5
ESERCIZI SULLA DINAMICA DI CORPI
RIGIDI:
risoluzione mediante le equazioni cardinali della dinamica
Esercizio n.11
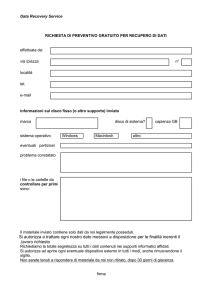
Sia dato un piano inclinato fisso e posto in un piano verticale. Su di esso rotola
senza strisciare un disco omogeneo di raggio R e massa M; quest’ultimo è connesso ad una massa puntiforme di peso q mediante un filo inestensibile e di massa
trascurabile che scorre senza attrito sulla carrucola posta in B in modo che il filo
scorra parallelamente al piano inclinato (cfr. figura seguente).
B
A
M, R
q
G
α
C
Detta g l’accelerazione di gravità e assumendo che il sistema sia inizialmente in
quiete, determinare il moto del sistema e come variano nel tempo la tensione nel
filo e la reazione di contatto tra disco e piano inclinato.
− − − − − − − − − − − − − − −−
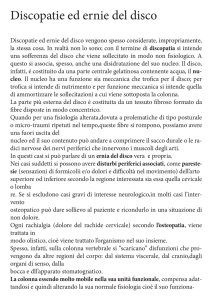
Se il filo rimane sempre in tensione, il sistema è caratterizzato da 1 grado di libertà.
Come coordinata libera si può scegliere, ad esempio, la posizione verticale (x) della
massa q. Indicato con ϑ l’angolo di rotazione (in senso antiorario) del disco, la
relazione con la variabile x si ottiene osservando che C è il centro di istantanea
rotazione del disco e che la velocità del punto A può essere espressa come:
− ³−−−−→´
→
vA = ϑ̇ ∧ A − C = 2ϑ̇R k ∧ n = 2ϑ̇R t
6
essendo k il versore ortogonale al piano che contiene il disco e che forma con n e
t la terna cartesiana di riferimento.
vA
vG
n
k
t
ϑ
A
α
.
x
q
C
Analogamente per il baricentro G la velocità risulta:
→ ³−−−−→´
−
vG = ϑ̇ ∧ G − C = ϑ̇R k ∧ n = ϑ̇R t
Il vincolo di inestensibilità del filo permette di determinare la relazione tra x e ϑ:
vA = 2ϑ̇R = −ẋ
ovvero:
x − x0
2R
in cui ϑ0 è l’angolo corrispondente alla posizione iniziale x0 della massa q.
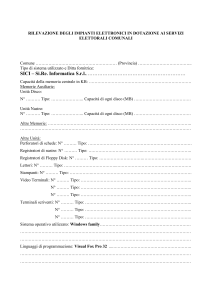
Per scrivere le equazioni del moto per ciascun elemento del sistema si isolano
la massa q e il disco mettendo in evidenza le forze corrispondenti.
ϑ = ϑ0 −
TA
−TQ
−TA
TQ
q
p
n
t
k
−φC
φC
α
i
j
L’intensità della tensione del filo è costante poiché il filo scorre sulla carrucola senza
attrito:
¯ ¯ ¯ ¯
¯ ¯ ¯ ¯
T , ¯TA ¯ = ¯TQ ¯
7
Le equazioni del moto, in forma vettoriale, si scrivono come segue (mq = q/g,
IG = MR2 /2):
´
³
⎧
⎪
m
a
=
q
+
−
T
⎪
Q
⎨ q Q
´
³
=
p
+
φ
+
−
T
M
a
G
A
C
⎪
⎪
⎩
IG ϑ̈ k = MG
Le varie forze possono essere convenientemente espresse mediante i versori n, t e j:
⎧
⎪
TA = T t
⎪
⎪
⎪
⎪
⎨ TQ = T j
φC = φt t + φn n
⎪
⎪
⎪
p=M g j
⎪
⎪
⎩
q=q j
mentre il momento delle forze applicate al disco è:
³−−−−→´ ³
´ ³−−−−→´
³−−−−→´
MG = A − G ∧ −TA + G − G ∧ p + C − G ∧ φC =
¢
¡
¢
¡
= (R n) ∧ −T t + (−R n) ∧ φt t + φn n =
= −T R k − R φt k = − (T + φt ) R k
Analogamente, per le accelerazioni si ha:
½
aG = dvdtG = ϑ̈R t= − 12 ẍ t
aQ = ẍ j
A questo punto si possono proiettare i termini delle equazioni:
³ ´
³ ´
³
´
⎧
q
⎪
ẍ
j
×
j
=
q
j
×
j
+
−T
j
×j
⎪
g
⎪
³
´
⎪
¢
¡
⎪
⎨ M − 1 ẍ t × t = M g j × t + φ × t + ¡−T t¢ × t
C
2
³
´
¢
¡
¢
¡
⎪
⎪ M − 1 ẍ t × n = M g j × n + φC × n + −T t × n
⎪
2
⎪
⎪
⎩ MR2
ϑ̈ k × k = MG × k = − (T + φt ) R k × k
2
ottenendo così un sistema di 4 equazioni nelle 4 funzioni incognite x (t), T (t), φt (t)
e φn (t):
⎧ q
ẍ = q − T
⎪
⎪
⎨ g 1
− 2 M ẍ = M g sin (α) + φt − T
0 = −M g cos (α) + φn
⎪
⎪
⎩ MR2 ¡ 1 ¢
− 2R ẍ = − (T + φt ) R
2
ovvero
⎧
sin(α)
T = q 3p+4p
⎪
⎪
8q+3p
⎪
⎨
sin(α)
φt = −p q+(p+4q)
8q+3p
⎪
φn = p cos (α)
⎪
⎪
⎩
sin(α)
g
ẍ = 8q−4p
8q+3p
Si noti che risulta, come ipotizzato, T > 0; se fosse risultato T < 0 ad un certo
istante, si sarebbe dovuto assumere T = 0 nelle equazioni del moto.
