APPUNTI PER IL CORSO DI:
Metodi Numerici per il Design
E. Miglio
MOX - Dept. of Mathematics “F. Brioschi”
Politecnico di Milano
P.zza Leonardo da Vinci 32, Milano, Italy
Indice
1 Geometria in R3
1.1 Definizione di un punto nello spazio . . . . . . . . . . . . . . . . . . .
1.1.1 Somma di vettori e moltiplicazione di un vettore per un numero
1.1.2 Vettori applicati . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Prodotto scalare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Norma di un vettore . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
.
.
.
.
.
.
.
.
.
.
3
3
4
4
5
6
Indice
2
Capitolo 1
Geometria in R3
In questo capitolo verranno presentati i fondamenti della geometria analitica in R 3 . In tutto
il capitolo con numero si intenderà sempre numero reale.
1.1 Definizione di un punto nello spazio
Fissata un’unità per le lunghezze, i numeri possono essere adoperati per rappresentare i punti
di una retta.
Una coppia ordinata di numeri (x, y) può essere adoperata per rappresentare un punto di
un piano.
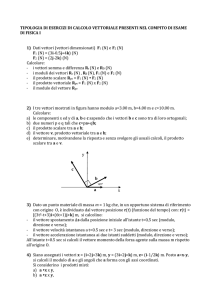
Una terna di numeri (x, y, z) può, poi, servire per rappresentare un punto dello spazio
tridimensionale. In luogo di (x, y, z) scriveremo anche (x1 , x2 , x3 ), questo ci consentirà di
estendere tutti concetti che stiamo per introdurre al caso di spazi n-dimensionali considerando n-uple di numeri che rappresenteranno punti nel suddetto spazio n-dimensionale.
z
P(x,y,z)
x
y
Figura 1.1: Rappresentazione di un punto in uno spazio 3D.
3
Capitolo 1. Geometria in R3
In generale un punto in spazio verrà indicato con una lettera maiuscola X e le corrispondenti coordinate verranno indicate con la rispettiva lettera minuscola dotata di un pedice
(x1 , x2 , . . . , xn ).
Nel seguito ci riferiremo al caso dello spazio 3D (che nel seguito indicheremo con R 3 , per
indicare che i punti di tale spazio sono identificati da 3 numeri reali) ma tutte le definizioni
che daremo si estedono facilmente al caso di Rn .
1.1.1 Somma di vettori e moltiplicazione di un vettore per un numero
Cominciamo col definire la somma tra punti. Siano A = (a1 , a2 , a3 ) e B = (b1 , b2 , b3 ) due
punti, definiamo la somma A + B come il punto di coordinate (a 1 + b1 , a2 + b2 , a3 + b3 ).
Inoltre se c è un numero qualsiasi definiamo cA il punto di coordinate (ca 1 , ca2 , ca3 ).
Osserviamo che in generale sono soddisfatte le seguenti uguaglianze:
1. (A + B) + C = A + (B + C);
2. A + B = B + A;
3. c(A + B) = cA + cB;
4. se c1 , c2 sono numeri allora (c1 + c2 )A = c1 A + c2 A e (c1 c2 )A = c1 (c2 A);
5. indicato con O = (0, 0, 0) il punto le cui coordinate sono tutte nulle, per ogni A si ha
O + A = A + O = A;
6. 1 · A = A; se con −A si denota il punto (−1)A allora A + (−A) = O. Si noti che nel
seguito invece di scrivere A + (−B) scriveremo A − B.
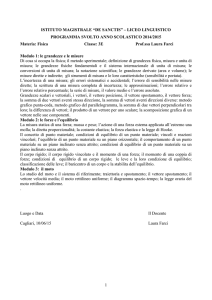
Vediamo ora di dare un significato geometrico (nel piano) delle operazioni di addizione
di vettori e di moltiplicazione di un numero per un vettore. Consideriamo i vettori A = (2, 3)
e B = (−1, 1). Allora A + B = (1, 4). Questa operazione è rappresentata graficamente da
un parallelogramma.
Si consideri ora A = (1, 2) e c = 3 allora cA = (3, 6). La moltiplicazione per 3 produce
un allungamento di A di 3 volte; analogamente 12 A significa allungare A mezza volta, cioè
dimezzarlo. In generale, se t è un numero, t > 0, interpretiamo tA come il punto che si trova
sulla stessa semiretta passante per l’origine su cui si trova A, t volte più distante dall’origine.
La moltiplicazione per un numero negativo inverte la direzione.
