I. Introduzione
I.
INTRODUZIONE
La potenza è generalmente definita come la velocità alla quale l'energia viene
trasmessa. L'unità del Sistema Internazionale che la misura è il Watt, definito come la
trasmissione di un Joule al secondo. Sono definibili comunque diversi tipi di potenza, tra cui:
La Potenza Istantanea è definita come:
P (t ) ≡ V (t ) ⋅ I (t )
Nelle misure a microonde è di maggiore interesse la Potenza Media, ovvero la velocità
di trasferimento dell'energia mediata su un gran numero di periodi della componente in
frequenza più piccola del segnale. Per un segnale (tono) puro a frequenza f:
1
V ⋅I
⋅ ∫ VM ⋅ sin(2π ⋅ f ⋅ t ) ⋅ I M ⋅ sin(2π ⋅ f ⋅ t + ϕ ) ⋅ dt = M M ⋅ cos(ϕ ) = Vrms ⋅ I rms ⋅ cos(ϕ )
2
T 0
T
Pav =
ove
Vrm =
VM
2
I rm =
IM
2
T =
1
f
Se il segnale è invece semplicemente periodico e T è il periodo della componente a
frequenza più bassa,
T
Pav =
1
⋅ V (t ) ⋅ I (t ) ⋅ dt
T ∫0
Per segnali impulsati, ovvero con un andamento nel tempo del tipo:
V, I
τ
T
t
è definibile un “duty cycle”, D.C., come
D.C . ≡
τ
T
=τ ⋅ f
e dunque una Potenza Impulsata (Pulse Power):
Pp =
1
τ
τ
⋅ ∫ V (t ) ⋅ I (t ) ⋅ dt
0
e quindi:
1
I. Introduzione
Pp =
Pav
D.C .
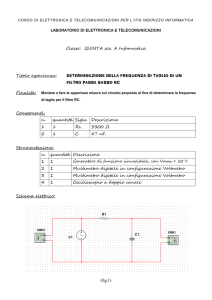
Esiste anche un terzo tipo di potenza misurabile, la Peak Envelope Power, ossia la
potenza massima misurabile da uno strumento misuratore con tempi di risposta molto inferiori
al periodo del segnale modulante e molto superiori al periodo a microonde. Tale potenza
viene utilizzata quando la forma dell'impulso di cui si vuole misurare la potenza non è
sufficientemente rettangolare da utilizzare la potenza impulsata.
P(t)
Peak envelope power
Pp
t
2
II. Standard e sensori di potenza
II.
STANDARD E SENSORI DI POTENZA
I dispositivi per la definizione e la misura di potenze possono essere classificati in tre
grandi gruppi:
A.
Standard primari, nei quali la potenza è ottenuta direttamente in termini delle unità
di base del Sistema Internazionale (S.I.).
B.
Standard a sostituzione, nei quali la potenza a microonde è confrontata con potenze
ad altre frequenze (ad esempio in continua).
C.
Standard secondari, che possono essere usati direttamente per la misura di potenze
dopo essere stati calibrati con standard a sostituzione.
I tre tipi di standard saranno brevemente discussi di seguito.
A.
Standard primari: questo tipo di standard interessa i laboratori di standardizzazione,
nei quali si deve definire una relazione univoca tra le unità del sistema internazionale e
il watt a microonde. Un’implementazione diretta della definizione di potenza richiede
la misura di frequenza e di energia associata ai campi elettrico e magnetico. L’energia,
in questo tipo di standard, è misurata in termini di lavoro compiuto su particelle
cariche immerse in un campo.
Esempi:
- Wattmetro a pressione di radiazione
- Wattmetro ad effetto Hall (vedi figura II.1)
- Wattmetro a fascio elettronico
Fig.II.1
3
II. Standard e sensori di potenza
B.
Standard a sostituzione: esistono numerosi esempi di questo tipo di standard. Di
seguito verranno esaminati i più diffusi:
Calorimetri: il principio di base è la conversione di potenza elettromagnetica in calore
e la successiva misura di variazione della temperatura: sono quindi dispositivi di tipo
terminale. Possono essere di due tipi fondamentali: statici e a flusso di fluido. Al
primo tipo appartiene il Calorimetro a Carichi Gemelli (Twin Load) mostrato nella
figura II.2 a sinistra:
Fig. II.2
La potenza del segnale a RF è misurata confrontandola con la potenza in continua
necessaria per avere equilibrio termico, cioè per avere dalla termopila un’uscita in
tensione nulla.
Al secondo tipo appartiene il Calorimetro a Flusso di Fluidi (Fluid Flow), utilizzato
per alte potenze e mostrato nella figura II.2 a destra.
Bolometri: Sono così indicati sia i Misuratori a Filo (Barretter) che i Termistori. In
generale un bolometro è un elemento assorbente dissipativo che presenta un elevato
coefficiente di temperatura relativo alla sua resistenza elettrica.
I misuratori a filo sono tra i più precisi e sono composti generalmente da un filo di
platino di resistenza tale da essere adattato come terminazione per una linea di
4
II. Standard e sensori di potenza
trasmissione. Presentano un coefficiente di temperatura positivo (materiale PTC), cioè
aumentano la propria resistività all’aumentare della temperatura.
Fig. II.3
I termistori sono invece formati da un sottile semiconduttore che connette due fili
metallici su un supporto tipicamente vetroso, come nella figura seguente:
Fig. II.4
Il coefficiente di temperatura del semiconduttore è, come noto, negativo (materiale
NTC), ossia la sua resistività diminuisce all’aumentare della temperatura.
In entrambi i sensori, il cambio di resistenza dovuto alla dissipazione di potenza a
microonde è, come si vedrà meglio in seguito, misurato con l’ausilio di circuiti a
ponte.
Il range dinamico di questi sensori è elevato (da alcuni nW fino al Watt). Il termistore
è più flessibile, visto che il suo valore di resistenza può essere variato di diversi ordini
di grandezza, a seconda della corrente di polarizzazione e del drogaggio del materiale
semiconduttore.
5
II. Standard e sensori di potenza
Dispositivi Termoelettrici: sono basati sull’effetto termoelettrico, ossia sull’instaurarsi
di una differenza di potenziale tra due materiali quando una loro giunzione viene
riscaldata (termocoppie). Vengono così usati per misurare l’aumento di temperatura
dovuto alla dissipazione di potenza su un carico ad essi termicamente solidale.
C.
Standard secondari: il più usato è senz’altro il diodo a giunzione: la corrente in
continua rivelata da un diodo, a bassi livelli di potenza incidente, è all’incirca
proporzionale al quadrato del campo elettrico e quindi alla potenza. Questo tipo di
standard è intrinsecamente poco lineare e deve quindi essere calibrato: questo si può
ottenere con circuiti di taratura appropriati o con fitting numerici.
6
III. Metodi di misura della potenza
III.
METODI DI MISURA DELLA POTENZA
I metodi di misura della potenza media utilizzano tipicamente:
- Termistori
- Termocoppie
- Rivelatori a diodi
Il procedimento generale di misura utilizza tipicamente uno dei sensori suddetti,
appositamente calibrato, e connesso alla porta della linea di trasmissione a cui si deve
effettuare la misura. L’uscita del sensore è connessa ad uno strumento di elaborazione e
visualizzazione appropriato, denominato Power Meter.
