Capitolo 11
Retroazione e compensazione
11.1 Circuiti Retroazionati
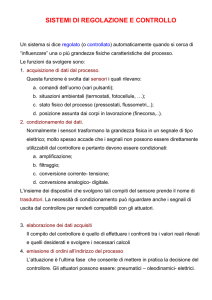
Un circuito retroazionato non è in generale riconducibile a semplice modello a singolo anello. Ciò nonostante la
schematizzazione di fig. 11.1 rappresenta molto bene le proprietà di un circuito retroazionato, su essa sarà basato lo studio
degli amplificatori retroazionati.
Si
Sε
+
a(s)
-
So
Sf
f(s)
Fig. 11.1
Schema a blocchi di un circuito retroazionato
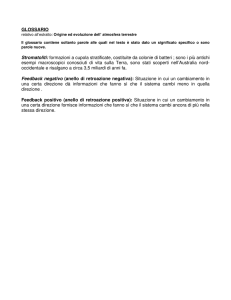
Nello schema di figura si possono identificare l’amplificatore ad anello aperto (o blocco d’andata) definito dalla
FdT a (s ) , la rete di retroazione definita dalla FdT f (s ) , il segnale d’ingresso S i , il segnale d’uscita S o , il segnale di
retroazione S f , ed infine il segnale errore Sε , dato dalla differenza di S i con S f . La FdT del guadagno d’anello, T (s)
e quella dell’amplificatore retroazionato, A(s) , sono dati da:
T ( s) = f ( s)a( s)
S
a( s)
a( s)
A( s ) = o =
=
S i 1 + f ( s ) a( s) 1 + T ( s )
(11.1)
(11.2)
Indipendentemente dal tipo di grandezza di prelievo e di controllo sussiste la seguente:
S o = S ε a ( s)
(11.3)
Se si considera l’amplificatore retroazionato in continua (cioè per s=0), si trova:
Sε = Si − S f =
So
a(0)
(11.4)
XI - 1
Retroazione e compensazione
Essendo a (0 ) un guadagno elevato, Sε è circa uguale a zero ed S f è uguale ad S i . Questo risultato esprime una
prima proprietà importante degli amplificatori retroazionati per cui se l’amplificatore ad anello aperto ha un guadagno
elevato, il segnale di retroazione è una replica del segnale d’ingresso, si vedrà più avanti che questa proprietà si traduce
anche nel concetto di corto circuito virtuale. Essa è valida non solo in continua ma per tutte le frequenze per le quali si può
supporre a( jω ) abbastanza grande da considerare uguale a zero il segnale errore.
Iε
Iε
a(s)
Vε
Vi
Fig. 11.2
Vε
Ii
+
-
a(s)
Zi
Vf
Zi
If
+
-
Confronto di tensioni
Fig. 11.3
Confronto di correnti
Si prenda in considerazione il caso in cui in ingresso si confronta una tensione, cioè S i = Vi , S f = V f ed Sε = Vε .
Come si vede in fig. 11.2, supponendo a (0)elevato,Vε = 0 , segue V i = V f e I ε = 0 , essendo l’impedenza d’ingresso finita.
Alla stessa situazione si arriva con lo schema semplificato di fig. 11.3, dove si è assunto S i = I i , S f = I f ed Sε = I ε . Con
a (0 ) grande, I ε = 0 , I i = I f e Vε = 0 essendo ancora una volta l’impedenza d’ingresso finita. In entrambe queste
situazioni i terminali d’ingresso sono in cortocircuito virtuale. Il cortocircuito virtuale non è quindi una prerogativa degli
amplificatori operazionali e nemmeno degli amplificatori di tensione, bensì esprime una proprietà generale degli
amplificatori retroazionati basati su un anello ad alto guadagno.
11.1.2 La funzione Sensitivity
Data una generica funzione Y dipendente da h parametri x1 , x 2 ,...x h :
Y = Y ( x1 , x2 ,...xh )
(11.5)
si può evidenziare la dipendenza funzionale di Y rispetto ad un generico parametro xi , a tal proposito si definisce la
funzione sensitivity della Y rispetto xi come:
S xYI =ˆ
∆Y Y
∆Y x i
=
∆xi xi ∆xi Y
(11.6)
Questa funzione valuta la variazione relativa della Y rispetto alla variazione relativa di xi ; se in particolare ∆xi → 0
si ha:
S xYI =
∂Y xi
∂xi Y
(11.7)
Alcune proprietà importanti dell’amplificatore retroazionato possono essere valutate attraverso il calcolo della
sensitivity di A( s) o a ( s ) . Si consideri la dipendenza di a ( s ) rispetto ad un generico parametro x cioè a = a ( s, x) quindi
anche A = A( s, x) , la sensitivity di A rispetto ad x sarà:
∂a
∂a
(1 + af ) − af ∂a x
∂
A
x
x ∂a x 1
1
∂x = ∂x
S xA =
= ∂x
=
= S xa
2
2
∂x A
A (1 + af ) A ∂x a 1 + af
1 + T ( s)
(1 + af )
XI - 2
(11.8)
Retroazione e compensazione
Se T >> 1 la S xA viene diminuita di un fattore T rispetto S xa da ciò si deduce un’importante proprietà dei circuiti
retroazionati, che è l’insensibilità rispetto alle variazioni parametriche.
La sensitivity di A( s) rispetto ad a ( s ) è data da:
S aA =
S aA =
∂A a
∂a A
[1 +
(11.9)
1
f ( s ) a ( s )]
2
1
1
a
=
≈
A 1 + T ( s) T (s)
(11.10)
Da quest’ultima equazione si nota che le variazioni indotte su a ( s ) dalle tolleranze di fabbricazione, dalla
temperatura, dalle imprecisioni del punto di lavoro, ecc., si ripercuotono su A attenuate di un fattore pari al guadagno
d’anello. Questa come già detto è una proprietà fondamentale degli amplificatori retroazionati che li rende particolarmente
adatti nell’implementazione di funzioni con elevata accuratezza.
D’altra parte la sensibilità rispetto alla rete di retroazione è:
S fA =
∂A( s ) f ( s )
a 2 (s)
f ( s)
f (s)a( s)
=−
=−
≈ −1
2
∂f ( s ) A( s )
(1 + f ( s)a (s) ) A( s) 1 + f (s)a( s)
(11.11)
Pertanto le variazioni cui è soggetta la rete di retroazione si ripercuotono con proporzionalità pari ad uno sulla FdT
dell’amplificatore retroazionato. A questo punto sembrerebbe che il problema dell’accuratezza uscito dalla porta rientri
dalla finestra. Anche la rete di retroazione, normalmente realizzata con componenti passivi, è soggetta, seppur in maniera
minore, alla dipendenza dalle tolleranze di fabbricazione, alla temperatura e alle non linearità, ed in realtà non è sempre
vero che basta far dipendere la FdT ad anello chiuso unicamente dalla rete di retroazione per ottenere un’elevata
accuratezza. Un esempio tipico in questo senso è l’integratore basato sull’amplificatore operazionale che, in una
realizzazione integrata., è soggetto ad un’elevata tolleranza (tipicamente 20-30%).
