POLITECNICO DI MILANO
Dipartimento di Elettronica e Informazione
Corso di Laurea Specialistica in Ingegneria Elettronica
Anno Accademico 2009-2010
PROGETTO DI UN CIRCUITO INTEGRATO CMOS
A MODULAZIONE-DEMODULAZIONE
PER MISURE D’IMPEDENZA SU LARGA BANDA
Relatore: Prof. Giorgio FERRARI
Correlatore: Prof. Marco SAMPIETRO
Tesi di Laurea di:
Cecilia GATTI,
matricola 734590
Indice
Indice delle figure ................................................................................................................................................ iii
Sommario ............................................................................................................................................................... vi
1.
Spettroscopia d’impedenza ..................................................................................................................... 1
1.1.
Introduzione ......................................................................................................................................... 1
1.2.
Proprietà elettriche dei materiali biologici e spettroscopia ............................................... 3
1.2.1.
1.3.
Campi di applicazione del circuito progettato ......................................................................... 7
1.3.1.
Citometria di flusso.................................................................................................................... 7
1.3.2.
Microscopio a forza atomica .................................................................................................. 8
1.3.3.
Lab-On-Chip ............................................................................................................................... 11
1.4.
Tecniche tradizionali per la misura dell’impedenza ............................................................ 13
1.4.1.
Ponte di Wheatstone ............................................................................................................... 13
1.4.2.
Tecniche di risonanza ............................................................................................................. 15
1.5.
Amplificatore a transimpedenza ................................................................................................. 16
1.5.1.
2.
3.
Proprietà elettriche delle cellule .......................................................................................... 5
Definizione delle specifiche di progetto .......................................................................... 18
Descrizione della struttura progettata ............................................................................................. 20
2.1.
Gloop del sistema .............................................................................................................................. 27
2.2.
Analisi sul rumore............................................................................................................................. 33
2.3.
Aspetti critici nella struttura progettata .................................................................................. 36
2.3.1.
Gestione della corrente continua ....................................................................................... 36
2.3.2.
Propagazione dell’offset ........................................................................................................ 37
Realizzazione dell'integrato .................................................................................................................. 39
3.1.
Stadio di ingresso .............................................................................................................................. 39
3.2.
Moltiplicatori a interruttori .......................................................................................................... 42
3.3.
Moltiplicatore analogico ................................................................................................................. 43
3.4.
Opamp chopper con gestione del modo comune ................................................................. 49
3.5.
Integratore con resistenza da 1,5GΩ ......................................................................................... 53
i
3.5.1.
Implementazione della resistenza da 1,5GΩ ................................................................. 56
3.5.2.
Struttura differenziale dell’integratore e rete di gestione del modo comune ... 58
3.6.
4.
Opamp con polo a bassa frequenza ............................................................................................ 63
Simulazioni sul sistema complessivo ................................................................................................ 67
4.1.
Riassunto delle prestazioni ........................................................................................................... 67
4.2.
Risultati delle simulazioni ............................................................................................................. 67
5.
Generazione dei segnali di riferimento in fase e in quadratura .............................................. 81
5.1.
Requisiti ed errori ............................................................................................................................. 81
5.2.
Rete di generazione dei segnali di riferimento ...................................................................... 88
6.
5.2.1.
Struttura per fornire i segnali in quadratura ................................................................. 88
5.2.2.
Circuiti sfasatori ........................................................................................................................ 91
Conclusioni .................................................................................................................................................. 92
Bibliografia ............................................................................................................................................................ 94
APPENDICE A: Sfasatori realizzati ............................................................................................................... 96
I.
Sfasatore ad anello chiuso .................................................................................................................. 96
Calcolo del guadagno d’anello .............................................................................................................. 97
Calcolo dell’errore sulla fase .............................................................................................................. 100
Progetto dello sfasatore ....................................................................................................................... 101
II.
Sfasatore polifase RC realizzato ................................................................................................ 106
III.
Simulazioni sui due sfasatori ..................................................................................................... 108
ii
Indice delle figure
Figura 1.1: Rappresentazione polare dell’impedenza nelle sue componenti di modulo e fase. ...................................2
Figura 1.2: Cole-cole plot di una rete RC in parallelo. ......................................................................................................................3
Figura 1.3: Spettro della permettività dielettrica su un ampio range di frequenze: sono rappresentate la parte
reale e immaginaria della permettività complessa e i processi ad esse associati (rilassamento ionico e bipolare
e risonanze atomiche ed elettroniche ad alta frequenza). .............................................................................................................4
Figura 1.4: Illustrazione dei range di frequenza relativi alle dispersioni dielettriche di materiali biologici. .........5
Figura 1.5: Modello equivalente di una singola cellula sospesa in soluzione. La membrana plasmatica è
formata da un doppio strato di molecole lipidiche. ..........................................................................................................................6
Figura 1.6: Parte superiore: Passaggio di una particella all’interno di un microcanale con tre elettrodi. Il
segnale d’impedenza viene misurato in modo differenziale, la misura del tempo di transito permette di
calcolare la velocità della cellula. Parte inferiore: Modello elettrico semplificato della variazione di impedenza
al passaggio di una cellula. Simulazione dello spettro d’impedenza di una cellula dal diametro di 10um. I
rettangoli evidenziano le frequenze di interesse per la discriminazione cellulare. ...........................................................8
Figura 1.7: Schema di principio di un microscopio a forza atomica (AFM). ..........................................................................9
Figura 1.8: Parte superiore: Misure elettriche utilizzando un microscopio AFM. Parte inferiore:
Rappresentazione schematica della tecnica Nanoscale Dieletric Microscopy. .................................................................. 10
Figura 1.9: Il sistema Lab-on-Chip consiste in un microchip con canali per prelevare i campioni bilogici e gli
eventuali reagenti, un array di microelettrodi e sistemi per la rivelazione dei segnali e analisi dei dati. ............. 12
Figura 1.10: Schema di principio di un ponte in corrente alternata. ..................................................................................... 14
Figura 1.11: Misuratore di ammettenza basato sulla risonanza parallelo .......................................................................... 15
Figura 1.12: Schema di principio del circuito di misura dell’impedenza basato su un amplificatore a
transimpedenza. ............................................................................................................................................................................................ 16
Figura 1.13: Topologia classica di amplificatore a transimpedenza. L’amplificatore realizza una conversione
corrente-tensione lineare tra ingresso e uscita tramite la resistenza Rr.............................................................................. 17
Figura 1.14: Preamplificazione ottenuta dal rapporto tra la capacità di derivazione Cd e la capacità di
integrazione Ci. .............................................................................................................................................................................................. 18
Figura 2.1: Schema della innovativa topologia circuitale usata per effettuare misure d’impedenza su ampio
spettro. ............................................................................................................................................................................................................... 20
Figura 2.2: Rappresentazione schematica del circuito. Sono evidenziate le componenti armoniche presenti
idealmente nel sistema. .............................................................................................................................................................................. 22
Figura 2.3: Sdoppiamento del cammino d’andata in due canali paralleli, con segnali di riferimento seno e
coseno, per trattare correttamente il segnale di corrente proveniente dal DUT nelle sue due componenti in
fase e in quadratura con il segnale di stimolo. ................................................................................................................................. 23
Figura 2.4: (a): Spettro del segnale (verde) e del rumore flicker (rosso) sovrapposto in corrispondenza dei
diversi stadi della struttura finora considerata.(b): Schema a blocchi del cammino d’andata per evitare che il
segnale risenta del rumore flicker. (c): Spettro del segnale e del rumore della struttura del punto (b). .............. 25
Figura 2.5: Schema a blocchi della struttura completa realizzata nel presente lavoro di tesi. ................................... 27
Figura 2.6: Diagramma di modulo e fase del Gloop calcolato per 𝑓0 = 1𝑀𝐻𝑧. ................................................................ 29
Figura 2.7: Diagramma qualitativo di Nyquist del Gloop calcolato per 𝑓0 = 1𝑀𝐻𝑧....................................................... 29
Figura 2.8: Diagramma di Bode di modulo e fase del Greale con segnale d’ingresso a 1MHz, 10MHz, 100MHz. .. 31
Figura 2.9: Circuito semplificato per considerazioni sul rumore presente in corrispondenza delle uscite a
bassa frequenza (OUTDC). .......................................................................................................................................................................... 35
Figura 2.10: Rete di retroazione locale che preleva la corrente in continua proveniente dal DUT. .......................... 36
Figura 2.11: Schema circuitale del sistema con i generatori di offset presenti sul cammino d’andata. ................. 38
iii
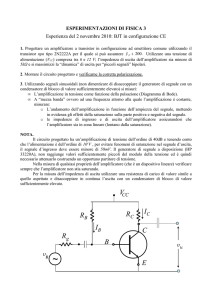
Figura 3.1: Stadio differenziale in ingresso, ad alta banda e basso rumore. ....................................................................... 39
Figura 3.2: Modulo della funzione di trasferimento del primo stadio. .................................................................................. 41
Figura 3.3: Principio di funzionamento del moltiplicatore a interruttori. .......................................................................... 42
Figura 3.4: Onde quadre di comando dei transistori usati come interruttori nel moltiplicatore. Il duty cycle è
leggermente diverso dal 50% per evitare fenomeni di crossconduzione. .......................................................................... 43
Figura 3.5: Transistor a canale n polarizzato in zona ohmica per effettuare la moltiplicazione tra i segnali
applicati al gate e tra source e drain. .................................................................................................................................................... 44
Figura 3.6: Buffer di corrente con bassa impedenza d’ingresso ad elevata velocit{: la tensione in ingresso può
essere controllata tramite il gate del transistor Mc. ...................................................................................................................... 45
Figura 3.7: Schema del moltiplicatore differenziale ad alta frequenza. ................................................................................ 46
Figura 3.8: Schema del moltiplicatore differenziale ad alta frequenza con cancellazione dei termini non voluti.
