Introduzione
Nell'ambito degli azionamenti elettrici sta trovando sempre più larga applicazione la classe dei motori sincroni, che permettono la realizzazione di un
controllo del movimento molto accurato ed eciente. Questa peculiarità è
dovuta alla elevata densità di potenza e all'elevato rapporto tra coppia ed
inerzia, unite alla quasi totale assenza di perdite nel rotore, che caratterizzano questo tipo di macchine. Lo svantaggio che si incontra nella costruzione
di un sistema di controllo per motore sincrono è la necessità di conoscere con
elevata risoluzione la posizione del rotore, cui sono intrinsecamente legate le
grandezze elettriche. Vengono perciò normalmente impiegati sensori elettromeccanici di posizione di vario tipo, con prevalente diusione di encoder
incrementali ottici.
Il controllo sensorless di motori elettrici è ancora un argomento di ricerca,
dopo più di due decenni di studio. L'obiettivo consiste nell'eliminazione della necessità di un trasduttore di posizione, grazie all'impiego della macchina
stessa come sensore (self-sensing ).
In termini di prestazioni ci si pregge,
per un azionamento con controllo sensorless, l'avvicinamento il più possibile
spinto ai risultati di dinamica ed accuratezza di un corrispondente controllo
sensored. Le tecniche di stima possono essere suddivise a seconda del range di
velocità di applicazione: per le alte velocità possono essere impiegati ecacemente osservatori di usso basati sulla misura della tensione indotta, mentre
l'indisponibilità di una tensione di ampiezza signicativa a velocità ridotta
o addirittura a rotore fermo non consente la stima di posizione e velocità
ncon la necessaria precisone.
In queste condizioni possono essere sfruttati
solo gli eetti della salienza magnetica spaziale, ossia della distribuzione non
uniforme dell'induttanza in funzione della posizione del rotore, caratteristica
di alcuni tipi di motore sincrono (sincrono a riluttanza, sincrono a magneti
permanenti interni).
Questo viene realizzato grazie all'iniezione di segnali
addizionali rispetto a quelli normalmente richiesti per il controllo del motore. L'approccio è simile a quanto viene fatto per i classici sensori magnetici
di posizione (resolver): un usso noto viene impresso alle fasi di statore, ed
interagendo con la distibuzione dell'induttanza risulta in una corrente la cui
VII
ampiezza è inuenzata dalla posizione del rotore.
Il segnale iniettato deve essere tale da non causare signicative oscillazioni
del sistema meccanico, e deve essere distinguibile dalle grandezze fondamentali (dedicate alla produzione di coppia). Lo stato dell'arte in questo campo è
costituito da due principali metodi di iniezione: uno basato su commutazioni
a gradino della tensione in particolari istanti di tempo, l'altro sulla sovraimposizione di segnali sinusoidali.
Il secondo tipo di iniezione sembra essere
il più promettente, in quanto non pone, a parità di prestazioni, speciche
hardware superiori a quelle di un azionamento con sensore.
La tesi si propone di analizzare le tecniche di stima della posizione e velocità del rotore per un motore sincrono a magneti permanenti interni (Interior
Permanet Magnet, IPM ) tramite iniezione di segnali in alta frequenza, attraverso lo studio, la simulazione e la verica sperimentale. Lo stato dell'arte
annovera molti schemi e tecniche per il controllo sensorless ad iniezione di
segnale, quindi l'analisi, comprensiva di simulazioni e prove sperimentali, è
stata condotta su un numero limitato di stimatori, secondo i seguenti criteri:
alta o media larghezza di banda della stima;
due sensori di corrente di fase e misura della tensione di alimentazione
dell'inverter;
maggiore indipendenza possibile rispetto ai parametri del sistema elettromeccanico;
implementazione su controllore digitale.
Il contributo che il lavoro svolto propone può così riassunto:
analisi del meccanismo di funzionamento delle tecniche scelte;
simulazione di un azionamento sensorless per IPM sotto varie condizioni
e prove sperimentali di base;
introduzione di una nuova tecnica di demodulazione per il segnale di
errore della stima e di una procedura di avviamento con individuazione
della polarità del rotore.
Nel Capitolo 1 si introduce il modello elettro-meccanico del motore trifase
IPMSM, sia nel riferimento trifase che in quelli bifase di statore e sincrono.
Viene inoltre denita l'approssimazione valida per l'alta frequenza, che verrà
impiegata successivamente nella trattazione del meccanismo di stima.
VIII
Il Capitolo 2 tratta gli schemi classici per il controllo di velocità in un azionamento e le principali strategie di controllo di coppia per motori sincroni,
analizzando più dettagliatamente il controllo vettoriale per IPMSM e le sue
ottimizzazioni.
Nel Capitolo 3 vengono illustrati i più diusi metodi di stima sensorless,
entrando nel dettaglio delle tecniche basate sull'iniezione di usso ad alta
frequenza, evidenziandone le dierenze di principio ed i relativi eetti.
Si
introduce una nuova procedura di determinazione della polarità dell'asse diretto di rotore, basata sulla produzione di coppia.
Le tecniche di demodulazione del segnale di errore in alta frequenza impiegato per la correzione della stima sono trattate nel Capitolo 4, fornendo un
confronto anche in una semplice simulazione numerica. Viene introdotta una
tecnica originale, maggiormente robusta, basata sulla trasformata di Fourier
discreta (Discrete Fourier Transform, DFT ) e la proiezione delle correnti in
un nuovo sistema di coordinate.
Il Capitolo 5 contiene le simulazioni del funzionamento dell'azionamento con
controllo sensorless in condizioni di transitorio e di regime, applicando combinazioni diverse di tecniche di stima e di elaborazione del segnale e rapportandosi al corrispondente controllo con sensore.
Nel Capitolo 6 viene esposta la parte relativa alle prove sperimentali, condotte su un azionamento a controllo digitale con motore IPM per scooter
elettrico. Vengono riassunte le caratteristiche dell'hardware utilizzato e del
programma di controllo, con risalto alle parti introdotte per la stima di posizione e velocità. Le prove sperimentali, pur confermando l'applicabilità delle
tecniche studiate, non hanno dato i risultati attesi, a causa di una componente estranea al modello ideale e presumibilmente legata alla saturazione
magnetica, che pregiudica le prestazioni del sistema.
IX
X
Elenco delle gure
1.1
Sezione di un IPMSM reale a due coppie polari. In evidenza
le linee di usso principali (assi magnetici). . . . . . . . . . . .
1.2
3
Circuito equivalente per un motore trifase visto dalle fasi di
statore. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.3
Fasi equivalenti nel riferimento di statore. . . . . . . . . . . . .
8
1.4
Fasi equivalenti nel riferimento di rotore. . . . . . . . . . . . .
9
2.1
Controllo di velocità classico.
. . . . . . . . . . . . . . . . . .
15
2.2
Controllo di corrente generico nella forma più semplice. . . . .
15
2.3
Schema generico di controllo vettoriale con sensore di posizione. 16
2.4
Controllo vettoriale sensorless. . . . . . . . . . . . . . . . . . .
2.5
Regione di funzionamento in controllo ottimo con indebolimento di campo.
3.1
. . . . . . . . . . . . . . . . . . . . . . . . .
18
Principio di funzionamento delle stime fondate su fenomeni di
salienza magnetica. . . . . . . . . . . . . . . . . . . . . . . . .
3.2
16
23
Osservatore meccanico completo (con feed-forward della coppia comandata o stimata e regolatore con componente derivativa). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
3.3
Osservatore meccanico semplicato (solo correzione con l'errore). 26
3.4
Pattern PWM per la transient excitation e relative correnti di
fase, con evidenza dell'eetto dei tempi morti.
3.5
. . . . . . . . .
27
Schema dell'anello di retroazione per la stima con iniezione di
usso rotante. . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
3.6
Schema di stima per iniezione di vettore rotante. . . . . . . . .
31
3.7
Schema dell'anello di retroazione per la stima con iniezione di
usso pulsante in direzione
3.8
dˆ.
. . . . . . . . . . . . . . . . . .
Schema di stima classico (demodulazione heterodyning) per
iniezione di vettore pulsante. . . . . . . . . . . . . . . . . . . .
3.9
32
33
Schema proposto per il riconoscimento della polarità tramite
generazione di coppia.
. . . . . . . . . . . . . . . . . . . . . .
XI
37
4.1
Esempio dei segnali coinvolti nella demodulazione tramite DFT. 43
4.2
Schema dello stimatore con demodulazione DFT.
4.3
. . . . . . .
44
Circuito di ricostruzione della demodulante (PLL) con bloccaggio della fase in seguito all'aggancio. . . . . . . . . . . . . .
46
4.4
Schema in anello chiuso per il confronto dei demodulatori.
. .
48
4.5
Demodulatore heterodyning. . . . . . . . . . . . . . . . . . . .
49
4.6
Segnale di errore teorico e ricostruito con la demodulazione
heterodyning.
. . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7
Demodulatore ad onda quadra.
4.8
Segnale di errore teorico e ricostruito con la demodulazione ad
onda quadra.
4.9
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . .
Demodulatore a divisione.
. . . . . . . . . . . . . . . . . . . .
49
50
50
50
4.10 Segnale di errore teorico e ricostruito con la demodulazione a
divisione.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.11 Demodulatore DFT.
. . . . . . . . . . . . . . . . . . . . . . .
51
51
4.12 Segnale di errore teorico e ricostruito con la demodulazione
DFT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.13 Ricostruzione della demodulante.
52
. . . . . . . . . . . . . . . .
52
5.1
Modello dell'azionamento in ambiente Simulink. . . . . . . . .
55
5.2
Modello di inverter e motore in grandezze per unità. . . . . . .
57
5.3
Modello del generatore dei riferimenti di corrente con traiettoria MTPA. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4
Schema per la generazione delle tensioni in alta frequenza.
5.5
Simulazione dello stimatore.
5.6
Schema per la gestione dell'individuazione della polarità.
5.7
Forme d'onda del segnale di errore con stima bloccata (vetto-
58
. .
59
. . . . . . . . . . . . . . . . . . .
62
. . .
64
re pulsante con demodulazione heterodyne) nel transitorio di
velocità (0.25 [p.u.]), per due valori di banda del controllo di
corrente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.8
68
Forme d'onda del segnale di errore con stima bloccata (vettore
pulsante con demodulazione ad onda quadra) nel transitorio
di velocità (0.25 [p.u.]), per due valori di banda del controllo
di corrente.
