Università degli Studi di Milano
Facoltà di Scienze Matematiche, Fisiche e Naturali
Laurea Triennale in Fisica
Tracciamento di particelle
cariche e tecniche di selezione di
particelle con vita media
relativamente lunga (b-tagging)
Relatore:
Prof. Francesco RAGUSA
Correlatore:
Dott. Attilio ANDREAZZA
Federico Meloni
Matricola N. 689768
Codice PACS: 14.65.-q
Anno Accademico 2007/2008
Indice
1 Introduzione
3
2 Tracking
5
2.1 Moto di una particella carica in un campo magnetico . . .
6
2.1.1 Fit lineare . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.2 Fit quadratico . . . . . . . . . . . . . . . . . . . . . . 14
2.2 Errori nel tracking . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.1 Allineamento . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.2 Scattering Multiplo . . . . . . . . . . . . . . . . . . . 16
3 b-tagging
19
3.1 Lifetime tagging . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1.1 Determinazione e segno del parametro di impatto . 24
3.1.2 Probabilità di vita media . . . . . . . . . . . . . . . . 26
3.2 Migliorare il filtro: combinazione di più variabili . . . . . . 28
4 Simulazione
30
4.1 Ricostruzione di Mtop . . . . . . . . . . . . . . . . . . . . . . 32
4.2 Parametrizzazione del fondo . . . . . . . . . . . . . . . . . . 36
4.3 Simulazione della misura . . . . . . . . . . . . . . . . . . . 41
4.4 Efficienza b-tagging . . . . . . . . . . . . . . . . . . . . . . . 46
5 Conclusioni
48
2
Capitolo 1
Introduzione
Tutte le ricerche in fisica delle particelle si basano su esperimenti in cui
è necessario rivelare e tracciare la traiettoria delle particelle al fine di
misurarne le quantità caratteristiche quali ad esempio energia, quantità di moto e carica. Nel primo capitolo di questo lavoro si prenderanno
in considerazione le tecniche di ricostruzione della traiettoria a partire
da una serie di misure di posizione all’interno di un rivelatore in cui
è presente un campo magnetico noto e verranno esaminate le fonti di
errore nella misura, siano esse di origine statistica o sistematica.
Nel secondo capitolo si passa alla trattazione di un utilizzo specifico
del tracciamento delle particelle: il b-tagging.
Le particelle contenenti quark b sono caratterizzate da una serie di
qualità che ne rendono possibile l’identificazione: esse hanno una vita media relativamente lunga (dell’ordine di 10−12 secondi), hanno una
grande massa, hanno la tendenza a decadere in un grande numero di
particelle figlie comprendenti dei leptoni con grande quantità di moto
trasversa.
L’utilizzo del b-tagging nei moderni esperimenti è molto importante e
rientra in molti campi di ricerca: ad esempio se il bosone di Higgs dovesse esistere e avesse massa sufficientemente piccola, ci si aspetta di
trovare dei quark b nei suoi prodotti di decadimento; allo stesso modo il
quark b è presente nella maggioranza dei decadimenti del quark top e
rappresenta un candidato ideale per tutte le misure della fisica del top.
3
Un altro campo di ricerca dove il b-tagging è naturalmente necessario è
quello della fisica dello stesso quark b come ad esempio le ricerche sulla
violazione di CP.
La trattazione prenderà in considerazione la principale caratteristica
discriminante, ossia la vita media.
Il terzo ed ultimo capitolo del lavoro presenterà i risultati di una simulazione montecarlo realizzata utilizzando C++ e ROOT inerente la
ricostruzione della massa del quark top a partire da un decadimento
tt → W + W − b b → q q 0 l νl b b, una misura che è stata realizzata da
CDF II a Tevatron. Saranno presentati i risultati della simulazione con
il b-tagging attivo e disattivato e si confronteranno le misure così ricostruite.
In un secondo momento si effettuerà un test di coerenza tra i risultati
ottenuti con un numero di eventi simile a quello reale (∼ 60) e la simulazione montecarlo stessa. Infine si analizzeranno gli effetti dell’efficienza
dell’algoritmo di b-tagging sull’andamento della misura.
4
Capitolo 2
Tracking
Lo studio delle collisioni e dei decadimenti a livello nucleare e particellare si basa sull’utilizzo di strumenti in grado di rivelare e misurare i
prodotti di queste interazioni.
Gli esperimenti attualmente in corso e futuri si basano sull’utilizzo di
sofisticati sistemi elettronici in grado di selezionare automaticamente
i segnali rilasciati dai prodotti delle interazioni sotto studio all’interno
dei rivelatori e di maneggiare enormi quantità di dati per ricostruire
l’evento.
In questo capitolo saranno esaminati i principi che stanno alla base
della ricostruzione della traiettoria di una particella all’interno di un
rivelatore.
Una breve introduzione al fenomeno fisico del moto di una particella carica in un campo magnetico precederà la presentazione del formalismo
matematico del fit richiesto per ricavare l’equazione della traiettoria.
Benchè idealmente il rivelatore dovrebbe effettuare le misure senza
alterare in maniera misurabile lo stato delle particelle che lo attraversano, questa situazione non è sempre realistica: al termine della trattazione del fit si prenderà dunque in considerazione il problema degli errori
nella ricostruzione della traiettoria, siano essi generati dal procedimento del fit, da problemi di calibrazione-assemblaggio o dall’interazione tra
particella e materiale del rivelatore.
5
2.1. MOTO DI UNA PARTICELLA CARICA IN UN CAMPO
MAGNETICO
2.1
Moto di una particella carica in un campo
magnetico
Il moto di una particella immersa in un campo magnetico è soggetto alla
forza di Lorentz, data da
F = qv × B
(2.1)
Come si può osservare dalla sua formula, la forza è sempre perpendicolare sia alla velocità che alla direzione del campo B che la genera:
particelle ferme o in moto secondo una direzione parallela al campo B
non ne risentiranno.
La principale conseguenza di questa proprietà della forza di Lorentz
è che essa non compie lavoro sulla particella, lasciandone inalterata
l’energia e permette pertanto di fare una misura non distruttiva della quantità di moto di una particella.
Al contrario dell’energia, la direzione del moto della particella viene
cambiata dalla forza e, nel caso di un campo magnetico uniforme, produce una traiettoria elicoidale.
La presenza di un campo magnetico rende immediatamente distinguibili le cariche delle particelle coinvolte: cariche positive e negative
vengono deflesse in versi opposti, mentre le particelle neutre non risentono della forza e quindi conservano la loro originaria direzione di
emissione.
Si ha dunque che una particella di quantità di moto p e carica q
in un campo magnetico costante nel tempo B(r) si muove secondo una
traiettoria determinata dell’equazione differenziale
q dr
d2 r
=
B(r)
ds2
p ds
(2.2)
dove s è una coordinata locale data dallo spazio percorso sulla traiettoria che semplifica la trattazione dei problemi dal momento che il modulo
della velocità è costante.
Nel caso di un campo magnetico uniforme questa coincide con un’elica.
A partire da questa legge, attraverso la misura accurata di una traiettoria in un campo magnetico noto (anche nel caso in cui il campo magnetico non sia uniforme) è possibile ricavare la quantità di moto della
6
2.1. MOTO DI UNA PARTICELLA CARICA IN UN CAMPO
MAGNETICO
particella. I rivelatori che si utilizzano nei collisori hanno quasi sempre
un campo magnetico generato da un solenoide con l’asse coincidente con
la direzione dei fasci; risulta pertanto conveniente utilizzare un sistema
di coordinate cilindrico e scomporre la traiettoria della particella in due
piani: ρ − Φ (ortogonale al campo B) e ρ − z (contentente B).
