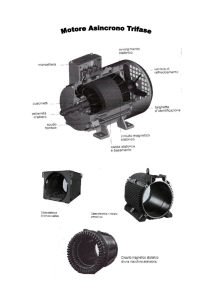
FUNZIONAMENTO DEL MOTORE ASINCRONO TRIFASE E SUE CARATTERISTICHE
F. e. m. indotte dal campo rotante negli avvolgimenti di statore e
rotore. Scorrimento.
Le linee di induzione del campo rotante che attraversano il traferro del motore asincrono
vengono tagliate, durante la uniforme rotazione del campo, da tutti i conduttori attivi che
compongono gli avvolgimenti sia dello statore che del rotore.
In particolare gli avvolgimenti statorici si comportano a tale riguardo esattamente come gli
avvolgimenti indotti di un alternatore o di un motore sincrono, perché il campo rotante che
scorre nel traferro del motore asincrono esercita sui conduttori fissi dello statore l'identico
effetto di induzione elettromagnetica che viene prodotto dalla rotazione materiale della ruota
polare di una macchina sincrona.
In ciascuna fase dello statore si genera perciò una f. e. m. indotta E1 la quale ha la stessa
espressione della f. e. m. generata da un alternatore.
Indicando cioè con Φ il flusso che compete a ciascun polo del campo rotante, con f1 la
frequenza di alimentazione del motore e con N1 il numero dei conduttori attivi che si trovano
collegati in serie tra loro a comporre ciascuna fase, si ha in ogni fase statorica una f. e. m.
indotta il cui valore efficace è espresso dalla relazione E1 = K1 • f1 • Φ • N1
essendo K1 il noto fattore di Kapp. Nelle tre fasi si hanno naturalmente tre f. e. m. identiche
sfasate l'una rispetto all'altra di 120° elettrici. In analogia coi trasformatori, queste f. e. m.
statoriche vengono spesso designate col nome di f. e. m. primarie del motore.
Corrispondentemente viene detta f. e. m. secondaria E2 la f. e. m. che viene indotta dallo stesso
1
campo rotante negli avvolgimenti del rotore, i quali si comportano come gli avvolgimenti
secondari del trasformatore.
Questa f. e. m. secondaria si genera perché le linee di forza del campo rotante tagliano i
conduttori attivi del rotore; però siccome il rotore gira nello stesso verso del campo rotante, è
chiaro che la velocità di taglio delle linee di forza non sarà l'effettiva velocità del campo, ma solo
la velocità relativa del campo rotante rispetto al rotore.
Essendo f1 la frequenza di alimentazione del motore, detta anche frequenza primaria, il campo
rotante con p coppie di poli ruota nello spazio, e cioè rispetto allo statore che è fisso, alla velocità
di sincronismo n1, data in giri al primo da
n1 = 60 • f1 / p
Se allora in una certa condizione di regime il rotore compie, seguendo campo rotante, n2 giri
al primo (n2 < n1), la velocità relativa del campo rotante rispetto al rotore sarà la differenza tra
le due velocità: il campo rotante scorre cioè, rispetto al rotore che lo segue, in ragione di (n1- n2)
giri al primo. La differenza (n1 - n2) si denota col nome di velocità di scorrimento e rappresenta
il numero di giri che il rotore perde, ad ogni minuto primo, rispetto al campo rotante.
Si indica invece semplicemente col nome di scorrimento, la frazione di giro che il rotore
perde per ciascun giro del campo rotante e cioè il rapporto
s =
n1 − n 2
n1
In pratica si esprime più comodamente lo scorrimento percentuale, cioè la misura dello
scorrimento che si ha su 100 giri del campo rotante, scrivendo:
s % = 100 ⋅ s = 100 ⋅
n1 − n 2
n1
2
È chiaro che quando il rotore è fermo, come accade ad esempio all'atto dell'avviamento, si ha
n2 = 0 e perciò s = 1 oppure s % = 100; se invece il rotore arrivasse a raggiungere la velocità del
campo rotante si avrebbe n2 = n1 e perciò s = 0 : mentre il motore passa dalla velocità zero alla
velocità di sincronismo, lo scorrimento varia dunque da uno a zero.
