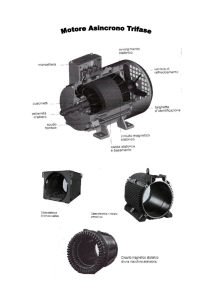
FUNZIONAMENTO DEL MOTORE ASINCRONO TRIFASE E SUE CARATTERISTICHE
F. e. m. indotte dal campo rotante negli avvolgimenti di statore e
rotore. Scorrimento.
Le linee di induzione del campo rotante che attraversano il traferro del motore asincrono
vengono tagliate, durante la uniforme rotazione del campo, da tutti i conduttori attivi che
compongono gli avvolgimenti sia dello statore che del rotore.
In particolare gli avvolgimenti statorici si comportano a tale riguardo esattamente come gli
avvolgimenti indotti di un alternatore o di un motore sincrono, perché il campo rotante che
scorre nel traferro del motore asincrono esercita sui conduttori fissi dello statore l'identico
effetto di induzione elettromagnetica che viene prodotto dalla rotazione materiale della ruota
polare di una macchina sincrona.
In ciascuna fase dello statore si genera perciò una f. e. m. indotta E1 la quale ha la stessa
espressione della f. e. m. generata da un alternatore.
Indicando cioè con Φ il flusso che compete a ciascun polo del campo rotante, con f1 la
frequenza di alimentazione del motore e con N1 il numero dei conduttori attivi che si trovano
collegati in serie tra loro a comporre ciascuna fase, si ha in ogni fase statorica una f. e. m.
indotta il cui valore efficace è espresso dalla relazione E1 = K1 • f1 • Φ • N1
essendo K1 il noto fattore di Kapp. Nelle tre fasi si hanno naturalmente tre f. e. m. identiche
sfasate l'una rispetto all'altra di 120° elettrici. In analogia coi trasformatori, queste f. e. m.
statoriche vengono spesso designate col nome di f. e. m. primarie del motore.
Corrispondentemente viene detta f. e. m. secondaria E2 la f. e. m. che viene indotta dallo stesso
1
campo rotante negli avvolgimenti del rotore, i quali si comportano come gli avvolgimenti
secondari del trasformatore.
Questa f. e. m. secondaria si genera perché le linee di forza del campo rotante tagliano i
conduttori attivi del rotore; però siccome il rotore gira nello stesso verso del campo rotante, è
chiaro che la velocità di taglio delle linee di forza non sarà l'effettiva velocità del campo, ma solo
la velocità relativa del campo rotante rispetto al rotore.
Essendo f1 la frequenza di alimentazione del motore, detta anche frequenza primaria, il campo
rotante con p coppie di poli ruota nello spazio, e cioè rispetto allo statore che è fisso, alla velocità
di sincronismo n1, data in giri al primo da
n1 = 60 • f1 / p
Se allora in una certa condizione di regime il rotore compie, seguendo campo rotante, n2 giri
al primo (n2 < n1), la velocità relativa del campo rotante rispetto al rotore sarà la differenza tra
le due velocità: il campo rotante scorre cioè, rispetto al rotore che lo segue, in ragione di (n1- n2)
giri al primo. La differenza (n1 - n2) si denota col nome di velocità di scorrimento e rappresenta
il numero di giri che il rotore perde, ad ogni minuto primo, rispetto al campo rotante.
Si indica invece semplicemente col nome di scorrimento, la frazione di giro che il rotore
perde per ciascun giro del campo rotante e cioè il rapporto
s =
n1 − n 2
n1
In pratica si esprime più comodamente lo scorrimento percentuale, cioè la misura dello
scorrimento che si ha su 100 giri del campo rotante, scrivendo:
s % = 100 ⋅ s = 100 ⋅
n1 − n 2
n1
2
È chiaro che quando il rotore è fermo, come accade ad esempio all'atto dell'avviamento, si ha
n2 = 0 e perciò s = 1 oppure s % = 100; se invece il rotore arrivasse a raggiungere la velocità del
campo rotante si avrebbe n2 = n1 e perciò s = 0 : mentre il motore passa dalla velocità zero alla
velocità di sincronismo, lo scorrimento varia dunque da uno a zero.
Dicendo, ad esempio, che un motore asincrono lavora, in una certa condizione di carico, con
uno scorrimento del 3% si esprime il fatto che il rotore perde 3 giri per ogni cento giri del campo
rotante e cioè che mentre il campo fa 100 giri rotore ne compie 97.
In ogni caso se un motore asincrono si trova a funzionare con un dato scorrimento s, vuol dire
che le linee di forza del campo rotante tagliano i conduttori attivi del rotore con una velocità di
scorrimento espresso, in giri al primo, dalla relazione:
n1 – n2 = n1 • s
mentre il rotore compie corrispondentemente un numero di giri
n2 = (1-s) • n1
Agli effetti della generazione della f. e. m. secondaria E2 negli avvolgimenti del rotore le cose
vanno come se il rotore fosse fermo e soggetto all’azione di un campo induttore che ruotasse con
la velocità di scorrimento (n1 - n2); ne risulta perciò che la frequenza delle correnti indotte nel
rotore, denominata frequenza secondaria f2 non corrisponde alla frequenza primaria f1, ma è
determinata invece dalla velocità di scorrimento. Tale frequenza secondaria sarà data quindi
(come in un alternatore con p coppie di poli e velocità (n1 - n2) = n1 • s) dalla relazione
f2=
p ⋅ (n 1 − n 2)
60
=
p ⋅n1
60
⋅s
3
Poiché
p ⋅n1
60
Risulta anche: f2 = s
=f1
• f1
Quest'ultima relazione è importantissima ed esprime il fatto che la frequenza f2 delle correnti
indotte nel rotore di un motore asincrono è eguale alla frequenza di alimentazione moltiplicata
per lo scorrimento s.
Inversamente si può dire che lo scorrimento di un motore asincrono può essere definito anche,
e misurato, eseguendo il rapporto tra la frequenza delle correnti indotte nel rotore e la frequenza
di alimentazione dello statore.
I valori dello scorrimento in regime normale di funzionamento del motori asincroni variano entro i limiti dall‘1 al 5%;
corrispondentemente la frequenza delle correnti rotoriche risulterà dell'ordine dall‘1 al 5% della frequenza di
alimentazione f1 e perciò, dati i valori delle frequenze industriali (42 ÷ 60 Hz), dell'ordine appena di qualche periodo al
secondo. Per esempio, se lo scorrimento è del 3 % e la frequenza di alimentazione è f1 = 50 Hz, la frequenza delle correnti
indotte nel rotore è f2 = 0,03 x 50 = 1,5 Hz .
Il valore efficace della f. e. m. secondaria E2 che viene indotta, alla frequenza f2, in ciascuna
fase del rotore, se N2 è il numero dei conduttori attivi per fase ed è Φ il flusso corrispondente ad
un polo del campo rotante induttore, sarà dato dalla espressione
E2 = K2 • Φ • N2 • f2
essendo K2, generalmente diverso dal fattore K1, relativo allo statore.
4
Poiché f2 = s • f1, si può scrivere anche
E2 = K2 • Φ • N2 • s • f1
Quest'ultima relazione attesta che restando costante la frequenza di alimentazione f1 e il flusso
Φ (e perciò costante anche la f. e. m. primaria E1 = K1 • Φ • N1 • f1), la secondaria E2 varia invece
al variare dello scorrimento. Per indicare tale dipendenza, il valore generico della f. e. m.
secondaria corrispondente allo scorrimento s sarà rappresentato, ove occorra, col simbolo E2 (s).
Il valore dello scorrimento dipende dalle condizioni di carico del motore e precisamente dal
valore della coppia resistente che esso è chiamato a vincere. Se il motore gira a vuoto e cioè con
coppia resistente nulla, per l'equilibrio dinamico deve essere nulla anche la coppia motrice: ciò
avviene quando si annullano le correnti indotte nel rotore e cioè quando si annulla la f. e. m.
secondaria. Questa non può annullarsi, d'altra parte, se non quando lo scorrimento si annulla: per
s = 0 risulta infatti E2 (s) = 0. Si arriva così alla conclusione che il motore asincrono funzionante
a vuoto presenta uno scorrimento nullo e cioè la sua velocità di rotazione n2 eguaglia la velocità
del campo rotante n1 ; in altri termini il motore funzionante a vuoto raggiunge e conserva la
velocità di sincronismo dalla quale si discosta solo, all'atto pratico, della minima quantità che
occorre per dar luogo alla piccola coppia necessaria a vincere gli attriti. Lo scorrimento a vuoto
può avere ad esempio valori dell'ordine di 0,001 (il rotore perde un giro su 1000 giri del campo
rotante) : corrispondentemente la f. e. m. secondaria E2 assume dei valori di piccole frazioni di
volt, con frequenza f2 bassissima dell'ordine di qualche periodo al minuto primo.
5
In generale si può dire quindi che quando un motore asincrono passa dal funzionamento a
carico al funzionamento a vuoto, lo scorrimento , la f. e. m. secondaria e la frequenza
corrispondente tendono a zero insieme alla coppia.
Caricando il motore invece, il rotore rallenta e lo scorrimento aumenta: aumenta perciò la
f. e. m. E2 e quindi anche la corrente rotorica. A pieno carico lo scorrimento raggiunge di
regola valori dal 2 al 5%.
