INDICE GENERALE
Home
Unità di misura
Capitolo 1
1.1 Il Campo elettrico
1.2 Il campo magnetico
1.3 Energia e potenza
1.4 Equazioni di Maxwell
Capitolo 2
2.1 Circuiti a parametri concentrati
2.2 Circuiti lineari tempo-invarianti
2.3 Bipoli lineari tempo-invarianti e relazioni costitutive
2.4 I principi di Kirchhoff
2.5 Collegamento di resistorii
2.6 Partitori resistivi di tensione e di corrente
2.7 Calcolo di resistenze equivalenti nel caso generale
2.8 Collegamento di condensatori
2.9 Collegamento di induttori
2.10 Generatori equivalenti
2.11 Generatore equivalente di Thevenin e Norton
2.12 Reti equivalenti di componenti attivi
2.13 Determinazione della corrente in reti resistive mediante Thevenin e Norton
2.14 Teorema di Millmann per reti resistive
2.15 Bipoli lineari tempo-varianti
2.16 Bipoli non lineari
2.17 Densità di energia
2.18 Induttanza del cavo coassiale e della linea bifilare
Capitolo 3
3.1 Generalità
3.2 Definizioni relative alla teoria dei grafi
3.3 Scrittura delle equazioni di equilibrio elettrico mediante i principi di Kirchhoff
3.4 Il teorema di Tellegen
3.5 Il metodo delle correnti di maglia
3.6 Il metodo delle tensioni di taglio
3.7 Il metodo del potenziale di nodo
Capitolo 4
4.1 Risoluzione delle equazioni del circuito
4.2 Richiami sulla soluzione classica delle equazioni differenziali lineari a coefficienti costanti
4.3 Determinazione delle condizioni iniziali
4.4 Determinazione dell'ordine di una rete
4.5 Le variabili di stato
4.6 Circuiti del I° ordine
Pagina 1
4.7 Soluzione dell'equazione di stato per circuiti del I° ordine
4.8 Circuiti con t< 0 (circuiti instabili)
4.9 Circuiti del II° ordine
4.10 Soluzione dell'equazione di stato per circuiti del II° ordine
4.11 Circuiti di ordine n
Capitolo 5
5.1 Generalità sul funzionamento a regime dei circuiti
5.2 Il regime sinusoidale
5.3 Metodo trigonometrico
5.4 Il metodo fasoriale
5.5 Applicazione del metodo fasoriale alla risoluzione dei circuiti
5.6 Bipoli elementari
5.7 Definizione di ammettenza, conduttanza, suscettanza
5.8 Circuiti mutuamente accoppiati
5.9 Potenza ed energia
5.10 Potenza ed energia nei circuiti magneticamente accoppiati
5.12 Il teorema di Boucherot
5.13 Il rifasamento
Capitolo 6
6.1 La trasformata unilatera di Laplace (t.d.L.)
6.2 Proprietà della trasformata di Laplace
6.3 Antitrasformata di Laplace
TAB.6.1 PROPRIETÀ DELLA TRASFORMATA DI LAPLACE
TAB. 6.2 TRASFORMATE DI LAPLACE
6.4 Risoluzione delle equazioni integro-differenziali mediante la t.d.L.
6.5 Confronto tra metodo classico e t.d.L
6.6 Applicazione della t.d.L. alla risoluzione dei circuiti
6.7 Perché usare la t.d.L. unilatera anziché quella bilatera
6.8 Perché usare 0- nella trasformata di Laplace
6.9 Determinazione della risposta di un circuito lineare mediante la t.d.L
6.10 Funzione di rete
6.11 Funzione di rete come L-trasformata della risposta impulsiva
6.12 Semplificazioni poli-zeri
6.13 Stabilità
6.14 Il principio di sovrapposizione degli effetti nei circuiti L-trasformati
6.15) Teoremi relativi alle reti lineari
6.16 Il teorema di Millmann
6.17 Considerazioni sulla determinazione della f.d.t.
6.18 Risposta a regime e risposta transitoria
6.19 Circuiti del I° ordine
6.20 Circuiti del II° ordine
6.21 Poli dominanti
6.22 Calcolo della risposta forzata mediante l'integrale di convoluzione
6.23 Metodo algebrico per la determinazione della stabilità
Capitolo 7
7.1 Sviluppo in serie di Fourier
7.2 Serie di Fourier finita
7.3 Simmetrie
7.4 Spettri di ampiezza e fase
7.5 Serie di Fourier esponenziale
7.6 Grandezze tipiche di tensioni e correnti sinusoidali
7.7 Circuiti alimentati con grandezze periodiche
7.8 Potenza nei circuiti alimentati con ingressi periodici
7.9 Distorsione introdotta dal circuito
7.10 Trasformata di Fourier
Capitolo 8
8.1 Introduzione
8.2 Risposta in frequenza e mappa dei poli-zeri
8.3 Frequenza di taglio e banda passante
8.4 Circuiti equivalenti di induttori e condensatori reali
8.5 Circuiti risonanti
8.6 Energia nei circuiti risonanti
8.7 Diagrammi di Bode
8.8 Tracciamento dei diagrammi di Bode
Capitolo 9
9.1 Generalità
9.2 Collegamento delle fasi dei generatori
9.3 Collegamento delle fasi dei carichi
9.4 Potenza nei sistemi simmetrici ed equilibrati
9.5 Rifasamento nei sistemi simmetrici ed equilibrati
9.6 Sistemi trifase simmetrici e squilibrati
9.7 Sistemi asimmetrici e squilibrati
9.8 Potenza nei sistemi asimmetrici e squilibrati
9.9 Misura della potenza attiva nei sistemi a tre fili
9.10 Rifasamento dei carichi trifase nel caso generale
9.11 Linee trifasi
Capitolo 10
10.1 Generalità e definizioni
10.2 Collegamento di doppi bipoli
10.3 Doppi bipoli con porta di uscita chiusa su un carico
10.4 Teorema del massimo trasferimento di potenza
10.5 Doppi bipoli come adattatori di impedenza
Appendice A
A.1 Funzione a gradino unitaria
A.2 Funzione a rampa
A.3 Funzione impulsiva
A.4 Derivazione delle funzioni continue a tratti
A.5 Derivazione della funzione impulsiva
A.6 Derivazione della funzione a rampa
Appendice B
B.1 Calcolo della risposta forzata mediante l'integrale di convoluzione
B.2 Interpretazione grafica dell'integrale di convoluzione
B.3 Calcolo della risposta forzata scomponendo in gradini dell'ingresso
Appendice C
C.1 Risposta libera
CAPITOLO 1
1.1 Il Campo elettrico
Si consideri una carica di prova q, caricata positivamente, e si ponga in varie regioni
dello spazio; in quelle regioni in cui sulla carica q viene esercitata una forza si dice che
esiste un campo elettrico. Il campo elettrico è definito dunque come una regione dello
spazio in cui si manifestano delle forze sulla carica di prova q.
Detta Q la carica che ha provocato il campo elettrico, e detta d la distanza tra Q e q,
quest'ultima tale da non modificare il campo elettrico prodotto da Q, la forza che si
manifesta ha le seguenti caratteristiche:
− direzione: quella della congiungente le due cariche:
− verso: di attrazione se Q è negativa, di repulsione se Q è positiva (accade il
contrario se q e' negativa).
− intensità: data dalla legge di Coulomb e vale:
F=
1 Qq
4 πε d 2
(1.1)
con ε costante dielettrica dipendente dal mezzo nel quale è presente il campo elettrico (per
il vuoto vale ε0= 8,854 ⋅10-12 F/m).
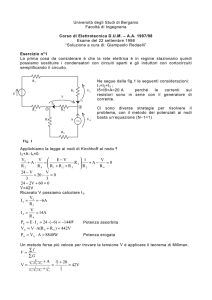
Spostando la carica di prova in tutto lo spazio circostante Q si evidenzia il campo
elettrico, le cui linee di forza (direzioni tangenti alla forza agente). Nel caso in cui il
campo elettrico sia generato da una carica a simmetria sferica, come mostrato in fig. 1.1, le
linee di forza sono radiali. Le superfici normali in ogni punto alle linee di forza sono dette
superfici equipotenziali; in fig.1.1 tali superfici sono sferiche.
q
+
A
F
>
B
Q
Fig 1.1 Campo elettrico prodotto da una carica Q a simmetria sferica.
2
Cap. 1 Richiami di elettrologia
Il lavoro compiuto dalle forze del campo per spostare la carica q dal punto A al punto
B, vedi fig. 1.1, vale:
L AB = ∫
xB
xA
Fdx = ∫
xB
xA
1 Qq
dx
4πε x 2
in cui xA e xB sono le distanze tra i punti A e B e la carica Q. Risolvendo si ha:
Qq
=
−
4πε
L AB
1
x
xB
=
xA
Qq 1
1
−
4πε x A x B
(1.2)
Indicando con:
E=
1 Qq
4πε x
(1.3)
l'energia potenziale si ha anche:
L AB = E A − E B
Si osservi che EA > EB, pertanto lo spostamento della carica per effetto delle forze
prodotte dal campo elettrico avviene da punti a energia potenziale maggiore verso punti a
energia potenziale minore; lo spostamento tra punti appartenenti ad una superficie
equipotenziale avviene con lavoro nullo. Nelle considerazioni finora svolte risulta evidente
la similitudine tra campo elettrico e campo gravitazionale.
Si definisce intensità del campo elettrico la quantità:
K=
1 Q F
=
4πε x 2 q
(1.4)
Vale inoltre la relazione(Teorema di Gauss):
∫ εK ⋅ nds = Q
S
in cui Q è la carica racchiusa dalla superficie chiusa S.
Il campo elettrico è un vettore avente le stesse caratteristiche della forza F.
Si definisce differenza di potenziale (d.d.p.) tra due punti A e B la quantità:
x
VAB
L AB E A E B
1
Q B 1
Q 1
= VA − VB =
=
−
=
−
∫
2 dx =
4 πε x x
4 πε x A x B
q
q
q
(1.5)
A
Per quanto detto in precedenza, lo spostamento della carica avviene da punti a
potenziale più alto (VA) verso punti a potenziale più basso (VB). Portando il punto B
all'infinito si ha:
Q
Q 1
= VA
0
dx
=
−
x A 4 πεx 2
4 πε x A
VA∞ = VA − V∞ = ∫
∞
(1.6)
Dalla (1.6) si ottiene la definizione di potenziale di un punto A che risulta essere il
lavoro fatto dalle forze del campo per spostare la carica q dal punto A all'infinito diviso la
carica stessa.
Il potenziale è definito dalla relazione:
3
Cap.1 Richiami di elettrologia
V = − ∫ K ⋅ dx
(1.7)
sostituendo la (1.4) nella (1.7) si ha:
V=
Q
+ cos tan te
4πεx
Il potenziale è quindi definito a meno di una costante, tale costante viene fissata
scegliendo un punto di riferimento; se si sceglie come riferimento un punto all'infinito, con
V∞= 0, la costante è nulla. Se assumiamo come riferimento un punto K al quale si
attribuisce potenziale nullo risulta:
Cos tan te = Vk −
Q
Q
=−
4 πεx K
4 πεx K
Poiché ciò che interessa non è il potenziale ma la differenza di potenziale, la scelta del
riferimento risulta ininfluente.
Dalla (1.7) si ha:
K=−
dV
dx
(1.8)
Si chiama generatore di tensione una apparecchiatura in grado di stabilire una d.d.p. (o
tensione) ai suoi terminali.
Applicando una d.d.p. alle estremità di un conduttore (si rimanda al corso di Fisica per
la definizione di conduttore, semiconduttore, isolante) si ottiene uno spostamento di
cariche elettriche, ossia una corrente elettrica. La corrente elettrica è data dalla relazione:
i=
dq
dt
(1.9)
Nonostante che la corrente sia dovuta ad un flusso di elettroni, si assume
convenzionalmente come verso della corrente quello che avrebbero le cariche positive. Nei
generatori viene indicato con un + o con un pallino l'estremità dal quale esce la corrente
(per i generatori per i quali la d.d.p. cambia segno il morsetto positivo indica l'estremità
dalla quale esce la corrente quando è positiva).
Dalla (1.9) si ha:
t
0
t
t
−∞
−∞
0
0
q ( t ) = ∫ idt = ∫ idt + ∫ idt = q( 0) + ∫ idt
(1.10)
essendo q(-∞)=0.
Si definisce densità di corrente J la quantità:
J=
dI
ds
(1.11)
Sperimentalmente si ha:
dI = σK ⋅ nds = J ⋅ nds
(1.12)
La densità di corrente è quindi una grandezza vettoriale legata al campo elettrico dalla
relazione:
4
Cap. 1 Richiami di elettrologia
J = σK =
1
K
ρ
( 1.13)
in cui σ è la conducibilità e ρ la resistività del materiale. La densità di corrente è un
vettore solenoidale, ossia:
∫ J ⋅ nds = 0
(1.14)
La relazione (1.14) indica che le linee del campo di J sono chiuse, ossia in una
superficie chiusa entrano tante linee di forza quante ne escono.
Dalle (1.7) e (1.13), supponendo ρ indipendente dalla corrente, si ha:
VAB =
∫
xB
xA
Kdx =
∫
xB
xA
ρJdx =
x B dx
I
ρ dx =I ∫ ρ
xA
xA
S
S
∫
xB
Alla quantità:
xB
R=∫ ρ
xA
dx
S
(1.15)
si da il nome di resistenza elettrica. Tenendo conto della (1.15), per la d.d.p tra i punti A
e B si trova:
VAB = RI
(1.16)
La (1.16) è detta legge di Ohm ed esprime il legame esistente tra la d.d.p. alle
estremità di un conduttore e la corrente che lo attraversa.
Per un conduttore di lunghezza e sezione costante S, la (1.15) diviene:
R=ρ
S
(1.17)
Si chiama condensatore una apparecchiatura costituita da due superfici conduttrici
(armature), separate da un isolante (dielettrico). Se ad un condensatore si applica la d.d.p.
V, esso si carica con carica Q. Si definisce capacità del condensatore il rapporto:
C=
Q
V
(1.18)
Dalla (1.10), supponendo la capacità indipendente dalla tensione e dal tempo, si ha:
v( t ) =
Q 1 t
1 t
=
idt = v(0) +
idt
C C −∞
C 0
∫
∫
(1.19)
ed anche:
i(t ) = C
dv
dt
(1.20)
1.2 Il campo magnetico
Il campo magnetico è una zona dello spazio in cui un ago magnetico è sottoposto a
forze che lo orientano in una determinata direzione. Il campo magnetico può essere
generato con materiali particolari (magneti permanenti) o con una corrente. Consideriamo
il secondo caso; il legame tra corrente e campo magnetico H è espresso dalla relazione
(Legge di Ampere):
5
Cap.1 Richiami di elettrologia
∫ H ⋅ dx = I
(1.21)
c
la quale esprime il fatto che la circuitazione di H lungo un percorso chiuso è pari alla
corrente racchiusa da tale percorso.
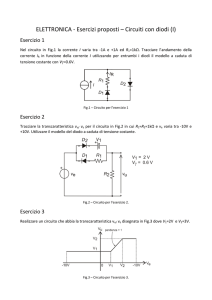
Per un filo rettilineo lungo, la (1.21) diviene (legge di Biot-Savart):
H=
I
2πr
(1.23)
in cui si è assunto come percorso di circuitazione una circonferenza concentrica con il
conduttore di raggio r percorso dalla corrente I. Per il caso considerato le linee di forza del
campo magnetico sono anch'esse circonferenze concentriche con il conduttore.
H
H
a)
b)
Fig. 1.2 Campo magnetico prodotto da un conduttore rettilineo percorso da corrente
entrante a) uscente b)
La direzione del campo magnetico è tangente alle linee di forza, il verso è determinato
con una delle note regole (mano destra, cacciavite ecc.). Le linee di forza del campo
magnetico sono chiuse, a differenza di quelle del campo elettrico che sono aperte.
Si definisce induzione magnetica la quantità:
B = µH
(1.23)
in cui µ è la permeabilità magnetica; essa ha valore costante nel vuoto (4π10-7H/m), per i
materiali diamagnetici e paramagnetici, mentre varia con H nei materiali ferromagnetici.
Si definisce flusso di B:
Φ = ∫ B ⋅ ndS
S
(1.24)
Per quanto affermato riguardo alle linee di forza di H e quindi di B si ha inoltre:
∫ B ⋅ ndS = 0
(1.25)
Una spira (o un qualunque altro circuito) concatenato con un flusso ϕc variabile nel
tempo è sede di una forza elettro motrice (f.e.m.) data da:
e=−
dϕ c
dt
(1.26)
Nella (1.26) il segno negativo significa che, se la spira è chiusa, la corrente circolante
prodotta dalla variazioni di flusso ha verso tale da annullare tali variazioni (Legge di
Lentz),
Si definisce coefficiente di autoinduzione o induttanza il rapporto:
L=
ϕc
i
(1.27)
6
Cap. 1 Richiami di elettrologia
in cui ϕc è il flusso concatenato con il circuito e prodotto dalla corrente che circola nel
circuito stesso. (Il flusso concatenato con un solenoide di N spire è N volte quello
concatenato con una spira). Se L non dipende dalla corrente e dal tempo, in virtù della
(1.27) la (1.26) diviene:
e = −L
di
dt
(1.28)
Si definisce coefficiente di mutua induzione il rapporto:
M=
ϕc
i
(1.29)
in cui ϕc è il flusso che si concatena con un circuito ed è prodotto dalla corrente i che
circola in un altro circuito posto in prossimità del primo. Per M indipendente da corrente e
tempo si ha:
e = −M
di
dt
(1.30)
La (1.28) e la (1.30) sono dette rispettivamente forza elettromotrice di auto e di
mutua induzione.
Nel caso in cui il flusso concatenato sia dovuto all'effetto combinato di auto e mutua
induzione si ha:
di 2
di 1
e = − L
±M
dt
dt
(1.31)
in cui vale il segno positivo se il flusso di mutua è concorde con quello di auto, il segno
negativo se è discorde.
Dalla (1.7) si ha:
∫ K ⋅ dl = 0
∫
per circuiti non concatenati con flusso
(1.32)
dϕ
K ⋅ dl = e = − c per circuiti concatenati con flusso
dt
Dalle (1.21) e (1.23) si ha:
Ic =
Φ
B
∫ µ dl = ∫ µS dl
Se il flusso è costante in tutte le sezioni si ha:
I c = Φ∫
dl
= Φℜ
µS
(1.33)
La (1.33) è detta legge di Hopkinson.
Si chiama riluttanza la quantità:
ℜ=
dl
∫ µS
(1.34)
7
Cap.1 Richiami di elettrologia
Per un avvolgimento di N spire percorso dalla corrente I si ha: Ic = NI , la legge di
Hopkinson diviene quindi:
NI = ℜΦ
(1.35)
Si osservi la similitudine formale tra le (1.15) e (1.34) e tra le (1.16) e (1.35) in cui si
hanno le seguenti corrispondenze.
VAB → NI
R → ℜ
I → Φ
1.3 Energia e potenza
Dalla definizione di d.d.p. si ottiene la definizione di energia elettrica come:
t
t
0
0
w = ∫ vdq = ∫ vidt
(1.36)
Per la potenza elettrica si ha:
p=
dw
= vi
dt
(1.37)
Nella TAB. 1.1 sono riportate le unità di misura delle grandezze elettriche che sono
state definite nel presente capitolo. Nella TAB. 1.2 sono riportati i principali multipli e
sottomultipli.
1.4 Le equazioni di Maxwell
Il teorema di Gauss, la seconda delle (1.32), la (1.25) e la (1.21) costituiscono le
equazioni di maxwell in forma integrale. Esse sono:
Q
∫SK ⋅ nds = ε 0
=
∫ K ⋅ dl = e = −
1
ε0
∫v ρ c dv
(1.38)
dϕ c
∂
= − ∫ B ⋅ nds
dt
∂t s
(1.39)
∫ B ⋅ ndS = 0
(1.40)
∂
∫ B ⋅ dl = µ 0 (I + I s ) =µ 0 ∫sJ ⋅ nds + µ 0 ∂t ∫sε 0 K ⋅ nds
(1.41)
Nelle relazioni precedenti ρ c è la densità di carica volumetrica e Is è la corrente di
spostamento. Tale corrente, per la cui definizione si rimanda ai libri di fisica, tiene conto
dei fenomeni che avvengono all'interno dei dielettrici in seguito ad una variazione di
campo elettrico (ad es. durante la fase di carica e di scarica di un condensatore).
8
Cap. 1 Richiami di elettrologia
TAB. 1.1
GRANDEZZA
UNITA' DI MISURA
SIMBOLO
Forza
Carica
Capacità
Costante dielettrica
Lavoro
Potenza
Energia potenziale
Campo elettrico
Corrente
Densità di corrente
Conducibilità
Resistività
Resistenza
Campo magnetico
Induzione magnetica
Permeabilità
Flusso
Induttanza
Coeff. di mutua induzione
Riluttanza
newton
coulomb
farad
farad/metro
joule
watt
joule
volt/metro
ampere
ampere/metro2
(ohm metro)-1
ohm metro
ohm
ampere/metro
weber/metro2
henry/metro
weber
henry
henry
henry-1
N
C
F
F/m
J
W
J
V/m
A
A/m2
Ω-1m-1
Ωm
Ω
A/m
Wb/m2
H/m
Wb
H
H
H-1
TAB. 1.2
FATTORE
PREFISSO
SIMBOLO
1012
109
106
103
102
10
10-1
10-2
10-3
10-6
10-9
10-12
10-15
Tera
Giga
Mega
Kilo
etto
deca
deci
centi
milli
micro
nano
pico
femta
T
G
M
K
h
da
d
c
m
µ
n
p
f
CAPITOLO 2
2.1 Circuiti a parametri concentrati
Con la teoria dei circuiti si studiano i circuiti a parametri concentrati, ossia quei
circuiti in cui i parametri R, L, M, C in generale distribuiti su tutta l'estensione del circuito
vengono concentrati in un punto. Questa approssimazione vale solo sotto determinate
condizioni.
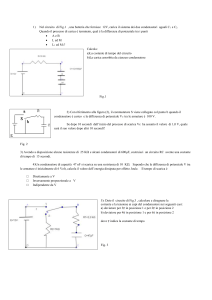
La propagazione dei fenomeni elettrici avviene sotto forma di onde elettromagnetiche
che si propagano alla velocità della luce c = 3⋅105 Km/s; il tempo di transito di tali
fenomeni su una distanza d è data dalla relazione:
t = d/c
(2.1)
Considerando variazioni periodiche di periodo T, il tempo di transito deve essere
confrontato con T. Solo nel caso in cui risulti:
t << T
si possono trascurare i fenomeni propagativi ed il circuito può essere rappresentato a
parametri concentrati.
0
λ
x
a)
0
t
T
b)
Fig. 2.1 Onda elettromagnetica a); grandezza elettrica b).
Poiché T è anche il tempo impiegato a percorrere una lunghezza d'onda λ si ha:
(2.2)
T = λ/c
la relazione t << T diviene allora:
d << λ
(2.3)
10
Cap.2 Equazioni costitutive e reti resistive
L'approssimazione a parametri concentrati è accettabile quando le dimensioni del
circuito sono molto minori della lunghezza d'onda delle onde elettromagnetiche.
Poiché vale anche la relazione:
λ = c/f
(2.4)
si deduce che quanto maggiore è la frequenza di lavoro tanto minori debbono essere le
dimensioni del circuito affinché esso possa essere rappresentato a parametri concentrati.
Esempio 2.1
Si consideri un circuito che lavori alla frequenza f = 25kHz, si ha:
λ = c/f ≅ 12 Km
Per un circuito che lavora alla frequenza di 50Hz si ha:
λ = 3 ⋅105/50 =6 ⋅103 Km
In questo caso, poiché T = 0,02 s, accettando verificata la relazione t << T per t =0,01T, si
avrebbe:
d = t ⋅ c = 0,01 T ⋅ c = 0,01 c/f = 0,01 λ = 60 km
2.2 Circuiti lineari tempo-invarianti
Per analizzare un circuito elettrico, ed anche qualunque altro sistema, deve essere
scritto un sistema di equazioni, in genere integro-differenziali che costituiscono il modello
matematico del circuito; se tali equazioni sono di tipo lineare il circuito è detto circuito
lineare, se inoltre i coefficienti delle equazioni non dipendono dal tempo, il circuito è detto
lineare tempo-invariante. Per i circuiti che soddisfano le condizioni precedenti le
equazioni che costituiscono il modello matematico sono del tipo:
v( t ) = α i( t ) + β
di
+ γ i( t ) dt
dt
(2.5)
in cui α, β, γ, sono costanti.
Un circuito lineare soddisfa il principio di sovrapposizione degli effetti, il quale
afferma che in un circuito inizialmente a riposo( condizioni iniziali nulle) la risposta del
circuito a più ingressi (generatori) può essere determinata sommando le risposte ottenute
considerando i generatori agenti singolarmente nel circuito.
Un circuito tempo-invariante soddisfa la proprietà di traslazione nel tempo di causa ed
effetto, ossia, se i(t) è la risposta all'ingresso v(t), allora i(t-τ) è la risposta all'ingresso
traslato v(t-τ).
2.3 Bipoli lineari tempo-invarianti e relazioni costitutive
Nei circuiti a parametri concentrati le resistenze dei circuiti e le zone in cui si svolgono
i campi elettrici e magnetici vengono confinati in elementi circuitali, resistori, induttori,
condensatori, aventi come parametro, resistenza, induttanza, capacità (nel linguaggio
comune si identificano spesso, impropriamente, tali elementi circuitali con i propri
parametri, si parla cioè di induttanza invece che di induttore etc.)
Ogni elemento circuitale a due terminali è detto bipolo e le relazioni che, per tale
bipolo, legano tensione e corrente vengono dette relazioni costitutive.
11
Cap.2 Equazioni costitutive e reti resistive
2.3.1 Resistore
Il legame tra tensione e corrente è espresso dalla relazione:
v = Ri =
1
i
G
(2.6)
in cui R è la resistenza e G la conduttanza del resistore. Vale:
R=1 G
(2.7)
Per l'energia e per la potenza si ha:
w=
t
0
Ri 2dt
(2.8)
p( t ) = Ri 2
(2.9)
Nella fig. 2.2a) è indicato il simbolo circuitale del resistore.
A
B
R
A
B
a)
b)
B
A
c)
Fig. 2.2 Simbolo circuitale del resistore a); circuito aperto b); corto circuito c).
Un circuito aperto ha resistenza R = ∞ , un corto circuito ha resistenza R = 0.
2.3.2 Induttore
Il legame tensione-corrente è espresso dalla relazione:
v( t ) = L
di
dt
(2.10)
Si osservi che rispetto alla (1.28) è cambiato il segno, ciò poiché con v(t) si indica la
caduta di tensione e con e(t) la f.e.m. indotta . Dalla (2.10) si ha anche:
i( t ) =
1
L
t
−∞
v( t )dt =
1
L
0
−∞
v( t )dt +
1 t
1 t
v( t )dt = i(0) +
v( t )dt
L 0
L 0
(2.11)
La (2.11) mostra che per conoscere la corrente i(t) all'istante t è necessario conoscere il
valore i(0) all'istante iniziale; per questo motivo si dice che l'induttanza è un elemento con
memoria.
L'energia entrante nell'induttanza nell'intervallo [ t 1 , t 2 ] è:
w [t 1 , t 2 ] =
t2
t1
v( t )i( t )dt =
t2
t1
L
i(t 2 )
di
1
1
i( t )dt =
Li( t )di = Li 2 ( t 2 ) − Li 2 ( t 1 )
i
(
t
)
1
dt
2
2
(2.12)
La potenza vale:
p ( t ) = v ( t ) i ( t ) = Li ( t )
di dw ( t )
=
dt
dt
(2.13)
La (2.12) mostra che l'energia entrante nell'induttore dipende solo dai valori iniziali e
finali della corrente e non dall'andamento della corrente. Ciò è tipico dei fenomeni
conservativi (si pensi ad esempio all'energia potenziale e cinetica della fisica). L'induttore
12
Cap.2 Equazioni costitutive e reti resistive
può immagazzinare e successivamente restituire energia (senza dissipazione) ed è per
questo detto elemento reattivo. In fig. 2.3 a) è riportato il simbolo circuitale dell'induttore.
a)
C
b)
L
Fig. 2.3 Simbolo circuitale dell’induttore a) e del condensatore b).
2.3.3 Induttori mutuamente accoppiati
Nelle figg. 2.4 a) e b) sono rappresentati due circuiti mutuamente accoppiati. In tali
circuiti i pallini hanno il seguente significato: se le correnti sono entrambe entranti o
uscenti dai morsetti contrassegnati con i pallini i flussi di autoinduzione e di mutua
induzione sono concordi, in caso contrario sono discordi.
Risulta evidente che qualora fosse noto il circuito fisico, e quindi il senso di
avvolgimento, una volta assegnato il verso della corrente si potrebbero determinare i versi
dei flussi di auto e di mutua induzione senza dover ricorrere ai pallini. Questi ultimi sono
invece rappresentati sul circuito elettrico equivalente partendo proprio da quello reale.
i
1
v1
i2
L1
L2
Μ
1
v1
v2
L1
a)
2
L2
Μ
v2
b)
Fig. 2.4 Circuiti mutuamente accoppiati con M > 0 a) e M < 0 b).
Le equazioni costitutive per i circuiti mutuamente accoppiati rappresentati in fig. 2.4
a) e b) sono:
- caso a
v1 ( t) = L1
di 1
di 2
+M
dt
dt
(2.14)
v 2 ( t) = L 2
di 2
di 1
+M
dt
dt
(2.15)
v1 ( t) = L1
di 1
di 2
−M
dt
dt
(2.16)
v 2 ( t) = L 2
di 2
di 1
−M
dt
dt
(2.17)
- caso b)
Per l'energia, procedendo come in precedenza e supponendo nulli i valori delle correnti per
t = 0, si ha:
w(t) =
t
0
[v ( t)i ( t) + v
1
1
2
1
2
1
2
( t ) i 2 ( t ) ]dt = L 1 i 12 + L 2 i 22 ± M i 1 i 2
(2.18)
13
Cap.2 Equazioni costitutive e reti resistive
Nella (2.18) il segno positivo è relativo al caso a), quello negativo al caso b).
Vale ovviamente quanto detto a proposito degli induttori non accoppiati riguardo alla
conservazione dell'energia.
2.3.4 Condensatore
Per la tensione e la corrente del condensatore valgono le seguenti relazioni:
v( t ) =
1
C
i( t ) = C
t
−∞
i( t ) dt = v( 0) +
1
C
t
0
i( t ) dt
(2.19)
dv
dt
(2.20)
L'energia entrante nel condensatore nell'intervallo [ t 1 , t 2 ] è:
[
]
w t1, t 2 =
t2
t1
v( t ) i( t ) dt =
t2
t1
Cv( t )
dv
dt =
dt
d 1 2
1
1
Cv dt = Cv 2 ( t 2 ) − Cv 2 ( t 1 )
t 1 dt 2
2
2
(2.21)
t2
Poiché questa energia è di tipo conservativo (il condensatore immagazzina energia in
fase di carica e la restituisce in fase di scarica) e la conoscenza della tensione all'istante t è
subordinata alla conoscenza della tensione all'istante iniziale, il condensatore, come
l'induttanza, è un elemento reattivo con memoria.
Il simbolo circuitale del condensatore è rappresentato in fig. 2.3 b).
2.3.5 Generatori indipendenti
2.3.5 a) Generatori di tensione
I generatori ideali di tensione impongono alle loro estremità una differenza di
potenziale v(t) indipendente dalla corrente che li attraversa. Nelle fig. 2.5 a),b),c), sono
rappresentati rispettivamente il simbolo circuitale del generatore di tensione, il legame
tensione corrente (caratteristica esterna), ed il simbolo utilizzato nella letteratura
anglosassone.
Α
a)
e
Β
v
e
Α
b)
i
e
+
_
Β
c)
Fig. 2.5 Simbolo circuitale del generatore ideale di tensione a), sua caratteristica esterna b), simbolo
circuitale anglosassone c).
Un generatore di tensione avente tensione nulla è equivalente ad un corto circuito (il corto
circuito tra due punti A e B si ottiene collegando i due punti con un conduttore di
resistenza nulla); nel seguito con l'espressione " disattivare un generatore di tensione" si
intende l'operazione di sostituzione del generatore con un corto circuito. Questa
operazione, puramente teorica, non coincide con quella pratica di cortocircuitare il
generatore, in quest'ultimo caso si avrebbe infatti una corrente infinita.
14
Cap.2 Equazioni costitutive e reti resistive
i
Α
i= 0
Α
R
v
R
v=0
Β
v
Β
Β
a)
i=
Α
b)
c)
Fig. 2.6 Generatore ideale di tensione chiuso su una resistenza a); generatore ideale disattivato b);
generatore cortocircuitato c)
In pratica è impossibile realizzare un generatore ideale, infatti esso presenta sempre
parametri interni, R, L, C, che rendono la tensione alle estremità dipendente dalla corrente
che li attraversa. In fig. 2.7 è rappresentata un generatore di corrente continua e la sua
caratteristica esterna.
.
Α
+
e_
r
v
+
i
v
R
e
ri
_
v
Β
a)
b)
v
r
i
Fig. 2.7 Batteria a) e sua caratteristica esterna b).
Per i = 0 si ha v = e (funzionamento a vuoto, ossia con circuito esterno interrotto),
per v = 0 si ha: icc =e/r (funzionamento in corto circuito).
Il generatore di tensione rappresentato in fig.2.7 a) è un generatore di tensione
continua, ossia costante nel tempo. Il segno + indica il morsetto a potenziale più elevato.
In generale la tensione del generatore non è costante nel tempo; il pallino di fig. 2.6a)
indica il morsetto dal quale esce la corrente quando la tensione è positiva.
Con l'espressione "disattivare un generatore ideale di tensione" si intende l'operazione
di sostituzione del generatore con un corto circuito (si deve però mantenere l'elemento
circuitale che rappresenta il parametro interno).
2.3.5 b) Generatori di corrente
I generatori di corrente ideali impongono una corrente, indipendente dalla tensione,
Α
Α
v
+
v
j
j
_
a)
Β
j
b)
i
Β
c)
Fig. 2.8 Simbolo circuitale del generatore ideale di corrente a); caratteristica esterna b); simbolo
utilizzato nella letteratura anglosassone c)
nel circuito in cui operano. In fig. 2.8 sono rappresentati i simboli circuitali e la
caratteristica esterna del generatore ideale di corrente.
Un generatore di corrente con corrente nulla equivale ad un circuito aperto. Nel seguito
15
Cap.2 Equazioni costitutive e reti resistive
con l'espressione "disattivare un generatore di corrente" si intende sostituire il generatore
con un ramo aperto come illustrato in fig. 2.9.
Β
Α
a)
A
B
i=0
i
b)
Fig. 2.9 Generatore di corrente attivato a) e disattivato b).
I generatori reali hanno parametri interni R, L, C. In fig. 2.10 a) è rappresentato il caso
particolare in cui il generatore abbia solo resistenza interna r, in fig. 2.10 b) è riportata la
sua caratteristica esterna.
v
Α
i
+
j
r
v
R
rj
i1
i
_
Β
a)
b)
j
i
Fig. 2.10 Generatore reale di corrente a) e sua caratteristica esterna b).
Con resistenza esterna R = 0 (funzionamento in corto circuito) si ha i(t) = j(t), con
R = ∞ (funzionamento a vuoto) i(t) = 0.
La potenza relativa ad un generatore di tensione o di corrente vale:
p(t) = v(t) i(t)
essa risulta positiva se erogata, negativa se assorbita (in quest'ultima condizione il
generatore funziona da motore o da batteria che si carica). Nel caso di generatori di
corrente continua la potenza risulta negativa se la corrente entra dal morsetto
contrassegnato con il + (generatori di tensione) o se (per i generatori di corrente) la
tensione ostacola il passaggio di corrente( ossia presenta una polarità contraria a quella di
fig. 2.10 a)).
NOTA: Con il termine potenza erogata dal generatore si intende la potenza che viene trasferita agli
utilizzatori. Con potenza generata si intende invece la somma della potenza erogata e di quella dissipata
all'interno del generatore. I due termini coincidono per i generatori ideali.
2.3.5 c) Trasformazione di generatori di tensione in generatori di corrente e viceversa
Si consideri il circuito di fig. 2.11 a), in cui un generatore ideale di tensione alimenta
un generico utilizzatore, rappresentato con un rettangolo, con una tensione v(t) che
determina una corrente i(t). Per l'utilizzatore non cambia niente se il generatore di tensione
è sostituito con un generatore di corrente, come mostrato in fig. 2.11 b), che fornisce una
corrente pari a i(t) e determina la stessa v(t) ai terminali dell'utilizzatore. È ovviamente
vero anche il contrario.
16
Cap.2 Equazioni costitutive e reti resistive
i
i
+
+
v
e
v
j
_
_
a)
b)
Fig. 2.11 Generatore di tensione a); generatore corrente equivalente b).
La sostituzione, sempre agli effetti esterni al generatore, può essere effettuata anche
per generatori reali. Nella fig. 2.12 sono riportati alcuni tipi di generatori di tensione e gli
equivalenti di correnti.
+
L
R
i
v
_
i'
i
e
i
C
i
j
R
e
e
i
j
i'
i
j
L
i'
C
Fig. 2.12 Generatori di tensione ed equivalenti di corrente.
a) Generatore di tensione con resistenza interna R
v=e−Ri
i=
e v
− = j−i
R R
a cui corrisponde il generatore di corrente avente:
e
j=
R
(2.23)
Viceversa per il generatore di tensione equivalente a quello di corrente di corrente si ha:
e=Rj
(2.24)
b) Generatore con induttanza interna L
v= e−L
di
dt
i=
j=
Partendo dal generatore di corrente:
1
1
edt −
vdt = j − i
L
L
1
edt
L
e=L
(2.25)
dj
dt
(2.26)
c) Generatore con capacità interna C
v = e−
1
idt
C
i=C
de
dv
−C
= j−i
dt
dt
j=C
de
dt
(2.27)
17
Cap.2 Equazioni costitutive e reti resistive
Partendo dal generatore di corrente:
e=
1
C
(2.28)
jdt
2.3.6 Generatori dipendenti ( o pilotati o controllati)
Molti dispositivi elettronici possono essere modellati con equazioni in cui le tensioni
e/o le correnti dipendono da tensioni e/o correnti in altre parti del circuito. La
rappresentazione di questi dispositivi nei circuiti è ottenuta mediante generatori detti
dipendenti (o pilotati o controllati), poiché la loro tensione o corrente dipende da quella in
altri rami. I vari tipi di generatori controllati e le rispettive relazioni costitutive sono:
Generatori di tensione controllati in tensione;
Generatori di tensione controllati in corrente
Generatori di corrente controllati in tensione;
Generatori di corrente controllati in corrente.
e=µv
e = rm i
j = gmv
j = αi
(2.29)
(2..30)
(2..31)
(2..32)
in cui µ ed α sono grandezze adimensionali, rm e gm hanno dimensioni di resistenza e
conduttanza. I simboli circuitali utilizzati sono riportati in fig. 2.13
j
e
a)
b)
Fig. 2.13 Generatori dipendenti di tensione, a) e di corrente b)
2.4 I principi di Kirchhoff
2.4.1 I° principio di Kirchhoff
Applicando la (1.14) alla parte di circuito (insieme di taglio) delimitato dalla
superficie chiusa S di fig. 2.14 , si ha:
i5
i1
i5
n
i4
i1
i4
S
i3
i2
a)
i2
i3
b)
Fig. 2.14 Applicazione del primo principio di Kirchhoff alle superfici chiuse a) e ai nodi b).
18
S
Cap.2 Equazioni costitutive e reti resistive
J x n dS = J 1 x n dS + J 2 x n dS + ⋅⋅⋅⋅ + J 5 x n dS = −i1 + i 2 − i 3 − i 4 + i5 = 0
S
S
S
(2.33)
Dalla (2.33) si trova che la somma algebrica delle correnti relative alla superficie
chiusa S (o all'insieme di taglio relativo) è nulla. Lo stesso risultato si ottiene se l'insieme
di taglio contiene rami convergenti in un punto detto nodo. Si ha quindi:
I° principio di Kirchhoff: la somma algebrica delle correnti in una superficie chiusa, in
un insieme di taglio, in un nodo è nulla.
Si noti che sommare algebricamente le correnti significa attribuire un segno alle
correnti, tale segno dipende dall'orientamento della normale n, con le convenzioni di fig.
2.14 risultano positive le correnti uscenti dalla superficie (o dal nodo) e negative quelle
entranti.
2.4.2 II° principio di Kirchhoff
Applicando la relazione (1.32) al circuito di fig. 2.15 (maglia), supponendo dl
orientato in senso orario, si ha:
L1
R2
D
C
B
i4
i3
i2
L2
C
dl
i5
G
F
i
A
E
R1
e2
e1 1
Fig. 2.15 Circuito al quale si applica il II principio di Kirchhoff.
B
C
D
E
F
G
A
A
B
C
D
E
F
G
K x dl = K x dl + ... + ... + ... + ... + ... + ... = ( VA − VB ) +
+ ( VB − VC ) + ( VC − VD ) + ( VD − VE ) + ( VE − VF ) + ( VF − VG ) + ( VG − VA ) =
= VAB + VBC + VCD + VDE + VEF + VFG + VGA = 0
(2.34)
Dalla (2.34) si ha:
II Principio di Kirchhoff: in una maglia la somma algebrica delle differenze di potenziale
è nulla.
Sostituendo nella (2.34) le relazioni costitutive relative ai vari elementi e tenendo
conto dell'orientamento del dl e i versi delle correnti, si ha:
−
di
di
1
i 2 dt + L1 3 + R 2 i 3 − L 2 4 − e1 + R 1i1 − e 2 = 0
C
dt
dt
(2.35)
da cui:
e1 + e 2 = R 1i1 −
di
di
1
i 2 dt +R 2 i 3 + L1 3 − L 2 4
C
dt
dt
(2.36)
Il secondo principio di Kirchhoff può anche essere enunciato nel seguente modo:
stabilito il verso di percorrenza della maglia, la somma algebrica delle forze elettro
19
Cap.2 Equazioni costitutive e reti resistive
motrici (f.e.m.) in essa agenti, prese con segno positivo se tendenti a far circolare corrente
concorde al verso di percorrenza (in termini pratici significa incontrare prima il morsetto
negativo), negativo in caso contrario, è uguale alla somma algebrica delle cadute di
tensione, prese con segno positivo se provocate da correnti concordi al verso di
percorrenza, negativo in caso contrario.
2.4.3 Calcolo delle differenze di potenziale( d.d.p.)
Si supponga ad esempio di voler calcolare la d.d.p. tra i punti B e F del circuito
rappresentato in fig. 2.15. Si ha:
VBF = VBC + VCD + VDE + VEF = VBA + VAG + VGF
(2.37)
Sostituendo:
VBF = L 1
di 3
di 4
1
+ R 2i3 − L2
+ e2 =
i dt + e 1 − R 1 i 1
dt
dt
C 2
(2.38)
La d.d.p. tra due punti si ottiene sommando algebricamente le d.d.p. sui singoli elementi,
prese con segno positivo se provocate da correnti concordi con il verso di percorrenza,
con segno negativo in caso contrario; le f.e.m. sono prese con segno positivo se si incontra
prima il morsetto positivo( contrassegnato con il + o con il pallino) nello spostamento tra
primo e secondo punto, con segno negativo in caso contrario.
Contrassegnando con segno positivo le estremità a potenziale più elevato sia per
elementi attivi che passivi (si ricordi che la corrente va da potenziale più alto a potenziale
più basso), le d.d.p. sui singoli elementi vanno prese con segno positivo se nello
spostamento si incontra prima il segno +.
In fig. 2.16 sono riportati quattro esempi in cui è illustrato quanto detto in precedenza.
A
A
A
A
+
R
_
i
e
+
i
e
_
R
_
R
+
i
e
+
R
_
i
e
B
vAB =
B
vAB = _ Ri + e
B
vAB = _ Ri _ e
B
vAB =
Ri + e
Ri _ e
Fig. 2.16 Calcolo della d.d.p. VAB in vari casi
2.4.4 L'operatore D
L’operatore D viene utilizzato per comodità di scrittura per indicare le operazioni di
derivata e di integrale, si pone infatti:
D=
Risulta:
d
dt
1
=
D
dt
20
Cap.2 Equazioni costitutive e reti resistive
D⋅
1
d
=
D dt
1
⋅D =
D
dt = 1
d
dt ≠ 1
dt
2.5 Circuiti equivalenti
Un qualunque bipolo può essere sostituito con un bipolo equivalente, ossia con un bipolo
che alimentato con la stessa tensione assorba la stessa corrente, se alimentato con la stessa
corrente produca la stessa caduta di tensione alle sue estremità.
+
v
_
i
+
v
_
B
i
B'
Fig. 2.17 Bipoli equivalenti.
L'equivalenza vale agli effetti esterni, all'interno dei bipoli sono presenti elementi che
assorbono correnti o provocano cadute di tensione diverse.
Determiniamo ora i bipoli equivalenti per alcuni casi particolari.
2.5.1 Resistori collegati in serie
Due o più resistori si dicono in serie quando sono attraversati dalla stessa corrente.
In fig. 2.18 sono rappresentati tre resistori collegati in serie.
A
C
B
R1
R2
D
A
D
R eq
R3
a)
b)
Fig. 2.18 Resistori in serie a) e resistore equivalente b).
Si osservi che anche le resistenze R1 e R 8 di fig. 2.19 sono attraversate dalla stessa
corrente(sottolineiamo stessa corrente infatti resistenze attraversate da correnti uguali non è
detto che siano in serie)
R2
A
i
R1
R4
R6
R3
B
R5
R8
i
R7
Fig. 2.19 Insieme di taglio con due terminali contenenti resistenze R1 e R8 in serie.
In generale quando si può costruire un insieme di taglio con due soli terminali, le
eventuali resistenze presenti su tali terminali sono in serie.
Applicando il II principio di Kirchhoff al circuito di fig. 2.18 a), si ha:
VAD = VAB + VBC + VCD = R1 i +R2 i +R3 i = ( R1 +R2+R3 ) i = R eq i
In generale:
21
Cap.2 Equazioni costitutive e reti resistive
n
R eq =
(2.39)
Ri
1
Più resistori in serie sono equivalenti ad un resistore di resistenze pari alla somma
delle resistenze dei singoli resistori.
2.5.2 Resistori collegati in parallelo
Due o più resistori si dicono in parallelo quando sono sottoposti alla stessa d.d.p.
In fig. 2.20 a) sono rappresentati tre resistori collegati in parallelo.
i1
R1
i2
R2
A
i
i3
B
A
B
i
v
R3
v
a)
R eq
b)
Fig. 2.20 Resistenze in parallelo a) e resistenza equivalente b).
Si osservi che risultano in parallelo anche le resistenze R1 e R2 di fig. 2.21 a e b ).
A
A
D
C
R1
a)
E
D
C
R2
B
R1
R2
B
b)
Fig. 2.21 Circuiti con due resistenze, R1 e R2 , in parallelo
In generale se in circuito si può individuare una maglia in cui solo due rami
contengono resistenze (e gli eventuali altri rami siano cortocircuiti), le resistenze di tali
rami risultano in parallelo.
Applicando il I principio di Kirchhoff al circuito di fig. 2.20 a) si ha:
i = i1 + i 2 + i 3 = v
da cui:
R eq =
In generale:
1
1
1
v
+
+
=
R1 R 2 R 3
R eq
1
1
1
1
+
+
R1 R 2 R 3
(2.40)
(2.41)
22
Cap.2 Equazioni costitutive e reti resistive
1
R eq =
(2.42)
1
1 Ri
n
In termini di conduttanza si ha:
n
G eq =
1
(2.43)
Gi
Nel caso in cui tutte le resistenze siano uguali la resistenza e la conduttanza
equivalente valgono:
R eq =
R
n
G eq = n ⋅ G
(2.44)
Nel caso di due resistenze in parallelo si ha anche:
R eq =
R1 ⋅ R 2
R1 + R 2
(2.45)
2.5.3 Collegamenti a stella e a triangolo
Nelle fig. 2.22 a) e b) sono mostrati i collegamenti stella e a triangolo.
A
A
RA
R CA
R AB
RC
RB
B
a)
B
C
b)
R BC
C
Fig. 2.22 Collegamento a stella a) e a triangolo b)
È spesso utile, nel calcolo della resistenza equivalente di un bipolo, passare da un
collegamento all'altro, a tale scopo si possono usare le seguenti formule delle quali si
omette la dimostrazione:
RA =
R AB⋅ ⋅ R CA
R AB + R BC + R CA
R AB⋅ ⋅ R BC
R AB + R BC + R CA
R BC⋅ ⋅ R CA
RC =
R AB + R BC + R CA
RB =
R AB =
RA ⋅ RB + RA ⋅ RC + RB ⋅ RC
RC
RA ⋅ RB + RA ⋅ RC + RB ⋅ RC
RA
RA ⋅ RB + RA ⋅ RC + R B ⋅ RC
=
RB
R BC =
R CA
(2.46)
Nel caso in cui le resistenze siano tutte uguali risulta:
R STELLA =
1
R TRIANGOLO
3
Si osservi che nel collegamento a stella è presente un nodo in più ed una maglia in
meno rispetto al collegamento a triangolo.
23
Cap.2 Equazioni costitutive e reti resistive
2.6 Partitori resistivi di tensione e di corrente
Sono detti circuiti partitori, quei circuiti che ripartiscono la tensione o la corrente tra
due resistenze in serie o in parallelo come mostrato in fig. 2.23 a) e b).
i
R1
v
ii1
2
i
i1
1
2
R2
R1
v
R2
a)
v
2
b)
Fig. 2.23 Partitori di tensione a) e di corrente b).
Per il circuito di fig. 2.23 a) le tensioni v1 e v2 risultano:
v1 = v
R1
R1 + R 2
v2 = v
R2
R1 + R 2
(2.47)
Per il circuito di fig. 2.23 b) si ha:
R1 i1 = R 2 i 2
i1 + i 2 = i
da cui risulta:
i1 = i
R2
R1 + R 2
i2 = i
R1
R1 + R 2
(2.48)
Le (2.47) e (2.48) consentono di calcolare tensioni e correnti nelle resistenze R1 e R2
quando è nota la tensione o la corrente totale.
2.7 Calcolo di resistenze equivalenti nel caso generale
2.7.1 Reti resistive passive
In questo caso si giunge alla resistenza equivalente attraverso equivalenti serie,
parallelo e trasformazioni stella triangolo.
Esempio 2.3
R2
A
R1
B
B
R5
R4
D
R3
R7
C
F
E
A
R6
RA
D
F
O
RC
C
R'7
R8
a)
RB
R'1
R9
Fig. 2.24 Esempio 2.3
R5
b)
R6
24
Cap.2 Equazioni costitutive e reti resistive
Le resistenze R1 e R9 sono in serie, in serie tra loro risultano anche R7 e R8 ;
trasformando a stella il triangolo costituito da R2 R3 R4 , si ottiene il circuito di fig. 2.24 b),
in cui:
R R
R R
R R
R B = 2 4 RC = 3 4
R 1′ = R 1 + R 9 R 7′ = R 7 + R 8
RA = 2 3
RS
RS
RS
con : RS = R2 + R3 + R4
Semplificando ulteriormente si ottengono i circuiti di fig. 2.25 a),b),c), in cui:
R'B
A
R"1
A
F
O
R"1
R"B
O
F
A
R' C
R"1'
F
R'7
R'7
R'7
a)
b)
c)
Fig. 2.25 Circuiti semplificati
R 1′′ = R 1 + R A R ′B = R B + R 5 R ′C = R 6 + R C
R ′′B =
R ′B ⋅ R ′C
R ′B + R ′C
R 1′′′= R 1′′ + R ′′B
R eq =
R 1′′′⋅ R ′7
R 1′′′+ R ′7
Esempio 2.4
R1
B
R3
A
R1
D
R2
C
A
R4
R5
a)
Fig. 2.26 Esempio 2.4
R2
B C D
R3
b)
Le resistenze R3 e R4 possono essere tolte perché cortocircuitate; unendo i punti B,C,D,
si ottiene il circuito di fig. 2.26 b), dal quale si ha:
1
R eq =
1
1
1
+
+
R1 R 2 R 3
2.7.2 Reti resistive comprendenti generatori controllati
In questo caso la resistenza equivalente tra i due poli deve essere calcolata supponendo di
25
Cap.2 Equazioni costitutive e reti resistive
applicare un generatore fittizio di tensione v* (o di corrente i*), con circuito disattivato dai
generatori indipendenti, determinare la corrente i* ( o la tensione v*) ed eseguire il
rapporto:
R eq =
v∗
i∗
(2.49)
In fig. 2.27 è illustrata la procedura per il calcolo di R eq.
i*
+
v*
_
i*
v*
a)
b)
Fig. 2.27 Calcolo della resistenza equivalente per reti resistive contenenti generatori controllati
Esempio 2.5
Si voglia eseguire il calcolo la resistenza equivalente tra i punti A e B del circuito di
fig. 2.28 a).
µv
A
i∗
+
R1
v
−
B
R3
R2
i1∗
R4 e
1
a)
µv
i 2∗
+
R1
v
−
RA
b)
Fig. 2.28 Esempio 2.5.
Essendo la serie tra R3 e R4 è in parallelo con R2, si può porre:
RA =
R2 ⋅ (R3 + R4 )
R2 + R3 + R4
Poiché nel circuito è presente un generatore dipendente, il calcolo della resistenza
equivalente deve essere effettuato applicando il generatore di tensione v* tra i punti A e B
si giunge al circuito di fig. 2.28 b), dal quale risulta:
i 1∗ =
v∗
R1
v ∗ − µv = R A i ∗2
i ∗ = i 1∗ + i ∗2
Dalla seconda equazione si ha:
i ∗2 =
sostituendo nella prima si ottiene:
v∗
(1 + µ ) R
A
con: v = R A i ∗2
26
Cap.2 Equazioni costitutive e reti resistive
i∗ =
(1 + µ ) R A + R 1
v∗
v∗
+
= v∗
R 1 (1 + µ ) R A
(1 + µ ) R A R 1
da cui:
R eq =
(1 + µ ) R A R 1
v∗
∗ =
i
(1 + µ ) R A + R 1
Per µ = 0 la resistenza equivalente è data dal parallelo di R1 con R4.
Esempio 2.6
Calcolare la resistenza equivalente tra i punti A e B del circuito di fig.2.29 a).
A
R1
R2
i*
αi
i
B
+
R3
v∗
R1
R2
i
−
a)
Fig. 2.29 Esempio 2.6
Dal circuito di fig. 2.29b), si ha:
i∗ = (1 + α ) i
da cui: i =
R3
αi
b)
1+ α
i∗
v ∗ = R 1i ∗ + R 2 i
La resistenza equivalente risulta:
R
v∗
R eq = ∗ = R 1 + 2
1+ α
i
Si osservi che:
- per α = 0 il ramo contenente il generatore di corrente risulta aperto per cui:
Req =R1 + R2
- la resistenza in serie al generatore ideale di corrente non influisce sulla resistenza
equivalente.
2.8 Collegamento di condensatori
2.8.1 Collegamento in serie
Più condensatori sono in serie, vedi fig. 2.30, quando hanno la stessa carica( in
analogia con i resistori i conduttori di collegamento di condensatori in serie sono percorsi,
in fase di carica, dalla stessa corrente di conduzione
A
Q
Q
Q
C1
v1
C2
v2
C
3
v3
a)
B
A
Q
Ceq
v
b)
B
27
Cap.2 Equazioni costitutive e reti resistive
Fig. 2.30 Condensatori in serie a) e condensatore di capacità equivalente b).
Dalla fig. 2.30 a) si ha:
v = v1 + v 2 + v 3 = Q
con:
C eq =
1
1
1
Q
+
+
=
C1 C 2 C 3
C eq
1
1
1
1
+
+
C1 C 2 C 3
In generale si ha:
C eq =
1
n
1
(2.50)
1
Ci
2.8.2 Collegamento in parallelo
Analogamente al caso dei resistori in parallelo, più condensatori si dicono in
parallelo quando sono soggetti alla stessa differenza di potenziale. Tale tipo di
collegamento è mostrato in fig. 2.31a).
A
Q1
C1
Q2
C2
Q3
C3
B
A
Q
B
Ceq
v
v
a)
b)
Fig. 2.31 Condensatori in parallelo a) e condensatore equivalente b.
Per determinare la capacità equivalente, ricordando che la carica complessiva
depositata è la somma di quella di tutti i condensatori, si ha:
Q = Q 1 + Q 2 + Q 3 = (C 1 + C 2 + C 3 ) V = C eq V
con:
C eq = (C 1 + C 2 + C 3 )
In generale:
n
C eq =
Ci
(2.51)
1
2.8.3 Collegamenti a stella e a triangolo
In figura 2.32 sono rappresentati condensatori collegati a stella e a triangolo.
Analogamente a quanto visto per i resistori anche in questo caso si può passare da un
28
Cap.2 Equazioni costitutive e reti resistive
collegamento all'altro.
A
A
CA
C
C CA
AB
CC
CB
B
B
C
a)
C BC C
b)
Fig. 2.32 Condensatori collegati a stella a) e a triangolo b).
Le formule sono:
CA =
C AB C BC + C AB C CA + C BC C CA
C BC
CB =
CC =
C AB =
C AB C BC + C AB C CA + C BC C CA
C CA
CA C B
CA + C B + CC
C BC =
C AB C BC + C AB C CA + C BC C CA
C BA
C CA =
C BCC
CA + C B + CC
(2.52)
CCCA
CA + C B + CC
2.9 Collegamento di induttori
2.9.1 Collegamento in serie di induttori
Più induttori risultano collegati in serie quando sono percorsi dalla stessa corrente. In
fig. 2.33 a) sono mostrati tre induttori collegati in serie.
i
A
L2
v2
L1
v1
B
L3
v3
B
A
Leq
v
a)
a)
Fig. 2.33 Collegamento in serie di induttori a) e induttore equivalente b).
Si ha:
v = v 1 + v 2 + v 3 = ( L 1 + L 2 + L 3 )Di = L eq Di
Per n induttori collegati in serie si ha:
n
Leq =
Li
(2.53)
1
2.9.2 Collegamento di induttori in parallelo
Più induttori risultano in parallelo se soggetti alla stessa differenza di potenziale come
29
Cap.2 Equazioni costitutive e reti resistive
illustrato in fig. 2.34 a).
A
i
L1
i1
L2
i2
L3
A
B
B
i
i3
a)
v
L eq
v
b)
Fig. 2.34 Collegamento in parallelo di induttori a) e induttore equivalente b).
1
1
1 1
1
+
+
v=
v
L1 L 2 L 3 D
L eq D
i = i1 + i 2 + i 3 =
In generale si ha:
L eq =
1
n
1
(2.54)
1
Li
2.9.3 Induttori in serie mutuamente accoppiati
In fig. 2.35 sono rappresentati due induttori di induttanza L1 e L2 collegati in serie e
mutuamente accoppiati con coefficiente di mutua induzione M.
L1
L2
M
i
+
v
_
Fig. 2.35 Induttori mutuamente accoppiati
Dalla fig. 2.35 si ha:
v = ( L 1 + L 2 + 2 M ) Di = L eq Di
con:
L eq = L1 + L 2 + 2 M
Invertendo uno dei due pallini si ha:
L eq = L1 + L 2 − 2 M
In generale si ha:
L eq = L1 + L 2 ± 2 M
(2.55)
in cui il segno positivo vale se le correnti sono entrambe entranti o uscenti dal morsetto
contrassegnato con il pallino, il segno negativo in caso contrario.
2.9.4 Induttori in parallelo mutuamente accoppiati
In fig. 2.35 a) e b) sono mostrati due induttori in parallelo mutuamente accoppiati, e un
30
Cap.2 Equazioni costitutive e reti resistive
circuito equivalente al precedente in cui gli induttori sono disaccoppiati.
L1-M
L1
L1
i1
A
i
i2
A
B
M
i1
i
B
i2
ML eq
L2
v
v
a)
L2
L2-M
b)
Fig. 2.35 Induttori in parallelo mutuamente accoppiati.
Dalla fig.2.35a) si ha:
v = L1Di1 + M Di 2 = L1Di1 + M D( i − i1 ) = ( L1 − M ) Di1 + M Di
v = L2 Di 2 + M Di1 = L2 Di 2 + M D( i − i 2 ) = ( L2 − M ) Di 2 + M Di
Le relazioni precedenti dimostrano che i circuiti di fig. 2.35 a) e b) sono equivalenti,
quindi:
L eq = ± M +
(L1
M )(L 2
L1 + L 2
M)
(2.56)
2M
Nella (2.56) vale il primo segno per correnti entrambe entranti o uscenti dal morsetto
contrassegnato dal pallino, come in fig.2.35 a), in caso contrario vale il secondo.
2.10 Generatori equivalenti
2.10.1 Generatori equivalenti di tensione
2.10.1a) collegamento serie
Applicando il II principio di Kirchhoff tra i punti A e B di fig. 2.36a) si ha:
e eq = e 1 − e 2 + e 3 − e 4
A
B
e1
e2
e3
e4
B
A
eeq
Fig. 2.36 Generatori di tensione ideali collegati in serie a) e generatore equivalente b).
In generale si ha:
n
e eq =
e1
(2.57)
1
La (2.57) è una somma algebrica.
2.10.1 b) collegamento parallelo
Il parallelo tra generatori ideali di tensione è possibile solo nel caso in cui tutti i
generatori abbiano la stessa f.e.m; se così non fosse si avrebbe una corrente di circolazione
31
Cap.2 Equazioni costitutive e reti resistive
infinita nel circuito costituito dai generatori.
B
A
R1
R1
R1
e
e
R2
R
e
R
B
A
A≡B
e
e
R2
R2
C
C
C
a)
R
b)
c)
Fig. 2.37 Generatori ideali di tensione in parallelo c) generatore equivalente b)circuito equivalentec).
Più generatori ideali di stessa f.e.m. in parallelo, equivalgono, agli effetti esterni, ad un
unico generatore di stessa f.e.m.. È evidente che è vero anche il contrario, ossia un
generatore di tensione ideale può essere sostituito, agli effetti esterni, con più generatori di
stessa f.e.m. in parallelo. In virtù della precedente considerazione il circuito di fig. 2.37a) è
equivalente a quello di fig. 2.37 b). Poiché nel primo circuito il tratto A B non è percorso
da corrente può essere aperto come in fig.2.37c). Risulta quindi:
i1 =
e
R
i2 =
e
R1 + R 2
Si osservi che la corrente i1 non è influenzata da R1 e R2 mentre i2 non dipende da R.
Ciò accade perché tra i punti B e C è imposta la tensione e che non dipende dalla
corrente.
2.10.1 c) Generatori reali di tensione in serie
Se si considera il caso in cui i generatori abbiano una resistenza interna, come
mostrato in fig. 2.38a) si ottiene:
e eq = − e1 + e 2 − e 3
(2.58)
req = r1 + r2 + r3
r1
A
e1
r2
e2
r3
B
r eq
A
e3
B
eeq
a)
b)
Fig. 2.38 Generatori reali in serie a) e generatore equivalente b).
Nel caso generale eeq è data dalla (2.57) mentre la resistenza equivalente si ottiene
sommando tutte le resistenze.
2.10.1 d) Generatori reali di tensione in parallelo
Dalla fig. 2.39a) si ha:
i1 =
e1 − v AB
r1
i2 =
e 2 − v AB
r2
i1 + i 2 + i 3 = i
i3 =
e 3 − v AB
r3
32
Cap.2 Equazioni costitutive e reti resistive
sostituendo le correnti si ha:
e1 − v AB e 2 − v AB e 3 − v AB
+
+
=i
r1
r2
r3
da cui:
e1 e 2 e 3
1 1 1
+
+ − v AB
+ +
=i
r1 r2 r3
r1 r2 r3
e quindi:
v AB
e1 e 2 e 3
+
+
r1 r2 r3
i
=
−
1 1 1
1 1 1
+ +
+ +
r1 r2 r3
r1 r2 r3
e ponendo:
e1 e 2 e 3
+
+
r1 r2 r3
e eq =
1 1 1
+ +
r1 r2 r3
req =
1
1 1 1
+ +
r1 r2 r3
si ottiene il circuito equivalente di fig. 2.39b).
r
r
1
r
2
e
i1
e2
1
B
i
B
i2
i
r eq
3
R
e3
eeq
R
i3
A
A
a)
b)
Fig. 2.39 Generatori reali di tensione in parallelo a) e generatore equivalente b).
Si osservi che i termini a numeratore di eeq rappresentano le correnti di corto circuito
dei generatori, ossia quelle correnti che si otterrebbero collegando le estremità del
generatore come indicato in fig. 2.40.
r
e
i cc
e
ge
i cc =
r =
Fig. 2.40 Generatore di tensione chiuso in corto circuito.
Invertendo il pallino del generatore cambia il segno del termine corrispondente a
numeratore poiché cambia il verso della corrente di corto circuito. In generale, indicando
con n il numero di rami contenenti generatori, si ha:
33
Cap.2 Equazioni costitutive e reti resistive
n
e eq =
1
n
req =
1
n
e i ri
=
1 ri
1
=
1 ri
1
eigi
gi
n
gi
(2.59)
1
in cui si è indicato con g la conduttanza.
2.10.2 Generatori ideali di corrente
2.10.2 a) collegamento serie
A
B
j
j
A
B
j
j
a)
Fig. 2.41 Generatori ideali di corrente in serie.
b)
Per dualità con i generatori ideali di tensione risulta evidente che possono essere
collegati in serie solo generatori di corrente ideali di stessa corrente; se così non fosse alle
estremità di ogni generatore si stabilirebbe una d.d.p. infinita (ci si potrà rendere conto di
questa affermazione quando saranno trattati i generatori reali in serie).
Più generatori in serie aventi le caratteristiche specificate possono essere sostituiti con
un solo generatore di corrente di stessa corrente(solo agli effetti esterni). Risulta
naturalmente vero anche il contrario, ossia un generatore ideale può essere sostituito con
più generatori ideali di stessa corrente in serie. In virtù di quest'ultima considerazione i
circuiti di figg. 2.41 a) e b) sono equivalenti, il ramo tratteggiato non è infatti percorso da
corrente. In queste condizioni( ramo in serie al generatore ideale) il circuito lavora a
corrente imposta e la d.d.p. su ogni resistenza è indipendente dalle altre.
R1
R2
j
a)
R1
R2
j
j
b)
Fig. 2.41 Funzionamento a corrente imposta.
NOTA: due circuiti sono detti duali quando nelle equazioni costitutive possono essere scambiate tra loro
tensioni e corrente.
2.10.2 b) Collegamento in parallelo
A
A
j
j2
1
j3
j eq
B
a)
B
b)
Fig. 2.42 Generatori ideali di corrente in parallelo a) e generatore equivalente b).
34
Cap.2 Equazioni costitutive e reti resistive
Applicando il I principio di Kirchhoff al nodo A o al nodo B di fig. 2.42a si ha:
jeq = j1 + j2 + j3
in generale:
jeq =
(2.60)
ji
La corrente del generatore equivalente risulta la somma algebrica delle correnti dei singoli
generatori in parallelo.
2.10.2 c) collegamento serie
Trasformando i generatori di corrente di fig. 2.43 a) in generatori di tensione e
successivamente, dopo aver trovato il generatore equivalente, riportando a generatore di
corrente si ottiene la fig.2.43 b) in cui:
jeq =
R 1 j1 + R 2 j2
R1 + R 2
R eq = R 1 + R 2
In generale si ha:
R i ji
jeq =
R eq =
Ri
(2.61)
Ri
in cui la somma a numeratore di jeq è algebrica.
R1
R2
j1
R eq
j2
j eq
B
A
a)
B
A
b)
Fig. 2.43 Generatori reali di corrente in serie a) e generatore equivalente b).
2.10.2 d) Collegamento in parallelo
A
j1
A
j2
R1
j
R2
B
B
a)
eq
Req
b)
Fig. 2.44 Generatori reali di corrente in parallelo a) e generatore equivalente b).
Applicando il I principio di Kirchhoff e notando che le resistenze sono in parallelo si ha:
jeq =
ji
Ri =
1
1 Ri
(2.62)
35
Cap.2 Equazioni costitutive e reti resistive
in cui la somma della corrente è algebrica.
2.11 Determinazione del generatore equivalente mediante i teoremi di
Thevenin e di Norton
2.11 a) Teorema di Thevenin
La dimostrazione del teorema sarà fornita nel capitolo relativo alla risoluzione dei
circuiti mediante la trasformata di Laplace. Tale teorema afferma:
Un bipolo lineare resistivo è equivalente(agli effetti esterni) ad un altro costituito da un
generatore di tensione eeq in serie ad una resistenza Req . La f.e.m. eeq è pari alla d.d.p. vista
ai terminali del bipolo, la resistenza Req è quella vista tra gli stessi terminali con i
generatori indipendenti disattivati.
Mediante il teorema di Thevenin possono essere ricavate le (2.58),(2.59),(2.60).
Esempio 2.7
Si voglia determinare l'equivalente di Thevenin del bipolo di fig. 2.45a)
La f.e.m. del generatore equivalente è la d.d.p. tra i punti A e B, essa vale:
e eq = v AB = − e + R 2 j + µv
in cui:
v = −R3 j
e eq = −e + ( R 2 − µR 3 ) j
sostituendo:
+ v
A
R1
R2
-
+ v=0 -
A
R1
R3
R2
R3
A
eeq
j
µv
e
B
µ v =0
B
a)
b)
Fig. 2.45 Esempio 2.7
R eq
B
c)
Per determinare Req si debbono disattivare i generatori indipendenti come indicato
in fig. 2.45b); poiché risulta v = 0 anche il generatore controllato è disattivato( è un caso
particolare!) pertanto si ha:
R eq = R 1 + R 2
Il bipolo equivalente di Thevenin è riportato in fig. 2.45 c).
2.11 b)Teorema di Norton
Un bipolo lineare resistivo è equivalente, agli effetti esterni, ad un bipolo costituito da
un generatore di corrente I0 avente in parallelo una resistenza Req. La corrente I0 è quella
che scorre tra i terminali del bipolo cortocircuitati, la resistenza equivalente Req è
calcolata come in Thevenin.
36
Cap.2 Equazioni costitutive e reti resistive
Esempio 2.8
Si voglia determinare il bipolo equivalente di Norton del circuito di fig. 2.43 a). Nelle
figg. 2.46 a) e b) sono riportati i circuiti per il calcolo di I0 e di Req.
I1 R1
I2
j1
A
R2
R1
j2
B
A
I0
a)
Dalle relazioni:
I 0 = − I 1 + j1
R2
B
b)
Fig. 2.46 Esempio 2.8
I 0 = − I 2 + j2
R 1I 1 + R 2 I 2 = 0
R 1 ( j1 − I 0 ) + R 2 ( j 2 − I 0 ) = 0
da cui:
R 1 j1 + R 2 j2
I0 =
R1 + R 2
La corrente I0 risulta uguale alla jeq di fig. 2.43 b).
Dal circuito di fig. 2.46 b), si ha:
R eq = R 1 + R 2
Il bipolo equivalente di Norton è riportato in fig. 2.43 b).
si ha:
Esempio 2.9
Si determini il bipolo equivalente di Norton del bipolo rappresentato in fig. 2.47 a)
A
i
R
j1
B
A
D
R
R
D
j2
i
R
R
αi
j1
I0
B
a)
R
R
R
j2
αi
i
b)
Fig. 2.47 Esempio 2.9
La resistenza R posta tra i punti A e B risulta cortocircuitata e pertanto può essere
soppressa; la corrente del generatore j1 passa attraverso il cortocircuito; le due resistenze R
in parallelo sono percorse dalla stessa corrente i che rappresenta anche la parte di corrente,
dovuta a j2 , attraverso il corto circuito.
Si ha quindi:
I 0 = j1 + i
Applicando il I principio di Kirchhoff al nodo D si ha:
j
2 i = j2 + αi
da cui:
e quindi:
i= 2
2−α
I 0 = j1 + j2
1
2−α
37
Cap.2 Equazioni costitutive e reti resistive
Per la resistenza equivalente, disattivando i generatori di corrente e applicando il
generatore di tensione v* come in fig. 2.47 c), si ha:
A
R
v*
R
1
i*
i1
R
R
( 1_ α ) i
αi
i
B
i ∗ = i 1 + (1 − α ) i ; i 1 =
v∗
( 2 − α) R
Sostituendo si ha:
Fig. 2.47 c) Esempio 2.9
∗
v
; v ∗ = (1 − α ) Ri + Ri = ( 2 − α ) Ri
R
in cui: i =
1
1− α
3 − 2α ∗
+
=
v
( 2 − α) R
R ( 2 − α) R
La resistenza equivalente è:
2−α
v∗
R eq = ∗ =
R
3 − 2α
i
i∗ = v∗
2.12 Reti equivalenti di componenti attivi
Si riportano le reti equivalenti di alcuni componenti attivi al solo scopo di illustrare
come per la presenza di tali componenti si abbiano circuiti comprendenti generatori
pilotati.
2.12 a) Transistore bipolare a giunzione
Nelle figg. 2.47 a) e b) sono riportati i simboli circuitali per i transistor di tipo pnp e
npn, nella fig. 2.47 c) è invece riportato il circuito equivalente, a parametri ibridi, per il
transistor connesso a emettitore comune, per piccoli segnali a bassa frequenza.
c
c
b
b
b
h ie
+
ib
hre vc
e
e
a)
b)
hfe i b
h oe
vc
_
e
c
e
c)
Fig. 2.47 Simbolo circuitale per transistori di tipo pnp a) e npn b), circuito equivalente a parametri
ibridi per piccoli segnali in bassa frequenza.
2.12 b) Amplificatori operazionali
L'amplificatore operazionale è un dispositivo che possiede almeno cinque terminali
come illustrato in fig. 2.48 a); tali terminali sono detti: ingresso invertente, ingresso non
38
Cap.2 Equazioni costitutive e reti resistive
invertente, uscita, terminali di polarizzazione (terminali E+ ed E−). La polarizzazione si
ottiene come mostrato in fig. 2.48 b) in cui i valori tipici sono: E+= 15V E−= -15V.
Ingresso
invertente
E+
E+
_
_
uscita
+
Ingresso
non invertente
+
E
_
_
E
a)
b)
Fig. 2.48 Simbolo dell'A.O. a) e circuito di polarizzazione dell'A.O. b)
Il simbolo circuitale dell'A.O. e il suo circuito equivalente sono riportati, rispettivamente in
fig. 2.48 c) e d).
Comunemente l'A.O. è indicato negli schemi con tre terminali anziché con quattro come
indicato in fig. 2.48 c) essendo omesso il terminale di collegamento a massa; è preferibile
indicare anche questo terminale per evitare l'errore i+ + i- + i0 = 0.
1
v
1
_
i
_
> _
vd
2
> +
v+
i+
io
<
_
vd
Ri
Ro
Av d
2 +
vo
+
vo
_
c)
d)
Fig. 2.48 Simbolo circuitale dell'A.O. c) e circuito equivalente dell'A.O. d)
La tensione vd = v+ - v- è detta tensione di ingresso differenziale. In fig. 2.48 e)
riportata la caratteristica di uscita v0 = f (vd).
vo ( V )
10
0,1
>
vd( mV )
Fig. 2.48 e) Caratteristica vo = f (vo )
Dalla caratteristica di fig. 2.48 e) si rileva che:
- vd e vo hanno ordine di grandezza molto diverso, la prima è in V, la seconda in mV;
- in un piccolo intorno dell'origine la caratteristica è pressoché lineare, v o = A vd , con A
guadagno di tensione ad anello aperto.Valori tipici per l'A.O. sono:
- resistenza di ingresso Ri > 100 KΩ;
39
Cap.2 Equazioni costitutive e reti resistive
- resistenza di uscita Ro < 100 Ω;
- guadagno di tensione A > 105.
Dalla fig. 2.48 e) si osserva inoltre che un piccolo segnale di ingresso sarebbe sufficiente a
portare l'A.O. in saturazione, per ottenere il funzionamento nel tratto lineare si deve
ricorrere alla reazione negativa, si deve cioè riportare in ingresso invertente l'uscita.
Per l'A.O. ideale si assumono i seguenti valori:
Ri = ∞
R0 = 0
A=∞
Con queste condizioni risulta:
i+ = i− = 0
v+ = v− = vd = 0
L'ultima relazione è conseguenza del fatto che assumendo infinito il guadagno A la
caratteristica di fig. 2.48 e) risulta perfettamente verticale nel tratto lineare. La condizione
vd = 0 equivale a cortocircuitare l'ingresso, poiché però anche le correnti sono nulle, siamo
in presenza di un corto circuito speciale detto corto circuito virtuale.
Il modello circuitale ed il circuito equivalente per l'A.O. ideale sono riportati in fig. 2.49.
_
i =0
_ >
_
i =0
> _
vd = 0
> +
+
i+= 0
+
vd = 0
_
vo
+
Av d
>
i+= 0
vo
_
a)
b)
Fig. 2.49 Simbolo circuitale dell'A.O. ideale a) circuito equivalente dell'A.O. ideale b)
Di particolare interesse è il circuito di fig. 2.49 detto buffer o inseguitore di tensione
in cui risulta: vo = v2 .
_
_
+
+
vo
v2
+
vd = 0
+
Av d
v2
_
_
a)
vo
b)
Fig. 2.50 Inseguitore di tensione a) e circuito equivalente b)
2.13 Determinazione della corrente in reti resistive mediante i teoremi di
Thevenin e Norton
Si consideri il circuito di fig. 2.45 a), se tra i punti A e B è posta una resistenza R, essa
è percorsa da una corrente uguale a quella che percorrerebbe la stessa R posta tra i punti A
e B del circuito equivalente di fig. 2.45 c). Questa considerazione ci consente di calcolare
la corrente mediante il teorema di Thevenin:
La corrente in un ramo di resistenza R può essere calcolata mediante il teorema di
Thevenin applicando la seguente procedura:
- si stacchi il ramo di resistenza R dal circuito;
- si determini, tra i punti di distacco, il bipolo equivalente di Thevenin;
- si colleghi la resistenza R alle estremità di tale bipolo.
