Anno accademico 1988-1989
Alcune costanti fisiche
massa dell’elettrone
9.11 ∙ 10−28 𝑔
massa del protone
1.7 ∙ 10−24 𝑔
raggio del protone e neutrone
10−13 𝑐𝑚
carica dell’elettrone
1.6 ∙ 10−19 𝑐𝑜𝑢𝑙𝑜𝑚𝑏
numero di Avogadro
6.023 ∙ 1023
costante dei gas 𝑅
0.082 𝑎𝑡𝑚 ∙ 𝑙𝑖𝑡𝑟𝑖/(𝐾 ∙ 𝑚𝑜𝑙𝑖)
costante gravitazionale
6.67 ∙ 10−8 𝑐𝑚3 /(𝑔 ∙ 𝑠 2 )
velocità della luce nel vuoto
3 ∙ 1010 𝑐𝑚/𝑠
1) Nuclei atomici instabili possono decadere in vari frammenti. Consideriamo, in
particolare, un nucleo a riposo che si frammenta in due e schematizziamo il
processo nel modo seguente. Siano 𝐴 e 𝐵 i due frammenti di forma sferica, di
densità uniforme, con raggi 𝑅𝐴 e 𝑅𝐵 e con cariche 𝑄𝐴 e 𝑄𝐵 , rispettivamente. I due
frammenti si trovano inizialmente a contatto con velocità relativa 𝑣, nota.
(𝑎) Dire se negli istanti successivi 𝑣 rimarrà costante oppure cambierà valore e
giustificare l’affermazione.
(𝑏) Quali saranno le velocità di ciascun frammento a grande distanza?
(𝑐) Quale sarà l’ordine di grandezza della velocità relativa a grande distanza,
trascurando la velocità iniziale, nel caso di un nucleo di Uranio di peso atomico
235?
Si verifica un decadimento nucleare quando, a partire da un’unica particella, si
genera un sistema di particelle che prima era tenuto insieme da forze interne. In
questo esercizio, si considera per semplicità il caso di una particella a riposo che
esplode in due corpi, come illustrato schematicamente nella figura che segue.
Se all’istante iniziale, che convenzionalmente viene indicato con 𝑡 = 0, la
particella è in quiete un attimo prima del decadimento, allora, per la legge di
conservazione della quantità di moto, anche dopo il decadimento il sistema avrà
quantità di moto nulla. Si può quindi scrivere che
2
𝑚𝐴 𝑣⃗𝐴 + 𝑚𝐵 𝑣⃗𝐵 = ⃗0⃗
ed i due frammenti viaggiano con velocità opposte in maniera tale da soddisfare
la relazione
𝑚𝐴 𝑣𝐴 (𝑡) = −𝑚𝐵 𝑣𝐵 (𝑡) ∀𝑡 > 0 ,
in cui si è passato a quantità scalari, in quanto i due atomi si trovano sulla stessa
linea di volo. Inoltre, dato che il testo assegna l’energia di disintegrazione,
fornendo la velocità relativa dei due frammenti
𝑣𝐴 (0) − 𝑣𝐵 (0) = 𝑣 ,
si conclude che
𝑣𝐴 (0) = 𝑣
𝑚𝐵
𝑚𝐴
, 𝑣𝐵 (0) = −𝑣
.
𝑚𝐴 + 𝑚𝐵
𝑚𝐴 + 𝑚𝐵
Dunque, all’istante iniziale è nota la velocità dei singoli frammenti.
Per esemplificare, si consideri forse il più importante processo di decadimento
che soddisfa questa condizione: il decadimento 𝛼. In questo processo, un nucleo
atomico instabile di grande massa atomica 𝐴 emette una particella 𝛼, per
raggiungere una condizione di stabilità. Il nucleo di un atomo è costituito da 𝑍 =
𝐴 − 𝑁 protoni carichi positivamente ed 𝑁 neutroni neutri; una particella 𝛼 è
costituita da due protoni e due neutroni. Questo decadimento si può quindi
rappresentare simbolicamente con la reazione
𝐴
𝑍𝑃
→
𝐴−2
𝑍−2𝐹
3
+𝛼,
in cui 𝑃 rappresenta il nucleo originario, detto padre, e 𝐹 quello finale, detto figlio,
che ha ridotto il numero di neutroni e protoni di due unità.
(𝑎) Negli istanti successivi alla disintegrazione, la velocità dei due frammenti
cambierà, dato che sono entrambi formati da neutroni e protoni, carichi
positivamente.
(𝑏) Per determinare quali saranno le velocità di ciascun frammento in un istante
qualsiasi successivo al decadimento, dette 𝑥𝐴 (𝑡) e 𝑥𝐵 (𝑡) le loro posizioni e 𝑚𝐴 e
𝑚𝐵 le rispettive masse, bisogna determinare l’energia totale 𝐸, che è un invariante
del moto e che vale
1
1
𝑘𝑄𝐴 𝑄𝐵
𝐸 = 𝑚𝐴 𝑣𝐴2 (𝑡) + 𝑚𝐵 𝑣𝐵2 (𝑡) +
,
2
2
𝑥𝐴 (𝑡) − 𝑥𝐵 (𝑡)
in cui la costante di Coulomb 𝑘 vale
𝑁𝑚2
𝑘 = 9.0 ∙ 10
,
𝐶2
9
Imponendo la proporzionalità tra le velocità, per eliminare una delle due velocità,
l’energia diventa
1
𝑚𝐴
𝑄𝐴 𝑄𝐵
𝐸 = 𝑚𝐴 𝑣𝐴2 (𝑡) (1 +
.
