FACOLTÀ DI INGEGNERIA
Corso di Laurea in Ingegneria delle Telecomunicazioni
Tesi di Laurea
Effetti dell’electron cloud sulla
dinamica del fascio di particelle
in macchine acceleratrici
Relatore:
Prof. Stefania Petracca
Correlatore:
Dott. Theo Demma
Candidato:
Francesco Maria Velotti
Anno Accademico 2008 - 2009
matr.196/510
Indice
1 Introduzione
1
2 Cenni sugli Acceleratori
3
2.1
Definizioni sul moto di particelle relativistiche . . . . . . . . . . . . .
4
2.2
Concetti generali sugli acceleratori . . . . . . . . . . . . . . . . . . . .
7
2.3
Luminosità per collider ad alta energia . . . . . . . . . . . . . . . . . 11
3 Dinamica Lineare
3.1
13
Dinamica trasversale . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1.1
Focheggiamento . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1.2
Oscillazioni di betatrone . . . . . . . . . . . . . . . . . . . . . 24
3.2
Emittance e admittance . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.3
Dinamica longitudinale . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4 Radiazione di Sincrotrone
45
4.1
Radiazione per particelle relativistiche . . . . . . . . . . . . . . . . . 46
4.2
Smorzamento delle oscillazioni . . . . . . . . . . . . . . . . . . . . . . 49
5 Wake Fields
54
5.1
Funzioni di wake . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5.2
Impedenze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
i
INDICE
ii
6 Electron Cloud
62
6.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
6.2
Build-up dell’electron cloud . . . . . . . . . . . . . . . . . . . . . . . 66
6.3
Sorgenti di elettroni primari . . . . . . . . . . . . . . . . . . . . . . . 66
6.4
Interazione elettrone-bunch
. . . . . . . . . . . . . . . . . . . . . . . 67
6.4.1
Bunch cilindrico . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.4.2
Bunch con distribuzione di carica non uniforme . . . . . . . . 71
6.5
Secondary electron yield . . . . . . . . . . . . . . . . . . . . . . . . . 72
6.6
Effetti di saturazione . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
6.7
Descrizione dell’evoluzione dell’electron cloud tramite mappa cubica . 77
6.7.1
Formalismo della mappa cubica . . . . . . . . . . . . . . . . . 78
6.7.2
Calcolo del coefficiente lineare . . . . . . . . . . . . . . . . . . 80
7 Instabilità Causate dall’Electron Cloud
7.1
Instabilità di single-bunch . . . . . . . . . . . . . . . . . . . . . . . . 85
7.1.1
7.2
84
Schemi di simulazione . . . . . . . . . . . . . . . . . . . . . . 89
Instabilità di multi-bunch . . . . . . . . . . . . . . . . . . . . . . . . 91
7.2.1
Tracking dell’instabilità di multi-bunch . . . . . . . . . . . . . 95
8 Possibili soluzioni
97
8.1
Uso dei solenoidi per sopprimere l’electron cloud in DaΦne . . . . . . 97
8.2
Simulazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
8.2.1
Regioni con bassa fotoemissione . . . . . . . . . . . . . . . . . 99
8.2.2
Regioni con alta fotoemissione . . . . . . . . . . . . . . . . . . 103
A Lagrangiana ed Hamiltoniana
107
Ringraziamenti
117
Capitolo 1
Introduzione
I campi elettrici presenti nella camera a vuoto di un acceleratoere possono far collidere gli elettroni prodotti da foto-emissione, ionizzazione di gas residui, ecc. verso
le pareti della camera a vuoto. Se gli elettroni che bombardano le pareti possiedono sufficiente energia, si produrranno elettroni secondari, che una volta accelerati
potranno colpire a loro volta la superficie producendo ancora elettroni. Sotto opportune condizioni, si produce, in tal modo, un meccanismo di moltiplicazione a valanga
degli elettroni prodotti dalle collisioni noto come multipacting effect. Si crea così
una nube di elettroni all’interno della camera (electron cloud ) che, se sufficientemente densa, può incidere negativamente sul funzionamento e sulle prestazioni della
macchina, causando, ad esempio, la perdita del fascio, l’aumento dell’emittanza, degradazione del vuoto, e disturbi sulla diagnostica dei fasci. Lo studio dell’insorgenza
dell’electron cloud e dei suoi effetti, avendo grande evidenza sperimentale in numerose macchine acceleratrici, è già da alcuni anni uno dei temi di maggiore rilevanza
nell’attivita’ di ricerca sugli effetti collettivi nella dinamica dei fasci di particelle
nella comunità scientifica internazionale [13, 26, 20, 18, 27].
Il lavoro che ha condotto alla stesura di questa tesi è iniziato con lo studio della fisica del fenomeno dell’electron cloud, dandone una giustificazione da un punto
di vista formale [17], ed è proseguito con l’acquisizione e utilizzo di codici di si1
CAPITOLO 1. INTRODUZIONE
2
mulazione (ECLOUD [25]) per visualizzarne i possibili effetti sulla dinamica delle
particelle, successivamente è stato utilizzato un metodo semi analitico, per trattare
l’evoluzione di alcuni parametri di merito del fenomeno, introdotto in letteratura
da Iriso, Petracca e Demma [18], [19], che oltre a produrre un risparmio molto significativo dei tempi di calcolo, migliora la comprensione della fisica del problema
nella sua formulazione analitica. Gli strumenti acquisiti, i codici di simulazione ed
il metodo semi analitico sono stati applicati allo studio dei parametri della macchina acceleratrice DaΦne dei Laboratori Nazionali di Frascati dell’INFN con risultati
molto soddisfacenti, in particolare si è ottenuto un ottimo accordo tra valori ottenuti dalla simulazione, quelli ricavati utilizzando il metodo semianalitico e i risultati
sperimentali.
Il contenuto della Tesi è organizzato in sette capitoli. Il primo capitolo contiene
dei cenni sulla macchine acceleratrici e loro grandezze fondamentali. Nel secondo
viene introdotto il formalismo necessario per studiare il moto delle particelle all’interno della camera a vuoto. Il terzo si occupa della radiazione di sincrotrone, che
è una delle cause principali della formazione dell’electron cloud. Il quarto capitolo tratta brevemente dei campi scia (wake fields). Nel quinto capitolo è illustrato
il fenomeno dell’electron cloud, i parametri che lo caratterizzano, ed il metodo semi analitico utilizzato per lo studio. Nel sesto sono illustrate le instabilità indotte
dall’electron cloud, dal punto di vista sia analitico che numerico. L’ultimo capitolo contiene i risultati numerici ottenuti con il codice di simulazione ECLOUD per
DaΦne e viene considerato un espediente sperimentale per sopprimere l’insorgenza
dell’electron cloud.
Capitolo 2
Cenni sugli Acceleratori
Lo studio sperimentale dei nuclei e delle particelle elementari e delle loro interazioni
consiste in larga parte nello studio di processi di collisione tra particelle ad energie
sufficientemente elevate. Un importante aiuto lo riceviamo da apparati in grado
di fornire fasci continui o impulsati di particelle (cariche o neutre) con energia e
intensità adeguate allo scopo prefissato. La natura, in realtà, mette a disposizione
delle sorgenti naturali di particelle come i raggi cosmici e le sorgenti radioattive.
I raggi cosmici incidenti sull’atmosfera terrestre hanno uno spettro in energia che
raggiunge valori compresi tra 1018 e 1019 eV, anche se con intensità molto piccole. Le
limitazioni dei raggi cosmici come fasci naturali di particelle energetiche in termini
di intensità e di dispersione in energia e direzione, rendono comunque necessaria la
costruzione di “sorgenti artificiali” quali acceleratori, accumulatori, colliders, ecc. Il
più potente acceleratore di particelle costruito è l’LHC, entrato in funzione soltanto
nello scorso autunno, il quale potrà raggiungere energia di singolo fascio pari a 7 TeV.
3
CAPITOLO 2. CENNI SUGLI ACCELERATORI
2.1
4
Definizioni sul moto di particelle relativistiche
Seguendo la convenzione standard definiamo la velocità relativistica β e il fattore di
Lorentz γ come
β=
v
c
(2.1)
�− 1
�
γ = 1 − β2 2
(2.2)
con v velocità della particella e c velocità della luce nel vuoto.
L’energia totale, la quantità di moto e l’energia cinetica per una particella con
massa a riposo m, sono rispettivamente:
(2.3)
U = γmc2 ,
U
,
c
(2.4)
W = (γ − 1) mc2 .
(2.5)
p = βγmc = β
La relazione tra l’energia e la quantità di moto è:
�
U = (pc)2 + (mc2 )2 .
(2.6)
Le particelle generalmente accelerate sono gli elettroni con massa me = 0.511 MeV
e i protoni con massa mp = 938 MeV.
Generalmente distinguiamo tre possibili casi:
γ�1
Non relativistico (N.R.)
γ>1
Relativistico
γ�1
Ultra relativistico (U.R.)
CAPITOLO 2. CENNI SUGLI ACCELERATORI
5
Espandiamo ora l’Eq. (2.2) per β piccolo e otteniamo γ � 1+ 12 β 2 , quindi sostituendo
in (2.5) otteniamo:
1
1
W � mc2 β 2 = mv 2
2
2
(2.7)
che è l’energia cinetica classica.
Introduciamo ora una serie di relazioni molto usate nello studio della fisica per
gli acceleratori. Differenziando la (2.2) otteniamo:
�
�− 3
dγ = β 1 − β 2 2 dβ = βγ 3 .
(2.8)
Per un’accelerazione monodimensionale e per la (2.8), la seconda legge di Newton
diventa
F =
dp
d
dv
dv
= mc (βγ) = γ 3 m = m∗ ,
dt
dt
dt
dt
(2.9)
definendo come massa effettiva,
m∗ =
dp
d (γmv)
=
= mγ 3 .
dv
dv
(2.10)
Come già accennato, le particelle cariche sono accelerate da forze elettromagnetiche, le quali sono descritte dall’equazione di Lorentz:
�→
→
−
− − →
−�
F =q E +→
v ×B .
(2.11)
Se non c’è campo elettrico ma esclusivamente un campo magnetico uniforme, l’ Eq.
(2.11) può essere scritta come
� →
�
−
−
→
−
→
−
d→
p
d
d−
v
dγ →
d→
v
→
−
→
−
−
F =qv ×B =
=
(γm v ) = m γ
+
v = γm
,
dt
dt
dt
dt
dt
(2.12)
�→
�
�− �
−
−
−
dove β = � β � è una costante, quindi (dγ/dt) = 0. La velocità →
v =→
ω ×→
ρ , definita
−
dalla velocità angolare →
ω e dal raggio, è costante per una forza centrale con modulo
CAPITOLO 2. CENNI SUGLI ACCELERATORI
6
costante. Il cyclotron radius ρ è il raggio di curvatura della traettoria. L’Eq. (2.12)
diventa
−
→
−
d→
ρ
→
−
→
−
−
−
q v × B = γm ω ×
= γm→
ω ×→
v.
dt
(2.13)
→
−
Nel caso in cui la particella ha velocità iniziale perpendicolare a B , si ha
qvB = γmωv = γm
v2
,
ρ
(2.14)
quindi la forza di Lorentz è la forza centripeta che mantiene la particella di carica
q e massa m su un’orbita circolare. Dividendo l’Eq. (2.14) per v/ρ, otteniamo la
relazione che lega la quantità di moto con il raggio di curvatura, il campo magnetico
e la carica della particella:
p = βγmc = qBρ.
(2.15)
Per una particella con la stessa carica dell’elettrone, è utile ricodare
p [GeV/c] � 0.3B [T ] ρ [m]
(2.16)
e (Bρ) rappresenta la rigidità magnetica. Altre relazioni importanti sono:
ω=
eB
γm
�
�
� ⊥� = γ E
� ⊥ + �v × B
�⊥
E
�� = E
��
E
�
�
�
�
�⊥
� ⊥ − �v × E
�⊥
B
= γ B
� �� = B
� �
B
(2.17)
(2.18)
(2.19)
(2.20)
(2.21)
dove nella (2.17) ω è la velocità angolare o frequenza del ciclotrone ed e è la carica dell’elettrone, ed i simboli � e ⊥ rappresentano rispettivamente la componente
CAPITOLO 2. CENNI SUGLI ACCELERATORI
7
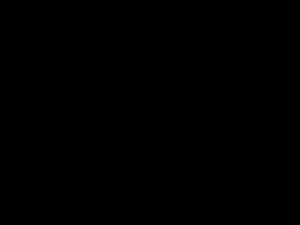
Figura 2.1: Esempio di acceleratore circolare (LEP), in cui si possono osservare le
componenti principali.
parallela ed ortogonale alla velocità. [1]
2.2
Concetti generali sugli acceleratori
In generale un acceleratore di particelle è composto da alcuni elementi fondamentali
(fig. 2.1):
• una sorgente di ioni o elettroni;
• una camera a vuoto (vacuum chamber) all’interno della quale le particelle sono
accelerate;
CAPITOLO 2. CENNI SUGLI ACCELERATORI
8
• un dispositivo di guida e focalizzazione (bending e focusing magnets), che utilizza campi magnetici per mantenere le particelle in prossimità di un’orbita o
traiettoria di riferimento;
• un sistema di accelerazione (RF cavity), che mediante campi elettrici fornisce
energia alle particelle e le accelera;
• dispositivi di misura e correzione, per controllare l’intensità, la posizione e le
dimensioni del o dei fasci nel corso del processo di accelerazione ed eventualmente del periodo in cui i fasci restano accumulati e, se necessario, correggere
automaticamente posizione, dimensioni e dispersione in energia del o dei fasci;
• nel caso di acceleratori che producono un fascio da utilizzare su bersaglio fisso,
un bersaglio interno all’accumulatore o un sistema che consenta l’estrazione
del fascio e lo convogli su uno o più bersagli esterni; nel caso di un collider il
“bersaglio” e’ costituito da un secondo fascio accumulato, circolante in senso
opposto al primo. [2]
Possiamo ora dividere gli acceleratori in due grandi famiglie: quelli che accelerano le particelle tramite tensione continua e quelli che accelerano mediante campi
elettromagnetici variabili nel tempo.
Nel primo caso è applicata una d.d.p. costante elevata tra la sorgente di ioni
e il bersaglio; tale d.d.p. è ottenuta tramite un alimentatore di tensione AC e un
sistema di raddrizzatori a diodi. Questo tipo di acceleratori soffrono però di un
forte limite, ovvero non possono raggiungere elevata energia a causa di fenomeni di
scarica. Per ovviare a tale limite si utilizzano tecniche di accelerazione mediante
campi elettromagnetici variabili nel tempo. In generale si sfrutta il doppio ruolo del
campo magnetico, ovvero dovrà mantenere il fascio su un’orbita circolare e dovrà
CAPITOLO 2. CENNI SUGLI ACCELERATORI
9
accelerarlo. Consideriamo la forza di Lorentz
�
�
d�p
�
�
= q E + �v × B ,
dt
(2.22)
in cui il secondo membro, non considerando il campo elettrico, è
d�p
� orbit
= q�v × B
dt
(2.23)
allora per la (2.15) possiamo scrivere
�Borbit =
�p
qρ
(2.24)
quindi ρ rimane costante. Vediamo ora come la variazione temporale del campo
magnetico accelera il fascio:
d�p
�
= qE
dt
(2.25)
considerando l’equazione in forma integrale di Maxwell
�
� =−d
� · dl
E
dt
Cρ
�
Σρ
�
� · ds
B
(2.26)
allora
dp
qρ dBavg
=
dt
2 dt
(2.27)
e quindi abbiamo
�p =
qρ
�Bavg .
2
(2.28)
Da cui si evince che affichè il fascio sia accelerato e ρ resti costante deve valere la
relazione
�Borbit =
�Bavg
.
2
(2.29)
CAPITOLO 2. CENNI SUGLI ACCELERATORI
10
Quanto descritto finora è l’idea che sta alla base del funzionamento degli acceleratori
in generale, ma in particolare del betatrone. [1]
Gli acceleratori basati sulla condizione di accelerazione risonante sfruttano un
campo elettrico oscillante, in fase con il passaggio delle particelle, per accelerare il
fascio; quest’ultimo presenta una struttura discontinua nella coordinata longitudinale, ovvero è diviso in bunches (gruppi di particelle vicine tra loro nella coordinata
longitudinale, separati da intervalli spopolati). Per questo tipo di acceleratori ci
sono tre implementazioni fondamentali:
• acceleratore lineare (LINAC), è costituito da una serie di tubi di drift, intervallati da gap acceleratrici, nel quale i fasci percorrono una trettoria rettilinea;
• (sincro) ciclotrone, è formato da due elettrodi a forma di D nei quali il fascio
percorre una traettoria a spirale in quanto il campo magnetico è costante e
tra i due elettrodi le particelle sono accelerate dal campo elettrico, quindi il
raggio di curvatura è crescente;
• sincrotrone, ha una forma circolare in quanto il raggio di curvatura si mantiene
costante ed è formato da una o più cavità acceleratrici le quali sono attraversate
ripetutamente dalle particelle. In questa struttura il campo magnetico cresce
quasi linearmente con quello elettrico. [1]
Gli acceleratori hanno vari scopi:
• ricerca per la fisica delle alte energie, ovvero le particelle accelerate sono fatte
scontrare tra loro o contro un bersaglio fisso per studiare i prodotti dell’interazione e per dare uno sguardo più da vicino agli elementi di base della
materia;
• ricerca per la fisica nucleare, ovvero studiare le interazioni di ioni completamente nudi con l’obiettivo di indagare sulla struttura, sulle interazioni e sulle
proprietà dei nuclei;
CAPITOLO 2. CENNI SUGLI ACCELERATORI
11
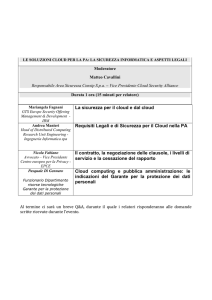
Figura 2.2: Collisione di una singola particella di un fascio con un bunch di un altro
fascio.
• produzione di luce di sincrotrone, in quanto utilizzata nello studio della struttura atomica, della chimica, della fisica della materia condensata, della biologia
e della tecnologia;
• applicazioni mediche, ad esempio trattamento del cancro tramite bombardamento con adroni.
2.3
Luminosità per collider ad alta energia
A causa dell’utilizzo di campi variabili nel tempo per produrre accelerazione in
macchine ad alta energia, questi dispositivi tendono a produrre fasci di particelle
non continui, ma costituiti da sequenze di bunches (“pacchetti” di particelle).
Si supponga che un bunch si stia muovendo in una direzione e che, nello stesso
acceleratore, ce ne sia un altro che si stia muovendo in direzione opposta. Entrambi
hanno sezione trasversale A e contengono N particelle. Ogni particella di un bunch “vedrà” una frazione dell’area dell’altro bunch N σint /A oscurata dalla sezione
trasversale d’interazione σint . Questa situazione è mostrata in fig. 2.2.
CAPITOLO 2. CENNI SUGLI ACCELERATORI
12
Il numero di interazioni per ogni passaggio di due fasci simili è quindi N 2 σint /A.
Se la frequenza di collisione dei bunches è f , allora il rate di interazione è
R=f
N2
σint .
A
(2.30)
La luminosità, L, è definita come il numero di interazioni per unità di tempo e
di superficie trasversale
L=f
N2
.
A
(2.31)
Una situazione più realistica si ha quando la distribuzione delle particelle nel piano
perpendicolare alla direzione del moto è Gaussiana, o più propriamente, una distribuzione di Rayleigh. La funzione densità di probabilità per la distribuzione di
particelle è funzione del raggio r in una distribuzione a simmetria cilindrica:
dn (r) =
N − r22
e 2σ r dr.
σ2
(2.32)
Per questa distribuzione la luminosità assume la forma
L=f
N2
.
4πσ 2
(2.33)
L’unità di misura della luminosità è cm−2 s−1 , ad esempio DaΦne a luminosità
1032 cm−2 s−1 ed LHC a 1034 cm34 s−1 .
Capitolo 3
Dinamica Lineare
Come detto nel capitolo precedente, il sincrotrone è un acceleratore in cui la variazione del campo magnetico e della pulsazione delle cavità a RF mantiene stabile
l’orbita delle particelle (ρ costante) e le particelle continuano ad essere sincrone con
la fase del campo acceleratore.
Abbiamo detto che l’orbita resta stabile, quindi il campo magnetico necessario
per mantenere chiusa l’orbita deve essere ”creato” solo in corrispondenza di essa. Ciò
consente di realizzare macchine acceleratrici di grandi dimensioni, ad esempio come
l’LHC del CERN in cui L ∼ 27 Km. In un acceleratore di questo tipo, le particelle
compiono un numero molto elevato di rivoluzioni, quindi il problema fondamentale
risulta essere quello della stabilità dei fasci e le eventuali correzioni riguardanti:
• le inevitabili deviazioni dall’orbita delle particelle sincrone ( particelle con
energia pari all’energia nominale del fascio);
• le dimensioni trasversali del fascio;
• la sincronia di accelerazione.[2]
13
CAPITOLO 3. DINAMICA LINEARE
14
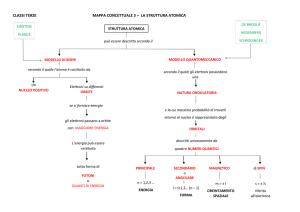
Figura 3.1: Caratterizzazione dei gradi di libertà trasversi e longitudinali rispetto
al moto di una particella.