40
Cap.2 Equazioni costitutive e reti resistive
La corrente risulta:
I=
E eq
(2.63)
R eq + R
Mediante il teorema di Norton si ha:
La d.d.p. alle estremità di un ramo di resistenza R può essere calcolate procedendo nel
seguente modo:
- si stacchi il ramo di resistenza R dal circuito;
- si determini, tra i punti di distacco, il bipolo equivalente di Norton;
- si colleghi la resistenza R alle estremità di tale bipolo.
La d.d.p. risulta:
V=
R eq R
R eq + R
I0
(2.64)
2.14 Teorema di Millmann per reti resistive
Si consideri il circuito di fig. 2.39 a), ossia un circuito in cui tutti i rami sono i
parallelo, per il I principio di Kirchhoff si può scrivere:
E 1 − VAB E 2 − VAB E 3 − VAB VAB
+
+
=
R1
R2
R3
R
da cui:
VAB
E1 E 2 E 3
+
+
R1 R 2 R 3
E G + E 2 G 2 + E 3G 3
=
= 1 1
1
1
1
1
G1 + G 2 + G 3 + G
+
+
+
R1 R 2 R 3 R
Questa relazione esprime il teorema di Millmann, il quale, considerando che i termini
a numeratore sono le correnti ottenute cortocircuitando i rami in parallelo e che quelli a
denominatore sono le conduttanze degli rami stessi afferma che:
In un circuito con solo due nodi, ossia con tutti i rami in parallelo, la d.d.p. tra tali nodi si
ottiene come rapporto tra la somma delle correnti di corto circuito dei singoli rami e la
somma delle conduttanze dei rami stessi.
Quanto asserito in precedenza vale ovviamente anche per circuiti contenenti generatori
di corrente; in tal caso la corrente di corto circuito coincide con la corrente stessa del
generatore.
Le correnti nei rami del circuito di fig. 2.39 possono essere determinate per mezzo di
relazioni del tipo:
Ii =
E i − VAB
Ri
Nel caso generale di un circuito costituito da r rami in parallelo, di cui m contenenti
generatori di tensione e n generatori di corrente, si ha:
41
Cap.2 Equazioni costitutive e reti resistive
m
1
VAB =
n
Ei
+ Ji
Ri
1
=
m
1
1 Ri
r
1
EiGi +
m
1
n
1
Ji
(2.65)
Gi
2.15. Bipolo lineari tempo-varianti
Sono tempo varianti quei bipoli per cui i parametri variano con il tempo. Le equazioni
costitutive sono ancora lineari, Ma i parametri R, L, M, C sono funzione del tempo.
2.15.1 Resistori
Per questi bipoli la caratteristica v, i è rappresentata da una retta in cui la pendenza
varia nel tempo. Un esempio è mostrato in fig. 2.51.
Fig. 2.51 Caratteristica v, i per un resistore lineare tempo-invariante
La legge di Ohm diviene:
v( t ) = R ( t )i( t )
i( t ) = G ( t )i( t )
(2.66)
in cui R(t) e G(t) sono i valori assunti dalla resistenza e dalla conduttanza al tempo t. Per
effetto della variazione di R o di G la tensione e la corrente possono avere andamento nel
tempo diversi.
Esempio 2.10
Se la resistenza varia nel tempo con legge: R ( t ) = R 0 + R 1 sen ω1 t e la corrente è:
i( t ) = I M sen ω 2 t , la tensione risulta:
R I
v( t ) = R 0 I M sen ω 2 t + 1 M [cos(ω1 − ω 2 )t − cos(ω1 + ω 2 )t ]
2
2.15.2 Induttore
Indicando con L(t) il valore dell'induttanza, variabile con una qualunque legge nel
tempo, si ha:
v L (t ) =
si ha inoltre:
d[L(t )i(t )]
di(t )
dL(t )
= L (t )
+ i(t )
dt
dt
dt
i (t ) =
(2.67)
t
1
v(t )dt
L −∞
(2.68)
42
Cap.2 Equazioni costitutive e reti resistive
2.15.3Condensatore
In modo del tutto simile al caso dell'induttore, indicando con C(t) la capacità variabile
nel tempo, risulta:
d[C(t )v(t )]
dv(t )
dC(t )
i C (t ) =
= C (t )
+ v (t )
(2.69)
dt
dt
dt
v (t ) =
t
1
i(t )dt
C (t ) − ∞
(2.70)
2.16 Bipoli non lineari
In questo caso i parametri sono funzione della corrente o della tensione, pertanto le
equazioni di equilibrio risultano differenziali non lineari.
2.16.1 Resistori
In Fig.2.52 è riportata una generica caratteristica v, i per un resistore non lineare, che
mostra la dipendenza della resistenza dalla corrente
Fig. 2.52 Caratteristica di un resistore non lineare
Per un determinato punto di lavoro individuato da i1 e v1 si definisce una resistenza
statica, dipendente dalla corrente, il cui valore è:
v
(2.70)
R S = 1 ≡ tgα
i1
Si definisce resistenza differenziale la quantità:
dv
(2.71)
rd =
dt i=i1
che rappresenta la derivata della tensione rispetto alla corrente calcolata in corrispondenza
del punto di lavoro.
Un elemento circuitale a resistenza non lineare è il diodo, il simbolo utilizzato nei
circuiti e la caratteristica tensione-corrente sono riportati in fig.2.53
a)
b)
Fig. 2.53 Simbolo circuitale del diodo a) e sua caratteristica tensione-corrente b)
43
Cap.2 Equazioni costitutive e reti resistive
In molte applicazioni viene considerato il diodo ideale, esso presenta resistenza nulla
quando la tensione applicata è positiva, infinita in caso contrario. Il diodo ideale equivale
quindi ad un corto circuito (tensione nulla) nella direzione consentita alla corrente, ad un
circuito aperto (corrente nulla) nella direzione vietata.
Esempio 2.11
Nel circuito di fig.2.54 a) è rappresentato un circuito, comprendente un diodo ideale,
alimentato con un generatore la cui d,d,p, vale .
a)
b)
Fig. 2.54 Esempio 2.11
La corrente circolante attraverso il diodo, e quindi nel circuito, risulta nulla quando v(t) è
negativa (il diodo non conduce ed equivale ad un circuito aperto); in queste condizione
tutta la tensione si localizza alle estremità del diodo stesso. Durante la semionda positiva
della tensione (il diodo equivale ad un corto circuito) la corrente circolante è pari a v(t)/R e
la tensione alle estremità del diodo è nulla.
2.16.1 a) Determinazione del punto di lavoro
Il punto di lavoro viene determinando applicando al circuito un generatore di tensione
continua come illustrato in fig.2.55. Tale punto, una volta assegnata la caratteristica
tensione-corrente, può essere determinato per via grafica. Dal circuito si ha:
E = V + RI
(2.72)
Riportando sul piano v, i tale relazione si ottiene una retta (tratteggiata), detta retta di
carico, che incontra gli assi nei punti (E, 0) e (0, E/R).
a)
b)
Fig. 2.55 Circuito non lineare a) e caratteristica tensione-corrente della resistenza non lineare b)
Il punto di incontro tra la retta di carico e la caratteristica tensione corrente (fornita dal
costruttore del componente) determina il punto di lavoro le cui coordinate rappresentano la
tensione alle estremità del componente e la corrente che lo percorre. E' possibile ottenere la
soluzione per via analitica ricorrendo all'approssimazione lineare a tratti o
44
Cap.2 Equazioni costitutive e reti resistive
all'approssimazione polinomiale. Nel primo caso la caratteristica è sostituita con una
spezzata (linearità a tratti), nel secondo è approssimata con relazioni del tipo:
v=
n
0
a kik
i=
n
0
a k vk
(2.73)
2.16.1 b) Analisi per piccoli segnali
Si consideri il circuito di fig.2.56 che differisce da quello di fig.2.55 per l'introduzione
di un generatore di tensione di valore v g (t ) = VM sen ωt con VM << E.
a)
b)
Fig. 2.56 Circuito non lineare in cui un segnale di piccola ampiezza è sovrapposto ad uno costante
Dal circuito si ha:
E + v g (t ) = Ri (t ) + v(t )
(2.74)
in cui v(t ) = f [i(t )] . Per le ipotesi sulle tensioni il funzionamento avviene nell'intorno del
punto di lavoro individuato da [V0 , I 0 ] e quindi si può scrivere:
v = V0 + ~v
(2.75)
~
i = I0 + i
Sostituendo nell'equazione di equilibrio si ha:
~
E + v g (t ) = R I 0 + i + V0 + ~v
(
e poiché:
risulta:
)
E = RI 0 + V0
(2.76)
~
v g = R i + ~v
(2.77)
Lo sviluppo in serie di Taylor della tensione nell'intorno del punto di lavoro è:
(
)
~
~
~
dv
v(i ) = v I 0 + i = V0 +
i = V0 + rd i
di i =I0
(2.78)
e quindi:
~v = r ~i
d
La corrente può dunque essere determinata dalla relazione:
~
v g = (R + rd ) i
(2.79)
(2.80)
Si può quindi concludere che una volta determinato il punto di lavoro, le oscillazioni
di piccola ampiezza si determinano applicando il solo generatore che fornisce vg e
sostituendo la resistenza non lineare con quella differenziale. Questo modo di procedere
45
Cap.2 Equazioni costitutive e reti resistive
consiste nel linearizzare la curva tensione-corrente nell'intorno del punto di lavoro(ossia
nel sostituire la curva con la sua tangente). Ciò può essere fatto solo per oscillazioni di
piccola ampiezza, per oscillazioni di grande ampiezza si deve necessariamente ricorrere
alla soluzione grafica, dalla quale si ottengono le uscite che hanno andamenti nel tempo
diversi da quelli di ingresso. Un esempio di soluzione grafica è riportato in Fig. 2.57
v
Fig. 2.57 Esempio di soluzione grafica
2.16.2 Induttori
Un induttore non lineare è un elemento circuitale in cui il parametro induttanza è
funzione della corrente, ossia:
(2.81)
L = f (i )
di conseguenza si ha:
d[L(i )i ]
di
dL di
dL di
(2.82)
vL =
= L(i ) + i
= L(i ) + i
dt
dt
di dt
di dt
1
(2.83)
i=
vdt
L(i )
Possono essere estese a questo caso le considerazioni relative al punto di lavoro e alla
linearizzazione intorno ad esso sviluppate per i resistori non lineari. Dato il circuito di
fig.2.58a) in cui è presente un induttore non lineare, la cui caratteristica è riportata in
fig.2.58b), il punto di lavoro si trova intersecando la verticale per I0=J con la caratteristica
flusso-corrente.
a)
b)
Fig. 2.58 Circuito con induttore non lineare a) caratteristica flusso-corrente dell'induttore.
46
Cap.2 Equazioni costitutive e reti resistive
Il punto di equilibrio è quindi caratterizzato da I0 e Φ 0 , la tensione alle estremità
dell'induttore è nulla. Inserendo nel circuito di fig. 2.58a) un generatore di corrente che
fornisca:
j(t)= JM sen ωt con
JM<<J
e definendo l'induttanza differenziale con la relazione:
Ld =
La tensione vale:
dϕ
dt i=I0
(2.84)
~
di
~
v(t ) = V0 + v = L d
dt
(2.85)
2.16.3 Condensatori
Per un condensatore non lineare, tempo-invariante, la capacità è funzione della
tensione, pertanto si può scrivere:
C = f (v )
i=
(2.86)
d[C(v )v ]
dv
dC dv
dC dv
= C (v ) + v
= C (v ) + v
dt
dt
dv dt
dv dt
v=
1
idt
C(v )
(2.87)
(2.88)
Per il circuito di fig.2.59a), alimentato in corrente continua, in cui è presente un
condensatore non lineare il punto di lavoro, determinato come indicato in fig. 2.59 b), è
caratterizzato dalle coordinate (V0,Q0). La corrente risulta nulla.
a)
b)
Fig. 2.59 Circuito con condensatore non lineare a) caratteristica carica-tensione del condensatore.
Applicando al circuito di fig. 2.59a) anche un generatore di tensione che fornisca:
vg(t)= VM sen ωt
con
VM<<E
e definendo capacità differenziale la quantità:
Cd =
risulta:
dq
dv
(2.89)
v = V0
~
d~
v
i (t ) = I 0 + i = C d
dt
(2.90)
47
Cap.2 Equazioni costitutive e reti resistive
2.17 Densità di Energia
Per calcolare la densità di energia, per unità di volume, immagazzinata in un campo
magnetico si fa riferimento ad un solenoide di N spire, sezione S e lunghezza l concatenato
con un flusso ϕ variabile nel tempo. Detta e la f.e.m. indotta, l'energia immagazzinata
nell'intervallo di tempo dt è:
dW = eidt = Ni
dϕ
dB
dB
dt
dt = NiS
dt = HlS
dt
dt
dt
L'energia immagazzinate nell'intervallo (0, t), indicando con V il volume risulta:
t
t
0
0
W = dW = V HdB
L'energia per unità di volume è quindi:
t
W1 = HdB
(2.91)
0
Per sistemi lineari vale la relazione dB = µdH e quindi:
W1 = µHdH =
1
1 B2 1
µH 2 =
= BH
2
2 µ
2
(2.92)
In modo del tutto simile per il campo elettrico, posto D = εK , si ha:
W1 =
1 2 1 D2 1
εK =
= DK
2
2 ε
2
(2.93)
2.18 Determinazione del coefficiente di autoinduzione
Il coefficiente di autoinduzione può in generale essere calcolato mediante la
definizione in precedenza fornita (rapporto tra flusso concatenato con il circuito e corrente
che percorre il circuito stesso e che genera il flusso). In alcuni casi tuttavia tale calcolo
risulta più agevole utilizzando le espressioni dell'energia.
2.18.1 Induttanza del cavo coassiale
Si consideri il cavo coassiale rappresentato in Fig. 2.60 in cui il conduttore esterno è
supposto privo di spessore.
Fig. 2.60 Cavo coassiale
48
Cap.2 Equazioni costitutive e reti resistive
Dalla relazione:
B2
dv
v 2µ
0
1 2
LI =
2
si ottiene:
1
I2
L=
B2
dv
vµ
0
(2.94)
Per 0 ≤ r ≤ R 1 , detta I' la corrente racchiusa da una generica linea di forza di raggio r e
I quella relativa a tutto il conduttore, assumendo una densità di corrente costante, si ha:
H1 =
I'
Ir
=
2πr 2πR 12
Per R 1 ≤ r ≤ R 2 il campo magnetico è:
H2 =
Dalla (2.94) si trova:
L=
R1
0
Si può scrivere:
µ0r 2
4π
2
R 14
2πrldr +
R2
R1
µ0
2
4π r2
I
2πr
2πrldr =
L = Li + L e
µ0l µ 0l R 2
ln
+
8π 2 π R 1
(2.95)
(2.96)
in cui Li è detta induttanza interna e rappresenta il contributo all'induttanza del conduttore
di raggio R1, Le è l'induttanza esterna ed è il contributo della parte esterna a R1.
2.18.2 Induttanza della linea bifilare
Il calcolo dell'induttanza della linea bifilare può essere condotto in modo analogo a
quanto fatto per il cavo coassiale.
Fig. 2.61 Linea bifilare
L'induttanza è data dalla somma di Li e di Le. Considerando che i conduttori sono due
e che Le si trova integrando tra r=d/2 e D, risulta:
L=
µ0l 1
D
+ ln
2π 2
r
(2.97)
CAPITOLO 3
3.1 Generalità
Assegnato un circuito in cui sono noti gli ingressi, ossia le tensioni e/o le correnti
relative ai generatori indipendenti di tensione e/o di corrente, e i parametri circuitali, R, L,
M, C, α, µ, rm, gm, risolvere il circuito significa in generale determinare le correnti e le
tensioni in tutti i rami del circuito. Detto r il numero dei rami del circuito il numero delle
incognite risulta pari a 2r ed è quindi necessario scrivere un sistema di 2r equazioni
indipendenti nelle 2r incognite suddette. Tali equazioni, in generale integro-differenziali, si
ottengono scrivendo i principi di Kirchhoff e le equazioni costitutive (relazioni tensionecorrente) relative ad ogni ramo. Poiché queste ultime sono in numero pari al numero dei
rami, ossia r, ne consegue che le r rimanenti equazioni vanno scritte applicando i principi
di Kirchhoff. Resta inteso che qualora non interessi conoscere le tensioni di ramo il numero
delle incognite, e di conseguenza quello delle equazioni, si dimezza e la scrittura delle
equazioni costitutive non è più necessaria. Resta ora da vedere quante delle r equazioni
debbano essere scritte con il primo principio di Kirchhoff e quante con il secondo.
3.2 Definizioni relative alla teoria dei grafi
Si definisce grafo di un circuito la figura che si ottiene rimpiazzando tutti i rami con
un segmento. La figura che si ottiene presenta lo stesso numero di rami e di nodi del
circuito. Due grafi si dicono equivalenti se hanno lo stesso numero di rami e di nodi e se
questi ultimi sono ugualmente collegati tra loro. Un grafo si dice orientato se i suoi rami
sono orientati (ad. esempio nel verso della corrente). Un grafo è connesso quando esiste un
percorso continuo che unisce tutti i nodi. Si definisce albero del grafo connesso un
qualunque percorso che unisca tutti i nodi senza formare poligoni chiusi. In fig.3.1 sono
riportati due grafi equivalenti, e che possono quindi essere relativi allo stesso circuito o a
due circuiti distinti avente lo stesso numero di rami e di nodi questi ultimi ugualmente
collegati tra di loro (gli elementi circuitali sui rami del circuito sono in questo caso diversi
nei due casi). I rami appartenenti ad un albero sono detti ramo d'albero e sono
numericamente pari n-1. I rami del grafo che sono stati soppressi per ottenere l'albero sono
detti corde e sono in numero pari a r − (n-1). In fig.3.2 sono riportati tutti i possibili alberi
relativi ai grafi di fig.3.1. Nella stessa figura sono indicate, con linea tratteggiata, le corde.
Definiamo maglia indipendente o fondamentale una maglia che non può essere ottenuta
come combinazione lineare di altre maglie. Poiché una maglia risulta sicuramente
50
Cap. 3 Scrittura delle equazioni di equilibrio elettrico
indipendente se possiede almeno un ramo che non appartiene a nessun'altra maglia ne
consegue che risultano indipendenti le maglie monocorda. In base all'affermazione
precedente si conclude che in un circuito il numero delle maglie indipendenti è pari al
numero delle corde.
1
4
A
A
B
5
6
3
1
4
C
3
2
B
6
C
5
2
D
D
Fig.3.1 Grafi orientati equivalenti
Fig.3.2 Alberi relativi al grafo di fig.3.1
Si definisce insieme di taglio l'insieme dei rami (rami d'albero o corde) che debbono
essere tagliati per rendere il grafo sconnesso. L'insieme di taglio può evidentemente essere
ottenuto intersecando il grafo con una superficie chiusa. Un insieme di taglio
fondamentale o indipendente è un insieme di taglio che non può essere ottenuto come
combinazione lineare di altri insiemi di taglio già considerati. Un insieme di taglio risulta
indipendente se contiene un ramo d'albero che non appartiene ad alcun altro insieme di
taglio. Risultano pertanto indipendenti gli insiemi di taglio monoramo d'albero. Si
conclude quindi che in un circuito gli insiemi di taglio indipendenti sono pari al numero
dei rami d'albero.
3.3 Scrittura delle equazioni di equilibrio elettrico mediante i principi di
Kirchhoff
Si supponga di avere un circuito composto da r rami e da n nodi e si vogliano calcolare
le correnti in tutti i rami. Come in precedenza affermato si deve allora scrivere un sistema
di r equazioni nelle r incognite rappresentate dalle correnti di ramo. In base a quanto visto
al precedente paragrafo si può affermare che:
In un circuito composto da r rami ed n nodi si possono ottenere (n-1) equazioni
linearmente indipendenti applicando il I° principio di Kirchhoff agli insiemi di taglio
monoramo d'albero e r-(n-1) equazioni linearmente indipendenti applicando il II°
principio di Kirchhoff alle maglie monocorda.
Cap.3
51
Scrittura delle equazioni di equilibrio elettrico
Osservazione I: poiché è sempre possibile partendo da un nodo arrivare all'ultimo
aggiungendo sempre un ramo d'albero nuovo (si veda a tal proposito la fig.3.2) risultano
indipendenti gli insiemi di taglio costituiti dai rami convergenti in n-1 nodi scelti
arbitrariamente e pertanto il I° principio di Kirchhoff può essere applicato ad n-1 nodi
scelti arbitrariamente.
Osservazione II: nello scrivere le equazioni alle maglie si procede spesso applicando il
cosiddetto metodo dei tagli, si procede cioè scegliendo una qualunque maglia iniziale,
scrivendo la corrispondente equazione e poi immaginando di tagliare un qualunque ramo.
Si prende poi un'altra qualunque maglia e si procede come sopra e così via finché e
possibile trovare maglie. E' immediato verificare che i rami che di volta in volta vengono
tagliati sono quelli che corrispondono alle corde.
3.3.1 Applicazione del I° principio di Kirchhoff
L'applicazione del I° principio di Kirchhoff agli n-1 insiemi di taglio indipendenti, o
comunque a n-1 nodi qualunque, di un circuito, con le convenzioni a suo tempo stabilite di
assumere le correnti positive se uscenti dall'insieme di taglio (o dal nodo) porta alla
scrittura di n-1 equazioni in r incognite che poste in forma matriciale risultano:
[ A ] [ i] = 0
[( n −1) x r ] [ r x 1]
(3.1)
in cui [A] detta matrice di incidenza ridotta (la matrice di incidenza è relativa a tutti gli n
insiemi di taglio) è una matrice i cui termini valgono:
1 - se la corrente esce dall'insieme di taglio (nodo);
0 - se la corrente non appartiene all'insieme di taglio;
-1 - se la corrente entra nell'insieme di taglio (nodo).
Esempio 3.1
Relativamente al grafo di fig.3.1, applicando il I° principio ai nodi A, B, C, con i versi
indicati dalle frecce, si ha:
i1
1
0 −1
0
0
−1 1
1
0
0
0
−1
1
1
0
0
−1 0
i2
i3
=0
i4
i5
i6
Per il nodo D si otterrebbe la riga:
[0
]
−1 1 0 0 −1
che è una combinazione lineare di quelle scritte in precedenza (basta sommare gli elementi
delle tre righe dopo averli preventivamente moltiplicate per −1).
3.3.3 Applicazione del II° principio di Kirchhoff
L'applicazione del II° principio di Kirchhoff alle r −(n-1) maglie indipendenti conduce
ad una equazione matriciale del tipo:
[ B]
[ v] = 0
[ r −( n −1) x r ] [ r x 1]
(3.2)
52
Cap. 3 Scrittura delle equazioni di equilibrio elettrico
in cui v è il vettore delle tensioni dei rami e [B] è una matrice i cui elementi , in accordo
con le convenzioni stabilite nel Cap.2, valgono:
1 - se la polarità della d.d.p. è tale da spingere la corrente nel verso di percorrenza;
-1 - nel caso contrario al precedente;
0 - se il ramo non appartiene alla maglia.
Esempio 3.2
Sempre in riferimento al grafo di fig. 3.1, operando con il primo albero della fig.3.2,
assumendo come verso di percorrenza delle maglie quello orario e come polarità delle
d.d.p. quello stabilito dalle frecce, si ha:
v1
v2
1 0 0 −1 −1 0
v3
=0
0 1 0 0
1 −1
v4
0 0 1 1
0
1
v5
v6
Considerando una qualsiasi altra maglia si otterrebbe una riga combinazione lineari delle
precedenti, ad es. per la maglia costituita di sole corde si avrebbe:
[1
]
1 1 0 0 0
Definendo impedenza operazionale di ramo un termine del tipo:
Z R (D ) = R + LD +
1
CD
(3.3)
e utilizzando le convenzioni adottate nel Cap.2 per il calcolo delle d.d.p. di ramo,si ha:
[v] = [e] + [Z R (D )] [i]
(rx1)
(rx1)
(rxr )
(rx1)
(3.4)
Nella matrice [e] le f.e.m hanno segno positivo se di polarità concorde con la d.d.p.,
discorde nel caso contrario. Il termine risulta nullo se sul ramo relativo non è presente
alcun generatore. La matrice delle impedenze di ramo [Z(D)] è una matrice diagonale che
presenta le impedenze di ramo sulla diagonale principale. Le (3.1), (3.2), (3.4), conducono
al seguente sistema di 2r equazioni in 2r incognite (tensioni e correnti di ramo):
A
0
0
i
0
B
= 0
v
− Z R (D ) I
e
(3.5)
Assumendo come incognite le sole correnti, sostituendo la (3.4) nella (3.2), si ha:
da cui:
[B][v] = [B][e] + [B][Z R (D)][i] = 0
(3.6)
[B][Z R (D )][i] = −[B][e]
(3.7)
Si verifica facilmente che il prodotto [B][Z(D)] produce una matrice in cui i termini di
ciascuna riga sono le impedenze dei rami (con le convenzioni sui segni stabilite nel Cap.2)
Cap.3
53
Scrittura delle equazioni di equilibrio elettrico
costituenti una maglia (poiché la prima riga di [B] ha termini diversi da zero solo in
corrispondenza dei rami appartenenti alla prima maglia, ecc.). Per lo stesso motivo −[B][e]
produce per ogni riga la somma algebrica (con le convenzioni del Cap.2) delle f.e.m. agenti
nella maglia relativa.
Posto:
[B] [Z R (D)] = [Z(D)]
[r −(n −1)xr ]
−
[r −(n −1)xr ]
( rxr )
si ha:
[Z(D )] [i]
[r −(n −1)xr ] (rx1)
=
[B] [e] = [e M ]
[r −(n −1)xr ] (rx1)
[r −(n −1)x1]
[e M ]
(3.8)
[r −(n −1)x1]
Utilizzando le relazioni (3.1) e (3.8) si ottengono le equazioni di equilibrio elettrico del
circuito che risultano:
A
( n −1)xr
Z
r −(n −1)xr
(rxr )
[i]
(rx1)
=
0
(n −1)x1
(3.9)
eM
r −(n −1)x1
( rx1)
La (3.9) costituisce un sistema di r equazioni indipendenti nelle r incognite
rappresentate dalle correnti degli r rami. Tali equazioni sono di tipo algebrico qualora si
lavori a regime in corrente continua, di tipo differenziale o integro-differenziale negli altri
casi.(Si vedrà più avanti che esse possono essere equazioni complesse nel caso di regime
sinusoidale).
Esempio 3.3
Si vogliono scrivere le equazioni che consentono di determinare le correnti in tutti i rami
del circuito di fig.3.3 facendo uso dei principi di Kirchhoff.
Poiché le incognite sono r =7 si debbono scrivere 7 equazioni di cui n −1 = 3 ai nodi, le
restanti alle maglie.
L1
R3
i7
e2
i2
i1
i3
C1
R5
R1
i5
i6
L2
R4
i4
R2
Fig.3.3 Esempio 3.2
Con riferimento alla 3.9 si ha:
−1 1 0 0 0 0 −1
[A ] = 0 − 1 1 0 1 1 0
0 0 0 1 −1 −1 0
− e2
0
[e M ] =
0
e1
1
4
2
3
54
Cap. 3 Scrittura delle equazioni di equilibrio elettrico
1
C1 D
R3
R5
0
0
− R5
0
0
− R5
−1
C1 D
0
0
[Z(D )] =
0
1
C2D
1
R2 +
C2D
R2 +
0
0
0
0
L2D
0
0
0
R4
0
0
0
R 1 + L1 D
−1
1
0
0
0
0
−1
0
0
1
C1 D
−1
0
1
0
0
1
1
−1
1
−1
0
0
R3
R5
0
0
0
0
0
− R5
0
0
− R5
−1
C1D
C2 D
1
R2 +
C2 D
L2 D
0
0
0
1
R2 +
i1
0
0
i2
i3
0
0
0
0
i4 = − e2
i5
0
0
R4
0
0
0
R 1 + L1 D
i6
i7
0
e1
Questo sistema può essere scritto direttamente con le convenzione del Cap.2. Per il circuito
in esame risulta inoltre:
1
0
[B] =
0
1
1
0 0 0 0
0 −1 1 1 0 0
0 −1 1 0 1 0
−1 0
0
[Z(D)] =
0 0 0 1
1
C1D
0
0
0
0
0
0
0
0
R3
0
0
0
0
0
0
R5
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
R2 +
C2D
0
L2D
0
0
0
0
0
0
0
0
R4
0
0
R 1 + L1 D
Si può verificare che [B][ZR(D)]=[Z(D)].
Casi particolari
3.3.3 a) Accoppiamenti induttivi
La presenza di accoppiamenti induttivi nel circuito comporta la presenza di termini
aggiuntivi nella matrice delle impedenze di ramo [ZR(D)] e quindi nella matrice [Z(D)]. Se
ad es. risultano mutuamente accoppiati i rami j e k con coefficiente di mutua induzione Mjk
comparirà il termine Mjk D (con segno stabilito secondo le convenzione del Cap.1) ai posti
jk e kj della matrice [Z(D)]. La matrice [B] rimane inalterata.
Esempio 3.4
Si consideri il circuito di fig.3.3. in cui i due induttori L1 e L2 siano mutuamente accoppiati,
con coefficiente di mutua induzione M, come rappresentato in fig.3.4 e si scrivano le
Cap.3
55
Scrittura delle equazioni di equilibrio elettrico
equazioni di equilibrio elettrico con i principi di Kirchhoff.
L1
R3
i7
e2
i2
i1 M
i3
C1
R5
R1
i5
i6
L2
R4
1
4
2
i4
R2
3
Fig.3.4 Esempio 3.4
Le equazioni risultano così modificate:
−1
1
0
0
0
0
−1
0
0
1
C1 D
−1
0
1
0
0
1
1
−1
1
−1
0
0
R3
R5
0
0
0
0
L2 D
0
MD
0
R4
0
MD
0
R 1 + L1 D
R2 +
1
0
0
− R5
0
0
− R5
−1
C1 D
C2 D
1
R2 +
C2 D
0
0
0
i1
0
i2
0
i3
0
i4 = − e2
i5
0
i6
0
i7
e1
3.3.3 b) Sono presenti generatori di corrente
Se nel circuito sono presenti ng generatori di corrente, il numero di correnti incognite,
e quindi il numero di equazioni che debbono essere scritte, si riduce da r a r −ng . In questo
caso, posti i generatori di corrente su ng corde è sufficiente applicare il 2° principio di
Kirchhoff alle rimanenti r−(n−1)−ng maglie che possono essere formate con le rimanenti
corde. Per quanto riguarda le equazioni ai nodi esse in generale non variano di numero
sebbene alcune correnti, quelle relative ai generatori passino a termine noto. La (3.9)
diviene quindi:
A
(n −1)x (r − n g )
Z
( )
(r −n g xr −n g )
r −(n −1)x r − n g
[i]
(rx1)
J
=
(n −1)x1
eM
(3.10)
r −(n −1)− n g x1
(r − n g x1)
in cui la matrice [J] è composta da alcune righe comprendenti le correnti dei generatori di
corrente ed altre composte da 0.
Esempio 3.5
Nell'esempio di fig.3.5 i rami sono 7 di cui 2 contenenti generatori di corrente e quindi le
correnti incognite si riducono a 5. Si scrivono 5 equazioni di cui 3 ai nodi e 2 alle maglie.
Rispetto al caso precedente non si scrivono le equazioni per le maglie (monocorda) che
presentano i generatori di corrente sulle corde.
56
Cap. 3 Scrittura delle equazioni di equilibrio elettrico
L1
j2
e1
R3
i2
i1
i5
i3
C1
L2
R5
R1
1
j1
4
2
i4
3
C2
R2
Fig.3.5 Esempio 3.4
Le equazioni risultano:
−1
0
1
−1
0
1
0
0
0
1
0
1
C1D
0
0
1
−1
R3
R5
0
0
0
− R5
R2 +
i1
i2
j2
− j1
i 3 = j1
− e1
i4
0
L2 D i5
0
1
C2 D
3.3.3 c) Sono presenti generatori controllati
Una volta espressa la grandezza di pilotaggio (corrente o tensione) in funzione delle
correnti di ramo si può procedere come nel caso generale. Si possono avere i seguenti casi:
• è presente un generatore di corrente αi; in questo caso si ha variazione nella matrice di
incidenza in cui compare α in corrispondenza della corrente di ramo di pilotaggio. Nel
caso in cui tale corrente sia quella di un generatore di corrente la variazione compare nel
vettore degli ingressi;
• è presente un generatore di tensione controllato in correte rmi; compare il termine rm
nella matrice delle impedenze in corrispondenza della corrente di pilotaggio o nella
matrice degli ingressi se la corrente di pilotaggio e di un generatore di corrente;
• è presente un generatore di corrente controllato in tensione gmv; una volta espressa v in
funzione delle correnti di ramo e degli ingressi si hanno variazioni nella matrice di
incidenza ed eventualmente in quella degli ingressi;
• è presente un generatore di tensione controllato in tensione µv; una volta espresso v si
possono avere variazioni sia nella matrice delle impedenze che in quella degli ingressi.
Esempio 3.6
Nel circuito do fig.3.6, si ha: v AB = R 3i 2 + e1 + L 2 Di 5
Fig.3.6 Esempio 3.6
Cap.3
57
Scrittura delle equazioni di equilibrio elettrico
Le equazioni di equilibrio sono:
−1
0
0
1
C1 D
1
− (1 + α )
α
0
1
0
0
0
1
0
1
−1
−1
R3
R5
0
0
0
0
− R5
L2D
0
µR 3
0
0
−
1
C1D
R2 +
1
C2D
0
0
µL 2 D R 1 + L1D
0
i1
0
i2
0
i3
0
=
i4
− e1
i5
0
i6
− µe1
3.4 Il teorema di Tellegen
Prima di fornire l'enunciato e la dimostrazione del teorema conviene fare alcuni
richiami e alcune puntualizzazioni relative alla potenza. Nel Cap.1 si è trovato che il lavoro
fatto per spostare la carica tra i punti A e B vale:
L AB = F ⋅ d = ( K ⋅ d )q = VAB q
da cui si deduce che il lavoro risulta positivo se la carica si sposta concordemente al verso
della forza che la sollecita; in questo caso risulta positiva anche la potenza data da:
p=
L AB
= v AB i AB
t
(3.11)
in cui iAB indica uno spostamento di carica da A a B. E poiché vAB = −vBA e iAB = −iBA ne
consegue, in riferimento al generico bipolo di fig.3.7, che :
p = v AB i AB = v BA i BA
p' = v AB i BA = − v AB i AB = − p
p" = v BA i AB = − v AB i AB = p' = − p
A
vAB
iAB
A
a)
vAB
B
iBA
A
b)
vBA
iAB
c)
B
B
Fig.3.7 Generico bipolo
La potenza viene quindi definita positiva quando è fornita al bipolo dalla restante parte
del circuito. Nel caso in cui la potenza sia negativa essa viene fornita, dal bipolo, alla
restante parte del circuito. In tal caso il bipolo comprende elementi attivi.
In base alle affermazioni precedenti la potenza pi relativa all'i-mo ramo compreso tra i
nodi j e k può essere scritta come:
pi =
(
1
v i + v kji kj
2 jk jk
)
Dopo queste premesse si può enunciare il teorema.
(3.12)
58
Cap. 3 Scrittura delle equazioni di equilibrio elettrico
Il Teorema di Tellegen afferma che in qualunque circuito la sommatoria delle potenze
relative a tutti i rami è nulla, ossia:
r
p=
i =1
v i i i = [ v] T [ i] = 0
(3.13)
Dimostrazione: la potenza relativa ai rami che convergono nel nodo j è data da:
n
k =1
v jk i jk
in cui v jk = o per j = k e la corrente è nulla se i nodi non sono collegati. Ripetendo il
ragionamento per tutti i nodi tenendo conto della (3.12) la potenza complessiva risulta:
1
2
n
n
j=1 k =1
v jk i jk
considerando un riferimento "o" e tendendo conto delle premesse, si ha:
1
2
n
n
j=1 k =1
v jk i jk =
1
2
n
n
j=1 k =1
(v
jo
)
− v ko i jk =
1
2
n
j=1
n
n
v jo
k =1
i jk +
1
v
2 k =1 ko
n
j=1
i kj
e poiché le due sommatorie relative alle correnti sono nulle perché rappresentano
l'applicazione del I° principio di Kirchhoff ai nodi j e k il teorema risulta dimostrato.
3.5 Il metodo delle correnti di maglia
Si consideri la relazione (3.1) esprimente il I° principio di Kirchhoff scritto per gli
insiemi di taglio fondamentali, e si evidenzino le correnti di ramo d'albero [iR] e quelle di
corda [iC]. Si ha:
i
AR AC R = 0
(3.14)
iC
[
da cui:
[A R ] [i R ] +
]
[A C ]
[i C ]
( n −1) x ( n −1) ( n −1) x1 ( n −1) xr −( n −1) r − ( n −1) x1
=0
(3.15)
Avendo scelto insiemi di taglio fondamentali la matrice [AR] contiene elementi non
nulli, di valore 1 o -1, solo sulla diagonale principale; se inoltre le correnti di ramo
vengono orientate in modo da uscire dagli insiemi di taglio essa coincide con la matrice
identica. Per le caratteristiche di [AR] risulta [AR] -1 = [AR] . Si ha quindi :
[i R ] = −[A R ]−1[A C ][i C ] = −[A R ][A C ][i C ]
(3.16)
e quindi note le correnti di corda possono essere determinate anche le correnti di ramo.
Esempio 3.7
Si consideri il grafo orientato di fig.3.8 in cui sono indicati anche gli insiemi di taglio e si
assumano i versi delle correnti come indicato dalle frecce (si osservi che le correnti dei
rami d'albero sono tutte uscenti dagli insiemi di taglio cui appartengono e quindi [AR]
coincide con la matrice identica) applicando la (3.14) si ha:
Cap.3
59
Scrittura delle equazioni di equilibrio elettrico
5
6
1
4
2
7
3
Fig. 3.8 Esempio3.7
i1
i2
i3
1 0 0 1 1
0 0
0 1 0 1 1
1 0
0 0 1 0 −1 −1 1
i4
i5
i6
i7
i4
i1
1 1
0 0
i5
i2 = 1 1
1 0
i6
i3
0 −1 −1 1
i7
=0
Il metodo delle correnti di maglia fornisce appunto un modo per determinare le sole
correnti di maglia. Si definiscono correnti di maglia [iM] quelle correnti (fittizie) che
percorrono tutti gli elementi di una maglia (e che quindi stabiliscono anche il verso di
percorrenza della maglia) e che, considerando maglie monocorda, coincidono a meno del
segno con le correnti di corda (si osservi che non esiste nessuna particolare prescrizione
riguardo al segno da assegnare alle correnti di maglia tuttavia è spesso conveniente
assegnare a tutte le correnti di maglia lo stesso verso ad es. quello orario). Tutti gli
elementi circuitali sono quindi percorsi dalla corrente di maglia relativa alla maglia cui
appartengono; ciò significa che gli elementi posti sulle corde, appartenendo ad una sola
maglia, sono percorsi da una sola corrente (appunto quella di maglia) mentre quelli posti
sui rami d'albero, appartenendo a più maglie sono percorsi da più di una corrente. Le
correnti di corda sono quindi legate a quelle di maglia da una matrice [DM] con elementi
non nulli 1 o -1, solo sulla diagonale principale. Tale matrice risulta uguale alla matrice
identica se le correnti di corda sono orientate concordemente a quelle di maglia.
Si ha:
[i C ] = [D M ][i M ]
(3.17)
Le correnti di ramo sono date da:
[i]
( rx1)
=
iR
=
iC
− AR AC
(n −1)x (r − n +1)
I
(r − n +1)x (r − n +1)
rx (r − n +1)
[i C ]
( r − n +1)x1
=
− AR ACDM
(n −1)x (r − n +1)
DM
(r − n +1)x (r − n +1)
rx (r − n +1)
[i M ]
(r − n +1)x1
=
[ ] [ ]
M
iM
rx (r − n +1) (r − n +1)x1
(3.18)
Si deve ora trovare un sistema di r − (n −1) equazioni nelle r − (n −1) incognite
costituite dalle correnti di maglia. A questo scopo si rammenti che le tensioni [v] agenti sui
rami del circuito possono essere espresse, (secondo le convenzioni sui segni già specificate
per il calcolo delle d.d.p. le f.e.m [e] vengono prese con segno positivo se si incontra primo
60
Cap. 3 Scrittura delle equazioni di equilibrio elettrico
il morsetto positivo e le cadute di tensione sono prese positive se determinate da correnti
concordi al verso in cui ci spostiamo per calcolare la d.d.p.) , per mezzo della relazione:
[ v ] = [ e] + [ Z R ( D ) ] [ i ]
( r x 1) ( r x 1)
( r x r ) ( r x 1)
(3.19)
in cui [ZR(D)] e una matrice avente sulla diagonale principale le impedenze operazionali di
ramo, gli altri elementi sono tutti nulli. Premoltiplicando per [B] si ha:
[B][v] = [B][e] + [B][Z R (D )][i] = 0
(3.20)
da cui, adottando per i segni delle f.e.m. le stesse convenzioni adottate nel II° principio di
Kirchhoff (segni positivi se si incontra prima il morsetto negativo), esprimendo le correnti
di ramo in funzione di quelle di maglia, si ottiene:
[B] [Z R (D )] [M ] [i M ]
( r − n +1xr )
(rxr − n +1) (r − n +1xr )
(r − n +1)x (r − n +1)
( rxr )
=
[B] [e]
(3.21)
(r − n +1xr ) (rx1)
(r − n +1)x1
con ovvie posizioni:
[Z M (D )][i M ] = [e M ]
(3.22)
in cui [Z M (D )] è detta matrice delle impedenze di maglia.
Esempio 3.8
Si consideri il circuito di fig. 3.9 il cui grafo è quello rappresentato in fig. 3.8
5
C1
R4
e1
R1
e2
L1
L2
2
1
1
R3
C2
2
3
7
4
4
R2
6
3
Fig. 3.9 Esempio 3.8
La matrice delle impedenze di ramo, secondo la numerazione degli alberi di fig. 3.8, è:
[
R1
0
0
Z R ( D) = 0
0
0
0
]
La (3.21) diviene:
0
0
L1 D
0
0
R2 + R3
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
L2 D
0
0
0
1 / C1 D 0
0
0
R4
0
0
0
0
0
0
0
0
0
1 / C2 D
Cap.3
61
Scrittura delle equazioni di equilibrio elettrico
R 1 + ( L1 + L 2 )D
− ( R 1 + L1 D )
− L1 D
0
R 2 + R 3 + L1 D
R2 + R3
R 2 + R 3 + R 4 + L1 D
R2 + R3
− L1 D
1
R 1 + R 2 + R 3 + L1 D +
C1D
R 2 + R 3 + L1 D
0
R2 + R3
R2 + R3
− ( R 1 + L1 D )
R2 + R3 +
e2
=
1
C2 D
0
− e1
0
L'esempio precedente suggerisce alcune considerazioni:
La
matrice delle impedenze di maglia è simmetrica. Sulla diagonale principale è
•
presente la somma delle impedenze di tutti i rami costituenti la maglia; l'elemento Zkj
rappresenta l'impedenza del ramo a comune tra la maglia k e la maglia j, tale elemento è
preso con segno positivo se la corrente della maglia j è concorde (nel ramo a comune)
con quella della maglia k, con segno negativo in caso contrario.
• La matrice delle impedenze di maglia può essere ottenuta direttamente dal circuito
fissando le correnti di maglia (che rappresentano anche il verso di percorrenza della
maglia stessa) e scrivendo il II° principio di Kirchhoff considerando che alcuni elementi
sono percorsi da più correnti.
• La matrice [eM] è la stessa ottenuta risolvendo il circuito con i principi di Kirchhoff.
Nell'esempio 3.9 le equazioni alle correnti di maglia sono ricavate direttamente
scegliendo le maglie monocorda e applicando il II° principio di Kirchhoff .
Esempio 3.9
L1
e1
R3
e2
L2
C1
R4
i1
i2
i3
R1
C2
R2
Fig.3.10 Esempio 3.9
Le equazioni alle correnti di maglia scritte direttamente come indicato in precedenza
risultano:
e1
− e2 =
0
R 1 + L1 D +
1
−
C1 D
0
1
C1 D
−
1
C1 D
1
1
R 2 + R 3 + L2 D +
+
C1 D C 2 D
− L2 D
0
i1
− L2 D
i2
L2 D + R 4
i3
3.5.1 Sono presenti accoppiamenti induttivi
Per semplificare la scrittura delle equazioni è opportuno che i rami contenenti induttori
mutuamente accoppiati siano attraversati da una sola corrente, ossia siano posti su corde.
62
Cap. 3 Scrittura delle equazioni di equilibrio elettrico
Nel caso in cui ciò non sia fatto va considerato l'accoppiamento relativo a tutte le correnti.
Nell'esempio 3.10 sono scritte le equazioni di equilibrio elettrico sia per il caso in cui i
termini mutuamente accoppiati siano sulle corde, sia per il caso che si trovino sui rami
d'albero.
Esempio 3.10
Si consideri il circuito di fig.3.11 in cui gli induttori L1 e L2 sono mutuamente accoppiati
con coefficiente di mutua induzione M.
L1
R3
e2
M
e1
L2
C1
R4
i1
i2
i3
R1
C2
R2
Fig.3.11 Esempio 3.10
Considerando l'albero di fig.3.11 si ha:
e1
− e2 =
0
R 1 + L1 D +
1
−
C1 D
− MD
1
C1 D
−
1
C1 D
1
1
R 2 + R 3 + L2 D +
+
C1 D C 2 D
R4
− MD
i1
R4
i2
L2 D + R 4
i3
Con l'albero di fig.3.10 si avrebbe invece:
e1
− e2 =
0
R 1 + L1 D +
1
C1 D
1
−
+ MD
C1 D
− MD
1
+ MD
C1 D
1
1
R 2 + R 3 + L2 D +
+
C1 D C 2 D
− L2 D
−
− MD
i1
− L2 D
i2
L2 D + R 4
i3
In entrambi i casi le matrici delle impedenze risultano simmetriche.
3.5.2 Sono presenti generatori di corrente
Inserendo i generatori di corrente sulle corde risultano note le correnti di maglia
relative e pertanto si abbassa il numero delle (correnti) incognite. In questo caso le
equazioni relative alle maglie contenenti i generatori di correnti non debbono essere scritte.
Si osservi che le equazioni alle maglie comprendenti i generatori di corrente possono
anche essere scritte purché si introduca come incognita la tensione alle estremità dei
generatori stessi.
Cap.3
63
Scrittura delle equazioni di equilibrio elettrico
Esempio 3.11
L1
R3
vj
j
e
L2
C1
R4
i1
i2 ≡-j
i3
R1
C2
R2
Fig.3.12 Esempio 3.11
Per il circuito di fig.3.12 considerando che la corrente i2 ≡−j si ha:
R 1 + L1 D +
0
0
1
C1D
1
0
i1
e
C1 D
− L2D R 4 + L2D i2 = 0
1
0
i3
−j
−
Scrivendo anche l'equazione alla maglia contenente il generatore, si ha:
1
1
−
R 1 + L1 D +
0
0
C1D
C1 D
0
− L2D
R 4 + L2D 0
1
1
1
−
+
− L2D
R 2 + R 3 + L2D +
1
C1D
C1 D C 2 D
0
1
0
0
i1
i2
i3
vj
e
=
0
0
−j
3.5.3 Sono presenti generatori controllati
Nella scrittura delle equazioni i generatori controllati vengono trattati come quelli
indipendenti, per ogni generatore deve essere tuttavia aggiunta una equazione che fornisce
la grandezza di pilotaggio. Le equazioni di equilibrio e quelle di pilotaggio possono essere
accorpate per dar luogo ad un'unica equazione matriciale come è mostrato nell'esempio
successivo.
Esempio 3.12
Si vogliono scrivere le equazioni di equilibrio per il circuito di fig.3.13, contenente
generatori controllati, facendo uso del metodo delle correnti di maglia.
Fig.3.13 Esempio 3.12
64
Cap. 3 Scrittura delle equazioni di equilibrio elettrico
Poiché: i = i1 − i 2 e v = L1Di1 si ha:
Si osservi che la matrice ottenuta non è più simmetrica. Cioè è tipico delle reti contenenti
generatori controllati. Eliminando II, III e IV riga si ha:
3.6 Il metodo delle tensioni di taglio
Il metodo delle tensioni di taglio discende dall'applicazione del solo I° principio di
Kirchhoff al circuito. Di seguito, analogamente a quanto fatto per le correnti di maglia,
viene fornita una dimostrazione del metodo. Si consideri la relazione (3.2) che esprime il
II° principio di Kirchhoff e si evidenzino le tensioni [vC] e [vR] relative alle corde e ai rami
d'albero. La (3.2) può essere riscritta:
v
[B R B C ] R = 0
(3.23)
vC
da cui si ha:
[B R ] [v R ] +
[B C ]
[v C ]
( r − n +1)x (n −1) (n −1)x1 (r − n +1)x (r − n +1) (r − n +1)x1
=0
(3.24)
La matrice [BC] è quadrata, diagonale e contiene elementi di valore 1 o - 1 sulla
diagonale principale, pertanto può essere invertita e la sua inversa coincide con la matrice
stessa. Si può quindi scrivere:
[v C ] = −[B C ]−1 [B R ][v R ] = −[B C ][B R ][v R ]
(3.25)
La (3.25) mostra che le tensioni di corda possono essere determinate se sono note
quelle di ramo d'albero.
Dalla matrice [B] ottenuta per l'esempio 3.7 si ha:
Il risultato trovato può essere verificato sul grafo orientato dell'esempio citato.
Il metodo delle tensioni di taglio consente appunto di determinare, a meno del segno,
Cap.3
65
Scrittura delle equazioni di equilibrio elettrico
le tensioni dei rami d'albero, e quindi, attraverso la (3.25), quelle di corda.
Si definiscono tensioni di taglio quelle tensioni (fittizie) che sollecitano tutti i rami
dell'insieme e che, considerando insiemi fondamentali, coincidono a meno del segno con le
tensioni di ramo d'albero. Convenzionalmente le tensioni di taglio sono orientate in modo
da far uscire la corrente dall'insieme stesso. Tutti i rami appartenenti ad un insieme di
taglio sono quindi sottoposti alla tensione di taglio dell'insieme cui appartengono; ciò
significa che i rami d'albero, appartenendo ad un solo insieme di taglio, sono sottoposti ad
un'unica tensione mentre quelli posti sulle corde, appartenendo in generale a più insiemi
sono sottoposti a più tensioni di taglio. Le tensioni di ramo d'albero sono legate a quelle di
taglio da una matrice [DT] avente elementi non nulli, di valore 1 o - 1, solo sulla diagonale
principale. Tale matrice coincide con quella identica se le tensioni di ramo d'albero sono
orientate come quelle di taglio.
Risulta:
[v R ] = [D T ][v T ]
(3.26)
in cui [vT] è il vettore delle tensioni di taglio.
Le tensioni dei rami sono fornite dalla relazione:
v
[v] = R =
vC
( rx1)
I
(n −1)x (n −1)
− BR BC
(r − n +1)x (n −1)
rx (n −1)
[v R ] =
(n −1)x1
DT
[v ] = [T] [v ]
− B C B R D T (n −1T)x1 rx (n −1) (n −1T)x1
(n −1)x (n −1)
(3.27)
(r − n +1)x (n −1)
rx (n −1)
Per l'esempio 3.7, supponendo le tensioni di ramo d'albero orientate come quelle di
taglio, si ha:
[D T ] =
1 0 0
0 1 0
1 1
− [B C ][B R ][D T ] =
0 0 1
0
1 1 −1
0 1 −1
0 0
[T] =
1
DT
− BC BR D T
1 0
0
0 1
0
0 0
1
= 1 1
0
1 1 −1
0 1 −1
0 0
1
Si deve ora scrivere un sistema di (n - 1) equazioni nelle (n - 1) incognite costituite
dalle tensioni di taglio. Consideriamo circuiti in cui i generatori indipendenti siano
esclusivamente di corrente. Le correnti [i] agenti sui rami del circuito possono essere
espresse, (secondo le convenzioni sui segni già specificate), per mezzo della relazione:
[i]
(rx1)
= [ j] + [YR (D )] [v]
(rx1)
(rxr )
(rx1)
(3.28)
in cui [j] è il vettore degli ingressi, [YR(D)] e una matrice i cui elementi sono tutti nulli
eccetto quelli sulla diagonale principale i cui termini sono le ammettenze di ramo.
Premoltiplicando per [A] si ha:
[A ][i] = [A][ j] + [A][YR (D )][v] = 0
(3.29)
66
Cap. 3 Scrittura delle equazioni di equilibrio elettrico
da cui, adottando per i segni delle correnti le stesse convenzioni adottate nel I° principio di
Kirchhoff (segni positivi per correnti uscenti dall'insieme di taglio), esprimendo le correnti
di ramo in funzione di quelle di maglia si ottiene:
[A] [YR (D )] [T] [v T ] = − [A ] [ j]
( n −1xr )
(rxr ) (rxn −1) (n −1xr )
(n −1)x (n −1)
(3.30)
(n −1xr ) (rx1)
(n −1)x1
con ovvie posizioni:
[YT (D )][v T ] = [ jT ]
(3.31)
in cui [YT(D)] è detta matrice delle ammettenze di taglio.
Esempio 3.13
Fig. 3.14 Esempio 3.13
E' immediato verificare che, tenendo conto che le eventuali ammettenze in serie a
generatori di corrente non danno contributo nel calcolo delle correnti e che quindi non
vanno considerate, si ha:
1 0 0 0 1
1
0
0 1 0 0 1 1
1
[A ] =
0 0 1 0 0 −1 −1
0
0
0
0 0 0 1 0 −1 −1 −1
1/ R1
0
0
0
1 / L1 D
0
0
0
1/ R 2
0
0
0
[YR ] = 0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0 1/ L2D
0
0
0
C1D
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0 1/ R 3
inoltre:
[ jT ] = −[A][ j] =
0
j1
− j2
− j1 + j2
Dall'esempio precedente si deduce che:
• La matrice delle ammettenze di taglio è simmetrica. Sulla diagonale principale è
presente la somma delle ammettenze di tutti i rami appartenenti all'insieme di taglio;
Cap.3
67
Scrittura delle equazioni di equilibrio elettrico
l'elemento Ykj rappresenta l'ammettenza del ramo a comune tra gli insiemi k e j, e ha
segno positivo se gli insiemi sono uno interno all'altro, negativo se sono esterni.
• La matrice delle impedenze di taglio può essere ottenuta direttamente dal circuito
scrivendo il I° principio di Kirchhoff in funzione delle ammettenze e delle tensioni.
• La matrice [jT] si ottiene assumendo con segno positivo le correnti, dei generatori di
corrente, entranti nell'insieme di taglio, con segno negativo quelle uscenti.
Esempio 3.14
Si vogliono scrivere le equazioni di equilibrio elettrico con il metodo delle tensioni di
taglio dall'esame diretto del circuito di fig.3.15
Fig. 3.15 Esempio 3.14
Con le modalità descritte in precedenza per la costruzione della matrice delle ammettenze e
delle correnti agli insiemi di taglio si ha:
1
1
1
1
+
+ CD
+ CD
−
L1 D L 2 D
L2D
L2D
v T1
j1 + j2
1
1
1
R1 +
vT2 =
j1
+ CD
+ CD
−
L2D
L2D
L2D
v T3
− j1 + j3
1
1
1
−
−
R2 +
L2D
L2D
L2D
3.6.1 Sono presenti accoppiamenti induttivi
La scrittura delle correnti attraverso le ammettenze e le tensioni di taglio non è
possibile se sono presenti rami mutuamente accoppiati, in tal caso le correnti debbono
essere ricavate attraverso le correnti di maglia. Di seguito è illustrato un metodo che
consente di sostituire ai rami mutuamente accoppiati un circuito equivalente in cui i rami
risultano disaccoppiati. Dopo questa operazione è possibile l'applicazione diretta del
metodo delle tensioni di taglio. Si considerino i due rami mutuamente accoppiati di
fig.3.16 appartenenti rispettivamente agli insiemi di taglio 1, 2 e 3, 4.
−∆/M
−∆/M
a)
b)
Fig. 3.16 Circuito con accoppiamento induttivo a) e suo equivalente b)
Scrivendo le equazioni con il metodo delle correnti di maglia per il circuito di fig. 3.16
68
Cap. 3 Scrittura delle equazioni di equilibrio elettrico
a), si ha:
v1 − v 2
L D MD i1
= 1
v3 − v 4
MD L 2 D i 2
(3.32)
in cui M>0 per corrente entrambe entranti o uscenti dai pallini e M<0 in caso contrario.
Posto:
(3.30)
∆ = L1L 2 − M 2
le correnti risultano:
i1
1 L 2 − M v1 − v 2
(3.31)
=
i2
∆D − M L1 v 3 − v 4
Risolvendo:
L2
(v 1 − v 2 ) − M (v 3 − v 4 )
∆D
∆D
−M
i2 =
(v 1 − v 2 ) + L 1 (v 3 − v 4 )
∆D
∆D
i1 =
Sommando e sottraendo v1 al termine in M nella prima equazione e v3 a quello in M
della seconda equazione si ha:
L2
(v1 − v 2 ) + M (v1 − v 3 ) + − M (v1 − v 4 )
∆D
∆D
∆D
M
(v 3 − v 1 ) + − M (v 3 − v 2 ) + L 1 (v 3 − v 4 )
i2 =
∆D
∆D
∆D
i1 =
Procedendo come in precedenza sommando e sottraendo v2 e v4 anziché v1 e v2, e
cambiando di segno risulta:
L2
(v 2 − v 1 ) + M (v 2 − v 4 ) + − M (v 2 − v 3 )
∆D
∆D
∆D
M
−M
(v 4 − v 2 ) +
(v 4 − v1 ) + L1 (v 4 − v 3 )
− i2 =
∆D
∆D
∆D
− i1 =
Le due serie di equazioni costituiscono l'equilibrio elettrico, scritto rispettivamente agli
insiemi di taglio 1, 3 e 2, 4, del circuito di fig.3.16 b) che rappresenta quindi l'equivalente
di quello di fig. 3.16 a). Possono verificarsi alcuni casi particolari:
a) i rami accoppiati hanno un punto in comune
a)
b)
Fig. 3.17 Accoppiamento induttivo con un punto a comune e suo equivalente
Nel caso in cui i rami mutuamente accoppiati abbiano un punto a comune, i circuiti di
Cap.3
69
Scrittura delle equazioni di equilibrio elettrico
fig. 3.16 a) e b) si trasformano come indicato nelle figg. 3.17 a) e b). Il circuito di fig. 3.17
b) è equivalente a quello di fig. 3.18 a) (circuito a p o a triangolo) e quest'ultimo
(trasformazione triangolo-stella) , equivale a quello di fig. 3.18 b) (circuito a T o a stella).
a)
b)
Fig. 3.18 Equivalenti a p a) e a T b) del circuito di fig. 3.17 a)
La fig. 3.18 mostra che il circuito a p presenta una maglia in più rispetto a quello a T.
Quest'ultimo presenta tuttavia un nodo in più.
b) i rami accoppiati hanno due punti a comune
Con passaggi ovvi si ottengono i circuiti di fig. 3.19 tra loro equivalenti.
a)
b)
c)
Fig. 3.19 Accoppiamento induttivo con due punti a comune a) e circuiti equivalenti b) e c)
Esempio 3.15
a)
b)
Fig. 3.20 Esempio 3.15. Circuito di partenza a) e circuito disaccoppiato b)
Dopo aver disaccoppiato il circuito di partenza, come illustrato in precedenza, si
70
Cap. 3 Scrittura delle equazioni di equilibrio elettrico
possono scrivere le equazione con il metodo delle tensioni di taglio. Esse sono:
3.6.2 Sono presenti generatori di tensione
I generatori reali di tensione presenti nel circuito possono trasformati, con le regole
note, in generatori di corrente; dopo questa operazione si può procedere come per il caso
precedente. Se tra i generatori indipendenti sono presenti generatori ideali di tensione
conviene inserire questi ultimi sui rami d'albero, in tal caso la relativa tensione di taglio è
nota (ed infatti coincide a meno del segno con la f.e.m. del generatore) e l'equazione a
quell'insieme di taglio non deve essere scritta. Volendo invece procedere alla scrittura di
tale equazione è necessario introdurre un'altra incognita che è la corrente nel generatore
ideale di tensione.
Esempio 3.16
Nel circuito di fig.3.21 è presente, oltre a due generatori di corrente, anche un generatore
ideale di tensione. Nella scelta dell'albero il ramo contenente tale generatore è stato inserito
su un ramo d'albero.
Fig. 3.21 Esempio 3.14
Le equazioni di equilibrio sono:
Volendo scrivere di equilibrio delle correnti anche per l'insieme 3 si ha:
Cap.3
71
Scrittura delle equazioni di equilibrio elettrico
3.6.3 Sono presenti generatori dipendenti
Nella scrittura delle equazioni i generatori controllati vengono trattati come quelli
indipendenti, per ogni generatore deve essere tuttavia aggiunta una equazione che fornisca
la grandezza di pilotaggio. Le relazioni che forniscono la grandezza di pilotaggio possono
essere compattate, insieme alle equazioni di equilibrio, per dar luogo ad un'unica equazione
matriciale come mostrato negli esempi seguenti.
Esempio 3.17
Fig. 3.22 Esempio 3.17
La tensione e la corrente di pilotaggio valgono:
v = v 2 − v3
i=
v1 + v 2 − v 3
R2
Compattando queste equazioni con quelle di equilibrio si ha:
La presenza dei generatori dipendenti rende non simmetrica la matrice quadrata.
Eliminando IV e V riga si ha anche:
72
Cap. 3 Scrittura delle equazioni di equilibrio elettrico
Esempio 3.18
Si consideri il circuito di fig. 3.23 in cui è presente un generatore controllato di tensione.
Fig. 3.23 Esempio 3.18
Essendo: v = v 2 − v 3 e v1 = µv si ha:
Eliminando I e IV riga si ha anche:
3.7 Il metodo del potenziale di nodo
Il metodo del potenziale di nodo è del tutto simile a quello delle tensioni di taglio, i
due si differenziano per il fatto che mentre il primo discende dall'applicazione del I°
principio di Kirchhoff agli n-1 insiemi di taglio indipendenti, il secondo discende
dall'applicazione del I° principio di Kirchhoff agli n-1 nodi. (Gli n-1 nodi ai quali applicare
il del I° principio di Kirchhoff possono essere scelti del tutto arbitrariamente poiché le
equazioni risultano sono sempre linearmente indipendenti. Questo accade perché può
essere sempre scelto un albero in modo tale che passando da un nodo al successivo, dal 1°
Cap.3
73
Scrittura delle equazioni di equilibrio elettrico
all'(n-1)-mo, aggiungendo sempre un ramo d'albero nuovo, e quindi una corrente nuova).
L'applicazione di questo metodo consente di calcolare i potenziali dei nodi del circuito.
Come noto dai corsi di fisica il potenziale è definito a meno di una costante k il cui valore
non influenza la d.d.p. tra i vari nodi. Si può quindi scegliere k in modo tale che il
potenziale di un qualunque nodo del circuito risulti nullo. Tale nodo costituisce quindi il
riferimento rispetto al quale calcolare il potenziale incognito dei restanti n-1 nodi.
Applicando il I° principio di Kirchhoff a n-1 nodi (facendo coincidere l'n-mo con
quello di riferimento) e indicando con [A] la matrice di incidenza ridotta, si ha:
[A] [i]
(n −1)xr (rx1)
=0
(3.35)
Premoltiplicando la (3.29) per [A] si ottiene:
[A ][i] = [A][ j] + [A][YR (D )][v] = 0
(3.36)
Indicando inoltre con [N] una matrice che lega il vettore [v] delle tensioni dei rami a
quello [vN] dei potenziali degli n-1 nodi risulta:
[v] = [N] [v N ]
( rx1)
Dalla (3.36) si ha:
(3.37)
rx (n −1) (n −1)x1
[A] [YR (D )] [N] [v N ] = − [A] [ j]
(n −1)xr
con ovvie posizioni:
(rxr ) rx (n −1) (n −1)x1
(n −1)x (n −1)
(3.38)
(n −1)xr rx1
(n −1)x1
[YN ( D)][ v N ] = [ jN ]
(3.39)
La matrice [YN(D)] è detta matrice delle ammettenze di nodo.
Anche in questo caso la matrice è simmetrica, contiene sulla diagonale elementi Yii dati
somma delle ammettenze dei rami collegati al nodo i, i termini Yij contengono la somma,
cambiata di segno, delle ammettenze dei rami a comune tra i nodi i e j. La matrice può
essere ricavata direttamente dal circuito sulla base delle considerazioni precedenti. Si può
anche osservare che dopo aver effettuato il prodotto tra la matrice delle ammettenze il
vettore delle tensioni di nodo, considerando anche il vettore degli ingressi, si ottengono
delle equazioni rappresentanti ciascuna il I° principio di Kirchhoff applicato agli n-1 nodi.
Esempio 3.19
C1
A
R1
R4
B
D
1
j1
j2
L1
L2
6
VA
R3
Dal circuito di fig. 3.24 si ha:
7
VB
5
R2
E
VD
2
4
8
3
VE = 0
C Fig. 3.24 Esempio 3.19
VC
74
Cap. 3 Scrittura delle equazioni di equilibrio elettrico
La matrice delle ammettenze di ramo è la stessa dell'esempio 3.13, quindi:
3.7.1 Casi particolari
Per i casi particolari si rimanda a quanto detto per il metodo delle tensioni di taglio. Di
seguito è riportato un esempio di un circuito contenente generatori ideali di tensione.
Esempio 3.20
A
C1
i
e1
B
D
R1
L1
L2
j1
j2
R2
e2
E
C
Fig. 3.13 Esempio 3.11
Poichè: v A − v B = e1
v C = −e 2 , indicando con i la corrente nel ramo di e1, si trova:
1 / L 2 D + C1 D
0
0
1 / L1 D
0
0
− C1 D
0
− 1 vA
1 vB
− C1 D
1
0
−1
− 1 / R2
0
1 / R 2 + C1 D
0
0
0
0
0
−1
0
0
0
j1
v C = − j1 + j2
vD
e1
i
e2
CAPITOLO 4
4.1 Risoluzione delle equazioni del circuito
Sono stati in precedenza illustrati alcuni metodi utilizzabili per la scrittura delle
equazioni di equilibrio dei circuiti elettrici. Per circuiti lineari stazionari le equazioni
risultanti sono differenziali, lineari, a coefficienti costanti. Nel caso in cui le equazioni
siano di tipo integro-differenziali, attraverso una preventiva operazione di derivazione
possono essere riportate a equazioni differenziali
La soluzione delle equazioni differenziali può essere ottenuta mediante la trasformata
di Laplace, come sarà mostrato in seguito, o direttamente nel dominio del tempo
utilizzando la teoria classica. Un’altra tecnica di risoluzione direttamente nel dominio del
tempo, che sarà illustrata, almeno in parte, nel presente capitolo è quella delle variabili di
stato.
4.2 Richiami sulla soluzione classica delle equazioni differenziali lineari a
coefficienti costanti
Sia assegnata l’equazione differenziale lineare a coefficienti costanti:
m
m −1
a m D ( ) x + a m −1D( ) x +......+ a 1Dx + a 0 x = f ( t )
(4.1)
la soluzione completa x(t) è data dalla somma della soluzione xc(t) della (4.1) resa
omogenea, e detta soluzione complementare, con una soluzione particolare xp(t). Si ha
cioè:
(4.2)
x (t ) = x c ( t) + x p (t )
La soluzione dell’equazione omogenea
è del tipo:
a m D ( m) x + a m−1 D ( m−1) x +......+ a 1 Dx + a 0 x = 0
x c ( t ) = Ke pt
(4.4)
Sostituendo la (4.4) la (4.3) si ha:
(a
mp
m
)
+ a m −1p m −1 +......+ a1p + a 0 Ke pt = 0
da cui si ottiene l’equazione algebrica:
(4.3)
76
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
a m p m + a m −1p m −1 +......+ a 1p + a 0 = 0
(4.5)
detta equazione caratteristica od anche equazione algebrica associata dalla quale si
ottengono i valori di p da sostituire nella (4.4). E poiché una combinazione lineare delle
soluzioni è ancora soluzione della (4.3), per la soluzione complementare si possono
distinguere i seguenti casi:
1) Radici reali e distinte
x c ( t ) = K 1e p1t + K 2 e p2 t +.................+ K m e p m t
(4.6)
2) Radici reali multiple
x c ( t ) = ( K1 + K 2 t + K 3 t 2 .................+ K m t m−1 )e pt
(4.7)
3) Radici complesse coniugate distinte
Per ogni coppia di radici complesse coniugate p i = σ i ± jω i (le radici complesse sono
coniugate poiché l'
equazione caratteristica è a coefficienti reali), posto:
K i = u i + jv i =
u 2i
+
v 2i
e
j arctg
vi
ui
= K i e jϕ i
si ha:
x ci (t ) = K i e (σi + jωi )t + K *ie (σi − jωi )t = K i e σi t 2
K *i = u i − jv i = K i e − jϕ i
e j(ωi t + ϕi ) + e − j(ωi t +ϕi )
2
da cui:
x ci ( t ) = 2 K i e σ i t cos(ω i t + ϕ i ) = 2 K i e σ i t sen ω i t + ϕ i +
π
2
(4.8)
4) Radici complesse coniugate multiple
Per ogni coppia di radici complesse coniugate pi di molteplicità q si ha:
[
(
x ci ( t ) = 2e σi t K i1 cos(ω i t + ϕ i1 ) + K i2 t cos(ω i t + ϕ i2 )+.....+ K iq t q −1 cos ω i t + ϕ iq
)]
(4.9)
5) Radici immaginarie distinte
Per ogni coppia di radici p i = ± jω i , ponendo σi=0 nella (4.8) si ha:
x ci ( t ) = 2 K i cos(ω i t + ϕ i ) = 2 K i sen ω i t + ϕ i +
π
2
(4.10)
6) Radici immaginarie di molteplicità q
Posto σi=0 nella (4.9) risulta:
[
(
x ci ( t ) = 2 K i1 cos(ω i t + ϕ i1 ) + K i2 t cos(ω i t + ϕ i 2 ) +.....+ K iq t q −1 cos ω i t + ϕ iq
)]
(4.11)
Per la determinazione della soluzione particolare si rammenti che se la funzione a
termine noto è del tipo:
(4.12)
f ( t ) = a 0 + a 1 t +................+ a n −1 t n
si avrà:
Cap.4
77
Soluzione delle equazioni di equilibrio nel dominio del tempo
x p ( t ) = A 0 + A 1 t +................+A n −1 t n
(4.13)
in cui i coefficienti Ai si ottengono sostituendo la (4.13) nella (4.1).
Se gli ingressi f(t) sono di tipo esponenziale, anche la xp(t) sarà esponenziale, ossia:
f ( t ) = ae αt
x p ( t ) = Ae αt
(4.14)
Rientrano in questa categoria anche gli ingressi costanti, per i quali si ha:
f ( t) = a
x p ( t) = A
(4.15)
e quelli di tipo sinusoidali, per i quali risulta:
x p ( t ) = A sen( ωt + ϕ )
f ( t ) = K sen ωt
(4.16)
La soluzione di una equazione differenziale di ordine m è unica se sono assegnate m
condizioni iniziali; esse sono il valore dell'
incognita e delle sue prime m-1 derivate valutate
in zero. Il problema:
a m D ( m) x + a m−1 D ( m−1) x +......+a 1 Dx + a 0 x = f ( t )
x(0) = x 0 , Dx
] t =0 = x (01) ,
D2 x
(4.17)
] t =0 = x (02) ,........., D m−1x] t =0 = x 0( m−1)
ammette quindi un'
unica soluzione.
4.3 Determinazione delle condizioni iniziali
Come già si è detto nel Cap.2 per i condensatori e per gli induttori, ossia per gli
elementi con memoria, la conoscenza della tensione o della corrente al tempo t è
subordinata alla conoscenza di tale grandezza all'
istante iniziale (in generale tale istante
sarà t0, per comodità si assume t0 = 0). Ed è proprio la presenza di tali elementi circuitali
che rendono differenziali le equazioni di equilibrio elettrico del circuito che altrimenti
risulterebbero algebriche. Le condizioni iniziali vanno fornite per quelle grandezze, come
le tensioni ai terminali dei condensatori e le correnti che attraversano gli induttori, che
compaiono sotto forma di derivata nelle equazioni di equilibrio.
Allo scopo di determinare le condizioni iniziali si indichi con 0- e 0+ un istante
immediatamente precedente all'
istante 0 ed uno immediatamente successivo. Per
definizione si assume nullo il tempo intercorrente tra 0- e 0+. Si considerino i circuiti di fig.
4.1, rappresentati al tempo 0-, e si integrino le equazioni di equilibrio tra l'
istante 0- e
l'
istante 0+ al termine del quale l'
interruttore risulta chiuso. Per quanto detto in precedenza
il tempo di chiusura dell'
interruttore è assunto nullo.
Le equazioni di equilibrio, per i circuiti di fig. 4.1, sono scritte alle maglie per i casi a)
e c), ai nodi per i casi b) e d).
R
R
i
e
i
i
L
a)
v
j
L
R
b)
v
e
i
v
C
(s
c)
Fig. 4.1 Circuiti RL e RC al tempo t=0
j
C
R (s
d)
-
v
78
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
1) Circuito RL
Circuito di fig.4.1a)
Circuito di fig.4.1b)
0+
0+
0+
0+
0+
0+
0
0
0
0
0
0
0+
i 0+
di
edt = Ridt + L dt
dt
−
−
−
ossia:
0+
edt =
0−
ossia:
( )
Ridt +
0−
L di
jdt =
dt + idt
R dt
−
−
−
jdt =
Ldi
( )
0−
i 0−
( )
i 0+
0+
( )
i 0−
e poiché e è una funzione limitata si ha:
0+
L
di + idt
R
−
0
e poiché j è una funzione limitata si ha:
(4.18) 0 = 0 + L i 0 + − i 0 +
0 = 0 + L i(0 ) − i(0 )
(4.19)
R
Dalle precedenti relazioni, sia da quelle relative al circuito RL serie che da quelle
relative al circuito parallelo, si deduce che per un induttore risulta verificata la relazione:
[
+
−
]
[ ( ) ( )]
i( 0 + ) = i( 0 − )
(4.20)
la quale afferma che la corrente in un induttore non può avere discontinuità. Si può dare
una spiegazione fisica del risultato trovato. La (4.20), attraverso le (4.18) e (4.19), esprime
anche la continuità del flusso concatenato con l'
induttore. Se così non fosse si avrebbe una
tensione infinita ai terminali dell'
induttore stesso (variazione finita di flusso concatenato in
tempo nullo) e ciò implicherebbe per il caso a) un generatore di tensione infinita, per il
caso b) un generatore di corrente infinita. Nel caso b) infatti la tensione infinita alle
estremità dell'
induttanza determinerebbe una corrente infinita nella resistenza, corrente che
dovrebbe essere controbilanciata dal generatore. Se i generatori di tensione e di corrente
fossero del tipo e = Vδ(t), j = Iδ(t) in cui δ(t) è la funzione impulsiva (vedi Appendice A)
nei due casi si avrebbe:
caso a)
0
+
0
−
caso b)
0
+
0
−
0+
Vδ( t ) dt = V
edt =
jdt =
da cui:
0
V
i( 0 + ) = i( 0 − ) +
L
0+
(4.21)
−
0
jδ( t ) dt = I
da cui:
−
( ) ( )
i 0+ = i 0− +
I
R
L
(4.22)
2) Circuito RC
Circuito di fig.4.1c)
0
0
+
0
+
0
Circuito di fig.4.1d)
+
dv
edt = vdt + RC dt
dt
−
−
−
ossia:
0+
0
0
0+
v 0+
edt =
0−
0−
0
0
0
( )
0−
+
) − v(0 )]
−
(4.23)
( )
v 0+
jdt =
RCdv
e poiché e è una funzione limitata si ha:
[
0+
dv
jdt = C dt +
dt
−
−
0+
v 0−
0 = 0 + RC v(0
0+
ossia:
( )
vdt +
0+
0+
Cdv +
( )
v 0−
v
dt
R
−
0
v
dt
R
−
e poiché j è una funzione limitata si ha:
(4.24)
0 = 0 + C v 0+ − v 0−
[ ( ) ( )]
Cap.4
79
Soluzione delle equazioni di equilibrio nel dominio del tempo
Dalle (4.23) e (4.24) si ha:
v(0 + ) = v(0 − )
(4.25)
La relazione (4.25) impone la continuità della tensione ai terminali del condensatore,
il che significa anche continuità della carica. Se ciò non avvenisse, ossia se la carico
subisse variazioni finite in tempi nulli nel condensatore circolerebbe una corrente infinita.
Tale corrente richiederebbe un generatore di corrente infinito nel caso d) e di tensione
infinita, che dovrebbe controbilanciare la caduta di tensione sulla resistenza, nel caso c).
