Meccanica
12. Lavoro ed Energia
http://campus.cib.unibo.it/2431/
Domenico Galli
Dipartimento di Fisica e Astronomia
22 febbraio 2017
Traccia
1. Forme Differenziali
2. Integrali Curvilinei e Integrali di Superficie
3. Lavoro
4. Energia Cinetica
5. Il Rotore
6. Forze Conservative
7. Energia Meccanica
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
2
Differenziali
Consideriamo una variabile x;
Una variazione finita della variabile x è indicata con ∆x;
Una variazione infinitesima della variabile x è indicata con dx e
denominata differenziale;
I
I
Un infinitesimo è una quntità minore in valore assoluto di qualsiasi numero reale
positivo;
Il concetto di infinitesimo è estremamente utile e intuitivo e può essere reso
matematicamente rigoroso in varie maniere.
Consideriamo ora una variabile U che è funzione di x:
U = f (x)
L’analisi matematica consente di mettere in
relazione la variazione infinitesima dU della
variabile U con la variazione infinitesima dx
della variabile x:
df
dU =
dx = f 0 (x) dx
dx
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
3
Forme Differenziali
Un’espressione avente forma:
dQ = A (x) dx
dQ = A (x, y) dx + B (x, y) dy
dQ = A (x, y, z) dx + B (x, y, z) dy + C (x, y, z) dz
è detta forma differenziale.
Evidentemente dQ, così come dx, dy e dz sono differenziali ed esiste
una relazione funzionale tra di essi.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
4
Forme Differenziali Esatte
Le forme differenziali:
dQ = A (x) dx
dQ = A (x, y) dx + B (x, y) dy
dQ = A (x, y, z) dx + B (x, y, z) dy + C (x, y, z) dz
sono dette esatte se esiste una funzione Q = f (x), Q = f (x, y),
Q = f (x, y, z) che, nei 3 casi proposti, soddisfa rispettivamente le
condizioni:
df
dQ =
dx
dx ã
Å
Å
ã
∂f
∂f
dQ =
dx +
dy
∂x y
∂y x
Å
ã
Å
ã
Å
ã
∂f
∂f
∂f
dQ =
dx +
dy +
dz
∂x y,z
∂y x,z
∂z x,y
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
5
Forme Differenziali Esatte (II)
Non è detto che la funzione f esista:
Eccetto nel caso di una forma differenziale in una sola variabile.
In generale, pertanto, non è detto che il differenziale dQ sia un
differenziale esatto.
Indichiamo i differenziali non-esatti con la lettera d barrata: d.
Per esempio: dQ, dL, ecc.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
6
Forme Differenziali Esatte (III)
Caso di Una Variabile Indipendente
La forma differenziale:
dQ = A (x) dx
è sempre esatta, perché si può sempre trovare una funzione f tale che:
df
df
⇒ dQ =
dx
dx
dx
Infatti la funzione f cercata è la primitiva della funzione A (x):
A (x) =
Z
f (x) =
A (x) dx + C
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
7
Forme Differenziali Esatte (IV)
Caso di Una Variabile Indipendente
Esempio 1
Nella forma differenziale:
dy = x dx
risulta A (x) = x, per cui la funzione f cercata è:
Z
Z
x2
f (x) = A (x) dx + C = x dx + C =
+C
2
⇒
y=
x2
+C
2
Esempio 2
Nella forma differenziale:
dy = (cos x) dx
risulta A (x) = cos x, per cui la funzione f cercata è:
Z
Z
f (x) = A (x) dx + C = (cos x) dx + C = sin x + C
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
⇒
y = sin x + C
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
8
Forme Differenziali Esatte (V)
Caso di Due Variabili Indipendenti
Consideriamo ora la forma differenziale:
dQ = A (x, y) dx + B (x, y) dy
Per poterla scrivere nella forma esatta:
Å
Å
ã
ã
∂f
∂f
dQ =
dx +
dy
∂x y
∂y x
sarebbe necessario trovare una funzione f (x, y) tale che:
Å
∂f
∂x
ã
Å
= A (x, y) ,
y
∂f
∂y
ã
= B (x, y)
x
Queste condizioni sono verificate soltanto nel caso particolarissimo nel
quale, tra le funzioni A (x, y) e B (x, y), sussista la relazione:
Å
∂A
∂y
ã
x
∂B
=
∂x
Å
ã
y
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
9
Forme Differenziali Esatte (VI)
Caso di Due Variabili Indipendenti
Dimostriamo che la condizione è necessaria. Se esiste la funzione f tale che:
Å
ã
Å
ã
∂f
∂f
= A (x, y) ,
= B (x, y)
∂x y
∂y x
allora le derivate di A e B si possono scrivere come:
∂ ∂f
∂A
=
=
∂x y
∂x ∂x
Å
ã
Å
ã
∂B
∂ ∂f
=
=
∂x y
∂x ∂y
Å
ã
Å
ã
∂2f
,
∂x2
∂2f
,
∂x ∂y
∂ ∂f
∂A
=
=
∂y x
∂y ∂x
Å
ã
Å
ã
∂B
∂ ∂f
=
=
∂y x ∂y ∂y
Å
ã
Å
ã
∂2f
,
∂y ∂x
∂2f
,
∂y 2
Per il Teorema di Schwarz, l’ordine di derivazione non cambia il risultato, per
cui si ha:
Å
ã
Å
ã
∂2f
∂2f
∂A
∂B
=
⇒
=
∂y ∂x
∂x ∂y
∂y x
∂x y
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
10
Forme Differenziali Esatte (VII)
Caso di Due Variabili Indipendenti
Esempio 1
Nella forma differenziale:
dQ = xy 2 dx + x2 y dy
risulta:
A (x, y) = xy 2 ,
quindi:
Å
ã
∂A
= 2xy
∂y x
ã
Å
∂B
= 2xy
∂x y
B (x, y) = x2 y
Å
⇒
∂A
∂y
ã
Å
=
x
∂B
∂x
ã
y
La forma differenziale è esatta. Per determinare la funzione f si calcola
l’integrale curvilineo di dQ lungo una qualunque spezzata che congiunga
l’origine O, di coordinate (0, 0), con un punto generico P di coordinate (x, y).
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
11
Forme Differenziali Esatte (VIII)
Caso di Due Variabili Indipendenti
Esempio 1 (continuazione)
Per esempio la spezzata γ in figura, che possiamo descrivere come:
γ (O, P ) = γ1 (O, C) ∪ γ2 (C, P )
γ1 (O, C) = (x0 , y 0 ) ∈ R2 ; x0 ∈ [0, x], y 0 ≡ 0
γ2 (C, P ) = (x0 , y 0 ) ∈ R2 ; x0 ≡ x, y 0 ∈ [0, y]
Dette x0 e y 0 le variabili di integrazione, l’integrale si scrive:
Z
Z
0 02 0
f (x, y) = dQ + C =
x y dx + x02 y 0 dy 0 + C =
γ(O,P )
γ(O,P )
Z
Z
=
x0 y 02 dx0 +
γ(O,C)
Zx
=
x02 y 0 dy 0 + C =
x0 · 02 · dx0 +
0
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
x0 y 02 dx0 +
x0 ∈[0,x]
y 0 ≡0
γ(C,P )
Zy
Z
x2 y 0 dy 0 + C = x2
0
Zy
Z
x02 y 0 dy 0 + C =
x0 ≡x
y 0 ∈[0,y]
y 0 dy 0 + C =
x2 y 2
+C
2
0
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
12
Forme Differenziali Esatte (IX)
Caso di Due Variabili Indipendenti
Esempio 2
Nella forma differenziale:
dQ = −y dx + x dy
risulta:
A (x, y) = −y,
quindi:
Å
ã
∂A
= −1
∂y x
ã
Å
∂B
= +1
∂x y
B (x, y) = x
Å
⇒
∂A
∂y
ã
Å
6=
x
∂B
∂x
ã
y
La forma differenziale è non-esatta. Non esiste la funzione f cercata.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
13
Forme Differenziali Esatte (X)
Caso di Tre Variabili Indipendenti
Consideriamo infine la forma differenziale:
dQ = A (x, y, z) dx + B (x, y, z) dy + C (x, y, z) dzy
Per poterla scrivere nella forma esatta:
Å
ã
Å
ã
Å
ã
∂f
∂f
∂f
dQ =
dx +
dy +
dz
∂x y,z
∂y x,z
∂z x,y
sarebbe necessario trovare una funzione f (x, y) tale che:
Å
Å
ã
Å
ã
ã
∂f
∂f
∂f
= A (x, y, z) ,
= B (x, y, z) ,
= C (x, y, z)
∂x y,z
∂y x,z
∂z x,y
Queste condizioni sono verificate soltanto nel caso particolarissimo nel
quale, tra le funzioni A (x, y, z), B (x, y, z) e C (x, y, z), sussistano le
relazioni:
Å
ã
Å
ã
Å
ã
Å
ã
Å
ã
Å
ã
∂A
∂B
∂A
∂C
∂B
∂C
=
,
=
,
=
∂y x,z ∂x y,z
∂z x,y ∂x y,z
∂z x,y ∂y x,z
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
14
Forme Differenziali Esatte (XI)
Caso di Tre Variabili Indipendenti
Dimostriamo che la condizione è necessaria. Se esiste la funzione f tale
che:
Å
Å
Å
ã
ã
ã
∂f
∂f
∂f
= A (x, y, z) ,
= B (x, y, z) ,
= C (x, y, z)
∂x y,z
∂y x,z
∂z x,y
allora le derivate di A, B e C si possono scrivere come:
∂A
∂ ∂f
∂2f
=
=
,
∂x
∂x ∂x
∂x2
Å
ã
∂B
∂ ∂f
∂2f
=
,
=
∂x
∂x ∂y
∂x ∂y
Å
ã
∂C
∂ ∂f
∂2f
=
=
,
∂x
∂x ∂z
∂x ∂z
Å
ã
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
∂A
∂ ∂f
∂2f
=
=
,
∂y
∂y ∂x
∂y ∂x
Å
ã
∂B
∂ ∂f
∂2f
=
,
=
∂y
∂y ∂y
∂y 2
Å
ã
∂C
∂ ∂f
∂2f
=
=
,
∂y
∂y ∂z
∂y ∂z
Å
ã
∂A
∂ ∂f
∂2f
=
=
,
∂z
∂z ∂x
∂z ∂x
Å
ã
∂B
∂ ∂f
∂2f
=
,
=
∂z
∂z ∂y
∂z ∂y
Å
ã
∂C
∂ ∂f
∂2f
=
=
.
