CAPITOLO TERZO
Progettazione e Simulazioni del generatore sincrono a MP
3.1 Introduzione
I fattori che hanno portato alla progettazione del generatore sincrono a magneti permanenti, da accoppiare a turbine eoliche ad asse verticale, sono da ricercarsi nella necessità di soddisfare, dal punto di vista energetico, numerosissimi siti
remoti e cascine isolate non raggiunti dalla rete di distribuzione di energia elettrica
ed inoltre, favorire la penetrazione di questo prodotto anche in ambiti che non
siano solo quelli rurali. Ovviamente affinché tali turbine possano soddisfare la richiesta di mercato è necessario che esse presentino delle caratteristiche tali da poterle rendere appetibili soprattutto all’utente comune. Si ritiene infatti che esse
debbano essere facili da installare, semplici da manutenere ed estremamente efficienti affinché possano produrre sufficiente energia durante l’anno anche nei siti
in cui la velocità media del vento è relativamente bassa.
La turbina scelta per la progettazione del generatore sincrono oggetto del presente capitolo è del tipo ad asse verticale, modello GEOL 2, prodotta dall’azienda
Newtak S.r.l. di Napoli (Italia) avente una potenza nominale di picco pari a 2 kW.
In base alle caratteristiche tecniche di tale turbina si è proceduto al dimensionamento del generatore sincrono a MP avente una potenza nominale di 2 kW.
Successivamente si sono effettuate delle simulazioni del generatore, oggetto
dello studio, utilizzando il software FEMM, risolvendo il problema della deter-
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
minazione della configurazione del campo di induzione magnetica all’interno della macchina, cosa difficilmente determinabile con i tradizionali metodi analitici vista la complessità geometrica della macchina.
Dai risultati ottenuti dalle simulazioni effettuate, è stato possibile analizzare la
presenza o meno di effetti di saturazione in regioni del circuito magnetico della
macchina.
3.2 Dimensionamento di massima del generatore da 2 kW
Il generatore tipo, a magneti permanenti multipolare, per la potenza nominale di 2 kW ha delle dimensioni geometriche stabilite in funzione della coppia specifica k, parametro che risulta di fondamentale conoscenza per il dimensionamento della macchina elettrica.
Definendo con p il numero di coppie polari, con c la coppia specifica per
dato numero di poli e per data lunghezza di una macchina sincrona a magneti
permanenti al NdFeB e con l la lunghezza assiale dello statore e del rotore, si
è valutata la coppia specifica k della macchina presa come riferimento:
∙
(1)
I suddetti dati sono stati estrapolati dal lavoro svolto in [13]. Nella fattispecie la coppia specifica c è pari a 3,29 Nm, le coppie polari sono 3 e la lunghezza assiale della macchina è di 59 mm. Pertanto la coppia specifica vale:
,
∙, (2)
Si è proceduto alla valutazione della coppia nominale, C, della macchina da
progettare, definendo con P la potenza nominale della macchina e con n la
velocità meccanica espressa in giri/1’.
32
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
∙
[
]
∙∙
(3)
Considerando un generatore con potenza nominale di 2 kW e velocità
meccanica pari a 180 giri/1’, parametro fornito dalle caratteristiche tecniche
della turbina considerata, la macchina dovrà sviluppare una corrispondente
coppia pari a:
∙
= ∙
,![
]
(4)
Dato che, per esigenze realizzative legate al tipo di avvolgimento statorico,
il numero delle coppie polari deve essere un numero intero e dispari, si è proceduto, variando il valore della frequenza f all’interno di un range prossimo ai
50 Hz, alla determinazione della lunghezza assiale l che deve presentare il generatore da progettare.
Ω
f
p
[giri/1’]
[Hz]
180
~50
≅ 16
180
60
20
180
63
21
180
70
23
Tabella 3.1 La tabella mostra il valore della frequenza e il numero di coppie polari per data velocità.
