Rifilato:
in alto:
in basso:
a sinistra:
a destra:
61,5 mm
61,5 mm
43,5 mm
43,5 mm
Motorcontroller
Manuale
Montaggio e
installazione
Tipo CMMS-AS-...
Manuale
564 231
it 0708NH
[737 768]
Edizione __________________________________________________ it 0708NH
Denominazione __________________________________ P.BE-CMMS-AS-HW-IT
Codice di ordinazione _________________________________________ 564 231
(Festo AG & Co KG., D-73726 Esslingen, 2008)
Internet:
E-mail:
http://www.festo.com
0H
[email protected]
È vietata la riproduzione, distribuzione e diffusione a terzi, nonché l'uso arbitrario, totale o
parziale del contenuto della presente documentazione senza la preventiva autorizzazione
scritta della Festo. Qualsiasi infrazione comporta il risarcimento di danni. Tutti i diritti riservati, ivi compreso il diritto di deposito brevetti, modelli registrati o di design.
Lista delle revisioni
Autore:
Festo AG & Co. KG
Titolo del manuale:
Festo P.BE-CMMS-AS-HW-IT 0708NH
Nome del file:
Luogo di memorizzazione del file:
N. prog.
Descrizione
Indice di revisione
Data della modifica
001
Stesura
0708NH
18.07.2008
4
Festo P.BE-CMMS-AS-HW-IT 0708NH
Indice generale
Indice generale
1.
Note generali .......................................................................................................... 9
1.1
Documentazione ................................................................................................... 9
1.2
Codice prodottoCMMS-AS-C4-3A .......................................................................... 9
1.3
Volume di fornitura.............................................................................................. 10
2.
Norme di sicurezza per attuatori e comandi elettrici ............................................ 11
2.1
Simboli utilizzati .................................................................................................. 11
2.2
Istruzioni di carattere generale ............................................................................ 12
2.3
Pericoli dovuti ad un impiego errato.................................................................... 14
2.4
Norme di sicurezza .............................................................................................. 15
2.4.1
Norme di sicurezza generali ................................................................. 15
2.4.2
Norme di sicurezza durante montaggio e manutenzione ..................... 17
2.4.3
Protezione contro il contatto di componenti elettrici ........................... 19
2.4.4
Protezione contro le scosse elettriche mediante bassa tensione (PELV)20
2.4.5
Protezione contro movimenti pericolosi............................................... 20
2.4.6
Protezione contro il contatto di componenti caldi ................................ 21
2.4.7
Protezione durante manipolazione e montaggio ................................. 22
3.
Descrizione del prodotto ....................................................................................... 23
3.1
Note generali ....................................................................................................... 23
3.2
Caratteristiche ..................................................................................................... 23
3.3
Interfacce ............................................................................................................ 25
3.3.1
Panoramica delle interfacce ................................................................. 25
3.3.2
Funzioni I/O e controllo dell'unità........................................................ 26
3.3.3
Generazione analogica di set-point...................................................... 27
3.3.4
Interfaccia RS232 (diagnosi/interfaccia di parametrazione) ................ 28
3.3.5
Interfacce per esercizio sincrono diretto .............................................. 34
3.3.6
Strategia multi-firmware ...................................................................... 40
3.3.7
Interfaccia di sincronizzazione ............................................................. 40
3.3.8
Motor Feedback ................................................................................... 40
3.3.9
Chopper di frenatura (azionamento dei freni) ...................................... 41
3.3.10 Richiamo del motore (encoder angolare) ............................................. 41
3.3.11 Interfaccia di controllo X1 .................................................................... 41
3.3.12 Interfaccia dell'encoder incrementale [X10] ......................................... 43
3.3.13 Interfaccia di parametrazione seriale RS232 e RS485 – X5 .................. 43
3.3.14 Contenitore delle schede SD X12 ......................................................... 43
3.3.15 Scheda di memoria SD ......................................................................... 43
3.4
Interfacciamento fieldbus .................................................................................... 44
Festo P.BE-CMMS-AS-HW-IT 0708NH
5
Indice generale
3.4.1
3.4.2
3.4.3
3.4.4
FHPP .................................................................................................... 45
Bus CAN ............................................................................................... 46
PROFIBUS ............................................................................................ 47
DeviceNet ............................................................................................ 47
3.5
Panoramica delle funzioni ................................................................................... 48
3.5.1
Modi operativi...................................................................................... 48
3.5.2
Diagramma di temporizzazione − Commutazione dei modi operativi ... 49
3.5.3
Elaborazione dei valori di riferimento .................................................. 50
3.5.4
Funzione I²t .......................................................................................... 50
3.5.5
Controllo di posizionamento ................................................................ 50
3.5.6
Corsa di riferimento ............................................................................. 52
3.5.7
Diagramma di temporizzazione per corsa di riferimento ...................... 55
3.5.8
Generatore di traiettoria ...................................................................... 57
3.5.9
Comando sequenziale I/O.................................................................... 58
3.5.10 Funzioni di sicurezza, messaggi di errore............................................. 60
3.5.11 Reazione in caso di disattivazione dell'abilitazione ............................. 61
3.5.12 Funzione dell'oscilloscopio .................................................................. 63
3.5.13 Funzione a impulsi e teach-in I/O ........................................................ 64
3.5.14 Programma di traslazione con concatenazione dei record di
posizionamento provvista di commutazione del
posizionamento/regolazione del momento torcente ........................... 69
3.5.15 Misurazione volante ............................................................................ 75
3.5.16 Posizionamento continuo .................................................................... 75
3.5.17 Adattamento al modulo dell'asse/motore ........................................... 75
4.
Tecnica di sicurezza funzionale ............................................................................ 76
4.1
Generalità, impiego ammesso ............................................................................. 76
4.2
Funzione integrata "Arresto sicuro" .................................................................... 78
4.2.1
Generalità/descrizione della funzione "Arresto sicuro" ...................... 78
4.2.2
Azionamento sicuro del freno di arresto .............................................. 80
4.2.3
Funzionamento/Temporizzazione ........................................................ 81
4.2.4
Esempi di applicazione ........................................................................ 84
5.
Installazione meccanica ....................................................................................... 88
5.1
Istruzioni importanti ............................................................................................ 88
5.2
Montaggio ........................................................................................................... 90
6.
Collegamenti elettrici ........................................................................................... 91
6.1
Vista dell'apparecchio ......................................................................................... 91
6.2
Interfacce ............................................................................................................ 93
6.3
Sistema completo CMMS-AS ............................................................................... 94
6.4
Interfacce e occupazione dei connettori .............................................................. 96
6.4.1
Interfaccia I/O [X1] ............................................................................... 96
6
Festo P.BE-CMMS-AS-HW-IT 0708NH
Indice generale
6.4.2
6.4.3
6.4.4
6.4.5
6.4.6
6.4.7
6.4.8
6.4.9
6.4.10
Encoder motore – EnDat 2.1 e 2.2 (X2) ................................................ 99
Fieldbus CAN [X4] ............................................................................... 101
RS232/RS485 [X5] ............................................................................. 101
Collegamento motore [X6] ................................................................. 101
Alimentazione di tensione [X9] ........................................................... 102
Comando di sincronizzazione [X10].................................................... 102
Scheda SD [X12]................................................................................. 103
Occupazione dei connettori "Arresto sicuro" [X3] ............................. 104
Impostazioni fieldbus e bootloader ................................................... 104
6.5
Indicazioni per un'installazione sicura ed elettromagneticamente compatibile 105
6.5.1
Spiegazioni e termini ......................................................................... 105
6.5.2
Istruzioni di collegamento.................................................................. 105
6.5.3
Generalità sulla compatibilità elettromagnetica (CEM) ...................... 106
6.5.4
Aree CEM: secondo ambiente ............................................................ 106
6.5.5
Cablaggio elettromagneticamente compatibile ................................. 107
6.5.6
Esercizio con cavi lunghi .................................................................... 108
6.5.7
Protezione contro le scariche elettrostatiche ..................................... 108
7.
Operazioni preliminari per la messa in funzione ................................................ 109
7.1
Istruzioni di collegamento generali ................................................................... 109
7.2
Attrezzi/Materiale ............................................................................................. 109
7.3
Collegamento del motore .................................................................................. 109
7.4
Collegamento del motorcontroller CMMS-AS all'alimentazione elettrica........... 110
7.5
Collegamento del PC ......................................................................................... 110
7.6
Verifica dello stato di "pronto" ......................................................................... 110
7.7
Diagramma di temporizzazione − Sequenza di inserzione ................................. 111
8.
Funzioni di servizio e segnalazioni di guasto ..................................................... 112
8.1
Funzioni di protezione e servizio ....................................................................... 112
8.1.1
Panoramica ........................................................................................ 112
8.1.2
Monitoraggio di cortocircuiti del modulo terminale − Monitoraggio di
sovracorrenti e cortocircuiti ............................................................... 112
8.1.3
Monitoraggio della tensione nel circuito intermedio.......................... 112
8.1.4
Monitoraggio della temperatura per motore e unità di potenza −
Monitoraggio della temperatura per termodispersore ....................... 113
8.1.5
Monitoraggio dell'encoder................................................................. 113
8.1.6
Monitoraggio I²t ................................................................................. 113
8.1.7
Monitoraggio della potenza del chopper di frenatura ........................ 113
8.2
Segnalazioni del modo operativo e di guasto .................................................... 114
8.2.1
Indicazione del modo operativo e di errore ........................................ 114
8.2.2
Messaggi di errore ............................................................................. 114
Festo P.BE-CMMS-AS-HW-IT 0708NH
7
Indice generale
A.
Dati tecnici .......................................................................................................... 119
A.1
Generalità .......................................................................................................... 119
A.2
Elementi di comando e segnalazione ................................................................ 120
A.2.1
Indicazione di stato............................................................................ 120
A.2.2
Elementi di comando ......................................................................... 120
A.3
Interfacce .......................................................................................................... 121
A.3.1
Alimentazione [X9] ............................................................................. 121
A.3.2
Collegamento del motore [X6] CMMS-AS ........................................... 122
A.3.3
Uscita per freno ................................................................................. 122
A.3.4
Ingresso per encoder incrementale [X2] ............................................. 122
A.3.5
Interfaccia per encoder incrementale [X10] ........................................ 123
A.3.6
RS232/RS485 [X5] ............................................................................. 123
A.3.7
Bus CAN [X4] ...................................................................................... 123
A.3.8
Interfaccia I/O [X1] ............................................................................. 123
B.
Glossario ............................................................................................................. 125
C.
Indice analitico ................................................................................................... 126
8
Festo P.BE-CMMS-AS-HW-IT 0708NH
1. Note generali
1.
Note generali
1.1
Documentazione
Il presente manuale di prodotto permette di operare in modo sicuro con il servomotorcontroller della serie CMMS-AS. Riporta norme di sicurezza da osservare.
Questa documentazione fornisce informazioni relative a:
-
montaggio delle parti meccaniche
-
installazione dei componenti elettrici e
-
panoramica delle funzioni disponibili.
Ulteriori informazioni sono riportate nei seguenti manuali per la gamma di prodotti CMMS:
-
Manuale CANopen "P.BE-CMMS-CO-…":
descrizione del protocollo CANopen implementato secondo DSP402
-
Manuale PROFIBUS "P.BE-CMMS-FHPP-PB-…":
descrizione del protocollo PROFIBUS-DP implementato.
-
Manuale DeviceNet "P.BE-CMMS-FHPP-DN-…":
descrizione del protocollo DeviceNet implementato.
-
Manuale FHPP "P.BE-CMM-FHPP-…":
descrizione del profilo implementato per manipolazione e posizionamento Festo
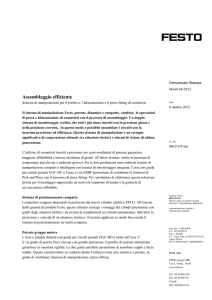
1.2
Codice prodottoCMMS-AS-C4-3A
Motorcontroller per servo-sotorcontroller per servomotori,
corrente nominale 4 A, 230 V CA
CMM
—
S
—
AS
—
C4
—
3A
Serie
CMM
Motorcontroller
Versione
S
Standard
Tecnologia motore
AS
Servo CA
Corrente nominale motore
C4
4A
Tensione di ingresso
3A
Unità di potenza 230 VCA
Festo P.BE-CMMS-AS-HW-IT 0708NH
9
1. Note generali
1.3
Volume di fornitura
La fornitura comprende:
Numero Fornitura
1
Motorcontroller CMMS-AS-C4-3A
1
Pacchetto di servizio
(software di parametrazione, documentazione, modulo S7, GSD, EDS, firmware)
1
Assortimento di connettori NEKM-C4
Tab. 1.1: Volume di fornitura
10
Festo P.BE-CMMS-AS-HW-IT 0708NH
2. Norme di sicurezza per attuatori e comandi elettrici
2.
Norme di sicurezza per attuatori e comandi elettrici
2.1
Simboli utilizzati
Informazioni
Nota
Informazioni e indicazioni importanti
Attenzione
La non osservanza può comportare gravi danni materiali
Avvertenza
La non osservanza può comportare danni alle cose e alle persone
Avvertenza
PERICOLO !
La non osservanza può comportare gravi danni alle cose e alle
persone
Avvertenza
Tensione che può essere mortale!
La norma di sicurezza richiama l'attenzione su una tensione che
può eventualmente provocare la morte
Accessori
Ambiente
Festo P.BE-CMMS-AS-HW-IT 0708NH
11
2. Norme di sicurezza per attuatori e comandi elettrici
2.2
Istruzioni di carattere generale
Festo AG & Co. KG non assume alcuna responsabilità per danni imputabili alla non osservanza delle indicazioni di pericolo riportate nelle presenti istruzioni d'uso.
Nota
Prima di mettere in funzione l'unità, leggere le Norme di sicurezza
per attuatori e comandi elettrici da pagina 11 e il capitolo 6.5 Indicazioni per un'installazione sicura ed elettromagneticamente compatibile pagina 105.
Nel caso in cui la documentazione in questa lingua non sia perfettamente comprensibile,
contattare il fornitore e informarlo al riguardo.
Il funzionamento perfetto e sicuro del motorcontroller presuppone un trasporto, magazzinaggio, montaggio e installazione appropriati ed eseguiti a regola d'arte nonché manovra
e manutenzione accurate.
Nota
Per gli interventi sugli impianti elettrici impiegare solo personale
addestrato e qualificato.
Personale addestrato e qualificato
Secondo questo manuale o le indicazioni di pericolo sul prodotto, le persone addette alle
operazioni di progettazione, installazione, montaggio, messa in funzione e funzionamento
del motorcontroller sono sufficientemente informate in merito alle avvertenze e misure
precauzionali riportate nelle presenti istruzioni d'uso e dispongono di una qualificazione
adeguata alle loro attività.
-
Formazione professionale e addestramento o autorizzazione di attivare e disattivare,
collegare a massa apparecchiature/sistemi secondo gli standard della tecnica di sicurezza nonché di contrassegnarli opportunamente in funzione delle esigenze di lavoro.
-
Formazione professionale o addestramento secondo gli standard della tecnica di sicurezza per quanto riguarda manutenzione e impiego dell'equipaggiamento di sicurezza.
-
Addestramento per il primo soccorso.
Per evitare lesioni personali e/o danni materiali, leggere le seguenti avvertenze prima di
avviare l'impianto.
Osservare sempre le norme di sicurezza.
12
Festo P.BE-CMMS-AS-HW-IT 0708NH
2. Norme di sicurezza per attuatori e comandi elettrici
Non cercare di installare o avviare il motorcontroller senza prima aver letto attentamente tutte le norme di sicurezza inerenti
attuatori e comandi elettrici riportate in questo manuale.
Leggere queste norme di sicurezza e tutte le indicazioni utente
prima di operare con il motorcontroller.
Rivolgersi al rappresentante di vendita responsabile se queste
indicazioni utente per il motorcontroller non fossero disponibili.
Per garantire un funzionamento sicuro e affidabile del motorcontroller, richiedere la spedizione immediata di questa
documentazione al responsabile (responsabili).
Consegnare le presenti norme di sicurezza anche nel caso in cui il
motorcontroller venisse venduto, noleggiato e/o consegnato a
terzi.
Per motivi di sicurezza e di garanzia non è permesso aprire il
motorcontroller.
Una configurazione eseguita a regola d'arte costituisce la condizione per un funzionamento perfetto del motorcontroller!
Avvertenza
PERICOLO !
Un impiego inappropriato del motorcontroller e la non osservanza
delle indicazioni di pericolo qui riportate nonché interventi non
corretti nel dispositivo di sicurezza possono provocare danni
materiali, lesioni personali, scosse elettriche o persino la morte nei
casi estremi.
Festo P.BE-CMMS-AS-HW-IT 0708NH
13
2. Norme di sicurezza per attuatori e comandi elettrici
2.3
Pericoli dovuti ad un impiego errato
Avvertenza
PERICOLO !
Elevata tensione elettrica e notevole corrente di lavoro!
Pericolo di morte o gravi lesioni personali dovuti alle scosse
elettriche!
Avvertenza
PERICOLO !
Elevata tensione elettrica dovuta al collegamento errato!
Pericolo di morte o lesioni personali dovuti alle scosse elettriche!
Avvertenza
PERICOLO !
Le superfici dei corpi delle apparecchiature possono essere calde!
Pericolo di lesioni! Pericolo di ustioni!
Avvertenza
PERICOLO !
Movimenti pericolosi!
Pericolo di morte, gravi lesioni personali o danni materiali dovuti ai
movimenti accidentali dei motori!
14
Festo P.BE-CMMS-AS-HW-IT 0708NH
2. Norme di sicurezza per attuatori e comandi elettrici
2.4
Norme di sicurezza
2.4.1
Norme di sicurezza generali
Avvertenza
Il motorcontroller corrisponde alla classe di sicurezza IP20 e al
grado di inquinamento 2.
Assicurarsi che l'ambiente di lavoro soddisfi questa classe di
sicurezza o questo grado di inquinamento (vedi capitolo 5.1).
Avvertenza
Utilizzare solo accessori e parti di ricambio approvati dal costruttore.
Avvertenza
Collegare i motorcontroller alla rete secondo le norme EN e prescrizioni VDE (associazione elettrotecnica tedesca) in modo che
possano essere staccati con dispositivi di disattivazione appropriati (ad es. interruttore principale, contattore, interruttore di
potenza).
Avvertenza
Per la commutazione dei contatti di comando si consiglia di
utilizzare contatti dorati o quelli con un'elevata pressione.
A titolo precauzionale bisogna adottare misure di soppressione dei
disturbi per gli impianti di commutazione, ad es. contattori e relè
con elementi RC o cablare dei diodi.
Osservare le prescrizioni e norme di sicurezza vigenti nel paese in
cui viene utilizzata l'apparecchiatura.
Avvertenza
Osservare le condizioni ambientali specificate nella documentazione del prodotto.
Non sono permesse applicazioni critiche per la sicurezza, a meno
che non siano state approvate esplicitamente dal produttore.
Festo P.BE-CMMS-AS-HW-IT 0708NH
15
2. Norme di sicurezza per attuatori e comandi elettrici
Le indicazioni per una installazione con compatibilità elettromagnetica sono riportate nel capitolo 6.5 Indicazioni per un'installazione sicura ed elettromagneticamente compatibile
(pagina 105).
Il costruttore dell'impianto o della macchina è responsabile
dell'osservanza dei valori limite richiesti dalle prescrizioni
nazionali.
Avvertenza
Le caratteristiche tecniche e condizioni di collegamento/
installazione per il motorcontroller sono riportate in questo
manuale di prodotto e devono essere osservate assolutamente.
Avvertenza
PERICOLO !
Osservare le prescrizioni di installazione e norme di sicurezza
durante gli interventi sugli impianti ad alta tensione (ad es. DIN,
VDE, EN, IEC o altre direttive nazionali e internazionali).
La non osservanza di queste prescrizioni può comportare la morte,
lesioni personali o notevoli danni materiali.
Sono valide, tra l'altro, le seguenti norme senza pretesa di
completezza:
16
VDE 0100
Linee guida per la costruzione di impianti per
produzione di energia elettrica fino a 1000 Volt
EN 60204-1
Equipaggiamento elettrico di macchine
EN 50178
Equipaggiamento di impianti ad alta tensione con
apparecchiature elettroniche
EN ISO 12100
Sicurezza di macchine – Concetti fondamenti,
principi di strutturazione generali
EN 1050
Sicurezza di macchine – Principi per la valutazione
dei rischi
EN 1037
Sicurezza di macchine – Impedimento di avviamenti accidentali
EN 954-1
Componenti essenziali per la sicurezza di sistemi
di comando
Festo P.BE-CMMS-AS-HW-IT 0708NH
2. Norme di sicurezza per attuatori e comandi elettrici
2.4.2
Norme di sicurezza durante montaggio e manutenzione
In ogni caso per le operazioni di montaggio e manutenzione dell'impianto sono valide le
prescrizioni in materia DIN, VDE, EN e IEC, nonché tutte le norme di sicurezza e antinfortunistiche statali e locali. Il costruttore dell'impianto o il committente devono garantire
l'osservanza di queste direttive.
Avvertenza
Il motorcontroller può essere impiegato, revisionato e/o riparato
solo da personale addestrato e qualificato per gli interventi sulle
apparecchiature elettriche o per il lavoro con quest'ultime.
Per evitare incidenti, lesioni personali e/o danni materiali:
Avvertenza
Il freno di arresto del motore in dotazione di serie o un freno
esterno azionato dal regolatore dell'attuatore non sono adatti per
la protezione personale!
Inoltre assicurare gli assi verticali contro la caduta o l'abbassamento dopo lo spegnimento del motore, ad es. mediante:
- bloccaggio meccanico dell'asse verticale,
- dispositivo di frenatura/ritenuta/bloccaggio o
- compensazione sufficiente del peso dell'asse.
Avvertenza
Il reostato di frenatura interno è sottoposto a una pericolosa
tensione del circuito intermedio durante l'esercizio e alcuni minuti
dopo il disinserimento del motorcontroller. Questa tensione può
essere mortale o provocare gravi lesioni personali in caso di
contatto.
Prima di eseguire le operazioni di manutenzione, assicurarsi
che l'alimentazione elettrica sia disinserita e bloccata e che il
circuito intermedio sia scaricato.
Diseccitare l'equipaggiamento elettrico agendo sull'interruttore
principale e poi bloccarlo per evitare inserimenti accidentali,
aspettare che il circuito intermedio sia scaricato per:
- gli interventi di manutenzione e riparazione
- le operazioni di pulizia
- lunghe interruzioni d'esercizio.
Festo P.BE-CMMS-AS-HW-IT 0708NH
17
2. Norme di sicurezza per attuatori e comandi elettrici
Avvertenza
Procedere accuratamente durante le operazioni di montaggio.
Sia al momento del montaggio sia durante il funzionamento
successivo dell'attuatore, assicurarsi che nel motorcontroller non
cadano trucioli di foratura, polvere metallica o pezzi di montaggio
(viti, dadi, ritagli di conduttori).
Assicurarsi che l'alimentazione di tensione esterna del regolatore
(tensione di rete 230 V) sia disinserita.
Disattivare il circuito intermedio o la tensione di rete 230 V sempre
prima di disinserire l'alimentazione logica di 24 V.
Avvertenza
Eseguire gli interventi in prossimità della macchina solo quando
l'alimentazione di corrente alternata o continua è disinserita e
bloccata.
Moduli terminali disinseriti o abilitazione del regolatore disattivata
non sono bloccaggi appropriati. In caso di guasto può verificarsi
una traslazione accidentale dell'attuatore.
Avvertenza
Eseguire la messa in servizio con i motori che girano a vuoto per
evitare danni meccanici, ad es. dovuti al senso di rotazione errato.
Avvertenza
In linea di massima le apparecchiature elettroniche non sono a
prova di guasto.
L'utilizzatore è tenuto a traslare l'impianto in uno stato sicuro in
caso di disfunzione di una apparecchiatura elettrica.