∂z
∂z ∂z
∂z 2
Å
ã
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
15
Forme Differenziali Esatte (XII)
Caso di Tre Variabili Indipendenti
Per il Teorema di Schwarz, l’ordine di derivazione non cambia il risultato,
per cui si ha:
∂2f
∂2f
=
∂y ∂x
∂x ∂y
∂2f
∂z ∂y
∂2f
∂x ∂z
=
=
∂2f
∂y ∂z
∂2f
∂z ∂x
⇒
⇒
⇒
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
Å
Å
Å
∂A
∂y
ã
Å
∂B
∂x
ã
∂B
∂z
ã
Å
∂C
∂y
ã
∂C
∂x
ã
∂A
=
∂z
y,z
ã
=
x,z
=
x,y
Å
y,z
x,z
x,y
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
16
Forme Differenziali Esatte (XIII)
Caso di Tre Variabili Indipendenti
Si osservi che le 3 condizioni:
Å
Å
Å
ã
Å
ã
ã
ã
∂A
∂B
∂C
∂B
,
=
=
,
∂y x,z ∂x y,z
∂z x,y ∂y x,z
Å
∂C
∂x
Å
ã
=
y,z
∂A
∂z
ã
x,y
si possono scrivere:
∂C
∂B
∂A ∂C
∂B ∂A
−
=0
−
=0
−
=0
∂x
∂y
∂y
∂z
∂z
∂x
ovvero:
Å
ã
Å
ã
Å
ã
∂C
∂B
∂A ∂C
∂B ∂A
−
ı̂ +
−
̂ +
−
k̂ = ~0
∂y
∂z
∂z
∂x
∂x
∂y
o ancora, in forma compatta:
det
ı̂
∂
∂x
A
̂
∂
∂y
B
k̂
∂
∂z
C
Ä
ä
~ ∧ Aı̂ + B̂ + C k̂ = ~0
=∇
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
17
Forme Differenziali Esatte (XIV)
Caso di Tre Variabili Indipendenti
Esempio 1
Nella forma differenziale:
dQ = y 2 z dx + 2xyz dy + xy 2 dz
risulta:
A (x, y, z) = y 2 z,
quindi:
Å ∂A ã
= 2yz,
∂y x,z
Å ∂B ã
= 2xy,
∂z x,y
Å
ã
∂C = y 2 ,
∂x y,z
B (x, y, z) = 2xyz,
Å
Å
Å
∂B
∂x
ã
∂C
∂y
ã
∂A
∂z
ã
C (x, y, z) = xy 2
= 2yz
y,z
= 2xy
x,z
= y2
x,y
La forma differenziale è esatta.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
18
Forme Differenziali Esatte (XV)
Caso di Tre Variabili Indipendenti
Esempio 1 (continuazione)
Per determinare la funzione f si calcola l’integrale curvilineo di dQ lungo una
qualunque spezzata che congiunga l’origine O, di coordinate (0, 0, 0), con un
punto generico P di coordinate (x, y, z). Utilizziamo la spezzata γ in figura, che
possiamo descrivere come:
γ (O, P ) = γ1 (O, A) ∪ γ2 (A, B) ∪ γ3 (B, P )
γ1 (O, A) = (x0 , y 0 , z 0 ) ∈ R3 ; x0 ∈ [0, x], y 0 ≡ 0, z 0 ≡ 0
γ2 (A, B) = (x0 , y 0 , z 0 ) ∈ R3 ; x0 ≡ x, y 0 ∈ [0, y], z 0 ≡ 0
γ3 (B, P ) = (x0 , y 0 , z 0 ) ∈ R3 ; x0 ≡ x, y 0 ≡ y, z 0 ∈ [0, z]
Dette x0 e y 0 le variabili di integrazione, l’integrale
si scrive:
Z
f (x, y, z) = dQ + D
γ(O,P )
dove D è una costante arbitraria.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
19
Forme Differenziali Esatte (XVI)
Caso di Tre Variabili Indipendenti
Esempio 1 (continuazione)
Otteniamo:
Z
f (x, y, z) =
Z
02 0 0
y z dx + 2x0 y 0 z 0 dy 0 + x0 y 02 dz 0 + D =
dQ + D =
γ(O,P )
Z
=
γ(O,P )
Z
Z
y 02 z 0 dx0 + 2 x0 y 0 z 0 dy 0 + x0 y 02 dz 0 + D =
γ(O,A)
Z
=
γ(A,B)
02 0
Z
0
0 0 0
y z dx + 2
x0 ∈[0,x]
y 0 ≡0
z 0 ≡0
Zx
0
Z
0
x y z dy +
x0 ≡x
y 0 ∈[0,y]
z 0 ≡0
Zy
02 · 0 · dx0 +
=
γ(B,P )
x0 ≡x
y 0 ≡y
z 0 ∈[0,z]
xy 0 · 0 · dy 0 +
0
x0 y 02 dz 0 + D =
Zz
xy 2 dz 0 + D = xy 2
0
Zz
dz 0 + D =
0
2
= xy z + D
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
20
Forme Differenziali Esatte (XVII)
Caso di Tre Variabili Indipendenti
Esempio 2
Nella forma differenziale: Nella forma differenziale:
dQ = y 2 z dx + xyz dy + xy 2 dz
risulta:
A (x, y, z) = y 2 z,
quindi:
Å ∂A ã
= 2yz,
∂y x,z
Å ∂B ã
= xy,
∂z x,y
ã
Å
∂C
= y2 ,
∂x y,z
B (x, y, z) = xyz,
Å
Å
Å
∂B
∂x
ã
∂C
∂y
ã
∂A
∂z
ã
C (x, y, z) = xy 2
= yz
y,z
= 2xy
x,z
= y2
x,y
La forma differenziale è non-esatta. Non esiste la funzione f cercata.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
21
Integrale Curvilineo di un Campo
Vettoriale
Siano dati:
Un campo vettoriale ~v (P ), definito in R3 ;
Una curva γ (P1 , P ) ⊂ R3 , avente, per estremi,
i punti P1 e P .
Prendiamo, sulla curva γ (P1 , P ), un certo
numero n − 1 di punti:
P2 , P3 , . . . , Pn ∈ γ (P1 , P )
Fissata una terna cartesiana di riferimento Oxyz, denominiamo i
vettori posizionali dei punti P1 , P2 , . . . , Pn , P :
~r1 = ~rOP1 ,
~r2 = ~rOP2 ,
...,
~rn = ~rOPn ,
~rn+1 = ~rOP
e consideriamo la spezzata formata dai segmenti orientati:
∆~r1 = ~r2 − ~r1 ,
∆~r2 = ~r3 − ~r2 ,
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
...,
∆~rn = ~rn+1 − ~rn
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
22
Integrale Curvilineo di un Campo
Vettoriale (II)
La somma dei prodotti scalari della funzione per tali segmenti, nel
limite in cui essi diventano infinitesimi, diviene l’integrale curvilineo:
n
X
Z
n→∞
~v (~ri ) · ∆~ri −−−−−−−−→ I =
∆~
ri →~0
i=1
~v (~r ) · d~r
γ(P0 ,P )
La curva γ (P1 , P ) ⊂ R3 , può essere parametrizzata mediante un
generico parametro ξ:
¶
©
γ = P ∈ R3 ; P = P (ξ) , ξ ∈ [ξ1 , ξ2 ]
In tal caso l’integrale curvilineo si calcola come:
Z
I=
~v (~r ) · d~r =
γ(P1 ,P )
Zξ2 Ä
ä d~
r
~v ~r (ξ) ·
dξ
dξ
ξ1
dove ~r = ~rOP .
