———— S.Barbarino - Appunti di Fisica - Scienze e Tecnologie Agrarie ————
Cap. 3
Dinamica del punto materiale
3.1 - Leggi di Newton
La legge fondamentale della dinamica é la cosiddetta seconda legge di Newton:
La risultante delle forze applicate su un corpo é uguale al prodotto della massa del
corpo per l’accelerazione
F~ = m~a
(3.1.1)
F~ si misura in Newton e la massa m in Kg.
Dalla (3.1.1) si deduce che se F~ 6= 0 il corpo subisce una accelerazione:
~a =
~
F
m
(3.1.2)
e, quindi varia la sua velocitá.
Dalla (3.1.2) segue che se la risultante delle forze agenti su un corpo é nulla, la sua
accelerazione é zero e quindi la sua velocitá rimane costante. Se il corpo era inizialmente
fermo (ossia velocitá nulla), esso continua a rimanere fermo.
Da questo si puó dedurre il primo principio della dinamica (o principio di inerzia):
Un corpo persevera nel suo stato di quiete o di moto rettilineo uniforme se la risultante
delle forze agenti su di esso é nulla.
La legge fondamentale della dinamica ci permette, quindi, di determinare
la traiettoria e le legge oraria del moto di un corpo se si conosce l’espressione
della forza.
In natura vi sono diversi tipi di forze di cui si conosce la loro espressione analitica; fra
le piú importanti vi sono:
1) Forza di tipo elastico
2) Forza gravitazionale
3) Forza d’attrito
Applicando per ciascun tipo di forza la legge di Newton, siamo in grado di stabilire la
traiettoria e la legge oraria che descrive il moto di un corpo.
In questo capitolo trattiamo le forze di tipo elastico ossia la Dinamica delle oscillazioni
3.2 - Particella sottoposta a forze elastiche
Si abbia una massa m legata ad una molla vincolata in V . Sia tutto il sistema a riposo
e giacente in un piano orizzontale. Assumiamo come origine O del sistema di riferimento
3-1
———— S.Barbarino - Appunti di Fisica - Scienze e Tecnologie Agrarie ————
la posizione della massa a riposo.
~ ..............
F
............................................................................................................... ..............
....... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... .. ................................................................. .. .... .. .. .. .. .. ..........................................................
.. .... .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .... ........ .. .......... ................. ............................................................ .. ................................................ .. .. .. .. .... .. .. .............................................. .. .... .. .. .. .. .. .. .. .... .. .. .. ..............................
..
..
..
..
..
..
..
.
................
V
O
x
x
fig.3.2-1
Supponiamo di spostare la massa m dalla sua posizione di riposo O ad una posizione
generica x. La massa m é sottoposta alla forza di richiamo della molla che per la legge di
Hooke é:
F = −kx
(3.2.1)
essendo k (N/m) la costante elastica della molla. Piú la costante k é elevata piú la
molla é rigida, ossia occorre una forza maggiore per ottenere lo stesso allungamento di una
molla con costante elastica piú bassa.
Per il secondo principio della dinamica si ha:
mẍ = −kx
ossia:
ẍ +
k
x=0
m
(3.2.2)
(3.2.3)
la cui soluzione é:
x(t) = C1 cos ω0 t + C2 sin ω0 t
(3.2.4)
essendo C1 , C2 e ω0 delle costanti da determinare.
