P.C. Cacciabue
Dipartimento di Ingegneria Aerospaziale
Corso
Sicurezza del Trasporto
Aereo
Esercizi per prove in itinere
FT – ET – Functional Safety
P.C. Cacciabue
Dipartimento di Ingegneria Aerospaziale
Table of Contents
Esercizi
Fault Trees ............................................................................................................................... 3
Esercizio FT-1 ........................................................................................................................................... 4
Esercizio FT-2 ........................................................................................................................................... 5
Esercizio FT-3 ........................................................................................................................................... 6
Esercizio FT-4 ........................................................................................................................................... 7
Esercizio FT-5 ........................................................................................................................................... 8
Esercizio FT-6 ........................................................................................................................................... 9
Esercizi
Event Trees Functional Safety ............................................................................................. 10
Esercizio ET-1 ........................................................................................................................................ 11
Esercizio ET-2 ........................................................................................................................................ 12
Esercizio ET-3 ........................................................................................................................................ 13
Esercizio ET-4 ........................................................................................................................................ 14
Soluzioni ..................................................................................................................................................... 15
Soluzione Esercizio FT-1 ........................................................................................................................ 16
Soluzione Esercizio FT-2 ........................................................................................................................ 17
Soluzione Esercizio FT-3 ........................................................................................................................ 18
Soluzione Esercizio FT-4 ........................................................................................................................ 19
Soluzione Esercizio FT-5 ........................................................................................................................ 20
Soluzione Esercizio FT-6 ........................................................................................................................ 21
Soluzione Esercizio ET-1........................................................................................................................ 22
Soluzione Esercizio ET-2........................................................................................................................ 23
Soluzione Esercizio ET-3........................................................................................................................ 24
Soluzione Esercizio ET-4........................................................................................................................ 25
II
P.C. Cacciabue
Dipartimento di Ingegneria Aerospaziale
Esercizi
Fault Trees
STA
3
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Esercizio FT-1
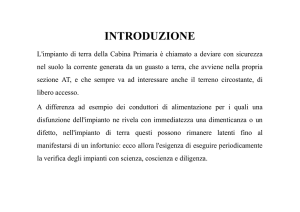
Sia dato l’impianto descritto in figura, composto da un serbatoio che alimenta un motore attraverso un
sistema di sensori (S1, S2, S3), un filtro F1, due valvole (V1 e V2) e due pompe (P1 e P2).
Condizioni di progetto:
1. E’ sufficiente che uno dei tre sensori S dia il consenso affinché il sistema di pompaggio sia
attivato.
2. Il sistema di pompaggio è costituito dai sotto-sistemi P1-V1 e P2-V2. L’alimentazione al motore
può arrivare sia da uno che dall’altro sotto-sistema.
Date le probabilità ed i modi di guasto di ogni componente come da tabella allegata:
1. Rappresentare l’Albero di Guasto per la mancata alimentazione al motore; e
2. Calcolare la probabilità di mancata alimentazione del motore (esprimendo la probabilità in
termini di esponenziale 10 e con una precisione alla terza cifra decimale)
Serbatoio
s1
P1
V1
s2
s3
F1
P2
Motore
V2
probabilità
p(s1)
p(s2)
p(s3)
modo di guasto
2.250E-01 Mancata risposta da parte del sensore
==
2.250E-01
==
2.250E-01
p(P1)
p(P2)
7.500E-02 Pompa bloccata spenta
==
7.500E-02
p(V1)
p(V2)
7.500E-02 Valvola bloccata chiusa
==
7.500E-02
p(F1)
7.500E-03 Filtro bloccato chiuso
STA
4
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Esercizio FT-2
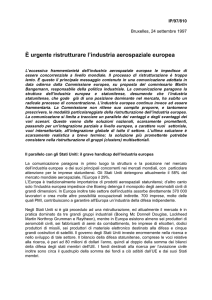
Sia dato l’impianto descritto in figura, composto da un serbatoio che alimenta un motore attraverso un
sensore (S1), una pompa (P1) ed un sistema di filtri (F1, F2, F3) e valvole (V1, V2 V3).
E’ sufficiente che uno dei tre filtri e valvola associata funzionino correttamente affinché il sistema di
filtraggio permetta l’alimentazione al motore.