Valori maggiori dello scorrimento si hanno in genere solo in condizioni speciali o transitorie :
così all' atto dell' avviamento quando il rotore è fermo, e si ha quindi n2 = 0, lo scorrimento ha il
valore s = 1 perché il moto relativo tra campo rotante e rotore corrisponde all'effettiva velocità
del campo rotante. In tali condizioni la frequenza secondaria f2 = s•f1 coincide con la frequenza
primaria f1 e la f. e. m. secondaria E2 (s) = K2 • Φ • N2 • f1 • s, per s = 1 assume il valore :
E2 (1) = K2 • Φ • N2 • f1
Finché il rotore è fermo il motore si comporta cioè come un trasformatore statico realizzando, per
ciascuna fase, un rapporto di trasformazione :
K ⋅
m = E1 = 1 N1
E 2 (1) K 2 ⋅ N 2
Definita la f. e. m. secondaria E2(1) a rotore fermo, l'espressione della f. e. m. secondaria E2 (s),
che si ha in corrispondenza di una generica condizione di funzionamento caratterizzata dallo
scorrimento s, assume senz'altro la forma :
E2 (s) = s • E2(1)
6
Occorre infine osservare che se il rotore è munito di avvolgimento trifase, nelle tre fasi si
hanno f. e. m. eguali sfasate l'una rispetto all'altra di 120° elettrici ; se invece il rotore è munito di
avvolgimento bifase (anche se lo statore è trifase) nelle due fasi si hanno f. e. m. eguali sfasate di
90°.
Il rotore a gabbia può essere considerato come provvisto di un avvolgimento multifase con
una sola sbarra per fase (N2 = 1) : nelle sbarre successive si hanno f. e. m. eguali ordinatamente
sfasate l'una rispetto all'altra dell'angolo elettrico fra le cave, pari a (360° • p / q), essendo q il
numero complessivo delle sbarre e p le coppie di poli del campo rotante.
7
Reazione rotorica.
Le f. e. m. secondarie E2(s) agendo nei circuiti chiusi del rotore, vi generano delle correnti le
quali si possono esprimere, per ciascuna fase, in base alla rispettiva impedenza.
Poiché il rotore è provvisto in ogni caso di un avvolgimento polifase simmetrico, nelle
diverse fasi si hanno correnti eguali in valore ed egualmente sfasate sulle rispettive f. e. m.
Tali correnti creano perciò a loro volta, come le correnti nello statore, un campo rotante,
denominato campo indotto, il quale ha in ogni caso lo stesso numero di poli del campo
induttore.
Se si tratta di un rotore ad anelli infatti esso è provvisto di un avvolgimento con passo polare
identico allo statore; se si tratta di un rotore a gabbia, le correnti indotte assumono da sole come
si è già osservato una distribuzione equipolare con lo statore.
Questo campo rotante indotto compie, rispetto al rotore che lo genera e indipendentemente
dalla rotazione propria del rotore, un numero di giri che dipende dalla frequenza f2 delle
correnti rotoriche; e precisamente, se p sono le coppie di poli, il campo indotto compie rispetto
al rotore un numero di giri al primo espresso da 60 • f2 / p . Il verso di rotazione di questo
campo rispetto al rotore coincide d'altra parte col verso della rotazione propria del rotore,
perché in tal verso si seguono sul rotore i ritardi di fase delle correnti che vi sono indotte dal
campo induttore. Ne segue che la velocità di rotazione propria del rotore e la velocità relativa
rispetto al rotore, del campo rotante che esso genera, si sommano.
D'altra parte la velocità relativa del campo indotto rispetto al rotore coincide con la velocità
di scorrimento (n1 - n2) = n1 • s. Infatti, essendo sempre f2 = s • f1, risulta
60 ⋅ f 2
p
=
60 ⋅ f 1
p
⋅ s = n1 ⋅ s = n1 − n 2
8
Eseguendo la somma della velocità propria del rotore n2 e della velocità addizionale (n1 - n2) del
campo che esso genera, si ottiene la velocità risultante nello spazio del campo indotto ; tale
somma vale n2 + (n1 – n2) = n1
Si arriva cosi alla conclusione essenziale che il campo indotto ruota nell'intraferro con una
velocità che si identifica in ogni caso, e qualunque sia la velocità pro pria del rotore n2, con la
velocità del campo rotante induttore. Tanti giri perde il rotore rispetto a quest'ultimo e altrettanti
ne riprende il campo indotto: qualunque sia lo scorrimento del rotore, il campo che esso genera si
mantiene così in perfetto sincronismo con il campo rotante induttore. In tal modo i due campi
rotanti, induttore e indotto, conservano invariata durante le rotazione la loro posizione
reciproca.
Ne segue in particolare che le correnti rotoriche, per tutto ciò che riguarda la reazione che
esse esercitano sul sistema induttore, possono essere considerate della stessa frequenza delle
correnti di alimentazione dello statore, perché la minore frequenza delle correnti secondarie è
sempre compensata dalla rotazione meccanica del rotore.
Se il rotore è fermo (s = 1) la frequenza secondaria coincide senz'altro con in frequenza
primaria; se invece il rotore è in marcia, ad esempio con uno scorrimento del 3 %, la frequenza
delle correnti rotoriche è pari al 3% della frequenza primaria mentre il rotore gira con una
velocità che è il 97 % della velocità di sincronismo: il 3% mancante è colmato dalla velocità con
in quale il campo indotto scorre a sua volta rispetto al rotore che lo genera e perciò in definitiva le
correnti secondarie reagiscono sullo statore come se avessero ancora la frequenza primaria e il
rotore fosse ancora immobile.
9
Conseguentemente l'effetto di reazione delle correnti rotoriche sullo statore di un motore
asincrono si palesa perfettamente analogo all’effetto di reazione degli avvolgimenti secondari
sugli avvolgimenti primari di un trasformatore statico, indipendentemente dalla rotazione
meccanica del rotore.
Il fatto di avere nel motore asincrono un flusso rotante di valore costante anziché un flusso
alternativo di direzione fissa come nel trasformatore non sposta la perfetta correlazione che esiste
fra a le due macchine; è già noto infatti che, agli effetti del flusso concatenato con una o più spire,
la rotazione di queste in un campo fisso e costante, oppure la rotazione di un campo costante
rispetto alle spire, equivale precisamente ad un flusso concatenato immobile rispetto alle spire ma
variabile con legge alternativa.
Si immagini ora di considerare un motore ideale senza perdite e senza dispersioni magnetiche
alimentato a tensione costante: in tal caso la tensione applicata a ciascuna fase dello statore deve
essere direttamente equilibrata, in virtù della legge di Ohm, dalla f. e. m. primaria E1 ; perciò il
flusso per polo del campo rotante induttore deve assumere e conservare il valore che risulta
dall'eguaglianza V1 = E1 = K1 • Φ • N1 • f1
L'alimentazione del motore a tensione costante comporta dunque come necessaria conseguenza
la costanza del flusso induttore Φ. Nel funzionamento a vuoto, essendo nulla la coppia
resistente, il motore a partire dall'avviamento accelera fino a raggiungere la velocità di
sincronismo alla quale si annulla anche la coppia motrice. In tali condizioni sono ridotte a
zero le correnti indotte nel rotore e perciò è nulla la reazione secondaria; l'avvolgimento
primario del motore assorbe allora dalla linea che lo alimenta la sola corrente magnetizzante
Iµ che è necessaria a produrre il flusso induttore Φ. Tale corrente, essendo nulla la potenza, è
10
sfasata in ciascuna fase di 90° in ritardo sulla tensione.
Il diagramma vettoriale relativo ad una fase dello statore assume così la configurazione
indicata in fig. 1 a): il flusso Φ è segnato in fase con la corrente magnetizzante Iµ;
la f. e. m. E1 è segnata a 90° in ritardo rispetto al flusso e con ciò risulta precisamente in diretta
opposizione alla tensione applicata V1.
Fig. 1 - Diagramma vettoriale del motore a campo rotante ideale:
a) funzionamento a vuoto ; b) funzionamento sotto carico.
11
Occorre osservare che il vettore Φ ha il significato di rappresentare il flusso concatenato con la
fase che si considera. Mentre la f. e. m. E1 è massima (negativa) tale flusso è zero, perché la
f. e. m. indotta in una fase raggiunge il massimo valore quando i conduttori vengono tagliati
perpendicolarmente dal campo, cioè quando il piano delle spire è parallelo alle linee di forza e il
flusso che attraversa le spire stesse è nullo. In tale istante la corrente magnetizzante è nulla;
raggiunge invece il massimo dopo un quarto di periodo, quando il campo per effetto della
rotazione si dispone perpendicolarmente al piano delle spire e perciò rende massimo il flusso che
le attraversa : corrispondentemente la f. e. m. si annulla. In ogni caso avviene che il campo rotante
passa in posizione tale da rendere massimo il flusso concatenato con una determinata fase, nel
preciso istante in cui è massima la corrente magnetizzante relativa a quella fase.
12
Se ora si applica all'albero del
motore una coppia frenante,
esso rallenta fino ad assumere
uno scorrimento s tale per cui le
correnti indotte nel rotore
raggiungono l'intensità
necessaria e sufficiente a
sviluppare una coppia motrice
eguale alla coppia resistente
applicata.