Avvertenza
PERICOLO !
Il motorcontroller e in particolare il reostato di frenatura possono
raggiungere temperature elevate che, in caso di contatto, possono
provocare gravi ustioni.
18
Festo P.BE-CMMS-AS-HW-IT 0708NH
2. Norme di sicurezza per attuatori e comandi elettrici
2.4.3
Protezione contro il contatto di componenti elettrici
Questa sezione tratta solo apparecchiature e componenti dell'attuatore con tensioni oltre
50 Volt. Al contatto, le parti con tensione superiore a 50 Volt possono costituire un pericolo per le persone e possono provocare scosse elettriche. Durante il funzionamento delle
unità elettriche determinati componenti sono necessariamente sotto tensione pericolosa.
Avvertenza
Tensione che può essere mortale!
Elevata tensione elettrica!
Pericolo di morte e di lesioni per effetto delle scosse elettriche o
gravi lesioni personali!
In ogni caso per l'esercizio sono valide le prescrizioni in materia DIN, VDE, EN e IEC, nonché tutte le norme di sicurezza e antinfortunistiche statali e locali. Il costruttore dell'impianto o il committente devono garantire l'osservanza di queste direttive.
Avvertenza
Prima della messa in funzione montare sulle apparecchiature
le apposite coperture e i dispositivi di protezione contro il contatto.
Per le unità incorporate garantire la protezione contro il contatto
diretto dei componenti elettrici per mezzo di un corpo esterno,
ad es. un armadio elettrico.
Osservare le norme EN 60204-1 e EN 50178.
Avvertenza
Osservare la sezione minima dei conduttori di protezione in rame
(prescritta dalla norma EN 60204-1) per l'intera lunghezza!
Avvertenza
Prima della messa in funzione collegare, anche per eseguire
brevi misurazioni e controlli, sempre il conduttore di protezione
a tutte le apparecchiature elettriche secondo lo schema o collegarlo con il filo di massa.
Altrimenti sul corpo contenitore possono manifestarsi elevate
tensioni che provocano scosse elettriche.
Avvertenza
Non toccare i punti di collegamento elettrici dei componenti
quando sono attivati.
Festo P.BE-CMMS-AS-HW-IT 0708NH
19
2. Norme di sicurezza per attuatori e comandi elettrici
Avvertenza
Prima di accedere ai componenti elettrici con tensione superiore a 50, staccare l'apparecchiatura dalla rete o dalla sorgente di
tensione.
Bloccare per evitare inserimenti accidentali.
Avvertenza
Al momento dell'installazione tenere presente l'intensità della
tensione del circuito intermedio soprattutto riguardo a isolamento e misure di protezione.
Garantire un collegamento a massa e un dimensionamento dei
conduttori a regola d'arte nonché apposite misure di protezione
contro i cortocircuiti.
2.4.4
Protezione contro le scosse elettriche mediante bassa
tensione (PELV)
Collegamenti e morsetti con tensioni comprese fra 5 e 50 Volt sul motorcontroller sono
voltaggi di protezione che sono realizzati a prova di scariche elettriche secondo le norme
qui riportate:
Normative
-
international: IEC 60364-4-41
-
europee: EN 50178
Avvertenza
PERICOLO !
Elevata tensione elettrica dovuta al collegamento errato!
Pericolo di morte o di lesioni dovuto alle scosse elettriche!
Su attacchi e morsetti con tensioni 0 … 50 Volt collegare solo apparecchiature, componenti
elettrici e conduttori dotati di basso voltaggio di protezione (PELV = Protective Extra Low
Voltage).
Collegare solo tensioni e circuiti elettrici provvisti di disinserzione sicura dai voltaggi pericolosi. Una disinserzione sicura può essere realizzata utilizzando ad esempio trasformatori
di separazione, fotoaccoppiatori affidabili o funzionamento a batteria senza rete.
2.4.5
Protezione contro movimenti pericolosi
Nel corso della messa in funzione controllare la funzionalità delle funzioni di sicurezza
utilizzate, ad es. "arresto sicuro".
Il committente deve stabilire un controllo periodico delle funzioni di sicurezza.
20
Festo P.BE-CMMS-AS-HW-IT 0708NH
2. Norme di sicurezza per attuatori e comandi elettrici
I movimenti pericolosi possono essere provocati dall'azionamento errato dei motori collegati. Le cause possono essere molteplici:
Cause
-
cablaggio sporco o errato
-
errori durante l'impiego dei componenti
-
errori nei trasduttori di misura e generatori di segnali
-
componenti guasti o non conformi alle direttive CEM
-
errori nel software del sistema di comando host
Questi errori possono verificarsi immediatamente dopo l'avviamento o dopo un indeterminato periodo di tempo durante l'esercizio.
I sistemi di monitoraggio presenti nei componenti escludono ampiamente una funzione
errata negli attuatori collegati. Tuttavia non bisogna confidare unicamente in questi fatti
riguardo alla protezione delle persone, soprattutto il pericolo di lesioni e/o danni materiali. Fino al momento in cui i sistemi di monitoraggio incorporati non vengono attivati non si
possono escludere in ogni caso movimenti errati dell'attuatore, la cui entità dipende dal
tipo di comando e dalle condizioni d'esercizio.
Avvertenza
PERICOLO !
Movimenti pericolosi!
Pericolo di morte, pericolo di lesioni, gravi lesioni personali o danni
materiali!
Per i motivi summenzionati bisogna garantire la protezione delle persone eseguendo dei
controlli o adottando dei provvedimenti che sono prioritari per l'impianto. I quali vengono
contemplati dal costruttore in base alle condizioni specifiche dell'impianto sulla scorta di
un'analisi dei pericoli ed errori. A questo proposito vengono incluse anche le norme di
sicurezza valide per l'impianto. La macchina può eseguire movimenti accidentali o possono verificarsi altre funzioni errate disinserendo, bypassando o non attivando i dispositivi di
sicurezza.
2.4.6
Protezione contro il contatto di componenti caldi
Avvertenza
PERICOLO !
Le superfici dei corpi delle apparecchiature possono essere calde!
(fino a circa 85 °C vedi capitolo 8.1.4).
Pericolo di lesioni! Pericolo di ustioni!
Festo P.BE-CMMS-AS-HW-IT 0708NH
21
2. Norme di sicurezza per attuatori e comandi elettrici
Avvertenza
Pericolo di ustioni!
Non toccare la superficie del corpo contenitore in prossimità
delle sorgenti termiche calde!
Prima di intervenire, lasciar raffreddare le apparecchiature disattivate per 10 minuti.
Pericolo di ustioni se si toccano i componenti caldi dell'equipaggiamento (ad es. il corpo contenitore) in cui sono presenti termodispersori e resistenze.
2.4.7
Protezione durante manipolazione e montaggio
La manipolazione e il montaggio di determinati pezzi e componenti in un modo non appropriato può causare delle lesioni in condizioni sfavorevoli.
Avvertenza
PERICOLO !
Pericolo di lesioni dovuto ad un impiego non corretto!
Lesioni personali in seguito a schiacciamento, tagli e urti!
A questo proposito sono valide le norme di sicurezza generali
Avvertenza
Osservare le prescrizioni d'installazione e norme di sicurezza
generali relative a impiego e montaggio.
Utilizzare dispositivi di montaggio e trasporto adatti.
Prevenire il pericolo di schiacciamenti e contusioni adottando
misure appropriate.
Utilizzare solo attrezzi adatti. Impiegare attrezzi speciali se prescritto.
Impiegare dispositivi di sollevamento e attrezzi a regola d'arte.
Se necessario utilizzare un equipaggiamento di protezione adeguato (ad es. occhiali, scarpe di sicurezza e guanti).
Non sostare sotto i carichi pendenti.
Per evitare il pericolo di scivolamento, eliminare immediatamente i liquidi fuoriusciti sul pavimento.
22
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
3.
Descrizione del prodotto
3.1
Note generali
Il servoregolatore di posizionamento della serie CMMS-AS è un servoconvertitore CA intelligente, dotato di svariate possibilità di parametrazione e opzioni di ampliamento. Questa
unità può essere adattata in modo flessibile alle applicazioni più diverse.
Il servoregolatore CMMS-AS è stato realizzato per l'esercizio della serie di servomotori
EMMS-AS con encoder digitali del valore assoluto in versione Singleturn e Multiturn.
Sono possibili i posizionamenti punto-a-punto o le applicazioni master-slave come pure le
traslazioni a sincronizzazione multiasse. Con un comando multiasse host si può comunicare attraverso l'interfaccia CAN.
L'interfaccia di parametrazione FCT (Festo Configuration Tool) permette di semplificare
l'impiego e la messa in servizio del servoregolatore di posizionamento. Le rappresentazioni grafiche e i pittogrammi consentono una parametrazione intuitiva.
3.2
Caratteristiche
Compattezza
Dimensioni compatte
Ad allineamento diretto
Integrazione completa di tutti i componenti per controller e unità di potenza,
comprese le interfacce RS232 e CANopen
Schopper di frenatura incorporato
Filtri CEM incorporati
Azionamento automatico per un freno di arresto incorporato nel motore
Piena conformità alle attuali norme CE ed EN senza necessità di misure esterne supplementari (lunghezza del cavo del motore fino a 15 m)
Encoder Interface
Encoder ad alta risoluzione Heidenhain, encoder del valore assoluto
(Multiturn e Singleturn) con EnDat
Input/Output
I/O a programmazione libera
Ingresso analogico a 12 bit ad alta risoluzione
Esercizio a impulsi/teach
Accoppiamento semplice a un sistema di comando host tramite I/O
Esercizio sincrono
Esercizio master/slave
Moduli di ampliamento e fieldbus
PROFIBUS-DP
DeviceNet
Festo P.BE-CMMS-AS-HW-IT 0708NH
23
3. Descrizione del prodotto
Interfaccia CANopen integrata
Interfaccia aperta secondo CANopen
Profilo Festo per manipolazione e posizionamento (FHPP)
Protocollo secondo gli standard CANopen DS301 e DSP402
Contiene l'"Interpolated Position Mode" per applicazioni multiasse
Motion Control
Esercizio in funzione di regolatore di coppia, velocità o posizione
Comando di posizionamento integrato
Posizionamento a tempo ottimizzato (a forma di trapezio) o senza strappi (forma S)
Movimenti assoluti e relativi
Posizionamento punto a punto con e senza approssimazione
Sincronizzazione della posizione
Meccanismo elettronico
64 record di posizione
8 profili di traslazione
Diversi metodi della corsa di riferimento
Comando sequenziale integrato
Sequenza automatica di record di posizione senza sistema di comando host
Sequenze di posizione lineari e cicliche
Tempi di ritardo impostabili
Diramazioni e posizioni di attesa
Posizioni di stop definibili per punti di arresto non critici
Funzioni di sicurezza integrate
"Arresto sicuro" integrato secondo EN 954-1 categoria di sicurezza 3 nell'unità base
Protezione contro avviamenti imprevisti
Disattivazione a 2 canali del modulo terminale
Certificazione di BG (in fase di preparazione)
Riduzione del cablaggio esterno
Tempi di reazione più brevi in caso di errore
Restart più rapido, il circuito intermedio resta caricato
Movimento multiasse interpolante
Con un sistema di comando adatto, il CMMS-AS è in grado di eseguire delle traslazioni con
interpolazione tramite CANopen.
A tale scopo i valori nominali di posizione vengono impostati dal sistema di comando in
una base di tempo fissa. Nel frattempo il servoregolatore di posizionamento interpola automaticamente i valori di dati fra due punti di appoggio.
Programma di parametrazione "Festo Configuration Tool (FCT)"
Messa in servizio e diagnosi molto semplici
Configurazione di motorkontroller, motore e asse
24
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Impostazione automatica di tutti i parametri del regolatore utilizzando i sistemi meccanici Festo
Funzione a oscilloscopio a 4 canali
Tedesco e inglese
3.3
Interfacce
3.3.1
Panoramica delle interfacce
Interfaccia valore
nominale
Generazione di
set-point tramite
Funzione
Modo operativo
Ingressi analogici
X1 (+10 V)
Generazione analogica di setpoint con risoluzione di 12 bit
Regolazione del momento
torcente
Regolazione della velocità
Interfaccia direzione X1 (24 V) oppure
impulsi
X10 (5 V)
CW/CCW (ciclo CW / ciclo CCW)
CLK / DIR (ciclo / direzione)
Sincronizzazione
Segnali di traccia
A/B
Encoder
Sincronizzazione
Ingressi/uscite
digitali
X10 (5 V RS422)
X1 (24 VCC)
-
Ingresso (slave)
-
Emulazione (master)
Selezione di record
Controllo di posizionamento
Esercizio a impulsi/teach
Record di traslazione concatenati
Funzioni di start e stop
Fieldbus CANopen
X4 (CAN)
Istruzione diretta
Regolazione del momento
torcente
Corsa di riferimento
Regolazione della velocità
Esercizio a impulsi
Regolazione della posizione
Selezione di record
Controllo di posizionamento
Interpolated position mode
Tab. 3.1: Interfacce
Festo P.BE-CMMS-AS-HW-IT 0708NH
25
3. Descrizione del prodotto
3.3.2
Funzioni I/O e controllo dell'unità
Ingressi digitali
Gli ingressi digitali approntano le funzioni di controllo elementari.
Per memorizzare le destinazioni di posizionamento, il motorcontroller CMMS-AS dispone
di una tabella in cui le destinazioni possono essere registrate e in seguito richiamate. Sei
ingressi digitali servono per selezionare la destinazione, un ingresso aggiuntivo viene utilizzato come ingresso di start. Due ingressi vengono utilizzati per lo sblocco del modulo
terminale da hardware e lo sblocco del regolatore.
Finecorsa
I finecorsa vengono utilizzati come limitatori di sicurezza per lo spazio di movimento. Durante la corsa di riferimento uno dei due finecorsa può fungere da punto di riferimento per
il controllo di posizionamento.
Ingresso sample
Per il comando di funzioni critiche in funzione del tempo tramite un fieldbus è disponibile
un ingresso sample ad alta velocità utilizzabile per diverse applicazioni (rilevamento della
posizione, applicazioni speciali, ...).
Ingresso analogico
Il motorcontroller CMMS-AS dispone di un ingresso analogico per il livello d'ingresso
nell'intervallo +10 ... -10 V. L'ingresso è realizzato come "ingresso differenziale" (a 12 bit)
per garantire un'elevata protezione contro le interferenze. I segnali analogici vengono
quantificati e digitalizzati dal convertitore analogico-digitale con una risoluzione di 12 bit.
Servono per impostare i valori nominali (numero di giri o momento) per la regolazione.
Funzioni base
Gli ingressi digitali disponibili sono già configurati per le funzioni base delle applicazioni
convenzionali. Per l'utilizzo di ulteriori funzioni, come ad es. la funzione a impulsi, il programma di traslazione o la sincronizzazione, è possibile usare l'ingresso analogico AIN0
come ingresso digitale.
Mediante una commutazione delle modalità (MODE) è possibile selezionare una delle seguenti predisposizioni per default:
Mode
Funzione
Mode 0
Posizionamento
Mode 1
Funzione a impulsi
Mode 2
Programma di traslazione
Mode 3
Sincronizzazione
Tab. 3.2: Commutazione delle modalità
26
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
3.3.3
Generazione analogica di set-point
La generazione analogica di set-point ±10 VCC può essere configurata come impostazione
del valore di riferimento:
-
valore nominale della velocità
-
valore nominale del momento torcente.
Attivazione necessaria per generazione analogica di set-point
Lo schema di collegamento mostra la posizione degli interruttori in condizioni di funzionamento attive.
*) I finecorsa sono impostati per default su contatto normalmente chiuso (configurazione tramite FCT)
Festo P.BE-CMMS-AS-HW-IT 0708NH
27
3. Descrizione del prodotto
3.3.4
Interfaccia RS232 (diagnosi/interfaccia di parametrazione)
L'interfaccia RS232 è prevista come interfaccia di parametrazione.
Parametri
Livello del segnale
Secondo la specifica RS232 o RS485
Baudrate
9600 Baud fino a 115 kBaud
Protezione contro le scariche elettrostatiche
Driver protetti dalle scariche elettrostatiche (16 kV)
Connessione
Standard modem zero, X5
Connessione
Tramite X5 / DSUB 9 pin / piedino
Tab. 3.3: Parametri dell'interfaccia RS232
L'interfaccia RS485 si trova sullo stesso connettore ad innesto dell'interfaccia RS232.
La comunicazione deve essere attivata separatamente dall'utilizzatore. Poiché la ricezione
dei messaggi RS232 è possibile anche quando è attiva la comunicazione RS485, l'unità
rimane accessibile in qualsiasi momento per la parametrazione.
Dopo il reset l'interfaccia seriale dispone sempre delle seguenti impostazioni base.
Parametri
Valore
Baudrate
9600 baud
Bit di dati
8
Parità
Nessuno
Bit di stop
1
Tab. 3.4: Parametri default
Eseguire le seguenti impostazioni per poter gestire una interfaccia con un programma da
terminale, ad es. per scopi di test (suggerimenti):
Parametri
Valore
Controllo di flusso
Nessuno
Emulazione
VT100
Configurazione ASCII
- i caratteri trasmessi terminano con avanzamento riga
- i caratteri introdotti vengono emessi a livello locale (eco locale)
- al momento della ricezione aggiungere l'avanzamento riga alla fine riga
Tab. 3.5: Impostazione per programma da terminale
Tenere presente che il motorcontroller emette automaticamente una segnalazione di inserzione tramite l'interfaccia seriale immediatamente dopo un reset. Un programma di
ricezione sul lato di controllo deve elaborare o rifiutare questi caratteri ricevuti.
28
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Comandi generali
Comando
Sintassi
Risposta
Reinizializzazione del servoregolatore di posizionamento
RESET!
Nessuno
(segnalazione di inserzione)
Memorizzazione del set di parametri corrente e di tutti i
record di posizione nella memoria flash non volatile
SAVE!
DONE
Impostazione della baudrate per la comunicazione seriale BAUD9600
BAUD19200
BAUD38400
BAUD57600
BAUD115200
Comando ignoto
qualsiasi
ERROR!
Lettura del numero di versione del rilascio GC
(gestione della configurazione) del firmware
VERSION?
2300:VERSION:MMMM.SSSS *)
*)
MMMM:
SSSS:
Versione principale del rilascio GC (formato esadecimale)
Versione secondaria del rilascio GC (formato esadecimale)
Tab. 3.6: Comandi generali
Comandi di parametro
Parametri e dati vengono sostituiti tramite i cosiddetti "oggetti di comunicazione" (OC),
che vengono utilizzati in una sintassi fissa. Per gli errori al momento dell'accesso di scrittura o lettura sono definiti speciali valori di ritorno.
Comando
Sintassi
Risposta
Lettura di un OC
OR:nnnn
nnnn:HHHHHHHH oppure OR:EEEEEEEE
Scrittura di un OC
OW:nnnn:HHHHHHHH OK! oppure OW:EEEEEEEE
Lettura del limite inferiore di un OC
ON:nnnn
nnnn:HHHHHHHH oppure ON:EEEEEEEE
Lettura del limite superiore di un OC
OX:nnnn
nnnn:HHHHHHHH oppure OX:EEEEEEEE
Lettura del valore effettivo di un OC
OI:nnnn
nnnn:HHHHHHHH oppure OI:EEEEEEEE
*)
nnnn:
HHHHHHHH:
EEEEEEEE:
Numero dell'oggetto di comunicazione (OC), 16 bit (formato esadecimale)
Dati / valori di 32 bit (formato esadecimale)
Valore di ritorno se l'accesso è errato
Tab. 3.7: Comandi di parametro
Significato dei valori di ritorno
Valore di ritorno Significato
0x0000 0002
I dati sono più piccoli del limite inferiore, i dati non sono stati scritti
0x0000 0003
I dati sono più grandi del limite superiore, i dati non sono stati scritti
0x0000 0004
I dati sono più piccoli del limite inferiore, i dati sono stati limitati al limite inferiore e poi
acquisiti
Festo P.BE-CMMS-AS-HW-IT 0708NH
29
3. Descrizione del prodotto
Valore di ritorno Significato
0x0000 0005
I dati sono più grandi del limite superiore, i dati sono stati limitati al limite superiore e
poi acquisiti
0x0000 0008
I dati sono al di fuori del campo di valori valido e non sono stati scritti
0x0000 0009
I dati sono momentaneamente al di fuori del campo di valori valido e non sono stati
scritti
Tab. 3.8: Valori di ritorno
Comandi delle funzioni
Comando
Sintassi
Risposta
Attivare abilitazione del regolatore, perciò impostare la
logica di abilitazione su "DIN5 e RS232"
OW:0061:00000001
OK! oppure
OW:EEEEEEEE1)
Disattivare abilitazione del regolatore, perciò impostare
la logica di abilitazione su "DIN5 e RS232"
OW:0061:00000002
OK! oppure
OW:EEEEEEEE1)
Disattivare modulo terminale, perciò impostare la logica
di abilitazione su "DIN5 e RS232"
OW:0061:00000003
OK! oppure
OW:EEEEEEEE1)
Tacitare errore
OW:0030:00010000
OK!
1) I valori di ritorno errati possono essere provocati ad es. da una logica di abilitazione del regolatore non
impostata in modo appropriato o da un circuito intermedio non caricato
Tab. 3.9: Comandi delle funzioni
Impostazione del modo operativo
Il cambio del modo operativo può richiedere alcuni tempi ciclo dei regolatori a causa della
sincronizzazione necessaria dei processi interni. Perciò si consiglia espressamente di verificare e aspettare l'acquisizione del modo operativo desiderato.
Modo operativo
Sintassi
Regolazione del momento torcente
OW:0030:00000004
Regolazione della velocità
OW:0030:00000008
Posizionamento
OW:0030:00000002
Response
OK! oppure OW:EEEEEEEE
Tab. 3.10: Modo operativo
I valori di ritorno errati possono essere provocati da valori non validi che non appartengono al gruppo summenzionato. Il modo operativo corrente può essere letto utilizzando il
comando "OR".
30
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Controllo tramite interfaccia RS485
Nota
Prima di attivare l'interfaccia RS485, assicurarsi di utilizzare un
cavo del modem zero completamente cablato. Tutti i pin del cavo
devono essere occupati secondo le seguenti specifiche
(vedi capitolo 6.4.4).
Pin Denominazione breve
Denominazione
Direzione del segnale
Descrizione
1
Data Carrier Detect
Unità di trasmissione
--> unità terminale
Il segnale del supporto dati è stato
rilevato dall'unità di trasmissione
Receive (x) Data
Unità di trasmissione
--> unità terminale
Linea che sull'unità terminale riceve un bit di dati dall'unità di trasmissione
Linea che sull'unità terminale trasmette un bit di dati all'unità di
trasmissione
2
DCD
RxD
3
TxD
Transmit (x) Data
Unità terminale
--> unità di trasmissione
4
DTR
Data Terminal Ready
Unità terminale
--> unità di trasmissione
L'unità terminale è pronta
5
GND
Ground (massa)
Nessuno
Potenziale di riferimento a 0 V
6
DSR
Data Set Ready
Unità di trasmissione
--> unità terminale
L'unità di trasmissione è pronta
Request To Send
Unità terminale
--> unità di trasmissione
L'unità terminale segnala che il
punto corrispondente deve trasmettere (richiesta di trasmissione)
Clear To Send
Unità di trasmissione
--> unità terminale
L'unità di trasmissione segnala
disponibilità di ricezione
(permesso di trasmissione)
Ring Indicator
Unità di trasmissione
--> unità terminale
L'unità di trasmissione riceve una
segnalazione acustica o un segnale
di chiamata sulla linea telefonica
7
8
9
RTS
CTS
RI
Tab. 3.11: Configurazione di una linea del modem zero
Configurazione nell'FCT
Per la configurazione eseguire le seguenti impostazioni nella finestra "Posto di lavoro":
-
Sulla pagina "Dati di applicazione" nel registro "Selezione dei modi operativi" impostare l'interfaccia di controllo su "RS485".