Figura 3.2: Particelle cariche in moto immerse in un campo magnetico uniforme
subiscono una deflessione (a) perpendicolare alle linee di campo, (b) parallela alle
linee di campo.
3.1
Dinamica trasversale
Le oscillazioni di betatrone avvengono nel piano (x, y) ortogonale alla direzione del
fascio (fig. 3.1). Le frequenze delle oscillazioni trasverse sono molto più grandi
rispetto alla frequenza tipica delle oscillazioni di fase, quindi il moto longitudinale
può essere trattato indipendentemente.[2]
Le particelle si muovono lungo orbite circolari immerse in un campo magnetico
uniforme, il quale produce il focheggiamento. Supponiamo che la particella subisca
una deflessione angolare nel piano ortogonale al campo magnetico, l’orbita risultante
sarà comunque circolare, con raggio invariato ma centro differente, come mostrato
in fig. 3.2.
La seconda orbita sta eseguendo un’oscillazione stabile rispetto alla prima. Sfortunatamente, se la deflessione ha una componente lungo le linee di campo magnetico,
l’orbita diventerà successivamente una spirale infinita, quindi non c’è focheggiamento
CAPITOLO 3. DINAMICA LINEARE
15
Figura 3.3: Sistema di riferimento di Frenet-Serret lungo l’orbita di riferimento.
rispetto a questo grado di libertà. [2]
Si consideri il sistema di riferimento locale mostrato in fig. 3.3, dove:
• s è la lunghezza dell’arco (misurata sull’orbita) tra un punto arbitrario fissato
Q e un punto generico P ;
• O (s) è il centro del cerchio osculatore di raggio ρ;
• ρ = ρ (s) è il raggio di curvatura della traiettoria ideale di riferimento (orbita
chiusa della particella sincrona) ;
• r = r (s) è la distanza della traiettoria generica dall’asse y passante per O(s);
• x = x (s) e y = y (s) sono le coordinate di betatrone che descrivono le
oscillazioni trasverse;
• x = x (s) = r (s) − ρ (s);
• R = R (s, x, y) è il raggio di curvatura locale della trettoria generica della
particella.
CAPITOLO 3. DINAMICA LINEARE
3.1.1
16
Focheggiamento
Nel piano orizzontale (y = 0), dall’Eq. (2.15) e rispetto al sistema di riferimento
locale, possiamo scrivere:
R (s, x, y) =
p
qBy (s, x, y)
(3.1)
ponendo x = 0 si ha
(3.2)
R (s, x = 0, y = 0) = ρ (s) .
Derivando parzialmente la (3.1) rispetto ad x:
∂R
dR ∂By
ρ (s)
(s, x = 0, y = 0) =
=−
∂x
dBy ∂x
By (s, x = 0, y = 0)
�
∂By
∂x
�
,
(3.3)
x=0,y=0
con
B0 (s) ≡ By (s, x = 0, y = 0)
(3.4)
si definisce l’indice di campo n (s):
ρ (s)
n (s) ≡ −
B0 (s)
�
∂By
∂x
�
(3.5)
x=0,y=0
e omettendo per semplicità di notazione la dipendenza da s, la (3.5) diventa:
∂R
(x = 0) = n.
∂x
(3.6)
La condizione di stabilità dell’orbita nel piano orizzontale può essere scritta come:
R (x) < r (x) x > 0
.
R (x) > r (x) x < 0
(3.7)
CAPITOLO 3. DINAMICA LINEARE
17
Considerando x � ρ, con r = ρ + x, nell’intorno di x = 0 si ha
R (x) � ρ +
�
∂R
∂x
�
x,
(3.8)
x=0
e la condizione di focheggiamento (3.7) nel piano orizzontale diventa
n < 1.
(3.9)
Si noti che la condizione di focheggiamento orizzontale è soddisfatta anche per n ≤ 0;
per la precisione, quanto minore è n, tanto più “forte” sarà l’effetto di focheggiamento
orizzontale.
Analizziamo ora il focheggiamento nel piano verticale (x = 0). Supponiamo
che il campo magnetico non abbia componenti lungo s e nel piano dell’orbita di
riferimento (y = 0) sia
� (s, x, y = 0) = By (s, x) ûy ;
B
(3.10)
allora la forza di Lorentz sarà data da:
� = −qvs By ûx + qvs Bx ûy + q (vx By − vy Bx ) ûs
F� = q�v × B
(3.11)
Fy = qvs Bx .
(3.12)
ovvero
Quindi la condizione di focheggiamento nel piano verticale risulta
<0y>0
Fy
>0y<0
(3.13)
CAPITOLO 3. DINAMICA LINEARE
essendo vs > 0 e q > 0
Bx
allora per la (3.10) abbiamo
� ×B
� = 0, quindi
Essendo ∇
<0y>0
>0y<0
18
(3.14)
∂Bx
< 0.
∂y
(3.15)
∂By
∂Bx
=
∂x
∂y
(3.16)
la condizione di focheggiamento nel piano verticale diventa
∂By
<0
∂x
(3.17)
n > 0.
(3.18)
ovvero
� ed n indipendenti da s, entrambe le condizioni di focheggiamento (3.9)
Essendo B
e (3.18) sono soddisfatte simultaneamente e vale la condizione di focheggiamento
debole (weak focusing):
0 < n < 1,
(3.19)
Se n � −1 e per n � 1 si parla di focheggiamento forte (strong focusing) che
corrisponde ad una sequenza di magneti caratterizzati alternativamente da n � 1 e
n � 1.
In un acceleratore sono utilizzati due tipi di magneti:
� (x, y) = By ûy uniforme sia in
• dipoli, che producono un campo magnetico B
x che in y. Essi assicurano che l’orbita di riferimento sia chiusa, ma non
possiedono alcuna funzione di focheggiamento;
• quadrupoli, i quali possono avere rispettivamente n � −1 e n � 1. So-
CAPITOLO 3. DINAMICA LINEARE
19
Figura 3.4: Coordinate per descrivere il moto nei due piani trasversali (con p fissato).
no caratterizzati da un campo magnetico sull’asse di simmetria, ma se sono
disposti in maniera tale che l’orbita di riferimento passi per tale asse, non
hanno alcun effetto sull’orbita di riferimento e svolgono soltanto una funzione
di focheggiamento.
Per discutere ora, sotto quali condizioni una disposizione di dipoli e quadrupoli
possiede proprietà focheggianti in entrambi i piani trasversali, bisogna innanzitutto
specificare la struttura, tipicamente periodica, della successione degli elementi magnetici lungo l’orbita di riferimento; introdurre un linguaggio per la descrizione del
moto nei due piani trasversali, insieme ad opportune approssimazioni.
Considerando ora il moto, con p fissato, nelle coordinate orizzontali (x, x� ), come
in fig. 3.4, la sola componente del campo magnetico che ci interessa è quella verticale
By , il cui valore dipende, in un quadrupolo, solo da x; quindi il moto nei due piani
trasversali risulta disaccoppiato.
Se lo spessore l dei quadrupoli è piccolo rispetto al raggio di curvatura R della
traettoria da essi introdotto, il campo magnetico sulla traettoria è uniforme e il
suo valore può quindi essere considerato come funzione della coordinata xin della
traettoria all’ingresso del quadrupolo
(fig. 3.5). Questa approssimazione è definita come approssimazione di lente
sottile (thin lens): xout = xin . La relazione (2.15) con
By (x) =
∂By
x
∂x
(3.20)
CAPITOLO 3. DINAMICA LINEARE
20
Figura 3.5: Deflessione di una particella mediante un elemento magnetico sottile.
diventa
p = qBy (x) R = q
∂By
xR
∂x
(3.21)
L’inclinazione della traettoria della particella sarà:
e lo sfasamento
�
� �
�
� ql ∂By � � l ∂By �
l
�
�
�
|θ| �
=
xin � = �
xin ��
R � p ∂x
(Bρ) ∂x
(3.22)
∆x� ≡ x�out − x�in ,
(3.23)
B�l
xin .
(Bρ)
(3.24)
con x� ≡ dx/ds, vale:
∆x� � −
L’effetto di un quadrupolo sulle coordinate (x, x� ) può essere rappresentato in
forma matriciale:
x
x�
out
1 0 x
=
− f1 1
x�
(3.25)
out
CAPITOLO 3. DINAMICA LINEARE
21
Figura 3.6: Lente sottile convessa.
in cui la distanza focale della lente del quadrupolo vale
f≡
(Bρ)
;
B�l
(3.26)
positiva nel caso di quadrupolo focheggiante, come mostrato in fig. 3.6, negativa nel
caso di quadrupolo defocheggiante.
La dinamica delle particelle nello spazio libero (drift) di lunghezza L tra due
quadrupoli consecutivi è descritto dalla relazione
x
x�
out
1 L x
=
.
0 1
x�
(3.27)
in
Quindi per descrivere la dinamica tra due punti s1 e s2 sulla traettoria si introduce
la relazione
x
x
= M (s1 , s2 )
x�
x�
s2
(3.28)
s1
dove M (s1 , s2 ) è la matrice 2 × 2 che si ottiene moltiplicando tra loro le matrici
corrispondenti a tutti gli elementi magnetici compresi tra s1 e s2 :
M (s1 , s2 ) =
�
Mi .
(3.29)
i
La successione periodica di elementi magnetici, detta reticolo magnetico (magnetic lattice) individua una cella fondamentale detta FODO, in cui:
CAPITOLO 3. DINAMICA LINEARE
22
• F rappresenta un quadrupolo focheggiante;
• O rappresenta un dipolo, drift space;
• D rappresenta un quadrupolo defocheggiante
e la matrice M corrispondente è
1 L 1 0 1 L 1 0
MF ODO =
=
1
1
0 1
1
0
1
−
1
f
f
� �2
L
L
L2
2L + f
1− f − f
− fL2
1 + Lf
(3.30)
(3.31)
Una serie di elementi successivi aventi matrici M1 , M2 , ...., Mn , saranno descritti
dalla matrice della rivoluzione completa:
M = Mn ...M2 M1
(3.32)
e per n rivoluzioni di macchina si ha
x
Mn
x�
.
(3.33)
xin
Se ora V1 e V2 sono gli autovettori di M e λ1 e λ2 gli autovalori, tali che M Vi = λi Vi ,
un vettore generico si scriverà
x
= AV1 + BV2
x�
(3.34)
CAPITOLO 3. DINAMICA LINEARE
23
dove A e B sono due costanti; dopo n rivoluzioni si ha
x
n
n
Mn
= Aλ1 V1 + Bλ2 V2 .
x�
(3.35)
in
La condizione di stabilità è equivalente alla richiesta che λn1 e λn2 non crescano con
n.
Notiamo che M è il prodotto di matrici con determinanti unitari, quindi anche
M avrà determinante uguale ad 1. Allora gli autovalori di M sono uno il reciproco
dell’altro:
1
,
λ1
(3.36)
λ1 = eiµ
(3.37)
λ2 = e−iµ
(3.38)
λ2 =
quindi, in generale, possiamo scrivere
dove µ è un numero complesso e per la condizione di stabilità, µ deve essere reale.
Ponendo
a b
M =
c d
(3.39)
e risolvendo l’equazione agli autovalori
det(M − λI) = 0
(3.40)
(ad − bc) − (a + d) λ + λ2 = 0.
(3.41)
otteniamo
CAPITOLO 3. DINAMICA LINEARE
24
Essendo (ad − bc) = det (M ) = 1 scriveremo
λ−1 + λ = a + d ≡ T rM,
(3.42)
dove T rM è la traccia di M . Esprimendo λ in termini di µ
eiµ + e−iµ = 2 cos µ = T rM,
(3.43)
quindi la condizione di stabilità sarà1
1
− 1 ≤ T rM ≤ 1.
2
(3.44)
Nel caso particolare di un reticolo costituito dalla ripetizione periodica della cella
FODO, per la (3.31), la condizione di stabilità diventa
1
−1≤1−
2
o, semplificando [2]
3.1.2
� �2
L
≤1
f
� �
�L�
� � ≤ 1.
� 2f �
(3.45)
(3.46)
Oscillazioni di betatrone
Consideriamo ora una particella che percorre, immersa in un campo magnetico con
gradiente B � = ∂By /∂x, una distanza ∆s. Riprendendo l’Eq. (3.24), vediamo che
l’inclinazione della traettoria di una particella cambia di ∆x� , quindi:
∆x�
B � (s)
=−
x.
∆s
(Bρ)
1
(3.47)
La condizione di stabilità è indipendente dal punto di partenza, in quanto la traccia di un
prodotto di matrici è invariante rispetto a permutazioni cicliche delle matrici.
CAPITOLO 3. DINAMICA LINEARE
25
Figura 3.7: Variazione del versore x.
Facendo il limite per ∆s → 0, otteniamo un’equazione differenziale del secondo
ordine
x�� +
B � (s)
x = 0.
(Bρ)
(3.48)
Se il campo magnetico è diverso da zero sulla traettoria di riferimento, come ad
esempio nei dipoli, allora l’Eq. (3.48) rappresenta la differenza tra le variazioni di
inclinazione della particella in questione e quella della particella ideale.
Essenzialmente abbiamo ottenuto l’equazione del moto in due passaggi, però ora
procederemo ad una derivazione più rigorosa di tali equazioni.
Si consideri come traettoria di riferimento una linea diritta o una singola curva
planare chiusa; per ottenere le equazioni del moto per le oscillazioni di betatrone in
un LINAC o in un sincrotrone.
Nella geometria mostrata in fig. 3.3, la posizione di una particella può essere
� (da non confondersi con R (s, x, y)) nella forma
espressa come un vettore R
� = rûx + yûy ,
R
(3.49)
dove, come detto in precedenza, r ≡ ρ + x.
L’equazione del moto in generale è
d�p
�
= e�v × B,
dt
(3.50)
CAPITOLO 3. DINAMICA LINEARE
26
� abbia componenti radiali e verticali e ignorato le possibili
ma assumendo che B
componenti lungoûs si ha:
�
�
�
�
� ûx ûy ûs �
�
�
�
�
�
�
�v × B = � vx vy vs �� = −vs By ûx + vs Bx ûy + (vx By − vy Bx ) ûs .
�
�
�
�
� Bx By 0 �
(3.51)
Se ignoriamo la radiazione prodotta da cariche accelerate, l’energia e il fattore di
Lorentz γ, non cambieranno in un campo magnetico statico e si ha
d�p
d
�˙ = γmR
�¨
= γmR
dt
dt
(3.52)
�
�¨ = e�v × B .
R
mγ
(3.53)
�˙ = ṙûx + rû˙ x + ẏûy ;
R
(3.54)
û˙ x = θ̇ûs ,
(3.55)
e quindi
�˙
Sia R:
dalla fig. 3.7 si ha:
dove θ̇ ≡ vs /r e quindi la (3.54) diventa
�˙ = ṙûx + rθ̇ûs + ẏûy
R
(3.56)
ma derivando ancora si ottiene
�
�
�¨ = r̈ûx + 2ṙθ̇ + rθ̈ ûs + rθ̇û˙ s + ÿûy .
R
(3.57)
La nuova quantità è û˙ s . Con lo stesso procedimento utilizzato per calcolare û˙ x si
CAPITOLO 3. DINAMICA LINEARE
27
Figura 3.8: Confronto della lunghezza del tratto ds lungo l’orbita di riferimento, con
la lunghezza vs dt lungo la traettoria della particella.
ottiene
e quindi
û˙ s = −θ̇ûx
(3.58)
�
�
�
�
�¨ = r̈ − rθ̇2 x̂ + 2ṙθ̇ + rθ̈ ûs + ÿûy .
R
(3.59)
L’equazione del moto nella direzione di ûx è:
r̈ − rθ̇2 = −
evs By
ev 2 By
=− s ;
γm
γmvs
(3.60)
essendo vx � vs e vy � vs , una buona approssimazione della quantità di moto totale
p della particella è γmvs , allora
r̈ − rθ̇2 = −
evs2 By
.
p
(3.61)
Poniamo ora s come variabile indipendente
d
ds d
=
;
dt
dt ds
(3.62)
CAPITOLO 3. DINAMICA LINEARE
28
dalla fig. 3.8 si vede che
ρ
ds = ρdθ = vs dt ,
r
(3.63)
quindi assumendo che d2 s/dt2 = 0 abbiamo
d2
=
dt2
�
ds
dt
�2
� ρ �2 d 2
d2
= vs
ds2
r ds2
(3.64)
e utilizzando l’Eq. (3.60) e la definizione di r, l’equazione del moto diventa
d2 x ρ + x
By
−
=−
2
2
ds
ρ
(Bρ)
�
x
1+
ρ
�2
;
(3.65)
con analoghi procedimenti si può ottenere l’equazione del moto per la direzione ûy :2
d2 y
Bx
=
ds2
(Bρ)
�
x
1+
ρ
�
.2
(3.66)
Considerando l’espansione in serie, troncata al primo ordine, dei campi:
∂Bx
∂Bx
y+
x
∂y
∂x
∂By
∂By
= By (0, 0) +
y+
x,
∂y
∂x
Bx = Bx (0, 0) +
(3.67)
By
(3.68)
con l’ipotesi che l’acceleratore sia planare (Bx (0, 0) = 0) e il moto sia accoppiato
(∂By /∂y, ∂Bx /∂x = 0), le equazioni del moto diventano
�
�
d2 x
1
1 ∂By (s)
+ 2+
x = 0
ds2
ρ
(Bρ) ∂x
d2 y
1 ∂By (s)
−
y = 0
2
ds
(Bρ) ∂x
(3.69)
(3.70)
dove si è utilizzata la condizione al rotore (3.16) per eliminare Bx .
Le equazioni (3.69), (3.70) risultano essere molto simili all’Eq. (3.48), ma quella
2
In generale queste sono equazioni non lineari, però in questo caso ci siamo limitati a considerare
solo i termini del primo ordine, in quanto ipotizziamo che i campi varino linearmente con x� e y.
CAPITOLO 3. DINAMICA LINEARE
29
in x risulta diversa solo per l’aggiunta di un termine ”centripeto”, originato dalla
scelta delle coordinate curvilinee.
Tali equazioni possono essere riscritte nella forma di equazioni di Hill :
x�� + Kx (s) x = 0
(3.71)
y �� + Ky (s) y = 0;
(3.72)
introducendo le funzioni K (s) (spring constant)
1 ∂By
1
+ 2
(Bρ) ∂x
ρ
1 ∂By
Ky (s) = −
.
(Bρ) ∂x
Kx (s) =
(3.73)
(3.74)
che per gli acceleratori circolari sono periodiche con periodo pari alla lunghezza
C dell’orbita ideale:
K (s + C) = K (s) .
(3.75)
Una soluzione generale dell’equazione di Hill ha la forma
x (s) = Aw (s) cos [ψ (s) + δ]
(3.76)
dove A e δ sono due costanti di integrazione che sono determinate dalle condizioni
iniziali.
Per calcolare w (s) e ψ (s), sostituiamo nell’Eq. (3.71) la soluzione generale (3.76)
e otteniamo
�
�
x�� + Kx = A (2w� ψ � + wψ �� ) sin (ψ + δ) + A w�� − wψ �2 + Kw cos (ψ + δ) = 0.
(3.77)
Affinchè le funzioni w e ψ siano indipendenti da δ occorre che i coefficienti dei termini
CAPITOLO 3. DINAMICA LINEARE
30
in seno e coseno siano singolarmente nulli:
2w� ψ � + wψ �� = 0
w�� − wψ �2 + Kw = 0
(3.78)
moltiplicando la prima della (3.78) per w otteniamo:
�
��
2ww� ψ � + w2 ψ �� = w2 ψ � = 0
(3.79)
e quindi
w2 ψ � = h
(3.80)
h
.
w2
(3.81)
con h costante
ψ� =
Usando la seconda relazione della (3.78) si ha l’equazione differenziale per w:
w3 (w�� + Kw) = h2 .