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
23
Integrale di Superficie di un Campo
Vettoriale
Siano dati:
Un campo vettoriale ~v (P ), definito in R3 ;
Una superficie Σ ⊂ R3 .
Suddividiamo la superficie Σ in un certo numero n di superfici
infinitesime ∆Σi , prendiamo
su di esse i punti:
P1 , P2 , . . . , Pn ∈ Σ
di vettore posizionale:
~r1 = ~rOP1 , . . . , ~rn = ~rOPn
e consideriamo la somma:
n
X
~v (~ri ) · n̂ (~ri ) ∆Σi
i=1
dove n̂ (~ri ) è la normale
alla superficie Σ nel punto Pi .
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
24
Integrale di Superficie di un Campo
Vettoriale (II)
Nel limite in cui le superfici ∆Σ diventano infinitesime, la somma
diviene l’integrale di superficie:
n
X
n→∞
~v (~ri ) · n̂ (~ri ) ∆Σi −−−−−−−−→ I =
i=1
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
∆Σi →~0
ZZ
~v (~r ) · n̂ (~r ) dΣ
Σ
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
25
Integrale di Superficie di un Campo
Vettoriale (III)
La superficie Σ ⊂ R3 , può essere parametrizzata mediante due
generici
¶ parametri ξ ed η:
©
γ = P ∈ R3 ; P = P (ξ, η) , ξ ∈ [ξ1 , ξ2 ], η ∈ [η1 , η2 ]
In tal caso l’integrale di superficie si calcola come:
ZZ
I=
~v (~r ) · n̂ (~r ) dΣ =
Σ
Zξ2
dξ
ξ1
Zη2 Ä
η1
∂~r
∧
~v ~r (ξ, η) ·
∂ξ ∂η
ä Å ∂~
r
ã
dη
dove ~r = ~rOP .
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
26
Lavoro ed Energia
I princìpi della dinamica sono sufficienti per determinare il moto di un
sistema meccanico.
Tuttavia risulta conveniente l’introduzione di nuove grandezze fisiche
(lavoro ed energia) in quanto:
Semplificano la soluzione di molti problemi dinamici:
I
I
Si può descrivere il moto con equazioni differenziali del I ordine invece che del
II ordine.
Spesso si può determinare lo stato finale di un sistema senza bisogno di
risolvere equazioni del moto (p. es.: problemi d’urto).
Consentono di estendere la nostra comprensione fisica ad ambiti più ampi
(termodinamica, meccanica relativistica, ecc.).
Intuitivamente si può dire che:
L’energia è la capacità di produrre lavoro;
Il lavoro è il processo attraverso il quale una certa quantità di
energia si trasferisce da un corpo a un altro.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
27
Lavoro Elementare
Si definisce lavoro elementare dL compiuto da una forza F~ il prodotto
scalare:
®
dL = F~ · d~r = Fx dx + Fy dy + Fz dz
~ = Fx ı̂ + Fy ̂ + Fz k̂
F
d~r = dx ı̂ + dy ̂ + dz k̂
dove d~r è lo spostamento elementare del punto di applicazione della
forza F~ .
dL non è, in generale, un differenziale esatto:
In generale, dL è un differenziale non-esatto.
Cioè, in generale, il lavoro L non è una “funzione” delle coordinate. Per
questo si mette la barra obliqua trasversale sulla d.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
28
Lavoro
Il lavoro Lγ(A,B) di una forza F~ il cui punto di applicazione P si sposta
lungo la linea γ che congiunge il punto A con il punto B è l’integrale
curvilineo:
Z
Lγ(A,B) =
F~ · d~r
γ(A,B)
Le dimensioni del lavoro sono:
[L] = [F ] L = M [a] L = M LT −2 L = M L2 T −2
e l’unità di misura nel Sistema Internazionale è il Joule (simbolo J):
1 J = 1 Nm
mentre nel sistema tecnico (obsoleto e deprecato) era il
chilogrammetro (simbolo kgm):
1 kgm = 1 kgf m = 9.80665 J
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
29
Lavoro (II)
Nota Bene:
Si compie lavoro sollevando una valigia;
Non si compie lavoro mantenendo una valigia sollevata o
trasportandola ad altezza costante (poiché la forza è perpendicolare
allo spostamento del punto di applicazione).
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
30
Lavoro (III)
Esempio 1: lavoro compiuto da una molla che si espande
Preso l’asse x parallelo all’asse della molla e l’origine O in corrispondenza della
lunghezza a riposo l0 della molla, si ha:
´
F~ = −k x ı̂
⇒ dL = F~ · d~r = (−k x ı̂) · (dx ı̂) = −k x dx ı̂ · ı̂ = −k x dx
d~r = dx ı̂
Se la molla si allunga dalla lunghezza iniziale l1
alla lunghezza finale l2 , il lavoro compiuto vale:
Z
L12 =
lZ
2 −l0
F~ · d~r = −k
γ(A,B)
x2
x dx = −k
2
ï
l1 −l0
òl2 −l0
=
l1 −l0
1
1
2
2
= − k (l2 − l0 ) + k (l1 − l0 )
2
2
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
31
Lavoro (IV)
Esempio 2: lavoro compiuto dalla forza peso
Consideriamo un punto che scende lungo un piano inclinato.
F~ = −mg k̂
d~r = dx ı̂ + dz k̂
Ä
ä Ä
ä
dL = F~ · d~r = −mg k̂ · dx ı̂ + dz k̂ = −mg dx k̂ · ı̂ − mg dz k̂ · k̂ = −mg dz
Se il punto scende lungo il piano inclinato per un dislivello pari a h, il lavoro
compiuto dalla forza peso vale:
Z
L12 =
Z0
0
F~ · d~r = −mg dz = −mg [z]h =
γ(P1 ,P2 )
h
= mgh > 0
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
32
Lavoro (V)
Esempio 2: lavoro compiuto dalla forza peso (continuazione)
Si osservi che l’espressione del lavoro della forza peso contiene soltanto il
dislivello h:
L12 = mgh = mg ∆z = mg [z (P1 ) − z (P2 )]
per cui è indipendente dal percorso γ lungo il quale il punto materiale scende.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
33
Lavoro (VI)
Esempio 3: lavoro compiuto dalla forza di attrito dinamico
~ t(d) su di un punto
Calcoliamo il lavoro compiuto dalla forza di attrito dinamico R
materiale che si sposta lungo un arco di circonferenza di raggio R giacente su
di un piano orizzontale.
~ t(d) ha modulo costante Rt(d) = µRn e
I La forza di attrito radente dinamico R
verso opposto al vettore velocità:
~ t(d) = −µRn v̂ = −µRn t̂
R
I
Essendo ds = R dϕ, lo spostamento elementare d~r
si scrive:
d~r = ds t̂ = R dϕ t̂
I
Il lavoro elementare dL vale quindi:
~ t(d) · d~r = −µRn t̂ · R dϕ t̂ =
dL = R
= −µ Rn R dϕ t̂ · t̂ = −µ Rn R dϕ
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
34
Lavoro (VII)
Esempio 3: lavoro compiuto dalla forza di attrito dinamico (continuazione)
~ t(d) quando il
Il lavoro L12 compiuto dalla forza di attrito radente dinamico R
punto si sposta lungo la circonferenza passando dall’angolo al centro ϕ1
all’angolo al centro ϕ2 vale pertanto:
Z
L12 =
~ t(d)
R
· d~r = −µ Rn R
γ(P1 ,P2 )
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
Zϕ2
ϕ
dϕ = −µ Rn R [ϕ]ϕ21 = −µ Rn R (ϕ2 − ϕ1 ) < 0
ϕ1
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
35
Teorema delle Forze Vive
Consideriamo un sistema di n punti materiali P1 , P2 , . . . , Pn , di massa
rispettivamente m1 , m2 , . . . , mn , soggetti rispettivamente alle forze
F~1 , F~2 , . . . , F~n . Se i punti compiono uno spostamento elementare pari
rispettivamente a d~r1 , d~r2 , . . . , d~rn , il lavoro complessivo compiuto dalle
forze vale:
dL =
n
X
i=1
F~i · d~ri =
n
X
mi~ai · d~ri =
i=1
n
X
i=1
n
X
n
1X
1 d
=
mi
(~vi · ~vi ) dt =
2 dt
2
i=1
mi~ai ·
n
X
d~ri
d~vi
dt =
· ~vi dt =
mi
dt
dt
i=1
d vi2
mi
dt
dt
i=1
Se le masse sono costanti (approssimazione non relativistica) risulta:
d
dL =
dt
n
1X
mi vi2 dt
2 i=1
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
!