Festo P.BE-CMMS-AS-HW-IT 0708NH
31
3. Descrizione del prodotto
-
Sulla pagina "Controller, interfaccia di controllo" non attivare la selezione del modo
"Utilizzato".
Poi tramite i pulsanti "Download" caricare le configurazioni modificate nel motorcontroller e memorizzarle in modo permanente premendo il pulsante "Salvare".
La nuova configurazione viene attivata "risettando" il motorcontroller (o disattivando e
riattivando).
Sintassi dei comandi sotto RS485
Il regolatore del motore a passi viene controllato tramite RS485 con gli stessi oggetti di
RS232. Rispetto a RS232 è stata ampliata solo la sintassi dei comandi per la scrittura/
lettura degli oggetti.
Sintassi:
XTnn:HH……HH:CC
Significati:
XT:
Costanti fisse
HH……HH:
Dati (sintassi di comando normale)
nn:
Numero di nodo, identico al numero di nodo CANopen
(impostazione tramite interruttori DIP)
Nota
Sui primi 5 caratteri la risposta trasmette i seguenti caratteri:
"XRnn:" con nn = numero di nodo dell'unità
Tutte le unità reagiscono al numero di nodo 00 come "Broadcast". In questo modo è possibile accedere a ogni unità senza
conoscere il numero di nodo.
Il comandi tipo "OW", "OR" ecc. supportano una somma di
controllo opzionale, che viene formata senza i primi 5 caratteri.
Le segnalazioni di attivazione del bootloader e del firmware
vengono trasmesse nel modo RS232.
32
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Esempio "Profile Position Mode" tramite RS232
Con l'accesso CAN simulato tramite RS232 il motorcontroller può essere azionato anche
nel "Profile Position Mode". Perciò qui appresso viene descritta la sequenza fondamentale.
1. Conversione della logica di abilitazione del regolatore
La logica di abilitazione del regolatore può essere convertita tramite il COB 6510_10.
La simulazione dell'interfaccia CAN viene acquisita completamente tramite RS232,
quindi la logica di abilitazione può essere convertita anche su DIN + CAN.
Comando:
=651010:0002
Così tramite il CAN Controlword (COB 60040_00) si può concedere l'abilitazione.
Comando:
=604000:0006 Comando "Shutdown"
Comando:
=604000:0007 Comando "Switch on / Disable Operation"
Comando:
=604000:000F Comando "Enable Operation"
2. Attivazione del "Profile Position Mode"
Il modo di posizionamento viene attivato tramite il COB 6060_00 (mode of operation). Deve essere scritto solo una volta per far sì che tutti i selettori interni vengano
impostati correttamente.
Comando:
=606000:0001 Profile Positon Mode
3. Scrivere parametri di posizione
La posizione di arrivo può essere scritta tramite il COB 607A_00 (target position).
Viene scritta nelle "Position Units". Cioè essa dipende dal CAN Factor Group
impostato. In questo caso l'impostazione default è 1/216 giri
(16 bit parte prima della virgola, 16 bit parte dopo la virgola).
Comando:
=607100:00058000 Posizione di arrivo 5,5 giri
La velocità di traslazione e la velocità terminale possono essere scritte rispettivamente tramite COB 6081_00 (profile velocity) e COB 6082_00 (end velocity).
Vengono scritte nelle "Speed Units". Cioè esse dipendono dal CAN Factor Group
impostato.
In questo caso l'impostazione default è 1/212 giri/min
(20 bit parte prima della virgola, 12 bit parte dopo la virgola).
Comando:
=608100:03E80000 Velocità di traslazione 1000 giri/min
L'accelerazione, la decelerazione e la rampa di arresto rapido possono essere scritte
rispettivamente tramite COB 6083_00 (profile acceleration), COB 6084_00 (profile
deceleration) e COB 6085 (quick stop deceleration).
Vengono scritte nelle "Acceleration Units". Cioè esse dipendono dal CAN Factor
Group impostato.
In questo caso l'impostazione default è 1/28 giri/min/s
(24 bit parte prima della virgola, 8 bit parte dopo la virgola).
Festo P.BE-CMMS-AS-HW-IT 0708NH
33
3. Descrizione del prodotto
Comando:
=608400:00138800 Accelerazione 5000 giri/min/s
4. Avviare posizionamento
Il posizionamento viene avviato tramite il CAN Controlword (COB 6040_00):
- L'abilitazione del regolatore viene controllata tramite i BIT0 … 3 (vedi sopra)
- Il posizionamento viene avviato tramite un fronte di risalita sul bit 4.
Vengono acquisite le seguenti impostazioni:
- Il bit 5 stabilisce se un posizionamento in corso viene terminato prima che venga
acquisito un nuovo comando di traslazione (0) oppure se il posizionamento in corso deve essere interrotto (1)
- Il bit 6 stabilisce se il posizionamento deve essere eseguito in modo assoluto (0) o
relativo (1)
Comando:
=604000:001F
Avviare posizionamento assoluto o
Comando:
=604000:005F
Avviare posizionamento relativo
5. Esercizio tramite RS485
Se il CMMS-ST viene azionato tramite RS485, allora il controllo può essere eseguito
esattamente come nell'esercizio tramite RS232. All'occorrenza viene scritto semplicemente il numero di nodo prima del comando. Il numero di nodo viene regolato
tramite gli interruttori DIP.
Comando:
3.3.5
XT07:=607100:000A0000
Posizione di arrivo 10 giri trasmettono al
nodo 7
Interfacce per esercizio sincrono diretto
Il motorcontroller supporta l'esercizio master-slave, denominato di seguito "sincronizzazione". Il regolatore può funzionare sia come master sia come slave.
Se il motorcontroller funziona come master, allora esso predispone i segnali A/B sull'uscita dell'encoder incrementale (X10) (RS422).
Se il motorcontroller viene utilizzato con predisposizione slave, sono disponibili diversi
ingressi e forme di segnale per la sincronizzazione.
X10 [5 V RS422]:
A/B, CW/CCW, CLK/DIR
X1 [24 V]:
CW/CCW, CLK/DIR
L'interfaccia dell'encoder incrementale può essere configurata, tramite software, sia come
uscita che come ingresso (master o slave). Inoltre sul connettore sono presenti due ingressi per la connessione di segnali di direzione impulsi di 5 V (CLK/DIR), (CW/CCW).
I segnali di direzione impulsi di 24 VCC vengono realizzati tramite X1 DIN2 e DIN3.
34
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Nota
Uscita:
5 V CC
segnali di direzione impulsi tramite X10
24 V CC
segnali di direzione impulsi tramite X1
generazione di segnali dell'encoder incrementale (X10)
Il motorcontroller genera, sulla base dei dati dell'encoder, i segnali di traccia A, B e l'impulso zero di un encoder incrementale. Il numero tacche può essere impostato nell'FCT
con valori fra 32 … 2048.
Nota
Per evitare errori di arrotondamento, il numero tacche dovrebbe
contenere il fattore 2n per ogni giro (32, 64 … 2048).
Le modifiche apportate a questa interfaccia vengono attivate solo dopo un "reset"
(download, salvataggio, reset).
Un driver di potenza RS422 predispone i segnali su X10 in modo differenziale.
Ingresso:elaborazione di segnali dell'encoder incrementale o di segnali
di direzione impulsi (X10)
I segnali vengono analizzati come segnali di traccia A/B di un encoder incrementale oppure come segnali di direzione impulsi (CW/CCW o CLK/DIR) di un comando del motore a
passi. La forma di segnale viene selezionata nell'FCT. Il numero di passo per ogni giro è
parametrabile. Inoltre si può parametrare un meccanismo elettronico supplementare.
Si possono analizzare i seguenti segnali:
Segnali di traccia A/B
Direzione impulsi CLK/DIR
Impulsi CW/CCW
Ingresso:elaborazione di segnali di direzione impulsi 24 V CC (X1)
Direzione impulsi CLK/DIR
Impulsi CW/CCW
I segnali di direzione impulsi di 24 VCC vengono realizzati tramite X1 DIN2 e DIN3.
Frequenza di clock − Segnali di direzione impulsi
Tensione
Ingresso
Frequenza di clock
5V
X10
500 kHz
24 V
X1
fino a 20 kHz
Tab. 3.12: Frequenza d'ingresso max.
Attivazione della sincronizzazione
La sincronizzazione può essere impostata procedendo in diversi modi.
Festo P.BE-CMMS-AS-HW-IT 0708NH
35
3. Descrizione del prodotto
Con il software di parametrazione FCT sulla pagina "Dati di applicazione" nel registro
"Selezione dei modi operativi" selezionando l'interfaccia di controllo "Sincronizzazione".
Tramite X1 (interfaccia I/O digitale) selezionando il modo 3.
Nota
Impostando la sincronizzazione con il software FCT, il regolatore
reagisce solo tramite l'interfaccia di sincronizzazione. Tutte le altre
funzioni del modo operativo "posizionamento" non sono più
disponibili.
Nota
Una volta modificata la configurazione con FCT, caricare le configurazioni modificate nel motorcontroller tramite i pulsanti "Download" e poi memorizzarle in modo permanente premendo il pulsante
"Salvare".
La nuova configurazione viene attivata "risettando" il motorcontroller (o disattivando e riattivando).
Per garantire la flessibilità del regolatore, si consiglia di attivare la sincronizzazione tramite l'interfaccia I/O.
Attivazione I/O necessaria per la sincronizzazione tramite FCT
-
DIN4
abilitazione del modulo terminale
-
DIN5
abilitazione del regolatore
-
DIN6
finecorsa 0
-
DIN7
finecorsa 1
-
DIN13
stop
36
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Attivazione I/O necessaria per la sincronizzazione tramite commutazione
del modo
Lo schema di collegamento mostra la posizione degli interruttori in condizioni di funzionamento attive.
*) I finecorsa sono impostati per default su contatto normalmente chiuso (configurazione tramite FCT)
Festo P.BE-CMMS-AS-HW-IT 0708NH
37
3. Descrizione del prodotto
Lo schema di collegamento mostra la posizione degli interruttori in condizioni di funzionamento attive.
*) I finecorsa sono impostati per default su contatto normalmente chiuso (configurazione tramite FCT)
38
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
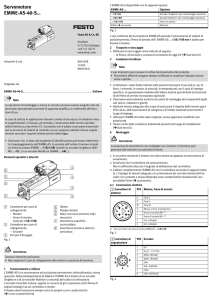
Diagrammi di temporizzazione I/O
1
ENABLE
0
1
START
0
1
STOP
0
1
DOUT0: READY
0
1
DOUT1: MC
DOUT2:
Speed
reached
0
1
0
1
DOUT3: ERROR
0
1
Drive is moving
0
t1 tmc
tx
t1
= 1,6 ms
tx
= x ms (in funzione delle rampe)
tmc
= x ms (in funzione della finestra MC)
t1
tx
Fig. 3.1: Andamento del segnale con modo operativo "selezione sincronizzazione" /
attivando la sincronizzazione tramite START (DIN8)
Con sincronizzazione attiva (DIN8: START impostato) il segnale MC è impostato finché
l'attuatore è fermo. Cioè il segnale MC viene impostato finché non si esce dalla finestra per
"DZ = 0 identificato".
Festo P.BE-CMMS-AS-HW-IT 0708NH
39
3. Descrizione del prodotto
Per la conferma "velocità raggiunta" impostare la velocità di confronto su zero e solo un'area di segnalazione nella finestra.
Istruzioni generali
Le limitazioni e impostazioni generali tramite FCT sono valide anche per la sincronizzazione.
Limitazioni dell'asse, velocità, accelerazioni, finestre di segnalazione ecc.
Sincronizzando un master in avanzamento appare la segnalazione "Valore nominale
raggiunto" non appena si raggiunge la velocità all'interno della finestra di segnalazione impostata. Se dovesse verificarsi una sovramodulazione durante la fase di recupero
o la finestra fosse troppo piccola, allora la segnalazione appare più volte o sfarfalla.
3.3.6
Strategia multi-firmware
Il lettore di schede SD integrato permette di aggiornare il firmware con un qualsiasi
firmware del cliente. Boadloader automatico.
3.3.7
Interfaccia di sincronizzazione
È possibile elaborare i seguenti segnali di sincronizzazione:
-
segnali di direzione impulsi (CLK/DIR) tramite le interfacce X1 e X10
-
segnali CW/CCW tramite le interfacce X1 e X10
-
segnali A/B tramite l'interfaccia X10
Mediante l'interfaccia X10 si possono elaborare segnali con un livello di 5 V.
L'interfaccia X1 è predisposta per un livello del segnale di 24 V. Occorre attivare la sincronizzazione MODE3 tramite DIN9=1 e DIN12=1.
3.3.8
Motor Feedback
La posizione viene richiamata digitalmente tramite EnDat.
Interfaccia EnDat V2.x per encoder Single e Multiturn
Parametri
Valore
Protocollo di comunicazione
Heidenhain EnDat 2.1 (senza traccia analogica) e 2.2
Livello del segnale DATA, SCLK
5 V differenziale / RS422 / RS485
Risoluzione angolare / numero tacche encoder
incrementale
interno al regolatore fino a 16 bit / giro
Lunghezza del cavo
L
25 m
esecuzione del cavo secondo le specifiche Heidenhain
Frequenza limite SCLK
1 MHz
Alimentazione dell'encoder
dal regolatore, 5 V –0/+5 %
IA = 200 mA max.
40
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Parametri
Valore
Cavi Sense per alimentazione
non supportati
Tab. 3.13: Descrizione dei segnali encoder motore EnDat 2.1 e 2.2 (X2)
3.3.9
Chopper di frenatura (azionamento dei freni)
Nel modulo terminale di potenza è incorporato un chopper dotato di reostato di frenatura.
Se durante l'alimentazione di ritorno viene superata la capacità di carica consentita del
circuito intermedio, allora l'energia frenante può essere trasformata in calore tramite il
reostato interno. L'azionamento del chopper di frenatura viene controllato dal software.
Il reostato di frenatura interno è protetto contro i sovraccarichi per mezzo di software e
hardware.
3.3.10 Richiamo del motore (encoder angolare)
Il CMMS-AS dispone di una connessione per un encoder angolare montato sull'albero del
motore. Questo encoder viene utilizzato per la comunicazione di un motore sincrono a
3 fasi e come rilevamento del valore effettivo per il regolatore di velocità e di posizione
incorporato.
Il regolatore supporta i seguenti encoder:
Encoder ENDAT 2.1
–
solo informazioni angolari digitali
Encoder ENDAT 2.2
–
informazioni angolari digitali e parametri di servizio
(temperatura)
3.3.11 Interfaccia di controllo X1
L'interfaccia di controllo X1 è predisposta come D-Sub a 25 poli. Sono disponibili i seguenti segnali:
Segnale
Descrizione
AMON
Uscita analogica per scopi monitor
AIN0 / #AIN0
Ingresso analogico differenziale con risoluzione a 12 bit
Alternativamente si può parametrare l'ingresso analogico differenziale con le funzioni
Mode e Stop (DIN12 e DIN13) (in funzione dell'interfaccia di controllo parametrata)
DOUT0 … DOUT3
Uscite digitali con livello di 24 V
DOUT0 è occupato in modo fisso con la funzione "pronto per l'esercizio"
Altre uscite configurabili (destinazione raggiunta, asse in movimento, velocità di destinazione raggiunta…)
Festo P.BE-CMMS-AS-HW-IT 0708NH
41
3. Descrizione del prodotto
Segnale
Descrizione
DIN0 … DIN13
Ingressi digitali per livello di 24 V, le seguenti funzioni:
(gli ingressi vengono occupati in funzione della selezione del modo)
Mode 0
1 x abilitazione del modulo terminale (DIN4)
1 x abilitazione del regolatore / tacitazione di errori (DIN5)
2 x finecorsa (DIN6 + DIN7)
6 x selezione della posizione (DIN0 … 3, DIN10, 11)
1 x start posizionamento (DIN8)
2 x commutazione MODE (DIN9, 12)
1 x stop (DIN13)
Mode 1
2 x esercizio a impulsi (DIN10, 11)
1 x teach (DIN8)
Mode 2
1 x alt programma di traslazione (DIN3)
1 x start programma di traslazione (DIN8)
2 x next per programma di traslazione, condizione per la commutazione al passo successivo (DIN 10, 11)
Mode 3
2 x impulso/direzione (CLK/DIR o CW/CCW su DIN2, 3)
1 x start sincronizzazione (DIN8)
Tab. 3.14: Interfaccia di controllo X1
Gli ingressi digitali sono realizzati per poter essere configurati:
Mode 0:
Mode 1:
Mode 2:
Mode 3:
occupazione standard
occupazione standard per esercizio a impulsi e teach
occupazione standard per il programma di traslazione
occupazione standard per la sincronizzazione
DIN12 e DIN9 possono essere configurati come segnali selector per poter commutare fra le
diverse configurazioni I/O.
Così è possibile selezionare massimo 4 occupazioni I/O diverse, che sono descritte nella
Tab. 6.2: Occupazione dei pin: interfaccia I/O [X1] Mode 0,
Tab. 6.3: Occupazione dei pin: interfaccia I/O [X1] Mode 1,
Tab. 6.4: Occupazione dei pin: interfaccia I/O [X1] Mode 2 e
Tab. 6.5: Occupazione dei pin: interfaccia I/O [X1] Mode 3.
42
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
3.3.12 Interfaccia dell'encoder incrementale [X10]
L'interfaccia dell'encoder incrementale può essere configurata come ingresso e come uscita tramite software. Inoltre sul connettore sono presenti due ingressi per la connessione di
segnali di direzione impulsi di 5 V (CLK/DIR) / (CW/CCW).
Emulazione dell'encoder incrementale – [X10] è uscita
Il regolatore genera i segnali di traccia A, B e l'impulso zero di un encoder incrementale
dall'angolo di rotazione determinato sul motore tramite l'encoder. I segnali A, B e N corrispondono a quelli di un encoder incrementale.
Risoluzione angolare/numero tacche uscita
Il numero tacche è a commutazione continua Vengono supportati i seguenti numeri tacche: 2048 … 32 tacche/giro. La commutazione viene attivata solo dopo un RESET del regolatore. Un driver di potenza RS422 predispone i segnali su X10 in modo differenziale.
Sincronizzazione – [X10] è ingresso
L'interfaccia X10 può essere configurata come ingresso tramite software per l'elaborazione
dei segnali dell'encoder incrementale o dei segnali di direzione impulsi.
I segnali vengono analizzati come segnali di traccia A/B di un encoder incrementale oppure come segnali di direzione impulsi (CW/CCW, CLK/DIR) di un comando del motore a passi. La forma di segnale viene selezionata tramite software. Il numero di passo per ogni giro
è parametrabile. Inoltre si può parametrare un meccanismo elettronico supplementare.
3.3.13 Interfaccia di parametrazione seriale RS232 e RS485 – X5
Permette di parametrare il regolatore e di scaricare set di parametri e firmware tramite una
interfaccia RS232 (modem zero) fino a 115 Kbit/s.
Può essere utilizzata come interfaccia RS232 o alternativamente anche come RS485. L'impiego simultaneo non è possibile perché entrambe le interfacce utilizzano lo stesso UART
nel DSP.
3.3.14 Contenitore delle schede SD X12
Per memorizzare i parametri di regolazione ed anche il firmware completo del regolatore è
prevista una possibilità di collegamento per una scheda di memoria SD (supporto dati
comune per camere digitali). Il collegamento è realizzato come contenitore "Push Push"
per motivi di styling.
3.3.15 Scheda di memoria SD
La scheda di memoria SD consente di caricare un set di parametri o di eseguire un download del firmware.
Tramite un menu del software di parametrazione è possibile indicare e caricare
(o memorizzare) un set di parametri sulla scheda di memoria.
Festo P.BE-CMMS-AS-HW-IT 0708NH
43
3. Descrizione del prodotto
Inoltre in una parola di configurazione nel set si può stabilire se dopo l'attivazione deve
essere caricato automaticamente un firmware e/o un set di parametri dalla scheda di memoria.
Se è attivato il download automatico del firmware (interruttore DIP 8 = 1) o se il firmware
del regolatore non è valido, allora durante l'inizializzazione il sistema controlla se è inserita una scheda di memoria SD e − nel caso sia presente − la inizializza. Se sulla scheda è
presente un file con il firmware, questo viene innanzitutto controllato (controllo di checksum). Qualora non venga rilevato nessun errore, il firmware viene trasferito dalla scheda
al regolatore e quindi registrato nella memoria FLASH del programma.
Se è stato attivato il caricamento automatico dei parametri tramite il software di messa in
servizio, all'avvio del firmware il sistema controlla se è inserita una scheda e − nel caso sia
presente − la inizializza. A seconda delle impostazioni viene caricato un determinato o il
più attuale file di parametri e memorizzato nella memoria FLASH dei dati.
3.4
Interfacciamento fieldbus
Si possono utilizzare diversi fieldbus nel CMMS-AS. In condizioni standard il bus CAN è
integrato nel controller. Opzionalmente è possibile utilizzare il PROFIBUS o DeviceNet tramite schede. Però può essere attivo contemporaneamente solo un fieldbus.
Per tutti i fieldbus è implementato il profilo per manipolazione e posizionamento Festo
(FHPP) come protocollo di comunicazione. Inoltre nel bus CAN è implementato il protocollo
di comunicazione che si basa sul profilo CANopen secondo CiA Draft Standard DS301 e sul
profilo Drive secondo CiA Draft Standard DSP402.
Indipendentemente dal fieldbus si può utilizzare un gruppo di fattori in modo da poter
trasferire i dati di applicazione nelle unità specifiche dell'utente.
44
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Interfacciamento I/O necessario per attivazione del fieldbus
Lo schema di collegamento mostra la posizione degli interruttori in condizioni di funzionamento attive.
*) I finecorsa sono impostati per default su contatto normalmente chiuso (configurazione tramite FCT)
3.4.1
FHPP
FHPP permette di realizzare un sistema di controllo unitario a prescindere dal fieldbus
utilizzato. Perciò l'utente non ha più bisogno di confrontarsi con le condizioni specifiche
dei singoli bus o comandi (PLC) ma riceve un profilo preparametrato per poter mettere in
servizio e controllare rapidamente l'attuatore.
Per quanto riguarda i modi operativi viene fatta una distinzione fra selezione di record e
funzionamento diretto nell'FHPP.
Nella selezione di record vengono utilizzati i set di traslazione archiviati nel controller.
Nel funzionamento diretto si possono utilizzare
l'esercizio di posizionamento,
la regolazione della velocità o
la regolazione della forza.
I quali possono, se necessario, essere commutati dinamicamente durante il funzionamento diretto.
Ulteriori informazioni sono riportate nel manuale FHPP P.BE-CMM-FHPP-SW-IT.
Festo P.BE-CMMS-AS-HW-IT 0708NH
45
3. Descrizione del prodotto
3.4.2
Bus CAN
Il bus CAN è integrato in modo fisso nel controller e può essere parametrato sul lato frontale e attivato o disattivato tramite gli interruttori DIP, i quali permettono di impostare
l'indirizzo del nodo e la baudrate (visibili dall'esterno). Inoltre si può attivare una resistenza di cessazione nonché attivare o disattivare il bus CAN. Il controller supporta baudrate
fino a 1 Mbit/s.
Utilizzando il protocollo di comunicazione FHPP sono disponibili i modi operativi summenzionati.
Se alternativamente è attivato il protocollo CANopen secondo DS301 con il profilo di applicazione DSP402, allora si possono utilizzare
l'esercizio di posizionamento (CiA: Profile Position Mode),
l'esercizio di riferimento (CiA: Homing Mode),
l'esercizio di posizionamento interpolante (CiA: Interpolated Position Mode)
la regolazione della velocità (CiA: Profile Velocity Mode) e
l'esercizio di controllo della coppia (CiA: Torque Profile Mode).
