UNIVERSITÀ DEGLI STUDI DI TERAMO
_________________________
CORSO DI LAUREA IN TUTELA E BENESSERE ANIMALE
Corso di : FISICA MEDICA
Docente: Dott. Chiucchi Riccardo
A.A. 2015 /2016
mail:[email protected]
Medicina Veterinaria: CFU 5 (corso integrato con Statistica e
Informatica : CFU 5)
Tutela e benessere animale: CFU 5
Durata del corso: 35 ore
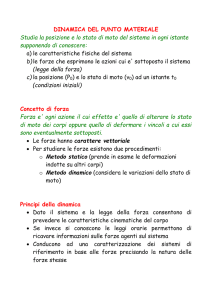
Dinamica
La dinamica è quella parte della fisica che studia le cause del moto di
un corpo e definisce le leggi con cui queste agiscono.
Alla base della dinamica ci sono tre principi formulati da Isaac
Newton nel 1687 nel capitolo iniziale “Assiomi o leggi del
movimento” del trattato “Philosophiae Naturalis Principia
Mathematica”.
Quest’opera è una delle più importanti nella storia della fisica ed è
alla base della fisica classica.
I tre principi descritti da sono Newton:
1. Primo principio (principio d’inerzia) : “Ogni corpo persevera
nello stato di quiete o di moto rettilineo uniforme, a meno che
non sia costretto a cambiare da forze impresse a mutare questo
stato”. Dal primo principio si deduce che un corpo che non
interagisce con altri corpi tende a rimanere in quiete o a
procedere di moto rettilineo uniforme.
2. Secondo principio (variazione del moto): “Il cambiamento di
moto è proporzionale alla forza motrice impressa e avviene
secondo la linea retta lungo la quale la forza è stata impressa”.
Il secondo principio afferma quindi che per far cambiare il moto
di un corpo, occorre che su di esso venga esercitata un’azione
esterna che chiameremo forza. La forza quantifica l’interazione
esterna a cui è soggetto il corpo.
Il secondo principio della dinamica può essere espresso
mediante la formula:
F
v
t
F
m
a
F m a dove:
m viene detta massa del corpo;
v la variazione di velocità del corpo;
Δt l’intervallo di tempo considerato;
a l’accelerazione del corpo.
La forza è una grandezza vettoriale che ha la stessa direzione e
verso della variazione di velocità mentre il suo modulo è dato
dal prodotto della massa del corpo per la sua accelerazione.
L’unità di misura della forza nel SI è il kg m a cui è stato dato il
s2
nome di newton, il cui simbolo è N. N kg m
s
Possiamo anche affermare che la forza è una grandezza vettoriale in
grado di deformare un corpo oppure di far variare il suo moto o
stato di quiete.
Le forze possono dividersi in:
2
Forze di contatto: sono le forze che si manifestano solo quando
dei corpi entrano in contatto tra loro.
Forze a distanza: sono quelle forze che invece si manifestano
tra corpi che non sono in contatto.
La massa inerziale e gravitazionale
La massa è una grandezza scalare sempre positiva, è una proprietà
intrinseca del corpo e rappresenta la quantità di materia che
costituisce il corpo.
L’unità di misura della massa nel S.I. è il chilogrammo (kg).
La massa, a seconda del tipo di definizione utilizzato, può essere
inerziale o gravitazionale anche se sperimentalmente è stata provata
la loro equivalenza.
La massa inerziale indica la proprietà che hanno i corpi di opporsi
alle variazioni del loro stato di quiete o di moto e quantifica quindi
l’inerzia dei corpi cioè la loro tendenza a mantenere invariato il
proprio stato di moto.
La massa gravitazionale è una grandezza fisica che esprime la
capacità di un corpo ad attrarre e ad essere attratto da un altro.
La massa gravitazionale viene misurata per mezzo di una bilancia a
bracci uguali.
Di seguito verranno descritte alcune forze
Forza gravitazionale
Tra due corpi rispettivamente di massa m1 e m2 (supposti per
semplicità puntiformi) posti ad una distanza r, esiste un’interazione.
Tale interazione a cui ognuno dei due corpi è soggetto, è
rappresentata da una forza attrattiva, detta forza gravitazionale il
cui modulo è dato dalla seguente formula:
F
g
G
mm
r
1
2
2
Fg = forza gravitazionale;
m1 = massa del primo corpo;
m2 = massa del secondo corpo;
r = distanza tra i due corpi;
G= costante di gravitazione universale che nel S.I. vale
2
-11 Nm
;
G 6,672 10
2
kg
La forza gravitazionale Fg è una grandezza vettoriale la cui direzione
è individuata dalla retta passante per le due masse, il verso è
sempre attrattivo ed ha valori apprezzabili solamente quando il
prodotto delle masse è molto grande (come nel caso dei pianeti).