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
36
Teorema delle Forze Vive (II)
Definita l’energia cinetica:
T (~v1 , ~v2 , . . . , ~vn ) =
n
1X
mi vi2
2 i=1
Si ha:
dT
dt
dt
e, integrando tra la configurazione iniziale A e quella finale B:
dL =
ZtB
Z
LA,B =
dL =
γ(A,B)
tA
LA,B = TB − TA
dT
dt = [T (t)]ttB
= T (tB ) − T (tA ) = TB − TA
A
dt
(Teorema delle Forze Vive)
Il lavoro compiuto da tutte le forze che agiscono su di un sistema meccanico,
nel passaggio da una configurazione iniziale A a una configurazione finale B è
uguale alla corrispondente variazione dell’energia cinetica di tale sistema.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
37
Energia Cinetica
Essendo LA,B = TB − TA , l’energia cinetica ha le stesse dimensioni
del lavoro:
[T ] = [L] = M L2 T −2
pertanto nel Sistema Internazionale si misura in Joule.
L’energia cinetica non è mai negativa:
È nulla se e soltanto se tutti i punti materiali del sistema meccanico
considerato sono in quiete.
Nel caso di un singolo punto materiale di massa m e velocità ~v :
1
m v2
(punto materiale)
2
Nel caso di un sistema meccanico costituito di n punti materiali:
T =
T =
n
1X
mi vi2
2 i=1
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
(sistema di punti materiali)
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
38
Energia Cinetica (II)
Definita la velocità w
~ i del punto materiale Pi relativa al centro di
massa G:
w
~ i = ~vi − ~vG
si può scrivere:
T =
n
n
1X
1X
mi ~v 2i =
mi (~vG + w
~ i ) · (~vG + w
~ i) =
2 i=1
2 i=1
=
n
Ä
ä
1X
mi ~v 2G + w
~ 2i + 2~vG · w
~i =
2 i=1
=
n
n
n
X
1 2X
1X
mi +
mi w
~i
vG
mi wi2 + ~vG ·
2
2 i=1
i=1
i=1
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
39
Energia Cinetica (III)
Poiché il centro di massa è definito mediante la relazione:
~rOG =
n
1 X
mi ~rOPi
M i=1
n
X
⇒
mi ~rOPi = M ~rOG
i=1
Prendendo come centro di riduzione il centro di massa (O ≡ G) si
ottiene:
n
X
~0
z}|{
mi ~rGPi = M ~rGG = ~0
i=1
Derivando, membro a membro, rispetto al tempo, si ottiene quindi:
n
X
i=1
mi
n
n
X
X
d
d~rGPi
=
mi
(~rOPi − ~rOG ) =
mi (~vi − ~vG ) =
dt
dt
i=1
i=1
=
n
X
mi w
~ i = ~0
i=1
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
40
Energia Cinetica (IV)
Possiamo quindi scrivere l’energia cinetica nella forma:
~0
n
n
1 2X
1X
T = vG
mi +
mi wi2 + ~vG ·
2
2
i=1
i=1
T =
n
1X
1
2
M vG
+
mi wi2
2
2 i=1
z }|
n
X
{
mi w
~i
i=1
(Teorema di König)
(sistema di punti materiali)
L’energia cinetica di un sistema meccanico è la somma dell’“energia
cinetica del centro di massa” (che avrebbe il centro di massa se in esso
fosse concentrata tutta la massa) e dell’energia cinetica relativa al
centro di massa.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
41
Energia Cinetica (V)
Nel caso di un corpo rigido che rototrasla, utilizzando la formula
fondamentale della cinematica dei corpi rigidi, ed essendo g la retta
passante per G e parallela a ω
~ , si ha:
~vi = ~vG + ω
~ ∧ ~rGPi
w
~ i = ~vi − ~vG = ω
~ ∧ ~rGPi
n
X
mi wi2 =
i=1
n
X
mi (~
ω ∧ ~rGPi )2 = ω 2
i=1
n
X
mi (û ∧ ~rGPi )2 = ω 2 Ig
i=1
n
1X
1
1
1
2
2
+
mi wi2 = M vG
+ Ig ω 2
T = M vG
2
2 i=1
2
2
Quindi:
T =
1
1
2
M vG
+ Ig ω 2
2
2
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
(Teorema di König)
(corpo rigido che rototrasla)
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
42
Energia Cinetica (VI)
Nel caso di un corpo rigido, che ruota attorno a un asse fisso u
(vincolato), utilizzando la formula fondamentale della cinematica dei
corpi rigidi, scegliendo il centro di riduzione O sull’asse di rotazione u,
si ottiene:
~0
z}|{
~vi = ~vO + ω
~ ∧ ~rOPi = ω
~ ∧ ~rOPi
T =
=
n
n
1X
1X
mi vi2 =
mi (~
ω ∧ ~rOPi )2 =
2 i=1
2 i=1
n
1
1 2X
ω
mi (û ∧ ~rOPi )2 = ω 2 Iu
2
2
i=1
Quindi:
T =
1
Iu ω 2
2
(Teorema di König)
(corpo rigido che ruota attorno a un asse fisso)
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
43
L’Operatore Rotore
Consideriamo una funzione vettoriale della posizione P (campo
vettoriale):
F~ = F~ (P ) = F~ (x, y, z) = Fx (x, y, z) ı̂ + Fy (x, y, z) ̂ + Fz (x, y, z) k̂
Si definisce l’operatore “rotore” come:
Ä
ä
⎧ ∂
∂
∂ ⎫
⎪
~ ∧ F~ = ⎪
⎪
⎪
+ ̂
+ k̂
∧ Fx ı̂ + Fy ̂ + Fz k̂
∇
⎪
⎪ı̂
⎪
⎪
∂y
∂z ⎭
⎩ ∂x
̂
k̂
∂
∂
~ ∧ F~ = rot F~ = det
=
∇
∂y ∂z
Fy Fz
ï
ò
ï
ò
ï
ò
∂Fy
∂Fx ∂Fz
∂Fy
∂Fx
∂Fz
−
ı̂ +
−
̂ +
−
k̂
=
∂y
∂z
∂z
∂x
∂x
∂y
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
ı̂
∂
∂x
Fx
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
44
L’Operatore Rotore (II)
L’operatore rotore si applica a un campo vettoriale; il risultato è un
campo vettoriale:
î
ó
~
F
P ∈ R3 7−−−
−→
î
ó
~ F
~
∇∧
P ∈ R3 −
7 −−−→
F~ (P ) ∈ V
Ä
ä
~ ∧ F~ (P ) ∈ V
∇
campo vettoriale
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
45
L’Operatore Rotore (III)
Esempio:
Data la funzione vettoriale:
F~ (x, y, z) = −2y ı̂ + 2x ̂ + 2z k̂ ∈ V
il rotore è la funzione vettoriale:
ı̂
̂
k̂
ı̂
̂
k̂
Ä
ä
∂
∂
∂
∂
~ ∧ F~ (x, y, z) = det ∂
= det ∂
=
∇
∂x ∂y ∂z
∂x ∂y ∂z
Fx Fy Fz
−2y 2x 2z
ï
ò
ï
ò
∂ (2z) ∂ (2x)
∂ (−2y) ∂ (2z)
=
−
ı̂ +
−
̂ +
∂y
∂z
∂z
ï ∂x
ò
∂ (2x) ∂ (−2y)
+
−
k̂ =
∂x
∂y
= 4 k̂ ∈ V
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
46
Significato Fisico del Rotore
Cerchiamo di capire intuitivamente il significato dell’operatore rotore:
~ ∧ F~ = ∂Fz − ∂Fy ı̂ + ∂Fx − ∂Fz ̂ + ∂Fy − ∂Fx k̂
∇
∂y
∂z
∂z
∂x
∂x
∂y
ï
ò
ï
ò
ï
ò
Consideriamo la circuitazione (ovvero l’integrale curvilineo lungo una
linea chiusa) in un piano perpendicolare all’asse z:
Prendiamo, come linea chiusa γ, un rettangolo infinitesimo di lati ∆x
e ∆y e consideriamo l’integrale:
I
I = lim
∆x→0
∆y→0 γ
F~ · d~r
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
47
Significato Fisico del Rotore (II)
La linea chiusa rettangolare γ in figura si può descrivere come:
γ = AB ∪ BC ∪ CD ∪ DA
¶
AB = (x, y, z) ∈ R3 ; x ∈ [x0 , x0 + ∆x], y ≡ y0 , z ≡ z0
©
¶
©
¶
©
BC = (x, y, z) ∈ R3 ; x ≡ x0 + ∆x, y ∈ [y0 , y0 + ∆y], z ≡ z0
CD = (x, y, z) ∈ R3 ; x ∈ [x0 , x0 + ∆x], y ≡ y0 + ∆y, z ≡ z0
¶
DA = (x, y, z) ∈ R3 ; x ≡ x0 , y ∈ [y0 , y0 + ∆y], z ≡ z0
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
©
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
48
Significato Fisico del Rotore (III)
Otteniamo quindi:
I
I = lim
∆x→0
∆y→0 γ
F~ · d~r =
= lim
∆x→0
∆y→0
̂ dy
ı̂ dx
Z
z}|{
Z
−̂ dy
−ı̂ dx
Z
z}|{
z}|{
F~ · d~r + F~ · d~r + F~ · d~r +
γ(A,B)
γ(B,C)
γ(C,D)
Z
F~ · d~r =
γ(D,A)
Z
= lim
∆x→0
∆y→0
= lim
Z
Fx dx +
γ(A,B)
h
z}|{
Fy dy −
γ(B,C)
Z
Fx dx −
γ(C,D)
Z
Fx dx +
Z
Fy dy −
Z
Fy dy =
γ(D,A)
Z
Fx dx −
Z
Fy dy
i
∆x→0
∆y→0 x∈[x0 ,x0 +∆x]
x≡x0
x≡x0 +∆x
x∈[x0 ,x0 +∆x]
y∈[y0 ,y0 +∆y]
y≡y0
y∈[y0 ,y0 +∆y]