5.9
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
68
Forme d'onda del segnale di errore con stima bloccata (vettore
pulsante con demodulazione DFT) nel transitorio di velocità
(0.25 [p.u.]), per due valori di banda del controllo di corrente.
69
5.10 Forme d'onda del segnale di errore con stima bloccata (vettore
rotante) nel transitorio di velocità (0.25 [p.u.]), per due valori
di banda del controllo di corrente. . . . . . . . . . . . . . . . .
XII
69
5.11 Risposta del sistema con sensore ad un riferimento di velocità
a gradino.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
70
5.12 Risposta del sistema sensorless (vettore pulsante con demodulazione heterodyne) ad un riferimento di velocità a gradino. . .
71
5.13 Risposta del sistema sensorless (vettore pulsante con demodulazione ad onda quadra) ad un riferimento di velocità a
gradino.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
5.14 Risposta del sistema sensorless (vettore pulsante con demodulazione DFT) ad un riferimento di velocità a gradino. . . . . .
72
5.15 Risposta del sistema sensorless (vettore rotante) ad un riferimento di velocità a gradino.
. . . . . . . . . . . . . . . . . . .
72
5.16 Risposta del sistema con sensore ad un riferimento di inversione di velocità (da 0.1 [p.u.] a -0.1 [p.u.]).
. . . . . . . . . .
73
5.17 Risposta del sistema sensorless (vettore pulsante con demodulazione DFT) ad un riferimento di inversione di velocità (da
0.1 [p.u.] a -0.1 [p.u.]).
. . . . . . . . . . . . . . . . . . . . . .
73
5.18 Risposta del sistema sensorless (vettore pulsante con demodulazione ad onda quadra) ad un riferimento di inversione di
velocità (da 0.1 [p.u.] a -0.1 [p.u.]).
. . . . . . . . . . . . . . .
74
5.19 Risposta del sistema sensorless (vettore pulsante con demodulazione DFT) ad un riferimento di inversione di velocità (da
0.1 [p.u.] a -0.1 [p.u.]).
. . . . . . . . . . . . . . . . . . . . . .
74
5.20 Risposta del sistema sensorless (vettore rotante) ad un riferimento di inversione di velocità (da 0.1 [p.u.] a -0.1 [p.u.]).
. .
75
5.21 Inizializzazione ed avvio del sistema sensorless (vettore pulsante con demodulazione DFT) con determinazione della polarità.
76
5.22 Risposta del sistema sensorless (vettore pulsante con demodulazione heterodyne) ad un riferimento di velocità a gradino, in
condizioni di stima degradate. . . . . . . . . . . . . . . . . . .
77
5.23 Risposta del sistema sensorless (vettore pulsante con demodulazione DFT) ad un riferimento di velocità a gradino, in
condizioni di stima degradate. . . . . . . . . . . . . . . . . . .
77
5.24 Risposta del sistema sensorless (vettore pulsante con demodulazione heterodyne) ad un riferimento di velocità a gradino, in
condizioni di stima degradate. . . . . . . . . . . . . . . . . . .
78
5.25 Risposta del sistema con sensore a variazioni a gradino della
coppia di carico (0.5 [p.u.]).
. . . . . . . . . . . . . . . . . . .
79
5.26 Risposta del sistema sensorless (vettore pulsante con demodulazione heterodyne) a variazioni a gradino della coppia di
carico (0.5 [p.u.]). . . . . . . . . . . . . . . . . . . . . . . . . .
XIII
79
5.27 Risposta del sistema sensorless (vettore pulsante con demodulazione ad onda quadra) a variazioni a gradino della coppia di
carico (0.5 [p.u.]). . . . . . . . . . . . . . . . . . . . . . . . . .
80
5.28 Risposta del sistema sensorless (vettore pulsante con demodulazione DFT) a variazioni a gradino della coppia di carico (0.5
[p.u.]). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
80
5.29 Risposta del sistema sensorless (vettore pulsante con demodulazione heterodyne) a variazioni a gradino della coppia di
carico (0.5 [p.u.]). . . . . . . . . . . . . . . . . . . . . . . . . .
6.1
Schema funzionale della scheda di controllo e del setup di
sviluppo e misura dell'azionamento. . . . . . . . . . . . . . . .
6.2
88
Schema di controllo implementato, con evidenza delle funzionalità realizzate dal DSP tramite programmazione.
6.3
81
. . . . . .
89
Diagramma di temporizzazione del campionamento e dell'aggiornamento del controllo per la PWM simmetrica (segnali su
una fase).
6.4
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Diagramma di usso del programma eseguito dal DSP per il
controllo dell'azionamento. . . . . . . . . . . . . . . . . . . . .
6.5
91
93
Segnali relativi alla prova con stima in parallelo al controllo
con sensore (demodulazione DFT), a velocità costante pari a
0.1 [p.u.],
a vuoto. (Ch1: posizione misurata, Ch2: segnale di
errore). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
6.6
Segnali relativi alla prova con stima in parallelo al controllo
con sensore (demodulazione heterodyne), a velocità costante pari a
0.1 [p.u.],
a vuoto. (Ch1: posizione misurata, Ch2:
segnale di errore). . . . . . . . . . . . . . . . . . . . . . . . . . 104
6.7
Segnali relativi alla prova con stima in parallelo al controllo con sensore, con riferimento di velocità a gradino pari a
0.1 [p.u.],
a vuoto. (Ch1: errore di stima della posizione, Ch2:
velocità stimata, Ch3: velocità misurata).
6.8
. . . . . . . . . . . 105
Segnali relativi alla prova in controllo sensorless, con riferimento di velocità a gradino pari a
0.05 [p.u.],
a vuoto.(Ch1:
errore di stima della posizione, Ch2: velocità stimata, Ch3:
velocità misurata).
6.9
. . . . . . . . . . . . . . . . . . . . . . . . 106
Segnali relativi alla prova con stima in parallelo al controllo
con sensore, velocità pari a
0.05 [p.u.],
a vuoto.
(Ch1: posi-
zione misurata, Ch2: segnale di errore, Ch3: riferimento di
corrente).
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
XIV
6.10 Segnali relativi alla prova con errore di stima forzato a zero,
a vuoto, velocità pari a
[0.1 p.u.].
(Ch1: posizione misurata,
Ch2: segnale di errore, Ch3: riferimento di corrente).
. . . . . 108
6.11 Segnali relativi alla prova con errore di stima forzato a zero,
con lieve carico, velocità pari a
[0.1 p.u.].
(Ch1:
posizione
misurata, Ch2: segnale di errore, Ch3: riferimento di corrente). 109
6.12 Segnali relativi alla prova con errore di stima forzato a zero,
con lieve carico, velocità pari a
[0.1 p.u.].
(Ch1:
posizione
misurata, Ch2: segnale di errore, Ch3: riferimento di corrente). 110
XV
XVI
Nomenclatura
Simboli ed abbreviazioni
vx
Vn
Vbase
VDC
t0min
ix
In
Ibase
rs
Zn
λx
ΛP M
λP M
Λbase
Ls0
Lsσ
Lg
Lx
ΣL
∆L
τRL
s
p
θr
θm
Θbase
ωr
ωm
Ωbase
Tensione di statore.
Tensione nominale.
Tensione base.
Tensione di alimentazione dell'inverter.
Tempo minimo di applicazione del vettore nullo.
Corrente di statore.
Corrente nominale.
Corrente base.
Resistenza di statore.
Impedenza nominale.
Flusso concatenato di statore.
Modulo del usso del magnete permanente.
Flusso del magnete permanente concatenato dalle fasi di statore.
Flusso base.
Induttanza di fase media.
Induttanza di fase di dispersione.
Induttanza di fase di anisotropia.
Induttanza di statore.
(L + Ld )/2.
dierenziale (Lq − Ld )/2.
Induttanza media
Induttanza
Costante di tempo del primo ordine della serie R-L.
Operatore di derivazione nel tempo
d/dt.
Numero di coppie polari del motore.
Posizione elettrica del rotore.
Posizione meccanica del rotore(θm
= p θr ).
Angolo base.
Velocità angolare elettrica del rotore.
Velocità angolare meccanica del rotore
Velocità angolare base.
XVII
(ωm = p ωr ).
fn
Te
TL
Tbase
J
ωi
Vi
Ii1 , Ii0
DF Tωi
Frequenza nominale.
Coppia elettromagnetica generata dal motore.
Coppia di carico.
Coppia base.
Momento di inerzia del sistema meccanico.
Pulsazione del segnale iniettato.
Ampiezza nominale della tensione iniettata.
Ampiezze delle correnti risultanti dall'iniezione.
Componente a pulsazione
ωi
della
Trasformata di Fourier discreta (DFT ).
LP F, BP F
α, β
d, q
d0 , q 0
T abc→αβ ,T αβ→abc
T αβ→dq ,T dq→αβ
Filtri passa-basso, passa-banda.
Coordinate di statore.
Coordinate sincrone di rotore.
Coordinate sincrone traslate di
−π/4.
Trasformazioni diretta ed inversa di Clarke.
Trasformazione diretta ed inversa di Park.
Apici e pedici
ˆ
Grandezze stimate.
∗
Grandezze comandate (riferimenti).
Grandezze in rappresentazione vettoriale.
αβ ,α ,β
Grandezze nelle coordinate di statore.
dq ,d ,q
Grandezze nelle coordinate di rotore.
i
Grandezze derivanti dall'iniezione
di segnali in alta frequenza.
XVIII
Capitolo 1
Modello del motore
Una buona parte delle applicazioni nelle quali sia richiesta movimentazione di
meccanismi viene attuata tramite dispositivi elettromeccanici. In particolare, la quasi totalità delle macchine elettriche di dimensioni non microscopiche
impiega l'eetto elettromagnetico come principio di conversione, in quanto la
densità di potenza ottenibile con macchine elettromagnetiche è superiore agli
analoghi elettrostatici. Data dunque la vastità di impiego del motore elettrico, rivestono notevole interesse le tecniche che ne permettono il controllo,
ossia consentono di ottenere da esso l'inseguimento di determinate speciche
di movimento.
Il presente capitolo sarà centrato sulla classe di motori co-
siddetti sincroni, che trovano impiego prevalente nelle applicazioni in cui sia
richiesta alta ecienza o accuratezza nel controllo. Infatti, questo tipo di motori presenta potenzialmente il miglior rendimento e il più alto rapporto tra
coppia prodotta ed inerzia, unendo a questo caratteristiche molto favorevoli
come l'assenza di contatti striscianti e la precisione nel controllo di coppia.
