LOCALIZZAZIONE ok
21-11-2006
16:07
Pagina 27
MOBILE
La localizzazione nei
sistemi radiomobili
GIANLUCA BOIERO
MASSIMO COLONNA
DARIO PARATA
I servizi di localizzazione si possono definire come quei servizi che integrano
l’informazione di posizione di un utente con altre informazioni per fornire un
valore aggiunto all’utente stesso. I servizi basati sulla localizzazione vantano
una lunga tradizione. Sin dalla fine degli anni Settanta, il Dipartimento della
Difesa degli Stati Uniti gestisce una infrastruttura satellitare, il GPS (Global
Positioning System) [1, 2]. Questo sistema, concepito per scopi militari, è
stato aperto alla fine degli anni Ottanta all’industria civile e da quel momento
molte aziende si sono avvalse dei dati GPS per migliorare i propri prodotti e
servizi. Tuttavia un interesse diffuso verso i servizi basati sulla localizzazione si
sta manifestando solo dalla fine degli anni Novanta grazie alla diffusione capillare dei sistemi cellulari, e del GSM in particolare, che hanno abilitato nuove
tecniche di localizzazione e soprattutto hanno aperto un vasto mercato di
potenziali utilizzatori di questo tipo di servizi.
L’articolo descrive i diversi aspetti della localizzazione cellulare. In particolare,
dopo un’introduzione in cui si evidenzieranno i servizi basati sulla localizzazione e le relative prospettive di mercato, si illustreranno le principali tecniche di
localizzazione utilizzabili nei sistemi radiomobili, comprese quelle che prevedono l’integrazione con la localizzazione GPS; saranno presentate le architetture di rete standardizzate in ambito 3GPP (3rd Generation Partnership Project)
e OMA (Open Mobile Alliance) e si descriveranno infine le piattaforme realizzate da TILab. Saranno descritte sia la piattaforma NIMBLE (Non Intrusive
MoBile Location Environment) in esercizio presso TIM sia le piattaforme prototipali ESkyLo (Earth-Sky Location) e LocHNESs (Localizing & Handling
Network Event Systems) evidenziando i principali servizi abilitati.
1. Introduzione
I servizi di localizzazione su rete radiomobile
sono servizi a valore aggiunto che si basano sulla
conoscenza della posizione dell’utente; per definizione, quindi, il ruolo centrale nella catena del valore
è riservato all’operatore di rete, in quanto detentore
dell’informazione essenziale allo sviluppo dei servizi.
Esistono due categorie distinte di LBS (Location
Based Services): servizi in cui è l’utente che richiede
l’informazione sulla propria posizione e servizi in cui
è la rete che autonomamente determina la posizione
dell’utente. In questo secondo caso, l’operatore può
o inoltrare a terze parti ovvero utilizzare per propri
scopi l’informazione di posizione (per esempio in
modo statistico per migliorare la gestione della propria rete). Nel caso di localizzazione generata dalla
rete, quindi di localizzazione effettuata senza una
specifica richiesta da parte dell’utente, emergono
problematiche legate alla privacy che richiedono la
giusta attenzione onde evitare che questi riceva una
percezione negativa da questo tipo di servizi.
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006
27
LOCALIZZAZIONE ok
21-11-2006
16:07
Pagina 28
BOIERO › COLONNA › PARATA • La localizzazione nei sistemi radiomobili
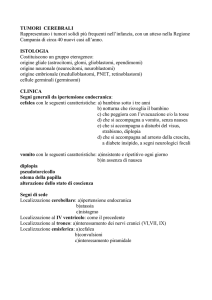
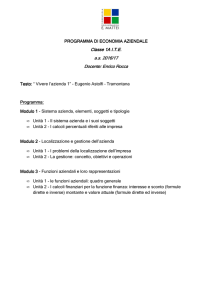
Gli LBS si possono raggruppare in quattro
macrocategorie:
• servizi trigger;
• servizi informativi basati sulla posizione dell’utente;
• servizi di tracking per terze parti;
• servizi di emergenza/assistenza (figura 1).
Wireless Location Services
Network Enhancing
Services
Trigger services
Location based
Information Services
3rd Party
Tracking Services
Location Sensitive
Billing
“Where am I?/Where
is...” Services
Fleet Management
Location based
Call-Routing
Vehicle Traffic and
Navigation Services
People Finding
Automated
Advertising Services
Location-based
News (weather, events)
Asset Tracking
Tourist Information
FIGURA 1› Classificazione dei servizi basati sulla localizzazione.
I servizi trigger, o anche di “geo-fencing”, si attivano nel momento in cui l’utente raggiunge una
determinata posizione o entra in una area predefinita senza alcun intervento diretto da parte sua;
appartengono a questa classe l’invio di informazioni pubblicitarie localizzate oppure una tariffazione delle chiamate dipendente dalla posizione in
cui si trova l’utente stesso (casa, ufficio, ...).
I servizi informativi basati sulla localizzazione
offrono all’utente la possibilità di accedere, su sua
richiesta, ad un insieme di contenuti via SMS, WAP,
… ; questa categoria di servizi include la fornitura
di informazioni localizzate sul modello “pagine
gialle” (ad esempio nomi ed indirizzi di hotel, ristoranti, negozi, ... posti nelle vicinanze dell’utente ed
eventualmente sul percorso migliore per raggiungerli), informazioni sullo stato del traffico nelle vicinanze dell’utente o sul percorso da esso individuato, informazioni meteorologiche, orari degli
autobus e dei treni locali, ... .
I servizi di tracking per terze parti prevedono la
localizzazione continua, ad intervalli abbastanza
regolari, dei terminali e comprendono i servizi di
gestione di un parco macchine e di flotte aziendali,
i servizi di tracking di beni (ad esempio oggetti di
particolare valore da monitorare durante spostamenti o in caso di furto) e persone (ad esempio
bambini da parte dei genitori).
28
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006
I servizi di assistenza ed emergenza consentono di aiutare i clienti in difficoltà e possono
anche attivarsi autonomamente nel momento in
cui il cliente effettua una chiamata d’emergenza
all’apposito numero come ad esempio accade con
il 911 negli Stati Uniti.
Esiste poi un’ultima classe di servizi, denominata network-enhancing, in
cui la localizzazione degli
u ten ti vi en e s fr ut t a t a in
modo statistico dall’operatore per monitorare le prestazioni della rete radiomobile (QoS monitoring) e per
valutare in tempo reale l’effetto degli interventi su di
essa (Real-time planning).
Gli attributi principali che
consentono di caratterizEnd-User
zare gli LBS sono costituiti
Assistance Services
dalla copertura del servizio
e dall’accuratezza della
Emergency Services
localizzazione. La copertura
Notification
del servizio rappresenta l’aRoadside Assistance
rea geografica in cui l’utente percepisce una qualità
adeguata alle sue aspettative e, per i servizi più interessanti, può andare dall’ambito cittadino nel caso
di servizi di informazioni
localizzate fino all’ambito
nazionale e oltre nel caso di
tracking di flotte e di
g e s t i o n e d i p a rc o a u t o .
L’accuratezza della localizzazione, e cioè la differenza fra la posizione reale
del cliente e la posizione stimata, può variare da
pochi metri nel caso dei servizi di navigazione fino
ad alcuni chilometri nel caso della gestione del
parco macchine; i servizi più interessanti prevedono comunque un livello di accuratezza della
posizione compresa tra 25 e 200 metri.
Altre caratteristiche importanti sono rappresentate dal tempo di risposta, cioè dal ritardo con cui
il sistema di localizzazione determina la posizione
di un terminale, e dalla priorità con cui vengono
gestite le diverse richieste, che deve ovviamente
essere più elevata nel caso di servizi di emergenza
o di servizi destinati ad una clientela pregiata. Il
tempo di risposta, in particolare, può essere legato
in modo inverso all’accuratezza sulla posizione per
cui il sistema che fornisce il servizio deve essere in
grado di gestire il trade-off tra le esigenze di accuratezza e di tempo di risposta.
Da numerosi anni si portano avanti sperimentazioni con i servizi di localizzazione ed oramai sono
diversi gli operatori mobili che offrono servizi a
valore aggiunto legati alla localizzazione. Un esempio è rappresentato dall’operatore svedese Telia
che già da alcuni anni presenta ai propri clienti, sia
di tipo corporate sia di tipo consumer, un’offerta
articolata costituita da una decina di servizi. Altri
esempi sono forniti dagli operatori nipponici KDDI,
LOCALIZZAZIONE ok
21-11-2006
16:07
Pagina 29
BOIERO › COLONNA › PARATA • La localizzazione nei sistemi radiomobili
che nel suo portale dedicato agli LBS presenta
numerose applicazioni, e NTT DoCoMo che offre
gli LBS attraverso il portale I-mode.