............................................................................................................................................................................................................................... 48
Figura 3.9: Funzione di trasferimento del moltiplicatore analogico. L’ampiezza del segnale d’uscita è pari a
6dB dando in ingresso un segnale differenziale in continua e un segnale variabile in frequenza differenziale di
1V.......................................................................................................................................................................................................................... 48
Figura 3.10: Dinamica differenziale in uscita del moltiplicatore analogico. ....................................................................... 49
Figura 3.11: Struttura folded cascode dell’amplificatore centrale del sistema. ................................................................ 50
Figura 3.12: Circuito di gestione della tensione di modo comune in uscita. ...................................................................... 51
Figura 3.13: Circuito equivalente della rete per la gestione del modo comune. ............................................................... 52
Figura 3.14: Modulo della F.d.T dell’operazionale centrale e densit{ di rumore equivalente in ingresso. ........... 53
Figura 3.15: Classica struttura dell’integratore. .............................................................................................................................. 54
Figura 3.16: Diagrammi di Bode del modulo della funzione di trasferimento dell’integratore. A(s) è la funzione
di trasferimento dell’operazionale. ....................................................................................................................................................... 55
Figura 3.17: Funzione di trasferimento del blocco integratore. Si noti che il polo è a 10 − 6𝐻𝑧 e che
l’attraversamento dell’asse 0dB avviene a 10Hz, come desiderato. ....................................................................................... 56
Figura 3.18: Struttura del riduttore di corrente. ............................................................................................................................. 56
Figura 3.19: Andamento in frequenza della corrente, nel blocco che realizza la resistenza da 1,5GΩ ................... 58
Figura 3.20: Soluzione pienamente differenziale per il trattamento del segnale in ingresso all’integratore. .... 59
Figura 3.21: Struttura differenziale dell’integratore e schema a blocchi della rete di gestione del modo
comune. ............................................................................................................................................................................................................. 60
Figura 3.22: Andamento del Gloop di modo comune dell’integratore. ................................................................................. 61
Figura 3.23: Modulo e fase del guadagno d’anello dell’integratore su modo comune, con rete di gestione
tempo-continuo. ............................................................................................................................................................................................ 62
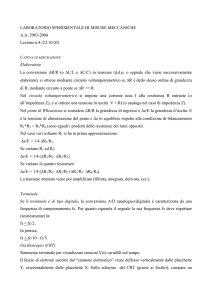
Figura 3.24: Schema dell’amplificatore operazionale con polo a bassa frequenza. ........................................................ 63
Figura 3.25: Circuito equivalente in prossimità del ramo Ccomp-Rcomp e singolarità a esso legate. .................... 64
Figura 3.26: Diagrammi di Bode della funzione di trasferimento dell’amplificatore con polo a bassa frequenza,
si noti la presenza del picco (eliminato dimensionando opportunamente lo stadio) sotto l’asse a 0dB a
frequenza prossima al prodotto guadagno-banda (a) e l’elevato margine di fase (b). .................................................. 66
Figura 4.1: Andamento nel tempo dei segnali nel sistema ad anello aperto (a esclusione della modulazione dei
moltiplicatori analogici). ........................................................................................................................................................................... 68
Figura 4.2: Transitorio dell’uscita ad alta frequenza e di assestamento della massa virtuale a tensione circa
nulla. ................................................................................................................................................................................................................... 69
Figura 4.3: Segnali ottenuti nel sistema con una corrente in ingresso ampia 1nA, sinusoidale, a 1MHz: dalla
massa virtuale all’uscita dell’amplificatore chopper, centrale sul cammino d’andata. .................................................. 71
Figura 4.4: Segnali ottenuti nel sistema con una corrente in ingresso ampia 1nA, sinusoidale, a 1MH: tensioni
d’ingresso e uscita, in continua, dell’integratore sul canale coseno, e di uscita in continua (idealmente nulla)
sul canale seno. .............................................................................................................................................................................................. 72
Figura 4.5: Corrente in ingresso al sistema e tensione di uscita differenziale ad alta frequenza: come atteso, le
due risultano in quadratura. .................................................................................................................................................................... 73
Figura 4.6: Componenti spettrali presenti sull’uscita ad alta frequenza del sistema dando in ingresso un
segnale a 1MHz. ............................................................................................................................................................................................. 73
Figura 4.7: Andamento nel tempo delle uscite in continua, ad alta frequenza e della massa virtuale del sistema
da simulazione PSS (a transitorio esaurito), con segnale d’ingresso a 100kHz. ............................................................... 76
Figura 4.8: Andamento nel tempo delle uscite in continua, ad alta frequenza e della massa virtuale del sistema
da simulazione PSS (a transitorio esaurito), con segnale d’ingresso a 1MHz. ................................................................... 76
Figura 4.9: Andamento nel tempo delle uscite in continua, ad alta frequenza e della massa virtuale del sistema
da simulazione PSS (a transitorio esaurito), con segnale d’ingresso a 10MHz. ................................................................ 77
Figura 4.10: Andamento nel tempo delle uscite in continua, ad alta frequenza e della massa virtuale del
sistema da simulazione PSS (a transitorio esaurito), con segnale d’ingresso a 100MHz. ............................................ 78
Figura 4.11: Andamento dell’ampiezza del segnale sull’uscita ad alta frequenza del sistema, dovuto
iv
all’impedenza dell’RC-parallelo posto in ingresso. ........................................................................................................................ 80
Figura 4.12: Andamento della fase del segnale sull’uscita ad alta frequenza del sistema, dovuto all’impedenza
dell’RC-parallelo posto in ingresso. ...................................................................................................................................................... 80
Figura 5.1: Schema per indagare l’impatto delle non idealità dei segnali di riferimento. ............................................ 81
Figura 5.2 Schema per indagare le non idealità dei segnali di riferimento considerando il sistema raezionato.
............................................................................................................................................................................................................................... 84
Figura 5.3: (a): Rappresentazione fasoriale del segnale in ingresso (blu) e della componente di errore (rosso)
con fase opposta rispetto a quella del segnale in ingresso, presente a causa di ampiezze diverse dei segnali di
riferimento. (b): Rappresentazione faoriale del segnale (blu) e delle componenti di errore (rosso) dovute a un
errore 𝜑𝑄 di fase tra il segnale seno e coseno di riferimento. .................................................................................................. 88
Figura 5.4: Schemi a blocchi per fornire segnali di riferimento in quadratura a frequenza variabile (tra 0Hz e
100MHz) a partire da segnali in quadratura tra loro a frequenza fissa (200MHz). ........................................................ 89
Figura 5.5: Schema a blocchi corretto per fornire segnali di riferimento in quadratura a frequenza variabile tra
0Hz e 100MHz a partire da segnali in quadratura a frequenza 𝛽 = 200𝑀𝐻𝑧 e da una sinusoide a frequenza
variabile tra 𝛼 = 100𝑀𝐻𝑧 ÷ 200𝑀𝐻𝑧. ............................................................................................................................................... 90
Figura 5.6: Soluzione non realizzabile per ottenere i segnali sfasati dalla semplice modulazione del segnale in
banda base. ...................................................................................................................................................................................................... 90
Figura 5.7: Cascata di due blocchi VCO per ottenere segnale in quadratura (sinistra). Struttura classica
dell’oscillatore LC (destra)........................................................................................................................................................................ 91
Figura 0.1: Semplice schema a blocchi per ottenere un segnale sfasato di 90 gradi rispetto a quello in
ingresso. ............................................................................................................................................................................................................ 96
Figura 0.2: Struttura con due sfasamenti in cascata per ottenere un segnale in quadratura con quello
d’ingresso, con controllo in retroazione sulla fase. ........................................................................................................................ 97
Figura 0.3: Schema del circuito sfasatore ad anello chiuso. ....................................................................................................... 98
Figura 0.4: Modulo e fase del trasferimento di una semplice rete RC passa basso. ...................................................... 102
Figura 0.5: Circuito equivalente al source del transistor sfasatore per il calcolo delle singolarità introdotte. 103
Figura 0.6: Moltiplicatore analogico realizzato come Cella di Gilbert per realizzare il phase detector. Struttura
replicata con ingressi invertiti per renderla simmetrica. ........................................................................................................ 105
Figura 0.7: Rete RC per ottenere segnali sfasati di 90 gradi (singolo stadio). Il segnale differenziale di tensione
(Iin+)-(Iin-) risulta in fase con l’uscita differenziale di tensione (Iout1+)-(Iout1-) e in quadratura con
(Qout1+)-(Qout1-)..................................................................................................................................................................................... 107
Figura 0.8: Replica della rete RC su due stadi per ottenere segnali in quadratura con insensibilità ai mismatch.
............................................................................................................................................................................................................................ 108
Figura 0.9: Transitorio della tensione di controllo, al gate dei MOS sfasatori, e della tensione in uscita al
circuito sfasatore. ....................................................................................................................................................................................... 109
Figura 0.10: Andamento nel tempo a transitorio esaurito delle tensioni nel circuito sfasatore ad anello chiuso.
............................................................................................................................................................................................................................ 109
Figura 0.11: Andamento dello sfasamento del segnale in uscita rispetto a quello in ingresso, al variare della
tensione di controllo e della corrente nel MOS sfasatore. ........................................................................................................ 110
Figura 0.12: (a): Andamento della frequenza del polo e dello sfasamento fornito dal MOS sfasatore in funzione
della tensione di gate. (b): Risposta in frequenza del blocco dato dal MOS sfasatore e dal filtro passa alto che
ne polarizza il gate, la frequenza 200MHz è evidenziata. ........................................................................................................ 111
Figura 0.13: Andamento in frequenza dello sfasamento fornito dalla rete RC a due stadi sui due segnali
differenziali in uscita, che risultano in quadratura tra loro. ................................................................................................... 112
Figura 0.14: Andamento in frequenza (in particolare a 200MHz) dello sfasamento tra i due segnali
differenziali in uscita, dei due segnali in uscita rispetto al segnale in ingresso, e del modulo dei segnali in
uscita. .............................................................................................................................................................................................................. 112
Figura 0.15: Ampiezze dei segnali in uscita nell’intorno della frequenza d’interesse. ............................................... 113
v
Sommario
La spettroscopia d’impedenza, tecnica d’indagine basata sulla misura dell’impedenza su un ampio
intervallo di frequenze, è alla base di svariate tecniche di caratterizzazione di campioni solidi,
sospensioni e microstrutture.
Negli ultimi anni l’interesse della comunit{ scientifica verso lo sviluppo di biosensori che utilizzano
la spettroscopia d’impedenza è crescente dal momento che lo strumento di analisi offerto da tale
tecnica è versatile, accurato e non necessita dell’uso di marcatori, al contrario dei metodi ottici, piu’
comunemente usati in biologia. La caratterizzazione delle proprietà cellulari a partire da segnali
elettrici esterni è un approccio inoltre compatibile con la tecnologia CMOS, e permette una profonda
integrazione funzionale, aprendo la strada alla realizzazione di piattaforme complete per analisi
parallele ed automatizzate, da utilizzare in applicazioni in-vivo (eventualmente portabili) e in-vitro.
Tali considerazioni rispecchiano la naturale tendenza a convergere dell’elettronica e della biologia,
che ha subito nelle ultime decadi un’accelerazione senza precedenti, allorchè lo scaling delle
tecnologie microelettroniche ha raggiunto dimensioni minime compatibili con le dimensioni delle
singole cellule. Questa nuova frontiera d’indagine porta a investigare fenomeni elettrochimici che
avvengono su scala dimensionale dell’ordine dei nanometri e scala temporale dell’ordine dei
nanosecondi.
Nel presente lavoro di tesi, coerentemente con la linea di azione appena indicata, è stato progettato
uno strumento completamente integrato in tecnologia CMOS 0,35um per indagini spettroscopiche.
La realizzazione dello strumento di indagine dell’impedenza su singolo chip punta a unire
all’indubbia efficacia della spettroscopia d’impedenza i vantaggi dell’elevata sensibilita’ e della
localizzazione delle misure. Il primo e’ consentito dalla riduzione dei parassitismi che incidono
pesantemente sul rumore degli strumenti macroscopici, soprattutto ad alta frequenza, mentre il
secondo e’ diretta conseguenza della miniaturizzazione. Entrambi questi aspetti sono importanti
nel mondo biologico dal momento che generalmente i segnali da misurare sono piccoli e che si
vogliono indagare le proprieta’ dei materiali biologici su scale compatibili con quelle cellulari. In
particolare il rilevamento in loco delle proprietà di interesse avverrebbe in tempo reale e in modo
non invasivo.
Nel caso di misure d’impedenza di interfacce biologiche submicrometriche le richieste in termini di
sensibilita’ sono particolarmente spinte: a causa della scarsa conducibilit{ dei tessuti si tratta di
operare nel dominio delle centinaia di megaohm e degli attofarad, poiché la tensione applicata non
può superare le decine di millivolt allo scopo di non perturbare il delicato equilibrio elettrostatico
del campione in esame, e le correnti di segnale risultanti sono limitate ai nanoampère. Al tempo
stesso nella spettroscopia d’impedenza è importante esplorare un’estesa regione spettrale, fino al
centinaio di megahertz, che fornisce un margine sufficiente per investigare completamente il range
vi
di frequenze in cui si colloca la dispersione dielettrica di proteine e lipidi, costituenti fondamentali
delle cellule animali e vegetali. Tutto ciò impone specifiche stringenti per la strumentazione.
