Indice dei temi svolti di fisica:
Autore: Antonio Pierro
Giochi matematici
Cosa si intende per sistema di riferimento inerziale? Discutere esplicitamente un caso
concreto di uno stesso moto visto in sistema inerziale e in un sistema non-inerziale
Un sistema di riferimento inerziale è un sistema di coordinate in cui vale la prima legge della
dinamica: un corpo (non sottoposto ad azioni esterne) persiste nel suo stato di quiete o moto
rettilineo uniforme.
Qualunque sistema di riferimento che si muove con velocità costante rispetto ad un riferimento
inerziale è esso stesso inerziale. Un sistema di riferimento in moto con velocità costante rispetto alle
stelle lontane è la migliore approssimazione di un riferimento inerziale.
La terra non è un riferimento inerziale a causa del suo moto orbitale attorno al sole e del moto
rotazionale attorno al suo asse. Nel suo moto secondo un’orbita ellittica attorno al sole, la terra è
soggetta ad un’accelerazione centripeta addizionale verso il sole. Inoltre poiché la terra ruota
intorno al proprio asse una volta ogni 24 ore un punto sulla superficie della terra subisce
un’accelerazione centripeta che è massima all’equatore e decresce man mano che ci allontaniamo
fino a diventare nulla ai poli.
Tuttavia, per moti di durata ed estensione limitata, tale che la velocità del sistema di riferimento non
sia variata di molto durante il moto in osservazione, la terra può essere considerata con una buona
approssimazione un sistema di riferimento inerziale.
Quindi, occorre confrontare la durata del moto con il periodo del moto della terra, se la durata del
moto è molto più piccola del periodo di rotazione della terra intorno al proprio asse allora il sistema
di riferimento può essere considerato inerziale (perché si suppone che in tale intervallo di tempo la
sua velocità non sia cambiata di molto). Cosicché per lo studio del moto di caduta di un grave, che
dura pochi secondi, può essere usato il sistema del laboratorio.
La descrizione di un evento di un sistema fisico può risultare differente se operata da sistemi di
riferimento differenti. Le trasformazioni di Galileo stabiliscono le equazioni che permettono di
passare dalla descrizione di un evento E da un sistema di riferimento inerziale S1 ad un altro
inerziale S2 :
x= x’ +vot ; y=y’ ; z=z’ ; t=t’
si noti come secondo queste trasformazioni il tempo è lo stesso in tutti i sistemi di riferimento
inerziale. Benché questa ipotesi può sembrare ovvia, essa risulta non corretta quando si ha a che
fare con velocità confrontabili con quella della luce.
Un sistema di riferimento non inerziale è un sistema di riferimento nel quale la descrizione della
dinamica dei corpi non vede verificato il principio di inerzia. Tutti e soli i sistemi di riferimento che
si muovono di moto accelerato rispetto al sistema delle stelle fisse presentano questa particolarità e
possono essere quindi definiti non inerziali.
Per salvare le leggi di inerzia, l’osservatore nel sistema di riferimento non inerziale, può fare ricorso
alle forze apparenti, postulare cioe’, ad hoc, l’esistenza di una forza (detta forza di inerzia),
calcolata con la formula F=ma. Esempi di forze apparenti sono la forza centrifuga e la forza di
Coriolis. La forza centrifuga è una forza che appare agire sul corpo quando si muove di moto
curvilineo e si studia il suo moto in un sistema ad esso solidale (cioè in un sistema di riferimento
non inerziale). Posto che il moto curvilineo ha come causa una forza centripeta, la forza centrifuga
ha ugual modulo di questa ma verso opposto: Fc=-mw^2r dove w è la velocità angolare.
La forza centrifuga e quella di Coriolis e tutte le altre forze apparenti, possono essere determinate in
forma vettoriale studiando i moti relativi di sistemi di riferimento.
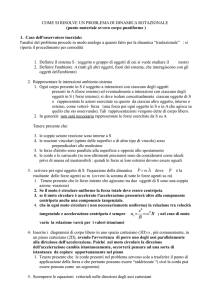
Dato un sistema di riferimento S(Oxyz) e un sistema S’(O’x’y’z’) in moto relativo uno rispetto
all’altro; ci prefiggiamo di determinare il moto del punto materiale P rispetto al sistema S quando
sia noto il moto di P rispetto ad S’ e il moto di S’ rispetto ad S.
Si hanno:
•
•
•
•
•
rp il vettore posizione di P rispetto ad S (rp = OP)
r’p il vettore pos. di P rispetto ad S’ (r’p=O’P)
ro’ il vettore posizione di O’ rispetto ad S (ro’=OO’)
i,j,k i versori degli assi x,y,z del sistema S
i’,j’,k’ i versori degli assi x’y’z’ del sistema S’
dalla figura si ricava subito rp=ro’+r’p
per le velocita’ vp=v’p+vo’+w*r’p (1) (dove vp e v’p rappresentano rispettivamente la velocita del
punto materiale P misurata da un osservatore solidale con S e uno solidale con S’)
gli altri due termini sommati insieme costituiscono la velocità di trascinamento vo’+w*r’p cioè la
velocità che il punto materiale avrebbe rispetto al sistema S se fosse fermo rispetto ad S’, solidale
con esso e quindi da esso trascinato.