8
Il moto della massa risulta essere uniformemente accelerato e le forze coinvolte
rimangono costanti nel tempo. La funzione x (t) si ottiene integrando due volte
l’accelerazione:
Z t
8q − 4p sin (α)
ẋ (t) = A +
ẍ (τ ) dτ = A +
gt
8q + 3p
0
Z t
8q − 4p sin (α) t2
g
x (t) = B +
ẋ (τ ) dτ = B + A t +
8q + 3p
2
0
Le costanti di integrazione A e B si ottengono imponendo le condizioni iniziali:
ẋ (0) = A = 0
x (0) = B = x0
Dunque si ottiene:
x (t) = x0 +
8q − 4p sin (α) t2
g
8q + 3p
2
Si noti che se 2q = p sin (α) il sistema rimane in quiete, ovvero la configurazione
iniziale (x0 ) è di equilibrio; se invece risulta 2q > p sin (α), il coefficiente del termine
quadratico è positivo, ovvero la massa q si abbassa progressivamente imponendo al
disco di risalire il piano inclinato. In alternativa, se 2q < p sin (α) il coefficiente del
termine quadratico è negativo e la massa viene sollevata dal disco che, rotolando,
discende il piano inclinato.
Risoluzione altenativa
Il problema può essere risolto anche senza isolare il disco dal piano inclinato. Mettendo in evidenza le forze scambiate tra il filo e la massa q e tra il filo e il disco le
equazioni del moto che si possono scrivere sono le seguenti:
TA
−TA
n
t
−TQ
TQ
q
p
k
i
C
α
(
q
g
³
´
aQ = q + −TQ
IC ϑ̈ k = MC
j
9
ovvero, all’equazione del moto per la massa q si aggiunge l’equazione del momento
della quantità di moto scritta per il disco rispetto al centro di istantanea rotazione
C. Il momento MC delle forze applicate al disco è dato dall’espressione seguente:
³−−−−→´ ³
´ ³−−−−→´
MC = A − C ∧ −TA + G − C ∧ p =
³ ´
¡
¢
= (2R n) ∧ −T t + (R n) ∧ p j =
= −2T R k + R p sin (α) k = [−2T + p sin (α)] R k
Il momento d’inerzia del disco rispetto al centro di istantanea rotazione può essere
determinato mediante la formula di trasporto di Huygens-Steiner:
3
IC = IG + M R2 = M R2
2
Proiettando le equazioni su j e k si ottiene un sistema di due equazioni scalari nelle
incognite T e x:
½ q
ẍ = q − T
g
¡ ẍ ¢
3
2
M
R
− 2R = [−2T + p sin (α)] R
2
sistema che, risolto, fornisce la stessa soluzione precedentemente determinata:
(
sin(α)
T = q 3p+4p
3p+8q
sin(α)
ẍ = 8q−4p
g
8q+3p
Esercizio n.12
Sia dato un piano inclinato fisso e posto in un piano verticale. Su di esso rotolano
senza strisciare un disco e un anello omogenei e scabri, entrambi di raggio R e
massa M. I due corpi rigidi sono posti inizialmente in contatto e il coefficiente di
attrito dinamico è µ (cfr. figura seguente).
Detta g l’accelerazione di gravità, determinare il moto del sistema e come varia
nel tempo la reazione di contatto tra i due dischi. Si trascuri l’attrito volvente tra
ciascuno dei due corpi rigidi e il piano inclinato.
− − − − − − − − − − − − − − −−
10
Finché disco e anello rimangono in contatto il sistema è caratterizzato da 1
grado di libertà: come coordinata libera si sceglie, ad esempio, la posizione lungo
il piano inclinato del baricentro del disco (x).
Le rotazioni (ϕ e ϑ) dei due corpi rigidi possono essere espresse in funzione della
coordinata libera x osservando che, detto GD il baricentro del disco e GA quello
dell’anello, si può scrivere:
´ ¡ ¢
→ ³−−−−−→´ ³
−
vGD = ϕ̇ ∧ GD − H = −ϕ̇ k ∧ R t = ϕ̇R n = ẋ n
´ ¡ ¢
→ ³−−−−−→´ ³
−
vGA = ϑ̇ ∧ GA − K = −ϑ̇ k ∧ R t = ϑ̇R n = ẋ n
da cui si deduce:
ẋ
R
Per la scrittura delle equazioni del moto si sfrutta quanto osservato al punto (). Il
disco e l’anello vengono separati e si mettono in evidenza le reazioni vincolari (φC
e −φC ) scambiate tra i due corpi rigidi.
