1 ONDE E RAGGI
Consideriamo il campo lontano di un dipolo (elementare o corto)1
ζ Ih −jβr
e
sin θ
2λ r
(1)
1
Ih −jβr
e
sin θ
= Eθ
Hϕ = j
2λ r
ζ
che, come già detto, rappresenta una onda che si propaga nella direzione ir . Dopo aver introdotto
alcuni concetti generali sulle onde, ne vedremo in dettaglio le caratteristiche.
L’andamento spaziale della fase (e della ampiezza) del campo elettrico2 consente di
individuare le caratteristiche di questa onda. In particolare la forma delle superfici equifase
individua il tipo di onda.
Consideriamo ad esempio il campo (1). La sua fase è costante sulle sfere centrate sulla
posizione del dipolo. Ne segue che queste sfere sono le superfici equifase (o fronti d’onda )
dell’onda che si propaga. Anche l’ampiezza risulta costante sulle sfere equifase (che sono quindi
anche superfici equiampiezza). Una onda come la (1), in cui le superfici equifase ed equiampiezza
sono delle sfere concentriche, è detta onda sferica.
L’insieme delle superfici equifase individua un insieme di curve, che sono in ogni punto
ortogonali a una superfice equifase. Queste curve prendono il nome di raggi, e possono essere
considerate come le traiettorie lungo cui sipropaga l’onda (e quindi viaggia l’energia associata
all’onda stessa). Infatti, la direzione dei raggi coincide con il vettore di Poynting S. Nel vuoto
(e più in generale in un mezzo omogeneo nello spazio) i raggi sono delle rette. L’utilità del
concetto di raggio sta nel fatto che l’interazione di una onda con oggetti fisici può essere valutata
considerando l’interazione dei singoli raggi, considerati isolati3 .
Per una onda sferica, in particolare, i raggi sono le rette (più correttamente le semirette)
uscenti dal centro delle sfere equifase, punto che viene detto centro di fase della sorgente. La
geometria dei raggi e delle superfici equifase determina anche la variazione della ampiezza del
campo. Infatti, poiché le superfici equifase sono ortogonali ai raggi, la potenza attiva attraverso
ogni superfice equifase è costante. Nel caso di una onda sferica, l’area della superfice equifase
(sferica) varia in modo proporzionale a r 2 e pertanto l’ampiezza del vettore di Poynting deve
essere proporzionale a 1/(r 2 ), come infatti è.
Eθ = j
1
Per i dettagli, si vedano i paragrafi 13–17 della parte generale.
2
In questo caso il campo elettrico ha una sola componente, e quindi è possibile definire una fase
del campo. In casi più complessi questo non è possibile. Tuttavia, in tutti i casi di interesse, o
tutte le componenti del campo hanno la stessa variazione spaziale della fase oppure le variazioni
spaziali sono approssimativamente uguali.
3
A rigori, ogni raggio nonè una semiretta, ma ha una estensione laterale finita, proporzionale
√
a λD/2, essendo D la distanza tra sorgente e punto campo [L. Barclay, Propagation of Radiowaves, 2nd Ed., IET, London, UK, 2003, Par. 8.3.2]. Quindi l’interazione di una onda con
un oggetto può essere trattata considerando un raggio per volta solo se l’oggetto non varia sulla
larghezza del raggio stesso.
1
P
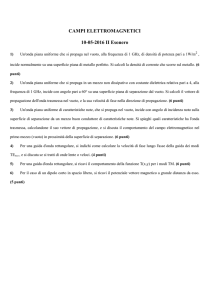
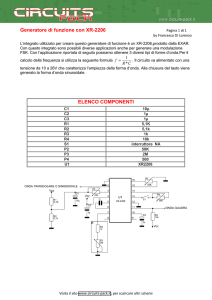
Fig.1: Fronti d’onda sferici (tratto pieno) e piani tangenti (tratteggio).
Consideriamo ora un punto P posto sulla superfice equifase a distanza r dalla sorgente.
Possiamo approssimare la superfice sferica in P con il suo piano tangente. Pertanto, vicino a P ,
la superfice equifase in P è approssimativamente piana. Se consideriamo altri punti sul raggio
per P , possiamo ripetere lo stesso discorso e ottenere quindi un insieme di superfici equifase
piane. Poiché ognuno di questi piani è ortogonale al vettore ir in P , questi piani equifase sono
tra loro paralleli. Si ha quindi una onda piana, in cui i raggi sono tra loro paralleli. La costanza
della potenza attraverso le superfici equifase ci consente di concludere che il vettore di Poynting è
costante tra un piano e l’altro (oltre che sullo stesso piano equifase) Pertanto, in una onda piana,
il vettore di Poynting, e di conseguenza il modulo del campo elettrico e del campo magnetico
sono costanti.
La conclusione è che, in una zona limitata attorno a ciascun punto P di una onda
sferica3 , l’onda sferica può essere approssimata da una onda piana.
Ha ovviamente interesse valutare l’estensione di questa zona, estensione che dipende
dall’errore accettabile, rispettivamente di ampiezzza e di fase. I relativi calcoli sono sviluppati
in apendice. Qui riporteremo solo i risultati.
P
R
∆T
P
Q
∆r
S
∆r
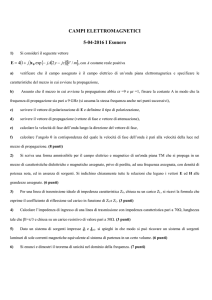
Fig.2: Geometria relativa al calcolo dell’errore di ampiezza (a sin.)
e di fase (a des.).
Per quanto riguarda l’errore di ampiezza, questo presente se il punto campo é più vicino
3
Se l’onda sferica è prodotta da un dipolo elementare o corto, il punto P deve ovviamente essere
in campo lontano del dipolo, visto che occorre anche una variazione di ampiezza proporzionale
a 1/(r) per avere una onda sferica.
2
(punto Q di Fig. 2) o lontano (punto R di Fig. 2) di P dalla sorgente. L’estensione 2∆r della
zona (centrata sulla sfera per P ) in cui l’errore di ampiezza
|campo di onda piana| − |campo di onda sferica| <ǫ
|campo di onda sferica|
ha una profondità proporzionale alla distanza r tra P la sorgente:
ǫ
r
=⇒
2∆r = ǫ r
(2)
2
Un errore accettabile é in genere ǫ = 10–20 %, corrispondente a un rapporto tra onda
piana e sferica di 0.8–1.5 dB. In tal caso la zona in cui l’onda sferica (1) può essere approssimata
con una onda piana ha una estensione (in direzione radiale) del 10–20 % di r. Quindi già a
distanza di qualche decina di lunghezze d’onda questa zona é profonda alcune volte λ.
Un errore di fase si ha invece se ci si sposta lateralmente rispetto a P (la variazione di
fase lungo il raggio per P é l stessa per l’onda piana e per quella sferica). L’errore di fase tra le
due onde, sferica e piana, nel punto S di Fig. 2 vale
∆r =
β
∆T 2
2r
edè sempre negativo (la fase vera in Q é sempre minore di quella in P ).
Dalla relazione precedente ricaviamo il ∆T massimo per un dato errore di fase accettabile
∆φM
r
r
r
2r
rλ
r ∆φM
∆φM =
∆φM =
λ
(3)
∆T =
β
π
λ π
avendo usato la relazione tra β e λ. Assumendo un errore di fase massimo accettabile di 5o , si
trova che già a distanze di qualche decina di λ la zona accettabile ha una estensione laterale di
circa 2λ.
∆φ0 = −
2 ONDE PIANE
Una onda piana é, come vedremo, una soluzione delle equazioni di Maxwell priva di
significato fisico. Vedremo infatti che essa non rispetta le condizioni di Sommerfeld, e richiede
una sorgente di estensione infinita. Abbiamo però mostrato che una onda sfrica può essere molto
ben approssimata da una onda piana, sia pure in una zona di estensione finita. Limitatamente
a questa zona, quindi é possibile studiare la propagazione della nostra onda sferica, e la sua
interazione con oggetti fisici, considerando in sua vece una onda piana. Vediamo quindi le
principali proprietà delle onde piane, e studieremo poi le interazioni di tali onde piane con
superfici piane di separazione tra due mezzi.
Per prima cosa determiniamo la forma di una onda piana. Come detto nel paragrafo
precedente, una onda piana deve avere entrambi i campi, elettrico e magnetico, con ampiezza
costente, e con una fase (intesa come fase comune di tutte le tre componenti) costante su un
insieme di piani paralleli. Un insieme di piani paralleli é individuato da un vettore costante k,
e i vari piani hanno equazione
3
k·r =A
(4)
dove la costante A individua i vari piani. Pertanto tutte le componenti di entrambi i campi
devono avere una fase data (a meno di una costante diversa per ciascuna componente) dal
primo membro di (4). Tenendo anche conto che l’ampiezza deve essere costante ovunque, si
trova come forma generale delle onde piane
E(r) = E0 exp −j k · r
H(r) = H0 exp −j k · r
(5)
con E0 e H0 vettori costanti. Imponiamo che le (5) soddisfino le equazioni di Maxwell, in
assenza di sorgenti e per un mezzo omogeneo nello spazio, e per semplicità anche isotropo. Non
supporremo invece di essere nel vuoto, situazione che emergerà come caso particolare dei risultati
che troveremo. Sostituendo le (5) nelle equazioni di Maxwell
∇ × E = −jωµH
∇ × H = jωεE
(6)
∇ · εE = 0
∇ · µH = 0
si ottiene allora
∇ × E0 exp −jk · r = ∇ exp −jk · r × E0 = −jωµH0 exp −jk · r
∇ × H0 exp −jk · r = ∇ exp −jk · r × H0 = jωεE0 exp −jk · r
(7)
∇ · εE0 exp −jk · r = ∇ exp −jk · r · εE0 = 0
∇ · µH0 exp −jk · r = ∇ exp −jk · r · µH0 = 0
x vale
Calcoliamo il gradiente di exp −jk · r componente per componente. La componente
∂
∂
∇ exp −jk · r · ix =
exp −jk · r =
exp −j(kx x + ky y + kz z)
∂x
∂x
= −jkx exp −j(kx x + ky y + kz z)
e analogamente per le altre. Segue quindi
∇ exp −jk · r = −jk exp −jk · r
Sostituendo nelle (7) e semplificando i fattori esponenziali segue
4
(8)
−jk × E0 = −jωµH0
−jk × H0 = jωεE0
−jk · εE0 = 0
−jk · µH0 = 0
ovvero, essendo ε e µ costanti
k × E0 = ωµH0
k × H0 = −ωεE0
e
k·E=0
k·H=0
(9)
(10)
Le (9,10) sono le sole condizioni cui devono soddisfare campi e vettore k per avere onde
piane.
Le (10) implicano che k é ortogonale ai campi. Inoltre, dalle (9), segue che anche E0 e
H0 sono ortogonali e quindi E0 , H0 , k formano una terna rettangola (levogira).
Notiamo poi che k é anche ortogonale ai piani in cui i campi sono costanti, ovvero
individua la direzione dello spazio in cui i campi variano. Ricordando quanto detto sulla
propoagazione di onde sferiche, segue allora che k, o più precisamente il suo versore ik , individua la direzione di propagazione dell’onda piana.
Per risolvere le equazioni moltiplichiamo vettorialmente la prima delle (9) per k e sostituiamo la seconda
k × k × E0 = ωµ k × H0 = −ω 2 εµE0
Sviluppando il primo membro, e ricordando che k · E0 = 0, segue
k · E0 k − k · k E0 = − k · k E0 = −ω 2 εµE0
(11)
k · k = ω 2 εµ
(12)
che ha soluzioni non nulle solo se
Il primo membro della (12) è il quadrato del vettore k.
Scelto k in modo da soddisfare la (12), il vettore E0 può essere qualunque, purché
soddisfi a k · E0 = 0. Infine il vettore H0 sarà dato da
H0 =
1
k × E0
ωµ
(13)
che può essere invertita in
1
H×k
ωε
Ricapitolando, onde piane che si propagano in una direzione generica si ottengono prendendo un vettore k in quella direzione, che soddisfi la (12), e usando come campi
E=
5
E(r) = E0 exp −j k · r
(14)
1
k × E0 exp −j k · r
H(r) =
ωµ
dove E0 è un vettore qualunque, ma col vincolo k · E0 = 0.
I campi dati dalle (14), con le relative precisazioni, sono ovviamente soluzione delle
equazioni di Maxwell (6), in assenza di sorgenti, e per materiali spazialmente omogenei. E
questo avviene qualunque sia il vettore reale k purché soddisfi la (12).
Tuttavia, nella derivazione, non si é mai usato il fatto che k sia un vettore reale. Quindi
le (14) sono soluzione delle equazioni di Maxwell anche per k complesso qualunque, purché
soddisfi1 la (12).
Tutte queste soluzioni prendono ancora il nome di onde piane. Tuttavia il loro comportamento fisico, e anche alcune proprietà matematiche, dipendono dal vettore k. Distinguiamo
quindi tra
• Onde piane proprie o omogenee quando il vettore k ha una direzione reale, ovvero
può essere scritto nella forma
k = k ik
(15)
essendo ik un versore reale, e k un numero reale o complesso (ma non immaginario
puro);
• Onde piane in cut–off se Re k = 0. In tal caso il campo non si propaga, ma semplicemente si attenua in direzione ortogonale a k, che risulta essere immaginario puro.
• Onde piane improprie o inomogenee o evanescenti in tutti gli altri casi.
In altri termini, se il vettore k non soddisfa le condizioni di polarizzazione lineare,
allora l’onda é inomogenea. Se invece vi soddisfa, e la sua parte reale é diversa da zero, l’onda
é omogenea.
Nel caso del vuoto, per una onda omogenea si ha, da (12),
k · k = (k ik ) · (k ik ) = k2 = ω 2 ε0 µ0
Pertanto la costante k introdotta nella (15) coincide con la costante di propagazione.
Pertanto il vettore k viene detto vettore di propagazione.
Passiamo al caso generale. Se separiamo il vettore complesso k in parte reale e parte
immaginaria
k = β − jα
(16)
si trova che l’onda è omogenea se β e α sono paralleli oppure α = 0. In tutti gli altri casi l’onda
è inomogenea.
I vettori β e α caratterizzano la variazione del campo della onda piana (14). La variazione di un tale campo é infatti
exp −j k · r = exp [−j β · r] exp [− α · r] −→
1
modulo = exp [− α · r]
fase = −β · r
Se k é complesso, il primo membro della (12) è solo il quadrato del vettore k, edè diverso dal
suo modulo quadro: k · k 6= |k|2 (mentre queste due quantità sono uguali per vettori reali)
6
Questo campo ha quindi modulo costante se α · r = cost e fase costante se β · r = cost.