Se fossero disponibili tensioni impulsive si avrebbe:
caso a)
0
+
0
−
caso b)
0
+
0
−
0+
Vδ( t ) dt = V
edt =
jdt =
da cui:
0
V
v(0 + ) = v(0 − ) +
RC
0+
−
0
jδ( t ) dt = I
v(0 + ) = v(0 − ) +
(4.26)
da cui:
−
I
C
(4.27)
4.4 Calcolo delle condizioni iniziali in casi particolari
4.4.1 Caso di un nodo improprio
Si consideri un caso, come quello rappresentato in fig.4.2, in cui in seguito ad una
perturbazione si venga a formare un nodo improprio.
a)
b)
Fig.4.2 Circuito al tempo t=0- a) circuito in cui al tempo t=0+ si è formato un nodo improprio
Dalle fig.4.2 a) e b) si nota che le correnti negli induttori, diverse all'
istante t=0- ,
debbono divenire uguali successivamente all'
apertura dell'
interruttore(che avviene in un
tempo ritenuto nullo). Ciò comporta una discontinuità delle correnti per le quali all'
istante
0+ deve essere i L1 0 + = i L 2 0 + = i 0 + . Per determinare il valore di i(0+), note i L1 0 + e
( )
( )
( ) ( )
equazione di equilibrio elettrico integrata tra 0- e 0+, si ha:
i L 2 0 + , si consideri l'
0+
0+
0+
( )
0+
di
di
edt = Ridt + L1 dt + L 2 dt
dt
dt
0−
0−
0−
0−
da cui si trova:
(L1 + L 2 )i(0 + ) = L1i L1 (0 − ) + L 2 i L 2 (0 − )
e quindi:
( )
i 0+ =
( )
( )
L1i L1 0 − + L 2 i L 2 0 −
(L1 + L 2 )
(4.28)
(4.29)
80
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
La relazione (4.28) indica che nel passaggio dalla 0- allo 0+ i flussi complessivamente
concatenati con gli induttori L1 e L2 rimangono costanti. Se così non fosse si avrebbe nel
circuito un impulso di tensione(ciò sarebbe possibile solo se fosse presente un generatore
di tensione impulsivo ossia e = Kδ(t)). Si può osservare che ai terminali di ciascun
induttore, per effetto della discontinuità della corrente, nasce un impulso di tensione. Gli
impulsi di tensione relativi a L1 e L2 sono tali da compensarsi. Tutte le considerazioni
svolte sono puramente teoriche in quanto, in pratica, nessun circuito può essere interrotto
in un tempo nullo. Al momento dell'
apertura dell'
interruttore si forma infatti un arco
elettrico che consente alla corrente di riassestarsi alla nuova situazione senza discontinuità.
4.4.2 Caso di una maglia impropria
Questo caso può essere trattato in maniera del tutto simile al precedente. Si consideri
infatti il circuito di fig.4.3 nel quale alla chiusura dell'
interruttore si forma una maglia
impropria.
a)
b)
Fig.4.3 Circuito al tempo t=0- a) maglia impropria formatasi in seguito alla chiusura dell'interruttore b)
L'
equazione di equilibrio elettrico, scritta con il metodo del potenziale di nodo,
integrata tra 0- e 0+ è:
Ponendo
( )
( ) ( )
v C1 0 + = v C 2 0 + = v 0 +
si ha:
(C1 + C 2 )v(0 + ) = C1v C1 (0 + ) + C 2 v C2 (0 + )
e quindi:
( )
v 0+ =
( )
( )
C1 v C1 0 + + C 2 v C 2 0 +
(C1 + C 2 )
(4.30)
(4.31)
La (4.31) esprime la costanza della carica complessivamente immagazzinata nei
condensatori.
Si può quindi concludere che: in generale, in seguito ad una perturbazione, non si
presentano discontinuità nei flussi complessivamente concatenati con gli induttori
appartenenti ad una maglia e nella carica complessiva dei condensatori che convergono in
un nodo(o in un insieme di taglio). Se in seguito alla perturbazione non si formano nodi o
maglie impropri quanto sopra equivale a dire che la corrente negli induttori e la tensione
nei condensatori non presentano discontinuità.
Cap.4
81
Soluzione delle equazioni di equilibrio nel dominio del tempo
4.5 Determinazione dell'ordine di una rete
L'
ordine di una rete è espresso dall'
ordine dell'
equazione, o del sistema di equazioni
differenziali, che esprimono il suo equilibrio elettrico(modello matematico). L'
ordine della
rete può quindi essere individuato sulla base delle seguenti considerazioni:
• data una equazione differenziale(o un sistema) debbono essere assegnate un numero
di condizioni iniziali pari all'
ordine dell'
equazione;
ordine di una equazione differenziale(o di un sistema) è pari al numero di
• l'
condizioni iniziali che debbono essere assegnate.
Si deduce quindi che l'
ordine del circuito coincide con il numero di condizioni iniziali
che possono essere assegnate. Come ripetutamente affermato in un circuito elettrico le
condizioni iniziali possono essere assegnate per le correnti negli induttori e per le tensione
ai terminali dei condensatori. Detti nL e nC il numero degli induttori e quello dei
condensatori l'
ordine n del circuito sarà dato dalla relazione:
n = n L + nC
(4.28)
La (4.28) cade in difetto in alcuni casi particolari. Per determinare una relazione più
generale debbono prima essere fornite alcune definizioni.
−
+
2
1
3
4
e
+
i2
−
+
j2
+
−
−
a)
i1
j1
i3
b)
Fig.4.4 Maglia impropria a) nodo improprio b)
Si definisce rete degenere, una rete che contiene maglie improprie o nodi impropri.
Si definisce maglia impropria(vedi fig.4.4a))una maglia i cui rami contengano solo
condensatori e/o generatori ideali di tensione. In parallelo a detti rami possono comparire
anche altri elementi circuitali.
Si definisce nodo improprio (insieme di taglio improprio) (vedi fig.4.4b)) un nodo
(insieme di taglio) nel quale convergono rami contenenti generatori ideali di corrente o
induttori. In serie ai rami considerati possono comparire anche altri elementi circuitali.
Indicando con mi il numero delle maglie improprie e con ni il numero dei nodi
impropri risulta:
n = n L + n C − mi − n i
(4.29)
a) Maglie improprie
L'
equilibrio elettrico della maglia impropria rappresentata in grassetto in fig.4.4a),
scritto all'
istante 0+ risulta:
(4.30)
− e( 0 + ) + v 1 ( 0 + ) + v 2 ( 0 + ) + v 3 ( 0 + ) − v 4 ( 0 + ) = 0
+
Dalla (4.30) si ricava che una delle condizioni iniziali è funzione di e(0 ) e delle altre
condizioni iniziali e pertanto non può essere assegnata arbitrariamente. L'
ordine, essendo
pari al numero di condizioni iniziali indipendenti, si abbassa pertanto di una unità.
82
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
b) Nodi impropri
Applicando il I° principio di Kirchhoff al nodo improprio di fig.4.4b) e valutando per
t=0+ si ha:
j1 (0 + ) − i1 (0 + ) + i 2 (0 + ) − j2 (0 + ) + i 3 (0 + ) = 0
(4.31)
Dalla (4.31) si deduce che non tutte le condizioni iniziali possono essere assegnate
arbitrariamente in quanto una risulta combinazione lineare delle altre. L'
ordine si abbassa
quindi di una unità.
4.5 Le variabili di stato
Come ripetutamente affermato la conoscenza, al generico istante t, della tensione ai
terminali di un condensatore o della corrente che circola in un induttore è subordinato alla
conoscenza del valore di tali grandezze all'
istante assunto come iniziale. E'stato anche
osservato come sia necessario conoscere tali valori iniziali, unitamente agli ingressi
(generatori indipendenti) per risolvere un circuito, ossia per risolvere le equazioni
differenziali che costituiscono l'
equilibrio elettrico. Le correnti nei condensatori e le
correnti negli induttori, la cui conoscenza consente anche di determinare l'
energia
immagazzinata nel circuito, vengono dette variabili di stato e possono essere organizzate
in un vettore detto vettore di stato. In un circuito elettrico il numero delle variabili di stato
coincide con il numero di elementi reattivi indipendenti ed è quindi anche uguale all'
ordine
del circuito. Se tutte le condizioni iniziali sono nulle, ossia sono nulle tutte le variabili di
stato all'
istante iniziale, si dice che il circuito si trova a stato nullo e la sua risposta è detta
risposta a stato nullo o risposta forzata. Se invece è nullo il vettore degli ingressi la
risposta del circuito dipende dalle sole condizioni iniziali ed è detta risposta a ingresso
nullo o risposta libera.
Detto X il vettore delle variabili di stato, X il vettore delle derivate delle variabili di
stato, U il vettore degli ingressi, l'
equazione:
X = AX + BU
(4.32)
è detta equazione di stato. Le matrici A e B dipendono dagli elementi circuitali. Detto
inoltre Y il vettore delle uscite, non necessariamente coincidenti con le variabili di stato, si
ha la relazione:
Y = CX + DU
(4.33)
detta equazione di uscita. C e D dipendono dai parametri del circuito.
Si osservi che l'
effettivo ordine del circuito emerge proprio operando con le variabili di
stato (per un circuito di ordine n si possono infatti scrivere n equazioni differenziali del I°
ordine) e non quando si scrivono le equazioni di equilibrio del circuito con le correnti di
maglia o con le tensioni di nodo. Si consideri ad es. un circuito di II° ordine costituito da
due condensatori in serie con un generatore di corrente (o due induttori in parallelo ad un
generatore di tensione), in cui la corrente (la tensione nel secondo caso) è nota e pertanto
non deve essere scritta alcuna equazione e di conseguenza non è necessaria alcuna
condizione iniziale. Operando con le variabili di stato si ha:
C1 VC1 = j
VC1 = VC1 (o ) + jt
L1 I L1 = E
I L1 = I L1 (o ) + Et
C 2 VC 2 = j
VC 2 = VC 2 (o ) + jt
L 2 I L2 = E
I L 2 = I L 2 (o ) + Et
Cap.4
83
Soluzione delle equazioni di equilibrio nel dominio del tempo
4.6 Circuiti del I° ordine
Sono circuiti che contengono un solo elemento reattivo e quindi il loro equilibrio
elettrico è espresso da una equazione differenziale del I° ordine. Per un circuito del I°
ordine l'
equazione di stato, matriciale, (4.32) si trasforma nell'
equazione scalare:
x = ax + bu
(4.34)
Qualunque circuito di I° ordine può essere trasformato, utilizzando i teoremi di
Thevenin o di Norton in uno dei due circuiti rappresentati in fig.4.5.
eeq
i
C
Req
Req
Jeq
v
a)
i
L
v
b)
Fig.4.5 Circuiti equivalenti del I° ordine. Equivalente di Thevenin a) di Norton b)
Le equazioni di stato per i circuiti di fig.4.5 possono essere ricavati mediante la
seguente procedura:
caso a)
Poiché la corrente può essere espressa
come:
i = CDv
l'
equazione di equilibrio, alla maglia, vale:
e eq = R eq CDv + v da cui posto τ = R eq C
si ha:
Dv = −
v e eq
+
τ
τ
(4.35)
caso b)
Poiché la tensione può essere espressa come:
v = LDi
l'
equazione di equilibrio, al nodo, vale:
L
L
jeq =
Di + i da cui posto τ =
si ha:
R eq
R eq
i jeq
(4.36)
Di = − +
τ
τ
Posto Di = x , i = x , jeq = u
Posto Dv = x , v = x , e eq = u
In entrambi i casi si ottiene:
x=−
x u
+
τ τ
(4.37)
che corrisponde alla (4.34) se si pone a = −1/τ e b =1/τ. La costante τ ha le dimensioni di
un tempo ed è detta costante di tempo. Il significato della costante di tempo verrà
illustrato in seguito.
La (4.37) costituisce una equazione differenziale lineare a coefficienti costanti e che
può quindi essere risolta come indicata al paragrafo 4.2
L'
equazione caratteristica relativa alla (4.37) è:
p+
1
da cui si deduce: p = − .
τ
La soluzione complementare risulta:
1
=0
τ
(4.38)
84
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
x c ( t ) = Ke
− pt
= Ke
−
t
τ
(4.39)
La soluzione particolare dipende dal tipo di ingresso applicato. Saranno ora riportate le
risposte del circuito per alcuni tipici ingressi e precisamente: risposta al gradino, risposta
all'
impulso, risposta all'
ingresso sinusoidale. L'
ingresso a gradino e quello impulsivo sono
definiti in Appendice A.
4.6.1 Risposta al gradino
Assumendo u(t) = u0 (per i due circuiti di fig.4.5 si avrebbe eeq = u0 e jeq = u0 ) che
corrisponde ad un ingresso costante nel tempo e x(t0) = x0 si ha xp(t) = A. Sostituendo nella
(4.37) si ottiene A=u0. La soluzione completa vale:
x( t ) = x c ( t ) + x p ( t ) = Ke
−
t
τ
+ u0
valutando per t = t0 si trova:
[
K = x( t 0 ) − u ( t 0 )
e quindi:
t0
eτ
t0
eτ
]
x( t ) = ( x 0 − u 0 )e
= (x 0 − u 0 )
−
t−t0
τ
+ uo
(4.40)
Nella (4.40) il primo addendo, ossia la soluzione complementare si annulla se, come
negli esempi considerati, τ>0, in tal caso si afferma che il circuito è asintoticamente
stabile e la soluzione complementare viene anche detta risposta transitoria. La soluzione
particolare è detta risposta a regime.
La (4.40) può anche essere scritta:
x(t ) = x 0 e
−
t−t0
τ
+ u0 1− e
−
t−t0
τ
(4.41)
in cui il primo addendo rappresenta la risposta del circuito alle sole condizioni iniziali e
viene detta risposta libera o a ingresso nullo. Il secondo addendo rappresenta la risposta
del circuito ai soli ingressi ed è detto risposta forzata o a stato nullo. Si può osservare
che, per circuiti asintoticamente stabili, la risposta libera tende a zero mentre quella forzata
tende alla risposta a regime.
Riassumendo, indicando con xt(t), xr(t), xl(t), xf(t),le risposte: transitoria, a regime,
libera, forzata, si ha:
x( t ) = x t ( t ) + x r ( t ) = x l ( t ) + x f ( t )
[
]
x t ( t ) = x( t 0 ) − x r ( t 0 ) e
x r ( t) = u 0
x l ( t ) = x( t 0 )e
−
t−t0
τ
x f ( t) = u 0 1 − e
−
t−t0
τ
−
t−t0
τ
(4.42)
Cap.4
85
Soluzione delle equazioni di equilibrio nel dominio del tempo
Per semplicità di rappresentazione grafica si consideri ora la (4.40) valutata per t 0 =0 e
x 0 =0, in tal caso essa diviene:
x( t ) = u 0 1 − e
−
t
τ
(4.43)
L'
andamento nel tempo della relazione (4.43), riportato in fig.4.6, mostra come l'
uscita
x(t) tenda esponenzialmente all'
ingresso u0.
uo
x(t)
uoe −t/τ
t
Fig.4.6 Risposta di un circuito del I° ordine
Eseguendo la derivata, rispetto al tempo della (4.43) e valutando per t=0, ossia
nell'
origine, si ha:
dx( t )
dt
t =0
u 0 − τt
=
e
τ
=
t =0
u0
τ
La derivata così calcolata rappresenta il coefficiente angolare della tangente alla curva
di x(t) nell'
origine. E'facile verificare che tale tangente incontra l'
asintoto alla curva x(t) in
t = τ.
Valutando inoltre la (4.43) per t = τ si ha:
x( τ ) = u 0 (1 − e −1 ) ≅ 0,632 u 0
I risultati trovati consentono di formulare le due seguenti definizioni per la costante di
tempo:
• la costante di tempo τ è il tempo necessario affinché x(t) raggiunga il 63,2% del suo
valore finale
• la costante di tempo τ rappresenta l'ascissa del punto di incontro tra l'asintoto di x(t) e
la tangente a tale curva nell'origine
La prima definizione è più adatta a determinare τ qualora sia noto (ad esempio perché
ricavato sperimentalmente) l'
andamento di x(t). Sarebbe infatti difficile riuscire a tracciare
la tangente alla curva nell'
origine senza commettere errori
Ripetendo il procedimento, tracciando la tangente alla curva in τ, si trova che essa
incontra l'
asintoto in 2τ e così via.
Nella TAB 4.1 sono riassunti i risultati ottenuti dal calcolo di x(t) in corrispondenza a
tempi multipli della costante di tempo. Dalla suddetta tabella si deduce che per quanto il
transitorio abbia una durata teorica infinita, in pratica esso può considerarsi esaurito
quando è trascorso un tempo pari a circa 4÷5 volte la costante di tempo.
86
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
TAB 4.1
x( t )
u0
0
0,632
0,865
0,950
0,982
0,993
t
0
τ
2τ
3τ
4τ
5τ
Ascissa dell'
intersezione
tra tangente e asintoto
τ
2τ
3τ
4τ
5τ
6τ
I risultati della TAB. 4.1 sono anche rappresentati nel grafico di fig.4.7
x(t )
u0 1
0,632
τ
0
2τ
3τ
t
Fig.4.7Derivazione della costante di tempo dal grafico della risposta al gradino
Si considerino ora i circuiti di fig.4.5 con generatori disattivati, come mostrato in
fig.4.8, e con elementi reattivi in possesso di una carica iniziale x(t0).
Req
i
C
+
−
i
Req
v
−
L
v
+
a)
b)
Fig.4.8 Scarica di un circuito RC a) scarica di un circuito RL b)
Per i due circuiti di fig.4.8 si ha:
CR eq Dv + v = 0
L
Di + i = 0
R eq
x(t0) = v(t0)
x(t0) = i(t0)
Con le stesse posizioni usate in precedenza si può genericamente scrivere:
x+
x
=0
τ
(4.44)
da cui si ottiene la risposta libera:
x( t ) = x( t 0 ) e
−
t −t0
τ
(4.45)
Cap.4
87
Soluzione delle equazioni di equilibrio nel dominio del tempo
e considerando t0=0 e ripetendo il procedimento illustrato in precedenza si ottengono la
TAB.4.2 e la fig.4.9.
TAB 4.2
x( t )
t
x( t 0 )
1
0,368
0,135
0,050
0,018
0,007
0
τ
2τ
3τ
4τ
5τ
Ascissa dell'
intersezione
tra tangente e asse t
τ
2τ
3τ
4τ
5τ
6τ
la costante di tempo τ è il tempo necessario affinché x(t) raggiunga il 36,8% del suo
valore iniziale
• la costante di tempo τ rappresenta l'ascissa del punto di incontro tra la tangente alla
curva di x(t) nel punto t=0 e la l'asse dei tempi
•
x( t )
x( t 0 ) 1
τ
0
2τ
t
3τ
Fig.4.9 Scarica di un circuito del I° ordine
E'interessante ricavare la derivata di x(t) che rappresenta, a meno di L, la tensione nel
caso LR e, a meno di C, la corrente nel caso RC. Risulta:
x( t ) = −
x( t ) = −
[ x(t ) − u ] e
0
x( t 0 )
τ
0
τ
e
−
−
t−t0
τ
In fase di scarica
t−t0
τ
In fase di scarica
Riassumendo, per i circuiti RC ed RL nella configurazione di fig.4.5, si ha:
Circuito RC
Carica
[
t−t
− 0
e τ
]
v( t ) = v ( t 0 ) − v r ( t 0 )
+ v r (t)
v( t ) = v( t 0
t−t
v ( t ) − v( t 0 ) − τ 0
i( t ) = r 0
e
R eq
τ = R eq C
v r ( t ) = E eq
(4.46)
Scarica
t −t0
−
)e τ
− v( t 0 ) −
i( t ) =
e
R eq
t−t0
τ
(4.47)
88
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
Circuito RL
Carica
[
]
i( t ) = i( t 0 ) − i r ( t 0 ) e
−
t−t0
τ
[
v( t ) = R eq i r ( t 0 ) − i( t 0 )
τ=
L
R eq
Scarica
+ i r (t)
i( t ) = i( t 0 ) e
t−t0
−
e τ
]
−
t −t0
τ
v( t ) = − R eq i( t 0 )e
(4.48)
−
t−t0
τ
(4.49)
i r ( t ) = J eq
Esempio 4.1
Nel circuito di fig.4.10 l'
interruttore viene portato in posizione 1 all'
istante t=0 , all'
istante t1
viene portato in posizione 2 e all'
istante t3 in posizione 3. Calcolare gli andamenti di
tensione e corrente del condensatore.
Si assuma E1 = 10V, E2 = 5V, R1=10KΩ, R2=5KΩ, R3=5KΩ, C=10µF, vC(0)=0, t1=0,6s,
t2=1s.
1
2
3
R1
R2
E1
E2
R3
C
Fig.4.10 Esempio 4.1
Interruttore in posizione 1
In base alle (4.46) si ha:
τ 1 = R 1C = 0,1s ; v c ( t ) = E 1 1 − e
−
t
τ1
= 10(1 − e −10 t ) ; i( t ) =
[E1 − v c (0)]e
R1
−
t
τ1
= 10 −3 e −10 t
Il circuito è da considerarsi a regime per un tempo pari a 5τ1 = 0,5s. Ciò significa il circuito
è a regime al momento della commutazione dell'
interruttore in posizione 2.
i(mA) v(V)
10
1
i(t)
0
0,6
1
-1
Fig.4.11Andamento di tensione e corrente
t(s)
Cap.4
89
Soluzione delle equazioni di equilibrio nel dominio del tempo
Interruttore in posizione 2
La condizione iniziale e la costante di tempo sono: v c ( t 1 ) = E 1 = 10V τ 2 = R 2 C = 0,05s
Si ha inoltre:
v c ( t ) = [v c (t 1 ) − E 2 ]e
−
t − t1
τ2
E 2 − vc (t1 ) −
i( t ) =
e
R2
[
]
+ E 2 = 5 e −50( t − t1 ) + 1
t − t1
τ2
= −10 −3 e
−50( t − t1 )
Poiché t 2 > 5τ 2 = 0,05s il circuito risulta a regime quando l'
interruttore viene commutato
in posizione 3.
Interruttore in posizione 3
Si ha: vc(t2) = E2 = 5V, τ3= R3C = 0,05s. Per tensione e corrente risulta:
v c ( t ) = v c ( t 2 )e
−
t−t2
τ3
= 5e
v (t ) −
i( t ) = − c 2 e
R3
−50( t − t 2 )
t−t2
τ3
= −10 −3 e −50( t − t 2 )
Gli andamenti di tensione e corrente sono rappresentati in fig.4.11
Esempio 4.2
Si consideri il circuito di fig.4.5b) alimentato con la corrente riportata nel grafico di
fig.4.12. Tale corrente, per quanto affermato in Appendice A può essere rappresenta
mediante la relazione:
[
j( t ) = J u( t ) − u( t − t 1
]
e corrisponde all'
applicazione, nell'
intervallo 0 ÷ t1 di un generatore di corrente J. Tale
generatore è disattivato per t > t1.
j(t)
J
0
t1
t
Fig. 4.12 Andamento della corrente applicata al circuito di fig.4.5b)
Assumendo: iL(0) = 0, J=10mA, Req=1kΩ, C=10µF, t1=50ms, la costante di tempo risulta
τ = 10ms. Per tensione e corrente si ha quindi:
Intervallo 0 ÷ t1
La corrente e la tensione risultano:
i L (t) = J 1 − e
−
t
τ
= 10 − 2 (1 − e −100 t )
v( t ) = [J − i L (0)]R eq e
−
t
τ
= 10e −100 t
Il circuito può essere considerato a regime all'
istante t1, risulta infatti t1 = 50ms = 5τ, e
pertanto risulta: iL(t1) = J = 10mA
90
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
t > t1
i L ( t ) = i L ( t 1 )e
i(mA)
−
t
τ
−2
= 10 e
−100 t
v( t ) = −i L ( t 1 ) R eq e
i(mA)
v(V)
−
t
τ
= −10e −100 t
v(V)
10
10
iL(t)
iL(t)
v(t)
0
50
0
t(ms)
50
20
t(ms)
v(t)
Fig.4.13 Andamenti di tensione e corrente con t1 = 50ms a) e t1=20ms b)
Nel caso in cui fosse t1 =20ms, il circuito non avrebbe raggiunto il regime per t = t1 e
pertanto si avrebbe:
i L (t) = J 1 − e
v( t ) = − J 1 − e
−
−
t1
τ
t1
τ
e
−
t
τ
R eq e
= 8,64 ⋅ 10 − 3 e −100 t
−
t
τ
= −8.64 ⋅ 10 − 3 e −100t
In fig. 4.13 sono riportati, per i due valori di t1, gli andamenti di corrente e tensione per i
due valori di t1.
4.6.2 Risposta all'impulso
Si vuol determinare la risposta all'
impulso unitario δ(t) dei due circuiti del primo
ordine rappresentati in fig.4.5. La risposta libera, dipendendo dalle sole condizioni iniziali,
è fornita per qualunque ingresso, e quindi anche per quello impulsivo, dalla relazione
indicata nella (4.42). Per la risposta forzata si può osservare che essendo l'
impulso unitario
la derivata del gradino unitario, come illustrato in Appendice A, la risposta forzata
all'
impulso unitario, poiché il circuito è lineare e stazionario, può essere ottenuta derivando
la risposta al gradino unitario.
La risposta forzata al gradino unitario si trova ponendo u0=1e x0=0 nella (4.41), ossia:
x f (t) = 1 − e
−
t−t0
τ
u( t − t 0 )
(4.50)
in cui la funzione a gradino unitario traslata u(t-t0), sottintesa nella (4.40), significa che la
risposta del circuito è nulla per t<t0. I circuiti godono infatti della proprietà di causalità
secondo la quale il circuito può fornire una risposta solo dopo l'
istante t0 in cui viene
applicato l'
ingresso (come dire che l'
effetto è successivo alla causa). La presenza di u(t-t0) è
richiesta se si vuol derivare nel senso indicato in Appendice A. Derivando in tal senso si ha
la risposta all'
impulso unitario che vale:
Cap.4
91
Soluzione delle equazioni di equilibrio nel dominio del tempo
t−t0
τ
1 −
xδ (t) = − − e
τ
u( t − t 0 ) + 1 − e
−
t−t0
τ
1 −
δ( t − t 0 ) = e
τ
t−t0
τ
u( t − t 0 )
Il risultato ottenuto coincide con quello che si trova derivando in senso ordinario
poiché la (4.50) non presenta discontinuità. Derivando ulteriormente si ha:
x δ (t) =
−
1
τ
2
e
−
t −t 0
τ
1 −
u(t − t 0 ) + e
τ
t−t0
τ
1
δ( t − t 0 ) = −
τ
2
e
t −t 0
τ
−
1
u ( t − t 0 ) + δ( t − t 0 )
τ
Riassumendo e considerando anche il caso t0=0 si ha:
Risposta al gradino unitario
x( t ) = x 0 e
x(t ) = x 0 e
t −t0
−
τ
−
t
τ
+1− e
+1− e
−
t
τ
t−t0
−
τ
Risposta all'impulso unitario
u( t − t 0 )
x δ (t) = x 0 e
x δ (t) = x 0 e
u(t)
t−t0
τ
−
−
t
τ
1 −
+ e
τ
t−t0
τ
u ( t − t 0 ) (4.51)
t
1 −
+ e τ u( t )
τ
(4.52)
Per i circuiti di fig.4.5, con t0=0, si ha:
Circuito RC di fig.4.5a)
vδ ( t) =
i δ ( t) =
t
−
v(0)e τ
+
1
R eq C
t
−
e τ
Circuito RL di fig.4.5b)
t
R eq − t
−
u( t ) (4.53) i δ ( t ) = i(0)e τ +
e τ u( t )
L
(4.54)
[i( 0) − 1]R eq − τ
v( 0) − 1 − τ
1 − v( 0)
e u( t ) + [1 − i(0)]R eq δ( t ) (4.56)
e u( t ) +
δ ( t ) (4.55) v δ ( t ) =
2
L
R eq
R eq C
2
t
t
Con condizioni iniziali nulle si ha:
Circuito RC di fig.4.5a)
vδ ( t) =
1
R eq C
i δ ( t ) = Cv δ = −
t
−
τ
e u( t )
1
R 2eq C
e
−
=
t
1 −τ
e u( t )
τ
t
τ u( t )
+
Circuito RL di fig.4.5b)
(4.57) i δ ( t ) =
1
δ ( t ) (4.59)
R eq
R eq
L
e
−
v δ ( t ) = Li δ = −
t
τ u( t )
R 2eq
L
e
t
1 −
= e τ u( t )
τ
−
t
τ u( t )
+ R eq δ ( t )
(4.58)
(4.60)
Gli andamenti rappresentati dalle (4.57), (4.58), (4.59),(4.60) sono riportati in fig.4.14
vδ(t)
iδ(t)
vδ(t) iδ(t)
1
τ
t
δ( t )
R eq
δ ( t ) R eq
−1
− R 2eq
L
R 2eq C
Fig.4.14 Risposta all'impulso per circuiti del I° ordine
92
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
Si può dare una ulteriore interpretazione della risposta all'
impulso. Si consideri infatti
l'
Esempio 4.2. in cui J1=1/∆ e t1=∆, si ottiene:
i (t ) =
t
−
1
1− e τ
∆
i(t ) = i(∆ )e
−
t
τ
v (t ) =
R eq
e
∆
v(t ) = −i(∆ )R eq e
−
−
t
τ
per t < ∆
∆
t
τ
con
−
1
i(∆ ) =
1− e τ
∆
per t > ∆
Al tendere a zero di ∆ il segnale di ingresso tende all'
impulso unitario. Per le risposte,
considerando che: lim e
−
∆
τ
∆ →0
R eq
i (t ) =
1
τ
v (t ) =
i (t ) =
1
τ
v (t ) = −
≅ 1−
1−
∆
R eq
τ
∆
si ha:
τ
R eq
τ
=
= R eq δ(t )
A
∆
1−
per t < ∆
R eq
R eq
τ
=−
=−
A
τ
L
per t > ∆
4.6.3 Risposta all'ingresso sinusoidale
Si consideri un ingresso del tipo:
u( t ) = U M sen ωt
(4.61)
La soluzione complementare è espressa dalla (4.39), la soluzione particolare è invece
del tipo:
x p ( t ) = X M sen( ωt + ϕ )
(4.62)
Sostituendo nella (4.37), opportunamente riscritta, si trova:
τωX M cos( ωt + ϕ ) + X M sen( ωt + ϕ ) = U M sen ωt
1 + ω 2 τ 2 , con ovvi passaggi si ha:
Moltiplicando e dividendo il primo membro per
XM 1 + ω2τ2
τω
1 + ω 2 τ2
cos( ωt + ϕ ) +
1
1 + ω2τ2
[
sen( ωt + ϕ) = U M sen ωt
]
X M 1 + ω 2 τ 2 sen β cos( ωt + ϕ) + cos β sen( ωt + ϕ ) = U M sen ωt
X M 1 + ω 2 τ 2 sen( ωt + ϕ + β) = U M sen ωt
Confrontando il risultato ottenuto con la (4.62) risulta:
XM =
UM
1 + ω2τ2
La soluzione completa è quindi:
ϕ = −β = − arctg ωτ
(4.63)
Cap.4
93
Soluzione delle equazioni di equilibrio nel dominio del tempo
x( t ) = Ke
−
t
τ
+ X M sen( ωt + ϕ )
(4.64)
nota la condizione iniziale x(0) può essere determinata la costante K che vale:
ωτ
K = x( 0) − X M sen ϕ = x( 0) + X M sen β = x( 0) + X M
1 + ω2τ2
Supponendo nulla la condizione iniziale risulta:
x( t ) =
UM
ωτ
1 + ω2τ2
1 + ω2τ2
e
−
t
τ
+ sen( ωt + ϕ )
(4.65)
L'
andamento qualitativo della (4.65) è mostrato nella fig.4.15
x(t)
x(t)
xc(t)
xc(0)
x(0)
0
xp(0)
t
xp(t)
Fig.4.15 Risposta di un circuito del I° ordine all'ingresso sinusoidale
4.7 Soluzione dell'equazione di stato per circuiti del I° ordine
Per i circuiti del I° ordine le equazioni matriciali (4.32) e (4.33) divengono equazioni
scalari che possono essere scritte nella forma:
x = ax + bu
(4.66)
(4.67)
y = ax + du
con a = −1/τ e b =1/τ.
Come detto la risposta del circuito è data dalla somma della risposta libera e quella
forzata. Cioè:
x( t ) = x l ( t ) + x f ( t )
in cui la risposta libera è già stata calcolata (equazioni (4.42)) e vale: x l ( t ) = x( t 0 )e ( 0 ) .
Nelle (4.42) è riportata anche la risposta forzata per l'
ingresso a gradino. Si può dimostrare
che la risposta ad un ingresso qualunque può essere calcolata mediante l'
integrale di
convoluzione (vedi Appendice B) ossia mediante la relazione:
−a t − t
t
x f ( t ) = w ( t − t ')u( t ')dt '
(4.68)
t0
in cui w(t-t'
) rappresenta la risposta del circuito, inizialmente scarico, all'
impulso unitario.
Tale risposta si ottiene dalle (4.52) e, con le posizioni fatte, vale:
w ( t ) = be at
Sostituendo la (4.69) nella (4.68) si ha:
(4.69)
94
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
t
x f ( t ) = be a ( t − t ') u( t ')dt '
(4.70)
t0
La soluzione completa vale quindi:
t
x( t ) = x( t 0 )e a ( t − t 0 ) + be a ( t − t ') u( t ')dt '= x( t 0 )e
−
( t−t0 )
τ
t
+
t0
t0
1 −
e
τ
( t − t ')
τ
u( t ')dt '
(4.71)
Si può verificare con una semplice sostituzione che la (4.71) è soluzione
dell'
equazione di stato(*)
Esempio 4.3
Si calcoli la risposta forzata per il circuito di fig.4.5a) con ingresso la tensione continua di
valore Eeq. Applicando la (4.70) si ha:
t
v f (t) =
t0
1 −
e
τ
( t − t ')
τ
E eq dt '= e
−
t
( t − t ')
τ
= E eq 1 − e
E eq
−
( t−t0 )
τ
t0
Assumendo come uscita la corrente, la relazione y = cx + du, diviene:
i=−
E eq
E eq − ( t − t 0 )
v
+
=
e τ
R eq R eq R eq
4.8 Circuiti con τ< 0 (circuiti instabili)
In questo caso la relazione la risposta del circuito è fornita dalla relazione (4.40) in cui
l'
esponenziale è positivo:
[
]
x( t ) = x 0 − u r ( t 0 ) e
t−t0
τ
+ u r ( t)
(4.72)
La soluzione complementare non tende a zero come nel caso τ > 0 e pertanto non ha
più senso parlare né di transitorio (che per definizione si deve estinguere) né di regime
(poiché quest'
ultima è una situazione che si verifica a transitorio esaurito). Un circuito che
presenti costante di tempo negativa è detto instabile. Si può osservare che un circuito
costituito di soli elementi passivi (R,L,M,C) non può presentare costante di tempo
negativa. Dal punto di vista fisico ciò non può accadere perché mancano nel circuito quegli
elementi che dovrebbero fornire l'
energia per sostenere una uscita tendente, nella sua parte
rappresentata dalla soluzione complementare, all'
infinito. Ciò può invece accadere, entro
certi limiti, se nel circuito sono presenti elementi attivi, rappresentati mediante generatori
controllati.
Si può concludere che in un circuito del I° ordine in cui non compaiano generatori
controllati la costante di tempo è sicuramente negativa.
(*)
D
In questa operazione si tenga conto che
β( x)
β( x)
α( x)
α ( x)
f ( x, y) dy = f [ x, β( x)]β'(x) + f [ x, α ( x)]α '(x) +
∂f ( x , y )
dy
∂x
Cap.4
95
Soluzione delle equazioni di equilibrio nel dominio del tempo
Esempio 4.4
In fig. 4.16 a) e b) sono rappresentati due inseguitori di tensioni, il primo reazionato
positivamente, il secondo negativamente. Nelle figg.4.17 a) e b) sono riportati i
corrispondenti circuiti equivalenti ottenuti considerando una resistenza di ingresso infinita
v0
C
e
a)
v0
C
e
b)
Fig.4.16 Inseguitore di tensione reazionato negativamente a) e positivamente b)
vd
e
Avd
R
C
vd
v0
a)
e
Avd
R
C
v0
b)
Fig.4.17 Circuiti equivalenti degli inseguitori di tensione di fig.4.16
Il circuito equivalente di Thevenin ,tra i terminali di uscita, essendo vd ≅0 ha come f.e.m
equivalente:
e eq = v 0 = − v d + e = e nel caso a)
e eq = v 0 = v d + e = e
nel caso b)
Per determinare la resistenza equivalente deve essere disattivato il generatore di tensione
indipendente e applicato un generatore di prova di valore v0* tra i morsetti di uscita. detta i*
la corrente in R si ha:
v *0 = Ri * + Av d = Ri * − Av 0 nel caso a) v *0 = Ri * + Av d = Ri * + Av 0 nel caso b)
Le resistenze equivalente risulta nei due casi:
v *0
v *0
R
R
R
R
Ra = * =
≅
Rb = * =
≅−
1+ A A
1− A
A
i
i
le costanti di tempo valgono quindi:
RC
RC
τa =
τb = −
A
A
Esempio 4.5
Come altro esempio di circuito del I° ordine, con costante di tempo positiva o negativa al
variare dei parametri, si consideri il circuito rappresentato in fig.4.18a). In fig.4.18b) è
rappresentato il circuito da utilizzare per il calcolo della resistenza equivalente di
Thevenin. Volendo determinare la f.e.m. di Thevenin, dal circuito di fig.4.18a) risulta:
e eq = 2 Ri 1 e = Ri 1 da cui si ottiene: e eq = 2e
Per il calcolo della resistenza equivalente, dal circuito di fig.4.18b), si ha:
96
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
v ∗0
i1 =
R
v ∗0
i2 =
2R
3
A
−
2R 2R 0
i * = i 1 + i 2 + i 3 = v ∗0
v ∗0 − Av d v ∗0 − Av ∗0 / 2
Av ∗0
=
≅−
i3 =
R0
R0
2R 0
v ∗0
v d = Ri 2 =
2
da cui si ottiene: R eq =
La costante di tempo risulta dunque negativa per R >
105 la costante di tempo è negativa per R>3mΩ.
3R 0
. Assumendo R0 = 100Ω e A =
A
i2
R
R
vd
e
i1
R
C
R
a)
i1
R0
i2
i*
v0 *
i3
R
R
R
2 RR 0
3R 0 − AR
Avd
R
b)
Fig.4.18 Esempio 4.5
4.9 Circuiti del II° ordine
Sono del II° ordine quei circuiti, costituiti da un numero qualunque di maglie e nodi,
che contengono due elementi reattivi indipendenti (dello stesso tipo o di tipo diverso, vale
a dire due induttori, due condensatori, un induttore e un condensatore) e per la cui
soluzione debbono essere fornite due condizioni iniziali. La risoluzione delle equazioni
integro-differenziali che rappresentano l'
equilibrio elettrico conduce alla risoluzione di una
equazione caratteristica di II° grado. Sono circuiti tipici del secondo ordine i due circuiti,
RLC serie e RLC parallelo, rappresentati in fig.4.19.
Rs
J
+
iR
iL
v
Rp
L
iC
C
+ vR
L
− + vL −
+
vC
e
_
i
a)
−
C
b)
Fig.4.19 Circuiti del II° ordine, RLC parallelo a) e RLC serie b)
Le equazioni di equilibrio per i due circuiti di fig. 4.19 sono:
Circuito RLC parallelo
Circuito RLC serie
j = i R + i L + i C Poiché v = LDi L risulta:
LDi L
j=
+ i L + LCD 2 i L da cui:
Rp
1
1
1
j = D2i L +
Di L +
i
LC
R pC
LC L
Poiché
e = vR + vL + vC
i = CDv C
risulta:
e = R s CDv C + LCD 2 v C + v C da cui:
Rs
1
1
(4.74)
e = D2 vC +
Dv C +
v
(4.73)
LC
L
LC C
Cap.4
97
Soluzione delle equazioni di equilibrio nel dominio del tempo
Si osservi che la (4.73) può essere ottenuta dalla (4.74), e viceversa, scambiando iL con
vC, C con L, Rs con 1/Rp. Tale proprietà e tipica dei circuiti duali.
Le (4.73) e (4.74) possono essere poste nella forma standard:
D 2 x + 2 Dx ξω n + xω 2n = ω 2n y
od anche:
(4.75)
x + 2 x ξω n + xω 2n = ω 2n y
in cui ξ e detto fattore di smorzamento e ωn è la pulsazione naturale.
Per i circuiti di fig.4.19 si ha rispettivamente:
ωn =
ξ=
1
ωn =
LC
1
2R p
L
C
ξ=
1
(4.77)
LC
Rs
2
(4.76)
C
L
(4.78)
Le (4.75) e (4.76) hanno soluzione unica se sono assegnate le condizioni iniziali:
x( 0) = x 0
x( 0) = x 0
(4.79)
4.9.1 Determinazione della soluzione complementare
L'
equazione caratteristica relativa alle (4.75) e (4.76) e le relative soluzioni sono:
p 2 + 2 pξω n + ω 2n = 0
(4.80)
2
(4.81)
p 1,2 = − ξω n ± ω n ξ − 1
Al variare del coefficiente di smorzamento ξ , comunemente detto anche
smorzamento, si distinguono i seguenti casi, ottenibili direttamente dal paragrafo 4.2:
a) Radici reali e distinte( ξ >1 circuito sovrasmorzato)
(
−ω n t ξ − ξ 2 −1
)
(
− ω n t ξ + ξ 2 −1
)
x c ( t ) = K 1e p1t + K 2 e p2 t = K 1e
+ K2e
b) Radici reali coincidenti( ξ =1 circuito con smorzamento critico)
x c ( t ) = ( K1 + K 2 t )e − ξω n t
(4.82)
(4.83)
c) Radici complesse coniugatate( ξ <1 circuito sottosmorzato)
[(
) ]
x c ( t ) = 2 Ke −ξω n t cos ω n 1 − ξ 2 t + ϕ
(4.84)
d) Radici immaginarie pure( ξ =0 circuito non smorzato)
x c ( t ) = 2 K cos(ω n t + ϕ)
(4.85)
Gli andamenti di xc(t) per i vari casi sono riportati in fig.4.20.
4.9.2 Risposta al gradino unitario
Assumendo come ingresso il gradino unitario u(t), si ottiene una soluzione particolare
costante xp(t) = A. Sostituendo nella (4.75) o (4.76) si ottiene A = u(t). La soluzione
completa risulta quindi: x(t) = xc(t) + xp(t)
98
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
K1
K1+K2
K1 e
p1t
ξ >1
xc(t)
K2
K2 e
Im(p)
t
p2 t
p1
p2
Re(p)
xc(t)
K1
K1 e
ξ =1
pt
Im(p)
K2t e
pt
p
Re(p)
t
2Kcosϕ
xc(t)
2K e
Im(p)
ξ <1
−ξω n t
jω n 1 − ξ 2
−ξω n
t
Re(p)
− jω n 1 − ξ 2
-2K e −ξω n t
xc(t)
ξ=0
2Kcosϕ
Im(p)
jω n
t
− jω n
Re(p)
Fig.4.20 Risposte libera per un circuito del II° ordine, composto di elementi passivi, per vari valori di
smorzamento
Cap.4
99
Soluzione delle equazioni di equilibrio nel dominio del tempo
Con le (4.79) come condizioni iniziali si ha:
a) ξ >1
x( t ) = K 1e P1t + K 2 e P2 t + 1
x( t ) = K 1 p 1e P1t + K 2 p 2 e P2 t
(4.86)
Imponendo la verifica delle condizioni iniziali si ha:
x 0 = K1 + K 2 + 1
x 0 = K1p1 + K 2 p 2
da cui risolvendo:
K1
1
=
K2
p1
1
p2
−1
x0 − 1
p2
1
=
x0
p 2 − p 1 − p1
(
)
− ξω n − ω n ξ 2 − 1 ( x 0 − 1) − x 0
− 1 x0 − 1
−1
=
1
x0
2ω n ξ 2 − 1 ξω n − ω n ξ 2 − 1 ( x 0 − 1) + x 0
(
)
Sostituendo nelle (4.86) si trova la risposta del circuito al gradino unitario. Per
condizioni iniziali nulle la risposta risulta essere:
x( t ) =
(
)
− ξ + ξ 2 − 1 e p1t
2 ξ2 − 1
(ξ −
+
)
ξ 2 − 1 e p2 t
(4.87)
2 ξ2 − 1
L'
andamento di x(t) è riportato in fig.4.21
x(t)
1
K2
t
K1
Fig.4.21 Risposta al gradino unitario di un circuito di II° ordine con
ξ <1 e condizioni iniziali nulle
b) ξ =1
Per smorzamento unitario si ha:
x ( t ) = (K 1 + K1 t )e −ωn t + 1
(4.88)
x ( t ) = (K 1 + K 1 t )(− ω n )e − ωn t + K 2 e − ωn t
Per t = 0 si trova:
K1 = x 0 − 1
K 2 = x 0 + ω n ( x 0 − 1)
Nel caso in cui le condizioni iniziali siano nulle si ha:
x ( t ) = −(1 + ω n t )e − ωn t + 1
L'
andamento rappresentato dalla (4.89) è riportato in fig.4.22
(4.89)
100
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
x(t)
1
t
Fig.4.22 Risposta al gradino unitario di un circuito del II° ordine con ξ =1
c) ξ < 1
La risposta al gradino unitario e la sua derivata valgono:
[(
) ]
x( t ) = 2 Ke −ξω n t cos ω n 1 − ξ 2 t + ϕ + 1
[(
) ]
(4.90)
[(
) ]
x( t ) = −2 Ke − ξω n t ω n 1 − ξ 2 sen ω n 1 − ξ 2 t + ϕ − 2 Kξω n e − ξω n t cos ω n 1 − ξ 2 t + ϕ
Imponendo le condizioni iniziali si ha:
x 0 = 2K cos ϕ + 1
x 0 = −2Kω n 1 − ξ 2 sen ϕ − 2Kξω n cos ϕ
da cui si ottiene:
2K =
x0 − 1
cos ϕ
tan gϕ = −
x 0 + ξω n ( x 0 − 1)
(x 0 − 1)ω n
ξ2 − 1
Per condizioni iniziali nulle si ottiene(*) :
x(t ) = 1 −
= 1−
1
1 − ξ2
1
1− ξ
2
)
(
e −ξωn t cos ω n 1 − ξ 2 t − arctg
(
e −ξωn t sen ω n
ξ
1 − ξ2
=
)
1 − ξ2
1 − ξ 2 t + arctg
ξ
(4.91)
L'
andamento di x(t) è riportato in fig.4.23.
x(t)
1+
1
1− ξ
2
e − ξω n t
1
1−
1
1 − ξ2
e − ξω n t
t
Fig.4.23 Risposta al gradino unitario di un circuito del II° ordine con ξ <1
(*)
Nel ricavare la seconda delle (4.91) si ricordi che: cos(x-β)=sen(x−β+π/2) e che tang(β−π/2)=−1/tang(β)
Cap.4
101
Soluzione delle equazioni di equilibrio nel dominio del tempo
d) ξ = 0
Lo smorzamento nullo corrisponde a radici immaginarie. La risposta del circuito può
essere determinata ponendo ξ =0 nelle relazione trovate per il caso precedente. Si ha
x0 − 1
x0
2K =
tan gϕ = −
cos ϕ
( x 0 − 1)ω n
Per condizioni iniziali:
(4.92)
x( t ) = 1 − cos ω n t
L'
andamento di x(t) è rappresentato in fig.4.24. Esso ha andamento oscillatorio intorno
al valore unitario, ciò accade poiché la parte complementare della risposta non si annulla.
x(t)
1
t
Fig.4.24 Risposta di un circuito del II° ordine al gradino unitario
per ξ =0
4.9.3 Risposta all'impulso unitario
La risposta forzata all'
impulso unitario si trova derivando la risposta forzata al gradino
unitario. La risposta libera dipendendo dalle sole condizioni iniziali è la stessa per tutti gli
ingressi. Per condizioni iniziali nulle, derivando le (4.87), (4.89), (4.91), (4.92) si ha:
ξ
x( t ) =
>1
ωn
2
2 ξ −1
x(t)
x(t)
ξ
(e p t − e p t )
1
2
=1
ξ
x( t ) = ω 2n te − ω n t x( t ) =
ω n e − ξω n t
1− ξ
x(t)
ξ >1
t
ξ <1
<1
x(t)
2
ξ
sen ω n 1 − ξ 2 t
=0
x ( t ) = ω n sen ω n t
ξ =1
t
ξ =0
t
Fig.4.25 Risposta di un circuito del II° ordine all'impulso unitario
t
102
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
In fig. 4.25 sono riportati gli andamenti per i vari valori dello smorzamento.
4.9.4 Risposta all'ingresso sinusoidale
Assumendo un ingresso del tipo:
u( t ) = U M sen ωt
si ha una uscita sinusoidale di stessa frequenza ma di ampiezza e fase diverse. L'
uscita può
essere scritta come:
x( t ) = X M sen(ωt + ϕ)
in cui l'
ampiezza XM e la fase ϕ rappresentano le incognite da determinare. Operando
come per i circuiti del I° ordine, ossia sostituendo nell'
equazione di equilibrio elettrico, nel
caso in esame nella (4.75) o (4.76) si ha:
− ω 2 X M sen( ωt + ϕ ) + 2ξωω n X M cos( ωt + ϕ ) + ω 2n X M sen( ωt + ϕ ) = ω 2n YM sen ωt
Dividendo per ωn2 e raccogliendo opportunamente si ha:
ω2
ω
1 − 2 X M sen( ωt + ϕ) + 2ξ
X M cos( ωt + ϕ ) = YM sen ωt
ω
ωn
n
Si può anche scrivere:
1−
2
ω
ω 2n
2
+ 2ξ
ω
ωn
2ξ
2
X M sen ωt + ϕ + arctg
ω
ωn
ω2
1− 2
ωn
= YM sen ωt
Da cui si ottengono modulo e fase che valgono:
XM =
YM
ω2
1− 2
ωn
2ξ
ϕ = − arctg
2
ω
+ 2ξ
ωn
2
ω
ωn
(4.93)
(4.94)
ω2
1− 2
ωn
La soluzione complessiva per i vari valori dello smorzamento risulta:
a) ξ >1
x ( t ) = K 1e p1t + K 2 e p 2 t + X M sen (ωt + ϕ)
Mediante le condizioni iniziali (4.79) si calcolano le costanti che risultano:
K1
p2
1
=
K2
p 2 − p1 − p1
− 1 x 0 − X M sen ϕ
1 x 0 − ωX M cos ϕ
(4.95)
Cap.4
103
Soluzione delle equazioni di equilibrio nel dominio del tempo
Sostituendo nella (4.95) si trova la soluzione. In fig.4.27 è riportato l'
andamento
qualitativo per condizioni iniziali nulle.
b) ξ =1
x( t ) = ( K1 + K 2 t )e − ω n t + X M sen( ωt + ϕ )
(4.96)
in cui:
K 2 = x 0 + ω n x 0 − X M (ω n sen ϕ + ω cos ϕ)
K1 = x 0 − X M sen ϕ
In fig.4.28 è riportato l'
andamento per condizioni iniziali nulle.
c) ξ < 1
La risposta del circuito, il cui andamento, per condizioni iniziali nulle, è riportato in
fig. 4.29, vale:
(
)
x( t ) = 2 Ke −ξω n t cos ω n 1 − ξ 2 t + α + X M sen( ωt + ϕ )
in cui:
α = arctg
X M (ξω n sen ϕ + ω cos ϕ) − x 0 − ξω n x 0
ω n 1 − ξ 2 (x 0 − X M sen ϕ)
x(t)
x(t)
K=
x 0 − X M sen ϕ
cos α
xc(t)
-XMsenϕ
0
t
XMsenϕ
xp(t)
Fig.4.27 Risposta di un circuito di II° ordine con ξ >1 all'ingresso sinusoidale.
x(t) x(t)
xc(t)
0
t
xp(t)
Fig.4.28 Risposta di un circuito di II° ordine con ξ =1 all'ingresso sinusoidale.
(4.97)
104
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
x(t)
x(t)
xc(t)
t
0
Fig.4.29 Risposta di un circuito di II° ordine con ξ <1 all'ingresso sinusoidale.
d) ξ = 0
Annullando lo smorzamento nella (4.97) si ottiene:
x( t ) = 2 K cos(ω n t + α ) + X M sen( ωt + ϕ )
(4.98)
L'
andamento per condizioni iniziali nulle è riportato in fig.4.30
x(t)
x(t)
xc(t)
t
0
Fig.4.30 Risposta di un circuito di II° ordine con ξ =0 all'ingresso sinusoidale.
Dalla (4.93) si osserva che nel caso di smorzamento nullo, se la pulsazione naturale e
quella del segnale di ingresso sono uguali, YM tende a infinito. Questa condizione è detta
di risonanza.
4.10 Soluzione dell'equazione di stato per circuiti del II° ordine
Per i circuiti del II° ordine l'
equazione di stato assume la seguente forma:
u1
x1
a 11
=
x2
a 21
a 12
a 22
x1
b 11
+
x2
b 21
b 12
b 22
. b1n
. b 2n
u2
.
(4.99)
un
Alla (4.99) va associata l'
eventuale equazione di uscita. Limitiamoci al calcolo delle
variabili di stato. Come noto la risposta si compone di due termini, risposta libera e risposta
forzata, che debbono essere entrambi calcolati.
Cap.4
105
Soluzione delle equazioni di equilibrio nel dominio del tempo
4.10.1 Calcolo della risposta libera (o a ingresso nullo)
Per calcolare la risposta libera è necessario (vedi Appendice C) un calcolo preventivo
degli autovalori e degli autovettori della matrice A. Nel caso in esame l'
equazione
caratteristica dalla quale si deducono gli autovalori è:
det ( λI − A ) = det
λ − a 11
− a 12
− a 21
=0
λ − a 22
(4.100)
da cui:
ha:
λ2 − (a 11 + a 22 ) λ + a 11a 22 − a 12 a 21 = 0
Utilizzando la forma standard, rappresentata dalla (4.80), per i circuiti del II° ordine si
λ 2 + 2 ξω n λ + ω 2n = 0
in cui:
− (a 11 + a 22 )
ξ=
ω n = a 11a 22 − a 12 a 22
a 11a 22 − a 12 a 21
Gli autovalori coincidono quindi con le soluzioni dell'
equazione caratteristica
utilizzata nel metodo classico di risoluzione delle equazioni differenziali.
Per una migliore comprensione della precedente asserzione si osservi infatti che dalla
(4.99) resa omogenea, si ottiene una equazione differenziale del II° ordine che consente di
calcolare x1 o x2. Si ha:
x 1 = a 11 x 1 + a 12 x 2
x 2 = a 21 x 1 + a 22 x 2
derivando la prima e sostituendo la seconda (considerando che dalla 1a si ha
a 12 x 2 = x 1 − a 11 x 1 ), si ottiene:
x 1 − x(a 11 + a 22 ) − x 1 (a 12 a 21 − a 11a 22 ) = 0
L'
equazione algebrica associata a questa equazione è la stessa di quella trovata per il
calcolo degli autovalori.
Consideriamo i vari casi che possono presentarsi.
4.10.1 a) autovalori reali e distinti
Siano λ1 e λ2 i due autovalori reali e distinti, gli autovettori associati, indicati con:
η1 =
η11
η12
η2 =
η21
η22
(4.101)
si ricavano dalle relazioni:
λ 1 − a 11
− a 21
− a 12
λ 2 − a 22
η11
=0
η12
λ 1 − a 11
− a 21
− a 12
λ 2 − a 22
η21
=0
η22
Ponendo:
[
η = η1
]
η1 =
η11
η12
η21
η22
α = η −1 =
η11
η21
η12
η22
−1
=
T
α 11
T
α 12
α T21
α T22
=
α 1T
α T2
106
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
la risposta libera risulta:
η11
T
x ( t ) = e λ1t
α 11
η12
od anche:
[
T
α 12
x ( t ) = c1e λ1t
x (0)
] x 21 (0)
η 21
x 1 (0)
α T21 α T22
η22
x 2 (0)
[
+ e λ2t
]
η11
η21
+ c 2 e λ2t
η12
η22
(4.102)
(4.103)
in cui :
[
T
c1 = α 11
T
α 12
x (0)
] x 21 (0)
[
c 2 = α T21 α T22
x
c 2e
(4.104)
η2
x2
c1eλ 1t + c 2 e λ 2 t
2
λ2t
x (0)
] x 21 (0)
η1
c1e λ 1t
x1
x1
Fig. 4.31 Rappresentazione del vettore della risposta libera
Dalla relazione (4.103) si deduce che il vettore della risposta libera, relativo ad un
certo stato iniziale, si ottiene sommando, ad ogni istante, due vettori giacenti sulla
direzione degli autovettori come indicato in fig.4.31
Premoltiplicando c1 e c2 per η1 e η2 e sommando si ha:
c1 η1 + c 2 η2 =
η11
T
α 11
η12
[
]
T
α 12
+
η21
T
α 21
η22
[
T
α 22
]
x 1 (0)
1 0 x1 (0)
=
x 2 (0)
0 1 x 2 (0)
Si ha quindi:
x 1 (0)
η11
η21
= c1
+ c2
x 2 (0)
η12
η22
(4.105)
Dalle (4.103) e (4.105) si deduce che se c1 = 0 o c2 = 0, ossia se le condizioni iniziali
giacciono lungo la direzione individuata, sul piano di stato, dall'
autovettore η2 o da quello
η1, risultano diseccitati i modi di evolvere relativi a λ1 o a λ2. Queste situazioni sono
rappresentate in fig.4.32.
x2
x2
η2
x2(0)
η1
x2(0)
a)
x2
x1
η2
x2(0)
η1
x1(0)
b)
η2
η1
x2(0)
x1
x1(0)
x1
c)
Fig. 4.32 Possibili giaciture del vettore delle condizioni iniziali sul piano di stato. Sono eccitati entrambi i
modi di evolvere a) è eccitato il solo modo relativo a η2 b) è eccitato il solo modo relativo a η1 c).
Cap.4
Soluzione delle equazioni di equilibrio nel dominio del tempo
107
Il luogo dei punti individuato sul piano di stato da x ( t ) , al variare del tempo, è detto
traiettoria. Per ogni vettore di condizioni iniziali esiste una traiettoria che converge o no
verso il punto di equilibrio a seconda che esso sia o no un nodo stabile.
Un punto di coordinate (x1p, x2p) è detto di equilibrio se partendo da un qualunque
vettore di condizioni iniziali l'
evoluzione libera converge in quel punto. Gli stati di
equilibrio per l'
equazione X = AX si trovano dunque ponendo X = 0 e quindi AX = 0.
per un circuito di II° ordine si ha quindi:
a 11 a 12
a 21 a 22
x1
=0
x2
ne consegue che l'
origine del piano di stato è l'
unico punto di equilibrio se detA≠0. Se
invece il determinante di A è nullo esistono infiniti punti di equilibrio giacenti sulla retta:
a 11 x 1 + a 12 x 2 = 0 (a 21 x 1 + a 22 x 2 = 0)
Nell'
ipotesi in cui detA≠0 consideriamo i seguenti casi:
4.10.1. b) λ1 < 0
λ2 < 0
λ 2 > λ 1
La relazione (4.103) scritta nella forma:
x ( t ) = c 1e
− λ1 t
η11
η21
−λ t
+ c2e 2
η12
η22
(4.106)
mostra che qualunque sia il punto di partenza sul piano di stato, ovvero qualunque siano le
condizioni iniziali tutte le traiettorie convergono nell'
origine che è detta nodo stabile. Nel
caso rappresentato in fig.4.33 si osserva che le traiettorie tendono all'
origine divenendo
tangenti all'
autovettore η1. Ciò accade perché si è supposto λ2 maggiore di λ1 e pertanto il
modo di evolvere legato a questo autovalore tende a zero più rapidamente.
4.10.1 c) λ1 > 0
λ2 > 0
λ2 > λ1
La risposta libera è fornita dalla relazione:
x ( t ) = c 1e λ1 t
η11
η21
+ c 2 e λ2 t
η12
η22
(4.107)
L'
origine rappresenta un nodo instabile poiché tutte le traiettorie divergono da essa.
Le traiettorie al tendere di t all'
infinito tendono a divenire parallele a η2 perché il modo di
evolvere legato a λ2 cresce più rapidamente di quello legato a λ1. Questa situazione è
rappresentata in fig. 4.34.
4.10.1 d) λ1 < 0
λ2 > 0
In questo caso si ha:
x ( t ) = c 1e − λ1 t
η11
η21
+ c 2 e λ2 t
η12
η22
(4.108)
Al tendere del tempo all'
infinito il modo relativo a λ1 tende ad annullarsi mentre quello
relativo a λ2 a infinito. Le traiettorie divergono dall'
origine, vedi fig. 4.35, che è detto
punto di sella, in modo tangente a η2.
108
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
Fig.4.33 Nodo stabile nell'origine
Fig.4.34 Nodo instabile nell'origine
Fig.4.35 Punto di sella nell'origine
4.10.1 e) Autovalori complessi coniugati a parte reale negativa
Dall'
Appendice C, posto:
λ = σ ± jω
η R = Re{η}
m = Re 2 { c} + Im 2 { c}
si ha:
ηI = Im{η}
(4.109)
Im{ c}
Re{ c}
(4.110)
ϕ = arctg
Cap.4
109
Soluzione delle equazioni di equilibrio nel dominio del tempo
[
x ( t ) = 2 m e σt cos( ωt + ϕ) η R − sen( ωt + ϕ) ηI
da cui:
[
]
(4.111)
]
x 1 ( t ) = 2 m e σt cos( ωt + ϕ ) η11 − sen( ωt + ϕ) η21 =
2
= 2 me σt η11
+ η221 cos( ωt + ϕ)
Si ha quindi:
η11
2
η11
+ η221
− sen( ωt + ϕ)
η21
(4.112)
2
η11
+ η221
x 1 ( t ) = M 1e σt cos(ωt + θ1 )
x 2 ( t ) = M 2 e σt cos(ωt + θ 2 )
(4.113)
in cui si è posto:
η 21
η11
η 22
2
(4.114)
M 2 = 2 m η12
+ η 222
θ 2 = ϕ + arctg
η12
Poiché σ è negativo entrambe le (4.113) tendono a zero come mostrato in fig.4.36.
L'
origine e detta fuoco stabile.
2
M 1 = 2 m η11
+ η221
θ1 = ϕ + arctg
Re
Fig.4.36 Fuoco stabile nell'origine
f) Autovalori complessi coniugati a parte reale positiva
Valgono le stesse relazioni trovate al punto precedente. Essendo ora σ positivo la
traiettoria diverge dall'
origine, come rappresentato in fig.4.37, che è detta fuoco instabile.
Fig.4.37 Fuoco instabile nell'origine
110
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
4.10.1 g) Autovalori complessi coniugati a parte reale positiva
Ponendo σ = 0 nelle (4.113) si ha:
x 1 ( t ) = M 1 cos(ωt + θ 1 )
(4.115)
x 2 ( t ) = M 2 cos(ωt + θ 2 )
Partendo da un qualunque vettore delle condizioni iniziali le traiettorie sono degli
ellissi come mostrato in fig.4.38. L'
origine e detta centro.
Fig.4.38Centro nell'origine
4.10.2 Calcolo della risposta forzata
Dall'
Appendice C si ha:
t
x f (t) = eA
( t − t ')
Bu( t ')dt '
0
per autovalori reali e distinti e per autovalori complessi coniugati si ha:
4.10.2 a) autovalori reali e distinti
x f ( t) =
t
0
η11
η12
[α 11T
]
T
α 12
e λ1
( t − t ')
+
η21
η22
[α T21
]
α T22 e λ 2
( t − t ')
Bu( t − t ')dt '
(4.116)
4.10.2b) autovalori complessi coniugati
x f ( t) =
t
0
) − β]
)
sen ω( t − t '
e σ ( t − t ') − K sen[ω( t − t '
Bu( t − t ')dt '
2
) K sen[ω( t − t '
) + β]
Re{η} − K sen ω( t − t '
in cui:
K = Re 2 {η} + Im 2 {η}
β = arctg
(4.117)
Im{η}
Re{η}
Esempio 4.6
Le equazioni di stato per i due circuiti del II° ordine rappresentati in fig.4.19, indicando con
iL e con vC la corrente nell'
induttanza e la tensione ai terminali del condensatore, sono
rispettivamente:
Cap.4
111
Soluzione delle equazioni di equilibrio nel dominio del tempo
Caso a)
Caso b)
1
0
iL
L
+ 1 j
1
vC
−
C
R pC
0
iL
=
vC
−
1
C
iL
−
=
vC
Rs
L
1
C
−
1
L
0
1
iL
+ L e
vC
0
Calcolo degli autovalori
1
L
1 =0
−
R pC
0
det
1
C
−
da cui:
λ2 + λ
1
R pC
+
1
=0
LC
Assumendo:
Rp = 250Ω, L = 0,5H, C = 10µF
si ha:
λ2 + 400λ + 2 ⋅ 105 = 0
da cui:
λ 1 = −200 + j400
λ 1 = −200 − j400
RS
1
−
L =0
det 1L
0
C
da cui:
R
1
λ2 + λ S +
=0
L LC
Assumendo:
RS = 350Ω, L = 0,25H, C = 10µF
si ha:
λ2 + 1400λ + 4 ⋅ 105 = 0
da cui:
λ 1 = −400
λ 1 = −1000
−
Calcolo degli autovettori
λ1
1
C
−
λ1 +
1
L
1
R SC
η11
=0
η12
Assumendo η11 = 1 risulta
η12 = −100 + j200
e quindi:
1
η1 =
− 100 + j200
1
=
− 100 − j200
da cui:
1
1
ηR =
ηI =
− 100
200
η1*
λ1 +
Rp
1
L
L
η11
=0
η12
1
λ1
C
Assumendo η12 = 1 risulta η11 = −4 ⋅ 10 −3
Analogamente per λ2 si ha:
η22 = 1
η21 = −1o −2
−
da cui:
η1 =
− 4 ⋅ 10 −3
1
η2 =
− 10 −2
1
Risposta libera
Assumendo iL = 1A e vC = 0 il vettore delle condizioni iniziali risulta: x 0 =
Nei due casi si ha:
1
.
0
112
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
α=η
c1 =
− 100 − j200 − 1
1
=
1
− j400 100 − j200
−1
α=η
1
1
= 0,5 − j0,25 c =
− 100 − j200 − 1
0
− j400
1
[
]
c 2 = c1* = 0,5 + j0,25
2
c2 =
2
m = 0,5 + 0,25 = 0,56
− 0,25
ϕ = arctg
= −0,464
0,5
Si ha quindi:
iL
vC
iL
vC
1
10 −2
1
=
0,6 ⋅ 10 −2 − 1 4 ⋅ 10 −3
1
1
−2
= 166,7
− 2 1 10
0
0,6 ⋅ 10
[
]
1
1
−3
= −166,7
− 2 − 1 4 ⋅ 10
0
0,6 ⋅ 10
[
]
= 166,7 e −400 t
− 4 ⋅ 10 −3
1
− e −1000 t
− 10 −2
1
1
= 2 ⋅ 0,56 ⋅ e −100 t cos( 200t − 0,464)
− sen(200t − 0,464)
−1
− 100
0
200
Per il caso di autovettori complessi coniugati si ha:
i L = 112
, e −100 t cos( 200t − 0,464) =
[
]
vC = 112
, e−100t − 100 cos(200t − 0,464) − 200sen(200t − 0,464) = −112e−100t 5
= −250,4 sen( 200t − 0,464 + 0,464) = −250,4 sen 200t
Utilizzando la (4.3.21) si avrebbe:
1
5
cos( 200t − 0,464) −
2
5
sen(200t − 0,464) =
iL
i L ( 0)
= e At
vC
v C ( 0)
e poiché:
K = Re 2 {η} + Im 2 {η} = 100 5 = 223,6
β=
Im{η}
Re{η}
= 1107
,
iL
, )
sen 200t
1
e−100t − 223,6 sen(200t − 1107
=
2
vC
223,6 sen(200t + 1107
, ) 0
− 223,6 sen 200t
200
=
− 112
, e −100 t sen(200t − 1107
, )
− 250 sen 200t
=
112
, e −100 t cos( 200t − 0,464)
− 250 sen 200t
Risposta forzata
Caso a)
Assumendo j = 1A si ha:
t
x f (t) =
0
0
sen 200( t − t ')
e −200( t − t ') − 223,6 sen[ 200( t − t ') − 1,107]
5 dt '
2
200
− 223,6 sen 200( t − t ')
223,6 sen[200( t − t ') + 1,107] 10
risolvendo si trova:
Cap.4
113
Soluzione delle equazioni di equilibrio nel dominio del tempo
[
278,75[1,34 +
1,25 − 1 + 2e −200t sen( 200t + π / 4)
x f (t) =
2e
− 200 t
]
sen( 200t + 1,892)
]
Caso b)
t
x f (t) =
0
=
0
0
100 − 400( t − t ') − 4 ⋅ 10 −3
100 −103 ( t − t ') 10 − 2
−2
1 10
e
e
− 1 4 ⋅ 10 − 3
5 +
10
105
6
6
1
1
[
[
]
]
dt '=
0,23 − 0,16e −400 t − 0,066e −1000 t
48,3 − 41,6e −400 t − 6,6e −1000 t
Come caso particolare si osservi che assumendo:
x0 =
−1
100
risulta:
c1 =
−1
100
1 10 −2
=0
10 2
6
[
]
Poiché il vettore delle condizioni iniziale giace lungo la direzione di η2 nella risposta libera
non è attivato il modo di evolvere relativo a λ1.
4.11Circuiti di ordine n
Nel Cap.3 si è mostrato come le equazioni di equilibrio di un circuito, detti u gli
ingressi e x le uscite, che possono o no coincidere con le variabili di stato, possono essere
poste nella seguente forma matriciale:
a 11 ( D) a 12 ( D) . a 1n ( D) x 1
a 21 ( D) a 22 ( D) . a 2 n ( D) x 2
.
.
.
.
.
a n1 ( D) a n 2 ( D) . a nn ( D) x n
=
u1
u2
(4.118)
.
un
in cui il generico termine aij(D) è del tipo:
a ij ( D) = α ij + β ij D + γ ij
1
D
(4.119)
La (4.118) rappresenta un sistema di equazioni integro-differenziali, affinché esso
diventi un sistema di equazioni differenziali debbono essere derivate tutte le righe per le
quali γij≠0. Qualora tutte le righe contenessero termini del tipo citato si avrebbe:
Da 11 ( D)
Da 21 ( D)
.
Du1
Da 12 ( D) . Da 1n ( D) x 1
Du 2
Da 22 ( D) . Da 2 n ( D) x 2
=
.
.
.
.
.
Da n1 ( D) Da n 2 ( D) . Da nn ( D) x n
Risolvendo si ottiene:
Du n
(4.120)
114
x1
x2
.
xn
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
=
Da 11 ( D)
Da 21 ( D)
Da 12 ( D) . Da 1n ( D)
Da 22 ( D) . Da 2 n ( D)
.
.
.
.
Da n1 ( D) Da n 2 ( D) . Da nn ( D)
−1
⋅
Du 1
Du 2
=
.
Du n
1
∆ ( D)
m11 ( D)
m 21 ( D)
m12 ( D) . m1n ( D)
m 22 ( D) . m 2 n ( D)
.
.
.
.
m n1 ( D) m n 2 ( D) . m nn ( D)
⋅
Du 1
Du 2
.
Du n
Per il generico xk risulta:
xk =
m k1 ( D)
m ( D)
m ( D)
Du 1 + k 2
Du 2 + .................... + kn
Du n
∆ ( D)
∆ ( D)
∆ ( D)
(4.121)
ossia:
∆(D) x k = m k1 (D)Du 1 + m k 2 ( D) Du 2 + .................... + m kn (D)Du n
in cui il determinante ∆( D) è del tipo:
∆( D) x k = a m D m + a m−1 D m−1 +..........................+ a 1 D + a 0
e il secondo membro è una funzione nota del tempo.
La (4.121) è quindi riconducibile ad una equazione differenziale, lineare a coefficienti
costanti, di ordine n, ossia:
a n D m x k + a m−1 D m−1 x k +..........................+ a 1 Dx k + a 0 =
i
m ik ( D) Du i
la cui equazione caratteristica è:
∆( p) = a m p m + a m −1 p m −1 +..........................+ a 1 p + a 0 = 0
Allo stesso risultato si giunge annullando il vettore degli ingressi nella (4.118) e
notando che il sistema divenuto omogeneo ammette soluzione diversa da zero solo nel caso
in cui il determinante sia nullo.
Nell'
ipotesi che l'
equazione caratteristica abbia solo radici reali e distinte, per la risposta
complementare si ha:
x 1c
K 11
K 12
.
x 2c
K 21
=
.
.
x nc
K n1
K 22
. K 2n
.
.
.
. K nm
K n2
K 1n
⋅
e p1t
e p2t
.
(4.122)
e pm t
Le (n x m) costanti incognite debbono essere determinate facendo uso delle m
condizioni iniziali assegnate relative alle variabili di stato. Per le uscite che sono anche
variabili di stato risultano quindi assegnate le condizioni iniziali, per le uscite che invece
non lo sono, si deve procedere valutando le equazioni di equilibrio al tempo 0+.
Procedendo allo stesso modo, dopo aver eventualmente derivato le equazioni di equilibrio,
si possono determinare anche i valori iniziali delle derivate.
Esempio 4.7
Per il circuito del II° ordine rappresentato in fig.4.39 possono essere assegnate le due
condizioni iniziali:
( ) ( )
i 1 0 + = i1 0 − = I 0
v c (0 + ) = v c (0 − ) = V0
Cap.4
115
Soluzione delle equazioni di equilibrio nel dominio del tempo
R
i3
R
R
i2
i1
e
−
+ vC
C
L
Fig.4.39 Esempio 4.7
Nello scrivere le equazioni di equilibrio elettrico con il metodo delle correnti di maglia
si osserva che l'
equazione relativa alla maglia in cui scorre la corrente i2 contiene un
integrale. Derivando tale equazione si ottiene:
2 R + LD
−R
− RD
−R
i1
e
2 RD + 1 / C − RD i 2 = 0
−R
−R
3R
i3
0
L'
equazione caratteristica, invariante rispetto alla derivazione, risulta:
p2 +
3p
L
1
R2 +
+
=0
5RL
C
LC
Assumendo:
L = 0,1H
si ottiene:
C = 10µF
R = 1kΩ
e = E = 10V
p 1 = −170
La soluzione complementare è:
I0 = 0
V0 = 2 V
p 2 = −5890
i 1c
K 11
i 2 c = K 21
i 3c
K 31
K 12
e p1t
K 22
e p2 t
K 32
Per la soluzione particolare, poiché le correnti risultano costanti rispetto al tempo, si ha:
da cui si trova:
2R
−R
0
1/ C
0
−R
−R
3R
i 1p = 6mA
− R i 1p
E
i2p = 0
i 3p
0
i2p = 0
i 3p = 2 mA
e quindi:
i1
K11
K12
i 2 = K 21 K 22
i3
K 31
K 32
e
−170 t
e −5890t
6 ⋅10 −3
+
0
2 ⋅10 −3
116
Cap. 4 Soluzione delle equazioni di equilibrio nel dominio del tempo
Per determinare le costanti di integrazione sono necessari i valori iniziali delle correnti e
delle loro derivate prime. Le equazioni di equilibrio elettrico, valutate al tempo 0+, sono:
( )
( ) ( ) ( )
− Ri (0 ) + 2Ri (0 ) − Ri (0 ) = 0
− Ri (0 ) − Ri (0 ) + 3Ri (0 ) = 0
2Ri1 0 + + LDi1 ]0+ − Ri 2 0 + − Ri 3 0 + = e 0 +
+
1
+
1
Risolvendo si trova:
i 2 (0 + ) = −1,2 mA
a
2
2
+
+
3
+
+
3
i 3 (0 + ) = −0,4 mA
Di 1
a
]0
+
= −16A / s
+
Derivando la 2 e 3 equazione di equilibrio e valutando per t = 0 risulta:
− RDi 1
]0
+
+ 2 RDi 2
− RDi 1
da cui :
Di 2
Si ha quindi:
]0
+
]0
+
]0
+
+ 1 / Ci 2 (0 + ) − RDi 3
− RDi 2
= −12,73A / s
i 1 (0 + ) = K11 + K12 + i 1p
i 2 (0 + ) = K 21 + K 22 + i 2 p
i 3 (0 + ) = K 31 + K 32 + i 3p
]0
+
+ 3RDi 3
Di 3
]0
+
]0
+
]0
+
=0
=0
= −9,58A / s
]0 = p1K11 + p 2 K12
Di 2 ] 0 = p 2 K 21 + p 2 K 22
Di 3 ] 0 = p 1 K 31 + p 2 K 32
Di 1
+
+
+
Dalle relazioni precedenti si possono determinare le costanti. Si ha :
K 11
p 2 − 1 i1 0 + − i1p
−9
1
=
= 10 −3
K 12
3
p 2 − p 1 − p1 1
Di 1 ]0 +
( )
K 21
p2
1
=
K 22
p 2 − p1 − p1
K 31
p2
1
=
K 32
p 2 − p1 − p1
( )
− 1 i 2 0+ − i 2 p
−3
= 10 −3
1
2
Di 2 ]0+
− 1 i 3 (0 + ) − i 3 p
−4
= 10 − 3
1
2
Di 3 0+
]
4.12 Scrittura delle equazioni di stato per circuiti di ordine n
Per la scrittura delle equazioni di stato è conveniente seguire la seguente procedura:
• sostituire gli induttori con generatori di corrente iL pari alla corrente che circola
nell'
induttore;
• sostituire i condensatori con generatori di tensione vC pari alla tensione alle estremità
del condensatore;
Successivamente nella rete resistiva così ottenuta si calcoli:
induttore, in
• la tensione vL alle estremità del generatore di corrente rappresentativo dell'
funzione di iL e di vC;
• la corrente iC che percorre il generatore di tensione rappresentativo del condensatore, in
funzione di iL e di vC;
• si operi quindi la sostituzioni v L = L i L i C = C v C
Cap.4
117
Soluzione delle equazioni di equilibrio nel dominio del tempo
Procedendo come indicato in precedenza si giunge ad una equazione di stato come
(4.32), per la cui soluzione si rimanda a quanto detto in Appendice C.
Esempio 4.8
Il circuito di fig.4.40a) può essere, secondo la procedura indicata, sostituito con quello di
fig.4.40b).