In ciascuna fase rotorica si
genera
per effetto dello
scorrimento una determinata f.
e. m. E2(s) sfasata di 90° in
ritardo sul flusso Φ e perciò in
fase con la f. e. m. primaria E1;
Fig. 1 - Diagramma vettoriale del motore a campo rotante ideale:
a) funzionamento a vuoto ; b) funzionamento sotto carico.
questa f. e. m. secondaria produce nella fase considerata la corrente secondaria I2 la quale,
avendo supposto nulle le dispersioni magnetiche e la reattanza corrispondente, risulta in fase
con la f. e. m. che la produce, come in fig. 1 b).
13
È importante notare che pur avendo la f. e. m. E2 e la corrente I2 la frequenza f2, esse sono
egualmente rappresentabili sul diagramma come se avessero la frequenza f1 perché agli effetti
delle reazioni sullo statore, la minore frequenza delle correnti rotoriche risulta esattamente
compensata dalla rotazione meccanica del rotore.
14
È chiaro che la corrente I2 circolando negli avvolgimenti del rotore dà luogo ad una forza
magnetomotrice la quale tenderebbe a variare il flusso induttore, che prima era prodotto dalla
sola corrente magnetizzante Iµ.
Siccome il flusso, d'altra parte, non può variare perché cesserebbe l'equilibrio fra la f. e. m.
E1 e la tensione applicata V1 accade, come in un trasformatore, che nel preciso istante in cui si
produce la corrente I2 l'equilibrio predetto momentaneamente si rompe obbligando gli
avvolgimenti primari ad assorbire dalla linea di alimentazione, oltre alla corrente magnetizzante
Iµ, una nuova corrente I’1 la cui f. m. m. sia tale da stabilire ancora l'equilibrio preesistente : ciò
richiede precisamente che la f. m. m. corrispondente alla corrente primaria richiamata dalla
reazione rotorica, risulti eguale e opposta alla f. m. m. corrispondente alla corrente
secondaria:
K1 • N1 • I’1 = - K2 • N2 • I2
[Se gli avvolgimenti di statore e rotore hanno diverso numero di fasi, e in particolare se lo statore
è trifase mentre il rotore è bifase oppure a gabbia, la corrente secondaria I2 e la corrente di
reazione I’1 sono ancora tali da dar luogo nei rispettivi avvolgimenti a due f. m. m. eguali ed
opposte, secondo la relazione: m1 • K1 • N1 • I’1 = - m2 • K2 • N2 • I2
essendo m1 ed m2 il numero delle fasi di statore e di rotore].
15
Si viene a concludere, in generale, che un motore asincrono sotto carico, alimentato a tensione
costante, assorbe dalla linea di alimentazione una corrente I1 che è la risultante, in ciascuna fase,
della corrente magnetizzante Iµ e della corrente I’1 che vi è richiamata dalla reazione secondaria.
È così possibile precisare meglio che il campo rotante indotto, in realtà non esiste come
campo indipendente ma esiste invece unicamente allo stato di f. m. m. rotante, dovuta alle
correnti rotoriche: questa f. m. m. tuttavia non produce il campo corrispondente, perché viene
direttamente contrastata ed equilibrata da una f. m. m. eguale ed opposta dovuta alla corrente di
reazione richiamata negli avvolgimenti primari. Nell'intraferro del motore si ha necessariamente
un campo rotante unico, il quale, se la tensione di alimentazione è costante, permane invariato sia
a vuoto che a carico.
Tutte le considerazioni esposte sotto il nome di campo rotante indotto vanno intese quindi nel
senso sopra precisato, e cioé sostituendo alla parola campo la parola f. m. m.. Volendo, si può
anche conservare il riferimento ad un campo rotante indotto, pensando di associargli però ad
opera dello statore, un campo rotante direttamente opposto che lo annulla.
All'atto pratico il motore funzionante a vuoto deve assorbire oltre alla corrente magnetizzante
Iµ anche una piccola componente attiva Ia per compensare sia le perdite nel ferro che le perdite
meccaniche: la risultante di tali due correnti costituisce la corrente a vuoto del motore
I0 =I µ +Ia
Queste due componenti sono tra loro in quadratura, e danno come risultante un valore
I 0 = I 2µ + I a2
16
Circuito equivalente del motore asincrono.
In un motore asincrono reale ciascuna fase statorica e rotorica è caratterizzata innanzi tutto
dalla presenza della resistenza ohmica degli avvolgimenti. Nel circuito equivalente del motore
debbono inoltre figurare le reattanze di dispersione, dovute a quelle linee di induzione del
campo che si concatenano singolarmente con ciascuna fase dei due avvolgimenti statorico e
rotorico senza interessare altro e perciò non partecipano al fenomeno della reazione.
Questi flussi di dispersione comprendono le linee di induzione che si chiudono direttamente
attorno ai conduttori attivi, rispettivamente dello statore e del rotore, senza attraversare il
traferro (flusso disperso alle cave) e inoltre le linee di induzione che si richiudono attorno alle
testate degli avvolgimenti che sporgono dai pacchi lamellari (flusso disperso alle testate).
Sviluppandosi prevalentemente nell'aria, questi flussi possono ritenersi proporzionali alle
correnti che li producono ; si può considerare quindi, per ogni fase, una opportuna induttanza di
dispersione, definita come rapporto tra il flusso disperso concatenato con gli avvolgimenti della
fase considerata e la corrente che la percorre. Se gli avvolgimenti sono simmetrici risulteranno
eguali fra loro le induttanze L1 relative alle diverse fasi primarie, ed analogamente risulteranno
eguali tra loro le induttanze L2 relative alle fasi secondarie.
[Gli avvolgimenti trifasi con matasse in tre ordini avranno in realtà induttanze diverse per le tre
fasi, perché varia da una fase all'altra lo sviluppo e la forma delle connessioni frontali: si tratta
però anche in tal caso di differenze trascurabili].
17
Moltiplicando le induttanze predette L1 ed L2 per la pulsazione relativa rispettivamente alla
frequenza primaria e secondaria f1 e f2 si ottengono le reattanze di dispersione primaria e
secondaria X1 e X2. Così, posto ω1 = 2πf1, la reattanza primaria per ciascuna fase è:
X1 = ω1 • L1
Per una data frequenza di alimentazione del motore, essa costituisce un parametro praticamente
costante della macchina, il quale si associa alla resistenza ohmica R1 di ciascuna fase primaria
per comporre l'impedenza primaria
Z1 = R1 + j • X1
Analogamente posto:
ω2 (s) = 2 • π • f2(s)
la reattanza secondaria è
X2(s) = ω2 (s) •L2
il cui valore dipende dallo scorrimento s in quanto la frequenza rotorica vale f2 =f1 • s. In
generale risulta quindi, in funzione dello scorrimento
X2(s) = s • ω1 •L2
Per s = 1, cioè a rotore fermo, la frequenza rotorica coincide con la frequenza di linea f1 e si ha
quindi X2 (1) = ω1 • L2 ; in corrispondenza di un generico valore dello scorrimento s l'espressione
della reattanza di dispersione secondaria assume così la forma
X2(s) = s • X2(1)
18
Mentre il rotore passa da fermo alla velocità di sincronismo, la reattanza secondaria X2(s) varia
dunque proporzionalmente allo scorrimento fra i limiti
X2(1) = ω1• L2;
X2(0) = 0
Per quanto riguarda la resistenza secondaria si può osservare che le fasi rotoriche, a regime
normale, sono di regola chiuse in corto circuito tra loro: si dovrà considerare perciò la resistenza
ohmica propria di ciascuna fase, comprese le connessioni di corto circuito. A parte le variazioni
dipendenti dalla temperatura, questa resistenza secondaria R2 costituisce un parametro costante
della macchina. Se in casi particolari il motore lavora con resistenze addizionali sulle fasi
rotoriche, alla resistenza R2 va aggiunta o conglobata la resistenza addizionale relativa a ciascuna
fase.
La resistenza e la reattanza secondarie definiscono l'impedenza secondaria, che viene espressa
per ciascuna fase, in funzione dello scorrimento, dalla relazione
Z2(s) = R2 + j • X2(s) = R2 + j • s • ω1 • L2 = R2 + j • s • X2(1)
Variando lo scorrimento da uno a zero il valore dell'impedenza secondaria aria fra i limiti
Z 2 (1) = R 22 + X 22 (1) ; Z 2 (0) = R 2
Quindi mentre il motore tende alla velocità di sincronismo e cioè lo scorrimento a zero,
l'impedenza secondaria tende alla resistenza ohmica R2 .
In base all'espressione della impedenza secondaria, è possibile calcolare la corrente I2(s) che
circola in ciascuna fase del rotore ; per la legge di Ohm tale corrente è infatti espressa dalla
relazione simbolica
s ⋅ E 2 (1)
E 2 (s ) =
I 2 (s ) =
19
Z 2 (s ) R 2 + j ⋅ s ⋅ X 2 (1)
Dividendo il numeratore e il denominatore per s si ottiene anche
I 2 (s ) =
E 2 (1)
R 2 + j ⋅ (1)
X2
s
Quest'ultima relazione dimostra che la corrente che circola in ciascuna fase del rotore quando
esso ruota con lo scorrimento s, e quella stessa che si avrebbe quando il rotore fosse immobile
(s = 1), ma con la resistenza ohmica di ogni fase aumentata dal valore R2 al valore R2/s, cioè
della quantità R(s) espressa dalla differenza
1−s
R (s ) = R 2 − R 2 =
s
s
⋅R 2
Si giunge così alla conclusione fondamentale che nel motore asincrono, la rotazione meccanica
del rotore equivale, elettricamente, alla comparsa nel circuito rotorico della resistenza fittizia
R(s) dipendente dallo scorrimento come si vedrà, la potenza elettrica dissipata in questa
resistenza corrisponde precisamente alla potenza meccanica sviluppata dal rotore.