Durante la fase antecedente alla misura vera e propria, la potenza a Radio Frequenza
in ingresso al sensore viene dapprima annullata e il power meter è calibrato in modo da dare
in uscita indicazione nulla (zero-setting o zeroing). Quindi la potenza in esame viene applicata
e viene misurata su tale riferimento. Nel caso ideale, il sensore assorbe tutta la potenza su di
esso incidente; questo non è di solito vero: infatti è sempre presente un disadattamento di
impedenza tra la linea e il sensore e verrà quindi riflessa potenza verso il generatore. Il
bilancio di potenza sarà così:
Pin = Pref + Pdiss
ove il coefficiente di riflessione del sensore ρ lega Pin e Pref:
Pref = ρ ⋅ Pin
2
Il coefficiente di riflessione ρ (in modulo) è quindi una specifica decisiva per un
sensore di potenza, visto che è la sorgente prevalente dell’errore (mismatch uncertainty).
Tipicamente si trovano valori del 5% (⏐ρ⏐≈ 0.05) che variano in funzione sia della potenza
incidente che della frequenza. Inoltre, la potenza dissipata Pdiss può essere dissipata in punti
diversi del sensore e tali perdite non sono così registrate e misurate.
Questa deviazione dell’idealità è identificata con l’efficienza effettiva del sensore ηe,
definita come:
ηe ≡
Pmeas
Pdiss
Le due specifiche precedenti vengono raggruppate insieme definendo il Fattore di
Calibrazione del sensore, Kb:
7
III. Metodi di misura della potenza
Kb ≡
(
Pmeas
2
= ηe ⋅ 1 − ρ
Pin
)
Valori tipici di tale fattore sono di 0.9 ÷ 0.95: in questo caso il sensore misurerà il 10%
in meno della potenza effettivamente incidente. E’ compito del power meter, con opportune
calibrazioni, correggere tale errore, e peraltro, come si vedrà meglio in seguito, la correzione
del solo fattore di calibrazione non elimina completamente l’errore per disadattamento.
Verranno ora illustrati i tre tipi fondamentali di set-up di misura, discutendone poi
vantaggi e svantaggi assieme alle maggiori cause di errore.
III.1
Strumenti e misure utilizzanti termistori
Come accennato, un termistore è un campione di materiale semiconduttore, accessibile
tramite due terminali metallici, la cui resistività varia in maniera inversamente proporzionale
alla temperatura.
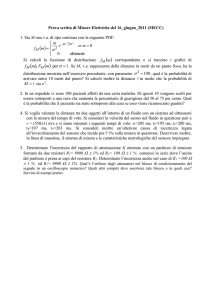
In un termistore quindi la potenza incidente provoca, per effetto Joule, un
innalzamento della temperatura con una variazione conseguente di resistenza. Le curve
caratteristiche potenza dissipata / resistenza di un termistore sono del tipo in figura, in cui il
parametro è la temperatura ambiente:
R [ Ω]
Fig. III.1
Pdiss [W]
Come è facile notare, l'andamento delle curve è fortemente non lineare e dipende dalla
temperatura di esercizio. Le curve stesse variano poi con le caratteristiche costruttive del
termistore, in dipendenza dai materiali usati e dalle modalità di assemblaggio. La tecnica di
utilizzazione e di misura quindi non può essere basata sul valore quantitativo descritto da tali
curve.
8
III. Metodi di misura della potenza
Al contrario, si cerca di mantenere il termistore ad un valore costante di resistenza R
per mezzo di una polarizzazione in continua (o a bassa frequenza). Non appena viene
dissipata potenza ad RF su di esso, il termistore tenderà a diminuire tale R e la polarizzazione
verrà diminuita in modo tale da riportare il valore a quello di partenza: la diminuzione di
potenza in continua necessaria a bilanciare la variazione di resistenza è pari alla potenza a RF
da misurare. Tale diminuzione è così diagrammata dal power meter. Il montaggio del
termistore deve assicurare poi un’alta efficienza del sensore, un buon adattamento di
impedenza alla linea di adduzione nonché resistenza allo shock termico e meccanico.
Un esempio di tale montaggio (di tipo coassiale) consiste di 4 termistori adattati,
connessi come in figura:
Fig. III.2
Due termistori Rd sono connessi in serie (dal punto di vista del montaggio a ponte
successivo). Per i segnali in ingresso, essi sono connessi in parallelo e sono polarizzati in
modo da presentare ciascuno una resistenza di 100 Ω. Il circuito a ponte vedrà quindi una
resistenza complessiva del sensore pari a 200 Ω, mentre il segnale a RF in ingresso andrà a
dissiparsi su una terminazione adattata a 50 Ω. Si noti che il sensore è, per il circuito a ponte
seguente, dinamicamente cortocircuitato tramite il condensatore di bypass Cb, per eliminare
eventuali componenti variabili nel circuito di misura.
I termistori di compensazione Rc, il cui scopo è controllare e compensare eventuali
variazioni della temperatura ambiente, sono polarizzati in modo da avere una resistenza di
200 Ω verso un secondo ponte; essi sono elettricamente isolati dal segnale a RF ma in
contatto termico con i termistori Rd.
Il cuore dei sistemi di questo tipo è, come accennato, un circuito di confronto a ponte:
nelle prime realizzazioni, il termistore, al variare della potenza incidente Pin, variava la
propria resistenza e sbilanciava il ponte. Lo sbilanciamento veniva quindi misurato e la
9
III. Metodi di misura della potenza
potenza incidente veniva dedotta utilizzando delle carte di calibrazione. Questo modo di
effettuare la misura presenta due problemi di notevole entità:
-
Il coefficiente di riflessione del termistore varia con la potenza incidente, oltre che con
la frequenza.
-
La relazione di calibrazione è dipendente dal termistore usato e addirittura varia
all’interno della stessa famiglia costruttiva (spread delle caratteristiche).
L’approccio moderno consiste nel realizzare un ponte compensato:
Fig. III.3
Il circuito di polarizzazione è alimentato con un segnale a frequenze audio od in
continua. Ovviamente tale circuito è influenzato dalla temperatura ambiente e piccole
variazioni di questa (ad esempio il semplice contatto del sensore con le mani, hand grasp)
sbilanciano il ponte e si ripercuotono direttamente come errori di misura. Si ricorre così ad un
doppio ponte utilizzante il montaggio già accennato. Un esempio è mostrato in figura, ove
viene esemplificato un power meter a termistori.
10
III. Metodi di misura della potenza
Fig. III.4
In questo caso la compensazione è in continua, per eliminare problemi connessi con
l’uso di frequenze audio verso la sorgente a RF. Uno strumento del genere ha accuratezza
dell’1% ed il range di misura è tipicamente da -50dBm (10 nW), con costanti di tempo di 30
ms.
Il power meter è inizialmente azzerato con potenze di ingresso nulle portando Vc al
valore VRF,0. Se si applica poi potenza al termistore di misura, VRF diminuisce così che
PRF
2
VRF
V2
,0
=
− RF
4⋅R 4⋅R
dove R è il valore della resistenza del termistore al bilanciamento e PRF è la potenza dissipata
su di esso; ovviamente, dal precedente azzeramento,
VRF ,0 = Vc
e così:
PRF
2
Vc2
VRF
1
⋅ (Vc − VRF ) ⋅ (Vc + VRF )
=
−
=
4⋅R 4⋅R 4⋅R
La circuiteria del power meter (sezione logica) misura tale prodotto. Infatti la corrente
nello switch finale ha una larghezza di impulso proporzionale a (VC + VRF) e un’altezza
proporzionale a (VC - VRF). L’area dell’impulso di corrente è quindi proporzionale al
prodotto; basta così integrare e leggere il valore della tensione risultante.
