Coordinato da
Organizzato da
Tema n. 4: Problematiche di esercizio e ciclo di vita
DETERMINAZIONE DELL’USURA DI ROTAIE TRANVIARIE MEDIANTE ANALISI
DELLE IMMAGINI CON TECNICHE MONO E STEREOSCOPICHE
Marco Guerrieri
Facoltà di Ingegneria ed Architettura, Università di Enna, “Kore”
( cell. 333.9993614 – E-mail: [email protected])
Ferdinando Corriere
Facoltà di Ingegneria ed Architettura, Università degli Studi di Palermo
(cell. 380.2932880 – E-mail: [email protected])
Giuseppe Parla
Facoltà di Ingegneria, Università degli Studi di Palermo
(cell. 348.7982089 – E-mail: [email protected])
Dario Ticali
Facoltà di Ingegneria ed Architettura, Università di Enna, “Kore”
(cell. 333.3650775 – E-mail: [email protected])
Abstract
La misura dei valori assunti dai parametri geometrici del binario e lo stato di usura delle rotaie,
ormai da diversi anni viene effettuata con tecniche laser ad alto rendimento e con treni diagnostici
(come ad esempio i treni Archimede e Talete per le ferrovie ordinarie).
Nel presente lavoro viene descritta una nuova procedura per la stima dell’usura del profilo
trasversale di rotaie tranviarie in esercizio mediante la tecnica dell’image processing; tale
approccio metodologico si basa sulle “informazioni” contenute in immagini fotografiche ad alta
risoluzione delle rotaie e su specifici algoritmi che permettono di ottenere l’esatto profilo
geometrico delle rotaie stesse e quindi di poter misurare l’usura del loro estradosso e, più in
particolare, della superficie di rotolamento. Le analisi ed i risultati presentati nello studio sono
relativi a ricerche svolte in laboratorio con metodiche mono e stereoscopiche effettuate su sezioni
trasversali di rotaie tranviarie prelevate da linee già in esercizio. Grazie alle loro specifiche
peculiarità ed alla elevata precisione nella stima dell’usura ed alla velocità di analisi, le due
tecniche si prestano ad essere usate, in potenza, sia per analisi in laboratorio (dove sono di
semplice applicazione le tecniche monoscopiche), sia per rilievi ad alto rendimento in situ
mediante l’installazione di idonea apparecchiatura sui rotabili diagnostici (tecniche stereoscopiche)
opportunamente attrezzati, eventualmente in associazione alle metodiche di auscultazione del
binario tradizionalmente impiegate in ambito ferroviario.
1. Introduzione
Uno degli incidenti più frequenti e più temibili in ambito ferroviario è costituito dal deragliamento
che può essere causato da molti fattori, alcuni sporadici e statisticamente non significativi, altri,
molto più frequenti, ed originati soprattutto da una cattiva gestione della sovrastruttura che può non
essere conforme agli standard minimi di sicurezza prescritti dagli Ente gestori delle ferrovie
ordinarie e tranviarie. In funzione della dinamica, l’incidente per deragliamento può essere
classificato in: i) Deragliamento per arrampicamento della ruota sulla rotaia (Wheel-flangeclimbderailment); ii) Deragliamento per scivolamento della ruota (slide-up derailment)
generalmente dovuto ad uno scartamento eccessivo; iii) Deragliamento per salto della rotaia
(Jump-up derailment) determinato da un urto violento della ruota del treno sulla rotaia stessa.
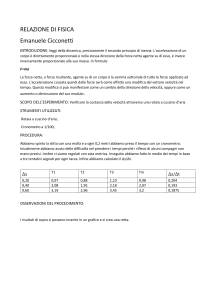
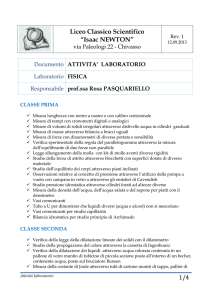
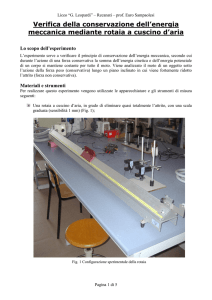
Di particolare interesse è il deragliamento per arrampicamento della ruota sulla rotaia
(statisticamente il più frequente), che si può verificare per elevati valori del rapporto della forza di
contatto Q/P (wheel/rail contact forces), ovvero qualora si abbia una riduzione del carico verticale
P ed un incremento della forza laterale Q, (TCRP Report 71, 2005). Indicando rispettivamente con
l’angolo di flangiatura e con f il coefficiente di attrito, il valore limite del rapporto Q/P (vedi Fig. 1)
che scongiura il deragliamento può essere ottenuto con la nota equazione di Nadal (Nadal, 1902):
=
(1)
L’equazione di Nadal permette di individuare due situazioni limite, la prima relativa a un elevato
livello di sicurezza che si verifica per elevati carichi assiali P e per piccoli valori della forza laterale
Q; la seconda relativa ad un basso livello di sicurezza che si manifesta in condizioni opposte
(carico assiale modesto ed elevato valore della forza laterale). Dalla relazione (1) si desume che a
parità di altre condizioni, al crescere dell’angolo di flangiatura, come effetto dell’usura della rotaia,
diminuisce il rapporto Q/P (vedi Fig. 1).