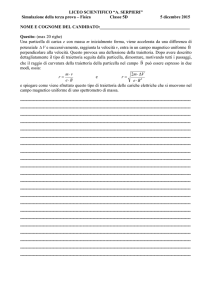
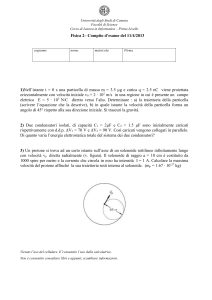
Figura 2.1: Angolo di dip λ e parametro d’impatto d nel piano ρ − z
Supponendo B uniforme, nel piano ρ − z la traiettoria è spesso approssimabile con una linea retta dalla quale è possibile ricavare l’angolo λ
detto angolo di dip ed il parametro d’impatto, come mostrato in fig. 2.1.
Il parametro d’impatto è definito come la distanza minima della traiettoria dall’origine del sistema di riferimento che usualmente coincide
con il punto di interazione. Nel piano ρ − Φ la traiettoria è un arco di
circonferenza da cui si misura la quantità di moto trasversa.
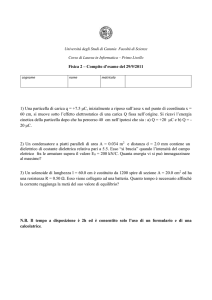
Un parametro molto importante da cui è possibile risalire alla quantità di moto totale della particella è la sagitta dell’arco percorso nel piano ρ − Φ, illustrata nella fig. 2.2. Dato un arco di circonferenza (di rag-
Figura 2.2: Sagitta s per un arco di circonferenza di raggio R e lunghezza L
gio R e lunghezza L) la sagitta dell’arco è legata al raggio dalle seguenti
7
2.1. MOTO DI UNA PARTICELLA CARICA IN UN CAMPO
MAGNETICO
relazioni
2α =
L
R
(2.3)
L2
α2
=
(2.4)
2
8R
Misurando la sagitta e l’angolo di dip λ è possibile risalire al raggio di
s = R(1 − cosα) ' R
curvatura e alla quantità di moto totale sfruttando
(2.5)
pt = pcosλ = 0.3BR
p=
pt
0.3BR
=
cosλ
cosλ
(2.6)
Una ricostruzione precisa della traiettoria della particella è necessaria
per un’accurata determinazione di queste due grandezze.
Figura 2.3: Misura della sagitta tramite tre misure di posizione yi
Prendiamo ora in considerazione l’andamento dell’errore sulla quantità
di moto ricavata dalla misura della sagitta calcolata a partire da tre
misure di posizione y1 , y2 e y3 , come mostrato in fig. 2.3. L’espressione
della sagitta e del suo errore sono quindi
y1 + y2
s = y3 −
2
r
δs =
3
δy
2
(2.7)
L’errore sul raggio di curvatura è legato all’errore sulla sagitta da:
r
L2 δR
3
| δs |=
=
δy
(2.8)
8R R
2
8
2.1. MOTO DI UNA PARTICELLA CARICA IN UN CAMPO
MAGNETICO
Sostituendo in questa espressione la relazione tra errore sul raggio di
curvatura ed errore sulla quantità di moto della particella
R=
p
0.3B
si ottiene
δp
=
p
δp
δR
=
p
R
√
96R
δy
L2
(2.9)
(2.10)
Sostituendo ora al raggio R la sua espressione in termini di quantità di
moto
√
96p
δp
=
δy
p
0.3BL2
(2.11)
si giunge alla relazione finale
√
96
δp
=
δy
2
p
0.3BL2
(2.12)
Il risultato ottenuto evidenzia come l’errore sulla quantità di moto
sia proporzionale alla quantità di moto stessa e all’errore sulla misura delle coordinate dei rivelatori di tracciamento. Va inoltre messa in
evidenza la forte dipendenza dalla lunghezza della traiettoria misurata, che dipende dall’inverso del quadrato: questa analisi approssimata
della ricostruzione della quantità di moto fornisce già delle importanti
indicazioni sul tipo di rivelatore necessario per ottimizzarne la misura.
Nella prossima sezione i risultati appena ottenuti verranno confrontati
con quelli derivanti da una trattazione più completa, che prenda in esame più di tre punti sulla traiettoria e consenta l’attribuzione di errori
diversi e correlati per effettuare il fit delle traiettorie.
Passiamo quindi alla trattazione matematica della ricostruzione della traiettoria in questi due piani ponendo particolare attenzione agli
errori.
9
2.1. MOTO DI UNA PARTICELLA CARICA IN UN CAMPO
MAGNETICO
2.1.1
Fit lineare
Abbiamo già notato che la proiezione della traiettoria sul piano ρ−z (che
contiene il campo magnetico B) è spesso approssimabile con una retta e
pertanto per la sua ricostruzione è sufficiente utilizzare un fit lineare.
Per la ricostruzione della traiettoria occorre scegliere un sistema di riferimento e supponiamo di fare N+1 misure di posizione yn della particella
durante il suo moto (da ora in poi utilizzeremo y al posto di ρ per semplificare la notazione).
Al fine di semplificare la trattazione del problema ogni misura sarà effettuata da un rivelatore posto in una posizione zn nota. Gli errori σn saranno tutti scorrelati e descritti pertanto da una matrice di covarianza
diagonale.
Il metodo per trovare la miglior retta y = a + bz passante per i punti
misurati consiste nel minimizzare la funzione
2
χ =
N
X
(yn − a − bzn )2
(2.13)
σn2
n=0
Il minimo della funzione si ottiene per
a=
Sy Szz − Sz Syz
D
b=
S1 Syz − Sz Sy
D
(2.14)
avendo definito
S1 =
N
N
N
X
X
X
1
yn
zn
S
=
S
=
y
z
σn2
σn2
σn2
n=0
n=0
Syz =
N
X
yn zn
n=0
σn2
Szz
n=0
N
X
zn2
=
σn2
(2.15)
n=0
D = S1 Szz − Sz Sz
(2.16)
Il problema può essere formulato anche utilizzando un formalismo
matriciale utile per compattezza, rapidità di adattamento a problemi
simili e la possibilità di essere utilizzato in un programma per elaboratore.
Nel caso della retta possiamo esprimere la relazione fra tutte le
10
2.1. MOTO DI UNA PARTICELLA CARICA IN UN CAMPO
MAGNETICO
previsioni del modello come
f0
a + bz0
1
f =
· · · = · · · = · · ·
fN
a + bzN
1
z0
" #
a
· · ·
b = Ap
zN
(2.17)
y0
Le misure sono rappresentate da un vettore colonna Y =
· · · e gli
yN
elementi della matrice di covarianza sono dati, in generale, da Vij =
h(yi − hyi i) (yj − hyj i)i
La funzione da minimizzare χ2 diviene χ2 = (Y − Ap)T W (Y − Ap)
con W = V −1 e il χ2 risulta minimo per ξ ∗ = (AT W A)−1 AT W Y .
Analizziamo ora l’errore sui parametri a (intercetta) e b (pendenza)
ricavati dal fit, sotto l’ulteriore ipotesi di disporre di rivelatori equispaziati e di errori di misura uguali σn = σ.
Chiamiamo L = zN − z0 e zc =
zN +z0
2
rispettivamente la lunghezza del
rivelatore ed il suo centro.
La matrice di covarianza (calcolata in z = 0) è data da
#
"
"
#
σa2 cab
1 Szz −Sz
=
D −Sz S1
cab σb2
(2.18)
E’ possibile esprimere in forma finita le quantità S
N +1
zc
Sz = (N + 1) 2
2
σ
σ
N + 1 N + 2 L2
=
+ zc2
σ2
N 12
S1 =
Szz
(2.19)
L2 (N + 1)2 (N + 2)
(2.20)
12σ 2
N
da cui si ricavano gli errori sui parametri a e b della retta ricostruita.
