PARTE 4
a4 deformaz rev 10.docx
Rel.02/03/10
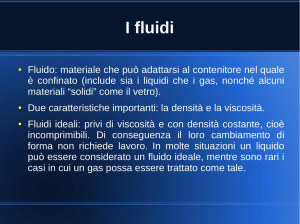
I fluidi come continui deformabili
Indice
1.
2.
Velocità di deformazione di un elementino di fluido ………………….…………… pag.
Proporzionalità tra tensore degli sforzi viscosi e
tensore della velocità di deformazione nei fluidi newtoniani …………………………..
3. Il problema della pressione ………………………………………………..……………………..
4. Sforzo normale in quiete e in movimento ….………………………………………………….
5. Alcune considerazioni sulla viscosità di volume e sulla relazione di Stokes …………
4
11
13
18
20
Nella parte 1, si è già accennato al fatto che, nell'ambito della fluidodinamica
classica, i fluidi vengono modellati come continui deformabili.
Ciò significa che si rinuncia a descrivere il moto di ciascuna singola molecola
e che, della reale natura molecolare del particolare fluido in esame, si tiene conto
soltanto attraverso proprietà statistiche medie, quali la densità, la viscosità, la
temperatura, ecc., che dalla sua struttura molecolare dipendono.
Nell'ambito della classe dei continui deformabili (che comprende anche i
solidi), si definiscono fluidi quelle particolari sostanze materiali, siano esse liquide o
gassose che, in condizioni statiche, o di quiete, possono sostenere esclusivamente
sforzi 1 di tipo normale.
1
Sappiamo dalla meccanica che la forza per unità di superficie, ovvero lo sforzo, che si
esercita in un punto P di un continuo deformabile, su di una superficie elementare σ di
versore normale n , è dato da un vettore S ( n ) che dipende soltanto da P e da n .
y
n
S
P
σ
σ
P
y
n
S
x
P
σ
x
z
z
(continua)
Nel caso di quiete, pertanto, lo stato di sforzo in un fluido è compiutamente
descritto dal solo sforzo normale 2, isotropo 3, che prende il nome di pressione, che
ha un significato intrinseco (ovvero indipendente dal riferimento) e che denotiamo
con lo scalare p 4. Ciò vale per ogni tipo di fluido, sia esso un liquido o un gas,
newtoniano o meno, e indipendentemente dalla sua viscosità.
In condizioni di moto, invece, i fluidi possono sostenere, non solo ulteriori
sforzi di tipo normale, ma anche sforzi tangenziali. La condizione necessaria, ma
non sufficiente, affinché ciò si verifichi è che il fluido abbia viscosità non nulla.
Viscosità 5, che è una proprietà fisica caratteristica d'ogni fluido reale (gas perfetti
inclusi) e che, come si è detto, dipende dalla sua struttura molecolare e dal suo stato
termodinamico.
Il vettore S( n) si può esprimere mediante tre sforzi S1, S 2 ed S3 , relativi a tre elementi
superficiali distinti, passanti per P e aventi i versori normali orientati come gli assi
cartesiani x, y e z:
€
S(n) = S1n1 + S2n 2 + S3n 3
€
dove n 1 , n 2 ed n 3 sono le componenti cartesiane di n , ovvero i coseni direttori della
normale all'elemento σ su cui si esercita lo sforzo S(n ). Questa relazione mostra che lo
€
stato di sforzo in un punto è dato da un tensore, o tensore doppio, individuato dai tre
vettori S1 , S2 ed S3 , o dalle loro componenti cartesiane:
S11 S12 S13
S 21 S 22 S 23
S
31 S 32 S 33
(componeti di S1 )
(componeti di S2 )
(componeti di S3 )
dove i termini con indici uguali (che occupano la diagonale della matrice associata al
tensore) rappresentano le componenti degli sforzi normali, mentre quelli con indici
€ le componenti tangenziali.
diversi rappresentano
2
Ne è un esempio l'acqua in un bacino in quiete, che è perfettamente in grado di sostenere
la pressione atmosferica agente sulla sua superficie libera.
3
L'isotropia è la proprietà di indipendenza del valore locale di una grandezza fisica dalla
direzione di osservazione. Una grandezza fisica che goda di tale proprietà ben si adatta
quindi ad essere rappresentata con una variabile scalare. Non si confonda l'isotropia, che è
proprietà locale, con l'uniformità, che è invece la proprietà di indipendenza di una
variabile (sia essa scalare o vettoriale) dalla posizione spaziale. Pressione e temperatura,
ad esempio, sono grandezze scalari, ma la loro distribuzione spaziale non è generalmente
uniforme e pertanto le componenti del vettore gradiente, che ne rappresenta le variazioni
nello spazio, non sono affatto nulle.
4
E' evidente che, in condizioni di quiete, lo scalare pressione può essere definito, a meno
del segno, anche come un terzo della traccia del tensore degli sforzi, ovvero come la
media delle tre componenti normali del tensore degli sforzi:
3
p = − 13
∑ i=j Sij = − 13 (S11 +S22 +S33)
1
5
O meglio, le viscosità, dal momento che, se si escludono i gas monoatomici, i fluidi reali
presentano in generale, sia una viscosità dinamica µ, sia una viscosità di volume β.
€
Parte 4 - Pag. 2
L'esistenza di un tensore degli sforzi viscosi è tuttavia subordinata, non solo
all'esistenza di una viscosità, ma anche a quella di un atto di moto che non deve
essere puramente rigido. Affinché si producano sforzi viscosi è necessario infatti che
gli elementi fluidi subiscano, nel corso del loro moto, anche una variazione di forma
e/o di dimensioni: quella che, riferita all’unità di tempo, prende il nome di velocità di
deformazione.
Nel corso di Fluidodinamica si tratterà, in particolare, di quella classe di fluidi
viscosi che prendono il nome di newtoniani. Il motivo di questa scelta (che è peraltro
comune a tutta la fluidodinamica classica) è duplice. Innanzitutto a questa classe
appartengono fluidi di grande interesse pratico: sono newtoniani, infatti, non solo
l'acqua e l'aria e, potremmo dire, la totalità dei gas, monoatomici o meno, in un vasto
campo di condizioni di temperatura e di pressione, ma anche moltissimi altri fluidi 6.
In secondo luogo, per i fluidi newtoniani esiste un legame di proporzionalità
diretta tra il tensore degli sforzi viscosi ed il tensore della velocità di deformazione.
E ciò costituisce un'enorme semplificazione nella scrittura e nell'integrazione delle
equazioni di bilancio che governano il loro moto.
I tipi di sforzo che possono essere sostenuti, rispettivamente, dai fluidi non
viscosi (fluidi che esistono soltanto come astrazione), dai fluidi viscosi newtoniani e
da quelli non newtoniani, sono riassunti nella tabella 7.
Atto di moto e
tipo di fluido
Non viscoso
(non esiste)
Viscoso
Newtoniano
Viscoso
Non Newtoniano
Quiete
Solo sforzo normale isotropo coincidente con lo
scalare pressione
Solo sforzo normale isotropo coincidente con lo
scalare pressione
Solo sforzo normale isotropo coincidente con lo
scalare pressione
Pressione
+
sforzi
viscosi
normali
e
tangenziali
Pressione
+
sforzi
viscosi
normali
e
tangenziali
Gli sforzi viscosi sono
funzioni
lineari
della
velocità di deformazione
Gli sforzi viscosi sono
funzioni non lineari della
velocità di deformazione
Moto
(non rigido)
Solo sforzo normale isotropo coincidente con lo
scalare pressione
6
Sono newtoniani, ad esempio, anche gli oli naturali e sintetici, il miele, gli idrocarburi
liquidi e gassosi. Generalmente non lo sono, invece, le soluzioni polimeriche, le materie
plastiche allo stato fuso, il dentifricio, i metalli allo stato plastico, il sangue ed i fanghi (o,
più in generale, le sospensioni di particelle solide in liquidi).