Dicendo, ad esempio, che un motore asincrono lavora, in una certa condizione di carico, con
uno scorrimento del 3% si esprime il fatto che il rotore perde 3 giri per ogni cento giri del campo
rotante e cioè che mentre il campo fa 100 giri rotore ne compie 97.
In ogni caso se un motore asincrono si trova a funzionare con un dato scorrimento s, vuol dire
che le linee di forza del campo rotante tagliano i conduttori attivi del rotore con una velocità di
scorrimento espresso, in giri al primo, dalla relazione:
n1 – n2 = n1 • s
mentre il rotore compie corrispondentemente un numero di giri
n2 = (1-s) • n1
Agli effetti della generazione della f. e. m. secondaria E2 negli avvolgimenti del rotore le cose
vanno come se il rotore fosse fermo e soggetto all’azione di un campo induttore che ruotasse con
la velocità di scorrimento (n1 - n2); ne risulta perciò che la frequenza delle correnti indotte nel
rotore, denominata frequenza secondaria f2 non corrisponde alla frequenza primaria f1, ma è
determinata invece dalla velocità di scorrimento. Tale frequenza secondaria sarà data quindi
(come in un alternatore con p coppie di poli e velocità (n1 - n2) = n1 • s) dalla relazione
f2=
p ⋅ (n 1 − n 2)
60
=
p ⋅n1
60
⋅s
3
Poiché
p ⋅n1
60
Risulta anche: f2 = s
=f1
• f1
Quest'ultima relazione è importantissima ed esprime il fatto che la frequenza f2 delle correnti
indotte nel rotore di un motore asincrono è eguale alla frequenza di alimentazione moltiplicata
per lo scorrimento s.
Inversamente si può dire che lo scorrimento di un motore asincrono può essere definito anche,
e misurato, eseguendo il rapporto tra la frequenza delle correnti indotte nel rotore e la frequenza
di alimentazione dello statore.
I valori dello scorrimento in regime normale di funzionamento del motori asincroni variano entro i limiti dall‘1 al 5%;
corrispondentemente la frequenza delle correnti rotoriche risulterà dell'ordine dall‘1 al 5% della frequenza di
alimentazione f1 e perciò, dati i valori delle frequenze industriali (42 ÷ 60 Hz), dell'ordine appena di qualche periodo al
secondo. Per esempio, se lo scorrimento è del 3 % e la frequenza di alimentazione è f1 = 50 Hz, la frequenza delle correnti
indotte nel rotore è f2 = 0,03 x 50 = 1,5 Hz .
Il valore efficace della f. e. m. secondaria E2 che viene indotta, alla frequenza f2, in ciascuna
fase del rotore, se N2 è il numero dei conduttori attivi per fase ed è Φ il flusso corrispondente ad
un polo del campo rotante induttore, sarà dato dalla espressione
E2 = K2 • Φ • N2 • f2
essendo K2, generalmente diverso dal fattore K1, relativo allo statore.
4
Poiché f2 = s • f1, si può scrivere anche
E2 = K2 • Φ • N2 • s • f1
Quest'ultima relazione attesta che restando costante la frequenza di alimentazione f1 e il flusso
Φ (e perciò costante anche la f. e. m. primaria E1 = K1 • Φ • N1 • f1), la secondaria E2 varia invece
al variare dello scorrimento. Per indicare tale dipendenza, il valore generico della f. e. m.
secondaria corrispondente allo scorrimento s sarà rappresentato, ove occorra, col simbolo E2 (s).
