RUDIMENTI DI GEOMETRIA 3D
1. Vettori geometrici e vettori applicati
In questa sezione vogliamo richiamare il concetto di vettore geometrico e fornire un significato “rigoroso” al
concetto di vettore applicato, essenziali per le applicazioni fisica e in particolare per la meccanica razionale.
Definizione. Un segmento orientato è un segmento in cui sia stato scelto un ordine tra i due estremi ed è
quindi individuato da una coppia ordinata di punti. Il primo punto è detto coda o origine e il secondo è detto
punta o fine. Un segmento orientato, rappresentato in figura (graficamente con una freccia), è denotato dai
punti di estremo: l’origine seguita dalla punta.
I segmenti orientati AB e BA contengono lo stesso insieme di punti, ma sono diversi, essendo diverso l’ordine
degli estremi. Ogni punto individua un segmento banale in cui origine e fine coincidono. Un segmento orientato
definisce tre grandezze:
• direzione: retta (o più propriamente un fascio di rette) contenente AB;
• verso: A precede B;
• lunghezza: una volta fissata una units̀ di misura questa determina la lunghezza del vettore. Ovviamente AA ha lunghezza nulla.
Definizione. Due segmenti orientati AB e CD si dicono equipollenti se hanno le stesse lunghezza, direzione
e verso e si pone AB ≡ CD.
La relazione di equipollenza è una relazione di equivalenza, ossia si ha che 1. ogni segmento orientato è
equipollente a se stesso; 2. se AB è equipollente a CD allora anche CD è equipollente ad AB; 3. se AB
è equipollente ad CD e CD è equipollente a EF , allora anche AB è equipollente a EF . Da ciò si deduce
che l’insieme dei segmenti orientati è suddiviso (o meglio partizionato) in classi di equipollenza a due a due
disgiunte: cioè è sempre possibile stabilire se un segmento orientato appartiene o meno ad una determinata
classe e esso appartiene solo ad una classe. La proprietà appena osservata permette di definire il concetto di
vettore geometrico.
Definizione. Chiamiamo vettore geometrico una classe di equipollenza di segmenti orientati. L’insieme S di
tali classi è detto spazio vettoriale geometrico.
Vediamo ora che S è effettivamente un R–spazio vettoriale. Notiamo che ha senso parlare di lunghezza,
direzione e verso di un vettore geometrico,1 considerando quelle di uno qualsiasi dei suoi rappresentanti. La
classe dei segmenti orientati banali definisce il vettore nullo ~0, inoltre due vettori si dicono opposti se hanno
uguale direzione e lunghezza ma verso opposto e infine due vettori si dicono paralleli se hanno la stessa direzione.
Introduciamo ora le due operazioni che renderanno S un R–spazio vettoriale.
• Somma tra vettori.2 Consideriamo due vettori ~v e w.
~ La somma ~v + w
~ si effettua seguendo i seguenti
passi:
i. si scelga un punto A;
Date: 3 novembre 2013.
1D’ora in poi scrivere semplicemente vettore invece che vettore geometrico.
2Metodo punta–coda o del parallelogramma.
1
ii. si scelgano altri due punti B e C in modo che AB = ~v e BC = w;
~
iii. ~v + w
~ := AC, cioè definiamo la somma di ~v con w
~ come la classe di equipollenza di segmenti
orientati di rappresentante il segmento orientati AC.
• Prodotto per scalari. Siano ~v ∈ S e α ∈ R. Il vettore w
~ := α ~v è il vettore diretto come ~v di
lunghezza pari a |α| k~v k e di verso concorde a ~v se α > 0, discorde se α < 0, inoltre se α = 0, w
~ = ~0.
Tali operazioni soddisfano le proprietà a cui devono soddisfare l’operazione interna e il prodotto per scalari
nel caso degli spazi vettoriali (si verifichi per esercizio), cioè S dotato di queste due operazioni è un R–spazio
vettoriale.
Definiamo ora cosa significa applicare un vettore ad un punto; operazione fondamentale in fisica. L’operazione
di applicazione di un vettore ad un punto P consiste nello scegliere quel particolare segmento orientato della
classe, cioè quel determinato rappresentante, avente origine in P : un vettore applicato consiste quindi di una
coppia (P, ~v ), in cui P ∈ A3 e ~v ∈ S. L’insieme dei vettori applicati ad un punto prefissato A viene denotato
con SA ed è dotato della struttura di R–spazio vettoriale. Un vettore applicato in un punto A si può scrivere:
B = A + ~v
oppure
~v = B − A.