Esiste comunque una tecnica fondamentale per ottenere una FdT ad anello chiuso di elevata accuratezza che consiste
nel far dipendere la FdT, e quindi il fattore f della rete di retroazione, dal rapporto tra i valori dei componenti passivi
piuttosto che dal loro valore assoluto. Esempi molto noti di quest’approccio sono gli amplificatori invertenti e non
invertenti basati sull’amplificatore operazionale ed i circuiti a condensatore commutato. In entrambi questi casi la
precisione è legata alle tolleranze relative dei componenti passivi, che con una tipica tecnologia per circuiti integrati vanno
dall’1% (tolleranza relativa dei resistori integrati) allo 0.1% (tolleranza relativa dei condensatori integrati).
11.1.3 Segnali spuri lungo l’anello
E’ di notevole interesse pratico per chi progetta amplificatori retroazionati, conoscere l’effetto sulla variabile d’uscita
di una sorgente di rumore, di un offset, di una sorgente di distorsione e, più in generale, di un disturbo o segnale di errore di
qualsiasi natura, che viene iniettato in qualche punto dell’anello di retroazione. Per analizzare l’effetto di questi disturbi si
fa riferimento allo schema a blocchi di fig.11.1 riportato in fig.11.4 dove sono stati evidenziati i disturbi all’ingresso e
all’uscita del blocco d’andata e della rete di retroazione.
Snai
Si
Sε
+
+
-
Sf
a(s)
Snfo
+
Fig.11.4
Sna
So
+
Snfi
f(s)
Segnali spuri nell’amplificatore ad anello chiuso
XI - 3
+
Retroazione e compensazione
Da un’analisi visiva della figura 11.4 assumendo S i = 0 , si può facilmente trovare:
{− [(S (s) + S
o
nfi
]
( s ) ) f ( s ) + Snfo ( s) + Snai ( s )}⋅ a ( s ) + Snao ( s) = So ( s )
(11.12)
dalla quale ipotizzando T >> 1 si ottiene:
S o ( s) ≈ − S nfi ( s) +
[
]
a( s)
1
S nai ( s) − S nfo ( s ) +
S nao ( s )
f ( s ) a( s)
T (s)
(11.13)
Quest’equazione dice che il disturbo all’ingresso della rete di retroazione si trasferisce invariato in uscita, i disturbi
all’ingresso del blocco d’andata e all’uscita della rete di retroazione sono processati in maniera analoga al segnale di
ingresso in altre parole per questi due disturbi il rapporto segnale rumore si conserva, il disturbo all’uscita del blocco
d’andata è invece attenuato fortemente dal guadagno d’anello.
Quest’ultima proprietà è di notevole interesse in quanto sono le sezioni finali (stadi d’uscita) che in genere presentano
grandi valori di offset e sono soggette ad un elevato rumore e/o distorsione. Pertanto, la presenza di un elevato guadagno
d’anello riduce fortemente questi segnali spuri. E’ interessante notare che la FdT relativa al disturbo S nao ( s ) coincide con
la S aA per cui un disturbo di questo tipo si ripercuote sulla FdT A( s) in maniera analoga ad una variazione parametrica di
a( s) .
11.1.4 Proprietà dinamiche
Si trattano ora alcune importanti proprietà degli amplificatori retroazionati che è possibile desumere dallo schema a
blocchi semplificato di fig. 11.1. Si definiscono di tipo “dinamico” in quanto hanno a che vedere con il comportamento in
frequenza ed in particolare con la banda ad anello chiuso. Bisogna dire, in ogni caso, che anche le proprietà viste
precedentemente valgono in frequenza e che la distinzione tra dinamico e statico è puramente semplificativa.
Si consideri una FdT approssimabile a singolo polo del tipo:
a( s) =
a0
1 + sτ
(11.14)
Più precisamente per comportamento a polo dominante, in questa sezione, si intende quello per cui la frequenza di
transizione, ω T , è maggiore o uguale della frequenza associata al secondo polo, ω S , come mostrato dal diagramma di
Bode in fig. 11.5.
|a(jω)|
|a(jω)|
ωS
ωD
ωT
ωGBW
ωD
Fig. 11.5
FdT a polo dominante
Fig. 11.6
ωS
ωT
FdT di un amplificatore con ω T > ω S
Il modulo della risposta in frequenza è dato da:
a ( jω ) =
a0
1 + (ωτ )
(11.15)
2
XI - 4
Retroazione e compensazione
Se ω T >> 1 ⇒ ω T τ >> 1 allora:
τ
a ( jω ) ≈
a0
ωτ
(11.16)
La frequenza di transizione è quella tale che a( jω T ) = 1 per cui:
a0
= a0ω C = ω GBW
τ
ωT =
(11.17)
Cioè, la frequenza di transizione, in un amplificatore approssimabile a polo dominante, è pari al prodotto bandaguadagno (GainBandWidth). Nel caso di amplificatore con ω T > ω S , la frequenza ω GBW pari al prodotto bandaguadagno, che non coincide più con ω T , si può ottenere come intersezione del prolungamento della parte a -20/dB per
decade con l’asse delle frequenze (fig. 11.6).
Si consideri adesso un amplificatore d’andata a polo dominante e si supponga la rete di retroazione puramente
passiva, si può quindi scrivere:
f (s) = f o
(11.18)
Sostituendo a (s ) e f (s ) nell’espressione di A(s) si ottiene:
a0
a0
a0
Ao
a( s)
1
sτ =
+
1
A( s ) =
=
=
=
f 0 a0 1 + f 0 a0 + sτ 1 + f 0 a0
sτ
sτ
1 + a( s) f 0
1+
1+
1+
1 + f 0 a0
1 + f o ao
1 + sτ
(11.19)
dove Ao è:
Ao =
ao
1 + ao f o
(11.20)
mentre la frequenza di taglio ω CF risulta:
ω CF = (1 + f o ao )
1
τ
(11.21)
Come si vede, da una parte il guadagno è stato attenuato di un fattore (1 + T0 ) dall’altra la banda si è ampliata dello
stesso fattore (1 + T0 ) questo implica che il prodotto banda guadagno resta immutato. Del resto si assumerà sempre che ad
anello chiuso gli amplificatori siano a singolo polo, e quindi la frequenza di transizione (ad anello chiuso) ω TL coinciderà
sempre con ω GBW . In particolare, nel caso in cui a (s ) è a singolo polo, la frequenza di transizione dell’amplificatore
retroazionato è uguale alla frequenza di transizione dell’amplificatore d’andata:
ω TF =
ao
= ω T = ω GBW
τ
(11.22)
Nel caso più generale in cui l’amplificatore d’andata non è a polo dominante ( ω T > ω S ), supposto che il guadagno
d’anello abbia un margine di fase di almeno 45° (fig. 11.7), l’amplificatore d’andata e quello retroazionato avranno in
comune la frequenza ω GBW . In generale quindi si può affermare che, se il margine di fase del guadagno d’anello è superiore
a 45°, il prodotto banda-guadagno passando dall’amplificatore ad anello aperto a quello ad anello chiuso si conserva.
XI - 5
Retroazione e compensazione
a
A
ωS
ωD
Fig.11.7
ωGBWa
FdT del guadagno ad anello aperto e ad anello chiuso
Nell’ipotesi che la rete di retroazione sia puramente resistiva, il guadagno d’anello è una funzione con gli stessi poli
dell’amplificatore ad anello aperto. Nel caso FdT a singolo polo si ha:
T (s) =
f 0 a0
1 + sτ
(11.23)
da cui risulta che la frequenza di transizione è pari a:
ω TL =
f o ao
τ
(11.24)
Se T0 >> 1 , ω TL è uguale ad ω CF data dall’equazione (11.21). Quest’uguaglianza esprime una proprietà di
fondamentale importanza nella progettazione di amplificatori retroazionati: essa permette di prevedere la banda ad anello
chiuso sulla base del calcolo del guadagno d’anello, pertanto l’analisi e le equazioni che riguardano il guadagno d’anello
non solo danno informazioni importanti sulla precisione della funzione ad anello chiuso e sul grado di stabilità, come si
vedrà più avanti, ma sono la base principale per la determinazione della banda ad anello chiuso.