Due osservazioni finali possono essere effettuate: innanzitutto questo tipo di misure
resiste bene all’invecchiamento (aging) dei sensori. Inoltre il metodo è anche denominato
“DC substitution”, visto che in realtà viene misurata la potenza in continua necessaria per
riportare il ponte in condizioni di bilanciamento.
11
III. Metodi di misura della potenza
III.2
Strumenti e misure utilizzanti termocoppie
Una termocoppia è costituita da una coppia di materiali metallici diversi uniti ad una
estremità. Se la giunzione tra i due metalli viene riscaldata, agli estremi opposti viene a crearsi
una differenza di potenziale (effetto Thomson ed effetto Peltier, detti insieme effetto
Seebeck):
Fig. III.5
Fig. III.6
Tale differenza di potenziale è proporzionale alla differenza di temperatura tra le
giunzioni ed al calore fornito alla giunzione calda. Più termocoppie possono essere connesse
in serie per fornire differenze di potenziale più elevate (termopile). Tradizionalmente i due
metalli utilizzati per sensori a microonde sono Bismuto e Antimonio: la potenza a RF viene
dissipata su una resistenza che può essere costituita con i due metalli della giunzione o meno.
L’elemento dissipativo in esame deve presentare una resistenza abbastanza elevata da fungere
da terminazione per il segnale a RF (50Ω), deve essere di dimensioni contenute per dar luogo
ad un cambio di temperatura che consenta misure di piccole potenze (e quindi deve presentare
una piccola capacità termica) ed infine essere caratterizzato da una risposta in frequenza la più
uniforme possibile.
La soluzione di norma adottata è quella di costruire termocoppie utilizzando le
tecniche di deposizione “a film sottile” (thin film). Queste minuscole termocoppie tendono a
avere reattanze parassite e livelli di burn-out molto bassi (presentando cosi un livello di
potenza massima misurabile alquanto basso).
12
III. Metodi di misura della potenza
Se poi si cerca di utilizzarle in serie, a formare termopile, gli effetti reattivi, soprattutto
nel campo delle microonde, diventano predominanti e devono essere rigorosamente
controllati.
Le moderne termocoppie utilizzano sia la tecnologia a film sottile, sia quelle dei
semiconduttori, come mostrato nell’esempio in figura seguente:
Fig. III.7
Un resistore a film sottile di nitruro di tantalio viene deposto su un chip di silicio. Su
tale resistore la potenza a RF viene trasformata in calore; questo resistore funge poi anche da
terminazione adattata fino a frequenze vicine a 18 GHz, oltre a presentare una elevata
robustezza agli shock meccanici. Le proprietà di tale tecnica realizzativa consentono poi un
coefficiente di riflessione che è il migliore fra tutti i diversi tipi di sensore. Uno strato di
ossido separa poi la resistenza dal substrato, facendo sì che essa contatti da un lato uno strato
di silicio drogato n. Entrambi i terminali liberi sono poi contattati con dei pin dorati.
Un tipico sensore a termocoppia è costituito secondo lo schema circuitale in figura:
Fig. III.8
Vengono usate due termocoppie su un unico chip: esse sono connesse in serie verso il
voltmetro di misura (per ottenere una maggiore differenza di potenziale), mentre sono
connesse in parallelo nei confronti della potenza incidente a RF. La resistenza di ciascuna
coppia giunzione + resistore è di 100 Ω così che il segnale RF sia adattato e che il voltmetro
13
III. Metodi di misura della potenza
sia chiuso su 200 Ω. Si noti che il condensatore di bypass anche in questo caso
dinamicamente cortocircuita il sensore in modo che il voltmetro legga unicamente la tensione
continua dovuta alle termocoppie. Un tipico montaggio (in tecnologia coplanare) è mostrato
nella figura seguente:
Fig. III.9
La caratteristica principale di un sensore a termocoppia è la sensibilità espressa
solitamente in microvolt in uscita per milliwatt di potenza di ingresso. Tale “sensitivity” è il
prodotto di altri due parametri: la potenza termoelettrica e la resistenza termica della
termocoppia.
La potenza termoelettrica è la tensione in uscita (espressa di solito in nV) per grado di
differenza di temperatura tra la due giunzioni. E’ tipico un valore di 250 nV/°C, che è
influenzato dal drogaggio del semiconduttore. La resistenza termica è invece influenzata dallo
spessore del chip ed ha valori tipici di 0.4 °C/mW. Quindi il valore tipico di sensitivity di una
termocoppia è 100 nV/mW. Due termocoppie in serie tendono ad avere una sensibilità minore
della somma delle singole componenti a causa dell’accoppiamento termico tra esse.
La massima potenza misurabile è limitata dalle capacità di smaltimento del calore
prodotto per effetto Joule: infatti, i differenti coefficienti di dilatazione termica dei vari
componenti tendono a produrre stress meccanici che possono portare alla rottura del chip.
Tipicamente la massima potenza misurabile si aggira intorno ai 300 mW.
Il sensore deve ovviamente essere accoppiato ad uno strumento (power meter) che
consenta la lettura della potenza misurata ed effettui le necessarie operazioni di azzeramento e
calibrazione.
14
III. Metodi di misura della potenza
L’uscita del sensore è tipicamente di livello molto basso: per 1 nW di potenza
applicata, il sensore ha una tensione di uscita (utilizzando le caratteristiche appena accennate)
di appena 160 nV! Tale differenza di potenziale è difficile da trasmettere su un cavo ordinario
e potrebbe facilmente essere degradata dal rumore di fondo. Si ricorre quindi ad un “chopper”
integrato nel sensore, a bassa frequenza (220 Hz), che permette una prima amplificazione
della tensione in uscita dal sensore, e il successivo invio in un cavo che arriva al vero e
proprio power meter. Il “chopper” è di solito realizzato a FET e segue lo schema di principio
indicato in figura:
Fig. III.10
Lo schema di un tipico power meter è indicato in figura:
Fig. III.11
Come è intuibile dagli schemi finora presentati, le misure di potenza con termocoppie,
a differenza di quelli con termistori, sono a loop aperto e quindi potenzialmente meno
accurate. Per risolvere tale problema, i power meter con sensori a termocoppie hanno un
15
III. Metodi di misura della potenza
oscillatore di riferimento integrato, con frequenza e potenza di uscita controllate
accuratamente (tipicamente 50 MHz, 1 mW). Per verificare l’accuratezza del sistema, il
sensore viene collegato direttamente a tale oscillatore e l’uscita del power meter viene tarata
su tale livello.
III.3
Strumenti e misure utilizzanti rivelatori a diodi
I diodi convertono energia ad alta frequenza in valori continui grazie alle loro
proprietà rettificanti, legate alla caratteristica nonlineare tensione/corrente. Non tutti i diodi
però possono essere usati a tale scopo. Infatti se si considera un diodo p-n al silicio non
polarizzato, questo presenta un’impedenza così elevata da non fornire alcuna potenza ad un
carico. D’altra parte, se lo si polarizza in prossimità della tensione di soglia Vγ (0.7 V), il
rumore generato e la deriva termica conseguente maschererebbero gli effetti di una eventuale
potenza incidente oggetto della misura.