Per ricavare l’accelerazione eseguo la derivata di (1)
ap=a’p+ao’+w*(w*r’p)+dw/dt*r’p+2w*v’p (2)
la (2) rappresenta la relazione piu’ generale fra l’accelerazione di P misurata da S (indicata con ap)
e l’accelerazione dello stesso punto P misurata da S’ (indicata con a’p)
la somma dei tre termini ao’+ w*(w*r’p)+dw/dt*r’p rappresenta l’accelerazione di trascinamento,
cioe’ l’accelerazione che l’osservatore S misurerebbe se il punto P fosse solidale con il sistema S’
(sarebbe in tal caso a’p= 0 e v’p=0).
L’ultimo termine prende il nome di accelerazione complementare o accelerazione di Coriolis. Essa
è presente soltanto se il sistema S’ ruota (w!=0) il punto P si muove rispetto ad S’ e la velocita di
v’p non e’ parallela a w.
ao’ è l’accelerazione di trascinamento dovuta ad un moto traslatorio accelerato; essa è uguale per
tutti i punti solidali con S’ (per esempio tutti i passeggeri di un autobus che acceleri o deceleri in
moto rettilineo).
w*(w*r’p) è l’accelerazione con cui è trascinato il punto P se il sistema S’ ruota con velocità
angolare w costante o variabile, cioe’ l’accelerazione centripeta del moto circolare descritto da P.
dw/dt*r’p è l’accelerazione con cui è trascinato il punto P se il moto rotatorio di S’ non è uniforme.
Si osservi infine che se S’ si muove rispetto ad S di moto traslatorio rettilineo uniforme (ao’=0
w=0) dalla (3) si ricava ap=a’p; cioè l’accelerazione di P è identica nei due sistemi . ciò è
particolarmente importante in dinamica e individua una classe privilegiata di sistemi di riferimento,
detti inerziali, tutti equivalenti tra loro.
Ora consideriamo un sistema di riferimento S3 che non si muove di moto uniforme rispetto al
sistema delle stelle fisse (che chiamiamo per semplicità S0). Poniamo per semplicità che S3 si
muova di moto uniformemente accelerato rispetto a S0: S0 e qualunque altro sistema inerziale
misureranno una stessa accelerazione a3 per S3, e per il secondo principio della dinamica
misureranno anche una stessa forza F3 applicata a S3 affinché esso possa veder variata la propria
velocità.
Esempio: una macchina (S3) sulla strada partendo da ferma aumenta costantemente la propria
velocità; il valore di questa accelerazione (quindi la rapidità di variazione della velocità della
macchina) sarà la stessa se misurata da un pedone fermo sul marciapiede (S0) o da un ciclista (S1)
che pedala a velocità costante sul ciglio della strada. L’accelerazione a è la stessa tra S1 e S0
benché il valore della velocità della macchina misurato dai due osservatori in ogni istante sia
diverso.
Analizziamo ora il punto di vista di un osservatore solidale con S3; per questo osservatore ogni
corpo solidale con un sistema di riferimento inerziale apparirà accelerato di un'accelerazione pari a
“-a3”. Questa descrizione solidale con S3 non è simmetrica a quelle solidali con S0 e S3, perché
l'osservatore "agganciato" a S3 non è in grado di individuare alcuna forza che sia responsabile
dell'accelerazione dei corpi suddetti: questo osservatore è dunque costretto a rinunciare al principio
di inerzia e dovrà osservare che oggetti e persone possono subire variazioni della propria velocità
senza che vi sia un'azione esterna a causarla. Per salvare il principio di inerzia è costretto a fare
appello a quello che è chiamata forza apparente.
Esempio: l'autista della macchina è fermo rispetto a quest'ultima, ed è dunque solidale con il
sistema di riferimento non inerziale da essa rappresentato. Se l'autista guarda fuori dal finestrino
vedrà il pedone sul marciapiede e il ciclista muoversi di moto accelerato in direzione che va dal
parabrezza alla parte posteriore della macchina. Ma mentre il pedone e il ciclista concordano
nell'identificare un'agente che causa l'accelerazione della macchina (la forza d'attrito dell'asfalto
generata dalla rotazione dei pneumatici), l'autista li vede accelerare "spontaneamente". L'autista
stesso sente un'accelerazione sul proprio corpo; se sul cruscotto della macchina ci fossero delle
biglie libere di muoversi, l'autista le vedrebbe accelerare verso la parte posteriore del veicolo.
Per utilizzare la legge d'inerzia l'osservatore nel sistema di riferimento non inerziale può fare ricorso
alla cosiddetta forza apparente, postulare cioè ad hoc l'esistenza di una forza, calcolata con la
formula F = ma, per ogni corpo accelerato. La forza centrifuga è un esempio di forza apparente,
percepita dagli osservatori in moto non lineare.
È da notare infine come non abbia senso affermare che la descrizione della dinamica dei corpi in un
sistema inerziale sia "più corretta" di quella in un sistema non inerziale: semplicemente, assumere la
prospettiva del primo sistema è più funzionale ai fini di una rigorosa descrizione matematica
dell'evento, perché permette di legare le forze con l'interazione con altri corpi (scambi di energia o
di quantità di moto). Ciò non toglie che in taluni casi sia invece più pratico considerare la
prospettiva non inerziale.