La velocitá della massa m durante la il moto é:
ẋ(t) = −ω0 C1 sin ω0 t + ω0 C2 cos ω0 t
(3.2.5)
Derivando ancora una volta, si ottiene l’accelerazione:
ẍ(t) = −ω02 C1 cos ω0 t − ω02 C2 sin ω0 t
(3.2.6)
Sostituendo la (3.2.6) e la (3.2.4) nella (3.2.3) si ottiene:
k
k
C1 cos ω0 t + C2 sin ω0 t = 0
m
m
k
k
2
2
−ω0 C1 + C1 cos ω0 t + −ω0 C2 + C2 sin ω0 t = 0
m
m
−ω02 C1 cos ω0 t − ω02 C2 sin ω0 t +
3-2
(3.2.7)
(3.2.8)
———— S.Barbarino - Appunti di Fisica - Scienze e Tecnologie Agrarie ————
Poiché le funzioni sin ω0 t e cos ω0 t non
(3.2.8) é soddisfatta se e solo se:
2
−ω0 C1 +
−ω02 C2 +
si annullano mai contemporaneamente, la
k
C1 = 0
m
k
C2 = 0
m
(3.2.9)
(rad/s)
(3.2.10)
ossia:
ω0 =
r
k
m
ω0 é chiamata la pulsazione del sistema massa-molla denominata frequenza angolare
propria o di risonanza. Si definisce frequenza propria o di risonanza la quantitá:
ν0 =
ω0
2π
(s−1 )
(3.2.11)
C1 e C2 sono due costanti di integrazione determinate dalle condizioni iniziali:
P er
t=0
=⇒
x(0) = x0
e
ẋ(0) = ẋ0
(3.2.12)
Imponendo tali condizioni alle equazioni (3.2.4) e (3.2.5), si ha:
x(0) = C1 = x0
(3.2.13)
ẋ(0) = ω0 C2 = ẋ0
(3.2.14)
C1 = x 0
ẋ0
C2 =
ω0
(3.2.15)
da cui:
(3.2.16)
Pertanto le equazioni descriventi, in modo completo, il moto sono:
ẋ0
sin ω0 t
ω0
ẋ(t) = −x0 ω0 sin ω0 t + ẋ0 cos ω0 t
x(t) = x0 cos ω0 t +
(3.2.17)
(3.2.18)
La soluzione (3.2.4) puó essere scritta in una forma differente esprimendo le costanti
C1 e C2 in funzione di altre due costanti. Infatti, ponendo:
C1 = a cos α
e
3-3
C2 = −a sin α
(3.2.19)
———— S.Barbarino - Appunti di Fisica - Scienze e Tecnologie Agrarie ————
la (5.2.4) si puó scrivere:
x = a cos α cos ω0 t − a sin α sin ω0 t
(3.2.20)
ossia:
x(t) = a cos(ω0 t + α)
(3.2.21)
ẋ(t) = −aω0 sin(ω0 t + α)
(3.2.22)
e, quindi:
essendo:
q
a=
ossia:
a=
s
x20
C12 + C22
ẋ20
+ 2
ω0
e
e
tan α = −
tan α = −
C2
C1
ẋ0
ω 0 x0
(3.2.23)
(3.2.24)
Per eliminare l’ambiguitá del segno di α é conveniente calcolare anche il cos α e il
sin α; dalla (3.2.14) si ha:
cos α = s
x0
ẋ2
x20 + 02
ω0
e
ẋ0
sin α = −
ω0
s
ẋ2
x20 + 02
ω0
(3.2.25)
Le equazioni (3.2.21), (3.2.22) e (3.2.24) descrivono completamente il moto di una
particella sottoposta a forza di tipo elastico. Esse dimostrano che la dipendenza dal tempo
dello spostamento dalla posizione di riposo é di tipo sinusoidale o armonico. Il moto é
caratterizzato da tre quantitá:
1) la massima deviazione o ampiezza delle oscillazioni a; 2) la frequenza angolare ω0 ; 3) la cosiddetta fase iniziale α. L’ampiezza e la fase di un moto oscillatorio
armonico sono determinate dalle condizioni iniziali, mentre la frequenza angolare non
dipende dalle condizioni iniziali ma dai parametri del sistema oscillante.
3-4
———— S.Barbarino - Appunti di Fisica - Scienze e Tecnologie Agrarie ————
La frequenza propria ν0 rappresenta il numero di oscillazioni che la massa
compie in un secondo (l’unitá di tempo).
