
15
Relatività speciale
quando si mette in moto, all'energia di riposo si aggiunge 1'energia cinética. Einstein
ebbe il m/rito di trarre proprio questa conseguenza, molto prima che vi fosse una
qualsiasi prova sperimentale di essa.
Il fatto che la particella ferma ha un'energía I! significa che essa deve in
qualche modo avere la capacità di fornirci un lavoro pari ad I! . É proprio ció che la
microfisica moderna dimostra in mille modi: la particella puó annichilarsi e in tal
modo fornisce un'energia (raggiante, termica, cinetica di altre particelle) proprio
eguale a 7- # . La massa deve quindi concepirsi come una sorta di energía congelata,
che in opportune condizioni puó liberarsi.
Dunque abbiamo trovato che le componenti di : insieme con 3IÎ- formano un
quadrivettore P. La quantità di moto e 1'energia fauno parte di un único ente
intrínseco dello spazio-tempo, invariante per rotazione di assi. Noi percepiamo
separate le componenti spaziali di P, che chiamiamo quantità di moto e la componente
temporale, che (a meno di un fattore) chiamiamo energia. Ma questa scomposizione
dipende da come sono orientati gli assi nello spazio-tempo, cioé da come scegliamo il
nostro sistema inerziale. II quadrato della lunghezza del quadrivettore P
P"# P## P$# P%# œ :#
I
-#
(II.69)
sará evidentemente invariante, dato che non puó dipendere dal1'orientamento degli
assi. Il suo valore per 1'osservatore in K, rispetto al quale la particella si muove con
velocitá @, sará lo stesso che per 1'osservatore in K', rispetto al quale la particella sta
ferma. Per quest'ultimo, sarà : œ ! e I œ I! , e il valore dell'invariante é I!# Î- # .
Pertanto potremo scrivere :# -I# œ I!# Î- # . Sostituendo a I! il suo valore (II.67),
si trova
I œ - È:# 7# - #
(II.70)
Questa equazione, che esprime 1'energia in funzione della quantitá di moto, é molto
importante nella física moderna. Fra 1'altro essa mostra che, nell'ipotesi che la massa
fosse zero, se la particella avesse egualmente un'energia, dovrebbe avere anche una
quantitá di moto e viceversa. In tal caso varrebbe la relazione
:œ
I
-
(II.71)
E' proprio ció che avviene per il campo elettromagnetico, dove un fotone di energia
I œ 2/ ha un impulso 2/ Î- .
Dunque, le componenti di : insieme con 3IÎ- formano un quadrivettore, che
si suole anche rappresentare nella seguente maniera, dove le quantità della riga
superiore sono identiche a quelle corrispondenti della riga inferiore:
P"
Œ:
B
P#
:C
P$
:D
P%
3I
-
(II.72)
Nel caso del raggio vettore nel cronotopo abbiamo la corrispondenza
B"
ŒB
B#
C
B$
D
B%
3->
(II.73)
Vediamo altri quadrivettori del campo elettromagnetico.
Anno accademico 2011/2012
16
Relatività speciale
La quadricorrente
La densità di corrente elettrica N e la densità di carica elettrica 4 formano il
quadrivettore quadricorrente ]
]"
ŒN
B
]#
NC
]%
3- 4
]$
ND
(II.74)
] rappresenta complessivamente la corrente e la carica dello spazio ordinario.
L'equazione di continuità dello spazio ordinario
.3@N
`4
œ!
`>
diviene
.3@] œ
† ] œ "
%
" 5
` ]5
œ!
`B5
(II.75)
dove la divergenza va presa nel cronotopo, rappresentata quindi dal dalambertiano
œ ! 35 `Î`B5 , vettore dello spazio-tempo, analogo al vettore f dello spazio
%
" 5
ordinario. Poichè .3@ è un operatore invariante, la (II.75) è invariante per
trasformazione di Lorentz. Dunque, l'equazione di continuità è rispettata in tutti i
sistemi inerziali e la quadricorrente è solenoidale.