y≡y0 +∆y
z≡z0
z≡z0
z≡z0
z≡z0
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
49
Significato Fisico del Rotore (IV)
Nel tratto AB possiamo esprimere Fx mediante la formula di Taylor,
troncata all’ordine zero, a partire dal punto A(x0 , y0 , z0 ):
Fx (x, y0 , z0 ) = Fx (x0 , y0 , z0 ) + O (x − x0 ) ,
x → x0
per cui, per x → x0 l’integrale curvilineo su γ (A, B) diviene:
Z
I1 =
Z
[Fx (x0 , y0 , z0 ) + O (x − x0 )] dx =
Fx dx =
γ(A,B)
x∈[x0 ,x0 +∆x]
y≡y0
z≡z0
x0Z+∆x
x +∆x
0Z
dx + O
(x − x0 ) dx =
= Fx (x0 , y0 , z0 )
x0
x0
= Fx (x0 , y0 , z0 ) [x]xx00 +∆x + O (x − x0 )2
î
Ä
= Fx (x0 , y0 , z0 ) ∆x + O ∆x2
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
óx0 +∆x
x0
=
ä
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
50
Significato Fisico del Rotore (V)
Nel tratto CD possiamo esprimere Fx mediante la formula di Taylor,
troncata all’ordine zero, a partire dal punto D(x0 , y0 + ∆y, z0 ):
Fx (x, y0 + ∆y, z0 ) = Fx (x0 , y0 + ∆y, z0 ) + O (x − x0 ) ,
x → x0
per cui, per x → x0 l’integrale curvilineo su γ (D, C) diviene:
Z
I3 =
Z
Fx dx =
γ(D,C)
[Fx (x0 , y0 + ∆y, z0 ) + O (x − x0 )] dx =
x∈[x0 ,x0 +∆x]
y≡y0 +∆y
z≡z0
x0Z+∆x
x +∆x
0Z
dx + O
(x − x0 ) dx =
= Fx (x0 , y0 + ∆y, z0 )
x0
= Fx (x0 , y0 +
x0
∆y, z0 ) [x]xx00 +∆x
+ O (x − x0 )2
î
Ä
= Fx (x0 , y0 + ∆y, z0 ) ∆x + O ∆x2
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
óx0 +∆x
x0
=
ä
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
51
Significato Fisico del Rotore (VI)
Nel tratto BC possiamo esprimere Fy mediante la formula di Taylor,
troncata all’ordine zero, a partire dal punto B(x0 + ∆x, y0 , z0 ):
Fy (x0 + ∆x, y, z0 ) = Fy (x0 + ∆x, y0 , z0 ) + O (y − y0 ) ,
y → y0
per cui, per y → y0 l’integrale curvilineo su γ (B, C) diviene:
Z
I2 =
Z
Fy dy =
γ(B,C)
[Fy (x0 + ∆x, y0 , z0 ) + O (y − y0 )] dy =
x≡x0 +∆x
y∈[y0 ,y0 +∆y]
z≡z0
y0Z+∆y
dy + O
= Fy (x0 + ∆x, y0 , z0 )
(y − y0 ) dy =
y0
y0Z+∆y
y0
= Fy (x0 + ∆x, y0 , z0 ) [y]yy00 +∆y + O (y − y0 )2
î
Ä
= Fy (x0 + ∆x, y0 , z0 ) ∆y + O ∆y 2
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
óy0 +∆y
y0
=
ä
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
52
Significato Fisico del Rotore (VII)
Nel tratto DA possiamo esprimere Fy mediante la formula di Taylor,
troncata all’ordine zero, a partire dal punto A(x0 , y0 , z0 ):
Fy (x0 , y, z0 ) = Fy (x0 , y0 , z0 ) + O (y − y0 ) ,
y → y0
per cui, per y → y0 l’integrale curvilineo su γ (A, D) diviene:
Z
I4 =
Z
Fy dy =
γ(A,D)
[Fy (x0 , y0 , z0 ) + O (y − y0 )] dy =
x≡x0
y∈[y0 ,y0 +∆y]
z≡z0
y0Z+∆y
dy + O
= Fy (x0 , y0 , z0 )
(y − y0 ) dy =
y0
y0
= Fy (x0 , y0 , z0 ) [y]yy00 +∆y + O (y − y0 )2
î
Ä
= Fy (x0 , y0 , z0 ) ∆y + O ∆y 2
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
y0Z+∆y
óy0 +∆y
y0
=
ä
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
53
Significato Fisico del Rotore (VIII)
Ricomponendo i 4 termini, otteniamo:
Z
I = lim
∆x→0
∆y→0
= lim
∆x→0
∆y→0
Z
Fx dx +
γ(A,B)
î
Fy dy −
γ(B,C)
Z
Fx dx −
γ(C,D)
Z
Fy dy =
γ(D,A)
Fx (x0 , y0 , z0 ) ∆x + Fy (x0 + ∆x, y0 , z0 ) ∆y −
ó
− Fx (x0 , y0 + ∆y, z0 ) ∆x − Fy (x0 , y0 , z0 ) ∆y =
= lim [Fx (x0 , y0 , z0 ) − Fx (x0 , y0 + ∆y, z0 )] ∆x +
∆x→0
∆y→0
+ lim [Fy (x0 + ∆x, y0 , z0 ) − Fy (x0 , y0 , z0 )] ∆y
∆x→0
∆y→0
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
54
Significato Fisico del Rotore (IX)
Possiamo anche riscrivere la precedente espressione nella forma:
ñ
ô
Fx (x0 , y0 + ∆y, z0 ) − Fx (x0 , y0 , z0 )
I = − lim
∆x ∆y +
∆x→0
∆y
∆y→0
ñ
ô
Fy (x0 + ∆x, y0 , z0 ) − Fy (x0 , y0 , z0 )
∆x ∆y
+ lim
∆x→0
∆x
∆y→0
Ricordando la definizione di derivata parziale:
∂Fx
Fx (x0 , y0 + ∆y, z0 ) − Fx (x0 , y0 , z0 )
(x0 , y0 , z0 ) = lim
∆y→0
∂y
∆y
∂Fy (x , y , z ) = lim Fy (x0 + ∆x, y0 , z0 ) − Fy (x0 , y0 , z0 )
0 0 0
∆x→0
∂x
∆x
otteniamo:
ï
ò
∂Fy
∂Fx
I = lim
(x0 , y0 , z0 ) −
(x0 , y0 , z0 ) ∆x ∆y
∆x→0 ∂x
∂y
∆y→0
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
55
Significato Fisico del Rotore (X)
Concludiamo che:
∂Fy
∂Fx
F~ · d~r =
(x0 , y0 , z0 ) −
(x0 , y0 , z0 ) dx dy =
∂x
∂y
I
ï
lim
∆x→0
∆y→0 γxy
ò
Ä
~ ∧ F~
= ∇
ä
z
dx dy
Ovvero:
Ä
~ ∧ F~
∇
ä
z
= lim
∆x→0
∆y→0
1
∆x ∆y
I
F~ · d~r
γxy
La componente z del rotore di un campo vettoriale F~ è uguale alla
circuitazione del campo F~ lungo una linea chiusa infinitesima γxy
giacente su di un piano perpendicolare all’asse z, divisa per l’area Axy
delimitata dalla curva γxy sul piano.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
56
Significato Fisico del Rotore (XI)
Analogamente si può dimostrare che:
Ä
~ ∧ F~
∇
ä
x
= lim
∆y→0
∆z→0
1
∆y ∆z
I
F~ · d~r
γyz
La componente x del rotore di un campo
vettoriale F~ è uguale alla circuitazione
del campo F~ lungo una linea chiusa
infinitesima γyz giacente su di un piano
perpendicolare all’asse x, divisa per
l’area Ayz delimitata dalla curva γyz sul
piano.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
57
Significato Fisico del Rotore (XII)
Infine si può dimostrare in modo analogo che:
Ä
~ ∧ F~
∇
ä
y
1
= lim
∆z→0 ∆z ∆x
∆x→0
I
F~ · d~r
γzx
La componente y del rotore di un campo
vettoriale F~ è uguale alla circuitazione
del campo F~ lungo una linea chiusa
infinitesima γzx giacente su di un
piano perpendicolare all’asse y,
divisa per l’area Azx delimitata
dalla curva γzx sul piano.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
58
Significato Fisico del Rotore (XIII)
Ragionando ancora allo stesso modo, considerando la circuitazione di una
funzione vettoriale lungo una linea chiusa infinitesima γ giacente su di un
piano non parallelo agli assi, si trova:
~ ∧ F~ · n̂ = lim 1
∇
Aγ →0 Aγ
Ä
ä
I
F~ · d~r
γ
dove n̂ è la normale al piano su cui giace la
linea chiusa infinitesima γ e Aγ è l’area
racchiusa dalla linea γ sul piano
considerato.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
59
Significato Fisico del Rotore (XIV)
Esempio 1: Campo vettoriale con rotore identicamente nullo
F~ (x, y, z) = x ı̂ + y ̂ + z k̂
ï
ò
ï
ò
ï
ò
∂Fz
∂Fy
∂Fx
∂Fz
∂Fy
∂Fx
~
~
k̂ =
∇∧F =
−
ı̂ +
−
̂ +
−
∂y
∂z
∂z
∂x
∂x
∂y
ï
ò
ï
ò
ï
ò
∂y
∂x
∂z
∂x ∂z
∂y
=
−
ı̂ +
−
̂ +
−
k̂ = ~0
∂y
∂z
∂z
∂x
∂x ∂y
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
60
Significato Fisico del Rotore (XV)
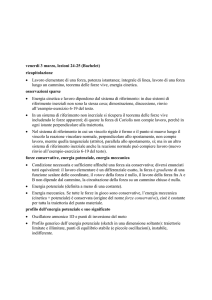
Esempio 2: Campo vettoriale con rotore non-nullo
F~ (x, y, z) = −y ı̂ + x ̂
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
61
Significato Fisico del Rotore (XVI)
Per raffigurarsi in maniera intuitiva il significato del rotore:
Si supponga che il campo vettoriale F~ rappresenti la velocità di un
fluido;
Si immagini di introdurre nel fluido una sferetta ruvida S.