Queste sono equzioni di superfici, e più precisamente di piani, rispettivamente ortogonali ad α e
a β. Pertanto, per una onda piana, sia essa omogenea o inomogenea, le superfici equiampiezza,
e le superfici equifase (dette anche fronti d’onda) sono sempre dei piani. In particolare, per una
onda omogenea (e solo per questa), i piani equifase ed equiampiezza coincidono.
Notiamo anche che, per le proprietà del prodotto scalare, la (12) diventa
k · k = β − jα · β − jα = |β|2 − |α|2 − 2jβ · α = ω 2 εµ
Possiamo riscrivere la relazione precedente, separando parte reale e immaginaria, nella
forma
h i
|β|2 − |α|2 = ω 2 Re εµ
(17)
h i
1
(18)
β · α = − ω 2 Im εµ
2
Se il mezzo è privo di perdite, ε e µ reali e positivi, allora il secondo membro della
(18) è nullo, e segue che, se i vettori β e α sono entrambi diversi da zero, allora devono essere
ortogonali. Pertanto, per una onda piana inomogenea in un mezzo senza perdite, i piani equifase
ed equiampiezza sono ortogonali. Ricapitolando, in un mezzo senza perdite,
Onda omogenea
−→
α=0
Onda inomogenea
−→
β e α ortogonali
Invece, avere β = Re k = 0 richiede, in base alle (17,18), che il prodotto εµ sia reale
ma negativo.
Concludiamo notando che dalla (13)
H(r) =
1
k × E(r)
ωµ
segue, passando ai moduli,
|H(r)| =
1
|k|
|k × E(r)| =
|E(r)|
ω|µ|
ω|µ|
in quanto la (10) implica che k e E sono ortogonali.
Per una onda omogenea
|k| = ω
p
|εµ|
=⇒
p
r ω |εµ| ε 1
|k|
=
=
=
ω|µ|
ω|µ|
µ
|ζ|
ovvero il rapporto tra il modulo di E e quello di H è pari a |ζ|.
Per una onda inomogena, invece, i risultati sono diversi. Infatti
|k|2 = k · k∗ = |kx |2 + |ky |2 + |kz |2
k · k = kx2 + ky2 + kz2
p
in quanto almeno una delle componenti di k è complessa. Pertanto |k| 6= ω |εµ| e il rapporto
tra il modulo di E e quello di H è diverso da |ζ|.
7
6=
3 VETTORE DI POYNTING DI UNA ONDA PIANA
La forma generale di una onda piana che si propaga nella direzione del vettore k è data
dalle (14)
E(r) = E0 e−j k·r
1
k × E0 e−j k·r
H(r) =
ωµ
con k · E0 = 0. L’espressione (14) vale anche per onde piane inomogenee, con k dato dalla (16).
Calcoliamone il vettore di Poynting
−j k·r 2
e
2
1
1
∗ S = E × H∗ =
E0 × [k × E0 ] e−j k·r =
|E0 |2 k∗ − (k∗ · E0 ) E∗0
2
2ωµ
2ωµ
(19)
Se l’onda è omogenea, k è un vettore reale o proporzionale ad un vettore reale, ovvero
può essere espresso come
k = k̂ ik
√
con ik versore reale, e k̂ = ω εµ, eventualmente complesso k̂ = β̂ − j α̂, allora
k∗ · E0 = k̂∗ ik · E0 =
k̂∗
k̂
k̂ ik · E0 =
k̂∗
k̂
k · E0 = 0
e quindi
1
k̂∗
1
k̂∗
|E0 |2 k∗ e−2α̂ik ·r =
|E0 |2
|E0 |2 ik e−2α̂ik ·r
k e−2α̂ik ·r =
2ωµ
2ωµ
2ωµ
k̂
Ricordando che ζ = ωµ/k̂ segue infine
S=
1 |E0 |2
ik e−2α̂ik ·r
2 ζ∗
S=
(20)
(21)
ovvero S è orientato nella direzione di propagazione. In assenza di perdite, ζ ∗ è reale, α̂ = 0, e
di conseguenza anche S è reale e vale:
S=
1 |E0 |2
ik
2 ζ
(22)
Se β = 0, ovvero se k = −jα, allora ancora k∗ · E0 = 0 e dalla (19) segue
S=j
1
|E0 |2 α e−2α·r
2ωµ
Il vettore di Poynting è quindi immaginario puro, con la direzione di α, ovvero di
k. Pertanto una tale onda non trasporta potenza attiva, ma solo reattiva, nella direzione di
attenuazione.
8
Consideriamo infine il caso di una onda evanescente, ma, per semplicità, limitatamente
al caso di assenza di perdite. In tal caso β e α sono ortogonali, e possiamo scegliere il riferimento
in modo che β sia orientato lungo l’asse x e α lungo quello z. Si ha allora
k = kx ix − j|kz |iz
(23)
Risulta, in tal caso, k∗ · E0 6= 0, a meno che il campo non abbia la sola componente y.
Se quindi E = E0y iy , segue
1
1
|E0y |2 k∗ e−2|kz |z =
|E0y |2 [kx ix + j|kz |iz ] e−2|kz |z
(24)
2ωµ
2ωµ
Pertanto la componente x del vettore di Poynting è reale, mentre quella z risulta immaginaria pura.
Questa ultima considerazione (ma, ovviamente, non la equazione (24) ), vale anche nel
caso generale. Pertanto, per una onda evanescente in un mezzo privo di perdite, col riferimento
scelto in modo che k sia dato dalla (23), si ha flusso di potenza reale solo in direzione x (ovvero
in direzione di β), e di potenza reattiva solo in direzione z (ovvero in direzione di α).
S=
4 ANALISI DELLA PROPAGAZIONE
Consideriamo una onda piana omogenea, i cui campi sono dati dalle (14), e il cui vettore
di propagazione é dato da (si veda (15,12))
k = k ik
con
k2 = ω 2 εµ
(25)
essendo ε e µ le costanti del mezzo in cui si sviluppa l’onda piana.
Se siamo interessati alla propagazione libera dell’onda, in un mezzo illimitato e omogeneo, possiamo scegliere l’asse z lungo la direzione di propagazione, in modo che ik = iz .
Ovviamente, per la simmetria dello spazio (che é isotropo per ipotesi) tutte le direzioni del
piano (x, y) sono equivalenti, e quindi qualunque polarizzazione si propaga allo stesso modo, e
si conserva nella propagazione. Possiamo allora scegliere, ad esempio, un campo elettrico polarizzato lineramente lungo x, cui corrisponde un campo magnetico polarizzato linearmente lungo
y.
Le (14) forniscono allora, ricordando la scelta fatta di ik
E(r) = E0 ix exp −j kz
1
(26)
k
E0 iy exp −j kz = E0 iy exp −j kz
H(r) =
ωµ
ζ
dove naturalmente anche l’impedenza caratteristica
r
ωµ
ωµ
µ
ζ=
=
=p
(27)
k
ε
ω 2 εµ
dipende dal mezzo.
9
Poiché la polarizzazione dei campi non cambia, possiamo anche semplicemente considerare Ex (r) e Hy (r), che sono grandezze scalari.
La propagazione nel vuoto o in un mezzo senza perdite non presenta particolari differenze
tra loro. Diverso é il discorso in presenza di perdite. La presenza di perdite (qualunque ne sia
la causa) può essere tenuta in conto molto semplicemente nelle equazioni delle onde piane. Se
infatti utilizziamo la costante dielettrica efficace (complessa)1 ε(ω), allora le equazioni di Maxwell
possono essere risolte analogamente al caso senza perdite, scrivendo ancora (vedi (25))
k2 = ω 2 ε(ω)µ
(28)
e ricordando però che
ε(ω) = ε1 (ω) − jε2 (ω)
è un numero complesso. Questo ovviamente cambierà il comportamento fisico della soluzione,
ma anche alcuni dettagli matematici.
In particolare, l’equazione (28) ha due soluzioni2 , ma conviene scegliere una convenzione
per determinare k in modo da assegnare un significato univoco alla (26). In particolare vogliamo
che la (26) rappresenti una onda che si propaga nel verso positivo dell’asse z. Posto
k = β − jα
(29)
|E0 |e−αz cos(βz − ωt + ϕ0 )
(30)
con β, α reali, la (26) diventa, nel DT
che è ancora una onda 3 che viaggia nella direzione positiva dell’asse z se β > 0
Mentre l’onda viaggia, deve poi attenuarsi a causa della disspazione dovuta alle perdite.
Ciò richiede che anche α > 0. Pertanto la costante di propagazione k è la radice di k 2 che si
trova nel 40 quadrante del piano di Gauss.
Poiché ε2 > 0 allora k2 si trova nel 30 o 40 quadrante, con fase compresa in (−π, 0) Pertanto esisterà sempre una tale radice k con fase compresa tra −π/2 e 0 ovvero nel 40 quadrante.
I casi limite sono quelli corrispondenti a ε2 = 0 e si trattano come limite di ε2 > 0:
ε1 > 0 la radice k sarà sull’asse reale (mezzo senza perdite)
ε1 < 0 la radice k sarà immaginaria pura, con parte immaginaria negativa.
Il campo magnetico corrispondente a (30), si scrivera ancora formalmente nello stesso
modo, utilizzando come impedenza il valore
r
µ
ωµ
=
(31)
ζ=
k
ε(ω)
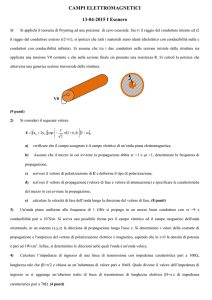
complesso. Ciò che cambierà sarà invece l’interpretazione delle soluzioni cosı̀ trovate (basta confrontare l’andamento del campo nella figura in questa pagina con quello relativo alla propagazione
in assenza di perdite).
1
Come detto precedentemente, da ora in poi ε(ω) tiene conto sia della dispersione, sia delle
perdite
2
Anche nel caso senza perdite ci sono due soluzioni, ma abbiamo implicitamete assunto k > 0.
Come vedremo, questa scelta é un caso particolare del criterio che useremo per k2 complesso.
3
Si ricordi che la definizione di onda non prevede che la configurazione viaggi mantenendosi
identica ma solo riconoscibile
10
campo elettrico (unità arbitrarie)
t=t0
t=t1
1
0.5
0
−0.5
−1
0
0.5
1
1.5
2
2.5
3
posizione (unità arbitrarie)
Fig. 1: Andamento del campo eletrico in un materiale con perdite (t1 > t0 )
5 PROPAGAZIONE IN PRESENZA DI PICCOLE PERDITE
Le perdite in un materiale si assumono piccole se:
ε2
≪1
(32)
ε1
avendo posto, per la costante dielettrica efficace, ε = ε1 − jε2 .
In tal caso è possibile (se necessario) approssimare costante di propagazione e impedenza,
e soprattutto calcolare in maniera perturbativa l’effetto delle perdite.
Per quanto riguarda la costante di propagazione, si ha, dalla (28):
s
p
p
ε2
√
k = ω ε(ω)µ = ω (ε1 − jε1 )µ = ω ε1 µ
1−j
ε1
e utilizzando la condizione di piccole perdite (32) è possibile espandere la radice stessa in serie
di Taylor arrestandosi al primo termine. Si ottiene cosı̀
ε2
√
k = ω ε1 µ 1 − j
(33)
2ε1
La costante di propagazione β coincide quindi, in questa approssimazione, con quella in
assenza di perdite, mentre ovviamente compare una attenuazione
ε2
2ε1
Per quanto riguarda l’impedenza si ottiene, allo stesso ordine di approssimazione e con
passaggi equivalenti partendo dalla (31)
α=β
ζ=
r
µ0
=
ε(ω)
r
−1/2 r µ0
µ0
ε2
ε2
≃
1−j
1+j
ε1
ε1
ε1
2ε1
(34)
Anche qui la parte reale di ζ coincide con quella in assenza di perdite, mentre la parte
immaginaria è positiva, cosı̀ come α che risulta, in presenza di perdite, sempre positiva. Tuttavia,
mentre la presenza di una parte immaginaria di k diversa da zero produce una attenuazione, e
11
quindi una differenza sostanziale nella fisica del fenomeno, una piccola parte immaginaria di ζ ha
solo l’effetto di produrre un piccolo sfasamento tra E e H, e può quindi essere spesso trascurata.
Usando la (30) segue che la attenuazione del campo su di un tratto di lunghezza D,
vale, in presenza di piccole perdite (32),
ε2
D
exp [−αD] ≃ exp −β
2ε1
Se D nonè troppo grande in termini di lunghezza d’onda nel materiale, ovvero se βD
é dell’ordine di grandezza dell’unità (o più piccolo), l’argomento dell’esponenziale é piccolo, a
causa della (32), e quindi l’attenuazione vale
ε2
ε2
D ≃1−β
D≃1
(35)
exp −β
2ε1
2ε1
In altri termini, é possibile trascurare ε2 in tali materiali, purché la distanza di interesse
sia al più paragonabile alla lunghezza d’onda. Come detto, tali materiali si dicono trasparenti1 .
1
A rigori, un matriale può essere trasparente anche se βD ≫ 1. Infatti, dalla (35) segue che un
materiale, con ε2 ≪ ε1 é trasparente fino a distanze di propagazione tali che
ε2
βD ≪1
2ε1
12
6 PROPAGAZIONE DISPERSIVA
Finora abbiamo considerato solo segnali sinusoidali puri. Pertanto anche il caso di mezzo
dispersivo, in cui ε (ed eventualmente µ) dipende dalla frequenza non presenta difficoltà. Basta
utilizzare il valore di ε(ω) relativo alla frequenza ω dell’onda.
Il caso di segnale non sinusoidale, invece, richiede una trattazione diversa per il caso
dispersivo. Infatti occorre ricordare che la velocità di propagazione di un’onda sinusoidale è
ω
β
Se β è una funzione lineare di ω tutte le frequenze hanno la stessa velocità. Poiché
un segnale non sinusoidale può essere sempre decomposto (Trasformata di Fourier) in onde
sinusoidali, tali onde viaggiano tutte con la stessa velocità e, al termine della propagazione, si
ricompongono ricostruendo lo stesso segnale di partenza.
Se invece β è una funzione non lineare di ω le varie componenti sinusoidali hanno velocità
diversa e quindi all’arrivo il segnale può non essere ricostruito in maniera corretta. Pertanto
ogni qualvolta β non è funzione lineare di ω ovvero se
vp =
d2 β
6= 0
dω 2
c’è il rischio di deformare i segnali che si propagano, se questi sono non sinusoidali. Ciò avviene
nei mezzi dispersivi ma può avvenire per altre cause, come le perdite (v. paragrafo precedente).