7
Discuteremo meglio, al paragrafo 3, il significato dello scalare pressione, che viene
ripetutamente citato nella tabella. In molti casi (ma non sempre) tale pressione coincide
con quella pressione statica, o termodinamica che, limitatamente al gas perfetto, si è
definita nella Parte 2 di questi appunti.
Parte 4 - Pag. 3
1 - Velocità di deformazione di un elementino di fluido
La scrittura delle equazioni di bilancio per la quantità di moto e per l'energia
richiede, come si è accennato nella Parte 3, la conoscenza delle forze di superficie,
ovvero dello stato di sforzo locale e istantaneo presente sulla superficie che delimita
ogni generico elemento di fluido.
Dal momento che abbiamo appena affermato che, almeno per i fluidi
newtoniani di cui ci occuperemo, lo stato di sforzo è dipendente dalla velocità di
deformazione, è utile analizzare le modalità di deformazione di un generico
elementino (o particella) di fluido continuo, soggetto ad un atto di moto generico.
Stato di sforzo e velocità di deformazione sono descritti da due tensori le cui
componenti sono, ovviamente, funzioni dello spazio e del tempo. Ma per semplicità,
per descrivere la deformazione istantanea di un elemento di fluido nel corso del suo
movimento (adottiamo quindi, per il momento, il punto di vista lagrangiano),
consideriamo soltanto un campo di moto bidimensionale nel piano x − y , e quindi
compiutamente definito dalle sole componenti u e v della velocità, parallele agli assi
cartesiani x e y, e stazionario.
All'interno di tale campo, consideriamo un elemento infinitesimo (anch'esso
piano) di fluido continuo. Assumiamo poi, per comodità, che all'istante t = t o tale
elemento abbia forma quadrata, con vertici ABCD e lati di lunghezza dx e dy
paralleli agli assi cartesiani.
Il vertice in A abbia coordinate (x, y) e la velocità in A, all'istante t = t o ,
abbia componenti u e v. Le coordinate degli altri vertici, all'istante t = t o , sono
definite in figura.
y
y
C'
D'
C (x+dx, y+dy)
D (x, y+dy)
dy
B'
A (x, y)
dx
t = to
B (x+dx, y)
x
A'
t = t o + dt
x
A capo di un intervallo di tempo infinitesimo dt , per effetto dell'atto di moto,
l'elemento di fluido trasla, ruota e si deforma in modo tale che ciascuno dei suoi
vertici viene ad occupare posizioni diverse nel piano, che denotiamo con A ' , B' ,
C ' e D ' , le cui coordinate sono ovviamente dipendenti dall'atto di moto considerato,
e cioè dalla distribuzione spaziale delle componenti u e v della velocità.
Note le posizioni iniziali dei vertici A, B, C e D, per definire la deformazione
subita dall'elemento di fluido nell'unità di tempo, ovvero la sua velocità di
Parte 4 - Pag. 4
deformazione, dobbiamo definire le posizioni A ' , B' , C ' e D ' occupate,
rispettivamente, da ciascuno di essi, a capo dell'intervallo di tempo infinitesimo dt .
A tal fine, facciamo ricorso alle consuete espansioni in serie di Taylor e, a
titolo di esempio, esprimiamo le coordinate del vertice A', al tempo t = t o + dt , in
funzione delle sue coordinate iniziali al tempo t = t o , nel modo seguente:
(x A ) t
∂2 x
∂x
=
x
+
dt
+
2
( A )t o ∂t
o + dt
∂t
A,t o
dt 2 + .......
∂2 y
∂y
=
y
+
dt
+
2
( A )t o ∂t
o + dt
∂t
A,t o
dt 2 + .......
A,t o
(y A ) t
€
A,t o
espansioni che possiamo anche troncare ai termini di derivate prime, purché
l'incremento temporale dt sia scelto sufficientemente piccolo.
€
Se poi sostituiamo alle derivate prime temporali delle coordinate x e y le
corrispondenti componenti (u A ) t e ( v A ) t del vettore velocità in A, al tempo
o
o
t = t o , possiamo scrivere:
(x A ) t
o
+ dt
= (x A ) t + (u A ) t dt
(y A ) t
o
+ dt
= (y A ) t + (v A ) t dt
o
o
o
o
€
e, dal momento che il vertice in A ha coordinate (x, y) e che la velocità in A ha
componenti u e v, le coordinate iniziali e finali del vertice considerato sono,
€
rispettivamente:
A ≡ (x , y )
A' ≡ (x + udt , y + v dt )
Se le dimensioni dx e dy dell'elemento piano sono molto grandi rispetto alle
scale molecolari (stiamo, infatti, considerando il fluido come un continuo
deformabile), ma sufficientemente piccole da definire un intorno di A in cui le
derivate prime delle componenti della velocità possano ritenersi costanti, possiamo
procedere in modo analogo per gli altri vertici dell'elemento e, sempre usando
approssimazioni di Taylor con accuratezza del 1° ordine (che può essere del tutto
soddisfacente se gli incrementi spaziali dx e dy sono sufficientemente piccoli),
otteniamo:
B ≡ (x + dx, y)
∂u
∂v
B'≡ x + dx + u + dx dt, y + v + dx dt
∂x
∂x
€
Parte 4 - Pag. 5
C ≡ (x + dx, y + dy)
∂u
∂u
∂v
∂v
C'≡ x + dx + u + dx + dy dt, y + dy + v + dx + dy dt
∂y
∂x
∂y
∂x
D ≡ (x, y + dy)
€
€
∂u
∂v
D'≡ x + u + dy dt, y + dy + v + dy dt
∂y
∂y
La variazione della forma dell'elemento di fluido (che definiamo, appunto,
deformazione) può essere ricondotta, tra l'altro, alla variazione della lunghezza delle
sue diagonali. Consideriamo, ad esempio, la diagonale C − A , i cui estremi, al tempo
t = t o + dt , occupano le posizioni C ' ed A', ed esprimiamo la variazione della sua
lunghezza. La variazione del vettore che rappresenta la diagonale dell'elementino è:
[C'−A'] − [C − A] ≡
∂u
∂u
∂v
∂v
≡ x + dx + u + dx + dy dt, y + dy + v + dx + dy dt − (x + udt, y + v dt) +
∂y
∂x
∂y
∂x
€
−[(x + dx, y + dy) − (x, y)]
€
che, con le dovute semplificazioni, si riduce a:
€
∂u
∂u
[C'−A'] − [C − A] ≡ ∂x dx + ∂y dy dt,
∂v
∂v
dx + dy dt
∂y
∂x
e che potremmo scrivere anche, nella forma più compatta:
€
€
[C'−A'] − [C − A] ≡ [dudt, dv dt]
Pertanto, nell'intervallo di tempo dt , la componente di tale vettore nella
direzione dell'asse x, che rappresenta la proiezione su x dell'allungamento della
€
diagonale considerata,
subisce una variazione Δx pari a:
∂u
∂u
Δx = dudt = dx + dydt
∂y
∂x
E in modo del tutto analogo si perviene a scrivere anche la variazione Δy,
nella direzione y, del vettore che rappresenta la diagonale dell'elementino:
€
∂v
∂v
Δy = dv dt = dx + dydt
∂y
∂x
€
Parte 4 - Pag. 6
Con un artificio, possiamo ora vedere che la variazione della lunghezza della
diagonale di un elementino di fluido in una direzione che, ad esempio, scegliamo
parallela all'asse x, è il risultato dei contributi dei cinque termini definiti nel seguito.