Il valore dello scorrimento dipende dalle condizioni di carico del motore e precisamente dal
valore della coppia resistente che esso è chiamato a vincere. Se il motore gira a vuoto e cioè con
coppia resistente nulla, per l'equilibrio dinamico deve essere nulla anche la coppia motrice: ciò
avviene quando si annullano le correnti indotte nel rotore e cioè quando si annulla la f. e. m.
secondaria. Questa non può annullarsi, d'altra parte, se non quando lo scorrimento si annulla: per
s = 0 risulta infatti E2 (s) = 0. Si arriva così alla conclusione che il motore asincrono funzionante
a vuoto presenta uno scorrimento nullo e cioè la sua velocità di rotazione n2 eguaglia la velocità
del campo rotante n1 ; in altri termini il motore funzionante a vuoto raggiunge e conserva la
velocità di sincronismo dalla quale si discosta solo, all'atto pratico, della minima quantità che
occorre per dar luogo alla piccola coppia necessaria a vincere gli attriti. Lo scorrimento a vuoto
può avere ad esempio valori dell'ordine di 0,001 (il rotore perde un giro su 1000 giri del campo
rotante) : corrispondentemente la f. e. m. secondaria E2 assume dei valori di piccole frazioni di
volt, con frequenza f2 bassissima dell'ordine di qualche periodo al minuto primo.
5
Reazione rotorica.
Le f. e. m. secondarie E2(s) agendo nei circuiti chiusi del rotore, vi generano delle correnti le
quali si possono esprimere, per ciascuna fase, in base alla rispettiva impedenza.
Poiché il rotore è provvisto in ogni caso di un avvolgimento polifase simmetrico, nelle
diverse fasi si hanno correnti eguali in valore ed egualmente sfasate sulle rispettive f. e. m.
Tali correnti creano perciò a loro volta, come le correnti nello statore, un campo rotante,
denominato campo indotto, il quale ha in ogni caso lo stesso numero di poli del campo
induttore.
Se si tratta di un rotore ad anelli infatti esso è provvisto di un avvolgimento con passo polare
identico allo statore; se si tratta di un rotore a gabbia, le correnti indotte assumono da sole come
si è già osservato una distribuzione equipolare con lo statore.
Questo campo rotante indotto compie, rispetto al rotore che lo genera e indipendentemente
dalla rotazione propria del rotore, un numero di giri che dipende dalla frequenza f2 delle
correnti rotoriche; e precisamente, se p sono le coppie di poli, il campo indotto compie rispetto
al rotore un numero di giri al primo espresso da 60 • f2 / p . Il verso di rotazione di questo
campo rispetto al rotore coincide d'altra parte col verso della rotazione propria del rotore,
perché in tal verso si seguono sul rotore i ritardi di fase delle correnti che vi sono indotte dal
campo induttore. Ne segue che la velocità di rotazione propria del rotore e la velocità relativa
rispetto al rotore, del campo rotante che esso genera, si sommano.
D'altra parte la velocità relativa del campo indotto rispetto al rotore coincide con la velocità
di scorrimento (n1 - n2) = n1 • s. Infatti, essendo sempre f2 = s • f1, risulta
60 ⋅ f 2
p
=
60 ⋅ f 1
p
⋅ s = n1 ⋅ s = n1 − n 2
6
Eseguendo la somma della velocità propria del rotore n2 e della velocità addizionale (n1 - n2) del
campo che esso genera, si ottiene la velocità risultante nello spazio del campo indotto ; tale
somma vale n2 + (n1 – n2) = n1
Si arriva cosi alla conclusione essenziale che il campo indotto ruota nell'intraferro con una
velocità che si identifica in ogni caso, e qualunque sia la velocità pro pria del rotore n2, con la
velocità del campo rotante induttore. Tanti giri perde il rotore rispetto a quest'ultimo e altrettanti
ne riprende il campo indotto: qualunque sia lo scorrimento del rotore, il campo che esso genera si
mantiene così in perfetto sincronismo con il campo rotante induttore. In tal modo i due campi
rotanti, induttore e indotto, conservano invariata durante le rotazione la loro posizione
reciproca.
Ne segue in particolare che le correnti rotoriche, per tutto ciò che riguarda la reazione che
esse esercitano sul sistema induttore, possono essere considerate della stessa frequenza delle
correnti di alimentazione dello statore, perché la minore frequenza delle correnti secondarie è
sempre compensata dalla rotazione meccanica del rotore.