R1
R3
R2
e
R1
j
C
−
a)
R2
iL
e
L
R3
vL
+
iC
i1
j
j
vC
b)
Fig. 4.40 Esempio 4.8
Da quest'
ultimo circuito si trova:
v L = − R 1i L − R 2 ( i L − i 1 ) + e
i C = i1 + j
La corrente i1 deve essere espressa in funzione di iL e di vC. Sempre dal circuito di
fig.4.40b) si ha:
(R 2 + R 3 )i1 − R 2 i L + v C = 0
da cui:
i2 =
R2
1
iL −
v
R2 + R3
R2 + R3 C
Sostituendo nelle espressioni di vL e di iC si ottiene:
v L = −( R 1 + R 2 )i L + R 2
iC =
R2
1
iL −
v + e = Li L
R2 + R3
R2 + R3 C
R2
1
i1 −
v + j = Cv C
R2 + R3
R2 + R3 C
In forma matriciale:
iL
vC
R 22
−1
R1 + R 2 −
L
R2 + R3
=
R2
C( R 2 + R 3 )
− R2
1
L( R 2 + R 3 ) i L
L
+
−1
vC
0
C( R 2 + R 3 )
0
e
1
C
j
CAPITOLO 5
5.1 Generalità sul funzionamento a regime dei circuiti
Si è già evidenziato come si possa parlare di regime solo nel caso in cui la soluzione
complementare (detta in questo caso risposta transitoria) si estingue al tendere del tempo
all'infinito. Ciò è tipico dei circuiti stabili ossia di quei circuiti per i quali le radici
dell'equazione caratteristica sono a parte reale negativa.
Per i circuiti lineari in cui gli ingressi sono di tipo esponenziale anche le uscite sono di
tipo esponenziale. Ciò accade in virtù del fatto che nelle equazioni di equilibrio elettrico
compaiono le operazioni di moltiplicazione della variabile (tensione o corrente) per una
costante, di derivazione, di integrazione, ossia operazioni che applicate a grandezze
esponenziali riproducono grandezze esponenziali dello stesso tipo.
Esempio 5.1
Assegnato i( t ) = e αt per le operazioni di moltiplicazione per una costante, derivazione,
integrazione e somma, si ha:
Ai( t ) = Ae αt
Di( t ) = αe αt
1
1
i ( t ) = e αt
D
α
Ai( t ) + Di( t ) +
1
1 αt
i( t ) = A + α +
e
D
α
Ben diversi sarebbero i risultati se comparissero anche prodotti o quozienti. In tal caso
infatti si otterrebbero ancora grandezze esponenziali ma con esponenti diversi.
Esempio 5.2
Si considerino i 1 ( t ) = Ae αt e i 2 ( t ) = Be αt . Per le operazioni di moltiplicazione e
divisione si ha:
i1 ( t) A
i 1 ( t )i 2 ( t ) = ABe 2αt
=
i 2 (t) B
Nel primo caso l'esponente raddoppia, nel secondo diviene nullo.
120
Cap. 5 Circuiti in regime sinusoidale
Gli ingressi di tipo continuo e di tipo sinusoidale rientrano nella famiglia degli ingressi
di tipo esponenziali, si parla in questo caso di regime continuo e regime sinusoidale.
Nel il caso in cui l'ingresso sia una corrente continua, si ha:
i( t ) = Ie αt α =0 = I
]
Applicando tale corrente ad un circuito R,L, serie si ha:
v( t ) = Ri( t ) + LDi( t ) = RI
Per un circuito RC parallelo con un ingresso pari a:
e( t ) = Ee αt
si avrebbe:
]α = 0 = E
v( t )
E
+ CDv( t ) =
R
R
Dalle precedenti relazioni si deduce che in corrente continua, a regime, la differenza di
potenziale alle estremità di un induttore è nulla e pertanto questo elemento circuitale può
essere sostituito con un corto circuito, mentre la corrente in un condensatore è nulla e
pertanto esso può essere rimpiazzato con un circuito aperto.
Occupiamoci ora di determinare la risposta del circuito a ingressi sinusoidali. Saranno
proposti due metodi: quello trigonometrico e quello, universalmente adottato, fasoriale.
i( t ) =
5.2 Il regime sinusoidale
Una grandezza sinusoidale è rappresentata dalla relazione:
α
i( t ) = I M sen(ωt + α ) = I M sen ω t +
= I M sen ω ( t + t 0 )
(5.1)
ω
dove:
IM -è il valore massimo detto anche ampiezza;
ω -è la pulsazione o frequenza angolare la cui unità di misura è s-1 (od anche rad/s);
α -è la fase
La pulsazione è definita mediante la relazione:
2π
(5.2)
ω = 2 πf =
T
in cui:
f - è la frequenza. La frequenza è misurata in è Hz (hertz, 1Hz = 1s-1)
T- è il periodo la cui unità di misura è il s (secondo)
Il periodo è il tempo impiegato a compiere un intero ciclo (ossia una sinusoide), la
frequenza è il numero di cicli compiuti in un secondo.
La funzione sinusoidale rappresentata dalla (5.1) è mostrata nei due grafici di fig.5.1
in cui sulle ascisse sono stati riportati, rispettivamente, gli angoli e i tempi.
i(t)
-t0
i(t)
T
t
2π
−α
Fig. 5.1 Rappresentazione di una grandezza sinusoidale
ωt
121
Cap.5 Circuiti in regime sinusoidale
Assegnata inoltre la grandezza:
(5.3)
v( t ) = VM sen(ωt + β)
avente stessa pulsazione (e quindi stessa frequenza) di i(t), assumendo β > α, si ottiene
la rappresentazione di fig. 5.2 in cui v(t) risulta in anticipo rispetto a i(t) dell'angolo
ϕ =β−α detto sfasamento.
v(t)
i(t)
−β −α
ωt
Fig. 5.3 Grandezze sinusoidali sfasate dell'angolo ϕ = β −α
Per una corrente periodica di periodo T si definisce valore efficace quel valore di
corrente costante nel tempo che percorrendo una resistenza R per un certo tempo, ad es. T,
produce lo stesso effetto joule della corrente i(t) che percorre la stessa resistenza per lo
stesso tempo.
In base alla precedente definizione, detto I il valore efficace della corrente i(t), si ha:
T
0
R i( t ) 2 dt = RI 2 T
da cui risulta:
I=
1
T
T
0
i( t ) 2 dt
(5.4)
Se la corrente è di tipo sinusoidale si ha:
I=
IM
2
(5.5)
E' immediato verificare che esprimendo la potenza mediante la relazione
v( t ) 2
p=
R
si ottiene anche il valore efficace della tensione alle estremità di un resistore che risulta
espresso da relazioni simili alle (5.4) e (5.5) in cui si sostituisca la tensione con la corrente.
Per estensione si considerano valide tali relazione anche per correnti e tensioni relative a
elementi circuitali diversi dai resistori.
La risoluzione di circuiti alimentati con grandezze sinusoidali può essere effettuata
mediante il metodo trigonometrico o mediante il metodo fasoriale.
5.3 Metodo trigonometrico
Le operazioni che compaiono nelle equazioni di equilibrio dei circuiti applicate a
grandezze sinusoidali producono altre grandezze sinusoidali che differiscono da quelle di
ingresso per il valore massimo e per la fase. Se, per esempio, ad un circuito viene applicata
la tensione sinusoidale (5.3) si avrà come uscita una corrente sinusoidale come quella
122
Cap. 5 Circuiti in regime sinusoidale
rappresentata dalla (5.1) in cui IM e α sono le incognite da determinare. Per illustrare il
metodo trigonometrico si consideri un circuito R, L, per il quale si ha:
e( t ) = Ri( t ) + LDi( t )
sostituendo la (5.1) e (5.3) si ha:
E M sen( ωt + β) = RI M sen( ωt + α ) + ωLI M cos( ωt + α ) =
R
= I M R 2 + ω 2 L2
2
sen( ωt + α ) +
2 2
R +ω L
da cui posto:
R
cos ϕ =
R + ω 2 L2
sen ϕ =
R 2 + ω 2 L2
risulta:
ωL
2
cos( ωt + α )
ωL
R 2 + ω 2 L2
E M sen (ωt + β) = I M R 2 + ω 2 L2 [cos ϕsen (ωt + α ) + sen ϕcos(ωt + α )] =
= I M R 2 + ω 2 L2 sen(ωt + α + ϕ)
Si ottiene quindi:
IM =
EM
α =β−ϕ
R 2 + ω 2 L2
(5.6)
5.4 Il metodo fasoriale
Il metodo fasoriale e di gran lunga il più utilizzato nella determinazione della risposta
a regime dei circuiti alimentati con generatori di tensione e/o di corrente sinusoidale.
Definiamo inizialmente ciò che si intende per fasore rotante e per fasore. Dalla relazione:
(5.7)
e jωt = cos ωt + j sen ωt
si può scrivere:
cos ωt = Re e jωt
sen ωt = Im e jωt
(5.8)
{ }
{ }
Per una generica grandezza sinusoidale, ad esempio la tensione v(t) rappresentata dalla
(5.3) si può scrivere:
v( t ) = V sen( ωt + β) = Im V e j( ωt +β )
(5.9)
{
M
M
}
La quantità in parentesi è detta fasore rotante, essa rappresenta un segmento di
lunghezza VM che ruota con velocità costante ω (in verso antiorario) intorno all'origine del
piano di Gauss e che risulta sfasato, al tempo t = 0, di un angolo α rispetto all'asse reale. La
proiezione di tale segmento sull'asse immaginario, come in fig.5.4, rappresenta v(t).
v(t)
Im
ω
t=0
Re
0
Fig. 5.4 Fasore rotante e corrispondente grandezza sinusoidale
t
123
Cap.5 Circuiti in regime sinusoidale
Il fasore rotante viene indicato anche con la relazione:
V ( t ) = VM e j( jω+β)
(5.10)
Si chiama fasore la quantità:
V
V = M e jβ = Ve jβ
(5.11)
2
Si noti che nell'espressione (5.11) compare il valore efficace, è naturalmente possibile
esprimere il fasore anche mediante il valore massimo. L'utilizzo del valore efficace risulta
più conveniente poiché nella pratica è questo il valore al quale si fa riferimento (ad es.
quando si parla di una tensione di 220V o di una corrente di 10 A si fa riferimento al valore
efficace). In seguito si vedrà che anche la potenza dipende dai valori efficaci di tensione e
corrente.
5.4.1 Derivazione e integrazione dei fasori rotanti
Per l'operazione di derivazione si ha:
[
]
DV( t ) = D VM e j( ωt +β ) = jωVM e j( ωt +β ) = jωV( t ) = ωVM e
(
j ωt +β + π2
)
(5.12)
Per l'integrazione risulta:
[
]
1
1
1
1
1
j( ωt +β − π2 )
V( t ) =
VM e j( ωt +β) =
VM e j( ωt +β ) =
V( t ) = VM e
D
D
jω
jω
ω
(5.13)
Dalle relazioni precedenti si deduce che la derivata di un fasore risulta essere un fasore
il cui valore massimo è moltiplicato per ω e la cui fase è ruotata di π/2 in anticipo.
Nell'operazione di integrazione si ottiene un fasore il cui valore massimo e diviso per ω e la
cui fase è ruotata di π/2 in ritardo. All'atto pratico per eseguire ciascuna delle due
operazioni basta sostituire l'operatore D con jω.
Valgono inoltre le seguenti relazioni:
[
]
[
]
1
1
I m [e j( ωt +β ) ] = I m [e j( ωt +β ) ]
D
D
DI m e j( ωt +β) = I m D e j( ωt +β )
(5.14)
Relazioni del tutto simili valgono ovviamente anche per la parte reale.
5.4.2 Rappresentazione dei fasori
I fasori sono numeri complessi e pertanto possono essere rappresentati sul piano di
Gauss come mostrato in fig.5.5.
j
Vj
α
VR
Fig. 5.5 Rappresentazione di un fasore sul piano di Gauss
In base alla fig. 5.5 il fasore può essere espresso mediante una delle seguenti relazioni:
124
Cap. 5 Circuiti in regime sinusoidale
V = VR + jVj = V( cos α + j sen α ) = Ve jα = V α
in cui:
V = VR2 + V j2
α = arctg
e
(5.15)
Vj
(5.16)
VR
sono il modulo e l'argomento del numero complesso.
5.4.3 Richiami sulle operazioni con i numeri complessi
Assegnati i numeri complessi:
u = a + jb = a 2 + b 2 e
j arctg ba
= ue jα
e
v = c + jd = c 2 + d 2 e
j arctg dc
= ve jβ
a) somma e sottrazione
w = u + v = ( a ± c) + j( b ± d )
b) prodotto
w = u v = ( a + jb)(c + jd ) = (ac − bd ) + j(ad + bc) = ue jα ve jβ = uve j( α +β )
c) rapporto
Se i numeri complessi sono dati in forma esponenziale si ha:
u u
w = = e j( α −β )
v v
In caso contrario è necessario eseguire l'operazione di razionalizzazione che consiste
nel moltiplicare numeratore e denominatore per il complesso coniugato di quest'ultimo. Si
ricordi che dato un numero complesso il suo coniugato è un numero complesso avente
stessa parte reale e parte immaginaria cambiata di segno. Il prodotto tra un numero
complesso e il suo coniugato fornisce il modulo al quadrato.
u a + jb ( a + jb)(c − jd ) ( ac + bd ) + j( bc − ad )
w= =
=
=
v c + jd ( c + jd )( c + jd )
c2 + d 2
5.5 Applicazione del metodo fasoriale alla risoluzione dei circuiti
Si consideri un circuito RLC serie e si alimenti con la tensione:
V ( t ) = VM e j(ωt +β ) = VM cos(ωt + β) + jVM sen (ωt + β)
Per quanto detto a proposito del calcolo della soluzione particolare la corrente risulta:
I( t ) = I M e j(ωt +α ) = I M cos(ωt + α ) + jI M sen (ωt + α )
Sostituendo nell'equazione di equilibrio si ha:
VM e j(ωt +β ) = RI M e j(ωt +α ) + LDI M e j(ωt +α ) +
1
I M e j(ωt + α )
CD
Tenendo conto delle (5.12) e (5.13) si può scrivere:
VM e j(ωt +β ) − RI M e j(ωt +α ) − jωLI M e j(ωt + α ) −
Indicando con:
1
I M e j(ωt +α ) = 0
jωC
125
Cap.5 Circuiti in regime sinusoidale
V=
VM
2
e jβ
I=
IM
2
e jα
si ha:
e jωt VM e jβ − RI M e jα − jωLI M e jα −
1
1
I M e jα = e jωt V − RI − jωLI −
I =0
j ωC
jωC
La relazione precedente risulta verificata per:
V = RI + jωLI +
1
I
jωC
(5.17)
Risolvendo la (5.17) si ottiene il fasore della corrente, moltiplicando per 2 e jωt si
ottiene il fasore rotante. La cui parte immaginaria e la parte reale di tale fasore rotante
rappresentano, rispettivamente, la risposta del circuito agli ingressi:
VM sen (ωt + β) e VM cos(ωt + β)
Si chiamano reattanza induttiva, reattanza capacitiva e impedenza le quantità:
X L = ωL
1
XC =
ωC
(5.18)
(5.19)
1
= R + j( X L − X C ) = R ± jX
(5.20)
ωC
In dicando con Z il modulo dell'impedenza e con ϕ l'argomento, valgono inoltre le
seguenti relazioni:
Z = R + j ωL −
Z = R 2 + X2
±X
ϕ = arctg
R
R = Z cosϕ
X = Z sen ϕ
(5.21)
(5.22)
(5.23)
(5.23)
Con le posizioni fatte la (5.17) diviene:
V = ZI = ZIe ± jϕ
(5.24)
da cui si deduce che l'argomento dell'impedenza rappresenta lo sfasamento tra tensione e
corrente.
5.6 Bipoli elementari
Vengono ora riportate le relazioni costitutive e i diagrammi fasoriali relativi per bipoli
elementari costituiti da un solo resistore, un solo induttore, un solo condensatore, resistore
e induttore collegati in serie, resistore e condensatore collegati in serie.
5.6.1 Bipolo resitivo
La caduta di tensione ai terminali di un bipolo costituito da una sola resistenza R
percorsa dalla corrente i(t) = IMsenωt risulta: v(t) = Ri(t) = RIMC = VMsenωt. In termini
fasoriali risulta:
126
Cap. 5 Circuiti in regime sinusoidale
V = RI
(5.25)
Il bipolo resistivo, detto anche ohmico, e il corrispondente diagramma fasoriale sono
riportati in fig.5.6. Tale figura mostra che per il bipolo resistivo corrente e tensione
risultano in fase.
I
V
R
V
I
Fig. 5.6 Bipolo resistivo e diagramma fasoriale
5.6.2 Bipolo induttivo
Per il bipolo induttivo si ha:
v( t ) = LDi( t ) = ωLI M sen ωt +
π
2
a cui, in termini fasoriali, corrisponde la relazione:
V = jωLI = jX L I
(5.26)
Il bipolo induttivo e il corrispondente diagramma fasoriale sono rappresentati in
fig.5.7. Dalla (5.26) e dal diagramma fasoriale si deduce che la tensione risulta sfasata in
anticipo di π/2 rispetto alla corrente.
I
V
V
jωL
Fig. 5.7 Bipolo induttivo e diagramma fasoriale
I
5.6.3 Bipolo capacitivo
In questo caso risulta:
v( t ) =
1
1
π
i( t ) =
I M sen ωt −
CD
ωC
2
In termini fasoriali:
V = −j
1
I = − jX C I
ωC
(5.27)
Dalla (5.27) e dal diagramma fasoriale di fig. 5.8 si nota che la tensione risulta π/2 in
ritardo rispetto alla corrente.
V
I
−j
I
1
ωC
V
Fig. 5.8 Bipolo capacitivo e relativo diagramma fasoriale
127
Cap.5 Circuiti in regime sinusoidale
5.6.4 Bipolo ohmico-induttivo
Operando con i fasori l'equazione di equilibrio risulta:
V = ( R + jωL)I = ( R + jX L )I = ZI = Ze jϕ I
in cui:
Z = R 2 + X 2L
ϕ = arctg
(5.28)
XL
R
(5.29)
Il circuito e il relativo diagramma fasoriale sono riportati in fig. 5.9
R
V
V
jωL
I
jX L I
ϕ
I
RI
Fig.5.9 Bipolo ohmico-induttivo e diagramma fasoriale
Si osserva che per il bipolo considerato la tensione risulta sfasata in anticipo sulla
corrente di un angolo ϕ pari all'argomento dell'impedenza.
Alle quantità:
Va = V cosϕ = RI
Vr = V sen ϕ = X L I
(5.30)
si da nome di componente attiva e componente reattiva della tensione.
5.6.5 Bipolo ohmico-capacitivo
Operando come in precedenza si ha:
1
V= R− j
I = ( R − jX C )I = ZI = Ze − jϕ I
ωC
(5.31)
con:
XC
R
In fig.5.10 sono riportati il circuito ohmico-capacitivo e il rispettivo diagramma
fasoriale.
Z = R 2 + X 2C
ϕ = arctg
R
V
1
−j
ωC
I
RI
ϕ
I
− jX C I
V
Fig.5.10 Circuito ohmico-capacitivo e diagramma fasoriale
Per il circuito considerato la tensione risulta sfasata in ritardo rispetto alla corrente.
5.7 Definizione di ammettenza, conduttanza, suscettanza
Si definisce ammettenza Y quell'operatore complesso dato da:
Y=
1
1
R
=
= 2
Z R ± jX Z
j
X
=G
Z2
jB = G 2 + B2 e
jϕ
= Ye
jϕ
(5.32)
128
Cap. 5 Circuiti in regime sinusoidale
le quantità G e B sono rispettivamente la conduttanza e la suscettanza. Si ha inoltre:
R
G= 2
Z
ωL
(5.33)
BL = 2
Z
1
BC =
ωCZ 2
Si può osservare che l'argomento dell'ammettenza è dato da quello dell'impedenza
cambiato di segno.
I
V
Ia
jBL
Ir
Ia=G V
G
V
Ir= − jB L V
I = YV
Fig.5.9 Circuito ohmico-induttivo parallelo con relativo diagramma fasoriale
Per il circuito RL di fig.5.9 per il quale sia assegnata la tensione si ha:
V
= V( G − jB) = I a − jI r
(5.34)
I=
R + jX
La (5.34) è l'equazione che si ottiene applicando il I principio di Kirchhoff ad un
circuito costituito da due rami in parallelo come mostrato in fig. 5.9. Il passaggio
dall'impedenza all'ammettenza consente quindi di passare dalla rappresentazione serie alla
rappresentazione parallelo del circuito. Ia e Ir sono le componenti attiva e reattiva della
corrente
5.8 Circuiti mutuamente accoppiati
Anche per i circuiti mutuamente accoppiati si può applicare il metodo fasoriale
semplicemente sostituendo l'operatore D con jω. A titolo di esempio si consideri il circuito
di fig.5.10. per il quale risulta:
V1 = ( R 1 + jωL1 )I 1 + jωMI 2
(5.35)
V2 = jωMI 1 + ( R 2 + jωL 2 )I 2
j
R1
V1
jωL
I1
jωMI2
V1
R2
jωM
jωL2
I2
V2
jωL1I1
jωMI1
V2
reale
R1I1
jωL2I2
R2I2
I2
Fig. 5.10 Circuiti mutuamente accoppiati e relativo diagramma fasoriale
I1
129
Cap.5 Circuiti in regime sinusoidale
Si può tracciare il diagramma fasoriale relativo alle (5.35) supponendo che le tensioni
applicate e le conseguenti correnti risultino:
v 1 ( t ) = VM1 sen(ωt + α 1 )
i 1 ( t ) = I M1 sen(ωt + α 1 − ϕ 1 )
v 2 ( t ) = VM 2 sen(ωt + α 2 )
i 2 ( t ) = I M 2 sen(ωt + α 2 − ϕ 2 )
5.9 Potenza ed energia
Sia assegnato un bipolo passivo per il quale risulti:
v( t ) = VM sen( ωt + ϕ )
i( t ) = I M sen ωt
si definisce potenza istantanea la quantità:
p( t ) = v ( t ) i( t )
(5.36)
Sostituendo le espressioni di v(t) e i(t) si ha:
[
p( t ) = VM I M sen ωt sen( ωt + ϕ ) = VI cos ϕ − cos( 2ωt + ϕ)
]
(5.37)
La relazione (5.37) mostra che la potenza istantanea, il cui andamento è rappresentato
in fig. 5.11, oscilla intorno ad un valore medio VIcosϕ , in cui V ed I sono i valori efficaci
di tensione e corrente, con pulsazione doppia rispetto a quella della tensione di
alimentazione.
La fig.5.11 evidenzia inoltre alcuni intervalli di tempo in cui la potenza è positiva,
ossia fluisce dal generatore verso l'utilizzatore, altri in cui essa è negativa e pertanto fluisce
in senso contrario. Per chiarire questo fenomeno si sviluppa ulteriormente la (5.37). Si ha:
p( t ) = VI[cos ϕ − cos ϕ cos 2ωt + sen ϕ sen 2ωt ] = VI cos ϕ(1 − cos 2ωt ) + VI sen ϕ sen 2ωt
La quantità:
p a ( t ) = VI cos ϕ(1 − cos 2ωt )
(5.38)
è sempre positiva ed è detta potenza attiva istantanea.
La relazione:
p r ( t ) = VI sen ϕ sen 2ωt
(5.39)
rappresenta la potenza reattiva istantanea.
p(t)
v(t)
i(t)
p(t)
VI cosϕ
t
Fig. 5.11 Andamento della potenza istantanea p(t)
130
Cap. 5 Circuiti in regime sinusoidale
p(t)
p(t)
pa(t)
VI cosϕ
t
pr(t)
Fig.5.12 Andamento di potenza attiva e reattiva istantanea
. La potenza istantanea è quindi data dalla somma di potenza attiva e potenza reattiva
istantanea. Gli andamenti di potenza attiva e reattiva istantanea sono riportati in fig. 5.12
Tenendo conto della prima delle (5.30) la (5.38) diviene anche:
p a ( t ) = RI 2 (1 − cos 2ωt ) = RI 2M sen 2 ωt = Ri 2 ( t )
(5.40)
da cui si deduce che la potenza attiva istantanea è una potenza che viene dissipata nella
parte resistiva del circuito, ed quindi ovvio che essa sia sempre positiva, ossia che fluisca
sempre nella direzione generatore-utilizzatore.
La potenza reattiva istantanea è invece una potenza a valore medio nullo e risulta
quindi una potenza di scambio tra generatore e utilizzatore. Per comprendere meglio la
natura di questo scambio si ricorre ad un esempio. Si consideri un bipolo RLC serie per il
quale si ha:
v( t ) = Ri( t ) + LDi( t ) + v C ( t )
moltiplicando per i(t) si ottiene la potenza istantanea data da:
p( t ) = v( t )i( t ) = Ri 2 ( t ) + Li( t ) Di( t ) + v C ( t )i( t )
Per quanto detto in precedenza risulta:
p r ( t ) = p( t ) − p a ( t ) = p( t ) − Ri 2 ( t ) = Li( t ) Di( t ) + v C ( t ) i( t )
e poiché i(t)=CDvC(t) si ha:
p r ( t ) = Li( t ) Di( t ) + v C ( t )CDv C ( t ) = D
1 2
1
Li ( t ) + Cv C2 ( t ) = D w L ( t ) + w C ( t ) = Dw LC ( t )
2
2
[
]
La potenza reattiva istantanea risulta quindi la derivata delle energie immagazzinate
nei campi elettrici e magnetici.
Per il bipolo considerato assumendo:
I
π
con VCM = M
i( t ) = I M sen ωt risulta: v C ( t ) = VCM sen ωt −
2
ωC
l'energia immagazzinata nei campi elettrici e magnetici vale:
1 2
1
π
2
LI M sen 2 ωt + CVCM
sen 2 ωt −
=
2
2
2
1 2
1
1
1
LI (1 − cos 2ωt ) + CVC2 (1 + cos 2ωt ) = ( LI 2 + CVC2 ) − ( LI 2 − CVC2 ) cos 2ωt
2
2
2
2
w LC ( t ) = w L ( t ) + w C ( t ) =
131
Cap.5 Circuiti in regime sinusoidale
wLC(t)
wLC
(t)
LI2
1
( LI 2 + CV 2 )
2
CV2
wL(t
)
wC(t)
t
Fig.5.13Andamento delle energie per un circuito RLC serie
L'andamento dell'energia è riportato in fig.5.13. Dalla figura si rileva che l'energia è
costituita da un termine costante, pari al minore tra CV2 e LI2, che rimane
permanentemente immagazzinato nei campi elettrici e magnetici, e può essere scambiata
tra i campi stessi, e un termine variabile che partecipa agli scambi energetici con il
generatore. La parte di energia che non partecipa allo scambio con il generatore è
immagazzinata nei campi all'atto della loro formazione e viene restituita quando essi si
estinguono.
Per la potenza reattiva si ha:
p r ( t ) = Dw LC ( t ) = ( LI 2 − CV 2 )ω sen 2ωt = ωL −
1 2
I sen 2ωt = ( X L − X C )I 2 sen 2ωt = XI 2 sen 2ωt
ωC
Tenendo conto della seconda delle (5.30) si ottiene la (5.39).
Si definisce potenza attiva P il valore medio della potenza attiva istantanea,
coincidente con il valore medio della potenza istantanea. Si definisce potenza reattiva Q il
valore massimo della potenza reattiva istantanea. Si ha:
T
T
1
1
P=
p( t ) dt =
p ( t )dt = VI cosϕ = RI 2 = GV 2
T0
T0 a
Q = Max{p r ( t )} = VI sen ϕ = XI 2 = BV 2
(5.41)
(5.42)
Pur essendo dimensionalmente uguali la P e la Q hanno significato fisico diverso. Si
tiene conto di questo fatto utilizzando unità di misura diverse e precisamente il W (watt)
per la potenza attiva il VAR (volt-ampere reattivi) per quella reattiva. Si osservi inoltre
che, in base alle assunzioni iniziali relative a tensione e corrente, risulta:
ϕ > 0 e quindi Q >0 per carichi ohmici-induttivi
ϕ < 0 e quindi Q <0 per carichi ohmici-capacitivi
Si definisce inoltre, ed è questa una pura definizione matematica priva di significato
fisico, la potenza apparente S, unità di misura VA (volt-ampere), mediante la relazione:
S = P 2 + Q 2 = VI = ZI 2 = YV 2
con:
(5.43)
E' una definizione matematica anche la potenza apparente complessa S . Indicando
V = Ve jβ
I = Ie jα
I * = Ie − jα
ϕ =β−α
132
Cap. 5 Circuiti in regime sinusoidale
S = VI * = VIe j(β −α ) = VI cos ϕ + jVI sen ϕ = P + jQ
(5.44)
valgono quindi le relazioni:
P = Re{S}
Q = Im{S}
S= S
(5.45)
In fig.5.14 sono rappresentati i triangoli delle potenze relativi a carichi ohmiciinduttivi e ohmici-capacitivi.
V
S
P
ϕ
Q
ϕ
S
I
Q
I
P
a)
V
b)
Fig.5.14 Triangolo delle potenze per carichi ohmici-induttivi a) e ohmici-capacitivi b)
5.10 Potenza ed energia nei circuiti magneticamente accoppiati
Si considerino i due circuiti mutuamente accoppiati di fig.5.10. Le potenze relative a
ciacun circuito possono essere determinate mediante le relazioni:
S1 = V1I 1* = P1 + jQ1 = ( R 1 + jωL1 )I 1I 1* + jωMI 2 I 1*
S 2 = V2 I *2 = P2 + jQ 2 = jωMI 1I *2 + ( R 2 + jωL 2 )I 1I *2
(5.46)
I 1 = I 1e jα1
(5.47)
ponendo:
si ha:
I 1* = I 1e − jα1
I 2 = I 2 e jα 2
I *2 = I 2 e − jα 2
− j α −α
S1 = R 1I 12 + jωL1I 12 + jωMI 1I 2 e ( 1 2 )
j α −α
S = R I 2 + jωL I 2 + jωMI I e ( 1 2 )
2
2 2
2 2
1 2
da cui sviluppando si ottiene:
P1 = R 1I 12 + ωMI 1I 2 sen(α 1 − α 2 )
P2 = R 2 I 22 − ωMI 1I 2 sen(α 1 − α 2 )
Q1 = ωL1I 12 + ωMI 1I 2 cos(α 1 − α 2 )
(5.48)
Q 2 = ωL 2 I 22 + ωMI 1I 2 cos(α 1 − α 2 )
Sommando le potenze attive e reattive si ha:
P = P1 + P2 = R 1I 12 + R 2 I 22
Q = Q1 + Q 2 = ωL1I 12 + ωL 2 I 22 + 2ωMI 1I 2 cos(α 1 − α 2 )
(5.49)
Le (5.49) dimostrano che la potenza attiva complessivamente dissipata nel circuito è
pari alla somma delle potenze dissipate nelle singole resistenze. Le (5.48) dimostrano
tuttavia che attraverso l'accoppiamento induttivo c'è trasferimento di potenza da un circuito
133
Cap.5 Circuiti in regime sinusoidale
all'altro. La presenza dell'accoppiamento induttivo varia inoltre la potenza reattiva di una
quantità pari a 2ωMI1I 2 cos(α1 − α 2 ) .
Per l'energia istantanea si ha:
1
1
1
1
L1i12 + L 2 i 22 + Mi 1i 2 = L1I 2M1 sen 2 (ωt + α 1 ) + L 2 I 2M 2 sen 2 (ωt + α 2 ) +
2
2
2
2
1
1
2
MI M1I M 2 sen(ωt + α 1 ) sen(ωt + α 2 ) = L1I 1 1 − cos(2ωt + α 1 ) + L 2 I 22 1 − cos(2ωt + α 2 ) +
2
2
w(t) =
[
[
]
[
]
]
+ MI 1I 2 cos(α 1 − α 2 ) − cos(2ωt + α 1 + α 2 )
(5.50)
L'energia media vale:
T
1
1
1
w ( t )dt = L1I12 + L 2 I 22 + MI1I 2 cos(α 1 − α 2 )
Wm =
2
2
T0
(5.51)
5.11 Il teorema di Boucherot
Il teorema di Boucherot afferma che in un circuito operante in regime sinusoidale la
somma delle potenze apparenti complesse relative a tutti i rami è nulla. Ciò equivale a dire
che la somma delle potenze reattive e quella delle potenze reattive è nulla.
La dimostrazione del teorema è del tutto simile a quella di Tellegen. Risulta:
1
ST =
2
1
=
2
n
j=1 k =1
n
n
j=1
n
Vj0
k =1
Vjk I *jk
I *jk
1
=
2
n
n
j=1 k =1
n
1
+
V
2 k =1 k 0
(V
n
j=1
j0
−
)
Vk 0 I *jk
1
=
2
n
n
j=1
Vj0
k =1
I *jk
n
1
−
V
2 k =1 k 0
n
j=1
I *jk =
(5.52)
I *kj
essendo:
n
k =1
I *jk = 0 e
n
j=1
I *kj = 0 per il I principio di Kirchhoff applicato ai generici nodi j e k.
In dicando con Vk e I k i fasori della tensione e della corrente per il k-mo ramo, e
supponendo la corrente diretta nel verso dei potenziali decrescenti, la (5.52) può anche
essere scritta come:
n
ST =
k =1
Vk I *k = 0
(5.53)
e poiché per il generico ramo si può scrivere:
Vk = E k − Z k I k
(5.54)
sostituendo nella (5.53) si ha:
n
ST =
ponendo :
k =1
( E k − Z k I k )I *k =
n
k =1
E k I *k −
n
k =1
Z k I k I *k
(5.55)
134
Cap. 5 Circuiti in regime sinusoidale
{
PGk = Re E k I *k
}
{
Q Gk = Im E k I *k
}
(5.56)
le potenze attive e reattive relative ai generatori si ha:
n
k =1
n
k =1
n
PGk =
Q Gk =
k =1
n
R K I 2k
(5.57)
X K I 2k
(5.58)
k =1
Le (5.56) e (5.57) indicano che nel circuito la somma delle potenze attive dei
generatori è pari alla somma delle potenze dissipate nelle resistenze, la somma delle
potenze reattive relative ai generatori è pari alla somma (algebrica per le ipotesi fatte
relativamente alle potenze reattive di induttori e condensatori) delle potenze reattive dei
carichi. Questo teorema esprime quindi gli stessi risultati del teorema di Tellegen per
circuiti operanti a regime sinusoidale.
5.12 Il rifasamento
Si chiama rifasamento l'operazione mediante la quale viene ridotto, addirittura
annullato nel caso di rifasamento totale, l'angolo tra la tensione e le corrente. Poiché nella
totalità dei casi i carichi risultano ohmici-induttivi, il rifasamento viene attuato mediante
condensatori.
R1
X1
V1
IC
I1
I
IC
X
R
P
V
ϕR
V
I1
ϕ
Fig.5.15 Circuito rifasato e diagramma fasoriale relativo
I
Si consideri il circuito di fig.5.15 in cui una linea di resistenza R1 e reattanza X1
alimenta un carico rappresentato da una impedenza equivalente costituita da una resistenza
R ed una reattanza induttiva X. Prima di effettuare il rifasamento, ossia con interruttore
aperto, la corrente I che percorre la linea è la stessa che attraversa il carico e risulta sfasata
in ritardo dell'angolo ϕ = arctgX/R rispetto alla tensione V. Chiudendo l'interruttore, e
quindi inserendo il condensatore in parallelo al carico, la corrente nel carico, ipotizzando la
costanza di V, non cambia mentre la corrente in linea diminuisce passando da I a I1. Tale
corrente presenta la stessa componente attiva di I ma componente reattiva ridotta.
Lo scopo del rifasamento è quindi quello di ridurre il valore della corrente che circola
in linea, fermo restando il valore della corrente nel carico (a parità di V). Il funzionamento
del carico non risulta quindi mutato per effetto dell'inserimento del condensatore (in realtà,
poiché ciò che è costante è la tensione V1 all'inizio della linea, inserendo il condensatore
varierà, sia pure di poco, V e quindi anche I).
I vantaggi che discendono dalla diminuzione della corrente in linea sono i seguenti:
1. diminuisce la perdita per effetto joule nella resistenza di linea R1I12. Osserviamo che è a
spese dell'utente l'energia segnata dai contatori, che sono posti a monte del carico, non
fa parte di tale energia quella dissipata in linea. L'ente distributore dell'energia
135
Cap.5 Circuiti in regime sinusoidale
trovandosi a dover produrre oltre all'energia richiesta dagli utenti anche quella dispersa
in linea, e che non viene né pagata né utilizzata da nessuno, impone all'utente stesso, al
fine di minimizzare corrente e perdite, di lavorare con un cosϕ minimo pari a 0,9.
2. diminuisce la caduta di tensione in linea e dunque a parità di V può essere minore V1.
3. diminuisce la corrente richiesta al generatore che può quindi essere utilizzato anche per
alimentare altri utilizzatori.
Vogliamo ora determinare il valore della capacità idoneo a determinare il rifasamento
voluto. Ci sono vari modi di procedere:
5.12.1 Con le ammettenze
−B
X
= − arctg = − ϕ
G
R
L'ammettenza equivalente del complesso carico-condensatore, con interruttore chiuso,
e lo sfasamento tra corrente di linea I1 e tensione V risultano:
Per il carico si ha Z = R + jX Y = G − jB
ϕ * = arctg
ϕ *R = − arctg
Y ' = G − jB + jωC
B − ωC
= −ϕ R
G
Per la capacità si ha:
C=
B + Gtgϕ *R B − Gtgϕ R
=
ω
ω
(5.59)
Per rifasamento completo, ϕR = 0, si ha:
C=
B
L
= 2
ω Z
(5.60)
5.12.2 Con le correnti
Dal grafico di fig.5.15 , posto:
I a = I cos ϕ = I 1 cos ϕ R
risulta:
I C = I a ( tgϕ − tgϕ R )
e poiché e anche: I C = ωCV uguagliando le due espressioni si trova:
C=
I a ( tgϕ − tgϕ R )
ωV
(5.61)
5.12.3 Con le potenze
Per il teorema di Boucherot risulta:
Q C = Q − Q R = P(tgϕ − tgϕ R ) = ωCV 2
da cui:
C=
P( tgϕ − tgϕ R )
ωV 2
(5.62)
è immediato verificare che la capacità calcolata con le (5.61) e (5.62) è uguale a quella
calcolata con la (5.59). Per la (5.62) si ha:
136
Cap. 5 Circuiti in regime sinusoidale
GV 2
C=
B
− tgϕ R
B − Gtgϕ R
G
=
2
ω
ωV
(5.63)
5.12.4 Il significato energetico del rifasamento
Si è in precedenza osservato come la potenza reattiva costituisca una potenza di
scambio tra generatore e utilizzatore e si è anche mostrato che la potenza reattiva è la
derivata dell'energia immagazzinata nei campi elettrici e magnetici. Un esempio relativo ad
un circuito RLC serie ha anche mostrato come esista un livello di energia costante,
immagazzinato nei campi al momento della loro formazione, e che viene scambiato tra
campo elettrico e campo magnetico, al quale si sovrappone, nel caso che i valori massimi
delle due energie siano diversi, una energia che viene invece scambiata con il generatore. E'
semplice verificare che un fenomeno analogo avviene anche per i circuiti parallelo. Il
carico di fig.5.15 può essere sostituito infatti con un altro avente tre rami in parallelo, uno
di resistenza R'=1/G, uno di induttanza L' = Z2/ωX =1/ωB ed uno di capacità C. Indicando
con v(t)=VMsenωt la tensione applicata risulta:
π
1
1
w LC ( t ) = w L ( t ) + w C ( t ) = CVM2 sen 2 ωt + L' I 2M sen 2 ωt −
=
2
2
2
B 2 1 2
B
1
1
1B 2
CV 2 (1 − cos 2ωt ) +
V (1 + cos 2ωt ) =
C+
V − V C−
cos 2ωt
ω
ω
2
2ω
2
2
La potenza reattiva risulta:
p r ( t ) = Dw LC ( t ) = V 2 ( ωC − B) cos 2ωt
da cui si deduce che per ωC = B ossia nel caso di rifasamento totale la potenza scambiata
tra generatore e carico risulta nulla. Permangono invece come dimostra l'espressione di wLC
gli scambi tra campo elettrico e magnetico. Anche per rifasamento parziale l'introduzione
del condensatore riduci gli scambi energetici tra generatore e utilizzatore.
CAPITOLO 6
6.1 La trasformata unilatera di Laplace (t.d.L.)
La trasformata di Laplace è una tecnica mediante la quale si trasforma un problema dal
dominio della variabile tempo t a quello della variabile complessa s. Risolto il problema
nel dominio di s di torna a quello di t mediante l' operazione di antitrasformazione. Il
vantaggio che si ottiene è quello di risolvere, nel dominio di s, equazioni algebriche
anziché integro-differenziali come nel dominio di t.
L[ f(t)]
F(s)
f(t)
L -1 [ f ( t ) ]
Fig. 6.1 Trasformazione e antitrasformazione secondo Laplace
Detta f ( t ) la funzione da trasformare secondo Laplace (L-trasformazione) si ha:
L[f(t)]=F(s)
(6.1)
in cui F( s ) è una funzione complessa della variabile complessa s = σ + j ω.
L' operazione di L-Trasformazione è definita dalla relazione:
F(s) = L[ f(t)] =
∞
0
f ( t )e − st dt
(6.2)
La t.d.L. può essere calcolata per quelle funzioni per le quali l'integrale (6.2) converge;
perché ciò accada la f( t ) deve essere di tipo esponenziale, ossia deve esistere un σ > 0 tale
che:
lim f ( t ) e − σt = 0
t →∞
138
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
2
La funzione e t non è trasformabile perché non è esponenziale. La funzione e at è
invece trasformabile, infatti l'integrale converge per tutti i valori di s per cui
Re( s ) > a
in questo caso a è detta ascissa di convergenza.
Se σ∗ è l'ascissa di convergenza, si dimostra che l'integrale (6.2) converge per tutti
gli s per cui:
Re( s ) > σ∗ (1)
(6.3)
Esempio 6.1
Si voglia determinare la t.d.L. della funzione f( t ) = e at . Si ha:
F(s) =
∞
0
f ( t )e − st dt =
∞
0
e at e − st dt =
∞
0
e − ( s− a ) t dt =
1
( s − a)
Il denominatore di F( s ) si annulla per s = a; a è dunque una singolarità del denominatore
ed è facile verificare che è anche l'ascissa di convergenza.
L’ ascissa di convergenza coincide con la parte reale della singolarità di F( s ) più a
destra sul piano di Gauss.
Si osservi che essendo 0 l'estremo di integrazione inferiore nella (6.2), funzioni aventi
andamenti diversi prima di t = 0 ma uguali dopo tale istante, come illustrato in fig. 6.2,
hanno la stessa t.d.L.
f( t )
0
f( t )
t
0
f( t )
t
0
t
Fig. 6.2 Esempio di funzioni aventi la stessa t.d.L.
Nell'operazione di L-trasformazione possono essere considerate funzioni definite a
partire da t = 0, questo risultato può essere ottenuto moltiplicando la funzione da Ltrasformare per u(t).
Nel caso in cui si debba eseguire la trasformata di Laplace della funzione impulsiva
δ(t), come estremo inferiore deve essere assunto 0- poiché la funzione è definita
nell'intervallo 0-,0+.
Esempio 6.2
Si voglia eseguire la trasformata di Laplace della funzione impulsiva δ(t) definita nell'
Appendice A.
Dalla definizione di t.d.L. si ha:
(1)
Si potrebbe pensare che F(s) sia definita solo nella regione di convergenza, in realtà essa e' definita in tutto
il piano di s eccetto le singolarità del denominatore (prolungamento analitico).
139
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
0+
L[δ( t ) ] =
0
−
δ( t ) e − st dt =
0+
0−
δ( t ) dt = 1
Per la proprietà di campionamento della δ(t), con questa operazione si estrae il valore di
e −st per t = 0, ossia 1.
Esempio 6.3
Calcolare la t.d.L. della funzione a gradino unitario u(t). si ha:
L[ u( t ) ] =
0+
∞
0
u( t ) e − st dt =
−
0
−
u( t ) e − st dt +
∞
0
+
u( t ) e − st dt =
risulta infatti:
1
s
0+
u( t ) e − st dt = 0
In questo caso è indifferente considerare 0- o 0+ come estremo di integrazione inferiore
nella (6.2).
0−
6.2 Proprietà della trasformata di Laplace
6.2.1 Linearità
[
]
[
]
[
]
L c 1 f 1 ( t ) + c 2 f 2 ( t ) = c 1 L f 1 ( t ) + c 2 L f 2 ( t ) = c 1 F1 ( s) + c 2 F2 ( s)
(6.4)
Questa proprietà discende dalla proprietà di linearità dell'operazione di
integrazione. Dalla definizione di t.d.L. si ha infatti:
[
]
L c1 f1 ( t ) + c 2 f 2 ( t ) =
∞
0
[c f ( t ) + c
1 1
]
f ( t ) e − st dt = c 1
2 2
∞
0
e − st f1 ( t ) dt + c 2
∞
0
e − st f 2 ( t ) dt =
= c 1 F1 ( s) + c 2 F2 ( s)
6.2.2 Differenziazione
L
df(t)
= sF( s) − f ( 0)
dt
(6.5)
Infatti:
L
df(t)
=
dt
∞
0
df(t) −st
e dt = f (t )e −st
dt
∞
0
+s
∞
0
f (t )e −st dt = −f (0 ) + sF(s)
Per la derivata seconda si ha:
L
Ponendo: g( t ) =
df ( t )
dt
si ha: L
G( s) = L[g( t ) ] = L
Sostituendo si ha:
d 2 f ( t)
= s 2 F( s) − sf ( 0) − f ' ( 0)
dt 2
(6.6)
d g(t)
= sG( s) − g( 0) in cui:
dt
df ( t )
= sF( s) − f ( 0)
dt
g( 0) =
df ( t )
dt
= f ' ( 0)
t =0
140
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
dg( t )
d 2 f ( t)
L
=L
= s 2 F( s) − sf ( 0) − f ' ( 0)
2
dt
dt
Per la derivata di ordine n si ha:
L
d n f ( t)
= s n F( s) − s n −1 f ( 0) − s n − 2 f ' ( 0).........− f ( n −1) ( 0)
dt n
(6.7)
6.2.3 Integrazione
[
L
Si ha infatti:
[
t
L
0
] [
0
]
f ( t ) dt =
]
F( s)
s
(6.8)
e − st
f ( t ) dt e dt = −
0
s
∞
f ( t ) dt =
t
t
0
− st
t
0
∞
f ( t ) dt
+
0
1
s
∞
0
f ( t ) e − st dt =
F( s)
s
Nel caso in cui l'estremo inferiore di integrazione sia -∞ si ha:
[
L
t
−∞
] [
f ( t ) dt = L
0
−∞
f ( t ) dt +
t
0
]
f ( t ) dt =
1
s
0
f ( t ) dt +
−∞
F( s)
s
(6.9)
6.2.4 Traslazione nel tempo
[
]
L f ( t − t 0 ) u( t − t 0 ) = F(s)e − st 0
(6.10)
Si ha infatti:
[
]
L f ( t − t 0 ) u( t − t 0 ) =
∞
0
[f (t − t )u(t − t )]e
0
0
− st
dt
posto t - t0= x e quindi t = x + t0 e dx = dt risulta:
∞
0
[ f ( t − t )u( t − t )]e
0
0
− st
dt =
∞
−t0
f ( x) u( x)e − st o e − sx dx = e − st o
∞
0
f ( x)e − sx dx = e − st o F( s)
In fig. 6.3 a) e b), rispettivamente, sono riportate una generica funzione f(t) e la stessa
funzione traslata del tempo to .
f(t - t 0 ) u(t - t 0 )
f( t )u(t)
0
t
0
t0
a)
t
b)
Fig. 6.3 Funzione f(t)u(t) a) e funzione f( t-to )u( t-to )
NOTA: Si osservi che alla funzione f(t-to )u(t) non può essere applicata la regola di traslazione nel tempo;
tale regola può invece essere applicata alla funzione f(t-to ) u( t-to )
141
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Esempio 6.4
Si voglia determinare la L-trasformata delle funzioni:
f1 (t ) = e −5 t u (t ) f 2 (t ) = e −5(t − t 0 ) u (t − t 0 ) f 3 (t ) = e −5( t − t 0 ) u ( t )
rappresentate in fig. 6.4
f 3 (t)
f 2 (t)
f 1 (t)
0
t0
t 0
t0
t 0
Fig. 6.4 Esempio 6.4
t
Dall'esempio 6.1 e dalla regola di traslazione nel tempo si ottiene:
F1 ( s) =
1
s+5
e − st 0
s+5
F2 ( s) = e − st 0 F1 ( s) =
F3 ( s) = L[ e 5t 0 e −5t u( t ) ] =
e 5t 0
s+5
6.2.5 Traslazione in s
L[ e − at f ( t ) u( t ) ] = F( s + a )
(6.11)
Si ha infatti:
L[e − at f ( t ) u( t )] =
∞
0
f ( t )e − at e − st dt =
∞
0
f ( t )e − ( a + s) t dt =
∞
0
f ( t )e − s′t dt = F( s ′) = F(s + a )
6.2.6 L-trasformata di funzioni periodiche
Se f(t) è una funzione periodica di periodo T, si ha:
L[ f ( t ) u( t ) ] =
F1 ( s)
1 − e − sT
(6.12)
con: F1 ( s) = L-1[ f1 ( t ) ] e f1( t ) valore di f ( t ) nel primo periodo.
Si consideri ad esempio la funzione periodica rappresentata in fig. 6.5 per la quale si
può scrivere:
f 1 (t ) =
f (t ) per 0≤t ≤T
0 altrove
f (t)
0
t
Fig. 6.5 Funzione periodica di periodo T
Risulta essere:
142
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
F( s) = F1 ( s) + F1 ( s) e − sT + F1 ( s) e −2 sT +....... = F1 ( s)(1 + e −sT + e −2 sT +......) =
F1 ( s)
1 − e −sT
in cui F1(s) è la t.d.L. di f1(t). Il risultato ottenuto è dovuto al fatto che la quantità in
parentesi rappresenta una serie geometrica di ragione e-sT.
Esempio 6.5
Si vuol eseguire la trasformata di Laplace della funzione periodica di fig. 6.5
f (t)
A
0
T
t
Fig. 6.5 Esempio 6.5
La funzione f1( t ) è espressa dalla relazione:
A
A
f 1 ( t ) = tu( t ) − ( t − T) u( t − T) − Au( t − T) da cui:
T
T
A 1
(1 − e −sT ) − 1 A 1
A
A
1
s
sT
F1 ( s) = 2 (1 − e − sT ) −
e F( s) =
=
−
− sT
s
s sT 1 − e − sT
s T
1− e
6.2.7 Cambio di scala
L[ f ( at ) u( t ) ] =
1 s
F
a a
(6.13)
Infatti, posto at = t' e s' = s/a si ha:
L[ f ( at ) u( t ) ] =
∞
0
f ( at ) e − st dt =
∞
0
f ( t ') e
−
st '
a
1
dt ' =
a
∞
0
1
F( s') 1 s
f ( t ') e − s' t ' dt ' =
= F
a
a
a a
6.2.8 Moltiplicazione per t
[
]
L t f ( t ) u( t ) = −
Si ha infatti:
[
]
L t f ( t ) u( t ) =
∞
0
t f ( t ) e − st dt = −
∞
0
dF( s)
ds
(6.14)
d
d
f ( t ) e − st ]dt = −
[
ds
ds
∞
0
f ( t ) e − st dt = −
dF( s)
ds
In generale si ha:
L[ t n f ( t ) u( t ) ] =
e quindi:
∞
0
( − 1) n
n
dn
n d
− st
(
)
(
)
f
t
e
dt
=
−
1
[
]
ds n
ds n
∞
0
f ( t ) e − st dt = ( − 1)
n
d n F( s)
ds n
143
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
L[ t n f ( t ) u( t ) ] = ( − 1)
6.2.9 Convoluzione
[
L[ f ( t )∗ g( t ) ] = L
[
Si ha infatti:
∞
L
=
0
∞
0
] [
f ( τ ) g( t − τ ) dτ =
∞
∞
0
0
f ( τ) e − sτ G (s)dτ =G (s)
∞
0
∞
0
n
d n F( s)
ds n
(6.15)
]
f ( τ ) g( t − τ ) dτ = F( s) G( s)
]
∞
f ( τ ) g( t − τ ) dτ e − st dt =
0
[
f ( τ)
∞
0
(6.16)
]
g( t − τ ) e − st dt dτ =
f ( τ) e − sτ dτ =G( s) F( s) = F( s) G( s)
6.2.10 Teorema del valore iniziale
f ( 0) = lim sF( s)
(6.17)
s→∞
Dalla regola di derivazione si ha infatti:
lim
∞
s→∞ 0
df ( t ) − st
e dt =0 = lim [sF( s) − f ( 0) ] = lim sF( s) − f ( 0)
s→∞
s→∞
dt
6.2.11 Teorema del valore finale
lim f ( t ) = lim sF( s)
t →∞
s→ 0
(6.18)
Risulta infatti:
lim sF( s) = lim
s→ 0
∞
s→ 0 0
df ( t ) − st
e dt + f ( 0) =
dt
∞
0
df ( t )
dt + f ( 0) = lim f ( t )
t →∞
dt
6.3 Antitrasformata di Laplace
L'operazione di antitrasformazione è definita dalla relazione:1
f (t ) = L−1 [F(s )] =
1
2πj
σ + jω
σ − jω
F(s )e st ds
(6.19)
In pratica per eseguire l'operazione di antitrasformazione non si fa uso della (6.19), ma
si scompone F(s) in fratti semplici, ossia in somma di frazioni di cui sono note, perché
tabellate, le antitrasformate. Si ha cioè:
F(s) = F1 ( s) + F2 ( s) +............+ Fn ( s)
Dalla proprietà di linearità si ha poi:
f ( t ) = f1 ( t ) + f 2 ( t ) +............+ f n ( t )
1
L'operazione di antitrasformazione da sempre luogo a funzioni unilatere e quindi del tipo f(t) u(t) o più in
generale f(t - to)u(t - to)
144
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
La funzione da antitrasformare è generalmente disponibile sotto forma di rapporto di
polinomi, ossia:
F( s) =
s m + a 1s m−1 + a 2 s m− 2 +........+ a 0
N( s)
=K n
D( s)
s + b 1s n−1 + b 2 s n− 2 +.........+ b 0
(6.20)
Tale frazione è detta:
- propria se il grado del denominatore è maggiore di quello del numeratore, cioè: n > m;
- non strettamente propria se n = m;
- impropria se n < m.
Negli ultimi due casi si deve procedere preventivamente alla operazione di divisione,
dalla quale si ottiene:
R( s)
(6.21)
F( s) = Q( s) +
D( s)
Esempio 6.6
F( s) =
2s3 + s2 + s + 1
s + 10
= 2s − 3 + 2
2
s + 2s + 3
s + 2s + 3
Antitrasformando si ha:
f ( t) = 2
dδ ( t )
s + 10
− 3δ( t ) + L−1 2
dt
s + 2s + 3
Nell'antitrasformata di funzioni non strettamente proprie compare δ(t), in quella di
funzioni improprie compare δ(t) con le sue derivate.
Si procede ora considerando il caso di funzioni proprie. Chiamando poli le radici di
D(s), possono distinguersi i seguenti casi:
6.3.1 Poli reali e distinti
Indicando p1,p2,........pn i poli si può scrivere:
F( s) =
N( s)
(s − p )(s − p )..........(s − p )
1
2
n
=
n
1
Ki
s − pi
(6.22)
in cui le quantità Ki sono detti residui.
Vale la seguente regola: se N(s) e D(s) sono in forma monica (coefficiente del termine
di grado più elevato uguale a uno) si ha:
K i = 1 se n = m + 1
K i = 0 se n > m + 1
Per determinare l'i-mo residuo si può procedere moltiplicando la F(s) sviluppata in
fratti semplici per (s − p i ) e calcolando il limite per s → pi. Si ha infatti:
(s − p )F( s) = (s − p ) s −Kp + (s − p ) s −Kp
1
i
da cui:
i
2
1
i
2
+.....+ K i +.....+(s − p i )
Kn
s − pn
145
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
K i = lim ( s − p i ) F(s)
(6.23)
s→ p i
Antitrasformando la (6.23) si ha:
n
f ( t) =
1
K i e p i t u( t )
(6.24)
6.3.2 Poli complessi coniugati
Consideriamo il caso che tra le radici di F(s) ci siano i due poli complessi coniugati:
p 1 = σ + jω
p1∗ = σ − jω
e
Procedendo come per i poli reali e distinti, per la parte relativa ai poli complessi
coniugati, si ha:
F( s) =
K1
K 1∗
+
s − p 1 s − p 1∗
(6.25)
con K1 e K 1∗ complessi coniugati poiché F(s) è un polinomio a coefficienti reali. Posto:
K 1 = u + jv = u 2 + v 2 e jϕ = M e jϕ
in cui:
M = u2 + v2
e
ϕ = tg −1
K 1∗ = u − jv = u 2 + v 2 e − jϕ = Me − jϕ
v
u
la (6.25) diviene:
F( s) =
Me jϕ
Me − jϕ
+
s − σ − jω s − σ + jω
Antitrasformando si ha:
f (t ) = Me jϕ e (σ+ jω)t + Me − jϕ e (σ− jω )t = 2Me σt
= 2Me cos(ωt + ϕ)u (t )
e j(ωt +ϕ ) + e − j(ωt +ϕ )
=
2
(6.26)
σt
Si può anche procedere nel seguente modo:
F( s) =
u + jv
u − jv
2 u( s − σ ) − 2 vω
+
=
s − σ − jω s − σ + jω
( s − σ) 2 + ω 2
(6.27)
Ricordando le antitrasformate di senωt, cosωt e la regola di traslazione in s si ha:
f ( t ) = (2 u cos ωt − 2 v sen ωt )e σt u( t ) = 2e σt u 2 + v 2 cos ωt + tg −1
v
u
u( t )
Spesso, per i circuiti del secondo ordine, la F(s) ha la tipica forma:
F( s) =
ω 2n
s2 + 2sξω n + ω 2n
Per ξ < 1 il denominatore ha due radici complesse coniugate e quindi si ha:
(6.28)
146
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
F( s) =
(s + ξω )
ω 2n
(6.29)
+ ω 2n (1 − ξ 2 )
2
n
Antitrasformando si ha:
ωn
f ( t) =
1− ξ
2
(
)
e − ξω n t sen ω n 1 − ξ 2 t u( t )
(6.30)
6.3.3 Poli immaginari
Si possono utilizzare i risultati ottenuti per poli complessi coniugati con σ= 0 e ξ= 0.
Con queste posizioni le (6.26), (6.27), (6.29), (6.30) divengono:
f ( t ) = 2 M cos( ωt + ϕ ) u( t )
F( s) =
2 us + 2 vω
s2 + ω 2
f ( t ) = ω n sen ω n t u( t )
F( s) =
(6.31)
ω n2
s2 + ω n 2
6.3.4 Poli reali multipli
Si consideri il caso in cui la funzione da antitrasformare abbia il polo p α multiplo di
molteplicità q, cioè che sia del tipo:
F( s) =
N( s)
(6.32)
(s − p )(s − p )....(s − p ) ....(s − p )
q
1
α
2
n
La scomposizione in fratti semplici è ora del tipo:
F( s) =
K1
K2
+
( s − p ) (s − p )
1
2
+....+
K αq
+
K α ( q −1)
(s − p ) (s − p )
q
α
q −1
+....+
K α1
(s − p )
+....+
α
α
Kn
(s − p )
n
Per calcolare K αq si moltiplica per (s − p) e si fa tendere s → p α . Si ha:
α
F( s)(s − p α ) =
q
K 1 (s − p α )
(s − p )
q
+....+ K αq + K α ( q −1) (s − p α )+....+ K α1 (s − p α )
q −1
+....+
K n (s − p α )
q
(s − p )
n
1
Facendo tendere s → p α si ottiene:
[
K αq = lim F( s)( s − p α )
s→ p α
q
]
Derivando successivamente, rispetto ad s, l'espressione F( s)(s − p α ) e valutando per s
q
= p α , si ha:
[
d
q
K α ,( q −1) =
F( s)( s − p α )
ds
]
s= p α
[
1 d (i)
q
K α ,( q − i ) =
F(s)( s − p α )
(
)
i
i ! ds
]
s= p α
147
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
K α ,1
1
d ( q −1)
q
= K α[q −( q −1) ] =
F(s)( s − p α )
q −1)
(
(q − 1)! ds
[
]
s= p α
Considerando che 0! = 1 e che eseguire la derivata di ordine zero significa non
derivare, si può scrivere:
K α ,( q − i ) =
[
1 d ( i)
q
( i ) F(s)( s − p α )
i! ds
]
(6.33)
s= p α
i = 0, 1, ......., q -1
Antitrasformando si ottiene:
f ( t ) = K 1e
p1t +
+
K αq t ( q −1)
(q − 1)!
+
K αq −1 t ( q − 2 )
( q − 2 )!
+....+ K α 2 t + K α1 e pα t +....+ K n e
pnt
u( t ) (6.34)
Esempio 6.7
Come applicazione di quanto affermato per il caso di poli reali multipli si consideri la
seguente operazione di antitrasformazione:
K 2 ,3
K 2 ,2
K 2 ,1
K1
1
F( s) =
+
3 =
3 +
2 +
( s + 1)( s + 2) ( s + 1) ( s + 2) ( s + 2) ( s + 2)
Per le costanti si ha:
1
1
K1 =
=1
K 2 ,3 =
= −1
3
( s + 1) s=−2
( s + 2) s=−1
d
1
ds s + 1
Si può quindi scrivere:
K 2,2 =
= −1
s=−2
K 2 ,1 =
1 d2
1
2
2 ! ds s + 1
= −1
s=−2
1
1
1
1
−
3 −
2 −
( s + 1) ( s + 2) ( s + 2) ( s + 2)
Antitrasformando si ottiene:
F( s) =
f ( t) = e
−t
t2
−
+ t + 1 e − 2 t u( t )
2!
6.3.5 Poli complessi coniugati multipli
Procedendo come illustrato al punto precedente si ha:
f (t) =
2 t ( q −1)
M q cos ωt + ϕ q +.....+2 t M 2 cos(ωt + ϕ 2 ) + 2 M 1 cos(ωt + ϕ 1 ) e σt u( t )
q
−
1
!
( )
(
)
(6.35)
6.3.6 Poli immaginari multipli
Ponendo σ = 0 nella (6.35) si ha:
f ( t) =
2t ( q −1)
(q − 1)!
(
)
M q cos ωt + ϕ q +.....+2 t M 2 cos(ωt + ϕ 2 ) + 2M1 cos(ωt + ϕ1 ) u( t )
(6.36)
148
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
TAB.6.1 PROPRIETÀ DELLA TRASFORMATA DI
LAPLACE
PROPRIETÀ
DOMINIO di t
DOMINIO di s
Linearità
Cambio di scala
a 1 f1 ( t ) + a 2 f 2 ( t )
a 1 F1 ( s) + a 2 F2 ( s)
t
a
aF( as) a > 0
Traslazione in t
f (t − t 0 )
f
e − at f ( t )
Traslazione in s
Derivazione
d n f ( t)
ds n
Integrazione
t
−∞
F(s+a)
s n F( s) − s n −1 f ( 0) − s n − 2 f (1) ( 0) −....− f ( n −1) ( 0)
F( s) 1
+
s
s
f ( t ) dt
t n f ( t)
Moltiplicazione per
t
( − 1) n
f ( t)
t
Divisione per t
Convoluzione in t
e − st 0 F( s)
∞
0
Teorema del valore iniziale
Trasformata di Laplace
Antitrasformata di Laplace
s
f ( τ) g( t − τ) dτ
Convoluzione in s
Teorema del valore finale
∞
f(t)g(t)
0
−∞
f ( t ) dt
d n F( s)
ds n
F( s) ds
F(s)G(s)
1
2πj
σ + jω
σ − jω
F( σ ) G( s − σ ) dσ
f ( 0) = lim f ( t ) = lim sF( s)
t→0
s→∞
lim f ( t ) = lim sF( s)
t →∞
s→ 0
F( s) =
f ( t) =
1
2πj
∞
0
f ( t ) e − st dt
σ + jω
σ − jω
F( s) e st ds
149
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
TAB. 6.2 TRASFORMATE DI LAPLACE
f (t)
F(s)
u(t)
1
s
1
n!
δ(t)
tnu(t)
s n +1
1
s+a
1
e-atu(t)
t n −1 − at
e u(t)
( n − 1)
( s + a) n
(1− e − at )u( t )
a
s( s + a )
1
e − at − e − bt
u( t )
b−a
( s + a )( s + b)
be − at − ae − bt
u( t )
b−a
( s + a )( s + b)
s
ω
s + ω2
s
2
s + ω2
ω
senωt u(t)
2
cosωt u(t)
e-at senωt u(t)
( s + a) 2 + ω 2
e-at cosωt u(t)
ω n e − ξω n t
1 − ξ2
− e −ξω n t
1 − ξ2
(
( c − a ) 2 + b2
e
− at
)
1 − ξ2
ξ
u( t ) ξ < 1
b
sen bt + tg
u( t )
c−a
−1
at − 1 + e − at
a
[
( s + a) 2 + ω 2
sen ω n 1 − ξ t u( t ) ξ< 1
2
sen ω n 1 − ξ 2 t − tg −1
b
s+a
2
ω 2n
s2 + 2ξω n + ω 2n
s
s + 2 ξω n + ω 2n
2
s+ c
( s + a ) 2 + b2
1
u( t )
s ( s + a)
2
]
1
abt + ( a − b) (1 − e − at ) u( t )
a2
s+ b
s ( s + a)
2
150
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
6.4 Risoluzione delle equazioni integro-differenziali mediante la t.d.L.
Sia assegnata l'equazione integro-differenziale:
e( t ) = Ri( t ) + LDi( t ) +
1
i( t )
CD
esprimente l'equilibrio elettrico di un circuito R, L, C serie, e siano assegnate le condizioni
iniziali:
i( 0) = I 0
v( 0) = V0
Trasformando secondo Laplace si ha:
E( s) = RI( s) + LsI( s) − LI 0 +
1
V
I( s) + 0
sC
s
1
V
I( s) + 0 è la tensione sul condensatore e LsI( s) − LI 0 quella sull'induttanza.
sC
s
In seguito all'operazione di L-trasformazione l'equazione integro-differenziale è
divenuta una equazione algebrica dalla quale si ha:
in cui
I( s) =
V
V0
sC E( s) + LI 0 − 0
s
s =
2
1
s LC + sRC + 1
R + Ls +
sC
E( s) + LI 0 −
La corrente i(t) si ottiene antitrasformando I(s), ossia:
i( t ) = L-1[I( s) ]
Esempio 6.8
Nell'equazione precedente si assumano i seguenti valori:
I 0 = 0; V0 = 10 V; e = 20 V ; R = 1Ω; L = 1H ; C = 1F
Poiché E(s)=20/s si ha:
I( s) =
10
=
s + s+1
2
10
10
=
2
1
3
1
s2 + s + +
s+
+
4 4
2
3
2
2
Antitrasformando si ottiene:
i( t ) =
20 − 21 t
3
e sen
t u( t )
2
3
6.5 Confronto tra soluzione classica e soluzione mediante t.d.L per le
equazioni differenziali
Nella fig. 6.6 è effettuato il confronto tra soluzione per mezzo del metodo classico e
per mezzo di t.d.L. Con il metodo classico risulta spesso oneroso il calcolo delle
condizioni iniziali per le prime n-1 derivate (partendo dalle condizioni iniziali note) e delle
costanti di integrazione, per cui, in generale, l'utilizzo della t.d.L. risulta vantaggioso.
151
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
SISTEMA DI EQUAZIONI INTEGRO-DIFFERENZIALI di ordine n
METODO CLASSICO
LAPLACE
Condizioni iniziali
Riduzione ad una equazione differenziale
di ordine n e calcolo dei valori iniziali delle
n-1 derivate mediante le condizioni iniziali note.
Determinazione della
soluzione complementare contenente n costanti arbitrarie
Determinazione della
soluzione particolare.
Trasformazione di tutte le equazioni
Risoluzione di equazioni algebriche
per ottenere le incognite
+
Soluzione complessiva con n costanti arbitrarie
Scomposizione in fratti semplici e
determinazione di n costanti
Valutazione delle costanti mediante le condizioni
iniziali
Antitrasformazione
Fig. 6.6 Soluzione mediante il metodo classico e mediante t.d.L
6.6 Applicazione della t.d.L. alla risoluzione dei circuiti
Scritte le equazioni integro-differenziali che rappresentano l'equilibrio elettrico del
circuito e assegnate le condizioni iniziali è possibile procedere alla risoluzione mediante la
t.d.L. come mostrato al paragrafo 4); è tuttavia possibile disegnare subito un circuito Ltrasformato dal quale dedurre direttamente le equazioni nel dominio di s. Ciò può essere
fatto sulla base delle seguenti considerazioni per induttori e condensatori.
6.6.1 Induttori
v L ( t ) = LDi L
VL ( s) = LsI L ( s) − Li L ( 0)
(6.36)
Le due precedenti relazioni sono relative alle figg.6.7a) e b) rispettivamente.
L
i L(t)
+
vL(t)
a)
I L(s)
+
Li(0)
Ls
1/Ls
I L(s)
+
VL(s)
VL(s)
b)
i(0)/s
c)
Fig. 6.7 Induttanza a) circuito L-trasformato serie b) circuito L-trasformato parallelo b)
152
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
La (6.36) è utile per la scrittura delle equazione con il metodo delle correnti di maglia;
volendo procedere con il metodo delle tensioni di taglio (o di nodo) si ha:
iL ( t) =
1
L
t
0
v L ( t ) dt + i L ( 0)
I L ( s) =
1
i ( 0)
VL ( s) + L
Ls
s
(6.37)
Il corrispondente circuito parallelo è riportato in fig. 6.7c).
6.6.2 Condensatori
La tensione alle estremità del condensatore, nel dominio di t e in quello di s, vale:
vC ( t ) =
1 t
i ( t ) dt + v C ( 0)
C 0 C
VC ( s) =
1
v ( 0)
I C ( s) + C
Cs
s
(6.38)
da cui si deduce il circuito L-trasformato serie. Il circuito parallelo si ottiene invece dalle
relazioni:
(6.39)
i C ( t ) = CDv C
I C ( s) = CsVC ( s) − Cv C ( 0)
In fig.8 sono riportati i circuiti L-trasformati serie e parallelo.
iC(t) C
+
I C(s)
vC (t)
+
Cs
1/Cs v(0)/s
I C(s)
VC(s)
a)
VC (s)
+
CvCv(0)/s
(0)
b)
c)
Fig. 6.8 Condensatore a); circuito L-trasformato serie b);circuito L-trasformato parallelo c)
6.6.3 Induttori mutuamente accoppiati
Le equazioni di equilibrio elettrico nel dominio di t e di s valgono:
v1 ( t ) = L1Di1 + MDi 2
V1 ( s) = L1sI1( s) − L1i1 ( 0) + MsI 2 ( s) − Mi 2 ( 0)
v 2 ( t ) = MDi1 + L2 Di 2
(6.40)
V2 ( s) = MsI1 ( s) − Mi1 ( 0) + L2sI 2 ( s) − L2i 2 ( 0)
Le seconde delle (6.40) rappresentano le equazioni di equilibrio del circuito Ltrasformato di fig. 6.10a). Dalle (6.40) si ha anche:
V1( s) = L1s I1 ( s) −
i1( 0)
i ( 0)
+ Ms I 2 ( s) − 2
s
s
(6.41)
i ( 0)
i ( 0)
V2 ( s) = Ms I1( s) − 1
+ L2s I 2 ( s) − 2
s
s
Alle (6.41) corrisponde il circuito di fig.6.9b).
L1 i1(0) M i2 (0)
L1 s
V1(s)
I 1 (s)
M i1(0)
L2i2 (0)
L2 s
Ms
a)
V2(s)
I 2(s)
I 1 (s)
i1(0)
s
I1
i1(0)
s
I2
i 2(0)
s
L2 s
L 1s
Ms
Fig. 6.9 Circuiti L-trasformati mutuamente accoppiati
b)
I 2 (s)
i 2(0)
s
153
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Ai circuiti mutuamente accoppiati possono essere applicate le regole di disaccoppiamento
in precedenza illustrate, ad esempio se i due circuiti hanno un punto a comune si ottengono
i circuiti L-trasformati di fig.6.10.
L1 i1(0)
L2 i2 (0)
( L1 M )s ( L 2 M ) s
M i2 (0)
M i1(0)
Ms
I 1(s)
∆ s /Μ
I 1 (s)
∆s
L2 M
i1(0)
s
I 2(s)
I 2 (s)
∆s
L1 M
i 2(0)
s
Fig. 6.10 Circuiti L-trasformati disaccoppiati
6.7 Perché usare la t.d.L. unilatera anziché quella bilatera
Oltre alla trasformata unilatera di Laplace definita dalla relazione:
F( s) =
∞
0
f ( t ) e − st dt
è possibile definire la trasformata bilatera di Laplace mediante la relazione:
Fb ( s) =
∞
−∞
f ( t ) e − st dt
Per eseguire la trasformata bilatera dovrebbe essere noto anche l'andamento di f(t)
prima dell'istante t = 0 preso come inizio del fenomeno. Se ad esempio volessimo
conoscere l'evoluzione di un circuito composto da R, L, C dovrebbero essere noti gli
andamenti di tensione sul condensatore e corrente nell'induttanza a partire da - ∞. Con la
trasformata unilatera è invece sufficiente conoscere i valori iniziali, senza sapere come essi
sono stati raggiunti. Con la trasformata bilatera si verrebbe a perdere il concetto di stato,
intendendo come variabili di stato quell'insieme di variabili la cui conoscenza ad un
determinato tempo t1consente di determinare la risposta del circuito per ogni t >t1 .
6.8 Perché usare 0- nella trasformata di Laplace
Esempio 6.9
Si consideri il circuito R, L di fig.6.11 alimentato con un generatore di tensione di
valore Vδ(t).
R
Vδ (t)
Vδ (t)
L
i(t)
t
Fig. 6.11 Circuito R, L alimentato con la tensione Vδ(t)
All'istante 0+ il circuito diviene quello di fig. 6.12. Applicando la t.d.L. con 0+ come
estremo di integrazione inferiore, e quindi L-trasformando l'equazione di equilibrio del
circuito di fig. 6.12 si ha:
0 = RI( s) + LsI( s) − Li( 0+ )
154
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Per determinare il valore di i(0+) si integra l'equazione di equilibrio del circuito di
fig.6.11 tra 0- e 0+. Si ha:
R
L
i(t)
Fig. 6.12 Circuito di fig.6.11 allo 0+
V
0+
0
δ( t ) dt =
−
0+
0
−
Ri( t ) dt +
e poiché :
V
0+
0+
0+
0
0
0
δ( t )dt = V
−
Ri( t )dt = 0
−
si ha:
L
−
0+
0
−
L
di( t )
dt
dt
i( 0+ )
di( t )
dt = − Ldi = L i( 0− ) − i( 0+ )
i( 0 )
dt
[
]
V
+ i(0− )
L
Sostituendo nell'equazione di equilibrio L-trasformata si ha:
V = RI( s) + LsI( s) − Li( 0− )
Allo stesso risultato si perviene L-trasformando, partendo da i(0-), l'equazione di
equilibrio del circuito di fig. 6.11.
i(0+ ) =
Dall'esempio precedente si deduce che nel caso in cui non ci siano impulsi applicati al
tempo t = 0, le trasformate di Laplace calcolate a partire da 0+ o da 0- coincidono, in caso
contrario differiscono per una costante, infatti:
∞
0
−
f ( t ) e − st dt =
da cui:
L− [ f ( t ) ] =
0+
0
−
∞
0−
f ( t ) e − st dt +
∞
0+
f ( t ) e − st dt
f ( t ) e − st dt + L+ [ f ( t ) ]
Nell'ipotesi in cui : f(t) = Aδ(t) + g(t) si ottiene:
L− f ( t ) = A + L+ f ( t )
Se invece manca l'impulso risulta:
L− f ( t ) = L+ f ( t )
Dall'esempio 6.9 si osserva inoltre che partendo da t = 0+ risulta laborioso il calcolo
della condizione iniziale.
Esempio 6.10
Si consideri il circuito di fig. 6.13, per esso l'equilibrio elettrico, con interruttore aperto
e quindi per t = 0+, è espresso dalla relazione:
e( t ) = L1 Di1 + L 2 Di 2 + R 2 i 2
con i1 = i 2 = i
155
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Trasformando a partire da 0+ si ha:
E( s) = L1sI( s) − L1i(0+ ) + L2sI( s) − L2 i( 0+ ) + R 2 I( s)
L1
e
i(t)
t=0L
R1
2
R2
Fig. 6.13 Esempio 6.10
Per determinare la condizione iniziale si fa uso della conservazione del flusso. Dette
i1( 0 ) e i2 ( 0− ) le correnti nelle induttanze L1 e L 2 prima dell'apertura dell'interruttore,
si ha:
L1i1 (0− ) + L2i 2 ( 0− ) = ( L1 + L2 )i(0+ )
Sostituendo nell'espressione L-trasformata si ha:
−
E( s) = L1sI( s) + L2sI( s) − L1i1 (0− ) − L2i2 (0− ) + R 2I( s)
È facile vedere che operando la trasformazione utilizzando 0- come estremo inferiore
di integrazione si ottiene lo stesso risultato.
Si può concludere che quando ci sono salti di corrente in induttori, o di tensione in
condensatori, utilizzare 0- significa imporre la costanza del flusso (o della carica). Come
sottolineato in precedenza i salti di corrente o di tensione ora ipotizzati sono puramente
teorici e sono in pratica impediti dal fenomeno dell'arco elettrico.
Entrambi gli esempi illustrati mostrano che assumere 0- come estremo di integrazione
nella t.d.L. sia vantaggioso perché rende possibile utilizzare le condizioni iniziali allo 0-,
note, anziché calcolare quelle allo 0+. Tale semplificazione sussiste in casi particolari (e
teorici) in generale è indifferente usare l'uno o l'altro estremo di integrazione.
