UNIVERSITA’ DEGLI STUDI DI BOLOGNA
___________________________________________________________________________
FACOLTA’ DI INGENERIA
CORSO DI LAUREA IN INGEGNERIA DELLE TELECOMUNICAZIONI
INSEGNAMENTO: MICROONDE
PROGETTO DI UN AMPLIFICATORE
BILANCIATO E DI UNO DIFFERENZIALE E
CONFRONTO DELLE LORO PRESTAZIONI
PER APPLICAZIONI RADIO NELL’AMBITO
DEL PROGETTO SKA
(SQUARE KILOMETER ARRAY)
TESI DI LAUREA DI:
CINZIA CARLOTTI
RELATORE:
CHIAR.MA PROF.ING. ALESSANDRA COSTANZO
CORRELATORI:
DOTT. ING. MARCO POLONI
DOTT. ING. FEDERICO PERINI
__________________________________________________________________________
ANNO ACCADEMICO 2002/2003
GRAZIE A….
Al termine di questa straordinaria esperienza di lavoro e soprattutto di vita,
mi sento in dovere di ringraziare la Prof.Costanzo e l’Ing.Montebugnoli
per avermi dato la possibilità di svolgere la tesi presso il Radiotelescopio
di Medicina.
Grazie di cuore anche a Marco e Federico che mi hanno seguito, aiutato e
sostenuto, durante tutto lo svolgimento della tesi con una pazienza davvero
infinita.
Rivolgo inoltre un particolare ringraziamento ad Alessandro Cattani, senza
il quale la realizzazione così rapida dei prototipi non sarebbe stata
possibile, e a Sergio Mariotti, per il prezioso aiuto datomi nella
caratterizzazione degli amplificatori.
Un grazie a Germano e Fabio e a tutti quelli che, volenti o nolenti, hanno
dovuto sopportare le mie “incursioni” nei loro uffici.
Grazie infine a tutte le persone che lavorano al radiotelescopio per la
cordialità e l’amicizia che mi hanno dimostrato sin dal primo giorno.
Grazie a Luca, Vincenzo, Claudio, Enrico, Cristian, Assan e a tutti i
laureandi e tirocinanti che hanno condiviso con me questo importante
periodo della nostra vita. Grazie ragazzi, siete mitici!
Voglio inoltre ringraziare i miei genitori che, in tutti questi anni mi hanno
sostenuto e hanno condiviso con me le gioie e i dolori dell’università.
Grazie per avermi sopportato, la laurea dovrebbero darla anche a voi!
Grazie alle mie zie, ai miei zii, a tutti i miei meravigliosi e variegati cugini,
a mia nonna Dana e a tutti quelli che mi hanno dimostrato il loro amore in
questi anni.
Un enorme grazie a tutti i ragazzi di Bologna, Francesco, Luca, Simone,
Marco, Nico, Michele, Seba, Elisa e Paolo, che hanno condiviso con me
gli studi e, con la loro presenza, hanno alleggerito il carico degli esami. Un
grazie anche a Cinzia (non emozionarti!), Cristian, Cristina e a tutte le
ragazze e i ragazzi di Ferrara, che con la loro amicizia hanno riempito di
gioia la mia vita!
Grazie alla mia nonna Emma che non c’è più, ma che so che mi è stata
vicina e mi ha sorvegliato in tutti questi mesi di duro lavoro.
Grazie per tutte le volte che ero sfinita e tu ti mettevi lì a massaggiarmi (e
a tirarmi le dita dei piedi!)
Grazie per tutte le volte che mi hai svegliato russando e grazie per tutte le
volte che mi hai fatto saltare nel tuo letto a farti il solletico.
Grazie per la tua forza e per la famiglia che mi hai dato.
Grazie per essere stata la mia nonna…
E per finire…entrata trionfale (perché sei modesto!), grazie a te, Gianluca!
Grazie per la pazienza che hai avuto negli ultimi mesi e grazie anche per
tutte le volte che non mi hai lasciato essere egoista. Grazie per la nostra
(quasi) casa e grazie per l’appoggio che mi dimostri e che mi hai
dimostrato in tutti questi anni.
Sei stato un mio amico, il mio ragazzo, il mio compagno… adesso sei una
parte della mia anima.
Con tutto il mio cuore, con tutta la mia anima e con tutta la mia mente
Questo lavoro è dedicato a te.
Indice
INTRODUZIONE – LA RADIOASTRONOMIA
I.1 ORIGINE E SVILUPPO DELLA RADIASTRONIOMIA
I.2 CARATTERISTICHE FREQUENZIALI DELLA RADIOASTRONOMIA
I.3 I RADIOTELESCOPI
I.4 S.K.A.
I.4.1 Il Progetto Australiano
I.4.2 Il Progetto Americano
I.4.3 Il Progetto Canadese
I.4.4 Il Progetto Cinese
I.4.4 Il Progetto Olandese
1
3
4
9
11
14
15
17
18
CAPITOLO 1 – LA CROCE DEL NORD
1.1 LA STAZIONE RADIOASTRONOMICA DI MEDICINA
1.1.1 La Linea Focale e i Dipoli a Mezz’onda
1.2 L’UPGRADE DELLA CROCE DEL NORD VERSO IL “PROGETTO SKA”
1.2.1 Configurazione Attuale della Croce del Nord
1.2.2 Configurazione Futura
22
26
28
28
30
CAPITOLO 2 – AMPLIFICATORI A RADIOFREQUENZA
2.1 LNA: INTRODUZIONE
2.2 RUMORE NEI DISPOSITIVI ELETTRONICI
2.3 GENERALITA’ SUGLI AMPLIFICATORI A RADIOFREQUENZA
2.4 CARATTERISTICHE DEGLI AMPLIFICATORI A RADIOFREQUENZA
2.4.1 Figura di Rumore(NF)
2.4.2 Guadagno e Adattamento
2.4.3 Stabilità
2.4.4 Non Linearità e Distorsione Armonica
2.4.5 Non Linearità e Distorsione di Intermodulazione
2.4.6 Punto di Intercetta del III Ordine (IP3)
2.4.7 Punto di Compressione a 1Db
2.5 CONSIDERAZIONI GENERALI
35
36
39
41
41
42
47
49
50
54
56
56
CAPITOLO 3 – PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
3.1 L’AMPLIFICATORE BILANCIATO
3.2 ACCOPPIATORI IBRIDI A 90 GRADI
3.3 FUNZIONAMENTO DELL’AMPLIFICATORE BILANCIATO
3.4 CARATTERISTICHE DELL’AMPLIFICATORE BILANCIATO
3.5 PROGETTO DI MASSIMA IN BASE ALLE SPECIFICHE RICHIESTE
3.5.1 Considerazioni Iniziali di Progetto
3.5.2 Specifiche del Progetto
3.5.3 Caratteristiche del Progetto Iniziale
3.5.4 Il problema dello Shift in Frequenza
3.5.5 Scelta dell’Accoppiatore Ibrido a 90°
59
59
62
67
70
70
70
71
73
75
CAPITOLO 4 - PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
4.1 AMPLIFICATORE DIFFERENZIALE: GENERALITA’
4.2 AMPLIFICATORE DIFFERENZIALE: COMPORTAMENTO IN CONTINUA
4.3 RELAZIONE CORRENTE/TENSIONE DIFFERENZIALE
79
81
83
4.4 ANDAMENTO DELLA TENSIONE DIFFERENZIALE DI USCITA
4.5 CARATTERISTICHE DEGLI AMPLIFICATORI DIFFERENZIALI
4.5.1 Calcolo dei Guadagni
4.5.2 CMRR
4.5.3 Definizioni di Dinamica di Ingresso e di Uscita di Modo
Comune e Differenziale
4.5.4 Considerazioni Relative alla Dinamica
4.6 CARATTERISTICHE NON IDEALI DELL’AMPLIFICATORE DIFFERENZIALE
4.6.1 Tensione di Offset di Ingresso e di Uscita
4.6.2 Campo di Variazione delle Tensioni di Modo Comune in Ingresso
4.6.3 PSRR
4.7 AMPLIFICATORE DIFFERENZIALE CON USCITA SINGOLA
4.8 LA CONFIGURAZIONE CASCODE
4.9 PROGETTO DELL’LNA CON ARCHITETTURA DIFFERENZIALE
4.9.1 Specifiche del Progetto
4.9.2 Scelta del Dispositivo Attivo
4.9.3 Scelta del Punto di Lavoro
4.9.4 Individuazione dell’Architettura delle Matching Network
4.9.5 Schema Complessivo
84
86
86
87
88
89
90
90
91
91
92
94
100
100
101
103
103
105
CAPITOLO 5 – MICROWAVE OFFICE
5.1 DESCRIZIONE GENERALE DEL SOFTWARE
5.2 L’AMBIENTE DI PROGETTAZIONE
5.3 PARAMETRI DI PROGETTO
5.4 LE SIMULAZIONI LINEARI
5.5 CREAZIONE DEL LAYOUT
5.6 SIMULATORE NON LINEARE
108
110
111
113
116
119
CAPITOLO 6 - SIMULAZIONI
6.1 PROGETTO DELL’AMPLIFICATORE BILANCIATO
6.2 AMPLIFICATORE BILANCIATO CON BANDA DI 20MHz
6.2.1 Individuazione dell’Architettura delle Reti di Adattamento
e Polarizzazione dell’Amplificatore a Singolo Stadio
6.2.2 Ottimizzazione dei Valori dei Componenti Circuitali delle
Matching Network
6.2.3 Verifica del Punto di Lavoro
6.2.4 Presentazione dei Risultati Ottenuti
6.2.5 Studio della Stabilità
6.2.6 Simulazioni con i File di Parametri S
6.2.7 Configurazione Bilanciata con Splitter Ideali
6.2.8 Configurazione Bilanciata con Splitter con insertion loss diversa da zero
6.2.9 Configurazione Bilanciata con Modello per amplitude
unbalance e phase unbalance
6.2.10 Analisi ai Grandi Segnali
6.3 AMPLIFICATORE BILANCIATO CON BANDA DI 250MHz
6.3.1 Individuazione dell’Architettura delle Reti di Adattamento
e Polarizzazione dell’Amplificatore a Singolo Stadio
6.3.2 Ottimizzazione dei Valori dei Componenti Circuitali
delle Matching Network
6.3.3 Verifica del Punto di Lavoro
6.3.4 Presentazione dei Risultati Ottenuti
6.3.5 Studio della Stabilità
6.3.6 Simulazioni con i File di Parametri S
6.3.6 Configurazione Bilanciata con Splitter con Insertion Loss diversa da zero
6.4 PROGETTO DELL’AMPLIFICATORE DIFFERENZIALE
6.5 CONSIDERAZIONI GENERALI
6.5.1 L’Impedenza di Progetto
122
123
123
124
130
131
133
139
142
144
144
147
148
149
150
151
152
153
154
157
159
159
160
6.5.2 Le Simulazioni con Microwave Office
6.6 CONSIDERAZIONI INIZIALI DI PROGETTO
6.7 PROGETTO A BANDA LARGA
6.8 PROGETTO DELL’AMPLIFICATORE DIFFERENZIALE A 100MHz
6.8.1 Individuazione della Topologia delle Reti di Adattamento
di Ingresso e di Uscita del Dispositivo
6.8.2 Ottimizzazione dei Valori degli Elementi Circuitali
6.8.3 Verifica del Punto di Lavoro
6.8.4 Risultati delle Simulazioni
6.8.9 Simulazioni con i File di Parametri S
6.8.10 Verifica della Stabilità
6.8.11 Valutazione dell’IP3
6.8.12 Valutazione del CMRR
6.9 CONSIDERAZIONI RIEPILOGATIVE SUL PROGETTO
6.10 CONFRONTO DELLE PRESTAZIONI
161
163
165
171
172
173
174
174
174
177
178
178
180
181
CAPITOLO 7 – REALIZZAZIONE DEI CIRCUITI
7.1 REALIZZAZIONE DEL PROTOTIPO DELL’AMPLIFICATORE BILANCIATO
7.2 PROGETTAZIONE DEL LAYOUT DEL CIRCUITO
7.2.1 Individuazione dei Componenti da Utilizzare nel Prototipo
7.2.2 Determinazione della Larghezza delle Piste e della loro
Lunghezza Relativamente al Dispositivo Singolo
7.2.3 Individuazione del Layout della Struttura Bilanciata
7.2.4 Risultati delle Simulazioni Elettromagnetiche
7.2.6 Valutazione dell’Ingombro del Circuito
7.3 REALIZZAZIONE DEL LAYOUT
7.4 MONTAGGIO DEI COMPONENTI
7.5 REALIZZAZIONE DEL PROTOTIPO DELL’AMPLIFICATORE DIFFERENZIALE
7.6 PROGETTAZIONE DEL LAYOUT DEL CIRCUITO
7.6.1 Individuazione dei Componenti da Utilizzare nel Prototipo
7.6.2 Determinazione della Larghezza delle Piste e
Individuazione del Layout più adatto alla Struttura Complessiva
7.6.3 Considerazioni di Progetto
7.6.4 Considerazioni sulle Reti di Polarizzazione
7.6.5 Valutazione dell’Ingombro del Circuito
7.7 REALIZZAZIONE DEL LAYOUT DEL CIRCUITO
7.8 MONTAGGIO DEI COMPONENTI
186
186
186
188
189
191
194
196
198
200
200
200
201
204
206
206
207
207
CAPITOLO 8 – CARATTERIZZAZIONE DEI CIRCUTI
8.1 CARATTERIZZAZIONE DEL PROTOTIPO DELL’AMPLIFICATORE BILANCIATO
8.1.1 SIMULAZIONI CON LO SPLITER PSCQ-2-450
8.1.2 MISURA DEI PARAMETRI S
8.1.3 MISURA DEL RUMORE
8.1.4 MISURE DI DINAMICA
8.2 CARATTERIZZAZIONE DELL’AMPLIFICATORE DIFFERENZIALE
208
208
209
213
219
222
CAPITOLO 9 - CONCLUSIONI
9.1 CONCLUSIONI E SVILUPPI FUTURI
9.1.1 L’Amplificatore Bilanciato
9.1.2 L’Amplificatore Differenziale
226
226
227
APPENDICE A - PARAMETRI S: DESCRIZIONE E SIGNIFICATO
A.1 DEFINIZIONE DEI PARAMETRI S
A.2 LA CARTA DI SMITH
A1
A7
INTRODUZIONE
1
___________________________________________________________________________
I.1 O RIGINE E SVILUPPO DELLA RADIOASTRONOMIA
(Ref.[1])
L’osservazione dell’Universo è possibile attraverso due “finestre”:
la finestra ottica e la finestra radio. Mentre della finestra ottica si
occupa l’Astronomia classica, la finestra radio è argomento della
Radioastronomia.
La
Radioastronomia
rappresenta,
quindi,
quel
campo
dell’astronomia che studia l’universo nella porzione di spettro che
va dai 30MHz ai 300GHz, cioè dalle radioonde alle microonde.
Le origini della radioastronomia sono relativamente recenti. Già
alla fine del XIX secolo, alcuni studi presero in considerazione la
possibilità che i corpi celesti, ed in particolare il Sole, potessero
emettere onde radio. I primi risultati certi si ottennero, però,
soltanto nel secolo successivo.
L’effettiva scoperta di segnali radio di natura non terrestre ebbe
luogo, in modo casuale, nel 1932, per opera di Karl Jansky. Jansky
era impiegato presso i Bell Telephone Laboratories e aveva
l’incarico di studiare la natura di interferenze di tipo elettrostatico,
riscontrate sui collegamenti telefonici trans-oceanici. Durante i suoi
esperimenti, egli individuò tre tipi di fenomeni: due si dimostrarono
di origine temporalesca, mentre, il terzo si rivelò essere un rumore,
molto debole, di origine sconosciuta. Dopo lunghe indagini, egli
notò che il fenomeno si ripeteva con un periodo di qualche minuto
inferiore alle 24 ore (23 ore e 56 minuti). Più tardi, arrivò a
scoprire che questo era originato dall’emissione, da parte delle
regioni più dense della Via Lattea, di segnali a radiofrequenza, a
cui fu dato il nome di radio-rumori galattici.
F ig u r a 1 . A n t e n n a u s a t a d a J a n s k y n e lle s u e o s s e r v a zio n i
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
2
___________________________________________________________________________
Negli anni successivi, un ulteriore contributo alle osservazioni
radioastronomiche fu dato da Grote Reber. Reber era un
radioamatore e il suo interesse si rivolse fin da subito alle scoperte
fatte da Jansky. Nel 1937, egli costruì quello che si può considerare
come il primo vero radiotelescopio: un riflettore parabolico di 9.5m
di diametro, assemblato su di una robusta montatura in legno. Dopo
aver raccolto ed elaborato un numero sufficiente di dati, nel 1944,
egli fu anche in grado di compilare la prima radio-mappa della
nostra galassia.
F ig u r a 2 . I l p r im o r a d io t e l e s c o p i o c o s t r u i t o d a R e b e r
Dopo la Seconda Guerra Mondiale, quando divennero disponibili le
tecnologie radar, la radioastronomia godé di ulteriori sviluppi che
la portarono ai livelli dell’astronomia ottica.
Notevole fu, in quegli anni, il contributo di John Kraus. Egli diede
vita, presso la Ohio State University, al primo osservatorio radio e
fu autore di diverse pubblicazioni in ambito radioastronomico, che,
ancora adesso, sono da considerarsi di fondamentale importanza.
Oggi la radioastronomia ha raggiunto livelli tecnologici altissimi e
rappresenta uno dei più importanti mezzi di osservazione per lo
studio del nostro universo.
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
3
___________________________________________________________________________
Tra le principali tappe del progresso della radioastronomia, vanno
ricordate: la scoperta della struttura a spirale della Galassia,
l’identificazione ottica di alcune radiosorgenti e la scoperta delle
quasar e delle pulsar.
Di fondamentale importanza, fu, inoltre, la scoperta della riga
spettrale dell’idrogeno neutro, l’elemento più diffuso nell’universo,
a 1420MHz (21cm), ad opera dell’astronomo olandese H.C. Van de
Hulst.
I.2 CARATTERISTICHE FREQUENZIALI DELLA RADIOASTRONOMIA
(Ref.[2])
Nonostante gli oggetti celesti forniscano informazioni distribuite
sull’intero spettro elettromagnetico, la loro ricezione, da terra, è
possibile solo in una piccola parte di esso. Tale parte comprende il
visibile, le microonde e le radioonde.
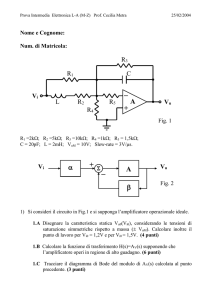
F i g u r a 3 . T r a s p a r e n za a t m o s f e r i c a
Infatti, nella parte alta dello spettro elettromagnetico (λ<1cm), le
radiazioni sono assorbite dall’ossigeno e dal vapore acqueo della
bassa atmosfera, mentre, nella parte bassa dello spettro (λ oltre i
10m), le osservazioni sono limitate dalla presenza della ionosfera,
che riflette verso l’esterno le onde provenienti da oggetti lontani
dal nostro pianeta.
Le onde di frequenza compresa tra i 3MHz e i 30GHz non vengono
invece assorbite in modo sensibile dalla materia interstellare e dalle
nubi terrestri. Diviene perciò possibile, per la radioastronomia,
studiare le caratteristiche di oggetti celesti, altrimenti invisibili con
i normali strumenti ottici.
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
4
___________________________________________________________________________
Non tutte le limitazioni nell’osservazione alle radiofrequenze sono,
però, di origine “naturale”. Le interferenze radio di tipo “manmade” stanno, infatti, seriamente minando il futuro della
Radioastronomia e questo, nonostante la banda riservatale sia, di
fatto, protetta dal Ministero delle Comunicazioni. Ciò complica
notevolmente il lavoro degli ingegneri impegnati nella
progettazione dei radiotelescopi, in quanto rende indispensabile che
questi ultimi siano sempre più sofisticati e dotati di tecniche di
mitigazione delle interferenze via via più potenti.
I.3 I RADIOTELESCOPI
Lo strumento principalmente utilizzato in radioastronomia per la
ricezione
delle
onde
elettromagnetiche
è
chiamato
radiotelescopio.
Un radiotelescopio consiste, in generale, di una antenna, dotata di
uno specchio avente forma parabolica o cilindro-parabolica. La
scelta di tale forma è legata alle sue proprietà geometriche, per le
quali:
•
•
Tutte le radiazioni provenienti da una direzione parallela
all’asse della parabola convergono sul fuoco
Tutti i punti di una superficie d’onda (punti equifase)
provenienti da una direzione parallela all’asse della
parabola si trovano ancora in fase sul fuoco.
Attraverso l’uso di opportuni trasduttori, posti sul fuoco, le onde
elettromagnetiche, vengono convertite in segnali elettrici, tali da
potere essere analizzati con la normale strumentazione elettronica.
Le principali grandezze caratterizzanti un radiotelescopio sono:
• Sensibilità
• Potere risolutore
• Campo visivo
Per sensibilità si intende la capacità di rivelare segnali molto
deboli. Tale grandezza dipende dall’area di raccolta, dall’efficienza
di antenna a dalla sensibilità del ricevitore utilizzato per
amplificare i segnali ricevuti. I segnali radioastronomici, però, sono
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
5
___________________________________________________________________________
così deboli da essere fino a svariati ordini di grandezza al di sotto
del rumore generato dal ricevitore. Questo fatto complica
notevolmente il post-processing, dato che si rende necessario un
tempo di integrazione estremamente lungo. Per questo motivo, si
tendono a realizzare grandi aree collettrici, in modo da aumentare
la quantità di energia elettromagnetica, associata all’onda incidente
e semplificare, così, l’elaborazione del segnale ricevuto.
Il potere risolutore rappresenta l’angolo minimo sotto cui è
possibile distinguere due oggetti vicini. In particolare, in
radioastronomia, per angolo minimo si intende la minima
separazione angolare tra due oggetti celesti, alla quale le immagini
risultano distinte anziché confuse in una sola.
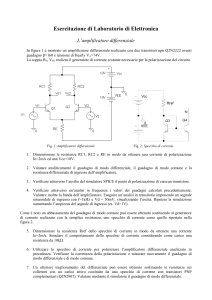
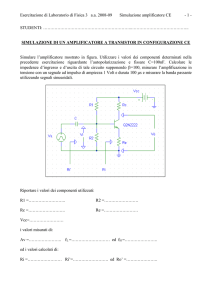
Il potere risolutore è legato all’apertura del fascio di antenna che
dipende, a sua volta, dal diametro della stessa. Se indichiamo con ϕ
l’apertura, espressa in gradi, del fascio e con D λ il diametro
dell’antenna misurato in lunghezze d’onda, la relazione tra queste
due grandezze è esprimibile come (Ref.[3]):
ϕ=
57.3°
Dλ .
Se il diametro aumenta, il fascio si restringe, per cui il sistema
diventa più direttivo e la risoluzione migliora.
Questa proprietà è mostrata chiaramente in Fig.4.
F ig u r a 4 . R e la zio n e t r a d ia m e t r o d e ll’ a n t e n n a e a p e r t u r a d e l f a s c io
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
6
___________________________________________________________________________
Per esempio, un telescopio ottico di 10 cm di diametro, ha un potere
risolutore di circa 1 secondo di arco (1/3600 di angolo giro).Per
ottenere lo stesso potere risolutivo da un radiotelescopio, dato che
la lunghezza d’onda radio può essere anche un milione di volte
maggiore della lunghezza d’onda ottica, è necessario un diametro di
50 km, condizione che è impensabile raggiungere nella pratica.
Per campo visivo si intende l’istantanea e contigua area di angolo
solido di cielo che può essere figurata, cioè l’angolo nel quale noi
possiamo collocare N beams indipendenti.
Potere risolutore e sensibilità sono, quindi, i fattori più critici e più
delicati per gli studi radioastronomici.
Per arrivare ad avere una sensibilità e un potere risolutore, tali da
riuscire a ricevere segnali estremamente deboli, si dovrebbero
costruire antenne di dimensioni enormi e difficilmente realizzabili.
Per ovviare a tutto ciò, si utilizza la tecnica interferometrica.
Questa tecnica è basata sul noto principio dell’ottica secondo il
quale, per ottenere la massima risoluzione possibile da uno
specchio di dato diametro non è necessario utilizzarne tutta la
superficie ma bastano due punti diametralmente opposti. Questo
principio è applicabile anche nel campo radio. Si tratta, infatti,
sempre, di onde elettromagnetiche, l’unica differenza è
rappresentata dalla diversa frequenza.
Per la radioastronomia, l’uso della interferometria rende possibile
l’utilizzo di due o più radiotelescopi, di dimensioni ridotte, posti
anche a grande distanza, piuttosto che di uno unico di grandi
dimensioni. Per aumentare la risoluzione non si deve fare altro che
allontanare tra loro le due antenne; il potere risolutore viene a
dipendere, infatti, dalla distanza reciproca.
Un interferometro “radioastronomico” è, quindi, costituito da due o
più antenne, poste a grande distanza tra loro e orientate verso la
stessa sorgente, i cui segnali vengono combinati tra loro.
Una struttura basata sulla tecnica interferometrica è il VLA (Very
Large Array) situato a Socorro, nel New Mexico. Tale struttura è
costituita da 27 antenne, di 25m di diametro, disposte a Y lungo
percorsi di 20Km. Le antenne possono muoversi secondo diverse
configurazioni con diverse distanze: si va da 1Km fino ad una
distanza massima di circa 35Km. Ciò consente allo strumento di
operare a diverse risoluzioni.
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
7
___________________________________________________________________________
F ig u r a 5 . V LA
Distanze maggiori vengono applicate nella tecnica VLBI (Very
Long Baseline Interferometro). Le antenne che fanno parte del
VLBI Network si trovano in diverse parti del mondo e consentono,
sempre utilizzando la tecnica interferometrica, di ottenere il potere
risolutore che si avrebbe con un radiotelescopio grande come la
Terra. Anche la Stazione Radioastronomica di Medicina, con la sua
antenna parabolica da 32m, fa parte del VLBI e, in particolare,
dell’EVN (European VLBI Network).
F ig u r a 6 . Eu r o p e a n V LBI N e t wo r k
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
8
___________________________________________________________________________
Per aumentare ulteriormente la risoluzione, viene utilizzato il
satellite giapponese VSOP (VLBI Space Observatory Programme),
lanciato in orbita nel 1997. Tale satellite trasporta una antenna di
8m di diametro e ruota attorno alla Terra, percorrendo un’orbita
ellittica. VSOP è utilizzato per formare, insieme alle antenne
situate sulla superficie terrestre, una grandissima rete VLBI. In
questo modo, infatti, viene simulata una antenna di diametro pari
all’orbita del satellite, il cui raggio maggiore è, in questo caso, di
circa 21˙000Km.
F ig u r a 7 . V S O P
A parte le differenti distanze raggiungibili, la differenza tra VLA e
VLBI sta nel diverso modo di collegare le varie antenne.
Infatti, nel VLA, i radiotelescopi sono collegati tra loro mediante
cavi e i segnali, provenienti da ognuno di essi, vengono combinati
direttamente. Nel VLBI, invece, più radiotelescopi, posti a grande
distanza, osservano simultaneamente la stessa sorgente e registrano
il segnale su nastri magnetici o su capienti sistemi di hard-disk. Ad
ogni dato viene anche associata una marca temporale, caratterizzata
da una precisione superiore al micro-secondo, che consente di
sincronizzare le registrazioni ed eseguire correttamente la
combinazione dei segnali.
In entrambi i casi, la combinazione dei dati, viene realizzata
utilizzando tecniche di correlazione. Facendo la moltiplicazione
analogica dei segnali, si riesce a separare il segnale da un rumore
casuale molto più forte.(Ref.[4])
Nonostante i notevoli vantaggi in termine di risoluzione, ottenuti
con la tecnica interferometrica, la richiesta, da parte dei
radioastronomi, è ancora quella di un superiore potere risolutivo,
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
9
___________________________________________________________________________
oltre che di una maggiore sensibilità e di un range di frequenze più
ampio di quello oggi
disponibile. A tale scopo si stanno
sviluppando tecnologie sempre più innovative. La più importante è
il progetto SKA.
I.4 S.K.A
(Ref. [5])
SKA (Square Kilometer Array) è un progetto internazionale che ha
lo scopo di realizzare un radiotelescopio di nuova concezione.
Al progetto SKA partecipano le più importanti organizzazioni
scientifiche mondiali. In particolare, ne fanno parte Australia,
Canada, Europa,Cina, India e USA.
Per l’Europa, un contributo determinante è dato da Italia e Olanda;
in tale direzione, comincia inoltre a muoversi attivamente anche
l’Inghilterra.
SKA è un progetto recente: il comitato che lo coordina, lo ISSC
(International SKA Steering Committee), è stato istituito solo nel
2000. In ogni caso, si prevede, entro il 2006, di avere a
disposizione sufficienti dati ed informazioni tecniche per arrivare
ad un progetto unico, che diventerebbe operativo attorno al 2015.
Attualmente, le istituzioni partecipanti allo SKA stanno
sviluppando diversi technical concepts, allo scopo di arrivare a
soddisfare le specifiche generali che sono state date dal ISSC. Le
differenti soluzioni tecnologiche, di cui le più significative saranno
presentate nei prossimi paragrafi, verranno poi selezionate e
integrate per convergere nella realizzazione di un’unica struttura
finale, caratterizzata da un’area di raccolta di un milione di metri
quadrati. Perché questo sia possibile, le diverse istituzioni devono
tenere conto di alcune linee guida, indispensabili per ottimizzare al
massimo i ritorni scientifici del progetto, che consistono in:
•
una configurazione che permetta alle stazioni SKA di
essere distribuite su migliaia di chilometri
•
basso livello di interferenze a radio frequenze
•
accesso alle vie di comunicazione.
Le specifiche dello SKA, pur venendo fissate, in modo definitivo,
solo nel 2008, non si discosteranno di molto da quelle attuali; esse
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
10
___________________________________________________________________________
rendono lo SKA un progetto assolutamente rivoluzionario, rispetto
agli attuali radiotelescopi. L’area di raccolta, di un chilometro
quadrato consentirà, infatti, oltre che di avere un potere risolutivo
più ampio, di raggiungere una sensibilità di due ordini di grandezza
superiore a quella odierna e di osservare più parti di cielo
contemporaneamente, potendo contare su 100 beams indipendenti.
Quest’ultima caratteristica è molto importante perché renderà lo
SKA un sistema multiuser. Questo significa che si potranno avere
fino a 100 utenti che saranno in grado di condurre, in modo
indipendente, osservazioni di tipo diverso.
Il maggiore potere risolutivo e la superiore qualità delle immagini,
dovuta all’aumento della sensibilità, sono fondamentali per studiare
la nascita e l’evoluzione dell’universo. In particolare, si potrà
indagare sulla formazione di stelle, galassie e quasar. SKA si
propone infatti, di esaminare i componenti gassosi dell’Universo
per dare una risposta relativamente alla sua origine ed evoluzione,
dando la possibilità, agli astronomi, di “osservare” a distanze
corrispondenti a un milione di anni dopo il Big Bang, oltre che
cercare pianeti al di fuori del sistema solare ed eventuali
intelligenze extraterrestri.
I benefici, che si avranno dalla realizzazione del progetto non sono,
però, legati soltanto al mondo della radioastronomia. Infatti,
essendo lo SKA un progetto estremamente innovativo, porta con sé
notevoli vantaggi dovuti alla ricerca e allo sviluppo di nuove
tecnologie, che trovano larga applicazione nelle telecomunicazioni,
nell’ information technology e nei settori attigui. Basti pensare, per
esempio, che l’elevata sensibilità richiesta dal progetto determina
inevitabilmente problemi legati all’interferenza radio, richiedendo
lo sviluppo di tecniche sempre più all’avanguardia nella
mitigazione delle interferenze, tecniche molto importanti anche al
di fuori del mondo radioastronomico.
Verranno di seguito illustrati i principali technical concepts
attualmente in fase di sviluppo.
I.4.1 Il Progetto Australiano
Il technical concept australiano di SKA è in fase di studio presso
l’ATNF (Australia Telescope National Facility), che fa parte dello
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
11
___________________________________________________________________________
CSIRO (Commonwealth Scientific & Industrial Research
Organization).
Per l’implementazione del progetto, sono stati sviluppati due
differenti modelli: l’ NTD (New Technology Demonstrator) e lo
SKAMP ( SKA Molonglo Prototipe).
L’ NTD prevede l’utilizzo di antenne tridimensionali sferiche,
chiamate Luneburg Lenses, ciascuna di circa 7 m di diametro.
(Ref.[6])
Figura 8. Luneburg Lenses
Il loro principio di funzionamento è basato sulla graduazione
radiale dell’indice di rifrazione di un materiale dielettrico, in modo
tale che esso assuma un valore massimo al centro della sfera e
unitario sulla superficie. Infatti, se indichiamo con r la coordinata
radiale normalizzata della sfera, l’indice di rifrazione è dato da:
η=
(2 − r ) .
2
Questo ha l’effetto di focalizzare l’energia di un’onda piana,
incidente sulla lente, in un punto, sulla parte opposta della sfera,
che, a seconda della frequenza, può appartenere alla superficie
oppure esserne all’esterno. Tale punto è quello su cui sarà
posizionato il ricevitore.
Inoltre, la simmetria sferica conferisce alla lente l’importante
proprietà di essere un’antenna di tipo “all sky”, cioè di consentire
la visione contemporanea di tutto il cielo.
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
12
___________________________________________________________________________
Del tutto analoga è la soluzione che prevede l’utilizzo di semisfere,
invece di sfere complete. In questo caso, infatti, la mezza sfera
sottostante è sostituita da un piano di terra, che riflette l’onda
incidente.
F i g u r a 9 . S o l u zio n e c o n s f e r e c o m p l e t e e c o n m e zze s f e r e
Il piano di terra costituisce, indubbiamente, un vantaggio, in
termini di supporto meccanico, dato che sostiene direttamente le
parti dense della sfera.
Infatti, uno dei problemi, presentati dalle Luneburg Lenses, è che il
materiale dielettrico rende la struttura estremamente pesante. In
Fig.10 vengono riportati alcuni materiali, presi in considerazione
3
per il progetto, con le loro corrispondenti densità (Kg/ m ).
(Ref.[7])
E’ evidente che, per alcuni materiali, un diametro della sfera anche
piuttosto ridotto, porta ad un peso non indifferente e complesso da
gestire nella pratica.
Figura 10. Caratteristiche dei materiali presi in considerazione nel progetto delle
Luneburg Lenses
Questa osservazione, unitamente agli alti costi ed alle forti perdite
a radiofrequenza nel dielettrico, indicano che diventa fondamentale,
per la realizzabilità del progetto, una attenta scelta dei materiali,
tanto più che si prevede l’utilizzo di un numero estremamente
elevato di sfere.
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
13
___________________________________________________________________________
Il progetto finale, infatti, contempla la costruzione di circa 50’000
sfere di 7 m, di cui la metà sarà concentrata in un’area di circa 4Km
di diametro.
Le rimanenti andranno, invece, a costituire delle stazioni, ognuna
delle quali avrà un diametro di 250m e comprenderà circa 180 sfere.
Tali stazioni saranno dislocate, con andamento spiraliforme, fino ad
una distanza di 2000 km dalla zona centrale. (Ref.[8])
Lo SKAMP, invece, propone, per la realizzazione del progetto
SKA, una soluzione che si rifà al radiotelescopio di Molonglo,
località nei pressi di Canberra. Questa stazione è costituita,
attualmente, da due paraboloidi cilindrici collineari, ciascuno di
778mx12m, distanziati tra loro di 15m. L’area di raccolta
complessiva di 18˙000 metri quadrati è, oggi, la più grande di tutto
l’Emisfero Sud. Allineato secondo la direzione est-ovest, il
radiotelescopio è puntato, in declinazione, attraverso la rotazione
meccanica dei paraboloidi cilindrici attorno al loro asse. Viene,
inoltre, utilizzato un sistema di “fasci”, ottenuti ritardando,
progressivamente, in modo elettronico, i segnali che arrivano
sull’antenna. Ciò consente di osservare la sorgente in istanti
differenti e permette di identificare i disturbi di origine terrestre,
poiché essi vengono rilevati, contemporaneamente, su tutti i fasci.
Figura 11. Il radiotelescopio di Molonglo
Anche se, attualmente, la stazione di Molonglo opera ad una
frequenza di 843MHz, si vuole arrivare a lavorare con frequenze
che vanno da 300MHz a 1,42GHz. Per arrivare a questo risultato
sono già state proposte varie soluzioni tra cui l’uso di dipoli attivi
di antenna o di un array lineare di antenne Vivaldi.
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
14
___________________________________________________________________________
Il progetto complessivo prevede l’utilizzo di 600 stazioni, di
111mx15m, disposte anch’esse con un andamento spiraliforme,
attorno ad un nucleo centrale. Anche questo progetto risulta essere
piuttosto costoso ma ha l’importante vantaggio di utilizzare una
tecnologia, almeno in parte, già nota.(Ref.[9])
I.4.2 Il Progetto Americano
La proposta americana prende il nome di ATA (Allen Telescope
Array) e nasce dalla collaborazione tra il SETI Institute e il
laboratorio di radioastronomia dell’Università di Berkeley, in
California.
Tale progetto prevede la realizzazione di 350 antenne gregoriane,
offsettate o classiche, per un’area di raccolta complessiva di 10'000
chilometri quadrati. L’antenna gregoriana, utilizzata in questo caso,
prevede un riflettore primario parabolico di 6.1m di diametro e un
sub-riflettore secondario ellittico di 2.4m. I due riflettori hanno in
comune il fuoco primario, mentre, nel fuoco secondario
dell’ellissoide, è posto il ricevitore. Il fronte d’onda incidente viene
riflesso dallo specchio primario a quello secondario, il quale, a sua
volta, lo convoglia sul ricevitore. Inoltre, uno schermo metallico
connette la metà inferiore dei due riflettori, consentendo di ottenere
temperature di sistema più basse. (Ref.[10])
Figura 12. Il progetto americano
Nelle vicinanze del campus di Berkeley è già stato costruito un
prototipo, chiamato RPA (Rapid Prototyping Array). L’RPA è
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
15
___________________________________________________________________________
costituito da 7 antenne offsettate, ciascuna di 3.6m di diametro, ed
è utilizzato per verificare il corretto funzionamento del hardware e
del software, finora realizzati, oltre che per ponderare la sua
capacità di far fronte alle interferenze radio.(Ref.[11])
I.4.3 Il Progetto Canadese
(Ref. [12])
Il progetto canadese, condotto dal CNRC (National Research
Council of Canada), prende il nome di LAR (Large Adaptive
Reflector).