)+𝑘
2
𝑚𝐵
𝑥𝐴 (𝑡) − 𝑥𝐵 (𝑡)
Volendo conoscere la velocità a grandi distanze, quando la distanza relativa tende
all’infinito, basta determinare l’energia all’istante iniziale
1
𝑚𝐴
𝑘𝑄𝐴 𝑄𝐵
𝐸 = 𝑚𝐴 𝑣𝐴2 (0) (1 +
,
)+
2
𝑚𝐵
𝑅𝐴 + 𝑅𝐵
4
poi asintoticamente 𝑡 → ∞
1
𝑚𝐴
𝐸 = 𝑚𝐴 𝑣𝐴2 (∞) (1 +
),
2
𝑚𝐵
infine imporre l’uguaglianza
1
𝑚𝐴
1 𝑚𝐴 𝑚𝐵 2
𝑄𝐴 𝑄𝐵
𝑚𝐴 𝑣𝐴2 (∞) (1 +
𝑣 +𝑘
.
)=
2
𝑚𝐵
2 𝑚𝐴 + 𝑚𝐵
𝑅𝐴 + 𝑅𝐵
Risolvendo la precedente equazione, risulta
𝑣𝐴 (∞) =
𝑚𝐵
1
1
𝑄𝐴 𝑄𝐵
𝑚𝐴
√𝑣 2 + 2𝑘 (
+
, 𝑣𝐵 (∞) = −
𝑣 (∞) ,
)
𝑚𝐴 + 𝑚𝐵
𝑚𝐴 𝑚𝐵 𝑅𝐴 + 𝑅𝐵
𝑚𝐵 𝐴
che era quanto si voleva determinare.
(𝑐) Trascurando la velocità iniziale, le formule che esprimono le velocità dei
frammenti a grandi distanze si semplificano come
2𝑘
𝑚𝐵 𝑄𝐴 𝑄𝐵
2𝑘
𝑚𝐴 𝑄𝐴 𝑄𝐵
𝑣𝐴 (∞) = √
, 𝑣𝐵 (∞) = −√
.
𝑚𝐴 + 𝑚𝐵 𝑚𝐴 𝑅𝐴 + 𝑅𝐵
𝑚𝐴 + 𝑚𝐵 𝑚𝐵 𝑅𝐴 + 𝑅𝐵
Uno schema di decadimento radioattiva dell’Uranio 235 proviene dalla cosiddetta
serie dell’Attinio, secondo cui
235
92𝑈
→
231
90𝑇ℎ
5
+ 42𝐻𝑒 .
Adoperando questa reazione di decadimento, bisogna stabilire anzitutto le
dimensioni dei due nuclei atomici. Detto 𝐴 il numero di massa atomica. in generale
vale la formula
3
𝑅 = 𝑅0 √𝐴 con 𝑅0 ≅ 1.2 ∙ 10−15 𝑚 .
Pertanto, il raggio dei nucleo in esame vale
3
3
𝑅𝑇ℎ = 𝑅0 √231 , 𝑅𝐻𝑒 = 𝑅0 √4 .
Per le cariche, invece, risulta
𝑄𝑇ℎ = 90𝑒 = 90 ∙ 1.6 ∙ 10−19 𝐶 , 𝑄𝐻𝑒 = 2𝑒 = 2 ∙ 1.6 ∙ 10−19 𝐶 .
Per le masse dei due frammenti, infine, ricordando che una mole contiene un
numero di Avogadro 𝑁𝐴 di atomi della sostanza considerata, risulta
𝑚 𝑇ℎ =
231
4
, 𝑚𝐻𝑒 =
.
𝑁𝐴
𝑁𝐴
Sostituendo questi valori nelle due espressioni delle velocità, in definitiva, si
ottengono gli ordini di grandezza desiderati: precisamente, per l’Elio, il
frammento più leggero, si ha
𝑣𝐻𝑒 (∞) = √
2𝑘
𝑚𝐵 𝑄𝐴 𝑄𝐵
𝑚
≅ 1.15 ∙ 106
,
𝑚𝐴 + 𝑚𝐵 𝑚𝐴 𝑅𝐴 + 𝑅𝐵
𝑠
mentre per il Torio, quello più pesante, risulta
6
𝑣 𝑇ℎ (∞) = −
𝑚𝐴
𝑚
𝑣𝐴 (∞) ≅ −2 ∙ 104
.