Inoltre SA è banalmente isomorfo allo spazio dei segmenti orientati con origine in A. È ora abbastanza semplice
costruire un isomorfismo tra lo spazio dei vettori geometrici S e lo spazio dei vettori applicati SA in un punto
fissato A: è sufficiente introdurre un sistema di riferimento con origine in A e applicare poi i vettori all’origine.
Cosı̀ facendo si identificano i vettori ~v := AP con le coordinate dei punti di punta P
x0
~v0 7−→ y0
z0
e le operazioni appena introdotto divengono operazioni tra le coordinate.
N.B. Si noti, però, che l’isomorfismo appena introdotto non è canonico, cioè dipende dalla scelta del sistema
di riferimento, mentre le operazioni tra i vettori sono definite intrinsecamente! La natura geometrica dei vettori
permette di scegliere in ogni occasione il sistema di riferimento più opportuno. Questo fatto è di fondamentale
importanza in meccanica, perche‘, assieme ai principi di Newton emerge chiaramente che il sistema di riferimento
(purché inerziale) può essere scelto in modo arbitrario.
La costruzione introdotta permette di affermare che l’insieme dei vettori geometrici può essere dotato di una
struttura affine. Ricordiamo che una delle differenze fondamentali tra spazi vettoriali e spazi affini è che mentre
in uno spazio vettoriale l’origine dei sistemi di riferimento è necessariamente il vettore nullo, in uno spazio affine
l’origine può essere posta in qualsiasi punto.
2. Struttura euclidea dello spazio dei vettori geometrici
Lo spazio dei vettori geometrici, però, non solo è dotato della struttura affine, ma anche della struttura
euclidea ereditata dalla struttura euclidea standard di R3 . Siano ~v e w
~ due vettori di S in cui sia stato
introdotto un sistema di riferimento, ossia sia stato fissato un punto O detto origine e sia stati scelti tre vettori
linearmente indipendenti (formanti una base di R3 ). Siano quindi [v1 v2 v3 ]T e [w1 w2 w3 ]T le coordinate
di ~v e w,
~ rispettivamente.
2
Definizione. Il prodotto scalare euclideo di S è l’applicazione bilineare, simmetrica e definita positiva
· : S × S −→ R
(~v , w)
~ 7−→ ~v · w
~ := v1 w1 + v2 w2 + v3 w3 =
3
X
vj w j
j=1
• bilineare: lineare in entrambe le entrate del prodotto;
• simmetrica: ~v · w
~ =w
~ = ~v ;
• definita positiva: ~v · ~v ≥ 0 e l’uguaglianza vale se e solo se ~v = ~0.
Lo spazio dei vettori geometrici (ma più in generale lo spazio affine A3 3–dimensionale a lui isomorfo) munito
di un prodotto scalare euclideo è detto spazio euclideo 3–dimensionale e si indica con E3 .
La nozione di prodotto scalare permette di introdurre una nozione di lunghezza o norma di un vettore,
usando le coordinate:
k · k S −→ R+
√
~v 7−→:= k~v k := ~v · ~v
Proprietà.
• k~v k = 0 se e solo se ~v = ~0;
• kα ~v k = |α| k~v k con α ∈ R;
• k~v + wk
~ ≤ k~v k kwk
~ (disuguaglianza triangolare);
• k~v + wk
~ 2 = k~v k2 + 2 ~v · w
~ + kwk
~ 2 (Teorema di Carnot);
• k~v + wk
~ 2 + k~v − w}
~ 2 = 2 k~v k2 + kwk
~ 2
• |~v · w|
~ ≤ k~v k kwk
~ (disuguaglianza di Cauchy–Schwarz).3
La disuguaglianza di Cauchy–Schwarz assicura che
|~v · w|
~
≤ 1,
k~v k kwk
~
e ciò permette di introdurre il concetto di angolo o più precisamente di coseno di un angolo non orientato:
cos θ(~v , w)
~ =
|~v · w|
~
;
k~v k kwk
~
recuperando cosı̀ anche la nozione di prodotto scalare nota dalla fisica. La nozione di angolo consente di
introdurre il concetto di ortogonalità tra vettori. Precisamente
Definizione. Due vettori ~v , w
~ di S si diranno ortogonali
~v · w
~ = 0.