N zc2
σ2
2
σa = 1 + 12
(2.21)
N + 2 L2 N + 1
D=
σb2 = 12
N
σ2
(N + 2)L2 N + 1
(2.22)
Gli errori su entrambi i parametri sono quindi linearmente dipen√
denti dall’errore di misura σ e inversamente proporzionali a N + 1;
11
2.1. MOTO DI UNA PARTICELLA CARICA IN UN CAMPO
MAGNETICO
inoltre l’errore sul parametro b è inversamente proporzionale alla lunghezza L.
Si osserva che σa aumenta linearmente con la distanza del centro
del rivelatore zc dall’origine del sistema di riferimento scelto: questa
dipendenza dell’errore sull’intercetta richiede un approfondimento. Per
capire meglio calcoliamo gli errori del fit nel caso in cui l’origine del
sistema di riferimento sia posta al centro della traiettoria (zc = 0).
Ci si pone quindi nel nuovo sistema di riferimento e si ricalcolano σa e
σb
N +1
Sz = 0
σ2 N + 1 N + 2 L2
=
σ2
N 12
(2.23)
L2 (N + 1)2 (N + 2)
12σ 2
N
(2.24)
S1 =
Szz
D=
I nuovi errori calcolati sono:
σa2 =
σb2 = 12
σ2
N +1
N
σ2
(N + 2)L2 N + 1
(2.25)
(2.26)
Tuttavia questo risultato non deve portare a credere che l’errore sull’estrapolazione all’origine del sistema di riferimento iniziale sia diminuito: infatti il nuovo errore σa trovato si riferisce adesso ad un punto
differente che si trova ad una distanza zc da quello del caso precedente. Attraverso la propagazione degli errori 1 si ottiene infatti il risultato
originario:
f (−zc ) = a − bzc
σ−zc
2
σ−z
= σa2 + zc2 σb2
c
σ2
N zc2
= 1 + 12
N + 2 L2 N + 1
(2.27)
(2.28)
(2.29)
Da questa semplice discussione, emergono alcune importanti indicazioni sulle caratteristiche che dovrebbe possedere l’apparato di misura:
1
nel caso in cui l’origine sia al centro della traittoria la matrice di covarianza e’
diagonale
12
2.1. MOTO DI UNA PARTICELLA CARICA IN UN CAMPO
MAGNETICO
per ridurre l’errore sul parametro di impatto (cioè l’estrapolazione in
z = −zc ) si può agire tenendo conto dei fattori da cui esso dipende.
In primo luogo l’errore dipende dall’incertezza sulla misura della posizione: per ottimizzare la precisione sul parametro d’impatto occorre
utilizzare dei rivelatori con errore di misura più piccolo possibile (tipicamente rivelatori al silicio).
In secondo luogo, il fattore dipendente dall’errore sulla pendenza può
essere migliorato utilizzando un rivelatore più lungo possibile e quindi
un rivelatore di grandi dimensioni.
Infine la dipendenza dalla distanza tra il punto di interazione (punto di
estrapolazione a −zc ) e il centro dell’apparato di misura può essere mitigata utilizzando un rivelatore più vicino possibile al vertice primario
della traiettoria che si vuole misurare.
Il bisogno di una misura molto precisa e vicina al vertice primario viene conciliata con il bisogno di un rivelatore di grandi dimensioni (limitato normalmente dal costo) attraverso l’utilizzo accoppiato di
due tipi di rivelatore: un rivelatore di vertice di dimensioni ridotte, ma
molto preciso (L = 10cm, σ = 5µm) ed all’esterno un rivelatore centrale di dimensioni molto più grandi, con costi minori ma che garantisce
comunque una misura della pendenza con elevata precisione.
13
2.1. MOTO DI UNA PARTICELLA CARICA IN UN CAMPO
MAGNETICO
2.1.2
Fit quadratico
Il procedimento di fit quadratico viene utilizzato per ricostruire l’equazione di una traiettoria circolare sotto l’ipotesi che la particella sia dotata di una quantità di moto non troppo piccola: nel caso in esame ci si
pone nel piano ρ − Φ (perpendicolare a B).
Come visto precedentemente, la traiettoria della particella in questo
piano è un cerchio di raggio R
(y − y0 )2 + (x − x0 )2 = R2
(2.30)
Se la quantità di moto della particella non è troppo piccola, il raggio di
curvatura sarà abbastanza grande da poter utilizzare l’approssimazione:
y = y0 +
p
R2 − (x − x0 )2 '
(x − x0 )2
)=
2R2
x2
x0
1 2
= (y0 + R + 0 ) + x −
x
2R
R
2R
' y0 + R(1 −
(2.31)
La traiettoria risulta quindi approssimata da una parabola di equazione y = a + bx + cx2 .
I parametri a e b mantengono il loro significato di intercetta e pendenza nell’origine come nel caso del fit lineare, mentre c contiene le informazioni sul raggio di curvatura e quindi la quantità di moto della
particella.
Per la ricostruzione della traiettoria occorrono gli stessi elementi utilizzati per il caso lineare (un sistema di riferimento e N+1 misure di
posizione). In completa analogia con il caso precedente la miglior parabola y = a + bx + cx2 passante per i punti misurati viene identificata
minimizzando la funzione
2
χ =
N
X
(yn − a − bxn − cx2 )2
n
σn2
n=0
(2.32)
Il formalismo matriciale è perfettamente adattabile all’aumento delle
dimensioni del problema ricorrendo ai medesimi strumenti utilizzati nel
caso del fit lineare.
14
2.1. MOTO DI UNA PARTICELLA CARICA IN UN CAMPO
MAGNETICO
La funzione χ2 avrà ancora il suo minimo in ξ ∗ = (AT W A)−1 AT W Y , ma
in questo caso ξ sarà un vettore colonna di 3 elementi mentre le matrici
A e W saranno rispettivamente (N + 1) × 3 e (N + 1) × (N + 1).
Le formule dettagliate possono essere trovate nel lavoro di Gluckstern
[5].
Analizziamo ora gli errori statistici del fit quadratico: gli errori sui
parametri a e b conservano gli andamenti già evidenziati con il fit lineare, mentre il calcolo dell’errore sul parametro c porta alla seguente
relazione:
σc =
σp
CN
L2
(2.33)
dove CN è un coefficiente dipendente dal numero di misure di posizione
effettuate (N ).
Ricordiamo l’espressione del parametro c e come il suo errore si traduce
in un errore sul raggio della traiettoria
c=
1
2R
σc =
1
δR
2R2
(2.34)
Siamo interessati a ricavare l’errore sulla quantità di moto calcolata a
partire dal parametro c: ricordando la relazione che lega la quantità di
moto al raggio di curvatura R e al campo magnetico B e sostituendola
nell’espressione di σ 2 c si ricava:
σ p
δp
=
4CN
p2
0.3BL2
(2.35)
Si ritrovano quindi nell’espressione dell’errore gli andamenti già evidenziati nella discussione svolta per il calcolo della quantità di moto a
partire dalla sagitta, uniti alla dipendenza dal numero di misure.
Anche nel caso del fit quadratico si osserva come in generale sia importante avere un rivelatore di grandi dimensioni (e quindi grande L) per
ridurre gli errori sulla quantità di moto e sulla pendenza.
15
2.2. ERRORI NEL TRACKING
2.2
Errori nel tracking
Oltre agli errori già messi in evidenza e legati all’errore statistico sulle
singole misure, un sistema di tracking è normalmente soggetto ad altri
errori sia di natura sistematica sia di natura statistica.
In questa sezione viene analizzata la principale fonte di errore sistematico nel tracking dovuta a imprecisioni nell’assemblaggio del rivelatore.