La comunicazione può avvenire tramite SDO (Service Data Objects) e/o PDO (Process Data
Objects). Per ogni direzione di trasmissione (Transmit/Recive) sono disponibili 2 PDO.
Controllo di bordo con interpolazione lineare
L'"Interpolated position mode" permette di realizzare un controllo di bordo in una applicazione multiasse del regolatore. A tale scopo i valori nominali di posizione di un comando
principale vengono impostati in una base di tempo fissa. Se la base di tempo dei valori
nominali di posizione è maggiore rispetto al tempo ciclo del regolatore di posizione del
controller, il regolatore interpola automaticamente i dati tra due valori nominali di posizione predefiniti. Il controller calcola anche un prepilotaggio corrispondente della velocità.
46
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
4
1 Base di tempo
valore nominale
di posizione
2 Tempo ciclo
regolazione di
posizione
1
3
3 Andamento
interpolato della
posizione
4 Andamento
effettivo della
posizione
2
Fig. 3.2: Interpolated position mode
3.4.3
PROFIBUS
Il controller viene collegato al PROFIBUS tramite un apposito modulo di espansione
(CAMC-PB) che deve essere inserito nello slot X7. Se inserito, il modulo viene attivato automaticamente al successivo avviamento del controller.
L'indirizzo slave viene configurato sul lato frontale del controller tramite gli interruttori
DIP.
Vengono supportate baudrate fino a 12 Mbaud.
Come protocollo di comunicazione viene utilizzato l'FHPP con i modi operativi summenzionati.
3.4.4
DeviceNet
Il controller viene collegato a una rete DeviceNet tramite un apposito modulo di espansione (CAMC-DN) che deve essere inserito nello slot X7. Se inserito, il modulo viene attivato
automaticamente al successivo avviamento del controller.
L'MAC-ID e la baudrate vengono configurate sul lato frontale del controller tramite gli interruttori DIP.
Vengono supportate baudrate fino a 500 kbaud.
Come protocollo di comunicazione viene utilizzato l'FHPP con i modi operativi summenzionati.
Festo P.BE-CMMS-AS-HW-IT 0708NH
47
3. Descrizione del prodotto
3.5
Panoramica delle funzioni
3.5.1
Modi operativi
-
Generazione di set-point tramite segnali dell'encoder incrementale, adatti per frequenze fino a 500 kHz
-
Generazione analogica di velocità con risoluzione di 12 bit
-
Punto di riferimento
-
Accoppiamento semplice a un comando host, ad es. a un PLC, tramite ingressi e uscite
digitali
-
Posizionamento con limitazione degli strappi o a tempo ottimizzato, relativo o assoluto rispetto a un punto di riferimento tramite il generatore di traiettoria integrato
-
Impostazione della posizione tramite fieldbus CANopen integrato con inter
polazione automatica fra i valori nominali.
Modo operativo
Funzione
Interfaccia valore nominale /
interfaccia
Generazione di set-point
tramite
Regolazione del
momento torcente
Valore nominale analogico
X1
Fieldbus
Istruzione diretta
Regolazione della
velocità
Analogico
X1
Segnali CW/CCW
X1 (24 V / Mode 3)
X10 (5 V)
CLK/DIR
Segnali di direzione impulsi
X1 (24 V / Mode 3)
X10 (5 V)
Fieldbus
Istruzione diretta
Segnali A/B +
I/O (avvio sincronizzazione)
X10
X1 (Mode 3)
Fieldbus
Interpolated position
mode
Fieldbus
Istruzione diretta
Master/Slave
Regolazione della
posizione
48
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Modo operativo
Funzione
Controllo di posizionamento
Corsa di riferimento
Esercizio a impulsi
Interfaccia valore nominale /
interfaccia
Generazione di set-point
tramite
I/O
Selezione di record
Fieldbus
Istruzione diretta
Fieldbus
Selezione di record
I/O
Selezione di record
Fieldbus
Istruzione diretta
Fieldbus
Selezione di record
I/O
Fieldbus
Modo di autoapprendimento
Istruzione diretta
Tramite I/O
Tab. 3.15: Modi operativi
3.5.2
Diagramma di temporizzazione − Commutazione dei modi
operativi
1
ENABLE
0
1
0
1
STOP
0
1
DIN9
0
1
DIN12
0
1
DOUT0: READY
0
1
DOUT1: MC
0
1
DOUT2: ACK
0
1
DOUT3: ERROR
0
1
0
1
2
t1
t1
1)
2)
3)
4)
1
t1
3
t1
4
t1
1
t1
= 1,6 ms
Posizionamento
Sequenze / Programma di traslazione
Intermittenza / Teach
Sincronizzazione
Fig. 3.3: Timing per attivazione del singoli modi operativi
Festo P.BE-CMMS-AS-HW-IT 0708NH
49
3. Descrizione del prodotto
3.5.3
Elaborazione dei valori di riferimento
Mediante i selettori del valore di riferimento è possibile attivare valori da fonti diverse sui
regolatori corrispondenti. Nel firmware sono implementati i seguenti selettori del valore di
riferimento:
-
selettore del valore di riferimento della velocità
-
selettore di valore ausiliario, il cui valore di riferimento viene sommato al valore di
riferimento della velocità.
La posizione dei selettori del valore di riferimento viene memorizzata in parametri non
volatili.
A seconda del segno, il valore di riferimento della velocità viene bloccato dal segnale del
rispettivo ingresso finecorsa. Gli ingressi per i finecorsa influiscono anche sul generatore
di rampe per il valore di riferimento della velocità.
Il valore di riferimento della velocità (senza il valore di riferimento ausiliario) viene raggiunto attraverso una rampa di valori di riferimento. In tal caso è possibile parametrizzare
le quattro rampe di accelerazione nell'ambito fino a circa 10 secondi. La rampa di valori di
riferimento può essere disattivata.
3.5.4
Funzione I²t
Un integratore controlla l'integrale corrente²-tempo del controller CMMS-AS. Non appena il
tempo parametrato viene superato appare una segnalazione di avvertimento e la corrente
max. viene limitata alla corrente nominale.
3.5.5
Controllo di posizionamento
Alla regolazione della corrente è sovrapposto un controllo di posizionamento. È possibile
selezionare fino a 64 posizioni (corsa di riferimento + 63 posizioni) e raggiungerle tramite
un generatore di traiettoria. Inoltre sono presenti record volatili con dati di posizione per il
posizionamento tramite il fieldbus.
I record sono composti da un valore di posizione e da un profilo di traslazione. Per gli otto
profili di traslazione si possono impostare i seguenti parametri:
-
velocità di traslazione
-
accelerazione
-
ritardo
-
limitazione dello strappo
-
tempo
-
ritardo di avviamento
-
velocità finale
-
attendere o eliminare il posizionamento in corso, oppure ignorare l'istruzione di start.
50
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Da qualsiasi record di posizionamento è possibile avviare direttamente un altro record a
piacere. Il passaggio a un nuovo record di posizionamento può avvenire senza il precedente arresto.
I set di parametri sono richiamabili tramite:
-
gli ingressi digitali (record di posizione 0 … 63)
-
l'interfaccia RS232 (solo per scopi di prova) oppure
-
l'interfaccia fieldbus.
Interfacciamento I/O necessario per posizionamento
Lo schema di collegamento mostra la posizione degli interruttori in condizioni di funzionamento attive.
*) I finecorsa sono impostati per default su contatto normalmente chiuso (configurazione tramite FCT)
Festo P.BE-CMMS-AS-HW-IT 0708NH
51
3. Descrizione del prodotto
3.5.6
Corsa di riferimento
Per la corsa di riferimento si può scegliere tra i metodi seguenti, orientati al profilo DS402.
Corsa verso
Metodo
positivo
Metodo
negativo
Rappresentazione grafica
Dec Hex Dec Hex
Finecorsa con analisi impulso
zero
2
02
1
01
1
Index Impuls
Negativer
Endschalter
Battuta fissa con analisi impulso zero
-2
FE
-1
FF
-1
Index Impuls
Finecorsa
18
12
17
11
Battuta fissa
-18
EE
-17
EF
7
1
Impulso zero
34
22
33
21
Acquisizione posizione corrente 35
23
35
23
Tab. 3.16: Metodi della corsa di riferimento
52
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Metodi
della
corsa di
riferim.
1
Finecorsa negativo con impulso indice.
Con finecorsa negativo inattivo:
corsa a velocità di ricerca in direzione negativa verso il finecorsa negativo.
Corsa a bassa velocità in direzione positiva fino a quando il finecorsa diventa inattivo,
quindi proseguimento fino al primo impulso indice.
Questa posizione viene acquisita come punto di riferimento.
Se parametrizzato: corsa a velocità di traslazione fino all'origine dell'asse.
2
Finecorsa positivo con impulso indice.
Con finecorsa positivo inattivo:
corsa a velocità di ricerca in direzione positiva verso il finecorsa positivo.
Corsa a bassa velocità in direzione negativa fino a quando il finecorsa diventa inattivo,
quindi proseguimento fino al primo impulso indice.
Questa posizione viene acquisita come punto di riferimento.
Se parametrizzato: corsa a velocità di traslazione fino all'origine dell'asse.
-1
Battuta negativa con impulso indice
Corsa a velocità di ricerca in direzione negativa fino alla battuta.
Corsa a bassa velocità in direzione positiva fino all'impulso indice successivo.
Questa posizione viene acquisita come punto di riferimento.
Se parametrizzato: corsa a velocità di traslazione fino all'origine dell'asse.
-2
Battuta positiva con impulso indice
Corsa a velocità di ricerca in direzione positiva fino alla battuta.
Corsa a bassa velocità in direzione negativa fino all'impulso indice successivo.
Questa posizione viene acquisita come punto di riferimento.
Se parametrizzato: corsa a velocità di traslazione fino all'origine dell'asse.
17
Finecorsa negativo
Con finecorsa negativo inattivo:
corsa a velocità di ricerca in direzione negativa verso il finecorsa negativo.
Corsa a bassa velocità in direzione positiva fino a quando il finecorsa diventa inattivo.
Questa posizione viene acquisita come punto di riferimento.
Se parametrizzato: corsa a velocità di traslazione fino all'origine dell'asse.
18
Finecorsa positivo
Con finecorsa positivo inattivo:
corsa a velocità di ricerca in direzione positiva verso il finecorsa positivo.
Corsa a bassa velocità in direzione negativa fino a quando il finecorsa diventa inattivo.
Questa posizione viene acquisita come punto di riferimento.
Se parametrizzato: corsa a velocità di traslazione fino all'origine dell'asse.
Festo P.BE-CMMS-AS-HW-IT 0708NH
53
3. Descrizione del prodotto
Metodi
della
corsa di
riferim.
-17
Battuta negativa
Corsa a velocità di ricerca in direzione negativa fino alla battuta.
Questa posizione viene acquisita come punto di riferimento.
Se parametrizzato: corsa a velocità di traslazione fino all'origine dell'asse.
-18
Battuta positiva
Corsa a velocità di ricerca in direzione positiva fino alla battuta.
Questa posizione viene acquisita come punto di riferimento.
Se parametrizzato: corsa a velocità di traslazione fino all'origine dell'asse.
33
Impulso indice in direzione negativa
Corsa a bassa velocità in direzione negativa fino all'impulso indice.
Questa posizione viene acquisita come punto di riferimento.
Se parametrizzato: corsa a velocità di traslazione fino all'origine dell'asse.
34
Impulso indice in direzione positiva
Corsa a bassa velocità in direzione positiva fino all'impulso indice.
Questa posizione viene acquisita come punto di riferimento.
Se parametrizzato: corsa a velocità di traslazione fino all'origine dell'asse.
35
Posizione corrente
Come punto di riferimento viene acquisita la posizione corrente.
Se parametrizzato: corsa a velocità di traslazione fino all'origine dell'asse.
Nota:
Possibile mediante spostamento del sistema di riferimento per la traslazione verso il finecorsa
o la battuta fissa. Per questo motivo viene impiegato principalmente nel caso degli assi di
rotazione.
Tab. 3.17: Spiegazione dei metodi delle corse di riferimento
54
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
3.5.7
Diagramma di temporizzazione per corsa di riferimento
Controller
release
1
Statusword:
referenced
1
0
0
1
START
0
1
Limit switch E0
0
1
Limit switch E1
0
1
DOUT0: READY
0
1
DOUT1: MC
0
1
DOUT2: ACK
0
1
DOUT3: ERROR
0
1
–
0
t1 tx
t1
t1
= 1,6 ms
tx
= x ms (in funzione delle rampe)
+
tx
tx
tx
Fig. 3.4: Andamento del segnale allo start della corsa di riferimento e con
esecuzione positiva
Festo P.BE-CMMS-AS-HW-IT 0708NH
55
3. Descrizione del prodotto
Controller
release
1
Statusword:
referenced
1
0
0
1
START
0
1
Limit switch E0
0
1
Limit switch E1
0
1
DOUT0: READY
0
1
DOUT1: MC
0
1
DOUT2: ACK
0
1
DOUT3: ERROR
0
1
Drive is moving
neg
0
t1
tx t1
t1
= 1,6 ms
tx
= x ms (in funzione delle rampe)
pos
tx
tx
tx
Fig. 3.5: Andamento del segnale in caso di interruzione errata
(errore di posizionamento, ...)
56
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Controller
release
1
Statusword:
referenced
1
0
0
1
START
0
1
STOP
0
1
Limit switch E0
0
1
Limit switch E1
0
1
DOUT0: READY
0
1
DOUT1: MC
0
1
DOUT2: ACK
0
1
DOUT3: ERROR
0
1
–
0
t1
t1 t1
tx
tx t1
+
tx
tx t1
tx
= 1,6 ms
= x ms (in funzione delle rampe)
Fig. 3.6: Andamento del segnale in caso di interruzione dovuta all'ingresso STOP
3.5.8
Generatore di traiettoria
Il record di posizionamento selezionato viene caricato nel generatore di traiettoria con un
segnale di start per un record tramite DIN8, fieldbus o interfaccia RS232.
In base al record dati caricato viene eseguito il calcolo preliminare interno necessario.
I calcoli preliminari possono durare fino a 5 ms. Per elaborare il segnale di start sono disponibili le seguenti possibilità parametrabili:
-
Il segnale di start viene ignorato (ignorare) una volta identificato durante il posizionamento.
-
Una volta identificato un segnale di start durante il posizionamento, la corsa viene
proseguita fino alla posizione di arrivo (aspettare).
-
Una volta identificato un segnale di start, il posizionamento viene interrotto e l'attuatore avanza a velocità costante. Al termine del calcolo preliminare l'attuatore si sposta
nella nuova posizione di arrivo (interrompere).
Il generatore di traiettoria fornisce i seguenti messaggi:
-
Destinazione raggiunta (default: uscita digitale DOUT1 – MC)
Festo P.BE-CMMS-AS-HW-IT 0708NH
57
3. Descrizione del prodotto
-
Percorso rimanente raggiunto.
3.5.9
Comando sequenziale I/O
RESET
Power ON
T1
Programma di
boot
Da tutti tranne
RESET / Power ON
Download del
firmware
T2
T23
Inizializzazione
Stato di errore
T3
T25
Pronto per
l’esercizio
T18
T20
T4
T17
T5
Regolazione del momento torcente
T16
T6
Regolazione della
velocità
T15
T8
Controllo di posizionamento
T13
T9
Esercizio
a impulsi
58
Tacitazione errori
T21
Caricamento/
salvataggio parametri
scheda SD
Attivazione
modulo terminale
T24
T19
Inizializzazione scheda
SD
T10 T11
Disattivazione modulo
terminale
T12
Corsa di
riferimento
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
T
Condizioni
T1
RESET / Power ON
T2
Timeout trascorso o download del firmware terminato
T3
L'inizializzazione è stata eseguita correttamente
T4
Operazioni dell'utente
DIN4=1 e DIN5=1
T5
Nel software di messa in servizio è stato selezionato
"Regolazione del momento torcente"
Generazione di set-point tramite
AIN0/AGND
T6
Nel software di messa in servizio è stato selezionato
"Regolazione della velocità"
Generazione di set-point tramite
AIN0/AGND
T8
Nel software di messa in servizio è stato selezionato
"Posizionamento"
Selezione di record tramite
DIN0 … DIN3, DIN10, DIN11
Start processo di posizionamento:
DIN8=1
T9
Nel software di messa in servizio sono stati impostati Selezione I/O-Mode:
tutti i parametri per l'esercizio a impulsi (ad es. veloci- DIN9=0, DIN12=1
tà max., accelerazione …)
Jog +: DIN10=1
Jog -: DIN11=1
T10
Selezione I/O-Mode:
DIN9=0, DIN12=0
T11
Selezione del metodo della corsa di riferimento e
Selezione record di posizionamento 0
parametrazione delle velocità e delle accelerazioni nel Start processo di posizionamento:
software di messa in servizio
DIN8=1
T12
Attuatore con riferimento definito
T13
DIN5=0
T15
DIN5=0
T16
DIN5=0
T17
DIN4=0
T18
Richiesta di scrittura / lettura alla scheda
SD tipo:
- caricamento parametri
- salvataggio parametri
- download del firmware
T19
La scheda SD è stata inizializzata correttamente
T20
Nel software di messa in servizio è stato selezionato
"Caricare dopo riavvio di SD"
T21
Il set di parametri è stata caricato
T22
Si è verificato un errore che ha provocato il disinserimento del modulo terminale
T23
Festo P.BE-CMMS-AS-HW-IT 0708NH
59
3. Descrizione del prodotto
T
Condizioni
T24
T25
Operazioni dell'utente
Tacitazione dell'errore comandata dai lati
DIN5: 1 - 0
L'errore è stato tacitato e non sono presenti altri errori
Tab. 3.18: Comando sequenziale I/O
3.5.10 Funzioni di sicurezza, messaggi di errore
Per garantire un funzionamento sicuro del CMMS-AS vengono monitorate le condizioni
seguenti:
-
arresto sicuro, EN 954/cat 3 e IEC 61508
-
temperatura del modulo terminale
-
temperatura del motore
-
tensione del circuito intermedio (valore min./max.)
-
errori di inizializzazione
-
errori di check-sum durante il trasferimento dei parametri
-
errori di comunicazione
-
errori di posizionamento
-
corsa di riferimento
-
sovracorrente/cortocircuito nel modulo terminale di potenza
-
sistema encoder
-
watchdog (monitoraggio del processore).
60
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
3.5.11 Reazione in caso di disattivazione dell'abilitazione
Controller
enable
1
Output stage
release
1
0
0
1
START
Holding brake
current-carrying
Output stage
switched on
0
1
0
1
0
1
DOUT0: READY
0
1
DOUT1: MC
0
1
DOUT2: ACK
0
1
DOUT3: ERROR
0
1
Drive is moving
0
t1
t1
t1
= 1,6 ms
tx
= x ms (in funzione delle rampe di frenatura)
tx
Fig. 3.7: Reazione in caso di disattivazione dell'abilitazione del regolatore
Festo P.BE-CMMS-AS-HW-IT 0708NH
61
3. Descrizione del prodotto
Controller
released
1
Output stage
release
1
0
0
1
START
0
Holding brake
current-carrying
1
Output stage switched
on
1
0
0
1
DOUT0: READY
0
1
DOUT1: MC
0
1
DOUT2: ACK
0
1
DOUT3: ERROR
0
1
Drive is moving
0
t1
t1
t1
t1
= 1,6 ms
tx
= x ms (in funzione delle rampe di frenatura)
tx
Fig. 3.8: Reazione in caso di disattivazione del modulo terminale
62
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Controller
release
1
Output stage
release
1
0
0
1
START
Holding brake
currentcarrying
Output stage
switched on
0
1
0
1
0
1
DOUT0: READY
0
1
DOUT1: MC
0
1
DOUT2: ACK
0
1
DOUT3: ERROR
0
1
Intermediate circuit
0
1
Drive is moving
0
t1
t1
= 1,6 ms
tx
= x ms (ZK viene scaricato)
t1
tx
t1
Fig. 3.9: Reazione in caso di interruzione dell'alimentazione del circuito intermedio
(errore: modulo terminale immediatamente OFF)
3.5.12 Funzione dell'oscilloscopio
La funzione dell'oscilloscopio implementata nel firmware è un mezzo ausiliario importante
per ottimizzare le impostazioni del regolatore senza dover utilizzare uno strumento di misura separato. Essa permette di registrare l'andamento nel dei segnali. È composta da tre
blocchi:
La parte di inizializzazione, che gira a bassa priorità, esegue i calcoli preliminari per il procedimento di misurazione vero e proprio.
La parte di trasferimento, anch'essa dotata di bassa priorità. È integrata nel time-slicing
della comunicazione seriale.
La parte di misurazione gira ad alta priorità nell'interrupt di regolazione e registra i canali
di misurazione. Al verificarsi della condizione di trigger, il procedimento di misurazione
viene interrotto dopo un numero definito di passi di rilevamento.
Si possono registrare due canali, ciascuno con 256 valori a 16 bit. Si possono parametrare:
-
Sorgente trigger (corrente, velocità, posizione, posizione del rotore, tensione del modulo terminale, errore di posizionamento, abilitazione del regolatore, finecorsa, posi-
Festo P.BE-CMMS-AS-HW-IT 0708NH
63
3. Descrizione del prodotto
zionamento avviato, motion complete, errore di posizionam. (messaggio), errori generali, modulo terminale attivo, corsa di riferim. attiva)
-
Livello trigger
-
Possibilità trigger (auto, normal, force, fronte ascendente/discendente)
-
Frequenza di misurazione
3.5.13 Funzione a impulsi e teach-in I/O
L'esercizio a impulsi e teach-in viene parametrato tramite l'interfaccia (FCT) o un oggetto
CANopen. Poi può essere attivato tramite gli ingressi digitali per MODE1. Attivando l'esercizio a impulsi/teach-in, due altri ingressi digitali vengono utilizzati per controllare il motore. In questa modalità il comando a impulsi viene sovrapposto al comando corrente.
Durante il controllo posizione, il motore viene traslato continuamente con il profilo parametrato (esercizio a impulsi) (positivo/negativo) se il segnale sull'ingresso digitale è positivo.
L'ingresso digitale DIN8 serve per acquisire la posizione di arrivo impostata. Inoltre viene
analizzato lo stato degli ingressi digitali DIN0 … DIN3 e la posizione di arrivo viene memorizzata sulla relativa posizione.
Istruzioni generali
Si possono rilevare le prime 15 posizioni della tabella dei record di posizionamento (posiz. 1 … 15). Con DIN8 la posizione corrente viene trasferita nel record che è selezionato
con DIN0 … DIN3.
Le posizioni rilevate vengono salvate definitivamente nella memoria permanente con il
fronte discendente di DIN5 "abilitazione regolatore".
Nota
Le posizioni possono essere memorizzate sulla scheda SD solo
tramite FCT. Quindi utilizzando la funzione a impulsi/teach-in
(senza FCT), la scheda SD non deve essere inserita o "leggere dopo
restart di SD" deve essere disattivata altrimenti al riavvio del
regolatore i vecchi valori vengono riletti dalla scheda SD.
Attivare funzione a impulsi/teach-in
La funzione a impulsi/teach-in viene attivata durante l'esercizio I/O selezionando il modo 1.
64
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Attivazione I/O necessaria per funzione a impulsi/teach-in
Lo schema di collegamento mostra la posizione degli interruttori in condizioni di funzionamento attive.
*) I finecorsa sono impostati per default su contatto normalmente chiuso (configurazione tramite FCT)
Festo P.BE-CMMS-AS-HW-IT 0708NH
65
3. Descrizione del prodotto
Impostazioni nell'FCT
I parametri qui impostati sono validi per l'esercizio a impulsi tramite l'interfaccia I/O e FCT.
Le accelerazioni sono valide anche per il "passo singolo" tramite FCT.