Se la sferetta inizia a ruotare significa che il campo vettoriale ha un
~ ∧ F~ diverso da zero nel centro
rotore ∇
della sferetta;
L’asse di rotazione della sferetta S, orientato
secondo la regola della mano destra, indica la
~ ∧ F~ nel
direzione e il verso del rotore ∇
centro della sferetta;
La velocità angolare con cui ruota la sferetta
~ ∧ F~
è pari alla metà del modulo del rotore ∇
nel centro della sferetta.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
62
Significato Fisico del Rotore (XVII)
Nel caso proposto, il campo vettoriale F~ farebbe ruotare la sferetta S,
posizionata in qualunque punto, attorno a un asse parallelo all’asse z.
La rotazione avverrebbe sempre in senso antiorario, in quanto la
velocità del fluido aumenta allontanandosi dall’asse z:
Di conseguenza la parte della sferetta più lontana dall’asse z si muove
in senso antiorario con velocità superiore
alla parte della sferetta più vicina dall’asse z.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
63
Significato Fisico del Rotore (XVIII)
Esempio 2: Campo vettoriale con rotore non-nullo (continuazione)
F~ (x, y, z) = −y ı̂ + x ̂
ï
ò
ï
ò
ï
ò
∂Fz
∂Fy
∂Fx
∂Fz
∂Fy
∂Fx
~
~
k̂ =
∇∧F =
−
ı̂ +
−
̂ +
−
∂y
∂z
∂z
∂x
∂x
∂y
h
i
h
i
h
i
∂
∂
∂
∂
∂
∂
= ∂y
0 − ∂z
x ı̂ + ∂z
(−y) − ∂x
0 ̂ + + ∂x
x − ∂y
(−y) k̂ =
= [0 − 0] ı̂ + [0 − 0] ̂ + [1 − (−1)] k̂ = 2k̂
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
64
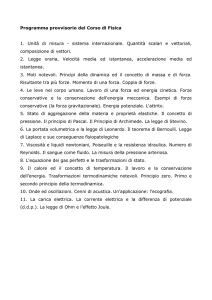
Significato Fisico del Rotore (XIX)
Esempio 3: Campo vettoriale con rotore non-nullo
F~ (x, y, z) = x2 k̂
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
65
Significato Fisico del Rotore (XX)
Esempio 3: Campo vettoriale con rotore non-nullo (continuazione)
F~ (x, y, z) = x2 k̂
ï
ò
ï
ò
ï
ò
∂Fz
∂Fy
∂Fx
∂Fz
∂Fy
∂Fx
~
~
k̂ =
∇∧F =
−
ı̂ +
−
̂ +
−
∂y
∂z
∂z
∂x
∂x
∂y
h
i
h
i
h
i
∂
∂
∂
∂
∂
∂
= ∂y
x2 − ∂z
0 ı̂ + ∂z
0 − ∂x
x2 ̂ + ∂x
0 − ∂y
0 k̂ =
= [0 − 0] ı̂ + [0 − 2x] ̂ + [0 − 0] k̂ = −2x ̂
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
66
Teorema di Stokes
Il flusso del rotore di un campo vettoriale, attraverso una superficie
aperta Σ, è uguale alla circuitazione del campo vettoriale lungo il bordo
γ = ∂Σ di tale superficie:
ZZ Ä
~ ∧ F~
∇
ä
· n̂ dΣ =
Σ
I
F~ · d~r
(Teorema di Stokes)
∂Σ
Si Noti Bene:
L’integrale al I membro è un integrale di
superficie;
L’integrale al II membro è un integrale
curvilineo;
Il simbolo ∂ in questo caso indica il bordo:
In altri contesti il simbolo ∂ denota una
derivata parziale.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
67
Teorema di Stokes (II)
Per
il significato
del Teorema di Stokes:
ZZ comprendere
I
Ä
ä
~ ∧ F~ · n̂ dΣ = F~ · d~r
∇
Σ
∂Σ
immaginiamo di suddividere la superficie Σ in tanti rettangolini di
dimensione infinitesima:
dΣ1 , dΣ2 , dΣ3 , . . .
Per ogni rettangolino si ha, per
quanto abbiamo visto:
ä
~ ∧ F~ · n̂ = lim 1
∇
Aγ →0 Aγ
Ä
I
F~ · d~r
γ
per cui risulta, posto Aγ = dΣi :
~ ∧ F~ · n̂i dΣi =
∇
Ä
ä
I
F~ · d~r
γi
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
68
Teorema di Stokes (III)
La circuitazione sulla linea chiusa γ si può
scrivere come la somma delle circuitazioni sulle linee chiuse γ1 , γ2 . . . .:
In quanto, nella somma, i contributi all’integrale lungo le linee
interne si cancellano a 2 a 2:
Essendo esse percorse in verso
opposto in ogni coppia di
rettangolini adiacenti.
SiIha pertanto:
I
I
F~ · d~r = F~ · d~r + F~ · d~r + · · · =
γ
γ1
I 2 contributi si
cancellano tra loro
γ2
~ ∧ F~ · n̂1 dΣ2 + ∇
~ ∧ F~ · n̂2 dΣ2 + · · · =
= ∇
Ä
=
ä
ZZ Ä
~ ∧ F~
∇
Ä
ä
ä
· n̂ dΣ
Σ
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
69
Proprietà del Rotore
Il rotore di un gradiente è sempre nullo:
Ä
ä
~ ∧ ∇U
~
∇
= ~0
Infatti:
Ä
ä
~ ∧ ∇U
~
~ ∧ ∂U
∇
=∇
∂x
Å
Å
=
∂ ∂U
∂y ∂z
ı̂
̂
k̂
∂
ã
∂
∂
∂U
∂U
ı̂ +
̂ +
k̂ = det ∂x ∂y ∂z
=
∂y
∂z
∂U ∂U ∂U
∂x ∂y ∂z
ã
Å
ã
∂ ∂U
∂ ∂U
∂ ∂U
−
−
ı̂ +
̂ +
∂z ∂y
∂z ∂x
∂x ∂z
Å
ã
∂ ∂U
∂ ∂U
+
−
k̂ =
∂x ∂y
∂y ∂x
= ~0
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
70
Forze Conservative e Forze Posizionali
Le forze il cui lavoro dipende solamente dalla posizione iniziale A e
dalla posizione finale B, ma non dal percorso γ, si dicono forze
conservative.
Se una forza dipende esplicitamente dalla velocità o dal tempo, essa
può compiere lavori diversi anche lungo lo stesso percorso, per cui
non è sicuramente conservativa.