F ig u r a 1 3 . I l p r o g e t t o c a n a d e s e
Come illustrato in Fig.14, il LAR è costituito da un riflettore piano
di 200m di diametro, formato da circa 150 sezioni mobili. Ogni
sezione, composta da pannelli esagonali, sollevati da terra, ha
forma triangolare e dimensione pari a circa 20m.
A seconda del puntamento che si deve effettuare, sono interessate
alla ricezione solo un certo numero di sezioni. Queste devono, di
volta in volta, approssimare al meglio il tratto di parabola; ciò si
ottiene modificando la posizione delle sezioni stesse, attraverso
l’aiuto del calcolatore.
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
16
___________________________________________________________________________
F i g u r a 1 4 . S e z i o n e t r i a n g o la r e f o r m a t a d a p a n n e l l i m o b i l i
A causa della sua particolare struttura, tale progetto è caratterizzato
da una grande distanza focale. Il fuoco, collocato ad una altezza di
circa 500m, si trova su di un pallone aerostatico, riempito di elio,
ed è mantenuto in posizione da una struttura costituita da più
tiranti.
L’antenna, quindi, può essere puntata muovendo il fuoco, attraverso
l’uso di argani che cambiano la lunghezza dei tiranti e,
modificando, contemporaneamente, la superficie del riflettore
interessata.
Il sistema di tiranti e il posizionamento del fuoco con l’aerostato
sono fondamentali per il corretto funzionamento del sistema.
Nonostante il LAR offra la copertura di una notevole porzione di
cielo, vi sono notevoli difficoltà nella gestione del pallone
aerostatico, in quanto le simulazioni richiedono di tenere conto di
un numero elevatissimo di parametri di tipo metereologico.
I.4.4 Il Progetto Cinese
(Ref. [13])
Il progetto cinese, sostenuto dal BAO (Beijing Astronomical
Observatory), prevede la costruzione di un array di 30 riflettori
sferici, ciascuno di 200m di diametro, collocati all’interno di
depressioni naturali. La posizione del primo prototipo, chiamato
FAST (Five hundred meter Aperture Spherical Telescope), è già
stata individuata e prende il nome di KARST (Kilometer-square
Area Radio Synthesis Telescope).
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
17
___________________________________________________________________________
F ig u r a 1 5 . I l p r o g e t t o c in e s e
Il FAST,come mostrato in Fig.16, è costituito da una superficie
sferica di 500m di diametro, con un raggio di curvatura di 300m e
una apertura effettiva di 300m.
F i g u r a 1 6 . P r i n c i p i o d i f u n zi o n a m e n t o d e l F A S T .
Il suo funzionamento si basa sul principio secondo il quale una
porzione sufficientemente piccola di superficie sferica si
differenzia poco da una parabola, della quale continuano ad essere
valide le proprietà.
Quindi, pur avendo a disposizione una semisfera di diametro molto
grande, la parte illuminata è solo una piccola porzione di essa ed,
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
18
___________________________________________________________________________
inoltre, deve essere continuamente aggiustata per rendere possibile
l’inseguimento della radiosorgente.
I.4.5 Il Progetto Olandese
Il progetto olandese, sostenuto dall’ASTRON (ASTRonomisch
Onderzolk in Nederland), si è sviluppato in tre fasi successive: la
realizzazione di una antenna dimostrativa denominata AAD
(Adaptive Antenna Demonstrator), la costruzione di OSMA (One
Square Meter Array) e, infine, lo sviluppo di THEA (Thousand
Element Array).
L’AAD è costituito da 8 elementi in microstriscia integrati, 8
ricevitori, un adaptive beamformer digitale e un convertitore D/A.
La sua realizzazione ha permesso di verificare la sua capacità di
seguire elettronicamente le radio-sorgenti e di minimizzare le
interferenze radio.(Ref.[14])
L’OSMA, invece, è costituito da un array di 144 elementi, un dual
beam beamformer a radiofrequenza, un ricevitore a 16 canali e due
adaptive beamformers digitali. Tale array è costituito da una
regione centrale di 64 elementi attivi, circondata da due linee di
elementi passivi. Tale configurazione permette di avere due beam
indipendenti, guidati in modo digitale.(Ref.[15])
F ig u r a 1 7 . O S M A
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
19
___________________________________________________________________________
THEA, infine, è un phased-array, costituito da 1024 elementi attivi,
distribuiti su una griglia regolare di 16 metri quadrati. THEA è
organizzato secondo una gerarchia a due livelli di beamforming. Il
primo livello consiste di un beamformer, a radiofrequenza, di 64
antenne, noto come tile. Il secondo livello consiste di 16 tiles,
processati in un beamformer digitale. La sua struttura permette di
lavorare ad una frequenza compresa tra 750MHz e 1500MHz e di
avere beam multipli, anch’essi guidati in modo digitale.(Ref.[16])
F ig u r a 1 8 . TH EA
Il lavoro svolto si è articolato secondo i seguenti punti:
Capitolo 1 - “La Croce del Nord”
Descrizione generale della “Croce del Nord” con particolare
attenzione al sistema delle linee focali, in cui troveranno
collocazione gli amplificatori oggetto di questa tesi. Presentazione
di possibili configurazione future in vista dell’upgrade della Croce
nell’ambito del Progetto SKA.
Capitolo 2 - “Amplificatori a RadioFrequenza”
Descrizione delle principali proprietà degli amplificatori a
radiofrequenza con particolare riferimento agli LNA e ai loro
parametri caratteristici.
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
20
___________________________________________________________________________
Capitolo 3 - “Preamplificatore con Architettura Bilanciata”
Descrizione
delle
proprietà
dell’amplificatore
bilanciato.
Determinazione delle specifiche di progetto e presentazione delle
scelte fatte in merito ai tipi di dispositivi da utilizzare e ad una
configurazione adattabile allo scopo.
Capitolo 4 - “Preamplificatore con Architettura Differenziale”
Descrizione delle proprietà dell’amplificatore differenziale.
Determinazione delle specifiche di progetto e presentazione delle
scelte fatte in merito ai tipi di dispositivi da utilizzare e ad una
configurazione adattabile allo scopo.
Capitolo 5 - “Microwave Office”
Descrizione generale del software “Microwave Office”, utilizzato
nelle simulazioni dei due amplificatori.
Capitolo 6 - “Simulazioni”
Presentazione delle simulazioni effettuate per i due progetti e
discussione dei risultati ottenuti.
Capitolo 7 - “Realizzazione dei Circuiti”
Progettazione del layout dei circuiti e realizzazione fisica di un loro
prototipo in tecnologia ibrida.
Capitolo 8 - “Caratterizzazione dei Circuiti”
Presentazione dei risultati delle misure effettuate.
Capitolo 9 - “Conclusioni”
Presentazione delle conclusioni ed eventuali sviluppi futuri.
Appendice A - “Parametri S: Descrizione e Significato”
Breve descrizione dei Parametri S
Appendice B: “Data-Sheet dei componenti utilizzati”
Presentazione dei Data-Sheet dei componenti che sono stati
utilizzati nei due progetti.
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
21
___________________________________________________________________________
REFERENCES:
[1]: www.nrao.edu
[2]: “Lessico Universale Italiano”- Enciclopedia Treccani
[3]:www.ira.cnr.it/Medicinaweb/Nc/ATTIVITA%27%20SKA.htm
[4]: Opuscolo “ISTITUTO DI RADIOASTRONOMIA”
[5]: “The Square Kilometer Array: an international radio telescope
for the 21 s t century”
www.atnf.csiro.au/projects/ska/aust_ska.html
[6] “The Square Kilometer Array – An Australian Perspective” ,
P.Hall
www.atnf.csiro.au/SKA/techdocs/Catalogue.html
[7]: “Calculating the Weight of an Artificial Dielectric Luneburg
Lens”, John Kot
[8] “Eyes on the Sky: A Refracting Concentrator Approach to the
SKA” , Ron Beresford, Aaron Chippendale,
Dick Ferris,
Peter Hall, Carole Jackson,Graeme James and Mark Wieringa
www.skatelescope.org/ska_documents.shtml
[9] “Prototyping SKA Technologies at the Molonglo Radio
Telescope”
G. B. Warr, J. D. Bunton, D. Campbell-Wilson, L. E. Cram, R. G.
Davison, A. J. Green,
R. W. Hunstead, D. A. Mitchell, A. J. Parfitt, E. M. Sadler
www.physics.usyd.edu.au/astrop/ska/
[10]:
“Allen
Telescope
Array
General
Overview”
www.seti.org/seti/our_projects7allen_telescope_array/overview/
[11]:”The Square Kilometer Array Preliminary Strawman Design
Large N - Small D”, prepared by the USSKA Consortium
www.astron.berkeley.edu/rol/
[12]: “The Large Adaptive Reflector: A 200-m diameter,wideband,
cm-m wave radio telescope”,Brent Carlson a , Luc Bauwens b ,
___________________________________________________________________________
LA RADIOASTRONOMIA
INTRODUZIONE
22
___________________________________________________________________________
Leonid Belostotski c , Elizabeth Cannon d , Ya-Ying Chang e
,Xiaohui Deng b , Peter Dewdney Joeleff Fitzsimmons f , David
Halliday g , Kai Kürschner e ,Gerard Lachapelle d , David Lo g ,
Pedram Mousavi h , Meyer Nahon i , Lot Shafai h ,Sigfried F.
Stiemer e , Russell Taylor j , Bruce Veidt a
www.drao-ofr.hia-iha.nrc-cnrc.gc.ca/science/ska/LAR.publicationlist-v4.html
[13]: “Kilometer-square Area Radio Synthesis Telescope KARST”,
R. Nan(1), B. Peng(1), Y. Qiu(1), G. Ren(2), S. Wu(1), Y.
Zheng(1), W. Zhu(1), J.H. Wu(1),Y. Su(1), C. Jin(1), H. Zhang(1),
L. Zhu(1) , X. Xu(1)
www.skatelescope.org/ska_documents.shtml
[14]: “THE ADAPTIVE ANTENNA DEMONSTRATOR”, Grant
Hampson, Malcolm Goris, Antony Joseph, Felix Smits.
www.astron.nl/tl/thea/publications
[15]: “Initial Calibration and Beamforming Results from
theThousand Element Phased-Array”, G. A. Hampson and J. G. bij
de Vaate
[16]: “Receiver Architecture of the THousand Element Array
(THEA)”, G.W. Kant, A.W. Gunst, A.B.J. Kokkeler, A.B. Smolders
www.astron.nl/tl/thea/publications
___________________________________________________________________________
LA RADIOASTRONOMIA
CAPITOLO 1
22
___________________________________________________________________________
1.1 LA STAZIONE RADIOASTRONOMICA DI MEDICINA
(Ref.[1], Ref.[2])
La Stazione Radioastronomica di Medicina (Bologna) è gestita
dall’Istituto di Radioastronomia (IRA) del CNR (Consiglio
Nazionale delle Ricerche). Nella stazione sono attivi due grandi
radiotelescopi: un’antenna parabolica di 32m e la “Croce del Nord”.
F i g u r a 1 . 1 . L a S t a zi o n e d i M e d i c i n a
L’antenna parabolica, inaugurata nel 1983, è formata da uno
specchio primario di 32 metri di diametro. A seconda del
funzionamento, può essere utilizzata avvalendosi anche di un
secondo specchio di forma convessa, detto specchio secondario o
subriflettore, del diametro di circa 3 metri. Quando lo specchio
secondario è in funzione, le onde elettromagnetiche vengono
convogliate sul fuoco secondario, dove risiede il sistema di
ricezione. In alcuni casi è, invece, sufficiente un sistema ottico più
semplice. Il subriflettore viene spostato e come sistema
di
ricezione viene utilizzato quello posto sul fuoco primario.
L’antenna può funzionare a frequenze comprese tra i 327MHz e i
43GHz (cioè tra i 90cm e gli 0.7cm) ed è completamente
orientabile, per cui può puntare gli oggetti celesti per tutto il tempo
della loro “visibilità” in cielo.
___________________________________________________________________________
LA CROCE DEL NORD
CAPITOLO 1
23
___________________________________________________________________________
L’antenna parabolica è coinvolta in diversi progetti, in rete o in
single dish, ovvero la modalità operativa in cui l’antenna compie le
sue osservazioni singolarmente, non cooperando con radiotelescopi
di altre nazioni. In particolare, l’antenna parabolica di Medicina fa
parte dell’European VLBI Network, come è stato già anticipato nel
Paragrafo I.3.
Figura 1.2. La parabola
Il radiotelescopio “Croce del Nord”, inaugurato nel 1964, è stato
costruito per lavorare ad una frequenza di 408MHz, corrispondente
ad una lunghezza d’onda di 73.5cm. Con un’area di raccolta di
30˙000 metri quadrati, la Croce è uno dei più grandi radiotelescopi
di transito dell’Emisfero Nord.
Un radiotelescopio di transito è un radiotelescopio in grado di
ricevere le onde elettromagnetiche provenienti da un punto dello
spazio, quando questo, per effetto della rotazione terrestre, si trova
sul meridiano celeste del luogo. Il sistema di movimentazione
elettromeccanica prevede, quindi, solo il puntamento in
declinazione.
___________________________________________________________________________
LA CROCE DEL NORD
CAPITOLO 1
24
___________________________________________________________________________
La Croce è costituita da due antenne, disposte a “T” secondo la
direzione Est-Ovest e Nord-Sud.
Il ramo E-W è costituito da un’unica grande antenna con lo
specchio di forma cilindrico parabolica, lungo 560m e largo 35m.
Lungo la linea focale, parallela all’asse di rotazione e a distanza di
circa 20m da esso, si trovano 1536 dipoli a mezz’onda (36cm),
allineati e spaziati egualmente di circa 36cm. In prossimità dei
dipoli, è stato posto uno specchio a forma d’angolo (corner), per
aumentare l’efficienza dell’antenna e abbassare il livello dei
segnali spuri.
Nel paragrafo 1.1.1 verranno illustrate in dettaglio le proprietà di
questo tipo di antenna e le caratteristica della linea focale.
F ig u r a 1 . 3 . I l r a m o E- W
Il ramo N-S è costituito da un array di 64 antenne, anch’esse di
forma cilindrico parabolica, lunghe 23.5m e larghe 8m, disposte
parallelamente a 10m l’una dall’altra. Sull’asse focale di ogni
antenna, posizionato a 1,84m da terra, sono disposti ad uguale
distanza gli uni dagli altri 64 dipoli. In totale, sul ramo N-S si
hanno un totale di 4096 dipoli. La diversa struttura dei due bracci è
dovuta all’impossibilità di realizzare meccanicamente una struttura
unica, lunga 640m su un profilo parabolico con dipoli nel relativo
fuoco e ruotabile attorno ad esso.
___________________________________________________________________________
LA CROCE DEL NORD
CAPITOLO 1
25
___________________________________________________________________________
F ig u r a 1 . 4 . I l r a m o N - S
La precisione meccanica di questa struttura non è da considerare in
senso assoluto, ma solo relativamente alla lunghezza d’onda alla
quale lo strumento è destinato a lavorare. Si è dimostrato infatti
che, se la forma geometrica dello specchio non differisce da quella
di una parabola reale di più di L/16, tali imperfezioni non
influenzano sensibilmente (meno dell’1%) il rendimento dello
strumento. Ciò ha permesso di costruire gli specchi con cavi di
acciaio, posti alla distanza di 2cm, invece di utilizzare una
superficie “completamente piena”. Questo rappresenta un notevole
vantaggio nei confronti delle sollecitazioni del vento, della neve e
dell’acqua.
F ig u r a 1 . 5 . I c a v i d i a c c ia io
___________________________________________________________________________
LA CROCE DEL NORD
CAPITOLO 1
26
___________________________________________________________________________
1.1.1
La Linea Focale e i Dipoli a Mezz’onda
Come si è visto nel Paragrafo 1.1, il ramo Nord-Sud è caratterizzato
dalla presenza di 4096 dipoli mentre il ramo Est-Ovest ha 1536
dipoli distribuiti su 64 antenne. I dipoli del ramo E-W sono disposti
su di un’unica linea focale, della stessa lunghezza dell’antenna,
mentre, quelli del ramo N-S sono suddivisi in 64 linee focali,
corrispondenti alle 64 antenne e costituite ognuna da 64 dipoli.
F ig u r a 1 . 6 . I d ip o li
Si presterà particolare attenzione alla linea focale del ramo N-S,
poiché essa sarà oggetto dei seguenti paragrafi. Questa, infatti,
trovandosi piuttosto vicino al terreno, si presta meglio di quella del
ramo E-W alla sperimentazione di prototipi di nuovi sistemi di
ricezione. Il Low Noise Amplifier, oggetto di questa tesi, trova
infatti collocazione sulla linea focale del ramo Nord-Sud, subito al
di sotto dei dipoli a mezz’onda.
Per comprendere pienamente il funzionamento della Croce, si rende
indispensabile la conoscenza del funzionamento e delle proprietà di
questi tipi di antenna.
Un dipolo a mezz’onda è un’antenna risonante, cioè lunga un
numero intero di mezze lunghezze d’onda, costituita da un
conduttore filiforme. Essa è costituita da due bracci uguali e aperti,
la cui alimentazione è di tipo bilanciato, cioè i conduttori che la
costituiscono sono simmetrici rispetto terra. In Fig.1.7 vengono
rappresentate le distribuzioni di corrente e di tensione.
___________________________________________________________________________
LA CROCE DEL NORD
CAPITOLO 1
27
___________________________________________________________________________
F ig u r a 1 . 7
Il campo elettrico irradiato ha una espressione del tipo:
Eθ =
60I o
π
cos cosθ
rsinθ
.
2
(1.1)
Il diagramma di radiazione non è più costituito da due
circonferenze nel piano x, z, come nel dipolo elementare, ma è più
schiacciato, come mostrato in Fig.1.8. La resistenza di radiazione è
R i = 73Ω , se il conduttore è infinitamente sottile, e diminuisce
all’aumentare del diametro.
F ig u r a 1 . 8
___________________________________________________________________________
LA CROCE DEL NORD
CAPITOLO 1
28
___________________________________________________________________________
1.2
L’UPGRADE DELLA CROCE DEL NORD VERSO IL
“PROGETTO SKA”
Date le sue grandi dimensioni (564m x 640m) e il suo elevato
numero di dipoli (5632), la Croce rappresenta il banco di prova
ideale per le tecnologie che dovranno essere sviluppate nell’ambito
del progetto SKA. Essa, infatti, avendo un’area di raccolta pari a
1/33 di quella richiesta dalle specifiche del progetto, può essere
considerata come un “reduced scale SKA”.
A questo proposito, un upgrade sostanziale è pianificato al fine di
trasformare lo strumento in uno dei più sensibili, flessibili e
importanti radiotelescopi dell’Emisfero Nord. L’upgrade prevede il
progetto e lo sviluppo di nuovi front-end a basso rumore ed elevata
dinamica, vector modulator, mixer e link ottici digitali a basso
costo. Inoltre, il nuovo hardware installato permetterà di studiare e
applicare gli algoritmi digitali di beamforming (formazione del
fascio) e reiezione delle interferenze, necessari ad un
radiotelescopio di nuova generazione com’è lo SKA.
Con questa tesi ci si propone di sviluppare front-end a basso rumore
ed ad alta dinamica con lo scopo di avere una riduzione della
temperatura di sistema e aprire così la strada a nuove applicazioni.
Nei paragrafi seguenti viene illustrata la configurazione attuale
della Croce e vengono presentate le possibili configurazioni future,
nell’ambito dell’upgrade della Croce.
1.2.1
Configurazione Attuale della Croce del Nord
I dipoli allineati lungo il braccio E/W e N/S sono, in definitiva, dei
ricevitori/convertitori di energia, che occorrerà elaborare secondo
le seguenti specifiche:
• Limitare il più possibile l’attenuazione del segnale rispetto al
rumore, cioè amplificare il segnale ricevuto cercando di
rendere massimo il rapporto segnale-rumore
• Fare in modo che i punti in fase sulla superficie d’onda si
trovino ancora in fase come tensione elettrica
___________________________________________________________________________
LA CROCE DEL NORD
CAPITOLO 1
29
___________________________________________________________________________
Per rispettare queste specifiche
differenziato il ramo E-W e N-S.
occorre
trattare
in
modo
I 1536 dipoli del ramo E-W sono divisi in 6 sezioni di 256 dipoli
ciascuna. All’interno di ciascuna sezione si opera una somma
progressiva dei segnali raccolti utilizzando un metodo detto ad
“albero di Natale”, come mostrato in Fig.1.9. Tale metodo permette
di passare dai 256 segnali elementari ad un unico segnale
mantenendo le specifiche citate prima.
F ig u r a 1 . 9
Le 64 antenne del ramo N-S sono suddivise in 8 sezioni che
raggruppano 8 antenne ciascuna. Per ogni antenna ci sono 64 dipoli,
i cui segnali vengono sommati con un sistema ad albero di Natale,
meno rigoroso del precedente, fino ad avere un singolo segnale per
ogni antenna. A questo punto però, come mostrato in Fig.1.10, si
nota che i segnali non arrivano in fase sulle singole antenne, dato
che i percorsi in aria sono diversi. Si nota inoltre che tali percorsi
variano con il puntamento. È necessario, quindi, adottare un sistema
di ritardi, variabili con il puntamento, per rimettere in fase i segnali
provenienti dalle singole antenne prima di sommarli, al fine di
ottenere un solo segnale per ogni sezione N-S.
___________________________________________________________________________
LA CROCE DEL NORD
CAPITOLO 1
30
___________________________________________________________________________
F ig u r a 1 . 1 0
La configurazione attuale è caratterizzata, quindi, da 8 ricevitori
nel ramo N-S e da 6 nel ramo E-W. I 6 segnali del ramo E-W
vengono poi combinati elettronicamente per dare vita a tre fasci.
Con questo sistema è come se si avessero, invece di una sola
antenna puntata in direzione del meridiano, tre antenne puntate in
direzioni progressive. È possibile quindi fare un tracking in
direzione E-W, altrimenti impossibile per problemi meccanici. Allo
stesso modo, gli 8 segnali del ramo N-S vengono combinati per
dare vita a 5 fasci.
Oggi, l’antenna lavora a 408MHz con una larghezza di banda di
2.7MHz. in casi particolari, come nell’osservazione delle pulsar, la
larghezza di banda può essere tuttavia portata a 5MHz, ma solo nel
ramo E-W.
1.2.2 Configurazione Futura
Prima dell’upgrade complessivo della Croce, sarà realizzato un
prototipo in scala ridotta. Tale prototipo è chiamato BEST (Basic
Element for SKA Training) e fa riferimento ad una singola antenna
del ramo N-S. Sulla sua linea focale verranno, infatti, installati un
numero ancora da determinare di front-end, per realizzare test
preliminari per il beamforming e il multibeaming.
Su ogni singola antenna si prevedono di installare 8 ricevitori
oppure 4 gruppi di 2 ricevitori. La differenza tra queste due
___________________________________________________________________________
LA CROCE DEL NORD
CAPITOLO 1
31
___________________________________________________________________________
configurazioni sta nel loro diverso effetto sul beamforming. Nel
primo caso, infatti, il numero totale di beams indipendenti, sarà
441, mentre nel secondo caso, se ne avranno 189.
Per quanto riguarda gli LNAs, ognuno di essi sarà connesso al
balun all’uscita di ogni blocco di 16 dipoli (nel caso di 4 ricevitori)
o di 8 dipoli (nel caso di 8 ricevitori).
Il primo tipo di configurazione futura prevede l’introduzione di 4
gruppi di due ricevitori, come mostrato in Fig.1.11. I quattro gruppi
di ricevitori saranno insatallati sulla linea focale all’uscita dei
primi 8 singoli dipoli. In questo modo, il numero di ricevitori
installati su tutto il ramo N-S sarà di 512 (256 gruppi di 2
ricevitori).
F ig u r a 1 . 1 1
Il secondo tipo di configurazione prevede l’introduzione di 8
singoli ricevitori per ogni antenna del ramo N-S, come mostrato in
Fig.1.12. Il numero totale di ricevitori installati sarà, anche in
questo caso 512. Questo è il numero massimo di ricevitori
installabili sul ramo N-S, senza modificare il design della linea
focale.
___________________________________________________________________________
LA CROCE DEL NORD
CAPITOLO 1
32
___________________________________________________________________________
F ig u r a 1 . 1 2
Per quanto riguarda il ramo E-W, si farà solo un breve accenno al
suo upgrade. Anche in questo caso sono state prese in
considerazione diverse configurazioni. La prima prevede l’impiego
di 1 ricevitore ogni 64 dipoli, la seconda di un ricevitore ogni 8
dipoli, infine, la terza prevede addirittura di installare un ricevitore
per ogni dipolo. In Fig.1.13, 1.14, 1.15 vengono illustrate le tre
possibilità.
F ig u r a 1 . 1 3 . U n r ic e v it o r e o g n i 6 4 d ip o li
___________________________________________________________________________
LA CROCE DEL NORD
CAPITOLO 1
33
___________________________________________________________________________
F ig u r a 1 . 1 4 . U n r ic e v it o r e o g n i 4 d ip o li
F ig u r a 1 . 1 5 . U n r ic e v it o r e o g n i d ip o lo
___________________________________________________________________________
LA CROCE DEL NORD
CAPITOLO 1
34
___________________________________________________________________________
REFERENCES:
[1]: "The Northern Cross as a very promising SKA test bed",
Rapporto interno 322/02
http://www.ira.cnr.it/Medicinaweb/Nc/Documenti/SKA_NorthernCr
oss.pdf
[2]: “Il radiotelescopio <<Croce del
E.Gandolfi, F.Perugini
“Giornale di Astronomia” – Settembre 1977
Nord>>”,
A.Ficarra,
___________________________________________________________________________
LA CROCE DEL NORD
CAPITOLO 2
35
___________________________________________________________________________
2.1
LNA: INTRODUZIONE (Ref.[1])
Gli LNAs (Low Noise Amplifiers) sono amplificatori a basso
rumore, la cui realizzazione è legata all’esigenza di dovere
amplificare segnali molto deboli, cercando di non deteriorare il
rapporto segnale-rumore, già di per sé molto basso. Si ricordi,
infatti, che, nel caso specifico della radioastronomia, i segnali sono
tanto deboli che, come unità di misura del flusso utilizzano il
Jansky ( 1Jy = 10 −26
W
).
m 2 Hz
Questi dispositivi sono molto semplici, a causa del fatto che una
maggiore complessità comporta un maggior numero di componenti
e, quindi, un rumore più elevato. Essi vengono largamente
impiegati nei ricevitori a radiofrequenze e a microonde e si
trovano, in genere, sul front-end dei sistemi riceventi,
immediatamente dopo l’antenna. In Fig.2.1 è rappresentato lo
schema a blocchi di un front-end.
Figura 2.1. Schema a blocchi di un front-end
Viene, di seguito, illustrata l’importanza rivestita dal primo stadio
di un sistema di ricezione. Si consideri un generico 2-porte; il suo
fattore di rumore, che verrà illustrato in dettaglio nei paragrafi
successivi, è dato da:
F=
( SNR ) i
N
= 1+ a
( SNR ) o
Ni
(2.1)
dove (SNR)i e (SNR)o sono, rispettivamente, il rapporto segnalerumore all’ingresso e all’uscita dell’amplificatore. Ni indica,
invece, il rumore all’ingresso della sorgente e Na è il rumore
dovuto al circuito. In generale, il fattore di rumore di un sistema
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
36
___________________________________________________________________________
costituito, come il front-end, da più dispositivi disposti in serie è
dato da:
Ftotal = F1 +
F2 − 1 F3 − 1
+
+ ...
G1
G1G2
(2.2)
dove F1, F2, F3, G1, G2, G3 sono il fattore di rumore e il guadagno
di potenza di ogni stadio. Tale espressione mostra che, se il
guadagno di potenza del primo stadio è sufficientemente elevato, il
fattore di rumore totale sarà dominato dal primo stadio. Essendo
l’LNA il primo blocco del sistema di ricezione, spetta ad esso avere
un guadagno elevato e un fattore di rumore il più piccolo possibile.
Per comprendere l’importanza di tali dispositivi, è necessario
chiarire il problema del rumore. Il rumore, infatti, rappresenta il
limite inferiore, per l’ampiezza del segnale elettrico, che può
essere amplificato da un circuito senza che si verifichi un
significativo deterioramento nella qualità del segnale stesso. Esso
determina, inoltre, il limite superiore, per il guadagno utilizzabile
in un amplificatore, in quanto, se il guadagno viene aumentato
indiscriminatamente, negli stadi di uscita possono verificarsi
problemi di saturazione.
2.2 RUMORE NEI DISPOSITIVI ELETTRONICI
(Ref.[2])
Nei circuiti elettronici, il rumore si presenta come piccole
fluttuazioni statisticamente casuali di tensione o di corrente,
generate all’interno di ogni componente.
Data la sua natura casuale, per la descrizione del rumore si può
utilizzare la teoria probabilistica e in particolare si utilizza la
funzione densità di probabilità.
I tipi di rumore che caratterizzano un circuito elettronico, sono:
RUMORE TERMICO: si presenta come fluttuazioni di tensione o di
corrente ed è dovuto all’agitazione termica casuale degli elettroni.
Questo tipo di rumore esiste sempre, qualunque sia la natura del
processo di conduzione o la natura dei portatori di carica. La sua
densità spettrale di potenza si presenta con uno spettro bianco, cioè
costante nel campo delle frequenze di interesse. Si consideri la
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
37
___________________________________________________________________________
fluttuazione di tensione e n , generata dal resistore R, posto ad una
temperatura T. La distribuzione di probabilità di e n è di tipo
gaussiano ed il valore quadratico medio, nella banda
f1 - f 2 , è:
p(f) =
f2
e = 4kT ∫ R(f)p(f)df
2
n
f1
con
hf
hf kT
e − 1
kT
(2.3)
−23
dove k è la costante di Boltzmann ( 1,38 ×10 Joule/K ), T è la
−34
temperatura assoluta, h è la costante di Plank ( 6.62 × 10 Joule × s ) e f è
la frequenza.
Al di sotto di 100GHz e per una temperatura di 290K, risulta che
p(f) ≈ 1 ; ciò comporta che:
e n2 = 4kTR(f 2 − f 1 ) = 4kTBR .
(2.4)
La potenza di rumore diventa, quindi:
Pn =
en2
= kTB
4R
(2.5)
RUMORE SHOT: ha origine nelle giunzioni ed è causato dagli
elettroni, che attraversano la barriera di potenziale in un
semiconduttore. Si manifesta perché la corrente totale che fluisce
nel dispositivo è, in realtà, costituita da una seria di impulsi di
corrente, casuali ed indipendenti, dovuti proprio alle singole
cariche che attraversano la barriera. Questa serie di piccoli eventi
casuali determinano un processo con una distribuzione di
probabilità gaussiana. Si originano fluttuazioni attorno al valore
medio della corrente I, il cui spettro SI è espresso da:
SI = 2qI
(2.6)
dove q è l’unità di carica.
RUMORE FLICKER (1/f): è causato, principalmente, dalle
imperfezioni e dalle contaminazioni nella struttura del reticolo
cristallino, dovute ai processi di fabbricazione dei dispositivi
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
38
___________________________________________________________________________
elettronici. E’ presente, in diversa misura, in tutti i dispositivi e
dipende fortemente dalla tecnologia. Tale rumore è sempre legato
ad un flusso di corrente e si manifesta come variazione di
conduttanza.
La sua densità spettrale di potenza è descritta dall’equazione:
Ia
G f (f ) = C1 b , dove a, b e C1 sono determinati empiricamente. Da ciò
f
si evince che esso presenta un’energia concentrata alle basse
frequenze. Una conseguenza di tale rumore è la generazione di
fluttuazioni nel guadagno del dispositivo.
Il rumore 1/f, unitamente ai drift termici e all’offset dei
componenti, provoca fluttuazioni sul segnale di uscita. Questa
caratteristica, in radioastronomia, è estremamente negativa. Essa,
infatti, va ad incidere sulla sensibilità. Se si esprime quest’ultima
in termini di minima variazione di temperatura rilevabile dal
radiotelescopio, si ha un’espressione del tipo:
∆Tmin
2
2
∆G ∆Tsys
= Tsys ⋅ M ⋅
+
+ ...
+
B ⋅ τ ⋅ n G Tsys
1
(2.7)
dove M è una costante adimensionale di sensibilità, che dipende
dall’architettura del ricevitore, B è la larghezza di banda del
ricevitore, τ è il tempo di integrazione, n è il numero di
T
osservazioni, ∆G è la fluttuazione del guadagno, e sys è la
temperatura di rumore dell’intero sistema. Dall’espressione
precedente, risulta evidente che un incremento delle fluttuazioni del
guadagno provoca un aumento della minima variazione di
temperatura rilevabile e, quindi, una diminuzione della sensibilità.
Gli amplificatori a basso rumore sono estremamente sensibili al
rumore generato dai propri resistori e transistori. A questo
proposito, si preferisce fare uso della tecnologia a GaAs, che
garantisce una grande riduzione del rumore generato nei dispositivi.
Nei FET essendo la corrente drain-source simile a quella di un
resistore, ci sarà la presenza di rumore termico, mentre sarà del
tutto assente il rumore shot.
Prima di passare al progetto degli amplificatori a basso rumore,
oggetto di questa tesi, è necessario fare cenno alle caratteristiche
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
39
___________________________________________________________________________
degli amplificatori a radiofrequenza e introdurre brevemente
alcuni parametri, che verranno utilizzati nel progetto.
2.3 GENERALITA’ SUGLI AMPLIFICATORI A RADIOFREQUENZA
(Ref.[3], Ref.[4]))
I circuiti ad alta frequenza richiedono una trattazione
particolare, che si differenzia da quella dei circuiti a frequenze
inferiori, per il fatto che non possono essere descritti in termini
di matrici ammettenza o impedenza. Per la misura dei parametri
delle matrici Y e Z, infatti, è necessario “caricare” le porte dei
dispositivi, rispettivamente su cortocircuiti e su circuiti aperti.
Tuttavia, essi, ad alta frequenza, sono fisicamente molto difficili
da realizzare e da fare lavorare su un vasto range di frequenze;
risulta, invece, molto più semplice realizzare dei buoni
componenti resistivi.
Inoltre, un altro problema che si presenta alle alte frequenze è
quello della stabilità.
I corto circuiti e i circuiti aperti, infatti, sono carichi non
dissipativi, cioè riflettono la potenza che viene loro fornita
senza dissiparla.
Se indichiamo la potenza riflessa con:
Prifl = Pi Γ 2
(2.8)
dove con Γ si è indicato il coefficiente di riflessione (vedi
Appendice A), la potenza sul carico sarà:
(
)
Prifl = Pi 1 − Γ 2 .
(2.9)
Dato che, per un circuito aperto e per un corto circuito, il
coefficiente di riflessione è pari rispettivamente a:
Γ open = 1
Γ short = −1
(2.10)
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
40
___________________________________________________________________________
si conclude che, in entrambi i casi, la potenza è completamente
riflessa verso la sorgente. Ciò può generare delle oscillazioni e
causare problemi di instabilità in fase di misura.
Data, quindi, la difficoltà di misurare, alle alte frequenze,
tensioni e correnti, si è stabilito di ragionare in termini di onda
incidente e di onda riflessa. Qu esto comporta l’utilizzazione di
parametri distribuiti invece che di parametri concentrati.
Si fa, quindi, uso della matrice di diffusione, S (Scattering), che
ha il notevole vantaggio di avere parametri che non vengono
misurati in condizioni di circuito aperto o di cortocircuito, ma in
condizioni di carico adattato il quale, essendo dissipativo,
generalmente, mantiene il dispositivo stabile. Tali parametri
vengono
illustrati
in
dettaglio
nell’Appendice
A.
Convenzionalmente, l’impedenza che si usa per questo tipo di
caratterizzazione è reale e vale Ro=50Ω, che è il tipico valore
dell’impedenza caratteristica dei cavi coassiali usati per
connettere apparati di telecomunicazione. In realtà, non vi è
alcuna garanzia assoluta che i dispositivi non oscillino in queste
condizioni di carico. Un tale valore di Ro definisce una
condizione sufficientemente dissipativa, tale per cui i
dispositivi, in linea generale, non oscillando possono essere
misurati e caratterizzati.
Nei circuiti a radiofrequenze e a microonde, occorre, quindi,
utilizzare particolari e più idonei dispositivi. Nel caso specifico
degli amplificatori, non è possibile fare uso degli amplificatori
operazionali, in quanto il loro funzionamento è limitato a
frequenze più basse.
Progettare un amplificatore a radiofrequenza richiede, quindi,
requisiti diversi.
In banda base, per esempio, non è possibile un’ottimizzazione
del guadagno, in quanto, per motivi che verranno illustrati in
seguito, si deve rinunciare all’adattamento. Ciò comporta
l’utilizzo di stadi aggiuntivi per ottenere un aumento di
guadagno.
A radiofrequenza, invece, dato che a frequenze elevate i
dispositivi smettono di lavorare bene, tra i vari stadi occorre
realizzare le condizioni di adattamento.
A questo scopo è utile utilizzare componenti passivi e privi di
perdite, tipo induttanze, L, e capacità, C. Tali dispositivi, mentre
in banda base sono grandi e difficili da realizzare, a
radiofrequenza sono più piccoli e di facile realizzazione,
soprattutto in microstriscia.
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
41
___________________________________________________________________________
2.4
CARATTERISTICHE
RADIOFREQUENZA
2.4.1
DEGLI
AMPLIFICATORI
A
Figura di Rumore(NF) (Ref.[5])
La figura di rumore è un’importante figura di merito usata per
caratterizzare le performance non solo del singolo componente ma
dell’intero sistema di ricezione; è, infatti, uno dei fattori che ne
determinano la sensibilità.
