Università di Pavia
DIPARTIMENTO
di
FISICA NUCLEARE e TEORICA
G. Zambotti
Introduzione alla
MECCANICA STATISTICA
Lezioni del corso di Meccanica statistica
A.A. 2009/2010
The topics we shall analyse
are not always well defined.
They are often complicated
and fuzzy.
(S.K. Ma)
Queste note raccolgono gli argomenti trattati nel corso di Meccanica statistica (AA 2009/2010). Vengono studiati i sistemi in equilibrio, con particolare attenzione per i fondamenti e i metodi. Le ”applicazioni” sono ridotte al modello di Ising unidimensionale e ai gas ideali di Fermi e di Bose.
Ringrazio gli studenti di questo e dei precedenti corsi per la loro attenzione. Ringrazio doppiamente
chi in passato mi ha segnalato errori ed omissioni, e chi lo farà in futuro.
G. Z.
Pavia, 24 maggio 2010.
Indice
1) Fondamenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1)
Premessa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2)
Fondamenti della meccanica statistica classica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3)
L’ipotesi ergodica classica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4)
Commenti sul teorema ergodico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.5)
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2) Fenomeni dipendenti dal tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1)
Una equazione irreversibile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2)
L’equazione della diffusione in dimensione 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3)
L’equazione della diffusione e il moto browniano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.4)
Evoluzioni: reversibile vs irreversibile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.5)
Evoluzioni irreversibili . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.6)
L’equazione di Liouville . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.7)
Il coarse graining . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.8)
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3) Termodinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.1)
La rappresentazione dell’entropia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2)
Lo stato di equilibrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3)
La trasformata di Legendre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.4)
Altre rappresentazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.5)
Non applicabilità della trasformata di Legendre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.6)
La trasformata di Legendre generalizzata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.7)
Le condizioni di stabilità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.8)
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4) Meccanica statistica microcanonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.1)
La distribuzione microcanonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.2)
Il limite termodinamico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.3)
L’entropia microcanonica: esempi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.4)
Volume della sfera n-dimensionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.5)
Altre espressioni dell’entropia microcanonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.6)
Additività dell’entropia microcanonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.7)
La distribuzione di Maxwell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.8)
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5) Meccanica statistica canonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1) La distribuzione canonica (metodi variazionali) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2) La distribuzione canonica (altra derivazione) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3) La fluttuazione dell’energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4) Il problema dell’equivalenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5) La distribuzione gran canonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6) La fluttuazione del numero di particelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7) La teoria di Lee-Yang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.8)
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
6) Il modello di Ising . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1) Il modello di Ising . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2) La approssimazione del campo medio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3) Il modello di Ising unidimensionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4) La magnetizzazione del modello unidimensionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5) Le funzioni di correlazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6) La suscettività per la catena aperta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7) Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7) I gas
7.1)
7.2)
7.3)
7.4)
7.5)
7.6)
7.7)
7.8)
7.9)
7.10)
7.11)
7.12)
7.13)
60
60
62
63
65
66
68
69
74
74
76
80
82
83
84
86
ideali quantistici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
La meccanica statistica quantistica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Un esperimento alla Stern-Gerlach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Proprietà dell’operatore statistico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Gli operatori statistici canonico e gran canonico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Stati di un sistema di particelle identiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
I numeri di occupazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Il limite classico del gas ideale quantistico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Termodinamica del gas ideale di Fermi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Integrali di Fermi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
La condensazione di Bose-Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Proprietà del gas ideale di Bose . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Il calore specifico del gas ideale di Bose . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Bibliografia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
1
Fondamenti
1.1 Premessa
Un sistema fisico come, ad esempio, un gas (classico) può essere descritto, in prima approssimazione,
come un insieme di N punti materiali (”molecole”) soggetti alle leggi della meccanica analitica. Secondo
questo punto di vista, il moto del sistema è descritto da un insieme di funzioni (qi (t), pi (t); i = 1, . . . , 3N ),
con una dipendenza dal tempo, t, determinata dalle equazioni di Hamilton. La caratteristica essenziale
della descrizione del gas fornita dalla meccanica analitica è di essere esatta (chiaramente solo in linea di
principio, date le ovvie difficoltà di scrivere, nonchè di risolvere, le equazioni di Hamilton quando il valore di
N è quello tipico di un sistema macroscopico), e completa (nel senso che essa contiene tutta l’informazione
possibile relativa al sistema).
Lo stesso sistema (il gas) viene descritto anche da altre teorie: dalla termodinamica (TD), se esso
è in ”equilibrio termodinamico”, o dalla dinamica dei fluidi (DF), se esso è sede di moti macroscopici
(flussi di materia, propagazione e/o smorzamento di onde sonore, trasmissione di calore, ecc.). TD e DF
utilizzano un numero di variabili macroscopiche (densità, pressione, temperatura, ecc.), molto più piccolo
del numero delle (q, p). La descrizione del sistema fornita da TD e DF è dunque enormemente incompleta
rispetto a quella della meccanica analitica. La meccanica statistica (classica) è la teoria che definisce e
giustifica i metodi per derivare le descrizioni macroscopiche (incomplete), come TD e DF, dalla descrizione
microscopica (completa) fornita dalla meccanica analitica.
Nella meccanica statistica (classica) le variabili macroscopiche sono definite come valori medi di opportune variabili microscopiche, calcolati mediante una opportuna densità di probabilità, ρ(x), funzione
del ”microstato” x (per i sistemi in equilibrio termodinamico, ρ è indipendente da t). La determinazione
di ρ è il problema centrale della teoria dei fondamenti della meccanica statistica.
1.2 Fondamenti della meccanica statistica classica
Consideriamo un sistema classico con N gradi di libertà (1) , i cui stati microscopici (o ”microstati”)
siano descrivibili come punti, di coordinate
x =
˙ (q1 , · · · qN , p1 , · · · , pN ), di uno spazio euclideo 2N -
dimensionale, Γ (lo ”spazio delle fasi”; Γ può anche essere discreto: vedi l’es. 1.4). I sistemi di interesse
per la meccanica statistica sono (di solito) privi di vincoli: in tal caso, le coordinate lagrangiane coincidono
con le coordinate di posizione, e i momenti coniugati con le quantità di moto. Come vedremo nel seguito,
l’insieme dei microstati può coincidere con tutto Γ (come per un sistema ”in equilibrio termico con una
riserva di calore”), oppure con una sottoregione di Γ (come per un sistema ”isolato” con una energia
assegnata), oppure può risultare dalla unione di un opportuno insieme di spazi Γ (come per un gas con
numero di particelle indefinito: vedi il § 5.5). Fino ad avviso contrario considereremo solo sistemi per i
(1)
Il numero dei gradi di libertà di un sistema macroscopico in genere non è conosciuto con precisione: ad esempio,
per un gas il numero dei gradi di libertà dipende dal numero delle molecole, che, non solo non è noto con precisione, ma
può anche essere variabile. Quindi bisogna accertare che le previsioni della teoria non dipendono dal valore preciso di N ,
oppure, in alternativa, prepararsi a generalizzare la teoria in modo da poter trattare N come una ulteriore variabile casuale.
Quest’ultimo è il punto di vista della meccanica statistica nella formulazione ”gran canonica” (vedi il cap. 5).
1.2
Fondamenti della meccanica statistica classica
2
quali Γ coincide con lo spazio euclideo introdotto sopra.
Chiameremo ”spazio delle fasi accessibile” la regione di Γ i cui punti sono possibili microstati del
sistema. Sottolineiamo il fatto che lo ”spazio delle fasi accessibile” è definito come l’insieme di tutti (e soli)
i microstati effettivamente accessibili. Ad esempio, per un insieme di N molecole (puntiformi, e di massa
m) non interagenti, in un volume V , e con energia totale E, lo spazio delle fasi accessibile è costituito da
tutti (e soli) i punti x tali che le posizioni delle molecole cadano in V , e che la somma delle energie delle
P3N 2
singole molecole sia uguale ad E:
i pi = 2mE.
La specificazione del microstato x a un istante t0 equivale ad una descrizione completa dello stato
dinamico del sistema, nel senso che la conoscenza di x all’istante t0 , unita alla conoscenza della hamiltoniana, permette in linea di principio di determinare (risolvendo le equazioni di Hamilton) il microstato
a ogni istante t 6= t0 . Se, per qualche motivo (come, ad esempio, il gran numero di gradi di libertà),
il microstato di un sistema non può essere specificato, allora i metodi della meccanica (le sue equazioni
differenziali) non sono applicabili, e il calcolo esatto delle proprietà del sistema, già impossibile di fatto
(per sistemi macroscopici non banali), diventa impossibile anche in principio. Inoltre, anche se, per paradosso, un calcolo esatto fosse possibile, esso sarebbe probabilmente inutile, perchè quantità fondamentali
per i comportamenti macroscopici di un sistema, come ad esempio la temperatura, non sembrano essere
riconducibili ad alcuna quantità microscopica (cioè: non sembra esistere una funzione delle (q, p) che sia
interpretabile come, ad esempio, ”temperatura”)!
Nell’impossibilità (e forse nell’inutilità) di calcolare le proprietà del sistema in modo esatto, non resta
che ricorrere ai metodi ”statistici” che descriveremo nel seguito: si deve cioè abbandonare la meccanica
”esatta” (cioè la meccanica analitica), e passare alla meccanica ”statistica”, che possiamo dunque caratterizzare come la teoria che studia sistemi specificati in modo incompleto [Tol § 77]. Come vedremo più
avanti, le previsioni della meccanica statistica per un sistema con N gradi di libertà risultano verificate
dall’esperienza solo se ”N è molto grande” (nel senso che sarà precisato). Un sistema con ”N molto
grande” sarà chiamato ”macroscopico”. Un sistema macroscopico ammette una descrizione macroscopica
(la termodinamica, la meccanica dei fluidi, ecc.), che utilizza opportune grandezze (macroscopiche), come
la temperatura, la densità, le suscettività, ecc..
Il postulato fondamentale della teoria dei sistemi classici conosciuti in modo incompleto è il seguente:
P1 ) Il microstato, x ∈ Γ, di un sistema classico conosciuto in modo incompleto è una variabile
casuale, caratterizzata da una opportuna densità di probabilità, ρ(x, t).
La forma esplicita di ρ sarà discussa in seguito; per ora basti osservare che, per ogni t, ρ(x, t) deve essere
una funzione (su Γ ) reale, non negativa, e normalizzata:
Z
dx ρ(x, t) = 1 ,
con :
Γ
dx =
˙
N
Y
dqi dpi .
(1.1)
i=1
Si noti che il postulato P1 si applica anche quando l’informazione sul microstato è completa, cioè quando
si sa con certezza che a un certo istante t0 il microstato di un sistema è un certo x0 . Infatti, tale caso
corrisponde a: ρ(x, t0 ) =
˙ δ(x − x0 ) (dove δ(z) è la ”delta di Dirac” (multidimensionale) di argomento z).
Chiamiamo ”variabili microscopiche” le funzioni dello stato microscopico: b = b(x) (b è una funzione
su Γ ). In linea di principio, una variabile microscopica può dipendere esplicitamente da t (ad esempio, la
hamiltoniana di un sistema può contenere un campo esterno dipedente da t); qui ci limitiamo a variabili
microscopiche che non dipendono esplicitamente da t. Data una variabile microscopica b, chiamiamo ”valor
medio di b calcolato con la densità di probabilità ρ”, il seguente integrale (o somma, nel caso di Γ discreto):
Z
­ ®
B(t) =
˙ b t=
˙
dx ρ(x, t) b(x) .
(1.2)
Γ
1.2
Fondamenti della meccanica statistica classica
3
Definiamo ora le variabili macroscopiche di un sistema macroscopico specificato in modo incompleto.
Dobbiamo distinguere due tipi di variabili macroscopiche:
A) Variabili macroscopiche, B, per le quali esiste una variabile microscopica b(x) tale che B è definita
dal valor medio (1.2) di b(x). Esempio tipico di variabile macroscopica di tipo A è la ”energia interna”
termodinamica U , che ha come variabile microscopica corrispondente l’energia microscopica H(x): U =
hHi. La (1.2) può essere generalizzata alle variabili microscopiche ”locali”, funzioni, oltre che del punto
x ∈ Γ , anche del punto r dello spazio fisico (vedi l’es. 1.2). Se b = b(x, r) è una variabile microscopica
locale, definiamo il valor medio di b(x, r) come:
Z
B(r, t) =
˙ hbi(r,t) =
˙
dx ρ(x, t) b(x, r) .
(1.3)
Γ
Una importante classe (di funzioni ρ) è quella delle ρ per le quali vale la condizione:
∂ρ
= 0;
∂t
(1.4)
tali ρ sono dette ”stazionarie”. Le variabili macroscopiche calcolate (tramite la (1.2)) con una ρ stazionaria
sono stazionarie (cioè indipendenti da t). Infatti, da (1.2) e (1.4) segue:
Z
dB
∂ρ
=
dx
b = 0.
(1.5)
dt
∂t
Γ
Un sistema macroscopico per il quale tutte le variabili macroscopiche sono indipendenti da t è un sistema ”in
equilibrio termodinamico”. Pertanto, condizione necessaria e sufficiente perchè un sistema macroscopico
sia in equilibrio termodinamico è che la ρ che lo caratterizza (nel senso del postulato P1 ) soddisfi la (1.4).
Per sistemi in equilibrio le (1.2) e (1.3) si scrivono:
Z
Z
B=
˙ hbi =
˙
dx ρ(x) b(x) ,
e, rispettivamente : B(r) =
˙ hbir =
˙
dx ρ(x) b(x, r) .
(1.6)
Γ
Γ
B) Variabili macroscopiche per le quali non esiste una corrispondente variabile microscopica: esempi
tipici sono l’entropia e la temperatura. Le variabili di tipo B devono essere definite ad hoc: qui di seguito
definiamo l’ ”entropia statistica”.
Consideriamo dapprima un sistema i cui microstati accessibili formano un insieme finito, costituito
da N microstati. Assumiamo che la probabilità che il sistema si trovi nel microstato i-esimo (con: i =
P
1, . . . , N ) sia pi . Chiameremo l’insieme {p} =
˙ (pi : i = 1, . . . , N ) (con:
i pi = 1): ”distribuzione di
−1
probabilità”. Nel caso in cui le probabilità pi siano uguali: pi =
˙ p=N
(i = 1, . . . , N ), definiamo la
”entropia statistica”, Sst , come:
Sst =
˙ − ln p =
˙ ln N .
(1.7)
L’entropia statistica è una funzione (crescente) del numero di stati microscopici disponibili. La scelta del
logaritmo conferisce ad S la proprietà della ”additività”: l’entropia di un sistema composto da due sistemi
è la somma delle rispettive entropie (vedi l’es. 1.5a). Come è ben noto (vedi anche il cap. 3) la additività
è una delle proprietà anche dell’entropia termodinamica.
In generale le pi sono diverse. Definiamo allora Sst come:
Sst =
˙ Sst ({p}) =
˙ −
N
X
pi ln pi
(1.8)
i=1
(per un esempio della (1.8) vedi l’es. 1.4d). È chiaro che la (1.7) è un caso particolare della (1.8). Viceversa,
la (1.8) può essere vista come una ”media sui microstati” della entropia (1.7):
Sst =
˙
N
X
i=1
pi (Sst )i ,
con :
(Sst )i =
˙ − ln pi .
(1.9)
1.3
L’ipotesi ergodica classica
4
Consideriamo poi un sistema caratterizzato da un insieme continuo di microstati. Definiamo:
SS) Per un sistema in equilibrio, caratterizzato da un insieme continuo di microstati, e per il
quale è definita una densità di probabilità ρ, l’ ”entropia statistica” è:
Z
Sst [ρ] =
˙ −
dx ρ ln (Γ0 ρ) ,
(1.10)
Γ
dove Γ0 è una costante da determinare.
La notazione S[ρ] mette in evidenza il fatto che S è funzione di ρ. Per sistemi il cui spazio delle fasi
accessibile è un sottoinsieme proprio di Γ le definizioni precedenti devono essere riformulate: un esempio
importante (il sistema isolato) sarà illustrato nel cap. 4.
Non è ovvio, a priori, che l’entropia statistica possa essere una grandezza fisicamente rilevante. Sorprendentemente, tuttavia, ciò accade. Risulta infatti:
ST) L’entropia termodinamica, Std , coincide con l’entropia statistica (moltiplicata per la
costante di Boltzmann, kB ):
Std = kB Sst .
(1.11)
La (1.6) e la (1.11) (nel seguito scriveremo semplicemente S, invece di Std ) sono alla base della validità e
dell’importanza della meccanica statistica (di equilibrio) come teoria fisica.
Vedremo più avanti (cap. 3) che da S è possibile derivare tutte le altre variabili di tipo B. Assegnata
una ρ, la (1.6), per le variabili di tipo A, e la (1.11) per le variabili di tipo B, definiscono allora tutte le
variabili macroscopiche del sistema. Se chiamiamo ”stato macroscopico” (o ”macrostato”) del sistema un
insieme di valori di tutte le variabili macroscopiche, possiamo affermare che una ρ definisce un macrostato
del sistema.
1.3 L’ipotesi ergodica classica
I postulati del paragrafo precedente non sono sufficienti a definire concretamente la ρ che corrisponde
allo stato di equilibrio di un sistema dato. Dobbiamo quindi ricorrere ad un ulteriore postulato. Consideriamo i più ”elementari” tra i sistemi in equilibrio, e cioè quelli isolati (sistemi non isolati saranno discussi
nel cap. 5). Consideriamo quindi sistemi per i quali la hamiltoniana, H, è costante del moto (assumiamo
anche che le forze siano conservative; allora H coincide con l’energia), e formuliamo il seguente postulato:
P2 ) Per un sistema isolato in equilibrio, ρ(x) è costante sullo spazio delle fasi accessibile.
Il postulato P2 equivale ad assumere che un sistema isolato in equilibrio si possa trovare con uguale densità
di probabilità (o probabilità) in tutti i microstati accessibili. La ρ definita dal postulato P2 viene chiamata
”microcanonica”.
Dal punto di vista matematico, i postulati P, e le definizioni come la (1.6), permettono di calcolare
1.3
L’ipotesi ergodica classica
5
le variabili macroscopiche (di tipo A) di un sistema isolato. Rimane, tuttavia, la necessità di giustificare
fisicamente i postulati e le definizioni. In particolare, consideriamo la (1.6). Essa afferma, nel caso di
una ρ stazionaria (vedi la (1.4)), che le variabili macroscopiche di un sistema in equilibrio termodinamico
non dipendono da t. Ciò è consistente con l’idea che un sistema in equilibrio termodinamico sia in uno
stato macroscopico stazionario, ma è anche in contraddizione col fatto che lo stato microscopico dello
stesso sistema dipende da t ! Per superare la contraddizione è opportuno richiamare la diversità delle
scale temporali delle osservazioni macroscopiche e della dinamica microscopica. Si osserva infatti che,
di solito, la misura di una grandezza di un sistema macroscopico richiede, per l’inerzia dell’apparato
di misura, un tempo molto più lungo dei tempi caratteristici della dinamica microscopica del sistema.
Assumendo che l’operazione di misura non perturbi il sistema, si può allora assumere che durante la
misura il sistema percorra, nello spazio delle fasi, tutto un tratto di traiettoria ([Bal app. A.7], [Far §
2.3]), e che il risultato della misura corrisponda ad una media sui microstati toccati dalla traiettoria, cioè
ad una ”media temporale”. È allora opportuno formulare un ulteriore postulato, che, limitatamente alle
variabili di tipo A, fornisce una nuova definizione di ”variabile macroscopica”:
E) Il risultato della misura di una variabile macroscopica di tipo A di un sistema isolato in
equilibrio è la media temporale, b, della corrispondente variabile dinamica microscopica:
b=
˙ b(x0 , t0 ) =
˙ lim
T →∞
Z
1
T
t0 +T
dt b(x(x0 , t0 ; t))
(1.12)
t0
dove x(x0 , t0 ; t) è la soluzione delle equazioni del moto definita dalla condizione x = x0 per t = t0 .
Mostriamo ora che, se per hbi intendiamo la ”media sulla superficie dell’energia”, che definiamo qui di
seguito, allora risulta (per una particolare categoria di sistemi): b = hbi. Definiamo la ”media sulla
superficie dell’energia”.
Consideriamo un sistema isolato con hamiltoniana H = H(q, p), e con energia E (assumiamo: 0 <
E < ∞). Sia Σ(E) la ”superficie dell’energia”: Σ(E) =
˙ {(q, p) : H(q, p) = E}. Assumiamo che l’ ”area”
della superficie Σ(E) sia finita (assumiamo che Σ(E) sia topologicamente equivalente alla superficie di una
sfera (multidimensionale), e che, se E1 < E2 , la superficie Σ(E1 ) sia collocata interamente all’interno di
Σ(E2 ) [Khi § 7]). Assumiamo che tutti i punti di Σ(E) siano accessibili al sistema (cioè che lo spazio delle
fasi accessibile coincida con la superficie dell’energia). È quindi necessario definire la ”media sullo spazio
delle fasi” come un integrale di superficie, invece che come un integrale di volume. Assumiamo allora di
poter introdurre nuove coordinate canoniche, tali da poter scrivere l’elemento di volume di Γ come:
dx = dE dµ ,
(1.13)
dove dµ è un ”elemento di area” sulla superficie Σ(E) (vedi l’es. 1.6). Al posto della (1.6) definiamo (per
un sistema isolato con energia E):
Z
­ ®
B=
˙ b =
˙
dµ ρ(x) b(x) ,
(1.14)
Σ(E)
dove ρ è normalizzata su Σ(E):
Z
dµ ρ(x) = 1 .
(1.15)
Σ(E)
L’entropia termodinamica ora è (per una data ρ):
Z
S=
˙ S[ρ] =
˙ − kB
dµ ρ ln(Σ0 ρ) ,
Σ(E)
(1.16)
1.3
L’ipotesi ergodica classica
6
dove Σ0 è un’altra costante (da determinare).
Definiamo la ”densità di probabilità microcanonica”, come: ρmc (x) = cost. (per x ∈ Σ(E)), cioè:
Z
1
ρmc (x) =
,
dove : Σ(E) =
˙
dµ
(1.17)
Σ(E)
Σ(E)
(usiamo lo stesso simbolo per la superficie e per la sua area). La ”media microcanonica” su Σ(E) di una
funzione b(x) è:
Z
Z
1
hbimc =
˙
dµ ρmc (x) b(x) =
˙
dµ b(x) .
(1.18)
Σ(E) Σ(E)
Σ(E)
La probabilità e la media microcanoniche si possono, ovviamente, definire anche per sistemi con spazi delle
fasi discreti.
Consideriamo allora un sistema isolato, e sia Σ(E) la relativa superficie dell’energia. Chiamiamo
”ergodiche” le traiettorie che ”passano arbitrariamente vicine a tutti i punti di Σ”, ed ”ergodici” i sistemi
per cui (quasi) tutte le traiettorie sono ergodiche (la nostra discussione è qualitativa: per una trattazione
esauriente vedi, ad esempio, [AA]) Per i sistemi ergodici si dimostra il:
Teorema ergodico: La media temporale (1.12) non dipende da (x0 , t0 ), e coincide
con la media (1.18):
b = hbimc .
(1.19)
Le due espressioni (1.18) e (1.12) hanno dunque, per sistemi ergodici, lo stesso valore. D’altra parte, come
definizione di ”risultato della misura di una variabile macroscopica”, la (1.12) è più soddisfacente della
(1.18): alla luce della (1.12) il fatto che al valore di una variabile macroscopica contribuiscano ”molti”
microstati appare del tutto naturale. La media temporale (1.12) è, tuttavia, praticamente impossibile da
calcolare: infatti, il calcolo della (1.12) richiede la conoscenza delle soluzioni delle equazioni del moto! Al
contrario, il calcolo della media (1.18) è, in linea di principio, più facile: è richiesta ”solo” una integrazione!
È allora soddisfacente definire una variabile macroscopica mediante la (1.12), ma, alla luce della (1.19), è
conveniente calcolarla mediante la (1.18)!
Il teorema ergodico giustifica quindi la definizione (1.18) per le variabili macroscopiche (di un sistema
isolato); inoltre, esso giustifica la scelta (vedi il postulato P2 ) di ρmc come densità di probabilità per un
sistema isolato. Infine, il teorema ergodico è discusso [Far § 3.4] nell’ambito della meccanica ordinaria:
la meccanica statistica diventa cosı̀ una estensione della meccanica ordinaria. Alla luce di quanto sopra,
possiamo affermare che il teorema ergodico è il fondamento della meccanica statistica classica (2) .
La (1.19) esprime l’uguaglianza tra un integrale di linea e un integrale di superficie. Per mostrare che
ciò può essere del tutto naturale, consideriamo il seguente esempio. Consideriamo uno ”spazio delle fasi”
costituito dal quadrato: Q =
˙ (0 ≤ q, p < L), con condizioni cicliche al contorno: (q + L = q , p + L = p).
Sia t un parametro (”tempo”), e sia (q(t), p(t)) =
˙ (q0 + t, p0 + α t), dove α è un numero reale, la linea
(”traiettoria”) che passa per il punto (q0 , p0 ) all’istante t = 0 (3) . Consideriamo la variabile microscopica
b(q, p) definita dalla serie di Fourier:
b(q, p) =
˙
∞
X
Blm exp [i2π(lq + mp)/L] ,
(1.20)
l,m=−∞
(2)
Per un accenno al problema ergodico in meccanica quantistica, vedi [Mor cap 12 (pag. 256)].
(3)
Tale linea potrebbe essere interpretata come la soluzione delle equazioni di Hamilton corrispondenti alla hamiltoniana:
H = p − αq, relativa ad un sistema, con un solo grado di libertà, il cui spazio delle fasi è il quadrato Q.
1.4
Commenti sul teorema ergodico
7
con coefficienti Blm assegnati. Calcoliamo la media (1.2) di b con la densità uniforme: ρ = cost. = L−2 :
1
hbi =
˙ 2
L
Z
Z
L
L
dq
0
0
1
dp b(q, p) = 2
L
Z
∞
X
Z
L
Blm
dq e
0
l,m=−∞
L
i2πlq/L
dp ei2πmp/L = B00 .
(1.21)
0
Consideriamo poi la media temporale. Sia (q0 , p0 ) la posizione (in Q) all’istante t = 0, e sia (q(t), p(t)) =
˙
(q0 + t , p0 + αt) la traiettoria definita dalla condizione iniziale: (q(0), p(0)) = (q0 , p0 ). Definiamo il valore
di b all’istante t come: b(t) =
˙ b(q(t), p(t)), e calcoliamo la media temporale (1.12). Se α è irrazionale, segue
facilmente:
Z
1 T
b=
˙ lim
dt b(t) = B00 .
(1.22)
T →∞ T
0
Dunque, se α è irrazionale la media sullo spazio delle fasi e la media temporale sono uguali (4) :
hbi = b .
(1.23)
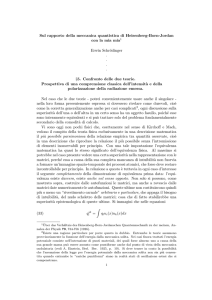
Dunque, l’integrale di linea (1.12) è uguale all’integrale di superficie (1.2) (qui Γ =
˙ Q). Ciò è conseguenza
p
L
(a)
Fig. 1.1 :
a) Una traiettoria in
b) Per
(b)
p
o
Q.
α irrazionale il moto è ergodico,
ma non porta all’equilibrio.
qo
L
q
del fatto che, per α irrazionale (5) , la traiettoria risulta passare arbitrariamente vicino a ogni punto di Q
([AA app. 1]; si noti che la traiettoria non passa mai due volte per uno stesso punto, altrimenti sarebbe
periodica!): si può dire che la traiettoria ”riempie Q” (6) . Le ”traiettorie ergodiche”, definite sopra, sono
una generalizzazione della traiettoria della fig. 1.1a per α irrazionale.
1.4 Commenti sul teorema ergodico
La condizione cruciale per la validità del teorema ergodico è che (quasi tutte) le traiettorie siano
ergodiche. Per una hamiltoniana generica, tuttavia, tale condizione non può valere, in virtù del fatto
(4)
Si noti che se α è razionale la traiettoria è periodica: infatti, posto: α = r/s, con r, s interi, per t = sL risulta:
(q(t), p(t)) =
˙ (q0 + sL , p0 + rL) = (q0 , p0 ). Quindi la traiettoria ”non riempie Q”; a ciò corrisponde il fatto che le due medie
non sono uguali: b =
(5)
P∞
n=−∞ Bnr,−ns e
2πin(rq0 −sp0 )
6= B00 .
Per il sistema della fig. 1.1a, la superficie dell’energia coincide con la traiettoria! Quindi, la (1.23) è un esempio di
come un integrale di linea possa essere uguale a un integrale di superficie, ma non è un esempio di uguaglianza tra media
temporale e media microcanonica!
(6)
L’uguaglianza tra la media temporale (1.22) (un integrale di linea) e la media sullo spazio delle fasi (1.21) (un integrale
di superficie) è riconducibile, qualitativamente, al fatto che, per una traiettoria come quella del caso ”α irrazionale”, la
frazione di tempo, dt/T , che il punto rappresentativo passa in una regione fissata, dx =
˙ dq dp, è (per T → ∞) dx/L2 :
(dt/T ) = (dx/L2 ) [Re80 § 8.B]. Segue:
b ≈ lim
T →∞
X dt
i
i
T
b(x(ti )) = lim
N →∞
X dx
i
i
L2
b(xi ) ≈ hbi .
(1.24)
1.4
Commenti sul teorema ergodico
8
che esistono costanti del moto indipendenti dalla hamiltoniana (per un sistema con N gradi di libertà
ne esistono 2N − 1). A ogni costante del moto possiamo, in linea di principio, associare una superficie analoga alla Σ(E). È evidente che le traiettorie del sistema devono rimanere confinate sulla intersezione di tante superfici quante sono le costanti del moto indipendenti. Sembrerebbe allora che
le traiettorie non possano essere ergodiche. Quindi il sistema non sarebbe ergodico, e la (1.19) non
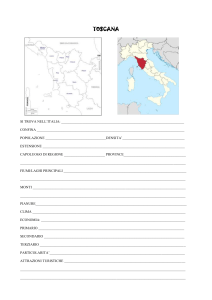
sarebbe valida! Per superare il paradosso è necessario studiare le caratteristiche delle costanti del moto
del sistema: se a tutte le costanti del moto corrispondessero superfici cosı̀ complesse, dal punto di
vista geometrico, da rendere ”inefficace” il confinamento della traiettoria sulla loro intersezione (vedi
la fig. 1.2), allora la contraddizione tra esistenza di più costanti del moto ed ergodicità delle traiettorie potrebbe essere risolta. Dal punto di vista fenomenologico, il fatto che le proprietà termodinamiche
calcolate a partire da ρmc risultino verificate suggerisce che la (1.19) sia corretta, e quindi che il teorema ergodico sia valido. Almeno per un sistema, non realistico, ma nondimeno fisicamente significativo,
K
Fig. 1.2 :
H
2
H
Costanti del moto:
K1 : con una superficie ”semplice”
K1
K2 : con una superficie ”complessa”
e cioè per un gas di sfere dure in una scatola, l’ergodicità è stata dimostrata [Mu69 § 1.5]. Per un sistema
realistico la dimostrazione è di fatto impossibile: quindi, per un sistema realistico l’ergodicità deve essere
assunta: è quindi opportuno parlare, nelle applicazioni, non di ”teoria” ma di ”ipotesi” ergodica.
Il teorema ergodico soffre anche di altre importanti limitazioni:
• La (1.19) è priva di ogni riferimento al numero dei gradi di libertà, N , del sistema: in effetti, l’esempio
discusso sopra mostra che esistono sistemi ergodici anche con un solo grado di libertà. D’altra parte, come
vedremo più avanti (vedi ad esempio il § 4.2), la meccanica statistica è efficace, come teoria fisica, solo per
sistemi con N molto grande; quindi, il fatto che la teoria ergodica valga anche per sistemi ”piccoli” sembra
qualificarla più come una condizione necessaria (per la applicabilità della meccanica statistica), che come
una condizione necessaria e sufficiente ([Bal app. A.7], [Ru69 § 1.1]).
• L’ipotesi ergodica non dà alcuna indicazione sul come definire le grandezze di tipo B (pag. 3); per
esse è necessario ricorrere a postulati addizionali (come la (1.11)).
• Il ”numero dei microstati” accessibili a un sistema macroscopico è enorme (per una stima vedi
[Cha43 App. VI]) al punto che una traiettoria può toccarne, nella durata di una misura macroscopica,
solo una frazione estremamente piccola [Bali § 4.1.4]. Alla luce di ciò, l’interpretazione di una variabile
macroscopica come ”media temporale” deve essere approfondita!
• L’operazione di ”media temporale” elimina ogni dipendenza dal tempo; per rendere possibile una
estensione alla teoria dei sistemi non in equilibrio, l’ipotesi ergodica deve essere riformulata. Per di più, i
moti di tipo ergodico non sembrano corrispondere ai moti effettivi di un sistema con molti gradi di libertà,
nel senso che un moto ergodico non comporta alcun tipo di ”rilassamento all’equilibrio”. Per esempio, per
il sistema dell’esempio discusso sopra, la densità di probabilità definita dalla condizione iniziale uniforme:
ρ0 (q, p) = L−2 , è una ρ di equilibrio (nel senso della (1.4)), ma, come risulterà evidente dal modo in cui ρ
evolve nel tempo (§ 2.5), una densità inizialmente non uniforme non arriva, per alcun t > 0, a soddisfare
la (1.4) (vedi la fig. 1.1b). Una interpretazione soddisfacente del processo di rilassamento richiede che
il sistema goda di una condizione più forte della ergodicità: il ”mixing” [Re80 § 8.C]. Risulta che i moti
mixing sono anche ergodici, ma che (in generale) i moti ergodici non sono mixing! Anche da questo punto
di vista, quindi, l’ergodicità appare una condizione necessaria, ma non sufficiente.
1.5
Esercizi
9
1.5 Esercizi
Esercizio 1.1 Densità di probabilità nello spazio delle configurazioni.
Sia ρ(q, p) una densità di probabilità sullo spazio Q × P , dove Q è lo ”spazio delle q” e P è lo ”spazio
delle p”. Mostrare che ρQ (q), definita come:
Z
ρQ (q) =
˙
dp ρ(q, p) ,
(1.25)
P
è la densità di probabilità su Q. Definire la densità di probabilità su P .
Esercizio 1.2 La variabile dinamica locale ”densità microscopica”.
Si consideri un gas ideale unidimensionale di N particelle racchiuse nel segmento (0 < r < L).
a) Mostrare che la variabile microscopica:
ν(q1 , . . . , qN ; r) =
˙
N
X
δ(qi − r) ,
per
0<r<L,
(1.26)
i=1
dove qi (0 < qi < L) è la posizione della particella i-esima, ha il significato di ”densità microscopica nel
punto r”, cioè di ”densità di numero di particelle (nel punto r) nel microstato (q1 , . . . , qN )” . Mostrare che
ν ha la dimensione di una densità (numero di particelle per unità di lunghezza), è non negativa, e il suo
integrale (in r) su un intervallo (l1 , l2 ) è uguale al numero di particelle contenute in (l1 , l2 ).
b) Mostrare che la densità macroscopica del gas, n1 (r), calcolata con la densità di probabilità (su Q:
vedi es. 1.1):
½
(1)
ρQ (q) =
˙
C
0
N
Q
i
e−γqi
se
se
qi ∈ (0, L) , per ogni i ,
qi ∈
/ (0, L) , per almeno un i ,
(1.27)
dove γ =
˙ mg/kB T , e C = γ/(1 − e−γL ), è:
½
n1 (r) =
˙ hνi1 =
CN e−γr
0
se
se
r ∈ (0, L) ;
r∈
/ (0, L) ;
(1.28)
(1)
ρQ descrive quindi un gas ideale in equilibrio a temperatura T , e soggetto a un campo gravitazionale
costante diretto nel verso negativo dell’asse r.
c) Mostrare che, per γ → 0 (cioè per g → 0 e/o T → ∞), risulta: n1 (r) → n2 (r), dove:
½
n2 (r) =
˙ hνi2 =
N/L se
0
se
r ∈ (0, L) ;
r∈
/ (0, L) .
(1.29)
(2)
−N
Mostrare che n2 (r) è la densità macroscopica del gas calcolata con la densità di probabilità: ρQ (q) =
˙ L
(2)
(ρQ descrive quindi un gas ideale in equilibrio e non soggetto a campi esterni).
Esercizio 1.3 Meccanica statistica di una particella in un segmento.
Si consideri una particella puntiforme di massa m confinata nel segmento I =
˙ (−L/2, L/2), e con
velocità v ∈ (−∞, ∞). a) Definire i microstati della particella e lo spazio delle fasi. b) Verificare che la
funzione:
1
ρ(x, v) =
˙
L
r
a −av2
e
,
π
con :
a=
˙
m
,
2kB T
(1.30)
è una densità di probabilità su Γ. c) Calcolare le medie della posizione, della velocità, e dell’energia cinetica.
­ ®
R
R
[Risultati: a) (x, v), Γ =
˙ I × R; b) I dx R dv ρ(x, v) = 1; c) hxi = 0, hvi = 0, m v 2 /2 = kB T /2].
1.5
Esercizi
10
Esercizio 1.4 Un modello di paramagnete.
Considerare un sistema i cui microstati siano {s} =
˙ (s1 , . . . , sN ), dove ognuna delle variabili s può
assumere solo i valori: s1 = ± 1 (i = 1, . . . , N ).
a) Definire l’insieme dei microstati del sistema (lo ”spazio delle fasi”). Si noti che quando (come qui)
lo spazio delle fasi è discreto non si assegna una ”densità di probabilità”, ma una ”probabilità”. Se pi è la
P
probabilità del microstato i-esimo, il valor medio di una variabile a si definisce come: hai =
˙
i pi ai .
b) Siano β e h costanti. Assumere, come probabilità del microstato {s}, la funzione:
p({s}) =
N
h X
i
1 −βE({s})
1
exp βh
si =
˙
e
,
Z
Z
i
con :
E({s}) =
˙ −h
N
X
si ,
(1.31)
i
P
P
P
−βE({s})
dove Z è una costante. Calcolare Z. [Z = {s} e−βE({s}) =
˙
= . . .].
s1 =±1 · · ·
sN =±1 e
P
c) Calcolare, con la (1.31), il valor medio della variabile microscopica: M ({s}) = iN si (”momento
magnetico totale”). [Risultato: hM i = N tanh(βh).]
P
d) Calcolare, con la (1.31), l’entropia termodinamica: S = −kB {s} p{s} ln p{s} (vedi (1.11) e (1.8)).
[Risultato: S = N (ln(2 cosh(βh)) − βh tanh(βh)).] Calcolare il limite di S per h → 0 [S = N ln 2], e per
h → ∞ [S = 0].
e) Calcolare la ”suscettività per campo nullo”:
χ=
˙
∂m ¯¯
,
¯
∂h h=0
con :
m=
˙ lim
N →∞
hM i
N
[risulta :
χ = β] .
(1.32)
Esercizio 1.5 Proprietà dell’entropia statistica.
a) Mostrare che l’entropia di un sistema costituito da due sottosistemi indipendenti, S1 ed S2 , caratP
terizzati rispettivamente da N1 ed N2 microstati discreti con probabilità diverse, pi (con i pi = 1) e
P
qj (con
j qi = 1), è la somma delle entropie dei sottosistemi (”estensività” della (1.8)). [Possiamo
indicare un microstato del sistema complessivo con (i, j); la relativa probabilità è: πi,j =
˙ pi qj . Segue:
P
S=
˙ − i,j πi,j ln πi,j = . . . = S1 + S2 .]
b) Mostrare che l’entropia di un sistema costituito da due sottosistemi indipendenti con microstati
(1)
(2)
continui è la somma delle entropie dei sottosistemi. [Scrivere: ρ(x) = ρ1 (x1 )ρ2 (x2 ), e: Γ◦ = Γ◦ Γ◦ .]
c) Mostrare che p1 = . . . = pN (= N −1 ) rappresenta un estremo per l’entropia (1.8) rispetto a tutti
P
˙ S({p + δp}) − S({p}),
gli insiemi {pi : i = 1, . . . , N } tali che i pi = 1. [Calcolare la variazione: δS =
P
rispetto a variazioni δpi tali che i δpi = 0 (utilizzare un moltiplicatore di Lagrange)].
PN −1
d) Verificare che p1 = . . . = pN (= N −1 ) rappresenta un massimo di S. [Scrivere pN = 1 − 1
pi ,
e considerare S come funzione delle N − 1 variabilli indipendenti (p1 , . . . , pN −1 ); verificare che, per
j = 1, . . . , N − 1, risulta: (∂S/∂pj )N −1 = 0; (∂ 2 S/∂p2j )N −1 < 0.]
Esercizio 1.6 Elementi di area.
a) Scrivere l’elemento di volume nella forma (1.13) per una particella libera (H = p2 /2m). [Le superfici
di energia costante sono le rette p = costante. Quindi: dx = dE dµ, con: dµ = dq/(p/m)].
b) Verificare che per un oscillatore armonico unidimensionale, con hamiltoniana: H =
˙ p2 /2m +
mω 2 q 2 /2, la trasformazione: (q, p) → (Q, P ), con:
H
,
P =
˙
ω
µ
Q=
˙ arctan
mωq
p
¶
,
è canonica [Gol § 9.2]. Verificare che l’elemento di volume si può scrivere: dx = dE dµ, con: dµ = dQ/ω.
2
Fenomeni dipendenti dal tempo
Per i sistemi non in equilibrio il problema teorico centrale è quello della ”irreversibilità”, cioè del
fenomeno per cui un sistema, preparato ad un istante iniziale in una condizione di non equilibrio, e lasciato
poi evolvere autonomamente, raggiunge, dopo un intervallo di tempo opportuno, uno stato di equilibrio
nel quale esso in seguito permane. Qui discutiamo l’irreversibilità alla luce della dinamica microscopica.
2.1 Una equazione irreversibile
L’evoluzione temporale spontanea di un sistema macroscopico presenta, di solito, un andamento irreversibile, nel senso che alcune grandezze fisiche cambiano sempre nel verso che porta ad uno stato di
equilibrio, e mai nel verso contrario: ad esempio, il modulo della differenza delle temperature in due punti
di un mezzo conduttore di calore, termicamente e meccanicamente isolato, non aumenta mai (diminuisce,
o rimane costante). Spesso, una evoluzione irreversibile può essere descritta da opportune equazioni differenziali. Un classico esempio è il fenomeno della ”diffusione”, che può essere descritto da una semplice
equazione, che deriviamo qui di seguito.
Consideriamo un liquido in equilibrio contenente una sospensione molto diluita di N particelle di
massa molto più grande di quella delle molecole del liquido. Sia n = n(r, t) la densità di numero delle
particelle in sospensione: n(x, t) soddisfa la condizione di normalizzazione:
Z
∞
dx n(x, t) = N
(per ogni t) .
(2.1)
−∞
L’osservazione dice che se a un istante risulta: |∇n| 6= 0 (dove ∇ è il gradiente), allora a quell’istante è
presente un flusso (densità di corrente) j di particelle, che soddisfa la ”legge di Fick”:
j = −D ∇n ,
(2.2)
dove D è una costante (1) positiva; la condizione D > 0 esprime il fatto che il flusso è sempre diretto in
modo da ridurre le differenze di densità. La densità e la corrente sono legate anche dalla condizione che il
numero totale di particelle non può cambiare, e cioè dalla ”equazione di conservazione”:
∂n
+∇·j=0
∂t
(2.3)
(∇ · j è la divergenza di j). Segue immediatamente che la densità soddisfa la ”equazione della diffusione”:
∂n
= D ∇2 n .
∂t
(2.4)
Limitiamoci, per semplicità, al caso unidimensionale, e supponiamo che lo spazio fisico accessibile al
sistema coincida con l’intero asse x. La (2.4) diventa allora:
∂n
∂2n
=D 2,
∂t
∂x
(1)
(−∞ < x < ∞) .
(2.5)
D potrebbe dipendere da r e/o da t; in tali casi l’equazione della diffusione assumerebbe una forma diversa (vedi [Cra]).
2.2
L’equazione della diffusione in dimensione 1
12
Consideriamo le soluzioni della (2.5). Sia t0 un istante (”istante iniziale”), e sia: n(x, t0 ) =
˙ f (x), la
”condizione iniziale”, con:
Z ∞
dx f (x) = N .
(2.6)
−∞
La soluzione della (2.5) corrispondente alla data condizione iniziale è (vedi § 2):
·
¸
Z ∞
1
(x − x0 )2
0
0
n(x, t) = p
dx f (x ) exp −
.
4D(t − t0 )
4πD(t − t0 ) ∞
(2.7)
Ad esempio, la soluzione che corrisponde alla condizione iniziale: f (x) =
˙ N δ(x − x0 ) (dove δ è la
delta di Dirac, e x0 è un punto assegnato), è:
¸
·
N
(x − x0 )2
n(x, t) = p
.
(2.8)
exp −
4D(t − t0 )
4πD(t − t0 )
La (2.8) rappresenta l’evoluzione al tempo t di una densità iniziale (al tempo t0 ) ”concentrata in x = x0 ”;
per t → ∞, essa tende ad una densità uniforme.
Come ulteriore esempio, consideriamo la condizione iniziale:
r
α −αx2
f (x) =
˙ N
e
,
(2.9)
π
dove α è un numero (> 0) assegnato. Sostituendo nella (2.7), si trova facilmente:
s
·
¸
1 αβ
αβ
1
2
n(x, t) = N
exp −
x ,
con : β =
˙
,
πα+β
α+β
4D(t − t0 )
(2.10)
cioè:
s
" µ
#
¶−1
β
2
n(x, t) = N
exp − 1 +
βx =
α
s
#
" µ
µ
¶−1
¶−1
1
1
1
x2
1
=N
1+
exp − 1 +
.
π 4D(t − t0 )
4αD(t − t0 )
4αD(t − t0 )
4D(t − t0 )
β
π
µ
β
1+
α
¶−1
Per: t À t0 , e: αD(t − t0 ) ≈ αDt À 1, la soluzione (2.11) diventa:
r
·
¸
1
x2
n(x, t) ≈ N
exp −
.
4πDt
4Dt
(2.11)
(2.12)
È chiaro che, per t → ∞, la funzione (2.11) tende a diventare indipendente da t0 e α, cioè tende a ”perdere
memoria” della condizione iniziale !
Il comportamento ”irreversibile” delle (2.7) è evidente: non solo una densità iniziale ”piccata” (come
la δ) tende a diventare ”piatta”, ma una densità ”quasi piatta” (come la (2.9), se α À 1) tende a diventare
più piatta ancora! Ciò è in contrasto con il comportamento delle soluzioni delle equazioni della dinamica
microscopica (come le equazioni di Hamilton), per le quali l’evoluzione non ha un verso privilegiato: per
ogni soluzione esiste anche la soluzione che descrive il moto in verso contrario!
2.2 L’equazione della diffusione in dimensione 1
Sia t0 un istante arbitrario (qui scriviamo t0 invece di t0 ). Calcoliamo la soluzione della (2.5) per una
condizione iniziale data a t = t0 : n(x, t0 ) =
˙ ft0 (x). Per semplificare la notazione, scrivamo la (2.5) come:
Ln = 0 ,
dove :
L=
˙
∂2
∂
−D 2 .
∂t
∂x
(2.13)
2.3
L’equazione della diffusione in dimensione 1
13
Introduciamo il ”propagatore”, K(x0 , t0 | x, t), definito dalle seguenti proprietà [Bar § 8.3]:
L K(x0 , t0 | x, t) = 0 ,
K(x0 , t | x, t) = δ(x − x0 ) ,
K(x0 , t | x, t) → 0 ,
per
t > t0 ,
per
t0 = t ,
per
|x − x0 | → ∞ .
(2.14)
L’ultima delle (2.14) è la condizione al contorno per l’equazione L K = 0. Si noti che K è soluzione
dell’equazione (della diffusione) omogenea, e quindi non è una funzione di Green [Bar § 8.3.1]. In termini
di K possiamo definire la funzione:
Z
∞
n(x, t) =
˙
dx0 ft0 (x0 ) K(x0 , t0 | x, t) .
(2.15)
−∞
È immediato verificare che, in virtù delle (2.14), la (2.15) soddisfa la (2.5) con la data condizione iniziale:
Ln = 0 ,
n(x, t0 ) = ft0 (x) .
con
(2.16)
Il metodo più conveniente per calcolare il propagatore utilizza la rappresentazione di Fourier:
Z
0
0
∞
K(x , t | x, t) =
−∞
dk A(x0 ,t0 ) (k, t) eikx .
(2.17)
Sostituendo nella (2.16) si trova immediatamente:
¸
∂A
2
LK =
dk
+ Dk A eikx = 0 ,
∂t
−∞
Z
∞
·
∂A
+ Dk 2 A = 0 ,
∂t
cioè :
(2.18)
da cui:
2
A(x0 ,t0 ) (k, t) = B(x0 ,t0 ) (k) e−Dk t .
(2.19)
I coefficienti B si trovano utilizzando la condizione iniziale (2.14), e la rappresentazione:
1
2π
δ(x − x0 ) =
Z
∞
0
dk eik(x−x ) .
(2.20)
−∞
Dalle (2.18) e (2.14) otteniamo facilmente:
B(x0 ,t0 ) (k) =
Segue:
A(x0 ,t0 ) (k, t) =
e quindi
K(x0 , t0 | x, t) =
1
2π
1 Dk2 t0 −ikx0
e
e
.
2π
(2.21)
1 −Dk2 (t−t0 ) −ikx0
e
e
,
2π
Z
∞
dk e−Dk
2
(t−t0 )
(2.22)
0
eik(x−x ) .
(2.23)
−∞
Calcoliamo l’integrale (2.23). Poniamo: ξ =
˙ x − x0 ; τ =
˙ t − t0 , e osserviamo che:
Segue:
³
ξ ´2
ξ2
.
−Dk 2 τ + ikξ =
˙ − Dτ k − i
−
2Dτ
4Dτ
(2.24)
"
·
¸Z ∞
µ
¶2 #
ξ2
ξ
1
exp −
dk exp −Dτ k − i
.
K(x , t | x, t) =
2π
4Dτ −∞
2Dτ
(2.25)
0
0
2.3
L’equazione della diffusione e il moto browniano
14
Posto ancora z =
˙ k − iξ/2Dτ =
˙ k − ik0 , otteniamo:
·
¸ Z ∞−ik0
£
¤
1
ξ2
K(x , t | x, t) =
exp −
dz exp −Dτ z 2 .
2π
4Dτ −∞−ik0
0
0
(2.26)
Utilizzando il teorema di Cauchy, il cammino di integrazione può essere portato sull’asse reale, e segue:
K(x0 , t0 | x, t) =
³
ξ2 ´
1
exp −
2π
4Dτ
Z
∞
−∞
2
dk e−Dτ k =
³
1
ξ2 ´
exp −
2π
4Dτ
r
π
,
Dτ
(2.27)
cioè, più esplicitamente:
¸
·
(x − x0 )2
K(x , t | x, t) = p
.
exp −
4D(t − t0 )
4πD(t − t0 )
0
0
1
(2.28)
Usando la (2.28) nella (2.15) ritroviamo la (2.7).