1)
Velocità di dilatazione isotropa, che comporta l'allungamento (o l'accorciamento)
uguale di ogni lato dell'elemento, senza variazione dell'angolo formato dai lati
passanti per A, e quindi senza variazione della direzione della bisettrice di tale
angolo, che in questo caso coincide con la diagonale dell'elemento.
2)
Velocità di dilatazione lineare isovolumica, che comporta allungamenti o
accorciamenti diversi di ciascuno dei lati dell'elemento, e tali da mantenere
invariato il volume dell'elemento stesso (l'area nel caso bidimensionale). L'angolo
in A e la relativa bisettrice rimangono invariati.
3)
Velocità di distorsione pura (pari ad un mezzo del vettore γ ), che produce
variazione nell'angolo formato dai lati passanti per A, senza modificare, né la
direzione della bisettrice, né il volume dell'elemento (varia, ovviamente, la
lunghezza dei lati).
€
Velocità di rotazione rigida (pari ad un mezzo del vettore ω = rotV ), che comporta
la variazione della direzione della bisettrice dell'angolo in A, ma lascia inalterati,
sia l'angolo, sia la lunghezza dei lati.
4)
5)
Velocità di traslazione rigida dell'elemento, che€comporta un uguale spostamento
di ciascuno dei vertici dell'elemento, e che ne lascia pertanto del tutto inalterati il
volume, la forma e la giacitura.
y
y
δ
δ
A (x, y)
A (x, y)
x
velocità di dilatazione isotropa
x
velocità di dilatazione lineare isovolumica
y
y
dy
δ
δ
A (x, y)
x
A (x, y)
dx
velocità di rotazione rigida
velocità di distorsione pura
Parte 4 - Pag. 7
x
y
δ
δ
A (x, y)
x
velocità di traslazione rigida
L'artificio consiste nel sommare e sottrarre, a Δx, in questo caso, la quantità:
1 ∂v
1
dy + divVdx dt
2 ∂x
2
Ciò che si ottiene è:
1
1 ∂v ∂u
€ ∂u 1
1 ∂v ∂u
Δx = dudt = divVdx + − divV dx + + dydt + − − dydt
∂x 2
2 ∂x ∂y
2
2 ∂x ∂y
Vel. dil. lineare isotropa
€
Vel. dil. lineare isovolumica
Vel. distorsione pura
Vel. rotazione rigida
Il primo dei termini contenuti tra le parentesi quadre rappresenta il contributo
alla componente secondo x della deformazione prodotta dalla velocità di dilatazione
isotropa. Questa, in base alla definizione che ne abbiamo dato, deve produrre
allungamenti uguali di ciascuno dei lati dell'elemento che, nel caso di un elemento
piano, coincidono con 1/2 della dilatazione isotropa (1/3, nel caso tridimensionale),
ovvero della divergenza del vettore velocità.
La divergenza del vettore velocità V , nell'elemento di volume dτ , è definita
come il limite del rapporto tra il flusso di V attraverso la superficie ds di dτ ed il
volume dτ , al tendere di questo a zero 8. Pertanto, se il vettore velocità V ha
componenti cartesiane ortogonali istantanee u ( t ) , v ( t ) , w ( t ) , si definisce divergenza
del vettore V all'istante t i, nel punto Pj , lo scalare:
€
€
∂u(t i ) ∂v(t i ) ∂w(t i )
divV(t i ,Pj ) =
+
+
€
∂y
∂z
∂x
P=Pj
8
€
Si ricordi anche il teorema della divergenza (o di Gauss) che afferma che, in un campo
vettoriale avente vettore caratteristico V , data una superficie chiusa S che delimita un
volume V, l'integrale della divergenza del vettore V esteso al volume V uguaglia il flusso
del vettore V attraverso la superficie S che delimita V.
Parte 4 - Pag. 8
Il secondo termine, moltiplicato per dx , è il contributo alla componente
secondo x della deformazione associato alla velocità di deformazione lineare
isovolumica (o, meglio, isosuperficiale, visto che stiamo considerando un caso
piano).
Dal momento che, per definizione, l'area dell'elemento piano infinitesimo
deve conservarsi inalterata, se esiste una variazione della componente u della
velocità in direzione x, e cioè un termine ∂u ∂x , questo deve essere
necessariamente bilanciato da una variazione di segno opposto della componente v
in direzione y.
La quantità contenuta tra le parentesi del terzo termine, e moltiplicata per dy
e per 1/2, è pari alla velocità di distorsione pura γ che, per un vettore velocità V di
componenti cartesiane ortogonali istantanee locali (u ( t ) ,v ( t ) ,w ( t ) ) , è il vettore di
componenti 9:
γ(t i ) P=Pj
€
€
γ x (t i ) P=P = ∂w(t i ) + ∂v(t i )
j
∂z P=P
∂y
j
∂u(t i ) ∂w(t i )
+
= γ y (t i ) P=Pj =
∂z
∂x P=Pj
∂v(t i ) ∂u(t i )
γ z (t i ) P=Pj =
+
∂y P=P
∂x
j
Infine, il quarto termine, moltiplicato anch'esso per dy , è il contributo
all'allungamento della proiezione
secondo x della diagonale considerata, dovuto alla
€
velocità angolare dell'elementino. Velocità angolare che, com'è noto, è pari ad 1/2
del vettore rotore della velocità, definito come:
rotV(t i ) P=Pj = ω (t i ) P=Pj
€
ξ(t i ) P=P = ∂w(t i ) − ∂v(t i )
j
∂z P=P
∂y
j
∂u(t i ) ∂w(t i )
= η(t i ) P=Pj =
−
∂z
∂x P=Pj
∂v(t i ) ∂u(t i )
ζ(t i ) P=Pj =
−
∂y P=P
∂x
j
Questo termine si è tenuto volutamente separato dagli altri dal momento che,
insieme alla velocità di traslazione rigida (qui non riportata), costituisce l'atto di
€
9
Si ricordi che in ogni corrente piana, quale è quella qui considerata, i vettori velocità di
distorsione pura e rotore della velocità presentano una sola componente non nulla, e che
questa è ortogonale al piano di moto.
Parte 4 - Pag. 9
moto rototraslatorio rigido, che non contribuisce in alcun modo alla deformazione (e
quindi alla generazione di sforzi) dell'elemento di fluido 10.
Nel caso più generale di elemento di fluido e di atto di moto tridimensionali,
se denotiamo con u, v, e w le componenti locali ed istantanee del vettore velocità V
in un sistema di coordinate cartesiane ortogonali x, y, z, il tensore della velocità di
deformazione è il seguente tensore (o tensore doppio) di componenti:
€
e=
∂u
e xx =
∂x
1 ∂u ∂v
e xy = +
2 ∂y ∂x
1 ∂u ∂w
e xz = +
2 ∂z ∂x
1 ∂v ∂u
e yx = +
2 ∂x ∂y
∂v
e yy =
∂y
1 ∂v ∂w
e yz = +
2 ∂z ∂y
1 ∂w ∂u
e zx =
+
2 ∂x ∂z
1 ∂w ∂v
e zy =
+
2 ∂y ∂z
∂w
e zz =
∂z
Si può però dimostrare che, per la condizione di equilibrio dinamico alle
€ rotazioni, ovvero per il teorema del momento della quantità di moto per un fluido
newtoniano 11, tale tensore è simmetrico.