Date le probabilità ed i modi di guasto di ogni componente come da tabella allegata:
1. Rappresentare l’Albero di Guasto per la mancata alimentazione al motore; e
2. Calcolare la probabilità di mancata alimentazione del motore (esprimendo la probabilità in
termini di esponenziale 10 e con una precisione alla terza cifra decimale)
Serbatoio
F1
s1
P1
F2
F3
V1
V2
Motore
V3
probabilità
p(S1)
modo di guasto
7.000E-02 Mancata risposta da parte del sensore
p(P1)
4.000E-02 Pompa bloccata spenta
p(F1)
p(F2)
p(F3)
3.500E-01 Filtro bloccato chiuso
==
3.500E-01
==
3.500E-01
p(V1)
p(V2)
p(V3)
2.000E-01 Valvola bloccata chiusa
==
2.000E-01
==
2.000E-01
STA
5
P.C. Cacciabue
Dipartimento di Ingegneria Aerospaziale
Esercizio FT-3
Sia dato l’impianto descritto in figura, composto da una caldaia (Boiler) che invia acqua calda
all’impianto di riscaldamento di una casa attraverso un sistema di termostati (T), per la regolazione della
temperatura ambientale, due pompe (P1 = Pompa principale e P2=Pompa secondaria) e due valvole di non
ritorno (V1 e V2) per la regolazione della portata. L’interruttore (S) serve a controllare il funzionamento
delle pompe in modo che, in caso di malfunzionamento di P1, venga azionata la pompa secondaria.
Condizioni di progetto:
1. Il sistema di sensori T dà il consenso affinché il sistema di pompaggio sia attivato.
2. Il sistema di pompaggio è basato sul sottosistema P1-V1 e in caso di malfunzionamento dello
stesso, l’interruttore (S) provvede ad attivare il sottosistema secondario P2-V2, che offre le stesse
condizioni di portata del sistema principale.
Date le probabilità ed i modi di guasto di ogni componente come da tabella allegata e assumendo che non
vi siano tubazioni ostruite o bloccate:
1. Rappresentare l’Albero di Guasto per la mancata alimentazione di riscaldamento alla casa.
2. Calcolare la probabilità di mancata alimentazione di riscaldamento alla casa (esprimendo la
probabilità in termini di esponenziale 10 e con una precisione alla terza cifra decimale, come per i
dati forniti in tabella)
3. Effettuare una breve analisi di sensitività dell’impianto per definire punti deboli rilevanti.
P1
Boiler
V1
T
S
P2
V2
p(T)
probabilità
modo di guasto
9,000E-02 Mancata risposta da parte dei termostati
p(P1)
p(P2)
8,000E-02
8,000E-02
Pompa bloccata spenta
==
p(V1)
p(V2)
7,000E-02
7,000E-02
Valvola bloccata chiusa
==
p(S)
9,000E-03
Interruttore non funzionante
STA
6
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Esercizio FT-4
Sia dato l’impianto descritto in figura, composto da una tanica (Tank) di capacità illimitata che alimenta il
serbatoio attraverso due sistemi indipendenti di filtri (F1 ed F2) e valvole di non ritorno (V1 e V2) e da
una pompa (P) ed un ugello di regolazione della portata.
Condizioni di studio affidabilistico:
3. Ai sistemi di pompaggio (P) e di alimentazione (F1-V1 e F2-V2) sono associati componenti le cui
probabilità di guasto sono assegnate (vedi tabella).
4. Per l’ugello di regolazione si assumono le seguenti caratteristiche operative:
a. Il componente ha un comportamento affidabilistico di tipo “distribuzione esponenziale”.
b. Il tempo medio di guasto è pari alle ore assegnate in tabella.
c. Il periodo richiesto di operazione corretta del componente è assegnato in tabella.
Obiettivo dello studio affidabilistico, assumendo che non vi siano tubazioni ostruite o bloccate:
4. Rappresentare l’Albero di Guasto per la mancata alimentazione del serbatoio; e
5. Calcolare la probabilità di mancata alimentazione (esprimendo la probabilità in termini di
esponenziale 10 e con una precisione alla terza cifra decimale, come per i dati forniti in tabella)
Serbatoio
Tank
F1
F2
V2
N
P
V1
p(P)
probabilità
modo di guasto
8,900E-02 Pompa bloccata chiusa
p(F1)
p(F2)
7,800E-02
8,900E-02
Filtro bloccato
==
p(V1)
p(V2)
7,800E-02
8,900E-02
Valvola bloccata chiusa
==
tav fail N
t oper.
ore
2.000E+04
5.000E+03
Tempo medio di guasto dell’ugello
Periodo richiesto di operazione corretta del componente
STA
7
P.C. Cacciabue
Dipartimento di Ingegneria Aerospaziale
Esercizio FT-5
Sia dato l’impianto descritto in figura, composto da un insieme di componenti (pompe e valvole) che ha
l’obbiettivo di trasmettere un flusso di fluido dall’ingresso all’uscita dell’impianto stesso.