È chiaro che la soluzione (2.7) è continua e infinitamente differenziabile rispetto a x, anche se la
condizione iniziale presenta discontinuità (vedi però [Bar § 8.3.1]). In altri termini, ogni discontinuità
nella condizione iniziale viene ”smussata” (dopo un intervallo di tempo arbitrariamente piccolo!); questo
comportamento delle soluzioni dell’equazione della diffusione è tipico delle equazioni del tipo ”parabolico”,
ed è una manifestazione del fenomeno della irreversibilità (per contrasto, si noti che le equazioni di tipo
”iperbolico”, come l’equazione delle onde, comportano che le discontinuità non vengano affatto smussate,
ma, anzi, vengano ”propagate” [Bar § 12.2.4]). Si noti ancora che, secondo la (2.28), la velocità di
spostamento (della quantità fisica descritta dalla densità n) risulta infinita! Infatti, basta considerare che
il propagatore all’istante iniziale è esattamente nullo ovunque, tranne che in x = x0 , mentre dopo un
intervallo di tempo arbitrariamente piccolo esso è diventato positivo su tutto l’asse x. Ciò è riconducibile
alla forma della (2.5), che non tiene conto dell’inerzia (del ”soluto”), e quindi non considera gli effetti
di ritardo nell’instaurarsi della corrente. Per fenomeni rapidi (cioè per t − t0 . τ , dove τ è un tempo
caratteristico della dinamica molecolare) l’equazione della diffusione deve essere sostituita dall’ ”equazione
della telegrafia” [Bar § 8.3.2].
2.3 L’equazione della diffusione e il moto browniano
Qui mostriamo che l’equazione macroscopica della diffusione può essere giustificata da una teoria
microscopica in cui si considera il moto delle particelle del gas che diffonde, trattando però il moto stesso
non con i metodi della meccanica ”esatta” (§ 1.2), ma con opportune ipotesi probabilistiche.
Consideriamo un sistema di N particelle, in equilibrio termodinamico ad una temperatura T , e non
interagenti tra di loro. Consideriamo una qualunque delle particelle, e assumiamo di poterne osservare
la posizione solo agli istanti t0 , t0 + τ , t0 + 2τ , ecc., dove τ è un intervallo di tempo sufficientemente
grande da poter trattare lo spostamento della particella in τ come una variabile casuale. Una realizzazione
pratica del sistema suddetto è costituita da un insieme di N particelle di massa M e ”diametro” D,
sospese in un liquido in equilibrio alla temperatura T e cosituito da molecole di massa m e ”diametro”
d, con m, d, ¿ M, D. Le particelle e le molecole hanno la stessa energia cinetica media (≈ kB T : vedi
l’es. 5.5e), ma, per la differenza delle masse, la velocità (media) delle particelle è molto minore di quella
delle molecole. È quindi possibile scegliere, come intervallo τ (vedi sopra) un intervallo piccolo su scala
macroscopica, ma sufficientemente lungo perchè una particella subisca gli urti di un numero molto grande
di molecole. Gli impulsi trasmessi a una particella in urti successivi sono sostanzialmente casuali, e quindi
lo spostamento subito dalla particella in τ può effettivamente essere considerato casuale: il moto risultante
si chiama ”moto browniano”.
2.3
L’equazione della diffusione e il moto browniano
15
Limitiamoci al caso unidimensionale. Supponiamo cioè che le particelle siano disposte su una retta,
che assumiamo come asse x; supponiamo inoltre che il sistema sia infinitamente esteso (cioè che le possibili
posizioni delle particelle siano −∞ < x < ∞). Sia n(x, t) la densità di numero delle particelle: supponiamo
che n sia nota a un istante t, e calcoliamo (2) n all’istante t + τ .
Consideriamo un intervallo dx. Supponiamo che τ sia sufficientemente grande da poter asssumere che
tutte le particelle presenti in dx a t siano uscite da dx a t + τ . Sia ∆ una distanza, e sia φ(∆, τ ) ∆ la
probabilità che una particella subisca, nell’intervallo τ , uno spostamento compreso tra ∆ e ∆ + d∆. Il
numero di particelle nell’unità di lunghezza che subiscono, nell’intervallo τ , uno spostamento compreso tra
∆ e ∆ + d∆ è allora:
dN = n φ(∆, τ ) d∆ .
(2.29)
Assumiamo che φ non dipenda né da t (consistentemente con l’ipotesi di equilibrio termodinamico) né da
x (ciò esprime l’uniformità spaziale del liquido), e che soddisfi le condizioni:
Z ∞
d∆ φ(∆, τ ) = 1 ,
φ(∆, τ ) = φ(−∆, τ ) .
(2.30)
−∞
(ci aspettiamo che φ sia diversa da zero solo per |∆| ”piccoli”). Il numero delle particelle che entrano in
dx nell’intervallo (t, t + τ ) è:
Z ∞
Z ∞
n(x, t + τ ) dx = dx
d∆ n(x + ∆, t) φ(−∆, τ ) = dx
d∆ n(x + ∆, t) φ(∆, τ )
(2.31)
−∞
−∞
(n(x + ∆, t) dx φ(−∆, τ ) d∆ è il numero di particelle nell’intervallo dx nel punto x + ∆ che subiscono,
nell’intervallo τ , uno spostamento compreso tra −∆ e −∆ + d∆). Da (2.31) segue:
Z ∞
n(x, t + τ ) =
d∆ n(x + ∆, t) φ(∆, τ ) .
(2.32)
−∞
Supponiamo ora che il tempo caratteristico della variazione temporale di n sia molto maggiore di τ
(cioè che n(x, t + τ ) differisca di poco da n(x, t)). Assumiamo allora di poter trattare τ come ”piccolo”.
Sviluppando in serie di Taylor otteniamo:
n(x, t + τ ) = n(x, t) + τ
∂n
+ ...
∂t
.
(2.33)
Sviluppiamo poi n(x + ∆, t) in serie di Taylor rispetto a ∆:
n(x + ∆, t) = n(x, t) + ∆
∂n
1
∂2n
+ ∆2 2 + O(∆3 ) .
∂x 2!
∂x
(2.34)
Sostituendo nella (2.32), e usando la (2.33), otteniamo:
∂2n
∂n
=D 2,
∂t
∂x
dove abbiamo definito:
D=
˙
1
2τ
Z
∞
d∆ φ(∆, τ ) ∆2 ,
(2.35)
(2.36)
−∞
e dove abbiamo supposto che φ(∆) decresca in modo sufficientemente rapido da rendere trascurabili gli
integrali:
Z ∞
d∆ φ(∆, τ ) ∆n ,
per : n ≥ 3 .
(2.37)
−∞
(2)
La derivazione illustrata qui è quella sviluppata da A. Einstein [Ei56 pag. 14] nel 1905. La teoria ebbe un grande im-
patto, in quanto fornı̀ un argomento inoppugnabile a favore dell’ipotesi, al tempo ancora dibattuta, della struttura molecolare
della materia [Bru76 cap. 15]. Per un’altra derivazione vedi [Hec pag. 343]).
2.4
Evoluzioni: reversibile vs irreversibile
16
La (2.35) è la equazione della diffusione (per un sistema unidimensionale). La soluzione della (2.35)
corrispondente alla condizione iniziale: n(x, 0) =
˙ N δ(x), dove δ(x) è la delta di Dirac, è (vedi la (2.8)):
n(x, 0) = √
µ
¶
x2
N
exp −
.
4Dt
4πDt
(2.38)
Usando la (2.38) è facile calcolare (3) i seguenti valori medi (sulle N particelle):
­ 2®
x = 2Dt .
hxi = 0 ,
(2.40)
2.4 Evoluzioni: reversibile vs irreversibile
Consideriamo un sistema i cui stati, xr (r = 1, . . . , n), formino un insieme finito. Assumiamo che
l’evoluzione temporale del sistema sia discreta, nel senso che lo stato cambi solo agli istanti: ti = t0 + iτ
(i = 0, 1, 2, . . .), dove τ è un intervallo assegnato. Nel seguito scriveremo: ti =
˙ i. Conviene associare a
n
ogni stato xr un vettore, xr , di R :
xr =
˙ col (01 , . . . , 0r−1 , 1r , 0r+1 , . . . , 0n )
(2.41)
(”col” sta per ”colonna”). Per semplicità, qui e nel seguito prendiamo n = 3: i possibili stati sono allora:
¯ ¯
¯ ¯
¯ ¯
¯1¯
¯0¯
¯0¯
¯ ¯
¯ ¯
¯ ¯
x1 =
˙ ¯¯ 0 ¯¯ , x2 =
˙ ¯¯ 1 ¯¯ , x3 =
˙ ¯¯ 0 ¯¯ .
(2.42)
¯0¯
¯0¯
¯1¯
Introduciamo l’ ”operatore di evoluzione temporale dello stato”, rappresentato da una matrice 3 × 3 (in
generale: n × n), Q =
˙ {qhk }, tale che:
x(i + 1) =
˙ Q x(i) ,
cioè :
Ad esempio, sia Q =
˙ F, con:
xh (i + 1) =
¯
¯0
¯
Q=
˙ F=
˙ ¯¯ 0
¯1
X3
1
0
0
k=1
qhk xk (i) (h = 1, 2, 3) .
(2.43)
¯
0 ¯¯
1 ¯¯ .
0¯
(2.44)
L’azione di F sugli stati xr (r = 1, 2, 3) è:
F x1 = x3 ;
F x2 = x1 ;
F x3 = x2 .
(2.45)
Se all’istante i = 0 lo stato è, ad esempio, x(0) = x1 , l’evoluzione (2.43) (con Q =
˙ F) è
x(0) = x1 ,
x(1) = x3 ,
x(2) = x2 ,
x(3) = x1
(4)
ecc.
:
(2.46)
(l’evoluzione è periodica).
Assumiamo ora che i possibili stati non siano più limitati agli x (vedi (2.42)), ma formino un sinieme
(3)
Z
∞
−ax2
dx e
−∞
(4)
q
=
π
,
a
Z
∞
Z
−ax2
dx x e
−∞
∞
2
dx x2 e−ax =
= 0,
−∞
1
2a
q
π
.
a
(2.39)
La (2.45) potrebbe descrivere un moto casuale sui vertici di un triangolo: una particella, posta su uno dei vertici, a
ogni istante i ”salta”, su uno degli altri due vertici.
2.5
Evoluzioni irreversibili
17
continuo. Più precisamente, assumiamo che, per ogni terna (p1 , p2 , p3 ), dove i pr sono numeri non negativi
che soddisfano la relazione:
X3
pk = 1 ,
(2.47)
k=1
il vettore:
p=
˙ col (p1 , p2 , p3 ) =
˙ p1 x1 + p2 x2 + p3 x3 ,
(2.48)
sia un possibile stato del sistema. Assumiamo che l’evoluzione temporale degli stati p sia
p(i + 1) =
˙ Q p(i) ,
cioè :
ph (i + 1) =
X3
k=1
(5)
qhk pk (i) .
Se, ad esempio: p(0) = (1/2) col (1, 1, 0), e: Q =
˙ F, l’evoluzione di p(0) è:
¯ ¯
¯ ¯
¯ ¯
¯ ¯
¯1¯
¯1¯
¯0¯
¯1¯
¯
¯
¯
¯
¯
¯
1
1
1¯ ¯
1
p(0) = ¯¯ 1 ¯¯ , p(1) = ¯¯ 0 ¯¯ , p(2) = ¯¯ 1 ¯¯ , p(3) = ¯¯ 1 ¯¯ ,
2¯ ¯
2¯ ¯
2¯ ¯
2¯ ¯
0
1
1
0
:
(2.49)
ecc. .
(2.50)
Consideriamo una generica matrice Q, e assumiamo che Q sia indipendente dal ”tempo”. Segue che,
se lo stato a t = 0 è p(0), allora lo stato a t = N è:
p(N ) = QN p(0) .
(2.51)
Diciamo che uno stato p è ”stazionario rispetto a Q”, se vale la relazione:
Qp = p.
(2.52)
Un’evoluzione Q è ”irreversibile” se esiste uno stato stazionario, p∞ (assumiamo che p∞ sia unico), tale
che, per ogni stato iniziale p(0), sia:
lim QN p(0) = p∞ .
(2.53)
N →∞
È facile verificare che C è irreversibile. Ad esempio la applicazione iterata di C a p(0) =
˙ x1 dà la seguente
successione di stati:
¯ ¯
¯ ¯
¯ ¯
¯ ¯
¯ ¯
¯ ¯
¯ ¯
¯1¯
¯0¯
¯2¯
¯2¯
¯6¯
¯ 10 ¯
¯1¯
¯ ¯
¯ ¯
¯ ¯
¯ ¯
¯ ¯
¯ ¯
¯ ¯
1
1
1
1
1
1
¯0¯ ,
¯1¯ ;
¯1¯ ;
¯3¯ ;
¯5¯ ;
¯ 11 ¯ · · · −→ p∞ =
˙ ¯¯ 1 ¯¯ .
(2.54)
¯ ¯
¯ ¯
¯ ¯
¯ ¯
¯ ¯
¯ ¯
2
4
8
16
32
3
¯0¯
¯1¯
¯1¯
¯3¯
¯5¯
¯ 11 ¯
¯1¯
Inoltre, è ovvio che p∞ è stazionario; si dimostra poi (vedi il paragrafo seguente) che lo stato p∞ viene
raggiunto (nel senso della (2.53)) a partire da un p(0) qualunque. Quindi C è irreversibile.
Si noti che l’esistenza di uno stato stazionario non è sufficiente per l’irreversibilità. Infatti, è immediato
verificare che lo stato: p∞ =
˙ col (p, p, p), con p = 1/3 (vedi la (2.54)), è stazionario per per l’evoluzione
descritta da F (vedi (2.50)): F p∞ = p∞ . Tuttavia, p∞ soddisfa la (2.53) solo se p(0) = p∞ . Se
p(0) 6= p∞ , allora FN p(0) non tende a p∞ , e quindi l’evoluzione generata da F non è irreversibile.
L’irreversibilità di C è riconducibile al suo carattere probabilistico. Ad esempio, il primo passaggio
nella sequenza (2.54): p(0) −→ p(1), può essere visto come:
x1 −→ p2 x2 + p3 x3 ,
con :
p2 = p3 = 1/2 .
(2.55)
Quindi, se interpretiamo gli x come microstati e i p come macrostati (si noti che i microstati sono casi
particolari dei macrostati), la (2.55) implica che a t = 0 il sistema è con certezza nel microstato x1 , ma
a t = 1 si trova o in x2 (con probabilità 1/2) o in x3 (con probabilità 1/2). L’esempio (2.54) mostra che
evoluzione definita da C comporta una (progressiva) ”riduzione dell’informazione” su quale sia il microstato
(5)
Q deve soddisfare la condizione:
P
h qhk = 1
(k = 1, . . . , 3).
2.6
Evoluzioni irreversibili
18
del sistema.
Possiamo anche osservare che F fa corrispondere a uno stato, sia di tipo x che di tipo p, uno e un
solo stato (di tipo x o di tipo p)), mentre per C la corrispondenza è biunivoca solo per gli stati di tipo p.
In sintesi, possiamo affermare che F è ”microscopicamente (e anche macroscopicamente) deterministica”,
mentre C è deterministica solo macroscopicamente, o, come diremo nel seguito, ”microscopicamente non
deterministica”. Quanto sopra suggerisce che le evoluzioni microscopicamente deterministiche non sono
irreversibili.
2.5 Evoluzioni irreversibili
Possiamo verificare che C genera un’evoluzione irreversibile. Consideriamo la ”decomposizione spettrale” della matrice C. È facile verificare che gli autovettori ”destri” della matrice C (cioè i vettori che
soddisfano l’equazione: C d = λ d) sono:
¯ ¯
¯1¯
1 ¯¯ ¯¯
d1 =
˙ ¯1¯ ,
3¯ ¯
1
¯
¯
¯ 1 ¯
¯
¯
d2 =
˙ ¯¯ 0 ¯¯ ,
¯ −1 ¯
¯
¯
¯ 1 ¯
¯
¯
d3 =
˙ ¯¯ −2 ¯¯ .
¯ −1 ¯
(2.56)
con i corrispondenti autovalori:
λ1 = 1 ,
λ2 = λ 3 =
˙ − 1/2 ,
(2.57)
I vettori d sono normalizzati secondo la (2.47). Consideriamo anche gli autovettori sinistri (cioè i vettori
che soddisfano l’equazione: s C = λ s; gli s sono ”righe”):
s1 =
˙ |1 1 1| ,
s2 =
˙
1
|1 0 − 1| ,
2
s2 =
˙
1
|1 − 2 1|
6
(2.58)
dove i coefficienti sono scelti in modo da soddisfare la condizione (2.69). Indichiamo con i simboli [ds] le
matrici che si ottengono moltiplicando ”righe per colonne”: ad esempio:
¯ ¯
¯
¯1¯
¯1
¯
¯
1
1¯
[d1 s1 ] =
˙ ¯¯ 1 ¯¯ |1 1 1| = ¯¯ 1
3¯ ¯
3¯
1
1
1
1
1
¯
1 ¯¯
1 ¯¯ .
1¯
Con i simboli sd indichiamo invece i prodotti ”riga per colonna”, cioè i prodotti scalari: sd =
˙
(2.59)
P
h sh d h .
Sono soddisfatte le seguenti relazioni di ortogonalità:
si dj = δij .
(2.60)
È immediato verificare che, per un p arbitrario (che soddisfi la (2.47)), risulta:
[d1 s1 ] p = d1
(2.61)
(la (2.61) sarà usata più avanti). C può essere sviluppata come segue (6) :
C=
X3
k=1
1
1
λk [dk sk ] =
˙ [d1 s1 ] − [d2 s2 ] − [d3 s3 ] ,
2
2
(2.62)
Usando le (2.60) segue:
1
1
[d2 s2 ] − N [d3 s3 ] .
2N
2
P
Si potrebbe scrivere: sr =
˙ hr|, ds =
˙ |si. La (2.71) diventerebbe allora: C =
k λk |kihk|.
CN = [d1 s1 ] −
(6)
(2.63)
2.6
L’equazione di Liouville
19
Otteniamo allora:
lim CN = [d1 s1 ] .
(2.64)
N →∞
Se p(0) è un macrostato iniziale arbitrario, da (2.61) segue:
lim CN p(0) = [d1 s1 ] p(0) = d1 .
N →∞
Risulta inoltre che d1 è stazionario (vedi (2.52)) rispetto a C
(7)
(2.65)
:
C d1 = d1 .
(2.66)
In conclusione, per N → ∞ lo stato p(N ) tende allo stato stazionario d1 indipendentemente dallo stato
iniziale p(0). L’evoluzione (2.62) è dunque irreversibile.
2.6 L’equazione di Liouville
La discussione dei paragrafi precedenti suggerisce che una evoluzione microscopicamente deterministica non può essere irreversible. Ciò sarà confermato, qui di seguito, da una analisi della evoluzione
hamiltoniana. Consideriamo un sistema isolato, con N gradi di libertà, caratterizato da uno spazio delle
fasi accessibile continuo, Γ , con microstati x =
˙ {q, p} =
˙ (q1 , · · · , qN , p1 , · · · , pN ), da una hamiltoniana
H = H(x), e da una densità ρ(x, t). Cominciamo col ricavare l’equazione (differenziale) che definisce
l’evoluzione temporale di ρ(x, t): la ”equazione di Liouville”.
Siano t0 un istante di tempo, e x0 =
˙ {q0 , p0 } un punto di Γ . Indichiamo poi con
x = x(x0 , t0 ; t) =
˙ {q(q0 , p0 , t0 ; t), p(q0 , p0 , t0 ; t)}
(2.67)
la soluzione delle equazioni del moto:
q̇i =
˙
dqi
∂H
=
,
dt
∂pi
ṗj =
˙
dpj
∂H
=−
,
dt
∂qj
(2.68)
con la condizione iniziale: x(x0 , t0 ; t0 ) = x0 . Chiameremo il punto x(x0 , t0 ; t): ”evoluto temporale del
punto x0 nell’intervallo di tempo t − t0 ”. Chiameremo inoltre l’insieme degli evoluti di x0 per ogni t:
”traiettoria passante per x0 all’istante t0 ”. La corrispondenza: x0 → x(x0 , t0 ; t), è biunivoca.
Consideriamo, a un istante t0 , una generica regione γ(t0 ) ⊂ Γ (per semplicità, assumiamo che γ(t0 )
sia connessa). Sia σ(t0 ) la superficie che delimita γ(t0 ). Chiamiamo γ(t) la regione di Γ costituita dagli
evoluti dei punti di γ(t0 ) nell’intervallo t − t0 , e sia σ(t) la superficie che delimita γ(t). Per la biunivocità
dell’evoluzione temporale, i punti di σ(t) sono gli evoluti dei punti di σ(t0 ).
Sia ρ0 (x) una densità di probabilità su Γ assegnata all’istante t0 (densità ”iniziale”), e sia:
Z
P (γ(t0 )) =
˙
dx ρ0 (x) ,
(2.69)
γ(t0 )
la probabilità che il sistema abbia microstato in γ(t0 ) all’istante t0 . A un istante t i punti di γ(t0 ) si sono
spostati fino ad occupare una regione γ(t), e la densità ρ0 (x) si è anch’essa modificata (in generale) fino
a diventare una funzione che indichiamo con ρ(x, t). Tuttavia, la probabilità che il microstato del sistema
cada, all’istante t, in γ(t), cioè:
Z
P (γ(t)) =
˙
dx ρ(x, t) ,
(2.70)
γ(t)
(7)
Per una classificazione delle matrici
Q che ammettono uno stato stazionario, vedi: [Btl § 2.21], o [Fel cap. XVI].
2.6
L’equazione di Liouville
20
deve, per definizione di γ(t), essere uguale a P (γ(t0 )). Ciò implica:
dP
d
=
˙
dt
dt
Z
dx ρ(x, t) = 0 .
(2.71)
γ(t)
Mostriamo ora come dalla (2.71) si può derivare una equazione differenziale per ρ. È conveniente
adottare una notazione vettoriale: indichiamo allora il punto dello spazio con x, e sia u =
˙ ẋ =
˙ (q̇, ṗ) la
velocità del punto x all’istante t. Per definizione, abbiamo:
dP
1
=
˙ lim
τ →0 τ
dt
"Z
#
Z
ρ(x, t + τ ) dx −
ρ(x, t) dx .
γ(t+τ )
(2.72)
γ(t)
Ponendo γ(t + τ ) =
˙ γ(t) + δγ segue:
"ÃZ
#
Z !
Z
dP
1
=
˙ lim
+
ρ(x, t + τ ) dx −
ρ(x, t) dx =
τ →0 τ
dt
γ(t)
δγ
γ(t)
#
"Z
Z
ρ(x, t + τ ) − ρ(x, t)
= lim
dx +
ρ(x, t + τ ) dx =
τ →0
τ
γ(t)
δγ
¶
Z
Z µ
∂ρ
1
∂ρ
=
dx + lim
ρ(x, t) +
τ dx =
τ →0 τ δγ
∂t
γ(t) ∂t
Z
Z
∂ρ
1
=
dx + lim
ρ(x, t) dx .
τ →0 τ δγ
γ(t) ∂t
(2.73)
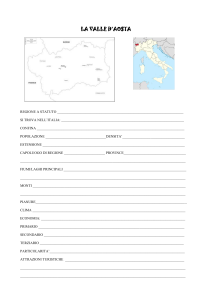
La regione δγ è quella compresa tra le superfici σ(t) e σ(t + τ ) (fig. 2.1). Sia dσ un elemento infinitesimo
della superficie σ(t): ad esso associamo un vettore di modulo uno, n, normale all’elemento e orientato
verso l’esterno della superficie. Nell’intervallo τ l’elemento dσ descrive un cilindro di altezza: |u(x, t)|τ ,
u
γ (t+dt)
n
dσ
dγ
u
Fig. 2.1 :
Moto nello spazio delle fasi di un volume
γ(t).
γ (t)
n
c L’integrale su δγ è allora uguale all’integrale su σ(t):
e di area della base: dσ cos(nu).
Z
Z
ρ dx =
δγ
Z
Z
~ ,
τ u(x, t) · dσρ
c dσρ =
τ |u(x, t)| cos(nu)
τ u · n dσρ =
σ(t)
σ(t)
(2.74)
σ(t)
~ =
dove dσ
˙ n dσ. La derivata (2.73) diventa allora:
dP
=
dt
Z
γ(t)
∂ρ
dx +
∂t
Z
Z
·
~ =
ρ(x, t) u(x, t) · dσ
σ(t)
γ(t)
¸
¡
¢
∂ρ
+ ∇ · ρ(x, t) u(x, t) dx ,
∂t
(2.75)
dove ∇ · (ρu) è la divergenza del vettore ρu. In virtù della (2.71), la (2.75) deve essere nulla per ogni
regione γ(t): quindi ρ deve soddisfare l’equazione differenziale:
∂ρ
+ ∇ · (ρ u) = 0 ,
∂t
(2.76)
2.7
Il coarse graining
21
che conviene scrivere come:
µ
dove:
¶
∂
Dρ
+ u · ∇ ρ + ρ∇ · u =
˙
+ ρ∇ · u = 0,
∂t
Dt
¸
N ·
X
X dxi ∂
∂
∂
D
∂
∂
=
˙
q̇i
+ ṗi
=
˙
+
+
Dt
∂t
dt ∂xi
∂t i=1
∂qi
∂pi
i
L’operatore differenziale D/Dt è la ”derivata lungo la traiettoria”.
La velocità u soddisfa la condizione:
∇ · u = 0.
(2.77)
(2.78)
(2.79)
Infatti, dalle (2.68) segue:
∇·u =
˙
¸ X
¸
N ·
∂ ṗi
∂ ∂H
∂ ∂H
+
=
−
= 0.
∂qi
∂pi
∂qi ∂pi
∂pi ∂qi
i=1
N ·
X
∂ q̇i
i=1
(2.80)
Dalla (2.80) e (2.76) segue che la densità ρ(x, t) deve soddisfare l’equazione:
Dρ
= 0,
Dt
(2.81)
con la condizione iniziale: ρ(x, t0 ) = ρ0 (x). Un’altra utile espressione della (2.81) è:
∂ρ
+ [ρ, H] = 0 ,
∂t
(2.82)
dove [· , ·] è la parentesi di Poisson. Le (2.81) e (2.82) sono forme equivalenti della ”equazione di Liouville”:
essa è l’equazione fondamentale della meccanica statistica (classica) di non equilibrio. Dato il significato
dell’operatore differenziale D/Dt (vedi la (2.78)), la (2.81) significa che ρ evolve in modo da rimanere
”costante lungo la traiettoria” (8) . Si noti che le ”ρ di equilibrio”, cioè le ρ che soddisfano la (1.4), sono
le soluzioni della (2.82) che sono anche costanti del moto, cioè tali che sia: [ρ, H] = 0. Indicando con x0
il punto tale che la traiettoria, che ”parte” da x0 all’istante t0 , ”arriva” in x dopo un intervallo t − t0 ,
l’evoluzione prevista dalla (2.81) può essere espressa anche come:
ρ(x, t) = ρ0 (x0 ) .
(2.83)
Consideriamo poi il volume, |γ(t)|, della regione γ(t):
Z
|γ(t)| =
˙
dx .
(2.84)
γ(t)
Il volume |γ(t)| è definito da un integrale analogo all’integrale (2.70), con la sola differenza che la funzione
ρ è ora sostituita dalla funzione 1. La derivata temporale di |γ(t)| è allora (vedi la seconda delle (2.75), e
la (2.79)):
Z
d|γ|
=
∇ · u(x, t) dx = 0 , da cui : |γ(t)| = |γ(t0 )| .
(2.85)
dt
γ(t)
La seconda delle (2.85) vale, evidentemente, anche per una regione di volume infinitesimo: indicando
allora con dx0 un elemento di volume all’istante t0 (qui usiamo lo stesso simbolo per la regione e per il suo
volume), e con dx il suo evoluto all’istante t, la seconda delle (2.85) si scrive:
dx = dx0
(8)
(2.86)
Un fluido che si muove mantenendo costante la densità è un fluido ”incomprimibile”; quindi la (2.79) mostra che il
moto del fluido costituito dai punti dello spazio delle fasi (”fluido di fase”) è incomprimibile.
2.7
Il coarse graining
22
(oppure, nella notazione non vettoriale del § 1.1: dx = dx0 ). Le (2.85) e/o (2.86) esprimono il fatto che, per
un sistema hamiltoniano, il volume di una regione dello spazio delle fasi è una costante del moto (”teorema
di Liouville” (9) ).
2.7 Il coarse graining
In termodinamica, le trasformazioni irreversibili di un sistema isolato sono accompagnate da un aumento dell’entropia. Se ci limitiamo a trasformazioni sufficientemente lente, rispetto ai tempi caratteristici
della dinamica microscopica, da poter assumere che il sistema sia, a ogni t, ”quasi in equilibrio” (vedi
anche la nota 3 al § 3.3), diventa fisicamente accettabile introdurre una ”entropia dipendente dal tempo”,
S(t). Scriviamo allora le (1.8) e (1.11) come:
S(t) =
˙ − kB
Xn
r=1
pr (t) ln pr (t) .
(2.87)
dove le p(t) sono ”probabilità dipendenti dal tempo”. Analogamente, la (1.16) diventa:
Z
£
¤
S(t) =
˙ − kB
dµ ρ(x, t) ln Σ0 ρ(x, t) .
(2.88)
Σ(E)
L’evoluzione di S(t) è determinata da quella di p(t). È immediato verificare che le evoluzioni di
tipo deterministico lasciano invariata S(t)! Nel caso dell’evoluzione discreta, è sufficiente considerare
l’evoluzione da un i a i+1 (usiamo le notazioni del § 2.4). Sia p(i) =
˙ (p1 , p2 , p3 ). Segue: p(i+1) =
˙ F p(i) =
(p2 , p3 , p1 ), e quindi:
S(i + 1) =
˙ − kB
X3
k=1
pk (i + 1) ln pk (i + 1) = −kB
X3
h=1
ph (i) ln ph (i) =
˙ S(i) .
(2.89)
L’invarianza di S rispetto a F è dovuta al fatto che la probabilità del microstato ”iniziale”, xr (i), e qualla
del microstato ”finale”( secondo le (2.45)), xs (i + 1), sono uguali: ps (i + 1) = pr (i). Quindi F cambia
l’ordine dei p nell’insieme (p1 , p2 , p3 ), ma non i valori: l’uguaglianza S(i + 1) = S(i) è allora ovvia. Per
un’evoluzione continua (hamiltoniana) il comportamento di ρ(x, t) è analogo (vedi la (2.83)); la verifica
dell’invarianza di S(t) per l’evoluzione hamiltoniana è illustrata nell’es. 2.3.
Γ
Γ
Fig. 2.2:
Filamentazione (con conservazione del volume)
di una regione iniziale
γ.
γ (0)
γ(τ)
Una conferma della contraddizione tra evoluzione microscopicamente deterministica ed irreversibilità
segue, nel caso hamiltoniano, dall’evoluzione di ∂ρ/∂t. È facile verificare che per un sistema con hamiltoniana indipendente da t (cioè per un sistema isolato), l’equazione di Liouville implica che ∂ρ/∂t rimane
costante lungo la traiettoria. Infatti, dalla (2.82) otteniamo:
·
¸
·
¸
·
¸ ·
¸
D ∂ρ
∂ ∂ρ
∂ρ
∂
∂ρ
∂ρ
∂ρ
=
˙
+
, H = − [ρ, H] +
,H = −
,H +
,H = 0
(2.90)
Dt ∂t
∂t ∂t
∂t
∂t
∂t
∂t
∂t
(9)
Il teorema di Liouville può essere dimostrato anche utilizzando il fatto che il moto generato dalle equazioni di Hamilton
equivale ad una trasformazione canonica, e che lo jacobiano di una trasformazione canonica è 1 ([Gol § 9.4], [Re80 § 7.B])
2.8
Il coarse graining
23
(se ∂H/∂t = 0). Ricordiamo ora che un sistema in equilibrio è caratterizzato da una ρ stazionaria (vedi la
(1.4)). La (2.90) mostra che, se ρ è assegnata inizialmente, a un istante t0 , come ”di equilibrio” (∂ρ/∂t = 0,
a t = t0 ), allora essa rimane di equilibrio per ogni t. Analogamente, se ρ è assegnata a t = t0 come ”di
non equilibrio” (∂ρ/∂t 6= 0, a t = t0 ), essa rimane di non equilibrio per ogni t. In altri termini, una ρ di
non equilibrio non tende alla ρ di equilibrio!
Per descrivere processi ireversibili, è dunque necessario che ρ evolva diversamente da come prescritto
dall’equazione di Liouville (consideriamo ora sistemi hamiltoniani), cioè in modo microscopicamente non
deterministico (MnD). Un modo per indurre una evoluzione MnD è suggerito dalla teoria ergodica. Consideriamo un sistema isolato, tale che a un istante t = 0 la corrispondente densità di probabilità, ρ(x, 0),
sia non nulla in una sottoregione dello spazio delle fasi, che nella fig. 2a è indicata con γ(0); indichiamo
con |γ(0)| il volume di γ(0). Per semplicità, assumiamo che ρ(x, 0) sia costante su γ(0), e indichiamo
con ρ0 il relativo valore: ρ0 = 1/|γ(0)|. ρ(x, 0) non soddisfa la condizione di equilibrio (1.4), e il sistema
in questione non è in equilibrio. Sia γ(t) la regione evoluta di γ(0) a un tempo t > 0. La densità di
probabilità al tempo t, ρ(x, t), è costante su γ(t), e il relativo valore, ρt , è, per il teorema di Liouville
(2.85): ρt = 1/|γ(t)| = 1/|γ(0)|.
L’evoluzione descritta sopra è quella, microscopicamente deterministica, prevista dall’equazione di
Liouville. In linea di principio, essa potrebbe osservata: sarebbe sufficiente disporre a t = 0 di un
numero grande, N , di sistemi identici non interagenti (un ensemble di sistemi), distribuiti con densità n0 (numero di sistemi per unità di volume nello spazio delle fasi) uniforme in γ(0); per N →
∞ abbiamo: n0 /N → ρ0 . Al tempo t potremmo osservare la densità nt in γ(t), e, per N → ∞,
troveremmo: νt /N → ρt . Tuttavia, la suddetta osservazione richiederebbe misure capaci di determinare la posizione esatta di un sistema nello spazio delle fasi. Per un sistema macroscopico, misure
di questo tipo, dette ”fine grained” (”a grana fine”), non sono realizzabili (§ 1.2). Consideriamo allora le misure che realisticamente sono realizzabili: quelle di tipo ”coarse grained” (”a grana grossa”).
Fig. 2.3 :
Coarse graining nello spazio delle fasi. Il valore della
densità
ρ è indicato dalla intensità di grigio.
Per descrivere un modello, estremamente schematizzato, di misura coarse grained, cominciamo col
suddividere lo spazio delle fasi in un reticolo di celle, γj , di dimensioni corrispondenti al potere risolutivo
degli strumenti disponibili. Assumiamo che la massima informazione, sulla posizione del sistema nello
spazio delle fasi, ottenibile dalla misura sia: ”in quale cella si trova” (e non: ”in quale punto si trova”).
Consideriamo allora l’ensemble di cui sopra, e assumiamo che la regione iniziale, γ(0), coincida con la
cella γi . L’evoluzione esatta, da γ(0) a γ(t) è tale che (salvo casi eccezionali, come quello rappresentato
nella fig. 1.1b), γ(t) si ”filamenta” (10) , come indicato nella fig. 2b. Se la misura è di tipo coarse grained,
non potremo osservare il ”filamento” γ(t), ma solo una sua immagine ”a grana grossa”, come suggerito
dalla fig. 2.3. Chiamiamo γc (t) la regione costituita dalle celle (della partizione) toccate da γ(t). La ρ
osservata all’istante t non sarà la ρ dell’evoluzione esatta (”costante su γ(t)”), ma sarà una ρc (x, t) (”ρ
coarse grained”), definita su γc (t). Ciò implica che all’istante t la ρ è non nulla su una regione di volume
maggiore del corrispondente volume a t = 0: deve allora esistere almeno un punto di γc (t) in cui il valore di
(10)
La ”filamentazione” nasce dalla instabilità caratteristica (salvo eccezioni) dei moti microscopici dei sistemi fisici: due
traiettorie che partono da punti iniziali anche molto vicini tendono negli istanti successivi ad allontanarsi [Bal app. A.6].
2.8
Esercizi
24
ρ è più piccolo del minimo di ρ in γ(0). L’evoluzione coarse grained quindi non è hamiltoniana: essa è MnD
(fig. 2.3). Sia τ un tempo caratteristico della dinamica microscopica (11) . A un istante t À τ , la regione
iniziale γ(0) si sarà filamentata al punto da ”riempire” tutto lo spazio accessibile (consistentemente con il
comportamento ergodico!): la corrispondente regione γc (t) coinciderà allora con tutto lo spazio accessibile,
e la successiva evoluzione (coarse grained!) non modificherà la situazione (per un esempio numerico, vedi
[Re80 § 8.C]). Il sistema avrà cosı̀ raggiunto l’equilibrio!
2.8 Esercizi
Esercizio 2.1 Una matrice di transizione irreversibile.
Consideriamo un sistema che può trovarsi in due stati. Supponiamo che la sua evoluzione (nel senso
del § 4) sia definita dalla matrice [Fel § XVI.2]:
¯
¯
¯1 − p
α ¯¯
¯
Q=
˙ ¯
,
p
1 − α¯
con : 0 < p, α < 1 .
(2.91)
Calcolare lo stato p∞ tale che Qp∞ = p∞ (stato stazionario).
Soluzione: Gli autovalori della (2.91) sono:
λ1 = 1 ,
λ2 = 1 − α − p ,
(2.92)
e i corrispondenti autovettori destri e sinistri sono:
¯ ¯
¯α¯
d1 = ¯¯ ¯¯ ,
p
Si ottiene:
¯
¯
¯ 1 ¯
¯
¯;
d2 = ¯
−1 ¯
s1 =
¯
1 ¯¯ α
Q = Q1 + (1 − α − p) Q2 =
˙
α+p¯p
1
|1 1| ,
α+p
s2 =
1
|p − α| .
α+p
¯
¯
¯
1 ¯¯ p −α ¯¯
α ¯¯
+ (1 − α − p)
.
p¯
α + p ¯ −p α ¯
(2.93)
(2.94)
Usando il fatto che 1 − α − p < 1, per N → ∞ abbiamo: limN →∞ QN = Q∞ , con
Q∞
Posto:
p∞
¯
1 ¯¯ α
= Q1 =
˙
α+p¯p
¯ ¯
1 ¯¯ α ¯¯
=
,
α+p¯p¯
risulta :
¯
α ¯¯
.
p¯
(2.95)
Q∞ p∞ = p∞ .
(2.96)
Il vettore p∞ è dunque lo stato stazionario cercato.
Esercizio 2.2 Equazione di Liouville classica.
a) Per una particella libera di massa m in moto libero su una retta sia assegnata, all’istante t◦ , la
densità di probabilità:
ρ0 (q, p) =
˙
·
¸
1
1
1
2
exp − 2 (p − p)2 −
(q
−
q)
,
2πQP
2P
2Q2
con
− ∞ < q, p < ∞ ,
(2.97)
dove (q, p, Q, P ) sono costanti. Calcolare la densità di probabilità a un istante t (> t◦ ), e discuterne il
significato fisico.
Soluzione: per calcolare ρ(q, p, t) è necessario (vedi il § 5) determinare il punto (q0 , p0 ) tale che la
(11)
Per un gas in condizioni normali, τ è l’intervallo di tempo medio tra due urti molecolari: τ ≈ 6 · 10−10 sec [Rei § 12.2]).
2.8
Esercizi
25
traiettoria, (q(t), p(t)), che passa per (q, p) all’istante t, passi per (q0 , p0 ) all’istante t0 . La traiettoria che
passa per (q0 , p0 ) all’istante t0 è:
p0
(2.98)
p(t) = p0 ,
q(t) = (t − t0 ) + q0 .
m
(q0 , p0 ) seguono dalla ulteriore condizione: p(t) = p , q(t) = q. Segue:
p
p0 = p ,
q0 = q − (t − t0 ) .
(2.99)
m
Segue infine, applicando la (2.83) (e posto v =
˙ p/m):
·
¸
1
1
1
2
ρ(q, p, t) =
˙ ρ0 (q0 , p0 ) =
exp − 2 (p − p)2 −
q
−
v
(t
−
t
))
.
(2.100)
(q
−
0
2πQP
2P
2Q2
b) Verificare che la (2.100) è soluzione dell’equazione di Liouville.
c) Calcolare, con le ρ di cui sopra, i valori medi hqi al tempo t0 e, rispettivamente, al tempo t.
d) Per la particella libera del punto (a), verificare che se f (q, p) è una funzione derivabile arbitraria,
allora la soluzione dell’equazione di Liouville, con condizione iniziale ρ0 (q, p) = f (q, p), è: ρ(q, p, t) =
f (q − v(t − t0 ) , p).
Esercizio 2.3 Conservazione dell’entropia.
Sia ρ(x, t) una soluzione di una equazione di Liouville per una hamiltoniana indipendente dal tempo.
Definiamo una ”entropia dipendente dal tempo”, S(t), come:
Z
£
¤
S(t) =
˙ − kB
dx ρ(x, t) ln Γ0 ρ(x, t) .
(2.101)
Γ
Mostrare che S(t) non dipende da t.
Soluzione: Ricordiamo che l’evoluzione di ρ è descritta dalla condizione: ρ(x, t) = ρ0 (x0 ) (vedi la
(2.83)), dove x0 è il punto tale che la traiettoria, x = x(x0 ; t), che ”parte” da x0 all’istante t0 =
˙ 0, ”arriva”
in x dopo un intervallo t. Conviene usare i simboli seguenti:
x(x0 ; t) =
˙ Ut x0 ,
(2.102)
dove Ut è l’ ”operatore di evoluzione temporale”; è chiaro che Ut ammette un inverso, che indichiamo con
Ut−1 . Scriviamo allora la (2.83) come:
¡
¢
ρ(x, t) = ρ0 Ut−1 x .
(2.103)
L’entropia S(t) diventa:
Z
S(t) =
˙ − kB
Γ
¡
¢ £
¡
¢¤
dx ρ0 Ut−1 x ln Γ0 ρ0 Ut−1 x .
(2.104)
Nella (2.104), possiamo cambiare variabile di integrazione. Poniamo:
x0 =
˙ Ut−1 x ,
Segue:
Z
S(t) =
˙ − kB
cioè :
x=
˙ Ut x0 .
£
¤
d (Ut x0 ) ρ0 (x0 ) ln Γ0 ρ0 (x0 ) .
(2.105)
(2.106)
Γ
Ricordiamo che l’evoluzione temporale può essere vista come una trasformazione canonica, dalle coordinate
x0 alle Ut x0 , e che il modulo dello jacobiano di una trasformazione canonica è 1 [Re80 § 7.B]. Segue:
¯ µ
¶¯
¯
Ut x0 ¯¯ 0
0
0
d (Ut x ) = ¯¯J
(2.107)
¯ dx = dx
x0
(si noti che la (2.107) è consistente con la (2.86)). Dalla (2.106) segue allora [Pen es. 3.4.1]:
Z
£
¤
S(t) =
˙ − kB
dx0 ρ0 (x0 ) ln Γ0 ρ0 (x0 ) =
˙ S(0) .
Γ
(2.108)
3
Termodinamica
La meccanica statistica di equilibrio è la teoria che ”spiega” i fenomeni descritti dalla termodinamica.
L’opportunità di richiamare, in un corso di meccanica statistica, i concetti base della termodinamica
è quindi ovvia. Esistono diverse formulazioni della termodinamica: qui illustriamo la formulazione ”di
Gibbs”, perchè la sua struttura logica e matematica è quella che più si avvicina a quella della meccanica
statistica (1) .
3.1 La rappresentazione dell’entropia
L’esperienza mostra che per ogni sistema termodinamico esiste un numero massimo di ”variabili
indipendenti” (cioè controllabili dallo sperimentatore indipendentemente l’una dalle altre), tali che ogni
quantità termodinamica del sistema è esprimibile come funzione di esse. In generale sono possibili diverse
scelte per l’insieme delle variabili indipendenti (ad esempio, per un gas: (U, V, N ), (T, V, N ), (T, P, N ),
ecc.). Alle varie scelte corrispondono formulazioni diverse, ma equivalenti, delle proprietà termodinamiche
del sistema, dette ”rappresentazioni”. Cominciamo dalla ”rappresentazione dell’entropia”.
Per concretezza, consideriamo un gas di N molecole di un solo tipo, confinate in un volume V , e isolato
termicamente e meccanicamente; sia U la sua energia interna. Le variabili U, V, N sono indipendenti.
Un dato insieme (U, V, N ) definisce uno ”stato termodinamico” (o, più brevemente, ”stato”) del gas; è
sottinteso che lo stato è ”di equilibrio”, cioè stazionario (cioè tale che tutte le grandezze termodinamiche
sono costanti nel tempo). Un dato empirico fondamentale è che esiste una funzione, S = S(U, V, N ), che
risulta coincidere con l’entropia, e che gode della proprietà seguente:
S1 ) S è una funzione ad un sol valore e derivabile di U, V, N , con:
¯
∂S
∂S ¯¯
=
˙
> 0,
∂U
∂U ¯V,N
¯
∂S ¯¯
∂S
=
˙
> 0.
∂V
∂V ¯U,N
(3.1)
Tutte le variabili termodinamiche del sistema (diverse da U, V, N ) si ottengono da S(U, V, N ) (nel
modo che vedremo).
Per il suo ruolo, S è chiamata ”funzione fondamentale” della rappresentazione dell’entropia (come vedremo,
ogni rappresentazione ha la sua funzione fondamentale). Qui di seguito elenchiamo altre proprietà della
funzione S. È bene sottolineare che esse sono di natura empirica: quindi non si pone, a livello della
termodinamica, il problema di ”giustificarle” (tale compito spetta alla meccanica statistica!).
Adottiamo i seguenti simboli per le derivate di S rispetto alle variabili indipendenti:
1
∂S
P
∂S
µ
∂S
=
˙
,
=
˙
,
=
˙ − .
(3.2)
∂U
T
∂V
T
∂N
T
T, P, µ risulteranno essere, rispettivamente, la temperatura, la pressione, e il ”potenziale chimico”, una
importante quantità collegata con l’equilibrio ”materiale”, cioè con l’equilibrio rispetto allo scambio di
molecole (vedi l’es. 3.3). In virtù delle (3.2), il differenziale della funzione S(U, V, N ) si scrive:
dS =
˙
(1)
P
µ
1
dU + dV − dN.
T
T
T
(3.3)
Un’altra formulazione è quella ”di Clausius”, basata essenzialmente sulla seconda legge della termodinamica [MNV1].
3.1
La rappresentazione dell’entropia
27
Si noti che −µ/T rappresenta la variazione di S conseguente alla aggiunta di una molecola a U, V costanti;
µ può assumere valori negativi, nulli, o positivi (2) . La giustificazione empirica della (3.3) sta nella relazione:
dS =
1 –
(dQ − µ dN ) ,
T
(3.4)
dove
– =
dQ
˙ dU + P dV
(3.5)
(Q è il ”calore”). La (3.5) è l’espressione della ”prima legge della termodinamica” nel caso in cui N sia
– =
costante (se N può variare, la prima legge si scrive: dQ
˙ dU + P dV − µ dN [Cal § 2.1]). Per un sistema
– =
– , dove dW
– è il ”lavoro” (per i gas: dW
– =
generico, la (3.5) si scrive: dQ
˙ dU − dW
˙ − P dV ; per un esempio
di lavoro in un sistema diverso dal gas, vedi [Re80 § 2.D.2]).
I differenziali dS, dU, ecc., corrispondono, fisicamente, alle variazioni (di S, U, ecc.) che si realizzano
quando il sistema è soggetto a opportune trasformazioni infinitesime reversibili (3) (qui assumiamo che la
nozione di ”trasformazione” sia ovvia; per una discussione formale vedi, ad esempio, [Mu70 § 6]). Esistono
anche trasformazioni irreversibili (o spontanee), caratterizzate da variazioni δS tali che sia:
δS >
δQ
.
T
(3.6)
Consideriamo una trasformazione infinitesima reversibile su un sistema con V, N costanti: la variazione
di S è allora: (δS)V,N = (1/T ) (δU )V,N . La variazione dell’energia interna a V, N costanti, (δU )V,N , ora
coincide con il calore scambiato, (δU )V,N = (δQ)V,N . Per una trasformazione infinitesima reversibile a
V, N costanti abbiamo allora: (δQ)V,N = T (δS)V,N . In termini di (δQ)V,N si costruisce una quantità di
cui faremo uso in seguito: la ”capacità termica a V, N costanti”, definita come il rapporto tra la quantità
di calore, δQ, fornita al sistema reversibilmente e a V, N costanti, e la corrispondente variazione della
temperatura, δT :
¯
¯
δQ ¯¯
δS ¯¯
CV,N =
˙ lim
= T lim
.
(3.7)
δT →0 δT ¯V,N
δT →0 δT ¯V,N
Sperimentalmente risulta:
CV,N > 0
(3.8)
(eccezionalmente può essere: CV,N = 0, e nei punti critici può risultare CV,N = ∞ [Sta § 3.2]). La (3.8) è
una condizione di ”stabilità” (§ 7). Consideriamo infatti un sistema, A, in condizioni di poter scambiare
calore con un secondo sistema, B: supponiamo che a un dato istante A e B abbiano la stessa temperatura
(allora A e B sono ”in equilibrio termico”). Supponiamo poi che, a un istante successivo, B ceda ad A una
quantità di calore (infinitesima) δQ: se la (3.8) è verificata, la temperatura di A aumenta (e quella di B
diminuisce). Quindi il calore acquistato da A può rifluire da A a B, e le temperature tendono a ritornare
al valore di equilibrio: il sistema A + B è dunque ”stabile”. Se invece la (3.8) non è verificata (cioè se
risulta C < 0), il sistema A + B risulta ovviamente ”instabile”.
Le (3.2) esprimono T , P , e µ come funzioni di U, V, N :
T = T (U, V, N ) ,
(2)
P = P (U, V, N ) ,
µ = µ(U, V, N ) .
(3.9)
Per esempio, per il gas ideale quantistico (Bose e Fermi) risulta µ < 0 per T opportunamente grande; invece, per T
opportunamente bassa risulta µ = 0 per il gas di Bose (per un gas di fotoni risulta µ = 0 per ogni T : vedi l’es. 3.4), e µ > 0
per il gas di Fermi. Per T → ∞ il gas quantistico ”diventa classico” (cap. 7): quindi per il gas ideale classico risulta µ < 0.
Il segno meno nella definizione di µ (vedi la terza delle (3.2)) assicura che µ ha, rispetto allo scambio di particelle, lo stesso
ruolo di T rispetto allo scambio di calore (es. 3.3d).
(3)
Le trasformazioni reversibili sono trasformazioni ”ideali”: una realizzazione approssimata di una trasformazione re-
versibile è una trasformazione che avviene con tempi caratteristici molto più lunghi dei tempi di rilassamento del sistema, in
modo da consentire al sistema di essere sempre ”quasi in equilibrio” (trasformazioni ”quasi statiche” [Cal § 1.7]).
3.2
Lo stato di equilibrio
28
Le (3.9) sono le ”equazioni di stato”. Qualora S non fosse nota, ma fossero note (ad esempio sperimentalmente) le funzioni (3.9), l’integrazione del differenziale (3.3) permetterebbe di determinare la funzione
S = S(U, V, N ) (per un esempio, vedi l’es. 3.5). Un’altra proprietà di S è:
S2 ) L’entropia è una funzione omogenea di grado uno:
S(λU, λV, λN ) = λ S(U, V, N ) ,
(3.10)
dove λ è un numero arbitrario.
Le variabili U, V, N sono dette ”estensive”, mentre T, P, µ, cosı̀ come U/V , U/N , V /N , ecc., sono dette
”intensive”: in genere sono chiamate ”estensive” le quantità proporzionali a V (o a N , o a U ), ed ”intensive”
quelle che non dipendono separatamente da V (o da N , o da U ), ma solo da combinazioni come V /N o
simili. La (3.10) implica che anche S è estensiva (basta prendere, ad esempio, λ = 1/N ).
