GEI-100360A (I)
GE Industrial Systems
AV-300i
TM
.75 to 200 Horsepower
Manuale Hardware & Guida Rapida
© 2003 General Electric Company, USA.
Diritti riservati.
Questo manuale si riferisce alla versione SW 1.X00
Le istruzioni indicate non hanno lo scopo di fornire tutti i dettagli o variazioni nell’apparecchiatura, né di fornire ogni
possibile risposta alle eventuali problematiche incontrate durante l’installazione, l’operazione e la manutenzione.
Se si desidera avere maggiori informazioni su particolari problemi non dettagliatamente specificati, contattare GE
Industrial Systems, Salem, Virginia, USA.
Questo documento contiene informazioni proprietarie di General Electric Company, USA ed è fornito al cliente per
assisterlo durante l’installazione, operazioni di test e/o manutenzione del prodotto descritto.
Questo documento non può essere riprodotto né completamente né in parte e il suo contenuto non può essere
divulgato a terzi senza l’approvazione scritta di GE Industrial Systems.
AV300i è un marchio registrato General Electric Company. USA.
Klixon è un marchio registrato Texas Instruments, Inc.
National Electric code e NEC sono marchi registrati National Fire Protection Association.
2
Sommario
Legenda simbologia di sicurezza all’interno del manuale ......................................................................... 7
0. ISTRUZIONI DI SICUREZZA ................................................................................... 7
1. GUIDA RAPIDA .................................................................................................... 10
1.1 SCHEMA FUNZIONALE DELLE CONNESSIONI ............................................................................ 10
1.2 INTRODUZIONE .......................................................................................................................... 11
1.3 DENOMINAZIONE DEI MORSETTI DELLA SCHEDA DI REGOLAZIONE ......................................... 12
1.3.1 Massima sezione dei cavi ammessa dai morsetti................................................................. 13
1.4 DENOMINAZIONE DEI MORSETTI DI POTENZA .......................................................................... 13
Figura 1.4.1: Morsettiera di potenza ....................................................................................................... 13
1.4.1 Massima sezione dei cavi ammessa dai morsetti di potenza ................................................ 13
1.5 CONNETTORE XE PER ENCODER ............................................................................................... 14
1.5.1 Collegamento degli encoder ................................................................................................. 14
1.5.2 Impostazione degli encoder tramite jumper .......................................................................... 15
1.5.3 Massima lunghezza e sezione dei cavi ................................................................................. 15
1.6 LISTA DEI JUMPER SULLA SCHEDA DI REGOLAZIONE .............................................................. 16
1.7 FUNZIONAMENTO DEL TASTIERINO .......................................................................................... 17
1.7.1. Diodi luminosi LED e funzione dei tasti ................................................................................ 17
1.7.2 Navigazione all’interno dei menu .......................................................................................... 19
1.8. CONTROLLI PRELIMINARI ........................................................................................................ 20
1.9. TARATURA RAPIDA .................................................................................................................. 21
1.9.1 Funzione Motopotenziometro ............................................................................................... 25
1.10 IMPOSTAZIONI OPZIONALI ...................................................................................................... 26
1.11 GUIDA ALLA TARATURA RAPIDA PER INVERTER CONFIGURATI IN FABBRICA (O PRECONFIGURATI) ................................................................................................................................. 27
1.12 RICERCA GUASTI ..................................................................................................................... 28
LISTA OVERFLOW ................................................................................................................................... 28
Lista dei messaggi di errore durante l’autotaratura ................................................................................. 29
Segnalazioni di allarme sul visualizzatore del tastierino.......................................................................... 30
Altre Anomalie ........................................................................................................................................ 32
2. FUNZIONI E CARATTERISTICHE GENERALI ....................................................... 35
3. DESCRIZIONE, IDENTIFICAZIONE COMPONENTI E SPECIFICHE ...................... 37
3.1. IMMAGAZZINAGGIO, TRASPORTO ........................................................................................... 37
3.1.1. Generalità ........................................................................................................................... 37
3.1.2. Designazione del tipo di inverter ......................................................................................... 37
3.1.3. Targhetta ............................................................................................................................ 38
Figura 3.1.3.1: Targhetta di identificazione ......................................................................................... 38
Figura 3.1.3.2: Targhetta livello revisione firmware & schede ................................................................ 38
Figura 3.1.3.3: Posizione delle targhette ................................................................................................. 38
3.2. IDENTIFICAZIONE COMPONENTI .............................................................................................. 39
Figura 3.2.1: Schema fondamentale di un inverter di frequenza ........................................................... 39
Figura 3.2.2: Esploso & componenti........................................................................................................ 40
3.3. SPECIFICHE GENERALI ............................................................................................................. 41
3.3.1. Condizioni ambientali e normative ....................................................................................... 41
Tabella 3.3.1.1: Specifiche ambientali .................................................................................................... 41
Smaltimento dell’apparecchio ................................................................................................................. 42
3
3.3.2. Allacciamento alla rete e uscita dell’inverter ........................................................................ 42
Tabella 3.3.2.1: Dati tecnici in ingresso e uscita .................................................................................... 43
3.3.3. Corrente dal lato rete .......................................................................................................... 44
3.3.4. Uscita ................................................................................................................................ 44
Tabella 3.3.3.1: Nominal Drive Current ................................................................................................... 45
3.3.5. Parte di regolazione e controllo ........................................................................................... 46
3.3.6. Precisione .......................................................................................................................... 47
4. MONTAGGIO......................................................................................................... 49
4.1. SPECIFICHE MECCANICHE ....................................................................................................... 49
Figura 4.1.1: Dimensioni (taglie 3F75 ... 3020) ..................................................................................... 49
Figura 4.1.2: Metodi di fissaggio (taglie 3F75 ... 3020).......................................................................... 49
Tabella 4.1.1: Dimensioni e pesi (taglie 3F75 ... 3020) ......................................................................... 49
Figura 4.1.3: Dimensioni (taglie 3025 ... 3200) ..................................................................................... 50
Figura 4.1.4: Metodi di fissaggio (taglie 3025 ... 3200).......................................................................... 50
Tabella 4.1.2: Dimensioni e pesi (taglie 3025 ... 3200) .......................................................................... 50
Figura 4.1.5: Orientamento del tastierino ................................................................................................ 51
4.2. POTENZA DISSIPATA, VENTILATORI INTERNI E APERTURE MINIME DELL’ARMADIO CONSIGLIATE PER LA VENTILAZIONE ................................................................................................................ 51
Tabella 4.2.1: Dissipazione del calore e minimo flusso d’aria richiesto .................................................. 51
Tabella 4.2.2: Aperture minime dell’armadio consigliate per la ventilazione ........................................... 51
4.2.1 Tensione di alimentazione dei ventilatori ............................................................................... 52
Figura 4.2.1: Connessione ventilatori tipo UL sulle taglie 3100, 3125e 3150 ......................................... 52
Figura 4.2.2: Connessione ventilatori tipo UL sulle taglie 3075e 3200 ................................................... 52
Figura 4.2.3: Collegamento esterno ........................................................................................................ 52
4.3. DISTANZE DI MONTAGGIO ........................................................................................................ 53
Figura 4.3.1: Inclinazione massima ......................................................................................................... 53
Figura 4.3.2: Distanze di montaggio........................................................................................................ 53
4.4. MOTORI ED ENCODER .............................................................................................................. 54
4.4.1. Motori ................................................................................................................................ 54
4.4.2. Encoder ............................................................................................................................. 55
Tabella
Tabella
Tabella
Tabella
4.4.2.1: Sezione e lunghezza dei cavi consigliata per il collegamento degli encoder................ 56
4.4.2.2: Impostazione degli encoder tramite i jumper S11...S23 (sulla scheda di regolazione) . 56
4.4.2.3: Collegamento degli encoder .......................................................................................... 56
4.4.2.4: Disposizione del connettore alta densità XE per encoder sinusoidale o digitale .......... 58
5. COLLEGAMENTO ELETTRICO .............................................................................. 59
5.1. ACCESSO AI CONNETTORI ....................................................................................................... 59
5.1.1 Rimozione della copertura .................................................................................................... 59
Figura 5.1.1: Rimozione delle coperture (taglie 3F75 ... 3020) ............................................................... 59
Figura 5.1.2: Rimozione delle coperture (taglie 3025 ... 3200) ............................................................... 60
5.2. PARTE DI POTENZA .................................................................................................................. 61
5.2.1 Scheda di Potenza PV33-.. ................................................................................................... 61
Figura
Figura
Figura
Figura
Figura
5.2.1.1:
5.2.1.2:
5.2.1.3:
5.2.1.4:
5.2.1.5:
Scheda
Scheda
Scheda
Scheda
Scheda
PV33-1.
PV33-2.
PV33-3.
PV33-4.
PV33-5.
(per taglie 3F75 ... 3003) ..................................................................... 61
(per taglie 3005... 3010) ...................................................................... 61
(per taglie 3015 ... 3020) ..................................................................... 62
(per taglie 3025 ... 3060) ..................................................................... 62
(per taglie 3075 ... 3200) ..................................................................... 63
5.2.1. Denominazione dei morsetti di potenza / Sezione dei cavi .................................................... 64
Figura 5.2.1.1: Collegamento morsetti di potenza ................................................................................... 64
Tabella 5.2.1.1: Massima sezione dei cavi ammessi dai morsetti di potenza ......................................... 64
5.3. PARTE DI REGOLAZIONE ........................................................................................................... 65
5.3.1 Scheda di regolazione RV33 ................................................................................................ 65
4
Figura 5.3.1.1: Switch e Jumper sulla Scheda di Regolazione RV33-3 ................................................. 65
Tabella 5.3.1.1: Diodi luminosi (LED) sulla Scheda di Regolazione RV33 ............................................... 65
Tabella 5.3.1.2: Punti di prova sulla Scheda di Regolazione RV33......................................................... 65
Tabella 5.3.1.3: Jumper sulla Scheda di Regolazione RV33 ................................................................... 66
Tabella 5.3.1.4: Switch S3 di adattamento della Scheda di Regolazione RV33 .................................... 66
5.3.2. Denominazione dei morsetti della Scheda di Regolazione ..................................................... 67
Tabella 5.3.2.1: Collegamento e denominazione dei morsetti di regolazione.......................................... 67
Tabella 5.3.2.2: Massima sezione dei cavi ammessa dai morsetti della scheda regolazione ................. 68
Tabella 5.3.2.3: Massima lunghezza dei cavi .......................................................................................... 68
Figura 5.3.1.2: Potenziali della parte di regolazione ............................................................................... 69
5.4. INTERFACCIA SERIALE RS 485 ................................................................................................. 70
5.4.1. Descrizione ........................................................................................................................ 70
Figura 5.4.1.1: Linea seriale RS485 ........................................................................................................ 70
5.4.2. Disposizione del connettore XS per la linea seriale RS485 ............................................... 71
Tabella 5.4.2.1: Disposizione del connettore XS per la linea seriale RS485 ....................................... 71
5.5. SCHEMA TIPICO DI COLLEGAMENTO ....................................................................................... 72
5.5.1. Collegamento inverter AV300i ............................................................................................ 72
Figura 5.5.1.1: Circuiti ausiliari di controllo ............................................................................................ 72
Figura 5.5.1.2: Schema tipico di collegamento ...................................................................................... 73
5.5.2 Connessione in parallelo lato AC (ingresso) e DC (circuito intermedio) di più inverter .......... 74
5.6. PROTEZIONI .............................................................................................................................. 75
5.6.1. Fusibili esterni nella parte di potenza .................................................................................. 75
Tabella 5.6.1.1: Fusibili esterni lato rete ................................................................................................. 75
5.6.2 Fusibili esterni nella parte di potenza per ingresso DC ........................................................ 76
Tabella 5.6.2.1: Fusibili esterni per collegamento DC ............................................................................. 76
5.6.3 Fusibili interni ..................................................................................................................... 76
Tabella 5.6.3.1: Fusibili interni ................................................................................................................ 76
5.7. INDUTTORI / FILTRI ................................................................................................................... 77
5.7.1. Induttori in ingresso ............................................................................................................ 77
Tabella 5.7.1.1: Induttori di rete .............................................................................................................. 77
5.7.2. Induttori in uscita ................................................................................................................ 77
Tabella 5.7.2.1: Induttori di uscita consigliati ......................................................................................... 78
5.7.3. Filtri antidisturbo ................................................................................................................ 78
5.8. UNITÀ DI FRENATURA .............................................................................................................. 79
Figura 5.8.1: Funzionamento con unità di frenatura (schema di principio .............................................. 79
5.8.1. Unità di frenatura interna .................................................................................................... 80
Figura 5.8.1.1: Collegamento con unità di frenatura interna e resistenza di frenatura esterna.............. 80
5.8.2 Resistenza di frenatura esterna ............................................................................................ 81
Tabella 5.8.2.1: Lista e dati tecnici delle resistenze esterne normalizzate per inverter 3F75 ... 3060 .... 81
Figura 5.8.2.2: Ciclo di frenatura con profilo tipico triangolare .............................................................. 81
Figura 5.8.2.3: Ciclo di frenatura con TBR / TC = 20% .......................................................................... 82
Figura 5.8.2.4: Ciclo di frenatura generico con profilo triangolare ......................................................... 83
Tabella 5.8.2.2: Soglie di frenatura per differenti tensioni di alimentazione ........................................... 84
Tabella 5.8.2.3: Dati tecnici delle unità di frenatura interna ................................................................. 84
5.8.3. Calcolo della resistenza di frenatura esterna da accoppiare alle unità di frenatura con un
metodo approssimato ................................................................................................................... 85
Figura 5.8.3.1: Power Resistor Overload Factor ..................................................................................... 85
5.9. MANTENIMENTO DELLA REGOLAZIONE ................................................................................... 86
Tabella 5.9.1: Tempo di mantenimento del DC Link ................................................................................ 86
Figura 5.9.1: Mantenimento della regolazione per mezzo di condensatori aggiunti al DC link ............... 86
5.10. COMPORTAMENTO IN PRESENZA DI BUCHI DI RETE ............................................................. 88
Tabella 5.10.1: Tempo massimo di mantenimento della regolazione. Soglia di Undervoltage 230V ...... 89
Tabella 5.10.2: Tempo massimo di mantenimento della regolazione. Soglia di Undervoltage 400V ...... 90
5
Tabella 5.10.3: Tempo massimo di mantenimento della regolazione. Soglia di Undervoltage 460V ...... 90
5.11. TENSIONE DI SICUREZZA DEL DC LINK .................................................................................. 91
Tabella 5.11.1: Tempo di scarica del DC Link ......................................................................................... 91
6. MANUTENZIONE ................................................................................................. 92
6.1. CURA ........................................................................................................................................ 92
6.2. ASSISTENZA ............................................................................................................................. 92
6.3. RIPARAZIONE ........................................................................................................................... 92
Legenda diagrammi a blocchi ................................................................................................................. 92
6.4. SERVIZIO CLIENTI ..................................................................................................................... 92
7. DIAGRAMMI A BLOCCHI..................................................................................... 93
AVy Inverter Overview ............................................................................................................................ 93
Digital inputs/Outputs & Mapping Standard and Option cards ............................................................... 94
Analog Inputs/Outputs & Mapping .......................................................................................................... 95
Speed Reference generation ................................................................................................................... 96
Speed / Torque regulation ....................................................................................................................... 97
Ramp reference Block ............................................................................................................................. 98
Speed regulator ....................................................................................................................................... 99
Speed regulator PI part ......................................................................................................................... 100
Droop compensation ............................................................................................................................. 101
Inertia / Loss compensation .................................................................................................................. 102
Torque current regulator ........................................................................................................................ 103
Speed Feedback .................................................................................................................................... 104
Motor control ......................................................................................................................................... 105
Motor parameters .................................................................................................................................. 106
SENSORLESS Parameters ..................................................................................................................... 107
V/Hz functions ....................................................................................................................................... 108
Speed Threshold / Speed control .......................................................................................................... 109
Speed adaptive and Speed zero logic .................................................................................................. 110
PID function ........................................................................................................................................... 111
Start and Stop management ................................................................................................................. 112
Power loss stop control ......................................................................................................................... 113
Jog function .......................................................................................................................................... 114
Motor potentiometer ............................................................................................................................. 115
Multi speed ........................................................................................................................................... 116
Dual Motor setup ................................................................................................................................... 117
Brake unit function ................................................................................................................................ 118
DC Braking function ............................................................................................................................... 119
Dimension factor / Face value factor .................................................................................................... 120
PAD parameters .................................................................................................................................... 121
Links function ........................................................................................................................................ 122
Test Generator ....................................................................................................................................... 123
Alarm mapping ...................................................................................................................................... 124
8. LISTA DEI PARAMETRI DIVISI PER MENU....................................................... 125
6
Legenda simbologia di sicurezza all’interno del manuale
PERICOLO
AVVERTENZA !
ATTENZIONE !
Rilevare procedure ed eventuali condizioni di funzionamento che, se non osservate possano essere causa di gravi danni a persone o cose.
Rilevare procedure ed eventuali condizioni di funzionamento che, se non osservate possano essere causa di danni ad altre apparecchiature o all’inverter stesso.
La gravità delle lesioni o dei danni che possono essere provocati dalla mancata osservanza
di tali indicazioni,dipende ovviamente da diverse condizioni. Tuttavia le istruzione descritte
di seguito dovrebbero essere sempre osservate con molta attenzione.
NOTA!
Richiamare l’attenzione a particolari procedure e condizioni di funzionamento.
0. ISTRUZIONI DI SICUREZZA
ATTENZIONE !
In conformità alla direttiva EEC gli inverter AV300i e gli
accessori devono essere utilizzati solo dopo avere
verificato che l’aparecchiatura è stata prodotta utilizzando
quei dispositivi di sicurezza richiesti dalla direttiva 89/392/
EEC, relativa al settore dell’automazione.
Questi sistemi causano movimenti meccanici. L’utilizzatore
è responsabile di assicurare che questi movimenti meccanici
non si traducano in condizioni di insicurezza. Il costruttore
deve prevedere blocchi di sicurezza e limiti operativi che
non possono essere bypassati o oltrepassati.
AVVERTENZA - PERICOLO DI INCENDIO E
SCOSSA ELETTRICA
Quando si utilizzano strumenti come oscilloscopi che
funzionano su apparecchiature in tensione, la carcassa
dell’oscilloscopio deve essere messa a terra e deve essere
utilizzato un amplificatore differenziale. Per ottenere letture
accurate, scegliere con cura sonde e terminali e prestare
attenzione alla regolazione dell’oscilloscopio.
Fare riferimento al manuale di istruzione del costruttore
per una corretto impiego e per la regolazione della
strumentazione.
AVVERTENZA - PERICOLO DI INCENDIO E DI
ESPLOSIONE
L’installazione di inverter in aree a rischio, dove siano
presenti sostanze infiammabili o vapori di combustibili o
polveri, può causare incendi o esplosioni.Gli inverter
devono essere installati lontano da queste aree a rischio
anche se sono utilizzati con motori adatti per l’impiego in
queste condizioni.
AVVERTENZA - PERICOLO DI LESIONI
PERSONALI
Un sollevamento non corretto può causare danni seri o
fatali. L’apparecchiatura deve essere sollevata utilizzando
attrezzi appropriati o da personale addestrato.
AVVERTENZA - PERICOLO DI SCOSSA
ELETTRICA
I motori e gli inverter devono essere collegati alla messa a
terra in accordo alle normative elettriche nazionali.
AVVERTENZA !
Riposizionare tutti i coperchi prima di applicare tensione al
dispositivo. La mancanza di questa avvertenza può essere
causa di morte o seri danni alla persona.
AV300i Manuale Hardware & Guida Rapida
7
GR
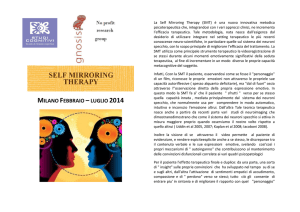
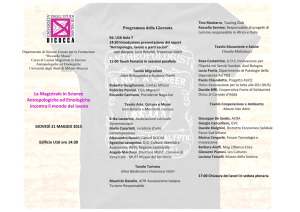
AVVERTENZA - TIPO DI ALIMENTAZIONE E
COLLEGAMENTI A TERRA
L2
PE2/
PE1/
W2/T3
U2/T1
V1/L2
W1/L3
Un esempio di collegamento è descritto nella figura riportata
di seguito.
AC OUTPUT
CHOKE
L1
AC INPUT
CHOKE
AC Main Supply
U1/L1
1 Gli inverter sono progettati per essere alimentati con
reti standard trifasi, elettricamente simmetriche rispetto
alla terra (reti TN o TT).
2 In caso di alimentazioni tramite reti IT, è strettamente
necessario l'uso di un trasformatore triangolo/stella,
con terna secondaria riferita a terra.
V2/T2
In caso di rete di alimentazione IT, un'eventuale perdita di
isolamento di uno dei dispositivi collegati alla stessa rete,
può essere causa di malfunzionamenti dell'inverter se non
si utilizza il trasformatore stella/triangolo.
L3
Safety
ground
Earth
All wires (including motor ground) must
be connected inside the motor terminal box
AVVERTENZA / ATTENZIONE !
Gli inverter a frequenza variabile sono apparecchiature
elettriche per l’impiego nelle installazioni industriali. Parti
dell’inverter sono in tensione durante il funzionamento.
L’installazione elettrica e l’apertura del dispositivo possono
essere eseguiti solo da personale qualificato. Installazioni
non corrette di motori possono danneggiare il dispositivo
e essere causa di ferimenti o danni materiali.
L’inverter non è dotato di protezione contro sovravelocità
del motore.
Fare riferimento alle istruzioni elencate in questo manuale
e osservare le normative di sicurezza locali e nazionali.
Non eseguire la prova di isolamento tra terminali
dell’inverter o tra i terminali del circuito di controllo.
ATTENZIONE !
Non installare l’inverter in ambienti dove la temperatura
eccede quella ammessa dalle specifiche: la temperatura
ambiente ha un grande effetto sulla vita e sull’affidabilità
dell’inverter. Lasciare il coperchio fissato per temperature
di 40°C o inferiori.
ATTENZIONE !
ATTENZIONE !
Non collegare tensioni di alimentazione che eccedano il
campo di tensione ammesso. Se vengono applicate tensioni
eccessive all’inverter verranno danneggiati dei componenti
interni.
Se la segnalazione degli allarmi dell’inverter è attiva,
consultare la sezione RICERCA DEI GUASTI nella parte
seconda del manuale di istruzione, e dopo aver eliminato il
problema riprendere l’operazione. Non azzerare l’allarme
automaticamente tramite una sequenza esterna, ecc.
ATTENZIONE !
ATTENZIONE !
Non è consentito il funzionamento dell’inverter senza il
collegamento di messa a terra. Per prevenire disturbi, la
carcassa del motore deve essere messa a terra attraverso
un connettore di terra separato dai connettori di terra delle
altre apparecchiature.
La connessione di messa a terra deve essere dimensionata
in accordo alle normative elettriche nazionali. Il capocorda
deve essere fissato utilizzando la pinza indicata dal
costruttore del capocorda.
GR
ATTENZIONE !
8
Assicurarsi di rimuovere il (i) pacchetto (i) di deessicante
durante il disimballaggio del prodotto (se non vengono
rimossi questi pacchetti potrebbero posizionarsi nelle
ventole o ostruire le aperture di raffreddamento causando
un sovrariscaldamento dell’inverter).
L’inverter deve essere fissato su una parete costruita con
materiali resistenti al calore. Durante il funzionamento la
temperatura delle alette di raffreddamento può raggiungere
90°C.
—————— Guida rapida ——————
NOTE:
I termini “Inverter”, “Drive” e “Azionamento”
sono talvolta usati intercambiabilmente
nell’industria. In questo documento verrà
utilizzato il termine “Inverter”.
1.
2.
In nessun caso aprire l’apparecchio quando
è collegata la tensione di rete di
alimentazione. Il tempo minimo di attesa
prima di poter lavorare sui morsetti oppure
all’interno dell’apparecchio è indicato nella
sezione 4.11.
Maneggiare l’apparecchio in modo tale da
non toccare oppure danneggiare alcuna
parte. Non è consentito variare le distanze
di isolamento, oppure rimuovere materiali
isolanti e coperture. Se la copertura frontale
deve essere rimossa per funzionamento con
temperature ambiente fra 40° e 50° C,
l’utilizzatore deve accertarsi per mezzo di
opportuni provvedimenti, che non possa
avvenire alcun contatto occasionale con
parti sotto tensione.
3.
Proteggere l’apparecchio da sollecitazioni
non consentite (temperatura, umidità,
colpi, ecc.).
4.
Non può essere applicata tensione all’uscita
dell’inverter (morsetti U2, V2 W2). Non è
consentito inserire in parallelo sull’uscita
più inverter, e non è ammesso il
collegamento diretto dell’ingresso con
l’uscita dell’inverter (Bypass).
5.
Per agganciare motori in movimento deve
essere attivata la funzione: “Auto capture”
nel menu ADD SPEED FUNCT (non
applicabile a Regulation mode=sensorless
vect).
6.
Non può essere collegato all’uscita
dell’inverter (morsetti U2, V2, W2) nessun
carico capacitivo (ad esempio condensatori
di rifasamento).
7.
Effettuare sempre i collegamenti di terra (PE),
attraverso gli appositi morsetti (PE2) ed il
contenitore metallico (PE1). Gli Inverter a
frequenza variabile e i filtri di Ingresso AC
hanno una corrente di dispersione verso
terra maggiore di 3,5 mA. Secondo EN 50178
in questi casi il cavo di collegamento di terra
(PE1) deve essere di un tipo specifico e
raddoppiato per ridondanza.
8.
La messa in servizio elettrica deve essere
effettuata da personale qualificato. Questo
è responsabile del fatto che esista un
adeguato collegamento di terra ed una
protezione dei cavi di alimentazione
secondo le prescrizioni locali e nazionali. Il
motore deve essere protetto contro il
sovraccarico.
9.
Non devono essere eseguite prove di
rigidità dielettrica su parti dell’inverter. Per
la misura delle tensioni dei segnali devono
essere utilizzati strumenti di misurazione
appropriati (resistenza interna minima 10
kΩ /V).
10. In caso di immagazzinamento degli inverter
per più di due anni, bisogna tener presente
che i condensatori del circuito intermedio
mantengono sicuramente le loro
caratteristiche originali solo se alimentati
entro tre anni dalla data di fornitura. Prima
della messa in servizio degli apparecchi, che
sono rimasti così a lungo in magazzino, si
consiglia di alimentare gli inverter per
almeno due ore , al fine di recuperare le
caratteristiche originarie dei condensatori:
allo scopo applicare tensione d’ingresso
senza abilitare l’inverter (Disable).
11. In caso di guasto, se l’inverter è disabilitato
ma non scollegato dalla rete, non è possibile
escludere il movimento accidentale
dell’albero motore.
AV300i Manuale Hardware & Guida Rapida
9
GR
1. GUIDA RAPIDA
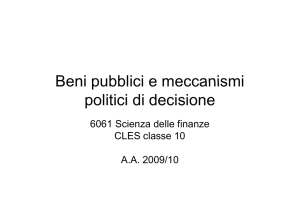
1.1 SCHEMA FUNZIONALE DELLE CONNESSIONI
AC fuses
AC Mains
Contactor
AC Drive
Cabinet
Mounting panel
AC
Power
Supply
AC
Mains
choke
U1 V1 W1
U2 V2 W2 PE2
PE1
EMI filter
Motor
cable
terminals
Ground
Bus
Encoder cable
AC Motor
NOTA:
GR
10
La terra di sicurezza dell’inverter è PE1. Se PE2 è usato per la terra motore, collegare il
filtro EMI a PE1.
—————— Guida rapida ——————
1.2 INTRODUZIONE
Questa quida è stata sviluppata per un avviamento
rapido tramite tastierino di un inverter e motore che
deve funzionare sia in modalità sensorless, sia in
controllo field oriented (con reazione da encoder
digitale o sinusoidale). Si assume anche che viene
utilizzato per il controllo uno schema di allacciamento
standard. In altre parole, l’inverter deve funzionare
tramite tastierino (o contatti esterni) e la velocità sarà
impostata tramite un potenziometro in ingresso
(alimentazione da 0 a 10 Vdc). L’inverter può gestire
diverse modalità operative, numerose combinazioni e
complesse configurazioni opzionali. Questa guida
copre una parte delle stesse.
Per eseguire modifiche complesse alle configurazioni
standard indicate in questa quida, fate riferimento agli
altri capitoli del manuale.
Connessioni standard: vedere il capitolo 5 per il
collegamento delle configurazioni standard suggerite.
Notare che se questo è un sistema progettato e
collegato dalla fabbrica, l’impostazione dell’inverter
(ad eccezione della taratura del motore) è già stata
eseguita e questa Guida Rapida non è applicabile.
In questo caso, può essere necessario utilizzare la
guida Taratura Rapida (vedere capitolo 1.8) per
inverter con configurazione di fabbrica (AV300i).
NOTA:
Memoria: Esistono due aree di memoria dove
vengono immagazzinati i parametri. La prima area è
quella correntemente utilizzata dall’inverter. La
seconda è un area permanente che viene utilizzata
dall’inverter quando viene a mancare l’alimentazione
e successivamente viene ripristinata.
Notare che SOLO durante l’avvio l’inverter legge la
memoria permanente. Ogni scarico e carico dei files
(uploads and downloads)dal configuratore, ogni
modifica dei parametri, ecc., vengono eseguiti e letti
solo nell’area di memoria attiva.
impostazioni e non si vuole modificare l’impostazione
permanenete.
Sottolineatura: Di seguito, le parole sottolineate, si
riferiscono a tasti presenti sul tastierino..
Virgolette“”: Le virgolette sono messe attorno a
parole che saranno visualizzate sul display del
tastierino.
Menu di Navigazione: In molti casi, per visualizzare
il valore richiesto, i tasti devono essere premuti più di
una volta. Il display ha due righe, la riga superiore
mostra sempre il livello SUPERIORE del menu
corrente. Tutti i sottomenu riferiti al menu principale
saranno visualizzati nella SECONDA RIGA del
display. Il menu visualizzato nella prima riga è solo
per informazione e non ha niente a che fare con
l’inserimento dei dati. Se il simbolo di direzione indica
di premere la [Freccia giù] in “Regulation Mode”,
significa di mantenere premuto la [Freccia giù] fino a
quando “Regulation Mode” viene visualizzato nella
Seconda riga. Vedere al capitolo 1.7.2 la struttura
per la navigazione all’interno dei menu.
Collegamenti I/O : l’inverter NON SARÀ
OPERATIVO fino a che non sia data l’abilitazione
hardware (morsetto 12 I/O) e gli altri interblocchi.
Eseguire quando indicato di seguito per connettere
temporaneamente gli ingressi digitali:
Collegare il morsetto 16 al 18, 19 al 15, 15 al 14, 12 al
13, inserire inoltre un semplice interruttore tra i
morsetti 13 e 14. Su questi morsetti è presente una
bassa tensione, quindi nel caso siate sprovvisti di un
interruttore, è sufficiente collegare insieme (o
scollegare) due cavetti . Per testare l’inverter,
selezionare l’interruttore su On e Off ed eseguire in
modo corretto tutti gli altri interblocchi, l’inverter verrà
abilitato e disabilitato (e nello stesso tempo start e
stop).
La memoria “flash” viene utilizzata solamente
all’avvio e quando vengono salvati nuovi valori tramite
il comando “SAVE PARAMETERS”. Le modifiche
effettuate sui parametri durante la fase di
impostazione saranno utilizzate dall’inverter ma, in
caso di riavvio, se le nuove impostazioni non sono
state salvate con il comando “SAVE
PARAMETERS”, saranno perse. Questo è un
vantaggio nel caso si stiano provando delle nuove
AV300i Manuale Hardware & Guida Rapida
11
GR
1.3 DENOMINAZIONE DEI MORSETTI DELLA SCHEDA DI REGOLAZIONE
Morsettiera X1
1
2
3
4
5
Ingresso
analogico 1
Ingresso
analogico 2
Ingresso analogico differenziale programmabile e configurabile.
Segnale: morsetto 3.
Potenziale: morsetto 4. Non preconfigurato in fabbrica.
Ingresso
analogico 3
Ingresso analogico differenziale programmabile e configurabile.
Segnale: morsetto 5.
Potenziale: morsetto 6. Non preconfigurato in fabbrica
6
±10V
0.25mA
(20mA con
riferimento
in corrente)
+10V
Tensione di riferimento +10V; Potenziale: morsetto 9
+10V/10mA
8
-10V
Tensione di riferimento -10V; Potenziale: morsetto 9
-10V/10mA
9
0V
12
Enable drive
13
Start
14
Fast stop
COM D I/O
18
0 V 24
19
+24V OUT
22
0V
26
27
0 V 24
28
RISERVATO
29
RISERVATO
36
Digital input 1
37
Digital input 2
38
39
41
42
46
78
R1K
Sblocco generale inverter; 0V o aperto: inverter disabilitato;
+15…+30V: Inverter abilitato
Comando di start; 0V o aperto: Nessuno start; +15…+30V: Start
OV o aperto: Fast stop.
+15…+30V: Nessun Fast stop.
+15…+30V: Nessun External fault
+30V
3.2mA @ 15V
5mA @ 24V
6.4mA @ 30V
Potenziale per ingressi e uscite digitali, morsetti : 12...15, 36...39, 41...42
-
Potenziale per tensione + 24V OUT , al morsetto 19
-
Tensione +24V. Potenziale: morsetto 18 o 27 o 28
Analog output Uscita analogica programmabile; Configurato in fabbrica per Motor speed.
1
Potenziale: morsetto .22
Analog output
2
BU comm.
output
23
0V interno e potenziale per ±10V
External fault OV o aperto: External fault.
16
21
Unità di frenatura
esterna (opzionale)
max
7
15
BU-
Funzione
Ingresso analogico differenziale programmabile e configurabile.
Segnale: morsetto 1.
Potenziale: morsetto 2. Configurato in fabbrica per Ramp ref 1
0V interno e potenziale per i morsetti 21 e 23
Uscita analogica programmabile; Configurato in fabbrica per Motor current.
Potenziale: morsetto .22
Comando unità di frenatura BU-... controllato dal micropr. VeCon.
Potenziale: morsetto 27.
Potenziale del comando BU-... , morsetto 26
+22…28V
120mA @ 24V
±10V/5mA
±10V/5mA
+28V/15mA
-
+30V
Ingresso digitale programmabile; Non preconfigurato in fabbrica.
3.2mA @ 15V
Ingr. Dig. program; default: none. Configurabile come 2° indice qualificatore encoder
Digital input 3
(impostazione da jumper S30). Parametro ”Digital input 3” deve essere 0=OFF)
Ingresso Digitale Programmabile; default: none. Configurabile come 1° indice
Digital input 4 qualificatore encoder. Parametro ”Digital input 4” deve essere 0=OFF ).
Digital output
1
Uscita digitale programmabile; Non preconfigurato in fabbrica.
Digital output
2
Tensione di ingresso per le uscite digitali dei morsetti 41/42.
Supply D O
Potenziale morsetto 16.
Motor PTC
Sensore PTC per sovratemperature motore (se usato togliere la resistenza R1k )
5mA @ 24V
6.4mA @ 30V
+30V/40mA
+30V/80mA
1.5mA
79
Morsettiera X2
80
82
83
OK relay
contact
Relay 2
contact
Funzione
Contatto privo di potenziale del relè di OK (chiuso=OK)
250V AC
1 A AC11
Contatto privo di potenziale del relè di segnalazione (relè 2) velocità zero.
Configurazione di fabbrica: aperto 0, motore fermo
250V AC
1 A AC11
85
GR
12
max curr.
—————— Guida rapida ——————
1.3.1 Massima sezione dei cavi ammessa dai morsetti
Maximum Permissible Cable Cross-Section
Tightening
2
Terminals
[mm ]
flexible
0.14 ... 1.5
0.14 ... 1.5
1 ... 79
80 ... 85
torque
[Nm]
0.4
0.4
AWG
multi-core
0.14 ... 1.5
0.14 ... 1.5
28 ... 16
28 ... 16
Ai4090
NOTA:
Ad ogni morsetto può essere collegato solo un cavo non trattato (senza terminale). Catene di
segnale e collegamenti multipli di cavi devono essere effettuati attraverso morsetti esterni montati
nel quadro.