Pertanto, grazie alla condizione di simmetria, che si traduce nelle relazioni:
e xy = e yx
e xz = e zx
e = e
yz zy
le 9 componenti del tensore e si riducono a sole 6 componenti indipendenti:
1 ∂u ∂v
e xy = +
2 ∂y ∂x
1 ∂u ∂w
e xz = +
2 ∂z ∂x
e yx = e xy
∂v
e yy =
∂y
1 ∂v ∂w
e yz = +
2 ∂z ∂y
e zx = e xz
e zy = e yz
∂w
e zz =
∂z
e xx
e=
€
∂u
=
∂x
10 €Anzi,
sebbene qui si sia scelto di scomporlo in cinque contributi, il generico atto di moto
è sempre riconducibile alla somma di una velocità di rototraslazione rigida e di una
velocità di deformazione.
11
Per una dimostrazione del teorema di simmetria del tensore degli sforzi, si veda, ad
esempio, "Aerodinamica" di E. Mattioli, Editore Levrotto e Bella, Torino, pag. 146.
Parte 4 - Pag. 10
e il tensore, scritto nella più compatta notazione cartesiana tensoriale, diventa:
1 ∂v ∂v
eij = i + j
2 ∂x j ∂x i
con e ij = e ji , per i ≠ j
Scritto invece in coordinate cilindriche r , θ e z , il tensore della velocità di
€
€
deformazione ha componenti:
€
e rr =
e=
∂v r
∂r
eθr = e rθ
e zr = e rz
€
1 1 ∂v r ∂v θ v θ
e rθ =
+
−
2 r ∂θ
∂r
r
eθθ =
1 ∂v θ v r
+
r ∂θ
r
1 ∂v ∂v
e rz = r + z
2 ∂z
∂r
1 ∂v 1 ∂v z
eθz = θ +
2 ∂z r ∂θ
e zθ = eθz
e zz =
∂v z
∂z
2 - Proporzionalità tra tensore degli sforzi viscosi e tensore della
velocità di deformazione nei fluidi newtoniani
Si è affermato che, per i fluidi newtoniani, esiste un legame di proporzionalità
diretta tra il tensore velocità di deformazione e ij ed il tensore degli sforzi viscosi
Sij .
Ciò significa che ciascuna delle componenti del tensore degli sforzi viscosi
può essere espressa da una combinazione lineare delle componenti del tensore della
velocità di deformazione, una volta che siano noti, mediante modelli teorici o
indagini sperimentali, i valori degli 81 coefficienti che definiscono tale legame.
Tuttavia, le condizioni di:
a) simmetria del tensore degli sforzi,
b) simmetria del tensore velocità di deformazione,
c) indipendenza del lavoro di deformazione dal sistema di riferimento,
d) e di isotropia del fluido (che ben si addice ai fluidi newtoniani),
consentono di esprimere le componenti del tensore degli sforzi viscosi in funzione di
quelle del tensore della velocità di deformazione, attraverso 2 sole variabili scalari,
che si denotano generalmente con µ e λ , e che sono delle proprietà fisiche
dipendenti dal particolare fluido in esame e dal suo stato termodinamico 12.
12
€
Per maggiori dettagli si veda: B.Finzi, M.Pastori, "Calcolo tensoriale e applicazioni",
Zanichelli, Bologna, 1961, 2a Edizione, Capitolo 9, paragrafi 5 ed 8.
Parte 4 - Pag. 11
Per un generico fluido newtoniano si ottengono pertanto le seguenti relazioni:
€
€
€
€
∂u ∂v ∂w
∂u
S xx = 2µe xx + λ +
+
= 2µ + λdivV
∂x
∂x ∂y ∂z
(S1.a)
∂u ∂v
S xy = S yx = 2µe xy = µ + = µγ z
∂y ∂x
(S1.b)
∂w ∂u
S xz = S zx = 2µe xz = µ
+ = µγ y
∂x ∂z
(S1.c)
∂u ∂v ∂w
∂v
S yy = 2µe yy + λ +
+
= 2µ + λdivV
∂x ∂y ∂z
∂y
(S1.d)
∂v ∂w
S yz = S zy = 2µe yz = µ +
= µγ x
∂z ∂y
(S1.e)
∂u ∂v ∂w
∂w
S zz = 2µe zz + λ + +
+ λdivV
= 2µ
∂z
∂x ∂y ∂z
(S1.f)
€
dove µ è la viscosità dinamica locale del fluido (che, nel caso particolare di gas
perfetto monoatomico, si è ricavata dalla teoria cinetica) e λ è definita come:
€
(
λ = β − 23 µ
)
(S2)
ovvero è funzione della viscosità dinamica µ e di una seconda viscosità, β, che
prende il nome di viscosità di volume.
€
Quest'ultima è nulla nel caso di gas monoatomici (quindi non è deducibile
dalla teoria cinetica) ma è generalmente non nulla nei fluidi newtoniani. Nel caso
particolare dell'aria secca, ad esempio, β è dello stesso ordine di grandezza di µ.
Il contributo di β al tensore degli sforzi viscosi è poi generalmente trascurabile
nel caso dei liquidi, ma non per la trascurabilità di β in sé, che può essere anzi
tutt'altro che piccola, bensì per la relativa incomprimibilità delle sostanze liquide,
che comporta una velocità di dilatazione isotropa (ovvero una divV ) praticamente
trascurabile.
Della viscosità di volume riparleremo ampiamente più avanti. Per il momento,
possiamo concludere questo paragrafo affermando che, anche nel caso più generale
di atto di moto, gli sforzi viscosi in un fluido newtoniano sono descritti dal tensore
S:
S xx
S = S yx
S zx
S xy
S yy
S zy
S xz
S yz
S zz
€
Parte 4 - Pag. 12
(S3)
le cui componenti, definite dalle relazioni (S1a÷S1f), sono funzioni solamente
dell'atto di moto e delle proprietà fisiche del fluido, entrambi locali ed istantanei, che
sono e perfettamente noti.
Sebbene, come si è detto, la matrice (S3) sia simmetrica, e quindi gli indici di
ciascun elemento possano essere invertiti senza conseguenza alcuna, nel seguito
useremo la convenzione di associare al 1° indice della componente S ij la direzione
di azione dello sforzo, e al 2° la direzione della normale alla superficie su cui tale
sforzo agisce. Pertanto, la componente indicata con S zy dovrà intendersi come la
componente dello sforzo che agisce in direzione dell'asse z, applicato su di una
faccia dell'elemento che ha normale parallela all'asse y. Si tratterà quindi, come per
S xy ed S zx , di componenti di sforzo tangenziali, o di taglio. Analogamente, con S xx
si indicherà la componente agente in direzione dell'asse x e applicata ad una faccia
che ha normale parallela all'asse x: si tratterà quindi, come per S yy ed S zz , di
componenti di sforzo di tipo normale.
€
3 - Il problema della pressione
Nella fluidodinamica, così come nell'aerodinamica e nella gasdinamica, si
avrà spesso a che fare con la pressione. Anzi, si parlerà, non solo di pressione, ma
anche di pressione termodinamica, di pressione statica, di pressione totale e di
pressione dinamica. Vediamo di chiarire subito alcuni punti sulla pressione, a
cominciare dalla terminologia.