66
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Diagrammi di temporizzazione I/O
1
ENABLE
0
1
START/TEACH
0
1
STOP
0
1
DIN11: Jog -
0
1
DIN10: Jog +
0
1
DOUT0: READY
0
1
DOUT1: MC
0
1
DOUT2: ACK-TEACH
0
1
DOUT3: ERROR
0
1
Drive is moving
neg
0
t1
pos
tx
t1
= 1,6 ms
tx
= x ms (in funzione delle rampe di frenatura)
t1
tx
Fig. 3.10: Andamento del segnale durante l'esercizio a impulsi positivo e negativo
Festo P.BE-CMMS-AS-HW-IT 0708NH
67
3. Descrizione del prodotto
1
ENABLE
0
1
START/TEACH
0
1
STOP
0
1
DIN11: Jog -
0
1
DIN10: Jog +
0
1
DOUT0: READY
0
1
DOUT1: MC
0
1
DOUT2: ACK-TEACH
0
1
DOUT3: ERROR
0
1
Drive is moving
–
0
t1
–
tx
t1
–
tx
t1
= 1,6 ms
tx
= x ms (in funzione delle rampe di frenatura)
t1
–
+
tx
t1
+ –
tx
t1
tx
Fig. 3.11: Andamento attivando contemporaneamente entrambi i segnali /
brevemente differiti
68
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
1
ENABLE
0
1
START / TEACH
0
1
STOP
0
1
DIN11: Jog DIN10: Jog +
(1)
0
1
(1)
0
1
DIN0 - DIN3
(1)
0
1
DOUT0: READY
0
1
DOUT1: MC
0
1
DOUT2: ACK-TEACH
0
1
DOUT3: ERROR
0
1
–
0
t1
+
tx
t1
tx
t1
t1
= 1,6 ms
tx
= x ms (in funzione delle rampe di frenatura)
(1)
Impostazione della posizione di arrivo da programmare
t1
t1
Fig. 3.12: Reazione in caso di ingresso teach
3.5.14 Programma di traslazione con concatenazione dei record
di posizionamento provvista di commutazione del posizionamento/regolazione del momento torcente
Il programma di traslazione permette di concatenare diverse istruzioni di posizionamento
in una sequenza. Queste posizioni vengono eseguite in successione. Le caratteristiche del
programma di traslazione sono:
Nel programma si possono impostare 63 record di posizionamento della tabella.
Oltre alle sequenze lineari sono permesse anche concatenazioni ad anello (concatenazione continua).
Per ogni passo di programma si può impostare una posizione di sequenza libera.
Come condizione per la commutazione al passo successivo sono disponibili 2 ingressi
digitali in funzione di next 1 e next 2.
Nel programma di traslazione sono disponibili 7 possibilità di entrata attivando I/O,
cioè sono possibili 7 sequenze diverse. Sotto FHPP l'approccio è a selezione libera e il
numero è limitato solo dal numero max. dei record di posizionamento.
Festo P.BE-CMMS-AS-HW-IT 0708NH
69
3. Descrizione del prodotto
Le righe del programma vengono elaborate ogni 1,6 ms. Così viene garantito che una
uscita settata dal programma rimanga impostata per minimo 1,6 ms.
Il programma può essere controllato tramite gli ingressi digitali. Gli ingressi digitali in
cui vengono analizzati i livelli (High/Low), devono essere presenti in modo stabile per
minimo 1,6 ms (tempo ciclo del comando sequenziale per il programma di traslazione)
Da qualsiasi record di posizionamento è possibile avviare direttamente un altro record
a piacere. Il passaggio a un nuovo record di posizionamento può avvenire senza la
precedente velocità finale = 0.
Condizioni di commutazione
Valore
Condizione
Abbrev. Descrizione
0
-
End
Nessuna commutazione automatica al passo successivo
1
Motion Complete
MC
La commutazione al passo successivo ha luogo quando la condizione Motion Complete è soddisfatta (finestra di tolleranza). Per questa
ragione l'asse si arresta per un attimo durante il posizionamento
4
Arresto
STS
La commutazione al passo successivo avviene dopo che l'attuatore
si è arrestato e il tempo programmato è trascorso. In questo caso
con arresto non s'intende solo la fine del record di posizionamento
(MC) ma anche la traslazione sul blocco in un punto qualsiasi
5
Tempo
TIM
La commutazione al passo successivo avviene non appena è trascorso il tempo programmato.
La misurazione del tempo ha inizio con l'avvio del record di posizionamento
6
NEXT
(fronte positivo)
NRI
La commutazione al passo successivo avviene immediatamente
dopo un fronte positivo su DIN10 (NEXT1) o DIN11 (NEXT2)
7
NEXT
NFI
(fronte negativo)
La commutazione al passo successivo avviene immediatamente
dopo un fronte negativo su DIN10 (NEXT1) o DIN11 (NEXT2)
9
NEXT
(fronte positivo)
in attesa
NRS
La commutazione al passo successivo avviene dopo il messaggio
Motion Complete e un fronte positivo su DIN10 (NEXT1) o DIN11
(NEXT2)
10
NEXT
NFS
(fronte negativo)
in attesa
La commutazione al passo successivo avviene dopo il messaggio
Motion Complete e un fronte negativo su DIN10 (NEXT1) o DIN11
(NEXT2)
Tab. 3.19: Condizioni di commutazione per il programma di traslazione
Nota
L'indicazione di tempo per STS e TIM è il tempo che viene immesso
nel profilo di traslazione. Il tempo inizia con l'esecuzione del record
di posizionamento.
70
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Profili con velocità finale <> 0
Nota
I record di posizionamento che contengono una velocità finale <> 0
NON devono essere utilizzati per record singoli in quanto la condizione "velocità finale" può essere raggiunta solo nelle concatenazioni.
Attivazione della concatenazione di record
La concatenazione di record viene attivata durante l'esercizio I/O selezionando il modo 2.
Festo P.BE-CMMS-AS-HW-IT 0708NH
71
3. Descrizione del prodotto
Interfacciamento I/O necessario per concatenazione di record
Lo schema di collegamento mostra la posizione degli interruttori in condizioni di funzionamento attive.
*) I finecorsa sono impostati per default su contatto normalmente chiuso (configurazione tramite FCT)
Disattivando DIN3 "Arresto programma di traslazione", il programma attivo viene arrestato sulla posizione corrente. Riattivando DIN3, il programma di traslazione viene proseguito
automaticamente partendo da questa posizione.
Il programma di traslazione attivo viene terminato disattivando DIN9 "Commutazione modo". Il record di posizionamento attivo viene ultimato.
Il programma di traslazione viene interrotto disattivando DIN13 "Stop".
Il programma deve essere riattivato.
72
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
Diagrammi di temporizzazione I/O
1
ENABLE
0
1
START
0
1
STOP
Positioning
record
0
1
0
1
DOUT0: READY
0
1
DOUT1: MC
0
1
DOUT2: ACK
0
1
DOUT3: ERROR
0
1
Drive is moving
0
t1
t1
t1
t1
t1
tx
(1)
t1
= 1,6 ms
tx
= x ms (in funzione del posizionamento)
(1)
Vale per record di posizionamento con velocità finale = 0
Fig. 3.13: Andamento del segnale allo start di una sequenza
Festo P.BE-CMMS-AS-HW-IT 0708NH
73
3. Descrizione del prodotto
1
ENABLE
0
1
START
0
1
STOP
Positioning
record
0
1
0
1
DOUT0: READY
0
1
DOUT1: MC
0
1
DOUT2: ACK
0
1
DOUT3: ERROR
0
1
Drive is moving
0
t1
tx
t1
t1
t1
t1
t1 tx
t1
= 1,6 ms
= x ms (in funzione delle rampe di frenatura)
Fig. 3.14: Andamento del segnale in caso di interruzione dovuta all'ingresso STOP
1
ENABLE
0
1
START
0
1
STOP
0
1
HALT
Positioning
record
0
1
0
1
DOUT0: READY
0
1
DOUT1: MC
0
1
DOUT2: ACK
0
1
DOUT3: ERROR
0
1
Drive is moving
0
t1
t1
tx
t1
t1
t1
tx
tx
t1
tx
tx
= 1,6 ms
= x ms (in funzione delle rampe di frenatura)
Fig. 3.15: Andamento del segnale in caso di interruz. e continuaz. mediante ingresso HALT
74
Festo P.BE-CMMS-AS-HW-IT 0708NH
3. Descrizione del prodotto
3.5.15 Misurazione volante
Attraverso l'ingresso ad alta velocità DIN9 si può rilevare la posizione reale in qualsiasi
momento. A questo proposito viene analizzato il fronte ascendente o discendente (parametrabile). Il tempo di ritardo massimo durante il rilevamento della posizione si aggira
nell'ordine di pochi microsecondi. I dati di posizione memorizzati sono accessibili attraverso una connessione fieldbus.
3.5.16 Posizionamento continuo
Il posizionamento continuo in una direzione (applicazioni con asse di rotazione) è possibile
senza alcun problema (nell'intervallo di ±32767 giri). Un ingresso finecorsa può essere
utilizzato come ingresso per l'interruttore di riferimento.
3.5.17 Adattamento al modulo dell'asse/motore
All'utente vengono messi a disposizione set di parametri preimpostati. In ogni caso per
l'esercizio ottimale della combinazione motore-asse bisogna ottimizzare i parametri di
regolazione.
Per la serie di motori EMMS-AS sono disponibili i componenti e le dimensioni di tutto il
modulo meccanico.
I servomotori EMMS-AS da azionare sul CMMS-AS:
EMMS-AS
-40-M, -55-S
-TS / -TM / -TSB / -TMB
EMMS-AS
-70-S, -70-M, -100-S -RS / -RM / -RSB / -RMB
Festo P.BE-CMMS-AS-HW-IT 0708NH
75
4. Tecnica di sicurezza funzionale
4.
Tecnica di sicurezza funzionale
4.1
Generalità, impiego ammesso
I servoregolatori di posizionamento della serie CMMS-AS supportano la funzione di sicurezza "arresto sicuro" con protezione dall'avviamento inatteso secondo i requisiti della
norma EN 954-1, categoria 3.
L'arresto della macchina deve essere eseguito mediante il sistema di controllo. Ciò vale in
particolare per gli assi verticali privi di meccanismo autobloccante o compensazione dei
pesi.
Il costruttore deve progettare il sistema di sicurezza per l'intera macchina e per tutti i componenti integrati sulla base di una analisi / valutazione dei rischi eseguite secondo la direttiva sui macchinari o EN ISO 12100, EN 954-1 ed EN 1050. Tra i componenti della macchina rientrano anche gli attuatori elettrici.
La norma EN 954-1 definisce i requisiti per i sistemi di controllo, classificandoli in cinque
categorie in base all'entità del rischio (vedi Tab. 4.1).
CateSintesi del requisito
goria 1)
Comportamento del sistema 2)
Principi per garantire la
sicurezza
B
I componenti specifici per la sicurezza
Il verificarsi di un errore può Essenzialmente tramite
e/o i loro dispositivi di protezione nonprovocare la perdita della
la selezione di compoché i loro componenti devono essere
funzione di sicurezza.
nenti.
progettati, costruiti, selezionati, assemblati e combinati in conformità alle norme vigenti in modo tale da poter resistere agli influssi previsti.
1
Devono essere soddisfatti i requisiti
della categoria B.
Si devono utilizzare componenti e principi di sicurezza di provata affidabilità.
2
76
Devono essere soddisfatti i requisiti
della categoria B e implementati principi
di sicurezza di provata affidabilità.
La funzione di sicurezza deve essere
verificata ad intervalli di tempo adeguati
per mezzo del sistema di controllo della
macchina.
Il verificarsi di un errore può
provocare la perdita della
funzione di sicurezza, ma la
probabilità che si verifichi
un errore è inferiore a quella della categoria B.
Il verificarsi di un errore può Essenzialmente attraverprovocare la perdita della
so la struttura stessa.
funzione di sicurezza negli
intervalli di tempo tra una
prova e l'altra.
La perdita della funzione di
sicurezza viene rilevata
mediante una prova.
Festo P.BE-CMMS-AS-HW-IT 0708NH
4. Tecnica di sicurezza funzionale
CateSintesi del requisito
goria 1)
Comportamento del sistema 2)
3
Quando si verifica il singolo
errore, la funzione di sicurezza rimane sempre garantita.
Devono essere soddisfatti i requisiti
della categoria B e implementati principi
di sicurezza di provata affidabilità.
I componenti specifici per la sicurezza
devono essere progettati nel modo seguente:
Principi per garantire la
sicurezza
Vengono rilevati alcuni, ma
non tutti gli errori.
- Un singolo errore non deve causare Un accumulo di errori scola perdita della funzione di sicurezza nosciuti può provocare la
in nessun componente.
perdita della funzione di
- Il singolo errore viene rilevato non
sicurezza.
appena la procedura corrispondente
viene eseguita.
4
Devono essere soddisfatti i requisiti
della categoria B e implementati principi
di sicurezza di provata affidabilità.
I componenti rilevanti per la sicurezza
devono essere realizzati con struttura a
due canali; autocontrollo costante; completa identificazione degli errori!
In caso di errori, la funzione
di sicurezza rimane sempre
garantita.
Gli errori vengono rilevati
per tempo, in modo da
impedire una perdita della
funzione di sicurezza.
1)
La categoria non è concepita per essere applicata in una sequenza arbitraria o una struttura gerarchica in riferimento ai requisiti di sicurezza tecnica.
2)
Dalla valutazione del rischio risulterà se la perdita completa o parziale della o delle funzioni di sicurezza è accettabile a causa degli errori.
Tab. 4.1: Descrizione del requisito per le categorie secondo EN 954-1
La norma EN 60204-1 tratta, tra le altre cose, le operazioni da seguire in caso di emergenza
e fornisce una definizione per "STOP EMERGENZA" e "ARRESTO-EMERGENZA" (vedi Tab.
4.2).
Operazione
Definizione (EN 60204-1)
Tipo di pericolo
STOP
EMERGENZA
Sicurezza elettrica in caso di emergenza
Lo STOP D'EMERGENZA deve essere utilizzamediante disinserimento dell'energia elettri- to in presenza di un rischio di scossa elettrica nell'intera unità installata o in una sua
co o di un altro rischio di natura elettrica.
parte.
ARRESTO
EMERGENZA
Sicurezza funzionale in caso di emergenza
mediante arresto di una macchina o dei
componenti mobili.
L'ARRESTO D'EMERGENZA è concepito per
arrestare un processo o un movimento non
appena questo possa provocare un potenziale rischio.
Tab. 4.2: Stop d'emergenza e arresto d'emergenza secondo la norma EN 60204-1
Con la funzione "Arresto sicuro" non viene eseguita alcuna separazione galvanica. Per tale
motivo non offre alcuna protezione contro le scosse elettriche. Ai sensi della normativa
non è quindi possibile realizzare un circuito di arresto d'emergenza con la funzione di "ar-
Festo P.BE-CMMS-AS-HW-IT 0708NH
77
4. Tecnica di sicurezza funzionale
resto sicuro", in quanto viene richiesto il disinserimento dell'intero impianto mediante il
dispositivo di separazione dalla rete (interruttore principale o contattore di rete).
Per quanto riguarda l'arresto, la norma EN 60204-1 prevede tre categorie di arresto in
funzione di una analisi dei rischi (vedi Tab. 4.3).
Categoria
di stop
Tipo
Operazione
0
Arresto non controllato mediante disinserimento immediato dell'energia elettrica.
STOP EMERGENZA o ARRESTO EMERGENZA
1
Arresto controllato e disinserimento dell'energia elettrica ad arresto avvenuto.
ARRESTO EMERGENZA
2
Arresto controllato senza disinserimento
dell'energia elettrica ad arresto avvenuto.
Non indicato per STOP EMERGENZA o
ARRESTO EMERGENZA
Tab. 4.3: Categorie di stop
4.2
Funzione integrata "Arresto sicuro"
Avvertenza
La funzione di "arresto sicuro" non protegge dalle scosse elettriche
ma esclusivamente da movimenti pericolosi!
4.2.1
Generalità/descrizione della funzione "Arresto sicuro"
Con l'arresto sicuro viene interrotta l'alimentazione di energia all'attuatore in modo affidabile. L'attuatore non può più generare alcuna coppia e quindi nessun movimento pericoloso. In caso di carichi sospesi si devono adottare misure supplementari per impedire la
caduta del carico (ad es. freni di arresto meccanici). Nello stato di "arresto sicuro" non
deve avvenire alcun controllo della posizione di arresto.
In linea di massima per realizzare la funzione di "arresto sicuro" sono necessarie 3 misure:
Interventi
-
relè tra rete e sistema di azionamento (contattore di rete)
-
relè tra parte di potenza e motore di azionamento (contattore del motore)
-
blocco sicuro degli impulsi (blocco degli impulsi dei semiconduttori di
potenza, integrato nel CMMS-AS)
L'impiego della soluzione integrata (blocco sicuro degli impulsi) offre diversi vantaggi:
Vantaggi
78
-
meno componenti esterni, ad es. contattori
-
cablaggi ridotti e minore ingombro nell'armadio di comando
-
conseguente riduzione dei costi
Festo P.BE-CMMS-AS-HW-IT 0708NH
4. Tecnica di sicurezza funzionale
Un ulteriore vantaggio consiste nella disponibilità dell'impianto. Grazie alla soluzione integrata, il circuito intermedio del servoregolatore può rimanere caricato. In tal modo si
riducono sensibilmente i tempi di attesa in caso di riavvio dell'impianto.
Fig. 4.1: Schema a blocchi "Arresto sicuro" secondo EN 954-1, categoria 3
Attenzione
Se la funzione di "arresto sicuro" non è necessaria, occorre
ponticellare i pin 1 e 2 del connettore [X3].
Per l'arresto sicuro secondo la norma EN 954-1 categoria 3 è necessaria la presenza di due
canali, ovvero deve essere impedito con sicurezza un riavvio attraverso due percorsi separati, completamente indipendenti l'uno dall'altro. Questi due percorsi per interrompere
l'alimentazione di energia all'attuatore tramite il bloccaggio sicuro degli impulsi vengono
definiti "percorsi di disinserzione":
Festo P.BE-CMMS-AS-HW-IT 0708NH
79
4. Tecnica di sicurezza funzionale
1. percorso di disin- Sblocco del modulo terminale tramite [X1] (blocco dei segnali PWM;
serzione
i driver IGBT non vengono più pilotati con impulsi).
2. percorso di disin- Interruzione dell'alimentazione dei sei IGBT del modulo terminale
serzione
tramite [X3] mediante un relè (i driver dei fotoaccoppiatori IGBT
vengono separati dall'alimentazione elettrica per mezzo di un relè,
impedendo che i segnali PWM raggiungano gli IGBT).
Tra il comando del relè per l'alimentazione del driver del modulo
terminale e il controllo dell'alimentazione del driver viene eseguito
un controllo di plausibilità nel µP. Esso serve sia per rilevare eventuali errori del blocco impulsi che per eliminare il messaggio di errore E 05-2 ("sottotensione alimentazione driver") che si presenta
durante il normale esercizio.
Contatto di feedback a potenziale
zero
Ai fini dell'arresto sicuro, il circuito integrato dispone inoltre di un
contatto di feed-back a potenziale zero ( [X3], pin 5 e 6) per monitorare la presenza dell'alimentazione del driver. Questo contatto è
realizzato come contatto n.c. e deve essere collegato ad es. al comando principale. Il PLC deve eseguire ad intervalli di tempo adeguati (ad es. ciclo PLC o ad ogni richiesta di "arresto sicuro") un
controllo di plausibilità tra il comando del relè per l'alimentazione
del driver e il contatto di feed-back (contatto aperto = alimentazione del driver presente).
Se si verifica un errore durante il controllo di plausibilità è necessario impedire un ulteriore funzionamento a livello del sistema di comando, ad es. disattivando l'abilitazione del regolatore o il contattore di rete.
4.2.2
Azionamento sicuro del freno di arresto
Attivando l'"arresto sicuro" viene disinserita la corrente dal freno di arresto a due canali
(freno serrato); (vedi schema a blocchi).
1. canale
Il freno di arresto viene pilotato durante l'esercizio tramite DIN5
(abilitazione del regolatore) (vedi il diagramma di temporizzazione
seguente). Il 1° percorso di disinserzione "sblocco del modulo terminale" agisce tramite µP sul driver del freno e priva di corrente il
freno di arresto (freno serrato).
2. canale
Il 2° percorso di disinserzione "comando relè alimentazione driver"
agisce direttamente su un MOSFET che disattiva il freno di arresto
(freno serrato).
Attenzione
L'utilizzatore è responsabile per il dimensionamento e il funzionamento sicuro del freno di arresto. Il funzionamento del freno deve
essere verificato per mezzo di una prova di frenatura idonea.
80
Festo P.BE-CMMS-AS-HW-IT 0708NH
4. Tecnica di sicurezza funzionale
4.2.3
Funzionamento/Temporizzazione
Il diagramma di temporizzazione seguente illustra il funzionamento di "Arresto sicuro" in
combinazione con l'abilitazione del regolatore e il freno di arresto.
"safe stop"
"safe stop"
Triggering of pulse amplifier supply relay (optocoupler driver)
Timing of "safe stop"
activation variable.
To be determined by user,
e.g. by means of safety
switching devices, depending
on application.
X3.2 (24V)
2. shut-down path
X3.2 (0V)
t
Supply of pulse amplifiers (optocoupler driver)
“ON“ (15V)
Discharge curve of
electrolytic capacitors for the
supply of the pulse amplifiers
“OFF”
t
Floating feedback contact for driver supply
(X3.5/6)
open
closed
t
Output stage enabling (X1, DIN4)
“ON”
Timing of output
stage enabling
variable
1. shut-down path
“OFF”
t
Controller enabling (X1, DIN5)
t
Internal output stage enabling
(controlled by µP)
“ON”
“OFF”
t
Holding brake control (X6.1/2)
Released
(24V)
Delay until brake is
released!
Delay until brake is
applied!
Can be set via FCT
Fixed
(0V)
t
Set speed "n"
n
Both ramps ca be set
separately via FCT
n=0
“H
”
t
Seven-segment
display
“H”
t
1
“H”
t t
2 3
t t t
4 5 6
t
7
t
8
t t1
9 0
t1
1
t1
2
Fig. 4.2: Temporizzazione "Arresto sicuro" secondo EN 954-1, categoria 3
Festo P.BE-CMMS-AS-HW-IT 0708NH
t1
3
t
81
4. Tecnica di sicurezza funzionale
Descrizione del diagramma di temporizzazione
Questo diagramma di temporizzazione è stato creato sull'esempio della regolazione della
velocità, tenendo in considerazione l'abilitazione del regolatore DIN5 su [X1]. Per le applicazioni con fieldbus l'abilitazione del regolatore viene controllata anche dal rispettivo fieldbus. A seconda dell'applicazione, anche il modo operativo è configurabile tramite il software di parametrazione.
Nota
Lo stato di "Arresto sicuro" è evidenziato in GRIGIO rispetto
all'esercizio funzionale!
Stato iniziale
-
L'alimentazione a 24 V è attivata e il circuito intermedio è caricato.
-
Il servoregolatore si trova nello stato di "Arresto sicuro".
Questo stato viene visualizzato con una "H" lampeggiante sul
display a 7 segmenti.
Restart dopo "Arresto sicuro" attivato
Per riattivare il modulo terminale del servoregolatore e quindi utilizzare il motore collegato, eseguire le seguenti operazioni:
1. L'attivazione del relè di controllo della tensione di alimentazione del driver del modulo
terminale (2° percorso di disinserzione) avviene nel momento t1 tramite [X3] con 24 V
tra il pin 2 e il pin 3.
2. L'alimentazione del driver viene caricata.
3. Il contatto di feed-back a potenziale zero ( [X3], pin 5 e 6) per il controllo di plausibilità
tra il comando del relè dell'alimentazione del driver è aperto dopo max. 20 ms verso t1
(t2-t1) e l'alimentazione del driver è disinserita.