6.9 Determinazione della risposta di un circuito lineare mediante la t.d.L
Le equazioni L-trasformate di equilibrio elettrico di un qualunque circuito lineare
possono essere scritte direttamente dal circuito L-trasformato, ossia da un circuito in cui
compaiano generatori ottenuti L-trasformando la f.e.m o la corrente stabilita dai generatori
indipendenti, sostituendo induttanze e capacità con impedenze operazionali Ls e 1/Cs,
introducendo generatori fittizi di condizioni iniziali.
L’esempio 6.11 evidenzia come l’equilibrio elettrico di un circuito, in termini di Ltrasformata, possa sempre essere scritto nella forma:
[ U(s)] + [U 0 (s)] = [A(s)][Y(s)]
(6.42)
in cui:
U(s) è il vettore degli ingressi ottenuto dai generatori indipendenti;
U0(s) è il vettore degli ingressi ottenuto dai generatori fittizi di condizioni iniziali;
A(s) è la matrice delle impedenze o delle ammettenze;
Y(s) è il vettore delle uscite.
Risolvendo rispetto a Y(s) si ha:
156
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Y( s) = [A( s) ]
−1
{[U( s)] + [U ( s) ]}
0
(6.43)
Esempio 6.11
Scrivere le equazioni di equilibrio elettrico per i circuiti L-trasformati rappresentati
nella fig. 6.14 a) e b).
I2(s)
Li1(0) vc(0)/s
V1(s
V2(s)
Ls
)
1
1
E1(s)
R
1
I1(s)
I2(s)
R
i(0)
Cs
Cs
Ls
Cv(0)
I1(s
s
)
E2(s)
a)
b)
Fig.6.14 Esempio 6.11
Applicando il metodo delle correnti di maglia per il circuito di fig.6.14a) e quello delle
tensioni di nodo per il circuito di fig.6.14b), si ottiene:
E1 (s) + Li(0 )
R + Ls
−R
I1 (s )
1
v ( 0) =
R+
−R
E 2 (s) −
I (s )
Cs 2
s
1 1
1
i( 0)
+
−
V1 ( s)
I 1 (s) + I 2 (s) −
R Ls
R
s =
1
1
V ( s)
− I 2 (s) + Cv( 0)
−
+ Cs 2
R
R
L’inversione della matrice A(s) è sempre possibile poiché, per come sono state scritte
le equazioni di equilibrio(ossia in modo tale che nessuna equazione risulti combinazione
lineare delle altre), essa risulta non singolare.
La (6.43) può anche essere scritta:
Y(s) = [ A(s)]
−1
[ U(s)] + [A(s)] −1[U 0 (s)]
(6.44)
Nella (6.44) il primo addendo a secondo membro è dovuto ai soli ingressi e
rappresenta quindi la risposta a stato nullo( o risposta forzata), il secondo addendo è dovuto
alle soli condizioni iniziali e rappresenta quindi la risposta a ingresso nullo(o risposta
libera). Si ha quindi:
Risposta del circuito = Risposta a stato nullo(forzata) + Risposta a ingresso nullo( libera)
Poiché risulta:
[A( s) ] −1 =
agg[A( s) ]
det[A( s) ]
157
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
in cui il numeratore è costituito dalla matrici degli aggiunti. Gli elementi di tale matrice
sono dati dalla relazione cij=(-1)i+jdetAji (con Aij minore di A)2. Si può scrivere:
agg[A ( s) ]
agg[A( s) ]
U( s) ] +
U ( s)
[
det[A( s) ]
det[A ( s) ] 0
[
Y( s) =
]
(6.45)
Per eseguire l’operazione di antitrasformazione si deve scomporre in fratti semplici la
(6.45), ciò comporta la risoluzione dell’equazione:
det[A(s)]=0
(6.46)
L’equazione (6.46) coincide con l’equazione caratteristica ottenuta applicando il
metodo classico. Con tale metodo, infatti, si deve risolvere un sistema di equazioni lineari a
coefficienti costanti del tipo:
u( t ) = [A( D) ][ y( t ) ]
(6.47)
la cui soluzione complementare si ottiene risolvendo l’equazione:
[
0 = [A ( D) ] y c ( t )
da cui l’equazione caratteristica:
]
(6.48)
det[A(p)] = 0
(6.49)
L’equazione caratteristica è una equazione a coefficienti reali (poiché si ottiene da
circuiti aventi elementi come R, L, M, C e generatori dipendenti) e pertanto le sue
soluzioni possono essere reali o complesse coniugate.
6.9.1 Risposta a ingresso nullo (libera)
La risposta a ingresso nullo (o libera) è la risposta del circuito alle sole condizioni
iniziali e può essere determinata disattivando i generatori indipendenti presenti nel circuito
stesso(debbono invece essere lasciati attivi i generatori fittizi di condizioni iniziali oltre a
quelli dipendenti). Dalla (6.45), annullando gli ingressi, si trova la risposta libera che vale:
agg[A( s) ]
(6.50)
Y ( s) =
U ( s)
det[A( s) ] 0
Indicando con pi le radici dell’equazione caratteristica (6.46) si ha:
[
Y (s ) =
a 11
2
Data la matrice [ A ] = a 21
a 31
a 12
a 22
a 32
agg[A (s )][U 0 (s )]
(s − s1 )(s − s2 ).......(s − s1n )
a 13
a 22
a 23 si ha: A 11 =
a 32
a 33
a 13
,
a 33
a 23
a 11
, A 12 =
a 33
a 31
a 12
,
a 32
a 13
,
a 33
A 33 =
a 11
a 21
a 12
c = det[A 11 ] , c 12 = − det[A 21 ] , c 13 = det[A 31 ] , c 21 = − det A 12 , c 22 = det[A 22 ] ,
a 22 11
A 31 =
a 12
a 22
a 13
a 21
, A 13 =
a 33
a 31
a 12
a 32
A 23 =
a 11
a 31
(6.51)
A 21 =
A 22 =
a 11
a 31
]
a 13
,
a 23
[ ]
c 11
c 23 = − det[A 32 ] , etc. La matrice degli aggiunti è: agg[ A ] = c 21
c 31
c 12
c 13
c 22
c 32
c 23
c 33
A 32 =
a 11
a 21
a 22
,
a 32
a 13
,
a 23
158
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Antitrasformando si ottengono termini del tipo:
y i = K i e pi t
yi =
m
j
per ogni radice reale e distinta
K ij t j−1e pi t
per ogni radice reale pi di molteplicità m
y i = 2 K i e σ i t cos(ω i t + ϕ i )
per ogni coppia di radici complesse coniugate
σ i ± jω i per le quali K i = K i e jϕ i
I termini K i e p i t sono detti modi di evolvere del circuito; nel capitolo relativo alle
variabili di stato si è trovato che tali modi possono essere o no tutti attivati a seconda del
valore delle condizioni iniziali.
6.9.2 Risposta a stato nullo (forzata)
La risposta a stato nullo, o risposta forzata, è la risposta del circuito inizialmente
scarico ai generatori. Tale risposta si ottiene dal circuito L-trasformato disattivando tutti i
generatori di condizioni iniziali. Dalla (6.45) si ottiene:
Yf ( s) =
agg[A( s) ]
[ U( s) ]
det[A( s) ]
(6.52)
Nel caso di circuiti con un solo ingresso e una sola uscita (SISO, single input-single
output) si può scrivere:
Y(s) = W(s) U(s)
(6.53)
in cui W(s) è detta funzione di rete. Per la determinazione della W(s) si
possono considerare le equazioni di equilibrio con un solo ingresso attivato,
ossia:
Y1f ( s)
α 11 (s) .. . α 1h ( s) .. α 1n (s)
0
.
Ykf ( s)
..
..
..
α k1 ( s) .. α kh ( s)
.
.
.
Ynf ( s)
=
..
..
..
..
..
..
α n1 ( s) .. α nh ( s)
..
..
.. α kn ( s)
..
..
..
..
.. α nn ( s)
.
U h (s)
(6.54)
.
0
Per la k-ma uscita si ha:
Ykf =
α kh (s)
U (s)
det A (s) h
Posto U(s)=Uh(s), Y(s)=Ykf(s), α(s)=αkh(s) risulta:
α (s)
Y(s)
W( s) =
=
(6.55)
det A (s) U(s)
Nel caso in cui si abbiano più ingressi e più uscite si può definire una matrice di
funzioni di rete i cui elementi si possono ottenere considerando un solo ingresso attivo (e
tutti gli altri disattivati, ossia applicando il principio di sovrapposizione degli effetti) e la
corrispondente uscita.
Antitrasformando la (6.53) si ottiene la risposta forzata. Nell’operazione di
antitrasformazione si può ricorrere alla scomposizione in fratti semplici o all’integrale di
159
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
convoluzione. In quest’ultimo caso si ha:
t
t
0
0
y f ( t ) = L−1 [W( s) U( s) ] = w( τ)u( t − τ ) dτ = w( t − τ )u( τ ) dτ
(6.56)
6.10 Funzione di rete
La funzione di rete è stata già definita, mediante la (6.55), come rapporto tra la
trasformata di Laplace dell’uscita e quella dell’ingresso con condizioni iniziali nulle. La
W(s) può essere classificata in base alla grandezza di ingresso e a quella di uscita nel
seguente modo:
6.10.1 Ingresso e uscita riferiti alla stessa coppia di poli
Per i casi rappresentati nella fig.6.15 si ha:
W( s) =
V( s)
= Z( s) impedenza di ingresso
I( s)
per la fig.6.15a) in cui si è assunta la corrente come ingresso e la tensione come uscita e:
W( s) =
I( s)
= Y( s) ammettenza di ingresso
V( s)
per la fig.6.15b) in cui si è assunta la tensione come ingresso e la corrente come uscita.
I(s)
I(s)
V(s)
V(s)
a)
b)
Fig. 6.15 Impedenza di ingresso a) ammettenza di ingresso b)
6.10.2 Ingresso e uscita relativi a due diverse coppie di poli
V2(s)
V1(s)
I2(s)
V1(s)
a)
b)
I1(s)
I2(s)
c)
I1(s)
V2(s)
d)
Fig.6.16 Trasferimento in tensione a) ammettenza di trasferimento b) trasferimento in corrente c) impedenza
di trasferimento b)
Nei quattro casi rappresentati in fig.6.16 si ottiene rispettivamente:
160
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
V2 ( s)
rapporto di trasferimento in tensione
V1 ( s)
I ( s)
b) W( s) = Y21 ( s) = 2
ammettenza di trasferimento(transammettenza)
V1 ( s)
I 2 ( s)
c) W( s) = K I ( s) =
rapporto di trasferimenti in corrente
I 1 ( s)
V ( s)
d) W( s) = Z 21 ( s) = 2
impedenza di trasferimento(transimpedezenza)
I 1 ( s)
Le funzioni di rete relative ai punti a) e c), che rappresentano il rapporto tra due
grandezze omogenee, sono dette funzioni di trasferimento(f.d.t). Nel linguaggio comune si
tende a confondere la f.d.t con la funzione di rete. In altre parole si parla di f.d.t. anche
quando le grandezze a numeratore e a denominatore non sono omogenee.
a) W( s) = K V ( s) =
Esempio 6.12
I 1 ( s)
I 2 ( s)
V2 ( s)
, W2 ( s) =
, W3 ( s) =
V1 ( s)
V1 ( s)
V1 ( s)
nel circuito rappresentato in fig.6.17.
R1
Calcolare le f.d.t W1 ( s) =
V1(s)
I1(s) L1s
L2(s) V2(s)
I2(s)
Fig.6.17 Esempio 6.12
Le equazioni di equilibrio elettrico sono:
R 1 + L 1s
− L 1s
V1 ( s)
I 1 ( s)
=
R 2 + ( L1 + L 2 )s I 2 ( s)
− L1 s
0
da cui posto:
[
]
det[ A ] = ( R 1 + L1s) R 2 + ( L1 + L 2 )s − L21s2 = L1 L 2 s2 + ( L1 R 2 + L1 R 1 + L 2 R 1 )s + R 1 R 2
si ottiene:
W1 ( s) =
I ( s)
L 1s
V ( s) L1 L 2 s
I 1 ( s) R 2 + ( L1 + L 2 )s
; W2 ( s) = 2
; W3 ( s) = 2
=
=
=
V1 ( s)
det[ A ]
V1 ( s) det[ A ]
V1 ( s) det[ A ]
Dalla relazione (6.55), e dall’esempio precedente, si deduce che la f.d.t. è un rapporto
tra due polinomi di cui quello ha numeratore è di grado inferiore o uguale a quello a
denominatore. Ciò accade poiché il denominatore è il determinante di una matrice e il
numeratore un suo cofattore. La f.d.t può quindi essere posta nella forma:
W( s) = K
s n + a n−1s n −1 +......+ a 1s + a 0
s m + b m−1s m−1 +......+ b 1s + b 0
∏ (s − z i )
= K m1
∏1 (s − p j )
n
(6.57)
161
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
in cui zi sono gli zeri della f.d.t. e pj sono gli zeri del denominatore e sono detti poli della
f.dt. Per quanto affermato in precedenza il numero degli zeri è sempre minore o uguale a
quello dei poli.
Oltre alla spiegazione matematica si può anche fornire una spiegazione fisica della
relazione m≥n. Si supponga che sia n>m, si può allora scrivere:
W( s) = K s n − m + c n − m−1s n − m−1 +.....+ c1s + c 0 +
d m−1s m−1 +.....+ d 1s + d 0
(6.58)
s m + b m−1s m−1 +.....+ b 1s + b 0
per un ingresso U(s) la risposta forzata è data da: Y(s)=U(s)W(s) e contiene termini del tipo
siU(s). Antitrasformando si otterrebbe che l’uscita dipende dalla derivata i-ma
dell’ingresso. Poiché la derivata di una funzione vale:
f ( t + h) − f ( t )
h→0
h
f ' ( t ) = lim
si avrebbe che l’uscita, al tempo t dipenderebbe anche dai valori futuri dell’ingresso, il che
contrasta con il principio di causalità secondo il quale:
i circuiti elettrici(ma più in generale tutti i sistemi fisici) sono causali, cioè non
anticipatori, nel senso che la loro risposta all’istante τ dipende dai valori che l’ingresso
ha assunto per t≤τ e non da quelli che esso assumerà per t>τ. In altre parole si afferma
che la causa è successiva all’ingresso.
Un circuito per il quale n=m è detto non strettamente causale, in questo caso
l’ingresso, eventualmente moltiplicato per una costante, è riportata direttamente in uscita.
Esempio 6.13
Si vogliono determinare le risposte a stato nullo(forzata) e a ingresso nullo(libera) per
il circuito di fig.6.18, in cui sia: J1=10A, vc(0)=V0=5V, iL(0)=I0=2A, R=1Ω, L=1H, C=1F,
α=0,5, γ=1.
+
J1
v1
+
+
R _
C
_
γV2
R
αV1
L
v2
_
Fig.6.18 Esempio 6.13
In fig.6.19 è riportato il circuito L-trasformato, dal quale scrivendo le equazioni di
equilibrio con il metodo dei potenziali di nodo si ottiene:
J1(s)
V1(s) R +
_
1
Cs
CV0
γV2
αV1(s)
Fig.6.19 Circuito L-trasformato
R
Ls
I 0 V (s)
2
s
162
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
1
J 1 ( s) + CV0
+ Cs
I0
= R
−
α
s
−γ
V1 ( s)
1 1 V2 ( s)
+
R Ls
Sostituendo i valori si ha:
10
1 + s − 1 V ( s)
+5
1
s
1
=
2
0,5 1 +
V
2 ( s)
s
−
s
La risposta libera e quella forzata risultano dalle relazioni:
5
1 + s − 1 V ( s)
1
2 =
1
−
0,5 1 +
()
s
s V2 s
10
1 + s − 1 V ( s)
1f
s = 0,5 1 + 1
()
0
s V2 f s
Il determinante della matrice vale:
detA(s)= (1 + s) 1 +
Si ha quindi:
1
s2 + 2,5s + 1 (s + 0,5)( s + 2)
+ 0,5 =
=
s
s
s
1+ s
5
2
0,5 −
− ( 4,5s + 2)
A
B
s
=
=
+
det A( s)
(s + 0,5)( s + 2) s + 0,5 ( s + 2)
V2 =
e poiché:
− 4,5( − 0,5) + 2
− [4,5( − 2) + 2]
A=
= 0,17 e B =
= −4,67 si ha:
( − 0,5 + 2)
( − 2 + 0,5)
[
]
v 2 = (0,17e 0,5t − 4,67e −2 t )u( t )
Analogamente per la risposta forzata:
1+ s
V2 f =
0,5
10
s
0
det A( s)
=
−5
− 3,33
3,33
=
+
(s + 0,5)( s + 2) s + 0,5 ( s + 2)
da cui:
v 2 f = −3,33(e −0,5t − e −2 t )u( t )
La tensione complessiva vale:
v 2 ( t ) = v 2 ( t ) + v 2 f ( t ) = −(3,16e −0,5t − 1,34e −2 t )u( t )
6.11 Funzione di rete come L-trasformata della risposta impulsiva
Dalla definizione di funzione di rete risulta Y(s)=W(s)U(s); assumendo come ingresso
l’impulso unitario applicato all’istante t=0 si ha U(s)=1 e quindi Y(s)=W(s).
La funzione di rete, e quindi la funzione di trasferimento, rappresenta anche la t.d.L.
163
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
della risposta del circuito, con condizioni iniziali nulle, all’ingresso impulsivo δ(t).
Riassumendo le caratteristiche della f.d.t., si ha:
1) W( s) =
L{Risposta a stato nullo}
L{ Ingresso}
2) W( s) = L{ Risposta a δ(t) a stato nullo}
3) W(s) è un rapporto di polinomi del tipo:
W(s) = K
s n + a n −1s n −1 +.....+ a 1s + a 0
con m≥n
s m + b m−1s m−1 +.....+ b 1s + b 0
(6.59)
4) Le radici del denominatore di W(s) coincidono con quelle dell’equazione caratteristica
della trattazione classica. Il denominatore è quindi il polinomio caratteristico.
Esempio 6.14
Per il circuito di fig.6.21 determinare la f.d.t. W(s)=V2(s)/V1(s). Calcolare inoltre le
risposte agli ingressi δ(t), u(t), e-2tu(t). Si assuma R=1Ω, L=1H.
R
L(s)
V1(s)
V2(s)
Fig.6.20 Esempio 6.14
Dalla regola del partitore di tensione si ha:
V (s)
Ls
R/L
1
W (s) = 2
=
= 1−
= 1−
V1 (s) R + Ls
s+R/L
s +1
1
1
e poiché: L {δ( t )} =1, L {u( t )} = , L e −2 t u( t ) =
per i tre ingressi si ha:
s
s+2
1
per v1(t)=δ(t)
V2 (s) = W(s) = 1 −
v 2 ( t ) = δ ( t ) − e − t u( t )
s+1
1
per v1(t)=u(t)
V2 (s) = G (s) =
v 2 ( t ) = e − t u( t )
s+1
1
1
v 2 ( t ) = (2e −2 t − e − t )u( t )
per v1(t)=e-2t u(t)
V2 (s) = F(s) =
−
s + 2 ( s + 1)( s + 2)
Gli andamenti nel tempo delle tre risposte sono riportate in fig.6.21
{
w(t)
}
f(t)
g(t)
δ(t)
-t
e u(t)
-2t
-t
2e u(t)
e u(t)
t
a)
t
b)
t
-t
e u(t)
c)
Fig.6.21Risposte del circuito di fig.6.20 all’impulso a), al gradino unitario b), a e-2tu(t) c)
164
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
L’esempio 6.14 evidenzia come in un circuito non strettamente causale, salvo casi di
semplificazioni poli-zeri, come avviene per l’ingresso a gradino, la grandezza in ingresso
venga riportata direttamente in uscita.
6.12 Semplificazioni poli-zeri
Se accade che numeratore e denominatore di W(s) abbiano uno stesso polinomio
divisore α(s), o in altre parole se ci sono alcuni poli coincidenti con alcuni zeri, le soluzioni
dell’equazione α(s)=0 forniscono modi di evolvere che non si ritrovano nell’uscita. In
sostanza l’ordine del circuito si abbassa di un numero pari al numero di cancellazioni polizeri.
Esempio 6.15
Per il circuito di fig.6.22 in cui G1=1Ω-1, G2=2Ω-1, C1=0,5F, C2=1,5F, α=2A/V si
determini la f.d.t. W(s)=V2(s)/J1(s)
V1(s)
J1(s)
C2 s
G1
C1 s
G2
V2(s)
αV1
Fig.6.22Esempio 6.15
Le equazioni di equilibrio scritte con il metodo delle tensioni di nodo risultano:
J 1 (s)
G 1 + (C1 + C 2 )s − (G 1 + C 2 s) V1 ( s)
=
0
− (G 1 + C 2 s + α ) G 1 + G 2 + C 2 s V2 ( s)
Risolvendo si ha:
W(s) =
V2 (s)
G1 + C2s + α
=
2
J 1 (s) C1s + (G 1C1 + G 2 C1 + G 2 C 2 − αC 2 )s + G 1G 2 − αG 1
Sostituendo i valori si ha:
3 + 1,5s
2
=
0,5s(3 + 1,5s) s
Il modo di evolvere legato a s=-2, soluzione dell’equazione caratteristica, non compare
nell’uscita.
W(s) =
6.13 Stabilità
La stabilità è una caratteristica del circuito legata alla posizione dei poli nel piano di
Gauss. Saranno ora illustrati alcuni modi di definire la stabilità.
6.13.1 Stabilità come risposta all’impulso
Un circuito dal quale sia stata ottenuta la f.d.t. W(s) risulta stabile se la risposta
all’impulso è limitata, ossia:
165
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
lim W( t ) ≠ ∞
(6.60)
t →∞
Se tale limite tende a zero il circuito è detto stabile se invece tende ad un valore costante
non nullo è detto metastabile (o marginalmente stabile).
Poiché la f.d.t può essere scritta come:
N (s)
(6.61)
W(s) = n
(s − p i )
1
la risposta all’impulso, coincidente con l’antitrasformata di Laplace di W(s) vale:
w(t) =
n
1
K i e pi t
(6.62)
Il limite (6.60) dipende quindi dai poli della f.d.t. Esaminiamo i vari casi:
a) poli reali e distinti
Dalla (6.62) si deduce che il limite (6.60) tende a zero se tutti i poli sono negativi, se
un polo è nullo il limite tende ad un valore finito non nullo. Si può dunque affermare,
escludendo eventuali semplificazioni polo-zero, che il circuito risulta stabile se tutti i poli
si trovano nel semipiano negativo del piano di Gauss e metastabile se c’è un polo
nell’origine. Se anche un solo polo si trova nel semipiano positivo il circuito risulta
instabile. Le varie situazioni sono rappresentate in fig.6.24
w(t)
Im
K3 e p 3 t
K2
p1
p2
p3
Re
t
K1e p1t
a)
b)
Fig.6.24Posizione dei poli nel piano di gauss a) e relativa risposta ne tempo b)
b) poli reali multipli
Il circuito risulta stabile se i poli si trovano nel semipiano negativo, instabile se i poli
si trovano nell’origine. In questo caso si hanno infatti termini del tipo:
W(s) =
(
N (s)
(s − p i )
)
w ( t ) = K1 + K 2 t + K 3 t 2 +.......+ K q t q −1 e pi t
q
In fig.6.25 sono riportati i casi relativi a poli, di molteplicità due, a parte reale negativa
e nell’origine.
w(t)
Im
K1+K2t
(K1 + K 2 t )e p t
1
p1
p2
Re
Fig.6.25 Stabilità per poli reali multipli
t
166
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
c) Poli complessi coniugati
Sia assegnato un circuito per il quale la funzione di trasferimento e la sua trasformata
valgano:
W(s) =
As + B
( s + σ) + ω
2
w ( t ) = Ke −σt sen(ωt + ϕ )
2
Tale circuito risulta stabile se σ>0. Poiché i poli di W(s) valgono: p = − σ ± jω si può
affermare che il circuito risulta stabile se i poli, di qualunque molteplicità, della f.d.t. hanno
parte reale negativa, ossia se si trovano nel semipiano negativo di Gauss. Un esempio è
riportato in fig.6.27.
Im
2
w(t)
jω
σ
Re
t
-2
Fig.6.26 Stabilità per poli complessi coniugati
d) Poli immaginari
Nel caso di poli immaginari semplici la f.d.t. e la sua antitrasformata sono del tipo:
W(s) =
As + B
s2 + ω 2
w ( t ) = K sen(ωt + ϕ)
Se i poli hanno molteplicità doppia si ha:
W(s) =
As + B
w ( t ) = Kt sen(ωt + ϕ)
(s 2 + ω 2 ) 2
Nel primo caso il circuito risulta marginalmente instabile, nel secondo instabile. Si
conclude, come è anche mostrato in fig.6.27, che poli semplici sull’asse immaginario
danno stabilità marginale, poli multipli danno instabilità
w(t)
Im
w(t)
1.49978
150
jω
Re
t
-jω
-1.49995
a)
t
-150
b)
c)
Fig.6.27 Poli immaginari a)risposta per poli immaginari semplici b) risposta per poli immaginari doppi c)
Riassumendo:
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
167
Per quanto riguarda la stabilità come risposta all’impulso il circuito risulta:
- stabile se tutti i poli della f.d.t. sono a parte reale negativa
- metastabile se alcuni poli semplici della f.d.t. si trovano sull’asse immaginario(origine
compresa)
- instabile se la f.d.t. contiene almeno un polo con parte reale positiva o un polo sull’asse
immaginario(origine compresa) di molteplicità superiore ad uno.
Si osservi che con questo tipo di definizione, essendo la t.d.L. dell’impulso pari a 1, le
singolarità dell’ingresso non influenzano la stabilità poiché non si verificano
semplificazioni poli-zeri né aumento dell’ordine di molteplicità dei poli della f.d.t per
effetto dell’ingresso.
Notiamo infine che per circuiti composti da soli elementi passivi(R,L,M,C) non
sussistono problemi di stabilità poiché la risposta all’impulso tende sicuramente a zero in
quanto l’energia presente nel circuito viene dissipata nelle resistenze. Se manca la
resistenza il circuito diviene metastabile poiché la risposata rimane limitata dovendo
rimanere costante l’energia presente negli elementi reattivi. Se invece sono presenti nel
circuito elementi attivi, rappresentati con generatori dipendenti, il circuito può anche essere
instabile.
6.13.2 Stabilità come risposta a ingresso nullo
Si supponga il circuito alimentato con le sole condizioni iniziali (gli eventuali
generatori indipendenti presenti nel circuito debbono essere disattivati). Possono verificarsi
i seguenti casi:
− tutti i poli sono a parte reale negativa: la risposta tende a zero al tendere all'infinito
del tempo. Il circuito è asintoticamente stabile;
− poli, semplici, a parte reale nulla: uno stato iniziale provoca, per circuiti passivi (R.
L. M, C) una risposta oscillatoria smorzata, il circuito è stabile;
− poli a parte reale positiva: la risposta libera non è limitata al tendere all'infinito del
tempo, il circuito è instabile.
6.13.3 Stabilità BIBO
Secondo questa definizione il circuito è stabile se per un ingresso limitato(bounded
imput) anche l'uscita risulta limitata (bounded output).
La risposta forzata è data da:
Y( s) = W( s) U( s) =
N( s) N U ( s)
D( s) D U ( s)
(6.63)
dalla (6.63) risulta che i poli di Y(s), escludendo il caso di semplificazioni poli zeri,
sono tutti quelli di W(s) e di U(s). Poiché l'ingresso è limitato i poli di U(s) sono a parte
reale negativa oppure a parte reale nulla con molteplicità uno. La condizione di stabilità
BIBO, impone che tutti i poli di W(s) siano a parte reale negativa. Se infatti fossero
presenti poli, anche semplici, sull'asse immaginario, sarebbe sempre possibile trovare un
ingresso avente anch'esso poli sull'asse immaginario, coincidenti con quelli di W(s), per il
quale l'uscita non sarebbe limitata.
Si può quindi concludere che un circuito risulta stabile BIBO se tutti i poli di W(s)
sono a parte reale negativa.
168
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Esempio 6.18
Nel circuito di fig.6.28 si ha: L=1H, C=1F, v2(0)=0, v1(t)=sent.
La f.d.t. W(s) =V2(s)/V1(s) risulta:
Ls
V1(s)
1
Cs
C
V2(s)
Fig.6.28 Esempio 6.18
1
1 + LCs2
W(s) =
e poiché V1 ( s) =
1
si ha:
1 + s2
V2 ( s) = V1 (s)W(s) =
1
(s2 + 1) 2
Per la proprietà di moltiplicazione in t risulta:
L{t sen t} = −
d
1
2s
dv 2 ( t )
=
+ 2 v1 ( 0 )
2
2 =2sV2(s) = 2 L
2
ds s + 1
dt
(s + 1)
da cui:
t
v 2 (t) =
1
1
t sen t dt = ( − t cos t + sen t )
20
2
La v2(t) non è quindi limitata sebbene sia limitata v1(t). Ciò dipende dal fatto che V1(s) e
W(s) hanno due poli coincidenti sull'asse immaginario
Nella TAB 6.3 sono riassunti i risultati ottenuti per le varie definizioni di stabilità
TAB 6.3
POSIZIONE DEI POLI
x
x
x
xx
Re
Im
Stabilità
BIBO
Stabile
Asintoticamente
stabile
Stabile
Marginalmente
stabile
(Metastabile)
Stabile
Instabile
Instabile
Instabile
Instabile
Im
xx
Re
Stabilità a
ingresso nullo
Re
x Im
x
x
Im
Stabilità come
risposta a δ(t)
xx
Re
x
x x Re
169
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
6.14 Il principio di sovrapposizione degli effetti nei circuiti L-trasformati
Il principio di sovrapposizione degli effetti afferma che: in un circuito lineare Ltrasformato in cui agiscono più ingressi(generatori indipendenti di tensione e di corrente)
le t.d.L delle uscite possono essere trovate facendo agire un solo generatore(o gruppi di
generatori)per volta, determinando la relativa risposta e successivamente sommando i
risultati trovati. I generatori di condizioni iniziali vengono trattati come i generatori
indipendenti.
Operando nel dominio del tempo si è osservato che la risposta completa dovuta a
ciascun generatore può essere determinata solo nel caso in cui le condizioni iniziali siano
nulle (ciò significa che può essere determinata la sola risposta forzata). Ciò vale anche
operando con Laplace. In questo caso è tuttavia possibile applicare il principio di
sovrapposizione degli effetti a qualsiasi generatore indipendente o di condizione iniziali.
Si consideri un circuito L-trasformatole cui equazioni di equilibrio siano:
U1 ( s)
a 11 ( s)
a 21 ( s)
U 2 ( s)
=
.
.
U n ( s)
a n1 ( s)
....... a 1n ( s) Y1 ( s)
....... a 1n ( s) Y2 ( s)
.......
.
.
....... a nn ( s) Yn ( s)
(6.64)
in cui Ui(s) sono gli ingressi, Yi(s) le uscite e aij(s) le impedenze/ammettenze operazionali.
Indicando con [A] la matrice quadrata (n x n) delle impedenze/ammettenze, si ha:
0
0
Y1 ( s)
U1 ( s)
U1 ( s)
()
0
U 2 ( s)
0
Y2 ( s)
−1 U 2 s
−1
−1
−1
+....+[ A ]
=
= [ A]
= [ A]
+ [ A]
.
.
.
.
.
0
U n ( s)
0
Yn ( s)
U n ( s)
(6.65)
Y1(1) ( s)
Y2(1) ( s)
.
Yn(1)
Y1( 2 ) ( s)
+
( s)
Y2( 2 ) ( s)
.
Yn( 2 )
Y1( 3) ( s)
+....+
( s)
Y2( 3) ( s)
.
Yn( 3)
( s)
in cui il termine Yi(j) è la i-ma uscita prodotta da j-mo ingresso agente da solo nel circuito.
Esempio 6.19
Nel circuito di fig.6.29 si ha: R=1Ω, L=1H, e1(t)=2u(t) V, e2(t)=4u(t) V, i(0)=2A
R
e2(t)
L
e1(t)
R
E2(s)
Ls
E1(s)
Li(0)
a)
Fig.6.29 Esempio 6.19
b)
170
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Risolvendo il circuito direttamente nel tempo , mediante la sovrapposizione degli effetti, si
ha:
R
R
− t
− t
E1
E2
i ' (t) =
+ C 1 e L = 2 + C 1e − t
i '' ( t ) =
+ C 2 e L = 4 + C 2 e −t
R
R
sommando, tenendo conto della condizione iniziale, si ha:
i( t ) = i ' ( t ) + i '' ( t ) = 6 − (C1 + C 2 )e − t = 6 − 4e − t
Si noti che mentre la i(t) può essere determinata, altrettanto non si può dire per i'(t) e i''(t),
infatti non essendo ovviamente noti i valori di i'(0) e i''(0), non è possibile determinare C1 e
C2, ameno che il circuito non sia inizialmente scarico. In tal caso si ha: i(0)= i'(0)= i''(0) per
cui risulta:
i ' ( t ) = 2 − 2e − t
i '' ( t ) = 4 − 4e − t
i( t ) = 6 − 6e − t
Applicando il principio di sovrapposizione degli effetti nel dominio di s, ossia al circuito Ltrasformato di fig.6.19b), si ha:
I ' (s) =
E 1 (s)
2
=
(
R + Ls s s + 1)
E 2 (s)
4
2
Li(0)
=
=
I ''' (s) =
(
)
R + Ls s s + 1
R + Ls s + 1
6
2
I( s) = I ' ( s) + I '' ( s) + I ''' ( s) =
+
s(s + 1) s + 1
I '' (s) =
antitrasformando:
i ' ( t ) = 2 − 2e − t
i '' ( t ) = 4 − 4e − t
i ''' ( t ) = 2e − t
i( t ) = 6 − 4e − t
Applicando la sovrapposizione degli effetti nei circuiti L-trasformati si trovano dunque
separatamente le risposte forzate dovute ai singoli generatori e la risposta libera.
6.15 Teoremi relativi alle reti lineari
Vengono illustrati alcuni teoremi la cui dimostrazione richiede l'applicazione del
principio di sovrapposizione degli effetti e che pertanto possono essere applicati solo ai
circuiti lineari.
6.15.1 Il teorema di Thevenin
L'enunciato del teorema, ottenuto modificando opportunamente quello già fornito per
le reti resistive, è il seguente:
un bipolo lineare può essere sostituito con un bipolo equivalente, agli effetti esterni,
costituito da un generatore reale di tensione di f.e.m pari alla tensione alle estremità del
bipolo aperto e di impedenza uguale a quella vista alle estremità del bipolo con generatori
indipendenti e condizioni iniziali disattivati. Il teorema può essere anche enunciato come
segue: la corrente in un bipolo(lineare(*) o non lineare, passivo o attivo) facente parte di
un circuito può essere determinata utilizzando un circuito costituito dal bipolo in oggetto
in serie ad un generatore reale di tensione di f.e.m. Veq(s) e impedenza Zeq(s) . I valori di
Veq(s) e Zeq(s) si determinano dal circuito ottenuto staccando il bipolo (il circuito residuo
deve essere un bipolo lineare) e procedendo come illustrato in precedenza.
(*) questa affermazione è valida in generale, tuttavia quando si lavora con Laplace si fa riferimento solo a
bipoli lineari (o linearizzati), ossia a bipoli per i quali le relazioni costitutive sono di tipo lineare. La t.d.L. è
infatti utilizzata per risolvere equazioni differenziali lineari a coefficienti costanti
171
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Sia dato il circuito di fig.6.30a) in cui la parte racchiusa da un rettangolo contiene
elementi attivi e passivi lineari, la parte di circuito a destra dei punti A e B è il bipolo per il
quale deve essere determinata la corrente.
A
A
V(s)
V(s)
B I(s)
I(s)
B
a)
b)
Fig.6.30 Rete lineare che alimenta un bipolo a)circuito equivalente agli effetti esterni al bipolo.
La sostituzione del bipolo con un generatore di corrente I(s) non altera, per il 1°
principio di Kirchhoff, le correnti nei rami della rete lineare. In conseguenza della costanza
delle correnti anche la tensione V(s) alle estremità del bipolo non varia. La tensione V(s)
può quindi essere calcolata sia nel circuito di fig.6.30a) che in quello di fig.6.30b).
Applicando il principio di sovrapposizione degli effetti al circuito di fig.6.30b) si ottengono
i due circuiti di fig.6.31a) e b), dal secondo dei quali, detta Zeq(s) l'impedenza equivalente
della rete lineare tra i punti A e B, risulta:
V ' ( s) = − Z eq (s)I( s)
A
A
Veq(s)
I(s)
V(s)
B
B
a)
b)
Fig.6.31 Applicazione del principio di sovrapposizione degli effetti al circuito di fig.6.30b)
Sovrapponendo gli effetti si ha:
V( s) = Veq (s) − Z eq (s)I( s)
(6.66)
che rappresenta l'equilibrio elettrico del circuito di fig.6.32. Tale circuito, detto equivalente
di Thevenin, mostra come la rete lineare sia stata trasformata in un bipolo equivalente
costituito da un generatore reale di tensione di f.e.m. Veq(s) e impedenza Zeq(s) .
Zeq
Veq(s)
A
V(s)
B
I(s)
Fig.6.32 Circuito equivalente di Thevenin
Nel caso in cui il bipolo sia lineare passivo di impedenza Z(s) si ha: V(s)=Z(s)I(s) che
sostituita nella (6.66) consente di ricavare l'espressione della corrente che vale:
172
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
I(s) =
Veq (s )
(6.67)
Z eq (s) + Z(s)
Nota: se il bipolo contiene accoppiamenti induttivi o generatori dipendenti esso deve essere
aperto in modo tale che i suddetti elementi continuino a far parte del circuito.
6.15.2 Il teorema di Norton
Il teorema di Norton è il duale di quello di Thevenin e pertanto può essere ottenuto da
quest'ultimo scambiando tra loro tensione e corrente impedenza e ammettenza(e quindi
anche circuito aperto con cortocircuito, collegamento serie con collegamento parallelo).
L'enunciato è quindi il seguente:
In un circuito un bipolo lineare può essere sostituito con uno equivalente, agli effetti
esterni, costituito da un generatore reale di corrente Ieq pari alla corrente che circolo tra
le estremità del bipolo cortocircuitato e di ammettenza uguale a quella vista alle estremità
del bipolo con generatori disattivati. Il teorema può essere anche enunciato come segue: la
tensione alle estremità di un bipolo(lineare o non lineare, passivo o attivo) facente parte
di un circuito può essere determinata in un circuito costituito dal bipolo in oggetto in
parallelo ad un generatore reale di corrente di valore Ieq(s) e ammettenza Yeq(s). I valori di
Ieq(s) e Yeq(s) si determinano dal circuito ottenuto staccando il bipolo (il circuito residuo
deve essere un bipolo lineare) e procedendo come illustrato in precedenza.
Per la dimostrazione del teorema di Norton si procede in maniera duale a quanto fatto
per il teorema di Thevenin. Dato il circuito di fig.6.33a), le tensioni e le correnti non
cambiano se si sostituisce il bipolo con un generatore ideale di tensione che stabilisca tra i
punti A e B la stessa tensione V(s) come mostrato nel circuito di fig.6.33b).
A
A
V(s)
V(s)
V(s)
B I(s)
B I(s)
b)
a)
Fig.6.33 Rete lineare che alimenta un bipolo a)circuito equivalente agli effetti esterni al bipolo
Applicando il principio di sovrapposizione degli effetti al circuito di fig.6.33b) si
ottengono i due circuiti di fig.6.34a) e b), dal secondo dei quali, detta Yeq(s) l'ammettenza
equivalente della rete lineare tra i punti A e B, risulta:
I ' ( s) = −Yeq (s) V( s)
A
A
Ieq(s)
B I'(s)
b)
Fig.6.34 Applicazione del principio di sovrapposizione degli effetti al circuito di fig.6.33b)
a)
B
V(s)
V(s)
173
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Sovrapponendo gli effetti si ha:
I( s) = I eq (s) − Yeq (s) V( s)
(6.68)
che rappresenta l'equilibrio elettrico del circuito di fig.6.34. Tale circuito, detto equivalente
di Norton, mostra come la rete lineare sia stata trasformata in un bipolo equivalente
costituito da un generatore reale di corrente di valore Ieq(s) e ammettenza Yeq(s) .
A
Yeq
Ieq(s)
V(s)
B
I(s)
Fig.6.34 Circuito equivalente di Norton
Nel caso in cui il bipolo sia lineare passivo di ammettenza Y(s) si ha: I(s)=Y(s)V(s)
che sostituita nella (6.66) consente di ricavare l'espressione della tensione che vale:
I eq ( s)
(6.69)
V(s) =
Yeq (s) + Y(s)
6.15.3 Il teorema di compensazione
Si consideri il circuito di fig.6.35a) in cui una variazione di impedenza δZ(s) provoca
una variazione di corrente δI(s) come rappresentato in fig.6.35b).
A
A
Z(s)
Z(s)
δZ(s)
B I(s)+δI(s)
B I(s)
a)
b)
A Z(s)
A
δZ(s)I(s
δZ(s)I(s)
Z(s)
δZ(s)δΙ(s)
B
I(s)+δI(s)
c)
B I(s)
d)
A Z(s)
A Z(s)
δZ(s)
δZ(s)I(s)
δZ(s)Ι(s)
δZ(s)δΙ(s)
B
e)
B
δI(s)
f)
Fig.6.35 Dimostrazione del teorema di compensazione
δI(s)
174
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Il teorema di compensazione afferma che:
in una rete lineare la variazione di corrente δI(s) dovuta ad una variazione di impedenza
δZ(s) può essere determinata mediante la relazione:
δI( s) =
− δZ( s) I( s)
δZ( s) + Z( s) + Z eq ( s)
(6.70)
in cui Z(s) è l'
impedenza che è variata della quantità δZ(s), Zeq(s) e I(s) sono l'
impedenza
equivalente vista alle estremità di Z(s)(calcolata come in Thevenin) e la corrente che
percorre Z(s) nel circuito precedente alla variazione.
L'impedenza δZ(s) percorsa dalla corrente I(s)+δI(s) può essere sostituita con due
generatori di tensione δZ(s)I(s) e δZ(s) δI(s), vedi fig.6.35c), senza che corrente e tensione
negli altri rami del circuito varino. Applicando al circuito di fig.6.35c) il principio di
sovrapposizione degli effetti, si ottengono i due circuiti di fig.6.35d) ed e), il primo dei
quali è identico a quello di partenza e fornisce la I(s), il secondo circuito, in cui tutti i
generatori indipendenti della rete a sinistra di A e B sono stati disattivati, fornisce la
variazione di corrente. Sostituendo il generatore di tensione δZ(s) δI(s) con l'impedenza
δZ(s) percorsa dalla corrente δI(s) si ottiene il circuito di fig.6.35f), dal quale indicando con
Zeq(s) l'impedenza equivalente del bipolo a sinistra dei punti A e B si ottiene la (6.70)(*).
6.15.4 Corrente in un ramo in cui viene chiuso un interruttore
da:
La corrente che percorre un ramo in seguito alla chiusura di un interruttore è data
I(s) =
V0 (s)
Z eq (s)
(6.71)
in cui V0 è una tensione pari a quella esistente alle estremità dell'
interruttore ma di
polarità contraria. Zeq(s) è l'
impedenza equivalente vista dalle estremità dell'
interruttore
con circuito disattivato
Nel circuito di fig.6.36a) l'interruttore aperto equivale ad una resistenza infinita,
percorsa da una corrente nulla, alle cui estremità è presente una tensione V0. Sostituendo
tale resistenza con un generatore ideale di tensione V0, come rappresentato in fig.6.36b), la
tensione e la corrente anche nella restante parte del circuito non variano.
Alla chiusura dell'interruttore, vedi fig.6.36c), la tensione V0 si annulla; ciò può essere
simulato inserendo un altro generatore di tensione V0 di polarità contraria a quello già
presente, come illustrato in fig.6.36d). La corrente che circola nel ramo in cui è stato chiuso
l'interruttore può dunque essere calcolata in uno qualunque dei circuiti di fig.6.36c) e d).
Considerando il circuito di fig.6.36d) ed applicando il principio di sovrapposizione degli
effetti si ottengono i due circuiti di fig.6.36e) ed f). Il primo è identico a quello di
fig.6.36b) e quindi la corrente nel ramo dell'interruttore è nulla. Tale corrente può allora
essere calcolata dal circuito di fig. 6.36 f) dal quale si ottiene la (6.71).
Si può osservare che il metodo di calcolo illustrato corrisponde all'applicazione del
teorema di Thevenin ad un ramo in cui l'impedenza è nulla.
(*) Si osservi che nel circuito utilizzato per determinare le variazioni di corrente non compaiono le condizioni
iniziali. Si ha infatti i(0)+δi(0)=i(0) e v(0)+δv(0)=v 0) da cui: δi(0)=0 e δv(0)=0.
175
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
I=0
I=0
Fig. 6.36 Corrente in un ramo in cui viene chiuso un interruttore
Fig. 6.37 Tensione in un ramo in cui viene aperto un interruttore
I(s)
176
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
6.15.5 Tensione alle estremità di un interruttore che si apre
La tensione che alle estremità di un interruttore, in seguito alla sua apertura, è data da:
V(s) =
I 0 (s)
Yeq (s)
(6.72)
in cui I0 è una corrente pari a quella che circola nell'
interruttore chiuso ma di verso
impedenza equivalente vista dalle estremità dell'
interruttore con
contraria. Yeq(s) è l'
circuito disattivato.
Poiché questo problema è il duale del precedente la dimostrazione, omessa, si conduce
come nel caso dell'apertura dell'interruttore sostituendo tensione con corrente e quindi
generatori di tensione con generatori di corrente, impedenze con ammettenze. Il modo di
procedere è indicato in fig. 6.37.
6.15.6 Il teorema di reciprocità
Il teorema di reciprocità vale per le reti reciproche, ossia quelle reti per le quali la
matrice delle impedenze/ammettenze ottenuta scrivendo l'equilibrio elettrico mediante le
correnti di maglia/tensioni di taglio è simmetrica, è cioè verificata la relazione: aij(s)=aji(s).
Tale condizione non e soddisfatta se la rete contiene generatori controllati che simulano
componenti attivi. Il teorema afferma che:
in una rete lineare reciproca, inizialmente scarica, in cui agisce un solo generatore dette k
e j due porte vale la relazione:
Vk (s) Vj (s)
=
I j ( s)
I k ( s)
(6.73)
in cui Vk(s) è la f.e.m del generatore, unico in tutto il circuito, che agisce sulla porta k-ma
e Ij(s) è corrente che tale generatore provoca sulla j-ma porta . Analogamente per Vj(s) e
Ik(s). Il teorema vale anche considerando generatori di corrente. In tal caso se Ij(s) è la
corrente del generatore sulla j-ma porta Vk(s) è la tensione ai terminali della k-ma porta e
viceversa.
Vj(s)
Vk(s)
a)
Ij(s)
Ik(s)
Vj(s)
Ik(s)
b)
Ij(s)
Vk(s)
Ik(s)
c)
d)
Fig.6.38 Teorema di reciprocità, con generatori di tensione a),b) e con generatori di corrente c) e d)
177
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Per i circuiti di fig.6.38a) e b) si ha:
0
.
a 11 ( s)
.
a k1 ( s).
Vk ( s)
=
.
.
.
.
a
0
n1 ( s)
. . a 1 j ( s) . a 1n ( s)
. .
.
.
.
.
.
.
.
. a kj ( s)
.
.
.
.
. a nj ( s)
.
.
.
.
I 1 ( s)
.
a kn ( s)
.
.
I j ( s).
.
.
a nk ( s) I n ( s)
0
.
.
Vj ( s)
.
0
=
a 11 ( s) . . a 1 j ( s)
.
. .
.
. a 1n ( s)
.
.
..
a j1 ( s)
.
a n1 ( s)
.
.
.
.
.
.
.
.
.
.
. a jk ( s)
.
.
. a nj ( s)
I 1 ( s)
.
.
I k ( s).
a jn ( s)
..
.
.
a nk ( s) I n ( s)
da cui indicando con [A(s)] la matrice delle ammettenze e con αij(s) il generico elemento di
[A(s)]-1si trova:
V j (s)
Vk (s)
= α kj (s)
I j (s)
I k (s)
= α jk (s)
Vk (s) Vj (s)
=
.
I j ( s)
I k ( s)
In modo analogo considerando le reti di fig.6.38c) e d).
e poiché la rete è reciproca risulta αkj(s)=αjk(s)(*) e quindi:
6.16 Il teorema di Millmann
Il teorema di Millmann afferma che:
in un circuito in cui tutti i rami sono in parallelo, e quindi sono presenti due soli nodi, la
differenza di potenziale alle estremità di tali rami può essere determinata mediante la
relazione:
I CCi (s)
r
V( s) =
(6.74)
Yi (s)
r
in cui Icc(s) e Y(s) sono la corrente di corto circuito, prese con segno positivo se entranti
nel nodo, e l'
ammettenza, calcolata con generatori disattivati, di ciascun ramo.
La dimostrazione discende immediatamente dal metodo delle tensioni di taglio (o del
potenziale di nodo). Per circuiti contenenti solo generatori di corrente, le correnti di corto
circuito coincidono con quelle dei generatori, per gli eventuali generatori di tensione
presenti si ha: I CCi (s) = E i ( s) Yi (s) . Nel caso in cui siano presenti accoppiamenti induttivi,
si deve prima procedere all'operazione di disaccoppiamento. Anche la presenza di
generatori controllati non consente una immediata applicazione della (6.74).
Esempio 6.20
Applicando il teorema di Millmann ai due circuiti di fig.6.39 a)e b) si ottiene
rispettivamente:
(*) Dalle relazioni: a (s)=a (s), a (s) α (s)=0, a (s) α (s)=0, valide per ogni i≠j, si ha a (s) α (s)=a (s) α (s) e
ij
ji
ij
ij
ji
ji
ij
ij
ji
ji
quindi αij(s)=αji(s)
178
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
V( s) =
E( s) I 0
− + CV0
R
s
V( s) =
1
1
1
+
+ Cs +
R 1 Ls
R2
I0
+ CV0
s
1 1
+ + Cs
Ls R
J ( s) −
I0
s
J(s)
1 +
_
R
1
Ls
CV0 V(s)
a)
1
Cs
Ls
E(s)
LI0
R1
R2 V(s)
V0
s
b)
Fig.6.39 Esempio 6.30
6.17 Considerazioni sulla determinazione della f.d.t.
La relazione (6.55) fornisce un metodo generale per la determinazione della f.d.t.;
direttamente dal circuito possono tuttavia essere effettuate previsioni sulle caratteristiche di
tale f.d.t. e in alcuni casi semplici possono anche essere determinati, attraverso i teoremi di
Thevenin e Norton, i poli e gli zeri.
6.17.1 Grado del numeratore e del denominatore
Il grado m del denominatore viene stabilito, con le modalità già illustrate in
precedenza, dal numero degli elementi reattivi presenti nel circuito. Poiché, detto n il grado
del numeratore, deve essere m ≥ n, al tendere di s→∞ possono presentarsi i seguenti due
casi:
• lim W(s) = 0
se m>n
s→∞
• lim W(s) = K
s→∞
(*)
se m=n
Dal circuito si può stabilire direttamente se è verificata la prima o la seconda delle due
relazioni ossia se è m>n oppure m=n. Si osservi infatti che per s→∞ le impedenze
operazionali Ls→∞ mentre quelle 1/Cs→0, ciò, sul circuito significa, aprire gli induttori e
cortocircuitare i condensatori. Una volta eseguita questa operazione deve essere verificato
il valore, 0 o KVi, al quale tende la tensione Vu di uscita.
(*)
K è lo stesso della relazione (6.59)
179
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Esempio 6.21
Si vuol determinare la relazione tra il grado del numeratore e quello del denominatore
V (s)
per i due circuiti di fig.6.40
per le f.d.t. W(s) = u
Vi (s)
1/Cs
Vi(s)
Ls
R Vu(s)
a)
R1
R2
Ls
R1
R2
Vu(s)
Vi(s)
R Vu=Vi
Vi
Vi
1/Cs
Vu=0
b)
Fig.6.40 Esempio 6.21
I due circuiti sono entrambi del secondo ordine poiché sono presenti due elementi
reattivi indipendenti e quindi m=2. Nel caso di fig.6.40a) risulta anche n=2 poiché per
s→∞ la tensione di uscita non è nulla. Nel caso di fig.6.40b) n<2 poiché la tensione di
uscita è nulla.
6.17.2 Caratteristiche dei poli
• In una rete passiva, ossia costituita di soli resistori, induttori, condensatori ed
accoppiamenti induttivi, i poli della f.d.t. non possono essere a parte reale positiva.
Infatti, se fossero presente radici a parte reale positiva la risposta alle sole condizioni
iniziali si amplificherebbe; ciò non è possibile perché per la presenza degli elementi
passivi l'energia del circuito può solo diminuire o al più rimanere costante se non sono
presenti resistori.
• In un circuito con soli elementi passivi, in cui gli elementi reattivi sono di un solo tipo
(L o C), i poli della f.d.t. possono essere solo reali e negativi. Poli complessi coniugati
darebbero luogo ad una risposta alle condizioni iniziali di tipo oscillatorio smorzato che
implica uno scambio energetico tra gli elementi reattivi del circuito. Scambio che può
avvenire solo se sono presenti sia induttori che condensatori, in tal caso la scarica
dell'induttore provoca la carica del condensatore e viceversa.
asse immaginario. Si innesca in questo caso uno scambio
• Una rete LC ha i poli sull'
energetico tra condensatore e induttore che da luogo a oscillazioni non smorzate. In
questo cado infatti l'energia complessivamente presente nel circuito, mancando la causa
dissipante costituita dalle resistenze, rimane costante, ossia:
1 2 1 2
Cv C + Li L = K
2
2
180
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
6.17.3 Determinazione dei poli
I poli della f.d.t. sono dati dagli zeri dell'
impedenza(dell'
ammettenza), ottenuta
sommando all'
impedenza (all'
ammettenza) di un qualsiasi elemento del circuito
l'
impedenza (l'
ammettenza) vista ai terminali dell'
elemento stesso e calcolata disattivando i
generatori indipendenti.
Si consideri la rete attiva di fig.6.41a) in cui agisce un solo generatore indipendente di
tensione, inserito nell'i-mo ramo, e si calcoli la corrente che circola nel k-mo ramo. Tale
corrente può essere determinata mediante il metodo delle correnti di maglia, applicato al
circuito di fig.6.41a) o al circuito equivalente di fig.6.41b) ottenuto mediante il teorema di
Thevenin.
A
A
Zk(s)
Zk(s)
Ei(s)
Eeqk(s)
B
B Ik(s)
a)
Ik(s)
b)
Fig. 6.41 Rete attiva a) rete equivalente di Thevenin per il calcolo della corrente ne k-mo ramo
Dal circuito di fig.6.41a) si ha:
0
.
a11( s) .
.
.
. a1n ( s) I1( s)
.
.
.
.
. a ik ( s) . a ni ( s)
I1( s)
α11( s) .
.
. α1n ( s)
0
.
.
.
.
.
1
α i1( s) . α ik ( s) . α ni ( s) E i ( s)
=
det[A ]
.
α k1( s) . α ki ( s) . α kn ( s)
I k ( s)
0
α n1( s) .
.
. α nn ( s)
I n ( s)
.
.
.
.
E i ( s) = a i1( s)
.
a k1( s) . a ki ( s) . a kn ( s) I k ( s)
0
a n1( s) .
.
. a nn ( s) I n ( s)
.
da cui si ottiene:
α ki (s)
I k (s )
=
E i (s) det[A (s)]
Dal circuito di fig.6.41b), posto Eeqk(s)=β(s)Ei(s) si ha:
.
a11( s) .
.
.
.
.
0
= a i1( s) . a ik ( s)
E eqk ( s)
a k1( s) . a ki ( s)
0
.
a n1( s) .
0
e quindi:
. a1n ( s) I '1( s)
.
.
.
. a ni ( s)
.
. a kn ( s) I k ( s)
. a nn ( s) I ' n ( s)
I '1( s)
.
.
I k ( s)
I ' n ( s)
1
=
det[A ]
α11( s) .
.
. α1n ( s)
.
.
.
.
.
α i1 ( s) . α ik ( s) . α ni ( s)
0
.
0
α k1( s) . α ki ( s) . α kn ( s) E eqk ( s)
0
.
. α nn ( s)
α n1( s) .
I k (s ) α kk (s)β(s )
=
E i (s) det[A(s)]
I poli della f.d.t. sono gli zeri dell'equazione caratteristica det[A(s)] = 0 e quindi i
termini come αki e αkk non hanno influenza, salvo particolari casi di semplificazione. Dalla
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
181
relazione precedente si deduce che anche β(s) non interviene sui poli della f.d.t. Dovendo
inoltre essere:
I k (s) =
α kk (s)β(s) E i (s)
β(s) E i (s)
=
det[A (s)]
Z eq ( s) + Z(s)
si deduce che:
poli{Ik(s)}=zeri{det[A(s)]}=zeri{Zeq(s)+Z(s)}
(6.75)
Con una procedura del tutto simile è facile vedere che è anche:
zeri{det[A(s)]}=zeri{Yeq(s)+Y(s)}
(6.76)
Esempio 6.22
Si può applicare quanto detto in precedenza per calcolare i poli della f.d.t. relativa
all'esempio 6.12. Guardando da R1 si ha:
R1 +
L1s(R 2 + L 2 s )
R 2 + (L1 + L 2 )s
L1L 2 s 2 + (L1R 1 + L 2 R 1 + L1R 2 )s + R 1R 2
1
1
1
+
+
L1L 2 s 2 + (L1R 1 + L 2 R 1 + L1R 2 )s + R 1R 2
R 1 L1s R 2 + L 2 s
Guardando da L1s si ottiene
R 1 (R 2 + L 2 s )
R1 + R 2 + L 2s
l'impedenza
L1s +
1
1
1
+
+
L1s R 1 R 2 + L 2 s
L1L 2 s 2 + (L1R 1 + L 2 R 1 + L1R 2 )s + R 1R 2
L1L 2 s 2 + (L1R 1 + L 2 R 1 + L1R 2 )s + R 1R 2
per l'impedenza
per l'ammettenza
per
per l'ammettenza
Dall'equazione L1L 2 s 2 + (L1R 1 + L 2 R 1 + L1R 2 )s + R 1R 2 = 0 si trovano i poli che
sono ovviamente gli stessi ottenuti per altra via nell'esempio 6.12
6.17.4 Determinazione degli zeri
Sono definiti zeri quei valori di s per cui si annulla il numeratore della f.d.t. e quindi
anche l'uscita. La ricerca diretta degli zeri consiste quindi nel determinare, agendo sul
circuito, i valori di s che annullano l'uscita. Se per s = 0 l'uscita si annulla è presente
almeno uno zero nell'origine.
6.17.5 Determinazione del guadagno
Il guadagno K che compare nella (6.59) può essere determinato, solo se il numero dei
poli e degli zeri è uguale, mediante la relazione lim W(s) . Nel circuito ciò significa
s→∞
valutare il rapporto uscita ingresso con rami contenenti le induttanze aperti e rami
contenenti i condensatori cortocircuitati
182
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Esempio 6.23
Nel circuito di fig.6.42 la tensione di uscita si annulla se l'ammettenza del gruppo RC si
annulla.
1/Cs
V1(s)
R
R V2(s)
Fig.6.42 Esempio 6.23
Lo zero si ricava dalla relazione:
1
1
+ Cs = 0 da cui: s = −
R
RC
Il polo si ricavando si ricava sommando l'ammettenza relativa a R con quella equivalente
vista ai suoi terminali e poi uguagliando a zero, ossia:
2
2
+ Cs = 0 da cui: s = −
R
RC
Cortocircuitando i rami contenenti condensatori e aprendo quelli contenenti induttanze si
trova K=1. La f.d.t. vale quindi:
1
RC
W(s) =
2
s+
RC
s+
Esempio 6.24
Il circuito rappresentato in fig.6.43, comprendente due elementi reattivi indipendenti è
del secondo ordine e quindi nella f.d.t. W(s)=V2(s)/V1(s) sono presenti due poli. Aprendo i
rami contenenti le induttanze si trova che la tensione di uscita e quella di ingresso sono
uguali e pertanto sono presenti anche due zeri e K=1. Cortocircuitando gli induttori si
l'uscita risulta non nulla e pertanto non sono presenti zeri nell'origine. Per determinare poli
e zeri si fa ricorso a quanto detto ai punti 3) e 4).I poli si ottengono dalla relazione:
(R 1 + L1s)( R 2 + L 2 s) + R(R 2 + L 2 s) + R( R 1 + L1s)
1
1
1
+
+
=
=0
R R 1 + L 1s R 1 + L 1s
R( R 1 + L1s)( R 2 + L 2 s)
Gli zeri si ottengono annullando l'uscita, ciò avviene per i valori di s per cui:
R 1 + L 1s = 0
da cui
s= −
R1
L1
R 2 + L 2s = 0
da cui
s=−
R2
L2
183
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
R
R1
R2
V2(s)
V1(s)
L1
L2
Fig.6.43 Esempio 6.24
Se si considera il caso in cui:
R1 R 2
=
= a si hanno due zeri coincidenti di valore -a, per
L1 L 2
i poli si ha:
L1 L 2 ( s + a ) 2 + RL 2 ( s + a ) + RL1 ( s + a ) = ( s + a ) s + a + R
L1 + L 2
=0
L1 L 2
La f.d.t. risulta:
( s + a) 2
W( s) =
( s + a)
=
L1 + L 2
L + L2
s+a + R 1
L1 L 2
L1 L 2
Si deduce che i due rami in parallelo aventi la stessa costante di tempo portano ad una
semplificazione polo-zero e pertanto fanno abbassare l'ordine del circuito. Il polo poteva
essere trovato in maniera più immediato sostituendo i due rami in parallelo con uno di
ammettenza equivalente.
( s + a) s + a + R
6.18 Risposta a regime stazionario e risposta transitoria
Prima di definire il significato di regime e di transitorio si consideri il seguente
esempio.
Esempio 6.25
Si abbia un circuito del primo ordine, RL serie, alimentato da un generatore di tensione
avente f.e.m. e(t)=EM senωt u(t) e condizione iniziale i(0)=I0.
Come noto la corrente vale:
i( t ) = Ke
−
t
τ
+ I M sen( ωt − ϕ ) con τ =
L
R
IM =
EM
2
2 2
R +ω L
ϕ = arctg
ωL
R
la costante di integrazione vale: K = I 0 + I M sen ϕ . Sostituendo si trova:
i( t ) = (I 0 + I M sen ϕ)e
−
t
τ
+ I M sen( ωt − ϕ )
Nel caso in cui la tensione applicata sia e( t ) = E M sen ωt u( t − t 0 ) , operando un
cambio di variabile t' = t-t0 si ha: e( t ) = E M sen ω( t ' + t 0 ) u( t ' ) .
Risolvendo, con i(t0)=I0 si ha:
i( t ) = Ke
−
t'
τ
[
]
+ I M sen ω( t ' + t 0 ) − ϕ = Ke
−
t−t0
τ
+ I M sen( ωt − ϕ)
184
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
e poiché K = I 0 − I M sen(ωt 0 − ϕ)
risulta:
[
]
i( t ) = I 0 − I M sen(ωt 0 − ϕ ) e
−
t −t0
τ
+ I M sen(ωt − ϕ)
In generale per un circuito di ordine n in cui le radici dell'equazione caratteristica sono
reali e distinte si trova:
i( t ) =
n
1
Kie
pi
( t−t0 )
τ
+ i p ( t)
(6.77)
Nella (6.77) la corrente è composta da due parti: una che rappresenta, secondo la
terminologia utilizzata nella teoria classica della risoluzione delle equazioni differenziali,
la soluzione complementare, l'altra la soluzione particolare. Il tipo di andamento nel tempo
della soluzione complementare (esponenziale, oscillatoria) dipende dai soli parametri del
circuito, attraverso le radici pi; detta risposta dipende tuttavia anche dalle condizioni
iniziali, attraverso i coefficienti Ki e dal tempo t0. La risposta particolare è invece
indipendente sia dalle condizioni iniziali che dall'istante t0 di inizio del fenomeno(perché il
circuito è stazionario).
Se il circuito è asintoticamente stabile, ossia se Re{pi}<0, al tendere di t→∞ la
soluzione complementare tende a zero, ed è detta risposta transitoria, e la soluzione
completa si identifica con quella particolare. Se infine gli ingressi sono tali per cui la
risposta del circuito ha andamento nel tempo dello stesso tipo dell'andamento degli ingressi
(ciò accade solo per ingressi di tipo esponenziali) allora si dice che il circuito ammette
regime e la soluzione particolare è detta risposta a regime. Anche gli ingressi sinusoidali e
quelli costanti possono essere visti come segnali esponenziali, in questo caso si parla di
regime sinusoidale e regime continuo.
Un circuito lineare stazionario ammette regime se è asintoticamente stabile e se gli
ingressi sono di tipo esponenziale.
Esempio 6.26
Per un circuito RLC serie con ingresso esponenziale di tipo i( t ) = Ie αt si ha:
v( t ) = RIe αt + LDIe αt +
1 αt
I
Ie = RI + αLI +
e αt = Ve αt
CD
αC
L'ingresso e l'uscita sono entrambi esponenziali.
Nel caso in cui l'ingresso sia i(t)=At si ha:
v( t ) = RAt + LA + A
t2
2
In questo caso l'uscita non è del tipo a rampa come l'ingresso.
La risposta a regime può essere calcolata facendo uso della f.d.t. W(s).
Sia infatti x( t ) = Ae αt il generico ingresso la T.d.L. della risposta forzata, nel caso di
poli reali e distinti, è data da:
185
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Y(s) = W(s) X(s) =
n
Ki
K
+
s − si s − α
(6.78)
A
( s − α)
= AW(α )
s−α
s=α
(6.79)
N (s)
n
∏ (s − s )
A
=
s−α
i
1
i
in cui:
K = W( s)
Sostituendo nell'espressione di Y(s) e antitrasformando si ottiene:
y( t ) =
n
1
K i s si t + AW(α )e αt
(6.80)
Se il circuito è stabile il primo termine, rappresenta la risposta transitoria dovuta ai soli
generatori. La risposta a regime risulta:
y r ( t ) = AW(α )e αt = W(α) x( t )
(6.81)
Se l'ingresso è costante, ossia α=0, si ha:
y r ( t ) = W(0)A
(6.82)
Per ingressi sinusoidali, lavorando con il metodo fasoriale, si ha:
x( t ) = X M sen ωt → X M e jωt = X( t )
Poiché la L-trasformata dell'ingresso è:
[
]
L X M e jωt =
XM
s − jω
il fasore rotante dell'uscita, per la (6.81), risulta:
Yr ( t ) = W( jω ) X( t )
(6.83)
Si ha poi:
( )
yr(t)=Im{ Yr ( t ) }=Im{ W( jω ) U M e j[ ωt +ϕ ω ] }= W( jω ) U M sen[ωt + ϕ( ω ) ]
in cui W( jω )
e ϕ(ω) sono il modulo e l'argomento di W(jω).
La risposta transitoria dovuta ai soli generatori vale:
n
Ki
y tg ( t ) = y( t ) − y r ( t ) =
s − si
1
in cui:
Ki =
N (s)(s − si )
∏ (s − s j )
n
j=1
=
U(s)
s= si
N (si )
n
∏
j=1( j≠ i )
(s − s )
i
j
A
si − α
(6.84)
(6.85)
La risposta forzata è quindi uguale alla somma tra la risposta transitoria dovuta ai soli
generatori e la risposta a regime. Per le uscite che sono anche variabili di stato (correnti
186
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
negli induttori e tensioni ai terminali dei condensatori) dovendo essere y(0+)=y(0-) risulta
anche ytg(0+)= −yr(0+).
Se le condizioni iniziali non sono nulle la risposta complessiva può essere trovata, in
virtù della linearità del circuito, sommando alla (6.80) la risposta dovuta alle sole
condizioni iniziali.
Dalla (6.44), per ingressi di tipo u( t ) = Ae αt si ha:
Y (s) =
n
1
n
Ki
H
+
+
s − si s − α
Mi
s − si
1
(6.86)
in cui:
Mi =
N(s)(s − s i )
n
∏ (s − s j )
j=1
N(s i )
=
U 0 (s)
n
∏ (s i − s j )
(6.87)
U 0 (s i )
j=1( j≠i )
s =s i
Si ha quindi:
Y(s) =
n
1
Ki + Mi
H
+
=
s − si
s−α
n
1
N (si )
n
∏
j=1( j≠ i )
i
(s − s )
i
[U(s ) − U (s )] +
j
0
s − si
i
H
s−α
(6.88)
Antitrasformando si ha:
y( t ) = y t ( t ) + y r ( t )
(6.89)
in cui il primo termine rappresenta la risposta transitoria determinata sia dai generatori che
dalle condizioni iniziali, il secondo la risposta a regime. Tale risultato è ovviamente uguale
a quella che si ottiene lavorando con il circuito L-trasformato contenente i generatori di
condizioni iniziali.
La risposta complessiva del circuito può essere anche trovata determinando
separatamente il transitorio, dovuto ai generatori e alle condizioni iniziali, e il regime e
successivamente sommando. Tale modo di procedere risulta particolarmente comodo in
corrente continua e in corrente alternata. Infatti in corrente continua il regime può essere
determinato cortocircuitando i rami contenenti gli induttori e aprendo quelli contenenti i
condensatori; in corrente alternata il regime può essere calcolato mediante il metodo
fasoriale. Il transitorio può invece essere determinato considerando un circuito Ltrasformato transitorio in cui i generatori indipendenti sono stati disattivati e quelli di
condizioni iniziali si ottengono considerando le condizioni iniziali transitorie. Per
comprendere la validità di questa procedura si consideri che la risposta transitoria
corrisponde, per circuiti stabili, alla risposta complementare del metodo classico; tale
risposta è ottenuta rendendo omogenee le equazioni differenziali che rappresentano
l'equilibrio elettrico del circuito, ossia supponendo di disattivare i generatori indipendenti.
L-trasformando tale circuito vengono a comparire generatori di condizioni iniziali relativi
al solo valore iniziale della componente transitoria.
187
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Le condizioni iniziali transitorie si ottengono, per le grandezze che sono anche
variabili di stato, dalla (6.89) e valgono:
y t ( 0) = y ( 0) − y r ( 0)
6.90)
Dal circuito in cui sono presenti i generatori indipendenti, ed eventualmente quelli
controllati, si ricava la risposta a regime, dal circuito transitorio L-trasformato in cui
sono presenti i generatori di condizioni iniziali transitorie, ed eventualmente quelli
controllati, con generatori indipendenti disattivati, si calcola la risposta transitoria.
Esempio 6.27
Nel circuito di fig.6.44a), in cui i generatori forniscono tensioni costanti nel tempo, i valori
delle correnti negli induttori all'istante zero valgono i1(0)=I10 e i2(0)=I20 .
L1
E1
L1s
L2
E2
i2
i1
R1
L2i2t(0)
I2t(s)
I1t(s)
L1i1t(0)
R1
R2
a)
L2s
R2
b)
Fig.6.44 Esempio 6.27
Le correnti a regime si trovano, sostituendo gli induttori con cortocircuiti, dalle relazioni:
E1
R + R1
=
−R
E2
−R
I 1r
R + R 2 I 2r
da cui risulta:
I 1r =
E1 (R + R 2 ) + E 2 R
R 1 R 2 + R( R 1 + R 2 )
I 2r =
E 2 ( R + R 1 ) + E1R
R 1 R 2 + R( R 1 + R 2 )
Le condizioni iniziali transitorie valgono:
i 1t ( 0) = I 10 − I 1r
i 2 t ( 0) = I 20 − I 2 r
In fig.6.44b) è riportato il circuito L-trasformato transitorio, dal quale si ha:
L1i1t (0 )
I1t (s )
R + R 1 + L1s
−R
=
L 2 i 2 t (0 )
R + R 2 + L 2 s I 2 t (s )
−R
Risolvendo con Laplace, e quindi utilizzando il circuito L-trasformato, si trova la
soluzione complessiva. Nel dominio della variabile s la soluzione a regime è individuata
dai termini aventi denominatore uguale a quello della L-trasformata di Laplace
dell'ingresso. In t la soluzione a regime è ottenuta facendo tendere il tempo all'infinito
nell'espressione antitrasformata.
188
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Nell'ipotesi che la risposta a regime esista, indicando con yc(t), yp(t), yt(t), yr(t), yl(t),
yf(t), la soluzione complementare, la particolare, la risposta transitoria, quella di regime, la
risposta libera e la risposta forzata, la risposta del circuito può essere scritta nei seguenti
modi:
y( t ) = y c ( t ) + y p ( t ) = y t ( t ) + y r ( t ) = y l ( t ) + y f ( t )
(6.91)
in cui la risposta complementare e quella particolare coincidono rispettivamente con la
transitoria e con quella di regime. La risposta forzata coincide con quella di regime a
transitorio esaurito. Riassumendo le definizioni per i vari tipi di risposta si ha:
Risposta libera è la risposta del circuito alle sole condizioni iniziali (e quindi con ingressi
nulli).
Risposta transitoria è la somma della risposta libera e della risposta transitoria, ossia di
quella parte che si esaurisce al tendere all'
infinito del tempo.
Risposta a regime è la risposta del circuito a transitorio esaurito.
Risposta forzata è la risposta del circuito ai soli ingressi (e quindi con condizioni iniziali
nulle) ed è data dalla somma tra la risposta a regime e il transitorio dovuto ai soli
ingressi.
Si osservi che un circuito contenenti elementi reattivi può anche non avere transitorio.
Affinché ciò si verifichi deve accadere che nella (6.90) risulti y(0) = yr(0), o più in generale
y(t0) = yr(t0). Ciò significa che la presenza o meno del periodo transitorio in un circuito, in
seguito ad una perturbazione di un precedente regime, dipende anche dall'istante di
chiusura.
6.19 Circuiti del I° ordine
Sia assegnata una f.d.t. relativa ad un circuito del I° ordine, con condizioni iniziali
nulle, ossia del tipo:
W(s) =
K
s+1/ τ
(6.92)
in cui τ è la costante di tempo già definita al Cap 4.6. Si vuol determinare, facendo uso
della t.d.L. la risposta del circuito all'ingresso a gradino unitario e all'impulso unitario.
6.19.1 Risposta al gradino unitario
Poiché come noto la t.d.L. dell'ingresso a gradino unitario risulta U(s)=1/s, per la
risposta si ha:
G (s) = W(s) U(s) =
K
τ
τ
=K −
s(s + 1 / τ)
s s+1/ τ
(6.93)
da cui antitrasformando si ha:
g ( t ) = Kτ 1 − e
− τt
u (t )
(6.94)
Come precisato al Cap.4.6 l'esponenziale può essere considerato nullo dopo 4-5
costanti di tempo.
189
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
6.19.2 Risposta all'impulso unitario
Poiché la t.d.L dell'impulso unitario è U(s)=1 si ha:
w ( t ) = L−1
K
−t
= Ke τ u( t )
s+1/ τ
(6.95)
allo stesso risultato si giunge ricordando che poiché l'impulso unitario è la derivata del
gradino unitario, la w(t) può essere determinata derivando la (6.94). Si ha infatti:
(
)
1 −t
−t
−t
w ( t ) = g' ( t ) = Kτ e τ u( t ) + Kτ 1 − e τ δ( t ) = Ke τ u( t )
τ
Esempio 6.28
Si vogliono calcolare le risposte al gradino e all'impulso unitario per i due circuiti
rappresentati in fig. 6.45.
Le f.d.t. risultano rispettivamente:
WC (s) =
1
1
1
1 1
=
=
1 + sRC RC s + 1 / RC τ s + 1 / τ
WL ( s) =
s
s
=
s+ R / L s+1/ τ
La risposta al gradino risulta:
g C ( t ) = L−1
(
)
1
1
−t
−
= 1 − e τ u( t )
s s+1/ τ
g L ( t ) = L−1
R
V1(s)
1
−t
= e τ u( t )
s+1/ τ
R
V2(s)
1/sC
V1(s)
Ls
V2(s)
Fig.6.45 Esempio 6.28
Le risposte all'impulso risultano:
w C ( t ) = L−1
1 1
1 −t
= e τ u( t )
τ s+1/ τ
τ
1 −tu
w L ( t ) = g 'L ( t ) = − e τ u( t ) + δ ( t )
τ
Gli andamenti delle risposte trovate sono rappresentati in fig. 6.46.
1/τ
gL(t)
1
gC(t)
wC(t)
1
wL(t)
δ(t)
t
-1/τ e-t/τ
-1/τ
t
t
Fig.6.46 Andamenti delle risposte al gradino e all'
impulso unitari per i circuito di fig.6.45
190
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Si può osservare che per il circuito RL, non strettamente causale poiché numeratore e
denominatore della f.d.t. sono uguali, un impulso in ingresso viene trasferito sull'uscita.
Dal punto di vista fisico si può fornire la seguente spiegazione: al tempo 0- in cui viene
applicato δ(t) l'induttanza non dovendo essere percorsa da corrente, poiché i(0-)=0, si
comporta come un circuito aperto e quindi tutta la tensione si localizza ai suoi terminali. Si
osservi che la presenza dell'impulso consente una discontinuità nella corrente ed infatti
risulta i(0+)=1/L. Diversamente accade per il circuito RC per il quale il condensatore è
inizialmente un coro e pertanto l'impulso si localizza ai terminali di R. Infatti:
VR (s) =
s
da cui:
s +1/ τ
1 −tu
v R ( t ) = − e τ u( t ) + δ( t )
τ
6.20 Circuiti del II° ordine
Si consideri una f.d.t. tipica di un sistema del II° ordine data da:
W(s) =
ω 2n
(6.96)
s2 + 2sξω n + ω 2n
in cui ξ e ωn sono lo smorzamento e la pulsazione naturale. (La (6.96) è la f.d.t. che si
ottiene considerando un circuito RLC serie e assumendo come ingresso la tensione e come
uscita la tensione sul condensatore). Risulta tuttavia evidente che per qualunque circuito
del II° ordine il denominatore della f.d.t. può essere posto nella stessa forma della (6.96).