Pressione termodinamica (in un fluido in quiete)
Abbiamo già definito la pressione termodinamica come la forza per unità di
superficie esercitata dalle molecole di un gas, per effetto degli urti conseguenti alla
sua velocità di agitazione termica. Lo abbiamo fatto per un particolare tipo di fluido,
il gas perfetto monoatomico, usando il modello della teoria cinetica, e assumendo
quindi che il gas si trovasse in condizioni di quiete (ovviamente a prescindere dai
moti su scala molecolare) e di equilibrio termico 13. La pressione termodinamica,
13
A rigore, ciò che si ipotizza nel modello della teoria cinetica, come in tutta la
termodinamica classica, è lo stato di equilibrio termodinamico. Stato che si ottiene
quando sono verificate simultaneamente le condizioni di equilibrio meccanico, termico e
chimico del sistema considerato.
L'equilibrio meccanico esiste quando tutte le forze sono bilanciate, sia all'interno del
sistema, sia tra il sistema considerato e quelli che lo circondano. In assenza di forze di
campo, ciò implica che la pressione sia perfettamente uniforme.
L'equilibrio termico è verificato se tutte le parti di un sistema si trovano alla stessa
temperatura, e questa è uguale alla temperatura dei sistemi circostanti.
L'equilibrio chimico si ha quando un sistema non presenta alcuna tendenza a modificare
spontaneamente la sua composizione chimica, indipendentemente dalla velocità della
reazione.
(continua)
Parte 4 - Pag. 13
così definita, è peraltro anche quella che chiamiamo più semplicemente pressione,
ovvero quello scalare cui abbiamo già più volte accennato.
E termodinamica, o pressione, chiameremo ogni scalare che sia definito nelle
medesime condizioni e associato allo stato termodinamico (e governato quindi da
un'equazione di stato), anche se il fluido in esame non sarà necessariamente un gas
monoatomico ma, ad esempio, un generico gas, un ipotetico gas non viscoso, una
miscela di gas (come l'aria secca) o, addirittura, un liquido, dal momento che,
semplice o complessa, un'equazione di stato può essere definita anche per questi
ultimi.
Pressione statica
Statica si definisce poi la pressione che si misura in un punto di una regione
occupata da un fluido che si trovi, a livello di continuo deformabile (ovvero, a
prescindere, ancora, dai moti molecolari), in condizioni di quiete. Ma allora, visto
che la pressione termodinamica è stata definita proprio in tale situazione, siamo
autorizzati a dire che la pressione termodinamica è anche la pressione statica. In altri
termini, ogniqualvolta siano rispettate le condizioni previste dalla teoria cinetica (o
condizioni analoghe, che consentano di definire una pressione termodinamica), la
pressione termodinamica coincide anche con la pressione statica o, più
semplicemente, con la pressione.
Pressione termodinamica in un fluido in movimento
Meno evidente è se, di pressione termodinamica (e di pressione statica,
quindi), sia ancora corretto parlare anche quando il fluido è in movimento, ovvero
nel caso di correnti di fluidi. In altre parole, quando la massa di fluido, che qui
continuiamo a ritenere per semplicità essere un gas perfetto e monoatomico, è in
movimento, possiamo ancora pensare che la pressione sia legata alle altre variabili di
stato, temperatura e densità, da una relazione del tipo p = ρRT ? La risposta è
affermativa: vediamo perché.
L'equazione di stato è un legame tra la pressione del gas, la sua massa per
unità di volume e l'energia associata all'agitazione termica delle sue molecole 14
(ovvero alla sua temperatura), valido in condizioni di quiete e di equilibrio. Ora,
soddisfatte le condizioni di equilibrio chimico e termico 15, e se l'atto di moto è
rettilineo e uniforme e non comporta velocità commensurabili con quella della luce
(il che è escluso nell'ambito di tutta la meccanica e la gasdinamica classiche),
Pertanto, non solo nell'ambito della teoria cinetica, ma anche di tutta la termodinamica
classica, ogni processo termodinamico è descrivibile soltanto come una successione di
stati di equilibrio termodinamico che, per essere tali, devono avvenire a velocità
infinitamente piccola. Le trasformazioni termodinamiche così descritte sono pertanto
necessariamente reversibili. A rigore, quindi, la termodinamica classica non è applicabile
a sistemi fisici in cui le variabili di stato, come la pressione, non siano uniformi.
Ritorneremo su questo problema più avanti.
14
Energia che, nel caso di un gas monoatomico, è puramente traslazionale.
15
Vedremo più avanti le conseguenze della presenza di eventuali gradienti termici o di
forze esterne agenti sul fluido.
Parte 4 - Pag. 14
temperatura e densità del gas non sono affatto influenzate dalle condizioni di moto
purché esse vengano rilevate da un osservatore solidale con il fluido. Pertanto,
sebbene il gas sia in movimento, nemmeno la pressione subirà variazioni, purché
venga anch'essa misurata da un osservatore in moto con il fluido. A tale condizione,
quindi, la pressione continuerà ad obbedire alla medesima equazione di stato che le
compete nella condizione di quiete.
Ciò significa che, se ritorniamo alla definizione di pressione termodinamica
data dalla teoria cinetica (V. Parte 2), il fatto che il recipiente che contiene il gas a
densità e temperatura uniformi sia in quiete, oppure sia animato da un moto rettilineo
e uniforme, non modifica minimamente lo sforzo che le sue molecole esercitano
urtando la superficie del contenitore.
Il che è quasi ovvio, ma suggerisce due considerazioni piuttosto importanti.
La prima, di cui avremo numerose conferme anche nel seguito, è che, nella
dinamica dei fluidi, quello che conta è sempre il moto (o l'assenza di moto) relativo.
La seconda indica che, a rigore, qualora si voglia misurare la pressione
termodinamica istantanea in un punto P di una corrente di fluido, è necessario che la
sonda di misura, nell'istante in cui si effettua la misura della pressione in P, transiti
per tale punto del campo di moto con velocità esattamente uguale a quella locale e
istantanea del fluido. Il che fa intravedere che la misura della pressione
termodinamica in un fluido in movimento è cosa non del tutto banale.
A queste conclusioni si è giunti nell'ipotesi che il moto del fluido sia rettilineo
ed uniforme. Si potrebbe obiettare che, in generale, anche all'interno di un elemento
di fluido relativamente piccolo, è sempre presente un gradiente della velocità e che
quindi non é possibile annullare esattamente il moto medio relativo tra l'osservatore
e le molecole in esso contenute.
Se trascuriamo, per il momento, le conseguenze di un moto non rettilineo ed
uniforme sull'equilibrio meccanico e ci limitiamo a considerare soltanto il problema
del moto relativo tra il fluido e l'osservatore, possiamo facilmente dimostrare che
anche un'eventuale disuniformità dell'atto di moto non presenta, di fatto,
conseguenze significative. Infatti, se le dimensioni dell'elemento sono
sufficientemente piccole 16, un gradiente della velocità, anche elevato, non potrà
comportare variazioni sensibili della velocità al suo interno. Quanto meno, tali
variazioni della velocità saranno ben difficilmente significative rispetto alla radice
del valore quadratico medio della velocità molecolare che è la velocità da cui
dipendono la temperatura e lo stato termodinamico del fluido: quest'ultima assume
infatti valori dell'ordine di qualche centinaio di metri al secondo (ad esempio, per
l'aria in condizioni standard, è pari a 486 m/s) 17.