Poiché i segnali che vengono normalmente trasmessi non sono sinusoidali, ma sono comunque a
banda stretta, ovvero occupano un intervallo di frequenze piccolo rispetto alla frequenza centrale
di tale intervallo, è conveniente trattare la propagazione in un mezzo dispersivo solo di questi
segnali, che si prestano ad una analisi abbastanza semplice.
Consideriamo allora un segnale a banda stretta, di trasfomata con estensione 2∆ω centrata intorno a ω0 , che si propaga con una legge del tipo e−jkz con Re[k] funzione non lineare
di ω 1 .
Sia vT (t) il segnale per z = 0, e indichiamo con vR (t, z) il segnale per z ≥ 0 (col che,
ovviamente, vR (t, 0) = vT (t). In termini di trasformate di Fourier si ha
VR (ω, z) = VT (ω) e−jk(ω)z = V (ω) e−jβ(ω)z e−α(ω)z
Il corrispondente segnale vR (t, z) è reale ∀z, e da questo discende che VR (−ω, z) =
VR∗ (ω, z). Dalla relazione precedente segue quindi
β(−ω) = −β(ω)
α(−ω) = α(ω)
Assumiamo per semplicità il mezzo trasparente in tutta la banda del segnale, in modo
da poter trascurare l’attenuazione. Risulterà quindi
VR (ω, z) = VT (ω) e−jβ(ω)z
1
Il termine e−jkz risulta essere la funzione di trasferimento (o, più precisamente, la risposta
armonica) del canale di trasmissione. La trattazione di questo paragrafo si applica anche a
tutti quei casi in cui la fase di una funzione di trasferimento è una funzione non lineare della
frequenza, come ad esempio i filtri, indipendentemente dalla causa fisica di tale dipendenza
non lineare.
13
e per ottenere il segnale per z ≥ 0 occorre antitrasformare tale VR (ω, z), ottenendo
vR (t, z) = 2Re
Z
#
"Z
ω0 +∆ω
dω
dω
VR (ω)ejωt
= 2Re
VT (ω) e−jβ(ω)z ejωt
2π
2π
ω0 −∆ω
∞
0
utilizzando la proprietà di vT (t) (e quindi di vR (t, z)) di essere a banda limitata. Facendo la
sostituzione ω = σ + ω0 si ottiene
#
"Z
+∆ω
dσ
(36)
ejω0 t
vR (t, z) = Re
2 VT (ω0 + σ) e−jβ(ω0 +σ)z ejσt
2π
−∆ω
Poiché 2∆ω ≪ ω0 , possiamo sviluppare β(ω0 + σ) in serie di Taylor rispetto a σ intorno
a σ = 0, ottenendo
1
1
β(ω0 + σ) ≃ β(ω0 ) + β ′ (ω0 ) σ + β ′′ (ω0 + ξ) σ 2 = β0 + β1 σ + β2 σ 2
2
2
dove |ξ| < |σ| < ∆ω, dipende da σ.
Se (si veda l’appendice)
1
2
β2 σ z < 1 max |β ′′ (ω)| ∆ω 2 z ≪ 1
2
2
(37)
(38)
dove il massimo è calcolato in (ω0 − ∆ω, ω0 + ∆ω), è possibile trascurare il terzo termine della
espansione.
In tal caso infatti l’errore relativo vale circa 1/2 max |β ′′ (ω)| ∆ω 2 z. Si noti che, nonostante l’approssimazione sembri fatta nella espansione di β in serie di Taylor, l’errore relativo
è indipendente dai termini conservati in tale espansione e invece dipende da z, che entra solo
nell’integrale. Ciò perché l’errore di una approssimazione deve essere valutato come effetto sul
risultato finale di interesse, e non nel momento in cui tale approssimazione viene fatta.
Si può dare una forma quantitativa alla (38), in quanto in elettromagnetismo si assume
di poter trascurare un termine esponenziale (con esponente immaginario puro) a fattore in un
integrale (come quello in esame) se l’esponente è, in modulo, sempre minore di π/8. Quindi si
ottiene
max |β ′′ (ω)| ∆ω 2 z <
Se vale la (39), si ottiene
"Z
+∆ω
π
4
−jβ0′ σz
2 VT (ω0 + σ) e−jβ0 z e
vR (t, z) = Re
−∆ω
"Z
+∆ω
= Re
(39)
jσ(t−β0′ z)
2 VT (ω0 + σ) e
−∆ω
ejσt
dσ jω0 t
e
2π
#
#
(40)
dσ j(ω0 t−β0 z)
e
2π
Siamo interessati a valutare le modifiche del segnale dovute alla propagazione. Per z = 0
si ha, da (40),
#
"Z
+∆ω
jσt dσ jω0 t
(41)
vT (t) = vR (t, 0) = Re
e
2 VT (ω0 + σ) e
2π
−∆ω
14
L’integrale nella (41) é in generale una grandezza complessa. Supponiamo per semplicità
che sia reale e pari a vc (t), col che
vT (t) = vc (t) cos ω0 t
(42)
Allora l’integrale nella (40) vale vc (t − β1 z) per cui
vR (t, z) = vc (t − β1 z) cos(ω0 t − β0 z)
3
tensione (unità arbitrarie)
tensione (unità arbitrarie)
3
(43)
2
1
0
−1
−2
−3
2
1
0
−1
−2
−3
0
5
10
15
20
0
posizione (unità arbitrarie)
5
10
15
20
posizione (unità arbitrarie)
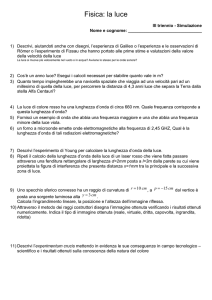
Fig. 1: Segnale a banda stretta per z = 0 e per z > 0.
Nelle figure 1a e 1b sono riportati, in unità arbitrarie, un possibile segnale a banda
stretta per z = 0 e per z > 0. In particolare abbiamo scelto, per z = 0, un vT (t) costituito
da una sinusoide a frequenza ω0 (portante), il cui inviluppo è costituito da vc (t) (un impulso
rettangolare nel caso della figura). L’inviluppo si sposta con una velocità (si veda il paragrafo
sulla propagazione per onde)
vg =
dω(β0 )
1
=
β1
dβ
detta velocità di gruppo. Un osservatore, solidale con un punto della sinusoide portante, ad
esempio col punto di argomento (fase) 0, si sposta invece con velocità
vf =
ω0
β0
detta appunto velocità di fase. Si noti che la velocità di gruppo è non solo la velocità con
cui si sposta l’informazione associata al segnale ma anche la velocità con cui si sposta l’energia
associata al segnale, che è presente solo dove vc è diverso da zero. Pertanto vg deve essere minore
della velocità della luce nel vuoto. Invece la vf non ha alcun significato fisico, e quindi potrebbe
essere ( e in molti casi è) maggiore della velocità della luce nel vuoto.
Pertanto, se vale la (39), l’informazione, rappresentata da vc (t), si propaga senza deformarsi. Se invece la (39) non è rispettata, l’inviluppo del segnale si deforma, e non è più
possibile ricostruire l’informazione associata. La presenza di dispersione, misurabile da |β2 |,
pone quindi un limite superiore alla massima distanza di trasmissione o, alternativamente alla
massima banda trasmissibile, corrispondente alla massima velocità di trasmissione. Un incremento di distanza può quindi essere ottenuto o a spese della velocità di trasmissione o riducendo
15
la dispersione del canale. Inoltre, a meno che la velocità non sia molto piccola, il limite sulla
distanza posto dalla dispersione è generalmente più piccolo di quello imposto dalle perdite.
Si noti infine che, nel caso non valga la (39), 1/β1 perde il significato di velocità di
gruppo. Infatti, per un segnale deformato, è difficile andare a definire in maniera precisa una
velocità a cui si sposta l’energia. In questi casi, quindi, 1/β1 può anche diventare maggiore della
velocità della luce nel vuoto.
7 ESEMPIO: PROPAGAZIONE DISPERSIVA IN FIBRA OTTICA
Una fibra ottica é un sottile cilindro di vetro (diametro esterno, normalizzato, pari a
125 µm) in cui la parte centrale, detta core (nucleo, con un diametro di 5–10 µm) ha una costante
dielettrica leggermente supperiore alla parte esterna, detta cladding (mantello). La differenza
di costante dielettrica (dell’ordine di grandezza dello 0.5 %) si ottiene mediante un it drogaggio
opportuno della zona centrale durante la fabbricazione.
I campi che si propagano nella fibra sono nel vicino infrarosso (intorno a 1.5 µm di
lunghezza d’onda), e tale propagazione avviene essenzialmente nel core, in quanto la piccola
differenza di costante dielettrica confina il campo essenzialmente nel nucleo della fibra (benché
una piccola parte del campo debordi nel mantello). Poiché il vetro, a tali frequenza, é dispersivo,
i fenomeni descritti nel paragrafo precedente avengono anche nelle fibre ottiche. La dispersione
dovuta alla variazione con ω della costante dielettrica della fibra é detta dispersione cromatica,
in quanto la sua causa é esattamente la stessa che produce la disperione della luce da parte di
un prisma di vetro1 . In realtà in una fibra ottica vi sono altre cause di dispersione2 , ma in molti
casi la dispersione dominante é quella cromatica. Pertanto é possibile utilizzare le considerazioni
del paragrafo precedente.
Il segnale ottico trasmesso nella fibra é costituito da una sequenza di impulsi modulati
(42) con vc (t) generalmente di forma gaussiana (troncata)
1
Si veda, in proposito un qualunque libro di ottica, o di fisica per i licei.
2
Le principali cause di dispersione, oltre a quella cromatica, sono la dispersione geometrica
e quella di polarizzazione. La dispersione geometrica é legata al confinamento dielettrico del
campo che si propaga. La costante di propagazione del campo é una media pesata delle costanti
di nucleo εn e mantello εm . Poiché il campo si trova essenzialmente nel nucleo, la costante di
√
propagazione é molto prossima a ω εn µ0 , con una piccola variazione (in basso) che dipende
da quanto il campo deborda nel mantello. Al crescere della frequenza il campo si concentra
√
di più nel nucleo, e quindi aumenta εn µ0 . Quindi frequenze diverse nella banda del segnale
avranno velocità di propagazione diverse, il che da luogo a propagazione dispersiva. Questa
dispersione é in genere più piccola di quella cromatica, ma la tendenza attuale é di realizzare
fibre con una dispersione geometrica più grande ma di segno opposto a quella cromatica nella
banda di interesse, in modo da ridurre, spesso considerevolmente, la dispersione totale.
La dispersione di polarizzione é legata al fatto che piccole dissimetrie della fibra fanno si che
le due polarizzazioni lineari ortogonali che possono esistere in un cilindo abbiano velocità di
propagazione differenti. Se l’onda si propaga coinvolgendole due polarizzazioni, allora é presente
un’allargamento degli impulsi trasmessi. Tale effetto é in generale piccolo, ma può diventare
significativo se la dispersione geometrica é stata progettata per compensare quella cromatica.
16
t2
(44)
vc (t) = exp − 2
2T0
in cui T0 é proporzionale alla durata del segnale stesso. In particolare, l’intervallo in cui é
concentrato il 95% della energia di tale segnale risulta Td = 2.77 T0 . La trasformata di (44) vale
√
ω 2 T02
F[vc (t)] = 2π T0 exp −
(45)
2
e quindi la sua banda (sempre calcolata al 95% dell’energia totale)è
1 2.77
2∆ω
1.22
2.77
=
=⇒
BW =
=
[Hz]
T0
2π
2π T0
Td
La modulazione usata é in genere del tipo OOK (on-off keying), in cui 1 corrisponde
alla trasmissione di un impulso e 0 alla assenza di trasmissione. Una velocità di trasmissione di
B bps richiede evidentemente che ogni impulso sia incluso in un intervallo TS = 1/B sec.
Assumendo Td = TS = 1/B (impulsi consecutivi senza ritorno per lo zero), la banda di
trasmissione é
2∆ω =
2∆ω = 7.67 B
La massima distanza Di a cui é possibile questa trasmissione é data dalla (39), che nel
nostro caso possiamo riscrivere come
1
π
=⇒
Di < 0.053
4
|β2 | B 2
Per una fibra, la dispersione totale viene misurata con
|β2 | ∆ω 2 Di = 14.7 |β2 | B 2 Di <
D=
(46)
d 1
d dβ
2π vp d2 β
2π vp
=
=− 2
= − 2 β2
2
dλ vg
dλ dω
λ dω
λ
Consideramo un valore tipico di D di 20 psec/(nm · km). Ad esso corrisponde, nel SI, un
valore di 20·10−6 sec/m2 e quindi β2 = −3.6·10−26 sec2 /m, con λ = 1.5 µm e vp = 2·108 m/sec.
Per una trasmissione di 10 Gb/sec la massima distanza é di circa 15 km. In realtà, ricordando che
la condizione trovata nella appendice, con la quale abbiamo derivato la (39), nonè una relazione
esatta ma approssimata, e conduce a un errore massimo del 10%, la reale velocità di trasmissione
per una distanza di 15 km é quindi di circa 9Gb/sec.
8 DISCONTINUITA’
Le onde piane che abbiamo considerato nei paragrafi precedenti possono esistere solo se
la geometria è uniforme. Ciò può avvenire per due motivi:
• le proprietà geometriche o elettromagnetiche dello spazio variano con continuità rispetto
alle coordinate spziali;
• la struttura in esame è costituita da più zone omogenee, ciascuna con parametri diversi
da quelli delle altre, separate da superfici di separazione attraverso le quali i parametri
elettromagnetici dei materiali sono discontinui.
17
Per semplicità, non considereremo il caso di regioni con con proprietà variabili con
continuità, e ci concentreremo sul caso di zone omogenee separate da discontinuità. In particolare
considereremo per ora solo discontinuità piane, e parallele tra loro.
Il caso più semplice é quello in cui nel campo lontano del dipolo é posta una superfice
piana di discontinuità, abbastanza grande da poter studiare l’interazione del campo del dipolo
con questa superfice come l’interazione di una onda piana con un piano di discontinuità infinito,
e ortogonale alla direzione di propagazione.