Lo sviluppo degli LBS non è stato però così diffuso e rapido come ci si attendeva: nel 2005,
quindi circa cinque anni dopo il lancio di questo
tipo di servizi, le revenue dovute agli LBS sono
ammontate a circa 144 milioni di euro [3]. Tuttavia,
la necessità per gli operatori mobili di mantenere,
se non incrementare, i livelli di ARPU attuali, le
decisioni degli enti regolatori orientati, così come
già avviene negli Stati Uniti, a rendere obbligatoria
la localizzazione per i servizi di emergenza e infine
la maturità delle tecnologie di localizzazione, ed in
special modo quella dei terminali d’utente, portano
ad un maggiore ottimismo relativamente allo sviluppo di questi servizi per cui Berg Insight stima
una crescita annua del 34% delle revenue da LBS
nel mercato europeo fino a raggiungere una quota
complessiva di 622 milioni di euro nel 2010. A
dominare questo mercato saranno i servizi di navigazione, con una quota di circa il 48%, favoriti
dalla diffusione di terminali in tecnologia A-GPS
(Assisted-GPS) [3].
2. Le tecniche di localizzazione cellulare
Le misure fondamentali alla base delle principali
tecniche di localizzazione utilizzabili nei sistemi
radiomobili sono:
• misure di prossimità;
• misure di tempi e di differenze di tempi;
• misure di potenza.
È inoltre possibile ottenere sia delle tecniche di
localizzazione miste in cui vengono utilizzate le
misure di più grandezze tra quelle elencate o altre
informazioni messe a disposizione dalla rete cellulare, quali l’Identificativo di cella o il Timing
Advance, sia delle tecniche di localizzazione ibride
in cui le misure sulla rete radiomobile vengono
integrate con quelle provenienti dal sistema satellitare GPS (si veda il riquadro di approfondimento
“Quale tecnologia di localizzazione”).
2.1 Misure di prossimità: Cell-Id e Cell-Id+TA
La localizzazione tramite misure di prossimità è
la tecnica più semplice e più rapida per stimare la
posizione di un terminale e si basa sulla limitatezza della copertura delle BTS causata dall’attenuazione che le onde radio subiscono propagandosi nello spazio. In questo caso, la posizione di
un terminale è approssimata con la posizione della
BTS con la quale il terminale stesso è in comunicazione o dalla quale esso riceve un segnale.
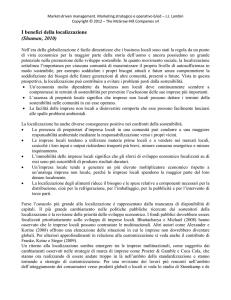
Nei sistemi radiomobili, questa tecnica è
denominata CI (Cell-Id) e sfrutta la conoscenza
da parte del terminale in ogni istante, quindi
anche quando è nello stato di “idle”, dell’identificativo della cella nella quale esso si trova
(figura 2a e 2b) [4, 5]. Questo tipo di localizzazione ha il notevole pregio di non porre alcun
vincolo hardware né sul terminale nè sulle BTS
ma ha lo svantaggio di fornire un’accuratezza
molto bassa e soprattutto fortemente legata alle
dimensioni delle celle.
Le tecniche di localizzazione sono tante e
diverse tra loro e si basano tutte sulla misura di una
o più grandezze quali angoli, tempi, distanze, … ,
che sottintendono una relazione spaziale tra il terminale da localizzare e uno o più punti fissi disposti
nell’ambiente circostante e la cui posizione è ben
nota. Nel caso dei sistemi radiomobili, queste grandezze sono misurate sfruttando le proprietà fisiche
delle onde radio e cioè la velocità di propagazione e
l’attenuazione. La posizione del terminale viene
quindi determinata, in seguito alla misura dei parametri fisici di interesse, a
partire dalla posizione delle
BTS (Base Transceiver
Station) di riferimento utilizzando una metodologia
diversa a seconda del parametro fisico misurato. Il
risultato della localizzazione
può essere espresso in vari
modi in base alla tecnica
a. CI con antenne omnidirezionali
b. CI con antenne settoriali
impiegata e al sistema di
riferimento rispetto al quale
sono espresse le posizioni
delle BTS: la posizione del
terminale può essere quindi
rappresentata dal piano di
un edificio, dal numero di
una stanza, dal nome di un
c. CI+TA con antenne settoriali
d. E-CI+TA con antenne settoriali
quartiere o di una zona geoCI = Cell Id
grafica o da un punto nello
E = Enhanced
TA = Timing Advance
spazio espresso in coordinate
WGS-84
(World
Geographic
r efer ence
FIGURA 2› Tecniche di localizzazione CI con antenne omnidirezionali (a) e settoriali (b), CI+TA (c) ed E-CI+TA.
System), UTM (Universale
Trasversa di Mercatore), … .
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006
29
LOCALIZZAZIONE ok
21-11-2006
16:07
Pagina 30
BOIERO › COLONNA › PARATA • La localizzazione nei sistemi radiomobili
Quale tecnologia di
localizzazione
La scelta della tecnologia adatta per
la localizzazione dipende principalmente da ragioni di tipo economico e
tecnologico. Per quanto riguarda le
motivazioni economiche si dovranno
tenere in conto il costo della tecnologia, le previsioni di utilizzo e soprattutto di ricavi previsti per l’insieme dei
servizi che si vogliono erogare. Per
ciò che riguarda gli aspetti tecnologici, il dato che maggiormente pesa è
la precisione con cui viene fornita
l’informazione di localizzazione,
anche se nel complesso occorre
tenere in considerazione il tempo
necessario al calcolo della posizione,
la disponibilità di copertura che tale
tecnologia può assicurare, la scalabilità e la complessità della tecnologia e
il tempo necessario per metterla in
campo e renderla operativa. Un ruolo
importante può essere giocato da altri
fattori quali le imposizioni di tipo
regolamentare come probabilmente
accadrà per i servizi di emergenza.
Nel caso l’operatore decida di orientarsi verso servizi che richiedono un
livello di accuratezza non molto
spinto, come l’individuazione di esercizi commerciali o alcuni tipi di pubblicità localizzata, e posto che non vi
siano vincoli regolamentari che
impongano maggiore precisione nelle
applicazioni di emergenza, la scelta
può certamente ricadere su metodi
basati sull’identificativo di cella.
Il metodo che si basa sul GPS, pur
garantendo un ottimo livello di accuratezza, impone all’utente di possedere
un ricevitore GPS integrato o comunque collegato al terminale mobile; esistono inoltre problemi per l’utilizzo del
ricevitore in ambienti con scarsa visibilità dei satelliti. I metodi basati su
al
Metodo Modifiche
terminale
Modifiche
alla rete
Costi
Accuratezza
Copertura
Tempo
di calcolo
CI +
TA/RTT
Nessuna
Nessuna
Bassi
Da 500 m (aree
urbane) fino a
10 km
(aree rurali)
Totale
Basso
E-CI
Nessuna
Nessuna
Bassi
150 - 1 km
Totale
Basso
Alti
50 - 250 m
Totale con alcuni
problemi nelle
aree rurali
Basso
Medi
5 - 50 m
Totale con
problemi in
condizioni indoor
Medio
Modifiche
OTDOA/ software (E- Aggiunta unità
E-OTD OTD/OTDOA)
di misura
U-TDOA Nessuna per
(LMU)
U-TDOA
A-GPS
A-GPS
CI
E-Cl
E-OTD
Modifiche
hardware
=
=
=
=
Aggiunta unità
di riferimento
Assisted - GPS
Cell Id
Enhanced Cell Id
Enhanced - Observed Time
Difference
LMU
OTDOA
RTT
TA
U-TDOA
=
=
=
=
=
Location Measurement Uni
Observed Time Difference Of Arrival
Round Trip Time
Timing Advance
Uplink-Time Difference Of Arrival
TABELLA A› Caratteristiche della tecnica di localizzazione.
misure di tempo (E-OTD/OTDOA) sono
caratterizzati da un’alta intrusività in
rete e nel terminale e di conseguenza
un elevato costo d’implementazione.
Le prestazioni in termini di accuratezza, seppur buone, non sembrano
garantire sempre il salto di qualità
necessario per la fornitura di servizi
specifici (es. servizi di emergenza,
navigazione, route guidance).