1.4 DENOMINAZIONE DEI MORSETTI DI POTENZA
Figura 1.4.1: Morsettiera di potenza
Funzione (max) - Taglie 3F75 … 3020
Funzione (max) - Taglie 3025 … 3200
U1/L1
3Ph~
V1/L2
U1/L1
Allacciamento alla rete
(3x480 VAC +10% 3Ph, ved. tabella 3.3.2.1)
3Ph~
V1/L2
W1/L3
BR1
W1/L3
Comando resistenza unità di frenatura (la resistenza
di frenatura deve essere collegata tra BR1 e C)
C
Resistenza di frenatura
(opzionale)
C
Resistenza di frenatura
(opzionale)
Collegamento al circuito intermedio
(770 VDC / 1,65 output current)
D
Collegamento al circuito intermedio
(770 VDC / 1,65 output current)
D
BR1
U2/T1
M
Allacciamento alla rete
(3x480 VAC +10% 3Ph, ved. tabella 3.3.2.1)
Comando resistenza unità di frenatura (la resistenza
di frenatura deve essere collegata tra BR1 e C)
U2/T1
Collegamento motore
(AC line volt 3Ph, 1,36 output current)
V2/T2
M
Collegamento motore
(AC line volt 3Ph, 1,36 output current)
V2/T2
W2/T3
W2/T3
PE2/
Collegamento di terra del motore
PE2/
Collegamento di terra del motore
PE1 /
Collegamento di massa (contenitore metallico)
PE1 /
Collegamento di massa (contenitore metallico)
1.4.1 Massima sezione dei cavi ammessa dai morsetti di potenza
Type
U1,V1,W1,U2,V2,W2,C,D
terminals
Tightening torque
BR1 terminals
Tightening torque
PE1, PE2 terminals
Tightening torque
Type
U1,V1,W1,U2,V2,W2,C,D
terminals
Tightening torque
BR1 terminals
Tightening torque
PE1, PE2 terminals
Tightening torque
3F75
3001
3002
AWG
14
[mm2]
2
3007
3010
10
3015
[mm2]
2
4
3025
3030
10
16
25
2
3
8
6
10
8
8
10
6
10
0.9
1.6
16
2
6
16
3
1.2 to 1.5
4
0.5 to 0.6
14
2
[mm2]
1.2 to 1.5
10
12
0.5 to 0.6
3040
3050
2
35
AWG
[mm2]
4
[Nm]
[mm2]
6
16
[Nm]
1.6
3
3060
3075
3100
3125
3150
1/0
50
2/0
70
4/0
95
300*
150
350*
4xAWG2
185
4x35
10-30
3
3200
* = kcmils
terminals not available
2
50
6
16
AWG
[mm2]
10
1.2 to 1.5
12
8
10
4
6
8
8
4
[Nm]
6
8
10
12
[Nm]
AWG
3020
8
0.5 to 0.6
14
[Nm]
3005
12
[Nm]
AWG
AWG
3003
4
AV300i Manuale Hardware & Guida Rapida
avy4040
13
GR
1.5 CONNETTORE XE PER ENCODER
Designation
PIN 1
Function
I/O
Channel B-
I
For B- digital or B- COS incremental signal
+8V Encoder supply voltage
PIN 2
PIN 3
PIN 4
Channel C+
I
PIN 8
PIN 10
10 mA digital or
8.3 mA analog
1 V pp analog
8.3 mA analog
5 V digital or
10 mA digital or
1 V pp analog
8.3 mA analog
I
Channel A+
I
Channel A-
I
Channel B+
I
Channel E+
I
Channel E-
I
Channel F+
I
Channel F-
I
For F- digital commutation or COS- absolute position signal
Channel G+
I
For G+ digital commutation signal
8.3 mA analog
–
–
5 V digital or
10 mA digital or
1 V pp analog
8.3 mA analog
+5 V
200 mA
5 V digital or
10 mA digital or
1 V pp analog
8.3 mA analog
5 V digital or
10 mA digital or
1 V pp analog
8.3 mA analog
5 V digital or
10 mA digital or
1 V pp analog
8.3 mA analog
5 V digital or
10 mA digital or
1 V pp analog
8.3 mA analog
5 V digital or
10 mA digital
1 V pp analog
Channel G-
PIN 15
10 mA digital or
O
+5V encoder supply voltage
PIN 14
5 V digital or
1 V pp analog
O
Reference point for +5V encoder supply voltage
For F+ digital commutation or COS+ absolute position signal
PIN 13
5 V digital or
10 mA digital or
For E- digital commutation or SIN- absolute position signal
PIN 12
200 mA
5 V digital or
For E+ digital commutation or SIN+ absolute position signal
PIN 11
+8 V
1 V pp analog
For B+ digital or B+ COS incremental signal
PIN 9
8.3 mA analog
Channel C-
For A+ digital or A+ SIN incremental signal
PIN 7
1 V pp analog
For C+ digital or analog zero pulse or index
For A+ digital or A+ SIN incremental signal
PIN 6
max. current
10 mA digital or
O
For C- digital or analog zero pulse or index
PIN 5
max. voltage
5 V digital or
I
For G- digital commutation signal
5 V digital or
10 mA digital
1 V pp analog
ai3140
1.5.1 Collegamento degli encoder
Encoder type
Shielded
cable
DE
SE
SESC
DEHS
SEHS
8 pole
8 pole
12 pole
14 pole
14 pole
DE
SE
SESC
DEHS
SEHS
8 pole
8 pole
12 pole
14 pole
14 pole
1
B-
2
3
+8V C+
4
5
C-
A+
XE CONNECTOR PIN
6
7
8
9
10
11
12
13
14
15
A-
E-
F+
F-
G+
G-
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
0V
B+ +5V E+
Internal +5V Encoder Power Supply
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
Internal +8V Encoder Power Supply
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
ai3160
-
GR
DE: encoder digitale incrementale 5V con A / A, B / B, C / C
SE: encoder sinusoidale incrementale 5V con A / A, B / B, C / C
14
—————— Guida rapida ——————
-
DEHS: encoder digitale incrementale 5V con A / A, B / B, C / C e tre sensori Hall con segnali digitali di
posizione (per motori Brushless)
SESC: encoder sinusoidale incrementale 5V con A / A, B / B, C / C e due tracce sin/cos per rilievo posizione
assoluta (per motori Brushless o posizionatori)
SEHS: encoder sinusoidale incrementale 5V con A / A, B / B, C / C e tre sensori Hall con segnali digitali
di posizione (per motori Brushless)
1.5.2 Impostazione degli encoder tramite jumper
Encoder / Jumpers setting S11 S12 S13 S14
DE
OFF OFF OFF OFF
SE
ON ON ON ON
SESC
ON ON ON ON
DEHS
OFF OFF OFF OFF
SEHS
ON ON ON ON
S15
OFF
ON
ON
OFF
ON
S16
S17
OFF ON (*)
ON
ON
OFF ON (*)
ON
-
S18
S19
S20
S21
S22
S23
-
-
-
-
-
-
A
B
B
A
B
B
A
B
B
A
B
B
A
B
B
A
B
B
ai3150
DE: encoder digitale incrementale 5V con A / A, B / B, C / C
SE: encoder sinusoidale incrementale 5V con A / A, B / B, C / C
DEHS: encoder digitale incrementale 5V con A / A, B / B, C / C e tre sensori Hall con segnali digitali di
posizione (per motori Brushless)
- SESC: encoder sinusoidale incrementale 5V con A / A, B / B, C / C e due tracce sin/cos per rilievo posizione
assoluta (per motori Brushless o posizionatori)
- SEHS: encoder sinusoidale incrementale 5V con A / A, B / B, C / C e tre sensori Hall con segnali digitali
di posizione (per motori Brushless)
(*) Se l’encoder non dispone del canale zero S17=OFF
-
1.5.3 Massima lunghezza e sezione dei cavi
Cable section [mm2]
Max Length m [feet]
0.22
27 [88]
0.5
62 [203]
0.75
93 [305]
1
125 [410]
1.5
150 [492]
avy3130
AV300i Manuale Hardware & Guida Rapida
15
GR
1.6 LISTA DEI JUMPER SULLA SCHEDA DI REGOLAZIONE
Designation
S0
S1
S5 - S6
Function
The setting must not be changed
The setting must not be changed
Terminating resistor for the serial interface RS485
ON= Termination resistor IN
OFF= No termination resistor
Adaptation to the input signal of analog input 1 (terminals 1 and 2)
S8
ON=0...20 mA / 4...20 mA
OFF=0...10 V / -10...+10 V
Adaptation to the input signal of analog input 2 (terminals 3 and 4)
S9
ON=0...20 mA / 4...20 mA
OFF=0...10 V / -10...+10 V
Adaptation to the input signal of analog input 3 (terminals 5 and 6)
S10
ON=0...20 mA / 4...20 mA
OFF=0...10 V / -10...+10 V
S11 - S12 - S13 Encoder setting ( jumpers on kit EAM_1618 supplied with the drive)
S14 - S15 - S16 ON=Sinusoidal SE or SESC encoder
OFF=Digital DE or DEHS encoder
S17
Monitoring of the C-channel of the digital encoder
ON=C-Channel monitored
OFF=C-Channel not monitored (required for single-ended channels)
S18 - S19
Encoder setting
S20 - S21
Pos. B=digital DEHS encoder
Pos. A= sinusoidal SESC encoder
S22 - S23
Analog input 3 enabling (alternative with SESC encoder)
Pos. A= if SESC encoder is used
Pos. B=analog input 3 enabled
S24
Jumper to disconnect 0 V (of 24 V) from ground
ON=0 V connected to ground
OFF=0 V disconnected from ground
S25
Jumper to disconnect 0 V (regulation section) from ground
ON=0 V connected to ground
OFF=0 V disconnected from ground
S26 - S27
Internal use
Encoder Internal power supply selection
S28
ON / ON = +5 V
OFF / OFF = +8 V
S29
Internal use
Second encoder qualifier input
S30
A=from EXP-… board
B=from digital input "3" on RV33-3
Factory setting
OFF
OFF
ON (*)
OFF
OFF
OFF
OFF
OFF
B
B
ON
ON
ON
ON/ON
A
ON
ay4060
(*) on multidrop connection the jumper must be ON only for the last drop of a serial line
GR
16
—————— Guida rapida ——————
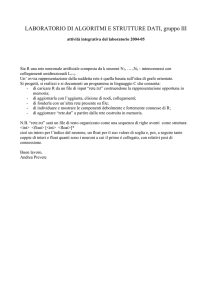
1.7 FUNZIONAMENTO DEL TASTIERINO
Il tastierino è composto da un visualizzatore LCD con due righe da 16 caratteri ciascuna, sette LED e nove
tasti funzione. Viene usato per:
- comandare l’azionamento, quando è selezionato questo tipo di utilizzo (Main commands=DIGITAL)
- visualizzare la velocità, la tensione, la diagnostica , ecc. , durante il funzionamento
- impostare i parametri
Navigation
Drive Controls
-Torque +T orque Alarm Enable ZeroSpeed Limit
-Torque +Torque Alarm Enable ZeroSpeed Limit
-Torque
Negative torque current
+Torque
Positive torque current
Jog
Speed
Alarm
Alarm condition
Enable
Drive enable status
ZeroSpeed Speed <=zero speed threshold
Help
Alarm
Escape
Home
Enter
Limit
Actual current >=current limit
Shift
This monitoring module can be upgraded with the keypad with
alphanumeric LCD display
NOTA:
cavi di collegamento del tastierino più lunghi di 20 cm devono essere schermati.
1.7.1. Diodi luminosi LED e funzione dei tasti
I diodi luminosi LED che si trovano sul tastierino servono per diagnosticare in modo veloce gli stati di funzionamento dell’inverter..
Designation
-Torque
+Torque
ALARM
ENABLE
Zero speed
Limit
Shift
Color
yellow
yellow
red
green
yellow
yellow
yellow
Function
the LED is lit, when the drive operates with a negative torque
the LED is lit, when the drive operates with a positive torque
the LED is lit; it signals a trip
the LED is lit, when the drive is enabled
the LED is lit; it signals zero speed
the LED is lit, when the drive operates at a current limit
the LED is lit, when the second keypad functions are enabled
ai5010
AV300i Manuale Hardware & Guida Rapida
17
GR
Tasto
[START]
[STOP]
Jog
[Aumentare] / [Jog]
[Diminuire] / [Rotation control]
Help
[Freccia giù]/ [Help]
Il tasto START comanda l’abilitazione dell’inverter (funzione
STOP CONTROL = ON) e della condizione di Run (Main
commands = DIGITAL)
Quando Main commands è impostato come TERMINALS il
tasto non è attivo.
Il tasto STOP comanda lo stop dell’inverter quando Main
commands è impostato come DIGITAL
(Premendo questo tasto per 2 secondi, l’inverter sarà anche
disabilitato).
Quando Main commands è impostato come TERMINALS il
tasto non è attivo.
Il tasto “più” incrementa la velocità di riferimento per la funzione
Motor pot .
Comando JOG , quando è selezionato inizialmente il tasto shift.
Il tasto “meno” diminuisce la velocità di riferimento per la
funzione Motor pot .
Controllo del senso di Rotazione. Quando è selezionato il tasto
shift, cambia la direzione della rotazione del motore (nella
modalità Jog e nella funzione Motor pot).
Freccia giù- Questo tasto è utilizzato per cambiare la selezione
dei menu o dei parametri. Nella modalità parametri e impostazione
riferimento, cambia il valore del parametro o il riferimento.
Help – Funzione non disponibile (viene visualizzato “Help not
found” quando è selezionato il tasto shift)
[Freccia sù]/ [Alarm]
Freccia su - Questo tasto è utilizzato per cambiare la selezione
dei menu o dei parametri. Nella modalità parametri e impostazione
riferimento, cambia il valore del parametro o il riferimento.
Alarm - Visualizzazione del registro allarmi ( tasto shift
selezionato ). Utilizzare le frecce SU/GIU’ per scorrere attraverso
gli ultimi 10 allarmi intervenuti.
[Freccia sinistra] / [Escape]
Freccia a sinistra, quando si editano parametri numerici, questo
tasto seleziona la cifra da modifiicare. In altri casi consente di
uscire dalla modalità selezionata.
Escape - Permette di uscire dalla modalità impostazione parametri
e dalla visualizzazione degli Allarmi (RESET), quando è
selezionato il tasto shift
Alarm
Escape
Home
Enter
Funzione
Riferimento
[Enter] / [Home]
[Enter] - Consente di inserire un nuovo valore di un parametro
nella modalità impostazione parametri.
Home - Consente di passare direttamente al BASIC MENU
(quando è selezionato il tasto shift)
Il tasto Shift abilita le funzioni alternative della tastiera (Rotation
control, Jog, Help, Alarm, Escape, Home)
Shift
GR
18
[Shift]
—————— Guida rapida ——————
AV300i Manuale Hardware & Guida Rapida
AV-300i
INPUT VARIABLES
AV-300i
DRIVE PARAMETER
AV-300i
MONITOR
AV-300i
BASIC MENU
Main menu
Enter
Enter
Enter
Enter
BASIC MENU
Drive type
BASIC MENU
Motor current
BASIC MENU
Actual spd
BASIC MENU
Start/stop
BASIC MENU
Ramp ref 1
BASIC MENU
Enable drive
-/+
2nd level
Enter
Drive type
Mains voltage
3rd level
Parameter
Menu
1.7.2 Navigazione all’interno dei menu
19
GR
1.8. CONTROLLI PRELIMINARI
Eseguire le seguenti verifiche prima di alimentare
l’inverter:
Terra/ Messa a terra
· Verificare la connessione di terra dell’inverter e
del motore.
· Verificare che le connessioni della tensione di
alimentazione, le uscite in tensione e la regolazione
non siano a massa.
Collegamenti
· Verificare le seguenti connessioni: ingressi U1/
L1, V1/L2, W1/L3), uscite U2/T1, V2/T2, W2/
T3), circuito intermedio (C,D) con un’unità di
frenatura esterna, termistore del motore (78,79),
Relay di OK (80,82 n.a), Relay 2 (83,85 n.a) e
scheda di regolazione (1.....46, XS, XE).
Impostare i jumper e gli switch sulla scheda di
Regolazione
· Enable drive (morsetto 12) e Start (morsetto
13) APERTO
· Fast stop (morsetto 14) e External fault
(morsetto 15) CHIUSO
12 ENABLE DRIVE (chiudere per attivare)
13 START (chiudere per attivare)
14 FAST STOP (aprire per attivare)
15 EXTERNAL FAULT (aprire per attivare)
16 Comune dei morsetti della scheda
18 + 24V Comune
19 +24VDC (interno)
. Registrare i dati di targa del motore, informazione dell’encoder e dati meccanici.
DATI DEL MOTORE
HP (kW)
Amps
Volts
Hz
rpm
Cos phi (power factor)
Tach type
Tach PPR
Motor rotation for machine fwd direction [CW/CCW]
Gearbox ratio
Dai54123
GR
20
—————— Guida rapida ——————
1.9. TARATURA RAPIDA
1. Alimentare l’inverter dopo avere eseguito il
controllo completo delle connessioni e dei
livelli delle tensioni in ingresso :
·Verificare che siano presenti le seguenti
tensioni:
Tra i morsetti 7 e 9: +10V (sulla scheda di
regolazione)
Tra i morsetti 8 e 9: -10V (sulla scheda di
regolazione)
Tra i morsetti 19 e 18: +24…30V (sulla scheda
di regolazione)
·Controllare la tensione del circuito
intermedio (DC link) premendo [Freccia giù]
per ottenere “MONITOR”, quindi premere
[Enter], poi [Freccia giù] per ottenere
“MEASUREMENTS”, poi [Enter], e [Freccia
giù] per ottenere “DC link voltage” e infine
[Enter].
Il valore sarà:
480-650 vdc per tensione di ingresso 400 vac
550-715 vdc per tensione di ingresso 460 vac
Se la tensione non rientra nei campi indicati,
verificare la tensione della linea, altrimenti
l’inverter non funzionerà correttamente..
2. Valori di default come valori di fabbrica:
- Se non si è sicuri della configurazione
dell’inverter, è necessario impostare come valori
di default i valori impostati dalla fabbrica o copiarli
in un file su PC per essere sicuri che si stà
iniziando da una configurazione conosciuta. Per
impostare i valori di fabbrica come default:
· Default alla memoria corrente: Premere
[Freccia sinistra] per tornare a “MONITOR”,
quindi [Freccia giù] per ottenere “SPEC
FUNCTIONS” e poi premere [Enter]. Premere
[Freccia giù] per ottenere “Load Default” e poi
[Enter]. I valori di fabbrica di tutti i parametri
saranno caricati nella memoria corrente ma i
valori precedenti sono ancora presenti nella
memoria permanente.
3. Impostare la tensione di alimentazione:
· Premere [Freccia sinistra] per ottenere
“SPEC FUNCTIONS” quindi [Freccia sù]per
“BASIC MENU”, quindi premere [Enter],
premere [Freccia giù] per ottenere “Drive type”,
ora premere [Enter] per ottenere “MAINS
VOLTAGE” e premere [Enter]. A questo punto
utilizzando i tasti [Freccia sù]/ [Freccia giù] ,
cambiare il valore della tensione scegliendo quello
più vicino alla tensione di alimentazione. Quindi
premere [Enter] per impostare il valore.
4. Adattare la temperatura ambiente:
· Premere [Freccia giù] per ottenere “Ambient temp” quindi premere [Enter]. A questo punto
utilizzando i tasti [Freccia sù]/ [Freccia giù],
selezionare il valore della temperatura ambiente
massima: 40°C o 50°C e premere [Enter].
5. Caricare i valori di default relativi al Motore:
· Premere [Freccia sinistra] per tornare a
BASIC MENU e quindi premere [Freccia giù]
per ottenere “DRIVE PARAMETER”, premere
[Enter], a questo punto premere [Freccia giù]
per ottenere “Motor Parameter”, premere
[Enter] e poi [Freccia giù] per ottenere “Load
Motor Par” , infine premere [Enter]. Premere i
tasti [Freccia sù]/ [Freccia giù] fino a
visualizzare la tensione dl motore corretta, quindi
premere [Enter]. Per motori a 460 VAC,
selezionare 460, e per motori 380/400 VAC
selezionare 400.
6. Impostare i valori motore:
· Premere [Freccia sinistra] per tornare A
“drive parameter”, [Enter] per ottenere “Mot
plate data”, [Enter] fino a “Nominal Voltage” e
quindi [Enter] ancora per visualizzare il valore.
A questo punto utilizzare i tasti [Freccia sù]/
[Freccia giù] per cambiare il valore e premere
[Freccia sinistra] per spostare la posizione del
carattere. Quando i valori impostati sono corretti
premere [Enter].
· Premere [Freccia giù] per ottenere “Nominal
speed”, premere [Enter], quindi utilizzare i tasti
[Freccia sù]/ [Freccia giù] per visualizzare la
velocità nominale indicata sulla targhetta del
motore. Premere [Enter] per confermare i
valori. Nota, alcuni costruttori di motori dedicati
agli inverter vettoriali indicano la velocità di
sincronismo (esattamente 600, 900, 1500, 1800,
3600) come velocità nominale, anzichè inserire
la velocità a cui il motore girerebbe quando
alimentato da una rete trifase a 50 Hz (velocità
con scorrimento). In qusto caso, BISOGNA
inserire il valore della velocità tenendo conto dello
scorrimento. Per questi casi inserire un valore
inferiore a 20 rpm se non si ha l’esatto valore
della velocità di scorrimento.
· Premere [Freccia giù] per ottenere “Nom
frequency” , premere [Enter] e scegliere la
frequenza nominale indicata sulla targhetta
(normalmente 50 o 60 Hz ) per mezzo dei tasti
[Freccia sù]/ [Freccia giù]. Premere [Enter]
per confermare i dati.
· Premere [Freccia giù] per ottenere “Nominal
current” , premere [Enter] e impostare la
AV300i Manuale Hardware & Guida Rapida
21
GR
corrente nominale indicate sulla targhetta del
motore utilizzando i tasti [Freccia sù]/ [Freccia
giù]. Premere [Enter] per confermare i dati.
· Premere [Freccia giù] per ottenere “Cos phi”,
premere [Enter] e impostare il fattore di potenza
nominale indicato sulla targhetta utilizzando i tasti
[Freccia sù]/ [Freccia giù] (se il dato non è
noto, confermare il valore preimpostato).
Premere [Enter] per confermare i dati.
· Premere [Freccia giù] per ottenere “Base
Voltage”, premere [Enter] e impostare base
voltage utilizzando i tasti [Freccia sù]/ [Freccia
giù] (comunemente la tensione nominale).
Premere [Enter] per confermare i valori. Fare
riferimento al manuale Istruzioni d’Uso per
ulteriori informazioni su Base Voltage e Base
Frequency nel caso il motore debba funzionare a
velocità diverse dallo standard.
· Premere [Freccia giù] per ottenere “Base
Frequency”, premere [Enter] e impostare il
valore utilizzando i tasti [Freccia sù]/ [Freccia
giù] (comunemente la frequenza nominale).
Premere [Enter] per confermare i dati.
· Premere [Freccia giù] per ottenere “Take motor
par”, premere [Enter] per accettare i parametri
motore. Nel caso venga visualizzato il
messaggio “Over-range error XXX”, i dati
inseriti non sono corretti e l’inverter NON
ACCETTA i valori inseriti. La causa più comune
è l’inserimento del valore di “Nominal Current“
inferiore del 30% della taglia dell’inverter. Questo
non è consentito per problemi legati al controllo di
piccoli motori con inverter di grosse taglie. Provare
a tornare all’inizio del punto 6 e ripetere
l’inserimento dei dati. Nel caso l’inverter continui
a non accettare i valori inseriti, vedere la lista
Overflow nel capitolo 1.12 “Ricerca guasti” o
rivolgersi al servizio assistenza.
7. Impostare i valori di base dell’inverter:
· Premere [Freccia sinistra] per tornare A
“DRIVE PARAMETER” quindi premere
[Freccia
giù]
per
ottenere
“CONFIGURATION” , premere [Enter].
· Premere [Freccia giù] per ottenere “Speed
Base Value” quindi premere [Enter] e impostare
velocità nominale a carico indicata sulla targhetta
del motore, premere [Enter].
· Premere [Freccia giù] per ottenere “Full load
current” quindi premere [Enter] e impostare la
corrente nominale dell’INVERTER indicata sulla
targhetta dell’inverter utilizzando i tasti [Freccia
sù]/ [Freccia giù], quindi premere [Enter] per
confermare.
8. Impostare Regulation Mode: (V/f, Sensorless
o Field oriented)
GR
22
· Premere [Freccia sù] per ottenere “Regulation
mode”, quindi premere [Enter] e utilizzare i tasti
[Freccia sù]/ [Freccia giù] per selezionare
“Sensorless vect” o “Field oriented”, premere
[Enter].
· Se viene selezionato “Field oriented” :
· Premere [Freccia giù] sino ad ottenere “Motor
spd fbk”, quindi premere [Enter], e [Freccia giù]
per ottenere “Encoder 1 type”, premere [Enter].
Utilizzare i tasti [Up arrow]/[Freccia giù] per
selezionare l’encoder sinusoidal o digitale, quindi
premere [Enter].
· Premere [Freccia giù] per ottenere “Encoder
1 pulses”, quindi premere [Enter] e impostare i
valori utilizzando i tasti [Freccia sù]/[Freccia
giù] a ppr (pulses per revolution) dell’encoder
utilizzato (normalmente 1024), premere [Enter].
9. Limiti di velocità:
· Premere [Freccia sinistra] sino ad ottenere
“BASIC MENU”, quindi premere [Freccia giù]
per “Limits”, quindi premere [Enter] per “Speed
Limits”, premere [Enter] per “Speed Amount”,
premere [Enter] per “Speed Min Amount”.
PREMERE [Freccia giù] per ottenere “Speed
Max Amount”, premere [Enter]. Modificare il
valore da 5000 rpm fino alla massima velocità
del motore utilizzando i tasti [Freccia sù]/
[Freccia giù] come eseguito in precedenza (ora
impostare al 105% della velocità nominale del
motore). Premere [Enter].
10. Prima dell’autotaratura:
Per questo scopo verrà utilizzato il tastierino. Le
connessioni I/O devono essere collegate
correttamente così come i comandi hardware di
abilitazione/disabilitazione dell’inverter.
11. Save Parameters:
· Premere [Freccia sinistra] sino ad ottenere
“LIMITS”, quindi premere [Freccia sù] e
selezionare “BASIC MENU” quindi premere
[Enter], ora premere [Freccia giù] per ottenere
“Save parameters”, premere [Enter].
Il display visualizzerà “wait” durante il salvataggio
permanente dei nuovi valori dei parametri.
12. Autotaratura:
Assicurarsi che l’inverter sia alimentato ma non
abilitato. Portare il morsetto 12 ENABLE ad
uno stato alto (+24 Vdc).
· Quando è stata data l’abilitazione tramite un
contatto esterno, premere [Freccia sinistra] sino
ad ottenere “BASIC MENU” premere [Freccia
giù] per selezionare “Drive Parameter”, premere
—————— Guida rapida ——————
[Enter], e [Freccia giù] per ottenere “Motor
parameters” , premere [Enter]. Premere
“[Freccia giù] per ottenere “Self Tuning” e
[Enter] per visualizzare “Self tune 1”. Premere
[Enter] per visualizzare “Start part 1”, premere
[Enter] per visualizzare “Start part 1 ?” e
premere nuovamente [Enter] per confermare.
Sul tastierino si deve illuminare il led “enable”, se
non si illumina, verificare che i cavallotti (o contatti
esterni) siano impostati in modo che sia presente
la tensione 24 Vdc sui morsetti 12, 13, 14 e 15 in
riferimento ai morsetti 16 o 8.
· Ora apparirà il messaggio “measuring Rs”
(resistenza dello statore). Attendere fino a quando
apparirà “end”, quindi disabilitare l’inverter
(aprendo il contatto al morsetto12) e premere
[Freccia sinistra] due volte in modo che apparirà
“Self tune 1”. Premere [Enter], quindi [Freccia
giù] sino a che apparirà “Take val part 1” e
premere [Enter]. Il display visualizzerà “wait”
durante il salvataggio permanente dei nuovi valori.
NOTA: Ripetere l’autotaratura nel caso vengano
visualizzati i messaggi “xxx range error” o
“timeout”. Se questi messaggi d’errore
persistono vedere il capitolo 1.12 “Ricerca
guasti”.
13. Autotaratura parte 2:
La parte iniziale dell’autotaratura (Self-tune 1)
si esegue senza la rotazione dell’albero motore.
La seconda parte è disponibile in due versioni
“Self-tune 2a” e “Self-tune 2b”:
- “Self-tune 2a” richiede una rotazione
dell’albero motore al 50% della velocità nominale
(l’albero motore deve essere disaccoppiato dal
carico).
- Nel caso la rotazione dell’albero motore non
sia possibile, si può utilizzare “Self-tune 2b” che
si esegue ad albero motore fermo.
“Self-tune 2a” fornisce risultati più precisi, quindi
è il metodo preferibile, quando possibile.
· Premere [Freccia sinistra] per ottenere “Self
tune 1” quindi [Freccia giù] per selezionare “Self
tune 2a “ o “Self tune 2b” e premere [Enter].
Abilitare l’inverter portando +24V al morsetto 12.
Premere [Enter], verrà visualizzato “Start part 2a
?” o “Start part 2b ?” premere ancora [Enter] .
Ora apparirà “Measure sat 2a (oppure b)” e l’albero
motore inizierà a ruotare (se è stato selezionato “Self
-tune 2a”). Attendere fino quando il display
visualizzerà “end”. Premere [Freccia sinistra] per
ottenere “Self -tune 2a (oppure b)” quindi [Enter]
e [Freccia giù] per selezionare “Take val part 2a
(oppure b)”. Disabilitare l’inverter (portare il
morsetto 12 ad un livello di tensione basso), quindi
premere [Enter].
NOTA: Ripetere l’autotaratura nel caso vengano
visualizzati i messaggi “xxx range error” o
“timeout”. Se questi messaggi d’errore
persistono vedere il capitolo 1.12 “Ricerca
guasti”.
Nel caso si voglia provare il funzionamento
dell’inverter con i nuovi parametri, non è
necessario salvarli in modo permanente.
Nel caso l’inverter venga spento e poi
riacceso questi valori vengono persi.
14. Self tune part 3:
La terza parte, “Speed regulator tuning”,
identifica il valore di inerzia totale all’albero del
motore (Kg*m2), il valore degli attriti in N*m e il
calcolo del guadagno Proporzionale e Integrale
del regolatore di velocità. L’albero motore deve
essere libero di girare e accoppiato dal carico.
PERICOLO !
Questa procedura richiede una libera
rotazione dell’albero del motore accoppiato
al carico. Il livello del comando Start/Stop
non è tenuto in considerazione. L’
autotaratura dell’anello di velocita’ non può
essere effettuata su macchine a corsa
limitata.
ATTENZIONE !
Il test viene eseguito utilizzando il valore di
limite di coppia impostato nel parametro
Test T curr lim. Il riferimento di coppia è
applicato attraverso un riferimento a gradino (senza rampa), inoltre la trasmissione
meccanica non deve avere “giochi” e deve
essere compatibile con le operazioni
utilizzando il valore di limite di coppia
impostato nel parametro Test T curr lim.
L’utilizzatore può modificare tramite questo
parametro il valore del limite di coppia
appropriato.
NOTA ! - In applicazioni dove il valore dell’inerzia
totale del sistema e’ molto grande, occorre
agire aumentando il valore del parametro Test
T curr lim per evitare errori di “Time out”.
- L’autotaratura dell’anello di velocita’
non è adatta per impieghi del drive in
applicazioni quali “ascensori” e
impianti di sollevamento.
- E’ richiesta la connessione dell’encoder
per la retroazione di velocita’ quando è
selezionato il modo Field oriented.
- Impostare il limite di corrente del drive
(BASIC MENU\ T Current lim +/-) ad un
AV300i Manuale Hardware & Guida Rapida
23
GR
valore compatibile con la taglia del motore
utilizzato e il carico applicato. (Esempio:
quando il motore è 1/3 della potenza
dell’inverter, il limite deve essere ridotto
rispetto ai valori dei parametri di default).
- Impostare il senso di rotazione dell’albero
motore: orario (FWD) o anti-orario (REV)
tramite il parametro Fwd-Rev spd tune.
Nel caso sia richiesto di cambiare il valore del
tempo di rampa di accelerazione / decelerazione
impostato in fabbrica, utilizzare i parametri Acc
delta time / Acc delta speed e Dec delta time
/ Dec delta speed.
Se si vuole avviare il motore con il tastierino,
utilizzare i tasti Aumentare (+) e Diminuire (-) (
Enable motor pot parameter = Enabled)
vedere il successivo capitolo per l’avvio.
· Premere [Freccia sinistra] per ottenere “Self
-tune 2a (o 2b)” quindi [Freccia giù] per “Self
-tune 3” e premere [Enter] per selezionare
“Fwd-Rev spd tune”, premere [Enter].
Impostare il senso di rotazione dell’albero motore:
orario (FWD) o antiorario (REV) tramite i tasti
[Freccia sù] / [Freccia giù]. Premere [Enter]
confermare la selezione.
· Abilitare l’inverter tramite il contatto sul
morsetto 12 [chiudere i morsetti da 13 a 19 se è
abilitata la funzione Speed control (default)].
Premere [Freccia giù] per ottenere “Start part
3” quindi premere [Enter], verrà visualizzato
“Start part 3 ?” , premere [Enter]. Sul display
ora apparira il messaggio “Measure speed” e il
motore inizierà a girare. Attendere sino a quando
verrà visulaizzato “end”, poi premere [Freccia
sinistra] per ottenere “Self -tune 3” , premere
[Enter] e premere ancora [Freccia giù] per
ottenere “Take val part 3”. Disabilitare l’inverter
e premere [Enter].
E’ terminata l’impostazione iniziale e la taratura,
i valori sono ora residenti nella memoria corrente.
NOTA: Ripetere l’autotaratura nel caso vengano
visualizzati i messaggi “xxx range error” o
“timeout”. Se questi messaggi d’errore
persistono vedere il capitolo 1.12 “Ricerca
guasti”.
Nel caso si voglia provare il funzionamento
dell’inverter con i nuovi parametri, non è
necessario salvarli in modo permanente. Nel
caso l’inverter venga spento e poi riacceso
questi valori vengono persi.
Per salvarli in modo permanente andare sino
al parametro Save parameters e premere
[Enter].
15. Impostazione per l’avvio:
Innanzitutto, impostare l’inverter nella
configurazione con cui si vuole operare.
L’inverter è configurato in fabbrica per essere
comandato tramite un riferimento esterno +/- 10V
attraverso un potenziometro collegato ai morsetti
1 e 2 (vedere tabella 5.3.2.1).
GR
24
—————— Guida rapida ——————
1.9.1 Funzione Motopotenziometro
Tasti di controllo
Sequenza
Display
Premere il tasto START per portare l’inverter nello stato
Enable e Run (avvio)
Premere il tasto STOP per fermare l’inverter dallo stato
Run
Jog
Motor pot oper
+0 [rpm] POS
Premere questo tasto per diminuire il valore di riferimento
della velocità
Motor pot oper
-0 [rpm] NEG
Premere SHIFT e [-] per cambiare la direzione del senso
di rotazione dell’albero motore
Shift
NOTE!
Premere questo tasto per visualizzare il riferimento
corrente e incrementare la velocità
(Main commands = DIGITAL)
Inverter abilitato, morsetto 12 a 24Vdc
Start, morsetto 13 a 24Vdc
Resettare il valore della velocità di riferimento
tramite la funzione Mot pot
Premere il tasto [STOP] per fermare il motore
Premere [Freccia sinistra] per ottenere “BASIC
MENU”, poi [Freccia giù] per “FUNCTIONS”.
Premere [Enter] per visualizzare “Motor pot”,
premere ancora [Enter] per ottenere “Enab motor
pot”e premere [Freccia giù] per selezionare
“Motor pot reset”, premere enter per confermare
[Enter].
Sul display verrà visualizzato “ready” fino a quando
il valore di riferimento sarà impostato a zero.
Se si vuole utilizzare un potenziomentro o altro
collegato al morsetto 1 per la regolazione analogica
della velocità (impostazione di fabbrica), impostare il
parametro Enable motor pot = Disable.
·
·
Funzione Jog
NOTA!
Questa funzione è già abilitata (parametro
Enable jog = Enabled) con un valore di
riferimento della velocità = 100 rpm.
(Main commands = DIGITAL)
Inverter abilitato, morsetto 12 a 24Vdc
Start, morsetto 13 a 24Vdc
Premere [SHIFT e [+] per avviare, verrà visualizzata la
velocità.
Premere [-] per selezionare la direzione di rotazione
dell’albero motore.
Premere [jog] per cambiare il senso di rotazione.
Premere [Freccia sinistra] per uscire dalla funzione jog.
Cambiare il riferimento jog
·
Premere [Freccia giù] sino ad ottenere
“FUNCTIONS”, premere [Enter], quindi
[Freccia giù] sino a che viene visualizzato “Jog
reference”, e premere [Enter]. Utilizzare i tasti
[Freccia su]/[Freccia giù] per cambiare il valore,
premere [Freccia sinistra] per muovere la
posizione del carattere, impostare il nuovo
riferimento, quindi premere [Enter].
Eseguire ora eventuali altre modifiche
all’impostazione (vedere la sezione Impostazioni
Opzionali). Al termine seguire le indicazioni della
prossima sezione per salvare le nuove impostazioni
nella memoria permanente.
Salvare tutti i valori nella memoria permanente:
. Premere [Freccia sinistra] per tornare a
“CONFIGURATION” quindi [Freccia su]/ per
“BASIC MENU” e premere [Enter]. Premere
[Freccia giù] per ottenere “Save parameters”
e per confermare [Enter]. I parametri ora sono
memorizzati in modo permanente.
AV300i Manuale Hardware & Guida Rapida
25
GR
1.10 IMPOSTAZIONI OPZIONALI
Verifica Encoder: Impostare l’inverter nella modalità
V/f e avviare il motore, abilitare e avviare l’inverter
e impostare un riferimento analogico. Se il riferimento
sul morsetto 1 è positivo rispetto al morsetto 2
(comune) l’albero motore girerà in senso orario. Con
il motore che gira in senso orario (visto di fronte
all’albero motore), oppure facendo girare a mano
l’albero motore mentre non è abilitato, è possibile
leggere sul display la misura dell’encoder
selezionando il menu “Monitor/measurements/speed/
speed in rpm/Enc 1 speed”. La velocità deve essere
positiva. Se risulta negativa, devono essere scambiati
i canali A e A- o B e B- sull’encoder. Ora tornare al
punto 15 “Impostazioni per l’avvio”.
Limite di currente: Il limite di corrente deve essere
stato impostato per default a circa il 136% (il numero
esatto è una funzione del cos phi ma la differenza è
piccola). Il valore impostato può essere verificato
nel menu “LIMITS/Current limits/T current lim”. Il
valore di T current lim può essere cambiato se si
vuole un numero alto (o basso). I limiti di corrente
sono basati sulla capacità dell’inverter, non del motore.
T current è la componente della corrente che
produce coppia. Sono possibili impostazioni in eccesso
del 200%, nonostante il motore non sia in grado di
sopportarle. La maggior parte dei motori sono in
grado di sopportare sovraccarchi del 150% per 1
minuto. L’inverter è autoprotetto tramite una gestione
intelligente della temperatura, della tensione e un
algoritmo I2T opportunamente configurato. L’inverter
fornirà il 150% del valore impostato nel menu
“Configuration/Full Load Current” per 1 minuto (200
% per un breve periodo).
Configurazione I/O: L’inverter può avere molteplici
configurazioni di I/O: nelle condizioni di fornitura
standard sono forniti tre ingressi e due uscite
analogiche, 6 ingressi e due uscite digitali che sono
assegnabili e configurabili. In condizione di default,
le uscite analogiche sono impostate come Actual
speed e Torque current, con la possibilità di un
fattore moltiplicativo.
Per impostare le due uscite analogiche, per collegare
uno strumento esterno o altri scopi, seguire le seguenti
indicazioni:
Fare riferimento alla sezione 1.3 “Denominazione
dei morsetti ... ” di questa guida che descrive la
connessione della sezione di regolazione. Una
descrizione più dettagliata riguardo la
configurazione I/O è presente nel manuale
Istruzioni d’Uso. Le uscite analogiche sono per
default con scala moltiplicativa di 1, che significa
GR
26
10 volts in uscita al massimo valore del
parametro. In altre parole se l’uscita analogica 1
è impostata con un fattore di scala uguale a 1,
l’uscita fornisce 10 Vdc quando il riferimento
oppure la velocità corrispondono al valore definito
da Speed base value (si trova nel menu
CONFIGURATION). Se si vogliono 5 Vdc max
in uscita alla massima velocità, impostare quindi
il fattore di scala a 0,5.
Se l’uscita è stata impostata come Torque
current, 10 Vdc corrisponderà alla corrente
nominale. Se l’uscita deve essere 10 Vdc con
150% di “Full Load Current” (si trova nel menu
CONFIGURATION) il fattore di scala dovrà
essere 0.66. In condizioni standard l’inverter è
impostato come segnale della velocità (con fattore
scala 1) sull’uscita analogica 1 (morsetti 21 e
22) e corrente (Torque current, con fattore di scala
1) sull’uscita analogica 2 (morsetti 23 e 22).
Notare che il morsetto 22 è il comune per
entrambe le uscite. Il comune può essere messo
a terra, preferibilmente attraverso lo strumento
di misura (meter), in questo caso rimuovere il
jumper S25.
Come disabilitare Analog input 1 come
riferimento di rampa: (Gli ingressi analogici 2 e 3
sono disabilitati per default, l’ingresso analogico 1 è
per default a Ramp ref 1). La disabilitazione
dell’ingresso analogico e per consentire l’impostazione
in modo digitale della velocità via tastierino
· Premere i tasti [Freccia sù]/[Freccia giù] per
ottenere “I/O Config”, quindi premere [Enter].
· Premere [Freccia giù] per ottenere “Analog
inputs”, quindi premere [Enter] per visualizzare
“Analog input 1”. Premere [Enter] per ottenere
“Select input 1“, quindi premere [Enter] per
visualizzare l’impostazione che sarà “Ramp ref 1”.
· Premere i tasti [Freccia sù]/ [Freccia giù] sino
a quando si visualizza “OFF” , quindi premere
[Enter].
Come abilitare Analog input 2 come riferimento
di rampa:
· Premere [Up arrow]/[Freccia giù] per ottenere
“I/O Config” e premere [Enter], quindi premere
[Freccia sinistra] per ottenere “Analog inputs”
premere [Enter] per visualizzare “Analog input
1” e [Freccia giù] per ”Analog input 2” .
Quindi premere [Enter] per ottenere “Select
input 2”, e [Enter] ancora per visualizzare
l’impostazione (“OFF”). Utilizzare i tasti
[Freccia sù]/ [Freccia giù] per visualizzare
—————— Guida rapida ——————
“Ramp ref 1” (se questa impostazione non è
stata ancora utilizzata, oppure Ramp ref 2) e
premere [Enter]. Questo significa che Analog
input 2 (morsetti 3 e 4) sarà il riferimento di
velocità con
rampa (accelerazione /
decelerazione) dell’inverter.
Il manuale completo su CD mostra la configurazione
completa degli I/O e altre impostazioni dell’inverter.
Per ulteriori informazioni contattare il servizio
assistenza.
1.11 GUIDA ALLA TARATURA RAPIDA
PER INVERTER CONFIGURATI IN
FABBRICA (O PRE-CONFIGURATI)
Quando la configurazione dell’inverter è stata
completata e si deve solamente eseguire la taratura
con un motore collegato, possono essere ignorate
diverse procedure indicate in precedenza.
Se non si è certi dei valori, è consigliato seguire la
procedura indicata, allo scopo di verificare la
correttezza dei valori visualizzati.
In questo caso utilizzare il tasto [Freccia sinistra]
piuttosto che [Enter] in tutti i passaggi in cui i valori
trovati risultano corretti.
Iniziare dal punto 4 della procedura e non resettare
i parametri al valore di fabbrica.
Le nuove impostazioni possono essere salvate su un
dischetto utilizzando il programma di configurazione
per PC a corredo con il prodotto.
AV300i Manuale Hardware & Guida Rapida
27
GR
1.12 RICERCA GUASTI
LISTA OVERFLOW
GR
CODICE
10 ; 54
CAUSE
Il rapporto tra gli impulsi dell’Encoder 1 [416] ed il numero di paia di poli del motore deve
essere maggiore di 128
3;4
Il valore di resistenza dello statore [436] è troppo elevato. Il motore non è compatibile con
la taglia dell’azionamento usato.
5 ; 8 ; 9 ; 15
Il valore della induttanza di dispersione [437] è troppo elevato. Il motore non è compatibile
con la taglia dell’azionamento usato.
16 ; 24
Il valore di resistenza del rotore [166] è troppo elevato. Il motore non è compatibile con la
taglia dell’azionamento usato
17
I valori della tensione nominale [161] e della frequenza nominale [163] producono un
flusso nominale motore (fuori tolleranza) troppo elevato.
- Verificare questi valori: il valore della tensione nominale è troppo elevato e/o il valore
della frequenza nominale è troppo basso.
18
I valori della tensione base [167] e della frequenza base [168] producono un flusso nominale
motore (fuori tolleranza) troppo elevato.
- Verificare questi valori: il valore della tensione base è troppo elevato e/o il valore della
frequenza base è troppo basso.
23
Il rapporto tra il flusso nominale (tensione nominale, frequenza nominale) ed il flusso di
lavoro (tensione base, frequenza base) è troppo elevato.
- Verificare i valori dei suddetti parametri.
Il valore della corrente magnetizzante [165] è troppo elevato.
- Verificare che questo sia inferiore a quello della corrente a pieno carico.
27
Il valore della tensione base è troppo elevato. Detto valore deve essere inferiore a 500 V
28
Il valore della frequenza base è troppo elevato. Detto valore deve essere inferiore a 500 Hz
59
La corrente di lavoro magnetizzante [726] è troppo elevata. Verificare che il valore del
flusso nominale (tensione nominale e frequenza nominale) sia inferiore al valore di flusso
di lavoro (tensione base e frequenza base). Controllare i valori dei parametri.
Il valore della corrente magnetizzante è troppo elevato.
- Verificare che detto valore sia inferiore a quello della corrente a pieno carico.
64
Il valore di Motor cont curr [ ], nella funzione protezione termica motore (menù Ovld
mot contr [ ]), produce correnti continuative troppo basse in rapporto alla taglia
dell’inverter utilizzato. Ciò può anche essere dovuto a un’impostazione troppo bassa del
parametro Nominal current [ ] (≤ 0.3 x I2N)
66
Il valore della velocità nominale [162] è sbagliato. Il valore impostato produce un valore di
slittamento troppo basso (o troppo elevato).
28
—————— Guida rapida ——————
LISTA DEI MESSAGGI DI ERRORE DURANTE L’AUTOTARATURA
Messaggi generici
Descrizione
“Drive disabled”:
“Not ready”:
Note
Alimentare il morsetto 12 (ENABLE) a una tensione di +24V
“Take val part 1” , “Take val part 2a” , “Take val part 2b”o “Take val part
3” non possono essere eseguiti in quanto il test non è stata completato correttamente.
