Appunti su polinomi quadratici,
curve e superfici quadriche
Lucio Guerra
v.2 2012-2013
Polinomi quadratici
In questa parte del corso lavoreremo in uno spazio affine numerico An (K).
1
Il luogo degli zeri di un polinomio
Sia f ∈ K[x1 , . . . , xn ]. Nello spazio An (K) un punto P (x1 , . . . , xn ) tale che
f (x1 , . . . , xn ) = 0 si dice uno ’zero’ di f , e l’insieme
V (f ) := {P ∈ An (K) : f (x1 , . . . , xn ) = 0}
si dice il luogo degli zeri di f .
Se f = 0 si ha l’intero An (K), se f ∈ K × si ha il sottoinsieme ∅.
Notare che: V (αf ) = V (f ) se α ∈ K × .
Nello studio della geometria elementare si incontrano esempi di sottoinsiemi del
piano che sono definiti da una equazione cartesiana del tipo f (x, y) = 0 in cui f è
un polinomio, e vengono chiamati curve, ovvero ’linee curve’. In questa trattazione
si segue il percorso inverso, per ogni polinomio è definito il luogo degli zeri, e si
apre il problema di stabilire se questo insieme può essere considerato una curva.
Infatti, anche se il polinomio f (x, y) non è costante, l’insieme V (f ) può ancora
essere vuoto oppure ridotto a un punto, e la questione dipende dal campo K.
Esempi: se K = R il polinomio x2 + y 2 + 1 non ha zeri, e il polinomio x2 + y 2 ha
come unico zero l’origine; se K = C si ha sempre un insieme infinito, in conseguenza
del teorema fondamentale dell’algebra, ad esempio il polinomio x2 + y 2 ha per ogni
x gli zeri (x, ±ix).
Nello spazio tridimensionale poi si incontrano esempi di sottoinsiemi che sono
definiti da una equazione cartesiana del tipo f (x, y, z) = 0 in cui f è un polinomio,
1
e vengono chiamati superfici. Seguendo il percorso inverso, per ogni polinomio è
definito il luogo degli zeri, e si ha il problema di stabilire se questo insieme può
essere considerato una superficie.
Questo argomento in questa generalità, per polinomi arbitrari, non rientra nel
programma di questo corso. Ci limiteremo allo studio dei polinomi quadratici (i.e.
di grado 2), negli aspetti più algebrici, con l’obiettivo di descrivere il luogo degli
zeri di un polinomio quadratico nel piano o nello spazio tridimensionale, sul campo
reale o sul campo complesso, affrontando il problema di riconoscere quando si può
parlare di una curva nel piano o di una superficie nello spazio.
In generale se f ∈ K[x1 , . . . , xn ] r K soddisfa certe opportune condizioni si dice
che l’insieme degli zeri V (f ) è una ipersuperficie algebrica in An (K). Se f è un
polinomio quadratico che soddisfa tali condizioni allora si parla di una ipersuperficie
quadrica, o semplicemente una quadrica, nello spazio affine.
2
Trasformazioni di coordinate
Una affinità ϕ : An (K) → An (K) dello spazio affine numerico, data da una
formula
0
x1
p11 · p1n
x1
q1
x1
· 7−→ · ·
· · + · =: ·
x0n
xn
pn1 · pnn
xn
qn
che scriviamo in breve come X 7→ P X + Q, dove P è una matrice invertibile, sarà anche detta una trasformazione di coordinate. Induce una
trasformazione di polinomi, un automorfismo
∼
K[x1 , . . . , xn ] −→
K[x1 , . . . , xn ]
dell’anello dei polinomi, che scriviamo
f (x1 , . . . , xn )
7−→
f 0 (x1 , . . . , xn ) := f (x01 , . . . , x0n )
= f (ϕ(x1 , . . . , xn ))
che si denota con il simbolo ϕ∗ .
Le affinità di An (K) formano un gruppo, indicato con il simbolo Aff(An (K)).
Quelle con P = 1n si dicono traslazioni, e formano un sottogruppo. Quelle
con Q = 0 sono gli automorfismi di K n come spazio vettoriale, e formano
un sottogruppo, indicato con il simbolo GL(K n ).
Le formule precedenti rappresentano nello stesso modo due fatti distinti.
2
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
Cambiamento di riferimento
Sono dati in An (K) due riferimenti R e R0 . Un punto P ha coordinate (x1 , . . . , xn )
e (x01 , . . . , x0n ), rispetto a R e R0 , collegate mediante la trasformazione precedente.
In questa situazione, l’uguaglianza f 0 (x1 , . . . , xn ) = f (x01 , . . . , x0n ) implica che:
VR (f 0 ) = VR0 (f )
Di conseguenza, per un sottoinsieme dello spazio affine, la proprietà di essere
descritto come luogo degli zeri di un polinomio, rispetto a un opportuno
riferimento, è indipendente dal riferimento.
Trasformazione mediante affinità
Sono dati una affinità ϕ : An (K) → An (K) e un riferimento. Se un punto P
ha coordinate (x1 , . . . , xn ) allora il punto ϕ(P ) ha coordinate (x01 , . . . , x0n ), ottenute mediante la trasformazione precedente. Allora l’uguaglianza f 0 (x1 , . . . , xn ) =
f (x01 , . . . , x0n ) implica che:
V (f 0 ) = ϕ−1 (V (f ))
Di conseguenza, per un sottoinsieme dello spazio affine la proprietà di essere
il luogo degli zeri di un polinomio è invariante per affinità.
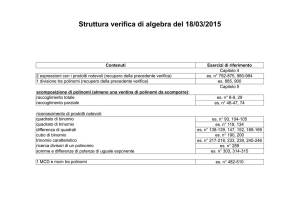
Esempio 2.1. La trasformazione di coordinate (x, y) 7→ (x − y, x + y) induce una
trasformazione di polinomi in cui xy −1 7→ x2 −y 2 −1. Sono rappresentate in figura
le due interpretazioni. A sinistra: due riferimenti, una iperbole, i due polinomi
corrispondenti danno equazioni dell’iperbole relative ai due riferimenti. A destra:
un riferimento, due iperboli, che la data affinità trasforma una sull’altra, i due
polinomi corrispondenti danno equazioni delle due iperboli.
...
...
...
...
...
...
...
...
...
...
...
...
...
.
...................................................................................................................................
...
...
...
...
...
...
.
....
...
....
...
....
.
..............
.....
....
..
..
...
...
...
...
..
..
....
......
.... ..... .....
............
........... .................
.....
..
....
..
.....
.....
.......
...................................
........
............. ..................
......
...
.....
.....
.....
.......
....................................
...
...
...
...
...
...
...
...
...
...
...
...
...
.
...................................................................................................................................
...
...
...
...
...
...
.
....
...
....
...
....
.
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
3
3
Equivalenza di polinomi
Equivalenza affine
Definizione 3.1. Due polinomi f, g ∈ K[x1 , . . . , xn ] si dicono equivalenti
tramite affinità se si può scrivere una relazione
g(x1 , . . . , xn ) = α f (ϕ(x1 , . . . , xn ))
= α f 0 (x1 , . . . , xn )
per mezzo di una trasformazione di coordinate ϕ di An (K) e uno scalare
non nullo α in K × opportuni.
Se f, g sono polinomi equivalenti, si hanno le due interpretazioni: rappresentano uno stesso insieme rispetto a due riferimenti opportuni: VR (g) =
VR0 (f ); oppure rappresentano rispetto a uno stesso riferimento due insiemi
equivalenti tramite affinità: V (g) = ϕ−1 V (f ).
Osservazione 3.2. La relazione di equivalenza tramite affinità è una relazione
di equivalenza nell’insieme dei polinomi K[x1 , . . . , xn ].
Osservazione 3.3. Non è difficile dimostrare che: due polinomi che sono
equivalenti tramite affinità hanno lo stesso grado; in altre parole il grado di
un polinomio è invariante per equivalenza affine.
Esempio 3.4. I polinomi di grado 1 sono tutti equivalenti (e gli iperpiani sono tutti
equivalenti). Consideriamo un polinomio a1 x1 +· · ·+an xn +b e supponiamo ai 6= 0.