In virtù di queste considerazioni, negli
ultimi anni quasi tutti gli operatori e
manifatturiere si sono orientati verso
roadmap tecnologiche (tabella A) che
prevedono, in una prima fase, l’imple-
L’accuratezza della tecnica CI può essere
migliorata utilizzando un’altra informazione sempre
disponibile nei terminali durante una connessione:
il TA (Timing Advance) nel GSM e il RTT (Round
Trip Time) nell’UMTS; la tecnica risultante è denominata CI+TA (CI+RTT). Il TA rappresenta una stima
del ritardo con cui si propagano i segnali sulla
tratta radio, e quindi della distanza che separa il
terminale dalla BTS, è calcolato dalla rete con continuità durante la chiamata, è quindi trasmesso al
terminale in caso di sua variazione e consente ai
pacchetti trasmessi da esso di allinearsi correttamente sulla trama TDMA [6]. Anche il RTT rappresenta una stima del ritardo di propagazione sulla
tratta radio anche se l’uso che ne fa la rete è diffe-
30
mentazione di soluzioni di tipo CI
(spesso E-CI) e, in una seconda fase,
l’integrazione di queste ultime con la
tecnologia GPS attraverso l’utilizzo di
terminali evoluti (dotati di chipset
GPS) e l’invio di opportuni dati di assistenza dalla rete (A-GPS). Questa
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006
strategia sembra essere, al momento,
la scelta più appropriata, in quanto
permette, con un investimento graduale da parte dell’operatore, la fornitura di una gamma di servizi sempre
più completa. L’implementazione di
soluzioni integrate che utilizzano congiuntamente dati/misure cellulari e
satellitari (tecniche ibride) permetterà
inoltre di raggiungere buone prestazioni di localizzazione (accuratezza e
disponibilità di servizio) sia in
ambiente urbano sia in zone rurali.
rente [7]. Il TA ed il RTT consentono di individuare
una corona circolare all’interno della cella identificata dal Cell-Id, che delimita ulteriormente l’area in
cui è posizionato il terminale da localizzare (figura
2c). Questa tecnica migliora la precedente, ma ha
come limiti principali da un lato il numero di bit con
cui sono rappresentati il TA e il RTT, per cui la
corona circolare che ne risulta ha uno spessore
radiale di circa 550 metri per il GSM e di circa 70
metri per l’UMTS, e dall’altro l’eventuale errore che
la rete commette nella stima del TA a causa dei
fenomeni di propagazione radio ed in special modo
del multipath; per questi motivi, la tecnica CI+TA,
come si vedrà nel seguito, sarà utilizzata in combinazione con misure di potenza.
LOCALIZZAZIONE ok
21-11-2006
16:07
Pagina 31
BOIERO › COLONNA › PARATA • La localizzazione nei sistemi radiomobili
2.2 Misure di tempo assoluto e di differenze di tempo:
E-OTD, OTDOA, U-TOA
La localizzazione realizzata tramite misure di
tempo assoluto è conosciuta con l’acronimo TOA
(Time Of Arrival) e si basa sul noto principio della
trilaterazione. In sintesi, misurato il tempo ti impiegato dal segnale a propagarsi tra terminale e trasmettitore e nota la velocità con cui il segnale si
propaga nello spazio (c=3·10 8 m/s), si individua
una circonferenza centrata sulle coordinate del trasmettitore (Xi, Yi) e di raggio pari a:
dove (x, y) sono le coordinate incognite del
punto in cui si trova il terminale. Dalla misura dei
tempi di propagazione con almeno tre trasmettitori,
si individuano tre circonferenze la cui intersezione
costituisce il punto cercato; in altre parole dalle tre
misure si ottiene un sistema di tre equazioni risolvendo il quale si determina la posizione del terminale [1, 8]. In realtà, le misure di tempo sono affette
da un errore causato sia da una sincronizzazione
dei clock poco accurata sia dai fenomeni di propagazione per cui le tre circonferenze non si intersecano in un punto ma individuano un’area all’interno
della quale è compresa la posizione del terminale.
Il sistema di equazioni è quindi inconsistente e non
presenta una soluzione unica; il metodo di risoluzione più comunemente usato prevede la minimizzazione dell’errore quadratico medio tramite un
processo iterativo.
La tecnica TOA è impiegata nella localizzazione
GPS [8], mentre non ha applicazione nei sistemi
radiomobili per la difficoltà ad ottenere una sincronizzazione accurata tra le BTS e per la necessità di
avere un timestamp nei segnali per indicarne l’istante di trasmissione.
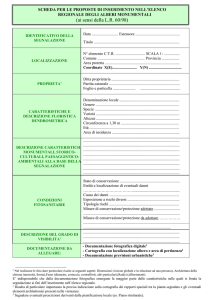
L a te c nic a di loc a lizza zione TDOA (Time
Difference Of Arrival) prevede la misura della differenza dei tempi di propagazione dei segnali tra il
terminale e due BTS; ciascuna misura, riferita ad
una coppia di BTS poste nei punti di coordinate (Xi,
Yi) e (Xj, Yj), individua una iperbole, nei cui fuochi
sono posizionate le BTS stesse, di equazione
dove (x, y) sono sempre le coordinate incognite
del punto in cui si trova il terminale. Realizzando
questa misura con due coppie indipendenti di BTS,
si individuano due iperboli la cui intersezione costituisce il punto cercato (figura 3). Anche in questo
caso, l’errore sulle misure di tempo fa sì che il
sistema di equazioni non abbia soluzione unica.
La tecnica TDOA è di più semplice realizzazione
rispetto alla TOA in quanto non è necessario inserire alcun timestamp nei segnali trasmessi, ma
richiede sempre la sincronizzazione delle BTS.
Nel GSM la localizzazione TDOA viene realizzata secondo due modalità differenti: una prima
denominata E-OTD (Enhanced-Observed Time
Difference) in cui le misure sono effettuate dal ter-
minale ed una seconda denominata U-TDOA
(Uplink-Time Difference Of Arrival) in cui le misure
sono effettuate dalla rete [4]. Nell’UMTS la tecnica
E-OTD assume il nome di OTDOA (Observed Time
Difference Of Arrival) [5].
La tecnica E-OTD sfrutta le misure TDOA realizzate dal terminale rispetto a più BTS e risolve il
problema della sincronizzazione di queste ultime
utilizzando delle unità, denominate LMU (Location
Measurement Unit), con il compito di determinare
l’errore relativo di sincronizzazione RTD (Real
Time Difference) tra le diverse coppie di BTS
c o i n v o l t e n e l l e m i s u re T D O A . D e t t a O T D
(Observed Time Difference) la differenza dei tempi
di arrivo, misurata dal terminale, tra i segnali trasmessi da due BTS e detta GTD (Geometric Time
Difference) la differenza dei tempi di arrivo che il
terminale misurerebbe esclusivamente per ragioni
geometriche (la GTD è determinata quindi dalla
posizione relativa delle due BTS), l’equazione dell’iperbole su cui si trova il terminale è data dalla
seguente relazione:
Le unità LMU e la loro sincronizzazione rappresentano la complessità aggiuntiva che occorre
introdurre in rete per far fronte alla sincronizzazione
non
accurata
dei
clock
delle
BS.
Un’implementazione di questo metodo può richiedere un rapporto LMU/BTS compreso tra 1:3 e 1:5.
Nel caso in cui anche le LMU non siano sincronizzate tra loro, la differenza tra gli scostamenti temporali dei loro clock può essere misurata a patto
che ogni coppia di LMU sia in grado di ricevere il
segnale da almeno due BTS. L’impiego di LMU non
sincronizzate richiede una loro attenta dislocazione
in campo e può portare ad un incremento del rapporto LMU/BTS; la localizzazione può inoltre
essere difficoltosa in aree a bassa densità di BTS
quali quelle rurali.
FIGURA 3› Principio della tecnica di localizzazione TDOA.
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006
31
LOCALIZZAZIONE ok
21-11-2006
16:07
Pagina 32
BOIERO › COLONNA › PARATA • La localizzazione nei sistemi radiomobili
La tecnica U-TDOA, invece, si basa sulla
misura degli istanti di arrivo di un segnale trasmesso dal terminale ad almeno tre unità LMU
sincrone tra loro; questo segnale è il burst di
accesso che viene trasmesso dal terminale alla
rete per effettuare un tentativo di handover asincrono forzato dalla rete stessa (l’handover viene
poi abortito). La posizione del terminale è determinata, secondo i principi del TDOA, calcolando
la differenza dei tempi di arrivo di almeno due
coppie di segnali ricevuti dalle LMU.
