CAPITOLO
5
AMPLIFICATORI PER ALTA FREQUENZA
5.1 Progetto di amplificatori
In questa sezione verranno presi in esame amplificatori per piccoli segnali orientati ad
applicazioni a radiofrequenza e, in generale, a frequenze elevate. Si vuole sottolineare
come i metodi finora visti per realizzare un amplificatore non siano gli unici possibili e
come, invece, a seconda delle frequenze a cui si opera, il modo di progettare e i
requisiti richiesti per tali circuiti siano diversi. In un progetto per applicazioni a bassa
frequenza, infatti, si tende ad utilizzare gli operazionali, mentre per progetti ad alte
frequenze, quali ad esempio microonde e radiofrequenze, saranno necessari dispositivi
diversi, in grado di operare a tali frequenze.
In generale, quando si è parlato di amplificatori, si è stati abituati a considerare
amplificatori di tensione, poiché tali circuiti hanno un notevole significato quando si
trattano frequenze non eccessivamente elevate. In primo luogo, ad esempio, la
tensione risulta più facilmente misurabile rispetto alla corrente; la misura di corrente,
infatti, obbliga all’interruzione del circuito, mentre quella di tensione, essendo
effettuata in parallelo, non costringe ad interrompere il circuito sotto misura. Di più, il
notevole utilizzo di circuiti che operano su tensioni può essere ricondotto a motivi
storici, dal momento che i primi dispositivi elettronici, come i tubi a vuoto, erano
controllati in tensione. Gli amplificatori di tensione, infine, non creano problemi
quando vengono fatti operare a vuoto, cosa non altrettanto vera per amplificatori di
corrente che dovendo comportarsi come generatori di corrente, in presenza di circuito
aperto danno luogo a sovratensioni pericolose. Esiste, tuttavia, una metodologia di
progettazione, detta Current Mode, di tipo integrato che utilizza BJT e FET e che
sviluppa blocchi funzionali operanti in corrente. Tale metodologia può dare
interessanti vantaggi in termini di larghezza di banda e consumi.
Si consideri, ora, un amplificatore rappresentato, dal punto di vista circuitale, da un
insieme di stadi in cascata, ognuno dei quali è a sua volta un amplificatore; quando
possibile, tali amplificatori sono connessi tra loro attraverso delle capacità di
disaccoppiamento, in modo tale da rendere indipendente il punto di lavoro di uno
stadio dall’altro e, dunque, garantire una progettazione più solida. Ogni stadio è
costituito da un transistore e da resistenze, scelte in modo da ottenere il guadagno e i
livelli d’impedenza d’ingresso e d’uscita desiderati, compatibilmente con la
polarizzazione voluta e con la stabilità di quest’ultima in termini di variazione di
temperatura. Affinché lo stadio di amplificazione abbia buone prestazioni sarà
necessario che, oltre all’alto guadagno di tensione, vi sia un’elevata impedenza
d’ingresso, nonché una bassa impedenza d’uscita, al fine di avvicinare all’idealità
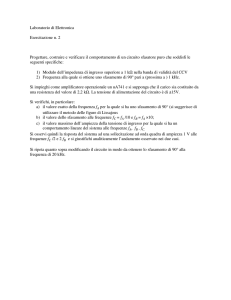
l’amplificatore stesso. Per meglio chiarire quanto detto, si consideri il circuito
rappresentato in figura 1:
200
Zout
Zs
+
-
Vs
Vin
Zin
AVVin
+
-
Vout
ZL
fig.1
La relazione che lega la tensione d’uscita a quella d’ingresso è data da:
V out =
Z
Z
out
+ Z
Z
A V V in =
L
Z
L
out
L
+ Z
AV
L
Z in
ZS + Z
VS
(1)
in
da cui si evince che il guadagno utile finale dipende fortemente, oltre che dal guadagno
di tensione, anche dall’impedenza d’ingresso, da quella di sorgente, da quella di carico
e dall’impedenza d’uscita. Tendendo all’idealità si ottiene:
per
per
Z
Z
out
in
Z
→ 0
Z
L
+ Z
out
Z in
ZS + Z
→ ∞
L
in
→ 1
→ 1
⇒
V out
= AV
VS
(2)
analizzando la (2), si può affermare che per un’impedenza d’ingresso infinita e per
un’impedenza d’uscita nulla è possibile realizzare un blocco di amplificazione che
fornisca un guadagno di tensione AV, indipendentemente dai valori delle impedenze Zs
e ZL. E’, dunque, auspicabile realizzare delle impedenze tali per cui siano:
Z
out
Z
in
<< Z
>> Z
L
(3)
S
per ben approssimare i concetti ideali di zero e infinito. Ogni qualvolta le (3) non sono
verificate, si avrà una perdita in termini di guadagno, oltre alla necessità di tenere
conto delle condizioni di sorgente e di carico in fase di progettazione. Se, invece, le (3)
sono verificate, nell’intera catena di amplificazione del segnale ciascuna cella è
progettabile singolarmente, senza problemi di connessione. Ciò era già stato visto
parlando di filtri attivi, in cui il blocco operazionale fungeva da blocco ideale,
consentendo un’agevole connessione tra le diverse celle del filtro stesso. Nel caso
dell’amplificatore di tensione si può, allora, parlare di “blocco operazionale”, che tende
a realizzare uno stadio ideale con alta impedenza d’ingresso, bassa impedenza d’uscita
e guadagno elevato, con possibilità di inserire una retroazione. Ciò rende le prestazioni
del circuito indipendenti dai componenti attivi e dipendenti, esclusivamente, dalle reti
di retroazione passive, rendendo stabile nel tempo il circuito stesso.
201
A questo punto è opportuno ricordare che quello che realmente interessa in ultima
analisi per un amplificatore è il guadagno di potenza. Il migliore amplificatore è quello
che estrae la massima potenza disponibile del generatore e cede la massima potenza
possibile al carico. Alla luce di questa osservazione è chiaro che il modo di progettare
usato alle basse frequenze comporta una perdita in termini di trasferimento di
potenza. Se si è in presenza, infatti, di impedenze molto diverse, come avviene nel caso
considerato, e manca la condizione di adattamento, si avrà un pessimo trasferimento
di potenza; ciò nonostante, alle basse frequenze questo inconveniente non è molto
rilevante, poiché, grazie ai componenti utilizzati, i guadagni di potenza ottenibili sono
esuberanti in relazione alle frequenze in gioco, anche se non sono ottimizzati. Se, poi,
si volesse aumentare il guadagno di potenza, basterebbe aggiungere qualche ulteriore
stadio alla catena e, quindi usare qualche transistor in più, il cui costo per basse
frequenze è poco consistente.
Le cose cambiano drasticamente alle alte frequenze, dove ottenere guadagni di
potenza elevati non è affatto facile, a causa dei limiti dei dispositivi stessi. Si
dovranno, allora, progettare gli amplificatori in modo da realizzare, tra uno stadio e
l’altro, delle condizioni di adattamento e rendere, così, migliore il trasferimento di
potenza. La condizione di adattamento, tuttavia, implica la necessità di avere reti
passive tra uno stadio e l’altro, prive di perdite e realizzate con capacità, induttori e
trasformatori in generale. Questi ultimi componenti, in particolare alle basse
frequenze, risultano scomodi perché ingombranti, non integrabili e costosi. Ecco
perché alle basse frequenze si preferisce inserire qualche stadio in più per ottenere il
guadagno di potenza desiderato, piuttosto di ricorrere all’adattamento.
Il modo di progettare, dunque, cambierà in funzione dei componenti di cui si dispone,
della tecnologia e del range di frequenze a cui si opera; inoltre, più la frequenza
aumenta e più risulta necessario l’utilizzo delle reti di adattamento. Stabilire un
confine tra bassa e alta frequenza risulta, tuttavia, complicato, in quanto tale
distinzione deve essere vista in funzione della potenza e dei livelli dei segnali in gioco.
Se, infatti, si considerano piccoli segnali, gli amplificatori presentano livelli di potenza
non molto elevati e, dunque, frequenze pari ad 1 ÷ 2GHz possono essere considerate
non eccessive e le metodologie di progetto finora studiate possono essere sufficienti a
realizzare buoni circuiti; se si hanno, invece, potenze pari a 100W ÷ 10KW, anche a
100MHz non si può parlare di bassa frequenza e sarà necessario parlare di
adattamento. L’alta frequenza, quindi, ha il suo limite inferiore in relazione alla
potenza e più quest’ultima si alza, più tale limite si abbassa.
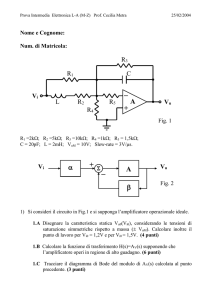
Parlando, ora, di adattamento, si vuole esaminare più in dettaglio la rete di
adattamento a trasformatore. Si consideri il circuito di figura 2:
Rs
Vs
I1
n1
V1
n2
I2
V2
fig. 2
202
RL
Il massimo trasferimento di potenza si avrà quando
R1 =
V1
= RS
I1
(4)
che è la condizione di adattamento, che viene realizzata dal trasformatore attraverso
le seguenti relazioni:
n2
V 2
V = n
1
1
I 2 = n1
I 1
n2
La resistenza che si vedrà al primario sarà:
R1
n
V
=ˆ 1 = 1
I1
n2
2
R L = R s
(5)
Dalla (5) si osserva che si ha a disposizione un grado di libertà, dato dal rapporto
spire, per garantire che la R1 sia uguale alla resistenza Rs. Si dovrà, allora, scegliere:
n1
n
2
2
=
Rs
RL
Se, inoltre, il dispositivo due porte inserito è passivo e reciproco, come solitamente è, si
può dimostrare che vale automaticamente:
R2 = −
V2
= RL
I2
Il modo di procedere che utilizza l’adattamento è sicuramente il migliore in assoluto,
ma l’utilizzo del trasformatore a bassa frequenza non è gradito. Di più, se si devono
adattare generiche impedenze, sarà necessario utilizzare, oltre al trasformatore, anche
capacità e induttanze, che consentono di realizzare le variazioni di fase desiderate.