Possiamo quindi concludere che la pressione termodinamica, sebbene definita
in condizioni di quiete, continua ad essere legata alle altre variabili di stato dalla
16
Da intendersi, come di consueto, piccole rispetto alle dimensioni caratteristiche del
sistema macroscopico continuo, ma tali da contenere comunque un numero
statisticamente significativo di molecole di gas.
17
Vincenti e Kruger, "Introduction to Physical Gasdynamics", Ed. Krieger, 1965, pag. 9.
Parte 4 - Pag. 15
medesima relazione, anche nel caso in cui il fluido considerato sia in movimento. E
ciò è vero anche in condizioni di atto di moto del tutto generale 18.
Pressione uniforme e non
Se ci si limita a trattare fenomeni fluidodinamici in equilibrio chimico, e se
valgono le ipotesi di uniformità termica, di equilibrio e di assenza di forze di campo,
non solo i termini pressione, pressione termodinamica e pressione statica sono
sinonimi, ma non possono che assumere valore rigorosamente uniforme.
Affinché possa esistere un gradiente della pressione, è quindi necessario che
venga a cadere almeno una delle ipotesi della teoria cinetica, ovvero che, ad
esempio, il fluido non abbia temperatura uniforme, oppure che le forze di campo non
siano affatto trascurabili.
Ma a conclusione della nota sull'equilibrio termodinamico si è affermato che,
a rigore, la termodinamica classica non è applicabile a sistemi fisici in cui le variabili
di stato non siano uniformi. Questa affermazione potrebbe avere implicazioni
pratiche tragiche se si considera che i processi fluidodinamici reali sono
generalmente irreversibili, ovvero caratterizzati da successioni di stati di nonequilibrio, proprio a causa del fatto che le distribuzioni delle variabili di stato
pressione, densità e temperatura non sono affatto uniformi. Ciò non significa
necessariamente che si debba abbandonare completamente la termodinamica
classica: come spesso succede, si deve però rinunciare a trattare i processi fisici reali
in modo esatto ed accettare, ancora una volta, di descriverli in modo approssimato 19.
Se il sistema termodinamico in esame, ad esempio, è in equilibrio chimico 20,
ma non è in equilibrio meccanico e termico, è sempre possibile suddividerlo in
sottosistemi di dimensioni infinitesime rispetto a quelle del sistema originario, ma
tuttavia ancora molto grandi rispetto alle dimensioni delle molecole del fluido. E a
questo punto è lecito assumere che, all'interno di ciascun sottosistema valgano le
condizioni di equilibrio termodinamico (mentre ciascuno di essi può trovarsi in nonequilibrio rispetto ai sistemi circostanti) e viene recuperata la validità delle variabili
di stato della termodinamica classica. Ed è quindi possibile ottenere, per
integrazione, una descrizione dell'intero sistema in non-equilibrio, che è sì
approssimata, ma con livello di approssimazione così elevato da non giustificare il
ricorso a modelli termodinamici più complessi, almeno nell'ambito di tutta la
gasdinamica classica.
18
Si noti che ciò è completamente diverso, dall'affermare che, in una corrente di fluido, lo
stato di sforzo normale locale deve coincidere necessariamente con la pressione
termodinamica (il che, come vedremo, può anche non verificarsi affatto).
19
Il che, spesso, non è affatto grave ed è insito nel concetto stesso di "modello della realtà"
(si veda la Parte 1). Grave sarebbe, invece, il non avere la consapevolezza dei limiti del
modello adottato.
20
Il problema è più complesso nel caso in cui sia presente anche il non-equilibrio chimico,
ma è esaurientemente trattato nel già citato Vincenti e Kruger, "Introduction to Physical
Gasdynamics", Ed. Krieger, 1965.
Parte 4 - Pag. 16
Allo stesso modo viene risolto il problema della non stazionarietà.
L'evoluzione temporale delle variabili di stato in un fenomeno non stazionario viene
descritta in modo quasi-statico, attraverso una successione temporale di stati di
equilibrio.
Possiamo quindi affermare che uno scostamento dall'equilibrio termico non è
del tutto incompatibile con il modello della termodinamica classica ed è tale da
produrre un gradiente delle variabili di stato, pressione inclusa.
Come si è detto, un'altra ipotesi della teoria cinetica che può venire a mancare,
dando anch'essa luogo ad un gradiente della pressione, è quella di assenza di forze di
campo.
In condizioni normali, gas e
liquidi sono quasi sempre soggetti al
gradiente idrostatico
pressione uniforme S
campo gravitazionale e gli effetti
dinamici del peso proprio del fluido,
soprattutto nel caso dei liquidi, che
S
hanno densità sensibilmente maggiore
di quella dei gas, possono non essere
per niente trascurabili. Pertanto, il
S
campo di pressione presenterà in
generale un gradiente in direzione
verticale, ovvero una variazione
spaziale della pressione, che è
funzione dell'accelerazione di gravità e della densità del fluido.
S
Un esempio è quello del bacino riportato in figura, dove la pressione (ovvero
la pressione statica, o termodinamica) aumenta con la profondità, a partire dal valore
uniforme, indicato con S, presente sulla superficie libera del liquido. Un altro
esempio è costituito dall'atmosfera terrestre, nella quale pressione, densità e
temperatura diminuiscono sensibilmente, anche se in diversa misura, all'aumentare
della quota (si veda la tabella dell'International Standard Atmosphere, nella Parte 2).
Sebbene prenda il nome di gradiente idrostatico, tale variazione non riguarda
affatto le sole condizioni di quiete e i soli liquidi: è, al contrario, presente in tutte le
correnti di qualunque fluido la cui densità non sia nulla. E' però vero che, a parità di
accelerazione di gravità, esso è maggiore nel caso dei liquidi perché maggiore è la
loro densità, ed è altrettanto vero che le conseguenze dinamiche di tale gradiente
sono maggiormente sensibili in condizioni prossime a quelle di quiete, quando le
altre forze in gioco tendono praticamente ad annullarsi.
Pressione dinamica e pressione totale
Possiamo concludere questo paragrafo sulla pressione con un cenno alla
pressione dinamica. Si tratta dello scalare 1 ρ V 2 che esprime l’energia cinetica del
2
fluido per unità di volume, ma non costituisce affatto uno sforzo esterno: esso
Parte 4 - Pag. 17
appartiene infatti al termine non lineare (l’accelerazione convettiva) dell’equazione
di bilancio della quantità di moto.
Lo scalare pressione totale, infine, esprime l’energia totale per unità di
volume. Nel caso di un fluido a proprietà costanti, l’energia totale coincide con
l’energia meccanica e la pressione totale è quindi pari alla somma dei tre contributi
della pressione (energia cinetica a livello molecolare per unità di volume), della
pressione dinamica (energia cinetica a livello del continuo o “di insieme” delle
molecole, per unità di volume ) e dell’energia potenziale per unità di volume:
2
p t = p + 12 ρ V + ρgz .
4 - Sforzo normale
€ in quiete e in movimento
Si è affermato che qualunque fluido, anche in condizioni di quiete, può
sostenere uno sforzo, purché orientato nella direzione della normale locale alla sua
superficie. Si è discusso il significato di questo scalare, che prende il nome di
pressione, e si è anche dimostrato che tale pressione continua ad essere legata
attraverso la medesima equazione di stato alla densità e alla temperatura, anche in
condizioni di moto e in presenza di gradienti.
Si è poi affermato che, in condizioni generali di moto, a questo stato di sforzo
isotropo si vengono a sommare altri sforzi normali e tangenziali, detti viscosi che,
nel caso dei fluidi newtoniani, è possibile valutare compiutamente attraverso le
relazioni (S1.a÷S1.f).