Forza peso
Il peso di un corpo è la forza che agisce su di esso, dovuta
all’attrazione gravitazionale della Terra.
È importante notare che massa e peso sono due grandezze distinte
infatti la massa è una grandezza scalare e si misura (nel S.I.) in
chilogrammi, mentre il peso, essendo una forza, è una grandezza
vettoriale e l’unità di misura nel S.I. è il newton.
La forza peso Fp e la massa m, sono legati dalla seguente relazione:
F
peso
m g
Dove g è una grandezza vettoriale chiamata accelerazione di gravità
che è sempre diretta verso il centro della Terra e in prossimità della
superficie terrestre vale circa 9,81 m .
s2
Il valore di g varia con:
la latitudine da un valore minimo all’equatore di circa 9,78 m ,
s2
fino ad un massimo di circa 9,83 m ai poli;
s2
l’altitudine. Ad esempio ad un’altitudine di 10000 m, il suo
valore è di circa 9,77 m .
s2
Nelle tabelle seguenti sono riportati i valori della forza peso
corrispondenti a determinate masse.
massa
(g)
Forza
peso (N)
massa
(kg)
Forza
peso (N)
1
0,00981
1
9,81
10
0,0981
10
98,1
100
0,981
100
981
500
4,905
500
4905
1000
9810
Forza di trazione - tensione
Quando si ha un corpo materiale che è tirato tramite una fune
inestensibile lungo una direzione, come rappresentato in figura:
si dice che la fune è in tensione e la forza di trazione che essa
esercita sul corpo si chiama tensione rappresentata in genere con T .
Questa forza è applicata al punto di fissaggio della fune al corpo e
diretta lungo la fune nel verso di allontanamento dal corpo.
La fune esercita la tensione T su entrambi gli estremi.
Forza vincolare
Per definire la forza vincolare utilizziamo l’esempio di un corpo che è
appoggiato su un piano come in figura:
Il fatto che il corpo sia in quiete implica che la risultante di tutte le
forze ad esso applicate è nulla.
Il corpo è sottoposto alla forza peso
F di gravità, e tale forza,
p
affinché il corpo sia in equilibrio, deve essere bilanciata da una forza
uguale ed opposta detta reazione vincolare o anche forza normale
N dovuta all’interazione che il corpo ha con il piano.
La superficie del piano costituisce il vincolo che impedisce al corpo di
muoversi.
La reazione vincolare ha le seguenti caratteristiche:
direzione sempre normale (perpendicolare) alla superficie del
vincolo, da qui l’uso della lettera N per la sua rappresentazione;
il suo modulo è uguale a quello che la forza esercita sul vincolo;
il suo verso è sempre opposto a quello che la forza esercita sul
vincolo
Scomposizione di forze
Quando si ha un corpo che è vincolato a muoversi su un piano non
orizzontale, è utile scomporre le forze applicate al corpo, lungo la
direzione dello spostamento.
Consideriamo il moto di un corpo che si trova su un piano inclinato
come rappresentato nella figura seguente:
E’ utile scomporre la forza peso P nella direzione in cui avviene il
moto e nella componente perpendicolare ad esso:
1.
:componente della forza peso P lungo la direzione del moto;
2. P :componente della
direzione del moto.
forza
peso
P perpendicolare alla
Utilizzando le proprietà di triangoli rettangoli si ottiene:
= mg sinθ;
P
mg cos θ.
Visto che il corpo è vincolato muoversi sul piano, esso sarà soggetto
anche alla reazione vincolare che avrà stesso modulo e stessa
direzione di P ma verso opposto.
N mg cos θ
Forza di attrito statico e dinamico
Quando si hanno due corpi che sono a contatto e si tenta di
spostarne uno sulla superficie dell’altro, si osserva che le due
superfici a contatto oppongono resistenza a scorrere. Si ha quindi
una forza tangente alla superficie di contatto tra i corpi che si
oppone al moto che viene detta forza di attrito statico Fs . Per far
muovere dalla sua posizione uno dei due corpi, è necessario
applicare una forza che superi Fs .
Una volta iniziato, lo scorrimento viene mantenuto applicando una
forza Fd che viene detta forza di attrito dinamico.