(3.82)
che non richiede la periodicità della funzione. Imponendo invece che w (s) sia
periodica, di periodo C, (3.76) può essere riscritta come
x (s) = w (s) (A1 cos ψ + A2 sin ψ)
(3.83)
e quindi
�
x (s) =
�
�
�
�
A2
A1
�
A1 w (s) +
h cos ψ (s) + A2 w (s) −
h sin ψ (s) .
w (s)
w (s)
�
(3.84)
CAPITOLO 3. DINAMICA LINEARE
31
Imponendo le condizioni iniziali
x (s0 ) = x0
(3.85)
x� (s0 ) = x�0
(3.86)
w (s0 ) = w0
(3.87)
w� (s0 ) = w0�
(3.88)
ψ (s0 ) = 0
(3.89)
dove
ψ (s) ≡
si ha
�
A1 =
A2 =
s
s0
h
ds̄,
(s̄)
(3.90)
w2
x0
w0
(3.91)
x�0 w0 −x0 w0�
h
e sostituendo la (3.91) nelle (3.83) e (3.84) si ottiene
x (S0 + C) =
�
�
� 2
�
w0 w0�
w0
cos ∆ψC −
sin ∆ψC x0 +
sin ∆ψC x�0
h
h
1 +
x (s0 + C) = −
�
�
w0 w0�
h
w0
h
�2
(3.92)
�
�
w0 w0�
sin ∆ψC x0 + cos ∆ψC +
sin ∆ψC x�o ;
h
(3.93)
dove si è posto
w (s0 + C) = w0
(3.94)
w� (s0 + C) = w0�
(3.95)
ψ (s0 → s0 + C) ≡ ∆ψC =
�
s0 +C
s0
h
ds̄
(s̄)
w2
(3.96)
in cui la (3.96) rappresenta l’avanzamento di fase su un’intera rivoluzione, indipen-
CAPITOLO 3. DINAMICA LINEARE
32
dentemente dalla scelta di s0 , essendo w (s) periodica.
Conviene introdurre nuove variabili dette ”parametri di Courant-Snyder ”:
w2 (s)
h
1 dβ (s)
β�
α (s) ≡ −
=−
2 ds
2
2
1 + α (s)
γ ≡
β (s)
β (s) ≡
(3.97)
(3.98)
(3.99)
dove β (s) è detta funzione di ampiezza. Sostituendo β (s) nella (3.82) si ha
2ββ �� − β 2 + 4β 2 K = 4
(3.100)
in cui è sparita la dipendenza da h.
La soluzione generale del moto può essere scritta in termini di parametri di
Courant-Snyder :
x (s) = A
�
β (s) cos (ψ (s) + δ)
(3.101)
in cui la costante h è inclusa in A e l’equazione
ψ � (s) =
1
β (s)
(3.102)
descrive la dipendenza dell’ampiezza delle oscillazioni da s e mostra che β (s) può
essere interpretata come una lunghezza d’onda locale dell’oscillazione divisa per 2π.
Quanto detto finora varrà in generale, infatti l’avanzamento di fase tra due
posizioni longitudinali s1 e s2 è dato univocamente da
∆ψ (s1 → s2 ) =
�
s2
s1
ds
β (s)
(3.103)
cosichè, per un’acceleratore circolare, il numero di oscillazioni per una rivoluzione
CAPITOLO 3. DINAMICA LINEARE
33
Figura 3.9: Mappatura dello spazio delle fase, giro dopo giro, in un acceleratore
circolare.
completa (tune dell’acceleratore) è:
1
ν=
2π
3.2
�
ds
.
β (s)
(3.104)
Emittance e admittance
In assenza di campo, la soluzione per un oscillazione di betatrone (3.101) può essere
espressa in termini di x e x� ed eliminando le funzioni trigonometriche
α (s) x (s) + β (s) x� (s) = −A
�
β (s) sin (ψ (s) + δ) .
(3.105)
Quadrando e sommando l’Eq. (3.101) e la (3.105) otteniamo
A2 = γ (s) x2 (s) + 2α (s) x (s) x� (s) + β (s) x�2 (s) .
(3.106)
Quest’ultima relazione è detta invariante di Courant-Snyder ed è l’analogo dell’energia totale in un oscillatore armonico. Per una data traettoria, il valore di A è
fissato e l’espressione dell’invariante di Courant-Snyder descrive, per ogni posizione
CAPITOLO 3. DINAMICA LINEARE
34
Figura 3.10: Ellissi nello spazio delle fasi lungo la traettoria di riferimento.
s, un’ellissi nel piano (x, x� ), come mostrato in fig. 3.9.
Poichè β, quindi anche α e γ, dipende da s, la forma e l’orientazione dell’ellissi
associata, per una data traettoria (A fissato), varieranno in funzione di s (fig. 3.10).
Comunque al variare di s, le ellissi pur avendo stessa forma e orientazione avranno
anche stessa area A. Dall’equazione generale di un’ellissi
ax2 + 2bxy + cy 2 = d
(3.107)
si ha l’area dell’ellisse
√
πd
ac − b2
(3.108)
che nel nostro caso, riferendoci all’Eq. (3.106), vale
�
πA2
βγ − α2
= πA2 ,
(3.109)
e dimostra pertanto che l’area racchiusta all’interno della traettoria di una certa
particella non accelerata nello spazio delle fasi (x, x� ) è costante.
L’admittance è l’area della più grande ellissi nello spazio delle fasi che l’acceleratore accetterà. In ogni punto dell’acceleratore, il massimo valore che potrà assumere
√
x è A β. Se la mezza apertura a disposizione del fascio è a (s), allora da qualche
CAPITOLO 3. DINAMICA LINEARE
parte ci sarà un minimo in a (s) /
35
�
β (s). Quindi l’admittance sarà
�
a2
π
β
�
.
(3.110)
min
Nel caso particolare in cui si ha una mezza apertura uniforme a, senza l’intromissione
√
di elettrodi o cose simili, il minimo in a/ β cadrà nel massimo della funzione di
ampiezza, βmax ; allora
admittance =
πa2
βmax
(3.111)
L’area occupata nello spazio delle fasi dal fascio è detta emittance ed è indicata
con il simbolo �. Essa è una proprietà del fascio, ovvero del modo in cui esso è stato
preparato a partire dalla sorgente, più precisamente della distribuzione dei valori di
A e δ per le particelle del fascio.
Per un sincrotrone con emittance �, l’area occupata nello spazio delle fasi è
delimitata dalla curva
�
= γx2 + 2αxx� + βx��2 .
π
(3.112)
Spesso è conveniente parlare dell’emittance di una particolare distribuzione di
particelle in termini dello scarto quadratico medio della dimensione trasversale del
fascio. Ad esempio, possiamo considerare un fascio in un sincrotrone nel quale le
particelle sono distribuite Gaussianamente rispetto ad una sola coordinata trasversa.
Questa è la scelta naturale nel caso di un fascio di elettroni, in quanto la radiazione
di sincrotrone dà luogo ad una distribuzione di questo tipo se la perdita di particelle
del fascio è trascurabile e costituisce una ragionevole approssimazione anche nel caso
di un fascio di particelle più pesanti.
Supponiamo che la distribuzione nella coordinata trasversa x, normalizzata ad
una particella, sia data dalla funzione densità
n (x) dx = √
x2
1
e− 2σ2 dx
2πσ
(3.113)
CAPITOLO 3. DINAMICA LINEARE
36
e che la distribuzione sia stazionaria nel tempo per una particolare posizione s lungo
la traettoria. Il fascio si trova in equilibrio se la distribuzione è indistinguibile da un
giro all’altro. Dalle Eq. (3.101) (3.105) possiamo dire che le traiettorie, nello spazio
delle fasi x, (αx + βx� ), sono circolari, allora in questa situazione di equilibrio anche
la distribuzione nella coordinata αx + βx� sarà Gaussiana con deviazione standard
σ, mentre nello spazio delle fasi bidimensionale, sarà:
1 − (x
n (x, αx + βx ) dxd (αx + βx ) =
e
2πσ 2
�
�
2 + αx+βx� 2
(
)
2σ 2
)
dxd (αx + βx� ) .
(3.114)
Introducendo le coordinate polari, dove la coordinata con
2
(3.115)
r2 = x2 + (αx + βx� ) ,
la distribuzione (3.114) si scrive
n (r, θ) rdrdθ =
1 − r22
e 2σ rdrdθ.
2πσ 2
(3.116)
Definendo ora una superficie circolare di raggio a nella quale è contenuta una frazione
di particelle F , si ha che
F =
�
2π
0
�
a
nrdrdθ =
0
�
a
r2
e− 2σ2
0
r
dr
σ2
(3.117)
e risolvendo per a
a2 = −2σ 2 ln (1 − F ) .
(3.118)
Moltiplicando l’Eq. (3.112) per β si vede che
β�
2
= x2 + (αx + βx� ) ,
π
(3.119)
CAPITOLO 3. DINAMICA LINEARE
37
ma dalla definizione della coordinata radiale (3.115) si ha
β�
= r 2 = a2
π
(3.120)
e l’emittance, che contiene la frazione di particelle F di un fascio Gaussiano nello
spazio delle fasi (x, x� ), vale
�=−
2πσ 2
ln (1 − F ) ,
β
(3.121)
con valore efficace della dimensione trasversa σ, in un punto del reticolo dove la
funzione di ampiezza è β.[2]
3.3
Dinamica longitudinale
Come già accennato nel Capitolo 1, l’accelerazione è impressa alle particelle nelle
cavità risonanti, pertanto in un LINAC, si ha una lunga sequenza di cavità disposte
lungo una traettoria rettilinea, mentre in un sincrotrone basta anche una sola cavità alla quale le particelle ritorneranno ripetutamente grazie all’applicazione di un
campo magnetico dipolare che determina un’orbita chiusa.
Ignorando per il momento la dinamica trasversale del fascio, si definisce particella
ideale (o sincrona), ovvero quella particella che ad ogni istante di tempo ha energia
e posizione longitudinale ideali, tale da ricevere, da ogni cavità accelerante l’energia
di progetto in modo da mantenersi sull’orbita di riferimento.
Ovviamente tale condizione è per definizione ideale, in quanto un fascio reale sarà
costituito, in ogni istante, da una distribuzione di energie e posizioni longitudinali;
avremo quindi a che fare con un problema di stabilità.
Occorre ricavare le condizioni sotto le quali una particella, che ad un certo istante
t0 ha energia E (t0 ) e posizione s (t0 ), manterrà ad ogni successivo istante t, un’e-
CAPITOLO 3. DINAMICA LINEARE
38
nergia E (t) e una posizione s (t) prossime rispettivamente a Es (t) e ss (t) della una
particella sincrona. Intuitivamente ci si può aspettare che tale situazione si verifichi
quando |E (t0 ) − Es (t0 )| e |s (t0 ) − ss (t0 )| sono sufficientemente piccoli. Tale condizione però, pur essendo necessaria, non è tuttavia sufficiente. Affinchè la situazione
di stabilità appena enunciata si verifichi, è necessario che la posizione longitudinale della particella ideale soddisfi un opportuno criterio; il principio che garantisce
che, per un’opportuna scelta di ss (t0 ), esistano valori di E (t0 ) e di s (t0 ) tali che
la condizione di stabilità sia soddisfatta, va sotto il nome di principio di stabilità di
fase.
Quando le condizioni di stabilità per il moto longitudinale sono soddisfatte, le
particelle prossime alla particella ideale (in E ed s) oscilleranno attorno ai valori
Es , ss della particella ideale, tali oscillazioni sono dette oscillazioni di sincrotrone.
Come già detto, nel seguito saranno trascurati i gradi di libertà trasversali del
moto perchè la frequenza delle oscillazioni di sincrotrone è in generale molto più
piccola di quella delle oscillazioni di betatrone. Per semplicità si consideri una sola
cavità a RF, di spessore longitudinale infinitesimo e sia
V (t) = V sin (ωRF t)
(3.122)
la legge oraria con cui varia la d.d.p. con t tra le due estremità longitudinali della
cavita. Siano ts1 , ts2 , . . . tsn gli istanti3 in cui la particella sincrona attraversa la cavità
le n volte; la fase della d.d.p. nella cavità, vista da tale particella in corrispondenza
del suo n−esimo attraversamento della cavità stessa, sarà:
ψns = ωRF tsn .
3
(3.123)
In conseguenza dell’ipotesi semplificatrice formulata in merito allo spessore longitudinale infinitesimo della cavità, il tempo di attraversamento della cavità può essere trascurato rispetto al
periodo di oscillazione del campo nella cavità stessa.
CAPITOLO 3. DINAMICA LINEARE
39
Indicando con ωR la pulsazione di rivoluzione della particella ideale, la scelta di una
pulsazione ωRF sarà tale che:
(3.124)
ωRF = hωR ,
dove h è una costante intera positiva; essa assicura che la particella ideale attraversi
la cavità acceleratrice sempre in corrispondenza della stessa fase del campo elettrico
(modulo 2π).
Siano t1 , t2 , . . . tn gli istanti in cui una generica particella, non ideale, attraversa
la cavità la prima volta, la seconda volta, .... l’n-esima volta, e sia ψn = ωRF tn
la fase della d.d.p. nella cavità vista da tale particella in corrispondenza del suo
s
n−esimo attraversamento. Indicando con τn+1
l’intervallo temporale che intercorre
tra l’n−esimo e l’(n + 1) −esimo attraversamento della cavità per la particella ideale,
ossia il periodo di rivoluzione della particella sincrona e con τn+1 = (τ s + ∆τ )n+1
l’analoga quantità per una generica particella non ideale. Le fasi della d.d.p. per
due attraversamenti consecutivi della cavità per la particella generica saranno allora
legate tra loro dalla relazione:
s
ψn+1 = ψn + ωRF (τ + ∆τ )n+1 = ψn +
s
ωRF τn+1
+
s
ωRF τn+1
�
∆τ
τs
�
.
(3.125)
n+1
Indicando con Tns l’intervallo temporale che intercorre tra il primo e l’n−esimo
attraversamento della cavità da parte della particella ideale, ossia:
Tns
=
n
�
k=2
s
s
s
τks ⇒ Tn+1
= Tn+1
+ τn+1
,
(3.126)
risulta conveniente sfruttare la circostanza già menzionata, ovvero la fase della d.d.p.
per tutti gli attraversamenti della cavità da parte della particella ideale è la stessa;
a tale scopo, sostituiamo la fase ψn con la fase ridotta φn , definita come
φn ≡ ψn − ωRF Tns ,
(3.127)
CAPITOLO 3. DINAMICA LINEARE
40
cosichè, per la particella ideale
(3.128)
φsn = ψ1s ∀n
non dipende da n.
In termini della fase ridotta, la relazione tra le fasi della d.d.p. per due attraversamenti consecutivi della cavità per la particella generica sarà quindi:
φn+1 = φn +
s
ωRF τn+1
�
∆τ
τs
�
.
(3.129)
n+1
s
La condizione di sincronia ωRF = hωR assicura che la quantità ωRF τn+1
non dipenda
da n e sia un multiplo intero di 2π; se ciò accade h è detto numero armonico.
Viceversa, la quantità (∆τ /τ s )n+1 dipende effettivamente da n e relativamente alla
particella generica, può essere espressa in termini della differenza ∆En+1 = En+1 −
s
En+1
. Infatti, indicando con Ls la lunghezza dell’orbita della particella ideale4 e con
v s la sua velocità5 , mentre con L, v le analoghe quantità per la particella generica,
si ha
τs =
Ls
vs
(3.130)
e quindi
∆τ
∆L ∆v
= s − s
s
τ
L
v
(3.131)
∆L = L − Ls
(3.132)
∆v = v − v s .
(3.133)
dove
Assumendo che le deviazioni di L e p da Ls e ps siano piccole rispetto a Ls e ps
4
5
In assenza di oscillazioni di betatrone.
Supposta costante lungo l’orbita, oppure prendendone il valor medio.
CAPITOLO 3. DINAMICA LINEARE
41
Figura 3.11: Un magnete curvante deflette le particelle con quantità di moto
maggiore rispetto alla particella sincrona di un angolo più piccolo.
rispettivamente, possiamo scrivere, per la (2.15), che
∆v
1 ∆p
=
,
s
v
(γ s )2 ps
(3.134)
dove ps rappresenta la quantità di moto della particella ideale e ∆p l’incremento
della quantità di moto per ogni passaggio in una sezione acceleratrice.
Vediamo ora come la quantità ∆L/Ls , in generale, dipenda dal valore di ∆p.
In un acceleratore circolare, l’orbita di una particella con quantità di moto p�=ps
differisce da quella della particella ideale; più precisamente, il moto generale di una
particella con momento longitudinale p�=ps è costituito da oscillazioni di betatrone
trasversali attorno a un’orbita di lunghezza L�=Ls . La distanza, nel piano orizzontale, dell’orbita della particella di momento p da quella della particella ideale, è
funzione della posizione longitudinale s e si parametrizza con il momentum dispersion function D (s). L’origine fisica di tale effetto risiede nel fatto che il campo
guida dell’acceleratore circolare6 deflette la traiettoria di una particella di momento
p > ps di un angolo inferiore rispetto a quello per cui è deflessa la traiettoria della
particella ideale. Ciò è mostrato in fig. 3.11 dove ∆p ≡ p − ps . Quindi, ∆L/Ls
6
Si parla del campo magnetico uniforme a tratti originato dai magneti dipolari.
CAPITOLO 3. DINAMICA LINEARE
42
dipenderà dal valore di ∆p, ovvero
∆L
∆p
=α s
s
L
p
(3.135)
dove α è il momentum compaction factor, che sarà descritto successivamente in
dettaglio.
Se ∆p/ps � 1, l’equazione del moto nella coordinata trasversale x per la generica
particella differisce da quella della particella sincrona solo per la comparsa di un
termine che non dipende da x, il quale rende l’equazione non omogenea:
�
�
1
B�
1 ∆p
x + 2+
x=
ρ
(Bρ)
ρ ps
��
(3.136)
dove ρ indica il raggio di curvatura locale dell’orbita ideale. La soluzione generale
per tale equazione sarà esprimibile come
x (s) = xh (s) + xi (s) ,
(3.137)
ovvero sarà la combinazione lineare della soluzione generale dell’equazione omogenea
associata e della soluzione particolare dell’equazione non omogenea:
�
xh (s) = A β (s) cos (ψ (s) + δ)
xi (s) = D (p, s)
∆p
.
ps
(3.138)
(3.139)
Dalla (3.139) si vede che la funzione di dispersione è una soluzione particolare
dell’equazione (3.136)
�
1
B�
1
D + 2+
D=
ρ
(Bρ)
ρ
��
�
(3.140)
e, in base all’approssimazione fatta, non dipende da p. Si dimostra che esiste sempre
CAPITOLO 3. DINAMICA LINEARE
43
una soluzione periodica per l’equazione (3.140), ovvero
(3.141)
D (s + Ls ) = D (s)
che indicheremo con DC (s) e la funzione (3.139) si può scrivere come
xi (s) = DC (s)
∆p
ps
(3.142)
e descrive l’orbita della particella di impulso p�=ps .
Detta Ls la lunghezza dell’orbita della particella ideale Ls =
L dell’orbita generica (per p�=ps ) è esprimibile come:
L=
� �
xi (s)
1+
ρ (s)
�
�
ds, la lunghezza
(3.143)
ds
da cui si ricava il momentum compaction factor α:
∆L
=
Ls
�
1
Ls
�
DC (s)
ds
ρ (s)
�
∆p
1
⇒α= s
s
p
L
�
DC (s)
ds =
ρ (s)
�
DC
ρ
�
.
(3.144)
In conclusione dalle (3.131) (3.134) e (3.144) si ha:
�
�
∆τ
1
∆p
∆p
s
= α (γ ) −
= η (γ s ) s
2
s
s
s
τ
p
p
(γ )
(3.145)
dove
η (γ s ) ≡ α (γ s ) −
1
(γ s )2
(3.146)
è detto slip factor. Il segno di tale quantità dipende dal valore del momento ps della
particella ideale e determina le condizioni sotto le quali le particelle di momento
p�=ps compiono oscillazioni di sincrotrone stabili attorno a ps . Il valore di γ s per il
quale si ha η (γ s ) = 0, ossia
α (γ s ) =
1
(γ s )2
(3.147)
CAPITOLO 3. DINAMICA LINEARE
si indica con γ† . [2]
44
Capitolo 4
Radiazione di Sincrotrone
Le particelle accelerate emettono radiazioni elettromagnetiche specialmente quelle
“leggere” come elettroni e positroni in moto lungo orbite curve sotto l’influenza di
campi magnetici in acceleratori ad alta energia.
L’energia persa da tali particelle per ogni rivoluzione può diventare critica per
la scelta della dimensione dell’acceleratore perchè limita la massima energia raggiungibile dal fascio. La radiazione ha un effetto incisivo sulla dinamica del moto
delle particelle, principalmente produce smorzamento ma anche eccitazione delle
oscillazioni attorno all’orbita di equilibrio.
Tali effetti influenzano la progettazione di alcuni componenti dell’acceleratore:
il sistema a RF deve compensare l’energia persa ad ogni giro; il sistema di vuoto
deve far fronte al desorbimento dei gas prodotto dall’impatto dei fotoni con le pareti dell’acceleratore. Se l’energia del fascio è sufficientemente elevata, lo spettro
delle radiazioni si può estendere fino ai raggi X e la radiazione può penetrare le
pareti della macchina, quindi deve essere realizzata una speciale schermatura della
camera a vuoto per prevenire il danneggiamento delle componenti sensibili, quali
apparecchiature elettroniche, cavi e bobine.[3]
45
CAPITOLO 4. RADIAZIONE DI SINCROTRONE
4.1
46
Radiazione per particelle relativistiche
Se una particella di carica e si muove lentamente con accelerazione a, la potenza da
essa irradiata P è data dalla formula di Larmour [2]:
P =
1 e 4 a2
.