Ripetere la procedura di autotaratura.
“Time out”:
La procedura di autotaratura non è stata completata nel tempo disponibile.
“Start part...?”:
Premere ENT per confermare l’inizio del test di autotaratura
“Tuning aborted”:
Test di autotaratura disabilitato dall’utente (sono stati premuti i tasti [Shift] / [Escape].
“Set Main cmd=Dig”: Selezionare il menu CONFIGURATION e impostare il parametro Main commands
= Digital.
“Set Ctrl=Local”:
Selezionare il menu CONFIGURATION e impostare il parametro Control mode = Local.
“Reg mode NOK”:
Self tune part 3 può essere eseguito solo con Regulation mode = Field oriented
o Regulation mode = Sensorless vect. Selezionare il menu BASIC MENU e
impostare il parametro Regulation mode correttamente.
“Inertia range”:
La procedura Self-tuning part 3 ha riscontrato un valore di inerzia del motore troppo
basso per cui non è stata in grado di calcolare i guadagni del regolatore di velocità.
Provare a ripetere la taratura per superare un eventuale errore accidentale di misura.
Se l’errore viene dato ancora (inerzia effettivamente inferiore al minimo misurabile),
evitare di dare il comando “Take val part 3”. Il regolatore di velocità risulterà
comunque stabile con i valori dei guadagni impostati di fabbrica. E’ possibile una
ottimizzazione della velocità di risposta con la taratura manuale del regolatore.
Messaggi di errori di misura
Questi messaggi di errore possono apparire quando sono stati identificati valori estremi dei parametri. Può
essere utile ripetere la procedura di autotaratura quando appare uno qualsiasi dei seguenti messaggi. Se il
messaggio persiste, devono essere adottate procedure di taratura manuale.
Descrizione
“No break point”
“Over speed”
“Drive stalled”:
“Load applied”:
“T curr too high”:
“Friction null”:
Note
La procedura Self tune part1 non è stata completata. Prima di ripetere la taratura,
controllare l’integrità delle connessioni tra inverter e motore.
La procedura Self tune part3 ha riscontrato una velocità molto più alta di quella
prevista per il test. Possibili cause sono: trascinamento da parte del carico o cattiva
taratura degli anelli interni nel caso di funzionamento Sensorless vect. Provare a
ripetere la taratura Self tune1 o le corrispondenti operazioni di taratura manuale.
Incrementare il valore del parametro Test T curr lim e ripetere Self tune 3
E’ stato riscontrato un valore di coppia di carico a velocita’ zero troppo elevato. Non
è possibile eseguire Self tune 3 per questo tipo di carico.
Ridurre il valore del parametro T curr lim per Self tune 3
Il valore dell’attrito è zero o inferiore del limite di precisione del controllo.
AV300i Manuale Hardware & Guida Rapida
29
GR
SEGNALAZIONI DI ALLARME SUL VISUALIZZATORE DEL TASTIERINO
ALLARME
GR
PROBABILI CAUSE
BU Overload
Il ciclo di frenatura non rientra nei valori consentiti.
Bus loss
Guasto nella connessione Bus (solo con la scheda opzionale di interfaccia Bus).
Controllare la connessione del Bus.
Problemi di compatibilità elettromagnetica, verificare i collegamenti.
Curr fbk loss
Guasto nella connessione tra la scheda di regolazione e il trasformatore di corrente
TA (oppure trasduttore).
Controllare il cavo di connessione sul connettore XTA
DSP error
Errore nel programma del processore
Disinserire ed inserire di nuovo l’apparecchio
In caso di insuccesso: probabile guasto interno. Mettersi in contatto con il servizio
di assistenza.
Enable seqerr
Si ha se, con la configurazione dei comandi principali impostata da morsettiera, si
accende l’inverter con i comandi già abilitati alla partenza. Effetto analogo se si
tenta di effettuare un RESET* con ENABLE attivo.
Vedere CONFIGURATION/MAIN COMMAND.
External fault
Anomalia esterna, segnalata al morsetto 15
Quando non viene usata la segnalazione di “External fault”: manca il collegamento
tra i morsetti 16 e 18 (potenziale di riferimento) e/o 15 e 19.
Quando la segnalazione di “External fault” viene usata:
- Manca il segnale al morsetto 15 (15 ... 30V rispetto al morsetto 16). Con
tensione di alimentazione esterna: devono essere collegati tra di loro i potenziali
di riferimento!
Failure supply
Guasto sulla tensione di alimentazione = Le tensioni sono inferiori ai valori consentiti.
ATTENZIONE: Prima di estrarre i morsetti estraibili si deve sempre togliere
tensione!
Nella maggioranza dei casi la causa è da ricercare nei cavi di collegamento esterni.
Rimuovere le morsettiere estraibili della scheda di regolazione e dare un comando di
RESET*. Se dopo questo non viene segnalato allarme, verificare se nel cablaggio è
avvenuto un cortocircuito, eventualmente tra lo schermo ed il conduttore.
Se in tale modo non viene eliminato l’allarme: tentare un nuovo RESET*.
In caso di insuccesso: probabile guasto interno. Mettersi in contatto con il servizio di
assistenza.
Heatsink ot
(Per taglie da 22kW ... e superiori). Temperatura del dissipatore dell’inverter troppo elevata.
Ventola di raffreddamento guasta.
Guasto nel modulo IGBT sulla scheda di potenza.
Duty cycle della corrente di sovraccarico troppo veloce.
30
—————— Guida rapida ——————
Heatsink sensor
Temperatura ambiente troppo elevata
Ventola di raffreddamento guasta.
Dissipatori intasati
Intake air ot
(Per taglie da 22kW e superiori). Temperatura dell’aria di raffreddamento troppo alta.
Ventola (e) di raffreddamento guasta (e).
Ingresso aria di raffreddamento ostruito.
Interrupt error
Si è presentato un interrupt non utilizzato
Disinserire ed inserire di nuovo l’apparecchio
In caso di insuccesso: probabile guasto interno. Mettersi in contatto con il servizio
di assistenza.
Module overtemp
(Per taglie da 0.75 a 15 kW). Temperatura del modulo IGBT troppo alta.
Ventola di raffreddamento guasta.
Guasto nel modulo IGBT sulla scheda di potenza.
Duty cycle della corrente di sovraccarico troppo veloce.
Output stages
Errore di sovracorrente interna della sezione potenza IGBT
Spegnere l’apparecchio e riaccenderlo
Se i problemi persistono, contattare il servizio assistenza.
Overcurrent
Sovracorrente nel circuito motore
Corto circuito tra le fasi o verso terra sull’uscita dell’inverter.
Regolatore di corrente ottimizzato in modo scorretto
La segnalazione avviene al momento dell’inserzione: l’inverter viene collegato da
un motore già in rotazione. Deve essere attivata la funzione Auto capture.
Spegnere l’apparecchio e riaccenderlo
Se i problemi persistono, contattare il servizio assistenza.
Overvoltage
Sovratensione nel DC link dovuta all’energia recuperata dal motore
Allungare la rampa di decelerazione. Se questo non è possibile:
- utilizzare una unita di frenatura BU... per dissipare l’energia di recupero
Overtemp Motor
Sovratemperatura del motore (segnalata dal termistore ai morsetti 78/79)
Rottura del conduttore tra il termistore del motore ed i morsetti 78 e 79
Surriscaldamento del motore:
- Ciclo di carico applicato in condizioni troppo estreme
- Temperatura dell’ambiente in cui è installato il motore troppo elevata
- Il motore è dotato di ventilazione assistita: non funziona il ventilatore
- Il motore non è dotato di ventilazione assistita: carico troppo elevato a basse
velocità. Il raffreddamento della ventola montata sull’albero motore non è sufficiente per questo ciclo di carico. Cambiare il ciclo oppure provvedere a
servoventilare il motore.
Regulation ot
Temperatura della scheda di regolazione dell’inverter troppo alta.
Temperatura ambiente troppo elevata
AV300i Manuale Hardware & Guida Rapida
31
GR
Speed fbk loss
Perdita di retroazione della velocità
L’encoder non è collegato, collegato in modo non corretto oppure non è alimentato:
Selezionare il parametro Actual spd nel BASIC MENU.
- Con l’inverter disabilitato ruotare il motore in senso orario (visto dal lato albero
motore). Il valore indicato deve essere positivo.
- Se il valore indicato non cambia oppure vengono indicati dei valori a caso,
controllare l’alimentazione e il sistema di cavi deIl’encoder.
- Se il valore indicato è negativo, invertire le connessioni dell’encoder. Cambiare
canale A+ e A- oppure B+ e B-.
Undervoltage
Sottotensione
Parametro Mains voltage erroneamente impostato (ad esempio impostato 460V,
anche se l’inverter deve lavorare con 400V). Rimedio: impostare correttamente il
parametro e successivamente tacitare l’allarme tramite RESET*.
La tensione che giunge alla parte di potenza dell’inverter è troppo bassa a motivo di:
- tensione di rete troppo bassa oppure cadute di tensione troppo prolungate
- cattivo collegamento dei conduttori (ad esempio morsetti di contattore, induttanza,
filtro ... non ben serrati). Rimedio: controllare i collegamenti.
Visualizzatore del tastierino spento o non visualizza nessun messaggio
Controllare la connessione del cavo tra la scheda di regolazione e il tastierino.
ALTRE ANOMALIE
ALLARME
PROBABILI CAUSE
L’albero motore non gira
Viene visualizzata una situazione di allarme: vedere la tabella precedente.
Dopo aver rimosso la causa di allarme, deve essere dato un comando di RESET*.
Il visualizzatore del tastierino non è illuminato: manca tensione di alimentazione ai
morsetti U1 / V1 / W1 oppure è intervenuto un fusibile interno.
Mancano i comandi di sblocco e/o di start (controllare la configurazione dei morsetti
della regolazione).
L’inverter non accetta i comandi: selezione errata della modalità di funzionamento.
Intervento degli organi di protezione dell’alimentazione: organi di protezione non
correttamente dimensionati oppure guasto sul ponte raddrizzatore d’ingresso.
Gli ingressi analogici per il riferimento non sono stati configurati, oppure sono stati
configurati in altro modo.
L’albero motore gira in modo errato
Polarità errata del segnale di riferimento
Il motore è collegato in modo errato. ATTENZIONE: quando pur girando nel senso
sbagliato, il motore si può regolare, devono essere scambiati sia due fasi dei conduttori
motore, sia i due collegamenti encoder (A+ con A- oppure B+ con B-).
L’albero motore non raggiunge la velocità nominale
L’azionamento è in limite di velocità. Rimedio: verificare i parametri Speed max
amount, Speed max pos e Speed max neg.
L’azionamento lavora in limite di corrente (LED Ilimit acceso). Probabili cause:
- Motore sovraccaricato
GR
32
—————— Guida rapida ——————
- Inverter dimensionato con una taglia troppo piccola
- Impostata una caratteristica V/f sbagliata
- Impostata una riduzione di flusso mediante Torque reduct
Inseriti valori troppo elevati per il numero di impulsi al giro dell’encoder. Rimedio:
controllare i parametri interessati (Encoder 1 pulses) ed inserire il valore corretto.
Il valore correttivo riduce il riferimento principale. Rimedio: controllare configurazione.
In funzionamento da morsettiera: parametro Speed base value troppo basso
Il motore si porta subito alla massima velocità
Assegnando il riferimento da morsettiera: controllare se il valore varia dal minimo al
massimo. Se si utilizza un potenziometro di riferimento: è presente il collegamento
con lo 0V?
Verificare il funzionamento dell’encoder:
Selezionare il parametro Enc 1 speed nel menu MONITOR \ Measurement \ Speed
\ Speed in rpm
- Con regolazione bloccata, girare il motore in senso orario (visto dal lato albero
motore). Il valore visualizzato deve essere positivo.
- Se il valore visualizzato non cambia oppure presenta valori incomprensibili,
verificare l’alimentazione ed il cablaggio dell’encoder.
- Se il valore visualizzato è negativo, si devono scambiare i collegamenti
dell’encoder: canale A+ con A- oppure B+ con B-.
Il motore accelera troppo lentamente
Valori e tempi di rampa impostati non correttamente
Il motore gira con la massima corrente
- Motore sovraccaricato
- Inverter troppo piccolo
- Caratteristica V/f sbagliata
Il motore rallenta troppo lentamente
Valori e tempi di rampa impostati non correttamente
Il motore gira piano, anche se il riferimento è uguale a zero
E’ impostata una velocità minima
Disturbo derivante da un ingresso analogico non utilizzato. Rimedio: configurare
con OFF l’ingresso analogico non utilizzato.
Scollegare il riferimento dall’ingresso utilizzato.
- Se l’azionamento sta fermo, l’effetto dipende dalla resistenza del cavo conduttore dello 0V.
- Se l’azionamento continua a muoversi: operare una taratura del’ offset dell’ingresso analogico. Impostare il parametro Offset input XX in modo tale che
l’azionamento stia fermo.
La tensione di uscita oscilla ampiamente sotto carico
Il valore di Rotor resistance non è corretto. Fare l’ottimizzazione dell’inverter
come descritto nel capitolo “Controllo e taratura manuale di rotor resistance” del
manuale Istruzioni d’Uso.
Il motore non eroga la coppia massima e la potenza massima
Il valore della corrente di magnetizzazione Magnetizing curr è più piccolo di
quello richiesto dal motore collegato.
AV300i Manuale Hardware & Guida Rapida
33
GR
- La proporzione tra i parametri Output voltage / Output frequency nel menu
MONITOR / Measurements deve essere approssimativamente uguale alla proporzione tra i parametri Base voltage / Base frequency.
- L’inverter lavora in limite di corrente
- Verificare che sia impostato correttamente il valore di Full load curr nel menu
CONFIGURATION.
- Verificare i valori del limite di corrente
- Il valore per i parametri Magnetizing curr e/o Rotor resistance non è corretto.
Ottimizzare la taratura come indicato in precedenza.
Andamento non lineare della velocità in accelerazione con la corrente massima
Diminuire in modo proporzionale i parametri Speed I e Speed P. Se questo non
porta alcun miglioramento, bisogna ottimizzare il regolatore.
La velocità oscilla
Verificare i parametri Speed P e Speed I
Se il punto di lavoro si trova in condizione di indebolimento flusso: verificare i
parametri Flux P e Flux I.
Valore errato per Rotor resistance
Rimedio: Fare l’ottimizzazione del regolatore come descritto nel capitolo “Controllo
e taratura manuale di rotor resistance” del manuale Istruzioni d’Uso.
L’azionamento non reagisce all’adattativo di velocità
Manca l’abilitazione dell’adattativo di velocità. Enable spd adap = Enabled!
Manca il riferimento adattativo sull’ingresso analogico se usato Adap reference
La funzione motopotenziometro non viene eseguita
Manca l’abilitazione della funzione. Enable motor pot = Enabled
Con funzionamento da morsettiera: Motor pot up e/o Motor pot down non
sono stati configurati su un ingresso digitale.
Non funziona la Marcia Jog E’ ancora operante un comando di start.
Manca l’abilitazione della funzione. Enable jog = Enabled
Con funzionamento da morsettiera: Jog + e/o Jog - non sono stati configurati su
un ingresso digitale.
Non funzionano i riferimenti di velocità interni
Manca l’abilitazione della funzione. Enab multi spd = Enabled
Con funzionamento da morsettiera: Speed sel 0, Speed sel 1 e Speed sel 2
non sono stati configurati sugli ingressi digitali.
La funzione Multi ramp non reagisce
Manca l’abilitazione della funzione. Enab multi rmp = Enabled
Con funzionamento da morsettiera: Ramp sel 0 e Ramp sel 1 non sono stati
configurati su un ingresso digitale.
*
Per effettuare il RESET allarmi premere il tasto [Escape] ([shift] + [freccia sinistra]). Nel caso i comandi
Enable e Start fossero configurati da morsettiera (CONFIGURATION / Main.=Terminal), per effettuare
il RESET togliere da tali morsetti il potenziale di comando.
NOTA:
GR
34
L’operazione di RESET allarmi può essere inoltre configurata su un ingresso digitale
opportunamente configurato.
—————— Guida rapida ——————
2. FUNZIONI E
CARATTERISTICHE GENERALI
Gli apparecchi della serie AV300i sono stati sviluppati
come inverter vettoriali ad orientamento di campo con
eccellenti caratteristiche di rotazione uniforme ed
elevata disponibilità di coppia.
Le modalità di controllo disponibili sono:
- orientamento di campo con sensore di velocità
- orientamento di campo senza sensore di velocità
(Sensorless)
- controllo V/f .
La modulazione “space vector” mantiene il livello di
rumorosità al minimo
- Tensione d’uscita fino al 98% della tensione in
entrata
- Procedimento di autotaratura per i regolatori di
corrente, di flusso e di campo.
Ampliamento delle uscite analogiche e digitali e degli
ingressi digitali e analogici mediante schede opzionali
Assegnazione dei riferimenti di velocità e
visualizzazione dei valori istantanei in percentuale della
dimensione definibile dall’utilizzatore.
Possibilità di regolazione in velocità ed in coppia.
Adattivo del regolatore di velocità.
Segnalazioni funzioni della velocità.
Funzione motopotenziometro (Aumento / Diminuzione
della velocita tramite comando)
Marcia ad impulsi.
8 riferimenti di velocità interni (Preset speed).
4 rampe interne lineari o ad esse.
Funzione PID.
Arresto controllato in caso di mancanza rete.
Gli azionamenti sono dotati di IGBT (Insulated Gate
Bipolar Transistors).
L’uscita è protetta contro la messa a terra accidentale
ed il cortocircuito di fase in uscita
Le tensioni di alimentazione delle schede sono ottenute
mediante alimentatore “switching” partendo dalla
tensione del circuito intermedio, con buona capacità
di sopportare buchi di rete.
Isolamento galvanico tra parte di potenza e parte di
regolazione.
Ingressi analogici differenziali.
Semplice utilizzo dell’apparecchio
- tramite morsettiera
- da tastierino con display retroilluminato
- mediante programma PC di fornitura standard e
linea seriale RS485
- mediante un collegamento con bus di campo
(opzionale): PROFIBUS-DP, DeviceNet o
GENIUS.
- Configuratore Toolbox.
Messaggi memorizzati per gli ultimi 10 interventi ed
indicazione temporale di intervento.
Controllo del sovraccarico.
Possibilità di aggancio ad un motore già in rotazione
(Fly catching).
Tre ingressi analogici configurabili liberamente
sull’apparecchio standard.
AV300i Manuale Hardware & Guida Rapida
35
Cap.2
GR
36
—————— Guida rapida ——————
3. DESCRIZIONE, IDENTIFICAZIONE COMPONENTI E
SPECIFICHE
3.1. IMMAGAZZINAGGIO, TRASPORTO
3.1.1. Generalità
Gli inverter AV300i vengono imballati con cura per una spedizione corretta. Il trasporto deve essere effettuato
con mezzi adeguati (vedere indicazioni di peso). Fare attenzione alle indicazioni stampate sull’imballo.
Ciò vale anche per gli apparecchi disimballati per essere inseriti in armadi di comando.
Verificare subito al momento della fornitura:
- che l’imballo non abbia subito danni visibili,
- che i dati della bolla di consegna corrispondano all’ordine fatto.
Effettuare con attenzione le operazioni di apertura degli imballaggi ed assicurarsi che:
- durante le operazioni di trasporto nessuna parte dell’apparecchio sia stata danneggiata,
- l’apparecchio corrisponda al tipo effettivamente ordinato,
In caso di danneggiamenti oppure di fornitura incompleta o errata, segnalare la cosa direttamente all’ufficio commerciale competente.
L’immagazzinaggio deve essere fatto solamente in luoghi asciutti ed nei limiti di temperatura specificati.
NOTA!
Le variazioni di temperatura possono causare la formazione di condense di umidità nell’apparecchio, che sono accettabili in determinate condizioni (vedere capitolo 3.4.1
“Condizioni ambientali ammesse”), non sono tuttavia consentite durante il funzionamento
dell’apparecchio. Bisogna pertanto in ogni caso accertarsi che l’apparecchio al quale
viene applicata tensione, non presenti alcuna condensa!
3.1.2. Designazione del tipo di inverter
I dati tecnici fondamentali dell’inverter sono documentati nella sigla e sulla targhetta identificativa. Esempio:
6K AVI 4 3 003 Y 1 A 1
GE Industrial Control Product
AV-300i product
Input voltage (4=480 VAC)
Phases for input voltage (1=single phase, 3= 3 phase)
Drive rating in Horsepower with 150% overload for 60s (1)
Drive Options (2)
Enclosure type (1=IP20)
Major revision level
Minor revision level
La scelta dell’inverter viene fatta in base alla corrente nominale del motore. La corrente nominale d’uscita
deve essere maggiore oppure uguale a quella richiesta dal motore impiegato.
La velocità del motore asincrono dipende dal numero di paia poli e dalla frequenza (dati di targa e di
catalogo). Nel caso di funzionamento di un motore a velocità superiore alla sua nominale, consultare il
AV300i Manuale Hardware & Guida Rapida
37
Cap.3
costruttore del motore per i problemi meccanici che ne derivano (cuscinetti, sbilanciamento etc.). Analogamente, per motivi termici, in caso di funzionamento continuativo a frequenza inferiore a circa 20 Hz
(ventilazione insufficiente, a meno che il motore non disponga di ventilazione assistita).
3.1.3. Targhetta
Verificare che tutti i dati indicati nella targhetta fissata sull’inverter corrispondano al prodotto ordinato.
Figura 3.1.3.1: Targhetta di identificazione
GENERAL
Type
ELECTRIC
:
6KAVI43003Y1A1
Main Power In :
480 Vac
8.9 A
50/60Hz 3Phase
Main Power Out :
0-480Vac
7.5A
0-400Hz
UL
S/N 9862330
LISTED
INDUSTRIAL CONTROL EQUIPMENT
UL
Type: Modello dell’inverter
S/N: Numero di serie
Main Power In: Tensione di alimentazione - Corrente alternata di ingresso - Frequenza
Main Power Out: Tensione in uscita - Corrente d’uscita - Frequenza d’uscita
Figura 3.1.3.2: Targhetta livello revisione firmware & schede
Firmware HW release
Release
D F P
1.000
0.A
R
0.A 0.A
S
S/N
BU
9862330
SW. CFG
1.000
Prod.
CONF
D1
Figura 3.1.3.3: Posizione delle targhette
Cap.3
38
——— Descrizione, Identificazione componenti e specifiche ———
3.2. IDENTIFICAZIONE COMPONENTI
L’inverter converte la frequenza e la tensione costanti di una rete trifase esistente in una tensione continua, e ricava da quest’ultima una nuova rete trifase con tensione e frequenza variabili. Questa rete trifase
variabile consente di regolare con continuità la velocità di motori asincroni trifasi.
Figura 3.2.1: Schema fondamentale di un inverter di frequenza
3
1
4
2
5
7
8
6
1 Tensione di alimentazione di rete
2 Induttanza di rete
(vedere capitolo 5.7.1)
3 Ponte raddrizzatore trifase
Converte una tensione alternata in una tensione continua
tramite un ponte trifase ad onda intera.
4 Circuito intermedio
Con resistenza di precarica e condensatori di spianamento
Tensione continua (UDC) =√2 x tensione di rete (ULN)
5 Ponte Inverter ad IGBT
Converte la tensione continua in una tensione alternata
trifase ad ampiezza e frequenza variabile
6 Parte di controllo configurabile
Schede per il controllo e la regolazione della parte di
potenza ad anello chiuso ed aperto. Ad esse vengono
collegati comandi, riferimenti e reazioni.
7 Tensione d’ uscita
Tensione alternata variabile da 0 a 98% della tensione di
alimentazione (ULN).
8 Encoder per retroazione di velocità
(Vedere capitolo 4.4.2)
AV300i Manuale Hardware & Guida Rapida
39
Cap.3
Figura 3.2.2: Esploso & componenti
Tastierino
Copertura
Mascherina ingresso cavi
Copertura superiore
Scheda di regolazione
Scheda di potenza
Ventola di raffredamento
Ponte a IGBT
Dissipatore
Ventola di raffredamento
(per taglia 0001 e superiore)
Cap.3
40
——— Descrizione, Identificazione componenti e specifiche ———
3.3. SPECIFICHE GENERALI
3.3.1. Condizioni ambientali e normative
Tabella 3.3.1.1: Specifiche ambientali
0 … +40; +40…+50 with derating
[°C]
32 … +104; +104…+122 with derating
[°F]
Pollution degree 2 or better (free from direct sunligth, vibration, dust, corrosive
or inflammable gases, fog, vapour oil and dripped water, avoid saline
environment)
TA Ambient temperature
Installation location
IP20
IP54 for the cabinet with externally mounted heatsink
(size type 3F75 to 3020)
Up to 1000 m above sea level; for higher altitudes a current reduction of 1.2%
for every 100 m of additional height applies .
Degree of protection
Installation altitude
Temperature:
E
N
V
I
R
O
N
M
E
N
T
operation 1)
operation 2)
storage
0…40°C (32°…104°F)
0…50°C (32°…122°F)
-25…+55°C (-13…+131°F), class 1K4 per EN50178
-20…+55°C (-4…+131°F), for devices with keypad
-25…+70°C (-13…+158°F), class 2K3 per EN50178
-20…+60°C (-4…+140°F), for devices with keypad
transport
Air humidity:
5 % to 85 %, 1 g/m 3 to 25 g/m3 without moisture condensation or icing (Class
3K3 as per EN50178)
storage
5% to 95 %, 1 g/m 3 to 29 g/m3 (Class 1K3 as per EN50178)
transport
95 % 3)
60 g/m 4)
operation
A light condensation of moisture may occur for a short time occasionally if the device is
not in operation (class 2K3 as per EN50178)
Air pressure:
S
T
A
N
D
A
R
D
Climatic conditions
Clearance and creepage
Vibration
EMC compatibility
Approvals
operation [kPa]
86 to 106 (class 3K3 as per EN50178)
storage [kPa]
transport [kPa]
86 to 106 (class 1K4 as per EN50178)
70 to 106 (class 2K3 as per EN50178)
IEC 68-2 Part 2 and 3
EN 50178, UL508C, UL840 degree of pollution 2
IEC68-2 Part 6
EN61800-3 (see “EMC Guidelines” instruction book)
CE, UL, cUL
avy2000
1)
2)
3)
4)
Parametro Ambient temp = 40°C
Temperatura ambiente = 0 ... 40°C
Sopra 40°C:
- riduzione della corrente del 2% di (I2N) corrente nominale di uscita per K
- rimuovere la copertura (migliore della classe 3K3 secondo EN50178)
Parametro Ambient temp = 50°C
Temperatura ambiente = 0 ... 50°C
Corrente declassata a 0.8 x I2N
Sopra 40°C:
- rimuovere la copertura (migliore della classe 3K3 secondo EN50178)
Umidità relativa dell’aria più elevata, quando la temperatura si innalza lentamente attorno ai 40 °C oppure quando l’apparecchio
viene portato direttamente dai -25 °C a +30 °C.
Umidità assoluta dell’aria più elevata, quando l’inverter è portato direttamente dai +70 °C ai +15 °C.
AV300i Manuale Hardware & Guida Rapida
41
Cap.3
Smaltimento dell’apparecchio
Gli inverter della serie Art Drive possono essere smaltiti come rottami elettronici secondo le vigenti disposizioni
nazionali.
Le coperture frontali per gli apparecchi fino alla taglia 6KAVI43020 sono riciclabili: il materiale utilizzato è
>ABS+PC<.
3.3.2. Allacciamento alla rete e uscita dell’inverter
Gli inverter AV300i devono essere collegati a una rete in grado di fornire una potenza di corto circuito
simmetrica (a 480 V +10% V max) inferiore o uguale ai valori indicati nella tabella 3.3.2.1. Per l’eventuale
inserzione di una induttanza di rete vedere il capitolo 5.7.1.
Non è richiesto un adattamento hardware dell’alimentazione della regolazione alla tensione di rete disponibile,
poichè l’alimentazione viene derivata dal circuito intermedio (DC link). Durante la messa in funzione
dell’apparecchio impostare il parametro Mains voltage al valore della tensione di rete disponibile.
In questo modo viene automaticamente impostata anche la soglia per il rilevamento di sottotensione.
NOTE!
In alcuni casi sono necessari sul lato ingresso induttanze di rete ed eventuali filtri EMI.
Vedere le indicazioni contenute nel capitolo “Induttanze / Filtri”.
Gli inverter ed i filtri di rete hanno correnti di dispersione verso terra maggiori di 3,5 mA. Le normative EN
50178 prescrivono che, per correnti di dispersione maggiori di 3,5 mA, la connessione di terra deve essere
di tipo fisso (al morsetto PE1).
Cap.3
42
——— Descrizione, Identificazione componenti e specifiche ———
Type
Inverter Output (IEC 146 class1), Continuous service
[kVA]
Inverter Output (IEC 146 class2),150% overload for 60s
[kVA]
PN mot (recommended motor output) :
@ ULN=230Vac; f SW=default; IEC 146 class 1 [kW]
@ ULN=230Vac; f SW=default; IEC 146 class 2 [kW]
@ ULN=230Vac; f SW=default; IEC 146 class 1 [Hp]
@ ULN=230Vac; f SW=default; IEC 146 class 2 [Hp]
@ ULN=400Vac; f SW=default; IEC 146 class 1 [kW]
@ ULN=400Vac; f SW=default; IEC 146 class 2 [kW]
@ ULN=460Vac; IEC 146 class 1
[Hp]
@ ULN=460Vac; IEC 146 class 2
[Hp]
U2 Max output voltage
[V]
f2 Max output frequency
I2N Rated output current :
@ ULN=230-400Vac; f SW= default; IEC 146 class 1
[Hz]
@ ULN=230-400Vac; f SW=default; IEC 146 class 2
[A]
@ ULN=460Vac; f SW=default; IEC 146 class 1
[A]
@ ULN=460Vac; f SW=default; IEC 146 class 2
[A]
[A]
fSW switching frequency (Default)
[kHz]
fSW switching frequency (Higher)
[kHz]
Iovld (short term overload current, 200% of I 2N for 0.5s on 60s)
[A]
3001
3002
3003
3005
3007
3010
3015
3020
3025
3030
3040
3050
3060
3125
3150
3200
1.6
1.4
2.7
2.4
3.8
3.4
5
4.5
6.5
5.9
8.5
7.7
12
10.9
16.8
15.3
22.4
20.3
32
29
42
38.2
55
50
64
58.3
79
72
3075
98
128
89.2 116.5
3100
145
132
173
157.5
224
204
0.37
0.37
0.50
0.50
0.75
0.75
1
0.75
0.75
0.75
1
1
1.5
1.5
2
1.5
1.1
1.1
1.5
1.5
2.2
2.2
3
2
1.5
1.5
2
2
3
3
3
3
2.2
2.2
3
3
4
4
5
5
3
3
4
4
5.5
5.5
7.5
7.5
4
4
5
5
7.5
7.5
10
10
5.5
5.5
7.5
7.5
11
11
15
15
7.5
7.5
10
10
15
15
20
20
11
11
15
15
22
22
30
25
18.5
15
25
20
30
30
40
30
22
18.5
30
25
37
37
50
40
22
22
30
30
45
45
60
50
30
30
40
40
55
55
75
60
37
37
50
50
75
55
100
75
55
55
75
75
110
90
150
125
75
55
100
75
132
110
150
150
90
90
100
100
160
160
200
200
210
191
183
166
250
227
217
198
324
295
282
256
55
45
75
60
90
90
125
100
0.98 x U LN (AC Input voltage)
500
2.4
2.2
2.1
1.9
4
3.6
3.5
3.2
5.6
5.1
4.9
4.4
7.5
6.8
6.5
5.9
9.6
8.7
8.3
7.6
12.6
11.5
11
10
17.7
16.1
15.4
14
200
24.8
22.5
21.6
19.6
33
30
28.7
26
47
43
40
36
63
58
54
50
79
72
68
62
93
85
81
74
114
104
99
90
142
129
124
112
185
169
160
146
8
4
16
16
4.4
7.2
10.2
13.6
17.4
23
32.2
45
0.96
0.87
0.93
60
86
116
8
144
170
208
258
--
338
382
454
n.a.
158
177
153
192
216
188
220
247
214
n.a.
309
268
Derating factor:
0.87
KV at 460/480Vac
KT for ambient temperature
KF for switching frequency
I
N
P
U
T
ULN AC Input voltage
[V]
AC Input frequency
IN AC Input current for continuous service :
- Connection with 3-phase reactor
@ 230Vac; IEC 146 class1
[Hz]
@ 400Vac; IEC 146 class1
[A]
@ 460Vac; IEC 146 class1
- Connection without 3-phase reactor
@ 230Vac; IEC 146 class1
[A]
@ 400Vac; IEC 146 class1
[A]
@ 460Vac; IEC 146 class1
Max short circuit power without line reactor (Zmin=1%)
2.9
3.3
2.9
4
4.5
3.9
5.5
6.2
5.4
7
7.9
6.7
9.5
10.7
9.3
14
15.8
13.8
18.2
20.4
17.8
25
28.2
24.5
[A]
3.6
3.9
3.4
4.4
4.8
4.2
6.8
7.4
6.4
7.9
9
7.8
11
12
10.4
15.5
16.9
14.7
21.5
24.2
21
27.9
30.3
26.4
35.4
40
34.8
[kVA]
160
270
380
500
650
850
[A]
43
Overvoltage threshold
[V]
Undervoltage threshold
[V]
Cap.3
Braking IGBT Unit (standard drive)
230 V -15% ... 480 V +10%, 3Ph
50/60 Hz ±5%
1.7
1.9
1.7
[A]
0.87
0.90
0.8 @ 50°C (122°F)
0.7 for higher f SW
39
44
37
55
62
53
69
77
66
84
94
82
98
110
96
122
137
120
For these types an external inductance is recommended
1200 1700 2250 3200 4200 5500 6400 7900 9800 12800 14500 17300 22400
820 VDC
230 VDC (for 230 V AC mains), 400 V DC (for 400V AC mains), 460 V DC for 460 V AC mains)
Standard internal (with external resistor); Braking torque 150%
Option internal (with external
resistor); Braking torque 150%
External braking unit (optional)
avy2010
Tabella 3.3.2.1: Dati tecnici in ingresso e uscita
AV300i Manuale Hardware & Guida Rapida
O
U
T
P
U
T
3F75
3.3.3. Corrente dal lato rete
NOTE!
La corrente di rete dell’inverter dipende dallo stato di servizio del motore connesso. La
tabella 3.3.2.1 indica i valori corrispondenti ad un servizio nominale continuo (IEC 146
classe 1), tenendo in considerazione il fattore di potenza d’uscita tipico per ciascuna
taglia.
3.3.4. Uscita
L’uscita dell’inverter AV300i è protetta contro cortocircuiti di fase e verso terra. La frequenza di switching
è costante su tutto il range di velocità e dipende dalla taglia dell’inverter.
NOTE!
Non è consentito collegare una tensione esterna ai morsetti di uscita dell’inverter! Quando
l’inverter è funzionante, è tuttavia consentito di sganciare il motore dall’uscita dello
apparecchio dopo che questo è stato disabilitato.
Il valore nominale della corrente continuativa di uscita ( ICONT ) dipende dalla tensione di rete ( Kv ), dalla
temperatura ambiente ( KT ) e dalla frequenza di switching ( KF ) :
ICONT = I2N x KV x KT x KF (I valori dei fattori di declassamento sono indicati nella tabella 3.3.2.1)
Con una capacità massima di sovraccarico IMAX = 1.36 x ICONT per 60 secondi
I fattori di declassamento vengono selezionati automaticamente durante l’impostazione dei valori di tensione di rete appropriati, dalla temperatura ambiente e dalla frequenza di commutazione.
Potenze motore consigliate
Il coordinamento delle potenze nominali del motore con il tipo di inverter della sottostante tabella prevede
l’impiego di motori con tensione nominale corrispondente alla nominale della rete di alimentazione.
Per motori che hanno altre tensioni, la taglia dell’inverter da utilizzare è scelta in base alla corrente nominale
del motore.
La corrente nominale del motore non può essere inferiore a 0,3 x I2N. La corrente magnetizzante o a
vuoto del motore non deve essere superiore di ICONT.
NOTE!
Cap.3
44
Nel caso di condizioni di servizio con sovraccarico maggiore del 150%, la corrente
nominale deve essere declassata.
La tabella 3.3.3.1 indica i valori della corrente nominale per i più tipici profili di servizio
(temperatura ambiente = 40°C, frequenza di switching standard). Nel caso di cicli con
correnti nominali applicate dopo il sovraccarico è anche indicata la minima durata.
Per cicli di funzionamento inferiori della minima durata indicata, la corrente successiva
al sovraccarico deve essere ridotta a un livello più basso di quella nominale, in modo che
la media RMS sul ciclo non ecceda la corrente continuativa ICONT.
Un criterio analogo si applica per operazioni con fattori di declassamento addizionali.
——— Descrizione, Identificazione componenti e specifiche ———
Type
3F75
3001
3002
3003
3005
3007
3010
3015
3020
3025
3030
3040
3050
3060
3075
3100
3125
3150
3200
[A]
2.4
4
5.6
7.5
9.6
12.6
17.7
24.8
33
47
63
79
93
114
142
185
210
250
324
Overload service 150%x60s followed by I N , min. cycle time 360s
[A]
(IEC 146 class2)
2.2
3.6
5.1
6.8
8.7
11.5
16.1
22.5
29.9
42.6
57.1
71.6
84.3 103.4 128.7 167.7
190.4
227
293.8
Overload service 200%x10s followed by I N , min. cycle time 30s
[A]
1.6
2.7
3.8
5.1
6.5
8.6
12.0
16.9
22.4
32
42.8
53.7
63.2
77.5
96.6 125.8
142.8
170
220.3
Overload service 200%x60s followed by I N , min. cycle time 160s [A]
1.6
2.7
3.8
5.1
6.5
8.6
12.0
16.9
22.4
32
42.8
53.7
63.2
77.5
96.6 125.8
142.8
170
220.3
Overload service 250%x10s followed by I N , min. cycle time 25s
[A]
1.3
2.2
3.0
4.1
5.2
6.8
9.6
13.5
18
25.6
34.3
43
50.6
62
77.2 100.6
114.2
136
176.3
Overload service 300%x10s followed by I N , min. cycle time 25s
[A]
1.1
1.8
2.5
3.4
4.3
5.7
8.0
11.2
15
16
21.4
27
31.6
38.8
48.3
63
71.4
85
110.2
Overload service 300%x60s followed by I N , min.cycle time 130s
[A]
1.1
1.8
2.5
3.4
4.3
5.7
8.0
11.2
15
16
21.4
27
31.6
38.8
48.3
63
71.4
85
110.2
[A]
2.1
3.5
4.9
6.5
8.3
11
15.4
21.6
28.7
40
54
68
81
99
124
160
183
217
282
Overload service 150%x60s followed by I N , min. cycle time 360s
[A]
(IEC 146 class2)
1.9
3.2
4.4
5.9
7.6
10
14
19.6
26
36.3
49
61.7
73.4
89.8 112.4 145.1
166
196.7
255.7
Overload service 200%x10s followed by I N , min. cycle time 30s
[A]
1.4
2.4
3.3
4.4
5.6
7.5
10.5
14.7
19.5
27.2
36.7
46.2
55.1
67.3
84.3 108.8
124.4
147.6
191.8
Overload service 200%x60s followed by I N , min. cycle time 160s [A]
1.4
2.4
3.3
4.4
5.6
7.5
10.5
14.7
19.5
27.2
36.7
46.2
55.1
67.3
84.3 108.8
124.4
147.6
191.8
Overload service 250%x10s followed by I N , min. cycle time 25s
[A]
1.1
1.9
2.7
3.5
4.5
6.0
8.4
11.7
15.6
21.8
29.4
37
44
54
67.5
87
99.6
118
153.4
Overload service 300%x10s followed by I N , min. cycle time 25s
[A]
0.9
1.6
2.2
2.9
3.8
5.0
7.0
9.8
13
13.6
18.4
23.1
27.5
33.7
42.2
54.4
62.2
73.8
95.9
Overload service 300%x60s followed by I N , min. cycle time 130s [A]
0.9
1.6
2.2
2.9
3.8
5.0
7.0
9.8
13
13.6
18.4
23.1
27.5
33.7
42.2
54.4
62.2
73.8
95.9
- I2N Rated output current (@ ULN=230-400Vac) :
Continuous service, no overload (IEC 146 class 1)
Continuous service, no overload (IEC 146 class 1)
avy2020
Tabella 3.3.3.1: Nominal Drive Current
AV300i Manuale Hardware & Guida Rapida
- I2N x KV Rated output current (@ ULN=460/480Vac) :
45
Cap.3
3.3.5. Parte di regolazione e controllo
Abilitazione ingressi
Ingressi analogici
Selezionabili
0 / 15...30 V
3.2...6.4 mA
0... ± 10 V
0...20 mA
4...20 mA
0.25 mA max
10 V max
10 V max
(5 mA @ 24 V)
Tensione massima di modo comune: 0...± 10 V
Uscite analogiche
0...± 10 V
5 mA max per uscita
Ingressi digitali
0 / 15...30 V
3.2...6.4 mA
Alimentazione
Segnali
+ 15...35 V
+ 15...35 V
20 mA max per uscita
Tensione
1 V pp
Corrente
Numero impulsi
al giro
Frequenza max.
Cavo max.
8.3 mA pp per canale (resistenza di ingresso= 124 Ohms).
min 600
max 9999
80 kHz
150 m, schermato, 4 doppini “intrecciati” come da tabella 4.4.2.1
Tensione
Corrente
Numero impulsi
al giro
Tipo
Frequenza max.