In particolar modo, come evidenziato in tabella 3.1, per data velocità si è fissata la frequenza a 63 Hz a cui corrispondono 21 coppie polari, dunque la
lunghezza assiale l del generatore vale:
)
(*∙[
]
(5)
Da cui si ottiene:
,
(,∙
+
,,+[
]
(6)
È pertanto possibile, a questo punto, determinare le principali dimensioni del
generatore elettrico, ma non prima di aver dato alcuni cenni sulla macchina elet33
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
trica di riferimento considerata per la progettazione del generatore eolico, oggetto
di questa tesi.
Si è ipotizzato di prendere come base per la progettazione il dimensionamento
elettromagnetico di una macchina sincrona a MP sviluppato in [13]. Di seguito
sono riportati alcune informazioni della macchina presa come riferimento dalla
quale sono stati estratti i principali parametri per la progettazione del generatore
elettrico.
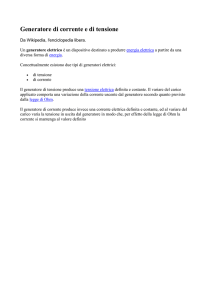
La macchina elettrica a magneti permanenti, presa in esame, è il risultato
dell’ottimizzazione di una macchina del tipo BLQ 40 prodotta dalla ditta Magnetic
s.p.a. di Vicenza (Italia). Essa è del tipo IPMS (Interior Permanent Magnet
Synchronous) avente tre coppie polari montate secondo la geometria riportata in
figura 3.1:
Figura 3.1
Sezione trasversale della macchina IPMS ottimizzata.
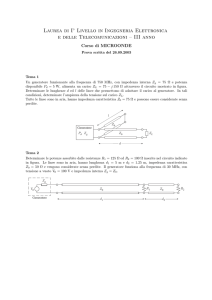
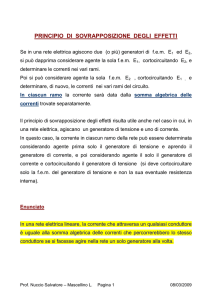
La figura 3.2, sottostante, riporta la sezione di un settore angolare della macchina IPMS con le definizioni delle diverse parti costituenti il rotore.
34
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
Figura 3.2
Settore angolare della configurazione rotorica della macchina sincrona a MP di riferimento.
Dalla figura 3.2 si evidenzia che il rotore presenta delle cavità contenenti i magneti permanenti disposti all’interno della struttura rotorica in modo tale da determinare una direzione di magnetizzazione sia radiale che tangenziale. Tra i magneti permanenti sono presenti dei vincoli in alluminio che hanno un duplice
compito: quello di sostenere i magneti permanenti e quello di costituire delle barriere di flusso in modo da poter limitare, per quanto possibile, il flusso disperso.
I parametri e valori nominali della macchina di riferimento sono elencati nella
tabella 3.2.
Parametri
Valori nominali
Velocità nominale
4000 [giri/1’]1
Corrente nominale (valore efficace)
3,6 [A]
Tensione nominale di fase (valore efficace)
77 [V]
Coppia nominale
1,8 [Nm]
Numero di poli
6
Tab. 3.2 Parametri e valori nominali della macchina IPMS
1
Si è scelto di indicare la velocità di rotazione dell’IPMS in giri/1’ anziché in rad/s.
35
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
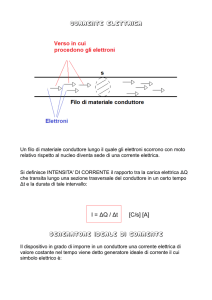
In figura 3.3 è riportato un settore angolare della macchina di riferimento:
Figura 3.3
settore angolare della macchina elettrica presa come riferimento.
Le caratteristiche geometriche, con riferimento alla figura 3.3 sono riportate
nella tabella 3.3 seguente [13]:
Identificazione delle grandezze
Valori
Diametro esterno dello statore Dos
81 [mm]
Diametro interno dello statore Dis
49,6 [mm]
Diametro esterno del pacco lamellare rotorico Dor
48,8 [mm]
Diametro interno del pacco lamellare rotorico Dir
18,4573 [mm]
Lunghezza assiale del rotore e dello statore
59 [mm]
Spessore del traferro Wt
0,4 [mm]
Profondità di cava Lc
9,2126 [mm]
Larghezza della cava in mezzeria Wc
4,05 [mm]
Diametro dei fori per le viti statoriche Dfs
2 [mm]
Passo di cava τcava
5,67 [mm]
Tabella 3.3 Caratteristiche geometriche della macchina IPMS.