Cerchiamo perciò le forze conservative tra le forze che dipendono
soltanto dalla posizione, dette forze posizionali.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
71
Forze Posizionali
Se una forza è posizionale allora:
Lγ(A,B) = −Lγ(B,A)
Infatti, se un tratto infinitesimo di curva d~r dà al I membro il contributo:
dL = F~ · d~r
nel II membro lo stesso tratto dà il contributo:
dL = F~ · (−d~r ) = −F~ · d~r
in quanto d~r è percorso a ritroso, mentre la forza, essendo posizionale
rimane invariata.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
72
Campi di Forza
Data una forza posizionale che agisce a distanza (consideriamo qui,
come esempio, la forza di gravità), possiamo associare a ogni punto
~ (P ) che rappresenta la forza
geometrico P dello spazio un vettore G
che agirebbe su di punto materiale se esso avesse massa m = 1 kg e si
trovasse nel punto geometrico P :
Ä
campo di forza (gravità)
ä
~ : P ∈ R3 7−→ G
~ (P ) ∈ V
G
Questo campo vettoriale è denominata campo
di forza:
~ (P ), la forza di
Dato il campo di gravità G
~
gravità F (P ) esercitata su di un corpo di
massa m che si trovi nel punto P vale:
~ (P )
F~ (P ) = m G
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
73
Campi di Forza (II)
Esempio: campo della forza di gravità
Il campo di gravità si scrive:
~ (~r ) = −γ M r̂ = −γ M ~r
G
r2
r3
Nella base cartesiana, essendo ~r = x ı̂ + y ̂ + x k̂ e r =
~ (x, y, z) = −γ M x ı̂ + y ̂ + x k̂3
G
(x2 + y 2 + z 2 ) 2
p
x2 + y 2 + z 2 , si ha:
campo di forza (gravità)
In questo modo la forza di gravità risulta:
~ (~r ) = −γ M m r̂ = −γ M m ~r
F~ (~r ) = m G
r2
r3
oppure, nella base cartesiana:
~ (~r ) = −γ M m x ı̂ + y ̂ + x k̂3
F~ (~r ) = m G
(x2 + y 2 + z 2 ) 2
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
74
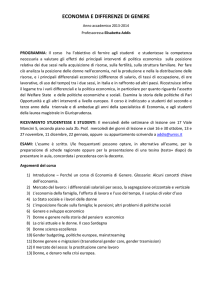
Campi di Forza (III)
Linee di Campo o Linee di Flusso
Un campo di forza si può rappresentare graficamente mediante le linee
di campo (o linee di flusso), ovvero mediante linee:
~ (P );
Tangenti in ogni punto al vettore campo di forza G
~ (P );
Orientate con il verso del campo di forza G
In numero, per unità di superficie
trasversale, proporzionale al modulo
~ (P )k.
del campo di forza kG
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
campo di gravità
linee di campo
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
75
Campi di Forza (IV)
Linee di Campo o Linee di Flusso
campo di gravità
frecce su griglia regolare
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
campo di gravità
linee di campo
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
76
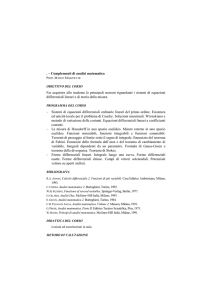
Campi di Forza (V)
campo di gravità di due sferette massive uguali
frecce su griglia regolare
Campo Gravitazionale di Due Sferette Massive Uguali
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
77
Campi di Forza (VI)
campo di gravità di due sferette massive uguali
linee di campo
Campo Gravitazionale di Due Sferette Massive Uguali
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
78
Forze Conservative
I Proprietà
Condizione necessaria e sufficiente affinché la forza posizionale F~ (~r )
sia conservativa è che sia nullo il lavoro compiuto dalla forza per ogni
linea chiusa del dominio di esistenza:
I
F~ · d~r = 0,
∀γ ⊂ D F~
(I Proprietà)
Ä ä
γ
La condizione è sufficiente:
H
Se γ F~ · d~r = 0, allora, ∀A, B ∈ γ, si deve avere:
Z
F~ · d~r +
Z
F~ · d~r = 0
γ1 (A,B)
γ2 (B,A)
Z
Z
F~ · d~r =
γ1 (A,B)
Z
⇒
F~ · d~r −
γ1 (A,B)
Z
F~ · d~r = 0
γ2 (A,B)
F~ · d~r
γ2 (A,B)
quindi F~ (~r ) è conservativa.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
79
Forze Conservative (II)
I Proprietà
La condizione è anche necessaria:
Se la forza posizionale F~ (~r ) è conservativa allora, presa una curva
chiusa γ e due punti A e B su di essa, si deve avere:
Z
F~ · d~r =
Z
F~ · d~r
γ1 (A,B)
γ2 (A,B)
Z
Z
F~ · d~r +
γ1 (A,B)
Z
⇒
F~ · d~r −
γ1 (A,B)
F~ · d~r = 0
⇒
Z
F~ · d~r = 0
γ2 (A,B)
I
F~ · d~r = 0
γ
γ2 (B,A)
quindi è nullo il lavoro compiuto dalla forza per ogni linea chiusa del
dominio di esistenza.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
80
Forze Conservative (III)
II Proprietà e Potenziale
Condizione necessaria e sufficiente affinché la forza posizionale F~ (~r )
sia conservativa è che esista un campo scalare U (~r ), detto potenziale,
tale che:
Lγ(A,B) = U (~rB ) − U (~rA )
(II Proprietà)
La condizione è necessaria:
Infatti, se la forza posizionale F~ (~r ) è conservativa, scelto ad arbitrio
un punto di partenza fisso O, si può definire la funzione scalare della
posizione (potenziale):
Z
U (~rP ) =
F~ · d~r
(Potenziale)
γ(O,P )
Essendo F~ (~r ) conservativa, U (~r ) dipende
soltanto dall’estremo P e non dalla curva γ.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
81
Forze Conservative (IV)
II Proprietà
Utilizzando la funzione U (~r ) si può esprimere:
Z
U (~rB ) =
Z
F~ · d~r,
U (~rA ) =
γ2 (O,B)
Z
F~ · d~r,
Lγ(A,B) =
γ1 (O,A)
F~ · d~r
γ(A,B)
Essendo la forza conservativa, risulta:
Z
Lγ(A,B) =
F~ · d~r =
γ(A,B)
=−
Z
Z
F~ · d~r =
Z
F~ · d~r +
γ(A,O)∪γ(O,B) γ1 (A,O)
F~ · d~r +
γ1 (O,A)
Z
Z
F~ · d~r =
γ2 (O,B)
F~ · d~r = −U (~rA ) + U (~rB )
γ2 (O,B)
La condizione è sufficiente:
Infatti, se Lγ(A,B) = U (~rB ) − U (~rA ) è evidente che
il lavoro dipende soltanto dagli estremi e dunque la
forza è conservativa.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
82
Forze Conservative (V)
Potenziale
Essendo Lγ(A,B) = U (~rB ) − U (~rA ), il potenziale ha le stesse
dimensioni del lavoro:
[U ] = [L] = M L2 T −2
Il potenziale è definito a meno di una costante additiva arbitraria.
Infatti, scegliendo come punto di zero O0 , invece di O, si avrebbe:
costante arbitraria
(dipende dalla scelta di O e O0 )
0
Z
U (~rP ) =
F~ · d~r =
γ(O0 ,P )
Z
F~ · d~r +
γ(O0 ,O)
Z
F~ · d~r =
γ(O,P )
zZ }| {
F~ · d~r +U (~rP )
γ(O0 ,O)
Questo arbitrarietà nell’espressione del potenziale
non limita l’utilità del potenziale nella soluzione di
problemi fisici, in quanto il lavoro è sempre ottenuto
dalla differenza dei potenziali (con lo stesso punto
di zero) in due punti diversi.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
83
Forze Conservative (VI)
III Proprietà
Condizione necessaria e sufficiente affinché la forza posizionale F~ (~r )
sia conservativa è che esista un campo scalare U (~r ), detto potenziale,
tale che:
Ä
ä
~
F~ (~r ) = ∇U
(~r )
(III Proprietà)
La condizione è necessaria:
Infatti se la forza F~ (~r ) è conservativa esiste la funzione potenziale
U (~r ) tale che Lγ(A,B) = U (~rB ) − U (~rA ).
Per uno spostamento elementare d~r = dx ı̂, il lavoro è perciò:
dL = U (x + dx, y, z) − U (x, y, z)
D’altro canto, per definizione:
dL = F~ · d~r = F~ · (dx ı̂) = F~ · ı̂ dx = Fx dx
Confrontando le due espressioni di dL si ottiene:
Fx dx = U (x + dx, y, z) − U (x, y, z)
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
84
Forze Conservative (VII)
III Proprietà
Quindi:
U (x + dx, y, z) − U (x, y, z)
=
dx
∂U
U (x + ∆x, y, z) − U (x, y, z)
=
= lim
∆x→0
∆x
∂x
Con un ragionamento analogo si dimostra, per le componenti y e z:
Fx =
Fy =
∂U
,
∂y
Fz =
∂U
∂z
dunque, in notazione vettoriale:
∂U
∂U
∂U
~
F~ = Fx ı̂ + Fy ̂ + Fz k̂ =
ı̂ +
̂ +
k̂ = ∇U
∂x
∂y
∂z
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
85
Forze Conservative (VIII)
III Proprietà
La condizione è anche sufficiente:
~ , allora si ha:
Infatti, se F~ = ∇U
∂U
∂U
∂U
dx +
dy +
dz =
∂x
∂y
∂z
= dU = U (x + dx, y + dy, z + dz) − U (x, y, z)
dL = F~ · d~r = Fx dx + Fy dy + Fz dz =
Dunque in questo caso dL = dU è un differenziale esatto, ovvero il
differenziale di una funzione che dipende dalle sole coordinate.