Lo svantaggio che ne limita la diusione è da ricercare principalmente nella
maggiore complessità degli schemi di controllo che è necessario adottare, se
messi a confronto con quelli di altre classi di motori come i quelli in corrente
continua o asincroni.
Riguardo quest'ultimo aspetto, un'importante die-
renza risiede nella necessità, per il controllo di motori sincroni, di conoscere
con precisione la posizione del rotore, anche nel caso di realizzazione di un
controllo di velocità.
1.1 Il motore elettrico trifase
In questa breve introduzione al modello di una macchina elettrica si farà riferimento genericamente ad un dispositivo che grazie a fenomeni elettromagnetici realizza la conversione elettro-meccanica di potenza, e che naturalmente
1
2
CAPITOLO 1.
MODELLO DEL MOTORE
può funzionare in entrambi i sensi di conversione (dal sistema elettrico a
quello meccanico e viceversa). Nella condizione nella quale l'energia elettrica
esterna viene impiegata per generare energia meccanica si parla di funzionamento come motore, viceversa si parlerà di generatore. Nei casi come quello
che è stato trattato nel corso della tesi, in cui la macchina sia impiegata
prevalentemente per la generazione di movimento, questa viene classicata
come motore, nonostante il trasferimento di potenza possa in alcuni momenti
(ad es. in decelerazione) avvenire dal sistema meccanico a quello elettrico.
Si considereranno qui solamente motori rotativi, costituiti cioé da due parti coassiali unite tramite un giunto rotoidale, mentre esistono altre tipologie
(ad es. lineari) le cui parti sono diversamente accoppiate. La parte vincolata
all'ambiente scelto come riferimento, generalmente esterna, viene detta stato-
re, mentre l'altra, soggetta alla coppia generata e collegata al meccanismo da
movimentare (carico ), è denominata rotore. Le due parti sono generalmente
costituite in prevalenza da materiale ferromagnetico. All'interno dello statore sono ricavati degli spazi (cave ) atti ad ospitare degli avvolgimenti, detti
fasi di statore. Si farà riferimento a motori trifase, ossia aventi avvolgimenti in numero multiplo di tre secondo il numero di coppie polari, con campo
prevalentemente radiale.
Le spire di conduttori sono collegate in parallelo
ed accessibili all'esterno per mezzo di tre contatti elettrici ad esse riferiti,
oltre eventualmente al neutro (collegamento al nodo centrale tra le fasi). Il
collegamento verso l'esterno di circuiti posti sul rotore (si parla in questo
caso di rotore avvolto ) è critico a causa del relativo spostamento, che obbliga
ad impiegare contatti striscianti (tramite spazzole, brush ) fonte di grossi inconvenienti. Per questo si sono aermate delle tipologie di motori con rotore
elettricamente isolato rispetto agli avvolgimenti (brushless ), che presentano
però in generale maggiore complessità di controllo rispetto a quelli con rotore
avvolto. Nell'accezione comune, con il termine brushless si intende designare
in ambito industriale una classe di motori sincroni, mentre i motori asincroni
(pur essendo anch'essi senza spazzole) sono detti ad induzione (induction ).
1.2 Modello del PMSM
Nel prosieguo della trattazione il modello cui ci si riferirà, a meno di eccezioni espressamente indicate, sarà quello del motore sincrono cosiddetto
brushless sinusoidale , le cui principali tipologie sono a magneti permanenti
(Permanent Magnet Synchronous Motor, PMSM ) e a riluttanza (Synchro-
nous Reluctance Motor ). In particolare, le simulazioni e le prove sperimentali
sono condotte su un motore a magneti permanenti interni (Interior-PMSM
o più concisamente IPM ), il cui modello è il più generale e può essere usa-
1.2.
MODELLO DEL PMSM
3
to, con i corretti parametri, per motori sia a magneti annegati nel rotore
che superciali (Surface-PMSM ), purchè sinusoidali. L'aggettivo sinusoidale
è qui inteso a descrivere la distribuzione delle grandezze magnetiche viste
circuitalmente da una fase al variare dell'angolo di rotore.
Il motore IPM è costituito da uno statore su cui sono disposti gli avvolgimenti delle fasi, e da un rotore in materiale ferromagnetico, all'interno del
quale sono disposti dei magneti permanenti. Il rotore risulta essere magne-
ticamente anisotropo, in quanto la riluttanza è dovuta sia alla sezione non
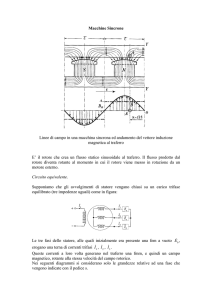
uniforme del rotore, sia alla presenza dei magneti, la cui permeabilità è paragonabile a quella del vuoto, per piccole variazioni del usso. In Fig. 1.1
è presentata la tipica sezione di un IPMSM a due coppie polari. Sono ben
visibili le cave di statore, così come la struttura non omogenea del rotore. Le
cavità in cui sono alloggiati i magneti si estendono anche oltre, costituendo
le cosiddette barriere di usso che enfatizzano l'anisotropia magnetica.
Figura 1.1: Sezione di un IPMSM reale a due coppie polari. In evidenza le linee di
usso principali (assi magnetici).
Per poter trattare estesamente gli aspetti riguardanti il controllo sensorless, è necessaria la comprensione delle equazioni che costituiscono la base
del modello del sistema elettro-meccanico. Si tratteranno solamente motori
a usso radiale, la cui diusione è nettamente più larga rispetto a soluzioni
con distribuzione del campo assiale. Numerose semplicazioni, comunemente accettate, sono state usate nel ricavare il modello, anche se alcune di esse
saranno poi riviste in altri capitoli per spiegare particolari aspetti:
4
CAPITOLO 1.
MODELLO DEL MOTORE
la saturazione magnetica non viene considerata;
il magnete permanente viene assunto come avente usso totale di ampiezza costante, con curva di demagnetizzazione lineare;
il usso dei magneti, la densità degli avvolgimenti e la risultante induttanza delle fasi di statore sono considerate sinusoidalmente distribuite
al variare dell'angolo. Gli avvolgimenti distribuiti sono però modellati
da corrispondenti fasi concentrate;
le tre fasi di statore sono identiche, disposte simmetricamente e connesse a stella (Y), pertanto i terminali accessibili corrispondono ciascuno
ad uno dei tre avvolgimenti e non è presente alcuna corrente omopolare
(assenza di neutro).
le lunghezze d'onda e gli spessori di penetrazione del campo elettromagnetico sono considerati molto più grandi delle dimensioni siche del
motore (non viene considerato l'eetto pelle), così che resistenza ed
induttanza sono costanti al variare della frequenza;
le perdite nel ferro (per isteresi e correnti parassite) sono trascurate,
pertanto lo sono anche le correnti indotte nel rotore;
le costanti di tempo meccaniche sono molto più grandi di quelle elettriche;
tutti i parametri vengono considerati in condizioni di temperatura costante.
1.2.
5
MODELLO DEL PMSM
1.2.1
Modello elettrico trifase
Figura 1.2: Circuito equivalente per un motore trifase visto dalle fasi di statore.
Si consideri un motore IPM, per il quale valgano le ipotesi in 1.2, e se
ne consideri l'equivalente elettrico visto dai terminali delle fasi di statore,
per valori ssati dell'angolo relativo tra rotore e statore
angolare
ωr .
θr
e della velocità
E' importante notare che le grandezze angolari qui considera-
te (θr , ωr ), dette elettriche, sono legate alla periodicità con cui la posizione
angolare ha eetto elettromagnetico sulle fasi di statore, mentre le reali variabili meccaniche che descrivono il movimento sono
θm = p θr
e
ωm = p ωr .
La direzione ch eindividua la posizione del rotore viene scelto in base alle
proprietà magnetiche presentate dal rotore, e precisamente, per un PMSM,
coincide con l'asse del magnete permanente, mentre per lo statore il riferimento coincide con l'asse magnetico della fase
a.
Ciò è vero a rigore solo
per una singola coppia polare, ma l'estensione a più coppie è immediata in
quanto si ha solamente periodicità nella denizione dell'angolo, ossia diventa
2π
.
indierente, per il modello elettrico, che il rotore si trovi in θr o in θr +
p
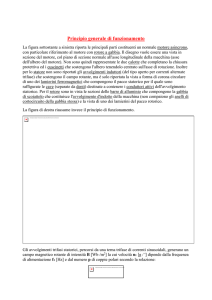
Ciascuno degli avvolgimenti sopra descritti può essere schematizzato tramite un circuito elettrico equivalente (1.2) costituito dalla serie di una resistenza, un'autoinduttanza ed un generatore di tensione indotta (forza contro-
elettromotrice o Back-ElectroMotive Force, B-EMF e accoppiamento con le
altre fasi). Le auto-induttanze sono la composizione dell'induttanza media
Ls0 ,
Lsσ e di un termine variabile con l'angolo
Lg , che assume valore negativo secondo la
dell'induttanza di dispersione
di rotore, il cui valore massimo è
6
CAPITOLO 1.
convenzione qui adottata per lo zero di
MODELLO DEL MOTORE
θr .
Laa = Lsσ + Ls0 + Lg cos (2θr )
2π
Lbb = Lsσ + Ls0 + Lg cos 2θr +
3
4π
Lbb = Lsσ + Ls0 + Lg cos 2θr +
3
(1.1)
(1.2)
(1.3)
I generatori di tensione indotta comprende i termini relativi alle induttanze
mutue ed un addendo relativo alla variazione del usso del magnete permanente concatenato da ciascuna fase a seguito di variazioni della posizione.
Gli accoppiamenti induttivi mutui possono essere espressi come
2π
1
Lab (2θr ) = Lba (2θr ) = − Ls0 + Lg cos 2θr −
2
3
(1.4)
1
Lbc (2θr ) = Lcb (2θr ) = − Ls0 + Lg cos (2θr )
2
1
4π
Lca (2θr ) = Lac (2θr ) = − Ls0 + Lg cos 2θr −
2
3
Considerando quindi un vettore per le tensioni di fase
(1.5)
(1.6)
v abc = [va , vb , vc ]T
(con
riferimento al potenziale del centro stella O del circuito) e per le correnti
iabc = [ia, ib , ic ]T , si possono esprimere le equazioni dei tre rami in forma
compatta come
v abc = rs iabc + sλabc
dove si è denito
(1.7)
λabc = [λa, λb , λc ]T = Labc iabc + λP Mabc
per i ussi totali
concatenati da ciascun avvolgimento. La matrice delle induttanze
forma
Labc
ha la
Laa (2θr ) Lab (2θr ) Lac (2θr )
Labc (2θr ) = Lba (2θr ) Lbb (2θr ) Lbc (2θr )
Lca (2θr ) Lcb (2θr ) Lcc (2θr )
(1.8)
mentre il vettore dei ussi concatenati dovuti al magnete permanente sono
λP Mabc
cos (θr )
= ΛP M cos θr + 2π
3 cos θr + 4π
3
(1.9)
perciò, volendo distinguere le tensioni auto-indotte da quelle dovute alle
induttanze mutue si avrà
eabc = s M abc (θr ) + λP Mabc
(1.10)
1.2.