36
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
La macchina di riferimento presenta un diametro esterno del rotore Dor di
48,8 mm e un traferro di 0,4 mm, come mostrato in tab. 3.2. Pertanto il relativo
passo polare “τ” è:
∙0,
./
τ∙
+,,,,[
]
∙
(7)
Ipotizzando il passo polare della generatrice pari a quello della macchina di riferimento si ottiene una circonferenza media al traferro “Ct” determinata
dall’espressione seguente:
)1 2∙3∙2∙,∙24,[55]
(8)
Con l’espressione (8), conoscendo il passo di cava τcava pari a 5,67 mm, si
è proceduto al calcolo del numero di cave statoriche della macchina :
63
)1
787
4,
2,≅
,4
(9)
Infine, si è ricavato il numero di cave per polo e per fase q, avendo indicato con p il numero di coppie polari e con m il numero di fasi che presenta
l’avvolgimento considerato della macchina:
:
9∙∙5∙∙
,,
(10)
Il numero di cave per polo e per fase q risulta essere un numero frazionario, questo ha portato all’ipotesi realizzativa di un’avvolgimento statorico di
tipo a doppio strato.
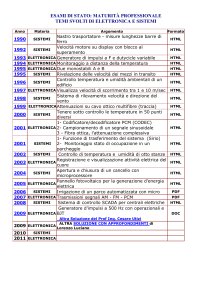
Lo schema di avvolgimento riportato nella figura 3.4 si riferisce a tre coppie di poli.
37
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
Figura 3.4
Sezione dell’avvolgimento statorico riferita a tre coppie polari.
La figura 3.5 mostra il modello tridimensionale, realizzato con il software
di modellazione 3D2, della macchina risultante dal dimensionamento elettromeccanico prima effettuato:
Figura 3.5 Struttura tridimensionale del generatore sincrono progettato.
2
Il Software di modellazione 3D utilizzato è Google Sketchup Pro 6.
38
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
3.3 Strutture magnetiche e meccaniche del generatore
Parti magnetiche e meccaniche costituenti lo statore.
Il nucleo magnetico dello statore, come quello del rotore, è realizzato in ferro
laminato formato da lamierini magnetici allo scopo di ridurre le perdite per isteresi, con uno spessore di 0,5 mm, e con un fattore di laminazione pari a 0,95; il piano di laminazione è perpendicolare all’asse della macchina. La permeabilità magnetica relativa del flusso nella zona lineare è pari a µr =14872 e la conducibilità
elettrica vale σ =10,44 MS/m.
Per contenere le perdite che si verificano nel ferro, in relazione alla frequenza
di lavoro, i lamierini sono isolati con vernice su ambo i lati. Essi, in aggiunta, sono realizzati in ferro con piccole percentuali di silicio che riduce le perdite per
isteresi magnetica e per correnti parassite [6]. Le cave, realizzate nella periferia interna dello statore, sono di forma trapezoidale semichiuse con denti rettangolari a
fondo di forma semicircolare3, nelle quali è alloggiato l’avvolgimento statorico
[14] [15].
La curva normale di magnetizzazione del materiale ferromagnetico, utilizzato
per la realizzazione del nucleo statorico, è rappresentata nella figura 3.6.
3 Si preferisce realizzare un fondo semicircolare per determinare una maggiore facilità di sistemazione
dei conduttori e per aumentare la resistenza necessaria delle strutture magnetiche.
39
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
Figura 3.6 Curva normale di magnetizzazione del materiale costituente il nucleo statorico.
Avvolgimento di statore.