Inoltre, come noto dai corsi di Algebra lineare e Geometria (analitica), due vettori ortogonali sono linearmente indipendente, inoltre in uno spazio euclideo è possibile definire una base ortogonale o ortonormale (in
quest’ultimo caso i vettori di base oltre ad essere a due a due ortogonali devono avere norma unitaria4). Tranne in alcuni casi espressamente indicati lavoreremo con basi ortogonali in E3 , denotando con {e1 , e2 , e3 } o
{c1 , c2 , c3 } o {i, j, k} e versori di base.
2]T sono ortogonali ma non sono versori.
√
√
Sol. Osserviamo che ~v · w
~ = 2 +√0 − 2 = 0, √
per cui ~v e w
~ sono ortogonali. La norma di ~v è k~v k = ~v · ~v = 2,
mentre la norma di w
~ è kwk
~ = w
~ ·w
~ = 2 2.
Esempio 1. Verificare che i vettori ~v = [1
0
− 1]T e w
~ = [2
3Per esercizio dimostrare le proprietà qui elencate.
4Un vettore di norma unitaria è anche detto versore.
3
0
Ora, dato un vettore non nullo ~v è sempre possibile costruire un versore avente stessa direzione e stesso
verso: è sufficiente dividere il vettore originario per la sua norma:
~u :=
Infatti
~u · ~u =
~v
.
k~v k
~v
k~v k2
~v
1
~
v
·
~
v
=
= 1.
·
=
k~v k k~v k
k~v k2
k~v k2
Esempio 2. Con riferimento all’esempio precedente normalizzare i vettori ~v e w
~ e completarli ad una base
ortonormale di E3 .
Sol. Poniamo
√
√ 2
1
w
~
~
v
2
2
~b1 =
0 e ~b2
0
=
=
k~v k
2
kwk
~
8
−1
2
che sono ortonormali. Per completare b1 e b2 ad una base ortonormale di E3 è sufficiente aggiungere il vettore
e2 .
In caso non ci si accorgesse di tale fatto, bisognerebbe scrivere un qualche vettore linearmente indipendente
da ~b1 e ~b2 e poi applicargli la procedura di ortonormalizzazione di Gram–Smith per la quale si rimanda ad un
libro di Algebra Lineare e Geometria.
3. Prodotto vettoriale e prodotto misto
Nello spazio euclideo 3–dimensionale E3 oltre al prodotto scalare rimane definito il prodotto vettoriale di
due vettori
· × · : E3 × E3 −→ E3
v2 w3 − v3 w2
(~v , w)
~ 7−→ ~v × w
~ := v3 w1 − v1 w3
v1 w1 − v2 w1
in cui ~v = [v1 v2 v3 ]T e w
~ = [w1 w2 w3 ]T .
Una formula utile per l’espressione del prodotto vettoriale consiste nel porre i vettori ~v e w,
~ nell’ordine
assegnato, come seconda e terza riga di una matrice e come prima riga porre i vettori della base canonica:
i
j
k
v1 v 2 v3
w1 w2 w3
e poi sviluppare come un determinante ma
i
v1
w1
esclusivamente rispetto alla prima riga, ottenendo
j
k
v2 w3 − v3 w2
v2 v3 = v3 w1 − v1 w3
w2 w3
v1 w1 − v2 w1
Proprietà.
• ~v × w
~ = −w
~ × ~v ;
• (~v + ~u) × w
~ = ~v × w
~ + ~u × w;
~
• (λ ~v ) × w
~ = λ(~v × w)
~ = ~v × (λ w),
~ λ ∈ R;
• ~v × w
~ = 0 se e solo se ~v e w
~ sono proporzionali;
• ~v × w
~ · ~v = 0;
• k~v × wk
~ 2 = k~v k2 + kwk
~ 2 − (~v · w)
~ 2 (identità di Lagrange).
Dall’identità di Lagrange si ricava che k~v × w = ~v k kwk
~ sin θ, con θ angolo convesso tra ~v e w
~ e cioè che la
norma di un prodotto vettore rappresenta l’area del parallelogramma di lati ~v e w.
