DINAMICA DI SISTEMI AEROSPAZIALI
Tema d’esame 15 - 11 - 2011
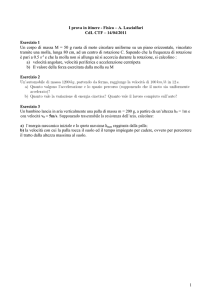
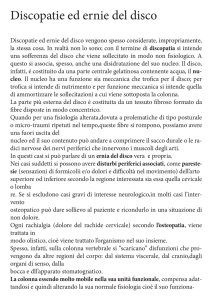
Esercizio 1. Un corsoio di massa m
scorre su un piano orizzontale con attriR, M , J
000 A
111
to radente di coefficiente fd . Al corsoio, in
F
000
111
000
111
h
C, è collegata la biella B–C, di lunghezza b
000000000 c
111111111
000
111
D
000000000
C
C
m
e massa trascurabile. La biella, a sua volm111111111
ta, è collegata in B alla manovella A–B, di
000000000d
111111111
b
a,
J
000000000
111111111
m
lunghezza a < b e momento d’inerzia bari11111111
00000000
B
centrico Jm . Il baricentro della manovella
E
si trova in A, ovvero nel punto in cui la
manovella è incernierata al telaio.
Tale punto è posto ad una altezza h rispetto all’asse lungo il quale scorre il corsoio. Il disco di raggio R,
massa M e momento d’inerzia baricentrico J, con centro in D, è collegato al corsoio da una biella C–D, di
massa trascurabile. Il disco rotola senza strisciare su di un piano orizzontale, caratterizzato dal coefficiente
di attrito statico fs . Il disco è caratterizzato dal coefficiente di resistenza al rotolamento fv . Il sistema é
posto nel piano verticale.
1.a) Si scrivano rotazione, velocità ed accelerazione angolari del disco in funzione dell’angolo di rotazione
della manovella, nell’ipotesi che questa ruoti a velocità angolare costante Ω;
1.b) si valutino le reazioni scambiate nel punto E tra il disco e il telaio;
1.c) si valutino le reazioni scambiate nel punto F tra il corsoio e il telaio;
1.d) si determini la coppia che occorre applicare alla manovella per ottenere il movimento del sistema
descritto al punto (1.a);
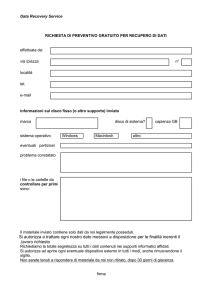
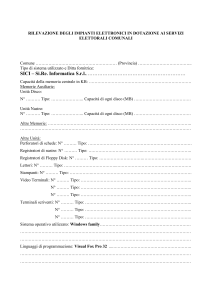
Esercizio 2. Un’asta di massa m uniforme e
lunghezza L, posta in un piano verticale, è incernierata a terra in O e collegata in A ad una
molla che agisce in direzione verticale. La molla abbia un precarico tale per cui all’equilibrio
statico per f (t) = 0 l’asta sia orizzontale.
2.a) Si scriva l’equazione del moto del sistema, linearizzata rispetto alla soluzione di
equilibrio statico;
f (t)
11
00
00
11
00 O
11
00
11
L, m
A
k
2.b) si calcoli la frequenza caratteristica del sistema;
1111
0000
2.c) si calcoli la risposta ad una forzante f (t) = f0 cos(Ωt) a transitorio di avviamento esaurito;
2.d) si valuti la forza scaricata a terra dal pattino nel caso al punto (2.c);
2.e) si valutino le azioni interne in un punto generico a distanza a dal punto O nel caso al punto (2.c).
Traccia di soluzione
Esercizio 1.
1.a) Moto del disco. La rotazione ϕ del disco, positiva in senso antiorario, nell’ipotesi di puro rotolamento
è legata alla traslazione y del suo centro D in direzione parallela al piano di rotolamento e positiva verso
destra da
y
ϕ=− .
(1)
R
Dato che il piano di rotolamento è parallelo al piano di strisciamento del corsoio, la traslazione x di quest’ultimo in direzione parallela al piano è uguale alla traslazione del punto D, y. Quindi il moto del disco è legato
al moto del punto C, che a sua volta può essere messo in relazione con quello della manovella A–B attraverso
una equazione di chiusura relativa al triangolo ABC.