Alle alte frequenze le reti di adattamento possono essere realizzate in tecnologia
integrata (tecnologia a microstriscia per le frequenze sufficientemente alte) che, grazie
ai particolari materiali usati, permettono di ottenere quanto richiesto con dimensioni
notevolmente ridotte. Un ultimo importante aspetto da sottolineare è che, a frequenze
elevate, viene impiegata più di rado la retroazione; tale metodologia viene, infatti,
utilizzata in presenza di guadagni elevati, al fine di ottenere una buona
desensibilizzazione del circuito. Nel caso di alte frequenze, invece, non avendo
guadagni sufficientemente alti, non solo non si ottengono i vantaggi sperati, ma si può
anche incorrere in problemi di instabilità, in seguito alla presenza di effetti reattivi
203
importanti e di difficile controllabilità. Ad alta frequenza, quindi, la retroazione dovrà
essere usata con molta cautela.
5.2 Modelli dei transistori e richiami sui parametri S
Nell’ambito degli amplificatori lineari, cioè per piccoli segnali, esistono due grosse
famiglie di modelli dei dispositivi che possono essere usati per il progetto: i modelli di
tipo black-box e i modelli di tipo circuito equivalente, quali Giacoletto-Johnson, Π
ibrido, ecc..
Quando si progettano amplificatori a larga banda risulta molto più comodo l’utilizzo
dei modelli di tipo circuito equivalente, in quanto i componenti risultano indipendenti
dalla frequenza e con metodi sufficientemente semplici (come, ad esempio, il metodo
delle costanti di tempo) è possibile calcolare le caratteristiche di banda
dell’amplificatore. Viceversa, i modelli di tipo black-box sono più scomodi in questo
ambito, in quanto non garantiscono una trattazione semplice, essendo basati su
matrici di numeri complessi che dipendono dalla frequenza.
I due modelli, inoltre, possono essere confrontati anche dal punto di vista della loro
caratterizzazione a partire da misure sul dispositivo reale. In tale ottica il modello
black-box è migliore rispetto al modello circuito equivalente, poiché necessita solo di
una misurazione esterna, senza bisogno della conoscenza della fisica del dispositivo.
Viene, infatti, polarizzato il circuito e, successivamente, per effettuare la misura
vengono connessi degli strumenti detti analizzatori di reti vettoriali (NVA =
Network Vector Analyser), che misurano i parametri richiesti, come impedenze ed
ammettenze, in funzione della frequenza. Ricavare, invece, un modello di tipo circuito
equivalente non è così semplice, in quanto l’identificazione degli elementi che lo
compongono non è immediata.
Oltre a misure esterne, infatti, sono solitamente necessarie delle procedure di
ottimizzazione (tool di ottimizzazione numerica) che facciano in modo che il modello
riproduca tali misure o, addirittura, misure in condizioni particolari, che consentano di
identificare direttamente alcuni parametri. Tutto ciò fa sì che questi due tipi di
modelli differiscano notevolmente l’uno dall’altro anche in termini di “costi” di
identificazione del modello stesso. Inoltre, alle alte frequenze, i modelli di tipo circuito
equivalente risultano molto più complessi rispetto a quelli per bassa frequenza a causa
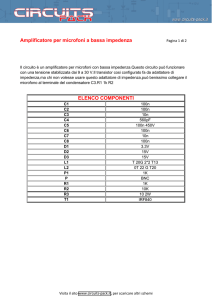
di numerosi effetti parassiti non più trascurabili. A titolo di esempio, si consideri il
circuito equivalente per piccoli segnali di un FET (MESFET) ad alta frequenza, la cui
complessità è ben visibile in figura 3:
204
CpDG
G
LG
RG
CpG
RD
D
CDG
Ri
v
LD
CD
gmve − jωt
CpD
CG
RS
LS
S
fig. 3
In questo genere di dispositivo l’elettrodo di controllo è realizzato con una giunzione di
tipo Schottky. Rispetto al MOS, invece di esserci un effetto di campo legato al
condensatore, c’è un campo legato alla giunzione Schottky metallo semiconduttore, che
serve come sempre a modulare la corrente nel canale. In questo tipo di dispositivi,
viste le elevate frequenze, non sono trascurabili effetti induttivi dovuti alle
metallizzazioni.
L’identificazione attraverso misure esterne, dunque, di un oggetto come quello
illustrato in figura 3 non è semplice e dal momento che si dovranno identificare i valori
di tutti i componenti che costituiscono il circuito, sarà necessario utilizzare dei tool
numerici. Risulta, allora, molto più semplice misurare il dispositivo e avere delle
caratteristiche ai morsetti esterni, cosa possibile con i modelli black-box o modelli a
matrice. I limiti di questi ultimi sono principalmente rappresentati dal difficile
impiego (se si usano carta e penna) nel progetto di circuiti a larga di banda; tuttavia,
dal momento che a frequenze elevate è molto comune il caso di amplificatori a banda
stretta, tali modelli trovano a RF e microonde un largo impiego.
Si osservi che la banda è un “concetto relativo”, perché se il canale trasmissivo
necessario è pari a 10MHz e lo si considera a partire dalla continua, la banda risulta
enorme; se, tuttavia, lo stesso canale lo si considera sempre di 10MHz, ma allocato
nell’intorno di 10GHz, la banda risulta stretta. Un amplificatore, dunque, a 10GHz con
banda di 10MHz rappresenta un progetto a banda stretta e questo vale tanto più
quanto più si sale con la frequenza.
Prima di introdurre un modello a matrice di tipo black-box basato sui parametri di
diffusione, si vogliono richiamare i parametri ibridi per un transistore bipolare,
realizzato con un modello di tipo circuito equivalente:
v BE = hie ⋅ i B + hre ⋅ v CE
i C = hfe ⋅ i B + hce ⋅ v CE
205
Tale descrizione viene definita ibrida in quanto si ha una tensione ad una porta e una
corrente all’altra porta; in tale modello, inoltre, all’aumentare della frequenza i
parametri risulteranno di tipo complesso, mentre a bassa frequenza saranno da
considerarsi reali.
Un’altra descrizione di un dispositivo può essere effettuata in termini di matrici
impedenza o ammettenza; con notazione vettoriale:
V = Z I
oppure
I = YV
dove Z ed Y sono rispettivamente la matrice impedenza e la matrice ammettenza.
Purtroppo, nessuna delle descrizioni sopracitate è adeguata alle alte frequenze, poiché
risulta difficile misurare impedenze e ammettenze, infatti:
v 1 = z 11 ⋅ i 1 + z 12 ⋅ i 2
e vale
z 11 =ˆ
v1
i1
i2 = 0
ossia z11 si può ottenere misurando tensione e corrente e mettendole a rapporto, sotto
la condizione che all’altra porta la corrente sia nulla, cioè che si abbia un circuito
aperto per segnali; viceversa, per le misure di ammettenza si sarebbe dovuto avere un
cortocircuito per i segnali. Ad alte frequenze e a banda larga, i circuiti aperti e i
cortocircuiti sono difficili da realizzare, inoltre, entrambi sono carichi non dissipativi,
cioè, ragionando in termini di potenza, riflettono la potenza che viene loro fornita
senza dissiparla. Ciò può causare problemi di instabilità in fase di misura, generando
oscillazioni. È questa la ragione fondamentale per cui i circuiti ad alta frequenza non
vengono caratterizzati da modelli di tipo matrice ammettenza o impedenza. Ciò che,
invece, viene usato è un modello black-box detto a matrice S (Scattering = diffusione),
che ha il notevole vantaggio che i parametri S o di diffusione non vengono misurati in
condizioni di circuito aperto o di cortocircuito, ma in condizioni di carico resistivo che,
essendo dissipativo, mantiene di solito il dispositivo stabile. Convenzionalmente, la
resistenza che si usa per questo tipo di caratterizzazione è pari a
R 0 = 50 Ω
che è il tipico valore dell’impedenza caratteristica dei cavi coassiali usati per
connettere apparati di telecomunicazione. In realtà, non vi è alcuna garanzia assoluta
che i dispositivi non oscillino in queste condizioni di carico, comunque, un tale valore
di R0 definisce una condizione sufficientemente dissipativa, tale per cui i dispositivi
considerati “buoni”, in linea generale, non oscillano e, quindi, si riescono a misurare e
caratterizzare.
206
Si vuole vedere, ora, il concetto di parametri di diffusione; tali parametri, come
precedentemente affermato, sono riferiti ad una condizione operativa di misura che
prevede delle resistenze o, più in generale, delle impedenze dette impedenze di
normalizzazione alle porte. Operativamente tali impedenze diventano delle
resistenze di valore pari a 50Ω. Tali parametri non legano più tensioni e correnti,
bensì due quantità dette variabili d’onda, convenzionalmente indicate con le lettere
a e b. Tale denominazione deriva dalla forte analogia con le linee di trasmissione,
infatti, facendo riferimento all’ambito di queste ultime, a e b vengono a coincidere con
le onde di tensione incidente e riflessa. In tal caso, a e b assumono la seguente forma:
a =
V
b =
V
+
−
(x)
Z0
variabile d’onda incidente
(x)
Z0
variabile d’onda riflessa
in cui Z0 è l’impedenza caratteristica della linea, la cui espressione è data da:
Z
0
R + jω L
≅
G + jω C
=
L
C
(1)
dove l’ultimo termine della (6) vale nel caso in cui la linea sia da considerarsi a basse
perdite.