Dalla omogeneità dell’entropia segue la importante ”relazione di Eulero”:
S=
1
P
µ
U + V − N.
T
T
T
(3.11)
Infatti, poniamo: U 0 =
˙ λU , ecc., e deriviamo la (3.10) rispetto a λ:
U
∂
S(U 0 , V 0 , N 0 ) + . . . = S(U, V, N ).
∂U 0
(3.12)
Le derivate ∂S(U 0 , ...)/∂U 0 sono funzioni di (U 0 , ...); per λ = 1 esse diventano funzioni di (U, ...). Segue:
¯
¯
∂
1
∂
0
0
0 ¯
U
S(U , V , N )¯
S(U, V, N ) + . . . =
˙ U + . . . = S.
(3.13)
+ ... =
˙ U
0
∂U
∂U
T
λ=1
Dalle (3.11) e (3.3) segue la ”relazione di Gibbs-Duhem” [Cal § 3.2]:
Ud
1
P
µ
+ V d − N d = 0.
T
T
T
(3.14)
La (3.14) può essere immediatamente trasformata in una equazione differenziale che permette poi esprimere
una delle variabili T, P, µ in funzione delle altre (es. 3.1). Un’altra proprietà di S è:
S3 ) L’entropia di un sistema composto di due sottosistemi in equilibrio tra di loro è la somma
delle rispettive entropie: S = S1 + S2 (”additività dell’entropia”).
Nel caso in cui le funzioni S per i due sottosistemi, che assumiamo caratterizzati da U1 , V1 , N1 e, rispettivamente, U2 , V2 , N2 , abbiano la stessa forma (cioè nel caso in cui i due sottosistemi siano dello stesso tipo),
la additività dell’entropia si esprime come:
S(U1 + U2 , V1 + V2 , N1 + N2 ) = S(U1 , V1 , N1 ) + S(U2 , V2 , N2 ) .
(3.15)
3.2 Lo stato di equilibrio
Analizziamo i meccanismi con i quali i valori delle variabili termodinamiche di un sistema in uno
stato di equilibrio si mantengono stazionari. Consideriamo, per esempio, la densità di un gas (in equili-
3.2
Lo stato di equilibrio
29
brio, e non soggetto a forze esterne, come la gravità). È ”ovvio” che la densità ha un valore costante nel
tempo, e uniforme nello spazio. Il meccanismo microscopico che mantiene la densità costante e uniforme
è di natura cinetica. Infatti, se osserviamo la densità ”locale” in un punto (numero di molecole in un
volume ”molto piccolo” contenente quel punto), vediamo che, per effetto dei movimenti, essenzialmente
casuali, delle molecole, essa varia (”fluttua”) da istante a istante. Quindi, istante per istante la densità
non è affatto uniforme. Tuttavia, le molecole collidono tra di loro, e una molecola subisce mediamente
più urti che tendono a farla uscire da una regione ad alta densità, che urti che tendono a farcela entrare.
Di conseguenza, ogni fluttuazione in cui la densità aumenta è seguita da una in cui essa diminuisce, e
viceversa, con la conseguenza che in media (media temporale, nello spirito dell’ipotesi ergodica) la densità
rimane uniforme. Analogamente, se il gas viene preparato in una condizione di non equilibrio in cui la
densità è non uniforme, e poi viene lasciato evolvere autonomamente, le fluttuazioni che tendono a ridurre
la disuniformità sono più frequenti e più ”intense” di quelle che tendono a mantenerla (o ad aumentarla),
per cui la densità tende, in media, all’uniformità.
Il meccanismo macroscopico invocato dalla termodinamica per mantenere costante la densità, è invece
basato sull’entropia. Consideriamo un sistema (il gas) in uno stato di equilibrio, a. Assumiamo che il
sistema sia mantenuto in a da opportuni ”vincoli” (ad esempio, le pareti di un contenitore). Supponiamo
che, ad un certo istante, uno dei vincoli venga modificato, in modo che il sistema cessi di essere in equilibrio (ad esempio, supponiamo che il volume del contenitore venga fatto aumentare, come nella ”espansione
alla Joule” [MNV1 § 11.5]). Supponiamo inoltre che la modificazione del vincolo sia istantanea, e che
dopo di essa il sistema non sia più disturbato. L’osservazione dice che, a partire dall’istante successivo
alla modificazione del vincolo, il sistema esegue una trasformazione irreversibile verso un nuovo stato di
equilibrio, b. Si osserva infine che la variazione di S nella trasformazione è positiva: ∆S =
˙ Sb − Sa > 0.
Quanto osservato sopra per un gas risulta valere in generale: un sistema isolato che non sia in equilibrio
(evitiamo di usare l’espressione ”stato di non equilibrio”!) evolve sempre verso uno stato di equilibrio,
e che nel corso di tale evoluzione la funzione S aumenta; inoltre, l’evoluzione termina quando il sistema
raggiunge lo stato di equilibrio, che risulta essere quello in cui S è ”massima” (nel senso che preciseremo
tra poco). Il meccanismo termodinamico che impedisce ad un sistema di uscire (spontaneamente) da uno
stato di equilibrio è quindi basato sul fatto che in una evoluzione spontanea l’entropia aumenta, e che non
ci può essere evoluzione spontanea a partire da uno stato di equilibrio perchè ”in uno stato di equilibrio
l’entropia è già massima”.
Per chiarire in che senso ”l’entropia è massima in uno stato di equilibrio”, è necessario definire
l’entropia per un sistema che non sia in uno stato di equilibrio. Poichè l’entropia, come qualunque altra grandezza termodinamica, è definita solo per stati di equilibrio, è necessario definire stati di equilibrio
che corrispondano in qualche modo alla condizione di un sistema che non sia in uno stato di equilibrio:
questi sono gli ”stati di equilibrio vincolato” [Cal § 1.9], che definiamo qui di seguito. Con riferimento
al gas di cui sopra, immaginiamo una parete rigida e fissata, ma permeabile alle molecole, che divida il
volume occupato dal gas, V , in due sottovolumi V1 e V2 , con V1 + V2 = V , in modo che, a un determinato
istante, V1 e V2 contengano, rispettivamente, N1 ed N2 molecole, con N1 + N2 = N (e con energie interne
U1 e U2 , con U1 + U2 = U ). Se risulta (N1 /V1 ) 6= (N2 /V2 ), allora, a quell’istante, si è in presenza di
una fluttuazione della densità. In quell’istante il gas non si trova, ovviamente, in uno stato di equilibrio,
e quindi non possiamo calcolare S. Tuttavia, possiamo ”stabilizzare la fluttuazione”, immaginando di
”impermeabilizzare” (a quell’istante) la parete, in modo da ”bloccare” i valori di N1 ed N2 . Come risultato di questa operazione abbiamo ottenuto uno stato di equilibrio ”vincolato” (il ”vincolo” è, in questo
caso, la parete impermeabilizzata). Sottolineiamo che il vincolo è un artificio mentale che permette di
”stabilizzare le fluttuazioni” e quindi di definire S in presenza di una fluttuazione. Si noti che le scale temporali caratteristiche delle fluttuazioni sono molto più lunghe delle scale temporali microscopiche; quindi,
durante una fluttuazione il sistema è in uno stato di ”quasi equilibrio”: trasformare tale stato in un stato
3.3
La trasformata di Legendre
30
di equilibrio effettivo, mediante il vincolo, è quindi giustificato. Per lo stato di equilibrio vincolato risulta:
S = S(U1 , V1 , N1 ) + S(U2 , V2 , N2 ) =
˙ S1 + S2 (vedi la (3.15)). Formuliamo allora il seguente postulato:
S4 ) Lo stato di equilibrio, o, di un sistema (gas) isolato con dati U, V, N , è quello per cui la
funzione S è massima rispetto a tutti gli stati di equilibrio vincolati, a, ottenibili da o mediante
l’interposizione di opportuni vincoli.
Chiamiamo ”trasformazione virtuale” la trasformazione da uno stato di equilibrio a uno di equilibrio
vincolato. Il postulato S4 implica che in ogni trasformazione virtuale di un sistema isolato, da uno stato
di equilibrio o ad uno di equilibrio vincolato a, a U, V, N costanti, la variazione di entropia sia negativa:
(δS)U,V,N =
˙ (Sa − So )U,V,N < 0 .
(3.16)
Sulla base del postulato S4 è facile verificare che le derivate parziali di S (vedi le (3.2)) hanno effettivamente
il significato di, rispettivamente, temperatura (4) , pressione, e potenziale chimico (vedi l’es. 3.3).
3.3 La trasformata di Legendre
La rappresentazione dell’entropia utilizza un insieme di variabili indipendenti che risultano, in laboratorio, di difficile controllo. È quindi opportuno cercare rappresentazioni in cui le variabili indipendenti siano
più ”pratiche” (ad esempio, la temperatura è più ”pratica”, cioè più facilmente controllabile, dell’energia
interna). Supponiamo di conoscere due rappresentazioni diverse, caratterizzate da insiemi di variabili indipendenti che indichiamo con X e, rispettivamente, Y , e dalle relative funzioni fondamentali, A(X) e
B(Y ). Consideriamo dapprima la rappresentazione A(X): per definizione (vedi S1 ) da A(X) devono poter
essere dedotte tutte le grandezze termodinamiche del sistema, compresa B(Y ): quindi, dalla funzione A(X)
si deve poter ottenere la funzione B(Y ). Analogamente, nella rappresentazione B(Y ), dalla funzione B(Y )
si deve poter ottenere la funzione A(X). In altri termini, la relazione tra le funzioni fondamentali di due
rappresentazioni diverse deve essere invertibile. Supponiamo, per concretezza, che sia: X = (S, V, N ) (e
quindi A = U ), e: Y = (T, V, N ) (e quindi B = A). Nel caso considerato la relazione tra S e T è data da
una derivata: T = ∂S/∂U . Risulta allora che la relazione tra B (= A) e A (= U ) deve essere definita come
una ”trasformata di Legendre” (vedi la (3.35).
Limitiamoci al caso di funzioni di una sola variabile [FaMa § 8.1]. Sia allora y = y(x) una funzione
(reale) di una variabile (reale) x. Supponiamo che esista un intervallo I =
˙ (x1 , x2 ) tale che, per x ∈ Ix ,
siano verificate le seguenti condizioni (nel § 5 vedremo che in casi importanti esse non sono verificate):
a) y sia continua e derivabile (almeno) due volte, con derivata seconda continua;
b) la derivata seconda, d2 y/dx2 , sia non nulla; per concretezza, supponiamo che sia:
d2 y
=
˙ yxx (x) > 0.
d x2
(3.17)
Sia p un numero reale, e consideriamo la funzione (di x):
dy
=
˙ yx (x) = p .
dx
(4)
(3.18)
Si noti che la prima delle (3.2), insieme con la (3.1), esclude che la temperatura possa assumere valori negativi. D’altra
parte è possibile che per particolari valori di U risulti: ∂S/∂U < 0; tali valori corrisponderebbero quindi a ”stati” con T < 0,
che tuttavia risultano non essere stati di equilibrio ([Pat § 3.9]; [Cal § 1.9]).
3.4
Altre rappresentazioni
31
In virtù della (3.17), yx (x) è una funzione continua e monotona (crescente), e quindi esiste (per i teoremi
sulle funzioni implicite [FMS cap 11]) un intervallo Ip =
˙ (p1 , p2 ) tale che, per p ∈ Ip , la (3.18) definisce
una funzione:
x = x(p) ,
(3.19)
derivabile e con derivata continua. Indichiamo con C il grafico della funzione y = y(x): per p ∈ Ip , x(p) è
la ascissa del punto di C in cui la retta tangente ha coefficiente angolare p. Indichiamo con −ψ =
˙ − ψ(p)
l’ordinata dell’intersezione con l’asse y della retta tangente a C nel punto (x, x(p) (vedi la fig. 3.1). È
chiaro che risulta:
p=
y(x(p)) + ψ(p)
,
x(p)
(3.20)
da cui:
ψ(p) = px(p) − y(x(p)) .
(3.21)
La (3.21) e la (3.18) definiscono la ”trasformata di Legendre”, ψ(p), di y(x).
y
p = tg θ
i
i
y
(i = 1,2)
p = tg θ
y(x(p))
θ
θ2
1
Fig. 3.1 :
x x
x1
Trasformata di Legendre.
-ψ
2
θ
x(p)
x
Consideriamo ora un piano (p, ψ), e la funzione p = ψ(p). In virtù delle proprietà di x(p) e di
y(x) anche ψ(p) risulta continua e derivabile. Dalle (3.21) e (3.18) si ottiene:
ψp (p) =
˙
dψ
= x(p) + p x0 (p) − yx (x(p))xp (p) = x(p) .
dp
(3.22)
Dalla (3.18) segue ancora:
1 = yxx (x(p)) xp (p) ,
da cui : xp (p) = [yxx (x(p)]−1 .
(3.23)
Allora dalla (3.17) segue infine:
ψpp (p) = [yxx (x(p)]−1 > 0 .
(3.24)
Quindi anche la funzione p = ψ(p) possiede una trasformata di Legendre, che chiamiamo h(x). Ripetendo
il procedimento visto per y(x) otteniamo:
h(x) = x p(x) − ψ(p(x)) ,
(3.25)
dove p(x) è la soluzione, per x ∈ Ix , dell’equazione (analoga alla (3.18)):
x = ψp (p).
(3.26)
Per la (3.22), la (3.26) coincide con la x = x(p). Quindi, le funzioni x = x(p) e p = p(x) sono l’una inversa
dell’altra, cioè: x(p(x)) = x. È facile allora mostrare che h(x) coincide con y(x). Dalla (3.21) segue infatti:
h(x) = x p(x) − [p(x) x(p(x)) − y(x(p(x)))] = x p(x) − [p(x) x − y(x)] =
˙ y(x) .
(3.27)
3.4
Altre rappresentazioni
32
In definitiva: ”la trasformata di Legendre della trasformata di Legendre di y(x) coincide con y(x)”. La
trasformazione di Legendre (5) è dunque una operazione invertibile.
3.4 Altre rappresentazioni
Consideriamo di nuovo la rappresentazione dell’entropia, S(U, V, N ) (per concretezza, consideriamo le
variabili di un gas, e cerchiamo una nuova rappresentazione che abbia come variabili indipendenti T, V, N .
Usiamo il metodo della trasformata di Legendre, assumendo che le condizioni (a) e (b) del § 3 siano
verificate. Cominciamo col considerare la trasformata di Legendre di S rispetto ad U :
S∗ =
˙ T U − S(U )
∂S
T =
˙
∂U
)
S ∗ = T U (T ) − S(U (T )) =
˙ S ∗ (T ) .
=⇒
(3.28)
In virtù della prima delle (3.2), T deve essere identificato con T −1 . La trasformata di Legendre di S rispetto
ad U risulta allora funzione della temperatura inversa: S ∗ (T ) =
˙ S ∗ (T −1 ). È chiaro che sarebbe molto più
naturale una dipendenza da T , piuttosto che da T −1 . Una funzione fondamentale con le caratteristiche
di essere sia una trasformata di Legendre che una funzione di T , può essere ottenuta (vedi la (3.35)),
introducendo dapprima la ”rappresentazione dell’energia interna”.
Osserviamo che, in virtù della prima delle (3.1), la funzione S = S(U, V, N ) può essere invertita
rispetto ad U : sia U = U (S, V, N ) la funzione inversa. Risulta ovviamente:
∂U
=
∂S
µ
∂S
∂U
¶−1
> 0.
(3.29)
Dalla (3.29) segue che anche la funzione U = U (S, V, N ) è invertibile rispetto ad S: la funzione inversa è,
ovviamente, S = S(U, V, N ). Quindi, dalla funzione S = S(U ) si può ottenere la funzione U = U (S), e
viceversa. Allora U = U (S, V, N ) può essere considerata la funzione fondamentale della rappresentazione
in cui le variabili indipendenti sono S, V, N (in questo caso si ottiene una nuova funzione fondamentale
senza ricorrere alla trasformata di Legendre!). Dalla (3.3) segue:
dU = T dS − P dV + µ dN .
(3.30)
Le equazioni di stato nella rappresentazione dell’energia sono allora:
T =
∂U
,
∂S
P =−
∂U
,
∂V
µ=
∂U
.
∂N
(3.31)
Come S, anche U risulta omogenea di grado uno (es. 3.6b): la relativa relazione di Eulero è:
U = T S − P V + µN .
(3.32)
Infine, la relazione di Gibbs-Duhem nella rappresentazione dell’energia si scrive:
S dT − V dP + N dµ = 0 .
(3.33)
La rappresentazione dell’energia interna è adatta a descrivere sistemi ”in equilibrio a S costante”. Dal
punto di vista fisico, tali equilibri non sono molto interessanti, ma la rappresentazione dell’energia interna
(5)
È facile estendere la definizione al caso di funzioni di più variabili: se f è funzione di più variabili, la trasformata di
Legendre di f rispetto ad una di esse è del tipo: f ∗ (y , z) =
˙ supx [xy − f (x , z)] . f ∗ (y , z) è allora la ”trasformata di Legendre
di f (x , z) rispetto a x”.
3.4
Altre rappresentazioni
33
è utile, come vediamo qui di seguito, per derivare la ”rappresentazione dell’energia libera”, A(T ).
Consideriamo allora la trasformata di Legendre di U (S, V, N ) rispetto ad S (6) :
)
U∗ =
˙ TS − U
∂U
T =
∂S
=⇒
U ∗ (T ) = T S(U (T )) − U (T ) ,
(3.34)
dove U (T ) è la funzione che si ottiene invertendo la T = ∂U/∂S. U ∗ (T ) è sia una trasformata di Legendre
che una funzione di T : essa potrebbe dunque essere la funzione fondamentale cercata sopra. Convenzionalmente, si preferisce utilizzare, invece di U ∗ (T ), la funzione:
A(T ) =
˙ − U ∗ (T ) =
˙ U − TS ,
(3.35)
detta ”energia libera (di Helmholtz)” (A dipende anche da V, N ). Sottolineiamo il fatto che abbiamo
ottenuto A(T ) da S(U ) mediante la sequenza di passaggi:
S(U ) −→ U (S) −→ U ∗ (T ) −→ A(T ) ,
(3.36)
e che tutti i passaggi sono invertibili: quindi dalla funzione A(T ) si può riottenere la funzione S(U ). La
rappresentazione (della termodinamica del gas) che assume come variabili indipendenti T, V, N , e come
funzione fondamentale A(T, V, N ), si chiama ”rappresentazione dell’energia libera”. Le equazioni di stato
nella rappresentazione di A seguono immediatamente dal differenziale:
dA = −S dT − P dV + µ dN
(3.37)
(vedi la (3.3) e la (3.30)), e sono:
−S =
∂A
,
∂T
P =−
∂A
,
∂V
µ=
∂A
.
∂N
(3.38)
Si noti anche l’importante relazione (che si ottiene scrivendo la (3.35) come: U = A + T S, e usando la
prima delle (3.38)):
∂(T −1 A)
∂(βA)
1
U=
=
˙
,
con : β =
˙
.
(3.39)
−1
∂T
∂β
kB T
In termini dell’energia libera A è possibile definire lo ”stato di equilibrio” di sistemi molto importanti:
quelli ”in equilibrio termico con una riserva di calore”, dove per ”riserva di calore” (o ”termostato”)
intendiamo un sistema con pareti rigide, fisse, e impermeabili, capace di assorbire e/o cedere quantità di
calore (anche finite) mantenendo costante la propria temperatura. Dato un sistema termodinamico, un
sistema che possa fungere, con buona approssimazione, da riserva di calore per il primo, è un sistema
cosı̀ grande (rispetto al primo) che il passaggio del calore avviene lasciando inalterata ogni sua grandezza
termodinamica (non solo la temperatura): quindi, una riserva di calore assorbe e cede calore in modo
reversibile [Cal § 4.3]. Se T è la temperatura della riserva, la condizione di equilibrio tra il sistema e la
riserva è ovviamente (es. 3.3a), che anche il sistema abbia temperatura T . A volte, per brevità, invece di
scrivere ”sistema in equilibrio in contatto termico con una riserva con temperatura T ”, scriveremo ”sistema
a T costante” (a rigore ciò è improprio, perchè anche un sistema isolato con energia U è ”a T costante”,
con 1/T = ∂S/∂U !).
Consideriamo dunque un sistema a T costante, e supponiamo che il sistema e la riserva formino un
sistema (composto) isolato. Indicando con S l’entropia del sistema, e con Sr quella della riserva (caratte(6)
È facile verificare che la condizione (b) qui è soddisfatta. Dalla prima delle (3.31) segue (è sottinteso che tutte le
derivate qui sono a V, N costanti): ∂ 2 U/∂S 2 = ∂T /∂S. Ricordiamo poi: ∂S/∂T = CV /T > 0 (vedi la (3.8)). Allora la
funzione S = S(T ) può essere invertita, e risulta: ∂T /∂S = 1/(∂S/∂T ) > 0.
3.5
Non applicabilità della trasformata di Legendre
34
rizziamo con l’indice r tutte le grandezze della riserva), la condizione perchè uno stato del sistema composto
sia di equilibrio è che l’entropia totale: St = S + Sr , sia massima rispetto a tutti gli altri stati raggiungibili
mediante trasformazioni virtuali, cioè che sia:
δSt = δ(S + Sr ) < 0 ,
a
(U + Ur ) costante .
(3.40)
Per definizione, la variazione δSr ha luogo in modo reversibile. Possiamo quindi scrivere:
δSr =
1
1
∂Sr
δUr =
˙
δUr = δUr .
∂Ur
Tr
T
(3.41)
La (3.40) diventa allora:
δ(S + Sr ) = δS +
1
1
δUr = (T δS − δU ) < 0 ,
T
T
cioè
δA > 0 ,
(3.42)
dove A =
˙ U − T S. La (3.42) è la condizione di equilibrio cercata: per un sistema a T costante, lo stato di
equilibrio è quello per cui è minima A.
La rappresentazione dell’energia libera risulta particolarmente conveniente per quei fenomeni, come le
transizioni di fase (cambiamenti di stato), in cui la temperatura gioca un ruolo essenziale. Consideriamo,
ad esempio, la transizione gas-liquido. Dalla condizione di minimo dell’energia libera A = U − T S, segue
che a temperatura ”alta” lo stato di equilibrio coincide con lo stato ad alta entropia (il gas), mentre a
temperatura ”bassa” esso coincide con lo stato a bassa energia (il liquido).
Un’altra rappresentazione molto utile è quella ”del potenziale gran canonico”, Ω(T, V, µ), definito come
trasformata di Legendre di A(T, V, N ) rispetto a N . Tale rappresentazione è necessaria per descrivere un
gas in equilibrio con assegnati il volume V , la temperatura T , e in equilibrio rispetto agli scambi di particelle
(equilibrio materiale) a un dato µ (vedi l’es. 3.3c). Ω risulta espresso come:
Ω=
˙ A(T, V, N ) − µN )
=⇒
∂A
µ=
∂N
Ω = Ω(T, V, µ) .
(3.43)
Dalla A = U − T S, e dalla (3.32) segue:
Ω = −P V .
(3.44)
Le equazioni di stato nella rappresentazione del potenziale gran canonico seguono dal differenziale:
dΩ = −S dT − P dV − N dµ .
(3.45)
Anche qui, si trova (vedi l’es. 3.10) che per un ”sistema a T e µ costanti” (cioè per un sistema in equilibrio
termico con una riserva di calore con temperatura T e in equilibrio materiale con una riserva di particelle
con potenziale chimico µ), lo stato di equilibrio è quello per cui è minimo Ω.
Citiamo infine la rappresentazione del ”potenziale termodinamico” (o ”energia libera di Gibbs”),
G = G(T, P, N ), definito come la trasformata di Legendre di A rispetto a −V :
G=
˙ P V + A(T, V, N ) )
=⇒
∂A
P =−
∂V
G = G(T, P, N ) .
(3.46)
Le equazioni di stato nella rappresentazione del potenziale di Gibbs seguono dal differenziale:
dG = −S dT + V dP + µ dN .
(3.47)
3.6
La trasformata di Legendre generalizzata
35
Per un sistema ”a T e P costanti” (cioè in equilibrio termico con una riserva di calore con temperatura T
e con un equilibrio meccanico con una riserva di volume (definita in modo analogo alla riserva di calore)
con pressione P ) lo stato di equilibrio è quello per cui è minimo G [Cal cap. 6].
3.5 Non applicabilità della trasformata di Legendre
In termodinamica è facile incontrare problemi in cui le condizioni (a) e/o (b) del § 3 non sono verificate.
Consideriamo, ad esempio, un gas reale: come è ben noto, esiste una ”temperatura critica”, Tc , tale che
l’equazione di stato (per T < Tc , ed N fissato) ha la forma della figura 3.2a. Consideriamo l’energia libera
di Helmholtz: A = A(T, V, N ), e ricordiamo la seconda delle (3.38):
P =−
∂A
=
˙ P (T, V, N )
∂V
(3.48)
(la (3.48) è l’equazione di stato). Scegliendo un valore di V , V0 , e integrando rispetto a V la (3.48),
possiamo determinare la dipendenza di A da V (per dati T , N ):
Z
V
A(T, V, N ) = A(T, V0 , N ) −
dV 0 P (T, V 0 , N ) .
(3.49)
V0
Nella fig. 3.2b riportiamo il grafico di A(V ). Risulta evidentemente:
∂2A
∂P
< 0,
˙
2 =
∂V
∂V
∂2A
∂P
−
=
˙
= 0,
∂V
∂V 2
−
per :
V ∈
/ [V1 , V2 ] ;
per :
V ∈ [V1 , V2 ] .
(3.50)
Per V ∈
/ [V1 , V2 ] (T, N sono fissati) le condizioni (a) e (b) sono verificate. Nell’intervallo (V1 , V2 ), invece, la
P
Fig. 3.2 :
a) l’isoterma P (T, V, N );
b) l’energia libera A(T, V, N ).
A
V1
g
V2
V
(liq.)
(a)
(b)
Ps
(c)
c) L’energia libera di Gibbs:
g=
˙ G/N = g(T, V ).
(gas)
V1
V2
V
Ps
P
condizione (3.17) non è verificata, e quindi la funzione P = P (V ) non ammette inversa.
Un altro caso frequente è quello di una funzione il cui intervallo di definizione contenga un punto in cui
la funzione stessa non è derivabile. Ad esempio, per descrivere la termodinamica del gas di prima si può
utilizzare, oltre che A(T, V, N ), anche il potenziale termodinamico: G = G(T, P, N ), dove P è la pressione
(vedi la (3.46)). Dalla (3.47) segue:
∂G
=V .
∂P
(3.51)
Ponendo: g =
˙ G/N , v =
˙ V /N (e ricordando che la derivata parziale rispetto a P è calcolata ad N costante),
scriviamo la (3.51) come:
∂g
1
=v =
˙
,
∂P
n
(3.52)
dove n =
˙ N/V è la densità (numero di particelle per unità di volume). È ben noto che per N fissato e
T < Tc , esiste un valore di P , Ps (Ps è la pressione del vapore saturo, alla temperatura data), tale che
3.6
La trasformata di Legendre generalizzata
36
per P > Ps il ”gas” è nella fase liquida, mentre per P < Ps il ”gas” è nella fase gassosa (per P = Ps c’è
coesistenza tra le due fasi). Nella fase liquida la densità è maggiore che in quella gassosa: nl > ng . Segue:
1
1
>
,
ng
nl
¯
¯
∂g ¯¯
∂g ¯¯
>
.
∂P ¯P <Ps
∂P ¯P >Ps
cioè :
(3.53)
La funzione G non è derivabile rispetto a P in Ps (vedi la fig. 3.2c). Anche in questo caso, la trasformata
di Legendre di G (rispetto a P ) non può essere calcolata con la (3.24).
3.6 La trasformata di Legendre generalizzata
Definiamo la nozione di ”convessità” di una funzione di una variabile. Sia I un intervallo aperto di
R, e sia f : I → R una funzione reale; f è ”convessa” se, per ogni x1 , x2 ∈ I e ogni λ ∈ (0, 1) è:
f (λx1 + (1 − λ)x2 ) ≤ λ f (x1 ) + (1 − λ) f (x2 ) .
(3.54)
In termini geometrici, la (3.54) implica che una corda P Q (vedi la fig. 3.3) sta sopra il tratto del grafico di
f compreso tra P e Q, o coincide con esso. f è ”strettamente convessa” se per ogni x1 , x2 (con x1 6= x2 )
la (3.54) vale come disuguaglianza (cioè se la curva non contiene tratti rettilinei).
Qui di seguito elenchiamo, senza dimostrazioni, le proprietà delle funzioni convesse che ne giustificano
l’uso in termodinamica. Se f : I → R è una funzione convessa, allora:
(a)
y
Fig. 3.3 :
a) funzione convessa;
(b)
b) funzione strettamente convessa;
Q
(c)
P
c) funzioni concave.
x
1) f è continua su I.
2) Se f è derivabile due volte su un intervallo (a, b) ∈ I, allora f è convessa se e solo se la derivata
seconda è non negativa: f 00 ≥ 0, e strettamente convessa se e solo se:
f 00 > 0 .
(3.55)
3) La funzione f ∗ (y) : I ∗ → R, definita come (7) :
f ∗ (y) =
˙ sup [xy − f (x)] ,
x
(3.56)
dove I ∗ =
˙ {y : f ∗ (y) < ∞}, è convessa [RV § 15, teor. A]. f ∗ (y) è chiamata ”funzione convessa coniugata a
f ”, oppure ”trasformata di Legendre (sottinteso: ”generalizzata”) di f ”. La proprietà fondamentale della
trasformata di Legendre è la ”invertibilità”, definita come segue:
4) La trasformata di Legendre f ∗∗ della trasformata di Legendre f ∗ di una funzione convessa coincide
con la funzione f :
f ∗∗ (x) =
˙ sup [yx − f ∗ (y)] = f (x) .
(3.57)
y
La trasformata di Legendre può essere definita anche per le funzioni ”concave”, dove f è concava se e
solo se −f è convessa. Le proprietà delle funzioni concave sono analoghe a quelle delle funzioni convesse.
(7)
Qui indichiamo con (f, y, f ∗ ) le quantità che nel § 3 erano indicate come (y, p, ψ).
3.7
Le condizioni di stabilità
37
Ad esempio, se f : I → R è una funzione concava, allora:
1’) f è continua su I.
2’) Se f è derivabile due volte su un un intervallo (a, b) ∈ I, allora f è concava se e solo se f 00 ≤ 0, e
strettamente concava se e solo se:
f 00 < 0 .
(3.58)
3’) Se f (x) è concava, la trasformata di Legendre di f , definita come:
f ∗ (y) =
˙ inf [xy − f (x)] ,
(3.59)
x
è concava.
4’) La trasformata di Legendre della trasformata di Legendre di una funzione concava coincide con la
funzione: f ∗∗ (x) = f (x).
La trasformata di Legendre di una funzione strettamente convessa (o concava) può essere calcolata
facilmente. Consideriamo ad esempio un intervallo I 0 in cui f è derivabile due volte, e in cui è verificata
la (3.55) (per la (3.58) si procede in modo analogo). Allora la funzione y = y(x) =
˙ ∂f /∂x è crescente, e
∗0
quindi esiste un intervallo I in cui la funzione inversa, x = x(y), è definita. La (3.56) equivale allora, per
y ∈ I ∗ 0 , alle equazioni:
)
f ∗ (x) =
˙ xy − f (x)
=⇒ f ∗ = x(y) y − f (x(y)) =
˙ f ∗ (y) .
(3.60)
y(x) =
˙ ∂f /∂x
La (3.60) è la forma della trasformata di Legendre che di solito è usata nella meccanica analitica. Due
esempi sono [RV probl. 15B] (la funzione esponenziale è strettamente convessa in virtù della (3.55)):
f (x) = x2
(I = R) ,
f (x) = ex
(I = R) ,
f ∗ (y) = y 2 /4
½
y log y − y , y > 0
f ∗ (y) =
0,
y=0
(I ∗ = R) ;
(I ∗ = [0, ∞)) .
Dove la (3.60) non è applicabile, bisogna ricorrere alla definizione (3.56). Consideriamo ad esempio
una f (x) convessa su un intervallo (a, b), e sia xv ∈ (a, b) un punto angoloso (in cui f non è derivabile).
f
(b)
f(x)
Fig. 3.4 :
a) La trasf. di L. generalizzata.
θ
t1
(a)
xy
b) L’esempio (3.61).
f(x)
xy - f(x) (< 0)
x y - f(x ) =
0
0
supx [xy - f(x)]
t2
θ = arctg y
x
x0
(b)
xv
x
Siano t1 e t2 le rette tangenti in xv− e, rispettivamente, xv+ , (vedi la fig. 3.4b), e siano y− e y+ (con:
y± =
˙ (df /dy)± , e: y− < y+ ) i relativi coefficienti angolari. La trasformata di Legendre è allora:
f ∗ (y) = yxv − f (xv ) ,
per :
y− ≤ y ≤ y+ .
(3.61)
Quindi, a un punto in cui f è non derivabile corrisponde un tratto rettilineo di f ∗ . Due esempi sono:
f (x) = |x| ,
I = R,
f ∗ (y) =
0,
I ∗ = [−1, 1] ;
f (x) = K ,
I = {c} ,
f ∗ (y) =
cy − K ,
I∗ = R
(3.62)
(nel secondo esempio, K è una costante e c (la coordinata di) un punto).
3.7
Le condizioni di stabilità
38
3.7 Le condizioni di stabilità
Studiamo la condizione che S sia massima nello stato di equilibrio (§ 3.2). Consideriamo un gas isolato,
in uno stato (U, V, N ), e supponiamo che il volume V sia costituito da due volumi V1 e V2 (V1 + V2 = V ),
separati da una parete diatermica e mobile che, per semplicità, assumiamo impermeabile alle molecole: i
numeri, N1 ed N2 (N1 + N2 = N ), di molecole contenute in V1 e, rispettivamente, V2 , sono allora fissati
(nel seguito di questo paragrafo omettiamo di indicare la dipendenza dal numero di molecole e intendiamo
che tutte le derivate sono calcolate a N costante). Siano inoltre U1 ed U2 (U1 + U2 = U ) le rispettive
energie. La condizione di equilibrio è che ogni variazione virtuale:
δU1 =
˙ U1 − U10 ;
δU2 =
˙ U2 − U20 ;
δV1 =
˙ V1 − V10 ;
δV2 =
˙ V2 − V20 ,
δU1 + δU2 = 0 ;
δV1 + δV2 = 0 ,
(3.63)
con
(3.64)
(con ”0 ” indichiamo i valori relativi allo stato di equilibrio) comporti una diminuzione dell’entropia rispetto
al valore di equilibrio S 0 =
˙ S(U 0 , V 0 ) = S10 (U10 , V10 ) + S20 (U20 , V20 ).
Sviluppiamo S fino al secondo ordine nelle variazioni (3.63). Consideriamo, per esempio, S1 (per S2
vale una formula analoga): scrivendo la derivata seconda mista come:
(·
· 2 ¸0
µ
¶¸0 ·
µ
¶¸0 )
∂ S
1
∂
∂S
∂
∂S
,
(3.65)
=
˙
+
∂U ∂V 1
2
∂V ∂U 1
∂U ∂V
1
lo sviluppo in serie di Taylor di S1 (U1 , V1 ) diventa:
·
¸0
·
¸0
·
·
¸0
¸0
∂S
∂S
1 ∂2S
1 ∂2S
2
δU1 +
δV1 +
(δU
)
+
(δV1 )2 +
1
∂U 1
∂V 1
2 ∂U 2 1
2 ∂V 2 1
(·
µ
¶¸0 ·
µ
¶¸0 )
∂
∂S
∂
∂S
1
+
δU1 δV1 + . . . ,
+
2
∂V ∂U 1
∂U ∂V
1
S1 = S10 +
(3.66)
dove i termini omessi sono di ordine superiore al secondo. L’entropia totale, S = S1 + S2 , può allora essere
sviluppata come:
(
)
·
¸0
X · ∂S ¸0
∂S
0
S=S +
δUα +
δVα +
∂U α
∂V α
α=1,2
(·
)
µ ¶¸0
·
µ ¶¸0
1 X
∂
1
∂
1
+
δUα +
δVα δUα +
(3.67)
2 α=1,2
∂U T
∂V T
α
α
(·
)
µ ¶¸0
µ ¶¸0
·
1 X
P
P
∂
∂
+
δUα +
δVα δVα + . . . ,
2 α=1,2
∂U T
∂V T
α
α
dove abbiamo utilizzato la prima e la seconda delle (3.2). Le condizioni di equilibrio, T10 = T20 e P10 = P20 ,
insieme alle (3.64), implicano che il termine del primo ordine nella (3.67) è nullo; introducendo poi le
variazioni δTα e δPα (si ricordi che T e P sono, per le (3.2), funzioni di (U, V )), la (3.67) diventa:
¾
½
¾
¸
·½
Pα
1 X
1
δUα + δ
δVα + . . . =
S = S0 +
δ
2 α=1,2
Tα
Tα
1 X 1
= S0 +
(−δTα δSα + δPα δVα ) + . . . =
(3.68)
2 α=1,2 Tα
1 X
= S0 +
(−δTα δSα + δPα δVα ) + . . . ,
2T α=1,2
3.7
Le condizioni di stabilità
39
dove abbiamo utilizzato la δU + P δV = T δS (vedi la (3.30)), e dove abbiamo posto, a meno di termini di
ordine superiore (T =
˙ T10 = T20 è la temperatura di equilibrio):
Tα =
˙ Tα (Uα , Vα ) ≈ Tα (Uα0 , Vα0 ) =
˙ T.
(3.69)
Supponiamo ora di poter esprimere Vα e Sα in funzione di Tα e Pα . Per le variazioni δVα e δSα
otteniamo allora:
)
(·
¸0
·
¸0
∂V
∂V
δT +
δP
,
δVα =
∂T P
∂P T
α
(·
)
(·
)
(3.70)
¸0
·
¸0
¸0
·
¸0
∂S
∂S
∂S
∂V
δSα =
δT +
δP
=
δT −
δP
,
∂T P
∂P T
∂T P
∂T P
α
α
dove abbiamo utilizzato la ”relazione di Maxwell” [Cal § 7.1]:
·
¸
·
¸
∂S
∂V
=−
,
∂P T
∂T P
(3.71)
che segue dalla condizione che il differenziale (3.47) sia esatto.
Alcune delle derivate che figurano nelle (3.70) hanno un significato fisico diretto, che giustifica la
adozione di nomi e simboli particolari:
·
¸
1 ∂V
comprimibilità isoterma :
κT =
˙ −
;
(3.72)
V ∂P (T,N )
·
¸
1 ∂V
espansività termica :
αP =
˙
;
(3.73)
V ∂T (P,N )
¸
·
∂S
;
(3.74)
capacità termica a V costante : CV =
˙ T
∂T (V,N )
·
¸
∂S
capacità termica a P costante : CP =
˙ T
.
(3.75)
∂T (P,N )
Consideriamo, per esempio, la (3.72), e scriviamola come:
δV
= −κT δP ;
(3.76)
V
la (3.76) significa che la ”variazione di volume per unità di volume” conseguente a una (piccola) variazione
di P è proporzionale a δP , con coefficiente κT . Per questo, κT e le altre quantità introdotte sopra sono
chiamate ”funzioni risposta”.
Sostituendo le (3.70) - (3.75) nella (3.68) segue:
½
¾
1 X
1
S = S0 +
− CP (δTα )2 + 2V αP δPα δTα − V κT (δPα )2 + . . . .
(3.77)
2T α=1,2
T
Ricordiamo poi l’identità (es. 3.11):
CP − CV = T V
αP2
.
κT
Da (3.77) e (3.78) segue allora:
¾
½
1 X CV
1
2
S = S0 −
(δTα )2 +
(V αP δTα − V κT δPα ) + . . .
=
2T α=1,2 T
V κT
α
÷
!2
¸
·
¸
X C
1
1
∂V
∂V
V
= S0 −
(δTα )2 +
δTα +
δPα
+ ...
=
2T α=1,2 T
V κT
∂T P
∂P T
α
¸
X ·C
1
1
V
(δTα )2 +
(δVα )2 + . . . .
= S0 −
2T α=1,2 T
V κT
α
(3.78)
(3.79)
3.8
Esercizi
40
Se lo stato di equilibrio è un massimo per S, deve risultare S > S 0 per ogni variazione (δTα , δVα ) (8) .
Devono quindi essere soddisfatte le ”condizioni di stabilità”:
(CV )α > 0 ,
(κT )α > 0 ,
(α = 1, 2) .
(3.81)
Per i sistemi termodinamici le (3.81) risultano sperimentalmente verificate.
3.8 Esercizi
Esercizio 3.1 Il potenziale chimico del gas ideale.
Si considerino le equazioni di stato del gas ideale monoatomico, nella forma:
1
3 kB
=
;
T
2 u
P
k
= B ,
T
v
dove u =
˙
U
V
, v=
˙
.
N
N
(3.82)
Si consideri poi la relazione di Gibbs-Duhem (3.14), scritta nella forma
d
µ
1
P
= ud + vd .
T
T
T
(3.83)
Usando le (3.82) nella (3.83), e integrando, mostrare che il potenziale chimico nello stato (u, v) è:
"
µ ¶ 32 µ ¶− 52 #
µ ³µ´
3
u
v
U
V
N
−
= − kB ln
− kB ln
=
˙ − kB ln
T
T 0
2
u0
v0
V0 U0
No
(3.84)
dove ”0” è uno stato di riferimento, e (u0 , v0 ) =
˙ (U0 /N0 , V0 /N0 ) sono valori relativi a ”0” [Cal § 3.4]. Si
noti che la (3.84) implica:
"
µ ¶3 #
µ
V U 2
= −kB ln α
+β
(3.85)
T
N N
con α, β costanti indipendenti dallo stato.
Esercizio 3.2 L’entropia e l’energia interna del gas ideale.
a) Verificare che l’entropia del gas ideale monoatomico rispetto allo stato ”0” (vedi l’es. 3.1) è:
"
µ ¶ 32 µ ¶− 52 #
N
S0
U
V
S(U, V, N ) = N
+ N kB ln
N0
V0 U0
N0
con :
³µ´
S0
5
=
˙ kB −
.
N0
2
T 0
(3.86)
[Sostituire le (3.82) e (3.84) nella (3.11) [Cal § 3.4]]. Scrivere la (3.86) nella forma:
"
V
S(U, V, N ) = N kB ln
N
µ
U
N
¶ 32 #
+ cost. ,
(3.87)
e verificare la proprietà (3.10) (omogeneità).
b) Verificare che la (3.86) è additiva. [Scrivere S in termini di (T, P ); supporre poi che il volume V
contenente N molecole sia diviso in due sottovolumi V1 e V2 contenenti N1 e, rispettivamente, N2 molecole,
(8)
Ammettendo anche variazioni di N la (3.79) diventa [Re80 § 2.H.2]:
S = S0 −
1
2T
X ·C
V
α=1,2
T
h
(δTα )2 +
1
∂µ
(δVα )2 +
V κT
∂N
alle (3.81) bisogna allora aggiungere la condizione: [∂µ/∂N ]0
(P,T )
i0
(P,T )
> 0 (es. 3.12).
¸
(δNα )2 + . . . ;
(3.80)
3.8
Esercizi
41
e separati da una parete diatermica, mobile, e permeabile alle molecole; supporre che i due gas siano in
equilibrio reciproco ... ]
c) Verificare che l’energia interna del gas ideale monoatomico è:
µ
¶¸
µ ¶− 23 µ ¶ 53
·
S
V
N
2
S0
U =
˙ U0
exp
−
.
(3.88)
V0
N0
3kB N
N0
Esercizio 3.3 Significato fisico di (T, P, µ) (9) .
a) Considerare un sistema isolato, composto da due sottosistemi separati da una parete rigida e fissata,
e impermeabile alle molecole, ma permeabile al calore (”diatermica”). Calcolare la variazione dell’entropia
rispetto a trasformazioni virtuali dU1 e dU2 (con dU1 + dU2 = 0) delle energie dei sottosistemi; mostrare
che nello stato di equilibrio è: T1 = T2 [Cal § 2.4].
b) Considerare il sistema del punto (a), e sostituire la parete rigida e fissata, impermeabile e diatermica,
con una rigida e mobile, impermeabile e diatermica, e mostrare che nello stato di equilibrio è: T1 = T2 , e
P1 = P2 [Cal § 2.7].
c) Considerare il sistema del punto (a), e sostituire la parete rigida e fissata, impermeabile e diatermica
con una rigida e fissata, permeabile e diatermica, e mostrare che nello stato di equilibrio è: T1 = T2 , e
µ1 = µ2 [Cal § 2.8].
d) Per lo stesso sistema del punto (c), mostrare che, facendo evolvere il sistema a partire da uno stato
di equilibrio vincolato con T1 = T2 e µ1 > µ2 , segue dN1 < 0. [Quindi: µ ha, nei confronti dell’equilibrio
rispetto agli scambi di molecole, la stessa funzione di T rispetto agli scambi di calore].
Esercizio 3.4 Potenziale chimico per particelle ”non conservate”.
Si consideri un gas di particelle, che possono essere create e distrutte (ad esempio, il ”gas di fotoni”, o
”radiazione di corpo nero”, in cui i fotoni vengono emessi ed assorbiti dalle pareti della cavità), in equilibrio
materiale con una riserva di particelle (nel caso dei fotoni la riserva è costituita dalle pareti della cavità).
Il numero totale di particelle, N1 + N2 , non è costante, e quindi la condizione: δN1 + δN2 = 0 (usata
nell’es. 3.3c) non è verificata. Mostrare che la condizione di equilibrio ora è: µ1 = µ2 = 0.
Esercizio 3.5 L’entropia del gas ideale.
Ricavare la (3.86) integrando il differenziale (3.3). [Sostituire in (3.3) le (3.82) e la (3.84).]
Esercizio 3.6 La rappresentazione dell’energia.
a) Derivare le (3.31) utilizzando il fatto che U = U (S) è inversa della S = S(U ), e le (3.2).
b) Mostrare che l’omogeneità di grado uno di U (vedi la (3.32)) segue da quella di S, e implica la
”estensività”: U = N f (s, v, µ), con s =
˙ S/N, v =
˙ V /N .
c) Mostrare che da: T = T (S, V, N ), e (per (V, N ) costanti) da:
· 2 ¸−1
∂2U
∂ U
∂U
dT =
dS
,
segue
:
C
=
.
(3.89)
V
∂ S2
∂ S2
∂S
Esercizio 3.7 Trasformazioni adiabatiche reversibili di un gas ideale monoatomico.
Si consideri una trasformazione infinitesima, adiabatica, reversibile, e a N costante, di un gas ideale.
Vale allora la condizione: dU + P dV = 0, cioè: du − (P/n2 )dn = 0 (dove: n =
˙ N/V ), cioè anche, per le
(3.82): (3/2) dT + T dV /V = 0.
a) Mostrare che la relazione tra T e V in una trasformazione del tipo suddetto è: T V 2/3 = costante.
b) Mostrare che per la stessa trasformazione vale anche la relazione: P n−5/3 = costante.
(9)
I calcoli dell’es. 3.3 coinvolgono solo i termini del primo ordine nello sviluppo di S rispetto agli incrementi delle varia-
bili indipendenti. La condizione che lo stato di equilibrio di un sistema isolato corrisponda effettivamente ad un massimo
dell’entropia, e non semplicemente ad un estremo, si traduce in condizioni sui termini del secondo ordine (§ 7).
3.8
Esercizi
42
Esercizio 3.8 ∆S per un gas ideale.
Calcolare la variazione dell’entropia, ∆S, per un gas ideale con N costante nei seguenti casi:
a) una espansione adiabatica irreversibile da V1 a V2 in cui il lavoro è nullo [Rei § 5.1]) (espansione
”alla Joule”) [∆S = N kB ln(V2 /V1 )];
b) una trasformazione reversibile in cui U varia da U1 a U2 a V costante [∆S = (3/2)N kB ln(U2 /U1 )].
Esercizio 3.9 L’energia libera di Helmholtz.
a) Verificare che l’energia libera di H. di un gas ideale monoatomico con molecole puntiformi è:
"
µ ¶ 32 #
V No
T
N T
− N kB T ln
A(T, V, N ) = Ao
,
No To
N Vo To
con Ao =
˙
3
k No To − So To ,
2 B
(3.90)
dove So , Vo , No sono le costanti che figurano nella (3.86), e To è definito in termini di Uo ed No dalla prima
delle (3.82). Ricavare le equazioni di stato nella rappresentazione di A.
b) Considerare la trasformata di Legendre:
−
A
1
=S−U ,
T
T
1
∂S
=
,
T
∂U
(3.91)
che definisce −A/T come trasformata di Legendre di S(U ) rispetto a U (quindi −A/T risulta funzione di
1/T ). Mostrare che la trasformata inversa è:
S=−
A
1
− U,
T
T
U=
∂(A/T )
∂(1/T )
(3.92)
(la (3.92) definisce S(U ) come trasformata di Legendre di −A/T rispetto a 1/T ).
Esercizio 3.10
Il potenziale gran canonico
Mostrare che lo stato di equilibrio di un sistema in equilibrio termico con una riserva di calore con
data T , e in equilibrio materiale con una riserva di particelle con dato µ, è caratterizzato dal minimo del
potenziale gran canonico (3.43).
[Soluzione: considerare il sistema (isolato) costituito dal sistema in oggetto e dalle due riserve, e
scrivere l’entropia totale come: St =
˙ S + Sp + Sc , dove Sp [Sc ] è l’entropia dfella riserva di particelle
[di calore]. Procedere come per l’energia libera di Helmholtz (vedi la (3.42)), imponendo la condizione:
δSt < 0, e utilizzando le formule: ∂Sp /∂Np = −µ/T , ∂Sc /∂Uc = 1/T .]
Esercizio 3.11
Proprietà delle funzioni implicite ([Re80 § 2.B] ; [Cal app. A.5]).
Si considerino tre variabili, x, y, z, tra le quali esista una relazione del tipo F (x, y, z) = 0. Mostrare
che valgono le seguenti relazioni:
µ
a)
µ
b)
∂x
∂y
¶ µ
z
∂y
∂z
¶
∂x
∂y
µ
+
x
¶
∂x
∂z
·µ
=
z
∂y
∂x
¶ ¸−1
;
(3.93)
z
¶
µ
=0,
oppure
y
∂x
∂y
¶ µ
z
∂y
∂z
¶ µ
x
∂z
∂x
¶
= −1 .
(3.94)
y
Considerare poi un’altra variabile, w, funzione di x, y: w = w(x, y), e mostrare che vale la relazione:
µ
c)
∂x
∂w
¶
µ
=
z
∂x
∂y
¶ µ
z
∂y
∂w
¶
.
z
(3.95)
3.8
Esercizi
43
Infine, scrivendo x = x(y, w) e considerando z costante, mostrare che vale la relazione:
µ
d)
∂x
∂y
¶
µ
=
z
∂x
∂y
¶
µ
+
w
∂x
∂w
¶ µ
y
∂w
∂y
¶
.