Al variare dello smorzamento le radici del denominatore (poli) descrivono, sul piano
di Gauss, un luogo detto luogo delle radici. Tale luogo è rappresentato nella fig.6.47. Le
radici valgono:
s1,2 = − ξω n ± ω n ξ 2 − 1
ξ >1
s1,2 = −ω n
ξ =1
s1,2 = − ξω n ± jω n 1 − ξ 2
(6.97)
ξ <1
s1,2 = ± jω n
ξ=0
j
ξ=0
ξ<1
ω n 1− ξ2
ωn
ξ>1
ξ>1
σ
−ξωn
ξ=1
ξ<1
ϕ = arctg
ξ=0
Fig.6.47Luogo delle radici per un circuito del II° ordine di tipo RLC
1− ξ2
ξ
191
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
Calcoliamo la risposta al gradino e all'impulso per il caso in cui ξ<1 (per il caso ξ>1 si
hanno due esponenziali simili a quelli dei circuiti di I° ordine).
6.20.1 Risposta al gradino unitario
Si ha:
G (s) = W(s) U(s) =
ω 2n
1
1
As + B
2
2 = − 2
s s + 2ξω n + ω n s s + 2ξω n + ω 2n
e poiché deve essere:
ω2n = s 2 + 2ξω n + ω 2n − As 2 − Bs
si trova: A=1 B = 2ξω n
Risulta quindi:
ω n 1 − ξ2
s + 2ξω n
s + ξω n
1
1
ξ
= −
−
G (s) = − 2
2
s s + 2ξω n + ω 2n s (s + ξω ) 2 + ω 2 (1 − ξ 2 )
1 − ξ 2 (s + ξω n ) + ω 2n (1 − ξ 2 )
n
n
da cui antitrasformando si ha:
(
)
g ( t ) = 1 − e −ξωn t cos ω n 1 − ξ 2 t − e −ξωn t
ξ
1− ξ
2
(
)
sen ω n 1 − ξ 2 t u ( t )
si può anche scrivere:
e − ξω n t
g( t ) = 1 −
1 − ξ2
(
sen ω n 1 − ξ
2
)t + arctg
1 − ξ2
u( t )
ξ
(6.98)
In fig.6.48 è riportato l'andamento di g(t).
1+
g(t)
1
1 − ξ2
e − ξω n t
Tp
1−
OS
1
1 − ξ2
e − ξω n t
1,2
1
0,9
0,98
t2
tp
tS
t
Fig.6.48 Risposta al gradino unitario di un circuito del II° ordine con ξ <1
La risposta del circuito del II° ordine al gradino unitario è caratterizzata da un certo
numero di grandezze, ossia:
192
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
− OS massima sovraelongazione (overshoot)
− tp tempo di picco (istante al quale si verifica la massima sovraelongazione). Derivando
g(t) e uguagliando a zero si ha:
tp =
π
OS = e
ω n 1 − ξ2
−
πξ
1− ξ 2
(6.99)
− tR tempo di salita. Tempo necessario affinché l'uscita passi dal 10% al 90% del valore
finale
− tE tempo all'emivalore. Tempo impiegato affinché l'uscita raggiunga il 50% del valore
finale
− tS tempo di assestamento. Tempo impiegato affinché l'uscita rimanga entro il ±2% del
valore finale. Poiché trascorso un tempo pari a 4ξωn l'uscita raggiunge il 98,2% del
valore finale si ha t S ≅ 4 / ξω n
− Tp periodo. E' il tempo che intercorre tra due picchi e che vale:
Tp =
2π
(6.100)
ωn 1 − ξ 2
− N numero di oscillazioni compiute nel tempo tS. Questo numero è dato dal rapporto tra
il tempo di assestamento e il periodo. Risulta quindi:
2
tS 2 1− ξ
N=
=
Tp
πξ
(6.101)
La conoscenze di queste grandezze consente di individuare l'andamento della risposta
al gradino e permette anche di confrontare le risposte di circuiti diversi (ovviamente
sempre del II° ordine).
Per smorzamento nullo (ricordiamo che questo può avvenire se la resistenza è nulla) la
risposta al gradino unitario vale:
g( t ) = 1 − sen ω n t +
π
2
u( t ) = (1 − cos ω n t )u( t )
(6.102)
6.20.2 Risposta all'impulso unitario
La risposta all'impulso unitario è data dall'antitrasformata della funzione di
trasferimento W(s) e vale:
w ( t ) = L−1 [W(s)] = L−1
ω n 1 − ξ2
ωn
1− ξ
2
(s + ξω n )
2
+ ω 2n
(1 − ξ )
2
=
ωn
1− ξ
2
(
)
sen ω n 1 − ξ 2 t u( t )
(6.103)
L'andamento nel tempo della risposta w(t) all'impulso unitario δ(t) è riportato in
fig.6.49.
193
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
w(t)
ωn
1− ξ
2
e − ξω nt
− ωn
1− ξ
2
e − ξω nt
Fig.6.49Risposta all'
impulso unitario di un circuito del II° ordine avente ξ < 1
Esempio 6.29
Si consideri un circuito da tre elementi R, L,C, collegati in serie e si calcolino le funzioni
di trasferimento che si ottengono assumendo come ingresso la tensione ai terminali del
bipolo e come uscita la tensione ai terminali della resistenza R, dell'induttanza L, e della
capacità C.
Si ottiene:
WR ( s) =
VR (s)
R
sCR
sR / L
sR / L
=
=
=
=
V(s)
R + Ls + 1 / sC s2 LC + sCR + 1 s 2 + sR / L + 1 / LC s2 + 2sξω n + ω 2n
in cui la pulsazione naturale e lo smorzamento valgono:
ωn =
WL (s) =
1
LC
ξ=
R C
2 L
VL (s)
Ls
s2 LC
s2
=
= 2
= 2
V(s)
R + Ls + 1 / sC s LC + sCR + 1 s + 2sξω n + ω 2n
VC (s)
ω 2n
1 / sC
1
WC (s) =
=
=
=
V(s)
R + Ls + 1 / sC s2 LC + sCR + 1 s2 + 2sξω n + ω 2n
La WL(s) è non strettamente causale poiché anche il numeratore è di secondo grado.
Dividendo si ha:
WL (s) = 1 −
2sξω n + ω 2n
s2 + 2sξω n + ω 2n
= 1 − WL* (s)
Nella fig. 6.50 sono rappresentate, mediante diagrammi a blocchi, le funzioni di
trasferimento ottenute nei tre casi.
Si può osservare che per la WL(s), come già detto non strettamente causale, un segnale
applicato in ingresso, salvo particolari semplificazioni come accade ad esempio per il
gradino, si ritrova anche in uscita.
194
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
V(s)
V(s)
WR(s)
VR(s)
+
WR*(s)
V(s)
WC(s)
VL(s)
−
VC(s)
Fig.6.50 Rappresentazione di WR(s), WL(s), WC(s) mediante diagrammi a blocchi
Esempio 6.30
Si consideri il circuito RLC parallelo di fig.6.51 e si calcolino le f.d.t. ottenute assumendo
come ingresso I(s) e come uscite IR(s), IL(s), IC(s).
I(s)
IR(s)
IL(s)
IC(s)
1/R
1/Ls
Cs
Fig.6.51 Esempio 6.30
Si ha:
WR (s) =
I R (s)
1/ R
Ls
s / RC
=
=
= 2
2
I(s) 1 / R + Cs + 1 / Ls RLCs + Ls + R s + 2sξω n + ω 2n
in cui:
ωn =
1
LC
ξ=
1 L
2R C
I L (s)
ω 2n
1 / Ls
1 / LC
WL (s) =
=
=
=
I(s)
1 / R + Cs + 1 / Ls LCs 2 + Ls / R + 1 s2 + 2sξω n + ω 2n
WC (s) =
I C (s)
Cs
LCs2
s2
=
=
=
I(s)
1 / R + Cs + 1 / Ls LCs2 + Ls / R + 1 s2 + 2sξω n + ω 2n
La f.d.t. risulta non strettamente causale e pertanto, salvo semplificazioni come ad esempio
per il gradino o la rampa, l'ingresso si ritrova direttamente sull'uscita. Una spiegazione
fisica del fenomeno può essere la seguente: inizialmente il condensatore scarico equivale
ad un corto circuito che è quindi attraversato da tutta la corrente. Nel caso serie l'induttanza
scarica equivale ad un circuito aperto e pertanto, inizialmente, tutta la tensione si localizza
alle sue estremità.
195
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
6.21Poli dominanti
Si consideri la f.d.t.:
W(s) =
la cui antitrasformata è:
ω n 1 − ξ2
K1
K2
+
+
s + s1 s + s2 (s + ξω ) 2 + ω 2 (1 − ξ 2 )
n
n
[
(6.104)
)]
(
w ( t ) = K1e −s1t + K 2 e −s2 t + e − ξω n t sen ω n 1 − ξ 2 t u( t )
(6.105)
e supponiamo che i poli siano posizionati sul piano di Gauss come in fig. 6.52.
jω n 1 − ξ 2
ξωn
s2
s1
− jω n 1 − ξ 2
Fig.6.52 Posizione dei poli della (6.104) sul piano di Gauss
Si abbia cioè: s2>>s1 e ξωn >>s1 in tal caso si dice che il polo relativo a s1 è
dominante rispetto agli altri. Poiché s1 s2 e ξωn rappresentano gli inversi di costanti di
tempo, nella (6.105) i termini relativi a s2 e ξωn si esauriscono molto più rapidamente
rispetto al termine relativo a s1 che risulta quindi dominante nel caratterizzare la risposta,
tanta che in prima approssimazione si può scrivere:
w ( t ) ≅ K1e − s1t u( t )
(6.106)
commettendo un errore consistente solo nell'intorno di t = 0.
Gli andamenti dei tre addendi che compongono la (6.105) sono riportati in fig.6.53a)
nella fig.6.53b) è invece riportato l'andamento di w(t). Tale figura mostra che a parte un
piccolo intervallo intorno a t =0 l'andamento della w(t) è simile a quello di un circuito di I°
ordine.
K1e − s1t
K2e
− s2 t
w(t)
e − ξω n t sen ω n 1 − ξ 2 t
a)
t
b)
Fig.6.53 Andamento dei tre termini della (6.105) a) andamento di w(t) b)
Si conclude quindi che in una f.d.t. c'
è un polo, o una coppia di poli complessi
coniugati, dominanti quando esso si trova molto più vicino degli altri all'
asse
immaginario. In tal caso la costante di tempo ad esso associata è molto più grande
196
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
(dominante) delle altre e il relativo modo di evolvere si estingue molto più lentamente degli
altri.
6.22 Calcolo della risposta forzata mediante l'integrale di convoluzione
Dalla definizione di f.d.t. indicando con f(t) l'ingresso e con y(t) l'uscita si ha:
Y(s) = W(s) F(s)
Antitrasformando mediante l'integrale di convoluzione si ha:
−1
y( t ) = L
∞
[W(s) F(s)] = w ( t )∗ f ( t ) =
∞
w ( τ ) f ( t − τ ) dτ = w ( t − τ ) f ( τ ) dτ
0
e poiché:
w ( t − τ) = 0
f ( t − τ) = 0
si ha:
0
per τ > t
per τ > t
t
t
y ( t ) = w ( τ ) f ( t − τ ) dτ = w ( t − τ ) f ( τ ) dτ
0
(6.107)
0
L'estremo superiore di integrazione diviene t anziché ∞ perché, dovendo il circuito
rispettare la proprietà di causalità, la risposta al tempo t non può dipendere dai valori che
l'ingresso assumerà in tempi successivi. Nell'Appendice B è stato mostrato che calcolare la
risposta forzata mediante l'integrale (6.107) corrisponda a scomporre il segnale di ingresso
in impulsi elementari e successivamente applicare il principio di sovrapposizione degli
effetti. Si può anche scrivere:
Y(s) =
W(s)
W(s)
W(s)
W(s)
sF(s) =
sF(s) − f (0) + f (0)] =
sF(s) − f (0)] +
f (0)
[
[
s
s
s
s
e poiché:
t
L−1
W(s)
= w ( t )dt = g( t )
s
0
in cui g(t) è la risposta al gradino unitario.
L−1 [sF(s) − f (0)] = f ' ( t )
L−1
W(s)
f (0) = f (0)g( t )
s
si ha:
t
−1
y( t ) = L
W(s)
W(s)
sF(s) − f (0)] +
f (0) = g( t − τ ) f '( τ )dτ + f (0)g( t ) =
[
s
s
0
t
(6.108)
= g( τ ) f '( t − τ )dτ + f (0)g( t )
0
Quest'ultimo modo di procedere corrisponde a scomporre il segnale di ingresso in
gradini, per ognuno dei quali viene calcolata la risposta. La risposta complessiva è data
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
197
dalla somma delle risposte ai singoli gradini. Anche in questo viene quindi utilizzato
principio di sovrapposizione degli effetti (vedi Appendice B).
6.23 Metodo algebrico per la determinazione della stabilità
E' un metodo che consente di stabilire se il sistema è o non è stabile senza determinare
i poli della f.d.t.
Vale la seguente affermazione per la cui dimostrazione si rimanda a corsi di algebra:
Condizione necessaria per la stabilità asintotica, ossia affinché tutti i poli siano a parte
reale negativa, è che il denominatore della f.d.t. abbia tutti i coefficienti non nulli e di
stesso segno. Questa condizione risulta anche sufficiente per circuiti di I° e II° ordine.
Per i circuiti di ordine superiore al II°, per i quali il denominatore della f.d.t. è di grado
superiore al II°, deve essere verificata la condizione di sufficienza, ciò si ottiene mediante
la regola di Routh, anch'essa fornita senza dimostrazione.
Si consideri il seguente polinomio:
N (s) = a 4 s4 + a 3s3 + a 2 s2 + a 1s + a 0
e si consideri una tabella in cui nella prima riga si mettono i coefficiente pari (si sarebbero
messi quelli dispari se il coefficiente di grado più alto fosse stato dispari) e nella seconda
riga quelli dispari (o pari se il primo coefficiente è dispari).
s4
a4
a2
s3
a3
a1
s2
b2
b0
s1
c1
0
s0
d0
a0
Per le righe successive si procede nel seguente modo:
b 2 = ( a 3 a 2 − a 1a 4 ) / a 3
c1 = ( b 2 a 1 − b 0 a 3 ) / b 2
b 0 = (a 3 a 0 − 0 a 4 ) / a 3 = a 0
d 1 = ( c 1 b 0 − 0 b 2 ) / c1 = b 0
La condizione di sufficienza è verificata se nella prima colonna della tabella di Routh tutti
i termini sono non nulli e di stesso segno.
Esempio 6.31
Determinare la stabilità di un circuito avente la seguente f.d.t.:
W(s) =
2s + 5
s + s + 5s3 + s 2 + 6s + 3
5
4
La condizione di necessarietà e verificata (altrimenti sarebbe stato inutile continuare) si
tratta di costruire la tabella di Routh per verificare la sufficienza.
198
Cap. 6 Risoluzione dei circuiti mediante la Trasformata di Laplace
s5
s4
s3
s2
s1
s0
1
1
4
1
5
1
3
3
6
3
-9
3
Poiché la prima colonna della tabella di Routh presenta 3 permanenze di segno e 2
variazioni significa che ci sono tre poli a parte reale negativa e due a parte reale positiva,
dunque il circuito risulta instabile.
Regole per la costruzione della tabella
1) le righe pari terminano tutte con il termine noto;
2) nel costruire la tabella tutti gli elementi di una riga possono essere divisi per la stessa
quantità positiva (in tal caso non vale più quanto asserito al punto 1);
3) se durante la costruzione della tabella il primo elemento di una qualsiasi riga è nullo il
circuito è instabile;
4) se tutti gli elementi di una riga sono nulli il circuito è al più marginalmente stabile;
5) se in una riga compaiono termini nulli o negativi il circuito è instabile.
Qualora si verifichi il caso 3), la tabella può essere continuata, se interessa conoscere il
numero di radici a parte reale negativa e positiva. La tabella può essere continuata
rimpiazzando il termine nullo con un ε positivo o negativo.
Esempio 6.32
Sia N(s)= s5 + s4+ 2s3 + 2s2 +3s +1 del quale si vuole individuare il segno della parte reale
delle radici. In particolare vogliamo accertare se tutte le radici sono a parte reale negativa.
Poiché è soddisfatta la condizione necessaria si può procedere con la tabella di Routh.
s5
s4
s3
s2
s1
s0
1
1
0(ε)
-2/ε
2
2
2
2
1
3
1
P
P(ε >0)
V
V
P
P
V(ε < 0)
V
P
P
1
Poiché sono presenti tre permanenze di segno e due variazioni si hanno tre radici a parte
reale negativa e due a parte reale positiva.
Per il caso 4) possiamo intanto osservare che le eventuali righe comprendenti tutti
elementi nulli sono le dispari (infatti le pari terminano con il termine noto). In questa
situazione le radici presentano una simmetria quadrantale, ossia simmetria rispetto a
entrambi gli assi e rispetto all'origine, ciò significa che il circuito può al più essere
marginalmente stabile, cosa che accade se le radici sono sull'asse immaginario. In
corrispondenza ad una riga di termini nulli la tabella può essere continuata ricorrendo ad un
polinomio ausiliario ottenuto derivando il polinomio i cui termini sono gli elementi della
riga precedente.
Cap.6 Risoluzione dei circuiti mediante la Trasformata di Laplace
199
Esempio 6.33
Assegnato il polinomio:
N(s) = s6 + 2s5 + 8s4+ 12s3 + 20s2 +16s +16
la tabella di Routh è:
s6 1
8
20
16
s5 2
12
16
s4 2
12
16
3
s 0
0
Non potendo continuare la tabella, si considera il polinomio i cui coefficienti sono gli
elementi della riga di s4 ossia:
A(s) = 2s4 + 12s2 + 16
Derivando rispetto a s si ha:
A'(s) = 8s3 + 24s
i coefficienti di A'(s) possono essere utilizzati per costruire la riga di s3 che era costituita di
termini tutti nulli. L tabella completa risulta:
s6
s5
s4
s3
s2
s1
s0
1
2 (1)
2 (1)
8 (1)
6 (3)
8/3 (1)
16 (1)
8
12 (6)
12 (6)
24 (3)
16(8)
20
16 (8)
16 (8)
16
Poiché la prima colonna non presenta variazioni di segno il polinomio presenta radici a
parte reale negativa e radici a parte reale nulla. Queste ultime possono essere determinate
risolvendo
A(s) = 2s4 + 12s2 + 16 = 0 da cui si trova:
s1 = j 2
s2 = − j 2
s 3 = j2
s3 = − j2
Si noti che questo modo di procedere fornisce informazioni sulla stabilità del circuito,
senza tuttavia fornire indicazioni su "quanto" il circuito sia stabile, ossia quanto i poli sono
vicini all'asse immaginario. Per un circuito contenente generatori dipendenti, e che quindi
può essere instabile, questa informazione è invece importante, infatti i poli della relativa
f.d.t. vicini all'asse immaginario, sia pure a parte reale negativa, possono, per effetto di
variazioni di alcuni parametri (causate per esempio da variazioni di temperatura), passare
nel semipiano positivo.
CAPITOLO 7
7.1 Sviluppo in serie di Fourier
E' stato in precedenza mostrato come la risposta a regime di un circuito alimentato con
generatori di tensione, o corrente, sinusoidale possa essere determinata mediante il metodo
fasoriale. In particolare, detta W( jω ) la f.d.t. calcolata per s=jω, U( jω ) il fasore
rappresentativo dell'ingresso sinusoidale di frequenza ω, il fasore Y( jω ) della risposta può
essere determinato mediante la relazione:
Y( jω ) = W( jω ) U( jω )
Il metodo fasoriale, con opportuni accorgimenti, può essere utilizzato anche per
risolvere circuiti alimentati con grandezze periodiche. Ricordiamo che una funzione f(t) si
dice periodica, di periodo T, se soddisfa la relazione: f ( t ) = f ( t ± nT) con n=1,2,3.....
Una funzione periodica che soddisfi le condizioni di Dirichlet (che sono condizioni di
sufficienza), ossia che:
• presenti un numero finito di massimi e di minimi in un periodo;
• presenti un numero finito di discontinuità (salti) in un periodo;
• sia finito l'integrale:
T
f ( t ) dt =
T/2
f ( t ) dt
−T / 2
0
può essere scomposta in serie di Fourier secondo la relazione:
f (t) = a 0 +
in cui:
ω0 =
2π
T
a0 =
1
f ( t )dt
T0
∞
a n cos nω0 t +b n sen nω0 t
(7.1)
n =1
è la pulsazione fondamentale ed inoltre:
T
T
è il valore medio
2
an =
f ( t ) cos nω 0 tdt
T0
T
2
bn =
f ( t ) sen nω 0 tdt
T0
(7.2)
202
Cap.7 Circuiti alimentati con grandezze periodiche
I termini di pulsazione nω0 sono detti armoniche di ordine n.
La sviluppo in serie di Fourier può essere espresso anche con le relazioni:
f (t) = a 0 +
∞
n =1
A n cos( nω 0 t − α n )
A n = a 2n + b 2n
α n = arctg
f (t) = a 0 +
bn
an
∞
n =1
A n sen( nω 0 t + β n )
a
π
β n = arctg n = − α n
bn 2
(7.3)
7.2 Serie di Fourier finita
La serie di Fourier, come mostrano le (7.1) e (7.3), è costituita da un numero infinito di
termini, in pratica si considerano un numero finito di termini operando un troncamento
della serie. Indicando con fn(t) la serie troncata si ha:
n
f n (t) = a 0 +
k =1
(a k cos kωt + b k sen kωt )
(7.4)
L'errore dovuto all'approssimazione è:
ε n ( t) = f (t) − f n (t)
(7.5)
Nel caso in cui la funzione periodica presenti una discontinuità (salto) in t0, la serie
converge al valore medio:
f ( t 0+ ) + f ( t 0− )
(7.6)
f (t 0 ) =
2
come è illustrato nella fig.7.1
f(t)
f(t0-)
f(t0)
f(t0+)
Fig. 7.1 Funzione periodica con discontinuità in to
In tali casi si verifica inoltre, per la funzione troncata, l'effetto Gibb che consiste in una
sopraelevazione, nell'intorno di t0, della funzione troncata rispetto a quella effettiva. Tale
effetto, per una funzione periodica rettangolare, è mostrato in fig. 7.2.
All'aumentare di n, ossia delle componenti considerate in fn(t), il picco della
sovraelongazione rimane costante in ampiezza ma si avvicina a t0.
t0
Fig.7.2 Esempio di effetto Gibb
t
203
Cap.7 Circuiti alimentati con grandezze periodiche
La dipendenza dei coefficienti an e bn rispetto a n dipende dal tipo di discontinuità, si
ha:
1. Se la funzione f(t) presenta discontinuità an e bn diminuiscono con 1/n;
2. Se f(t) è continua, ma f '(t) presenta discontinuità, i coefficienti decrementano con 1/n2;
3. Se f(t) e f '(t) sono continue ma f ''(t) è discontinua, il decremento avviene con 1/n3;
In generale se la funzione e le sue derivate fino alla i-ma sono continue mentre la i+1ma è discontinua i coefficienti decrescono con 1/n(i+2).
7.3 Simmetrie
Se la f(t) soddisfa particolari condizioni di simmetria alcuni coefficienti dello sviluppo
in serie di Fourier possono essere nulli.
Consideriamo alcuni casi:
7.3.1 Funzioni pari
Sono quelle funzioni per le quali f(t) = f(-t). Nello sviluppo in serie di Fourier delle
funzioni pari sono compresi solo i termini in coseno e l'eventuale termine a0, ciò poiché
risultano nulli i coefficienti bn. Risulta cioè bn = 0 per ogni valore di n. Un esempio di
funzione pari è riportato in fig. 7.3a)
7.3.2 Funzioni dispari
Sono dispari le funzioni, vedi fig.7.3b), per le quali f(t) = - f(-t). Nello sviluppo in serie
di Fourier sono presenti i soli termini in seno poiché risulta: bn ≠ 0 an = 0 per n =
0,1,2,3,....
f(t)
f(t)
-t
-t
t
t+T/2
t
t+T/2 T
a)
b)
Fig.7.3 Funzione pari (e mezza onda pari) a) funzione dispari (e mezza onda dispari) b)
Se ad una funzione pari f(t) si aggiunge una costante K si ottiene una funzione ancora
pari che differisce da quella di partenza per il valore medio che è stato variato della
costante K.
Sommando K ad una funzione dispari si ottiene una funzione che non è più né pari né
dispari. In entrambi i casi lo sviluppo in serie di Fourier si ottiene sommando K allo
sviluppo in serie della funzione di partenza. Anche per una funzione ottenuta come somma
di una funzione pari ed una dispari lo sviluppo in serie si ottiene sommando i singoli
sviluppi.
7.3.3 Funzione simmetrica rispetto all'asse dei tempi( simmetria mezza onda dispari)
E' una simmetria relativa alle funzioni, dette anche emisimmetriche, che verificano la
relazione:
f ( t ) = − f ( t + T / 2)
204
Cap.7 Circuiti alimentati con grandezze periodiche
Nello sviluppo in serie di Fourier di queste funzioni sono nulli i coefficienti delle
armoniche pari. Un esempio di tali funzioni e rappresentato in fig.7.b)
7.3.4 Simmetria mezza onda pari
Riguarda le funzioni per le quali vale la relazione:
f ( t ) = f ( t + T / 2)
Nello sviluppo in serie di Fourier di queste funzioni mancano le armoniche dispari, è
invece presente a0.
Una funzione con simmetria mezza onda pari è rappresentata in fig.7.3a).
Riassumendo:
Simmetria
f (t) = − f (−t)
f ( t) = f (− t)
f ( t ) = − f ( t + T / 2)
a0
0
≠0
0
f ( t ) = f ( t + T / 2)
≠0
f ( t ) = − f ( t + T / 2)
f (t) = − f (−t)
f ( t ) = f ( t + T / 2)
f ( t) = f (− t)
0
an
0
≠0
≠0
n=1,3,5,7,...
≠0
n=2,4,6,8,....
0
≠0
bn
≠0
0
≠0
n=1,3,5,7,...
≠0
n=2,4,6,8,....
≠0
n=1,3,5,7,...
0
≠0
n=2,4,6,8,....
Osserviamo che con una opportuna scelta dell'origine una funzione pari può divenire
dispari e viceversa.
Una traslazione secondo l'asse dei tempi modifica lo sviluppo in serie di Fourier solo
per quanto riguarda la fase.
Si ha infatti:
f ( t − t*) = a 0 +
∞
1
[
]
A n cos nω 0 ( t − t *) − α n = a 0 +
∞
1
[
]
A n cos nω 0 t − (α n + nω 0 t *)
(7.7)
Una traslazione secondo l'asse delle ordinate modifica solo il valore medio dello
sviluppo in serie di Fourier.
Infatti:
∞
f (t) + K = a 0 + K +
1
[
A n cos nω 0 t − α n
]
(7.8)
7.4 Spettri di ampiezza e fase
Gli andamenti di An e di αn (βn) in funzione di nω0 sono detti rispettivamente spetto di
ampiezza e spettro di fase. In definitiva tali spettri mostrano l'ampiezza e la fase di tutte le
armoniche presenti nello sviluppo in serie di Fourier.
Esempio 7.1
Si vuol determinare lo sviluppo in serie di Fourier e disegnare gli spettri di ampiezza e
fase per la tensione periodica di fig. 7.4.
205
Cap.7 Circuiti alimentati con grandezze periodiche
v(t)
V
0
T/2
T t
Fig.7.4 Esempio 7.1
La tensione rappresentata in fig.7.1 è una funzione dispari e simmetrica rispetto
all'asse dei tempi, risulta quindi: an = 0 per tutti gli n mentre bn ≠0 per n dispari. Si ha:
2V
bn =
T
T/ 2
0
T
−1
cos nω 0 t
nω 0
2V
sen nω 0 tdt − sen nω 0 tdt =
T
T/ 2
T/ 2
0
−1
−
cos nω 0 t
nω 0
T
=
T/ 2
4V
nπ
in cui ω 0 T = 2 π .
Lo sviluppo in serie e quindi dato da:
∞
v( t ) =
1
4V
sen( nω 0 t ) =
nπ
∞
1
4V
cos( nω 0 t − π / 2) per n dispari
nπ
In fig.7.5 sono riportati I, III, V armonica e la loro somma
I
III
t
V
Fig.7.5Andamento di I, III, V armonica e della loro somma
Gli spettri di ampiezza e fase sono riportati in fig. 7.6
4V
B
βn
4V
3π
0
4V
5π
1
5
a)
3
0
1
3
2
n
4
5
n
π
−
2
b)
Fig.7.6 Spettro di ampiezza a) spettro di fase b)
206
Cap.7 Circuiti alimentati con grandezze periodiche
Esempio 7.2
Si vuol determinare lo sviluppo in serie di Fourier della tensione di fig.7.7 ottenuta da
quella di fig.7.4 aggiungendo un valore medio V0 e traslando di -T/4. Per quanto detto in
precedenza si ha:
∞
v( t ) = V0 +
∞
V0 +
1
1
4V
T
sen nω 0 t +
nπ
4
4V
π
sen nω 0 t + n
2
nπ
∞
= V0 +
4V
T
sen nω 0 t + nω 0
=
nπ
4
1
per n dispari
v(t)
V
V0
0
T
t
Fig.7.7 Esempio 7.2
Gli spettri di ampiezza e fase sono riportati in fig.7.8
4V
An
αn
4V
3π
V0
1
3
4V
5π
5
π
2
0
n
1
5π
2
3π
2
3
5
n
Fig.7.8 Spettri di ampiezza e fase
In fig.7.9 sono rappresentati la I, III, V armonica e la funzione ricostruita ottenuta
sommando dette armoniche al valore medio V0.
III
V0
V
Fig.7.9Rappresentazione di I, III, V armonica e loro somma traslata di V0
207
Cap.7 Circuiti alimentati con grandezze periodiche
7.5 Serie di Fourier esponenziale
Dalla relazione (7.1) ricordando le relazioni:
e jnω 0 t + e − jnω 0t
cos nω 0 t =
2
si ha:
f (t) = a 0 +
∞
n=1
an
e jnω 0t − e − jnω 0 t
sen nω 0 t =
2j
∞
a n − jb n jnω0t ∞ a n + jb n − jnω0t
e jnω0t + e − jnω0t
e jnω0t − e − jnω0t
+b n
= a0 +
e
+
e
2
2j
2
2
n=1
n=1
ponendo:
c0 = a 0
cn =
e quindi:
a n − jb n
2
c −n = c n* =
a n + jb n
2
T
T
1
1
cn =
f ( t )(cos nω 0 t − j sen nω 0 t )dt =
f ( t )e − jnω 0t dt
T0
T0
T
c−n
1
=
f ( t )e jnω 0 t dt
T0
la f(t) risulta espressa dalla relazione:
f (t) = c 0 +
∞
n =1
c n e jnω0 t +
Poiché si ha:
∞
n =1
∞
n =1
c −n e − jnω0 t =
c − n e − jnω 0 t =
−1
∞
n =0
c n e jnω0 t +
∞
n =1
c −n e − jnω0 t
c n e jnω 0 t
n =−∞
la serie esponenziale risulta:
∞
f (t) =
c n e jnω 0t
con
n =−∞
T
(7.9)
1
cn =
f ( t )e − jnω 0 t
T0
Esempio 7.3
Si consideri la tensione di fig.7.10, in cui τ è variabile e T costante, e se ne calcoli la
serie esponenziale di Fourier.
v(t)
V
τ
Fig.7.10 Esempio 7.3
2T
t
208
Cap.7 Circuiti alimentati con grandezze periodiche
I coefficienti della serie trigonometrica, calcolati come indicato dalla seconda delle
(7.9), valgono:
cn =
[
T
1
−V
Ve − jnω0 t dt =
e − jnω0 t
T0
jnω 0 T
−j
nω0 τ
2
2Ve
jnω 0 T
e
j
nω0 τ
2
−e
2j
−j
nω0 τ
2
=
]
=
−j
nω0 τ
2
T
0
[
]
−V
1 − e − jnω0 τ =
jnω 0 T
nω 0 τ Vτ
Vτe
sen
=
e
nω 0 T τ
2
T
2
−j
nω0 τ
2
nω 0 τ
2 = c e − jϕ n
n
nω 0 τ
2
sen
in cui:
nω 0 τ
sen
Vτ
2
cn =
nω 0 τ
T
2
ϕn =
e poiché ω 0 =
nω 0 τ
2
2π
= 2 πf 0 sostituendo si ha:
T0
cn =
Vτ sen nf 0 τπ
T nf 0 τπ
ϕ n = nf 0 τπ
sen x
, riportato in fig.7.11, si possono disegnare anche gli
x
andamenti di cn e ϕn. Tali andamenti sono riportati in fig.7.12.
Ricordando l'andamento di
sen x
x
1/x
sen x
2π
Fig. 7.11 Andamento di senx/x
x
209
Cap.7 Circuiti alimentati con grandezze periodiche
cn
Vτ
T
1/τ
f0
2/τ
π
nf0
−π
Fig.7.12 Spettro di ampiezza e di fase
7.6 Grandezze tipiche di tensioni e correnti sinusoidali
Una funzione periodica è caratterizzata mediante le seguenti grandezze:
a) Valore di picco
E' il valore massimo assunto dalla funzione nel periodo
b) Valore efficace
Secondo la definizione già fornita al Cap.5 si ha:
T
V=
1
v 2 ( t )dt =
T0
1
T
T
∞
V0 +
0
1
VMn sen( nω 0 t + α n )
2
∞
dt =
0
Vn2
(7.10)
in cui Vn è il valore efficace dell'armonica n-ma (si rammenta che il valore efficace
dell'eventuale valore medio è il valore medio stesso).
c) Valore medio
Il valore medio per una funzione periodica e data dalla relazione:
T
Vm =
1
v( t ) dt
T0
(7.11)
Se la funzione è simmetrica rispetto all'asse dei tempi il valore medio definito dalla
(7.11) risulta nullo. In tali casi si definisce il valore medio nel semiperiodo che vale:
Vm =
2
T
T/ 2
v( t ) dt
0
(7.12)
210
Cap.7 Circuiti alimentati con grandezze periodiche
Nel caso di grandezze sinusoidali la (7.12) fornisce:
Vm =
2
V
π M
(7.13)
d) Fattore di forma
Si definisce fattore di forma il rapporto tra il valore efficace e il valore medio.
Kf =
V
Vm
(7.14)
Nel caso di grandezze sinusoidali si ha:
Kf =
π
2 2
,
= 111
(7.15)
e) Fattore di picco
E' dato dal rapporto tra il valore di picco e il valore efficace ed è quindi rappresentato
dalla relazione:
V
(7.16)
Kp = M
V
Tale valore è pari a
2 per le grandezze sinusoidali.
f) Fattore di deformazione
E' dato dal rapporto tra il valore efficace dell'armonica fondamentale e il valore
efficace complessivo. In formula:
Kd =
V1
V
(7.17)
g) Distorsione
E' il rapporto tra il valore efficace delle armoniche (eccetto la fondamentale) e il valore
efficace della fondamentale:
∞
D=
2
Vn2
V1
(7.18)
Si definisce distorsione dell'armonica n-ma il rapporto tra il valore efficace di quella
armonica e il valore efficace della fondamentale.
Dn =
Vn
V1
(7.19)
Sostituendo nella (7.18) si ha:
∞
D=
2
D 2n
(7.20)
La distorsione e il fattore di deformazione sono un indice di quanto l'andamento di una
grandezza periodica si discosta dall'andamento sinusoidale.
211
Cap.7 Circuiti alimentati con grandezze periodiche
7.7 Circuiti alimentati con grandezze periodiche
Si consideri un circuito elettrico lineare al quale sia applicato il seguente ingresso
(tensione o corrente):
∞
f (t) = fo +
n =1
FMn sen( nω 0 t + α n )
(7.21)
La risoluzione di tale circuito può essere attuata applicando al circuito stesso un
generatore per ogni armonica, ed uno per il valore medio. Nel caso in cui l'ingresso sia un
generatore di tensione i generatori relativi alle singole armoniche debbono essere collegati
in serie, se invece l'ingresso f(t) è un generatore di corrente i generatori di armonica
debbono essere collegati in parallelo. Tali collegamenti sono illustrati in fig. 7.13 a) e b).
v1 ( t ) = VM1 sen (ω0 t + β1 )
v 2 ( t ) = VM 2 sen (2ω 0 t + β 2 )
V0
v1(t)
vn(t)
v2(t)
v(t)
i1(t)
i2(t)
in(t)
a)
........................................
v n ( t ) = VMn sen(nω0 t + β n )
i1 ( t ) = I M1 sen (ω0 t + β1 )
i(t)
b)
i1 ( t ) = I M 2 sen (2ω0 t + β 2 )
......................................
i n ( t ) = I M1 sen (nω 0 t + β n )
Fig.7.13 Circuiti equivalenti di generatori periodici di tensione a) e di corrente b)
L'uscita dovuta alla k-ma armonica, applicando metodo fasoriale, è data da:
Yk = W( jkω 0 )Fk = W( jkω 0 ) e jϕ k Fk
(7.22)
Nel dominio del tempo risulta:
y k ( t ) = YMk sen( kω 0 + α k + ϕ k )
in cui:
YMk = W( jkω 0 ) FMk
(7.23)
(7.24)
Indicando con y0 la risposta del circuito alla componente continua (questa risposta è
ottenuta dal circuito con condensatori aperti e induttori cortocircuitati), la risposta
complessiva risulta:
∞
y( t ) = y o +
n =1
YMn sen( nω 0 t + α n + ϕ n )
(7.25)
Osserviamo che operando in questo modo si ottiene la sola risposta a regime del
circuito. La risposta transitoria può essere determinata considerando il circuito LLtrasformato transitorio in cui le condizioni iniziali transitorie sono del tipo:
212
Cap.7 Circuiti alimentati con grandezze periodiche
∞
i t (0) = i(0) − i 0 +
n =1
I Mn sen(α n + ϕ n )
∞
v t (0) = v(0) − v 0 +
n =1
(7.26)
VMn sen(β n + ϕ n )
7.8 Potenza nei circuiti alimentati con ingressi periodici
Si consideri un bipolo lineare alimentato con la tensione periodica:
∞
v( t ) = v o +
e sia:
∞
i( t ) = i o +
VMn sen( nω 0 t + α n )
(7.27)
I Mn sen( nω 0 t + α n + ϕ n )
(7.28)
n =1
n =1
la corrente da esso assorbita. La potenza attiva assorbita dal bipolo è data dalla
relazione;
T
1
1
P=
v( t ) i( t )dt =
T0
T
T
∞
v0 +
0
1
VMn sen( nω 0 t + α n ) i 0 +
e ricordando che:
T
0
si ha:
∞
1
I Mn sen( nω 0 t + α n + ϕ n ) dt
0p ≠ q
sen (pt + α ) sen (qt + β)dt = T
p=q
cos(α − β)
2
∞
P = v 0i 0 +
1
Vn I n cosϕ n
(7.29)
in cui Vn e In sono i valori efficaci di tensione e corrente.
La (7.29) consente di concludere che: In un circuito lineare alimentato con grandezze
periodiche la potenza attiva si ottiene sommando le potenze attive relative alle singole
armoniche, il che equivale ad applicare il principio di sovrapposizione degli effetti. Ciò è
vero solo per generatori di frequenza diversa, il principio di sovrapposizione per le
potenze non è infatti valido per generatori di stessa frequenza. (La sovrapposizione degli
effetti è in generale valida per relazioni lineari e non quadratiche come è appunto la
potenza).
Indicando con R la resistenza del bipolo si può quindi anche scrivere:
P=R
i 20
∞
+
1
I 2n = RI 2
(7.30)
in cui I è il valore efficace della grandezza periodica e vale:
∞
I=
0
I 2n
(7.30)
213
Cap.7 Circuiti alimentati con grandezze periodiche
Allo stesso modo è stato definito il valore efficace di una tensione periodica. Si
conclude che il valore efficace di una corrente o di una tensione periodica è dato dalla
radice quadrata della somma dei valori efficaci al quadrato.
Per analogia con i sistemi alimentati con grandezze sinusoidali, ma senza lo stesso
significato fisico, si può definire la potenza reattiva come:
∞
Q=
1
Vn I n sen ϕ n
(7.31)
Si definisce anche la potenza apparente con la relazione:
∞
S = VI =
0
e il fattore di potenza f.d.p come:
∞
Vn
0
In
P
= cos β
S
f . d. p. =
(7.31)
(7.32)
Si definisce sinusoide equivalente di una grandezza periodica una sinusoide avente
stesso periodo e stesso valore efficace di quella periodica. definendo la sinusoide
equivalente della tensione e della corrente risulta anche: P = VI cosβ .
7.9 Distorsione introdotta dal circuito
Si consideri di applicare in ingresso al un circuito di fig.7.14 la tensione di fig.7.3, per
la quale il generico termine della serie esponenziale di Fourier vale:
nω 0 τ
nω 0 τ sen
Vτ − j 2
2
cn =
e
n
ω
T
0τ
2
La f.d.t, assumendo come uscita la tensione v2(t) vale:
W (s) =
v1(t)
V2 (s )
R
=
V1 (s ) 1 + sRC
R
C
v2(t)
Fig. 7.14 Circuito RC
Per quanto affermato in precedenza la risposta a regime, per ogni armonica, può essere
calcolata, utilizzando il metodo fasoriale, mediante la relazione:
V2 n ( jnω 0 ) = W ( jnω 0 ) V1n ( jnω 0 ) = W( jnω 0 ) e jϕ ( nω 0 ) V1n ( jnω 0 )
(7.33)
Ci chiediamo ora quali condizioni debbano essere soddisfatte affinché v2(t) abbia lo
stesso andamento nel tempo di v1(t). Ciò accade se la tensione di uscita può essere ottenuta
da quella di ingresso mediante una traslazione lungo l'asse dei tempi e mediante la
moltiplicazione per una costante.
Deve cioè essere:
214
Cap.7 Circuiti alimentati con grandezze periodiche
v 2 ( t ) = Kv1 ( t + τ) = Kv10 + KVM11 sen ω 0 ( t + τ) + KVM12 sen 2ω 0 ( t + τ) +...+ KVM1n sen nω 0 ( t + τ) +.. =
[
]
[
]
[
]
= Kv10 + KVM11 sen ω 0 t + ϕ(ω 0 ) + KVM12 sen 2ω 0 t + 2ϕ(ω 0 ) +.....+ KVM1n sen nω 0 t + nϕ(ω 0 ) +.....
per ogni armonica, in termini di fasori, risulta:
V21 ( jω 0 ) = KV11e jϕ ( ω 0 )
V22 ( j2ω 0 ) = KV12 e j2 ϕ ( ω 0 )
V2 n ( jnω 0 ) = KV1n e jnϕ ( ω 0 )
Uguagliando l'n-ma armonica con l'espressione ottenuta nella (7.33) si ha:
Ke jnϕ ( ω 0 ) = W( jnω 0 ) e jϕ ( nω 0 )
(7.34)
Si deduce che affinché non siano introdotte distorsioni deve accadere che al variare
della frequenza il modulo di W rimanga costante mentre la fase varia linearmente.
Per l'esempio considerato si ha:
W( jnω 0 ) =
R
=
1 + jnω 0 RC
R
1 + ( nω 0 RC)
2
e
− j arctg ( nω 0 RC )
che non soddisfa le condizioni precedenti. Quindi il segnale di uscita risulterà distorto
rispetto a quello di ingresso. Per valori piccoli di nω0 RC si può scrivere:
W( jnω 0 ) = Re − jnω 0 RC
e pertanto, assegnato il prodotto RC, le armoniche per le quali è valida la relazione
precedente risultano moltiplicate per una costante e ugulmente traslate rispetto alle
rispettive armoniche di v1(t).
7.10 La trasformata continua di Fourier
Nel caso in in cui il segnale d'ingresso sia aperiodico, la risposta del circuito può
ancora essere determinata mediante il metodo fasoriale, facendo uso della trasformata
continua di Fourier (t.d.F.) anziché dello sviluppo in serie. Si tratta in questo caso di
sviluppare il segnale aperiodico in infinite componenti sinusoidali di frequenza variabile
con continuità. Anche in questo caso debbono essere soddisfatte le condizioni di Dirichlet,
in particolare poiché per le funzioni aperiodiche si può assumere il periodo tendente
all'infinito, deve essere finito l'integrale:
∞
−∞
f ( t ) dt
Per ottenere la t.d.F. è conveniente considerare una funzione periodica che abbia, su un
periodo, l'andamento di quella aperiodica e successivamente far tendere all'infinito il
periodo. Si consideri ad esempio la funzione rappresentata in fig.7.9, mantenendo costante
l'ampiezza V e la durata τ e facendo tendere all'infinito T si ottiene la funzione aperiodica
di fig.7.15.
v(t)
V
τ
t
Fig.7.15 Funzione, aperiodica, rettangolare
215
Cap.7 Circuiti alimentati con grandezze periodiche
Dalla fig.7.12 si rileva che al tendere di T→∞ lo spettro di ampiezza decresce, poiché
esso dipende da Vτ / T, mentre la sua larghezza, pari a 1/τ, rimane costante. La frequenza f0
= 1/T decresce e tende a zero anche la differenza, pari a f0, tra le frequenze di due
armoniche contigue, lo spettro tende cioè a divenire continuo. Ricordando che lo sviluppo
in serie di Fourier in forma esponenziale è:
∞
f (t) =
−∞
T
c n e jnω 0t
T/ 2
1
1
f ( t ) e − jnω o t dt =
f ( t ) e − jnω o t dt
T0
T −T/2
cn =
sostituendo c n in f (t) e ricordando che T = 2π/ω0 si ha:
∞
f (t) =
e
ω0
2π
jnω 0 t
−∞
T/ 2
f ( t )e − jnω 0t dt
(7.36)
−T / 2
Facendo tendere T→∞ si ha ω 0 → dω , nω 0 → ω , ossia la distanza tra due
componenti tende a divenire nulla e la pulsazione passa da valori discreti a valori continui.
Inoltre la sommatoria tende all'integrale.
La (7.36) diviene allora:
∞
1
f (t) =
2π −∞
∞
f ( t )e − jωt dt e jωt dω
(7.37)
−∞
La quantità:
ℑ{f ( t )} = F( jω ) =
∞
f ( t )e − jωt dt
(7.38)
−∞
è detta trasformata di Fourier. L'antitrasformata di Fourier la relazione:
f (t) = ℑ
−1
{F( jω )}
∞
1
=
F( jω ) e jωt dω
2 π −∞
(7.39)
In analogia con la serie di Fourier, la t.d.F. può essere vista come un mezzo per
scomporre una funzione in una somma, in questo caso continua, di grandezze sinusoidali.
Nel caso della t.d.F. tuttavia le ampiezze delle singole armoniche sono infinitesimali,
1
infatti valgono
F( jω ) dω , e non si può dire che ogni armonica sia associata ad una
2π
singola frequenza. Lo spettro di F(jω) non fornisce quindi l'ampiezza delle componenti in
funzione della frequenza in contrasto con quanto avveniva per la serie. Se ad es. la f(t) è
una tensione e si misura quindi in volt, non altrettanto si può dire di F(jω) che infatti si
misura in volt ⋅ sec.
Esempio 7.4
Si voglia calcolare la t.d.F. del segnale rappresentato in fig.7.15. Applicando la
definizione si ha:
F( jω ) =
∞
τ
f ( t )e − jωt dt = Ve − jωt dt =
−∞
0
V − jωt
e
jω
τ
=
0
V
2 V − jωτ / 2 e jωτ / 2 + e − jωτ / 2
1 − e − jωτ ) =
e
=
(
jω
ω
j2
2 V − jωτ / 2
ωτ
sen ωτ / 2
sen πτf
=
e
sen
= Vτe − jωτ / 2
= Vτe − jπτf
ω
2
ωτ / 2
πτf
216
Cap.7 Circuiti alimentati con grandezze periodiche
Gli andamenti del modulo e della fase di F(jω) sono riportati in fig.7.16
F(jω)
τ
1/τ
π
1/2τ
f
F(jω)
f
−π
Fig.7.16 Andamento di modulo e fase di F(jω) in funzione della frequenza
7.11 Proprietà della trasformata di Fourier
1) Dal confronto tra l'espressione di c n , relazione (7.9), e quella di F(jω), relazione (7.38)
si ha:
1
(7.40)
c n = F( jnω 0 )
T
da cui si deduce che nota la t.d.F. di una funzione aperiodica f(t), possono essere
rapidamente determinati i coefficienti dello sviluppo in serie complesso di Fourier di una
funzione periodica di cui f(t) rappresenta un periodo. Gli esempi 7.3 e 7.4 forniscono
una conferma della (7.40).
2) Dalla definizione di t.d.F. si ha:
∞
F( jω ) =
∞
f ( t )e − jωt dt =
−∞
[f ( t ) cos ωt − jf ( t ) sen ωt]dt =R( ω ) − jI( ω )
−∞
in cui:
R( ω ) =
∞
f ( t ) cos ωtdt
−∞
I( ω ) =
∞
(7.41)
f ( t ) sen ωtdt
−∞
e poiché R(ω) è pari e I(ω) è dispari risulta:
R( ω ) = R( − ω )
I( ω ) = − I( − ω )
(7.42)
217
Cap.7 Circuiti alimentati con grandezze periodiche
Si ha quindi:
F( − jω ) = R( − ω ) − jI( − ω ) = R( ω ) + jI( ω ) = F* ( jω )
(7.43)
dunque se F(jω) è conosciuta per ω > 0 lo è anche per ω < 0.
Se la funzione f(t) è pari si ha:
I( ω ) =
∞
∞
0
f ( t ) sen ωtdt =
−∞
−∞
∞
f ( t ) sen ωtdt + f ( t ) sen ωtdt = − f ( t ) sen ωtdt + f ( t ) sen ωtdt
−∞
0
0
0
Effettuando, nel primo integrale, la sostituzione t' = −t si ha:
∞
∞
∞
∞
0
0
0
0
I( ω ) = − f ( − t ) sen ω ( − t ) d( − t ) + f ( t ) sen ωtdt = − f ( t ) sen ωtdt + f ( t ) sen ωtdt = 0
In modo analogo per R(ω) si ha:
R( ω ) =
∞
∞
0
f ( t ) cos ωtdt =
−∞
−∞
∞
f ( t ) cos ωtdt + f ( t ) cos ωtdt = − f ( t ) cos ωtdt + f ( t ) cos ωtdt =
−∞
0
0
∞
∞
∞
0
0
0
0
− f ( − t ) cos ω( − t ) d( − t ) + f ( t ) cos ωtdt = 2 f ( t ) cos ωtdt
Applicando un procedimento analogo per f(t) dispari si trova:
∞
I( ω ) = 2 f ( t ) sen ωtdt
R(ω) = 0
0
Riassumendo:
f(t)
I(ω)
R(ω)
∞
pari
0
2 f ( t ) cosωtdt
0
∞
dispari
2 f ( t ) sen ωtdt
0
0
I risultati trovati sono una conseguenza dei seguenti fatti:
l'integrale, tra −t1 e t1, di una funzione dispari è nullo
l'integrale, tra −t1 e t1, di una funzione pari è il doppio dell'integrale tra 0 e t1
il prodotto tra due funzioni pari è una funzione pari
il prodotto tra due funzioni dispari è una funzione pari
il prodotto tra una funzione pari e una dispari è una funzione dispari.
Per l'antitrasformata, dalla (7.39), si ha:
∞
1
f (t) =
[ R(ω) − jI(ω )](cos ωt − j sen ωt )dω =
2 π −∞
∞
1
[ R(ω) cos ωt + I(ω ) sen ωt ] + j[ R(ω ) sen ωt − I(ω ) cos ωt ]dω
2 π −∞
218
Cap.7 Circuiti alimentati con grandezze periodiche
In base alle considerazioni sull'integrale di funzioni pari e dispari, ed anche in base al
fatto che f(t) è reale, si trova:
∞
1
1
f (t) =
R (ω ) cos ωt + I(ω ) sen ωt ]dω =
[
2 π −∞
π
∞
[ R(ω) cos ωt + I(ω ) sen ωt ]dω
(7.44)
0
3) Linearità
Per la proprietà di linearità si ha:
ℑ{f1 ( t ) + f 2 ( t )} = ℑ{f1 ( t )} + ℑ{f 2 ( t )}
(7.45)
In virtù di questa proprietà una funzione di cui si voglia determinare la t.d.F. può
essere scomposta in funzioni di cui si conosce la t.d.F. Poiché è possibile scomporre una
funzione nella somma di due componenti una pari ed una dispari si ha:
f (t) = f p (t) + fd (t)
con:
fp =
e quindi:
f ( t) + f (− t)
2
{
fd =
f (t) − f (−t)
2
}
ℑ{f ( t )} = ℑ f p ( t ) + ℑ{f d ( t )} = R p ( jω ) + I d ( jω )
4) Moltiplicazione per una costante
ℑ{Kf ( t )} = Kℑ{f ( t )}
(7.46)
5) Traslazione nel tempo
ℑ{f ( t − t 0 )} = e − jωt 0 ℑ{f ( t )}
(7.47)
Si ha infatti:
ℑ{f ( t − t 0 )} =
∞
∞
f ( t − t 0 )e
− jωt
dt =
−∞
f (λ )e
− jω ( λ + t 0 )
∞
dt = e
− jωt 0
−∞
f ( t ) e − jωt dt
−∞
6) Derivazione nel tempo
Valgono le seguenti relazioni:
ℑ
df ( t )
= jωℑ{f ( t )}
dt
d n f ( t)
n
= ( jω ) ℑ{f ( t )}
ℑ
n
dt
Per la dimostrazione della prima relazione basta considerare che:
∞
1
f (t) =
F( jω ) e jωt dω
2π −∞
(7.48)
219
Cap.7 Circuiti alimentati con grandezze periodiche
∞
∞
df ( t )
1
1
=
F( jω )e jωt jωdω = jω
F( jω )e jωt dω = jωf ( t )
dt
2 π −∞
2 π −∞
7) Integrazione nel tempo
t
ℑ
f ( t )dt =
−∞
8 ) Traslazione in frequenza
{
F( jω )
+ πF( 0) δ( ω )
jω
(7.49)
} [
(7.50)
]
ℑ f ( t )e jωt 0 = F j(ω − ω 0 )
Si ha infatti:
∞
[
]
f ( t ) e jω 0t e − jωt dt = F j(ω − ω 0 )
−∞
9) Cambiamento di scala
ℑ{f ( at )} =
1 ω
F
a a
a>0
(7.51)
Si ha infatti:
ℑ{f ( at )} =
∞
∞
f ( at ) e
− jωt
dt =
−∞
∞
f (λ )e
− jωλ / a
−∞
1
1
1 ω
dλ = f ( λ ) e − jωλ / a dλ = F
a
a
a a
−∞
10) Convoluzione nel tempo
∞
ℑ
f ( τ) w ( t − τ)dτ = ℑ{f ( t )∗ w ( t )} = F( jω )W( jω )
(7.52)
−∞
La dimostrazione è simile a quella svolta per la dimostrazione nel dominio della
variabile s di Laplace.
11) Convoluzione in frequenza
∞
1
ℑ{f ( t ) w ( t )} =
F( ω − τ ) W( τ )dτ
2π −∞
12) Simmetria
ℑ{F( t )} = j2 πf ( − jω )
Dalla relazione:
f (t) = ℑ
scambiando t con jω si ha:
−1
{F( jω)}
∞
1
=
F( jω ) e jωt dω
2 π −∞
(7.53)
(7.54)
220
Cap.7 Circuiti alimentati con grandezze periodiche
∞
1
f ( jω ) =
F( t ) e jωt dt
2 πj −∞
operando la sostituzione di ω con −ω si trova:
∞
F( t ) e − jωt dt = ℑ{F( t )}
2πjf ( − jω ) =
−∞
13) Derivazione rispetto
ω
{
}
ℑ ( − jt ) f ( t ) =
n
d n F( jω )
Si ha infatti:
d n F( jω )
dω
n
dn
=
dω n
14) Teorema di Parseval
∞
∞
f ( t )e
− jωt
dt =
−∞
(7.55)
dω n
( − jt ) n f ( t)e − jωt dt = ℑ{( − jt ) n f ( t )}
−∞
∞
∞
2
1
f ( t ) dt =
F( jω ) dω
2 π −∞
−∞
2
∞
(7.56)
∞
1
f ( t ) w ( t ) dt =
F( jω )W( − jω ) dω
2π −∞
−∞
(7.57)
Dimostriamo la (7.57). Si ha:
∞
∞
f (t)w(t)dt = w(t)
−∞
−∞
∞
∞
∞
∞
1
1
1
F( jω)e jωt dω dt = F( jω)
w(t)e jωt dt dω =
F( jω)W(− jω)dω
2π −∞
2
π
2
π
−∞
−∞
−∞
7.12 T.d.F di funzioni che non soddisfano le condizioni di Dirichlet
1) f1(t) = δ(t)
f2(t) = δ(t −t0)
Applicando la definizione si ha:
ℑ{δ ( t )} =
ℑ{δ ( t − t 0 )} =
∞
δ ( t ) e − jωt dt = 1
(7.58)
−∞
∞
δ ( t − t 0 ) e − jωt dt = e − jωt 0
(7.59)
−∞
La (7.59) mostra che la traslazione di t0 dell'impulso corrisponde, per la F(jω) ad una
variazione di fase, ossia ad una rotazione, di −ωt0. Si ha inoltre:
∞
e − jω 0 t
1
ℑ {δ (ω − ω 0 )} =
δ (ω − ω 0 )e − jωt dt =
2 π −∞
2π
−1
(7.60)
da cui:
{
}
ℑ e jω 0 t = 2 πδ (ω − ω 0 )
ed anche:
(7.61)
221
Cap.7 Circuiti alimentati con grandezze periodiche
ℑ{1} = 2πδ (ω )
(7.62)
2) f ( t ) = A cos ω 0 t
Per questa funzione, periodica, non risulta verificata la condizione
∞
−∞
f ( t ) dt , tuttavia
si ha:
e jω 0t + e − jω 0t
ℑ{A cosω 0 t} = ℑ A
2
A jω 0 t
A
e
+ ℑ e − jω 0 t
2
2
=ℑ
Facendo uso della (7.61) si ha:
[
]
A jω 0 t
A
e
+ ℑ e − jω 0t = Aπ δ(ω − ω 0 ) + δ(ω + ω 0 )
2
2
ℑ{A cosω 0 t} = ℑ
(7.63)
3) f ( t ) = A sen ω 0 t
Procedendo come in precedenza si ha:
ℑ{A sen ω 0 t} = ℑ A
e jω 0t − e − jω 0 t
2j
A jω 0 t
A − jω 0t
e
−ℑ
e
2j
2j
=ℑ
e quindi:
ℑ{A sen ω 0 t} = ℑ
[
]
A jω 0 t
A − jω 0 t
e
−ℑ
e
= − jAπ δ(ω − ω 0 ) − δ(ω + ω 0 )
2j
2j
(7.64)
4) f(t) = A
Ponendo ω0 = 0 nella (7.63) si ha:
ℑ{ A} = 2πAδ (ω )
(7.65)
5)f(t) = Au(t)
Applicando la definizione di t.d.F. si ha:
ℑ{Au( t )} =
∞
∞
Au( t )e
− jωt
−∞
0
analogamente posto ω* = −ω:
ℑ{Au( − t )} =
∞
−∞
0
Au( − t )e
− jωt
dt =
−∞
Per ω ≠ 0 si ha:
dt = Ae − jωt dt =
Ae
−∞
jω *t
dt = − Ae
0
A
jω
per ω ≠ 0
∞
jω*t
dt = Ae − jω*t dt =
0
A
A
=−
jω *
jω
ℑ{ A} = ℑ{Au( t ) + Au( − t )} = 0
Per ω = 0 risulta:
ℑ{Au( − t )} =
0
Au( t )dt = − lim At = lim At = ℑ{Au( t )}
−∞
t →−∞
t →∞
Tenendo conto della (7.65) si ha:
ℑ{ A} = ℑ{Au( t ) + Au( − t )} = 2 ℑ{Au( t )} = 2 πδ(ω )
da cui risulta:
per ω ≠ 0
222
Cap.7 Circuiti alimentati con grandezze periodiche
ℑ{Au( t )} = πδ (ω )
Sommando i risultati per ω = 0 e per ω ≠ 0 si ottiene:
A
ℑ{Au( t )} =
+ πδ (ω )
jω
(7.65)
7.13 Analisi dei circuiti mediante la t.d.F.
La trasformata di Fourier può essere utilizzata per determinare la risposta a stato nullo
dei circuiti. Tale risposta, come noto, può essere calcolata, una volta nota la risposta w(t)
all'impulso unitario (ossia la t.d.L. inversa della f.d.t.), mediante l'integrale di
convoluzione, ossia:
∞
y( t ) =
f ( t − τ ) w ( τ ) dτ
−∞
Trasformando y(t) secondo Fourier si ha:
ℑ{ y( t )} = Y( jω ) =
∞
∞
f ( t − τ) w ( τ)dτ e − jωt dt
−∞ −∞
scambiando l'ordine di integrazione si ha:
∞
∞
∞
f ( t − τ) w( τ)dτ e − jωt dt =
Y( jω) =
∞
∞
∞
f (λ)e − jω (λ + τ) dλ w( τ)dτ =
f ( t − τ)e − jωt dt w(τ)dτ =
−∞ −∞
−∞ −∞
−∞ −∞
=
∞
∞
∞
f (λ)e − jωλ dλ e − jωτ w( τ)dτ = F( jω) e − jωτ w( τ)dτ =F( jω) W( jω)
−∞ −∞
−∞
E' quindi possibile affermare che la t.d.F. della risposta a stato nullo è pari al prodotto
tra la t.d.F. F(jω) dell'ingresso e quella W(jω) della risposta all'impulso unitario.
Ricordando anche la definizione di antitrasformata di Fourier si ha:
Y( jω ) = F( jω )W( jω )
(7.66)
∞
1
y( t ) =
Y( jω )e jωt dω
2π −∞
(7.67)
Anche qui, come del resto con Laplace, l'operazione di antitrasformazione eseguita per
mezzo della (7.67) non è sempre agevole, risulta pertanto conveniente, decomporre Y(jω)
in fratti semplici e antitrasformare utilizzando opportune tabelle.
Esempio 7.5
Nel circuito di fig.7.17a), in cui è applicata la tensione v1(t) rappresentata in fig.7.17b) si
vuol determinare la tensione v2(t).
v1(t)
v1(t)
R
C
R
v2(t)
V
τ
a)
Fig.7.17 Esempio 7.5
b)
t
223
Cap.7 Circuiti alimentati con grandezze periodiche
Per la tensione v1(t) si ha:
v 1 ( t ) = V[ u( t ) − u( t − τ)]
la cui antitrasformata, considerando πδ(ω )e − jωτ = πδ (ω ) che vale:
V1 ( jω ) = V πδ (ω ) +
1
1 − jωτ
V
− πδ(ω )e − jωτ −
e
=
(1 − e − jωτ )
jω
jω
jω
Il risultato trovato coincide ovviamente con quello dell'esempio 7.4.
Si ha inoltre:
R
1 + jωRC
1
W( jω ) = W( s) ]s= jω =
=
R
2 + jωRC
R+
1 + jωRC
La t.d.F. della tensione v2(t) vale quindi:
V2 ( jω ) = V1 ( jω )W( jω ) =
in cui:
V
V2* ( jω ) =
jω( jωRC + 2)
dove le costanti valgono:
V
K1 =
2
e quindi:
=
V2* ( jω ) =
V
1
1 − e − jωτ )
= V2* (1 − e − jωτ )
(
jω
2 + jωRC
V
jωRC( jω + 2 / RC)
=
K2 − =
K1
K2
+
jω jω + 2 / RC
V
2
V 1
1
−
2 jω jω + 2 / RC
La V2(jω) risulta:
V2 ( jω ) =
=
V 1
V 1
1
1
−
−
−
e − jωτ =
2 jω jω + 2 / RC
2 jω jω + 2 / RC
V 1
1
V 1
1
+ πδ (ω ) −
−
+ πδ(ω ) −
e − jωτ
2 jω
jω + 2 / RC
2 jω
jω + 2 / RC
Antitrasformando risulta:
v 2 (t) =
[
(
)
V
(1 − e 2 t / RC )u( t ) − 1 − e 2( t −τ )/ RC u( t − τ)
2
]
Si consideri ora un circuito asintoticamente stabile, ossia un circuito per il quale il
transitorio si esaurisca, al quale siano applicati in successione i due ingressi f1(t) = f(t) e
f2(t) = f(t)u(t). Si noti che f1(t) è applicato a t = −∞, f2(t) per t = 0. Le t.d.F. degli ingressi
valgono:
F1 ( jω ) =
∞
f ( t )e
−∞
− jωt
dt
F2 ( jω ) =
∞
∞
f ( t ) u( t )e
−∞
− jωt
dt = f ( t )e − jωt dt
0
224
Cap.7 Circuiti alimentati con grandezze periodiche
La risposta del circuito ai due ingressi, supponendo nota W(jω) e tenendo conto della
proprietà di causalità, risultano:
∞
∞
1
y1 ( t ) =
F ( j ω ) W ( jω ) d ω
2 π −∞ 1
1
y 2 (t) =
F ( jω ) W ( jω ) d ω
2π 0 2
La prima relazione rappresenta la risposta ad un ingresso applicato a t = −∞ e quindi a
qualsiasi tempo è la risposta a transitorio esaurito. La seconda relazione rappresenta invece
la risposta ad un ingresso applicato al tempo t = 0 e quindi comprende anche la parte
transitoria. Le due risposte coincidono per t →∞.
Esempio 7.6
Si consideri un circuito R, L serie (R = 1Ω, L =1H), con condizioni iniziali nulle,
alimentato con un generatore di tensione avente e(t) = u(t) nel quale si voglia determinare
l'andamento della tensione sulla resistenza a partire da t = 0.
La f.d.t. W(s) vale:
R
1
W( s) =
=
Ls + R s + 1
Procedendo con Laplace si ha:
1
1
1
= −
s( s + 1) s s + 1
VR (s) = E ( s) W( s) =
Antitrasformando risulta:
[
]
v R ( t ) = 1 − e − t u( t )
Risolvendo con Fourier si ha:
VR ( jω ) = E ( jω )W( jω ) = πδ (ω ) +
1
jω
1
( jω + 1)
=
πδ (ω )
1
+
jω + 1 jω( jω + 1)
Per il primo termine dalla definizione di antitrasformata si ha:
∞
ℑ
πδ (ω )
1 πδ (ω ) − jωt
1
=
e dω =
jω + 1
2 π −∞ jω + 1
2
−1
Per il secondo termine:
ℑ−1
1
jω ( jω + 1)
= ℑ−1
1
1
1
−
= segno( t ) − e − t u( t ) (*)
jω jω + 1
2
sommando i due termini e tenendo conto della proprietà di causalità, si ottiene per vR(t) il
risultato già trovato con Laplace.
Se in ingresso fosse stato applicato e(t) = 1V, avremmo avuto:
∞
ℑ
−1
2 πδ (ω )
1 2 πδ (ω ) − jωt
=
e dω = 1
jω + 1
2 π −∞ jω + 1
La t.d.F. avrebbe in questo caso fornito il valore della risposta a transitorio esaurito. Ciò
poiché avendo applicato l'ingresso a t = −∞ , il circuito, stabile, risulta a regime per
qualunque t.
(*) Segno(t) è una funzione che vale 1 per t > 0 e -1 per t < 0.
CAPITOLO 8
8.1 Introduzione
Nel Cap.6 è stato mostrato come la conoscenza della funzione di trasferimento W(s)
consenta di determinare la t.d.L. della risposta Y(s) di un circuito al quale sia applicato un
segnale di ingresso la cui t.d.L. sia F(s) mediante la relazione:
Y(s ) = W (s )F(s )
Il passaggio dal dominio di s a quello di t avviene poi attraverso l'operazione di
antitrasformazione mediante l'operazione:
y(t ) = L−1 [Y (s )]
Nel Cap.7 si è mostrato che, posto:
W ( jω) = W (s )]s= jω
(8.1)
la risposta del circuito, a stato nullo, può essere determinata mediante la relazione:
Y( jω) = W ( jω)F( jω)
(8.2)
Anche in questo caso si può tornare al dominio di t antitrasformando secondo Fourier.
La funzione di trasferimento, valutata per s=jω, rappresenta anche la risposta in
frequenza ed è stata definita mediante la (6.83) come coefficiente della risposta, a
regime, all’ingresso ejωt e quindi anche della risposta y(t) all’ingresso f(t) = senωt (che
rappresenta la parte immaginaria del fasore rotante ejωt). Si ha infatti:
Y ( jω) = W ( jω) F( t ) = W ( jω) e jϕ e jωt
{ }
{
}
y( t ) = Im Y( t ) = Im W ( jω) e j e jωt = W ( jω) sen(ωt + φ)
La risposta in frequenza può essere in ottenuta, anche sperimentalmente, alimentando
il circuito con un ingresso sinusoidale di ampiezza costante e frequenza variabile, e
operando il rapporto tra i fasori rappresentativi di uscita e ingresso, ossia:
W ( jω) =
Y( jω)
F( jω)
(8.3)
226
Cap.8 Risposta in frequenza
Si osservi la differenza sostanziale tra le (8.2) e (8.3), la prima operando con la t.d.F.
fornisce la risposta forzata, la seconda operando con i fasori fornisce la risposta a regime.
Nota W(jω) è inoltre possibile, utilizzando lo sviluppo in serie di Fourier e il principio
di sovrapposizione degli effetti, calcolare la risposta a regime del circuito soggetto a
segnali periodici.
8.2 Risposta in frequenza e mappa dei poli-zeri
Sia assegnata la funzione di trasferimento W(s) in forma fattorizzata:
∏ (s − z i )
W (s) = K 1n
∏1 (s − p j )
m
(8.4)
la risposta in frequenza, sostituendo s con jω, risulta:
( jω − z i )
M zi e j
∏
∏
1
1
W ( jω) = K
=K
n
n
jβ
∏1 (jω − p j )
∏1 M pje
m
in cui:
M zi = jω − z i
m
α i = arg( jω − z i )
i
(8.5)
j
(
M pj = jω − p j
β j = arg jω − p j
)
Si può anche scrivere:
W ( jω) = W ( jω) e jφ( ω)
(8.6)
in cui:
∏ M zi
W ( jω) = K 1n
∏1 M pj
m
ϕ(ω) =
m
1
αi −
m
1
βj
(8.7)
In fig.8.1 è illustrata una procedura per ottenere graficamente, per un fissato valore ω,
il modulo e l’argomento di ogni termine della funzione di trasferimento.
jω
Mp2
jω
jω
Mz1
σ
σ
σ
Mp3
a)
b)
c)
Fig.8.1 Mappa poli-zeri a) moduli e fasi dei vari termini della f.d.t. per ω=0 b) per un generico ω
Nella fig.8.1 i moduli sono rappresentati dalla congiungente poli e zeri con il punto
sull’asse immaginario corrispondente all’assegnato valore di ω. Ricordiamo inoltre che gli
angoli sono positivi se percorsi in senso antiorario. Possono essere evidenziati i seguenti
risultati:
a) per ω→∞ si ha:
227
Cap.8 Risposta in frequenza
lim W(jω) = K lim ( jω)
( m−n )
ω→∞
e quindi:
-
W ( j∞) → ∞ se m > n
-
W ( j∞) → K se m = n
-
W ( j∞) → 0 se m > n
ω→∞
La prima relazione rappresenta una ulteriore prova che la condizione m > n non è
fisicamente ammissibile.
Per la fase si ha:
π
2
→∞
π
lim ϕ(ω) = (m − n ) + π
2
ω→∞
lim φ(ω) = (m − n )
se K > 0
se K < 0
∏ (−z i )
W ( j0 ) = K 1n
∏1 (−p i )
m
b) Per ω→0 risulta:
∏ (−z i )
W ( j0 ) = K 1n
∏1 (−p i )
e quindi:
m
=H
W ( j0) = 0
se ci sono zeri nell’origine
W ( j0) → ∞
se ci sono poli nell’origine
ϕ(0) = 0
ϕ(0) = Nπ
ϕ(0) = (i – j)π/2
se non ci sono singolarità nell’origine e gli zeri sono tutti nel
semipiano negativo (circuito a fase minima)
con N numero di zeri a parte reale positiva (circuito a fase non
minima)
con i e j numero di zeri e di poli nell’origine
c) poli e zeri vicini sul piano di Gauss danno effetti che tendono ad annullarsi nella risposta
in frequenza;
d) i poli che influenzano di più la risposta in frequenza sono quelli dominanti;
e) poli vicini all’asse immaginario producono un picco in W ( j ) per frequenze uguali
alla sua parte immaginaria, ed inoltre la fase passa da π/2 a -π/2. Il contrario accade per
zeri vicini all’asse immaginario.
Esempio 8.1
Come esempio di quanto asserito al punto e) si consideri la seguente funzione di
trasferimento:
W (s) =
2s(s + 0,1 − j8)(s + 0,1 + j8)
(s + 0,25 − j4)(s + 0,25 + j4)(s + 0,2 − j10)(s + 0,2 + j10)
228
Cap.8 Risposta in frequenza
W( j )
2
π/2
1
0
4
2
6
8
10
12
14
ϕ(ω)
-1
-π/2
Fig.8.2 Esempio 8.1
Posto s=jω si ottiene la risposta in frequenza. In fig.8.2 sono riportati gli andamenti di
modulo e fase di W(jω) in funzione di ω. Il grafico del modulo mostra un minimo per ω =
8s-1, cioè in corrispondenza della parte immaginaria dello zero, e due massimi per ω = 4s-1 e
ω = 10s-1, in corrispondenza della parte immaginaria dei poli. In corrispondenza dei
suddetti valori di ω la fase subisce una variazione di π per lo zero e di −π in
corrispondenza dei poli. Si nota anche che a causa
dello zero nell’origine per ω→0 la fase tende a π/2. Per ω→∞ il modulo tende a zero e la
fase a −π/2 perché ci sono 4 poli e 3 zeri.
8.3 Frequenza di taglio e banda passante
Sia assegnata una funzione di trasferimento W(jω) il cui modulo abbia l’andamento,
con la frequenza, e quindi a meno della costante 2π, anche con al pulsazione, riportato in
fig.8.3.
W ( jω)
WM
WM
2
f1
f2
f
Fig.8.3 Definizione di frequenze di taglio e banda passante
Si definiscono frequenza di taglio inferiore f1 e frequenza di taglio superiore f2 le
frequenze che si ottengono intersecando la curva che rappresenta l’andamento di W ( j )
229
Cap.8 Risposta in frequenza
con una retta parallela all’asse delle ascisse e di ordinata ottenuta dividendo per 2 il
valore massimo della curva. Per alcune applicazioni particolari anziché per 2 si può
dividere per altre costanti. Si definisce Banda passante la quantità:
B = f 2 − f1
(8.8)
8.4 Circuiti equivalenti di induttori e condensatori reali
Ogni elemento circuitale passivo può essere rappresentato con un circuito equivalente
in cui compaiono resistori induttori e condensatori, ciò per effetto delle inevitabili perdite
che in esso si manifestano, degli effetti induttivi legati ai campi magnetici e di quelli
capacitivi legati ai campi elettrici. Al variare della frequenza questi circuiti equivalenti
possono tuttavia essere semplificati poiché alcuni elementi producono effetti trascurabili
rispetto a quelli prodotto da altri. Si riportano di seguito i circuiti equivalenti di induttori e
condensatori reali.
8.4.1 Induttori
In fig.8.4a) è illustrato il circuito equivalente di un induttore reale per basse e per alte
frequenze. In tale circuito R tiene conto delle cause di perdita (ohmiche nel conduttore per
isteresi e correnti parassite qualora il supporto sia realizzato in materiale ferroso). C tiene
conto della capacità tra spira e spira.
Dalla fig.8.4a) si capisce immediatamente che il circuito ha comportamento induttivo
alle basse frequenze, quando il condensatore equivale ad un circuito aperto e l’induttore ad
un corto circuito, e capacitivo quando il condensatore equivale ad un corto e l’induttore ad
un circuito aperto. Volendo trovare una frequenza limite si può calcolare l’ammettenza
equivalente che vale:
Yeq =
R
2
2 2
R +ω L
−
jωL
2
R + ω 2 L2
+ jωC
(8.9)
Il comportamento induttivo si ha per:
L
R 2 + ω 2 L2
>C
ω<
ossia per
1 R2
−
LC L2
Rp
C
L
L
R
a)
R
b)
Lp
c)
Fig.8.4 Circuito equivalente di un induttore reale a) circuito equivalente serie alle basse frequenze b)
circuito equivalente parallelo alle basse frequenze c)
Si consideri il circuito equivalente alle basse frequenze, detto V il valore efficace della
tensione applicata ed I il valore efficace della corrente che circola si ha:
VR = RI
VL = ωLI
V = VR2 + VL2 = I R 2 + ω 2 L2
Si definisce fattore di merito dell’induttanza la quantità:
Q=
VL ωL
=
VR
R
(8.10)
230
Cap.8 Risposta in frequenza
Anziché alla rappresentazione serie del circuito equivalente si può ricorrere a quella
parallelo come mostrato in fig.8.4c). Per passare dalla rappresentazione dalla prima alla
seconda è sufficiente passare da impedenza ad ammettenza. Si ha infatti:
Yp =
1
R
1
1
ωL
−j
= 2 −j 2 =
Z Z
Rp
ωL p
Z
da cui si ottiene:
Rp =
Z 2 R 2 + ω 2 L2 ω 2 L2
=
≅
R
R
R
Lp =
Il fattore di merito risulta:
Q=
Z2
R 2 + ω 2 L2
=
≅L
ω2 L
ω2 L
Rp
(8.11)
ωL
8.4.2 Condensatori
Il condensatore reale, diversamente da quello ideale, è sede di perdite nel dielettrico,
che non è perfettamente isolante, e può quindi essere rappresentato come in fig. 8.5a) o b).