6π�0 c3
(4.1)
La distribuzione angolare della radiazione varia come sin2 (θ), dove θ è l’angolo
tra la direzione dell’accelerazione e il punto di osservazione.
Si può calcolare facilmente la potenza irradiata da particelle relativistiche cariche
visto che la potenza irradiata è Lorentz invariante. Supponiamo che un fotone,
con frequenza angolare ω � stia viaggiando nella direzione che forma un angolo θ
con l’asse x� di un sistema (x� , y � ) in moto parallelamente all’asse x del sistema di
riferimento del laboratorio (x, y). La trasformazione che lega (x� , y � ) al sistema (x, y)
del laboratorio è
tan θ =
sin θ�
γ (cos θ� + β)
ω = γω � (1 + β cos θ� ) .
(4.2)
(4.3)
Se due fotoni sono emessi con angoli rispettivamente θ� e θ� +π ed hanno la stessa
frequenza angolare ω � , nel sistema di riferimento del laboratorio (x, y) l’energia totale
sarà proporzionale a
ω1 + ω2 = 2γω � .
(4.4)
Se l’emissione avviene in un piccolo intervallo τ � , allora in termini di potenza irradiata, la relazione (4.4) diventa
P τ = P �τ �γ
(4.5)
CAPITOLO 4. RADIAZIONE DI SINCROTRONE
47
oppure P = P � , in quanto per la dilatazione temporale si ha τ = γτ � .
La potenza persa per effetto Doppler in una direzione è guadagnata nell’altra
direzione. Fintanto che la distribuzione angolare di radiazione nel sistema in moto
ha l’appropriata simmetria, si può concludere dicendo che la potenza è invariante.
Analizziamo ora due casi: accelerazione perpendicolare o parallela alla direzione
del moto di una particella relativistica carica.
L’accelerazione è perpendicolare alla direzione del moto quando una particella
attraversa un magnete curvante. In un sistema inerziale che si muove alla velocità
della particella, tangente all’orbita nel momento di arrivo della particella, in quell’istante, la particella sarà a riposo e subirà un’accelerazione in direzione −y � . In
questo sistema di riferimento la potenza irradiata è data dalla formula di Larmour,
dove a� sarà l’accelerazione. Per un’accelerazione trasversale al moto relativo dei
due sistemi , a� = γ 2 a. Nel sistema (x� , y � ) la distribuzione di potenza ha la corretta simmetria fronte-retro necessaria affinchè la potenza sia invariante. Allora la
potenza vista nel sistema del laboratorio è:
1 e 2 a2 4
γ
6π�0 c3
1 e2 c 4
=
γ
6π�0 ρ2
1
e4
=
B2E 2.
6π�0 m4 c5
P =
(4.6)
(4.7)
(4.8)
Nella (4.7) è stato posto a = c2 /ρ l’accelerazione centripeta, nella (4.8) invece
è stato sostituito E = γmc2 e B = γmc/(eρ), che rispettivamente sono l’energia
totale e il campo magnetico necessario per curvare l’orbita della particella.
Considerando ora che l’accelerazione sia parallela al moto della carica, nel sistema (x� , y � ) la distribuzione angolare sarà ruotata di π/2 e la potenza è ancora un
CAPITOLO 4. RADIAZIONE DI SINCROTRONE
48
invariante. Essendo ora a� = γ 3 a, la potenza sarà
P =
1 e 2 a2 6
γ .
6π�0 c3
(4.9)
Tale risultato è usato di rado in quanto è difficile produrre un’accelerazione nella
direzione del moto di una particella in rapido movimento. La (4.9) può essere
riscritta come
P =
2 r0 2
ṗ
3 mc
(4.10)
dove r0 è il raggio della particella.
Tornando al caso in cui la radiazione è prodotta da un’accelerazione trasversa,
si ha che l’energia persa ad ogni giro dell’orbita ideale, a causa della radiazione di
sincrotrone è:
�
2πR
P
dz
c
0
� �
1
4
= Cγ E R
ρ2
U0 =
(4.11)
(4.12)
dove
Cγ =
4π r0
= 8.85 × 10−5 m/GeV3
3 (mc2 )3
(4.13)
e il quadrato di 1/ρ è mediato sulla circonferenza dell’anello 2πR. Il coefficiente
numerico Cγ è stato calcolato per l’elettrone, con r0 = 2.818 × 10−15 m. La potenza
media irradiata è
�P � = f U0
(4.14)
dove f è la frequenza di rivoluzione [2]
f=
c
.
2πR
(4.15)
CAPITOLO 4. RADIAZIONE DI SINCROTRONE
4.2
49
Smorzamento delle oscillazioni
Con l’introduzione della radiazione di sincrotrone, le oscillazioni trasverse e longitudinali di una singola particella non avranno più ampiezze invarianti, quindi il sistema
è dissipativo.
Il tempo caratteristico per gli effetti della radiazione di sincrotrone è τ0 , nel quale
un elettrone con energia E irradiata E:
τ0 ≡
E
.
�P �
(4.16)
La radiazione di sincrotrone riduce la quantità di moto di una particella nella
direzione del moto, mentre il sistema di accelerazione cerca di ripristinarla. Considerando il caso in cui non ci sono accelerazioni nette, in media i due incrementi dei
momenti sono uguali in modulo. Se in un elemento di lunghezza ds, la particella
irradia energia du e riceve lo stesso incremento di energia dal sistema acceleratore,
le quantità di moto prima e dopo saranno rispettivamente p�1 e p�2 :
p�2 = p�1 −
du p�1 du
+ ûs .
c p1
c
(4.17)
Riscrivendo in termini delle componenti trasverse e longitudinali
du p1y
c p1
du p1s du
= p1s −
+ .
c p1
c
p2y = p1y −
(4.18)
p2s
(4.19)
Dividendo la (4.18) per la (4.19) otteniamo la relazione in y � = py /ps prima e dopo
l’attraversamento di ds:
y2�
=
y1�
�
�
1 − du/E
du
�
= y1 1 −
1 − du/E + du/cps
E
(4.20)
CAPITOLO 4. RADIAZIONE DI SINCROTRONE
50
Figura 4.1: Illustrazione della differenza di incremento della lunghezza del percorso
tra una particella e quella sincrona.
dove E è l’energia totale della particella e dove sono stati considerati solo i termini
in du/E di ordine minore. Tuttavia l’equazione in y contiene un termine
y �� = −
1 du �
y
E ds
(4.21)
in aggiunta al termine di focheggiamento proporzionale ad y. Per un damping rate
lento rispetto alla frequenza delle oscillazioni di betatrone, l’oscillazione libera è ora
modificata da un fattore moltiplicativo
1
e− 2
�
1 du
ds
E ds
=e
− 2τt
0
(4.22)
e la costante di tempo dello smorzamento è
τy = 2τ0 .
(4.23)
La differenza tra l’energia della particella sincrona e quella di una particella
generica è ∆E. In un elemento trasverso infinitesimo, ∆E varierà come
∆E2 = ∆E1 − du (∆E1 ) + du (0)
(4.24)
dove il secondo e il terzo termine a destra sono rispettivamente l’energia persa a
causa della radiazione di sincrotrone e l’energia guadagnata attraverso il sistema RF
CAPITOLO 4. RADIAZIONE DI SINCROTRONE
51
a ∆E = 0. In termini della potenza irradiata
du (∆E1 ) = P (∆E1 ) dt1
�
��
�
∆E1
∆B
D ∆E1
= P (0) 1 + 2
+2
1+
dt0
E
B
ρ E
du (0) = P (0) dt0 ,
(4.25)
(4.26)
(4.27)
dove dt1 è stato espresso in termini di dt0 sull’orbita della particella sincrona usando
la fig. 4.1 e P (∆E) è stata scritta in termini di P (0) utilizzando la (4.19). Scrivendo
∆B come
∆E
,
E
(4.28)
�
�
P (0)
D
B�
2 + + 2D
dt0
E
ρ
B
(4.29)
∆B = B � x = B � D
la variazione di ∆E per rivoluzione sarà
d∆E
= −∆E
dn
�
T
0
essendo T il periodo di rivoluzione, il primo integrale è 2U0 /E . Moltiplicando ambo
i membri per la frequenza di rivoluzione f , otteniamo
�
�
��
� T
d∆E
f U0
f P (0)
1
B�
= −∆E 2
+
dt0 D
+2
.
dt
E
E
ρ
B
0
(4.30)
Dalla definizione (4.16) f U0 /E = 1/τ0 , quindi la (4.30) può essere scritta come
d∆E
∆E
= −
(2 + D)
dt
τ0
� �
��
D
1
B�
+
2
ρ2
ρ
B
� �
D =
.
1
ρ2
(4.31)
(4.32)
Quando questo termine è aggiunto alle equazioni del moto per oscillazioni di sincro-
CAPITOLO 4. RADIAZIONE DI SINCROTRONE
52
trone, la soluzione conterrà il fattore
e
− 2τ1 (2+D)
(4.33)
0
e la costante di tempo per lo smorzamento sarà
τs =
2τ0
.
2+D
(4.34)
Il teorema di Robinson permette di ottenere la somma dei damping rates per tutti
e tre i gradi di libertà; dunque conoscendo i primi due otterremo immediatamente
il terzo.
Si consideri la matrice di trasferimento degli esavettori x, x� , y, y � , Φ, ∆E attraverso un elemento ds. Gli elementi sulla diagonale per x� e y � differiscono dall’unità
per −du/E, mentre, per quanto detto in precedenza, l’elemento sulla diagonale principale per ∆E vale 1 − 2du/E. Gli unici termini nel determinante della matrice di
primo ordine in ds, vengono fuori dagli elementi sulla diagonale, quindi per questa
matrice infinitesima
du
,
E
(4.35)
U0
.
E
(4.36)
det (dM ) = 1 − 4
per un’intera rivoluzione
det (M ) = 1 − 4
Ma il determinante è anche il prodotto degli autovalori. Per modi oscillatori, gli
autovalori possono essere espressi come eγk . I sei γk saranno complessi e coniugati
e quindi le parti immaginarie non daranno contributo al prodotto. Chiamando le
parti reali αx , αy , αs , otteniamo
αx + αy + αs = −2
U0
.
E
(4.37)
Gli α sono i decrementi per giro; moltiplicando per la frequenza di rivoluzione
CAPITOLO 4. RADIAZIONE DI SINCROTRONE
53
otteniamo le costanti di tempo [2]
2
1
1
1
=
+ +
τ0
τx τ y τs
2
τx =
τ0 .
1−D
(4.38)
(4.39)
Capitolo 5
Wake Fields
Un fascio di particelle cariche interagisce elettromagneticamente con l’ambiente della
camera a vuoto; da tale interazione si generano i wake fields (campi scia). Assumendo che il fascio si muova alla velocità della luce, il wake field che più interessa è quello
visto da una carica di prova che segue il fascio ad una distanza fissa relativa. Nel
limite relativistico, la causalità impone che non vi sia alcun campo elettromagnetico
di fronte al fascio, da cui il termine ”wake” (scia).
Se la camera a vuoto non ha una superficie liscia o se non è perfettamente
conduttrice, il fascio genererà dietro di se una scia elettromagnetica (fig. 5.1).
5.1
Funzioni di wake
In fig. 5.2 sono mostrati alcuni esempi di ambienti in cui un fascio con un potenziale
che ammette uno sviluppo in multipoli può eccitare un campo elettromagnetico scia
dietro di se. Una carica di prova e dietro il fascio, considerato come un anello con
distribuzione cos mθ in uno di tali ambienti, subirà una forza elettromagnetica scia
(forza di wake). La camera a vuoto ha una simmetria assiale e sia il fascio che la
carica finale di prova viaggiano alla velocità della luce c.
54
CAPITOLO 5. WAKE FIELDS
55
Figura 5.1: Linee di campo elettrico scia in una camera a vuoto con pareti non
perfettamente conduttrici generato da una carica puntiforme q.
Figura 5.2: Esempi di camere a vuoto che generano wake fields. Il fascio è rappresentato come un anello con un momento multipolare distribuito come cos mθ.
Una carica di prova e sta seguendo il fascio ad una distanza fissa. (a) Discontinuità
geometriche periodicamente distribuite lungo la camera a vuoto. (b) Struttura liscia
ma non perfettamente conduttrice. (c) Discontinuità geometrica presente in un solo
punto della camera.
CAPITOLO 5. WAKE FIELDS
56
�
�
�
�
�
Nel caso in cui le pareti non sono PEC, la forza di Lorentz F = e E + ŝ × B
percepita dalla carica di prova ha componenti
F� = eEs
(5.1)
Fθ = e (Eθ + Br )
(5.2)
Fr = e (Er − Bθ ) .
(5.3)
In fig. 5.2(a), la forza sentita dalla carica di prova varia periodicamente con il
periodo delle discontinuità geometriche. In fig. 5.2(c), la forza si manifesta più o
meno come un impulso quando la carica di prova passa attraverso la discontinuità.
In questo caso la forza di wake diviene molto più complicata da studiare, perchè
dipende da s e t separatamente, non come il caso delle pareti resistive in cui c’è una
simmetria traslazionale, quindi la forza subita dalla carica di prova dipende da s e
da t tramite z = s − ct.
Tuttavia, ad alte energie, la traiettoria del fascio e la carica di prova non sono
molto perturbate se viaggiano a distanza dalla discontinuità; l’effetto maggiore sulla
carica di prova può essere ottenuto integrando la forza su una distanza più grande
rispetto alla dimensione della discontinuità, allora
�
L/2
−L/2
f ds ≡ f¯
(5.4)
dove f rappresenta le componenti della forza F� sentita dalla carica di prova ed L è
la distanza di interesse. Per la fig. 5.2(a), L è il periodo delle discontinuità. Per la
fig. 5.2(c), L è scelta molto più grande della dimensione della discontinuità, mentre
nel caso (b) la forza di wake è indipendente da s e quindi si semplifica f¯ = f L.
Per un sistema con simmetria assiale, F� e Fr sono proporzionali al cos mθ e Bs
CAPITOLO 5. WAKE FIELDS
57
e Fθ sono proporzionali al sin mθ, quindi
�
�
�⊥ ds = −eIm Wm (z) mrm−1 r̂ cos mθ − θ̂ sin mθ
F
−L/2
� L/2
F ds = −eIm Wm� (z) rm cos mθ
−L/2 �
� L/2
eBs ds = eIm Wm� (z) rm sin mθ
−L/2
� L/2
(5.5)
dove Wm è una funzione di z ancora da determinare e Wm� è la sua derivata rispetto
a z. Per la causalità si ha che la carica di prova non potrà subire la forza di wake
se è avanti al fascio, questo richiede che Wm (z) = 0 se z > 0.
In questa approssimazione ultrarelativistica, le (5.5) sono applicate alla carica
di prova nella posizione in cui i wake fieds sono generati, ovvero dove è presente
la discontinuità. Notare che non ci sono forze di wake trasversali quando m = 0,
�
perchè F�⊥ ds = 0
La forma esplicita di Wm può determinata solo dopo l’imposizione delle condizio-
ni al contorno; tuttavia è interessante notare che tutte le dipendenze esplicite delle
(5.5) da r, θ e z sono state derivate senza riferirsi a tutte le condizioni al contorno,
eccetto che per la simmetria assiale del contorno.
La funzione Wm (z) nelle (5.5) è chiamata funzione di wake; essa descrive la
risposta dell’ambiente della camera a vuoto ad un fascio impulsivo con momento
m-esimo. Matematicamente, Wm assomiglia alla funzione di Green. Talvolta può
essere più conveniente chiamare Wm funzione di wake trasversale e Wm� funzione di
wake longitudinale, per ragioni che derivano dalle (5.5). In analogia con il concetto
di potenziale elettrico, gli integrali delle (5.5) sono chiamati potenziali di wake.
In generale, le funzioni di wake sono solitamente determinate dalle proprietà
dell’ambiente della camera a vuoto; esse sono indipendenti dalle proprietà del fascio.
La proprietà (5.5) si applica alle componenti della forza e non alle componenti del
campo elettromagnetico. Fortunatamente, si ha bisogno delle componenti della forza
e non di quelle dei campi.
CAPITOLO 5. WAKE FIELDS
58
Si può utilizzare il risultato delle (5.5) per dire che il gradiente trasverso del
potenziale di wake longitudinale è uguale alla derivata longitudinale del potenziale
di wake trasversale:
∇⊥
�
L/2
∂
F� ds =
∂z
−L/2
�
L/2
−L/2
F�⊥ ds.
(5.6)
Questa scrittura è di solito nota come il teorema di Panofsky-Wenzel [8].
5.2
Impedenze
Fino ad ora i wake fields sono stati descritti in funzione del tempo dopo il passaggio
di un fascio impulsivo; un’altra utile analisi è quella in frequenza mediante la trasformata di Fourier del wake field. Un motivo dell’utilità di tale procedura è che tali
campi spesso contengono un numero ben determinato di frequenze, le quali possono
essere individuate tramite la trasformata di Fourier. Ciò non è vero per wake fields
prodotti da pareti non perfettamente conduttrici, ma solo per campi prodotti da
pareti che presentano discontinuità geometriche.
Le trasformate di Fourier delle funzioni di wake sono chiamate impedenze. L’idea
di rappresentare l’ambiente di un acceleratore mediante delle impedenze è stata
introdotta da Sessler e Vaccaro [9]. La descrizione delle forze di wake in termini
delle funzioni di wake nel dominio del tempo e in termini di impedenze nel dominio
della frequenza è equivalente. In molte applicazioni pratiche, ad esempio, il calcolo
delle funzioni di wake a piccole distanze risulta tecnicamente problematico, così come
il calcolo delle impedenza ad alte frequenze. In molti casi si preferisce utilizzare
un approccio misto, ovvero si utilizza la descrizione del fenomeno nel dominio del
tempo per impostare le equazioni del moto (F� = m�a) e si utilizza poi la tecnica
della trasformata di Fourier per risolverle.
Fin ora si è considerato un fascio con distribuzione tipo δ. Le scie prodotte da
un’altra distribuzione del fascio può essere ottenuta per sovrapposizione, utilizzando
CAPITOLO 5. WAKE FIELDS
59
i risultati del caso in cui la distribuzione è una δ. Ad esempio si consideri un fascio
che ha una corrente
J0 (s, t) = Jˆ0 ej(ks−ωt) .
(5.7)
Solo la parte reale della (5.7) è significativa. Il potenziale di wake in posizione s, al
tempo t e per m = 0 è la sovrapposizione delle scie prodotte da tutte le cariche del
fascio che sono passate per la stessa posizione in istanti di tempo precedenti, ovvero
�
�
�
1 ∞
s� − s
E s (s, t) = −
J0 s, t −
W0� (s − s� ) ds�
c s
c
�
�
1 0
z� �
= −
J0 s, t +
W0 (z) dz
c −∞
c
� ∞
1
= − J0 (s, t)
e−jωz/c W0� (z) dz
c
−∞
(5.8)
(5.9)
(5.10)
dove Ēs (s, t) è Es integrata, secondo la (5.4), rispetto alla cavità della discontinuità.
Nella (5.9) si è effettuato un cambio di variabile z = s − s� . Nella (5.10) il limite
superiore di integrazione è stato esteso a ∞ in quanto W0� = 0 per z > 0. Si
è sfruttato il fatto che il wale field per m = 0 è insensibile all’area della sezione
trasversale del fascio, quindi integrando la densità di corrente Js rispetto alla sezione
trasversale si è ottenuta la corrente del fascio J0 .
Sia la porzione dell’acceleratore che contiene il wake field di lunghezza L. Si può
definire allora il potenziale di wake su tutta la sezione causato dal wake field:
V (s, t) = E s (s, t) ;
(5.11)
quindi, per una corrente sinusoidale (5.7), si ha
V (s, t) = −J0 (s, t) Z0� (ω) ,
(5.12)
dove Z0� (ω) è chiamata impedenza longitudinale per il modo m = 0 a frequenza ω.
CAPITOLO 5. WAKE FIELDS
60
Dalla (5.12) risulta che:
Z0�
1
(ω) =
c
�
∞
−∞
e−jωz/c W0� (z) dz.
(5.13)
L’Eq. (5.13) esprime il legame tipo trasformata di Fourier che c’è tra Z0� e W0� ,
ovvero descrive il contenuto in frequenza di W0� .
Si noti che, nonostante la dipendenza della (5.7) da ω e da k, la (5.13) dipende
solo da ω; ciò è causato dal fatto che l’impedenza è localizzata nello spazio. Essa riunisce il segnale del fascio in un punto fisso e tale segnale conterrà solo le informazioni
frequenziali e non quelle spaziali.