Per poter indagare in modo completo il comportamento delle cellule a partire dalle loro
caratteristiche elettriche, le seguenti esigenze sono state soddisfatte in fase di progetto del sistema
elettronico d’indagine spettroscopica qui presentato. Quest’ultimo è integrato su singolo chip così
da permettere di posizionare il campione biologico nelle strette vicinanze del sistema di misura,
ridurre di conseguenza i parassitismi dei collegamenti e migliorare l’accessibilit{ della misura,
ottenendo un’indagine in tempo reale del campione, in modo non invasivo. Il circuito progettato
inoltre ha sensibilità molto elevata, dell’ordine dell’attofarad sulla misura di una capacità incognita:
quindi si garantisce un’accurata ricostruzione dello spettro dell’impedenza oggetto di studio anche
in presenza di valori di impedenza del DUT (Device Under Test) elevati. Infine è fondamentale il
requisito di banda estesa, in modo da rendere possibile l’indagine di spettri di dispersione posti su
un ampio range di frequenze, e di conseguenza la caratterizzazione di diverse strutture biologiche e
di tutti i fenomeni legati al comportamento di esse. La banda di analisi si estende da 10kHz a
100MHz, colmando il gap riscontrato nel mondo della ricerca odierna tra spettroscopia
d’impedenza a basse e alte frequenze.
Per ottenere tali prestazioni è risultata necessaria l’introduzione di una topologia architetturale
diversa rispetto a quella di un classico amplificatore a transimpedenza. Tale struttura innovativa ha
permesso di ottenere banda di indagine del DUT molto ampia senza compromettere le prestazioni
in termini di sensibilità.
L’idea che sta alla base della nuova architettura consiste nel traslare il segnale errore della
retroazione a bassa frequenza, lì effettuarne l’amplificazione, e riportarlo poi ad alta frequenza per
chiudere l’anello di retroazione con un segnale alla stessa frequenza del segnale di stimolo dato in
ingresso. In questo modo gli unici elementi necessari a larga banda sono i traslatori di frequenza,
mentre il blocco di guadagno nel percorso d’andata lavora a bassa frequenza.
I vantaggi derivanti da questa architettura a demodulazione-modulazione del segnale errore sono
svariati. Portare il segnale utile a bassa frequenza permette di amplificarlo anche disponendo di un
amplificatore a banda limitata: viene dunque a cadere il compromesso progettuale relativo al
prodotto guadagno-banda finito dell’amplificatore. Inoltre il segnale nel cammino d’andata del
circuito è traslato sempre alla stessa frequenza, indipendentemente dalla frequenza di indagine del
DUT: si assicura così un elevato guadagno d’anello per tutte le frequenze d’indagine, il cui valore
non dipende dalla frequenza del segnale in ingresso stesso, e pertanto un’ottima linearita’ della
misura. La banda di rumore ottenuta, infine, è molto contenuta: come si vedrà in seguito, la funzione
di trasferimento è caratterizzata da una larghezza di banda di qualche kilohertz pur riuscendo ad
amplificare segnali con frequenze fino al centinaio di megahertz. Nel suo complesso, il sistema
realizzato consiste in un amplificatore retroazionato tramite capacità: la particolarità della
struttura qui presentata è che il guadagno d’anello è elevato solo nell’intorno della frequenza del
segnale d’ingresso, indipendentemente dalla banda del blocco di guadagno presente nel cammino
d’andata, e che dunque il sistema si comporta come un integratore nell’intorno della frequenza di
stimolo, con tutti i vantaggi appena elencati.
La struttura progettata comprende uno stadio di preamplificazione e moltiplicatori analogici a larga
banda, operativi fino alle massime frequenze d’indagine da raggiungere. È stato inoltre
implementato un blocco di amplificazione con chopping del segnale per ridurre il contributo 1/f e
un filtro attivo con polo a bassa frequenza per introdurre il polo dominante dell’anello.
vii
Il circuito integrato qui presentato è a elevata sensibilità e permette di lavorare su larga banda di
indagine spettroscopica. Queste particolari prestazioni lo rendono impiegabile in svariati campi
d’indagine biologica, dalla citometria di flusso, alle acquisizioni di microscopia elettrochimica su
nanoscala, risultando particolarmente adatto all’integrazione con altri microsistemi di misura
nell’ottica di realizzare Lab-on-Chip, sistemi di misura e prima elaborazione autonomi.
Nel primo capitolo sono spiegati i concetti alla base della tecnica di spettroscopia d’impedenza, con
particolare attenzione all’indagine del mondo biologico; inoltre sono mostrati esempi applicativi del
presente lavoro di tesi e vengono considerate le strutture circuitali tradizionalmente impiegate per
effettuare analisi spettroscopiche.
Nel secondo capitolo è descritta la struttura innovativa progettata, con considerazioni a livello di
sistema; sono poi evidenziati gli aspetti critici e i maggiori vantaggi del circuito. Le scelte
progettuali dei singoli blocchi presenti sono invece spiegate nel terzo capitolo. I risultati delle
simulazioni sono raccolti nel quarto capitolo, dove si mettono in luce le prestazioni effettive del
circuito. Il quinto capitolo tratta come è possibile fornire i segnali di riferimento necessari e i
requisiti di precisione che questi devono presentare. In appendice A è mostrato il progetto e il
confronto tra le prestazioni di due diversi circuiti per generare tali segnali.
viii
Desidero ringraziare innanzitutto due persone speciali: Angelo, per avermi seguito in questa
tesi con passione quotidiana e per tutte le piccole e grandi soluzioni trovate grazie a lui, e
Filippo, per essere stato il simpatico tramite verso il mondo di Cadence e un ottimo compagno
di scrivania. Grazie a Giorgio, per la sua saggezza e per avermi mostrato gli acuti
ragionamenti dei veri ingegneri, ad Antonio, Alessandro, Marco Vergani, Maddalena, Mattia,
Marco Carminati, Dario e tutti i ragazzi del LabSamp, per l’amicizia di ognuno di loro e
l’atmosfera straordinaria che sanno creare ogni giorno. Grazie a Marco Sampietro, che è il
motore di tutto questo.
Un grazie di cuore ai miei genitori Viviana e Cesare e a mia sorella Elisa, che mi hanno sempre
sopportato e supportato con ottimismo e tenacia. Un pensiero particolare va ad Alessio, per il
suo prezioso incoraggiamento e il fattivo contributo, per l’insostituibile presenza accanto a
me, per la sua generosità.
Cecilia Gatti,
31 Marzo 2011
ix
1. Spettroscopia d’impedenza
1.1. Introduzione
La spettroscopia d’impedenza (IS) è una tecnica di indagine versatile che permette l’analisi di una
grande quantità di proprietà chimico-fisiche. La misura dell’impedenza sul più ampio intervallo di
frequenze possibile è alla base di diverse tecniche di caratterizzazione di solidi, liquidi,
microstrutture. In particolare si indagano con questa tecnica mezzi di sospensione, tessuti biologici
e fluidi sia in vivo che in vitro, dispositivi a semiconduttore, e si effettuano i test di componenti
elettronici.
Le misure di IS forniscono lo spettro, ovvero l’andamento di modulo e fase di un’impedenza ignota
al variare della frequenza. Soprattutto in ambito biologico, dove le grandezze da misurare sono di
ampiezza limitata, lo spettro ottenuto è tipicamente caratterizzato da variazioni di lieve entità:
molto spesso le informazioni sperimentali estraibili consistono in variazioni sul modulo
dell’ampiezza di pochi punti percentuali, cambiamenti della fase di frazioni di grado, piccoli
spostamenti in frequenza delle singolarità presenti. Per queste ragioni, al fine di ottenere misure
significative, occorre che lo strumento sperimentale abbia elevata risoluzione.
Il principio che sta alla base della spettroscopia d’impedenza è il seguente: si applica al campione
oggetto di studio uno stimolo noto di tensione o corrente e se ne osserva la risposta nel tempo,
ovvero la corrente o la tensione risultante. Nel caso di studio di campioni a elevata impedenza, quali
quelli biologici, come sarà in seguito mostrato, l’applicazione di uno stimolo di tensione è
preferibile.
Qualsiasi fattore in grado di influenzare la conduttività del sistema può essere potenzialmente
indagato con tale tecnica di misura, poiché l’andamento in frequenza dell’impedenza permette di
descrivere in modo completo le proprietà elettriche di un qualsiasi sistema lineare. Il tipo di
informazioni ottenibili dallo spettro del campione oggetto di studio può essere solitamente
ricondotto a due categorie:
parametri pertinenti al solo oggetto indagato, come la conduttività del materiale, la costante
dielettrica, la mobilità e la concentrazione all’equilibio delle specie cariche;
parametri pertinenti all’interfaccia elettrodo-oggetto indagato, come ad esempio il valore
della capacità in una regione di interfaccia e i meccanismi di trasferimento della carica
elettrica all’interfaccia.
1
La necessit{ di distinguere tra loro le due tipologie di informazioni estraibili si traduce nell’esigenza
pratica di analizzare lo spettro su banda il più possibile larga, in modo da distinguere fenomeni
diversi che intervengono a diverse frequenze.
Sono ora riportati i semplici passaggi matematici che permettono di ottenere la misura
impedenziometrica. Al dispositivo in esame (device under test, DUT) è applicato un segnale V(t) con
componente spettrale alla frequenza d’indagine ed è letta la corrente i(t).
Figura 1.1: Rappresentazione polare dell’impedenza nelle sue componenti di modulo e fase.
L’ammettenza del campione da misurare è data dal rapporto tra la trasformata di Laplace della
corrente che attraversa il DUT e la trasformata del segnale di tensione applicato in ingresso:
𝑌=
𝑇𝑑𝐿(𝑖(𝑡))
𝑇𝑑𝐿(𝑉(𝑡))
=
𝐼(𝑠)
= 𝐺 + 𝑖𝐵,
𝑉(𝑠)
ed è possibile rappresentarla in un diagramma polare, come in fig.1.1. In tal caso l’ammettenza è
descritta da modulo e fase:
|𝑌| = 𝛼 = √𝐺 2 + 𝐵2 ,
𝐵
𝜑 = arctan ( ),
𝐺
ottenendo, come è noto:
𝑌 = 𝛼𝑒 𝑖𝜑 .
I risultati ottenuti tramite tecniche di spettroscopia d’impedenza necessitano per loro natura di una
rappresentazione in tre dimensioni, dal momento che l’impedenza può essere vista come una
funzione complessa: l’informazione di impedenza si distingue in parte reale e immaginaria al
variare della frequenza.
Per esprimere in modo completo Z si utilizza il diagramma di Bode, che fornisce l’andamento del
modulo e della fase in funzione della frequenza su due grafici separati, o il Cole-Cole plot, detto
anche diagramma di Nyquist, dove è possibile concentrare tutte le informazioni in un unico grafico
cartesiano bidimensionale. Tale diagramma è rappresentato in fig.1.2: si esprime la componente
immaginaria in funzione della parte reale al variare della frequenza, così che ogni frequenza sia
rappresentata da un punto nel piano e la curva risultante sia l’interpolazione dell’informazione alle
diverse frequenze in cui viene misurata l’impedenza. Il Cole-Cole plot risulta particolarmente
opportuno per ottenere informazioni legate a singolarità vicine in frequenza, che non
risulterebbero ben distinte su grafici logaritmici quali i diagrammi di Bode.
2
Figura 1.2: Cole-cole plot di una rete RC in parallelo.
1.2. Proprietà elettriche dei materiali biologici e
spettroscopia
Le tecniche impedenziometriche, già utilizzate da decenni su campioni di materiale biologico,
hanno trovato numerose opportunità di applicazione e sviluppo con l’avvento delle nanotecnologie.