Un la caratteristica tensione/corrente di un diodo a giunzione segue la relazione
I (t ) ) = I s ⋅ [exp(α ⋅ V (t )) − 1]
dove Is è la corrente di saturazione inversa, funzione della temperatura, e α =
q
≅ 40
η ⋅ k ⋅T
per temperature prossime ai 300 K.
Se si sviluppa in serie di potenze intorno a V(t)=0,
⎡
⎤
(
α ⋅ V )2 (α ⋅ V )3 (α ⋅ V )4
I ≅ I s ⋅ ⎢α ⋅ V +
+
+
+ L⎥
2!
3!
4!
⎣
⎦
I termini che danno origine a correnti con componenti continue (se V è supposto di
tipo puramente sinusoidale) sono quindi quelli di ordine pari. Se V non è di valore troppo
elevato, lo sviluppo può arrestarsi al secondo ordine, ed il diodo è detto operare nella regione
a “legge quadratica”, visto che IDC ∝ V2. Quando la tensione applicata è tale che questa
approssimazione non è più valida, la legge non è più semplicemente quadratica.
Il circuito in figura rappresenta un detector non polarizzato per la misura di basse
potenze:
16
III. Metodi di misura della potenza
Fig. III.12
La potenza massima viene trasferita dalla sorgente (generatore Vs e resistenza interna
Rs) quando la resistenza del diodo è adattata a quella della sorgente. La resistenza del diodo,
nell’origine, vale:
R0 =
1
α ⋅ Is
ed è quindi fortemente dipendente dalla temperatura: questo significa che sia la sensibilità che
il coefficiente di riflessione del diodo sono funzione della temperatura. Per ovviare a questo
problema si adatta la sorgente con una resistenza Rmatch (≈ 50 Ω); in ogni caso, R0 non può
essere molto elevata, poichè ciò porterebbe a bassi valori di sensibilità. Si sceglie così Is ≈ 10
µA, che corrisponde a R0 ≈ 2.5 kΩ.
Per ottenere questo valore di Is si costruisce il diodo in modo che abbia una piccola
barriera di potenziale, come nel caso di diodi Schottky (metallo-semiconduttore). Escludendo
i diodi di tipo “point-contact” per la loro fragilità, tali diodi hanno la struttura in figura:
Fig.III.13
La scelta dei metalli condiziona l’altezza della barriera e quindi la corrente di
saturazione Is e la resistenza R0. I parassiti (principalmente capacitivi) sono minimizzati dalla
struttura a “MESA”. Diodi siffatti prendono il nome di Low-barrier Schottky Diode (LBSD)
ed hanno potenziali potenze rivelabili da -70dBm (100 pW) a -20dBm (10 nW), in un campo
di frequenze da qualche MHz fino a 40 GHz. Per avere tale comportamento in frequenza, i
diodi devono essere compensati da elementi reattivi che bilancino i loro parassiti:
17
III. Metodi di misura della potenza
Fig.III.14
Nella figura seguente è mostrato un tipico montaggio per sensori a diodi in misure
coassiali:
Fig.III.15
Il vantaggio dei sensori a detector è senz’altro la loro efficienza di conversione del
segnale RF in continua (3000 volte quella delle termocoppie). Livelli di potenza di 100 pW (70 dBm) producono tensioni di uscita di 50 nV. Come nel caso delle termocoppie, questo
segnale deve essere opportunamente trattato (chopper + amplificatore). Inoltre, si deve fare
attenzione ad effetti spuri “tipo termocoppia”.
Anche questo tipo di sensore ha uno schema di misura del tipo a loop aperto e
necessita di un segnale di riferimento a frequenza e potenza fissati. Questo viene ottenuto
dalla solita sorgente, ma tipicamente attenuata di 30dB, visto il range dinamico del sensore. Si
noti che sensori tipici hanno una potenza massima ben più alta del range di linearità (circa 40
dB).
18
IV. Misure di potenza ed errori per disadattamento
IV.
MISURE DI POTENZA ED ERRORI PER DISADATTAMENTO
Si consideri il caso di un generatore di potenza (con coefficiente di riflessione ΓG)
connesso ad un carico (ΓL) tramite una linea senza perdite come in figura:
a1
ΓG
b2
b1
bG
a2
Z0, l
ΓL
Γ1
Fig. IV.1
Il generatore emette un’onda bG se un carico non riflettente (o adattato, Γ = 0) è ad
esso collegato. Nel caso contrario, la prima onda incidente è bG , che è riflessa come bG⋅Γ1,
riflessa ancora dal generatore bG⋅ΓG⋅Γ1 e così via. In totale, la somma delle onde riflesse
incidenti sul generatore vale:
(
)
b1 = bG ⋅ Γ1 ⋅ 1 + ΓG ⋅ Γ1 + (ΓG ⋅ Γ1 ) + (ΓG ⋅ Γ1 ) + L =
e, visto che Γ1 =
2
3
bG ⋅ Γ1
1 − ΓG ⋅ Γ1
b1
,
a1
b1 =
bG ⋅ b1
a1 − ΓG ⋅ b1
da cui, risolvendo per a1:
a1 = bG + ΓG ⋅ b1
Quindi l’onda incidente sulla prima porta della linea, a1, non sarà pari a bG a meno che
b1 = 0, ossia se il carico è adattato (Γ1 = 0).
Si può anche scrivere
a1 = bG + ΓG ⋅ b1 = bG + ΓG ⋅ Γ1 ⋅ a1
ossia
a1 =
bG
1 − ΓG ⋅ Γ1
IV.1
19
IV. Misure di potenza ed errori per disadattamento
La linea senza perdite (la cui impedenza caratteristica è quella di normalizzazione di
ΓG, ΓL, Γ1) introduce soltanto uno sfasamento sulle onde a1, b1, a2, b2, in modo che sia:
b 2 = a 1 ⋅ e j ⋅ β ⋅l
a 2 = b1 ⋅ e − j⋅β ⋅l
Dividendo membro a membro si ottiene:
ΓL =
b2 a1 2⋅ j ⋅ β ⋅l
= ⋅e
= Γ1 ⋅ e 2⋅ j ⋅ β ⋅l
a2 b1
Γ1 = Γ L ⋅ e − 2 ⋅ j ⋅ β ⋅l
⇔
ed, in particolare
Γ L = Γ1
La potenza ceduta alla linea (e quindi al carico) varrà così
(
P1 = a1 − b1 = a1 ⋅ 1 − Γ1
2
2
2
2
)
utilizzando la IV.1, si ottiene:
P1 =
bG
(
2
1 − Γ1 ⋅ Γ G
2
⋅ 1 − Γ1
2
)
Tale potenza coinciderà con la potenza disponibile dal generatore se si è in condizioni
di adattamento coniugato, ossia:
ΓG = Γ1*
ottenendo l'espressione per la potenza disponibile Pav:
Pav = P1 Γ
G
= Γ 1*
=
bG
(
2
1 − ΓG* ⋅ ΓG
2
⋅ 1 − ΓG
2
)= 1 − Γ
bG
2
2
G
La potenza PL ceduta al carico vale invece:
(
PL = b2 − a2 = b2 ⋅ 1 − Γ L
2
2
2
2
) = a ⋅ (1 − Γ ) = 1 − Γ ⋅ Γ ⋅ (1 − Γ )
2
bG
2
1
2
2
L
2
1
L
G
La Perdita per Disadattamento Coniugato Mconj (Conjugate Mismatch Loss) è definita
come il rapporto tra la potenza disponibile dal generatore Pav e quella ceduta al carico PL:
1 − Γ1 ⋅ ΓG
P
≡ av =
2
PL
1 − Γ L ⋅ 1 − ΓG
2
M conj
(
)(
2
)≥1
L’introduzione della linea di trasmissione è del tutto artificiosa: possiamo far tendere
la sua lunghezza a zero, in modo che sia:
Γ1 → Γ L
ottenendo finalmente, per la Mconj:
20
IV. Misure di potenza ed errori per disadattamento
M conj =
1 − Γ L ⋅ ΓG
2
(1 − Γ )⋅ (1 − Γ )
2
2
L
G
Di solito si preferisce esprimerla in decibel, ottenendo:
(
M conj ,dB = 10 ⋅ Log10 1 − Γ L ⋅ ΓG − 10 ⋅ Log10 1 − Γ L
2
2
)− 10 ⋅ Log (1 − Γ )
2
10
G
La Perdita per Disadattamento da Z0, MZ0 (Z0 Mismatch Loss) ovvero la perdita
dovuta al fatto che il carico è diverso da Z0 , vale invece:
M Z0 =
1 − Γ L ⋅ ΓG
2
(1 − Γ )
2
L
ovvero, in decibel:
(
M Z 0 ,dB = 10 ⋅ Log10 1 − Γ L ⋅ ΓG − 10 ⋅ Log10 1 − Γ L
2
2
)
Si definisce infine semplicemente Perdita per Disadattamento, M (Mismatch Loss) il
solo termine
M =
1
(1 − Γ )
2
L
Osservazioni:
-
L’adattamento coniugato garantisce che tutta la potenza disponibile dal generatore
venga ceduta al carico. In tal caso M = 1.