Nella descrizione di un generico n-porte, a e b perdono il loro significato originale (non
ci sono linee di trasmissione) e vengono descritti, convenzionalmente, come
combinazioni lineari di tensioni e correnti. La loro definizione diventa, allora:
dove
ai =
1
(V i + Z
2 R 0i
bi =
1
(V i − Z
2 R0i
R 0 i = ℜ e {Z
0i
0i
∗
0i
Ii
)
(2)
Ii
)
(3)
}
con i = 1,2,3,…,n numero di porte. La (2) e la (3), dunque, descrivono a e b come
combinazioni lineari di correnti e tensioni tramite dei coefficienti che sono le
impedenze di normalizzazione delle porte. In termini operativi la Z0 viene scelta
puramente resistiva e uguale per tutte le porte, cioè:
Z
0i
= R 0i = R 0
207
e la definizione di a e b diventa allora
ai =
1
(V i + R 0 I i
2 R0
)
bi =
1
(V i − R 0 I i
2 R0
)
Un modello così realizzato risulta, quindi, più adatto alla misura, poiché viene
utilizzato un carico resistivo di 50Ω, dunque, non si hanno di solito oscillazioni e, un
altro aspetto di grande interesse è che, per una rete passiva tale modello esiste
sempre. Ad esempio la descrizione S esiste anche per cortocircuiti e circuiti aperti,
situazione in cui Y e Z, rispettivamente, non sono definibili.
Il dispositivo, allora, può essere descritto in termini di a e b che, come si vedrà,
rivestono un preciso significato fisico e sono fortemente legati alla potenza.
5.2.1 Significato fisico delle variabili d’onda a e b
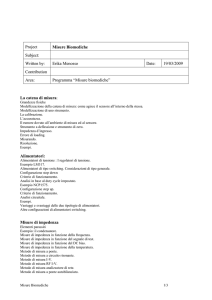
Sia dato un semplice generatore sinusoidale Es con resistenza di sorgente R0 ed una
generica impedenza di carico ZL, come mostrato in figura 1:
I
Es
a
R0
b
+
-
V
ZL
fig. 1
in cui vengono, inoltre, evidenziate le variabili d’onda incidente a e riflessa b. Con
semplici calcoli si ricava il rapporto tra a e b, che definisce il coefficiente di
riflessione Γ L e che vale:
ΓL =
b
Z
=
a
Z
L
L
− R0
+ R0
Si vuole, ora, calcolare il valore di a facendo riferimento al circuito di figura 1:
a =
1
(V + R 0 I
2 R0
)=
1
2 R0
si può, ora, ricavare
208
(E s
− R0I + R0I
)=
Es
2 R0
(1)
P AVs
1
=
a
2
2
=
E
2
s
(2)
8R0
in cui la (2) rappresenta la potenza disponibile del generatore, ossia, la potenza che il
generatore eroga quando la resistenza di carico è pari a quella del generatore stesso ed
è la massima potenza erogabile al carico. Da ciò si osserva come la variabile a assuma
un significato fisico ben preciso, cioè risulta legata alla potenza disponibile del
generatore. Dal momento, però, che a dipende dal valore di normalizzazione scelto, che
in questo caso è pari ad R0, il suo significato di potenza disponibile è vero se e solo se
l'impedenza di normalizzazione è uguale all'impedenza del generatore.
Quanto appena detto è altresì verificabile matematicamente osservando la (1), dove
non si sarebbero ottenuti due termini (R0I) che si eliminavano a vicenda, ma termini
diversi che avrebbero generato una diversa espressione di a e, pertanto, la perdita del
suo significato fisico di potenza disponibile.
Con qualche passaggio matematico (che non vedremo), è possibile ottenere anche
l'espressione della potenza ceduta al carico:
PL =
1
ℜ e {VI
2
∗
}=
1
a
2
−
2
1
b
2
2
(3)
Se si sfrutta, ancora, come impedenza di normalizzazione quella della sorgente, nasce
un significato fisico anche per la variabile b, ossia:
1
b
2
= P AVs − P L
2
(4)
Avendo sfruttato la (2) e la (3), si è ottenuto per b il significato fisico di potenza
riflessa. La (4), dunque, esprime il fatto che, in condizioni di disadattamento, non
potrà essere assorbita tutta la potenza che il generatore è in grado di fornire al carico
(PAvs), ma potrà esserne utilizzata soltanto una quantità pari a PL. La (4), allora,
rappresenta la potenza non assorbita dal carico e riflessa da esso a causa del
disadattamento. Da tali considerazioni si definisce, quindi, a come variabile d’onda o
onda di potenza incidente e b come variabile d’onda o onda di potenza riflessa.
Le quantità finora esaminate possono essere poste in relazione al coefficiente di
riflessione nel seguente modo:
PL
1
=
a
2
2
1 − b
a
2
2
(
= P
AVs 1 − Γ L
2
in cui, se la rete di carico è passiva, vale sempre la disuguaglianza
ΓL ≤ 1
209
)
(5)
La (5) risulta importante, in quanto in essa si mette in relazione la potenza del
generatore con il carico e, soprattutto, si evidenzia il fatto che la potenza ceduta al
carico è sempre minore o uguale alla potenza disponibile.
La condizione di adattamento, espressa dalla seguente relazione
Z
L
= R0
viene verificata se il coefficiente di riflessione è nullo, ossia
ΓL = 0
In tal caso, tutta la potenza disponibile verrà ceduta al carico e si avrà
P L = P AVs
e la potenza riflessa sarà nulla, cioè:
1
b
2
2
= 0
⇒
b = 0
ovvero, si avrà soltanto l'onda incidente e non quella riflessa. Si deve fare, tuttavia,
molta attenzione a non incappare nel seguente malinteso: avere onda riflessa nulla
non significa necessariamente avere realizzato la condizione di adattamento. Per
meglio chiarire questo concetto, si consideri il circuito di figura 2 o, meglio, il
transistor che rappresenta l'amplificatore in esame:
1
R0
Vs
3
a
Rin
Rout
+
-
2
vAV
a
R0
4
fig. 2
In figura 2 si è assunto che l'impedenza R0 del generatore rappresenti l'impedenza
d'uscita dell'apparato che precede, tipicamente di valore pari a 50Ω (e.g.,: impedenza
dei cavi coassiali di connessione) e si è evidenziato come anche l'impedenza di carico
debba assumere valore pari ad R0 = 50Ω. Si osserva che alle porte 1-2 la grandezza a
assume il significato di potenza disponibile, poiché si sta utilizzando come impedenza
di normalizzazione il valore di R0; alla porta 3-4, invece, a non ha più il significato di
potenza disponibile, perché essendo definita omogeneamente in termini di R0, non può
rappresentare anche la potenza disponibile del generatore vAV, che ha resistenza pari
ad Rout e non R0, come si vorrebbe. Alla porta 3-4, b risulta comunque nullo, perché
definito rispetto ad R0, ma come si può osservare non c'è adattamento. Infatti:
210
b =
1
(V − R 0 I
2 R0
)=
(R 0 I
1
2 R0
− R0I
)=
0
ma R0 ≠ Rout.
In questo particolare caso, alla porta 3-4 b non assume il significato di potenza riflessa
ed a non assume il significato di potenza disponibile, per il fatto che non si è utilizzata
la giusta normalizzazione, cioè quella della sorgente vista alla porta.
Riassumendo, allora, a e b assumono un significato fisico ben preciso se e solo se si ha
una corretta normalizzazione rispetto alla sorgente, in caso contrario, esse
rappresentano delle semplici combinazioni lineari tra correnti e tensioni.
Se si considera, ora, un due porte il parametro Γ non sarà più uno scalare, come
precedentemente visto per un monoporta, bensì assumerà una definizione più generica
e si parlerà di parametri S. Si consideri, a tale proposito, il due porte di figura 3:
I1
1
I2
3
a1
V1
b1
a2
2
4
V2
R0
b2
fig. 3
legando onde incidenti e riflesse e non più correnti e tensioni, come per il monoporta,
si ottiene:
b 1 = s 11 a 1 + s 12 a 2
b 2 = s 21 a 1 + s 22 a 2
in cui, per definizione
b1
a1
s 11 =ˆ
a2 =0
Per misurare s11 si vuole, dunque, che sia a2 = 0, cioè che alla porta 3-4 di figura 3 vi
deve essere un'impedenza R0 =50Ω; in tal caso, infatti, si avrà:
a2 =
1
2
R0
(V
+ R0I2 )=
1
2
R0
(−
R0I2 + R0I2 )= 0
Anche nel caso del due porte si può dare un significato fisico ai parametri, infatti, ad
esempio:
s 21
2
=
211
b2
a1
2
2
(6)
che definisce il rapporto tra la potenza che va al carico quando a2 è nullo, e la potenza
disponibile in ingresso. Dalla definizione di s21, ossia:
b2
a1
s 21 =ˆ
a2 =0
si può, allora, dedurre come la (6) rappresenti la quantità di potenza disponibile
erogata dal generatore che giunge realmente al carico passando attraverso il due porte
o, meglio ancora, l'effettivo guadagno di potenza nelle condizioni sopracitate. Ciò
permette, quindi, di definire la bontà della catena di amplificazione.
5.3 Progetto delle reti di adattamento
Per ottenere il massimo trasferimento di potenza in un circuito con impedenza
d'ingresso pari a Zs e impedenza di carico pari a ZL, sarà necessario inserire una rete
che permetta di verificare la condizione di adattamento. Per progettare tali reti, si può
utilizzare uno strumento, detto carta di Smith, che si basa sulla relazione che lega il
coefficiente di riflessione Γ all'impedenza o all'ammettenza. Si ricorda, infatti, che
vale:
Γ =
Z − R0
z −1
=
= U + jV
Z + R0
z +1
(1)
in cui si è utilizzata la definizione di impedenza normalizzata
z =
Z
R0
L'ultima uguaglianza della (1) consente di mappare z sul piano Γ, in particolare:
Γ = U + jV
↔
z = r + jx
(2)
in cui si è espressa z come somma di una parte resistiva e una parte reattiva.