Analogamente, se la corrente del fascio ammette uno sviluppo in multipoli
Jm (s, t) = Jˆm ej(ks−ωt) ,
(5.14)
� m
V = E s = −Jm Zm
r cos mθ
(5.15)
si può definire la relazione
attraverso un’impedenza longitudinale
�
Zm
1
(ω) =
c
�
∞
−∞
e−jωz/c Wm� (z) dz.
(5.16)
Per il fascio (5.14), si può scrivere la forza di wake trasversa come
�
�
m−1
⊥
�
F⊥ = jeJm (s, t) mr
r̂ cos mθ − θ̂ sin mθ Zm
(ω) ,
(5.17)
⊥
dove Zm
(ω) è l’impedenza trasversale data da
⊥
Zm
=j
�
∞
−∞
e−jωz/c Wm (z)
dz
.
c
(5.18)
CAPITOLO 5. WAKE FIELDS
61
In molte applicazioni si è interessati agli effetti longitudinale per m = 0 e a quelli
trasversi per m = 1, infatti, in alcuni casi, si identifica con Z0� l’impedenza longitudinale e con Z1⊥ l’impedenza trasversale. In qualche applicazione risulta utile
�
esprimere le impedenze utilizzando gli ohm, quindi sarà ΩL−2m per Zm
e ΩL−2m+1
⊥
per Zm
. Ad esempio Z0� sarà espresso in ohms e Z1⊥ in ohms per metro.
I segni negativi che compaiono nelle (5.12) (5.15) rappresentano il ritardo di fase
(180°) che ha la tensione vista dal fascio rispetto alla corrente del fascio stesso. Analogamente si introduce in fattore j nell’Eq. (5.17) perchè la forza trasversa tende ad
essere in ritardo di fase di 90° rispetto alla corrente del fascio. Tali fattori sono introdotti esclusivamente per convenzione e le impedenze sono quantità generalmente
complesse.
Invertendo le trasformate di Fourier (5.16) e (5.18) si possono ottenere le funzioni
di wake dalle impedenze
� ∞
1
�
(z) =
ejωz/c Zm
(ω) dω
2π −∞
� ∞
1
⊥
Wm (z) =
ejωz/c Zm
(ω) dω.
2π −∞
Wm�
(5.19)
(5.20)
Il teorema di Panofsky-Wenzel, Eq. (5.6), dà anche la relazione tra le impedenze
longitudinali e trasversali per un dato m;
�
Zm
(ω) =
ω ⊥
Z (ω) .
c m
(5.21)
Capitolo 6
Electron Cloud
6.1
Introduzione
I campi elettrici presenti in una camera a vuoto possono accelerare gli elettroni (prodotti da foto-emissioni, ionizzazione di gas residui, ecc.) verso le pareti della camera
a vuoto. Se gli elettroni che bombardano le pareti acquisiscono abbastanza energia,
produrranno elettroni secondari, i quali saranno accelerati dal campo elettrico normale alla superficie e potrebbero colpire a loro volta la superficie producendo ancora
elettroni. Se si verificano determinate condizioni sulle superfici, il rimbalzo degli
elettroni produce una moltiplicazione di questi ultimi, ovvero il multipacting effect,
il quale crea una nube elettronica all’interno della camera.
L’electron cloud (nube elettronica) è definita come l’accumulazione di elettroni
all’interno della camera a vuoto, che, se sufficientemente forte, può incidere sulle
performance della macchina, causando, ad esempio, la perdita del fascio, l’aumento
dell’emittance, l’incremento della pressione nella camera e disturbi sulla diagnostica
dei fasci.
Nelle regioni in cui non sono previsti campi, il campo elettrico che genera il
multipacting è prodotto dal fascio1 , allora le due componenti che influenzano l’accu1
Per regioni con elementi elettrici e magnetici (come cavità a RF, dipoli), il campo diventa la
62
CAPITOLO 6. ELECTRON CLOUD
63
Figura 6.1: Tipico comportamento del SEY in funzione dell’energia degli elettroni
incidenti. Il comportamento cambia per materiali diversi, quindi cambieranno δmax ,
E1 , E2 , ecc.
mulazione degli elettroni sono il fascio e le caratteristiche della superficie delle pareti
della camera. Tra queste la più importante è il Secondary Electron Yield (SEY, o δ)
del materiale delle pareti ed esso dipende dall’energia degli elettroni incidenti. Tale
dipendenza è mostrata in fig. 6.1. Per un dato elettrone incidente sulla parete, sono
prodotti più elettroni secondari se l’energia dell’elettrone incidente è maggiore di E1
e minore di E2 .
In letteratura [4] lo studio dell’electron cloud è classificato in due differenti regimi:
single-bunch e multi-bunch.
Regime a single-bunch
Si assume il regime single-bunch se la lunghezza del bunch (carico positivamente) è
abbastanza grande da sostenere passaggi multipli di elettroni, il fenomeno che si genera è chiamato trailing edge multipacting. Gli elettroni sono attratti dal potenziale
combinazione di quello prodotto dal fascio e di quello prodotto dagli elementi.
CAPITOLO 6. ELECTRON CLOUD
64
Figura 6.2: Schema del multipacting in regime di single-bunch nel PSR.
del fascio e il loro moto è caratterizzato dalla frequenza di rimbalzo
ωe =
�
2πre λp
(6.1)
dove re è il raggio dell’elettrone e λp è la densità volumetrica del fascio. Dopo il
passaggio della parte centrale del bunch, quella centrata nel picco della densità di
carica, gli elettroni sono rilasciati e accelerati dalle code del fascio aventi densità
minore (effetto di trailing edge della distribuzione di densità del fascio, fig. 6.2).
Il numero di elettroni all’interno della camera cresce drammaticamente con questo
effetto di trailing edge multipacting.
L’accumulo elettronico è tipicamente insensibile al bunch spacing (sb/c, dove sb
è la distanza, in unità di lunghezza, tra due bunch successivi) ma dipende fortemente dalla lunghezza del bunch e dalla variazione della densità longitudinale, ciò
determina il guadagno di energia e la durata del multipacting. Al momento dell’accelerazione del fascio, l’energia degli elettroni è in generale al di sotto dei keV .
Con la costituzione dell’electron cloud si ha un aumento di pressione nella camera
a vuoto e si osservano instabilità trasversali.
CAPITOLO 6. ELECTRON CLOUD
65
Figura 6.3: Schema del multipacting in LHC.
Regime a multi-bunch
In questo caso l’accumulazione di elettroni avviene grazie al passaggio di successivi
bunches carichi positivamente. Gli elettroni primari possono essere generati da fotoelettroni (prodotti dalla radiazione di sincrotrone), da ionizzazione di gas residui e
dalle particelle perse dal fascio che colpiscono le pareti della camera. Questi elettroni
primari guadagnano energia grazie all’interazione con il bunch che sta passando ed
eventualmente con i bunch successivi.
Il multipacting (fig. 6.3) può svilupparsi solo se sono soddisfatte due condizioni:
• il guadagno di energia è tale che esso può generare più di un elettrone secondario dopo l’impatto con la parete della camera. In fig. 6.1 ciò avviene quando
l’energia è maggiore di E1 e minore di E2 ;
• il tempo di vita degli elettroni secondari è comparabile con il bunch spacing.
Questo meccanismo è stato descritto in [5] e chiamato beam-induced multipacting(BIM).
Per una camera circolare di raggio b, il BIM è storicamente presentato quasi come
una risonanza: il tempo impiegato dagli elettroni ad attraversare la camera a vuoto
è sincrono con i passaggi del bunch, ciò porta a
Nb ≤
b2
re sb
(6.2)
CAPITOLO 6. ELECTRON CLOUD
66
dove Nb è la popolazione del bunch. Tuttavia l’Eq. (6.2) è troppo severa, poichè la
maggior parte degli elettroni secondari viaggia con piccolissimo dispendio energetico
e il SEY è prossimo all’unità, quindi il loro tempo di vita sarà molto lungo.
L’electron cloud è osservato sia in macchine con bunch spacing piccoli (sb/c ≈
4 − 8 ns), sia con grandi bunch spacing (sb/c ≈ 25 − 200 ns). Un risultato interessante
è che, a causa della natura puramente elettromagnetica dell’interazione che guida il
fenomeno dell’electron cloud, è stato trovato anche per fasci di elettroni nell’APS,
anche se ad un livello più modesto rispetto a fasci di positroni nella medesima
macchina.
6.2
Build-up dell’electron cloud
Questo sezione fornisce una panoramica sulla fisica coinvolta nel processo di buildup (costituzione) dell’electron cloud. Il primo problema da affrontare è l’interazione
tra un elettrone e il passaggio di un bunch in assenza di campi elettromagnetici
esterni. Il secondo è la moltiplicazione degli elettroni sulla superficie della parete,
descritta dal SEY della superficie del beam-pipe (”tubo” in cui passa il fascio). Il
build-up dell’electron cloud è interrotto dall’effeto della carica spaziale della nube
stessa. Tuttavia, finora non vi è un processo analitico per la fusione di questi due
processi e la formazione dell’electron cloud è attualmente studiata attraverso vari
codici di simulazione.
6.3
Sorgenti di elettroni primari
Per LHC (come per tutte le macchine ad adroni) i fotoelettroni non sono una fonte
significativa di elettroni primari, perché la radiazione di sincrotrone è piccola. Le
principali fonti di elettroni primari sono la ionizzazione dei gas residui e l’impatto
delle particelle perse dal fascio con le pareti della camera. Il numero di elettro-
CAPITOLO 6. ELECTRON CLOUD
67
ni primari per passaggio di bunch per unità di lunghezza prodotti dall’interazione
fascio-gas è
dNe
P
= σNb
dl
kT
(6.3)
dove σ è la ionizzazione dei gas residui dalle particelle del fascio, Nb è la popolazione
del bunch, P è la pressione di vuoto, k è la costante di Boltzmann e T è la temperatura del sistema. Per i protoni e per gli ioni del fascio che incidono sulla superficie,
il tasso di produzione di elettroni (numero di elettroni per particella incidente) è
dNe
Λ
≈
dNb
cos θ
�
dE
dx
�
,
(6.4)
dove dE/dx è la potenza elettronica d’arresto, θ è l’angolo d’incidenza e Λ è una
costante dipendente dal tipo di materiale e dal tipo di particelle del fascio. L’Eq.
(6.4) è valida per θ ≈ 89.6°; per angoli più grandi di θ = 89.8°, la (6.4) non è più
valida perchè si andrà in saturazione.
6.4
Interazione elettrone-bunch
Si consideri un beam-pipe a sezione trasversale circolare con bunch di ioni positivi
altamente relativistici (β ≈ 1) che si muovono lungo la direzione longitudinale, z
(come in fig. 6.4). L’Hamiltoniana2 (espressa in coordinate cilindriche), che descrive
il moto di un elettrone con massa me e carica −e è data da:
H=
p2r
p2θ
[pz − eβe V (r, z − βct) /c]2
+
+
− eV (r, z − βct) ,
2me 2me r2
2me
(6.5)
dove βe = ve /c è la velocità relativistica dell’elettrone, e V (r, z − βct) è il potenziale creato dalla distribuzione di carica del bunch. Per semplificare la (6.5) è utile
studiare il contributo dei diversi termini singolarmente.
2
Per un approfondimento, si veda l’appendice A.
CAPITOLO 6. ELECTRON CLOUD
68
Figura 6.4: Interazione elettrone-bunch basata sul formalismo di Berg in un beampipe a simmetria cilindrica.
Partendo dal presupposto che gli elettroni del multipacting non sono relativistici
(ve � c), il termine eβe V (r, z − βct) /c può essere trascurato. In secondo luogo,
segue dall’elettrodinamica classica che il campo elettrico per un bunch di protoni
altamente relativistico è diverso da zero in un cono con rms dell’angolo dell’ordine di
1/γ nella direzione del moto del fascio. Quindi, in prima approssimazione, l’influenza
della spinta longitudinale prodotta dal fascio può essere trascurata.
Assumendo momento angolare pθ pari a zero, la (6.5) diventa
H=
p2r
− eV (r, z) ,
2me
(6.6)
la dinamica radiale è calcolata mediante l’equazione di Hamilton:
∂pr
∂H
∂V (r, z)
=−
=e
.
∂t
∂r
∂r
(6.7)
Per valutare il potenziale V (r, z), si assume che la parete della camera sia perfetta-
CAPITOLO 6. ELECTRON CLOUD
69
mente conduttrice; dall’equazione di Poisson
(6.8)
∇2 V = −ρ/�0
assumendo che sia la camera che la distribuzione del bunch abbiano simmetria
cilindrica, il potenziale creato dal bunch vale
1
V (r, z) =
�0
�
r
r� ρ (r� , z) ln
0
r� �
dr ,
r
(6.9)
dove ρ (r, z) è la distribuzione di carica spaziale del fascio che può essere fattorizzata
come:
(6.10)
ρ (r, z) = λb (z) f (r) .
6.4.1
Bunch cilindrico
Si consideri ora il caso in cui il bunch abbia la forma di un cilindro, di lunghezza
infinita e carica distribuita uniformemente, con raggio σr e densità lineare costante
λb . Questa approssimazione è valida se si considera che la forma del bunch sia
modellata da una curva Gaussiana sia nel piano longitudinale che in quello trasverso,
quindi l’rms della lunghezza del bunch σz è significativamente maggiore rispetto alla
dimensione trasversale σr . La densità lineare di carica è quindi
ZeNb
λb = √
2πσz
(6.11)
dove Nb è il numero di particelle cariche nel bunch e Z è lo stato di carica ionica.
In questo caso, il potenziale dell’Eq. (6.9) avrà la forma
V (r) =
−
−
λb
r2
4π�0 σr2
λb
2π�0
�
ln
r
σr
+
1
2
�
r ≤ σr
r ≥ σr .
(6.12)
CAPITOLO 6. ELECTRON CLOUD
70
In questa approssimazione non è presente la dipendenza da z. Ora è possibile
dividere l’interazione elettrone-bunch in due regimi, in funzione della posizione iniziale dell’elettrone r. Il primo, per gli elettroni al di fuori del nucleo del fascio che
sono quasi stazionari durante il passaggio di un bunch. L’altro per gli elettroni che
rimangono intrappolati nel nucleo del fascio. Quest’ultimo regime ha un potenziale
simile a quello dell’oscillatore armonico. S. Berg definì questi regimi rispettivamente come “kick -regime”, ovvero gli elettroni nel beam-pipe non entrano nel bunch
durante il suo passaggio e “autonomus-regime”, ovvero gli elettroni nel beam-pipe
effettuano oscillazioni armoniche all’interno del bunch. Il raggio critico rC (critical
radius, fig. 6.4), che separa questi due regimi, è definito come la distanza radiale per
la quale, il tempo per il passaggio di un bunch, è uguale ad un quarto3 del periodo
delle oscillazioni. Può essere calcolato come
�
�
rC ≈ 2 ZNb re σz 2/π,
(6.13)
dove re = e2 / (4π�0 me c2 ) = 2.82 × 10−15 m è il raggio classico dell’elettrone.
Dalla (6.7), il momento radiale guadagnato da un elettrone è:
∆pr ≈ e
∂V (r, z)
∆tb ,
∂r
(6.14)
dove ∆tb è il tempo che occorre al bunch per passare.
Gli elettroni “kiked”, inizialmente vicini alle pareti del beam-pipe, guadagnano
un’energia pari a
∆Ewall = 2me c
2
�
ZNb re
b
�2
,
(6.15)
dove b è il raggio del beam-pipe.
Gli elettroni ”autonomi” guadagnano un’energia che dipende dall’esatto periodo
3
In un oscillatore armonico, il guadagno massimo di energia si ha quando la particella di prova
esegue un quarto di oscillazione.
CAPITOLO 6. ELECTRON CLOUD
71
di oscillazioni, dal tempo in cui la particella è soggetta a tale forza e dalla sua energia
all’inizio dell’oscillazione. La frequenza di oscillazione dell’elettrone è
ωe = c
�
2πZre Nb
.
σr2 σz
(6.16)
Per un elettrone inizialmente fermo ad una distanza pari alla dimensione trasversale
bunch σr , il guadagno massimo di energia è
1
1
Zre Nb
∆Ebunch = me ωe2 σr2 = me c2
.
2
2
σz
6.4.2
(6.17)
Bunch con distribuzione di carica non uniforme
Si consideri ora uno scenario più realistico:
• gli elettroni non sono stazionari, ma si muovono durante il passaggio del bunch;
• la distribuzione spaziale di carica del bunch non è uniforme sia longitudinalmente che trasversalmente.
Si consideri ora una distribuzione longitudinale Gaussiana e tre distribuzioni diverse
per il piano trasverso: cilindrica, Gaussiana e un profilo parabolico espresso da
λb (t) =
�
� �2 � 3
λb 1 − σct
l
0
|ct| ≤ σl
(6.18)
|ct| ≥ σl
dove 2σl è la lunghezza totale del bunch e λb è il picco della densità lineare del bunch.
L’Eq. (6.18) assomiglia ad un profilo Gaussiano del fascio troncato dolcemente in
ct = ±σl (l’equivalente dell’rms Gaussiano della lunghezza è σz ≈ σl /3).
Le distribuzioni longitudinali e trasversali sono fattorizzate secondo la (6.10).
L’espressione per il guadagno medio di energia di una distribuzione uniforme di
CAPITOLO 6. ELECTRON CLOUD
72
elettroni in un beam-pipe circolare in regime autonomus è data da
∆Eaut = me c
2
�
ZNb re
b
�2
4
π
�
rC
1
ln
−
c0 σ r 2
�
,
(6.19)
dove c0 = 1.05 è solo una costante numerica. Invece in regime di kick, ovvero oltre
il raggio rC , il guadagno medio di energia è:
∆Ekick = me c
2
�
ZNb re
b
�2
4 ln
b
.
rC
(6.20)
Tuttavia le equazioni (6.19), (6.20) non sono sempre valide, in quanto se il raggio
critico rC diventa comparabile con il raggio del beam-pipe b, le particelle inizialmente
in regime di kick entrano nel regime autonomus durante il passaggio del bunch. In
questo caso, l’energia media trasmessa alle pareti è
∆Eint
ZNb re
= me c √
2πσz
2
�
b
1
ln
−
c0 σr 2
�
.
(6.21)
Tale energia cresce linearmente con l’intensità del bunch, Nb e decresce con la
lunghezza dello stesso, σz . Mentre dipende debolmente, a causa del logaritmo, dal
raggio del beam-pipe b e dalla dimensione trasversale del fascio σr . Quindi l’energia
guadagnata da un elettrone durante il passaggio di un bunch dipende principalmente
dalla sua posizione radiale.
6.5
Secondary electron yield
La moltiplicazione degli elettroni sulle pareti del beam-pipe è un “ingrediente” fondamentale per la formazione dell’electron cloud. Questo è parametrizzato tramite
il Secondary Emission Yield della superficie delle pareti della camera, solitamente
indicato con δ o SEY , il quale ci dà il numero degli elettroni secondari emessi per
CAPITOLO 6. ELECTRON CLOUD
73
Figura 6.5: Sinistra : schema che mostra le diverse componenti che definiscono
l’emissione secondaria di elettroni. Destra: curve di distribuzione di energia per
pareti di acciaio inox con elettroni a 300 eV incidenti normalmente. La distribuzione
mostra tre differenti componenti: true secondaries, rediffused e backscattered.
elettrone incidente:
δ=
Is
= SEY
Ip
(6.22)
dove Is è la corrente di elettroni secondari emessi dalla superficie e Ip è quella degli
elettroni incidenti.
Convenzionalmente, sono definite tre componenti del flusso di elettroni secondari
in base all’energia con cui essi sono emessi. La parte sinistra della fig. 6.5 mostra
uno schema del processo di emissione secondaria, mentre il plot di destra mostra
il contributo delle tre componenti per il caso di un fascio di elettroni incidenti con
energia Ep = 300 eV su una superficie in acciaio inossidabile. Le tre componenti
sono:
1. Elastically backscattered electrons (elettroni retrodiffusi elasticamente dalla
parete) Iel . Questi elettroni sono emessi con energia uguale a quella delle
particelle incidenti.
2. True secondaries (elettroni secondari veri) Its . Questi elettroni sono originati
da elettroni che penetrano nel materiale per poche decine di nanometri. La
loro energia di emissione è di pochi eV .
CAPITOLO 6. ELECTRON CLOUD
74
3. Rediffused electrons (elettroni ridiffusi) Irdf . Questi elettroni sono quelli riflessi
dopo varie collisioni all’interno del materiale.