Quello che può essere utile discutere ora è se, e a quali condizioni, l'atto di
moto generico di un fluido newtoniano possa modificare, attraverso gli sforzi
viscosi, il valore locale dello sforzo normale isotropo.
Per farlo, incominciamo col definire il tensore S T che descrive lo stato di
sforzo totale locale per un fluido viscoso newtoniano in movimento, con atto di moto
del tutto generico. Sforzo che è la somma degli sforzi viscosi dovuti al moto e della
pressione p (unico sforzo possibile in condizioni di quiete). Introducendo la matrice
€
unitaria I , scriviamo quindi:
S T = S − pI =
S xx S xy S xz
= S yx S yy S yz
€
S zx S zy S zz
sforzo indotto dal moto
−
p
0
0
0
p
0
0
0
p
(S4)
sforzo agente in quiete
€
dove S è il tensore (S3) introdotto al paragrafo 2, le cui componenti sono definite
dalle relazioni (S1.a÷S1.f) e pI è la matrice che rappresenta lo scalare pressione, il
cui segno, per convenzione, è opposto a quello degli altri sforzi normali.
Parte 4 - Pag. 18
Per comodità possiamo infine riscrivere il tensore S T nella forma:
S xx − p
S yx
S zx
T
S =
S xy
S€
yy − p
S zy
S xz
S yz
S zz − p
(S5)
Prima di procedere oltre, è conveniente ricordare che lo sforzo normale
isotropo, che qui €
indichiamo per chiarezza con q, è definito, a meno del segno, come
un terzo della traccia (o dell'invariante lineare) del tensore S T , ovvero come la
media delle tre componenti normali del tensore (S5):
−q =
1
(Sxx − p) + (Syy − p) +€(Szz − p)
3
[
]
(S6)
ed è evidente che, in condizioni di quiete, in cui si annulla non solo la somma dei tre
sforzi normali S xx , S yy ed S zz , ma anche di ciascuno di essi, tale pressione q
€
coincide necessariamente
con lo scalare pressione statica o termodinamica p di cui
abbiamo lungamente parlato.
Ma quale indicazione fornisce la (S6) in relazione al quesito che ci siamo posti?
In condizioni generali di moto e per un generico fluido newtoniano, le tre
componenti S xx , S yy ed S zz , sono date dalle relazioni:
∂u
S xx = 2µ + λdivV
∂x
∂v
S yy = 2µ + λdivV
∂y
€
e la (S6) diventa:
∂w
S zz = 2µ + λdivV
∂z
(S1.a)
(S1.d)
(S1.f)
€
∂w
∂v
1 ∂u €
−q = 2µ + λdivV
− p + 2µ + λdivV − p + 2µ + λdivV − p
3 ∂x
∂y
∂z
ovvero:
−q =
€
(
1
[(2µ + 3λ) divV − 3p]
3
)
e, ricordando la relazione λ = β − 23 µ , che lega le viscosità del fluido newtoniano:
€
−q = β divV − p
(S7)
Lo scalare€q, che definisce ancora lo stato di sforzo normale isotropo, nel caso
di un atto di moto generale di fluidi viscosi newtoniani a proprietà variabili non
€
coincide affatto con la pressione
termodinamica p, ma dipende anche da quella
Parte 4 - Pag. 19
proprietà fisica del fluido che abbiamo definito viscosità di volume e dalla velocità
di dilatazione isotropa locale del fluido 21.
Pertanto l'identità tra lo sforzo normale isotropo q e la pressione
termodinamica p è verificata rigorosamente soltanto nei casi particolari:
a) di gas perfetti monoatomici per i quali, come si è detto, è nulla la viscosità di
volume β ,
b) di ipotetici fluidi non viscosi, per i quali è nulla, non solo β , ma anche µ ,
c) e di fluidi viscosi newtoniani la cui comprimibilità possa considerarsi nulla.
€In tal caso infatti l'equazione di continuità impone che divV = 0 .
€ per i gas 22,
Quest'ultima ipotesi, molto più appropriata per€ i liquidi che
costituirà la base della maggior parte dei fenomeni e dei modelli che si esamineranno
€ a numerose correnti gassose
in questo corso. Il motivo della sua applicabilità anche
è discusso nel paragrafo che segue. Il motivo della sua applicabilità anche alle
correnti gassose è discusso nel prossimo paragrafo.
5 - Alcune considerazioni sulla viscosità di volume
e sulla relazione di Stokes
L'esistenza di semplici relazioni lineari tra le componenti del tensore degli
sforzi viscosi e quelle del tensore della velocità di deformazione facilita
enormemente la scrittura delle equazioni di bilancio, nel caso particolare di fluidi
newtoniani 23. Esse, infatti, permettono di esprimere lo stato di sforzo viscoso locale
ed istantaneo attraverso le relazioni (S1.a÷S1.f), ovvero in funzione di derivate
spaziali della velocità e delle due sole proprietà caratteristiche del fluido viscosità
dinamica µ e viscosità di volume β.
21
Come vedremo, anche le fluttuazioni del moto turbolento possono alterare il valore medio
della pressione. Ma si tratta di un concetto di media piuttosto complesso, che verrà
discusso più avanti.
22
Anzi, in generale, l'ipotesi di incomprimibilità è sostituita da quella di costanza, non solo
della densità, ma anche della temperatura e della viscosità. Si parla infatti di fluidi a
proprietà costanti.
23
Storicamente, alla formulazione delle equazioni di bilancio per la quantità di moto, che
prendono oggi il nome di equazioni di Navier-Stokes, contribuirono M. Navier (1827), S.
D. Poisson (1831), B. de Saint Venant (1843) e G. G. Stokes (1845), che ipotizzarono la
linearità del legame tra gli sforzi e la velocità di deformazione, in modo del tutto
arbitrario. Soltanto successivamente, il confronto tra i risultati di alcune soluzioni
analitiche delle equazioni di Navier-Stokes (le cosiddette soluzioni esatte) e i risultati di
misure sperimentali confermò la correttezza di tale ipotesi, che oggi viene correntemente
adottata per descrivere il comportamento dei fluidi newtoniani, ovvero di quella classe di
fluidi che comprende, praticamente, la totalità dei fluidi gassosi, nonché un buon numero
di liquidi, tra i quali l'acqua.
Parte 4 - Pag. 20
Della viscosità dinamica si è già esaminata l'origine fisica, facendo ricorso al
modello della teoria cinetica. Vale ora la pena di fare altrettanto per la viscosità di
volume β.
Consideriamo un elemento di gas viscoso newtoniano di forma sferica, in
equilibrio termodinamico e soggetto ad uno sforzo normale S , uniforme (che
garantisce quindi condizioni di equilibrio meccanico). In condizioni di quiete (figura
a), lo sforzo S è isotropo e, come sappiamo, coincide con la pressione termodinamica
p. Infatti, se sommiamo le tre componenti sulla diagonale della (S5) e teniamo conto
€
delle relazioni (S1.a), (S1.d) ed (S1.f) otteniamo:
S = ( β divV − p)
(S8)
e, dal momento che, in condizioni di quiete, la divergenza di V è identicamente
nulla, la (S12) si traduce appunto in:
€
S = −p
(S9)
€
S+dS
sforzo normale uniforme S
€
a)
S-dS
b)
Immaginiamo ora che, pur rimanendo uniforme, il modulo dello sforzo
normale isotropo agente sulla superficie dell'elemento sferico presenti delle
oscillazioni di ampiezza dS attorno al suo valore medio S (figura b).