5V
10 mA
min 600
max 9999
standard con segnali complementari
150 kHz
Uscite digitali
Ingressi Encoder
Sinusoidale
Digitale
(5 mA @ 24 V)
Tensione interna di alimentazione
Carico max
Tolleranza
+5V
+ 10 V
- 10 V
+ 24 V
+ 10 V
- 10 V
+ 24 V
160 mA
Connettore
10 mA
Morsetto 7
10 mA
Morsetto 8
120 mA
Morsetto 19
± 3 % 1)
± 3 % 1)
+ 20 ... 30 V, non stabilizzata
XE per encoder digitale, PIN 7/9
1)
Cap.3
La tolleranza tra l’ampiezza positiva e negativa è ± 0.5%
46
——— Descrizione, Identificazione componenti e specifiche ———
3.3.6. Precisione
Output frequency:
temperature dependent stability error
[°C]
resolution
[Hz]
Internal reference value voltage:
- temperature dependent stability error
Reference values:
resolution via keypad / Interface bus
resolution via terminals ( 1/2, 3/4, 5/6 )
linearity via terminals ( 1/2, 3/4, 5/6 )
[V]
[°C]
Speed limit / Absolute max speed
Digital reference resolution
Field oriented (with sinusoidal Encoder):
S
P
E
E
D
C
O
N
T
R
O
L
50 ppm/°C typical
0.001 Hz at 50 Hz
0.005 Hz at 300 Hz
± 10V, terminals 7 and 8
100 ppm/°C typical
16 bit or 15 bit + sign
11 bit + sign
± 0.1 % of full scale
8000
0.25
[rpm]
[rpm]
speed feedback resolution
[rpm]
accuracy
control range
max bandwidth
[%]
[rpm]
[rad/s]
0.25 (for encoder pulses number 1900)
> 0.25(for encoder pulses number <1900)
typical 0.01%
better than 1:10000
300 rad/s [47 Hz] (1)
Field oriented (with digital Encoder):
speed feedback resolution
accuracy
control range
max bandwidth
[rpm]
[%]
[rpm]
[rad/s]
0.5
typical 0.02%
better than 1:1000
300 rad/s [47 Hz] (1)
Sensorless vector control:
speed feedback resolution
[rpm]
0.002 x Nominal speed
0.3% @ Nominal speed
1.3% @ 2% of Nominal speed
from 1:50 to 2.5 x Nominal speed
100 rad /s [15,9Hz] (1)
accuracy
[%]
control range
max bandwidth
[rpm]
[rad/s]
accuracy
[rpm]
0.3 x nominal motor slip with automatic slip
compensation
[%]
depending on motor nominal slip, typ. 1:50
[rpm]
typical 1:1.000
[%]
typical 5% (2)
control range
[rpm]
1÷20
min. response time (at load step)
[ms]
0.8
Constant V/f control:
control range
T
O
R
Q
U
E
C
O
N
T
R
O
L
Field oriented - Sensorless:
resolution
accuracy
max bandwidth
2.4 krad/s [380 Hz]
avy2030
(1) Il tempo di risposta e la banda passante dipendono dal carico e dall’inerzia. Questi sono valori limite.
(2) Questo valore non tiene conto delle perdite nel ferro, perdite meccaniche ed armoniche di dentatura della coppia nel motore. Con
Rr adaptation abilitato.
AV300i Manuale Hardware & Guida Rapida
47
Cap.3
Cap.3
48
——— Descrizione, Identificazione componenti e specifiche ———
4. MONTAGGIO
4.1. SPECIFICHE MECCANICHE
Figura 4.1.1: Dimensioni (taglie 3F75 ... 3020)
Figura 4.1.2: Metodi di fissaggio (taglie 3F75 ... 3020)
E5
d
E2 E4
E3
E1
Mounting with external dissipator (E)
Mounting wall (D)
Tabella 4.1.1: Dimensioni e pesi (taglie 3F75 ... 3020)
Type
Drive dimensions:
a
mm (inch)
b
mm (inch)
c
mm (inch)
d
mm (inch)
D1
mm (inch)
D2
mm (inch)
E1
mm (inch)
E2
mm (inch)
E3
mm (inch)
E4
mm (inch)
E5
mm (inch)
Ød
Weight
kg (lbs)
3F75
3001
3002
3003
3005
105.5 (4.1)
3007
151.5 (5.9)
306.5 (12.0)
199.5 (7.8)
62 (2.4)
69 (2.7)
115 (4.5)
296.5 (11.6)
69 (2.7)
115 (4.5)
299.5 (11.7)
99.5 (3.9)
145.5 (5.7)
284 (11.2)
3010
3015
3020
208 (8.2)
323 (12.7)
240 (9.5)
84 (3.3)
168 (6.6)
310.5 (12.2)
164 (6.5)
315 (12.4)
199 (7.8)
299.5 (11.8)
9 (0.35)
M5
3.5 (7.7)
3.6 (7.9)
3.7 (8.1)
4.95 (10.9)
8.6 (19)
avy3100
AV300i Manuale Hardware & Guida Rapida
49
Cap.4
Figura 4.1.3: Dimensioni (taglie 3025 ... 3200)
Figura 4.1.4: Metodi di fissaggio (taglie 3025 ... 3200)
D4
D1
D2
Mounting wall (D)
D3
D2
D3
D3
D3
Tabella 4.1.2: Dimensioni e pesi (taglie 3025 ... 3200)
Type
3025
3030
3040
3050
3060
3075
3100
3125
3150
3200
Drive dimensions:
a
mm (inch)
309 (12.1)
376 (14.7)
b
mm (inch)
489 (19.2)
564 (22.2)
268 (10.5)
225 (8.8)
c
mm (inch)
D1
mm (inch)
D2
mm (inch)
D3
mm (inch)
D4
mm (inch)
965 (38)
297.5 (11.7)
308 (12.1)
442 (17.4)
150 (5.9)
100 (3.9)
475 (18.7)
550 (21.6)
Ø
Weight
509 (20)
909 (35.8)
741 (29.2)
891 (35)
725 (28.5)
M6
947 (37.3)
kg
18
22
22.2
34
34
59
75.4
80.2
86.5
109
lbs
39.6
48.5
48.9
74.9
74.9
130
166.1
176.7
190.6
240.3
avy3105
Cap.4
50
—————— Montaggio——————
Figura 4.1.5: Orientamento del tastierino
Per consentire un ottimale angolo di visione, il tastierino può essere orientato in tre differenti posizioni.
4.2. POTENZA DISSIPATA, VENTILATORI INTERNI E APERTURE MINIME
DELL’ARMADIO CONSIGLIATE PER LA VENTILAZIONE
La dissipazione del calore dell’inverter dipende dal funzionamento del motore collegato. I valori indicati nella
tabella 4.2.1.sono riferiti alle frequenza di switching in condizioni di default (vedere capitolo 3.3.4, “Uscita”),
Tamb ≤ 40°C , tipico fattore di potenza del motore e corrente continuativa nominale.
Tabella 4.2.1: Dissipazione del calore e minimo flusso d’aria richiesto
3
F
7
5
Type
3
0
2
5
3
0
2
0
3
0
1
5
3
0
1
0
3
0
0
7
3
0
0
5
3
0
0
3
3
0
0
2
3
0
0
1
3
0
4
0
3
0
3
0
3
0
6
0
3
0
5
0
3
1
0
0
3
0
7
5
3
1
2
5
3
2
0
0
3
1
5
0
PV Heat dissipation:
1)
@ULN=400Vac
1)
[W]
48.2 77.5 104.0 138.3 179.5 233.6 327.4 373
512 658
864
1100 1250 1580 1950 2440 2850 3400 4400
@ULN=460Vac
1)
[W]
45.0 72.0 96.3 126.7 164.1 215.6 300.8 340
468 582
780
1000 1100 1390 1750 2200 2560 3050 3950
fSW=default; I2=I2N
Airflow of fan:
Internal fan [m3/h]
Heatsink fans [m3/h]
11
11
11
11
-
30
30
30
11
11
11
30
30
170
2x30 2x30 2x30 2x79 2x79 80
340
975
650
1820
avy3110
NOTA!
Tutti gli inverter sono equipaggiati con ventilatori interni.
NOTA!
Le perdite dovute alla dissipazione del calore (Heat dissipation losses) sono riferite alla
frequenza di switching di default.
Tabella 4.2.2: Aperture minime dell’armadio consigliate per la ventilazione
3
F
7
5
Type
3
0
0
1
3
0
0
2
3
0
0
3
3
0
0
5
3
0
0
7
3
0
1
0
3
0
1
5
3
0
2
0
3
0
2
5
3
0
3
0
3
0
4
0
3
0
5
0
3
0
6
0
3
0
7
5
3
1
0
0
3
1
2
5
3
1
5
0
3
2
0
0
Minimum cooling opening:
Control section
31 (4.8)
cm2 (sq.inch)
Heatsink
2
cm (sq.inch)
36 (5.6)
36 (5.6)
72 (11.1)
128 (19.8)
2x150
(2x 2x200 (2x31)
23.5)
2x370
(2x57.35)
2x620 (2x96.1)
2x
1600
(2 x
248)
avy3120
AV300i Manuale Hardware & Guida Rapida
51
Cap.4
4.2.1 Tensione di alimentazione dei ventilatori
Taglie da 3F75 a 3060
La tensione di alimentazione (+24VAC) per questi ventilatori è
fornita da un alimentatore interno al drive.
La tensione di alimentazione per questi ventilatori è fornita dalla
tensione di alimentazione di rete:
- 3075: 0.8A@115V/60Hz, 0.45A@230V / 50Hz
- 3100... 3150: 1.2A@115V/60Hz, 0.65A@230V / 50Hz
- 3200: 1.65A@115V/60Hz, 0.70A@230V / 50Hz
Taglie da 3075 a 3200
Figura 4.2.1: Connessione ventilatori tipo UL sulle taglie 3100, 3125e 3150
Drive
115
2V3
AUTOTRAFO
0
U3
M
~
230
230VAC fans
1V3
Figura 4.2.2: Connessione ventilatori tipo UL sulle taglie 3075e 3200
Drive
U3
2V3
1V3
No.2 115VAC fans
M
M
~
~
Figura 4.2.3: Collegamento esterno
U3
2V3
Drive
U3
115VAC
2V3
230VAC
(*)
1V3
NOTA!
Cap.4
52
1V3
Drive
(*)
solo per
inverter
3075 e
3200
Le taglie 3100, 3125 e 3150 sono provviste di fusibili interni 2.5A 250VAC slo-blo.
Per le taglie 3075 e 3200 i fusibili devono essere montati esternamente.
—————— Montaggio——————
4.3. DISTANZE DI MONTAGGIO
NOTA!
Durante il montaggio bisogna tener conto delle misure e dei pesi indicati in questo manuale.
Utilizzare gli strumenti e gli attrezzi tecnici appropriati necessari (sollevatori oppure gru
per pesi considerevoli). Manipolazioni inadeguate e impiego di attrezzi inadatti possono
provocare danni.
Figura 4.3.1: Inclinazione massima
Inclinazione massima ammissibile 30°.
NOTA!
Gli inverter devono essere sistemati in modo da garantire attorno ad essi la libera circolazione
dell’aria. La distanza superiore ed inferiore deve essere di almeno 150 mm. Frontalmente
deve essere mantenuto uno spazio libero di almeno 50 mm.Per la taglia 3200 la distanza
superiore ed inferiore deve essere di almeno 380 mm. Frontalmente e lateralmente va
mantenuto uno spazio libero di almeno 140 mm.
Non si devono installare nelle vicinanze dell’inverter altri apparecchi che generano calore.
Figura 4.3.2: Distanze di montaggio
150 mm ( 6" )
[380mm (15")]
10 mm ( 0.4" )
[140mm (5.5")]
20 mm ( 0.8" ) 150 mm ( 6" )
[140mm (5.5")] [380mm (15")]
10 mm ( 0.4" )
[140mm (5.5")]
50 mm ( 2" )
[140mm (5.5)]
[...] for 3200 size
NOTA!
Dopo alcuni giorni di funzionamento verificare il serraggio delle viti in morsettiera.
AV300i Manuale Hardware & Guida Rapida
53
Cap.4
4.4. MOTORI ED ENCODER
Gli inverter della serie AV300i sono concepiti per la regolazione vettoriale dei motori asincroni standard. Per
la reazione di velocità, in caso di regolazione Field oriented, va utilizzato un encoder incrementale sinusoidale
oppure un encoder incrementale digitale.
4.4.1. Motori
I dati elettrici e meccanici dei motori asincroni standard si riferiscono ad un determinato campo di funzionamento. Per far funzionare questi motori collegati ad un inverter bisogna tener presenti i seguenti punti:
Possono essere impiegati motori asincroni standard?
Con gli inverter della serie AV300i possono lavorare anche motori asincroni standard. Alcune caratteristiche
del motore influiscono sensibilmente sulle prestazioni ottenibili. Consigliamo quindi di considerare con scrupolo
le annotazioni che seguono. Fare attenzione anche a quanto affermato nel capitolo 4.3.2 “Uscita” in merito
alle potenze ed alle tensioni del motore.
Quali motori asincroni non lavorano vantaggiosamente collegati all’inverter?
L’impiego di motori con rotore a doppia gabbia oppure a gabbia profonda limita le prestazioni dinamiche.
Collegamento a stella oppure a triangolo?
Possono essere collegati motori sia con collegamento a stella che a triangolo. I motori collegati a stella
generalmente presentano regolabilità migliore, così che dovrebbe essere preferito un collegamento a stella.
Raffreddamento
Il raffreddamento dei motori asincroni viene ottenuto normalmente tramite una ventola calettata sull’albero
del motore. Bisogna fare attenzione che la ventilazione a bassi giri si riduce e non è più sufficiente a
raffreddare il motore. Chiarire con il costruttore del motore le condizioni di funzionamento per verificare se è
necessario ricorrere ad una ventilazione assistita.
Funzionamento a velocità superiore alla nominale
Per il funzionamento del motore a velocità superiori alla nominale, contattare il costruttore del motore in
merito ai possibili problemi meccanici (cuscinetti, bilanciamento) e alle maggiori perdite nel ferro.
Dati del motore necessari per collegarlo ad un inverter
I dati di targa del motore:
- Tensione nominale motore
- Corrente nominale motore
- Frequenza nominale motore
- Velocità nominale motore
- Cos ϕ (fattore di potenza)
Gli altri dati necessari per una regolazione vettoriale vengono calcolati nell’inverter. Per l’ottimizzazione
dell’azionamento è vantaggioso conoscere anche il valore di:
- Corrente di magnetizzazione
- Resistenza rotorica.
- Resistenza statorica ( solo per controllo Sensorless )
- Induttanza di dispersione ( Field oriented mode con adattamento automatico della resistenza rotorica
“Enable Rr adap” oppure Sensorless mode ).
Cap.4
54
—————— Montaggio——————
Protezione del motore
Termistori
I termistori PTC secondo DIN 44081 oppure 44082 presenti nel motore possono essere collegati direttamente
ai morsetti 78 e 79 dell’inverter. In questo caso è necessario rimuovere la resistenza inserita tra i morsetti
78 e 79 ( 1 Kohm ).
Contatti delle pastiglie termiche (klixon) negli avvolgimenti del motore
l contatti delle pastiglie termiche tipo “klixon” possono bloccare l’azionamento sia tramite i circuiti ausiliari di
comando sia collegandoli all’inverter come segnalazione di allarme esterno (morsetto 15). Possono anche
essere collegate ai morsetti 78 e 79 per avere la segnalazione di allarme specifica. Il questo caso inserire
in serie al collegamento la resistenza da 1 Kohm tenendo presente che un estremo della resistenza stessa
deve essere connesso al morsetto 79.
NOTA!
Il circuito di interfacciamento PTC (o Klixon) del motore va considerato a tutti gli effetti
come un circuito di segnale e quindi trattato come tale. Le connessioni ai PTC (o Klixon)
del motore devono cioè essere realizzate con un doppino intrecciato e schermato avente
un percorso fisico possibilmente non parallelo ai cavi motore o comunque ad una distanza
di almeno 20 cm!
Limitazione della corrente dell’inverter
Il limite di corrente può proteggere il motore contro sovraccarichi non consentiti. Allo scopo è necessario
parametrizzare il limite di corrente e la funzione di controllo del sovraccarico “Orld mot ctrl”, in modo tale
che la corrente rimanga nei valori ammessi per il motore.
NOTA!
Si ponga attenzione al fatto che con il limite di corrente può essere controllato solamente
il riscaldamento del motore dovuto al sovraccarico, ma non quello dovuto ad una
ventilazione insufficiente. Per un funzionamento dell’azionamento a bassi giri si
raccomanda di impiegare termistori PTC oppure di inserire negli avvolgimenti del motore
delle pastiglie termiche!
Induttanze d’uscita
Utilizzando motori standard si raccomanda in alcuni casi l’uso di induttanze d’uscita per proteggere l’isolamento
dell’avvolgimento. Vedere la sezione 5.7.2. “Induttanze d’uscita”
4.4.2. Encoder
Può essere collegato al connettore XE (connettore alta densità 15-poli, sull’inverter) uno dei quattro tipo di
encoder elencati, fare riferimento alla tabella 4.4.2.2 per l’impostazione dei jumper:
- DE: encoder digitale incrementale 5V con A / A, B / B, C / C
- SE: encoder sinusoidale incrementale 5V con A / A, B / B, C / C
- DEHS: encoder digitale incrementale 5V con A / A, B / B, C / C e tre sensori Hall con segnali digitali di
posizione (per motori Brushless)
- SESC: encoder sinusoidale incrementale 5V con A / A, B / B, C / C e due tracce sin/cos per rilievo posizione
assoluta (per motori Brushless o posizionatori)
- SEHS: encoder sinusoidale incrementale 5V con A / A, B / B, C / C e tre sensori Hall con segnali digitali
di posizione (per motori Brushless)
Gli encoder forniscono la reazione di velocità alla regolazione. Si devono calettare sull’albero del motore
mediante giunti privi di gioco.
I migliori risultati di regolazione si ottengono impiegando encoder incrementali sinusoidali, tuttavia si possono
AV300i Manuale Hardware & Guida Rapida
55
Cap.4
anche utilizzare encoder incrementale digitali , vedere il capitolo 4.3.6, “Precisione”.
Il cavo dell’encoder deve essere formato da doppini intrecciati, con schermo globale collegato a terra dal lato
inverter. Si eviti di collegare lo schermo sul connettore del motore. Nei casi estremi (cavo con lunghezza
maggiore di 100 metri, forte rumore elettromagnetico), può essere necessario usare un cavo che abbia anche
uno schermo su ogni doppino, da collegare al comune dell’alimentazione (0V). Lo schermo globale va
sempre messo a terra.
Alcuni tipi di encoder sinusoidali possono richiedere un’installazione con isolamento galvanico dalla struttura
e dall’albero del motore.
Tabella 4.4.2.1: Sezione e lunghezza dei cavi consigliata per il collegamento degli encoder
Cable section [mm2]
Max Length m [feet]
0.22
27 [88]
0.5
62 [203]
0.75
93 [305]
1
125 [410]
1.5
150 [492]
avy3130
Tabella 4.4.2.2: Impostazione degli encoder tramite i jumper S11...S23 (sulla scheda di regolazione)
Encoder / Jumpers setting S11 S12 S13 S14
DE
OFF OFF OFF OFF
SE
ON ON ON ON
SESC
ON ON ON ON
DEHS
OFF OFF OFF OFF
SEHS
ON ON ON ON
S15
OFF
ON
ON
OFF
ON
S16
S17
OFF ON (*)
ON
ON
OFF ON (*)
ON
-
S18
S19
S20
S21
S22
S23
-
-
-
-
-
-
A
B
B
A
B
B
A
B
B
A
B
B
A
B
B
A
B
B
ai3150
Il jumper S17 seleziona l’abilitazione o la disalibitazione del canale di lettura impulsi C. Il jumper deve essere
selezionato correttamente per riscontrare l’allarme di mancanza encoder.
S17 ON : canale C (index) lettura=ON
S17 OFF: canale C (index) lettura=OFF
(*) Se l’encoder non dispone del canale zero S17=OFF
Tabella 4.4.2.3: Collegamento degli encoder
Encoder type
Shielded
cable
DE
SE
SESC
DEHS
SEHS
8 pole
8 pole
12 pole
14 pole
14 pole
DE
SE
SESC
DEHS
SEHS
8 pole
8 pole
12 pole
14 pole
14 pole
1
B-
2
3
+8V C+
4
5
C-
A+
XE CONNECTOR PIN
6
7
8
9
10
11
12
13
14
15
A-
E-
F+
F-
G+
G-
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
0V
B+ +5V E+
Internal +5V Encoder Power Supply
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
Internal +8V Encoder Power Supply
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
l
ai3160
Cap.4
56
—————— Montaggio——————
Caratteristiche:
Encoder sinusoidale (connettore XE sulla scheda di regolazione)
frequenza massima
80 kHz (scegliere il numero di impulsi al giro in funzione della velocità
massima richiesta)
numero impulsi al giro
min 600, max 9999
canali
bicanale, con uscite differenziali
alimentazione
+ 5V (Alimentazione interna)*
caricabilità
> 8,3 mA pp ogni canale
Encoder digitale (connettore XE sulla scheda di regolazione)
frequenza massima
150 kHz (scegliere il numero di impulsi al giro in funzione della
velocità massima richiesta)
numero impulsi al giro
min 600, max 9999
canali
- bicanale, con uscite differenziali ( A / A, B / B, C / C ). La rilevazione
della mancanza encoder è possibile con l’impostazione del firmware.
- bicanale (A,B), solo attraverso scheda opzionale.
alimentazione
+ 5V (Alimentazione interna)*
caricabilità
> 4,5 mA / 6,8 ... 10 mA ogni canale
*
Via tastierino (menu “CONFIGURATION/Motor spd fbk/ Enc 1 supply vlt”) è possibile selezionare 4
diversi valori della tensione di alimentazione dell’encoder per compensare la caduta di tensione dovuta
alla lunghezza del cavo e alla corrente di carico dell’encoder.
Le selezioni disponibili sono:
- per alimentazione encoder +5V: 0=5.41V, 1=5.68V, 2=5.91V, 3=6.18V.
- per alimentazione encoder +8V: lasciare default 0=5.41V
Verifica della tensione di alimentazione dell’Encoder (se viene utilizzata la tensione di alimentazione
+5V interna)
All’accensione dell’inverter:
- con tutti i canali encoder collegati verificare la tensione di alimentazione dell’encoder sui terminali
dell’encoder.
- nel caso la tensione misurata non rientri nel campo ammesso dalle specifiche (es: +5V ± 5%) del tipo di
encoder collegato, tramite il parametro Enc 1 supply vlt selezionare un appropriato valore di tensione.
Connettore da utilizzare per il collegamento esterno dell’encoder
Connettore maschio tipo:
Custodia connettore:
15 poli alta densità (tipo VGA)
Standard 9 poli basso profilo (Es.: AMP 0-748676-1, 3M 3357-6509)
AV300i Manuale Hardware & Guida Rapida
57
Cap.4
Tabella 4.4.2.4: Disposizione del connettore alta densità XE per encoder sinusoidale o digitale
Designation
PIN 1
Function
I/O
Channel B-
I
For B- digital or B- COS incremental signal
PIN 2
PIN 3
PIN 4
+8V Encoder supply voltage
Channel C+
O
I
PIN 8
PIN 10
8.3 mA analog
5 V digital or
10 mA digital or
1 V pp analog
8.3 mA analog
Channel A+
I
Channel A-
I
Reference point for +5V encoder supply voltage
Channel B+
O
I
+5V encoder supply voltage
Channel E+
O
I
Channel E-
I
Channel F+
I
Channel F-
I
For F- digital commutation or COS- absolute position signal
PIN 14
Channel G+
I
For G+ digital commutation signal
PIN 15
10 mA digital or
1 V pp analog
I
For F+ digital commutation or COS+ absolute position signal
PIN 13
5 V digital or
8.3 mA analog
For E- digital commutation or SIN- absolute position signal
PIN 12
200 mA
10 mA digital or
For E+ digital commutation or SIN+ absolute position signal
PIN 11
+8 V
5 V digital or
For B+ digital or B+ COS incremental signal
PIN 9
8.3 mA analog
1 V pp analog
For A+ digital or A+ SIN incremental signal
PIN 7
1 V pp analog
Channel C-
For A+ digital or A+ SIN incremental signal
PIN 6
max. current
10 mA digital or
For C+ digital or analog zero pulse or index
For C- digital or analog zero pulse or index
PIN 5
max. voltage
5 V digital or
Channel G-
10 mA digital or
8.3 mA analog
–
–
5 V digital or
10 mA digital or
1 V pp analog
8.3 mA analog
+5 V
200 mA
5 V digital or
10 mA digital or
1 V pp analog
8.3 mA analog
5 V digital or
10 mA digital or
1 V pp analog
8.3 mA analog
5 V digital or
10 mA digital or
1 V pp analog
8.3 mA analog
5 V digital or
10 mA digital or
1 V pp analog
8.3 mA analog
5 V digital or
10 mA digital
1 V pp analog
I
For G- digital commutation signal
5 V digital or
1 V pp analog
5 V digital or
10 mA digital
1 V pp analog
ai3140
Cap.4
58
—————— Montaggio——————
5. COLLEGAMENTO ELETTRICO
5.1. ACCESSO AI CONNETTORI
5.1.1 Rimozione della copertura
NOTE!
Osservare le indicazioni di sicurezza descritte in questo manuale. Gli apparecchi possono
essere aperti senza l’uso della forza. Utilizzare solo gli attrezzi indicati.
Fare riferimento alla figura 3.2.2 “Esploso & componenti” per l’identificazione delle parti.
Figura 5.1.1: Rimozione delle coperture (taglie 3F75 ... 3020)
Taglie 3F75 ... 3010
Per effettuare il collegamento elettrico deve essere rimossa la chiusura e la mascherina ingresso cavi:
- allentare la vite (1), togliere la chiusura (2) dell’apparecchio premendo sui due lati e sollevandola come
indicato in figura (3).
- allentare le due viti (4) per rimuovere la mascherina ingresso cavi.
Per montare le schede opzionali e modificare l’impostazione dei jumper interni deve essere rimosso l’involucro:
- rimuovere il tastierino e il connettore (5)
- alzare l’involucro nella parte inferiore (sopra il livello del connettore) e spingerlo in avanti (6)
Taglie 3015 ... 3020
Per effettuare il collegamento elettrico deve essere rimossa la chiusura e la mascherina ingresso cavi:
- allentare le due viti (1) e togliere la chiusura dell’apparecchio.
- allentare le due viti (4) per rimuovere la mascherina ingresso cavi.
Per montare le schede opzionali e modificare l’impostazione dei jumper interni deve essere rimosso l’involucro:
- rimuovere il tastierino e il connettore (5)
- alzare l’involucro nella parte inferiore (sopra il livello del connettore) e spingerlo in avanti (6)
AV300i Manuale Hardware & Guida Rapida
59
Cap.5
Figura 5.1.2: Rimozione delle coperture (taglie 3025 ... 3200)
4
3
3
1
2
2
Taglie 3025 ... 3200
Per effettuare il collegamento elettrico si deve rimuovere la copertura (1) dell’apparecchio allentando le due
viti (2).
Per montare le schede opzionali e modificare l’impostazione dei jumper interni devono essere allentate le due
viti (3) e deve essere rimossa la copertura superiore facendola scorrere nel senso indicato (4).
ATTENZIONE:
Cap.5
60
Per non danneggiare irreparabilmente il prodotto non è consentito sollevare e/o trasportare
l’apparecchio tenendolo per le schede !
—————— Collegamento elettrico ——————
5.2. PARTE DI POTENZA
5.2.1 Scheda di Potenza PV33-..
Figura 5.2.1.1: Scheda PV33-1. (per taglie 3F75 ... 3003)
XP
M1
Figura 5.2.1.2: Scheda PV33-2. (per taglie 3005... 3010)
AV300i Manuale Hardware & Guida Rapida
61
Cap.5
Figura 5.2.1.3: Scheda PV33-3. (per taglie 3015 ... 3020)
Figura 5.2.1.4: Scheda PV33-4. (per taglie 3025 ... 3060)
Cap.5
62
—————— Collegamento elettrico ——————
Figura 5.2.1.5: Scheda PV33-5. (per taglie 3075 ... 3200)
AV300i Manuale Hardware & Guida Rapida
63
Cap.5
5.2.1. Denominazione dei morsetti di potenza / Sezione dei cavi
Figura 5.2.1.1: Collegamento morsetti di potenza
Funzione (max) - Taglie 3F75 … 3020
Funzione (max) - Taglie 3025 … 3200
U1/L1
3Ph~
V1/L2
U1/L1
Allacciamento alla rete
(3x480 VAC +10% 3Ph, ved. tabella 3.3.2.1)
3Ph~
W1/L3
BR1
C
Resistenza di frenatura
(opzionale)
D
W1/L3
Comando resistenza unità di frenatura (la resistenza
di frenatura deve essere collegata tra BR1 e C)
Collegamento al circuito intermedio
(770 VDC / 1,65 output current)
C
Resistenza di frenatura
(opzionale)
M
Collegamento al circuito intermedio
(770 VDC / 1,65 output current)
D
BR1
U2/T1
V2/T2
Allacciamento alla rete
(3x480 VAC +10% 3Ph, ved. tabella 3.3.2.1)
V1/L2
Comando resistenza unità di frenatura (la resistenza
di frenatura deve essere collegata tra BR1 e C)
U2/T1
Collegamento motore
(AC line volt 3Ph, 1,36 output current)
M
Collegamento motore
(AC line volt 3Ph, 1,36 output current)
V2/T2
W2/T3
W2/T3
PE2/
Collegamento di terra del motore
PE2/
Collegamento di terra del motore
PE1 /
Collegamento di massa (contenitore metallico)
PE1 /
Collegamento di massa (contenitore metallico)
Accesso ai morsetti di potenza
Taglie 3F75 ... 3020 I morsetti di potenza diventano accessibili rimuovendo la chiusura e la mascherina
ingresso cavi (vedere capitolo 5.1, “Accesso ai connettori”), è possibile inoltre (su
alcune taglie) sganciare la parte estraibile della morsettiera. Tutti i morsetti di potenza
sono disposti sulla scheda di potenza PV33-....
Taglie 3025 ... 3200: I morsetti di potenza diventano accessibili rimuovendo la chiusura (vedere capitolo
5.1, “Accesso ai connettori”).
Massima sezione dei cavi ammessa dai morsetti U1, V1, W1, U2, V2, W2, C, D, PE
Tabella 5.2.1.1: Massima sezione dei cavi ammessi dai morsetti di potenza
Type
U1,V1,W1,U2,V2,W2,C,D
terminals
Tightening torque
BR1 terminals
Tightening torque
Tightening torque
[mm2]
2
[mm2]
2
3007
3010
3015
10
3025
3030
10
16
25
2
3
8
6
10
8
8
10
6
10
0.9
1.6
16
2
6
16
3
1.2 to 1.5
4
0.5 to 0.6
1.2 to 1.5
10
12
4
3040
3050
2
35
[mm2]
4
[Nm]
[mm2]
6
16
[Nm]
1.6
3
3060
3075
3100
3125
3150
1/0
50
2/0
70
4/0
95
300*
150
350*
4xAWG2
185
4x35
10-30
3
3200
* = kcmils
terminals not available
2
50
6
16
AWG
[mm2]
10
1.2 to 1.5
12
8
10
4
6
8
8
0.5 to 0.6
AWG
6
8
10
12
14
2
3020
8
4
[Nm]
[Nm]
3005
0.5 to 0.6
14
AWG
3003
12
[Nm]
AWG
[mm2]
Type
U1,V1,W1,U2,V2,W2,C,D
terminals
Tightening torque
PE1, PE2 terminals
3002
14
[Nm]
Tightening torque
Tightening torque
3001
AWG
PE1, PE2 terminals
BR1 terminals
3F75
AWG
4
avy4040
ATTENZIONE!
In caso di cortocircuito verso terra sull’uscita dell’inverter AV300i, la corrente nel cavo
di terra del motore può essere un massimo di due volte il valore della corrente nominale
I 2N .
NOTA:
Utilizzare esclusivamente cavi in rame a 60°C / 75°C.
Cap.5
64
—————— Collegamento elettrico ——————
5.3. PARTE DI REGOLAZIONE
5.3.1 Scheda di regolazione RV33
Figura 5.3.1.1: Switch e Jumper sulla Scheda di Regolazione RV33-3
XT
S29
XP
BACK SIDE
XEXP
XEXP1
FRONT SIDE
XT1
S30
1 2 3 4 5 6 7 8
9 12 13 14 15 16 18 19
X1
F1
21 22 23 26 27 28 29 36 37 38 39 41 42 46 78 79
S30
80 82 83 85
X2
Tabella 5.3.1.1: Diodi luminosi (LED) sulla Scheda di Regolazione RV33
Designation
RST
PWR
RS485
Color
red
green
green
Function
LED lit during the Hardware Reset
LED lit when the voltage +5V is present and at correct level
LED is lit when RS485 interface is supplied
ai4050g
Tabella 5.3.1.2: Punti di prova sulla Scheda di Regolazione RV33
Designation
XY4
XY5
Function
Phase current signal (U) (see manual "User's Guide", table
1.3.1.2.2)
Reference point
ay4070g
AV300i Manuale Hardware & Guida Rapida
65
Cap.5
Tabella 5.3.1.3: Jumper sulla Scheda di Regolazione RV33
Designation
S0
S1
S5 - S6
Function
The setting must not be changed
The setting must not be changed
Terminating resistor for the serial interface RS485
ON= Termination resistor IN
OFF= No termination resistor
Adaptation to the input signal of analog input 1 (terminals 1 and 2)
S8
ON=0...20 mA / 4...20 mA
OFF=0...10 V / -10...+10 V
Adaptation to the input signal of analog input 2 (terminals 3 and 4)
S9
ON=0...20 mA / 4...20 mA
OFF=0...10 V / -10...+10 V
Adaptation to the input signal of analog input 3 (terminals 5 and 6)
S10
ON=0...20 mA / 4...20 mA
OFF=0...10 V / -10...+10 V
S11 - S12 - S13 Encoder setting ( jumpers on kit EAM_1618 supplied with the drive)
S14 - S15 - S16 ON=Sinusoidal SE or SESC encoder
OFF=Digital DE or DEHS encoder
S17
Monitoring of the C-channel of the digital encoder
ON=C-Channel monitored
OFF=C-Channel not monitored (required for single-ended channels)
S18 - S19
Encoder setting
S20 - S21
Pos. B=digital DEHS encoder
Pos. A= sinusoidal SESC encoder
S22 - S23
Analog input 3 enabling (alternative with SESC encoder)
Pos. A= if SESC encoder is used
Pos. B=analog input 3 enabled
S24
Jumper to disconnect 0 V (of 24 V) from ground
ON=0 V connected to ground
OFF=0 V disconnected from ground
S25
Jumper to disconnect 0 V (regulation section) from ground
ON=0 V connected to ground
OFF=0 V disconnected from ground
S26 - S27
Internal use
Encoder Internal power supply selection
S28
ON / ON = +5 V
OFF / OFF = +8 V
S29
Internal use
Second encoder qualifier input
S30
A=from EXP-… board
B=from digital input "3" on RV33-3
Factory setting
OFF
OFF
ON (*)
OFF
OFF
OFF
OFF
OFF
B
B
ON
ON
ON
ON/ON
A
ON
ay4060
(*) on multidrop connection the jumper must be ON only for the last drop of a serial line
Tabella 5.3.1.4: Switch S3 di adattamento della Scheda di Regolazione RV33
Type
S1
S2
S3
S4
S5
S6
S7
S8
1007
1015
1022
1030
2040
2055
2075
3110
3150
ON
OFF
ON
OFF
OFF
ON
OFF
ON
OFF
OFF
ON
ON
OFF
OFF
OFF
ON
ON
OFF
OFF
OFF
OFF
OFF
ON
OFF
OFF
OFF
ON
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
ON
OFF
OFF
OFF
ON
OFF
OFF
OFF
ON
OFF
OFF
OFF
OFF
OFF
OFF
OFF
ON
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
Type
S1
S2
S3
S4
S5
S6
S7
S8
4220
4300
4370
5450
5550
6750
7900
71100
71320
81600
ON
OFF
ON
OFF
OFF
OFF
OFF
OFF
OFF
ON
ON
OFF
OFF
OFF
OFF
OFF
ON
ON
ON
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
ON
OFF
OFF
OFF
OFF
ON
OFF
OFF
ON
OFF
OFF
OFF
OFF
OFF
ON
OFF
ON
OFF
OFF
OFF
OFF
ON
ON
OFF
ON
OFF
OFF
OFF
OFF
OFF
OFF
ON
ON
OFF
OFF
OFF
OFF
ON
OFF
ON
ON
OFF
OFF
OFF
OFF
OFF
ON
ON
ON
OFF
OFF
OFF
OFF
avy4080
Nelle condizioni di fornitura standard gli apparecchi sono già predisposti correttamente. Quando la scheda
di regolazione è stata fornita come ricambio, disporre lo switch S3 per la taglia che interessa!
Cap.5
66
—————— Collegamento elettrico ——————
5.3.2. Denominazione dei morsetti della Scheda di Regolazione
Tabella 5.3.2.1: Collegamento e denominazione dei morsetti di regolazione
Morsettiera X1
1
2
3
4
5
Ingresso
analogico 1
Ingresso
analogico 2
Ingresso analogico differenziale programmabile e configurabile.
Segnale: morsetto 3.
Potenziale: morsetto 4. Non preconfigurato in fabbrica.
Ingresso
analogico 3
Ingresso analogico differenziale programmabile e configurabile.
Segnale: morsetto 5.
Potenziale: morsetto 6. Non preconfigurato in fabbrica
6
±10V
0.25mA
(20mA con
riferimento
in corrente)
+10V
Tensione di riferimento +10V; Potenziale: morsetto 9
+10V/10mA
8
-10V
Tensione di riferimento -10V; Potenziale: morsetto 9
-10V/10mA
9
0V
12
Enable drive
13
Start
14
Fast stop
COM D I/O
18
0 V 24
19
+24V OUT
22
0V
26
27
0 V 24
28
RISERVATO
29
RISERVATO
36
Digital input 1
37
Digital input 2
38
39
41
42
46
78
R1K
Sblocco generale inverter; 0V o aperto: inverter disabilitato;
+15…+30V: Inverter abilitato
Comando di start; 0V o aperto: Nessuno start; +15…+30V: Start
OV o aperto: Fast stop.
+15…+30V: Nessun Fast stop.
+15…+30V: Nessun External fault
+30V
3.2mA @ 15V
5mA @ 24V
6.4mA @ 30V
Potenziale per ingressi e uscite digitali, morsetti : 12...15, 36...39, 41...42
-
Potenziale per tensione + 24V OUT , al morsetto 19
-
Tensione +24V. Potenziale: morsetto 18 o 27 o 28
Analog output Uscita analogica programmabile; Configurato in fabbrica per Motor speed.
1
Potenziale: morsetto .22
Analog output
2
BU comm.
output
23
0V interno e potenziale per ±10V
External fault OV o aperto: External fault.
16
21
Unità di frenatura
esterna (opzionale)
max
7
15
BU-
Funzione
Ingresso analogico differenziale programmabile e configurabile.
Segnale: morsetto 1.
Potenziale: morsetto 2. Configurato in fabbrica per Ramp ref 1
0V interno e potenziale per i morsetti 21 e 23
Uscita analogica programmabile; Configurato in fabbrica per Motor current.
Potenziale: morsetto .22
Comando unità di frenatura BU-... controllato dal micropr. VeCon.
Potenziale: morsetto 27.
Potenziale del comando BU-... , morsetto 26
+22…28V
120mA @ 24V
±10V/5mA
±10V/5mA
+28V/15mA
-
+30V
Ingresso digitale programmabile; Non preconfigurato in fabbrica.
3.2mA @ 15V
Ingr. Dig. program; default: none. Configurabile come 2° indice qualificatore encoder
Digital input 3
(impostazione da jumper S30). Parametro ”Digital input 3” deve essere 0=OFF)
Ingresso Digitale Programmabile; default: none. Configurabile come 1° indice
Digital input 4 qualificatore encoder. Parametro ”Digital input 4” deve essere 0=OFF ).
Digital output
1
Uscita digitale programmabile; Non preconfigurato in fabbrica.
Digital output
2
Tensione di ingresso per le uscite digitali dei morsetti 41/42.
Supply D O
Potenziale morsetto 16.
Motor PTC
Sensore PTC per sovratemperature motore (se usato togliere la resistenza R1k )
5mA @ 24V
6.4mA @ 30V
+30V/40mA
+30V/80mA
1.5mA
79
Morsettiera X2
80
82
83
OK relay
contact
Relay 2
contact
Funzione
max curr.
Contatto privo di potenziale del relè di OK (chiuso=OK)
250V AC
1 A AC11
Contatto privo di potenziale del relè di segnalazione (relè 2) velocità zero.
Configurazione di fabbrica: aperto 0, motore fermo
250V AC
1 A AC11
85
AV300i Manuale Hardware & Guida Rapida
67
Cap.5
Massima sezione dei cavi ammessa dai morsetti
Tabella 5.3.2.2: Massima sezione dei cavi ammessa dai morsetti della scheda regolazione
Maximum Permissible Cable Cross-Section
Tightening
2
Terminals
[mm ]
flexible
0.14 ... 1.5
0.14 ... 1.5
1 ... 79
80 ... 85
torque
[Nm]
0.4
0.4
AWG
multi-core
0.14 ... 1.5
0.14 ... 1.5
28 ... 16
28 ... 16
Ai4090
E’ consigliato l’utilizzo di un cacciavite a taglio piatto da 75 x 2.5 x 0.4 mm. Rimuovere l’isolamento dei cavi
per una lunghezza di 6.5 mm. Ad ogni morsetto può essere collegato solo un cavo non trattato (senza terminale).