NETWORK
DATABASE
Measurements
collected from
Handset
RADIATION
PATTERNS
DFL
ALGORITHM
Handset
position
estimate
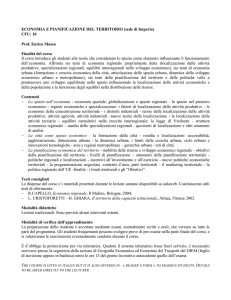
2.3 Misure di potenza: E-CI+TA e DFL
Anche la localizzazione realizzata con misure
di potenza, così come la tecnica TOA, si basa
PROPAGATION
MODEL
sul principio della trilaterazione con la differenza
che in questo caso ciò che viene misurato è l’attenuazione dei segnali radio nel percorso tra traDFL = Data Fit Location
smettitore e ricevitore che risulta legata alla
distanza che li separa attraverso le leggi della
FIGURA 4› Elementi della tecnica di localizzazione DFL.
propagazione radio [9]. Questa tecnica non
richiede modifiche al terminale in quanto utilizza
le misure che il terminale stesso effettua periodimassimizzare la durata della batteria, è bene
camente anche nello stato di “idle” ma risente noteche esso rimanga spento e si accenda solo su
volmente delle fluttuazioni di potenza del segnale
richiesta;
radio causate dal multipath per cui viene solita• start-up time o TTFF (Time To First Fix): il tempo
mente utilizzata in combinazione con la tecnica
di acquisizione dei segnali satellitari, in condiCI+TA (in questo caso viene denominata E-CI+TA,
zioni di funzionamento a freddo (cold start),
Enhanced-CI+TA); l’identificativo della cella ed il TA
cioè con risveglio del ricevitore GPS dopo un
consentono di delimitare l’area all’interno della quale
tempo relativamente lungo di inutilizzo, è molto
può trovarsi il terminale (figura 2d).
lungo (da 45 secondi a qualche minuto);
Una particolare tecnica di localizzazione basata
• localizzazione in ambienti indoor e canyon
sui principi del E-CI+TA è rappresentata dalla tecnica
urbani: in condizioni di scarsa visibilità dei
DFL (Data Fit Location) sviluppata in TILab [10, 11]; il
satelliti la potenza ricevuta scende al di sotto
processo di localizzazione attuato dal DFL è suddidella sensibilità del ricevitore2 e non è più suffiviso in due fasi distinte: nella prima, tramite un’analisi
ciente all’acquisizione dei segnali GPS; questa
della topologia della rete e delle caratteristiche delle
condizione si presenta in mancanza del camantenne delle BTS, viene delimitata un area di ricerca
mino diretto tra satellite e ricevitore cioè proprio
all’interno della quale il terminale si trova con una
nei luoghi quali canyon urbani e ambienti indoor
probabilità molto alta, nella seconda fase avviene la
dove potenzialmente è maggiore l’impiego dei
selezione di un punto all’interno dell’area di ricerca in
terminali radiomobili.
base ai valori di potenza misurati dal terminale sui
All’inizio degli anni Ottanta, per porre rimedio ai
segnali trasmessi dalla BTS servente e dalle BTS
problemi sopra descritti, è stata proposta la tecadiacenti, al valore di TA ed alle previsioni di campo
nica A-GPS (Assisted-GPS) [12]. Un sistema di tipo
realizzate tramite opportuni modelli di propagazione
A-GPS prevede, oltre alle necessarie modifiche
(figura 4).
hardware e software del terminale d’utente neces2.4 Tecniche Hybrid/Assisted GPS
sarie per incorporare un ricevitore GPS, la trasmissione da parte della rete radiomobile di opportuni
Il sistema GPS stand-alone è ottimale per tutti
dati di assistenza in grado di migliorare le prestagli impieghi in ambienti outdoor in condizione di
zioni del ricevitore (figura 5). L’idea dell’A-GPS
piena visibilità dei satelliti disponibili (presenza del
consiste nell’introdurre una serie di stazioni di rifecammino diretto tra satellite e ricevitore). Volendo
rimento GPS 3 in grado di monitorare i satelliti in
modo continuo: esse controllano ininterrottamente
utilizzare il sistema GPS come tecnologia di localo stato della costellazione e producono informalizzazione nell’ambito della telefonia mobile, si
zioni precise riguardanti la visibilità dei satelliti, le
osservano alcuni grossi problemi:
• power dissipation: la potenza dissipata dal ricevitore è abbastanza elevata1, per cui, al fine di
(2)
Valori tipici di sensibilità sono pari a circa -135 dBm.
(1)
Il consumo è dell’ordine dei 100 mAh, mentre un terminale
commerciale in stato di “idle” ne consuma un decimo ed un
terminale in conversazione ne consuma poco più del doppio.
32
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006
(3)
Per una nazione come l’Italia sono sufficienti due stazioni
di riferimento.
LOCALIZZAZIONE ok
21-11-2006
16:07
Pagina 33
BOIERO › COLONNA › PARATA • La localizzazione nei sistemi radiomobili
Dati di Assistenza
Misure GSM + GPS
Server A-GPS
Calcolo X, Y, Z
Rete radiomobile
A-GPS = Assisted GPS
FIGURA 5› Schema del principio della tecnica Assisted GPS.
effemeridi, le correzioni di clock dei satelliti, l’effetto doppler, la fase di codice, ... [8]. La rete di
stazioni è collegata all’infrastruttura cellulare che
può, ad ogni richiesta dell’utente, inviare questi
dati di assistenza al telefono in modo da velocizzare la fase di start-up, che può scendere fino ad
un secondo, e migliorare la sensibilità del ricevitore
GPS, che può ridursi fino a circa -150/-160 dBm
anche in cold start rendendo praticamente possibile la localizzazione in ambienti “light”-indoor.
In aggiunta o anche in alternativa alle funzionalità di assistenza, la disponibilità della rete radiomobile rende possibile l’implementazione di algoritmi di localizzazione ibrida satellitare-terrestre,
cioè di algoritmi che combinano le informazioni di
Cell-Id, TA e le misure di potenza sulla rete radiomobile con le misure effettuate sui segnali GPS,
con l’obiettivo di realizzare prestazioni migliori
rispetto a quelle offerte dalle diverse tecniche di
localizzazione usate singolarmente [11] (figura 6). I
miglioramenti che si ottengono con una soluzione
Hybrid A-GPS rispetto ad una con GPS standalone o A-GPS sono i seguenti:
• disponibilità di servizio del 100% in tutti gli
a m b i e n t i c o m p re s i q u i n d i q u e l l i i n c u i i l
numero di satelliti in visibilità non consentirebbe il funzionamento del GPS stand-alone;
• accuratezza migliore in tutte le condizioni di
visibilità dei satelliti grazie alla possibilità di
utilizzare un maggior numero di informazioni;
• TTFF ridotto ulteriormente rispetto a una
soluzione A-GPS grazie al fatto che il calcolo
della posizione può essere effettuato con un
numero minore di misure satellitari.
U n a p a r t i c o l a re t e c n i c a d i l o c a l i z z a z i o n e
Hybrid/A-GPS è stata sviluppata da TILab nella
piattaforma ESkyLo che sarà descritta in
seguito.
3. Le Architetture standard per la localizzazione
cellulare
L’attività di standardizzazione delle architetture di localizzazione nei sistemi radiomobili
viene condotta sia in ambito ETSI 3GPP sia in
ambito OMA. I due enti si sono però orientati
verso due architetture che differiscono tra loro
principalmente per la modalità con cui le informazioni necessarie alla localizzazione transitano
nella PLMN: attraverso i link di segnalazione
(architettura “over control plane”) per il 3GPP,
attraverso i normali canali dati (architettura “over
user plane”) per OMA.
3.1 Architettura 3GPP “over control plane”
L’ a t t i v i t à d i s t a n d a rd i z z a z i o n e d i q u e s t a
architettura e delle relative funzionalità di rete è
stata avviata con la Release 98 e può considerarsi ormai conclusa; è tutt’ora in corso, invece,
l’attività di definizione per la Release 7 di UMTS
delle funzionalità che consentiranno il supporto
della tecnica di localizzazione di tipo
A-GPS con il nuovo sistema satellitare
Galileo (Assisted Gallileo) 4 .
L’architettura di una rete radiomobile
per servizi di localizzazione (chiamati
LCS - LoCation Services in 3GPP) in
ambito 2G e 3G è rappresentata nella
figura 7; in essa sono evidenziati i nuovi
nodi e le funzionalità LCS distribuite
all’interno degli apparati [13]. Questi
sono:
•
MLC (Mobile Location Center): presiede a tutte le funzioni che supportano
il servizio di localizzazione; in particolare
amministra le risorse che servono per
effettuare la localizzazione e calcola la
posizione del mobile nonché l’accura(4)
Area di incertezza
risultante
FIGURA 6› Schema del principio della tecnica Hybrid/Assisted GPS.
Galileo è un sistema civile di navigazione satellitare sviluppato in Europa come alternativa al
GPS statunitense a controllo miltare (con cui è
garantita però l’interoperabilità). La sua entrata
in esercizio è prevista per il 2010.