Date le probabilità ed i modi di guasto di ogni componente come da tabella allegata:
1. Calcolare la probabilità di mancata alimentazione di flusso attraverso il sistema (esprimendo la
probabilità in termini di esponenziale 10 e con una precisione alla terza cifra decimale, come per i
dati forniti in tabella)
2. Descrivere la procedura utilizzata e rappresentare il processo di calcolo effettuato.
Si consiglia di scomporre il sistema in due sotto-sistemi definiti dal comportamento dell’elemento chiave
e di calcolare la probabilità di guasto come la somma dei due sotto-sistemi. In questo caso, si faccia
riferimento al teorema di Bayes ed al concetto di probabilità condizionata tra sistemi o sottosistemi
dell’impianto.
p(E)
probabilità
modo di guasto
1.000E-01 Valvola bloccata chiusa
p(A)
p(C)
1.000E-01
1.000E-01
Pompa bloccata spenta
==
p(B)
p(D)
1.000E-01
1.000E-01
Valvola bloccata chiusa
==
STA
8
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Esercizio FT-6
Sia dato l’impianto descritto in figura, composto da un insieme di componenti (pompe e valvole di non
ritorno) che ha l’obbiettivo di trasmettere un flusso di fluido dall’ingresso all’uscita dell’impianto stesso.
Date le probabilità ed i modi di guasto di ogni componente come da tabella allegata:
1. Calcolare la probabilità di mancata alimentazione di flusso attraverso il sistema (esprimendo la
probabilità in termini di esponenziale 10 e con una precisione alla terza cifra decimale, come per i
dati forniti in tabella)
2. Descrivere la procedura utilizzata e rappresentare il processo di calcolo effettuato.
Si consiglia di scomporre il sistema in due sotto-sistemi definiti dal comportamento dell’elemento chiave
e di calcolare la probabilità di guasto come la somma dei due sotto-sistemi. In questo caso, si faccia
riferimento al teorema di Bayes ed al concetto di probabilità condizionata tra sistemi o sottosistemi
dell’impianto.
A
B
E
C
D
p(A)
p(B)
probabilità
modo di guasto
1.000E-01 Pompa bloccata spenta
1.000E-01 Valvola bloccata chiusa
p(C)
p(D)
1.000E-01
1.000E-01
Pompa bloccata spenta
Valvola bloccata chiusa
p(E)
1.000E-01
Valvola bloccata chiusa
STA
9
P.C. Cacciabue
Dipartimento di Ingegneria Aerospaziale
Esercizi
Event Trees
Functional Safety
STA
10
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Esercizio ET-1
Sia dato un impianto ipotetico e sia considerato un evento iniziatore (EI) di possibili sequenze incidentali,
con probabilità di accadimento p(EI) (vedi tabella).
Le funzioni di sicurezza che intervengono, in sequenza, in tale circostanza siano: PY1, PY2, PY3, e PY4.
Le condizioni operative e le probabilità di fallimento di PY1, PY2 e PY4 siano le seguenti:
• PY1: funzione di sicurezza indipendente con probabilità di fallimento data in tabella.
• PY2: funzione di sicurezza indipendente con probabilità di fallimento data in tabella.
• PY3: funzione di sicurezza indipendente con associato valore di Safety Integrity Level (SIL)
• PY4: questa funzione viene attivata solo nel caso in cui PY3 fallisca.
Date le probabilità di ogni funzione di sicurezza come da tabella allegata:
1. Sviluppare l’albero degli eventi associato al sistema in esame e le relative Sequenze (Si).
2. Valutare il valore di SIL da assegnare alla funzione di sicurezza PY3 affinché l’impianto sia
considerato accettabile sotto il profilo della sicurezza, in riferimento alla Matrice di Rischio ed
alle Gravità (Gi) delle Sequenze (Si) assegnate (vedi figura). Giustificare la scelta effettuata.
Si esprima la probabilità in termini di esponenziale 10 e con una precisione alla terza cifra decimale.
Si assuma che:
If (p(x) ≥ 0.990) then p(x) = 1
Probabilità di
accadimento EI
PY1
PY2
0.02
Probabilità di
fallimento PY
0.5
0.008
PY4
0.001
p(EI)
Modalità operativa su richiesta
SIL
Probabilità media di “Failure
on demand”
Riduzione del rischio
4
≥ 10 a < 10
> 10.000 a ≤100.000
3
≥ 10-4 a < 10-3
> 1.000 a ≤10.000
2
≥ 10 a < 10
> 100 a ≤1.000
1
≥ 10-2 a < 10-1
> 10 a ≤100
-5
-3
f
10-1
5
10-3
4
10-5
3
10-7
10-9
2
1
1
STA
2
3
4
5
G
-4
-2
SEQ.
SEV.