𝑚𝐵
𝑠
7
2) Un pallone areostatico modello AX-4 ad aria calda è costituito da un involucro
rigido di volume 𝑉 = 850 𝑚3 con un’apertura all’estremità inferiore. L’aria
all’interno viene mantenuta alla temperatura di 100 °𝐶. Il pallone deve sollevare
un carico totale (involucro più carico utile) di 200 𝑘𝑔. Sapendo che la densità
dell’aria decresce con l’altezza secondo la formula
𝜌 = 𝜌0 (1 − 𝛼ℎ) con 𝛼 = 0.049 𝑘𝑚−1 ,
e che la temperatura dell’aria esterna decresce come
𝑇 = 𝑇0 (1 − 𝛽ℎ) con 𝛽 = 0.026 𝑘𝑚−1 ,
calcolare l’altezza massima che il pallone può raggiungere.
L’aerostato è un aeromobile che, per ottenere la portanza, ossia la forza
necessaria per sollevarsi da terra e volare, utilizza gas più leggeri dell'aria e,
proprio in funzione del tipo di gas utilizzato, è possibile suddividere gli aerostati
in palloni ad aria calda, dove l’aria viene scaldata per mezzo di bruciatori, palloni
a gas gonfiati con idrogeno o elio.
Venendo al problema assegnato, si osserva innanzitutto che la spinta archimedea,
anche detta idrostatica, prima sospinge verso l’alto, poi sostiene il pallone
aerostatico. La Legge di Archimede, come è ben noto, afferma che
un corpo immerso in un fluido ideale è soggetto ad una forza, diretta verso l’alto,
pari in modulo al peso del volume di fluido spostato dal corpo immerso.
8
Inoltre, il modello di aerostato scelto è a volume rigido, per cui in quel che segue
il volume 𝑉 sarà ritenuto costante. Infine, disponendo di un gas perfetto, per cui
vale la ben nota equazione di stato
𝑝𝑉 = 𝑛𝑅𝑇 ,
la sua densità, con evidente significato dei simboli adoperati, vale
𝜌=
𝑚
𝑛
𝑝
=𝜇 =𝜇
,
𝑉
𝑉
𝑅𝑇
essendo 𝜇 la massa molecolare. Nel caso dell’aria, è possibile valutare peso
molecolare medio come media pesata dei gas componenti. Limitandosi ai suoi
componenti principali, cioè Azoto, Ossigeno, Argon, si ottiene
𝜇(𝐴𝑟𝑖𝑎) = 0.78 𝜇(𝑁2 ) + 0.21 𝜇(𝑂2 ) + 0.01 𝜇(𝐴𝑟) = 28.96
𝑔
.
𝑚𝑜𝑙
Per convenzione, la densità dell’aria viene definita come quella misurata per l’aria
secca alla temperatura
𝑇0 = 15 °𝐶 = (15 + 273.15) 𝐾 = 287.15 𝐾,
al livello del mare, equivalente alla pressione
𝑝0 = 1 𝑎𝑡𝑚 = 101325 𝑃𝑎 .
In queste condizioni risulta pari a
𝜌0 = 𝜇(𝐴𝑟𝑖𝑎)
𝑝0
𝑘𝑔
≅ 1.225 3 .
𝑅𝑇0
𝑚
9
Orbene, facendo riferimento alla figura di seguito riportata, detta ℎ la massima
quota raggiunta, si può scrivere che, in condizione di equilibrio, sull’aerostato
agiranno tre distinte forze. Precisamente, faranno sentire il loro effetto
la spinta archimedea
𝑆 = 𝜌𝑉𝑔,
il peso della navicella
𝑃 = 𝑀𝑔,
il peso dell’aria calda
𝑃𝐴 = 𝜌𝐴 𝑉𝑔.
La prima tra queste forze è diretta verso l’alto, mentre le altre due punteranno
verso il basso, in modo che sia soddisfatta l’equazione di equilibrio
10
𝑆 = 𝑃 + 𝑃𝐴 → 𝜌𝑉𝑔 = 𝑀𝑔 + 𝜌𝐴 𝑉𝑔 → (𝜌 − 𝜌𝐴 )𝑉 = 𝑀 .
Rielaborando la formula precedente come
𝜌 (1 −
𝜌𝐴
)𝑉 = 𝑀
𝜌
ed adoperando la formula che esprime la densità di un gas perfetto, si può scrivere
𝜌 (1 −
𝑇
𝑇0
𝑀
,
) 𝑉 = 𝑀 → (1 − 𝛼ℎ) [1 − (1 − 𝛽ℎ)] =
𝑇𝐴
𝑇𝐴
𝜌0 𝑉
un’equazione di secondo grado che consente il calcolo della massima quota.
Sostituendo i valori numerici assegnati oppure conosciuti
𝑇𝐴 = 373.15 𝐾 , 𝑀 = 200 𝑘𝑔 , 𝑉 = 850 𝑚3 ,
risulta la seguente equazione di secondo grado
(1 − 0.049ℎ) [1 −
287.15
200
(1 − 0.026ℎ)] =
373.15
850 ∙ 1.225
in cui la quota ℎ è espressa in chilometri. Essa ammette due soluzioni reali, una
sola delle quali, quella positiva, risulta accettabile e pari a
ℎ ≅ 12.12 𝑘𝑚 .