Inoltre viene trattato l’errore introdotto dall’interazione tra le particelle
tracciate e i materiali che devono attraversare (scattering multiplo).
2.2.1
Allineamento
Una fonte di errore sistematico può essere individuata nell’errata conoscenza della reale posizione dei diversi rivelatori di tracciamento.
Ponendoci nella situazione utilizzata per la trattazione dell’errore
sul fit, si osserva che se il rivelatore k-esimo è traslato rispetto agli altri
rivelatori di una quantità δ, la misura di yk ne risulterà sistematicamente influenzata: yk → yk + δ.
L’errore sistematico sulla misura della posizione yk andrà quindi ad influenzare tutti i parametri del fit distorcendone la ricostruzione.
Un altro possibile errore di allineamento potrebbe essere dovuto alla rotazione di uno dei piani di misura rispetto agli altri, falsando allo stesso
tempo sia la misura di yk che di xk .
Questo genere di errori sistematici, che vengono individuati attraverso un processo di taratura del rivelatore, può essere corretto semplicemente attraverso l’inserimento di un termine correttivo nell’algoritmo
di fit delle traiettorie.
2.2.2
Scattering Multiplo
Un’ulteriore fonte di errore nelle misure è dovuta alla presenza dello
scattering multiplo della particella con il materiale del rivelatore.
Una particella di momento p e carica unitaria che attraversa un materiale, caratterizzato dalla lunghezza di radiazione X0 , per un percorso
di lunghezza L viene deflessa più volte dallo scattering Coulombiano do-
16
2.2. ERRORI NEL TRACKING
vuto ai nuclei.
Si tiene conto complessivamente delle numerose interazioni coulombiane introducendo un angolo di deflessione complessivo θp cui e’ soggetta
la particella dopo avere attraversato un spessore X di materiale.
0.0136 2 1
2
(2.36)
hθp i =
pβ
X0
La proiezione di questo angolo su un qualsiasi piano contenente la direzione originaria ha distribuzione quasi gaussiana (differente per le
lunghe code con l’andamento di sin−4 2θ ) data da
1
1
P (θp ) = q
exp − 2 θp2
2hθp i
2πhθp2 i
(2.37)
L’effetto ha una dipendenza inversa dal momento p e, causando una
deflessione casuale delle particelle che attraversano il materiale, introduce una forte correlazione tra le misure di posizione lungo la traiettoria
descritta.
Negli esperimenti con collisori i vertici secondari dovuti al decadimento di particelle con vita media breve sono contenuti all’interno della beam pipe e per particelle di piccola quantità di moto la precisione
del parametro d’impatto dipende principalmente dal materiale e dallo
spessore della beam pipe e del primo strato di rivelatori. Per particelle
dotate di grande quantità di moto, l’effetto dello scattering multiplo è
invece trascurabile.
Approfondiamo l’effetto che lo scattering multiplo ha sulla ricostruzione delle quantità misurate a partire dalla traiettoria di una particella
nel caso in cui lo scattering multiplo non sia trascurabile.
Per tenere conto dello scattering multiplo occorrerebbe cambiare la funzione χ2 modificando gli errori e soprattutto introducendo le correlazioni tra le misure che vengono introdotte. Il calcolo si trova nel lavoro di
Gluckstern già citato e ne riportiamo il risultato.
r
0.0136 1
4CN
δp
'
(2.38)
p
β 0.3B X0 L
Si osserva dunque come la dipendenza inversa dell’errore da L si in√
debolisce ( L e non più L2 ).
17
2.2. ERRORI NEL TRACKING
Allo stesso modo la dipendenza inversa da L viene eliminata dall’espressione dell’errore sulla pendenza, mentre l’errore sul parametro di impatto (intercetta) acquista una dipendenza lineare da L con l’effetto di
rendere determinante l’effetto dello scattering multiplo sulla ricostruzione del vertice primario da cui hanno origine le particelle con piccola
quantità di moto.
18
Capitolo 3
b-tagging
Come già anticipato, lo studio del quark b è uno dei campi di ricerca di
primo piano nella fisica delle particelle.
Per questo motivo è necessario disporre di un metodo affidabile per distinguere gli eventi contenenti i quark b, mantentendo nel contempo il
fondo il più limitato possibile. L’efficienza dell’algoritmo e l’eliminazione del fondo sono quindi di capitale importanza in queste ricerche.
Uno dei campi di ricerca attuali più importanti in cui il b-tagging sarà
necessario è la ricerca del bosone di Higgs: se quest’ultimo fosse dotato
di una massa sufficientemente piccola, il quark b dovrebbe essere uno
dei principali prodotti del suo decadimento.
Ulteriori campi di applicazione del b-tagging sono la fisica del quark top
(di cui il quark b è uno dei principali prodotti di decadimento) e la fisica
del b stesso (come ad esempio la violazione di CP).
Gli adroni contenenti il quark b si distinguono dalle altre particelle
per molti aspetti: sono dotati di vita media relativamente lunga, hanno
una grande massa, tendono a decadere in un grande numero di particelle figlie tra cui ci sono dei leptoni con grande quantità di moto trasversa. Tutti questi elementi possono essere utilizzati in un algoritmo di
b-tagging per selezionare con maggiore precisione gli eventi contenenti
quark b.
Al termine del capitolo si prenderà in considerazione la combinazione
di più variabili nell’algoritmo di selezione, trattando le difficoltà che è
19
possibile incontrare in un’operazione del genere.
Nella prossima sezione verrà trattato il principale metodo di identificazione di un adrone b, ossia la misura della vita media.
20
3.1. LIFETIME TAGGING
3.1
Lifetime tagging
Ai fini della loro identificazione, la più importante proprietà degli adroni
b è la loro vita media: si tratta di una grandezza misurabile in maniera
relativamente semplice attraverso la misura del parametro di impatto.
Il parametro d’impatto d è definito come la minima distanza fra il punto
dell’interazione primaria e la traiettoria della particella, come mostrato
nella fig. 3.1.
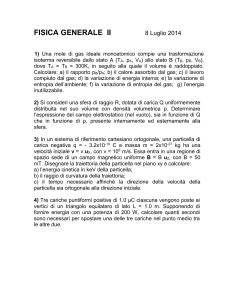
Figura 3.1: Parametro d’impatto d per un generico sistema di riferimento con
origine O diversa dal vertice primario dell’interazione PV
La vita media di un adrone b è di circa 1.6 × 10−12 s: questo corrisponde
ad una traiettoria di circa 3mm (per γ ∼ 10) che quando viene estrapolata verso il vertice primario dell’interazione non passa esattamente per
esso, ma si discosta per un parametro di impatto di circa 500µm .
Questa affermazione merita un’approfondimento: considerando il decadimento di una particella in due particelle figlie che si muovono a
velocità prossime a c nel sistema di riferimento del centro di massa e
compiendo misure su di esse nel sistema di riferimento del laboratorio
ci si potrebbe aspettare un effetto relativistico di contrazione delle distanze per il parametro di impatto, ma non è così.
Il parametro di impatto d, come illustrato nella fig. 3.2, è legato alla
21
3.1. LIFETIME TAGGING
Figura 3.2: Rappresentazione del parametro d’impatto d, della lunghezza di
volo L e dell’angolo θ nel caso del decadimento di un adrone b
generato nel vertice primario PV
lunghezza di volo L e all’angolo θ da
d = Ltanθ
(3.1)
sviluppando tanθ al primo ordine si ottiene
d = Lθ = γcτ θ
(3.2)
L’angolo θ può essere stimato assumendo che la quantità di moto trasversa sia circa mB /2.