(3.96)
z
Dimostrazioni:
a,b) Scriviamo ([Re80 § 2.B] ; [Cal § 7.5]) la relazione tra x, y, z come x = x(y, z); consideriamo
poi la funzione inversa y = y(x, z), e la funzione composta x = x(y(x, z), z); differenziando quest’ultima
otteniamo:
µ ¶
µ ¶
µ ¶ ·µ ¶
µ ¶
¸ µ ¶
∂x
∂x
∂x
∂y
∂y
∂x
dx =
dy +
dz =
dx +
dz +
dz ;
∂y z
∂z y
∂y z
∂x z
∂z x
∂z y
se teniamo z costante (dz = 0) segue
µ
1=
¶ µ
∂x
∂y
z
∂y
∂x
¶
⇒
(a) .
z
Se invece teniamo costante x (dx = 0) segue:
µ
0=
∂x
∂y
¶ µ
z
∂y
∂z
¶
µ
+
x
∂x
∂z
¶
⇒
(b) .
y
c) Consideriamo ancora la x = x(y, z), e supponiamo che sia y = y(w, z); differenziando la funzione
composta x = x(y(w, z), z) otteniamo:
µ
dx =
∂x
∂y
¶
µ
dy +
z
∂x
∂z
¶
µ
dz =
y
∂x
∂y
¶ ·µ
∂y
∂w
z
¶
µ
∂y
∂z
dw +
z
¶
¸ µ ¶
∂x
dz +
dz ;
∂z y
w
se teniamo z costante (dz = 0) segue:
µ
dx|z =
∂x
∂y
¶ µ
z
∂y
∂w
¶
dw|z
⇒
(c) .
z
d) Consideriamo la funzione x = x(y, w), e supponiamo che sia w = w(y, z); differenziando la funzione
composta x = x(y, w(y, z)) segue:
µ
dx =
∂x
∂y
¶
µ
dy +
w
∂x
∂w
¶
µ
dw =
y
∂x
∂y
¶
µ
dy +
w
¶ "µ
∂x
∂w
y
∂w
∂y
dy
⇒
¶
µ
dy +
z
∂w
∂z
#
¶
dz
;
y
se teniamo z costante (dz = 0) segue:
µ
dx|z =
∂x
∂y
¶
µ
dy +
w
∂x
∂w
¶ µ
y
∂w
∂y
¶
(d) .
z
Tutte le relazioni tra derivate parziali qui illustrate possono essere dedotte in modo più generale ed elegante
con il ”metodo degli jacobiani” ([Cal app. A.5], [Mu70 § 25]).
Esercizio 3.12 Un identità per le funzioni risposta.
Derivare la seguente identità tra le funzioni risposta:
CP − CV = T V
αP2
.
κT
[Soluzione: vedi, ad esempio, [Re80 § 2.G.2], [Sta § 2.3], [Hu87 p. 21], ...].
(3.97)
3.8
Esercizi
44
Esercizio 3.13 Una disuguaglianza termodinamica.
Derivare la disuguaglianza (∂N/∂µ)(T ,V ) > 0. Soluzione: dalla (3.94) otteniamo:
µ
∂N
∂µ
"µ
¶
=−
(T ,V )
∂µ
∂V
¶
µ
(N,T )
∂V
∂N
#−1
¶
.
(3.98)
(µ,T )
Osserviamo poi che dalla condizione che dA (vedi la (3.37)) sia un differenziale esatto segue:
µ
∂µ
∂V
¶
µ
=−
(T ,N )
∂P
∂N
¶
µ
,
da cui :
(T ,V )
"µ
¶
∂N
∂µ
=
(T ,V )
∂P
∂N
¶
µ
(T ,V )
∂V
∂N
¶
#−1
.
(3.99)
(µ,T )
Osserviamo che dalla relazione di Gibbs-Duhem (vedi la (3.14)), segue µ = µ(P, T ); dalla (3.96) otteniamo:
µ
∂N
∂V
¶
µ
=
(P,T )
∂N
∂V
¶
µ
+
(µ,T )
∂N
∂µ
¶
µ
(T ,V )
∂µ
∂V
¶
;
(3.100)
(P,T )
in particolare, a P, T costanti anche µ è costante; la (3.100) diventa allora:
µ
∂N
∂V
¶
µ
=
(P,T )
∂N
∂V
¶
=n
(3.101)
(µ,T )
(n =
˙ N/V è la densità). Usando la (3.93), e sostituendo la (3.101) nella seconda delle (3.99), otteniamo:
µ
∂N
∂µ
µ
¶
=
(T ,V )
∂N
∂P
¶
(T ,V )
µ
∂N
∂V
µ
¶
=n
(µ,T )
∂N
∂P
¶
.
(3.102)
(T ,V )
Per N fissato, P, V e T sono legati da una qualche equazione di stato, che possiamo scrivere come
F (P, V, T ) = 0 ; possiamo allora usare la (3.94), per cui la (3.102) diventa:
µ
∂N
∂µ
¶
(T ,V )
" µ
#
µ
¶
µ
¶
¶
∂N
∂V
∂V
=n −
= −n2
=
˙ n 2 V κT > 0 .
∂V (P,T ) ∂P (N,T )
∂P (N,T )
(3.103)
Esercizio 3.14 Positività della comprimibilità isoterma.
Mostrare qualitativamente, con un argomento analogo a quello per la (3.8), che la positività di κT,N
(vedi la (3.72)), è una condizione necessaria per la stabilità di un sistema in equilibrio rispetto allo ”scambio
di volume”.
4
Meccanica statistica microcanonica
Secondo la termodinamica nella rappresentazione dell’entropia, lo stato di equilibrio di un sistema
isolato è quello in cui l’entropia è massima rispetto a tutte le trasformazioni virtuali a energia costante. In
questo capitolo deriveremo la densità di probabilità ρ che descrive un sistema isolato usando la condizione
di massimo del ”funzionale entropia” S[ρ]: ritroveremo cosı̀ la ρ microcanonica, ρmc , già suggerita dalla
teoria ergodica. La teoria microcanonica fornisce un contesto utile per introdurre un altro degli strumenti
fondamentali della meccanica statistica: il ”limite termodinamico”.
4.1 La distribuzione microcanonica
Un metodo per determinare la funzione di distribuzione per un sistema isolato è suggerito dal modo
con cui la termodinamica caratterizza lo stato di equilibrio (di un sistema isolato). Consideriamo, al
solito, un gas costituito di molecole di un solo tipo, e ricordiamo che lo stato di equilibrio termodinamico
è caratterizzato dal postulato S4 (pag. 30: ”massimo dell’entropia”). Qui di seguito mostriamo che una
condizione di ”massimo dell’entropia” può essere formulata anche nell’ambito della meccanica statistica, e
che da essa si può derivare la densità microcanonica (1.17).
Cominciamo col definire ”densità di probabilità di un gas isolato in equilibrio” la ρ, che indicheremo
con ρmc , tale che l’entropia S[ρ]:
Z
S=
˙ S[ρ] =
˙ − kB
dµ ρ ln(Σ0 ρ)
(1.16)
Σ(E)
sia massima in ρ = ρmc rispetto a tutte le ρ = ρmc + δρ che soddisfano la condizione di normalizzazione:
Z
K[ρ] =
˙
dµ ρ − 1 = 0 .
(4.1)
Σ(E)
La densità ρmc deve allora soddisfare la condizione che sia nulla la variazione di S[ρ] al primo ordine in δρ
(per ogni δρ compatibile con la (4.1)), cioè che sia:
δS =
˙ S[ρmc + δρ] − S[ρmc ] = O[(δρ)2 ] .
(4.2)
Calcoliamo ρmc con il metodo dei moltiplicatori di Lagrange (1) . Poniamo:
S 0 [ρ] =
˙ S[ρ] + λ0 K[ρ] ,
(4.3)
dove λ0 è il moltiplicatore. Definiamo ρmc (funzione di λ0 ) mediante la condizione che S 0 [ρ] abbia un
estremo in ρmc , con λ0 fissato, rispetto a tutte le ρmc + δρ con δρ arbitraria. Condizione necessaria per
l’estremo è che sia:
δS 0 =
˙ S 0 [ρmc + δρ] − S 0 [ρmc ] = O[(δρ)2 ] .
(1)
(4.4)
In effetti, qui si usa una versione del metodo dei moltiplicatori di L. in cui si cercano gli estremi di un f unzionale (in
uno spazio di f unzioni). I metodi appropriati sono quelli del calcolo variazionale, il cui strumento principale è la ”derivata
funzionale” (vedi, ad esempio: [BDFN app. L]).
4.2
Il limite termodinamico
La (4.4) implica:
46
Z
−kB
·
λ0
dµ ln(Σ0 ρmc ) + 1 −
k
Σ(E)
B
¸
δρ = 0 .
(4.5)
Perchè la (4.5) sia vera per δρ arbitraria, si deve annullare il coefficiente di δρ nell’integrando. ρmc è allora
determinata dalle due equazioni:
Z
λ0
ln(Σ0 ρmc ) + 1 −
= 0;
dµ ρmc = 1 .
(4.6)
kB
Σ(E)
Ricavando λ0 dalla seconda delle (4.6), si ottiene la ρ (normalizzata) per la quale S[ρ] ha un estremo:
Z
−1
ρmc (x) = Σ(E)
(x ∈ Σ(E) ,
con : Σ(E) =
˙
dµ
(4.7)
Σ(E)
(si ricordi che Σ(E) indica sia la superficie Σ(E), che l’area della stessa) (2) .
Risulta dunque che la densità di probabilità per un sistema isolato, ρmc , è ”costante sulla superficie
dell’energia”, consistentemente con l’ipotesi ergodica (§ 1.3). Dalla (1.10), calcolata per ρ = ρmc , otteniamo
l’entropia microcanonica per un sistema isolato, che indichiamo con Smc (E):
Smc (E) = kB ln [Σ(E)/Σ0 ] .
(4.8)
Esempi della (4.8) saranno illustrati nel paragrafo 3.
4.2 Il limite termodinamico
Finora non abbiamo ancora tenuto conto di una condizione che è sottintesa in ogni considerazione
termodinamica, e cioè che il sistema in esame sia ”grande”. La necessità di questa condizione può essere
illustrata con considerazioni elementari. Consideriamo ad esempio la relazione:
s = s(u, v) ,
(4.9)
che segue dalla (3.10) prendendo λ = 1/N , e definendo:
s=
˙
S
,
N
u=
˙
U
,
N
v=
˙
V
.
N
(4.10)
La (4.9) è una relazione tra sole quantità intensive, e quindi non dipende da quanto il sistema è ”grande”
(per un altro esempio di relazioni tra sole quantità intensive vedi le (3.82)). È facile verificare che la
possibilità di ridursi alle sole quantità intensive vale solo a determinate condizioni. Studiamo un gas
(classico) in cui N atomi interagiscono con forze a coppie, funzioni della distanza tra gli atomi della
coppia (questa situazione è tipica dei gas ”neutri”), e consideriamo il ruolo del range delle forze. L’energia
potenziale del gas è:
V ({q}) =
˙ V (q1 , . . . , qN ) =
˙
1 XN
vij ,
i6=j=1
2
con :
vij =
˙ v(|qi − qj |)
(4.11)
(assumiamo che le funzioni v siano le stesse per tutte le coppie). Assumiamo che le configurazioni
(q1 , . . . , qN ) con densità di probabilità non nulla (”configurazioni permesse”) siano caratterizzate da una
densità n (n =
˙ N/V ) finita: ciò è assicurato se, come di solito avviene, l’energia ha, per distanze molto
piccole, un andamento del tipo ”hard core”. Assumiamo ancora che il range r0 della forza sia ”corto”. Più
precisamente, se indichiamo con L una lunghezza caratteristica macroscopica (ad esempio una dimensione
(2)
È possibile verificare, con un calcolo analogo a quello dell’es. 1.5c, che la (4.7) corrisponde ad un massimo di S[ρ].
4.3
L’entropia microcanonica: esempi
47
lineare del contenitore del gas), assumiamo che sia: r0 ¿ L (di fatto, r0 risulta dell’ordine di qualche
decina di diametri atomici). Per forze a corto range possiamo assumere: vij = 0, se |qi − qj | > r0 . Allora,
per le configurazioni permesse, il numero dei termini non nulli nella somma (4.11) è uguale a N α/2, dove:
α ≈ n(4/3)πr03 . Se poi la media hvij i è la stessa per tutte le coppie di atomi, e scriviamo hvi =
˙ hvij i, la
media di V è (come ordine di grandezza):
hV i =
1
N α hvi ∝ N .
2
(4.12)
La media dell’energia potenziale è dunque proporzionale ad N . La media dell’energia cinetica, K, è
anch’essa proporzionale ad N . Segue: U =
˙ hK + V i ∝ N . Quindi, se le forze interatomiche hanno corto
range, l’energia interna è estensiva. Per contro, è facile vedere che se le forze avessero range ”infinito”
(come la attrazione gravitazionale in un sistema di masse), la media dell’energia potenziale sarebbe proporzionale a N (N − 1) ≈ N 2 , e quindi non sarebbe estensiva.
Studiamo l’influenza esercitata sulle proprietà termodinamiche di un gas dalla forma del suo contenitore. Limitiamoci a considerare contenitori di forma ”normale”, cioè tale che esista una lunghezza L in
modo che il volume del contenitore stesso, V , soddisfi la condizione: V ∝ L3 . L’influenza di cui sopra
dovrebbe essere riconducibile ad un comportamento degli atomi diverso a secondo che essi si trovino vicino
alle pareti oppure all’interno del volume. Una tale diversità potrebbe essere prodotta da una diversità tra le
forze atomo-parete e le forze atomo-atomo. Assumiamo che, per quasi tutte le configurazioni, il contributo
(alle proprietà termodinamiche del gas) degli atomi vicini alle pareti sia proporzionale al loro numero, Np ,
cioè al numero degli atomi contenuti in un ”cilindro” di base L2 e altezza r0 : Np ∝ nr0 V 2/3 , dove n è la
densità. L’esperienza indica che, per gas racchiusi in contenitori di forma normale, la forma del contenitore
non ha alcuna influenza sulle proprietà termodinamiche. Ciò implica che il rapporto Np /N ∝ r0 V −1/3 (si
ricordi che N = nV ∝ V ) è trascurabile, il che è possibile solo se V è ”molto grande”. Assumiamo dunque
che la meccanica statistica sia applicabile solo a sistemi ”grandi”. Per esprimere in termini matematici
tale ipotesi è necessario applicare il limite termodinamico (o limite macroscopico), che definiamo qui di
seguito.
La definizione precisa del ”limite termodinamico”, che indicheremo con L, dipende dal tipo di equilibrio cui è soggetto il sistema: per un gas isolato esso è definito come:
¸
·
U N
,
= cost. ;
(4.13)
L=
˙
lim , con :
V V
U,V,N →∞
invece, per un gas in equilibrio termico a T (temperatura) data (§ 5.1) esso è definito come:
·
¸
N
L=
˙
lim , con : T,
= cost. ;
V
V,N →∞
infine, per un gas in equilibrio termico e chimico a (T, µ) dati (§ 5.4) esso è definito come:
·
¸
L=
˙
lim , con : T, µ = cost. .
(4.14)
(4.15)
V →∞
In generale, L consiste nel ”far tendere all’infinito la dimensione del sistema, mantenendo inalterate le
quantità intensive”, come la densità, la temperatura, il potenziale chimico, gli eventuali campi esterni,
ecc.. Il ruolo, nella teoria, del limite termodinamico può essere riassunto come segue [Gr72 § II.A.1]:
LT) L’esperienza mostra che i gas (e più in generale: i sistemi termodinamici) si comportano come
se U, V, N fossero infinitamente grandi. Per un dato sistema, la condizione di ”essere infinitamente
grande” viene realizzata applicando, alle espressioni matematiche che rappresentano le proprietà
del sistema, il limite termodinamico.
4.3
L’entropia microcanonica: esempi
48
Il limite termodinamico di una quantità ”estensiva” (E, S, . . . ) produce un infinito: L hHi = ∞ !
È quindi essenziale che esso venga applicato ad espressioni in cui figurano solo quantità ”intensive”, cioè
rapporti tra quantità estensive (3) : ad esempio, ci si può aspettare che sia: L (hHi/ V ) < ∞.
4.3 L’entropia microcanonica: esempi
In questo paragrafo calcoliamo l’entropia microcanonica per due sistemi con microstati continui. Cominciamo con il caso di un sistema di N oscillatori armonici indipendenti, che per semplicità assumiamo
unidimensionali e di massa 1. La hamiltoniana del sistema è
(4)
:
N
¢
1 X¡ 2
pi + ωi2 qi2 .
2 i=1
H =
˙
(4.16)
Sia E l’energia del sistema. Notiamo che l’area della superficie dell’energia, Σ(E), può essere ottenuta da
un’altra grandezza, più facile da calcolare: il volume, Γ (E), della regione limitata da Σ(E): Γ (E) =
˙ {x :
0 ≤ H(x) ≤ E}. Infatti, Γ (E) è:
Z
Z
Γ (E) =
˙
dx =
H≤E
Z
E
dE
Z
0
dµ =
˙
Σ(E 0 )
0
E
dE 0 Σ(E 0 ).
(4.17)
0
Dalla (4.17) otteniamo allora Σ(E) come:
Σ(E) =
∂Γ
.
∂E
(4.18)
Riscriviamo la hamiltoniana (4.16) ponendo: xi =
˙ ωi qi , xN +i = pi , per: i = 1, . . . N . La superficie
√
dell’energia: Σ(E), diventa la superficie di una sfera di raggio R =
˙ 2E nello spazio euclideo R2N . Nelle
QN
Q2N
QN
N
−N
=
˙
nuove coordinate, l’elemento di volume è: dx =
˙
i=1 ωi . Il
j=1 dxj , con: ω
i=1 dqi dpi = ω
volume, Γ (E), della regione limitata dalla superficie dell’energia è allora:
Z
N
Y
Γ (E) =
˙
Z
dqi dpi = ω
H≤E i=1
2N
Y
−N
x21 +...x22N ≤R2 j=1
dxj .
(4.19)
Sia Γn (R), per un generico intero n, il volume della sfera di raggio R (con centro nell’origine) in Rn :
Z
Γn (R) =
˙
n
Y
x21 +...x2n ≤R2 j=1
dxj .
(4.20)
Poniamo: Γn (R) =
˙ Cn Rn , dove la costante Cn risulta essere (vedi § 4):
Cn = π n/2 [(n/2)!]−1 .
(4.21)
Γ (E) = ω −N Γ2N (R) =
˙ ω −N C2N R2N ,
(4.22)
Otteniamo allora:
(3)
Dal punto di vista matematico, si pone il problema delle condizioni che garantiscano che, per esempio, E =
˙ hHi risulti
estensiva: per esempio, risulta che la eventuale forza attrattiva tra le molecole deve annullarsi, al crescere della distanza, in
modo opportunamente rapido [Ru69 § 3.2.3].
(4)
Se qi sono le ”ampiezze dei modi propri”, e pi i corrispondenti momenti coniugati, la hamiltoniana del sistema di
oscillatori è equivalente a quella di un solido ideale d-dimensionale di N/d atomi puntiformi [RiCa § 16.2].
4.3
L’entropia microcanonica: esempi
49
cioè, usando la (4.21):
1 (2π)N N
E .
ωN N !
Calcoliamo ora Smc . Usando la (4.23) nella (4.18) otteniamo:
Γ (E) =
Σ(E) =
˙
(4.23)
∂Γ
N (2π)N N −1
= N
E
.
∂E
ω
N!
(4.24)
Usando poi la approssimazione di Stirling per il fattoriale:
√
N ! ≈ N N e−N 2πN ,
possiamo scrivere (per N À 1):
1
Σ(E) = √
2πN
µ
per :
2πe E
ω N
¶N
N À 1,
(4.25)
N
.
E
(4.26)
Notiamo che Σ(E) ha dimensione: [Σ] = (azione)N /energia. Poniamo allora: Σ0 =
˙ hN ε−1 , dove h ed ε
sono due costanti con la dimensione di una azione e, rispettivamente, di una energia. Segue:
"µ
¶N #
√
Σ(E)
2πe E
εN
= kB ln
+ kB ln
− kB ln 2πN .
(4.27)
Smc =
˙ kB ln
Σ0
hω N
E
Nel limite termodinamico, qui definito come:
·
L=
˙
lim ,
¸
con :
E/N = cost. ,
(4.28)
E,N →∞
otteniamo l’entropia (microcanonica) ”per oscillatore”:
µ
¶
Smc
1 E
smc =
˙ L
= kB ln
+ s0 ,
N
hω N
con :
s0 =
˙ ln (2πe).
Per N ”sufficientemente grande”, possiamo scrivere l’entropia del sistema di N oscillatori come:
µ
¶
1 E
Smc = N kB ln
+ N s0 .
hω N
(4.29)
(4.30)
Come ulteriore esempio, consideriamo un gas ideale di N molecole puntiformi di massa m, tutte dello
stesso tipo, in un volume V =
˙ L3 , e con energia E. La hamiltoniana del sistema è:
H =
˙
3N
1 X 2
p .
2m i=1 i
(4.31)
Ora Γ (E) è il prodotto:
Γ (E) = V N Γ3N (R) ,
(4.32)
√
dove Γ3N (R) è il volume della sfera di raggio R =
˙ 2mE nello spazio euclideo, di dimensione 3N , dei
momenti. Dalla (4.22) segue:
π (3N/2)
Γ (E) = V N
(2mE)(3N/2) ;
(4.33)
(3N /2)!
Σ(E) = 2πmV N
(2πmE)(3N/2−1)
(2πmE)(3N/2−1)
≈ 2πmV N
,
(3N/2 − 1)!
(3N/2)!
(4.34)
dove abbiamo usato la condizione: N À 1. In virtù della formula di Stirling (4.25) segue:
Σ(E) ≈ 2πmV
N
¸3N/2
·
(3N/2−1)
N
(2πmE)
1
4πmeE
1
√
√
=V
.
(3N/2) −3N/2
3N
E
(3N/2)
e
3πN
3πN
(4.35)
4.4
L’entropia microcanonica: esempi
50
Dalle (4.8) e (4.35), ponendo: Σ0 =
˙ h3N ε−1 , e trascurando (per N À 1) i termini costanti e quelli in ln N ,
e ln(ε/E), segue:
" µ
¶3/2 #
Σ(E)
4πm E
3
Smc =
˙ kB ln
= N kB ln V
+ N kB .
(4.36)
2
Σ0
3h N
2
L’espressione (4.36) dell’entropia del gas ideale presenta una interessante anomalia. Infatti, l’entropia
(4.36) non è una funzione omogenea (vedi la (3.10)) delle variabili estensive, e quindi non possiede una
delle proprietà essenziali dell’entropia termodinamica. Inoltre, l’entropia (4.36), divisa per N , non ammette
limite termodinamico (la (4.36) porta a previsioni fisicamente inaccettabili: vedi l’es. 4.4c). La difficoltà
può essere ”superata”, introducendo una ”area effettiva” della superficie dell’energia: Σeff (E) =
˙ Σ(E)/N !,
e definendo l’entropia in termini di Σeff :
·
Smc
Σeff (E)
=
˙ kB ln
Σ0
¸
·
¸
1 Σ(E)
=
˙ kB ln
.
N ! Σ0
(4.37)
Dalle (4.35) e (4.37) segue immediatamente, usando ancora la (4.25):
"
Smc
V
= N kB ln
N
µ
4πm E
3 h2 N
¶3/2 #
5
+ N kB .
2
(4.38)
La (4.38) è omogenea, ed è fisicamente corretta (vedi la (3.86)). Inoltre, Smc /N ha ora un limite termodinamico ben definito. Infatti, posto:
E
V
=
˙ u,
=
˙ v,
(4.39)
N
N
e definendo il limite termodinamico come: L =
˙ [E, V, N → ∞, con: u, v costanti], risulta:
" µ
¶3/2 #
Smc
4πm
5
L
= kB ln v
u
+ kB .
2
N
3h
2
(4.40)
Invece di introdurre il fattore N ! tramite Σeff , possiamo, equivalentemente, usare, al posto delle (1.10)
e (4.1), le formule:
Z
Z
S[ρ] =
˙ − kB
dµeff ρ ln(Σ0 ρ) ,
dµeff ρ = 1 ,
(4.41)
Σ
Σ(E)
con: dµeff =
˙ dµ/N ! (vedi l’es. 4.5). L’uso di dµeff invece di dµ, o di Σeff al posto di Σ, non può essere
giustificato (se non per il fatto che ”funziona”!). Quindi la (4.41) o la (4.37) non sono, nell’ambito della
meccanica statistica classica, giustificabili. La situazione cambia nell’ambito della meccanica statistica
quantistica. Infatti, molecole identiche godono della proprietà che microstati che differiscono per una
permutazione di due molecole sono identici (”indistinguibilità” delle molecole): la necessità di usare dµeff
invece di dµ è evidentemente un riflesso di tale proprietà (5) .
Il fattore N ! deve essere usato in modo appropriato. Ad esempio, se le N molecole del gas sono
racchiuse in due sottovolumi impermeabili, V1 e V2 , contenenti rispettivamente N1 ed N2 molecole (con:
N1 +N2 = N ), l’indistinguibilità vale solo per le molecole di V1 e, rispettivamente, di V2 : il fattore che deve
comparire nell’espressione del ”volume effettivo” è allora N1 ! N2 ! , e non N ! . L’indistinguibilità non gioca
alcun ruolo nemmeno per sistemi in cui le particelle sono, per qualche motivo, distinguibili. Ad esempio,
gli oscillatori che figurano nella (4.16) non sono particelle in uno spazio fisico [RiCa l.c.], e quindi non si
pone la possibilità che si permutino tra di loro! Quindi gli oscillatori devono essere considerati distinguibili,
e il fattore N ! non deve comparire.
Osserviamo infine che i modelli di sistemi ideali, come il solido ideale o il gas ideale, sono basati su
ipotesi contraddittorie! Infatti, nello spirito della teoria ergodica, lo spazio delle fasi accessibile utilizzato
(5)
L’uso di dµeff invece di dµ è chiamato ”correct Boltzmann counting”.
4.5
Altre espressioni dell’entropia microcanonica
51
per calcolare l’entropia deve essere lo spazio effettivamente accessibile al sistema. Consideriamo ad esempio
l’area (4.34): il suo uso nella (4.36) è giustificato solo se l’energia di ogni molecola assume tutti i valori
compatibili con il valore dell’energia totale. Tuttavia, se le molecole sono indipendenti ognuna di esse
mantiene la propria energia ”iniziale”, e quindi lo spazio effettivamente visitato è solo un sottoinsieme
(proprio) di Σ ! L’uso di Σ è giustificato solo se tutte le configurazioni possibili sono effettivamente
accessibili: ciò richiede che esistano collisioni tra le molecole e che esse siano sufficientemente frequenti, in
contraddizione con l’ipotesi che il gas in discussione sia ideale. In realtà, nessun gas è ideale: tuttavia, un
gas reale può venire a trovarsi in condizioni (alte temperature e/o basse densità) in cui le interazioni possono
essere per certi versi ignorate. Per un gas in tali condizioni, è lecito approssimare la hamiltoniana vera
con la (4.31), e quindi approssimare la superficie vera dell’energia con una superficie sferica. Tuttavia, le
interazioni non sono trascurate del tutto: la loro esistenza continua a manifestarsi nell’ipotesi che lo spazio
delle fasi accessibile sia l’intera superficie dell’energia. Quindi, il calcolo illustrato sopra non rappresenta
una teoria errata del gas ideale, ma una teoria approssimata del gas reale.
4.4 Volume della sfera n-dimensionale
Sia f (R) una generica funzione (integrabile) su Rn , funzione della sola distanza dall’origine. Possiamo
scrivere l’integrale di f (R) su tutto Rn come [Hu87 § 6.5]:
Z +∞
Z +∞
Z ∞
dx1 · · ·
dxn f (R) =
dR Σn (R) f (R) ,
(4.42)
−∞
−∞
0
dove Σn (R) è l’area della sfera di raggio R. Notiamo che:
Z
Γn (R) =
˙
R
dR0 Σn (R0 ) ,
da cui :
dΓn
= n Cn Rn−1 .
dR
Σn (R) =
0
(4.43)
Prendiamo f (R) =
˙ exp(−R2 ). Usando la (4.43), cambiando variabile di integrazione (t = R2 ), e integrando
per parti, otteniamo:
Z +∞
Z +∞
Z ∞
Z ∞
2
2
2
dx1 · · ·
dxn e−R =
dR Σn (R) e−R =
˙ n Cn
dR Rn−1 e−R =
−∞
−∞
0
0
(4.44)
Z ∞
³n´
³n
´
n
n
n/2−1 −t
= Cn
Cn Γ
= Cn Γ
+1 =
˙ Cn (n/2)!
dt t
e =
˙
2
2
2
2
0
(non si confonda la ”funzione” Γ(n) (6) con il ”volume” Γn ). Invece, calcolando direttamente otteniamo:
¸n
·Z +∞
Z +∞
Z +∞
2
2
dx e−x
= π n/2 .
(4.45)
dxn e−R =
dx1 · · ·
−∞
−∞
−∞
Dal confronto tra la (4.45) e la (4.44) segue la (4.21): Cn = π n/2 [(n/2)!]−1 .
4.5 Altre espressioni dell’entropia microcanonica
Il limite termodinamico permette di correggere una debolezza della teoria microcanonica. Infatti,
dobbiamo osservare che la condizione di isolamento ”perfetto” del sistema, cioè la condizione che il valore
(6)
¢
½ n ¡n
·
− 1 · ··· · 2 · 1
2 ¡2
¢
(n/2)! =
˙ Γ(n/2 + 1) =
n
3 1 √
n
2
·
2
− 1 · ··· ·
2
·
2
·
π
(n pari) ;
(n dispari) .
4.5
Altre espressioni dell’entropia microcanonica
52
dell’energia sia definito con precisione (H = E), non è realistica. È dunque opportuno riformulare la teoria
”attenuando” la condizione di isolamento: supponiamo allora che l’energia sia definita a meno di ∆, dove
∆ è una costante di valore imprecisato, ma comunque piccolo rispetto ad E (∆ ¿ E), e sostituiamo la
condizione H = E con la condizione:
E−∆≤H ≤E.
(4.46)
Chiameremo ”∆-isolato” un sistema che soddisfa la (4.46). Lo spazio delle fasi accessibile è ora lo ”strato
dell’energia”, Γ∆ (E):
Γ∆ (E) =
˙ {x : E − ∆ ≤ H(x) ≤ E} ,
(4.47)
e S[ρ] deve essere definita come:
Z
S[ρ] = −kB
dx ρ ln(Γ0 ρ) ,
(4.48)
Γ∆
dove Γ0 è una costante da determinarsi. Come prima, determiniamo ρmc imponendo la condizione che S[ρ]
sia massima per ρ = ρmc . Il calcolo è analogo a quello per i sistemi isolati, e il risultato è (es. 4.1b):
−1
ρmc (x) = Γ∆ (E)
(per
x ∈ Γ∆ (E)) ,
(4.49)
dove Γ∆ (E) indica il volume dello strato Γ∆ (E):
Z
Γ∆ (E) =
˙
dx .
(4.50)
Γ∆ (E)
∆
Usando la (4.49) nella (4.48) otteniamo l’entropia microcanonica per un sistema ∆-isolato, Smc (E):
∆
Smc (E) = kB ln (Γ∆ (E)/Γ0 ) .
(4.51)
Abbiamo dunque due espressioni per l’entropia del gas: la (4.8) e la (4.51). Le due espressioni sono
diverse, consistentemente con il fatto che esse si riferiscono a due gas in condizioni microscopiche diverse.
Tuttavia, l’esperienza mostra che, anche se l’energia di un sistema macroscopico è determinata solo a meno
di ∆ (nel senso della (4.46)), le sue proprietà termodinamiche non sono influenzate dal valore di ∆. In
particolare, per un sistema macroscopico l’entropia (4.51) deve essere uguale all’entropia (4.8), e quindi
”indipendente da ∆”. Infatti, usando la condizione ∆ ¿ E, e la (4.18), possiamo scrivere:
Γ∆ (E) = Γ (E) − Γ (E − ∆) ≈
∂Γ
∆=
˙ Σ(E) ∆.
∂E
(4.52)
Posto Γ0 =
˙ Σ0 E0 , dove E0 è un’altra costante, dalla (4.51) e dalla (4.18) segue:
∆
Smc = kB ln
Σ(E)
∆
∆
+ kB ln
=
˙ Smc + kB ln
.
Σ0
E◦
E◦
(4.53)
Supponiamo ora che, nel limite termodinamico, ∆ rimanga costante (ma anche se fosse, per esempio:
∆ ∝ N , la conclusione sarebbe la stessa), e supponiamo che L (Smc /N ) esista (negli esempi del § 3 ciò
risulta vero: vedi la (4.40)). Segue:
∆
Smc
Smc
L
=L
.
(4.54)
N
N
Quindi, nel limite termodinamico, l’entropia per molecola di un gas isolato (condizione poco realistica) è
dunque uguale a quella di un gas nella condizione (più realistica) di ∆−isolamento.
Il limite termodinamico permette di introdurre una ulteriore espressione dell’entropia microcanonica.
Cominciamo col considerare, in uno spazio di dimensione n, due sfere concentriche di raggi R e, rispettivamente: R − ∆ =
˙ (1 − ∆/R) R =
˙ εR, con ∆ ¿ R, e quindi ε / 1 (e R − ∆ ¿ R). Indichiamo con Γ (R)
4.7
Le condizioni di stabilità
53
il volume di una sfera di raggio R. Il rapporto tra il volume dello strato (compreso tra le superfici delle
due sfere) e il volume della sfera esterna è:
Γ∆ (R)
Γ (R) − Γ (εR)
=
˙
= 1 − εn .
Γ (R)
Γ (R)
(4.55)
Per n → ∞ abbiamo: Γ∆ (R)/Γ (R) → 1; quindi, il ”volume dello strato diventa uguale al volume della
sfera”. Assumendo che il risultato sia valido anche per i volumi Γ (E) e Γ∆ (E), e assumendo: ∆ ¿ E, nel
Γ
limite termodinamico risulta: Γ∆ (E)/Γ (E) → 1. Definiamo allora la ”entropia microcanonica Smc
(E)”
come:
Γ
Smc
(E) =
˙ kB ln(Γ (E)/Γ0 ).
(4.56)
∆
Γ
coincide con Smc , e quindi con Smc :
Da quanto sopra segue che, nel limite termodinamico, Smc
Γ
L
∆
Smc
S
Smc
= L mc = L
.
N
N
N
(4.57)
Nel caso del gas ideale, per esempio, l’uso della (4.56) consentirebbe di derivare la (4.40) direttamente
dalla (4.33), senza passare per la (4.34). Più significativamente, la (4.56) consente (vedi il paragrafo
seguente) una facile verifica del fatto che l’entropia microcanonica possiede tutte le proprietà dell’entropia
termodinamica.
4.6 Additività dell’entropia microcanonica
La termodinamica studia grandezze, come l’entropia, l’energia interna, ecc., che sono interpretate dalla
meccanica statistica come valori medi di opportune grandezze microscopiche. Quello che la termodinamica
non può studiare, invece, sono gli scostamenti delle grandezze dai loro valori medi (”fluttuazioni”). Queste
possono essere studiate nel modo più conveniente nella meccanica statistica canonica (§ 5.3): qui possiamo
tuttavia vederne una anticipazione, considerando l’entropia di un sistema globalmente isolato (e quindi
microcanonico), ma diviso in due sottosistemi in interazione [Hu87 § 6.2].
Consideriamo un gas isolato e in equilibrio, composto da due gas separati da una parete rigida e
impermeabile, ma che permette ai due gas di scambiarsi energia (calore). La hamiltoniana del sistema
complessivo è: H = H1 + H2 + H 0 , dove H 0 rappresenta l’interazione tra i due gas. La presenza di H 0 è
necessaria, se si vuole che le energie dei due gas non rimangano costanti (se i due gas non interagiscono la
additività è banale: vedi l’es. 1.5a,b). Nel limite termodinamico, tuttavia, H 0 può essere trascurata, se le
forze tra le molecole sono a corto raggio d’azione. In tal caso, infatti, l’energia di interazione è proporzionale
alla superficie della parete che separa i due gas, mentre le energie H1 ed H2 sono proporzionali ai rispettivi
numeri di molecole, cioè ai volumi. Nel limite termodinamico il rapporto tra superficie e volume tende a
zero, e possiamo assumere: H 0 /H1 , H 0 /H2 → 0 [Bal § 4.3]. Possiamo quindi scrivere H = H1 + H2 . I
due gas hanno allora energie ben definite, (E1 , E2 ), che assumono, nello spazio delle fasi Γ (E) (dove E è
l’energia totale del sistema), tutti i valori compatibili con la relazione:
E1 + E2 ≤ E .
(4.58)
Mostriamo che ai due gas si possono associare entropie Smc (1) ed Smc (2), tali che l’entropia del gas
complessivo, Smc , risulta essere: Smc = Smc (1) + Smc (2) (”additività di Smc ”). In virtù dell’identità
4.7
Le condizioni di stabilità
54
(4.57), useremo, per l’entropia microcanonica, l’espressione (4.56). Calcoliamo il volume Γ (E) relativo al
gas complessivo. Risulta:
Z
Z
Z
Γ (E) =
˙
dx =
dx1
dx2 =
Z
H≤E
=
H1 ≤E
H2 ≤E−E1
Z E
dx1 Γ2 (E − E1 ) =
(4.59)
dE1 Σ1 (E1 ) Γ2 (E − E1 ) .
H1 ≤E
0
Dividiamo l’intervallo (0, E) in E/∆ intervalli di lunghezza ∆, e calcoliamo l’integrale (4.59) come:
Z
dE1 Σ1 (E1 ) Γ2 (E − E1 ) ≈
0
≈
E/∆
X
X
E/∆
E
Γ (E) =
˙
∆ Σ1 (Ei ) Γ2 (E − Ei ) ≈
i=1
X
(4.60)
E/∆
Γ∆ 1 (Ei ) Γ2 (E − Ei ) ≈
i=1
Γ1 (Ei ) Γ2 (E − Ei ) ,
i=1
dove la ∆ Σ1 (Ei ) ≈ Γ∆ 1 (Ei ) ≈ Γ1 (Ei ) segue dalla (4.52) e dalla (4.55). I volumi Γ (E) sono funzioni molto
rapidamente crescenti di E (vedi, ad esempio, la (4.33)): quindi Γ1 (E1 ) è funzione molto rapidamente
crescente (di E1 ), e Γ2 (E − E1 ) è funzione molto rapidamente decrescente (di E1 ). Possiamo quindi
assumere che il prodotto Γ1 (E1 )Γ2 (E − E1 ) presenti un massimo, cioè che uno dei termini della somma
(4.60) sia più grande di tutti gli altri. Supponiamo che il termine più grande sia il j-esimo. Posto E 1 =
˙ Ej ,
possiamo allora scrivere:
Γ1 (E 1 ) Γ2 (E − E 1 ) ≤ Γ (E) ≤
(1)
E
Γ1 (E 1 ) Γ2 (E − E 1 ) .
∆
(4.61)
(2)
˙ N1 + N2 . Dividendo
Poniamo Γ0 =
˙ Γ0 Γ0 ; siano poi (N1 , N2 ) i numeri di molecole dei due gas, con N =
la (4.61) per Γ0 , prendendo il logaritmo, e introducendo fattori N in modo opportuno, otteniamo:
"
#
"
#
N1 1
Γ1 (E 1 )
N2 1
Γ2 (E − E 1 )
1
Γ (E)
ln
+
ln
≤
ln
≤
(1)
(2)
N N1
N N2
N
Γ0
Γ0
Γ0
#
#
"
"
(4.62)
N2 1
1
E
N1 1
Γ1 (E 1 )
Γ2 (E − E 1 )
+
.
≤
ln +
ln
ln
(1)
(2)
N
∆
N N1
N N2
Γ
Γ
0
0
Prendiamo il limite termodinamico, qui definito come nella (4.13) con la ulteriore condizione che i rapporti
Ni /N =
˙ ni (i = 1, 2) rimangano costanti. Posto:
"
#
·
¸
Γi (E i )
1
Γ (E)
1
=
˙ si , (i = 1, 2) , e : L
L
ln
ln
=
˙ s,
(4.63)
(i)
Ni
N
Γ0
Γ
0
Γ
dove le s sono le ”entropie per particella” (s =
˙ S/N ; scriviamo S al posto di Smc
), otteniamo:
s = n 1 s1 + n 2 s2 .
(4.64)
Consideriamo valori di (N, N1 , N2 ) abbastanza grandi da essere ”già nel limite termodinamico”. Allora,
moltiplicando la (4.64) per N , e ponendo Si =
˙ Ni si (i = 1, 2), e S =
˙ N s, la (4.64) implica:
S(E) ≈ S1 (E 1 ) + S2 (E 2 ) .
(4.65)
La (4.65), o, più rigorosamente, la (4.64), esprimono la additività dell’entropia microcanonica. Inoltre,
la (4.65) implica che il volume Γ (E) è, approssimativamente: Γ (E) ≈ Γ1 (E 1 ) Γ2 (E 2 ), dove (E 1 , E 2 )
è la ripartizione (dell’energia) più probabile. Le altre ripartizioni (E1 , E2 ) sono realizzate in volumi di
spazio delle fasi molto più piccoli. La ”fluttuazione dell’energia”, cioè, per il sottosistema 1 (ad esempio):
4.7
La distribuzione di Maxwell
55
­
®
(E1 − E 1 )2 , sarà calcolata in seguito (vedi la (5.29).
Il termine massimo della somma (4.60), corrispondente alla ripartizione più probabile dell’energia, è
individuato dalla condizione:
¯
¯
∂
[Γ1 (E1 ) Γ2 (E2 )]¯¯ = 0 .
∂E 1
E1
(4.66)
Dalla (4.66) segue immediatamente:
µ
Poniamo:
·
¸¶
µ
·
¸¶
1
∂Γ1 (E1 )
1
∂Γ2 (E2 )
=
.
Γ1 (E1 )
∂E1
Γ2 (E2 )
∂E2
E1
E2
"
#¯
1
Γi (E) ¯¯
1
∂
k ln (i) ¯
=
˙
=
˙
¯
Ti
∂E B
T (E i )
Γ0
(i = 1, 2) .
(4.67)
(4.68)
Ei
La (4.67) equivale allora alla condizione:
T1 = T2 .
(4.69)
La (4.69) autorizza l’identificazione di T con la temperatura, e la (4.68) diventa
1
∂S
=
.
T
∂E
(4.70)
In modo analogo si possono derivare le altre due relazioni (3.2). Quanto sopra è una ulteriore conferma
della validità dell’identificazione di Smc con l’entropia termodinamica.
4.7 La distribuzione di Maxwell
Mostriamo come la distribuzione di Maxwell può essere derivata, per il gas ideale, dalla distribuzione
microcanonica. Secondo la meccanica statistica microcanonica di un sistema isolato, tutti i punti sulla
superficie dell’energia di un gas ideale di N molecole, che per semplicità consideriamo puntiformi e di
massa m, corrispondono a stati ugualmente probabili. D’altra parte, da considerazioni cinetiche sappiamo
[Pat § 6.4], che la densità di probabilità per la velocità di una molecola di un gas è la ”distribuzione di
Maxwell”: f (v) = fx (vx )fy (vy )fz (vz ), dove:
r
fx (vx ) =
˙
a −avx2
e
,
π
con
a=
˙
m
2kB T
(4.71)
(e analogamente per fy e fz ), oppure, per il modulo v =
˙ |v|:
f (v) = 4π
³ a ´3/2
π
2
v 2 e−av .
(4.72)
(per una derivazione della (4.71) vedi l’es. 4.6). La (4.71) e la (4.72) mostrano che la molecola ”preferisce”
le velocità basse, in apparente contraddizione con l’uguale probabilità per tutti gli stati possibili ricordata
sopra. Qui di seguito mostriamo (per il gas ideale) che non sussiste alcuna contraddizione, e che, anzi, è
possibile derivare la distribuzione di Maxwell dalla distribuzione microcanonica.
Consideriamo dapprima un esempio. Sia S un insieme di N particelle, distribuite uniformemente su
un disco, D, di raggio R, nel piano (x, y): la densità di particelle è allora: σ 0 (x, y) =
˙ N/πR2 (se (x, y) ∈ D),
e la densità di probabilità per la posizione di una particella è: σ(x, y) =
˙ σ 0 /N = 1/πR2 . Consideriamo
poi l’insieme L, ottenuto proiettando la posizione di ognuna delle particelle di S sull’asse x, e associando
4.7
La distribuzione di Maxwell
56
a ognuna delle proiezioni una particella: L è quindi un insieme di N particelle sull’asse x. Il numero delle
particelle di L contenute in un segmento dx è:
Z
λ0 (x) dx = dx
y+
dy σ 0 (x, y) ,
con
y± =
˙ ±
p
R2 − x2 ,
(4.73)
y−
e la densità di probabilità per una delle particelle proiettate è
λ(x) =
˙
λ0
2 p 2
=
R − x2 .
N
πR2
(4.74)
Analogamente, nel caso in cui l’insieme S sia concentrato sulla sola circonferenza di D, la densità σ è:
σ(x, y) =
˙
³p
´
1
δ
x2 + y 2 − R
2πR
(4.75)
(dove δ(z) è la delta di Dirac di argomento z), mentre la densità λ diventa:
λ(x) =
1
.
π R2 − x2
√
(4.76)
Consideriamo ora lo stesso problema in uno spazio con un numero di dimensioni molto grande. Supponiamo che l’insieme S di N punti sia concentrato, con densità uniforme, sulla superficie di una sfera di
raggio R in uno spazio di dimensione n.Questo è, in particolare, il caso della superficie dell’energia, H = E,
p
di un gas ideale di N molecole puntiformi di massa m: in tal caso abbiamo n =
˙ 3N , e R = 2E/m. La
densità di probabilità nello spazio n-dimensionale è:
¶
µq
1
(4.77)
σ(x1 , · · · , xn ) =
˙
δ
x21 + · · · + x2n − R ,
Sn
dove Sn = nCn Rn−1 (Sn è l’area della superficie della sfera, e Cn è dato dalla (4.21)). Sia S 0 l’insieme
ottenuto proiettando S su un sottospazio di dimensione n0 < n; poniamo:
¢ ¡
¢
¡
2
2
˙ r0 + r00 .
r2 =
˙ x21 + · · · + x2n = x21 + · · · + x2n0 + x2n0 +1 + · · · + x2n =
(4.78)
La densità di S 0 , f (x1 , · · · , xn0 ), segue integrando σ(xn0 +1 , · · · , xn ) sulle coordinate:
1
=
Sn
Z
³p
dxn0 +1 · · · dxn δ
r0 2 + r00 2 − R
´
.
(4.79)
Conviene introdurre coordinate polari nello spazio (xn0 +1 , · · · , xn ). Poniamo n00 =
˙ n − n0 , e scriviamo:
00
dxn0 +1 · · · dxn =
˙ dxn0 +1 · · · dxn0 +n00 = dΩn00 (r00 )n
−1
dr00 ,
(4.80)
00
dove dΩn00 è l’elemento di angolo solido in Rn . Integrando sugli angoli segue:
Z
00
00
con : Sn00 =
˙ n00 Cn00 (r00 )n −1 .
(r00 )n −1 dr00 dΩn00 = dr00 Sn00 ,
(4.81)
Integrando sugli angoli il secondo membro della (4.79) otteniamo allora:
f (x1 , · · · , xn0 ) =
n00 Cn00 1
n Cn Rn−1
Z
dr00 (r00 )n
00
−1
³p
δ
´
r0 2 + r00 2 − R .
(4.82)
Notiamo poi che risulta:
³p
δ
´
´
³
p
R
r0 2 + r00 2 − R = p
δ r00 − R2 − r0 2 .
R2 − r 0 2
(4.83)
4.8
Esercizi
57
La (4.82) diventa allora:
f=
³
´(n00 −1)/2
n00 Cn00 1
R
2
02
p
R
−
r
.
n Cn Rn−1 R2 − r0 2
(4.84)
Poniamo ora n = 3N ed n0 = 3. È facile vedere che, supponendo N À 1, e usando la formula di Stirling
(4.25), risulta:
"µ
· 00
¸
¶3/2 #
µ
¶3/2
3N
n Cn00
3N
n00 Cn00
≈ ln
ln
,
cioè
≈
.
(4.85)
n Cn
2π
n Cn
2π
Segue allora (ponendo N − 1 ≈ N , e simili):
µ
µ
¶3N/2 µ
¶3/2
·
µ
¶¸3N/2
x1 2
x1 2
3N
1
f (x1 ) =
1− 2
≈
exp − 2
.
(4.86)
R
2π
R3N
R
p
p
Scrivendo infine v al posto di x1 , e ponendo R = 2E/m = 3N kB T /m (dove E ed m sono, rispettivamente, l’energia totale del gas e la massa di una molecola), segue:
3N
2π
¶3/2
1
R3N
µ
f (v) =
˙ fx (vx )fy (vy )fz (vz ) =
m
2πkB T
¶3/2
µ
¶
mv 2
exp −
.
2kB T
(4.87)
4.8 Esercizi
Esercizio 4.1 Sistemi isolati.
a) Calcolare l’energia interna del sistema descritto dalla (4.7). [Risultato: U =
˙ hHi = E.]
b) Derivare la (4.49). [Applicare il metodo variazionale alla (4.48).]
Esercizio 4.2 Additività dell’entropia microcanonica.
Mostrare che, per un sistema costituito da due sottosistemi indipendenti (cioè: non interagenti né
meccanicamente né termicamente), l’entropia microcanonica risulta la somma delle entropie microcanoniche dei sottosistemi: S = S1 + S2 . [Si mostri che Σ(E) = Σ1 (E1 ) Σ2 (E2 ) (dove: E = E1 + E2 ), e si ponga
(1) (2)
Σ◦ =
˙ Σ◦ Σ◦ .]
Esercizio 4.3 Sistemi ideali.
a) Ricavare dalla (4.30) la temperatura e la capacità termica del sistema di oscillatori (4.16)
[C =
˙ dQ/dT =
˙ dE/dT =
˙ T (dS/dT ). Risultato: C = N kB .] Mostrare che per un sistema di oscillatori armonici indipendenti tridimensionali, risulta: C = 3N kB .
b) Ricavare dalla (4.38) la temperatura del gas ideale.
c) Ricavare dalla (4.38) l’equazione di stato P = P (T, V, N ) per il gas ideale.
d) Ricavare dalla (4.38) il potenziale chimico del gas ideale, e confrontare con la (3.85).
Esercizio 4.4 Miscele di gas ideali.
Si scriva la (4.38) come
" µ
¶ 32 #
µ
¶
5
V 3
5
V 2πmkB
2
T
+ N kB =
˙ N kB ln
T
+ NK
S = N kB ln
2
N
h
2
N
2
(4.88)
e si considerino i due seguenti stati termodinamici:
α) due volumi V1 e V2 , con V1 + V2 = V , contenenti due gas di N1 e, rispettivamente, N2 molecole
4.8
Esercizi
58
dello stesso tipo, con N1 + N2 = N , entrambi con la stessa temperatura e la stessa pressione;
β) un volume V contenente le N molecole descritte in (α), cioè la miscela dei due gas.
a) Calcolare, sulla base della (4.88), e ricordando che per ipotesi valgono le condizioni:
V
V1 + V2
V1
V2
=
=
=
,
N
N1 + N2
N1
N2
l’entropia nei due stati, e mostrare che Sα = Sβ [Poichè, per ipotesi, le molecole dei due gas sono identiche,
il sistema può passare da α a β, e viceversa, semplicemente inserendo e, rispettivamente, estraendo una
separazione in grado di dividere V in V1 e V2 ; quindi la trasformazione è reversibile.]
b) Considerare due situazioni, α0 e β 0 , analoghe a quelle descritte sopra, ma con gas costituiti di
molecole di tipo diverso. Mostrare che, secondo la (4.88), ora risulta Sα0 < Sβ 0 . Quindi, il miscelamento
di due gas diversi produce un aumento dell’entropia: mostrare che l’origine dell’aumento stànell’aumento
del volume disponibile ai gas, e non nel miscelamento.
c) Calcolare l’entropia di miscelamento di due gas ideali, costituiti da molecole dello stesso tipo, sulla
base della (4.36), e verificare che, contrariamente al risultato del punto (b), essa risulta positiva (”paradosso
di Gibbs” [Hu87 § 6.6]).
d) Mostrare che per un gas ideale (in equilibrio) di N molecole, di cui N1 sono di un gas ideale di tipo
Pr
1, ecc. , Nr di un gas ideale di tipo r, con i=1 Nr = N , in un volume V alla temperatura T , la pressione
è la somma delle ”pressioni parziali”:
P =
r
X
Pi ,
con
Pi = Ni
i=1
kB T
Ni
=
˙
P .