Se indichiamo il fattore di rumore come il rapporto segnale-rumore
all’ingresso del dispositivo diviso il rapporto segnale-rumore
all’uscita del dispositivo, si ha:
F=
(SNR )i
(SNR )o
Si
Si
N
N + G a Ni
Ni
= i =
= a
G a Si
Ga Ni
So
No Na + Ga Ni
(2.11)
Dove Si e N i sono la potenza di segnale e di rumore di ingresso, So
e N o sono la potenza di segnale e di rumore all’uscita, G a è il
Na è
guadagno
dell’amplificatore
e
il
rumore
aggiunto
dall’amplificatore.
Possiamo, quindi, esprimere la figura di rumore come:
NF = 10 log (F).
(2.12)
La figura di rumore di un dispositivo, come si è visto dalle
espressioni della potenza di rumore viste nel secondo paragrafo,
dipende dalla temperatura e dalla frequenza. Essa, inoltre, dipende
dall’impedenza vista dall’ingresso del dispositivo. Tale dipendenza
è collegata al fatto che essa condiziona la potenza di rumore
all’uscita.
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
42
___________________________________________________________________________
Figura 2.2. Rumore e impedenza
Si dimostra, infatti, che esiste un valore ottimo per l’impedenza di
sorgente, Γ opt , in corrispondenza del quale le prestazioni, in termine
di rumore, sono le migliori ottenibili, data la temperatura, la
frequenza e il punto di lavoro. Una espressione del fattore di
rumore, che tiene conto dell’impedenza ottima, è data da:
2
ΓS − Γ opt
4R n
F = Fopt +
,
Z0 1 + Γ 2 1 − Γ 2
opt
S
(
)
(2.13)
dove R n è la resistenza di rumore, Z0 è l’impedenza di sistema e ΓS è
il coefficiente di riflessione di ingresso visto dal dispositivo.
2.4.2 Guadagno e Adattamento (Ref.[5])
Nel caso di un LNA si parla di guadagno di potenza, definito come
il rapporto tra potenza in uscita e potenza in ingresso al dispositivo,
secondo l’espressione:
G=
POUT
.
PIN
(2.14)
In questo caso, è difficile avere un guadagno elevato a causa di
problemi legati al rumore, alla linearità e alla stabilità del sistema.
Per applicazioni particolari, come, in modo specifico, le
applicazioni radioastronomiche, il guadagno può essere anche di
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
43
___________________________________________________________________________
30dB “a caldo”, cioè a temperatura ambiente (300K), e di 35dB “a
freddo”, cioè a temperature criogeniche (20K).
L’unità di misura di potenza utilizzata è il dB, oppure il dBm, che è
il corrispondente in dB di 1mW. Il livello di potenza in dBm è dato
dall’equazione:
P(mW )
P(dBm ) = 10log
.
1mW
(2.15)
L’importanza del trasferimento di potenza è una delle ragioni per
cui il guadagno di potenza, e non quello di tensione e di corrente, è
così spesso utilizzato nei dispositivi a RF e a microonde. Uno dei
guadagni di potenza più utilizzati è il guadagno di trasduzione, che
è definito come il rapporto tra la potenza ceduta al carico e la
potenza disponibile della sorgente:
G=
POUT
PIN
2
VOUT
2
R S VOUT
RL
,
= 2 =4
VIN
R L VIN2
4R S
(2.16)
dove VOUT è la tensione sul carico R L , e VIN è la sorgente con
resistenza interna R S .
In termini di parametri S, facendo riferimento alla Fig.2.3, il
guadagno di traduzione può essere espresso come (Ref.[6]):
(2.17)
Figura 2.3. Due porte
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
44
___________________________________________________________________________
Se si considera il transistor ideale, si ritiene verificata la
relazione s12 =0. In tali condizioni, allora, si può definire il
Guadagno di Trasduzione di Potenza Unilaterale (unilaterale
perché vale per s12 =0), la cui espressione matematica è la
seguente:
(2.18)
Tenendo, inoltre, presente che:
Γ in = s11 +
s 21s12 Γ L
1 − s 22 Γ L
Γ out = s 22 +
s 21s12 Γ S
1 − s11 Γ S
(2.19)
Si osserva che, quando s12 =0, ΓIN e ΓOUT risulteranno indipendenti
tra loro, in particolare, si avrà:
Γ in = s11
Γ out = s 22
(2.20)
che, inoltre, risultano indipendenti anche da ΓS e ΓL . Tutto ciò
comporta una notevole semplificazione, in quanto, non essendoci
dipendenza tra la porta d'ingresso e quella d'uscita, il
coefficiente di riflessione d'ingresso e di carico dipenderanno,
esclusivamente, dal transistor e non dalle condizioni di carico e
sorgente. A questo punto, si può dare la definizione di
adattamento. Viene definita con adattamento, l’azione che rende
le impedenze di sorgente e di carico, tali da ottenere il livello
desiderato di potenza trasmessa e riflessa.
Per ottenere il massimo trasferimento di potenza, dall’ingresso
all’uscita, si sceglieranno ΓS e ΓL , nel rispetto delle condizioni di
adattamento coniugato simultaneo alle due sezioni, ossia:
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
45
___________________________________________________________________________
ΓSottimo = Γ∗in = s ∗11
Γ ottimo
= Γ ∗out = s ∗ 22
L
(2.21)
In particolare, il massimo guadagno di trasduzione ottenibile
sarà:
(2.22)
ferme restando le condizioni:
s11 < 1
s 22 < 1
(2.23)
che sono verificate nella maggior parte dei casi.
In genere, però, la coppia ΓSott e ΓLott non è una coppia di valori
accettabili, perché l’aumento del guadagno rende il sistema
eccessivamente sensibile e quindi tendenzialmente meno stabile.
Inoltre, nella realtà, non è sempre possibile realizzare una
sorgente o un carico che abbiano le impedenze desiderate, per
cui andranno cercate delle soluzioni alternative.
In genere, quello che si fa, è di utilizzare delle reti di
adattamento di ingresso e di uscita, chiamate matching network,
da interporre tra la sorgente e l’amplificatore e tra questo e il
carico, con lo scopo di realizzare l’adattamento, come mostrato
in Fig.2.4.
Figura 2.3. Due porte con matching network
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
46
___________________________________________________________________________
Il guadagno di traduzione diventa, in questo caso:
2
G TU = G S ⋅ s 21 ⋅ G L
(2.24)
dove:
GS =
GL =
1 − ΓS
2
1 − s11ΓS
2
1− ΓL
2
(2.25)
1 − s 22 Γ L
2
(2.26)
sono le funzioni di trasferimento, rispettivamente, della rete di
adattamento di ingresso e della rete di adattamento di uscita.
Questa
espressione
del
guadagno
risulta
estremamente
significativa, sia perché rappresen ta la situazione in cui ci si
trova normalmente in fase di progetto, sia perché fornisce
un'idea
reale
dell'entità
del
disadattamento
presente,
permettendo di scegliere con più accuratezza come progettare
l'amplificatore.
Dall’espressione di Gtu, si nota che, se il dispositivo viene
connesso direttamente ai 50Ω, si ha:
ΓS = 0
ΓL = 0
(2.27)
Da cui:
GS = 1
GL = 1
(2.28)
Ciò comporta che:
G TU = s 21
2
(2.29)
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
47
___________________________________________________________________________
G S e GL mettono, quindi, in luce come migliora il trasferimento
di potenza , introducendo una eventuale rete di adattamento.
2.4.3
Stabilità (Ref.[7])
Come abbiamo visto, il fatto di rendere massimo il trasferimento
di potenza dall’ingresso all’uscita del dispositivo, crea dei
problemi di stabilità, in quanto, rende il dispositivo stesso più
sensibile e, quindi, maggiormente soggetto al rumore.
Una condizione, per cui possono nascere delle oscillazioni che
portano all’instabilità, è quella in cui il guadagno di anello di
una porta supera l’unità, cioè:
ΓS Γ IN > 1
Γ L Γ OUT > 1
(2.30)
In questo caso, infatti, la dimensione dell’onda, incidente ad una
porta, aumenterà indefinitamente, inducendo l’oscillazione.
Una rete a due porte si definisce incondizionatamente stabile
rispetto al carico , se:
Γ in = s11 +
s 21s12 Γ L
< 1, ∀ Γ L < 1
1 − s 22 Γ L
(2.31)
Il luogo dei punti ΓL , tale che | ΓIN |=1 è un cerchio, detto cerchio
di stabilità di uscita, che separa la regione di stabilità da quella
di instabilità. Se | s11 |<1, il centro della carta di Smith si trova
nella regione stabile, in caso contrario si viene a trovare nella
regione instabile.
Analogamente,
una
rete
a
due
porte
si
definisce
incondizionatamente stabile rispetto alla sorgente se:
Γ out = s 22 +
s 21s12 ΓS
< 1, ∀ ΓS < 1
1 − s11ΓS
(2.32)
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
48
___________________________________________________________________________
Il luogo dei punti ΓS tali che | ΓOUT |=1 è un cerchio, detto cerchio
di stabilità di ingresso. Esso separa la zona di stabilità da quella
di instabilità, secondo lo stesso criterio del caso precedente.
Nello studio della stabilità, esistono delle situazioni in cui il
cerchio di stabilità non tocca la carta di Smith, o, meglio, il
sistema risulta incondizionatamente stabile, per qualunque
valore di ΓS o ΓL scelto. In questo caso, è utile utilizzare un
parametro detto parametro K (di Rollett), definito in funzione
della frequenza. Il valore di questo parametro permette di capire
quali siano le frequenze, alle quali il sistema risulta
potenzialmente instabile, cioè, le frequenze, in cui i cerchi
toccano la carta di Smith. Mediante K si individuano le
frequenze, per cui si ha la certezza di avere stabilità,
indipendentemente dalla scelta di ΓS o ΓL (i cerchi non toccano la
carta di Smith).
La definizione matematica di tale parametro è la seguente:
(2.33)
dove:
∆ = s11s 22 − s12s 21
(2.34)
La condizione necessaria e sufficiente per la stabilità è:
K >1
(2.35)
e
∆ <1
(2.36)
Facendo riferimento al guadagno, l’espressione di quest’ultimo
risulta:
G Tmax =
(
s 21
K - K 2 −1
s12
)
(2.37)
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
49
___________________________________________________________________________
( K >1)
Nel caso in cui non si abbia stabilità incondizionata, il guadagno
non ha un massimo. Tale valore è spesso fornito dal costruttore
del dispositivo o, in caso contrario, è facilmente calcolabile
tramite l’espressione precedente, noto il valore di K, solitamente
presente nei Data Sheet del componente.
Se, però, K < 1 (dispositivo potenzialmente instabile), come può
accadere, il costruttore fornisce il guadagno MSG (Maximum
Stable Gain) definito come:
G MSG =
s 21
s12
.
(2.38)
Ciò non è particolarmente rilevante dal punto di vista del
significato fisico, ma fornisce un’idea della qualità del
componente. In generale, un buon transistor dovrà avere s 21
molto grande, che corrisponde ad un guadagno s 21 elevato ed un
parametro di reazione s12 molto piccolo.
2.4.4 Non Linearità e Distorsione Armonica (Ref[3], Ref.[8])
Se ad un dispositivo oppure ad un circuito non lineare è applicato
un segnale sinusoidale, il segnale di uscita non è puramente
sinusoidale ma risulta distorto.
Si consideri un modello, per le tensioni e le correnti di un circuito
elettronico generico, del tipo:
i = a 1 v + a 2 v 2 + a 3 v 3 + ...
(2.39)
Una rete lineare è caratterizzata dall’avere tutti i coefficienti nulli,
ad esclusione del primo, mentre, in una generica rete non lineare,
possono essere presenti tutti i termini.
La distorsione armonica, HD (Harmonic Distorsion), è causata
proprio dalla non linearità della relazione tra il segnale di ingresso
e quello di uscita.
Si supponga di avere in ingresso un segnale ad un singolo tono, ω0 :
v s (t) = Vsin (ω 0 t )
.
(2.40)
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
50
___________________________________________________________________________
Il segnale di uscita contiene non solo la frequenza fondamentale ma
anche componenti a frequenze multiple della fondamentale, dette
armoniche ( ω0 , 2 ω0 , 3 ω0 ,…). Tale segnale, espresso in termini di
corrente, avrà una espressione del tipo:
i(t) = V0 + V1sin (ω0 t + ϕ1 ) + V2sin (2ω0 t + ϕ 2 ) + V3sin (3ω0 t + ϕ 3 ) + ...
(2.41)
Per valutare la distorsione, è indispensabile introdurre il
coefficiente di distorsione, definito come il rapporto tra l’ampiezza
dell’armonica che si sta considerando e l’ampiezza della
fondamentale. Tale grandezza può essere espressa come:
HD k =
Ik
,
I1
(2.42)
dove I1 rappresenta l’ampiezza dell’armonica fondamentale, mentre
I k è l’ampiezza della armonica k-esima.
Si dimostra che i coefficienti di distorsione di seconda e di terza
armonica, HD2 e HD3, hanno la forma (Ref.[4]):
HD 2 =
a2
I1
2a 12
a
HD 3 = 33 I12
4a 1
.
(2.43)
Queste espressioni, chiaramente, hanno significato solo se viene
definita l’ampiezza del segnale di ingresso: quanto più quest’ultima
aumenta, tanto più l’amplificatore diventa distorcente.
2.4.5 Non Linearità e Distorsione di Intermodulazione
(Ref.[9])
Come si è visto nel paragrafo precedente, in un circuito non lineare,
nel caso di segnale d’ingresso ad una sola frequenza, si presenta il
fenomeno della distorsione armonica. Nella maggior parte dei casi
reali, però, in ingresso al dispositivo si hanno più sinusoidi. Ne è
un esempio la stessa Radioastronomia, in cui, al segnale
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
51
___________________________________________________________________________
radioastronomico utile, risultano sovrapposti segnali interferenti a
frequenze diverse.
Quando tali segnali entrano in un circuito o in un dispositivo non
lineare, sull’uscita si presentano componenti a frequenze diverse da
quelle di eccitazione.
Si consideri, per semplicità, un segnale di ingresso a due sinusoidi:
v s (t ) = V1cos(ω1 t ) + V2 cos(ω 2 t ) .
(2.44)
Questo segnale, una volta assegnati opportuni valori a V1 e V2 ,
consente di definire e caratterizzare la non linearità in termini di
distorsione di intermodulazione (IM).
Si consideri il modello, per le tensioni e le correnti, rappresentato
nell’equazione 2.39.
La corrente può essere espressa anche in questo modo:
i(t) = i1 (t ) + i 2 (t) + i 3 (t) + ...
(2.45)
Svolgendo i calcoli si trova che:
i1 (t) = a1v s (t ) = a 1V1cos(ω1t ) + a 1V2 cos(ω 2 t )
(2.46)
1
i 2 (t) = a 2 v2 s (t ) = a 2 {V12 + V22 + V12cos(2ω1t ) + V22cos(2ω2 t ) + 2V1V2 [cos((ω1 + ω2 )t ) + cos((ω1 − ω2 )t )]}
2
(2.47)
V13cos(3ω1 t ) + V23cos(3ω 2 t ) + 3V12 V2 [cos((2ω1 + ω 2 )t ) + cos((2ω1 − ω 2 )t )]
1
i 3 (t) = a 3 v 3 s (t ) = a 3 + 3V1V22 [cos((2ω 2 + ω1 )t ) + cos((2ω 2 − ω1 )t )] + 3 V13 + 2V1 V22 cos(ω1 t ) +
4 3
2
3 V2 + 2V1 V2 cos(ω 2t )
(
)
(
)
(2.48)
Se si considerasse solo il termine i1 (t ) , come sarebbe nel caso di un
circuito lineare, non ci sarebbe nessuna componente del segnale di
uscita, a frequenza diversa da quella del segnale di ingresso. La
presenza di termini di ordine quadratico, invece, fa nascere
componenti a frequenze spettrali diverse, come riassunto in Fig.2.5.
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
52
___________________________________________________________________________
Figura 2.5
In generale, nascono le pulsazioni:
ω m,n = mω1 + nω 2 con m, n = ... − 3,−2,−1,0,1,2,3,...
(2.49)
Lo spettro risultante presenta, allora, anche le righe corrispondenti
alle suddette pulsazioni; tale fenomeno è indicato come generazione
di
frequenza e le righe prendono il nome di prodotti di
intermodulazione.
Inoltre, la relazione che intercorre tra grado k del polinomio e
ordine r delle pulsazioni è espressa da:
r= m + n ≤k
(2.50)
in cui, ogni termine di grado k, in i(t), genera pulsazioni di ordine
r ≤ k . La complessità del grado polinomiale aumenta la non linearità
del circuito.
Le righe, che si trovano a frequenze, risultanti dalla combinazione
lineare di ω1 e ω 2 , entrambi con coefficiente uno, rappresentano il
prodotto di intermodulazione del secondo ordine, come evidenziato
dall’equazione precedente. Tale prodotto di intermodulazione non è
particolarmente fastidioso, perché cade lontano dalla banda dei
segnali di eccitazione e, quindi, si può facilmente eliminare con un
filtro.
Per quanto riguarda, invece, il prodotto di intermodulazione del
terzo ordine, le righe che si trovano a frequenze del tipo:
2ω1 + ω 2
2ω 2 + ω1
,
essendo lontane dalla banda di interesse, possono essere eliminate
con un filtraggio, come nel caso del prodotto di intermodulazione
del secondo ordine.
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
53
___________________________________________________________________________
I prodotti, invece, che nascono per differenza, cioè:
2ω1 − ω 2
2ω 2 − ω1
,
vanno a cadere in prossimità della banda che li ha generati, molto
vicini ai canali di ingresso, come mostrato in Fig.2.6. Il filtraggio,
necessario ad eliminare queste righe, è molto costoso a causa
dell’elevata selettività del filtro. Il prodotto di intermodulazione
del terzo ordine risulta, quindi, molto pericoloso perché, non
essendo eliminabile con filtri, tende a sporcare lo spettro e a
danneggiare il contenuto informativo del segnale. Si parla, in
questo caso, di distorsione di intermodulazione.
Come si può notare, le uniche componenti che cadono in banda sono
dovute ai coefficienti di ordine dispari. Spesso, però, nel
considerare questi effetti, ci si ferma al termine di terzo grado,
dato che i termini di grado superiore hanno livelli di potenza
decrescenti; in questo caso si parla di spurie del terzo ordine o di
distorsione di intermodulazione del terzo ordine.
Rappresentiamo graficamente i due toni visti in precedenza e le due
spurie del terzo ordine che cadono in banda, all’uscita
dell’amplificatore:
Figura 2.6
Facendo riferimento alle equazioni iniziali, si dimostra che:
IM2=2HD2
IM3=3HD3
(2.51)
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
54
___________________________________________________________________________
Il valore di IM3 dipende, quindi, dall’ampiezza dei toni in ingresso
e questo ne lede la generalità.
2.4.6 Punto di Intercetta del III Ordine (IP3)
(Ref.[3], Ref.[9])
Si osservi che la potenza in uscita del termine utile, P1 , essendo
lineare, cresce proporzionalmente alla potenza della sorgente, cioè:
P1 = gPin .
(2.52)
La potenza, associata a IM3, invece, risulta essere pari a:
PIM3 = kP 3 in ,
(2.53)
dove, k e g sono due guadagni, diversi tra loro. Si noti che,
quest’ultima espressione è, i realtà, una forma approssimata, in
quanto la dipendenza cubica del disturbo da P in nasce da un
modello semplificato. La validità del modello determina, quindi, la
validità stessa dell’espressione.
Passando ai logaritmi, espressi in dBm, si ha che:
P1 = G + PIN
PIM3 = K + 3PIN ,
(2.54)
dove:
P1 = 10log
P1
.
1mW
(2.55)
Il punto di intercetta IP3, come si vede dalla Fig.2.7 è definito
come l’intersezione tra la P1 e la PIM3 e può essere espresso come:
IP3 =
3P1 − PIM3
.
2
(2.56)
Trattandosi, dunque, di rette e, quindi, di andamenti lineari, IP3
può essere misurato attraverso due punti qualsiasi presi lungo la
retta. Questo parametro si misura, quindi, mettendo i due toni
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
55
___________________________________________________________________________
sinusoidali in ingresso ed andando a vedere quanto vale la potenza
del termine utile, che si ha all’uscita, e la potenza della riga di
disturbo.
Figura 2.7. Definizione di IP3 e P1dB
Tale definizione risulta, in ogni caso, puramente convenzionale,
infatti, questi valori di potenza non potranno mai essere misurati,
dato che, prima, interverranno fenomeni quali la compressione del
guadagno e la distorsione, con il relativo piegamento delle
caratteristiche.
Per concludere, si può dire che un amplificatore con un IP3 più alto
è, in generale, migliore, dal punto di vista della linearità, di uno
con un IP3 più basso. Rimaneggiando le equazioni precedenti, si
nota, infatti che:
PIM3 = 3P1 − 2IP3 ,
(2.57)
da cui si vede che un amplificatore con IP3 più alto, a parità di
potenza che si vuole in uscita e a parità di termine utile, dà un
disturbo più basso, cioè una potenza di intermodulazione del terzo
ordine più bassa e quindi un amplificatore più lineare.
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
56
___________________________________________________________________________
2.4.7 Punto di Compressione a 1dB
In un amplificatore reale, per potenze sufficientemente elevate, il
guadagno tende ad abbassarsi; la potenza d’ingresso, per cui il
valore del guadagno di potenza scende di 1dB, è definito punto di
compressione a 1dB, dove il termine compressione sta ad indicare il
fatto che, finché è tutto lineare, si ha una retta a pendenza pari al
guadagno, mentre, da un certo punto in poi, si ha appunto il calo di
pendenza.
Si noti che questo parametro non permette di caratterizzare
completamente la distorsione dell’amplificatore, ma, piuttosto, dà
un idea del livello di potenza oltre il quale il comportamento è
manifestatamene non lineare.
2.5 CONSIDERAZIONI GENERALI
(Ref.[10])
Alle radiofrequenze, l’adattamento del circuito riveste un ruolo
fondamentale
nel
conseguimento
dell’ottimizzazione
delle
prestazioni. Tradizionalmente, l’ingresso e l’uscita sono adattate
all’impedenza per massimizzare il trasferimento di potenza. Come
abbiamo già visto, però, l’LNA ha come obbiettivo anche quello di
amplificare il segnale ricevuto ad un livello accettabile,
minimizzando il rumore aggiuntivo. Ciò, chiaramente, si ottiene con
la minimizzazione della cifra di rumore e la massimizzazione del
guadagno.
Sfortunatamente,
però,
calcolando
i
valori
dell’impedenza che ottimizzano la potenza, il rumore e il guadagno,
si trovano tre valori diversi, come indicato in Fig.2.8.
L’impedenza che ottimizza il guadagno si trova nel centro del
cerchio sulla sinistra della carta, mentre, nel centro del cerchio
sulla destra della carta si trova l’impedenza per l’ottimizzazione
della figura di rumore. L’impedenza ottima per la potenza è, invece,
nel centro vero e proprio della carta. Appare quindi evidente che,
ottimizzando l’impedenza per una grandezza, automaticamente si
individua un valore non ottimale per gli altri fattori.
Questo è il problema principale che si deve affrontare nella
progettazione di un amplificatore a basso rumore.
Diverse topologie di circuito sono state prese in considerazione per
ovviare, almeno in parte, a questi problemi. Nell’ambito di questa
tesi verranno analizzate, per la realizzazione dell’amplificatore a
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
57
___________________________________________________________________________
basso rumore, la configurazione bilanciata e la configurazione
differenziale.
F i g u r a 2 . 4 . L ’ i m p e d e n za o t t i m a l e pe r l e t r e d i f f e r e n t i c a r a t t e r i s t i c h e
si trova su punti diversi della carta di Smith.
Un amplificatore bilanciato presenta il grande vantaggio, per la sua
particolare struttura, di non necessitare di adattamento. Per questo
motivo, tutti i gradi di libertà della progettazione possono essere
utilizzati per la minimizzazione della figura di rumore, con notevoli
vantaggi in termini di performance.
La configurazione differenziale, invece, è stata presa in
considerazione per i vantaggi applicativi che avrebbe sulla Croce
del Nord. Attualmente, infatti, tra il dipolo e l’LNA è presente un
balun, che un amplificatore differenziale consentirebbe di
eliminare, aprendo la strada alla larga banda.
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 2
58
___________________________________________________________________________
REFERENCES:
[1]: “A 1V Fully Diferential CMOS LNA for 2,4GHz Application”,
Chih-Lung Hsiao, Ro-Min Weng, kun-yi Lin.
http://ieeexplore.ieee.org/Xplore/DynWel.jsp
[2]: “Realizzazione di un banco di misura del rumore 1/f per
frequenze
millimetriche”,
J.Monari,
A.Orfei,
S.Mariotti,
A.Scalambra, M.Poloni – Rapporto interno IRA 298/00
[3]: Appunti tratti dalle lezioni del corso di “Microonde” –
Prof.A.Costanzo
[4]: Appunti tratti dalle lezioni del corso di “Elettronica delle
Telecomunicazioni” – Prof.ri V.A.Monaco, F.Filicori, A.Santarelli
[5]: “INTEGRATED LNA AND MIXER BASICS”, Application
Note 884, National Semiconductor Corporation
[6]: “Elettronica 2- Amplificatori a basso rumore”,
F.Santarossa
TELIT-Mobile Terminals S.p.a
[7]: “Amplificatori a RF”, C.Deltin
TELIT-Mobile Terminals S.p.a
[8]: “MANUALE DI ELETTRONICA E TELECOMUNICAZIONI”,
G.Biondo, E.Sacchi - HOEPLI
[9]: “Capitolo 1: Non linearità”, G.Vannini.
www-micrel.deis.unibo.it
/˜eletlc/staff/Giorgio/didattica/lucidi_e3.html
[10]: “Design A Low-Noise Communications Amplifier”, Brian
Battaglia, “MICROWAVES & RF”, December 1999
___________________________________________________________________________
AMPLIFICATORI A RADIOFREQUENZA
CAPITOLO 3
59
___________________________________________________________________________
3.1
L’AMPLIFICATORE BILANCIATO
L’amplificatore bilanciato è una configurazione molto utilizzata
negli amplificatori che funzionano nel range di frequenze delle
microonde.
Il
suo
schema
generale
è
mostrato
in
Fig.3.1.(Ref[1],Ref.[2])
F ig u ra 3 .1
L’amplificatore bilanciato è un dispositivo in cui il segnale di
ingresso viene diviso in due segnali, attraverso un 3dB Hybrid
Coupler a 90°. Il segnale in uscita dalla porta 3 del primo
accoppiatore è sfasato di 90° rispetto a quello in uscita dalla porta
4. I due segnali ottenuti vengono poi amplificati dai due
amplificatori A e B e quindi ricombinati dal secondo 3dB Hybrid
Coupler a 90°.
3.2 ACCOPPIATORI IBRIDI A 90 GRADI
(Ref[1])
Un accoppiatore ibrido a 90 gradi è un 4 porte passivo, reciproco e
privo di perdite, che risulta, inoltre, adattato. Infatti, se si chiudono
tre qualunque delle sue porte sull’impedenza di normalizzazione,
che si considera di 50Ω, alla porta rimanente si vedono ancora 50Ω.
In Fig.3.2 viene mostrata una sua generica rappresentazione.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
60
___________________________________________________________________________
F ig u ra 3 .2
La proprietà caratteristica dell’accoppiatore è che, per ogni porta
che viene alimentata, la potenza si suddivide equamente fra le due
porte laterali rispetto alla porta eccitata. Nel caso ideale, quindi,
alla porta che si trova sul lato opposto non arriva nulla. Questo
significa che, facendo riferimento alla Fig.3.2, se viene eccitata la
porta 1, alla porta 2 non c’è segnale, mentre la potenza si suddivide
equamente tra la porta 3 e la porta 4. A causa di questo tipo di
funzionamento, tali dispositivi sono chiamati anche accoppiatori
ibridi a 3dB. In particolare, se viene alimentata la porta 1, metà
della potenza finisce sulla porta 4 con uno sfasamento ideale di
zero gradi, mentre, l’altra metà finisce sulla porta 3 con uno
sfasamento di 90 gradi.
Nell’indicazione della matrice di Scattering dell’accoppiatore, si
deve ricordare che tale matrice, essendo il dispositivo reciproco,
risulta simmetrica. Inoltre, se si suppone il dispositivo ideale, cioè
si considera nulla la potenza sulla porta non accoppiata, la
diagonale principale è costituita da elementi tutti nulli.
Ricordando che uno sfasamento di 90 gradi equivale ad una
moltiplicazione per e
-j
π
2
e che
1
(potenza ) = 1 (segnale) , la matrice S
2
2
dell’accoppiatore ibrido a 3dB vale:
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
61
___________________________________________________________________________
π
1 - j2
1
0
e
0
2
2
π
1
1 -j2
0
e
0
2
2
S=
(3.1)
.
π
1
1 e-j2
0
0
2
2
π
1 -j2
1
e
0
0
2
2
Alle radiofrequenze e alle microonde, esistono diversi metodi di
realizzazione degli accoppiatori ibridi a 90 gradi. In particolare,
alle radiofrequenze si utilizzano delle bobine avvolte su dei nuclei
di ferrite, mentre tali dispositivi, alle microonde, sono costruiti
utilizzando delle microstrisce o delle strip-lines.(Ref.[3])
I parametri che definiscono le performance degli accoppiatori
sono(Ref.[4]):
•
RANGE DI FREQUENZA: il range in cui viene garantito che
le specifiche siano soddisfatte.
•
INSERTION LOSS: diminuzione di potenza dovuta alle
perdite nel conduttore e nel dielettrico.
•
ISOLAMENTO: potenza alle porte isolate in relazione alla
potenza in ingresso.
•
VSWR (Voltage Standing Wave Ratio): misura dell’impedenza
del dispositivo in relazione all’impedenza di normalizzazione. In
particolare: VSWR =
1+ Γ
1- Γ
, dove Γ è l’ampiezza del coefficiente di
riflessione alla frequenza di interesse.
•
REFLECTION LOSS: incremento delle perdite di inserzione
dovuto al disadattamento.
•
ACCOPPIAMENTO: la differenza in dB tra la potenza alla
porta accoppiata e alla porta di ingresso.
•
COUPLING LOSS: perdita sulla linea principale dovuta
all’accoppiamento di potenza.
•
PHASE UNBALANCE: la variazione di fase, rispetto alla
quadratura, delle porte di uscita.
•
AMPLITUDE UNBALANCE: il valore assoluto della
differenza di potenza, espressa in dB, tra le due porte di uscita
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
62
___________________________________________________________________________
dell’accoppiatore. In un circuito ideale tale differenza deve essere
0dB.
•
RETURN LOSS: la differenza in dB tra la potenza incidente
su una discontinuità disadattata e la potenza riflessa dalla
discontinuità.
3.3 FUNZIONAMENTO
(Ref[1],Ref.[2])
DELL’AMPLIFICATORE
BILANCIATO
Si supponga che l’amplificatore bilanciato sia costituito da due
amplificatori a stadio singolo, nel caso ideale, identici, le cui
matrici di diffusione, SA e SB , e i cui guadagni G A e G B , sono noti.
I due accoppiatori a 3dB hanno entrambi la quarta porta chiusa su
di una impedenza di normalizzazione a 50Ω. Questo fa sì che la
potenza riflessa dagli ingressi di entrambi gli amplificatori,
ricombini alla porta isolata dell’accoppiatore ibrido e sia dissipata
nella terminazione resistiva.
Più in dettaglio, si indichi con s R F un segnale in ingresso
all’amplificatore bilanciato. A causa dello splitter, metà di tale
segnale, che si può indicare come s R F /2, è inviata all’amplificatore
A con fase di 0°, mentre l’altra metà è inviata a B con fase di 90°. I
segnali riflessi alle porte di ingresso di A e B saranno
rispettivamente ρ s R F /2 (ϕ) e ρ s R F /2 (ϕ + 90°) dove ρ(ϕ) è il
coefficiente di riflessione di ciascun amplificatore intermedio.
Rientrando nello splitter si avrà che essi saranno nuovamente
sfasati. Si ottiene, così:
alla porta di ingresso:
ρ s R F /4 (ϕ) + ρ s R F /4 (ϕ + 180°) = 0°
alla porta adattata con 50Ω:
ρ s R F /4 (ϕ + 90°) + ρ s R F /4 (ϕ +
90°) = ρ s R F /4 (ϕ) + ρ s R F /2 (ϕ + 90°)
Questo significa che tutta la potenza riflessa viene scaricata sul
carico adattato non ripercuotendosi, così, sull’ingresso. Questo
porta ad avere un VSWR molto basso. La stessa cosa avviene
sull’uscita.(Ref.[5])
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
63
___________________________________________________________________________
L’amplificatore bilanciato gode delle seguenti proprietà:
1.
L’adattamento in ingresso e in uscita (a 50Ω) risulta
realizzato sempre, anche se i singoli amplificatori non sono
adattati. Questo significa che, per la struttura, sarà sempre
S11 = S22 = 0 , purché gli amplificatori A e B siano uguali.
2.
Il guadagno complessivo della struttura coincide con il
guadagno di ciascuno dei due amplificatori A e B, e, di
conseguenza, la stessa cosa vale per la sua figura di rumore.
3.
La potenza di uscita della struttura complessiva è doppia
rispetto alla potenza che si potrebbe, teoricamente, avere all’uscita
di ciascuno dei due amplificatori A e B.
Nel seguito si procede alla dimostrazione delle proprietà enunciate.
Innanzitutto, si noti che il sistema, nel suo complesso, è un due
porte, per cui la matrice S complessiva è un 2x2.
Si cominci dal calcolo di S11 e S21 del dispositivo complessivo; si è
già detto che, grazie alla presenza delle terminazioni resistive,
l’onda incidente sulla porta 1 del secondo accoppiatore è nulla. Se
si chiude la porta 1 su 50Ω, essendo il dispositivo adattato, anche
sulle porte 3 e 4 del secondo accoppiatore si vedranno 50Ω, per cui,
nel calcolo di S11 e di S21 si può scrivere:
b 03 = b0 4 = 0 .
(3.2)
Si ha che:
S11 =
b1I b1I
= .
a IN a 1I
(3.3)
b1I è la somma di due contributi, uno che proviene dalla porta 3 e
uno che proviene dalla porta 4, per cui può essere espresso come:
b1I =
a I4
a I − jπ
+ 3 e 2.
2
2
(3.4)
Esplicitando a 3I e a I4 :
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
64
___________________________________________________________________________
a 3I = S11B b 3I + S12B b O4 = S11B a IN
a I4 = S11A b I4 + S12A b 3O = S11A a IN
e
−j
π
2
2
1
,
2
(3.5)
dove:
b 3I = a IN
b I4 = a IN
e
-j
π
2
2
1
.
2
(3.6)
L’equazione 3.4 diventa, quindi:
b1I =
a
I
4
2
+ a 3I
e
-j
π
2
1
1
1
= S11A a IN − S11B a IN = a IN (S11A − S11B ) .
2
2
2 2
(3.7)
La prima proprietà enunciata risulta, quindi, verificata dal momento
che:
S11 =
b1I 1
= (S11A − S11B ) ,
a IN 2
(3.8)
con un procedimento del tutto analogo si arriva all’espressione
relativa all’adattamento in uscita:
S22 =
1
(S22B − S22A ) .
2
(3.9)
Da queste espressioni, risulta evidente che, per avere adattamento
in ingresso e in uscita dal dispositivo complessivo, non è necessario
che i singoli amplificatori siano adattati, cioè non è necessario
avere S11A = S22A = S11B = S22B = 0 . Per avere l’adattamento, basta, infatti,
che i due amplificatori siano uguali e cioè che S11A = S11B e S22A = S22B .
Si passi adesso al calcolo di S21 , che può essere espresso come:
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
65
___________________________________________________________________________
b
bO
S21 = OUT = 1I ,
(3.10)
a IN
a1
dove:
b1O =
e
-j
π
2
2
1 O
a4 .
2
a 3O +
(3.11)
Le espressioni di a O3 e a O4 sono:
a O3 = S21A b I4 + S22A b 3O = S21A
a IN
2
a = S 21B b + S22B b = S21B
a IN
O
4
I
3
O
4
2
e
−j
π
2
.
(3.12)
Sostituendo queste espressioni nell’equazione 3.11, si trova che:
π
b1O =
a IN − j 2
e (S21A + S21B ) ,
2
(3.13)
da cui:
−j
S21 =
π
2
b OUT e
(S21A + S21B ) .
=
a IN
2
(3.14)
Con calcoli del tutto analoghi si arriva all’espressione:
S12 =
e
−j
2
π
2
(S12A + S12B ) .
(3.15)
Il guadagno dell’amplificatore bilanciato, risulterà, quindi, pari a:
Gtot =
1
s 21 A + s21B
4
2
(3.16)
In particolare, se i due amplificatori sono uguali, risulterà:
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
66
___________________________________________________________________________
2
Gtot = s 21A
(3.17)
Se gli amplificatori sono uguali, quindi, si vede che il guadagno
complessivo coincide con quello di ciascun amplificatore e risulta,
quindi, verificata la seconda proprietà enunciata all’inizio della
trattazione.
Per completezza si può dire che il guadagno dell’amplificatore
bilanciato è dato da:
s 21 A = G A
1/ 2
exp( jϕ A )
G + GB + 2G AGB 2 cos(ϕ A − ϕ B )
= A
4
1
Gtot = s 21,tot
s 21B = G B
1/ 2
2
exp( jϕ B )
Quindi se G A = G B e se ϕ A = ϕ B si otterrà che G t o t = G A . Da questa
espressione si può anche vedere meglio la riduzione di guadagno,
qualora si verificasse un danneggiamento di una dei due
amplificatori intermedi.
Per quanto riguarda la potenza, si verifica, la seguente relazione:
POUTA =
1 O2 1
2
2
a 3 = S 21A a IN = POUTB .
2
4
(3.18)
La POUT complessiva del sistema risulta:
POUT =
1
1
2
2
2
b OUT = S21 a IN = 2POUTA = 2POUTB .
2
2
(3.19)
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
67
___________________________________________________________________________
La potenza in uscita al dispositivo complessivo, risulta, quindi, il
doppio di quella disponibile all’uscita dei singoli amplificatori.