Consideriamo allora una situazione in cui (Fig. 1) lo spazio sia diviso in sue regioni, e
indichiamo i parametri della regione di sinistra, estesa fino a z = 0− , con µ1 , ǫ1 e quelli della
regione di destra con µ2 , ǫ2 . Un dipolo, posto sull’asse z a grande distanza verso −∞, produce
un campo che si propaga verso la discontinuità e che, nella zona della discontinuità medesima,
può essere approssmato con una onda piana. Questa onda piana é la causa della interazione
che vogliamo analizzare, e evidentemente esisterebbe da sola nella zona in esame e la discontinuità non ci fosse. Questo campo prende il nome di campo incidente (o campo incidente sulla
discontinuità), dove l’aggettivo incidente indica sia che il campo arriva verso la discontinuità,
sia che il campo esisterebbe da solo se il mezzo fosse tutto omogeneo e con le caratteristiche
della regione dove c’e’ la sorgente. In tal modo si divide lo studio della discontinuità da quello
della interazione tra sorgenti e zona omogenea (che serve a determinare l’ampiezza della onda
che viaggia verso la discontinuità).
Il campo elettrico incidente vale
E(z) = Ei e−jk1 z
(47)
in cui indichiamo col pedice 1 tutte le costanti (primarie e secondarie) della zona per z < 0 e col
pedice 2 quelle della zona per z > 0. Ovviamente la ampiezza Ei dipende dalla ampiezza della
sorgente utilizzata, mentre la forma (47) di E(z), ne è indipendente e dipende solo dal fatto che
la zona 1 è omogenea e uniforme.
µ1 ε1
µ2 ε2
Er
E2 (0)
Ei
z
Fig. 1: Campi ad una discontinuità
L’onda (47) prende il nome di onda progressiva, e sarà presente, ma non da sola, anche
nella struttura reale (vedi Fig. 1).
Finora abbiamo infatti considerato solo una delle due soluzioni della equazione (28),
ovvero quella con parte reale positiva. Il relativo vettore di propagazione (supponendo ancora l’onda omogenea) vale, come già detto, k = k iz . Il relativo campo é dato da E(r) =
Ei exp [−j k z] (vedi (26) ). Ma naturalmente anche l’altra soluzione, che, in base a quanto
18
convenuto, denotiamo con −k é una soluzione che conduce a una onda piana perfettamente
lecita.
Ricordando la (25), possiamo allora scrivere il vettore di propagazione di questa seconda
onda nella forma
k = (−k) iz
Se il mezzo é senza perdite, allora k = β reale, e questo vettore di propagazione ha una
componente negativa nella direzione z. Pertanto questa soluzione conduce a un campo
E(r) = Er exp [−j(−β) z] = E0 exp [jβ z]
(48)
che si propaga nella direzione negativa dell’asse z, con la stessa velocità di propagazione (in
modulo) dell’onda (26) che si propaga nella direzione positiva dell’asse z.
Se infatti esaminiamo i campi (26) e (48) nel dominio del tempo troviamo
ei (z, t) = |E0 | cos(βz − ωt − ϕi ) = f (z − vp t)
er (z, t) = |Er | cos(βz + ωt + ϕr ) = g(z + vp t)
essendo Ei = |Ei |ejϕi , Er = |Ee |ejϕr , e vp = ω/β . La funzione f (z − vp t) rappresenta come
già fatto notare, una onda che si propaga in dirazione positiva dell’asse z, per la forma del suo
argomento. Una tale onda verrà detta nel seguito onda progressiva. Allo stesso modo, sempre
per la (diversa) forma del suo argomento, g(z + vp t) rappresenta una onda che si propaga nella
direzione negativa dell’asse z, e verrà in genere indicata col nome di onda riflessa.
In questo discorso la scelta dell’asse z come direzione di propagazione é una scelta,
mentre la proprietà necessaria é che le due onde (26) e (48) siano omogenee. Anche l’assenza di
perdite é stata usata solo per semplicità. In presenza di perdite le due onde si attenuano mentre
si propagano (si veda (30) ). Pertanto, fissata una direzione (non orientata) di propagazione,
esistono due onde piane che si propagano lungo quella direzione, con verso di propagazione
opposto. Queste onde sono in genere indicate con il termine di onda progressiva e onda riflessa.
Notiamo tuttavia che la somma di queste due onde piane, come la somma di due onde piane
qualunque che si propagano in direzione diversa, nonè una onda piana.
Quando l’onda (47) incide sulla discontinuità, produce una onda riflessa nella zona 1 e
una onda trasmessa nella zona 2. che, per simmetria, si propagheranno anch’esse nella direzone
dell’asse z (ovviamente l’onda riflessa viaggerà in direzione di −iz ). In altri termini il campo
totale nella struttura sarà
E1 (z) se z ≤ 0
(49)
E(z) =
E2 (z) se z ≥ 0
dove
E1 (z) = Ei e−jk1 z + Er ejk1 z
E2 (z) = E2 (0)e−jk2 z
(50)
Esaminiamo più in dettaglio le (50). Il secondo termine del campo per z < 0 é una
onda riflessa, ovvero una onda che si propaga nella direzione negativa dell’asse z. Per vederlo,
cerchiamo il vettore di propagazione kr di questa onda. Deve ovviamente essere, per definizione
di vettore di propagazione
19
−jkr · r = jk1 z
(si confronti la definizione generale di onda piana data dalla (14)). Sviluppando per componenti
i vettori a primo membro si ha kr · r = (krx , kry , krz ) · (x, y, z) = krx x + kry y + krz z, e per
confronto segue
kr = −k1 iz
(51)
Nauralmente, questa onda riflessa é prodotta dalla discontinuità, e quindi si allontana
da essa. Analogamente, il campo per z > 0 é costituito da una onda progressiva,prodotta dalla
interfaccia e che si allontana da essa verso z = +∞.
Grazie alla simmetria del problema, la polarizzazione del campo incidente si conserva
sia nel campo trasmesso, sia in quello riflesso. Possiamo quindi assumere un campo incidente
solo lungo x, e le (50) possono essere scritte in soli termini scalari:
E1 (z) = Ei e−jk1 z + Er ejk1 z
E2 (z) = E2 (0)e−jk2 z
(52)
in cui le ampiezze dei campi Ei , Er , E2 (0) sono le componenti x dei relativi campi.
Se il campo elettrico ha solo componente x, allora il campo magnetico ha solo componente y (vedi (26)). Evidentemente, il campo magnetico avrà la stessa forma di (49,52). In
particolare
H(z) =
H1 (z)
H2 (z)
se z ≤ 0
se z ≥ 0
(53)
dove H1 conterrà una onda progressiva (incidente) ed una riflesa, mentre H2 conterrà solo una
onda progressiva. Le espressioni delle due onde progressive si ottengono immediatamente da
(26). Per quella riflessa occorre invece tener conto della (51). Da (14) segue per il campo
megnetico riflesso
Hr =
k1
1 1
1
− k1 iz × Er ix ejk1 z = −
kr × Er ix ejk1 z =
Er iy ejk1 z = − Er iy ejk1 z
ωµ
ωµ
ωµ
ζ1
in cui facciamo notare esplicitamente il cambio di segno nella relazione tra E ed H, rispetto alla
onda progressiva.
Segue allora
1
Ei e−jk1z − Er ejk1 z
ζ1
1
H2 (z) =
E2 (0)e−jk2 z
ζ2
H1 (z) =
(54)
dove le ampiezze del campo magnetico H1 , H2 sono le componenti y dei relativi campi.
Per poter determinare le costanti complesse Er e E2 (0) e cosı̀ completare la soluzione
del nostro problema, occorre ricordare che alla sezione z = 0 della zona devono essere continui i
componenti del campo elettrico Et e del campo magnetico Ht tangenti alla superficie di discontinuità, e quindi trasversi rispetto a z. Nel nostro caso i campi sono tutti tangenti, e quindi ne
consegue:
20
E1 (0− ) = E2 (0+ )
H1 (0− ) = H2 (0+ )
(55)
Imponendo le (55) alle soluzioni (52,54) segue
Ei + Er = E2 (0)
1
1
Ei − Er =
E2 (0)
ζ1
ζ2
(56)
Le (56) sono un sistema lineare non omogeneo che consente di determinare le ampiezze
incognite Er e E2 (0). Poiché tutte le incognite devono essere proporzionali a Ei per la linearità
del problema, conviene introdurre il coefficiente di riflessione alla interfaccia
Γ=
Er
Ei
(57)
e dividere le (56) per Ei . Dalla prima delle (56) segue allora
E2 (0)
= 1+Γ
Ei
(58)
e sostituendo nella seconda delle (56) si ha
1+Γ
1−Γ
=
ζ1
ζ2
=⇒
ζ2 − ζ2 Γ = ζ1 + ζ1 Γ
da cui segue, risolvendo,
Γ=
ζ2 − ζ1
ζ2 + ζ1
(59)
e anche
ζ2 − ζ1
2ζ2
E2 (0)
=1+
=
Ei
ζ2 + ζ1
ζ2 + ζ1
(60)
La (59) esprime il fatto che il coefficiente di riflessione Γ (o meglio, il suo modulo |Γ|)
è tanto più grande quanto più le impedenze caratteristiche dei due mezzi sono percentualmente
diverse. La (59) può essere riscritta come
Γ=
1 ζ2 − ζ1
2 ζ2 + ζ1
2
ovvero in funzione del rapporto tra la differenza delle impedenze e la loro media. Dividere per
la media è un modo di normalizzare la differenza, ovvero di ottenere la differenza relativa.
Il coefficiente di riflessione dipende dalle impedenze in quanto queste sono usate nelle
condizioni di continuità (56) per esprimere la componente tangente del campo magnetico in
funzione di quella del campo elettrico.
Le relazioni (59,60) possono anche essere espresse in termini dell’inversa Yi della impedenza caratteristica, parametro che viene detto ammettenza caratteristica. In particolare la (60)
diventa
21
Γ=
Y2 − Y1
Y1 − Y2
=−
Y 1 + Y2
Y2 + Y1
(61)
µ1 ε1
ZC
Er
Ei
z
Fig. 2: Incidenza su di una superfice di impedenza.
Le relazioni (59,60) sono applicabili anche in altri casi, oltre a quello di discontinuità dei
parametri per il quale sono state ricavate. La generalizzazione piu’ immediata si ha quando un
semispazio, di costanti µ1 , ǫ1 termina ad z = 0 con una superficie sulla quale vale una condizione
di impedenza (vedi Fig. 2) ovvero una relazione del tipo
E t = Z C H t × iz
(62)
ES = ZC HS
(63)
Nella (62) Et e Ht sono i componenti del campo elettrico e del campo magnetico tangenti alla superficie di discontinuità, e ZC è un parametro caratteristico della superficie, detta
impedenza superficiale. Nel nostro caso (Fig. 2), campo elettrico e magnetico sono ortogonali
tra loro e a z e quindi la (62) diventa
essendo ES ed HS le ampiezze dei campi sulla superficie di impedenza.
In presenza di una onda incidente (47), il campo elettrico e quello magnetico nel semispazio sono date ancora da E1 (z), H1 (z) di (52,54). Dalla (55) segue allora
Ei + Er =
ES
1
1
Ei − Er =
ES
ζ1
ZC
(64)
che hanno per soluzione ancora le (59,60). Quindi nel semispazio 1 vi sarà una onda riflessa di
ampiezza
Er = Γ Ei
con
Γ=
e sulla superficie di impedenza il campo elettrico sarà
22
ZC − ζ 1
ZC + ζ 1
(65)
ES = (1 + Γ) Ei
(66)
campo che coincide con quello al termine del semispazio 1 medesimo.
La (62) può essere usata anche per il caso in cui in z = 0 vi è un C.E.P. o un C.M.P. .
Nel primo caso Et è nullo e quindi Es = 0. La (63) può essere usata con ZC = 0 e segue allora
Γ = −1.
Se invece vi è un C.M.P., allora sarà nullo Ht ovvero HS . Nella (63) il parametro ZC
dovrà andare all’infinito. Conviene in tal caso passare alle ammettenze, definendo YC = 1/ZC e
usando la (61). HS = 0 implica YC = 0 e segue allora da (61) che Γ = 1.
Concludiamo questo paragrafo esaminando più in dettaglio la forma del campo nella
regione 1, in cui vi é contemporaneamente la presenza di onda progressiva e onda riflessa.
I campi sono dati da (52,54), che riscriviamo come1
Ex (z) = E + e−jkz + E − ejkz
1 + −jkz
− jkz
E e
−E e
Hy (z) =
ζ
(67)
Naturalmente, tra le ampiezze dell’onda riflessa e progressiva si ha E − = Γ E + . Può
essere utile riscrivere la prima delle (67) mettendo in evidenza l’onda progressiva
#
"
−
E
+ −jkz
2jkz
+ −jkz
=E e
1 + Γ(z)
(68)
1+ + e
Ex (z) = E e
E
L’ultima uguaglianza della (68) definisce la funzione Γ(z), che prende anch’essa il nome
di coefficiente di riflessione e misura il rapporto, punto per punto, tra l’ampiezza dell’onda
riflessa e quella dell’onda incidente. Il coefficiente di riflessione Γ definito dalla (57) é ovviamente
Γ = Γ(0) =
E−
E+
=⇒
Γ(z) = Γ e2jkz
(69)
da cui segue
|Γ(z)| = |Γ| e2jkz = |Γ|
2j(β−jα)z e
= |Γ| e2jβz e2αz = |Γ| e2αz
(70)
Una importante conseguenza della (70) per mezzi senza perdite, per i quali k = β reale,
e quindi α = 0, è che |Γ(z)| è costante.
Sostituendo (69) in (68) segue anche, per un mezzo generico,
+ −jkz
2jkz
Ex (z) = E e
1+Γ e
da cui
2
+ 2 −2αz
|Ex (z)| = |E | e
1
2
1 + Γ e2jkz = |E + |2 e−2αz 1 + |Γ|2 e4αz + 2 Re Γ e2jkz
+ 2 −2αz
2 4αz
2αz
2jβz
= |E | e
1 + |Γ| e
+ 2e
Re Γ e
Consideriamo qui solo il mezzo 1, e quindi scriveremo semplicemente k e ζ.
23
essend k = β − jα e quindi 2jkz = 2jβz + 2αz.
Anaologamente, possiamo scrivere il campo magnetico nella forma
1 + −jkz
1 + −jkz
2jkz
1 − Γ(z) = E e
1−Γ e
Hy (z) = E e
ζ
ζ
(71)
da cui
2
1
1
2jkz + 2
+ 2
2
2jkz
|Hy (z)| = 2 |E | 1 − Γ e
= |ζ|2 |E | 1 + |Γ| − 2 Re Γ e
|ζ|
1
= 2 |E + |2 1 + |Γ|2 − 2 e2αz Re Γ e2jβz
|ζ|
2
9 LEGGE DI SNELL
In un paragrafo precedente, abbiamo studiato l’incidenza ortogonale di una onda piana
su di una interfaccia dielettrica. Consideriamo ora il caso (Fig. 1) in cui l’onda incida obliquamente, con un angolo θi rispetto alla normale all’interfaccia. Si produrranno ancora onde piane
riflesse e trasmesse, ma la loro direzione va determinata 1 .