20
Fig. 2 - Circuito equivalente
del motore asincrono.
Ciascuna fase del rotore in marcia con lo scorrimento s può essere pertanto rappresentata da
un circuito equivalente nel quale agisce la f. e. m. E2(1) relativa al rotore fermo, ed è dotato
oltre che della resistenza propria R2, della reattanza di dispersione X2(1) misurata anch' essa a
rotore fermo, collegate in serie con una resistenza addizionale R(s) che rende conto dell' effetto
della rotazione, come è rappresentato in fig. 2.
Durante la rotazione del motore, nella realtà si verifica una diminuzione della f. e. m. indotta
nel rotore e della frequenza f2: nel circuito equivalente rotorico ciò equivale a supporre che resti
invariata sia la f. e. m. che la frequenza, e che aumenti invece la resistenza ohmica del rotore.
Così, nel funzionamento a vuoto, il motore raggiunge la velocità di sincronismo e la corrente
nel rotore si annulla, perché si annulla la f. e. m. indotta: nel circuito equivalente si suppone
invece che la f. e. m. E2(1) resti invariata, ma che diventi infinita la resistenza di carico R(s);
per s = 0 si ha infatti
1− s
R (s ) =
s
⋅R 2 = ∞
Si può dire così che il motore asincrono funzionante a vuoto si comporta come un
trasformatore statico a circuito secondario aperto.
21
Quando invece il rotore è immobile e si ha s = 1, la resistenza di carico diventa
R (s ) =
1− s
s
⋅ R 2 = 0;
nel secondario non si ha in tali condizioni nessuna resistenza addizionale ma solo la resistenza
propria dell'avvolgimento. Ciò vuol dire che il motore asincrono, col rotore immobile si comporta
come un trasformatore statico chiuso in corto circuito.
L'avvolgimento primario di questo trasformatore corrisponde al circuito equivalente di una fase
dello statore dotata della propria resistenza ohmica e della reattanza di dispersione X1, e
alimentata alla tensione primaria V1 come in fig. 2. La resistenza trasversale R0 e la reattanza X0
rappresentano infine, come nei trasformatori, gli elementi del circuito equivalente del motore che
richiamano la corrente di perdita Ia e la corrente magnetizzante Iµ .
Fig. 2 - Circuito equivalente
del motore asincrono.
22
Diagramma delle correnti al variare dello scorrimento.
In base al circuito equivalente sopra definito è possibile stabilire come variano le correnti nel
rotore e nello statore del motore asincrono at variare dello scorrimento s.
Per rendere più semplice la deduzione si pone l'ipotesi di trascurare le cadute di tensione
primarie. In tale ipotesi la tensione V1 applicata ad una fase dello statore deve essere interamente
equilibrata dalla f. e. m. E1: allora, se la tensione V1 è mantenuta costante, anche la f. e. m. deve
restare costante e perciò deve restare costante anche il flusso Φ, sia a vuoto che a carico.
Si può inoltre supporre che le perdite meccaniche al rotore, determinate dalle resistenze
passive di attrito e ventilazione, siano conglobate nelle perdite nel ferro statoriche. In base a
questa ipotesi il funzionamento a vuoto del motore avviene alla esatta velocità di sincronismo,
cioè con scorrimento s = 0 e con una corrente secondaria nulla. Corrispondentemente il primario
assorbe la corrente I0 che costituisce la corrente a vuoto del motore; questa è sfasata in ritardo
rispetto alla tensione di un angolo ϕ0 il cui coseno rappresenta il fattore di potenza a vuoto.
Le componenti della corrente a vuoto
I µ = I 0 ⋅ sen (ϕ 0), I a = I 0 ⋅ cos(ϕ 0)
in quadratura e in fase rispetto alla tensione V1, rappresentano rispettivamente la corrente
magnetizzante richiesta per la generazione del flusso induttore, e la corrente attiva richiesta per la
compensazione delle perdite meccaniche e nel ferro (Pm + Pf) nonché delle perdite per effetto
Joule nella resistenza ohmica primaria (P’j0 = 3 • R1 • I20). È chiaro infatti che la potenza
P0 = 3 • V1 • I0 cos(ϕ0)
23
assorbita a vuoto dal motore, essendo nulla la potenza al rotore per l'assenza di qualsiasi coppia
resistente, deve corrispondere alle sole perdite a vuoto
P0 = (Pm + Pf) + P’j0
Analogamente l'espressione
Q0 = 3 •V1 • I0 • sen(ϕ0)
rappresenta la potenza reattiva a vuoto, principalmente connessa al campo rotante ed in
piccola parte alla quantità Q’0 = 3 • X1 • I20 corrispondente al flusso disperso statorico dovuto
alla corrente a vuoto I0 .
La f. e. m. primaria E1 è rappresentata a sua volta da un vettore uguale e opposto a V1
(fig. 3) mentre la f. e. m. secondaria E2(1), in fase con E1, è definita dalla relazione
E2 (1) = E1 / m essendo m il rapporto di trasformazione del motore. Applicando all'asse una
certa coppia resistente il motore rallenta e viene a funzionare con un certo scorrimento s.
Corrispondentemente nel rotore viene a circolare una corrente I2(s) definita in valore del rapporto
E 2 (1)
(
)
=
s
I2
2
2
R2 +
(
1
)
(X 2 )
s
e sfasata in ritardo rispetto alla f. e. m. dell'angolo ψ2(s) definito da
tan(ψ 2 (s ) ) =
X 2 (1) = s ⋅ X 2 (1)
R2
R2
s
24
Essa è rappresentata sul diagramma della fig. 3 dal vettore I2(s) che ha l'estremo in P2. Affinché il
flusso resti invariato il primario deve assorbire allora, oltre alla corrente a vuoto I0, anche la
corrente di reazione I’1(s) = - I2(s) / m rappresentata da un vettore opposto a I2 (s).
Fig. 3 - Diagramma
circolare del
motore asincrono
per Φ = cost.
In totale quindi ciascuna fase dello statore deve assorbire sotto carico una corrente
I1 = I0 + I’1
rappresentata dal vettore che ha l'estremo in P1.
25
È ora facile dimostrare che al variare dello scorrimento s, il vettore rappresentativo della
corrente secondaria I2(s) varia in modo che il suo estremo P2 si muova lungo il semicerchio che
ha per diametro il vettore
E 2 (1)
I 2 (∞ ) =
j ⋅ X 2 (1)
il quale rappresenta a sua volta, in ampiezza e fase, la corrente secondaria che si instaura
nel rotore per s = ∞ : (ciò significa immaginare di far ruotare artificialmente il rotore in senso
opposto al campo rotante con velocità infinita o comunque elevatissima).
L'angolo di sfasamento ψ2(∞) di questa corrente, in base alla relazione precedente
tan(ψ 2 (s ) ) =
X (1)
X 2 (1)
=s ⋅ 2
R2
R2
s
raggiunge il valore di 90° e perciò il vettore I2(∞) ha l'estremo nel punto P2(∞) segnato in figura.
D'altra parte la corrente generica I2(s) che corrisponde ad un punto come P2 si può scrivere anche
sotto la forma
X 2 (1)
E 2 (1) ⋅
I 2 (s ) =
2
2
X 2 (1)
R2 +
X 2 (1) )
(
s
( )
X 2 (1)
Ma essendo in questa
(Rs )
2
2
+ ( X 2 (1) )
= sen (ψ 2 (s ))
2
si ha anche
I 2 (s ) = I 2 (∞) ⋅ sen (ψ 2 (s ))
26
Ciò vuol dire che il triangolo 0 P2 P2(∞) è rettangolo in P2 e perciò, variando s, il punto P2
descrive la semicirconferenza che ha per diametro la corrente I2 (∞).
È facile allora comprendere che il punto P1, che è l’estremo del vettore che rappresenta la
corrente primaria I1 = I0 + I’1 si muoverà corrispondentemente lungo la semicirconferenza
P0 P1 P (∞): il centro 01 di questo cerchio starà precisamente sull'orizzontale condotta per P0 e
il suo diametro P0P(∞) rappresenta la corrente di reazione I1(∞) = - I2(∞) / m. Le corde
del semicerchio primario condotte da P0 rappresentano le correnti di reazione I’1
corrispondenti ai diversi valori dello scorrimento, mentre i vettori condotti dall'origine 0 ai vari
punti della semicirconferenza rappresentano le correnti primarie.
Per s = 0 la corrente secondaria è nulla, e il punto P2 coincide con l'origine 0: in tali condizioni
la corrente primaria si riduce alla corrente a vuoto I0 e il punto P1 coincide con P0. Caricando
gradualmente il motore lo scorrimento aumenta: allora la corrente secondaria va pure
aumentando e contemporaneamente aumenta anche il rispettivo sfasamento ψ2 (basta pensare che
al crescere dello scorrimento aumenta la frequenza secondaria e perciò aumenta la reattanza):
così il punto P2 descrive il semicerchio secondario da 0 verso P2(∞), mentre l'estremo del vettore
che rappresenta la corrente primaria si muove da Po verso P(∞).