La trasformazione di coordinate
(x1 , . . . , xi , . . . , xn ) 7−→ (x1 , . . . , a1 x1 + · · · + an xn + b, . . . , xn )
(è invertibile) induce una trasformazione di polinomi
xi 7−→ a1 x1 + · · · + an xn + b
Inoltre due monomi xi e xj sono equivalenti tramite la trasformazione di coordinate
che scambia le due coordinate indicate e tiene fisse tutte le altre coordinate.
Esempio 3.5. Nell’esempio 2.1 si ha una trasformazione di coordinate che induce
una trasformazione xy − 1 7→ x2 − y 2 − 1.
Equivalenza euclidea
Se il campo base è R, se lo spazio vettoriale Rn si considera dotato del
prodotto scalare standard, allora lo spazio affine An (R) risulta dotato della
4
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
metrica standard, e viene detto lo spazio euclideo numerico di dimensione n,
e si indica con il simbolo En . Nello spazio Rn si hanno le basi ortonormali,
e nello spazio euclideo En i riferimenti ortonormali.
Le isometrie di En sono quelle affinità che conservano il prodotto scalare
dei vettori. I cambiamenti del riferimento ortonormale in En , cosı̀ come le
isometrie di En , sono rappresentati nella stessa forma di una trasformazione
di coordinate a coefficienti in R in cui la matrice P è una matrice ortogonale
(tP = P −1 ).
Le isometrie di En formano un sottogruppo di Aff(An (R)), indicato con
il simbolo Isom(En ). Quelle con P = 1n sono le traslazioni, e formano un
sottogruppo. Quelle con Q = 0 sono le trasformazioni ortogonali di Rn , e
formano un sottogruppo, indicato con il simbolo O(Rn ).
Definizione 3.6. Due polinomi f, g ∈ R[x1 , . . . , xn ] si dicono equivalenti
tramite isometrie se si può scrivere una relazione
g(x1 , . . . , xn ) = α f (ϕ(x1 , . . . , xn ))
in cui la trasformazione di coordinate ϕ è una isometria di E n , e in cui
α ∈ R× .
Osservazione 3.7. La relazione di equivalenza tramite isometrie è una relazione di equivalenza nell’insieme dei polinomi R[x1 , . . . , xn ].
Esempio 3.8. I polinomi di grado 1 sono tutti equivalenti tramite isometrie.
Consip
deriamo un polinomio a1 x1 +· · ·+an xn +b di grado 1. Poniamo a := a21 + · · · + a2n .
Poiché il vettore ( aa1 , . . . , aan ) è di norma uno, esiste una matrice ortogonale P di
ordine n che ha questo vettore come prima riga. Sia inoltre Q il vettore ( ab , 0, . . . , 0).
La corrispondente trasformazione di coordinate
(x1 , . . . , xn ) 7−→
a1
a x1
+ ··· +
an
a xn
+ ab , . . . . . .
(è una isometria) induce una trasformazione di polinomi
x1 7−→ a1 (a1 x1 + · · · + an xn + b)
Esempio 3.9. Nell’esempio 2.1, relativo al campo R, la trasformazione di coordinate
utilizzata non è una isometria. Una isometria è ad esempio la trasformazione
(x, y) 7→ √12 x − √12 y, √12 x + √12 y
e questa induce la trasformazione xy − 1 7→ 21 x2 − 12 y 2 − 1.
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
5
4
Richiami sulle forme quadratiche
,→
Sia K un campo di caratteristica 6= 2. Se V è uno spazio vettoriale su K, si
definiscono corrispondenze
forme bilineari
−→
V ×V →K
forme quadratiche
V →K
forme bilineari simmetriche
←→
V ×V →K
Se V è lo spazio vettoriale numerico K n , si hanno biiezioni
forme quadratiche
Kn → K
&
.
polinomi quadratici
matrici simmetriche
omogenei in
di ordine n
←−−→
K[x1 , . . . , xn ]
a coefficienti in K
P
5
aij xi xj
(aij ) = A
Polinomi quadratici
Un polinomio quadratico f ∈ K[x1 , . . . , xn ] si scrive come
f (x1 , . . . , xn ) = f2 (x1 , . . . , xn ) + f1 (x1 , . . . , xn ) + f0
X
X
=
aij xi xj + 2
bi xi + c
dove la matrice
a11 · a1n
·
A= · ·
an1 · ann
che rappresenta componente omogenea quadratica è una matrice simmetrica,
di ordine n, e inoltre A 6= 0; definiamo inoltre
B = (b1 , . . . , bn )
la matrice-riga che rappresenta la componente omogenea lineare; l’espressione analitica precedente può essere riscritta in forma compatta
f (x1 , . . . , xn ) = t XA X + 2BX + c
6
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
Al polinomio quadratico f si associa la
n + 1 definita a blocchi
c
B
M =
tB
A
matrice simmetrica di ordine
.
Esempio numerico: ...
6
Equivalenza di polinomi quadratici
Una affinità ϕ : An (K) → An (K) si scrive come X 7→ P X + Q, dove P è
una matrice invertibile di ordine n. Ricordiamo che alla affinità ϕ si associa
la matrice di ordine n + 1
1
0
.
R=
Q
P
La matrice R è invertibile e la sua inversa è la matrice associata, nello stesso
modo, alla affinità inversa X 7→ P −1 X − P −1 Q.
Consideriamo un polinomio quadratico f (x1 , . . . , xn ) e il polinomio trasformato f 0 (x1 , . . . , xn ) = f (ϕ(x1 , . . . , xn )).
Proposizione 6.1. Il polinomio trasformato f 0 è ancora un polinomio quadratico; se f è rappresentato dalla matrice M , la matrice associata a f 0 è
data da
M 0 = tRM R
Dimostrazione. Per definizione si ha f 0 (x1 , . . . , xn ) = f (x01 , . . . , x0n ) = tX 0 AX 0 +
2BX 0 + c dove X 0 = P X + Q, e calcolando si trova f 0 (x1 , . . . , xn ) =
=
t(P X
+ Q)A(P X + Q) + 2B(P X + Q) + c
=
(tX tP
+ tQ)A(P X + Q) + 2B(P X + Q) + c
=
tX tP AP X
=
tX(tP AP )X
+ tX tP AQ + tQAP X + tQAQ + 2BP X + 2BQ + c
+ 2tQAP X + 2BP X + tQAQ + 2BQ + c
dove si è usata l’uguaglianza tX tP AQ = tQAP X, che segue dalla simmetria
di A, e di conseguenza si hanno le uguaglianze
A0 = tP AP
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
7
B 0 = (tQA + B)P,
c0 = tQAQ + 2BQ + c,
che si possono riassumere nella uguaglianza di matrici a blocchi
c0
B0t
B0
1
tQ
A0
=
0
tP
tB
c
B
A
Q
1
0
P
come nell’enunciato.
Osservazione 6.2. Nella dimostrazione precedente, la formula A0 = tP AP
significa che la componente quadratica f2 è trasformata nella componente quadratica (f 0 )2 tramite la trasformazione di coordinate X 7→ P X, che
rappresenta l’automorfismo di K n associato alla data affinità di An (K).
Possiamo scrivere (f2 )0 = (f 0 )2 , senza dimenticare che nei due termini dell’uguaglianza il segno di trasformazione si riferisce a due trasformazioni di
coordinate in generale diverse.
Proposizione 6.3. Per i polinomi quadratici i ranghi
rg(M )
rg(A)
sono invarianti per equivalenza affine.
Dimostrazione. Se un polinomio quadratico ha la matrice associata M con
il blocco A, un polinomio quadratico equivalente ha una matrice associata
del tipo α tRM R con un blocco del tipo α tP AP , dove le matrici R e P sono
invertibili, e α è uno scalare non nullo. Basta applicare le formule nella
dimostrazione precedente.
Definizione 6.4. Un polinomio quadratico f (x1 , . . . , xn ) si dice di tipo
generale, o semplicemente generale, se ha rango massimo rg(M ) = n + 1,
si dice degenere se invece rg(M ) ≤ n.
Osservazione 6.5. Nella teoria delle forme quadratiche si ha una terminologia
analoga. Una forma quadratica q(x1 , . . . , xn ) si dice di tipo generale se ha
rango massimo rg(A) = n, si dice degenere se invece rg(A) ≤ n − 1. Notare
che: se una forma quadratica viene vista come un polinomio quadratico,
allora è sempre degenere, poiché la matrice associata M ha B = 0 e c = 0.