S1
G1
S2
G2
S3
G3
S4
S5
S6
S7
S8
S9
S10
S11
S12
G3
G4
G4
G2
G2
G3
G4
G4
G5
11
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Esercizio ET-2
Sia dato un impianto ipotetico e sia considerato un evento iniziatore (EI) di possibili sequenze incidentali,
con probabilità di accadimento p(EI) (vedi tabella).
Le funzioni di sicurezza che intervengono, in sequenza, in tale circostanza siano: PY1, PY2, e PY3.
Le condizioni operative e le probabilità di fallimento di PY1 e PY2 siano le seguenti:
• PY1: funzione di sicurezza indipendente con probabilità di fallimento data in tabella.
• PY2: funzione di sicurezza indipendente con probabilità di fallimento data in tabella.
La funzione di sicurezza PY3 viene valutata attraverso la Sicurezza Funzionale in riferimento ad un altro
impianto, diverso da quello in esame.
1. Valutare il valore del Safety Integrity Level (SIL) della funzione di sicurezza PY3 attraverso la
tecnica dei Grafi di Rischio date le condizioni rappresentate in tabella.
2. Sviluppare l’albero degli eventi associato al sistema in esame.
3. Assumendo che probabilità di “failure on demand” della funzione PY3 sia pari al valore medio
dell’intervallo associato al SIL calcolato al punto 1, valutare se l’impianto sia da considerare
sicuro o meno, in riferimento alla Matrice di Rischio allegata. Giustificare la scelta effettuata.
Si esprima la probabilità in termini di esponenziale 10 e con una precisione alla terza cifra decimale.
Si assuma che:
If (p(x) ≥ 0.990) then p(x) = 1
Sicurezza Funzionale
Il valore del SIL è valutato in relazione ad uno studio di sicurezza
basato sui seguenti parametri:
1. Severità delle Conseguenze (S): diversi morti.
2. Esposizione ai pericoli (A): rara o infrequente esposizione.
3.
Difese e protezioni dalle conseguenze (G): appena
possibile.
4.
Probabilità di verificarsi dei pericoli (W): assenza di altre
barriere.
f
SEQ.
SEV.
5
S1
G1
4
S2
G2
3
S3
G3
2
S4
G4
S5
G2
S6
G3
S7
G4
S8
G5
10-1
Modalità operativa su richiesta
SIL
Probabilità media di “Failure
on demand”
Riduzione del rischio
4
≥ 10-5 a < 10-4
> 10.000 a ≤100.000
3
≥ 10-4 a < 10-3
> 1.000 a ≤10.000
2
≥ 10-3 a < 10-2
> 100 a ≤1.000
1
≥ 10-2 a < 10-1
> 10 a ≤100
10-3
10-5
10-7
10-9
1
Probabilità di accadimento EI
p(EI)
1.32E-02
Probabilità di fallimento PY
PY1
PY2
STA
1
2
3
4
5
G
1.44E-03
1.44E-03
12
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Esercizio ET-3
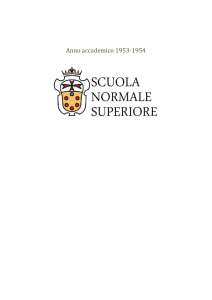
Sia dato l’impianto composto da “Scambiatore di Calore Secondario”, “Torre di raffreddamento”, e dai
seguenti sistemi indipendenti: 1) Regolazione automatica (“Automazione”), 2) Pompaggio (“Normal
Feed”), 3) Controllo Manuale (“Manual Feed + Manual Control Panel”), e 4) Sicurezza (“Safety”).
Scopo dell’impianto è di asportare il calore residuo derivante dall’impianto principale per mezzo di una
portata di refrigerante. La regolazione avviene, normalmente, con l’Automazione (attraverso V1-P1 e V2P2) ovvero, in caso di malfunzionamento di questa, con il Controllo Manuale (attraverso V3-P3).
In assenza di asportazione del calore interviene un sistema di sicurezza che spegne l’intero impianto.
Se anche il sistema di sicurezza fallisce, lo scambiatore potrebbe esplodere.
Dato l’Evento Iniziatore (EI) Attivazione dello Scambiatore di Calore Secondario (p=1.000):
1. Sviluppare l’Albero degli Eventi considerando nell’ordine i sistemi 1-4 (Automazione,
Pompaggio, Controllo Manuale, e Sicurezza) nelle seguenti condizioni:
a. L’Automazione ed il sistema Pompaggio posso guastarsi indipendentemente.
b. Il guasto dell’Automazione impedisce il funzionamento del sistema Pompaggio, ma il
viceversa non è vero.
c. Il Controllo Manuale, se e quando interviene, raggiunge sempre il risultato voluto.