L’avvolgimento di statore, di tipo trifase a doppio strato e con passo raccorciato4, è costituito da tre sezioni di avvolgimento, una per ogni fase. Ogni sezione
è costituita da più bobine di filo di rame isolato avente conducibilità elettrica
σ =58 MS/m e permeabilità magnetica relativa µr≅1.
La figura 3.7 mostra lo schema di massima di un settore angolare dello statore
della generatrice in cui è alloggiato l’avvolgimento statorico.
4
Sotto certe condizioni l’accorciamento del passo contribuisce a migliorare la forma della f.e.m..
40
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
Figura 3.7 Schema di massima di una sezione trasversa di un settore angolare dello statore della macchina.
Gli estremi delle tre fasi dell’avvolgimento vengono collegati fra loro a stella
per impedire la circolazione di correnti omopolari, e ognuna delle 7 zone di avvolgimento sono connesse in parallelo tra loro per limitare la tensione a 252,8 V e
ottenendo, di conseguenza, un’intensità di corrente di 25,2 A.
Parti magnetiche e meccaniche costituenti il rotore.
Si ipotizza di realizzare il nucleo magnetico del rotore con l’identico materiale
con cui si suppone di realizzare lo statore, cioè in ferro laminato.
All’intero della struttura rotorica trovano sede i magneti permanenti alle terre
rare al NdFeB tipo HS-40AV della casa costruttrice HITACHI, le cui caratteristiche magnetiche sono riassunte nella tabella 3.4 [9].
Materiale
Tipo
Induzione residua Br [T]
NdFeB
HS-40AV
1,24÷1,32
Tabella 3.4
Caratteristiche magnetiche del NdFeB HS-40AV.
41
Campo coercitivo Hc [kA/m]
Densità di
energia magnetica (BH)max
[kJ/m3]
923÷1035
286÷327
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
Il rotore, strutturalmente, presenta una forma ad anello sorretto da una struttura di supporto, in alluminio con tre razze, al fine di limitare l’inerzia e il peso
dell’intero rotore. Per evitare l’insorgere di sforzi dannosi e pericolosi sull’intera
macchina, durante il montaggio, il supporto del rotore deve essere ben centrato
rispetto all’asse di rotazione e dovrà essere realizzato in modo molto accurato,
nonostante la bassa velocità di rotazione, evitando spigoli vivi poiché costituiscono un pericolo per la resistenza della struttura. Per quanto cura si ponga sulla
costruzione del rotore ben raramente si ottiene l’equilibratura perfetta delle masse. È necessario, pertanto, praticare dei fori nel pacco lamellare allo scopo di alleggerire la parte squilibrata la quale è individuata tramite apposite macchine equilibratrici [8].
Infine l’albero della macchina, realizzato in acciaio non legato C45, è stato dimensionato in modo da presentare un diametro minimo per il quale non si verifichino rotture. Le caratteristiche fisiche e meccaniche dell’albero sono riportate
nella tabella 3.4.
Modulo di
elasticità
alla flessione E
[N/mm2]
220000
Carico di
rottura alla
trazione
σr
[N/mm2]
Peso
specifico
p.sp
Coefficiente
di dilatazione termica
β
[kg/dm3] [mm/m/°C]
680
7,87
0,0108
Calore
specifico
c.sp
Temperatura
di fusione
Tfus
[kcal/kg]
[°C]
0,12
≈1500
Tabella 3.5 Proprietà fisiche e meccaniche dell’acciaio non legato C45 impiegato per la costruzione dell’albero.