Massima lunghezza dei cavi
Tabella 5.3.2.3: Massima lunghezza dei cavi
Cable section [mm2]
Max Length m [feet]
0.22
27 [88]
0.5
62 [203]
0.75
93 [305]
1
125 [410]
1.5
150 [492]
avy3130
Potenziali della parte di regolazione
I potenziali della parte di regolazione sono isolati e possono essere scollegati dalla terra tramite jumper. Dalla
figura 5.3.1.2 si può rilevare la connessione tra di loro.
Gli ingressi analogici sono differenziali.
Gli ingressi digitali sono separati dalla regolazione per mezzo di optoisolatori. I morsetti dal 12 al 15 e dal 36
al 39 hanno il morsetto 16 come potenziale di riferimento comune.
Le uscite digitali non sono differenziali e hanno il morsetto 22 come potenziale di riferimento comune.
Le uscite analogiche e il riferimento comune ±10V hanno lo stesso potenziale (morsetto 22 e 9).
Le uscite digitali sono separate dalla regolazione per mezzo di optoisolatori. I morsetti 41 e 42 hanno il
morsetto 16 come potenziale di riferimento comune e il morsetto 46 come alimentazione comune.
Per ridurre le interferenze sui segnali in ingresso e uscita, è consigliato di non rimuovere i jumper S24 e S25
di connessione verso terra.
Il comando di frenatura ha come riferimento il morsetto 27 che è collegato alla tensione di riferimento del
+24V (morsetto 18).
Cap.5
68
—————— Collegamento elettrico ——————
Figura 5.3.1.2: Potenziali della parte di regolazione
To Expansion Cards
1
Analog input 1
2
Analog
output 1
3
21
0V
Analog input 2
22
4
Analog
output 2
5
23
Analog input 3
6
S25
+10V
12
Enable drive
0V
13
- 10V
Start
14
7
9
8
Relay 2
Fast stop
83
85
15
External fault
OK relay
80
36
82
Digital input 1
+30V
37
Digital input 2
46
Digital output 1
38
41
Digital input 3
39
Digital input 4
Digital output 2
42
16
29
COM D I/O
+24V
+24 V
19
Internal power supply
from Power Card
28
0V (24V)
0 (+24 V)
18
78
1k
79
Over Temperature
Motor
BU
S24
AV300i Manuale Hardware & Guida Rapida
26
27
69
Cap.5
5.4. INTERFACCIA SERIALE RS 485
5.4.1. Descrizione
La linea seriale RS 485 permette di trasmettere i dati mediante un doppino costituito da due conduttori
simmetrici, spiralati con uno schermo comune. Per la velocità di trasmissione di 9,6 kBaud, la distanza massima
di trasmissione è 1200 metri. La trasmissione avviene con un segnale differenziale. La linea seriale RS 485 è
in grado di trasmettere e ricevere ma non contemporaneamente (funzionamento half-duplex). Mediante RS
485 possono essere collegati fino a 31 inverter AV300i (sono selezionabili fino a 128 indirizzi). L’impostazione
dell’indirizzo avviene per mezzo del parametro Device address. Particolarità circa la trasmissione dei parametri, il loro tipo ed il range dei valori possono essere rilevati dalle tabelle della sezione 8 del manuale (colonna
“RS 485").
XS
470 R
100 R
470 R
0VS
+5 V S
150 R
S5
S6
TxA/RxA
TxB/RxB
+5 V
PE
5
4
9
2
3
8
7
1
6
RS485
Figura 5.4.1.1: Linea seriale RS485
Sugli inverter della serie AV300i , la linea seriale RS 485 è predisposta mediante un connettore a 9 poli SUBD (XS) posto sulla scheda di Regolazione. La comunicazione può avvenire con o senza un isolamento
galvanico: utilizzando l’isolamento galvanico è necessaria un’alimentazione esterna di +5V. Il segnale
differenziale viene trasmesso sui Pin 3 (TxA/RxA) e Pin 7 (TxB/RxB). All’inizio e alla fine del collegamento
fisico della seriale RS 485 devono essere presenti e collegate le resistenze di terminazione, per evitare la
riflessione sui cavi. Negli apparecchi della serie AV300i le resistenze di terminazione vengono attivate con
l’inserzione dei cavallotti S5 ed S6. Questo permette un collegamento punto-punto con un PLC oppure
PC.
NOTE!
Fare attenzione al fatto che solo il primo e l’ultimo componente della catena di una seriale
RS 485 devono avere le resistenze di terminazione S5 e S6 inserite. In tutti gli altri casi
(all’interno di una catena) i cavallotti S5 e S6 non devono essere inseriti.
Utilizzando l’interfaccia “CTI” può essere realizzato un collegamento punto-punto senza alcuna impostazione
del jumper.
Nella connessione Multidrop (due o più inverter) è necessaria l’alimentazione esterna (pin 5 / 0V e pin 9 / +5V).
I pin 6 ed 8 sono ad uso esclusivo dell’interfaccia “CTI”.
Cap.5
70
—————— Collegamento elettrico ——————
Per il collegamento di una linea seriale assicurarsi che:
- siano stati impiegati solamente cavi schermati
- i cavi di potenza ed i cavi di comando dei contattori e dei relè siano in canaline separate.
NOTA!
Per maggiori dettagli sulla comunicazione vedere il manuale “S Link 3".
5.4.2. Disposizione del connettore XS per la linea seriale RS485
Tabella 5.4.2.1: Disposizione del connettore XS per la linea seriale RS485
Designation
PIN 1
PIN 2
PIN 3
PIN 4
PIN 5
PIN 6
PIN 7
PIN 8
PIN 9
Function
Internal use
Internal use
RxA/TxA
Internal use
0V (Ground for 5 V)
Internal use
RxB/TxB
Internal use
+5 V
I/O
–
–
I/O
–
–
–
I/O
–
–
Elec. Interface
–
–
RS485
–
Power supply
–
RS 485
–
Power supply
ai4110
I = Input
O = Output
AV300i Manuale Hardware & Guida Rapida
71
Cap.5
5.5. SCHEMA TIPICO DI COLLEGAMENTO
5.5.1. Collegamento inverter AV300i
Figura 5.5.1.1: Circuiti ausiliari di controllo
L01
EMERGENCY-OFF
K0
S11
Off
S12
Stop
K2
G1
ok
K2T
S2
ON / Start
K1M
80
82
K2
K1M
K2
K0
K2T
L00
EMERGENCY-OFF
ON / OFF
Start / Stop
t =1s
Mains contactor
Note: Per questo circuito il relè di OK deve essere configurato come “Drive healty” (configurazione di fabbrica)
NOTE:
Cap.5
72
Lo schema di allacciamento indicato nella figura 5.5.1.1 (Circuiti ausiliari di controllo) è
valido solo in condizioni di allarme Enable seq err = Ignore.
—————— Collegamento elettrico ——————
16
15
14
K2
13
K1M
12
0 V24
COM ID
Analog
output 1
18
+ 24V
21
22
Analog
output 2
19
23
Fault
External
8
Fast stop
+ 10 V
0 V 10
Start
Enable
drive
Dig. Inp.4
Analog input 2
Analog input 3
BU
RS 485
26
Optional from 22kW
up to 55kW
9
1
A-
6
A+
5
XE1
BB+
8
5V
Keypad
7
27
0V
L1
L2
L3
N
PE
5
+
n>0
( default )
6
-
ok
3
+
82
80
4
-
85
83
9
1
+
Dig. Inp.1
R1
(2 ... 5 kOhm)
7
2
Dig. Inp.3
Dig. Inp.2
FWD
0
REV
- 10 V
Analog input 1
K0
46
+ 30 V
41
Dig. Out.2
42
Dig. Out.1
-
The circuit diagram is for the standard configuration of the drive as delivered.
EMC installation and wiring techniques are not shown.
For this see appropriate chapter. The connection of option card is also shown separately.
The automatic restart of the drive after a failure alarm is not included.
Figura 5.5.1.2: Schema tipico di collegamento
79
1V3
2V3
U3
SMPS
*)
*) R 1Kohm if
no thermistor
connected
78
D
PE1
F1
C
5
6
W1/L3
3
4
V1/L2
V2/T2
1
2
U1/L1
U2/T1
K1M
L1
Thermistor
M1
W2/T3
M
3~
E
G1
AV300i Manuale Hardware & Guida Rapida
73
Cap.5
5.5.2 Connessione in parallelo lato AC (ingresso) e DC (circuito intermedio) di
più inverter
Caratteristiche e limitazioni:
1 Gli inverter devono essere tutti di pari taglia all’interno di gruppi omogenei
2 Gli induttori di linea obbligatori (vedi capitolo 5.7.1) devono essere tutti identici (del medesimo fornitore).
3 L’alimentazione da rete deve essere contemporanea per tutti gli inverter, deve cioè esistere un solo
interruttore / contattore di linea.
4 È ammesso un massimo di 6 inverter connessi come indicato.
5 Se è necessario dissipare dell’energia di frenatura, deve essere utilizzata una sola unità di frenatura
“BU” interna (con resistenza esterna) oppure una (o più) unità di frenatura esterne (“BU-300-...”)
configurata(e) come slave ed aventi come master uno degli inverter o una BU come master e le altre
configurate come slave.
6 Sul lato dc-link (morsetti C e D) di ogni inverter dovranno essere inseriti fusibili extrarapidi F12 … F62,
(vedere capitolo 5.6.2).
F11
L1
U
V
W
U2
V2
INVERTER 1 W2
C
M1
3
D
F12
F21
L2
U
V
W
U2
V2
INVERTER 2 W2
C
BR
M2
3
D
F22
L1
(*) ATTENZIONE !
L2
(*)
Non collegare se sono utilizzate unità di
frenatura esterne
RBR
L3
K1
F..
L..
U
V
W
U2
V2
INVERTER .. W2
C
M..
3
D
F..
F61
L6
U
V
W
U2
V2
INVERTER 6 W2
C
0V24
M6
3
D
MCMD
F62
F7
7
8
9
BR
RBR
10
D
BU-300-...
C
CR
(SLAVE)
Cap.5
74
—————— Collegamento elettrico ——————
5.6. PROTEZIONI
5.6.1. Fusibili esterni nella parte di potenza
Prevedere la protezione a monte dell’inverter sul lato rete. Possono essere impiegati fusibili e interruttori
protettori con caratteristiche ritardate. I fusibili extrarapidi offrono una protezione maggiore
NOTA!
Quando i morsetti del circuito intermedio ( C e D ) sono collegati con apparecchi
esterni, la protezione deve essere realizzata essenzialmente con fusibili extrarapidi. Si
tratta ad esempio dei casi in cui esiste:
Collegamento con unità di frenatura esterne (BU...)
Accoppiamento del circuito intermedio di più inverter
Collegamento di condensatori esterni
Collegamenti con induttore trifase sul lato rete aumentano la durata dei condensatori del circuito intermedio.
Tabella 5.6.1.1: Fusibili esterni lato rete
Drive
type
3F75
3001
F1 - Fuses type
Connections without three-phase reactor
on AC input
DC link
capacitors
life time [h]
Europe
25000
GRD2/10 or Z14GR10
A70P10
FWP10
GRD2/16 or Z14GR16
A70P20
FWP20
USA
Connections with three-phase reactor
on AC input
DC link
capacitors
life time [h]
50000
50000
50000
Europe
USA
GRD2/10 or Z14GR10
A70P10
FWP10
GRD2/10 or Z14GR10
A70P10
FWP10
GRD2/16 or Z14GR16
A70P20
FWP20
3002
25000
3003
10000
3005
25000
GRD2/20 or Z14GR20
A70P20
FWP20
50000
3007
25000
GRD2/25 or Z14GR25
A70P25
FWP25
50000
GRD2/20 or Z14GR20
A70P20
FWP20
3010
10000
GRD3/35 or Z22GR40
A70P35
FWP35
50000
GRD2/25 or Z14GR25
A70P25
FWP25
3015
25000
GRD3/50 or Z22GR40
A70P40
FWP40
50000
GRD3/35 or Z22GR40
A70P35
FWP35
3020
10000
GRD3/50 or Z22GR50
A70P40
FWP50
50000
GRD3/50 or Z22GR50
A70P40
FWP40
3025
10000
GRD3/50 or Z22GR50
A70P50
FWP50
50000
25000
3030
10000
25000
3040
10000
25000
3050
10000
3060
10000
3075
10000
3100
10000
25000
3125
10000
25000
3150
10000
25000
3200
10000
25000
For these types an external reactor is
mandatory if the AC input impedence is equal
or less than 1%
25000
25000
25000
S00üf1/80/80A/660V or
A70P80 FWP80
Z22gR80
S00üf1/80/100A/660V or
A70P100 FWP100
M00üf01/100A/660V
S00üf1/80/160A/660V or
A70P175 FWP175
M00üf01/160A/660V
S1üf1/110/250A/660V or
A70P300 FWP300
M1üf1/250A/660V
S2üf1/110/400A/660V or
A70P400 FWP400
M2üf1/400A/660V
avy4120
Costruttore dei fusibili:
NOTA!
Tipo GRD2... (E27), GRD3... (E33), M... (fusibili a coltello),
Z14... 14 x 51 mm, Z22... 22 x 58 mm
Jean Müller, Eltville
A70P...
Gould Shawmut
FWP...
Bussmann
I dati tecnici dei fusibili come ad esempio dimensioni, pesi, potenze dissipate, portafusibili
ecc. si possono rilevare dai relativi cataloghi.
AV300i Manuale Hardware & Guida Rapida
75
Cap.5
5.6.2 Fusibili esterni nella parte di potenza per ingresso DC
Nel caso venga utilizzato un convertitore rigenerativo RS-300 devono essere utilizzati i seguenti fusibili (vedere
manuale istruzioni RS-300 per ulteriori informazioni):
Tabella 5.6.2.1: Fusibili esterni per collegamento DC
Fuses type
Drive type
3F75
3001
3002
3003
3005
3007
3010
3015
3020
3025
3030
3040
3050
3060
3075
3100
3125
3150
3200
Europe
Z14GR6
A70P10
USA
FWP10A14F
Z14GR10
A70P10
FWP10A14F
Z14GR16
A70P20-1
FWP20A14F
Z14GR20
Z14GR32
Z14GR40
Z22GR63
S00üF1/80/80A/660V
S00üF1/80/100A/660V
S00üF1/80/125A/660V
S00üF1/80/160A/660V
S00üF1/80/200A/660V
S1üF1/110/250A/660V
S1üF1/110/315A/660V
S2üF1/110/400A/660V
S1üF1/110/500A/660V
S1üF1/110/500A/660V
A70P20-1
A70P30-1
A70P40-4
A70P60-4
A70P80
A70P100
A70P150
A70P175
A70P200
A70P250
A70P350
A70P400
A70P500
A70P500
FWP20A14F
FWP30A14F
FWP40B
FWP60B
FWP80
FWP100
FWP150
FWP175
FWP200
FWP250
FWP350
FWP400
FWP500
FWP500
avy4140
Costruttore dei fusibili:
NOTE!
Tipo Z14..., Z22, S00 ..., S1...
A70P...
FWP...
Jean Müller, Eltville
Gould Shawmut
Bussmann
I dati tecnici dei fusibili come ad esempio dimensioni, pesi, potenze dissipate, portafusibili
ecc. si possono rilevare dai relativi cataloghi.
5.6.3 Fusibili interni
Tabella 5.6.3.1: Fusibili interni
Drive type
3025 to 3200
3F75 to 3200
3075 to 3150
Designation Protection of
F1
+24V
F1
+24V
F3
Fans
transformer
Fuse (source)
2A fast 5 x 20 mm (Bussmann:
SF523220 or Schurter:
FSF0034.1519 or Littlefuse:
217002)
Resettable fuse
2.5A 6.3x32
(Bussmann: MDL 2.5, Gould
Shawmut: GDL1-1/2, Siba: 70 059
76.2,5 , Schurter: 0034.5233)
Fitted on:
Power card PV33-4-"D" and higher
Power card PV33-5-"B" and higher
Regulation card RV33-1C and higher
Bottom cover (power terminals side)
ai4145
Cap.5
76
—————— Collegamento elettrico ——————
5.7. INDUTTORI / FILTRI
NOTA!
Per gli inverter della serie AV300i, per limitare la corrente di ingresso RMS, può essere
inserita sul lato rete un’induttore trifase. L’induttanza deve essere fornita da un’induttore
trifase o da un trasformatore di rete.
NOTA!
Per l’utilizzo di filtri sinusoidali in uscita, contattare l’ufficio di competenza G.E. più vicino.
5.7.1. Induttori in ingresso
Tabella 5.7.1.1: Induttori di rete
Drive type
3F75
3001
3002
3003
3005
3007
3010
3015
3020
3025
3030
3040
3050
3060
3075
3100
3125
3150
3200
Mains
Inductance [mH]
6.1
3.69
2.71
2.3
1.63
1.29
0.89
0.68
0.51
0.35
0.24
0.18
0.13
0.13
0.148
0.148
0.085
0.085
0.085
Rated
current [A]
2.5
3.7
5.5
6.7
8.7
11.8
17.4
22.4
30
41
58
71
102
102
173
173
297
297
297
Three-phase Mains choke
Saturation
Frequency
current [A]
[Hz]
5
50/60
7.4
50/60
11
50/60
14
50/60
18
50/60
24.5
50/60
36.5
50/60
46.5
50/60
61
50/60
83
50/60
120
50/60
145
50/60
212
50/60
212
50/60
350
50/60
350
50/60
600
50/60
600
50/60
600
50/60
Model
Number *
KLR3ATB
KLR4ATB
KLR6ATB
KLR8ATB
KLR12ATB
KLR16ATB
KLR21ATB
KLR27ATB
KLR45ATB
KLR55ATB
KLR80ATB
KLR110ACB
KLR160ACB
KLR160ACB
KLR200ACB
KLR200ACB
KLR300ACB
KLR300ACB
KLR300ACB
ai4150
* Modelli G.E. Industrial System Power Equipment.
L’induttore di rete è fortemente consigliato, per tutte le taglie:
- per aumentare la vita dei condensatori del circuito intermedio e l’affidabilità dei diodi di ingresso
- per diminuire la distorsione armonica di rete
- per ridurre i problemi causati dall’alimentazione tramite una linea a bassa impedenza (≤ all’1%).
NOTA!
La corrente nominale di questi induttori è determinata in relazione alla corrente nominale
dei motori standard, elencati nella tabella 3.3.3.1 del paragrafo 3.3.4. Uscita.
5.7.2. Induttori in uscita
L’inverter AV300i può essere utilizzato con motori standard oppure con motori progettati appositamente per
essere utilizzati con gli inverter. Questi ultimi possiedono solitamente un’isolamento maggiore per sostenere
meglio la tensione PWM.
Si fornisce di seguito esempi di normativa di riferimento:
AV300i Manuale Hardware & Guida Rapida
77
Cap.5
- Per motori standard a bassa tensione
VDE 0530:
max. tensione di picco
1kV
max. dV/dt
500 V/us
NEMA MG1 part 30: max. tensione di picco
1 kV
min. tempo di salita
2 us
- Per motori a bassa tensione per uso con inverters
NEMA MG1 part 31: max. tensione di picco
1.6 kV
min. tempo di salita
0.1 us.
I motori progettati per essere utilizzati con inverter non richiedono nessun filtro speciale in uscita dell’inverter.
I motori standard, in particolare con cavi lunghi (solitamente superiori ai 100 metri) e con l’utilizzo di inverter
fino alla taglia 3010, possono richiedere un’induttore d’uscita per mantenere la forma d’onda di tensione
entro i limiti specificati. La gamma di induttori consigliati e i modelli sono elencati nella tabella 5.7.2.1.
La corrente nominale degli induttori dovrebbe essere approssimativamente maggiore del 20% rispetto a
quella dell’inverter per tenere in considerazione perdite aggiuntive causate da una forma d’onda PWM.
Tabella 5.7.2.1: Induttori di uscita consigliati
Inverter type
3F75
3001
3002
3003
3005
3007
3010
3015
3020
3025
3030
3040
3050
3060
3075
3100
3125
3150
3200
Rated Inductance
[mH]
1.4
Three-phase choke
Rated Current
Saturation Current
[A]
[A]
9.5
20
Model number *
Load Reactors 5% Z
37G00202
0.87
16
34
0.51
27
57
0.43
0.33
0.24
0.18
32
42
58
76
68
72
100
130
37G00403
37G00803
37G01203
37G01803
37G02503
37G02503
37G02503
37G04503
37G05503
0.12
110
192
37G08003
0.07
180
310
37G01003
0.041
310
540
37G16003
37G20003
37G20003
Ai4135
* Modelli G.E. Industrial System Power Equipment.Gli induttori possono 200% per 3 minuti.
NOTA!
Con corrente nominale dell’inverter e frequenza 50 Hz, gli induttori di uscita provocano
una caduta della tensione di uscita di circa il 2%.
5.7.3. Filtri antidisturbo
Gli inverter della serie AV300i devono essere equipaggiati esternamente con un filtro EMI al fine di limitare
le emissioni in radiofrequenza verso rete. La selezione di tale filtro viene effettuata in funzione della taglia
dell’inverter, della lunghezza dei cavi motore e dell’ambiente di installazione. A tale scopo si veda la Guida
alla compatibilità elettromagnetica (potete richiederla all’Ufficio di competenza G.E.).
Nella Guida sono inoltre indicate le norme di installazione del quadro elettrico (collegamento dei filtri e degli
induttori di rete, schermature dei cavi, collegamenti di terra, ecc.) da seguire al fine di renderlo conforme
Cap.5
78
—————— Collegamento elettrico ——————
EMC secondo la Direttiva 89/336/EEC.
Tale documento chiarisce inoltre il quadro normativo relativo alla compatibilità elettromagnetica e illustra le
verifiche di conformità effettuate sugli apparecchi G.E.
5.8. UNITÀ DI FRENATURA
I motori asincroni regolati in frequenza, durante il funzionamento ipersincrono o rigenerativo, si comportano
come generatori, recuperando energia che fluisce attraverso il ponte inverter, nel circuito intermedio come
corrente continua. Questo provoca un aumento della tensione del circuito intermedio. Per impedire che la
tensione raggiunga valori non consentiti vengono impiegate delle unità di frenatura (BU-300). Al raggiungimento
di un determinato valore di tensione, queste inseriscono una resistenza di frenatura in parallelo ai condensatori
del circuito intermedio. L’energia recuperata viene dissipata in calore dalla resistenza (RBR). Per questo si
possono realizzare tempi di decelerazione molto brevi ed un funzionamento su quattro quadranti limitato.
Figura 5.8.1: Funzionamento con unità di frenatura (schema di principio
_
E
R BR
U ZK
BU
M
3
Gli apparecchi dalle taglia 3F75 alla 3060 hanno in configurazione standard una unità di frenatura interna.
Tutti gli apparecchi standard AV300i... possono essere dotati di una unità di frenatura esterna (BU-300...)
collegata ai morsetti C e D.
NOTA!
Quando è presente l’unità di frenatura interna o quando i morsetti del circuito intermedio
(C-D) sono collegati con apparecchi esterni, la protezione deve essere realizzata con
fusibili extrarapidi! Osservare le relative prescrizioni di montaggio.
AVVERTENZA!
I resistori di frenatura possono essere soggetti a sovraccarichi non previsti a seguito di
guasti. E' assolutamente necessario proteggere i resistori mediante l'utilizzo di dispositivi
di protezione termica.
Questi dispositivi non devono interrompere il circuito in cui e' inserito il resistore, ma il loro
contatto ausiliario deve interrompere l'alimentazione della parte di potenza del drive.
Nel caso in cui il resistore preveda un contatto di protezione, questo deve essere utilizzato
unitamente a quello del dispositivo di protezione termica.
NOTA!
La connessione della resistenza di frenatura deve essere eseguita utilizzando un cavo
twistato.
Se la resistenza dispone di protezione termica (Klixon), tale protezione può essere collegata
all’ingresso di “external fault” del drive.
AV300i Manuale Hardware & Guida Rapida
79
Cap.5
5.8.1. Unità di frenatura interna
L’unità di frenatura interna è inclusa come standard (fino alla taglia 3060, inclusa). La resistenza di frenatura
è opzionale e deve essere sempre montata esternamente. Per l’impostazione dei parametri fare riferimento
al capitolo “Abilitazione frenatura interna” del manuale Istruzioni d’Uso. La figura successiva mostra la
configurazione per un funzionamento con frenatura interna.
Figura 5.8.1.1: Collegamento con unità di frenatura interna e resistenza di frenatura esterna
F1
Braking
resistor
AC Motor
3Ph~
Cap.5
80
—————— Collegamento elettrico ——————
PE1 /
PE2/
W2/T3
V2/T2
U2/T1
D
C
BR1
W1/L3
V1/L2
U1/L1
Braking
Unit
5.8.2 Resistenza di frenatura esterna
Abbinamenti consigliati per l’impiego con unità di frenatura interna:
Tabella 5.8.2.1: Lista e dati tecnici delle resistenze esterne normalizzate per inverter 3F75 ... 3060
Inverter
Resistor
PNBR
RBR
EBR
Type
Type
[kW]
[Ohm]
[kJ]
MRI/T600 100R
0.6
100
22
MRI/T900 68R
0.9
68
33
MRI/T1300 49R
MRI/T2200 28R
MRI/T4000 15R4
MRI/T4000 11R6
MRI/T4000 11R6
MRI/T8000 7R7
MRI/T8000 7R7
1.3
2.2
4
4
4
8
8
49
28
15.4
11.6
11.6
7.7
7.7
48
82
150
150
150
220
220
3F75
3001
3002
3003
3005
3007
3010
3015
3020
3025
3030
3040
3050
3060
Descrizione simboli:
P NBR
R BR
E BR
P PBR
T BRL
avy4190
Potenza nominale della resistenza di frenatura
Valore della resistenza di frenatura
Massima energia dissipabile dalla resistenza
Potenza di picco applicata alla resistenza di frenatura
Tempo di frenatura massimo in condizioni di ciclo operativo limite (potenza di frenatura
= PPBR con profilo tipico triangolare)
TBRL= 2
EBR
=[s]
PPBR
Figura 5.8.2.2: Ciclo di frenatura con profilo tipico triangolare
n,P
PPBR
EBR
n
TBRL
T CL
TCL
t
Tempo di ciclo minimo in condizioni di ciclo operativo limite (potenza di frenatura =
PPBR con profilo tipico triangolare)
AV300i Manuale Hardware & Guida Rapida
81
Cap.5
TCL=
1
2
TBRL
PPBR
=[s]
PNBR
L’allarme BU overload viene attivato quando il ciclo di funzionamento supera i massimi valori permessi, per
evitare possibili danni alla resistenza.
Identificazione delle resistenze normalizzate
Esempio:
NOTA!
MRI/T900 68R
MRI = tipo resistenza
900 = potenza nominale (900 W)
T= con termostato di sicurezza
68R = valore resistivo(68 Ω)
Gli abbinamenti proposti taglia inverter-modello resistenza, consentono una frenatura di
arresto a coppia nominale con duty cycle TBR / TC = 20%
Dove:
T B R = Tempo di frenatura
TC
= Tempo di ciclo
Figura 5.8.2.3: Ciclo di frenatura con TBR / TC = 20%
P,n
n
TBR
t
TC
Le resistenze normalizzate possono essere utilizzate con abbinamenti diversi rispetto a quelli sopra indicati.
Tali resistenze i cui dati tecnici sono riportati nella tabella 5.8.2.1, sono dimensionate per un sovraccarico pari
a 4 volte la potenza nominale per 10 secondi. Possono comunque sopportare un sovraccarico che dia luogo
alla stessa dissipazione energetica fino al livello massimo di potenza definito da:
2
PPBR=
VBR [V]
=[w]
RBR [ohm]
Dove:
VBR = soglia di intervento delle unità di frenatura, come indicato nella tabella 5.8.2.2.
Facendo riferimento alla figura 5.8.2.4., dove il profilo di potenza è quello tipico triangolare, si consideri il
seguente esempio (vedi anche tabella 5.8.2.1):
Cap.5
82
—————— Collegamento elettrico ——————
Resistenza modello: MRI/T600 100R
Potenza nominale PNBR = 600 [W]
Energia massima EBR = 4 x 600[W] x 10[s] = 24000[J]
Rete alimentazione inverter = 460V
Dalla tabella 5.8.2.2: VBR =780V
P PBR =
VBR 2
R BR
780 2
=
= 6084 [W]
100
T BRL = 2
E BR
P PBR
=
2
24000
= 7.8[s]
6084
E’ necessario verificare le seguenti relazioni:
A)
Se TBR ≤ EBR / PNBR verificare:
1)
PMB ≤ 2 . EBR / TBR
2)
PMB . TBR
£ PNBR
2 TC
dove: PMB è la massima potenza di frenatura richiesta dal ciclo (v.fig. 5.8.2.4)
La potenza media del ciclo non deve superare la nominale delle resistenze.
B)
Se TBR > EBR / PNBR e cioè nel caso di frenate con tempi lunghi, dimensionare PMB ≤ PNBR
Figura 5.8.2.4: Ciclo di frenatura generico con profilo triangolare
n,P
PPBR
PMB
TBR
TC
t
Se non viene rispettata una delle sopradescritte regole, è necessario rispettando i limiti dell’unità di frenatura
indicati nella tabella 5.8.2.3, aumentare la potenza nominale della resistenza.
Al fine di proteggere le resistenze da pericolosi sovraccarichi, i parametri BU ovld time e BU duty cycle
(menu FUNCTIONS\Brake Unit) stabiliscono il tempo ed il ciclo di funzionamento massimo a cui le resistenze
possono tollerare la loro potenza di picco PPBR .
I dati devono essere riferiti alla tensione di rete per la quale sono specificatamente definiti dal parametro BU
DC vlt (menu FUNCTIONS\Brake unit).
I parametri di default sono impostati per una soglia di frenatura corrispondente ad una tensione di rete di 400V.
Per abbinamenti di resistenze di frenatura diversi di quelli indicati in tabella 5.8.2.1, procedere come segue
tenendo in considerazione il significato di queste formule:
BU ovld time [s] = EBR / PPBR (tempo di frenatura limite per ciclo a profilo rettangolare)
BU duty cycle % = (PNBR / PPBR) x 100
AV300i Manuale Hardware & Guida Rapida
83
Cap.5
Tabella 5.8.2.2: Soglie di frenatura per differenti tensioni di alimentazione
Mains
voltage
Braking threshold
VBR [V]
230Vac
400Vac
460Vac / 480 Vac
400
680
780
avy4200
Il risultato di questi calcoli va assegnato ai parametri corrispondenti nel menù FUNCTION\Brake unit.
Quando il ciclo di funzionamento supera i dati inseriti, si attiva automaticamente l’allarme BU overload al
fine di evitare possibili danni alla resistenza. La seguente tabella può essere utilizzata per la scelta di resistenze
esterne diverse dalla serie standard.
Tabella 5.8.2.3: Dati tecnici delle unità di frenatura interna
Inverter
type
3F75
3001
3002
3003
3005
3007
3010
3015
3020
3025
3030
3040
3050
3060
3075
3100
3125
3150
3200
IRMS
[A]
IPK
[A]
T
[s]
Minimum
RBR
[ohm]
4.1
7.8
19
100
6.6
12
16
67
12
17
18
37
29
22
31
52
17
16
42
23
37
36
26
15
50
104
22
7.5
78
10
External braking unit (optional)
avy4210
IRMS = Corrente nominale dell’unità di frenatura
IPK = Corrente di picco erogabile per 60 secondi max.
T
= Tempo di ciclo minimo per servizio a IPK per 10 secondi
In generale deve essere soddisfatta la condizione: IRMS
1
2
PPBR
RBR
T BR
TC
Tutti gli azionamenti sono provvisti dei morsetti 26 e 27 i quali consentono di controllare una o più unità di
frenatura esterne collegate in parallelo.
L’azionamento funzionerà da Master e l’unità di frenatura esterna BU-300 dovrà essere configurata come
Slave. In questo modo sarà possibile utilizzare la protezione I2t per la resistenza anche con l’uso di BU esterna
(vedere il capitolo “Abilitazione frenatura interna” del manuale Istruzioni d’Uso). Nel caso vengano impiegate
più BU esterne, ciascuna con una resistenza (tutte uguali) riferire i calcoli dei parametri a una singola unità.
Cap.5
84
—————— Collegamento elettrico ——————
5.8.3. Calcolo della resistenza di frenatura esterna da accoppiare alle unità di
frenatura con un metodo approssimato
Per calcolare valori di resistenza diversi da quelli indicati in tabella 5.8.2.1 (da utilizzare ad esempio con
diversi valori di soglia di intervento dell’unità di frenatura) valgono le seguenti considerazioni:
la potenza di picco dissipabile dalla resistenza è PPBR = VBR2 / RBR [W] , dove “VBR” rappresenta la tensione
di intervento dell’unità di frenatura (da tabella 5.8.2.2 ).
La potenza massima PMB richiesta dal ciclo non deve superare tale valore : PMB ≤ PPBR.
La resistenza di frenatura è utilizzata normalmente con ciclo intermittente. Si potrà pertanto utilizzare una
resistenza in grado di dissipare una potenza continuativa inferiore a PMB.
Per decidere il fattore di sovraccarico si può utilizzare il seguente diagramma, valido per profilo di carico
rettangolare. Per profilo triangolare il diagramma dà luogo a un dimensionamento conservativo, in favore di
sicurezza (diagrammi simili possono essere forniti dal costruttore della resistenza che si intende utilizzare).
Per calcolare il valore della potenza continuativa (nominale) della resistenza di frenatura, utilizzando il grafico
si applica la seguente formula:
Potenza nominale PMBR =
PMB
Overload factor
fA003
Figura 5.8.3.1: Power Resistor Overload Factor
TIME OF OVERLOAD (sec. - log. scale)
RESISTOR POWER
Pause Time
15 sec.
30 sec.
1 min.
5 min.
30 min.
OVERLOAD FACTOR
Esempio:
Per frenare un motore da 18,5 kW (38A a 400V) con sovraccarico del 150% si
ottiene una potenza rigenerata massima di 27,75 kW. Ipotizzando un tempo di
frenata di 5 secondi (tempo di sovraccarico per la resistenza) e 1 minuto di pausa,
il grafico fornisce un fattore di sovraccarico di 3,9.
Pertanto la potenza nominale della resistenza sarà:
P NBR =
27750
3.9
@ 7100 W
fA004
Per le taglie superiori a 3060 oppure per cicli particolari di frenatura occorre utilizzare una unità di frenatura
esterna BU-300.
AV300i Manuale Hardware & Guida Rapida
85
Cap.5
5.9. MANTENIMENTO DELLA REGOLAZIONE
L’alimentazione della parte di controllo viene derivata tramite un alimentatore switching (SMPS) dalla
tensione continua del circuito intermedio. Quando la tensione del circuito intermedio passa al di sotto di un
valore di soglia (UBuff), l’inverter viene bloccato automaticamente. Fino a quando la tensione non raggiunge
un valore finale (Umin) l’alimentazione viene mantenuta dall’energia presente nel circuito intermedio. Il
tempo di mantenimento dipende dalle capacità del circuito intermedio. Nella tabella sono riportati i valori
minimi. Inserendo in parallelo condensatori esterni ai morsetti C e D, il tempo di mantenimento (tBuff) può
essere prolungato.
Tabella 5.9.1: Tempo di mantenimento del DC Link
Internal
Buffer time tBuff
Maximum
Maximum
capacitance
(minimum value) with the
internal capacitance at :
AC Input
AC Input
voltage =400V
voltage =460V
permissible
external
capacitance
power required
by switched
mode power
supply
Cext [µF]
0
0
0
0
0
0
0
1500
1500
4500
4500
4500
4500
4500
0
0
0
0
0
PSMPS [W]
65
65
65
65
65
65
65
65
65
70
70
70
70
70
70
70
70
70
70
Inverter type
Cstd
3F75
3001
3002
3003
3005
3007
3010
3015
3020
3025
3030
3040
3050
3060
3075
3100
3125
3150
3200
[µF]
220
220
330
330
830
830
830
1500
1500
[s]
0.165
0.165
0.24
0.24
0.62
0.62
0.62
1.12
1.12
[s]
0.25
0.25
0.37
0.37
0.95
0.95
0.95
1.72
1.72
1800
2200
3300
4950
4950
6600
6600
1.54
1.88
2.83
4.24
4.24
5.6
5.6
2.3
2.8
4.2
6.3
6.3
8.1
8.1
9900
14100
14100
8.4
12.8
12.8
12.1
17.2
17.2
avy4220
1 = 1 + 1
Cx
C1x
C2x
PE1 /
PE2/
W2/T3
V2/T2
U2/T1
D
C
BR1
W1/L3
V1/L2
U1/L1
SMPS = Switched Mode Power Supply
F1
CX 900 VDC
or
3Ph~
Figura 5.9.1: Mantenimento della regolazione per mezzo di condensatori aggiunti al DC link
Cap.5
86
—————— Collegamento elettrico ——————
NOTA!
Quando i morsetti del circuito intermedio (C e D) sono collegati con apparecchi esterni,
la protezione deve essere realizzata con fusibili extrarapidi!
Formula per il dimensionamento di condensatori esterni:
Cext =
Cext, Cstd
P SMPS
tBuff
UBuff, Umin
[µF]
[W]
[s]
[V]
2 P
SMPS
t Buff 10
U2 Buff - U2min
6
- C std
fA018
UBuff = 400 V con ULN = 400 V
UBuff = 460 V con ULN = 460 V
Umin = 250 V
Esempio di calcolo
Un inverter 3025 lavora collegato ad una rete con ULN = 400V. Deve essere mantenuta l’alimentazione per
una caduta della tensione di rete della durata massima di 1,5 secondi.
P SMPS
UBuff
C std
70 W
400 V
1800 µF
C ext =
tBuff
U min
1.5 s
250 V
2 . 70 W . 1.5 s . 106 m F / F
(400 V) 2 - (250 V)
2
- 1800mF = 2154 mF - 1800 mF = 354mF
AV300i Manuale Hardware & Guida Rapida
87
Cap.5
5.10. COMPORTAMENTO IN PRESENZA DI BUCHI DI RETE
Il circuito intermedio di alimentazione dell’AV300i (DC link) viene alimentato mediante un ponte raddrizzatore
trifase.
Qualora tale circuito raggiungesse la soglia minima di mantenimento, a causa di un’abbassamento della
tensione di ingresso (vedi tabelle 5.10.1 e 5.10.2, viene istantaneamente generato un’allarme di Undervoltage,
che disabiliterà automaticamente l’inverter .
Tale allarme, essendo programmabile, può essere oltremodo configurato per eseguire una eventuale funzione
di autorestart od un suo reset automatico. I parametri che interagiscono per tali prestazioni riguardano in
particolare il numero di tentativi di restart permessi ed il tempo entro il quale si vuole evitare l’intervento della
memorizzazione dell’allarme Undervoltage.
Poichè la regolazione dell’inverter è alimentata dal DC link, quando questi scende al disotto della soglia limite
di 250Vdc, la regolazione viene disalimentata. Il tempo in cui questo avviene, dipende dalla capacità del DC
link stesso e dalla potenza assorbita dalla regolazione e dal ventilatore, e determina in ogni caso il periodo in
cui l’inverter mantiene attiva la sua regolazione in presenza di buchi di rete o mancanza rete.
Il circuito intermedio DC link può essere tuttavia rinforzato mediante l’aggiunta di capacità esterne al fine di
mantenerlo il più a lungo possibile oltre la soglia dei 250Vdc. Le seguenti tabelle riportano i valori massimi di
mantenimento della tensione di DC link in funzione dell’inserzione di valori massimi di capacità esterne. Va
tuttavia rammentato che l’inserzione di capacità esterne fornisce sì un più lungo mantenimento dell’alimentazione della regolazione, ma necessita anche di un maggiore tempo di ricarica.
L’insensibilità ad eventuali buchi di rete dipende dal carico dell’inverter (quindi dall’energia che il DC link
deve dissipare), dall’ampiezza e dalla durata degli stessi. In mancanza di capacità esterne, un buco di rete
pari ad un ciclo (16,6ms @ 60Hz) in condizioni di motore a carico nominale, causerà un’istantaneo allarme di
Undervoltage.
Il tempo di intervento dell’allarme Undervoltage può essere calcolato in base alla seguente formula:
t=
(Udc2 - UBuff2 ) (CStd+ Cext)
2Pam 106
fA027
dove:
t:
Udc:
Uthr:
Ubuff
Cext:
Pam:
tempo di intervento allarme undervoltage
tensione di DC link
soglia tensione di allarme
capacità del DC link
capacità esterna
potenza assorbita dal motore
Pam dipende dalle condizioni di carico del motore
- a pieno carico può essere calcolato come segue:
Pam =
Pm
hm
fA028
dove:
Pm:
ηm:
Cap.5
88
potenza nominale del motore
efficienza nominale del motore
—————— Collegamento elettrico ——————
-
a vuoto, dipende dalle perdite del ferro, dalle perdite meccaniche e dalle perdite joule di statore. La
somma di queste è pari a circa il 50% delle perdite a pieno carico. Le perdite a pieno carico Plfl sono
espresse dalla formula seguente:.
Plfl = Pm
1 - hm
hm
fA029
l massimo tempo di mantenimento dell’alimentazione della regolazione dell’inverter AV300i viene ottenuto
aggiungendo i massimi valori ammessi di capacità esterne.
Le tabelle seguenti mostrano il massimo tempo di mantenimento della regolazione in funzione delle possibili
soglie di intervento dell’allarme di Undervoltage per le diverse taglie di inverter.