7
MODELLO DEL PMSM
con
0
Lab (2θr ) Lac (2θr )
0
Lbc (2θr )
M abc (2θr ) = Lba (2θr )
Lca (2θr ) Lcb (2θr )
0
(1.11)
eabc = [ea , eb , ec ]T
(1.12)
così che le tensioni di fase rispecchieranno il circuito equivalente di Fig. 1.2.
Osservando il modello esposto sopra in 1.7 si può notare che le tre equazioni
non sono linearmente indipendenti, in quanto le tensioni e le correnti di fase
ripettano dei vincoli ulteriori imposti dalle leggi di Kirchho:
X
ix = 0
(1.13)
vx = 0
(1.14)
x=a,b,c
X
x=a,b,c
E' quindi possibile ridurre a due dimensioni la formulazione del modello elettrico, come risulta conveniente sia per la modellazione che per il controllo.
Si utilizzano solitamente due sistemi di assi ortogonali, l'uno solidale con lo
statore, l'altro con il rotore.
1.2.2
Coordinate bifase di statore
Si introduca un sistema di riferimento solidale con lo statore, di coordinate
α coincidente con la fase a. Si consideri
quindi la trasformazione di Clarke (T abc→αβ ), le cui coordinate sono illustrate
ortogonali
αβ ,
ed avente l'ascissa
in Fig. 1.2.2. Il modello diventa così
vα
vβ
= rs
iα
iβ
+
s 0
0 s
λα
λβ
(1.15)
o in forma vettoriale
v αβ = rs iαβ +
s 0
0 s
λαβ
(1.16)
dove i ussi concatenati dalle due fasi ttizie disposte ortogonalmente sono
λα
λβ
=
L + ∆L cos (2θr ) −∆L sin (2θr )
−∆L sin (2θr ) L − ∆L cos (2θr )
iα
iβ
+ ΛP M
cos (θr )
sin (θr )
(1.17)
λαβ = Lαβ iαβ + λP Mαβ
avendo denito la componente di anisotropia dell'induttanza
3
componente media ΣL = Ls0 + Lsσ .
2
(1.18)
∆L = 32 Lg
e la
8
CAPITOLO 1.
MODELLO DEL MOTORE
Figura 1.3: Fasi equivalenti nel riferimento di statore.
1.2.3
Coordinate bifase di rotore (riferimento sicrono)
Un diverso approccio, che come si vedrà risulta molto vantaggioso per il
controllo, è quello che prevede lo spostamento del sistema di riferimento in
una direzione identicata dall'angolo di rotore (trasformazione di Park), come
in Fig. 1.2.3 .
Come noto, il modello elettrico di una macchina sincrona trifase viene
spesso costruito proiettando le grandezze trifase su due assi, che sono usualmente solidali con lo statore (assi
αβ ) o con il rotore (assi dq ).
Generalmente,
il controllo viene realizzato nel riferimento di rotore. Le equazioni che descrivono un motore sincrono a magneti permanenti con salienza di rotore (come
i motori con disposizione interna dei magneti) sono
vd
vq
= rs
id
iq
+
s ωr
−ωr s
λd
λq
(1.19)
oppure, in forma vettoriale
v dq = rs idq +
s ωr
−ωr s
λdq
(1.20)
Il usso assume la forma
λd
λq
=
Ld 0
0 Lq
id
iq
+
λdq = Ldq idq + λP Mdq
Λpm
0
(1.21)
(1.22)
1.2.
9
MODELLO DEL PMSM
Figura 1.4: Fasi equivalenti nel riferimento di rotore.
con
Lq = 32 Ls0 + Lsσ + 32 Lg
come la dipendenza
Ld = 32 Ls0 + Lsσ + − 32 Lg . É semplice vedere
dall'angolo di rotore θr sia stata disaccoppiata e non
e
compaia più nelle equazioni del modello.
La dipendenza è stata trasferita
T αβ→dq (θr ) necessaria a portare le grandezze in questo
In questa formulazione, quindi, il vettore di usso dovuto al
nella trasformazione
riferimento.
magnete avrà sempre componente
q
nulla, essendo solidale con l'asse
d
del
rotore. Questa condizione permette di semplicare il controllo, e viene inoltre sfruttata nella creazione di algoritmi di stima della posizione basati su
osservatori di usso, come verrà descritto in 3.1.
1.2.4
Semplicazione per l'alta frequenza
Si riporta ora brevemente una semplicazione che costituisce un caso particolare del modello sopra esposto. Ciò che si ricava qui di seguito è in accordo
con l'ipotesi, posta come premessa al modello del motore IPM, secondo cui
induttanza e resistenza rimangono costanti per ogni frequenza.
Si elidono
solamente, dalle equazioni elettriche delle fasi, i termini che per valori di
frequenza sucientemente elevati sono trascurabili rispetto agli altri.
Le
equazioni semplicate saranno utili nel seguito al ne di comprendere il funzionamento delle tecniche di stima per il controllo sensorless che si basano
appunto sul comportamento alle alte frequenze, esposte in 3.2.
Ciascuna fase di statore può essere vista come un circuito avente funzione
di trasferimento tensione-corrente di tipo passa-basso, essendo l'impedenza
oerta dall'induttanza proporzionale alla pulsazione. Nel modello valido per
10
CAPITOLO 1.
MODELLO DEL MOTORE
alte frequenze, intendendo con alte quelle superiori di alcune volte alla fre1
rs
, si avrà che le cadute
quenza di taglio della serie R-L, ossia ωi = ΣL
τRL
resistive possono essere trascurate, così come le tensioni indotte dalla rotazione del usso del magnete permanente (nell'ipotesi che
ωi ωr ).
Il modello
esposto in 1.19 diventa quindi
v idq =
s ωr
−ωr s
λidq
(1.23)
dove i due ussi (1.21), che sono qui solamente dovuti alle correnti, vengono
riportati anche nel riferimento di statore:
λidq = T αβ→dq (θr ) λiαβ
(1.24)
λiαβ = Lαβ (θr ) iiαβ
(1.25)
L'espressione delle tensioni nel riferimento di statore a partire da (1.15) è
dunque ancora più semplice:
v iαβ =
s 0
0 s
λiαβ =
s 0
0 s
Lαβ (θr ) iiαβ
(1.26)
Per ciò che riguarda l'interazione con il sottosistema meccanico, gli eetti
dovuti alla iniezione di segnali a dinamica molto veloce vengono trascurati.
Ciò è lecito se si pensa che, per costanti di tempo meccaniche molto più
grandi di quelle elettriche (come è per la quasi totalità delle applicazioni),
frequenze considerate sopra il taglio per le equazioni elettriche di fase lo
saranno a maggior ragione per il comportamento meccanico. In sostanza, si
considerano nulle la velocità e lo spostamento impressi da segnali elettrici ad
alta frequenza.
1.3 Modello complessivo elettro-meccanico
Per poter modellare correttamente il sistema dinamico costituito dal motore
è indispensabile tenere conto di entrambe le porte che esso presenta rispetto
all'esterno: l'una costituita dai capi delle tre fasi di statore, l'altra dall'albero
motore, che non sono slegate, visto che la macchina viene impiegata proprio
per il trasferimento di potenza da una porta all'altra. Il legame viene realizzato dall'espressione della coppia elettromagnetica e dalla presenza, nelle
equazioni (1.19),(1.15), di
θr , ωr .
Finora queste due grandezze meccaniche
sono state considerate come parametri, mentre sono invece variabili di stato
del sistema meccanico. In quanto variabili di stato, quindi, esse non vengono
imposte ma sono il risultato dell'evoluzione nel tempo.
1.3.
MODELLO COMPLESSIVO ELETTRO-MECCANICO
11
Se si considerano dunque anche le equazioni del sottosistema meccanico,
dovranno essere rispettate anche le seguenti
ωr = s θr
Te − TL = s J
(1.27)
ωr
p
che tengono conto della coppia elettromagnetica
(1.28)
Te
prodotta dall'interazione
dei ussi e delle correnti. In un riferimento con assi ortogonali la coppia sarà
proporzionale al prodotto vettoriale tra i vettori di usso e corrente, quindi
nel riferimento sincrono
dq
si ha
3
3
Te = p (λd iq + λq id ) = p (ΛP M iq + ∆L id iq )
2
2
(1.29)
Le equazioni (1.27)-(1.29) descrivono il modo in cui avviene la conversione elettromeccanica di energia. Infatti, è facile vedere come l'immissione di
potenza attraverso la porta elettrica del sistema si traduca in una coppia e
quindi in un'accelerazione applicata al lato meccanico, determinandone una
variazione dell'energia cinetica. Come si può dedurre dalle espressioni, inoltre, il trasferimento non avviene con rendimento unitario, essendo presenti
varie fonti di perdita, sia meccaniche (attriti), sia elettro-magnetiche (cadute
resistive sugli avvolgimenti di statore, correnti parassite di rotore, isteresi
magnetica, ussi dispersi). Alcune di esse sono state modellate con il termini
di perdita ohmica
carico
TL ),
rs ix
e di attrito meccanico (incorporate nella coppia di
mentre altri tipi di perdite, il cui comportamento è molto più
complesso, vengono qui trascurate in virtù del fatto che presentano, nella
maggior parte delle condizioni di funzionamento, minore entità rispetto a
quelle appena menzionate. Tra gli obiettivi di un dispositivo di controllo è
spesso inclusa la massimizzazione del rendimento, che consiste per la maggior
parte nella riduzione dell'ampiezza delle correnti necessarie.
12
CAPITOLO 1.