2. Definire la Gravità (G) delle sequenze identificate, considerando Catastrofico (G=5) lo scoppio
dello Scambiatore, Maggiore (G=3) il caso di intervento della Sicurezza (depressurizzazione
attraverso la valvola di sicurezza) e Successo sia il controllo manuale che il controllo automatico.
3. Calcolare la probabilità dell’Intervento Manuale, tale da soddisfare le condizioni di
accettabilità della Matrice di Rischio data in figura, con i dati di affidabilità assegnati in tabella e
le Gravità definite in precedenza.
SAFEY
Valvola
sicurezza
Rel. V
STOP
from plant
Scambiatore
Calore
Secondario
AUTOMAZIONE
Controllo automatico
portate e arresto di
emergenza
to plant
Torre raff.
V1
P1
NORMAL FEED
V2
P2
MANUAL FEED
V3
P3
10-1
p(P1)
7,000E-01
Pompa bloccata spenta
10-3
p(P2)
6,000E-01
==
10-5
p(V1)
5,000E-01
Valvola bloccato chiusa
p(V2)
4,000E-01
Fallimento automazione
SIL
STA
4
Si assuma per”pf on demand” il valor
medio dell’intervallo relativo al SIL
STOP
SIL
1
min
1,000E-01
max
1,000E-02
4
2
1,000E-02
1,000E-03
3
1,000E-03
1,000E-04
3
4
1,000E-04
1,000E-05
5
10
-7
10-9
2
Probabilità
1
1
Safety
Syst.
Rel. V
f
modo di guasto
p(Autom) 2,000E-02
Φ
p
probabilità
==
MANUAL CONTROL PANEL
INDICATORS
Φ
2
3
4
5
G
p(EI)
1.00
p>0,99
1.00
p(Intervento Manuale) = x
13
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Esercizio ET-4
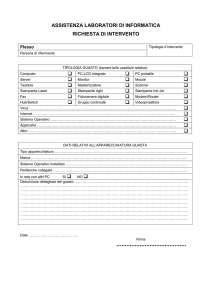
Sia dato l’impianto descritto in figura, composto dal “Reattore Aggiuntivo”, e da un insieme di sistemi
indipendenti per: regolazione automatica portata (“Automatic Controller”), pompaggio (P1-V1),
Controllo Manuale (“manual Control Panel”), Sistema Sicurezza (“Safety”).
Scopo del Reattore Aggiuntivo è di aumentare la capacità di reazione chimica di un impianto principale.
In caso di guasto dell’automazione è possibile intervenire manualmente sia per la regolazione della
portata sia per l’intervento di soppressione e spegnimento del sistema.
In caso di emergenza (assenza di controllo e soppressione automatica e/o manuale), interviene il sistema
di sicurezza. In tale circostanza, il malfunzionamento di quest’ultimo porterebbe il Reattore ad esplodere.
Dato l’Evento Iniziatore (EI) Attivazione del Reattore Aggiuntivo (p=1.000):
1. Sviluppare l’Albero degli Eventi considerando nell’ordine i sistemi: Automazione, Pompaggio,
Intervento Manuale (regolazione e/o soppressione), e Intervento Sicurezza nelle seguenti
condizioni:
a. L’Automazione ed il sistema di pompaggio possono guastarsi indipendentemente.
b. Il guasto dell’Automazione non impedisce il funzionamento del sistema di pompaggio.
c. L’Intervento Manuale (regolazione e/o soppressione), se e quando avviene raggiunge
sempre il risultato voluto.
2. Definire la Gravità (G) delle sequenze identificate, considerando Catastrofico (G=5) lo scoppio
del Reattore, Maggiore (G=3) il caso di intervento della Sicurezza (rottura del disco della valvola
di sicurezza), e Successo sia il controllo manuale (inclusa soppressione) che automatico.
3. Calcolare la probabilità dell’Intervento Manuale per soddisfare le condizioni di accettabilità
della Matrice di Rischio data in figura con i dati di affidabilità assegnati in tabella e le Gravità
definite in precedenza.
Safety
Sensore
Pressione
V Safety
Automatic
Controller
to plant
REATTORE
AGGIUNTIVO
Suppression fluid
V2
V1
from plant
P1
Φ
Flow
A
Manual Control Panel
B
Manual
Open V2
Manual
Regulation
Automation Pressure
Indicators
probabilità
STOP
f
modo di guasto
10-1
7,000E-02
Pompa bloccata spenta
10-3
p(V1)
5,000E-02
==
10-5
p(Autom) 2,000E-02
Fallimento automazione
0,000E+00
Valvola soppressione mai guasta
SIL
Safety
Syst.