Il significato dei simboli nelle diverse colonne è il seguente:
Cstd =
Cext max =
Tbuff =
PSMPS =
Ubuff =
Umin =
capacità interne (in µF)
capacità esterna massima (in µF)
massimo tempo di mantenimento (in secondi)
potenza assorbita dalla regolazione (in watt)
soglia di tensione per la disabilitazione dell’inverter da allarme di Undervoltage, (in volt)
tensione minima per alimentazione regolazione, (in volt)
dove Tbuff è definito dalla formula:
Tbuff =
(Cstd + Cext max) (Ubuff2 - Umin2)
2 PSMPS 106
Tabella 5.10.1: Tempo massimo di mantenimento della regolazione. Soglia di Undervoltage 230V
Size
3025
3030
3040
3050
3060
3075
3100
3125
3150
3200
PSMPS
C std
Cext max
Ubuff
Umin
Tbuff
70
70
70
70
70
70
70
70
70
70
1800
2200
3300
4950
4950
6600
6600
4500
4500
4500
4500
4500
0
0
0
0
0
230
230
230
230
230
230
230
230
230
230
200
200
200
200
200
200
200
200
200
200
0.58
0.62
0.72
0.87
0.87
0.61
9900
14100
14100
0.61
0.91
1.3
1.3
avy4225
AV300i Manuale Hardware & Guida Rapida
89
Cap.5
Tabella 5.10.2: Tempo massimo di mantenimento della regolazione. Soglia di Undervoltage 400V
Size
Psmps
C std
Cext max
Ubuff
Umin
Tbuff
3F75
3001
3002
3003
3005
3007
3010
3015
3020
3025
3030
3040
3050
3060
3075
3100
3125
3150
3200
65
65
65
65
65
65
65
65
65
220
220
330
330
830
830
830
1500
1500
0
0
0
0
0
0
0
1500
1500
250
250
250
250
250
250
250
250
250
0.165
0.25
0.24
0.24
0.62
0.62
0.62
2.25
2.25
70
70
70
70
70
70
70
70
70
70
1800
2200
3300
4950
4950
6600
6600
4500
4500
4500
4500
4500
0
0
0
0
0
400
400
400
400
400
400
400
400
400
400
400
400
400
400
400
400
400
400
400
200
200
200
200
200
200
200
200
200
200
5.4
5.74
6.68
8.1
8.1
5.65
9900
14100
14100
5.65
8.48
12.08
12.08
avy4230
Tabella 5.10.3: Tempo massimo di mantenimento della regolazione. Soglia di Undervoltage 460V
Size
Psmps
C std
Cext max
Ubuff
Umin
Tbuff
3F75
3001
3002
3003
3005
3007
3010
3015
3020
3025
3030
3040
3050
3060
3075
3100
3125
3150
3200
65
65
65
65
65
65
65
65
65
220
220
330
330
830
830
830
1500
1500
0
0
0
0
0
0
0
1500
1500
460
460
460
460
460
460
460
460
460
250
250
250
250
250
250
250
250
250
0.25
0.25
0.37
0.37
0.95
0.95
0.95
3.45
3.45
70
70
70
70
70
70
70
70
70
70
1800
2200
3300
4950
4950
6600
6600
9900
14100
14100
4500
4500
4500
4500
4500
0
0
0
0
0
460
460
460
460
460
460
460
460
460
460
200
200
200
200
200
200
200
200
200
200
7.72
8.21
9.56
11.58
11.58
8.04
8.09
12.13
17.28
17.28
avy4240
Cap.5
90
—————— Collegamento elettrico ——————
5.11. TENSIONE DI SICUREZZA DEL DC LINK
Tabella 5.11.1: Tempo di scarica del DC Link
Type
3F75
3001
3002
3003
3005
3007
3010
3015
3020
3025
I2N
2.1
3.5
4.9
6.5
8.3
11
15.4
21.6
28.7
42
Time (seconds)
90
150
205
220
Type
3030
3040
3050
3060
3075
3100
3125
3150
3200
I2N
Time (seconds)
58
76
90
110
142
180
210
250
310
60
90
60
120
avy4250
Questo è il lasso di tempo minimo che deve trascorrere da quando un inverter AV300i viene disabilitato dalla
rete prima che un operatore possa agire sulle parti interne dell’inverter stesso per evitare scosse elettriche.
CONDIZIONE:
Questi valori prendono in considerazione la disalimentazione di un inverter alimentato a
480VAc +10%, senza nessuna opzione, (la carica per l’alimentatore switching è la scheda
di regolazione, il tastierino e i ventilatori 24Vdc “se montati”).
L’inverter è disabilitato. Questo rappresenta la condizione peggiore.
AV300i Manuale Hardware & Guida Rapida
91
Cap.5
6. MANUTENZIONE
6.1. CURA
Gli inverter della serie AV300i devono solamente
essere installati secondo le disposizioni di montaggio.
Non richiedono altra particolare cura. Non eseguire
una eventuale pulizia con straccio bagnato o umido.
Prima della pulizia togliere la tensione di alimentazione
dell’apparecchio.
6.2. ASSISTENZA
Due settimane dopo la prima messa in funzione,
stringere le viti di tutti i morsetti dell’apparecchio.
Questa operazione deve essere ripetuta ogni anno.
In caso di immagazzinamento degli inverter per più di
tre anni, bisogna tener presente che i condensatori
del circuito intermedio mantengono sicuramente le loro
caratteristiche originali solo se alimentati entro tre anni
dalla data di fornitura. Prima della messa in servizio
di apparecchi che sono rimasti così a lungo in
magazzino, si consiglia di alimentare gli inverter per
almeno due ore al fine di ricuperare le caratteristiche
originarie dei condensatori. Allo scopo applicare
tensione d’ingresso senza applicare carico in
uscita. Dopo questo provvedimento l’apparecchio è
pronto per essere installato senza limitazioni.
sonale qualificato dal fornitore.
Se si dovesse eseguire una riparazione in proprio,
bisogna tener presenti i seguenti punti:
- Nell’ordinazione dei pezzi di ricambio non indicare
solamente il tipo di apparecchio, ma specificare
anche il numero di serie dell’inverter (scritto sulla
targhetta dell’inverter). Oltre a questo è utile
indicare anche il tipo della scheda di regolazione
e la versione software del sistema (targhetta di
configurazione dell’apparecchio, ved. fig.3.1.3.2).
- Sostituendo le schede fare particolare attenzione
che venga mantenuta la stessa posizione per gli
switches ed i cavallotti! Ciò vale specialmente
per lo switch S3 che si trova sulla scheda di
regolazione. Per mezzo di questo switch viene
determinata la corrente nominale di taglia
dell’inverter.
NOTA!
In caso di danneggiamento di
parte dell’apparecchio, provocato
da una errata codifica dello switch
S3 il fornitore non si assume
alcuna responsabilità!
6.4. SERVIZIO CLIENTI
6.3. RIPARAZIONE
Si raccomanda di far eseguire una riparazione
dell’apparecchio, in linea di massima, da parte di per-
Nei casi in cui si debba ricorrere al servizio assistenza,
ci si può rivolgere al relativo ufficio di competenza
della G.E.al numero (540) 387 -7595, dalle 8 a.m.alle
5 p.m. (EDT) nei giorni lavorativi. Per emergenze
durante i giorni festivi, chiamare il n. (540) 387-8080.
.
Legenda diagrammi a blocchi
Parameters
Ramp +/- delay
100 ms
Parameter name
Parameter value
Variables
T current ref
50%
Cap.6
92
Variable name
Variable value
——— Manutenzione ———
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
AV-300i Inverter Overview
NAVIGATION
BASIC CONFIGURATION
Go To Index
AVi_Contents
03
AV-300i Drive Feedbacks & Status
04
05
Ramp ref (%)
Speed ref (%)
Dc link voltage
Output voltage
Regulation temp
Ramp output (%)
Actual spd (%)
Active power
Output frequency
Heatsink temp
Drive ready
Ramp +
Encoder 1 state
Motor current
Overload 200%
Speed limited
Ramp -
Encoder 2 state
Torque
Ovld Available
Curr limit state
Spd threshold
Spd zero thr
Input / Output
Mapping
Continuos curr
7.5 A
Speed base value
1765 rpm
Mains Voltage
400V
Full load current
7.5 A
Ambient temp
40 ° C
Main commands
Digital
Regulation mode
V/f Control
Control mode
Local
Switching freq
8kHz
Device address
0
ALARM
mapping
02
03
04
05
FUNCTIONS
06
06
AV300i Manuale Hardware & Guida Rapida
AVi_HWIO
AVi_Alarm_mp
AVi_Funct
07
07
Speed Reference
Select / Ramp
08
Speed / Torque regulator
Motor control
Ramp ref (d)
Ramp output (d)
Speed Regulator
Speed ref (d)
Torque curr Reg
08
T curr (%)
T current ref
Motor Control
Actual spd (d)
Start & Stop
Management
09
Flux
AVi_Ramp
09
AVi_STSP_pro
Speed Feedback
AVi_SReg
AVi_Ovr_RfSel
AVi_Tcurr_reg
AVi_motctrl
10
10
AVi_Spd_Fbk
AVi_Ovr_SpTq
Digital inputs Status
11
DRIVE
Enable
Dig input term 9
Dig input term 1
12
11
EXPANSION CARD
DRIVE
Dig input term 2
Dig input term 5
12
Dig input term 6
Start
Dig input term 10
13
Dig input term 3
13
Dig input term 7
Fast stop
Dig input term 4
Dig input term 11
Dig input term 8
14
14
93
15
15
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC Flux vector Drive
Firmware Revision:
AVi_Ovw.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
09/02/98
-- GE User
7. DIAGRAMMI A BLOCCHI
02
Cap.7
94
A
01
02
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
NAVIGATION
Overview
01
Analog I/O
AVi_Ovw
Digital Inputs/Outputs & Mapping
Standard and Option cards
AVi_HWIOAN
Digital Inputs
Digital Outputs
41
D01
Ramp +
36
16
*
Digital input 1
DG1+
03
02
Digital output 1
COM_DO
Off
03
Virtual digital I/O
16
42
Virtual dig inp
DG104
Virtual dig out
Digital output 2
0000h
D02
Ramp -
37
DG2+
*
Jog Requests
05
Enable jog
Enable
16
DG2-
05
Option card
T
Motorpot Requests
38
D_Out 3
06
DG3+
04
COM_DO
Digital input 2
Off
16
*
Enab motor pot
06
Spd Thresold
——— Diagrammi a blocchi ———
COM_DO
T
Off
51
Option Dig.Output 3
Enable
Digital input 3
55
Regulator Commands
16
07
07
DG3-
Enable ramp
Enable
39
DG4+
08
D_Out 4
T
*
52
Option Dig.Output 4
Overld Available
Digital input 4
COM_DO
Enable spd reg
Off
55
Enable
T
16
DG4-
09
08
09
D_Out 5
Option card
53
Option Dig.Output 5
Curr Limit State
10
31
DG5+
COM_DO
55
*
10
Drive Relay Output
Option Dig. input 5
Off
DG5(Common 0V)
11
35
32
DG6+
Off
R1NO
35
55
12
D_Out 7
82
56
Option Dig.Output 7
Undervoltage
Ok relay func.
Drive Healthy
DG7+
COM_DO
85
80
DG6(Common 0V)
33
11
Overvoltage
R2COM
Option Dig. input 6
13
54
Option Dig.Output 6
R2NO
*
12
D_Out 6
83
Relay 2
Speed Zero Thr
COM_DO
R1COM
55
13
*
Option Dig. input 7
Off
DG7Common 0V)
14
D_Out 8
Option Dig.Output 8
35
57
COM_DO
15
34
14
Overcurrent
55
DG8+
15
Option Dig. input 8
Off
DG8(Common 0V)
16
GE g Motors and
Industrial Systems
Salem, Va. USA
35
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_HWIO.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/10/98. The master is located on vasald03/[vss]$/InnovCtl.
08/05/98 --
GE User
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
Analog Inputs/Outputs & Mapping
NAVIGATION
Overview
AVi_Ovw
02
Analog Outputs
Digital I/O
AVi_HWIO
02
From digital reference
setting
Select input 1
Ramp Ref 1
03
Tune value inp 1
Auto tune inp 1
1
0
Ref_1+
+
HW
input
type
04
2
Volts
03
1
Select input 1
Ramp Ref 1
04
An in 1 target
D
A AO2
C
2 ACOM
Input 1 cp error
-
0
Window comparator
Ref_1-
22
Scale output 1
F
1
D
A AO1
C
1 ACOM
Select output 1
Actual Spd (rpm)
Input 1 type
-10V. . .+10V
21
Scale input 1
05
Select output 2
Torque Current
Input 1 filter
1
0 ms
23
22
05
Scale output 2
1
Input 1 compare
Offset input 1
0
0
06
06
Option card
AV300i Manuale Hardware & Guida Rapida
D
A AO3
C
1 ACOM
Input 1 cp match
Select output 3
Current U
07
12
1
Off
08
Input 1 cp delay
Input 2 type
-10V. . .+10V
0 ms
Auto tune inp 2
Tune value inp 2
0
1
Ref_2+
3
09
+
HW
input
type
4
From digital reference
setting
Volts
S
D
A AO4
C
2 ACOM
Select output 4
Motor Current
-
Ref_210
14
1
Off
An in 2 target
Tach follower
0
11
11
Encoder 2 (Option)
XFI connector
From digital reference
setting
Select input 3
Encoder 1
XE connector
Off
Input 3 type
-10V. . .+10V
Auto tune inp 3
Tune value inp 3
Off
Ref_3+
5
13
HW
input
type
6
+
F
Volts
-
5
A+
5
A+
6
A-
6
A-
12
Select input 3
0
1
8
An in 3 target
1
Ref_3-
B+
8
Select enc 2
OFF
B-
1
13
B+
Select enc 1
OFF
B-
Offset input 3
14
09
Scale output 4
Select input 2
1
Offset input 2
13
10
F
Scale input 2
12
07
Scale output 3
Select input 2
08
11
7
0
1
14
7
0V
Scale input 3
0V
2/9
9
95
+V
5V
15
15
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC Flux vector Drive
Firmware Revision:
AVi_HWIOAN.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
08/28/98 --
GE User
Cap.7
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
NAVIGATION
96
Speed Reference generation
Back to Overview
02
02
AVi_Ovw
Speed Draw
function
03
03
Speed ratio
04
10000
Speed input
+
04
Jog +
Ramp input
Jog
selection
-
Jog 05
To Speed/Torque
Overview
Speed ratio
05
AVi_Jog
10000
AVi_Ovr_SpTq
06
06
——— Diagrammi a blocchi ———
Spd draw out (d)
Min Speed Limit
Speed limited
07
07
Speed
Speed min amount
0 rpm
08
Speed
t
t
08
Ramp ref 1
0 rpm
Speed min pos
0 rpm
Enab multi spd
09
+
F
Ramp Reference
Zero
Enab motor pot
S
T
Zero
Enable ramp
T
F
+
09
T
Ramp in = 0
Ramp out = 0
AVi_Ramp
10
10
Speed min neg
0 rpm
Speed ref 1
0 rpm
Speed
Ramp ref 2
0 rpm
11 Ramp ref 1
0
Ramp ref (d)
t
Quick stop
COMMAND
AVi_mpot
12
11
Dig input term 11
Ramp ref 2
Ramp output (d)
12
7
AVi_Mspd
13
13
14
14
15
15
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_Ovr_RfSel.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98 --
GE User
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
01
U
01
Speed / Torque regulator
NAVIGATION
Back to Overview
AVi_Ovw
02
02
03
03
04
04
Max Speed Limit
Speed limited
05
Speed max amount
2000 rpm
0 rpm
From Speed
Reference
generation
06
05
T current ref
Speed ref 2
Speed ref (d)
Speed max pos
2000 rpm
06
AVi_Ovr_RfSel
Torque current regulator
Speed Regulator
AV300i Manuale Hardware & Guida Rapida
+
+
Spd draw out (d)
07
Enable spd reg
+
+
T
-
+
To Motor Control
+
AVi_Motctrl
Actual spd (d)
Speed max neg
2000 rpm
07
AVi_SReg
AVi_TCurr_reg
08
08
T current ref 1
0 %
Regulation mode
T current ref 2
SENSORLESS ALGHORITHM
0 %
Speed reg output
Sensorless
09
09
AVi_slspar
10
10
Speed Feedback
Encoder 1
Regulation mode
Speed fbk sel
Enc 1 speed
T
11
Field Oriented
11
Encoder 2
Enc 2 speed
Droop compensation
AVi_Spd_Fbk
12
12
+
Load comp
0 %
13
13
T current ref
Droop gain
0 %
AVi_Droop_cp
14
14
97
15
15
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_Ovr_SpTq.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/28/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98 --
GE User
Cap.7
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
Ramp reference Block
NAVIGATION
Back
98
AVi_Ovr_RfSel
02
02
Ramp +
t
0
To Speed Reference
generation
Ramp -
03
Freeze ramp
From
Ramp in = 0
04
Acc delta speed
100 rpm
04
05
Freeze ramp
COMMAND
Ramp ref (d)
06
To
Ramp out=0
T
05
03
AVi_Sreg
Reference Ramp
Ramp +/- delay
100 ms
Linear
Quick stop
Acc delta time
1 s
06
Enab multi rmp
——— Diagrammi a blocchi ———
F
07
Dec delta speed
100 rpm
QStp delta speed
1000 rpm
Dec delta time
QStp delta time
08
07
1 s
1 s
08
Ramp shape
Linear
F
Speed
S-shape
09
Multi Ramp Function
Acc delta speed 3
100 rpm
Dec delta speed 3
100 rpm
Acc delta speed 2
100 rpm
Dec delta speed 2
100 rpm
Acc delta speed 1
100 rpm
10
Dec delta speed 1
100 rpm
Acc delta speed0
100 rpm
10
Dec delta speed0
100 rpm
S shape t const
500 ms
t
S acc t const
11
09
500 ms
Acc delta time 0
500 ms
1 s
Acc delta time 1
Dec delta time 1
1 s
1 s
Acc delta time 2
12
11
Dec delta time 0
1 s
S dec t const
Dec delta time 2
1 s
1 s
Acc delta time 3
12
Dec delta time 3
1 s
1 s
Ramp shape
13
T
14
S-shape
13
S acc t const 0
500 ms
S dec t const 0
500 ms
S acc t const 1
500 ms
S dec t const 1
500 ms
S acc t const 2
500 ms
S dec t const 2
500 ms
S acc t const 3
500 ms
S dec t const 3
500 ms
14
15
15
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC Flux vector Drive
Firmware Revision:
AVi_Ramp.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
06/25/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98 --
GE User
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
Speed regulator
NAVIGATION
Back
02
Speed P/I base value
AVi_Ovr_SpTq
02
Speed P base
0.939379 A/rpm
Speed I base
0.234845 A/rpm*ms
Load comp
03
03
Speed droop comp
04
04
05
05
AVi_Droop_cp
AV300i Manuale Hardware & Guida Rapida
Inertia/Loss comp
06
06
Aux spd fun sel
T
07
07
AVi_J_comp
Speed ref (d)
Speed Limits
Speed reg output
08
08
Speed max amount
2000 rpm
Speed max pos
2000 rpm
Speed P in use
Speed I in use
AVi_Tcurr_reg
Speed max neg
2000 rpm
09
To
Torque current
regulator
P/I speed regulator
+
Speed ref 1
0 rpm
10
+
+
+
+
Lock speed reg
+
F
+
Enable spd reg
Zero Torque
+
T
+
09
T current ref
T
10
Zero
11
AVi_Srpi
Speed min neg
0 rpm
Speed ref 2
0 rpm
Speed P
10 %
Speed min amount
0 rpm
11
T current ref 2
0 %
Speed I
Actual spd (rpm)
1 %
12
+
Speed fbk
12
Prop. filter
0 ms
Speed Adaptive
and
Speed zero logic
Lock speed I
Not Active
+
13
AVi_Spd_fbk
Zero torque
COMMAND
T current ref 1
0 %
Speed min pos
0 rpm
Speed up
13
P/I regulator includes
anti-windup logic
Aux spd fun sel
F
14
14
AVi_Adp_spd
99
Speed up gain
0 %
15
15
Speed up base
1000 ms
Speed up filter
0 ms
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_Sreg.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
06/25/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98 --
GE User
Cap.7
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
Speed regulator PI part
NAVIGATION
100
Back to Overview
02
02
AVi_Sreg
03
03
Prop. filter
Speed P in use
0 ms
04
Speed P
10 %
04
Anti-windup
Torque current limits
Enable spd adap
F
05
05
Adap P gains
06
06
——— Diagrammi a blocchi ———
+
Speed ref (d)
07
+
Anti-windup
Lock speed reg
+
07
Speed reg output
F
+
08
08
Zero
Lock speed I
Here the contribution
due to the speed up part
is not shown
09
T
Actual spd (rpm)
09
Enable spd adap
Zero
Speed I
10
1 %
10
F
Speed I in use
11
11
Adap I gains
12
12
13
Adap reference
14
Speed Adaptive
and
Speed zero logic
13
Adap I gains
Adap P gains
14
AVi_Adp_spd
15
15
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_Srpi.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/02/98 --
GE User
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
01
U
01
Droop compensation
NAVIGATION
Back
02
02
AVi_Sreg
03
03
04
04
05
05
Load comp
0 %
06
06
AV300i Manuale Hardware & Guida Rapida
Droop limit
07
Droop filter
1500 rpm
To Speed
reference
08
07
0 ms
Enable droop
T
+
T current ref
08
-
low pass filter
09
09
Droop gain
0 %
Zero
101
10
10
11
11
12
12
13
13
14
14
15
15
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_Droop_cp.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98 --
GE User
Cap.7
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
Inertia/Loss compensation
NAVIGATION
102
Back
AVi_Sreg
02
02
03
03
04
04
Ref 0 level
10 rpm
05
05
Speed
——— Diagrammi a blocchi ———
06
06
Inertia c filter
0 ms
Friction
0.001 N*m
07
07
1
08
Speed ref (d)
n
+
T
Torque const
d
08
Aux spd fun sel
To speed regulator
output
low pass filter
09
Inertia
09
Flux reference
0.005 Kg*m*m
10
10
11
11
12
12
13
13
14
14
15
15
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_J_comp.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98 --
GE User
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
01
U
01
Torque current regulator
NAVIGATION
Back to Overview
AVi_Ovr_SpTq
02
02
Current reg P/I
base value
Current P base
475.518 V/A
03
03
Current I base
475.518 V/A*ms
04
04
Torque current limits
Curr limit state
Current P
6.1 %
05
T current lim +
0.6 %
136 %
AV300i Manuale Hardware & Guida Rapida
06
05
Current I
In use Tcur lim+
T current lim
06
136 %
+
T current ref
To Motor Control
In use Tcur lim-
To Droop Feedback
From Speed Regulator
07
AVi_Droop_cp
07
AVi_motctrl
AVi_SReg
P/I regulator includes
anti-windup logic
T current lim 136 %
T curr lim type
08
08
Torque current
T
09
09
Torque
reduction
Torque reduct.
Torque reduction
COMMAND
T
10
OVERLOAD Control
10
DRIVE
Current lim red
Ovld Available
100 %
I2t
torque
11
torque
11
I_sqrt_t_accum
T current lim +
T current lim +
T current lim +
Overload 200%
T current lim -
12
12
speed
MOTOR
speed
Ovld mot state
T current lim -
13
T current lim -
T current lim +
-1% of
Motor nom speed
T current lim -
13
+1% of
Motor nom speed
Motor cont curr
100 %
14
Torque Limit +/-
Motoring & Generating Torque Limit
14
Trip time 50%
60 s
103
15
15
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC Flux vector Drive
Firmware Revision:
AVi_Tcurr_reg.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98 --
GE User
Cap.7
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
01
U
01
Speed Feedback
NAVIGATION
104
Back to Overview Go to motor control
02
AVi_Ovr_SpTq
02
AVi_motctrl
Motor Encoder Setup
03
03
Encoder 1
XE1 connector
04
05
Encoder 1
(Sinusoidal or Digital)
06
5
A+
6
A-
8
B+
1
B-
3
C+
4
C-
Encoder 1 pulses
7
0V
Refresh enc 1
Disabled
04
05
06
Encoder 1 type
Digital
——— Diagrammi a blocchi ———
07
1024
07
Actual spd (d)
9
5V
Speed fbk sel
08
Enc1 supply vlt
Encoder repeater
(OPTION)
09
Speed
T
5.41 V
08
09
Encoder repeat
Index Storing
T
10
10
OPTION
Encoder 2
XFI connector
11
12
13
14
5
A+
6
A-
8
B+
1
B-
3
C+
4
C-
Encoder 2 pulses
0V
Refresh enc 2
Disabled
7
15
12
13
14
1024
15
2/9
+V
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
11
Enable ind store
Disabled
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_spd_fbk.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98 --
GE User
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
Motor control
Voltage reg base value
NAVIGATION
Back to Overview
02
AVi_Ovw
Flux reg base value
Voltage P base
0.00526428 Vs/V
Flux P base
855.043 A/Vs
Voltage I base
0.658035 Vs/V*s
Flux I Base
7.51503 A/Vs*ms
02
03
03
From Speed/Torque
regulator
AVi_Ovr_SpTq
04
04
Output voltage
05
Flux max
(ramped)
Flux max
(ramped)
Dc link voltage
05
Magnetization logic
Go to Motor
parameters
AVi_motpar
Flux level
AV300i Manuale Hardware & Guida Rapida
06
Flux current
limit
100 %
Flux reference
Flux max
(ramped)
06
F current ref
Voltage limit
07
07
Voltage regulator
460 V
Flux current regulator
Dynam vlt margin
1 %
T
+
Base voltage
08
Flux regulator
+
+
08
Flux reg mode
Flux min
Out vlt level
09
Flux P
Voltage P
Flux I
Voltage I
10
CONFIGURATION
Flux model
11
Flux max
10
Flux
Go to Sensorless
parameters
Base voltage
Base frequency
Torque current
REGULATION
Flux model
AVi_slspar
60 Hz
11
P/I regulators include
anti-windup logic
12
PWM
1.4 %
4 %
460 V
09
6 %
15 %
100 %
Flux current
12
AC
Motor
AVi_motpar
13
Rotor resistance
1.07585 Ohm
Stator resist
1.07585 Ohm
P1 flux model
Magnetizing curr
2.33276 A
0.45
14
P2 flux model
9
13
Go to Motor
parameters
Encoder
(option)
Lkg inductance
0.0317009 H
14
AVi_spd_fbk
105
15
15
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_motctrl.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/02/98 --
GE User
Cap.7
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
NAVIGATION
Back to Overview
106
AVi_Ovw
02
Motor parameters
Back to mot ctrl
AVi_motctrl
02
Magnetization init logic
03
03
Flux ref
Nominal voltage
460 V
04
04
Nominal speed
1765 rpm
Nom frequency
60 Hz
05
t
Nominal current
Magn ramp time
min
1 s
Cos phi
05
Flux max
(ramped)
4.8 A
0.81
06
06
Flux ref
V
Base voltage
Flux
——— Diagrammi a blocchi ———
460 V
07
07
Flux current
f
t
Base frequency
08
08
60 Hz
Magn boost curr.
30 %
09
09
Enable rr adap.
T
10
Rotor resistance
1.07585 Ohm
LS
Stator resist
1.07585 Ohm
LR
LS + LR
10
Lkg inductance
0.0317009 H
11
11
Dynamic
CEMF
Magnetizing curr
2.33276 A
12
12
13
13
14
14
15
15
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_motpar.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98 --
GE User
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
SENSORLESS Parameters
NAVIGATION
Overview
Back to Mot control
AVi_Ovw
02
AVi_motctrl
02
Regulation mode
V/f Control
03
03
04
04
Flux model
Sls speed filter
0.01 s
05
05
Flux corr factor
0.9
AV300i Manuale Hardware & Guida Rapida
06
06
Flux
Working
Flux
07
07
Low speed factor
5000
08
Estimated speed
for Sensorless mode
I Magn
Actual speed
08
Magn working cur
09
09
Dead time compensation
Output voltage
10
10
11
11
Comp slope
13 V/A
Voltage command
to PWM
12
12
Voltage comp lim
6 V
13
13
14
14
107
15
15
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_slspar.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/02/98 --
GE User
Cap.7
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
V/Hz functions
NAVIGATION
108
Overview
Go to functions
AVi_Ovw
02
Regulation mode
V/f Control
AVi_Funct
02
03
03
Actual boost
Actual slip comp
04
04
V/f shape
V = k * f 1.0
05
V/f shape
V
Torque
Voltage Boost
Slip Compensation
05
Base voltage
460 V
06
06
——— Diagrammi a blocchi ———
Speed
f
07
07
Vlt boost type
Slip comp type
Motor losses
Manual
Manual
1 %
Manual slip comp
0 rpm
0 %
Base frequency
60 Hz
Manual boost
08
08
Slip comp filt
0.03 s
09
09
ENERGY SAVE
Auto capture
V out
10
Enable
T
10
Spd srch time
10 s
Enable save eng
Disable
11
Flux srch time
11
1 s
Lock save eng
Off
Spd auto capture
1500 rpm
V/f flux level
100 %
V/f speed search
Delay auto cap
1000 ms
12
12
Delay retrying
1000 ms
f
13
13
Flux var time
10 s
14
14
15
15
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_vf.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98 --
GE User
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
01
U
01
Speed Threshold / Speed control
NAVIGATION
Overview
Go to functions
AVi_Ovw
02
AVi_Funct
02
03
03
04
04
Spd threshold +
1000 rpm
Actual spd (rpm)
05
05
Spd threshold
06
06
AV300i Manuale Hardware & Guida Rapida
Spd threshold 1000 rpm
07
07
08
t
0
Threshold delay
08
100 ms
09
09
Speed ref
Set error
100 rpm
10
10
Set speed
11
11
12
12
Actual spd (rpm)
13
13
0
Set delay
t
100 ms
109
14
14
15
15
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC Flux vector Drive
Firmware Revision:
AVi_SPD_THR.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98
-- GE User
Cap.7
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
01
U
01
Speed adaptive and Speed zero logic
NAVIGATION
110
Back to overview
02
Speed Adap function
AVi_Sreg
Adap joint 1
Enable spd adap
Disabled
Adap joint 2
03
6.1 %
6.1 %
02
03
Sel. adap type
Speed
04
04
Adap I gain 1
Adap P gain 1
05
05
1 %
10 %
06
06
Adap I gain 2
Adap P gain 2
07
07
Adap I gain 3
Adap P gain 3
1 %
10 %
08
08
09
09
10
Adap reference
1000 rpm
Speed zero logic
Adap speed 1
10
Adap speed 2
20.3 %
Spd=0 P gain
11
40.7 %
Enable spd=0 P
11
10 %
T
Ref 0 level
10 rpm
12
To pos A
(Lock sensorless)
Lock speed I
Lock Sensorless
&
Ramp ref / Speed ref
>=
Ref 0 level
Enable spd=0 R
12
&
T
>=
Enable spd=0 P
&
T
14
>
=
From pos B
Anti Drift
Speed zero
Speed
Inibit field rotation in
Flux model
(for Sensorless mode)
T
From pos A
Lock speed I
Enable spd=0 I
13
&
——— Diagrammi a blocchi ———
1 %
10 %
13
&
Enable lck sls
14
T
Zero pos gain
t
0
10 %
Lock zero pos
15
Speed zero delay
100 ms
15
T
To pos B
(Lock sensorless)
AntiDrift
GE g Motors and
Industrial Systems
Salem, Va. USA
Enable zero pos
16
T
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_Adp_spd.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/28/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98 --
GE User
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
NAVIGATION
01
Overview
01
Go to functions
AVi_Ovw
PID function
AVi_Funct
Feed-fwd PID
02
02
Gain
PI steady delay
03
PID out scale
0 ms
03
1
PID source
0
04
thr
Steady
state
PID source gain
1
PID target
Gain
04
0
PI P gain PID
10 %
P init gain PID
05
05
10 %
thr2
AV300i Manuale Hardware & Guida Rapida
sign PID
06
06
PID out. sign PID
Bipolar
PI top lim
PID offset 0
10
PID offs. sel.
0
Offset 0
PI output PID
07
Gain
Feed fwd sign:
pos gain = -1
neg gain = +1
PID offset 1
0
07
Enable PI PID
T
ON
+
++
+
08
08
PI bottom lim
0
PID output
PI output PID
PID acc time
09
0 s
09
PI central v1
1
PI central v2
PI I gain PID
1
10 %
PI integr freeze
I init gain PID
10
10
Off
10 %
PID dec time
PI central v sel
0 s
1
sign PID
Diameter calc st
Diameter calc
PID feed-back
11
11
0
PD P gain 1 PID
Enable drive
Disable drive
T
PI central v3
1
10 %
PD P gain 2 PID
12
+
+
10 %
Enable PD PID
10 %
T
PD P gain 3 PID
Minimum diameter
1 cm
+
+
ON
12
Gear box ratio
1
PID feed-back
13
0
PID error
PID clamp
10000
Diameter
calculator
Speed fbk sel
Encoder 1
13
PI output PID
Positioning spd
0 rpm
PD D gain 1 PID
14
1 %
PD D gain 2 PID
PD D filter PID
1 %
111
Dancer constant
Encoder 2 position
1 %
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
B
C
D
E
F
G
H
1 mm
15
16
A
8000
0 ms
PD D gain 3 PID
15
14
Max deviation
Encoder 1 position
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_PID.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/28/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98 --
GE User
Cap.7
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
01
U
01
Start and Stop management
NAVIGATION
112
Go to
functions
AVi_Funct
Overview
02
AVi_Ovw
02
03
03
04
04
05
05
Speed zero level
10 rpm
06
06
Spd 0 trip delay
0 ms
Digital Commands
——— Diagrammi a blocchi ———
07
From external sequence
or digital commands
07
Stop mode
Start/Stop
Enable drive
Stop & speed 0
T
T
Dig input term 10
Dig input term 9
08
08
Stop mode
Enable / Disable Drive
management
Fast stp & spd 0
09
09
Stop mode
10
Fst / stp & spd 0
10
11
Stop mode
11
OFF
12
12
13
13
14
14
15
15
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC Flux vector Drive
Firmware Revision:
AVi_STSP_pro.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/29/98. The master is located on vasald03/[vss]$/InnovCtl.
09/02/98
-- GE User
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
01
U
01
NAVIGATION
Overview
Power loss stop control
Go to functions
AVi_Ovw
AVi_Funct
02
02
AC Mains voltage
PL stop active
03
PL next active
PL time-out sig
03
100 %
04
04
DC link voltage
05
Dc link voltage
time
05
PL stop vdc ref
646 V
PL stop P gain
AV300i Manuale Hardware & Guida Rapida
5 %
100 %
PL stop I gain
0.3 %
06
Power loss detection
PL stop vdc ref
06
PL active limit
PI regulator
646 V
UV level detection
07
07
PL Timer
Dc link voltage
08
08
PL time-out ack
Not acknoledged
PL time-out
10 s
PL next active
09
09
Speed ref (d)
Speed ref
Speed ratio
calculator
Speed ref (d)
10
To Analog input set
as "Speed ratio" of
Next Drive
10
Actual spd (d)
PL stop acc
100 rpm/s
PL next factor
PL stop dec
100 rpm/s
11
11
Actual speed
Actual spd (d)
12
12
13
13
PL stop enable
Disabled
PL mains status
Not ok
PL time-out ack
Not acknoledged
Torque current
14
14
+100 %
113
PL active limit
15
15
PL stop t limit
100 %
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
-100 %
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_pwrlss_ctrl.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
08/03/98. The master is located on vasald03/[vss]$/InnovCtl.
08/03/98
-- GE User
Cap.7
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
JOG function
NAVIGATION
114
Overview
02
Go to functions
AVi_Ovw
02
AVi_Funct
03
03
To Speed reference
Speed input
04
04
Jog Reference
Jog selection
Jog reference
100 rpm
F
05
05
Ramp input
06
06
——— Diagrammi a blocchi ———
07
07
JOG
Enable jog
Disable
F
08
08
Enable
09
09
DRIVE KEYPAD
(or Digital inputs)
10
Start - Stop
Programming
11
10
Stop mode
Jog stop ctrl
OFF
AVi_STSP_pro
11
F
12
12
_
13
Jog
13
+
14
14
15
15
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_jog.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/10/98. The master is located on vasald03/[vss]$/InnovCtl.
07/20/98 --
GE User
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
Motor potentiometer
NAVIGATION
Overview
Go to functions
AVi_Ovw
02
AVi_Funct
02
To Speed Reference
03
04
03
04
Enab motor pot
T
05
05
AV300i Manuale Hardware & Guida Rapida
06
06
Motor pot sign
Negative
F
07
07
Positive
Motor pot reset
08
08
0
09
09
DRIVE KEYPAD
(or digital inputs)
10
10
_
11
Jog
+
11
12
12
13
13
14
14
115
15
15
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_mpot.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/20/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98
-- GE User
Cap.7
116
A
01
02
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
NAVIGATION
Overview
AVi_Ovw
Multi speed
Go to functions
AVi_Funct
02
Enab multi spd
Disabled
Multi speed sel
0
03
03
Ramp ref (d)
04
04
Speed sel 0
Bit 0 Not Selected
05
Speed sel 1
Bit 1 Not Selected
Speed sel 2
Bit 2 Not Selected
REFERENCE
0
0
0
1
0
0
Multi speed 1
0
1
0
Multi speed 2
1
1
0
Multi speed 3
0
0
1
Multi speed 4
1
0
1
Multi speed 5
0
1
1
Multi speed 6
1
1
1
Multi speed 7
Ramp ref 1
0 rpm
+
05
Ramp ref 2
0 rpm
06
06
——— Diagrammi a blocchi ———
07
08
09
0 rpm
07
0 rpm
08
0 rpm
0 rpm
09
0 rpm
10
10
11
0 rpm
11
0 rpm
12
12
13
13
14
14
15
15
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_mspd.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/07/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98
-- GE User
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
Dual Motor setup
NAVIGATION
Overview
Go to functions
AVi_Ovw
02
AVi_Funct
02
03
03
Actual mot setup
04
04
05
05
Mot setup state
AV300i Manuale Hardware & Guida Rapida
06
06
(or via Digital input)
Mot setup sel
07
Actual Motor Setup
F
07
08
08
COPY
Copy mot setup
Copy mot Setup 0
COPY
09
09
10
10
Motor Setup 0
Motor Setup 1
11
11
12
12
13
13
14
14
15
15
117
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_motstp.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98
-- GE User
Cap.7
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
NAVIGATION
118
Overview
02
Brake unit function
Go to functions
AVi_Ovw
02
AVi_Funct
03
03
BU DC vlt
400V
BU DC vlt
AC 230
AC 400
AC 460
04
04
Enable BU
05
05
T
06
06
——— Diagrammi a blocchi ———
External
resistor
07
I2 t
logic
08
BU
ALARM
BU disable
07
Drive alarm
08
09
09
10
10
BU duty cycle
External
Resistor
11
10 %
BU DC vlt
400V
11
BU ovld time
1.9 s
12
12
13
13
14
14
15
15
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC Flux vector Drive
Firmware Revision:
AVi_BRU.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98
-- GE User
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
DC Braking function
NAVIGATION
Overview
Go to functions
AVi_Ovw
02
AVi_Funct
02
DC braking mode
T
DC Braking mode
DC Braking
current
03
selection
QStp opt code
Quick stop
F
04
05
03
04
05
Ramp stop
AV300i Manuale Hardware & Guida Rapida
DC Braking mode 1
DC Braking mode 0
06
06
07
Speed
Speed
100 %
100 %
07
08
08
09
09
Zero
spd
threshold
Zero
spd
threshold
10
10
I DC
I DC
11
11
12
12
DC braking curr
50 %
DC braking curr
50 %
13
13
14
14
DC braking delay
500 ms
119
Brk time @ stop
1000 ms
15
15
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_DCBR.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98
-- GE User
Cap.7
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
Dimension factor
Face value factor
NAVIGATION
120
Overview
02
Go to functions
AVi_Ovw
AVi_Funct
02
03
03
04
04
05
05
06
06
Dimension factor
——— Diagrammi a blocchi ———
07
User
defined variable
Face value factor
Dim factor num
1
X
Control variable
X
Dim factor den
08
07
Face value num
1
Face value den
1
08
1
09
09
Dim factor text
rpm
10
10
11
11
12
12
13
13
14
14
15
15
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_fctfct.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98
-- GE User
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
PAD parameters
NAVIGATION
Overview
02
Go to functions
AVi_Ovw
02
AVi_Funct
03
03
04
04
05
05
Pad 1
Pad 2
0
Pad 4
0
Pad 5
0
Pad 6
0
Bitword pad A
0
0
Bitword pad B
0000h
0000h
06
output
Digital
output
Digital
input
Digital
output
Analog
input
Analog
output
Analog
07
Pad 3
0
input
Analog
AV300i Manuale Hardware & Guida Rapida
Pad 0
06
07
08
08
General PAD
09
09
Pad 7
Pad 8
Pad 9
0
Pad 10
0
Pad 11
0
Pad 12
0
0
Pad 13
0
Pad 14
Pad 15
0
0
0
10
10
11
11
12
12
13
13
14
14
121
15
15
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_PAD.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98
-- GE User
Cap.7
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
01
01
LINKS Function
NAVIGATION
Overview
Go to functions
122
AVi_Ovw
02
AVi_Funct
02
03
03
04
04
Input max 1
LINK 1
0
05
05
+
Source 1
+
06
+
X
0 par.n
Destination 1
0 par.n
+
06
——— Diagrammi a blocchi ———
Output offset 1
Input min 1
0
0
07
Input absolute 1
Mul gain 1
Off
07
Div gain 1
1
1
Input offset 1
0
08
08
Input max 2
LINK 2
0
09
09
+
Source 2
0 par.n
+
10
+
X
Destination 2
0 par.n
10
Output offset 2
Input min 2
0
0
11
+
Input absolute 2
11
Mul gain 2
Off
Div gain 2
1
1
Input offset 2
0
12
12
13
13
14
14
15
15
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_Links.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/02/98
-- GE User
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
01
U
01
Test Generator
NAVIGATION
Overview
02
Go to functions
AVi_Ovw
02
AVi_Funct
03
03
Gen access
Not Connected
04
04
05
05
AV300i Manuale Hardware & Guida Rapida
Generator
output
06
06
Gen amplitude
0 %
07
07
08
Gen offset
09
08
0 %
09
Time
10
10
Gen frequency
1 Hz
11
11
12
12
13
13
14
14
123
15
15
Cap.7
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_Test_gen.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98
-- GE User
Cap.7
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
124
01
U
01
Alarm mapping
NAVIGATION
Overview
AVi_Ovw
02
02
BU Overload
03
Overcurrent
BU Activity
Disable Drive
OC Latch
BU OK relay open
OC Ok relay open
ON
ON
Undervoltage
UV Latch
Output stages
OS Latch
ON
04
ON
UV Ok relay open
ON
UV Restart time
1000 ms
O2 Activity
Disable Drive
N of attempts
Overvoltage
OV Latch
——— Diagrammi a blocchi ———
BL Activity
Disable Drive
ON
BL Ok relay open
HS Latch
Hold off time
0 ms
BL Restart time
ON
09
HO Activity
Disable Drive
OM Latch
HO Ok relay open
09
ES Activity
Disable Drive
ON
Enable seq err
10
EF Activity
Disable Drive
ES Latch
EF Latch
ES OK relay open
ON
ON
11
Hw opt1 failure
ON
OM Ok relay open
External fault
08
0 ms
OM Activity
Disable Drive
ON
10
07
ON
ON
Overtemp motor
06
ON
HS Activity
Disable Drive
HS Ok relay open
08
Bus loss
BL Latch
ON
Heatsink
05
ON
OV Ok relay open
07
OPT2 failure
O2 Ok relay open
1
06
04
OS Ok relay open
ON
05
03
ON
ON
11
EF Ok relay open
ON
Heatsink / Air OT
RO Activity
Disable Drive
HA Ok relay open
Regulation OT
ON
12
12
RO Latch
ON
Module overtemp
RO Ok relay open
MO Ok relay open
ON
ON
13
13
Pointer
14
Failure text
10
14
0
Failure hour
Failure code
15
15
GE g Motors and
Industrial Systems
Salem, Va. USA
16
A
B
C
D
E
F
G
H
I
J
K
L
Proprietary Information
Do Not Copy
PRODUCT:
File name:
AV-300i AC flux vector Drive
Firmware Revision:
AVi_Alarm_mp.vsd
Issued Date --- Initials:
01.00
03/10/97 -- GE User
This is a verified copy of controlled documentation printed on Revision Date -- Initials:
07/02/98. The master is located on vasald03/[vss]$/InnovCtl.