MODELLO DEL MOTORE
Capitolo 2
Controllo vettoriale per IPMSM
Si consideri un azionamento elettrico con controllo di velocità. Nella maggior
parte dei casi è presente un anello di retroazione più esterno, quello appunto di velocità, che fornisce un comando di coppia (o una grandezza ad essa
legata) ad un sottosistema che ne permette la generazione, seguendo più o
meno fedelmente il riferimento. Come avviene per la maggior parte dei controlli in cascata, anche in questo caso la banda passante più larga è richiesta
al sottosistema più interno. In questo modo, il controllo più veloce (legato
strettamente alle variazioni del sistema elettrico) può essere visto da quello
a dinamica più lenta in prima approssimazione come un amplicatore ideale. Sia per i motori sincroni che per quelli in corrente continua la coppia è
legata principalmente alle correnti, mentre le tensioni, a regime, sono per lo
più legate alla velocità. Questo fa sì che il riferimento di coppia sia in realtà
tradotto in valori di corrente comandati, adati ad una regolazione la cui
uscita genererà a sua volta i valori di tensione da applicare alle fasi. La presenza di due anelli disgiunti permette inoltre di seguire particolari traiettorie
di corrente nonché di limitare i valori imposti.
2.1 Struttura del sistema di controllo
Un azionamento con controllo di velocità viene costruito con un anello esterno, che impone a quello più interno un riferimento di coppia da applicare
al motore.
Questo obiettivo viene raggiunto grazie al cosiddetto controllo
di coppia, che spesso si traduce in realtà in un controllo delle correnti nel
riferimento sincrono
dq ,
non essendo disponibile, nella maggior parte degli
azionamenti, una misura di coppia.
Adandosi quindi alla conoscenza a
priori dei parametri del motore, si deduce la corrispondenza tra le correnti
impresse e la coppia risultante, pertanto è possibile generare dei valori di
13
14
CAPITOLO 2.
CONTROLLO VETTORIALE PER IPMSM
corrente necessari alla generazione di una data coppia. L'eventuale dierenza tra la coppia comandata e quella erogata (dovuta ad imprecisione nella
conscenza delle variabili in gioco) viene compensata dal controllo esterno di
velocità con la generazione di un riferimento adeguato. La costruzione di uno
schema robusto risulta essere semplice in quanto, in una regione abbastanza
ampia, il valore della coppia in funzione del modulo della corrente ha andamento crescente. Il controllo più critico in termini di velocità di risposta ed
accuratezza è quello di corrente (in Fig. 2.2 è riportata un esempio semplice
per una generica corrente), che va ad applicare sicamente alle fasi del motore i riferimenti di corrente imposti tramite la generazione di opportuni valori
di tensione. Questi sono poi tradotti in tempi di commutazione per i rami
dell'inverter (tramite modulazione dei vettori di spazio, Space Vector - Pulse
Width Modulation, SV-PWM ), il quale non possiede di norma un anello di
retroazione della tensione, ma può essere corredato di compensazioni in anello aperto per ciò che riguarda la tensione di alimentazione o i tempi morti
[1].
Il più diuso approccio al controllo di coppia per motori sincroni è certamente il controllo vettoriale, secondo cui si opera nel dominio della trasformazione di Park, ossia nel riferimento sincrono, che non è proprio solo
dei motori sincroni, ma per questo genere di macchine viene considerato lo
standard. Una classe diversa è ad esempio il Direct Torque Control, in cui un
algoritmo, considerata la coppia comandata ed il usso totale stimato, genera direttamente il riferimento per l'inverter di tensione, in considerazione del
fatto che la coppia è proporzionale al prodotto vettoriale di usso e corrente,
π
tra i due vettori per massimizzare
che porta a imporre uno sfasamento di
2
il rapporto tra coppia e corrente o tensione.
2.2 Controllo vettoriale
Tramite la trasposizione delle grandezze del controllo nel riferimento sincrono
si ottengono numerosi vantaggi in termini di prestazioni e semplicità dello
schema, con la necessità però di conoscere con elevata precisione la posizione del rotore.
L'espressione della coppia elettromagnetica generata dal
motore (1.29) rende chiaro il motivo che spinge all'adozione di un approccio
al controllo che parta dal riferimento sincrono con lo statore
dq :
non vi è
alcuna dipendenza dalla posizione (come non ve ne si trova nell'equazione
del modello elettrico (1.19)). Ciò signica che il controllo di coppia e quello di corrente, per valori costanti del riferimento ed in situazione di regime
di velocità non dovranno trattare segnali sinusoidali aventi pulsazione pari
alla velocità elettrica di rotazione, come invece accadrebbe nel riferimento
2.2.
15
CONTROLLO VETTORIALE
Figura 2.1: Controllo di velocità classico.
Figura 2.2: Controllo di corrente generico nella forma più semplice.
di statore. Diventa quindi possibile ottenere una elevata accuratezza nella
produzione di coppia, in quanto le correnti hanno eetto sulla coppia in base
sia alla loro ampiezza, sia alla loro direzione rispetto al usso. Nel caso in
cui il usso sia quello proveniente dal magnete permanente, il controllo di
un motore sincrono si avvicina a quello di un motore in corrente continua,
del quale è nota la semplicità. In realtà, questa vicinanza è eettivamente
vericata per motori privi di salienza magnetica (∆L
= 0
nell'espressione
della coppia), per i quali il controllo di coppia prevede (per velocità no al
valore base) la sola generazione di un riferimento per la corrente in quadratura, mentre la corrente sull'asse diretto viene controllata a valore nullo.
La presenza di salienza magnetica permette di ottimizzare la generazione di
coppia in rapporto alle tensioni e alle correnti impresse alle fasi del motore,
introducendo in sostanza un grado di libertà nella scelta del vettore di corrente da applicare per ottenere una certa coppia. Oltre all'incremento della
densità di potenza, la presenza di salienza tipica dei motori IPM permette di
estendere il range di velocità. In generale, un controllo di velocità vettoriale
viene schematizzato come in Fig.
2.3, dove il riferimento di coppia prove-
16
CAPITOLO 2.
CONTROLLO VETTORIALE PER IPMSM
niente dalla regolazione esterna viene tradotto in due riferimenti di corrente
in
dq ,
che sono poi attuati da due diversi anelli di feed-back della corrente.
Il sensore di posizione viene impiegato per ricavare anche la velocità, ed entrambe le grandezze sono normalmente necessarie alla regolazione di corrente
con disaccoppiamento degli assi.
In uno schema sensorless, ossia in assen-
za di trasduttori di posizione, queste informazioni sono ricavate tramite una
stima, ad esempio basandosi sulla misura di corrente (Fig. 2.4).
Figura 2.3: Schema generico di controllo vettoriale con sensore di posizione.
Figura 2.4: Controllo vettoriale sensorless.
2.3 Ottimizzazione della strategia di controllo
Nell'ottimizzazione delle traiettorie di corrente sul piano
dq
per una data
coppia e velocità si distinguono due principali criteri di ottimizzazione: uno
2.3.
OTTIMIZZAZIONE DELLA STRATEGIA DI CONTROLLO
17
basato sulla massimizzazione del rapporto tra coppia prodotta e modulo della
corrente impressa (Maximum Torque per Ampere, MTPA), l'altro che mira
a rendere massimo il rapporto tra coppia e modulo di tensione (Maximum
Torque per Voltage, MTPV ). Spesso sono attuate strategie di controllo miste, per poter soddisfare i limiti imposti o per poter ottenere più sosticate
ottimizzazioni [14].
Per ciò che riguarda le perdite di potenza, la maggio-
re causa è costituita da perdite ohmiche sugli avvolgimenti, proporzionali al
quadrato della corrente, pertanto se ne privilegia solitamente la riduzione, a
patto di poter rispettare, contemporaneamente, i limiti di tensione.
Le strategie di controllo del motore sincrono a magneti permanenti anisotropo più diuse sono le seguenti:
controllo ad
id = 0
(come per il motore isotropo), che è una tecni-
ca semplice, che permette di linearizzare il legame coppia-corrente ma
non sfrutta la coppia dovuta all'anisotropia e quindi non consente di
ottimizzare il rapporto coppia/corrente;
π
costante, scelto in modo da ottimizza2
re il funzionamento con la coppia di impiego prevalente, con il qua-
controllo ad angolo
>
le si ottiene un buon compromesso tra semplicità ed ottimizzazione
coppia/corrente;
controllo di coppia ottimo (massima coppia/corrente), che ha lo svantaggio di essere limitato in velocità;
controllo di coppia ottimo ed indebolimento di campo, nel caso sia necessario il funzionamento in limite di tensione (al di sopra della velocità
base).
Evidentemente, si tratta in ogni caso di strategie di controllo orientate sul
usso di rotore, che richiedono, in ogni istante di funzionamento, la conoscenza della posizione
θr
assunta dall'asse magnetico di rotore (asse
d)
rispetto
alla posizione statorica di riferimento (coincidente con l'asse magnetico della
fase
a).
La denizione delle caratteristiche di controllo di coppia ottimo e di indebolimento di campo è eettuata a partire dall'analisi delle curve caratteristiche di funzionamento (luoghi a tensione, coppia e corrente costanti) nel piano
delle correnti
dq .
Tali caratteristiche sono ottenute a partire dal modello di
Park della macchina scritto in regime stazionario sinusoidale, nel quale per
comodità si trascura, nelle equazioni di equilibrio delle tensioni, la caduta
di tensione resistiva rispetto gli altri termini (caduta reattiva e forza controelettromotrice dovuta al magnete). In Fig. 2.5 sono mostrate la regione di
18
CAPITOLO 2.
CONTROLLO VETTORIALE PER IPMSM
funzionamento e le curve signicative per un controllo ottimo con indebolimento di campo. La traiettoria MTPA viene seguita nchè ciò è consentito
dal limite di tensione comandabile dall'inverter. La limitazione di tensione
corrisponde ad un limite di velocità dipendente dalla coppia richiesta, oltre
il quale la traiettoria consentita avente minima corrente è la MTPV [2].
Figura 2.5: Regione di funzionamento in controllo ottimo con indebolimento di
campo.
2.3.1
MTPA
Esprimendo la coppia (1.29) in funzione del modulo e dell'angolo del vettore
di corrente, si ha:
con
1
Te = p ΛP M idq sin + ∆L idq sin 2
2
= arctan iidq = arg idq . E' possibile quindi ricavare
(2.1)
il rapporto
coppia/corrente
Te
1
r = = p ΛP M sin + ∆L sin 2
2
idq
(2.2)
Imponendo la massimizzazione del rapporto (2.2) si ha
dr
= p (ΛP M cos − 2∆L cos 2) = 0
d
(2.3)
2.4.