8
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
7
Richiami sulla classificazione delle forme quadratiche
Forme canoniche delle forme quadratiche
Sia K un campo di caratteristica 6= 2. Algoritmo di Lagrange. Ogni forma
quadratica q(x1 , . . . , xn ) a coefficienti in K può essere trasformata tramite un
automorfismo (un elemento di GL(K n )) in una forma quadratica diagonale
a1 x21 + · · · + ar x2r
con r ≤ n, in cui i coefficienti sono in K × , dunque r è il rango di q.
Forme quadratiche complesse
Ogni forma quadratica q(x1 , . . . , xn ) a coefficienti in C è trasformata tramite
automorfismi in una e una sola forma quadratica diagonale
x21 + · · · + x2r
con r ≤ n, dove r è il rango di q.
Forme quadratiche reali
Teorema di Sylvester. Ogni forma quadratica q(x1 , . . . , xn ) a coefficienti in
R è trasformata tramite automorfismi (in GL(Rn )) in una e una sola forma
quadratica diagonale
x21 + · · · + x2p − x2p+1 − · · · − x2p+q
con p + q ≤ n.
I numeri p, q di coefficienti diagonali positivi, negativi si dicono indici di
positività, negatività di q.
La somma p + q = r coincide con il rango di q. La differenza p − q = s è
detta la segnatura di q.
Gli indici di positività e di negatività sono invarianti per automorfismi.
In conseguenza del teorema di Sylvester, due forme quadratiche reali si ottengono una dall’altra tramite un automorfismo se e solo se hanno gli stessi
indici di positività e di negatività, ovvero se e solo se hanno lo stesso rango
e la stessa segnatura.
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
9
Forme quadratiche reali e trasformazioni ortogonali
Teorema spettrale. Ogni forma quadratica q(x1 , . . . , xn ) a coefficienti in
R è trasformata tramite trasformazioni ortogonali (elementi del gruppo
ortogonale O(Rn )) in una forma quadratica diagonale
a1 x21 + · · · + an x2n
La successione a1 , . . . , an rappresenta lo spettro degli autovalori della
matrice associata (può esserci l’autovalore nullo). Se si richiede che sia
a1 ≤ · · · ≤ an allora la successione è unicamente determinata.
8
Forme canoniche dei polinomi quadratici
Teorema 8.1. Sia K un campo di caratteristica 6= 2. Ogni polinomio quadratico f ∈ K[x1 , . . . , xn ] è equivalente tramite affinità a una delle seguenti
forme canoniche
a1 x21 + · · · + ar x2r
con r ≤ n
2
2
a1 x1 + · · · + ar xr + 1
con r ≤ n
a1 x21 + · · · + ar x2r + xr+1 con r < n
(r, r)
(r + 1, r)
(r + 2, r)
in cui i coefficienti si intendono diversi da 0. Per ogni forma canonica i
valori della coppia di invarianti (rg(M ), rg(A)) sono indicati nella colonna
a destra. Due forme canoniche di tipo diverso non sono equivalenti tramite
affinità.
Dimostrazione. Utilizziamo la rappresentazione f = f2 + f1 + f0 definita
in precedenza, in cui f2 è una forma quadratica non nulla, f1 è una forma
lineare, f0 è una costante.
(1) Eliminazione dei prodotti misti xi xj , ovvero diagonalizzazione della forma quadratica f2 . Tramite un automorfismo vettoriale,
in GL(K n ), la componente f2 (x1 , . . . , xn ) è trasformata in una forma diagonale a1 x21 + · · · + ar x2r , con r ≤ n, in cui i coefficienti sono diversi da
0. Tale automorfismo trasforma la componente f1 (x1 , . . . , xn ) in un’altra
forma lineare che scriviamo come 2b1 x1 + . . . + 2bn xn , e trasforma quindi il
polinomio f (x1 , . . . , xn ) in un polinomio del tipo
a1 x21 + · · · + ar x2r + 2b1 x1 + . . . + 2bn xn + c
(a)
(2) Eliminazione di termini lineari. Un polinomio quadratico come in (a) è trasformato tramite una traslazione in un polinomio in cui non
compaiono i termini lineari in x1 , . . . , xr .
10
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
Una semplice osservazione: dati a, b con a 6= 0, si può scrivere
ax2 + 2bx = a(x + u)2 + v
con u = b/a e v = −b2 /a, e la traslazione (in una dimensione) x 7→ x − u
induce la trasformazione
ax2 + 2bx 7−→ ax2 + v
Possiamo applicare questa osservazione al polinomio (a) relativamente
a tutte le variabili x1 , . . . , xr simultaneamente. Posto ui := bi /ai per i =
1, . . . , r, abbiamo che:
se r = n la traslazione
(x1 , . . . , xn ) 7→ (x1 − u1 , . . . , xn − un )
trasforma il polinomio (a) in un polinomio della forma
a1 x21 + · · · + an x2n + c0
(b0 )
se r < n la traslazione
(x1 , . . . , xn ) 7→ (x1 − u1 , . . . , xr − ur , xr+1 . . . , xn )
trasforma il polinomio (a) in un polinomio della forma
a1 x21 + · · · + ar x2r + 2br+1 xr+1 + . . . + 2bn xn + c0
(b00 )
(2.1) Nel caso (b0 ) oppure nel caso (b00 ) in cui ogni bi = 0 si ottiene una
forma del tipo a1 x21 + · · · + ar x2r + c0 . Se c0 = 0 abbiamo una forma canonica
a1 x21 + · · · + ar x2r
Se c0 6= 0 abbiamo un polinomio proporzionale a una forma canonica
a01 x21 + · · · + a0r x2r + 1
(3) Semplificazione dei termini non quadratici rimanenti. Nel
caso (b00 ), in cui r < n, supponiamo che qualche bi 6= 0. Sappiamo che
un polinomio di grado uno `(xr+1 , . . . , xn ) è equivalente al monomio xr+1
tramite una trasformazione di coordinate
(xr+1 . . . , xn ) 7−→ (x0r+1 . . . , x0n )
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
11
che coinvolge solo le coordinate di indici r + 1, . . . , n (vedere l’esempio 17.4),
Allora tramite la trasformazione estesa
(x1 , . . . , xr , xr+1 . . . , xn ) 7−→ (x1 , . . . , xr , x0r+1 . . . , x0n )
il polinomio (b00 ) è trasformato nella forma canonica
a1 x21 + · · · + ar x2r + xr+1
Infine per dimostrare che due forme canoniche di tipo diverso non sono
equivalenti è sufficiente confrontare i relativi valori della coppia di ranghi
rg(M ) e rg(A) che sono invarianti per equivalenza.
Osservazione 8.2. Un polinomio quadratico in f (x1 , . . . , xn ) si dice a centro
se ammette un centro di simmetria, i.e. un punto del piano rispetto al quale
il polinomio è simmetrico. Una forma canonica del primo o del secondo
tipo è simmetrica rispetto all’origine, mentre una forma canonica del terzo
tipo si vede che non è simmetrica rispetto a nessun punto. Di conseguenza
i polinomi quadratici a centro sono precisamente i polinomi quadratici che
sono equivalenti a una forma canonica del primo o del secondo tipo.
Osservazione 8.3. Se il campo è R, ogni polinomio quadratico f ∈ R[x1 , . . . , xn ]
è equivalente tramite isometrie a una forma canonica come nel teorema
precedente.
Infatti l’equivalenza al passo (1) può essere realizzata tramite una trasformazione ortogonale (teorema spettrale), la traslazione al passo (2) è una
isometria, e anche l’equivalenza al passo (3) può essere realizzata tramite
una isometria (esempio 3.8).
Osservazione 8.4. Si hanno forme canoniche di rango 1 solo del primo tipo
con r = 1, dunque monomi della forma αx2 . Di conseguenza i polinomi
quadratici f (x1 , . . . , xn ) con rango rg(M ) = 1 sono esattamente i polinomi
del tipo
α (p1 x1 + · · · + pn xn + q)2
proporzionali al quadrato di un polinomio di grado 1. In questo caso il luogo
degli zeri di f non è altro che un iperpiano dello spazio affine.
Esercizio 8.5. Per i polinomi quadratici in K[x, y] compilare l’elenco delle forme
canoniche date dal Teorema, ordinate secondo i valori decrescenti del rg(M ) e, per
uno stesso valore del rg(M ), ordinate secondo i valori decrescenti del rg(A).