Rp
C
R
C
Fig. 8.5 Circuito equivalente serie di condensatori reali a) circuito equivalente parallelo b)
Le relazioni tra i parametri dei due circuiti possono essere trovate procedendo come
per gli induttori. Si ha:
Z=R−j
1
= R − jX
ωC
Y=
1 R
1
1
= 2 +j
= G + jB =
+ jωC p
2
Rp
Z Z
ωCZ
e quindi:
Rp =
1 Z 2 R 2 + 1 / ω2 C 2
1
=
=
≅ 2 2
G R
R
ω C R
Cp =
1
1
= 2
≅C
2
2
ω CZ
ω C R + 1 / ω2 C 2
(
2
)
In fig.8.6 sono riportati i diagrammi fasoriali relativi ai due tipi di rappresentazione.
I
RI
ϕ
jBV
δ
-jXI
I
δ
ϕ
V
GV
V
Fig. 8.6 Diagrammi fasoriali relativi al circuito equivalente serie del condensatore reale b) e al circuito
equivalente parallelo b)
Si definisce angolo di perdita del condensatore l’angolo δ dato da:
δ ≅ tgδ = ωCR =
1
ωCR p
(8.12)
231
Cap.8 Risposta in frequenza
8.5 Circuiti risonanti
8.5.1 Circuiti risonanti serie
Si consideri il circuito RLC serie rappresentato in fig. 8.7 e si supponga di alimentare
tale circuito con una tensione sinusoidale di ampiezza costante e frequenza variabile.
V(t)
L
∼
R
C
Fig. 8.7 Circcuito RLC serie alimentato con tensione sinusoidale di frequenza variabile
Per li circuito di fig.8.7, in cui v( t ) = 2V sen ωt ,risulta:
I=
in cui:
V
= I(ω)e − jφ( ω)
R + j(ωL − 1 / ωC )
ωL − 1 / ωC
R
Dalla fig. 8.8 in cui sono riportanti gli andamenti di reattanza induttiva e capacitiva,
del modulo e della fase della corrente si rileva che esiste una pulsazione ω0 in
corrispondenza della quale il circuito si comporta come resistivo. Per ω < ω0 il circuito
risulta ohmico-capacitivo e per ω < ω0 ohmico-induttivo. La pulsazione ω0 è detta
pulsazione di risonanza (alla quale corrisponde anche una frequenza di risonanza) e
rappresenta quel valore di ω per cui reattanza induttiva e capacitiva sono uguali. I valori di
pulsazione e frequenza di risonanza sono dati dalle relazioni:
1
1
ω0 =
(8.13)
f0 =
LC
2π LC
In corrispondenza della frequenza di risonanza la corrente risulta massima e vale:
V
I0 =
(8.14)
R
I(ω) = V / R 2 + (ωL − 1 / ωC )
2
φ(ω) = arctg
π/2
1/ωC
ϕ
I0
I
0
ωL
R
ω0
ω
a)
ω
ω0
−π/2
b)
Fig. 8.8 Andamenti diR, ωL, 1/ωC, I in funzione di ω a) andamento della fase dell’impedenza conω b)
232
Cap.8 Risposta in frequenza
Indicando con VR, VL, VC le tensioni alle estremità R, L, C, si ha:
VR = RI 0
VC = − j
VL = jω0 LI 0
I0
= VL
ω0 C
In fig. 8.9 è riportato il diagramma fasoriale corrispondente.
I0
V=VR
VC
VL
Fig. 8.9 Diagramma fasoriale per un circuito RLC serie in risonanza
La fig.8.9 evidenzia la compensazione tra la tensione sul condensatore e quella
sull’induttore, tali tensioni, per opportuni valori di corrente, ossia di resistenza, possono
raggiungere valori superiori alla tensione V di alimentazione dando luogo al fenomeno di
sovratensione.
Si definisce coefficiente di risonanza o fattore sovratensione Q la quantità:
VL ω0 L VC
1
=
=
=
V
R
V ω0 CR
Q=
(8.15)
Il fattore di sovratensione è legato allo smorzamento ξ mediante la relazione:
Q=
1
2
(8.16)
Si definisce inoltre la dissonanza d con la relazione:
d=
ω − ω0
ω
=
−1
ω0
ω0
(8.17)
Come esempio sarà ora calcolata, in funzione di Q, la f.d.t tra la tensione di ingresso e
la tensione che si localizza ai terminali del resistore e sarà riportato l’andamento di modulo
e fase in funzione di ω.
La f.d.t. risulta:
WR ( jω) =
VR ( jω)
=
V( jω)
R
R + j ωL −
1
ωC
=
1
1
=
ωL
1
ωω 0 L
ω0
1+ j
−
−
1+ j
R ωCR
ω0 R ωω 0 CR
Tenendo conto delle (8.15 e (8.17) si ha:
WR ( jω) =
1
ω ω0
1 + jQ
−
ω0 ω
=
1
d+2
1 + jQd
d +1
= WR ( jω) e − jϕ(ω )
(8.18)
In fig. 8.10 sono riportati gli andamenti di modulo e fase di WR(jω). Tale figura mostra
un comportamento selettivo del circuito tanto più accentuato quanto più Q aumenta, ossia ξ
ed R diminuiscono.
233
Cap.8 Risposta in frequenza
1
ϕ(ω)
Q=0.5
WR(jω)
π/2
Q=2
0.5
0
ω/ω0
1
0.7
Q=0.5
Q=2
Q=10
Q=10
-−π/2
Q=40
0
1,4
1
0.7
Q=40
ω/ω0
a)
b)
Fig. 8.10 Andamento di modulo a) e fase b) di WR(jω)
Si possono determinare le frequenze di taglio che con opportuni calcoli risultano:
f1 =
[
f0
− 1 + 1 + 4Q 2
2Q
]
f2 =
[
f0
1 + 1 + 4Q 2
2Q
]
(8.19)
La banda passante risulta:
B = f 2 − f1 =
f0
Q
(8.20)
8.5.2 Circuiti risonanti parallelo
Si consideri il circuito di fig. 8.11 costituito da tre rami in parallelo la cui ammettenza
equivalente risulta:
Y = G + j(B C − B L ) in cui: G =
1
Rp
BL =
1
ωL
B C = ωC
Il fasore della tensione è dato da:
V=
I
I
I
I −iϕ
=
= e p
Y G + j(B C − B L ) Y
~
V
Rp
L
IR
IL
IC
Fig. 8.11 Circuito R, L, C parallelo
Analogamente a quanto fatto per i circuiti risonanti serie possono essere tracciati gli
andamenti di G, BL, BC, V, ϕ in funzione di ω.
234
Cap.8 Risposta in frequenza
1/ωL
π/2
V0
ϕp
V
ωC
0
ω0
ω
G
ω0
−π/2
ω
a)
b)
Fig. 8.12 Andamenti diG, ωC, 1/ωL, I in funzione di ω a) andamento della fase dell’ammettenza conω b)
Annullando la parte immaginaria dell’ammettenza si ottengono la pulsazione e la
frequenza che risultano ancora date dalla (8.13). Dai grafici di fig. 8.12 si rileva che in
corrispondenza della frequenza di risonanza tensione e corrente sono in fase, per ω < ω0
la tensione risulta in anticipo sulla corrente (ammettenza di tipo induttivo), il contrario
accade per ω > ω0. In condizioni di risonanza risulta quindi:
I
V0 =
I L = − jB L V0
I C = jB C V0
IC + IL = 0
G
In fig.8.13 sono riportati i fasori della tensione e delle correnti in condizioni di
risonanza.
V0
I=IR
IL
IC
Fig. 8.13 Diagramma fasoriale per un circuito RLC parallelo in risonanza
Per valori sufficientemente piccoli di G può accadere che le correnti circolanti nei rami
di L e di C siano superiori alla corrente di alimentazione. Questo fenomeno è detto
fenomeno di sovraccorrente. Il fattore di sovracorrente è definito dalla relazione:
Qp =
Rp
I
IL
=
= C = ω0 CR p
I
ω0 L
I
(8.21)
Si può anche in questo caso determinare la funzione di trasferimento:
WR ( jω) =
I R ( jω)
=
I( jω)
G
1
G + j ωC −
ωL
=
1
1 + j ωCR p −
Rp
ωL
che può essere ancora rappresentata con i grafici di fig.8.10.
=
1
d+2
1 + jQd
d +1
(8.22)
235
Cap.8 Risposta in frequenza
8.5.3 Circuito risonante parallelo con gruppo RC serie
Il circuito risonante che viene considerato è quello rappresentato in fig.8.14 in cui il
ramo contenente il condensatore è collegato in parallelo ad un ramo contenente un resistore
e un induttore.
Fig.8.14 Circuito RLC con ramo RL serie
Il circuito di fig.8.14 equivale a quello di fig.8.11 con le seguenti posizioni:
La frequenza di risonanza ottenuta uguagliando le suscettanze induttiva e capacitiva
vale:
(8.23)
Per Q>>1 (ad es. Q≥10) si può assumere ωR = ω0.
Dal circuito di fig.8.14 si ha:
In risonanza risulta B C V = B L V e quindi I C + I r = 0 e V0 = I/G. Il relativo
diagramma fasoriale è riportato in fig.8.15
Fig.8.15 Diagramma fasoriale, in risonanza, per il circuito di fig.8.14
La f.d.t WG(jw ) ottenuta considerando come ingresso I e come uscita Ia, (questa
corrente non è individuabile nel circuito di fig. 8.14), si ha:
I ( jω )
G
1
1
1
WG ( jω) = a
=
=
=
=
=
2
2 2
BC BL
ωL ω L
I( jω) G + j(BC − BL )
(
)
ω
C
R
+
ω
L
ω
L
1+ j
−
1 + j ωCR + ω2 LC
−
G
1
=
1+ j
2
ω
ω ω ω0 L ω ω 0 L
ω 0 CR + 2
−
ω0
ω0 R
ω0 ω0 R
e poiché:
G
1+ j
−
R
1
=
1+ j
2
ω 1
ω
ω
+
Q 2 −1
ω0 Q ω0
ω0
R
R
R
1
=
1+ j
ω 1 ω2
ω ω0
+
Q
−
ω 0 Q ω 02
ω0
ω
236
Cap.8 Risposta in frequenza
si ha:
(8.24)
Si noti che per Q sufficientemente grande (es. Q≥10) e nell’intorno della frequenza di
risonanza (d ≅ 0) la (8.24) coincide con la (8.22).
8.5.4 Circuiti risonanti isocroni mutuamente accoppiati
Si considerino i due circuiti mutuamente accoppiati rappresentati in fig.8.16a) risonanti
V ( jω)
1
e si determini la f.d.t W ( jω) = 2
alla stessa frequenza (ossia isocroni) f 0 =
I( jω)
2π LC
a)
b)
Fig.8.16 Circuiti mutuamente accoppiati risonanti alla stessa frequenza
Trasformando il generatore di tensione in generatore di corrente si passa dallo schema
I
. Posto inoltre:
di fig.8.16a) a quello di fig.8.16b) in cui E =
j ωC
in cui K è il coefficiente di accoppiamento si possono scrivere le equazioni di equilibrio
elettrico per il circuito di fig.8.16b) che risultano:
da cui:
Esprimendo le impedenze in funzione di Q e d si ha:
nell’intorno della frequenza di risonanza in cui d è piccolo in confronto ad uno si può
assumere:
237
Cap.8 Risposta in frequenza
Si ha quindi:
Posto: K C = 1
Q1 Q 2
(KC è detto coefficiente di accoppiamento critico) a=K/KC e
assumendo Q1≅Q2 in modo tale che risulti
Posto infine: Wm =
d=0 e a =1) si ha:
Q1 + Q 2
= Q1Q 2 si ottiene:
2
1
R 1R 2 Q1Q 2 (Wm rappresenta il modulo della f.d.t. quando
2
Eseguendo la derivata del denominatore si possono determinare massimi e minimi di
W ( jω) . Si può verificare che per d=0 c’è un massimo per a≤1 e un minimo per a>1 di
∗
2a
.
a +1
Per a>1 ci sono inoltre due massimi di valore W*=1 in corrispondenza a
1
d = ± KC a 2 −1 .
2
valore W0∗ =
2
Fig. 8.17Andamentodel modulo W*(jω ) nell’intorno di d=0
Il risultato trovato è valido nell’intorno della frequenza di risonanza e per Q1 poco
diverso da Q2. L’andamento del modulo di W*(jw ) è riportato in fig.8.17.
238
Cap.8 Risposta in frequenza
La banda passante si trova ponendo W ∗ ( jω) = 1
W ∗ ( jω) =
f2 =
1
2Q
1
1 + 4a 4 d 4
=
1
da
2
cui
2
. Per a=1, Q1= Q2= Q, si ha:
d=±
1
2Q
f1 = −
1
2Q
+ 1 f0
+1 f0
e quindi:
B=
2f 0
Q
(8.25)
Confrontando la (8.25) con la (8.20) si nota che nei circuiti accoppiati la banda risulta
2 volte più larga rispetto a quella relativa al circuito isolato. La fig.8.17 mostra inoltre un
andamento del modulo della f.d.t. che più si avvicina a quello ideale rettangolare.
8.6 Energia nei circuiti risonanti
Il fenomeno della risonanza è basato sullo scambio energetico
condensatore. Si consideri ad esempio il circuito di fig.8.7 relativo alla
indicando con:
I
π
e
la corrente nel circuito
i( t ) = I M sen ωt
v c ( t ) = M sen ωt −
ωC
2
1
terminali del condensatore, le energie immagazzinate, per ω = ω0 =
LC
w L (t ) =
w C (t ) =
tra induttore e
risonanza serie,
e la tensione ai
risultano:
1 2
1
Li ( t ) = LI 2M sen 2 ω0 t
2
2
1 2
1 I 2M
1
1
π
π
Cv c ( t ) =
= LI 2M sen 2 ω0 t −
sen 2 ω0 t −
= LI 2M cos 2 ω0 t
2
2
2 ω0 C
2
2
2
2
Indicando con I il valore efficace della corrente si ha:
w L (t ) =
1 2
1
LI M sen 2 ω0 t = LI 2 (1 − cos 2ω0 t )
2
2
w C (t ) =
1 2
1
LI M cos 2 ω0 t = LI 2 (1 + cos 2ω0 t )
2
2
L’energia complessivamente immagazzinata vale:
w LC ( t ) = w L ( t ) + w C ( t ) =
1 2
1
LI M = CVM2 = LI 2 + CV 2
2
2
(8.26)
Gli andamenti di w L ( t ), w C ( t ), w L ( t ) sono riportati in fig.8.18.
La relazione (8.26) e la fig. 8.18 dimostrano che in risonanza lo scambio energetico
avviene tra induttore e condensatore senza interessare la restante parte del circuito.
Allo stesso risultato si giunge ovviamente per il circuito parallelo di fig. 8.11.
239
Cap.8 Risposta in frequenza
wLC
wC
wL
i
t
Fig. 8.18 Andamento di wL e wC in risonanza
8.7 Diagrammi di Bode
La rappresentazione della risposta in frequenza, ossia del modulo e della fase di
W ( j ) in funzione di ω, è stata realizzata negli esempi precedenti utilizzando diagrammi
con scale lineari su entrambi gli assi. Un modo più semplice ed efficace di
rappresentazione della risposta in frequenza si ottiene utilizzando i diagrammi di Bode.
Tali diagrammi utilizzano scale logaritmiche, per l’asse delle ascisse e scale lineari per
l’asse delle ordinate. In tal caso il modulo viene espresso in decibel. Per quanto sia
possibile, per la rappresentazione dell’ampiezza, utilizzare scale logaritmiche per entrambi
gli assi, nel seguito sarà fatto riferimento al tipo di rappresentazione illustrato in
precedenza. Utilizzando i diagrammi di Bode si hanno i seguenti vantaggi:
- si possono rappresentare con il dovuto dettaglio grandezze che variano su campi di
frequenze molto estesi;
- si possono costruire i diagrammi per una risposta armonica posta in forma fattorizzata
come somma di diagrammi elementari.
8.7.1 Guadagno espresso in decibel
Sia assegnato un doppio bipolo resistivo per il quale le potenze di ingresso e di uscita
siano rispettivamente Pi e Pu, si definiscono: guadagno di potenza Gp, guadagno di potenza
in Bel GpB, guadagno di potenza in decibel GpdB i rapporti:
P
Gp = u
G pB = LogG p
G pdB = 10LogG p
Pi
(8.27)
G
G
/ 10
inversamente: G p = 10 pB G p = 10 pdB .
Nel caso in cui le resistenze di ingresso e di uscita siano uguali si ha:
Vu2 R i R u I 2u Vu2 I 2u
Gp = 2
=
=
=
Vi R u
R i I i2 Vi2 I i2
e quindi:
V
I
G pdB = 20Log u = 20LogWV = WV dB
G pdB = 20Log u = 20LogWI = WI dB
Vi
Ii
Per resistenze di ingresso e di uscita uguali la definizione adottata per le potenze risulta
estesa anche ai rapporti di tensione e di corrente. Nella pratica anche se la f.d.t. non è
240
Cap.8 Risposta in frequenza
ottenuta come rapporto di due grandezze omogenee si usa esprimere il modulo di tale f.d.t.
in decibel mediante la relazione:
WdB = 20LogW
(8.28)
8.7.2 Scala logaritmica
In fig.8.19 è mostrata una scala logaritmica per la pulsazione ω e lineare per Logω.
Tale scala si ottiene ricordando che Log10n = nLog10
-2
-1
0
1
2
3
10-2
10-1
1
10
102
103
Logω
ω
Fig.8.19Scala logaritmica
Ciascuno dei tratti indicati in figura è detto decade, passando da una decade all’altra il
valore della pulsazione viene moltiplicato per dieci. I valori intermedi all’interno di una
decade possono essere determinati ricordando che:
Log 1 = 0
Log 2 = 0,3
Log 3 =0,477 ≅ 0,5
Log 4 = 2Log 2 = 0,6
Log 5 = Log 10 – Log 2 = 0,7
Log 6 = Log 3 + Log 2 =
0,777 ≅ 0,8
Log 7 = 0,85
Log 8 = 3Log 2 = 0,9
Log 9 = 2Log 3 = 0,95
In base ai risultati precedenti è possibile suddividere la decade come rappresentato in
fig. 8.19.
0
1
0,5
2
1
3
4
5
6 7 8
9 10
Log ω
ω
Fig. 8.19 Rappresentazione di una decade
I tratti come 1-2, 2-4, 4-8, tutti della stessa lunghezza, sono detti ottava. Passando da
un’ottava alla successiva la pulsazione raddoppia. Si osservi che sulle scale logaritmiche
non può essere rappresentato lo zero e pertanto l’origine dell’asse potrà essere presa in
corrispondenza di valori piccoli quanto si vuole ma non nulli.
8.7.3 La forma di Bode
Per il tracciamento dei diagrammi di Bode e conveniente esprimere la f.d.t. in una
forma opportuna detta forma di Bode. Tale forma si ottiene raccogliendo, nella f.d.t. in
forma fattorizzata, il valore di poli e zeri. Si consideri ad esempio il caso in cui siano
presenti solo poli e zeri reali negativi, ossia :
m
( jω + z i )
∏
1
W ( jω) = K
n
∏1 (jω + p i )
la forma di Bode è data da:
(8.29)
241
Cap.8 Risposta in frequenza
W ( jω) = K
jω
+1
zi
∏1
m
∏1 z i
n
∏1 p i ∏n
1
m
∏1
jω
+1
zi
∏1
jω
+1
pi
m
=H
jω
+1
pi
n
(8.30)
in cui la costante :
∏ zi
H = K 1n
∏1 p i
m
(8.31)
è detta guadano di Bode.
Il modulo e la fase della risposta in frequenza valgono quindi:
∏1
m
W( j ) = H
∏1
n
φ(ω) = ∠H +
m
1
ω
zi
2
ω
pi
2
+1
(8.32)
+1
φ zi (ω) −
in cui la fase di H vale π (0 −π) se K<0, zero se K>0.
n
1
φ pi (ω)
(8.33)
8.7.4 Diagrammi di bode di ampiezza e fase
Per tracciare i diagrammi di Bode su carta semilogaritmica in cui l’asse delle ascisse è
logaritmico e quello delle ordinate lineare e tarato in decibel, è necessario esprimere il
modulo della risposta in frequenza in decibel. Si ha:
W ( j ) dB = 20 LogH +
m
1
2
20 Log
zi
+1 −
n
1
2
20 Log
pi
+1
(8.34)
Dalla (8.34) si deduce che i diagrammi di Bobe di ampiezza si ottengono sommando
gli andamenti dei termini dovuti alla costante H, ai poli agli zeri. La presenza della
costante H determina solo una traslazione in alto o in basso a seconda che essa sia o no
maggiore di uno. Gli andamenti delle fasi si ottengono sommando gli andamenti delle fasi
dei singoli termini come indicato dalla (8.33).
Risulta quindi importante saper tracciare gli andamenti dei diagrammi di ampiezza e
fase relativamente a poli, zeri, guadagno H. Sarà considerato soltanto il caso relativo a
circuiti a fase minima, saranno cioè considerati soltanto zeri a parte reale negativa.
8.8 Tracciamento dei diagrammi di Bode
8.8.1 Costante H
Poiché:
H dB = 20 Log H
(8.35)
il diagramma della modulo risulta al di sopra o al di sotto dell’asse a 0dB a seconda che |H|
risulti maggiore o minore di uno. La fase è nulla se H>0 è π (o -π) se H<0 . I diagrammi di
modulo e fase sono riportati in fig.8.20.
242
Cap.8 Risposta in frequenza
HdB
∠H
H>1
π
π/2
ω
H<0
H>0
ω
-π
H<1
Fig. 8.20 Diagrammi di Bode modulo e fase per la costante H
8.8.2 Zero reale
Nella risposta in frequenza posta in forma di Bode i poli reali negativi comportano
termini del tipo:
ω
N( jω) = 1 + j
(8.36)
Ω
Il modulo espresso in dB risulta:
N ( jω) db = 20 Log 1 +
ω
Ω
2
Consideriamo i seguenti casi:
ω
a)
<< 1 a cui corrisponde N ( jω) db = 0 dB
ϕ(ω) = 0
Ω
ω
ω
π
b)
>> 1 a cui corrisponde N( jω) db = 20Log
ϕ(ω) =
Ω
2
Ω
Ritenendo valido, per il modulo, da 0 ad 1 il risultato trovato in a) e da 1 a ∞ si ottiene
l’andamento asintotico del diagramma di Bode di ampiezza. Tale andamennto è costituito
da una spezzata che ha un cambio di pendenza in corrispondenza di ω/Ω=1.
Fig.8.21Diagrammi di ampiezza e di fase per uno zero reale negativo
Il punto in cui avviene il cambio di pendenza è detto punto di rottura e la frequenza
corrispondente (ω = Ω) frequenza d’angolo o frequenza di corner. La pendenza della
semiretta che si ottiene per ω>Ω è espressa in decibel per decade o in decibell per ottava.
Poichè da una decade all’altra (ad es. da 1 a 10) si ottiene un incremento del numero di
decibel pari a 20 e da un’ottava all’altra (ad es. da 1 a 2) si ha un incremento di 6 decibell,
243
Cap.8 Risposta in frequenza
si dice che la semiretta ha una pendeza di 20 dB/decade o 6 dB/ottava.
Si può valutare, per punti, l’errore che si commette sostituendo l’andamento effettivo
con quello asintotico. In corrispondenza del punto di rottura (in cui l’errore e massimo),
un’ottova prima di tale punto e un’ottava dopo l’errore espresso in decibel risulta:
ω=Ω
dB
= 20 Log 2 = 3dB
ω=0,5 Ω
dB
= 20 Log 5 / 4 = 1dB
ω=2 Ω
dB = 20 Log 5 − 6 = 1dB
Per quanto riguarda l’andamento asintotico del diagramma delle fasi poiché in
corrispondenza del punto di rottura la fase vale π/4 e assumendo verificate le condizioni a)
e b) rispettivamente per ω/Ω<0,1 e per ω/Ω>10 , ossia una decade prima e una decade
dopo il punto di rottura, si ottiene una spezzata che coincide con l’asse delle ascisse (fase
zero) per valori di frequenza ω≤Ω, varia con pendenza π/4 rad/decade e vale π/2 pe ω≥Ω.
L’errore che si commette considerando l’andamento asintotico anziché quello reale è nullo
per ω=Ω. Una decade prima ed una decade dopo vale:
ω=0,1 Ω
ε ϕ = arctg 0,1 = 0,1rad
5,71°
π
= 0,1rad −5,71°
2
Gli andamenti asintotici e reali di ampiezza e fase sono riportati in fig. 8.21.
ω=10 Ω
ε = arctg 10 −
8.8.3 Zeri reali multipli
Si considerino termini del tipo:
N ( jω) = 1 + j
ω
Ω
n
(8.37)
Per il modulo espresso in decibell e fase si ha:
ω
<< 1 a cui corrisponde N ( jω) db = 0 dB ϕ(ω) = 0
a)
Ω
ω
ω
π
b)
>> 1 a cui corrisponde N ( jω) db = n 20Log
ϕ(ω) = n
Ω
Ω
2
In questo caso gli andamenti asintotici si ottengono moltiplicando per n gli andamenti
asintotici dello zero semplice. Un analogo discorso può essere fatto per gli errori.
Esempio 8.2
ω
Tracciare i diagrammi di Bode del termine 1 + j
10
2
|ΝdB|
2π
ϕ(ω)
π
π/2
0,1
1
10
100
ω
Fig. 8.23 Esempio 8.2
0,1
Zero negativo
1
10
100
ω
244
Cap.8 Risposta in frequenza
Per quanto detto in precedenza il diagramma di Bode del modulo risulta coincidente con
l’asse a 0dB a sinistra del punto di rottura, a destra di tale punto si ha una semiretta avente
pendenza 40 dB/decade ( o 12 dB/ottava). La fase parte da 0 e arriva a π rad. I due
diagrammi sono riportati in fig.8.23
8.8.4 Zero nell’origine
La risposta in frequenza presenta in questo caso termini del tipo:
N ( jω) = jω
Il modulo espresso in decibel e la fase risultano:
N ( jω) dB = 20 Logω
(8.38)
π
2
da cui si deduce che l’andamento del modulo è costituito da una retta con pendenza 20
dB/decade che incontra l’asse a 0 dB nel punto ω = 1rad/s. Gli andamenti di modulo e fase
sono riportati in fig.8.24.
φ(ω) =
|ΝdB|
ϕ(ω)
π/2
20
0,1
-20
π/4
1
10
100
ω
0,1
1
10
100
ω
Fig.8.24 Andamento di modulo e fase per uno zero nell’origine
Nel caso in cui lo zero sia di molteplicità q la pendenza e la fase risultano 20q
π
dB/decade e q rad.
2
8.8.5 Zeri complessi coniugati
Si considerino termini del tipo:
N ' ( jω) = −ω 2 + 2 jξωω n + ω 2n
in forma di Bode si ha:
N ' ( jω) = ω 2n 1 −
con
<1
ω2
ω
+ 2 jξ
= ω 2n N( jω)
2
ωn
ωn
Poiché il termine 2n è compreso nella costante H quando si considera W(jω) è
interessante tracciare i diagrammi di Bode per il termine:
N ( jω) = 1 −
ω2
ω
+ 2 jξ
2
ωn
ωn
N ( jω) =
ω2
1− 2
ωn
(8.39)
Poiché il modulo vale:
2
ω
+ 2
ωn
2
(8.40)
245
Cap.8 Risposta in frequenza
si può trovare l’andamento asintotico mediante le solite considerazioni, ossia:
ω
a)
<< 1
N ( jω) db = 0 dB
ϕ(ω) = 0
ωn
ω
ω
b)
>> 1
N ( jω) db = 40Log
ω(ω) = π
ωn
ωn
ω
Per
= 1 risulta inoltre ϕ(ω) = π/2
ωn
L’errore che si commette considerando l’andamento asintotico anziché quello reale, in
corrisposndenza di ω/ωn=1, vale:
ε (1) dB = N( jω) (1) dB = 20 Log 2ξ
(8.41)
da cui si deduce che:
- per = 0,5 la curva effettiva interseca l’asse a 0 dB in corrispondenza di ω = ωn;
- per < 0,5 in corrispondenza di ω = ωn la curva effettiva si trova al di sotto dell’asse a
0 dB, in particolare per = 0 essa tende a − ∞ (c’è quindi un asintoto verticale in
corrispondenza di tale punto)
- per > 0,5 in corrispondenza di ω = ωn la curva effettiva è al di sopra dell’asse a 0 dB
Si può determinare il minimo della curva mediante la relazione:
d
ω
1−
dω
ωn
2 2
ω
+ 2
ωn
2
=0
da cui si ottiene:
ω* = ω n 1 − 2 ξ 2
(8.42)
M* = 2
(8.43)
1−
2
Dalla (8.43) si deduce che il minimo esiste per < 1 / 2 = 0,707 . Dalla (8.40) si ricava
inoltre che per smorzamento nullo il diagramma di ampiezza incontra l’asse a 0 dB in ω
= 2 ωn . In fig.8.25 è riportato il diagramma di ampiezza per alcuni valori di
smorzamento. Nella fig.8.25a) è evidenziato l’andamento per due decadi, in fig.8.25b), per
meglio evidenziare l’andamento reale sono state considerate due ottave. In fig.8.26 è
riportato il diagramma della fase.
Cap.8 Risposta in frequenza
Fig.8.25 Diagramma di Bode di ampiezza per zeri complessi coniugati
Fig.8.26 Diagramma della fase per zeri complessi coniugati a parte reale negativa
246
247
Cap.8 Risposta in frequenza
8.8.6 Zeri immaginari coniugati
Gli zeri immaginari coniugati si ottengono annullando lo smorzamento nella (8.39).
Nella risposta in frequenza si hanno quindi termini del tipo:
ω2
N ( jω) = 1 − 2
ωn
Fig.8.27 Diagrammi di Bode, ampiezza e fase, per zeri immaginari coniugati
Per il tracciamento dei diagrammi di Bode si ottengono risultati corrispondenti a quelli
ralativi agli zeri considerando che le pendenze dei diagrammi delle ampiezze sono negative
e che le fasi sono cambiate di segno. Nel seguito non saranno considerate singolarità polari
a parte reale positiva indicative di circuiti instabili.
8.8.7 Poli reali negativi
Per il tracciamento dei diagrammi di bode relativi singolarità polari si procede in modo
del tutto simile a quanto fatto per gli zeri. Per il modulo si ha:
D( jω) db = 20 Log
1
= −20 Log 1 +
ω
Ω
2
(8.44)
2
ω
1+
Ω
da cui si deduce che l'andamento del diagramma di Bode ha una pendenza contraria a
quella degli zeri e dunque, a partire dal punto di rottura, esso è costituito da una semiretta
con pendenza -20 dB/decade.
Per quanto riguarda la fase, poiché le singolarità polari si trovano a denominatore, il
diagramma di Bode parte da o e arriva a -π/2 passando attraverso -π/4.
I diagrammi di Bode relativi a poli reali e distinti sono riportati in fig.8.28.
Si omette di trattare i casi relativi a poli complessi coniugati, poli nell'origine, ecc.
poiché essi possono essere facilmente essere ricavati da quella dei casi corrispondenti
relativi agli zeri tenendo presenti le considerazioni svolte ad inizio paragrafo.
8.8.8 Poli complessi coniugati
Vale quanto detto per gli zeri, purchè si consideri che la pendenza vale 0 o 40dB/decade mentre la fase varia tra 0 e - π. I grafici relativi sono riportati nelle figg. 8.30
e 8.31.
Cap.8 Risposta in frequenza
8.28 Diagrammi di Bode di ampiezza per poli reali e distinti
8.29 Diagrammi di Bode di fase per poli reali e distinti
248
Fig.
Cap.8 Risposta in frequenza
Fig.8.30 Diagramma di Bode di ampiezza per polii complessi coniugati
Fig.8.31 Diagramma di Bode di fase per poli complessi coniugati
249
CAPITOLO 9
9.1 Generalità
La generazione, la distribuzione e l'utilizzazione dell'energia elettrica, per lo meno per
quanto riguarda i sistemi di potenza, avvengono quasi totalmente sotto forma di corrente
alternata trifase. Ciò principalmente per i seguenti motivi:
− a parità di potenza, le macchine elettriche trifasi sono meno pesanti e ingombranti
rispetto alle monofasi. Inoltre i motori asincroni (che rappresentano una elevata
percentuale degli utilizzatori elettrici) monofase presentano problemi in fase di
avviamento;
− le linee elettriche di trasmissione risultano più leggere a parità delle altre condizioni
(potenza, tensione, fattore di potenza, distanza).
Lo studio dei circuiti elettrici trifase può essere condotto utilizzando i metodi generali
per lo studio delle reti elettriche illustrati in precedenza, ossia: i principi di Kirchhoff, il
metodo delle correnti di maglia, il metodo delle tensioni di taglio, il metodo del potenziale
di nodo. Possono essere ovviamente applicati, nei limiti di validità, anche tutti i teoremi
relativi alle reti. Se, come spesso accade, sono verificate particolari condizioni di simmetria
nel sistema delle tensioni di alimentazione e nelle impedenze dei carichi, tale studio può
essere eseguito in maniera più semplice, utilizzando i metodi che saranno presentati nel
presente capitolo. Quando tali condizioni non sono verificate debbono essere utilizzati i
metodi generali. In questi casi, come sarà mostrato nella parte terminale del capitolo,
risulta vantaggioso l'utilizzo del calcolo matriciale,.
Un sistema trifase di tensioni può essere immaginato come costituito da tre generatori
monofase aventi le forze elettro motrici e1(t), e2(t), e3(t) riportate nella (9.1). Tali f.e.m.
sono isofrequenziali e costituiscono un sistema simmetrico di tensioni poiché risultano
uguali i valori massimi e sono sfasate di 120° (2π/3) nel tempo. Il sistema è detto diretto se
le tensioni si susseguono in senso orario inverso se si susseguono in senso antiorario.
Le relazioni (9.1) e (9.2) rappresentano un sistema simmetrico diretto e uno inverso di
tensioni.
e1 = E M sen (ωt + α )
{
}
= E M Im e j(ωt +α )
j(ωt + α − 23 π )
e 2 = E M sen (ωt + α − 2π / 3) = E M Im e
j(ωt + α − 43 π )
e 3 = E M sen (ωt + α − 4π / 3) = E M Im e
{
{
}
}
(9.1)
250
Cap.9 Sistemi trifase
e1 = E M sen( ωt + α )
{
= E M Im e ( jωt +α )
{(
(
Im{e
}
e 2 = E M sen( ωt + α + 2 π / 3) = E M Im e
j ωt + α + 23 π
e 3 = E M sen( ωt + α + 4 π / 3) = E M
j ωt + α + 43 π
}
)
}
)
(9.2)
I fasori corrispondenti, indicando con E il valore efficace, sono:
E1 = Ee jα
E 2 = E 1e
− j 23 π
E 3 = E 1e
= E1 −
1
3
−j
= E 1a 2
2
2
= E1 −
1
3
+j
= E 1a
2
2
= E1 −
1
3
−j
= E 1a 2
2
2
= E1 −
1
3
+j
= E 1a
2
2
− j 43 π
(9.3)
E1 = Ee jα
E 2 = E 1e
− j 23 π
E 3 = E 1e
− j 43 π
(9.4)
1
3
1
3
in cui 1, a = − + j
, a2 = − − j
costituiscono le radici cubiche dell'unità1. Le
2
2
2
2
terne simmetriche dirette e inverse possono anche essere scritte in forma di vettori come:
E1
1
E 2 = E1 a 2
E3
a
E1
1
E 2 = E1 a
E3
a2
(9.5)
In seguito salvo diversa indicazione saranno considerate terne simmetriche dirette. E'
immediato osservare che essendo 1 + a 2 + a = 0 i tre fasori costituenti una terna simmetrica
hanno come somma zero. Infatti:
E 1 + E 2 + E 3 = E 1 (1 + a 2 + a ) = 0
(9.6)
9.2 Collegamento delle fasi del generatore
9.2.1 Collegamento a stella
Si considerino i tre generatori monofasi precedenti e si suppongano collegati a tre
carichi uguali di impedenza Z come illustrato in fig. 9.1. I tre circuiti chiusi che si
formano sono percorsi da tre correnti uguali in modulo e sfasate di 2/3π.
1
x3=1 è come dire (ρejθ)3=1ej(0+2kπ) da cui ρ=1 θ=0+2kπ/3 e quindi le radici sono: 1, 1ej2π/3, 1ej4π/3
251
Cap. 9 Sistemi trifase
~
E3
I1
E1
~
Z
~
Z
Z
E2
I2
I3
Fig. 9.1Generatori monofase che alimentano tre carichi di stessa impedenza
Si ha infatti:
E1
Z
E2
I2 =
= a 2 I1
Z
E
I 3 = 3 = aI 1
Z
I1 =
(9.7)
Un sistema di tre correnti uguali e sfasate di 2/3π è detto equilibrato. I tre conduttori
di ritorno possono essere sostituiti, senza che le equazioni di equilibrio elettrico si
modifichino, con un unico conduttore percorso dalla somma delle tre correnti. E poiché
risulta:
I 1 + I 2 + I 3 = I 1 (1 + a 2 + a ) = 0
(9.8)
il conduttore di ritorno può essere soppresso. Si ottiene quindi il circuito di fig.9.2
equivalente a quello di fig.9.1.
~
E3
I1
E1
Z
neutro
O
~
~
I3
E2
O'
Z
Z
I2
Fig. 9.2 Generatore trifase con le fasi collegate a stella che alimenta un carico anch'esso collegato a stella
Il collegamento così realizzato con i tre generatori, o meglio con le tre fasi del
generatore trifase, viene detto collegamento a stella ed il punto comune O è detto centro
stella. Il conduttore di collegamento tra il centro stella del generatore e quello del carico, la
cui presenza è ininfluente per le correnti, è detto neutro. Il collegamento a stella può essere
rappresentato in uno dei due modi riportati in fig. 9.3.
Nel collegamento a stella sono disponibili due terne di tensioni, una costituita dalle
tensioni E 1 , E 2 , E 3 esistenti tra l'estremità di una fase e il centro stella e dette tensioni di
fase o stellate, l'altra costituita dalle tensioni V12 , V23 , V31 esistenti tra due fasi e dette
252
Cap.9 Sistemi trifase
tensioni di linea o concatenate.
1
~
E3
~
E1
O
O
~
~
E2
~
2
E2
~
2
3
1
E1
3
E3
Fig. 9.3 Due modi di rappresentazione di generatori trifase con fasi collegate a stella
Tenendo conto che a 3 = 1, a 4 = a 2 , a 5 = a le tensioni di linea risultano:
π
j
3
3
V12 = E 1 − E 2 = (1 − a )E 1 =
+j
E 1 = 3E 1e 6
2
2
2
V23 = E 2 − E 3 = (a 2 − a )E 1 = a 2 (1 − a 2 )E 1 = a 2 V12 = 3E 2 e
V31 = E 3 − E 1 = ( a − 1) E 1 = a(1 − a 2 )E 1 = aV12 = 3E 3e
j
j
π
6
(9.9)
π
6
Dalle (9.9) si deduce che la terna delle tensioni di linea risulta in anticipo rispetto a quella
di fase di π/6 e che il valore efficace (e quindi valore massimo) delle tensioni di linea è
3 volte più grande di quello delle tensioni di fase.
Dalla (9.9), ma più in generale dal II° principio di Kirchhoff, risulta:
V12 + V23 + V31 = 0
(9.10)
In fig.9.4 sono rappresentati i fasori delle tensioni di fase e di linea.
V31
E3
V12
2/3π
2/3π
π/6
2/3π
E1
2/3π
2/3π
2/3π
E2
V23
Fig. 9.4 Rappresentazione fasoriale delle tensioni di fase e di linea
253
Cap. 9 Sistemi trifase
9.2.2 Collegamento a triangolo
Poiché come è stato visto tra i punti 1-2, 2-3, 3-1, esistono delle tensioni V12, V23, V31,
nulla cambia agli effetti del circuito esterno se inseriamo, come indicato in fig. 9.5a), tre
generatori tra i fili di linea. Niente cambia per le tensioni di linea neanche se si tolgono i
generatori collegati a stella come indicato in fig. 9.5b).
1
1
V31
~
~
~
O
E3
~
E1
~
~
E2
V23
V31
V12
2
~
~
V12
b)
~
3
a)
2
V23
3
Fig.9.5 Collegamento a triangolo delle fasi del generatore
Si osservi che nel collegamento a triangolo non c'è distinzione tra tensione di fase e
tensione di linea. All'interno della maglia chiusa costituita dalle fasi del generatore, fig.
9.5b), non circola alcuna corrente, infatti indicando con Z l'impedenza di ciascuna fase
risulta:
I=
V12 + V23 + V31
=0
3Z
(9.11)
Tale corrente non sarebbe nulla se le tre tensioni non costituissero una terna
simmetrica.
9.3 Collegamento delle fasi dei carichi
9.3.1 Collegamento a stella
Questo caso è già stato trattato al punto 9.2.1 in cui si è trovato che le correnti che
percorrono le fasi della stella costituiscono un sistema equilibrato fornito dalle (9.7).
Poiché le correnti che percorrono le tre impedenze Z inserite nelle fasi del carico sono le
stesse che percorrono i conduttori della linea che alimentano il carico stesso si dice che le
correnti di fase sono uguali a quelle di linea. Si è anche trovato che le correnti non
cambiano se il centro stella del generatore e quello del carico vengono uniti per mezzo del
fili neutro. Questa operazione può quindi essere effettuata per il calcolo della corrente nella
fase 1 che può essere determinata utilizzando il circuito monofase di fig.9.6 costituito
appunto dalla fase1 e dal neutro.
~
O
Fig.9.6 Circuito
E1
I1
Z
neutro
O'
equivalente per il calcolo della corrente nella fase 1
Nota la corrente nella prima fase le correnti nelle altre fasi possono essere determinate
254
Cap.9 Sistemi trifase
mediante le relazioni:
I1
1
I 2 = I1 a 2
I3
(9.12)
a
Osserviamo che in un carico collegato a stella la somma delle correnti risulta, per il I°
principio di Kirchhoff, nulla indipendentemente dal fatto che esse costituiscano un sistema
equilibrato.
9.3.2 Collegamento a triangolo
In fig.9.7 è rappresentato un utilizzatore le cui fasi sono collegate a triangolo. Si può
notare che la tensione applicata a ciascuna fase del carico coincide con quella tra due fili di
linea pertanto si dice che nel collegamento a triangolo tensione di fase e tensione di linea
coincidono. C'è invece differenza tra le correnti che percorrono le impedenze Z, dette
correnti di fase, e quelle che percorrono i conduttori della linea, dette correnti di linea.
V12
I1
V31
V23
2
I2
I12
1
Z
I31
Z
I23
Z
3
I3
Fig. 9.7 Carico con le fasi collegate a triangolo
Le tre correnti di fase sono date dalle relazioni:
V12
Z
V23
=
= a 2 I 12
Z
V
= 31 = aI 12
Z
I 12 =
I 23
I 31
(9.13)
esse costituiscono un sistema equilibrato di corrente per le quali risulta:
I 12 + I 23 + I 31 = 0
(9.14)
Per le correnti di linea si ha:
π
I 1 = I 12 − I 31
−j
3
3
= (1 − a ) E 1 =
−j
I 12 = 3 I 12 e 6
2
2
I 2 = I 23 − I 12 = a 2 I 1 = 3 I 23e
I 3 = I 31 − I 23 = a 2 I 1 = 3 I 31e
−j
−j
π
6
π
6
(9.15)
255
Cap. 9 Sistemi trifase
In fig. 9.8 è riportato il diagramma fasoriale delle correnti di linea e di fase.
I3
I31
2/3π
2/3π
2/3π
2/3π
I12
π/6
2/3π
I23
I2
2/3π
I1
Fig. 9.8 Correnti di linea e di fase per un carico a triangolo
Dalle relazioni precedenti si ha che in un sistema simmetrico ed equilibrato, per un
carico con le fasi collegate a triangolo, le correnti di linea sono in modulo 3 le correnti
di fase e risultano sfasate π/6 in ritardo
Dalle (9.15), ma più in generale in virtù del I° principio di Kirchhoff, risulta:
I1 + I 2 + I 3 = 0
(9.16)
La somma delle correnti di linea risulta sempre nulla, anche se esse non costituiscono
un sistema simmetrico. Un risultato analogo è stato trovato con la (9.10) per le tensioni di
linea. Una terna la cui somma risulta identicamente nulla è detta terna pura. Le terne
relative alle grandezze di linea sono quindi pure.
9.4 Potenza nei sistemi simmetrici ed equilibrati
Si consideri un carico costituito da tre impedenze uguali, collegate a stella o a
triangolo, le cui fasi siano percorse da una terna di correnti equilibrata per effetto
dell'applicazione di una terna simmetrica di tensioni. Per le due terne si assume:
e1 (t ) = E M sen ωt
e 2 (t ) = E M sen (ωt − 2π / 3)
e 3 (t ) = E M sen (ωt − 4π / 3)
i1 (t ) = I M sen (ωt − ϕ)
i 2 (t ) = I M sen (ωt − 2π / 3 − ϕ)
i 3 = I M sen (ωt − 4π / 3 − ϕ)
(9.17)
La potenza istantanea complessiva è data dalla somma delle singole potenze
istantanee. Poiché le potenze istantanee relative alle tre fasi valgono:
p1 (t ) = e1 (t )i1 (t ) = EI cos ϕ + EI cos(2ωt − ϕ)
p 2 (t ) = e 2 (t )i 2 (t ) = EI cos ϕ + EI cos(2ωt − 2π / 3 − ϕ)
p 3 (t ) = e 3 (t )i 3 (t ) = EI cos ϕ + EI cos(2ωt − 4π / 3 − ϕ)
risulta:
(9.18)
256
Cap.9 Sistemi trifase
p( t ) = p1 ( t ) + p 2 ( t ) + p 3 ( t ) = 3EI cos ϕ
(9.19)
La potenza istantanea risulta quindi costante. Ciò costituisce un vantaggio anche per il
motore primo che porta in rotazione il generatore, esso risulta infatti sollecitato con una
coppia resistente costante anziché pulsante.
Indicando con E, V, If, I la tensione di fase, la tensione di linea, la corrente di fase , la
corrente di linea, si possono definire potenza attiva, reattiva e apparente come segue:
P = 3EI f cos ϕ = 3RI f2 = 3GE 2 = 3VI cos ϕ
Q = 3EI f sen ϕ =
2
3XI f2
2
(9.20)
2
= 3BE = 3VI sen ϕ
S = P + Q = 3EI f =
3ZI 2f
(9.21)
2
= 3YE = 3VI
(9.22)
Si osservi che dove compare il 3 compaiono le grandezze di fase, la presenza di 3
è invece associata alle grandezze di linea. Si definisce fattore di potenza la quantità:
f .d.p. = cos tg −1
Q
P
(9.23)
E’ immediato verificare che per sistemi simmetrici ed equilibrati il fattore di potenza
coincide con il cosϕ.
La potenza complessa è la somma delle potenze complesse delle singole fasi e vale:
S = E1 I1* + E 2 I *2 + E 3 I *3
e poiché per i sistemi a tre fili vale la relazione:
I1* + I *2 + I *3 = 0
si ha:
(
)
S = E1 I1* + E 2 I *2 + E 3 − I1* − I *2 = (E1 − E 3 )I1* + (E 2 − E 3 )I *2 = V13 I1* + V23 I *2
(9.24)
E’ immediato verificare che valgono anche le relazioni:
S = V21I*2 + V31I*3 = V32 I *3 + V12 I1*
(9.25)
9.5 Rifasamento nei sistemi simmetrici ed equilibrati
Anche per i sistemi trifasi valgono le stesse considerazioni relative ai vantaggi
introdotti dal rifasamento svolte per i sistemi monofase. Sia assegnato un carico trifase
equilibrato, alimentato con una terna simmetrica di tensioni di linea di valore efficace V,
che assorba una potenza attiva P con fattore di potenza cosϕ e si voglia rifasare tale carico
a cosϕR. Tale risultato può essere ottenuto mediante tre condensatori di stessa capacità
collegati a stella o a triangolo come illustrato in fig.9.9
CS
a)
CT
b)
Fig.9.9 Rifasamento con condensatori collegati a stella a) e a triangolo b)
257
Cap. 9 Sistemi trifase
In analogia con i sistemi monofase, indicando con QC la potenza reattiva dei
generatori, risulta:
Q − QC
Q
tgϕ =
tgϕ R =
P
P
da cui:
Q C = P(tgϕ − tgϕ R )
(9.26)
Si tratta ora di determinare il valore della capacità che consente il rifasamento voluto.
Per i due tipi di collegamento si ha:
9.5.1 Collegamento a stella
Indicando con Vf la tensione di fase e con XCS la reattanza di ogni condensatore la
potenza reattiva complessiva nel collegamento a stella risulta:
Q C = 3X CS I C2 = 3X CS
Vf2
2
X CS
= 3ωC S Vf2 = ωC S V 2
Uguagliando l’espressione della QC con la (9.26) risulta:
CS =
P(tgϕ − tgϕ R )
ωV 2
(9.27)
9.5.2 Collegamento a triangolo
La potenza reattiva nel collegamento a triangolo, indicando con ICf la corrente di fase e
con XCT la reattanza di ogni condensatore, risulta:
V2
2
Q C = 3X CT I Cf = 3X CT 2 = 3ωC T V 2
X CT
Uguagliando con la (9.26) si ha:
CT =
P(tgϕ − tgϕ R )
3ωV 2
(9.28)
Dal confronto tra le relazioni (9.27) e (9.28) risulta:
1
CT = CS
3
(9.29)
Il collegamento a triangolo presenta quindi il vantaggio di avere, a parità di potenza
reattiva, condensatori di capacità 1/3 rispetto al collegamento a stella. Il collegamento a
triangolo presenta tuttavia lo svantaggio di sottoporre i condensatori, e quindi l’isolante
interposto tra le armature, alla tensione di linea anziché a quella di fase come accade nel
collegamento a stella.
In base a queste considerazioni si fanno le seguenti scelte:
- in bassa tensione, dove il dimensionamento dell’isolante non è diverso per la tensione
di fase e di linea, si utilizza il collegamento a triangolo;
- per tensioni più elevati i vantaggi derivanti dal risparmio sul dimensionamento
dell’isolante sono superiori a quelli dovuti alla minore capacità e pertanto si preferisce
il collegamento a stella.
258
Cap.9 Sistemi trifase
9.6 Sistemi trifase simmetrici e squilibrati
Consideriamo una terna di tensioni simmetrica diretta che alimenta un carico costituito
da tre impedenze diverse collegate a stella, senza neutro e con neutro, o a triangolo.
9.6.1 Collegamento a stella
~
O
~
~
E1
I1
3
E3
O
Z1
2
E2
1
~
1
I2
Z2
I3
O’
E1
I1
Z1
I2
Z2
I3
Z3
2
~
E2
3
~
E3
Z3
a)
In
O’≡ O
b)
Fig. 9.10Sistema simmetrico e squilibrato; carico collegato a stella a) a stella con neutro b)
Il circuito do Fig.9.10a) può essere risolto applicando il metodo delle correnti di
maglia. Scegliendo come albero il ramo attraversato da I2 si ha:
Z + Z2
E1 − E 2
V
= 12 = 1
Z2
E3 − E 2
V32
Z2
I1
Z 2 + Z3 I 3
(9.30)
Poiché il circuito presenta tutti i rami in parallelo si può risolvere anche mediante il
teorema di Millmann. La differenza di potenziale tra O e O’ risulta:
V0'0 =
E1 Y1 + E 2 Y2 + E 3 Y3
Y1 + Y2 + Y3
(9.31)
Le tensioni applicate alle fasi delle tre impedenze valgono:
V10' = V10 + V00' = E 1 − V0'0
V20' = V20 + V00' = E 2 − V0'0
(9.32)
V30' = V30 + V00' = E 3 − V0'0
Le correnti risultano:
I1 =
V10'
Z1
I2 =
V20'
Z2
I3 =
V30'
Z3
(9.33)
la somma di tali correnti, per il I° principio di Kirchhoff, risulta nulla, ossia:
I1 + I 2 + I 3 = 0
(9.34)
Dalle (9.32) si ha inoltre:
V10' + V20' + V30' = −3V0'0
(9.35)
9.6.2 Collegamento a stella con neutro
Con questo tipo di collegamento, come evidenziato anche in fig. 9.10b), risulta
V0'0 = 0 (il neutro è supposto di impedenza nulla). Pertanto le relazioni (9.32), (9.33),
(9.34) e (9.35) divengono:
259
Cap. 9 Sistemi trifase
V10' = E 1
I1 =
V20 ' = E 2
E1
Z1
V30 ' = E 3
E2
Z2
I2 =
I3 =
E3
Z3
I1 + I 2 + I 3 = I n
(9.36)
(9.37)
(9.38)
V10' + V20' + V30' = 0
(9.39)
Risolvendo con le correnti di maglia, assumendo come albero il ramo del neutro, si ha:
E1
Z1
0
0
I1
E2 = 0
E3
0
Z2
0
0
Z3
I2
I3
(9.40)
L’eventuale presenza di una impedenza di neutro Z n porterebbe a equazioni del tipo:
E1
Z1 + Z n
Zn
Zn
I1
Zn
Zn
Z2 + Zn
Zn
Zn
Z3 + Zn
I2
I3
E2 =
E3
(9.41)
9.6.3 Carichi a stella collegati in parallelo
Per i carichi a stella squilibrati non è in generale possibile effettuare il parallelo fase
per fase poiché i potenziali dei centro stella sono diversi. Volendo trovare un carico
equivalente si possono trasformare i due carichi a stella in carichi a triangolo ed effettuare
il parallelo. Successivamente è possibile riportare il carico ad una stella equivalente.
~
O
~
~
E1
E2
E3
ZC
IT1
IT3
C
A
ZB
ZA
1
Z1
3
Z2
A
Z3
B
Fig. 9.11 Carichi a stella collegati in parallelo
Per generatori ideali, come quelli rappresentati in fig.9.11, che alimentano carichi
squilibrati in parallelo si può scrivere:
VA 0
E1 E 2 E 3
+
+
Z1 Z 2 Z 3
=
1
1
1
+
+
Z1 Z 2 Z 3
VB0
E1 E 2 E 3
+
+
ZA ZB ZC
=
1
1
1
+
+
ZA ZB ZC
(9.42)
ciò in virtù del fatto che ciascun carico può essere analizzato indipendentemente dall’altro
260
Cap.9 Sistemi trifase
(poiché i generatori sono ideali). Analizziamo ora due casi particolari in cui i potenziali dei
centro stella A e B coincidono e pertanto può essere effettuato il parallelo fase per fase.
a) Si suppongano verificate le seguenti relazioni:
Z 2 = K 1 Z1
Z 3 = K 2 Z1
(9.43)
Z B = K1 Z A
ZC = K 2 ZA
(9.44)
sostituendo nelle (9.42) si ha:
VA 0 = VB0
b) Si abbia:
Z1 = KZ A
E 2 E3
+
K1 K 2
=
1
1
1+
+
K1 K 2
E1 +
(9.45)
Z 3 = KZ C
Z 2 = KZ B
(9.46)
le (9.42) divengono:
VA 0 = VB0
E1 E 2 E 3
+
+
ZA ZB ZC
=
1
1
1
+
+
ZA ZB ZC
(9.47)
In fig. 9.12 sono riportati i diagrammi fasoriali delle tensioni di fase e di linea relativi
ai carichi di fig. 9.11. Da tali diagrammi si osserva che per una assegnata terna di tensioni
di linea ne esistono infinite di fase in dipendenza del carico. In particolare la terna di fase il
cui centro stella coincide con il baricentro delle tensioni di linea è detta terna
baricentrica.
3
B
A
V23
V31
0
1
V12
2
Fig.9.12 Diagramma fasoriale di linea e di fase per stelle squilibrate in parallelo alimentate da un
generatore ideale di tensioni simmetriche
Procedendo con le correnti di maglia, per il circuito di fig. 9.11, si avrebbe:
Z + Z2
I1
= 1
Z2
I3
I T1
I T3
=
I1
I3
+
−1
Z2
Z2 + Z3
IA
IC
=
V12
V32
Z1 + Z 2
Z2
Z + ZB
IA
= A
ZB
IC
Z2
Z 2 + Z3
−1
Z + ZB
+ A
ZB
ZB
−1
ZB + ZC
ZB
Z B + ZC
−1
V12
V32
V12
V32
(9.48)
(9.49)
261
Cap. 9 Sistemi trifase
9.6.4 Collegamento a triangolo
In fig. 9.13 è riportato un carico le cui fasi sono collegate a triangolo. Per tale carico le
correnti di fase sono fornite dalle relazioni:
I12 =
V12
Z12
I 23 =
V12
V31
V23
2
I3
I 31 =
V31
Z 31
(9.50)
1
Z12
I1
I2
V23
Z 23
I31
I12
Z13
I23
Z23
3
Fig. 9.13 Carico costituito da tre impedenze diverse collegate a triangolo
ha:
Le correnti di linea si trovano applicando il I° principio di Kirchhoff ai nodi 1, 2 e 3. Si
I1 = I12 − I 31
I 2 = I 23 − I12
I 3 = I 31 − I 23
(9.51)
La terna delle correnti di linea è pura e quindi:
I1 + I 2 + I 3 = 0
(9.52)
Procedendo con metodo delle tensioni di taglio, o delle tensioni di nodo, si ha:
Y + Y31
I1
= 12
− Y31
I3
− Y31
V12
Y23 + Y31 V32
(9.53)
9.6.5 Formule di trasformazione stella triangolo
Le relazioni (9.30) e (9.53) forniscono un mezzo per la dimostrazione delle formule di
trasformazione stella–triangolo, e viceversa, in precedenza fornite. Si consideri infatti di
aver trasformato il carico di fig.9.13 in quello di fig. 9.10a). Per l’equivalenza le correnti
calcolate con la (9.53) o con la (9.30) debbono essere uguali e quindi:
Y12 + Y31
− Y31
− Y31
Y23 + Y31
=
Z1 + Z 2
Z2
Z2
Z 2 + Z3
−1
=
Z 2 + Z3
− Z2
− Z2
Z1 + Z 2
Z1 Z 2 + Z 2 Z 3 + Z 3 Z1
(9.54)
uguagliando i termini risulta:
Y31 =
Z2
Z1 Z 2 + Z 2 Z 3 + Z 3 Z1
Y12 =
Z 2 + Z3
Z3
− Y31 =
Z1 Z 2 + Z 2 Z 3 + Z 3 Z1
Z1 Z 2 + Z 2 Z 3 + Z 3 Z1
Y23 =
Z1 + Z 2
Z1
− Y31 =
Z1 Z 2 + Z 2 Z 3 + Z 3 Z1
Z1 Z 2 + Z 2 Z 3 + Z 3 Z1
(9.55)
262
Cap.9 Sistemi trifase
In termini di impedenza:
Z12 =
Z1 Z 2 + Z 2 Z 3 + Z3 Z1
Z3
Z 23 =
Z1 Z 2 + Z 2 Z3 + Z 3 Z1
Z1
Z 31 =
Z1 Z 2 + Z 2 Z 3 + Z 3 Z1
Z2
(9.56)
Inversamente supponendo di trasformare il triangolo in stella risulta:
Y23 + Y31
Y31
−1
Y31
Y12 + Y31
Z1 + Z 2
Z2
Y + Y31
− Y31
= 12
=
Y12 Y23 + Y23 Y31 + Y31 Y12
Z2
Z 2 + Z3
− Y31
Y23 + Y31
Uguagliando termine a termine si trova:
Z1 =
Z12 Z31
Z12 + Z 23 + Z31
Z2 =
Z12 Z 23
Z 31 Z 23
Z3 =
Z12 + Z 23 + Z 31
Z12 + Z 23 + Z 31
(9.57)
9.6.6 Carichi a triangolo collegati in parallelo
Si può effettuare il parallelo fase per fase e trovare il carico equivalente a triangolo. Se
interessa conoscere solo la corrente di linea, si può scrivere per ogni carico la matrice delle
ammettenze che compare nella (9.53) e successivamente effettuare la somma. Risulta:
I1
I3
=
Y12 + Y31
− Y31
− Y31
Y23 + Y31
+
'
Y12' + Y31
−
'
− Y31
'
Y31
'
Y23
+
V12
'
Y31
V32
(9.58)
9.6.7 Collegamento tra un carico a stella e uno a triangolo
Per trovare la corrente complessiva di linea si può prima trasformare a triangolo il carico
a stella ed effettuare il parallelo fase per fase. Ciò equivale anche ad applicare la relazione:
I1
I3
=
Y12 + Y31
− Y31
− Y31
Z + Z2
+ 1
Y23 + Y31
Z2
Z2
Z2 + Z2
−1
V12
V32
(9.59)
9.6.8 Collegamento tra un carico a stella con neutro ed uno a triangolo
Questo tipo di collegamento è rappresentato in fig.9.14
1
I1
2
Y12
Y23
I2
3
Y31
I3
Y1n
n
Y2n
Y3n
In
Fig.9.14 Collegamento tra carico a stella con neutro e carico a triangolo
263
Cap. 9 Sistemi trifase
Per il calcolo delle correnti di linea, complessivamente assorbite dai due carichi, si
applica il metodo delle tensioni di nodo come indicato in fig.9.14. Le equazioni risultanti
sono:
I1
Y12 + Y31 + Y1n
− Y12
− Y31
V1n
− Y12
− Y31
Y12 + Y23 + Y2 n
− Y23
− Y23
Y23 + Y31 + Y3n
V2n
V3n
I2 =
I3
(9.60)
9.6.9 Collegamento tra un carico a stella ed uno a stella con neutro
In un carico collegato a stella le correnti di ramo sono legate a quelle di maglia dalla
relazione:
I1A
I 2A
I 3A
1
0
Z 2 + Z3
I1A
1
=
−1 −1
= −1 −1
∆
− Z2
I 3A
0 1
0
1
1
0
− Z2
Z1 + Z 2
V12
1
=
∆
V32
Z 2 + Z3
− Z2
− Z3
− Z2
− Z1
Z1 + Z 2
V12
V32
in cui: ∆ = Z1 Z 2 + Z 2 Z 3 + Z 3 Z1
Poiché vale la relazione:
V12
V32
V1n
1 −1 0
V2 n
=
0 −1 1
V3n
V1n − V2 n
=
V2n − V3n
per la stella senza neutro si ha:
I1A
Z 2 + Z3
1
− Z3
I 2A =
∆
− Z2
I 3A
− Z2
− Z1
Z1 + Z 2
V1n
Z 2 + Z3
1 −1 0
1
− Z3
V2 n =
0 −1 1
∆
− Z2
V3n
− Z3
Z1 + Z 3
− Z1
− Z2
− Z1
Z1 + Z 2
V1n
V2 n
V3n
La corrente complessiva è:
Z 2 + Z3
I1
1
− Z3
I2 =
∆
− Z2
I3
− Z3
Z1 + Z 3
− Z1
− Z2
Y1n
− Z1 + 0
0
Z1 + Z 2
0
Y2 n
0
0
0
Y3n
V1n
V2 n
V3n
Quest
o modo di procedere equivale ha trasformare la stella in triangolo, secondo le
relazioni fornite dalle (9.55), e successivamente applicare la relazione (9.60).
9.6.10 Collegamento di due stelle con neutro
Indicando con Y1n Y2n Y3n e Y1'n Y2' n Y3' n le ammettenze delle due stelle la corrente
complessivamente assorbita risulta:
I1
Y1n + Y1'n
I2 =
0
I3
0
0
Y2 n +
0
V1n
0
Y2' n
0
Y3n +
Y3' n
V2 n
(9.61)
V3n
La (9.61) indica che per le due stelle può essere effettuato il parallelo fase per fase.
264
Cap.9 Sistemi trifase
9.7 Sistemi asimmetrici e squilibrati
Nel caso in cui le tensioni non soddisfino le condizioni di simmetria si parla di sistema
asimmetrico. Una terna asimmetrica di tensioni applicata ad carico costituito da tre
impedenze, uguali o diverse, produce in generale una terna squilibrata di correnti. Per
quanto riguarda i carichi collegati a triangolo valgono le stesse considerazioni del paragrafo
precedente. Le stesse procedure illustrate in precedenza relativamente alla risoluzione con i
metodi delle correnti di maglia e delle tensioni di taglio (o di nodo) valgono anche in
questo caso. Alcune considerazioni debbono tuttavia essere aggiunte per quanto riguarda i
carichi collegati a stella.
1
Z1
I1
2
Z2
I2
3
I3
Z
A
Z3
Z
Z
B
Fig. 9.15 Sistema asimmetrico e squilibrato
Si considerino i due carichi di fig. 9.15 costituiti da una stella equilibrata e una
squilibrata, per il I° principio di Kirchhoff dal circuito di figura risulta:
I1 + I 2 + I 3 =
1
(V1B + V2B + V3B ) = 0
Z
(9.62)
La terna delle tensioni V1B V2 B V3B , la cui somma è nulla , è detta terna baricentrica
poiché il punto B coincide con il baricentro del triangolo delle tensioni di linea. Si ricorda
che per un triangolo il baricentro è determinato dall’incontro delle mediane; tale punto
divide inoltre le mediane in due parti di cui una è 1/3 e l’altra è 2/3 della lunghezza totale.
La fig. 9.16 evidenzia la relazione (9.62).
1
V31
2/3
V3B
3
V1B
V12
B 1/3
V2b
-V1B 1/3 V23
2
Fig. 9.16 Terna asimmetrica di tensioni di linea e terna baricentrica di tensioni di fase
Dalla fig. (9.16) si ha:
VAB = VA1 + V1B
VAB = VA 2 + V2B
VAB = VA 3 + V3B
sommando i tre termini si ha:
(9.63)
265
Cap. 9 Sistemi trifase
VAB =
VA1 + VA 2 + VA3
3
(9.64)
Per determinare le relazioni tra terna baricentrica e tensioni di linea si può supporre di
far coincidere, nella (9.64), n con 1 (Z1 = 0 ) , con 2 (Z 2 = 0 ) , con 3 (Z3 = 0 ) . Si ottiene:
V1B = V12 − V31
V2 B = V23 − V12
(9.65)
V3B = V31 − V23
Per ottenere una terna baricentrica è quindi sufficiente derivare tra i tre fili di linea una
stella costituita da tre impedenze uguali.
Esempio 9.1
Come applicazione di quanto asserito ai punti precedenti, nel circuito di fig.9.17 si
calcolano le correnti complessive erogate dai generatori mediante il metodo matriciale.
1
2
1’
I1
’
Y 12
I2
3
2’
Zl2
I3
Z3
Y3n
n
Zl1
Z2
Z1
3’
I1A
Y12
Y31
Y23
I2A
I3A
Zl3
Y1n
n’
Y2n
In1
Y3n
Zn
In
Fig. 9.17 Esempio 9.1
Per il carico a stella con neutro in parallelo a quello a triangolo si può applicare la
relazione (9.60) da cui tenendo conto che:
I1A + I 2A + I 3A = I n1
risulta:
V1'n
Y12 + Y31 + Y1n
'
V2 n =
− Y12
'
V3n
− Y31
che può essere scritta nelle forma:
− Y12
Y12 + Y23 + Y2 n
− Y23
− Y31
− Y23
Y23 + Y31 + Y3n
[V ] = [Y ] [I ]
−1
'
n
A
La tensione all’inizio delle linea è:
Zl1 + Z n
Zn
Zn
V2 n =
Zn
Zl 2 + Z n
Zn
V3n
Zn
Zn
Zl 3 + Z n
V1n
in forma compatta:
I1A
V1'n
I 3A
V3' n
I 2 A + V2' n
−1
I1A
I 2A
I 3A
266
Cap.9 Sistemi trifase
[Vn ] = [Z][I A ] + [Vn' ] = {[Z] + [Y ]−1 }[I A ]
−1
[I A ] = {[Z] + [Y ]−1 } [Vn ]
La corrente complessiva si ottiene sommando il contributo degli altri carichi.
I1
I1A
Z 2 + Z3
− Z3
− Z2
0 0 0
Y12 − Y12 0 V1n
1
I 2 = I 2A +
− Z3
Z1 + Z 2
− Z1 + 0 0 0 + − Y12 Y12 0 V2 n
∆
I3
I 3A
− Z2
− Z1
Z1 + Z 2
0 0 Y3n
0
0
0 V3n
e quindi:
[I A ] = ([Z] + [Y ]−1 ) + [YS ] + [Y3 ] + [Y12 ] [Vn ]
−1
Si ha inoltre:
I1 + I 2 + I 3 = I n
9.8 Potenza nei sistemi asimmetrici e squilibrati
L’espressione generale della potenza istantanea e quella rappresentata dalla (9.20).
Tale espressione è quindi valida anche in questo caso; si deve tuttavia osservare che la
potenza istantanea non risulta costante perché questa è una caratteristica tipica dei soli
sistemi simmetrici ed equilibrati.
La potenza attiva, somma delle potenze attive delle singole fasi, risulta:
P = P1 + P2 + P3 = V1 I1 cos ϕ1 + V2 I 2 cos ϕ 2 + V3 I 3 cos ϕ 3
(9.66)
in cui V ed I sono i valori efficaci di tensione e corrente di fase e ϕ è lo sfasamento
relativo. La potenza reattiva viene definita come somma delle potenze reattive delle singole
fase e quindi:
(9.67)
Q = Q1 + Q 2 + Q 3 = V1 I1 sen ϕ1 + V2 I 2 sen ϕ 2 + V3 I 3 sen ϕ 3
Infine per la potenza apparente e per il fattore di potenza si ha:
(9.68)
S = P2 + Q2
P
f .d.p. =
(9.69)
S
Il fattore di potenza non coincide, come accadeva nei sistemi simmetrici ed equilibrati,
con il cosϕ che risulta diverso per ciascuna fase. Per comprendere il significato del fattore
di potenza definito dalla (9.69), si supponga di ruotare la terna delle correnti di fase di un
angolo δ, in senso antiorario, rispetto a quella delle tensioni di fase. In tal caso la potenza
attiva risulta:
P(δ ) = V1 I1 cos(ϕ1 − δ ) + V2 I 2 cos(ϕ 2 − δ ) + V3 I 3 cos(ϕ 3 − δ )
(9.70)
Derivando rispetto a δ e uguagliando a zero si trova:
dP(δ )
= V1I1 (− cos ϕ1 sen δ + sen ϕ1 cos δ ) + V2 I 2 (− cos ϕ 2 sen δ + sen ϕ 2 cos δ ) +
dδ
+ V3 I 3 (− cos ϕ 3 sen δ + sen ϕ 3 cos δ ) = 0
Dalla relazione precedente si ha:
267
Cap. 9 Sistemi trifase
(V1I1 cos ϕ1 + V2 I 2 cos ϕ 2 + V3 I 3 cos ϕ 3 )sen δ = (V1I1 sen ϕ1 + V2 I 2 sen ϕ 2 + V3 I 3 sen ϕ3 )sen δ
ossia:
P sen δ = Q cos δ
Risulta quindi:
tgδ =
Q
P
cos δ =
P
(9.71)
P2 + Q2
Si conclude che:
Nei sistemi asimmetrici e squilibrati (ed anche in quelli simmetrici e squilibrati) il
fattore di potenza coincide con l’angolo di cui deve essere ruotata la terna delle correnti di
fase, rispetto alla terna delle tensioni di fase, affinché la potenza attiva risulti massima.
9.9 Misura della potenza attiva nei sistemi a tre fili
La misura della potenza attiva viene effettuata mediante uno strumento detto
wattmetro. Il wattmetro elettrodinamico è dotato di due bobine, una detta amperometrica
inserita in serie al carico di cui si vuol misurare la potenza, ed una detta voltmetrica,
inserita in parallelo. Lo strumento restituisce il prodotto scalare tra tensione e corrente che,
nei sistemi monofase, rappresenta la potenza attiva. Per i sistemi simmetrici ed equilibrati
una volta effettuata, se possibile, la misura della potenza di una fase basta moltiplicare per
tre il risultato trovato per ottenere la potenza complessiva. Nella fig. 9.18 è mostrato lo
schema per la misura della potenza di una fase per un carico a stella e per uno a triangolo.
W
W
a)
b)
Fig. 9.18 Misura della potenza attiva di una fase per carico collegato a stella a) e a triangolo b)
La potenza attiva di una fase non è sempre misurabile, spesso infatti il carico si
presenta come una scatola chiusa dalla quale escono solo i conduttori di collegamento. Si
dimostra il teorema di Aron secondo il quale la misura della potenza attiva in un sistema a
tre fili può essere effettuata mediante due soli wattmetri inseriti nel circuito secondo uno
schema detto inserzione Aron.
La potenza apparente complessa per un tale sistema e fornita dalla relazione:
S = E1I1* + E 2 I *2 + E 3 I *3
(9.72)
e poiché la somma delle tre correnti è nulla, esprimendo una corrente in funzione delle altre
due si ha:
S = E1 I1* + E 2 I *2 − E 3 I1* + I *2 = (E1 − E 3 )I1* + (E 2 − E 3 )I *2 = V13 I1* + V23 I *2
(9.73)
(
)
analogamente, sostituendo le altre correnti, si ottiene:
S = V21I*2 + V31I*3
(9.74)
S = V32 I *3 + V12 I1*
(9.75)
268
Cap.9 Sistemi trifase
La misura della potenza si ottiene quindi utilizzando due wattmetri come indicato in
fig.9.19 e sommando le indicazioni dei due strumenti.
1
2
1
W1
2
W2
3
1
2
W2
3
W1
3
W1
W2
Fig. 9.19 Wattmetri in inserzione Aron
La potenza attiva è quindi fornita dalla relazione:
P = PW1 + PW 2
(9.76)
Nei sistemi simmetrici ed equilibrati, attraverso le indicazioni dei due wattmetri in
inserzione Aron, è possibile determinare anche la potenza reattiva.
I3
V31
V12
E3
ϕ
E1
I1
I2
E2
V1
V23
Fig. 9.20 Diagramma fasoriale per carico simmetrico ed equilibrato
Si consideri il diagramma fasoriale, relativo ad un sistema simmetrico ed equilibrato in
cui il carico è di tipo ohmico induttivo, rappresentato in fig. 9.20. Per la prima inserzione
di fig. 9.19 si ha:
π
π
(9.77)
PW1 = V13 I1 cos − ϕ
PW 2 = V23 I 2 cos + ϕ
6
6
la differenza tra le due indicazioni è:
PW1 − PW 2 = VI sen ϕ
(9.78)
La potenza reattiva è:
Q = 3 (PW1 − PW 2 )
(9.79)
Dalle relazioni (9.77) si deduce che per carico ohmico induttivo il wattmetro1 fornisce
una indicazione sempre positiva e maggiore di quella del wattmetro 2. L’indicazione di
quest’ultimo da un’indicazione negativa per ϕ >π/6. Il contrario accade per carichi ohmici
capacitivi. Per carichi solo resistivi le indicazioni dei due wattmetri sono uguali.
269
Cap. 9 Sistemi trifase
9.10 Rifasamento dei carichi trifase
Il caso di sistemi simmetrici ed equilibrati è già stato trattato, di seguito sarà invece
affrontato il problema del rifasamento di carichi squilibrati alimentati con terne
simmetriche o asimmetriche. Per questi tipi di carichi il rifasamento viene fatto
relativamente al fattore di potenza.
9.10.1 Sistema simmetrico e squilibrato
Supponendo il carico collegato a triangolo, indicando con G e B conduttanza e
suscettanza di ogni fase, le potenze attiva e reattiva e il fattore di potenza risultano:
2
2
P = G 12 V122 + G 23 V23
+ G 31V31
= (G 12 + G 23 + G 31 )V 2
(9.80)
2
2
Q = B12 V122 + B 23 V23
+ B 31V31
= (B12 + B 23 + B 31 )V 2
(9.81)
f .d.p. =
Q B12 + B 23 + B 31
=
P G 12 + G 23 + G 31
(9.82)
Utilizzando, per il rifasamento, tre condensatori uguali di capacità C collegati a
triangolo, indicando con f.d.p.R il fattore di potenza dopo il rifasamento, si ha:
C=
B +B +B
P
(f .d.p. − f .d.p.R ) = 1 (G12 + G 23 + G 31 ) 12 23 31 − f .d.p.R
2
3ω
G 12 + G 23 + G 31
3ωV
(9.83)
9.10.2 Sistema asimmetrico e squilibrato
In questo caso, poiché le tensioni sono diverse, risulta:
C=
2
2
2
2
G 12 V122 + G 23 V23
+ G 31V31
B12 V122 + B 23 V23
+ B 31V31
(
2
2
ωC V122 + V23
+ V31
)
2
2
G 12 V122 + G 23 V23
+ G 31V31
− f .d.p.R
(9.84)
La (9.84) mostra che la capacità dipende dalla tensione, essa deve quindi essere
determinata in base alla tensione presente sul carico. Tale tensione varia in conseguenza
del collegamento dei condensatori la cui capacità deve quindi essere nuovamente calcolata
così via.
9.11 Linee trifasi
Si considerano linee trifasi a tre o quattro fili che alimentano carichi che per generalità
saranno considerati squilibrati. Si assume inoltre una terna di tensioni asimmetriche.