Risulta, quindi, verificata anche la terza proprietà enunciata.
I risultati trovati sono, comunque, da ritenersi validi all’interno di
quel range di frequenze in cui il comportamento degli accoppiatori
è molto prossimo a quello ideale. Questo significa che la banda
dell’amplificatore bilanciato è limitata dalla banda in cui gli
accoppiatori a 3dB si comportano come tali.
3.4 CARATTERISTICHE DELL’AMPLIFICATORE BILANCIATO
Come abbiamo visto in precedenza, gli obbiettivi principali, di cui
si deve tenere conto nella progettazione di un amplificatore a basso
rumore, sono:
• Una bassa figura di rumore
• Un guadagno adeguato
• La stabilità
Per raggiungere questi obbiettivi, negli amplificatori a basso
rumore, che lavorano nello spettro delle microonde, è molto
utilizzato l’amplificatore bilanciato, grazie al suo basso rumore,
alle basse perdite e ad una stabilità migliore, se paragonato ad un
generico amplificatore a singolo stadio.
I vantaggi e gli svantaggi nell’utilizzo di una configurazione
bilanciata rispetto ad una configurazione a stadio singolo sono
riassunti in Tabella 1.(Ref.[6])
Altri vantaggi dell’amplificatore possono essere (Ref.[7]):
1 – possibilità di connettere più amplificatori bilanciati in cascata,
in virtù del fatto che ciascuno di essi è isolato dai 3dB Hybrid
Coupler.
2 – qualora uno dei due amplificatori interni all’amplificatore
bilanciato si rompesse, il dispositivo continua a lavorare anche se
con guadagno 4 volte inferiore.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
68
___________________________________________________________________________
Input/output Return Loss
Optimum noise figure Source
Matching With Better Input
Return Loss
Performance Stability In
Temperature
Unconditional Stable
Single ended
Balanced
amplifier
Fair or poor
Excellent
Difficult
Very eas y and
excellent
Poor and depend on
the selected
components
Difficult
Excellent
Easier
Performance Stability With
Component Variation
Poor
Excellent
IP3
--
3 dB better
P1db
--
3 dB better
Total Power Consumption
3 dB less
--
Reliabilit y
--
2 time higher
Cost 2 time less
Cost 2 time less
Integration
Size
Excellent
Small
Difficult
Larger
Ta bel la 1 . Co nf ro nt o t r a a mp l if ica t o re b ila nc i a t o e si ng o lo st a dio .
3 – laddove siano richiesti guadagni
30dB) un amplificatore bilanciato è
poiché, a causa di mismatches, sia il
fase possono subire variazioni. Si
variazioni mettendo degli isolatori tra
la noise figure complessiva.
molto alti (superiori anche a
da preferire ai single ended
guadagno complessivo che la
potrebbe ovviare a queste
i vari stadi: ciò però aumenta
4 – sono dispositivi molto più stabili dei single ended. Ciò è dovuto
al fatto che gli stadi intermedi di amplificazione vedono al loro
ingresso ed alla loro uscita dei carichi da 50Ω.
5 – sono amplificatori in genere di tipo broadband i quali
presentano una buona “piattezza in banda” del guadagno. Sono
dispositivi che hanno VSWR, sia in ingresso sia in uscita, molto
buoni. La banda è però limitata dalla banda dei 3dB Hybrid Coupler
(in genere 2 ottave).
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
69
___________________________________________________________________________
6 – la potenza in uscita dall’AMPLIFICATORE BILANCIATO è
doppia rispetto al caso single ended. Ciò avviene proprio grazie alla
divisione del segnale in due parti. Gli amplificatori possono essere
quindi “spinti” di più prima che vadano in saturazione.
7 – cancellazione nel carico, dei prodotti e delle armoniche del tipo
2F1+F2, 2F2+F1, 3F1, 3F2, e attenuazione di 3dB dei prodotti del
tipo F1-F2, F1+F2, 2F1, 2F2. Ciò permette di avere un punto di
intercetta di 3dB più alto, rispetto allo stadio singolo.
Svantaggi:
1 – Doppio numero di dispositivi attivi e quindi doppio consumo di
potenza.
2 – Dimensioni del circuito doppie rispetto al caso single ended.
3 – Sono dispositivi più complessi da realizzare.
Fatte queste considerazioni, è, comunque, necessario tenere conto
del fatto che le proprietà dell’amplificatore bilanciato risultano
valide, solo in relazione a quanto i due amplificatori a singolo
stadio utilizzati sono uguali. Nella realtà, avere due amplificatori
identici risulta impossibile e quindi, anche le proprietà
dell’amplificatore non sono verificate con precisione. Questo
significa, per esempio, che non si ha un adattamento perfetto e
nemmeno un perfetto raddoppio di potenza.
Nel caso reale, inoltre, le imperfezioni negli accoppiatori e le
discontinuità nei circuiti, impedendo un perfetto adattamento,
limitano il return loss di ingresso da 15dB fino ad un massimo di
20dB. Inoltre, dal punto di vista del rumore, si ha una certa
degradazione, rispetto al caso dei singoli amplificatori, a causa del
rumore aggiunto dalle terminazioni adattate. Inoltre, la figura di
rumore risulta collegata al return loss; In particolare, se si vuole
una figura di rumore piccola, il return loss deve essere il più basso
possibile.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
70
___________________________________________________________________________
3.5
PROGETTO DI MASSIMA IN BASE ALLE SPECIFICHE
RICHIESTE
In questo paragrafo vengono illustrate le considerazioni che hanno
portato allo sviluppo di una architettura di tipo bilanciato. Vengono
inoltre riportate le prime scelte progettuali effettuale.
3.5.1 Considerazioni Iniziali di Progetto
Come si è detto nel Capitolo 2, affrontare un progetto in cui si
ottimizzano contemporaneamente adattamento e NF risulta alquanto
difficoltoso. Nasce così l’idea di sviluppare una architettura di tipo
bilanciato.
Grazie alle proprietà relative all’adattamento di tale architettura, è
infatti possibile progettare gli amplificatori a singolo stadio
tenendo conto solo del rumore, senza avere specifiche
sull’adattamento.
Quello che si vuole verificare è la possibilità di diminuire la noise
figure a tal punto, da compensare l’insertion loss e le perdite
introdotte dagli splitter. In tal modo si avrebbe un LNA
caratterizzato da un adattamento molto buono e da una noise figure
paragonabile a quella di un amplificatore a stadio singolo.
Al fine di verificare questa possibilità, si è partiti dal progetto di un
LNA, sviluppato e realizzato all’interno della Stazione
Radioastronomica di Medicina, nell’ambito del progetto SKA. Tale
amplificatore verrà illustrato nel dettaglio nei paragrafi successivi.
3.5.2 Specifiche del Progetto
(Ref.[8])
Come già è stato detto nel Capitolo 3, l’amplificatore bilanciato
oggetto di questa tesi, è una delle architetture proposte per la
realizzazione di un Low Noise Amplifier. Tale amplificatore verrà
collocato sulla linea focale del Ramo Nord-Sud e sarà il primo
elemento della catena di ricezione. Esso, per ovvi motivi, dovrà
avere un guadagno molto elevato e una noise figure estremamente
bassa.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
71
___________________________________________________________________________
Le specifiche richieste per il progetto del bilanciato sono:
• Un guadagno il più elevato possibile. In particolare l’S 2 1 deve
essere almeno di 18dB.
• Una noise figure, al contrario, la più bassa possibile. Sarebbe
preferibile rimanere attorno a 0.5dB. Tuttavia un sensibile
miglioramento
del
guadagno
o
della
dinamica
dell’amplificatore giustificano almeno in parte un aumento di
tale valore.
• Un adattamento piuttosto buono. In generale si possono
considerare accettabili anche -10dB, sempre che ciò favorisca
l’aumento del guadagno o la diminuzione della noise figure.
Per quanto riguarda la frequenza di funzionamento, si richiede una
larghezza di banda di almeno 16MHz, centrata sui 408MHz. In
realtà, nella prospettiva di sostituire gli attuali dipoli con antenne a
banda più larga, sarebbe consigliabile progettare l’amplificatore in
modo che la banda di funzionamento vada da 300MHz a 700MHz.
Nel caso particolare dell’amplificatore bilanciato, si presenta però
il problema degli splitter a 90°. Tali dispositivi sono infatti
caratterizzati da una banda piuttosto stretta. La larghezza di banda
del progetto risulterà quindi limitata dalla larghezza di banda dei
componenti commerciali che si deciderà di utilizzare.
3.5.3 Caratteristiche del Progetto Iniziale
In Fig.3.3 viene presentato lo schema circuitale dell’LNA a singolo
stadio, progettato e realizzato nell’ambito del progetto IRA-SKA,
da cui si è partiti per lo sviluppo dell’amplificatore bilanciato.
Nello schema vengono riportati anche i valori degli elementi
circuitali che sono stati utilizzati.
Il dispositivo attivo utilizzato in questo progetto è l’E-PHEMT
ATF-54143 dell’Agilent Technologies (Ref.[9]). Tale dispositivo è
stato scelto per il progetto in quanto presenta una bassa cifra di
rumore (NFmin<0.2dB a 408MHz), un’alta dinamica (OIP3>32dBm)
e un basso costo. Il punto di lavoro stabilito nell’ambito di questo
progetto è di 3V e 60mA.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
72
___________________________________________________________________________
Figura 3.3
Essendo esso un HEMT di tipo enhancement ha il vantaggio,
rispetto agli HEMT tradizionali, di avere bisogno della sola
alimentazione positiva. Gli HEMT di tipo depletion, infatti,
necessitano di un potenziale di gate negativo rispetto al source
(V GS <0); ciò comporta la necessità di avere la doppia
alimentazione. Gli HEMT di tipo enhancement, invece, prevedono
di avere il potenziale di gate più positivo del source (V GS >0). Ciò
consente una maggiore semplicità del progetto e un risparmio in
termini di spazio e componenti.
La scelta di reti di adattamento di tipo passa alto è stata
determinata dal fatto che, come suggerito dal costruttore, si
integrano facilmente con la rete di polarizzazione e favoriscono la
stabilità in bassa frequenza del circuito (dato che ne diminuiscono
il guadagno). Inoltre, come verrà illustrato nel Capitolo 6,
nell’ambito di questo progetto la presenza di questo tipo di reti
consente di attenuare le frequenze relative alla radiodiffusione.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
73
___________________________________________________________________________
La scelta di una rete di polarizzazione attiva consente, infine, di
garantire una minore sensibilità del punto di lavoro del dispositivo,
alle variazioni di temperatura.
Un discorso a parte meritano le piste di source, indicate in figura
con Ls1 e Ls2. Tali induttanze agiscono infatti come retroazioni
serie per il dispositivo. Il loro valore è molto critico e una sua
variazione anche minima ha un forte impatto sull’adattamento e
sulla stabilità. La determinazione delle loro dimensioni e anche del
numero di via hole, ad esse collegati, è stata oggetto di studi
particolarmente approfonditi. Si è infine giunti a considerare, per
Ls1, le dimensioni di 0.5mmx4.3mm e, per Ls2, 0.5mmx4.7mm. Si
è inoltre fissato in 3 il numero di via hole a cui tale piste sono
collegate.
3.5.4 Il problema dello Shift in Frequenza
In Fig.3.4 e Fig.3.5 , vengono riportati i grafici relativi ai valori
simulati e misurati del circuito appena presentato.
Figura 3.4
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
74
___________________________________________________________________________
Figura 3.5
In Tabella 2 sono riportati i valori simulati e misurati (in dB)
relativi alla frequenza di 408MHz.
S 1 1 S 2 2 S 2 1 NF
Simulato -5 -26 18.7 0.32
Misurato -10 -17 22.6 0.4
Ta bel la 2
Dai grafici si può notare la presenza di uno shift in frequenza tra
gli andamenti simulati e misurati.
Un effetto di questo tipo non si è riscontrato solamente in questo
progetto, ma in tutti i progetti in cui è stato utilizzato il
componente ATF-54143.
Queste considerazioni, unitamente ad esperienze già sviluppate in
progetti precedenti, hanno portato alla decisione di affrontare il
progetto simulando e ottimizzando a 535MHz invece che a
408MHz. Nel seguito, quindi , tutti i valori relativi alle simulazioni
saranno riportati a queste frequenze.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
75
___________________________________________________________________________
Il dispositivo qui presentato costituisce solo il punto di partenza per
lo sviluppo di un nuovo stadio singolo da utilizzare nel progetto
dell’amplificatore bilanciato. I valori degli elementi circuitali e la
stessa topologia del circuito saranno quindi opportunamente
modificati al fine di migliorare le performance del dispositivo e di
renderlo adatto all’inserimento nella struttura bilanciata.
Le scelte progettuali effettuate e le relative ottimizzazioni saranno
presentate nel dettaglio nel Capitolo 6.
3.5.5 Scelta dell’Accoppiatore Ibrido a 90°
Una volta individuata la struttura di partenza per il dispositivo a
singolo stadio, è necessario realizzare l’architettura bilanciata. A
tal fine, un passo indispensabile nel progetto dell’amplificatore è la
scelta dello splitter a 90°.
Innanzitutto, si deve ricordare che la noise figure complessiva
risulta data dalla somma tra la noise figure dell’amplificatore e
l’insertion loss dell’accoppiatore. Per quanto riguarda gli splitter
reali, si possono inoltre fare considerazioni legate alla phase
Unbalanced e alla amplitude unbalanced. La presenza di queste due
non linearità, infatti, produce un peggioramento sia della noise
figure che del guadagno. Gli effetti di queste grandezze verranno
presentati più in dettaglio nel Capitolo 6. Per quanto riguarda la
scelta dello splitter è quindi necessario cercare innanzitutto il
componente con l’insertion loss più piccola possibile poi, a parità
di questo valore, verrà scelto il componente con l’amplitude e la
phase unbalanced più basse.
Sono stati individuati diversi componenti commerciali che vengono
presentati nelle figure successive. In giallo sono evidenziati i
componenti considerati mentre in blu sono cerchiati gli elementi
che si sono rivelati di interesse per il progetto.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
76
___________________________________________________________________________
F ig u ra 3 .6 . S pl it t e r d el la M iTe q
F ig u ra 3 .7 . S pl it t e r d el la M ini- Ci rc uit s
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
77
___________________________________________________________________________
Figura 2.8. Splitter della Synergy
Le caratteristiche dei componenti individuati sono riassunte in
Tabella 3.
Marca
MiniCircuits
MiTeq
Synergy
Modello
Frequenza
[MHz]
In s ert i o n
Lo s s (T yp )
[dB]
P h as e
Un b al an c ed
(T yp )
(degrees)
Am p l i t u d e
Un b al an c ed
(T yp )
[dB]
HPQ-05W
380-490
0.20
0.7
1.1
250-500
0.25
2
-
250-500
0.5
2
0.6
M-251-5292W102
SLQ-K08
Tabella 3. Splitter a 90°
Per il progetto dell’amplificatore sono stati infine scelti gli
accoppiatori della Mini-circuits, in quanto presentano l’insertion
loss inferiore.
Se si fosse voluto implementare il progetto dell’amplificatore a
banda più larga, sarebbe invece stato opportuno scegliere gli
splitter della Miteq i quali, pur non presentando una banda di
400MHz (richiesta eventualmente dalle specifiche), hanno
comunque delle buone caratteristiche su 250MHz.
Nel Capitolo 6 verrà presentato in dettaglio il progetto complessivo
dell’amplificatore bilanciato con le relative simulazioni.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 3
78
___________________________________________________________________________
REFERENCES:
[1]: Appunti tratti dalle lezioni del corso di “Microonde” – Prof.
A.Costanzo
[2]: Appunti tratti dalle lezioni di “Elettronica delle
Telecomunicazioni” – Prof.ri V.A.Monaco, F.Filicori, A.Santarelli
[3]: “RF directional couplers and
Application Note M560 – M/A-COM
www.macom.com
3dB
hybrids
overview”,
[4]: “Hybrid Coupler specification definitions”, Application note
VER8/1/00 - ANAREN
[5]: “Microwave
U.L.Rohde
Circuit
Design”,
G.D.Vendelin,
A.M.Pavio,
[6]: “Merits of Balanced Amplifier”, Application Note 101 –
WAN7com
[7]: “High Power GaAs FET Amplifier: Push-pull versus Balanced
Configurations”, Application Note 014 – Fujitsu
www.fcsi.fujitsu.com
[8]: “On the noise properties of balanced amplifier”, A.R.Kerr
www.ieee.com
[9]: “Agilent ATF-54143 Low Noise Enhancement Mode
Pseudomorphic HEMT in a Surface Mount Plastic Package”, Data
Sheet
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA BILANCIATA
CAPITOLO 4
79
___________________________________________________________________________
4.1 AMPLIFICATORE DIFFERENZIALE: GENERALITA’
(Ref.[1])
La struttura differenziale è utilizzata, principalmente, in quelle
applicazioni in cui è necessario amplificare la differenza di due
segnali, rimuovendo componenti indesiderate comuni ai due
ingressi. In questo modo, in uscita vengono eliminate eventuali
componenti continue sovrapposte al segnale di ingresso come, per
esempio, i drift termici.
Come schema a blocchi dell’amplificatore differenziale, viene
utilizzato quello mostrato in Fig.4.1.
F i g u r a 4 . 1 . S c h e m a a b l o c c h i d i u n a m p l i f i c a t o r e d i f f e r e n zia l e
L’amplificatore differenziale è dotato di due ingressi, comunemente
indicati con “+” e “-“. Essi sono definiti, rispettivamente, non
invertente e invertente. La differenza tra i due risiede nel fatto che,
nel caso invertente, il segnale di uscita è sfasato di 180° rispetto al
segnale applicato a quell’ingresso, mentre, nel caso non invertente,
il segnale di uscita è in fase con esso.
Ipotizzando che il guadagno dell’amplificatore sia Ad, in virtù del
fatto che la caratteristica di questa configurazione è quella di
amplificare la differenza tra i due segnali di ingresso, nel caso
ideale si ha che:
VOUT = (V1 − V2 )A d
(4.1)
Ciò significa che, se V1 = V2 , la tensione di uscita, VOUT , è nulla.
Nel caso reale, però, V1 e V2 possono subire amplificazioni
leggermente diverse. La relazione precedente diviene, quindi:
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
80
___________________________________________________________________________
VOUT = (A 1 V1 − A2 V2 )
(4.2)
Detto questo, è possibile definire:
• A d = (A1 − A 2 ) guadagno differenziale
• Ac =
(A1 + A 2 ) guadagno di modo comune
2
(4.3)
Qualsiasi combinazione di due generici segnali, V1 e V2 , sugli
ingressi dell’amplificatore, può, inoltre, essere scomposta in:
• Tensione di ingresso di modo differenziale: Vid = (V1 − V2 )
• Tensione di ingresso di modo comune: Vic =
(V1 + V2 )
2
(4.4)
In Fig.4.2, è rappresentato il segnale di ingresso di un amplificatore
differenziale, attraverso le sue componenti di modo comune e
differenziale.
F ig u r a 4 . 2
Come si può notare, è possibile esprimere V1 e V2 come:
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
81
___________________________________________________________________________
(V )
V1 = Vic − id
2
(V )
V2 = Vic + id
(4.5)
2
La tensione di uscita può essere espressa in termini di Vid e Vic ,
secondo la relazione:
VOUT = A d Vid + A c Vic = A d (V1 − V2 ) + A c
(V1 + V2 )
2
(4.6)
Il guadagno di modo comune e differenziale, sono dati, in questo
caso da:
Voc
guadagno di modo comune
Vic
V
A d = od guadagno di modo differenziale
Vid
• Ac =
•
(4.7)
4.2 AMPLIFICATORE DIFFERENZIALE: COMPORTAMENTO IN
CONTINUA
(R EF .[2])
L’amplificatore differenziale può essere implementato con
tecnologia sia a BJT che a FET. Esistono realizzazioni integrate
definite Amplificatori Operazionali; in esse, tuttavia, i componenti
di base per lo stadio di ingresso sono sempre quelli appena citati.
In questo paragrafo, viene sviluppata l’analisi dell’amplificatore
differenziale a BJT. Come riportato in Ref.[3], i risultati ottenuti
sono da considerarsi validi anche per i transistori ad effetto di
campo.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
82
___________________________________________________________________________
F ig u r a 4 . 3 .
Facendo riferimento alla Fig.4.3, si assuma che i due transistor
siano simmetrici, identici ed operanti alla stessa temperatura. Se,
all’istante iniziale, si ha:
Vbe1 = Vbe2 = Vbe
(4.8)
dato che, secondo il modello di Ebers-Moll:
I C = IS ⋅ e
Vbe
Vt
(4.9)
si ha:
I C1 = I C2 = I C
(4.10)
Ciò comporta che:
VC1 = VC2 = VCC − I C RC
(4.11)
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
83
___________________________________________________________________________
La tensione differenziale di uscita, Vod , che è la differenza tra le
due tensioni di collettore, rappresenta la differenza amplificata dei
due segnali di ingresso:
Vod = Avd (VC1 − VC 2 )
(4.12)
Dato il risultato ottenuto nell’equazione 4.11, si ricava che Vod =0.
Questo significa che, se all’ingresso ho due segnali uguali, l’uscita
è nulla.
4.3 RELAZIONE CORRENTE/TENSIONE DIFFERENZIALE
(Ref.[3])
Si faccia ancora riferimento alla Fig.4.3. Per semplificare l'analisi
dell’amplificatore differenziale, si assume che le resistenze di base,
in genere piccole rispetto a R C1 e R C2 , si possano considerare nulle e
che la resistenza R E , comune ai due emettitori e molto grande
rispetto a R C1 e R C2 , si possa considerare infinita.
Ciò che risulta è:
IC1 =
IE
1+ e−Vid/Vt
IC2 =
IE
1+ eVid/Vt
(4.13)
Dove:
V i d =V 1 -V 2
e
Vt =
K ⋅T
T
=
= 25mV a T=300 K
q
11600
(4.14)
−23
Qui, k è la costante di Boltzmann ( 1,38 ×10 Joule/K ), T è la
temperatura assoluta e q è la costante di Coulomb ( 1,60 ×10 −19 Coulomb ).
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
84
___________________________________________________________________________
Se si riporta in un grafico l’andamento di tali correnti, in funzione
della tensione differenziale, si nota che, per valori di Vid , compresi
tra – Vt e + Vt , i transistori lavorano in regione lineare; inoltre, si
vede che è sufficiente una differenza di tensione di circa 3 Vt , per
commutare quasi tutta la corrente su un ramo della coppia di
transistor.
Tale grafico viene indicato come transcaratteristica del circuito.
F ig u r a 4 . 4
La
pendenza
della
transcaratteristica
“transconduttanza” ed è pari a:
gm =
IC
Vt
viene
definita
(4.15)
4.4 ANDAMENTO DELLA TENSIONE DIFFERENZIALE DI
USCITA
(Ref.[3])
Dalle espressioni delle due correnti di collettore, si possono
ricavare quelle per le due tensioni di uscita. Infatti, se:
IC1 =
IE
1+ e−Vid/Vt
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
85
___________________________________________________________________________
IC2 =
IE
1+ eVid/Vt
(4.16)
Si ottiene:
VC1 =V c c -I c 1 R C 1
VC2 =V c c -I c 2 R C 2
(4.17)
L'andamento della tensione differenziale di uscita, definita dalla
differenza fra V C 1 e V C 2 , è dato da:
V o d =V C 1 -V C 2 =(I
c 2 -I c 1 )R c
− Vid
2V t
= I E tanh
.
(4.18)
Tale andamento è mostrato in Fig.4.5.
F ig u r a 4 . 5
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
86
___________________________________________________________________________
4.5
CARATTERISTICHE
DIFFERENZIALI
DEGLI
AMPLIFICATORI
4.5.1 Calcolo dei Guadagni (Ref.[2])
Il segnale di uscita dell’amplificatore differenziale può essere preso
sia in modo differenziale, cioè tra i due collettori, sia in modo
sbilanciato (single-ended), cioè tra un collettore e massa.
Nel calcolo del guadagno di modo differenziale, si ipotizzi nulla la
componente di modo comune. Dalla Fig.4.4, si vede che, se Vid
cresce, anche I C1 e I E1 aumentano, mentre I C2 e I E2 decrescono dalla
stessa quantità, cioè ∆ I C1 = -∆ I C2 . La corrente totale su R E è, quindi,
costante, rendendo costante anche la tensione di emettitore.
L’incremento di I C1 rende VC1 più piccolo, mentre, il decremento di
I C2 fa crescere VC2 della stessa quantità, cioè ∆ VC1 = - ∆ VC2 . Questo
significa che la tensione di uscita differenziale diventa negativa.
Si possono definire tre guadagni:
• Il guadagno di uscita differenziale: A d = −g m R C
gmR C
2
g R
• Il guadagno di uscita a single-ended di Q2: A d1 = − m C
2
• Il guadagno di uscita a single-ended di Q1: A d1 = −
Per valutare il guadagno di modo comune, invece, si ipotizzano
nulle le componenti differenziali della tensione di segnale. Se Vic
cresce, I C1 e I E1 crescono e anche I C2 e I E2 crescono della stessa
quantità, cioè ∆ VC1 =∆ VC2 . L’incremento di I C1 rende più piccolo VC1
e, allo stasso tempo, l’incremento di I C2 rende più basso VC2 della
stessa quantità, cioè ∆ VC1 =∆ VC2 .
Questo significa che la tensione di uscita differenziale Vod = VC1 – VC2
rimane a zero.
In questo caso si possono definire due guadagni:
• Guadagno di uscita differenziale di modo comune: Ac=0
• Guadagno di uscita a single-ended di modo comune di Q1 e
Q2:
Ac =
αR C
,
2R
dove R è la resistenza caratteristica del
generatore di corrente.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
87
___________________________________________________________________________
In conclusione:
• Il guadagno differenziale deve essere grande, mentre, il
guadagno di modo comune deve essere il più piccolo
possibile.
• L’amplificatore differenziale amplifica, effettivamente, solo
la differenza tra due segnali
• Il guadagno differenziale appare molto simile a quello della
configurazione ad emettitore comune
4.5.2 CMRR (Ref.[4])
Le performance dell’amplificatore differenziale sono misurate
attraverso il rapporto di reiezione di modo-comune, CMRR
(Common Mode Rejection Ratio), definito come il rapporto tra il
guadagno di tensione di modo differenziale e il guadagno di
tensione di modo comune:
CMRR =
Ad
.
Ac
(4.19)
Tale parametro indica l’attitudine a non amplificare segnali comuni
ai due ingressi.
E’ possibile, infatti, esprimere la tensione di uscita in funzione del
CMRR:
Vc
VOUT = A c Vc + A d Vd = A d Vd +
CMRR .
Il termine
(4.20)
Vc
rappresenta quello che rimane del segnale di modo
CMRR
comune; esso indica, cioè, quanto i segnali di modo comune
vengono reiettati.
Nel caso di un amplificatore differenziale ideale, A c è nullo e il
CMRR risulta infinito.
Nel caso reale, non potendo essere infinito, il CMRR deve essere il
più elevato possibile (tipicamente arriva a qualche migliaio).
In questo caso è importante che sia:
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
88
___________________________________________________________________________
Vc
<< Vd
CMRR
,
(4.21)
per cui:
CMRR >>
Vc
Vd .
(4.22)
Tale grandezza
l’espressione:
CMRR = 20log
Ad
Ac
.
può
essere
espressa
anche
in
dB,
secondo
(4.23)
4.5.3 Definizioni di Dinamica di Ingresso e di Uscita di Modo
Comune e Differenziale
Dinamica d’ingresso per il modo differenziale: è il campo di valori
di tensione, in cui può variare un segnale differenziale, applicato
agli ingressi, senza che intervengano fenomeni di non linearità
dell’amplificatore.
Dinamica d’uscita per il modo differenziale: è il campo di valori
all’uscita dell’amplificatore, quando il segnale di modo
differenziale è all’interno della dinamica d’ingresso.
Dinamica d’ingresso per il modo comune: è il campo di valori di
tensione, nel quale può variare un segnale di modo comune,
applicato agli ingressi, senza che intervengano fenomeni di non
linearità dell’amplificatore.
Dinamica d’uscita per il modo comune: è il campo di valori
all’uscita dell’amplificatore, quando il segnale di modo comune è
all’interno della dinamica d’ingresso. L’amplificatore differenziale
ideale ha in uscita la tensione Vu =0, per quanto riguarda
l’amplificazione del solo modo comune.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
89
___________________________________________________________________________
4.5.4 Considerazioni Relative alla Dinamica
Si consideri l’amplificatore differenziale rappresentato in Fig.4.3.
La tensione di uscita può essere espressa come:
VO = VC2 − VC1 = (VCC − R C I C2 ) − (VCC − R C I C1 ) = R C (I C1 − I C2 )
(4.24)
Si esprimano le correnti di collettore sviluppando in serie di
potenze, fino al termine del terzo ordine, il legame:
Vbe
Vt
IC = ISe
(4.25)
Si hanno così:
V
V 21
V 31
I C1 ≈ I C0 1 + 1 +
+
2
3
VT 2V T 6V T
(4.26)
V
V22
V 32
I C2 ≈ I C0 1 + 2 +
+
2
3
VT 2V T 6V T
Nel caso in cui i due ingressi siano uguali ma in opposizione di fase
( V2 = −V1 ), si ha:
2V 2V 31
2V1
V 31
V0 = RI C0 1 +
R
I
=
+
C0
3
3
VT 6V T
VT 3V T
(4.27)
da cui:
C1 =
2R C I C0
VT
C2 = 0
C3 =
R C I C0
3V 3 T
(4.28)
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
90
___________________________________________________________________________
La struttura differenziale, nel caso di ingressi uguali ma in
opposizione di fase, porta quindi alla eliminazione della
distorsione di intermodulazione del secondo ordine e alla
riduzione della distorsione di intermodulazione del terzo ordine,
con conseguente aumento della dinamica del dispositivo.
4.6 CARATTERISTICHE NON IDEALI DELL’AMPLIFICATORE
DIFFERENZIALE
Come si è visto nel paragrafo 4.2, una delle ipotesi, fatte
nell’analisi dell’amplificatore, è che i due transistori siano
perfettamente simmetrici. Nella pratica, questa condizione è
impossibile da realizzare. Il mismatching delle caratteristiche fa
sì che si abbiano alcuni effetti, che, nella trattazione ideale, non
erano presenti.
4.6.1 Tensione di Offset di Ingresso e di Uscita
(Ref.[3])
Le asimmetrie nel circuito fanno sì che la tensione continua di
uscita, Vo, sia diversa da zero, anche se entrambi gli ingressi
sono collegati a massa. La tensione che si presenta sull’uscita, in
questo caso, è chiamata tensione di offset di uscita. Volendo
riportare l’offset all’ingresso, si procede dividendo Vo per il
guadagno differenziale dell’amplificatore, Ad. Si ottiene, così,
una quantità che viene definita tensione di offset di ingresso, VOS :
VOS =
VO
.
Ad
(4.29)
Se, tra i due terminali di ingresso dell’amplificatore differenziale,
viene applicata una tensione pari a – VOS , la tensione di uscita si
riporta a zero. Si è visto, che la tensione di offset è provocata da
differenze tra i componenti attivi e tra quelli passivi costituenti le
reti di polarizzazione di questi ultimi.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
91
___________________________________________________________________________
Si può dimostrare che la tensione di offset, dovuta a differenze tra
R C1 e R C2 , è esprimibile come:
∆R
V =V C
os
T R
C
.
(4.30)
Invece, la tensione di offset dovuta alla differenza tra i due
transistori, che poi si manifesta nella differenza tra le due correnti
di scala, I S , è esprimibile come:
∆I
V =V S
os
T I
S
.
(4.31)
4.6.2 Campo di Variazione delle Tensioni di Modo Comune in
Ingresso
L’ICMR (Input Common-Mode Range), cioè il campo di variazione
del modo comune in ingresso di un amplificatore differenziale, è
l’intervallo delle tensioni di modo comune in ingresso, Vcm , in
corrispondenza delle quali la coppia differenziale amplifica,
linearmente, segnali di ingresso differenziali. Il limite superiore del
campo di variazione delle tensioni di modo comune è determinato
dalla tensione, per cui Q1 e Q2 entrano in saturazione. Il limite
inferiore è determinato, invece, dalla tensione per cui il transistor,
che genera la corrente di polarizzazione, I, esce dalla zona attiva,
non comportandosi più come un generatore di corrente. L’ICMR si
trova ponendo Vid =0 e variando Vic , finchè uno dei due transistori
non entra in saturazione.
4.6.3 PSRR (Ref.[5])
Per la definizione del PSRR (Power Supply Rejection Ratio), è
necessario osservare che, alla tensione continua di alimentazione,
VCC , è sovrapposta una componente di piccolo segnale, v CC , dovuta
ai disturbi. Risulta, quindi, necessario stabilire quale parte di
questo disturbo raggiunge l’uscita; a questo scopo, si definisce il
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
92
___________________________________________________________________________
v
guadagno: A CC = on , dove v on è il valore del rumore in uscita.
v CC
Quello che interessa è, però, il rumore riferito all’ingresso; a tale
scopo, indicato con A il guadagno della rete, si può definire:
v in =
v on A CC v CC
v
v
=
= CC = CC . Il PSRR è, quindi, definito come il
A
A
A
PSRR
A CC
rapporto di reiezione dell’alimentazione e, come si vede dalla
precedente espressione, è dato da: PSRR =
A
. Il PSRR tiene conto
A CC
della sensibilità dello stadio differenziale alle variazioni
dell’alimentazione e, solitamente, viene espresso in dB. Tale
parametro assume, in genere, valori piccoli, in quanto ben
compensato, grazie alla stabilizzazione dell’alimentazione,
effettuata con particolari rimedi tecnologici e circuitali.
4.7 AMPLIFICATORE DIFFERENZIALE CON USCITA SINGOLA
In questo paragrafo viene illustrato il funzionamento di un
amplificatore differenziale con uscita singola.
Tale dispositivo presenta infatti alcune differenze rispetto ad un
amplificatore differenziale con uscita differenziale.
Si faccia riferimento alla Fig.4.6.
Figura 4.6
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
93
___________________________________________________________________________
L’amplificatore presenta due ingressi v S 1 e v S 2 e una uscita v 0 .
Con riferimento all’ingresso v S 1 (v S 2 =0), il processo di
amplificazione può essere considerato come quello di un
amplificatore a due stadi. Il segnale presente sull’emettitore di Q1,
viene direttamente applicato sull’emettitore di Q2, per essere infine
prelevato sul collettore di Q2.
Il segnale v S 1 , quindi, entra nella base di Q1, esce dall’emettitore di
Q1, entra nell’emettitore di Q2 ed esce sul collettore di Q2. si ha
quindi la cascata di uno stadio a collettore comune seguito da uno
stadio a base comune.
Se si considera invece l’ingresso v s 2 (v s 1 =0), l’amplificazione
fornita da Q2 è quella della configurazione a doppio carico ed il
segnale di uscita è invertito.
Nell’ipotesi di perfetta simmetria della struttura, e in particolare di
Q1 e Q2, il segnale di uscita risulta proporzionale alla differenza
dei segnali presenti sugli ingressi.
Si ha quindi ancora:
v 0 = A d (v s1 − v s2 )
(4.32)
dove Ad è l’amplificazione differenziale.
Si dimostra che:
Ad =
I CQ
2VT
RC
(4.33)
dove I C Q è la corrente a riposo sui collettori dei due transistor per
cui vale:
I CQ1 = I CQ2 = I CQ
(4.34)
Nel caso particolare di un amplificatore differenziale a
radiofrequenza, i due emettitori non devono essere collegati a
massa e nemmeno ad un piccolo carico. Perché tutto funzioni allo
stesso modo, si devono invece collegare ad un carico sensibile per
la Radiofrequenza, che simuli per la stessa un circuito aperto.
In questo modo, il segnale v S 1 , entra nella base di Q1, esce
sull’emettitore di Q1 e, non vedendo il carico, dato che è molto
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
94
___________________________________________________________________________
elevato, entra nell’emettitore di Q2 ed esce sul collettore dello
stesso.
4.8 LA CONFIGURAZIONE CASCODE
(Ref.[3])
La ricerca bibliografica in materia di realizzazione di Low Noise
Amplifier ad architettura differenziale, ha messo in luce che la
configurazione più spesso utilizzata, alle alte frequenze, è la
configurazione cascode.
Nella sua forma più generica, l’architettura cascode è costituita da
uno stadio ad emettitore comune, seguito da uno stadio a base
comune. La sua forma differenziale e il relativo “elemento base”
sono mostrati in Fig.4.7.
F i g u r a 4 . 7 . F o r m a d i f f e r e n zia l e d e l l ’ a m p l i f i c a t o r e c a s c o d e e r e l a t i v o m e zzo c i r c u i t o
d i f f e r e n zia l e .
La coppia, formata da Q1 e Q2, costituisce il differenziale di base
che, per segnali di ingresso differenziali, funziona come un
amplificatore ad emettitore comune.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
95
___________________________________________________________________________
La coppia Q3 e Q4 rappresenta un amplificatore differenziale a base
comune.
La resistenza di carico, vista dal transistor Q1, non è più R C , ma
diventa la resistenza di ingresso, re , del transistore Q3, collegato a
base comune. Tale resistenza di carico è molto più bassa di quella
che si avrebbe in un normale differenziale e ciò comporta un
drastico
miglioramento
della
risposta
in
frequenza
dell’amplificatore, come si può notare dall’espressione:
ω=
1
.
C π re
(4.35)
Si vuole, adesso, trovare l’espressione della resistenza di uscita del
dispositivo. Si noti che lo stadio a base comune svolge la funzione
di buffer di corrente, fornendo al carico una corrente quasi uguale a
quella ricevuta. Si osservi, inoltre, che, poiché entrambi i
dispositivi (Q1 e Q3) sono polarizzati con la stessa corrente, I/2, i
loro parametri per piccoli segnali sono uguali. Ciò significa che, se
si indica con ro la resistenza di uscita dei singoli transistori, la
resistenza di uscita complessiva è pari a:
R o ≈ βro
(4.36)
Tale resistenza, risultando essere β volte più grande di quella
dell’amplificatore ad emettitore comune, comporta un deciso
miglioramento del guadagno.