Sia α l’angolo di rotazione della manovella, con origine a manovella orizzontale verso destra e verso
positivo antiorario. Sia β l’angolo di rotazione della biella, con le stesse convenzioni. Sia x la componente
orizzontale della distanza del perno C del corsoio dal punto A, positiva verso destra. L’equazione di chiusura
relativa al triangolo ABC è
aejα + bejβ = x − jh;
(2)
scomposta in parte reale ed immaginaria dà
a cos α + b cos β = x
(3a)
a sin α + b sin β = −h,
(3b)
dalle quali si ricava
h a
−1
β = sin
− − sin α
b
b
s
2
h a
x = a cos α + b 1 − − − sin α
b
b
(4a)
(4b)
ovvero β e soprattutto x in funzione di α.
Dalla derivata dell’equazione di chiusura,
j α̇aejα + j β̇bejβ = ẋ
(5)
si ricava
−α̇a sin α − β̇b sin β = ẋ
(6a)
α̇a cos α + β̇b cos β = 0,
(6b)
ovvero
b sin β 1
−b cos β 0
β̇
ẋ
=
−a sin α
a cos α
α̇
(7)
Dalla derivata seconda dell’equazione di chiusura,
j α̈aejα − α̇2 aejα + j β̈bejβ − β̇ 2 bejβ = ẍ
(8)
si ricava
−α̈a sin α − α̇2 a cos α − β̈b sin β − β̇ 2 b cos β = ẍ
2
2
α̈a cos α − α̇ a sin α + β̈b cos β − β̇ b sin β = 0,
(9a)
(9b)
ovvero
b sin β 1
−b cos β 0
β̈
ẍ
=
−a sin α
a cos α
α̈ −
α̇2 a cos α + β̇ 2 b cos β
α̇2 a sin α + β̇ 2 b sin β
.
(10)
A questo punto, il moto del punto C è determinato fino all’accelerazione in funzione di α e delle sue derivate.
In particolare, dal momento che nel caso in esame α̇ = Ω, è possibile operare alcune semplificazioni. È
opportuno notare che, nonostante l’accelerazione angolare della manovella sia nulla, a causa della cinematica
del meccanismo le accelerazioni di alcune parti sono in generale non-nulle.
1.b) Reazioni tra disco e telaio. Nel seguito, per semplicità, si considera la generica condizione di
moto rappresentata in figura alla quale, nell’ipotesi di rotazione antioraria della manovella, corrisponde uno
spostamento di corsoio e disco verso destra, e quindi una rotazione del disco in senso orario.
Dal momento che l’asta C–D ha massa trascurabile e non è sollecitata se non agli estremi, la reazione
vincolare scambiata tra asta e disco può essere diretta soltanto lungo l’asta stessa. Ne consegue che l’equilibrio
alla traslazione del disco in direzione verticale si riduce a
NE = M g.
(11)
Si scriva l’equilibrio alla rotazione del solo disco rispetto al punto C,
−J ϕ̈ + Cv + RTE = 0,
(12)
con TE arbitrariamente scelta come positiva verso destra, da cui si ricava
TE = −
J
ẍ − fv M g.
R2
(13)
1.c) Reazioni tra corsoio e telaio. Si scriva l’equilibrio alla traslazione del solo disco in direzione
orizzontale, considerando la forza HD scambiata con l’asta,
HD + TE − M ẍ = 0;
(14)
si ricava
J
HD = M + 2 ẍ + fv M g.
R
(15)
Si consideri ora l’equilibrio alla rotazione del corsoio rispetto al punto C; la forza dovuta allo strisciamento
si oppone al moto, quindi nel caso in esame e con le ipotesi menzionate in precedenza, la forza è diretta
verso sinistra. Detto W il momento di reazione scambiato con il vincolo e d lo spessore del corsoio, se il
punto F si trova sopra (ovvero se la componente di reazione normale è verso il basso) si ha
d
W + TF = 0
2
(16)
mentre se il punto F si trova sotto si ha
d
W − TF = 0
2
(17)
In ogni caso, questo equivale a considerare la forza TE applicata nel punto C.
Si scriva l’equilibrio alla rotazione del sottosistema costituito dalle aste B–C e C–D e dal corsoio rispetto
al punto B,
b cos βNF − b cos βmg + b sin βTF + b sin βmẍ + b sin βHD = 0
(18)
Siccome TF = fd kNF k, si ha
J
NF − mg + tan β fd kNF k + m + M + 2 ẍ + fv M g = 0
R
(19)
La presenza del modulo non consente di determinare a priori il valore di NF , siccome dipende da come
evolverà il movimento e l’equilibrio del sistema. In ogni caso, si ha
!
!