Il collegamento tra il rotore e l’albero motore è effettuato per mezzo della
struttura di supporto di cui si è parlato come visibile nell’immagine tridimensionale di figura 3.5
Al fine di dare una visione completa e approfondita della macchina appena
dimensionata, si è ritenuto opportuno riassumere i parametri e valori nominali
della macchina nella tabella 3.6:
42
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
Identificazione delle grandezze
Valori
Diametro esterno dello statore Dos
373,38 [mm]
Diametro interno dello statore Dis
341,98 [mm]
Diametro esterno del pacco lamellare rotorico Dor
341,18 [mm]
Diametro interno del pacco lamellare rotorico Dir
37 [mm]
Lunghezza assiale del rotore e dello statore
265,92 [mm]
Spessore del traferro Wt
0,4 [mm]
Profondità di cava Lc
9,21 [mm]
Larghezza della cava in mezzeria Wc
3,27 [mm]
Diametro dei fori per le viti statoriche Dfs
2 [mm]
Velocità nominale
180 [giri/1’]5
Corrente nominale
25,2 [A]
Tensione nominale
252,8 [V]
Coppia nominale
106,10 [Nm]
Numero di poli
42
Tabella 3.6 Caratteristiche geometriche ed elettriche del generatore progettato.
5
Si è scelto di indicare la velocità di rotazione dell’IPMS in giri/1’ anziché in rad/s.
43
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
3.4
Il software di simulazione FEMM
A causa della complessità della configurazione elettromagnetica e geometrica
della generatrice non è possibile procedere allo studio quantitativo della macchina
con metodi analitici tradizionali. Da qui l’esigenza di un approccio tramite il metodo agli elementi finiti che, suddividendo la struttura in un certo numero di elementi semplici (appunto elementi finiti), risolve il problema della determinazione
della configurazione del campo di induzione magnetica all’interno della macchina.
Si è utilizzato il software “FEMM 4.2” (Finite Element Method Magnetics), esso
permette il calcolo per la determinazione dei campi elettrici e magnetici in bassa
frequenza in due dimensioni. Inoltre, tale software, permette di effettuare uno
studio nel dominio “assisimmetrico” (simmetria per rotazione intorno ad un’asse,
simmetria cilindrica) o “planare” (direzione normale al piano, simmetria piana).
Il software permette di conoscere lo stato magnetico anche in condizioni non
lineari della macchina nonché di effettuare ottimizzazioni locali, impossibili da
tenere in conto con modelli di tipo analitico. Ciò permette l’opportunità di poter
ottimizzare la macchina quindi il livello prestazionale e individuarne le caratteristiche peculiari.
La modellizzazione a mezzo analisi FEMM prevede 3 fasi:
Prima fase, denominata “pre-processing”, essa consiste nel:
-
definire le caratteristiche del problema. In particolare si parla di analisi magnetostatica di tipo planare;
-
definire il modello geometrico della macchina, creato direttamente
attraverso FEMM editor, con autoCAD importando il relativo file
*.dxf oppure con un file *.lua di disegno;
-
definire i materiali costituenti il modello della macchina. Nello specifico occorre, oltre che scegliere i materiali, definire le loro caratte-
44
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
ristiche (conducibilità elettrica, permeabilità magnetica, ect.) e attribuire gli stessi alle diverse parti del modello in studio;
-
definire le condizioni al contorno, cioè associare alle linee di frontiera del modello le condizioni che il campo deve rispettare;
-
applicare le forzanti o i termini sorgenti.
Seconda fase, denominata “solution”, essa consiste nel calcolare la soluzione del problema. In questa fase il programma esegue i calcoli, risolvendo un sistema algebrico di equazioni e fornendo una soluzione
approssimata del potenziale vettoriale (o scalare) del campo induzione
magnetica B (o H) nei nodi degli elementi finiti in cui è stato suddiviso
il modello.
La terza e ultima fase, denominata “post-processing”, consiste
nell’analizzare, manipolare e visualizzare le soluzioni in termini di grandezze scalari e vettoriali. In particolare permette di visualizzare:
-
le mappe e i materiali delle diverse parti del modello;
-
le mappe del campo relativamente alla geometria del modello;
-
i valori degli integrali di superficie o di linea delle varie grandezze;
-
i grafici lungo linee definite dall’utente.
45
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
3.5 Le prove di simulazione del generatore
3.5.1 Prove di simulazione a vuoto
Seguendo la procedura illustrata nel precedente paragrafo, si effettua la simulazione su piattaforma FEMM caricando in essa il modello geometrico di figura
3.8 e assegnando le varie tipologie di materiali (richiamate nel paragrafo 3.3) ad
ogni parte della struttura in studio.