STA
4
min
1,000E-01
max
1,000E-02
4
2
1,000E-02
1,000E-03
3
1,000E-03
1,000E-04
3
4
1,000E-04
1,000E-05
10-7
10-9
p(V2)
SIL
1
5
p(P1)
2
1
1
Si assuma per”pf on demand” il valor
medio dell’intervallo relativo al SIL
2
3
4
5
G
p(EI)
p>0,99
p(V2)
probabilità
1.00
1.00
0.00
p(Intervento Manuale) = x
14
P.C. Cacciabue
Dipartimento di Ingegneria Aerospaziale
Soluzioni
STA
15
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Soluzione Esercizio FT-1
p(s1)
p(s2)
p(s3)
Data
2,250E-01
2,250E-01
2,250E-01
p(P1)
p(P2)
7,500E-02
7,500E-02
p(V1)
p(V2)
7,500E-02
7,500E-02
p(F1)
7,500E-03
1,139E-02
p(failure sensor system) = p(s1)*p(s2)*p(s3)
p(failure pumping system) = p(SS1)*p(SS2)
p(failure SS1) = p(failure SS2) = p(Vi)+p(Pi)-p(Vi)*p(Pi)
p(fail SS1)
p(fail feed) = p(failure sensor system) + p(failure pumping systems) + p(F1) - p(f.s.s.)*p(f.p.s.) p(F1)*p(f.s.s.) - p(F1) *p(f.p.s.) + p(F1)*p(f.s.s.)*p(f.p.s.)
2,084E-02
1,444E-01
1,444E-01
3,926E-02
Serbatoio
s1
P1
V1
s2
s3
STA
F1
P2
Motore
V2
16
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Soluzione Esercizio FT-2
p(s1)
7,000E-02
7,000E-02
p(P1)
4,000E-02
4,000E-02
p(F1)
p(F2)
p(F3)
3,500E-01
3,500E-01
3,500E-01
3,500E-01
p(V1)
p(V2)
p(V3)
2,000E-01
2,000E-01
2,000E-01
2,000E-01
p(failure SS1) = p(failure SS2) = p(failure SS3) = p(Vi)+p(Fi)-p(Vi)*p(Fi)
p(failure SS1)
p(failure SS2)
p(failure SS3)
4,800E-01
4,800E-01
4,800E-01
p(failure Feed System) = p(failure SS2)*p(failure SS3)*p(failure SS3)
p(failure F.S.)
1,106E-01
p(fail feed) = p(s1) + p(P1) + p(Feed System) - p(s1)*p(P1) - p(s1)*p(Feed System) - p(Pump)*p(Feed Ssystem)+
p(s1)*p(P1) *p(Feed System)
p(fail feed)
2,059E-01
Serbatoio
F1
s1
P1
F2
F3
STA
V1
V2
Motore
V3
17
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Soluzione Esercizio FT-3
P1
V1
T
p(T)
Data
9,000E-02
p(P1)
p(P2)
8,000E-02
8,000E-02
p(V1)
pV(2)
7,000E-02
7,000E-02
p(SWITCH)
9,000E-03
SWITCH
P2
V2
TOP EVENT
Feed System
T
Subsystem
P2-V2-S
Pumping system
P1-V1
P1
V1
P2
V2
S
p(failure Feed System)= p(failure P1-V1)*p(failure P2-V2-S)
1,444E-01
1,521E-01
2,196E-02
TOP Event = p(T) + p(failure Feed System) - p(T)*p(f.F.S.)
1,100E-01
p(failure P1-V1)= p(P1)+p(V1)-P(V1)*p(P1)
p(failure P2-V2-S)=p(P2)+p(V2)+p(S)-p(P2)*p(V2)-p(P2)*p(S)-p(V2)*p(S)+p(P2)*p(V2)*p(S)
Analisi Sensitività:
Punto debole dell'impianto: Termostato che essendo l'unico componente che da solo è in grado di bloccare l'impianto
deve essere molto più affidabile degli altri. La sua p(failure) è fondamentale nel calcolo della probabilità dell'evento
TOP.
STA
18
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Soluzione Esercizio FT-4
Tank
F1
h
T
p(P)
Data
5000
2,000E+04
8,900E-02
p(F1)
p(F2)
7,800E-02
8,900E-02
p(V1)
p(V2)
7,800E-02
8,900E-02
F2
V2
N
P
V1
TOP EVENT
N
Feed System
P
Subsystem
F2-V2
Subsystem
F1-V1
V1
F1
V2
F2
p(TOP) = [(V1 U F1) ∩ (V2 U F2)] U P U N
T = t. med. fail.