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006
33
LOCALIZZAZIONE ok
21-11-2006
16:07
Pagina 34
BOIERO › COLONNA › PARATA • La localizzazione nei sistemi radiomobili
2G
LMU
typeA
SMLC
BTS
BSC
HLR
MSC/VLR
SGSN
GMLC
LMU
typeB
LMU
typeA
SMLC
NodeB
RNC
LCS
client
HLR
lare il CI+TA per il GSM e il
CI+RTT per l’UMTS con la
possibilità per entrambi di
utilizzare le misure di
potenza se disponibili;
•metodi basati su TDOA ed
in particolare i metodi EOTD per il GSM, OTDOA per
l’UMTS e U-TDOA per
entrambi (in UMTS solo a
partire dalla Release 6);
• metodi di tipo A-GPS per
entrambi i sistemi.
3G
MSC/VLR
SGSN
GMLC
SMLC
BSC
BTS
GMLC
HLR
LCS
LMU
=
=
=
=
=
=
Base Station Controller
Base Transceiver Station
Gateway Mobile Location Center
Home Location Register
LoCation Service
Location Measurement Unit
MSC
RNC
SGSN
SMLC
VLR
=
=
=
=
=
LCS
client
3.2 Architettura OMA “over
user plane”
LCS features
Mobile service Switching Centre
Radio Network Controller
Serving GPRS Support Node
Serving Mobile Location Center
Visitor Location Register
FIGURA 7› Architettura standard 3GPP per il supporto della localizzazione.
SUPL (Secure User
Plane Location) è lo standard di localizzazione definito nel 2005 dal WG OMALOC a conclusione di un’attività, iniziata nel 2003, fortemente voluta degli operatori mobili della GSMA
(GSM Association). La versione 1.0 [14] sarà definitiv a m e n t e a p p ro v a t a a l t e r m i n e d e l l a f a s e d i
Interoperability Tests che dovrebbe concludersi
entro la fine del 2006 e l’inizio del 2007.
La soluzione OMA è di tipo client-server e si
basa sull’utilizzo dello user plane della PLMN, in
pratica di un canale TCP/IP, come mezzo per trasportare le informazioni tra il client residente sul
terminale mobile e il server di localizzazione; alla
rete radiomobile non sono quindi richieste funzionalità, nodi e segnalazione ad hoc per la localizzazione per cui, rispetto all’approccio 3GPP, quest’architettura risulta essere a più basso costo e a
più alta velocità di dispiegamento (figura 8).
tezza della stessa. L’MLC che si interfaccia
con l’LCS client5 può essere distinto da quello
che effettua i calcoli; in tal caso il primo è
detto GMLC (Gateway Mobile Location Center)
ed il secondo è detto SMLC (Serving Mobile
Location Center). In una rete possono essere
presenti uno o più GMLC ed uno o più SMLC.
• LMU (Location Measurement Unit): esegue le
misure necessarie in alcune tecniche al calcolo
della posizione; il tipo di misura effettuato
dipende dal metodo di localizzazione utilizzato.
L’LMU può essere integrata nella BTS/NodeB
(LMU type B) oppure connettersi alla PLMN
attraverso l’interfaccia radio standard,
come un normale terminale mobile
(LMU type A); in quest’ultimo caso
essa dispone di un proprio IMSI e di
un profilo di utenza registrato
Server SUPL
Canale TCP/IP
nell’HLR e supporta tutte le funzionalità radio e di mobilità necessarie. Il
External LCS
numero di LMU è dipendente dal
Client SUPL
Rete radiomobile
Client
metodo di localizzazione utilizzato.
Oltre ai nuovi nodi sopra descritti, lo
LCS = LoCation Services
SUPL = Secure User Plane Location
standard 3GPP richiede l’introduzione
TCP/IP = Transmission Control Protocol/ Internet Protocol
all’interno degli apparati preesistenti
(MSC, SGSN, HLR, BSC, RNC, ...) di
nuove funzionalità per il supporto della
segnalazione LCS.
FIGURA 8› Architettura logica a standard OMA per il supporto della localizzazione.
I metodi di localizzazione supportati
dallo standard sono:
• metodi basati su Cell-ID e in particoIn breve quindi l’architettura OMA “over user
(5)
plane” si può schematizzare in due entità: il client
che risiede sul terminale mobile e un server che si
L’LCS client è l’entità logico funzionale che richiede la locacolloca nella PLMN e utilizza i canali dati resi
lizzazione di un terminale. Questa entità può essere esterna
alla rete radiomobile o interna ad essa (potrebbe risiedere
disponibili da questa per comunicare con il primo
sul terminale).
attraverso un protocollo di comunicazione definito
34
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006
LOCALIZZAZIONE ok
21-11-2006
16:07
Pagina 35
BOIERO › COLONNA › PARATA • La localizzazione nei sistemi radiomobili
appositamente da OMA. Il client effettua le misure
e in alcuni casi calcola la posizione mentre il server
si occupa della gestione della privacy dell’ utente,
delle richieste di localizzazione, di fornire i dati di
assistenza per la localizzazione e, in alcuni casi, di
calcolare la posizione e colloquiare con i client LCS
esterni. Altre entità possono essere inserite in funzione della particolare tecnica di localizzazione
implementata. Nel caso del metodo A-GPS, come
detto, è necessario avere una rete di ricevitori di
riferimento al fine di collezionare i dati di assistenza necessari, mentre nel caso delle tecniche EOTD od OTDOA deve essere installata una rete
estesa di LMU.
Lo standard OMA SUPL nasce per supportare
la tecnologia di posizionamento A-GPS, ma può
essere utilizzato anche per gli altri metodi di localizzazione già previsti dallo standard 3GPP (ad
esclusione della tecnica U-TDOA).
Oggi, l’attività di standardizzazione si sta concentrando sulla definizione della nuova release
SUPL v2.0 che includerà il supporto delle procedure di trigger per servizi di “geo-fencing”, il supporto dei servizi di emergenza, l’interoperabilità
con il mondo WiFi e la gestione delle “hystorical
positions”.
nali GSM o UMTS che dispongano di un client residente sulla SIM, scaricabile Over-The-Air come
servizio TIM. Pur essendo basata su un protocollo
di comunicazione proprietario, anticipa l'architettura SUPL client server che è stata poi in seguito
standardizzata da OMA (figura 9).
La piattaforma NIMBLE utilizza la tecnica di
localizzazione DFL, descritta nel paragrafo 2.3, la
cui accuratezza misurata in diversi trial sulla rete
TIM è mostrata in tabella 1. La tabella riporta l'errore al 67% che significa che nel 67% dei casi la
piattaforma fornisce una localizzazione con un
Ambiente
Urbano
Suburbano
Rurale
Accuratezza (67%)
163 m
295 m
1235 m
TABELLA 1› Prestazioni della piattaforma NIMBLE.
errore inferiore al valore indicato. Il terminale è
localizzabile ovunque all'interno della rete indipendentemente dal fatto che esso sia all'aperto o
4.1 Piattaforma client-server NIMBLE
all'interno di edifici.
L'applicazione (client) residente sulla SIM (o
Nella rete di TIM è disponibile una piattaforma
anche su una applicazione del telefono in caso di
d i l o c a l izza zione , de nom ina ta NIMBLE (Non
dispositivo dedicato), su richiesta del centro servizi
Intrusive MoBile Location Environment) e svilup(server) o dell'utente, raccoglie le misure disponibili
pata internamente da TILab, che fornisce la localize le invia al server che calcola la posizione. La
zazione con modalità client-server per tutti i termicomunicazione fra client e server avviene sullo
user-plane via SMS o un
canale dati GPRS.
Affinché il telefono sia
Amministrazione
localizzabile con questa tecVisualizzazione allarmi
nica è necessario che sup& “provisioning”
porti alcune specifiche funIntranet
HTTP-S
zionalità standard del STK
(SIM application ToolKit)
oggi largamente disponibili
GSM/GPRS
SFTP
UCP UCP
Dati di
sui telefoni commerciali. La
SMS-C
NIMBLE
Gw
Rete
disponibilità di queste funGGSN
zi o n i n o n h a i mpa t t o s ul
TCP/IP
costo del terminale.
TCP/IP,
HTTP-XML
HTTP-XML
Un’applicazione può
BEAT3
NIMBLE
Inter@cTIM
TCP/IP,
Client
Gateway
accedere all’informazione di
HTTP-XML
Inter@cTIM
Localizzazione
localizzazione in tre modaNIMBLE
FleetNet
412TimNavigator
Applicazioni
lità:
esterne al
CS/VAS
• MO (Mobile Originated) ad esempio autolocalizzazione: la richiesta di servizio
SFTP = Secure File Transfer Protocol
CS-VAS = Centro Servizi VAS
TCP/IP = Transmission Control Protocol/IP
GGSN = Gateway GPRS Support Node
è iniziata dal mobile tramite
SMS-C = Short Message Service - Centre
GPRS = General Packet Radio Service
UCP = Universal Computer Protocol
GSM = Global System for Mobile communications
un menù di richiesta STK.