V
N
(4.89)
Esercizio 4.5 Elemento di area effettivo.
Cercare la ρ che rende S[ρ] (vedi la (4.41)) estrema rispetto a tutte le ρ che soddisfano la seconda
delle (4.41). Calcolare la corrispondente Smc . [Risultati: ρmc = N !/Σ(E); Smc = Σ(E)/N !Σ0 .]
Esercizio 4.6 Distribuzione di Maxwell.
Si supponga che la probabilità che, a un dato istante, la velocità di una molecola di un gas ideale
abbia la componente x compresa tra vx e vx + dvx , ecc., sia:
fx (vx ) fy (vy ) fz (vz ) dvx dvy dvz .
(4.90)
Si supponga inoltre che, in assenza di forze esterne, la densità di probabilità sia la stessa nelle tre direzioni
dello spazio (vx , vy , vz ), cioè che le tre funzioni (fx , fy , fz ) siano la stessa funzione, f , eqche il numero
(4.90) sia lo stesso per tutti i valori di vx , vy , vz che cadono nello strato (v, v + dv) dove v = vx2 + vy2 + vz2 :
quindi il numero (4.90) dipende solo dal modulo v, e sia
f (vx ) f (vy ) f (vz ) =
˙ φ(v) ,
(4.91)
dove φ è una funzione da determinare.
a) Si consideri una variazione di, per esempio, vx e vy , a vz costante, tale che v rimanga costante:
dv =
vx dvx + vy dvy
=0,
v
(4.92)
e si mostri che f (vx ) ed f (vy ) soddisfano l’equazione
df (vx )
1
df (vy )
1
=
.
vx f (vx ) dvx
vy f (vy ) dvy
(4.93)
4.8
Esercizi
59
Mostrare che la (4.93) è risolta dalle
2
f (vx ) = c e−avx ,
2
f (vy ) = c e−avy
(4.94)
(per f (vz ) si procede in modo analogo), dove c e a sono costanti positive da determinare.
b) Dalla condizione di normalizzazione
Z
Z
∞
dvx f (vx )
−∞
derivare: c =
Z
∞
∞
dvy f (vy )
−∞
dvz f (vz ) = 1 ,
(4.95)
−∞
p
a/π. Calcolare l’energia cinetica media di una molecola:
ε=
˙
Z
¢® 1 ³ a ´3/2 ∞
1 ­¡ 2
3m
m vx + vy2 + vz2 = m
,
4π dv v 4 f (v) =
2
2
π
4a
0
(4.96)
e uguagliandola al risultato termodinamico (per il gas ideale): ε =
˙ E/N = 3kB T /2, derivare: a = m/2kB T
(J.C. Maxwell (1860), cit. in [Bru76 vol. 1, § 5.1]).
5
Meccanica statistica canonica
Come strumento per la derivazione delle proprietà termodinamiche di un sistema fisico concreto, il
metodo microcanonico si rivela assai poco efficiente: infatti, la geometria della superficie dell’energia è,
per sistemi non ideali, cosı̀ complessa da rendere di fatto impossibile il calcolo di Σ(E) (o di Γ (E)). Anche
dal punto di vista fenomenologico, la meccanica statistica microcanonica è di interesse limitato, perchè la
difficoltà di sperimentare sui sistemi isolati rende difficili le verifiche empiriche della teoria. In effetti la
condizione più facile da realizzare in laboratorio non è quella di isolamento, ma quella di equilibrio (termico, materiale, ecc.) con opportune ”riserve” (riserve di energia per i sistemi a T costante, di particelle
per i sistemi a µ costante, ecc.). Quindi, sia per il trattamento matematico che per il confronto con gli
esperimenti, è di solito più conveniente utilizzare la meccanica statistica canonica, che studia sistemi che
assumono tutti i valori dell’energia (equilibrio termico), o, limitatamente ai gas, quella gran canonica, che
studia gas in equilibrio termico e che assumono tutti i valori del numero di molecole (equilibrio materiale).
Naturalmente, le proprietà di un sistema termodinamico (come, ad esempio, l’equazione di stato) non
dipendono, di solito, dalla condizione (di isolamento, o di equilibrio termico con una riserva di calore, o
altro) del sistema. Si pone quindi il problema di dimostrare che le diverse ”meccaniche statistiche” (microcanonica, canonica, gran canonica) portano alle stesse proprietà fisiche (”problema dell’equivalenza”).
5.1 La distribuzione canonica (metodi variazionali)
La meccanica statistica canonica studia sistemi (in equilibrio) per i quali la hamiltoniana può assumere
valori arbitrari, cioè per i quali lo spazio delle fasi accessibile coincide con l’intero spazio delle fasi. Fisicamente, ciò può essere realizzato mettendo i sistemi in interazione (”contatto termico”) con una riserva di
calore: l’interazione fàsı̀ che la hamiltoniana del sistema non sia costante del moto, e possa assumere valori
diversi. Le variazioni dell’energia del sistema devono aver luogo rispettando la condizione dell’equilibrio
termodinamico. Matematicamente, ciò può essere espresso in due modi:
A) assegnando il valore di T ;
B) assegnando il valore di hHi.
A) Assumiamo che sia assegnata la temperatura, T . Ricordiamo la condizione di equilibrio per un
”sistema a T costante” (vedi § 3.4), e postuliamo il seguente
Principio del minimo dell’energia libera: La densità di probabilità nello spazio dei microstati di un
sistema in equilibrio termico con una riserva di calore è quella che rende minimo il funzionale ”energia
libera (di Helmholtz)”.
Definiamo la ”energia libera (di Helmholtz) nello stato ρ”:
Z
Z
A[ρ] =
˙ U [ρ] − T S[ρ] =
Γ
dx H ρ + T kB
dx ρ ln(Γ0 ρ) .
Γ
(5.1)
5.1
La distribuzione canonica (metodi variazionali)
61
ρc è allora quella per cui A[ρ] è minima rispetto a tutte le ρ =
˙ ρc + δρ compatibili con la condizione di
normalizzazione:
Z
dx ρ = 1 .
(5.2)
Γ
Come nel § 4.1, consideriamo il funzionale:
A0 [ρ] =
˙ A[ρ] + λ0 K[ρ] ,
(5.3)
dove λ0 è un moltiplicatore di Lagrange. Determiniamo allora ρc dalla condizione (analoga alla (4.4)):
δA0 =
˙ A0 [ρc + δρ] − A0 [ρc ] = O[(δρ)2 ] .
Annullando il termine del primo ordine in δρ, si ottiene (1) :
Z
1 −βH
1
ρc =
e
dx e−βH ,
,
con : Z =
˙
Γ0 Z
Γ0 Γ
con :
(5.4)
β=
˙
1
.
kB T
(5.5)
Calcolando A[ρ] con ρ = ρc otteniamo
A=
˙ A(T, V, N ) = −kB T ln Z .
(5.6)
Le (5.5) e (5.6) sono le relazioni fondamentali della meccanica statistica canonica (cosı̀ come le (4.8) sono
le relazioni fondamentali della meccanica statistica microcanonica).
Per un gas di N particelle identiche risulta, da considerazioni analoghe a quelle del § 4.3, che l’elemento
di volume da utilizzare per le integrazioni sullo spazio delle fasi (per il calcolo della funzione di partizione,
o dei valori medi) deve essere l’ elemento di volume effettivo, dxeff =
˙ dx/N ! :
Z
Z
1
1
Z =
˙
dxeff e−βH(x) =
˙
dx e−βH(x) .
(5.7)
Γ0 Γ
Γ0 N ! Γ
La distribuzione canonica per un gas di N particelle identiche si scrive allora:
Z
1 −βH(x)
ρc (x) =
˙
e
,
con :
dxeff ρc (x) = 1 .
Γ0 Z
Γ
(5.8)
B) Assumiamo che sia assegnato il valor medio di H:
hHi = U .
(5.9)
La distribuzione canonica, ρc , può essere determinata generalizzando il metodo del ”massimo dell’entropia”
(§ 4.1). Formuliamo il seguente
Principio del massimo dell’entropia: La densità di probabilità nello spazio dei microstati di un sistema
è quella che, tra tutte quelle compatibili con i vincoli assegnati, rende massima l’entropia.
Nel § 4.1 l’unico vincolo era la normalizzazione delle ρ; qui abbiamo anche la condizione (5.9). Definiamo
allora il funzionale (indichiamo con Γ lo spazio delle fasi del sistema):
Z
U [ρ] =
˙ hHi − U =
˙
dx ρ H − U .
(5.10)
Γ
(1)
Un metodo approssimato per verificare che ρc corrisponde effettivamente ad un minimo di A[ρ] potrebbe essere quello
di: a) assumere che ρc sia definita su un Γ f inito (bisogna assumere: ρc = 0 per H opportunamente grande); b) discretizzare
Γ: Γ = ∪γi (i = 1, . . . , N ); c) assumere H (e ρc ) uniforme in ognuno dei γi , e scrivere A[ρ] come una somma finita (del tipo
(1.8)); d) seguire il metodo dell’es. 1.5d.
5.2
La distribuzione canonica (altra derivazione)
62
Consideriamo il funzionale:
S 00 [ρ] =
˙ S[ρ] + λ U [ρ] + λ0 K[ρ] ,
(5.11)
dove λ e λ0 sono moltiplicatori di Lagrange. Determiniamo ρc dalla condizione:
δS 00 =
˙ S 00 [ρc + δρ] − S 00 [ρc ] = O[(δρ)2 ] .
(5.12)
Annullando il termine del primo ordine in δρ, si ottiene:
ρc =
1 λH/k
B ,
e
Γ0 Z
con :
Z =
˙
1
Γ0
Z
dx eλH/kB .
(5.13)
Γ
Calcoliamo hHi con ρ = ρc . Posto: γ =
˙ λ/kB , segue:
Z
∂
dx H ρc =
ln Z .
hHi =
˙
∂γ
Γ
(5.14)
Usando: hHi =
˙ U , e ricordando la (3.39), possiamo identificare:
γ=
˙ −β,
ln Z =
˙ − βA .
(5.15)
Ritroviamo cosı̀ le (5.5) e (5.6).
5.2 La distribuzione canonica (altra derivazione)
Nel paragrafo precedente abbiamo ricavato la distribuzione canonica da postulati (”minimo di A”, e
”massimo di S con la condizione hHi = U ”) diversi da quelli introdotti nei capitoli precedenti. Tuttavia,
un postulato era già stato formulato (sotto varie forme: ”massimo di S” (senza la condizione hHi = U ),
”principio di equiprobabilità degli stati” (P2 , pag. 4), ”ipotesi ergodica”), e sarebbe desiderabile basare
tutta la teoria su quello solo. Qui di seguito mostriamo che la distribuzione canonica può essere dedotta
dalla sola teoria microcanonica, senza dover ricorrere ad ulteriori postulati (2) .
Consideriamo un sistema, s, e una riserva di calore, r, e supponiamo che l’ ”unione” di s ed r costituisca
un sistema isolato in equilibrio, che indichiamo con s + r, con energia E. Supponiamo che s [r] occupi un
volume Vs [Vr ] e sia costituito di Ns [Nr ] molecole, con: Ns ¿ Nr , e: Vs ¿ Vr , e siano Hs e Hr le rispettive
hamiltoniane. Supponiamo che s ed r siano separati da una parete diatermica (ma fissa e impermeabile).
Dal punto di vista microscopico, s e r sono sistemi interagenti: supponiamo però che la hamiltoniana di
interazione, Hsr , pur presente, in modo da consentire scambi di energia, sia ”trascurabile” rispetto ad Hs
ed Hr . Scriviamo quindi la hamiltoniana totale come:
H ≈ Hs + Hr ,
(5.16)
dove Hs e Hr possono assumere tutti i valori, Es ed Er , compatibili con la condizione: Es + Er = E.
Sia xs un microstato di s. Introduciamo una funzione ρs (xs ), sullo spazio delle fasi, Γ (s) , di s, tale che
ρs (xs ) dxs è la probabilità di trovare s in un volume dxs , indipendentemente dal microstato di r (ρs è
(r)
calcolata qui di seguito). Sia poi Γδ (Er ) è la regione (nello spazio delle fasi di r) costituita dai punti xr
(r)
tali che: Er =
˙ Hr (xr ) = E − Hs (xs ), per xs ∈ dxs . La regione Γδ (Er ) è uno ”strato” (vedi la (4.47)):
il suo volume può però (vedi la (4.55)) essere sostituito dal volume di tutta la regione, Γ (r) (Er ), interna
(2)
La distribuzione canonica potrebbe essere semplicemente postulata (come, per esempio, in [Geo]): ciò è giustificato sia
perchè nessuna delle derivazioni proposte risulta del tutto soddisfacente, sia perchè i riscontri sperimentali sono tali da non
lasciare dubbi sulla sua validità.
5.3
La fluttuazione dell’energia
63
alla superficie Hr = Er . Dalla equiprobabilità dei microstati del sistema isolato s + r, segue allora che
ρs (xs ) dxs è proporzionale a Γ (r) (Er ) dxs :
(r)
ρs (xs ) dxs ∝ Γδ (Er ) dxs ≈ Γ (r) (Er ) dxs ,
da cui : ρs (xs ) = C Γ (r) (Er ),
(5.17)
dove C è una costante, che sarà determinata dalla condizione di normalizzazione. Supponiamo ora che sia
Es ¿ Er (in generale possono esistere microstati in cui Es ≥ Er ; dobbiamo quindi assumere che la relativa
(densità di) probabilità sia trascurabile), e sviluppiamo in serie di Taylor rispetto ad Es . Trascurando i
termini in (Es )2 , segue:
¸
∂Γ (r)
Es =
∂Er E
¶
µ
· (r) ¸
1
∂Γ
(r)
Es ≈ Γ (r) (E) exp [−β 0 Es ] ,
= Γ (E) 1 − (r)
Γ (E) ∂Er E
·
Γ (r) (Er ) =
˙ Γ (r) (E − Es ) ≈ Γ (r) (E) −
dove abbiamo posto:
· (r) ¸
∂Γ
∂
Γ (r) (E)
1
β =
=
˙
ln
.
˙ (r)
∂E
Γ0
Γ (E) ∂Er E
0
(5.18)
(5.19)
Ricaviamo Γ (r) (Er ) dalla (5.18), e sostituiamo nella (5.17); normalizzando segue (omettiamo l’indice s):
Z
0
1
1
−β 0 H
ρ=
e
,
con
:
Z
=
˙
dx e−β H .
(5.20)
0
Γ0 Z
Γ0 Γ
L’entropia corrispondente alla (5.20) è:
Z
­ ®
S=
˙ − kB dx ρ ln(Γ0 ρ) = kB ln Z 0 + kB β 0 H .
(5.21)
Posto U =
˙ hHi, e confrontando con la relazione termodinamica: A = U − T S, seguono le identificazioni:
β 0 = (kB T )−1 ,
−kB T ln Z 0 = A ,
(5.22)
e: Z 0 coincide con la funzione di patrizione (5.5) (nel caso dei gas è necessario introdurre il fattore N !,
come nella (5.7)).
5.3 La fluttuazione dell’energia
In questo paragrafo accenniamo ad un importante problema che nasce dal confronto tra la meccanica
statistica e la termodinamica. Cominciamo coll’osservare che, secondo la termodinamica, un gas (per esempio) può essere descritto mediante diversi insiemi di variabili indipendenti: (U, V, N ), (T, V, N ), (T, V, µ),
ecc.. A seconda dei casi, può essere conveniente scegliere un insieme piuttosto che un altro: per esempio, se
stiamo considerando un sistema in equilibrio termico con un termostato, è naturale scegliere come variabile
indipendente T , piuttosto che U . Tuttavia, i vari insiemi di variabili indipendenti sono equivalenti, nel
senso che essi forniscono descrizioni identiche. Dal punto di vista matematico, l’equivalenza è garantita
dalle proprietà delle trasformate di Legendre. Dal punto di vista fisico, l’equivalenza è confermata dal fatto
che le proprietà termodinamiche di un sistema non dipendono dalla scelta delle variabili: per esempio, le
due seguenti forme dell’equazione di stato del gas ideale:
P =
2U
=
˙ P (U, V, N ) ,
3V
hanno lo stesso contenuto fisico.
P =
N kB T
=
˙ P (T, V, N ) ,
V
(5.23)
5.4
Il problema dell’equivalenza
64
Secondo la meccanica statistica, invece, l’equivalenza è garantita solo sotto opportune condizioni.
Consideriamo, ad esempio, la relazione tra l’energia libera di Helmholtz e l’entropia. La meccanica statistica
canonica calcola l’energia libera di Helmholtz come: A(T ) =
˙ − T ln Z(T ) (in questo paragrafo scegliamo
unità di misura tali che kB = Σ0 = Γ0 = 1). Analogamente, l’espressione microcanonica dell’entropia è:
S(E) = ln Σ(E). Scriviamo Z come:
Z
Z =
˙ Z(β) =
˙
Z
dx e
−βH(x)
Z
∞
=
dE e
Z
−βE
dµ =
˙
0
Σ(E)
∞
dE e−βE Σ(E) .
(5.24)
0
Dalla (5.24) (3) segue che nella meccanica statistica canonica l’energia libera è legata all’entropia da una
relazione di tipo integrale:
−
A
= ln
T
·Z
∞
¸
dE e−βE Σ(E)
·Z
∞
=
˙ ln
0
¸
dE eS(E)−βE .
(5.25)
0
La (5.24) è diversa dalla relazione termodinamica (vedi la (3.35)):
−A/T = S − U/T .
(5.26)
Pertanto, l’energia libera derivata dalla meccanica statistica canonica, e l’entropia derivata dalla meccanica
statistica microcanonica, non sono legate da una trasformata di Legendre, e quindi la meccanica statistica
canonica e quella microcanonica non sono equivalenti! Questa conclusione non deve sorprendere, dato che
le proprietà ”meccaniche”, e quindi ”meccanico-statistiche”, di un sistema devono essere diverse a secondo
che il sistema sia isolato o no. Nel § 4 mostreremo che, sotto opportune condizioni, la (5.25) implica la
(5.26)! Qui ci limitiamo a considerare il problema dal punto di vista della ”fluttuazione dell’energia”:
­
2
(H − hHi)
®
­
®
=
˙ (H − U )2 .
(5.27)
Consideriamo la meccanica statistica microcanonica di un sistema isolato con hamiltoniana H, e
sia H = E. È ovvio che il valor medio (microcanonico) di H, cioè l’energia interna, coincide con E:
­
®
hHi =
˙ U = E. Inoltre, la probabilità che H abbia valori diversi da hHi è nulla: (H − U )2 = 0. Nella
meccanica statistica microcanonica la fluttuazione dell’energia è quindi nulla. La meccanica statistica
canonica, invece, considera il sistema come in equilibrio termico con una riserva di calore: a un sistema di
questo tipo è associata una temperatura ben definita, ma non una energia ben definita. È facile calcolare la
fluttuazione dell’energia secondo la meccanica statistica canonica. Infatti, consideriamo le seguenti formule
(che si verificano facilmente):
hHi = −
Segue:
­
2
(H − hHi)
®
­ 2®
1 ∂2Z
H =
.
Z ∂β 2
1 ∂Z
,
Z ∂β
µ
­ ® ­ ®2
∂
= H2 − H =
∂β
1 ∂Z
Z ∂β
¶
=
˙ −
∂U
∂U
= T2
=
˙ T 2 CV ,
∂β
∂T
(5.28)
(5.29)
dove CV è la capacità termica a V, N costanti (qui di seguito scriviamo C). Per la meccanica statistica
canonica, la fluttuazione dell’energia è allora diversa da zero! Consideriamo, tuttavia, la fluttuazione
(quadratica) ”relativa” (di H):
(3)
­
2
(H − U )
U2
®
= T2
C
.
U2
(5.30)
La (5.24) mostra che Z(β) è la trasformata di Laplace di Σ(E) (risulta inoltre che Σ(E) ha il significato di ”densità
degli stati”). In linea di principio, la (5.24) può essere invertita in modo da esprimere Σ(E) come trasformata di Laplace
inversa di Z(β) (per un semplice esempio, vedi [KiES Example 12.1]).
5.4
Il problema dell’equivalenza
65
Nel limite termodinamico segue allora:
­
®
(H − U )2
1
L
∝L
= 0.
U2
N
(5.31)
Quindi, se C < ∞, la fluttuazione relativa dell’energia tende, nel limite termodinamico, a zero. La (5.31)
assicura che l’energia interna ha un valore ”ben definito” (nel senso che, nel limite termodinamico, la
fluttuazione di H è trascurabile rispetto al valor medio di H) anche per la meccanica statistica canonica.
Questo risultato conferma che la descrizione canonica può essere equivalente a quella microcanonica.
5.4 Il problema dell’equivalenza
Consideriamo il problema dell’equivalenza, tra la meccanica statistica canonica e quella microcanonica,
dal punto di vista della relazione tra la (5.25) e la (5.26) (il problema dell’equivalenza è uno dei temi teorici
cruciali per i fondamenti della meccanica statistica: i cenni che ne facciamo qui servono solo ad illustrare
il problema, per una discussione adeguata vedi, ad esempio, [Ru69 § 3.4]). Scriviamo la (5.25) come:
A
− = ln
T
·Z
¸
∞
dE e
−Φ(E)
,
con : Φ(E) =
˙ βE − S(E) .
(5.32)
0
La funzione Φ(E) è la differenza di due funzione positive crescenti monotonicamente. Possiamo allora
ipotizzare che Φ(E) presenti un minimo (unico), in corrispondenza con un valore E = U (da determinarsi).
Sviluppiamo Φ(E) in serie di Taylor intorno ad U , limitandoci al termine del secondo ordine:
Φ(E) = Φ(U ) +
∂Φ
1 ∂2Φ
(E − U ) +
(E − U )2 + · · · .
∂U
2 ∂U 2
(5.33)
L’unica giustificazione del fatto di trascurare i termini di ordine superiore al secondo è che in questo
modo, se la derivata seconda è positiva, l’integrale nella (5.32) esiste. Tuttavia, l’integrale deve esistere:
quindi, qualche meccanismo di convergenza deve essere in atto! Possiamo assumere che le conclusioni cui
arriveremo siano indipendenti dai dettagli del meccanismo. La derivata prima di Φ è nulla (per ipotesi):
da cui:
¯
¯
∂Φ
∂Φ(E) ¯¯
∂S(E) ¯¯
=
˙
=β−
= 0,
∂U
∂E ¯E=U
∂E ¯E=U
(5.34)
¯
1
∂S(E) ¯¯
=
.
T
∂E ¯E=U
(5.35)
La (5.35) permette di determinare U (in funzione di T e delle altre variabili del problema). Usando la
(5.35), e scrivendo: ∂S(E)/∂E =
˙ 1/T (E), otteniamo poi:
·
¸
·
¸
·
¸
∂2Φ
∂ ∂S(E)
∂
1
1 ∂T (E)
=
−
=
˙
−
=
.
∂E ∂E E=U
∂E T (E) E=U
T 2 (E) ∂E E=U
∂U 2
(5.36)
Chiamando E = E(T ) la funzione inversa della T = T (E), abbiamo:
∂T (E)
=
∂E
µ
∂E(T )
∂T
¶−1
=
˙
1
,
C(E)
(5.37)
dove C è la capacità termica (a (V, N ) costanti). Dalla (5.35) segue: T (U ) = T . La (5.36) diventa allora:
∂2Φ
1
1
˙ 2 .
2 = T 2 C(U ) =
T C
∂U
(5.38)
5.5
La distribuzione gran canonica
66
Poichè C > 0 (vedi la (3.8)), la (5.38) è positiva, consistentemente con l’ipotesi che U sia un minimo di Φ.
Z diventa allora:
Z
∞
Z = e−Φ(U )
·
dE exp −
0
¸
1
2
(E
−
U
)
.
2 T 2C
(5.39)
Supponiamo ancora che U e C siano tali da poter estendere il limite inferiore, nell’integrale (5.39), a −∞.
Segue:
Z
Z ≈ e−Φ(U )
∞
·
dE exp −
−∞
¸
√
1
2
(E
−
U
)
= e−Φ(U ) 2πT 2 C .
2
2T C
(5.40)
Dalla (5.40) otteniamo:
−
√
√
U
A(T )
=
˙ ln Z(T ) ≈ −Φ(U ) + ln 2πT 2 C =
˙ S(U ) − + ln 2πT 2 C .
T
T
(5.41)
Supponiamo che sia: C < ∞ (la condizione C < ∞ può essere violata, ad esempio, nei punti critici [Sta §
3.2]). Allora C è estensivo: infatti, dalla estensività di U (U ∝ N ) segue: C =
˙ ∂U/∂T ∝ N . Poichè anche
S è estensiva, prendendo il limite termodinamico (§ 4.2), dalla (5.41) segue:
L
A
U − TS
=L
,
N
N
(5.42)
che equivale alla (5.26). Possiamo concludere che, se C < ∞, e nel limite termodinamico, l’espressione
microcanonica dell’entropia e l’espressione canonica dell’energia libera diventano compatibili, cioè che la
meccanica statistica canonica e quella microcanonica sono ”equivalenti”.
5.5 La distribuzione gran canonica
Il passaggio dalla descrizione microcanonica a quella canonica è motivato dalla opportunità di eliminare la condizione: H = E. È spesso utile e/o necessario rimuovere anche la condizione che il numero
delle particelle sia fissato. Sistemi per i quali l’operazione è necessaria sono quelli in equilibrio rispetto
allo scambio di particelle (equilibrio materiale): ad esempio, sistemi di molecole di specie diversa in cui
avvengono reazioni chimiche, oppure sistemi in cui le particelle vengono emesse e riassorbite, come i fotoni
nella ”radiazione di corpo nero”. Per altri sistemi, come ad esempio i gas quantistici di particelle di massa
m > 0, l’operazione non è, in linea di principio, necessaria, ma nondimeno essa risulta conveniente (vedi
il cap. 7). La teoria adatta a studiare i sistemi suddetti è la meccanica statistica ”gran canonica”, che
introduciamo qui di seguito.
Per descrivere un sistema (classico) con un numero di particelle indefinito è necessario introdurre uno
”spazio delle fasi generalizzato”, Γ , definito come l’unione di tutti i ΓN (N = 0, 1, . . .): Γ =
˙ ∪N ΓN , dove
ΓN è lo spazio degli stati con N particelle, e definire una densità di probabilità su Γ , funzione di N e di
xN (con xN ∈ ΓN ): ρ =
˙ ρ(N, xN ), chiamata ”distribuzione gran canonica”. Prima di definire, per una tale
ρ, il ”valor medio”, osserviamo che la meccanica statistica gran canonica è rilevante solo per i gas, e che
per essi si presenta, come per le teorie microcanonica e canonica, il problema della indistinguibilità delle
molecole (anche qui consideremo solo il caso di gas costituiti da molecole dello stesso tipo). Calcoliamo
(N )
allora gli integrali sui vari ΓN con gli elementi di volume effettivi (vedi (4.41) e (5.7)): dxeff =
˙ dx(N ) /N !
dove dx(N ) è l’elemento di volume in ΓN . Ad esempio, la condizione di normalizzazione di ρ(N, xN ) si
esprime come:
∞ Z
X
N =0
ΓN
(N )
dxeff ρ(N, xN ) = 1 .
(5.43)
5.5
La distribuzione gran canonica
67
Si noti che, rispetto alla (5.8), nella (5.43) N si comporta come una ”variabile in più”, e quindi ”l’integrale
sulle x” della (5.8) è sostituito ”dall’integrale sulle x e dalla somma su N ”. Per una data ρ(N, xN ),
definiamo il valor medio di una variabile b(N, xN ) come:
∞ Z
X
­ ®
b =
˙
N =0
(N )
ΓN
dxeff b(N, xN ) ρ(N, xN ) .
(5.44)
In particolare, consideriamo la variabile microscopica ”numero delle molecole”, N . Per un sistema in
equilibrio materiale la variabile macroscopica ”numero delle molecole” è il valor medio hN i:
hN i =
˙
∞ Z
X
N =0
ΓN
(N )
dxeff N ρ(N, xN ) =
∞
X
N =0
Z
(N )
N
ΓN
dxeff ρ(N, xN ) .
(5.45)
La distribuzione gran canonica, ρgc (N, xN ), può essere determinata col metodo variazionale, ricordando la definizione termodinamica di stato di equilibrio per un sistema in equilibrio termico e materiale
(vedi l’es. 3.10):
Principio del minimo del potenziale gran canonico: La densità di probabilità nello spazio dei microstati
di un sistema in equilibrio termico con una riserva di calore e in equilibrio materiale con una riserva
di particelle è quella che rende minimo il potenziale gran canonico (3.43).
Indichiamo con HN la ”hamiltoniana del sistema quando esso si trova in un microstato con N particelle”.
Si trova facilmente (vedi l’es. 5.9a):
ρgc (N ; xN ) =
1
e−β(HN (xN )−µN ) ,
Γ0 (N )Z
(5.46)
dove assumiamo: Γ0 (N ) =
˙ h3N , e dove Z è la ”funzione di gran partizione”:
Z =
˙
∞
X
N =0
1
Γ0 (N )
Z
(N )
ΓN
dxeff e−β(HN −µN ) .
(5.47)
Una utile rappresentazione di Z si ottiene introducendo la ”fugacità”: z =
˙ exp(βµ), e scrivendo Z come:
Z
∞
∞
X
X
eβµN
(N )
Z =
˙ Z(T, V, z) =
dxeff e−βHN =
˙
z N ZN ,
Γ0 (N ) ΓN
N =0
(5.48)
N =0
dove ZN è data dalla (5.7), e dove: Z0 =
˙ 1, consistentemente col fatto che l’energia libera di un gas di 0
particelle deve essere nulla: A0 =
˙ − kB T ln Z0 = 0. Si noti che le variabili indipendenti nella (5.48) sono
(T, V, z), invece di (T, V, µ). Calcolando il potenziale gran canonico Ω[ρ] (vedi l’es. 5.9b), per ρ =
˙ ρgc (con
z, invece di µ, come variabile indipendente), otteniamo:
Ω=
˙ Ω[ρgc ] =
˙ Ω(T, V, z) = −kB T ln Z .
(5.49)
Deriviamo le equazioni di stato. Ricordando la (3.44), possiamo scrivere:
P V = kB T ln Z ,
(5.50)
che dà la pressione come funzione di (T, V, z). Per ottenere l’equazione di stato del gas nella forma più
¡
­ ®¢
­ ®
usuale: P = P T, V, N , è necessario esprimere z in funzione del numero medio di particelle, N . La
probabilità, p(N ), che il sistema abbia N particelle è:
Z
1
(N )
p(N ) =
˙
dxeff ρgc (xN , N ) = z N ZN .
(5.51)
Z
ΓN
5.7
La teoria di Lee-Yang
68
Il numero medio di particelle si può allora calcolare come:
∞
­ ® X
∂
N =
N p(N ) = z
ln Z .
∂z
(5.52)
N =1
Si noti che la (5.52) coincide con la relazione termodinamica: N = −∂Ω/∂µ (vedi la (3.45)). La (5.52)
esprime il valor medio di N in funzione di (T, V, z). La (5.50) e la (5.52) si possono considerare una
rappresentazione parametrica dell’equazione di stato:
1
ln Z ,
βV
(5.53)
­ ® ­ ®
∂
2)
N =
˙ N (T, V, z) = z
ln Z .
∂z
¡
­ ®¢
L’equazione di stato del gas nella forma: P = P T, V, N , segue invertendo la (5.53)(2) per ricavare:
¡
­ ®¢
z = z T, V, N , e poi sostituendo nella (5.53)(1). Il calcolo può essere fatto solo nei casi in cui Z è nota
esplicitamente (come esempi, vedi l’esercizio 5.7b, e il par. 7.8).
1)
P =
˙ P (T, V, z) =
5.6 La fluttuazione del numero di particelle
Consideriamo la fluttuazione di N per un fluido (gas, o liquido, o gas e liquido coesistenti) in equilibrio
materiale con dato µ, e in equilibrio termico con data T . Procedendo come per la (5.51) otteniamo:
∞
∞
X
­ 2®
1 ∂ ∂
1 X 2 N
N z ZN = z
z
Z.
N =
˙
N 2 p(N ) =
˙
Z
Z ∂z ∂z
Dalla (5.52) segue:
(5.54)
N =1
N =1
­ 2 ® ­ ®2
∂
N − N =z
∂z
µ
1 ∂Z
z
Z ∂z
¶
=z
∂hN i
∂hN i
= kB T
.
∂z
∂µ
(5.55)
Ricordiamo poi la formula (vedi (3.103)):
∂hN i
= n2 V κ T ,
∂µ
(5.56)
dove κT è definita nella (3.72). La (5.55) diventa allora:
2
­ 2®
hN i
2
N − hN i = kB T
κT .
V
(5.57)
Se la comprimibilità isoterma κT è finita, allora la fluttuazione risulta finita. Quindi, nel limite
termodinamico (che nella teoria gran canonica si esprime come: L =
˙ V → ∞), la ”fluttuazione quadratica
media relativa” è nulla:
"­
®#
(N − hN i)2
L
= 0.
(5.58)
2
hN i
Analogamente a quanto discusso nel § 4, la (5.58) suggerisce che, se κT < ∞, allora la meccanica statistica
canonica e la gran canonica sono equivalenti [Hu87 § 7.6].
Se κT è infinita, come avviene (nel limite termodinamico) nel punto critico della transizione gas-liquido
(dove l’isoterma P = P (V ) presenta un flesso orizzontale), o nella regione della coesistenza gas-liquido, la
fluttuazione è infinita, e l’equivalenza potrebbe non sussistere.
La fluttuazione al punto critico dà luogo al fenomeno della ”opalescenza critica”, consistente in una
diffusione anomala della luce, che conferisce al fluido un aspetto lattescente [Sta fig. 1.6]. Nella regione di
5.7
La teoria di Lee-Yang
69
coesistenza l’opalescenza non si verifica perchè la gravità determina la separazione delle due fasi: il fluido
risulta cosı̀ costituito da due fluidi (il gas e il liquido) omogenei, in cui la fluttuazione assume valori finiti.
5.7 La teoria di Lee-Yang
Le isoterme di un gas reale presentano, per T < Tc , un tratto orizzontale (vedi la fig. 3.2a), ai cui
estremi la funzione P (V ) è (continua ma) non derivabile. La presenza di ”anomalie”, come la suddetta non
derivabilità, o altro, nelle funzioni termodinamiche, è l’elemento più caratteristico della fenomenologia delle
transizioni di fase, e l’individuazione del meccanismo matematico capace di generare tali anomalie è un
problema teorico di grande interesse. Tale meccanismo dovrebbe essere implicito nella teoria: ad esempio,
nella meccanica statistica canonica, P (V ) dovrebbe potersi ottenere, con le sue anomalie, dalla funzione
di partizione ZN (T, V ) =
˙ Z(T, V, N ) (mediante la (5.5) e la seconda delle (3.38)). È chiaro tuttavia che
sarebbe necessario calcolare ZN in modo esatto, perchè eventuali espressioni approssimate di ZN (vedi,
ad esempio [Re80 § 9.H.1]) non solo danno valori numerici approssimati delle grandezze termodinamiche,
ma, ciò che più importa per il presente problema, possono introdurre proprietà analitiche spurie (come ad
esempio il tratto con ∂P/∂V > 0 nelle isoterme di Van der Waals [Re80 § 9.H.2]). D’altra parte, il calcolo
esatto di ZN è di fatto impossibile, per un gas non ideale. Ciò rende la meccanica statistica canonica
inadatta ad affrontare il problema delle anomalie.
La meccanica statistica gran canonica risulta invece più efficace. Cominciamo col ricordare che la
funzione di gran partizione per un gas in un volume V , con temperatura T e fugacità z è (vedi la (5.48)):
Z=
∞
X
z N ZN .
(5.59)
N =0
L’energia potenziale della forza tra due molecole di un gas reale contiene una parte repulsiva del tipo
(approssimativamente) ”sfera dura”, con raggio r0 , e una parte attrattiva con range finito (vedi fig. 5.1).
V(r)
Fig. 5.1 :
r0
Un potenziale realistico.
r
La parte repulsiva fa sı̀ che, per ogni valore, V , del volume, esista un numero, Nmax =
˙ N (V ), tale che
se il numero delle molecole fosse maggiore di Nmax , allora la distanza tra i centri di almeno una coppia
di molecole sarebbe minore di r0 . Allora, l’energia potenziale di interazione sarebbe +∞, e risulterebbe:
ZN = 0 (per N > Nmax ). Nmax è quindi il numero massimo di molecole che possono essere contenute in
V ; si noti che Nmax non dipende nè da T nè µ, ma solo da V . Segue che, per un dato V , Z diventa un
polinomio (in z) di grado Nmax (con coefficienti positivi):
Z=
N
max
X
z N ZN .
(5.60)
N =0
Una Z modello è la seguente ([UhF § III.4], [Re80 § 9.G]):
Z =
˙
(1 + z)V (1 − z V )
.
1−z
(5.61)
5.7
La teoria di Lee-Yang
70
Si noti che la (5.61) è un polinomio di grado 2V −1 (assumiamo che V sia il volume in unità tali da renderlo
adimensionale) con coefficienti positivi. Quindi la (5.61) è del tipo (5.60) con Nmax (V ) = 2V − 1 (4) . La
pressione P (z) e il volume per particella v(z) seguono dalle (5.53). Consideriamo separatamente i due
intervalli: z < 1, e z > 1. Si ottiene:
£
¤
V ln(1 + z) + ln(1 − z V ) − ln(1 − z) /V
P (z)
= £
¤
kB T
V ln(1 + z) + ln(z V − 1) − ln(z − 1) /V
(z < 1) ;
(5.62)
(z > 1) .
£
¤
V z/(1 + z) − V z V /(1 − z V ) + z/(1 − z) /V
1
=
¤
v(z) £
V z/(1 + z) + V z V /(z V − 1) − z/(z − 1) /V
(z < 1) ;
(5.63)
(z > 1) .
È anche facile verificare che P (z) e v(z) sono continue in z = 1, con:
P (1) = V −1 [V ln 2 + ln V ] ,
v(1) = 1/2 .
(5.64)
Risulta poi che le due funzioni P (z) e v(z) sono monotonicamente crescenti, e che [v(z)]−1 è invertibile
([v(z)]−1 ha un flesso verticale in z = 1: vedi fig. 5.2a). Sostituendo z = z(v) in P (z) si ottiene P in funzione
di v: P = P (v). Risulta che P (v) è continua e derivabile, con un flesso orizzontale in v = v(1) (fig. 5.2b).
____
1
v (z)
Fig. 5.2 :
a) la funzione (5.63);
b) la funzione
P(v)
V<
(b)
___
1
vL
___
1
vg
V=
(a)
P = P (v).
1
z
vL
vg
v
Si noti la somiglianza tra il grafico della funzione P (v) e l’isoterma di un gas reale. Tuttavia, P (v) risulta
derivabile ovunque: dobbiamo allora concludere che, per V finito, il tratto orizzontale e la non derivabilità
di P (v) nei suoi estremi non si manifestano.
Consideriamo allora il limite V → ∞. In tale limite risulta:
ln(1 + z)
(z < 1) ;
P (z)
=
kB T
ln(z + 1) + ln z
(z > 1) .
z/(1 + z)
1
=
v(z)
(2z + 1)/(1 + z)
(5.65)
(z < 1) ;
(5.66)
(z > 1) .
P (z) è continua in z = 1, mentre v −1 (z) ora è discontinua: il grafico di v −1 (z) presenta, nel punto z = 1,
un tratto verticale . Per z < 1 e z > 1 la funzione v = v(z) è invertibile; se poi definiamo z = 1 per
vl < v < vg , otteniamo una funzione z = z(v) definita per ogni z. Sostituendo z(v) in P (z) otteniamo
infine la funzione:
(4)
ln[v(1 − v)/(2v − 1)2 ]
P (v)
= ln 2
kB T
ln[v/(v − 1)]
(1/2 < v < 2/3) ;
(2/3 < v < 2) ;
(5.67)
(2 < v) .
Per V = 2v, con v dispari (ad esempio), segue: (1 − z 2v ) =
˙ (1 − z v ) (1 + z v ) = (1 − z)(1 + z + z 2 + . . . + z v −1 ) (1 + z v ).
5.8
Esercizi
71
Il grafico della (5.67) ha lo stesso andamento delle isoterme del gas reale per T < Tc !
La comparsa della discontinuità in z = 1 è determinata dal comportamento, nel piano z complesso,
degli zeri della funzione di gran partizione. Osserviamo infatti che, per V finito, Z è, come abbiamo visto
sopra, un polinomio in z di grado Nm :
Z =
˙ 1 + zZ1 + · · · + z Nm ZNm .
(5.68)
I coefficienti Zi (i = 0, . . . , N ) sono positivi: quindi l’equazione Z = 0 non ha radici reali. Si dimostra
allora ([YL52], [Hu87 § 9.3]) che P (z) e v(z) sono funzioni analitiche in una regione del piano z (complesso)
che contiene l’intero asse reale, e che la funzione P (v) è derivabile per 0 < v < ∞: ciò equivale a dire
che per V finito non c’è coesistenza gas-liquido. Invece, per V → ∞, gli zeri di Z aumentano di numero
(Nm cresce) e si muovono nel piano z. Può accadere che un punto, z0 , dell’asse reale diventi punto limite
di una successione di zeri. Si dimostra allora che le suddette proprietà di analiticità valgono per <z < z0
e per <z > z0 , ma non in un intorno di z0 . Il tipo di singolarità in z0 è individuabile solo con uno
studio dettagliato: se, tuttavia, esso consiste in una discontinuità della derivata prima, allora abbiamo
la situazione delle figg. 5.2. Nel caso della funzione (5.61), gli zeri sono facilmente individuabili: essi
coincidono con il punto z = −1 (V volte) e con le radici dell’unità:
z = e2πik/V ,
per :
k = 1, 2, . . . , V − 1 .
(5.69)
Gli zeri (5.69) sono distribuiti uniformemente sul cerchio di raggio 1; per V → ∞ la loro densità aumenta,
e il punto z0 =
˙ 1 diventa un punto limite.
Il comportamento nel limite termodinamico degli zeri della funzione di gran partizione è dunque il
meccanismo matematico che genera le anomalie delle funzioni termodinamiche nella transizione gas-liquido
(”teoria di Yang-Lee”). È bene notare che la conoscenza degli zeri della funzione di gran partizione equivale
alla conoscenza della funzione stessa: dal punto di vista pratico, quindi, la teoria di Yang-Lee, per quanto
elegante, non è, in generale, di grande utilità.
5.8 Esercizi
Esercizio 5.1 Funzione di partizione e quantità termodinamiche.
Verificare le relazioni (vedi la prima delle (3.38) e la (3.39)):
S = kB
∂
∂A
(T ln Z) =
˙ −
;
∂T
∂T
U =
˙ hHi = −
∂
∂
ln Z =
˙
(βA) .
∂β
∂β
(5.70)
Esercizio 5.2 Entropia di un sistema canonico discreto.
Si consideri un sistema in equilibrio a temperatura T , e caratterizzato da microstati discreti con
energie non degeneri Er (r = 1, 2, . . .). Mostrare che l’entropia, S = (U − A)/T , può essere scritta come:
P
S = −kB r pr ln pr , con: pr =
˙ Z −1 e−βEr .
Esercizio 5.3 Energia media di un sistema ideale.
Si consideri un sistema classico, in equilibrio termico ad una temperatura T , i cui microstati corrispondono (uno a uno) ai punti di uno spazio cartesiano di dimensione n con coordinate (x1 , ...xn ), dove
Pn
ad ogni microstato corrisponde l’energia: E({x}) = i=1 αi x2i (αi > 0 per ogni i).
a) Calcolare la funzione di distribuzione canonica e l’energia media. [Risultato: hEi = (n/2)kB T .]
R Q
b) hEi risulta indipendente dagli αi : dimostrarlo a partire dalla definizione: hEi = ( i dxi ) ρc H.
5.8
Esercizi
72
Esercizio 5.4 Sistemi ideali.
a) Derivare l’equazione di stato di un gas ideale classico, usando la meccanica statistica canonica.
b) Verificare che, per un gas ideale di particelle identiche, risulta: A(T, λV, λN ) = λA(T, V, N ) (omogeneità di A).
c) Calcolare la funzione di partizione, l’energia interna, e la capacità termica di un oscillatore armonico
unidimensionale, con hamiltoniana:
H=
1 2 1
p + m ω2 q2 .
2m
2
d) Per il paramagnete di Ising ideale, con energia: E({s}) =
˙ −h
(5.71)
PN
i=1
(5)
µi (vedi l’esercizio 1.4), calcolare
la funzione di partizione, Z, l’energia libera: A(T, h) =
˙ − kB T ln Z
, l’energia interna, e il ”momento
P
N
magnetico totale”: Mt =
˙ h i µi i. [Risultati: [Z = (2cosh βµh) ]; Mt [= −(∂G/ ∂h)] = N µ tanhβµh.]
Esercizio 5.5 Proprietà della funzione di partizione.
a) Come cambiano ρc , Z, A, se al posto della hamiltoniana H si prende la hamiltoniana H + C, con
C costante? Come cambiano i valori medi canonici?
b) Scrivere la hamiltoniana per un gas di N molecole (classiche) dello stesso tipo come: H = K + W
(dove K è l’energia cinetica e W è l’energia potenziale), e definire la costante Γ◦ (vedi la (5.7)) come:
Γ◦ =
˙ h3N , dove h è la costante di Planck (6) . Mostrare che, integrando sui momenti, la funzione di
partizione, ZN (V ), per il gas contenuto in un volume V e a temperatura T , può essere scritta come:
ZN (V ) =
˙
dove d3N q =
˙
QN
i=1
Z
1
h3N N !
d3 qi , λ =
˙
dx e
−βH
ΓN
1
=
N ! λ3N
Z
d3N q e−βW =
˙
1
QN ,
N ! λ3N
(5.72)
p
h2 β/2πm è la ”lunghezza d’onda termica” (vedi la (7.63)), e QN è:
Z
QN =
˙
d3N q e−βW ;
(5.73)
QN è la ”funzione di partizione configurazionale” (per W = 0 si ottiene: QN = V N ).
c) Mostrare che la ”densità di probabilità nello spazio delle q” (per un sistema di N particelle) è:
ρ(q1 , . . . , qN ) =
˙
Z Y
N
d3 pi ρc (q1 , . . . , pN ) =
i=1
1 −βW
e
.
QN
(5.74)
d) Calcolare la fugacità (z =
˙ eβµ ) per il gas ideale nella rappresentazione dell’energia libera [usare:
µ = ∂A/∂N ]. Mostrare che per N → ∞ risulta: z = λ3 /v, con v =
˙ V /N .
e) Calcolare la media (canonica) dell’energia cinetica del gas del punto (b) [hKi = (3/2)N kB T ].
Discutere il fatto che hKi non dipende dalla massa delle molecole.
Esercizio 5.6 Additività dell’energia libera di due sistemi non interagenti.
Si consideri un sistema costituito da due sottosistemi non interagenti, A e B, in equilibrio termico con
una unica riserva di calore: si indichino con (a, b) i microstati (che supponiamo discreti) di ognuno dei due
(5)
A volte (ad esempio: [Sta § 6.1]) la quantità −kB T ln Z(T, h) viene indicata con G(T, h) (energia libera ”di Gibbs”),
per il motivo che il campo h ha qualche analogia con la pressione (ad esempio, entrambi sono quantità intensive).
(6)
Nella teoria classica, la costante di Planck è utilizzata solo perchè ha la dimensione richiesta (h non figura nelle quantità
termodinamiche del sistema); tuttavia, la validità della scelta di h è confermata dal limite per alta temperatura della funzione
di partizione (quantistica) del gas ideale quantistico ([Pat § 5.5]; vedi anche (7.74)).
5.8
Esercizi
73
sottosistemi, con Ea e, rispettivamente, Eb , le relative energie. Mostrare che la distribuzione canonica del
sistema complessivo si fattorizza:
ρ = ρA ρB ,
con :
ρA =
˙ [ZA ]
−1
exp(−βEa )
e:
ZA =
˙
X
exp(−βEa ) ,
(5.75)
a
e analogamente per ρB . Mostrare che l’energia libera del sistema complessivo è additiva: A = AA + AB .
Esercizio 5.7 Proprietà dell’insieme gran canonico (I).
a) Verificare che l’energia interna di un sistema classico può essere espressa nella forma:
·
U (z) = −
∂
ln Z
∂β
¸
.
(5.76)
z
b) Verificare che, per un gas ideale classico, le (5.53) implicano l’equazione di stato P V = hN i kB T .
Esercizio 5.8 Proprietà dell’insieme gran canonico (II).
a) Considerare l’entropia gran canonica:
S=
˙ − kB
∞ Z
X
N =0
dxN ρgc (N, xN ) ln[Γ◦ (N ) ρgc (N, xN )] ,
(5.77)
ΓN
e verificare la relazione:
1
µ
hHigc − hN igc ;
(5.78)
T
T
usare la prima delle (5.53) e verificare che la (5.78) coincide con la relazione di Eulero (3.11); verificare
che la (5.78) può essere scritta, in termini del potenziale gran canonico (5.49), come: S = −(∂Ω/∂T )V,µ .
b) Mostrare che la pressione può essere scritta come: P = −(∂Ω/∂V )T,µ . [Soluzione: Ω è estensiva
(vedi la (3.43)), ed è funzione di una sola variabile estensiva: Ω = Ω(T, V, µ); segue: Ω/V = ∂Ω/∂V ].
S = kB ln Z +
Esercizio 5.9 Metodo variazionale per la distribuzione gran canonica.
Definire il ”funzionale potenziale gran canonico”, Ω[ρ], come: Ω[ρ] =
˙ H[ρ] − T S[ρ] − µ N [ρ], dove:
H[ρ] =
˙
∞ Z
X
N =0
ΓN
(N )
dxeff HN ρ(N, xN ) ,
S[ρ] =
˙ − kB
∞ Z
X
N =0
ΓN
(N )
dxeff ρ(N, xN ) ln[Γ◦ (N ) ρ(N, xN )] , (5.79)
e dove N [ρ] =
˙ hN i è dato dalla (5.45). Nella (5.79), HN =
˙ H(N, xN ) è la hamiltoniana del sistema nella
configurazione con N particelle, e Γ◦ (N ) è la costante solita.
a) Introducendo un moltiplicatore di Lagrange, λ0 , e procedendo come per la (5.3), calcolare la ρ (vedi
le (5.46) e (5.47)) per cui Ω[ρ] è minimo rispetto alle variazioni δρ che rispettano la condizione:
∞ Z
X
N =0
ΓN
(N )
dxeff δρ = 0 .
(5.80)
b) Calcolare Ω[ρ] per ρ = ρgc , e verificare la (5.49).
Esercizio 5.10 Massimo di p(N ).
Assumere che, per un gas ideale, la probabilità p(N ) (vedi (5.51)) presenti un massimo (unico), in
corrispondenza ad un certo Nmax .
a) Calcolare Nmax . [Invece di p(N ), considerare ln p(N ), e utilizzare la formula di Stirling.]
b) Verificare che la relazione tra µ e Nmax coincide (a meno di costanti) con la (3.85).
6
Il modello di Ising
La aggiunta di un termine di interazione alla hamiltoniana di un sistema ideale può determinare un
fenomeno radicalmente nuovo, non riconducibile ad una perturbazione del sistema ideale: una ”transizione
di fase” (cambiamento di stato). In questo capitolo ne discutiamo sulla base di un modello elementare: il
modello di Ising a primi vicini in dimensione 1.