L’uguaglianza tra ω TL ed ω CF è stata determinata e vale strettamente nell’ipotesi di amplificatore d’andata a singolo
polo. E' comunque da notare che anche in presenza di due poli, se il margine di fase è superiore a circa 50°, la banda ad
anello chiuso può approssimativamente variare tra ω TL ed 1.5ω TL , per cui ω TL rimane sempre un riferimento abbastanza
accurato per la determinazione della frequenza di taglio dell’amplificatore retroazionato. Tutte le considerazioni precedenti
possono essere riassunte nel diagramma di Bode in fig. 11.8, dove sono rappresentate le risposte in frequenza del modulo e
dei diversi guadagni, nel caso più generale di amplificatore d’andata a due poli.
a
T
A
ωD
Fig.11.8
ωGBWL
ωS
ωGBWa
FdT dell’amplificatore ad anello aperto, ad anello chiuso e del guadagno d’anello
Si nota dalla fig. 11.8 che il valore massimo di ω TL (garantendo un margine di fase minimo di 45°) è pari al secondo
polo e che quindi il massimo valore della banda ad anello chiuso è anch’esso pari al secondo polo.
XI - 6
Retroazione e compensazione
Quest’osservazione è in qualche modo in contrasto con quello che intuitivamente sembra essere un assunto generale e
cioè che la banda ad anello chiuso è vincolata al polo dominante. In realtà, nella progettazione di amplificatori ad alto
guadagno da impiegare come blocchi base di funzioni ad anello chiuso accurate, l’aumento della massima frequenza di
lavoro (banda ad anello chiuso) si traduce nella ricerca di appropriate topologie che presentino poli non dominanti di alta
frequenza, mentre di secondaria importanza risulta essere la posizione del polo dominante.
11.2 Approccio alternativo allo studio degli amplificatori retroazionati
La teoria dei circuiti retroazionati basata sulla schematizzazione a doppio-bipolo è senza dubbio quella più
universalmente adottata dai testi didattici di elettronica circuitale. Il suo grande pregio è quello di essere una teoria
completa che affronta un po' tutte le problematiche relative ai circuiti retroazionati.
In questa teoria vengono identificate quattro tipologie fondamentali di retroazione che sono:
Tensione-Tensione o Serie-Parallelo
Corrente-Corrente o Parallelo-Serie
Tensione-Corrente o Serie-Serie
Corrente-Tensione o Parallelo-Parallelo
Per ciascuna tipologia bisogna identificare l’amplificatore d’andata e la rete di retroazione, e schematizzare
opportunamente la sorgente ed il segnale d’uscita con modelli di tipo Thevenin o Norton a seconda del tipo di prelievo e/o
del tipo di ritorno del segnale di retroazione. In ciascuno dei quattro tipi di retroazione, sia per l’amplificatore d’andata sia
per la rete di retroazione, viene utilizzata una rappresentazione a doppio-bipolo con parametri h, nel caso di tensionetensione, g, nel caso di corrente-corrente, z, nel caso di tensione-corrente, y, nel caso di corrente-tensione. Inoltre,
l’amplificatore d’andata deve tenere opportunamente conto del carico in ingresso ed in uscita dovuto alla rete di
retroazione. Il circuito retroazionato così rappresentato è simile a quello ideale dello schema a blocchi in fig. 11.1 e quindi
la FdT ad anello chiuso assume la forma compatta dell’equazione (11.2). Inoltre forme compatte vengono anche stabilite
per l’impedenza d’ingresso e quella d’uscita.
La teoria basata sul doppio-bipolo, sebbene abbia il pregio della completezza, in molti casi non risulta d’immediata
applicazione e richiede svariate approssimazioni per potersi ricondurre ad una delle quattro tipologie. Infatti, non è sempre
facile in un circuito retroazionato poter identificare l’amplificatore d’andata e quello di retroazione e valutare il carico che
il circuito di retroazione esercita sull’amplificatore d’andata, specialmente se si deve tener conto degli effetti reattivi.
Inoltre alcune volte ci si trova nella strana situazione di dover utilizzare due o più schematizzazioni diverse per lo stesso
circuito a seconda di come il segnale d’ingresso viene applicato o il segnale d’uscita prelevato. Questo è, per esempio, il
caso di un amplificatore operazionale retroazionato resistivamente, dove a seconda se lo si utilizzi in maniera invertente
(retroazione corrente-tensione) o non invertente (retroazione tensione-tensione) si deve schematizzare in maniera diversa
sia la sorgente sia la rete di retroazione.
Nel seguito, invece di far riferimento ad una teoria dei circuiti retroazionati, si utilizzeranno diversi approcci a
seconda del parametro d’interesse. Più precisamente si farà riferimento all’equazione di Rosenstark per il calcolo del
guadagno ad anello chiuso, all’equazione di Blackman per il calcolo delle impedenze d’ingresso e d’uscita, ed infine ad
un’opportuna definizione del guadagno d’anello per lo studio della stabilità e della banda ad anello chiuso. Sia l’equazione
di Rosenstark che quella di Blackman hanno il grande vantaggio di poter essere utilizzate in maniera semplice
prescindendo dal tipo di retroazione e, addirittura, dalla presenza o meno della retroazione.
11.2.1 Rapporto di ritorno
Al fine di definire il rapporto di ritorno si fa riferimento alla rete rappresentata in fig. 11.9, dove è evidenziato uno dei
generatori dipendenti, S b e la relativa variabile di comando, S a .
Rete
Si
Fig.11.9
Sa
Zb
+
Za
-
Rete equivalente per il calcolo del rapporto di ritorno
XI - 7
Sb=KSa
So
Retroazione e compensazione
Per calcolare il rapporto di ritorno associato al generatore comandato S b , si annulla il segnale di ingresso S i , si
sostituisce S b con un generatore indipendente dello stesso tipo e con lo stesso segno, S i * , si associa alla variabile S a la
variabile di uscita S o * , sempre dello stesso tipo e segno. Si definisce il rapporto di ritorno nel modo seguente:
T =ˆ − K
S o∗
S i∗
(11.25)
11.2.2 Equazione di Rosenstark
L’equazione di Rosenstark consente di determinare il guadagno di un qualsiasi circuito anche se la si utilizzerà per i
circuiti retroazionati. Essa ha la seguente espressione:
A=
G AT + G D
1+ T
(11.26)
dove T è il rapporto di ritorno associato ad un qualunque generatore comandato, G A è il guadagno asintotico definito
come
G A =ˆ A T →∞ , K →∞
(11.27)
e G D è il guadagno diretto:
G D =ˆ A T =0, K = 0
(11.28)
In G A e G D il rapporto di ritorno è fatto tendere all’infinito e a zero, rispettivamente, mandando all’infinito e a zero il
fattore di guadagno k associato al generatore comandato scelto. E’ importante rilevare che i parametri dell’equazione di
Rosenstark variano, in generale, a seconda del generatore comandato scelto. Tale scelta va fatta sulla base di considerazioni
riguardanti la semplicità di calcolo.