Otteniamo:
θ=
pt
'
p
mB
2
pB
2
=
1
1
'
γβ
γ
(3.3)
d = cτ
si vede quindi che il parametro di impatto d non viene alterato da effetti
relativistici. I parametri di impatto sono la variabile principale su cui si
basa il b-tagging: per ogni traiettoria compresa in un evento misurato,
il parametro d’impatto e la risoluzione della misura vengono combinate
in un’unica variabile
d
σ
(significanza del parametro d’impatto) che indica
la probabilità che ha la traiettoria presa in esame di provenire direttamente dal vertice primario dell’interazione.
22
3.1. LIFETIME TAGGING
Per eventi privi di particelle a vita media lunga ci si aspetterebbe una
distribuzione piatta tra 0 e 1, mentre in presenza di adroni b c’è una
prevalenza di valori vicini allo 0.
23
3.1. LIFETIME TAGGING
3.1.1
Determinazione e segno del parametro di impatto
Per determinare il parametro di impatto di una particella occorre per
prima cosa ricostruire la posizione del vertice primario dell’interazione.
In un esperimento di collisione il vertice primario viene determinato
a partire da un insieme di traiettorie selezionate con l’aggiunta di un
vincolo dato dalla posizone della zona di intersezione tra i due fasci incidenti.
La posizione del vertice primario è quindi ottenuta minimizzando la
funzione
χ2 =
X (dn )2
n
σn2
+
X (V sp − Vi )2
i
2
i
(σisp )
(3.4)
dove la prima somma è riferita ai parametri d’impatto dn delle n tracce
utilizzate per la ricostruzione del vertice primario divisi per il proprio
errore σn , mentre la seconda somma corrisponde al vincolo sulla posizione dei fasci incidenti: se il vertice ricostruito a partire dalle tracce
misurate cade al di fuori della zona indicata da Visp e σisp (misurata periodicamente utilizzando tutti gli eventi registrati in un intervallo di
tempo T di circa 15 minuti e considerata costante in questo intervallo di
tempo), questo termine ne terrà conto.
Le tracce da inserire nel fit del vertice primario vengono selezionate imponendo dei limiti attraverso una applicazione iterativa di algoritmi di
selezione.
Ad esempio, nell’esperimento DELPHI a LEP, per il calcolo del vertice primario si richiedeva che le tracce fossero composte da almeno un
certo numero di misure. Successivamente la funzione χ2 veniva calcolata facendo uso di tutte le tracce disponibili e ricalcolata in un secondo
momento utilizzando a turno tutte le tracce meno quella i-esima: se la
differenza χ2 − χ2i massima eccedeva una soglia predefinita, la traccia
i veniva scartata e il procedimento ripetuto finchè non ci fossero state
più tracce da scartare.
Siccome il vertice primario è utilizzato nella definizione del parametro d’impatto, occorre tener conto del fatto che queste due grandezze
24
3.1. LIFETIME TAGGING
presenteranno una correlazione nel momento del computo degli errori
sulle rispettive grandezze.
Un utile espediente per ridurre il fondo nelle misure che si basano
sul tagging di vita media consiste nel definire un segno del parametro
d’impatto: per farlo occorre conoscere il percorso della particella con vita lunga.
Nel caso più semplice questo è approssimato dalla direzione del getto
al quale appartiene la particella: questa direzione viene definita con l’identificazione di un vertice secondario e l’assegnazione di un verso dal
vertice primario al secondario.
Per determinare il segno del paramentro di impatto viene calcolato il
punto con minore distanza tra la traccia ed il getto della particella a vita media lunga: se il punto si trova a monte (seguendo la direzione del
getto) del vertice primario viene attribuito un segno negativo al parametro d’impatto, altrimenti il segno sarà positivo.
Con questo metodo viene assegnato un segno positivo al parametro d’impatto delle tracce provenienti dal decadimento di particelle con vita media lunga, mentre le tracce provenienti direttamente dal vertice primario (e per le quali l’eventuale parametro d’impatto è solo il risultato di
errori di misura) avranno segni ugualmente distribuiti tra positivi e negativi.
Nel caso del b-tagging si utilizzano solo le tracce con parametro d’impatto positivo, ottenendo in questo modo una riduzione del fondo del
50%.
25
3.1. LIFETIME TAGGING
3.1.2
Probabilità di vita media
Per ogni traccia misurata è possibile definire un parametro S (significanza del parametro d’impatto)
S=
d
σ
(3.5)
dove d è il parametro di impatto (munito di segno come descritto nel paragrafo precedente) e σ la sua incertezza, che tiene conto della misura
del parametro di impatto di ogni traccia rispetto alla sua precisione.
Figura 3.3: Possibile distribuzione della significanza S in presenza di
particelle a vita media relativamente lunga
In figura è mostrata una possibile distribuzione della significanza; si noti che la distribuzione è asimmetrica. La parte relativa a valori negativi
della significanza è dovuta a tracce provenienti dal vertice primario che
hanno un parametro d’impatto causato da errori di misura. La parte
relativa a valori positivi contiene sia le tracce provenienti dal vertice
primario sia le tracce provenienti dal decadimento di particelle con vita media lunga. Lo studio della regione di sinistra della distribuzione
26
3.1. LIFETIME TAGGING
permette pertanto di “misurare” la funzione distribuzione f (S) della significanza del parametro d’impatto. Utilizzando questa funzione è possibile definire per ogni traccia una probabilità P (S 0 ) di avere modulo di
S maggiore di S 0 .
0
Z
∞
f (S)dS
P (S ) =
(3.6)
S0
Prendendo in considerazione la distribuzione di P (S 0 ) si osserva che,
per definizione, le tracce provenienti dal vertice primario hanno una distribuzione piatta tra 0 e 1; la presenza di un picco per valori piccoli di
P (S 0 ) rivela la presenza di particelle a vita media lunga che posseggono
parametri d’impatto (e quindi valori di S) maggiori.
La costruzione di P (S 0 ) è molto utile poichè permette una calibrazione
dell’apparato di misura a partire dai dati sperimentali e quindi indipendente dalle simulazioni. In questo modo è possibile mettere in evidenza
delle eventuali discrepanze tra le misure e le simulazioni, permettendo
una riduzione dell’errore sistematico.
E’ possibile quindi definire, per un insieme di N tracce, una probabilità di vita media a partire dalle P (S 0 ) delle singole tracce nel seguente
modo:
PN = Π ·
N
−1
X
j=0
(−logΠ)j
j!
(3.7)
dove
Π=
N
Y
P (S i )
(3.8)
i=1
Il significato di PN è analogo a quello di P (S 0 ): corrisponde alla probabilità che un insieme di N tracce abbia prodotto delle loro probabilità
superiore al valore osservato. La probabilità di vita media varia tra 0 e 1
per ogni insieme di N tracce scorrelate provenienti dal vertice primario,
mentre la presenza di particelle a vita media lunga viene evidenziata
dalla presenza di un picco in corrispondenza di valori bassi di PN .
Anche in questo caso è possibile analizzare il fondo utilizzando le tracce
con parametro S negativo: la distribuzione osservata sarà piatta a me-
27
3.2. MIGLIORARE IL FILTRO: COMBINAZIONE DI PIÙ VARIABILI
no di un piccolo picco vicino allo zero dovuto a particelle con vita media
lunga a cui è stato associato un segno errato.
3.2
Migliorare il filtro: combinazione di più variabili
Il b-tagging basato sulle sole informazioni derivanti dalla vita media è
sufficiente per i bisogni di molte applicazioni in fisica, tuttavia essa non
è l’unico parametro sensibile alla presenza di un quark b.