VAS = Value Added Services
HTTP = Hyper Text Transfer Protocol
Alla richiesta sono associate
XML = eXtensible Markup Language
NIMBLE = Non Intrusive MoBile Location Environment
le informazioni per la localizzazione (cella, misure di
FIGURA 9› Architettura della piattaforma NIMBLE.
potenza). NIMBLE utilizza le
misure di potenza per calco-
4. Le piattaforme di localizzazione Telecom Italia
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006
35
LOCALIZZAZIONE ok
21-11-2006
16:07
Pagina 36
BOIERO › COLONNA › PARATA • La localizzazione nei sistemi radiomobili
lare la posizione ed invia le coordinate
e la richiesta di servizio al SP (Service
Provider) competente. Quest’ultimo
può erogare il servizio direttamente o
tramite NIMBLE. Su questa modalità
BTS
BSC
di funzionamento si basano ad esemHLR
pio i servizi di informazioni localizzate
in prossimità della posizione dell'uInterfacce
MSC/
tente (ad esempio “cerco un
A-bis
VLR
Bancomat qui vicino”): l'utente deve
solo selezionare l'informazione di
BSC
BTS
interesse (ad esempio Sportello
Bancomat) ma non deve indicare la
propria posizione che viene calcolata
GSM
automaticamente da NIMBLE prima di
Network
DB
inoltrare la richiesta di informazione al
SP (ad esempio Pagine Gialle).
Sonde
• MT (Mobile Terminated) - ad esempio
FleetNet: il SP richiede a NIMBLE la
localizzazione di un mobile tramite
LAN
Applicazioni
interfaccia standard Le 6, con protoe
collo LIF-MLP [15], o tramite altro tipo
Servizi
di interfaccia (HTTP, web-service,
LocHNESs
TCP). NIMBLE invia la richiesta al
mobile che effettua le misure necesBSC = Base Station Controller
LAN = Local Area Network
BTS = Base Transceiver Station LocHNESs = Localizing & Handling Network
sarie al server per la stima della posiDB = Data Base
Event Systems
GSM = Global System for Mobile
MSC = Mobile service Switching Centre
zione; quest’ultima è poi restituita ai
communications
VLR = Visitor Location Register
SP
che
l’hanno
richiesta 7 .
HLR = Home Location Register
Applicazioni che impiegano questa
m o d alità di funziona m e nto son o
FIGURA 10› Principio di funzionamento di LocHNESs.
quelle per il tracking delle persone o
delle flotte.
• PS (Position Services) - ad esempio
412TIMNavigator: il SP invia direttamente a
Il messaggio più importante che transita sulla
NIMBLE i dati di localizzazione (cella, misure
interfaccia A-bis è il Measurement Result [16]; per
di potenza) ricevuti da un mobile e NIMBLE
ogni connessione attiva all’interno della cella e con
risponde con la posizione calcolata. In questo
periodicità pari a circa 480 ms, la BTS invia al BSC
caso è quindi l'applicazione che dialoga diretquesto messaggio che contiene tutte le misure di
tamente con il client applicativo sul terminale
potenza effettuate dal terminale e dalla BTS e il
m e n t re N I M B L E s v o l g e e s c l u s i v a m e n t e i l
valore di TA che si sta impiegando nella chiamata.
ruolo di motore di calcolo della posizione.
Di particolare importanza sono le misure di
potenza in downlink relative alla BTS servente ad al
4.2 Piattaforma di localizzazione statistica networkmassimo a sei BTS adiacenti, quelle che il termibased LocHNESs
nale riceve con la potenza più elevata, che consentono a LocHNESs, utilizzando la tecnica di localizLocHNESs (Localizing & Handling Network
zazione DFL di tracciare con continuità la posiEvent Systems) è un sistema sviluppato in TILab
zione di tutti i terminali in stato “connected” nella
che consente di localizzare in modo anonimo gli
rete. La lettura di questo messaggio è realizzata da
eventi rilevati sulle interfacce di segnalazione di
opportune sonde installate sulle interfacce A-bis
una rete radiomobile (chiamate, SMS, handover,
della rete.
ecc.). Gli eventi localizzati, cioè gli eventi con
Altre informazioni fornite dalle sonde, attraverso
associate le coordinate geografiche della posizione
l’elaborazione sia dei protocolli di comunicazione
in cui ciascuno di essi accade, sono poi forniti alle
BTS-BSC sia dei protocolli di livello superiore
applicazioni esterne che le impiegano per la stima
(RRM, MM, ...), sono:
del traffico automobilistico, per il monitoraggio
• Connection Failure - indica la caduta di una
della QoS e la pianificazione in tempo reale della
connessione attiva ad esempio in seguito a un
rete (figura 10).
failure del collegamento radio;
•
Handover Detection - indica la riuscita di un
(6)
handover;
L’interfaccia Le è quella tra GMLC e LCS client esterno.
• Channel Required - indica la richiesta di attiva(7)
zione di un canale da parte di un terminale per
Se più SP richiedono la localizzazione dello stesso mobile, NIMuna chiamata entrante o uscente;
BLE invia un solo SMS al terminale e distribuisce la risposta a
• Location Update - indica l’avvio della procedura
tutti i SP.
di location update da parte del terminale;
36
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006
LOCALIZZAZIONE ok
21-11-2006
16:07
Pagina 37
BOIERO › COLONNA › PARATA • La localizzazione nei sistemi radiomobili
• Handover Failure - indica
il fallimento di un handover;
• SMS Channel Request indica la richiesta di attivazione di un canale per
l’invio o la ricezione di un
SMS da parte del terminale;
• Voice Channel Release indica il rilascio di un
canale di traffico voce.
Ciascuna di queste informazioni viene associata ad un
messaggio di Measurements
Result relativo allo stesso
terminale in modo da consentirne la localizzazione;
questa associazione viene
e ff e t t u a t a s e m p re d a l l e
sonde attraverso l’analisi
dei messaggi dell’intera pila
protocollare dell’interfaccia
A-bis.
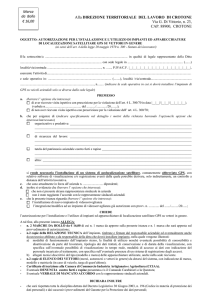
La localizzazione degli
eventi sopraelencati abilita
immediatamente due delle
FIGURA 11› Mappa del traffico voce (Erlang) su una zona di Roma.
applicazioni definite in precedenza di network-enhancing:
il monitoraggio della QoS
4.3 Piattaforma di localizzazione Hybrid/A-GPS ESkyLo
reale e la pianificazione in tempo reale della rete.
La prima discende immediatamente dalla locaESkyLo (Earth-Sky Location) è una piattaforma
lizzazione degli eventi sopraelencati e da una loro
Hybrid/A-GPS conforme allo standard SUPL v1.0
elaborazione e aggregazione ad esempio su base
descritto nel paragrafo 3.2; i dati di assistenza
cella o meglio ancora suddividendo in zone approconsentono di ridurre il TTFF e aumentare la senpriate l’area di interesse; è possibile quindi avere in
sibilità del ricevitore GPS con conseguente migliotempo reale mappe di traffico (in Erlang), di cadute
ramento della disponibilità e della percezione del
delle chiamate, di handover, di livelli di potenza
servizio. Inoltre, la piattaforma implementa un
ricevuta dal terminale, ... , come mostrato ad
algoritmo di localizzazione ibrida satellitare-terreesempio in figura 11.
stre che garantisce prestazioni migliori in termini
La pianificazione in tempo reale di una rete
di accuratezza e disponibilità di servizio rispetto
consiste nella modifica di alcuni suoi parametri di
alle tecniche usate singolarmente.
configurazione in funzione della distribuzione degli
utenti in tempo reale, delle loro richieste di servizio
e della qualità che essi stanno avendo; una pianificazione così fatta consente ad un operatore di
offrire un miglior servizio ai propri clienti e nello
stesso tempo di sfruttare al meglio le risorse di
rete. Sfruttando la localizzazione degli eventi reaRete
lizzata da LocHNESs, avendo quindi in tempo
radiomobile
reale le distribuzioni di traffico e i dati di QoS, è
possibile da un lato intervenire sulla rete effettuando una nuova pianificazione e dall’altro verificare immediatamente l’effetto delle modifiche
LocHNESs
apportate (figura 12).
Informazioni
Sono anche possibili ed in via di sperimentalocalizzate
Planning
zioni applicazioni commerciali di questa piatreal time
taforma. L'idea di base è che seguendo in modo
LocHNESs = Localizing & Handling Network Event Systems
anonimo lo spostamento degli utenti della rete cellulare è possibile derivare informazioni statistiche
sullo spostamento della popolazione e sull'utilizzazione del territorio utili per varie applicazioni (si
FIGURA 12› Schema di funzionamento della pianificazione in tempo reale.
veda il riquadro “LocHNESs e la stima del traffico
automobilistico”).