Si definisce periodo T il tempo necessario per compiere una oscillazione. Esso si
calcola dalla seguente proporzione:
T : 1 = 1 : ν0
(3.2.26)
1
ν0
(3.2.27)
da cui:
T =
Allora le equazioni (3.2.21) e (3.2.22) si possono scrivere:
t
x(t) =a cos 2π + α
T
2π
t
ẋ(t) = − a
sin 2π + α
T
T
(3.2.28)
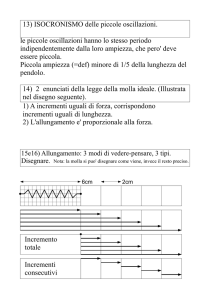
Diagramma orario di un oscillatore armonico
7
6
5
4
3
2
1
0
−1
−2
−3
−4
−5
−6
−7
a = 1 .....
.
.
..
........
. ..
.......
.......
......
... ....
... .... α = 0 ... ....
... ....ẋ
... ....
. T = 1 s .. ...
.
.
.
.. ...
.. ...
.. ...
.. ...
.. ...
... ....
... ....
... ....
... ....
.
.
.
. ....
. .....
.. ....
.. .....
.. ....
.
.
.
.
.
...
.
.
...
.
.
..
..
...
...
.
..
..
...
..
..
..
...
.
...
.
.
.
.
.
...
...
...
...
...
...
.
.
.
...
..
.
.
.
..
...
...
...
...
.
.
.
...
.
.
.
.
..
...
...
...
...
.
.
.
.
...
.
..
.
.
.
.
.
...
...
...
...
.
.
.
...
.
.
...
.
.
.
.
...
...
...
...
x ..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
........................................................................................................................................................................................................................................................................................................................................................................................
...
...
...
...
..
..
...
..
..
..
...
...
...
...
...
..
..
..
..
..
...
...
...
...
...
.
.
.
.
.
.
.
.
.
.
.
.
...
...
...
...
...
.
.
.
.
..
...
...
..
...
...
..
..
..
..
.
..
.
.
.
.
.
.
.
..
...
..
...
..
.
.
..
..
..
..
..
..
..
..
.
..
..
.
.
.
.
..
.
.
.
.
.
.
.
.
.
..
..
...
..
..
... ..
... ..
... ...
... ...
... ...
... ..
... ..
... .
... ..
... ..
... ...
... ..
... ..
... ..
... ..
... ..
... ..
... ...
... .
... .
... ..
... ..
... ..
... ..
... ...
.....
.......
.......
......
......
..
......
...
...
..
....
....
... ...... ....... ...... ....... ...... ........ ...... ........ ......
..... ...
...........
..........
..........
..........
...
0.0
0.5
1.0
1.5
2.0
2.5
t/T
fig.3.2-1
3-5
3.0
3.5
4.0
4.5
5.0
———— S.Barbarino - Appunti di Fisica - Scienze e Tecnologie Agrarie ————
Dal grafico di fig.3.2-1 si evince che la massa m si muove su traiettoria rettilinea dal
punto x = +a al punto x = −a e viceversa e che la velocitá della massa m é nulla agli
estremi della traiettoria x = +a e x = −a ed é massima nella posizione di risposo O.
L’accelerazione é massima agli estremi e nulla nella posizione di riposo.
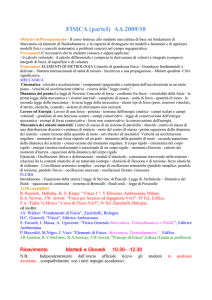
3.3 - Meccanica di particelle vincolate: il Pendolo semplice
Il corpo che oscilla é un punto materiale di massa m connesso ad un punto fisso
mediante un’asta rigida priva di massa la cui lunghezza l prende il nome di lunghezza del
pendolo. La traiettoria é pertanto un arco di circonferenza. Poiché possiamo prescindere
dall’attrito nel punto di sospensione e dalla resistenza dell’aria, resta, come unica forza
agente, il peso, la cui componente attiva nel verso delle φ crescenti é
Fa = −mg sin φ
(3.3.1)
•O
....