Figura 3.8 Settore angolare della macchina in simulazione.
Inoltre, si assegna la condizione al contorno di Dirichlet, la quale impone che il potenziale vettore A su un dominio circolare di raggio r0 sia nullo: detta condizione
non permette al flusso magnetico di attraversare il contorno su cui è stata imposta la suddetta condizione [12]. Nello specifico, il dominio circolare è rappresentato dal contorno del circuito magnetico del settore angolare di figura 3.8 (con
questa condizione si trascura sostanzialmente il flusso disperso alla macchina).
Invece, si assegna, ai contorni magnetici che sezionano la macchina, la condizione
46
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
al contorno di tipo mixed: detta condizione è applicata a regioni con confini aperti, dando la possibilità di simulare uno spazio aperto, cioè senza bordi, anche se il
calcolo avviene su uno spazio limitato.
Infine, dopo aver ripartito la geometria assegnata in elementi finiti di forma
triangolare (MESH), si è calcolata la soluzione del problema e questa è stata visualizzata graficamente in termini di linee del campo di induzione in una nuova
finestra di lavoro. Ecco cosa si ottiene nel caso specifico con il pulsantestrumento Run Mesh Generator:
Figura 3.9 Visualizzazione MESH delle regioni coperte dalla triangolazione.
Per il modello del generatore simulato si possono visualizzare i diagrammi riportati nelle figure successive relative alla condizione di funzionamento a vuoto.
47
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
Nello specifico si riportano:
la rappresentazione della distribuzione delle linee di forza del campo di
induzione magnetica B e dell’intensità di B (fig. 3.10).
Figura 3.10
Distribuzione delle linee di forza dell’induzione magnetica B e dell’intensità di B di un settore angolare del generatore con macchina a vuoto.
L’intensità dell’induzione magnetica B, nelle diverse regioni del modello, è
identificata mediante una distribuzione variabile di colori. La legenda riporta i diversi colori presenti nel modello ai quali sono associati i relativi range di variabilità di B.
48
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
la rappresentazione dell’intensità del campo magnetico H (fig. 3.11).
Figura 3.11 Intensità del campo magnetico H del generatore.
L’andamento del modulo dell’induzione magnetica B al traferro (fig. 3.12).
Figura 3.12 Andamento del modulo dell’induzione magnetica B al traferro del generatore a vuoto.
49
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
L’andamento della componente radiale dell’induzione magnetica B al traferro (fig. 3.13).
Figura 3.13 Andamento della componente radiale dell’induzione magnetica di B al traferro del generatore funzionante a vuoto.
L’andamento della componente tangenziale dell’induzione magnetica B al
traferro (fig.3.14).
Figura 3.14 Andamento della componente tangenziale di B al traferro del generatore funzionante a vuoto.
50
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
3.5.2 Prove di simulazione a carico
Per il modello del generatore simulato si possono visualizzare anche i diagrammi relativi al funzionamento a carico. Nelle figure successive si riportano
nello specifico:
la rappresentazione della distribuzione delle linee di forza del campo di
induzione magnetica B e dell’intensità di B (fig. 3.15).
Figura 3.15
Distribuzione delle linee di forza dell’induzione magnetica B e dell’intensità di B di un settore angolare del generatore con macchina funzionante a carico.
L’intensità dell’induzione magnetica B, nelle diverse regioni del modello, è
identificata mediante una distribuzione variabile di colori. La legenda riporta i diversi colori presenti nel modello ai quali sono associati i relativi range di variabilità di B.
51
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
La rappresentazione della densità di corrente J nelle varie sezioni
dell’avvolgimento (fig. 3.16).
Figura 3.16 Densità di corrente J nelle cave di un settore angolare del generatore.
L’andamento del modulo dell’induzione magnetica B al traferro (fig. 3.17).
Figura 3.17 Andamento del modulo dell’induzione magnetica B al traferro del generatore.
52
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
L’andamento della componente radiale dell’induzione magnetica B al traferro (fig. 3.18).