Se il motore viene frenato fino a bloccare il rotore lo scorrimento diviene eguale a uno ; la
corrente rotorica che ne risulta prende il nome di corrente secondaria di corto circuito: essa è
definita in valore dal rapporto
E 2 (1)
I 2cc =
R 22 + X 22 (1)
ed è sfasata in ritardo dell'angolo ψ2cc definito da
tan(ψ 2cc ) =
X 2 (1)
R2
27
Questa corrente è rappresentata sul diagramma del punto P2cc: la corrente primaria corrispondente
costituisce la corrente di corto circuito primaria Icc ed è definita dal punto Pcc ottenuto tracciando
da P0 la parallela al vettore I2cc. La corrente Icc è sfasata in ritardo rispetto a V1 dell'angolo ϕcc il
cui coseno rappresenta il fattore di potenza di corto circuito del motore.
Si può dire quindi che variando lo scorrimento da zero a uno l'estremo del vettore che rappresenta
la corrente secondaria descrive l'arco di cerchio compreso fra l'origine e P2cc, mentre l'estremo del
vettore che rappresenta la corrente primaria descrive corrispondentemente l'arco di cerchio
compreso tra P0 e Pcc. Facendo ruotare artificialmente il rotore in verso opposto al campo con
velocità crescente, lo scorrimento aumenta da uno all'infinito, e i punti rappresentativi delle
correnti secondaria e primaria descrivono rispettivamente gli archi compresi fra P2cc e P2(∞) e fra
Pcc e P(∞).
Il diagramma sopra descritto costituisce il diagramma circolare del motore asincrono
funzionante a flusso costante. Esso è noto anche come diagramma di Heyland.
All'atto pratico anche se è mantenuta costante la tensione di alimentazione, il flusso induttore
diminuisce alquanto da vuoto a carico, in conseguenza delle cadute di tensione primarie. Questo
fatto tuttavia non modifica l'aspetto generale del diagramma circolare ma ne modifica solo leggermente le dimensioni e la posizione del centro del semicerchio primario (vedi § successivo).
28
Determinazione del diagramma circolare del motore asincrono
mediante la prova a vuoto e la prova di corto circuito.
Il diagramma circolare del motore asincrono viene limitato in pratica al tracciamento della
semicirconferenza corrispondente alla corrente primaria, la quale definisce completamente le
caratteristiche del motore.
Per tracciare questa circonferenza basta conoscere due punti e il centro. In pratica, il problema
viene risolto generalmente determinando il punto P0, corrispondente al funzionamento a vuoto del
motore, e il punto Pcc corrispondente al funzionamento in corto circuito e cioè con scorrimento
eguale a uno.
Per la determinazione del diagramma circolare di un motore asincrono, si richiedono pertanto
due prove della macchina e cioè la prova a vuoto e la prova di corto circuito.
29
La prova a vuoto viene eseguita in base allo schema della fig. 4. Sulla linea di alimentazione del
motore vengono inseriti due wattmetri, un voltmetro e un ampermetro (o eventualmente tre
ampermetri per controllare l’equilibrio delle correnti). Si avvia quindi il motore alimentandolo
alla tensione e frequenza normali lasciandolo girare a vuoto.
L'ampermetro fornisce allora la misura della corrente a vuoto I0,
mentre la somma algebrica delle indicazioni dei due wattmetri
la potenza assorbita a vuoto P0. (All'atto pratico si farà sempre la
differenza fra il wattmetro maggiore e il minore, perché nel
funzionamento a vuoto il fattore di potenza è sempre minore di
0,5). Dalla relazione P0 = 3 • V1 • I0 • cos(ϕ0) si potrà poi ricavare il
fattore di potenza a vuoto
cos(ϕ 0) =
Fig. 4 - Prova a vuoto del
motore asincrono.
P0
3 ⋅V 1 ⋅ I 0
In questa prova si terrà il dovuto conto del collegamento fra le
fasi dello statore: se il collegamento è a triangolo, V1 è senz'altro
la tensione di linea indicata dal voltmetro mentre I0 sarà la
corrente segnata dall'ampermetro divisa per √3; inversamente
accadrà se il collegamento è a stella.
30
Determinata la corrente a vuoto ed il rispettivo sfasamento, si può senz'altro riportare in una scala
prefissata il vettore I0 sfasato in ritardo dello angolo ϕ0 rispetto alla tensione V1 come Fig. 5.
L'estremo di questo vettore il punto Po .
Fig. 5 - Costruzione del diagramma circolare mediante
i punti P0, e Pcc
31
La prova di corto circuito fornirà, analogamente, il punto Pcc. Tale prova consiste nel
determinare la corrente Icc che il motore assorbe quando si blocca rotore per impedirgli di
girare. Siccome la corrente di corto circuito Icc che si otterrebbe applicando al motore la
tensione normale V1n risulta eccessiva, e non può essere sopportata a lungo dal motore, la
prova viene eseguita (come nei trasformatori) alimentando il motore con una tensione ridotta.
All'atto pratico si applica precisamente quella tensione V1cc che occorre per far assorbire al
motore col rotore bloccato la corrente normale di pieno carico In. La tensione così definita
costituisce la tensione di corto circuito del motore. Essa risulta dell'ordine dal 15 al 30% della
tensione normale.
[Nei trasformatori in tensione di corto circuito è assai minore (dal 4 all'8% in genere); ciò è
dovuto al fatto che il motore asincrono ha una reattanza di dispersione maggiore per la
presenza dell'intraferro ].
Misurando la tensione di corto circuito V1cc e la corrente che essa produce In, si determina
quindi quale sarebbe la vera corrente di corto circuito Icc che si otterrebbe applicando la
tensione normale V1n siccome la caratteristica di corto circuito è lineare, si può fare senz'altro
la proporzione
V 1cc = V 1n
I n I cc
da cui
I cc
=
V 1n ⋅
In
V 1cc
32
Per ottenere l'angolo di sfasamento di questa corrente è necessario determinare anche il fattore
di potenza di corto circuito cos(ϕcc). Sul circuito di alimentazione si devono inserire a tale
scopo due wattmetri in inserzione Aron, che possano fornire la potenza di corto circuito Pccn
relativa alla tensione ridotta V1cc e alla corrente In . Si ha quindi
Pccn = 3 •V1cc • In • cos(ϕcc)
da cui si ricava
cos(ϕ cc ) =
P ccn
3 ⋅v 1cc ⋅ I n
La potenza di corto circuito Pcc corrispondente alla vera corrente di corto circuito Icc prodotta
dalla tensione normale V1n si può calcolare scrivendo
P cc
Essendo
V 1n = I cc si ha anche :
V 1cc I n
2
P cc
= 3 ⋅V 1n ⋅ I cc ⋅ cos(ϕ cc ) =
V 1n ⋅ I cc ⋅
P ccn
⋅
V 1cc I n
2
I
V
= cc ⋅ P ccn = 1n ⋅ P ccn
In
V 1cc
La potenza assorbita dal motore col rotore bloccato è cioè proporzionale al quadrato della
corrente assorbita e perciò anche al quadrato della tensione di alimentazione: questo fatto è del
tutto evidente, se si pensa che la potenza di corto circuito corrisponde essenzialmente alle
perdite nel rame dello statore e del rotore.
Riportando sul diagramma il vettore Icc in ritardo sulla tensione V1 dell'angolo ϕcc resta
determinato così il punto Pcc corrispondente al funzionamento del motore con la tensione 33
normale e scorrimento eguale a uno.
Dopo di ciò il centro 01 del cerchio rimane senz'altro determinato dal punto d'inserzione fra la
orizzontale condotta per P0 e la normale tracciata dal punto medio M della corda P0 Pcc.
Circa le proporzioni del diagramma è da osservare innanzi tutto che il motore asincrono viene
costruito in modo da realizzare il massimo fattore di potenza a pieno carico: ciò vuol dire che il
funzionamento a pieno carico del motore corrisponde sul diagramma approssimativamente al
punto di contatto P della tangente al cerchio condotta dall'origine 0: la corrente di pieno carico In
corrisponde perciò al vettore 0 P al quale compete il minimo sfasamento ϕ e perciò il massimo
fattore di potenza cos(ϕ). La corrente a vuoto I0 può risultare dell'ordine del 30% della corrente di
pieno carico In, mentre la corrente di corto circuito Icc può essere da 3 a 7 volte la corrente
normale.
[La corrente a vuoto dei motori asincroni risulta relativamente assai più intensa che nei
trasformatori per la presenza dell'intraferro, il quale determina evidentemente un aumento della
corrente magnetizzante Iµ necessaria a produrre il flusso. Inoltre le perdite meccaniche fanno
aumentare la componente attiva Ia]
Il fattore di potenza di corto circuito pur essendo quasi sempre minore di 0,5 risulta in genere
maggiore del fattore di potenza a vuoto, e perciò sul diagramma si ha generalmente ϕcc < ϕ0 .
34
COPPIA E POTENZA TRASMESSA.