In particolare, è risultato chiaro che riducendo le dimensioni dei sistemi di misura fino a realizzarlo
su chip si sarebbe potuto determinare le proprietà delle cellule viventi come concentrazione in un
volume e parametri elettrici legati alle attività vitali in modo rapido e non invasivo, con una elevata
risoluzione spaziale, riducendo i parassitismi e i problemi di accessibilità della misura che gli
strumenti macroscopici determinano. È questa la linea di ricerca che è stata seguita nel presente
lavoro di tesi.
Le tecniche che indagano il comportamento di tessuti biologici con la spettroscopia d’impedenza
sono conosciute, per ragioni storiche, come tecniche di spettroscopia dielettrica. Queste permettono
di caratterizzare i sistemi eterogenei quali cellule, materiali compositi, membrane in un liquido,
dispersioni colloidali, misurando la permettività e la conducibilità del campione in funzione della
frequenza. L’applicazione della spettroscopia dielettrica ha consentito di ottenere notevoli rislutati,
quali ad esempio la scoperta dello spessore molecolare della membrana cellulare e la natura ionica
della conduzione nervosa [1].
Quando un campo elettrico è applicato a un materiale, l’energia conservata in esso si trasforma. Il
movimento soggetto ad attrito dei portatori di carica provoca la dispersione di tale energia sotto
forma di calore, mentre la polarizzazione dei componenti
del materiale provoca
immagazzinamento energetico. La polarizzazione è legata a vari effetti, come l’orientamento dei
dipoli o l’accumulo di carica in corrispondenza delle superfici che separano materiali con diverse
proprietà elettriche (polarizzazione interfacciale).
La risposta di un materiale al campo elettrico applicato è descritta dalla conduttività (𝜍, in S/m) e
dalla permettività (𝜀, in F/m). La conduttività fornisce una misura della capacità del materiale di
condurre, ossia quantifica la facilità con cui portatori di carica delocalizzati si possono muovere
3
attraverso il materiale sotto l’influenza del campo esterno. La permittivit{ è un indicatore della
polarizzabilità del materiale, ossia della sua propensione ad immagazzinare carica. La permittività è
spesso espressa come permettività relativa, adimensionale, riferita alla permettività del vuoto.
Le due grandezze appena descritte sono raccolte in termini di permettività complessa secondo il
modello di Debye (1929) [2]:
𝜀 ∗ = 𝜀 ′ − 𝑖𝜀 ′′ = 𝜀 −
𝑖𝜍
.
𝜔
La parte immaginaria nella precedente espressione rappresenta la perdita dissipativa dovuta al
movimento della carica polarizzabile in fase con il campo elettrico.
Per molte sostanze la permittività e la conduttività sono costanti solo su un limitato intervallo di
frequenze. All’aumentare della frequenza la permettivit{ esibisce una generale tendenza a
diminuire laddove la conduttività tende ad aumentare. Queste variazioni si presentano con una
serie di picchi e sono chiamate dispersioni o rilassamento dielettrico, come si vede in fig.1.3.
La perdita dissipativa è presente anche per i materiali isolanti e per descrivere in modo abbastanza
intuitivo questa interazione si può fare ricorso al semplice concetto fisico usato da Pethig [1], in cui i
dipoli oscillanti sono considerati come sfere rotanti la cui rotazione è frenata dall’attrito con il
mezzo viscoso circostante. Risulta dunque chiaro che le le molecole mostrano un rilassamento
dielettrico all’aumentare della frequenza del campo, dal momento che oltre una certa frequenza
esse smettono di oscillare.
Figura 1.3: Spettro della permettività dielettrica su un ampio range di frequenze: sono rappresentate la parte
reale e immaginaria della permettività complessa e i processi ad esse associati (rilassamento ionico e bipolare
e risonanze atomiche ed elettroniche ad alta frequenza).
Nei materiali biologici tali dispersioni sono principalmente dovute ai fenomeni di accumulo di
carica per polarizzazione interfacciale nella cellula e forniscono informazioni sulle strutture
eterogenee e sulle proprietà elettriche dei suoi costituenti.
Le teorie dielettriche sulla polarizzazione interfacciale sono state sviluppate e validate da risultati
sperimentali su diversi sistemi eterogenei, e continuano a essere perfezionate cercando di
4
sviluppare modelli sempre più realistici e affidabili. Ogni dispersione può essere matematicamente
approssimata da una singola costante di tempo:
𝜀 ∗ (𝜔) = 𝜀∞ +
𝜀𝑠 − 𝜀∞
,
1 + 𝑖𝜔𝜏
dove 𝜀𝑠 è la permettività a basse frequenze (permettività statica), 𝜀∞ è la permettività misurata ad
alta frequenza, e 𝜏 è il tempo caratteristico di rilassamento.
In generale le proprietà dei materiali biologici sono caratterizzate da tre tipi di dispersione
denominati 𝛼, 𝛽, 𝛾, situati rispettivamente a bassa frequenza, nel dominio delle frequenze radio e in
quello delle microonde (fig.1.4). Le sospensioni cellulari, ad esempio, esibiscono una significativa
dispersione di tipo 𝛽 dovuta all’effetto di polarizzazione interfacciale presente all’interfaccia tra la
membrana fosfolipidica e la soluzione intra ed extra cellulare. Le molecole di acqua invece
presentano una dispersione di tipo 𝛾, mentre alcune proteine o altre macromolecole producono
dispersioni situate in un range variabile tra il dominio 𝛼 e quello 𝛾, a seconda delle dimensioni e
della carica delle molecole [3]. Come è facilmente deducibile dalla figura, è necessario estendere
l’analisi su un ampio range di frequenze.
Figura 1.4: Illustrazione dei range di frequenza relativi alle dispersioni dielettriche di materiali
biologici.
1.2.1.
Proprietà elettriche delle cellule
Ad eccezione dei virus, la materia vivente è costituita da cellule. Esse hanno una struttura simile tra
loro, con una membrana che, nel caso di batteri e cellule animali, include proteine a cavallo di essa e
che circonda il citoplasma.
La membrana cellulare ha una struttura complessa. Per poter svolgere l’insieme delle funzioni
necessarie alla vita la cellula ha necessit{ di scambiare molecole con l’ambiente che la circonda, e la
parete cellulare presenta opportuni canali per permettere che ciò accada. In particolare, la parete
contiene polisaccaridi e altri polimeri naturali e sono proprio i gruppi elettricamente carichi
presenti che consentono alla membrana di comportarsi come scambiatore di ioni. Ciò implica che le
proprietà elettriche della membrana cellulare siano soggette a cambiamenti in funzione della
variazione di concentrazione degli ioni presenti. La membrana che racchiude il citoplasma è
caratterizzata da una struttura a doppio strato lipidico, con spessore di 4-10nm. Gli effetti delle
5
proteine e dell’acqua determinano le propriet{ elettriche della cellula: la permettivit{ relativa
riportata in letteratura è variabile tra 2 e 10. Il trasporto di ioni attraverso la membrana è regolato
da opportune proteine transmembraniche, chiamate canali ionici, e in condizioni di riposo la
membrana è fortemente isolante. Alcuni esperimenti di patch-clamp [4] hanno rivelato che la
membrana non presenta alcuna dispersione dielettrica alle basse frequenze (4Hz-10kHz), dunque
l’applicazione di campi elettrici di notevole intensità a bassa frequenza provoca una elevata
differenza di potenziale ai capi della membrana plasmatica causando la rottura del doppio strato
lipidico, che fa da dielettrico. Inoltre, la cellula stessa mantiene una caratteristica differenza di
potenziale a cavallo della membrana, che cambia a seconda dell’attivit{ cellulare e ne caratterizza
gli scambi energetici.
Il citoplasma contiene sali, proteine, acidi nucleici e, in molti casi, strutture membranose che
possono influenzare le proprietà dielettriche. I valori di permettività relativa rintracciabili in
letteratura per il citoplasma sono compresi tra 50 e 200. Nella maggior parte dei casi, comunque, il
citoplasma può essere approssimato come una soluzione salina altamente conduttiva in cui è
presente materiale organico in grande quantità. Per frequenze superiori ai 20MHz possono aver
luogo fenomeni di dispersione relativi al movimento di piccole molecole dovuto al campo elettrico:
all’aumentare della frequenza del campo, gli ioni presenti nel citoplasma hanno un’inerzia nel
movimento tale da non permettere l’effettivo spostamento degli stessi. Di conseguenza, il
comportamento del citoplasma passa da conduttivo a dielettrico (rispettivamente 𝜌𝑐𝑦𝑡𝑜 e 𝜀𝑐𝑦𝑡𝑜 in
fig.1.5).
Il più semplice modello del comportamento cellulare, chiamato single-cell, è illustrato in fig.1.5: la
membrana cellulare è rappresentata da una impedenza puramente capacitiva con valori dell’ordine
di 0.5-1uF/cm2, il parallelo tra una resistenza e una capacità descrive la conduttività e la
permettività medie interne del citoplasma. A basse frequenze la cellula può essere considerata una
sfera isolante situata in un mezzo conduttivo, a frequenze alte invece la capacità della membrana
risulta cortocircuitata e presenta un’impedenza bassa, per cui risulta possibile accedere alle
proprietà elettriche interne.
Figura 1.5: Modello equivalente di una singola cellula sospesa in soluzione. La membrana
plasmatica è formata da un doppio strato di molecole lipidiche.
6
1.3. Campi di applicazione del circuito progettato
Nel presente lavoro di tesi è stato progettato un chip con ottime prestazioni in quanto a sensibilità e
intervallo di frequenze di analisi del DUT: uno strumento di misura con tali requisiti risulta
potenzialmente utile in svariate applicazioni di spettroscopia d’impedenza.
1.3.1.
Citometria di flusso
Grazie alla possibilità di integrare microelettrodi in canali capillari, che permettono la
manipolazione e il rilevamento a livello della singola cellula, esistono numerosi campi in cui un chip
per la citometria permetterebbe di indagare in tempo reale le caratteristiche della cellula. Tra i più
importanti, si pensi ad applicazioni nel campo dell’oncologia, dell’ematologia o della tossicologia.
I dispositivi dedicati alla citometria di flusso impedenziale si basano sul seguente procedimento.
Tipicamente vengono posizionati tre microelettrodi in un microcanale, trasversali al flusso di cellule
(A, B, C in fig.1.6.a) e la misura è realizzata sulla variazione di impedenza 𝑍𝐴𝐶 − 𝑍𝐵𝐶 tra due
segmenti successivi del canale quando vengono attraversati dalla cellula [5]. A partire dalla misura
delle dimensioni della cellula in esame, si effettua una stima degli altri parametri di interesse. Da
notare il fatto che i segnali presenti sono di ampiezza limitata, intorno alle decine di millivolt, e a
elevata frequenza, a partire da 100kHz.
E’ possibile considerare il semplice modello dell’interfaccia elettrodo-elettrolita di fig.1.6.b: la
cellula è presentata come un citoplasma uniforme, sferico, di conducibilità 𝜍𝑐 ~0,5𝑆/𝑚 (minore
della conducibilità della soluzione fisiologica in cui la cellula è immersa, circa 1,5𝑆/𝑚), circondato
da una membrana non conduttiva sottile, avente una capacità 𝐶𝑚 = 1𝜇𝐹/(𝑐𝑚2 ). Come si può notare
in fig.1.6.c, dove è rappresentato lo spettro d’impedenza risultante da una simulazione su cellula di
diametro 10 𝜇𝑚, è indispensabile avere uno strumento di misura in grado di eseguire l’analisi fino a
100MHz. Infatti a bassa frequenza la cellula è isolante: al suo passaggio si misura un aumento della
resistenza misurata legato al volume occupato dunque il primo massimo resistivo tra 100kHz e
1MHz è relativo alle dimensioni della cellula. Il picco di reattanza tra 2MHz e 5MHz è dovuto alla
membrana cellulare. Infine il valore d’impedenza ad alta frequenza è legato alla conduttività del
citoplasma, infatti da frequenza di circa 10MHz la cellula equivale a un conduttore di conducibilità
diversa rispetto dalla soluzione.