1
1
I1
2
3
I3
Z1
Z2
A
2
3
Z3
n
Fig. 9.21 Linea trifase a tre e a quattro fili
I1
Z1
I2
Z2
I3
Z3
In
A
270
Cap.9 Sistemi trifase
9.11.1 Linea a tre fili
I flussi concatenati con le maglie 1,2 e 3,1 valgono:
L − L 23
L + L 23 − L 31
L12
I3
2I1 + I 3 ) − 31
I 3 = L12 I1 + 12
(
2
2
2
L
L − L12
L + L 23 − L 31
= 23 (I1 + 2I 3 ) − 31
I1
I1 = L 32 I 3 + 12
2
2
2
Φ12 =
(9.85)
Φ 32
(9.86)
Le induttanze di linea sono state definite nel Cap.2
Le equazioni di equilibrio scritte con il metodo delle correnti di maglia risultano:
jωΦ12
Z1
V12
=
+
Z1 + Z 2
V32
jωΦ 32
Z1 + Z 2
Z3
I1
I3
(9.87)
sostituendo i flussi si ha:
V12
V32
= jω
L12
L12 + L 23 − L 31
2
L12 + L 23 − L 31
Z1
2
+
Z1 + Z 2
L 23
Z1 + Z 2
I1
Z3
I3
(9.88)
9.11.2 Linea a quattro fili
I flussi concatenati con le maglie 1-n, 2-n, 3-n, considerando che I n = I1 + I 2 + I 3
valgono:
L − L 31
L
L − L12
(9.89)
Φ1n = 1n (I1 + I n ) + 2 n
I 2 + 3n
I3
2
2
2
sostituendo si ottiene:
L + L1n − L 31
L + L 2 n − L12
(9.90)
I 2 + 3n
Φ1n = L1n I1 + 1n
I3
2
2
Analogamente:
L + L 3n − L 23
L + L 2 n − L12
Φ 2 n = L 2 n I 2 + 2n
I1
(9.91)
I 3 + 1n
2
2
L 3n + L1n − L 31
L + L 3n − L 23
I1 + 2 n
I2
2
2
Le equazioni di equilibrio risultano:
Φ 3n = L 3n I 3 +
V1n
V2 n
V3n
L1n
L + L 2n − L12
= jω 1n
2
L 3n + L1n − L 31
2
L1n + L 2n − L12
2
L 2n
L 2 n + L 3n − L 23
2
L 3n + L1n − L 31
2
Z1
L 2 n + L 3n − L 23
+ 0
2
0
L 3n
(9.92)
0
0
I1
Z2
0
0
Z3
I2
I3
CAPITOLO 10
10.1 Generalità e definizioni
Nei precedenti capitoli si è parlato di bipolo facendo riferimento a quegli elementi
circuitali che avevano due terminali (resistori, induttori, condensatori, generatori). Nel
calcolare le f.d.t. si sono considerati circuiti per i quali potevano essere assegnati una
coppia di terminali di ingresso ed una coppia di uscita. In generale si definisce multipolo
un circuito, come quello rappresentato in fig. 10.1 a) in cui possono essere individuati n
terminali.
a)
b)
Fig. 10.1 Generica rappresentazione di un multipolo a) e di un doppio bipolo b)
Per un multipolo, in virtù del I° principio di Kirchhoff le correnti incognite sono n-1.
Se nel multipolo così definito possono individuarsi coppie di terminali percorsi dalla stessa
corrente (come nei bipoli), tali terminali sono detti porta. Se nel multipolo tutti i terminali
sono organizzati in modo da costituire a due a due delle porte le correnti incognite risultano
pari a n/2. I doppi bipoli sono multipoli costituiti da quattro terminali a due a due
costituenti due porte, come indicato in fig. 10.1 b). Nel calcolo delle f.d.t. si considerano
quindi doppi bipoli e si definisce porta di ingresso la coppia di terminali ai quali viene
applicato il segnale di ingresso e porta di uscita la coppia di terminali tra i quali si preleva
l'uscita. Nel Cap. 6 si sono definite le impedenze e ammettenza di ingresso e di uscita le
transimpedenze e transammettenze, i rapporti di trasferimento (o amplificazione o
guadagno). A tali definizioni sarà fatto riferimento in seguito.
Un doppio bipolo si definisce equilibrato se il comportamento non si modifica
scambiando tra loro i terminali di ciascuna porta (in riferimento alla fig. 10.1b) esiste
simmetria rispetto ad un asse orizzontale). Il doppio bipolo è detto simmetrico se il
comportamento non si modifica scambiando la porta di ingresso con quella di uscita
(simmetria rispetto ad un asse verticale in fig. 10.1b)).
Agli effetti esterni il doppio bipolo può essere sostituito con uno equivalente i cui
272
Cap. 10 Doppi bipoli
parametri sono ottenuti considerando le equazioni di equilibrio scritte con il metodo delle
correnti di maglia (parametri Z), o con il metodo delle tensioni di taglio (parametri Y), o
con il metodo delle correnti di maglia per una porta e con le tensioni di taglio per l'altra
(parametri h), o relazionando tensione e corrente della porta di ingresso con tensione e
corrente della porta di uscita (parametri di trasmissione).
10.1.1 Parametri Z
Scrivendo le equazioni di equilibrio con le correnti di maglia si ottengono equazioni
del tipo:
V1
Z11
=
V2
Z 21
Z12 I 1
Z 22 I 2
(10.1)
Le
impedenze Z11 e Z 21 , dette rispettivamente impedenza di ingresso e
transimpedenza diretta a circuito aperto, possono essere determinate supponendo di
applicare un generatore di corrente sulla porta di ingresso e lasciando aperta quella di
uscita. Risulta:
V
(10.2)
Z11 = 1
I 1 I =0
2
Z 21
ha:
V2
=
I1
(10.3)
I2 =0
Analogamente alimentando la porta di uscita e lasciando aperta quella di ingresso si
Z 22 =
Z12 =
V2
I2
V1
I2
(10.4)
I1 = 0
(10.5)
I1 = 0
in cui le impedenze sono dette rispettivamente impedenza di uscita e transimpedenza
inversa a circuito aperto.
Per le reti reciproche1, ossia per quelle reti che soddisfano il teorema di reciprocità, la
matrice risulta simmetrica e quindi Z12 = Z 21 .
10.1.2 Parametri Y
ha:
Scrivendo, per le due porte, le equazioni mediante il metodo delle tensioni di taglio, si
I1
Y11
=
I2
Y21
Procedendo come in precedenza si ha:
I1
Y11 =
V1
1
Y12
Y22
V1
V2
(10.6)
(10.7)
V2 = 0
Sono sicuramente reciproche le reti passive realizzate con soli resistori, induttori e condensatori
273
Cap.10 Doppi bipoli
Y21 =
Y22 =
Y12 =
I2
V1
I2
V2
I1
V2
(10.8)
V2 = 0
(10.9)
V1 = 0
(10.10)
V1 = 0
Le quattro ammettenze sono dette rispettivamente: Ammettenza di ingresso e
transammettenza diretta in cortocircuito e ammettenza di uscita e transammettenza inversa
in cortocircuito.
Per le reti reciproche risulta Y12 = Y21 .
10.1.3 Parametri h (ibridi)
I parametri ibridi h si ottengono esprimendo la tensione della porta di ingresso e la
corrente di quella di uscita in funzione della corrente di ingresso e della tensione di uscita. I
parametri che si ottengono sono detti ibridi poiché alcuni sono impedenze, altri
ammettenze ed altri ancora quantità adimensionali. Risulta:
V1
h 11
=
I2
h 21
h 12
h 22
I1
V2
I Parametri che compaiono nella matrice hanno il seguente significato:
V1
h 11 =
I1 V =0
(10.11)
(10.12)
2
h 21 =
h 22 =
h 12 =
I2
I1
I2
V2
V1
V2
(10.13)
V2 = 0
(10.14)
I1 = 0
(10.15)
I1 = 0
in cui h 11 e h 21 sono rispettivamente l'impedenza di ingresso e l'amplificazione diretta di
corrente con uscita in cortocircuito; h 22 e h12 sono l'ammettenza di uscita e
l'amplificazione inversa di tensione con ingresso aperto.
10.1.4 Parametri g (o ibridi inversi)
La matrice dei parametri g è l'inversa di quella dei parametri h, risulta quindi:
I1
g 11 g 12 V1
(10.16)
=
V2
g 21 g 22 I 2
in cui:
I
(10.17)
g 11 = 1
V1 I = 0
2
274
Cap. 10 Doppi bipoli
g 21 =
g 22 =
g 12 =
V2
V1
(10.18)
I2 =0
V2
I2
I1
I2
(10.19)
V1 = 0
(10.20)
V1 = 0
I parametri sono rispettivamente, la conduttanza di ingresso e il guadagno diretto di
tensione a vuoto; l'impedenza di uscita e il guadagno inverso di corrente in cortocircuito.
10.1.5 Parametri ABCD di trasmissione
I parametri di trasmissione si ricavano dalla relazione:
V1
A B V2
=
I1
C D − I2
da cui risulta:
V
A= 1
V2 I = 0
(10.21)
(10.22)
2
C=
D=
B=
I1
V2
(10.23)
I2 =0
I1
− I2
V1
− I2
(10.24)
V2 = 0
(10.25)
V2 = 0
A è il guadagno inverso di tensione a circuito aperto, C la transammettenza inversa a
circuito aperto, D il guadagno inverso di corrente e B la transimpedenza inversa in
cortocircuito.
10.1.6 Parametri A*B*C*D* di trasmissione inversi
Dalla relazione:
V2
A∗
= ∗
I2
C
B∗
D
∗
V1
− I1
(10.26)
si ha:
A∗ =
C∗ =
D∗ =
V2
V1
I2
V1
(10.27)
I1 = 0
(10.28)
I1 = 0
I2
− I1
(10.29)
V2 = 0
275
Cap.10 Doppi bipoli
B∗ =
V2
− I1
(10.30)
V1 = 0
A* è il guadagno diretto di tensione a circuito aperto, C* è la transammetenza
diretta a circuito aperto, D* è il guadagno diretto di corrente in cortocircuito, B* è la
transimpedenza diretta in cortocircuito.
10.2 Collegamento di doppi bipoli
10.2.1 Collegamento serie
Due doppi bipoli collegati in serie hanno le porte di ingresso sono percorse dalla stessa
corrente I1 e le porte di uscita sono percorse dalla stessa corrente I2.
V1’’
Fig. 10.2 Collegamento serie di doppi bipoli
Dalla fig. 10.2, in cui sono rappresentati due doppi bipoli collegati in serie, si ha:
'
"
V1
V1'
V1"
Z11
+ Z11
=
+
=
'
V2
V2'
V2"
Z 21
+ Z"21
'
"
Z12
+ Z12
'
Z 22
+
Z"22
I1
I2
(10.31)
Si deduce quindi che due o più doppi bipoli collegati in serie sono equivalenti ad un
altro avente come matrice dell'impedenza la somma delle matrici delle impedenze dei due
doppi bipoli.
10.2.2 Collegamento in parallelo
Due o più doppi bipoli sono collegati in parallelo se tutte le porte di ingresso sono
sottoposte alla stessa tensione V1 e tutte le porte di uscita alla stessa tensione V2. Il
collegamento in parallelo è rappresentato in fig. 10.3.
I1’
Fig. 10.3 Collegamento parallelo di doppi bipoli
276
Cap. 10 Doppi bipoli
Dalla fig. 10.3 si ha:
"
I1
I 1'
I 1"
Y11' + Y11
= ' + " = '
"
I2
I2
I2
Y21 + Y21
'
"
Y12
+ Y12
'
Y22
+
V1
V2
"
Y22
(10.32)
Quindi Due o più doppi bipoli in parallelo possono essere sostituiti con un bipolo
equivalente avente matrice delle ammettenze pari alla somma delle matrici
dell'ammettenza di ciascun doppio bipolo.
10.2.3 Collegamento ibrido e ibrido inverso
Il collegamento ibrido si ottiene collegando in serie le porta di ingresso e in parallelo
quelle di uscita. Collegando in parallelo le porta di ingresso e in serie quelle di uscita si ha
un collegamento ibrido inverso. Entrambi i collegamenti cono rappresentati in Fig. 10.4.
Fig. 10.4 Collegamento ibrido a) e ibrido inverso b)
Per il collegamento ibrido risulta:
'
"
V1
V1'
V1"
h 11
+ h 11
= ' + " = '
I2
I2
I2
h 21 + h "21
'
"
h 12
+ h 12
h '22 + h "22
I1
V2
(10.33)
V1
I2
(10.34)
Per il collegamento ibrido inverso si ha:
"
I1
I'
I"
g ' + g 11
= 1' + 1" = '11
V2
V2
V2
g 21 + g "21
'
"
g 12
+ g 12
g '22
+
g "22
Nel collegamento ibrido la matrice dei parametri ibridi del doppio bipolo equivalente
è data dalla somma delle matrici ibride; nel collegamento ibrido inverso dalla somma
delle matrici dei parametri ibridi inversi.
10.2.4 Collegamento in cascata
Il collegamento in cascata si ha quando la porta di uscita è collegata con quella di
ingresso, come mostrato nel caso di due doppi bipoli in fig. 10.5.
Dalla fig. 10.5 si ha:
V1
A B V2'
A B A'
=
=
I1
C D − I 2'
C D C'
B'
D
'
V2
− I2
(10.30)
Quindi il doppio bipolo equivalente a più doppi bipoli in cascata ha una matrice di
277
Cap.10 Doppi bipoli
trasmissione data dal prodotto delle singole matrici di trasmissione. Ad un risultato del
tutto analogo si giunge per i parametri di trasmissione inversa.
Fig. 10.5 Collegamento in cascata
10.3 Doppi bipoli con porta di uscita chiusa su un carico
Si consideri un doppio bipolo avente la porta di uscita chiusa su un carico di
impedenza Z. Considerando la rappresentazione con i parametri di trasmissione si ha:
V
− I2 = 2
Z
A B
V1
A B V2
Z V2
(10.36)
=
=
D
I1
C D − I2
V2
C
Z
L' impedenze di ingresso vale:
V
AZ + B
(10.37)
Z1i = 1 =
I1 CZ + D
Considerando la rappresentazione a parametri inversi si ha:
∗
A∗ B
V2
A ∗ B∗ V1
Z V1
(10.38)
= ∗
=
∗
∗
I2
V1
C D − I1
C∗ D
Z
L'impedenza di ingresso vista dalla porta 2 risulta:
V2 A ∗ Z + B∗
= ∗
I2
C Z + D∗
Z 2i =
(10.39)
Considerando reti passive, per le quali vale il teorema di reciprocità, dalle relazioni
(10.23), (10.25), (10.28), (10.30) segue:
C = C∗
B = B∗
(10.40)
Confrontando inoltre le (10.21) e (10.26) si ha:
A∗ =
D
AD − BC
B∗ =
B
AD − BC
C∗ =
C
AD − BC
D∗ =
A
AD − BC
Tenendo conto delle (10.40) risulta:
A∗ = D
AD − BC = 1
D∗ = A
(10.41)
Per le reti passive la (10.39) diviene quindi:
Z 2i =
DZ + B
CZ + A
(10.42)
278
Cap. 10 Doppi bipoli
10.3.1 Impedenza immagine
Si definiscono impedenze immagine ZI1 e ZI2 quei valori di impedenza tali che quando
la porta di uscita è chiusa sulla propria impedenza immagine ZI2 l'impedenza vista dalla
porta di ingresso coincide con l'impedenza ZI1. Lo stesso risultato è valido scambiando la
porta di ingresso con quella di uscita. Per le (10.37) e (10.42) si ha:
Z I1 =
AZ I 2 + B
CZ I 2 + D
Z I2 =
DZ I1 + B
CZ I1 + A
(10.43)
dalle quali si trova:
Z I1 =
AB
CD
Z I2 =
BD
AC
(10.44)
10.3.2 Impedenza iterativa
Si definisce impedenza iterativa Zit quell'impedenza che collegata sulla porta di uscita
produce un'impedenza vista dalla porta di ingresso uguale ad essa stessa.
Dalla prima delle (10.43) si ottiene:
DZ it + B
Z it =
CZ it + D
da cui:
Z it =
(A − D ) ± (A − D)2 + 4BC
2C
(10.45)
10.3.3 Impedenza caratteristica
Se il bipolo oltre ad essere reciproco è anche simmetrico, e quindi A=D, l'impedenza
immagine e quella iterativa risultano uguali e prendono il nome di impedenza caratteristica.
Essa vale:
B
(10.46)
Z0 =
C
10.4 Teorema del massimo trasferimento di potenza
Si faccia l'ipotesi di lavorare in regime sinusoidale e si assegni un carico di impedenza
variabile Z = R + jX alimentato da un generatore di f.e.m E ed impedenza interna
Z i = R i + jX i 2 variabile. In queste condizioni vogliamo determinare il valore di Z che
rende massima attiva la potenza trasferita al carico. Tale potenza vale:
P=
RE 2
(R + R i )2 + (X + X i )2
essa risulta massima quando il denominatore è minimo. Una prima condizione è
sicuramente data dall'annullamento della parte reattiva, ossia jX= −jXi , in tal caso risulta:
P=
2
RE 2
(R + R i )2
(10.47)
La f.e.m. e l'impedenza interna possono essere determinate sostituendo al bipolo visto ai terminali
dell'impedenza Z l'equivqlente di Thevenin.
279
Cap.10 Doppi bipoli
E' immediato verificare che la (10.47) risulta massima quando R= Ri . L'impedenza che
rende massimo il trasferimento di potenza al carico risulta quindi:
Z = R i − jX i
(10.48)
La potenza massima trasferita è quindi:
P=
E2
4R i
(10.49)
Si osservi che in queste condizioni di funzionamento metà della potenza erogata viene
assorbita dal carico e metà viene dissipata nella resistenza interna.
10.5 Doppi bipoli come adattatori di impedenza
Come visto al paragrafo precedente il massimo trasferimento di potenza al carico
avviene quando è verificata la (10.48). L'impedenza del carico non è in genere modificabile
ed è quindi necessario interporre tra generatore e carico un adattatore di impedenza.
Utilizzando come adattatore un quadripolo, la condizione (10.48) si ottiene se risulta:
Z I1 = Zi
in cui Z ∗ è il complesso coniugato di Z .
ZI2 = Z ∗
APPENDICE A
A.1 Funzione a gradino unitaria
La funzione a gradino unitaria, indicata generalmente con u(t) e rappresentata in
fig.A.1a), è definita come:
1
t>0
(A.1)
u( t ) =
0
t<0
essa presenta una discontinuità (salto) in corrispondenza di t = 0.
u(t-t0)
u(t)
1
1
t0
t
a)
t
b)
Fig.A.1 Funzione a gradino unitario a) funzione a gradino unitario traslata b)
La funzione a gradino unitario traslata è definita mediante la relazione:
u( t − t 0 ) =
1
0
t > t0
t < t0
(A.2)
In generale si può affermare che la funzione a gradino vale uno quando l'argomento è
positivo e zero quando esso è negativo.
Esempio A.1
Si considerino le seguenti funzioni:
a) 2 u(t + 2)
b) u(−t + 1)
c) 4 u(−2 − t)
esse hanno il seguente significato:
2
t > −2
a) 2 u( t + 2) =
0
t < −2
c) 4 u( − t − 2) =
4
0
t < −2
t > −2
d) −u( t− 2)
b) u( − t + 1) =
d) − u( t − 2) =
1
0
−1
0
t <1
t >1
t>2
t<2
282
Appendice A Funzioni di particolare interesse
In fig.A.2 sono riportati i grafici che rappresentano i rispettivi andamenti nel tempo.
2u(t+2)
u(-t+1)
2
1
-2
a)
4u(-t-2)
1
t
t
b)
-u(t-2)
4
2
t
-2
-1
t
b)
a)
Fig.A.2 Esempio A.1
La funzione a gradino unitario può essere utilizzata nei seguenti casi:
A1.1 Per simulare la chiusura di un interruttore
Come è mostrato in fig.A.3 la chiusura di un interruttore al tempo t = 0 può essere
simulata moltiplicando per u(t) le f.e.m. (o le correnti) dei generatori indipendenti. Questa
operazione indica l'esistenza del circuito in oggetto a partire dal tempo 0.
t=0
e(t)
e(t)u(t)
a)
b)
Fig.A.3 Chiusura di un interruttore per t=0 a) sua simulazione b)
A1.2 Per rendere unilatere le funzioni
Qualunque funzione moltiplicata per u(t) diviene unilatera ossia diversa da zero solo
per t > 0. Questa caratteristica della funzione a gradino unitario è illustrata in fig.A.4
f(t)
f(t)u(t)
t
a)
t
b)
Fig.A.4 Generica funzione f(t) a) funzione f(t) resa unilatera b)
A1.3 Per dare rappresentazione analitica a particolari funzioni
La funzione a gradino unitario può essere utilizzata per esprimere, con un'unica
relazione una funzione somma di più funzioni definite in diversi intervalli di tempo.
283
Appendice A Funzioni di particolare interesse
Esempio A.2
f(t)
1
0
2
6
8
t
Fig.A.5 Esempio A.2
Facendo uso della funzione a gradino unitario si può scrivere:
1
f ( t ) = [ tu( t ) − ( t − 2) u( t − 2) − ( t − 6) u( t − 6) + ( t − 8) u( t − 8)]
2
A.2 Funzione a rampa
La funzione a rampa r(t), rappresentata in fig.A.6, è data dalla relazione:
r(t) = t u(t)
(A.3)
r(t)
0
t
Fig. A.6 Funzione a rampa
A.3 Funzione impulsiva
Si supponga di applicare ad un condensatore una tensione ud(t), come quella
rappresentata in fig.A.7a), e si voglia determinare la corrente che lo attraversa (si può anche
considerare il problema duale del calcolo della tensione alle estremità di un induttore al
quale sia applicata una corrente come quella di figura). Il calcolo si riconduce alla
moltiplicazione di una costante, la capacità (o l'induttanza), per la derivata della tensione (o
della corrente) stessa. Tale derivata, indicata con δd(t) è qualitativamente rappresentata in
fig. A.7b). Nella fig.A.7c) è rappresentata la funzione ottenuta moltiplicando t per δd(t).
ud(t)
a)
δd(t)
1
0
t δd(t)
b)
t
c)
0
t
t
Fig. A.7 Tensione (corrente) a) e sua derivata b) funzione t δd(t)
E' immediato osservare che accentuando sempre meno gli smussi sugli angoli di ud(t)
tale funzione tende al gradino unitario, mentre la funzione δd(t) diminuisce sempre più di
durata e aumenta di ampiezza fino a tendere ad una funzione nulla dappertutto ad
eccezione dell'origine in cui tende a infinito. La funzione δ(t) che si ottiene è quindi la
284
Appendice A Funzioni di particolare interesse
derivata di u(t) ed è detta funzione impulsiva o delta di Dirac. La funzione di figura A.7c)
tende a divenire nulla. Annullando gli smussi si ha dunque:
u d ( t ) → u( t )
du d ( t )
du( t )
→ δ( t ) =
dt
dt
tδ d ( t ) → tδ( t ) → 0
δ d (t) =
(A.4)
Per una dimostrazione rigorosa delle affermazioni precedenti è necessario riferirsi alla
teoria delle distribuzioni. Un altro modo, non rigoroso ma spesso utilizzato, per illustrare
come la funzione impulsiva possa essere considerata derivata di quella a gradino è
illustrato in fig. A.8
δd(t)
ud(t)
1
1/ε
0
ε
0
t
a)
ε
t
b)
Fig. A.8 funzione ud(t) a) e sua derivata b)
In fig. A.8 b) è riportata la derivata della funzione di fig A.4.8 a). Facendo tendere ε a
zero la funzione ud(t) tende a u(t) mentre δd(t) tende a δ(t).
La funzione impulsiva gode delle seguenti proprietà:
+∞
0+
0+
du
δ( t )dt = δ( t )dt =
dt =
dt
−
−
−∞
0
+∞
0
0+
f ( t )δ ( t )dt =
−∞
du = u(0 + ) − u(0 − ) = 1
( )
u 0
(A.5)
−
0+
f ( t )δ( t )dt =
0
( )
u 0+
−
f (0)δ( t )dt = f (0)
0
(A.6)
−
Più in generale per la funzione impulsiva traslata, ossia applicata all'istante t0 anziché
in t=0, si ha:
δ( t − t 0 ) =
∞
0
t = t0
t ≠ t0
(A.7)
+∞
δ( t − t 0 )dt = 1
(A.8)
−∞
+∞
f ( t )δ( t − t 0 )dt = f ( t 0 )
(A.9)
−∞
La relazione (A.9) indica che moltiplicando una funzione per quella impulsiva
applicata all'istante t0 e integrando si estrae il valore della funzione in t0 (operazione di
campionamento) .
285
Appendice A Funzioni di particolare interesse
Esempio A.3
La corrente in un condensatore al quale venga applicata la tensione Vu(t) vale:
i( t ) = C
d[ Vu( t )]
= CVδ ( t )
dt
Analogamente imponendo la corrente Ju(t) ad un induttore si ha:
d[Ju( t )]
v( t ) = L
= LJδ( t )
dt
Da cui si deduce che l'applicazione di un gradino di tensione fa nascere un impulso di
corrente, mentre l'imposizione di un gradino di corrente in un induttore fa sorgere un
impulso di tensione.
Esempio A.4
La tensione ai terminali di un condensatore, inizialmente scarico, provocata dalla corrente
Iδ(t) vale:
o+
I
1
v( t ) =
Iδ( t )dt =
C −
C
0
Allo stesso modo la corrente in una induttanza, scarica, alla quale si applichi la tensione
Vδ(t) è:
o+
V
1
i( t ) =
Vδ( t )dt =
L −
C
0
I risultati trovati mostrano che impulsi di corrente nei condensatori provocano una carica
istantanea (e quindi una variazione istantanea della tensione), impulsi di tensione applicati
agli induttori provocano salti nella corrente.
A4 Derivazione delle funzioni continue a tratti
Mediante le regole di derivazione introdotte possono essere eseguite le derivate di
funzioni continue a tratti, ossia di funzioni che presentino un numero finito di discontinuità
di seconda specie. Un esempio di una funzione continua a tratti e della sua derivata e
illustrato in fig. A.9
f '(t)
f(t)
f3(t)
f2(t)
[f2(t1)-f1(t1)]δ(t-t1)
f1(t)
0
f1(0)δ(t)
t1
t2
a)
t3
t
f2'(t
)
t1
0
f3(t3)δ(t-t3)
f3'(t
)
t2
f1'(t)
t3
t
[f3(t2)-f2(t2)]δ(t-t2)]
b)
Fig. A.9 Funzione continua a tratti a) e sua derivata b)
286
Appendice A Funzioni di particolare interesse
La funzione f(t) può essere descritta mediante la relazione:
[
]
[
]
[
f ( t ) = f 1 ( t ) u( t ) − u ( t − t 1 ) + f 2 ( t ) u( t − t 1 ) − u ( t − t 2 ) + f 3 ( t ) u( t − t 2 ) − u( t − t 3 )
Derivando si ottiene:
[
'
]
[
]
]
f ( t ) = f1' ( t ) u( t ) − u( t − t 1 ) + f1 (0)δ( t ) − f1 ( t 1 )δ( t − t 1 ) + f 2' ( t ) u( t − t 1 ) − u( t − t 2 ) +
[ u( t − t 2 ) − u( t − t 3 ) ] + f 3 ( t 2 ) δ ( t − t 2 ) − f 3 ( t 3 ) δ ( t − t 3 ) =
=
[ u( t) − u( t − t 1 )] + [ u( t − t 1 ) − u( t − t 2 )] + f 3' ( t )[ u( t − t 2 ) − u( t − t 3 )] + f1 (0)δ( t) +
+ [ f 2 ( t 1 ) − f1 ( t 1 ) ]δ ( t − t 1 ) + [ f 3 ( t 2 ) − f 2 ( t 2 )]δ ( t − t 2 ) − f 3 ( t 3 )δ( t − t 3 )
+ f 2 ( t 1 )δ ( t − t 1 ) − f 2 ( t 2 )δ ( t − t 2 ) +
f1' ( t )
f 3' ( t )
f 2' ( t )
Dai risultati trovati si può concludere che se la funzione presenta un salto in t0, la
derivata in quel punto risulta:
f ' (t)
]t=t
0
[
]
= f ( t 0 + ) − f ( t 0− ) δ ( t − t 0 )
(A.10)
Esempio A.5
Sia assegnata la funzione di fig. A.10 di cui si voglia determinare la derivata.
f(t)
f '(t)
2
2
1
0
-1
3
8
10
0
t
a)
2
3
8
-3
10
t
-1
b)
Fig. A.10 Esempio A.5
'
La funzione f(t) e la sua derivata f (t) valgono:
f ( t ) = 2 u( t ) − 3u( t − 3) + 2 u( t − 8) − u( t − 10)
f ' ( t ) = 2δ ( t ) − 3δ( t − 3) + 2δ( t − 8) − δ ( t − 10)
A5 Derivazione della funzione impulsiva
Si consideri la funzione detta a "gate" di fig.A.11a), essa ha come derivata la funzione
rappresentata in fig. A.11b). Facendo tendere ε a zero la funzione a "gate" tende a quella
impulsiva e la sua derivata alla derivata della funzione impulsiva. Tale derivata è
rappresentata in fig.A.11c).
δ'(t)
g'(t)
g(t)
1/ε
1/ε
1/ε
ε
a)
t
ε
b)
t
t
c)
Fig. A.11 Funzione "gate" a) derivata della funzione a "gate" b) derivata della funzione impulsiva c)
287
Appendice A Funzioni di particolare interesse
A.6 Derivazione della funzione a rampa
Tenendo presente la (A.4) si ha:
r ' (t) =
[
d t u( t )
dt
] = u( t ) + tδ( t ) = u( t )
La derivata della rampa è dunque il gradino.
(A.11)
APPENDICE B
B.1 Calcolo della risposta forzata mediante l'integrale di convoluzione
Si supponga di alimentare un circuito lineare tempo-invariante, inizialmente scarico,
con l'impulso rettangolare p∆(t) di area unitaria , rappresentato in fig. B.1a), e sia w∆(t) la
risposta da esso provocata e rappresentata in fig. B.1b).
p∆(t)
w∆(t)
1/∆
1/∆
∆
∆
t
a)
t
b)
Fig. B.1 Impulso rettangolare a) e risposta da esso provocata b)
L'impulso p∆(t) è descritto dalla relazione:
p ∆ (t) =
1
[ u( t ) − u ( t − ∆ ) ]
∆
(B.1)
Poiché il circuito è tempo-invariante una traslazione nell'ingresso provoca la stessa
variazione nell'uscita, come è mostrato in fig.B.2
w∆(t-τk)
p∆(t-τk)
1/∆
1/∆
τκ
τκ+ ∆ t
a)
τκ
τκ+ ∆
t
b)
Fig. B.2 Impulso rettangolare traslato a) e risposta traslata b)
In virtù della linearità del circuito moltiplicando l'ingresso per una quantità costante ak
anche l'uscita risulta moltiplicata per la stessa quantità. Si possono riassumere i risultati
trovati nel seguente modo:
290
Appendice B Calcolo della risposta forzata mediante l'integrale di convoluzione
p ∆ (t) → w ∆ (t)
p ∆ (t − τ k ) → w ∆ (t − τ k )
a k p ∆ (t − τ k ) → a k w ∆ (t − τ k )
Si consideri ora un generico ingresso f(t) e si approssimi con una funzione fg(t),
continua a tratti, come mostrato in fig.B.3, in cui l'intervallo di tempo [0, t] è stato
scomposto in N+1 intervalli di ampiezza ∆.
f(t) fg(t)
1
0
2
N+1
k
τ1 τ2
τk τk+1
τn
t
Fig. B.3 Funzione di ingresso approssimata con una funzione continua a tratti
Indicando con τ il generico tempo compreso tra l'istante 0, in cui è applicata la
sollecitazione è applicata al circuito inizialmente scarico, e il tempo t al quale si valuta la
risposta, posto τ0 = 0, si può scrivere:
N
fg (t) =
0
[
f ( τ k ) u( t − τ k ) − u( t − τ k − ∆ )
]
(B.2)
Tenendo conto della (B.1) risulta:
[ u( t − τ k ) − u ( t − τ k − ∆ ) ] = p ∆ ( t − τ k ) ∆
sostituendo nella (B.2) si trova:
N
fg (t) =
0
f (τ k ) p ∆ (t − τ k ) ∆
(B.3)
Alla quale, per il principio di sovrapposizione degli effetti, corrisponde la risposta:
N
y g (t) =
0
f (τ k ) w ∆ (t − τ k ) ∆
Aumentando il numero degli intervalli, ossia per ∆→0, si ha:
∆ → dt
f ( τ k ) → f ( τ)
p ∆ ( t − τ k ) → δ( t − τ k )
w ∆ (t − τ k ) → w( t − τ k )
fg (t) → f (t)
y g ( t ) → y( t )
inoltre la sommatoria (B.4) tende all'integrale di convoluzione:
(B.4)
Appendice B
291
Calcolo della risposta forzata mediante l'integrale di convoluzione
t
y ( t ) = f ( τ ) w ( t − τ ) dτ
(B.5)
0
La procedura seguita mostra che calcolare la risposta mediante l'integrale di
convoluzone significa scomporre l'ingresso in impulsi rettangolari e sommare le risposte ai
singoli impulsi. Ciò può essere fatto solo per circuiti lineari.
B.2 Interpretazione grafica dell'integrale di convoluzione
La relazione (B.5), che fornisce la risposta forzata del circuito, può avere anche una
interpretazione grafica. Si supponga ad esempio di voler calcolare la risposta al tempo t1, si
ha:
y( t 1 ) =
t1
0
f ( τ ) w ( t 1 − τ ) dτ =
t1
0
f ( t 1 − τ ) w ( τ ) dτ
La relazione precedente rappresenta l'area racchiusa dal prodotto delle curve f(τ)w(t-τ)
o f(t-τ)w(τ) per ogni 0 ≤ t ≤ t 1 .
Esempio B.1
Siano assegnate w(t) e f(t) illustrate in fig.B.4 a) e b) e si voglia calcolare la risposta per
alcuni valori di t1.
f(τ)
w(τ)
1
1
1
2
1
3 τ
a)
2
3 τ
b)
f(-τ)
f(t1-τ)
1
-1
1
1 τ
0
c)
d)
0
2
1
τ
Fig. B.4 Esempio B.1
In fig.B.4 c) e d) sono riportate f(-τ) e f(t1-τ) per t1=1s. La risposta del circuito al tempo t1
prefissato si trova eseguendo i prodotti tra le funzioni di fig.B a) e d) e calcolando l'area
sottesa come illustrato in fig.B.5.
w(τ) f(t1-τ)
1
1
w(τ)f(t1-τ)
2
3 τ
Fig. B.5 Risposta per t1=1
Nelle fig.B.6 e B.7 sono riportate le risposte per t1 = 2s, t1 = 3s.
1
2
3 τ
292
Appendice B Calcolo della risposta forzata mediante l'integrale di convoluzione
w(τ) f(2-τ)
1
1
w(τ)f(2-τ)
1
3 τ
2
2
3 τ
1
2
Fig.B.6 Risposta per t1=2s
w(τ) f(3-τ)
1
1
w(τ)f(3-τ)
3 τ
2
3 τ
Fig.B.7 Risposta per t1=3s
B.3 Calcolo della risposta forzata scomponendo in gradini dell'ingresso
E' stato in precedenza mostrato come l'applicazione dell'integrale di convoluzione al
calcolo della risposta forzata del circuito corrisponda a scomporre il segnale di ingresso in
impulsi rettangolari e ad applicare poi il principio di sovrapposizione degli effetti. La stessa
risposta può anche essere determinata scomponendo l'ingresso in gradini di ampiezza
opportuna e sovrapponendo gli effetti.
f(t)
5
6
7
4
8
a)
3
f(0)
0
f(t1)
2
9
1
τ0 τ1
τk
t1
t
fg(t)
5
δτκ 4
b)
3
δτ0 2
1
6
t
7
8
9
Fig. B.8 Funzione di ingresso a) e sua scomposizione mediante gradini
Appendice B
293
Calcolo della risposta forzata mediante l'integrale di convoluzione
Si consideri infatti il segnale di ingresso rappresentato in fig. B.8 a) esso può essere
scomposto mediante gradini come indicato in fig. B.8 b). In tali figure è stato indicato con
δτk l'ampiezza del generico gradino applicato all'istante τk. Indicando con g(t) la risposta al
gradino unitario applicato in t = 0, la risposta al gradino di ampiezza δτk applicato al tempo
τk vale δτk g(t-τk). La risposta y(t) del circuito al tempo t, indicando con h il numero dei
gradini attivati fino al tempo t, risulta:
h
y( t ) = f (0)g( t ) +
δτ k g( t − τ k ) − g( t 1 )g( t − t 1 )
0
(B.6)
f(t)
δτk
α
δτ
t
Fig. B.9 Particolare della funzione di ingresso
Dalla fig.B.9 si ha:
δτ k
= tgα → f '( τ k ) per δτ → 0
δτ
Moltiplicando e dividendo per δτ l'argomento della sommatoria nella (B.6) si ha:
h
δτ k
g( t − τ k ) δτ − g( t 1 )g( t − t 1 )
δτ
y( t ) = f (0)g( t ) +
0
facendo tendere δτ a zero si ottiene:
t
t
y( t ) = f (0)g( t ) + f ' ( τ)g( t − τ )dτ = f (0)g( t ) + f ' ( t − τ )g( τ)dτ
per 0 ≤ t ≤ t 1
0
(B.7)
0
t1
t1
y( t ) = f ( 0) g( t ) + f '( τ )g( t − τ ) dτ − f ( t 1 ) g( t − t 1 ) = f ( 0) g( t ) + f '( t − τ) g( τ) dτ − f ( t 1 ) g( t − t 1 )
0
0
per t ≥ t1
(B.8)
f(t)
f(0)
0
f(t1)
t1
t
Fig. B.10 Funzione con discontinuità iniziale e finale
294
Appendice B Calcolo della risposta forzata mediante l'integrale di convoluzione
~
Si osservi che indicando con f '( t ) la derivata generalizzata introdotta in Appendice B
si può scrivere:
t
~
f ' ( τ ) g ( t − τ ) dτ
y( t ) =
per 0 ≤ t ≤ t 1
0
(B.9)
t1
~
f ' ( τ ) g ( t − τ ) dτ
y( t ) =
per t ≥ t 1
0
Si consideri infatti la funzione di fig.B.10 indicando con f '(t) la derivata nell'intervallo
aperto (0, t1) si ha:
d
~
f '( t ) =
f ( t ) u( t ) − u( t − t 1 = f '( t ) u( t ) − u( t − t 1 + f (0)δ( t ) − f ( t 1 )δ( t − t 1 )
dt
Sostituendo nella (B.9) si ottengono le (B.7) e (B.8).
{ [
]}
[
]
Esempio B.1
La funzione f(t) rappresentata in fig.B.11 può essere scritta come:
f (0)
f (t) = −
( t − t 1 ) u( t ) − u( t − t 1 )
t1
[
]
f(t)
f(t1)
f(0)
0
t1
t
Fig. B.11 Esempio B.11
La derivata generalizzata vale:
f (0)
~'
f ( t ) = f (0)δ ( t ) −
u( t ) − u( t − t 1 ) = f (0)δ( t ) + f ' ( t )
t1
[
]
Assumendo una g( t ) = Ae −αt
Sostituendo nella (B.9) si ha:
t
[f (0)δ( τ) + f (τ)]g( t − τ)dτ = f (0)g( t) +
t
'
y( t ) =
0
f ' ( τ )g( t − τ )dτ = f (0) A 1 −
0
α
(1 − e −αt )
t1
per 0 ≤ t ≤t1
t1
[ f (0)δ( τ) + f ( τ)]g( t − τ)dτ = f (0)g( t) +
t1
'
y( t ) =
0
per t ≥ t1.
f ' ( τ) g( t − τ) dτ = f (0)A 1 −
0
α − α ( t − t1 )
− e −αt )
(e
t1
APPENDICE C
C.1 Risposta libera
Si vuol determinare la soluzione dell'equazione di stato
X = AX + BU
(C.1)
in cui X e U sono i vettori delle variabili di stato e degli ingressi.
Assumendo inizialmente nullo il vettore degli ingressi (questo significa disattivare tutti
i generatori indipendenti presenti nel circuito), si ha:
X = AX
(C.2)
La soluzione della (C.2) fornisce la risposta libera, ossia la risposta del circuito alle sole
condizioni iniziali. Per analogia con il caso scalare si ha:
X = e At X 0
(C.3)
in cui X0 è il vettore delle condizioni iniziali e e At è la matrice di transizione.
Verifichiamo che la (C.3) è soluzione della (C.2). Procedendo sempre per analogia al
caso scalare si ha:
e at = 1 + at +
a 2 t 2 a 3t 3
+
+..........
2!
3!
e At = I + At +
d(e At )
dt
A 2 t 2 A 3t 3
+
+..........
2!
3!
= A + A2t +
A 3t 2
A2t2
+.......... = A I + At +
+.......... = Ae At
2!
2!
Si ha quindi:
X =
d (e At X 0 )
dt
= Ae At X 0 = AX
La (C.2) risulta quindi verificata.
E' necessario a questo punto calcolare la matrice di transizione.
296
Appendice C
Soluzione dell'equazione di stato
C.1.1 Calcolo della matrice di transizione
Il calcolo della matrice di transizione richiede la conoscenza degli autovalori e degli
autovettori della matrice A. Data la matrice quadrata A, si consideri la relazione:
det ( A − λI ) = 0 [det ( λI − A ) = 0]
(C.4)
essa è detta equazione caratteristica e le sue soluzioni autovalori.
a) Autovalori reali distinti
Si considerino le relazioni:
(A − λ i I ) η i = 0
(C.5)
(C.6)
Aηi = λ i η i
esse hanno soluzione diversa da quella nulla poiché λ i sono autovalori. I vettori ηi sono
detti autovettori destri di A associati agli autovalori λ i .
Esempio C.1
Si vogliono determinare gli autovalori e gli autovettori della matrice:
0
1
0
A= 3
0
2
− 12 − 7 − 6
L'equazione caratteristica è:
λ −1
0
det ( λI − A ) = det − 3 λ
− 2 = λ3 + 6λ2 + 11λ + 6 = ( λ + 1)( λ + 2)( λ + 3) = 0
12 7 λ + 6
Gli autovalori risultano:
λ 1 = −1
λ 2 = −2
λ 3 = −3
Il primo autovettore si trova dalla relazione:
(λ 1I − A)η1 =
−1 −1
0
η11
− 3 − 1 − 2 η12 = 0
12
7
5
η13
Poiché la matrice ha rango 2 si trovano infinite soluzioni.
− η11 − η12 = 0
− 3η11 − η12 − 2 η13 = 0
Assumendo η11 = 1 si trova η12 = −1 , η13 = −1 . Quindi:
η11
1
η1 = η12 = − 1
η13
−1
Analogamente considerando gli altri autovalori si trova:
Appendice C
297
Soluzione dell'equazione di stato
−2
(λ 2 I − A ) η 2 =
−1
0
η 21
η 21
− 3 − 2 − 2 η 22 = 0
12
7
4
2
η2 = η 22 = − 4
η 23
η 23
− 3 − 1 0 η31
(λ 3I − A)η3 = − 3 − 3 − 2 η32 = 0
12 7
3 η33
Si ha quindi:
1
η 21
1
η2 = η 22 = − 3
η 23
3
[
η = η1
η2
]
1
2
1
η3 = − 1 − 4 − 3
−1
1
3
La matrice η dell'esempio precedente è detta matrice degli autovettori destri.
η1 η2 η3 sono gli autovettori destri. La relazione (C.6) può essere scritta:
[
] [
A η1 η2 η3 = η1 η 2 η3
]
λ1
0
0
0
λ2
0
0
0
λ2
In generale, indicando con Λ una matrice diagonale, avente sulla diagonale principale
gli autovalori, si ottiene:
(C.7)
Aη = ηΛ
e quindi:
(C.8)
η −1Aη = Λ
Nell'esempio precedente è:
[α 11
α 12
]
−1 −1
α 13 − 3 − 1 − 2 = 0
12
[α 21
[α 31
α 22
α 22
0
α 23
]
]
7
α 33 − 3
3
12
7
α=
α T2
α T3
è immediato verificare che α = η −1
[
]
[
]
α T2 = − 1 − 2 − 3
0
−2 = 0
α T3 = 1 3 / 2 5 / 2
3
da cui:
α 1T
]
5
− 2 −1 0
−3 −2 −2 =0
12 7
4
− 3 −1
[
α 1T = 1 5 / 2 9 / 2
9
5
2
1
= −6 −4 −2
2
5
3
2
298
Appendice C
Soluzione dell'equazione di stato
Si definiscono autovettori sinistri gli autovettori risultanti dalla relazione:
α Ti (λ i I − A ) = 0
Anche per gli autovettori sinistri si può scrivere:
(C.9)
αA = Λα
ed anche:
αAα −1 = Λ
(C.10)
α = η −1
(C.11)
Confrontando le (C.8) e (C.9) si ha:
Dalle precedenti relazioni si ha:
A = ηΛη −1 = ηΛα =
η i α Ti λ i
(C.12)
La (C.12) è detta rappresentazione spettrale della matrice A. Poiché è possibile
dimostrare che vale:
f ( At ) =
η i α Ti f ( λ i t )
(C.13)
si ha:
e
n
At
=
1
ηi α Ti e λ i t
(C.14)
La risposta libera data dalla (C.3) può quindi essere scritta:
n
X =
1
ηi α Ti e λ i t X 0
(C.15)
Poiché gli autovettori (destri) sono tra loro linearmente indipendenti possono essere
assunti come base dello spazio di stato. Lo stato iniziale può essere decomposto rispetto a
questa base secondo la relazione:
n
X0 =
1
c i ηi
(C.16)
in cui ci sono costanti. Sostituendo la (C.16) nella (C.15) ricordando che:
α Ti η j = δ ij
in cui il simbolo di Kronecher δ ij vale 1 per i = j e 0 per i ≠ j si ha:
n
X =
1
ηi α Ti e λ i t
n
1
n
c i ηi =
1
e λ i t η i α Ti ( η1c1 + η2 c 2 + ....) =
n
1
e λ i t η i c i (C.17)
dal confronto tra (C.15) e (C.17) si ha:
c i = α Ti X 0
(C.18)
I termini e λ i t ηi c i sono detti modi naturali. Un modo risulta eccitato (ossia compare
nella risposta) se il corrispondente ci è diverso da zero. Notiamo che ci risulta se le
condizioni iniziali non hanno componente su ηi .
Appendice C
299
Soluzione dell'equazione di stato
Dunque: un modo di evolvere risulta eccitato se le condizioni iniziali hanno componenti
sul corrispondente autovettore.
b) Autovalori complessi coniugati
Consideriamo il caso in cui la matrice A abbia una coppia di autovalori complessi
coniugati λ 1 e λ*1 . Poiché anche gli autovalori destri e sinistri risultano complessi
coniugati, l'evoluzione libera risulta:
*
X = e λ1t η1α 1T X 0 + e λ1t η1* α 1*T X 0
(C.19)
Le condizioni iniziali possono essere espresse con la relazione:
X 0 = c1η1 + c1*η1*
(C.20)
Procedendo come nel caso precedente si trova:
*
X = e λ1t η1c1 + e λ1t η1*c1*
(C.21)
Poniamo
λ 1 = σ + jω
η1 =
λ 1 = σ − jω
η11R + jη11I
η12 R + jη12 I
η1* =
(C.22)
η11R − jη11I
η12 R − jη12 I
(C.23)
Una componente dell'autovettore è arbitraria e pertanto può essere assunta unitaria la
prima componente. Si ha quindi:
η1 =
η12 R
1
1
=
+ jη12 I
Ke jβ
η1* =
η12 R
1
1
=
− jη12 I
Ke − jβ
in cui:
2
2
K = η12
R + η12 I
β = arctg
η12 I
η12 R
(C.24)
(C.25)
La matrice degli autovalori e la sua inversa sono:
η=
1
Ke jβ
1
Ke − jβ
α = η −1 =
Ke − jβ
j
2 K sen β − Ke jβ
−1
1
(C.26)
Per le costanti c1 c1* si ha:
c1 = α 1T X 0 =
x 10
x 20
1
+j
x 10 cos β −
= Me jϕ
2
2 sen β
K
c1* = α T2 X 0 = Me − jϕ
(C.27)
(C.28)
Nelle relazioni precedenti si è posto:
M=
x
1 2
1
x 10 +
x 10 cos β − 20
2
2
K
sen β
2
ϕ = arctg
x 20
K
x 10 sen β
x 10 cos β −
(C.29)
300
Appendice C
Soluzione dell'equazione di stato
La (C.21) diviene:
X = Me σt
η12 R
1
1
e j( ωt +ϕ ) +
e − j( ωt +ϕ ) =
η12 R − jη12 I
+ jη12 I
(C.30)
cos( ωt + ϕ )
η12 R cos( ωt + ϕ) − η12 I sen( ωt + ϕ )
= 2 Me σt
La matrice di transizione si determina dalla (C.21) e risulta:
e
At
1
1
e λ1t
=
Ke jβ
2K sen β
Ke
− j β−
π
2
−e
j
π
2
*
1
1
e λ1t
+
Ke − jβ
2K sen β
Ke
j β−
π
2
−e
−j
π
2
Sviluppando si trova:
e At =
− K sen (ωt − β)
sen ωt
e σt
2
K sen (ωt + β)
K sen β − K sen ωt
(C.31)
Nota: la matrice di transizione la risposta libera può essere calcolata dalla (C.3).
C.2 Risposta completa
L'equazione di stato (C.1) può essere scritta:
X − AX = BU
premoltiplicando per e
− At
si ha:
Dalla relazione:
integrando tra 0 e t si ha:
e quindi:
Premoltiplicando per e At si trova:
t
X = e At X 0 + e A (t − τ ) BU(τ)dτ
0
(C.32)
La differenza tra la (C.32), che rappresenta la risposta completa, e la (C.3) che
rappresenta la risposta libera, fornisce la risposta forzata. Essa vale:
TESTI DI COMPITI
Vengono forniti i testi di alcuni compiti e test sottoposti, nel corso degli anni,
ai frequentatori dei corsi di elettrotecnica per le Armi Navali e per lo Stato Maggiore.
Alcuni di questi compiti hanno anche la soluzione. Per i test a risposta multipla
è fornita la sequenza delle risposte esatte.
In tutti i testi sono presenti dei rimandi ipertestuali, correlati alle lezioni che
trattano gli argomenti dell’esercizio, da utilizzare qualora sorgano difficoltà durante
la risoluzione, o in fase preliminare quale ripasso degli argomenti. Tali rimandi sono
racchiusi in un rettangolo con i bordi rossi e sono quindi indicativi delle conoscenze
specifiche necessarie alla risoluzione dell’esercizio assegnato.
I testi sono raggruppati, in base agli argomenti, nelle seguenti categorie:
1)
2)
3)
4)
5)
6)
Regime in corrente continua
Regime in corrente alternata (mono e trifase)
Transitori
F.d.t e risposta in frequenza
Vari
Test
COMPITO DI ELETTROTECNICA II Cl. A.N. del 25-11-02
1) Determinare l’equivalente di Thevenin del bipolo rappresentato in Fig.1.
R
R
A
I
R
J
J=5A
R=10Ω
α= −3
E=20V
R αI
B
E
R
2) Calcolare la corrente I nel ramo AB.
R
A
I
R
R
B
J
E1
E2
R
R
R
E1=50V
E2=25V
J=17A
R=10Ω
R
R
3) Calcolare la corrente nel resistore di resistenza R, collegato tra i punti A e B, mediante il
teorema di Norton.
J1
R
A
R
I
J1
J2
R
R
B
R
E1
J1=1A
J2=2A
E1=30V
R=5Ω
SOLUZIONE
Esercizio 1
a)Calcolo della Eeq
Dal I° principio di Kirchhoff si ha: I =
E eq = RJ
J
e quindi:
1− α
1
2−α
+1 − E =
RJ − E = 42,5 V
1− α
1− α
b) calcolo della Req
R
R
A
R
J*
I
V*
R αI
B
Poiché: I =
J∗
1− α
E
e V
∗
R
= 2 RJ
∗
+ RI =
3 − 2α
RJ
1− α
∗
V ∗ 3 − 2α
=
R = 22,5 Ω
1− α
I∗
Si osservi che per α=1 il circuito non può funzionare perché risulta violato il primo principio
di Kirchhoff.
Risulta: R eq =
Esercizio 2
Si risolve con Thevenin e con Norton
a) Calcolo della resistenza equivalente
A
R
R
B
R eq =
R
R
b) Con Thevenin
R
2R ⋅ 3R
= 12 Ω
5R
R
A
R
E1 − E 2 = 5RI1 + 2J
B
I1 =
J
E
I1
R
R
J
R
E1 − E 2 − 2RJ
5R
E
E eq = VAB = 2RI1 + RJ =
2
(E1 − E 2 ) + 1 RJ = 44 V
5
5
R
R
La corrente I è data dalla relazione:
E eq
I=
= 2A
R eq + R
c) Con Norton
Ieq
A
E1
R
R
J/2
R
B
J/2
J
E2
R
R
R
Jeq-J/2
Poiché VAB=0 ne consegue che la correnti
nei due resistori collegati tra A e B sono
uguali di valore J/2. Quindi:
2R (I eq − J / 2 + R (I eq + J / 2 = E1 − E 2
da cui:
E − E 2 + RJ / 2
= 11 / 3A
I eq = 1
3R
(
) (
)
Jeq+J/2
La corrente I è:
R eq
I = I eq
= 2A
R eq + R
Esercizio 3
La resistenza equivalente vale Req= 2R=10Ω
A
R
Ieq
J1
E
J
B
R
La corrente di Norton vale:
I eq = J1 + J + E / 2R = 6A
e quindi:
R eq J eq
I=
= 4A
R eq + R
COMPITO DI ELETTROTECNICA II Cl. A.N. del 27-11-02
1) Determinare l’equivalente di Thevenin del bipolo rappresentato in Fig.1.
R
R
A
R
J
J=5A
R=10Ω
µ= 3
J
R µV
- V
B
+
R
2) Calcolare la corrente I nel ramo AB.
R
R
A
E1=100V
E2=20V
J=5A
R=2Ω
I
J
E1
E2
R
R
E1
R
B
R
R
3) Calcolare la corrente nel resistore di resistenza R, collegato tra i punti A e B, mediante il
teorema di Norton.
A
R
R
I
J1
J2
R
E1
R
R
R
B
J1=3A
J2=2A
E1=20V
R=4Ω
SOLUZIONE
Esercizio 1
Il circuito può essere semplificato come segue:
R
R
A
R
2J
2RI − µV − R 2J = 0
I
µV
2J
V
-
B
+
V = R 2J
Dalle relazioni precedenti si ha:
I = J(1 + µ ) = 20A
E eq = VAB = RI + V = RJ (3 + µ ) = 300V
R
Per il calcolo della resistenza equivalente si considera il seguente circuito:
A
J
R
R
J*
*
2RI − µV − RJ ∗ = 0
R
I
µV
B
V
R
+
V = RJ ∗
Dalle relazioni precedenti si ha:
1+ µ
I = J∗
2
5+µ
∗
VAB = RI + 2RJ ∗ = RJ ∗
2
∗
V
5+µ
R eq = AB
=R
= 40Ω
∗
2
J
Il circuito bipolo equivalente di Thevenin è quindi costituito da un generatore di tensione di
f.e.m. Eeq= 300V e resistenza Req= 40Ω.
CORRENTE ALTERNATA
COMPITO DI ELETTROTECNICA II Cl. S.M.
del 14-1-99
Punteggio
Domanda
Voto
1) Un utilizzatore alimentato con la tensione v(t) = 100 sen(100t - π/6) assorbe la
corrente
i(t) = 10 sen(100t - π/3). Per tale utilizzatore determinare:
3/30
a) l'impedenza
........
...
3/30
b) la potenza attiva, reattiva, apparente.
........
...
6/30
2) Un circuito costituito da tre elementi in serie i cui parametri sono: R = 10Ω, L =
0,05H, C = 1mF è alimentato con una corrente sinusoidale di valore efficace I = 10A e
pulsazione ω = 100rad/s. Calcolare il valore efficace della tensione applicata al circuito.
6/30
3) Nel circuito di figura, operante in regime sinusoidale, le correnti I1 e I2 hanno valore
efficace 10A, determinare il valore efficace della tensione V.
R=1Ω
I1
I2
V
6/30
4)
R1=10Ω
........
...
Nel circuito di figura, operante in regime sinusoidale, determinare la potenza attiva ,
reattiva e apparente complessiva e il valore efficace della corrente I.
P3=300W I
∼
6/30
Q2=500VAR
P2=500W
V=200V
P1=1kW
cosϕ=0,8R
........
...
5) Nel circuito di figura, operante in regime sinusoidale, in cui sono noti i valori efficaci
delle tensioni alle estremità di R, di L, di C, determinare il valore efficace della corrente
VR=100V
VL=150V
VC=50V
I in R1.
∼
I
R
R1=10Ω
L
C
........
...
COMPITO DI ELETTROTECNICA II Cl. A.N.
del 9-2-2000
1) Nel circuito di Fig.1, in cui sono noti i valori efficaci di VR , VC e la potenza reattiva del
condensatore, determinare il valore efficace della tensione V1. (Punteggio max 10)
VR
A
R
XL
V1
R=1Ω
XL = 2 Ω
VR = 50 V
VC = 100 V
QC = 1000 VAR
R1
VC
XC
R
B
2) Utilizzando il teorema di Thevenin calcolare il valore efficace della corrente I nella resistenza R1.
Per i generatori si ha: e1 ( t ) = 100 2 sen ωt e 2 ( t ) = 100 2 sen( ωt − π / 4) . (Punteggio max 10)
A
R
XL
I
E1
XC
R
E2
R1
R = 10 Ω
R1 = 5 Ω
XC = 10 Ω
XL = 20 Ω
XC
B
3) Nel circuito di fig.3, in cui e( t ) = 100 2 sen 100t e il modulo dell'impedenza Z = 1Ω , sono
noti:
• a interruttore aperto: le potenze del generatore PG = 4000 W e QG = 1800 VAR
• a interruttore chiuso: v AB1 ( t ) = VM sen 100t . E' inoltre noto che il condensatore è di capacità
tale da fornire un rifasamento totale.
determinare il valore della capacità. (Punteggio max 10)
A
Z1
Z
E
C
B
Z2
COMPITO DI ELETTROTECNICA II Cl. A.N.
del 27-02-2001
1) Nel circuito di figura, in cui sono noti i valori efficaci di IR e VR2, si determinino la potenza attiva
e la potenza reattiva erogate dal generatore.
R=10Ω, XL=5Ω, XL1=4Ω, XC=5Ω, R1=2Ω, ΙR=10A, VR2=50V
XL1
R1
XL
IR
~
R
XC
VR2
2)Nel circuito di figura, in cui sono presenti un generatore di tensione e uno di corrente alternata
aventi la stessa frequenza, è noto il valore efficace della tensione VAB con interruttore aperto.
Determinare la corrente, di regime, che percorre l'interruttore quando esso viene chiuso.
VAB=100V, X1=10Ω, X2=10Ω, XM=5Ω, R1=5Ω, R2=3Ω,
R1
A
X1
E
R2
B
XM
X2
I
3) Nel circuito di figura la capacità C del condensatore è tale da rifasare completamente il
complesso dei carichi in parallelo. Determinare la potenza, attiva e reattiva, assorbita da tali
carichi rifasati.
ω=100rad/s, V=200V, R1=1Ω, X1=1Ω, R=50Ω, C=0,8mF, Z1=10Ω, cosϕ1=0,8R, cosϕ2=0,6R
X1
~
V
R1
R
C
Z1
cosϕ1
cosϕ2
FDT E RISPOSTA IN FREQUENZA
COMPITO DI ELETTROTECNICA II Cl. A.N. del 26-4-99
1)Per il circuito di figura in cui sono assegnati R=20Ω, L=1H, C=100µF
a) determinare la funzione di trasferimento W(s) = V2(s)/V1(s); (7 punti)
b) studiare la stabilità al variare di α; (3 punti)
c) tracciare i diagrammi asintotici di Bode assumendo α = 1 (5 punti)
i
L
V1
R
αi
C
L
V2
2) Determinare la f.d.t. (5 punti) e tracciare i diagrammi asintotici di Bode di ampiezza (5 punti) e
fase (5 punti) per una rete lineare passiva avente le singolarità riportate in figura. E' inoltre noto
K=100 e che la risposta in frequenza soddisfa le seguenti condizioni:
π
ω →∞
2
b) lim W = +∞ dB
a) lim ∠W =
ω→∞
c) lim W = −∞ dB
ω →ω 0
j
ω2
ω0 = 0
ω1
ω 1 = 10 3 e jπ / 2
ω0
ω3
ω2*
ω1
ω4
*
ω 2 = 10 4 e j2 π / 3
ω3 = -105
ω4 = 102
VARI
COMPITO DI ELETTROTECNICA II Cl. A.N.
del 10-5-1999
1) Nel circuito di fig.1 è rappresentato un circuito funzionante a regime sinusoidale. Al tempo t = 0
viene aperto l’interruttore T; a partire da tale istante, dopo aver calcolato le condizioni iniziali (3
punti) determinare la corrente nel condensatore C1 (7 punti).
Assumere: R =10Ω, C1=C2 =1mF, e(t) = 200 2 sen100t V, j(t) = 10 2 sen(100t−π/2) A
t =0
e(t)
∼
T
R
∼
C2
C1
j(t)
R
Fig.1
2) Nel circuito di fig.2, in cui L =1H, C =10µF, R =100Ω, α =2, µ =0,3, determinare la funzione di
trasferimento W(s)= V2(s)/V1(s) (5 punti) e tracciare i diagrammi di Bode asintotici di ampiezza
(2,5 punti) e fase (2,5 punti).
A
C
i
C
V1
L
R
αi
R
µVA
R
L
V2
Fig.2
3) Il circuito di fig.3 è alimentato da una terna simmetrica diretta di tensioni in cui il valore efficace
della tensione di fase vale E = 220V. Per tale circuito determinare:
a) le correnti e le potenze erogate, a regime, dai generatori con T1 chiuso e T2 aperto (5 punti);
b) le correnti erogate, a regime, dai generatori con T1 aperto e T2 aperto (2,5 punti);
c) le correnti erogate, a regime, dai generatori con T1 aperto e T2 chiuso(2,5 punti);
Assumere Z1 = j38 , Z 2 = − j22 Ω , P = 6,6 kW, cosϕ =1.
∼
∼
∼
E1
P
E2
cosϕ
E3
Z2
Z2
Z1
Z2
Z1
Z1
T1
T2
Fig.3
COMPITO DI ELETTROTECNICA II Cl. A.N.
Del 4-5-2001
Nome e cognome ……………………………………..
1) Per il circuito di fig.1, in cui: R1= 10kΩ, R2= 2Ω, C1= 10µF, C2 = 500µF
V (s )
a) determinare la funzione di trasferimento W (s ) = 2 ;
V1 (s )
b) tracciare i diagrammi asintotici di Bode per modulo e fase di W(jω).
C1
L
V1
C2
R1
V2
R2
R
Fig.1
2) In fig.2 è rappresentata una terna simmetrica di tensioni, di valore efficace di linea V=380V e
frequenza f=50Hz, che alimenta due carichi equilibrati, uno che assorbe la potenza P1= 10kW
con cosϕ = 0,6R (in ritardo) l'altro di impedenza Z 2 = R 2 + jX 2 = 10 + j10 ; tali carichi sono
rifasati completamente da tre condensatori di capacità C collegati a triangolo. Nel circuito sono
presenti anche un condensatore di reattanza XC = 30Ω posto tra le fasi 1 e 2, un resistore di
resistenza R=20Ω, collegato tra la fase 3 e il neutro, e un induttore di reattanza XL= 10Ω
collegato tra la fase 2 e il neutro. Determinare:
a) La capacità di ciascuno dei condensatori collegati a triangolo;
b) La potenza attiva e reattiva erogata dai generatori;
c) La potenza attiva e reattiva erogata dai generatori nel caso in cui gli stessi condensatori
siano collegati a stella;
d) La potenza attiva e reattiva erogata dai generatori, a regime, nel caso in cui l'interruttore sia
aperto
~
1
~
2
~
3
XC
V
C
XL
N
R
C
C
Fig. 2
1/2
P1
cosϕ1
Z2
Z2
Z2
3) Il circuito di fig.3 in cui E = 25V, L=0,1H, C=10µF, µ=2, ξ=1 (smorzamento della parte
destra del circuito) si trova a regime prima dell'apertura dell'interruttore che avviene all'istante
t= 0. Determinare, a partire da t=0, l'andamento della corrente iL(t) nell'induttanza posta nella
parte destra del circuito.
L
R
E
2R
2R
µV
V
L
Fig. 3
2/2
iL
C
R
R
t =0
COMPITO DI ELETTROTECNICA II Cl. A.N. del 4-09-2001
π
, è funzionante a
2
regime prima dell'istante t = 0 in cui viene aperto l'interruttore. A partire da tale istante determinare
la corrente nel ramo contenete L1.
1) Il circuito di fig.1, in cui R = 10Ω, L =L1=0,1H, e( t ) = 100 sen 100t +
t=0
e(t)
R
L
R
L1
Fig. 1
2) In fig.2 è rappresentato un circuito lineare alimentato da una tensione periodica
v( t ) = E + e( t ) = 40 + 100 2 sen 100t (schematizzata in figura con un generatore di corrente
continua ed uno di corrente alternata). Assumendo R=10Ω, L =0,1H, C=10mF determinare:
a) il valore efficace della corrente in ogni ramo;
b) la potenza attiva complessivamente erogata dai generatori.
R
v(t)
L
e(t)
C
E
Fig. 2
R
COMPITO DI ELETTROTECNICA II Cl. A.N. del 29-5-2002
1.
Nel circuito di Fig.1 sono assegnati i valori efficaci delle correnti I1 e I2 che valgono I1=20A e
I 2 = 10 2 A , la resistenza R3=2Ω, la reattanza X3=2Ω, la reattanza X1=10Ω, la frequenza
f=50Hz. E’ anche noto che R2=X2 e che la capacità del condensatore è tale da rifasare
completamente i due carichi in parallelo. Determinare:
a) la capacità del condensatore espressa in µF;
b) la corrente complessiva asorbita dai due carichi in parallelo;
c) la corrente erogata dal generatore;
d) la tensione alle estremità del generatore;
e) le potenze, attiva e reattiva, erogate dal generatore.
R3
X3
Ig
I2
I1
Vg
∼
C
X2
X1
R2
2.
Fig.1
( )
In Fig.2a) è rappresentato un circuito del primo ordine in cui R=2Ω, L=0,5H, i L 0 − = 1A
(valore della corrente nell’induttore al tempo t=0-). In Fig.2b) è riportato l’andamento della
tensione del generatore. In tale figura risulta t 0 = 6 τ (in cui τ è la costante di tempo del
circuito). Determinare, relativamente alla corrente nell’induttore:
a) la risposta libera;
b) la risposta forzata.
v(t)
iL
R
v(t)
L
1
R
t0
2t0
−1
a)
3.
b)
Fig.2
Nel circuito di Fig.3 in cui R=10Ω L=0,2H, C=100µF, α=20 determinare:
a) la funzione di trasferimento W(s)=V2(s)/V1(s);
b) tracciare i diagrammi asintotici di Bode per modulo e fase.
R
i
V1
R
R
L
αi
Fig.3
C
R
V2
t
SOLUZIONE
Esercizio 1
a) Il rifasamento totale si ha quando la parte immaginaria dell’ammettenza complessiva
carichi-condensatore è nulla,ossia:
ωC −
C=
ωL 2
1
− 2
ωL1 R 2 + ω 2 L22
da cui:
L
1
1
1
1 1
1
+ 2 22 2 = 2 +
=
+
2
ω L 1 R 2 + ω L 2 ω L 1 2ω L 2 ω X 1 2 X 2
2
Poiché deve essere:
X1I1 = R 22 + X 22 I 2 = X 2 2I 2 risulta: X 2 = R 2 =
X 1 I1
2I 2
= 10Ω
Sostituendo nell’espressione della capacità risulta: C = 477,7µF
b) Ponendo sull’asse reale la tensione ai carichi, data da V=X1I1 = 200V risulta:
I = I1 + I 2 = − j20 + 10 − j10 = 10 − j30 = 31,6e − j1, 25 e quindi I = 31,6 A
IL
V
I2
I1
I
c) La corrente erogata dal generatore, uguale a quella che passa in linea, è IL =10 A
d) La tensione del generatore è:
Vg = V + (R 3 + jX 3 )I L = 200 + 2(1 + j)10 = 220 + j20 da cui Vg = 220,9V
e) Le potenze risultano:
{ }
= Im{V I } = X I
Pg = Re Vg I ∗L = R 3 I 2L + R 2 I 22 = 2200 W
Qg
∗
g L
2
3 L
= 200VAR
COMPITO DI ELETTROTECNICA II Cl. A.N.
del 01-10-2002
1) Nel circuito di Fig.1, in cui sono noti i valori efficaci di VR , VC e la reattanza del
condensatore, determinare (con interruttore aperto) il valore efficace della differenza di
potenziale E1. Successivamente, con interruttore chiuso e circuito a regime, determinare la
potenza attiva e reattiva erogata dal generatore di f.e.m E2.
A
R
R1
XL
E1
VR
VC
XC
E2
R
R1 = 5 Ω
R=2Ω
XL = 2 Ω
XC= 5Ω
VR = 50 V
VC = 50 V
E2=E1
B
Fig. 1
2) Il circuito di fig.2, in cui R = 10Ω, L=L1=0,1H, E = 50V, è funzionante a regime prima
dell'istante t = 0 in cui viene aperto l'interruttore. A partire da tale istante determinare la
corrente nel ramo contenete L1.
t=0
E
R
L
L1
R
Fig. 2
R
Esercizio 1
Ponendo la tensione VR ,e quindi la corrente IR, sull'asse reale risulta:
V
I R = R = 10A
R1
VAB = VR + VC = 50(1 − j)
IL =
VAB
= − j25
R + jX L
VR
IR
VC
VAB
I1
IL
I1 = I R + I L = 10 − j25
E1 = VAB + R ⋅ I1 = 70 − j100
E1
E1=122V
2)Si risolve mediante il teorema di Thevenin
E Th = VAB = 50(1 − j)
(R 1 − jX C )(R + jX L )
Z Th =
= 2,41 + j1,03
(R 1 − jX C ) + (R + jX L )
I2 =
E 2 − VAB
= −0,5 − j20,5
Z Th
S = E 2 I * = 2015 + j1485
P=2015W
Q=1485VAR
Esercizio 2
Condizioni iniziali: iL(0)=0, iL1(0)=E/R=5A.
Dal circuito L-trasformato si ha:
I1 (s ) =
L1i L1 (0)
R (R + Ls )
L1s +
2R + Ls
I1
Sviluppando e ricordando che L1=L, si ha:
i (0)(s + 2R / L )
5(s + 200 )
1,38
3,62
= 2
I1 (s ) = 2 L1
=
+
2
4
s + 300s + 10
s + 261,8 s + 38,2
s + 3R / L + (R / L )
i 1 (t ) = 1,38e −261,8 t + 3,62e −38, 2
Ls
L1s
I1(s)
R
L1iL1(0)
R
COMPITO DI ELETTROTECNICA del 9-9-03 II Cl. A.N.
(esame II sessione)
1) Il circuito di figura funziona a regime prima dell'istante t = 0 in cui viene aperto l'interruttore. A
partire da tale istante determinare l’andamento della corrente nei due induttori.
R = 10Ω, L=L1=0,1H, E = 50V, C=15pF
L
E
C
R
t=0
R
R
R
L1
2) Nel circuito di figura la capacità C del condensatore è tale da rifasare completamente il
complesso dei carichi. Determinare:
a) la potenza, attiva e reattiva, erogata dal generatore;
b) le stesse grandezze nel caso in cui il condensatore venga disinserito.
ω=100rad/s, V=200V, R1=1Ω, X1=1Ω, R=50Ω, C=0,8mF, Z1=10Ω, cosϕ1=0,8R, cosϕ2=0,6R
X1
~
V
R1
R
C
Z1
cosϕ1
cosϕ2
TEST
COMPITO DI ELETTROTECNICA II Cl. A.N. del 17-04-02
Collegamento a circuiti di II° ordine
1) Il grafico di figura può rappresentare:
la risposta di un circuito di II° ordine, con smorzamento uguale ad 1, all'ingresso
? a) sinusoidale;
risposta di un circuito di II° ordine contenente due induttori e un resistore all'ingresso
? b) lasinusoidale;
? c) la risposta di un circuito di II° ordine contenente due condensatori e un resistore all'ingresso
sinusoidale;
? d) la risposta di un circuito di II° ordine con un condensatore un induttore e un resistore all'ingresso
sinusoidale;
e)
? la risposta di un circuito di II° ordine costituito solo da un induttore e un da un
condensatoreall'ingresso sinusoidale;
x(t)
x(t)
xc(t)
t
0
2) In figura sono rappresentate le curve di carica e di scarica di un circuito del I° ordine. La
costante di tempo vale approssimativamente:
Costante di tempo
? a) 1 ms
? b) 0,5 ms
? c) 1,5 ms
10
2 ms
? d)
9
e) 9 ms
?
8
7
6
5
4
3
2
1
0
0
1
2
3
4
6
5
tempo(ms)
7
8
9
10
3) Con risposta libera di un circuito s'intende:
Risposta libera
2
? a) la risposta del circuito alle sole condizioni iniziali;
risposta di un circuito inizialmente scarico sollecitato con generatori di tensione e/o
? b) lacorrente;
? c) la risposta del circuito a transitorio esaurito;
risposta del circuito al gradino unitario;
? e)d) lala risposta
del circuito inizialmente scarico e con generatori disattivati.
?
4) Relativamente ad un circuito comprendente un generatore dipendente, quale tra le seguenti
affermazioni è errata:
? a) può non ammettere regime perché la risposta transitoria può essere non smorzata;
circuito sollecitato dalle sole condizioni iniziali può fornire una risposta libera che tende
? b) ilall'infinito;
Circuiti con generatori
? c) l'ordine del circuito, per effetto del generatore dipendente, varia; controllati
risposta transitoria può essere smorzata;
? e)d) lal'andamento
nel tempo della risposta a regime, se esiste, non è influenzato dal generatore
? dipendente ma dipende solo dai generatori indipendenti
5) L'ordine del circuito di figura è:
?a)b) 54
Ordine del circuito
? c) 3
?d) 2
?
e) Nessuna delle precedenti
6) Un
tipo:
? a)b)
? c)
? d)
?e)
?
E1
J1
circuito R,L,C, parallelo avente R=100Ω, L=1H, C=100µF, fornisce una risposta libera di
oscillatoria smorzata con pulsazione 100rad/s;
oscillatorio non smorzato con pulsazione 100 rad/s;
oscillatorio smorzato con pulsazione 87 rad/s;
esponenziale smorzato;
nessuna delle precedenti.
Circuito RLC parallelo
7) Quale tra le seguenti affermazioni relative ad un ramo contenente un induttore è falsa:
può avere discontinuità;
? a)b) lala tensione
corrente può avere discontinuità purchè nel circuito sia presente un generatore impulsivo
? di tensione;
corrente può avere discontinuità nel caso in cui a seguito di una manovra sul circuito si
? c) lavenga
a formare un nodo improprio;
? d) la corrente non può avere discontinuità in nessun caso teorico o pratico; Vai alla teoria
un circuito non degenere, non contenente generatori impulsivi, la corrente non può avere
? e) indiscontinuità.
8) Date le correnti i1 = 10 sen(100t + π / 2) e i 2 = 10 sen 100t , il valore efficace della somma vale:
? a) 10A
Vai alla teoria
10 2
? c)b) 20
A
?
? d) 20 / 2
? e) Nessuna delle precedenti
9) Un circuito RL serie viene alimentato a partire da t=0 con una tensione sinusoidale ed è
percorso a regime dalla corrente i( t ) = 10 sen(100 t − π / 6) . La componente transitoria della
corrente è nulla se:
?
?
?
?
?
a)
b)
c)
d)
e)
l'induttore è inizialmente scarico;
Risposta transitoria
il valore iniziale della corrente è 10 A;
il valore iniziale della corrente è -5 A;
il valore iniziale della corrente è 5 A;
non è possibile che la componente transitoria sia nulla;
10) Un bipolo passivo alimentato con la tensione v = 100 sen (100 t − π / 3) assorbe la corrente
i = 10 sen(100t − π / 6) . Tale circuito è di tipo:
?
?
?
?
?
a) ohmico
Bipoli in corrente alternata
b) ohmico-induttivo
c) ohmico-capacitivo
d) non ci sono elementi sufficiente per rispondere alla domanda
e) Nessuna delle precedenti
11) Il circuito descritto al punto 10 assorbe la potenza attiva:
?
?
?
?
?
a)
b)
c)
d)
e)
500W
250 3 W
1000W
500 3 W
Nessuna delle precedenti
Potenza attiva
12) In figura sono noti il valore efficae della corrente, il valore della resistenza e quello della
reattanza induttiva. Il valore efficace della tensione è:
?
?
?
?
?
a)
b)
c)
d)
e)
200V
100 2 V
j100V
100V
Nessuna delle precedenti
10Ω
10A
Bipolo RL
V
10Ω
13) Il metodo fasoriale può essere applicato ai circuiti lineari tempo-invarianti solo se:
?
?
?
?
?
a) è presente un solo generatore di tensione o di corrente sinusoidale;
b) se sono presenti più generatori di tensione e/o corrente sinusoidale purchè di frequenza
diversa;
c) non sono presenti contemporaneamente generatori di tensione e di corrente
d) se sono presenti più generatori di tensione e/o corrente sinusoidale purchè di stessa
frequenza
e) Nessuna delle precedenti
Metodo fasoriale
14) Quale delle seguenti affermazioni relative alla potenza reattiva istantanea è falsa:
?
?
?
?
a) La potenza reattiva istantanea è la derivata dell'enrgia immagazzinata negli elementi reattivi
del circuito;
b) La potenza reattiva istantanea ha un andamento periodico di frequenza doppia della corrente
e valore medio VIsenϕ;
c) La potenza reattiva istantanea è una potenza di scambio tra elementi reattivi del circuito e
generatore;
d) La potenza reattiva istantanea degli induttori è sfasata di 180° rispetto a quella dei
condensatori;
e) Nessuna delle precedenti
15) Quale delle seguenti affermazioni relative al circuito RLC parallelo di figura è vera:
?
?
?
?
?
a) La corrente del generatore e quella del resistore sono in fase per quel valore di pulsazione
che rende uguali le susciettanze di induttore e condensatore;
b) La corrente del generatore e quella del resistore sono in fase se induttanza e capacità sono
uguali;
c) La tensione alle estremità del condensatore e quella alle estremità dell'induttore sono sfasate
di 180°;
d) La corrente nell'induttore e quella nel condensatore sono sfasate di 90°;
e) La corrente nell'induttore e quella nel condensatore sono sfasate di 180° per quel valore di
pulsazione che rende uguali le susciettanze di induttore e condensatore;
J
+
iR
iL
v
Rp
L
_
iC
C