Vediamo ora alcune conseguenze fisiche che si traggono dall'esistenza della
quadricorrente e che non sarebbero prevedibili al di fuori della teoria della relatività.
Nel passaggio dal sistema K al sistema K' le componenti di un quadrivettore si
trasformano secondo le (II.61), per cui, in base alla corrispondenza (II.74) si ottiene
N"w
N" 4 @
œ
È" " #
;
N#w
œ N# ;
N$w
œ N$
4 @ † N Î- #
; 4 œ
È" " #
w
(II.76)
Queste equazioni possono anche scriversi
N¼w œ
N¼ 4 @
È" " #
;
Nlw œ Nl ; 4 w œ
4 @ † N Î- #
È" " #
(II.77)
dove N¼ e Nl indicano rispettivamente i componenti di N paralleli e perpendicolari a @.
Le (II.77) ci dicono quale corrente N e quale densità 4 misura l'osservatore in K'
quando l'osservatore in K misura una corrente N e una densità 4. La prima di queste
equazioni coincide con quella che si ricava da considerazioni elementari soltanto
qualora si trascuri " # rispetto all'unità. L'ultima equazione non è facilmente
prevedibile nemmeno in questo caso.
Il quadripotenziale
Il quadrato
2 œ ! 35 ` # Î`B5 `B5 verrà chiamato operatore dalambertiano,
%
" 5
naturale estensione del laplaciano f# . Consideriamo le equazioni di Maxwell che
valgono per i potenziali elettromagnetici nel calibro di Lorentz:
Anno accademico 2011/2012
17
Relatività speciale
2 E œ
%1
N ;
-
2 : œ %14
che possiamo riscrivere per le componenti
2 EB œ
%1
NB
-
2 EC œ
;
%1
NC
(II.78)
2 ED œ
%1
ND
-
2 3: œ
;
%1
3- 4
-
Ai secondi membri si hanno le quattro componenti della quadricorrente ] . Ora,
poiché l'operatore
2 è invariante, ne segue che EB , EC , ED , 3: devono avere la
varianza delle quattro componenti di un quadrivettore. Introdurremo pertanto il
quadripotenziale A mediante il seguente quadro di corrispondenza
ŒE
3:
A" A# A$ A%
B
EC
ED
(II.79)
e riassumeremo le (II.78) nell'unica equazione invariante
2 A œ
%1
]
-
(II.80)
`:
La condizione di Lorentz .3@E "- `> œ ! può ora scriversi semplicemente
.3@A œ
† A œ !
(II.81)
ed è invariante. Dunque il calibro di Lorentz è invariante nel passaggio da un sistema
inerziale ad un altro.
Analogamente a quanto trovato con le (II.86) per la quadricorrente avremo
E¼ :@ÎE¼ œ
È" " #
w
;
Elw
: @ † EÎ- #
œ El ; : œ
È" " #
w
(II.82)
Queste equazioni ci danno i potenziali Ew , :w valevoli per K' , quando sono noti i
potenziali E, : valevoli per K.
Osserviamo che se in K' si ha E' œ ! (le cariche sono fisse rispetto a K') la
prima e la seconda delle (II.82) forniscono:
E œ :@Î-
(II.83)
Basta dunque il calcolo del potenziale scalare per conoscere immediatamente anche il
potenziale vettore.
L'esavettore del campo
Consideriamo l'esavettore H (ovvero un tensore antisimmetrico nello spazio a
quattro dimensioni, avente sei sole componenti distinte) (un esavettore è un ente
invariante)
Anno accademico 2011/2012
18
Relatività speciale
H œ <9>A
(II.84))
dove A è il quadripotenziale e l'operatore rotore nello spazio a quattro dimensioni ha
componenti
Ð<9>?Ñ45 œ
`?4
`?5
`B4
`B5
(II.85)
Le equazioni che danno il campo em dai potenziali
L œ <9>E ; I œ 1<+. :
" `E
- `>
(II.86)
non esprimono altro che la seguente corrispondenza
ŒL
B
H#$ H$" H"#
H"%
H#%
LC
3IB
3IC
LD
3ID
H$%
(II.87)
Concludiamo che le componenti di L e di 3I , messe insieme, formano le sei
componenti di un esavettore dello spazio-tempo.