~ Dalla penutima proprietà
si ricava che ~v × w
~ è perpendicolare al piano generato da ~v e w
~ e quindi che la terna {~v , w,
~ ~v × w}
~ forma una
base di E3 . Dalla prima proprietà si ricava che il prodotto vettoriale non è un’operazione commutativa.
Da ultimo introduciamo due ultime operazione legate al prodotto vettoriale: il prodotto misto e il doppio
prodotto vettore.
4
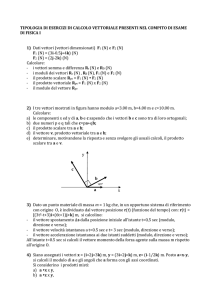
Figura 1. Interpretazione geometrica del prodotto misto
Prodotto misto. In uno spazio euclideo 3–dimensionale è definito il prodotto misto ossia un prodotto che
coinvolge un prodotto vettoriale e un prodotto misto. Dati tre vettori di ~v , w~
~ z in E3 :
~v · w
~ × ~z = det[Col(~v , w,
~ ~z)]
in cui Col(. . .) indica la matrice delle colonne dei vettori indicati tra parentesi. Dall’interpretazzione geometrica
del prodotto vettoriale e del prodotto scalare si evince che il ~v · w
~ × ~z sia il volume con segno del parallelepipedo
di spigoli ~v , w,
~ ~z.
Il prodotto misto, permette quindi di introdurre il concetto di base orientata. Una base di E3 si dirà
equiorientata con la base canonica se la sua forma volume associata è positiva. Si osservi che per le proprietà
del determinante, al variare dell’ordine degli elementi della base varierà anche l’orientazione della stessa.
Doppio prodotto vettore.
4. Rudimenti di Teoria delle curve nello spazio
Un modo “semplice” e naturale per pensare ad una curva consiste nell’interpretarla come quello strumento
che descrive il moto di una particella (o punto materiale): ad un dato istante t1 la particella si trova nel punto
dello spazio individuato dalle coordinate (x(t1 ), y(t1 ), z(t1 )). È importante osservare fin da subito che l’interesse
non è volto solamente alla traiettoria descritta dalle particelle, ma anche alle proprietà di questa, ad esempio
da come la traiettoria viene percorsa.
5
Definizione. Una curva parametrica in Rn con n ≤ 35 è una funzione differenziabile
γ : ]a, b[−→ Rn
t 7−→ γ(t) := (x(t), y(t), z(t))
Una curva quindi è individuata da una funzione di un aperto di R in Rn . Dire che γ è differenziabile per
noi significherà che γ ammette un numero sufficiente di derivate. Inoltre nel caso di funzioni a valori vettoriali,
la derivazione si effettua per componenti, cioè guardando le singole componenti della funzione come funzioni di
variabile reale.
Esempio 3. Si consideri la curva cartesiana6
γ : ]a, b[−→ R2
t 7−→ γ(t) := (t, t2 )
Ora
d
dt dt2
d
γ(t) =
(t, t2 ) =
,
= (1, 2t) .
dt
dt
dt dt
γ̇ è quindi un vettore in R2 . γ̇(t)|t=0 = (1, 0) è un vettore tangente alla curva nel punto in cui esso è calcolato.
Cosı̀ γ̇(1) = (1, 2) è un vettore applicato a γ(1) = (1, 1) e tangente a γ.
γ̇(t) =
γ̇(t) è un vettore tangente alla curva γ nel punto γ(t): per tale ragione è detto vettore velocità. La
norma kγ̇(t)k di γ̇(t) è detta velocità della curva. Si noti, come evidente anche dall’esempio precedente, che
generalmente la velocità di una curva varia da punto a punto. (Ciò dovrebbe essere immediato se si pensa ad
una curva come ad una traiettoria di un moto, infatti in generale un moto non avviene con velocità costante,
non è cioè uniforme, ma ci sono frenate, accelerazioni, etc.)
Esempio 4. Si consideri la curva
γ : ]a, b[−→ R3
t 7−→ γ(t) := (3t2 , 2t, 1 + et )
γ̇(t) = (6t, 2, et ) e kγ̇k = 35t2 + e2t + 4. Cioè la curva γ ha velocità che varia da punto a punto.
