Dinamica di un sistema articolato ad un grado
di libertà
Nicola Greco
November 28, 2011
Corso di Meccanica applicata alle macchine
1
1. Descrizione del sistema
2. Studio del modello statico
3. Derivazione del modello dinamico
4. Implementazione del modello
2
1
Descrizione del sistema
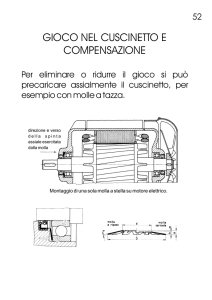
L'obiettivo di questo lavoro è derivare le equazioni della dinamica del sistema
articolato in g.1
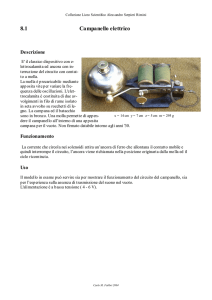
g.1 Sistema in esame
Il sistema è composto da un braccio orizzontale, alla cui estremità è collegata
una massa, e da due bracci trasversali, uno dei quali è collegato ad una molla a
compressione il cui scopo è tenere in equilibrio il sistema complessivo. Il sistema
è immerso in un campo gravitazionale g.
3
2
Studio del modello statico
Si studia inizialmente il modello statico del sistema, al ne di trovare il modulo
della forza Fk esercitata dalla molla sulla struttura. Mediante il diagramma di
corpo libero, si ottiene come risultato
F k = 2mg
Si ha quindi una relazione di proporzionalità fra la forza esercitata dalla
molla ed il prodotto della massa per la gravità; tale risultato è coerente, in
quanto ad un aumento della massa segue un aumento della forza esercitata
dalla molla, e lo stesso accade per un eventuale aumento della forza di gravità.
4
3
Derivazione del modello dinamico
In questo paragrafo è illustrata la procedura per ricavare le equazioni descriventi
la dinamica del sistema, mediante il metodo di Lagrange.
Si sceglie come coordinata lagrangiana l'angolo q compreso fra il braccio
trasversale e il suolo. Assumiamo che q = 45° sia la condizione in cui la molla
si trova a riposo.
Il passo iniziale è ricvare l'energia potenziale elastica, che risulta
Uk =
1
K(l − l0 )2
2
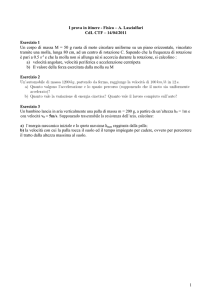
si deve quindi esprimere la lunghezza della molla, al variare dell'angolo q; in
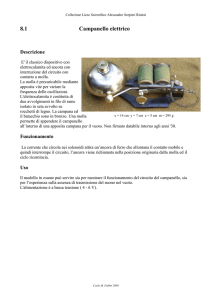
g.2 si osserva gracamente quale sia la variazione della lunghezza dela molla
in seguito ad un abbassamento della struttura
g.2 : lunghezza della molla in compressione
Quindi per angoli minori di 45° si ha una compressione della molla, mentre
per angoli superiori a 45° si ha viceversa un allungamento.
Applicando semplici regole trigonometriche, la lunghezza della molla risulta
dipendente dalla seguente legge
l=
l1 p
1 − 2cos(q)cos(45) + cos2 (45)
2
mentre la lunghezza di riposo è data da
l0 =
l1
sin(45)
2
L'energia potenziale della molla risulta quindi
Uk =
i
p
1
kl2 h
k(l−l0 )2 = 1 1 − cos(q)cos(45) − sin(45) 1 − 2cos(q)cos(45) + cos2 (45)
2
4
L'energia potenziale gravitazionale è data invece da
Ug = mgl1 sin(q)
la variazione di tale energia è relazionata alla variazione dell'altezza dal suolo
della massa collegata.
5
Inne, si calcola l'energia cinetica
T =
1
mv 2
2
supponendo la struttura indeformabile, la velocità vG della massa sarà uguale
alla velocità vA dell'estremità del braccio su cui è esercitata la forza da parte della
molla. tale velocità dipenderà dalla velocità angolare del braccio
vA = q 0 l1
risulta quindi l'energia cinetica
T =
1 02 2
mq l1
2
Una volta svolte le derivate mediante il metodo di Lagrange, si ottiene come
risultato la dinamica dell'angolo q
"
#
sin(45)cos(45)sin(q)
g
k
cos(45)sin(q) − p
q = − cos(q) −
l1
4m
1 − 2cos(q)cos(45) + cos2 (45)
00
6
4
Implementazione del modello
Come software per implementare il modello è stato scelto Simulink.
I risultati seguenti sono relativi ad una simulazione svolta con i seguenti dati:
angolo di partenza = 30°
massa collegata = 20kg
coeciente elastico k = 250000 N/m ( tale valore dovrà essere validato in
seguito)
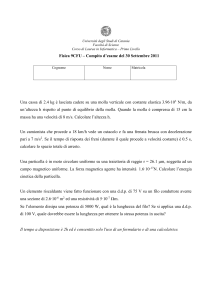
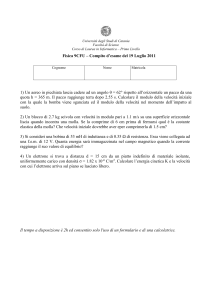
la dinamica dell'angolo q è presentata in Fig.3
Fig.3 : dinamica dell'angolo q
l'angolo giunge in una posizione di equilibrio di circa 44°. Tale valore è
ovviamente inferiore alla posizione di equilibrio, in quanto la forza della molla
dovrà compensare la forza gravitazionale esercitata sulla massa collegata.
7
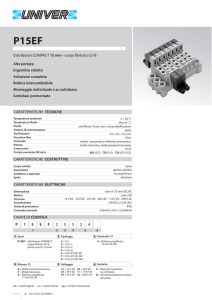
L'andamento della forza esercitata dalla molla è anch'esso oscillatorio, come
si osserva in Fig.4
Fig.4 Andamento della forza esercitata dalla molla
La molla all'equilibrio risulta esercitare una forza di modulo Fk = 398 N , che
di poco si discosta dal valore ricavabile dal modello statico Fk = 2mg = 392 N .
Ciò valida anche la scelta fatta riguardo il coeciente k di elasticità della molla.
8