La corrente totale degli elettroni secondari è la somma delle tre componenti, Is =
Its +Iel +Irdf , allora δ = δts +δel +δrdf . Tuttavia non c’è una sostanziale differenza tra
il processo di retrodiffusione e ridiffusione. Spesso non è fatta neanche distinzione
tra “rediffused” e “true secondaries” se si considerano energie al di sotto di ≈ 50 eV;
tutti gli elettroni saranno identificati come true secondaries. Allora il SEY sarà la
somma di queste due componenti:
δ = δt + δr
(6.23)
dove δt rappresenta il rendimento dei true secondaries e δr quello degli elettroni
riflessi. Nel seguito si utilizzerà questa notazione.
Il SEY dipende fortemente dall’energia E degli elettroni primari. Negli ultimi
anni sono stati condotti diversi studi per determinare δ (E); una tipica espressione
di un elettrone che colpisce la parete con incidenza normale si basa sul modello di
Furman e Pivi:
δr (E) = (δ0 − δ∞ ) e−E/Er + δ∞
(6.24)
∗
δt (E) = δmax
(6.25)
s (E/Emax )
s − 1 + (E/Emax )s
∗
dove δmax
è il massimo valore di δ (E), Emax è l’energia per la quale c’è il massimo
e δ0 , detto anche reflectivity, corrisponde alla probabilità per un elettrone di essere
retrodiffuso nel limite in cui E → 0. Allo stesso modo, il valore di δ∞ corrisponde
alla probabilità per un elettrone di essere retrodiffuso nel limite in cui E → ∞.
Mentre Er e s sono due parametri di fitting. Di solito una superficie è caratterizzata
∗
da δmax = δmax
+ δ∞ e Emax .
La figura 6.6 mostra l’andamento di δ (E) (rosso) e i contributi degli elettroni
CAPITOLO 6. ELECTRON CLOUD
75
Figura 6.6: Secondary emission yield in funzione dell’energia degli elettroni primari
incidenti. I cerch blu sono dati sperimentali ottenuti da R. Kirby e la curva in
rosso è ottenuta tramite fitting basato sulle equazioni (6.24) e (6.25). Le curve
tratteggiata e continua corrispondono rispettivamente al contributo degli elettroni
true secondaries e reflected.
riflessi (linea nera continua) e true secondary (linea tratteggiata) come descritto
dalle (6.24) (6.25). Il fit riproduce ottimamente i dati sperimentali per
Er = 60 eV
s = 1.5
δ∞ = 0.15
δ0 = 0.7
Emax = 300 eV
δmax = 1.9
.
Poichè gran parte degli elettroni presenti nell’electron cloud ha un’energia di
qualche eV , il valore di δ0 diventa molto importante. Purtroppo, a causa di limitazioni tecniche vi è una significativa incertezza nelle misurazioni del SEY per
elettroni a bassa energia, infatti, in fig. 6.6, i dati sperimentali non scendono al di
sotto dei 20 eV; questo è il principale problema irrisolto nel processo di emissione
secondaria: gli elettroni a bassa energia non sono persi quando incidono sulle pareti,
ma con grande probabilità sono riflessi (δ0 varia tra 0.5 e 1), aumentando così il
loro tempo di sopravvivenza. Quando l’energia degli elettroni primari diminuisce, il
numero degli elettroni backscattered diventa molto più rilevante.
CAPITOLO 6. ELECTRON CLOUD
76
Il SEY dipende anche dall’angolo con il quale gli elettroni colpiscono la superficie
delle pareti. Per un angolo di incidenza non normale alla superficie, il δ (E) dell’Eq.
(6.23) diventerà
δ (E, θ) = δ (E) eαp (1−cos θ)
(6.26)
dove l’angolo θ è preso rispetto alla normale della superficie (θ = 0 indica l’incidenza
normale) e αp è un parametro di fitting. [4]
6.6
Effetti di saturazione
Nelle sezioni precedenti si è mostrato come gli elettroni primari sono creati, accelerati
a causa dell’interazione con i bunch e moltiplicati come funzione del SEY delle pareti
della camera. Tuttavia, la moltiplicazione degli elettroni non è illimitata. Il build-up
dell’electron cloud satura quando gli elettroni persi sono lo stesso numero di quelli
generati. [6]
A seconda della carica del bunch, Nb e se il multipacting si verifica, si possono
stimare approssimativamente due regimi di saturazione:
1. per bunch con carica debole, la saturazione si raggiunge quando è raggiunta
la densità di neutralizzazione media, ovvero quando il campo elettrico medio
sulla parete è nullo. Questo porta ad una densità lineare di elettroni di
λsat = Nb /sb ,
(6.27)
dove sb è la distanza tra i bunch;
2. per bunch con carica forte, la saturazione si raggiunge quando l’energia con
la quale gli elettroni secondari sono emessi, �E � � non è grande abbastanza da
penetrare il campo spaziale di carica della nube. In questo caso, la densità
CAPITOLO 6. ELECTRON CLOUD
77
lineare di saturazione è:
λsat =
π �E � �
.
m e c2 re
(6.28)
Si noti che il primo regime mostra una dipendenza lineare diretta dalla popolazione
del bunch Nb , mentre il secondo no. La transizione avviene a
Ntrans =
�E � � sb
.
m e c 2 re
(6.29)
Si è considerato �E � � = Esec , indipendente dall’intensità del bunch, dal bunch
spacing, ecc.
Concludendo, si può dire che se c’è multipacting, la densità degli elettroni saturi
aumenta con la popolazione del bunch, per poi stabilizzarsi quando raggiunge il
valore di transizione dato dalla (6.29).
6.7
Descrizione dell’evoluzione dell’electron cloud
tramite mappa cubica
Per simulare il build up dell’electron cloud sono stati sviluppati una serie di codici
sofisticati, ad esempio PEI [15], POSINST [16] ed ECLOUD [17]. Questi codici
tipicamente tracciano il moto di macroparticelle, contenenti fino ad un massimo di
∼ 105 elettroni ognuna, tenendo conto di tutte le forze che agiscono su di esse. Visto
che le macroparticelle produrranno più elettroni a causa dell’emissione secondaria,
la loro carica totale aumenterà e quindi dovranno considerarsi anche macroparticelle
supplementari. Pertanto sarà necessaria una grande quantità di tempo e CPU. A
seconda dei parametri utilizzati, una simulazione completa può durare da poche ore
a diversi giorni.
Una nuova prospettiva è stata suggerita nella [18], in cui è stato verificato che,
l’evoluzione della densità dell’electron cloud mediata sul bunch spacing, può essere
CAPITOLO 6. ELECTRON CLOUD
78
Figura 6.7: Evoluzione della densità dell’electron cloud (verde) realizzata con
ECLOUD.
accuratamente descritto da una semplice mappa (cubica). Questo approccio ha il
vantaggio di essere molto semplice dal punto di vista computazionale.
6.7.1
Formalismo della mappa cubica
L’evoluzione nel tempo tipica della densità lineare di carica dell’electron cloud in un
punto qualsiasi di un dipolo di LHC è mostrata in fig. 6.7, per i parametri mostrati
in tab. 6.1.
Fatta eccezione che per le oscillazioni sovrapposte, la densità cresce esponenzialmente con il tempo ovvero con il passaggio dei vari bunches, fin quando non si arriva
alla saturazione. Al termine del passaggio del treno di bunches la densità decade
esponenzialmente.
Mediando la densit in un intervallo temporale corrispondente al passag- gio di
due bunches successivi, si ottengono i cerchi blu della fig.6.7.
Considerando l’evoluzione della densità media si riescono a distinguere i regimi
di build-up, saturazione e decadimento, ma si perdono le informazioni relative alle
CAPITOLO 6. ELECTRON CLOUD
Parametro
Energia delle particelle del fascio
Bunch spacing
Lunghezza bunch
Numero di bunch
Particelle per bunch
Campo magnetico curvante
Lunghezza magnete curvante
Mezza altezza camera a vuoto
Mezza larghezza camera a vuoto
Circonferenza
Primary photoemission yield
Massimo SEY, δmax
Energia per massimo SEY, Emax
Energia elettroni secondari
79
Unità
TeV
m
m
T
m
m
m
m
eV
eV
Valore
7
7.48
0.075
72
10
8 × 10 fino a 1.4 × 1011
8.4
1
0.018
0.022
27000
8 × 10−4
1.3 fino a 1.7
237
1.8
Tabella 6.1: Parametri di input per la simulazione con ECLOUD, relativi ad LHC.
Figura 6.8: Mappa della densità media dell’electron cloud ρm+1 in funzione di ρm .
Cerchietti: simulazioni con ECLOUD (δmax = 1.7, tutti i parametri della tab. 6.1).
La linea rossa tratteggiata rappresenta la saturazione (ρm+1 = ρm ). I punti la di
sopra della linea rossa descrivono il build-up dell’electron cloud (blu: N = 1.6×1011 ,
verde: N = 0.8 × 1011 ), quelli sotto la decadenza dell’electron cloud. La linea
verde e quella blu rappresentano le corrispondenti mappe cubiche. I segni quadrati
rappresentano le transizioni tra i treni di bunches pieni e vuoti.
CAPITOLO 6. ELECTRON CLOUD
80
oscillazioni della densità tra due bunches successivi. La fig.6.8 mostra il comportamento della densità media dopo il passaggio del bunch m-esimo, ρm+1 in funzione
di ρm , per due diversi valori della carica del bunch, N . La linea rossa tratteggiata
corrisponde alla saturazione.
Con il passaggio dei bunches, la densità dell’electron cloud cresce (ovvero i punti
al di sopra della linea rossa, ρm+1 > ρm ), per poi saturare. I punti sotto la linea rossa
(ρm+1 < ρm ) descrivono il decadimento. Tale regime, che corrisponde al passaggio
dei bunches vuoti, è indipendente da N .
La curva continua in fig. 6.8 è il fit cubico omogeneo
ρm+1 = aρm + bρ2m + cρ3m
(6.30)
che riproduce i dati con una buona approssimazione. Quindi l’idea della mappa
introdotta nella [18] in riferimento al RHIC, pu essere applicata anche nel caso dei
dipoli di LHC [19].
I tre termini nella mappa (6.30) sono:
• termine lineare, il quale descrive il meccanismo di crescita (> 1) e di decadenza
(< 1) esponenziale della densità;
• termine quadratico, il quale descrive l’effetto della carica spaziale che porta
alla saturazione (il suo segno riflette la concavità della curva);
• termine cubico, il quale apporta delle piccole correzioni.
6.7.2
Calcolo del coefficiente lineare
Si consideri Nm come il numero di elettroni uniformemente distribuiti attraverso la
sezione trasversale della beam-pipe prima del passaggio dell’m-esimo bunch. Dopo
CAPITOLO 6. ELECTRON CLOUD
81
Figura 6.9: Geometria della sezione trasversale del beam-pipe di LHC, reale (linea
continua) e approssimata (linea tratteggiata).
il passaggio di tale bunch, questi elettroni avranno un’energia media Ēg :
1
Ēg =
πRp2
�
2π
0
�
Rp
∆E (r, θ) r dr dθ
(6.31)
σr
dove ∆E (r, θ) è il guadagno energetico di un elettrone in posizione (r, θ) dopo il
passaggio di un bunch calcolato in kick-regime e σr è il raggio trasversale effettivo
del fascio.
Quando questi elettroni incidono sulle pareti della camera, emergono Nm δr elettroni riflessi con energia Ēg e si creano Nm δt elettroni secondari con energia Es � Ēg .
Prima dell’arrivo del bunch (m + 1), gli elettroni riflessi si muovono nella camera ed
effettuano un numero medio n di collisioni con le pareti della camera, ovvero4
�
�
tbb
n=
− 1,
t̄f
(6.32)
dove tbb è il bunch spacing e
4
4Rp
t̄f (E) = �
π 2E/me
(6.33)
�x� è la funzione Floor(x), la quale approssima un numero reale x al più grande intero ≤ x.
CAPITOLO 6. ELECTRON CLOUD
82
è la media angolare di
2Rp cos θ
tf (E, θ) = �
,
2E/me
(6.34)
dove θ è l’angolo definito in fig. 6.9.
Il numero totale degli elettroni riflessi con energia Ēg al passaggio del bunch
(m + 1) sarà di conseguenza
� �
(ref )
Nm+1 = Nm δrn Ēg .
(6.35)
Gli elettroni secondari originati da ogni collisione con le pareti della camera,
dopo un’ulteriore collisione con le stesse, origineranno elettroni secondari e riflessi,
tutti con la stessa energia Es .
Il numero totale degli elettroni secondari (bassa energia) al passaggio del bunch
(m + 1) sarà quindi
(sec)
Nm+1
�
= Nm δt Ēg
dove δs = δt + δr e
kp =
�
n
��
p=1
� �
δrp−1 Ēg δskp (Es ) ,
(6.36)
� ��
tbb − pt̄f Ēg
t̄f (Es )
(6.37)
è il numero di collisioni subite dagli elettroni a bassa energia, originati dopo p
collisioni degli elettroni ad alta energia, con le pareti della camera.
Il numero totale degli elettroni al passaggio del bunch (m + 1)-esimo sarà la
somma della della (6.35) e della (6.36):
Nm+1 = Nm
�
�
n
�
�
δr Ēg + δt Ēg
n
��
p=1
�
p−1
δr
�
Ēg δskp (Es )
�
(6.38)
da cui il coefficiente del termine lineare della mappa (6.30) può essere scritto in
CAPITOLO 6. ELECTRON CLOUD
83
Figura 6.10: Coefficiente lineare approssimativo a in funzione del bunch spacing,
per δmax = 1.3 (giallo), δmax = 1.5 (rosso), δmax = 1.7 (verde).
Figura 6.11: Comparazione del coefficiente lineare a della mappa derivato usando le
simulazioni di ECLOUD (barre verticali) e usando il calcolo analitico (linee continue
dello stesso colore), in funzione della popolazione del bunch N per δmax = 1.3
(giallo), δmax = 1.5 (rosso) e δmax = 1.7 (verde).
forma chiusa come segue
� �
� �
� � η
δsnη (Es ) − δrn Ēg
Nm+1
n
� �,
a=
= δr Ēg + δt Ēg δs (Es ) η
Nm
δs (Es ) − δr Ēg
(6.39)
�
� �
dove η = t̄f Ēg /t̄f (Es ) = Es /Ēg � 1. In fig. 6.10 il coefficiente a è mostrato in
funzione del bunch spacing tbb per differenti valori di δmax . Infine, in figura 6.11 il
risultato analitico è confrontato con i valori simulati, mostrando un buon accordo.
Capitolo 7
Instabilità Causate dall’Electron
Cloud
In acceleratori di positroni e protoni, gli elettroni prodotti per fotoemissione, ionizzazione e per emissione secondaria si accumulano nella camera a vuoto quando il
fascio è diviso in più bunch ravvicinati. Un bunch di protoni o positroni passando
attraverso l’electron cloud risente di una forza simile a quella di un wake field vicino. Questo wake field può causare instabilità transverse-mode-coupling se la densità
dell’electron cloud supera un determinato valore soglia.
L’electron cloud induce un wake field sul fascio che lo attraversa; ovvero esso
produce una perturbazione trasversale di una parte longitudinale del fascio, interessando così le parti successive del fascio. In un acceleratore questo wake field può
causare due tipi di instabilità:
1. instabilità trasversali di single-bunch (head-tail) causate da forze di wake vicine
(< 100 ps);
2. instabilità trasversale di multi-bunch (coupled-bunch) causate da forze di wake
a media distanza (> ns).
84
CAPITOLO 7. INSTABILITÀ CAUSATE DALL’ELECTRON CLOUD
7.1
85
Instabilità di single-bunch
Si consideri ora un bunch con distribuzione Ψ (x, px , y, py , z, pz ; s) nello spazio delle
�
fase a sei dimensioni, dove la densità Ψ è normalizzata: Ψdx dpx dy dpy dz dpz ds =
1. La coordinata longitudinale z rappresenta lo spostamento relativo longitudinale
del fascio; è espressa come z = s − ct, dove t è l’istante di tempo in cui una particella
con coordinata longitudinale z arriva in s, quindi una z positiva significa che la
particella è in anticipo rispetto al centro del bunch. Una particella in posizione z
all’interno del bunch risente di una forza di wake indotta dalla parte precedente del
bunch (z � < z). Se la forza di wake Fx(y) (z, s) è della stessa natura di una forza
derivante da una classica impedenza della camera a vuoto o di una cavità, potrà
essere espressa da
N+ r c
Fx(y) (z, s) =
γ
dove ρx(y) (z, s) =
�
�
∞
z
Wx(y) (z − z � , s) ρx(y) (z � , s) dz � ,
(7.1)
x (y) Ψdx dpx dy dpy dpz è un momento di dipolo orizzontale
(verticale) in z, N+ è il numero di positroni o protoni nel bunch ed rc è il classico
raggio della particella. Il termine Wx(y) (z, s) è il wake field. Questo è il coefficiente
lineare della forza accoppiata con un momento di dipoli della parte precedente del
bunch. Nell’Eq. (7.1), una particella in posizione z risente di una forza dipendente
solo dalla distanza dalla posizione z � in cui c’è una perturbazione del momento di
dipolo. Tuttavia non è chiaro a priori se il wake field prodotto dall’electron cloud ha
le stesse caratteristiche di quello convenzionale. In questo caso si tratterà come un
normale wake field in cui la forza di wake prodotta dall’electron cloud è modellata
secondo la (7.1) considerando una regione senza campi magnetici esterni.
Per valutare il wake field si può utilizzare l’approssimazione di “coasting beam”;
ovvero la distribuzione di carica longitudinale del fascio è considerata uniforme, in
cui la densità lineare del bunch λb è data da N+ /2σz . In questa approssimazione gli
CAPITOLO 7. INSTABILITÀ CAUSATE DALL’ELECTRON CLOUD
86
elettroni oscilleranno in un potenziale costante vicino al centro del fascio con una
pulsazione
ωe,x(y) =
�
2λb re c2
σx(y) (σx + σy )
(7.2)
dove σx(y) è la dimensione orizzontale (verticale) del fascio. Si cercherà di trattare il
wake field come un risonatore, caratterizzato da una resistenza di shunt Rs , da un
fattore di qualità Q e da una pulsazione di risonanza ωR , come è comunemente usato
per la caratterizzazione di camere a vuoto o cavità. Ci si aspetta che, nel caso dell’electron cloud, la frequenza di risonanza del risonatore equivalente sia strettamente
correlata alla frequenza di oscillazione degli elettroni ωe .
La forza tra il fascio e gli elettroni e quindi anche l’effettiva forza di wake, è
non lineare nelle perturbazioni trasversali di ampiezza. Questa non linearità porterà alla saturazione dell’instabilità per un certo valore dell’ampiezza, il quale sarà
paragonabile alla dimensione del fascio.
L’instabilità di single-bunch causata dal wake field dell’electron cloud sarà trattata adattando la teoria convenzionale dell’nstabilità, la quale è basata sull’Eq. (7.1).
Tale teoria prevede una crescita esponenziale in cui il tasso di crescita è determinanto, dai parametri del fascio e del wake field. Poichè il wake field reale non soddisfa
esattamente la (7.1), l’instabilità avrà un comportamento diverso dalla semplice
crescita esponenziale.
Si considerino ora delle “fette” del fascio di positroni, rappresentate tramite le
coordinate trasversali del centro di massa, coordinata longitudinale z e posizione s
[xb (z, s) , yb (z, s)]; tale moto lungo z è descritto come una variazione in funzione di s.
L’electron cloud, a sua volta, è caratterizzato dalle coordinate trasversali del centro
di massa [xc (s, t) , yc (s, t)] e dalla posizione s; quindi il suo moto in s è descritto
come una variazione nel tempo t.
Essendo questa una trattazione analitica si assume che l’interazione tra il fascio e l’electron cloud è lineare nello spostamento tra i centri del fascio e dell’elec-
CAPITOLO 7. INSTABILITÀ CAUSATE DALL’ELECTRON CLOUD
87
tron cloud per ogni s, dove le fette del fascio in (z, s) interagiscono con la nube in
[s, t = (s + z) /c]. Per ora si considererà solo il moto verticale, in quanto l’estensione a quello orizzontale è semplice. Allora le equazione del moto per il fascio e per
l’electron cloud sono
� ω �2
d2 yb (s, z) � ωβ,y �2
b,y
+
y
(s,
z)
=
−
{yb (s, z) − yc [s, (s + z) /c]} (7.3)
b
2
ds
c
c
d2 yc (s, t)
2
= −ωc,y
[yc (s, t) − yb (s, ct − s)] ,
(7.4)
dt2
dove ωβ,y è la pulsazione di betatrone senza l’interazione con gli elettroni. I due
coefficienti ωb,y e ωc,y caratterizzano la forza linearizzata tra il fascio e l’electron
cloud e sono
2λc rr c2
γky (σx + σy ) σy
2λb re c2
=
,
ky (σx , +σ) σy
2
ωb,y
=
(7.5)
2
ωc,y
(7.6)
dove λc e λb sono le densità lineari della nube e del fascio, σx e σy sono le dimensioni, rispettivamente, orizzontali e verticali del fascio. Ancora, ωb e ωc sono due
parametri di accoppiamento e ky è un parametro libero derivante dall’integrazione
di due distribuzioni Gaussiane le quali rappresentano il fasicio e l’electron cloud. Se
l’electron cloud è rappresentato da una distribuzione strettamente Gaussiana con lo
stesso rms della dimensione del fascio, si ha k = 2. Da notare che ωc , la quale è la
√
√
pulsazione coerente dell’electron cloud, differisce di un fattore 1/ k ∼ 1/ 2 dalla
pulsazione incoerente di oscillazione ωe di un singolo elettrone (7.2). Le equazioni
orizzontali del moto si otterranno sostituendo ωb,y e ωc,y con
2λc re c2
γkx (σx + σy ) σx
2λb re c2
=
.
kx (σx + σy ) σx
2
ωb,x
=
(7.7)
2
ωc,x
(7.8)
CAPITOLO 7. INSTABILITÀ CAUSATE DALL’ELECTRON CLOUD
88
Per la condizione iniziale yc (s, −∞) = 0 la soluzione della (7.4) è
yc (s, t) = ωc
�
t
−∞
yb (s, s − ct� ) sin ωc (t − t� ) dt� .