Figura 3.18 Andamento della componente radiale dell’induzione magnetica di B al traferro del generatore.
L’andamento della componente tangenziale dell’induzione magnetica B al
traferro (fig.3.19).
Figura 3.19 Andamento della componente tangenziale di B al traferro del generatore funzionante a carico.
53
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
3.6 Espressione della f.e.m. indotta
Per determinare il valore efficace della f.e.m. indotta del generatore si considera la seguente espressione:
E = 2,22 ∙ <= ∙ 2>∗ ∙ @
A ∙ BCDD ∙ EF ∙ GH
(13)
in cui:
<= ∙ 2>∗ ∙ @
A è il numero di conduttori relativi ad una zona di avvolgimento; in particolare:
o q= 1,5 è il numero di cave per polo e per fase;
o p* = 3 è il numero di coppie polari dell’avvolgimento base riportato
in figura 3.4;
o Nm = 20 è il numero di spire di una matassa;
BCDD = 1,6è il fattore di avvolgimento dell’avvolgimento preso in
esame (di figura 3.4) riferito alla tensione fase-fase;
EF flusso emanato da un polo, determinato per mezzo del software di
simulazione FEMM 4.2;
GH è la frequenza nominale.
Note le grandezze che compongono l’espressione (13), si ottiene il risultato
della f.e.m. indotta E:
E = 2,22 ∙ I1,5 ∙ 2 ∙ 3 ∙ 20K ∙ 1,6 ∙ 6,256 ∙ 10L! ∙ 63 = 252,8 [V] (14)
Molte delle armoniche indesiderate della f.e.m.i., provocate dalla non perfetta
distribuzione spaziale dell’induzione magnetica (vedi figura 3.14), sono attenuate
per il fatto che l’avvolgimento scelto è a cave frazionarie (q=1,5 numero di cave
per polo e per fase), il quale per sua natura contiene un fattore di raccorciamento
del passo diverso dall’unita (8/9) che determina una attenuazione, in particolare,
della 5a e della 7a armonica della f.e.m.i.. Il raccorciamento del passo di avvolgi54
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
mento contribuisce, infatti, a migliorare la non perfetta forma sinusoidale della
f.e.m. eliminando gli effetti determinati dalle componenti armoniche distorcenti
presenti nello sviluppo in serie di Fourier dell’onda del campo di induzione al traferro.
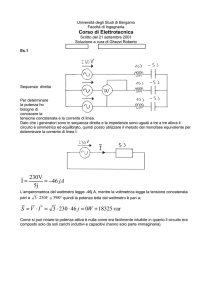
Nella figura 3.20 è riportato il risultato grafico dello spettro dell’avvolgimento
utilizzato e determinato mediante l’uso di un software di calcolo realizzato in ambiente MATLAB, in cui ν è l’ordine dell’armonica considerata, p è il numero di
coppie polari della macchina elettrica di riferimento ed è pari a tre, infine ν = p·ν’.
Figura 3.20
Analisi spettrale della f.e.m. indotta effettuata con il software MATLAB.
Lo spettro dell’avvolgimento, quindi, è riferito ad una lunghezza dell’onda
fondamentale pari a tre passi polari . Ne segue che l’armonica fondamentale della
forza elettromotrice da considerare nell’espressione (13) e nella (14) è quella di
ordine ν
=
p·ν’
=
3·1
=
3. Dal diagramma dell’analisi spettrale sopra riportato, si
evidenzia una ampiezza dell’onda fondamentale (3a) decisamente maggiore delle
armoniche di ordine superiore il che garantisce, quindi, una forma d’onda della
f.e.m. abbastanza “pulita”.
55
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
Riassumendo, nella successiva tabella 3.7 sono riportati i parametri e valori
nominali della macchina così dimensionata e progettata:
Parametri
Valori nominali
Velocità nominale
180 [giri/1’]6
Corrente nominale (valore efficace)
25,2 [A]
Tensione nominale
252,8 [V]
Frequenza nominale
63 [Hz]
Numero di poli
42
Tabella 3.7
Parametri e valori nominali del generatore progettato e dimensionato.