Perciò, dividendo la curva γ in un numero arbitrariamente grande di
tratti, si ottiene:
X (PX)] + [U (P ) − U Lγ(A,B) = [X
UX
(PX
) − U (A)] + [
U
(P
X
X
(P
1
2) − U X
1
3
2 )] +
+ · · · + [
U
(P
U
(P
n ) − U (Pn−1 )] + [U (B) − n )]
Lγ(A,B) = U (B) − U (A)
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
86
Forze Conservative (IX)
IV Proprietà
Condizione necessaria e sufficiente affinché la forza posizionale F~ (~r ),
definita in un dominio semplicemente connesso D, sia conservativa è
che il rotore della forza sia ovunque nullo nel dominio di definizione:
Ä
∀P ∈ D F~
ä
Ä ä
~ ∧ F~ (~rP ) = ~0,
∇
(IV Proprietà)
La condizione è necessaria:
Infatti se la forza posizionale è conservativa allora esiste una
~ . Perciò per la proprietà del
funzione potenziale U tale che F~ = ∇U
rotore che abbiamo visto (il rotore di un gradiente è sempre nullo):
Ä
ä
~ ∧ F~ = ∇
~ ∧ ∇U
~
∇
= ~0
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
87
Forze Conservative (X)
IV Proprietà
La condizione è anche sufficiente:
Ä
ä
~ ∧ F~ (~rP ) = ~0, ∀P ∈ D, allora, per il teorema di Stokes,
Infatti se ∇
scelta una superficie Σ che abbia per bordo la curva γ ⊂ D e sia
inclusa nel dominio D (Σ ⊂ D, la scelta è possibile, essendo D
semplicemente connesso), allora:
I
F~ · d~r =
γ=∂Σ
ZZ Ä
~ ∧ F~ · n̂ dΣ = 0,
∇
ä
∀γ ⊂ D F~
Ä ä
Σ
pertanto la forza è conservativa.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
88
Conservazione dell’Energia Meccanica
Consideriamo un sistema meccanico in cui tutti i vincoli siano ideali
~ =R
~t + R
~n = R
~ n ) e tutte le forze attive siano conservative:
(R
~ ⊥ d~r ).
Le forze vincolari compiono lavoro nullo (R
Le forze attive compiono un lavoro dato dalla variazione del potenziale.
Per il teorema delle forze vive:
LA,B = TB − TA
Essendo il campo conservativo si ha inoltre:
LA,B = UB − UA
Confrontando le due espressioni si ottiene:
TB − TA = UB − UA
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
⇒
TA − UA = TB − UB
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
89
Conservazione dell’Energia Meccanica (II)
Energia Potenziale ed Energia Meccanica Totale
Se si definisce l’energia potenziale come:
V (~r ) = −U (~r )
la precedente relazione si può scrivere nella forma:
TA + VA = TB + VB
In un sistema meccanico sottoposto a vincoli ideali e a forze attive
conservative, l’energia meccanica totale E si conserva:
E = T + V ≡ cost.
(Principio di Conservazione dell’Energia Meccanica).
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
90
Energie Potenziali di alcune Forze Notevoli
~
F
U
V
F~ = F ı̂
U =Fx
V = −F x
Forza
Costante
Elastica
Peso
Gravitazionale
F~ = −k (x − x0 ) ı̂ U = − 21 k (x − x0 )2 V =
F~ = −m g k̂
F~ = −γ
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
Mm
r2
U = −m g z
r̂
U =γ
Mm
r
1
2
k (x − x0 )2
V = mgz
V = −γ
Mm
r
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
91
Riassunto Principi di Conservazione
Quantità di moto: si conserva se la risultante delle forze esterne è
nulla.
Momento angolare rispetto a un centro di riduzione fisso O: si
conserva se il momento risultante delle forze esterne rispetto a O è
nullo.
Energia meccanica: si conserva se i vincoli sono ideali e le forze
attive sono conservative.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
92
Urti
Si ha un urto quando due corpi, che si muovono a velocità diverse,
interagiscono (p. es. vengono a contatto) e, in un intervallo di tempo
molto breve (rispetto al contesto), modificano sostanzialmente le
proprie velocità.
palle da biliardo
(urto quasi-elastico)
urto anelastico
annichilazione di particelle
elementari
(urto anelastico)
cometa
diffusione di elettroni
(urto elastico)
Sole
urto elastico
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
93
Urti (II)
Le forze d’urto agiscono per un intervallo di tempo molto breve.
Prima e dopo l’urto le forze d’urto sono assenti:
Se i corpi non sono soggetti ad altre forze, essi si muovono di moto
rettilineo uniforme.
Nei problemi d’urto non si è interessati alla dinamica dell’interazione,
ma soltanto alla relazione tra le quantità dinamiche prima e dopo
l’urto.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
94
Forze d’Urto
Le forze che agiscono durante l’urto tra due corpi non vincolati sono
forze interne al sistema formato dai due corpi.
L’intensità delle forze d’urto è tanto più elevata quanto più piccolo
è l’intervallo di tempo in cui le forze agiscono.
Infatti, se consideriamo la forza media nell’intervallo [t1 , t2 ] in cui le
forze d’urto agiscono, ricordando il teorema dell’impulso:
¨ ∂
F~ =
1
t2 − t1
Zt2
t1
~ (t2 ) − Q
~ (t1 )
Q
F~ (t) dt =
t2 − t1
~ (t2 ) − Q
~ (t1 ), la forza
A parità di variazione della quantità di moto Q
è tanto maggiore quanto minore è l’intervallo di tempo [t1 , t2 ].
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
95
Forze d’Urto (II)
Durante l’urto possono agire anche forze esterne non impulsive,
come la forza peso F~p . Tuttavia, di solito, esse sono trascurabili
rispetto alle forze d’urto F~u .
In assenza di forze impulsive esterne i sistemi interagenti possono cioè
essere considerati sistemi quasi-isolati.
Prima e dopo l’urto le forze esterne non impulsive devono essere
considerate, ma durante l’urto esse possono essere trascurate.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
96
Forze d’Urto (III)
Se sono presenti vincoli, le forze vincolari esterne non possono
essere trascurate:
Durante l’urto, hanno carattere impulsivo e possono
essere molto intense.
Esempio: urto di un pallone contro un muro
Sistema {pallone}: la quantità di moto non si conserva
perché la forza d’urto è una forza esterna impulsiva.
I Sistema {pallone, muro}: la quantità di moto non si
conserva perché la reazione vincolare che tiene il muro
fermo a terra è una forza esterna impulsiva.
I Sistema {pallone, muro, Terra}: la quantità di moto si
conserva in quanto tutte le forze sono interne. La Terra
ha un piccolissimo rinculo.
I
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
97
Forze d’Urto (IV)
In presenza di una forza vincolare esterna si conserva il momento
~ (O) rispetto al punto O di applicazione della reazione
angolare K
vincolare.
Esempio: sbarra vincolata a ruotare attorno a un punto O
Non si conserva la quantità di moto;
I Non si conserva il momento angolare rispetto a un centro di
riduzione generico;
I
I
Si conserva il momento angolare rispetto a O:
Perché la forza esterna impulsiva — ovvero la reazione
~ u — ha momento nullo rispetto a O.
vincolare R
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
98
Urti Elastici e Anelastici
Un urto è detto elastico se si conserva l’energia meccanica.
Un urto è detto anelastico se l’energia meccanica non si conserva.
Un urto è detto perfettamente anelastico se i due corpi procedono uniti
dopo l’urto:
I
In questo caso si ha la massima perdita di energia meccanica.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
99
Sommario Urti
Forze vincolari esterne assenti: si conserva la quantità di moto e il
momento angolare.
Forza vincolare esterna presente: si conserva il momento angolare
rispetto al punto di applicazione della forza vincolare.
Urto elastico: si conserva l’energia meccanica.
Urto perfettamente anelastico: i due corpi, dopo l’urto, procedono
uniti con la stessa velocità.
Meccanica – 12. Lavoro ed Energia
Differenziali
Integr. Lavoro
D. Galli
E. Cin.
Rotore
F. Conservative
E. Mecc.
100
Domenico Galli
Dipartimento di Fisica e Astronomia
[email protected]
https://www.unibo.it/sitoweb/domenico.galli
https://wiki-lhcb.bo.infn.it/bin/view/GalliDidattica
Meccanica – 12. Lavoro ed Energia
D. Galli
101