La resa dell’algoritmo di b-tagging può essere significativamente migliorata includendo ulteriori variabili discriminanti: ad esempio c’è una
probabilità abbastanza alta che tra i prodotti di decadimento di un adrone b sia incluso un elettrone o un muone dotato di grande quantità di
moto trasversa (1 GeV/c o più) rispetto all’asse del getto b.
Presa singolarmente, la presenza di un leptone con grande quantità di
moto avrebbe un’efficienza molto bassa, ma si dimostra molto utile per
raffinare i risultati dell’algoritmo di b-tagging se combinata con la misura del parametro d’impatto.
Un’ulteriore variabile che è possibile sfruttare per l’identificazione è la
massa invariante associata ad un vertice secondario: questa variabile
è molto sensibile al sapore del getto, ad esempio la massa dovuta alla
presenza di un quark c è limitata dal mesone D che ha massa di circa 1.8GeV/c2 , mentre nel caso del quark b questa può arrivare anche a
5GeV/c2 .
Anche la quantità di moto trasversa associata al vertice secondario (che
nel caso di quark b sarà maggiore) e la rapidità di ogni traiettoria associata al vertice secondario (le rapidità associate al decadimento di un
mesone B sono normalmente più piccole di quelle associate ad un mesone D per via della maggiore massa) sono esempi di variabili che è
possibile prendere in considerazione per formare un algoritmo combinato.
Il metodo di combinazione delle variabili ha una massima efficienza
quando non sono presenti correlazioni tra le variabili prese in esame:
28
3.2. MIGLIORARE IL FILTRO: COMBINAZIONE DI PIÙ VARIABILI
per questo nella scelta delle variabili discriminanti è necessario fare attenzione alle possibili correlazioni sussistenti tra di esse, che potrebbero
falsare i risultati dell’algoritmo di b-tagging se non venissero prese in
considerazione.
29
Capitolo 4
Simulazione
Al fine di osservare quali sono gli effetti dell’utilizzo delle tecniche di
b-tagging in una misura sperimentale, si è fatto ricorso ad una simulazione montecarlo, realizzata utilizzando il linguaggio C++ con l’ausilio
di ROOT, che ricostruisce l’esperimento per la misura della massa del
quark top Mtop fatta dal rivelatore CDF II presso Tevatron al Fermilab.
Gli obiettivi della simulazione sono studiare il miglioramento delle misure con l’abbattimento del fondo dovuto all’utilizzo del b-tagging e studiare i risultati della misura in funzione dell’efficienza dell’algoritmo di
b-tagging.
La ricostruzione della massa del quark top viene effettuata studiando il canale leptone + getti dell’interazione di una coppia costituita da
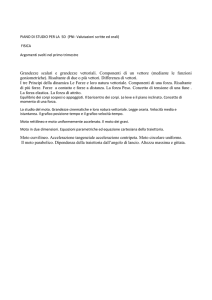
un quark top e la sua antiparticella, come mostrato in fig. 4.1:
tt → W + W − b b → q q 0 l νl b b
questo canale di decadimento è caratterizzato da un singolo leptone con
grande quantità di moto trasversa, dell’energia mancante dovuta alla
presenza del neutrino nel decadimento del bosone W, e da quattro getti:
due provenienti dal decadimento andronico di uno dei due bosoni W e
altri due dovuti ai quark bottom provenienti dal decadimento dei quark
top.
Nella simulazione si assumono i due quark t e t in quiete nel sistema
di riferimento del laboratorio. Il valore vero assunto per la massa del
quark top è di 175Gev/c2 .
30
Figura 4.1: Diagramma di Feynman del decadimento studiato nella simulazione
Nella macro della simulazione sono state inserite le condizioni utilizzate in CDF II per l’accettazione di una serie di tracce rappresentanti
l’evento cercato: si tratta di limitazioni sull’energia e la pseudorapidità delle particelle tracciate che vengono inserite per tenere conto delle
caratteristiche fisiche del rivelatore, come zone cieche, e utilizzate per
diminuire le possibilità di commettere errori nel riconoscimento delle
particelle.
In particolare si richiede che il leptone proveniente dal decadimento
del bosone W abbia energia trasversa ET ≥ 20 GeV e pseudorapidità
| η |≤ 1.0. Si richiede inoltre che i getti adronici (contenenti quark b
o derivanti dal decadimento di uno dei due bosoni W) abbiano energia
trasversa ET ≥ 15 GeV e pseudorapidità | η |≤ 2.0 e inoltre che l’energia mancante, dovuta all’impossibilità di effettuare misure sul neutrino
(prodotto di decadimento di un W) che è una particella scarsamente interagente, sia E > 20 GeV.
Le macro di ROOT utilizzate per le simulazioni sono disponibili su internet all’indirizzo:
http://atlas-pixel.mi.infn.it/Particelle2/eserciziROOT/Mtopebtagging
31
4.1. RICOSTRUZIONE DI MT OP
4.1
Ricostruzione di Mtop
Prima di procedere con l’analisi del fondo combinatorio, si effettua una
prima ricostruzione “ingenua” della massa del quark top: infatti con i
dati simulati è possibile associare correttamente i getti e le particelle
rivelate ai due quark top e si può pertanto calcolare la loro massa invariante senza compiere errori.
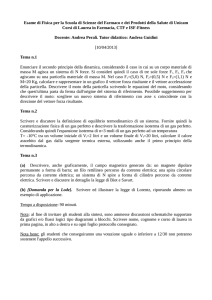
La figura 4.2 mostra la distribuzione di massa invariante così ottenuta.
Figura 4.2: Istogramma della distribuzione della massa invariante in caso di
segnale puro
La distribuzione ottenuta è gaussiana e una volta fittata risulta avere
valore medio di 173.2 ± 0.1 GeV/c2 : la stima molto accurata del valore
centrale e del suo errore è frutto della grande statistica propria della simulazione che non è tipicamente raggiungibile da un esperimento reale,
dove i dati sperimentali sono disponibili in quantità molto limitate. Si
osserva inoltre che la simulazione dell’esperimento comporta fin da questo momento una sottostima sistematica della massa del quark top.
32
4.1. RICOSTRUZIONE DI MT OP
Per procedere con il confronto si effettua una simulazione completa e
quindi comprendente anche il fondo combinatorio; inoltre, inizialmente,
supponiamo di non avere a disposizione alcun algortimo di b-tagging.
Figura 4.3: Istogramma della distribuzione della massa invariante di tutte le
combinazioni in assenza di b-tagging
Il fondo ottenuto è dovuto all’incapacità di riconoscere quali siano i getti
derivanti dal decadimento del quark top: mentre il leptone è facilmente
riconoscibile, senza l’utilizzo del b-tagging non è possibile suddividere
le particelle e i getti in due gruppi che corrispondono senza ambiguità
ai due quark top.
Poichè il decadimento che si vuole studiare ha come prodotti finali tre
getti adronici (uno contenente il quark b e due derivanti dal decadimento del bosone W) e il rivelatore non permette l’identificazione di alcuno di essi, per procedere con l’analisi della distribuzione per la massa
del quark top si prendono in considerazione, a turno, tutte le possibili
combinazioni di tre getti sui quattro disponibili. Le combinazioni sono:
• b + q + q 0 che è quella corretta che si vorrebbe isolare
33
4.1. RICOSTRUZIONE DI MT OP
• b + q + q 0 che prende in considerazione entrambi i getti provenienti
dal decadimento del bosone W ma li associa al quark b sbagliato
• b + b + q in cui si considerano due quark b e uno dei due getti del
decadimento del bosone W
• b + b + q 0 analoga alla precedente
Il peso delle combinazioni sbagliate è quindi tre volte superiore a quello
del segnale del top puro e, se non si considera adeguatamente questa
distorsione, si commette un grande errore sulla massa ricostruita. La
distribuzione della massa invariante di tutte le combinazioni è mostrata
in figura 4.3.