Un’apposita commissione della Federazione Aeronautica Internazionale (FAI),
che classifica tutti gli aeromobili, definisce gli aerostati come aeromobili più
leggeri dell’aria e li inserisce nella classe A, la quale, a sua volta, è suddivisa in
11
quattro sottoclassi, a seconda delle caratteristiche peculiari degli aerostati, della
grandezza e del tipo di gas utilizzato:
1. AA: palloni a gas;
2. AX: palloni ad aria calda, mongolfiere;
3. AM: palloni Rozier, palloni gonfiati sia con gas che con aria calda;
4. AS: palloni a gas con involucro pressurizzato per uso scientifico.
Queste sottoclassi sono organizzate in quindici categorie in base al volume
dell’involucro.
La mongolfiera è un tipo di aerostato ad aria calda, privo di apparato
motopropulsore e di governo, che naviga trasportato dalle correnti aeree. Le
12
mongolfiere, che possono essere libere o frenate, ossia vincolate al suolo, sono
costituite da tre parti: l’involucro, il bruciatore e la navicella.
L’involucro deve contenere l’aria riscaldata dal bruciatore, quindi la sua struttura
è formata da pannelli di nylon cuciti su nastri verticali ed orizzontali. Alla sommità
del pallone vi è un anello di coronamento che serve a riunire tutti i nastri verticali,
mentre alla base questi nastri vengono prolungati da cavi d’acciaio che, a loro
volta, sono fissati al quadro di carico su cui è montato il bruciatore. La sommità
dell’involucro è aperta e viene chiusa dall’interno per mezzo di un pannello
circolare, di diametro maggiore di quello dell’apertura, che viene tenuto in
posizione dalla spinta dell’aria calda, impedendo così la fuoriuscita dell’aria. Per
mezzo di un sistema di tiranti, è possibile aprire il pannello per accelerare la
discesa in volo o per facilitare lo sgonfiaggio del pallone.
Il bruciatore, generalmente doppio, ha lo scopo di riscaldare l’aria all’interno
dell’involucro ed è fissato al quadro di carico tramite un giunto cardanico che
consente di dirigere la fiamma con precisione all’interno dell’involucro. È
alimentato da gas propano liquido, contenuto in apposite bombole, di acciaio o
alluminio, alloggiate all’interno della cesta. Quando si aprono i rubinetti della
bombola, il propano, tramite tubi flessibili, raggiunge una serpentina dove, sotto
l’effetto del calore, torna allo stato gassoso, si mescola all’aria e viene incendiato
di volta in volta da una fiamma pilota alimentata dalle stesse bombole.
L’erogazione del gas al bruciatore e quindi la dimensione delle fiammate viene
regolata dal pilota mediante apposite valvole.
La navicella, che ha la forma di una grossa cesta fatta in vimini intrecciato, è
appesa all’involucro ed ha una buona robustezza, leggerezza ed elasticità. La cesta
ha una struttura portante di tubi metallici ed il fondo rinforzato da longheroni di
legno. Agli angoli della cesta sono alloggiate le bombole del gas, mentre lungo i
lati trovano posto gli strumenti di navigazione e le altre dotazioni di bordo. La
navicella è vincolata al quadro di carico e all’involucro per mezzo di cavi d’acciaio
e moschettoni. Il quadro di carico, a sua volta, è sostenuto da stecche rigide di
13
nylon, per impedire che, all’atterraggio, finisca addosso ai passeggeri.
L’autonomia di volo dipende dalla quantità di propano a disposizione per il
bruciatore, dalle condizioni climatiche e dal peso trasportato.
14
3) Si considerino dei conduttori bidimensionali, quali delle sottili lamine di rame,
a forma di quadrati di diversa grandezza. Se si applica la stessa differenza di
potenziale ai lati opposti di questi conduttori, come dipende la corrente dal valore
𝐿 del lato?
Se si indica con ℎ il piccolo spessore, inevitabilmente presente, di una lamina
quadrata di lato 𝐿, la resistenza 𝑅 vista da due lati opposti vale
𝑅=𝜌
lunghezza
,
sezione
essendo 𝜌 la resistività del metallo che costituisce la lamina.
Orbene, nel caso in esame risulta che
lunghezza = 𝐿 , sezione = ℎ𝐿 ,
per cui la precedente Legge di Ohm fornisce il risultato
𝑅=𝜌
𝐿
𝜌
= .
ℎ𝐿 ℎ
15
La risposta dunque al quesito posto si può dare affermando che, essendo la
resistenza appena calcolata 𝑅 non dipendente dalla lunghezza 𝐿 del lato della
lamina quadrata, circolerà la stessa corrente, quando si applica la stessa
differenza di potenziale ai lati opposti di questo tipo di conduttori.
16
4) Si consideri un campo magnetico 𝐵 di modulo costante che ruota con velocità
angolare 𝜔 nel piano 𝑥𝑦. Nel piano 𝑥𝑧 viene mantenuta ferma una spira di raggio
𝑎 e resistenza 𝑅.
(𝑖) Trascurando l’autoinduzione della spira, si calcoli il momento delle forze cui la
spira è soggetta in funzione del tempo ed il suo valor medio.
(𝑖𝑖) Indicando con 𝐿 il coefficiente di autoinduzione della spira, in quali condizioni
è valida l’approssimazione fatta in (𝑖)?