Sostituendo, ora, la (2) nella (1), sviluppando i calcoli ed esprimendo U e V in funzione
di r ed x si ricavano delle equazioni che consentono di mappare il piano r-x sul piano
U-V, ossia sul piano Γ. Per ciò che riguarda il piano z, non si considereranno i punti
tali per cui r < 0, in quanto ci si riferisce solo a dispositivi di tipo passivo. Si può
dimostrare con semplici passaggi matematici che ogni punto del piano z considerato, è
contenuto all'interno della circonferenza |Γ| = 1, poiché ogni bipolo passivo ha sempre
|Γ| ≤ 1; inoltre, i luoghi geometrici di r = costante ed x = costante, cioè le rette di
figura 1.a, corrispondono a circonferenze nel piano Γ, come mostrato in figura 1.b:
212
x= cost.
x
r = cost.
x= cost.
r
r = cost.
piano Γ
piano z
fig. 1.a
fig. 1.b
Oggi, la carta di Smith è meno utilizzata rispetto a qualche decina di anni fa, in
quanto è stata sostituita dai moderni calcolatori, tuttavia, risulta comunque di
notevole interesse, se non altro per il fatto che molti strumenti per radiofrequenza
rappresentano sul monitor i risultati della misura sulla carta di Smith; essa è un
modo, quindi, molto comodo per rappresentare i parametri in alta frequenza, oltre ad
essere utilizzata per il progetto di reti di adattamento.
Si vogliono, ora, sottolineare le mappature più importanti della carta di Smith:
piano Γ
x>0
z =r+ j
z = 0 + jx
|x| cresc.
Γ = -1
C.C.
Z=0
z=0
Γ=0
Z = R0
z=1
z =r− j
r cresc.
Z=∞
z
=∞
C.A.
z = r + jx
z = 1 + jx
fig. 2
x<0
Legenda:
•
•
z=Z=0
z=Z=∞
Γ=1
punto di cortocircuito
punto di circuito aperto
213
⇒ Γ = -1
⇒ Γ=1
z = 1
condizione di adattamento ⇒ Γ =0
Z = R 0 = 50 Ω
•
Ø Luoghi a resistenza costante:
•
•
z = 0+jx
z = 1+jx
•
z = r + jx
luogo dei punti a resistenza nulla ⇒ |Γ| = 1
retta di resistenza R0 = 50Ω
⇒ circonferenza passante per il
centro
rette generiche
⇒ circonferenza passante per il
punto di C.A. di raggio > o < di
quella passante per il centro, a
seconda dei valori di r.
Ø Luoghi a reattanza costante:
•
z = r+j0
luogo dei punti a reattanza nulla ⇒
•
z = r ± j ⋅1
•
z =r + jx
luoghi dei punti a reattanza
normalizzata unitaria X = 50Ω ⇒
luoghi generici
⇒
retta orizzontale passante per
il centro e i punti di C.C. e C.A.
(pure resistenze).
circonferenze passanti per C.A.
circonferenze sopra e sotto
quelle di cui al punto precedente
a seconda del valore di x.
Tutto ciò è stato realizzato facendo riferimento alle impedenze; le medesime
considerazioni possono essere fatte facendo riferimento alle ammettenze. In tal caso, si
ottiene:
Γ '=
Y − G0
y −1
=
Y + G0
y +1
con
y =
Y
G0
ammettenza normalizzata, definibile anche come somma di conduttanza e suscettanza
y = g + jb
Si potranno, così, mappare i valori di y sul piano Γ, ottenendo una rappresentazione
grafica speculare, rispetto al caso precedente. Si potrà, quindi, sostituire r con g e x
con b, a patto di effettuare una rotazione di 180° della carta stessa; si osserva, infatti,
che:
Γ '= − Γ
Nella seguente figura viene fornita una rappresentazione
Smith:
214
completa della carta di
Vedremo ora l’impiego della carta di Smith nel progetto di reti di adattamento di cui
analizzeremo alcune semplici topologie.
215
5.3.1 Reti a “L”
Tali reti sono particolarmente semplici e vengono realizzate con elementi concentrati
(induttanze e capacità). L'obiettivo finale sarà quello di ottenere una resistenza di
carico pari ad R0 = 50Ω, partendo da un'impedenza generica Z. In modo schematico si
può esprimere il concetto come segue:
L,C
R0
L,C
L,C
Z
R0
L,C
a) 1° metodo
Z
b) 2° metodo
fig.1
Esistono otto possibili tipologie di reti di adattamento, date dalla combinazione degli
elementi costituenti la rete (a) e la rete (b); si vuole, ora, vedere come dimensionare
tali reti. Innanzitutto, si osserva come viene rappresentato l’inserimento di
un'induttanza o una capacità serie o parallelo sulla carta di Smith: dato un generico
punto P, si vuole aggiungere al circuito un elemento di tipo serie (figura 2):
y<0
LP
P
CS
LS
x>0
CP
Γ
y>0
x<0
fig. 2
si ricorda che stiamo parlando di elementi serie puramente immaginari e, dal
momento che si considera una rappresentazione della carta di tipo impedenza, tali
elementi non alterano la parte resistiva r, che rimarrà, dunque, costante. Si
considererà, allora, la circonferenza interna a tratto continuo (figura 2): se l'elemento
serie considerato è un'induttanza LS, essendo la sua reattanza positiva si determinerà
un aumento della reattanza e un conseguente spostamento dal punto P, di partenza, in
senso orario lungo la circonferenza; viceversa, se l'elemento serie considerato è una
capacità CS. Qualora, invece, si voglia aggiungere ad una generica impedenza un
elemento in parallelo, risulterà più comodo usare la carta di Smith in funzione delle
ammettenze e non più delle impedenze, considerando, in figura 2, la parte sinistra.
Partendo sempre dal punto P, poiché l'elemento parallelo non altera la conduttanza,
ma solo la suscettanza, si considererà la circonferenza tratteggiata a conduttanza
216
costante; l'aggiunta di una induttanza LP in parallelo provocherà una diminuzione
della suscettanza e, quindi, ci si muoverà lungo la circonferenza in senso antiorario;
viceversa se si inserisce una capacità in parallelo.
Queste considerazioni sulla carta di Smith permettono di impostare il progetto della
rete di adattamento. Sia data la rete di figura 3:
L
R0 = 50Ω
Z = R + jX
C
fig.3
si vogliono progettare la L e la C che permettono di passare alla R0. Innanzitutto, si
dovrà normalizzare l'impedenza rispetto al valore di R0 che si desidera ottenere, visto
che sulla carta di Smith sono mappate solo impedenze normalizzate, quindi:
z =
Z
R0
→
x =
X
R0
r =
R
R0
(1)
Ora, note r ed x, si è in grado di trovare sulla carta il punto che corrisponde a quel
determinato valore di impedenza r + jx. Si supponga che le (1) siano le coordinate del
punto P da cui partire e dal quale raggiungere il centro della carta, che rappresenta la
condizione di adattamento (R0 ). Prima di tutto, si dovrà tracciare la circonferenza a
resistenza costante pari ad r e passante per P; in seguito, si traccerà anche la
circonferenza passante per il centro o quella che definisce l'obiettivo da raggiungere,
come evidenziato in figura 4:
g=1
x2
P
I
LS
r
b1
CP
b2
0
x1
fig. 4
Per arrivare ad O, sarà necessario muoversi in senso orario lungo la circonferenza ad
r = cost., fino a giungere nel punto I di intersezione tra le due circonferenze tracciate.
Ciò è possibile inserendo un'induttanza serie LS. Una volta raggiunto il punto I si
217
dovrà percorrere in senso orario la circonferenza a g = 1, passante per il centro stesso.
Questo percorso è garantito dall'inserimento di una capacità in parallelo CP; a questo
punto, non resterà altro che scegliere i valori di LS e CP necessari.
Se si indicano con x1 ed x2 i valori delle curve a reattanza costante passanti per i punti
P ed I rispettivamente (leggibili sulla carta) e si definisce:
x S = x 2 − x1
si può trovare
LS =
X S
x R
= S 0
ω
ω
(2)
dove, nella (2), si è evidenziata la frequenza in gioco e la denormalizzazione del valore
di reattanza. Per trovare, invece, il valore di CP, sarà necessario conoscere i valori
delle curve a suscettanza costante passanti per i punti I ed O, visto che la capacità è in
parallelo. Si dovranno leggere, allora, i valori b1 e b2 di suscettanza relativi a tali punti
e si potrà, così, definire la capacità come:
C
P
=
BP
bP
=
ω
R 0ω
(3)
in cui, nella (3), si è evidenziata la frequenza di lavoro e si è denormalizzato dividendo
per R0. Si è posto, inoltre:
b P = b 2 − b1 = 0 − b1 = − b1 > 0
5.3.1.1 Esempio numerico
L'obiettivo è quello di adattare ad R0 = 50Ω un'impedenza Z = R + jωL, supponendo
che sia:
R = 10 Ω
L = 3 . 18 nH
si ricorda che, per parlare di adattamento, è necessario sapere a quale frequenza si
intende operare; ovviamente, i valori trovati per la rete di adattamento risulteranno a
banda stretta solo per la frequenza scelta, che in questo caso specifico sarà pari a:
f 0 = 500 MHz
Ø Svolgimento:
La prima operazione da fare quando si progetta la rete di adattamento è la
normalizzazione, ossia:
r =
R
= 0 .2
R0
218
(1)
x =
2π f 0 L
X
=
= 0 .2
R0
R0
(2)
Si identifica, quindi, il punto A considerando le circonferenza ad r = 0.2 e ad x = 0.2.
Dal momento che l'obiettivo è raggiungere il punto C, il punto di intersezione tra la
circonferenza r = 0.2 e g = 0 definisce il punto B, dal quale si può ottenere il valore di
LS, sapendo che
x S = x b − x a = 0 .4 − 0 .2 = 0 .2
e, quindi
LS =
X S
x R
= S 0 = 3 . 18 nH
2π f 0
2π f 0
1
Ora, dal punto B ci si dovrà muovere verso C con una capacità in parallelo. Calcolando
la suscettanza, si ottiene:
bP = bc − bb = 0 − (− 2 ) = 2
e, quindi
C
P
=
BP
bP
=
= 12 . 74 pF
2π f 0
2π f 0 R 0
Si ricorda che, sulla carta di Smith, le reattanze sono evidenziate nel cerchio interno,
mentre le suscettanze su quello esterno; inoltre, il segno del valore di suscettanza e
reattanza è normalmente omesso. È importante sottolineare come non sia sempre
possibile adattare qualunque valore di impedenza; se, infatti, il punto di impedenza Z
si trova sulla carta in corrispondenza del punto P' di figura 5.a, aggiungendo
un'induttanza serie LS ci si allontana dal punto di adattamento O e non c'è possibilità
di ritornarvi, a meno che non si aggiunga una reattanza infinita, che è impossibile:
CS
P’ LS
CP
O
fig. 5.a
1
fig. 5.b
I valori trovati sono solo casualmente uguali ai valori forniti come impedenza di partenza.