07/31/98 --
GE User
8. LISTA DEI PARAMETRI DIVISI PER MENU
Legenda della tabella:
Scritte in bianco su fondo nero
Menu / Sottomenu.
Scritte in bianco su fondo nero,
tra parentesi
Menu non disponibile sul tastierino.
Righe con sfondo grigio
Parametri non accessibili da tastierino. Viene visualizzato solo lo
stato del parametro corrispondente.
[FF] nella colonna “Parameter”
(Parametro)
Dimensione corrispondente a “Factor function”.
Colonna “N.”
Numero del parametro (decimale). Per ottenere il numero
reale da inviare via Bus, linea seriale oppure Opt2 (scheda
DGF) si deve sommare 2000H (= 8192 decimale) al numero
indicato in colonna. I parametri del gruppo DRIVECOM
sono accessibili usando i formati e gli indici specificati in
“DRIVECOM power trasmission profile (#21)”.
Colonna “Format” (Formato)
Formato interno del parametro:
I = Intero (esempio: I16 = Intero 16 Bit).
U = Senza segno (esempio: U32 = 32 Bit senza segno)
Float = Floating point.
Colonna “Value” (Valore)
Valori minimo, massimo e di fabbrica del parametro.
S = Indica valori dipendenti dalla taglia del dispositivo
F = Indica valori dipendenti dal parametro Flt 100 mf [303]
Colonna “Factory” (di fabbrica)
S = Indica valori dipendenti dalla taglia del dispositivo
Colonna “Keyb.” (Tastierino)
9= Parametro disponibile tramite tastierino.
Colonna “RS485/Bus/Opt2-M”
(Bassa priorità)
Parametro accessibile via RS485, Bus di campo o scheda DGF
in modo “comunicazione manuale” (vedere manuale DGF). I
numeri indicano cosa deve essere inviato attraverso l’interfaccia di
linea per impostare i singoli parametri
Colonna “Terminal” (morsettiera)
Parametro assegnabile ad uno degli ingressi/usc. Digitali e/o
analogici.
AV300i Manuale Hardware & Guida Rapida
125
Cap.8
Colonna “Opt2-A” (Bassa Priorità)
“PDC”(Alta priorità)
Parametro disponibile via DGF in modo “comunicazione automatica
asincrona” (vedere manuale DGF) e/o via Process Data Channel
(PDC).
NOTA: Quando viene utilizzata un’interfaccia per Bus di
campo, i parametri il cui valore è [min=0; max=1] possono
essere assegnati sia ad un Virtual digital input (se è presente
il codice di accesso W), sia ad un Virtual digital output (se è
presente il codice di accesso R).
I numeri indicano ciò che deve essere inviato tramite linea seriale,
per attivare i singoli parametri.
IA, QA, ID, QD nella colonna
“Terminal” (Morsettiera)
La funzione è disponibile su un ingresso-uscita programmabile,
digitale o analogico, che sia libero.
IA = ingresso analogico
QA = uscita analogica
ID = ingresso digitale
QD = uscita digitale
Il numero eventualmente presente è quello con cui è siglato il
morsetto interessato.
H, L nella colonna “Terminal”
Livello di segnale al morsetto (H = alto, L = basso), che rende
attiva la singola funzione.
R/W/Z/C
Possibilità di accesso tramite linea seriale, Bus di campo oppure
Opt2 con comunicazione manuale o asincrona:
R = Lettura
W = Scrittura
Z = Scrittura solo ad azionamento bloccato
C = Parametro di comando (la scrittura di un valore provoca
l’esecuzione del comando).
X . Pyy
Il valore di questo parametro può corrispondere come min/max ad
X-volte il valore del parametro yy.
NOTA!
Numero del parametro (decimale). Per ottenere il numero reale da
inviare via Bus, linea seriale oppure Opt2 (scheda DGF) si deve
sommare 2000H (= 8192 decimale) al numero indicato in colonna.
I parametri del gruppo DRIVECOM sono accessibili usando i
formati e gli indici specificati in “DRIVECOM power trasmission
profile (#21)”.
*
Quando si accede al parametro tramite Opt2-A/PDC il formato è U16
**
Quando si accede al parametro tramite Opt2-A/PDC il formato è I16
***
Quando si accede al parametro tramite Opt2-A/PDC viene considerata solo la word bassa del testo
Cap.8
126
——— Lista parametri ———
Value
Parameter
No Format
Drive ready
Keyp.
min
max
Factory
380
U16
0
1
-
-
343
U16
0
1
No quick stop (1)
-
316
U16
0
1
No fast stop (1)
-
314
U16
0
44
I16
-2 x P45
+2 x P45
0
1
Stop (0)
Drive ready
Drive not ready
Quick stop
Quick stop
No Quick stop
Fast stop
Fast Stop
No Fast Stop
Enable drive
BASIC MENU
1
Disabled (0)
Enabled
Disabled
Ramp ref 1 [FF]
(Speed input var)
Start/Stop
Start
Stop
Actual spd (rpm)
Motor current [A]
315
U16
0
122
231
I16
Float
-8192
0
Mains voltage
333
U16
0
332
U16
0
1
40°C (1)
334
U16
0
16
S
802
331
300
Float
Text
U16
S
-
321
U16
0
21
22
29
U32
U16
U32
0
0
0
8192
S
BASIC MENU \ Drive type
2
460 V (2)
230 V
400 V
460 V
Ambient temp [°C]
50°C (122°F)
40°C (104°F)
Rated drive curr
7.5
12.6
17.7
24.8
33
47
63
79
93
114
142
185
210
250
324
485
580
2.4
4
5.6
9.6
Continuous curr [A]
Software version
Drive type (AV-300i)
Regulation mode
Sensorless vect
Self-tuning
Field oriented
V/f control
Acc delta speed [FF]
Acc delta time [s]
Dec delta speed [FF]
S
BASIC MENU
3
232 -1
65535
232 -1
S
274
V/f control (3)
100
1
100
AV300i Manuale Hardware & Guida Rapida
-
Access via
RS485/
BUS/
Opt2-M
R
1
0
R/W
0
1
R/W
0
1
Terminal
Opt2-A
/PDC
QD
H
L
ID
L
H
14
L
H
R
R/W
R/W
R/W
1
0
R/W
12
H
L
IA, QA
R/W
1
0
R
R
13
H
L
QA
QA
R/W
R/Z
0
1
2
R/Z
0
1
R
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
R
R
R
-
-
-
-
-
R
-
R
-
-
-
-
R/Z
0
1
2
3
R/W
R/W
R/W
R/W
R/W
R
-
127
Cap.8
Value
Parameter
No Format
Dec delta time [s]
T current lim + [%]
T current lim - [%]
Encoder 1 type
Sinusoidal
Digital
Encoder 1 pulses
Speed base value [FF]
Save parameters
30
8
9
415
Enable drive
Keyp.
min
max
Factory
U16
U16
U16
I16
0
0
0
0
65535
F
F
1
1
S
S
Digital (1)
416
45
256
Float*
U32***
U16
600
1
0
314
U16
0
315
U16
0
109
112
115
I16
I16
I16
119
I16
925
923
I16
Float
9999
16383
65535
MONITOR
1
1024
1500
Disabled (0)
Enabled
Disabled
Start/Stop
1
Stop (0)
Start
Stop
Ramp ref (d) [FF]
Ramp output (d) [FF]
Speed ref (d) [FF]
(Speed ref var)
Actual spd (d) [FF]
(Act spd value)
F act spd (d) [FF]
Act spd filter [s]
Ramp ref (rpm)
Ramp outp (rpm)
Speed ref (rpm)
Actual spd (rpm)
Enc1 speed [rpm]
Enc2 speed [rpm]
F act spd (rpm)
Act spd filter [rpm]
Ramp ref (%)
Ramp output (%)
Speed ref (%)
Actual spd (%)
DC link voltage [V]
Active power [%]
Output voltage [V]
Output frequency [Hz]
Motor current [A]
Torque [%]
T current ref [%]
T curr (%)
F T curr (%)
T curr filter [s]
Flux [%]
Heatsink temp [°C]
Regulation temp [°C]
Intake air temp [°C]
Digital I/Q
Dig input term
Dig input term 1
Dig input term 2
Dig input term 3
Dig input term 4
Dig input term 5
Dig input term 6
Dig input term 7
Cap.8
128
MONITOR \ Measurements \ Speed \ Speed in DRC []
-32768
32767
-32768
32767
-32768
32767
-32768
32767
-
-32768
32767
0.001
0.100
0.001
MONITOR \ Measurements \ Speed \ Speed in rpm
110
I16
-32768
32767
113
I16
-32768
32767
118
I16
-32768
32767
122
I16
-8192
8192
427
I16
-8192
8192
420
I16
-8192
8192
924
I16
-32768
32767
923
Float
0.001
0.100
0.001
MONITOR \ Measurements \ Speed \ Speed in %
111
Float
-200.0
+ 200.0
114
Float
-200.0
+ 200.0
117
Float
-200.0
+ 200.0
121
Float
-200.0
+ 200.0
MONITOR \ Measurements
227
U16
0
999
229 Float**
-500
500
233 Float**
0
500
324
Float
0.0
500.0
231
Float
0.00
S
230
Float
-500
500
41
I16
-500
500
927
I16
-500
500
928
I16
-500
500
926
Float
0.001
0.250
0.100
234 Float*
0.00
100.00
881
I16
1147
I16
914
U16
MONITOR \ I/O
564
U16
0
65535
565
U16
0
1
566
U16
0
1
567
U16
0
1
568
U16
0
1
569
U16
0
1
570
U16
0
1
571
U16
0
1
-
——— Lista parametri ———
Access via
RS485/
BUS/
Opt2-M
R/W
R/W
R/W
R/Z
0
1
R/Z
R/Z
C
Terminal
Opt2-A
/PDC
IA
IA
-
R/W
R/W
-
-
R
R
-
R/W
1
0
R/W
1
0
12
H
L
13
H
L
R/W
R
R
R
-
R
R
R
R
-
R
R
R/W
-
R
-
R
R
R
R
R
R
R
R/W
QA
QA
QA
QA
QA
-
R
R
R
R
R
R
R
-
R
R
R
R
-
-
R
R
R
R
R
R
R
R
R
R/W
R
R
R
R
QA
QA
QA
QA
QA
QA
QA
QA
QA
QA
R
R
R
R
R
R
-
R
R
R
R
R
R
R
R
R
-
R
R
R
R
R
R
R
R
R/W
Value
Parameter
No Format
Dig input term 8
Dig input term 9
Dig input term 10
Dig input term 11
Dig input term 12
Dig input term 13
Dig input term 14
Dig input term 15
Dig input term 16
Dig output term
Virtual dig inp
Virtual dig out
572
573
574
575
576
577
578
579
580
581
582
583
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
Nominal voltage [V]
Nominal speed [rpm]
Nom frequency [Hz]
Nominal current [A]
Cos phi
Base voltage [V]
Base frequency [Hz]
Take motor par
161
162
163
164
371
167
168
694
Float
Float**
Float
Float
Float
Float
Float
U16
Magnetizing cur [A]
Magn working cur [A]
Rotor resistance [Ohm]
Stator resist [Ohm]
Lkg inductance [H]
Load motor par
Std for 400V
Std for 460V
165
726
166
436
437
251
Float
Float
Float
Float
Float
U16
Self tune state
Start part 1
Stator resist [Ohm]
Stator resist Nw [Ohm]
Voltage comp lim [V]
Volt comp lim Nw [V]
Comp slope [V/A]
Comp slope Nw [V/A]
Lkg inductance [H]
Lkg indutance Nw [H]
Current P [%]
Current P Nw [%]
Rotor resistance [Ohm]
Rotor resist Nw [Ohm]
Current I [%]
Current I Nw [%]
Take val part 1
Start part 2a
P1 flux model
P1 flux model Nw
P2 flux model
P2 flux model Nw
Magnetizing curr [A]
Magnetiz curr Nw [A]
Flux P [%]
Flux P Nw [%]
Flux I [%]
Flux I Nw [%]
Voltage P [%]
Voltage P Nw [%]
Keyp.
min
max
Factory
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
65535
0
65535
0
65535
DRIVE PARAMETER \ Mot plate data
1
999
400
1
99999
S
1
999
60
0.10
999.00
S
0.1
0.99
S
1
999
460
1
999
60
0
1
DRIVE PARAMETER \ Motor Parameter
0.10
999.00
S
0.10
999.00
S
0.0001
S
S
0.0001
S
S
0.00001
9.00000
S
0
1
Std400V (0)
-
DRIVE PARAMETER \ Motor Parameter \ Self-tuning
U16
0
65535
DRIVE PARAMETER \ Motor Parameter \ Self-tuning \ Self-tune 1
676
U16
0
65535
436
Float
0.0001
S
S
683
Float
S
S
644
Float
0.1
30.0
6.0
685
Float
0.1
30.0
645
Float
0.1
50.0
13.0
686
Float
0.1
50.0
437
Float
0.00001
9.00000
S
684
Float
S
S
89
Float
0.00
100.00
S
687
Float
S
S
166
Float
0.0001
S
S
682
Float
S
S
90
Float
0.00
100.00
S
688
Float
S
S
677
U16
0
65535
DRIVE PARAMETER \ Motor Parameter \ Self-tuning \ Self-tune 2a
678
U16
0
65535
176
Float
0.00
1.00
S
689
Float
S
S
S
692
U16
1
20
S
690
U16
S
S
S
165
Float
0.1
999.0
S
691
Float
S
S
S
91
Float
0.00
100.00
S
907
Float
0.00
100.00
S
92
Float
0.00
100.00
S
908
Float
0.00
100.00
S
1022 Float
0
100.00
15.00
1024 Float
100.00
0.00
S
705
AV300i Manuale Hardware & Guida Rapida
Access via
RS485/
BUS/
Opt2-M
R
R
R
R
R
R
R
R
R
R
R/W
R
Terminal
Opt2-A
/PDC
-
R
R
R
R
R
R
R
R
R
R
R/W
R
R/Z
R/Z
R/Z
R/Z
R/Z
R/Z
R/Z
C
-
-
R/W
R
R/W
R/W
R/W
Z
0
1
-
-
R
-
-
C
R/W
R
R/W
R
R/W
R
R/W
R
R/W
R
R/W
R
R/W
R
Z/C
-
-
C
R/W
R
R/W
R
R/W
R
R/W
R
R/W
R
RW
R
RW
R
-
129
Cap.8
Value
Keyp.
Parameter
No Format
Voltage I [%]
Voltage I Nw [%]
Take val part 2a
902
909
679
Start part 2b
P1 flux model
P1 flux model Nw
P2 flux model
P2 flux model Nw
Magnetizing curr [A]
Magnetiz curr Nw [A]
Flux P [%]
Flux P Nw [%]
Flux I [%]
Flux I Nw [%]
Voltage P [%]
Voltage P Nw [%]
Voltage I [%]
Voltage I Nw [%]
Take val part 2b
680
176
689
692
690
165
691
91
907
92
908
1022
1024
902
909
681
Fwd-Rev spd tune
Fwd direction
Rev direction
Test T curr lim [%]
Start part 3
Inertia [kg*m*m*]
Inertia Nw [kg*m*m*]
Friction [N*m]
Friction Nw [N*m]
Speed P [%]
Speed P Nw [%]
Speed I [%]
Speed I Nw [%]
Take val part 3
1029
1048
1027
1014
1030
1015
1031
87
1032
88
1033
1028
U16
U16
Float
Float
Float
Float
Float
Float
Float
Float
U16
Low speed factor
Sls speed filter [s]
Flux corr factor
646
643
647
I16
Float
Float
712
U16
0
S
20
0
65535
0.0010
999.9990
S
0.0010
999.9990
0.000
99.99
S
0.000
99.99
0.00
100.00
S
0.00
100.00
0.00
100.00
S
0.00
100.00
0
65535
DRIVE PARAMETER \ Sensorless
0
32000
5000
0.01
0.50
0.01
0.50
1.0
0.90
DRIVE PARAMETER \ V/f control
0
3
V = k . f 1.0 (0)
709
U16
DRIVE PARAMETER \ V/f control \ Voltage boost
0
1
Manual (0)
Manual boost [%]
Actual boost [%]
710
711
Float
Float
Slip comp type
722
U16
Manual
Automatic
Manual slip comp [rpm]
Actual slip comp [rpm]
Slip comp filt [s]
Motor losses %
723
724
725
727
I16
I16
Float
Float
Spd srch time [s]
Flux srch time [s]
Spd autocapture [FF]
893
894
895
Float
Float
I16
V/f shape
min
max
Factory
Float
0.00
100.00
4.00
Float
0.00
100.00
S
U16
0
65535
DRIVE PARAMETER \ Motor Parameter \ Self-tuning \ Sel-tune 2b
U16
0
65535
Float
0.00
1.00
S
Float
S
S
S
U16
1
20
S
U16
S
S
S
Float
0.1
999.0
S
Float
S
S
S
Float
0.00
100.00
S
Float
0.00
100.00
S
Float
0.00
100.00
S
Float
0.00
100.00
S
Float
0.00
100.00
15.00
Float
100.00
0.00
S
Float
0.00
100.00
4.00
Float
0.00
100.00
S
U16
0
65535
DRIVE PARAMETER \ Motor Parameter \ Self-tuning \ Sel-tune 3
U16
1
2
Fwd direction (1)
V = k . f 1.0
V = k . f 1.5
V = k . f 1.7
V = k . f 2.0
Vlt boost type
Manual
Automatic
Cap.8
130
0.0
10.0
1.0
0.0
100.0
DRIVE PARAMETER \ V/f control \ Slip compens
0
1
Manual (0)
0
200
0
-400
400
0
0.003
0.300
0.030
0.0
20.0
0
DRIVE PARAMETER \ V/f control \ V/f spd search
0.01
10.00
10.00
0.01
20.00
1.00
-32768
32767
1500
——— Lista parametri ———
Access via
RS485/
BUS/
Opt2-M
R/W
R
Z/C
Terminal
Opt2-A
/PDC
-
-
C
R/W
R
R/W
R
R/W
R
R/W
R
R/W
R
RW
R
R/W
R
Z/C
RW
R
-
-
R/Z
1
2
R/Z
C
R/W
R
R/W
R
R/W
R
R/W
R
Z/C
-
-
-
-
R/W
R/W
R/W
-
-
R/Z
0
1
2
3
-
-
R/Z
0
1
R/W
R
-
-
-
-
R/Z
0
1
R/W
R
R/W
R/W
-
-
-
-
R/W
R/W
R/W
-
-
Value
Parameter
No Format
Delay auto cap [ms]
Delay retrying [ms]
896
897
U16
U16
898
U16
899
U16
900
901
U16
U16
Ramp ref 1 [FF]
44
(Speed input var)
Ramp ref 1 (%)
47
I16
Float
Ramp ref 2 [FF]
Ramp ref 2 (%)
48
49
I16
Float
Speed ref 1 [FF]
Speed ref 1 (%)
42
378
I16
Float
Speed ref 2 [FF]
Speed Ref 2 (%)
43
379
I16
Float
T current ref 1 [%]
T current ref 2 [%]
39
40
I16
I16
Speed min amount [FF]
Speed max amount [FF]
1
2
U32
U32
Enable save eng
Keyp.
min
max
Factory
0
10000
1000
0
10000
1000
DRIVE PARAMETER \ V/f control \ Energy save
0
1
Disabled (0)
Enabled
Disabled
Lock save eng
0
1
OFF (0)
OFF
ON
V/f flux level [%]
Flux var time [s]
0
100
100
1
100
10
INPUT VARIABLES \ Ramp ref \ Ramp ref 1
-2 × P45
+2 × P45
0
-200.0
+200.0
0.0
INPUT VARIABLES \ Ramp ref \ Ramp ref 2
-2 × P45
+2 × P45
0
-200.0
+200.0
0.0
INPUT VARIABLES \ Speed ref \ Speed ref 1
-2 × P45
+2 × P45
0
-200.0
+200.0
0.0
INPUT VARIABLES \ Speed ref \ Speed ref 2
-2 × P45
+2 × P45
0
-200.0
+200.0
0.0
INPUT VARIABLES \ T current ref
F
F
0
F
F
0
LIMITS \ Speed limits \ Speed amount
0
0
232 -1
2000
0
232 -1
LIMITS \ Speed limits \ Speed min/max
0
0
232 -1
32
0
2000
2 -1
0
0
232 -1
2000
0
232 -1
0
1
Speed min pos [FF]
5
Speed max pos [FF]
3
Speed min neg [FF]
6
Speed max neg [FF]
4
Speed limited
372
Speed not limited
Speed limited
U32
U32
U32
U32
U16
T curr lim type
715
U16
0
7
8
9
349
U16
U16
U16
U16
0
0
0
0
F
F
F
1
10
11
13
342
U16
U16
U16
U16
0
0
0
0
F
F
F
1
Flux level [%]
467
U16
10
Dynam vlt margin [%]
889
Float
10.00
Acc delta speed [FF]
Acc delta time [s]
21
22
U32
U16
0
0
T lim + / T lim mot gen
T current lim [%]
T current lim + [%]
T current lim - [%]
Curr limit state
Curr. limit not reached
Curr. limit reached
In use Tcur lim+ [%]
In use Tcur lim- [%]
Current lim red [%]
Torque reduct
Not actived
actived
-
LIMITS \ Current limits
1
T lim +/- (0)
S
S
S
-
100
Not act. (0)
LIMITS \ Flux limits
100
LIMITS \ Voltage limits
10.00
RAMP \ Acceleration
232 -1
65535
Access via
RS485/
BUS/
Opt2-M
R/W
R/W
Terminal
Opt2-A
/PDC
-
-
R/Z
1
0
R/W
0
1
R/W
R/W
-
-
ID
L
H
IA
-
R/W
R/W
IA, QA
R/W
R/W
-
-
R/W
R/W
IA, QA
-
R/W
-
R/W
R/W
IA, QA
-
R/W
-
R/W
R/W
IA, QA
-
R/W
-
R/W
R/W
IA, QA
IA, QA
R/W
R/W
R/Z
R/Z
-
-
R/Z
R/Z
R/Z
R/Z
R
0
1
QD
L
H
R
R/Z
0
1
R/W
R/W
R/W
R
0
1
R
R
R/W
R/W
0
1
-
-
IA
IA
IA
QD
L
H
ID
L
H
R/W
R/W
R/W
R
R/W
-
R
R
R/W
R/W
100
R/W
IA
QA
R/W
1.00
R/W
-
-
100
1
R/W
R/W
-
-
AV300i Manuale Hardware & Guida Rapida
131
Cap.8
Value
Keyp.
Parameter
No Format
Dec delta speed [FF]
Dec delta time [s]
29
30
U32
U16
0
0
QStp delta speed [FF]
QStp delta time [s]
37
38
U32
U16
0
0
Ramp shape
18
U16
0
19
663
664
20
673
Float
Float
Float
U16
U16
100
100
100
0
0
3000
3000
3000
65535
3
500
500
500
100
Fwd (1)
293
U16
0
1
not sel (0)
294
U16
0
1
not sel (0)
245
I16
0
1
Enabled (1)
344
U16
0
1
Not act. (1)
345
U16
0
1
Not act. (1)
373
U16
0
1
Not act. (1)
346
U16
0
1
-
347
U16
0
1
-
min
max
Factory
Access via
RS485/
BUS/
Opt2-M
Terminal
Opt2-A
/PDC
R/W
R/W
-
-
R/W
R/W
-
-
R/Z
0
1
R/W
R/W
R/W
R/W
R/W
0
1
2
3
R/W
1
0
R/W
1
0
R/Z
1
0
R/W
0
1
R/W
0
1
R/W
0
1
R
1
-
-
-
R/W
ID
H
L
ID
H
L
-
R/W
ID
L
H
ID
L
H
ID
L
H
QD
H
R/W
0
R
L
QD
1
H
0
L
R
R
R/W
1
0
R/Z
1
0
R/W
0
1
R/Z
0
1
R/W
QA
QA
ID
L
H
-
R
R
R/W
ID
L
H
-
R/W
-
-
RAMP \ Deceleration
Linear
S-Shaped
S shape t const [ms]
S acc t const [ms]
S dec t const [ms]
Ramp +/- delay [ms]
Fwd-Rev
No direction
Fwd direction
Rev direction
No direction
Forward sign
FWD selected
FWD not selected
Reverse sign
REV selected
REV not selected
Enable ramp
Enabled
Disabled
Ramp out = 0
Actived
Not Actived
Ramp in = 0
Actived
Not Actived
Freeze ramp
Actived
Not Actived
Ramp +
Acc. clockwise +
Dec. counter-clockwise
Other states
Ramp Acc. counter-clockwise +
Dec. clockwise
Other states
Speed ref [rpm]
Speed reg output [% ]
Lock speed reg
100
232 -1
65535
1
RAMP \ Quick stop
1000
232 -1
65535
1
RAMP
1
Linear (0)
SPEED REGULAT.
32767
1
118
236
322
I16
I16
U16
-32768
0
OFF (0)
242
I16
0
1
Enabled (1)
348
U16
0
1
Not act. (1)
1016
Speed up
Inertia-loss cp
Prop. filter [ms]
444
U16
0
1
Speed up (0)
U16
0
1000
0
ON
OFF
Enable spd reg
Enabled
Disabled
Lock speed I
Actived
Not Actived
Aux spd fun sel
Cap.8
132
——— Lista parametri ———
-
R/W
-
R/W
R/W
R
R
-
-
Value
Keyp.
Parameter
No Format
Enable spd=0 I
123
U16
SPEED REGULAT \ Spd zero logic
0
1
Disabled (0)
124
U16
0
1
Disabled (0)
125
U16
0
1
Disabled (0)
422
U16
0
1
Disabled (0)
126
106
890
Float
U16
U16
0.00
1
0
100.00
32767
1
10.00
10
Disabled (0)
891
U16
0
1
OFF (0)
Zero pos gain [%]
892
U16
0
Speed up gain [%]
Speed up base [ms]
Speed up filter [ms]
445
446
447
Float
Float
U16
Droop gain [%]
Droop filter [ms]
Load comp [%]
Droop limit [FF]
Enable droop
696
697
698
700
699
Float
U16
I16
U16
U16
Inertia [kg*m*m]
Friction [N*m]
Torque const [N*m/A]
Inertia c filter [ms]
1014
1015
1013
1012
Float
Float
Float
U16
Current norm
Torque current
Flux current
F current ref
Zero torque
267
350
351
352
353
Float
Float
Float
Float
U16
469
U16
min
max
Factory
Enabled
Disabled
Enable spd=0 R
Enabled
Disabled
Enable spd=0 P
Enabled
Disabled
Enable lck sls
Enabled
Disabled
Spd=0 P gain [%]
Ref 0 level [FF]
Enable zero pos
Enabled
Disabled
Lock zero pos
ON
OFF
100
10
SPEED REGULAT \ Speed up
0.00
100.00
0.00
0
16000
1000
0
1000
0
SPEED REGULAT \ Droop function
0.00
100.00
0.00
0
1000
0
F
F
0
0
2 × P45
1500
0
1
Disabled (0)
Enabled
Disabled
SPEED REGULAT \ Inertia/loss cp
0.001
999.999
S
0.000
99.999
S
0.01
99.99
S
0
1000
0
CURRENT REGULAT
0.00
9999.99
S
S
S
S
S
S
S
0
1
Not Act. (1)
Actived
Not Actived
Flux reg mode
Constant current
Voltage control
Flux reference
Flux
Out vlt level [%]
500
234
921
Speed P [%]
Speed I [%]
87
88
Current P [%]
Current I [%]
89
90
Voltage comp lim [V]
Comp slope [V/A]
644
645
0
FLUX REGULATION
1
Volt.control (1)
Float*
0.0
100.0
Float*
0.00
100.00
Float*
0.0
100.0
100.0
REG PARAMETERS \ Percent values \ Speed regulator
Float
0.00
100.00
S
Float
0.00
100.00
S
REG PARAMETERS \ Percent values \ Current reg
Float
0.00
100.00
S
Float
0.00
100.00
S
REG PARAMETERS \ Percent values \ Current reg\Dead time comp
Float
0.1
30.0
6.0
Float
0.1
50.0
13.0
AV300i Manuale Hardware & Guida Rapida
Access via
RS485/
BUS/
Opt2-M
Terminal
Opt2-A
/PDC
-
-
-
-
-
-
-
-
R/Z
1
0
R/Z
1
0
R/Z
1
0
R/Z
1
0
R/W
R/W
R/Z
1
0
R/W
1
0
R/W
-
-
ID
L
H
-
R/W
R/W
R/W
R/W
-
-
R/W
R/W
R/W
R/W
R/W
1
0
IA
ID
H
L
R/W
R/W
R/W
R/W
R
R/W
-
-
R
R
R
R
R/W
0
1
QA
QA
QA
ID
L
H
R/W
-
R/Z
0
1
R
R
R/W
-
QA
QA
IA,QA
R
R
R/W
R/W
R/W
-
-
R/W
R/W
-
-
R/W
R/W
-
-
-
133
Cap.8
Value
Keyp.
Parameter
No Format
Flux P [%]
Flux I [%]
91
92
Float
Float
1022
902
Float
Float
Speed P base [A/rpm]
Speed I base[A/rpm×ms]
93
94
Float
Float
Current P base [V/A]
Current I base [V/A×ms]
95
96
Float
Float
Flux P base [A/Vs]
Flux I base [A/Vs×ms]
97
98
Float
Float
Voltage P base [Vs/V]
Voltage I base [Vs/V x s]
1023
903
Float
Float
Speed P in use [%]
Speed I in use [%]
99
100
Float
Float
252
U16
253
U16
0
1
Local (0)
45
321
U32***
U16
1
0
16383
3
1500
V/f control (3)
179
303
675
413
412
Float
I16
Float
U16
I16
0.10
0
0.01
10
0
999.00
32767
5.00
136
1
S
S
1.00
30
Drive healthy (0)
240
U16
S
S
S
713
I16
-2
-1
Ramp stop (1)
414
U16
CONFIGURATION \ Motor spd fbk
0
1
Enc.1 (1)
415
I16
0
1
Digital (1)
416
1146
Float*
U16
600
0
9999
3
1024
5.41 V (0)
169
Float*
600
9999
1024
Voltage P [%]
Voltage I [%]
Main commands
min
max
Factory
REG PARAMETERS \ Percent values \ Flux regulator
0.00
100.00
S
0.00
100.00
S
REG PARAMETERS \ Percent values \ Voltage reg
0.00
100.00
15.00
0.00
100.00
4.00
REG PARAMETERS \ Base values \ Speed regulator
0.001
99.999
S
0.001
99.999
S
REG PARAMETERS \ Base values \ Current reg
0.1
99999.9
S
0.1
9999.9
S
REG PARAMETERS \ Base values \ Flux regulator
0.1
9999.9
S
0.01
999.99
S
REG PARAMETERS \ Base values \ Voltage reg
0.00001
9.99999
S
0.00001
9.99999
S
REG PARAMETERS \ In use values
0.00
100.00
S
0.00
100.00
S
CONFIGURATION
0
1
Digitals (1)
Terminals
Digital
Control mode
Local
Bus
Speed base value [FF]
Regulation mode
Sensorless vect
Self-tuning
Field oriented
V/f control
Full load curr [A]
Flt_100_mf
Magn ramp time [s]
Magn boost curr [%]
Ok relay funct
Drive healthy
Ready to start
Switching freq
4 KHz
8 KHz
16 KHz
2 KHz
Qstp opt code
Ramp stop
DC braking
Speed fbk sel
Encoder 1
Encoder 2
Encoder 1 type
Sinusoidal
Digital
Encoder 1 pulses
Enc1 supply vlt
5.41 V
5.68 V
5.91 V
6.18 V
Encoder 2 pulses
Cap.8
134
——— Lista parametri ———
Access via
RS485/
BUS/
Opt2-M
Terminal
Opt2-A
/PDC
R/W
R/W
-
-
R/W
R/W
-
-
R/Z
R/Z
-
-
R/Z
R/Z
-
-
R/Z
R/Z
-
-
R/W
R/W
-
-
R
R
-
-
R/Z
0
1
R/Z
0
1
R/Z
R/Z
0
1
2
3
R/Z
R
R/Z
R/Z
R/Z
0
1
R/Z
0
1
2
3
R/Z
1
2
-
-
-
-
-
R
-
-
R
-
-
-
-
-
ID
H
L
-
R/W
-
R
-
R
R/Z
1
0
R/Z
0
1
R/Z
R/Z
0
1
2
3
R/Z
-
Value
Parameter
No Format
Encoder repeat
Keyp.
min
max
Factory
1054
U16
0
1
Encoder 1 (1)
648
U16
0
1
-
-
651
U16
0
1
-
-
649
U16
0
1
Disabled (0)
652
U16
0
1
Disabled (0)
911
U16
0
1
Disabled (0)
912
913
U16
U32
0
0
333
U16
65535
0
232 -1
CONFIGURATION \ Drive type
S
2
460 V (2)
332
U16
0
1
40°C (1)
Encoder 2
Encoder 1
Encoder 1 state
Encoder 1 OK
Encoder 1 NOT OK
Encoder 2 state
Encoder 2 OK
Encoder 2 NOT OK
Refresh enc 1
Enabled
Disabled
Refresh enc 2
Enabled
Disabled
Enable ind store
Enabled
Disabled
Ind store ctrl
Index storing
Mains voltage
-
230 V
400 V
460 V
Ambient temp [°C]
50°C (122°F)
40°C (104°F)
Rated drive curr
7.5
12.6
17.7
24.8
33
47
63
79
93
114
142
185
210
250
324
485
580
2.4
4
5.6
9.6
Continuous curr [A]
Software version
Drive type (AV-300i)
334
U16
0
16
S
802
331
300
Float
Text
U16
S
S
S
Dim factor num
Dim factor den
Dim factor text
50
51
52
I32***
I32***
Text
Face value num
Face value den
54
53
I16
I16
357
U16
Latch
274
CONFIGURATION \ Dimension fact
1
65535
1
1
1
232 -1
rpm
CONFIGURATION \ Face value fact
1
32767
1
1
32767
1
CONFIGURATION \ Prog alarms \ Undervoltage
0
1
ON (1)
ON
OFF
AV300i Manuale Hardware & Guida Rapida
-
-
Access via
RS485/
BUS/
Opt2-M
R/Z
0
1
R
1
0
R
1
0
R/W
1
0
R/W
1
0
R/W
1
0
R/W
R
Terminal
Opt2-A
/PDC
-
-
QD
H
L
QD
H
L
-
R
-
-
-
R/W
-
R/W
R
-
-
-
-
R
-
R/Z
0
1
2
R/Z
0
1
R
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
R
R
R
-
R
-
R
R/Z
R/Z
R/Z
-
R
R
-
R/Z
R/Z
-
R
R
R/Z
1
0
-
-
135
Cap.8
Value
Parameter
No Format
OK relay open
358
I16
359
360
U16
U16
361
U16
362
I16
368
U16
369
U16
Keyp.
min
max
Factory
0
1
ON (1)
ON
OFF
Restart time [ms]
N of attempts
Latch
0
65535
1000
0
100
1
CONFIGURATION \ Prog alarms \ Overvoltage
0
1
ON (1)
ON
OFF
Ok relay open
0
1
ON (1)
ON
OFF
Activity
CONFIGURATION \ Prog alarms \ Heatsink sensor
1
5
Disable drive (2)
Warning
Disable drive
Quick stop
Normal stop
Curr lim stop
Latch
0
1
ON (1)
ON
OFF
Ok relay open
370
I16
0
1
ON (1)
1152
I16
CONFIGURATION \ Prog alarms \ Heatsink ot
0
1
ON (1)
1140
U16
CONFIGURATION \ Prog alarms \ Intake air ot
1
5
Disable drive (2)
1141
U16
0
1
ON (1)
1142
I16
0
1
ON (1)
1148
U16
1149
U16
0
1
ON (1)
1150
I16
0
1
ON (1)
1151
I16
ON
OFF
Ok relay open
ON
OFF
Activity
Warning
Disable drive
Quick stop
Normal stop
Curr lim stop
Latch
ON
OFF
Ok relay open
ON
OFF
Activity
CONFIGURATION \ Prog alarms \ Regulation ot
0
1
Warning (1)
Ignore
Warning
Latch
ON
OFF
Ok relay open
ON
OFF
Ok relay open
CONFIGURATION \ Prog alarms \ Module overtemp
0
1
ON (1)
ON
OFF
Cap.8
136
——— Lista parametri ———
Access via
RS485/
BUS/
Opt2-M
R/W
1
0
R/W
R/W
Terminal
Opt2-A
/PDC
-
-
-
-
R/Z
1
0
R/W
1
0
-
-
-
-
R/Z
1
2
3
4
5
R/Z
-
-
-
-
-
-
R/W
1
0
-
-
R/Z
1
2
3
4
5
R/Z
1
0
R/W
1
0
-
-
-
-
-
-
R/Z
0
1
R/Z
1
0
R/W
1
0
-
-
-
-
-
-
R/W
1
0
-
-
1
0
R/W
1
0
Value
Keyp.