6.1 Il modello di Ising
Il ”modello di Ising” fu introdotto originariamente [Is25] per studiare la transizione ferromagnetica,
ma deve la sua importanza all’essere un banco di prova per la teoria generale delle transizioni di fase (1) .
Per definire il modello di Ising cominciamo col considerare uno spazio fisico di dimensione opportuna (ad
esempio 3), e un reticolo (ad esempio cubico), i cui nodi indichiamo con un indice i. Consideriamo N
nodi, e ad ognuno associamo una variabile casuale, si (i = 1, . . . , N ), con valori ±1. Le variabili s sono
dette ”spin” (la scelta del nome non è casuale (vedi la nota 3) ma, nonostante il nome, le variabili s sono
classiche). Un insieme di valori per gli spin (s1 , . . . , sN ) è un microstato (”configurazione”) del modello; il
numero delle configurazioni è 2N . Ad ogni configurazione associamo una energia (”hamiltoniana”), che di
solito viene scritta come (2) :
E({s}) =
˙ −
N
N
X
1 X
Jij si sj − µ
hi si
2 i,j=1
i=1
(con :
Jii = 0) .
(6.1)
Il significato di Jij , µ, e hi , è illustrato qui di seguito. Si noti che se le J sono nulle (e: µ = 1, hi = h)
ritroviamo il paramagnete dell’es. 1.4.
Consideriamo dapprima il termine della (6.1) lineare nelle s: interpretando la costante µ come ”momento magnetico associato a uno spin”, tale termine rappresenta l’energia degli spin nel ”campo magnetico
esterno” (in generale variabile con i) hi . È più significativo il termine bilineare nelle s: infatti esso rappresenta l’interazione tra gli spin. Le costanti Jij (”costanti di accoppiamento”) definiscono l’intensità
dell’interazione. Le caratteristiche principali delle J sono il segno, e la dipendenza dalla distanza tra i
relativi spin. Se le J sono positive (qui studieremo solo questo caso), la probabilità (canonica) di una
configurazione in cui gli spin sono ”paralleli” (cioè con lo stesso valore), è maggiore di quella di una con
(1)
In origine il modello fu formulato per un sistema unidimensionale, e il risultato fu deludente perchè, come vedremo
anche qui, esso prevede una transizione solo per T = 0. Gli studi tuttavia continuarono (per una breve storia del modello vedi
[Bru67]), e si giunse cosı̀ al fondamentale lavoro di Lars Onsager [On44], che riuscı̀ a calcolare la funzione di partizione del
modello bidimensionale con campo esterno nullo (per la soluzione del modello bidimensionale con campo non nullo, vedi A.B.
Zamolodchikov in [Za89]; la soluzione del modello tridimensionale è ancora da trovare!). Il lavoro di Onsager segnò l’inizio
di un nuovo capitolo nella meccanica statistica delle transizioni di fase, in quanto rappresentò la prima dimostrazione (quasi
inaspettata [Tho § 4.2], [Gld § 2.14.1]) della possibilità di descrivere il fenomeno nell’ambito della sola meccanica statistica,
senza ipotesi ad hoc. Per un accenno alle relazioni tra il modello di Ising e la fisica del magnetismo, vedi [Sta § 8.1].
(2)
Se, come è naturale, si interpretano le {s} come ”coordinate generalizzate”, allora la hamiltoniana (6.1) non contiene i
”momenti coniugati”. Pertanto la hamiltoniana (6.1) non genera alcuna dinamica (dsi /dt = 0). Un modello di Ising dinamico
è discusso, per esempio, in [Sta app. E].
6.1
Il modello di Ising
75
spin ”antiparalleli” (cioè con valori opposti): il caso di J positive corrisponde allora ad un sistema ”ferromagnetico”, cioè ad un sistema in cui gli spin ”tendono ad allinearsi”. Il caso di J negative corrisponde ad
un sistema ”antiferromagnetico”, in cui gli spin tendono ad essere antiparalleli; il caso di J con valori sia
positivi che negativi, a caso, corrisponde ad un sistema ”disordinato” (”vetro di spin”: [FH91], [Pa81]).
Nei ferromagneti reali l’interazione ha raggio d’azione corto: nella versione più semplice (quella che qui
considereremo), si assume che le Jij siano diverse da zero solo per spin ”primi vicini” (cioè per spin la cui
distanza è la minima possibile) (3) . Nel seguito di questo capitolo useremo unità tali che sia: µ = kB = 1.
Le grandezze intensive del modello sono T e h. Tra le grandezze estensive, è particolarmente importante il ”momento magnetico totale”:
­ ®
M (T, h, N ) =
˙ st ,
dove :
st =
˙ st ({s}) =
˙
XN
i=1
si
(6.2)
(st è il momento magnetico totale microscopico). A M è associata la ”magnetizzazione” (una quantità
intensiva):
m = m(T, h) =
˙ lim M/N .
(6.3)
N →∞
Per i ferromagneti come Fe, Ni, ecc., la magnetizzazione è un vettore, m. La proprietà termodinamica più significativa dei ferromagneti è l’esistenza di una ”temperatura critica”, Tc (> 0) (4) , tale che la
magnetizzazione ”spontanea”, cioè per campo esterno nullo, risulta (vedi la fig. 6.1):
½
m(T, 0, N )
=0
6= 0
per T ≥ Tc ,
per T < Tc .
(6.4)
m(T)
1
+˚
+˚ + +
˚
˚
+
+
+
˚
˚
Fig. 6.1 :
m(T, 0) per Ni e Fe.
+
˚
.5
˚
Ni
0
500
+
˚
˚
Fe
+
+
1000
T(K)
Uno stato macroscopico con m = 0 viene interpretato come ”fase disordinata”, e uno con m 6= 0 come
”fase ordinata”: m ha quindi il ruolo di ”parametro d’ordine” della transizione di fase ferromagnetica. Per
il modello di Ising il parametro d’ordine è scalare (vedi la (6.3)).
A prima vista, sembrerebbe che la meccanica statistica canonica, costruita a partire dall’energia
(3)
Il termine bilineare della (6.1) ”descrive” l’effetto combinato dell’interazione elettrostatica tra due elettroni (in un
campione di, per es., Fe) e del principio di esclusione. Considerando l’interazione di un elettrone con il proprio ione come
”hamiltoniana imperturbata” e l’interazione (dell’elettrone) con un elettrone di uno ione vicino come ”perturbazione”, risulta
che quest’ultima ha una forma analoga a quella del primo termine della (6.1), dove le costanti Jij sono essenzialmente elementi
di matrice (”integrali di scambio”) dell’energia di interazione elettrostatica rispetto agli stati imperturbati ([Whit cap. 2];
[FeSM § 7.1]). In realtà, la teoria quantistica prevede che l’interazione sia del tipo ”di Heisenberg”: Jij b
si · b
sj , dove
b
s è
l’operatore vettoriale di spin. La (6.1) sostituisce il vettore b
s con la sua componente nella direzione del campo esterno: ciò è
poco realistico (salvo che per sistemi fortemente anisotropi). Esiste anche una interazione ”diretta” tra i momenti magnetici
associati agli spin degli elettroni: essa risulta tuttavia molto più debole di quella di scambio.
(4)
Per esempio, per il Fe risulta Tc ≈ 1044 ◦ K (la temperatura di fusione è 1260 ◦ K ). Un campione di Fe a temperatura
ambiente dovrebbe quindi essere quasi del tutto magnetizzato: in realtà risultano energeticamente favorite configurazioni in
cui il campione è suddiviso in regioni di dimensione microscopica (”domini”) completamente magnetizzate, ma con magnetizzazioni orientate ”a caso” [KiIS cap. 15]. Qui consideriamo il sistema come costituito da un unico dominio.
6.2
La approssimazione del campo medio
76
(6.1), non possa prevedere un momento magnetico spontaneo non nullo! Consideriamo dapprima il caso
paramagnetico (Jij = 0), per T > 0. Si trova facilmente:
hsi i = tanh βhi .
(6.5)
Per hi = 0, e T > 0, segue: hsi i = 0. Alla base di questo risultato sta il fatto che per hj = 0 (per ogni j),
e T > 0, tutte le configurazioni vengono ad avere la stessa probabilità:
p({s}) =
1
2N
(per : {h} = 0 , T > 0) .
(6.6)
D’altra parte, fissato un i, le 2N configurazioni si dividono in due gruppi. quello delle 2N −1 configurazioni
in cui si = +1, e quello delle 2N −1 configurazioni in cui si = −1. Segue:
hsi i =
˙
X
si ({s}) p({s}) = 2N −1
{s}
1
1
− 2N −1 N = 0
2N
2
(per : {h} = 0 , T > 0) .
(6.7)
Il meccanismo appena descritto sopra agisce anche per un sistema ferromagnetico (Jij > 0). Infatti, se
hj = 0, per tutti gli j, la hamiltoniana (6.1) è invariante rispetto al cambiamento di segno di tutti gli spin:
E({s}) = E({−s}). Per ogni T > 0, segue (indichiamo con Z la funzione di partizione per h = 0):
1
hsi i =
Z
X
β
P
e
l<m
Jlm sl sm
{s} (si =+1)
−
X
β
e
P
l<m
Jlm sl sm
= 0.
(6.8)
{s} (si =−1)
La (6.8) implica che la magnetizzazione è nulla, per h = 0, per ogni T > 0. Tale conclusione vale,
tuttavia, se le funzioni in gioco, e in particolare la funzione di partizione Z, sono funzioni analitiche di T .
In effetti risulta che, per h = 0, e N → ∞ (limite termodinamico), Z = Z(T ) sviluppa una singolarità per
T = Tc (con Tc determinato dalla teoria: vedi ad es. [Pat § 12.10]). L’esistenza (per h = 0, e N → ∞) di
due distinti rami nella funzione m = m(T ) è resa possibile proprio da tale singolarità (vedi la fig. 6.3: un
ramo è per T ≥ Tc , e l’altro per T ≤ Tc ; si noti che m(T ) ha, in T = Tc , derivata discontinua).
Una illustrazione elementare del ruolo delle singolarità è data dal modello di Ising paramagnetico
(consideriamo il caso di campo uniforme: hi = h). È chiaro (vedi la (6.5)) che nel punto h = 0, e T = 0,
la funzione hsi non è continua. In effetti risulta che i due limiti: limh→0 , e limT →0 , non commutano:
lim lim hsi = lim 0 = 0 ,
T →0 h→0±
T →0
lim lim hsi = lim ±1 = ±1 .
h→0± T →0
h→0±
(6.9)
Si noti che la seconda delle (6.9) mostra che anche un sistema non interagente (il paramagnete) è in grado
di ordinarsi (m =
˙ hsi 6= 0), purchè sia T = 0 (torneremo su questo punto nel par. 4).
6.2 La approssimazione del campo medio
Il calcolo esatto delle proprietà termodinamiche del modello di Ising è possibile solo in dimensioni 1
(vedi i §§ 3 e 4), e 2 (vedi la nota 1). È tuttavia possibile sostituire la hamiltoniana ”esatta” (6.1) con una
hamiltoniana approssimata, per la quale il calcolo è possibile in dimensione qualunque. Lo schema base
per la costruzione della nuova hamiltoniana è la ”approssimazione del campo medio”.
Cominciamo coll’osservare che l’effetto fondamentale dell’interazione tra gli spin è di indurre correlazioni tra gli stessi, cioè di indurre ”ordine” nel sistema. Un effetto ordinante, simile a quello indotto
dall’interazione, potrebbe essere indotto anche da un opportuno campo magnetico. La approssimazione
6.2
La approssimazione del campo medio
77
del campo medio consiste, appunto, nel sostituire la hamiltoniana (6.1) con la ”hamiltoniana di campo
medio”:
N
X
Emf ({s}) = −(hmf + h)
si
(6.10)
i=1
(”mf” sta per ”mean field”), dove il ”campo medio”, hmf , deve essere definito in modo da simulare al meglio
gli effetti dell’interazione. Osserviamo allora che la ”capacità ordinante” dell’interazione è tanto maggiore
quanto più grande è il valore della costante J; inoltre, la stessa capacità è tanto maggiore quanto maggiore
è la dimensione spaziale del reticolo (in un modello a primi vicini su un reticolo cubico in dimensione 3,
per esempio, uno spin ”sente” l’influenza di 6 spin, e quindi è più ”legato” di un sistema in dimensione
1, dove uno spin sente l’influenza solo di 2 spin). Assumiamo allora che hmf sia proporzionale a J e al
”fattore di coordinazione del reticolo (cubico)”, γ (γ = 2, 4, 6, se la dimensione è, rispettivamente: 1, 2,
3). Notiamo poi che se m = 0 (ciò si verifica per T sufficientemente grande) il sistema è ”disordinato”: in
tal caso l’effetto ordinante dell’interazione è nullo. Dobbiamo allora assumere che per m = 0 sia hmf = 0,
cioè che hmf sia proporzionale a m. In conclusione, definiamo:
hmf =
˙ γJm .
(6.11)
La (6.11) e la (6.10) definiscono la approssimazione di campo medio. È difficile prevedere, a priori,
l’errore prodotto dalla approssimazione. Si può dire solo che la approssimazione altera le caratteristiche
delle correlazioni tra gli spin. In effetti, le correlazioni ”esatte”, cioè quelle indotte dalla (6.1), hanno un
effetto ”locale”, nel senso che esse si manifestano su una distanza limitata (”lunghezza di correlazione”:
vedi § 5); al contrario, le correlazioni indotte da hmf hanno un effetto ”globale”, nel senso che hmf agisce
su tutto il sistema. Possiamo allora prevedere che l’errore sarà più significativo per quei fenomeni (come
i fenomeni critici: vedi il commento alla fine di questo paragrafo) in cui le correlazioni giocano un ruolo
importante.
Calcoliamo le proprietà termodinamiche del modello di Ising nella approssimazione del campo medio.
Usando la probabilità canonica corrispondente all’energia (6.10), è immediato ricavare (vedi anche gli es.
1.4, 5.4d) che m deve soddisfare l’equazione:
m = tanh [β(h + hmf )] =
˙ tanh[β(h + γJm)] .
(6.12)
Limitiamoci al caso h = 0 (per il caso h 6= 0 vedi, ad esempio: [Sta cap. 6]). Posto:
Tc =
˙ γJ
(6.13)
(ricordiamo che qui kB = 1), la (6.12) diventa:
·
m = tanh
¸
Tc
m =
˙ tanh (xm) ,
T
con :
x=
˙
Tc
.
T
(6.14)
Le soluzioni della (6.14) possono essere studiate graficamente, considerando le intersezioni dei grafici delle
due funzioni (di m): y1 =
˙ m, y2 =
˙ tanh (xm) (vedi la fig. 6.2). Il parametro x rappresenta la pendenza
di y2 nell’origine. Consideriamo dapprima il caso: x ≤ 1 (T ≥ Tc ). Allora l’unica intersezione delle due
curve, cioè l’unica soluzione della (6.14), è m = 0 Consideriamo poi il caso: x ≥ 1 (T ≤ Tc ). Ora ci sono
tre intersezioni, e quindi tre soluzioni della (6.14). La soluzione m = 0 deve essere scartata (5) . Studiamo
(5)
È possibile formulare una espressione dell’energia libera, Amf , consistente con la approssimazione del campo medio.
Risulta che m = 0 corrisponde ad una massimo di Amf , mentre le altre due soluzioni corrispondono invece a minimi di Amf :
quindi gli stati di equilibrio del sistema sono quelli con |m| 6= 0 (la ”scelta” tra m = |m| e m = −|m| dipende da come h
tende a zero) [LLfs1 § 144].
6.2
La approssimazione del campo medio
78
la dipendenza da T delle soluzioni non nulle. Consideriamo la soluzione m > 0 (ad esempio), e scriviamo
la (6.14) come:
1 − e−2xm
.
1 + e−2xm
m=
(6.15)
Per x À 1 (T ¿ Tc ) dalla fig. 6.2 segue m ≈ 1, e quindi:
m ≈ 1 − 2 e−2xm ≈ 1 − 2 e−2x =
˙ 1 − 2 e−2Tc /T .
(6.16)
Consideriamo poi la regione x ' 1: dalla fig. 6.2 risulta che in tal caso deve essere m ¿ 1. Possiamo allora
scrivere la (6.14) come: xm = arctanh m, e usare lo sviluppo:
arctanh m = m + m3 /3 + m5 /5 + ... .
(6.17)
xm = m + m3 /3 + O(m5 ) .
(6.18)
La (6.14) diventa allora:
y
1
y1
0
{
y2
Fig. 6.2 :
-1
Soluzioni dell’ eq. (6.14).
-1
1
0
T = 0.50 T c
T = 0.66 T c
T = 1.25 T c
m
Trascurando i termini indicati con O(m5 ), segue (per T / Tc ):
m3 = 3m(x − 1) = 3m(Tc − T )/T ≈ 3m(Tc − T )/Tc ,
da cui:
m=
p
(6.19)
3(Tc − T )/Tc .
(6.20)
Riassumendo, risulta (vedi la fig. 6.3):
= 0
p
m(T, 0) ≈ 3 (1 − T /Tc )
≈ 1 − 2 exp (−2Tc /T )
(per T ≥ Tc ) ;
(per T / Tc ) ;
(6.21)
(per T ¿ Tc ) .
La temperatura Tc =
˙ γJ è le ”temperatura critica” (vedi la (6.4) e la fig. 6.3); si noti che nella approssimazione di campo medio risulta Tc > 0 anche in dimensione 1 (γ = 2).
Calcoliamo, nella approssimazione del campo medio, la ”suscettività a campo nullo”:
µ
χ=
˙
∂m
∂h
¶
.
(6.22)
h=0
Ricordiamo le relazioni:
tanh(x + y) =
tanh x + tanh y
;
1 + (tanh x)(tanh y)
tanh α ≈ α − α3 /3 + 2α5 /15 + . . .
(per : α ¿ 1) .
(6.23)
6.3
Il modello di Ising unidimensionale
79
Dalla (6.12), scritta come: m = tanh(βh + xm), otteniamo facilmente:
tanh βh =
m − tanh xm
.
1 − m tanh xm
(6.24)
Consideriamo la regione T ≈ Tc (cioè x ≈ 1), e h ≈ 0: in tale regione abbiamo m ¿ 1. Possiamo allora
sviluppare le tangenti iperboliche nella (6.24) e ottenere:
βh − (βh)3 /3 + · · · ≈
m − (xm − (xm)3 /3 + · · ·)
≈ m(1 − x) + m3 [x3 /3 + x(1 − x)] + · · · .
1 − m (xm − (xm)3 /3 + · · ·)
(6.25)
Derivando rispetto ad h, e ponendo poi h = 0, segue:
£
¤
β ≈ χ (1 − x) + 3m2 (x3 /3 + x(1 − x)) .
(6.26)
Consideriamo dapprima il caso T ' Tc (e h = 0). Dalle (6.21) segue m = 0, e (ricordiamo che qui kB = 1):
χ≈
1
β
=
1−x
T − Tc
(T ' Tc ) .
(6.27)
Invece, nel caso T / Tc (e h = 0), dalle (6.21) segue m2 ≈ 3(Tc − T )/Tc ). Otteniamo allora (trascuriamo
un termine in (Tc − T )2 ):
χ≈
1
2(Tc − T )
(T / Tc )
(6.28)
(le (6.27) e (6.28) esprimono la ”legge di Curie-Weiss”). Come vedremo più avanti, la divergenza di χ per
T → Tc è riconducibile alle proprietà delle ”funzioni di correlazione”
(6)
.
m(T,0)
1
Fig. 6.3 :
Magnetizazione spontanea (6.21).
Tc
T
Possiamo valutare la bontà dei risultati ottenuti confrontando la (6.21) con i dati sperimentali (e
con i risultati esatti, laddove disponibili). Risulta che l’accordo migliora al crescere della dimensione
spaziale. Nel caso unidimensionale la (6.21) è errata, in quanto prevede Tc > 0, mentre dal calcolo
esatto (§§ 3, 4) seguirà Tc = 0
(7)
. Per sistemi con dimensioni d = 2, 3, l’accordo è migliore, ma i
valori numerici che si trovano rimangono distanti dai corrispondenti valori sperimentali: ad esempio, per
d = 3 risulta sperimentalmente (per T / Tc ): m ∝ (Tc − T )β , con β ≈ .35, contro il valore β = .5
previsto dalla seconda delle (6.21) (β, da non confondersi con (kB T )−1 , è l’ ”esponente critico” della
magnetizzazione). Considerazioni analoghe valgono per la suscettività a campo nullo: le (6.27) e (6.28)
prevedono: χ ∝ |T − Tc |−γ , con γ = 1, mentre il dato sperimentale (ad es. per il Ni) è (per T > Tc ):
γ ≈ 1.35. Come vedremo in seguito, per T ≈ Tc (”regione critica”) le correlazioni tra gli spin giocano
un ruolo fondamentale. La discrepanza tra i valori degli esponenti critici è un esempio della già citata
impossibilità, per la approssimazione di campo medio, di descrivere correttamente le correlazioni.
(6)
Per una discussione delle funzioni di correlazione nell’ambito di una teoria di campo medio vedi [Pa87 § 3.4].
(7)
Nei sistemi reali, i valori di Tc presentano una grande variabilità [Sta tab. 3.5]: in generale, Tc cresce con la dimensione
(come giustificato, qualitativamente, dalla (6.13)) e con J (vedi ancora la (6.13)). Da notare che anche i valori degli esponenti
critici dipendono, in generale, dalla dimensione (vedi [Re80 tab. 10.1]).
6.3
Il modello di Ising unidimensionale
80
6.3 Il modello di Ising unidimensionale
Discutiamo ora il modello di Ising (a primi vicini) unidimensionale, costituito da un reticolo lineare
(”catena”: vedi la nota 11) di N nodi, e quindi con N spin. Supponiamo che la catena sia ”chiusa”, cioè
che sia costituita da N + 1 spin con sN +1 =
˙ s1 (per la catena ”aperta” vedi l’es. 6.1); la hamiltoniana
(6.1) si scrive allora:
N
N
X
X
E({s}) = −
Ji si si+1 −
h i si .
(6.29)
i=1
i=1
Limitiamoci a considerare il caso: Ji = J, hi = h, (catena e campo ”uniformi”) e scriviamo la (6.29) come:
¸
N ·
X
1
Jsi si+1 + h(si + si+1 ) .
2
i=1
E({s}) = −
(6.30)
Illustriamo il metodo della ”matrice di trasferimento”. Osserviamo che la funzione di partizione:
X
Z =
˙
X
...
s1 =±1
exp [−βE({s})] =
˙ Z(T, h, N ) ,
(6.31)
sN =±1
può essere scritta, usando la condizione di chiusura della catena, come:
X
Z=
...
s1 =±1
X
Ts1 s2 Ts2 s3 · · · TsN s1 ,
(6.32)
sN =±1
dove abbiamo definito: a =
˙ βJ , b =
˙ βh, e:
¶
µ
1
Tsi si+1 =
˙ exp asi si+1 + b(si + si+1 )
2
(per :
i = 1, . . . , N ) .
(6.33)
I numeri Tsi si+1 (per si = ±1, si+1 = ±1) possono essere visti come elementi della matrice 2×2:
¯
¯T
T =
˙ ¯¯ +1 +1
T−1 +1
¯
¯ a+b
¯e
T+1 −1 ¯¯
=
˙ ¯¯ −a
T−1 −1 ¯
e
¯
e−a ¯¯
.
ea−b ¯
(6.34)
L’espressione (6.32) è la somma degli elementi diagonali (”traccia”) della matrice T N :
i
X h X
X
X £
¤
¡
¢
Z=
...
exp [−βE({s})] =
T N s1 s1 =
˙ Tr T N .
s1 =±1
s2 =±1
sN =±1
(6.35)
s1 =±1
Osserviamo che T è reale e simmetrica. Gli autovalori di una matrice del tipo:
¯
¯
¯A B¯
¯
¯
¯B C ¯
(6.36)
(con A, B, C reali), sono:
λ± =
i
p
1h
(A + C) ± (A − C)2 + 4B 2 ,
2
(6.37)
e i corrispondenti autovettori sono:
¯
¯
¯ x± ¯
¯
¯
¯ y± ¯ ,
"
con :
x± =
˙
µ
1+
λ± − A
B
¶2 #−1/2
"
,
y± =
˙
µ
1+
B
λ± − A
¶2 #−1/2
.
(6.38)
In particolare, gli autovalori della matrice T sono:
h
h
h
i
i
p
p
√ i
˙ ea C ± S 2 + e−4a =
˙ ea C ± R ,
λ± = ea coshb ± senh2 b + e−4a =
(6.39)
6.4
La magnetizzazione del modello unidimensionale
81
dove:
C =
˙ cosh b,
S=
˙ senh b,
R=
˙ S 2 + e−4a .
I corrispondenti autovettori hanno componenti:
h
√ i−1/2
1
x± = √ e−a e−2a + e2a S (S ∓ R)
,
2
y± =
˙ e2a (−S ±
(6.40)
√
R) x± .
(6.41)
Consideriamo valori di (T, h) tali che sia T > 0 e h arbitrario. È evidente, dalla (6.39), che risulta:
λ+ > 0 ;
λ− ≥ 0 ,
λ+ > λ −
e:
(6.42)
(per T > 0) .
(6.43)
In tal caso gli autovettori (6.41) sono ortogonali. Sia R la matrice costruita con gli autovettori (6.41):
¯
¯
¯x
x− ¯¯
R=
˙ ¯¯ +
.
(6.44)
y+ y− ¯
In virtù della ortogonalità degli autovettori (6.41), R è ortogonale:
¯
¯
¯ x+ y+ ¯
−1
¯
¯ = RT .
R =
˙ ¯
x− y− ¯
(6.45)
Posto Λ =
˙ R−1 T R (Λ è diagonale), risulta:
R
−1
T
N
R =Λ
N
¯ N
¯λ
=
˙ ¯¯ +
0
¯
0 ¯¯
¯.
λN
−
(6.46)
La funzione di partizione si scrive allora:
¡
¢
¡
¢
N
Z = Tr T N = Tr R−1 T N R = Tr ΛN = λN
+ + λ− .
(6.47)
Consideriamo ora il valor medio di uno degli spin: ad esempio s1 . Esso può essere scritto come:
hs1 i =
˙
X
1 X
...
s1 Ts1 s2 Ts2 s3 · · · TsN s1 ,
Z s =±1
s =±1
1
cioè:
(6.48)
N
¡
¢
1
hs1 i = Tr S T N ,
Z
dove :
¯
¯1
S =
˙ ¯¯
0
¯
0 ¯¯
.
−1 ¯
(6.49)
Dalla (6.46) segue allora:
¡
¢
−1
−1
Z hs1 i = Tr R−1 S R ΛN =
˙ λN
S R)++ + λN
S R)−−
+ (R
− (R
.
(6.50)
Usando le (6.44) otteniamo facilmente:
±S
± senh b
(R−1 S R)±± = √ =
˙ p
.
R
senh2 b + e−4a
(6.51)
Dalla (6.50) segue infine:
senh b
hs1 i = p
senh2 b + e−4a
N
λN
+ − λ−
.
N
λN
+ + λ−
(6.52)
Con lo stesso metodo possiamo ricavare il momento magnetico totale (6.2). È facile verificare che, in
virtù della uniformità del sistema, risulta, per uno spin generico sj :
hsj i =
˙
X
1 X
...
Ts1 s2 · · · Tsj−1 sj sj Tsj sj+1 · · · TsN s1 =
Z s =±1
s =±1
1
N
¡
¢
¡
¢
1
1
= Tr T j−1 ST N −j+1 = Tr ST N =
˙ hs1 i .
Z
Z
(6.53)
6.5
Le funzioni di correlazione
82
Per una catena uniforme risulta quindi: M = N hs1 i. Consideriamo poi la ”magnetizzazione”, cioè il
”momento magnetico per spin”:
M
= lim hs1 i .
N →∞ N
N →∞
m=
˙ m(T, h) = lim
(6.54)
Nel limite termodinamico, N → ∞, abbiamo:
"
senh b
p
m(T, h) = lim
senh2 b + e−4a
N →∞
N
1 − (λN
− /λ+ )
N
1 + (λN
− /λ+ )
#
.
(6.55)
Il significato fisico della (6.55) sarà discusso nel paragrafo seguente.
6.4 La magnetizzazione del modello unidimensionale
Come si è visto nel paragrafo precedente, per una ”catena chiusa” uniforme (vedi la (6.30)), i valori
medi hsi i non dipendono dalla posizione i, e risultano uguali alla magnetizzazione (8) :
senh βh
m(T, h) = p
,
senh2 βh + e−4βJ
(per T > 0) .
(6.56)
La (6.56) mostra che, in presenza di interazione, per T > 0 e h 6= 0, la magnetizzazione è maggiore di
quella del corrispondente modello paramagnetico: m(J>0) > m(J=0) . Per T > 0 e h = 0 risulta (sia per
J > 0, che per J = 0): m = 0. Infatti, nel limite per h → 0 dalla (6.56) segue:
m(J≥0) (T, 0) =
˙ lim m(T, h) = 0
h→0
(per T > 0).
(6.57)
Nel modello unidimensionale l’interazione non è dunque in grado, se T > 0, di mantenere l’ordine nel
sistema quando h → 0. Questo risultato può essere interpretato come ”assenza di magnetizzazione spontanea”, cioè come ”assenza della transizione di fase” (nel modello unidimensionale).
Notiamo che il risultato (6.57) è stato ottenuto nel limite ”h → 0, con T > 0”. Ciò corrisponde,
fisicamente, a ”spegnere il campo” mantenendo il sistema a temperatura finita. Se, invece, ”raffreddiamo
il sistema” (fino a T = 0) mantenendolo in un campo non nullo, allora il sistema rimane magnetizzato.
Segue infatti:
senh βh
m(0, h) =
˙ lim m(T, h) =
˙ lim p
T →0
(h6=0)
β→∞
(h6=0)
2
senh βh +
e−4βJ
= lim
β→∞
(h6=0)
senh βh
= segno (h) ,
|senh βh|
(6.58)
dove definiamo: segno(h) =
˙ h/|h| =
˙ ± 1. Se prendiamo poi il limite per h → 0± , otteniamo:
m(0, 0± ) =
˙ lim m(0, h) = ±1
h→0±
(6.59)
(si noti che la (6.59) è un caso particolare della (6.9)). La (6.59) mostra che per T = 0 il sistema
può mantenersi ordinato spontaneamente, e ciò suggerisce di interpretare la temperatura T = 0 come
temperatura critica Tc (anche se Tc = 0 !). Si ricordi, tuttavia, che la (6.59) vale anche per un paramagnete
(vedi la seconda delle (6.9)). L’influenza dell’interazione sulle proprietà della magnetizzazione a T = 0
è quindi marginale. In effetti, vedremo nel paragrafo 6 che l’effetto dell’interazione sulla suscettività (ad
esempio) è tutt’altro che marginale!
(8)
m segue dalla (6.55), usando la (6.43).
6.6
La suscettività per la catena aperta
83
6.5 Le funzioni di correlazione
Consideriamo un modello di Ising con dimensione qualsiasi, con interazione (a primi vicini) uniforme,
e con campo non uniforme. La hamiltoniana è allora:
N
N
X
J X
E({s}) =
˙ −
si sj −
h i si .
2
i=1
(6.60)
i6=j=1
Limitiamoci alla regione T > 0. Il valor medio di uno spin si si può scrivere come:
1 X −βE({s})
1 1 ∂Z
.
si e
=
Z
β Z ∂hi
hsi i =
˙
(6.61)
{s}
­
®
­
®
Chiamiamo ”funzioni di correlazione” i valori medi: si sj . Le funzioni si sj possono essere espresse da
una formula analoga alla (6.61):
­
®
1 1 ∂2Z
si sj = 2
.
β Z ∂hi ∂hj
(6.62)
Per J = 0, le funzioni di correlazione assumono una forma particolare (es. 6.6a):
­
® ­ ®­ ®
si sj = si sj
(per i 6= j,
e per J = 0) .
(6.63)
Le (6.63) suggeriscono che per J = 0 gli spin siano ”indipendenti”, o ”non correlati”. Consideriamo allora
le funzioni di correlazione ”connesse”
(9)
, Gij , definite come:
­
® ­ ®­ ®
Gij =
˙ si sj − si sj .
(6.64)
In virtù della (6.63), per J = 0, cioè in assenza di correlazione, le Gij (per i 6= j) sono nulle.
Le Gij sono legate alle ”suscettività locali”, χij :
χij =
˙
1 ∂ ³ 1 ∂Z ´
∂
hsi i =
;
∂hj
β ∂hj Z ∂hi
(6.65)
χij rappresenta la variazione del valor medio hsi i conseguente ad una variazione del campo nel punto j.
In assenza di interazione risulta: χij = 0 (es. 6.6b). La relazione tra Gij e χij è (es. 6.6c):
Gij = kB T χij .
(6.66)
Per un sistema spazialmente uniforme, Gij è una funzione solo della ”distanza” tra le posizioni i e
j: Gij = G(r), dove r =
˙ rij è una opportuna funzione degli indici i, j (ad esempio, in dimensione uno:
r =
˙ |i − j|). Le risultanze sperimentali (10) sono che, per un sistema ferromagnetico uniforme, esistono
una ”temperatura critica”, Tc , e una lunghezza, ξ = ξ(T ), detta ”lunghezza di correlazione”, tali che nella
”regione critica”: T ' Tc , h = 0, e per r À ξ, G(r) ha la forma:
G(r) ∝ r−α e−r/ξ ,
(6.67)
­
®
dove α è un numero positivo. ξ caratterizza la ”rapidità” con cui G(rij ) tende a zero, cioè con cui si sj
­ ®­ ®
tende a si sj . Di grande importanza è la dipendenza di ξ da T : risulta sperimentalmente che, nel
(9)
Le Gij sono dette ”connesse” perchè, in certi sviluppi perturbativi di ln Z, in cui ai vari termini vengono associati
opportuni grafici, a Gij risulta corrispondere un grafico ”connesso” [Do74 § II.A.1].
(10)
Le Gij si possono osservare mediante esperimenti di diffusione di neutroni [Dac], o di luce [BeP].
6.6
La suscettività per la catena aperta
84
”punto critico”, (T, h) = (Tc , 0), è: G(r) ∝ r−α . Quindi, per T = Tc abbiamo ξ = ∞ [Ma78 § 1.3]. Ciò
sarà verificato, nel caso del modello di Ising in dimensione 1, nel paragrafo seguente.
6.6 La suscettività per la catena aperta
Nelle vicinanze del punto critico le grandezze termodinamiche presentano comportamenti anomali.
Come esempio, calcoliamo, per un modello di Ising ferromagnetico, la suscettività uniforme, χ (vedi (6.22)).
Cominciamo con lo scrivere χ come:
¯
¯
1 ∂M ¯¯
M ¯¯
∂
= lim
.
lim
χ(T ) =
∂h N →∞ N ¯h=0 N →∞ N ∂h ¯h=0
(6.68)
È facile verificare che χ può essere espressa come:
" N
#
N
N
E DX
EDX
E
1 DX
χ = β lim
si sj −
si
sj
N →∞ N
i,j=1
i=1
j=1
h=0
1
=
˙ β lim
N →∞ N
"
N
X
#
Gij
i,j=1
.
(6.69)
h=0
Consideriamo il caso particolare di un modello di Ising in dimensione 1, del tipo ”catena aperta”
(11)
di N spin, in campo nullo (h = 0), e con T > 0 (per la catena chiusa si trovano risultati analoghi: vedi
l’es. 6.9). Supponiamo che N sia dispari (nel limite per N → ∞ ciò è ininfluente), poniamo: N = 2M + 1,
e assumiamo che l’indice i assuma valori in [−M, M ]. Scriviamo la suscettività (vedi la (6.69)) come
(omettiamo di indicare: h = 0):
M
X
1
χ = β lim
M →∞ 2M + 1
"
i=−M
#
M
X
Gij .
(6.70)
j=−M
Assumiamo che le Gij siano funzioni monotonicamente decrescenti della distanza: Gij = G(|i−j|) → 0
P
P
j G−M j
j Gij dipendono da i: ad esempio, per i = −M , in
P
figurano solo gli spin ”a destra di s−M ”, mentre (per i = 0) in
j G0j figurano sia gli spin a destra
P
P
di s0 che quelli alla sua sinistra. Qualitativamente, la differenza tra, per esempio, j G−M j , e j G0j ,
per |i − j| → ∞. Per N finito, le somme
è dovuta al fatto che le proprietà di uno spin ”vicino alle estremità” differiscono da quelle di uno spin
”lontano dalle stesse”. Possiamo assumere che, per N → ∞, gli spin vicini alle estremità siano ”pochi”,
e che le differenze suddette siano trascurabili (queste difficoltà non sussistono per la catena chiusa, che è
spazialmente uniforme). Assumiamo allora che, per N → ∞, le somme siano tutte uguali. Scegliamo i = 0
(per esempio), e scriviamo:
M
X
lim
M →∞
Gij ≈ lim
M →∞
j=−M
Notiamo poi che G00 =
˙ 1 (vedi la (6.64) per hsi i = 0
χ=β
∞
X
j=−∞
(11)
"
G0j = β 1 + 2
∞
X
j=1
#
M
X
G0j .
(6.71)
j=−∞
j=−M
(12)
∞
X
G0j =
˙
. Mettendo in evidenza G00 , la (6.70) diventa:
"
G0j = β − 1 + 2
∞
X
j=0
#
G0j
"
=
˙ β −1+2
∞
X
#
G(r) ,
(6.72)
r=0
n spin disposti su una linea chiusa, in modo che s1 ed sn interagiscano (con energia di interazione del tipo solito:
−J1n s1 sn ), formano una ”catena chiusa”. Se s1 ed sn non interagiscono, allora la catena è ”aperta”.
(12)
Il risultato: hsi i = 0, per T > 0 e h = 0, era stato ottenuto per la catena chiusa (vedi la (6.57)). Qui assumiamo che,
per N → ∞, sia: hsi i = 0, per T > 0 e h = 0, anche per la catena aperta (vedi anche [Sta § 8.2]).
6.7
Esercizi
85
dove il fattore 2 segue da: G0,−j = G0,j , e dove abbiamo posto G(r) =
˙ G0 r .
Calcoliamo G(r). Conviene assumere, per il momento, che le costanti J dipendano dalla posizione.
La hamiltoniana è allora:
M
−1
X
E({s}) = −
Ji si si+1 .
(6.73)
i=−M
Con il metodo dell’es. 6.1, si trova:
ZN =
˙ Z2M +1 = 22M cosh (a−M ) · · · cosh (a0 ) · · · cosh (aM −1 ) ,
dove :
ai =
˙ βJi .
(6.74)
La funzione di correlazione G(r) è allora:
­
®
1 X
s0 sr =
(s0 sr ) exp
ZN
{s}
à M −1
X
!
ai si si+1
=
i=−M
1 X
(s0 s1 )(s1 s2 ) · · · (sr−1 sr ) exp
=
ZN
à M −1
X
{s}
=
!
ai si si+1
(6.75)
=
i=−M
r−1
Y
1 ∂
∂
···
ZN =
tanh(ai ) .
ZN ∂a0
∂ar−1
i=0
Tornando al caso ”J uniforme”, cioè ponendo ai = βJ (per ogni i), otteniamo:
­
®
G(r) =
˙ s0 sr = tanhr (βJ) .
(6.76)
Per β < ∞ (cioè per T > 0) risulta: | tanh(βJ)| < 1. La (6.76) allora conferma il fatto che G(r) diminuisce
(in modulo) al crescere di r (vedi la (6.67)). Per T ' 0, cioè per βJ À 1, si trova:
¡
¢r
¡
¢
G(r) ≈ 1 − 2 e−2βJ ≈ exp −2 r e−2βJ =
˙ e−r/ξ ,
con :
ξ=
1 2J/T
e
.
2
(6.77)
Si noti che per T → 0 risulta: ξ → ∞ (vedi il commento dopo la (6.67)). Dalla (6.72) segue, per T ' 0:
∞
∞ ³
h
i
h
´r i
h
³
´−1 i
X
X
1 + e−1/ξ
χ=
˙ β −1+2
G(r) ≈ β − 1 + 2
e−1/ξ
= β − 1 + 2 1 − e−1/ξ
=
˙ β
. (6.78)
1 − e−1/ξ
r=0
r=0
Ricordiamo che, per T ' 0, è: 1/ξ ¿ 1, e quindi: e−1/ξ ≈ 1 − 1/ξ. Segue:
χ≈β
2 − 1/ξ
1 2J/T
=≈ 2βξ =
˙
e
.
1/ξ
T
(6.79)
La formula (6.79) per χ si può ottenere in modo molto più semplice usando la definizione (6.22) e
l’espressione esatta di m (vedi (6.56)). Il metodo seguito sopra tuttavia mette in luce il ”meccanismo”
che genera la divergenza per T → Tc ( =
˙ 0). Infatti, consideriamo ancora lo sviluppo (6.72). Notiamo che
per un ferromagnete le G(r) sono positive: ciò è giustificato dalla relazione (vedi la (6.66)) con le χ(r),
che per un ferromagnete sono ovviamente positive (per una dimostrazione formale vedi [Gr72 § VI-A]).
Inoltre, le G(r) sono finite: 0 ≤ G(r) ≤ 1. Quindi, χ diverge se la somma in (6.72) diverge, cioè se il
numero dei termini non trascurabili nella somma tende a ∞: questo è proprio quello che si verifica quando
la lunghezza di correlazione tende a ∞.
G(r)
T=0
1
T1 > 0
.5
Fig. 6.4 :
La funzione (6.77) per diverse
T 2 > T1
T.
0
5
10
20
r
6.7
Esercizi
86
6.7 Esercizi
Esercizio 6.1 La catena di Ising aperta in campo esterno nullo.
Si consideri un sistema di Ising unidimensionale di N spin, con energia:
E({s}) = −
N
−1
X
Ji si si+1
(6.80)
i=1
(le costanti di accoppiamento siano diverse, e h = 0). La funzione di partizione è:
X
Z =
˙ ZN =
X
···
s1 =±1
exp
"N −1
X
sN =±1
#
ai si si+1 ,
con :
ai =
˙ β Ji .
(6.81)
£
¤
exp aN sN sN +1 ,
(6.82)
i=1
a) Scrivere la (6.81) per N + 1 spin:
ZN +1 =
X
···
s1 =±1
X
exp
" N −1
X
sN =±1
#
ai si si+1
i=1
X
sN +1 =±1
e derivare la seguente relazione di ricorrenza [Sta § 8.2] per la funzione di partizione per una catena (aperta)
di N + 1 spin:
ZN +1 = 2 ZN cosh(aN ) .
(6.83)
ZN +1 = 2 Z1 cosh (a1 ) cosh (a2 ) · · · cosh (aN ) ,
(6.84)
b) Iterare la (6.83), e ricavare
N
dove Z1 può essere definita considerando che per una ”catena” di un solo spin abbiamo J = 0 (non c’è
interazione!), e quindi (per h = 0): E = 0. Segue Z1 = 2. Nel caso in cui tutte le costanti Ji siano uguali
(catena ”uniforme”), la (6.84) diventa:
ZN +1 = 2N +1 [cosh(a)]N ,
dove :
a=
˙ βJ .
(6.85)
Esercizio 6.2 Funzioni termodinamiche delle catene di spin.
a) Calcolare l’energia interna della catena aperta uniforme in campo magnetico nullo nel limite T → 0
in due modi diversi: 1) con la prima delle (5.70); 2) direttamente dalla definizione di valor medio [Risultato:
limT →0 hEi = −N J.]
b) Calcolare l’energia libera per spin: a = −(βN )−1 ln Z, per la catena chiusa, e verificare che nel
limite N → ∞ essa coincide con quella che si ottiene, per la catena aperta, dalla (6.85). [Usare la (6.47)]
Esercizio 6.3 Suscettività uniforme per il paramagnete.
Calcolare la suscettività uniforme (6.68) per h = 0 per il modello di Ising unidimensionale con J = 0
(paramagnete), e per T > 0, in due modi diversi:
a) utilizzando la definizione (6.68);
b) utilizzando la (6.69).
Esercizio 6.4 Matrice di trasferimento.
a) Definire una matrice di trasferimento per un sistema di Ising con l’energia (6.80), con Ji e hi
6.7
Esercizi
87
indipendenti da i (sistema uniforme), senza ricorrere all’artificio di scrivere l’energia come nella (6.30).
Verificare che la funzione di partizione che ne deriva coincide con la (6.47). Risultato:
¯ a+b
¯
¯ e
e−a+b ¯¯
¯
T =
˙ ¯ −a−b
.
(6.86)
e
ea−b ¯
b) Definire la matrice di trasferimento per un ”nastro chiuso” di 2 × N spin (una catena di N + 1
colonne di due spin con la colonna (N + 1)-esima coincidente con la prima, e con interazioni a primi vicini
[Tho es. 5.4]; il metodo può essere applicato a un ”nastro” di M × N spin, e, per M, N → ∞ permette di
risolvere il modello di Ising bidimensionale [On44]).
Esercizio 6.5 Probabilità di configurazioni del modello di Ising.
Mostrare, per un modello di Ising con N spin con h uniforme, che le probabilità (canoniche) delle
configurazioni: {+1} =
˙ (si = +1; per tutti gli i), e {−1} =
˙ (si = −1; per tutti gli i), soddisfano la relazione:
−2βhN
P ({−1})/P ({+1}) = e
. [Usare: Z(T, h, N ) = Z(T, −h, N ), dove Z è la funzione di partizione.]
Esercizio 6.6 Funzioni di correlazione.
a) Verificare l’equazione (6.63).
(J=0)
b) Calcolare la suscettività (6.65) per il paramagnete, e verificare che: χij
= 0 (per i 6= j).
c) Verificare l’equazione (6.66).
d) Calcolare, usando la (6.69), la suscettività uniforme a campo nullo per il paramagnete (es. 1.4e).
Esercizio 6.7 Derivazione della magnetizzazione dalla funzione di partizione.
Usare la definizione:
mN (h) =
˙
1
1 ∂ 1
1 ∂ 1
M (T, h, N ) =
ln Z(T, h, N ) =
˙
ln ZN (h) .
N
β ∂h N
β ∂h N
(6.87)
per mostrare che:
lim M (T, h, N ) = N segno(h) .
T →0
(h6=0)
(6.88)
[Soluzione: dalle (6.47) e (6.43) risulta, per T → 0:
·
µ
¶¸
λN
−
lim T ln Z = lim T ln λN
+
ln
1
+
= lim T ln λN
+
+ = N (J + |h|) ;
N
T →0
T →0
T →0
λ
+
(h6=0)
(h6=0)
(h6=0)
(6.89)
per h 6= 0 possiamo derivare rispetto ad h, e si ottiene la (6.88).]
Esercizio 6.8 Funzione di correlazione.
a) Mostrare che la probabilità che si abbia valore ±1 è:
­ ®
1 ± si
P (sj = ±1) =
.
2
(6.90)
b) Mostrare che le probabilità che si e sj siano paralleli o antiparalleli sono, rispettivamente:
­
®
1 + si sj
P (si = sj ) =
,
2
­
®
1 − si sj
P (si = −sj ) =
.
2
(6.91)
c) Mostrare che la probabilità che sia si = sj = 1 è:
P (si = sj = 1) =
­ ®¢ ¡
­ ®¢ ¡­
® ­ ®­ ®¢¤
1 £¡
1 + si
1 + sj + si sj − si sj
.
4
(6.92)
6.7
Esercizi
88
d) Mostrare che la probabilità che sia si = 1, sapendo che si = 1 (probabilità ”condizionale”), è:
P (sj = 1|si = 1) =
P (si = sj = 1)
.
P (si = 1)
(6.93)
Esercizio 6.9 Funzioni di correlazione per la catena chiusa.
Mostrare che le funzioni di correlazione per la catena chiusa, nel limite per T ' Tc =
˙ 0 e per N À 1,
coincidono con quelle per la catena aperta (vedi la (6.77)).
Soluzione: Usando il metodo della matrice di trasferimento otteniamo (assumiamo j > i):
h
i
­
®
£
¤
Z si sj = Tr ST j−i S T N −j+i = Tr R−1 S R Λj−i R−1 S R ΛN −(j−i) =
˙
X
−(j−i)
(R−1 S R)pq λj−i
(R−1 S R)qp λN
.
=
˙
q
p
(6.94)
p,q=±
Ricordando la (6.47), e la (6.43), otteniamo (per N À 1):
­
si sj
®
X µ λq ¶j−i µ λp ¶N
=
(R−1 S R)pq (R−1 S R)qp .
λ
λ
p
+
p,q=±
(6.95)
Dalla (6.43) segue, per N → ∞: (λp /λ+ )N → δp+ . Quindi:
­
®
si sj
−→
N →∞
X µ λq ¶j−i
λ+
q=±
(R−1 S R)+q (R−1 S R)q+ =
µ
= (R−1 S R)2++ +
λ−
λ+
(6.96)
¶j−i
(R−1 S R)+− (R−1 S R)−+ .
Inoltre, dalle (6.44) segue (S ed R sono definiti nella (6.39)):
e−2a
e−2a
(R−1 S R)+− = (R−1 S R)−+ = √ =
˙ p
.
R
senh2 b + e−4a
(6.97)
Per h = 0, dalle (6.97) segue allora:
­
®
Gij =
˙ si sj =
µ
λ−
λ+
¶j−i
(6.98)
(si noti che, consistentemente con l’uniformità spaziale del sistema considerato, Gij dipende solo dalla
”distanza”, j − i). Scriviamo poi la (6.98) come:
µ
Gij =
˙
λ−
λ+
¶j−i
·
λ+
= exp − (j − i) ln
λ−
¸
.
(6.99)
1
λ+
=
˙ ln
.
ξ
λ−
(6.100)
Posto: r =
˙ j − i, e: G(r) =
˙ Gij , segue (consistentemente con la (6.77)):
¸
·
r
,
G(r) = exp −
ξ
con :
La (6.100) vale anche nel caso i > j, con r =
˙ |i − j|.
Esercizio 6.10
Limite termodinamico.
Chiarire il ruolo del limite N → ∞ nella determinare la divergenza di ξ per T → 0 (vedi (6.77)).
6.7
Esercizi
89
Esercizio 6.11 Fluttuazioni al punto critico.
Verificare che la suscettività uniforme (6.69) può essere scritta come:
χ = β lim
N →∞
1­
2®
(st − hst i) h=0 .
N
(6.101)
Per T ≥ Tc (e h = 0) si ha hst i = 0. Segue:
1 ­ 2®
st h=0 .
(6.102)
N →∞ N
­ ®
Interpretare la validità simultanea, per T ' Tc , e h = 0, di: s2t = ∞ (che segue da (6.79)), e di: hst i = 0.
χ = β lim
Esercizio 6.12 Assenza di transizione per T > 0 nel modello di Ising 1d.
Si consideri una catena aperta uniforme di N =
˙ 2M + 1 spin in campo nullo, nella configurazione
P
{s}0 con energia E0 = −2M J (energia minima), e magnetizzazione m =
˙ (h i si i /N = +1. Considerare le
configurazioni, {s}1 , con una sola coppia di primi vicini di tipo (+−) o (−+): esempi di tali configurazioni,
per N = 7, sono:
+++−−−− ,
−−−++++ .
(6.103)
a) Verificare che il numero di tali configurazioni è 4M , e che tutte hanno energia: E1 = E0 + 2J.
b) Verificare che le 4M configurazioni del tipo (6.103) possono essere raggruppate in coppie caratterizzate da valori opposti della magnetizzazione: ad esempio, per le due configurazioni (6.103) è: m = ±1/7.
c) Si supponga che il sistema possa trovarsi con probabilità non nulla solo in {s}0 o nelle {s}1 (ciò è
possibile se si considera una temperatura 0 < T / J). Verificare che m è proporzionale a 1/M :
m ≈ 1/4M
e quindi : lim m = 0 .