Esercizio 8.6. Per i polinomi quadratici in K[x, y, z] compilare in modo analogo
l’elenco delle forme canoniche date dal Teorema.
12
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
9
Classificazione delle forme canoniche
Rimane il problema della classificazione: stabilire quando due forme canoniche, dello stesso tipo, sono equivalenti tramite affinità, e quindi determinare
un sottoinsieme di forme canoniche che ancora rappresenti la totalità dei
polinomi quadratici a meno di equivalenza affine, come nel Teorema 8.1, ma
abbia la proprietà che due forme canoniche nel sottoinsieme non siano tra
loro equivalenti.
Nella teoria delle forme quadratiche si incontra la seguente operazione
adatta a semplificare i coefficienti diagonali.
(4) Normalizzazione dei coefficienti diagonali.
osservazione: se a = a0 u2 con u 6= 0 allora
Altra semplice
ax2 = a0 (ux)2
e l’affinità x 7→ (1/u)x (in una dimensione) induce la trasformazione
ax2 7→ a0 x2
Dato un polinomio quadratico in forma canonica come nel Teorema 8.1,
supposto che si abbia ai = a0i u2i per i = 1, . . . , r, l’affinità
(x1 , . . . , xr , . . . , xn ) 7−→ ( a11 x1 , . . . , a1r xr , . . . , xn )
trasforma la forma quadratica a1 x21 +· · ·+ar x2r nella forma quadratica a01 x21 +
· · · + a0r x2r , e trasforma di conseguenza il polinomio quadratico iniziale, senza
modificare gli eventuali termini non quadratici.
Conseguenze del Teorema 8.1 e della osservazione precedente.
• Se il campo è C, ogni polinomio quadratico in C[x1 , . . . , xn ] è equivalente a una e una sola forma canonica con i coefficienti diagonali tutti
uguali a 1.
• Se il campo è R, ogni polinomio quadratico in R[x1 , . . . , xn ] è equivalente (tramite affinità reali) a una forma canonica con i coefficienti
diagonali uguali a 1 o −1.
Nel secondo caso l’unicità non vale senza ulteriori restrizioni e comunque
la classificazione richiede qualche ulteriore invariante dei polinomi quadratici
a coefficienti in R (oltre ai due ranghi). Questo caso del problema sarà
studiato in seguito per polinomi in due o tre variabili reali.
Come vediamo, la risposta al problema della classificazione dipende dal
campo K, e in particolare dalla grandezza del sottoinsieme K 2 degli elementi
quadrati.
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
13
Curve e superfici quadriche affini
Studieremo la classificazione dei polinomi quadratici in due o tre variabili a coefficienti in C o in R, studieremo il corrispondente luogo degli zeri nello spazio affine di
dimensione due o tre, e arriveremo a una definizione di curve e superfici quadriche
come sottoinsiemi dello spazio affine.
Lo strumento chiave è il Teorema 8.1, che utilizzeremo in una variante con
forme canoniche alternative, equivalenti alle altre, in cui il termine costante è uguale
a −1 e il termine lineare è −xr+1 .
Utilizzeremo la terminologia introdotta nella Definizione 6.4 e nella Osservazione 8.2. Per i polinomi quadratici di rango 1 il luogo degli zeri è un iperpiano, si è
visto nell’Osservazione 8.4, e non si considera un insieme quadratico.
10
Le coniche nel piano affine
Le coniche affini complesse
Proposizione 10.1. Ogni polinomio quadratico in C[x, y] è equivalente tramite affinità a una e una sola delle seguenti forme canoniche, il cui luogo
degli zeri è descritto nella colonna a destra:
x2 + y 2 − 1
x2 − y
generale a centro
generale senza centro
x2 + y 2
x2 − 1
due rette incidenti
due rette parallele
x2
una retta ’doppia’
Dimostrazione. Caso particolare n = 2 del risultato ottenuto nel § 9, riformulato utilizzando le forme canoniche alternative descritte sopra.
Definizione 10.2. Se f ∈ C[x, y] è un polinomio quadratico, il luogo degli
zeri V (f ) si considera in ogni caso una curva complessa; se inoltre f non
è equivalente a x2 allora V (f ) si dice una conica nel piano A2 (C).
Le coniche affini reali
Proposizione 10.3. Ogni polinomio quadratico in R[x, y] è equivalente tramite affinità a una e una sola delle seguenti forme canoniche, il cui luogo
degli zeri è descritto nella colonna a destra:
14
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
x2 + y 2 − 1
x2 + y 2 + 1
x2 − y 2 − 1
x2 − y
ellisse
vuoto
iperbole
parabola
x2 + y 2
x2 − y 2
x2 − 1
x2 + 1
un punto
due rette incidenti
due rette parallele
vuoto
x2
una retta ’doppia’
Dimostrazione. Conseguenza del secondo risultato ottenuto nel § 9, nel caso
particolare n = 2, riformulato utilizzando le forme canoniche alternative,
e selezionando solo una tra due forme canoniche che risultino equivalenti
tramite affinità ’elementari’, mentre per verificare che due polinomi in questo
elenco non sono equivalenti si deve ricorrere a qualche ulteriore proprietà
invariante, oltre ai ranghi rg(M ) e rg(A), per esempio si può ricorrere alla
osservazione successiva.
Osservazione 10.4. Per i polinomi quadratici in R[x, y] sono invarianti per
equivalenza affine:
• il segno del determinante det(A), quando non nullo,
• l’esistenza di zeri reali, la proprietà: V (f ) 6= ∅.
Dimostrazione. (1) Se un polinomio quadratico ha la matrice associata M
con il blocco A, a un polinomio equivalente è associata una matrice del tipo
α tR M R con un blocco del tipo α tP AP , come abbiamo visto in precedenza.
Dalla formula
det(α tP A P ) = α2 (det P )2 det(A)
segue che il det(α tP A P ) ha lo stesso segno del det(A). (2) Se f e g sono
equivalenti, i luoghi degli zeri V (f ) e V (g) sono in biiezione.
Definizione 10.5. Se f ∈ R[x, y] è un polinomio quadratico, non equivalente a una forma canonica come x2 + 1 oppure x2 + y 2 oppure x2 + y 2 + 1,
allora il luogo degli zeri V (f ) si considera una curva reale; se inoltre f non
è equivalente a x2 , allora V (f ) si dice una conica nel piano A2 (R).
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
15
Sulla classificazione delle coniche affini
La classificazione delle coniche nel piano affine, reale o complesso, è data dai
seguenti enunciati.
• Ogni conica in A2 (C) è equivalente tramite affinità a una e una sola
delle coniche definite da polinomi in forma canonica nella Proposizione
10.1 (eccetto l’ultimo, che è escluso dalla Definizione 10.2).
• Ogni conica in A2 (R) è equivalente tramite affinità a una e una sola
delle coniche definite da polinomi in forma canonica nella Proposizione
10.3 (eccetto quelli esclusi dalla Definizione 10.5).
Questi enunciati discendono dai risultati precedenti sui polinomi quadratici e dalla seguente affermazione:
(∗) nella situazione di ciascuno dei due enunciati, due coniche definite da
due polinomi in forma canonica tra loro distinti non sono equivalenti.
Per dimostrarla possiamo distinguere le coniche per mezzo di alcune semplici
proprietà geometriche che sono invarianti per affinità.
Per distinguere le coniche generali da quelle degeneri:
• generale: non contiene rette,
• degenere: unione di due rette, incidenti o parallele;
per distinguere le coniche generali complesse:
• a centro: esiste una retta che non interseca la curva,
• senza centro: ogni retta interseca la curva;
per distinguere le coniche generali reali:
• ellisse: limitata,
iperbole e parabola: illimitate,
• iperbole: esiste una retta che non interseca la curva e tale che ciascuno
dei due semipiani determinati dalla retta interseca la curva,
• parabola: per ogni retta che non interseca la curva uno dei due semipiani determinati dalla retta non interseca la curva (e l’altro contiene
tutta la curva).
Osserviamo infine che l’affermazione (∗) implica che: nella situazione di
ciascuna delle Proposizioni 10.1 e 10.3, due polinomi in forma canonica tra
loro distinti non sono equivalenti. Dunque la dimostrazione data sopra per
l’affermazione (∗) potrebbe sostituire gli argomenti utilizzati in precedenza,
ad esempio quelli nell’Osservazione 10.4.