1.1.2 Vettori applicati
Si noti che un vettore può essere applicato, invece che nell’origine, in qualunque altro punto
B dello spazio (o del piano): in generale un vettore che congiunge i punti A e B (nella
direzione da A verso B) viene indicato con AB.
4
1.2. Prodotto scalare
Figura 1.2: Somma di vettori.
Osservazione. Un generico vettore inteso come segmento orientato è individuato dal
suo modulo (lunghezza), la sua direzione ed il suo verso. Il vettore spiccato dall’origine ed
avente stessi modulo, direzione e verso di AB verrà indicato con O(B − A) ovvero in modo
più semplice con B − A. Due vettori AB e CD si dicono paralleli se esiste un numero c 6= 0
tale che (B − A) = c(D − C). I due vettori avranno direzione uguali se c > 0, avranno
direzioni opposte se c < 0.
1.2 Prodotto scalare
Siano A = (a1 , a2 , a3 ) e B = (b1 , b2 , b3 ) due vettori, definiamo come loro prodotto scalare
A · B = a 1 b1 + a 2 b2 + a 3 b3 .
Si noti che questo prodotto è un numero. Vediamo alcune proprietà del prodotto scalare
1. Se A e B sono vettori allora A · B = B · A;
2. Se A, B e C sono vettori allora A · (B + C) = A · B + A · C = (B + C) · A;
3. Se x è un numero allora (xA) · B = x(A · B) e A · (xB) = x(A · B);
4. Se A = O è il vettore nullo, allora A · A = O; in ogni altro caso abbiamo A · A > 0.
Diremo che due vettori sono perpendicolari se il loro prodotto scalare è nullo.
5
Capitolo 1. Geometria in R3
1.3 Norma di un vettore
Il comune concetto di lunghezza può essere formalizzato matematicamente introducendo la
norma euclidea di un vettore definita da:
v
u n
uX
kAk = t
a2i .
i=1
√
Si può verificare che kAk = A · A.
Diremo che U è un vettore unità se U è un vettore avente norma pari ad 1.
Diremo che due vettori non nulli A e B hanno la stessa direzione se esiste un numero
1
c > 0 tale che cA = B. Da questa definizione segue che il vettore kAk
A è un vettore unità
che ha la stessa direzione di A (supposto non nullo).
Siano A e B due vettori allora di definisce distanza tra A e B il numero kA − Bk =
sqrt(A − B) · (A − B). Questa definizione coincide con la consueta definzione di distanza.
Si noti che un vettore (per semplicità consideriamo il caso bidimensionale) può essere
rappresentato come A = kAk(cos(α) sin(α)) (rappresentazione polare, dove α è l’angolo
che il vettore forma con il semiasse positivo delle ascisse.
Si considerino ora due vettori A = kAk(cos(α) sin(α)) e B = kBk(cos(β) sin(β)).
Allora si ha
A · B = a1 b1 + a2 b2 = kAkkBk(cos(α) cos(β) + sin(α) sin(β)) =
kAkkBk cos(α − β) = kAkkBk cos(θ),
essendo θ = α − β l’angolo compreso tra i due vettori. Quindi abbiamo una seconda
caratterizzazione del prodotto scalare
A · B = kAkkBk cos(θ),
che ci permette di evidenziare la coincidenza con la consueta nozione di vettori perpendicolari rispetto alla definzione data in precedenza.
1.4 Rette e piani
Definiamo equazione parametrica della retta passante per un punto P ed avente la direzione
di un vettore A 6= O la seguente
X = P + tA
dove t assume tutti i valori reali.
Consideriamo ora il piano e scriviamo le coordinate di un punto X nella forma (x, y).
Sia P = (p, q) e A = (a, b), allora si ha
x = p + ta,
y = q + tb,
6
1.4. Rette e piani
e la consueta equazione della retta si ottiene eliminando il parametro t. In casi di spazi con un
numero maggiore di dimensioni non è possibile eliminare il parametro t e quindi l’equazione
parametrica è l’unica possibilità per rappresentare una retta.
Vediamo ora come descrivere un piano. Siano P un punto ed N un vettore non nullo.
Definiamo piano passante per P e perpendicolare a N l’insieme di tutti i punti X tali che
X − P è perpendicolare a N e quindi
(X − P ) · N = 0
che si può anche scrivere come X ·N = P ·N . Sia t un numero diverso da zero, l’insieme dei
punti X tali che (X − P ) · N coincide con l’insieme dei punti X tali che (X − P ) · tN = 0;
possiamo quindi dire che il piano è quello passante per P e perpendicolare alla retta avente
direzione N .
7