Il picco della distribuzione risulta essere intorno ai 170 GeV/c2 .
Inoltre è opportuno notare come, nel momento dell’elaborazione dei dati
sperimentali, dovendo calcolare tutte le possibili combinazioni dei getti
il tempo necessario per portare a termine l’analisi tenda ad essere molto
più lungo di un analisi in cui si distinguono i diversi elementi.
34
4.1. RICOSTRUZIONE DI MT OP
Come ultimo caso si simula ora nuovamente l’esperimento completo ma questa volta si suppone di disporre di un algoritmo di b-tagging
(supponendo un’efficienza del 100%): il rivelatore permette di distinguere i getti b da quelli derivanti dal decadimento del bosone W.
La conseguenza diretta di questa capacità è una drastica riduzione del
fondo: ci si aspetta che questo sia ancora presente, ma sia dovuto solamente alla combinazione comprendente il getto b errato.
Figura 4.4: Istogramma della distribuzione della massa invariante delle due
combinazioni che è possibile individuare con l’utilizzo di b-tagging
Si nota che, come aspettato, è ancora presente un fondo, ma esso rispetto al caso precedente ha un peso ridotto ad un terzo. La posizione del
picco è intorno ai 170 GeV/c2 . Tuttavia per un’accurata determinazione
della massa è indispensabile avere una parametrizzazione della forma
del fondo. Questo è l’oggetto dello studio fatto nel paragrafo successivo.
35
4.2. PARAMETRIZZAZIONE DEL FONDO
4.2
Parametrizzazione del fondo
Per trattare correttamente la distribuzione della massa del quark top
è opportuno studiare la distribuzione della massa invariante di tutte le
combinazioni errate. Il metodo montecarlo ci permette di studiare separatamente le singole combinazioni.
In questo caso le distribuzioni sono tre e corrispondono alle diverse combinazioni precedentemente elencate osservando che le due combinazioni
comprendenti entrambi i getti con quark b hanno uguale distribuzione
perciò possono essere studiate insieme.
La distribuzione del segnale puro è già stata presentata, perciò si
procede con l’analisi della distribuzione dei fondi.
Prendiamo in considerazione il fondo dovuto alle combinazioni comprendenti entrambi i getti b (b + b + q e b + b + q 0 ): questo fondo corrisponde
alla componente che viene eliminata quando si utilizza un algoritmo di
b-tagging nella misura.
Figura 4.5: Istogramma della distribuzione del fondo combinatorio dovuto
alle combinazioni comprendenti entrambi i getti b
36
4.2. PARAMETRIZZAZIONE DEL FONDO
La distribuzione ottenuta è mostrata nella fig. 4.5: per il fit utilizziamo
una parametrizzazione del tipo:
y = p0 exp − p3 q 5 + p4 q 4 + p5 q 3 + p6 q 2 + p7 q
dove
q=
(4.1)
x − p1
p2
(4.2)
Il polinomio di quinto grado contenuto nell’esponenziale è necessario
per ottenere la curva asimmetrica descritta dalla distribuzione.
Il fit della funzione restituisce una curva che presenta un massimo per
180 ± 3 GeV/c2 : riportiamo sintenticamente tutti i parametri che descrivono la forma della curva che saranno successivamente utilizzati per il
fit della distribuzione totale.
Parametro
p1
p2
p3
p4
p5
p6
p7
Valore
180
1150
50000
50000
9300
780
0
Passiamo ora all’analisi del fondo che non può essere eliminato tramite
l’utilizzo del b-tagging, cioè quello dovuto alla combinazione comprendente il getto b sbagliato.
Anche per questo fondo, illustrato nella fig. 4.6, si è utilizzata una parametrizzazione del tipo precedente, ed il procedimento di fit ha restituito
una curva che presenta un massimo per 164 ± 1 GeV/c2 . Riportiamo
anche per questo fondo i parametri di forma della curva.
Parametro
p1
p2
p3
p4
p5
p6
p7
Valore
164
260
1000
980
320
80
7
A questo punto si dispone di tutti gli elementi necessari per descrivere
le componenti della distribuzione completa, perciò si procede con il fit
della simulazione completa (ripetuta anche questa volta nei due casi di
b-tagging attivo e disattivato) comprendente la somma delle parametrizzazioni precedentemente ottenute.
37
4.2. PARAMETRIZZAZIONE DEL FONDO
Figura 4.6: Istogramma della distribuzione del fondo combinatorio comprendente il getto b sbagliato
38
4.2. PARAMETRIZZAZIONE DEL FONDO
Poichè sono presenti molti parametri, per ridurre la possibilità di
errori sistematici del fit dovuti alle correlazioni presenti tra di essi, si
sono fissati tutti i parametri che definiscono la “forma” delle componenti
della distribuzione lasciando invece libero di variare un parametro di
scala per la determinazione della presenza del fondo.
Questo espediente permette di utilizzare la stessa parametrizzazione
totale per entrambe le simulazioni.
Applichiamo quindi la nostra parametrizzazione alla distribuzione
realizzata senza b-tagging; i risultati sono mostrati in fig. 4.7.
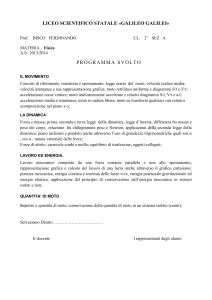
Figura 4.7: Istogramma con fit in assenza di b-tagging. Sono state riportate le
distribuzioni dei fondi combinatori: il fondo dovuto alle combinazioni con due getti b (curva blu) e quello dovuto alle combinazioni
con il getto b sbagliato (curva rossa)
Con questa parametrizzazione il valore della massa Mtop è di 172.4 ± 0.3
GeV/c2 .
39
4.2. PARAMETRIZZAZIONE DEL FONDO
Passiamo ora al fit della distribuzione realizzata utilizzando il btagging e i cui risultati sono mostrati in fig. 4.8.
Figura 4.8: Istogramma con fit in presenza di b-tagging. E’ stata riportata la
distribuzione del fondo combinatorio dovuto alle combinazioni con
il getto b sbagliato (curva rossa)
L’aver utilizzato la stessa parametrizzazione totale per entrambe le curve ci permette di avere una fonte di controllo aggiuntiva sulla bontà
del fit: poichè la componente di fondo dovuta alle combinazioni con due
getti b è assente ci si aspetta che il parametro di scala corrispondente
sia tanto più piccolo quanto meglio la parametrizzazione permette una
buona distinzione tra i due fondi. Il parametro risulta effettivamente
essere pari a 5 ± 2, corrispondente all’1% del restante fondo (caratterizzato da un parametro di scala pari a 363 ± 4).
Con questa parametrizzazione il valore della massa Mtop è di 173.1 ± 0.2
GeV/c2 .
40
4.3. SIMULAZIONE DELLA MISURA
4.3
Simulazione della misura
Vogliamo ora simulare un esperimento con una quantità di eventi analoga a quella disponibile nell’esperimento CDF II, cioè circa 60 eventi,
e confrontare il valore ricostruito per la massa invariante del quark top
con i risultati di una simulazione con grande statistica.
Simuliamo due esperimenti di circa 60 eventi con b-tagging attivo e disattivato.
Figura 4.9: Mtop senza b-tagging
Nella fig. 4.9 si riporta un esempio di risultato ottenuto applicando le
parametrizzazioni precedentemente studiate ad un campione statistico ristretto. Nel caso di un esperimento privo di b-tagging la massa
invariante ricostruita è di 174.5 ± 3.1 GeV/c2 .