In Fig.4.8 viene mostrato un amplificatore operazionale cascode in
tecnologia CMOS. La coppia, data da Q1C e Q 2C , forma un cascode
con l’amplificatore differenziale costituito da Q1 e Q 2 . In questo
caso, la configurazione cascode è utilizzata per aumentare il
guadagno degli stadi esistenti, senza fare uso di stadi in cascata.
La resistenza di uscita, guardando nel drain di Q 2C , è pari a:
R o2C ≈ g m2c ro2C ro2 ,
(4.37)
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
96
___________________________________________________________________________
la quale, rispetto al valore senza cascode, risulta più grande di un
fattore g m2c ro2C , cioè di circa due ordini di grandezza.
F ig u r a 4 . 8 . A m p lif ic a t o r e C a s c o d e in t e c n o lo g ia C M O S
I transistori Q 3 , Q 4 , Q 3C e Q 4C formano uno specchio di corrente, che
fornisce una resistenza di carico pari a:
R
o4C
=g
r
r
m 4c o4C o3
(4.38)
La resistenza di uscita diventa:
Ro = R
o2C
//R
o4C
.
(4.39)
Poiché il guadagno di tensione è dato da:
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
97
___________________________________________________________________________
A1= −g m1R o ,
(4.40)
aumentando R 0 di circa due ordini di grandezza, anche il guadagno
aumenta dello stesso fattore.
Il vantaggio, dell’uso della configurazione cascode, è quello di
realizzare un guadagno elevato, mantenendo un consumo di potenza
piuttosto basso e una buona figura di rumore. Uno svantaggio,
invece, è costituito dalla riduzione del campo di variazione della
tensione di modo comune in ingresso.
In Fig.4.9 viene, infine, mostrato l’amplificatore Folded Cascode.
La configurazione è definita rovesciata (Folded) perché il suo
specchio, formato dai transistori M8, M9, M10, M11, è rovesciato
verso il basso. Questo significa che, rispetto ad una configurazione
cascode tradizionale, ognuno dei sei transistor, sotto M1 e M 2 , viene
sostituito con il suo complementare e tale gruppo di dispositivi
viene disconnesso da - VSS , ripiegato e connesso a + Vdd .
Il vantaggio di questo circuito, rispetto alla tradizionale
configurazione cascode, sta nel fatto che il campo di variazione
della tensione di modo comune in ingresso risulta maggiore.
Una caratteristica molto importante del Folded Cascode è che il
polo dominante è fissato dalla capacità complessiva, C O , sul nodo
di uscita, dove C O include la capacità di carico. Si dimostra, infatti,
che il guadagno di tensione di questo circuito è pari a:
Av ≡
v0
1
= g m1,2 r0
vi
1 + sr0 C 0
1
C
1+ s A
g m5,6
CB
2g m10,11
.
CB
1+ s
g m10,11
1+ s
(4.41)
Il primo termine della 5.33 rappresenta il guadagno, il secondo
termine contiene il polo dominante, il terzo termine rappresenta il
secondo polo, dipendente dalle piccole capacità interne, che lo
rendono un polo ad alta frequenza. Infine, il quarto termine
contiene una coppia polo-zero, introdotta dalla conversione da
uscita differenziale a uscita singola.(Ref.[6])
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
98
___________________________________________________________________________
F i g u r a 4 . 9 . S c h e m a c i r c u i t a l e d i u n a m p l i f ic a t o r e F o ld e d C a s c o d e a d u s c it a s in g o la .
Se si indica la frequenza del polo dominante con:
ωD =
1
Co R o
(4.42)
La frequenza di guadagno unitario è data da:
ω t = Aω D =
g m1
Co
(4.43)
Questo conferma che, se i poli non dominanti si trovano a frequenze
inferiori a ω t , o, se il margine di fase in ω t non risulta sufficiente,
basta, semplicemente, aumentare C 0 , mettendogli in parallelo un
opportuno condensatore.
Un altro vantaggio del Folded Cascode è la sua minore sensibilità
all’effetto del rumore ad alta frequenza, sull’alimentazione
negativa. Da ciò deriva un PSRR più elevato.
Si dimostra infatti che il PSRR porta ad una espressione del tipo:
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
99
___________________________________________________________________________
g m1,2 g m12 rb
.
PSRR =
εg m3,4
(4.44)
Il polo dominante si semplifica, così come sarebbe accaduto per
tutti gli altri poli e zeri, che sono stati trascurati per non complicare
eccessivamente l’analisi. Il valore del PSRR risulta, quindi,
praticamente indipendente dalla frequenza. Sia il PSRR che il
CMRR assumono valori molto grandi, anche se non infiniti, a causa
delle piccole asimmetrie, dovute alla tolleranza del processo.
Tale configurazione è molto utilizzata in alta frequenza per ovviare
al problema del prodotto guadagno-larghezza di banda. A tale
proposito, è opportuno osservare che nella configurazione Folded
Cascode ad uscita differenziale, il prodotto guadagno-larghezza di
banda è un’ottava più elevato rispetto alla configurazione con
uscita singola. Per realizzare un amplificatore con uscita
differenziale, a partire dall’amplificatore Folded Cascode ad uscita
singola, è sufficiente trasformare i transistori M8 e M10 in
generatori di corrente, eliminando la connessione a diodo.
Uno svantaggio di questa configurazione è, invece, costituito dalla
ridotta escursione della tensione di uscita.
Figura 4.10
La Fig.4.10 mostra lo schema a blocchi di una configurazione
cascode, a due transistor, dove sono rappresentate le reti di
adattamento di ingresso e di uscita e le reti di polarizzazione. Nello
sviluppo del progetto dell’LNA ad architettura differenziale, si farà
riferimento a questo tipo di schema. In tale configurazione,
l’ingresso a radiofrequenza è applicato alla base del transistore CE
e l’uscita a RF è presa dal collettore del transistore CB. Rispetto ad
un transistore ad uscita singola, con questa configurazione, è
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
100
___________________________________________________________________________
possibile ottenere un migliore isolamento. Un problema è, però,
costituito dalla complessità del circuito; si hanno, infatti, un
numero doppio di transistori e dimensioni variabili dei dispositivi.
Per ottimizzare le performance si devono ottimizzare le dimensioni
di CE, quelle di CB, il punto di lavoro in continua e l’adattamento
di impedenza. (Ref.[7])
4.9
PROGETTO
DIFFERENZIALE
DELL’LNA
CON
ARCHITETTURA
Il progetto dell’amplificatore differenziale è stato sviluppato
secondo i seguenti passi:
•
•
•
•
Individuazione delle specifiche del progetto
Scelta del dispositivo attivo
Individuazione del punto di lavoro
Individuazione di una architettura per le reti di adattamento di
ingresso e di uscita del dispositivo attivo
• Indicazione dell’architettura dello schema complessivo
4.9.1 Specifiche del Progetto
Nell’ambito del progetto dell’amplificatore differenziale, vanno
tenute in considerazione le specifiche già descritte nel Paragrafo
3.5.2 per il progetto l’amplificatore bilanciato.
Anche in questo caso, infatti, il dispositivo trova collocazione
subito al di sotto dei dipoli ed è, quindi, il primo elemento della
catena di ricezione. Per questo motivo, esso deve presentare un
elevato guadagno e una NF la più bassa possibile.
Nel caso specifico dell’amplificatore differenziale, contrariamente
a quello che accadeva per l’amplificatore bilanciato, l’adattamento
non è automaticamente garantito. Questo comporta che, nel progetto
del dispositivo bisognerà prestare attenzione anche ai valori
dell’adattamento di ingresso e di uscita.
Come si è già detto nel paragrafo 3.6.1, per il progetto possono
essere considerati accettabili anche valori di adattamento attorno ai
10dB.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
101
___________________________________________________________________________
Per quanto riguarda il guadagno, è richiesto ancora un valore
maggiore o uguale a 18dB.
Infine, per quanto riguarda la frequenza, lo scopo è quello di
allargare la banda il più possibile. L’obbiettivo sarebbe quello di
arrivare alla realizzazione di amplificatori con banda compresa tra i
300MHz e i 700MHz.
4.9.2 Scelta del Dispositivo Attivo
Nella scelta del dispositivo attivo sono stati presi in considerazione
diversi componenti sia con architettura differenziale sia con
architettura CASCODE . Nel seguito viene data una breve descrizione
dei componenti considerati.
DISPOSITIVI CON ARCHITETTURA DIFFERENZIALE
PHILIPS SEMICONDUCTORS BFE520: è costituito da due
transistori npn di silicio collegati ad emettitore comune. Tale
dispositivo, lavorante a frequenze inferiori a 2GHz, è indicato nella
realizzazione di front-end a RF e, in particolare, di amplificatori
differenziali.
Alla frequenza di 900MHz e con un punto di lavoro di 3V e 20mA,
il guadagno tipico è di 16dB, la Noise Figure tipica è 1.1dB,
mentre quella massima è 1.6dB.
ANALOG DEVICES AD8350: è un fully differential amplifier,
lavorante a frequenze inferiori a 1GHz. Tale dispositivo è indicato
per i ricevitori a radiofrequenza. La Noise Figure è di 5.9dB a
250MHz mentre il guadagno va da 15dB a 20dB.
SANYO FH103: è costituito da due transistori npn. Tale
dispositivo, pur non essendo un differenziale vero e proprio è un
amplificatore a basso rumore consigliato nelle applicazioni
differenziali. La frequenza di utilizzo va dai 200MHz ai 2GHz. Alla
frequenza di 1GHz e in un punto di lavoro di 5V e 5mA, il
guadagno tipico è di 13dB, mentre la Noise Figure è 1.2dB.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
102
___________________________________________________________________________
DISPOSITIVI CON ARCHITETTURA CASCODE
PHILIPS SEMICONDUCTORS BFC505: è un dispositivo cascode,
costituito da due transistori npn. Il suo utilizzo è consigliato negli
amplificatori a basso rumore e alto guadagno. Tale dispositivo
lavora a frequenze inferiori a 2GHz.
La Noise Figure, a 500MHz e con un punto di lavoro di 1V e
0.5mA, ha un valore tipico di 1.1dB e massimo di 1.4dB. Il valore
tipico del guadagno a 900MHz e con un punto di lavoro di 3V e
5mA è di 16dB.
PHILIPS SEMICONDUCTORS BFC520: è un dispositivo cascode
costituito da due transistori npn e lavorante a frequenze inferiori a
2GHz. Il suo utilizzo è consigliato negli amplificatori a basso
rumore e alto guadagno. La figura di rumore a 900MHz e in un
punto di lavoro di 3V e 5mA, ha un valore tipico di 1.3dB e
massimo di 1.6dB. Il valore tipico del guadagno a 3V e 20mA è di
17dB.
MOTOROLA MBC13916: è un dispositivo di tipo cascode,
realizzato in tecnologia BiCMOS. E’ consigliato nella progettazione
di Low Noise Amplifier. Esso opera con una frequenza compresa tra
i 100MHz e i 2.5GHz. Il guadagno a 900MHz è di 16.5 dB, mentre
la Noise Figure ha un valore tipico di 0.9dB.
Le caratteristiche dei
riassunte in Tabella 1.
MARCA
Dispositivo
dispositivi
Tecnologia
appena
Motorola MBC13916 BiCMOS
Tipo di
Dispositivo
CASCODE
Philips
BFE520
BJT
DIFFERENZIALE
Sanyo
FH103
BJT
Philips
BFC505
BJT
PER
APPLICAZIONI
DIFFERENZIALI
CASCODE
Philips
BFC520
BJT
CASCODE
presentati
vengono
NF
Guadagno
0.9dB a
900MhZ
1.1dB a
900MHz
1.2dB a
900MHz
19dB a
900MHz
16dB a
900MHz
13dB a
900MHz
1.1dB a
500MHz
1.3dB a
900MHz
22dB a
900MHz
31dB a
900MHz
Tabella 1
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
103
___________________________________________________________________________
Come dispositivo da utilizzare nel progetto si è scelto
l’amplificatore con architettura cascode MBC13916 della Motorola.
Esso presenta, infatti, la figura di rumore più piccola tra tutti i
dispositivi considerati e il suo guadagno è abbastanza elevato.
Inoltre, come si è detto nel paragrafo 4.8, l’architettura cascode
presenta, alle alte frequenze, delle caratteristiche molto migliori,
rispetto a quella differenziale tradizionale.
4.9.3 Scelta del Punto di Lavoro
Una volta scelto il dispositivo attivo, il secondo passo del progetto
riguarda l’individuazione del punto di lavoro.
La tensione di alimentazione può avere un valore compreso tra i
2.7V e i 5V.
In Fig.4.11, si possono osservare i grafici relativi ad alcuni
parametri caratteristici del dispositivo.
Innanzitutto, si può notare che, essendo la polarizzazione on-chip,
qualunque tipo di alimentazione si scelga, la corrente di
assorbimento, Icc, ha comunque un valore molto basso, per cui, la
scelta della tensione non è condizionata da questo parametro.
Per quanto riguarda il guadagno, attorno ai 500MHz, per qualunque
tipo di alimentazione, non ci sono differenze sensibili.
L’alimentazione a 5V è, comunque, quella che porta ad un
guadagno superiore.
L’alimentazione scelta sarà, quindi, quella di 5V.
4.9.4 Individuazione dell’Architettura delle Matching Network
Come architettura di base per le reti di adattamento e di
polarizzazione del singolo dispositivo attivo, si fa riferimento a
quella proposta nel Data Sheet dell’elemento e riportata in Fig.4.12.
Questo schema viene consigliato per applicazioni a 900MHz e i
risultati che si ottengono sono riassunti in Fig.4.13.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
104
___________________________________________________________________________
F ig u r a 4 . 1 1
F ig u r a 4 . 1 2
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
105
___________________________________________________________________________
Figura 4.13
La capacità e l’induttanza della rete di ingresso costituiscono
rispettivamente una rete passa alto e una passa basso.
La capacità da 2pF e quella da 2.2pF determinano rispettivamente
un filtraggio di tipo passa alto e uno di tipo passa basso.
L’induttanza sulla rete di uscita è utilizzata sia per aiutare
l’adattamento di uscita che per la rete di polarizzazione.
Le capacità da 100pF e da 0.01µF costituiscono la rete di
polarizzazione.
Nel progetto in esame, tale circuito dovrà poi essere modificato per
consentire l’ottimizzazione delle prestazioni dell’architettura
differenziale complessiva alle frequenze di interesse. Le modifiche
ai valori ed alla architettura delle matching network saranno
illustrate nel dettaglio nel Capitolo 6.
4.9.5 Schema Complessivo
In Fig.4.14 viene riportato lo schema a blocchi dell’LNA
differenziale.
È fondamentale, per l’ottimizzazione delle performance del
sistema, che le reti di adattamento di ingresso e di uscita dei
singoli dispositivi attivi siano assolutamente identiche.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
106
___________________________________________________________________________
Figura 4.14
Nel progetto del differenziale, però, non è possibile ottimizzare le
reti dei dispositivi a singolo stadio, per poi formare la struttura
complessiva solo in un secondo momento.
Il guadagno e la NF del dispositivo a singolo stadio e del dispositivo
complessivo, infatti, sono diversi, al contrario di quanto accadeva
nell’amplificatore bilanciato.
Il progetto dell’LNA differenziale prevedrà quindi che le
simulazioni e le ottimizzazioni vengano fatte direttamente sulla
struttura complessiva.
Nel Capitolo 6 verranno presentate in dettaglio le scelte progettuali
e le simulazioni relative all’amplificatore differenziale.
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 4
107
___________________________________________________________________________
REFERENCES:
[1]: “Differential Amplifiers”, A.Ghosh
Advanced VLSI Design Laboratory, IIT Khargpur
[2]: “Differential Amplifiers”, A.Doolittle
Georgia Tech
[3]: “Circuiti per la Microelettronica”, Sedra, Smith
[4]: “Amplificatore Differenziale”, F.Fiori
Corso di Elettronica Applicata, Politecnico di Torino
[5]: “Capitolo 6: Amplificatore Differenziale”, D’Amore, Degli
Innocenti
http://webdeei.univ.trieste.it
[6]: “Capitolo 11- Amplificatori ad alta frequenza”, Palmisano,
Giustolisi, Dispense di Elettronica, Università di Catania
http://graymalkin.dees.unict.it/courses/micro/C-11.pdf
[7]: “Design A Low-Noise Communications Amplifier”, Brian
Battaglia
“MICROWAVES & RF”, December 1999
[8]: “MBC13916 – SIGE:C INTEGRATED RF CASCODE AMPLIFIER
LOWERS NOISE IN ULTRA-SMALL SOT-343 PACKAGE” – Fact Sheet
http://ewww.motorola.com/files/rf_if/doc/fact_sheet/MBC13916FACT.pdf
___________________________________________________________________________
PREAMPLIFICATORE CON ARCHITETTURA DIFFERENZIALE
CAPITOLO 5
108
___________________________________________________________________________
5.1 DESCRIZIONE GENERALE DEL SOFTWARE
Microwave Office (MWO) è uno strumento di progettazione ad alta
frequenza dell’AWR (Applied Wave Research).
Tale strumento permette la progettazione di circuiti, composti di
schematici e strutture elettromagnetiche, a partire da un database di
modelli elettrici e quindi la generazione del layout di questi
progetti. Esso permette inoltre l’ottimizzazione delle simulazioni e
la visualizzazione delle uscite in una grande varietà di forme
grafiche, sulla base delle analisi da eseguire.
Gli strumenti a disposizione del software sono:
• SIMULATORE LINEARE: il simulatore lineare usa l’analisi
nodale per simulare le caratteristiche del circuito. Le
simulazioni lineari vengono usate per circuiti, come
amplificatori a basso rumore, filtri e accoppiatori, che
possono essere caratterizzati con la matrice ammettenza.
Tipicamente produce misure come guadagno, stabilità, noise
figure, coefficiente di riflessione, cerchi di rumore e cerchi di
guadagno. Tale simulatore è costruito utilizzando tecniche
object-oriented che realizzano veloci ed efficienti simulazioni
dei circuiti lineari. Uno dei suoi strumenti più importanti è un
tuner che permette di visualizzare in real-time i risultati delle
simulazioni stesse. Per sviluppare ulteriormente il progetto si
possono utilizzare le ottimizzazioni e la yield analysis.
• TOOL PER LA CREAZIONE DEL LAYOUT: il layout è la
rappresentazione fisica di uno schematico. Esso è una parte
determinante della progettazione e della simulazione di
circuiti ad alta frequenza. La risposta di un circuito dipende
infatti anche dalla sua geometria. Di fatto il layout è un’altra
vista dello schematico e le modifiche fatte sullo schematico
stesso in MWO sono automaticamente e istantaneamente
riportate nel suo corrispondente layout. Questo elimina la
necessità di complicate sincronizzazioni nella progettazione.
___________________________________________________________________________
MICROWAVE OFFICE
CAPITOLO 5
109
___________________________________________________________________________
• SIMULATORE NON LINEARE: le simulazioni non lineari
usano il bilanciamento armonico o Volterra per eccitare i
circuiti. Questi due tipi di analisi non sono però
intercambiabili nella progettazione. Le analisi con il
bilanciamento armonico infatti sono più adatte per le
simulazioni di circuiti non lineari come amplificatori di
potenza, mixer e multipliers. L’analisi con la serie di
Volterra, che è un metodo di perturbazione lineare, è più
indicato per circuiti debolmente non lineari come
amplificatori operanti al di sotto del punto di compressione a
1dB.
• SIMULATORE
ELETTROMAGNETICO:
il
simulatore
elettromagnetico usa le equazioni di Maxwell per calcolare la
risposta di una struttura a partire dalla sua geometria fisica.
Le simulazioni elettromagnetiche sono ideali. Ciò permette di
testare ad alto livello strutture arbitrarie e fornire risultati
accurati. In aggiunta, le simulazioni elettromagnetiche non
sono soggette a molti dei vincoli dei modelli circuitali perché
il risultato viene ottenuto risolvendo equazioni. Un limite del
simulatore elettromagnetico è dato dal il tempo di
simulazione: esso cresce esponenzialmente con le dimensioni
del problema. E’ quindi importante minimizzare la
complessità del problema per avere risultati in modo rapido.
Le simulazioni EM e le simulazioni circuitali sono tecniche
complementari per la progettazione dei circuiti e i due
approcci possono essere utilizzati
in combinazione per
risolvere problemi di progetto. Il simulatore EM di MWO è
capace
di
simulare
strutture
planari,
contenenti
metallizzazioni multiple, e strutture dielettriche. Le strutture
possono avere buchi di interconnessione tra i modelli
dielettrici e le masse.
Per i progetti presentati in questa tesi viene fatto uso del simulatore
lineare, del simulatore non lineare e del tool di creazione del
layout. Nel seguito verrà descritto più approfonditamente l’utilizzo
di questi strumenti.
___________________________________________________________________________
MICROWAVE OFFICE
CAPITOLO 5
110
___________________________________________________________________________
5.2 L’AMBIENTE DI PROGETTAZIONE
Nella finestra principale dell’AWR Design Enviroment sono
presenti tutti gli elementi necessari per creare schematici lineari e
non lineari, strutture elettromagnetiche, layout di circuiti, eseguire
le simulazioni e visualizzare grafici.
I principali componenti dell’AWR Design
rappresentati in Fig.5.1 e descritti in Tabella 1.
Enviroment
sono
Figura 5.1
___________________________________________________________________________
MICROWAVE OFFICE
CAPITOLO 5
111
___________________________________________________________________________
COMPONENTI
MENU
TOOLBAR
PROJECT
BROWSER
ELEMENT
BROWSER
WORKSPACE
TABS
DESCRIZIONE
Un insieme di menù collocati lungo la parte
superiore della finestra che consentono di
eseguire le principali funzioni di MWO.
Una serie di tasti collocati sotto al MENU che
rendono disponibili in modo rapido i comandi
più frequentemente utilizzati, come creare un
nuovo schematico ed eseguire le simulazioni.
I tasti disponibili dipendono dalle funzioni in
uso e dalla finestra attiva dentro l’ambiente di
progetto.
Collocato nella colonna di sinistra della
finestra, è l’insieme completo dei dati e dei
componenti che definiscono il progetto
correntemente attivo. Le voci sono organizzate
dentro ad una struttura a nodi ed includono
schematici, strutture EM e grafici di uscita.
Comprende un esteso inventario di elementi
circuitali per costruire schematici e blocchi di
sistema.
L’ELEMENT
BROWSER
compare
nella
colonna di sinistra quando si clicca sul tasto
Elem in basso a sinistra nella finestra.
L’area in cui si disegnano schematici e
strutture EM e vengono visualizzati layout e
grafici.
Un set di tasti collocati in basso a sinistra nella
finestra che permette di cambiare il contenuto
della colonna di sinistra dal PROJECT
BROWSER (Proj) all’ELEMENT BROWSER
(Elem), al VARIABLE BROWSER (Var) o al
LAYOUT MANAGER (Layout).
Tabella 1
5.3 PARAMETRI DI PROGETTO
Il primo passo della progettazione è quello di creare il progetto
stesso, iniziando una nuova sessione di lavoro “New Project”.
Nel nuovo progetto dovranno essere definiti una serie di parametri
fondamentali.
___________________________________________________________________________
MICROWAVE OFFICE
CAPITOLO 5
112
___________________________________________________________________________
Questo è possibile selezionando la finestra “Global Units” della
casella “Project Options”, visibile nella zona del PROJECT
BROWSER, di Fig.5.1. La finestra di dialogo che appare è
riportata in Fig.5.2.
Figura 5.2
All’interno della “Project Options”, è inoltre possibile settare le
frequenze di progetto, (“Frequency Values”), come indicato in
Fig.5.3.
Figura 5.3
___________________________________________________________________________
MICROWAVE OFFICE
CAPITOLO 5
113
___________________________________________________________________________
Il frequency range di lavoro del progetto è impostabile definendo la
frequenza di START, la frequenza di STOP e lo step con cui si
desidera vengano fatte le simulazioni. È inoltre possibile fare
simulazioni ad una sola frequenza selezionando la voce “Single
Point”.
A questo punto, a seconda del tipo di simulazione che si deve
utilizzare, i passi da seguire si differenziano.
5.4 LE SIMULAZIONI LINEARI
Il primo passo della simulazione lineare è il disegno dello
schematico. Selezionando la finestra relativa all’ELEMENT
BROWSER, si importano gli elementi desiderati mediante il
sottomenù “Lumped Element” e si trascinano nello schematico,
come mostrato in Fig.5.4.
Figura 5.4
___________________________________________________________________________
MICROWAVE OFFICE
CAPITOLO 5
114
___________________________________________________________________________
Una volta che il circuito è stato disegnato si aggiungono le porte, le
masse e si settano i valori desiderati dei parametri.
Completato lo schematico, si passa alla creazione dei vari grafici in
cui visualizzare i risultati delle simulazioni di uscita. A tal fine è
possibile utilizzare diversi tipi di grafici presentabili anche in
forma di tabella e di Carta di Smith.
Per specificare quale grandezza si vuole visualizzare, dal grafico si
seleziona l’opzione “Add Measurement”. La finestra che compare è
rappresentata in Fig.5.5.
All’interno di questa finestra occorre specificare il tipo di misura,
il parametro che desidera misurare, lo schematico di cui si vogliono
fare le misure e il modo in cui visualizzare le uscite, cioè se si
vogliono i risultati espressi in dB o in modo lineare.
Figura 5.5
A questo punto si può procedere all’analisi del
la quale sul grafico saranno visualizzati
simulazione. Nel caso dei progetti di questa tesi
parametri S, guadagno, Noise Figure, parametri
di stabilità.
circuito, terminata
i risultati della
sono stati simulati
di stabilità, cerchi
___________________________________________________________________________
MICROWAVE OFFICE
CAPITOLO 5
115
___________________________________________________________________________
Se si vogliono modificare i parametri dello schematico in modo che
i risultati delle simulazioni siano più conformi alle specifiche di
progetto, si possono seguire due strade: il tuning e l’ottimizzazione.
Per quanto riguarda il tuning, il primo passo è quello di rendere
modificabili con questo strumento i valori degli elementi circuitali
che si desiderano variare.
I cambiamenti che vengono apportati ai valori delle variabili si
riflettono in tempo reale sulle simulazioni visualizzate sul grafico,
in modo da rendere visibili gli effetti di tali modifiche sulle stesse.
È chiaro che un metodo di questo tipo è applicabile quando lo
schematico è piuttosto semplice. Se si hanno invece molti elementi
da variare l’utilizzo di questo metodo diventa piuttosto complicato.
L’ottimizzazione, al contrario, può essere utilizzata anche in
presenza di schematici più complessi. Il primo passo, anche in
questo caso,
è quello di rendere ottimizzabili i valori degli
elementi circuitali che si desiderano modificare al fine di
migliorare le caratteristiche del sistema.
A questo scopo, il simulatore lineare di MWO prevede anche la
possibilità di impostare degli obbiettivi di Ottimizzazione, definiti
come “Optimizer Goals”.
In questo caso bisogna specificare la misura che si vuole
ottimizzare e il tipo di obbiettivo da raggiungere (la misura deve
essere maggiore, minore o uguale al valore obbiettivo).
Inoltre è possibile specificare il range di frequenze per cui si vuole
che l’obbiettivo sia raggiunto.
A questo punto si può procedere all’ottimizzazione. Il sistema
modificherà via via i valori degli elementi circuitali resi
“ottimizzabili” in modo da arrivare a soddisfare gli obbiettivi
prefissati.
Una volta raggiunto l’obbiettivo l’ottimizzatore si ferma
automaticamente. In caso non si riesca a raggiungere l’obbiettivo,
dopo un certo numero di iterazioni l’ottimizzatore visualizza il
risultato migliore che è stato in grado di ottenere.
All’interno di Microwave Office è possibile lavorare non solo con
elementi ideali ma anche con i modelli dei componenti
commerciali.
___________________________________________________________________________
MICROWAVE OFFICE
CAPITOLO 5
116
___________________________________________________________________________
Sotto la voce “XML Library” dell’ELEMENT BROWSER, sono
infatti presenti i modelli dei componenti di varie case costruttrici.
Per potere utilizzare questi componenti è comunque indispensabile
decidere anticipatamente la casa costruttrice e anche le serie di
appartenenza dei componenti stessi.
Rifare le simulazioni o anche le ottimizzazioni utilizzando tali
modelli invece degli elementi ideali, fornisce dei risultati
maggiormente conformi a quelli che poi si avranno nella realtà.
Una volta ottimizzato il progetto Microwave Office dà anche la
possibilità di sostituire ai modelli dei componenti commerciali i
loro File di Parametri S (sotto la voce “Data” nell’ELEMENT
BROWSER).
In questo caso, oltre alla serie di appartenenza dei componenti che
si devono utilizzare, è bene conoscerne anche il codice, per
facilitarne l’identificazione.
In genere le simulazioni fatte con questi componenti sono ancora
più accurate di quelle fatte con i modelli reali.
5.5 CREAZIONE DEL LAYOUT
Il primo passo nella creazione del layout di uno schematico è
l’importazione di un Layer Process File (LPF), in cui sono definite
le impostazioni di default per la vista di layout. Queste
comprendono modelli di estrazione, modelli di mappaggio e viste
3D.
Un LPF può essere importato utilizzando la voce “Layer Setup” nel
LAYOUT MANAGER, come indicato in Fig.5.6.
È poi necessario specificare la “Database Unit” del layout, che
viene definita come la più piccola unità di precisione per il layout.
Questo parametro, una volta fissato, non deve più essere modificato
fino alla fine del progetto.
Allo stesso modo bisogna specificare la misura della “Grid
Spacing” (grigliatura). Questa deve essere almeno un ordine di
grandezza superiore all’unità scelta.
Questi parametri sono settati attraverso la casella “Layout Options”
del LAYOUT MANAGER.
___________________________________________________________________________
MICROWAVE OFFICE
CAPITOLO 5
117
___________________________________________________________________________
Figura 5.6
È inoltre necessario specificare il tipo di substrato. Per questo è
utilizzato il modello MSUB, che in Fig.5.7 viene rappresentato
con i valori che sono stati utilizzati per i progetti di questa tesi
(basette in FR4 a doppio strato).
Figura 5.7
A questo punto è necessario inserire nello schematico le piste di
interconnessione tra i componenti.
Per individuare le loro dimensioni è possibile utilizzare il
programma TXLine che si trova all’interno di MWO, la cui
interfaccia è riportata in Fig.5.8.
___________________________________________________________________________
MICROWAVE OFFICE
CAPITOLO 5
118
___________________________________________________________________________
Figura 5.8
Una volta specificati i “Material Parameters” e le “Electrical
Characteristics” del progetto, TXLine fornisce come risultato la
larghezza che devono avere le piste.
La lunghezza dovrà essere invece stabilita di volta in volta in modo
che non influenzi le caratteristiche del progetto.
A questo punto si può procedere alla visualizzazione del layout
semplicemente utilizzando il tasto “View Layout” nel Toolbar. I
componenti possono poi essere spostati e disposti all’interno della
vista nel modo desiderato.
È possibile che per alcuni componenti non siano disponibili i
modelli per il layout. In questo caso bisogna crearlo. A tal fine si
utilizza un tool chiamato “New Cell Libraries”, in cui si può creare
un nuovo elemento di libreria per il layout. Con tale strumento è
possibile procedere al disegno del componente con la possibilità di
utilizzare materiali diversi e di disporre le porte nella posizione
desiderata.
___________________________________________________________________________
MICROWAVE OFFICE
CAPITOLO 5
119
___________________________________________________________________________
Dopo avere inserito la massa, i fori e il package dell’intero layout,
si può esportare il modello e procedere alla sua realizzazione fisica.
5.6 SIMULATORE NON LINEARE
L’analisi ai grandi segnali è stata utilizzata per determinare il punto
di lavoro del circuito e per calcolare il punto di intercetta del terzo
ordine.
Per la determinazione del punto di lavoro del circuito vengono
utilizzate le misure non lineari. Microwave Office è in grado di
creare misure non lineari sia nel dominio del tempo che nel dominio
delle frequenze e consente di misurare i parametri S ai grandi
segnali, la potenza, la tensione e la corrente.
Per le simulazioni non lineari è necessario utilizzare dispositivi
attivi non lineari, per i quali sono presenti apposite librerie
nell’ELEMENT BROWSER.
Una volta disegnato lo schematico, si deve inserire l’alimentazione,
utilizzando i modelli dei generatori.
Il passo successivo è quello di inserire i “MeasDevice” (dispositivi
di misura). Tali elementi servono per misurare la tensione o la
corrente in un determinato punto del circuito.
La tensione e la corrente di polarizzazione possono essere
visualizzate, sotto forma di grafico o di tabella. Nella finestra di
dialogo “Add Measurement”, bisogna specificare che si tratta di una
misura non lineare e selezionare poi il parametro da misurare ed il
dispositivo con cui si vuole fare la misura.
Per quanto riguarda la simulazione dell’IP3, si fa uso dell’analisi a
due toni. La simulazione di bilanciamento armonico a due toni è
usata per determinare l’uscita di un circuito con eccitazioni a
frequenze diverse dalla fondamentale.
Per potere misurare l’IP3, si deve utilizzare una Two-Tone
Harmonic Balance Port; per fare questa misura infatti nella porta di
ingresso devono essere inseriti due toni.
In Fig.5.9 sono riportati i parametri caratteristici di tale porta.
___________________________________________________________________________
MICROWAVE OFFICE
CAPITOLO 5
120
___________________________________________________________________________
Figura 5.9
Devono essere specificati l’ampiezza della potenza iniziale e finale
(che nel caso del progetto sono uguali perché la Gain Flatness è
molto ridotta), lo step e la distanza (espressa in termini di
frequenza) dei due toni, quello fondamentale e l’intermodulante.
Anche in questo caso è possibile visualizzare i risultati sotto forma
di tabella o di grafico (impostando gli opportuni parametri).
___________________________________________________________________________
MICROWAVE OFFICE
CAPITOLO 5
121
___________________________________________________________________________
REFERENCES:
“Getting Starter Guide” – MWO/VSS 2002
www.mwoffice.com
___________________________________________________________________________
MICROWAVE OFFICE
CAPITOLO 6
122
___________________________________________________________________________
6.1
PROGETTO DELL’AMPLIFICATORE BILANCIATO
(Ref.[1], Ref.[2], Ref.[3], Ref.[4], Ref.[5])
Di seguito viene presentato il progetto dell’amplificatore bilanciato
con banda di 20MHz, cioè la banda di interesse per l’upgrade della
Croce del Nord.
In seguito verrà inoltre accennato il progetto di un amplificatore
bilanciato con una banda di 250MHz. Tale progetto è utile nella
prospettiva di sostituire i dipoli, presenti attualmente sulle linee
focali, con antenne a più larga banda.
Prima di passare alla descrizione del progetto è necessario fare
alcune considerazioni relative al problema delle interferenze.
In Fig.6.1 viene riportata una porzione di spettro elettromagnetico
misurata nei dintorni della Stazione Radioastronomica di Medicina,
per frequenze fino a 2.5GHz.
F ig u r a 6 . 1
Dalla Fig.6.1 si nota che la banda in cui lavora la Croce si trova tra
quelle delle FM, dei ponti radio e dei canali televisivi.
Questo, unitamente al fatto che tali segnali sono molto più forti dei
segnali radioastronomici, costituisce un importante limite per la
capacità di ricezione di questi ultimi.
Si può comunque notare che le FM, comprendendo frequenze che
vanno dagli 88MHz ai 108MHz, si trovano relativamente “lontano”
dalla banda di interesse del progetto. Questo dà l’opportunità di
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
123
___________________________________________________________________________
predisporre delle reti di adattamento di tipo passa alto, per limitare
l’ingresso di tali segnali nel dispositivo (le reti di adattamento di
tipo passa alto, come già detto nel Capitolo 3, sono anche suggerite
dal costruttore in quanto favoriscono la stabilità del dispositivo alle
basse frequenze).
Per quanto riguarda invece le frequenze televisive, essendo esse in
prossimità della banda di funzionamento dell’LNA (470MHz), non
è possibile predisporre le reti di adattamento allo stesso scopo.
In ogni caso, tutta la banda attorno ai 408MHz è soggetta ad
interferenze. Ciò è dovuto al fatto che i segnali FM e quelli
televisivi si combinano generando prodotti di intermodulazione, che
vengono a cadere all’interno della banda in cui lavora la Croce.
Anche per questo motivo, almeno per il momento, pur essendo
interessante verificare le prestazioni dell’amplificatore bilanciato a
larga banda, una applicazione pratica di tale dispositivo ancora non
è possibile.
6.2 AMPLIFICATORE BILANCIATO CON BANDA DI 20MHz
6.2.1 Individuazione dell’Architettura delle Reti di Adattamento
e Polarizzazione dell’Amplificatore a Singolo Stadio
Come già stato detto nel Capitolo 3, lo scopo del progetto
dell’amplificatore bilanciato è quello di verificare la possibilità di
diminuire la noise figure degli amplificatori a singolo stadio a tal
punto, da compensare l’insertion loss e le perdite introdotte dagli
splitter. Al fine di verificare questa possibilità si è partiti dal
progetto dell’LNA, che è stato illustrato nel Paragrafo 3.5.
Si premette che, negli schemi circuitali, utilizzati nelle simulazioni,
almeno nella fase iniziale, non si sono considerate le piste. Questo
è dovuto al fatto che esperienze pregresse hanno dimostrato che
l’introduzione delle piste, alla frequenza di 408MHz, non ha un
effetto rilevante sulle simulazioni.
Dopo aver fatto diverse prove sul circuito di partenza, si è
osservato un miglioramento delle performance del dispositivo,
quando dalla configurazione circuitale iniziale venivano eliminate
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
124
___________________________________________________________________________
l’induttanza in serie e la capacità in parallelo all’ingresso (indicate
con L2 e C1 in Fig.3.3).
Si è quindi scelta come architettura per il progetto, un circuito in
cui tali componenti fossero assenti. Il circuito che verrà utilizzato
nel progetto è rappresentato in Fig.6.2.
F ig u r a 6 . 2
6.2.2 Ottimizzazione dei Valori dei Componenti Circuitali delle
Matching Network
Una volta individuata l’architettura delle matching network, si deve
passare all’ottimizzazione dei loro parametri.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
125
___________________________________________________________________________
Ciò comporta la ricerca dei valori più opportuni da attribuire ai
componenti circuitali, in modo che le specifiche di progetto
risultino soddisfatte.