219
Con la rete considerata, quindi, il luogo dei punti non adattabili in alcun modo è
evidenziato con la parte segnata di figura 5.b. Questi punti saranno adattabili solo a
condizione che si cambi tipo di rete di adattamento come, per esempio, una rete che
sfrutti una capacità serie CS e una capacità parallelo CP, come evidenziato in figura
5.a. Per ogni tipo di rete di adattamento esistono, comunque, le cosiddette zone
oscure. Sarà, quindi, necessario scegliere la rete adeguata, a seconda dei valori di
impedenza da adattare.
Le reti ad elle finora analizzate sono reti di adattamento a banda stretta, infatti,
facendo riferimento all’esempio numerico precedente, si osserva che l’adattamento a
R0 = 50Ω avviene solo per f0 = 500MHz; se fosse f0 = 501MHz, tale adattamento non si
realizzerebbe più con precisione.
Spesso l’adattamento a banda stretta non è un problema, in particolare, se si lavora a
frequenze elevate; nel momento in cui la banda stretta diventa un problema, si
dovranno utilizzare reti topologicamente più complesse, quali, ad esempio, le reti a T o
le reti a Π , mostrate in figura 6:
fig. 6
Queste reti, costituite sempre da elementi puramente reattivi (induttanze, capacità),
consentono di introdurre un grado di libertà in più che può essere impiegato per
migliorare la banda di adattamento. Chiaramente, quanto più si richiede un
adattamento su una banda larga, tanto più dovranno aumentare i gradi di libertà. Ciò
rappresenta un primo passo per l’aumento della banda, in realtà, per raggiungere lo
scopo desiderato si può ricorrere a cascate di reti LC, per le quali, però, sarà
necessaria una progettazione che preveda l’utilizzo di strumenti più complessi, quali
gli strumenti CAD. Tali strumenti, oltre a fornire i valori precisi dei componenti, sono
in grado di variare, tramite opportuni algoritmi, il numero di celle della rete, finché
non si riesce ad ottenere le prestazioni richieste. L’azione dei tools di progetto è, allora,
mirata sia alla scelta dei valori dei componenti, sia alla scelta della topologia della rete
o, meglio, all’aumento del numero di gradi di libertà da utilizzare.
Lavorando a frequenze elevate (20 ÷ 30GHz), vengono spesso utilizzati, nelle reti,
elementi a microstriscia al posto di elementi concentrati (si ricorda che un tronco di
linea, sotto opportune condizioni, risulta equivalente ad un elemento capacitivo o
induttivo).
Questo tipo di realizzazione risulta conveniente quando le dimensioni delle lunghezze
d’onda delle reti sono confrontabili con le dimensioni della realizzazione scelta, ad
esempio, con quelle di un circuito integrato. Per frequenze di qualche MHz, dunque, in
cui le lunghezze d’onda sono dell’ordine dei metri, tale realizzazione perde di
significato.
A livello di circuiti propriamente integrati si possono trovare gli MMIC (Monolithic
Microwave Integrated Circuit), utilizzati per microonde o radiofrequenze elevate e
vengono realizzati tipicamente in GaAs. Con lo stesso materiale possono anche essere
realizzate reti di adattamento di tipo distribuito, ma solo per frequenze solitamente
non inferiori alla ventina di GHz; in tal caso, infatti, tenuto conto della costante
220
dielettrica del materiale (εGaAs = 13), si ottengono lunghezze d’onda che permettono di
realizzare circuiti di dimensioni non eccessive.
Altri tipi di circuiti utilizzati sono gli MIC (Microwave Integrated Circuit), che si
distinguono dai precedenti perché vengono realizzati con una deposizione di metallo,
con tecnologia a film su allumina; su questa poi vengono montati i componenti discreti.
Questi circuiti vengono, oggi, più propriamente detti HMIC (Hybrid Microwave
Integrated Circuit), in quanto la realizzazione integrata consiste solo nella parte
passiva del circuito, mentre i componenti vengono saldati (di qui il termine “ibrido”).
5.4 Progetto di un amplificatore a radiofrequenza
Si vuole, ora, analizzare un amplificatore progettato per lavorare alle alte frequenze,
che ha come obiettivo quello di massimizzare il trasferimento di potenza (massimo
guadagno di potenza). Come esempio si consideri un amplificatore con un solo
transistor, significativo più dal punto di vista didattico che pratico. Un circuito siffatto
risulta poco interessante se pensato a basse frequenze, dove risulta raro trovare
amplificatori con buone prestazioni realizzati con un solo transistor; ad alte frequenze,
invece, lavorando in condizioni di adattamento e tenendo conto che i livelli di potenza
richiesti sono spesso molto minori rispetto a quelli richiesti alle basse frequenze, anche
un solo transistor può a volte soddisfare le necessità del caso.
Per completezza di trattazione si considereranno due circuiti, il primo (fig.1)
rappresentante un amplificatore a bassa frequenza realizzato con un BJT in
configurazione “emettitore comune” (per arrivare a frequenze superiori a qualche GHz
poteva essere impiegato anche un MESFET), il secondo, invece, rappresentante un
amplificatore ad alta frequenza e realizzato con la stessa configurazione:
VCC
RC
C2
R1
Rs
Vin
C1
T1
R
R2
RE
CE
fig. 1
In figura 1 si possono riconoscere: le resistenze di polarizzazione, le capacità di
disaccoppiamento in ingresso e in uscita, utili a non alterare il punto di lavoro e a
disaccoppiare il carico, la capacità sull’emettitore, che serve a recuperare il guadagno
in centro banda by-passando RE (CE è un cortocircuito per i segnali), che tende a
penalizzare il guadagno stesso.
Per le alte frequenze, invece, il circuito in esame diventa quello di figura 2,
notevolmente più complesso rispetto a quello di figura 1, tuttavia, le prestazioni in
termini di guadagno di potenza (viene realizzato l’adattamento) ottenibili con questo
221
schema sono così buone, che sarebbe auspicabile un utilizzo del circuito anche alle
basse frequenze. In realtà, a causa dell’ingombro delle induttanze a bassa frequenza,
si preferisce l’utilizzo di qualche transistor in più per avere i guadagni di potenza
richiesti, al fine di rendere la struttura più semplice in termini di elementi passivi.
Lo schema circuitale più complesso è, dunque, quello rappresentato in figura 2:
VCC
RC
R1
RFC
C2
RFC
R0
Vin
C1
T1
L1
L2
RFC
DCB
IMN
R0
RE
R2
fig. 2
CE
DCB
OMN
Analizzando il circuito si riconoscono:
•
•
•
•
Due resistenze R0 (una di ingresso e una di uscita), solitamente del valore di 50Ω,
in quanto tale valore rappresenta l’impedenza caratteristica di tipici apparati per
alta frequenza.
Tre elementi RFC (Radio Frequency Choke) di blocco ad alta frequenza, realizzati
con induttanze, che sono dei cortocircuiti per la continua (dal punto di vista della
continua le reti di polarizzazione di figura 1 e figura 2 coincidono); tali induttanze o
choke consentono, anche, di eliminare eventuali problemi introdotti dalle resistenze
di polarizzazione, che a radiofrequenze non potrebbero garantire prestazioni buone
e prevedibili, a meno che la loro qualità non fosse elevatissima; i choke, inoltre,
essendo degli aperti per i segnali, garantiscono che l’energia di segnale non venga
dissipata sulle resistenze stesse.
Un blocco RECE che ha lo stesso significato di quello visto a basse frequenze, cioè in
continua la CE è un aperto, mentre la RE stabilizza il punto di lavoro; per i segnali,
invece, la CE è un corto e permette di recuperare il guadagno.
Due reti di adattamento IMN (In Matching Network) e OMN (Output Matching
Network), nelle quali sono presenti due blocchi DCB (DC Block), che hanno la
funzione opposta a quella dei blocchi RFC, cioè bloccano la continua per evitare un
cortocircuito tra base ed emettitore e tra collettore ed emettitore, e sono, invece, dei
222
corto circuiti per i segnali. Si noti che le capacità C1 e C2, oltre a contribuire alla
realizzazione dell’adattamento richiesto, disaccoppiano generatore e carico in
continua.
Per maggiore chiarezza vengono riportati, in figura 3, i circuiti equivalenti, in
continua e per i segnali, del circuito di figura 2:
VCC
R1
C2
1
R0
RC
C1
T1
L2
T1
Vin
R0
RE
IMN
2
fig. 3.a:
R0
L1
R0
R2
3
fig. 3.b:
equivalente in
continua (DC)
OMN
4
equivalente a radiofrequenza (RF)
Si osserva che in figura 3.b le capacità C1 e C2 e le induttanze L1 e L2 non sono state
graficate, rispettivamente, come dei corti e degli aperti, in quanto, essendo parte delle
reti di adattamento, dovranno essere opportunamente dimensionate, al fine di
realizzare l’adattamento stesso. A valle della sezione 1-2 sarà, infatti, necessario
vedere una resistenza pari ad R0 = 50Ω, così come a monte della sezione 3-4, noti i
valori delle impedenze d’ingresso e d’uscita del transistor. In realtà, le cose non sono
così semplici, in quanto l’impedenza d’ingresso non sarà nota fintantoché non sarà
possibile sapere come è stato caricato il transistor T1 e viceversa per l’impedenza
d’uscita. Dal momento che in questo modo il progetto risulta piuttosto complesso,
saranno indispensabili alcune semplificazioni.