(𝑖𝑖𝑖) Come si può generare in pratica il campo magnetico descritto nel testo, senza
impiegare meccanismi rotanti?
Si consideri il campo di induzione magnetica assegnato, che ruota con assegnata
velocità angolare 𝜔 nel piano 𝑥𝑦, ad esempio nel senso orario, per cui
⃗⃗(𝑡) = 𝐵[𝑥̂ cos(𝜔𝑡) − 𝑦̂ sin(𝜔𝑡)] .
𝐵
È noto che in una spira circolare, mantenuta ferma nel piano 𝑥𝑧 e di area 𝑆 = 𝜋𝑎2 ,
immersa in un tale campo, viene indotta una corrente 𝑖(𝑡), che è legata alla
variazione del flusso magnetico Φ(𝑡), che sostiene una forza elettromotrice ℇ(𝑡).
Detto allora 𝑛̂ = 𝑦̂ il versore normale alla spira, si può scrivere
⃗⃗(𝑡) ∙ 𝑦̂ = −𝜋𝑎2 𝐵 sin(𝜔𝑡) → ℇ(𝑡) = −
Φ(𝑡) = 𝜋𝑎2 𝐵
𝑑Φ(𝑡)
=⏟
𝜋𝑎2 𝐵𝜔 cos(𝜔𝑡) ,
𝑑𝑡
ℇ
0
da cui discende il valore della corrente che istante per istante percorre la spira
ℇ(𝑡) 𝜋𝑎2 𝐵𝜔
ℇ0
𝑖(𝑡) =
=
cos(𝜔𝑡) = cos(𝜔𝑡) .
𝑅
𝑅
𝑅
(𝑖) La spira è soggetta ad un momento torcente
17
⃗⃗⃗ = 𝑚
⃗⃗(𝑡) ,
𝑀
⃗⃗⃗(𝑡) × 𝐵
che è pari al prodotto vettoriale tra il campo di induzione magnetica ed il
momento di dipolo magnetico della spira stessa
𝜋 2 𝑎4 𝐵𝜔
𝑚
⃗⃗⃗(𝑡) = 𝜋𝑎 𝑖(𝑡) 𝑦̂ =
cos(𝜔𝑡) 𝑦̂ .
𝑅
2
Eseguendo il prodotto vettoriale, risulta
⃗⃗⃗ = −
𝑀
𝜋 2 𝑎4 𝐵2 𝜔
cos 2 (𝜔𝑡) 𝑧̂ .
𝑅
Questo momento torcente, se la spira non fosse ferma nel piano 𝑥𝑧, tenderebbe
ad allineare il dipolo magnetico della spira con la direzione ed il verso del campo.
Considerandone il modulo
𝜋 2 𝑎4 𝐵2 𝜔
𝑀(𝑡) =
cos 2 (𝜔𝑡)
𝑅
e ricordando che il periodo vale
𝑇=
2𝜋
,
𝜔
si ottiene il valor medio
𝑀𝑚𝑒𝑑𝑖𝑜
1 𝑇
𝜋𝑎4 𝐵2 𝜔2 𝑇 2
= ∫ 𝑀(𝑡) 𝑑𝑡 =
∫ cos (𝜔𝑡) 𝑑𝑡 .
𝑇 0
2𝑅
0
Operando il cambio di variabile di integrazione 𝜔𝑡 = 𝜃, risulta ancora
18
𝑀𝑚𝑒𝑑𝑖𝑜
𝜋𝑎4 𝐵2 𝜔 2𝜋 2
𝜋 2 𝑎4 𝐵2 𝜔
=
∫ cos 𝜃 𝑑𝜃 =
.
2𝑅
2𝑅
0
(𝑖𝑖) Se la spira presenta anche un coefficiente 𝐿 di autoinduzione, la forza
elettromotrice indotta è la somma di due contributi
ℇ(𝑡) = 𝑅𝑖(𝑡) + 𝐿
𝑑𝑖(𝑡)
= ℇ0 cos(𝜔𝑡) .
𝑑𝑡
Dato che il campo ruota sempre alla stessa velocità angolare, tutte le grandezze
indotte avranno lo stesso periodo del campo forzante, per cui si suppone che la
corrente indotta sia ancora sinusoidale
𝑖(𝑡) = 𝐴 sin(𝜔𝑡) + 𝐵 cos(𝜔𝑡) .
Sostituendo nell’equazione differenziale, si ottiene l’identità
ℇ0 cos(𝜔𝑡) = 𝐴𝑅 sin(𝜔𝑡) + 𝐵𝑅 cos(𝜔𝑡) + 𝐴𝜔𝐿 cos(𝜔𝑡) − 𝐵𝜔𝐿 sin(𝜔𝑡) ,
vale a scrivere il seguente sistema lineare
{
𝐴𝑅 − 𝐵𝜔𝐿 = 0 ,
𝐵𝑅 + 𝐴𝜔𝐿 = ℇ0 .