Esempio: Collettore Comune
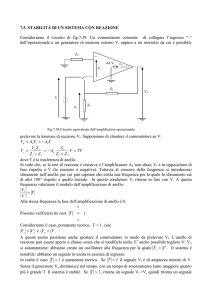
A titolo di esempio si consideri lo stadio a collettore comune in fig. 11.10.
Vi
rπ
Vi
gmVbe
Vbe
Q1
Vo
Vo
RE
Fig.11.10
Ro=RE||rc
Collettore comune e circuito equivalente
Calcolo di T
Si sceglie, in questo caso, l’unico generatore comandato presente nel circuito e si associa a g mVbe la corrente
d’ingresso I s e alla tensione di comando Vbe la tensione d’uscita Vo .
XI - 8
Retroazione e compensazione
Il rapporto di ritorno è quindi dato da:
T = −gm
Vo
Is
Osservando il circuito si trova:
T = − g m (− rπ // R0 ) = g m
rπ Ro
βRo
=
rπ + Ro rπ + Ro
Calcolo di GA
Vbe
Per il calcolo di G A si manda all’infinito g m . Essendo g mVbe una quantità finita, g m tendente ad infinito comporta
tendente a zero, quindi Vi è uguale a Vo . Il guadagno asintotico è quindi uguale ad uno: G A = 1
Calcolo di GD
Il guadagno diretto va calcolato ponendo a zero g m nel modello di fig. 1.10. Risulta:
GD =
Vo
Ro
=
Vi rπ + Ro
Quindi il guadagno dello stadio è:
gm
A=
rπ Ro
Ro
+
Ro
rπ + Ro rπ + Ro
(1 + β ) Ro
=
≈
rπ Ro
1
rπ + (1 + β ) Ro
+ Ro
1+ gm
gm
rπ + Ro
che è il ben noto guadagno del collettore comune, inoltre il risultato è stato raggiunto senza alcuna ipotesi sul circuito che
può essere o meno retroazionato.
11.2.3 Dimostrazione dell’equazione di Rosenstark
L’equazione di Rosenstark può essere dimostrata facendo riferimento allo schema generico mostrato in fig. 11.9, dove
è stato evidenziato uno dei generatori comandati. Per questa rete è possibile scrivere le seguenti equazioni:
S 0 = ASi + BSb
(11.29)
S a = CS i + DS b
Sb = k ⋅ S a
(11.30)
(11.31)
Le prime due sono una conseguenza del principio di sovrapposizione la terza è l’equazione caratteristica del
generatore comandato. Se dalla (11.31) si ricava S a e la si sostituisce nella (11.30) da questa si può ricavare S b in
funzione di S i che sostituita nella (11.29) dà:
S o = AS i +
BCk
A − AkD + BCk
Si =
Si
1 − kD
1 − kD
(11.32)
XI - 9
Retroazione e compensazione
Manipolando opportunamente quest’ultima equazione si può scrivere:
BC
A−
(− kD ) + A
So
D
=
1 − kD
Si
(11.33)
Se si pone S i = 0 nella (11.30), risulta S a S b = D e quindi:
T = −k
Sa
= −kD
Sb
(11.34)
Il termine − kD nella (11.34) è quindi uguale al rapporto di ritorno. Mandando − kD all’infinito nella (11.33) si
trova:
GA =
So
Si
= A−
T →∞
BC
D
(11.35)
Infine ponendo a zero − kD nella (11.33) risulta:
GD =
So
Si
=A
(11.36)
T =0
Pertanto i termini dell’equazione (11.33) corrispondono al rapporto di ritorno, al guadagno asintotico e al guadagno
diretto secondo la definizione precedentemente data..
11.2.4 Equazione di Blackman
L’equazione di Blackman permette di calcolare l’impedenza vista tra due terminali di una qualunque rete sia essa
retroazionata o meno. Chiaramente verrà utilizzata per i circuiti retroazionati, essendo semplice il calcolo delle impedenze
nei circuiti non retroazionati. L’equazione di Blackman come l’equazione di Rosenstark è calcolata sulla base della scelta
di un qualsiasi generatore comandato. La sua espressione è la seguente:
Z A = Za
1 + Tsc
1 + Toc
(11.37)
dove Z a è l’impedenza ad anello aperto, vista ai terminali di interesse, calcolata annullando il fattore di guadagno del
generatore comandato scelto, Tsc (short circuit) è il rapporto di ritorno con la porta considerata in corto circuito, ed infine
Toc (open circuit) è il rapporto di ritorno con la porta a circuito aperto.
Nell’equazione di Blackman, come in quella di l’equazione di Rosenstark, i parametri Z a , Tsc , Toc , dipendono, in
generale, dal tipo di generatore scelto. Anche qui la scelta si basa esclusivamente sul fatto di arrivare nella maniera più
veloce e più semplice al risultato finale.
Esempio: Collettore Comune
Calcolo della resistenza d’ingresso ad anello aperto, Ria
Guardando il modello equivalente di fig. 11.10, Ria è valutata ponendo a zero il fattore di guadagno g m . Si ha:
Ria = RiA
g m =0
= rπ + Ro
XI - 10
Retroazione e compensazione
Calcolo di TSC
Il valore di Tsc si calcola con i morsetti di ingresso cortocircuitati e quindi coincide con quello di T visto a proposito
del calcolo del rapporto di ritorno:
Tsc =
β ⋅ Ro
rπ + Ro
Calcolo di TOC
Se si lasciano i terminali d’ingresso a circuito aperto, la corrente in rπ è nulla è quindi il rapporto di ritorno è
anch’esso pari a zero. In definitiva, la resistenza d’ingresso ad anello chiuso è:
βRo
= rπ + Ro + βRo = rπ + (1 + β ) Ro
RiA = ( rπ + Ro )1 +
rπ + Ro
11.2.5 Dimostrazione dell’equazione di Blackman
Per la dimostrazione dell’equazione di Blackman si fa riferimento allo schema semplificato di fig. 11.11, dove è stata
evidenziata la porta per la quale si deve calcolare l’impedenza ed un generatore comandato della rete.
Rete
Vs
Fig. 11.11
Sa
Za
Zb
+
-
Sb=KSa
Schema semplificato per la dimostrazione dell’equazione di Blackman
Si supponga di applicare ai morsetti d’interesse un generatore di corrente di prova I s , l’impedenza vista sarà
Z A = V S I S . Per la rete in esame si possono scrivere le seguenti equazioni:
Vs = AI s + BSb
(11.38)
S a = CI s + DS b
Sb = k ⋅ S a
(11.39)
(11.40)
La (11.40) è l’equazione caratteristica del generatore comandato in esame, le (11.38), (11.39) sono invece
conseguenze del principio di sovrapposizione. Se dalla (11.40) si ricava S a e la si sostituisce nella (11.39) si ottiene:
Sb =
Ck
Is
1 − kD
(11.41)
che sostituita nella (11.38) dà:
V
ZA = S = A
IS
1 − k ( AD − BC )
1 − kD
1
A
(11.42)
XI - 11
Retroazione e compensazione
Dalla (11.38) ponendo S b = 0 si ha:
A=
VS
IS
(11.43)
Sb = 0
e siccome per essere S b = 0 qualunque S a , deve essere necessariamente k = 0 , si può scrivere:
A=
VS
IS
(11.43a)
K =0
Questa è proprio la definizione di Z a quindi:
A = Za
(11.43b)
Ponendo V s = 0 nella (11.38) risulta:
Is = −
B
Sb
A
(11.44)
che sostituita nella (11.39) dà:
Sa
1
= ( AD − BC )
Sb
A
(11.45)
per cui:
Tsc = − k
Sa
1
= −k ( AD − BC )
Sb
A
(11.46)
Ponendo I s = 0 nella (11.39) si ottiene:
Sa
=D
Sb
(11.47)
Di conseguenza:
Toc = − k
Sa
Sb
= −kD
(11.48)
I s =0
11.3 Studio della stabilità
11.3.1 Calcolo di T(s)
Ci si propone, in questa sezione, di effettuare lo studio della stabilità degli amplificatori retroazionati. A tale scopo, si
farà uso di T ( s ) . Con riferimento allo schema di principio di fig. 11.1, il calcolo di T ( s ) si può effettuare seguendo i passi:
1.