Se il rotore è fermo (s = 1) la frequenza secondaria coincide senz'altro con in frequenza
primaria; se invece il rotore è in marcia, ad esempio con uno scorrimento del 3 %, la frequenza
delle correnti rotoriche è pari al 3% della frequenza primaria mentre il rotore gira con una
velocità che è il 97 % della velocità di sincronismo: il 3% mancante è colmato dalla velocità con
in quale il campo indotto scorre a sua volta rispetto al rotore che lo genera e perciò in definitiva le
correnti secondarie reagiscono sullo statore come se avessero ancora la frequenza primaria e il
rotore fosse ancora immobile.
7
Conseguentemente l'effetto di reazione delle correnti rotoriche sullo statore di un motore
asincrono si palesa perfettamente analogo all’effetto di reazione degli avvolgimenti secondari
sugli avvolgimenti primari di un trasformatore statico, indipendentemente dalla rotazione
meccanica del rotore.
Il fatto di avere nel motore asincrono un flusso rotante di valore costante anziché un flusso
alternativo di direzione fissa come nel trasformatore non sposta la perfetta correlazione che esiste
fra a le due macchine; è già noto infatti che, agli effetti del flusso concatenato con una o più spire,
la rotazione di queste in un campo fisso e costante, oppure la rotazione di un campo costante
rispetto alle spire, equivale precisamente ad un flusso concatenato immobile rispetto alle spire ma
variabile con legge alternativa.
Si immagini ora di considerare un motore ideale senza perdite e senza dispersioni magnetiche
alimentato a tensione costante: in tal caso la tensione applicata a ciascuna fase dello statore deve
essere direttamente equilibrata, in virtù della legge di Ohm, dalla f. e. m. primaria E1 ; perciò il
flusso per polo del campo rotante induttore deve assumere e conservare il valore che risulta
dall'eguaglianza V1 = E1 = K1 • Φ • N1 • f1
L'alimentazione del motore a tensione costante comporta dunque come necessaria conseguenza
la costanza del flusso induttore Φ. Nel funzionamento a vuoto, essendo nulla la coppia
resistente, il motore a partire dall'avviamento accelera fino a raggiungere la velocità di
sincronismo alla quale si annulla anche la coppia motrice. In tali condizioni sono ridotte a
zero le correnti indotte nel rotore e perciò è nulla la reazione secondaria; l'avvolgimento
primario del motore assorbe allora dalla linea che lo alimenta la sola corrente magnetizzante
Iµ che è necessaria a produrre il flusso induttore Φ. Tale corrente, essendo nulla la potenza, è
8
sfasata in ciascuna fase di 90° in ritardo sulla tensione.
Circuito equivalente del motore asincrono.
In un motore asincrono reale ciascuna fase statorica e rotorica è caratterizzata innanzi tutto
dalla presenza della resistenza ohmica degli avvolgimenti. Nel circuito equivalente del motore
debbono inoltre figurare le reattanze di dispersione, dovute a quelle linee di induzione del
campo che si concatenano singolarmente con ciascuna fase dei due avvolgimenti statorico e
rotorico senza interessare altro e perciò non partecipano al fenomeno della reazione.
Questi flussi di dispersione comprendono le linee di induzione che si chiudono direttamente
attorno ai conduttori attivi, rispettivamente dello statore e del rotore, senza attraversare il
traferro (flusso disperso alle cave) e inoltre le linee di induzione che si richiudono attorno alle
testate degli avvolgimenti che sporgono dai pacchi lamellari (flusso disperso alle testate).
Sviluppandosi prevalentemente nell'aria, questi flussi possono ritenersi proporzionali alle
correnti che li producono ; si può considerare quindi, per ogni fase, una opportuna induttanza di
dispersione, definita come rapporto tra il flusso disperso concatenato con gli avvolgimenti della
fase considerata e la corrente che la percorre. Se gli avvolgimenti sono simmetrici risulteranno
eguali fra loro le induttanze L1 relative alle diverse fasi primarie, ed analogamente risulteranno
eguali tra loro le induttanze L2 relative alle fasi secondarie.
[Gli avvolgimenti trifasi con matasse in tre ordini avranno in realtà induttanze diverse per le tre
fasi, perché varia da una fase all'altra lo sviluppo e la forma delle connessioni frontali: si tratta
però anche in tal caso di differenze trascurabili].