41
4.3. SIMULAZIONE DELLA MISURA
Figura 4.10: Mtop con b-tagging
Nella fig. 4.10 si riporta un esempio di risultato ottenuto nel caso di un esperimento che fa utilizzo di b-tagging: la massa invariante
ricostruita è di 173.1 ± 2, 2 GeV/c2 .
Ci si chiede ora se il passaggio da una simulazione con pochi eventi
ad una a grande statistica comporti una distorsione nel risultato ottentuto.
Per effettuare quest’analisi si confronta la stima di Mtop risultante da
una simulazione montecarlo con 40000 eventi e le stime risultanti da
1000 simulazioni da 60 eventi realizzando un istogramma della diffei −M
renza Mtop
top dove Mtop è la stima ottenuta dalla simulazione da
i
40000 eventi (173.1 ± 0.1 GeV/c2 ) e Mtop
la stima della simulazione i-
esima. Eventuali effetti di distorsione saranno messi in evidenza da
uno spostamento del valore centrale dell’istogramma dallo zero.
42
4.3. SIMULAZIONE DELLA MISURA
i
− Mtop in assenza di b-tagging
Figura 4.11: Istogramma della deviazione Mtop
La distribuzione delle deviazioni dal valore stimato Mtop nel caso di
misure compiute senza l’utilizzo del b-tagging è riporta nella fig. 4.11.
La distribuzione è centrata intorno a −0.73 GeV/c2 con RMS 4.22 GeV/c2 .
43
4.3. SIMULAZIONE DELLA MISURA
i
− Mtop in presenza di
Figura 4.12: Istogramma della deviazione Mtop
b-tagging
Nel caso di misure compiute utilizzando il b-tagging la distribuzione
delle deviazioni, mostrata in fig. 4.12, ha valore centrale −0.05 GeV/c2
con RMS 4.35 GeV/c2 .
In entrambi i casi la deviazione dal valore stimato ad alta statistica
è compatibile con la deviazione nulla aspettata, anche se, nel caso in
cui non si fa uso del b-tagging, la presenza del fondo combinatorio aggiuntivo genera un piccolo effetto di sovrastima della massa invariante
ricostruita.
Questo risultato conferma la validità e la coerenza delle parametrizzazioni e delle previsioni sviluppate attraverso le simulazioni ad alta
statistica con l’analisi effettuabile sui risultati di una misura reale.
Occorre sottolineare che benchè i risultati ottenuti con differenti
campioni statistici siano perfettamente coerenti, sia la simulazione ad
alta statistica che la media di molte simulazioni portano ad una stima sistematicamente inferiore al valore vero assegnato alla massa del
44
4.3. SIMULAZIONE DELLA MISURA
quark top che rimane però compreso all’interno di 1σ in ogni simulazione reale.
45
4.4. EFFICIENZA B-TAGGING
4.4
Efficienza b-tagging
L’ultima analisi che si vuole effettuare sui risultati della simulazione
riguarda lo studio dell’effetto di un algoritmo di b-tagging con efficienza
diversa dal 100% sulla stima della massa del quark top.
Saranno considerati due possibili fonti di errore che possano peggiorare l’efficienza dell’algoritmo di b-tagging: la prima fonte è dovuta alla
possibilità che un getto b non venga riconosciuto come tale e quindi non
sia conteggiato nell’analisi dei dati, mentre la seconda fonte di errore
è considera la possibilità che un evento di fondo sia identificato come
getto contenente quark b.
Le efficienze utilizzate per la simulazione corrispondono a quelle indicate nell’articolo di Abulencia et al. [4] per la misura compiuta da CDF II
a Tevatron cioè, per un evento in cui almeno un getto viene riconosciuto
come contenente un quark b, del 60% per il riconoscimento di eventi di
segnale e del 90% per l’abbattimento del fondo.
A partire da questi valori è possibile stimare la probabilità b che ha
un getto b di essere riconosciuto correttamente e la probabilità f che
un evento di fondo possa essere identificato come segnale attraverso un
semplice calcolo.
1 − (1 − b )2 = 0, 6
(4.3)
b = 36, 8%
(1 − f )4 = 0, 9
(4.4)
f = 2, 6%
Con questi livelli di efficienza, le simulazioni non presentano discostamenti apprezzabili dalle stime precedentemente ottenute, tuttavia la simulazione che prende in considerazione l’efficienza reale del b-tagging
può essere utilizzata per una stima accurata dell’effettiva riduzione del
fondo nella misura.
Su una simulazione di 19.822 eventi che hanno superato le condizioni
definite all’inizio del capitolo, il rapporto η tra segnale (7.165 eventi) e
46
4.4. EFFICIENZA B-TAGGING
fondo (8.204 eventi) risulta essere
η=
segnale
= 0, 87
f ondo
(4.5)
che è molto vicino ad 1 (condizione che si avrebbe con un’efficienza di
b-tagging del 100%).
Al contrario, se non si disponesse di alcun sistema di b-tagging il rapporto η risulterebbe uguale a 0, 33.
Il confronto delle misure ottenute mostra come l’utilizzo di un algoritmo di b-tagging presenti il vantaggio di migliorare fortemente il
rapporto tra segnale e fondo che risulta quasi triplicato. Le principali
conseguenze di questo miglioramento sono la possibilità di distinguere
dal fondo anche dei segnali, che altrimenti potrebbero essere parzialmente oscurati, e la riduzione dell’errore sistematico che si commette
nel prendere in considerazione le combinazioni di getti errate.
47
Capitolo 5
Conclusioni
In questa tesi si è affrontato il problema del tracking di particelle cariche all’interno di un rivelatore. Sono stati discussi in dettaglio gli errori
statistici sulla determinazione della quantità di moto di una particella
e sul parametro d’impatto.
Si sono messi in evidenza due importanti fonti di errore nella ricostruzione della traiettoria (errori sistematici dovuti alla conoscenza del rivelatore e scattering multiplo).
Sono state messe in luce le caratteristiche generali che deve possedere
un rivelatore per ottimizzare le misure di posizione e quantità di moto
di una particella cioè disporre di un rivelatore di vertice molto preciso
per consentire un’agevole ricostruzione della traiettoria verso l’origine
(punto di interazione) e di un rivelatore centrale di grandi dimensioni
per sfruttare la dipendenza inversa dell’errore dalla distanza percorsa
all’interno del rivelatore.
E’ stato presentato il problema del b-tagging soffermandosi su una
variabile discriminante, la vita media, che attraverso misure di parametri d’impatto garantisce un’ottima selezione degli eventi permettendo nel contempo una taratura del rivelatore indipendente dalle simulazioni attraverso l’utilizzo di una parte di misure in cui si è certi siano
presenti solo componenti di fondo grazie all’utilizzo della significanza
del parametro d’impatto con segno.
Per ultima cosa, con l’ausilio della simulazione si è mostrato come,
48
attraverso l’utilizzo del b-tagging in una misura di interesse attuale
sia possibile migliorare notevolmente il rapporto tra segnale e fondo
attraverso l’abbattimento di quest’ultimo.
49
Bibliografia
[1] P. Abreu et al., “b-tagging in DELPHI at LEP”, The European
Physical Journal C, Vol.32, pp. 185-208, 2004.
[2] F. Ragusa and L. Rolandi, “Tracking at LHC”, New Journal of
Physics, Vol.9, 2007.
[3] F. Ragusa, “An introduction to charged particles tracking”, Italo
Hellenic School of Physics 2006.
[4] A. Abulencia et al., “Measurement of the top quark mass with the
dynamical likelihood method using lepton plus jets events with b√
tags in p − p collisions at s = 1.96 TeV”, Physical review, Vol.73,
2006.
[5] R.L. Gluckstern, “Uncertainties in track momentum and direction, due to multiple scattering and measurements errors”, Nuclear
Instruments and Methods, Vol.24, pp. 381, 1963.
50