-
In adattamento coniugato, esistono onde riflesse dal carico e questo è in genere
dannoso per il generatore.
-
La condizione di carico adattato (Z0-match, ΓL=0) non garantisce che il generatore
eroghi la potenza massima ma:
PG = bG ≤ Pav =
2
-
bG
2
1 − ΓG
2
Nel caso in cui sia il carico che il generatore abbiano coefficiente di riflessione nullo
(normalizzati alla stessa Z0), sono vere entrambe le condizioni: si avrà massimo
trasferimento di potenza e assenza di onde riflesse.
L'obiettivo finale delle misure di potenza è misurare la potenza che il dispositivo da
caratterizzare (finora schematizzato dal generatore e dal suo coefficiente di riflessione)
erogherebbe su una terminazione adattata. In questo caso si ha:
21
IV. Misure di potenza ed errori per disadattamento
Pav = M Z 0 ⋅ PMeas
Si noti però che la conoscenza di MZ0 richiede la conoscenza delle caratteristiche dei
coefficienti di riflessione ΓG e ΓL in modulo e fase. In realtà ΓG e ΓL sono difficilmente noti:
di solito sono noti con buona accuratezza soltanto i moduli. In questo modo né Mconj né MZ0
possono essere calcolati completamente. Se ne può dare comunque una stima: il termine in
questione è detto Incertezza per Disadattamento MU (Mismatch Uncertainty) ed è definito da
M U = 10 ⋅ Log10 1 − Γ L ⋅ ΓG
2
Conoscendo i moduli di ΓG e ΓL avremo per esso il limite massimo
2
M U ,max = 10 ⋅ Log10 1 + Γ L ⋅ ΓG
≤ 6 dB
e quello minimo
M U ,min = 10 ⋅ Log10 1 − Γ L ⋅ ΓG
Può anche essere fornito in percentuale come:
[
% M U = 100 ⋅ (1 ± Γ L ⋅ ΓG
)
2
2
]
−1
2
22
V. Errori ed incertezza totale nelle misure di potenza
V.
ERRORI ED INCERTEZZA TOTALE NELLE MISURE DI POTENZA
E’ di grande importanza, nelle misure di potenza, stabilirne l’accuratezza. Tale
accuratezza è espressa quantitativamente dall’incertezza, definita come “la fascia permessa”
per l’errore.
Gli errori prevalenti sono associati alla perdita per disadattamento e all’incertezza di
disadattamento già discusse. Una seconda fonte di errore è dovuta all’efficienza di
conversione non perfetta del sensore. Come già accennato, essa è definita come
ηe ≡
Potenza effettivamente rivelata
Potenza assorbita dal sen sore durante la misura
Tale efficienza è normalmente misurata dal costruttore del sensore. Se si vogliono
combinare gli effetti della perdita per disadattamento e dell’efficienza, si ottiene il già
accennato Fattore di Calibrazione:
kB ≡
(
Potenza effettivamente rivelata
= ηe ⋅ 1 − ΓL
Potenza incidente sul sen sore
2
)
Nei power meter di recente fabbricazione è possibile specificare tale kB, in modo che
la potenza indicata dallo strumento sia cioè:
2
Privelata
bG
P
= L = Pincidente =
kB
1 − Γ L ⋅ ΓG
2
Non è però ancora abbastanza, visto che ciò che si vuole misurare è la potenza che si
dissiperebbe in un carico adattato, cioè con ΓL=0. Rimane così da determinare l’incertezza per
disadattamento.
Esistono poi un certo numero di errori associati con l’elettronica del power meter, tra i
quali si distinguono:
23
V. Errori ed incertezza totale nelle misure di potenza
1.
Incertezza nell’oscillatore di riferimento: è l’incertezza nella potenza emessa
dall’oscillatore di calibrazione ed è di solito specificata dal costruttore.
2.
Incertezza per disadattamento dell’oscillatore di riferimento: è dovuta al coefficiente
di riflessione non perfetto dell’oscillatore. Anch’essa è specificata dal costruttore, ma
è di piccola entità (0,2%).
3.
Incertezza dello strumento: è la combinazione di errori strumentali quali la non
linearità degli amplificatori interni, il cambiamento di scala ed altri. E’ di solito
garantita al di sotto una soglia massima fornita dal costruttore.
4.
Short-term stability (rumore): è la variazione della lettura dovuta alla presenza di
rumore o di cause interferenti.
5.
Long-term stability (drift): è la variazione della lettura sul lungo periodo ed è di solito
dovuta alla perdita del riferimento di zero.
Queste cause di errore devono ora essere combinate per generare una relazione,
l’equazione della misura di potenza, che tenga conto di tutte le incertezze e fornisca
l’incertezza totale.
A tale scopo, si consideri che il generatore dissipa una potenza sul sensore pari a PG,L
anziché PG,Z0 a causa della perdita per disadattamento (mismatch loss):
PG ,Z 0 =
1 − Γ L ⋅ ΓG
1 − ΓL
2
2
⋅ PG ,L
La rivelata Privelata è poi legata a PG,L tramite il fattore di calibrazione:
PG ,Z 0 = 1 − Γ L ⋅ Γ G
2
⋅
(
1
ηe ⋅ 1 − ΓL
2
)
⋅ Privelata = 1 − Γ L ⋅ Γ G
2
⋅
Privelata
kB
Introducendo poi l’incertezza per disadattamento MU già definita nella sezione
precedente:
PG ,Z 0 = M U ⋅
PSUB
kB
24
V. Errori ed incertezza totale nelle misure di potenza
L’indicazione del power meter, Pmeas è poi diversa da Privelata a causa degli errori 1-5
introdotti dall'elettronica dello strumento:
Pmeas = m ⋅ Privelata + t
ove m tiene conto degli errori associati al power meter (essenzialmente di scalatura e legati
alla calibrazione), mentre t tiene conto dell’errore sul riferimento di zero (legato al drift). Si
ha così:
PG ,Z 0 =
M U ⋅ (Pmeas − t )
m ⋅ kB
che rappresenta la cercata Equazione della Misura di Potenza.