9
Moltiplicando le induttanze predette L1 ed L2 per la pulsazione relativa rispettivamente alla
frequenza primaria e secondaria f1 e f2 si ottengono le reattanze di dispersione primaria e
secondaria X1 e X2. Così, posto ω1 = 2πf1, la reattanza primaria per ciascuna fase è:
X1 = ω1 • L1
Per una data frequenza di alimentazione del motore, essa costituisce un parametro praticamente
costante della macchina, il quale si associa alla resistenza ohmica R1 di ciascuna fase primaria
per comporre l'impedenza primaria
Z1 = R1 + j • X1
Analogamente posto:
ω2 (s) = 2 • π • f2(s)
la reattanza secondaria è
X2(s) = ω2 (s) •L2
il cui valore dipende dallo scorrimento s in quanto la frequenza rotorica vale f2 =f1 • s. In
generale risulta quindi, in funzione dello scorrimento
X2(s) = s • ω1 •L2
Per s = 1, cioè a rotore fermo, la frequenza rotorica coincide con la frequenza di linea f1 e si ha
quindi X2 (1) = ω1 • L2 ; in corrispondenza di un generico valore dello scorrimento s l'espressione
della reattanza di dispersione secondaria assume così la forma
X2(s) = s • X2(1)
10
Mentre il rotore passa da fermo alla velocità di sincronismo, la reattanza secondaria X2(s) varia
dunque proporzionalmente allo scorrimento fra i limiti
X2(1) = ω1• L2;
X2(0) = 0
Per quanto riguarda la resistenza secondaria si può osservare che le fasi rotoriche, a regime
normale, sono di regola chiuse in corto circuito tra loro: si dovrà considerare perciò la resistenza
ohmica propria di ciascuna fase, comprese le connessioni di corto circuito. A parte le variazioni
dipendenti dalla temperatura, questa resistenza secondaria R2 costituisce un parametro costante
della macchina. Se in casi particolari il motore lavora con resistenze addizionali sulle fasi
rotoriche, alla resistenza R2 va aggiunta o conglobata la resistenza addizionale relativa a ciascuna
fase.
La resistenza e la reattanza secondarie definiscono l'impedenza secondaria, che viene espressa
per ciascuna fase, in funzione dello scorrimento, dalla relazione
Z2(s) = R2 + j • X2(s) = R2 + j • s • ω1 • L2 = R2 + j • s • X2(1)
Variando lo scorrimento da uno a zero il valore dell'impedenza secondaria aria fra i limiti
Z 2 (1) = R 22 + X 22 (1) ; Z 2 (0) = R 2
Quindi mentre il motore tende alla velocità di sincronismo e cioè lo scorrimento a zero,
l'impedenza secondaria tende alla resistenza ohmica R2 .
In base all'espressione della impedenza secondaria, è possibile calcolare la corrente I2(s) che
circola in ciascuna fase del rotore ; per la legge di Ohm tale corrente è infatti espressa dalla
relazione simbolica
s ⋅ E 2 (1)
E 2 (s ) =
I 2 (s ) =
11
Z 2 (s ) R 2 + j ⋅ s ⋅ X 2 (1)
Dividendo il numeratore e il denominatore per s si ottiene anche
I 2 (s ) =
E 2 (1)
R 2 + j ⋅ (1)
X2
s
Quest'ultima relazione dimostra che la corrente che circola in ciascuna fase del rotore quando
esso ruota con lo scorrimento s, e quella stessa che si avrebbe quando il rotore fosse immobile
(s = 1), ma con la resistenza ohmica di ogni fase aumentata dal valore R2 al valore R2/s, cioè
della quantità R(s) espressa dalla differenza
1−s
R (s ) = R 2 − R 2 =
s
s
⋅R 2
Si giunge così alla conclusione fondamentale che nel motore asincrono, la rotazione meccanica
del rotore equivale, elettricamente, alla comparsa nel circuito rotorico della resistenza fittizia
R(s) dipendente dallo scorrimento come si vedrà, la potenza elettrica dissipata in questa
resistenza corrisponde precisamente alla potenza meccanica sviluppata dal rotore.
12
Fig. 2 - Circuito equivalente
del motore asincrono.