I campi elettrici coinvolti sono:
• una onda piana incidente omogenea, di ampiezza Ei0 nota, con vettore di propagazione
noto ki :
Ei (R) = Ei0 exp −j ki · r
• una onda piana riflessa, di ampiezza Er0 e vettore di propagazione kr da determinare:
Er (R) = Er0 exp −j kr · r
• una onda piana trasmessa, di ampiezza Et0 e vettore di propagazione kt da determinare:
Et (R) = Et0 exp −j kt · r
1
Nel caso di incidenza ortogonale, anche le onde piane riflesse e trasmesse hanno direzione
ortogonale all’interfaccia per motivi di simmetria
24
µ1 ε1
µ2 ε2
z
θi
ki
Fig.1: Geometria del campo incidente
Naturalmente, per le proprietà delle onde piane (12,10), deve valere ki ·Ei0 = 0, kr ·Er0 =
0, kt · Et0 = 0 e soprattutto
ki · ki = kr · kr = ω 2 ε1 µ1
kt · kt = ω 2 ε2 µ2
(72)
Per ricavare i vettori incogniti kr e kt imporremo la continuità del campo elettrico totale
alla interfaccia.
Scegliamo un sistema di riferimento con l’asse z ortogonale all’interfaccia, e con l’origine
sulla interfaccia stessa, in modo che quest’ultima sia il piano z = 0. Scegliamo poi l’asse x in
modo che il vettore (noto) ki sia nel piano (x, z):
√
ki = (kix , 0, kiz ) = (k1 sin θi , 0, k1 cos θi )
essendo k1 = ω ε1 µ1 .
Cominciamo a scrivere la continuità della componente tangente del campo elettrico
all’interfaccia. Poiché la normale all’interfaccia coincide con iz , la continuità del campo elettrico
tangente fornisce
iz × Ei0 exp −j ki · rT + iz × Er0 exp −j kr · rT = iz × Et0 exp −j kt · rT
∀x, y
essendo rT = (x, y, 0) il valore di r in un punto generico dell’interfaccia. La moltiplicazione
vettoriale per iz serve a prendere solo la componente del campo tangente al piano di interfaccia.
Sviluppando i prodotti scalari, e portando tutto a primo membro, segue
iz ×Ei0 exp −j(kix x) +iz ×Er0 exp −j(krx x + kry y) −iz ×Et0 exp −j(ktx x + kty y) = 0 (73)
sempre da imporre ∀x, y.
La (73) impone che una combinazione lineare di funzioni esponenziali, in cui il primo
coefficiente è diverso da zero, sia identicamente nulla. Ora, le funzioni esponenziali sono linearmente indipendenti, ovvero una combinazione lineare (tipo la (73) ) di funzioni esponenziali
diverse può essere identicamente nulla solo se tutti i coefficienti sono nulli. Pertanto, l’unico
modo in cui la (73) possa essere valida è che le funzioni esponenziali, ovvero i loro esponenti,
siano identiche. Pertanto
25
exp −j(kix x) = exp −j(krx x + kry y) = exp −j(ktx x + kty y) = 0
kix x = krx x + kry y = ktx x + kty y
∀x, y
∀x, y
(74)
Scegliendo nella (74) x = 0, y 6= 0, oppure x 6= 0, y = 0, segue la forma generale della
Legge di Snell
kix = krx = ktx
0 = kry = kty
(75)
Conseguenza immediata della (75) è che i tre vettori di propagazione giacciono tutti
nello stesso piano (x, z), che viene detto piano di incidenza.
A partire dalle (75) e (72), è possibile ricavare poi anche le componenti z dei vettori di
propagazione
2
2
2
2
2
krz
= k12 − krx
+ kry
= k12 − kix
= kiz
2
(76)
2
2
2
ktz
= kt2 − ktx
+ kty
= k22 − kix
√
essendo (analogamente a k1 ) k2 = ω ε2 µ2 .
Per quanto riguarda l’onda riflessa, questa si allontana dall’interfaccia (mentre quella
incidente si avvicina), e quindi la prima delle (76) implica che krz = −kiz .
Pertanto anche l’onda riflessa è omogenea, e forma un angolo di riflessione θr con la
normale pari a θi .
Diverso, e più variegato, è il discorso relativo all’onda trasmessa. Supponiamo per
semplicità che il mezzo 1 sia privo di perdite, in modo che ε1 , µ1 e di conseguenza ki siano tutti
reali.
2
segue
Sviluppando l’espressione di ktz
2
2
ktz
= k22 − kix
= k22 − k12 sin2 θi = ω 2 ε2 µ2 − ω 2 ε1 µ1 sin2 θi
(77)
Se anche il secondo mezzo è privo di perdite, il secondo membro di (77) è reale, ma
il suo segno dipende dalle costanti del materiale, e dall’angolo di incidenza.
• Se ε2 µ2 ≥ ε1 µ1 , il secondo membro della (77) è sempre positivo, quindi ktz è reale
(positivo, in quanto l’onda si allontana dall’interfaccia). Ne segue che anche l’onda
trasmessa è omogenea e si può definire un angolo di trasmissione θt , angolo tra il
vettore reale kt e l’asse z. Risulta allora
√
√
ε1 µ1 sin θi = ε2 µ2 sin θt
ktx = k2 sin θt =⇒
(78)
(forma della legge di Snell vista nei corsi di fisica), e θt < θi .
2
• Se ε2 µ2 < ε1 µ1 , il segno del secondo membro della (77), e quindi quello di ktz
dipende
dall’angolo di incidenza.
√
√
2
> 0;
a) se ε1 µ1 sin θi < ε2 µ2 allora ktz
√
√
2
b) se ε1 µ1 sin θi > ε2 µ2 allora ktz < 0.
Nel caso a) ktz è reale positivo, l’onda trasmessa è ancora omogenea e si può definire
l’ angolo di trasmissione θt , che si calcola dalla (78). Ora però risulta θt > θi .
Nel caso b), invece, ktz è immaginario puro, e conviene scriverlo come ktz = −j |ktz |.
L’onda trasmessa è allora inomogenea, e non esiste un angolo (reale) di trasmissione.
26
Se invece il secondo mezzo ha perdite, allora ε2 , ed eventualmente µ2 , sono complessi.
Il secondo membro di (77) è allora complesso, e risulta complesso anche ktz . Pertanto l’onda
trasmessa é inomogenea.
Ricapitolando, in assenza di perdite si ha una onda trasmessa omogenea, a meno che
ε2 µ2 < ε1 µ1 e l’angolo di incidenza non sia superiore al cosiddetto angolo limite θL , definito
come l’angolo che separa i casi a) e b), pari a
√
ε2 µ2
(79)
sin θL = √
ε1 µ1
mentre in presenza di perdite nel secondo mezzo l’onda trasmessa é sempre inomogenea.
Il secondo membro della (79) prende il nome di indice di rifrazione relativo del secondo
mezzo rispetto al primo, e viene spesso indicato con n.
Si noti che il vettore di propagazione dell’onda inomogenea prodotta a seguito di incidenza oltre l’angolo limite su un materialesenza perdite ha la forma (23). Ne segue che, in tale
situazione, non si ha passaggio di potenza attiva oltre l’interfaccia, ma solo di potenza reattiva.
Questo spiega la attenuazione (senza propagazione) del campo oltre l’interfaccia. Si ha invece
una propagazione di potenza attiva in direzione x, ovvero lungo l’interfaccia (onda superficiale).
27
10 FORMULE DI FRESNEL – ANGOLO DI BREWSTER
La legge di Snell consente di determinare la forma delle onde riflessa e trasmessa ad
una interfaccia piana, in caso di incidenza obliqua, ma non la relativa ampiezza. Come visto nel
caso di incidenza ortogonale, per determinare il coefficiente di riflessione, e quindi tali ampiezze,
occorre anche imporre la continuità della componente tangente del campo magnetico.
Poiché gli esponenziali, per la legge di Snell, sono uguali, le due continuità forniscono
delle equazioni sulle ampiezze dei campi. Ricordiamo che i campi coinvolti sono:
• una onda piana incidente omogenea, di ampiezza Ei0 nota, e vettore di propagazione ki
noto:
Ei (R) = Ei0 exp −j ki · r
1
ki × Ei0 exp −j ki · r
Hi (R) =
ωµ1
• una onda piana riflessa, di ampiezza Er0 , da determinare, e vettore di propagazione kr
noto:
Er (R) = Er0 exp −j kr · r
1
Hr (R) =
kr × Er0 exp −j kr · r
ωµ1
• una onda piana trasmessa, di ampiezza Et0 , da determinare, e vettore di propagazione
kt noto:
Et (R) = Et0 exp −j kt · r
1
kt × Et0 exp −j kt · r
Ht (R) =
ωµ2
Imponendo la continuità delle componenti tangenti all’interfaccia si ottiene (vedi (73)
per il campo elettrico, con gli esponenziali che si semplificano essendo uguali, e analogamente
per il campo magnetico, dato dalla (13))
iz × Ei0 + iz × Er0 − iz × Et0 = 0
1
1
1
iz × ki × Ei0 +
iz × kr × Er0 −
iz × kt × Et0 = 0
ωµ1
ωµ1
ωµ2
(80)
A questo punto occorre tener conto che, al contrario del caso di incidenza ortogonale,
la polarizzazione del campo elettrico incidente gioca un ruolo fondamentale. Se consideriamo la
Fig. 1, si vede che un campo elettrico1 ET E ortogonale al piano di incidenza (x, z), detto campo
in polarizzazione T E, e un campo elettrico ET M parallelo al piano di incidenza, detto campo
in polarizzazione T M , sono fisicamente diversi, e quindi produrranno campi riflessi e trasmessi
differenti.
1
I nomi attribuiti ai campi rappresentati in Fig. 1 derivano dagli acronimi
T E Trasverso elettrico,
T M Trasverso magnetico,
con riferimento al fatto che nel primo caso é il campo elettrico ad essere tutto trasverso rispetto
alla normale alla superficie di interfaccia, ovvero ortogonale all’asse z. Nel secondo caso é invece
il campo magnetico ad essere tutto trasverso.
28
µ1 ε1
µ2 ε2
µ1 ε1
µ2 ε2
z
z
θi
θi
E TM
ki
E TE
ki
Fig.1: Polarizzazione T E (sin.) e T M (des.) di E
Poiché un campo generico è sempre ortogonale al suo vettore di propagazione, può essere
sempre decomposto nella somma di due polarizzazioni ortogonali tra loro, come ad esempio due
polarizzazioni lineari (con direzioni di polarizzazioni ortogonali) o le due polarizzazioni circolari
con verso di rotazione opposto. Pertanto il caso di incidenza di una onda con polarizzazione
qualunque può essere sempre risolto decomponendo tale onda in due opportune polarizzazioni
(tra loro ortogonali), calcolando l’interazione di queste due onde con l’interfaccia e poi sommando
i risultati. Basterà quindi risolvere esplicitamente solo l’interazione delle due polarizzazioni
scelte.
Naturalmente converrà scegliere le polarizzazioni più adatte ad essere usate come “basi”
per decomporre una polarizzazione generica. Queste polarizzazioni sono la T E e la T M di
Fig. 1. Esaminiamo il caso T E: per simmetria, nè il campo magnetico riflesso, nè il campo
magnetico trasmesso possono avere una componente ortogonale al piano di incidenza, perché
questo creerebbe una dissimmetria tra la parte superiore e quella inferiore del suddetto piano
(la parte verso cui sarebbe rivolto il componente ortogonale del campo magnetico). Poiché
questa dissimetria non può esserci, ne segue che il campo magnetico riflesso e quello trasmesso
sono entramnbi nel piano di incidenza, ovvero i campi riflesso e trasmesso sono anch’essi T E.
Analogamente si può ragionare per il caso T M .
µ1 ε1
θr
y
kr
θi
Ei
µ 1ε 1
x
Hr
Er
µ2 ε2
Et
Hr
θr
z
ki
x
Er
kt
Ht
Ei
Hi
µ 2ε 2
Et
y
kr
kt
Ht
z
θi
Hi
ki
Fig.2: Componenti dei campi da considerare nelle polarizzazioni T E e T M
(Si suppone l’onda trasmessa omogenea).
Pertanto se ne conclude che un campo incidente T E (rispettivamente T M ) produce
29
campi riflessi e trasmessi ancora T E (risp. T M ), ovvero che le due polarizzazioni T E e T M si
conservano nell’interazione con una interfaccia piana, come rappresentato2 in Fig. 2. Quindi
queste due polarizzazioni sono quelle scelte come base di decomposizione per risolvere il problema
della incidenza di una onda con polarizzazione generica. Introducendo i versori iT E ed iT M si
ha, per un campo E generico
E = ET E iT E + ET M iT M
dove le ampiezze della parte T E, ET E , e della parte T M , ET M , sono ovviamente complesse.
Poiché, per simmetria, un campo incidente in polarizzazione T E produce campi riflesso
e trasmesso nella stessa polarizzazione, e lo stesso vale per la polarizzazione T M , questa scelta
consente di semplificare il problema del calcolo di Γ e del campo trasmesso.
Cominciamo quindi a calcolare i campi riflesso e trasmesso nel caso di incidenza T E.
Come si vede dalla Fig. 2, tutti i campi elettrici coinvolti hanno solo la componente y. Poniamo
quindi
Ei0 = Ei iy ,
Er0 = Er iy ,
Er0 = Et iy ,
e sostituiamo nelle (80).
Si ottiene
Ei iz × iy + Er iz × iy − Et iz × iy = 0
1
1
1
iz × ki × iy + Er
iz × kr × iy − Et
iz × kt × iy = 0
Ei
ωµ1
ωµ1
ωµ2
La prima equazione fornisce immediatamente
Ei + Er = Et
(81)
Per sviluppare la seconda calcoliamo dapprima
iz × ki × iy = iz × (kix ix + kiz iz ) × iy = iz × (kix iz + kiz (−ix ) = −kiz iy
e analoghe per le altre due onde. Da queste relazioni segue anche il campo magnetico T E, nella
forma
Hx = −
Hz =
kiz
Ey
ωµ1
kix
Ey
ωµ1
(82)
Sostituendo si trova
krz
ktz
kiz
Ei (−iy ) +
Er (−iy ) −
Et (−iy ) = 0
ωµ1
ωµ1
ωµ2
Ricordando, dalla legge di Snell, che krz = −kiz possiamo ottenere
2
I campi, anche in polarizzazione lineare, sono rappresentati da vettori complessi. Quelli che
sono rappresentati in Fig. 2 sono in realtà i versori iT E ed iT M delle due polarizzazioni T E
e T M.