A questo scopo è stato utilizzato il Simulatore Lineare di
Microwave Office (si veda il Capitolo 5).
Per quanto riguarda gli elementi circuitali da considerare
nell’ottimizzazione, si sono prese in considerazione tutte le
induttanze e le capacità presenti sulle vie a RF.
Per quanto riguarda le resistenze, si è evitato di modificare il valore
della resistenza R5, in quanto facente parte della rete di
polarizzazione. Un cambiamento del suo valore potrebbe, infatti,
condurre ad un cambiamento del punto di lavoro del circuito (3V e
60mA). Le resistenze R1 e R4, facendo, invece, parte delle reti di
adattamento, sono state inserite nell’ottimizzazione.
Gli elementi circuitali i cui valori sono stati resi ottimizzabili sono,
quindi, le capacità C1, C2, C3, C4, le induttanze L1, L2, L3 e le
resistenze R1 e R4.
Come valori iniziali per l’ottimizzazione, si attribuiscono a questi
elementi i valori che essi avevano nel progetto dell’LNA, da cui si
è partiti (vedi Paragrafo 3.5.3).
È importante, prima di procedere alla ottimizzazione del circuito,
specificare i componenti commerciali che si utilizzeranno nel
progetto. Le proprietà di questi ultimi, infatti, hanno un grande
peso nei confronti delle prestazioni dell’amplificatore.
È molto importante, al fine di mantenere una noise figure bassa, che
gli elementi che vengono utilizzati per le reti di ingresso e di
uscita, ma soprattutto di ingresso, siano caratterizzati da un fattore
di merito, Q, elevato. Ciò è valido sia per quanto riguarda le
induttanze che per quanto riguarda le capacità. Questo è dovuto al
fatto che le perdite introdotte dalle reti di adattamento sono
correlate con il parametro Q dei componenti utilizzati.
Per quanto riguarda le capacità, nel progetto di partenza sono state
utilizzate quelle messe in commercio dalla ATC (American
Technical Ceramics). In particolare vengono utilizzati elementi
della serie 100B. Le capacità che fanno parte di questa serie hanno
dei valori compresi tra 0.1pF e 1000pF e sono caratterizzate da un
fattore di merito, Q, molto levato, come mostrato in Fig.6.3.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
126
___________________________________________________________________________
Per quanto riguarda le induttanze, invece, bisogna fare una
distinzione tra quelle che si trovano nella Input Matching Network
e quelle che si trovano nella Output Matching Network.
È infatti necessario che le induttanze che si trovano nella rete di
adattamento di ingresso, abbiano un fattore di merito, Q, il più alto
possibile. Quelle che si trovano sull’uscita hanno, invece,
specifiche meno stringenti.
Figura 6.3. ATC serie 100B
Per il circuito di ingresso si utilizzano quindi le induttanze della
Coilcraft, appartenenti alle serie Mini Spring Air Core Inductors,
Midi Spring Air Core Inductors e Maxi Spring Air Core Inductors.
Queste induttanze, mostrate in Fig.6.4, 6.5 e 6.6, avendo
l’avvolgimento in aria, hanno un Q molto elevato, dal momento che
non sono presenti perdite dovute alla ceramica o alla ferrite delle
tradizionali induttanze. Esse hanno valori compresi tra 2.5nH e
538nH e dimensione massima di 10.55mm×6mm.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
127
___________________________________________________________________________
F ig u r a 6 . 4 . M a x i S p r in g
F ig u r a 6 . 5 . M id i S p r in g
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
128
___________________________________________________________________________
F ig u r a 6 . 6 . M in i S p r in g
Per quanto riguarda invece le induttanze sulla rete di uscita, si sono
scelte ancora le induttanze della Coilcraft, appartenenti però questa
volta alla serie 0805CS, riportata in Fig.6.7. Tali induttanze hanno
valori compresi tra 2.8nH e 820nH e dimensioni di
2.29mm×1.73mm. Come si vede il loro fattore di merito è più
modesto di quelle scelte per la rete di ingresso.
A questo punto, si può predisporre il Software per l’ottimizzazione.
Prima di tutto si rendono ottimizzabili le induttanze, le capacità e le
resistenze individuate precedentemente. Bisogna poi fornire ai
parametri un range di variabilità. Questo è possibile prendendo
come riferimento i valori massimi e minimi delle varie serie, come
riassunto in Tabella 1.
E LEMENTO
I NDUTTANZE
I NDUTTANZE
C APACITÀ
DI INGRESSO
DI USCITA
V ALORE MINIMO Valore massimo
2.5nH
538nH
2.8nH
390nH
0.1pF
910pF
Tabella 1
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
129
___________________________________________________________________________
F ig u r a 6 . 7 . I n d u t t a n ze d e lla s e r ie 0 8 0 5 C S
A questo punto si aggiungono gli obbiettivi di ottimizzazione nella
cella “Optimizer Goal” del software e si procede all’ottimizzazione
vera e propria, prendendo come riferimento i valori del guadagno e
della noise figure.
Per arrivare ad avere dei valori il più conformi possibile agli
obbiettivi del progetto, si è reso necessario un avvicinamento a
“step”.
Inizialmente si è settato il valore del guadagno a 16dB e quello
della noise figure a 0.35dB. Dato che il circuito ha risposto
positivamente a questi valori, si è aumentato gradualmente il
guadagno e diminuita la noise figure, fino ad arrivare a un
guadagno obbiettivo di 20dB, su tutta la banda, e una noise figure
di 0.20dB.
A questo punto, si è visto che un aumento ulteriore del guadagno o
una diminuzione della noise figure non trovavano più risposta
nell’ottimizzazione del circuito. Il software cioè non era più in
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
130
___________________________________________________________________________
grado di trovare valori dei parametri con cui arrivare a soddisfare le
specifiche di ottimizzazione settate.
Come valori dei componenti circuitali sono quindi stati presi quelli
trovati in corrispondenza dell’ultima ottimizzazione riuscita.
A questo punto, però, nello schematico si hanno degli elementi nei
quali i valori di induttanza e di capacità sono quelli risultati
dall’ottimizzazione, mentre tutti gli altri parametri sono quelli
caratteristici dei componenti iniziali. Si devono quindi sostituire
tali elementi con i componenti commerciali aventi effettivamente il
valore di induttanza e di capacità risultato dall’ottimizzazione.
Si ha così:
•
•
•
•
•
•
•
•
•
L1=538nH
L2=22nH
L3=18nH
C1=5.6pF
C2=220pF
C3=220pF
C4=30pF
R1=56Ω
R4=330Ω
6.2.3 Verifica del Punto di Lavoro
Prima di presentare le simulazioni relative a questo progetto è
comunque opportuno andare a verificare che il punto di lavoro sia
conforme con quello scelto, cioè sia di 3V e 60mA, come già
specificato nel paragrafo 3.5.3.
In realtà le resistenze sulla continua non sono state cambiate; per
questo motivo il punto di lavoro dovrebbe essere sempre lo stesso.
Si è comunque fatta una prova per verificare che fosse davvero
così.
A tal fine, è necessario utilizzare una simulazione ai grandi segnali
del dispositivo. Lo schema circuitale che è stato utilizzato viene
rappresentato in Fig.6.8.
Come ci si aspettava la simulazione ha confermato un punto di
lavoro di 3V e 60mA.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
131
___________________________________________________________________________
F ig u r a 6 . 8
6.2.4 Presentazione dei Risultati Ottenuti
Come già detto nel Capitolo 3, le ottimizzazioni e le simulazioni
sono state fatte in una banda di 20MHz, centrata attorno ai
535MHz. Per completezza vengono qui riportate anche i valori delle
simulazioni relativi alla frequenza di 408MHz.
In Fig.6.9 vengono riportati i risultati della simulazione per quanto
riguarda il guadagno e la noise figure.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
132
___________________________________________________________________________
In Fig.6.10 vengono invece riportati i risultati relativi
all’adattamento di ingresso e di uscita, cioè gli andamenti della S 1 1
e della S 2 2 .
Si può notare che l’adattamento di ingresso, di cui non si è tenuto
alcun conto nelle ottimizzazioni, ha un valore comunque
accettabile. Questo significa che con una architettura di questo tipo,
per le reti di adattamento, non è possibile sfruttare a pieno il
disadattamento per migliorare la noise figure e il guadagno, come
invece ci si sarebbe aspettato.
Figura 6.9
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
133
___________________________________________________________________________
Figura 6.10
6.2.5 Studio della Stabilità
Per lo studio della stabilità, si possono utilizzare due metodi
diversi.
Il primo è basato sui cerchi di stabilità.
In pratica si rappresentano sulla carta di Smith i luoghi dei punti,
nei piani dei coefficienti di riflessione della sorgente e del carico,
che portano ad avere un coefficiente di riflessione uguale all’unità,
per la porta, rispettivamente, di uscita e di ingresso del dispositivo.
Tipicamente tali luoghi geometrici sono costituiti da circonferenze.
In Microwave Office si ha la possibilità di visualizzare tali
circonferenze utilizzando le funzioni SCIR1 e SCIR2. Inoltre, è
possibile visualizzare un contorno tratteggiato, posto all’interno o
all’esterno della circonferenza, per indicare la regione
potenzialmente instabile. Per dare una valutazione della stabilità
del circuito, si visualizza, sulla stessa carta, anche il coefficiente di
riflessione della sorgente o del carico, visti dal dispositivo attivo.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
134
___________________________________________________________________________
In questo modo è possibile determinare se le reti di polarizzazione
stabilizzano o meno il punto di lavoro.
Per quanto riguarda la rete di ingresso del progetto sotto analisi, si
deve tracciare il cerchio di stabilità di ingresso, riferito al circuito
mostrato in Fig.6.11.
Si traccia poi l’impedenza della rete di adattamento di ingresso,
vista dalla porta 2, rappresentata in Fig.6.12.
Figura 6.11. Circle stab in
I risultati di queste due simulazioni sono riportati sulla Carta di
Smith, come mostrato in Fig.6.13.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
135
___________________________________________________________________________
Figura 6.12. Match in
Figura 6.13
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
136
___________________________________________________________________________
Lo stesso procedimento può essere utilizzato per verificare la
stabilità della rete di uscita. Si traccia il cerchio di stabilità di
uscita, facendo riferimento al circuito di Fig.6.14, quindi si traccia
l’impedenza della rete di adattamento di uscita, vista dalla porta 1,
con riferimento al circuito di Fig.6.15.
I risultati vengono riportati sulla Carta di Smith, come illustrato in
Fig.6.16.
Figura 6.14. Circle stab out
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
137
___________________________________________________________________________
Figura 6.15. Match out
Figura 6.16
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
138
___________________________________________________________________________
L’incondizionata stabilità però non è garantita poiché, per
definizione, i cerchi di stabilità dovrebbero essere esterni alla carta
di Smith.
Dato che questi ultimi si trovano in prossimità del bordo della
carta, si può concludere che il circuito è comunque caratterizzato da
una stabilità accettabile.
L’altro metodo per determinare la stabilità del dispositivo, fa uso
del fattore di stabilità K, già definito nel Paragrafo 2.4.3.
Microwave Office fa inoltre uso del fattore di stabilità ausiliario
B1. Questo viene definito dalla seguente espressione:
2
2
B1 = 1 + S11 − S22 − ∆
2
(6.2)
dove:
(6.3)
∆ = S11S22 − S12S21
Condizione necessaria e sufficiente per l’incondizionata stabilità è
K>1 e B1>0. In Fig.6.17 vengono mostrate le simulazioni relative a
questi due parametri.
Dal grafico si vede che, secondo questa simulazione, il circuito è
stabile in tutto il range di frequenze considerato.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
139
___________________________________________________________________________
Figura 6.17
6.2.6 Simulazioni con i File di Parametri S
Una volta eseguite le simulazioni facendo uso dei modelli dei
componenti commerciali, si possono ripetere le stesse facendo
uso dei File di Parametri S.
Prima di procedere alla sostituzione, è bene individuare, per ogni
elemento, il codice del componente corrispondente, in modo da
facilitare la ricerca nelle librerie.
Per le induttanze e le capacità si ha:
•
•
•
•
•
•
•
•
C1: ATC 100B5R6JW
C2: ATC 100B221JW
C3: ATC 100B221JW
C4: ATC 100B300JW
L1: MAXI SPRING 132-20SMJ
L2: MIDI SPRING 1812SMS-22NJ
L3: 0805CS-180XJB
C6=C7=C8: MURATA GRM188R71H103KA01B
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
140
___________________________________________________________________________
Il circuito con i file di parametri S è mostrato in Fig.6.18.
Figura 6.18
In Fig.6.19 e Fig.6.20, è mostrato il confronto tra le simulazioni
ottenute con i modelli dei componenti e quelle ottenute con i file di
parametri S.
Come si può notare i risultati non sono completamente conformi a
quelli ottenuti con i modelli dei componenti commerciali.
Per individuare quale dei file di parametri S ne è la causa sono state
effettuate diverse prove. Attraverso sostituzioni successive si è
trovato che ciò accade quando viene introdotto il file di parametri S
dell’elemento C1. Purtroppo, un problema di questo tipo è
difficilmente risolvibile; le simulazioni con i file di parametri S
saranno quindi in questo caso da considerare con le dovute cautele.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
141
___________________________________________________________________________
Figura 6.19
Figura 6.20
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
142
___________________________________________________________________________
6.2.7 Configurazione Bilanciata con Splitter Ideali
Il progetto, a questo punto, prevede il completamento della
struttura bilanciata introducendo degli splitter a 90° ideali. La
configurazione del circuito è mostrata in Fig.6.21.
In Fig.6.22 e Fig.6.23 è riportato il confronto tra le simulazioni
relative al dispositivo a singolo stadio e quelle relative al
dispositivo bilanciato.
Come si osserva, compatibilmente con quanto detto nel Paragrafo
3.3, che il guadagno e la noise figure non cambiano mentre
l’adattamento, sia di ingresso che di uscita, subisce un forte
miglioramento. Ciò è comunque dovuto all’utilizzo dei modelli
ideali
degli
splitter.
Nella
realtà,
il
miglioramento
dell’adattamento sarà molto più limitato.
Figura 6.21
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
143
___________________________________________________________________________
Figura 6.22
Figura 6.23
__________________________________________________________________________
SIMULAZIONI
144
CAPITOLO 6
___________________________________________________________________________
6.2.8 Configurazione Bilanciata con Splitter con insertion loss
diversa da zero
In questo progetto, come valore di riferimento per l’insertion
loss, si considera il valore tipico fornito dalla Mini-Circuits. Tale
valore è pari a 0.2dB.
In Fig.6.24 è mostrato il confronto tra le simulazioni del
dispositivo a singolo stadio e quelle ottenute con splitter aventi
un’insertion loss di 0.2dB.
Figura 6.24
Come ci si aspettava, il guadagno subisce un lieve peggioramento
mentre per quanto riguarda la NF si nota un aumento uniforme di
circa 0.2dB.
6.2.9 Configurazione Bilanciata con Modello per amplitude
unbalance e phase unbalance
Una volta note le conseguenze dell’insertion loss sul dispositivo,
bisogna stabilire l’impatto sulle prestazioni del sistema
__________________________________________________________________________
SIMULAZIONI
145
CAPITOLO 6
___________________________________________________________________________
dell’amplitude unbalanced e della phase unbalanced, già definite
nel Paragrafo 3.2.
A tal fine, non è più possibile utilizzare il modello dello splitter
fornito dal software, in quanto quest’ultimo prevede come unica
non idealità l’insertion loss.
Si deve quindi cercare un modello alternativo che abbia le stesse
caratteristiche dello splitter, ma a cui sia possibile dare uno
sfasamento di ampiezza e di fase diverso da quelli ideali.
La configurazione che è stata utilizzata è mostrata in Fig.6.25.
Figura 6.25
Tale modello è stato ottenuto aggiungendo, alle due uscite di un
ibrido a 90°, un attenuatore e uno sfasatore.
Si indichino con L 2 1 e L 3 1 le “insertion loss” relative alle due
porte di uscita (porta 2 e porta 3 in Fig.6.25) del modello.
L’amplitude unbalanced, per definizione, può essere espresso
come:
__________________________________________________________________________
SIMULAZIONI
146
CAPITOLO 6
___________________________________________________________________________
AU = L 21 − L 31
(6.4)
E’ inoltre possibile esprimere l’insertion loss del modello
complessivo, attraverso gli stessi parametri. Per gli splitter della
Mini-circuits infatti, l’insertion loss può essere espressa secondo
la seguente formula:
IL =
(L 21 − 3dB) + (L 31 − 3dB)
2
(6.5)
dove con IL si è indicata l’insertion loss e con AU si è indicato
l’amplitude unbalanced.
Facendo uso del modello con gli attenuatori e gli sfasatori è
quindi
possibile
simulare
contemporaneamente
l’effetto
dell’amplitude unbalance, della phase unbalance e dell’insertion
loss sul circuito complessivo.
È bene precisare che una struttura di questo tipo è utile per
verificare l’impatto delle non idealità esclusivamente sul
guadagno e sulla noise figure. Tale modello non fornisce valori
affidabili riguardo alle simulazioni di S 1 1 e S 2 2 , per cui i valori
relativi a queste grandezze non verranno riportati.
I valori che vengono presi come riferimento per l’amplitude
unbalanced e la phase unbalanced in questo caso sono quelli
forniti dalla Mini-Circuits per lo splitter HPQ-05W, in
corrispondenza di una frequenza di 410MHz. Si ha:
• amplitude unbalanced: 0.77dB
• phase unbalanced: 0.4degrees
In Fig.6.26 sono riportati i risultati delle simulazioni relativi al
guadagno e della noise figure. Viene inoltre mostrato il confronto
tra questi valori e le simulazioni ottenute con il modello di
accoppiatori ibridi ideale fornito da Microwave.
__________________________________________________________________________
SIMULAZIONI
147
CAPITOLO 6
___________________________________________________________________________
Figura 6.26
Il guadagno non è particolarmente influenzato dalle non idealità,
mentre, invece la noise figure peggiora decisamente. Nel caso
del progetto a 408MHz, prendendo come riferimento AU=0.77dB
e IL=0.2dB, si ha una noise figure complessiva di circa 0.6dB.
Si è voluto infine verificare l’impatto della phase unbalanced sul
circuito complessivo. Attraverso simulazioni successive, fatte per
valori crescenti di sfasamento, si è verificato che questa non
idealità ha una influenza minima sui valori di guadagno e noise
figure. In particolare, uno sfasamento di 3 gradi, che è molto più
elevato di quello effettivamente presente nello splitter utilizzato
(0.4degrees), produce variazioni sulla noise figure dell’ordine del
centesimo di dB.
6.2.10 Analisi ai Grandi Segnali
Una volta portata a termine la caratterizzazione lineare del
dispositivo, si provvede al calcolo della IP3, cioè del punto di
intercetta del terzo ordine. A tal fine è necessario provvedere
__________________________________________________________________________
SIMULAZIONI
148
CAPITOLO 6
___________________________________________________________________________
all’analisi ai grandi segnali attraverso una simulazione non
lineare.
Lo scopo è di mettere in evidenza il miglioramento di dinamica
del dispositivo bilanciato rispetto all’amplificatore a singolo
stadio.
In Tabella 2, vengono riportati i valori di OIP3 in corrispondenza
di 535MHZ e per completezza, anche di 408MHz, con un segnale
di ingresso di potenza pari a -20dBm e il secondo tono a 1MHz.
Frequenza [MHz]
408
OIP3 a singolo stadio [dBm] +32.046
OIP3 Bilanciato [dBm]
+35.11
535
+31.98
+34.74
Tabella 2
Dai valori riportati nelle tabelle si osserva che l’introduzione
della configurazione bilanciata produce un miglioramento di circa
3dBm nella dinamica.
6.3
AMPLIFICATORE
250MHz
BILANCIATO
CON
BANDA
DI
In questo paragrafo viene presentato il progetto di massima di un
amplificatore bilanciato con una larghezza di banda di 250MHz.
Questo progetto ha come unico scopo quello di dare una
indicazione
sulla
possibile
estensione
a
larga
banda
dell’amplificatore bilanciato, presentato nei paragrafi precedenti.
Nel seguito si faranno considerazioni relative alla noise figure, al
guadagno e all’adattamento.
Per quanto riguarda le non idealità degli splitter e gli effetti della
struttura bilanciata sull’IP3, non verranno effettuate simulazioni
in quanto si presume che le considerazioni fatte nei paragrafi
precedenti siano ancora valide.
A causa del problema dello shift in frequenza delle simulazioni,
le ottimizzazioni sono state fatte da 380MHz a 630MHz. Questa
banda ha la stessa corrispondenza, rispetto a 530MHz, della
banda 250-500MHz rispetto i 408MHz.
__________________________________________________________________________
SIMULAZIONI
149
CAPITOLO 6
___________________________________________________________________________
6.3.1 Individuazione dell’Architettura delle Reti di Adattamento
e Polarizzazione dell’Amplificatore a Singolo Stadio
L’architettura scelta per le reti di adattamento e di polarizzazione
del dispositivo a singolo stadio è la stessa del progetto dell’LNA,
illustrato nel Paragrafo 3.5. Sono quindi
presenti anche
l’induttanza serie e la capacità parallelo sulla rete di ingresso,
che erano state eliminate nel progetto a 20MHz. Si è infatti
verificato che la presenza di tali elementi aiuta l’allargamento
della banda.
Il circuito utilizzato è mostrato in Fig.6.27.
Tali componenti sono indicati in figura come L2 e C1.
La capacità C1, in particolare, è utile anche per garantire una
maggiore stabilità.
Figura 6.27
__________________________________________________________________________
SIMULAZIONI
150
CAPITOLO 6
___________________________________________________________________________
6.3.2 Ottimizzazione dei Valori dei Componenti Circuitali
delle Matching Network
Anche in questo caso, per quanto riguarda i componenti circuitali,
si sono presi come riferimento i valori che erano stati utilizzati
nel progetto originario.
Il valore dei componenti delle reti di adattamento di ingresso e di
uscita devono poi essere modificati in modo da soddisfare le
specifiche di progetto all’interno della banda di interesse.
I componenti i cui valori sono resi attivi per l’ottimizzazione
sono L1, L2, L3, L4 e C1, C2, C3, C4 e C5.
In questo caso, tra gli “Optimizer Goals”, non è più sufficiente
inserire solo le specifiche riguardanti guadagno e noise figure.
Infatti, per progettare un circuito che funzioni a banda larga, è
necessario aggiungere una condizione sulla Gain Flatness (la
differenza tra valore massimo e minimo di guadagno all’interno
della banda di funzionamento).
Una condizione del progetto è quella di presentare una Gain
Flatness la più piccola possibile. Come riferimento si è preso un
valore di 1dB.
Procedendo in modo analogo al progetto a “banda stretta”,
nell’ottimizzazione, si è partiti da valori piuttosto alti di noise
figure e piuttosto bassi di guadagno, per avvicinarsi poi
progressivamente al risultato desiderato.
I valori limiti oltre i quali l’ottimizzazione non ha più dato
risultati soddisfacenti sono stati:
• NF=0.35dB
• S 2 1 =19dB
In realtà, il guadagno presenta una piattezza in banda di circa
2dB. Attraverso simulazioni successive si è dimostrato che, con
questo tipo di architettura, tale risultato è il migliore ottenibile.
Si può quindi concludere che la struttura proposta non è in grado
di garantire la piattezza in banda impostata come specifica di
progetto.
Con riferimento ai componenti commerciali, i valori risultati
dall’ottimizzazione sono:
• L1=490nH
• L2=22nH
__________________________________________________________________________
SIMULAZIONI
151
CAPITOLO 6
___________________________________________________________________________
•
•
•
•
•
•
•
L3=33nH
L4=47nH
C1=3pF
C2=10pF
C3=220pF
C4=220pF
C5=33pF
Il circuito complessivo diventa quindi quello mostrato in Fig.6.28.
6.3.3 Verifica del Punto di Lavoro
In questo progetto non sono stati modificati i valori iniziali delle
resistenze. Per questo motivo è presumibile che il punto di lavoro
sia rimasto invariato. Dato che, comunque, si sono cambiati i
valori degli elementi circuitali delle matching network, si
preferisce fare una verifica.
Figura 6.28
__________________________________________________________________________
SIMULAZIONI
152
CAPITOLO 6
___________________________________________________________________________
Dalle simulazioni ai grandi segnali, viene confermato un punto di
lavoro di 3V e 60mA.
6.3.4 Presentazione dei Risultati Ottenuti
In Fig.6.29 vengono mostrati i risultati della simulazione
dell’adattamento di ingresso e di uscita del circuito a singolo
stadio.
In Fig.6.30 vengono mostrati i risultati della simulazione del
guadagno e della noise figure del circuito a singolo stadio.
Come si vede, il guadagno va da 18.5dB per le frequenze più
basse a 16.44dB per quelle più alte. La noise figure invece va da
0.35dB a 0.313dB.
Figura 6.29
__________________________________________________________________________
SIMULAZIONI
153
CAPITOLO 6
___________________________________________________________________________
Figura 6.30
6.3.5 Studio della Stabilità
Lo studio della stabilità è stato fatto utilizzando il fattore di
stabilità K, già indicato nel Paragrafo 6.2.5. In Fig.6.31 è
mostrato l’andamento di tale parametro. Si vede chiaramente che
il dispositivo, nelle frequenze di interesse, presenta un K>1 e un
B1>0.
__________________________________________________________________________
SIMULAZIONI
154
CAPITOLO 6
___________________________________________________________________________
Figura 6.31
6.3.6 Simulazioni con i File di Parametri S
Una volta portate a termine le simulazioni con l’uso dei modelli
dei componenti reali, esse devono essere rifatte utilizzando i file
di parametri S.
Come già detto, prima di procedere alla sostituzione, è bene
individuare, per ogni elemento, il codice del componente
corrispondente, in modo da facilitare la ricerca nelle librerie.
Per le induttanze e le capacità si ha:
•
•
•
•
•
•
•
•
•
•
C1: ATC 100B3R0JW
C2: ATC 100B100JW
C3: ATC 100B221JW
C4: ATC 100B221JW
C5: ATC 100B330JW
L1: MAXI SPRING 132-19SMJ
L2: MIDI SPRING 1812SMS-22NJ
L3: MIDI SPRING 1812SMS-33NJ
L4: 0805CS-270XJB
C6=C7=C8: MURATA GRM188R71H103KA01B
__________________________________________________________________________
SIMULAZIONI
155
CAPITOLO 6
___________________________________________________________________________
Il circuito con i file di parametri S è mostrato in Fig.6.32.
Figura 6.32
In Fig.6.33 e 6.34, viene mostrato il confronto tra i risultati delle
simulazioni ottenute con i file di parametri S e quelle ottenute con i
modelli commerciali.
Anche in questo caso si nota come l’introduzione dei files di
parametri S produca cambiamenti su tutte le grandezze in gioco. In
particolare si presenta anche in questo caso un andamento della NF
piuttosto “riplettoso”.
__________________________________________________________________________
SIMULAZIONI
156
CAPITOLO 6
___________________________________________________________________________
Figura
6.33
Figura 6.34
__________________________________________________________________________
SIMULAZIONI
157
CAPITOLO 6
___________________________________________________________________________
6.3.6 Configurazione Bilanciata con Splitter con Insertion Loss
diversa da zero
A questo punto si procede implementando la configurazione
bilanciata, visibile in Fig.6.35. Come è già stato anticipato nel
Paragrafo 3.6.5, per questo progetto sono stati scelti gli splitter
della MiTeq, i quali hanno una insertion loss di 0.25dB.
Figura 6.35
In Fig.6.36 sono riportati i valori di Guadagno e noise figure.
L’insertion loss di 0.25dB, come ci si aspettava, fa aumentare di
circa lo stesso valore la noise figure, mentre produce solo un
leggero peggioramento sul guadagno.
Ripetendo le simulazioni facendo uso del modello per amplitude
unbalance e phase unbalance, si verifica che la nose figure a
530MHz è pari a circa 0.7dB.
__________________________________________________________________________
SIMULAZIONI
158
CAPITOLO 6
___________________________________________________________________________
Figura 6.36
Per concludere, il progetto a banda larga si trova quindi di fronte a
diversi problemi quali l’aumento della noise figure e la Flatness in
banda del guadagno.
Il primo problema può essere risolto con l’ausilio di splitter a 90°
più costosi e con migliori performance, anche se non si possono
comunque ottenere dei valori bassi come nel caso del progetto a
banda stretta.
Il problema del Flatness in banda, invece, può essere risolto
attraverso l’introduzione di un secondo stadio nelle due vie
dell’amplificatore bilanciato o, più semplicemente, introducendo
uno stadio equalizzatore all’uscita dell’amplificatore stesso.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
159
___________________________________________________________________________
6.4 PROGETTO DELL’AMPLIFICATORE DIFFERENZIALE
Il progetto dell’amplificatore differenziale, come già stato detto nel
Capitolo 4, è stato implementato principalmente in vista della
possibilità di eliminare il balun. Essendo il balun un dispositivo
notoriamente caratterizzato da una banda piuttosto ridotta, la sua
eliminazione apre la strada alla possibilità di realizzare sistemi di
ricezione a banda larga.
In virtù del fatto che l’amplificatore differenziale ha due ingressi, è
infatti possibile pensare di connetterlo direttamente ad una struttura
bilanciata come i singoli dipoli o la loro linea di
alimentazione/somma a monte dei balun.
Naturalmente, ciò non significa che l’applicazione di un tale tipo di
dispositivo sia immediatamente attuabile. Bisogna infatti ricordare
che una forte limitazione alla possibilità di allargare la banda è
fornita innanzitutto dai dipoli stessi che, oltre ad essere
caratterizzati da una banda piuttosto ridotta, sono comunque
soggetti alle interferenze causate dai segnali radio e televisivi (vedi
Paragrafo 6.2.1).
Il progetto avrà comunque come obbiettivo quello di realizzare un
amplificatore differenziale con buone prestazioni da 300MHz a
700MHz. È anche in vista di questa larghezza di banda che la NF di
0.9dB (contro quella attuale di 0.4dB) del dispositivo MBC13916,
scelto per il progetto, è considerata accettabile.
6.5 CONSIDERAZIONI GENERALI
La configurazione differenziale non è mai stata studiata nell’ambito
di applicazioni relative alla Croce del Nord. Inoltre, non sono stati
trovati riferimenti bibliografici riguardanti una sua possibile
implementazione in tecnologia ibrida. Per questo motivo, prima di
affrontare il progetto si sono dovute prendere in esame alcune
problematiche riguardanti:
• L’impedenza di progetto
• Le simulazioni con Microwave Office
Tali punti verranno trattati nel dettaglio nei paragrafi successivi.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
160
___________________________________________________________________________
6.5.1 L’Impedenza di Progetto
(Ref.[6], Ref.[7], Ref.[8], Ref[9], Ref.[10])
Nel progetto di un qualunque dispositivo di tipo single-ended,
l’adattamento di ingresso e di uscita si misura in termini di S 1 1 e
S 2 2 , con impedenza di normalizzazione tipicamente di 50Ohm.
Nel caso dell’amplificatore differenziale, per quanto riguarda
l’adattamento di uscita, questo viene misurato in termini di S 3 3 , con
impedenza di normalizzazione di 50Ohm.
L’adattamento di ingresso, invece, necessita di considerazioni più
approfondite.
Quello che si vuole ottimizzare è il guadagno di modo differenziale,
cioè il guadagno che si ottiene quando sugli ingressi è presente un
segnale differenziale.
Nel caso specifico che si sta considerando nell’ambito di questa
tesi, essendo gli ingressi dell’amplificatore differenziale collegati
alla linea di alimentazione dei dipoli, il segnale differenziale è
costituito dal modo dispari (odd mode).
A questo punto diventa quindi necessario trovare un collegamento
tra l’impedenza di modo dispari, Zodd, e l’impedenza differenziale
dell’amplificatore (Zdiff).
Per comprendere meglio il problema si consideri una coppia di
conduttori, come illustrato in Fig.6.37.
Figura 6.37. Il modo dispari e il modo pari
Si definiscono:
• Impedenza di modo dispari (Zodd): è l’impedenza tra un
conduttore e la massa quando i conduttori sono guidati in
modo differenziale.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
161
___________________________________________________________________________
• Impedenza di modo pari (Zeven): è l’impedenza tra un
conduttore e la massa quando i conduttore sono guidati con
segnali aventi uguale polarità.
L’impedenza differenziale è per definizione la combinazione in
serie di due impedenze di modo dispari. Si ha cioè:
Zdiff=2Zodd
(6.6)
La tipica rappresentazione della Zodd viene effettuata considerando
una resistenza tra la linea e massa, mentre, quella della Zdiff è di
una resistenza tra le due linee con massa virtuale posta in posizione
centrale.
L’adattamento di ingresso dell’amplificatore differenziale, quindi,
non deve più essere fatto prendendo come riferimento una
impedenza di normalizzazione di 50Ohm.
Si deve invece fare in modo di avere una impedenza differenziale
uguale all’impedenza differenziale della linea bilanciata di
alimentazione dei dipoli.
Nel progetto, per fare sì che la Zdiff della linea e dell’amplificatore
coincidano, sarà sufficiente che la Zodd tra i due ingressi sia uguale
alla Zodd della linea stessa. Questo è possibile anche in virtù del
fatto i due rami di ingresso dell’amplificatore sono completamente
simmetrici.
Data la mancanza di documentazione tecnica relativa al periodo di
costruzione della Croce, la Zodd dei dipoli è tuttora in fase di
valutazione. Sono stati svolti studi approfonditi relativamente alle
caratteristiche di impedenza della Croce. Tali studi hanno rivelato
una impedenza di modo dispari di 41.9Ohm. Anche se questo non è
un valore definitivo, è presumibile che non sia comunque molto
distante da quello reale. (Ref.[11])
6.5.2 Le Simulazioni con Microwave Office
Il primo passo dello sviluppo dell’amplificatore bilanciato era stato
quello di progettare gli amplificatori a singolo stadio. In un
secondo momento, tali amplificatori erano stati collegati tramite gli
splitter per creare la struttura complessiva. Ciò era stato però
possibile grazie alle particolari proprietà dell’amplificatore
bilanciato, il quale mantiene lo stesso guadagno e la stessa NF
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
162
___________________________________________________________________________
degli amplificatori a singolo stadio (a meno delle perdite introdotte
dagli splitter).
Nel caso del progetto dell’amplificatore differenziale, una scelta di
questo tipo non è possibile. Le prestazioni della struttura
complessiva infatti, sono molto diverse da quelle del dispositivo a
singolo stadio nonostante la necessità di perfetta simmetria tra i due
amplificatori che lo costituiscono. Si è verificato che tale diversità
si manifesta in termini di guadagno, adattamento e noise figure.
Per questo motivo, si è reso necessario sviluppare fin dall’inizio le
simulazioni sulla struttura differenziale complessiva.
A questo punto, dovendo lavorare su di un dispositivo con due porte
di ingresso, si è presentato il problema delle simulazioni della NF e
della stabilità. Questo tipo di misure infatti possono essere fatte
soltanto su dispositivi ad ingresso ed uscita singoli.
Il problema è stato risolto utilizzando per le simulazioni di queste
grandezze lo stesso circuito che viene utilizzato per il guadagno e
l’adattamento, dove, però, i due ingressi vengono collegati con un
trasformatore a presa centrale.
Ciò non conduce a risultati fuorvianti in quanto in Microwave
Office il modello del trasformatore è completamente ideale.
Gli schemi a blocchi delle due versioni del differenziale utilizzate
nelle simulazioni vengono presentati in Fig.6.38 e 6.39.
F ig u r a 6 . 3 8
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
163
___________________________________________________________________________
F ig u r a 6 . 3 9
6.6
CONSIDERAZIONI INIZIALI DI PROGETTO
Data la scarsità di informazioni e la mancanza di esperienze
nell’affrontare un progetto di questo genere, si sono incontrate
notevoli difficoltà. Queste hanno determinato un allungamento dei
tempi di progetto ed alcune limitazioni nella determinazione di
alcuni parametri caratteristici.
Prima dell’inizio della progettazione, sono stati richiesti alla
Motorola Semiconductors i files di parametri S del componente
MBC13916, da utilizzare in Microwave Office.
I dati forniti hanno messo in luce che, attorno ai 408MHz, la Noise
figure era superiore a quella che ci si sarebbe aspettato.
Il data-sheet del componente, infatti, riporta una NF di 0.9dB a
900MHz. Quello che si poteva supporre era che a 408MHz tale
grandezza fosse inferiore o al più uguale a questo valore.
Dai dati ricevuti, invece, risulta una NF di 1.1dB. Pur essendo vero
che la differenza non è comunque molto grande, nel progetto di un
LNA per applicazioni radioastronomiche anche 0.2dB possono
diventare importanti. Bisognerà quindi valutare in fase di progetto
quanto questo valore sia in definitiva critico.
Ben più rilevanti sono invece le conclusioni che si sono potute
trarre, una volta ricevuti i files, riguardo all’adattamento di uscita
del dispositivo.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
164
___________________________________________________________________________
Si è infatti verificato che l’S 2 2 non arriva nemmeno a –2dB, come
evidenziato in Fig.40.
Figura 6.40
Inoltre, se si fanno le simulazioni relative al circuito suggerito, nel
data-sheet della Motorola, per la frequenza di 900MHz (vedi
Paragrafo 4.9.4), si verifica che l’S 2 2 ha un valore di circa –7dB.
Ciò costituisce una ulteriore conferma del fatto che l’adattamento
di uscita difficilmente arriverà a valori elevati. Tale valore per il
progetto dell’LNA sarebbe comunque troppo basso, avendo fissato
come obbiettivo una S 2 2 di almeno –10dB.
Per riuscire ad avere un adattamento di uscita accettabile sarà
quindi necessario progettare con molta accuratezza le output
matching network.
È comunque presumibile che questo fattore, prima ancora del
rumore, diventi particolarmente critico per il progetto.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
165
___________________________________________________________________________
6.7
PROGETTO A BANDA LARGA
Il primo passo dello sviluppo del progetto è la determinazione del
valore da attribuire all’induttanza che si trova tra gli emettitori dei
due dispositivi.