Tenendo conto, allora, solo dei segnali si avrà:
ΓL
Γs
Rs
Vin
T1
IMN
Γin
Γout
OMN
R0
fig. 4
Si dovrà, a questo punto, progettare una rete di adattamento d’ingresso IMN e una
d’uscita OMN, al fine di garantire il massimo trasferimento di potenza,
223
compatibilmente con l’influenza reciproca esercitata da sorgente e carico e
compatibilmente ai vincoli di stabilità. Sarà, allora, necessario definire i coefficienti di
riflessione Γs visto dal transistor verso la sorgente, ΓL dal transistor verso il carico, Γin
e Γout, rispettivamente visti dalla sorgente e dal carico verso il transistor. Ovviamente
Γout dipende dalla rete di adattamento d’ingresso e, analogamente, la rete di
adattamento d’ingresso dipende da Γin, che a sua volta dipende dalla rete di
adattamento in uscita; si ha, dunque, un’interdipendenza fra ingresso e uscita. Di più,
si dovrà tenere conto anche della stabilità del sistema. Normalmente, a frequenze più
basse, un progetto con un singolo transistore non crea problemi di oscillazioni, a meno
che non si inseriscano delle retroazioni appositamente progettate. A RF, invece, a
causa di inevitabili effetti parassiti anche un amplificatore a singolo transistor può
risultare facilmente instabile.
5.4.1 Studio della stabilità
La stabilità, generalmente, viene studiata nel dominio di Laplace, calcolando una
opportuna funzione di trasferimento del circuito e analizzando la parte reale dei poli.
A radiofrequenza, si pone, tuttavia, il problema di ottenere un circuito equivalente
sufficientemente semplice e maneggiabile, attraverso il quale sia possibile, poi,
giungere ad un'analisi nel dominio di Laplace e procedere come di consueto.
Vista la complessità dei modelli di tipo circuito equivalente per dispositivi elettronici,
a tali frequenze è spesso più comodo usare un modello nel dominio jω, ad esempio di
tipo "matrice S" (parametri di diffusione). Non si avrà, allora, un vero e proprio
circuito equivalente, bensì una caratterizzazione di tipo black-box nel dominio jω
(regime sinusoidale). Questo tipo di analisi è già stata impiegata nello studio della
stabilità per gli operazionali, dove il suddetto problema è stato affrontato utilizzando i
diagrammi di Bode e/o il criterio di Nyquist, che fa riferimento alla risposta armonica
del circuito e, dunque, al dominio jω. Per completezza, si vogliono ora ricordare gli
enunciati del criterio:
•
Criterio di Nyquist: sistemi asintoticamente stabili ad anello aperto, a meno di un
eventuale polo nell'origine semplice o doppio. Nell'ipotesi che la funzione guadagno
di anello F(s) abbia tutti i poli a parte reale negativa, eccezion fatta per un
eventuale polo nullo semplice o doppio, condizione necessaria e sufficiente perché il
sistema in retroazione sia asintoticamente stabile è che il diagramma completo
della funzione F(jω) non circondi né tocchi il punto critico -1+j0.
•
Criterio di Nyquist: sistemi instabili ad anello aperto con un eventuale polo
nell'origine semplice o doppio. Nell'ipotesi che la funzione guadagno di anello F(s)
non presenti poli immaginari, eccezion fatta per un eventuale polo nullo semplice o
doppio, condizione necessaria e sufficiente perché il sistema in retroazione sia
asintoticamente stabile è che il diagramma completo della funzione F(jω) circondi il
punto critico -1+j0 tante volte in senso antiorario quanti sono i poli di F(s) con
parte reale positiva. Ogni giro in meno in senso antiorario o ogni giro in più in
senso orario corrisponde alla presenza, nel sistema in retroazione, di un polo con
parte reale positiva.
224
La seconda formulazione del criterio di Nyquist è, ovviamente, più generale, ma è
scarsamente utilizzata, in quanto necessita della conoscenza dei poli a parte reale
positiva, al fine di garantire la corretta applicazione del criterio e tale vincolo impone,
a sua volta, la conoscenza della funzione di trasferimento del circuito, costringendo a
passare al dominio di Laplace, cosa non sempre possibile.
Si farà riferimento, in questa sede, alla formulazione dei criteri di stabilità che
prevedono che i sistemi in catena aperta risultino stabili. Tale concetto è fondamentale
nel dominio di interesse ( jω), infatti, mentre nel dominio di Laplace si può usare la
funzione di trasferimento di un sistema per studiarne la stabilità indipendentemente
dalla stabilità o meno dei blocchi che lo compongono, nel dominio jω ciò non è
altrettanto vero. In particolare, sarà necessario che le ipotesi del criterio (stabilità ad
anello aperto) risultino verificate e bisognerà prestare attenzione che anche eventuali
trasformazioni applicate al circuito come, ad esempio, una impedenza trasformata in
ammettenza, verifichino le condizioni di esistenza della rappresentazione scelta. E'
possibile chiarire tale aspetto con un semplice esempio.
5.4.1.1 Esempio
Si consideri il circuito attivo di figura 1 composto dalla capacità in parallelo ad una
conduttanza negativa ottenuta, ad esempio, dalla linearizzazione di un circuito
complesso contenente transistori ed elementi attivi. Si vuole studiare la stabilità di
tale circuito quando viene connesso ad una conduttanza GL, come evidenziato a
tratteggio in figura 1. A tal fine, verranno presi in esame tre diversi metodi:
C
-G
GL
I
V
G>0
fig. 1
q
1° metodo: (trasformata di Laplace). Il metodo di Laplace prevede di eccitare il
circuito in esame con un generatore di corrente in parallelo o di tensione in serie,
verificando ovviamente che l’annullamento dell’eccitazione non modifichi il circuito
originario. Procedendo ad esempio con una eccitazione di corrente in parallelo, si
avrà:
V
1
=
I
sC − G + G
(1)
L
Come noto l’analisi della stabilità si basa sullo studio dei poli della (1). Il circuito
risulta stabile se il polo è a parte reale negativa, ossia:
s =
G − G
C
225
L
< 0
che implica
G
L
> G
(2)
Si osserva che il risultato ottenuto è indipendente dalla capacità e, quindi, per
semplificare la trattazione si può assumere, senza perdere di generalità, che la
capacità sia assente. Sotto questa ipotesi il circuito si riduce a quello di figura 2:
-G
V
GL
fig. 2
q
2° metodo: dato il circuito di figura 2, si può fornire una nuova interpretazione del
fenomeno finora trattato. Partendo, infatti, dall'ipotesi che -G generi energia, si
avrà instabilità nel momento in cui l'energia generata diventi maggiore dell'energia
dissipata. La potenza, quindi, generata dalla conduttanza negativa dovrà essere
minore di quella dissipata da GL, ossia:
V
2
G < V
2
G
L
che, ancora una volta, implica
G
L
> G
Si è, dunque, giunti in modo più empirico a quanto già ottenuto nella (2).
q
3° metodo: un ulteriore metodo per lo studio della stabilità è quello che si basa
sull'applicazione di una tensione V alla conduttanza G. Tale tensione genera una
corrente IG, come evidenziato in figura 3:
IG
-G
V
fig. 3
in formule
I
G
= VG
226
GL
La corrente IG, andando a scorrere su GL, provoca una caduta di tensione pari a
V
G
=
L
VG
G L
(3)
da cui si nota che, qualora sia
V
G
> V
L
il sistema risulterà instabile e, dunque, sarà stabile solamente se vale la relazione:
G
> G
L
che conferma quanto finora ottenuto. Si osserva, inoltre, che il rapporto fra le due
conduttanze dovrà essere minore di uno, cioè, il guadagno d'anello risulterà:
G
> 1
G L
=
AB
a conferma del fatto che il sistema è stabile secondo il criterio di Bode.
Proviamo ora ad applicare il secondo metodo visto, ragionando però in termini di
resistenza. Il circuito da considerare è, dunque, quello di figura 4:
IR
-R
V
RL
fig. 4
Sfruttando il ragionamento utilizzato per il terzo metodo, si può affermare che, se si
desidera un sistema stabile, la potenza generata dalla resistenza negativa dovrà
essere minore della potenza generata da RL, da cui:
RI R2 < R L I R2
e la condizione per la stabilità sarà, allora
RL > R
e, dal momento che il reciproco di una resistenza è la sua conduttanza, si ottiene:
G
L
< G
227
(4)
che contrasta con i risultati ricavati adottando i precedenti metodi. Ciò è dovuto al
fatto che si è effettuata una trasformazione da conduttanza a resistenza senza cautela.
Si può, infatti, osservare che per il parallelo capacità, conduttanza negativa di figura 1
non si può parlare di resistenza negativa perché questa non è definita. In particolare,
ciò è confermato dalla impossibilità di effettuare una misura di resistenza (impedenza)
del circuito in esame. Per meglio chiarire quanto detto, si consideri il circuito di figura
5, in cui, per misurare la resistenza (impedenza) si è inserito un generatore di corrente
e si dovrebbe misurare la tensione V corrispondente:
V
C
-G
I
fig. 5
Si può scrivere
Z =
V
I
1
sC − G
=
(5)
da cui il polo risulterà
s =
G
C
che è a parte reale positiva e, quindi, il sistema eccitato in corrente è instabile, ossia la
risposta in tensione che si ottiene diverge nel tempo. Ciò viola l'ipotesi di applicabilità
del criterio di stabilità. La misura di ammettenza, invece no da problema alcuno (la
funzione di trasferimento avrebbe semplicemente uno zero a parte reale positiva).
Si osservi che se si fosse partiti da una misura di impedenza, ci si sarebbe accorti
subito che il sistema era instabile. Da ciò si deduce come, a partire da una misura, la
stabilità del sistema sia subito definita e come, invece, effettuando delle
trasformazioni di variabili si debba prestare molta attenzione a rispettare le ipotesi di
applicabilità dei criteri nel dominio jω, al fine di ottenere risultati corretti.