ϕ̇ = ϑ̇ =
Essendo H il centro di istantanea rotazione del disco e K quello dell’anello, per i
due corpi rigidi si può scrivere:
³−−−−→´
→
−
−
→
→ ³−−−−−→´
−
⇒
IH ϕ̈ = GD − H ∧ p + C − H ∧ φC (1a)
Disco: Γ̇ H = M H
´
³−−−−→´ ³
→ ³−−−−−→´
−
→
−
−
→
Anello: Γ̇ K = M K
⇒
IK ϑ̈ = GA − H ∧ p + C − K ∧ −φC
(1b)
11
La reazione vincolare φC può essere espressa nel riferimento (n, t):
φC = φn n + φt t
Il contatto tra i due corpi rigidi richiede che le seguenti relazioni risultino soddisfatte:
φn ≤ 0
φt ≥ 0
φt = −µ φn
Qualora risultasse φn > 0 vi sarebbe il distacco tra il disco e l’anello e, a partire
dall’istante in cui φn = 0, bisognerebbe assumere φC = 0 nelle equazioni del moto.
Il sistema risolvente è il seguente:
³−−−−→´
⎧
→ ³−−−−−→´
−
⎪
I
−
H
∧
p
+
C − H ∧ φC
ϕ̈
=
G
⎪
D
⎨ H
³−−−−→´ ³
´
→ ³−−−−−→´
−
I
−
H
∧
p
+
C
−
K
∧
−
φ
ϑ̈
=
G
K
A
C
⎪
⎪
⎩
|φt | = µ φn
⎧
³
´ ¡ ¢
¢
¡
¢ ¡
⎪
I
−ϕ̈
k
= R t ∧ p + R n + R t ∧ φn n + φt t
⎪
⎨ H ³
´ ¡ ¢
¡
¢ ¡
¢
−
ϑ̈
k
=
R
t
∧
p
+
−R
n
+
R
t
∧
−φ
n
−
φ
t
I
K
n
t
⎪
⎪
⎩
|φt | = −µ φn
ovvero, proiettando lungo il versore k:
⎧
⎨ −IH Rẍ = −R p sin (α) − φn R + φt R
−IK Rẍ = −R p sin (α) + φn R + φt R
⎩
|φt | = −µ φn
e risolvendo:
⎧
⎨ φt = p sin (α) − 2Rẍ 2 (IH + IK )
φ = ẍ (IH − IK )
⎩ n 2R2
|φt | = −µ φn
Il segno di φn dipende dai momenti d’inerzia di ciascun corpo rigido rispetto al
centro di istantanea rotazione. Per il disco si ha (cfr. punto ):
3
IH = M R2
2
mentre per l’anello si può calcolare il momento d’inerzia rispetto al proprio baricentro GA :
Z 2π
M
R2 R 2π = M R2
γ R2 R dψ =
IGA =
2πR
0
M
in cui γ = 2πR
è la densità di massa per unità di lunghezza dell’anello. Applicando
poi il teorema di trasporto si ottiene:
IK = IGA + M R2 = 2M R2
12
Sostituendo quanto trovato nel sistema precedente si ricava:
⎧
M
⎨ φt = Mg sin (α) − 7ẍ
4
φn = − ẍ4 M
⎩
|4g sin (α) − 7ẍ| = µ ẍ
sistema che ammette le seguenti soluzioni:
½
½
4g sin (α) − 7ẍ ≥ 0
4g sin (α) − 7ẍ = µ ẍ
4g sin (α) − 7ẍ ≤ 0
− [4g sin (α) − 7ẍ] = µ ẍ
⇒
⇒
⎧
µ
φt = 7+µ
p sin (α)
⎪
⎪
⎪
⎨ φ = −p sin(α)
n
7+µ
4
⎪
ẍ
≤
g
sin
(α)
⎪
7
⎪
⎩ ẍ = g 4 sin(α)
7+µ
⎧
µ
φt = −p sin (α) 7−µ
⎪
⎪
⎪
⎨ φ = −p sin(α)
n
7−µ
⎪
ẍ
≥ 47 g sin (α)
⎪
⎪
⎩ ẍ = g 4 sin(α)
7−µ
Si noti però che la seconda non è accettabile poiché la condizione φn ≤ 0 implica
µ < 7 e di conseguenza φt < 0, ma il sistema richiede φt > 0.
In definitiva si ottiene un moto uniformemente accelerato:
⎧
µ
⎪
⎨ φt = 7+µ p sin (α)
φn = −p sin(α)
7+µ
⎪
⎩ x (t) = g 2 sin(α) t2 + ẋ t + x
0
0
7+µ
con le costanti di integrazione ẋ0 e x0 da determinarsi imponendo le condizioni
iniziali.