4. Circa 10 ms dopo l'apertura del contatto di feed-back si spegne la "H" sul display
(momento t3).
5. Il momento per lo sblocco del modulo terminale ( [X1], DIN4) è liberamente selezionabile (t4- t1). L'abilitazione può avvenire in contemporanea all'attivazione del relè del
driver, deve comunque trovarsi a circa 10 µs (t5-t4) prima del fronte ascendente
dell'abilitazione del regolatore ( [X1], DIN5), a seconda dell'applicazione.
6. Il fronte ascendente dell'abilitazione del regolatore nel momento t5 provoca l'allentamento del freno di arresto del motore (se presente) e lo sblocco interno del modulo
terminale. L'allentamento del freno è possibile solo se il comando del relè per l'alimentazione del driver è attivo; in questo modo viene infatti attivato un MOSFET che si
trova nel circuito elettrico del freno di arresto. Con il software di parametrazione si può
impostare un ritardo per l'inizio della traslazione (t6-t5) in modo che l'attuatore mantenga il numero di giri "0" per il tempo prestabilito e, solo al termine di questo periodo (momento t6), inizi a girare alla velocità impostata. Questo ritardo d'inizio della
traslazione va impostato in modo tale che il freno di arresto sia perfettamente allenta82
Festo P.BE-CMMS-AS-HW-IT 0708NH
4. Tecnica di sicurezza funzionale
to prima che inizi il movimento rotativo. Per i motori senza freno di
arresto, questo tempo di ritardo può essere impostato a 0.
7. Nel momento t7 l'attuatore ha raggiunto la velocità impostata. Le impostazioni richieste della rampa possono essere configurate con il software di parametrazione FCT.
Attivazione "Arresto sicuro"
I passi seguenti mostrano come portare un attuatore in funzione nello stato di
"arresto sicuro":
1. Prima di attivare la funzione di "Arresto sicuro" (cioè relè per l'alimentazione del driver "OFF" e sblocco del modulo terminale "OFF"; questi due percorsi di disinserzione
bloccano i segnali PWM) è opportuno arrestare l'attuatore disattivando l'abilitazione
del regolatore. La rampa di decelerazione (t9-t8) è impostabile a seconda dell'applicazione tramite il software di parametrazione ("decelerazione arresto di emergenza").
Avvertenza
PERICOLO !
L'attivazione dell'"arresto sicuro" durante l'esercizio provoca un
arresto graduale dell'attuatore. Negli attuatori dotati di freno di
arresto viene inserito il freno. Per questo motivo occorre assolutamente verificare che il dispositivo frenante dell'impianto sia in
grado di arrestare il movimento dell'attuatore.
2. Al raggiungimento del numero di giri 0, l'attuatore viene mantenuto ancora su questo
valore nominale per un ritardo di disazionamento (t10-t9) parametrabile. Questo intervallo di tempo impostabile è il ritardo con cui il freno di arresto viene inserito. Tale
valore deve essere parametrato dall'utente in funzione del rispettivo freno di arresto.
Per le applicazioni senza freno di arresto, questo tempo di ritardo può essere impostato a 0.
3. Al termine di questo periodo di tempo viene disinserito lo sblocco interno del modulo
terminale di µP (t10).
Il freno di arresto viene attivato in ogni caso una volta trascorso il
"tempo rampa di decelerazione + ritardo di disazionamento
impostato", anche nel caso in cui l'attuatore non sia riuscito ad
arrestarsi fino a quel momento!
4. A partire dal momento t10 si può attivare solo l'"arresto sicuro" (disinserimento contemporaneo del comando relè dell'alimentazione del driver e dello sblocco del
modulo terminale). Il tempo (t11-t10) deve essere determinato dall'utente in funzione dell'applicazione.
5. Togliendo il segnale di comando per il relè di disattivazione dell'alimentazione del
driver (t11) avviene la scarica dei condensatori in questa sezione di tensione.
Dopo circa 80 ms (t12-t11) viene chiuso il contatto di feed-back ( [X3], pin 5 e 6).
6. Nel momento t13 viene visualizzata una "H" sul display a 7 segmenti del servoregoFesto P.BE-CMMS-AS-HW-IT 0708NH
83
4. Tecnica di sicurezza funzionale
latore per segnalare lo stato di "arresto sicuro". Ciò avviene almeno 30 ms dopo la
chiusura del contatto di feed-back a potenziale zero (t13-t12).
4.2.4
Esempi di applicazione
Circuito di arresto d'emergenza
PLC
Inputs
Outputs
Power
contactor
EMERGENCY
STOP request
+24V
Output stage driver supply
Output stage enabling
Controller enabling
Feedback driver supply
EMERGENCY STOP
requested
EMERGENCY
STOP
switching
device
EN954-1 KAT3
with delay
K1
[X9.] Power supply
L
1
Mains input
N
2
+24V
Drawn contact
position:
EMERGENCY
STOP requested
or supply voltage
switched off
0V
6
24 V Input
7
CMMS-AS
[X1] I/O communication
+24V
9
DIN5: Controller enabling
21
DIN4: Output stage enabling
[X3] SAFE STANDSTILL / SUPPLY 24V
+24V
1
2
0V
24V-Input
Triggering of relay
3
0V
4
n.c.
5
NC1
6
NC2
Driver supply of
output stage
µP
Fig. 4.3: Circuito di arresto d'emergenza secondo EN 954-1, categoria 3, e categoria di stop
0 secondo EN 60204-1
Principio di funzionamento
La richiesta ARRESTO EMERGENZA blocca, tramite il dispositivo di commutazione di emergenza, lo sblocco del modulo terminale e il comando del relè per l'alimentazione del driver
del modulo terminale IGBT. L'attuatore si arresta gradualmente e allo stesso tempo viene
attivato il freno di arresto del motore, se presente.
84
Festo P.BE-CMMS-AS-HW-IT 0708NH
4. Tecnica di sicurezza funzionale
A quel punto l'attuatore si trova nello stato di "Arresto sicuro".
Il dispositivo di commutazione di emergenza è omologato per la categoria di sicurezza
3 secondo EN 954-1.
Un comando principale controlla i segnali "Richiesta ARRESTO EMERGENZA" e "Conferma
dell'alimentazione del driver" e ne verifica la plausibilità. In caso di errore viene disattivato
il contattore di rete.
La tensione del circuito intermedio viene mantenuta ed è immediatamente a disposizione
dell'attuatore dopo la disattivazione del dispositivo di commutazione di emergenza e l'abilitazione del regolatore.
Per il collegamento del motore e il freno di arresto opzionale, non rappresentati in questa
figura, si rimanda al capitolo 6 Collegamenti elettrici.
Avvertenza
PERICOLO !
Il dispositivo frenante dell'impianto deve essere realizzato in modo
tale da poter arrestare il movimento dell'attuatore.
Festo P.BE-CMMS-AS-HW-IT 0708NH
85
4. Tecnica di sicurezza funzionale
Controllo della porta di protezione
Request for standstill as per EN 60204-1 (stop category 1)
PLC
Inputs
Outputs
Power
contactor
Safety door monitor
open
closed
+24V
Output stage driver supply
Output stage enabling
Controller enabling
Feedback driver supply
Safety door open
[X9.] Power supply
L
1
Mains input
N
2
+24V
Drawn contact
position: Safety
door open or
supply voltage
switched
off
Safety door
switch
EN954-1 KAT3
with delay
K1
6
24V Input
0V
7
CMMS-AS
[X1] I/O communication
+24V
9
DIN5: Controller enabling
21
DIN4: Output stage enabling
[X3] SAFE STANDSTILL / SUPPLY 24V
1
2
0V
24V-Input
Triggering of relay
3
Driver supply of
output stage
0V
4
n.c.
5
NC1
6
NC2
µP
Fig. 4.4: Controllo della porta di protezione secondo EN 954-1, categoria 3, e categoria di
arresto 1 secondo EN 60204-1
Principio di funzionamento
La richiesta di arresto dell'attuatore imposta l'abilitazione del regolatore su Low.
L'attuatore gira fino a raggiungere la velocità 0 secondo la rampa di decelerazione preimpostata (parametrabile con il Festo Configuration Tool). Al termine del tempo di rampa
(incl. ritardo di disazionamento del freno di arresto, se presente) il comando del relè dell'alimentazione del driver e lo sblocco del modulo terminale vengono ripristinati dal comando
principale.
86
Festo P.BE-CMMS-AS-HW-IT 0708NH
4. Tecnica di sicurezza funzionale
Il comando principale controlla i segnali "Porta di protezione aperta", "Uscita alimentazione driver del modulo terminale" e "Conferma dell'alimentazione del driver" e ne verifica la plausibilità. In caso di errore viene disattivato il contattore di rete.
Con l'apertura della porta di protezione vengono anche interrotti lo sblocco del modulo
terminale e il comando del relè per l'alimentazione del driver. A quel punto l'attuatore si
trova nello stato di "arresto sicuro" con protezione dal riavvio.
Il dispositivo di commutazione della porta di protezione è omologato per la categoria di
sicurezza 3 secondo EN 954-1.
La tensione del circuito intermedio viene mantenuta ed è immediatamente a disposizione
dell'attuatore dopo la chiusura della porta di protezione.
Se la porta di protezione viene aperta senza che vi sia una richiesta di arresto, l'attuatore
si arresta gradualmente in conformità alla norma EN 60204-1, categoria di arresto 0, e allo
stesso tempo viene attivato il freno di arresto del motore, se presente. A quel punto l'attuatore si trova nello stato di "arresto sicuro" con protezione dal riavvio.
È inoltre possibile utilizzare un interruttore di posizione per la porta, che mantiene chiusa
la porta fino a quando l'attuatore è fermo o il segnale "Conferma dell'alimentazione del
driver" visualizza lo stato sicuro e il controllo di plausibilità fornisce un esito positivo.
Lo stato di "arresto sicuro" con protezione contro il riavvio viene però raggiunto solo con
l'apertura della porta di protezione (non rappresentato).
Un'altra possibile applicazione consiste nell'utilizzo di un dispositivo di commutazione
della porta di protezione con contatti temporizzati. L'apertura della porta di protezione
agisce direttamente sull'abilitazione del regolatore, il cui fronte discendente provoca un
arresto controllato in una rampa di decelerazione preimpostata. I segnali "Sblocco del
modulo terminale" e "Alimentazione driver del modulo terminale" vengono poi disattivati
con un certo ritardo attraverso il modulo di sicurezza. Il ritardo di disazionamento deve
essere compensato con il tempo della rampa di decelerazione (non rappresentato).
Avvertenza
PERICOLO !
Il dispositivo frenante dell'impianto deve essere realizzato in modo
tale da poter arrestare il movimento dell'attuatore.
Festo P.BE-CMMS-AS-HW-IT 0708NH
87
5. Installazione meccanica
5.
Installazione meccanica
5.1
Istruzioni importanti
Nota
Utilizzare il motocontroller CMMS-AS solo come apparecchio
montato all'interno di un armadio elettrico.
Posizione di montaggio verticale con le linee di alimentazione
[X9] rivolte verso l'alto.
Montare l'apparecchio con la fascetta di fissaggio sulla piastra
dell'armadio elettrico.
Distanze di montaggio:
per garantire una sufficiente ventilazione dell'unità si deve osservare una distanza di 100 mm da altri moduli sopra e sotto
l'unità.
In caso d'impiego secondo gli usi consentiti e installazione a
regola d'arte, i motorcontroller della serie CMMx possono essere allineati su una piastra di montaggio a dissipazione di calore.
A tale proposito ricordiamo che un riscaldamento eccessivo può
causare l'usura precoce e/o il danneggiamento dell'unità.
In caso di elevata sollecitazione termica del motorcontroller
CMMS-AS è necessaria una distanza di fissaggio (distanza fra i
fori) di 70 mm!
88
Festo P.BE-CMMS-AS-HW-IT 0708NH
5. Installazione meccanica
Fig. 5.1: Motorcontroller CMMS-AS: distanze di montaggio
Festo P.BE-CMMS-AS-HW-IT 0708NH
89
5. Installazione meccanica
5.2
Montaggio
Nella parte superiore e inferiore del motorcontroller CMMS-AS sono presenti delle fascette
di fissaggio che permettono di fissarlo verticalmente sulla piastra di montaggio dell'armadio elettrico. Le fascette di fissaggio sono integrate nel profilo del dissipatore di calore, per
cui viene garantita una cessione di calore ottimale verso la piastra dell'armadio elettrico.
Per il fissaggio del motorcontroller CMMS-AS utilizzare viti M5.
Fig. 5.2: Motorcontroller CMMS-AS: montaggio
90
Festo P.BE-CMMS-AS-HW-IT 0708NH
6. Collegamenti elettrici
6.
Collegamenti elettrici
6.1
Vista dell'apparecchio
1 Indicazione di stato
2 S1: impostazioni fieldbus e bootloader
3 Modulo tecnologico (opzionale)
4 M1: scheda di memoria SD
5 X4: bus CAN
1
6 X5: RS232/485
2
6
3
5
4
Fig. 6.1: CMMS-AS Vista anteriore
Festo P.BE-CMMS-AS-HW-IT 0708NH
91
6. Collegamenti elettrici
1 Vite di messa a terra
2 X9 alimentazione di tensione
3 X10 uscita encoder incrementale
1
4 X1 interfaccia I/O
2
3
4
Fig. 6.2: Vista dall'alto CMMS-AS
1 X3 arresto sicuro
2 X2 ingresso encoder incrementale
3 X6 collegamento motore
1
4 Collegamento schermo
2
3
4
Fig. 6.3: Vista dal basso CMMS-AS
92
Festo P.BE-CMMS-AS-HW-IT 0708NH
6. Collegamenti elettrici
6.2
Interfacce
X9:
Per l'esercizio del motorcontroller CMMS-AS l'alimentazione elettrica d'ingresso viene
collegata al connettore X9 su L1 (pin 1) e N (pin 2). Il PE viene collegato sul pin 5.
Nel PlugIn CMMS-AS bisogna adattare il monitoraggio della sottotensione all'alimentazione elettrica d'ingresso.
Per la parte di comando è necessaria una sorgente di tensione di 24 V-, che viene collegata
ai morsetti +24 V e 0 V del connettore X9.
Un reostato di frenatura esterno viene collegato ai contatti ZK+ e BR-CH.
X6:
Il motore viene collegato ai morsetti U, V e W.
Ai morsetti +MTdig e -MTdig viene collegata la sonda termica del motore (PTC, sensore SI o
contatto n.c.) (come sonde termiche analogiche si possono utilizzare KTY81 … KTY84. Non
nell'FCT e non con motori EMMS-AS).
Ai morsetti Br+ e Br- viene collegato il freno del motore.
Al PE del connettore X6 viene collegato il conduttore di terra dei motori.
Lo schermo del motore viene collegato al corpo del CMMS-AS per mezzo del relativo collegamento.
X2:
Il collegamento dell'encoder su [X2] tramite il connettore D-Sub a 15 poli è rappresentato
schematicamente in Fig. 6.4.
219H
Il motorcontroller deve essere prima cablato completamente. Dopodiché si possono inserire le tensioni d'esercizio per l'alimentazione elettrica d'ingresso e la parte di comando. Il
motorcontroller CMMS-AS viene danneggiato invertendo la polarità degli attacchi, se la
tensione è troppo elevata o scambiando gli attacchi della tensione d'esercizio e del motore.
Festo P.BE-CMMS-AS-HW-IT 0708NH
93
6. Collegamenti elettrici
6.3
Sistema completo CMMS-AS
Un sistema completo con motorcontroller CMMS-AS è rappresentato in Fig. 6.4.
Per il funzionamento del motorcontroller sono necessari i seguenti componenti:
20H
Componenti
-
Alimentatore di 24V per l'alimentazione della tensione pilota
(vedi capitolo A.3.1)
-
Alimentazione di potenza (vedi capitolo A.3.1)
-
Motorcontroller CMMS-AS
-
Motore EMMS-AS
-
Il kit di cavi è formato dal conduttore del motore e dell'encoder
NEBM
Per la parametrazione è necessario un PC con cavo di collegamento seriale.
94
Festo P.BE-CMMS-AS-HW-IT 0708NH
6. Collegamenti elettrici
1 Interruttore
principale
2
1
Fusibile
3
Alimentatore
per
tensione pilota
4
CMMS-AS
5
PC
6
EMMS-AS
2
3
4
5
6
Fig. 6.4: Struttura completa del CMMS-AS con motore e PC
Festo P.BE-CMMS-AS-HW-IT 0708NH
95
6. Collegamenti elettrici
6.4
Interfacce e occupazione dei connettori
6.4.1
Interfaccia I/O [X1]
L'occupazione dell'interfaccia X1 è impostabile più volte tramite commutazione di modalità (Mode). Così è possibile selezionare massimo 4 occupazioni I/O diverse, che sono descritte nella
Tab. 6.2: Occupazione dei pin: interfaccia I/O [X1] Mode 0,
Tab. 6.3: Occupazione dei pin: interfaccia I/O [X1] Mode 1,
Tab. 6.4: Occupazione dei pin: interfaccia I/O [X1] Mode 2 e
Tab. 6.5: Occupazione dei pin: interfaccia I/O [X1] Mode 3.
Mode
DIN9
DIN12
Mode 0 – Posizionamento
0
0
Mode 1 – Esercizio a impulsi
0
1
Mode 2 – Programma di traslazione
1
0
Mode 3 – Sincronizzazione
1
1
Tab. 6.1: Commutazione delle modalità
Pin
Denominazione
Valore
Mode = 0 − Posizionamento
1
AGND
0V
Schermo per segnali analogici
2
AIN0 /
±10 V
Interfaccia di controllo I/O digitali:
DIN12
Selezione del modo DIN12 (attivo high)
Interfaccia di controllo ingresso analogico:
Ingresso di riferimento 0, differenziale, tensione d'ingresso max. 30 V
3
DIN10
Selezione di record 4 (attivo high)
4
+VREF
5
libero
6
GND24
7
DIN1
Selezione di record 1 (attivo high)
8
DIN3
Selezione di record 3 (attivo high)
9
DIN5
Abilitazione regolatore EN (attivo high)
10
DIN7
Finecorsa 1
11
DIN9
Interfaccia di controllo I/O digitali: selezione del modo (attivo high)
+10 V ±4 %
Uscita di riferimento per potenziometro del valore nominale
GND
Potenziale di riferimento per ingressi e uscite digitali
Interfaccia di controllo fieldbus:
Ingresso sample (ingresso ad alta velocità)
12
DOUT1
24 V 100 mA
Uscita a programmazione libera – default: Motion Complete (attivo high)
13
DOUT3
24 V 100 mA
Uscita a programmazione libera – default: Error (attivo low)
14
AGND
0V
Potenziale di riferimento per segnali analogici
96
Festo P.BE-CMMS-AS-HW-IT 0708NH
6. Collegamenti elettrici
Pin
Denominazione
Valore
Mode = 0 − Posizionamento
15
#AIN0 /
DIN13
Ri = 20 k
Interfaccia di controllo I/O digitali: ingresso di stop (attivo low)
Interfaccia di controllo ingresso analogico:
Potenziale di riferimento ingresso del valore nominale 0, differenziale
16
DIN11
Selezione di record 5 (attivo high)
17
AMON0
±10 V ±4 %
Uscita analogica per monitor 0
18
+24 V
24 V 100 mA
Alimentazione a 24 V accessibile
19
DIN0
Selezione di record 0 (attivo high)
20
DIN2
Selezione di record 2 (attivo high)
21
DIN4
Sblocco del modulo terminale (attivo high)
22
DIN6
Finecorsa 0
23
DIN8
Start per il processo di posizionamento (attivo high)
24
DOUT0
24 V 100 mA
Uscita in stato di "stand-by" (attivo high)
25
DOUT2
24 V 100 mA
Uscita a programmazione libera – default: Ack-Start (attivo low)
Tab. 6.2: Occupazione dei pin: interfaccia I/O [X1] Mode 0
Pin
Denominazione
Valore
Mode = 1 − Esercizio a impulsi
1
AGND
0V
Schermo per segnali analogici
2
DIN12
24 V
Commutazione modo "1" = Esercizio a impulsi
3
DIN10
4
+VREF
5
Libero
6
GND24
Potenziale di riferimento per ingressi e uscite digitali
7
DIN1
Selezione di record 1 (attivo high)
8
DIN3
Selezione di record 3 (attivo high)
9
DIN5
Abilitazione regolatore/EN (attivo high)
Jog + (attivo high)
+10 V ±4 %
Uscita di riferimento per potenziometro del valore nominale
(le posizioni rilevate vengono memorizzate con fronte negativo)
10
DIN7
11
DIN9
Finecorsa 1
SAMP
Interfaccia di controllo I/O digitali:
Selezione del modo "0" = Esercizio a impulsi (attivo high)
Interfaccia di controllo fieldbus:
Ingresso sample (ingresso ad alta velocità)
12
DOUT1
24 V 100 mA
Uscita a programmazione libera − default: Motion Complete
(attivo high)
13
DOUT3
24 V 100 mA
Uscita a programmazione libera − default: Error (attivo low)
14
AGND
0V
Potenziale di riferimento per segnali analogici
15
DIN13
Ingresso di stop (attivo low)
16
DIN11
Jog – (attivo high)
Festo P.BE-CMMS-AS-HW-IT 0708NH
97
6. Collegamenti elettrici
Pin
Denominazione
Valore
Mode = 1 − Esercizio a impulsi
17
AMON0
±10 V ±4 %
Uscita analogica per monitor 0
18
+24 V
24 V 100 mA
Alimentazione a 24 V accessibile
19
DIN0
Selezione di record 0 (attivo high)
20
DIN2
Selezione di record 2 (attivo high)
21
DIN4
Sblocco del modulo terminale (attivo high)
22
DIN6
Finecorsa 0
23
DIN8
Teach (attivo high)
24
DOUT0
24 V 100 mA
Uscita in stato di "stand-by" (attivo high)
25
DOUT2
24 V 100 mA
Teach-Ack
Tab. 6.3: Occupazione dei pin: interfaccia I/O [X1] Mode 1
Pin
Denominazione
Valore
Mode = 2 − Programma di traslazione
1
AGND
0V
Schermo per segnali analogici
2
DIN12
Commutazione modo "0" = Programma di traslazione
3
DIN10
Next 1
4
+VREF
5
Libero
6
GND24
Potenziale di riferimento per ingressi e uscite digitali
7
DIN1
Selezione di record 1 (attivo high)
8
DIN3
Arresto programma di traslazione
9
DIN5
Abilitazione regolatore (attivo high)
10
DIN7
Finecorsa 1
11
DIN9
Commutazione modo "1" = Programma di traslazione
12
DOUT1
24 V 100 mA
Uscita a programmazione libera − default: Motion Complete
(attivo high)
13
DOUT3
24 V 100 mA
Uscita a programmazione libera − default: Error (attivo low)
14
AGND
0V
Potenziale di riferimento per segnali analogici
15
DIN13
Ingresso di stop (attivo low)
16
DIN11
Next 2
17
AMON0
±10 V ±4 %
Uscita analogica per monitor 0
18
+ 24 V
24 V 100 mA
Alimentazione a 24 V accessibile
19
DIN0
Selezione di record 0 (attivo high)
20
DIN2
Selezione di record 2 (attivo high)
21
DIN4
Sblocco del modulo terminale (attivo high)
22
DIN6
Finecorsa 0
23
DIN8
Avvio programma di traslazione
24
DOUT0
98
+10 V ±4 %
24 V 100 mA
Uscita di riferimento per potenziometro del valore nominale
Uscita in stato di "stand-by" (attivo high)
Festo P.BE-CMMS-AS-HW-IT 0708NH
6. Collegamenti elettrici
Pin
Denominazione
Valore
Mode = 2 − Programma di traslazione
25
DOUT2
24 V 100 mA
Uscita a programmazione libera − default: Ack-Start (attivo high)
Tab. 6.4: Occupazione dei pin: interfaccia I/O [X1] Mode 2
Pin
Denominazione
Valore
Mode = 3 − Sincronizzazione
1
AGND
0V
Schermo per segnali analogici
2
DIN12
3
DIN10
4
+VREF
5
Libero
6
GND24
Potenziale di riferimento per ingressi e uscite digitali
7
DIN1
Selezione di record 1 (attivo high)
8
DIN3
9
DIN5
Abilitazione regolatore (attivo high)
10
DIN7
Finecorsa 1
11
DIN9
Commutazione modo slave sincronizzazione "1" = Sincronizzazione
12
DOUT1
24 V 100 mA
Uscita a programmazione libera − default: Motion Complete
(attivo high)
13
DOUT3
24 V 100 mA
Uscita a programmazione libera − default: Error (attivo low)
14
AGND
0V
Potenziale di riferimento per segnali analogici
15
DIN13
16
DIN11
17
AMON0
±10 V ±4 %
Uscita analogica per monitor 0
18
+ 24 V
24 V 100 mA
Alimentazione a 24 V accessibile
19
DIN0
20
DIN2
21
DIN4
Sblocco del modulo terminale (attivo high)
22
DIN6
Finecorsa 0
23
DIN8
Avvio sincronizzazione
24
DOUT0
24 V 100 mA
Uscita in stato di "stand-by" (attivo high)
25
DOUT2
24 V 100 mA
Uscita valore di riferimento raggiunto (attivo high)
Commutazione modo slave sincronizzazione "1" = Sincronizzazione
+10 V ±4 %
24 V
Uscita di riferimento per potenziometro del valore nominale
Direzione_24 /CCW
Ingresso di stop (attivo low)
Selezione di record 0 (attivo high)
24 V
Impulso_24 / CW
Tab. 6.5: Occupazione dei pin: interfaccia I/O [X1] Mode 3
6.4.2
Encoder motore – EnDat 2.1 e 2.2 (X2)
Vengono supportati solo encoder dotati di interfaccia digitale EnDat 2.1 o 2.2 con assorbimento di corrente max. di 200 mA.