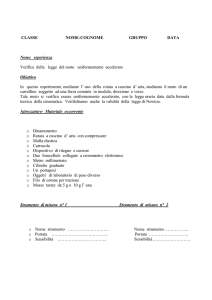
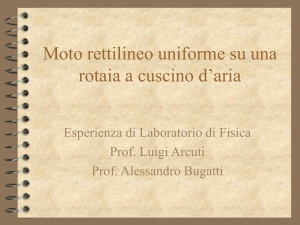
Oltre all’usura del fungo, molti altri ammaloramenti, fenditure, o difetti possono essere presenti
sulla rotaia (vedi Fig. 2), compromettendo potenzialmente le condizioni di sicurezza. Per la
valutazione dell’usura delle rotaie, in ragione delle specifiche esigenze, possono essere impiegate
strumentazioni a basso rendimento (es. miniprof) ovvero treni diagnostici che eseguono la
scansione laser del binario durante corse di monitoraggio della linea ferrata (Esveld, 2001). Più
recentemente sono state evidenziate le potenzialità offerte delle tecniche dell’image processing in
real – time per la determinazione dell’usura verticale, orizzontale ed a 45° della rotaia (Allippi, C.
et. Al , 2000; Guerrieri, M. et al., 2012). Nei seguenti paragrafi si illustrano i risultati delle analisi di
laboratorio effettuate su rotaie tranviarie usurate, dismesse da linee in ammodernamento,
finalizzate alla determinazione del profilo trasversale del fungo, mediante la tecnica monoscopica e
stereoscipica.
LIMITING Q/P
FLANGE ANGLE ()
Fig. 1. Condizioni di Nadal
Fig. 2. Usura e ammaloramenti della rotaia
2. Image Processing for la misura dell’usura delle rotaie (monoscopia)
L’obiettivo primario dell’image processing (elaborazione delle immagini) è quello di rendere
esplicito il contenuto informativo di una data immagine in relazione alla natura dell’applicazione alla
quale si fa riferimento. Tutti i metodi di segmentazione sono definiti allo scopo di elaborare
un’immagine secondo specifici algoritmi che suddividano l’immagine in regioni distinte ed
omogenee rispetto ad una prefissata caratteristica. Tale operazione costituisce il primo passo per
distinguere la regione in cui è presente l’oggetto di interesse (ROI region of interest ) dalle altre
parti ovvero dallo sfondo. Un tale processo di partizione dell’immagine deve essere capace di non
eliminare le importantissime informazioni del contorno degli oggetti, che nel presente lavoro,
rappresentano il punto di partenza per l’individuazione delle distanze tra i profili trasversali della
rotaia nelle diverse condizioni di esercizio ed in particolare: rotaia usurata e rotaia nuova.
Analizzata l’immagine di una rotaia (es. Rotaia a Gola e UIC 60), la procedura di segmentazione,
individua il contorno o “edge” dell’immagine attraverso l’algoritmo di Canny (Canny, 1986). Solo in
seguito la procedura risolve il problema di confrontare i due profili della rotaia (usurato e nuovo) e
di calcolarne gli scostamenti (verticale, orizzontale ed a 45°).