La misura ideale si ottiene ovviamente se kB = m = MU = 1 e t = 0.
Da tale espressione è poi possibile stimare l’incertezza totale della misura. Tale valore
può essere calcolato utilizzando due differenti strategie:
-
Incertezza Totale del Caso Peggiore (Worst Case Uncertainty)
-
Incertezza Totale come Valore Quadratico Medio (RSS Uncertainty)
Nel primo caso tutte le fonti di errore vengono calcolate al loro valore massimo ed in
modo che si sommino in modo costruttivo, ottenendo così il valore massimo della deviazione
tra Pmeas e PG,Z0.
I valori massimo e minimo di PG,Z0 sono così ottenuti da:
PG ,Z0 ,max =
PG ,Z 0 ,min =
M U ,max ⋅ (Pmeas − t min )
mmin ⋅ k B ,min
M U ,min ⋅ (Pmeas − t max )
mmax ⋅ k B ,max
da cui l’incertezza totale nel caso peggiore, espressa come:
∆ PG ,Z = PG ,Z
0
max
0
min
− Pmeas = ± YX [W ]
oppure in forma relativa o percentuale:
25
V. Errori ed incertezza totale nelle misure di potenza
∆ PG ,Z
Pmeas
0
∆ PG ,Z
= ± YX
[%]
⎛ PG ,Z 0 ,max Pmeas ⎞
⎟ = ± YX
= 10 ⋅ Log 10 ⎜⎜
⎟
⎝ PG ,Z 0 ,min Pmeas ⎠
dB
= ± YX
o
100 ⋅
Pmeas
0
oppure in decibel:
∆ PG ,Z
0 ,dB
Tipicamente, l'impatto dei singoli termini sull'incertezza totale è quello indicato in
figura V.1
Fig. V.1
Sicuramente l’incertezza calcolata con il metodo del caso peggiore fornisce una stima
per eccesso dei possibili errori. Una fascia di incertezza più accurata può essere calcolata con
la radice della somma dei quadrati (RSS) delle singole incertezze: questa tecnica suppone cioè
che la varie fonti di errore siano tra loro incorrelate e si combinino randomicamente.
Si ottiene:
∆ PG ,Z
PG ,Z0
0
⎡⎛ ∆ M
U
= ⎢⎜⎜
M
⎢⎣⎝
U
2
⎞ ⎛ ∆ kB
⎟⎟ + ⎜⎜
⎠ ⎝ kB
2
⎞ ⎛∆ m⎞ ⎛ ∆ t
⎟⎟ + ⎜
⎟ + ⎜⎜
⎠ ⎝ m ⎠ ⎝ Pmeas
2
⎞
⎟⎟
⎠
2
⎤
⎥
⎥⎦
1
2
Un esempio di calcolo delle incertezze in un caso particolare è riportato nella tabella
seguente:
26
V. Errori ed incertezza totale nelle misure di potenza
27
VI. Confronto tra i sensori di misura di potenza
VI.
CONFRONTO TRA I SENSORI DI MISURA DI POTENZA
Il confronto tra i diversi sensori di misura di potenza è basato su:
-
Accuratezza e range di misura in potenza
-
Coefficiente di riflessione e range di frequenza
-
Velocità di risposta
-
Massima potenza applicabile.
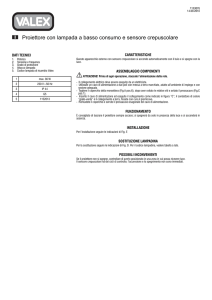
Consideriamo il primo punto, facendo riferimento alla figura VI.1, in cui si tengano
presenti i significati delle sigle : 432A,435A e 436A sono rispettivamente due power meter
analogici e uno digitale, e 8478B, 8484A, 8481A e 8481H sono rispettivamente sensori a
termistore, LBSD, e termocoppie (con o senza un attenuatore integrato)
Fig. VI.1
Si noti che sia le misure con termocoppie che quelle con LBSD possono essere
effettuate con lo stesso power meter, semplicemente cambiando il sensore. Questo fa sì che
28
VI. Confronto tra i sensori di misura di potenza
tali sistemi di misura abbiano un range molto esteso, da -75 a +30 dBm (105dB), variando
contemporaneamente sia la scala che il tipo di sensore.
La parte alta del range viene ottenuta con l’inserimento di attenuatori di precisione
prima del sensore vero e proprio.
In definitiva, i sensori a termistore, pur garantendo un basso valore per la fascia di
incertezza per misure di potenze comprese tra -30 e 10 dBm, hanno un range limitato. La
combinazione degli altri due sensori può poi essere effettuata sia utilizzando uno strumento
analogico che digitale: nel secondo caso, si noti che un cambio di scala non influenza più che
tanto l’incertezza, grazie alla maggiore precisione della misura digitale.
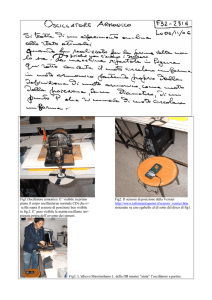
Per quanto riguarda il secondo punto, il range di frequenze che possono essere coperte
dai tre tipi di sensori è sostanzialmente lo stesso. In tale range cambia però il coefficiente di
riflessione sia del sensore che della sorgente e questo influenza le varie fonti di incertezza. In
tale ambito si noti, come si evince dalla figura VI.2, che i sensori a termocoppia e LBSD
hanno coefficienti di riflessione tipicamente più bassi.
D’altra parte i sensori a termistore, non avendo bisogno di oscillatori di riferimento,
sono più indicati per le misure in guida, semplificando notevolmente il setup di misura.
Fig. VI.2
Il terzo punto coinvolge la banda del power meter: per misurare infatti segnali molto
deboli accuratamente, i power meters devono avere bande molto strette; questo per filtrare il
segnale voluto e schermare il rumore di bande adiacenti. Bande strette d’altra parte
significano lunghi tempi di risposta; termocoppie e termistori, elementi sensibili al calore,
hanno poi tempi di risposta legati al riscaldamento e raffreddamento degli elementi sensibili.
Tempi tipici vanno dai 35 ms del termistore ai 100 ms della termocoppia.
Questo non è un problema per le misure manuali, ma può esserlo per quelle
automatizzate.
29
VII. Configurazioni per la misura di potenze
VII. CONFIGURAZIONI PER LA MISURA DI POTENZE
Un banco per la misura di potenze è solitamente del tipo mostrato in figura VII.1:
Carico
Sorgente
Dispositivo di
protezione
Accoppiatore
direzionale
DUT
Fig. VII.1
Sensore e PM
La scelta della sorgente dipende dal livello di potenza necessario e dal tipo di misura
(CW, swept o pulse). Il componente di protezione è tipicamente un circolatore (od un
isolatore) oppure un attenuatore se la potenza della sorgente disponibile è più alta del
necessario; lo scopo di tale componente è quello principalmente di salvaguardare la sorgente
contro eventuali riflessioni dal DUT ed adattare al contempo l'uscita della sorgente.