La soluzione di questo sistema fornisce i valori delle due costanti di sviluppo
𝐴=
𝜔𝐿
𝑅
ℇ
,
𝐵
=
ℇ ,
𝑅2 + (𝜔𝐿)2 0
𝑅2 + (𝜔𝐿)2 0
per cui, ritornando alla corrente, si può scrivere che
19
𝑖(𝑡) = ℇ0
𝑅
𝜔𝐿
sin(𝜔𝑡) + cos(𝜔𝑡)] .
[
𝑅2 + (𝜔𝐿)2 𝑅
Ciò comporta che l’approssimazione adottata nel punto precedente è valida se
l’induttanza 𝐿 → 0, cosa che accade quando la costante di tempo 𝜏 del circuito, che
è pari a
costante di tempo → 𝜏 =
𝐿
𝑅
risulta piccola rispetto al periodo di rotazione del campo di induzione magnetica,
vale a dire se
𝜔𝜏 =
𝜔𝐿
𝜏
= 2𝜋 ≪ 1 .
𝑅
𝑇
In tal modo, ogni variazione istantanea della forza elettromotrice viene
immediatamente indotta nella spira e la corrente 𝑖(𝑡) fluisce attraverso il solo
resistore, sicché
𝑖(𝑡) ≅ ℇ0
cos(𝜔𝑡) ℇ(𝑡)
=
, quando 𝐿 → 0 .
𝑅
𝑅
(𝑖𝑖𝑖) Come poi si possa generare un campo magnetico rotante rappresenta una
idea assai brillante, partorita dalla mente geniale di Galileo Ferraris nel 1882. Nel
1885, Ferraris dimostrò sperimentalmente in pubblico il risultato dei suoi studi:
l’esistenza di un campo magnetico rotante, generato mediante due bobine fisse,
tra loro perpendicolari, percorse da correnti di stessa frequenza ed in quadratura.
Un cilindretto di rame, immerso nel campo magnetico, si mise in movimento, tra
20
la meraviglia dei presenti, sotto l’azione delle forze elettrodinamiche tra campo
rotante e correnti indotte. Fu questo l’inizio del motore asincrono.
Galileo Ferraris
Livorno Piemonte, 30 ottobre 1847 – Torino, 7 febbraio 1897
La conseguente invenzione del motore asincrono a campo magnetico rotante è del
1886, ma l’idea venne pubblicata solamente nel 1888. Due mesi dopo il fisico
croato Nikola Tesla brevettava un motore identico, prendendosi notorietà e
denaro. La massima parte dei motori elettrici oggi in uso è di questo tipo. Uno dei
primi motori a campo magnetico rotante costruito da Galileo Ferraris è mostrato
nella figura che segue.
In realtà, oggi si ottiene un campo rotante adoperando tre spire, dato che l’intero
sistema di produzione, trasmissione e distribuzione dell’energia elettrica è trifase.
Comunque, tornando all’idea di Ferraris, un campo rotante può essere generato
in maniera efficiente da due avvolgimenti fissi, opportunamente disposti nello
spazio e percorsi da correnti sinusoidali convenientemente sfasate tra loro.
21
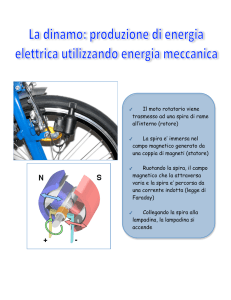
Seguendo lo schema riportato nella figura che segue, si possono notare le tracce
di due spire identiche, poste ad angolo retto: quando la corrente che attraversa la
spira esce dal foglio del disegno è riportata con un punto; invece, quando entra
nel foglio del disegno è riportata con una croce. Le due spire sono poste in un
cilindro di contenimento, detto statore, che poggia su un basamento. Se la coppia
di correnti di alimentazione è pari a
𝜋
𝑖1 (𝑡) = 𝐼𝑀 cos(𝜔𝑡) , 𝑖2 (𝑡) = 𝐼𝑀 cos (𝜔𝑡 + ) = −𝐼𝑀 sin(𝜔𝑡) ,
2
allora si ottiene un campo di induzione magnetica, nella regione centrale del
cilindro interno, che ruota in senso orario e che è descritto dall’equazione
⃗⃗(𝑡) = 𝐵[𝑥̂ cos(𝜔𝑡) − 𝑦̂ sin(𝜔𝑡)] con 𝐵 = 𝜇0
𝐵
22
𝑁
,
2𝜋𝑅
in cui si è indicato con 𝑁 il numero di avvolgimenti di ciascuna spira, che ha raggio
medio pari a 𝑅.
23
5) Un grano 𝑆 di sostanza radioattiva emette 𝑛 elettroni al secondo in maniera
isotropa nello spazio, tutti con la stessa energia 𝐸. Si pone ora il grano di sostanza
radioattiva in un campo magnetico costante e uniforme di intensità 𝐵 e si pone
una lastra fotografica a distanza 𝑎 dalla sostanza ed ortogonale al campo
magnetico.
(𝑎) Quanti elettroni per unità di tempo raggiungono la lastra fotografica?
(𝑏) Sviluppando la lastra, qual è il raggio della porzione di pellicola
impressionata?
(𝑐) Se lasciamo 𝑎 indeterminato, che relazione esiste tra la componente parallela
al campo magnetico della velocità degli elettroni che raggiungono lo schermo e la
distanza tra il punto di impatto ed il punto 𝑂?