Festo P.BE-CMMS-AS-HW-IT 0708NH
99
6. Collegamenti elettrici
La tensione d'esercizio per l'encoder viene derivata dall'alimentazione logica interna +5 V.
Non è prevista la stabilizzazione delle cadute di tensione sul cavo di collegamento dell'encoder (e non è neppure necessario per l'encoder EnDat 2.2/22).
La tolleranza della tensione di alimentazione viene limitata verso il basso in modo da poter
azionare anche encoder obsoleti Heidenhain con interfaccia EnDat 2.2/01. Tuttavia può
essere necessario realizzare linee di alimentazione a cablaggio doppio a seconda dell'assorbimento di corrente e della lunghezza del cavo.
Esempio:
Cablaggio dell'encoder con la sezione di 0,5 mm²
Lunghezza del cavo di 25 m, (= 50 m linea di andata e di ritorno)
Cablaggio doppio
Caduta di tensione in caso di cablaggio semplice Udiff 0,18 V
Pin
Denominazione
Valore
Specifiche
1
MT+
+3,3 V / 3 mA
Sonda termica del motore, contatto n.c., PTC, KTY...
Non occupato con conduttori NEBM
2
U_SENS-
5 V –0/+5 %
Imax = 200 mA
Collegato internamente al pin 3
3
GND
0V
Potenziale di riferimento per alimentazione encoder e sonda
termica del motore
4
n.c.
5
#DATA
5Vss
RI 120
Linea di trasmissione dati RS485 bidirezionale (differenziale)
trasmissione a impulsi zero con HYPERFACE
6
#SCLK
5Vss
RI 120
Uscita di clock RS485 (differenziale) per trasferimento dati
tramite l'interfaccia EnDat
7
n.c.
8
n.c.
9
U_SENS+
5 V –0/+5 %
Imax = 200 mA
Collegato internamente al pin 10
10
US
5V –0/+5 %
Imax = 200 mA
Tensione d'esercizio per encoder EnDat
11
n.c.
12
DATA
5 Vss
RI 120
Linea di trasmissione dati RS485 bidirezionale (differenziale)
trasmissione a impulsi zero con HYPERFACE
13
SCLK
5 Vss
RI 120
Uscita di clock RS485 (differenziale) per trasferimento dati
tramite l'interfaccia EnDat
14
n.c.
15
n.c.
Tab. 6.6: Occupazione dei pin encoder motore − EnDat 2.1 e 2.2 (X2)
100
Festo P.BE-CMMS-AS-HW-IT 0708NH
6. Collegamenti elettrici
6.4.3
Fieldbus CAN [X4]
Pin
Denominazione
Valore
Specifiche
1
-
2
CANL
5 V, Ri = 60 Ω
Linea di segnalazione CAN-Low
3
GND
0V
CAN-GND, collegato galvanicamente a GND nel regolatore
4
-
-
-
5
Schermo
-
Collegamento per schermo del cavo
6
GND
0V
CAN-GND, collegato galvanicamente a GND nel regolatore
7
CANH
5 V, Ri = 60 Ω
Linea di segnalazione CAN-High
8
-
-
-
9
-
-
-
Tab. 6.7: Occupazione dei pin: fieldbus CAN [X4]
6.4.4
RS232/RS485 [X5]
Pin
Denominazione
Valore
Specifiche
1
-
2
RS232_RxD
10 V, Ri > 2 kΩ
Linea di ricezione
3
RS232_ TxD
10 V, Ra < 2 kΩ Linea di trasmissione
4
RS485_A
-
-
5
GND
0V
RS232/485 GND, collegato galvanicam. a GND nel regolatore
6
-
-
-
7
-
-
-
8
+5 V_sicuro
5V
Tramite PTC al connettore
9
RS485_B
-
-
Tab. 6.8: Occupazione dei pin: RS232/RS485 [X5]
6.4.5
Collegamento motore [X6]
Esecuzione sul regolato- Controconnettore
re
Innestato/Kit di connettori
opzionale
Numero materiale
Connettore femmina
Combicon a 8 poli
Kit di connettori
547 452
MSTB 2,5/8-ST-5,08 BK
Tab. 6.9: Tipo di connettore: collegamento motore [X6]
N. pin
Denominazione
Valore
Specifiche
+3,3 V / 5 mA
Sonda termica del motore, contatto n.c., contatto
n.a., PTC, KTY
1
+MTdig
Con EMMS-AS motori PTC
2
-MTdig
Temp. 0 V
Festo P.BE-CMMS-AS-HW-IT 0708NH
101
6. Collegamenti elettrici
N. pin
Denominazione
Valore
Specifiche
3
BR+
Freno 24 V
Freno di arresto motore, livello del segnale in funzione dello stato di commutazione
4
BR-
Freno 0 V
5
PE
Collegamento PE motore
Collegamento PE nel cavo del motore
6
U
Vedi dati tecnici
Collegamento delle tre fasi del motore *)
7
V
8
W
*)
Applicare lo schermo del cavo sul corpo del regolatore (la flangia di fissaggio è stata realizzata
appositamente a forma speciale)
Tab. 6.10: Occupazione dei pin: collegamento motore [X6]
6.4.6
Alimentazione di tensione [X9]
Esecuzione sul regola- Controconnettore
tore
Innestato/Kit di connettori
opzionale
Numero materiale
Connettore femmina
Combicon a 7 poli
Innestato
547 452
MSTB 2,5/7-G-ST-5,08 BK
Tab. 6.11: Tipo di connettore: alimentazione di tensione [X9]
N. pin
Denominazione Valore
Specifiche
1
L1
Collegamento alla tensione di rete per ZK
2
N
230 V CA
compensati con A.3.1
3
ZK+
max. 400 V CC
compensati con A.3.1
ZK+ collegamento per reostato di frenatura esterno,
non a prova di cortocircuito verso L1, N e PE !
4
BR-CH
0 V / 400 V
max. 4 A
RBR > 100
Collegamento per reostato di frenatura esterno verso
ZK+
5
PE
PE
Collegamento PE dell'alimentazione di rete
6
24V
+24 V / 1 A
Alimentazione per la parte di comando con convertitore DCDC, DOUT0 … DOUT3 e freno di arresto, max. 1
A
7
0V
GND
Potenziale di riferimento comune per alimentazione
logica e parte di comando
Tab. 6.12: Occupazione dei pin: alimentazione di tensione [X9]
6.4.7
Comando di sincronizzazione [X10]
L'interfaccia è bidirezionale. Permette l'emissione di segnali di traccia A/B nel modo operativo "Asse master" e, in alternativa, l'elaborazione di segnali di comando A/B, CLK/DIR o
CW/CCW nel modo operativo "Asse slave".
102
Festo P.BE-CMMS-AS-HW-IT 0708NH
6. Collegamenti elettrici
Pin
Denominazione
Valore
Specifiche
1
A/CLK/CW
5 V, Ri = 120 Ohm
Segnale encoder incrementale A
Impulso CLK
Cicli in senso orario CW
Polarità positiva secondo RS422
2
B/DIR/CCW
5 V, Ri = 120 Ohm
Segnale encoder incrementale B
Direzione DIR
Cicli in senso antiorario CCW
Polarità positiva secondo RS422
3
N
5 V, Ri = 120 Ohm
Encoder incrementale, impulso zero N, polarità positiva
secondo RS422
4
GND
-
Riferimento GND per encoder
5
VCC
+5 V ±5 %, 100 mA
Alimentazione ausiliaria, carico max. di 100 mA, a prova
di corto circuito
6
A-/CLK-/CW-
5 V, Ri = 120 Ohm
Segnale encoder incrementale A
Impulso CLK
Cicli in senso orario CW
Polarità negativa secondo RS422
7
B-/DIR-/CCW-
5 V, Ri = 120 Ohm
Segnale encoder incrementale B
Direzione DIR
Cicli in senso antiorario CCW
Polarità negativa secondo RS422
8
N-
5 V, Ri = 120 Ohm
Encoder incrementale, impulso zero N, polarità negativa
secondo RS422
9
GND
-
Schermo per il cavo di collegamento
Tab. 6.13: Occupazione dei pin: uscita encoder incrementale/ingresso impulso/
direzione [X10]
6.4.8
Scheda SD [X12]
La scheda SD opzionale è prevista per il download del firmware e la memorizzazione dei
parametri. L'occupazione dell'interfaccia è realizzata secondo le specifiche della scheda
SD. In alternativa è possibile utilizzare una scheda MMC.
Esecuzione sull'unità
Posto scheda SD a 1 x 12 poli
Festo P.BE-CMMS-AS-HW-IT 0708NH
103
6. Collegamenti elettrici
6.4.9
Occupazione dei connettori "Arresto sicuro" [X3]
N. Pin
Denominazione
Valore
Specifiche
1
24V
24 V CC
Alimentazione 24 V CC accessibile
2
REL
0 V / 24 V CC
Attivazione e ripristino del relè per l'interruzione dell'alimentazione del driver
3
0V
0V
Potenziale di riferimento per PLC
4
LIBERO
-
5
NC1
Max.
6
NC2
[GND 24 V CC *)] [potenziale di riferimento per alimentazione 24 V CC e PLC *)]
60 V CA
30 V CC
2A
Contatto di feed-back a potenziale zero per alimentazione del
driver, contatto n.c.
Tab. 6.14: Occupazione dei connettori "Arresto sicuro" [X3]
6.4.10 Impostazioni fieldbus e bootloader
Interruttori Dip
Significato
1
Numero di nodo
2
3
4
5
6
7
8
Bootloader
(con l'interruttore in posizione ON è attiva la ricerca di nuovo firmware sulla scheda SD)
9
Baudrate
10
11
Attivazione dell'interfaccia CAN
12
Resistenza terminale
Tab. 6.15: Assegnazione degli interruttori Dip
104
Festo P.BE-CMMS-AS-HW-IT 0708NH
6. Collegamenti elettrici
Interruttori Dip
ON/OFF
Significato
1
ON
L'interruttore Dip 1 è il bit di ordine più basso. 1011011=91
2
ON
3
OFF
4
ON
5
ON
6
OFF
7
ON
Tab. 6.16: Esempio di numero di nodo
Interruttori Dip
ON/OFF
Significato
9
ON
10
OFF
L'interruttore DIP 9 è il bit di ordine più basso.
00=125 kBaud
01=250 kBaud (esempio)
10=500 kBaud
11=1000 kBaud
Tab. 6.17: Esempio di baudrate
6.5
Indicazioni per un'installazione sicura ed elettromagneticamente compatibile
6.5.1
Spiegazioni e termini
La compatibilità elettromagnetica (CEM) comprende i seguenti requisiti:
Immunità alle inter- Sufficiente insensibilità di un impianto elettrico o di una apparecferenze
chiatura elettrica nei confronti di interferenze elettriche, magnetiche
o elettromagnetiche provenienti dall'esterno e trasmesse attraverso
le linee o l'ambiente.
Emissione di interfe- Emissione sufficientemente bassa di interferenze elettriche, magnerenze
tiche o elettromagnetiche da parte di un impianto elettrico o di una
apparecchiatura elettrica verso altre apparecchiature nell'area circostante attraverso le linee e l'ambiente.
6.5.2
Istruzioni di collegamento
Lo schermo del cavo motore viene collegato al punto di attacco centrale PE dell'unità
CMMP-AS insieme al conduttore interno PE. Anche l'attacco PE sul lato della rete e lo
schermo del cavo dell'encoder vengono inseriti in questo punto a stella. Collegare il punto
a stella con un cavo di notevole superficie di linea (banda di rame) alla massa centrale
dell'armadio elettrico (conduttore corto alla piastra di montaggio).
Festo P.BE-CMMS-AS-HW-IT 0708NH
105
6. Collegamenti elettrici
Per lunghezze maggiori è necessario adottare misure di protezione elettromagnetica specifiche.
Avvertenza
Per motivi di sicurezza collegare assolutamente tutti i conduttori di
terra PE prima di mettere in servizio l'unità.
La connessione PE sul lato della rete viene inserita nel punto di
connessione centrale PE del CMMS-AS.
Per scaricare le interferenze a radiofrequenza, realizzare
collegamenti a terra di grandi dimensioni fra le unità e la piastra di
montaggio.
6.5.3
Generalità sulla compatibilità elettromagnetica (CEM)
L'emissione di interferenze e l'insensibilità ai disturbi di un motorcontroller dipendono
sempre dalla struttura globale dell'attuatore, che è composto dai seguenti componenti:
Componenti
-
alimentazione elettrica
-
motorcontroller
-
motore
-
cavi del motore
-
parti elettromeccaniche
-
esecuzione e tipo di cablaggio
-
sistema di comando sovrapposto
Nel motorcontroller CMMS-AS sono già incorporati bobine di reattanza per il motore e filtri
di rete per aumentare l'insensibilità ai disturbi e ridurre l'emissione di interferenze.
Di conseguenza il CMMS-AS può essere utilizzato senza schermi e filtri supplementari nella
maggior parte delle applicazioni (lunghezza del cavo motore fino a 15 m).
I motorcontroller CMMS-AS sono conformi alla norma di prodotto
per attuatori elettrici EN 61800-3.
Nella maggior parte dei casi non sono necessari filtri esterni
(vedi capitolo A.3.2).
La dichiarazione di conformità relativa alla direttiva CEM è
disponibile presso Festo.
6.5.4
Aree CEM: secondo ambiente
Se i cavi di collegamento sono stati installati e cablati correttamente, i motorcontroller
CMMS-AS soddisfano le disposizioni della relativa norma di prodotto EN 61800-3.
In questa norma non si parla più di "classi di valori limite" ma di cosiddetti ambienti.
106
Festo P.BE-CMMS-AS-HW-IT 0708NH
6. Collegamenti elettrici
Il "primo" ambiente comprende reti elettriche collegate a edifici residenziali, il secondo
ambiente comprende esclusivamente reti elettriche per uso industriale.
Per i motorcontroller CMMS-AS senza filtri esterni vale quanto segue:
Tipologia CEM Campo di rilevamento
Rispetto dei requisiti CEM
Emissione di
interferenze
Secondo ambiente (settore industriale)
Lunghezza cavo motore fino a 15m
Immunità alle
interferenze
Secondo ambiente (settore industriale)
Indipendente dalla lunghezza del cavo motore
Tab. 6.18: Requisiti CEM: secondo ambiente
6.5.5
Cablaggio elettromagneticamente compatibile
Per garantire una struttura del sistema di azionamento conforme ai requisiti CEM è necessario osservare quanto segue (vedi anche capitolo 6 Collegamenti elettrici, pagina 91):
21H
2H
23H
Avvertenza
Per motivi di sicurezza collegare assolutamente tutti i conduttori di
terra PE prima di mettere in servizio l'unità.
Durante l'installazione rispettare assolutamente le norme
EN 50178 e EN 60204-1 relative alla messa a terra!
1. Per mantenere entro limiti accettabili le correnti di dispersione e le perdite nel cavo di
collegamento, installare il motorcontroller CMMS-AS il più possibile in prossimità del
motore.
2. I cavi del motore e dell'encoder devono essere schermati.
3. Applicare lo schermo del cavo motore sul corpo del motorcontroller CMMS-AS (morsetti di collegamento schermatura). Di norma lo schermo del cavo va sempre applicato
anche sul rispettivo motorcontroller in modo che le correnti di dispersione possano ritornare anche nel regolatore che le ha generate.
4. Collegare l'attacco PE sul lato della rete al punto di connessione PE dell'attacco di alimentazione [X9].
5. Collegare il conduttore interno PE del cavo motore al punto di connessione PE del collegamento motore [X6].
6. Le linee di segnalazione devono essere installate possibilmente in posizioni separate
dai cavi elettrici. Non devono essere posate parallelamente agli altri cavi. Qualora non
sia possibile evitare un incrocio delle linee, posarle possibilmente in posizione verticale (cioè con un'angolazione di 90°).
7. Non utilizzare linee di segnale e di comando non schermate. Se il loro impiego è inevitabile, occorre almeno attorcigliarle.
8. Anche i cavi schermati hanno necessariamente brevi tratti non schermati su entrambe
le estremità (se non si utilizzano corpi del connettore schermati).
Festo P.BE-CMMS-AS-HW-IT 0708NH
107
6. Collegamenti elettrici
In generale valgono le seguenti indicazioni:
-
Collegare gli schermi interni ai pin previsti dei connettori ad
innesto; lunghezza max. 40 mm.
-
Collegare lo schermo completo sul lato motore applicandolo
opra il corpo del connettore o l'involucro del motore;
unghezza max. 40 mm.
6.5.6
Lunghezza dei conduttori non schermati: max. 35 mm.
Esercizio con cavi lunghi
Se per le applicazioni che richiedono cavi lunghi vengono selezionati cavi motore errati, ad
es. con una capacità eccessiva, allora può verificarsi un sovraccarico termico dei filtri. Per
evitare problemi di questo tipo nel caso di applicazioni in cui sono necessari cavi lunghi è
consigliabile osservare la seguente procedura:
-
A partire da una lunghezza dei cavi superiore a 15 m si devono utilizzare esclusivamente cavi con una capacità tra fase motore e schermo inferiore a 200 pF/m, o
preferibilmente inferiore a 150 pF/m! (contattare eventualmente il fornitore dei cavi
del motore)
-
Impiego di un filtro dU/dt all'uscita del motore
-
Filtro sull'attacco dell'alimentazione di tensione
-
Filtri di rete
6.5.7
Protezione contro le scariche elettrostatiche
Attenzione
In caso di connettori D-Sub non occupati sussiste il pericolo di
danneggiare l'apparecchio o altre parti dell'impianto per effetto
delle scariche elettrostatiche (ESD, electrostatic discharge).
Per evitare simili scariche, acquistare cappucci di protezione presso
i negozi specializzati.
108
Festo P.BE-CMMS-AS-HW-IT 0708NH
7. Operazioni preliminari per la messa in funzione
7.
Operazioni preliminari per la messa in funzione
7.1
Istruzioni di collegamento generali
Poiché una posa corretta dei cavi di collegamento è determinante
ai fini della compatibilità elettromagnetica, osservare assolutamente quanto riportato nel capitolo 6.5.5 Cablaggio elettromagneticamente compatibile (pagina 107)!
27H
28H
29H
Avvertenza
PERICOLO !
L'inosservanza di quanto indicato nel capitolo 2 Norme di sicurezza
per attuatori e comandi elettrici (pagina 11) può provocare danni
materiali, lesioni personali o, in casi estremi, la morte.
230H
231H
23H
7.2
Attrezzi/Materiale
Attrezzi
7.3
-
Cacciavite a croce dim. 1
-
Cavo per l'encoder incrementale
-
Cavo motore
-
Cavo di alimentazione
-
Cavo di comando
Collegamento del motore
Collegamento
del motore
1. Inserire il connettore del cavo nell'apposita presa sul motore e
poi stringere a fondo.
2. Inserire il connettore PHOENIX nella presa [X6] dell'unità.
3. Collegare lo schermo del cavo motore al morsetto di schermatura (non indicato come scarico della trazione).
4. Inserire il connettore del cavo dell'encoder nella presa di uscita
sul motore e poi stringere a fondo.
5. Inserire il connettore Sub-D nella presa [X2] dell'apparecchio e
stringere a fondo le viti di bloccaggio.
6. Controllare nuovamente tutte le connessioni.
Festo P.BE-CMMS-AS-HW-IT 0708NH
109
7. Operazioni preliminari per la messa in funzione
7.4
Collegamento del motorcontroller CMMS-AS all'alimentazione elettrica
Collegamento del
motorcontroller
1. Assicurarsi che l’alimentazione elettrica sia disinserita.
2. Inserire il connettore PHOENIX nella presa [X9] dell'unità.
3. Collegare il cavo PE della rete all'attacco PE X9.
4. Collegare la rete alla vite di terra (vedi capitolo 6.5).
5. Collegare le connessioni 24 V a X9 con un alimentatore adatto.
6. Stabilire i collegamenti elettrici.
7. Controllare nuovamente tutte le connessioni.
7.5
Collegamento del PC
Collegamento del PC 1. Inserire il connettore Sub-D del cavo dell'interfaccia seriale nella presa per l'interfaccia seriale del PC e stringere a fondo le viti
di bloccaggio.
2. Inserire il connettore Sub-D del cavo dell'interfaccia seriale nella presa [X5] RS232/COM del motorcontroller e stringere a fondo le viti di bloccaggio.
3. Controllare nuovamente tutte le connessioni.
7.6
Verifica dello stato di "pronto"
Verifica dello stato
di "pronto"
1. Accertarsi che l'interruttore di abilitazione del regolatore sia
disinserito.
2. Inserire l'alimentazione di tensione di tutte le unità. Il LED
READY sul lato anteriore dell'unità dovrebbe accendersi.
3. Controllare le funzioni di sicurezza (ad es. "Arresto sicuro",
STOP D'EMERGENZA...).
Se il LED READY non si accende, significa che c'è un guasto. Se il
display a 7 segmenti visualizza una sequenza di cifre, si tratta di un
messaggio d'errore la cui causa deve essere eliminata. In questo
caso consultare il capitolo 8.2.2 Messaggi di errore (pagina 114).
Se non si accende nessun indicatore sull'unità, eseguire i seguenti
passi operativi:
110
Festo P.BE-CMMS-AS-HW-IT 0708NH
7. Operazioni preliminari per la messa in funzione
Nessun indicatore
acceso
1. Disinserire la tensione di alimentazione.
2. Attendere 1 minuto in modo che il circuito intermedio si possa
scaricare.