F
Sperimentalmente si è verificato che
approssimazione:
F
s
N;
s
F
d
s
F e con buona
d
N
d
I coefficienti s e d sono adimensionali (numeri senza unità di
misura) e vengono detti rispettivamente coefficiente di attrito
statico e coefficiente di attrito dinamico.
e d dipendono dalla natura delle superfici a contatto e
s
sperimentalmente si è ottenuto che
s
d
.
Nella tabella seguente sono riportati i valori di
materiali.
Superfici
Legno - legno
Acciaio - acciaio
Acciaio - acciaio
lubrificato
Acciaio - alluminio
Acciaio - ottone
Acciaio - teflon
Acciaio - ghiaccio
Acciaio - aria
Rame - acciaio
Rame - vetro
Gomma - asfalto
(asciutto)
Gomma - asfalto
(bagnato)
Vetro - vetro
Legno sciolinato - neve
legno - cartone
s
(statico)
d
s
e
d
di alcuni
(dinamico)
0,5
0,78
0,3
0,42
0,11
0,61
0,51
0,04
0,027
0,001
1,05
0,68
0,05
0,47
0,44
0,04
0,014
0,001
0,29
0,53
1
0,8
0,7
0,9 - 1,0
0,1
0,32
0,6
0,4
0,05
0,23
Forza elastica
Diremo che un corpo rigido è elastico quando, se viene deformato, il
corpo tende a tornare alla forma originale senza che venga applicata
un’ulteriore forza.
Il corpo rigido elastico più comune è una molla infatti una volta
compressa o allungata, essa tende a tornare alla forma originale.
La forza elastica Fel è la forza che è responsabile nei corpi elastici di
questo ritorno alla configurazione iniziale, detta posizione di
equilibrio, e ha le seguenti caratteristiche:
si oppone sempre ad uno spostamento o a una deformazione;
tende a riportare tutti i punti che costituiscono il corpo rigido
alla loro posizione iniziale.
La forza elastica Fel si manifesta ogni volta che si effettua uno
spostamento dalla posizione di equilibrio, e cerca di far tornare il
sistema nella configurazione iniziale quindi è diretta come lo
spostamento, ma nel verso opposto.
Sperimentalmente si è verificato che:
F
el
ks nota come legge di Hooke
dove k viene detta costante elastica e la sua unità di misura nel S.I. è
il newton su metro (
N
m
) mentre
s rappresenta lo spostamento dalla
posizione di equilibrio.
Nel sistema rappresentato in figura, la molla è
sottoposta all’allungamento dovuto dalla forza
peso=mg e reagisce con una forza elastica Fel .
3. Terzo principio ( azione e reazione): “Per ogni forza che un
corpo A esercita su di un altro corpo B, ne esiste
istantaneamente un'altra uguale in modulo e direzione, ma
opposta in verso, causata dal corpo B che agisce sul corpo A”.
Per il terzo principio della dinamica, quando due corpi
interagiscono si ha F1 2
F2 1 dove :
F rappresenta la forza del che il corpo 1 esercita sul corpo 2;
F rappresenta la forza del che il corpo 2 esercita sul corpo 1.
1 2
2 1
Ad esempio se diamo un pugno alla parete di un muro, la mano
tocca il muro, esercitando su di esso una forza detta azione.
La mano però è soggetta ad una forza detta di reazione di
uguale intensità (e contraria) che il muro esercita su di noi.
Analogamente avviene nel caso rappresentato in figura:
le forze di azione sono rappresentate dalle
frecce (vettori) verdi mentre quelle di reazione
in blu.
Statica
La statica è la parte della fisica che studia le condizioni di equilibrio
di un corpo materiale.
Equilibrio
Un corpo è in equilibrio rispetto ad un dato sistema di riferimento
quando la risultante di tutte le forze che agiscono su di esso è nulla.
Quiete
Un corpo è in quiete rispetto ad un dato sistema di riferimento
quando la velocità è nulla e quindi non varia la sua posizione nel
sistema di riferimento considerato.
Da notare che un corpo può essere contemporaneamente in quiete
ed in equilibrio ma può anche essere in equilibrio e non in quiete,
come nel caso di un corpo che si muove a velocità costante ma non
è soggetto ad alcuna forza esterna.
Visto che il moto di un corpo dipende dal sistema di riferimento,
prima di studiare la statica ed enunciare i principi della dinamica, è
utile definire il sistema di riferimento inerziale.