5.4.1.2 Stabilità incondizionata
Un transistor si dice incondizionatamente stabile ad una data frequenza se, per
ogni:
ΓS < 1
ΓL < 1
228
(1)
si verifica che
Γ in
= s 11 +
s 21 s 12 Γ L
1 − s 22 Γ L
< 1
(2)
Γ out
= s 22 +
s 21 s 12 Γ S
1 − s 11 Γ S
< 1
(3)
Infatti, se la (2) e la (3) sono entrambe verificate, il transistor risulterà stabile
indipendentemente da quelle che sono le terminazioni connesse. Poiché, infatti, sia
dall'ingresso che dall'uscita si vedono sempre delle terminazioni resistive e non attive
(|Γin|< 1, |Γout|< 1), qualunque cosa si connetta l'oggetto risulterà sempre stabile.
Se, invece, Γin o Γout sono maggiori di uno, esisteranno delle condizioni di carico e/o
sorgente che possono violare il criterio di Bode e dare luogo ad instabilità del circuito.
Quando le condizioni di stabilità incondizionata vengono violate, ossia, quando le (2) e
(3) non sono soddisfatte, il dispositivo non è detto, comunque, che sia instabile; ciò
evidenzia solamente la presenza di bipoli a conduttanza negativa. Per tale motivo, nei
casi appena descritti si parla di sistemi potenzialmente instabili o, spesso, anche di
stabilità condizionata, in quanto la stabilità del sistema in esame è condizionata ai
valori dei carichi che si vanno a connettere.
Si osservi che quanto detto, per avere senso, richiede una ulteriore condizione:
s 22
< 1
(4)
s 11 < 1
Questa ultima condizione, normalmente verificata nella stragrande maggioranza dei
casi, è importante perché garantisce che i coefficienti di riflessione (2) e (3), che si
riferiscono, rispettivamente, alla connessione del transistore ad una impedenza di
carico e sorgente, abbiano un senso, ossia tali connessioni siano stabili, ovvero
misurabili. Se ad esempio consideriamo più in dettaglio la misura di Γin, questa, come
noto, viene effettuata con una sorgente a 50 Ω posta in ingresso e ΓL connesso in
uscita. Se |s22|< 1, ossia dall’uscita vediamo un coefficiente di riflessione passivo il
sistema caricato con ΓL passivo risulterà sicuramente stabile. Analogo discorso vale
per la porta d'ingresso. Quanto detto può essere facilmente schematizzato nel modo
illustrato in figura 1:
|s22|< 1
Γ in
Γ out
fig. 6
229
ΓL
Si osserva, tuttavia, che le (4) non sono condizioni sufficienti a garantire la stabilità,
ma sono comunque, necessarie per avere un sistema stabile. Le (4) sono, solitamente,
verificate ed è per questo motivo che, spesso, in fase di progetto è facile dimenticarsi di
effettuare una verifica, incorrendo poi in errori nella valutazione della stabilità.
Si vogliono analizzare, ora, alcuni strumenti che permettono di valutare i circuiti
finora esaminati dal punto di vista della stabilità. Si consideri, a tale scopo, la Carta di
Smith. Su questa è possibile tracciare dei cerchi che distinguono le zone corrispondenti
ai valori del coefficiente di riflessione del carico e della sorgente, che possono essere
potenziali fonti di instabilità, rispetto a quelli in cui si è certi che l'amplificatore è
incondizionatamente stabile. Esistono, infatti, dei valori di ΓS e ΓL che, non
soddisfacendo le condizioni (3) e (4), definiscono zone potenzialmente instabili. In tali
zone i coefficienti di riflessione ΓS e ΓL saranno maggiori di uno e ad essi
corrisponderanno resistenze e conduttanze negative, ossia, oggetti che generano
energia. In questa situazione, a seconda di ciò che viene connesso, si potrà creare o
meno oscillazione e, dunque, instabilità. Allo scopo di consentire una realizzazione
grafica di quanto appena detto riguardo le zone di potenziale instabilità e stabilità
incondizionata sulla carta di Smith, si rendono necessari alcuni passaggi matematici;
innanzitutto, i cerchi che si stanno cercando saranno identificati da un confine definito
nel modo seguente:
ΓL
ΓS
tale che
tale che
⇒
⇒
|Γin |= 1
|Γin |= 1
cerchi di stabilità in uscita
cerchi di stabilità in ingresso
con passaggi matematici si possono ottenere i seguenti risultati:
per Γ L
C
L
=
rL =
*
s 22
− ∆ * s 11
s 22
2
− ∆
2
(centro)
2
(raggio)
s 12 s 21
s 22
2
− ∆
dove
∆ = s 11 s 22 − s 21 s 12
Per ottenere i risultati relativi a ΓS è sufficiente scambiare i pedici 1 e 2 nei risultati
appena ricavati. L'interpretazione grafica di quanto detto è visibile in figura 7:
230
ΓL
2
1
|Γ in |= 1
P
.
ΓL = 0
potenziale intabilità
incondizionatamente stabile
fig. 7
in cui si osserva come il cerchio tratteggiato vada a definire due zone, una più
pericolosa, data dall'intersezione dei due cerchi, dove |Γin |> 1 e dove si ha potenziale
instabilità e l'altra identificata da |Γin |< 1, in cui si ha la garanzia dell'incondizionata
stabilità. Al fine di identificare il segno di ΓL si dovrà considerare il punto notevole P,
per il quale vale:
ΓL = 0
⇒
Γ in
= s 11
(5)
se, dunque,|s11 |< 1, allora la zona contrassegnata, in figura 7, con il numero 1
risulterà incondizionatamente stabile, mentre la zona 2 risulterà potenzialmente
instabile e sarà necessario prestare attenzione al ΓL che si andrà a connettere. Se,
ora, si considera l'ingresso, si ottiene quanto rappresentato in figura 8:
ΓS
2
1
|Γout |= 1
P’
.
ΓS = 0
potenziale intabilità
incondizionata stabilità
fig. 8
Si avrà, cioè, il luogo dei valori di ΓS tali che |Γout |= 1, rappresentato dalla
circonferenza a tratteggio e grazie al punto notevole P' si potrà, anche in questo caso,
distinguere le zone di potenziale instabilità e di incondizionata stabilità. In
particolare, sarà:
ΓS = 0
⇒
231
Γ out
= s 22
(6)
se, dunque,|s22 |< 1, allora la zona contrassegnata, in figura 8, con il numero 1
risulterà incondizionatamente stabile, mentre la zona 2 risulterà potenzialmente
instabile. Si osserva che le definizioni finora date valgono in funzione dei parametri S,
che a loro volta, sono variabili con la frequenza. E' per questo motivo che i cerchi di
stabilità variano anch'essi al variare della frequenza stessa. Si ricorda, inoltre, che lo
studio della stabilità va effettuato comunque a larga banda, nonostante il circuito in
esame possa essere progettato a banda stretta, in quanto si possono innescare delle
oscillazioni anche a frequenze diverse da quelle di interesse nel progetto. Dal momento
che tale studio risulta lungo e faticoso da realizzare a mano, sono stati introdotti dei
tools come, ad esempio, gli strumenti CAD, che attraverso un calcolatore consentono di
semplificare notevolmente i conti.
Tornando al progetto della stabilità dell'amplificatore, si può procedere al progetto
seguendo diversi livelli di accuratezza, con impatto diverso sulle prestazioni ottenibili,
a seconda di come vengono scelti ΓS e ΓL. Ad esempio ΓS e ΓL possono essere scelti in
modo tale che risultino appartenere alla zona di incondizionata stabilità. Tale progetto
non è, ovviamente, ottimale, in quanto risulta fortemente limitativo, poiché non è
necessario che entrambe le condizioni su Γin e Γout siano verificate, bensì ne basterà
una sola delle due. Scelto, infatti, ΓL o ΓS nella zona di incondizionata stabilità, si
avrà, rispettivamente dalla (5) o dalla (6), che |Γin |< 1 oppure che |Γout |< 1 e,
dunque, qualunque sia il dispositivo passivo connesso il sistema non potrà oscillare.
Un modo alternativo e più efficiente di procedere per sistemi potenzialmente instabili
è, invece, quello di non rinunciare a priori all’impiego delle zone di potenziale
instabilità, ma di ragionare in modo più accurato utilizzando il criterio di Bode, come
dimostra il seguente esempio.
Esempio: sia dato un sistema in cui si è scelto ΓL nella zona di potenziale instabilità,
per cui si avrà:
Γ in
> 1
Sarà, ora, necessario scegliere un ΓS tale che verifichi la condizione di stabilità del
criterio di Bode. A tale scopo, è opportuno schematizzare il sistema come in figura 9:
a
b
ΓS
Γ in t.c. |Γ in |> 1
fig. 9
Dovrà essere, allora
b = Γ in ⋅ a = Γ in Γ S ⋅ b
232
e poiché il guadagno d'anello deve essere minore di uno alla frequenza in cui
l'argomento è pari a zero o 2π, si avrà:
Γ in Γ S < 1
∠ Γ in Γ S = 0 = 2 π
secondo le ipotesi del criterio. Per un ΓL potenzialmente instabile, dunque, ΓS deve
necessariamente essere scelto con un metodo più accurato, al fine di garantire la
stabilità.
5.4.1.3 Parametro K
Nello studio della stabilità esistono delle situazioni in cui il cerchio di stabilità non
tocca la carta di Smith o, meglio, il sistema risulta incondizionatamente stabile per
qualunque valore di ΓL o ΓS scelto. Risulta allora utile utilizzare un parametro detto
parametro K (di Rollett) definito in funzione della frequenza e il cui valore permette
di capire quali siano le frequenze alle quali il sistema risulta potenzialmente instabile,
ossia, quando i cerchi toccano la carta di Smith e quali le frequenze per cui si ha la
certezza di avere stabilità indipendentemente dalla scelta di ΓL o ΓS (i cerchi non
toccano la carta di Smith). La definizione matematica di tale parametro è la seguente:
K =
1 − s 11
− s 22
2 s 12 s 21
2
2
+ ∆
2
> 1
(1)
dove con |∆| si intende
∆ = s 11 s 22 − s 21 s 12
< 1
Le condizioni riportate dalle (1) sono richieste per la stabilità incondizionata
(normalmente la condizione su ∆ è sempre verificata, tanto che spesso ci si scorda della
definizione corretta). Dalla definizione di K si può osservare come tale parametro sia
definito solo in funzione dei parametri S. Spesso il valore di K è fornito dal costruttore
nei Data Sheet del componente.