La coppia motrice che agisce sul motore asincrono per effetto delle azioni elettromagnetiche che
si esercitano fra il campo rotante e le correnti indotte nel rotore, è in diretta relazione con la
potenza che il campo rotante trasmette al rotore stesso. Siccome il campo rotante ruota sempre
con la stessa velocità, qualunque sia la velocità di rotazione effettiva del rotore, si può dire che la
trasmissione della potenza dallo statore al rotore avviene costantemente alla velocità di
60 ⋅ f 1
sincronismo
n1 =
p
Ne risulta che se Pt è la potenza trasmessa dal campo rotante al rotore, la coppia C che vi
2 ⋅ π ⋅C ⋅n1
corrisponde rimane determinata dalla relazione
Pt =
60
D'altra parte il rotore non ruota alla velocità di sincronismo, ma ad una velocità n2 < n1. Ciò vuol
dire che la potenza meccanica PM che viene effettivamente impressa al rotore non è l'intera
potenza Pt ma è invece
2 ⋅ π ⋅C ⋅n 2
PM =
60
La differenza tra la potenza totale Pt trasmessa al rotore e la potenza meccanica PM rappresenta
così la potenza elettrica dissipata nel rotore: siccome le perdite nel ferro del rotore sono
trascurabili, tale dissipazione corrisponde, essenzialmente alle perdite nel rame dei circuiti
rotorici. (Le perdite meccaniche non devono essere considerate perché esse vanno a carico della
potenza meccanica PM). Indicando perciò con P”j le perdite per effetto Joule nei circuiti rotorici
si ha
P j = 3 ⋅ R 2 ⋅ I 22 = P t − P M =
"
2 ⋅ π ⋅C ⋅n1 2 ⋅ π ⋅C ⋅n 2 2 ⋅ π ⋅C
−
=
⋅ (n 1 − n 2 )
60
60
60
35
Ricordando che (n1 – n2) = s • n1, risulta:
Ed essendo:
2 ⋅ π ⋅C ⋅n1
= Pt
60
P "j =
2 ⋅ π ⋅C ⋅ s ⋅n1
60
Si ottiene infine:
P”j = s • Pt
Si ha in ciò una proprietà importante del motore asincrono che si esprime dicendo che le
perdite per effetto Joule nel rotore corrispondono al prodotto dello scorrimento s per la
potenza Pt trasmessa dal campo rotante al rotore.
Richiamandosi al circuito equivalente del motore rappresentato in fig. 2 è ora possibile
controllare che la potenza meccanica PM impressa al rotore equivale alla potenza elettrica
dissipata nella resistenza fittizia di carico R(s).
Si ha infatti, considerando ad esempio un rotore trifase:
P M = P t − P "j =
1− s
1− s
P "j
− P "j =
⋅ P "j = 3 ⋅
⋅ R 2 ⋅ I 22 (s ) = 3 ⋅ R (s ) ⋅ I 22 (s )
s
s
s
Fig. 2 - Circuito equivalente
del motore asincrono.
36
Si può inoltre facilmente verificare che il rendimento elettrico del rotore, cioè il rapporto tra la
potenza meccanica PM e la potenza totale trasmessa al rotore Pt , coincide con la differenza
(1 - s) : così se un motore lavora con uno scorrimento del 3% vuol dire che la perdita per
effetto Joule nei circuiti rotorici è il 3% della potenza totale che viene impressa al rotore,
mentre il 97% viene trasformata in potenza meccanica.
37
Considerazioni sulle curve caratteristiche del motore asincrono. —
Il diagramma circolare consente di dedurre tutte le «curve caratteristiche» del motore
asincrono e cioè quelle curve che rappresentano la potenza assorbita, la potenza resa, la coppia
motrice, il fattore di potenza, il rendimento e lo scorrimento in funzione della corrente assorbita.
Se si immagina di frenare gradualmente il motore fino a bloccarlo, la corrente assorbita varia
dal valore I0 (corrente a vuoto) al valore Icc (corrente di corto circuito).
La potenza assorbita cresce dal valore Pa0, corrispondente al funzionamento a vuoto, fino a
raggiungere un massimo in corrispondenza della sommità del cerchio, per poi diminuire fino al
valore Pcc corrispondente al corto circuito.
La potenza resa è nulla nel funzionamento a vuoto, aumenta al crescere della corrente fino a
raggiungere un massimo, quindi prende a diminuire per annullarsi nel funzionamento in corto
circuito. Essa raggiunge il valore massimo per quel valore di corrente cui corrisponde sul
diagramma circolare il punto di contatto della tangente parallela alla retta delle potenze rese.
Il fattore di potenza aumenta rapidamente dal valore cos ϕ0 fino a raggiungere un massimo,
indi riprende diminuire fino al valore di corto circuito cos ϕcc : il massimo valore del fattore di
potenza viene raggiunto per quel valore della corrente assorbita che è rappresentata dal vettore
tangente al cerchio : per tale corrente infatti si ha il minimo sfasamento.
38
Lo scorrimento del motore cresce per un largo intervallo assai lentamente per poi raggiungere
rapidamente il valore s = 1 ossia il 100% in corrispondenza all'arresto del rotore, rappresentato
sul diagramma circolare dal punto Pcc. Ciò vuol dire che caricando gradualmente il motore a
partire dal funzionamento a vuoto, esso va rallentando per un largo intervallo in misura assai
poco sentita, mentre oltrepassando un certo limite di carico, il motore verrebbe condotto
rapidamente a fermarsi.
Il rendimento è nullo a vuoto ma cresce assai rapidamente appena si va caricando il motore fino a
raggiungere dei valori che restano sensibilmente costanti per un intervallo sufficientemente
ampio: dopo di ciò il rendimento diminuisce fino ad annullarsi quando il motore si arresta.
All'atto pratico non si utilizza mai il motore per l'intero sviluppo delle sue curve caratteristiche,
ma si limita il campo di funzionamento normale al primo intervallo, precisamente a quello che,
sul diagramma circolare, si estende dal punto P0 fino a oltrepassare di poco il punto di contatto
della tangente condotta al cerchio dall'origine 0. In tutto questo intervallo lo scorrimento del
motore si mantiene entro limiti assai piccoli, dell'ordine dal 2 al 4%; ciò vuol dire che il motore
asincrono entro i limiti di carico che vengono assunti a rappresentare la sua potenza normale,
rallenta in misura assai poco sentita, e cioè può considerarsi come un motore a velocità
praticamente costante. L'intervallo considerato investe inoltre il tratto delle caratteristiche nel
quale si verificano i massimi valori del rendimento e del fattore di potenza : questi scendono a
valori molto bassi solo in prossimità del funzionamento a vuoto e cioè nel funzionamento sotto
carichi assai ridotti.
39
Il valore della potenza nominale del motore (potenza di targa) è compresa in genere fra la
metà e un terzo del massimo valore assoluto della potenza che il motore potrebbe sviluppare;
analogamente il valore della coppia corrispondente alla potenza nominale è compreso fra la
metà e un terzo della coppia massima: questa circostanza conferisce al motore una larga
capacità di sovraccarico (si definisce capacità di sovraccarico il rapporto tra la coppia massima
CM e la coppia nominale Cn; negli asincroni si ha:
)
CM
Cn
≅ 2÷3
e cioè rende il motore asincrono adatto a sopportare dei sovraccarichi istantanei di oltre il 50%
della sua potenza nominale.
Il rendimento a pieno carico dei motori asincroni può raggiungere valor dell'ordine del 94% nei
motori di grande potenza (oltre 100 kW); può arrivare dall'85 al 90% per potenze comprese fra 10
e 50 kW e diminuisce per le potenze inferiori fino a circa il 60% nei motori piccolissimi. Il
fattore di potenza a pieno carico può variare analogamente da 0,65 a 0,92 dai piccoli
ai grandi motori ; a pari potenza, il fattore di potenza riesce in genere minore nei motori lenti, e
cioè con maggior numero di poli, perché aumentando il numero dei poli aumenta la corrente
magnetizzante del motore ed aumentano anche le dispersioni magnetiche e cioè le reattanze di
dispersione.
40
Caratteristica meccanica del motore asincrono.
La « caratteristica meccanica» di un motore e la curva che rappresenta la relazione tra la
coppia motrice e la velocità: C = f (n).
Nel caso del motore asincrono questa curva può essere dedotta dal diagramma circolare,
assumendo come asse delle ascisse la scala degli scorrimenti e innalzando su questa le coppie
corrispondenti come ordinate.
Fig. 12 Caratteristica
meccanica dedotta
dal diagramma
circolare della figura
precedente.
Allo scorrimento s = 100% corrisponde la coppia di spunto Ca.
La curva C = f (s) che assume la forma caratteristica indicata in figura.
La coppia motrice sviluppata dal motore cresce cioè in un primo tratto assai rapidamente al
crescere dello scorrimento fino a raggiungere il suo valore massimo, poi diminuisce
gradualmente fino a ridursi al valore Ca.
41
Il funzionamento del motore è stabile nell'intervallo crescente della coppia da zero al valore
massimo CM , mentre è instabile in tutto l’intervallo in cui la coppia è decrescente; in
quest'ultimo intervallo infatti ad ogni rallentamento del motore corrisponde una diminuzione
della coppia motrice; si produce così un rallentamento ulteriore e il motore è condotto a fermarsi.
Nel primo intervallo, invece, se il motore rallenta la coppia motrice aumenta e l'equilibrio
dinamico si ricostituisce. Come si è già osservato il campo di funzionamento normale del motore
viene generalmente limitato fino a un valore della coppia pari a meno della metà della coppia
massima.