La fase di detection dell’edge dell’immagine si rende necessaria in quanto, nonostante le immagini
digitali possano essere realizzate con macchine ad elevata risoluzione, alcuni pixel dell’immagine
potrebbero essere affetti da rumore (debolissime dispersioni luminose localizzate nel bordo
dell’immagine della rotaia) rendendo non abbastanza precisa l’individuazione del bordo della rotaia
stessa. Più in particolare, occorre individuare esattamente la posizione del bordo dell’immagine
anche sulle porzioni in cui non è percettivamente e/o numericamente apprezzabile una netta
separazione con lo sfondo chiaro. L’algoritmo di Canny studia in dettaglio il comportamento
dell’operatore gradiente applicato ad un contorno rumoroso. L’algoritmo determina che il pixel di
posto (i,j) nel generico piano cromatico p1 dell'immagine A(i,j,p), è un pixel di contorno secondo
Canny se nell'intorno del generico pixel il valore di intensità del pixel considerato - A(i,j,p) - risulta
superiore a determinati valori di soglia, stabiliti da Canny, secondo algoritmi di “histeresys
thresholdinge non-maximum suppression” (soppressione dei non-massimi ).Si è inoltre constatato
che, per una stessa immagine, la determinazione degli edge, operata separatamente sui tre piani
1
“p” è l’indice di piano: p=1 piano Red, p=2 piano Green, p=3 piano Blue
cromatici (RGB), fornisce, come era prevedibile, risultati migliori nei dettagli dei contorni, pertanto
si è preferito operare separatamente sui tre piani cromatici dell’immagine e riunire i risultati
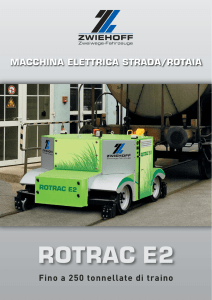
dell’elaborazione in una unica informazione booleana. I punti dei bordi della rotaia ottenuti con
l’algoritmo di Canny, indicati con {C}, sono riportati nell’immagine binaria di Fig.4, che costituisce
un ingrandimento di una porzione dell’immagine originaria (cfr. Fig. 3).
Per ogni punto {C} del bordo si provvede a distinguere alcuni gruppi di pixel più chiari vicino al
bordo della rotaia che non appartengono alle micro rugosità della stessa. Per ogni piano cromatico
dell’immagine in analisi si applica un filtro mediano usando la seguente relazione:
M=A*B
(2)
dove il template B, nel caso specifico, ha una dimensione definita [3x3] ed un coefficiente pari a
(1/9).
=
1 1
∗ 1 1
1 1
1
1
1
(3)
La (2) rappresenta la media dei pixel degli otto valori vicini. La procedura che si è implementata
applica iterativamente il filtro precedente in modo da diffondere i valori numerici di tutti i pixel che
sicuramente appartengono ad una regione colorimetricamente omogenea, sia essa di sfondo o
rotaia. L’immagine al tempo t (passo di iterazione) è originata dall’immagine iniziale convolvendola
con il filtro medio (2), ovvero:
(, , )=
( , )×
(, , )
(4)
dove (i,j) sono gli indici di posizione del pixel all'interno della matrice originaria A e “×” rappresenta
l’operatore di convoluzione. Inoltre, poiché il filtro a media espansa (4) tende ad eliminare le
informazioni sui dettagli dei bordi, è necessario cercare di mitigare questo effetto attraverso
l’applicazione di un altro operatore che, invece, enfatizzi il bordo della rotaia. Alla luce di quanto
argomentato, è stato indispensabile applicare, a valle della precedente convoluzione (4), un
operatore di estrazione dei contorni detto operatore di range (Gonzales et al., 2002; Gonzales et
al., 2004). Per ogni spostamento (i,j) del Template B il valore del pixel centrale può dunque essere
formalizzato come segue:
R(i, j) = Max(A
Min(A , ; A
,
,
;A
;A
;
;A
;A ,
,
;A ,
;A , ; A ,
;A ,
;A ,
;…;A
;…;A
)
,
;A ,
;…;A
,
;
,
)(5)
In tal senso, sono stati ricercati ed evidenziati i valori di range di ogni intorno [3x3] di tutti i pixel
dell’immagine originaria A. La seguente equazione (6) formalizza la precedente operazione di
differenza. Dunque, ad un generico passo di iterazione t, l’algoritmo proposto riesce ad abbassare
le intensità dei pixel che segnano il bordo della sezione piana della rotaia.
Min(A
,
;A
,
;A
;
;A ,
;A ,
))
(6)
In una qualunque direzione presa lungo il bordo della rotaia, si può facilmente constatare che la
relazione (4) tende ad uniformare numericamente il valore del pixel nell’intorno del punto
considerato, mentre la relazione (5) nel medesimo intorno abbassa i valori nelle zone più scure e
dunque colorimetricamente vicine alla rotaia.
Successivamente sono state individuate delle zone di incertezza nell’intorno dei punti ove detto
profilo nelle otto direzioni segnava una brusca variazione o, comunque, un salto oltre un
determinato intervallo di soglia, individuato da tre costanti [Ti, To, Ts].