2.
3.
si annulla il segnale d’ingresso S i ;
si effettua un taglio su un punto qualsiasi dell’anello, ristabilendo l’impedenza a monte del taglio che poi è
l’impedenza vista a valle, (monte è da dove arriva il segnale valle dove sta andando);
si applica un segnale S i * a valle e si preleva un segnale S o * a monte;
XI - 12
Retroazione e compensazione
Il guadagno d’anello sarà dato da:
T (s) = −
So
*
Si
*
(11.49)
Se in teoria si può tagliare in un qualsiasi punto dell’anello, è in genere preferibile interrompere sull’anello di
retroazione ove sono presenti solo elementi passivi anziché sull’anello diretto dove, di sicuro, sono presenti elementi attivi.
Questo allo scopo di poter calcolare nel modo più semplice possibile l’impedenza da ripristinare a monte del taglio. E’
altresì sconsigliato interrompere in punti dove si deve andare a valutare un’impedenza soggetta ad effetto Miller.
I segnali d’eccitazione S i * e di conseguenza S o * possono essere entrambi tensioni o correnti come si può vedere in
figura 11.12 (a) e 11.12 (b), dove sono anche indicati i versi corretti da prendere nei due casi, ma è chiaramente auspicabile
eccitare in tensione in punti d’alta impedenza e in corrente in punti di bassa impedenza.
Z
+
Io
+
-
Vo
-
Fig. 11.12 (a)
Vi
Z
Eccitazione in tensione
Fig. 11.12 (b)
Ii
Eccitazione in corrente
Per chiarire quanto detto si consideri l’amplificatore retroazionato di fig. 11.13 (a) (la freccia indica il verso di
percorrenza del segnale). In Figura 11.13 (b) è mostrato il punto dove si è operato il taglio, si noti, come, per stabilire quale
dei due punti del taglio sia monte e quale valle è indispensabile conoscere il verso di percorrenza del segnale. E’ facile
vedere che la resistenza da ripristinare a monte è Z i .
Dall’analisi del circuito si deduce:
T ( s) = − AV ( s )
Z L || ( Z 2 + Z i || Z 1 )
Z i || Z 1
⋅
Z o + Z L || ( Z 2 + Z i || Z 1 ) Z 2 + Z i || Z 1
(11.50)
Z2
Z1
Zo
+
+
Vs
Zi
-
Fig. 11.13 (a)
+
-
Vi
-
+
AVVi
Vo
ZL
-
Esempio di amplificatore retroazionato
Z2
Z1
Zo
+
Zi
-
Fig. 11.13 (b)
Vo *
Vi*
+
-
+
Zi
Vi
-
Calcolo del guadagno d’anello
XI - 13
+
-
+
AVVi
ZL
Vo
-
Retroazione e compensazione
11.3.2 Criteri di stabilità
La stabilità in senso stretto, cioè che tutti i poli dell’amplificatore siano stabili, è un requisito che, volendosi
soddisfare pienamente, non permetterebbe la realizzazione di alcun tipo di amplificatore. Si è pertanto interessati alla
stabilità relativa ovvero si vuole garantire un margine di stabilità per l’amplificatore soggetto a variazioni parametriche
non controllabili.
Partendo da un amplificatore stabile ad anello aperto non è detto che resti stabile una volta retroazionato. Esistono dei
criteri che permettono di studiare la stabilità di sistemi retroazionati partendo dalla conoscenza della FdT ad anello aperto.
Si farà uso di T ( s ) , del resto assumendo il blocco di retroazione resistivo i poli di T ( s ) coincidono con quelli di a ( s ) .I
criteri cui si farà riferimento per lo studio della stabilità dei sistemi retroazionati, oltre ai diagrammi di Bode, sono il luogo
delle radici e il criterio di Nyquist.
Luogo delle radici
Il metodo del luogo delle radici consiste nel mappare nel piano S tutti i poli del circuito retroazionato a partire dal
guadagno di anello al variare del guadagno di anello statico. E' un metodo che qualitativamente permette di capire se un
sistema inizialmente stabile, può, una volta retroazionato, diventare instabile e per quali condizioni.
Tutti i punti dell'asse reale posizionati a sinistra di un numero dispari di poli e zeri della T ( s ) appartengono al luogo
(per luogo s’intende il luogo positivo vale a dire per T0 > 0 ). Se la differenza tra il numero di poli ed il numero degli zeri
della T ( s ) è ≥ 2 allora al luogo appartengono anche poli complessi e coniugati.
Per T0 = 0 i poli ad anello chiuso coincidono con quelli ad anello aperto, al crescere di T0 il luogo descriverà, con
continuità, tanti rami quanti sono i poli di T ( s ) i quali si andranno a chiudere sugli zeri di T ( s ) (compresi gli zeri
all’infinito). Si riporta di seguito qualche esempio di luogo delle radici dei casi di più comune interesse.
Im(s)
T(s) =
1/τ
Fig. 11.14
Re(s)
T0
1 + sτ
FdT ad un polo
Im(s)
T(s) =
1/τ2
Fig. 11.15
Re(s)
1/τ1
T0
(1 + sτ 1 ) (1 + sτ 2 )
FdT a due poli
Si vede che un sistema ad uno o due poli è sempre stabile per qualsiasi valore del guadagno d’anello statico.
Im(s)
T(s) =
1/τ3 1/τ2
Fig. 11.16
1/τ1
Re(s)
FdT a tre poli
XI - 14
T0
(1 + sτ 1 ) (1 + sτ 2 ) (1 + sτ 3 )
Retroazione e compensazione
In questo caso il sistema può, al crescere di T0 , diventare instabile, soprattutto quando i tre poli sono di bassa
frequenza. Invece, come si vede dalla fig. 11.17, l’aggiunta di uno zero nel semipiano sinistro ha un effetto stabilizzante.
Im(s)
T(s) = T0
1/α
Fig. 11.17
1/τ3 1/τ2
Re(s)
1/τ1
(1 + sα )
(1 + sτ 1 ) (1 + sτ 2 ) (1 + sτ 3 )
FdT a tre poli ed uno zero
Criterio di Nyquist
E' un criterio basato sul diagramma polare di T ( jω ) .Un sistema stabile ad anello aperto avrà, ad anello chiuso, tanti
poli instabili quanti sono i circondamenti, in senso orario, del diagramma polare di T ( jω ) del punto (−1,0) . Se questo
punto non viene circondato il sistema rimane stabile.
Si riprendono in considerazione alcune delle situazioni più frequenti già analizzate col luogo delle radici:
Im[T(jω)]
ω →∞
ω →0
(-1,0)
Fig. 11.18
T(s) =
T0
1 + sτ
Re[T (jω)]
FdT ad un polo
Im[T(jω)]
ω →∞
ω →0
T0
(1 + sτ 1 ) (1 + sτ 2 )
Re[T (jω)]
(-1,0)
Fig. 11.19
T(s) =
FdT a due poli
Come si vede i sistemi ad un polo o a due poli sono sempre stabili perché non contengono mai il punto (-1,0).