16
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
11
Le coniche nel piano euclideo
Ci limitiamo a considerare polinomi quadratici di tipo generale il cui luogo
degli zeri è una conica reale, secondo la Definizione 10.5.
Proposizione 11.1. Ogni polinomio quadratico di tipo generale in R[x, y]
il cui luogo degli zeri è una conica reale è equivalente tramite isometrie del
piano euclideo E2 a una e una sola delle seguenti forme canoniche:
x2 y 2
+ 2 −1
a2
b
2
y2
x
−
−1
a2
b2
x2 − py
a≥b>0
ellisse
a, b > 0
iperbole
p>0
parabola
Dimostrazione. L’esistenza di una forma canonica associata è conseguenza del Teorema 8.1 e della Osservazione 8.3 sulla equivalenza per isometrie
(non si applica l’operazione di normalizzazione perché non è una isometria, in generale). Per dimostrare l’unicità occorre dimostrare che: se due
forme canoniche dello stesso tipo sono equivalenti allora sono coincidenti.
Consideriamo una isometria X 7→ P X + Q.
2
2
2
2
Supponiamo trasformi xa2 + yb2 − 1 7−→ α( xc2 + yd2 − 1). Necessariamente
Q = 0 in quanto la trasformazione non produce termini lineari nel polinomio trasformato. Inoltre α = 1 in quanto una tale trasformazione non
modifica il termine costante. Dunque l’isometria è una trasformazione or2
2
2
2
togonale X 7→ P X, e induce la trasformazione xa2 + yb2 7−→ xc2 + yd2 ; poiché
una trasformazione ortogonale conserva lo spettro degli autovalori, allora
{ a12 , b12 } = { c12 , d12 } e da qui segue che a = c e b = d. Analogamente si tratta
2
2
2
2
il caso in cui si abbia xa2 − yb2 − 1 7−→ α( xc2 − yd2 − 1).
Supponiamo ora che l’isometria trasformi x2 −py 7−→ α(x2 −qy). La trasformazione ortogonale associata trasforma x2 7−→ αx2 e conserva lo spettro
degli autovalori, quindi {1, 0} = {α, 0} e α = 1, dunque x2 − py 7−→ x2 − qy.
Inoltre la trasformazione ortogonale conserva gli autospazi e conserva le
norme dei vettori, quindi (1, 0) 7→ (±1, 0) e (0, 1) 7→ (0, ±1), e quindi
(x, y) 7→ (±x, ±y). Infine deve aversi Q = 0 poiché l’isometria non produce un termine x o un termine costante nel polinomio trasformato. Di
conseguenza x2 − py 7−→ x2 ± py e quindi p = q.
12
Geometria euclidea delle coniche affini reali
Nel libro di Sernesi il §32.
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
17
13
Le superfici quadriche nello spazio affine
tridimensionale
Le superfici quadriche affini complesse
Proposizione 13.1. Ogni polinomio quadratico in C[x, y, z] è equivalente
a una e una sola delle seguenti forme canoniche, il cui luogo degli zeri è
descritto nella colonna a destra:
x2 + y 2 + z 2 − 1
generale a centro
2
2
x +y −z
generale senza centro
x2 + y 2 + z 2
x2 + y 2 − 1
x2 − y
cono
cilindro
cilindro
x2 + y 2
x2 − 1
due piani incidenti
due piani paralleli
x2
un piano ’doppio’
Dimostrazione. Caso particolare n = 3 del risultato ottenuto nel § 9, riformulato utilizzando le forme canoniche alternative. Le definizioni generali di
cono e di cilindro sono richiamate nelle osservazioni seguenti.
Osservazione 13.2. Sia K un campo arbitrario. Dati in An (K) un sottoinsieme C e un punto V , si dice che C è un cono di vertice V se per ogni
P ∈ C r {V } si ha hV, P i ⊆ C. L’insieme C può essere ∅ o ridotto al singolo
{V }, ma se C r {V } =
6 ∅ allora C è unione di rette passanti per V , e in
particolare C 3 V . Notare che un insieme può essere un cono rispetto a
più vertici (come ad esempio una retta o un sottospazio lineare). Esempio:
l’insieme x2 + y 2 + z 2 = 0 è un cono con vertice nell’origine.
Osservazione 13.3. Sia K un campo arbitrario. Dati in An (K) un sottoinsieme C e una direzione δ, si dice che C è un cilindro di direzione δ se per
ogni P ∈ C la retta per P con direzione δ è contenuta in C. L’insieme C
può essere ∅, ma se C 6= ∅ allora C è unione di rette parallele alla direzione δ. Notare che un insieme può essere un cilindro rispetto a più direzioni
(come ad esempio una retta o un sottospazio lineare). Esempio: i luoghi
x2 + y 2 − 1 = 0 e x2 − y = 0 sono cilindri con la direzione dell’asse z.
Definizione 13.4. Se f ∈ C[x, y, z] è un polinomio quadratico, il luogo degli
zeri V (f ) si considera in ogni caso una superficie complessa; se inoltre
f non è equivalente a x2 allora V (f ) si dice una superficie quadrica nello
spazio A3 (C).
18
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
Le superfici quadriche affini reali
Proposizione 13.5. Ogni polinomio quadratico in R[x, y, z] è equivalente
a una e una sola delle seguenti forme canoniche, il cui luogo degli zeri è
descritto nella colonna a destra:
x2 + y 2 + z 2 − 1
x2 + y 2 + z 2 + 1
x2 + y 2 − z 2 − 1
x2 − y 2 − z 2 − 1
x2 + y 2 − z
x2 − y 2 − z
ellissoide
vuoto
iperboloide a una falda o rigato
iperboloide a due falde
paraboloide a forma di calice o lente
paraboloide a sella o rigato
x2 + y 2 + z 2
x2 + y 2 − z 2
x2 + y 2 + 1
x2 + y 2 − 1
x2 − y 2 − 1
x2 − y
un punto
cono
vuoto
cilindro
cilindro
cilindro
x2 + y 2
x2 − y 2
x2 + 1
x2 − 1
una retta
due piani incidenti
vuoto
due piani paralleli
x2
un piano ’doppio’
Dimostrazione. Conseguenza del secondo risultato nel § 9, nel caso particolare n = 3, riformulato in termini di forme canoniche alternative, conseguenza
ottenuta eliminando ripetizioni di forme canoniche che risultino equivalenti
tramite affinità ’elementari’, e utilizzando infine le seguenti considerazioni.
Per distinguere due forme canoniche di tipo generale, oltre al rango
rg(A), possiamo utilizzare alcune proprietà geometriche:
• l’ellissoide è limitato,
• gli iperboloidi sono illimitati,
– quello a una falda è rigato,
– quello a due falde non contiene rette;
• per i due paraboloidi:
– quello a calice non contiene rette,
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
19
– quello a sella è rigato;
Per distinguere due forme canoniche di tipo degenere, oltre ai ranghi rg(M )
e rg(A), sono sufficienti le proprietà geometriche indicate nell’enunciato e la
seguente osservazione relativa ai due cilindri con rg(A) = 2:
− per il cilindro x2 + y 2 − 1 le sezioni piane non degeneri sono ellissi,
− per il cilindro x2 − y 2 − 1 le sezioni piane non degeneri sono iperboli.
Tutte le proprietà indicate sono invarianti per equivalenza affine: se un luogo
V (f ) soddisfa una tale proprietà e se g è equivalente a f allora anche V (g)
soddisfa la stessa proprietà.
Definizione 13.6. Se f ∈ R[x, y, z] è un polinomio quadratico, non equivalente a una forma canonica come x2 + 1 oppure x2 + y 2 oppure x2 + y 2 + 1
oppure x2 + y 2 + z 2 oppure x2 + y 2 + z 2 + 1, allora il luogo degli zeri V (f ) si
considera una superficie reale; se inoltre f non è equivalente a x2 , allora
V (f ) si dice una superficie quadrica nello spazio A3 (R).
14
Geometria delle superfici quadriche affini
Lezione non trascritta. Si tratta di descrivere il luogo degli zeri dei polinomi
in forma canonica elencati nella proposizione precedente, e questo è facile
per quelli degeneri, rappresentare la forma del luogo degli zeri per i polinomi generali nell’elenco, indicata dalle denominazioni stesse, e verificare le
proprietà enunciate nella dimostrazione della proposizione precedente.