Le suddette costanti vengono determinate automaticamente dall’algoritmo in relazione al valore
massimo e minimo e medio degli scostamenti dei due profili. I valori dei pixel nelle predette zone
popolano per ogni passo iterativo t le matrici {Si} e {Gi} ben distinte dalle matrici {S} e {G} che
invece sono quasi sicuramente sfondo e rotaia. Pertanto, al passo di iterazione t si ha:
S(i, j, t) = J(i, j, t, Ti)
(7)
Si(i, j, t) = J(i, j, t, Ti, To)
Gi(i, j, t) = J(i, j, t, To, Ts)
G(i, j, t) = J(i, j, t, Ts)
(8)
(9)
(10)
L’algoritmo proposto, riesce a definire la matrice CF(i,j) del contorno finale, che viene formalizzata
dalla relazione seguente:
(, , )=
( , , ),
( , , ),
( , , ), ( , , )
(11)
dove F è la funzione che formalizza l'appartenenza del pixel al bordo della rotaia o allo sfondo.
Una sovrapposizione tra essa e l’immagine in origine è rappresentata in Figura 7.
Fig. 3. Foto rotaia a
gola
Fig. 4. Immagine
binaria rotaia
Fig. 5. Risultato
algoritmo
Fig. 6. Codifica binario
rotaia
Si precisa che a valle delle precedenti operazioni di definizione delle soglie (cfr. relazione (10)), la
procedura è inoltre in grado di estrapolare oltre che l’esatta posizione del contorno (cfr. relazione
(11)), anche una prima codifica binaria dell’oggetto che si formalizza con la seguente relazione:
( , , ) = J(i, j, t, Ts)
(12)
Il risultato ottenibile con l’impiego della precedente relazione per una porzione di rotaia di Fig. 3,
viene riportato in Fig. 4. Tale codifica binaria viene opportunamente affinata sulla scorta di alcune
operazioni di morfologia binaria. Infatti, da un attento esame della Figura 4 si evince che la
selezione binaria che si è ottenuta presenta all’interno delle cavità che non consentono di ottenere
un oggetto binario o blobs (binary large object) costituito da pixels vicini e connessi; pertanto è
necessario applicare su essa alcune operazioni morfologiche (J. Serra 1982) che permettono di
modificare l'originaria informazione ottenendo la matrice BW che viene rappresentata nella Figura7
relativamente all’intera immagine della rotaia, nella quale, chiaramente si evince una piena
connettività tra pixel vicini.
y
x
Fig. 7. Chiusura morfologica
immagine rotaia
Fig. 8. Sistema di riferimento perla
misura dell’usura per rotaie a gola
Fig. 9. Sistema di riferimento
per rotaie UIC
2.1 Determinazione delle caratteristiche geometriche di interesse
Per le finalità della presente ricerca, si è ulteriormente proceduto alla determinazione di alcune
grandezze geometriche caratterizzanti la forma dell’oggetto binario in precedenza determinato. Il
metodo più diffuso per ottenere la codifica del bordo di un oggetto binario è comunemente noto
come “chaincode” e consiste nella memorizzazione di una lista di punti (senza informazioni di
colore ma solo di posizione) e fu originariamente proposto da Freeman (Freeman, 1961). Una
volta identificate le coordinate di un punto della frontiera dell’oggetto (generalmente il più in alto e il
più a sinistra), il punto successivo viene individuato solo in base alla direzione da seguire che
collega i baricentri dei pixel (Trouillot, et al, 2008). Dunque una volta individuato il blobs (binary
large object) e le coordinate del suo contorno è possibile calcolare il centroide (M) che rappresenta
il centro delle masse (center of gravity).
Pertanto è stata ottenuta la posizione del centroide (xoj, yoj) della rotaia usurata e tutte le
coordinate del suo contorno, con l‘algoritmo di Freeman partendo dal risultato formalizzato dalla
relazione (11) e dalla relazione (12) mediante operazioni di chiusura morfologica (cfr. Fig.7). Le
coordinate del contorno vengono raccolte dal vettore Ru (rotaia usurata) di dimensioni [n x 2], dove
n è il numero delle ascisse cartesiane del bordo. In seguito, l’algoritmo acquisisce le coordinate del
profilo della rotaia non usurata e le riporta nella stessa scala dell’immagine precedentemente
determinata. Tali coordinate sono appositamente registrate in un vettore Ri (rotaia integra) di
dimensione [kx2] dove k rappresenta il numero delle ascisse discrete che ne individuano il
contorno della rotaia integra. Per ottenere lo scostamento tra il profilo della rotaia usurata rispetto a
quella non usurata, nel caso delle rotaie UIC 60, si è costruito un profilo ausiliario ottenuto
scalando il precedente Ri di un termine costante pari a: 1,3 (Rg) ottenendo in tal maniera una
frontiera perfettamente omotetica rispetto al profilo avente coordinate contenute nel vettore Ri (si
veda a tal proposito la Figura 9).