Tale elemento circuitale infatti è particolarmente importante per il
progetto. Come illustrato nel Paragrafo 4.7, esso costituisce un
carico sensibile alla radiofrequenza e deve simulare, per la
radiofrequenza stessa, un circuito aperto.
Utilizzando lo strumento di tuning del simulatore si è potuto
verificare che, da un valore di circa 200nH in poi, si hanno delle
particolari caratteristiche di simmetria tra i due rami per quanto
riguarda l’adattamento degli ingressi e il guadagno relativo ai due
ingressi stessi (in particolare S 3 1 =S 3 2 e S 1 1 =S 2 2 ), come evidenziato
in Fig.6.41.
Figura 6.41
Tale simmetrie risultano verificate fino a frequenze di circa 1GHz.
Come valore di riferimento si è deciso di prendere una induttanza di
300nH, la quale garantisce ampiamente la verifica di queste
specifiche.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
166
___________________________________________________________________________
Consapevoli del fatto che l’andamento della S 3 2 è coincidente con
quello della S31, da questo punto in avanti, in tutti i grafici, sarà
riportata solo questa ultima.
A questo punto è possibile dare inizio al progetto vero e proprio.
Inizialmente si prende come riferimento la banda da 300MHz a
700MHz
e
si
cercano
di
ottimizzare
le
prestazioni
dell’amplificatore all’interno di questo range di frequenze.
A tale scopo si sono prese in considerazione diverse topologie per
le reti di adattamento di ingresso e di uscita.
Nonostante però i tentativi fatti, appare immediatamente evidente
che, come si era temuto, l’adattamento di uscita non arriva mai ad
avere valori accettabili.
Infatti, anche senza tenere conto delle specifiche sulla Noise figure
e sulla Zodd (due gradi di libertà in più), non si riesce mai a portare
la S 3 3 a valori migliori di –8dB su tutta la banda. In ogni caso per
mantenere la piattezza in banda del guadagno, si avrebbero
comunque dei valori piuttosto bassi anche di questa grandezza
(circa 10dB).
Il circuito utilizzato e le relative simulazioni sono riportate in
Fig.6.42 e 6.43.
In Fig.6.44 vengono riportate anche le simulazioni della Zodd e
della NF. Appare evidente che queste grandezze hanno dei valori
piuttosto lontani da quelli di specifica e che quindi il circuito
andrebbe migliorato e modificato in tal senso. Ciò inevitabilmente
comporterebbe un peggioramento della S 3 3 , dato che il circuito è
stato progettato esclusivamente per la sua ottimizzazione.
A questo punto diventa necessario restringere la banda di
funzionamento
dell’amplificatore,
cercando
di
migliorare
contemporaneamente l’adattamento di uscita e il guadagno.
Senza tenere conto della NF e della Zodd, e quindi ancora una volta
avendo a disposizione due gradi di libertà in più per il progetto, si
arriva ad avere una S 3 3 di circa –9dB, su una banda di 200MHz.
Il problema in questo caso, oltre al fatto che comunque la S 3 3 è
ancora troppo bassa, è che la banda di 200MHz non è centrata sui
408MHz, e nonostante i tentativi fatti, non si riescono in tal senso
ad ottenere risultati accettabili.
Il circuito progettato e le simulazioni sono presentate in Fig.6.45 e
6.46 e 6.47.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
167
___________________________________________________________________________
F ig u r a 6 . 4 2
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
168
___________________________________________________________________________
F ig u r a 6 . 4 3
Figura 6.44
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
169
___________________________________________________________________________
Figura 6.45
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
170
___________________________________________________________________________
F ig u r a 6 . 4 6
F ig u r a 6 . 4 7
In vista del fatto che comunque, come specifiche, devono essere
considerate anche la NF e la Zodd e che, quindi, diminuiscono
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
171
___________________________________________________________________________
ancora i gradi di libertà a disposizione dell’S 3 3 , si può concludere
che è necessario diminuire ulteriormente la banda per essere in
grado di soddisfare le specifiche di progetto per tutte le grandezze
in gioco.
Nel
paragrafo
successivo
viene
descritto
il
progetto
dell’amplificatore differenziale con una banda di 100MHz (da
360MHz a 460MHz) centrata attorno ai 408MHz.
6.8
PROGETTO DELL’AMPLIFICATORE DIFFERENZIALE
A 100MHz
Si ricordi che le specifiche di progetto richiedono che all’interno
della banda di progetto vengano soddisfatte le seguenti specifiche:
• NF minore possibile
• Guadagno maggiore possibile
• Adattamento di uscita di almeno –10dB
Il progetto dell’amplificatore differenziale a 100MHz di banda si è
articolato svolgendo i seguenti passi:
• Individuazione della topologia delle reti di adattamento di
ingresso e di uscita
• Ottimizzazione dei valori
• Verifica del punto di lavoro del circuito
• Presentazione delle simulazioni
• Simulazioni con i file di parametri S
• Verifica della stabilità
• Valutazione dell’IP3
• Valutazione del CMRR
Nei paragrafi successivi vengono presentati in dettaglio questi punti.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
172
___________________________________________________________________________
6.8.1 Individuazione della Topologia delle Reti di Adattamento
di Ingresso e di Uscita del Dispositivo
Il primo passo del progetto dell’amplificatore differenziale a
100MHz è stato quello di cercare una topologia, per le reti di
adattamento di ingresso e di uscita, tale da garantire la possibilità
che tutte le specifiche del progetto fossero soddisfatte.
Dopo avere valutato varie strutture, si è arrivati ad una architettura
del tipo mostrato in Fig.6.48.
F ig u r a 6 . 4 8
Rispetto al circuito presentato in Fig.4.13, si sono aggiunte le
capacità C2, C5, C6, C7 e le resistenze R1 e R2. L’introduzione di
tali elementi ha come scopo quello di aiutare a migliorare
l’adattamento di uscita e di allargare la banda in cui questo ha
valori accettabili.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
173
___________________________________________________________________________
6.8.2 Ottimizzazione dei Valori degli Elementi Circuitali
Una volta individuata l’architettura più opportuna per le reti di
adattamento di ingresso e di uscita del dispositivo differenziale, si
deve procedere all’ottimizzazione dei valori degli elementi
circuitali presenti in tali reti.
A tal fine è necessario individuare, fin da subito, quelli che sono i
componenti commerciali che si pensa di utilizzare in una eventuale
realizzazione del circuito.
Come induttanze si sono scelte quelle della COILCRAFT della serie
0805CS, sia per le reti di adattamento di ingresso che per le reti di
adattamento di uscita.
Le capacità invece saranno quelle dell’ATC della serie 100B.
Si sostituiscano agli elementi ideali presenti nello schematico, i
modelli dei componenti commerciali.
Come valori iniziali per l’ottimizzazione, al range di frequenze
indicato dalle specifiche, si prendono quelli indicati nel Data-Sheet
del componente, riportati alla frequenza di 408MHz.
A questo punto si può procedere all’ottimizzazione con le modalità
indicate nel Capitolo 5 (Descrizione del Software). Questa volta si
rendono ottimizzabili tutti gli elementi del circuito, facendo molta
attenzione a fare in modo che i due rami del differenziale
presentino gli stessi valori per gli stessi elementi (rispettando cioè
la simmetria del circuito).
Come obbiettivi di ottimizzazione questa volta si predispongono il
guadagno (>18dB), la S33 (<-10dB), la Zodd (tra 38Ohm e 42Ohm)
e la NF (<2dB).
I valori degli elementi circuitali risultanti dall’ottimizzazione sono
i seguenti:
•
•
•
•
•
•
•
•
•
C1=C3=270pF
C5=C6=2.7pF
C2=C7=2.7pF
C4=C8=6.2pF
C10=C12=240pF
L3=L4=28nH
L1=L5=82nH
L2=L7=22nH
C9=C11=1000pF
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
174
___________________________________________________________________________
• R1=R2=14Ohm
6.8.3 Verifica del Punto di Lavoro
La verifica del punto di lavoro è impossibile da realizzare tramite le
simulazioni in quanto la Motorola Semiconductors non ha fornito il
modello non lineare del dispositivo.
Per quanto riguarda comunque il punto di lavoro, la sua
determinazione non dà eccessivi problemi in quanto la
polarizzazione del componente MBC13916 è on-chip.
Il file di parametri S che è stato fornito, fa riferimento ad un punto
di lavoro 5V e 10.5mA.
L’introduzione della resistenza serie sul ramo di uscita non
dovrebbe provocare problemi in quanto produce una variazione di
circa 0.14V sulla tensione che arriva sul dispositivo attivo. Dato
che, come tensioni di alimentazione si possono considerare valori
compresi tra 2.7V e 5V, tale variazione non ha alcun effetto sulla
corrente assorbita dal dispositivo MBC13916.
6.8.4 Risultati delle Simulazioni
In Fig.6.49 vengono riportate le simulazioni relative al guadagno e
all’adattamento di uscita del differenziale.
Si vede immediatamente che risultano soddisfatte le due specifiche
di filtraggio delle basse frequenze e di flatness del guadagno ridotta
in banda. Quest’ultima infatti è di appena 0.7dB.
In Fig.6.50 vengono riportate le simulazioni relative alla NF e alla
Zodd.
6.8.9 Simulazioni con i File di Parametri S
Prima di procedere alla sostituzione dei file di parametri S è
necessario individuare i codici identificativi dei componenti
commerciali che sono stati utilizzati nel progetto.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
175
___________________________________________________________________________
F ig u r a 6 . 4 9
F ig u r a 6 . 5 0
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
176
___________________________________________________________________________
Tali componenti sono:
•
•
•
•
•
•
•
•
C1=C3: ATC100B271JW
C5=C6: ATC100B2R7JW
C2=C7: ATC100B2R7JW
C4=C8: ATC100B6R2JW
C10=C12: ATC100B241JW
L3=L4: 0805CS-280XJW
L1=L5: 0805CS-82OXJW
L2=L7=0805CS-220XJW
Il confronto tra i risultati delle simulazioni con i modelli e con i
files di parametri S sono mostrati in Fig.6.51 e 6.52.
F ig u r a 6 . 5 1
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
177
___________________________________________________________________________
F ig u r a 6 . 5 2
Si nota che, per quanto riguarda l’adattamento di uscita, il
guadagno e la NF, le simulazioni rifatte con i file di parametri S
danno valori concordi con quelle fatte con i modelli.
Per quanto riguarda, invece la Zodd, l’introduzione dei file di
parametri S nelle simulazioni, porta a valori abbastanza diversi da
quelli del progetto con i modelli.
6.8.10 Verifica della Stabilità
In questo caso specifico, infatti, l’utilizzo dei Cerchi di Stabilità è
reso particolarmente ostico dal fatto che l’impedenza di ingresso
non è 50Ohm. In particolare, in questo progetto non si parla mai di
impedenza di ingresso alle porte ma di impedenza differenziale e di
modo comune.
Inoltre, in questo caso non si è in presenza di un dispositivo a
singolo stadio ma di un dispositivo a due ingressi.
Per questo motivo, anche se con l’utilizzo dei parametri K e B1 si è
verificato, utilizzando il trasformatore a presa centrale, che le
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
178
___________________________________________________________________________
condizioni di stabilità sono sempre rispettate, tali risultati sono poi
di difficile interpretazione pratica.
6.8.11 Valutazione dell’IP3
A causa del fatto che non si ha a disposizione il modello ai grandi
segnali del dispositivo, non è stato possibile realizzare le
simulazioni di IP3.
Dai dati inviati dalla Motorola risulta però che il componente
MBC13916 presenta un punto di intercetta del terzo ordine di uscita
di circa 9dBm.
Con un valore di questo tipo è plausibile supporre che anche in
presenza delle reti di adattamento e anche considerando il
vantaggio di dinamica fornito dall’amplificatore differenziale, la
dinamica complessiva del dispositivo sia comunque piuttosto
insoddisfacente.
6.8.12 Valutazione del CMRR
Non essendoci in Microwave Office una funzione adibita alla
misura del CMRR, sarà necessario ricavare questa grandezza
attraverso la sua espressione matematica (vedi Paragrafo 4.5.2).
A tal fine è però necessario ricavare tramite simulazioni il valore
del guadagno di modo comune. Per ricavare tale valore è sufficiente
collegare le due porte di ingresso del dispositivo in un’unica porta.
Per quanto riguarda la valutazione del guadagno di modo
differenziale, si è fatto uso del modello del trasformatore a presa
centrale.
Il circuito utilizzato e le relative simulazioni sono riportate in
Fig.6.53 e 6.54.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
179
___________________________________________________________________________
Figura 6.53
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
180
___________________________________________________________________________
F ig u r a 6 . 5 4
Il CMRR può essere espresso in dB secondo la seguente formula:
CMRR(dB)=(Ad)dB-(Ac)dB
(6.7)
CMRR(360MHz)=28-(-18.2)=46.2dB
CMRR(408MHz)=27.5-(-18.6)=46.1dB
CMRR(460MHz)=27.1-(-20.5)=47.6dB
6.9
CONSIDERAZIONI RIEPILOGATIVE SUL PROGETTO
Il componente MBC13916 è stato scelto in quanto caratterizzato
dalla configurazione cascode.
Come già evidenziato nel Capitolo 4, tale configurazione presenta
particolari vantaggi in termini di risposta in frequenza e di
guadagno.
Un altro vantaggio che presenta questo dispositivo è la
polarizzazione on-chip. Questa caratteristica consente di
semplificare notevolmente la rete di polarizzazione, con un
risparmio in termini di complessità e di ingombro del circuito.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
181
___________________________________________________________________________
Inoltre, tra tutti i dispositivi commerciali esaminati, tale
componente è quello che presenta la Noise figure più bassa.
Come si è già detto, però, il valore della Noise figure di 1.1dB
sarebbe stato accettabile nella prospettiva di una larghezza di banda
di 400MHz. Il fatto che lo scarso adattamento di uscita limiti la
banda a 100MHz, fa sì che la Noise figure diventi inaccettabile per
il progetto.
Questo, unitamente al fatto che anche la dinamica dell’MBC13916 è
piuttosto scarsa, ha fatto sì che il dispositivo si sia rivelato
inadeguato per il progetto.
Si prospettano così due possibili soluzioni per il futuro. La prima è
quella di continuare ad utilizzare questo dispositivo ma di
realizzare un amplificatore differenziale a due stadi, per vagliare la
possibilità di allargare la banda.
La seconda è quella di abbandonare la tecnologia al SiGe e di
realizzare una configurazione differenziale cascode facendo uso di
singoli HEMT. Il problema che potrebbe sorgere in questo caso è
l’eccessiva complessità del circuito causata dalla complessità delle
reti di polarizzazione.
È quindi probabile che venga presa in considerazione l’idea di
realizzare tale dispositivo in tecnologia MMIC.
6.10 CONFRONTO DELLE PRESTAZIONI
Per il progetto dell’amplificatore bilanciato si è fatto uso del
circuito riportato in Fig.6.55.
I valori previsti per i parametri sono:
• S 2 1 di circa 21dB
• NF di circa 0.6dB
• OIP3 di circa +34dBm
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
182
___________________________________________________________________________
F ig u r a 6 . 5 5
Per il progetto dell’amplificatore differenziale si è fatto uso del
circuito riportato in Fig.6.56.
F ig u r a 6 . 5 6
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
183
___________________________________________________________________________
I valori previsti per i parametri di progetto sono:
• S 3 1 =S 3 2 di circa 25dB
• NF di circa 1.7dB
• Adattamento di uscita di circa –10dB
Le prestazioni dell’amplificatore bilanciato sono sicuramente
migliori di quelle dell’amplificatore differenziale. Ciò comunque
non significa che tale struttura non sia da approfondire.
L’utilizzo di un diverso tipo di componente o di uno stadio doppio
invece di un singolo, potrebbero infatti condurre a risultati
migliori.
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
184
___________________________________________________________________________
REFERENCES:
[1]: “Agilent ATF-54143 Low Noise Enhancement
Pseudomorphic HEMT in a Surface Mount Plastic Package”
D ATA S HEET
Mode
[2]: “A High IIP3 Balanced Low Noise Amplifier for Cellular Base
Station Applications Using the Agilent Enhancement Mode PHEMT
ATF-54143 Transistor and Anaren Pico Xinger 3 dB Hybrid
Couplers”
Application Note 1281
[4]: “High Intercept Low Noise Amplifier for the 1850 – 1910 MHz
PCS Band using the Agilent ATF-54143 Enhancement Mode
PHEMT”
Application Note 1222
[5]: “A Low Noise High Intercept Point Amplifier for 900 MHz
Applications using the Agilent ATF-54143 PHEMT”
Application Note 1299
www.agilent.com
[6]: “Differential Impedance Measurement with Time Domain
Reflectometry”, E.Bogatin, Mike Resso – Application Note 1382-5
Agilent Technologies
[7]: Appunti tratti dalle lezioni del corso di
Prof.A.Costanzo
“Microonde” –
[8]: “Differential Impedance Measurements with the Tektronix
8000B Series Instruments”, TEKTRONIX
[9]: “Differential Impedance – What’s the Difference?”, D.Brooks
Printed Circuit Design
[10]: “Differential and Common Impedance”, E.Bogatin
Printed Circuit Design
[11]: “Rete di alimentazione dei radiatori della Croce del Nord
ramo Nord-Sud”, R.Tascone, A.Olivieri, O.A.Peverini, G.Virone,
M.Baralis
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 6
185
___________________________________________________________________________
Istituto di Elettronica ed Ingegneria dell’Informazione e delle
Telecomunicazioni – Politecnico di Torino
__________________________________________________________________________
SIMULAZIONI
CAPITOLO 7
186
___________________________________________________________________________
7.1 REALIZZAZIONE DEL PROTOTIPO DELL’AMPLIFICATORE
BILANCIATO
Terminata la fase di progetto del dispositivo, si è passati alla fase
realizzativa. Il procedimento si è articolato nelle seguenti 3 fasi:
• Progettazione del layout del circuito
• Realizzazione del layout
• Montaggio dei componenti
Ciascuna di
successivi.
esse
sarà
illustrata
nel
dettaglio
nei
paragrafi
7.2 PROGETTAZIONE DEL LAYOUT DEL CIRCUITO
La progettazione del circuito in esame, così come ogni circuito a
microonde, richiede l’identificazione e la valutazione di diversi
elementi quali:
• Individuazione dei componenti da utilizzare nel prototipo
• Determinazione della larghezza delle piste e della loro
lunghezza
• Individuazione del layout più adatto alla struttura complessiva
in esame
• Presentazione delle simulazioni elettromagnetiche
• Valutazione dell’ingombro del circuito
7.2.1 Individuazione dei Componenti da Utilizzare nel Prototipo
Il primo passo per la realizzazione del layout è quello di
individuare il footprint di tutti i componenti che verranno utilizzati
nella fase di montaggio del circuito. Per la realizzazione di un
corretto layout è infatti necessario conoscere l’ingombro di tali
componenti (package) e la posizione dei loro piedini (leads).
Per alcuni componenti, come le capacità dell’ATC e le induttanze
della Coilcraft, il layout è già presente nelle librerie di Microwave
Office. Per tutti gli altri, invece, è stato necessario disegnarlo,
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
187
___________________________________________________________________________
facendo riferimento alle dimensioni riportate nei Data-Sheet dei
componenti.
Per quanto riguarda le resistenze si utilizzeranno quelle della
NeOhm o della Bourns (a seconda della disponibilità); in entrambi i
casi si useranno componenti appartenenti alla serie 0805.
Come capacità da 10pF si utilizzeranno quelle della Murata con
codice identificativo GRM188R71H103KA01B.
Il transistor PNP è il componente MMBT2907A dell’ON
SEMICONDUCTOR.
Il dispositivo attivo, come già indicato nei Capitoli 3 e 6, è l’EPHEMT ATF54143 dell’Agilent Technologies.
I data-sheet di tutti i componenti utilizzati, in cui vengono riportate
anche le dimensioni dei componenti stessi, sono presentati in
Appendice B.
Per quanto riguarda invece lo splitter a 90°, non è stato possibile, a
causa delle tempistiche di consegna da parte del fornitore, reperire
il componente HPQ-05W della Mini-Circuits che si era scelto per il
progetto.
Si è così utilizzato il Power Splitter PSCQ-2-450, sempre della
Mini-Circuits, già disponibile in laboratorio e il cui range di
funzionamento, da 350MHz a 450MHz, lo rende comunque adatto al
progetto.
Questo componente presenta però, come valori tipici, una insertionloss di 0.5dB, un’amplitude unbalance di 1.50dB e una phase
unbalance di 5 gradi. Questi valori sono decisamente peggiori
rispetto a quelli dello splitter che si era scelto. Per questo motivo,
prima di procedere alla caratterizzazione del circuito complessivo
sarà necessario ripetere le simulazioni tenendo conto di questi
cambiamenti.
Tale splitter, inoltre, ha un ingombro molto superiore a quello del
componente che si era scelto e anche i piedini sono in posizione
differente. Per questo motivo, il layout, una volta che si avrà a
disposizione il componente HPQ-05W, dovrà essere rivisto.
Infine, lo splitter in questione non è a montaggio superficiale. Per
questo motivo, verrà montato nella faccia inferiore della basetta e
la sua presenza, nella faccia superiore sarà testimoniata solamente
dalle saldature e dai fori dei suoi piedini.
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
188
___________________________________________________________________________
7.2.2 Determinazione della Larghezza delle Piste e della loro
Lunghezza Relativamente al Dispositivo Singolo
In questa fase, è indispensabile conoscere le caratteristiche
elettriche e fisiche del substrato dove verranno realizzate le piste.
Il dielettrico è vetronite (costante dielettrica pari a 4.7 e loss
tangent di 0.02) nel quale sono depositati due strati di rame
(spessore di 17.5µm).
Lo spessore complessivo è di 1.6mm.
Note queste caratteristiche, è possibile determinare la larghezza
delle piste utilizzando il programma TXLine (vedi Capitolo 5).
Quello che risulta è che le piste di segnale, alla frequenza di
408MHz e per una impedenza caratteristica di 50Ω, devono essere
larghe 2.9mm.
A questo punto bisogna determinare la lunghezza delle piste che
caratterizzano il circuito. Anche questa infatti è piuttosto critica per
il mantenimento delle performance del sistema. Si è infatti
verificato, con l’ausilio di TXLine, che una variazione di 1mm nella
lunghezza di una pista provoca, alla frequenza di 408MHz, una
variazione di 1 grado sulla lunghezza elettrica. Purtroppo però la
lunghezza delle piste sarà legata al posizionamento dello splitter.
La presenza di quest’ultimo porta infatti all’inevitabile
conseguenza di avere delle piste di ingresso e di uscita piuttosto
lunghe.
Si ribadisce che, facendo uso dello splitter HPQ-05W, questa
lunghezza risulterà notevolmente ridotta.
In Fig.7.1 e Fig.7.2 sono riportati i risultati delle simulazioni
circuitali riguardanti adattamento, guadagno e noise figure del
dispositivo a singolo stadio. Come si vede, l’effetto della presenza
delle piste sulle simulazioni è piuttosto ridotto per quanto riguarda
il guadagno e la noise figure, mentre diventa abbastanza evidente
sull’adattamento. In particolare produce uno spostamento verso
frequenze inferiori dei picchi dell’S 1 1 e dell’S 2 2 .
Infine, per quanto riguarda le piste della rete di polarizzazione, la
loro larghezza non deve sottostare ad alcun vincolo, dato che questa
per la continua non rappresenta un valore critico.
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
189
___________________________________________________________________________
7.2.3 Individuazione del Layout della Struttura Bilanciata
Una volta individuata la lunghezza delle piste del dispositivo a
singolo stadio, si pone il problema di determinare la struttura
complessiva del layout dell’amplificatore bilanciato. È infatti
indispensabile,
per
il
mantenimento
delle
performance
dell’amplificatore stesso, che i due dispositivi a stadio singolo
siano il più possibile simmetrici.
L’ostacolo che appare subito evidente è che il dispositivo attivo
non è simmetrico. Questo significa che non sarà possibile
mantenere la sua orientazione uguale in entrambi i rami, a meno di
aumentare l’ingombro complessivo del circuito.
Figura 7.1
Prendendo come riferimento l’Application Note 1281 dell’Agilent
Technologies in cui è presentato il layout di un amplificatore
bilanciato, nel quale si fa uso del dispositivo ATF54143, si è scelto
di piazzare i due componenti attivi a 90° tra loro anziché dargli la
stessa orientazione.
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
190
___________________________________________________________________________
Figura 7.2
Il problema è ulteriormente complicato dalla particolare
disposizione dei piedini dello splitter. Si è ovviato a questo
inconveniente creando delle piazzole più grandi in prossimità dei
piedini del dispositivo attivo. In questo modo le piste e le piazzole
delle due vie continuano a rimanere identiche e il problema si
risolve saldando i relativi componenti in modo opportuno.
Analoga situazione si presenta con le induttanze della Coilcraft
della serie Midi e Maxi Spring, in quanto asimmetriche. Anche in
questo caso il problema viene risolto progettando delle piazzole più
grandi e saldando in modo opportuno i componenti.
A questo punto è necessario valutare l’impatto che queste
differenze, seppur minime, hanno sulla struttura complessiva del
circuito.
Occorre fare delle considerazioni anche sulle reti di polarizzazione.
Come si è detto nel Capitolo 3, per alimentare il dispositivo si è
scelta una rete di polarizzazione attiva. Anche in questo caso sono
sorti dei problemi in quanto il transistor PNP scelto per il progetto
è asimmetrico.
Inevitabilmente si sono dovute realizzare due reti di polarizzazione
diverse tra loro come disposizione dei componenti (anche se
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
191
___________________________________________________________________________
completamente identiche come valori degli stessi e come
topologia).
Ciò non costituisce però un problema in quanto il requisito della
simmetria è richiesto per le linee a RF e non per la continua.
Il problema reale è invece che l’asimmetria del PNP rende
impossibile portare l’alimentazione ad entrambi gli stadi partendo
da un unico punto comune e utilizzando solo piste presenti sul
layout.
Dopo avere valutato diverse soluzioni di layout, quella migliore e
più semplice da un punto di vista pratico e funzionale è sembrata
quella di portare la continua a uno dei due amplificatori attraverso
un bridge, realizzato con un filo fatto passare sotto al bottom layer.
Per maggiore chiarezza, in Fig.7.3 viene riportato lo schematico
con le piste.
I risultati delle simulazioni relative ad adattamento, noise figure e
guadagno della struttura bilanciata, in presenza delle piste, sono del
tutto simili a quelli ottenuti nel caso del singolo stadio.
7.2.4 Risultati delle Simulazioni Elettromagnetiche
Per valutare nel modo più preciso e corretto l’impatto che le
differenze seppur minime tra le due vie a RF hanno sulle
prestazioni del sistema, si è preferito fare ricorso alle simulazioni
elettromagnetiche (vedi Capitolo 5).
In tal senso si sono create le strutture elettromagnetiche
corrispondenti alle piste delle vie a RF di ingresso e di uscita dei
due amplificatori a singolo stadio. Le piste oggetto della
simulazione elettromagnetica sono indicate in rosso in Fig.7.4.
Per rendere la simulazione il più realistica possibile, si è prestata
particolare attenzione a porre le porte della struttura, con la
massima precisione possibile, in corrispondenza dei punti di
saldatura dei componenti.
Per maggiore chiarezza, in seguito viene indicato con A1,
l’amplificatore a singolo stadio posto in posizione superiore in
Fig.7.3. Con A2 viene invece indicato l’amplificatore a singolo
stadio posto inferiormente.
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
192
___________________________________________________________________________
Figura 7.3
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
193
___________________________________________________________________________
I risultati delle simulazioni EM sono riportati sotto forma di
modulo e fase della perdita introdotta dalle reti di ingresso e di
uscita.
In Tabella 1 e in Tabella 2 vengono riportati i valori relativi
rispettivamente alle vie di ingresso di uscita.
Frequenze
400
408
416
Perdita A1
(modulo)
[dB]
-1.6663
-1.5667
-1.4744
Perdita
A2 (modulo)
[dB]
-1.6974
-1.5963
-1.5025
∆
Perdita
MODULO A1 (fase)
[degree]
0.0311
54.268
0.0296
52.34
0.0281
50.463
Perdita
A2 (fase)
[degree]
55.372
53.454
51.588
∆ FASE
1.104
1.114
1.125
T a b e l l a 1 . S i m u l a z i o n i E M r e l a t i v e a l l e v ie d i i n g r e s s o
Frequenze
400
408
416
Perdita
A1 (modulo)
[dB]
-1.6018
-1.5635
-1.5327
Perdita
A2 (modulo)
[dB]
-1.5817
-1.5434
-1.5126
∆
Perdita
MODULO A1 (fase)
[degree]
0.0201
18.023
0.0201
16.937
0.0201
15.842
Perdita
A2 (fase)
[degree]
18.389
17.309
16.221
∆ FASE
0.366
0.372
0.379
T a b e l l a 2 . S i m u l a z i o n i E M r e l a t i v e a l l e v ie d i u s c i t a
Come si vede dalle tabelle, la differenza tra i moduli delle vie, sia
di ingresso che di uscita, è dell’ordine dei 0.03dB (2%) e può
quindi essere considerata trascurabile.
Per quanto riguarda invece lo sfasamento, le due vie di ingresso
presentano una differenza di fase reciproca di circa 1.1gradi mentre
le due vie di uscita presentano uno sfasamento di circa 0.4gradi.
Anche se si è detto che la differenza di un grado della lunghezza
elettrica corrisponde ad una lunghezza di 1mm, uno sfasamento di
questo tipo può essere considerato trascurabile poiché si era notato
che, nella struttura bilanciata, uno sfasamento di qualche grado tra
le due vie non produceva effetti rilevanti sulle simulazioni (vedi
Paragrafo 6.2.9).
Alla luce dei risultati trovati, si sono ripetute tali simulazioni con
uno sfasamento di 4 gradi sia sulla via di ingresso che su quella di
uscita.
Ciò che si è trovato è che adattamento e guadagno rimangono
praticamente gli stessi, mentre la NF peggiora di circa 0.03dB.
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
194
___________________________________________________________________________
Questa è una ulteriore conferma del fatto che lo sfasamento trovato,
anche sommato a quello già introdotto dallo splitter (2.34gradi a
407.5MHz), non produce cambiamenti apprezzabili nelle
performance del sistema.
Inoltre, in una struttura di tipo bilanciato, a causa della presenza
degli splitter, le piste di ingresso e di uscita dei due dispositivi a
singolo stadio devono avere la stessa lunghezza.
Ciò significa che cambiare la lunghezza delle piste del dispositivo
A1 significa dover cambiare inevitabilmente la lunghezza delle
piste anche del dispositivo A2, senza risolvere il problema.
Si è quindi deciso di lasciare inalterato il circuito, anche in
considerazione del fatto che comunque lo sfasamento introdotto
incide in maniera minima sulle simulazioni.
7.2.6 Valutazione dell’Ingombro del Circuito
Una volta progettato il layout, con la specifica di delimitare il più
possibile l’ingombro complessivo del circuito, è necessario
stabilirne con precisione le dimensioni.
A tal fine è opportuno osservare che, per fare delle misure
attendibili di NF, il circuito deve essere racchiuso in un box di
metallo. In questo modo vengono escluse dalla misura tutte le
interferenze dovute all’ambiente circostante.
La soluzione più adatta è quella di un box di dimensioni
80mmx65mm. Le dimensioni complessive della basetta devono
quindi essere inferiori a questo valore e coincidere con le
dimensioni interne (79mmx64mm).
Si è quindi definito un bordo della basetta di 77.9mmx63.9mm.
Utilizzando il programma TXLine, si è calcolato che, mantenendo
la massa ad almeno 4mm dal conduttore centrale, il modello del
coplanare più massa coincideva con la microstriscia. Per questo
motivo si sono creati degli spazi privi di rame per una distanza di
4mm attorno alle piste a RF.
La presenza del rame anche nella parte superiore della basetta
consente di mettere a massa i componenti. Questo, infatti, dovrebbe
essere fatto attraverso dei via hole (fori metallizzati).
L’impossibilità di realizzare fori di questo tipo ha portato
all’utilizzo di drill hole (fori passanti) che vengono poi utilizzati
per saldare dei reofori alle estremità delle due facce della basetta.
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
195
___________________________________________________________________________
Il layout complessivo della parte superiore della basetta è mostrato
in Fig.7.4.
I connettori che verranno utilizzati per portare all’interno della
scatola i segnali di ingresso e di uscita sono quelli della Radiall
della serie SMA-COM R124.454.123, il cui Data-Sheet è riportato
in Appendice B.
L’ultimo passo è la valutazione dell’ingombro in altezza del
circuito, dal momento che è necessario montare lo splitter nella
faccia inferiore della basetta.
La basetta è spessa 1.6mm e lo splitter è alto all’incirca 10mm. Il
componente più alto che deve essere montato nella faccia superiore
del layout è l’induttanza della serie Maxi Spring che è circa 6mm.
L’altezza totale risulta quindi di circa 18mm.
La scatola scelta è alta 20mm, quindi non ci saranno difficoltà di
sistemazione del circuito al suo interno.
Figura 7.4
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
196
___________________________________________________________________________
Si vuole ricordare che, come detto in precedenza, gli splitter
definitivi non saranno quelli utilizzati in questo progetto. Tale
circuito inoltre è stato progettato tenendo conto del fatto che
questa è ancora una versione prototipo, nella quale è possibile che
si debbano sostituire, in una eventuale fase di tuning, alcuni
componenti.
Una volta fatto fronte a questi problemi, sarà possibile apportare
una diminuzione delle dimensioni in gioco.
7.3 REALIZZAZIONE DEL LAYOUT
La realizzazione del circuito è stata effettuata utilizzando una fresa
per PCB (Printed Circuit Board), a disposizione dei laboratori della
Stazione Radioastronomica di Medicina. Tale strumento (LPKF
Protomat C30s) è in grado di lavorare con i files di tipo GERBER
precedentemente esportati da Microwave Office.
Attraverso l’uso di un particolare software, “CircuitCam 3.2”, è
stato creato un file interpretabile dalla macchina.
In Fig.7.5, viene visualizzata una rappresentazione dello stampato
in cui sono visibili anche i segni dei passaggi dei tools della fresa.
Ciò consente di rendersi conto di quelle che sono le zone più
critiche della realizzazione del layout. In figura sono messe in
evidenza le zone in cui devono essere saldati gli HEMT.
A questo punto, il file creato è stato importato nel software di
controllo della fresa (BoardMaster 3.0) e si è cominciata la
lavorazione.
In Fig.7.6 viene mostrata una fase della lavorazione della fresa.
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
197
___________________________________________________________________________
Figura 7.5
Figura 7.6
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
198
___________________________________________________________________________
7.4 MONTAGGIO DEI COMPONENTI
La fase finale della realizzazione del circuito è il montaggio dei
componenti.
In Fig.7.7 viene riportata la faccia inferiore del circuito, in cui è
possibile vedere il filo utilizzato per portare l’alimentazione ad
entrambi i dispositivi. In Fig.7.8 viene invece riportato il circuito
completo di scatola.
Figura 7-7
È stato inoltre realizzato anche il prototipo dell’amplificatore a
stadio singolo. Una sua foto è riportata in Fig.7.9.
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
199
___________________________________________________________________________
Figura 7.8
Figura 7.9
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
200
___________________________________________________________________________
7.5 REALIZZAZIONE DEL PROTOTIPO DELL’AMPLIFICATORE
DIFFERENZIALE
il procedimento si è articolato secondo le seguenti tre fasi:
• Progettazione del layout del circuito
• Realizzazione del layout
• Montaggio dei componenti
Ciascuna di
successivi.
esse
sarà
illustrato
nel
dettaglio
nei
paragrafi
7.6 PROGETTAZIONE DEL LAYOUT DEL CIRCUITO
Anche in questo caso, nella progettazione del layout, si sono
valutati diversi elementi quali:
• Individuazione dei componenti da utilizzare nel prototipo
• Determinazione della larghezza delle piste e individuazione
del layout più adatto alla struttura complessiva
• Considerazioni di progetto
• Considerazioni sulle reti di polarizzazione
• Valutazione dell’ingombro del circuito
7.6.1 Individuazione dei Componenti da Utilizzare nel Prototipo
Il primo passo per la realizzazione del layout è ancora quello di
individuare tutti i componenti che verranno poi utilizzati nel
montaggio del circuito.
Come già detto nel Paragrafo 7.2.1, per le capacità dell’ATC e le
induttanze della Coilcraft, il layout è già presente nelle librerie di
Microwave Office.
Per tutti gli altri componenti, invece, è stato necessario disegnarlo
facendo riferimento alle dimensioni riportate nei Data-Sheet dei
componenti stessi.
Per quanto riguarda le resistenze si utilizzeranno quelle della
NeOhm o della Bourns (a seconda della disponibilità); in entrambi i
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
201
___________________________________________________________________________
casi si useranno componenti appartenenti a serie di dimensioni
0805.
Come capacità da 1nF si utilizzeranno quelle della Murata con
codice identificativo GRM1885C1H102JA01B.
Il dispositivo attivo, come già indicato nei Capitoli 4 e 6, è
l’amplificatore
MBC13916
della
MOTOROLA
SEMICONDUCTORS.
7.6.2
Determinazione
della
Larghezza
delle
Piste
e
Individuazione del Layout più adatto alla Struttura Complessiva
Il secondo passo nel progetto del layout del circuito è la
determinazione della larghezza delle piste.
In questo caso particolare, bisogna però fare una distinzione tra le
piste di ingresso e quelle di uscita.
Infatti, essendo le piste di uscita riferite ad una impedenza di
50Ohm, la loro larghezza è ancora di 2.9mm, come già stabilito nel
progetto dell’amplificatore bilanciato. Ciò in virtù del fatto che
viene utilizzato lo stesso tipo di substrato e le stesse tipologie di
piste (microstriscia).
Per quanto riguarda le piste di ingresso, invece, è necessario fare
delle considerazioni più complesse.