20
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
Curve e superfici quadriche proiettive
In questa ultima parte lavoreremo in uno spazio proiettivo numerico Pn (K). Introdurremo la definizione degli zeri di un polinomio omogeneo nello spazio proiettivo.
Per le forme quadratiche in tre o quattro variabili a coefficienti in C o in R studieremo il corrispondente luogo degli zeri nello spazio proiettivo di dimensione due o tre,
e arriveremo a una definizione di curve e superfici quadriche nello spazio proiettivo.
Utilizzeremo la terminologia ricordata nella Osservazione 6.5.
15
Il luogo degli zeri proiettivo di un polinomio
omogeneo
Nello spazio proiettivo Pn (K) un punto [x0 , . . . , xn ] ha coordinate omogenee (x0 , . . . , xn ) ∈ K n+1 r {0}. Sia f ∈ K[x0 , . . . , xn ]. Il polinomio
f definisce una funzione su K n+1 . Affinché f definisca una funzione su
Pn (K) la condizione necessaria e sufficiente è che si abbia f (tx0 , . . . , txn ) =
f (x0 , . . . , xn ). Non è difficile vedere che solo un polinomio costante soddisfa
questa condizione.
Supponiamo f sia un polinomio omogeneo (non nullo) di grado d, cioè
contenga solo monomi di grado d. In tal caso si ha l’uguaglianza
f (tx0 , . . . , txn ) = td f (x0 , . . . , xn )
Anche in questa situazione particolare non è definita una funzione su Pn (K),
a meno che non sia d = 0. Tuttavia si ha che:
se f (x0 , . . . , xn ) = 0 allora f (tx0 , . . . , txn ) = 0 per ogni t,
e questo significa che la condizione f (x0 , . . . , xn ) = 0 dipende dal punto
[x0 , . . . , xn ] e non dalla particolare scelta delle coordinate omogenee (x0 , . . . , xn )
per il punto.
Se f ∈ K[x0 , . . . , xn ] è un polinomio omogeneo, un punto p[x0 , . . . , xn ] ∈
Pn (K) tale che f (x0 , . . . , xn ) = 0 si dice uno zero (proiettivo) di f , e
l’insieme
V (f ) := {p ∈ Pn (K) : f (x0 , . . . , xn ) = 0}
si dice il luogo degli zeri proiettivo di f .
Studieremo il luogo degli zeri proiettivo per i polinomi omogenei quadratici, i.e. le forme quadratiche (non nulle).
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
21
16
Trasformazioni di coordinate omogenee
Una proiettività ϕ : Pn (K) → Pn (K), data da una formula
0
x0
r00 · r0n
x0
x0
· 7−→ · · · · =: ·
xn
rn0 · rnn
xn
x0n
che scriviamo in breve come X 7→ RX, dove R è una matrice invertibile,
sarà anche detta una trasformazione di coordinate omogenee. Si ha
ϕ = P(Φ) dove Φ : K n+1 → K n+1 è l’automorfismo rappresentato dalla
stessa formula precedente. L’automorfismo Φ induce una trasformazione di
polinomi, un automorfismo
∼
K[x0 , . . . , xn ] −→
K[x0 , . . . , xn ]
dell’anello dei polinomi, che scriviamo
f (x0 , . . . , xn )
7−→
f 0 (x0 , . . . , xn ) := f (x00 , . . . , x0n )
= f (Φ(x0 , . . . , xn ))
che si denota con il simbolo Φ∗ . Ricordiamo che le proiettività di Pn (K)
formano un gruppo, che abbiamo indicato con il simbolo Pro(Pn (K)).
Le formule precedenti rappresentano nello stesso modo due fatti distinti.
Cambiamento di riferimento proiettivo
Sono dati in Pn (K) due riferimenti R e R0 . Un punto P ha coordinate omogenee
(x0 , . . . , xn ) e (x00 , . . . , x0n ), rispetto a R e R0 , collegate mediante la trasformazione
precedente. Allora l’uguaglianza f 0 (x0 , . . . , xn ) = f (x00 , . . . , x0n ) implica che:
VR (f 0 ) = VR0 (f )
Di conseguenza, per un sottoinsieme dello spazio proiettivo, la proprietà di
essere descritto come luogo degli zeri di un polinomio omogeneo, rispetto a
un opportuno riferimento, è indipendente dal riferimento.
Trasformazione mediante proiettività
Sono dati una proiettività ϕ : Pn (K) → Pn (K) e un riferimento proiettivo. Se un
punto P ha coordinate (x0 , . . . , xn ) allora il punto ϕ(P ) ha coordinate (x00 , . . . , x0n ),
22
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
ottenute mediante la trasformazione precedente. Allora l’uguaglianza f 0 (x0 , . . . , xn ) =
f (x00 , . . . , x0n ) implica che:
V (f 0 ) = ϕ−1 (V (f ))
Di conseguenza, per un sottoinsieme dello spazio proiettivo la proprietà
di essere il luogo degli zeri di un polinomio omogeneo è invariante per
proiettività.
17
Equivalenza di polinomi omogenei
Definizione 17.1. Due polinomi omogenei f, g ∈ K[x0 , . . . , xn ] si dicono
equivalenti tramite proiettività se si può scrivere una relazione
g(x0 , . . . , xn ) = α f (Φ(x0 , . . . , xn ))
= α f 0 (x0 , . . . , xn )
per mezzo di una trasformazione di coordinate omogenee ϕ di Pn (K) e uno
scalare non nullo α in K × opportuni.
Se f, g sono equivalenti, si hanno le due interpretazioni: rappresentano
uno stesso insieme proiettivo rispetto a due riferimenti opportuni: VR (g) =
VR0 (f ); oppure rappresentano rispetto a uno stesso riferimento due insiemi
equivalenti tramite proiettività: V (g) = ϕ−1 (V (f )).
Osservazione 17.2. La relazione di equivalenza tramite proiettività è una
relazione di equivalenza nell’insieme dei polinomi omogenei in K[x0 , . . . , xn ].
Osservazione 17.3. È chiaro che: due polinomi omogenei che sono equivalenti
tramite proiettività hanno lo stesso grado; in altre parole il grado di un
polinomio omogeneo è invariante per equivalenza proiettiva.
Esempio 17.4. I polinomi omogenei di grado 1, che identifichiamo con le forme
lineari (non nulle) su K n+1 , sono tutti equivalenti (e gli iperpiani proiettivi sono
tutti equivalenti). Consideriamo un polinomio a0 x0 + · · · + an xn e supponiamo
ai 6= 0. La trasformazione di coordinate
(x0 , . . . , xi , . . . , xn ) 7−→ (x0 , . . . , a0 x0 + · · · + an xn , . . . , xn )
(è invertibile) induce una trasformazione di polinomi
xi 7−→ a0 x0 + · · · + an xn
Inoltre due monomi xi e xj sono equivalenti tramite la trasformazione di coordinate
che scambia le due coordinate indicate e tiene fisse tutte le altre coordinate.
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
23
Esempio 17.5. Per i polinomi omogenei di grado 2, che identifichiamo con le forme
quadratiche (non nulle) su K n+1 , la teoria riportata nel §7 fornisce, a meno di
equivalenza proiettiva, forme canoniche diagonali
a0 x20 + · · · + ar x2r
con r ≤ n. Queste forme canoniche sono ulteriormente semplificate quando K è il
campo complesso o il campo reale.
Osservazione 17.6. Una forma canonica di rango 1 è un monomio αx2 . Di conseguenza le forme quadratiche di rango 1 sono quelle del tipo
α(r0 x0 + · · · + rn xn )2
proporzionali al quadrato di una forma lineare (non nulla). In questo caso il luogo
degli zeri è un iperpiano dello spazio proiettivo, e non si considera un insieme
quadratico.
18
Le coniche nel piano proiettivo
Le coniche proiettive complesse
Proposizione 18.1. Ogni forma quadratica (non nulla) in C[x, y, z] è equivalente a una e una sola delle seguenti forme canoniche:
x2 + y 2 + z 2
generale
x2 + y 2
due rette
x2
una retta ’doppia’
il cui luogo degli zeri è descritto nella colonna a destra.
Dimostrazione. Caso particolare del risultato sulle forme quadratiche complesse enunciato nel §7.
Definizione 18.2. Se f ∈ C[x, y, z] è una forma quadratica (non nulla), il
luogo degli zeri V (f ) si considera in ogni caso una curva complessa; se f
non è equivalente a x2 allora V (f ) si dice una conica nel piano P2 (C).