30
−
kiz
ktz
Ei − Er ) = −
Et
ωµ1
ωµ2
(83)
Le equazioni (81,83) hanno la stessa forma delle (56) se introduciamo due impedenze
T E, rapporto tra le componenti tangenti dei campi (e cambiamo di segno alla (83))
Z1T E =
Ei
ωµ1
=
Hix
kiz
Z2T E =
e
Et
ωµ2
=
Htx
ktz
(84)
che dipendono non solo dal mezzo, ma anche dalla direzione dell’onda incidente, direttamente
tramite kiz e, indirettamente tramite ktz (che si ricava da ki usando la legge di Snell):
1
Z1T E
Ei + Er = Et
1
Ei − Er = T E Et
Z2
(85)
La soluzione delle (83) procede quindi analogamente al caso di incidenza ortogonale,
introducendo un coefficiente di riflessione
ΓT E =
Er
Z T E − Z1T E
= 2T E
Ei
Z2 + Z1T E
(86)
con le stesse proprietà di quello per incidenza ortogonale, e calcolando poi3
2 Z2T E
Z T E − Z1T E
Et
=
= 1 + ΓT E = 1 + 2T E
Ei
Z2 + Z1T E
Z2T E + Z1T E
(87)
Passiamo al caso T M . Il campo elettrico incidente ha ora due componenti
Ei = Eix ix + Eiz iz
che non sono però indipendenti in quanto
k · Ei = kix Eix + kiz Eiz = 0
=⇒
Eiz = −
kix
Eix
kiz
(88)
La componente z non contribuisce alla prima delle (80) e quindi da quest’ultima si
ottiene
Eix iz × ix + Erx iz × ix − Etx iz × ix = 0
=⇒
Eix + Erx = Etx
(89)
analogamente alla (81). Per quanto riguarda la seconda delle (80), conviene riscriverla come
iz × Hi0 + iz × Hr0 = iz × Ht0 = 0
(90)
e calcolare prima il campo magnetico
3
Se nel mezzo 2 vi fosse anche onda riflessa, allora andrà sostituito il campo totale alla seconda
interfaccia E2 (0) al campo Et nelle equazioni che seguono
31
Hi0 =
1 1
ki × Ei0 =
ωµ1
ωµ1
1
=
ωµ1
1
=
ωµ1
(kix ix + kiz iz ) × (Eix ix + Eiz iz )
kiz Eix − kix Eiz iy
kix Eiz (−iy ) + kiz Eix iy
che ha ovviamente solo componente y: Hi0 = Hi iy . Ricavando Eiz da (88) si ottiene infine
1 1 k2
kiz Eix − kix Eiz =
kiz Eix + ix Eix
ωµ1
ωµ1
kiz
2
2
2
1 ω ε1 µ1
1 kiz + kix
Eix =
Eix =
=
ωµ1
kiz
ωµ1 kiz
Hi =
ωε1
Eix
kiz
2
2
= k12 = ω 2 ε1 µ1 . Sostituendo il campo magnetico nella (90) questa si semplifica
+kiz
in quanto kix
in
ωε1
ωε1
ωε2
Eix +
Erx =
Etx
kiz
krz
ktz
Ricordando che krz = −kiz , possiamo scrivere quest’ultima in modo analogo alla (83):
ωε2
ωε1
Eix − Erx ) =
Etx
kiz
ktz
.
Introducendo due impedenze T M
Z1T M =
kiz
ωε1
e
Z2T M =
ktz
ωε2
(91)
anche le condizioni di continuità per il caso T M prendono una forma analoga alle (80)
Eix + Erx = Etx
1
1
Eix − Erx = T M Etx
T
M
Z1
Z2
(92)
Si noti, in confronto alla (83), oltre alla ovvia sostituzione delle impedenze T M a quelle
T E, che ora compare solo la componente x del campo elettrico. In realtà questa differenza é
solo apparente in quanto sia la (83), sia la (92) coinvolgono aolo le componenti tangenti del
campo elettrico.
La soluzione delle (92) é, analogamente,
ΓT M =
Z T M − Z1T M
Erx
= 2T M
Eix
Z2 + Z1T M
(93)
e
Z T M − Z1T M
2 Z2T M
Etx
= 1 + ΓT M = 1 + 2T M
=
Eix
Z2 + Z1T M
Z2T M + Z1T M
(94)
Una volta calcolato il campo elelttrico tangente, é possibile calcolare l’eventuale componente longitudinale, nonché il campo magnetico dalle proprietà (14) delle onde piane.
32
Le definizioni (83,91) possono essere espresse in modo diverso. In particolare, nel mezzo
√
1 l’onda é per ipotesi omogenea, e quindi kiz = k1 cos θi = ω ε1 µ1 cos θi . Pertanto
r
ωµ1
ωµ1
1
µ1 1
TE
Z1 =
= √
=
= ζ1
kiz
ω ε1 µ1 cos θi
ε1 cos θi
cos θi
(95)
r
√
ω ε1 µ1 cos θi
µ1
kiz
TM
=
=
cos θi = ζ1 cos θi
Z1 =
ωε1
ωε1
ε1
Le (95) dipendono dalla sola ipotesi di onda omogenea, e quindi espressioni analoghe
potrebbero essere usate anche nel mezzo 2, purché l’onda trasmessa sia omogenea. Tuttavia, per
il mezzo 2, conviene usare una espressione più complessa, ma valida indipendentemente dal tipo
di onda trasmessa (e, inoltre, dipendente solo dall’angolo di incidenza, e non anche dall’eventuale
angolo di trasmissione). Per ricavarle, partiamo da
q
q
q
2
2
2
2
kz2 = k2 − kx2 = k2 − kx1 = k22 − k12 sin2 θi
dove kx2 = kx1 = k1 sin θi per la legge di Snell.
Poniamo anche k2 = nk1 , essendo l’indice di rifrazione n, definito da
n2 =
ε2 µ2
ε1 µ1
ottenendo
1
kz2 = k1
− sin θi = k2
n
Sostituendo nelle (83,91) si ottiene
q
n2
2
q
n2 − sin2 θi
ωµ2
ζ2 n
ωµ n
ωµ2
n
p
p 2
= √
=p
=
2
2
2
2
2
ktz
ω
ε
µ
2 2
k2 n − sin θi
n − sin θi
n − sin2 θi
p
√
q
q
ω ε2 µ2
kiz
k2 n2 − sin2 θi
ζ2
=
=
=
n2 − sin2 θi =
n2 − sin2 θi
ωε1
n ωε2
n ωε2
n
(96)
1
ζ2 n
ωµ2
ωµ1
p
− ζ1
−
cos θi
−
n2 − sin2 θi
ktz
kiz
=
= ωµ
=
ωµ
1
2
ζ2 n
1
+
+
p
+ ζ1
ktz
kiz
2
cos θi
n2 − sin θi
q
ktz
kiz
ζ2
−
n2 − sin2 θi − ζ1 cos θi
Z2T M − Z1T M
ωε2
ωε1
n
q
=
= TM
=
ktz
kiz
ζ2
Z2 + Z1T M
+
n2 − sin2 θi + ζ1 cos θi
ωε2
ωε1
n
(97)
Z2T E =
Z2T M
I coefficienti di riflessione possono quindi essere espressi come
ΓT E
ΓT M
Z2T E
Z2T E
Z1T E
Z1T E
Le (97) sono dette formule di Fresnel4 .
4
Per usare le (97) occorre ricordare che, se n2 − sin2 θi non è reale positivo (mezzi con perdite,
p
oppure onda trasmessa inomogenea), allora la sua radice quadrata
n2 − sin2 θi deve avere
parte reale non negativa e parte immaginaria non positiva. In partiolare, nel caso di onda
33
Conseguenza delle formule di Fresnel è che, se i mezzi sono entrambi senza perdite, esiste
un’angolo di incidenza, detto angolo di Brewster, per cui uno dei due coefficienti di riflessione
(97) è nullo.
Se le permeabilità magnetiche sono uguali, µ1 = µ2 , ad annullarsi e’ ΓT M .
Cominciamo a notare che, in tali condizioni risulta allora
n2 =
ε2 µ1
ε2
ε2 µ2
=
=
ε1 µ1
ε1 µ1
ε1
ζ2 =
r
ε2 = n2 ε1
=⇒
e
µ2
=
ε2
r
µ1
=
ε2
r
1
µ1
=
n2 ε1
n
r
1
µ1
= ζ1
ε1
n
In tal caso le (96) diventano
Z2T E = p
ζ2 n
ζ1
n2
2
2
=p
ζ1
− sin2 θ1
(98)
p
q
2 − sin2 θ
n
ζ2
1
2
Z2T M =
n2 − sin θ1 = ζ1
n
n2
Per determinare, in tali condizioni, l’angolo di Brewster, basta imporre, dalle (97), che
q
ζ1
TM
TM
(99)
n2 − sin2 θi = ζ1 cos θi
Z2 = Z1
=⇒
n2
dove la seconda delle (99) è una equazione nella incognita θi la cui soluzione (se esiste) è l’angolo
di Brewster cercato. Elevando al quadrato segue
n2
− sin θ1
n2
n2 − sin2 θi = ζ12 cos2 θi
−1
= 1 + tan2 θi , ottenendo
Dividiamo per ζ12 cos2 θi , e ricordiamo che cos2 θi
1 2
2
2
=1
n
(1
+
tan
θ
)
−
tan
θ
i
i
n4
che può essere risolta per tan2 θi ,
(n2 − 1) tan2 θi = n4 − n2 = n2 (n2 − 1)
da cui, semplificando, segue il valore dell’angolo di Brewster θB :
2
tan θB = n
2
=⇒
tan θB = n =
r
ε2
ε1
(100)
che esiste se n2 è reale positivo (o nullo).
In Fig. 3 e 4 sono riportati gli andamenti delle formule di Fresnel quando il mezzo 1 è
il vuoto, mentre il mezzo 2 ha µ2 = µ0 e costante dielettrica pari a 4ε0 e ε0/4 rispettivamente.
inomogenea in un mezzo
privo di perdite, tale radice è immaginaria pura, e cosı̀ sono le due
p
impedenze. Poiché n2 − sin2 θi è immaginaria negativa, allora Z2T M è immaginaria negativa:
Z2T M = −j |Z2T M |, mentre Z2T E è immaginaria positiva: Z2T E = j |Z2T E |.
34
Formule di Fresnel εr=4
1.2
TE
TM
1
|Γ|
0.8
0.6
0.4
0.2
0
0
10 20 30 40 50 60 70 80 90
Angolo di incidenza [deg]
Fig. 3: Andamento di |Γ| per ε2 = 4ε0
Formule di Fresnel εr=0.25
1.2
TE
TM
1
|Γ|
0.8
0.6
0.4
0.2
0
0
10 20 30 40 50 60 70 80 90
Angolo di incidenza [deg]
Fig. 4: Andamento di |Γ| per ε2 = ε0/4
Si nota la presenza del nullo per ΓT M all’angolo di Brewster, sia per ε2 > ε0 , sia
per ε2 < ε0 . Come segue anche dalla (100), nel primo caso θB > π/4, nel secondo θB < π/4.
Ovviamente il modulo di ΓT M è significativamente più piccolo di |ΓT E | in tutto un intervallo
intorno a θB : pertanto in tale intervallo il campo riflesso sarà quasi completamente polarizzato
T E, indipendentemente dalla orientazione del campo incidente (a meno che questa non sia
esattamente T M ).
Nella Fig. 4 si nota anche la presenza dell’angolo limite. Oltre l’angolo limite sin θ1 > n,
l’onda trasmessa è inomogenea, e quindi, dalle (96), entrambe le impedenze Z2T E e Z2T M sono
immaginarie pure: Z2 = ±j|Z2 | in cui il segno positivo . Ne segue che (sia per polarizzazione
T E, sia T M ) 5
5
Il doppio segno tiene conto del segno di Z2 , per onda evanescente, si veda la discussione dopo
la (96).
35
2
2
Z2 − Z1 2 ±j |Z2 | − Z1 2
= |Z2 | + Z1 = 1
|Γ| = =
±j |Z2 | + Z1 Z2 + Z1 |Z2 |2 + Z12
per le proprietà del modulo quadro.
2
11 RIFLESSIONE E TRASMISSIONE DI POTENZA
Finora abbiamo considerato solo la riflessione e la trasmissione in termini di campo.
Naturalmente, l’onda che incide sulla interfaccia trasporta anche potenza. Quindi conviene valutare l’effetto della interazione con una interfaccia piana anche sulla propagazione della potenza.
µ1 ε1
µ2 ε2
x
z
θi
y
ki
Fig.1: Geometria del campo incidente
Consideriamo ancora una interfaccia tra due mezzi, come in Fig. 1, e assumiamo che il
primo mezzo sia privo di perdite. Il campo incide con un angolo θi , eventualmente nullo (per
includere anche l’incidenza ortogonale).
Consideriamo un campo E generico, che possiamo decomporre in una parte T E e una
T M:
E = ET E iT E + ET M iT M
Il vettore di Poynting della sola onda incidente (che è omogenea) vale
1
|E|2 iki
2ζ1
essendo iki il versore del vettore di propagazione dell’onda incidente.
Ora
Si =
∗
|E|2 = E · E∗ = ET E iT E + ET M iT M · ET E iT E + ET M iT M = |ET E |2 + |ET M |2
36
in quanto iT E ed iT M sono reali ed ortogonali tra loro. Quindi le due parti hanno vettori di
Poynting disaccoppiati, ed è possibile considerare separatamente le due polarizzazioni T E e T M
anche per quanto riguarda la potenza.
Calcoliamo allora il vettore di Poynting all’interfaccia1 , iniziando dal caso T E. Per
+
z = 0 si ha
1
1
E × H∗ = Et iy × (Htx ix + Htz iz )∗
2
2
1
1
∗
∗
(−iz ) + Et Htz
ix
= Et Htx
2
2
Possiamo ricavare Htx e Htz dalla (82) ottenendo
S+ =
S+ =
1
|Et |2 iz +
TE ∗
2 Z2
1 kix
|Et |2 ix
2 ωµ2
(101)
Per z = 0+ si ha quindi un flusso di potenza attiva che viaggia lungo l’interfaccia, in
direzione x (kix é reale), e un flusso di potenza attiva e reattiva che invece attraversa l’interfaccia.