......
... .
.. ....
.
.
.. ..
.......... .
... ........
.
...
.
..
.
.
...
...
...
.
..
.
.
.
..
.
..
.
..
.
.
..
.
.
.
..
.
.
.
..
.
.
.
.
.
...
.
.
.
...
...
...
.
.
..
....
.
...
..
..
...
.
....
.
.
.
....
.
.
.
.
.
.
....
..
..
....
.
...
....
..
.... .........
...
.....
..
.... .....
.....
...
.
.
.
.... ......
.
.
..
..
..........
.....
..
...
.....
.........
......
......... ....
...
.....
.
....... ...
.
.
.
.
.
.
.
........
..
.......
........
.......
.........
..
........
..............
..
.........
.
.
.
..................
.
.
.
.
.
.
.
.
..... ....................................................................
..........
. ...
.. .....
..
.
..
.
..
..
..
..
.
....
..
.. ......
..
..
....
..
..
.... ...
.
.....
..
φ
l
..........
.•
........ ...............
.
.
.. .
...φ ....
.
.. ...
..
...
.
.
.
...
.
.
.
...
........
.
m~g
fig.3.3-1
Indicando con s la coordinata sulla traiettoria prestabilita, l’equazione del moto é:
m
d2 s
= −mg sin φ
dt2
(3.3.2)
d2 φ
= −mg sin φ
dt2
(3.3.3)
Tenendo conto che s = lφ, si ha:
ml
che si puó scrivere:
d2 φ g
+ sin φ = 0
(3.3.4)
dt2
l
La presenza del termine sin φ ci conduce al risultato che, in generale, le oscillazioni
del pendolo sono non armoniche. L’integrazione rigorosa dell’equazione (3.3.4) si puó
effettuare e conduce a funzioni ellittiche.
3-6
———— S.Barbarino - Appunti di Fisica - Scienze e Tecnologie Agrarie ————
Possiamo, tuttavia, ottenere importanti informazioni sulla fisica del pendolo sviluppando in serie il termine sin φ. Poniamo, cioé:
1
sin φ = φ − φ3 + ...........
6
(3.3.5)
La prima approssimazione si ottiene ponendo il primo termine dello sviluppo in serie
nell’equazione (3.3.4) ottenendo l’equazione differenziale che caratterizza le oscillazioni
armoniche.
d2 φ g
(3.3.6)
+ φ=0
dt2
l
É questa l’equazione delle oscillazioni armoniche giá esaminata nel paragrafo 3.2. Precisamente essa coincide con la (3.2.3) a parte il nome della variabile dipendente.
g
Posto ω02 = , la soluzione é:
l
φ(t) = φ0 cos(ω0 t + α)
(3.3.7)
Quindi, in approssimazione di piccole oscillazioni attorno alla posizione di equilibrio,
le oscillazioni della particella di massa m sono armoniche di periodo:
T =
2π
= 2π
ω0
s
l
g
(3.3.8)
L’equazione (3.3.8) esprime il fatto fisico importante, giá evidenziato sperimentalmente da Galileo Galilei, che il periodo di oscillazione di un pendolo semplice (in approssimazione di piccole oscillazioni) non dipende dalla massa della particella. Entro i limiti di
validitá della (3.3.6), il periodo delle oscillazioni é indipendente anche dall’ampiezza delle
oscillazioni. Le piccole oscillazioni del pendolo sono isocrone.
Assumendo come condizioni iniziali, φ = φ0 per t = 0, la (3.3.7) diventa:
φ(t) = φ0 cos ω0 t
Fine del Cap.3
3-7
(3.3.9)