Le coniche proiettive reali
Proposizione 18.3. Ogni forma quadratica (non nulla) in R[x, y, z] è equivalente tramite proiettività a una e una sola delle seguenti forme canoniche:
24
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
x2 + y 2 + z 2
x2 + y 2 − z 2
vuoto
generale
x2 + y 2
x2 − y 2
un punto
due rette
x2
una retta ’doppia’
il cui luogo degli zeri è descritto nella colonna a destra.
Dimostrazione. Conseguenza del teorema di Sylvester sulle forme quadratiche reali enunciato nel §7.
Definizione 18.4. Se f ∈ R[x, y, z] è una forma quadratica (non nulla), non
equivalente a una forma canonica come x2 oppure x2 +y 2 oppure x2 +y 2 +z 2 ,
allora il luogo degli zeri V (f ) si considera una curva reale; se inoltre f non
è equivalente a x2 , allora V (f ) si dice una conica nel piano P2 (R).
La ’forma’ delle coniche proiettive
Esempio 18.5. Sia K un campo arbitrario (di caratteristica 6= 2). La forma
quadratica xy − z 2 è di tipo generale. Sia C in P2 (K) il suo luogo degli zeri.
L’insieme C è in biiezione con la retta proiettiva P1 (K). L’applicazione
P1 (K) −→ P2 (K)
[u, v] 7−→ [u2 , v 2 , uv]
∼
è iniettiva e la sua immagine è C, e quindi la restrizione P1 (K) −→
C è una
biiezione.
In particolare, quando il campo K è C o R, poiché in questo caso la
conica C è equivalente a una qualsiasi conica generale, si ottiene che:
• la conica generale in P2 (R) è in biiezione con P1 (R) ∼
= S1;
• la conica generale in P2 (C) è in biiezione con P1 (C) ∼
= S2.
19
Le superfici quadriche nello spazio proiettivo
tridimensionale
Le superfici quadriche proiettive complesse
Proposizione 19.1. Ogni forma quadratica (non nulla) in C[x, y, z, w] è
equivalente a una e una sola delle seguenti forme canoniche:
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
25
x2 + y 2 + z 2 + w2
generale
x2
cono
+
y2
+
z2
x2 + y 2
due piani
x2
un piano ’doppio’
il cui luogo degli zeri è descritto nella colonna a destra.
Dimostrazione. Caso particolare del risultato sulle forme quadratiche complesse enunciato nel §7. Si veda l’osservazione seguente per la definizione
generale di cono proiettivo.
Osservazione 19.2. Sia K un campo arbitrario. Dati in Pn (K) un sottoinsieme C e un punto V , si dice che C è un cono di vertice V se per ogni
P ∈ C r {V } si ha L(V, P ) ⊆ C. Esempio: l’insieme x2 + y 2 + z 2 = 0 è un
cono con vertice nel punto [0, 0, 0, 1].
Definizione 19.3. Se f ∈ C[x, y, z, w] è una forma quadratica (non nulla),
il luogo degli zeri V (f ) si considera in ogni caso una superficie complessa;
se f non è equivalente a x2 , allora V (f ) si dice una superficie quadrica nello
spazio P3 (C).
Le superfici quadriche proiettive reali
Proposizione 19.4. Ogni forma quadratica (non nulla) in R[x, y, z, w] è
equivalente a una e una sola delle seguenti forme canoniche:
x2 + y 2 + z 2 + w2
x2 + y 2 + z 2 − w2
x2 + y 2 − z 2 − w2
vuoto
generale, non contiene rette
generale, insieme rigato
x2 + y 2 + z 2
x2 + y 2 − z 2
un punto
cono
x2 + y 2
x2 − y 2
una retta
due piani
x2
un piano ’doppio’
il cui luogo degli zeri è descritto nella colonna a destra.
Dimostrazione. Conseguenza del teorema di Sylvester sulle forme quadratiche reali enunciato nel §7. Si veda l’osservazione precedente per la definizione generale di cono proiettivo. Restano da verificare le due affermazioni
che riguardano le rette contenute in due di questi luoghi degli zeri. Questa
26
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
verifica si fa imitando quella relativa alle superfici quadriche affini, e non
viene trascritta.
Definizione 19.5. Se f ∈ R[x, y, z, w] è una forma quadratica (non nulla),
non equivalente a una forma canonica come x2 + y 2 oppure x2 + y 2 + z 2
oppure x2 + y 2 + z 2 + w2 , allora il luogo degli zeri V (f ) si considera una
superficie reale; se inoltre f non è equivalente a x2 , allora V (f ) si dice
una superficie quadrica nello spazio P3 (R).
20
Polinomi quadratici in coordinate affini e forme
quadratiche in coordinate omogenee
Nel sottoinsieme affine U0 : x0 6= 0 dello spazio proiettivo Pn (K) un punto ha
coordinate omogenee e anche coordinate affini, e i due sistemi di coordinate
sono collegati dalle formule
[x0 , x1 , . . . , xn ] 7−→ (x1 /x0 , . . . , xn /x0 )
[1, y1 , . . . , yn ]
(y1 , . . . , yn )
7−→
∼
che rappresentano la biiezione U0 −→
An (K).
Questa corrispondenza induce una corrispondenza tra polinomi
(
polinomi di grado 1
in K[y1 , . . . , yn ]
)
(
←→
7−→
a1 y1 + · · · + an yn + b
forme lineari
in K[x0 , x1 , . . . , xn ]
non divisibili per x0
)
bx0 + a1 x1 + · · · + an xn
7−→
che si utilizza ad esempio per definire la chiusura proiettiva in Pn (K) di un
sottospazio affine di U0 .
Per mettere in evidenza come questa definizione sia derivata dalla relazione tra le coordinate osserviamo la seguente descrizione:
L(1, y1 , . . . , yn )
7−→ x0 `(x1 /x0 , . . . , xn /x0 )
7−→
`(y1 , . . . , yn )
L(x0 , x1 , . . . , xn )
Esiste una corrispondenza indotta anche in grado due.
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
27
polinomi di grado 2
in K[y1 , . . . , yn ]
P
aij yi yj +
P
)
(
←→
7−→
bi y i + c
7−→
(
forme quadratiche
in K[x0 , x1 , . . . , xn ]
non divisibili per x0
cx20 +
P
bi x0 xi +
P
)
aij xi xj
per la quale osserviamo la seguente descrizione:
F (1, y1 , . . . , yn )
7−→ x20 f (x1 /x0 , . . . , xn /x0 )
7−→
f (y1 , . . . , yn )
F (x0 , x1 , . . . , xn )
La matrice associata a un polinomio quadratico f (y1 , . . . , yn ) coincide
con la matrice associata alla corrispondente forma quadratica F (x0 , x1 , . . . , xn ).
Quindi f e F hanno lo stesso rango, e in particolare f è di tipo generale se
e solo se F è tipo generale (ved. Definizione 6.4 e Osservazione 6.5).
Il luogo degli zeri proiettivo V (F ) in Pn (K) = U0 t H0 è descritto come
segue. Ricordiamo le identificazioni U0 ∼
= An (K) e H0 ∼
= Pn−1 (K). Si ha:
• V (F ) ∩ U0 ∼
= V (f )
• V (F ) ∩ H0 ∼
= V (f2 )
dove
P f2 è la componente omogenea di grado 2 di f , i.e. la forma quadratica
aij yi yj nella rappresentazione precedente.
L’insieme V (F )∩H0 si dice il luogo degli zeri all’infinito di f (e il luogo
degli zeri proiettivo V (F ) si potrebbe considerare un ’completamento proiettivo’ di V (f ), almeno quando siano verificare alcune ulteriori condizioni,
che non approfondiamo).
21
Equivalenza affine implica equivalenza
proiettiva
Una affinità ϕ : An (K) → An (K) data da una formula
0
y1
p11 · p1n
y1
q1
y1
· 7−→ · ·
·
· + · =:
·
yn
pn1 · pnn
yn
qn
yn0
28
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
induce un automorfismo vettoriale
1
0
x0
q1 p11
x1
7−→
·
·
·
qn pn1
xn
Φ : K n+1 −→ K n+1 dato da
0
x0
x0
· 0
x01
x1
· p1n
=:
·
·
·
x0n
xn
· pnn
che rappresenta la proiettività ϕ
b : Pn (K) → Pn (K) estensione di ϕ, essendo
ϕ
b = P(Φ).
