SOMMARIO DELLE MISURE DIRETTE
Studio delle caratteristiche degli strumenti usati, evidenziare possibili
errori sistematici, correggerli.
– p. 1/21
SOMMARIO DELLE MISURE DIRETTE
Studio delle caratteristiche degli strumenti usati, evidenziare possibili
errori sistematici, correggerli.
Effettuare misure ripetute, se possibile. Trattazione statistica
dell’indeterminazione.
– p. 1/21
SOMMARIO DELLE MISURE DIRETTE
Studio delle caratteristiche degli strumenti usati, evidenziare possibili
errori sistematici, correggerli.
Effettuare misure ripetute, se possibile. Trattazione statistica
dell’indeterminazione.
Se non è possibile, assumere come indeterminazione l’inverso della
sensibilità dello strumento.
– p. 1/21
SOMMARIO DELLE MISURE DIRETTE
Studio delle caratteristiche degli strumenti usati, evidenziare possibili
errori sistematici, correggerli.
Effettuare misure ripetute, se possibile. Trattazione statistica
dell’indeterminazione.
Se non è possibile, assumere come indeterminazione l’inverso della
sensibilità dello strumento.
Applicare il criterio del 3σ per l’eventuale rigetto di dati anomali.
– p. 1/21
SOMMARIO DELLE MISURE DIRETTE
Studio delle caratteristiche degli strumenti usati, evidenziare possibili
errori sistematici, correggerli.
Effettuare misure ripetute, se possibile. Trattazione statistica
dell’indeterminazione.
Se non è possibile, assumere come indeterminazione l’inverso della
sensibilità dello strumento.
Applicare il criterio del 3σ per l’eventuale rigetto di dati anomali.
Stima più attendibile della grandezza misurata: x
– p. 1/21
SOMMARIO DELLE MISURE DIRETTE
Studio delle caratteristiche degli strumenti usati, evidenziare possibili
errori sistematici, correggerli.
Effettuare misure ripetute, se possibile. Trattazione statistica
dell’indeterminazione.
Se non è possibile, assumere come indeterminazione l’inverso della
sensibilità dello strumento.
Applicare il criterio del 3σ per l’eventuale rigetto di dati anomali.
Stima più attendibile della grandezza misurata: x
Stima dell’interminazione: σx .
– p. 1/21
SOMMARIO DELLE MISURE DIRETTE
Studio delle caratteristiche degli strumenti usati, evidenziare possibili
errori sistematici, correggerli.
Effettuare misure ripetute, se possibile. Trattazione statistica
dell’indeterminazione.
Se non è possibile, assumere come indeterminazione l’inverso della
sensibilità dello strumento.
Applicare il criterio del 3σ per l’eventuale rigetto di dati anomali.
Stima più attendibile della grandezza misurata: x
Stima dell’interminazione: σx .
Significato statistico: semiampiezza dell’intervallo di confidenza
centrato sulla media e avente probabilità di includere il valore vero
pari al 68%
– p. 1/21
LA DISTRIBUZIONE DI POISSON
Distribuzione discreta detta degli eventi rari.
– p. 2/21
LA DISTRIBUZIONE DI POISSON
Distribuzione discreta detta degli eventi rari.
Limite della binomiale quando p → 0 e n → ∞, tale per cui λ = np
rimane finito.
– p. 2/21
LA DISTRIBUZIONE DI POISSON
Distribuzione discreta detta degli eventi rari.
Limite della binomiale quando p → 0 e n → ∞, tale per cui λ = np
rimane finito.
Corrisponde a realizzare un grandissimo numero di prove
bernoulliane, ove la probabilità di successo della singola prova è
estremamente bassa.
– p. 2/21
LA DISTRIBUZIONE DI POISSON
Distribuzione discreta detta degli eventi rari.
Limite della binomiale quando p → 0 e n → ∞, tale per cui λ = np
rimane finito.
Corrisponde a realizzare un grandissimo numero di prove
bernoulliane, ove la probabilità di successo della singola prova è
estremamente bassa.