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006
37
LOCALIZZAZIONE ok
21-11-2006
16:07
Pagina 38
BOIERO › COLONNA › PARATA • La localizzazione nei sistemi radiomobili
minali d’utente: esso non richiede
alcun hardware specifico e non
occorre l’installazione di alcun client
LocHNESs
software; qualunque terminale d’utente può quindi essere localizzato
e la stima del
indipendentemente dalle sue carattetraffico automobilistico
ristiche hardware e software.
Le mappe di traffico generate da
LocHNESs-SSTS abilitano una vasta
gamma di servizi. È possibile inviare
agli automobilisti, ad esempio tramite SMS, periodicamente o su
Una applicazione abilitata da
richiesta esplicita, informazioni sullo
LocHNESs, e in particolare dalla posstato del traffico o avvisi di blocchi e
sibilità che esso offre di localizzare
rallentamenti. Tramite opportuni
ogni 480 ms tutte le chiamate attive
applicativi installati ad esempio sul
nella rete, è costituita dalla stima del
telefono cellulare, l’automobilista
traffico automobilistico. L’applicazione
stesso può ricavare il tempo di persviluppata da TILab in proposito,
correnza di un dato percorso, oppure
denominata SSTS (Sistema di Stima
può ottenere indicazioni relativadel Traffico Stradale) (figura A), riceve
mente al percorso più
breve da seguire
tenendo in considerazione, oltre che della
distanza tra origine e
destinazione, anche
dello stato del traffico
in quel momento.
LocHNESs
Sistema di Stima del Traffico Stradale
Integrando le mappe
di traffico con un navigatore satellitare è
BTS
possibile ricalcolare in
Sistema
Selezione
Calcolo
Mappe
Sistema di
Sonde
tempo reale il perdi
utenti
in
indici
di
di
localizzazione
tracking
automobile
mobilità
traffico
corso da seguire in
BSC
base alla posizione
Rete GSM/UMTS
attuale del veicolo. Le
stesse informazioni,
tempo di percorrenza
BSC = Base Station Controller
BTS = Base Transceiver Station
su un percorso e
=
LocHNESs Localizing & Handling Network Event Systems
ricerca del percorso
con tempo di percorrenza minimo, posFIGURA A› Architettura del Sistema di Stima del Traffico Stradale.
sono essere richieste
dall’utente, in assenza
in tempo reale da LocHNESs i
Measurement Result localizzati relativi ad ogni chiamata attiva, aggrega
le localizzazioni di ciascuna chiamata
stimando anche le velocità istantanee
dei terminale, seleziona le chiamate
di utenti in automobile, utilizzando
come parametri le durate delle chiamate, le velocità istantanee e le
distanze percorse, e genera infine gli
indicatori di traffico (ad esempio
velocità media, velocità di picco, densità di traffico, …) e le mappe di traffico simili a quella mostrata in figura B.
Ogni mappa viene aggior nata ad
intervalli regolari, ad esempio ogni
cinque minuti, e può essere generata
per tutto il territorio italiano ovunque
vi sia la copertura della rete cellulare.
LocHNESs ha un impatto nullo sui ter-
Le funzionalità implementate dalla piattaforma
sono:
• Procedure di localizzazione Terminal-initiated e
Network-initiated (tramite WAP-push) con attivazione di connessione TCP/IP tramite i bearer
a disposizione (GPRS, EDGE o UMTS).
• Metodi di localizzazione supportati:
- A-GPS terminal-based con la piattaforma
che invia i dati di assistenza e il terminale
che calcola la posizione finale;
- A-GPS terminal-assisted con la piattaforma
che invia i dati di assistenza e calcola la posizione finale utilizzando in un algoritmo ibrido
le misure terrestri e satellitari;
- E-CI nel caso non siano disponibili dati
GPS e si impieghino quindi le misure già
utilizzate dalla piattaforma NIMBLE.
38
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006
• Supporto di funzionalità di security: autenticazione del terminale tramite MSISDN-IP address
mapping 8 e cifratura dei messaggi scambiati
tramite tecniche standard.
La piattaforma ESkyLo attualmente in fase di
ingegnerizzazione potrà essere utilizzata da TIM
p e r a s s i s t e re i t e r m i n a l i A - G P S a s t a n d a rd
SUPL v1.0 la cui diffusione sul mercato è attesa
nel 2007.
Le prime campagne di sperimentazione della
piattaforma ESkyLo con prototipi di terminali
commerciali hanno confermato le aspettative
riguardo a questa tecnologia; l'A-GPS permet(8)
In pratica si verifica che l’indirizzo IP con cui il terminale si presenta al server sia stato assegnato a un utente autenticato dalla rete.
LOCALIZZAZIONE ok
21-11-2006
16:07
Pagina 39
BOIERO › COLONNA › PARATA • La localizzazione nei sistemi radiomobili
sponsor principale al progetto innovativo “Real Time Rome” presentato
dal SENSEable City Laboratory del
MIT (Massachusetts Institute of
Technology) alla 10a Mostra internazionale di architettura alla Biennale
di Venezia [17, 18].
Il progetto integra i dati sulla mobilità
generati da LocHNESS-SSTS con
quelli relativi agli spostamenti degli
autobus e dei taxi, li correla con dati
geografici e socio-economici e fornisce informazioni su come le aree cittadine sono usate nel corso della
giornata e su come beni e servizi
sono distribuiti nella città, con la
possibilità di distinguere tra differenti
gruppi sociali (per esempio quello dei
residenti e quello dei turisti).
Il tutto con l’obiettivo di rendere i cittadini più informati su cosa accade
intorno a loro nel momento di prendere delle decisioni (figura C).
FIGURA B› Mappa del traffico automobilistico su una zona di Roma; il colore dei pixel indica
la velocità media in km/h.
del client su terminale, tramite SMS
o WAP ad un’applicazione centralizzata.
Le mappe di traffico possono
essere impiegate dalle amministrazioni locali per il monitoraggio del
traffico automobilistico sia nelle
tratte stradali ad alto scorrimento
(autostrade, superstrade) sia nelle
aree urbane e suburbane.
È possibile realizzare analisi statistiche del traffico automobilistico
che da un lato possono essere
d’ausilio nelle decisioni relative alla
viabilità, alle politiche dei trasporti
(potenziamento di alcune linee di
mezzi pubblici, modifiche ai percorsi, modifiche ai sensi di percorrenza delle strade, ...) e dall’altro
possono consentire una valutazione
in tempi relativamente brevi delle
decisioni prese.
Il monitoraggio del traffico è utile
anche nel monitoraggio dell’inquinamento causato dai veicoli e come
ausilio per le politiche ambientali
delle amministrazioni.
Telecom Italia ha partecipato come
FIGURA C› Mappa in tempo reale del traffico automobilistico di Roma presentata alla biennale
di Venezia nel progetto “Real Time Rome”.
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006
39
LOCALIZZAZIONE ok
24-11-2006
12:33
Pagina 40
BOIERO › COLONNA › PARATA • La localizzazione nei sistemi radiomobili
terà di compiere il salto di qualità in termini di
accuratezza passando dall'ordine di grandezza
delle centinaia di metri di incertezza tipiche
delle tecnologie cellulari oggi disponibili a
poche decine di metri abilitando quindi anche
servizi di navigazione accurata. La modalità di
funzionamento Hybrid/Assisted garantirà un'ottima disponibilità di servizio (prossima al 100%)
anche nei centri urbani dove la visibilità del
cielo è limitata e tempi di risposta di pochi
secondi, caratteristiche indispensabili per la
fornitura di servizi commerciali.
5. Conclusioni
L’articolo ha presentato la localizzazione nei
sistemi radiomobili relativamente ai suoi diversi
aspetti. L’informazione di posizione, oltre ad abilitare specifiche applicazioni location-based, permette di riqualificare ed integrare servizi già esistenti; per questo motivo la localizzazione rappresenta un ingrediente di notevole importanza per i
servizi in mobilità e per la personalizzazione dei
contenuti sempre più richiesta dagli utenti.
—
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[email protected]
[email protected]
[email protected]
[9]
[10]
[11]
Gli autori ringraziano Piero Lovisolo per i preziosi
suggerimenti e Claudio Benenti e Davide Bertinetti per
l’attenta revisione del testo.
[12]
[13]
[14]
[15]
[16]
[17]
[18]
40
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006
BIBLIOGRAFIA
E. D. Kaplan: Understanding GPS - Principles and
Applications, Artech House Inc., 1996.
A. El-Rabbany: Introduction to GPS - The Global
Positioning System, Artech House Inc., 2002.
Berg Insight: Strategic analysis of the European mobile
LBS market, Settembre 2006.