7
Figura 1.6: Parte superiore: Passaggio di una particella all’interno di un microcanale con tre elettrodi. Il
segnale d’impedenza viene misurato in modo differenziale, la misura del tempo di transito permette di
calcolare la velocità della cellula. Parte inferiore: Modello elettrico semplificato della variazione di
impedenza al passaggio di una cellula. Simulazione dello spettro d’impedenza di una cellula dal diametro di
10um. I rettangoli evidenziano le frequenze di interesse per la discriminazione cellulare.
1.3.2.
Microscopio a forza atomica
Il microscopio a forza atomica (AFM) è uno strumento atto alla caratterizzazione topografica di
superfici con altissima risoluzione spaziale. Come osservabile in fig.1.7, l’AFM consiste in una microstrip di silicio (cantilever) che termina con una punta realizzata tipicamente in silicio, oro o
diamante a seconda dell’applicazione. Il campione in esame è posizionato in prossimità della punta
da un elemento piezoelettrico che permette l’indirizzamento in un piano bidirezionale della
8
superficie del campione con una risoluzione migliore di 10nm. L’elemento piezoelettrico consente
anche il movimento nella direzione normale al piano con una risoluzione dell’ordine di 10pm.
Il principio di funzionamento dell’AFM è il seguente: durante una scansione la punta viene portata
in prossimità della superficie del campione in modo che la differente forza d’interazione tra punta e
superficie determini una flessione del cantilever. Questa flessione è rivelata otticamente inviando
un raggio laser sulla superficie del cantilever e misurandone la deflessione. Un opportuno sistema
di controllo cambia la distanza relativa tra cantilever e campione per mantenere la deflessione del
raggio laser costante. Il sistema complessivo è dunque un anello di retroazione optoelettronico che
fa in modo di mantenere costante la forza di interazione tra punta e superficie. L’immagine
topografica deriva dai dati relativi al movimento verticale del cantilever o del campione durante la
scansione.
Figura 1.7: Schema di principio di un microscopio a forza atomica (AFM).
Anche se fondamentalmente utilizzato per realizzare immagini topografiche, questo tipo di
microscopio può essere modificato per effettuare misure elettriche. Il cantilever e la punta possono
essere realizzati con materiali elettricamente conduttivi, come oro o silicio drogato, in modo da
creare un contatto elettrico, oltre che meccanico. Un secondo contatto elettrico può essere creato
deponendo il campione su un substrato conduttivo, ad esempio in oro o in grafite. In questo modo
viene realizzato quello che si chiama Nanoscale Capacitance Microscope (NMC), uno strumento
adibito alla misura della capacità tra punta e campione. In fig.1.8.a è riportato uno schema di
utilizzo della punta dell’AFM come elettrodo.
9
Figura 1.8: Parte superiore: Misure elettriche utilizzando un microscopio AFM. Parte inferiore:
Rappresentazione schematica della tecnica Nanoscale Dieletric Microscopy.
Utilizzando l’AFM come NCM è possibile, per esempio, quantificare e ricostruire un’immagine
bidimensionale della costante dielettrica a bassa frequenza di singole membrane con risoluzione
laterale di nanometri [6]. L’immagine della costante dielettrica relativa è ricostruita sulla base della
misurazione della capacità locale e del relativo spessore del campione. La misura della costante
dielettrica tramite AFM è realizzata in due fasi, come è riportato in fig.1.8.b [6]. Durante la prima
scansione viene ricostruita la topologia del campione ottenendo lo spessore rispetto al riferimento
costituito dal substrato piatto. Nella seconda scansione si misura la variazione ∆𝐶 della capacità
locale rispetto a un punto di riferimento sul substrato. Questa scansione viene eseguita ponendosi a
un’altezza costante rispetto all’elettrodo inferiore. Dai dati di spessore e capacit{ così ottenuti è
possibile ricavare la costante dielettrica locale del campione.
Un convenzionale microscopio a forza atomica non è dotato della strumentazione necessaria per
eseguire questo tipo di misura. Per ottenere la sensibilità richiesta, risoluzione migliore di 1aF, è
necessario che l’elettronica che estrae l’informazione impedenziale sia a basso rumore e si trovi
vicina al cantilever, in modo da minimizzare l’insieme dei parassitismi dovuti a una connessione a
distanza. È dunque particolarmente vantaggioso impiegare soluzioni completamente integrate per
l’elettronica di misura.
È da notare il fatto che finora le misure del tipo NMC sono state effettuate solo in ambiente secco,
mentre per sondare adeguatamente le proprietà di membrane biologiche è auspicabile eseguire
analisi in ambiente liquido. Il mezzo liquido determinerebbe tuttavia la formazione di resistenze
10
parassite di interfaccia tra punta del microscopio e campione che maschererebbero l’informazione
di capacità locale da misurare. Si rende dunque necessario, al fine di superare tali difficoltà, di
ampliare l’intervallo di frequenze della misura al di là di quello attuale, a 50kHz-1MHz, in modo da
rendere trascurabile il contributo resistivo rispetto a quello capacitivo.
1.3.3.
Lab-On-Chip
I sistemi Lab-On-Chip (LoC) sono atti a manipolare piccoli volumi di fluido in microcanali. Questo
tipo di strutture trova oggi un numero crescente di applicazioni soprattutto in ambito chimico,
biologico e medico, permettendo di abbattere il costo delle analisi e effettuarle in tempo reale e in
loco. Uno degli obiettivi a lungo termine è quello di integrare in un unico sistema LoC, con
dimensione dell’ordine del centimetro quadro, tutte le operazioni e analisi che normalmente
vengono svolte in un laboratorio. L’utilizzo di sistemi LoC fornisce svariati vantaggi, molto specifici
per le loro applicazioni:
Consumo di bassi volumi di fluido, dato il piccolo volume interno del chip. Ciò è benefico per
il minore utilizzo di costosi reagenti e per la non invasivit{ dell’analisi;
Analisi a elevata risoluzione, velocità di controllo sul chip e migliore efficienza dovuta ai
brevi tempi di ottenimento dei dati (basse distanze);
Migliore controllo del processo grazie a una più rapida velocità di risposta del sistema, in
particolare miglior controllo di temperatura per reazioni esotermiche;
Compattezza del sistema, legata all’integrazione delle funzionalità e ai piccoli volumi;
Naturale evoluzione dei sistemi LoC verso la parallelizzazione dei processi, che rende
possibile analisi a elevato throughput;
Costi di fabbricazione ridotti, con la possibilità di produrre chip usa e getta con tecniche di
produzione di massa;
Piattaforma più sicura per studi chimici, radioattivi e biologici, considerando l’integrazione
delle funzionalità e i minori volumi di fluido da immagazzinare.
La progettazione degli elementi funzionali di tali sistemi miniaturizzati, come micro-canali, microelettrodi, valvole, sensori, unità di lettura e di elaborazione dei segnali biologici, rappresenta una
sfida tecnologica a cui il filone di ricerca in cui si inserisce il presente lavoro di tesi cerca di dare una
risposta.
11
Figura 1.9: Il sistema Lab-on-Chip consiste in un microchip con canali per prelevare i campioni bilogici e
gli eventuali reagenti, un array di microelettrodi e sistemi per la rivelazione dei segnali e analisi dei dati .
Integrando questi sistemi con circuiti microelettronici per il rilevamento del segnale come in fig.1.9,
è possibile esaminare le caratteristiche elettriche delle singole cellule, in vivo e in vitro. In
particolare, utilizzando cellule, proteine, enzimi integrati con un sistema di microelettrodi è
possibile ottenere un sensore elettrochimico molto efficiente per sostanze biologicamente attive
[7]. L’interfaccia elettrica di questo sistema è tipicamente ottenuta utilizzando un array di
microelettrodi planari metallici.
Parallelamente allo sviluppo di LoC, la comunità scientifica ha sentito la generale necessità di
compiere i propri test su cellule viventi dando un’ulteriore spinta allo sviluppo di microstrutture ed
elettronica miniaturizzata per l’estrazione di dati in tale ambito. Il fine di questo sviluppo è quello di
progettare un sistema che sia in grado di rilevare autonomamente il maggior numero possibile di
parametri sul comportamento dinamico della cellula: monitorare cioè in tempo reale la crescita
cellulare, la scissione e il metabolismo. Questi sistemi inoltre possono contribuire alla scoperta di
nuovi farmaci e fornire un grande aiuto nei test tossicologici, sostituendosi ai convenzionali ed
eticamente controversi test su animali.
Il principale vantaggio dell’usare LoC per eseguire test in ambito biologico riguarda la possibilit{ di
coltivare cellule nello stesso ambiente in cui vengono eseguite le misure. Questo approccio offre
l’opportunit{ di monitorare i processi che fanno parte della proliferazione e scissione cellulare. Una
delle principali sfide a tale proposito è quella di contorllare lo stato interno della cellula per poter
determinare il più velocemente possibile e con elevato livello di affidabilità quale sostanza o evento
esterno abbia attivato un processo interno, come la mitosi o l’apoptosi. Anche per tale tipo di analisi
è utile un apparato a multisensori e risulta necessario lo sviluppo di elettronica su singolo chip e
che lavori su banda elevata.
12
1.4. Tecniche tradizionali per la misura
dell’impedenza
Come è stato ampiamente mostrato nei precedenti capitoli, l’indagine d’impedenza fino a frequenza
elevata e con ottima sensibilità è fondamentale in svariati campi di studio scientifici, dalla fisica
della materia, all’ingegneria e alla biologia. Nonostante i continui miglioramenti a questo proposito,
le metodologie adottate per la misura dell’impedenza ad alta frequenza non sono ancora state
perfettamente consolidate, a differenza di quanto avvenuto per le misure impedenziali a bassa
frequenza (banda audio) e ad altissima frequenza (microonde). Per questo il problema suscita un
interesse crescente da parte della comunità di ricerca metrologica [7].
L’impedenza è una grandezza complessa, completamente descritta dall’andamento in frequenza di
modulo e fase [Capitolo1.1, Introduzione]: le tecniche di spettroscopia d’impedenza hanno come
scopo quello di ricostruire tali parametri per caratterizzare eletticamente il dispositivo oggetto di
studio.
Nel campo della metrologia sono state date due definizioni operative alternative di impedenza, a
seconda dell’intervallo di frequenze caratteristico dell’applicazione considerata. Per frequenze fino
alle decine di kHz, l’impedenza è definita come il rapporto tra la trasformata di Fourier della
tensione presente tra i due terminali del dispositivo, e la trasformata della corrente che scorre tra
essi. Nell’ambito della metrologia a radiofrequenza, da 50MHz a centinaia di GHz, l’impedenza è
invece definita in corrispondenza di una sezione del dispositivo, di solito una porta coassiale, ed è
una quantit{ relativa allo scattering di un’onda elettromagnetica incidente sulla sezione
considerata, con riferimento all’impedenza caratteristica del sistema di misura. Un’importante
obiettivo del presente lavoro di tesi rientra nel progetto generale del mondo metrologico in tale
ambito: annullare il gap che separa il campo d’indagine a bassa e a molto alta frequenza, e quindi
condurre misure d’impedenza nelle decadi di frequenza centrali rispetto alla precedente
classificazione, nell’intervallo approssimativamente compreso tra 100kHz e 100MHz.
Esistono tecniche diverse per effettuare la misura di un’impedenza incognita, ognuna caratterizzata
da vantaggi e svantaggi. Nella scelta della tecnica da utilizzare, dunque, è molto importante valutare
lo specifico campo di applicazione e le condizioni in cui avviene la misura, considerando l’influenza
di fattori quali il range di frequenza di misura e l’accuratezza che è necessario ottenere.