Si può anche facilmente ricavare l’espressione analitica della coppia motrice in funzione dello
scorrimento, richiamandosi alla relazione C = 60 ⋅
Pt
2 ⋅ π ⋅n1
e sostituendo alla potenza trasmessa Pt il rapporto tra le perdite nel rame del rotore P”j e lo
scorrimento s (P”j = s • Pt); si ottiene
60
60
60
3 ⋅ R 2 ⋅ I 22 (s )
P "j
⋅ Pt =
⋅
=
⋅
C =
2 ⋅ π ⋅n1
2 ⋅ π ⋅ n1 s
2 ⋅ π ⋅n1
s
nella quale R2 è la resistenza di ciascuna fase dei circuiti rotorici e I2(s) la corrente che
percorre.
42
Ricordando l'espressione
I 2 (s ) =
E 2 (1)
2
2
R2 +
(
1
)
X
( 2 )
s
della corrente I2(s), l'espressione precedente assume la forma
C = 60 ⋅
3⋅R 2
2 ⋅ π ⋅ s ⋅ n1
E (1)
⋅
R
+ (X
s
2
2
2
2
(1) )
2
2
Ponendo l’espressione n1 = 60• f1 / p ed E2(1) = E1 / m, semplificando risulta infine
3 p E 12
s ⋅R 2
C =
⋅ ⋅ 2⋅ 2
2 ⋅ π f 1 m R 2 + s 2 ⋅ X 22 (1)
43
In questa espressione compare la f. e. m. primaria E1 , la quale rimane definita detraendo dalla
tensione applicata V1, le cadute di tensione primarie. Tali cadute dipendono dall'intensità della
corrente primaria I1 che dipende a sua volta dalla corrente secondaria I2(s) e perciò ancora dal
valore dello scorrimento s. Tuttavia entro il campo di funzionamento normale del motore le
cadute di tensione primarie si possono trascurare ritenendo E1 ≈V1.
Ne risulta pertanto, approssimativamente
2
C ≅
3 p V 1
s ⋅R 2
⋅ ⋅ ⋅ 2
2
2
2 ⋅π f 1 m
R
2 + s ⋅ X 2 (1)
Questa relazione dimostra in primo luogo che, entro i limiti in cui le cadute primarie di tensione
sono trascurabili, la coppia motrice sviluppata dal motore asincrono è proporzionale, per un dato
scorrimento, al quadrato della tensione di alimentazione.
Se la tensione rimane costante, la coppia motrice varia al variare dello scorrimento
proporzionalmente all'espressione
s
1
=
2
R 22 + s 2 ⋅ X 22 (1) R 2 + s ⋅ X 2 (1)
2
s
alla quale corrisponde precisamente una curva di variazione che ha un andamento simile alla
curva C = (s) rappresenta in fig. 12. In particolare si rileva che l'espressione considerata diviene
massima quando è minima la somma R 22
+ s ⋅ X 22 (1)
44
s
Osservando che il prodotto dei due addendi è pari a R22 • X22(1) e perciò rimane costante,
si deduce senz'altro che la somma minima quando i due addendi sono eguali. Ne risulta allora che
la coppia motrice sviluppata dal motore raggiunge il suo valore massimo CM per quel valore s'
dello scorrimento per cui si verifica l'eguaglianza R 22
+ s '⋅ X 22 (1)
s'
Il valore dello scorrimento di massima coppia dato pertanto dal rapporto:
s '= R 2 = R 2
X 2 (1) ω1 ⋅ L 2
Per questo valore dello scorrimento risulta
R 2 = s '⋅ X 2 (1) = X 2 (s ')
Si può quindi affermare che la coppia motrice diviene massima per quel valore dello
scorrimento per cui si verifica l'eguaglianza tra la resistenza ohmica e la reattanza dei circuiti
rotorici; vale a dire quando la corrente secondaria assume uno sfasamento di 45°.
45
All'atto pratico questa condizione viene
modificata alquanto per effetto delle cadute di
tensione primarie : basta osservare infatti il
diagramma circolare riportato in fig. 13. Se si
ricorda che le correnti rotoriche corrispondono
alle correnti primarie di reazione rappresentate
dalle corde del cerchio che hanno un punto
fisso in P0, si deduce che lo stato di regime per
cui la corrente rotorica è sfasata di 45°, è
rappresentato dal punto situato sulla sommità
del cerchio: in base alla conclusione su esposta
la coppia massima dovrebbe quindi verificarsi
Fig. 13 - Coppia massima
in corrispondenza del punto P1. In realtà, invece, la coppia massima CM si verifica nel punto P’
che rappresenta il punto di contatto col cerchio della tangente t parallela alla retta delle coppie.
A questo punto P’ corrisponde uno sfasamento della corrente rotorica ψ2 < 45°: ciò vuol dire
che la coppia massima viene raggiunta in realtà per una reattanza secondaria alquanto minore
della resistenza ohmica e cioè per uno scorrimento leggermente inferiore a quello definito
dall'eguaglianza R2 = X2(s’).
Tuttavia si può osservare che lo scostamento non è molto grande e perciò la coppia massima
può essere effettivamente espressa con sufficiente approssimazione sostituendo
R2 = R2
nell’espressione generale della coppia, allo scorrimento s il valore s’ dato dalla s '=
2
Risulta così
CM
≅
p V 1
3
1
⋅ ⋅ ⋅
2 ⋅π f 1 m
2 ⋅ X 2 (1)
ω1 ⋅ L 2
X 2 (1)
46
Questa espressione dimostra che il valore della coppia massima sviluppata da un dato motore
asincrono è indipendente dalla resistenza dei circuiti rotorici, mentre risulta inversamente
proporzionale all'induttanza di dispersione secondaria L2. Ciò vuol dire che per ottenere una
coppia massima elevata bisogna ridurre al minimo l'intraferro del motore, perché in tal modo si
riduce L2. Per questa ragione l'intraferro dei motori asincroni viene ridotto al più piccolo valore
che è compatibile con le esigenze meccaniche.
II valore della coppia massima rimane invece inalterato, entro certi limiti, anche se viene
aumentata la resistenza dei circuiti rotorici R2, la quale interviene solo a determinare il valore
dello scorrimento s’ che vi corrisponde. Tale scorrimento è direttamente proporzionale alla R2;
se questa è piccola, la coppia massima viene raggiunta con uno scorrimento piccolo e cioè con
un piccolo rallentamento del motore; se invece la resistenza ohmica del rotore viene aumentata,
il motore può sviluppare egualmente la stessa coppia massima, ma questa viene raggiunta con
un maggiore scorrimento e cioè con una maggiore perdita di velocità. Ciò vuol dire che
aumentando la resistenza ohmica del circuiti rotorici la caratteristica meccanica del motore
asincrono si modifica successivamente come è indicato nella fig. 14
47
La curva (1) corrisponde
alla resistenza
secondaria R’2 e la
coppia massima viene
raggiunta con lo
scorrimento s’1 ; se la
resistenza secondaria
viene raddoppiata, la
coppia massima viene
raggiunta con uno
scorrimento s’2 = 2• s’1 e
la caratteristica assume
la forma (2); triplicando
la resistenza secondaria
si passa analogamente
alla curva (3) che
presenta il massimo in
corrispondenza dello
scorrimento s’3= 3 • s’1 e
così via.
Dai fatti esposti risulta in particolare che il motore asincrono presenta uno scorrimento tanto
minore da vuoto a carico quanto più piccola è 1a resistenza dei circuiti rotorici: si ottiene in tal
modo il doppio vantaggio di migliorare il rendimento del motore e di contenere la perdita di
48
velocità che motore subisce da vuoto a carico entro limiti assai piccoli.
Fig. 14 - Come si modifica la caratteristica meccanica
aumentando la resistenza dei circuiti rotorici
Fig. 15 - Caratteristica meccanica C = f( n2 ).
Se si vuol mettere in rilievo direttamente come varia la coppia del motore al variare del
numero di giri, basta costruire la caratteristica meccanica assumendo come ascisse, in luogo dello
scorrimento s, la velocità del rotore n2 = n1(1 — s). Si ottiene allora la curva C = f (n2) che
assume la forma indicata in fig. 15.
Per ottenere la effettiva coppia utile resa all'asse del motore Cu occorre sottrarre alla coppia
motrice C la coppia Cp assorbita dagli attriti meccanici e dalla ventilazione, ponendo
Cu = C - Cp
49
La curva che rappresenta la coppia resa è pertanto un poco più bassa di quella che rappresenta la
coppia motrice sviluppata C. Il valore che assume la coppia dissipata Cp nel campo di
funzionamento normale del motore coincide praticamente col valore corrispondente alle perdite
meccaniche a vuoto Pm0, espresso da
60
CP =
2 ⋅ π ⋅n1
⋅ P m0
Il campo di funzionamento normale del motore corrisponde infatti all'intervallo tratteggiato,
entro il quale la coppia motrice sviluppata raggiunge un valore pari a circa la metà della coppia
massima: in tale intervallo la velocità di rotazione effettiva n2 differisce di poco dalla velocità di
sincronismo n1, e le perdite meccaniche Pm, rimangono perciò praticamente costanti.
In ogni caso in coppia utile all'asse Cu può essere calcolata in base alla potenza resa Pr ed alla
velocità n2 ponendo
Cu =
60
⋅Pr
2 ⋅ π ⋅n 2
Fig. 15 - Caratteristica meccanica C = f( n2 ).