Tutti gli elettroni vengono emessi dalla sorgente 𝑆 possiedono la stessa energia 𝐸,
per cui possiedono in modulo la stessa velocità di emissione
1
2𝐸
𝐸 = 𝑚𝑒 𝑣 2 → 𝑣 = √
,
2
𝑚𝑒
24
essendo 𝑚𝑒 = 9.1 ∙ 10−31 𝑘𝑔 la massa a riposo dell’elettrone.
(𝑎) Immaginando allora che la sorgente radioattiva sia collocata nell’origine di un
sistema di riferimento cartesiano nello spazio, la lastra sarà rappresentata dal
piano 𝜋 di equazione
𝑧 = −𝑎 con 𝑎 > 0 .
Il campo di induzione magnetico coerentemente è diretto nel verso contrario
all’asse 𝑧, ha modulo pari a 𝐵 ed è descritto dal vettore
𝐵 = −𝐵𝑧̂ .
Scomposta la velocità di lancio dalla sorgente del generico elettrone in una
componente parallela al piano 𝜋 ed in una componente parallela all’asse 𝑧, posto
cioè
25
𝑣⃗ = 𝑣⃗∥ + 𝑣𝑧 𝑧̂ ,
si può affermare che, durante il moto di un elettrone, la componente lungo l’asse
𝑧 della sua velocità rimane invariata, dato che risulta parallela al campo e non
produrrà alcuna forza magnetica
⃗⃗ = 𝑒𝐵(𝑣⃗∥ + 𝑣𝑧 𝑧̂ ) × 𝑧̂ = 𝑒𝐵𝑣⃗∥ × 𝑧̂ .
𝐹⃗ = −𝑒𝑣⃗ × 𝐵
Segue che nessuno degli elettroni con la componente
𝑣𝑧 = 𝑣 cos 𝜃 > 0 → 0 ≤ 𝜃 ≤
𝜋
2
raggiungerà la lastra, dato che si allontana verso il semiasse positivo 𝑧. Solo quegli
elettroni per cui
𝑣𝑧 = 𝑣 cos 𝜃 < 0 →
𝜋
<𝜃≤𝜋
2
raggiungeranno la lastra. Gli elettroni, che non possiedono la componente 𝑣𝑧 ,
gireranno su orbite circolari nel piano parallelo a 𝜋 e passante per la sorgente 𝑆.
Si conclude allora che degli 𝑛 elettroni emessi nell’unita di tempo, dunque,
soltanto la metà 𝑛/2 raggiungerà la lastra, essendo isotropa la distribuzione
angolare delle direzioni delle velocità degli elettroni.
(𝑏) Per comprendere le traiettorie descritte dagli elettroni, si comincia ad
esaminare la situazione in cui la componente della velocità 𝑣𝑧 parallela al campo
è nulla. In questo caso, l’elettrone descriverà lungo una circonferenza, giacente in
un piano parallelo a 𝜋 e passante per la sorgente 𝑆, di raggio pari a
26
𝑣 2 2𝐸
2𝐸
𝑒𝑣𝐵 = 𝑚𝑒
=
→ 𝑟0 =
.
𝑟0
𝑟0
𝑒𝑣𝐵
Gli elettroni non seguono né una traiettoria rettilinea né una traiettoria a spirale
e, pertanto, non giungeranno mai sulla lastra. Poiché le velocità sono distribuite
uniformemente in questo piano, le possibili traiettorie circolari costituiscono un
insieme di circonferenze di raggio 𝑟0 , tutte passanti per la sorgente. La curva che
delimita questo fascio, cioè l’inviluppo, è a sua volta una circonferenza di raggio
2𝑟0 , centrata in 𝑆, come suggerisce la figura che segue.
Nel caso generale, cioè quando si è in presenza di una componente di velocità
parallela al campo, gli elettroni descriveranno una traiettoria che è un’elica a
passo costante, che si origina in 𝑆, con asse di simmetria parallelo all’asse 𝑧. La
traccia degli elettroni che impattano sulla lastra sarà interna al cerchio di raggio
di raggio 2𝑟0 , anche se nessun elettrone ha l’energia sufficiente per raggiungerne
la circonferenza. In altri termini, tutte le traiettorie elicoidali sono comprese nel
cilindro di raggio 2𝑟0 ed altezza 𝑎.
27
(𝑐) Poiché la componente parallela al campo della velocità dell’elettrone non
subisce alcuna variazione durante il moto, lungo questo asse l’elettrone si muove
di moto rettilineo uniforme, per cui il tempo ∆𝑡, che impiega per partire dalla
sorgente S e per raggiungere il punto 𝑂, vale
∆𝑡 = −
𝑎
𝜋
con
<𝜃≤𝜋.