Im[T(jω)]
Im[T(jω)]
ω →∞
(-1,0)
Fig. 11.20
FdT a tre poli stabile
ω →∞
ω →0
(-1,0)
Re[T (jω)]
Fig. 11.21
XI - 15
FdT a tre poli instabile
ω →0
Re[T (jω)]
Retroazione e compensazione
Nel caso di Figura 11.21, il numero di circondamenti del diagramma polare intorno al punto (-1,0) e pari a due:
N C = 2 , per cui questo sistema a ciclo chiuso avrà due poli instabili. Una caratteristica dei diagrammi polari è la simmetria
rispetto all'asse Re[T ( jω )] delle due curve ottenute per ω > 0 e ω < 0 rispettivamente.
Il criterio di Nyquist permette di definire due parametri fondamentali in base ai quali è possibile stabilire non solo se
un sistema retroazionato è stabile ma anche il suo grado di stabilità. Si è visto che (-1,0) è un punto critico, se il
diagramma polare di T ( jω ) passa per questo punto il sistema in questione sarà al limite della stabilità ovvero un sistema
oscillante, in tal caso ci sarà una precisa pulsazione ω * per cui T(jω * ) = 1 e ∠ T(jω * ) = -180 . Per i sistemi a stabilità
regolare, che sono quelli a cui ci si interessa, T(jω ) decresce al crescere di ω . Tenuto conto di quanto detto, se ω ′ è la
pulsazione per la quale T(jω ′) = 1 , si possono presentare le seguenti situazioni:
a)
b)
c)
θ = ∠ T(jω ' ) > - 180° (fig. 11.22): all'aumentare di ω si è sicuri che (-1,0) non sarà contenuto nel diagramma polare;
θ = ∠ T(jω ' ) < - 180° (fig. 11.23): il punto (-1,0) è contenuto nel diagramma polare;
θ = ∠ T(jω ' ) = - 180° : il diagramma passa proprio per il punto critico.
Im[T(jω)]
Im[T(jω)]
ω →∞
(-1,0)
Fig. 11.22
ω →0
ω →0
θ
(-1,0)
Re[T (jω)]
θ = ∠ T(jω ' ) > - 180°
Fig. 11.23
θ
Re[T (jω)]
θ = ∠ T(jω ' ) < - 180°
Sia ω ′′ la pulsazione per la quale θ = ∠ T(jω ' ) = - 180° . Si possono presentare i seguenti casi:
a)
T(jω ′′) < 1 (fig. 11.24): il sistema retroazionato è stabile;
b)
T(jω ′′) > 1 (fig. 11.25): il sistema retroazionato è instabile;
c)
T(jω ′′) = 1 : il diagramma passa proprio per il punto critico.
Im[T(jω)]
Im[T(jω)]
ω →0
ω →0
(-1,0)
Fig. 11.24
T(jω ′′) < 1
(-1,0)
Re[T (jω)]
Fig. 11.25
Re[T (jω)]
T(jω ′′) > 1
A questo punto si possono definire due importanti parametri:
Margine di fase =ˆ ∠ T(jω ′) + 180 : esso offre un modo per quantificare quanto si è distanti in fase dalla condizione
critica; in base alla considerazione 1), il sistema retroazionato è stabile se MF > 0 ;
1
: il sistema retroazionato è stabile, in base alla considerazione 2), se MG > 0 .
Margine di guadagno =ˆ ∠
T ( jω ′′ ) dB
Per la valutazione della stabilità è sufficiente quindi esaminare questi due parametri. Generalmente si controlla solo il
margine di fase. Ci si chiede ora quali siano i criteri che permettono di stabilire la bontà di un dato margine di fase.
XI - 16
Retroazione e compensazione
La risposta si ricava esaminando il comportamento di un circuito retroazionato nel dominio del tempo e della
frequenza al variare del margine di fase.
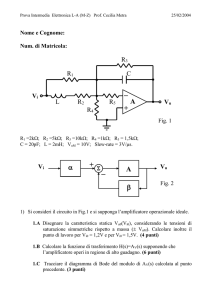
Si consideri un circuito del secondo ordine, la sua risposta in frequenza è mostrata in fig. 11.26. Come si può notare al
diminuire del margine di fase cresce il picco di risonanza. Il fatto che la banda, per margini di fase decrescenti, ha una
caratteristica sempre meno piatta, comporta una maggiore distorsione in frequenza del segnale. Inoltre un piccolo margine
di fase comporta un elevato rischio d’instabilità.
Altre considerazioni possono essere fatte nel dominio del tempo: sempre con riferimento ad un generico sistema del
secondo ordine è di notevole interesse considerare la sua risposta al gradino mostrata in fig. 11.27. In genere l’amplificatore
è tanto migliore quanto più fedelmente segue il riferimento.
Ad un margine di fase di 90° corrisponde una risposta esponenziale che caratterizza un sistema a polo dominante. Per
MF= 60° si incomincia ad avere un picco ed una breve oscillazione intorno alla risposta a regime. Per MF= 45° il picco
aumenta ed aumenta l'ampiezza delle oscillazioni e la loro durata. Al diminuire del margine di fase peggiora la risposta al
gradino.
MF=30°
MF=30°
MF=60°
MF=45°
MF=90°
MF=90°
ωn
Fig.11.26
Log ω
t
Risposta in frequenza per diversi valori del MF
Fig.11.27
Risposta al gradino per diversi valori del MF
Per la risposta in frequenza si può accettare un margine di fase non troppo grande nel caso in cui la banda d’interesse
sia alquanto inferiore alla frequenza di taglio ω n , cioè se il segnale non ha componenti armoniche (o sono trascurabili)
nella zona non piatta in cui il fenomeno della distorsione diventerebbe critico.
Nel dominio del tempo, generalmente si adotta come margine di fase ottimale, MF= 60°. Addirittura le prestazioni
del sistema migliorano per questo valore del margine di fase rispetto ad un MF= 90° perché quest’ultimo rende un sistema
troppo lento: per un MF=50° ÷ 60° si osservi un rapido raggiungimento del valore di regime della risposta al gradino ed
una banda abbastanza piatta, anche alle alte frequenze (intorno a ω n ).
Queste considerazioni portano a condizioni da soddisfare ben più restrittive, nel senso che non è sufficiente che un
circuito retroazionato sia stabile, solamente, ma è necessario che abbia un adeguato margine di fase.