1.4.1.
Ponte di Wheatstone
I ponti in alternata ricalcano la struttura del ponte di Wheatstone con la differenza che le resistenze
vengono sostituite da generiche impedenze e il circuito è alimentato da una tensione alternata
sinusoidale. In riferimento alla fig.1.10, variando il valore di una delle tre impedenze note
(𝑍1 , 𝑍2 , 𝑍4 ) si cerca di portare il ponte in una condizione di equilibrio tale che la tensione
differenziale tra i nodi C e D, misurata tramite un rivelatore di zero, sia nulla. Le possibili
combinazioni di impedenze che sono in grado di dar luogo all’equilibrio sono molte ma solitamente
ci si limita a considerare quelle che sono tali da soddisfare le seguenti condizioni:
Almeno due delle tre impedenze note devono essere puramente resistive, presentando la
sola parte reale, o puramente capacitive, presentando la sola parte immaginaria;
Le impedenze “pure” sono fisse, mentre l’impedenza ignota costituisce il ramo variabile
assieme alla terza impedenza nota, anche detta “di regolazione”;
13
Le condizioni di equilibrio devono essere indipendenti dalla frequenza.
Le combinazioni di impedenze che sono concretamente considerate si possono dunque così
riassumere:
Ponti a rapporto: le due impedenze “pure” si trovano su lati adiacenti;
Ponti a prodotto: le due impedenze “pure” si trovano su lati opposti.
Figura 1.10: Schema di principio di un ponte in corrente alternata.
In entrambi i casi si può scrivere l’equazione di equilibrio del ponte come segue:
𝑍𝑥 =
𝑍1 𝑍4
.
𝑍2
I ponti a rapporto normalmente utilizzati sono quelli che hanno come rapporto un numero reale. In
generale le due impedenze Z1 e Z2 sono due resistori. Si chiama ponte di Gott quello in cui
l’impedenza incognita è un condensatore e quella di regolazione è un condensatore con un resistore
in serie. Nel ponte di Wien invece l’impedenza incognita è un induttore e quella di regolazione è un
induttore con in serie un resistore. I ponti a prodotto normalmente utilizzati sono il ponte di
Maxwell e quello di Shering per la misura rispettivamente di induttori e condensatori. I ponti a
prodotto sono implementati in modo che il prodotto 𝑍1 𝑍4 sia un numero reale.
Tra i principali vantaggi dei ponti in alternata è possibile menzionare la cancellazione del segnale di
modo comune e la compatibilit{ con l’uso di sistemi differenziali, mentre tra gli svantaggi il più
limitante risulta essere la necessità di disporre di numerosi interruttori per selezionare le
impedenze note in un ampio dynamic range. Inoltre, a causa degli effetti parassiti degli interruttori,
dei collegamenti e delle tolleranze sulle impedenze note, risulta difficile coprire un intervallo
significativo di frequenze.
14
1.4.2.
Tecniche di risonanza
Figura 1.11: Misuratore di ammettenza basato sulla risonanza parallelo
Lo schema di principio di un misuratore di ammettenza basato sulla risonanza parallelo è riportato
in fig.1.11. Un generatore di tensione ad alta frequenza alimenta il circuito risonante parallelo, la
capacità di accoppiamento Ca è di valore modesto, così che 1/𝜔𝐶𝑎 sia molto maggiore della
resistenza R e che quindi il circuito risonante “veda” un’impedenza elevata verso il generatore.
Quest’ultimo così non fa diminuire apprezzabilmente la selettivit{ del circuito risonante e quindi la
precisione con cui può essere rilevata l’impedenza è buona. Il voltmetro elettronico rileva la
condizione di risonanza basandosi sulla misura del valore di picco della tensione ai capi del circuito
risonante. Per effettuare la misura dell’impedenza si utilizza il metodo di sostituzione: si porta il
circuito alla risonanza variando R e C, prima in assenza e poi in presenza dell’ammettenza incognita
Y. Il fattore di qualità della rete è dato da:
1 2
𝐶𝑉
2𝜋𝐸𝑖𝑚𝑚𝑎𝑔𝑎𝑧𝑧𝑖𝑛𝑎𝑡𝑎
𝑄=
= 2𝜋 2 2
= 𝜔0 (𝐶 + 𝐶𝑥 )(𝑅\\𝑅𝑥 ).
𝑉
𝐸𝑑𝑖𝑠𝑠𝑖𝑝𝑎𝑡𝑎
𝑇
2𝑅 0
Sapendo che la pulsazione di risonanza vale:
𝜔0 =
1
,
𝐿(𝐶 + 𝐶𝑥 )
si può ottenere:
𝑄=
𝑅\\𝑅0
.
𝜔0 𝐿
Essendo L e R di valore noto, dalla frequenza di risonanza si può ricavare il valore di Cx. Dalla misura
di Q invece è poi possibile ricavare il valore di Rx.
In alternativa al circuito presentato si possono considerare configurazioni circuitali che sfruttano la
risonanza serie. La disposizione in parallelo dei componenti è tuttavia preferibile perché l’errore
introdotto risulta minore, dal momento che tutti i componenti condividono un riferimento di massa
comune.
Le tecniche di risonanza risultano tanto efficaci quanto il fattore Q è elevato, il che rende meno
importante il rumore elettronico del sistema di lettura. Gli svantaggi risiedono nel dover regolare i
parametri del circuito per portarlo in risonanza, nella scarsa accuratezza nella misura di bassi valori
di resistenza (perché risulterebbe un basso Q) e soprattutto il limitato range di frequenza.
15
1.5. Amplificatore a transimpedenza
Figura 1.12: Schema di principio del circuito di misura dell’impedenza basato su un amplificatore
a transimpedenza.
La tecnica basata sull’utilizzo di un amplificatore a transimpedenza, nota anche con il nome di ponte
autobilanciato, è illustrata in fig.1.12. La corrente che scorre nel DUT è eguagliata dalla corrente che
attraversa la resistenza posta in retroazione all’amplificatore operazionale. La terra virtuale
presente all’ingresso invertente dell’amplificatore, nodo Low, fa sì che la tensione applicata al nodo
High coincida con la tensione applicata ai capi del DUT. L’impedenza incognita Zx risulta così
determinata, essendo nota la tensione applicata Vx e misurando quella in uscita Vr:
𝑍𝑥 =
𝑉𝑥 𝑅𝑟 𝑉𝑥
=
,
𝐼𝑥
𝑉𝑟
dove Vx e Vr vanno intesi come fasori alla frequenza di misura:
𝑉𝑥 = |𝑉𝑥 | 𝑒 𝑖𝜑𝑥 ,
𝑉𝑟 = |𝑉𝑟 |𝑒 𝑖𝜑𝑟 .
Il vantaggio di questa struttura è di essere semplice, flessibile e insensibile all’eventuale presenza di
una capacit{ parassita posta all’ingresso dello stadio a transimpedenza, ovvero al nodo Low. Lo
svantaggio, d’altra parte, risiede nel dover accedere a entrambi i terminali del DUT e nella necessità
di un rivelatore adeguato per estrarre la fase oltre che il modulo di Vr.
Inoltre la topologia di base dell’amplificatore a transimpedenza, in fig.1.13, non possiede gradi di
libertà sufficienti per disaccoppiare i vincoli sul rumore, la banda e la dinamica di corrente in
ingresso. Il rumore di corrente dovuto a Rr si confronta direttamente con il segnale, come si può
osservare dalle semplici relazioni sul trasferimento ideale in uscita della corrente proveniente dal
DUT e del generatore equivalente di rumore di corrente:
𝑉𝑜𝑢𝑡 = 𝐼𝐼𝑁 ∗ 𝑅𝑟 = 𝐼𝑛𝑜𝑖𝑠𝑒 ∗ 𝑅𝑟 .
Il rumore in ingresso dovuto alla resistenza è dunque:
2
𝑖𝑒𝑞𝑅
=
𝑟
16
4𝑘𝑇
.
𝑅𝑟
Figura 1.13: Topologia classica di amplificatore a transimpedenza. L’amplificatore realizza una
conversione corrente-tensione lineare tra ingresso e uscita tramite la resistenza Rr.
La banda, limitata dalla presenza dell’inevitabile capacit{ parassita in parallelo a Rr, risulta
inversamente proporzionale alla resistenza:
𝐵𝑊 =
1
2𝜋𝐶𝑝𝑎𝑟 𝑅𝑟
.
Infine la dinamica di corrente in ingresso risulta legata a quella di tensione desiderata in uscita
sempre attraverso Rr:
𝐼𝑀𝐴𝑋 =
𝑉𝑂𝑈𝑇,𝑀𝐴𝑋
.
𝑅𝑟
Dalle relazioni appena scritte risulta che, per garantire una densità spettrale di rumore in ingresso
sufficientemente bassa, è richiesto un elevato valore di resistenza in retroazione. Tale resistenza
non solo non sarebbe integrabile, ma farebbe sì che capacità parassite di anche centinaia di
femtofarad basterebbero per limitare la banda di indagine al di sotto del kiloherz. Inoltre la
dinamica di corrente d’ingresso sarebbe pari a pochi nanoampère in presenza di una escursione
della dinamica di tensione in uscita compresa tra +1.5V e -1.5V.
Nella prospettiva di realizzare un amplificatore a basso rumore, la topologia più idonea è quella in
cui il segnale si trasferisce attraverso capacità, elementi non rumorosi, e il guadagno è ottenuto dal
rapporto tra tali capacit{. Questa è stata l’idea alla base dello sviluppo della struttura in fig.1.14 il
cui progetto è stato oggetto di due tesi di laurea [8, 9].
La cascata dello stadio integratore e dello stadio derivatore consente l’amplificazione della corrente
in ingresso prima della conversione corrente-tensione, come suggerito dalla funzione di
trasferimento ideale del circuito in cui la resistenza equivalente complessiva è amplificata del
fattore dato dal rapporto delle capacità presenti sul percorso del segnale:
𝑉𝑜𝑢𝑡 (𝑠)
𝐶𝑑
= −𝑅𝑑 ( ).
(𝑠)
𝑉𝑖𝑛
𝐶𝑖
17
Figura 1.14: Preamplificazione ottenuta dal rapporto tra la capacità di derivazione Cd e la
capacità di integrazione Ci.
La compensazione dell’azione integrale con quella derivativa lega la corrente amplificata alla
corrente d’ingresso attraverso un guadagno costante la cui accuratezza è dovuta all’elevato
accoppiamento ottenibile, in tecnologia integrata, dal rapporto tra due capacità.
La presenza di una rete di reset impedisce la saturazione del primo stadio dovuta alla componente
in continua della corrente in ingresso.
Con l’architettura appena considerata è stata ottenuta una banda di 5MHz e una densità spettrale di
rumore in ingresso pari a 3𝑓𝐴/√𝐻𝑧 fino a 100kHz. Il limite per la massima banda di misura è dato
dal prodotto guadagno-banda dell’operazionale. Supponendo ad esempio di considerare un
amplificatore operazionale a singolo polo, il limite di banda dello stadio integratore sarebbe pari a
𝐵𝑊 = 𝐺𝐵𝑊𝑃𝑜𝑝𝑎𝑚𝑝 ∗
𝐶𝑖
,
𝐶𝑖 + 𝐶𝐼𝑁
dunque la banda decresce se si riduce il valore di capacità in retroazione. Dal momento che per
avere un buon guadagno ideale di corrente tale capacità deve essere piccola, è facile notare che
guadagno di corrente e banda di indagine devono essere frutto di un compromesso.
1.5.1.