Le distanze tra i due profili sono state misurate lungo le intercette tra le rette condotte dal centroide
del profilo Ri, rispetto alla frontiera Rg. La procedura è in grado di ricavare gli scostamenti tra i due
profili a confronto (usurato e non) relativamente ad una rotazione di 360° della retta uscente dal
centroide della rotaia e, pertanto, restituisce in output informazioni sullo stato di usura dell‘intero
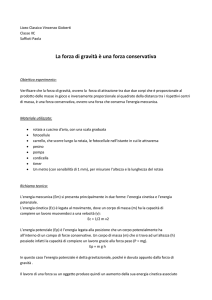
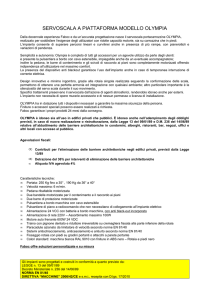
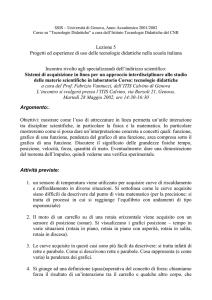
profilo della rotaia. In Figura 10 e 11 viene mostrato il risultato finale ottenibile dall’applicazione
dell’algoritmo proposto, relativamente alla porzione del fungo che si colloca tra un angolo ““
compreso tra 20° e 160°. Ovviamente è possibile ricavare anche i valori di usura verticale, a 45°
ed orizzontale, così come ad esempio richiesto in Italia da Rete Ferroviaria Italiana (RFI, 2002).
Diagramma Usura rotatia UIC 60
Angolo
20
25
30
35
40
45
50
55
0,1
Usura fungo rotaia [mm]
-6E-16
-0,1
-0,2
-0,3
-0,4
-0,5
calculated values
Interpolated data
-0,6
Fig. 10. Usura rotaie UIC 60 ( = 20°-70°)
60
65
70
Diagramma Usura rotaia UIC 60
Angle
110
115
120
125
130
135
140
145
150
155
160
0,1
Usura fungo rotaia [mm]
-6E-16
calculated values
-0,1
interpolated data
-0,2
-0,3
-0,4
-0,5
-0,6
Fig. 11. Usura rotaie UIC 60 ( = 110°-160°)
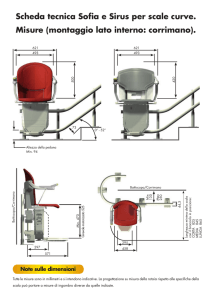
Con analogo approccio metodologico è stato ricavato il diagramma dell’usura delle rotaie a gola di
Fig. 12, nel sistema di riferimento (x; y), rappresentato in Fig. 8.
Usura rotia a gola
x [mm]
0
20
40
60
80
100
120
Usura estradosso rotaia [mm]
0
-0,1
-0,2
-0,3
-0,4
-0,5
calculated values
interpolated data
-0,6
Fig. 12. Usura rotaie a gola
3. Approccio stereoscopico per la stima dell’usura
La stereoscopia (Hartley et. al., 2003; Zhang, 1998; Faugeras, 1993; Hartley et. al., 2000), si basa
sull’analisi di immagini scattate da due telecamere poste ad una certa distanza l’una dall’altra: una
stessa scena produce quindi due distinte immagini lievemente diverse tra loro, in cui gli stessi
oggetti appaiono con dei leggeri spostamenti relativi, come è schematizzato in figura 13 (le
telecamere sono separate da una base orizzontale detta ”baseline”). E’ importante, per
semplificare le elaborazioni, che le due telecamere siano dotate di lenti con la stessa lunghezza
focale e che i sensori abbiano pixel della stessa dimensione. In più, poiché per la presente
applicazione la scena con cui si lavora non contiene degli oggetti in movimento, non è
indispensabile che l’acquisizione da parte delle due telecamere sia sincronizzata viceversa ciò si
rende necessario nelle applicazioni stereo in realtime ove nella scena si debbano inseguire degli
oggetti in movimento). Un parametro molto importante è la distanza tra le telecamere (baseline),
che può essere fissa o variabile. Questo valore influenza l’ambito di applicazione, per esempio
baseline più larghe permettono una migliore risoluzione di distanza. Infatti, essendo la risoluzione
di distanza pari alla distanza minima che il sistema stereo riesce a distinguere, l’algoritmo stereo
non è altro che una procedura di triangolazione, ne deriva che la risoluzione peggiora con la
distanza dalle telecamere. Pertanto, avere una risoluzione migliore permette di distinguere meglio
differenze di posizione quando gli oggetti si trovano lontani dalla telecamera. Le immagini acquisite
dal sistema di visione stereo hanno punti di vista leggermente diversi; sfruttando la differente
posizione degli oggetti nelle due immagini si può risalire alla profondità. Se si considera un punto P
appartenente alla scena, si nota che sulle due immagini destra e sinistra esso viene rappresentato
in due posizioni diverse I1 ed I2. Chiamate u1 e u2 le distanze tra queste posizioni e gli assi ottici
delle telecamere, la differenza u1 − u2 rappresenta la disparità (vedi Figg. 14 e 15).