2,000E+04
λ=1/T
5,000E-05
t=h of work
5000
2,212E-01
=> pfail = 1-e (-λt)
p(Feed System) = p(failure F1-V1) * p(failure F2-V2)
1,701E-01
1,499E-01
2,550E-02
TOP Event=p(P)+p(Feed System)+ p(N)-[p(P)*p(F.S.)+p(N)*p(F.S.)+p(P)*p(N)]+p(P)*p(F.S.)*p(N)
3,086E-01
p(failure F2-V2) = p(F2)+p(V2)-P(V2)*p(F2)
p(failure F1-V1) = p(F1)+p(V1)-P(V1)*p(F1)
STA
19
P.C. Cacciabue
Dipartimento di Ingegneria Aerospaziale
Soluzione Esercizio FT-5
STA
20
P.C. Cacciabue
Dipartimento di Ingegneria Aerospaziale
Soluzione Esercizio FT-6
STA
21
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Soluzione Esercizio ET-1
EI
0,02
EI
PY1
PY2
PY3
PY4
SEQ.
SEV.
1
1
SIL
SIL
1,00E-02
S1
G1
1,00E-01
1,00E+01
0
1
1,00E-02
S2
G2
1,00E-03
1,00E-01
1
0,001
1,00E-05
S3
G3
1,00E-05
1,00E+00
0
1
8,00E-05
S4
G3
1,00E-05
1,25E-01
0
Probabilità di
fallimento PY
PY1
PY2
PY3
PY4
0,5
0,008
1
0,001
1
IF (p(x)>=0.99) then p(x)=1 )
0,5
1
0,008
1
8,00E-05
S5
G4
1,00E-07
1,25E-03
2
0,001
8,00E-08
S6
G4
1,00E-07
1,25E+00
0
1
1,00E-02
S7
G2
1,00E-03
1,00E-01
1
1
0,02
1
Modalità operativa su richiesta
SIL
Probabilità media di “Failure
on demand”
Riduzione del rischio
4
≥ 10-5 a < 10-4
> 10.000 a ≤100.000
3
≥ 10
2
≥ 10-3 a < 10-2
1
≥ 10
-4
-2
1
a < 10
1
> 10 a ≤100
a < 10
1,00E-02
S8
G2
1,00E-03
1,00E-01
1
1,00E-05
S9
G3
1,00E-05
1,00E+00
0
1
8,00E-05
S10
G4
1,00E-07
1,25E-03
2
0,5
> 100 a ≤1.000
-1
1
0,001
1
> 1.000 a ≤10.000
-3
0,008
1
8,00E-05
S11
G4
1,00E-07
1,25E-03
2
0,001
8,00E-08
S12
G5
1,00E-09
1,25E-02
1
1
EI
PY1
PY2
PY3
PY4
S1
G1
S2
G2
10-1
S3
S4
φ
G3
5
G3
10-3
S5
G4
S6
G4
S7
G2
S8
G2
S9
G3
S10
G4
S11
G4
4
10-5
3
10-7
10-9
2
1
1
2
3
G5
STA
22
4
5
G
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Soluzione Esercizio ET-2
EI
1,32E-02
EI
PY1
PY2
PY3
Probabilità di
fallimento PY
PY1
PY2
PY3
1,44E-03
1,44E-03
5,50E-04
Result
1
1,32E-02
G1
1,00E-01
Positive
5,50E-04
7,26E-06
G2
1,00E-03
Positive
1,90E-05
G3
1,00E-05
Negative
5,50E-04
1,05E-08
G4
1,00E-07
Positive
1
1,90E-05
G2
1,00E-03
Positive
5,50E-04
1,05E-08
G3
1,00E-05
Positive
1
2,74E-08
G4
1,00E-07
Positive
5,50E-04
1,51E-11
G5
1,00E-09
Positive
1
SIL=3 Max prob. of failure at first decimal point
IF (p(x)>=0.99) then p(x)=1 )
1
1
0,00144
0,0132
Modalità operativa su richiesta
SIL
Probabilità media di “Failure
on demand”
Riduzione del rischio
4
≥ 10-5 a < 10-4
> 10.000 a ≤100.000
3
≥ 10-4 a < 10-3
> 1.000 a ≤10.000
2
≥ 10-3 a < 10-2
> 100 a ≤1.000
1
≥ 10-2 a < 10-1
> 10 a ≤100
1
0,00144
0,00144
EI
PY1
PY2
PY3
S1
S2
G1
1,3245E-02
G2
10-1
S3
G3
φ
5
10-3
S4
G4
4
10-5
S5
G2
S6
G3
S7
G4
S8
G5
3
10-7
10-9
2
1
1
STA
2
3
23
4
5
G
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Soluzione Esercizio ET-3
1
Data
p(P1)
p(P2)
p(V1)
p(V2)
7,000E-01
6,000E-01
5,000E-01
4,000E-01
p(P3)
p(V3)
0,000E+00
0,000E+00
p(Autom)
2,000E-02
SIL
4
5,500E-05
10-1
φ
5
10-3
4
10-5
p(Safety) SIL
3
10-7
10-9
2
1
1
2
3
4
5
G
p(Man Con.)
if p ≥ 0,99
then
SIL
1
2
3
4
p=1
p (IE) = p(st. S.C. Sec) = 1
min
1,000E-01
1,000E-02
1,000E-03
1,000E-04
p(failure P3) = p(P3)+p(V3)-P(V3)*p(P3)
Start
Scam.