19
GRANDEZZE BASE
che porge
Sostituendo quindi le due
idq = ΛP M cos 2∆L cos 2
correnti id = idq cos , iq = idq sin ,
(2.4)
si ottiene la
relazione che intercorre tra le due componenti
ΛP M
id =
4∆L
r
Λ2P M
+ i2q
16∆L
(2.5)
Questa traiettoria corrisponde, per una data coppia, al luogo dei punti del
piano
dq
giacenti nel punto di tangenza tra un cerchio a corrente costante e
l'iperbole a coppia costante. Il controllo MTPA può venire realizzato tramite
vari metodi, con o senza l'uso di tabelle calcolate o-line. Naturalmente il
controllo è lo stesso per valori di coppia positiva o negativa, nel caso della
consultazione di tabelle, queste sono compilate in funzione del modulo della coppia, eettuando poi l'inversione della corrente
iq
per ottenere coppie
negative.
2.3.2
MTPV
Si consideri il vettore di tensione v dq , il cui modulo, per una situazione di
regime in cui il termine resistivo sia trascurabile, sia pari a
q
v dq = ωr λdq = ωr λ2 + λ2q
(2.6)
d
La minimizzazione del usso corrisponderà, ad una data velocità, con la minimizzazione della tensione indotta. Imponendo la minimizzazione del modulo
del usso si ottiene la traiettoria a massimo rapporto coppia/corrente:
(Ld − Lq)
ΛP M + Ld Id
Lq
−
i2q
+ ΛP M
ΛP M + L d i d
Lq
=0
(2.7)
2.4 Grandezze base
Per il controllo risulta spesso utile riferire il modello a grandezze scalate. Si
deniscono quindi dei valori base, e variabili scalate secondo questi valori
sono espresse in per unità o [p.u.], che diventa in pratica l'unità di misura
all'interno del controllo.
La ragione risiede nella necessità di rappesentare
la variabili all'interno di un sistema di controllo, rimanendo entro i range
consentiti dalla particolare implentazione, sia per ciò che riguarda il sistema
sico, sia per ciò che riguarda la rappresentazione numerica in un calcolatore.
20
CAPITOLO 2.
CONTROLLO VETTORIALE PER IPMSM
I valori base possono essere scelti con vari criteri, nella simulazione e nell'implementazione verranno scelti i valori nominali (sistema base Control ) se si
eccettua la posizione, per la quale l'unità corrisponde per comodità all'angolo
giro. I valori base primari scelti sono
dove
VDC
1
Vbase = √ VDC (1 − 2t0min )
3
(2.8)
Ibase = In
(2.9)
Ωbase = 2πfn
(2.10)
Θbase = 2π
(2.11)
è la tensione di alimentazione dell'inverter, e
t0min
il tempo mi-
nimo di applicazione del vettore nullo nella modulazione PWM simmetrica
adottata (Adjacent Vector SV -PWM ). Da questi si possono ricavare i valori
base delle altre grandezze
Vbase
Ωbase
Λbase
Lbase =
Ibase
3p Vbase Ibase
Tbase =
2 Ωbase
Vbase
Zbase =
Ibase
Λbase =
(2.12)
(2.13)
(2.14)
(2.15)
Capitolo 3
Metodi di self-sensing per
IPMSM
In questo capitolo saranno illustrate le principali tecniche adottate nel campo
del controllo di motori sincroni per la stima delle grandezze angolari senza
l'uso di trasduttori meccanici. L'attenzione sarà focalizzata sui metodi, come quelli adottati nel presente lavoro, che basandosi sulla salienza magnetica
consentono di mantenere il funzionamento della stima anche a velocità nulla.
In questa classe di stimatori è prevista la sovraimposizione di appositi segnali atti ad ottenere informazioni sulla posizione di rotore, distinti da quelli,
detti fondamentali, che invece sono coinvolti nella produzione di coppia per
il controllo di velocità o di posizione.
Le numerose realizzazioni sensorless
che, invece, si fondano sull'osservazione di variabili di stato tramite la misura
ed elaborazione delle correnti e tensioni fondamentali saranno solamente descritte brevemente al ne di esporre i motivi che le rendono insucienti per
alcune applicazioni, determinando quindi la necessità di tecniche ad iniezione
di segnale. Inne, tenendo conto del fatto che i metodi di stima basati sulla
salienza non permettono, nella loro formulazione generale, la determinazione della polarità, vengono accennate alcune tecniche normalmente impegate
per la risoluzione del problema, e viene proposta una semplice procedura di
inizializzazione adatta allo scopo.
3.1 Osservazione di usso
Dal modello elettrico del motore in (1.15) si evince che, a patto di conoscere
in ogni istante i valori di correnti e tensioni, oltre che dei parametri supposti
costanti, è possibile ottenere il vettore di usso attraverso l'integrazione delle
21
22
CAPITOLO 3.
METODI DI SELF-SENSING PER IPMSM
tensioni indotte:
λαβ
1
=
uαβ − rs iαβ =
s
ˆ
uαβ − rs iαβ dt
(3.1)
Grazie all'inversione di (1.17) che porge
λP Mαβ = λαβ − Lαβ iαβ = ΛP M
cos (θr )
sin (θr )
(3.2)
Deve essere ricordato, inoltre, che la tensione non viene normalemente misurata in uscitaè poi possibile ricavare la posizione di rotore, che sarà banalmente
θ̂r = arctan
λP Mβ
λP Mα
(3.3)
Questo approccio viene detto open-loop, in quanto la stima ottenuta non
viene in nessun modo corretta basandosi sulle misure. Un'implementazione
di questo algoritmo sore di grossi problemi, tra cui l'eventuale presenza di
errori di misura, di imprecisione nel calcolo numerico o nella conoscenza dei
parametri, che risultano in un errore che viene accumulato nell'integrazione,
portando la stima a divergere. Per questi motivi, la tecnica di integrazione
ad anello aperto è scarsamente utilizzata, anche se esistono metodi piuttosto
?
complessi per migliorarne l'adabilità [ ].
La soluzione più comunemente adottata consiste nella costruzione di un
osservatore, ossia di uno schema di stima in anello chiuso (closed-loop ), che
come noto è caratterizzata da maggiore robustezza. Immaginando un algoritmo a tempo discreto, ad ogni passo le stime di posizione e velocità vengono
immesse in un modello che, riproducendo il sistema elettrico, ricava valori
attesi delle stesse grandezze che vengono misurate. Il confronto di queste ultime variabili con i valori misurati viene utilizzato per correggere la stima al
passo successivo. I metodi basati su osservatore, anche in varianti più o meno
complesse [3],[4], sono molto diusi e trovano impiego anche nel controllo di
motori asincroni, nei quali la conoscenza della posizione non dà automaticamente la conoscenza della direzione del usso di rotore. Il problema maggiore
associato a queste tecniche fa capo al principio di funzionamento, che si basa
sulla misura della tensione indotta dalla rotazione del magnete permanenente.
A velocità nulla o molto bassa essa ha modulo nullo o molto piccolo,
rendendo impossibile o almeno dicoltosa la stima. Inoltre, è richiesta una
buona conoscenza dei parametri elettrici del motore, tra i quali i più critici sono generalmente la resistenza di fase, che ha forte variabilità con la
temperatura, e le induttanze, se il funzionamento avviene in condizioni di
saturazione magnetica.
3.2.
METODI BASATI SULLA SALIENZA MAGNETICA
23
3.2 Metodi basati sulla salienza magnetica
I fattori che determinano il malfunzionamento delle tecniche basate sull'osservazione di usso (3.1) sono i motivi che spingono a ricorrere a tecniche
alternative, basate sul legame che intercorre tra l'angolo di rotore e l'induttanza avvertita dagli avvolgimenti di statore. I metodi di stima che ricorrono
all'imposizione di appositi segnali elettrici (iniezione di segnale ) sfruttano generalmente le caratteristiche di salienza magnetica spaziale. Per salienza si
intende una distribuzione dell'induttanza vista dagli avvolgimenti di statore
non uniforme (variabile) rispetto al variare dell'angolo tra la direzione del
usso e quella del rotore. Nel modello del motore nel riferimento sincrono
(1.15) ciò si traduce in una matrice delle induttanze che sarà espressa in
funzione dell'angolo di rotore come in (1.17). Mentre in alcuni tipi di motori questa condizione può venire provocata dalla saturazione del materiale
ferromagnetico in presenza di forte campo (motori a magneti permanenti
superciali, motori ad induzione), per altri (motori a riluttanza, motori a
magneti sepolti), al ne di ottenere vantaggi nella conversione di potenza, la
salienza è volutamente introdotta grazie ad una oppportuna progettazione
della sezione del rotore. Quest'ultimo caso è di particolare interesse per ciò
che riguarda le tecniche sensorless, in quanto la geometria viene progettata
per avere una distribuzione nota (nella maggior parte dei casi sinusoidale)
con marcata dierenza tra una direzione e la sua ortogonale.
Figura 3.1: Principio di funzionamento delle stime fondate su fenomeni di salienza
magnetica.
La presenza di salienza di rotore permette di utilizzare il motore stesso
24
CAPITOLO 3.
METODI DI SELF-SENSING PER IPMSM
come sensore (self-sensing ), impiegando tecniche analoghe a quelle che vengono utilizzate nella misura di posizione tramite i classici sensori magnetici
rotanti (resolver). In particolare, facendo riferimento alla Fig. 3.1, imponendo alle fasi di statore un segnale elettrico noto, ne viene misurato l'eetto,
che contiene informazioni relative alla posizione del rotore. Si tenga però presente che, a dierenza dell'uso di sensori dedicati alla sola misura, nel motore
i segnali utili alla stima sono sovrapposti a quelli necessari alla produzione di
coppia, rendendone dicile la separazione anche a causa di eventuali eetti
non lineari.
Un'altra grossa dierenza risiede nella diversa precisione pos-
sibile nella costruzione di un sensore e di una macchina, che nella seconda
porta spesso ad avere una salienza non ben determinata.
Per poter ridurre la dipendenza dai parametri e l'entità dell'errore, e per
garantire la convergenza anche in caso di errore iniziale non nullo, è necessario utilizzare l'informazione ottenuta (processando le grandezze misurate
assieme a quelle attese) per correggere la stima corrente.
Questo viene in
genere realizzato con un osservatore del sistema meccanico ad anello chiuso,
del tipo di Luenberger. Il confronto, al ne di ottenere un segnale per la correzione della stima, non può avvenire certamente su un segnale di posizione
vero e proprio, che non è disponibile, ma piuttosto su grandezze ad essa correlate. In questo tipo di schemi la misura eettuata è quella di corrente, che
è comunque presente in ogni azionamento, essendo necessaria al controllo.