3. Controllare tutti i cavi di collegamento.
4. Controllare se la tensione di comando a 24 V è presente.
5. Inserire nuovamente la tensione di alimentazione.
7.7
Diagramma di temporizzazione − Sequenza di inserzione
Power On
t1
DOUT3: #ERROR
Output stage
release
t2
t2
t5
Controller release
t2
Holding brake
released
t3
t7
Output stage
switched on
DOUT0: READY
t6
t4
Speed Setpoint
Speed actual
value
t1
ca. 500 ms
Esecuzione del programma di boot e avvio dell'applicazione
t2
> 1,6 ms
t3
= 10 ms
In funzione del modo operativo e dello stato dell'attuatore
t4
= N x 1,6 ms
Parametrabile (parametri di frenatura, ritardo inizio traslazione tF
t5
< 1,6 ms
t6
= N x 0,2 ms
In relazione alla rampa di arresto rapido
t7
= N x 1,6 ms
Parametrabile (parametri di frenatura, ritardo di disinserzione tA
Fig. 7.1: Diagramma di temporizzazione − Sequenza di inserzione
Festo P.BE-CMMS-AS-HW-IT 0708NH
111
8. Funzioni di servizio e segnalazioni di guasto
8.
Funzioni di servizio e segnalazioni di guasto
8.1
Funzioni di protezione e servizio
8.1.1
Panoramica
Il motorcontroller CMMS-AS dispone di numerosi sensori che monitorano il funzionamento
corretto di controller, modulo terminale di potenza, motore e comunicazione con i
dispositivi esterni. Tutti gli errori vengono registrati in una memoria interna. Nella maggior
parte dei casi quando si verifica un errore il controller arresta il motorcontroller e il modulo
terminale di potenza. È possibile riavviare il motorcontroller solo se l'errore è stato
eliminato o non è più presente e dopo aver cancellato la memoria degli errori mediante
tacitazione.
La sicurezza d'esercizio viene garantita dalle seguenti funzioni di monitoraggio:
-
Monitoraggio della temperatura per motore e unità di potenza
-
Monitoraggio del cortocircuito del modulo terminale
-
Identificazione di sovratensioni e sottotensioni nel circuito intermedio
-
Monitoraggio I2t
-
Monitoraggio dello stato di fermo
In caso di caduta della tensione di alimentazione a 24 V si hanno ca. 20 ms di tempo a
disposizione, ad es. per memorizzare i parametri e spegnere il sistema di regolazione.
8.1.2
Monitoraggio di cortocircuiti del modulo terminale − Monitoraggio di sovracorrenti e cortocircuiti
Il monitoraggio di sovracorrenti e cortocircuiti interviene non appena la corrente nel circuito intermedio supera la corrente max. doppia del regolatore. Esso identifica i cortocircuiti
fra due fasi del motore e i cortocircuiti sui morsetti d'uscita del motore contro il potenziale
di riferimento positivo e negativo del circuito intermedio e contro il potenziale di terra (PE).
Se il monitoraggio degli errori identifica una sovracorrente, il modulo terminale di potenza
viene arrestato immediatamente e così viene garantita la protezione contro i
cortocircuiti.
Nel motore vengono misurate separatamente due delle tre fasi che alimentano la regolazione di corrente. La misurazione della corrente viene utilizzata anche per rilevare eventuali cortocircuiti o sovracorrenti. Il modulo terminale è a prova di cortocircuito contro chiusure dopo U_ZK+, U_ZK-, PE e fra due fasi qualsiasi del motore.
8.1.3
Monitoraggio della tensione nel circuito intermedio
Il monitoraggio della tensione interviene non appena la tensione del circuito intermedio
supera l'intervallo della tensione d'esercizio. Poi il modulo terminale di potenza viene disattivato.
112
Festo P.BE-CMMS-AS-HW-IT 0708NH
8. Funzioni di servizio e segnalazioni di guasto
8.1.4
Monitoraggio della temperatura per motore e unità di potenza − Monitoraggio della temperatura per termodispersore
La temperatura del termodispersore del modulo terminale viene misurata con un sensore
lineare. Il monitoraggio interviene a temperatura oltre 85 °C. A una temperatura di 80 °C
viene emessa una segnalazione di avvertenza.
.
Misuraz. e monito- Il motorcontroller CMMS-AS dispone di un ingresso digitale
raggio della tempe- per il rilevamento e monitoraggio della temperatura dei motori
ratura del motore: EMMS-AS.
Su [X6]:
8.1.5
Monitoraggio dell'encoder
Un errore dell'encoder determina l'arresto del modulo terminale di potenza. Negli encoder
incrementali vengono controllati i segnali di commutazione.
8.1.6
Monitoraggio I²t
Il motorcontroller CMMS-AS dispone di un monitoraggio I²t per limitare la dissipazione
intermedia nel modulo terminale di potenza e nel motore. Dato che la dissipazione nel
sistema elettronico di potenza e nel motore aumenta al quadrato nel caso più sfavorevole,
il valore di corrente al quadrato viene assunto come misura per la dissipazione.
8.1.7
Monitoraggio della potenza del chopper di frenatura
Nel software operativo è integrato un monitoraggio della potenza del reostato di frenatura
interno.
Festo P.BE-CMMS-AS-HW-IT 0708NH
113
8. Funzioni di servizio e segnalazioni di guasto
8.2
Segnalazioni del modo operativo e di guasto
8.2.1
Indicazione del modo operativo e di errore
Le segnalazioni avvengono tramite un display a sette segmenti. Nella tabella seguente
sono descritte le indicazioni e il significato dei simboli visualizzati:
Indicazione
Significato
Nel modo operativo "regolazione della velocità" i segmenti esterni vengono visualizzati
"a rotazione". L'indicazione dipende dalla posizione reale o dalla velocità corrente
Quando è attiva l'abilitazione del regolatore viene visualizzata anche la barra centrale
Esercizio con regolazione del momento torcente (display a 7 segmenti = "I")
P xxx
Posizionamento ("xxx" indica il numero del record di posizionamento)
Le cifre vengono visualizzate una dopo l'altra
PH x
Corsa di riferimento. "x" indica la rispettiva fase della corsa di riferimento:
0 : fase di ricerca
1 : fase di movimento lento
2 : corsa verso la posizione neutra
Le cifre vengono visualizzate una dopo l'altra
E xxy
Messaggio di errore con indice "xx" e subindice "y"
-xxy-
Segnalazione di avvertimento con indice "xx" e subindice "y".
Un'avvertenza viene visualizzata almeno due volte sul display a 7 segmenti.
Tab. 8.1: Indicazione del modo operativo e di errore
8.2.2
Messaggi di errore
Quando si verifica un'anomalia, il motorcontroller CMMS-AS visualizza ciclicamente un
messaggio di errore sul display a 7 segmenti. Un messaggio di errore è composto da una E
(per Error), un indice principale e un subindice, ad es.: E 01 0.
Il significato dei messaggi di errore e i rimedi da adottare sono descritti nella tabella seguente:
Messaggio di
errore
Indice
princip.
Subindice
00
0
114
Significato del messaggio di errore
Interventi
Errore hardware
Motorcontroller e firmware non sono compatibili.
Aggiornare il firmware
Festo P.BE-CMMS-AS-HW-IT 0708NH
8. Funzioni di servizio e segnalazioni di guasto
Messaggio di
errore
Significato del messaggio di errore
Interventi
Indice
princip.
Subindice
01
0
Stack overflow
Firmware errato?
Eventualmente ricaricare il firmware standard.
Contattare il supporto tecnico
02
0
Sottotensione circuito
intermedio
Il monitoraggio della sottotensione viene configurato utilizzando l'FCT
Misurare la tensione del circuito intermedio
Controllare la configurazione
03
0
1
Monitoraggio temperatu- Motore troppo caldo? Controllare la parametrazione (regolara motore
tore di corrente, valori limite della corrente)
Sensore adatto?
Rottura del cavo?
Monitoraggio temperatuSensore difettoso?
ra motore
Se è presente un errore anche nel sensore cavallottato: apparecchio difettoso
04
0
Monitoraggio temperatu- Indicazione della temperatura plausibile?
ra unità di potenza
Controllare le condizioni di montaggio (raffreddamento:
sopra la superficie del corpo, il termodispersore incorporto e
la parete posteriore)
05
0
Errore alimentazione 5 V
Questo errore non può essere eliminato in proprio
1
Errore alimentazione
24 V
Inviare il motorcontroller al distributore autorizzato
2
Errore alimentazione
12 V
06
0
Cortocircuito modulo
terminale
07
0
Sovratensione nel circui- Controllare il collegamento del reostato di frenatura
to intermedio
Controllare la configurazione (applicazione)
08
0
Errore segnali di traccia Encoder collegato?
resolver / caduta portan- Cavo dell'encoder guasto?
te
Encoder guasto?
Controllare la configurazione dell'interfaccia dell'encoder.
Errore alimentazione
Se i segnali dell'encoder sono disturbati: controllare che
encoder
l'installazione sia conforme alle raccomandazioni CEM
Errore comunicazione
SINCOS-RS485
2
6
11
8
Errore segnali di traccia
SINCOS
1
Errore durante corsa di
riferimento
Festo P.BE-CMMS-AS-HW-IT 0708NH
Motore guasto?
Cortocircuito nel cavo?
Modulo terminale guasto?
La corsa di riferimento è stata interrotta, ad es. perché è
stata disattivata l'abilitazione del regolatore
115
8. Funzioni di servizio e segnalazioni di guasto
Messaggio di
errore
Significato del messaggio di errore
Interventi
Indice
princip.
Subindice
12
2
CAN: errore di comunica- I segnali sono disturbati durante l'invio dei messaggi
zione CAN durante trasmissione
14
9
Errore identificazione del
motore
16
2
Errore di inizializzazione
3
Stato imprevisto
0
Superamento valore
limite errore di posizionamento
1
Monitoraggio angolo
ruota polare
0
Temperatura motore a
5 °C sotto il max.
1
Temp. modulo terminale
a 5 °C sotto il max.
19
0
I²t all'80 %
21
0
Errore offset misurazione Questo errore non può essere eliminato in proprio
corrente
Inviare il motorcontroller al distributore autorizzato
22
0
PROFIBUS:
inizializzazione errata
Modulo di espansione difettoso?
Contattare il supporto tecnico
2
Errore di comunicazione PROFIBUS
Controllare l'indirizzo slave impostato
Controllare il terminale bus
Controllare il cablaggio
26
1
Errore cumulativo di cont- Questo errore non può essere eliminato in proprio
rollo
Contattare il supporto tecnico
29
0
Scheda SD non presente
1
Errore inizializzazione SD Errore durante l'inizializzazione / comunicazione non possibile
2
Errore set di parametri SD Check-sum errato / file non presente / formato file errato
3
Errore SD piena
Impossibile memorizzare i parametri su SD, capacità di memoria insufficiente
0
Motore I²t
Motore/parte meccanica bloccati o duri da azionare?
1
Servoregolatore I²t
Controllare il dimensionamento della potenza del gruppo
motore
1
Timeout arresto rapido
17
18
31
35
116
Contattare il supporto tecnico
Aumentare la finestra di errore
Parametro troppo alto per l'accelerazione
Si è tentato di accedere a una scheda SD non presente
Festo P.BE-CMMS-AS-HW-IT 0708NH
8. Funzioni di servizio e segnalazioni di guasto
Messaggio di
errore
Significato del messaggio di errore
Interventi
Indice
princip.
Subindice
40
0
Finecorsa software positivo
1
Finecorsa software negativo
2
Posizione di arrivo dietro
finecorsa software negativo
3
Posizione di arrivo dietro
finecorsa software negativo
8
Programma di traslazione: Trovato un ampliamento ignoto del programma di traslazione
istruzione non conosciuta
9
Programma di traslazione: Salto su un riga che non rientra nell'intervallo consentito
errore destinazione di
salto
1
Posizionamento: errore
nel calcolo preliminare
Impossibile raggiungere la destinazione di posizionamento
mediante le opzioni di posizionamento o le condizioni limite.
Controllare i parametri dei record di posizione interessati
4
Corsa di riferimento necessaria
Eseguire la corsa di riferimento
9
Posizionamento: errore
record dati di posizione
L'accelerazione impostata è troppo bassa per v_max.
0
Finecorsa hardware nega- Controllare i parametri, il cablaggio e i finecorsa
tivo
1
Finecorsa hardware positivo
9
Finecorsa: entrambi attivi
41
42
43
Festo P.BE-CMMS-AS-HW-IT 0708NH
117
8. Funzioni di servizio e segnalazioni di guasto
Messaggio di
errore
Significato del messaggio di errore
Interventi
Indice
princip.
Subindice
64
1
Errore moduli DeviceNet
2
Errore di comunicazione
DeviceNet
Errore cumulativo
3
Errore di comunicazione
DeviceNet
Errore cumulativo
4
Errore di comunicazione
DeviceNet
Errore cumulativo
5
Errore di comunicazione
DeviceNet
Errore cumulativo
6
Errore di comunicazione
DeviceNet
Errore cumulativo
0
Errore moduli DeviceNet
1
Errore di comunicazione
DeviceNet
2
Errore aritmetico generale Impossibile calcolare correttamente FHPP Factor Group
3
Errore modo operativo
Cambio di modo operativo con modulo terminale sbloccato
0
Errore di comunicazione
RS232
Errore cumulativo
65
70
79
Errore cumulativo
Tab. 8.2: Messaggi di errore
I messaggi di errore possono essere tacitati tramite:
-
l'interfaccia di parametrazione
-
il fieldbus (parola di controllo)
-
un fronte di discesa su DIN5 (abilitazione del regolatore).
Nota
Controllare periodicamente i dispositivi di sicurezza in base alle
condizioni dell'impianto.
118
Festo P.BE-CMMS-AS-HW-IT 0708NH
A. Dati tecnici
A.
Dati tecnici
A.1
Generalità
Intervallo
Valori
Intervalli di temperatura ammissibili
temperatura di
magazzinaggio: -25 … +70 °C
temperatura
d'esercizio:
0 … +40 °C
+40 … +50 °C con riduzione della potenza 4 % / K
Altezza di installazione ammissibile
fino a 1000 m l.d.m.
1000 … 3000 m l.d.m. con riduzione della potenza
10 % / 1000 m
Umidità dell'aria
umidità relativa dell'aria fino al 90 %, senza condensa
Grado di protezione
IP20 (montaggio dell'armadio elettrico)
Grado di imbrattamento
2
Conformità CE, direttiva sulla bassa tensione
vedi dichiarazione di conformità
Conformità CE direttiva CEM
vedi dichiarazione di conformità
Altre certificazioni
UL/CSA in preparazione
Tab. A.1: Dati tecnici: condizioni ambientali e qualifica
Caratteristiche
Valori
Dimensioni dell'apparecchio (HxLxP)
60x242x160 mm compresa fascetta di fissaggio
Peso
ca. 2,5 kg
Tab. A.2: Dati tecnici: dimensioni e peso
Intervallo
Valori
Lunghezza max. dei cavi motore per emissione di interferenze secondo
EN 61800-3 (corrisponde a EN 55011, EN 55022)
Secondo ambiente (settore industriale)
l
15 m
Capacità dei cavi di una fase a schermo o tra due linee
C‘ 220 pF/m
Tab. A.3: Dati tecnici: dati dei cavi
Sensori
Valori
Sensore digitale
Contatto n.c.:
Rfreddo < 1 k
Rcaldo > 10 kΩ
Tab. A.4 :Dati tecnici: monitoraggio temperatura del motore
Festo P.BE-CMMS-AS-HW-IT 0708NH
119
A. Dati tecnici
A.2
Elementi di comando e segnalazione
Il motorcontroller CMMS-AS dispone di due LED e di un display a sette segmenti sul lato
anteriore per la visualizzazione degli stati d'esercizio.
Elemento
Funzione
Display a 7 segmenti
Indicazione del modo operativo e, in caso di errore, di un numero di errore
codificato
LED ready (verde)
Stato di "pronto"
LED BUS (giallo)
Indicazione di stato del bus CAN
Tab. A.5: Elementi di segnalazione
A.2.1
Indicazione di stato
Ready:
LED verde
Bus CAN attivo:
LED giallo
Indicazione di stato: display a 7 segmenti (blu)
Sul display a 7 segmenti vengono visualizzate le seguenti informazioni di stato
(vedi capitolo 8.2.1):
Modulo terminale attivato (barra)
Motore in funzione – modo operativo "regolazione della velocità"
(rotazione dei segmenti)
Esercizio di posizionamento – indicazione P con numero di record in alternanza
Errore con numero (numero di errore lampeggiante, a 3 cifre)
A.2.2
Elementi di comando
Il numero di nodo può essere impostato tramite gli interruttori DIP sul fronte dell'unità:
7x numero di nodo
1x firmware, caricare da scheda SD
2x baudrate
1x CAN on/off
1x resistenza terminale
120
Festo P.BE-CMMS-AS-HW-IT 0708NH
A. Dati tecnici
A.3
Interfacce
A.3.1
Alimentazione [X9]
Caratteristiche
Valori
Tensione di alimentazione
monofase/ 95 … 255 VCA
adatta alla tensione di rete per USA/UE
Frequenza
50 … 60 Hz
Corrente di ingresso nominale
3A
Tensione del circuito intermedio
320 VCC
Tensione max. del circuito intermedio
400 VCC
Tensione di alimentazione unità di comando di comando
24 VCC ±20 %
Corrente nominale unità di comando
ca. 0,35 A CC
Corrente di uscita nominale
4A
Corrente di punta
10 A per 2 s oppure 0,5 s con motore fermo
Potenza nominale del circuito intermedio
600 W
Raffeddamento
passivo
Dissipazione modulo terminale
30 … 35 W
Dissipazione intrinseca parte di comando
8W
Tab. A.6: Dati tecnici: dati di potenza [X9]
Nota
Per sbloccare il freno di arresto, assicurarsi che le tolleranze di
tensione sui morsetti di collegamento vengano osservate.
Caratteristiche
Valori
Reostato di frenatura interno
230
Potenza impulso
700 W
Potenza nominale
15 W
Soglia di risposta
390 V
Isteresi
10 V
Tab. A.7: Dati tecnici: reostato di frenatura interno [X9]
Festo P.BE-CMMS-AS-HW-IT 0708NH
121
A. Dati tecnici
A.3.2
Collegamento del motore [X6] CMMS-AS
Lunghezza max. dei cavi del motore e dell'encoder 25 m
I filtri interni sono sufficienti per un cavo del motore di 15 m.
L'analisi dell'encoder è predisposta per l'esercizio con un cavo del motore fino a 25 m.
È possibile l'esercizio con un cavo di 25 m se vengono montati filtri esterni.
Dati di uscita
Valori
Corrente nominale motore
4 Aeff
Picco di corrente motore
10 Aeff
Frequenza max. di uscita
10 kHz
Tensione di uscita
320 V
Tab. A.8: Dati tecnici: dati di collegamento motore [X6]
A.3.3
Uscita per freno
Caratteristiche
Valori
Intervallo di tensione
18 … 30 V
Corrente di uscita
1,0 A
Cortocircuito / protezione da sovraccarico
>4A
Protezione temperatura
TJ > 150 °C
Carichi
- R > 24 Ω
- L standard 10 H
- C < 10 nF
Ritardo di commutazione
< 1 ms
Tab. A.9: Dati tecnici: uscita per freno
A.3.4
Ingresso per encoder incrementale [X2]
Parametri
Protocollo di comunicazione
Heidenhain EnDat 2.1 e 2.2
Livello del segnale DATA, SCLK
5 V differenziale / RS422 / RS485
Risoluzione angolare / numero tacche encoder
incrementale
interno al regolatore fino a 16 bit / giro
Lunghezza del cavo
L
25m
esecuzione del cavo secondo le specifiche Heidenhain
Frequenza limite SCLK
1 MHz
Alimentazione dell'encoder
dal regolatore, 5 V -0/+5 %
IA = 200 mA max.
Cavo Sense per alimentazione
non supportato
Tab. A.10: Ingresso per encoder incrementale X2
122
Festo P.BE-CMMS-AS-HW-IT 0708NH
A. Dati tecnici
A.3.5
Interfaccia per encoder incrementale [X10]
Interfaccia encoder incrementale
Valori
Modi operativi
Segnali A/B, CW/CCW o CLK/DIR in ingresso
Segnali A,B,N in uscita
Risoluzione angolare / numero tacche
si può impostare un numero di tacche qualsiasi
(tutti i numeri interi fra 16 e 2048)
Segnali di traccia
secondo lo standard RS422
Impedenza in uscita
120 Ω
Frequenza limite
flimite > 500 kHz
Tab. A.11: Interfaccia encoder incrementale X10
A.3.6
RS232/RS485 [X5]
Interfaccia di comunicazione
Valori
RS232
secondo le specifiche RS232
RS485
secondo le specifiche RS485
Baudrate
9600 … 115 kBaud
Protezione
driver protetti dalle scariche elettrostatiche
Tab. A.12: Dati tecnici: RS232 [X5]
A.3.7
Bus CAN [X4]
Interfaccia di comunicazione
Valori
Protocollo
CANopen DS301, DSP402 und FHPP
Baudrate
max. 1 MBaud
Resistenza terminale
120 Ω (attivabile tramite interruttori DIP)
Tab. A.13: Dati tecnici: bus CAN [X4]
A.3.8
Interfaccia I/O [X1]
Ingressi digitali
Valori
Livello del segnale
8 … 30 V (attivo high)
Numero
14
Tempo di reazione all'ingresso
1,6 ms
Tempo di reazione all'ingresso sample
< 100 µs
Funzione di protezione
contro le inversioni di polarità
Tab. A.14: Dati tecnici: ingressi digitali
Festo P.BE-CMMS-AS-HW-IT 0708NH
123
A. Dati tecnici
Uscite digitali
Valori
Livello del segnale
24 V (da alimentazione logica)
Corrente di uscita
< 100 mA
Numero
4
Tempo di reazione dell'uscita
< 2 ms
Funzione di protezione
contro inversione di polarità, cortocircuito, carico
induttivo
Tab. A.15: Dati tecnici: uscite digitali
Ingressi analogici
Valori
Livello del segnale
-10 … +10 V
Versione
ingresso differenziale
Risoluzione
12 bit
Tempo di reazione dell'ingresso
< 250 µs
Funzione di protezione
contro sovratensioni fino a ±30 V
Tab. A.16: Dati tecnici: ingressi analogici
Uscite analogiche
Valori
Livello del segnale
0 … 10 V
Versione
Single-Ended contro AGND
Risoluzione
9 bit
Tempo di reazione dell'uscita
< 250 µs
Funzione di protezione
cortocircuito contro AGND
Tab. A.17: Dati tecnici: uscite analogiche
124
Festo P.BE-CMMS-AS-HW-IT 0708NH
B. Glossario
B.
Glossario
CEM
La compatibilità elettromagnetica (CEM) comprende i seguenti requisiti:
Resistenza ai disturbi
Sufficiente insensibilità di un impianto elettrico o di un'apparecchiatura elettrica nei confronti di interferenze elettriche, magnetiche
o elettromagnetiche provenienti dall'esterno e trasmesse
attraverso le linee o l'ambiente.
Emissione di interfe- Emissione sufficientemente bassa di interferenze elettriche, magnerenze
tiche o elettromagnetiche da parte di un impianto elettrico o di
un'apparecchiatura elettrica verso altre apparecchiature nell'area
circostante attraverso le linee e l'ambiente.
Festo P.BE-CMMS-AS-HW-IT 0708NH
125
C. Indice analitico
C.
Indice analitico
C
Contenuto .............................................. 5
Controllo di posizionamento ................ 50
Corsa di riferimento ............................. 52
Metodi della corsa di riferimento ...... 52
D
Documentazione.................................... 9
E
Error .................................................. 114
G
Glossario ........................................... 126
CEM
Emissione di interferenze ............ 125
Immunità alle interferenze .......... 125
CEM ................................................ 125
I
Interpolated position mode ................. 46
M
Messaggio di errore ........... 110, 114, 118
tacitare ........................................... 118
N
Norme di sicurezza ........................ 11, 15
Note Generalità ................................... 12
Note Sicurezza ..................................... 11
Note Simboli ........................................ 11
S
Selettori del valore di riferimento ........ 50
V
Volume di fornitura .............................. 10
126
Festo P.BE-CMMS-AS-HW-IT 0708NH