Ciascuna fase del rotore in marcia con lo scorrimento s può essere pertanto rappresentata da
un circuito equivalente nel quale agisce la f. e. m. E2(1) relativa al rotore fermo, ed è dotato
oltre che della resistenza propria R2, della reattanza di dispersione X2(1) misurata anch' essa a
rotore fermo, collegate in serie con una resistenza addizionale R(s) che rende conto dell' effetto
della rotazione, come è rappresentato in fig. 2.
Durante la rotazione del motore, nella realtà si verifica una diminuzione della f. e. m. indotta
nel rotore e della frequenza f2: nel circuito equivalente rotorico ciò equivale a supporre che resti
invariata sia la f. e. m. che la frequenza, e che aumenti invece la resistenza ohmica del rotore.
Così, nel funzionamento a vuoto, il motore raggiunge la velocità di sincronismo e la corrente
nel rotore si annulla, perché si annulla la f. e. m. indotta: nel circuito equivalente si suppone
invece che la f. e. m. E2(1) resti invariata, ma che diventi infinita la resistenza di carico R(s);
per s = 0 si ha infatti
1− s
R (s ) =
s
⋅R 2 = ∞
Si può dire così che il motore asincrono funzionante a vuoto si comporta come un
trasformatore statico a circuito secondario aperto.
13
Quando invece il rotore è immobile e si ha s = 1, la resistenza di carico diventa
R (s ) =
1− s
s
⋅ R 2 = 0;
nel secondario non si ha in tali condizioni nessuna resistenza addizionale ma solo la resistenza
propria dell'avvolgimento. Ciò vuol dire che il motore asincrono, col rotore immobile si comporta
come un trasformatore statico chiuso in corto circuito.
L'avvolgimento primario di questo trasformatore corrisponde al circuito equivalente di una fase
dello statore dotata della propria resistenza ohmica e della reattanza di dispersione X1, e
alimentata alla tensione primaria V1 come in fig. 2. La resistenza trasversale R0 e la reattanza X0
rappresentano infine, come nei trasformatori, gli elementi del circuito equivalente del motore che
richiamano la corrente di perdita Ia e la corrente magnetizzante Iµ .
Fig. 2 - Circuito equivalente
del motore asincrono.
14
COPPIA E POTENZA TRASMESSA.
La coppia motrice che agisce sul motore asincrono per effetto delle azioni elettromagnetiche che
si esercitano fra il campo rotante e le correnti indotte nel rotore, è in diretta relazione con la
potenza che il campo rotante trasmette al rotore stesso. Siccome il campo rotante ruota sempre
con la stessa velocità, qualunque sia la velocità di rotazione effettiva del rotore, si può dire che la
trasmissione della potenza dallo statore al rotore avviene costantemente alla velocità di
60 ⋅ f 1
sincronismo
n1 =
p
Ne risulta che se Pt è la potenza trasmessa dal campo rotante al rotore, la coppia C che vi
2 ⋅ π ⋅C ⋅n1
corrisponde rimane determinata dalla relazione
Pt =
60
D'altra parte il rotore non ruota alla velocità di sincronismo, ma ad una velocità n2 < n1. Ciò vuol
dire che la potenza meccanica PM che viene effettivamente impressa al rotore non è l'intera
potenza Pt ma è invece
2 ⋅ π ⋅C ⋅n 2
PM =
60
La differenza tra la potenza totale Pt trasmessa al rotore e la potenza meccanica PM rappresenta
così la potenza elettrica dissipata nel rotore: siccome le perdite nel ferro del rotore sono
trascurabili, tale dissipazione corrisponde, essenzialmente alle perdite nel rame dei circuiti
rotorici. (Le perdite meccaniche non devono essere considerate perché esse vanno a carico della
potenza meccanica PM). Indicando perciò con P”j le perdite per effetto Joule nei circuiti rotorici
si ha
P j = 3 ⋅ R 2 ⋅ I 22 = P t − P M =
"
2 ⋅ π ⋅C ⋅n1 2 ⋅ π ⋅C ⋅n 2 2 ⋅ π ⋅C
−
=
⋅ (n 1 − n 2 )
60
60
60
15
Ricordando che (n1 – n2) = s • n1, risulta:
Ed essendo:
2 ⋅ π ⋅C ⋅n1
= Pt
60
P "j =
2 ⋅ π ⋅C ⋅ s ⋅n1
60
Si ottiene infine:
P”j = s • Pt
Si ha in ciò una proprietà importante del motore asincrono che si esprime dicendo che le
perdite per effetto Joule nel rotore corrispondono al prodotto dello scorrimento s per la
potenza Pt trasmessa dal campo rotante al rotore.