Definizione delle specifiche di progetto
Come gi{ affermato in precedenza le misure di spettroscopia d’impedenza richiedono l’utilizzo di
un sistema in grado di rilevare piccole variazioni di impedenza su un elevato intervallo di frequenze.
Prendendo in considerazione l’analisi della dispersione dielettrica delle cellule animali e vegetali,
infatti, risulta necessario estendere la banda delle misure d’impedenza nell’intervallo compreso tra
qualche kilohertz e le centinaia di megahertz per poter indagare in modo completo il
comportamento delle cellule stesse a partire dalle loro caratteristiche elettriche.
Dunque l’applicazione delle tecniche di spettroscopia a strutture molecolari biologiche richiede la
disponibilità di uno strumento elettronico di misura dotato delle seguenti caratteristiche:
Deve essere integrato su singolo chip, per permettere di posizionare il campione biologico
nelle strette vicinanze del sistema di misura. In tal modo si riducono i parassitismi dei
collegamenti e si migliora l’accessibilit{ della misura, ottenendo un’indagine in tempo reale
del campione, in modo non invasivo, che favorisce la realizzazione di sistemi portabili.
18
Deve avere sensibilità molto elevata. In tal modo si garantisce un’accurata ricostruzione
dello spettro dell’impedenza indagata anche in presenza di valori di impedenza del DUT
elevati, dettati dalle ridotte dimensioni del campione biologico stesso.
Deve avere banda estesa in modo da rendere possibile l’indagine di spettri di dispersione
posti su un ampio range di frequenze, e di conseguenza la caratterizzazione di diverse
strutture biologiche e di tutti i fenomeni legati al comportamento di esse.
Le tecniche per la misura di impedenza considerate in questo capitolo non forniscono prestazioni
sufficientemente elevate per l’esecuzione di misure di spettroscopia con elevata sensibilit{ e banda
così estesa. L’adozione di una tecnica a ponte, ad esempio, implicherebbe la scomoda necessità di
fare ricorso a un elevato numero di impedenze di valore noto per ottenere un range dinamico
sufficientemente esteso da garantire la sensibilit{ voluta. D’altro canto, i metodi di risonanza
apporterebbero buoni risultati solo in un range di frequenze molto limitato, il che sarebbe in
contrasto con il requisito di larga banda. La migliore strada da percorrere è dunque il progetto di un
amplificatore a transimpedenza.
Si rivela necessaria l’introduzione di una topologia architetturale profondamente rinnovata rispetto
a quella classica, che sia in grado di soddisfare le richieste imposte dalle misure di spettroscopia
d’impedenza: la banda di indagine del DUT dovr{ essere molto estesa senza compromettere le
prestazioni in termini di sensibilità. Per comprendere le scelte fatte in sede di progettazione, è
opportuno definire le specifiche che si è desiderato soddisfare nel presente lavoro di tesi:
Banda di misura fino a 100MHz;
Basso rumore in modo da ottenere una risoluzione nella misura di capacit{ dell’ordine
dell’attofarad;
Insensibilità alla presenza di una capacità parassita in ingresso fino a 10pF;
Guadagno d’anello elevato e costante nel range di frequenze d’interesse in modo da
assicurare un’elevata accuratezza su tutta la banda di funzionamento.
Sulla base di queste specifiche, nel prossimo capitolo si descriverà la nuova architettura progettata e
verrà chiarito il modo in cui essa soddisfa i requisiti sopra elencati. La fattibilità della struttura
innovativa presentata in questo progetto è stato oggetto di un precedente lavoro di tesi [10],
considerando blocchi ideali lungo il cammino d’andata.
19
2. Descrizione della struttura
progettata
Figura 2.1: Schema della innovativa topologia circuitale usata per effettuare misure d’impedenza su ampio
spettro.
Il presente lavoro di tesi è consistito nella progettazione di un circuito integrato per eseguire misure
di spettroscopia d’impedenza: il sistema realizzato deve soddisfare le specifiche di alta banda e
sensibilità esposte nel precedente capitolo. L’obiettivo del sistema realizzato consiste dunque nella
lettura del modulo e della fase della corrente proveniente dal DUT, in modo da poter risalire al
valore di impedenza incognita, essendo noto lo stimolo di tensione fornito al campione in esame.
Come è stato spiegato, applicando al campione una sinusoide 𝑉(𝑡) = 𝑉𝑚 sin(𝜔𝑡), si ottiene la
corrente 𝑖(𝑡) = 𝑖𝑚 sin(𝜔𝑡 + 𝜑), dove 𝜑 è lo sfasamento tra tensone applicata e corrente che scorre
nel DUT. 𝜑 è pari a 0 nel caso di impedenza puramente resistiva e pari a -90° nel caso di impedenza
puramente capacitiva. Dal rapporto tra il segnale di tensione e corrente si ricava l’informazione
sull’impedenza del DUT alla frequenza 𝜔/2𝜋.
La struttura concettualmente innovativa alla base del circuito realizzato è mostrata in fig.2.1 [10]. Il
DUT è stimolato da una tensione sinusoidale; la corrente che scorre nell’impedenza ignota è
semplicemente data dal rapporto tra la tensione nota applicata e l’impedenza del DUT stessa,
ammesso che il guadagno d’anello del sistema sia elevato e che quindi la massa virtuale sia
mantenuta a 0V. Se ciò avviene, la corrente che scorre attraverso il DUT procede nella capacità Cf
posta in retroazione definendo una tensione in uscita dal sistema proporzionale all’ammettenza da
misurare. Il generatore di stimolo, e naturalmente il DUT, sono gli unici elementi non integrati della
struttura.
20
L’idea che sta alla base della nuova architettura qui presentata consiste nel traslare il segnale errore
della retroazione 𝑒(𝑡) a bassa frequenza, lì effettuarne l’amplificazione, e riportarlo poi ad alta
frequenza per chiudere l’anello di retroazione con un segnale alla stessa frequenza del segnale di
stimolo dato in ingresso. In questo modo gli unici elementi necessari a larga banda sono i traslatori
di frequenza, mentre il blocco di guadagno nel percorso d’andata lavora a bassa frequenza.
I vantaggi derivanti da questa architettura a demodulazione-modulazione del segnale errore sono
svariati. Portare il segnale utile a bassa frequenza permette di amplificarlo anche disponendo di un
amplificatore a banda limitata ed elevato guadagno. In particolare, la massima frequenza del
segnale inviato sul DUT può essere maggiore del prodotto guadagno-banda dell’operazionale
presente nel cammino d’andata del circuito. Viene dunque a cadere il compromesso progettuale
relativo al prodotto guadagno-banda finito dell’amplificatore centrale: il segnale può essere a banda
elevata e al contempo amplificato dall’elevato guadagno in continua di un amplificatore con polo a
frequenza limitata. È semplice eseguire un confronto tra la struttura realizzata e un amplificatore
equivalente ideale a singolo polo. L’architettura a modulazione-demodulazione progettata amplifica
un segnale in ingresso fino a frequenza di 100MHz con un complessivo guadagno d’andata 𝐴0 =
106 , per fare lo stesso un amplificatore ideale dovrebbe presentare prodotto guadagno-banda pari
a:
𝐺𝐵𝑊𝑃𝑒𝑞𝑢𝑖𝑣𝑎𝑙𝑒𝑛𝑡𝑒 = 𝐴0 ∗ 𝑓𝑓𝑢𝑛𝑧𝑖𝑜𝑛𝑎𝑚𝑒𝑛𝑡𝑜 𝑚𝑎𝑠𝑠𝑖𝑚𝑎 = 106 100𝑀𝐻𝑧 = 100𝑇𝐻𝑧,
il che non è ottenibile con le odierne tecnologie. Inoltre in tale stima è stata trascurata la partizione
capacitiva, inevitabile nel guadagno d’anello, considerando la presenza di una capacità parassita
afferente al nodo d’ingresso.
Quello che si ottiene con la struttura presentata è che il segnale 𝑒(𝑡) è traslato sempre alla stessa
frequenza, indipendentemente dalla frequenza di indagine del DUT: si assicura così un elevato
guadagno d’anello per tutte le frequenze d’indagine, il cui valore non dipende dalla frequenza del
segnale in ingresso stesso. La banda di rumore ottenuta, infine, è molto contenuta: come si vedrà in
seguito, la funzione di trasferimento è caratterizzata da una larghezza di banda di qualche kiloherz
pur riuscendo ad amplificare segnali con frequenze fino al centinaio di megaherz.
Nel suo complesso, il sistema realizzato consiste in un amplificatore retroazionato tramite capacità
il cui trasferimento ideale vale:
𝑉𝑂𝑈𝑇
1
=−
.
𝐼𝐼𝑁
𝑠𝐶𝑓
La particolarità implementata nel presente lavoro è che il guadagno d’anello è elevato alla sola
frequenza del segnale d’ingresso, indipendentemente dalla banda del blocco di guadagno presente
nel cammino d’andata, e che dunque il sistema si comporta come un integratore
nell’intorno della frequenza f0, con tutti i vantaggi appena mostrati.
Per ottenere una frequenza indipendente da 𝑓0 a valle del traslatore, il metodo più semplice è quello
di moltiplicare per un segnale di riferimento avente la stessa frequenza del segnale d’ingresso, così
da traslare quest’ultimo in continua. Come è noto dalle formule di Werner, l’operazione di
moltiplicazione fornisce un segnale a bassa frequenza proporzionale all’ampiezza del segnale
d’ingresso e all’eventuale sfasamento di esso rispetto al segnale di riferimento:
𝐴1 sin(𝜔𝑡 + 𝜑) ∗ 𝐴𝑟𝑒𝑓 sin(𝜔𝑡) =
𝐴1 𝐴𝑟𝑒𝑓
𝐴1 𝐴𝑟𝑒𝑓
cos(𝜑) −
cos(2𝜔𝑡 + 𝜑) .
2
2
21
Lo stadio di guadagno centrale nel cammino d’andata ha dunque elevato guadagno in continua, con
cui viene trattata la componente alla frequenza differenza risultato della demodulazione.
L’amplificatore agisce inoltre come filtro per eliminare la componente a frequenza 2𝑓0 che se fosse
invece trasmessa provocherebbe la presenza di armoniche indesiderate nell’anello.
Figura 2.2: Rappresentazione schematica del circuito. Sono evidenziate le componenti armoniche presenti
idealmente nel sistema.
Le armoniche idealmente presenti nel caso di segnale puramente sinusoidale proveniente dal DUT
sono rappresentate in fig.2.2: come si nota, in tal caso all’uscita del sistema è presente la sola
componente a frequenza 𝑓0 e l’anello di retroazione è chiuso correttamente.
Poiché il segnale proveniente dal DUT presenta componenti ignote in fase, essendo l’impedenza
indagata ignota, la struttura di fig.2.1 non è di per sè adeguata. Infatti nel caso l’impedenza del DUT
sia puramente capacitiva, il segnale di corrente in ingresso al sistema è cosinusoidale. Tale segnale
trattato dal ramo di retroazione dato dalla capacità di feedback darebbe un segnale sinusoidale in
uscita coerente con la presenza di un segnale errore sinusoidale nel cammino d’andata che viene
moltiplicato per segnali di riferimento anch’essi sinusoidali e trattato correttamente come è appena
stato mostrato. Se invece l’impedenza del DUT fosse puramente resistiva, un segnale di tensione
sinusoidale in ingresso corrisponderebbe a un segnale di corrente sinusoidale nel DUT. Tale seno
darebbe un’uscita complessiva cosinusoidale essendoci un’impedenza capacitiva in retroazione, il
che non è coerente con il funzionamento corretto dell’anello di retroazione. Infatti tale situazione
corrisponde ad avere un segnale errore cosinusoidale in ingresso al cammino d’andata, che non
darebbe alcun contributo in continua a valle del primo moltiplicatore a frequenza nulla, risultando
in un segnale in effetti nullo all’uscita del sistema e in un segnale errore non nullo sulla massa
virtuale.