Una delle specifiche di progetto è quella di mantenere una Zodd di
circa 42Ohm. Inoltre, è necessario che i due ingressi si trovino
sullo stesso lato, in quanto i conduttori della linea bilanciata di
alimentazione dei dipoli sono l’uno accanto all’altro e ad una
distanza di circa 10mm. Per determinare la larghezza delle piste,
bisognerà utilizzare il modello delle linee accoppiate presente nel
programma TXLine. Selezionando il modo dispari e un gap tra le
due piste di 10mm, per la frequenza di 408MHz, la larghezza delle
piste risultante è di 3.7mm. Tale dovrà quindi essere la larghezza
delle piste di ingresso utilizzata per il progetto.
Per quanto riguarda invece la lunghezza delle piste, la regola che si
è seguita è stata quella di limitarla il più possibile.
Seguendo
il
procedimento
appena
illustrato,
l’effetto
dell’introduzione delle piste sul dispositivo complessivo, per
quanto riguarda guadagno, NF e adattamento, è molto ridotto.
L’unica grandezza che appare risentirne è la Zodd.
In Fig.7.10 viene presentato il confronto tra l’andamento della Zodd
in presenza e in assenza delle piste.
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
202
___________________________________________________________________________
Figura 7.10
Con il colore blu è indicato l’andamento della Zodd prima
dell’introduzione delle piste, mentre con il colore rosa è indicata la
Zodd in presenza delle piste. Dalla figura si evince che la loro
introduzione produce uno slittamento in frequenza verso il basso
del valore dell’impedenza di modo dispari.
La situazione peggiora ulteriormente quando si considerano le piste
che collegano gli emettitori dei due componenti attivi.
La loro introduzione, infatti, produce delle modifiche negli
andamenti di tutte le grandezze simulate. Ciò comunque era
piuttosto prevedibile dal momento che il dispositivo, di default,
aveva le terminazioni di emettitore a massa. Del resto la criticità
della terminazione di emettitore è paragonabile a quella che si era
riscontrata nell’ATF-54143, per le terminazioni di source.
Utilizzando lo strumento di tuning di MWO (vedi Capitolo 5), si è
verificato che, per mantenere la larghezza delle piste di emettitore
piuttosto ridotta, è indispensabile limitare il più possibile la loro
lunghezza. Mantenendo queste specifiche, le grandezze simulate
non subiscono grandi variazioni.
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
203
___________________________________________________________________________
Purtroppo, però, nel caso specifico di questo progetto, la necessità
di avere i due ingressi sullo stesso lato e l’asimmetria del
dispositivo attivo hanno come conseguenza quella di dovere
posizionare la rete di uscita, chiusa sui 50Ohm, tra i due ingressi.
Ciò inevitabilmente impedisce di avvicinare oltre un certo limite i
due dispositivi; la lunghezza minima delle due piste di emettitore è
di 3.5mm. Con riferimento a questo valore, la larghezza fissata per
le piste è di 1.1mm.
Le simulazioni relative al circuito in cui sono state introdotte le
piste sono mostrate in Fig.7.11 e 7.12.
Anche con questi valori, guadagno e adattamento, pur mantenendo
un andamento piuttosto conforme a quello delle simulazioni senza
piste, subiscono comunque un peggioramento. Le grandezze che
presentano i maggiori cambiamenti sono, in ogni caso, la Zodd e la
S33.
Il problema delle piste centrali e della Zodd viene affrontato più
approfonditamente nel paragrafo successivo.
Figura 7.11
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
204
___________________________________________________________________________
Figura 7.12
7.6.3 Considerazioni di Progetto
Come evidenziato nel Capitolo 6, l’andamento della Zodd cambia
nel passare dalle simulazioni con i modelli a quelle con i parametri
S.
Si è inoltre verificato che, per alcuni componenti circuitali , il
valore di tale cambiamento è notevole. Il fatto che ci sia una
differenza così marcata è sicuramente un risultato inaspettato.
Durante lo sviluppo del layout si è inoltre verificato che la Zodd
subisce una variazione anche con l’introduzione delle piste.
Alla luce di queste considerazioni e anche del fatto che la presenza
delle piste di collegamento tra i due dispositivi è particolarmente
critica, quello che si suggerisce, come indicazione per i progetti
futuri, è di individuare il layout del circuito, prima di passare alla
sua ottimizzazione.
Inoltre, si suggerisce di ottimizzare il circuito direttamente facendo
uso dei file di parametri S, che sono comunque più precisi.
Una volta realizzato il circuito, diventa quindi necessario
provvedere a sostituzioni progressive dei suoi componenti, fino a
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
205
___________________________________________________________________________
tornare a valori delle simulazioni compatibili con quelli che si
avevano prima dell’introduzione delle piste.
A tal fine si danno come indicazione i seguenti valori:
•
•
•
•
•
•
•
•
•
•
C1=C3=100pF
C5=C6=1.5pF
C2=C7=2.2pF
C4=C8=5.6pF
C10=C12=220pF
L3=L4=39nH
L1=L5=100nH
L2=L7=22nH
C9=C11=1000pF
R1=R2=14Ohm
I risultati delle simulazioni con questi nuovi valori sono riportati in
Fig.7.13.
Figura 7.13
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
206
___________________________________________________________________________
7.6.4 Considerazioni sulle Reti di Polarizzazione
Anche in questo caso si è rivelata l’impossibilità di portare la
continua ad entrambi gli amplificatori senza attraversare le piste RF
di ingresso o di uscita. Si è così deciso di utilizzare anche in
questo caso un filo passante sotto il circuito.
Si sono così dovute creare due piazzole per saldare il filo nella
faccia inferiore della basetta.
7.6.5 Valutazione dell’Ingombro del Circuito
Una volta sistemate le piste e le piazzole nel modo più opportuno, è
necessario delimitare il bordo della basetta.
In questo caso, il circuito è stato adattato per un box di dimensioni
50mmx25mm. Queste dimensioni le permettono di essere inserita
dentro ad una linea cava per la connessione diretta alla linea
bilanciata di alimentazione dei dipoli. Le dimensioni complessive
della basetta sono quindi state fissate sui 49mmx24mm.
Il layout complessivo della parte superiore della basetta è mostrato
in Fig.7.14.
Figura 7.14
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 7
207
___________________________________________________________________________
7.7 REALIZZAZIONE DEL LAYOUT DEL CIRCUITO
Le fasi della realizzazione del layout del circuito sono le stesse
presentate nel Paragrafo 7.3.
7.8 MONTAGGIO DEI COMPONENTI
Il prototipo ottenuto viene riportato in Fig.7.15.
Figura 7.15
___________________________________________________________________________
REALIZZAZIONE DEI CIRCUITI
CAPITOLO 8
208
___________________________________________________________________________
8.1
CARATTERIZZAZIONE
DELL’AMPLIFICATORE BILANCIATO
DEL
PROTOTIPO
Prima
di
passare
alla
caratterizzazione
del
prototipo
dell’amplificatore
bilanciato,
è
indispensabile
ripetere
le
simulazioni tenendo conto delle caratteristiche dello splitter PSCQ2-450. Di questo splitter si hanno a disposizione i files di Parametri
S per frequenze da 350MHz a 450MHz (Ref.[1]).
8.1.1 SIMULAZIONI CON LO SPLITER PSCQ-2-450
Per quanto riguarda l’adattamento, i risultati delle simulazioni sono
riportati in Tabella 1.
S 1 1 (dB)
400MHz -14.77
408MHz -14.4
416MHz -14.13
S 2 2 (dB)
-14.97
-14.45
-14.16
Tabella 1
Si nota che le simulazioni di S 1 1 e S 2 2 risultano molto più accurate.
La differenza tra questi valori e quelli ottenuti, utilizzando il
modello di ibrido a 90°, fornito da Microwave Office, dipende dalla
conoscenza del reale adattamento dello splitter, che si ha a
disposizione proprio grazie ai files di Parametri S.
I risultati relativi a guadagno e Noise Figure sono riassunti in
Tabella 2.
S 2 1 (dB)
400MHz 21.907
408MHz 21.667
416MHz 21.414
NF(dB)
0.6474
0.6478
0.6602
Tabella 2
Si è verificato che tali valori sono concordi con quelli che si erano
ottenuti, per guadagno e noise figure, con l’utilizzo della
modellizzazione fatta per simulare l’amplitude unbalance e la phase
unbalance. Ciò dà una conferma della bontà del modello utilizzato.
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
209
___________________________________________________________________________
Per quanto riguarda l’OIP3, le simulazioni sono state fatte a
408MHz per una potenza di –20dBm. Quello che risulta è:
• OIP3=+35.08dBm
Anche in questo caso c’è una corrispondenza con i valori ottenuti
dalle simulazioni con il modello dello splitter per amplitude e phase
unbalance.
Per verificare l’andamento del guadagno e dell’adattamento si
faccia riferimento al paragrafo successivo, in cui viene riportato il
confronto tra valori misurati e simulati dell’amplificatore
bilanciato.
8.1.2 MISURA DEI PARAMETRI S
La misura dei Parameri S dei dispositivi è stata fatta attraverso
l’analizzatore di rete vettoriale HP 8722D (50MHz-40GHz).
In Fig.8.1 e 8.2 viene riportato il confronto tra l’andamento
simulato e misurato di guadagno e adattamento di ingresso e di
uscita del singolo stadio.
Si sono indicati con “Singolo stadio” gli andamenti simulati, mentre
con “Bilanciato_Singolo” i risultati delle misure sul dispositivo a
singolo stadio.
Dai grafici riportati si vede con molta chiarezza la presenza di uno
spostamento in frequenza dei valori misurati rispetto a quelli
simulati. E’ comunque indispensabile, prima di trarre delle
conclusioni, fare riferimento anche alla noise figure.
Il problema verrà quindi affrontato più approfonditamente nel
prossimo paragrafo
In Fig.8.3 viene riportato in confronto tra andamenti misurati e
simulati di guadagno e adattamento del dispositivo bilanciato.
Con “Modello Spitter Reali” vengono indicati gli andamenti
simulati, mentre con “Bilanciato” quelli misurati.
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
210
___________________________________________________________________________
Figura 8.1
F ig u r a 8 . 2
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
211
___________________________________________________________________________
F ig u r a 8 . 3
Avendo a disposizione i files di Parametri S degli splitter, gli
andamenti del simulato sono piuttosto conformi a quelli del
misurato.
In Fig.8.4 e 8.5 sono riportati gli andamenti dei valori misurati di
guadagno e adattamento del dispositivo a singolo stadio e di quello
bilanciato.
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
212
___________________________________________________________________________
F ig u r a 8 . 4
F ig u r a 8 . 5
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
213
___________________________________________________________________________
Si osservi che il confronto tra le misure dell’amplificatore a stadio
singolo e di quello bilanciato è da considerarsi significativo
solamente all’interno della banda di funzionamento degli splitter
(350MHz-450MHz).
Si nota, inoltre, come la costruzione di una struttura bilanciata
abbia permesso di migliorare in modo notevole l’adattamento sia di
ingresso sia di uscita, confermando la teoria.
Il guadagno invece subisce, come ci si aspettava, una leggera
diminuzione (circa 0.8dB) a causa delle perdite dovute
all’introduzione degli splitter.
8.1.3 MISURA DEL RUMORE
Per la misura della temperatura di rumore dell’amplificatore
bilanciato e del suo corrispondente a singolo stadio è stato
utilizzato M.A.M.BO. (Microwave Amplifier Measurement Board).
M.A.M.BO. è uno strumento di misura del rumore progettato e
realizzato nel Laboratorio di Microonde della Stazione
Radioastronomica di Medicina, Istituto di Radioastronomia. Nelle
misure è stato utilizzato il generatore di rumore HP346C. Questo
dispositivo è stato ricalibrato all’interno della Stazione
Radioastronomica e si è riusciti a far sì che esso fornisca un errore
di soli 0.06dB sulla Noise Figure.
I risultati della misure del rumore del dispositivo a singolo stadio e
di quello bilanciato nella banda da 350MHz a 450MHz, sono
riportati in Fig.8.6. Tali misure sono state fatte a caldo, lasciando
cioè funzionare il dispositivo fino ad arrivare a regime termico.
Con MAMBO si è misurata la temperatura di rumore, la quale è
stata poi convertita in noise figure attraverso la nota formula:
NF=10Log((290+Tr)/290)
(8.1)
L’andamento visualizzato è stato ottenuto attraverso una linea di
tendenza polinomiale del 5°grado.
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
214
___________________________________________________________________________
Noise Figure Misurata
1
0,9
0,8
0,7
NF singolo stadio
0,6
NF Bilanciato
0,5
Poli. (NF singolo stadio)
Poli. (NF Bilanciato)
0,4
0,3
0,2
0,1
0
350 355 360 365 370 375 380 385 390 395 400 405 410 415 420 425 430 435 440 445 450
Frequenze (MHz)
Figura 8.6
La noise figure complessiva dell’amplificatore bilanciato si
mantiene su 0.8dB. Nella prospettiva di utilizzare uno splitter con
caratteristiche migliori in termini di Insertion Loss e di Return
Loss, sembra quindi che possa essere verificata l’ipotesi che era
stata fatta inizialmente. La costituzione della struttura bilanciata
complessiva conduce infatti a valori di adattamento molto buoni,
mentre la diminuzione della noise figure del singolo stadio
compensa l’aumento di quest’ultima dovuto all’introduzione degli
splitter. Ciò significa che con l’amplificatore bilanciato si è in
grado di mantenere una NF paragonabile a quella del singolo stadio
e di ottenere un deciso miglioramento dell’adattamento.
Per verificare che, anche per quanto riguarda la noise figure, si ha
una differenza in frequenza tra misure e simulazioni, si è pensato di
ripetere le misure con MAMBO da 350MHz a 650MHz. Lo scopo è
quello di individuare la posizione del punto di minimo della
temperatura di rumore.
Purtroppo però non è stato possibile reperire, per le misure, un
circolatore che coprisse l’intera banda. Per questo motivo si sono
utilizzati tre circolatori differenti, forzandoli a lavorare al di fuori
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
215
___________________________________________________________________________
della banda in cui i circolatori stessi sono stati sperimentalmente
caratterizzati.
I tre circolatori utilizzati sono:
• FOREM 99155
• FOREM 04955
• FOREM 99055
Attraverso l’uso del vettoriale, si sono caratterizzati tali dispositivi,
in modo da individuare il range di frequenze in cui è garantito il
loro corretto funzionamento.
Le bande individuate dalla caratterizzazione dei circolatori e le
bande in cui essi sono stati fatti lavorare per le misure sono
riportate in Tabella 3.
CIRCOLATORE
BANDA DA CARATTERIZZAZIONE
[MHz]
BANDA USATA NELLE MISURE
[MHz]
99155
350450
350550
04955
400490
400550
99055
550750
450650
Tabella 3
Una volta fatte le misure con MAMBO, si sono sovrapposti gli
andamenti delle tre misure (tutte a caldo) e si è cercato di
estrapolarne un andamento complessivo.
Il risultato delle misure della temperatura di rumore, ottenuto
facendo uso dei tre circolatori differenti, è riportato in Fig.8.7.
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
216
___________________________________________________________________________
40
35
30
25
99155
04955
20
99055
15
10
5
0
350
400
450
500
550
600
650
Figura 8.7
Con le barre verdi sono indicate le frequenze in cui i circolatori
lavorano nella banda in cui è garantito il loro funzionamento.
Da 350 a 450MHz sono considerati affidabili gli andamenti ottenuti
con il circolatore 99155. Per questo motivo, all’interno di questa
banda si prende come riferimento l’andamento rappresentato in blu
nel grafico.
Da 450 a 490MHz, invece, è il circolatore 04955 a lavorare in
banda. Per questo range di frequenze, quindi, si considerano
affidabili gli andamenti segnati in rosa sul grafico.
Stessa cosa succede per le frequenze che vanno da 550 a 650MHz.
Essendo questa la banda di corretto funzionamento del circolatore
99055, si considerano affidabili gli andamenti presentati in verde
sul grafico.
Il problema si pone quindi solamente per le frequenze che vanno da
490MHz a 550MHz.
Gli andamenti che si hanno sul grafico all’interno di questa banda,
infatti, si sono ricavati facendo lavorare il circolatore 04955 fino a
frequenze di 60MHz superiori a quelle individuate per il suo
corretto funzionamento. Mentre, per quanto riguarda il circolatore
99055, questo è stato fatto lavorare fino a 60MHz al di sotto della
banda per lui individuata.
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
217
___________________________________________________________________________
A questo punto, all’interno di questo range di frequenze si è fatta la
media matematica delle misure date dai due circolatori. In seguito,
si è fatto un fitting dei punti del grafico, utilizzando una linea di
tendenza polinomiale del quinto grado (linea rossa in Fig.8.8).
Anche per quanto riguarda l’andamento della noise figure simulata,
si è utilizzata una interpolazione in quanto, a causa dell’utilizzo dei
Parametri S, tale grandezza presentava un andamento “riplettoso”.
Noise Figure
0,9
NF misurata
NF simulata
0,8
Poli. (NF misurata)
Poli. (NF simulata)
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
350 360 370 380 390 400 410 420 430 440 450 460 470 480 490 500 510 520 530 540 550 560 570 580 590 600 610 620 630 640 650
Frequenze (MHz)
Figura 8.8
Oltre alla linea di tendenza polinomiale, sul grafico sono state
visualizzate anche le barre di errore relative alla misura della noise
figure.
L’individuazione del valore da attribuire a tale barre è stata
possibile grazie all’utilizzo di un programma fornito dall’Agilent
Technologies, di cui in Fig.8.9 è riportata l’interfaccia grafica.
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
218
___________________________________________________________________________
F ig u r a 8 . 9
Inserendo i dati relativi al DUT e al dispositivo utilizzato per
effettuare le misure, quello che si ottiene è una incertezza standard
(σ) di meno di 0.10dB. Tale valore è sicuramente ottimo per una
testina di rumore e produce un errore predominante sul dispositivo
complessivo molto basso. (Ref.[2], Ref.[3])
Una volta che si ha a disposizione il grafico della noise figure, è
poi possibile confrontarlo con i grafici relativi alle simulazioni
(riportati in azzurro in Fig.8.8).
Si nota che, anche in questo caso, è presente uno slittamento in
frequenza del punto di minimo della temperatura di rumore, anche
se di minore entità.
In Tabella 4 sono riportati i valori delle frequenze (espressi in
MHz) in corrispondenza dei picchi positivi e negativi delle
grandezze simulate e misurate, per quanto riguarda NF, guadagno e
adattamento.
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
219
___________________________________________________________________________
Misurato
NF 455
S 2 1 325
S 1 1 345
S 2 2 390
Simulato
445
360
410
440
∆
10
35
65
50
Tabella 4
Si può notare come, la differenza di frequenza tra misurato e
simulato vari a seconda della grandezza che si sta considerando ed
è comunque sempre presente. Ciò complica notevolmente il
problema della progettazione.
Il primo passo di ogni progetto sarà quindi quello di individuare il
parametro più importante di cui tenere conto e, di conseguenza,
prendere atto di quelle che sono le frequenze a cui risulta più
opportuno simulare.
8.1.4 MISURE DI DINAMICA
Le misure di IP3 sono state fatte utilizzando, oltre al vettoriale,
l’analizzatore di spettro HP 8564E (9kHz-40GHz).
I grafici relativi alle misure di OIP3 del dispositivo a singolo stadio
e del dispositivo bilanciato sono riportati in Fig.8.10 e 8.11.
Dalle misure effettuate si è trovato che:
• OIP3=+34dBm per il singolo stadio
• OIP3=+36dBm per il bilanciato
Nelle misure del punto di compressione a 1dB si è utilizzato
l’analizzatore di reti HP 8751 (5Hz-500MHz).
In Fig.8.12 e 8.13 sono riportati i grafici relativi al dispositivo a
singolo stadio e a quello bilanciato.
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
220
___________________________________________________________________________
F ig u r a 8 . 1 0
F ig u r a 8 . 1 1
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
221
___________________________________________________________________________
La potenza presente in ascissa è la potenza di ingresso al DUT a cui
sono già state detratte le perdite dovute allo splitter e ai cavi che
sono stati utilizzati nelle misure.
Si ottiene così:
• P1dBin=-6.8dBm per il singolo stadio
• P1dBin=-3dBm per il bilanciato
Per ricavare il punto di compressione a 1dB dell’uscita, è
sufficiente applicare la formula:
P1dBout = P1dBin + (G - 1)
(8.3)
Applicando questa formula si ricava che:
• P1dBout=+17.2dBm per il singolo stadio
• P1dBout=+20.1dBm per il bilanciato
I valori trovati della dinamica sono molto buoni.
F ig u r a 8 . 1 2
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
222
___________________________________________________________________________
F ig u r a 8 . 1 3
8.2
CARATTERIZZAZIONE DELL’AMPLIFICATORE DIFFERENZIALE
Rispetto ad un dispositivo a due porte, la caratterizzazione di un
dispositivo di tipo differenziale è più complessa. La maggior parte
degli analizzatori vettoriali di rete, infatti, non sono adatti allo
scopo, dal momento che le loro porte, essendo single-ended, non
sono in grado di supportare segnali differenziali e di modo comune.
I dispositivi single-ended, inoltre, sono caratterizzati da impedenze
di 50Ω e di 75Ω mentre i dispositivi differenziali non hanno valori
di impedenza standard.
Sono state individuate diverse metodologie per la caratterizzazione
di dispositivi di tipo differenziale (Ref.[4]). Alcune di esse vengono
brevemente descritte qui di seguito.
Viene innanzitutto contemplata la possibilità di effettuare delle
misure single-ended sul dispositivo con l’ausilio di un balun.
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
223
___________________________________________________________________________
Questo è utilizzato per connettere la porta single-ened
dell’analizzatore di rete alla porta differenziale del dispositivo.
Tale soluzione, anche se è la più semplice ed immediata, porta con
sé alcuni svantaggi dovuti alla non-idealità del balun stesso.
Innanzitutto, la banda in cui è possibile effettuare le misure dipende
dalla banda del balun (che notoriamente è piuttosto stretta). Il
balun, inoltre, introduce delle perdite dovute alla propria return
loss, insertion loss, amplitude unbalance e phase unbalance. Infine,
non permettendo il passaggio di segnali di modo comune, è
possibile ricavare informazioni solamente sulle misure che
riguardano il modo differenziale.
Un altro metodo contempla l’uso di una trasformazione matematica
per convertire i dati single-ended in parametri differenziali. Tale
metodo è chiamato tecnica mixed-mode S-parameter. Il
differenziale progettato in questa tesi è un dispositivo a tre porte
(ingresso differenziale ed uscita single-ended). Caratterizzare un 3
porte comporta eseguire 3 misure “a due porte”, ottenendo un totale
di 12 parametri S. Mediante una elaborazione software, basata su
particolari algoritmi (Ref.[5]), è possibile convertire i 12 parametri
S nei 9 parametri S necessari alla caratterizzazione di un
dispositivo a 3 porte. Questa tecnica cerca di determinare le
risposte corrispondenti ai segnali di modo comune e differenziale
su tutte le porte del dispositivo. La matrice mixed-mode è
organizzata in modo del tutto simile ad una matrice di parametri S,
solo che, in questo caso, ogni colonna rappresenta una condizione
di stimolo differenziale e ogni riga rappresenta una differente
risposta allo stimolo, come riportato in Fig.8.14.
Vi è inoltre un’altra soluzione che prevede l’utilizzo di un Test
System, apposito per dispositivi differenziali. Tale soluzione,
almeno in questa fase iniziale, non è stata contemplata in quanto è
molto dispendiosa.
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
224
___________________________________________________________________________
F ig u r a 8 . 1 4
Per quanto riguarda la misura della NF, anche in questo caso non è
possibile utilizzare le tradizionali tecniche di misura. Ricerche
bibliografiche hanno messo in luce la possibilità di caratterizzare la
NF di un dispositivo a tre porte in termini di matrice di rumore,
parametri di scattering e coefficienti di riflessione sulle
terminazioni del DUT. (Ref.[6])
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 8
225
___________________________________________________________________________
REFERENCES:
[1]: “Phase-Shifter per applicazioni Radioastronomiche con array di
grandi dimensioni” – Tesi di Laurea di Fabio Guelfi – A.A. 20002001
[2]: “Accuratezza delle misure di
S.Mariotti, T.Pisanu, A.Scalambra
Rapporto Interno Cnr-IRA 302/2000
temperatura
di
rumore”,
[3]: “Strumentazione e metodologie per la modellistica di rumore di
dispositivi attivi ad alta frequenza”, M. De Dominicis
Tesi di Dottorato in Ingegneria delle Telecomunicazioni e
Microelettronica – Università Tor Vergata - Febbraio 2004
[4]: “Concepts in Balanced Device Measurements”
Application Note 1373-2 – Agilent Technologies
[5] : “Combined Differential and Common-Mode Scattering
Parameters : Theory and Simulation”, D.E.Bocklemann,
W.R.Eisenstadt – IEEE Transactions on Microwave Theory and
Techniques
[6]: “Multiport Noise Characterization and differential Amplifiers”, J.Randa,
Radio-Frequency Technology Division National Institute of Standards and
Technology
___________________________________________________________________________
CARATTERIZZAZIONE DEI CIRCUITI
CAPITOLO 9
226
___________________________________________________________________________
9.1 CONCLUSIONI E SVILUPPI FUTURI
Nell’ambito della partecipazione dell’Istituto di Radioastronomia al
consorzio internazionale SKA, per la progettazione e realizzazione
di un radiotelescopio di nuova generazione, il radiotelescopio
“Croce del Nord”, sarà utilizzato per acquisire know how da
riversare in questo ambizioso progetto.
Con il seguente lavoro di tesi sono state investigate due tipologie di
amplificatori a basso rumore (LNA), da applicare al radiotelescopio
“Croce del Nord”. In particolare, sono state studiate e progettate
una architettura di tipo bilanciato ed una di tipo differenziale.
I risultati ottenuti vengono riassunti qui di seguito.
9.1.1 L’Amplificatore Bilanciato
L’LNA a singolo stadio, da cui si è partiti per la realizzazione del
progetto di questa tesi, presenta i seguenti valori misurati:
•
•
•
•
•
S 1 1 =-10dB
S 2 2 =-17dB
S 2 1 =22.6dB
NF=0.4dB
OIP3=+29.2dB
Il prototipo dell’amplificatore bilanciato che è stato realizzato,
presenta, invece, i seguenti valori misurati:
•
•
•
•
•
•
S 1 1 =-14dB
S 2 2 =-17.5dB
S 2 1 =23.88dB
NF=0.8dB
P1dBout=+20dBm
OIP3=+36dBm
É evidente che, l’introduzione di una architettura di tipo bilanciato
ha portato ad un buon miglioramento dell’adattamento (soprattutto
dell’S 1 1 ) e anche del guadagno.
Per quanto riguarda la dinamica, bisogna notare che, un aumento
così evidente dell’OIP3 dipende anche dal fatto che l’amplificatore
___________________________________________________________________________
CONCLUSIONI
CAPITOLO 9
227
___________________________________________________________________________
a singolo stadio, qui progettato, ha, esso stesso, un punto di
intercetta del terzo ordine di +34dBm.
La NF ha subito comunque un aumento abbastanza consistente. Si
ricordi che, nella realizzazione del prototipo, è stato comunque
utilizzato uno splitter con caratteristiche peggiori rispetto a quello
che si era inizialmente scelto.
È quindi presumibile che, utilizzando il dispositivo migliore, si sia
in grado di mantenere un valore di NF paragonabile a quello
dell’amplificatore a singolo stadio inizialmente progettato.
Gli svantaggi dell’utilizzo della configurazione bilanciata, come ci
si aspettava, sono il consumo di potenza raddoppiato, la maggiore
complessità circuitale, il maggiore ingombro e il costo che, seppur
basso, è sempre 4 volte superiore a quello di uno stadio singolo.
Uno sviluppo futuro di tale progetto sarà quello di realizzare un
nuovo prototipo dell’amplificatore bilanciato, facendo uso degli
splitter che si erano scelti inizialmente.
È inoltre di fondamentale importanza verificare i parametri S del
dispositivo ATF-54143 attraverso un operazione di de-embedding
del componente. Ciò consentirà di dare una giustificazione allo
shift in frequenza tra misure e simulazioni.
9.1.2 L’Amplificatore Differenziale
I risultati delle simulazioni circuitali dello splitter sono riassunti di
seguito:
•
•
•
•
S33=-10dB
S21=23dB
Zodd=36dB
NF=1.7dB
Lo scopo di questo progetto era quello di valutare le problematiche
relative all’applicazione di una struttura differenziale ai front-end
della Croce del Nord.
Sono stati quindi individuati diversi problemi quali la progettazione
tenendo conto della impedenza differenziale, la criticità
dell’introduzione delle piste nel layout del dispositivo e la forte
variazione della Zodd simulando facendo uso di modelli e parametri
S.
___________________________________________________________________________
CONCLUSIONI
CAPITOLO 9
228
___________________________________________________________________________
Il progetto presentato non fornisce comunque valori accettabili in
termini di NF e adattamento, a causa delle caratteristiche presentate
dal dispositivo MBC13916.
Sono quindi possibili tre sviluppi futuri nell’ambito di questo
progetto.
Il primo contempla la verifica dell’effetto dell’introduzione di un
doppio stadio, facendo sempre uso del dispositivo MBC13916.
Il secondo prevede l’abbandono della tecnologia BiCMOS per
passare all’utilizzo di HEMT.
Il terzo prevede la realizzazione dell’amplificatore differenziale in
tecnologia MMIC. Una strada di questo tipo è comunque quella più
complicata considerando tutte le implicazioni associate.
___________________________________________________________________________
CONCLUSIONI
APPENDICE A
A1
___________________________________________________________________________
A.1
DEFINIZIONE DEI PARAMETRI S
Un generico dispositivo a due porte, come quello mostrato in
Fig.A.1, è comunemente descritto attraverso la matrice
impedenza, ammettenza, oppure, attraverso la matrice ibrida,
secondo le relazioni riportate in Fig.A.2.
Figura A.1. Due porte
Figura A.2. Matrici Z, Y e H.
Come si è visto nel Capitolo 2, però, alle alte frequenze non è
possibile fare uso di questi parametri; per questo motivo è
necessario un altro metodo di caratterizzazione delle reti.
Le variabili che si usano comunemente alle radiofrequenze sono
le variabili d’onda.
LINEE DI TRASMISSIONE
Alle alte frequenze, i sistemi hanno una sorgente di potenza. Una
porzione di tale potenza è trasferitala carico attraverso una linea
di trasmissione, come esemplificato in Fig.A.3.
___________________________________________________________________________
PARAMETRI S: DESCRIZIONE E SIGNIFICATO
APPENDICE A
A2
___________________________________________________________________________
Figura A.3. Schema di una generica linea di trasmissione
Tensioni, correnti e potenza possono essere considerate in forma
di onde, che si muovono in entrambe le direzioni lungo la linea
di trasmissione. Una porzione di onda incidente al carico sarà
riflessa.
Il circuito equivalente di una generica linea di trasmissione è
mostrato in Fig.A.4.
Figura A.4. Linea di trasmissione
La sua impedenza caratteristica è definita dall’espressione:
ZO =
R + jω L
L
≅
R + jω C
C
(A.1)
___________________________________________________________________________
PARAMETRI S: DESCRIZIONE E SIGNIFICATO
APPENDICE A
A3
___________________________________________________________________________
L’ultima uguaglianza vale nel caso in cui la linea sia da
considerarsi priva di perdite, infatti, una linea di trasmissione di
questo tipo è costituita semplicemente da una induttanza in serie e
da
una
capacità
in
parallelo.
Convenzionalmente,
alle
radiofrequenze, si ha Zo=50Ω.
Il valore della tensione in un dato punto della linea è la somma
delle onde incidenti e riflesse in quel punto:
Vt = E inc + E rifl .
(A.2)
La corrente, invece, è data dalla differenza tra la tensione d’onda
incidente e riflessa, diviso l’impedenza caratteristica della linea:
It =
E inc − E rifl
Z0
.
(A.3)
Una grandezza molto utilizzata è il coefficiente di riflessione, Γ .
Esso viene definito mediante il rapporto:
Γ=
Z L − Z0
Z L + Z0 .
(A.4)
Γ
è una misura della qualità dell’adattamento di impedenza tra
il carico e l’impedenza caratteristica della linea. Infatti, il
coefficiente di riflessione è nullo, se si sceglie un carico pari
all’impedenza caratteristica della linea. Quindi, migliore è
l’adattamento, più piccola è la tensione d’onda riflessa, e più
piccolo è il coefficiente di riflessione.
PARAMETRI S
Si inserisca un due porte nella linea di trasmissione di Fig.A.3.
Il risultato è rappresentato in Fig.A.5.
E’ possibile esprimere le tensioni e le correnti in funzione dei
coefficienti di onda incidente e riflessa alle porte, secondo le
espressioni riportate in Fig.A.6.
___________________________________________________________________________
PARAMETRI S: DESCRIZIONE E SIGNIFICATO
APPENDICE A
A4
___________________________________________________________________________
Figura A.5.
Figura A.6
Si modifichino le equazioni di Fig.A.6 in modo che le tensioni
d’onda incidenti siano le variabili indipendenti, mentre, le
tensioni d’onda riflesse siano quelle dipendenti.
Ne risultano due equazioni del tipo:
E r1 = f11 (h )E i1 + f12 (h )E i2
E r2 = f 21 (h )E i1 + f 22 (h )E i2
(A.5)
f11 , f 12 , f 21 e f 22
rappresentano un nuovo set di parametri di rete,
che si possono chiamare parametri di Scattering.
Si dividano entrambi i membri dell’equazione A.5 per
possono definire le seguenti variabili:
a1 =
a2 =
E i1
Zo
Z0
. Si
,
E i2
Zo
,
(A.6)
___________________________________________________________________________
PARAMETRI S: DESCRIZIONE E SIGNIFICATO
APPENDICE A
A5
___________________________________________________________________________
E
b1 = r1
Zo
,
E
b 2 = r2
Zo
.
Comunemente, a viene indicata come variabile d’onda incidente,
mentre , b come variabile d’onda riflessa. Si noti che il quadrato
dell’ampiezza di tali variabili ha le dimensioni di una potenza.
La potenza incidente alla porta 1 è indicata con
b
a1
2
, mentre la
2
potenza riflessa dalla porta 1 è indicata con 1 . In Fig.A.7 viene
rappresentato il due-porte con indicazione delle variabili d’onda
incidente e riflessa.
Figura A.7
Legando, tra di loro, tali variabili, si ottiene:
b1 = S11a 1 + S12a 2
b 2 = S21a 1 + S22a 2
(A.7)
dove, per definizione:
S11 =
S 21 =
b1
a1
b2
a1
a 2 =0
,
a 2 =0
(A.8)
,
(A.9)
___________________________________________________________________________
PARAMETRI S: DESCRIZIONE E SIGNIFICATO
APPENDICE A
A6
___________________________________________________________________________
b
S 22 = 2
a 2 a =0
1
,
(A.10)
b
S12 = 1
a 2 a =0
1
.
(A.11)
Per misurare S11 , dunque, si deve avere a 2 =0, cioè la porta di
uscita in Fig.A.7, deve essere ch iusa su di un'impedenza pari a
R 0 =50Ω. In tal caso si avrà:
(A.12)
Chiudere la porta di uscita su di una impedenza uguale
all’impedenza caratteristica della linea, è equivalente a porre
a 2 =0. Ciò significa, infatti, che l’onda incidente è totalmente
assorbita dal carico.
Se si vuole dare un significato fisico ai parametri, si ha, ad
esempio che:
2
S 21 =
b2
2
a1
2
(A.13)
Questa espressione definisce il rapporto tra la potenza che va al
carico quando a 2 è nullo e la potenza disponibile in ingresso.
Dalla definizione di S21 , rappresentata dall’equazione A.9, si
deduce come la relazione A.13 rappresenti l'effettivo guadagno
di potenza, cioè la quantità di potenza disponibile, erogata dal
generatore, che giunge realmente al carico, passando attraverso
il due porte.
___________________________________________________________________________
PARAMETRI S: DESCRIZIONE E SIGNIFICATO
APPENDICE A
A7
___________________________________________________________________________
A.2
LA CARTA DI SMITH
La carta di Smith, rappresentata in Fig.A.8, è tra i diagrammi più
utilizzati per risolvere i problemi delle linee di trasmissione. Data
la laboriosità dei procedimenti analitici, si preferiscono, infatti,
metodi grafici e la carta di Smith, fra i diagrammi esistenti è quella
che consente un più facile impiego.
Si indichi con:
Z = R + jX ,
(A.14)
l’impedenza in un punto della linea di trasmissione; in particolare,
con Z si può indicare l’impedenza del carico.
Per la carta di Smith delle impedenze, si considera l’impedenza
normalizzata z, costituita da una resistenza normalizzata, r, e da
una reattanza normalizzata, x:
z = r + jx =
R
X
+j
Z0
Z0 .
(A.15)
Viene, quindi, mappato il piano complesso della variabile z.
La carta di Smith è formata da due famiglie di circonferenze
ortogonali tra di loro. La prima è la famiglia delle circonferenze
r=costante, aventi il centro sull’asse orizzontale. La seconda è
costituita dalle circonferenze x=costante, aventi il centro sulla
tangente alla circonferenza r=0, condotta per l’estremo destro della
carta.
La carta di Smith può essere interpretata ed usata anche come carta
delle ammettenze. Indicando con Y=G+jB l’ammettenza in un punto
della linea, il suo valore normalizzato, y, può essere espresso come:
y = g + jb =
G
B
+j
Y0
Y0 .
(A.16)
La carta di Smith può, pertanto essere utilizzata per le ammettenze
pur di sostituire r con g e x con b.
___________________________________________________________________________
PARAMETRI S: DESCRIZIONE E SIGNIFICATO
APPENDICE A
A8
___________________________________________________________________________
Figura A.8. Carta di Smith
___________________________________________________________________________
PARAMETRI S: DESCRIZIONE E SIGNIFICATO
APPENDICE A
A9
___________________________________________________________________________
REFERENCES:
[1]: Appunti tratti dalle lezioni del corso di “Microonde” –
Prof.A.Costanzo
[2]: “S Parameter Design”, Application Note 154 – Agilent
Technologies
[3]: “Capitolo 5: Amplificatori per alta frequenza”, G.Vannini
www.micrel.deis.unibo.it/˜eletlc/staff/Giorgio/didattica/lucidi_e
3.html
___________________________________________________________________________
PARAMETRI S: DESCRIZIONE E SIGNIFICATO