𝑣 cos 𝜃
2
28
6) La magnetizzazione 𝑚 di un materiale può essere approssimativamente
descritta da un’equazione di autoconsistenza (detta di “campo medio”) del tipo
𝑚 = 𝑓(𝑚) ,
dove 𝑓 è una funzione da determinarsi sulla base di una teoria microscopica. Il
valore di 𝑚 è massimo allo zero assoluto e decresce con l’aumentare della
temperatura. In prossimità della temperatura critica alla quale 𝑚 si annulla, è
conveniente rappresentare 𝑓(𝑚) nella forma di un polinomio in 𝑚. In particolare,
due forme sono possibili
𝑓(𝑚) = 𝑎1 (𝑇)(𝑚 − 𝑏1 𝑚3 ) ,
𝑓(𝑚) = 𝑎2 (𝑇)(𝑚3 − 𝑏2 𝑚5 ) ,
(1)
(2)
dove le funzioni positive 𝑎1 (𝑇) e 𝑎2 (𝑇) decrescono all’aumentare della
temperatura, e 𝑏1 e 𝑏2 sono costanti positive.
Si stabilisca la natura della transizione magnetica nei casi (1) e (2), ovvero si
determini in quale caso 𝑚 si annulla con discontinuità (transizione del “primo
ordine”) oppure con continuità (transizione del “secondo ordine”).
Il ferromagnetismo è la proprietà di alcuni materiali, detti per questo materiali
ferromagnetici, di magnetizzarsi molto intensamente sotto l’azione di un campo
magnetico esterno e di restare a lungo magnetizzati quando il campo si annulla,
diventando così magneti. Questa proprietà si mantiene fino ad una certa
temperatura, detta temperatura di Curie, al di sopra della quale il materiale si
comporta come un materiale paramagnetico. Per il ferro, ad esempio, questa
temperatura è di circa 770 °𝐶. Nei materiali ferromagnetici la permeabilità
magnetica relativa del materiale non è costante al variare dei campi, come invece
avviene nei materiali diamagnetici e nei materiali paramagnetici: la relazione tra
il campo di induzione magnetica ed il campo magnetico non è quindi lineare e
29
nemmeno univoca. Il metodo di trovare le relazioni tra questi vettori è un metodo
grafico e la legge seguita dall’andamento del campo magnetico segue il ciclo di
isteresi. Sono materiali ferromagnetici la magnetite, il ferro, il cobalto, il nichel,
numerosi metalli di transizione e le loro rispettive leghe.
Il problema proposto, a dire il vero, è un problema più di interesse più matematico
che fisico. Comunque, ecco i due casi discussi in qualche dettaglio.
(1) Imponendo che
𝑓(𝑚) = 𝑎1 (𝑇)(𝑚 − 𝑏1 𝑚3 ) = 𝑚
ed escludendo il caso banale 𝑚 = 0, si può scrivere l’equazione di secondo grado
𝑎1 (𝑇)(1 − 𝑏1 𝑚2 ) = 1 → 𝑚2 =
1
1
[1 −
].
𝑏1
𝑎1 (𝑇)
Dato che, in corrispondenza della temperatura critica 𝑇𝐶 la magnetizzazione si
annulla, vale a dire che
𝑚(𝑇𝐶 ) = 0 ,
dalla relazione precedente discende immediatamente che
1
1
[1 −
] = 0 → 𝑎1 (𝑇𝐶 ) = 1 .
𝑏1
𝑎1 (𝑇𝐶 )
Ciò comporta che l’unica soluzione accettabile dell’equazione di secondo grado
30
1
1
𝑚(𝑇) = √ [1 −
]
𝑏1
𝑎1 (𝑇)
si annulla con continuità in corrispondenza della temperatura critica, mostrando
una transizione del secondo ordine.
(2) Adoperando il secondo polinomio assegnato, per cui
𝑓(𝑚) = 𝑎2 (𝑇)(𝑚3 − 𝑏2 𝑚5 ) = 𝑚 ,
scartando la soluzione banale, risulta la seguente equazione biquadratica
𝑎2 (𝑇)(𝑚2 − 𝑏2 𝑚4 ) = 1 → 𝑏2 𝑚4 − 𝑚2 +
1
=0.
𝑎2 (𝑇)
Risultano allora le due soluzioni
𝑚2 =
1
1
4𝑏2
√1 −
±
.
2𝑏2 2𝑏2
𝑎2 (𝑇)
Nell’ipotesi che di considerare soluzioni reali e non costanti, cioè posto
𝑎2 (𝑇) > 4𝑏2 ,
la radice con il segno meno va scartata, dato che 𝑚(𝑇) è una funzione decrescente:
in effetti, basta osservare che la somma 𝑠 = 1/𝑏2 delle due soluzioni trovate non
dipende dalla temperatura. Ciò comporta che la magnetizzazione risulta pari a
31
𝑚(𝑇) = √
1
1
4𝑏2
√1 −
+
2𝑏2 2𝑏2
𝑎2 (𝑇)
e che, in corrispondenza della temperatura critica, la magnetizzazione non può
annullarsi, dato che 𝑚(𝑇) > 0, in ogni temperatura in cui ha senso determinarla.
Pertanto, si può affermare che
𝑚(𝑇𝐶 ) = √
1
1
4𝑏2
√1 −
+
≠0
2𝑏2 2𝑏2
𝑎2 (𝑇𝐶 )
e così la magnetizzazione non si annulla in corrispondenza della temperatura
critica, mostrando una transizione con discontinuità del primo ordine.
32