Una curva in cui kγ̇(t)} =
6 0 per ogni t ∈]a, b[ è detta regolare.
Per le curve regolari è possibile misurare la lunghezza della curva stessa abbastanza semplicemente:
Z d
d
L[γ|c ] =
kγ(ξ)k dξ
c
5Pensato come spazio affine su se stesso.
6Una curva è detta cartesiana se si può porre nella forma γ(x) = (x, f (s)) con f (x) funzione di una variabile.
6
Il significato geometrico di tale formula è abbastanza intuitivo: data una curva γ, si consideri una suddivisione
{c = t0 , t1 , . . . , tn−1 , tn = d} dell’intervallo [c, d] nel quale si vuole calcolare la lunghezza di γ. Ciò permette di
definire una spezzata s(t) con i vertici tutti in γ la cui lunghezza sarà
n
X
L[s|dc ] =
kγ(ti ) − γ(ti−1 )k
i=1
Figura 2. Rettificazione di una curva
La spezzata s(t) può essere pensata come un’approssimazione di γ, quindi raffinando la suddivisione, al
limite per i −→ +∞ i segmenti γ(ti ) − γ(ti−1 ) si confonderanno con i vettori tangenti a γ, fornendo cosı̀ la
lunghezza di γ.
Esempio 5. Si determini la velocità di una curva cartesiana γ(t) = (t, f (t)), con f (t) funzione reale di variabile
reale.
Sol. Il vettore velocità di γ è γ̇(t) = 1, dfdt(t) . Da cui
s
2
df (t)
kγ̇(t)k = 1 +
dt
Esempio 6. Si consideri
γ : ]a, b[−→ R2
θ 7−→ γ(θ) := (cos θ, sin θ)
cerchio unitario di centro l’origine. Calcoliamone la lunghezza.
Z 2π
Z 2π
L[γ] =
kγ̇(θ)k dθ =
dθ = 2π
0
0
essendo γ̇(θ) = (− sin θ, cos θ) e quindi kγ̇(θ)k = 1.
Esercizio 1. Si determini la velocità di una curva parametrizzata in coordinate polari, x(t) = ρ(t) cos θ(t),
y(t) = ρ(t) sin θ(t), con (ρ, θ) ∈ R∗+ ×]0, 2π[.
Si osservi che differenti curve possono avere la medesima traccia e viceversa. Per studiare ciò, ma in generale
anche da un punto di vista meccanico, è utile considerare riparametrizzazioni di curve.
Definizione. Sia γ :]a, b[−→ R3 una curva parametrica e sia φ :]a, b[−→]c, d[ una funzione continua, invertibile
con inversa continua7 La funzione δ :]c, d[−→ R3 è una riparametrizzazione di γ (e viceversa) se
γ =δ◦φ
Esempio 7. Si considerino le curve γ : t ∈]0, 2π[−→ (cos t, sin t) ∈ R2 e δ : τ ∈]0, π[−→ (cos 2τ, sin 2τ ) ∈ R2 .
La traccia di entrambe le curve è una circonferenza di raggio 1 e centro l’origine. La differenza tra le due curve
consiste nella velocità di percorrenza, infatti kγ̇k = 1 e kδ̇k = 2: δ percorre il supporto a velocità doppia di γ.
Si noti che entrambe le curve sono percorse con velocità uniforme, pertanto è semplice immaginare che le due
curve siano una riparametrizzazione una dell’altra. La funzione φ :]0, π[3 t −→]0, π/2[3 τ := t/2.
7Cioè φ sia un omeomorfismo.
7
Riferimenti bibliografici
[Candilera] M. Candilera, Dispensa di Geometria. Reperibile alla pagina web http://www.math.unipd.it/ candiler/mat tre.html
[Cornalba] M. Cornalba Piccola introduzione alla geometria proiettiva. Reperibile alla pagina web
http://mate.unipv.it/cornalba/dispense/proj.pdf
[Sernesi] E. Sernesi, Geometria 1. Bollati Boringhieri.
[Spera–1] M. Spera, Note di Elementi di Geometria. Non pubblicate.
[Spera–2] M. Spera, Note del Corso di Geometria. Libreria Progetto.
[Spera–3] M. Spera, Note di Geometria Computazionale. Non pubblicate.
[Spera–4] M. Spera, Comunicazioni private.
8