Fig. 13. Immagine delle rotaia ripresa
dalle due telecamere (immagine rossa ed azzurra)
Riuscendo a mettere in corrispondenza ogni pixel dell’immagine di sinistra con uno dell’immagine
di destra si può costruire l’immagine di disparità (Kanade et al., 1994; Marr et. al, 1976) contenente
le informazioni di profondità ricavate. A causa della diversa area di copertura della scena offerta
dalle due telecamere, l’immagine di disparità conterrà informazioni solo per l’area in cui sono
presenti dati provenienti da entrambe le telecamere. Pertanto, oltre alle aree non coperte da una
delle due immagini, anche in altre porzioni della scena potrebbe essere impossibile determinare la
disparità. In generale, quindi, l’immagine di disparità calcolata in contesti reali non contiene dati su
tutti i punti visibili alle due telecamere. Per la presente applicazione si ritiene indispensabile ritrarre
l'oggetto, di cui si vuole indagare sulla terza dimensione, in maniera che la zona di
sovrapposizione sia maggiore ove si vuole ricavare la profondità.
Fig.14. Le proiezioni I1 e I2 di un
punto P sulle due immagini.
Fig.15. Immagine di “disparità” della
rotaia
Fig.16. Riferimenti dello
spazio 3D e delle
immagini
3.1 Le corrispondenze
Nella costruzione dell’immagine di disparità (Kanade et al., 1994; Marr et. al, 1976) il primo
problema che si presenta è quello della corrispondenza, cioè la ricerca della proiezione di uno
stesso punto fisico nelle due immagini (ricerca del matchingpoint). Questo problema viene
affrontato con metodi globali o locali. Con i metodi locali una delle due immagini viene analizzata
per trovare la corrispondenza con una piccola regione proveniente dall’altra immagine.
Questa analisi avviene basandosi su caratteristiche come angoli o segmenti rettilinei (nei metodi
feature based), o tramite operatori di correlazione (nel caso dei metodi area based). I metodi
globali integrano i metodi locali con informazioni generali, come la continuità delle superfici o la
presenza di particolari tessiture (texture) nella scena. Ogni metodo per la ricerca di corrispondenze
ha caratteristiche che lo rendono più adeguato ad alcuni contesti. I metodi feature based, ad
esempio, operano meglio all’interno di edifici, dove l’ambiente contiene una grande quantità di
superfici rettilinee, mentre con tecniche area based la gamma di situazioni che si possono trattare
è molto più ampia. La stima corretta e veloce delle disparità è un problema difficile. I problemi
principali, che possono portare ad associare erroneamente due punti non corrispondenti sono
causati da:
- occlusioni: le telecamere si trovano in posizioni diverse, quindi è possibile che alcuni oggetti
siano visibili solo in una delle due immagini, o ne sia visibile solo una parte;
- distorsione: a causa della proiezione prospettica, lo stesso oggetto può essere proiettato in
modo diverso nelle due immagini
- parametri diversi delle due telecamere: se una delle telecamere non è a fuoco sulla stessa
distanza dell’altra, o se l’apertura del diaframma è diversa, i punti corrispondenti hanno
caratteristiche diverse nelle due immagini;
- riflessioni speculari;
- rumore dei sensori.
Nel presente studio è stato implementato un algoritmo che tenendo conto sia della continuità della
superficie della rotaia che della sua tessitura colorimetrica superficiale uniforme, ricerca per mutua
correlazione, con finestra di dimensioni costanti e pari 11 righe e 11colonne, le corrispondenze tra
l'immagine left e right.
3.2 La calibrazione
In un ambiente ideale le telecamere di una testa stereo rispondono al modello pinhole, hanno
esattamente la stessa lunghezza focale e assi ottici paralleli. Purtroppo nella realtà le lenti
introducono delle distorsioni, possono avere lunghezze focali diverse e assi ottici disallineati.