N →∞
(6.104)
d) Considerare che per un modello di Ising bidimensionale (e uniforme) di N spin in campo nullo,
su un reticolo (ad esempio) quadrato, le configurazioni ”eccitate” con energia più bassa sono quelle, che
indichiamo ancora con {s}1 , con un solo spin −1 (rispetto alla configurazione, {s}0 , con tutti gli spin
uguali a +1), e quindi con 4 coppie (di primi vicini) di tipo (−+). Assumere, in analogia con il punto (c),
che il sistema si possa trovare solo nella configurazione {s}0 e nelle configurazioni eccitate descritte sopra,
e giustificare (qualitativamente) il fatto che ora risulta: limN →∞ m = 1.
7
I gas ideali quantistici
Molti comportamenti dei sistemi macroscopici possono essere spiegati in termini classici, ma per molti
altri è necessario ricorrere alla meccanica quantistica. Tipicamente, la comparsa di fenomeni quantistici
è legata all’abbassamento della temperatura. Consideriamo, ad esempio, un gas. Al diminuire della temperatura diminuiscono anche l’energia cinetica media e il (modulo del) momento medio delle molecole.
La corrispondente lunghezza d’onda di de Broglie e la dimensione dei pacchetti d’onda che descrivono le
molecole allora crescono, e possono diventare dell’ordine di grandezza della distanza media tra le molecole
stesse. A quel punto i pacchetti d’onda ”si sovrappongono”, e i fenomeni, tipicamente quantistici, dovuti
all’interferenza delle funzioni d’onda diventano significativi (1) .
La meccanica statistica quantistica presenta molti elementi in comune con la teoria classica: ad
esempio, il tipo di sistemi che si studiano (quelli per cui non è disponibile una informazione completa), e il
metodo di definire le quantità macroscopiche come valori medi di corrispondenti osservabili microscopiche.
Invece, la meccanica statistica quantistica si differenzia da quella classica per la definizione dei microstati
(elementi di uno spazio di Hilbert invece che punti di uno spazio delle fasi) e delle variabili microscopiche
(operatori sullo spazio di Hilbert invece che funzioni sullo spazio delle fasi).
In questo capitolo introdurremo le nozioni fondamentali della meccanica statistica quantistica (lo
”stato miscela”, e il corrispondente ”operatore statistico”), e studieremo i gas ideali di Fermi e di Bose.
7.1 La meccanica statistica quantistica
Sia Q un sistema quantistico, e sia H lo spazio di Hilbert degli stati di Q (i ”microstati”). Nel
contesto della meccanica statistica quantistica, gli elementi di H sono chiamati anche ”stati puri”. Quando
il microstato del sistema è noto, allora si dispone di una ”informazione completa” (sul sistema); tuttavia,
come ricordiamo qui di seguito, l’informazione completa su un sistema quantistico è ”meno completa” di
quella su un sistema classico.
b di Q. Siano ai gli autovalori (che assumiamo discreti (2) ) di A,
b e
Consideriamo una osservabile, A,
|ai i i corrispondenti autovettori. Supponiamo che Q si trovi in uno stato puro |ψi. Secondo la meccanica
b (sul sistema Q nello stato |ψi), i risultati della misura non sono, in generale,
quantistica, se misuriamo A
prevedibili con certezza. Si può solo affermare che i possibili risultati della misura coincidono con gli
autovalori ai , e che le rispettive probabilità sono:
(A)
pi
¯
¯2
=
˙ ¯hai |ψi¯ .
(7.1)
La (7.1) può essere interpretata introducendo un insieme, G, di N sistemi identici a Q, con N arbitrario
ma grande (N À 1), e tutti nello stesso stato |ψi (G è un ”insieme di Gibbs” di sistemi). Se su ognuno dei
b e se ni (con: P ni = N ) è il numero delle volte che l’autovalore
sistemi di G effettuiamo una misura di A,
i
i-esimo viene rilevato nelle N misure, risulta:
(A)
pi
(1)
= lim
N →∞
ni
.
N
Un altro fenomeno che fa emergere comportamenti quantistici è il ”congelamento dei gradi di libertà”, responsabile,
ad esempio, dell’annullarsi del calore specifico dei solidi per T → 0 [Man § 6.2; RiCa § 16.5].
(2)
(7.2)
Per esempio, l’energia di un sistema spazialmente limitato ha spettro puramente discreto [Thi4 § 1.1].
7.1
La meccanica statistica quantistica
91
La media dei risultati delle N misure è:
bi =
hA
˙
X
(A)
pi ai =
i
X¯
X
¯
b | ψi .
¯hai |ψi¯2 ai =
hψ|ai iai hai |ψi =
˙ hψ | A
i
(7.3)
i
Inoltre, se una misura (su uno dei sistemi di G) ha dato come risultato ai , allora il sistema si trova,
immediatamente dopo la misura, nello stato |ai i.
La meccanica quantistica ordinaria dunque è già di per sè una teoria probabilistica. Peraltro, alla
casualità ”intrinseca” della meccanica quantistica ordinaria si può aggiungere una casualità ”accidentale”.
Ciò avviene quando il sistema si trova in uno ”stato miscela”, che definiamo qui di seguito. Chiamiamo
”stato miscela” un insieme di stati (normalizzati) |ψµ i, dove µ è un indice che varia su un assegnato insieme
I (che qui assumiamo discreto: vedi la nota 3), a ognuno dei quali è associata una probabilità πµ (con:
P
µ∈I πµ = 1). Diremo che ”il sistema si trova nello stato miscela {(|ψµ i, πµ )}” quando esso si può trovare,
con probabilità πµ in uno qualunque degli stati |ψµ i. Si noti che uno ”stato” miscela non è uno stato puro
(non è una combinazione lineare di stati di H !). Lo stato miscela è uno stato puro se tutti i πµ sono nulli
tranne uno, πµ0 (= 1): in tal caso lo stato miscela coincide con lo stato puro |ψµ0 i. Gli stati puri sono
dunque casi particolari di stato miscela.
Quando il sistema si trova in uno stato miscela, allora l’informazione sul sistema è incompleta (se lo
stato miscela si riduce ad uno stato puro, l’informazione sul sistema torna ad essere completa). Una tale
situazione è analoga a quella dei sistemi classici conosciuti in modo incompleto (§ 1.2). Ad esempio, per un
sistema classico in equilibrio termico con una riserva di calore potremmo definire lo ”stato miscela classico
canonico”, come l’insieme {(x, ρc (x)) : x ∈ Γ }.
Come per i sistemi classici, dobbiamo definire i ”valori delle grandezze fisiche per un sistema conosciuto
b definiamo il risultato di una misura di B
b per un sistema
in modo incompleto”. Data una osservabile B,
b
nello stato miscela {|ψµ i, πµ }, cioè il ”valore di aspettazione di B sullo stato miscela”, come la ”media,
­ ¯ ¯ ®
b ¯ψ µ :
con le probabilità πµ , dei valori medi quantistici”, ψµ ¯B
bi =
hB
˙
X
­ ¯ ¯ ®
b ¯ψµ
π µ ψ µ ¯B
(7.4)
µ∈I
(la validità della definizione (7.4) può essere verificata analizzando un esperimento ideale: vedi il paragrafo
seguente). La (7.4) è l’analogo quantistico della definizione classica (1.2). Tra breve la analogia sarà resa
ancora più esplicita.
Conviene scrivere la (7.4) in termini di un operatore, ρb. Sia {|ϕk i : k = 1, 2, . . .} una base nello spazio
P
b
b
H. Utilizzando la relazione di completezza:
k |ϕk ihϕk | = I, dove I è l’identità, otteniamo:
α
hX
i
hX
i
X
­ ® X
b =
b
b |ϕk i =
b ,
B
πµ hψµ | B
|ϕk ihϕk | |ψµ i =
hϕk |
πµ |ψµ ihψµ | B
˙ Tr (b
ρB)
µ=1
k
k
dove
ρb =
˙
X
(7.5)
µ
¯ ®­ ¯
πµ ¯ψµ ψµ ¯
(7.6)
µ
(si noti la analogia tra la (7.5) e la (1.2)). L’operatore (7.6) è chiamato ”operatore statistico” (3) . La (7.5)
b se: B
b=
deve valere per ogni B;
˙ bI, dalla ovvia condizione: h bI i = 1, segue la condizione di normalizzazione:
Tr ρb = 1 .
(7.7)
L’ipotesi fondamentale della meccanica statistica quantistica può essere formulata come segue:
(3)
L’operatore statistico può essere definito anche nel caso in cui gli stati |ψµ i formano un insieme continuo, a condizione
di sostituire la ”probabilità” πµ con una ”densità di probabilità” π(µ) (per un esempio, vedi l’es. 7.1.b3).
7.4
Gli operatori statistici canonico e gran canonico
92
MSQ) Un sistema quantistico macroscopico si trova in uno stato miscela. Le variabili macroscopiche di ”tipo A” (§ 1.2) del sistema sono i valori medi delle corrispondenti variabili microscopiche, calcolati con l’operatore statistico (7.6). Per le osservabili di ”tipo B” si procede
mediante formule ad hoc, analoghe a quelle classiche: ad esempio, l’espressione:
S=
˙ − kB Tr [b
ρ ln ρb]
(7.8)
definisce l’entropia (vedi (1.10) e (1.11)).
7.2 Un esperimento alla Stern-Gerlach
b α=
Consideriamo il sistema Q introdotto nel § 7.1. Fissiamo un insieme, α, di autovalori di A:
˙ {aµ :
µ ∈ I}, dove I è un insieme assegnato di valori di µ, e realizziamo l’esperimento definito dalle due seguenti
operazioni (un esperimento del tipo descritto è quello di Stern-Gerlach [FLS vol III § 5.1])
b su ciascuno dei sistemi di G (l’insieme di Gibbs associato a Q). Supponiamo che NI
1) Misuriamo A
misure, tra le N effettuate, diano come risultato uno degli autovalori aµ ∈ α; più precisamente, supponiamo
P
che l’autovalore aµ (per µ ∈ I) risulti nµ volte, con µ∈I nµ = NI . Chiamiamo GI l’insieme degli NI
b ha dato come risultato uno degli autovalori di α. L’insieme GI descrive
sistemi per i quali la misura di A
un sistema che si può trovare in ciascuno degli stati |aµ i (per µ ∈ I), con probabilità:
nµ
|haµ |ψi|2
.
=P
2
N →∞ NI
ν∈I |haν |ψi|
πµ =
˙ lim
(7.9)
L’insieme delle coppie {(|aµ i, πµ ) : µ ∈ I} è uno stato miscela.
b una osservabile che non commuta con A.
b Siano bj gli autovalori di B,
b e |bj i i corrispondenti
2) Sia B
b
b La
autovettori. Immediatamente dopo la misura di A, su ciascuno dei sistemi di GI misuriamo B.
b venga effettuata su un sistema che si trova nello stato |aµ i è la (7.9). La
probabilità che la misura di B
b dia come risultato bj è dunque:
probabilità che la misura di B
(B)
pj
=
X
πµ pµj ,
dove :
pµj =
˙ |hbj |aµ i|2 .
(7.10)
µ∈I
b è allora:
La media dei risultati della misura di B
bi =
hB
˙
X
j
(B)
pj bj =
X
πµ
µ∈I
X
j
pµj bj =
X
πµ haµ |
hX
i
X
b | aµ i. (7.11)
|bj ibj hbj | | aµ i =
˙
πµ haµ | B
j
µ∈I
µ∈I
La (7.4) è cosı̀ confermata.
7.3 Proprietà dell’operatore statistico
∗
a) ρb è un operatore hermitiano: hψ | ρb | ϕi = hϕ | ρb | ψi;
¯
¯2
­ ¯ ¯ ® P
b) per ogni |ψi, il valore d’aspettazione hψ | ρb | ψi è non negativo: ψ ¯ρb¯ψ = µ pµ ¯hψµ |ψi¯ ≥ 0; in
particolare, l’elemento diagonale ρbhh è la probabilità che una misura di A dia come risultato l’autovalore ah
(vedi l’es. 7.1c). Si noti che rispetto ad una base generica l’operatore statistico non è diagonale: i termini
non diagonali possono essere numeri complessi (non soggetti ad alcuna condizione di normalizzazione), e
pertanto non possono essere interpretati come probabilità [Bal § 2.3].
7.4
Gli operatori statistici canonico e gran canonico
93
c) uno stato puro è un caso particolare di stato miscela, caratterizzato da un operatore statistico della
forma ρb =
˙ |ψihψ|: l’operatore statistico per uno stato puro soddisfa la relazione:
ρb2 = ρb;
(7.12)
la (7.12) è anche condizione sufficiente perchè lo stato descritto da ρb sia puro [Des § 6.1].
7.4 Gli operatori statistici canonico e gran canonico
Consideriamo un sistema quantistico di N particelle in equilibrio termico, a temperatura T , con una
b N la hamiltoniana. Siano |Ei gli autostati di H
b N , e E i corrispondenti autovalori:
riserva di calore; sia H
b |Ei = E |Ei .
H
(7.13)
b N abbia spettro discreto, e che l’insieme degli stati |Ei sia completo. Indichiamo con
Assumiamo che H
HN lo spazio di Hilbert generato dagli stati |Ei. L’operatore statistico che descrive il sistema è l’operatore
statistico ”canonico” (4) , ρbc , definito come:
−1 −β H
ρbc =
˙ ZN
e bN ,
(7.14)
dove la ”funzione di partizione”, ZN , è (in virtù della (7.7)):
bN =
ZN =
˙ Tr e−β H
˙
X
bN | Ei =
hE | e−β H
|Ei∈HN
X
e−βE .
(7.15)
|Ei∈HN
Le proprietà termodinamiche del sistema seguono dalla (5.6).
Consideriamo poi un sistema quantistico in equilibrio termico, a temperatura T , con una riserva di
calore, e in equilibrio materiale, con potenziale chimico µ, con una riserva di particelle. Un tale sistema può
avere numeri di particelle qualunque. Lo spazio di Hilbert dei microstati, H, deve allora essere la somma
diretta di tutti gli spazi HN : H = ⊕∞
N =0 HN (”spazio di Fock”), dove H0 è lo spazio che contiene solo lo
stato con zero particelle. Nel formalismo della meccanica quantistica ordinaria le osservabili dipendono dal
numero di particelle: ad esempio, la hamiltoniana di un gas ideale di N particelle è:
bN =
H
˙
XN
i=1
b 2i /2m .
p
(7.16)
D’altra parte, lo spazio H contiene stati caratterizzati da numeri di particelle diversi: ciò richiede, in
generale, che una osservabile sia rappresentata in modo da poterla applicare ad uno stato del tipo: |N i +
|M i, con |N i ∈ HN e |M i ∈ HM , con N 6= M ! Tuttavia, per gli scopi limitati che qui ci proponiamo,
una rappresentazione del tipo suddetto (vedi la nota 5, a pag. 93) non è indispensabile. In effetti, la
meccanica statistica (quantistica) richiede, anche per un sistema con numero di particelle indefinito, il
b | N i, che è naturale definire come:
calcolo di elementi di matrice del tipo hN | A
b | Ni =
bN | N i ,
hN | A
˙ hN | A
(4)
(7.17)
bρc potrebbe essere derivato da un principio variazionale analogo a quello descritto nel § 5.1 per la ρ canonica classica. La
definizione di operatore statistico quantistico ”microcanonico” presenta invece difficoltà: ad esempio per una hamiltoniana,
b con spettro discreto e non degenere, il sottospazio dello spazio di Hilbert che corrisponde alla superficie dell’energia
H,
b contiene il solo microstato |Ej i! Esistono difficoltà anche per formulare una
Σ(Ej ), dove Ej è uno degli autovalori di H,
teoria ergodica quantistica: ciò risulta possibile solo per hamiltoniane con spettro continuo (per alcuni sistemi l’ergodicità
può essere esplicitamente dimostrata [Ben], [GM96]).
7.5
Stati di un sistema di particelle identiche
94
bN è la ”osservabile A
b per il sistema con N particelle”. Ad esempio, se H è la ”hamiltoniana per il
dove A
b | Ni =
b N | N i, dove H
bN
sistema con N indefinito, per un certo stato |N i ∈ HN definiamo: hN | H
˙ hN | H
è data dalla (7.16). Per lo studio del gas ideale quantistico con un numero indefinito di particelle dovremo
b e ”numero di particelle”, N
b . Assumeremo che H
b e N
b
utilizzare solo gli operatori ”hamiltoniana”, H,
commutino, e indicheremo gli autovettori simultanei come: |N, EN i. Scriveremo le rispettive equazioni
agli autovalori come:
b
b N |N, EN i = EN |N, EN i,
H|N,
EN i =
˙ H
b |N, EN i = N |N, EN i.
N
(7.18)
Assumeremo inoltre che l’insieme di tutti gli stati |N, EN i, per ogni N e ogni EN , formi un insieme
b (del sistema con numero indefinito
completo ortonormale in H. Scriveremo la traccia di una osservabile A
di particelle) come:
X
b=
Tr A
˙
hN, EN
bN | N, EN i =
|A
˙
|N,EN i
N =0
|N,EN i∈H
dove
∞ X
X
(N )
hN, EN
bN | N, EN i =
|A
˙
∞
X
bN , (7.19)
Tr (N ) A
N =0
P(N )
P
b N : P(N )
la somma sugli stati della base (in HN ) degli autostati di H
˙
|N,EN i∈HN .
|N,EN i =
Possiamo ora introdurre l’operatore statistico ”gran canonico”, ρbgc :
|N,EN i
b Nb) ,
ρbgc =
˙ Z −1 e−β(H−µ
(7.20)
dove Z è la ”funzione di gran partizione” (vedi (7.22)). L’operatore ρbgc è diagonale sugli stati |N, EN i:
ρbgc |N, EN i =
˙
1 −β(EN −µN )
e
|N, EN i .
Z
(7.21)
La funzione di gran partizione è allora:
b Nb) =
Z =
˙ Tr e−β(H−µ
X
b Nb) | N, E i =
hN, EN | e−β(H−µ
N
∞ X
X
e−β(EN −µN ) .
(7.22)
N =0 |EN i
|N,EN i∈H
Introducendo la fugacità: z =
˙ eβµ , la (7.22) diventa:
Z=
∞
X
z N ZN ,
(7.23)
N =0
dove ZN è la funzione di partizione quantistica (7.15) di un gas di N particelle (si noti la analogia con la
Z classica (5.48)). Le proprietà termodinamiche del sistema si ottengono dalla (5.49).
7.5 Stati di un sistema di particelle identiche
Consideriamo dapprima il sistema costituito da una particella di massa m e senza spin, confinata in
una ”scatola” tridimensionale, che per semplicità assumiamo cubica e di lato L, con condizioni periodiche
b1 =
b 1 formino
b 2 /2m. Assumiamo che gli autostati di H
al contorno. La hamiltoniana del sistema è: H
˙ p
b
una base nello spazio di Hilbert, H, degli stati del sistema. Indichiamo gli autostati di H1 con |pi, e i
corrispondenti autovalori con εp =
˙ p2 /2 m (con p =
˙ |p|):
b 1 |pi = εp |pi .
H
(7.24)
In virtù delle condizioni periodiche al contorno, ciascuna delle componenti di p ( =
˙ (p1 , p2 , p3 )) assume i
possibili valori:
(pi )ν = (h/L) νi ,
con : νi = 0, ±1, ±2, . . . (i = 1, 2, 3) .
(7.25)
7.6
I numeri di occupazione
95
Consideriamo poi un sistema, Q(div) , di N particelle non identiche, non interagenti, e senza spin. La
hamiltoniana di Q(div) sia:
bN =
H
˙
N
X
b 2i /2mi ,
p
(7.26)
i=1
b N , e i rispettivi autovalori, sono:
b i è il momento della i-esima particella. Gli autovettori di H
dove p
(1)
|p1 , . . . , pN i =
˙ |p1 i
⊗ · · · ⊗ |pN i
(N )
,
εp1 ,...,pN =
XN
i=1
p2i /2mi ,
(7.27)
b i sono dati dalle (7.25). Si noti che, per il
dove gli autovalori di ciascuna delle componenti di ciascuno dei p
sistema Q(div) , le N -uple (di vettori) (p1 , . . . , pN ) e gli autostati della hamiltoniana sono in corrispondenza
biunivoca: in particolare, due N -uple che differiscono per l’ordine (delle N -uple) corrispondono a stati
diversi. Lo spazio di Hilbert degli stati del sistema è: ⊗N
i=1 Hi , e l’insieme di tutti gli stati (7.27) ne
costituisce una base.
Consideriamo ora una particella con spin, nella scatola di cui sopra. Lo spazio di Hilbert degli stati
della particella è H ⊗ C 2s+1 , dove s è un numero che caratterizza lo spin della particella, e può assumere
uno dei valori: s = 0, 1/2, 1, 3/2, . . . , e C 2s+1 è uno spazio vettoriale complesso di 2s + 1 dimensioni.
Assumiamo che una base nello spazio di Hilbert degli stati della particella sia costituita dagli autovettori
simultanei delle componenti del momento, e dell’operatore, σ̂, ”componente dello spin lungo un asse”:
|p, σi =
˙ |pi ⊗ |σi .
(7.28)
b1 =
b 1 è ”indipendente dallo spin”). Le equazioni agli autovalori per H
b1
b 2 /2m (H
La hamiltoniana sia: H
˙ p
e per σ̂ sono:
b 1 |p, σi = εp |p, σi,
H
σ̂|p, σi = σ|p, σi ,
con :
σ = } (−s, −s + 1, . . . , s) .
(7.29)
(div)
, di N particelle (senza spin) non identiche. La hamiltoniana sia
b N sono:
la (7.26) (indipendente dagli spin). Gli autovettori di H
Consideriamo poi un sistema, Qs
|p1 , σ1 ; . . . ; pN , σN i =
˙ |p1 , σ1 i
(j)
dove |p, σi
(1)
⊗ · · · ⊗ |pN , σN i
(N )
,
(7.30)
appartiene allo spazio di Hilbert della j-esima particella. Gli autovalori corrispondenti agli
stati (7.30) sono:
εp1 ,σ1 ; ... ;pN ,σN =
XN
i=1
p2i /2mi .
(7.31)
(div)
Per il sistema Qs
, le N -uple (di quaterne (p, σ)) (p1 , σ1 ; . . . ; pN , σN ) e gli autostati della hamiltoniana
£
¤
2s+1
sono in corrispondenza biunivoca. Lo spazio di Hilbert degli stati del sistema è: ⊗N
, e
i=1 H ⊗ C
i
l’insieme di tutti gli stati (7.30) ne costituisce una base.
(id)
Consideriamo infine un sistema, Qs , di N particelle identiche. La hamiltoniana sia ancora la (7.26).
b N ora sono:
Gli autostati di H
|p1 , σ1 ; p2 , σ2 ; . . . ; pN , σN i =
˙
P
C π (−1)π |pπ1 , σπ1 i(1) ⊗ . . . ⊗ |pπN , σπN i(N )
(fermioni) ,
P
(1)
(N )
C π |pπ1 , σπ1 i ⊗ . . . ⊗ |pπN , σπN i
(bosoni) ,
(7.32)
dove la somma è su tutte le permutazioni π degli indici, e:
½
π
(−1) =
+1 ,
−1 ,
se π è pari;
se π è dispari.
(7.33)
7.6
I numeri di occupazione
96
La costante di normalizzazione, C è:
C=
˙ q
N!
1
Q
p,σ
np,σ !
,
(7.34)
dove np,σ è il numero di volte che la quaterna (p, σ) compare nella N -upla (p1 , σ1 ; . . . ; pN , σN ): np,σ è
il ”numero di occupazione dello stato (di particella singola) |p, σi”. Si noti che C ha la stessa forma per
fermioni e per bosoni: tuttavia i numeri di occupazione differiscono nei due casi:
½
np,σ =
0, 1,
0, 1, 2, . . . ,
per il gas di Fermi;
per il gas di Bose.
(7.35)
Si noti infine che, per un sistema di particelle identiche, N -uple (di quaterne) (p1 , σ1 ; . . . ; pN , σN ) che
differiscono solo per l’ordine (delle quaterne) corrispondono ad un unico stato.
7.6 I numeri di occupazione
Studiamo ora la meccanica statistica di un gas ideale quantistico, QN , di N particelle identiche, con
massa m e spin s, in equilibrio termico a temperatura T . Vedremo che l’identità delle particelle rende la
teoria canonica difficoltosa, tanto da rendere opportuno il ricorso alla teoria gran canonica.
Consideriamo uno (qualunque) degli stati (7.32): |p1 , σ1 ; . . . ; pN , σN i. Ad esso corrisponde un unico
insieme di numeri di occupazione {np,σ }, e viceversa. Indichiamo allora lo stato |p1 , σ1 ; . . . ; pN , σN i,
come: |{np,σ }i. Una successione {np,σ } è costituita da infiniti numeri, perchè infiniti sono i possibili valori
(p, σ); peraltro, solo un numero finito (≤ N ) di numeri np,σ saranno diversi da zero, in virtù della ovvia
condizione:
X
p,σ
np,σ = N .
(7.36)
Analogamente, possiamo indicare l’autovalore εp1 ,σ1 ; ... ;pN ,σN (vedi (7.31)) come:
E({np,σ }) =
˙
X
p,σ
np,σ εp,σ ,
con :
εp,σ =
˙ p2 /2m
(7.37)
L’equazione agli autovalori è:
b N |{np,σ }i = E({np,σ })|{np,σ }i .
H
(7.38)
La funzione di partizione di QN , ZN , può ora essere calcolata con la formula (7.15), in cui la somma
b N è calcolata come una somma su tutti i possibili insiemi di numeri di occupazione che
sugli autostati di H
P(N )
soddisfino la condizione (7.36). Indicando una tale somma con {np,σ } , la funzione di partizione (7.15)
diventa:
(id)
ZN
=
˙
X
(N )
b | {n }i = X
h{np,σ } | e−β H
p,σ
{np,σ }
(N )
X
¡
¢
np,σ εp,σ .
exp − β
(7.39)
p,σ
{np,σ }
(id)
È chiaro che, data la necessità di tener conto della (7.36), il calcolo di ZN
rimane difficoltoso anche con
il formalismo dei numeri di occupazione. Tuttavia, la difficoltà può essere facilmente superata passando
alla meccanica statistica gran canonica.
Consideriamo allora un gas (di particelle di massa m e spin s), che può trovarsi in microstati con un
numero di particelle qualsiasi (diremo brevemente: un sistema con un numero indefinito di particelle). Lo
spazio di Hilbert dei microstati del sistema è H = ⊕N HN . L’insieme di tutti gli stati |{np,σ }i forma una
b è allora:
base in H. La traccia di una osservabile del sistema, A,
b=
Tr A
X
{np,σ }
b | {np,σ }i ,
h{np,σ } | A
(7.40)
7.6
I numeri di occupazione
97
dove la somma è su tutti i possibili insiemi {np,σ }.
Assumiamo che il sistema sia in equilibrio termico con temperatura T e in equilibrio materiale con
potenziale chimico µ, e studiamo il sistema con la meccanica statistica gran canonica. Definiamo due
b eN
b , tali che per un generico stato |{np,σ }i sia:
operatori su H, H
´
³X
´
³X
b |{np,σ }i =
b
np,σ |{np,σ }i ;
(7.41)
np,σ εp,σ |{np,σ }i ,
N
H|{n
p,σ }i =
p,σ
p,σ
b eN
b hanno il significato di ”hamiltoniana” e, rispettivamente, ”numero di particelle” per il sistema con
H
un numero indefinito di particelle (5) . La funzione di gran partizione (7.22) può essere scritta come:
³
´
X
X
b Nb) =
Z =
˙ Tr e−β(H−µ
˙
exp − β
(εp,σ − µ) np,σ =
˙
{np,σ }
p,σ
³
´ Yh X
X X
X
¡
¢i
(7.42)
=
˙
· · · exp − β
(εp,σ − µ) np,σ =
exp − β(εp,σ − µ) np,σ .
n(p,σ)0 n(p,σ)1
p,σ
p,σ
I possibili valori dei numeri di occupazione sono:
½
0, 1,
np,σ =
0, 1, 2, . . . ,
np,σ
per il gas di Fermi,
per il gas di Bose.
(7.43)
b non dipende da σ̂), e poniamo: εp =
Osserviamo poi che εp,σ non dipende da σ (perchè H
˙ εp,σ . Posto
ancora: g =
˙ 2s + 1, la (7.42) diventa:
´np,σ i Y Y h X ¡
Yh X ³
¢np,σ i Y h X ¡ −βεp ¢np,σ0 ig
Z=
z e−βεp,σ
=
z e−βεp
=
ze
,
(7.44)
p,σ
np,σ
p
σ
np,σ
p
np,σ0
dove σ 0 è uno qualunque dei σ. Indichiamo la funzione di gran partizione per il gas di Fermi con Z− , e
quella per il gas di Bose con Z+ . Per il gas di Fermi risulta allora (vedi (7.43)):
Y¡
¢g
Z− =
1 + z e−βεp
(con : g =
˙ 2s + 1) .
(7.45)
p
Per il gas di Bose otteniamo invece, supponendo z < 1 (6) :
Y¡
¢−g
Z+ =
1 − z e−βεp
(con : g =
˙ 2s + 1) .
(7.46)
p
Notiamo infine che, posto:
½
a=
˙
−1 ,
+1 ,
per il gas di Fermi,
per il gas di Bose,
(7.47)
possiamo anche scrivere le Z∓ come:
Za =
Y¡
1 − az e−βεp
¢−ag
.
(7.48)
p
Calcoliamo il numero di particelle medio (es. 7.5):
­ ®
∂
ln Za .
N a=z
∂z
(7.49)
X
gze−βεp
g
.
=
˙
−βε
βε
−1
p
1 − aze
z e p −a
p
(7.50)
Dalla (7.48) segue facilmente:
hN ia =
˙
X
p
(5)
È possibile definire, su H, anche operatori che non sono diagonali sulla base |{np,σ }i (come l’ ”energia potenziale”):
si ottiene cosı̀ il formalismo della (cosiddetta) ”seconda quantizzazione” ([FW cap I], [Bof2 cap III]).
(6)
Il gas di Bose sarà discusso nel § 10.
7.7
Il limite classico del gas ideale quantistico
98
Notiamo che il numero totale di particelle in uno stato {np,σ } è:
N ({np,σ }) =
X
q,µ
nq,µ ({np,σ }) ,
(7.51)
dove nq,µ ({np,σ }) è il numero di particelle nello stato (di particella singola) |q, µi per un gas nello stato
|{np,σ }i. La probabilità dello stato |{np,σ }i è (7) :
P ({np,σ }) =
h
i
X
1
1 Y ³ −βεp,σ ´np,σ
exp − β
(εp,σ − µ) np,σ =
˙
ze
.
Z
Z p,σ
p,σ
(7.52)
Prendendo la media della (7.51) otteniamo un’altra espressione per hN ia :
hN ia =
˙
X
N ({np,σ }) Pa ({np,σ }) =
˙
{np,σ }
X X
nq,µ ({np,σ }) Pa ({np,σ }) =
˙
q,µ {np,σ }
X
hnq,µ ia .
(7.53)
q,µ
Definiamo il ”numero di occupazione dello stato |qi” (nello stato |{np,σ }i):
nq ({np,σ }) =
˙
X
µ
nq,µ ({np,σ }) ,
(7.54)
hnq,µ ia .
(7.55)
hnq ia .
(7.56)
e il ”numero di occupazione medio dello stato |qi”:
hnq ia =
˙
Scriviamo la (7.53) come:
hN ia =
X
µ
X
q
Confrontando (7.50) e (7.56) otteniamo (vedi anche l’es. 7.5b):
hnp ia =
g
.
z −1 eβεp − a
(7.57)
Si noti che la condizione hnp i ≥ 0 implica, per il gas di Bose : 0 ≤ z < 1 (vedi § 10); per il gas di Fermi,
invece, z può assumere valori nell’intervallo: 0 ≤ z < ∞.
7.7 Il limite classico del gas ideale quantistico
I gas che si incontrano in natura sono fatti di molecole, atomi, elettroni, fotoni, ecc., e sono quindi
sistemi quantistici. Nondimeno, è ben noto che in certe condizioni (tipicamente, ad alta temperatura e/o
a bassa densità) ritroviamo comportamenti che sono in accordo con la meccanica statistica classica. È
chiaro allora che deve esistere un limite in cui il gas quantistico ”diventa classico”. Mostriamo che tale
limite coincide con la condizione z ¿ 1.
Osserviamo che, se valgono le condizioni:
z −1 eβεp À 1
(per tutti i p) ,
(7.58)
allora il numero di occupazione medio (vedi le (7.57)) assume la forma:
hnp ia ≈ zge−βεp
(7)
La probabilità P ({np,σ }) è il valore di aspettazione (sullo stato miscela) del proiettore |{np,σ }ih{np,σ }|:
P ({np,σ }) =
˙ Tr (b
ρ |{np,σ }ih{np,σ }|) .
(7.59)
7.7
Il limite classico del gas ideale quantistico
99
(si noti che in questo caso risulta hnp ia ¿ 1). I valori (7.59) non dipendono da a: quindi le (7.58)
individuano una condizione del gas in cui una proprietà tipicamente quantistica, come la differenza tra
bosoni e fermioni, non si manifesta. Le condizioni (7.58) sono certamente soddisfatte se è:
z ¿ 1.
(7.60)
Studiamo le proprietà del gas nella condizione (7.60). Il numero medio di particelle è:
hN i =
X
p
hnp i ≈ zg
X
e−βεp .
(7.61)
p
Consideriamo il limite in cui V diventa molto grande. In tale limite le tre componenti di p diventano
variabili ”praticamente continue”, per cui possiamo calcolare una ”somma sulle componenti dei momenti”
come un ”integrale (triplo) sui momenti”.
Per giustificare ciò, cominciamo col considerare la somma su una componente (del momento), che
indichiamo con q, e sia f (q) una generica funzione continua, e ”variabile lentamente”, di q. Consideriamo
una partizione dell’intervallo (−∞ < q < ∞) in intervalli ∆q, e sia ∆ν(q) il numero dei valori q che cadono
nell’intervallo ∆q centrato in q. Sia poi dν/dq è la ”densità degli stati”, cioè il numero degli stati q in un
intervallo dq unitario. Possiamo allora approssimare:
1X
1X
1X
∆ν
1
f (q) ≈
f (q) ∆ν(q) =
f (q)
∆q ≈
L q
L
L
∆q
L
∆q
Dalla (7.25) segue:
Z
∆q
1X
1
f (q) ≈
L q
h
dq f (q)
dν
.
dq
(7.62)
Z
dq f (q) .
(7.63)
Per una generica funzione continua, e variabile lentamente, del vettore p, f (p), abbiamo:
Z
1 X
1
f (p) ≈ 3
dp f (p) .
V p
h
(7.64)
Calcolando la (7.61) come in (7.64) (ricordando che εp = p2 /2m), segue (vedi la nota 3 a pag. 16):
hN i
zg
= 3
V
h
Z
∞
4πp2 dp e−βp
2
/2m
=
˙
0
zg
,
λ3
(7.65)
dove λ è la ”lunghezza d’onda termica”:
r
λ=
˙ h
β
=
˙
2πm
r
2π}2 β
.
m
(7.66)
Consideriamo anche, sempre nell’ipotesi (7.60), l’equazione di stato. Quando vale la (7.58), ln Za (vedi
la (7.48)) diventa:
X
X ¡
¢
V
e−βεp = z g 3 .
ln 1 − a z e−βεp ≈ z g
ln Za = −a g
(7.67)
λ
p
p
Dalla prima delle (5.53) e dalla (7.65) segue che sia il gas di Fermi che quello di Bose soddisfano, se z ¿ 1,
l’equazione di stato del gas ideale classico: P V = hN i kB T .
P
Calcoliamo infine, nell’ipotesi (7.60), l’energia media: U =
˙
p hnp i εp . Sostituendo la somma con un
integrale, e utilizzando l’espressione per z che segue dalla (7.65), otteniamo:
µ ¶3 Z ∞
p2 −βp2 /2m
3 hN i
3
L
4πp2 dp
e
=
=
˙ hN i kB T .
U = zg
h
2m
2β
2
0
(7.68)
7.8
Termodinamica del gas ideale di Fermi
100
L’energia (7.68) è l’energia interna del gas ideale classico.
Alla luce della (7.65), la (7.60) equivale alla condizione:
λ3 /v ¿ 1 .
(7.69)
Possiamo riassumere la discussione precedente, sull’equazione di stato e sull’energia interna, come segue:
quando la condizione (7.69) è verificata (alta temperatura e/o a bassa densità), la differenza tra il gas di
Fermi e il gas di Bose scompare, ed entrambi si comportano come un gas ideale classico. Discutiamo allora
il significato fisico della condizione (7.69). Descriviamo le particelle con funzioni d’onda del tipo ”pacchetto
d’onda”. Limitiamoci, per semplicità, al caso di una particella in dimensione 1, che supponiamo descritta
dalla funzione d’onda normalizzata:
s
2
K
ψ(x) = √ e−(Kx/2) .
(7.70)
2π
La (7.70) descrive una particella localizzata in una regione (centrata sull’origine) di dimensione proporzionale a K −1 . Il valor medio dell’energia cinetica nello stato (7.70) è:
hεp i =
˙
1
1 2 2
hψ | pb2 | ψi =
} K .
2m
8m
(7.71)
Supponiamo poi che la particella appartenga ad un gas con temperatura T , e assumiamo che per l’energia
media del gas valga la (7.68). Allora è naturale porre:
hεp i ∝ kB T .
(7.72)
1
}
}
∝p
=p
∝ λ.
K
mkB T
8m hεp i
(7.73)
Dalle (7.71) e (7.66) segue allora:
Pertanto, la lunghezza d’onda termica λ rappresenta la larghezza spaziale del pacchetto d’onda che descrive
una particella ”con temperatura T ” (8) . È allora chiaro il ruolo della (7.69) nel definire i valori di T e
v per i quali il gas quantistico si comporta classicamente. Ciò avviene quando il volume ”occupato dalla
particella”, λ3 , è molto più piccolo del ”volume disponibile”, v. In tal caso la sovrapposizione dei pacchetti
d’onda che corrispondono alle varie particelle è trascurabile, e la differenza tra funzioni d’onda simmetriche
e antisimmetriche viene a scomparire. Il significato della condizione z ¿ 1, cioè della λ3 /v ¿ 1, è dunque
di un ”limite classico” del gas quantistico.
Possiamo infine giustificare la presenza del fattore 1/N ! nelle formule della meccanica statistica classica
di un gas (vedi, ad esempio, la (4.37) o la (5.72)). Limitiamoci al caso del gas ideale. Consideriamo allora il
”limite classico” della funzione di gran partizione del gas ideale quantistico. Risulta (vedi anche la (7.67)):
ln Za ≈ gz
X
e−βεp .
(7.75)
p
Segue:
"
Z = exp gz
X
#
e
−βεp
=
p
(8)
∞
X
N =0
z
N
gN
N!
Ã
X
!N
e
−βεp
.
(7.76)
p
Dalla rapresentazione in integrale di Fourier della (7.70):
Z
∞
2
dk e−(k/K ) eikx ,
ψ(x) =
˙ C
con :
−∞
risulta che K −1 ∝ λ è la ”lunghezza d’onda media del pacchetto d’onda”.
C =
˙
1
√ ,
π 2π K
1
p √
(7.74)
7.8
Termodinamica del gas ideale di Fermi
101
Interpretando la (7.76) come ”limite classico della funzione di gran partizione quantistica”, e confrontando
con la (5.48), possiamo identificare il coefficiente di z N con la funzione di partizione ZN . Segue:
ZN
g N ³ X −βεp ´N
VN
=
e
≈ gN
N! p
N ! h3N
µZ
dp e
−βp2 /2m
¶N
.
(7.77)
A meno del fattore g N , la (7.77) coincide con la funzione di partizione del gas ideale classico di N particelle
(vedi (5.72)). Il fattore (N !)−1 esprime dunque una proprietà quantistica del gas classico!
7.8 Termodinamica del gas ideale di Fermi
Ricordiamo l’espressione del numero di particelle medio per il gas di Fermi (vedi (7.50), con a = −1;
d’ora in avanti omettiamo il simbolo ”a”):
hN i =
X
g
z −1 eβεp
p
+1
,
(7.78)
dove 0 ≤ z < ∞. Assumiamo che V sia ”grande”, e calcoliamo la somma come un integrale, secondo la
(7.62); passiamo poi a coordinate polari nello spazio p, e integriamo sugli angoli. La (7.78) diventa allora:
1
hN i
4π
=
˙
=g 3
v
V
h
Poniamo y 2 =
˙ βp2 /2m. Segue:
dove λ =
˙ h
Z
∞
dp
0
p2
z −1 eβp2 /2m + 1
.
4π 2
4 1 2
p dp = √
y dy ,
h3
π λ3
(7.79)
(7.80)
p
β/2πm è la lunghezza d’onda termica. La seconda delle (7.79) diventa:
1
g 4
= 3 √
v
λ
π
Z
∞
dy
0
y2
z −1 ey2
+1
.
(7.81)
Poniamo ancora x =
˙ y 2 ; l’integrale (7.81) diventa:
4
√
π
Z
∞
0
y2
2
dy −1 y2
=√
π
z e +1
Z
∞
dx
0
x1/2
.
z −1 ex + 1
(7.82)
Definiamo le funzioni fn (z) (per n > 0) come:
1
fn (z) =
˙
Γ(n)
Z
∞
dx
0
xn−1
.
z −1 ex + 1
(7.83)
I valori di n che utilizzeremo sono: n = 1/2, 3/2, 5/2, e i corrispondenti valori della funzione Γ(n) sono:
Γ(1/2) =
La (7.81) diventa:
√
π,
Γ(3/2) =
√
π/2 ,
√
Γ(5/2) = 3 π/4 .
1
g
= 3 f3/2 (z) .
v
λ
(7.84)
(7.85)
La pressione del gas ideale di Fermi segue dalla prima delle (5.53), e dalla (7.45):
P V = kB T g
X
p
¢
¡
ln 1 + ze−βεp .
(7.86)
7.8
Termodinamica del gas ideale di Fermi
102
Procediamo come per la (7.78): calcolando la somma (7.86) come un integrale, e passando poi a coordinate
polari nello spazio p, la (7.86) diventa:
Z
³
´
2
P
4π ∞
=g 3
dp p2 ln 1 + z e−βp /2m .
(7.87)
kB T
h 0
Integrando per parti otteniamo:
P
4π β
=g 3
kB T
3h m
Z
2
∞
dp
0
p4 e−βp /2m
.
1 + z e−βp2 /2m
Cambiando variabili di integrazione, come per la (7.79), segue:
Z ∞
Z ∞
y4
x3/2
P
g 8
g
1
g
dy −1 y2
dx −1 x
= 3 √
= 3
=
˙ 3 f5/2 (z) .
kB T
λ 3 π 0
λ Γ(5/2) 0
z e +1
λ
z e +1
(7.88)
(7.89)
Mostriamo ora che la (7.85) può essere ”invertita”, per esprimere z in funzione di v e di λ. Fisicamente,
ciò equivale a considerare come variabile indipendente il numero medio di particelle, hN i, invece di z (o
µ). L’inversione della (7.85) può essere realizzata analiticamente nelle due regioni: z ¿ 1, z À 1.
Per z ¿ 1 conviene utilizzare la rappresentazione (7.115):
X∞
fn (z) =
(−1)l+1 (z l /ln ) .
(7.90)
l=1
La (7.85) diventa allora:
λ3
z2
≈ z − 3/2 + . . . .
gv
2
(7.91)
Invertendo la (7.91) si ottiene (es. 7.11a):
z≈
λ3
1
+ 3/2
gv 2
µ
λ3
gv
¶2
+ ...
(7.92)
(la (7.92) conferma (vedi anche la (7.69)) che z ¿ 1 implica alta temperatura e/o bassa densità). Per
z ¿ 1, la pressione diventa:
·
¸
P
g
z2
≈ 3 z − 5/2 + . . . .
(7.93)
kB T
λ
2
Usando la (7.92) nella (7.93) otteniamo:
Pv
1 λ3
= 1 + 5/2
+ ··· .
kB T
2 gv
(7.94)
La (7.94) è l’equazione di stato del gas di Fermi nella regione ”alta temperatura e/o bassa densità”. Si
noti la presenza di una correzione quantistica (all’equazione di stato del gas ideale classico) consistente in
un aumento della pressione (del gas di Fermi) rispetto alla pressione di un gas classico con uguali T e v.
Consideriamo poi la regione z À 1. È allora conveniente utilizzare la rappresentazione (7.123):
·
¸
4
π2
f3/2 (z) = √ (ln z)3/2 1 +
(ln z)−2 + . . . .
(7.95)
8
3 π
Esprimiamo z in funzione di T e v: sostituendo la (7.95) nella (7.85) si ottiene:
·
¸
√
3 πλ3
π2
3/2
−2
= (ln z)
1+
(ln z) + . . . .
4gv
8
(7.96)
La (7.96) mostra che z À 1 implica: λ3 /gv À 1. La regione z À 1 corrisponde dunque alla regione ”bassa
temperatura e/o alta densità”. Invertendo la (7.96) (es. 7.11b) segue:
#
µ √
¶−4/3
µ √ 3 ¶2/3 "
π 2 3 πλ3
3 πλ
1−
+ ... .
(7.97)
ln z =
4gv
12
4gv
7.8
Termodinamica del gas ideale di Fermi
103
Da: ln z =
˙ βµ, segue poi l’espressione di µ in funzione di T e v:
·
¸
π2
1
µ = εF 1 −
+
.
.
.
,
12 (βεF )2
(7.98)
dove la ”energia di Fermi”, εF , è:
εF =
˙ µ|T =0 =
1
β
µ √ 3 ¶2/3
µ 2 ¶2/3
3 πλ
}2
6π
=
.
4gv
2m
gv
<n>
p
g
(7.99)
T=0
g/2
T<<TF
Fig. 7.1 :
hnp i (gas di Fermi; T = 0, e T ¿ TF ).
0
ε
εF
p
Definiamo la ”temperatura di Fermi”: TF =
˙ εf /kB . Per T ¿ TF la natura quantistica del gas è
dominante (es. 8c). Ad esempio, consideriamo il numero di occupazione medio hnp i. Dalla (7.97) segue
che, per T ¿ TF , possiamo approssimare: µ ≈ εF , e: eβµ ≈ eβεF . Segue (9) :
hnp i ≈
g
β(εp −εF )
e
+1
,
per :
T ¿ TF .
Per T → 0, hnp i assume la tipica forma ”a gradino” (fig. 7.1):
½
g
(εp ≤ εF ) ,
,
per :
hnp i =
0
(εp > εF ) .
(7.100)
T = 0.
(7.101)
Per T = 0 le particelle occupano quindi tutti gli stati |pi fino a quello con energia εF .
Consideriamo la pressione per bassa temperatura e/o alta densità. Ricordiamo lo sviluppo (7.124):
·
¸
5π 2
8
(ln z)−2 + . . . .
(7.102)
f5/2 (z) = √ (ln z)5/2 1 +
8
15 π
Usando poi la (7.97), dalla (7.89) segue facilmente:
·
¸
2 εF
5 π2
P =
1+
+
·
·
·
.
5 v
12 (βεF )2
(7.103)
Si noti che il gas di Fermi esercita una pressione anche per T = 0.
Consideriamo infine l’energia interna del gas ideale di Fermi. Per definizione, abbiamo:
!
"
#
Ã
∞
X
1 X X (N ) X
∂
βµN
hHi =
εp np,σ = −
ln Z
εp np,σ e
exp −β
Z
∂β
p
p,σ
(7.104)
N =0 {np,σ }
(vedi anche la (5.76); si noti che la (7.104) vale anche per il gas ideale di Bose). Dalla (7.104) segue (si
ricordino la prima delle (7.78) e la (7.89), e si noti che la derivata rispetto a β, nella (7.104), va fatta a z
costante):
∂
3 1
∂
(βP V ) = −gV f5/2
(λ)−3 = gV
f ,
(7.105)
U =
˙ hHi = −
∂β
∂β
2 βλ3 5/2
(9)
Indicando il secondo membro della (7.100) con hnp i(εp ) , risulta: hnp i(εp ) = g − hnp i(2ε
F
”simmetria” del grafico di hnp i rispetto alla retta εp = εF .
−εp ) ,
da cui la evidente
7.9
Integrali di Fermi
104
cioè (per la (7.89)):
3
PV.
2
U=
(7.106)
Per T ¿ TF possiamo usare la (7.103) nella (7.106). Si trova immediatamente:
U=
·
¸
3
5 π2
hN i εF 1 +
+
·
·
·
.
5
12 (βεF )2
(7.107)
Dalla (7.107) segue la capacità termica (a V costante), CV :
µ
CV =
˙
∂U
∂T
¶
≈ kB
(V,N )
π 2 hN i
2 βεF
per :
T ¿ TF .
(7.108)
Per temperature alte (T À TF ) dobbiamo aspettarci che il gas di Fermi abbia un comportamento classico,
cioè che CV tenda a (3/2)N kB . L’andamento di CV in funzione di T è riassunto nella fig. 7.2. L’andamento
lineare per T ¿ TF è tipico del gas di Fermi (per una giustificazione qualitativa, vedi l’es. 7.10).
CV / Nk
3/2
Fig. 7.2 :
CV per il gas di Fermi
εF
kT
7.9 Integrali di Fermi
Riportiamo qui, per completezza, alcuni risultati standard [Pat app. E], necessari per gli sviluppi del
paragrafo precedente.
Consideriamo gli integrali:
Z
∞
Fn (z) =
˙
dx
(n > 0) .
(7.109)
dx xn−1 e−x =
˙ z Γ(n) .
(7.110)
0
Per z ¿ 1 abbiamo:
Z
∞
Fn (z) → z
xn−1
z −1 ex + 1
0
Per z generico conviene allora definire: Fn (z) =
˙ Γ(n) fn (z), con:
1
fn (z) =
˙
Γ(n)
Z
∞
dx
0
Le funzioni fn (z) sono chiamate ”integrali di Fermi”
A) z ¿ 1 :
(7.111)
. Consideriamo i casi: z ¿ 1, e z À 1.
Per z ¿ 1 conviene scrivere la (7.111) come:
fn (z) =
(10)
(10)
xn−1
.
z −1 ex + 1
1
Γ(n)
Z
0
∞
dx xn−1
ze−x
.
1 + z e−x
(7.112)
Si noti anche la relazione: fn−1 (z) = z ∂fn (z)/∂z, che può essere verificata facilmente derivando fn sotto il segno di
integrale e poi integrando per parti.
7.9
Integrali di Fermi
105
Nel denominatore della (7.112), z e−x è una quantità piccola; sviluppando in serie di Taylor segue:
fn (z) =
Z
1
Γ(n)
∞
∞
X
(−1)l (ze−x )l .
dx xn−1 ze−x
0
(7.113)
l=0
Posto poi (l + 1)x =
˙ y, e ricordando [AS70 § 6.1] la relazione:
Z
∞
dy y n−1 e−y =
˙ Γ(n) ,
(7.114)
0
possiamo integrare termine a termine. La (7.113) diventa allora:
∞
z l+1
1 X
fn (z) =
(−1)l
Γ(n)
(l + 1)n
Z
∞
X
dy y n−1 e−y =
0
l=0
B) z À 1 :
∞
(−1)l+1
l=1
zl
.
ln
(7.115)
Ponendo: ν =
˙ ln z, e integrando per parti nella (7.111) otteniamo:
fn (z) =
˙
1
nΓ(n)
Z
∞
dx xn
0
ex−ν
(ex−ν + 1)
2
.
(7.116)
Poniamo poi: t =
˙ x − ν. Segue:
fn (z) =
νn
nΓ(n)
Z
∞
dt
−ν
µ
et
2
(et + 1)
1+
t
ν
¶n
.