Parameter
No Format
Activity
365
U16
366
U16
0
1
ON (1)
367
I16
0
1
ON (1)
354
U16
355
U16
0
1
ON (1)
356
I16
0
1
ON (1)
363
U16
364
I16
210
U16
211
I16
639
U16
640
I16
634
U16
633
U16
0
1
ON (1)
635
I16
0
1
ON (1)
min
max
Factory
CONFIGURATION \ Prog alarms \ Overtemp motor
1
5
Disable drive (2)
Warning
Disable drive
Quick stop
Normal stop
Curr lim stop
Latch
ON
OFF
Ok relay open
ON
OFF
Activity
CONFIGURATION \ Prog alarms \ External fault
1
5
Disable drive (2)
Warning
Disable drive
Quick stop
Normal stop
Curr lim stop
Latch
ON
OFF
OK relay open
ON
OFF
Latch
CONFIGURATION \ Prog alarms \ Overcurrent
0
1
ON (1)
ON
OFF
OK relay open
0
1
ON (1)
ON
OFF
Latch
CONFIGURATION \ Prog alarms \ Output stages
0
1
ON (1)
ON
OFF
OK relay open
0
1
ON (1)
ON
OFF
Activity
CONFIGURATION \ Prog alarms \ Opt2 failure
2
5
Disabled drive (2)
Disable drive
Quick stop
Normal stop
Curr lim stop
OK relay open
0
1
ON (1)
ON
OFF
Activity
CONFIGURATION \ Prog alarms \ Bus loss
1
5
Disabled drive (2)
Warning
Disable drive
Quick stop
Normal stop
Curr lim stop
Latch
ON
OFF
OK relay open
ON
OFF
AV300i Manuale Hardware & Guida Rapida
Access via
RS485/
BUS/
Opt2-M
Terminal
Opt2-A
/PDC
R/Z
1
2
3
4
5
R/Z
1
0
R/W
1
0
-
-
-
-
-
-
R/Z
1
2
3
4
5
R/Z
1
0
R/W
1
0
-
-
-
-
-
-
R/Z
1
0
R/W
1
0
-
-
-
-
R/Z
1
0
R/W
1
0
-
-
-
-
R/Z
2
3
4
5
R/W
1
0
-
-
-
-
R/Z
1
2
3
4
5
R/Z
1
0
R/W
1
0
-
-
-
-
-
-
137
Cap.8
Value
Opt2-A
/PDC
-
-
-
-
-
-
R/Z
0
2
R/Z
1
0
-
-
-
-
-
-
R/Z
1
2
3
4
5
R/W
1
0
-
-
-
-
R/Z
R/W
W
1
0
-
-
R/Z
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
-
-
OFF
Speed ref 1
Speed ref 2
Ramp ref 1
Ramp ref 2
Ramp ref
Speed ref
Ramp output
Actual spd (rpm)
T current ref 1
T current ref 2
T current ref
F current ref
Flux current
Torque current
Speed reg out
Motor current
Current U
Current V
Current W
Output voltage
Voltage U
18
19
20
21
No Format
Hold off time [ms]
Restart time [ms]
636
637
U16
U16
Activity
386
U16
387
I16
min
max
Factory
0
10000
0
0
10000
0
CONFIGURATION \ Prog alarms \ Hw opt1 failure
1
5
Disabled drive (2)
Warning
Disable drive
Quick stop
Normal stop
Curr lim stop
OK relay open
0
1
ON (1)
ON
OFF
Activity
Latch
CONFIGURATION \ Prog alarms \ Enable seq err
0
2
Disabled drive (2)
728
U16
729
U16
0
1
ON (1)
730
I16
0
1
ON
R/W
(1)
1
ON
OFF
OK relay open
ON
OFF
Activity
0
CONFIGURATION \ Prog alarms \ BU overload
1
5
Disabled drive (2)
737
U16
738
I16
0
Device address
319
Ser answer delay [ms]
408
Pword 1 :
85
Enabled
Disabled
U16
U16
I32
0
0
00000
Select output 1
U16
Warning
Disable drive
Quick stop
Normal stop
Curr lim stop
OK relay open
1
ON (1)
ON
OFF
138
R/Z
1
2
3
4
5
R/W
1
0
Ignore
Disable drive
Cap.8
Access via
RS485/
BUS/
Opt2-M
R/W
R/W
Terminal
Parameter
Keyp.
66
CONFIGURATION
127
0
900
0
99999
Disabled (0)
I/O CONFIG \ Analog outputs \ Analog output 1
0
84
Actual speed (8)
——— Lista parametri ———
Value
Parameter
No Format
Voltage V
DC link voltage
Analog input 1
Analog input 2
Analog input 3
Flux
Active power
Torque
Rr adap output
Pad 0
Pad 1
Pad 4
Pad 5
Flux reference
Pad 6
PID output
Feed fwd power
Out vlt level
Flux level
F act spd (rpm)
F T curr (%)
Spd draw out
PL next factor
PL active limit
Scale output 1
62
Select output 2
67
(Select like output 1)
Scale output 2
63
Select output 3
68
(Select like output 1)
Scale output 3
64
Float
U16
Float
U16
Float
Select output 4
69
(Select like output 1)
Scale output 4
65
Float
Select input 1
U16
70
U16
Keyp.
Access via
RS485/
BUS/
Opt2-M
22
23
24
25
26
27
28
29
30
31
32
33
34
35
38
39
78
79
80
81
82
84
87
88
R/W
Terminal
Opt2-A
/PDC
-
-
R/Z
-
-
-10.000
10.000
1.000
I/O CONFIG \ Analog outputs \ Analog output 3
0
84
Current U (17)
R/W
-
-
R/Z
-
-
-10.000
10.000
1.000
I/O CONFIG \ Analog outputs \ Analog output 4
0
84
Motor current (16)
R/W
-
-
R/Z
-
-
-10.000
10.000
1.000
I/O CONFIG \ Analog inputs \ Analog input 1
0
28
Ramp ref 1 (4)
R/W
-
-
R/Z
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
19
21
22
23
24
25
26
28
-
-
min
max
Factory
-10.000
10.000
1.000
I/O CONFIG \ Analog outputs \ Analog output 2
0
84
T current (14)
OFF
Jog reference
Speed ref 1
Speed ref 2
Ramp ref 1
Ramp ref 2
T current ref 1
T current ref 2
Adap reference
T current lim
T current lim +
T current lim Pad 0
Pad 1
Pad 2
Pad 3
Load comp
PID offset 0
PI central v3
PID feed-back
V/f flux level
Flux level
Out vlt level
Speed ratio
AV300i Manuale Hardware & Guida Rapida
139
Cap.8
Value
Parameter
No Format
An in 1 target
Keyp.
min
max
Factory
295
U16
0
1
Assign. (0)
71
U16
0
2
± 10 V (0)
389
U16
0
1
Positive (1)
72
73
259
Float
Float
U16
-10000
0.1
0
10.000
10.000
65535
1.000
1.000
-
792
1042
1043
1044
1045
U16
I16
U16
U16
U16
0
-10000
0
0
0
1000
10000
10000
65000
1
0
0
0
0
-
74
I16
75
U16
296
U16
0
1
Assign.(0)
76
U16
0
2
± 10 V (0)
390
U16
0
1
Positive (1)
77
78
260
Float
Float
U16
-10000
0.1
0
10.000
10.000
65535
1.000
1.000
-
79
I16
80
U16
297
U16
0
1
Assign. (0)
81
U16
0
2
± 10 V (0)
391
U16
0
1
Positive (1)
82
83
261
Float
Float
U16
-10000
0.1
0
10.000
10.000
65535
1.000
1.000
-
84
I16
145
U16
-32768
32767
0
I/O CONFIG \ Digital outputs
0
49
Ramp + (8)
Assigned
Not assigned
Input 1 type
-10V ... + 10 V
0...20 mA, 0...10 V
4...20 mA
Input 1 sign
Positive
Negative
Scale input 1
Tune value inp 1
Auto tune inp 1
Auto tune
Input 1 filter [ms]
Input 1 compare
Input 1 cp error
Input 1 cp delay
Input 1 cp match
Input 1 not thr.val.
Input 1=thr.val
Offset input 1
Select input 2
(Select like Input 1)
An in 2 target
Assigned
Not assigned
Input 2 type
-10V ... + 10 V
0...20 mA, 0...10 V
4...20 mA
Input 2 sign
Positive
Negative
Scale input 2
Tune value inp 2
Auto tune inp 2
Auto tune
Offset input 2
Select input 3
(Select like Input 1)
An in 3 target
Assigned
Not assigned
Input 3 type
-10V ... + 10 V
0...20 mA, 0...10 V
4...20 mA
Input 3 sign
Positive
Negative
Scale input 3
Tune value inp 3
Auto tune inp 3
Auto tune
Offset input 3
Digital output 1
-32768
32767
0
I/O CONFIG \ Analog inputs \ Analog input 2
0
28
OFF (0)
-32768
32767
0
I/O CONFIG \ Analog inputs \ Analog input 3
0
28
OFF (0)
OFF
Speed zero thr
Spd threshold
Cap.8
140
——— Lista parametri ———
Access via
RS485/
BUS/
Opt2-M
R/W
0
1
R/Z
0
1
2
R/W
1
0
R/W
R/W
C
1
R/W
R/W
R/W
R/W
R
0
1
R/W
Terminal
Opt2-A
/PDC
ID
L
H
-
R/W
-
R/W
-
-
QD
L
H
-
R
R/Z
-
-
R/W
0
1
R/Z
0
1
2
R/W
1
0
R/W
R/W
C
1
R/W
ID
L
H
-
R/W
-
R/W
-
-
-
-
R/Z
-
-
R/W
0
1
R/Z
0
1
2
R/W
1
0
R/W
R/W
C
1
R/W
ID
L
H
-
R/W
-
R/W
-
-
-
-
R/Z
0
1
2
-
-
-
-
-
-
Value
Parameter
146
U16
0
49
Ramp - (9)
Access via
RS485/
BUS/
Opt2-M
3
4
5
6
8
9
10
11
12
13
14
15
16
17
18
19
20
25
26
27
28
29
30
31
32
35
36
38
46
49
51
52
53
54
55
56
57
62
R/Z
147
U16
0
49
Spd threshold (2)
R/Z
-
148
U16
0
49
Overld available (6)
R/Z
-
-
149
U16
0
49
Curr limit state (4)
R/Z
-
-
150
U16
0
49
Over-voltage (12)
R/Z
-
-
151
U16
0
49
Under-voltage (11)
R/Z
-
-
152
U16
0
49
Over-current (14)
R/Z
-
-
629
U16
0
49
Speed zero thr (1)
R/Z
83-85
-
137
U16
0
R/Z
0
1
2
3
4
5
6
-
-
No Format
Set speed
Curr limit state
Drive ready
Overld available
Ramp +
Ramp Speed limited
Undervoltage
Overvoltage
Heatsink sensor
Overcurrent
Overtemp motor
External fault
Failure supply
Pad A bit
Pad B bit
Virt dig input
Speed fbk loss
Bus loss
Output stages
Hw opt 1 failure
Opt 2 failure
Encoder 1 state
Encoder 2 state
Ovld mot state
Enable seq err
BU overload
Diameter calc st
Mot setup state
Input 1 cp match
Overload 200%
PL stop active
PL next active
PL time-out sig
Regulation ot
Module overtemp.
Heatsink ot
Intake air ot
Digital output 2
(Select like output 1)
Digital output 3
(Select like output 1)
Digital output 4
(Select like output 1)
Digital output 5
(Select like output 1)
Digital output 6
(Select like output 1)
Digital output 7
(Select like output 1)
Digital output 8
(Select like output 1)
Relay 2
(Select like output 1)
Digital input 1
Keyp.
min
max
Factory
I/O CONFIG \ Digital inputs
62
OFF (0)
OFF
Motor pot reset
Motor pot up
Motor pot down
Motor pot sign +
Motor pot sign Jog +
AV300i Manuale Hardware & Guida Rapida
Terminal
Opt2-A
/PDC
-
141
Cap.8
Value
Parameter
Jog Failure reset
Torque reduct
Ramp out = 0
Ramp in = 0
Freeze ramp
Lock speed reg
Lock speed I
Auto capture
Input 1 sign +
Input 1 sign Input 2 sign +
Input 2 sign Input 3 sign +
Input 3 sign –
Zero torque
Speed sel 0
Speed sel 1
Speed sel 2
Ramp sel 0
Ramp sel 1
Speed fbk sel
PAD A bit 0
PAD A bit 1
PAD A bit 2
PAD A bit 3
PAD A bit 4
PAD A bit 5
PAD A bit 6
PAD A bit 7
Fwd sign
Rev sign
An in 1 target
An in 2 target
An in 3 target
Enable droop
Quick stop
Enable PI PID
Enable PD PID
PI int freeze PID
PID offs. sel
PI central v s0
PI central v s1
Diameter calc
Lock zero pos
Lock save eng
Mot setup sel 0
PL mains status
PL time-out ack
Digital input 2
(Select like input 1)
Digital input 3
(Select like input 1)
Digital input 4
(Select like input 1)
Digital input 5
(Select like input 1)
Digital input 6
(Select like input 1)
Digital input 7
(Select like input 1)
Cap.8
142
138
U16
0
62
OFF (0)
Access via
RS485/
BUS/
Opt2-M
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
32
33
34
35
36
37
38
39
44
45
46
47
48
49
51
52
53
54
55
56
57
58
59
60
62
66
67
R/Z
139
U16
0
62
OFF (0)
R/Z
-
-
140
U16
0
62
OFF (0)
R/Z
-
-
141
U16
0
62
OFF (0)
R/Z
-
-
142
U16
0
62
OFF (0)
R/Z
-
-
143
U16
0
62
OFF (0)
R/Z
-
-
No Format
Keyp.
min
max
Factory
——— Lista parametri ———
Terminal
Opt2-A
/PDC
-
-
Value
Parameter
No Format
Keyp.
min
max
Factory
62
OFF (0)
Digital input 8
144
(Select like input 1)
U16
0
Select enc 1
1020
U16
0
1021
U16
0
5
OFF (0)
415
I16
0
1
Digital (1)
416
169
649
Float*
Float*
U16
600
600
0
9999
9999
1
1024
1024
Disabled (0)
652
U16
0
1
Disabled (0)
388
U16
0
181
U16
ADD SPEED FUNCT \ Adap spd reg
0
1
Disabled (0)
Sel adap type
182
U16
0
Speed
Adap reference
Adap reference [FF]
Adap speed 1 [%]
Adap speed 2 [%]
Adap joint 1 [%]
Adap joint 2 [%]
Adap P gain 1 [%]
Adap I gain 1 [%]
Adap P gain 2 [%]
Adap I gain 2 [%]
Adap P gain 3 [%]
Adap I gain 3 [%]
183
184
185
186
187
188
189
190
191
192
193
I16
Float
Float
Float
Float
Float
Float
Float
Float
Float
Float
101
102
103
393
U16
U16
U16
U16
104
105
394
U16
U16
U16
1
0
0
107
108
U16
U16
1
0
I/O CONFIG \ Encoder inputs
5
OFF (0)
OFF
Speed ref 1
Speed ref 2
Ramp ref 1
Ramp ref 2
Select enc 2
OFF
Speed ref 1
Speed ref 2
Ramp ref 1
Ramp ref 2
Encoder 1 type
Sinusoidal
Digital
Encoder 1 pulses
Encoder 2 pulses
Refresh enc 1
Enabled
Disabled
Refresh enc 2
Enabled
Disabled
Auto capture
ADD SPEED FUNCT
1
OFF (0)
ON
OFF
Enable spd adap
Enabled
Disabled
Spd threshold + [FF]
Spd threshold - [FF]
Threshold delay [ms]
Spd threshold
Speed exceeded
Speed not exceeded
Set error [FF]
Set delay [ms]
Set speed
Speed not ref. val.
Speed = ref. val.
Speed zero level [FF]
Speed zero delay [ms]
1
Speed (0)
-32768
32767
1000
0.0
200.0
20.3
0.0
200.0
40.7
0.0
200.0
6.1
0.0
200.0
6.1
0.00
100.00
10.00
0.00
100.00
1.00
0.00
100.00
10.00
0.00
100.00
1.00
0.00
100.00
10.00
0.00
100.00
1.00
ADD SPEED FUNCT \ Speed control
1
32767
1000
1
32767
1000
0
65535
100
0
1
32767
65535
1
100
100
ADD SPEED FUNCT \ Speed zero
32767
10
65535
100
AV300i Manuale Hardware & Guida Rapida
Access via
RS485/
BUS/
Opt2-M
R/Z
Terminal
Opt2-A
/PDC
-
-
R/Z
0
2
3
4
5
R/Z
0
2
3
4
5
R/Z
0
1
R/Z
R/Z
R/W
1
0
R/W
1
0
-
-
-
-
-
-
-
R
R
-
-
-
R/W
1
0
ID
H
L
-
R/Z
1
0
R/Z
0
1
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
-
-
-
-
IA
-
R/W
-
R/W
R/W
R/W
R
0
1
R/W
R/W
R
0
1
QD
L
H
QD
L
H
R
R/W
R/W
-
-
R
143
Cap.8
Value
Parameter
No Format
Spd zero thr
Keyp.
min
max
1
Factory
395
U16
0
-
246
I16
0
248
I16
0
1
Positive (1)
Motor pot reset
249
Motor pot up
396
No acceleration
Acceleration
Motor pot down
397
No deceleration
Deceleration
U16
U16
0
0
65535
1
No acc. (0)
-
U16
0
1
No dec. (0)
-
Enable jog
244
I16
0
375
U16
0
1
Spd inp. (0)
I16
U16
0
0
32767
1
100
No jog+ (0)
U16
0
1
No jog- (0)
153
I16
0
Multi speed sel
Multi speed 1 [FF]
Multi speed 2 [FF]
Multi speed 3 [FF]
Multi speed 4 [FF]
Multi speed 5 [FF]
Multi speed 6 [FF]
Multi speed 7 [FF]
Speed sel 0
Value 2 0 not selected
Value 2 0 selected
Speed sel 1
Value 2 1 not selected
Value 2 1 selected
Speed sel 2
Value 2 2 not selected
Value 2 2 selected
208
154
155
156
157
158
159
160
400
U16
I16
I16
I16
I16
I16
I16
I16
U16
0
-32768
-32768
-32768
-32768
-32768
-32768
-32768
0
7
32767
32767
32767
32767
32767
32767
32767
1
0
0
0
0
0
0
0
0
Not sel. (0)
-
401
U16
0
1
Not sel. (0)
-
402
U16
0
1
Not sel. (0)
-
Enab multi rmp
243
I16
0
Multi ramp sel
202
U16
Acc delta speed0 [FF]
Acc delta time 0 [s]
659
660
Drive not rotating
Drive rotating
Enab motor pot
FUNCTIONS \ Motor pot
1
Enabled (1)
Enabled
Disabled
Motor pot oper
Motor pot sign
Positive
Negative
FUNCTIONS \ Jog function
1
Enabled (1)
Enabled
Disabled
Jog operation
Jog selection
Speed input
Ramp input
Jog reference [FF]
266
Jog +
398
No jog forward
Forward jog
Jog 399
No backward jog
Backward jog
Enab multi spd
-
FUNCTIONS \ Multi speed fct
1
Disabled (0)
Enabled
Disabled
FUNCTIONS \ Multi ramp fct
1
Disabled (0)
Enabled
Disabled
Cap.8
144
0
3
0
FUNCTIONS \ Multi ramp fct \ Ramp 0 \ Acceleration 0
100
U32
0
232 -1
U16
0
65535
1
——— Lista parametri ———
Access via
RS485/
BUS/
Opt2-M
R
0
1
R/Z
1
0
R/W
1
0
Z/C
R/W
0
1
R/W
0
1
R/Z
1
0
R/Z
0
1
R/W
R/W
0
1
R/W
0
1
R/Z
1
0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
1
R/W
0
1
R/W
0
1
Terminal
Opt2-A
/PDC
QD
L
H
R
-
-
ID
-
ID H=reset
ID
L
H
ID
L
H
R/W
-
-
-
-
IA
ID
L
H
ID
L
H
R/W
R/W
R/W
-
-
ID
L
H
ID
L
H
ID
L
H
R/W
R/W
R/Z
1
0
R/W
-
-
-
R/W
R/W
R/W
-
-
R/W
R/W
Value
Keyp.
Parameter
No Format
S acc t const 0 [ms]
665
Dec delta speed0 [FF]
Dec delta time 0 [s]
S dec t const 0 [ms]
661
662
666
Acc delta speed1 [FF]
Acc delta time 1 [s]
S acc t const 1 [ms]
23
24
667
Dec delta speed1 [FF]
Dec delta time 1 [s]
S dec t const 1 [ms]
31
32
668
Acc delta speed2 [FF]
Acc delta time 2 [s]
S acc t const 2 [ms]
25
26
669
Dec delta speed2 [FF]
Dec delta time 2 [s]
S dec t const 2 [ms]
33
34
670
Acc delta speed3 [FF]
Acc delta time 3 [s]
S acc t const 3 [ms]
27
28
671
Dec delta speed3 [FF]
Dec delta time 3 [s]
S dec t const 3 [ms]
Ramp sel 0
Value 2 0 not selected
Value 2 0 selected
Ramp sel 1
Value 2 1 not selected
Value 2 1 selected
35
36
672
403
100
3000
500
FUNCTIONS \ Multi ramp fct \ Ramp 0 \ Deceleration 0
100
U32
0
232 -1
U16
0
65535
1
Float
100
3000
500
FUNCTIONS \ Multi ramp fct \ Ramp 1 \ Acceleration 1
100
U32
0
232 -1
U16
0
65535
1
Float
100
3000
500
FUNCTIONS \ Multi ramp fct \ Ramp 1 \ Deceleration 1
U32
0
100
232 -1
U16
0
65535
1
Float
100
3000
500
FUNCTIONS \ Multi ramp fct \ Ramp 2 \ Acceleration 2
100
U32
0
232 -1
U16
0
65535
1
Float
100
3000
500
FUNCTIONS \ Multi ramp fct \ Ramp 2 \ Deceleration 2
100
U32
0
232 -1
U16
0
65535
1
Float
100
3000
500
FUNCTIONS \ Multi ramp fct \ Ramp 3 \ Acceleration 3
100
U32
0
232 -1
U16
0
65535
1
Float
100
3000
500
FUNCTIONS \ Multi ramp fct \ Ramp 3 \ Deceleration 3
100
U32
0
232 -1
U16
0
65535
1
Float
100
3000
500
U16
0
1
Not sel. (0)
404
U16
0
626
U16
0
U16
U16
0
0
1017
1018
1019
I16
I16
Float
0
-32767
-200.0
943
U16
0
Mot setup sel 0
940
Value 2° not sel
Value 2° sel
Copy mot setup
941
Setup 0
Setup 1
Mot setup state
944
Not running
Running
U16
0
1
Not sel (0)
U16
0
1
Setup 0 (0)
U16
0
1
0
Stop mode
OFF
Stop & Speed 0
Fast stp & Spd 0
Fst / stp & spd 0
Spd 0 trip delay [ms]
627
Jog stop control
630
ON
OFF
Speed ratio
Spd draw out (d)
Spd draw out (%)
Mot setup sel
min
max
Factory
Float
1
Not sel. (0)
FUNCTIONS \ Stop control
3
40000
1
1
0
OFF (0)
FUNCTIONS \ Speed draw
32767
10000
32767
+200.0
FUNCTIONS \ Motor setup
1
Setup 0 (0)
Setup 0
Setup 1
AV300i Manuale Hardware & Guida Rapida
Access via
RS485/
BUS/
Opt2-M
R/W
Terminal
Opt2-A
/PDC
-
-
R/W
R/W
R/W
-
-
R/W
R/W
R/W
-
-
R/W
R/W
R/W
-
-
R/W
R/W
R/W
-
-
R/W
R/W
R/W
-
-
R/W
R/W
R/W
-
-
R/W
R/W
R/W
R/W
0
1
R/W
0
1
ID
L
H
ID
L
H
R/W
R/Z
0
1
2
3
R/W
R/Z
1
0
-
-
-
-
R/W
R
R
IA
QA
-
R/W
R
-
R/Z
0
1
R/Z
0
1
R/Z
0
1
R
0
1
-
R/W
ID
L
H
-
R/W
QD
L
H
R
R/W
-
145
Cap.8
Value
Parameter
No Format
Actual mot setup
Keyp.
min
max
Factory
0
1
Setup 0 (0)
942
U16
656
657
658
U16
U16
U16
FUNCTIONS \ Overload contr \ Ovld mot contr
50
100
100
0
120
60
0
1
Not ovrl (1)
-
I_sqrt_t_accum [%]
655
Ovld Available
406
Overload not possible
Overload possible
Overload 200%
1139
Overload not possible
Overload possible
U16
U16
FUNCTIONS \ Overload contr \ Ovld drv contr
0
100
0
0
1
-
-
U16
0
Enable BU
736
U16
0
740
741
801
Float
U16
U16
0.10
1
0
1083
U16
0
1082
1080
1081
1084
1087
1086
1085
1088
U16
U32
U32
U16
U16
Float
Float
U16
0
0
0
0
0
0.00
0.00
0
F
99999999
10000
800
65535
100.00
100.00
1
100
100
10000
646
10
5.00
0.30
Not active (0)
1089
1090
U16
U16
0
1
Not active (0)
1091
1093
I16
U16
0
0
32767
1
10000
Not active (0)
1094
U16
0
1
Not acknowledged
(0)
1092
U16
0
1
Not ok (0)
58
U16
SPEC FUNCTIONS \ Test generator
0
4
Not conn. (0)
Setup 0
Setup 1
Motor cont curr [%]
Trip time 50% [s]
Ovld mot state
Overload
Not overload
1
-
FUNCTIONS \ Brake unit
1
Disabled (0)
Enabled
Disabled
BU ovld time [s]
BU duty cycle [%]
BU DC vlt [V]
50.00
75
2
S
S
1
230
400
460
PL stop enable
Disabled
Enabled as Mst
Enabled as Slv
PL stop t limit [%]
PL stop acc [rpm/s]
PL stop dec [rpm/s]
PL stop vdc ref [V]
PL time-out [s]
PL stop P Gain [%]
PL stop I Gain [%]
PL stop active
Not active
Active
PL active limit [%]
PL next active
Not active
Active
PL next factor
PL time-out sig
Not active
Active
PL time-out ack
Not acknowledged
Acknowledged
PL mains status
Not ok
Ok
Gen access
FUNCTIONS \ Pwr loss stop f
2
0
Not connected
F current ref
T current ref
Flux ref
Ramp ref
Cap.8
146
——— Lista parametri ———
-
Access via
RS485/
BUS/
Opt2-M
R
0
1
Terminal
Opt2-A
/PDC
-
R
R/W
R/W
R
0
1
QD
L
H
R
R
R
0
1
R
0
1
QD
L
H
QD
L
H
R
R
R/W
1
0
R/W
R/W
R/W
0
1
2
-
-
-
-
R/W
0
1
2
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R
0
1
R
R
0
1
R
R
0
1
R/W
0
1
R/W
0
1
-
-
-
R
-
R
-
R
R
-
R/W
-
R/W
R/Z
0
1
2
3
4
-
-
R
Value
Keyp.
Parameter
No Format
Gen frequency [Hz]
Gen amplitude [%]
Gen offset [%]
59
60
61
Float
Float
Float
0.1
0.00
-200.00
435
U16
0
256
258
235
327
328
329
417
U16
U16
Float
0
0
0.00
65535
65535
65535.00
Text
U16
U16
U16
0
0
0
65535
59
65535
Pointer
Failure reset
330
262
U16
U16
1
0
10
65535
Failure reg del
263
U16
0
904
Enabled
Disabled
Brk time @ stop [ms]
905
DC braking curr [%]
717
DC braking delay [ms]
716
U16
U16
U16
U16
Source
Destination
Mul.Gain
Div.Gain
Input max
Input min
Input offset
Output offset
Input absolute
484
485
486
487
488
489
490
491
492
U16
U16
Float
Float
Float
Float
Float
Float
U16
0
30000
1000
0
100
50
0
65535
500
SPEC FUNCTIONS \ Links \ Link 1
0
65535
0
0
65535
0
-10000
10000
1
-10000
10000
1
0
231 -1
-231
31
31
0
-2
2 -1
0
231 -1
-231
0
231 -1
-231
0
1
OFF (0)
553
554
U16
U16
SPEC FUNCTIONS \ Links \ Link 2
0
65535
0
0
65535
0
Enable rr adap
min
max
Factory
62.5
1.0
200.00
0.00
200.00
0.00
SPEC FUNCTIONS
1
Disabled (0)
Enabled
Disabled
Save parameters
Load default
Life time [h.min]
Failure register
Failure text
Failure hour
Failure min
Failure code
-
No failure
Overcurrent
Overvoltage
Undervoltage
Heatsink sensor
Heatsink ot
Regulation ot
Module overtemp
Intake air ot
Overtemp motor
Failure supply
Curr fbk loss
Output stages
DSP error
Interrupt error
BU overload
Speed fbk loss
Opt2
Hw Opt 1failure
Bus loss
External fault
Enable seq err
DC braking mode
10
65535
SPEC FUNCTIONS \ DC braking
0
1
0
ON
OFF
Source
Destination
AV300i Manuale Hardware & Guida Rapida
-
Access via
RS485/
BUS/
Opt2-M
R/W
R/W
R/W
Terminal
Opt2-A
/PDC
-
-
-
-
-
-
ID
H=reset
-
-
R/Z
1
0
R/W
R/W
R/W
-
-
-
-
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
1
0
-
-
R/W
R/W
-
-
R/W
1
0
C
Z/C
R
R
R
R
R
R
0000h
2300h
3210h
3220h
4210h
4211h
4212h
4213h
4214h
4310h
5100h
5210h
5410h
6110h
6120h
7110h
7301h
7400h
7510h
8110h
9000h
9009h
R/W
Z/C
C
-
147
Cap.8
Value
Parameter
No Format
Mul.Gain
Div.Gain
Input max
Input min
Input offset
Output offset
Input absolute
555
556
557
558
559
560
561
Float
Float
Float
Float
Float
Float
U16
503
504
505
506
507
508
509
510
511
512
513
514
515
516
517
518
519
520
521
522
523
524
525
526
527
528
529
530
531
532
533
534
535
536
537
538
539
540
541
542
543
544
545
546
547
548
549
550
551
552
I16
I16
I16
I16
I16
I16
I16
I16
I16
I16
I16
I16
I16
I16
I16
I16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
Keyp.
min
max
Factory
-10000
-10000
-231
-231
-231
-231
0
10000
10000
231 -1
231 -1
231 -1
231 -1
1
1
1
0
0
0
0
OFF (0)
ON
OFF
Pad 0
Pad 1
Pad 2
Pad 3
Pad 4
Pad 5
Pad 6
Pad 7
Pad 8
Pad 9
Pad 10
Pad 11
Pad 12
Pad 13
Pad 14
Pad 15
Bitword Pad A
Pad A Bit 0
Pad A Bit 1
Pad A Bit 2
Pad A Bit 3
Pad A Bit 4
Pad A Bit 5
Pad A Bit 6
Pad A Bit 7
Pad A Bit 8
Pad A Bit 9
Pad A Bit 10
Pad A Bit 11
Pad A Bit 12
Pad A Bit 13
Pad A Bit 14
Pad A Bit 15
Bitword Pad B
Pad B Bit 0
Pad B Bit 1
Pad B Bit 2
Pad B Bit 3
Pad B Bit 4
Pad B Bit 5
Pad B Bit 6
Pad B Bit 7
Pad B Bit 8
Pad B Bit 9
Pad B Bit 10
Pad B Bit 11
Pad B Bit 12
Pad B Bit 13
Pad B Bit 14
Pad B Bit 15
Menu
Cap.8
148
SPEC FUNCTIONS \ Pad Parameters
-32768
32767
0
-32768
32767
0
-32768
32767
0
-32768
32767
0
-32768
32767
0
-32768
32767
0
-32768
32767
0
-32768
32767
0
-32768
32767
0
-32768
32767
0
-32768
32767
0
-32768
32767
0
-32768
32767
0
-32768
32767
0
-32768
32767
0
-32768
32767
0
0
65535
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
65535
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
0
1
0
OPTIONS \ Option 1
Accessible only with optional Field bus card
——— Lista parametri ———
Access via
RS485/
BUS/
Opt2-M
R/W
R/W
R/W
R/W
R/W
R/W
R/W
1
0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Terminal
Opt2-A
/PDC
-
-
IA, QA
IA, QA
IA
IA
QA
QA
QA
ID*, QD*
ID, QD
ID, QD
ID, QD
ID, QD
ID, QD
ID, QD
ID, QD
ID, QD
QD*
QD*
QD*
QD*
QD*
QD*
QD*
QD*
QD*
QD
QD
QD
QD
QD
QD
QD
QD
QD*
QD*
QD*
QD*
QD*
QD*
QD*
QD*
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R
R
R
R
R
R
R
R
-
Value
Parameter
No Format
Pdc in 0
Pdc in 1
Pdc in 2
Pdc in 3
Pdc in 4
Pdc in 5
1095
1096
1097
1098
1099
1100
U16
U16
U16
U16
U16
U16
Pdc out 0
Pdc out 1
Pdc out 2
Pdc out 3
Pdc out 4
Pdc out 5
1101
1102
1103
1104
1105
1106
U16
U16
U16
U16
U16
U16
Virt dig in 0
Virt dig in 1
Virt dig in 2
Virt dig in 3
Virt dig in 4
Virt dig in 5
Virt dig in 6
Virt dig in 7
Virt dig in 8
Virt dig in 9
Virt dig in 10
Virt dig in 11
Virt dig in 12
Virt dig in 13
Virt dig in 14
Virt dig in 15
1107
1108
1109
1110
1111
1112
1113
1114
1115
1116
1117
1118
1119
1120
1121
1122
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
Virt dig out 0
Virt dig out 1
Virt dig out 2
Virt dig out 3
Virt dig out 4
Virt dig out 5
Virt dig out 6
Virt dig out 7
Virt dig out 8
Virt dig out 9
Virt dig out 10
Virt dig out 11
Virt dig out 12
Virt dig out 13
Virt dig out 14
Virt dig out 15
1123
1124
1125
1126
1127
1128
1129
1130
1131
1132
1133
1134
1135
1136
1137
1138
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
U16
425
U16
769
U16
770
U16
786
787
U16
Float
Menu
Enable OPT2
Enabled
Disabled
Enable PI PID
Enabled
Disabled
Enable PD PID
Enabled
Disabled
PID source
PID source gain
Keyp.
min
max
Factory
Access via
RS485/
BUS/
Opt2-M
OPTIONS \ Option 1\ PDC config \ PDC inputs
R/W
0
65535
0
R/W
0
65535
0
0
65535
0
R/W
R/W
0
65535
0
R/W
0
65535
0
R/W
0
65535
0
OPTIONS \ Option 1\ PDC config \ PDC outputs
0
65535
0
R/W
0
65535
0
R/W
R/W
0
65535
0
R/W
0
65535
0
R/W
0
65535
0
R/W
0
65535
0
OPTIONS \ Option 1\ PDC config \ Virt dig in
R/W
0
65535
0
R/W
0
65535
0
0
65535
0
R/W
R/W
0
65535
0
R/W
0
65535
0
0
65535
0
R/W
R/W
0
65535
0
R/W
0
65535
0
R/W
0
65535
0
R/W
0
65535
0
0
65535
0
R/W
R/W
0
65535
0
R/W
0
65535
0
R/W
0
65535
0
R/W
0
65535
0
0
65535
0
R/W
OPTIONS \ Option 1\ PDC config \ Virt dig out
0
65535
0
R/W
R/W
0
65535
0
R/W
0
65535
0
R/W
0
65535
0
0
65535
0
R/W
R/W
0
65535
0
R/W
0
65535
0
R/W
0
65535
0
R/W
0
65535
0
0
65535
0
R/W
R/W
0
65535
0
R/W
0
65535
0
R/W
0
65535
0
R/W
0
65535
0
R/W
0
65535
0
0
65535
0
R/W
OPTIONS \ Option 2
Accessible only with optional DGF card (See DGF card user manual)
0
1
Disabled (0)
R/Z
1
0
OPTIONS \ PID
R/W
0
1
Disabled (0)
1
0
R/W
0
1
Disabled (0)
1
0
OPTIONS \ PID \ PID source
0
65535
0
R/W
-100.000
100.000
1.000
R/W
AV300i Manuale Hardware & Guida Rapida
Terminal
Opt2-A
/PDC
-
-
-
-
-
-
-
-
ID
R/W
ID
R/W
-
-
149
Cap.8
Value
Keyp.
Parameter
No Format
Feed-fwd PID
758
I16
PID error
PID feed-back
PID offs. Sel
759
763
762
I16
I16
U16
PID offset 0
PID offset 1
PID acc time [s]
PID dec time [s]
PID clamp
760
761
1046
1047
757
I16
I16
Float
Float
I16
PI P gain PID %
PI I gain PID %
PI steady thr
PI steady delay [ms]
P init gain PID %
I init gain PID %
PI central v sel
PI central v1
PI central v2
PI central v3
PI top lim
PI bottom lim
PI integr freeze
765
764
695
731
793
734
779
776
777
778
784
785
783
Float
Float
I16
U16
Float
Float
U16
Float
Float
Float
Float
Float
U16
PI output PID
771
I16
Real FF PID
418
I16
PD P gain 1 PID [%]
PD D gain 1 PID [%]
PD P gain 2 PID [%]
PD D gain 2 PID [%]
PD P gain 3 PID [%]
PD D gain 3 PID[%]
PD D filter PID [ms]
768
766
788
789
790
791
767
Float
Float
Float
Float
Float
Float
U16
PD output PID
PID out sign PID
421
772
I16
U16
PID output
774
I16
PID target
PID out scale
782
773
U16
Float
Diameter calc
794
U16
Enabled
Disabled
Positioning spd [rpm]
Max deviation
Gear box ratio
Dancer constant [mm]
Minimum diameter [cm]
795
796
797
798
799
I16
I16
Float
U16
U16
-100
-10000
0.001
1
1
PI central vs0
PI central vs1
Diameter calc st
780
781
800
U16
U16
U16
0
0
0
min
max
Terminal
Opt2-A
/PDC
R
IA
R
R
R/W
R/W
0
1
R/W
R/W
R/W
R/W
R/W
IA
ID
R
R/W
R/W
IA
-
R/W
-
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
1
0
ID
IA
ID
R/W
R/W
R
-
R
R
-
R
R/W
R/W
R/W
R/W
R/W
R/W
R/W
-
-
R
R/W
0
1
R
-
R
-
QA
R
R/W
R/W
-
-
ID
R/W
0
8000
1.000
1
1
Z/R
1
0
R/W
R/W
R/W
R/W
R/W
-
-
1
0
0
R/W
R/W
R
ID
ID
QD
R/W
R/W
R
Factory
OPTIONS \ PID
-10000
10000
0
OPTIONS \ PID \ PID references
-10000
10000
0
-10000
10000
0
0
1
Offset 0 (0)
Offest 0
Offset 1
-10000
10000
0
-10000
10000
0
0.0
900.0
0.0
0.0
900.0
0.0
0
10000
10000
OPTIONS \ PID \ PI controls
0.00
100.00
10.00
0.00
100.00
10.00
0
10000
0
0
60000
0
0.00
100.00
10.00
0.00
100.00
10.00
0
3
1
P785
P784
1.00
P785
P784
1.00
P785
P784
1.00
P785
10.00
10.00
-10.00
P784
0
0
1
0
ON
OFF
OPTIONS \ PID
1000 x
1000
P784
-10000
10000
0
OPTIONS \ PID \ PD controls
0.00
100.00
10.00
0.00
100.00
1.00
0.00
100.00
10.00
0.00
100.00
1.00
0.00
100.00
10.00
0.00
100.00
1.00
0
1000
0
OPTIONS \ PID
-10000
10000
0
0
1
1
0
Positive
Bipolar
Cap.8
150
-10000
10000
0
OPTIONS \ PID \ PID target
0
65535
0
-100.000
100.000
1.000
OPTIONS \ PID \ Diameter calc
0
1
0
100
10000
1.000
10000
2000
OPTIONS \ PID
1
1
1
Access via
RS485/
BUS/
Opt2-M
——— Lista parametri ———
Value
Keyp.
Parameter
No Format
Malfunction code
57
U16
0
55
56
44
U16
U16
I16
0
0
-2 × P45
65535
65535
+2 × P45
115
I16
-32768
119
I16
-32768
Speed min amount [FF]
Speed max amount [FF]
1
2
U32
U32
0
0
Speed min pos [FF]
Speed max pos [FF]
Speed min neg [FF]
Speed max neg [FF]
5
3
6
4
U32
U32
U32
U32
0
0
0
0
Acc delta speed [FF]
Acc delta time [s]
21
22
U32
U16
0
0
Dec delta speed [FF]
Dec delta time [s]
29
30
U32
U16
0
0
713
Ramp stop
DC braking curr
QStp delta speed [FF]
37
QStp delta time [s]
38
I16
-2
U32
U16
Face value num
Face value den
54
53
I16
I16
Dim factor num
Dim factor den
Dim factor text
50
51
52
I32***
I32***
Text
Speed base value [FF]
Speed input perc [%]
Percent ref var [%]
Act percentage [%]
45
46
116
120
U32***
I16
I16
I16
Password 2
86
No failure
Overcurrent
Overvoltage
Undervoltage
Heatsink sensor
Heatsink ot
Regulation ot
Module overtemp
Intake air ot
Overtemp motor
Failure supply
Curr fbk loss
Output stages
DSP error
Interrupt error
BU overload
Speed fbk loss
Opt2
Hw opt 1 failure
Bus loss
External fault
Enable seq err
Control Word
Status word
Speed input var [FF]
(Ramp ref 1)
Speed ref var [FF]
(Speed ref)
Act speed value [FF]
(Actual spd)
QStp opt code
min
max
Factory
DRIVECOM
65535
Access via
RS485/
BUS/
Opt2-M
Terminal
Opt2-A
/PDC
R
0000h
2300h
3210h
3220h
4210h
4211h
4212h
4213h
4214h
4310h
5100h
5210h
5410h
6110h
6120h
7110h
7301h
7400h
7510h
8110h
9000h
9009h
R/W
R
R/W
-
-
IA, QA
R/W
R
32767
R
-
R
32767
R
-
R
R/Z
R/Z
-
-
R/Z
R/Z
R/Z
R/Z
-
-
R/W
R/W
-
-
R/W
R/W
-
-
S
0
DRIVECOM \ Speed amount
0
232 -1
2000
232 -1
DRIVECOM \ Speed min/max
0
232 -1
2000
232 -1
0
232 -1
2000
232 -1
DRIVECOM \ Acceleration
100
232 -1
65535
1
DRIVECOM \ Deceleration
100
232 -1
65535
1
DRIVECOM \ Quick stop
-1
Ramp stop (1)
1000
232 -1
65535
1
DRIVECOM \ Face value fact
1
32767
1
1
32767
1
DRIVECOM \ Dimension fact
1
65535
1
1
1
232 -1
rpm
DRIVECOM
1
16383
1500
-32768
32767
0
-32768
32767
0
-32768
32767
0
SERVICE
Service
0
0
AV300i Manuale Hardware & Guida Rapida
R/Z
1
2
R/W
R/W
-
-
-
R/Z
R/Z
-
R
R
R/Z
R/Z
R/Z
-
R
R
-
R/Z
R/W
R
R
-
R
R/W
R
R
W
-
-
151
Cap.8
GE Industrial Systems
+ 1 540 387 7000
www.GEindustrial.com
General Electric Company
1501 Roanoke Blvd.
Salem, VA 24153-6492 USA
Draft - 30-7-2003