3.7 Analisi sul comportamento delle diverse zone del circuito magnetico
del modello simulato
Nella rappresentazione della distribuzione delle linee di forza del campo di induzione magnetica B e dell’intensità di B di figura 3.10, relativa al funzionamento
a vuoto del generatore a MP, si evidenzia una distribuzione delle linee di forza di
induzione magnetica B con valori variabili da 3,45.10-3 T a 1,96 T. L’induzione è
praticamente nulla nelle cave statoriche, in cui alloggia l’avvolgimento, ma chiaramente molto intensa nei denti. In generale si ha un comportamento lineare del
circuito magnetico del modello, l’induzione B presenta un valore di 1,96 T in corrispondenza di gruppi di 8 denti adiacenti per poi lasciarne uno “scarico” con valore di induzione magnetica praticamente nullo, il tutto ripetuto simmetricamente.
Il materiale ferromagnetico scelto, costituente la parte magnetica dello statore,
ha un comportamento pressoché lineare fino a 1,9 T circa, questo si evince dalla
curva normale di magnetizzazione del materiale ferromagnetico. Nella seguente
6
Si è scelto di indicare la velocità di rotazione del generatore in giri/1’ anziché in rad/s.
56
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
figura 3.21 è evidenziato il tratto lineare della curva normale di magnetizzazione
del materiale ferromagnetico nella zona in cui il campo intensità magnetica H è
molto basso.
Fig. 3.21
Tratto lineare della curva normale di magnetizzazione del materiale ferromagneti-
co nella zona di basso campo H.
Per quanto concerne la rappresentazione della distribuzione delle linee di forza
del campo di induzione magnetica B e dell’intensità di B di figura 3.15, relativa al
funzionamento a carico del generatore a MP, la situazione magnetica è abbastanza prossima a quella vista per il funzionamento a vuoto. In particolare, si evidenzia una distribuzione delle linee di forza di induzione magnetica B con valori variabili da 1,36.10-3 T nella zona in cui risiedono le cave, a 2,10 T nelle zone che interessano i denti.
Tra gli aspetti positivi di questo modello spicca l’assenza di tubicini di flusso
disperso dalla struttura del generatore. Le linee di induzione magnetica si richiudono attraversando un circuito magnetico costituito prevalentemente da ferro costituente il rotore e lo statore; in quest’ultima zona del circuito magnetico
l’induzione magnetica B presenta mediamente valore di 1 T identificando una zona con comportamento lineare (zona non satura).
57
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
In base a queste ultime affermazioni si può dire che il flusso disperso è stato
limitato, grazie ad un sapiente studio della struttura del generatore, sfruttando la
versatilità del programma di calcolo agli elementi finiti. In particolare è stato garantito un concatenamento quasi ottimale del flusso emanato da ciascun magnete
permanente costituente il rotore, determinando in ultima analisi la piena magnetizzazione della macchina.
Il massimo valore dell’induzione B al traferro, determinato con il software di
simulazione FEMM, si attesta intorno a 0,90 T.
58
Dott. Ing. A. Luce – Progettazione e Simulazioni del generatore sincrono a MP
Sommario
CAPITOLO TERZO ............................................................................................ 31
Progettazione e Simulazioni del generatore sincrono a MP .......................... 31
3.1 Introduzione ........................................................................................... 31
3.2 Dimensionamento di massima del generatore da 2 kW ............ 32
3.3 Strutture magnetiche e meccaniche del generatore .................... 39
3.4
Il software di simulazione FEMM .................................................. 44
3.5 Le prove di simulazione del generatore .......................................... 46
3.5.1 Prove di simulazione a vuoto .......................................................... 46
3.5.2 Prove di simulazione a carico ......................................................... 51
3.6 Espressione della f.e.m. indotta ........................................................ 54
3.7 Analisi sul comportamento delle diverse zone del circuito magnetico
del modello simulato ......................................................................................... 56
59