Osserviamo che per i = 1, . . . , n il polinomio di grado uno ϕi (y1 , . . . , yn )
e la forma lineare Φi (x0 , x1 , . . . , xn ) sono corrispondenti tramite la corrispondenza ricordata nella sezione precedente, e in particolare si ha
Φi (1, y1 , . . . , yn ) = ϕi (y1 , . . . , yn )
mentre per i = 0 si ha Φ0 (1, y1 , . . . , yn ) = 1.
Proposizione 21.1. Sia f (y1 , . . . , yn ) un polinomio quadratico, corrispondente alla forma quadratica F (x0 , . . . , xn ). Allora il polinomio f 0 (y1 , . . . , yn ),
trasformato di f tramite ϕ, è ancora un polinomio quadratico e corrisponde
alla forma quadratica F 0 (x0 , . . . , xn ), trasformata di F tramite Φ.
Dimostrazione. Dato il diagramma di corrispondenze
f (y1 , . . . , yn )
F (x0 , . . . , xn )
7−→
7−→
ϕ
7−→
Φ
f 0 (y1 , . . . , yn )
F 0 (x0 , . . . , xn )
verifichiamo che si ha
f 0 (y1 , . . . , yn )
=
F 0 (1, y1 , . . . , yn )
Infatti, applicando l’osservazione precedente e le definizioni, si ha la
seguente catena di uguaglianze: F 0 (1, y1 , . . . , yn ) = F (Φ(1, y1 , . . . , yn )) =
F (1, y10 , . . . , yn0 ) = f (y10 , . . . , yn0 ) = f (ϕ(y1 , . . . , yn )) = f 0 (y1 , . . . , yn ).
Poiché f 7−→ F allora F non è divisibile per x0 . Poiché F 7−→ F 0 tramite
Φ anche F 0 non è divisibile per x0 . Per la relazione tra F 0 e f 0 dimostrata
in precedenza (si vedano le formule esplicite nella sezione precedente) e per
il fatto che F 0 non è divisibile per x0 , si ha che il polinomio f 0 è di grado
due. E quindi la relazione tra F 0 e f 0 dimostrata in precedenza significa che
F 0 7−→ f 0 ovvero f 0 7−→ F 0 .
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
29
Come applicazione, possiamo dare per la precedente Proposizione 6.1
una seconda dimostrazione che non richiede calcoli con le matrici associate. Ricordiamo l’enunciato: se f è un polinomio quadratico, rappresentato
dalla matrice M , il polinomio f 0 , trasformato di f tramite ϕ, è ancora un
polinomio quadratico, e la matrice associata a f 0 è data da
M 0 = tRM R.
Dimostrazione. Il polinomio f e la forma corrispondente F sono rappresentati dalla stessa matrice M ; la forma trasformata F 0 è rappresentata
dalla matrice congruente tRM R (per la teoria delle forme quadratiche); il
polinomio trasformato f 0 è quadratico e corrisponde alla forma F 0 , per la
Proposizione precedente; dunque la matrice M 0 che rappresenta f 0 coincide
con la matrice tRM R che rappresenta F 0 .
La corrispondenza definita nella sezione precedente tra polinomi quadratici e forme quadratiche, lasciando cadere la restrizione sulle forme quadratiche, rimane iniettiva. La Proposizione precedente dice che tale corrispondenza è compatibile con l’equivalenza di polinomi e di forme. Di conseguenza
è ben definita per passaggio al quoziente una corrispondenza
polinomi quadratici
forme quadratiche 6= 0
in K[y1 , . . . , yn ]
in K[x0 , x1 , . . . , xn ]
−→
equivalenza affine
equivalenza proiettiva
Questa corrispondenza tra insiemi quoziente è suriettiva ma non iniettiva.
Non iniettiva perché può essere che f e g in K[y1 , . . . , yn ] non siano
equivalenti tramite affinità mentre sono equivalenti tramite proiettività le
corrispondenti F e G in K[x0 , x1 , . . . , xn ] (ved. sezione successiva).
Suriettiva perché: ogni forma quadratica in K[x0 , x1 , . . . , xn ] è equivalente a una forma quadratica non divisibile per x0 . (Una forma del tipo
x0 (a0 x0 + · · · + an xn ) in cui sia ai 6= 0 per qualche i > 0 è equivalente a x0 xi
che è equivalente a x20 − x2i ; una forma del tipo a0 x20 è equivalente a x21 .)
In definitiva questo spiega perché la geometria quadratica proiettiva è
più semplice della geometria quadratica affine.
22
Curve e superfici quadriche affini e proiettive
Vogliamo esplicitare il risultato che conclude la sezione precedente nel caso
di due o tre coordinate affini, quindi tre o quattro coordinate omogenee,
quando il campo K sia C o R. Indichiamo le coordinate affini con i simboli
30
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
x, y, z e le coordinate omogenee con i simboli X, Y, Z, W , con le convenzioni
consuete. Svolgiamo nei vari casi il seguente esercizio:
per ogni polinomio quadratico f in K[x, y, . . .] in forma canonica,
− scrivere la corrispondente forma quadratica F in K[X, Y, . . .],
− classificare F rispetto alla equivalenza proiettiva,
− classificare l’insieme degli seri all’infinito di f .
Coniche affini e proiettive
Per i polinomi quadratici in R[x, y] in forma canonica (Proposizione 10.3) e
di tipo generale la seguente tabella risponde alla richiesta dell’esercizio:
f
V (f )
F
V (F )
V (F ) ∩ HZ
x2 + y 2 − 1
x2 + y 2 + 1
x2 − y 2 − 1
x2 − y
ellisse
vuoto
iperbole
parabola
X2 + Y 2 − Z2
X2 + Y 2 + Z2
X2 − Y 2 − Z2
X2 − Y Z
generale
vuoto
generale
generale
vuoto
vuoto
due punti
un punto
Il compito di completare la tabella con le forme canoniche degeneri è lasciato
al lettore.
Si deduce la seguente tabella in cui la classificazione delle coniche in
2
A (R) di tipo generale viene caratterizzata in termini di punti all’infinito
(nella colonna a destra sono indicate le proprietà geometriche che si potrebbe
dimostrare sono collegate con il numero dei punti all’infinito):
conica
punti all’infinito
proprietà geometriche
ellisse
iperbole
parabola
vuoto
due punti
un punto
limitata
illimitata, asintoti
illimitata, senza asintoti
Il compito di sviluppare l’esercizio per i polinomi quadratici in C[x, y] in
forma canonica (Proposizione 10.1) è lasciato al lettore.
Superfici quadriche affini e proiettive
Per i polinomi quadratici in R[x, y, z] in forma canonica (Proposizione 13.5)
e di tipo generale la seguente tabella risponde alla richiesta dell’esercizio:
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche
31
f
V (f )
2
2
2
x +y +z −1
x2 + y 2 + z 2 + 1
x2 + y 2 − z 2 − 1
x2 − y 2 − z 2 − 1
x2 + y 2 − z
x2 − y 2 − z
ellissoide
vuoto
iperboloide una falda
iperboloide due falde
paraboloide a calice
paraboloide a sella
F
V (F )
2
2
2
2
X +Y +Z −W
X2 + Y 2 + Z2 + W 2
X2 + Y 2 − Z2 − W 2
X2 − Y 2 − Z2 − W 2
X 2 + Y 2 − ZW
X 2 − Y 2 − ZW
gen. senza rette
vuoto
gen. rigata
gen. senza rette
gen. senza rette
gen. rigata
V (F ) ∩ HW
vuoto
vuoto
conica generale
conica generale
un punto
degenere
Il compito di completare la tabella con le forme canoniche degeneri è lasciato
al lettore.
Si deduce la seguente tabella in cui la classificazione delle superfici quadriche in A3 (R) viene parzialmente interpretata in termini del luogo dei
punti all’infinito:
quadrica affine
luogo all’infinito
ellissoide
iperboloide
paraboloide
vuoto
conica generale
conica degenere
Il compito di sviluppare l’esercizio per i polinomi quadratici in C[x, y, z]
in forma canonica (Proposizione 13.1) è lasciato al lettore.
32
Lucio Guerra - Polinomi quadratici, curve e superfici quadriche