La componente z del vettore di Poyntingè continua attraverso l’interfaccia, dipendendo
solo dalle componenti trasverse dei campi (continue). Quindi
S + · iz = S − · iz
Conviene però calcolare anche direttamente quest’ultima
1
1
∗
E × H∗ · iz = − E1y H1x
2
2
I campi coinvolti sono dati dal primo membro di (81,83). Sostituendo si ha
1
1
−
S · iz = − (Ei + Er ) − T E (Ei − Er )∗
2
Z1
1
|Ei |2 (1 + Γ)(1 − Γ)∗
=
2Z1T E
S − · iz =
(102)
in quanto, essendo il mezzo 1 senza perdite e l’onda incidente omogenea, Z1T E é reale. Sviluppando il prodotto degli ultimi due fattori si ha
(1 + Γ)(1 − Γ)∗ = 1 − |Γ|2 + Γ − Γ∗ = 1 − |Γ|2 + 2j Im(Γ)
La potenza attiva in direzione z vale allora
−
SRz
=
i
h
i
h
1
2
2
2
1
−
|Γ|
=
S
1
−
|Γ|
|E
|
inc
i
2Z1T E
essendo Sinc la componente z del vettore di Poynting della sola onda incidente:
S · iz =
1
1
1
1
|Ei0 |2 = Sinc
|Ei0 |2 iki · iz =
|Ei0 |2 cos θi =
2ζ1
2ζ1
2Z1T E
Sia il campo elettrico, sia il campo magnetico, dipendono da x, y tramite exp (−jkix x), con
kix reale. Pertanto il vettore di Poynting è costante sulla interfaccia. Si può anche dimostrare
che il vettore di Poynting dipende solo da z in tutti i punti del primo mezzo
37
(e ad essa é associata una potenza reattiva, se Γ nonè reale)
Allo stesso modo si trova che |Γ|2 Sinc è la componente z del vettore di Poynting della
sola onda riflessa. Pertanto |Γ|2 è la riflettività in potenza della interfaccia. La potenza che
viene trasmessa oltre l’interfaccia è quindi la differenza tra la potenza incidente e quella riflessa.
Allo stesso modo, e con le stesse conclusioni, si procede per il caso T M . L’unica differenza è che le due riflettività, T E e T M , sono diverse.
12 BUON CONDUTTORE
Un materiale si definisce un buon conduttore se la sua conducibilità σ soddisfa a
σ ≫ ωε
.
(103)
Mentre in un materiale con conducibilità infinita il campo deve essere nullo, la presenza
di una conducibilità grande ma finita non preclude la presenza di campi. Se il materiale è
spazialmente omogeneo, sono quindi possibili onde piane, con costante di propagazione:
jσ
2
2
(104)
k =ω µ ǫ−
ω
Utilizzando la (103) possiamo approssimare k2 con
r
σ p
jσ
2
2
−j
=⇒
k≃ω µ
k ≃ω µ −
ω
ω
(105)
Poiché
segue
p
1−j
−j = √
2
r ωµσ
k ≃ 1−j
2
(106)
Il secondo fattore di k nella (106) si misura in m−1 . Il suo inverso è quindi una lunghezza
e prende il nome di profondità di penetrazione o skin depth in inglese) e si indica con
r
1−j
2
=⇒
k≃
(107)
δ=
ωµσ
δ
L’impedenza caratteristica corrispondente si ottiene analogamente e vale
Zm ≃
1+j
σδ
38
(108)
campo elettrico (unità arbitrarie)
1
0.8
0.6
0.4
0.2
0
0
1
2
3
4
5
6
7
8
posizione (unità arbitrarie)
Fig. 1: Andamento del campo eletrico in un buon conduttore
L’andamento del campo di una onda progressiva in un buon conduttore è quindi del
tipo
h
z
z i
e(z, t) = E0 exp −
cos
− ωt
δ
δ
e presenta una attenuazione molto forte: dopo una distanza pari a 6–8 volte la profondità di
penetrazione, il campo risulta attenuato di 300–3000 volte, e quindi considerabile scomparso.
Il campo presenta anche una oscillazione, ma con una lunghezza d’onda pari alla profondità di
penetrazione: non è quindi più facilmente riconoscibile l’andamento sinusoidale.
La condizione di buon conduttore dipende, per ogni materiale, dalla frequenza. Se σ è
costante con ω, un materiale è un buon conduttore solo fino ad una certa frequenza. Sono buoni
conduttori i metalli, fino a frequenze ottiche, o dell’ultravioletto, ma anche molti altri materiali,
se la frequenza è sufficientemente bassa.
Se consideriamo ad esempio il rame, σ = 5.8 · 107 S/m a 1 GHz, risulta δ = 2 µm
e Zm = (1 + j) 8 mΩ. A “bassa” frequenza anche l’acqua di mare, σ = 5 S/m, è un buon
conduttore a 10 kHz. Pre esso risulta δ = 2.2 m e Zm = (1 + j) 100 mΩ. Un tale valore di δ
sembra grande, ma in realtà implica che oltre i 10–15 metri di profondità il campo non riesce ad
arrivare, neanche usando frequenze cosı̀ basse. Questo impedisce, ad esempio, le comunicazioni
radio con sottomarini, o altri corpi immersi.
Per valutare da un punto di vista quantitativo la condizione di buon conduttore σ ≫ ωε,
possiamo riscrivere la (104) nella forma
jσ
ωǫ i
jσ h
2
2
2
(109)
k =ω µ ǫ−
1+j
=ω µ −
ω
ω
σ
e usando la (105) si trova che k dato dalla (107) è la radice del prodotto dei primi due termini.
Si ha cio é
s
ωǫ i 12
ωǫ i 21
jσ h
1−j h
2
1+j
1+j
k= ω µ −
=
(110)
ω
σ
δ
σ
Possiamo approssimare l’ultimo termine con il suo sviluppo di Taylor ottenendo
1−j
ωǫ i
1 h
ωǫ i
j ωǫ
1 h
k≃
1+
−j
1−
(111)
1+
=
δ
2 σ
δ
2σ
δ
2σ
39
L’errore percentuale, tanto sulla parte reale quanto su quella immaginaria di k è quindi
ωǫ/2σ . Se tale errore fosse non accettabile (ma σ è comunque abbastanza grande rispetto a ωǫ),
allora si può usare la (111), che equivale semplicemente a modificare il valore della profondità
di penetrazione.
13 INCIDENZA SU DI UN BUON CONDUTTORE
Consideriamo ora l’incidenza di una onda piana su di un buon conduttore, e in particolare iniziamo con il caso di incidenza ortogonale di un campo Ei , Fig. 1.
µ ε
µc εc σ
Er
E2 (0)
Ei
z
Fig. 1: Incidenza ortogonale su di un buon conduttore.
All’interno del conduttore è presente una onda piana attenuata, con impedenza caratteristica ZZm data dalla (108). Il coefficiente di riflessione alla interfaccia è quindi
Zm − ζ
(112)
Zm + ζ
Poiché normalmente |Zm | ≪ ζ risulta Γ ≃ −1, ovvero la potenza incidente viene
sostanzialmente riflessa tutta. Tuttavia il campo penetra anche all’interno del buon conduttore, e l’ampiezza all’interfaccia del campo trasmesso vale E2 = (1 + Γ)Einc . Per valutare E2 ,
quindi, non è possibile utilizzare l’approssimazione Γ ≃ −1, che conduce a campo trasmesso
nullo. Occorre quindi, alternativamente, o calcolare Γ con una approssimazione più elevata,
oppure calcolare, e approssimare, direttamente, 1 + Γ. Risulta più semplice la seconda strada,
che conduce a
Γ=
(Zm + ζ) + (Zm − ζ)
2Zm
Zm − ζ
=
=
(113)
Zm + ζ
Zm + ζ
Zm + ζ
A questo punto possiamo trascurare, a denominatore, Zm rispetto a ζ ottenendo
1+Γ =1+
1+Γ≃
2 (1 + j)
2Zm
=
ζ
σδζ
40
(114)
usando la (108) per l’impedenza caratteristica del buon conduttore. Di conseguenza il campo
trasmesso all’intefaccia vale
2(1 + j)
Einc
σδζ
e di conseguenza nel buon conduttore si avrà un campo
(115)
E20 =
E2 (z) = E20 e−jk2 z iy
dove k2 = (1 − j)/δ è la costante di propagazione nel buon conduttore.
y
E inc
J
z
x
Fig. 2: Geometria per il calcolo della corrente indotta
All’interno del materiale ci sarà anche una corrente elettrica, di densità (vedi figura)
J = σE. Sostituendo il valore di E si trova
J = σE20 e−jk2 z iy
La corrente corrispondente (in direzione y) si ottiene calcolando il flusso di J. Poiché il
campo è costante con x, possiamo calcolare la corrente per unità di lunghezza lungo x, che vale
Z ∞
Z ∞
Z ∞
−jk2 z
σE20 e
dz = σE20
J · iy dz =
e−jk2 z dz
(116)
I=
0
0
0
Integrando si trova
Z
0
∞
"
1
e−jk2 z dz =
e−jk2 z −jk2
z=∞
#
−1
e poiché il primo termine in parentesi quadra è nullo1 , segue (sostituendo)
1
Ricordiamo che k2 é complesso, per cui
h
| exp[−jk2 z]| = exp −
41
z
δ
i
I = σE20
1
2(1 + j)
δ
=σ
Ei
jk2
σδζ
j(1 − j)
Semplificando, e ricordando che j(1 − j) = 1 + j segue
2Ei
(117)
ζ
indipendentemente dal valore di σ, purché grande. Se passiamo al limite per σ → ∞ troviamo
che la corrente si concentra tutta all’interfaccia, diventando quindi una corrente superficiale, ma
il suo valore è comunque dato dalla (117). Si vede che la corrente I data dalla (117) coincide
col doppio del campo magnetico incidente, ovvero col campo magnetico totale alla sinistra della
interfaccia. Poiché immediatamente a destra della interfaccia il campo magnetico é nullo, si ha
una discontinuità di H, sostenuta dalla corretta corrente superficiale.
I=
14 INCIDENZA OBLIQUA – CONDIZIONE DI LEONTOVICH
Passiamo ora a considerare il caso di incidenza obliqua.
La prima cosa da vedere è la ”direzione” (più precisamente, il vettore di propagazione)
della onda piana nel conduttore, data dalla legge di Snell. Se θ è l’angolo di incidenza, il valore
di kx in entrambi i mezzi risulta pari a kx = k1 cos θ, essendo k1 la costante di propagazione nel
primo mezzo.
Nel secondo mezzo si ha quindi
s
2
q
1−j
2
2
kz2 = k2 − kx =
− k12 sin2 θ
(118)
δ
Risulta
k1 =
2π
1
≪
λ1
δ
e quindi
kz2 ≃
s
1−j
δ
2
= k2
=⇒
|kz2 | ≫ |kx2 |
(119)
Pertanto la propagazione nel buon conduttore avviene in direzione z indipendentemente
da θ. Tutto quanto visto nel paragrafo precedente continua quindi a valere, a patto di sostituire
l’impedenza ζ, con l’impedenza d’onda relativa all’angolo di incidenza e orientazione del campo
incidente.
Di conseguenza, immediatamente a destra della interfaccia, ci sarà sempre una onda
piana in direzione z, per la quale vale
che, per z → ∞, tende a 0.
42
H=
1
k2 in × E
ωµ
(120)
essendo in il versore normale alla superficie che punta in direzione del buon conduttore. I campi
nella (120) sono tutti trasversi, e quindi continui attraverso l’interfaccia. Pertanto tra i campi
trasversi a sinistra della interfaccia vale la condizione di Leontovich
Ht =
1
in × E
Zm
(121)
essendo
Zm =
(1 + j)
ωµ
=
k2
σδ
l’impedenza caratteristica del buon conduttore.
La condizione di Leontovich (121) è stata dimostrata per i conduttori piani. Tuttavia
è una ottima approssimazione, e viene largamente utilizzata, anche in altri casi, come quello di
superficie curva, o di onda non piana. I suoi limiti sono quelli legati alla approssimazione di
superfici curve (di interfaccia, o fronti d’onda) con piani: raggio di curvatura della superficie e
del fronte d’onda grandi rispetto alla lunghezza d’onda.
15 PROPAGAZIONE NEI MEZZI STRATIFICATI
Finora abbiamo considerato l’interazione di una onda piana con una singola interfaccia
piana. Il passo successivo è quello di considerare più interfacce piane tra loro parallele, come in
Fig. 1.
µa εa
µ1
ε1
µ2 ε2
µ3
ε3
µf εf
Ei
ki
z
t1
t2
t3
Fig.1: Geometria di un mezzo stratificato
(La polarizzazione dell’onda incidente è puramente indicativa)
43
Assumendo ancora l’asse z ortogonale ai piani di interfaccia, e la direzione x nel piano di
incidenza, in ogni zona, tranne l’ultima, ci saranno due onde piane, una progressiva e una riflessa.
In base alla legge di Snell, le componenti trasverse dei vetttori di propagazione di tutte queste
onde saranno uguali tra loro, e uguali alla componente trasversa del vettore di propagazione
del’onda incidente. Pertanto le onde nei vari strati avranno vettori di propagazione kx ix ±kzn iz .
La componente x è, come già detto, la stessa dappertutto, mentre le due componenti z (una
2
= ω 2 εn µn − kx2 . Nella zona semiinfinita
opposta all’altra) dipenderanno dal materiale1 : kzn
finale mancherà la sola onda riflessa.
Pertanto il tipo di onda piana nei vari strati, e la sua direzione se l’onda è omogenea,
sarà diverso da strato a strato (come in Fig. 2, nell’ipotesi di avere ovunque onde omogenee), e
potrà essere calcolato applicando la legge di Snell tra lo strato semiinfinito di sinistra (di costanti
εa , µa ) e lo strato in questione.
µ1
ε1
µ2
ε2
µ3 ε3
E -2
Er
E3
E +2
Ei
z
0
t
Fig.2: Onde un mezzo stratificato (nell’ipotesi che siano tutte omogenee)
Il campo nella zona n sarà dato da
−jkx x −jkzn z
−jkx x jkzn z
En = E+
e
+ E−
e
n e
n e
(122)
−jkx x −jkzn z
−jkx x jkzn z
Hn = H+
e
+ H−
e
n e
n e
Si nota immediatamente, nelle (122), che il fattore e−jkx x è comune a tutte le onde
e a tutti gli strati (legge di Snell) e può quindi andare in evidenza. Inoltre sappiamo che la
conoscenza delle componenti trasverse dei campi ci consente di calcolare poi, se necessario, quelle
longitudinali. Possiamo quindi limitarci a queste ultime, e considerare solo i due casi di incidenza
T E e T M , che si mantengono in tutti gli strati. Nel caso T E (ma il T M è del tutto analogo)
si ha, considerando solo le componenti Ey ed −Hx (indicate come E ed H semplicemente), e
sottintendendo il fattore comune e−jkx x (che, se necessario, può poi essere inserito alla fine)
En = En+ e−jkzn z + En− ejkzn z
Hn = Hn+ e−jkzn z + Hn− ejkzn z =
1
ZnT E
h
En+ e−jkzn z − En− ejkzn z
i
(123)
L’andamento (123) coincide esattamente con l’andamento di tensione e corrente in un
tratto omogeneo di linea di trasmissione, di costante di propagazione kzn ed impedenza ZnT E .