(7.117)
2
La funzione et / (et + 1) è ”essenzialmente diversa da zero” solo per valori di tali che |t| sia ”piccolo”.
Conviene allora sviluppare:
µ
¶n
µ ¶2
t
t
1
t
1+
= 1 + n + n(n − 1)
+ ... ,
ν
ν
2
ν
Definiamo gli integrali:
Z
∞
Ih =
˙
dt
−ν
Z
t h et
(et + 1)
2
∞
≈
dt
−∞
t h et
(et + 1)
2
(7.118)
,
(7.119)
dove, per ν À 1, abbiamo esteso l’integrale nella (7.117) fino a t = −∞. Risulta allora:
νn
fn (z) =
nΓ(n)
µ
¶
n
n(n − 1)
I0 + I1 +
I2 + . . . .
ν
2ν 2
(7.120)
Gli integrali Ih (h = 0, 1, 2, . . .) possono essere espressi (vedi dopo) in funzione della funzione ”zeta (di
Riemann)”, ζ(h):
µ
Ih = 2hΓ(h) 1 −
1
2h−1
¶X
∞
s=1
tutti
1
=
˙ 2h Γ(h)
sh
µ
1−
1
¶
2h−1
ζ(h) ,
dove :
ζ(h) =
˙
∞
X
1
.
sh
s=1
(7.121)
I valori di h che qui interessano sono h = 0, 2, per i quali si ha [AS70 § 23.2]:
ζ(0) = 1 ,
ζ(2) =
π2
.
6
(7.122)
Ricordando poi che ν = ln z, segue, per n = 3/2, 5/2:
·
¸
π2
4
−2
3/2
1+
(ln z) + . . . ,
f3/2 (z) = √ (ln z)
8
3 π
(7.123)
7.10
La condensazione di Bose-Einstein
f5/2 (z) =
106
·
¸
8
5π 2
√ (ln z)5/2 1 +
(ln z)−2 + . . . .
8
15 π
(7.124)
Deriviamo la (7.121). Cominciamo col notare che dalla seguente proprietà:
et
(et
e−t
=
2
+ 1)
(e−t
+ 1)
,
2
(7.125)
segue che per h dispari è: Ih = 0. Consideriamo allora i soli h pari. Per h = 0 si ha:
Z
∞
dt
I0 = 2
0
·
et
(et + 1)
2
= −2
1
et + 1
¸∞
= 1.
(7.126)
0
Per h pari e maggiore di zero si ha:
Z
∞
Ih = 2
Z
= 2h
dt
Z
t h et
2
= 2h
∞
th−1
=
˙ 2h
dt t
e +1
(et + 1)
0
∞
∞
∞
X
X
dt th−1 e−t
(−1)r e−rt = 2h
(−1)r
0
0
r=0
r=0
Z
∞
dt
0
1
(1 + r)h
th−1 e−t
=
1 + e−t
Z ∞
dy y h−1 e−y =
˙
0
∞
∞
∞
∞
r
s+1
X
X
X
X
(−1)
(−1)
1
1
= 2hΓ(h)
=
˙ 2hΓ(h)
= 2hΓ(h)
−
=
h
h
h
h
(1
+
r)
s
s
s
s=1
s=1
r=0
s=1
= 2hΓ(h)
dispari
∞
X
s=1
tutti
µ
=
˙ 2h Γ(h) 1 −
(7.127)
pari
¶X
µ
∞
1
1
1
1
−
2
=
˙
=
2hΓ(h
1
−
h
h
h−1
s
s
2
sh
s=1
s=1
∞
X
pari
1
2h−1
tutti
¶
ζ(h) ,
dove :
∞
X
1
ζ(h) =
˙
.
h
s
s=1
7.10 La condensazione di Bose-Einstein
Il gas ideale di Bose presenta un fenomeno, la ”condensazione di Bose-Einstein” (CBE), che non solo
viene effettivamente osservato (in sistemi ”quasi ideali”, come i gas di metalli alcalini molto rarefatti), ma
che risulta importante anche per sistemi ”fortemente interagenti”, come ad esempio l’4 He.
Consideriamo un gas ideale di particelle di Bose di massa m (> 0), e senza spin, confinato in una
scatola, che per semplicità assumiamo cubica e di lato L, con condizioni periodiche al contorno. Nonostante
la assenza di interazioni, il gas ideale di Bose presenta una transizione di fase, la CBE, caratterizzata
dall’esistenza di una ”temperatura critica”, Tc , al di sotto della quale le particelle ”preferiscono” occupare
lo stato p = 0, nel senso che per T → 0 risulta hnp i → 0, per tutti i p 6= 0, e hn0 i → hN i .
Le proprietà di un gas ideale di bosoni (di massa m e spin zero) nello stato termodinamico (T, V, µ),
con V = L3 , seguono dalla funzione di gran partizione (7.46) (scriviamo Z invece di Z+ ):
Z=
Y¡
1 − z e−βεp
¢−1
.
(7.128)
p
Le equazioni di stato si ottengono dalle (5.53): usando la (7.128) otteniamo:
P V = −kB T
X
p
¢
¡
ln 1 − z e−βεp ,
(7.129)
7.10
La condensazione di Bose-Einstein
N=
X
p
107
X
z e−βεp
hnp i ,
=
˙
−βε
1−ze p
p
(7.130)
dove il numero di occupazione medio dello stato p è (vedi (7.57)):
hnp i =
1
,
z −1 eβεp − 1
(7.131)
con: 0 ≤ z < 1 (la possibilità che sia z = 1 sarà discussa più avanti). Ricordiamo che le possibili energie
di particella singola sono: εp = p2 /2m, dove i possibili momenti p sono:
p~ν =
˙ (h/L) ~ν ,
dove : ~ν =
˙ (νx , νy , νz ) ,
con :
νx , νy , νz = 0, ±1, ±2, . . . .
(7.132)
La grandezza fondamentale nella CBE è il numero di occupazione medio dello stato p = 0:
hn0 i =
˙
1
z
=
.
z −1 − 1
1−z
(7.133)
Consideriamo dapprima l’andamento di hn0 i in funzione di z. Nella regione ”classica”, cioè per z ¿ 1
(vedi § 7), dalla (7.133) risulta hn0 i ¿ 1. Per z → 1, potrebbe invece essere: hn0 i ≈ N (e: hnp i ¿ N ).
Un esempio (non fisico: la dipendenza ”vera” di z da V e T sarà derivata più avanti) è:
z = 1 − N −1 =
˙ 1 − vV −1 ,
con :
v=
˙ V /N .
Usando la (7.134) nella (7.133), nel limite per V → ∞ (”limite termodinamico”
(7.134)
(11)
), risulta:
hn0 i
hn0 i
1
1 − vV −1
=
˙ v lim
= v lim
= 1,
V →∞ N
V →∞ V
V →∞ V 1 − (1 − vV −1 )
hnp i
hnp i
1
1
1
1
lim
=
˙ v lim
= v lim
≈ v lim
= 0.
V →∞ N
V →∞ V
V →∞ V [(V − v)/V ]eβεp − 1
V →∞ V eβεp − 1
lim
(7.135)
L’andamento di hn0 i in funzione di z (vedi la (7.133)) non è fisicamente molto significativo. È invece
più interessante l’andamento di hn0 i in funzione di T e v. In effetti risulterà che hn0 i è esprimibile in
funzione della quantità nλ3 =
˙ λ3 /v (con: n =
˙ 1/v), dove λ è la ”lunghezza d’onda termica” (7.66).
Osserviamo che, se la funzione (di p) hnp i fosse continua (”lentamente variabile”) per tutti i p, sarebbe
possibile (nel limite V → ∞: vedi § 7) calcolare la somma come un integrale: vedi (7.64). Tuttavia, se
fosse z = 1, la funzione hnp i divergerebbe in p = 0, e quindi in p = 0 la continuità non sussisterebbe. Per
p 6= 0, invece, hnp i è continua anche per z = 1. Scriviamo allora la somma (7.130) come:
N0
hn0 i
1 X
Ne
N
=
+
hnp i =
˙
+
,
V
V
V
V
V
(7.136)
p6=0
P
dove: N0 =
˙ hn0 i, e: Ne =
˙
p6=0 hnp i (Ne è il ”numero delle particelle negli stati eccitati”). Per p 6= 0 la
funzione hnp i è continua per ogni z, e quindi Ne può essere calcolata come un integrale (12) . Segue:
Z
N
N0
1
=
+ 3
dp hnp i ,
(7.137)
V
V
h |p|>0
cioè, in coordinate polari nello spazio p:
N0
1
N
=
+ 3 4π
V
V
h
(11)
Z
∞
p2 dp hnp i .
Nella rappresentazione (della termodinamica) del potenziale gran canonico, risulta: N = V f (T, µ) (”estensività di N ”).
Il limite termodinamico si riduce dunque al solo limite V → ∞.
(12)
(7.138)
p>0
Per una discussione matematicamente più rigorosa, vedi [Mu69 § 9.7].
7.10
La condensazione di Bose-Einstein
108
Notiamo poi che l’integrando nella (7.138) rimane finito per p → 0:
p2 hnp i =
˙
p2
z −1 eβεp
−1
≤
zp2
p2
≤ βεp
< ∞,
−1
e
−1
per :
eβεp
p → 0.
(7.139)
Possiamo allora estendere l’integrale fino a p = 0, e riscrivere la (7.138) come:
N
N0
1
=
+ 3 4π
V
V
h
Z
∞
p2 dp hnp i .
(7.140)
0
Usando la (7.131), scriviamo la (7.140) come:
N0
4π
N
=
+ 3
V
V
h
Z
∞
dp
0
p2
z −1 eβp2 /2m − 1
.
(7.141)
Posto: x =
˙ βp2 /2m, dalla (7.141) otteniamo:
Ne
1
=
˙ 3 g3/2 (z) ,
V
λ
(7.142)
dove λ è data dalla (7.66), e dove g3/2 (z) è il caso n = 3/2 delle funzioni gn (z), definite come (13) :
1
gn (z) =
˙
Γ(n)
Z
∞
dx
0
xn−1
.
z −1 ex − 1
(7.143)
g
2.61
Fig. 7.3:
La funzione
g3/2 (z).
z
1
La funzione g3/2 (z) è monotonicamente crescente e limitata: g3/2 (z) ≤ g3/2 (1) = O(1). La limitatezza
di g3/2 è la chiave della CBE. Infatti, supponiamo di aumentare, a T costante, la densità delle particelle ”eccitate”. Alla luce della (7.142), è chiaro che Ne /V non può crescere indefinitamente: Ne /V ≤
(Ne /V )max =
˙ λ−3 g3/2 (1). Per N/V > (Ne /V )max deve essere N0 /V > 0, cioè appunto la CBE (14) !
L’andamento di z in funzione di nλ3 segue dalle (7.133), (7.136), e (7.142), da cui segue:
z
1
1
= − 3 g3/2 (z) ,
V (1 − z)
v λ
(7.144)
1
z
=1−
g (z) .
N (1 − z)
nλ3 3/2
(7.145)
cioè (usando: v/V = N , e: v = 1/n):
Non è possibile risolvere la (7.145) analiticamente. Usiamo allora un metodo grafico [BMB fig. 5.13]. Per
dati nλ3 e N , consideriamo, su un diagramma (z, Y ) (fig. 7.4), le due funzioni:
Y1 = Y1 (z) =
˙
z
,
N (1 − z)
Y2 = Y2 (z) =
˙ 1−
1
g (z) .
nλ3 3/2
(7.146)
(13)
Le funzioni gn (z) [Pat app. D] vengono introdotte e discusse con metodi analoghi a quelli visti nel § 9 per la fn (z).
(14)
La stessa analisi porta, per un gas di Bose bidimensionale, all’espressione: Ne /V = λ−2 g1 (z), dove g1 (z) è data dalla
(7.143) per n = 1. Per z = 1, g1 (z) diverge: g1 (1) = ∞. Quindi in dimensione 2 la CBE è assente [Hu87 probl. 12.6] !
7.10
La condensazione di Bose-Einstein
109
Si noti che per V → ∞ il grafico della funzione Y1 viene a coincidere con il segmento [0, 1) dell’asse z e
con la semiretta (z = 1, Y1 > 0):
½
0,
per 0 ≤ z < 1 ,
lim Y1 (z) =
(7.147)
∞ , per z = 1 .
V →∞
Il grafico della funzione Y2 è una curva decrescente che passa per i punti (0, 1) e (1, g3/2 (1)/nλ3 ). È chiaro
che per V → ∞ la ascissa dell’intersezione delle due curve è:
per nλ3 ≥ g3/2 (1) ,
1 ,
z=
(7.148)
la soluzione di : g3/2 (z) = nλ3 , per nλ3 ≤ g3/2 (1) .
1
Fig. 7.4:
a) nλ3 ≥ g3/2 (1)
b) nλ3 ≤ g3/2 (1)
Y2
Y
1
Y2
Y1
1
z
1
(a)
z
1
(b)
L’interpretazione fisica della soluzione (7.148) diventa evidente se, per una fissata densità, n, definiamo
λc come:
λ3c =
˙ g3/2 (1)/n .
(7.149)
In termini di λc possiamo definire una temperatura, Tc , tale che:
s
Ã
!2/3
1
h2
n
.
λc =
˙ h
,
cioè : Tc =
2πmkB Tc
2πmkB g3/2 (1)
La (7.148) diventa allora:
per T ≤ Tc ,
1 ,
z=
la soluzione di : g (z) = nλ3 , per T > T ,
c
3/2
(per n fissata) .
(7.150)
(7.151)
Indichiamo il limite ”per V → ∞” con il simbolo L =
˙ limV →∞ . Dalla (7.145) segue, per una data n:
1 − (T /Tc )3/2 , per T ≤ Tc ,
N0
1
(7.152)
=1−
g
(z)
=
L
N
nλ3 3/2
0,
per T > Tc .
La (7.152) è rappresentata nella fig. 7.5, e descrive il fenomeno della CBE (Tc ha il significato di temperatura ”critica”). È chiaro che il termine ”condensazione” (di Bose-Einstein) descrive una condensazione
nello spazio dei momenti: le particelle ”condensano” nello stato p = 0. Si noti che Tc è la temperatura
alla quale la lunghezza d’onda termica diventa dello stesso ordine di grandezza della separazione media tra
le particelle (vedi la (7.149)): quindi Tc è la temperatura a cui gli effetti quantistici diventano importanti.
Nel seguito chiameremo l’insieme delle particelle nello stato p = 0: ”condensato” (15) .
(15)
La teoria sviluppata sopra vale per bosoni con massa: m > 0. Esistono anche gas di bosoni con m = 0: ad esempio, le
”eccitazioni” (fononi) di un solido a bassa T . Per m → 0 risulta: Tc → ∞. Inoltre, non esistono fononi di momento nullo (non
esistono vibrazioni reticolari di energia nulla): N0 = 0. Potremmo allora dire che un gas di N fononi con T finita corrisponde
alla componente non condensata di un gas di Bose con T < Tc : Ne = N . Per T → 0, il numero medio dei fononi tende a
zero (corrispondentemente al fatto che lo stato del sistema tende allo stato con energia minima, e quindi senza eccitazioni).
Quindi, un gas ideale di fononi per T → 0 non condensa, ma scompare!
7.11
Proprietà del gas ideale di Bose
110
Il gas di Bose ideale è evidentemente un modello matematico, non realizzabile in natura: non è
quindi ovvio che la CBE sia sperimentalmente osservabile. In realtà, un sistema bosonico come l’He (liquido) presenta una transizione di fase con una temperatura critica Tc ≈ 2.18 ◦ K [Hu87 fig. 13.2]. Se
calcoliamo la (7.150) con m uguale alla massa di un atomo di 4 He, e con n uguale alla densità dell’He
liquido, troviamo: Tc ≈ 3.13 ◦ K ! La vicinanza dei due dati, e altre considerazioni meno qualitative
(vedi ad es. [Hu87 § 13.8]), suggeriscono che la CBE abbia un ruolo anche nei sistemi di Bose reali.
N0
N
1
Fig. 7.5
Tc
T
In conclusione, notiamo che z ed N0 possono essere espressi anche in funzione di n, per T fissata.
Posto: nc =
˙ g3/2 (1)/λ3 , da (7.148) segue:
1 ,
z=
1 − (nc /n) ,
per n ≥ nc ,
la sol. di : g (z) = nλ3 ,
3/2
=⇒
N0
=
N
L
per n ≤ nc
per n > nc ,
.
0,
per n ≤ nc ,
(7.153)
Ancora, z ed N0 possono essere espressi in funzione di v (per T fissata). Posto: vc =
˙ 1/nc , segue:
per v ≤ vc ,
1 ,
1 − (v/vc ) , per v ≤ vc ,
N0
. (7.154)
z=
=⇒ L
=
la sol. di : g (z) = λ3 /v , per v > v
N
c
0,
per v > nc .
3/2
7.11 Proprietà del gas ideale di Bose
A) La pressione
Calcoliamo la pressione del gas in funzione di T ed n. Procedendo come per la (7.142), la (7.129) può
essere scritta come:
Z ∞
¡
¢
V
p2 dp ln 1 − ze−βεp .
(7.155)
P V = −kB T ln(1 − z) − kB T 3 4π
h
0
Introducendo la variabile x =
˙ βp2 /2m la (7.155) diventa:
µ
P V = −kB T ln(1 − z) − kB T V
2πm
βh2
¶3/2
2
√
π
Z
∞
¡
¢
x1/2 dx ln 1 − ze−x .
(7.156)
0
Integrando per parti segue:
Z
∞
0
¡
¢
2
x1/2 dx ln 1 − ze−βx = − β
3
Z
∞
dx
0
x3/2
z −1 eβx
−1
.
(7.157)
In definitiva, l’equazione per la pressione è:
1
1
βP = − ln(1 − z) + 3
V
λ
µ
4
√
3 π
¶−1 Z
∞
dx
0
x3/2
,
z −1 eβx − 1
(7.158)
7.11
Proprietà del gas ideale di Bose
111
cioè (ricordando (7.143)):
βP = −
Ricordiamo ora la (7.133):
N0 =
z
1−z
1
1
ln(1 − z) + 3 g5/2 (z) .
V
λ
da cui :
1−z =
(7.159)
1
.
1 + N0
(7.160)
Nel limite termodinamico segue allora, per T ≤ Tc :
h
i
h
i
h
i
L V −1 ln(1 − z) = L V −1 ln(1 + N0 ) ≤ L V −1 ln(1 + N ) =
h
i
h
i
= L V −1 ln(1 + V n) ≤ L V −1 ln(V n) = 0
(7.161)
(nel limite termodinamico n rimane costante). D’altra parte, per T > Tc è z < 1, e quindi:
h
i
L V −1 ln(1 − z) = 0 .
(7.162)
In definitiva, il termine V −1 ln(1 − z) nella (7.159) può essere trascurato (nel limite termodinamico) per
ogni T . La pressione P = P (T, V, z) è allora:
P =
kB T
g (z) .
λ3 5/2
(7.163)
Consideriamo le ”isoterme”, cioè le funzioni P = P (v; T ), per T fissata. Dalla (7.154) otteniamo:
per: v ≤ vc (T ) ,
kB T g5/2 (1) / λ3 ,
con : vc =
˙ λ3 /g3/2 (1) ;
(7.164)
P =
3
kB T g5/2 (z)/λ ,
per: v > vc (T ),
dove, nella seconda delle (7.164), z è soluzione dell’equazione:
nλ3 − g3/2 (z) = 0 .
(7.165)
Si noti che per v = vc risulta z = 1: quindi la funzione (7.164) è continua in v = vc . Per ogni T l’isoterma
corrispondente presenta un tratto piatto (per v ≤ vc (T )), analogo al tratto piatto di un’isoterma di un gas
reale classico. L’isoterma per T = 0 coincide con la retta P = 0. D’altra parte, per T = 0 il gas è tutto ”condensato”: possiamo concludere che il condensato ha pressione zero, indipendentemente dalla sua densità !
P (v)
T
T1
T2
Fig. 7.6:
Isoterme del gas ideale di Bose (T2
< T1 ).
vc(T 1)
v
Calcoliamo la funzione P = P (T ) per v fissato. Per T ≤ Tc , dalla (7.163) segue: P = (kB T /λ3 ) g5/2 (1).
Invece, per T > Tc , usando la seconda delle (7.151), la (7.163) può essere scritta (per n fissata) come:
g5/2 (z)
P
=n
.
kB T
g3/2 (z)
(7.166)
Le (7.166) sono rappresentate nella fig. 7.6.
Per z ¿ 1 le funzioni (7.143) possono essere scritte, sviluppando l’integrando rispetto a z e integrando
termine a termine [Pat app. D], come serie:
X∞
gn (z) =
z l /ln ,
(7.167)
l=1
7.11
Proprietà del gas ideale di Bose
112
da cui:
g3/2 (z) ≈ z + 2−3/2 z 2 + · · · ,
Segue:
g5/2 (z) ≈ z + 2−5/2 z 2 + · · · .
·
¸
P
1
≈n 1− √ z .
kB T
4 2
(7.168)
(7.169)
Invertendo la seconda delle (7.151) per ottenere z come funzione di nλ3 (si ottiene: z ≈ nλ3 −2−3/2 (nλ3 )2 ),
la (7.169) diventa:
P
1
= 1 − √ nλ3 + · · · .
(7.170)
kB T
4 2
La (7.170) è l’equazione di stato del gas ideale classico, con una correzione quantistica che rende la pressione
di un gas di Bose minore della pressione di un analogo gas classico.
B) Il calore specifico
È di grande interesse, anche per il confronto con altri sistemi bosonici (come il gas di fononi),
l’andamento del calore specifico, CV , a bassa T . La dipendenza da T può essere ricavata, per T ≤ Tc , con
una semplice considerazione qualitativa: assumiamo che l’energia media di una particella con p > 0 sia
circa kB T . Il numero delle particelle che contribuiscono all’energia interna, U , è (vedi (7.151) e (7.142)):
Ne ∝ T 3/2 ,
da cui :
U ≈ Ne kB T ∝ (kB T )5/2
(per T < Tc ) .
(7.171)
Per il calore specifico segue:
C ∝ (kB T )3/2
(per T < Tc )
(7.172)
(per una discussione più approfondita vedi § 12).
C) Anomalie del gas ideale di Bose
Le isoterme della fig. 7.6 presentano (per T < Tc ) un tratto orizzontale. Negli stati termodinamici
corrispondenti ai punti di tali tratti, la comprimibilità (3.72) del gas è infinita: κ = |V (∂P/∂V )|−1 = ∞ .
Ciò non ha riscontro nella fisica dei gas reali, e costituisce dunque una anomalia del gas ideale di Bose.
Un altro comportamento anomalo del gas ideale riguarda la densità (numero di particelle nell’unità
di volume). Cominciamo col definire un ”operatore densità”, n
b(r), tale che il suo valore di aspettazione su
uno stato |ϕi sia la densità del sistema. Ad esempio, per una particella in uno stato corrispondente ad una
funzione d’onda ϕ(r1 ), risulta: n
b1 (r) =
˙ δ(r − b
r), dove b
r è l’operatore ”posizione della particella”. Infatti:
Z
n1 (r) =
˙ hϕ | n
b1 (r) | ϕi = dr1 dr2 hϕ|r1 ihr1 | n
b1 (r) | r2 ihr2 |ϕi =
Z
Z
(7.173)
2
2
=
dr1 dr2 hϕ|r1 iδ(r − r2 )hr1 |r2 ihr2 |ϕi = dr1 |ϕ(r1 )| δ(r − r1 ) = |ϕ(r)|
(per una particella la densità di numero di particelle coincide con la densità di probabilità). Per N particelle
definiamo (per l’analogo classico vedi la (1.26))
n
bN (r) =
˙
N
X
δ(r − b
ri ) .
(7.174)
i=1
Supponiamo che le particelle costituiscano un gas ideale di bosoni a T = 0, in un volume V = L3 . Se
indichiamo con ϕ0 (r) la funzione d’onda dello stato fondamentale di una particella, la funzione d’onda
dello stato (fondamentale) del gas, |Ψ0 i, è:
Ψ0 (r1 , . . . , rN ) =
˙
N
Y
i=1
ϕ0 (ri ) .
(7.175)
7.12
Il calore specifico del gas ideale di Bose
113
La densità nello stato |Ψ0 i è:
nN (r) =
˙ hΨ0 | n̂N (r) | Ψ0 i =
˙
Z ³Y
N
N
´
X
drj |Ψ0 (r1 , . . . , rN )|2
δ(r − ri ) = N |ϕ0 (r)|2 .
j=1
(7.176)
i=1
Notiamo ora che la forma esplicita di ϕ0 dipende dalle condizioni al contorno sulle pareti di V . Per
condizioni periodiche (ad esempio: ϕ0 (x, y, z) = ϕ0 (x + L, y, z)), le soluzioni dell’equazione di Schrödinger
per la particella libera sono onde piane. In particolare, la soluzione con energia più bassa è: ϕ0 (x, y, z) =
L−3/2 . La corrispondente densità (7.176) è: nN (r) = N/V . La densità corrispondente alle condizioni al
contorno periodiche è dunque uniforme. Consideriamo invece condizioni di annullamento sulle pareti (ad
esempio: ϕ0 (0, y, z) = ϕ0 (L, y, z) = 0). La soluzione con energia più bassa ora è:
r
³ πx ´
³ πy ´
³ πz ´
8
ϕ0 (x, y, z) =
sen
sen
sen
.
(7.177)
V
L
L
L
La corrispondente densità (vedi la (7.176)) è:
nN (r) = 8
³ πx ´
³ πy ´
³ πz ´
N
sen2
sen2
sen2
.
V
L
L
L
(7.178)
La densità (7.178) non è uniforme (è nulla sulle pareti e massima al centro del volume). Quindi, la densità
di un gas ideale di Bose di N particelle a T = 0 dipende dalle condizioni al contorno usate per risolvere
l’equazione di Schrödinger per una particella. Le condizioni al contorno non dovrebbero essere fisicamente
rilevanti (almeno, non nel limite termodinamico!). Il fatto che, invece, la densità del gas ideale di Bose
dipenda dalle condizioni al contorno, è una sua ulteriore anomalia. È possibile verificare che in presenza
di interazione la suddetta anomalia non si manifesta [PiSt § 11.2].
7.12 Il calore specifico del gas ideale di Bose
Calcoliamo l’energia interna del gas ideale di Bose. Dalla (7.104), e ricordando la (7.163), otteniamo:
U =−
∂
∂ 1
3 1
3
(βP V ) = −V g5/2 (z)
= V g5/2 (z)
= PV.
∂β
∂β λ3
2 βλ3
2
(7.179)
Il calore specifico a V costante è, per definizione:
cV =
˙
1
N
µ
∂U
∂T
¶
.
(7.180)
V
Per calcolare cV in funzione di (T, v) dobbiamo utilizzare la dipendenza di z da λ3 /v. Per T > Tc ,
dalle (7.180) e (7.179) otteniamo:
·µ
¶
¸
∂ T
T ∂z ∂
3v
kB
g
(z)
+
g
(z)
.
(7.181)
cV (z) =
5/2
2
∂T λ3
λ3 ∂T ∂z 5/2
Osserviamo ora che:
5 1
∂ T
=
.
3
∂T λ
2 λ3
Inoltre, per le gn (z) vale la relazione [Pat app. D eq. 7]:
gn−1 (z) = z
Segue:
∂
gn (z)
∂z
∂
1
g (z) = g3/2 (z) .
∂z 5/2
z
(7.182)
(7.183)
(7.184)
7.13
Esercizi
114
Ancora, dal fatto che, per T > Tc , z è soluzione della (7.165), segue:
∂
∂z ∂
∂ λ3
=
g (z) =
g (z) ,
∂T v
∂T 3/2
∂T ∂z 3/2
da cui, per la (7.183):
∂z
=
∂T
µ
∂ λ3
∂T v
¶µ
(7.185)
¶−1
3 1 λ3 z
∂
g3/2 (z)
=−
.
∂z
2 v T g1/2 (z)
(7.186)
La (7.181) diventa allora:
"
cV (z) = kB
15 g5/2 (z) 9 g3/2 (z)
−
4 g3/2 (z) 4 g1/2 (z)
#
(per :
T > Tc ) .
(7.187)
Per T → ∞ (z → 0), dagli sviluppi (7.168) segue:
g5/2 (z)
= 1;
z→0 g
(z)
3/2
lim
lim
g3/2 (z)
= 1.
z→0 g
(z)
1/2
(7.188)
3
k ,
2 B
(7.189)
Dalla (7.187) segue allora:
lim cV =
T →∞
cioè il valore corrispondente al gas ideale classico. Per T → (Tc )+ abbiamo: z → 1. Risulta anche:
g1/2 (z) → ∞ per z → 1 [Pat app. D eq. 10]. Quindi:
lim
T →(Tc )+
cV = kB
15 g5/2 (1)
≈ 1.9 kB
4 g3/2 (1)
(7.190)
(si noti che il valore è maggiore del valore classico).
Per T ≤ Tc risulta: ∂z/∂T = 0. Dalla (7.181) segue allora (vedi la fig. 7.7):
cV (T, v) =
3
∂ T
15
v
k vg (1)
=
k
g (1)
2 B 5/2 ∂T λ3
4 B λ3 5/2
(per :
T ≤ Tc ) .
(7.191)
Si noti che cV è continuo in T = Tc (16) , mentre la sua derivata è discontinua: è chiaro che la discontinuità
segue dal diverso andamento di ∂z/∂T per T ≶ Tc .
C
C cl
Fig. 7.7:
Calore specifico
(16)
T
cV del gas ideale di Bose (Ccl =
˙ (3/2)kB ).
Tc
Ricordiamo che per T → Tc abbiamo z → 1. Abbiamo inoltre [Pat app. D]: g1/2 (z) → ∞ per z → 1. Allora, è
immediato verificare che il limite per T → Tc− della (7.187) è uguale al limite per T → Tc+ della (7.191). La continuità di cV
in T = Tc non è una proprietà universalmente valida: per un gas ideale ”intrappolato” in una buca di oscillatore armonico,
cV risulta discontinuo in T = Tc [PiSt eq 10.20].
7.13
Esercizi
115
7.13 Esercizi
Esercizio 7.1 Stati miscela e operatori statistici.
a) Scrivere l’operatore statistico per uno stato miscela coincidente con lo stato puro |ψi.
b) Si consideri lo spazio di Hilbert, H2 generato da due vettori, ortonormali: |1i, e |2i, e sia Q un
sistema i cui microstati appartengono ad H2 . Calcolare l’operatore ρb nei casi seguenti [Rich § 14.5]:
¯ ®
¯ ®
¯ ¯2 ¯ ¯2
¯ ®
˙ α¯1 + β ¯2 , con: ¯α¯ + ¯β ¯ = 1;
1) Q si trova nello stato puro: ¯ψ =
2) Q ha uguale probabilità di trovarsi negli stati |1i e |2i;
3) Q si trova, con uguale densità di probabilità, in tutti i seguenti stati
¯
¯ ®
¯ ®
®
¯θ, ϕ1 , ϕ2 =
˙ sin θ eiϕ1 ¯1 + cos θ eiϕ2 ¯2 ,
·
Risultati :
¯ ∗
¯ αα
ρ1 = ¯¯ ∗
βα
con :
¯
αβ ∗ ¯¯
;
ββ ∗ ¯
0 ≤ θ ≤ π ; 0 ≤ ϕ1 , ϕ2 ≤ 2π .
¯
1 ¯¯ 1
ρ2 = ρ3 = ¯
2 0
¯
0 ¯¯
.
1¯
(7.192)
¸
(7.193)
c) Considerare un operatore della forma (7.6), con i |ψµ i normalizzati, e mostrare che la condizione:
P
Tr ρ = 1, implica:
µ pµ = 1.
d) Determinare lo stato miscela corrispondente all’operatore statistico canonico (7.14) (considerare il
b sono non degeneri).
caso in cui gli autovalori di H
e) Mostrare che la traccia di un operatore non dipende dalla base. Soluzione: Siano {|αi} e {|βi} due
b una osservabile. È allora:
basi nello spazio di Hilbert del sistema, e sia A
i
hX
X
X
b=
b | αi =
b
|βihβ| | αi =
˙
hα | A
hα | A
Tr (α) A
β
α
α
i
hX
(7.194)
X
X
b.
b
b | βi =
hβ | A
˙ Tr (β) A
|αihα| A | βi =
=
hβ |
β
α
β
Esercizio 7.2 Particelle di spin 1/2.
Si consideri lo spazio di Hilbert (di dimensione 2), H, generato dai vettori ortonormali: | − i, | + i,
autovettori della ”componente z dello spin di una particella con spin 1/2”. Si consideri un elemento
¯ ®
¯ ®
¯ ®
2
2
di H del tipo: ¯ψ = a ¯ + + b ¯ − , con | a | + | b | = 1. a) Mostrare che lo stato suddetto descrive un atomo ”polarizzato”, nel senso che esiste un vettore unitario (nello spazio fisico tridimensionale)
~n =
˙ (nx , ny , nz ), tale che il valore d’aspettazione della ”componente lungo ~n dello spin” è uguale a 1:
√
~n · hψ | ~σ | ψi =
˙ hψ | (~n · ~σ ) | ψi = 1. [Esempio: se a = b = 1/ 2, allora: ~n =
˙ (1, 0, 0)].
b) Calcolare l’operatore statistico per una particella (di spin 1/2) polarizzata nella direzione ~n; dimostrare che lo stato della particella è uno stato puro, e derivarne una espressione sulla base degli autostati
di σz . [Risultato: ρ = [1 + ~n · ~σ ]/2].
c) Calcolare l’operatore statistico per una particella (di spin 1/2) che abbia probabilità p di essere
polarizzata parallelamente al vettore ~n, e probabilità q = 1 − p di essere polarizzata antiparallelamente a
~n. [Risultato: ρ = [1 + (p − q) ~n · ~σ ]/2].
Esercizio 7.3 Operatore statistico per una particella libera.
a) Mostrare che l’operatore |xihx| può essere interpretato come ”operatore densità di probabilità”.
b) Si consideri [KiES § 23] una particella di massa m e senza spin, in un segmento di lunghezza a,
in assenza di forze e con condizioni periodiche al contorno. Si supponga che la particella sia descrivibile da uno stato miscela costruito a partire dagli autostati del momento corrispondenti all’autovalore
±k =
˙ (2π/a)(±n), dove n è un intero positivo fissato. Si ricordi che gli autostati del momento, | ± ki,
corrispondenti agli autovalori ±}k sono rappresentati, nella rappresentazione della posizione, dalla fun√
zione d’onda ψ± (x) =
˙ (1/ a) exp(±ikx). Calcolare l’operatore statistico ρ e la densità di probabilità per
7.13
Esercizi
116
la posizione: λ(x) =
˙ h(|xihx|)i, nei due casi seguenti:
1) la particella è descritta dallo stato puro: |ψi =
˙ √12 (| + ki + | − ki);
2) la particella è descritta dallo stato miscela costituito da tutti i vettori |ψ (α+ ,α− ) i, con:
(α+ ,α− )
|ψ
i=
˙ √12 [eiα+ | + ki + eiα− | − ki], per tutte le possibili fasi (α+ , α− ), con densità di probabilità
uniforme. [Risultati: 1) λ(x) = (2/a) cos2 kx; 2) λ(x) = 1/a.]
Esercizio 7.4 L’oscillatore armonico quantistico.
Si consideri un oscillatore armonico quantistico unidimensionale, di massa m e frequenza ω, in equilibrio termico ad una temperatura T , e si assuma che gli autovalori dell’energia siano: εn = n}ω, con
n = 0, 1, 2, . . . (ipotesi di Planck).
a) Calcolare la funzione di partizione e l’energia media. Soluzione:
b=
Z =
˙ Tr e−β H
∞
X
e−β}ωn =
n=0
1
,
1 − e−β} ω
U =−
}ω
∂
ln Z = β} ω
.
∂β
e
−1
(7.195)
b) Calcolare le stesse quantità del punto (a), usando gli autovalori esatti: εn = (n + 1/2)}ω.
c) Per quali T le proprietà termodinamiche di un oscillatore armonico quantistico diventano uguali a
quelle di un oscillatore armonico classico?
Esercizio 7.5 hN i e hnp i per il gas ideale quantistico.
D E
³
´
b = Tr ρbgc N
b = . . ..]
a) Derivare la (7.49) usando la (7.5) e la (7.21). [Soluzione: N
b) Usando la (7.52), verificare la seguente espressione:
X
hnp0 ,σ0 ia =
np0 ,σ0 Pa ({np,σ }) =
˙ −
P
P
1 1 X βµ p,σ np,σ ∂
np,σ εp,σ
−β
p,σ
z
=
e
β Za
∂εp0 ,σ0
{np,σ }
{np,σ }
1 1
∂
1 ∂
=−
Za =
˙ −
ln Za .
β Za ∂εp0 ,σ0
β ∂εp0 ,σ0
(7.196)
Ricavare le seguenti espressioni di Z (vedi (7.44)):
Z− =
Y¡
¢
1 + z e−βεp,σ ,
Z+ =
p,σ
Y¡
¢−1
1 − z e−βεp,σ
.
(7.197)
p,σ
Usando le (7.197) nelle (7.196) ottenere:
hnp,σ i− =
Da: hnp ia =
˙
P
σ
1
z −1 eβεp,σ
+1
,
hnp,σ i+ =
1
z −1 eβεp,σ
−1
.
(7.198)
hnp,σ ia (vedi (7.51)), ottenere infine le (7.57).
Esercizio 7.6 Funzione di gran partizione del gas ideale quantistico.
Scrivere la funzione di gran partizione quantistica come:
Z =
˙
∞
X
N =0
z N ZN =
˙
∞
X
bN
z N TrN e−β H
(7.199)
N =0
(con z =
˙ eβµ ; TrN è la traccia sullo spazio HN ). Mostrare che la (7.199) equivale alla (7.42).
[Soluzione: Dalla (7.39) segue:
Z=
∞
X
N =0
zN
X (N )
{np }
∞ X
X
X
¢
¢ X
¡
¡
(N )
(εp − µ) np .
ε p np =
exp − β
exp − β
p
N =0 {np }
p
(7.200)
7.13
Esercizi
117
È facile vedere che la somma doppia che figura nella (7.199) può essere calcolata sommando su ogni np
indipendentemente l’uno dall’altro (si noti che ancora non abbiamo specificato i valori degli np ):
∞
X (N )
X
α0n0 α1n1 . . . =
hX
α0n0
n0
N =0 {ni }
ih X
i
α1n1 . . . .
(7.201)
n1
Come illustrazione della (7.201) supponiamo che le particelle dispongano di due soli stati: allora il
primo membro della (7.201) diventa:
Σ=
˙
∞ X
X
(N )
α1n1 α2n2 .
(7.202)
N =0 n1 ,n2
Scriviamo la somma (7.202) ordinando i termini secondo lo schema seguente [Bal § 5.4]:
Σ = 1+
+ α1 + α2 +
(7.203)
+ α12 + α1 α2 + α22 +
+ α13 + α12 α2 + α1 α22 + α23 + . . .
;
la (7.202), cosı̀ come scritta, equivale a ”sommare lungo le righe” nello schema (7.203); gli stessi termini
possono tuttavia essere ”sommati lungo le diagonali”, e questo dà:
#
#" ∞
!# " ∞
"
à ∞
∞
X
X
X
X
n2
n1
n2
n1
(7.204)
α2 .
=
˙
α1
α2
α1
n1 =0
n2 =0
n1 =0
n2 =0
Per N generico, la (7.201) può essere dimostrata verificando che tutti i termini presenti a sinistra sono
presenti una e una sola volta anche a destra, e viceversa. In definitiva, sommando su ogni np indipendentemente l’uno dall’altro, la (7.200) diventa la (7.42).]
Esercizio 7.7 Calcoli dimensionali.
Derivare, in base a considerazioni puramente dimensionali, e a meno di un fattore numerico, la
lunghezza d’onda termica (7.66), e l’energia di Fermi (7.99).
Esercizio 7.8 Effetti quantistici nei gas.
a) Considerare un volume di elio (m ≈ 7 · 10−24 g) gassoso, a T = 273 K e v =
˙ V /N = 10−20 cm3 per
molecola: mostrare che il gas si comporta come un gas classico. [λ3 ≈ 6 · 10−24 cm3 , e v ≈ 10−20 cm3 .]
¡
¢3
b) Considerare un volume di elio liquido a T = 10 K e v ≈ 10−8 (v coincide praticamente con il
volume di una particella): mostrare che gli effetti quantistici sono essenziali. [λ ≈ 1.2 · 10−7 cm.]
c) Mostrare che il gas di elettroni associato ad un metallo come il Cu è quantistico (λ3 /v À 1)
anche temperatura ambiente. [Usando nella (7.66) il valore della massa dell’elettrone troviamo: λel ≈
43 Å =
˙ 43 × 10−8 cm. La densità del gas di elettroni segue considerando che il numero degli elettroni
nell’unità di volume è uguale al numero di atomi di Cu nell’unità di volume (per il Cu solo un elettrone per
atomo si è libero di muoversi nel reticolo; gli altri rimangono legati al nucleo, e quindi non fanno parte del
gas). La massa atomica del Cu è 63.5 g mol−3 ; la massa di un atomo di Cu è m = 63.5/N0 ≈ 1.05 × 10−22
g (dove N0 ≈ 6 × 1023 mol−3 è il numero di Avogadro); la densità (di massa) del Cu è 8.6 g cm−3 ;
quindi il numero di atomi per unità di volume è nel =
˙ (8.6/1.05) × 1022 cm−3 ≈ 8.1 × 1022 cm−3 ; segue:
˙ λ3el nel ≈ 7 × 103 . Per il gas di elettroni del Cu risulta TF ≈ 80000 ◦ K . La pressione del gas è
λ3el /vel =
circa 2000 volte quella di un gas ideale classico alla stessa T [Bali ex. 10e]. È chiaro che il gas di elettroni
del Cu è molto lontano (anche a temperatura ambiente, cioè ”alta”) dalla condizione classica.]
7.13
Esercizi
118
Esercizio 7.9 Energia di Fermi.
Calcolare l’energia di Fermi in base alla condizione di massimo ”impacchettamento” nello spazio dei
momenti. Soluzione: posto pF =
˙ (2mεF )1/2 (pF è il ”momento di Fermi”), e supponendo che hnp~ i = g per
p ≤ pF , e hnp~ i = 0 per p > pF (si ricordi che qui T = 0) segue:
hN i =
∞
X
hnp iT =0 =
˙
p=0
X
p
~: p≤pF
g
−→ g
V Àλ3
V
h3
Z
pF
0
d3 p = g
4π
V
p 3,
(2π})3 3 F
(7.205)
da cui la (7.99).
Esercizio 7.10 Capacità termica del gas di Fermi.
Giustificare qualitativamente l’andamento lineare in T di CV per T → 0.
Soluzione: si consideri che, a una temperatura T (con kB T ¿ εF ), le uniche particelle che possono assorbire
energia (e quindi contribuire alla capacità termica) sono quelle con energie contenute in un intervallo di
ordine kB T intorno ad εF . Queste particelle sono in numero ∆N ≈ hN i (kB T /εF ), e la loro energia totale
è ∆U ≈ kB T ∆N ∝ T 2 . Per la capacità termica segue: CV ≈ ∂∆U/∂T ∝ T [Hu87 § 11.1].
Esercizio 7.11 Inversione delle serie.
a) Invertire la (7.91). Soluzione: si scriva: z = x + αx2 + . . . , con x =
˙ λ3 /gv, si sostituisca nella
(7.91), e si uguaglino a zero i coefficienti delle varie potenze di x.
b) Ricavare la (7.97). Soluzione: Eleviamo entrambi i membri della (7.96) a 2/3. Segue, ponendo
√
x=
˙ 3 πλ3 /(4gv), e sviluppando per (ln z)−2 ¿ 1:
µ
2/3
x
π2
−2
(ln z) + . . .
= (ln z) 1 +
8
¶2/3
µ
¶
π2
−2
≈ (ln z) 1 +
(ln z) + . . . .
12
(7.206)
Scriviamo ln z come una serie di potenze in x. La serie deve evidentemente iniziare come: ln z = x2/3 + . . . .
Ipotizziamo allora: ln z = x2/3 + αx−2/3 + O(x−4/3 ), con α da determinarsi. Sostituendo nella (7.206)
otteniamo:
´−1
π 2 ³ 2/3
x2/3 = x2/3 + αx−2/3 +
x + αx−2/3 + . . .
+ ... ,
(7.207)
12
cioè, moltiplicando per x2/3 , e sviluppando i denominatori:
0=α+
π2
π2
π2
x2/3
1
+ ... = α +
+ ... = α +
+ O(x−4/3 ) .
2/3
−2/3
−4/3
12 x + αx
12 1 + αx
12
+ ...
+ ...
Segue: α = −π 2 /12, cioè la (7.97).
(7.208)
Bibliografia
[AA]
[AS70]
[Bal]
[Bali]
[Bar]
[BDFN]
[Ben]
[BeP]
[BMB]
[Bof2]
[Bru67]
[Bru76]
[Btl]
[Cal]
[Cha43]
[Cra]
[Dac]
[Des]
[Do74]
[Ei56]
[FaMa]
[Far]
[Fel]
[FeSM]
[FH91]
[FLS]
[FMS]
[FW]
[Hec]
[Gan]
[Gard]
[Geo]
[Gld]
[GM96]
[Gol]
[Gr72]
[Hu87]
[Khi]
[KiIS]
[KiES]
[Is25]
[Isi]
V.I. Arnold, A. Avez, Problemes ergodiques de la mécanique classique, Gauthier - Villars (1967)
M. Abramowitz, I.A Stegun, Handb. of math. funct., National Bureau of Standards (1970)
R. Balescu, Equilibrium and non-equilibrium statistical mechanics, Wiley (1975)
R. Balian, From microphysics to macrophysics, Springer-Verlag (1992)
G. Barton, Elements of Green’s functions and propagation, Clarendon Press, Oxford (1989)
J.J. Binney, et al., The theory of critical phenomena, Oxford Univ. Pr. (1993)
F. Benatti, Deterministic chaos in infinite quantum systems, Springer-Verlag (1993)
B.J. Berne, R. Pecora, Dynamic light scattering, Wiley (1976)
M. Le Bellac, et al., Equilibrium and non-eq. statistical thermodynamics, Cambridge 2004
S. Boffi, da Heisenberg a Landau, Bibliopolis (2004)
S.G. Brush, History of the Lenz Ising model, Rev. Mod. Phys. 39, 883-893 (1967)
S.G. Brush, The kind of motion we call heat, North-Holland (1976)
M.S. Bartlett, An introduction to stochastic processes, Cambridge (1956)
H. Callen, Termodinamica, Tamburini (1972)
S. Chandrasekhar, Rev. Mod. Phys. 15, 1 (1943)
J. Crank, The mathematics of diffusion, Clarendon Pr. (1975)
H. Dachs ed., Neutron diffraction, Springer-Verlag (1978)
B. d’Espagnat, Conceptual foundations of quantum mechanics, Benjamin (1976)
C. Domb, in: C. Domb, M.S. Green, Phase trans. and cr. phen., Vol. 3, Acad. Pr. (1974)
A. Einstein, Investigations on the theory of the brownian movement, Dover (1956)
A. Fasano, S. Marmi, Meccanica analitica, Bollati-Boringhieri (1994)
I.E. Farquhar, Ergodic theory in statistical mechanics, Interscience (1964)
W. Feller, An introduction to probability theory and its applications, Wiley (1957)
R.P. Feynman, Statistical mechanics, Benjamin (1972)
K.H. Fischer, J.A. Hertz, Spin glasses, Cambridge Univ. Pr. (1991)
R.P. Feynman, et al., The Feynman lectures on physics, Addison-Wesley (1970)
N. Fusco, P. Marcellini, C. Sbordone, Analisi matematica due, Liguori Ed. (1996)
A.L. Fetter, J.D. Walecka, Quantum theory of many-particle systems, McGraw-Hill (1971)
C.E. Hecht, Statistical thermodynamics and kinetic theory, Freeman (1990)
F.R. Gantmacher The theory of matrices, Chelsea Pub. Comp. (NY) (1960)
C.W. Gardiner, Handbook of stochastic methods, Springer-V. (1983)
H.-O. Georgii, Gibbs measures and phase transitions, W. de Gruyter (1988)
N. Goldenfeld, Lectures on phase tr. and the renorm. group, Addison-Wesley (1992)
S. Graffi, A. Martinez, Erg. prop. of inf. harm. crystals, J. of Math. Phys. 37, 5111-5135 (1996)
H. Goldstein, Classical mechanics, Addison-Wesley (1980)
R.B. Griffiths, in: Phase trans. and cr. phen., Vol 1, C. Domb, M.S. Green eds., Acad. Pr. (1972)
K. Huang, Statistical mechanics, 2nd ed., Wiley (1987)
A.J. Khinchin, Mathematical foundations of statistical mechanics, Dover (1949)
C. Kittel, Introduzione alla fisica dello stato solido, Boringhieri (1971)
C. Kittel, Elementary statistical physics, Wiley (1958)
E. Ising, Z. Physik, 31, 253 (1925)
A. Isihara, Statistical physics, Academic Pr. (1971)
120
[LLfs1]
[Ma78]
[Man]
[Mes]
[MNV1]
[Mor]
[Mu69]
[Mu70]
L. Landau, E. Lifchitz, Statistical physics (part 1), Pergamon (1980)
S. Ma, Modern Theory of Critical phenomena, Benjamin (1976)
F. Mandl, Statistical physics, Wiley (1971), Benjamin (1976)
A. Messiah, Mécanique quantique, Dunod (1960)
P. Mazzoldi, et al., Fisica Vol. I, Edises (2003)
G. Morandi, Statistical mechanics, World Scientific (1995)
A. Münster, Statistical thermodynamics, Springer V. - Academic Press (1969)
A. Münster, Classical thermodynamics, Wiley (1970)
[On44]
[Pa81]
[Pa87]
[Pat]
[Pen]
[PiSt]
[Rei]
[Re80]
[Rich]
L. Onsager, Phys. Rev. 65, 117 (1944)
G. Parisi, Mean field theory for spin glasses, in [CDP]
G. Parisi, Statistical field theory, Addison-Wesley (1987)
R.K. Pathria, Statistical mechanics, Pergamon (1972)
O. Penrose, Foundations of statistical mechanics, Pergamon (1970)
L. Pitaevskii, S. Stringari, Bose-Einstein condensation, Clarendon Press (2003)
F. Reif, Fundamentals of statistical and thermal physics, McGraw-Hill (1965)
L.E. Reichl, A modern course in statistical physics, Arnold (1980)
R.D. Richtmyer, Principles of advanced mathematical physics, Springer-Verlag (1978)
[RiCa]
[Ros]
[Ru69]
[RV]
[Sta]
[SZF]
[Thi4]
[Tho]
[Tol]
[Whit]
[Za89]
A. Rigamonti, P. Carretta Structure of matter, Milano, Springer (2007)
S. Rosati, Fisica generale, Casa Ed. Ambrosiana (1978)
D. Ruelle, Statistical mechanics (rigorous results), Benjamin (1969)
A.W. Roberts, D.E. Varberg, Convex functions, Academic Pr. (1973)
H.E. Stanley, Introduction to phase transitions and critical phenomena, Oxford U.P. (1971)
M.F. Schlesinger, et al., (Eds.), Levy flights and related topics, Springer (1995)
W. Thirring, A course in math. phys.: IV: Q. mech. of large systems, Springer-Verlag (1983)
C.J. Thompson, Mathematical statistical mechanics, Macmillan (1972)
R.C. Tolman, The principles of statistical mechanics, Oxford Univ. Pr. (1938)
R.M. White, Quantum theory of magnetism, McGraw-Hill (1970)
A.B. Zamolodchikov, Int J. of Mod. Phys. A 4, 4235 (1989)