Sistema di riferimento inerziale
Un sistema di riferimento inerziale è un sistema costituito da tre
assi cartesiani solidali con il Sole e le stelle (il cosiddetto sistema
delle stelle fisse).
Ogni altro sistema di riferimento che si muova di moto rettilineo
uniforme rispetto ad esso è inerziale.
Ogni sistema di riferimento che accelera o ruota non si può
considerare inerziale.
Risultante di più forze applicate ad un corpo
Se più forze sono applicate allo stesso corpo puntiforme, l’effetto da
loro prodotto, equivale ad un’unica forza detta Risultante
applicata allo stesso punto.
R,
Il vettore Risultante R si ottiene sommando vettorialmente i vettori
delle singole forze.
n
R
F F F ... F
i
1
2
n
i 1
Viceversa ad una forza applicata in un punto P si possono sostituire
più forze applicate allo stesso punto, la cui somma vettoriale sia il
vettore della forza sostituita.
Equilibrio di un punto materiale
Un punto materiale è in equilibrio quando la risultante
forze applicate ad esso è nulla.
R di tutte le
Condizione di equilibrio di un punto materiale
n
R
F F F
i
1
... F
2
n
0
i 1
Corpo rigido
Un corpo rigido è un oggetto esteso le cui dimensioni nel sistema di
riferimento non sono trascurabili e che non subisce deformazione
qualunque siano le forze applicate su di esso.
Ovviamente tale corpo non esiste nella realtà ma è un modello utile
nello studio della statica.
La condizione di equilibrio vista precedentemente per il punto
materiale non garantisce l’equilibrio per un corpo rigido.
Studiamo il comportamento del corpo rigido rappresentato nella
seguente figura:
Se il modulo delle due forze è uguale ( F1
n
R
F
i
i 1
F
1
F
2
0
F ) si avrà:
2
E’ evidente che il corpo ruoterà quindi, per stabilire le condizioni di
equilibrio per un corpo esteso sarà necessario aggiungere la
condizione di non rotazione.
Per studiare la rotazione di un corpo esteso si introduce la grandezza
fisica vettoriale Momento.
Momento di una forza
Si definisce momento di una forza F applicata in un punto P,
rispetto ad un punto O, la grandezza vettoriale data da:
r F
Il punto rispetto al quale si calcola il momento della forza è
chiamato «polo».
Nella formula vista precedentemente,
r rappresenta la posizione del
punto P, di applicazione della forza F , rispetto al polo O.
Ricordando le proprietà del prodotto vettoriale, il momento di una
forza ha le seguenti caratteristiche:
la sua direzione è perpendicolare al piano che contiene r e F ;
il suo modulo è dato da:
r F sin dove
rappresenta
l’angolo tra r e F ;
il verso è determinato dalla regola della mano destra:
esce dal foglio se la rotazione di r su F è antioraria e viene
rappresentato graficamente con ;
entra nel foglio se la rotazione di
rappresentato graficamente con x.
r su F è oraria e viene
Retta di azione di una forza
La retta di azione di una forza F è una retta parallela alla forza F e
contenente il punto di applicazione P della forza.
Analizzando la figura seguente e, ricordando la definizione di
momento di una forza si ha:
r F sin
dove b
r sin
r sin
F
b F
per le proprietà del triangolo rettangolo OBP
Il segmento OB b viene detto braccio della forza F e rappresenta
la distanza tra il polo O e la retta di azione della forza.
Dimostriamo come il momento di una forza, calcolato rispetto ad un
polo O, non varia se si cambia il punto di applicazione della forza
lungo la propria retta di azione.
A tal fine, consideriamo la figura seguente
calcoliamo il momento della forza F , rispetto al polo O, quando la
forza F è applicata nel punto P e successivamente nel punto C'.
come visto precedentemente, il momento
della forza F ,
rispetto al polo O, quando la forza F è applicata nel punto P è
dato da:
r F sin
r sin
F
b F
il momento della forza F , rispetto al polo O, quando la forza F
è applicata nel punto C' è dato da:
r F sin
c.v.d.
r sin
F
b F
Momento nullo
Il momento
di una forza
seguenti due casi:
F rispetto ad un polo O è nullo nei
1) se la forza F è nulla;
2) se il braccio b è nullo (ovvero se il polo O si trova sulla retta di
azione della forza F ).
Il momento di più forze
Se a un corpo rigido sono applicate più forze
F1, F2 ,..., FN , il
momento totale τ tot rispetto ad uno stesso polo O, si ottiene
sommando i momenti delle singole forze:
τ
N
tot
τ τ
1
i 1
2
...+τ N