(7.9)
Sostituendo la soluzione nella (7.3), l’equazione del moto del fascio è ottenuta come
segue
d2 yb (s, z)
+
ds2
�
ω̃β
c
�2
ω 2 ωc
yb (s, z) = b 3
c
�
∞
yb (s, z � ) sin
z
ωc
(z − z � ) dz � ,
c
(7.10)
dove ω̃β2 = ωb2 + ωβ2 è la pulsazione di betatrone che include le interazioni tra fascio
ed electron cloud. Il corrispondente tune shift coerente è espresso come
∆ωβ =
ω02
2ωβ
(7.11)
dove ω0 è la pulsazione di rivoluzione. La parte destra dell’Eq. (7.10) può essere
rappresentata da una funzione di wake, la quale dipende solo dalla distanza longitudinale; integrata lungo la circonferenza dell’anello L, questa funzione di wake si
può scrivere come
�ω �
�
�
c
W1 (z) m−2 = cRs /Q sin
z
c
per z < 0,
(7.12)
dove
cRs /Q =
γωb2 ωc
L
λb r c c 3
(7.13)
in cui si è posto λb yb (s, z � ) = ρy (z � , s).
Si è quindi dimostrato che, in base alle approssimazioni fatte, il wake field causato
dall’electron cloud può essere rappresentato da un risonatore, come generalmente si
fa per descrivere il problema in termini di impedenze associate, in cavità e camere
a vuoto. Se interpretiamo il wake field come un risonatore, il coefficiente della
CAPITOLO 7. INSTABILITÀ CAUSATE DALL’ELECTRON CLOUD
89
Figura 7.1: Rappresentazione schematica dell’algoritmo di simulazione dell’ HEADTAIL code che modella l’instabilità di single-bunch causata dall’electron cloud
[11].
funzione di wake sinusoidale corrisponde ad una resistenza di shunt divisa da un
fattore di qualità: Rs /Q. In questo modello lineare la funzione di wake non oscilla;
questo significa che, anche se Rs /Q è una quantità finita, Rs e Q saranno infinite.
Per questo modello analitico, l’Eq. (7.10) mostra che la forza di wake è lineare e
obbedisce al principio di sovrapposizione degli effetti per una perturbazione yb (s, z)
e dipenderà solo dalla distanza longitudinale della perturbazione (z − z � ).
7.1.1
Schemi di simulazione
Le simulazioni al computer appaiono indispensabili per una corretta previsione e
comprensione delle dinamiche di instabilità. Si possono utilizzare diversi approcci
per modellare le interazione di un bunch e di un electron cloud, ad esempio rappresentando, il fascio, con un determinato numero di microbuches con dimensione
trasversale finita ma puntiformi nella coordinata longitudinale dello spazio delle fasi,
e gli elettroni con delle macroparticelle (Ohmi’s PEHT code [10]); oppure rappresentando sia il fascio che l’electron cloud come delle macroparticelle (discrete PIC
code, soft-Gaussian approximation).
Lo schema di simulazione per il PIC code o per il soft-Gaussian code è illustrata
CAPITOLO 7. INSTABILITÀ CAUSATE DALL’ELECTRON CLOUD
90
in fig. 7.1. Si considera che le interazioni tra il bunch e gli elettroni avvengono in uno
o più punti del beam-pipe. Come già detto precedentemente si rappresentano sia il
fascio che gli elettroni come macroparticelle. Le macroparticelle che compongono il
bunch sono divise in “fette” lungo la coordinata longitudinale, quindi l’interazione
tra bunch ed electron cloud è calcolata per ogni “fetta”. Gli elettroni si muovono
tra i centri delle fette con la loro quantità di moto istantanea e sotto la possibile
influenza di campi magnetici esterni. Dopo l’interazione, le macroparicelle del fascio
sono ricalcolate nel punto successivo di interazione tramite una matrice 6 × 6 che
rappresenta l’ottica lineare; invece l’electron cloud è aggiornato prima dell’arrivo del
bunch, ovvero si assume che esso si sia generato nuovamente con il passaggio dell’ultimo bunch e quindi non avrà memoria delle perturbazioni precedenti. L’interazione
tra le particelle del bunch e l’electron cloud è espressa dalle seguenti equazione
accoppiate del moto:
N�
int −1
d2�xp,i (s)
e
� e [�xp,i ; fe,n (x, y, t)] δ (s − sn )(7.14)
= −K (s) �xp,i (s)
E
ds2
γmp c2 n=0
� ��
�
d2�xe,j (s)
e
d�
x
e,j
� p [�xe,j ; fp,SL (x, y)] +
� ext .
= −
E
×B
(7.15)
dt2
me
dt
Qui le posizioni degli elettroni e delle particelle del bunch sono rappresentate dei
vettori bidimensionali e tridimensionali �xe ≡ (xe , ye ) e �xp (s) ≡ (xp , yp , zp ) dove
z = s − ct rappresenta una coordinata longitudinale; Ks è la distribuzione in 3D della messa a fuoco tra due punti di interazione, comunemente integrata nella matrice
6 × 6; fe,n (x, y) e fp,SL (x, y) rappresentano rispettivamente le funzioni di distribu�e è
zione dell’electron cloud in posizione n e delle particelle del bunch in una fetta; E
� p è quello del fascio; B
� ext è il campo magnetico
il campo elettrico degli elettroni ed E
esterno che potrebbe influenzare significativamente la dinamica degli elettroni. Nel� e,p , che agiscono sugli elettroni
l’approccio utilizzato da PIC code, i campi elettrici E
e sulle particelle del fascio durante la loro interazione, sono calcolati su una griglia.
CAPITOLO 7. INSTABILITÀ CAUSATE DALL’ELECTRON CLOUD
7.2
91
Instabilità di multi-bunch
Un bunch di positroni può essere caratterizzato dalla sua posizione longitudinale e
trasversale in funzione di s, ignorando la struttura interna del bunch. Le interazioni
tra i bunches e gli elettroni nella nube, sono determinate dai profili trasversali e
longitudinali dei bunches. Tali profili sono assunti Gaussiani con deviazione standard
determinata dall’emittance e dalla media della funzione beta in direzione trasversale
e longitudinale. Le equazioni del moto possono essere scritte come
Ne
d2�xp
re �
+ K (s) �xp =
F� (�xp − �xe ) δP (s − se )
ds2
γ e=1
Nb
�
d2�xe
2
= 2re c
F� (�xe − �xp ) δP [t − tp (se )] +
dt2
p=1
(7.16)
(7.17)
e d�xe
� − 2re c2 ∂φ ,
×B
me dt
∂x
dove i pedici p ed e rappresentano i positroni e gli elettroni rispettivamente, re è
il raggio dell’elettrone, me è la massa dell’elettrone, e è la carica dell’elettrone, φ
è il potenziale elettrico causato dagli elettroni, δP è la funzione di Dirac ed F� è la
forza di Coulomb in uno spazio bidimensionale. Il potenziale elettrico normalizzato,
il quale rappresenta le interazioni tra gli elettroni, è determinato dall’equazione di
Poisson:
∇2⊥ φ (x)
=
Ne
�
a=1
δ (x − xe,a ) .
(7.18)
La forza di carica spaziale è risolta utilizzando la funzione di Green considerando la
sezione circolare.
Il build-up dell’electron cloud è stimato utilizzando solo la (7.17) e le condizioni
iniziali per l’electron cloud sono mostrate in fig. 7.2. Si consideri come posizione
longitudinale se , quindi gli elettroni sono creati quando il bunch giunge in posizione
se al tempo t = t (se ). Per acceleratori di positroni la fotoemissione causata dalla
radiazione di sincrotrone è il processo principale nella produzione di elettroni. Il nu-
CAPITOLO 7. INSTABILITÀ CAUSATE DALL’ELECTRON CLOUD
92
Figura 7.2: Rappresentazione schematica del build-up dell’electron cloud. Gran parte degli elettroni sono originati dalla porzione di superficie su cui incide la radiazione
di sincrotrone.
mero medio di elettroni incidenti sulle pareti della camera rispetto alla circonferenza
dell’anello è
�
�
5π αγ
nγ /m · e+ = √
3 L
(7.19)
in cui α = 1/137. Il numero di fotoelettroni prodotti da un positrone nella camera
è
�
�
neγ /m · e+ = nγ Yγ .
(7.20)
Il tasso di fotoemissione diretta è stimato essere Yγ ∼ 0.1.
Un elettrone secondario è prodotto con probabilità [δ2 (E)] quando un elettrone è
assorbito dalle pareti della camera. Tale probabilità, la quale è funzione dell’energia
dell’elettrone incidente (E), è definita come segue
δ2 (E) = δ0 e−5E/Emax + δ2,max
E
1.44
.
Emax 0.44 (E/Emax )1.44
(7.21)
La densità degli elettroni cresce fino ad un valore soglia, determinato dall’equilibrio
CAPITOLO 7. INSTABILITÀ CAUSATE DALL’ELECTRON CLOUD
93
tra la creazione e l’assorbimento degli elettroni che si muovono sotto l’influenza di
forze e dalle condizioni iniziali. In questo caso si può assumere che gli elettroni
saranno prodotti uniformemente sulla superficie delle pareti della camera.
La distribuzione degli elettroni si riflette sulle caratteristiche dell’instabilità di
coupled-bunch; tale instabilità è causata dall’interazione del fascio con il movimento
collettivo dell’electron cloud e il moto degli elettroni della nube è molto correlato
con la distribuzione dell’electron cloud. Il moto collettivo e la distribuzione, dell’electron cloud, dipende dalla posizione all’interno dell’anello; ovvero dipende dalla
vicinanza o dalla lontananza rispetto al campo esterno prodotto dai vari componenti
dell’acceleratore.
Le caratteristiche dell’instabilità di coupled-bunch sono determinate dalla media
o dall’integrazione del moto collettivo delle electron clouds rispetto a tutto l’anello.
Per la valutazione dell’instabilità si assume che l’intero anello sia formato da un solo
componente (ad esempio solo drift-space) e che gli elettroni siano prodotti da una
sola delle possibili sorgenti, quindi per valutare l’effettivo aumento dell’instabilità si
fa un’opportuna media pesata dei singoli risultati.
L’instabilità di coupled-bunch è simulata risolvendo le (7.16) (7.17) (7.18), imponendo delle condizioni iniziali autoconsistenti. Pur non essendo difficile da simulare
l’evoluzione di ogni ampiezza del bunch osservando l’aumento dell’instabilità, richiede molte risorse al computer e molto tempo. Spesso, poi, tale metodo non fornisce
un quadro fisico dell’instabilità. Il meccanismo e le cause dell’instabilità sono simili
all’instabilità classica causata dalla struttura della camera a vuoto. La correlazione
tra i bunches è indotta dal moto coerente degli elettroni nella nube o dal campo
elettromagnetico nella camera.
La teoria ordinaria sull’instabilità è basata sui wake field. La forza verticale
di cui risente un bunch in posizione z è espressa dalla convoluzione del wake field
(W1,y ) con i momenti di dipolo dei bunches in anticipo rispetto al bunch di interesse
CAPITOLO 7. INSTABILITÀ CAUSATE DALL’ELECTRON CLOUD
(zi < zj ):
∞
Np r e �
Fy (zi ) =
W1,y (zi − zj ) yj (zj ) ,
γ j>i
94
(7.22)
dove il wake field W1,y (z) è funzione della distanza tra il bunch di interesse (zi ) e i
bunches in anticipo (zj ). Questa convoluzione è basata sulla linearità e sul principio
di sovrapposizione degli effetti della forza di wake.
La forza dell’Eq. (7.22) per un treno di bunch uniformemente spaziati con bunch
spacing Lsp induce un’instabilità di coupled-bunch caratterizzata da una relazione
di dispersione
N
(Ωm − ωβ )
w
m+νβ
L
Np r e c �
=
W1 (−iLsp ) ej2πi M
c
2γωβ i=1
in cui Nw è il range del wake field. La parte immaginaria di
Ωm L
c
(7.23)
=
T0
τm
è il tasso
di crescita per rivoluzione del modo m-esimo. I bunches oscilleranno con un modo
caratterizzato da m come
ym (zi ) = am e−j(Ωm t−2πmi/M ) ,
(7.24)
dove M è il numero di bunches assunti equamente spaziati. La parte reale di Ωm è
circa ωβ .
Alcune prove sono state fatte utilizzando un metodo analitico per studiare l’instabilità di coupled-bunch indotta dall’electron cloud. La difficoltà con la teoria
analitica per l’instabilità di coupled-bunch è dovuto al fatto che i singoli elettroni
nella nube non risentono tutti di un moto armonico lineare. Proprio per questa difficoltà è preferibile utilizzare un procedimento semianalitico, nel quale si calcolano
numericamente le forze di wake e il tasso di crescita dei modi di coupled-bunch è
valutato con la (7.23) [12]. Questo metodo è stato utilizzato per capire l’instabilità
di coupled-bunch osservata al KEK Photon Factory.
CAPITOLO 7. INSTABILITÀ CAUSATE DALL’ELECTRON CLOUD
95
Si ipotizzi che i buches interagiscano con la nube in posizione s. Il kick subito
dall’i-esimo bunch è espresso come
�
∆yp,i
i+N
Np re �w
=
W1 (zi − zj ) yp,j
γ j>i
(7.25)
dove y � = dy/ds. Questa equazione è generalmente usata per simulare il moto del
fascio con un dato wake field W1 , però si può anche utilizzare per valutare il wake
field indotto dall’electron cloud. Tale metodo è risultato molto efficiente per quanto
riguarda le simulazioni sul KEKB, soprattutto per wake field valutati in zone di
drift space e in magneti solenoidali, più problemi ci sono stati per quanto riguarda
i wake field indotti dall’electron cloud in magneti curvanti abbastanza forti [12].
7.2.1
Tracking dell’instabilità di multi-bunch
Le tre equazioni (7.16) (7.17) (7.18) possono essere risolte direttamente numericamente. In una simulazione di tracking del KEKB, un migliaio di bunches interagiscono con la nube durante molte centinaia di rivoluzioni, in base al tempo di crescita.
Poichè il calcolo del campo di carica spaziale impiegherebbe molto tempo, si utilizza
un’approssimazione. L’equazione di Poisson è risolta solo una volta per ampiezza
del fascio pari a zero, cioè, il potenziale della carica spaziale, che è stato calcolato
con la simulazione del build up, è posto come campo costante in questa simulazione di tracking; tale approssimazione è affidabile e sufficiente, quando le oscillazioni
in ampiezza del fascio sono piccole. Il tempo di calcolo sarà molto lungo in quanto gli effetti non lineari e i vari risultati da sovrapporre per valutare l’interazione
fascio-nube sono inclusi automaticamente.
L’ampiezza trasversale di ogni bunch è ottenuta come funzione del tempo; quindi
trasformando secondo Fourier le ampiezze di tutti i bunches si ha lo spettro dei
modi instabili. Esperimenti sull’instabilità di coupled-bunch sono stati ampiamente
CAPITOLO 7. INSTABILITÀ CAUSATE DALL’ELECTRON CLOUD
96
effettuati utilizzando il fast beam-position monitors [13, 14]. Il modulo del baricentro
del bunch è calcolato direttamente in funzione del tempo utilizzando i monitors. Lo
spettro dei modi dato dalla trasformazione di Fourier dei dati sperimentali è poi
confrontato con quello ottenuto dalle simulazioni [12].
Capitolo 8
Possibili soluzioni
8.1
Uso dei solenoidi per sopprimere l’electron cloud
in DaΦne
Gli effetti dovuti al fenomeno dell’electron cloud in DaΦne si possono sintetizzare
come segue: un grande e positivo tune shift indotto dalla corrente del fascio di
positroni; l’aumento dell’instabilità orizzontale con il tempo non può essere spiegato
solo attraverso l’interazione del fascio con pareti non PEC, essa aumenta anche con
la corrente del bunch; l’aumento anomalo della pressione di vuoto con la corrente
del fascio; il tune shift tra bunches presenta la forma caratteristica del build-up
dell’electron cloud.
In DaΦne il fascio risentirà di un’instabilità verticale provocata dall’electron
cloud e dall’interazione dei vari bunches con la nube stessa. Ovvero ciò che accade è
che se il bunch non attraversa la nube esattamente al centro, essa sarà perturbata,
tale perturbazione inciderà sul moto del bunch successivo destabilizzandolo. Tale
fenomeno è detto instabilità di coupled bunch, come già discusso precedentemente.
Questa instabilità è stata trovata tramite l’analisi di vari dati sperimentali.
L’osservazione dell’oscillazione, provocata dall’electron cloud, mostra che la fre-
97
CAPITOLO 8. POSSIBILI SOLUZIONI
98
(a)
(b)
Figura 8.1: (a) Densità volumetrica di carica dell’electron cloud in DaΦne in funzione del tempo, in una regione di drift. (b) Vista tridimensionale della densità
volumetrica di carica in un instante di tempo.
quenza di oscillazione del modo è sempre molto bassa, infatti tale modo e detto modo
-1 ed è quello più vicino all’origine dell’asse delle frequenze dalla parte negativa.
Per regioni di drift (senza campi esterni), imponendo una bassa fotoemissione,
però includendo comunque gli elettroni secondari, la densità volumetrica di carica
dell’electron cloud è mostrata in fig. 8.1. In questo caso si può ridurre drasticamente
la densità dell’electron cloud, soprattutto al centro della camera, con l’installazione
di solenoidi, ovvero applicando campi magnetici in grado di trattenere gli elettroni
primari e secondari nelle vicinanze delle pareti della camera.
CAPITOLO 8. POSSIBILI SOLUZIONI
8.2
99
Simulazioni
Come appena accennato, un modo efficace per ridurre l’electron cloud è quello dell’installazione di solenoidi. Tale beneficio è visibile chiaramente dal risultato di
numerosi esperimenti ed anche dal risultato di numerose simulazioni.
In questo caso le simulazioni sono state effettuate con ECLOUD, programma in
Fortran che simula il build-up dell’electron cloud, tramite i modelli e i meccanismi
fisici descritti nei riferimenti [21, 22, 23, 24]. La simulazione include i campi elettrici generati dal fascio, i campi magnetici arbitrari, il campo generato dalla carica
spaziale degli elettroni e le cariche immagini sia per gli elettroni che per il fascio. Il
programma richiede un file di input (ecloud.input) nel quale devono essere indicati i
parametri del fascio (bunch spacing, popolazione del bunch, ecc.), le proprietà della
superficie della camera (SEY, ecc.), il tipo del campo magnetico (intensità, dipoli,
solenoidi, ecc.), geometria della camera a vuoto, ecc. [25]. Ovviamente restituisce
vari file di output i quali dovranno essere successivamente analizzati.
Di seguito ci sono due sottosezioni. Nella prima è stato simulato il build-up
dell’electron cloud in regioni con bassa fotoemissione, in modo da mostrare come si
distribuiscono spazialmente gli elettroni sottoposti ad un magnete solenoidale. Nella
seconda, invece, si è considerata una regione con alta fotoemissione, sempre sotto
l’influenza di magneti solenoidali.
8.2.1
Regioni con bassa fotoemissione
La prima analisi è stata effettuata su regioni dritte, in cui la fotoemissione è assente e
quindi gli elettroni primari saranno molto pochi in quanto dovuti agli altri fenomeni
di emissione primari.
Il primo caso analizzato è quello in drift space, ovvero senza l’influenza di campi
esterni. La densità dell’electron cloud è mostrata in fig. 8.1(a) ed i parametri utilizzati nella simulazione sono riportati in tab. 8.1. Come si può notare chiaramente
CAPITOLO 8. POSSIBILI SOLUZIONI
100
Parametro
Valore
Numero di bunches
120
Numero di particelle per bunch
10.1 × 1010
Bunch spacing [m]
0.8
Lunghezza del bunch [m]
0.018
Primary photoelectron emission yield
0.00076
SEY
1.9
Dimensione orizzontale del fascio [m]
0.0014
Dimensione verticale del fascio [m]
0.00005
Campo elettrostatico [V ]
0.0
Circonferenza [m]
97.68
Tabella 8.1: Parametri utilizzati per le simulazioni.