Richiamandosi al circuito equivalente del motore rappresentato in fig. 2 è ora possibile
controllare che la potenza meccanica PM impressa al rotore equivale alla potenza elettrica
dissipata nella resistenza fittizia di carico R(s).
Si ha infatti, considerando ad esempio un rotore trifase:
P M = P t − P "j =
1− s
1− s
P "j
− P "j =
⋅ P "j = 3 ⋅
⋅ R 2 ⋅ I 22 (s ) = 3 ⋅ R (s ) ⋅ I 22 (s )
s
s
s
Fig. 2 - Circuito equivalente
del motore asincrono.
16
Si può inoltre facilmente verificare che il rendimento elettrico del rotore, cioè il rapporto tra la
potenza meccanica PM e la potenza totale trasmessa al rotore Pt , coincide con la differenza
(1 - s) : così se un motore lavora con uno scorrimento del 3% vuol dire che la perdita per
effetto Joule nei circuiti rotorici è il 3% della potenza totale che viene impressa al rotore,
mentre il 97% viene trasformata in potenza meccanica.
17
Caratteristica meccanica del motore asincrono.
La « caratteristica meccanica» di un motore e la curva che rappresenta la relazione tra la
coppia motrice e la velocità: C = f (n).
Nel caso del motore asincrono questa curva può essere dedotta dal diagramma circolare,
assumendo come asse delle ascisse la scala degli scorrimenti e innalzando su questa le coppie
corrispondenti come ordinate.
Fig. 12 Caratteristica
meccanica dedotta
dal diagramma
circolare della figura
precedente.
Allo scorrimento s = 100% corrisponde la coppia di spunto Ca.
La curva C = f (s) che assume la forma caratteristica indicata in figura.
La coppia motrice sviluppata dal motore cresce cioè in un primo tratto assai rapidamente al
crescere dello scorrimento fino a raggiungere il suo valore massimo, poi diminuisce
gradualmente fino a ridursi al valore Ca.
18
Il funzionamento del motore è stabile nell'intervallo crescente della coppia da zero al valore
massimo CM , mentre è instabile in tutto l’intervallo in cui la coppia è decrescente; in
quest'ultimo intervallo infatti ad ogni rallentamento del motore corrisponde una diminuzione
della coppia motrice; si produce così un rallentamento ulteriore e il motore è condotto a fermarsi.
Nel primo intervallo, invece, se il motore rallenta la coppia motrice aumenta e l'equilibrio
dinamico si ricostituisce. Come si è già osservato il campo di funzionamento normale del motore
viene generalmente limitato fino a un valore della coppia pari a meno della metà della coppia
massima.
Si può anche facilmente ricavare l’espressione analitica della coppia motrice in funzione dello
scorrimento, richiamandosi alla relazione C = 60 ⋅
Pt
2 ⋅ π ⋅n1
e sostituendo alla potenza trasmessa Pt il rapporto tra le perdite nel rame del rotore P”j e lo
scorrimento s (P”j = s • Pt); si ottiene
60
60
60
3 ⋅ R 2 ⋅ I 22 (s )
P "j
⋅ Pt =
⋅
=
⋅
C =
2 ⋅ π ⋅n1
2 ⋅ π ⋅ n1 s
2 ⋅ π ⋅n1
s
nella quale R2 è la resistenza di ciascuna fase dei circuiti rotorici e I2(s) la corrente che
percorre.