Si applica alle misure di conteggio, ovvero allo studio di fenomeni
(nello spazio o nel tempo) di cui siamo interessati al numero di
occorrenze, indipendentemente dall’ordine. Fenomeni
intrinsecamente discreti, soggetti a fluttuazioni.
– p. 2/21
LA DISTRIBUZIONE DI POISSON
Distribuzione discreta detta degli eventi rari.
Limite della binomiale quando p → 0 e n → ∞, tale per cui λ = np
rimane finito.
Corrisponde a realizzare un grandissimo numero di prove
bernoulliane, ove la probabilità di successo della singola prova è
estremamente bassa.
Si applica alle misure di conteggio, ovvero allo studio di fenomeni
(nello spazio o nel tempo) di cui siamo interessati al numero di
occorrenze, indipendentemente dall’ordine. Fenomeni
intrinsecamente discreti, soggetti a fluttuazioni.
Esempio 1:
decadimento radioattivo di un nucleo instabile. Il numero
di nuclei che potenzialmente possono decadere è molto grande (per
una mole di materiale radioattivo il numero di nuclei è dell’ordine di
1023 , numero di Avogadro). La probabilità di
"successo" (decadimento) per ogni nucleo è molto piccola.
Esempio 2: conteggi di fotoni provenienti da una sorgente celeste per
mezzo di un fotorivelatore (ad es: CCD)
– p. 2/21
Distribuzione di Poisson:MODELLO CONCETTUALE
La distribuzione di Poisson può essere anche derivata direttamente
in un modo che mostra come essa possa essere applicata a
situazioni reali.
– p. 3/21
Distribuzione di Poisson:MODELLO CONCETTUALE
La distribuzione di Poisson può essere anche derivata direttamente
in un modo che mostra come essa possa essere applicata a
situazioni reali.
Consideriamo un rivelatore in grado di contare il numero di fotoni
provenienti da una sorgente celeste (stella, galassia) nell’intervallo di
tempo ∆t.
– p. 3/21
Distribuzione di Poisson:MODELLO CONCETTUALE
La distribuzione di Poisson può essere anche derivata direttamente
in un modo che mostra come essa possa essere applicata a
situazioni reali.
Consideriamo un rivelatore in grado di contare il numero di fotoni
provenienti da una sorgente celeste (stella, galassia) nell’intervallo di
tempo ∆t.
La distribuzione di Poisson si basa su tre assunzioni di base,
elencate nella diapositiva che segue.
– p. 3/21
Distribuzione di Poisson:MODELLO CONCETTUALE
La distribuzione di Poisson può essere anche derivata direttamente
in un modo che mostra come essa possa essere applicata a
situazioni reali.
Consideriamo un rivelatore in grado di contare il numero di fotoni
provenienti da una sorgente celeste (stella, galassia) nell’intervallo di
tempo ∆t.
La distribuzione di Poisson si basa su tre assunzioni di base,
elencate nella diapositiva che segue.
La generalità delle assunzione permette di utilizzare questo tipo di
modello per analizzare diversi sistemi reali.
– p. 3/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Si assumano le seguenti ipotesi:
1. La probabilità di contare un fotone in ∆t è proporzionale a ∆t quando
∆t è infinitesimo:
P (1; dt) = λ dt
– p. 4/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Si assumano le seguenti ipotesi:
1. La probabilità di contare un fotone in ∆t è proporzionale a ∆t quando
∆t è infinitesimo:
P (1; dt) = λ dt
2. La probabilità di osservare più di un fotone in intervallo infinitesimo dt
sia trascurabile rispetto a quella che ne arrivi esattamente uno. In
altre parole, o contiamo un fotone o non ne contiamo nessuno.
P (1; dt) + P (0; dt) = 1
se l’intervallo di tempo dt è infinitesimo.
– p. 4/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Si assumano le seguenti ipotesi:
1. La probabilità di contare un fotone in ∆t è proporzionale a ∆t quando
∆t è infinitesimo:
P (1; dt) = λ dt
2. La probabilità di osservare più di un fotone in intervallo infinitesimo dt
sia trascurabile rispetto a quella che ne arrivi esattamente uno. In
altre parole, o contiamo un fotone o non ne contiamo nessuno.