Inoltre alla interfaccia tra due strati devono essere continui sia il campo elettrico trasverso,
1
Ovviamente le costanti del materiale possono essere complesse
44
sia quello magnetico trasverso, e questo è esattamente equivalente alla continuità di tensione e
corrente alla interfaccia tra due tratti di linea di trasmissione.
Pertanto la propagazione in un mezzo stratificato (nella ipotesi di interfacce tutte parallele, e di campo incidente piano) può essere studiata come la propagazione in un circuito a
linee di trasmissione, nel senso che la propagazione nel circuito a linee è analoga a quella nel
mezzo stratificato. In altri termini, il circuito in linee è equivalente alla propagazione nel mezzo
stratificato, anche se solo limitatmente a un campo ovunque T E (oppure ovunque T M ).
Il circuito equivalente si ottiene dapprima dividendo il problema in una parte T E e una
T M . Per ciascuna polarizzazione si sostituisce a ogni strato, inclusi quelli iniziali e finali, un
tratto di linea di lunghezza pari allo strato (e quindi semi–infinito per il tratto iniziale e quello
finale), e di costanti kzn e ZnT E (o ZnT M a seconda della polarizzazione). L’onda di tensione
(o di corrente) incidente è costituita dalla componente trasversa a z del campo elettrico (o
magnetico) incidente. Va comunque tenuto presente che su tale linea equivalente le grandezze
tensione e corrente si misurano in V/m e A/m rispettivamente. Eventuali piani C.E.P. o C.M.P.
(paralleli alle interfacce) diventano corti circuiti o circuiti aperti.
Questi dati sono sufficienti a calcolare tensione e corrente ovunque. Risolto il circuito
in linea di trasmissione, si possono ottenere i campi calcolando le componenti longitudinali, e
poi moltiplicando tutto per e−jkx x .
Tuttavia in molti casi questo passaggio a ritroso non è necessario, in quanto le informazioni che si ottengono sulle linee sono sufficienti. Questo è dovuto al fatto che anche la
propagazione di potenza si può direttamente studiare sulla linea di trasmissione equivalente.
Notiamo inizialmente che interessa solo la componente z del vettore di Poynting, in quanto
questa è l’unica responsabile del flusso di potenza attraverso le varie interfacce. Ora la componente z del vettore di Poynting (continuiamo a considerare il solo caso T E, in quanto il T M è
analogo) vale
1
1
Ey (−Hx )∗ = V (z)I ∗ (z)
(124)
2
2
essendo V (z) e I(z) le grandezze sulla linea di trasmissione equivalente. Quindi la potenza sulla
linea fornisce direttamente il vettore di Poynting relativo al problema di onde piane. In tutti
i problemi di flusso di potenza, quindi, non è necessario ritornare a considerare i campi delle
onde piane, ma basta fermarsi al problema in linea equivalente. In particolare problemi di massimizzazione della potenza possono essere direttamente risolti con le tecniche degli adattamenti
in linea di trasmissione (ovviamente usando solo tecniche che non richiedono stub o componenti
a costanti concentrate, salvo casi particolari).
S · iz =
45
APPENDICE
1:
DELL’ESPONENZIALE
ERRORE
DI
APPROSSIMAZIONE
Supponiamo che il valore vero di una grandezza sia
V = exp (tv)
(125)
essendo t una grandezza nota, mentre v nonè nota, ma di essa si conosce una approssimazione
a con errore ǫv , ovvero v = a + ǫv . Se supponiamo |ǫv | ≪ |a|, allora
v≃a
(126)
Si vuole valutare se, e con che errore, é possibile usare nella (69) la approssimazione
(126). Ovvero valutare l’errore che si commette nell’approssimare V , che, non dimentichiamolo,
é la grandezza di interesse, con
A ≃ exp (ta)
(127)
L’errore assoluto di questa approssimazione e’ la differenza (in modulo) tra il valore vero
e quello approssimato |V − A|, e l’errore relativo, che é quello di interesse, é pari al rapporto tra
l’errore assoluto e il valore vero1
V − A exp (tv) − exp (ta) =
= |1 − exp t(a − v)| = |1 − exp (−tǫv )|
ǫR = V exp (tv)
(128)
L’espressione (128) di ǫR fornisce due informazioni importanti
1) L’errore relativo sul valore finale richiesto V dipende dall’errore assoluto della approssimazione (126) ma non dipende affatto dall’errore relativo ǫv/|V | di tale approssimazione;
2) L’errore relativo sul valore finale richiesto V dipende in maniera essenziale dal valore di
t, nonostante questo parametro non intervenga nella approssimazione (126).
Questo implica che, a parità di t (ad esempio, t = 1), la approssimazione di v con errore
relativo di, ad esempio, 10−3 é utilizzabile se v = 10, producendo un errore relativo su V pari a
1 % e non lo é se v = 1000, quando l’errore relativo su V diventa di 1.7 (il valore vero é circa tre
volte quello approssimato). Se invece t = 0.01, allora lo stesso errore relativo su v é accettabile
anche se v = 1000, perché allora l’errore ǫR é pari a 1 %.
Se l’errore é piccolo, allora possiamo valutarlo in maniera più precisa. Se
|tǫv | ≪ 1
=⇒
ǫR ≃ |1 − [1 + (−tǫv )]| = |tǫv |
(129)
In elettromagnetismo capita di frequente di dover approssimare esponenziali usando approssimazioni dell’esponente, e quindi dovendo usare le considerazioni di questa appendice. In
particolare interessa valutare queste approssimazioni nel calcolo di integrali di funzioni esponenziali, e in cui, quindi, il risultato di interesse é l’integrale.
Consideriamo allora
1
In molti casi il valore vero nonè, ovviamente , noto e pertanto l’errore relativo viene in genere
ottenuto dividendo per il valore approssimato. Ovviamente, se l’errore é piccolo, le due valutazioni sono del tutto equivalenti
46
Z
1
exp [jtv(x)] dx
(130)
−1
come valore vero da calcolare, e consideriamo lo sviluppo di Taylor di v(x) intorno all’origine
1
1
v(x) = v0 + v1 x + v2 x2 + v3 x3 + R(x)
2
6
(131)
in cui vi sono i valori nell’origine delle successive derivate di v(x), e R(x) è il resto (errore) della
approssimazione. Il caso più interessante è quando si vuole approssimare v(x) con i primi due
termini dello sviluppo v(x) ≃ v0 + v1 x, assumendo inoltre, per semplicità, che nell’intervallo di
integrazione gli ultimi due termini della (131) siano trascurabili rispetto al termine quadratico.
L’errore assoluto di approssimazione è allora
Z 1
Z 1
t
2
exp [jtv0 + jtv1 x] dx =
exp jtv0 + jtv1 x + j v2 x dx −
2
−1
−1
Z 1
t
2
exp [jtv0 + jtv1 x] exp j v2 x − 1 dx
2
(132)
−1
e quindi occorre che il termine in parentesi graffe sia piccolo in tutto l’intervallo di integrazione,
ovvero che
t
v2 x 2 ≪ 1
|x| < 1
2
Si assume normalmente che tale termine sia piccolo, e quindi che l’errore complessivo
sull’integrale sia accettabile, se il valore massimo del termine trascurato è minore di π/8:
t
π
t
2
max v2 x = v2 <
2
2
8
(133)
Questa scelta causa un errore non superiore al 12 % se v1 t é piccolo, che poi decresce al
crescere di v1 t. Se, come capita spesso, il modulo dell’integrando nonè costante, ma diminuisce
verso gli estremi di integrazione, allora l’errore é significativamente più piccolo.
APPENDICE 2: ERRORE DI APPRROSSIMAZIONE DI ONDA PIANA
Abbiamo visto che una onda sferica (vedi Fig. 1) può essere approssimata da una onda
piana in una zona limitata dello spazio. Vogliamo qui valutare quantitativamentel’estensione di
questa zona in rapporto all’errore accettabile.
47
P
Fig.1: Fronti d’onda sferici (tratto pieno) e piani tangenti (tratteggio).
P
R
∆T
P
Q
∆r
S
∆r
Fig.2: Geometria relativa al calcolo dell’errore di ampiezza (a sin.)
e di fase (a des.).
Utilizzeremo per semplicità il campo lontano di un dipolo, (1), ma la discussione vale
per qualunque onda sferica. Cominciamo allora a valutare, per il campo (1), la differenza di
ampiezza. Se consideriamo due punti Q ed R sul raggio per P , a distanza ∆r, si ha
E(Q) = j
ζ Ih
e−jβ(r−∆r) sin θ
2λ (r − ∆r)
E(R) = j
ζ Ih
e−jβ(r+∆r) sin θ
2λ (r + ∆r)
La variazione di fase é inclusa nell’onda piana, per cui interessa solo la variazione del
modulo. Si ha quindi
1
1
−
2∆r
2r∆r
(r − ∆r) (r + ∆r)
=r
= 2
ǫ=
1
(r + ∆r)(r − ∆r)
r − ∆r 2
r
Approssimando il denominatore con r 2 e risolvendo rispetto a ∆r si trova
ǫ
r
=⇒
2∆r = ǫ r
(2)
2
Per quanto riguarda l’errore di fase, questo dipende dalla variazione delle superfici
equifase. Se consideriamo (vedi Fig. 2) le due superfici equifase per P , ovvero la sfera (superfice
vera) e il piano tangente (superfice approssimata), vediamo che al punto S su quest’ultimo é
∆r =
48
attribuita la stessa fase di P , mentre la sua fase vera é proporzionale alla sua distanza rS dal
centro di fase. Se indichiamo con ∆T la distanza tra P e S, questa distanza risulta, per il
teorema di Pitagora
s
2
p
∆T
2
2
rS = r + ∆T = r 1 +
r
cui corrisponde un errore di fase
∆φ0 = −β(rS − r)
Assumendo ∆T ≪ r si ha, per l’errore di fase
s
∆φ0 = −β r
1+
∆T
r
2
"
r
− r ≃ −β r +
2
∆T
r
2
#
−r =−
β
∆T 2
2r
che risulta sempre negativo.
Pertanto il ∆T massimo per un dato errore di fase accettabile ∆φM vale
r
r
r
2r
rλ
r ∆φM
∆T =
∆φM =
∆φM =
λ
β
π
λ π
avendo usato la relazione tra β e λ.
(3)
APPENDICE 3: FORMA GENERALE DEL VETTORE DI POYNTING
La forma generale, ovvero per un campo con polarizzazione qualunque, del vettore di
Poynting per una onda piana evanescente, in un mezzo privo di perdite, può essere ricavata dalla
(19). Scelto il riferimento in modo che k abbia la forma (23), per un campo generico
E = E0x ix + E0y iy + E0z iz
deve risultare
Quindi
k · E = kx E0x − j|kz |E0z = 0
=⇒
kx E0x = j|kz |E0z
(134)
k∗ · E = kx E0x + j|kz |E0z = 2kx E0x = 2j|kz |E0z
(135)
Sviluppiamo allora, dalla (19).
|E0 |2 k∗ − (k∗ · E0 ) E∗0 = |E0x |2 + |E0y |2 + |E0z |2 [kx ix + j|kz |iz ]
∗
∗
∗
− (k∗ · E0 ) E0x
ix + E0y
iy + E0z
iz
Sostituiamo nella (19) e sviluppiamo per componenti
49
e−2|kz |z kx |E0x |2 + |E0y |2 + |E0z |2 − 2kx |E0x |2
2ωµ
−2|kz |z
e
kx −|E0x |2 + |E0y |2 + |E0z |2
=
2ωµ
Sx =
Sy =
e−2|kz |z
∗
−2kx E0x E0y
2ωµ
(136)
e−2|kz |z j|kz | |E0x |2 + |E0y |2 + |E0z |2 − 2j|kz ||E0x |2
2ωµ
−2|kz |z
e
j|kz | |E0x |2 + |E0y |2 − |E0z |2
=
2ωµ
In particolare, se E0y = 0 si ha
Sz =
e−2|kz |z
−|E0x |2 + |E0z |2 k
2ωµ
Da (136) si vede, come già detto, che la componente x di S è reale, e quella z è immaginaria pura. Se poi il campo ha tutte e tre le componenti, S ha anche componente y, con una
fase non determinabile.
S=
50
INDICE
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
App. 1.
App. 2.
App. 3.
ONDE E RAGGI . . . . . . . . . . . . . . . . . . . . . .
ONDE PIANE . . . . . . . . . . . . . . . . . . . . . . .
VETTORE DI POYNTING DI UNA ONDA PIANA . . . . . .
ANALISI DELLA PROPAGAZIONE . . . . . . . . . . . . .
PROPAGAZIONE IN PRESENZA DI PICCOLE PERDITE . . .
PROPAGAZIONE DISPERSIVA . . . . . . . . . . . . . . .
ESEMPIO: PROPAGAZIONE DISPERSIVA IN FIBRA OTTICA
DISCONTINUITA’ . . . . . . . . . . . . . . . . . . . . .
LEGGE DI SNELL . . . . . . . . . . . . . . . . . . . . .
FORMULE DI FRESNEL – ANGOLO DI BREWSTER . . . . .
RIFLESSIONE E TRASMISSIONE DI POTENZA . . . . . . .
BUON CONDUTTORE . . . . . . . . . . . . . . . . . . .
INCIDENZA SU DI UN BUON CONDUTTORE . . . . . . . .
INCIDENZA OBLIQUA – CONDIZIONE DI LEONTOVICH . .
PROPAGAZIONE NEI MEZZI STRATIFICATI . . . . . . . .
ERRORE DI APPROSSIMAZIONE DELL’ESPONENZIALE . .
ERRORE DI APPRROSSIMAZIONE DI ONDA PIANA . . . .
FORMA GENERALE DEL VETTORE DI POYNTING
. . . .
51
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. 1
. 3
. 7
. 9
10
13
16
17
24
28
36
38
40
42
43
46
47
49