11.3.3 Compensazione
Nel paragrafo precedente è stato affermato che un qualsiasi amplificatore deve essere realizzato in modo da garantite
un’adeguata stabilita relativa, che poi si traduce in un adeguato margine di fase di T (s ) .In una prima fase di progetto, però,
T (s ) assume tipicamente margini di fase piccoli se non addirittura negativi. Bisogna quindi modificare T (s ) in modo tale
che raggiunga il margine di fase desiderato salvaguardando, nello stesso tempo, le caratteristiche della FdT ad anello
chiuso. Tutto questo si affronta in una successiva fase di progettazione che è quella della compensazione. La maggioranza
degli amplificatori è approssimabile ad un sistema a due poli, per cui anche T (s ) sarà del secondo ordine, si consideri
allora la rete semplificata, per il calcolo di T (s ) :
Vi
Fig.11.28
+
-
gm1Vi
Ro1
Co1
Vo1
Rete semplificata per il calcolo di T(s)
XI - 17
gm2Vo1
Ro2
Co2
Vo
Retroazione e compensazione
Come si vede la rete in esame è formata da due maglie disaccopiate, per cui T (s ) è immediatamente ricavabile ed
assume la forma seguente:
T ( s) = −
V0
G M 1 R01G M 2 R02
T0
=
=
Vi (1 + sR01C 01 ) ⋅ (1 + sR02 C 02 ) (1 + s / ω p1 ) ⋅ (1 + s / ω p 2 )
(11.51)
Si è, in primo luogo, interessati a valutare il margine di fase di T(s) che, sfruttando la definizione, vale:
MF = ∠ 180 − arctg
ωT
ω
− arctg T
ω P1
ω P2
(11.52)
Generalmente ω T >> ω P1 , di conseguenza il contributo al margine di fase del primo polo si può supporre costante e
pari a arctg ω T ≅ 90 . Sostituendo nella (11.52):
ω P1
MF = ∠ 90 − arctg
ωT
ω
= arctg P2
ω P2
ωT
(11.53)
da cui:
ω P 2 = ω T ⋅ tan (MF )
(11.54)
La (11.54) è una equazione fondamentale di progetto, se, ad esempio, si vuole MF = 600 essa dice che deve essere
0
ω P 2 ≅ 1.73ω T ; se si è nella condizione di dover accettare, per il sistema compensato, un MF minimo di 45 allora deve
essere ω P 2 = ω T . Si sa però che la banda ad anello chiuso si può assumere, con buona approssimazione, pari alla
pulsazione di attraversamento di T (s ) , ecco quindi che il limite superiore per la ω CF è il secondo polo ω P 2 . Inoltre se
ω P 2 ≥ ω T , come avviene nell’amplificatore compensato, si è sicuri che la T (s ) è approssimabile a polo dominante e quindi
ω T = ω GBW . Per l’amplificatore compensato la (11.54) diventa perciò:
ω P 2 = ω GBW ⋅ tan (MF )
(11.55)
Ancora con riferimento al T (s ) della (11.51) si supponga di avere la seguente situazione:
|T(jω)|dB
ωt
ωp1
Fig. 11.29
ωp2
Log ω
FdT con ω P 2 < ω T
Come si vede dalla fig. 11.29 si è nella condizione in cui ω P 2 < ω T cioè si ha MF<450, si vedrà adesso il modo in cui
intervenire per ottenere il margine di fase desiderato.
XI - 18
Retroazione e compensazione
Compensazione per riduzione del guadagno d’anello
Una possibile strategia di compensazione è quella di traslare la FdT T (s ) verso il basso cioè ridurre la pulsazione di
attraversamento lasciando invariati i poli (fig. 11.30). Questo risultato si può ottenere agendo sul guadagno d’anello statico
T0 che, dalla (11.51), vale:
T0 = T (0) = G M 1 Ro1G M 2 Ro 2
Dato che non si devono toccare i poli, non si può agire su Ro1 e Ro 2 , di conseguenza si deve intervenire sul prodotto
G M 1G M 2 , in particolare la scelta va effettuata in base al MF che si vuole ottenere. Sfruttando da (11.55) si ha:
G G R
1
1
= T0
tan( MF ) = M 1 M 2 o 2 tan( MF )
Ro 2 C o 2
Ro1C o1
C o1
da cui:
G M 1G M 2 =
C o1
(11.56)
2
Ro 2 C o 2 tan( MF )
In fase di progetto è preferibile assumere T0 = a(s ) ovvero ( f = 1 ) cioè pari al guadagno ad anello aperto, in modo
che la scelta della rete compensatrice non dipenda dai parametri della rete di retroazione, in altre parole si ci pone nelle
condizioni peggiori.
|T(jω)|dB
Prima della compensazione
Dopo la compensazione
ωp2
ωp1
Fig. 11.30
ωt
ωt
Log ω
Compensazione per riduzione del guadagno d’anello
Compensazione a polo dominante
Le specifiche sull’amplificatore ad anello chiuso danno spesso delle limitazioni sul guadagno statico di T (s ) , quindi
può capitare che la compensazione per riduzione di T0 non sia praticabile o non sia sufficiente. In questi casi si possono
operare altri tipi di compensazione come per esempio quella a polo dominante.
Anche questa tipologia di intervento mira a migliorare il MF abbassando la ω T di T (s ) agendo su ω P1 anziché su T0 .
In particolare si cerca di ridurre la frequenza del primo polo inserendo un capacitore C c (in pratica nel nodo di alta
impedenza) in parallelo a C o1 (in altre parole aumentando la costante di tempo di ω P1 ), come in fig. 11.31.
La C c si ottiene sempre dalla (11.55):
G G R
1
= M 1 M 2 o 2 tan (MF ) ⇒ C c
Ro 2 C o 2
C o1 + C c
(11.57)
XI - 19
Retroazione e compensazione
Questo tipo di compensazione è indicata quando i due poli sono molto distanti fra loro; nel caso di due poli di bassa
impedenza è sconsigliata, perché si otterrebbe una banda utile pressoché nulla, con due poli di alta frequenza si avrebbe il
problema di dover impiegare una grossa capacità che tradotto in logica integrata significa un’occupazione eccessiva di area
di silicio. Una situazione con due poli distanti è tipicamente quella di un cascode, mentre due stadi CE o CS in cascata
offrono, di norma, due poli vicini. In quest’ultimo caso è conveniente usare un’altra tecnica di compensazione di seguito
esposta.
|T(jω)|dB
Prima della compensazione
Dopo la compensazione
ωp2
ωp1
Fig. 11.31
ωp1
ωt
ωt
Log ω
Compensazione a polo dominante
Compensazione per effetto Miller o pole-splitting
Questo altro tipo di compensazione è usata quando i due poli sono di bassa impedenza è inoltre necessario che tra il
primo ed il secondo polo vi sia una struttura invertente. La compensazione viene effettuata inserendo una capacità C c tra
la maglia del primo e quella del secondo polo, come in fig. 11.32.
Cc
Vi
Fig. 11.32
+
-
gm1Vi
Ro1
Co1
Vo1
gm2Vo1
Ro2
Co2
Vo
Compensazione per effetto Miller
La capacità C c subisce in ogni caso effetto Miller. Come si sa però, per verificarsi il pieno effetto Miller il primo polo
deve risultare dominante rispetto al secondo e questo è sempre vero nell’amplificatore compensato, non solo perché C c è
una capacità di valore elevato rispetto alle capacità parassite dei circuiti integrati, ma anche perché l’effetto di C c sul
secondo polo, che non è trascurabile, causa l’allontanamento di quest’ultimo verso l’alta frequenza (pole-splitting). Il
primo polo si trasforma:
1
1
→
C o1 Ro1
Ro1 (Co1 + GM 2 Ro 2 Cc )
(11.58)
Per valutare dove si porta il secondo polo, si assume che ci sia il pole-splitting, perciò quando agisce il secondo polo,
C c si può considerare un cortocircuito; si può perciò adottare il circuito di fig. 11.33 dal quale si può agevolmente valutare
il nuovo valore del polo d’uscita.