Fissato il usso, il vettore di corrente è direttamente legato all'induttanza, la
cui matrice contiene una rotazione funzione dell'angolo di rotore. Pertanto,
confrontando la corrente attesa (considerando il usso iniettato e la posizione
ipotizzata), con il vettore misurato, si ottiene un segnale relativo allo sfasamento tra la posizione stimata e quella reale. Il confronto è ottenuto grazie
al prodotto vettoriale, che rispetto alla dierenza è maggiormente robusto
a fronte di imprecisioni nei guadagni, e permette quindi di ignorare, nella
generazione del vettore di corrente attesa, l'ampiezza.
Esistono principalmente due diverse versioni dell'osservatore del sistema
meccanico, una più completa (ma maggiormente dipendente dalla corretta
conoscenza dei parametri sici) ed una semplicata. La prima, in Fig. 3.2,
prevede la riproduzione della reale congurazione del sistema, in cui la sola
coppia di carico
Te
TL
viene stimata dal regolatore. La coppia elettromagnetica
viene immessa come feed-forward, per ottenenere un anticipo nell'insegui-
mento della velocità [5], e solitamente viene impiegato il valore comandato
al controllo di coppia (che sarà certamente in anticipo sulla reale coppia).
Ipotizzando di conoscere con precisione le grandezze meccaniche, l'osservatore necessiterà del segnale di errore solamente per una correzione blanda.
Questo schema è poco utilizzato, a causa della sua sensibilità ai parametri
meccanici, che nelle applicazioni industriali spesso non si conoscono o addi-
3.2.
METODI BASATI SULLA SALIENZA MAGNETICA
25
rittura variano fortemente durante il funzionamento. Si preferisce in questi
casi adottare lo schema semplicato di Fig. 3.3, in cui è riprodotta solamente
una equazione del modello meccanico, che lega posizione e velocità (1.27). Si
tiene conto quindi solamente dell'errore di stima al ne della sua correzione,
non considerando in alcun modo gli input dati al carico meccanico (coppia
generata).
Tramite un regolatore con dinamica rapida si ottiene prima la
velocità e quindi, per integrazione, la posizione angolare. Il funzionamento
è buono se l'anello di retroazione della stima ha elevata banda passante, di
modo che ogni accelerazione possa venire inseguita con minimo ritardo. Il
segnale di velocità così ottenuto è piuttosto rumoroso, non essendoci un loop
di retroazione per la velocità, ma solamente per la posizione. Per questo è
spesso necessario un ltro passa-basso, che però riduce la banda passante per
il controllo di velocità.
Questo genere di tecniche sono state esplorate a partire dagli ultimi anni
'80, e ricevono recentemente nuovo interesse per la disponibilità di convertitori (inverter) ad elevata velocità e di controllori digitali potenti dal costo
contenuto. Questi due elementi danno la possibilità di operare con buon rendimento implementando complessi algoritmi di controllo anche con frequenze
di aggiornamento dell'ordine delle decine di kHz per potenze di alcuni kW,
includendo la generazione di segnali ad alta frequenza.
Le tecniche di stima con iniezione di segnale di cui si ha conoscenza possono essere suddivise in due gruppi secondo il tipo di eccitazione: alcune sono
basate sulla misura della pendenza con cui varia la corrente in seguito ad
un particolare pattern di commutazione dell'inverter (transient excitation ),
mentre nelle più diuse (high-frequency injection ) si impongono con continuità tensioni o correnti sinusoidali (considerate in un sistema di riferimento
vettoriale). Il tratto comune consiste nel fatto che l'obiettivo è l'inseguimento della salienza di rotore. Le stime con eccitazione in transitorio presentano
problemi di funzionamento a velocità anche relativamente basse, e richiedono
spesso l'introduzione di hardware aggiuntivo (rispetto ad un azionamento con
sensore standard) o più costoso, mentre le tecniche ad alta frequenza risultano più semplici, sia nel principio di funzionamento che nella realizzazione,
ed in genere consentono di stimare anche a velocità alte, con l'inconveniente di dover riservare parte della tensione disponibile all'iniezione di segnale,
sottraendola a quella destinata al controllo.
26
CAPITOLO 3.
METODI DI SELF-SENSING PER IPMSM
Figura 3.2: Osservatore meccanico completo (con feed-forward della coppia
comandata o stimata e regolatore con componente derivativa).
Figura 3.3: Osservatore meccanico semplicato (solo correzione con l'errore).
3.2.1
Metodi transient excitation
I metodi di iniezione in alta frequenza con portante sinusoidale si adano ad
una separazione in frequenza per la distinzione tra le correnti fondamentali
(bassa frequenza) e quelle relative alla stima. I metodi cosiddetti transient
excitation (la cui versione più nota è costituita dal metodo INFORM, INdirect Flux detection by On-line Reactance Measurement ), invece, impiegano
una divisione di tempo [6],[7].
Considerando infatti la sequenza di modu-
lazione PWM fondamentale, ossia quella necessaria al controllo di corrente e dunque alla produzione di coppia, durante l'applicazione del vettore
nullo vengono generati opportuni segnali ad onda quadra di tensione, con
media nulla. Ciò si traduce in variazioni della corrente attorno al valore fondamentale imposto dal controllo di corrente, senza signicative oscillazioni
meccaniche.
In sostanza, durante periodi dedicati, alle fasi di statore vengono imposte
3.2.
METODI BASATI SULLA SALIENZA MAGNETICA
27
delle commutazioni di tensione a gradino, con l'obiettivo di misurare dell'induttanza attraverso la variazione di corrente in un tempo ssato. Essendo
l'inverter il dispositivo coinvolto sicamente nella generazione dei segnali,
è evidente che sarà semplice l'imposizione di transizioni nette nella tensione di uscita, che risentiranno in minor misura degli eetti di non idealità
(principalmente i tempi morti).
Figura 3.4: Pattern PWM per la transient excitation e relative correnti di fase, con
evidenza dell'eetto dei tempi morti.
Guardando nel dettaglio le forme d'onda coinvolte nella misura dell'induttanza in Fig.
3.4, considerando piccola la componente resistiva, si ha
che la corrente nel transitorio presenta un andamento quasi rettilineo, la cui
pendenza (ssata la tensione pari a quella disponibile sul bus DC) è inversamente proporzionale al valore di induttanza visto dalla fase. Il valore di
induttanza ottenuto viene confrontato con la distribuzione che ci si apetterebbe se la stima fosse corretta.
L'osservatore di posizione e velocità può
essere quindi identico a quelli impiegati per gli altri metodi di iniezione, in
quanto si sfrutta lo stesso principio sico (la rotazione geometrica operata
dalla matrice delle induttanze) per ottenere un segnale di errore di posizione
28
CAPITOLO 3.
METODI DI SELF-SENSING PER IPMSM
contenente lo stesso tipo di informazione, anche se veicolata da una diversa
portante.
Questa classe di tecniche presenta due inconvenienti principali. Il primo
consiste nella necessità di sincronizzare con molta precisione il campionamento delle correnti per la conversione A/D, che obbliga spesso all'aggiunta
di hardware dedicato o all'impiego di componenti con precisione temporale
maggiore. Il secondo è l'aumento del numero di commutazioni dell'inverter
per ogni periodo del controllo (sei volte rispetto al controllo standard, se
si vuole aggiornare la stima ad ogni intervallo), che fa aumentare di molto
le perdite di conversione e rende più restrittive le speciche di dissipazione
sui dispositivi di potenza.
Entrambi gli elementi hanno pesanti ripercus-
sioni, soprattutto sul costo della realizzazione e sul rendimento dell'intero
azionamento. Per poter ridurre questi inconvenienti si ricorre a frequenze di
commutazione fondamentale più basse (che però vengono adottate per tutto
il controllo, rendendolo meno preciso) o si applica l'eccitazione a cadenze inferiori rispetto a quella principale, anche introducendo brevi istanti in cui il
controllo di corrente viene disattivato. Questi espedienti fanno sì che l'accuratezza nella stima si degradi, soprattutto ad alte velocità ed accelerazioni.
E' dunque necessario un trade-o tra la precisione della stima, quella del controllo, ed il costo dei componenti, che rende questa tecnica non promettente
per il raggiungimento di prestazioni elevate a costo contenuto.
3.2.2
Vettore rotante
La tecnica basata sull'iniezione di un vettore di campo rotante ad alta velocità
venne presentata per la prima volta dal Prof. R.D. Lorenz e dal suo gruppo
di ricerca alla University of Wisconsin (Madison) nei primi anni '90 [8]. La
variazione di usso necessaria per ottenere sulle fasi di statore un segnale
utile alla stima è realizzata facendo ruotare un vettore di tensione di modulo
costante a velocità angolare molto elevata rispetto alla pulsazione elettrica
raggiungibile dal rotore. In questo modo si hanno, nelle due fasi di statore
αβ
due componenti di usso sinusoidali ad alta frequenza, che risultano essere
in quadratura. Conoscendo la direzione nella quale il usso è stato generato,
ed individuando dalle misure la direzione del vettore di corrente risultante
si riesce a risalire al relativo sfasamento, che dà l'informazione sull'angolo
di rotore. Quindi, confrontando tale angolo con quello stimato si ottiene il
desiderato segnale di errore, secondo lo schema di Fig. 3.5.
3.2.
29
METODI BASATI SULLA SALIENZA MAGNETICA
Figura 3.5: Schema dell'anello di retroazione per la stima con iniezione di usso
rotante.
Spesso ci si riferisce a questa tecnica come saliency image tracking in
quanto si elaborano entrambe le componenti di corrente per calcolare il prodotto vettoriale, in modo simile a quello in cui si individua la correlazione
tra immagini. Tracciando sul piano
α, β
le tracce delle tensioni iniettate e
delle relative correnti, si può vedere che le tensioni formano un cerchio, mentre le correnti un'ellisse, il cui asse maggiore è allineato con la direzione ad
induttanza minore (asse
d
del rotore).