L’accoppiatore direzionale è usato per potenze sopra i 10 mW (10 dBm) visto che la
maggior parte dei sensori è progettata con tale livello di potenza come potenza massima
manipolabile. Il carico deve fornire un buon adattamento in uscita e le sue proprietà di
dissipazione di potenza devono essere adeguate al livello di potenza in gioco.
A seconda del livello di potenza da misurare, sarà necessario inserire uno o più
attenuatori lungo la catena di misura.
Si consideri, come esempio, lo schema per la misura della potenza in uscita da un
amplificatore da 100 W (50 dBm) di potenza:
Carico
Pdiss,Max=30 dBm
3
Sorgente
Dispositivo di
protezione
50 dBm
Power Amp.
2
≈ 5 dBm
Accoppiatore
direzionale
C=20 dB
1
30 dBm
Attenuatore
da 20 dB
10 dBm
Fig. VII.2
Sensore e PM
30
VII. Configurazioni per la misura di potenze
Si noti che, utilizzando un accoppiatore direzionale nella configurazione classica
(porta 1: ingresso, 2: diretta e 3: accoppiata e 4: internamente isolata) avremmo avuto bisogno
di una terminazione (carico) capace di dissipare 100 W. Nel caso precedente, invece, le porte
2 e 3 sono tra loro isolate e la potenza viene a dissiparsi sulla terminazione interna (porta 4).
La scelta della potenza massima della terminazione dipende così dalla direttività
dell’accoppiatore (nel caso in esempio si è assunta una direttività tipica di 25 dB).
La scelta del valore di attenuazione dipende dal valore massimo manipolabile dal
termistore (nell’esempio, potrebbe essere 15 dBm).
Ovviamente, avendo a disposizione terminazioni su cui dissipare potenze più elevate,
si sarebbbe potuto usare direttamente lo schema in figura VII.1.
Per misure di potenza più basse, l’accoppiatore viene utilizzato nella configurazione
classica o addirittura omesso, utilizzando come carico direttamente il sensore di potenza.
Alternativamente, si può far precedere il sensore da un attenuatore di precisione, allo scopo di
proteggerlo da eventuali picchi di potenza che lo danneggerebbero.
Si noti che negli schemi mostrati finora si è supposto che la potenza da misurare fosse
concentrata ad una singola frequenza (o comunque in un range di frequenze limitato). Bisogna
però notare che frequente è la misura di potenze di uscita da dispositivi con comportamento
nonlineare (amplificatori di potenza): in tal caso la potenza non è limitata alla frequenza del
segnale proveniente dalla sorgente, ma viene distribuita anche su tutte le sue armoniche. Il
problema è anche più gravoso se il dispositivo di potenza è pilotato verso regimi di
compressione o anche di saturazione. In questi casi si preferisce effettuare la misura non con
la combinazione sensore + power meter, intrinsecamente a larga banda, ma con un
analizzatore di spettro.
31
VIII. Misure di attenuazione
VIII. MISURE DI ATTENUAZIONE
E' spesso necessario effettuare, per la caratterizzazione dei componenti di una catena
di misura, misure di attenuazione. Si faccia riferimento alla figura seguente, che descrive una
generica rete 2-porte lineare, descritta attraverso i suoi parametri di diffusione [S], connessa
ad un generatore ΓG ed un carico ΓL:
a1
ΓG
b2
b1
bG
a2
[S]
ΓL
Fig. VIII.1
Se il carico ed il generatore fossero direttamente connessi tra di loro, la potenza
dissipata sul carico PL,1 sarebbe pari a (sezione IV):
PL ,1 =
bG
(
2
1 − Γ L ⋅ ΓG
2
⋅ 1 − ΓL
2
)
Connettendo la rete due porte, la potenza dissipata sul carico, PL,2, sarà invece data da:
2
PL ,2 = bG ⋅
(
S 21 ⋅ 1 − Γ L
2
2
)
1 − (Γ G ⋅ S 11 + Γ L ⋅ S 22 + Γ G ⋅ S 21 ⋅ Γ L ⋅ S 12 ) + Γ G ⋅ S 11 ⋅ Γ L ⋅ S 22
2
Si definisce Perdita di Inserzione LI (Insertion Loss, reciproco del Guadagno di
Inserzione), il rapporto tra le due potenze PL,1 e PL,2 :
LI ≡
PL ,1
PL ,2
=
1 − (Γ G ⋅ S 11 + Γ L ⋅ S 22 + Γ G ⋅ S 21 ⋅ Γ L ⋅ S 12 ) + Γ G ⋅ S 11 ⋅ Γ L ⋅ S 22
S 21 ⋅ 1 − Γ G ⋅ Γ L
2
2
2
molto spesso espressa in decibel:
LI ,dB ≡ 10 ⋅ Log 10
PL ,1
PL ,2
Con il termine Attenuazione della rete due porte si indica il valore di perdita di
inserzione che si ottiene per un carico ed un generatore adattati (ΓL=ΓG=0):
A≡
1
S 21
2
o, in decibel,
AdB ≡ 10 ⋅ Log 10
1
S 21
2
32
VIII. Misure di attenuazione
Si può scomporre l'attenuazione in due componenti: infatti, la potenza che non arriva
sul carico viene in parte riflessa dalla rete ed in parte dissipata (o irradiata). Detta infatti PI la
potenza incidente sulla rete, PR quella riflessa e PD quella dissipata, si ottiene facilmente per
l'Attenuazione per Riflessione e l'Attenuazione per Dissipazione:
PI
1
AR ≡
=
PI − PR 1 − S 11
P − PR 1 − S 11
AD ≡ I
=
2
PL
S 21
e
2
2
da cui
A = AR ⋅ AD
e
AdB = AR ,dB + AD ,dB
VIII.1 Standard per la misura di attenuazione
Come nel caso della potenza, sono definiti alcuni standard che forniscono il
riferimento per la calibrazione dei componenti da laboratorio. Nel seguito, dopo aver
accennato allo standard di attenuazione a bassa frequenza maggiormente diffuso, verranno
discussi due esempi di standard ad alta frequenza.
-
Divisori di tensione Kelvin-Varley:
Fig.VIII.2
In figura VIII.2 è mostrato un esempio di tale standard funzionante su base decimale
ed a quattro decadi. Lo scopo di tale divisore è quello di dividere la tensione applicata in
ingresso ottenendo in uscita una attenuazione (in tensione) che può essere variata da 0 a 1 a
passi di 10-4. In tale schema vengono usati undici resistori uguali per ogni sezione, eccetto
l'ultima, che ne ha dieci. I contatti striscianti coinvolgono sempre due resistori ed il valore dei
33
VIII. Misure di attenuazione
resistori diminuisce di un fattore cinque nel passare da una sezione all'altra. Si noti che se la
porta di uscita viene chiusa su un carico di valore molto elevato (al limite un circuito aperto),
la resistenza di ingresso della rete non dipende dalla posizione dei contatti e, nell'esempio in
figura, vale 1250R. Facilmente si deduce che l'attenuazione ottenibile in questo modo viene
controllata con quattro cifre decimali. Sebbene venga usato spesso con base decimale, è
possibile anche costruire un divisore di questo tipo con base N: sono necessari a tale scopo N
resistori nell'ultimo stadio e N+1 nei precedenti e il valore dei resistori deve essere
decrescente di un fattore N/2; ad esempio, in un divisore binario, ogni sezione è costituita da
due resistori e il valore dei resistori è sempre lo stesso.