.
La prima equazione di Maxwell <9>L I Î- œ Ð%1Î-Ñ N e l'equazione
.3@I œ %14 si mettono nella forma
.3@H œ
† H œ
%1
-
J
(II.88)
che è invariante.
Le componenti dell'esavettore H nel passaggio dal sistema K al sistema K' si
trasformano nel solito modo
I¼w œ I¼
; Ilw œ
Il @ • L ÎÈ" " #
(II.89)
L¼w œ L¼
; Lw œ
Ll @ • I ÎÈ" " #
Dunque il campo elettrico e il campo magnetico che misura l'osservatore in K non
sono identici a quelli che misura l'osservatore in K'.
Si noti che quando " # può essere trascurabile rispetto all'unità le prime due
equazioni forniscono:
"
Iw œ I @ • L
-
(II.90)
Questa equazione fornisce una spiegazione relativistica della forza ponderomotrice
subita da una carica in moto in un campo magnetico. Per il sistema K' nel quale la
carica è fissa il campo elettrico non è I come il sistema K, bensì I "- @ • L.
Ne segue che nella teoria relativistica la forza di Lorentz non richiede
l'enunciazione di una legge speciale da aggiungere alle equazioni di Maxwell, ma è
una semplice conseguenza relativistica di esse e della definizione di campo elettrico.
Anno accademico 2011/2012
19
Relatività speciale
Effetti relativistici della radiazione elettromagnetica
Il quadrivettore di propagazione
E' definito dalla seguente corrispondenza
Œ5
3 =-
k" k# k$ k%
5C
B
5D
(II.91)
dove = indica la frequanza della radiazione em. La legge di varianza dei quadivettori
ci fornisce in questo caso
5¼w œ
5¼ =@Î- #
È" " #
;
5lw œ 5l ; =w œ
=@ † 5
È" " #
(II.92)
Effetto Doppler
Prendiamo in considerazione l'ultima delle (II.92). Se indichiamo con )
l'angolo formato da @ con 5 e ricordiamo che 5 œ =Î- , si può scrivere:
=w œ =
1 " -9=)
È" " #
(II.93)
Possiamo interpretare questa equazione nel modo seguente. Sia =w œ =! la frequenza
della luce emessa da una sorgente fissa in K', misurata in K' . Un osservatore fisso in
K vedrà la sorgente muoversi con velocità @ ed emettere nella dirczione che forma un
angolo ) con @ una luce di frequenza
= œ =0
È" " #
1 " -9=)
(II.94)
E' questo il noto fenomeno preconizzato da Doppler più di un secolo fa. Se la sorgente
si avvicina all'osservatore, la frequenza aumenta, se si allontana diminuisce. Se si
sviluppa il secondo membro in serie di potenze di " e ci si arresta al primo grado in "
si trova un resultato coincidente con quello ricavato dalla teoria elementare, non
relativistica. A partire dal termine di 2 grado comincia a farsi sentire il fattore
È" " # che dipende dalla dilatazione del tempo.
Aberrazione della luce
Chiamiamo rispettivamente ) e ) ' gli angoli che 5 e 5 w formano con @. In altre
parole, mentre per l'osservatore K la luce si propaga in una direzione che forma un
angolo ) con @, per l'osservatore K' la luce si propaga in una direzione che forma un
angolo )' con @.
La seconda delle (II.92) ci fornisce subito
5 w =38) ' œ 5 =38) , ovvero =w =38) ' œ = =38)
(II.95)
In forza della (II.93) si ottiene subito
=38) ' œ
È" " # =38)
-9=) "
, -9=) ' œ
1 " -9=)
1 " -9=)
Anno accademico 2011/2012
(II.96)
20
Relatività speciale
Le (II.96) descrivono il ben noto fenomeno della aberrazione della luce scoperto da
Bradley per cui per un osservatore terrestre la direzione da cui proviene la luce di una
stella dipende dalla velocità relativa della Terra rispetto alla stella.
Anno accademico 2011/2012
21