3GPP TS 43.059: “3rd Generation Partnership Project;
Technical Specification Group GSM/EDGE Radio
Access Network; Functional stage 2 description of
Location Services (LCS) in GERAN”, 2005.
3GPP TS 25.305, “3rd Generation Partnership Project;
Technical Specification Group Radio Access Network;
Stage 2 functional specification of User Equipment (UE)
positioning in UTRAN”, 2005.
O. Bertazioli, L. Favalli: GSM - GPRS - Tecniche Architetture - Procedure - Evoluzione verso UMTS,
Hoepli, 2002.
H. Holma, A. Toskala: WCDMA for UMTS: Radio
Access for Third Generation Mobile Communications,
John Wiley & Sons, 2004.
D. Coratella: “Il sistema GPS”, Notiziario Tecnico
Telecom Italia, Anno 11, n. 1, Giugno 2002, pp 87-103.
T. S. Rappaport: Wireless Communications - Principles
and Practice, Second Edition, Prentice Hall, 2002.
L. Stola, D. Filizola, L. Ordano: “System And Method
For Identifying The Position Of Mobile Terminals”,
Patent Application numero WO 0243428, pubblicata il
30/05/2002.
G. Boiero, D. Cavallo, F. Dovis, P. Mulassano:
“Innovative Hybrid NAV/COM Solution for Improving
Accuracy and Availability of User Positioning”, GNSS
2003 - Global Navigation Satellite System Conference,
Graz, 22-25 Aprile 2003.
R. E. Taylor, J. W. Sennott: “Navigation system and
method”, Brevetto n° US 4445118, Aprile 1984.
3GPP TS 23.271: “3rd Generation Partnership Project;
Technical Specification Group Services and System
Aspects; Functional stage 2 description of Location
Services (LCS)”, 2005.
OMA SUPL v1.0: “Secure User Plane Location
Architecture”, Agosto 2006.
OMA LIF-MLP v3.1; “Mobile Location Protocol”,
Febbraio 2004.
GSM 08.58: “Digital cellular telecommunications
system (Phase 2+); Base Station Controller (BSC) to
Base Transceiver Station (BTS) interface - Layer 3 specification”, 1999.
http://senseable.mit.edu/realtimerome/
http://www.labiennale.org/
LOCALIZZAZIONE ok
21-11-2006
16:07
Pagina 41
BOIERO › COLONNA › PARATA • La localizzazione nei sistemi radiomobili
—
ABBREVIAZIONI
3rd Generation Partnership Project
Assisted-GPS
Average Revenue Per User
Base Station
Base Station Controller
Base Transceiver Station
Cell-Id
Cell-Id + Timing Advance
Cell-Id + Round Trip Time
Centro Servizi - VAS
Data Fit Location
Enhanced-CI+TA
Enhanced Data rates for GSM Evolution
Enhanced-Observed Time Difference
Earth-Sky Location
European Telecommunications Standards
Institute
GGSN
Gateway GPRS Support Node
GMLC
Gateway Mobile Location Center
GPRS
General Packet Radio Service
GPS
Global Positioning System
GSM
Global System for Mobile communications
GSMA
GSM Association
GTD
Geometric Time Difference
HLR
Home Location Register
HTTP
HyperText Transfer Protocol
IMSI
International Mobile Subscriber Identity
IP
Internet Protocol
ISDN
Integrated Services Digital Network
LAN
Local Area Network
LBS
Location Based Services
LCS
LoCation Services
LIF-MLP
Location Interoperability Forum-Mobile
Location Protocol
LMU
Location Measurement Unit
LocHNESs Localizing & Handling Network Event
Systems
MIT
Massachusetts Institute of Technology
MLC
Mobile Location Center
MM
Mobility Management
MO
Mobile Originated
MSC
Mobile services Switching Centre
MSISDN
Mobile Station ISDN number
MT
Mobile Terminated
NIMBLE
Non Intrusive MoBile Location Environment
OMA
Open Mobile Alliance
OTD
Observed Time Difference
3GPP
A-GPS
ARPU
BS
BSC
BTS
CI
CI+TA
CI+RTT
CS-VAS
DFL
E-CI+TA
EDGE
E-OTD
ESkyLo
ETSI
OTDOA
PLMN
PS
QoS
RNC
RRM
RTT
SFTP
SGSN
SIM
SMLC
SMS
SMS-C
SP
SSTS
STK
SUPL
TA
TCP
TDMA
TDOA
TTFF
UCP
UMTS
U-TDOA
UTM
VAS
VLR
WAP
WCDMA
WG
WGS-84
WiFi
XML
Observed Time Difference Of Arrival
Public Land Mobile Network
Position Services
Quality of Service
Radio Network Controller
Radio Resource Management
Round Trip Time
Secure File Transfer Protocol
Serving GPRS Support Node
Subscriber Identity Module
Serving Mobile Location Center
Short Message Service
Short Message Service - Centre
Service Provider
Sistema di Stima del Traffico Stradale
SIM application ToolKit
Secure User Plane Location
Timing Advance
Transmission Control Protocol
Time Division Multiple Access
Time Difference Of Arrival
Time To First Fix
Universal Computer Protocol
Universal Mobile Telecommunications System
Uplink-Time Difference Of Arrival
Universale Trasversa di Mercatore
Value Added Services
Visitor Location Register
Wireless Application Protocol
Wideband Code Division Multiplex Access
Working Group
World Geographic reference System
Wireless Fidelity
eXtensible Markup Language
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006
41
LOCALIZZAZIONE ok
21-11-2006
16:07
Pagina 42
BOIERO › COLONNA › PARATA • La localizzazione nei sistemi radiomobili
Gianluca Boiero si laurea nel 2000
con lode in Ingegneria Elettronica presso il
Politecnico di Torino, nel 2003 consegue il
M a s t e r i n Te l e c o m u n i c a z i o n i p r e s s o
COREP/TILS. Nel 2001 entra in CSELT
(oggi Telecom Italia) nell’area dei Servizi
Mobili dove si dedica principalmente allo
studio delle tecnologie di localizzazione su
sistemi radiomobili e satellitari. In questo
ambito fornisce supporto specialistico
nello scouting di soluzioni innovative e consulenza all’attività
di standardizzazione 3GPP/OMA e in progetti internazionali.
Contribuisce alla definizione, alla brevettazione e alla
prototipazione di un sistema di posizionamento Hybrid/Assisted
GPS, conforme allo standard OMA-SUPL, progettato per
migliorare le performance dei ricevitori GPS integrati nei telefoni
cellulari. È autore di alcuni depositi brevettuali e di una decina di
articoli pubblicati in conferenze e riviste.
Massimo Colonna si laurea in
Ingegneria Elettronica nel 1997 presso il
Politecnico di Torino. Dallo stesso anno è
i n C S E LT, o g g i Te l e c o m I t a l i a , d o v e s i
occupa di sistemi radio per accesso fisso
(WLL, Broadband FWA, WiMAX) e di
wireless LAN (IEEE 802.11, Bluetooth,
HIPERLAN, ...), maturando una significativa
esperienza nella valutazione tecnica ed
economica di sistemi e apparati e nel
dimensionamento di reti d’accesso radio. Dal 2003 si
occupa di tecnologie e servizi basati sulla localizzazione e, in
particolare, partecipa allo studio di tecniche di localizzazione
innovative in reti wireless LAN basate sull’algoritmo DFL e allo
sviluppo della relativa piattaforma di localizzazione. Collabora
infine alla realizzazione del sistema di localizzazione statistica e
di stima del traffico automobilistico.
Dario Parata si laurea nel 1996 in
Ingegneria Elettronica presso il Politecnico
di Torino. Nel dicembre 1997 è assunto in
Siemens ICN (già Italtel) a Milano dove
lavora nell’area Reti Mobili e partecipa
all’attività di System Test ed Acceptance
Test sul prodotto OMC. Dal febbraio 2001
è in Telecom Italia (già CSELT) dove lavora
su progetti commissionati TIM, riguardanti
applicativi per il controllo dei cartellini di
tassazione nella rete GSM/GPRS. Dal gennaio 2003 lavora in
progetti legati alla localizzazione nelle reti radiomobili che lo
vedono coinvolto in attività di standardizzazione in ambito
3GPP, in progetti internazionali per la valutazione e scelta di
tecnologie LBS e in progetti di ricerca. Nell’ambito dell’attività
di ricerca approfondisce le tecniche di riconoscimento della
posizione rispetto ad un’area geografica e l’utilizzo della
localizzazione statistica per il monitoraggio della QoS, la
pianificazione della rete radiomobile e la stima del traffico
automobilistico.
42
NOTIZIARIO TECNICO TELECOM ITALIA › Anno 15 n. 3 - Dicembre 2006