Alle frequenze per cui K risulta minore di uno, il dispositivo è potenzialmente instabile
ed è quindi richiesto uno studio più accurato della sua stabilità, attraverso i cerchi di
stabilità o il criterio di Bode. Il parametro K, dunque, fornisce un veloce strumento di
pre-analisi che consente di distinguere le frequenze pericolose per la stabilità da quelle
in cui quest'ultima è, invece, garantita.
Si osservi che se nella (1) si ha s12 = 0, la condizione di stabilità è sempre verificata (K
diventa infinito) coerentemente con l’assenza di un percorso di retroazione; questo
salvo casi molto particolari per cui è violata la condizione su ∆ essendo | s11 |> 1
oppure | s22 |> 1.
5.4.1.4 Scelta di Γ in e Γ out
233
Il primo progetto di massima di un amplificatore si può basare sul considerare il
transistor ideale e, quindi, ritenere verificata la relazione s12 = 0.
Ai fini del calcolo del guadagno, tale approssimazione di solito non comporta errori
enormi e si può ritenere sufficientemente fedele alla realtà. In tali condizioni, allora, si
può definire il Guadagno di Trasduzione di Potenza Unilaterale (unilaterale
perché vale per s12 = 0), la cui espressione matematica è la seguente:
G TU =
PL
P AV S
(1)
in cui si è definito con PL la potenza ceduta al carico e con PAVs la potenza disponibile
della sorgente. Il guadagno di potenza espresso nella (1), fornisce una definizione di
maggiore interesse rispetto alla comune definizione di guadagno, nella quale si
prevede il rapporto tra la potenza ceduta al carico e la potenza entrante nel
dispositivo. In quest'ultimo caso, infatti, un guadagno di potenza elevato può non
essere significativo in quanto, in presenza di forte disadattamento (Γin molto diverso
da 50Ω) per fornire un minimo di potenza in ingresso sarebbe necessaria una notevole
potenza disponibile, rendendo illusorio un guadagno così elevato. Si pensi per analogia
al caso di un amplificatore con un guadagno di tensione molto alto, ma con una
bassissima resistenza d'ingresso: il vantaggio dell'elevato guadagno, in tale caso, si
perde nel rapporto di tensione esistente fra il generatore d'ingresso e la resistenza
d'ingresso dell'amplificatore.
Il guadagno operativo elevato ha, dunque, poco significato, perché in presenza di
disadattamento non si riesce a fornire la potenza in ingresso necessaria al dispositivo.
La (1), allora, risulta più significativa, poiché fornisce un'idea reale dell'entità del
disadattamento presente e permette di scegliere con più accuratezza come progettare
l'amplificatore. Il guadagno di trasduzione definito dalla (1) può essere scritto come
segue:
G TU =
1 − ΓS
2
1 − s 11 Γ S
2
⋅ s 21
2
1 − ΓL
2
1 − s 22 Γ L
2
= G S ⋅ s 21
2
⋅GL
(2)
dove si è definito con GS e GL
GS =
GL =
1 − ΓS
2
1 − s 11 Γ S
1 − ΓL
2
2
1 − s 22 Γ L
2
A partire dalla (2) si possono sviluppare importanti considerazioni; se, infatti, il
dispositivo non viene connesso ad alcuna rete di adattamento, bensì direttamente ai
50Ω, si avrà:
234
ΓL = 0
⇒
GL = 1
ΓS = 0
⇒
GS = 1
e il guadagno di potenza di trasduzione diverrà pari a
G TU = s 21
2
Si deduce, dunque, che GL e GS rappresentano funzioni di trasferimento che
sottolineano il miglioramento introdotto dall'inserimento di una eventuale rete di
adattamento. Si osserva, inoltre, che se S12 = 0, come da ipotesi iniziale, Γin e Γout
risulteranno indipendenti tra loro, in particolare, si avrà:
Γ in = s 11
Γ out = s 22
e risultano, inoltre, indipendenti anche da ΓS e ΓL. Tutto ciò comporta una notevole
semplificazione, in quanto non essendoci dipendenza tra la porta d'ingresso e quella
d'uscita, il coefficiente di riflessione d'ingresso e di carico dipenderanno
esclusivamente dal transistor e non dalle condizioni di carico e sorgente. I valori di ΓS
e ΓL sono quindi determinabili in modo semplice, non essendoci in questo caso neanche
vincoli sulla stabilità. imponendo la condizione di adattamento. Per ottenere il
massimo trasferimento di potenza si sceglieranno ΓS e ΓL quindi nel rispetto delle
condizioni di adattamento coniugato, ossia:
Γ Sottimo = Γ in∗ = s 11∗
∗
∗
Γ Lottimo = Γ out
= s 22
In particolare, il massimo guadagno di trasduzione ottenibile sarà:
max
G TU
=
1
1 − s 11
2
⋅ s 21
2
1
1 − s 22
2
(3)
ferme restando le condizioni
s 22
< 1
s 11 < 1
che sono, solitamente, verificate nella maggior parte dei casi.
Per capire cosa può invece succedere in presenza di potenziale instabilità del
dispositivo facciamo riferimento ad una situazione rara in pratica ma comoda da un
punto di vista didattico ed esemplificativo.
Supponiamo di avere s12 = 0 ma che sia anche |s11|> 1. In tale condizione sarà sempre
possibile avere un valore di ΓS tale che il valore del denominatore di GS risulti nullo
235
(basta scegliere ΓS = 1/s11), da cui si ottiene un valore di GTU infinito. Ciò ovviamente
corrisponde ad un assurdo. Analogamente accadrebbe per GL qualora risultasse |s22|>
1. L’annullamento dei denominatori di GS o GL corrisponde ad un forte pericolo di
instabilità, infatti, un ΓS = 1/s11 definisce il punto di guadagno d'anello unitario e basta
una variazione infinitesima per passare alla situazione di instabilità, rendendo molto
critica la condizione di elevato guadagno (si tratta di una condizione che in pratica
corrisponde ad una elevata sensibilità parametrica del guadagno). Si può dedurre,
allora, come in questo caso non esista una condizione di adattamento che fornisca il
massimo guadagno, poiché quest'ultimo potrebbe non essere definito. In queste
circostanze, risulta utile considerare dei luoghi a guadagno costante, su cui andare a
cercare, attraverso i cerchi di stabilità o altri metodi, i valori dei coefficienti di
sorgente e carico che forniscano il guadagno desiderato compatibilmente con vincoli
imposti sulla stabilità.
Se ora facciamo riferimento ad un sistema non unilaterale per cui si ha:
Γ in = s 11 +
s 21 s 12 Γ L
1 − s 22 Γ L
Γ out = s 22 +
s 21 s 12 Γ S
1 − s 11 Γ S
si potranno scegliere, in caso di incondizionata stabilità, ΓS e ΓL utilizzando la
condizione, che massimizza il guadagno, di adattamento coniugato:
Γ S = Γ in∗
(4)
∗
Γ L = Γ out
dove, però, le (4) non potranno più essere scelte in modo indipendente, bensì
costituiscono un sistema in cui l'una dipenda dall'altra. In particolare, in questo caso il
guadagno massimo risulta:
G Tmax =
(
s 21
K −
s 12
K
2
−1
)
(K > 1)
(5)
Nel caso in cui non si abbia stabilità incondizionata, il guadagno non ha un massimo
come già visto. Tale valore è spesso fornito dal costruttore del dispositivo, in caso
contrario, è facilmente calcolabile tramite la (5), noto che sia il valore di K, solitamente
presente nei Data Sheet del componente. Se, però, K < 1 (dispositivo potenzialmente
instabile), come può accadere, il costruttore fornisce il guadagno MSG (Maximum
Stable Gain) definito come:
G MSG =
s 21
s 12
ossia, il valore di G Tmax che si ottiene per la condizione di confine K = 1. Ciò non è
particolarmente rilevante dal punto di vista del significato fisico, ma fornisce un’idea
della qualità del componente. In generale, un buon transistor dovrà avere s21 molto
236
grande, che corrisponde ad un guadagno s21 elevato ed un parametro di reazione s12
molto piccolo.
Da quanto finora affermato, emerge che la condizione di adattamento non è sempre
realizzabile, ossia, non sempre sarà possibile far vedere al generatore e al carico
un’impedenza di 50Ω. Schematicamente si realizza l’adattamento se:
ΓS = Γin∗
sorgente
50Ω
fig. 1
∗
ossia, quando Γ S = Γ in . In realtà, a causa di problemi legati all’instabilità e alla
variazione dei parametri dei componenti, si potrà avere:
Γin ( amplif
≠0
.)
Γout ( amplif
.)
≠ 0
invece che nulli, come sarebbe auspicabile. Questo accade in pratica anche perché la
condizione di adattamento non potrà essere realizzate con precisione infinita
utilizzando componenti reali.
Nella pratica per un amplificatore, oltre ai parametri sopracitati, quali, ad esempio, il
guadagno di trasduzione, si forniscono anche:
input return loss = 20 log
10
Γin ( amplif
output return loss = 20 log
10
Γout ( amplif
.)
.)
che possono andare da un valore teoricamente infinito, quando ci si trova in una
situazione ideale (Γin(amplif.) = 0 e Γout(amplif.) = 0), in cui non si ha riflessione e le perdite
di ritorno sono nulle, a zero quando Γin(amplif.) e Γout(amplif.) sono unitari (massimo
disadattamento).
237