P (1; dt) + P (0; dt) = 1
se l’intervallo di tempo dt è infinitesimo.
3. Il numero di fotoni che arrivano in un intervallo finito sia indipendente
dal numero di fotoni che arrivano in un altro intervallo disgiunto →
eventi compatibili indipendenti.
– p. 4/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Si assumano le seguenti ipotesi:
1. La probabilità di contare un fotone in ∆t è proporzionale a ∆t quando
∆t è infinitesimo:
P (1; dt) = λ dt
2. La probabilità di osservare più di un fotone in intervallo infinitesimo dt
sia trascurabile rispetto a quella che ne arrivi esattamente uno. In
altre parole, o contiamo un fotone o non ne contiamo nessuno.
P (1; dt) + P (0; dt) = 1
se l’intervallo di tempo dt è infinitesimo.
3. Il numero di fotoni che arrivano in un intervallo finito sia indipendente
dal numero di fotoni che arrivano in un altro intervallo disgiunto →
eventi compatibili indipendenti.
Problema: Qual è la probabilità che in un intervallo di tempo t il
fotorivelatore conti esattamente un numero prefissato x di fotoni ?
– p. 4/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Dalle ipotesi assunte si ha:
P (1; dt) = λ dt =⇒ P (0; dt) = 1 − λ dt
– p. 5/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Dalle ipotesi assunte si ha:
P (1; dt) = λ dt =⇒ P (0; dt) = 1 − λ dt
Qual è la probabilità che in un intervallo di tempo t si osservino x = 0
fotoni ?
– p. 5/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Dalle ipotesi assunte si ha:
P (1; dt) = λ dt =⇒ P (0; dt) = 1 − λ dt
Qual è la probabilità che in un intervallo di tempo t si osservino x = 0
fotoni ?
Essa è pari alla probabilità composta che zero fotoni arrivino in t − dt
e zero fotoni arrivino nel successivo intervallo dt. Poichè i due
intervalli temporali non sono sovrapposti, gli eventi sono compatibili
indipendenti:
P (0; t) = P (0; t − dt) P (0; dt)
– p. 5/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Dalle ipotesi assunte si ha:
P (1; dt) = λ dt =⇒ P (0; dt) = 1 − λ dt
Qual è la probabilità che in un intervallo di tempo t si osservino x = 0
fotoni ?
Essa è pari alla probabilità composta che zero fotoni arrivino in t − dt
e zero fotoni arrivino nel successivo intervallo dt. Poichè i due
intervalli temporali non sono sovrapposti, gli eventi sono compatibili
indipendenti:
P (0; t) = P (0; t − dt) P (0; dt)
Utilizzando le assunzioni 1. e 2. si ha:
P (0; t) = P (0; t − dt) [1 − P (1; dt)] = P (0; t − dt) [1 − λdt], da cui
P (0; t) − P (0; t − dt)
= −λP (0; t − dt)
dt
– p. 5/21
LA DISTRIBUZIONE DI POISSON
Questa corrisponde all’equazione differenziale:
d
P (0; t) = −λ P (0; t) −→ P (0; t) = e−λt + cost.
dt
– p. 6/21
LA DISTRIBUZIONE DI POISSON
Questa corrisponde all’equazione differenziale:
d
P (0; t) = −λ P (0; t) −→ P (0; t) = e−λt + cost.
dt
Da P (0; 0) = 1 si ottiene la costante di integrazione cost = 0
– p. 6/21
LA DISTRIBUZIONE DI POISSON
Questa corrisponde all’equazione differenziale:
d
P (0; t) = −λ P (0; t) −→ P (0; t) = e−λt + cost.
dt
Da P (0; 0) = 1 si ottiene la costante di integrazione cost = 0
– p. 6/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Consideriamo la probabilità che x fotoni arrivino nell’intervallo t + dt.
In base alle assunzioni fatte ci sono solo due possibilità:
– p. 7/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Consideriamo la probabilità che x fotoni arrivino nell’intervallo t + dt.