L’obiettivo della calibrazione (Hartley et al., 2000; Faugeras, 1993; Tsai, 1987) è determinare due
insiemi di parametri, intrinseci ed estrinseci, che compensino l’imperfezione della testa stereo. I
parametri intrinseci correggono la distorsione delle lenti e la differenza di lunghezza focale, mentre
quelli estrinseci determinano l’offset spaziale delle due telecamere, compresa la distanza tra esse
e la deviazione dal parallelismo degli assi ottici. Attraverso questi parametri è possibile trasformare
le immagini acquisite in immagini “ideali”, come sarebbero quelle viste da telecamere pinhole con
assi ottici paralleli.
3.3 Proiezione e riproiezione.
Conoscendo i parametri di calibrazione, è possibile analizzare in maggior dettaglio le operazioni
che permettono di passare da una scena tridimensionale alle immagini destra e sinistra e
dall’immagine di disparità ad una ricostruzione 3D, (Hartley, 1995). La matrice di proiezione P
trasforma le coordinate 3D nelle coordinate delle immagini ideali. I sistemi di riferimento vengono
scelti in modo da rendere più semplici i calcoli e sono raffigurati in Figura 15 (in genere, i sistemi di
rifermento dello spazio 3D e delle immagini sono scelti in modo da avere l’asse X parallelo all’asse
u e Y parallelo a v. L’asse Z è perpendicolare alle immagini). Esiste una matrice di proiezione per
la telecamera sinistra ed una per la telecamera destra. Conoscendole, è possibile proiettare un
punto di coordinate [X Y Z]T, rappresentato in coordinate omogenee [X Y Z 1]T , nelle coordinate [u
v]T dell’immagine, tramite la seguente moltiplicazione matriciale:
=
= 0
0
(13)
1
0
0
1
−
0
0
(14)
Nella matrice P sono contenuti i valori ottenuti dalle procedure di calibrazione, in particolare la
lunghezza focale (Fx e Fy, in pixel), le coordinate del centro ottico (Cx e Cy, in pixel), la traslazione
rispetto alla telecamera sinistra (Tx, in mm, per la matrice relativa all’immagine sinistra vale 0) e le
coordinate del punto nell’immagine ideale sono [u/w v/w]T. La matrice di riproiezione Q permette,
viceversa, di ottenere le coordinate spaziale di un punto, ammesso che la disparità sia nota:
=
1
⎡0
⎢
= ⎢0
⎢
⎣0
(15)
1
0
1
0
0
0
0
0
−
−
⎤
⎥
⎥
⎥
⎦
(16)
I valori contenuti nella matrice Q rispecchiano quelli della matrice P per l’immagine sinistra, tranne
Cx', che viene estratto dalla matrice dell’immagine destra. Le coordinate del punto riproiettato
valgono dunque [X/W Y/W Z/W]T. Le seguenti figure 17 e 18 mostrano la ricostruzione 3D della
rotaia UIC 60 in esame, a partire dalla quale è possibili misurarne l’usura e pervenire a grafici del
tutto analoghi a quelli riportati in Figura 11 e 12.
Fig.17. Immagine 3D
Fig. 18. Ingrandimento dell’immagine 3D del fungo della rotaia
4. Conclusioni
Il controllo dello stato di usura della rotaie costituisce uno dei principali cardini per garantire un
adeguato livello di sicurezza del sistema di trasporto tranviario e ferroviario. Nel presente lavoro è
stata esaminata una nuova procedura per la determinazione dell’usura delle rotaie, basata sulla
tecnica dell’image processing. Il metodo, fondato sull’analisi di immagini fotografiche ad alta
risoluzione, ha richiesto l’ideazione e la successiva implementazione di specifici algoritmi
matematici atti a fornire la geometria della sezione trasversale di una generica rotaia usurata e la
misura dei relativi scostamenti rispetto a rotaie nuove della medesima tipologia. Lo studio ha
riguardato due differenti modalità di analisi: quella monoscopica (basata sull’impiego di immagini
originate da una sola telecamera) che può essere impiegata per le sole analisi in laboratorio, in
quanto necessita di foto della sezione trasversale della rotaia e quella stereoscopica (ottenuta con
l’impiego di due telecamere accoppiate) che, diversamente dalla prima, potrebbe essere impiegata
anche per le attività di monitoraggio del binario effettuata mediante treni diagnostici. I risultati
ottenuti evidenziano che entrambe le procedure presentano elevata precisione nella stima
dell’usura (e al contempo offrono una buona velocità di analisi) come è emerso dalle indagini di
laboratorio effettuate su rotaie UIC 60 e su rotaie a gola. In definitiva, le considerazioni d’analisi
svolte nello studio possono trovare applicazione anche nei processi e nei protocolli manutentivi per
le rotaie tranviarie in analogia a quanto sviluppato per la diagnostica predittiva riguardante le reti
ferroviarie ordinarie (Corriere, et al., 2012).