19
Dopo alcuni passaggi e trascurando le cadute di tensione primarie, cioè ritenendo E1 ≈V1 si ricava
Approssimativamente (m = rapporto di trasformazione):
2
3 p V 1
s ⋅R 2
⋅ ⋅ ⋅ 2
C ≅
2
2
2 ⋅π f 1 m
R
2 + s ⋅ X 2 (1)
Questa relazione dimostra in primo luogo che, entro i limiti in cui le cadute primarie di tensione
sono trascurabili, la coppia motrice sviluppata dal motore asincrono è proporzionale, per un dato
scorrimento, al quadrato della tensione di alimentazione.
Se la tensione rimane costante, la coppia motrice varia al variare dello scorrimento
proporzionalmente all'espressione
s
1
=
2
R 22 + s 2 ⋅ X 22 (1) R 2 + s ⋅ X 2 (1)
2
s
alla quale corrisponde precisamente una curva di variazione che ha un andamento simile alla
curva C = (s) rappresenta in fig. 12. In particolare si rileva che l'espressione considerata diviene
massima quando è minima la somma R 22
+ s ⋅ X 22 (1)
20
s
Osservando che il prodotto dei due addendi è pari a R22 • X22(1) e perciò rimane costante,
si deduce senz'altro che la somma minima quando i due addendi sono eguali. Ne risulta allora che
la coppia motrice sviluppata dal motore raggiunge il suo valore massimo CM per quel valore s'
dello scorrimento per cui si verifica l'eguaglianza R 22
+ s '⋅ X 22 (1)
s'
Il valore dello scorrimento di massima coppia dato pertanto dal rapporto:
s '= R 2 = R 2
X 2 (1) ω1 ⋅ L 2
Per questo valore dello scorrimento risulta
R 2 = s '⋅ X 2 (1) = X 2 (s ')
Si può quindi affermare che la coppia motrice diviene massima per quel valore dello
scorrimento per cui si verifica l'eguaglianza tra la resistenza ohmica e la reattanza dei circuiti
rotorici.
21
Questa espressione dimostra che il valore della coppia massima sviluppata da un dato motore
asincrono è indipendente dalla resistenza dei circuiti rotorici, mentre risulta inversamente
proporzionale all'induttanza di dispersione secondaria L2. Ciò vuol dire che per ottenere una
coppia massima elevata bisogna ridurre al minimo l'intraferro del motore, perché in tal modo si
riduce L2. Per questa ragione l'intraferro dei motori asincroni viene ridotto al più piccolo valore
che è compatibile con le esigenze meccaniche.
II valore della coppia massima rimane invece inalterato, entro certi limiti, anche se viene
aumentata la resistenza dei circuiti rotorici R2, la quale interviene solo a determinare il valore
dello scorrimento s’ che vi corrisponde. Tale scorrimento è direttamente proporzionale alla R2;
se questa è piccola, la coppia massima viene raggiunta con uno scorrimento piccolo e cioè con
un piccolo rallentamento del motore; se invece la resistenza ohmica del rotore viene aumentata,
il motore può sviluppare egualmente la stessa coppia massima, ma questa viene raggiunta con
un maggiore scorrimento e cioè con una maggiore perdita di velocità. Ciò vuol dire che
aumentando la resistenza ohmica del circuiti rotorici la caratteristica meccanica del motore
asincrono si modifica successivamente come è indicato nella fig. 14
22
La curva (1) corrisponde
alla resistenza
secondaria R’2 e la
coppia massima viene
raggiunta con lo
scorrimento s’1 ; se la
resistenza secondaria
viene raddoppiata, la
coppia massima viene
raggiunta con uno
scorrimento s’2 = 2• s’1 e
la caratteristica assume
la forma (2); triplicando
la resistenza secondaria
si passa analogamente
alla curva (3) che
presenta il massimo in
corrispondenza dello
scorrimento s’3= 3 • s’1 e
così via.
Dai fatti esposti risulta in particolare che il motore asincrono presenta uno scorrimento tanto
minore da vuoto a carico quanto più piccola è 1a resistenza dei circuiti rotorici: si ottiene in tal
modo il doppio vantaggio di migliorare il rendimento del motore e di contenere la perdita di
23
velocità che motore subisce da vuoto a carico entro limiti assai piccoli.
Fig. 14 - Come si modifica la caratteristica meccanica
aumentando la resistenza dei circuiti rotorici