In base alle assunzioni fatte ci sono solo due possibilità:
1. x fotoni arrivano in t e 0 arrivano in dt.
– p. 7/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Consideriamo la probabilità che x fotoni arrivino nell’intervallo t + dt.
In base alle assunzioni fatte ci sono solo due possibilità:
1. x fotoni arrivano in t e 0 arrivano in dt.
2. x − 1 fotoni arrivano in t e 1 arrivano in dt
– p. 7/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Consideriamo la probabilità che x fotoni arrivino nell’intervallo t + dt.
In base alle assunzioni fatte ci sono solo due possibilità:
1. x fotoni arrivano in t e 0 arrivano in dt.
2. x − 1 fotoni arrivano in t e 1 arrivano in dt
Poichè le due combinazioni sono incompatibili si deve applicare il
teorema della probabilità totale; e ricordando le relazioni
P (1; dt) = λ dt
P (x; t + dt) = P (x − 1; t) · P (1; dt) + P (x; t) · P (0; dt)
= P (x − 1; t) λ dt + P (x; t) (1 − λ dt)
Quindi si ottiene l’equazione differenziale:
P (x; t + dt) − P (x; t)
d
≡
P (x; t) = −λ P (x; t) + λ P (x − 1; t)
dt
dt
– p. 7/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Si tratta di un’equazione differenziale recursiva che lega P (x; t) a
P (x − 1; t). Riscriviamola nella forma:
d
P (x; t) + λ P (x; t) = λ P (x − 1; t)
dt
– p. 8/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Si tratta di un’equazione differenziale recursiva che lega P (x; t) a
P (x − 1; t). Riscriviamola nella forma:
d
P (x; t) + λ P (x; t) = λ P (x − 1; t)
dt
Moltiplichiamo tutti i termini per eλt :
d
P (x; t) + λ eλt P (x; t) = λ eλt P (x − 1; t)
e
dt
λt
– p. 8/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Si tratta di un’equazione differenziale recursiva che lega P (x; t) a
P (x − 1; t). Riscriviamola nella forma:
d
P (x; t) + λ P (x; t) = λ P (x − 1; t)
dt
Moltiplichiamo tutti i termini per eλt :
d
P (x; t) + λ eλt P (x; t) = λ eλt P (x − 1; t)
e
dt
λt
Il membro di sinistra può essere espresso come una derivata totale:
d λt
e P (x; t) = λ eλt P (x − 1; t)
dt
– p. 8/21
Distribuzione di Poisson:MODELLO CONCETTUALE
d λt
e P (x; t) = λ eλt P (x − 1; t)
dt
Integriamo rispetto a t:
λt
e P (x; t) =
Z
t
0
λ eλτ P (x − 1; τ )dτ + cost.
– p. 9/21
Distribuzione di Poisson:MODELLO CONCETTUALE
d λt
e P (x; t) = λ eλt P (x − 1; t)
dt
Integriamo rispetto a t:
λt
e P (x; t) =
Z
t
0
λ eλτ P (x − 1; τ )dτ + cost.
Si noti che per t = 0 −→ P (x; 0) = 0, l’integrale è identicamente
nullo per cui la costante di integrazione è pure cost = 0. Otteniamo
quindi:
P (x; t) = λe−λt
Z
0
t
eλτ P (x − 1; τ )dτ
– p. 9/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Applichiamo la relazione recursiva per x = 1 per ottenere P (1; t).
P (1; t) = λ e
−λt
= λ e−λt
= λ e−λt
Z
Z
Z
t
eλτ P (0; τ )dτ
0
t
eλτ e−λτ dτ
0
t
dτ
0
= λ t e−λt
– p. 10/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Applichiamo la relazione recursiva per x = 1 per ottenere P (1; t).
P (1; t) = λ e
−λt
= λ e−λt
= λ e−λt
Z
Z
Z
t
eλτ P (0; τ )dτ
0
t
eλτ e−λτ dτ
0
t
dτ
0
= λ t e−λt
Quindi applichiamo la formula recursiva per x = 2 per ottenere
P (2; t); poi per x = 3 per ottenere P (3; t) e così via.