Il volume dell'elemento di fluido subirà pertanto variazioni cicliche tra un
valore massimo ed un valore minimo e la divergenza della velocità (ovvero il flusso
di V attraverso una superficie di controllo) assumerà valori non nulli.
Come abbiamo già visto, in questo caso, lo stato di sforzo normale isotropo S
non può coincidere con la pressione termodinamica p, ma è descritto dallo scalare q:
€
−q = ( β divV − p) ≠ −p
(S7)
Se la frequenza e l'ampiezza delle oscillazioni dS è molto piccola, si può
assumere che la compressione
e l'espansione dell'elemento, pur presenti, avvengano
€
però in modo quasi-statico e reversibile, cosicché la divergenza di V si può ritenere
nulla e si può continuare a ritenere valida la relazione (S9). In generale, però, la
divergenza di V assume valori finiti ed il ruolo della viscosità di volume β, ovvero
della struttura molecolare del fluido, diventa fondamentale.
€ Vediamo perché.
€
Parte 4 - Pag. 21
In condizioni di equilibrio termodinamico, l'energia interna è equiripartita tra
tutti i gradi di libertà delle molecole. Se queste sono monoatomiche, i gradi di libertà
sono soltanto traslatori e, anche in presenza di una velocità di dilatazione isotropa di
valore finito, la condizione di equiripartizione dell'energia interna viene ristabilita in
modo istantaneo. Se invece le molecole sono pluriatomiche, esistono anche i gradi di
libertà rotatori e, in presenza di una variazione del volume occupato dal gas (ovvero
in presenza, appunto, di una perturbazione del suo equilibrio termodinamico), il
ripristino della condizione di equiripartizione dell’energia richiede un tempo finito,
che prende il nome di tempo di rilassamento molecolare.
Ora, la viscosità di volume è proprio una misura del tempo di rilassamento
molecolare e se osserviamo che anche 1 divV ha le dimensioni di un tempo,
possiamo concludere che, indipendentemente dal valore assoluto di β, il suo effetto
sarà significativo ogniqualvolta il tempo caratteristico con cui avviene la
deformazione isotropa dell'elemento è piccolo, o confrontabile con il tempo di
rilassamento molecolare 24.
Ciò detto, è opportuno giustificare il frequente ricorso alla relazione di Stokes
in base alla quale gli effetti della viscosità di volume, vengono trascurati anche in
presenza di gas pluriatomici e di comprimibilità. Questa relazione consiste
nell'assumere che:
25,
3λ + 2µ = 0
(S10)
e, dal momento che λ = ( β − 23 µ) , la (S10) equivale ad imporre appunto che la
viscosità di volume β sia identicamente nulla 26.
€
24
Un esempio tipico è quello delle onde d'urto. Un'onda d'urto ha uno spessore che è
confrontabile con il cammino libero medio delle molecole del gas ed un elementino di
fluido percorre tale distanza con una velocità che è dell'ordine di qualche centinaio di
metri al secondo. Nell'attraversamento dell'onda esso subisce una variazione di volume in
un tempo che può essere decisamente inferiore a quello di rilassamento delle molecole.
C'è chi sostiene che tale situazione non possa essere descritta dalle equazioni di NavierStokes. Quello che forse è più corretto affermare è che, sia l'assunzione di equilibrio
termodinamico, sia quella di continuo deformabile possono avvicinarsi pericolosamente
ai loro limiti di validità. Tuttavia, non solo le soluzioni che si ottengono per le onde
d'urto con le equazioni di Navier-Stokes sono in buon accordo con i risultati sperimentali,
ma la loro validità è anche dimostrabile in modo rigoroso, almeno nel caso di onde
relativamente deboli.
25
Relazione formulata da Stokes nel 1845, che portò alla scrittura delle equazioni di
bilancio per la quantità di moto e che, per tale motivo, prendono il nome di equazioni di
Navier-Stokes (denominazione che viene conservata anche quando la relazione di Stokes
non viene affatto utilizzata).
26
Non si tratta di un problema di poco conto: adottare, o meno, la relazione di Stokes porta
a valutazioni completamente diverse della viscosità di volume. Vediamo un esempio.
Alcuni esperimenti di Lightill del 1956 hanno permesso di determinare che, per l'azoto,
β = 0.8µ . Dal momento che l'aria è costituita per l'80 % circa da azoto, è ragionevole
ipotizzare che tale relazione valga anche per l'aria (µ dell'ordine di 1.8⋅10-5 [Pa⋅s] ) ed
assumere quindi che la sua viscosità di volume sia dell'ordine di 1.45⋅10-5 [Pa⋅s].
Utilizzando questi valori, la viscosità λ che compare nel tensore degli sforzi viscosi
Parte 4 - Pag. 22
Sebbene l’assunzione di β = 0 sia in evidente contrasto con la struttura
molecolare della maggior parte dei fluidi, bisogna riconoscere che essa non
impedisce affatto di riprodurre il comportamento di molti liquidi e gas reali che pure,
monoatomici, non sono. Come è possibile tutto ciò?
€
Il motivo di questo apparente paradosso è piuttosto semplice. In una gran parte
dei fenomeni trattati dalla fluidodinamica e dalla gasdinamica classica, sebbene le
variazioni del volume degli elementini di fluido possano essere anche notevoli, esse
avvengono con una velocità di deformazione isotropa sufficientemente piccola da
consentire alle molecole di conservare costantemente la condizione di
equiripartizione dell'energia interna. Un tipico esempio è costituito dai fenomeni
termici convettivi naturali. Un altro è quello di una siringa chiusa all'estremità
dell'ago, il cui stantuffo venga fatto scorrere lentamente tra i due estremi: sebbene le
variazioni del volume interno siano enormi, in termini relativi, la condizione di
equiripartizione dell'energia è praticamente verificata in ogni istante.
Se, da un lato, ciò non deve autorizzare ad impiegare la relazione di Stokes
indiscriminatamente (quello dell'onda d'urto, citato nella nota, costituisce appunto
uno dei casi, di notevole importanza in campo aeronautico, in cui tale ipotesi non
può essere adottata), dall'altro, non solo ne giustifica il successo, ma permette anche
di puntualizzare le conclusioni che abbiamo tratto al paragrafo 4, a riguardo
dell'identità, o meno, tra sforzo normale isotropo e pressione termodinamica. In tale
sede abbiamo concluso che l'identità tra lo sforzo normale isotropo q e la pressione
termodinamica può essere verificata anche in correnti di fluidi viscosi newtoniani,
purché l’atto di moto non produca variazioni di densità del fluido. Ora possiamo
precisare che ciò non richiede affatto l’ipotesi di incomprimibilità del fluido, bensì
un’ipotesi più accettabile: possiamo accettare che la comprimibilità del fluido sia
presente (e magari anche rilevante), purché essa produca variazioni di volume degli
elementi di fluido sufficientemente lente, se confrontate con il tempo di rilassamento
molecolare del fluido in esame.
normali (relazioni S1.a, S1.d, S1.f) assume il valore (positivo) di λ = 0.25 ⋅ 10 −5 mentre,
adottando l'ipotesi di Stokes, si ottiene il valore (negativo) di λ = −1.2 ⋅ 10 −5 . Visto che,
sebbene frutto di un'approssimazione piuttosto grossolana, il primo valore è certamente
più realistico del secondo, sembra addirittura preferibile assumere direttamente λ=0,
piuttosto che β=0.
Parte 4 - Pag. 23