50
La doppia funzione del reostato di avviamento. — Il motore asincrono costruito
con una piccola resistenza rotorica offre delle ottime qualità entro il campo di funzionamento
normale, ma presenta due gravi inconvenienti all'atto dell'avviamento: esso assorbe infatti una
corrente di spunto eccessivamente elevata e ciò malgrado non fornisce che una coppia di spunto
assai piccola. I due fatti non devono sembrare contraddittori perché allo atto dell'avviamento
avendosi il rotore immobile, la frequenza delle correnti rotoriche coincide con la frequenza di
linea e perciò, se è piccola la resistenza, le correnti stesse risultano quasi totalmente swattate.
Quando il rotore è in marcia invece la frequenza delle correnti rotoriche è assai ridotta e perciò lo
sfasamento è piccolo: si può ottenere così una maggiore coppia pur con delle correnti assai
minori che non all'atto dell'avviamento.
Da questa osservazione si intuisce senz'altro che per migliorare le condizioni di avviamento del
motore asincrono si deve provvedere da un lato a diminuire l'entità della corrente di spunto che
si verifica all'atto della chiusura dell'interruttore di linea finché il rotore è immobile, provvedendo
però nel contempo anche a diminuire lo sfasamento delle correnti rotoriche per ottenere una
maggiore coppia.
A questo riguardo è necessario considerare in prima linea quali sono le condizioni di carico che il
motore è chiamato a spuntare all'avviamento.
Se il motore deve avviarsi esclusivamente a vuoto è sufficiente una coppia di spunto anche assai
piccola e perciò l'unica condizione da soddisfare sarà, quella di contenere le correnti di spunto
entro limiti tollerabili senza preoccuparsi del valore della coppia d'avviamento che ne risulta. In
tal caso si potrà eseguire semplicemente l'avviamento del motore con una tensione ridotta,
ottenuta ad esempio inserendo un reostato di avviamento sulla linea di alimentazione in serie allo
51
statore, o eventualmente con un autotrasformatore riduttore.
Se invece il motore deve avviarsi sotto carico è necessario in primo luogo che esso possa
sviluppare una coppia di spunto maggiore della coppia resistente applicata all'albero: in tal caso
la riduzione delle correnti di spunto deve essere necessariamente accompagnata da un
conveniente rifasamento delle correnti rotoriche per aumentare la coppia.
Il mezzo più semplice per conseguire questo risultato è quello di applicare un reostato di
avviamento in serie al rotore.
La doppia funzione di questo reostato si pone chiaramente in rilievo considerando ancora il
diagramma circolare del motore. Se si immagina di chiudere l'interruttore di linea con la tensione
normale e con il rotore in corto circuito, si stabilisce come è noto, il regime di funzionamento
rappresentato dal punto Pcc, (fig. 16): lo statore assorbe cioè la corrente Icc= OPcc, mentre nei
circuiti rotorici si ha una corrente definita dal vettore P0Pcc moltiplicato per il rapporto di
trasformazione; la coppia d'avviamento è rappresentata dal segmento DccPcc
Fig. 16 - Effetto del
reostato di avviamento
in serie al rotore
52
Se ora si aumenta la resistenza dei circuiti rotorici, la retta delle potenze rese si sposta, mentre
rimane fissa la retta delle coppie perché, per un dato sistema di correnti, le perdite rotoriche
aumentano e quelle statoriche invece non cambiano: così ad esempio se la resistenza rotorica
viene raddoppiata (collegando in serie al rotore un opportuno reostato) la perdita per effetto Joule
nei circuiti rotorici, a pari corrente, risulta pure doppia e perciò la retta delle potenze rese si
sposta in modo che risulti DC’ = 2DC; i segmenti come CC' rappresentano in tal caso la potenza
dissipata nel reostato. Il punto Pcc passa così in P’cc e corrispondentemente la corrente di spunto
del motore diminuisce dal valore Icc = OPcc al nuovo valore I’cc = OP’cc: questa minore corrente
e però meno sfasata e perciò la coppia è aumentata dal precedente valore Ca = DccPcc, al nuovo
valore C’a = D’ccP’cc
Sc la resistenza aggiunta in serie al rotore viene ulteriormente aumentata, la retta delle potenze
rese si sposta ancora di più e il punto P’cc può passare successivamente in P’’cc, P’’’cc ecc.
È evidente che la corrente di spunto risulta tanto minore quando maggiore è il valore della
resistenza inserita, mentre la coppia d'avviamento aumenta fino ad un certo limite, dopo il quale
riprende a diminuire. Esiste cioè un determinato valore della resistenza per il quale il motore
sviluppa all'atto dell'avviamento la massima coppia. Questo fatto del resto si pone direttamente
in rilievo anche richiamando quanto si è già esposto circa l'influenza della resistenza dei circuiti
rotorici sulla forma della caratteristica meccanica del motore : si è visto infatti che aumentando
questa resistenza la caratteristica meccanica assume successivamente le forme (1), (2), (3) ecc.,
riportate in fig. 17, e la coppia di spunto assume corrispondentemente i valori C’a, C’’a, C’’’a,
ecc. Esiste un valore determinato della resistenza per cui la caratteristica assume la forma (4), e
su questa si ha precisamente la massima coppia per n2 = 0 e cioè quando il rotore è immobile.
53
Costruendo reostato con diversi contatti si potrà evidentemente passare durante l'avviamento
successivamente attraverso alle caratteristiche (4), (3), (2) o eventuali altre consimili, per arrivare
infine alla caratteristica (1) che rappresenta la caratteristica di marcia normale con il reostato
tutto escluso. Fig. 17 - Esiste un determinato valore
Si può in tal modo eseguire
della resistenza rotorica per cui si ha la
l'avviamento sfruttando una
massima coppia allo spunto.
coppia assai elevata, senza avere
d'altra parte correnti eccessive. Se
si ricorre all'espressione
2
C ≅
Risulta
2
p V 1
3
R
⋅ ⋅ ⋅ 2 2 2
C ≅
2 ⋅π f 1 m
R 2 + X 2 (1)
3 p V 1
s ⋅R 2
⋅ ⋅ ⋅ 2
2
2
2 ⋅π f 1 m
R
2 + s ⋅ X 2 (1)
della coppia motrice sviluppata
dal motore si può ottenere il
valore della coppia di
avviamento Ca ponendo s =1.
Si vede che il valore della coppia d'avviamento dipende appunto da R2 ed è facile dedurre che
questa coppia diviene massima quando R2 = X2(1).
Si può dire quindi che per avere la massima coppia all'avviamento si deve aggiungere in serie
al rotore una resistenza tale per cui la resistenza complessiva dei circuiti rotorici risulti eguale
alla reattanza, calcolata quest'ultima per la frequenza di linea.
54
In realtà, come si è già osservato, questa conclusione viene modificata in misura sensibile per
effetto delle cadute di tensione primarie che nella formula precedente vengono trascurate.
Per procedere al calcolo effettivo del reostato di avviamento bisogna quindi ricorrere al
diagramma circolare, dal quale si rileva l'entità della potenza che deve dissiparsi nel reostato per
avere la coppia di spunto richiesta.
Considerando ad esempio il diagramma riprodotto in fig. 18 risulta che per ottenere
all'avviamento la massima coppia CM si deve dissipare nel reostato la potenza P’jR rappresentata
dal segmento C’P’cc.
Indicando con R la resistenza di una fase del reostato dovrà essere quindi P’jr = 3 • R • I22
Fig. 18 - Come si determina il valore della resistenza di
avviamento per ottenere la massima coppia di spunto.
La corrente I2 viene dedotta leggendo sul
diagramma la corrente di reazione
corrispondente, rappresentata dal vettore
PoP’cc, e moltiplicando questa corrente per i1
rapporto di trasformazione del motore
m = E1 / E2(1). In pratica i reostati di
avviamento dei motori vengono
proporzionati alle condizioni di carico che si
verificano allo spunto : si possono avere così
dei reostati per l'avviamento a metà carico
oppure a pieno carico, o eventualmente per
l'avviamento in sovraccarico.
55
All'atto dell'avviamento il reostato deve essere in ogni caso completamente inserito : esso viene
escluso gradualmente mentre il rotore accelera, per arrivare infine a stabilire il corto circuito sugli
anelli. Mano a mano che i gradini di resistenza vengono esclusi, il motore passa a funzionare su
caratteristiche sempre più ripide come in figura 19; in questa fase la coppia motrice sviluppata C
deve necessariamente risultare più elevata della coppia resistente complessivamente applicata
all'asse Cr, per fornire al rotore la coppia di accelerazione (C — Cr) necessaria a vincere
la coppia reattiva di inerzia. La
velocità del rotore va con ciò
aumentando per raggiungere infine la
condizione di equilibrio dinamico
espressa dall'eguaglianza C = Cr che
definisce la velocità di regime n2,
corrispondente alla coppia resistente
applicata all'asse: si comprende che il
processo di avviamento sarà tanto più
rapido quanto maggiore è l'eccesso di
coppia (C — Cr) che si rende
disponibile nella fase di accelerazione.
Fig. 19. - Esempio di caratteristiche di avviamento di un
motore asincrono con reostato di avviamento previsto per
fornire allo spunto quasi la massima coppia.
56