– p. 10/21
Distribuzione di Poisson:MODELLO CONCETTUALE
Applichiamo la relazione recursiva per x = 1 per ottenere P (1; t).
P (1; t) = λ e
−λt
= λ e−λt
= λ e−λt
Z
Z
Z
t
eλτ P (0; τ )dτ
0
t
eλτ e−λτ dτ
0
t
dτ
0
= λ t e−λt
Quindi applichiamo la formula recursiva per x = 2 per ottenere
P (2; t); poi per x = 3 per ottenere P (3; t) e così via.
Infine, per un valore arbitrario si ha:
(λt)x −λt
e
P (x; t) =
x!
– p. 10/21
DISTR. DI POISSON: VALORE DI ASPETTAZIONE
x è la variabile casuale discreta, e λ è un parametro, il cui significato
è quello di rate o tasso medio di arrivo dei fotoni nell’unità di tempo
(in unità di [ fotoni /s]).
– p. 11/21
DISTR. DI POISSON: VALORE DI ASPETTAZIONE
x è la variabile casuale discreta, e λ è un parametro, il cui significato
è quello di rate o tasso medio di arrivo dei fotoni nell’unità di tempo
(in unità di [ fotoni /s]).
Per comprendere meglio, valutiamo il valore di aspettazione, ovvero il
numero atteso di fotoni nell’intervallo di tempo t
– p. 11/21
DISTR. DI POISSON: VALORE DI ASPETTAZIONE
x è la variabile casuale discreta, e λ è un parametro, il cui significato
è quello di rate o tasso medio di arrivo dei fotoni nell’unità di tempo
(in unità di [ fotoni /s]).
Per comprendere meglio, valutiamo il valore di aspettazione, ovvero il
numero atteso di fotoni nell’intervallo di tempo t
Ponendo µ = λt, otteniamo:
µx −µ
P (x; µ) =
e
x!
– p. 11/21
DIST. DI POISSON VALORE DI ASPETTAZIONE
E(x)
+∞
X
µx −µ
e
=
x
x!
x=0
+∞
X
µx −µ
=
e
x
x!
x=1
+∞
X
µx−1
−µ
= µe
(x − 1)!
x=1
= µ e−µ
+∞ y
X
µ
y=0
y!
= µ e−µ eµ
= µ
E(x) = µ = λt da cui si comprende che λ rappresenta il tasso medio
di arrivo dei fotoni.
– p. 12/21
DIST. DI POISSON VALORE DI ASPETTAZIONE
E(x)
+∞
X
µx −µ
e
=
x
x!
x=0
+∞
X
µx −µ
=
e
x
x!
x=1
+∞
X
µx−1
−µ
= µe
(x − 1)!
x=1
= µ e−µ
+∞ y
X
µ
y=0
y!
= µ e−µ eµ
= µ
E(x) = µ = λt da cui si comprende che λ rappresenta il tasso medio
di arrivo dei fotoni.
Si noti che λt corrisponde al parametro n p della distribuzione
binomiale.
– p. 12/21
DISTRIBUZIONE DI POISSON: VARIANZA
2
E(x )
=
+∞
X
2µ
x
x=0
x
x!
e−µ
+∞
X
µx−1 −µ
= µ
e
x
(x
−
1)!
x=1
= µ
+∞
X
x=1
µx−1 −µ
e
(x − 1) + 1
(x − 1)!
" +∞
#
+∞
y
y
X µ
Xµ
−µ
= µ
y
e
+
e−µ
y!
y!
y=0
y=0
= µ
" +∞
X
y=0
2
V ar(x) = E x
− E(x)
2
y P (y) +
+∞
X
y=0
#
P (y) = µ (µ + 1)
= µ (µ + 1) − µ2 = µ
coincide E(x).