J
mg − tan β
m + M + 2 ẍ + fv M g
R
NF =
NF > 0
(20a)
1 + tan βfd
!
!
J
mg − tan β
m + M + 2 ẍ + fv M g
R
NF < 0
(20b)
NF =
1 − tan βfd
Questa valutazione può essere svolta a priori dato che il movimento è imposto e quindi β e ẍ sono noti.
1.d) Coppia necessaria. Siccome il sistema ha un solo grado di libertà e non ha vincoli mobili, si può
utilizzare il teorema dell’energia cinetica. L’energia cinetica del sistema è
J
1
1
1
1
1
(21)
Jm α̇2 + m + M + 2 ẋ2 ,
Ec = Jm α̇2 + mẋ2 + mẏ 2 + J ϕ̇2 =
2
2
2
2
2
R
over ẋ = ẋ(α, α̇) è noto dalla cinematica.
La potenza delle forze attive è
Π = Cm α̇ + Πv + Πd ,
(22)
ove Πv rappresenta la potenza dissipata per rotolamento del disco e Πd quella dissipata per strisciamento
del corsoio.
Il calcolo della potenza Πv richiede la componente normale della reazione al contatto tra disco e piano,
NE , la quale consente di calcolare
Πv = − kϕ̇k fv RM g = − kẋk fv M g.
(23)
Il calcolo della potenza Πd richiede la componente normale della reazione al contatto tra corsoio e piano,
NF . Di conseguenza, la potenza dissipata per attrito nelle condizioni ipotizzate è
Πd = − kẋk fd kNF k
Dall’applicazione del teorema dell’energia cinetica si ricava
J
∂x
∂x
∂x
Jm α̈α̇ + m + M + 2 ẍ α̇ = Cm α̇ −
α̇fv M g −
α̇fd kNF k
R
∂α
∂α
∂α
ove i termini ∂x/∂α sono noti dalla cinematica (in assenza di vincoli mobili basta valutare ẋ/α̇).
La coppia necessaria è quindi
∂x
∂x
∂x
J
+
fv M g +
fd kNF k
Cm = Jm α̈ + m + M + 2 ẍ
R
∂α ∂α
∂α
(24)
(25)
(26)
Esercizio 2.
2.a) Equazione del moto linearizzata. Il sistema ha un grado di libertà; conviene utilizzare l’angolo ϑ
di rotazione dell’asta rispetto all’orizzontale in verso antiorario. L’allungamento della molla è u = L sin ϑ,
mentre quello di molla scarica sia u0 . L’equilibrio alla rotazione del sistema rispetto al punto O dà
−JG ϑ̈ − mxG ϑ̈xG − k (L sin ϑ − u0 ) L cos ϑ + f L cos ϑ − mgxG cos ϑ = 0.
Siccome l’asta è uniforme, xG = L/2 e JG = mL2 /12, per cui
L2
L
m ϑ̈ + k (L sin ϑ − u0 ) L cos ϑ = f L − mg
cos ϑ
3
2
(27)
(28)
La soluzione di equilibrio statico indicata corrisponde a ϑ = 0; in tale condizione, per f = 0, si ha
−kLu0 = −mg
L
2
(29)
da cui si ricava la condizione di precarico della molla
u0 =
mg
2k
(30)
La linearizzazione rispetto a ϑ = 0 porta a scrivere
m
L2
ϑ̈ + kL2 ϑ = f L
3
(31)
2.b) Frequenza caratteristica. È
s
v
u
2
kL
3k
u
ω0 = u
=
t L2
m
m
3
(32)
2.c) Risposta a forzante armonica. La risposta sia del tipo ϑ = Θ cos(Ωt), con Ω 6= ω0 . Nell’ipotesi che
lo smorzamento, abbastanza piccolo da essere trascurato nella scrittura dell’equazione del moto, sia tuttavia
presente e sufficiente a far annullare, in un tempo sufficientemente lungo, il movimento libero del sistema,
si ha
2
2 L
2
−Ω m
+ kL Θ = f0 L
(33)
3
da cui si ricava
L
Θ=
kL2
−
Ω2 m
L2
3
f0
(34)
2.d) Reazione al pattino. La reazione al pattino è data dalla forza che attraversa la molla, ovvero
RN = k (L sin ϑ − u0 ) = −
mg
+ kL sin (Θ cos(Ωt))
2
(35)
ovvero una parte costante dovuta al peso dell’asta (metà, per l’esattezza) e una parte variabile dovuta alla
risposta alla forzante.
2.e) Azioni interne. Sono dovute al peso e alle forze d’inerzia distribuite nell’asta.