Il usso che viene imposto nel riferimento si statore ha la forma
λiαβ
Vi
=
ωi
cos (ωi t)
sin (ωi t)
(3.4)
e può essere visto come la rotazione di un vettore di ampiezza costante alla
velocità angolare
ωi ,
ad esempio come:
λiαβ = T dq→αβ (ωi t)
Vi
ωi
0
(3.5)
La corrente dovuta a tale usso può essere ottenuta dall'inversione della
matrice delle induttanze in (1.25):
iiαβ =
L−1
αβ
λiαβ
Vi
= 2
L − ∆L2
cos (ωi t)
cos (2θr − ωi t)
ΣL
+ ∆L
sin (ωi t)
− sin (2θr − ωi t)
(3.6)
Il segnale contiene due componenti ad alta frequenza, una di ampiezza costante rotante nello stesso senso del usso iniettato, l'altra, di ampiezza minore,
che si muove nell'altro senso con fase legata alla posizione del rotore.
Le
correnti misurate, ltrate passa-banda per eliminare le componenti fondamentali estranee alla stima, vengono elaborate calcolando la trasformazione
30
CAPITOLO 3.
inversa
T αβ→dq 2θ̂r − ωi t +
π
2
METODI DI SELF-SENSING PER IPMSM
, che porta il riferimento ad essere sincrono
con la corrente attesa
T αβ→dq 2θ̂r − ωi t +
π
2
iiαβ
sin
2ω
t
−
2
θ̂
−
π
i
r
Vi L
=
2
L − ∆L2 cos 2ωi t − 2θ̂r − π
h i
Vi ∆L sin h2 θr − θ̂r i
+ 2
(3.7)
L − ∆L2 cos 2 θr − θ̂r
T αβ→dq 2θ̂r − ωi t +
π
2
iiαβ
sin 2ωi t − 2θ̂r − π
= Ii0
cos 2ωi t − 2θ̂r − π
h i
sin 2 θr − θ̂r
h i
+Ii1
cos 2 θr − θ̂r
(3.8)
La componente diretta ha contenuto
proporzionale al seno
h inbassa frequenza
i
di due volte l'errore di stima (sin
2 θr − θ̂r
), proprio delle tecniche di
stima basate sulla salienza magnetica, e viene quindi usata per correggere la
stima in un osservatore, come in Fig. 3.6.
Le tensioni necessarie per ottenere l'eccitazione con vettore rotante sono
calcolabili dall'espressione del usso che si vuole imporre (3.9), per semplice
derivazione:
v ∗iαβ
= s λiαβ = Vi
− sin (ωi t)
cos (ωi t)
(3.9)
e devono essere sommate ai riferimenti di tensione generati dai regolatori di
corrente, per essere attuate dall'inverter.
Uno dei problemi di questo metodo è la possibile presenza di un oset
di errore a regime anche a velocità nulla. Ciò si spiega con il fatto che, a
dierenza di quanto detto sopra, nelle implementazioni reali la conoscenza
esatta della direzione corrente del vettore di usso
λiαβ
non è disponibile
in quanto l'iniezione è aetta per lo meno da ritardi (dovuti all'inverter,
al campionamento e ai ltraggi).
Pertanto la posizione rilevata si riferisce
ad un angolo di iniezione inesatto, il cui errore viene trasferito, in assenza di
compensazione, alla stima di posizione. Inoltre, prove sperimentali eettuate
al ne del confronto tra varie tecniche [10] evidenziano su questo tipo di
iniezione di segnale la maggiore inuenza dei tempi morti, come problema
3.2.
METODI BASATI SULLA SALIENZA MAGNETICA
31
principale, assieme ad altre caratteristiche negative ma meno pesanti quali il
più elevato rumore acustico.
Figura 3.6: Schema di stima per iniezione di vettore rotante.
3.2.3
Vettore pulsante
Il metodo adottato è quello proposto in [9] da Corley e Lorenz, valido per tutti i motori che presentino salienza spaziale di rotore (come appunto il motore
a magneti sepolti). Esso prevede l'imposizione di un usso in direzione dell'asse
q̂
stimato, la cui intensità varia sinusoidalmente ad una frequenza nota
(al di sopra della banda trattata dal controllo di coppia) per poter estrarre
informazioni relative alla posizione di rotore. In particolare, come risultato
dell'iniezione, è possibile recuperare un segnale nel riferimento di rotore che,
per piccoli errori di stima dell'angolo di rotore, è in prima approssimazione
proporzionale ad esso. In questo modo, costruendo un anello di retroazione
come in Fig. 3.7, è possibile correggere la stima risultante da un osservatore,
ossia costruire un algoritmo che, impiegando un regolatore per processare
l'errore, tenda ad inseguire l'angolo (ed implicitamente la velocità angolare)
del motore.
32
CAPITOLO 3.
METODI DI SELF-SENSING PER IPMSM
Figura 3.7: Schema dell'anello di retroazione per la stima con iniezione di usso
pulsante in direzione dˆ.
Iniettando lungo la direzione
dˆ )
q̂
(in quadratura rispetto a quella stimata
un campo di intensità variabile sinusoidalmente nel tempo
con
Vi
λidˆ
λiq̂
Vi
=
sin (ωi t)
ωi
opportuno valore di tensione, e
ωi
0
1
(3.10)
sucientemente alta da rispettare
le ipotesi in 1.2.4, si ottiene, trasformando nel riferimento di statore,
λiα
λiβ
cos
θ̂r
Vi
sin (ωi t)
=
ωi
− sin θ̂r
(3.11)
Secondo il modello semplicato per l'alta frequenza (1.25), i ussi sono in
relazione con le correnti solamente tramite l'induttanza
Lαβ :
λiαβ = Lαβ iiαβ
(3.12)
Sostituendo il usso imposto in 3.10 ed invertendo l'ultima equazione si
ricavano le correnti di statore dovute all'iniezione in alta frequenza:
i iα
iiβ
∆L sin 2θr − θ̂r − ΣL sin θ̂r
Vi
=
sin
(ω
t)
i
ΣL2 − ∆L2
−∆L cos 2θr − θ̂r + ΣL cos θ̂r
(3.13)
3.2.
METODI BASATI SULLA SALIENZA MAGNETICA
33
Nel riferimento sincrono stimato (solidale con la direzione stimata), tali
correnti diventano
iidˆ
iiq̂
iidˆ
iiq̂
= T αβ→dq θ̂r iiαβ
h i
∆L
sin
2
θ
−
θ̂
r
r
Vi
h i
=
sin (ωi t)
2
ωi (ΣL − ∆L2 )
ΣL − ∆L cos 2 θr − θ̂r
(3.14)
che, denendo
Ii0 =
come
iidˆ
iiq̂
Vi
ΣL
e
ωi ΣL2 −∆L2
Ii1 =
(3.15)
Vi
∆L
possono essere espresse
ωi ΣL2 −∆L2
h i
Ii1 sin 2 θr − θ̂r
h i
= sin (ωi t)
Ii0 − Ii1 cos 2 θr − θ̂r
(3.16)
La componente diretta della corrente ad alta frequenza è modulata in ampiezza dal seno del doppio dell'errore di stima. Sapendo che il seno, per piccoli
valori dell'argomento, è approssimabile con quest'ultimo, si può aermare
iidˆ, opportunamente demodulata per eliminare la variazione
(sin (ωi t) ) può essere considerata un segnale di errore valido per
che la corrente
sinusoidale
un osservatore di stato (del tipo di Luenberger ) per posizione e velocità del
rotore.
Lo stimatore, nella sua forma classica più semplice, ha la struttura di Fig.
3.8, dove si riconosce l'osservatore vero e proprio (a destra) e l'elaborazione
delle correnti per l'ottenimento del segnale di errore. Le correnti, dopo un
ltraggio passa-banda per distinguerle dalle fondamentali, vengono demodulate tramite un mixer, con la tecnica detta heterodyning, trattata in 4.1.1.
Tale operazione risulta in un segnale in alta frequenza, che viene ltrato, e
in una componente proporzionale all'errore.
Figura 3.8: Schema di stima classico (demodulazione heterodyning) per iniezione
di vettore pulsante.
34
CAPITOLO 3.
METODI DI SELF-SENSING PER IPMSM
Riferendosi ancora alle equazioni semplicate, ed in particolare a (1.24),
si conoscono le espressioni delle tensioni indotte dai ussi deniti in (3.10):
Per ottenere il usso
vidˆ
viq̂
=
λidq̂
ˆ
s ω̂r
−ω̂r s
vidˆ
viq̂
=
s ω̂r
−ω̂r s
λdi
λqi
(3.17)
voluto, quindi, le tensioni necessarie saranno
Vi
sin (ωi t)
ωi
0
1
= Vi
− ω̂ωri sin (ωi t)
cos (ωi t)
(3.18)
Si adotteranno quindi le tensioni
vi∗dˆ
vi∗q̂
= Vi
− ω̂ωri sin (ωi t)
cos (ωi t)
che, una volta riportate nel riferimento
(3.19)
αβ , saranno imposte come riferimen-
to per l'inverter, sommate alle tensioni fondamentali.
Un eventuale errore
ω̂r non è molto rilevante se sono rispettate le ipotesi in 1.2.4,
ωi ωr , e quindi la componente dˆ della tensione iniettata, l'u-
sulla stima di
visto che
nica a dipendere dalla velocità, è molto piccola.
In sostanza, il problema
potrebbe sussistere solo nel caso di divergenza della stima (ω̂r
ωr ),
che
auspicabilmente non si verica nel normale funzionamento.
A causa del ritardo presente nella catena di iniezione-misura che costituisce la retroazione dell'errore di stima (dovuto principalmete all'implementazione digitale ed al ritardo con cui l'inverte attua le tensioni di riferimento),
come nel caso dell'iniezione di usso rotante si ha un errore statico, in questa tecnica si evidenzia un errore proporzionale alla velocità.
Tale errore
scaturisce dal fatto che, in sostanza, si va a confrontare l'angolo stimato
attualmente con quello iniettato in un istante precedente. Si supponga semplicemente, ragionando nel dominio del tempo continuo, che tra l'imposizione
di una direzione di iniezione e la misura del suo eetto si abbia un ritardo
τ.
Se il regolatore, come accade a regime di velocità, controlla a zero l'errore
tra la stima corrente e il feed-back, si ha che
θr − θ̂r (t − τ ) = θr − θ̂r − ωr τ = 0
(3.20)
risultando quindi in un anticipo pari a metà del prodotto del ritardo per la
velocità:
θr (t) − θ̂r (t) = −
ωr τ
2
(3.21)
É quindi possibile inserire una compensazione lineare, adottando il segnale di velocità stimata ed una taratura sperimentale per il ritardo.
Questa
compensazione deve naturalmente essere attuata al di fuori dell'anello di retroazione della stima, al solo ne di fornire un valore maggiormente preciso
per il controllo di corrente.