– p. 13/21
LA DISTRIBUZIONE DI POISSON
– p. 14/21
LA DISTRIBUZIONE DI POISSON
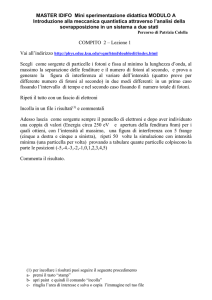
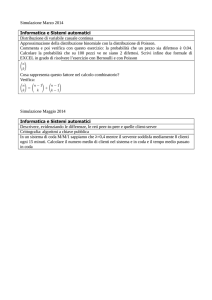
link: Come dipende la dist. di Poisson dal parametro µ
All’aumentare di µ la poissoniana diventa sempre più
simmetrica fino a convergere verso a distribuzione di
Gauss.
– p. 15/21
LA DISTRIBUZIONE DI POISSON
link: Come dipende la dist. di Poisson dal parametro µ
All’aumentare di µ la poissoniana diventa sempre più
simmetrica fino a convergere verso a distribuzione di
Gauss.
La poissoniana può essere utilizzata per approssimare
la binomiale nel caso in cui il numero di prove n → ∞ e
p → 0, in modo tale che n p sia finito. La poissoniana
corrispondente è quella definita dal parametro µ = np.
n!
P (x; n) =
px q n−x =
x! (n − x)!
µx µ n−x µx −µ
n!
1−
e
≈
x! (n − x)! n
n
x!
– p. 15/21
Una tipica applicazione astronomica
In Astronomia un tipico fenomeno rappresentato dalla statistica di
Poisson è il conteggio di dei fotoni provenienti da una sorgente
luminosa su di un dispositivo fotorivelatore.
– p. 16/21
Una tipica applicazione astronomica
In Astronomia un tipico fenomeno rappresentato dalla statistica di
Poisson è il conteggio di dei fotoni provenienti da una sorgente
luminosa su di un dispositivo fotorivelatore.
Anche assumendo che il sensore sia esposto ad una sorgente
uniforme, la risposta che ne deriva non è uniforme: ogni elemento
rivelatore, detto pixel, registrerà un numero di fotoni incidenti
leggermente diverso e l’aspetto globale dell’immagine astronomica è
quello di un’immagine granulosa, rumorosa, che varia senza alcuna
possibilità di previsione da un pixel all’altro e in funzione del tempo.
– p. 16/21
Una tipica applicazione astronomica
In Astronomia un tipico fenomeno rappresentato dalla statistica di
Poisson è il conteggio di dei fotoni provenienti da una sorgente
luminosa su di un dispositivo fotorivelatore.
Anche assumendo che il sensore sia esposto ad una sorgente
uniforme, la risposta che ne deriva non è uniforme: ogni elemento
rivelatore, detto pixel, registrerà un numero di fotoni incidenti
leggermente diverso e l’aspetto globale dell’immagine astronomica è
quello di un’immagine granulosa, rumorosa, che varia senza alcuna
possibilità di previsione da un pixel all’altro e in funzione del tempo.
Il numero di fotoni che giungono in un intervallo di tempo (o di
spazio) sul singolo pixel segue la statistica di Poisson, poichè i) il
numero di fotoni totali è enorme, ii) mentre è bassa la probabilità
diincidenza, iii) ed essi sono eventi indipendenti l’uno dall’altro.
– p. 16/21
Una tipica applicazione astronomica
Dunque se n è il numero di fotoni conteggiati da un certo pixel
(convenzionalmente si parla di segnale S = n), l’indeterminazione sul
conteggio (convenzionalmente si parla di rumore N - dall’inglese
√
noise) è N = n, per cui il parametro “rapporto segnale-rumore”, è
√
dato da S/N = n.
– p. 17/21
Una tipica applicazione astronomica
Dunque se n è il numero di fotoni conteggiati da un certo pixel
(convenzionalmente si parla di segnale S = n), l’indeterminazione sul
conteggio (convenzionalmente si parla di rumore N - dall’inglese
√
noise) è N = n, per cui il parametro “rapporto segnale-rumore”, è
√
dato da S/N = n.
Maggior numero di fotoni, migliore è la qualità dell’immagine
astronomica.