Figura 8.2: Vista tridimensionale della densità volumetrica di carica dell’electron
cloud in DaΦne in una regione in cui è presente un magnete solenoidale di 20 gauss.
CAPITOLO 8. POSSIBILI SOLUZIONI
101
Figura 8.3: Densità tridimensionale del’electron cloud per una regione sottoposta
ad un campo magnetico solenoidale di 200 Gauss in DaΦne.
dalla fig. 8.1(b), la densità massima è concentrata nel centro della sezione della
camera. Una soluzione, come più volte detto, è quella di installare dei solenoidi;
ad esempio in fig. 8.2 si può vedere come, applicando un leggero campo magnetico
solenoidale (20 Gauss), si ha una drastica riduzione della densità, soprattutto nel
centro della camera.
Aumentando l’intensità del campo magnetico gli elettroni si concentreranno sempre di più vicino le pareti della beam-pipe (fig. 8.3) e la densità diminuirà(fig.
8.4).
Per un determinato valore del campo magnetico si ha il fenomeno della risonanza
di multipacting. Ciò avviene quando il bunch spacing è uguale all’intervallo di tempo
tra due collisioni consecutive degli elettroni con la parete della camera. A seconda
dei paramentri dell’acceleratore è possibile calcolare la popolazione di un bunch
necessaria affinchè si verifichi tale fenomeno. Prima di tutto bisogna ricavare il
valore per cui ci sia emissione secondaria; come mostrato dalla fig. 8.5 tale valore
è 43.68 eV. Sostituendo nell’Eq. (6.15) si ricava Nb = 10.32 × 1010 . Allora per i
parametri di DaΦne il valore del campo magnetico affinchè si verifichi il fenomeno
CAPITOLO 8. POSSIBILI SOLUZIONI
102
Figura 8.4: Densità dell’electron cloud in funzione del tempo per un fascio passante
in solenoidi con diversi settaggi, per DaΦne.
Figura 8.5: SEY per DaΦne.
CAPITOLO 8. POSSIBILI SOLUZIONI
103
Figura 8.6: Variazione della densità media dell’electron cloud in funzione del campo
solenoidale. Parametri espressi dalla tab. 8.1.
della risonanza è dato da
Bzc =
πme c2
≈ 66 Gauss.
eLsep
(8.1)
Come si può notare dalla fig. 8.6 la banda di tale fenomeno è abbastanza larga
(≈ 40 Gauss).
8.2.2
Regioni con alta fotoemissione
Come visto nelle sezioni precedenti, applicando un magnete solenoidale la densità
volumetrica di carica dell’electron cloud diminuisce all’aumentare del campo magnetico, eccetto che per particolari configurazioni in cui si ha il fenomeno della risonanza
di multipacting. Nelle regioni con alta fotoemissione, ad esempio appena fuori da un
dipolo, si avrà una grande quantità di fotoni incidenti sulle pareti della camera, concentrati in un cono con apertura proporzionale ad 1/γ. In questa situazione, senza
solenoidi, ci sono molte probabilità di avere instabilità dovute all’electron cloud.
Utilizzando però tali magneti si riesce a risolvere il problema, infatti, come mo-
CAPITOLO 8. POSSIBILI SOLUZIONI
104
Figura 8.7: Densità media dell’electron cloud in funzione del campo solenoidale, in
regioni con alta fotoemissione.
Figura 8.8: Vista tridimensionale della densità volumetrica di carica, in DaΦne, in
una regiona con alta fotoemissione con un solenoide a 300 Gauss, in un istante di
tempo.
CAPITOLO 8. POSSIBILI SOLUZIONI
105
strato in fig. 8.7, all’aumentare del campo magnetico si avrà una grande attenuazione della densità della nube nella camera, tranne che per un picco nella posizione
di incidenza della radiazione, come è mostrato in fig. 8.8.
Conclusioni
I risultati principali contenuti in questa tesi si possono così riassumere. L’installazione di magneti solenoidali, riducendo l’intensità dell’electron cloud nelle regioni in
cui transita il fascio, abbatte efficacemente l’interazione electron cloud–fascio. Di
conseguenza saranno ridotte anche le instabilità provocate dalla nube. Il risultato
delle simulazioni è coerente con i dati sperimentali ottenuti su DaΦne.
Dal punto di vista modellistico, si è studiato un nuovo approccio allo studio
del build-up dell’electron cloud nel Capitolo 5. Si descrive la densità dell’electron
cloud usando una mappa cubica per evolvere la densità dell’electron cloud da un
bunch al successivo. Il coefficiente del termine del primo ordine è stato ottenuto
analiticamente riducendo il costo computazionale della simulazioni numeriche della
formazione dell’electron cloud. In futuro si pensa di calcolare anche il coefficiente
del secondo ordine.
106
Appendice A
Lagrangiana ed Hamiltoniana
La meccanica Newtoniana descrive un sistema fisico, a meno della presenza di vincoli,
con un’unica equazione di natura vettoriale. La Meccanica lagrangiana cerca di
semplificare la trattazione formale del problema descrivendolo mediante un’unica
equazione scalare e non vettoriale. Essa in realtà riesce solo in parte nel suo intento,
poiché le equazioni descrittive del problema potranno, a seconda dei casi, essere una
o più di una, ma la funzione (detta Lagrangiana) che entra a far parte di queste
equazioni è effettivamente scalare. Essa è definita come la differenza tra l’energia
cinetica e l’energia potenziale del sistema oggetto di studio. Essa, quindi, non è
l’energia meccanica totale del sistema (che ne è la somma). Allora si chiamerà
Lagrangiana la funzione
L = T − U.
(A.1)
L’energia cinetica T e l’energia potenziale U del sistema sono grandezze scalari
e pertanto tale sarà la Lagrangiana L. Tuttavia il moto del sistema si manifesta
nello spazio tridimensionale, quindi in qualche maniera questa natura vettoriale
dell’informazione fisica dovrà emergere dalle equazioni. Naturalmente, essa è in
primo luogo contenuta nel fatto che tanto T quanto U non sono numeri, ma sono
funzioni. Esse infatti dipendono dalla posizione nello spazio occupata dal sistema
107
APPENDICE A. LAGRANGIANA ED HAMILTONIANA
108
(qualora esso sia puntiforme o ci si sta occupando del suo solo centro di massa), o
da ognuno dei suoi costituenti. Sempre restando, per semplicità, nel caso di sistema
puntiforme o comunque rigido (di cui quindi consideriamo solo il moto del centro
di massa), T ed U saranno allora funzioni delle coordinate spaziali x, y e z, ed
eventualmente anche del tempo t. Implicitamente, se il sistema è in movimento,
tanto l’energia cinetica quanto quella potenziale saranno sempre funzioni del tempo,
in quanto le tre coordinate spaziali sono funzioni di esso (perché il sistema è in
moto); tuttavia T e U potrebbero anche essere funzioni esplicite del tempo, in
tutte quelle condizioni in cui il sistema scambia energia con l’esterno (dissipandola
o assorbendola). Il simbolo q indica una generica coordinata spaziale, coordinata
generalizzata, ed esso da solo può indicare anche un insieme di coordinate spaziali,
ad esempio le tre coordinate dello spazio cartesiano. Per evitare questa confusione
si potrebbe in realtà affinare un po’ la notazione, assegnando degli indici al simbolo
q, ad esempio q1 = x q2 = y
q = z.
La funzione Lagrangiana, allora, scelto lo spazio in cui avviene il moto del sistema
e scelta la metrica che ne dà un sistema di coordinate, sarà la differenza delle funzioni
energia cinetica T ed energia potenziale U del sistema oggetto di studio scritte
secondo le coordinate q dello spazio in cui avviene il moto. Le equazioni di EuleroLagrange permettono di calcolare le equazioni del moto a partire dalla Lagrangiana:
d
dt
�
∂L
∂ q̇
�
−
∂L
=0
∂q
(A.2)
dove q̇ è la derivata rispetto al tempo di q, ovvero la velocità. Quindi, calcolata la
Lagrangiana, basta sostituirla nell’Eq. (A.2) per ottenere le equazioni del moto.
L’Hamiltoniana H è definita come la somma (e non più come la differenza, come
nel caso della Lagrangiana) di energia cinetica ed energia potenziale, ovvero
H = T + U.
(A.3)
APPENDICE A. LAGRANGIANA ED HAMILTONIANA
109
Per un sistema meccanico, questa è esattamente l’energia meccanica totale del
sistema. Le equazioni del moto non sono più quelle di Eulero-Lagrange, ma quelle
di Hamilton:
∂H
∂p
∂H
ṗ = −
∂q
q̇ =
(A.4)
(A.5)
dove q indica le posizioni o coordinate generalizzate, che saranno le tre coordinate
cartesiane dello spazio che ci circonda per un sistema libero, ma saranno coordinate
opportunamente definite su spazi diversi per sistemi vincolati, mentre p indica gli
impulsi generalizzati, ovvero il prodotto di massa e velocità q̇ del sistema (o delle sue
costituenti). Come per la Lagrangiana, sostituendo l’Hamiltoniana nelle equazioni
di Hamilton, troveremo le equazioni del moto.
Bibliografia
[1] M. Conte e W. MacKay, “An introduction to the physics of particle
accelerators”, World Scientific (1994)
[2] D. A. Edwards e M. J. Syphers, “An introduction to the physics of high energy
accelerators”, SSC Laboratory (1993)
[3] K. Hübner, “Synchrotron radiation”, CERN/PS/LPI 84-30 (1984)
[4] U. Iriso, “Electron Clouds in the Relativistic Heavy Ion Collider”, (2005)
[5] O. Gröbner, “Bunch induced multipacting”, in Proceedings of the 10th International Conference on High Energy Accelerators, page 277. USSR Academy of
Science, Protvino, (1977)
[6] F. Zimmermann e G. Rumolo, “Electron cloud build up in machines with short
bunches”, ICFA Beam Dynamics Newsletters, 33 (Aprile 2004)
[7] L. Wang, M. Blaskiewicz, J. Wei, R. Macek, K. Ohmi, “Mechanism of electron
multipacting with a long-bunch proton beam”, EPAC’04 (2004)
[8] W. K. H. Panofsky, W. A. Wenzel, Rev. Sci. Instr. 27, 967 (1956)
[9] A. Sessler, V. Vaccaro, CERN Report ISR-RF/67-2 (1967)
[10] K. Ohmi e F. Zimmermann, Phys. Rev. Lett. 85, 3821(2000)
[11] G. Rumolo e F. Zimmermann, nel corso di Chamonix XI, (2001)
110
BIBLIOGRAFIA
111
[12] S.S. Win, K. Ohmi, H. Fukuma, M. Tobiyama, J. Flanagan, S. Kurokawa,
“Numerical study of coupled-bunch instability caused by an electron cloud”,
Phys. Rev. Special Topics 8, 094401 (2005)
[13] S. S. Win, H. Fukuma, K. Ohmi, S. Kurokawa, nel corso di ECLOUD’02, a
cura di G.Rumolo e F. Zimmermann, pp. 199-205 (2002)
[14] M. Toboyama, E. Kikutani, Phys. Rev. ST Accel. Beams 3, 012801 (2000)
[15] K. Ohmi, Phys. Rev. Lett. 75, 1526 (1995)
[16] M. A. Furman e G. R. Lambertson, nel corso di International Workshop on
Multibunch Instabilities in Future Electron and Positron Accelerators: MBI97, Tsukuba, Japan, 1997, a cura di Y.H. Chin, KEK Proceedings No. 97-17
(High Energy Accelerator Research Organization, Tsukuba, Japan, 1997), p.
170; M.A. Furman and M.T.F. Pivi, Phys. Rev. ST Accel. Beams 5, 124404
(2002)
[17] F. Zimmermann, CERN, LHC-Project-Report-95, 1997; G. Rumolo e F.
Zimmermann, CERN, SL-Note-2002- 016 (2002)
[18] U. Iriso e S. Peggs, nel corso di 9th European Particle Accelerator Conference,
a cura di L. Rivkin et al. (European Physical Society, Accelerator Group e
CERN, 2004), p. 2870
[19] T. Demma, S. Petracca, F. Ruggiero, G. Rumolo e F. Zimmermann, “Maps for
electron cloud density in Large Hadron Collider dipoles”, Phys. Rev. Special
Topics 10, 114401 (2007)
[20] T. Demma, “Electron Cloud Simulations for DAΦNE”, Beam Dynamics
Newsletter No. 48 (2009)
BIBLIOGRAFIA
112
[21] F. Zimmermann, “A Simulation Study of Electron-Cloud Instability and BeamInduced Multipacting in the LHC”, CERN LHC Project Report 95, SLACPUB- 7425 (1997)
[22] O. S. Brüning, “Simulationsforthebeam-inducedelectroncloudintheLHCbeam
screen with magnetic field and image charges”, CERN LHC Project Report
158 (1997)
[23] F. Ruggiero and X. Zhang, “Collective Instabilities in the LHC: Electron Cloud
and Satellite Bunches,” Workshop on Instabilities of High Intensity Hadron
Beams in Rings, BNL (1999)
[24] G. Rumolo, F. Ruggiero, F. Zimmermann, “Simulation of the Electron-Cloud
Build Up and its Consequences on Heat Load, Beam Stability and Diagnostics”,
PRST-AB 012801 (2001)
[25] F. Zimmermann e G. Rumolo, “Practical User Guide for ECloud”, CERN-SLNote-2002-016 (AP) (2003)
[26] U. Iriso e S. Peggs, nel corso di EPAC06, pp. 357-359 (2006)
[27] Y. Cai, M. Pivi e M. A. Furman, “Buildup of electron cloud in the PEP-II
particle accelerator in the presence of a solenoid field and with different bunch
pattern”, Phys. Rev. Special Topics 7, 024402 (2004)
Elenco delle figure
2.1
Esempio di acceleratore circolare (LEP), in cui si possono osservare
le componenti principali. . . . . . . . . . . . . . . . . . . . . . . . . .
2.2
7
Collisione di una singola particella di un fascio con un bunch di un
altro fascio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.1
Caratterizzazione dei gradi di libertà trasversi e longitudinali rispetto
al moto di una particella. . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2
Particelle cariche in moto immerse in un campo magnetico uniforme
subiscono una deflessione (a) perpendicolare alle linee di campo, (b)
parallela alle linee di campo. . . . . . . . . . . . . . . . . . . . . . . . 14
3.3
Sistema di riferimento di Frenet-Serret lungo l’orbita di riferimento. . 15
3.4
Coordinate per descrivere il moto nei due piani trasversali (con p
fissato). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.5
Deflessione di una particella mediante un elemento magnetico sottile.
20
3.6
Lente sottile convessa. . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.7
Variazione del versore x. . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.8
Confronto della lunghezza del tratto ds lungo l’orbita di riferimento,
con la lunghezza vs dt lungo la traettoria della particella. . . . . . . . 27
3.9
Mappatura dello spazio delle fase, giro dopo giro, in un acceleratore
circolare. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.10 Ellissi nello spazio delle fasi lungo la traettoria di riferimento. . . . . 34
113
ELENCO DELLE FIGURE
114
3.11 Un magnete curvante deflette le particelle con quantità di moto maggiore rispetto alla particella sincrona di un angolo più piccolo. . . . . 41
4.1
Illustrazione della differenza di incremento della lunghezza del percorso tra una particella e quella sincrona. . . . . . . . . . . . . . . . . 50
5.1
Linee di campo elettrico scia in una camera a vuoto con pareti non
perfettamente conduttrici generato da una carica puntiforme q. . . . . 55
5.2
Esempi di camere a vuoto che generano wake fields. Il fascio è rappresentato come un anello con un momento multipolare distribuito come
cos mθ. Una carica di prova e sta seguendo il fascio ad una distanza
fissa. (a) Discontinuità geometriche periodicamente distribuite lungo
la camera a vuoto. (b) Struttura liscia ma non perfettamente conduttrice. (c) Discontinuità geometrica presente in un solo punto della
camera. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6.1
Tipico comportamento del SEY in funzione dell’energia degli elettroni incidenti. Il comportamento cambia per materiali diversi, quindi
cambieranno δmax , E1 , E2 , ecc. . . . . . . . . . . . . . . . . . . . . . . 63
6.2
Schema del multipacting in regime di single-bunch nel PSR. . . . . . 64
6.3
Schema del multipacting in LHC. . . . . . . . . . . . . . . . . . . . . 65
6.4
Interazione elettrone-bunch basata sul formalismo di Berg in un beampipe a simmetria cilindrica.
6.5
. . . . . . . . . . . . . . . . . . . . . . . 68
Sinistra : schema che mostra le diverse componenti che definiscono
l’emissione secondaria di elettroni. Destra: curve di distribuzione
di energia per pareti di acciaio inox con elettroni a 300 eV incidenti
normalmente. La distribuzione mostra tre differenti componenti: true
secondaries, rediffused e backscattered. . . . . . . . . . . . . . . . . . 73
ELENCO DELLE FIGURE
6.6
115
Secondary emission yield in funzione dell’energia degli elettroni primari incidenti. I cerch blu sono dati sperimentali ottenuti da R. Kirby
e la curva in rosso è ottenuta tramite fitting basato sulle equazioni
(6.24) e (6.25). Le curve tratteggiata e continua corrispondono rispettivamente al contributo degli elettroni true secondaries e reflected.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
6.7
Evoluzione della densità dell’electron cloud (verde) realizzata con
ECLOUD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
6.8
Mappa della densità media dell’electron cloud ρm+1 in funzione di ρm .
Cerchietti: simulazioni con ECLOUD (δmax = 1.7, tutti i parametri
della tab. 6.1). La linea rossa tratteggiata rappresenta la saturazione
(ρm+1 = ρm ). I punti la di sopra della linea rossa descrivono il buildup dell’electron cloud (blu: N = 1.6 × 1011 , verde: N = 0.8 × 1011 ),
quelli sotto la decadenza dell’electron cloud. La linea verde e quella
blu rappresentano le corrispondenti mappe cubiche. I segni quadrati
rappresentano le transizioni tra i treni di bunches pieni e vuoti. . . . 79
6.9
Geometria della sezione trasversale del beam-pipe di LHC, reale (linea
continua) e approssimata (linea tratteggiata). . . . . . . . . . . . . . 81
6.10 Coefficiente lineare approssimativo a in funzione del bunch spacing,
per δmax = 1.3 (giallo), δmax = 1.5 (rosso), δmax = 1.7 (verde). . . . . 83
6.11 Comparazione del coefficiente lineare a della mappa derivato usando
le simulazioni di ECLOUD (barre verticali) e usando il calcolo analitico (linee continue dello stesso colore), in funzione della popolazione
del bunch N per δmax = 1.3 (giallo), δmax = 1.5 (rosso) e δmax = 1.7
(verde). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
ELENCO DELLE FIGURE
7.1
116
Rappresentazione schematica dell’algoritmo di simulazione dell’ HEADTAIL code che modella l’instabilità di single-bunch causata dall’electron cloud [11]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
7.2
Rappresentazione schematica del build-up dell’electron cloud. Gran
parte degli elettroni sono originati dalla porzione di superficie su cui
incide la radiazione di sincrotrone. . . . . . . . . . . . . . . . . . . . . 92
8.1
(a) Densità volumetrica di carica dell’electron cloud in DaΦne in funzione del tempo, in una regione di drift. (b) Vista tridimensionale
della densità volumetrica di carica in un instante di tempo. . . . . . . 98
8.2
Vista tridimensionale della densità volumetrica di carica dell’electron cloud in DaΦne in una regione in cui è presente un magnete
solenoidale di 20 gauss. . . . . . . . . . . . . . . . . . . . . . . . . . . 100
8.3
Densità tridimensionale del’electron cloud per una regione sottoposta
ad un campo magnetico solenoidale di 200 Gauss in DaΦne. . . . . . . 101
8.4
Densità dell’electron cloud in funzione del tempo per un fascio passante in solenoidi con diversi settaggi, per DaΦne. . . . . . . . . . . . 102
8.5
SEY per DaΦne. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
8.6
Variazione della densità media dell’electron cloud in funzione del
campo solenoidale. Parametri espressi dalla tab. 8.1. . . . . . . . . . 103
8.7
Densità media dell’electron cloud in funzione del campo solenoidale,
in regioni con alta fotoemissione. . . . . . . . . . . . . . . . . . . . . 104
8.8
Vista tridimensionale della densità volumetrica di carica, in DaΦne,
in una regiona con alta fotoemissione con un solenoide a 300 Gauss,
in un istante di tempo. . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Ringraziamenti
Si ringrazia la Divisione Acceleratori dei Laboratori Nazionali di Frascati dell’Istituto
Nazionale di Fisica Nucleare per la sua ospitalità ed in particolare lo staff di DaΦne
per il supporto.
117