Cal. Sec.
System
P1 – P2
Switch to
manual cont.
mean
5,500E-02
5,500E-03
5,500E-04
5,500E-05
6,460E-01
0,000E+00
p(failure P1-P2) = [p(P1)+p(V1)-P(V1)*p(P1)]*[p(P2)+p(V2)-P(V2)*p(P2)]
Autom.
max
1,000E-02
1,000E-03
1,000E-04
1,000E-05
Severità - G
Safety System
Rel. V. - Stop
1
s
Successo
0
2
manual
control
Controllo Manuale Corretto
0
3
s
Arresto di emergenza con
rilascio da parte di V rel
3
4
f
Scoppio scambiatore calore
5
5
manual
control
Controllo Manuale Corretto
0
6
s
Arresto di emergenza con
rilascio da parte di V rel
3
7
f
Scoppio scambiatore calore
5
pfail Man. Con.
1
1
3,469E-01
NA
2
6,331E-01
NA
3
6,331E-01
4
3,469E-01
3,469E-01
1-x
6,331E-01
6,331E-01
p< 10-5
x
1,580E-05
1,000E-05
3,482E-05
p<10-9
x
2,872E-05
5,500E-10
5
2,000E-02
NA
1-x
2,000E-02
2,000E-02
6
2,00E-02
p<10-5
x
5,000E-04
3,159E-07
7
1,10E-06
p<10-9
x
9,091E-04
1,738E-11
1,000E+00
STA
24
Dipartimento di Ingegneria Aerospaziale
P.C. Cacciabue
Soluzione Esercizio ET-4
p(P1)
p(V1)
Data
1
7,000E-02
5,000E-02
p(Autom)
2,000E-02
p(V2)
0,000E+00
10-1
φ
Safety
5
V Safety
10-3
4
Sensore
Pressione
Automatic
Controller
10-5
to plant
REATTORE
AGGIUNTIVO
3
10-7
p(Safety) SIL
p(Safety)
4
5,500E-05
10-9
p(Man Con.)
Suppression fluid
2
V2
1
V1
1
if p ≥ 0,99
then
SIL
1
2
3
4
p=1
p (IE) = p(st. Reat. Agg.) = 1
2
min
1,000E-01
1,000E-02
1,000E-03
1,000E-04
Start
Reattore
Agg.
System
P1 – V1
4
max
1,000E-02
1,000E-03
1,000E-04
1,000E-05
from plant
P1
5
G
mean
5,500E-02
5,500E-03
5,500E-04
5,500E-05
Φ
A
B
Flow
Automation
Pressure
Manual Control Panel
Manual
Open V2
Manual
Regulation
Indicators
STOP
1,165E-01
p(failure Pumping system) = p(P1)+p(V1)-P(V1)*p(P1)
p(failure V2) = 0
Autom.
3
Switch to
man. cont./saf. rel.
Severità - G
Safety System
Rel. V. - Stop
1
s
Successo
0
2
manual
control
Immissione di fluido di
soppressione attr. V2
0
3
s
Arresto di emergenza con
rilascio da parte di V Safety
3
4
f
Scoppio Reattore Aggiuntivo
s
6
1
1
8,658E-01
NA
2
"=1*(1-B6)*(G23)*
NA
1-x
3
1,142E-01
p<10-5
x
8,759E-05
1,000E-05
5
4
6,279E-06
p<10-9
x
1,593E-04
5,500E-10
Controllo Manuale Corretto
0
5
"=1*(B6)*(1-G23)*
NA
1-x
1,767E-02
manual
control
Immissione di fluido di
soppressione attr. V2
0
6
"=1*(B6)*(G23)*(1
NA
1-x
2,330E-03
7
s
Arresto di emergenza con
rilascio da parte di V Safety
3
7
2,330E-03
p<10-5
x
4,292E-03
2,041E-07
8
f
Scoppio Reattore Aggiuntivo
5
8
1,282E-07
p<10-9
x
7,803E-03
1,123E-11
5
8,658E-01
1,142E-01
1,000E+00
STA
25