1
→
Ro 2 Co 2
1
1
(Co1 + Co 2 )
|| Ro1 || Ro 2
G
M2
≅
GM 2
(Co1 + Co 2 )
(11.59)
XI - 20
Retroazione e compensazione
Nella Figura 11.34 è mostrato l’effetto della compensazione per effetto Miller su T (s ) . Fermo restando che i due poli
siano di bassa impedenza, può verificarsi che il secondo polo sia a frequenza minore del primo, in questo caso continuano
ad essere validi i ragionamenti fatti, quello che accade è che i due poli si scambiano di posto in modo tale che nella rete
compensata ω P1 è sempre il polo dominante e ω P 2 continua ad essere il secondo polo.
Ro1
Fig. 11.33
gm2Vo1
Co1
Ro2
Co2
Circuito equivalente per il calcolo del pole-splitting
|T(jω)|dB
Prima della compensazione
Dopo la compensazione
ωt
ωp1
Fig. 11.34
ωp1
ωp2
ωt
ωp2
Log ω
Compensazione per effetto Miller
La compensazione per effetto Miller ha anche uno svantaggio che sta nell’introduzione di uno zero nel semipiano
destro. In verità uno zero di questo tipo è già presente ed è dovuto alle piccole capacità parassite di accoppiamento locale,
tipicamente le C µ per i BJT e le C gd nei MOS. Il fatto è che, mentre uno zero dovuto a C µ o a C gd è d’altissima
frequenza (dato che queste capacità sono dell’ordine dei fF), lo zero dovuto a C c , che è una grossa capacità (2 ÷ 6 pF),
comincia ad avere una certa importanza.
Uno zero nel semipiano destro ai fini dello sfasamento si comporta esattamente come un polo, cioè, invece di dare uno
sfasamento in anticipo contribuendo a migliorare il margine di fase, dà uno sfasamento negativo e quindi per quanto
riguarda la stabilità è ancora più critico di un polo perché il polo dà uno sfasamento in ritardo, ma fa diminuire il guadagno,
mentre lo zero in più fa aumentare il guadagno. Del resto, come si sa dal luogo delle radici, al crescere di T0 ci sarà un
ramo (e quindi un polo) che si andrà a chiudere nello zero positivo, esisterà quindi un valore di T0 per il quale
l’amplificatore ad anello chiuso si destabilizza, in particolare si può provare che se la frequenza dello zero ω Z è minore di
ω GBW , il sistema ad anello chiuso risulterà instabile; viceversa se ω Z è maggiore di ω GBW , l’amplificatore ad anello chiuso
sarà stabile.
Per ovviare a tale problema esistono svariate tecniche di compensazione, in altre parole si trova la maniera di
annullare gli effetti negativi di tale zero. Prima però di passare in rassegna tali metodi si riassume la situazione in termini di
poli e zeri che si ha dopo l’inserimento della C c .
1
;
Ro1GM 2 Ro 2 C c
Primo polo: ω P1 ≅
Secondo polo: ω P 2 ≅
Zero: ω Z ≅ G M 2 C c .
GM 2
;
(C o1 + C o 2 )
XI - 21
Retroazione e compensazione
Il valore di C c si ricava ancora una volta dalla (11.55):
Cc =
GM 1
(C o1 + C o 2 ) tan (MF )
GM 2
(11.60)
1° Metodo
Lo scopo è quello di cercare di rimuovere le cause che portano alla comparsa dello zero: esso è generato dalla corrente
diretta i F che va dal nodo A verso il nodo B dello schema di fig. 11.35. Un modo per compensare lo zero è quello di
impedire questo cammino diretto attraverso il condensatore C c , salvaguardando il cammino inverso (da B verso A); questo
può essere fatto con un buffer di tensione.
Il cammino inverso responsabile della compensazione produce una corrente iC , che è data da: iC = (V B − V A ) ⋅ sC c
A
Cc
B
ic
Fig. 11.35
Compensazione dello zero con buffer di tensione
La tensione del nodo B si trasferisce esattamente nel nodo C, viceversa non ci potrà essere alcuna corrente che
attraversando il condensatore possa finire sul nodo B, poiché il buffer non consente una conduzione da A verso B. Il buffer
di tensione è generalmente implementato con un drain comune.
2° Metodo
Un altro metodo, duale, è quello di utilizzare invece di un buffer di tensione un buffer di corrente. Ovviamente esso
sarà messo tra il nodo A ed il condensatore, come in fig. 11.36.
Cc
A
B
ic
Fig. 11.36
Compensazione dello zero con buffer di corrente
L’ingresso del buffer è un punto a bassa impedenza, in tal modo si ottiene: iC = V B ⋅ sC c . E' quindi soddisfatta la
condizione per la corretta compensazione. Anche in questo caso il buffer di corrente non permette conduzione da A verso
B. Tutto ciò può essere ottenuto con un gate comune.
3° Metodo
E’ il metodo più usato, si mette una resistenza RC in serie al condensatore di compensazione C c :
A
Fig. 11.37
Cc
RC
Trasformazione dello zero
XI - 22
B
Retroazione e compensazione
Facendo i conti si vede che lo zero si modifica:
GM 2
1
→−
Cc
(RC − 1 G M 2 )C c
Se RC > 1 G M2 , lo zero si trova nel semipiano sinistro, se invece RC = 1 G M2 lo zero scompare. Allora ci sono due
possibilità progettuali: o si compensa, eliminando completamente lo zero nel semipiano destro, oppure si può sfruttare uno
zero nel semipiano sinistro per compensare qualche polo d’altissima frequenza: basta prendere RC poco maggiore di
1 G M2 . Compensare tali poli d’altissima frequenza può migliorare il margine di fase.
Compensazione Feed-forward
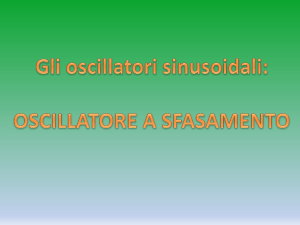
Si accenna infine ad un ultimo metodo di compensazione, poco usato rispetto a quelli precedenti. Si consideri il caso
di un T (s ) a tre poli, caratterizzato da un luogo delle radici del tipo mostrato in fig. 11.38 dove si può distinguere un polo
di bassa, uno di alta, ed uno di altissima frequenza. In un sistema di questo tipo si può trovare, ad anello chiuso, una coppia
di poli complessi coniugati ad elevato fattore di merito Q ovvero troppo vicini all’origine. Il risultato è un amplificatore di
scarse prestazioni. La compensazione feed-forward consiste nell’aggiunta di uno zero atto a compensare uno dei poli di
T (s ) riportandosi così ad una situazione a due poli. Si può optare per due diverse scelte, una prima soluzione potrebbe
essere quella di compensare il polo d’altissima frequenza l’altra quella di compensare il polo intermedio.
Con la prima soluzione si ottiene come unico beneficio un miglioramento del MF, con la seconda si ottiene anche un
miglioramento in termini di pulsazione di attraversamento il che da la possibilità di ottenere un incremento della banda ad
anello chiuso. Tuttavia è preferibile in genere la prima soluzione, questo perché la cancellazione fisica di un polo non è mai
perfetta per cui, in effetti, il polo che si pensa compensato continua a dare un suo contributo anche se in modo più lieve. In
queste vesti il polo intermedio da più problemi di quello d’altissima frequenza.
Un modo per inserire lo zero è quello di usare un CC e mettere un capacità C c tra base ed emettitore che quindi va a
cadere in parallelo alla Cπ si ha dunque:
ωZ = −
gm
(C c + Cπ )
da cui è possibile ricavare la C c necessaria.
Im(s)
1/τ3 1/τ2
Fig. 11.38
Luogo delle radici di una T (s ) a tre poli
XI - 23
1/τ1
Re(s)