Bibliografia
[1] TCRP Report 71 (2005). Track-Related Research Volume 5:Flange Climb Derailment
Criteriaand Wheel/Rail Profile Management and Maintenance Guidelines for Transit
Operations. TRB, Washington, D.C.
[2] Nadal, M. J (no date). Locomotives a Vapeur. Collection Encyclopedie Scientifique, Biblioteque
de Mecanique Appliqueeet Genie, Vol. 186, Paris, France.
[3] Esveld, C. (2001). Modern Railway Track-Second Edition. MRT Productions.
[4] Alippi C., Casagrande E., Scotti F. and Piuri V. (2000). Composite Real-Time Image Processing
for Railways Track Profile Measurement. IEEE Transactions on instrumentation and
measurement, Vol. 49, NO. 3.
[5] Guerrieri M., Parla G. and Ticali D. (2012). Image analysis for detecting the transverse profile
of worn-out rails. GSTF Journal on Computing (JoC), Vol. 2, n. 1, Print ISSN: 2010-2283, Eperiodical: 2251-3043.
[6] Guerrieri M., Parla G. and Ticali D. (2012). A theoretical and experimental approach to
reconstructing the transverse profile of worn-out rails. Ingegneria Ferroviaria , January 2012,
(pp. 23-37), ISSN: 0020-0956.
[7] Canny J. (1986). A computational approach to edge detection. PAMI(8), No. 6, (pp. 679698).
[8] Gonzales R.C., Woods R. E. (2002). Digital Image Processing 2nd ed. Prentice Hall, Upper
Saddle River, New Jersey.
[9] Gonzales R.C., Woods R.E, Eddins S.L. (2004). Digital image processing using Matlab.
Prentice Hall, Upper Saddle River (New Jersey).
[10] Serra J. (1982). Image analysis and mathematical morphology. London, Academic Press.
[11] Freeman, H., (1961). Computer Processing of Line Drawing Images. Computing Surveys.
6(1):57-97.
[12] TrouillotX., JourlinM. and J.C. Pinoli (2008). Geometric parameters computation with freeman
code. Submitted to Image anal stereol, 6 pages.
[13] RFI (2002). Procedura operativa subdirezionale DMAIMSD P0 IFS 002 0 del 16.01.02, Rilievi
della geometria del binario e relative disposizioni manutentive, Rete Ferroviaria Italiana.
[14] Hartley R., Zisserman A. (2003). Multiple View Geometry in Computer Vision 2nd edition.
Cambridge University Press, 2003.
[15] Hartley R., Zisserman A. (2000). Multiple View geometry in Computer Vision. Cambridge
University Press, 2000.
[16] Faugeras O. (1993). Three-Dimentional Computer Vision. MIT Press, Cambridge, MA (pp. 3368).
[17] Zhang Z. (1998). Determining the epipolar geometry and its uncertainty: A review.
International Journal of Computer Vision, 27(2), (pp. 161-195).
[18] Kanade T., Okutomi M. (1994). A stereo matching algorithm with an adaptive window: Theory
and experiments. IEEE Transactions on Pattern Analysis and Machine Intelligence, 16(9),
(pp- 920-932).
[19] Marr D., Poggio T. (1976). Cooperative computation of stereo disparity. Science,194, (pp 283287).
[20] Tsai R. Y. (1987). A Versatile Camera Calibration Technique for 3D Machine Vision. IEEE J.
Robotics&Automation, RA-3, No. 4, (pp. 323-344).
[21] Hartley R. I., Sturn P. (1995). Triangulation. ARPA Image Understanding Workshop, Prague,
Czech Republic.
[22] Guerrieri M., Parla G., Ticali D. (2012). Mono and stereoscopic image analysis for detecting
the transverse profile of worn-out rails, Procedia - Social and Behavioral Sciences, Volume
53, 3 October 2012, Pages 611-621, ISSN: 1877-0428.
[23] Corriere F., Di Vincenzo D. (2012). The Rail Quality Index as an indicator of the “Global
Comfort” in optimizing Safety, Quality and Efficiency in Railway Rails. Procedia - Social and
Behavioral Sciences. Volume 53, 3 October 2012, Pages 1089-1098, ISSN: 1877-0428.