– p. 17/21
Una tipica applicazione astronomica
Dunque se n è il numero di fotoni conteggiati da un certo pixel
(convenzionalmente si parla di segnale S = n), l’indeterminazione sul
conteggio (convenzionalmente si parla di rumore N - dall’inglese
√
noise) è N = n, per cui il parametro “rapporto segnale-rumore”, è
√
dato da S/N = n.
Maggior numero di fotoni, migliore è la qualità dell’immagine
astronomica.
Grande apertura dei telescopi (collecting area) / lunghi tempi di
esposizione.
– p. 17/21
Una tipica applicazione astronomica
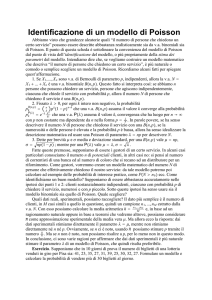
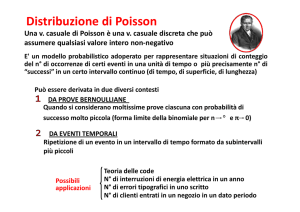
Pannello sinistro: immagine uniformemente illuminata
Pannello destro: immagine con rumore di Poisson.
a): Immagine simulata di galassie e stelle
b): Immagine simulata con aggiunta di rumore poissoniano.
– p. 18/21
LA DISTRIBUZIONE UNIFORME CONTINUA
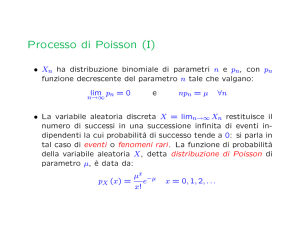
La variabile casuale x solo valori in [a, b], tutti
equiprobabili.
– p. 19/21
LA DISTRIBUZIONE UNIFORME CONTINUA
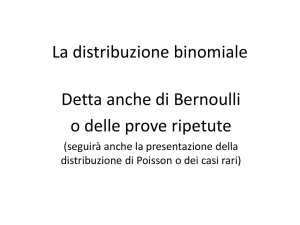
La variabile casuale x solo valori in [a, b], tutti
equiprobabili.
La densità di probabilità f (x) =cost in [a, b], nulla
esternamente all’intervallo.
– p. 19/21
LA DISTRIBUZIONE UNIFORME CONTINUA
La variabile casuale x solo valori in [a, b], tutti
equiprobabili.
La densità di probabilità f (x) =cost in [a, b], nulla
esternamente all’intervallo.
la cost. deriva dalla condizione di normalizzazione.
per x < a e per x > b;
f (x) = 0
f (x) =
1
= cost.
b−a
per a ≤ x ≤ b.
– p. 19/21
LA DISTRIBUZIONE UNIFORME CONTINUA
– p. 20/21
LA DISTRIBUZIONE UNIFORME CONTINUA
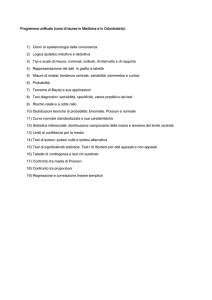
a+b
Valore di aspettazione E(x) =
2
– p. 21/21
LA DISTRIBUZIONE UNIFORME CONTINUA
a+b
Valore di aspettazione E(x) =
2
(b − a)2
Varianza V ar(x) =
12
– p. 21/21
LA DISTRIBUZIONE UNIFORME CONTINUA
a+b
Valore di aspettazione E(x) =
2
(b − a)2
Varianza V ar(x) =
12
b−a
≈ 0.3(b − a)
σ= √
12
– p. 21/21
LA DISTRIBUZIONE UNIFORME CONTINUA
a+b
Valore di aspettazione E(x) =
2
(b − a)2
Varianza V ar(x) =
12
b−a
≈ 0.3(b − a)
σ= √
12
Usata per trattare gli errori ogni qual volta si sa con
sicurezza che una certa variabile è contenuta in un
certo intervallo, ma non si ha alcun motivo per ritenere
alcuni valori più plausibili di altri.
– p. 21/21