La risposta in frequenza del divisore Kelvin-Varley è limitata dagli effetti reattivi
(principalmente capacitivi) dovuti ai parassiti di montaggio: utilizzando accurate tecniche
costruttive, la banda a -3 dB arriva a qualche decina di KHz. Per frequenze più elevate si
ricorre alla versione induttiva del divisore, consistente in una cascata di stadi formati da
autotrasformatori (divisori di tensione induttivi).
-
Attenuatori a setto rotante (rotary vane):
Fig. VIII.3
Le parti essenziali del divisore a setto rotante sono mostrate in figura VIII.3. I due setti
terminali vengono fissati in posizione perpendicolare al vettore del campo elettrico incidente e
l'attenuazione viene variata mediante la rotazione della sezione centrale. Detto θ l'angolo
formato dal setto nella sezione centrale con quelli fissi , l'attenuazione varrà
34
VIII. Misure di attenuazione
⎛ 1 ⎞
⎟⎟ + A0
A = 40 ⋅ Log 10 ⎜⎜
⎝ cos(θ ) ⎠
dove A0 è l'attenuazione quando i setti sono allineati. L'attenuatore rotante ha molti vantaggi
rispetto agli altri attenuatori in guida: in particolare, l'attenuazione è praticamente
indipendente dalla frequenza ed una variazione di attenuazione non introduce variazioni di
fase nel segnale che attraversa l'attenuatore; inoltre, l'adattamento è molto buono e il
coefficiente di temperatura molto basso (le proprietà non cambiano apprezzabilmente al
variare della temperatura).
Le principali fonti di errore in questo tipo di attenuatore sono dovute al
disallineamento dei setti terminali e a riflessioni interne. Nelle figure seguenti viene mostrato
l'andamento di questi errori al variare di αA = A - A0.
Fig. VIII.4
Fig.VIII.5
35
VIII. Misure di attenuazione
-
Attenuatori a pistone:
Fig.VIII.6
In questo tipo di attenuatori il segnale in ingresso viene lanciato in una guida con un
modo operante sotto il cut-off, così che il campo in guida venga ad attenuarsi
esponenzialmente. La posizione longitudinale lungo la guida dell'elemento ricevente
determina quindi l'attenuazione. Variando tale posizione si ottengono attenuazioni variabili in
un’ampia gamma.
VIII.2 Metodi per la misura di attenuazione
I metodi principali per la misura di attenuazione possono essere raggruppati nelle
categorie seguenti:
A-
Metodi a rapporto di potenze
B-
Confronto con un attenuatore di precisione a RF (RF substitution)
C-
Confronto con un attenuatore di precisione a IF (IF substitution)
D-
Confronto con un attenuatore di precisione a frequenze audio (AF substitution)
E-
Metodi senza standard di attenuazione
F-
Metodi basati sulla misura di coefficienti di riflessione
Per brevità verranno ora esaminate soltanto le prime due tecniche sopra elencate.
36
VIII. Misure di attenuazione
A.
Metodi a rapporto di potenze:
Uno schema possibile è descritto nella figura seguente:
Fig. VIII.7
I dispositivi di adattamento sono tipicamente dei tuner, che hanno lo scopo di ottenere
un adattamento buono (VSWR<1.005) guardando verso la sorgente e verso il power meter dal
punto di inserzione. I dispositivi di filtraggio a valle della sorgente hanno lo scopo di far
arrivare al power meter soltanto il segnale alla frequenza voluta e non le eventuali armoniche
generate dalla sorgente.
Detta P1 la lettura del power meter con connessione diretta dei due tuner (già adattati)
e P2 la lettura con il DUT inserito, l'attenuazione risultante è semplicemente il rapporto delle
due letture, come da definizione:
AdB = 10 ⋅ Log 10
P1
= P1,dBm − P2 ,dBm
P2
Si noti che in questo modo non è necessario conoscere l'efficienza del sensore, visto
che l'errore dovuto ad essa avviene comunque in entrambe le misure e viene quindi eliminato.
D'altra parte, un aumento dP nella potenza di uscita P del generatore che avvenga tra
la misura della connessione diretta e con il DUT inserito, provoca un errore nella misura di
attenuazione pari a:
dA = −4.343 ⋅
dP
P
dB
Quindi, anche un aumento modesto nella potenza di uscita del generatore (ad es 0.1%)
provoca un errore nella misura di attenuazione che può essere rilevante (0.043 dB). Per
risolvere il problema, oltre ad utilizzare delle sorgenti altamente stabili, si può ricorrere allo
schema seguente:
37
VIII. Misure di attenuazione
Fig. VIII.8
In questo caso vengono utilizzati due power meter (o un power meter con due sensori
indipendenti) ed un divisore di tensione del tipo Kevin-Varley già descritto, insieme ad un
rivelatore di zero. Il divisore di tensione viene aggiustato in modo tale da ottenere uno zero
sul rivelatore sia nella configurazione con connessione diretta sia con il DUT inserito. Il
valore di attenuazione in questo caso si ottiene dai valori di attenuazione (dalle posizioni) nei
due casi del divisore.
B.
Confronto con un attenuatore di precisione a RF:
Vengono utilizzati attenuatori di precisione variabili (a pistoni o a setto rotante). Uno
schema utilizzabile è il seguente:
Fig.VIII.9
Il principio di funzionamento è molto semplice: si connettono inizialmente in maniera
diretta le due flange al punto di inserzione, con l'attenuatore di precisione regolato in modo da
presentare un'attenuazione elevata A1, misurando, con un dispositivo di sensing adeguato, la
potenza in uscita. Si connette poi il DUT e si varia il valore di attenuazione dell'attenuatore
38
VIII. Misure di attenuazione
fino a che, in corrispondenza dell'attenuazione A2, la potenza in uscita non raggiunge il livello
precedente. il valore dell'attenuazione incognita del DUT è ovviamente la differenza A1-A2. Il
percorso parallelo a quello del segnale mostrato in figura ha lo scopo di rendere indipendente
la misura dal livello di potenza della sorgente.
39
Indice
INDICE
I.
INTRODUZIONE
1
II.
STANDARD E SENSORI DI POTENZA
3
III.
METODI DI MISURA DELLA POTENZA
7
III.1
Strumenti e misure utilizzanti termistori
8
III.2
Strumenti e misure utilizzanti termocoppie
12
III.3
Strumenti e misure utilizzanti rivelatori a diodi
16
IV.
MISURE DI POTENZA ED ERRORI PER DISADATTAMENTO
19
V.
ERRORI ED INCERTEZZA TOTALE NELLE MISURE DI POTENZA
23
VI.
CONFRONTO TRA I SENSORI DI MISURA DI POTENZA
28
VII.
CONFIGURAZIONI PER LA MISURA DI POTENZE
30
VIII. MISURE DI ATTENUAZIONE
32
VIII.1 Standard per la misura di attenuazione
33
VIII.2 Metodi per la misura di attenuazione
36
MISURE DI POTENZA
Corso di Strumentazione e Misure a Microonde
A.A. 2005/2006