È dunque necessario processare il segnale di corrente nelle sue due componenti seno e coseno
separatamente su due cammini, come si vede in fig.2.3. Questa soluzione ha il vantaggio di fornire
direttamente, all’uscita dei due amplificatori, i due segnali 𝑂𝑈𝑇𝑄 𝑒 𝑂𝑈𝑇𝐹 : essi sono segnali in
continua proporzionali rispettivamente alla parte reale e immaginaria dell’ammettenza del DUT.
Parte reale e immaginaria corrispondono rispettivamente a componente resistiva e capacitiva del
campione considerandolo equivalente a un parallelo RC.
22
Figura 2.3: Sdoppiamento del cammino d’andata in due canali paralleli, con segnali di riferimento seno e
coseno, per trattare correttamente il segnale di corrente proveniente dal DUT nelle sue due componenti in fase e
in quadratura con il segnale di stimolo.
Un’architettura simile a quella implementata è stata rinvenuta in un brevetto di Agilent
Technologies [11]. Progettando il circuito descritto nel presente lavoro si vuole tuttavia realizzare
una versione completamente integrata e ad altissima sensibilità.
Il DUT, stimolato con una tensione sinusoidale alla frequenza 𝑓0, risponde con un segnale in
corrente avente stessa frequenza e la cui ampiezza e fase dipendono dal valore dell’impedenza
oggetto della misura. L’effetto della retroazione è quello di far sì che solo una piccola frazione del
segnale di tensione applicato cada all'ingresso del blocco d'andata producendo un segnale errore
e(t):
𝑒(𝑡) = 𝐸0 sin(𝜔0 𝑡 + 𝜑).
Il segnale 𝑒(𝑡) si divide sui due rami, che lo processano in parallelo moltiplicandolo per i segnali di
riferimento in quadratura tra loro. In questo modo si ottengono due segnali rispettivamente
proporzionali alla sola componente in fase e in quadratura del segnale originario:
𝑚1 (𝑡) = 𝑒(𝑡) sin(𝜔0 𝑡) = 𝐸0 sin(𝜔0 𝑡 + 𝜑) sin(𝜔0 𝑡) =
𝐸0
(cos(𝜑) − cos(2𝜔0 𝑡 + 𝜑)),
2
𝑚2 (𝑡) = 𝑒(𝑡) cos(𝜔0 𝑡) = 𝐸0 sin(𝜔0 𝑡 + 𝜑) cos(𝜔0 𝑡) =
𝐸0
(sin(𝜑) + sin(2𝜔0 𝑡 + 𝜑)).
2
L’azione dei blocchi di guadagno, caratterizzati da una banda passante molto minore di 𝑤0 , è quella
di eliminare le componenti ad alta frequenza e di amplificare la sola componente in continua. Si
ottengono in questo modo le due uscite a bassa frequenza del sistema, proporzionali alle
componenti in fase e in quadratura dell’impedenza ignota rispetto allo stimolo sinusoidale fornito
sul DUT:
𝑂𝑈𝑇𝐹 (𝑡) =
𝐴0 𝐸0
cos(𝜑),
2
𝑂𝑈𝑇𝑄 (𝑡) =
𝐴0 𝐸0
sin(𝜑),
2
23
dove 𝐴0 è il guadagno in continua degli amplificatori con polo a bassa frequenza.
I due segnali 𝑂𝑈𝑇𝐹 (𝑡) e 𝑂𝑈𝑇𝑄 (𝑡) vengono in seguito moltiplicati per i rispettivi segnali di
riferimento in quadratura tra loro, a frequenza f0:
𝑉𝑂𝑈𝑇.𝐻𝐹 =
𝐴0 𝐸0
𝐴0 𝐸0
cos(𝜑) ∗ sin(𝑤0 𝑡) +
sin(𝜑) ∗ cos(𝜔0 𝑡).
2
2
In questo modo il segnale risultante dalla somma dei segnali provenienti dai due rami ha un
contenuto spettrale alla stessa frequenza del segnale d’ingresso, e ciò permette di chiudere l’anello
di reazione per mezzo della capacità Cf.
Idealmente, la retroazione fa sì che tutta la corrente proveniente dal DUT venga integrata sulla
capacità Cf ottenendo un segnale in uscita pari a:
𝑉𝑂𝑈𝑇 = −
1
𝐼𝐼𝑁 cos(2𝜋𝑓0 𝑡 + 𝜑)
∫ 𝑖𝐼𝑁 (𝑡) 𝑑𝑡 = −
∗
,
𝐶𝑓
𝐶𝑓
2𝜋𝑓0
dove iIN (t) = IIN sin(2πf0 t + φ) è la corrente nella capacità di retroazione se il segnale nel DUT è
sinusoidale. Le tensioni presenti sulle uscite in continua sono idealmente:
𝐼𝐼𝑁
𝐶𝑓
1
|𝑂𝑈𝑇𝐹 | =
∗
∗ cos(𝜑);
2𝜋𝑓0 𝐺𝑚𝑖𝑥𝑒𝑟
𝐼𝐼𝑁
𝐶𝑓
1
∗
∗ sin(𝜑),
|𝑂𝑈𝑇𝑄 | =
2𝜋𝑓0 𝐺𝑚𝑖𝑥𝑒𝑟
dove Gmixer è il guadagno del moltiplicatore analogico finale fissata l’ampiezza dei due segnali di
riferimento in fase e in quadratura.
Si consideri ora l’effetto del rumore nella struttura. In particolare il rumore del primo moltiplicatore
analogico e dell’amplificatore sarebbero sovrapposti in frequenza al segnale impedendone
l’estrazione.
In fig.2.4a è rappresentato lo spettro del segnale in ingresso e nei successivi stadi: a valle della
moltiplicazione si vede come il segnale, in continua, è sommerso dal rumore flicker. L’effetto
dell’amplificatore centrale è poi quello di far passare solo le componenti intorno alla continua ed
esso aggiunge il proprio contributo al rumore flicker. Dunque sia sulle uscite in DC che su quella ad
alta frequenza il rumore si confronta direttamente con il segnale, riducendo il rapporto segnalerumore.
24
Figura 2.4: (a): Spettro del segnale (verde) e del rumore flicker (rosso) sovrapposto in corrispondenza dei
diversi stadi della struttura finora considerata.(b): Schema a blocchi del cammino d’andata per evitare che il
segnale risenta del rumore flicker. (c): Spettro del segnale e del rumore della struttura del punto (b).
25
Appare evidente che occorre separare in frequenza le componenti di segnale e rumore: per fare ciò
è stato deciso di impiegare come blocco di guadagno centrale un amplificatore chopper. In tal modo
lo stadio di guadagno è preceduto e seguito da due moltiplicatori a onda quadra, realizzati con
semplici interruttori, che, non introducendo apprezzabile rumore, portano il segnale alla frequenza
delle onde quadre di comando degli interruttori, separandolo così in frequenza dal rumore flicker
che per sua natura è centrato intorno alla frequenza continua. Il singolo canale d’andata del segnale
è quindi modificato come in fig.2.4b, le componenti spettrali presenti sono disegnate in fig.2.4c. Per
evitare che il rumore del primo moltiplicatore analogico si sovrapponga al segnale, il primo dei due
moltiplicatori a interruttori precede il primo moltiplicatore analogico presente: in tal modo il
segnale utile viene portato alla frequenza di chopper prima che intervenga qualsiasi blocco
caratterizzato da elevato rumore flicker. Considerando per semplicità la sola armonica
fondamentale del segnale di chopper, nel punto A il segnale è presente a frequenza 𝑓0 ± 𝑓𝑐𝑜𝑝 , nel
punto B il segnale si trova riportato alla bassa frequenza 𝑓𝑐𝑜𝑝 e intorno a 2𝑓0 e il rumore flicker
introdotto dal moltiplicatore analogico è nell’intorno della continua. In C si trovano le stesse
componenti a bassa frequenza amplificate, mentre le componenti ad alta frequenza sono
parzialmente filtrate. In D il segnale utile è portato a frequenza nulla mentre il rumore flicker è
modulato intorno a 𝑓𝑐𝑜𝑝 . Infine in E si vede il segnale utile portato ad alta frequenza 𝑓0.
Supponendo di disporre in D di un filtro passa basso che elimini le componenti di rumore e le
componenti ad alta frequenza introdotte dal moltiplicatore a interruttori, le uscite del sistema in
continua e ad alta frequenza presentano un elevato rapporto segnale-rumore, avendo filtrato il
rumore flicker dei primi stadi e ridotto l'effetto dell'ultimo moltiplicatore grazie all'elevato
guadagno degli stadi precedenti.
La presenza di interruttori in corrispondenza del nodo di terra virtuale a cui afferisce uno dei
terminali del DUT non è però consigliabile in quanto la presenza di picchi di tensione dovuti agli
inevitabili fenomeni di iniezione di carica, che hanno luogo in corrispondenza dell’apertura e della
chiusura degli interruttori, potrebbe nuocere al campione biologico in esame. È stato pertanto
introdotto uno stadio che effettua un’amplificazione preliminare, a guadagno limitato per garantire
banda elevata, tra ingresso e moltiplicatore a interruttori in modo da garantire un
disaccoppiamento tra i picchi e il DUT.
Lo schema a blocchi completo del circuito è rappresentato in fig.2.5: il cammino d’andata è in realt{
mantenuto pienamente differenziale, aumentando la dinamica e la linearità nel trattamento del
segnale.
Il segnale proveniente dal DUT viene preamplificato dal primo stadio di guadagno, moltiplicato per
onde quadre alla frequenza di chopper e poi processato in parallelo dal canale che ne tratta la
componente in fase e da quello relativo alla componente in quadratura. A valle dei moltiplicatori
analogici con segnali di riferimento seno e coseno vi è l’amplificatore centrale che amplifica con alto
guadagno fino alla frequenza di chopper. I segnali sono poi riportati a frequenza nulla tramite
ulteriore moltiplicazione per onda quadra e inviati al filtro passa basso attivo che amplifica la
tensione in continua e pone un polo a frequenza molto bassa nell’anello. Infine grazie al
moltiplicatore analogico finale il segnale riportato alla frequenza d’indagine del DUT viene fornito
in retroazione sul morsetto di massa virtuale all’ingresso.
26
Figura 2.5: Schema a blocchi della struttura completa realizzata nel presente lavoro di tesi.
L’uscita finale del sistema dunque contiene un’informazione sovrapposta sulla parte reale e
immaginaria dell’impedenza del DUT, alla frequenza del segnale d’ingresso, invece le uscite in
continua permettono di rendere disponibile all'uscita del chip l'informazione impedenziale
separata nelle due componenti, in modo estremamente comodo. La comodità di disporre di uscite in
continua con le due componenti di fase e quadratura dell’impedenza del DUT separate è però
parzialmente limitata dal rumore del moltiplicatore finale, che impatta direttamente sull’estrazione
di tali segnali, come verrà spiegato in seguito.
2.1. Gloop del sistema
Per il calcolo del guadagno d’anello del sistema realizzato si consideri la struttura di fig.2.5. Per
semplicità di calcolo si trascura nella seguente analisi la presenza dei due moltiplicatori a
interruttori, il cui effetto principale è la riduzione del rumore flicker. Inoltre si considera l’insieme
dei due blocchi di guadagno presenti nel cammino d’andata, l’amplificatore chopper e il filtro passa
basso attivo, come un unico blocco di guadagno pari a 𝐴0 /(1 + 𝑠𝜏𝑝 ), dove 𝐴0 è il guadagno in
continua complessivamente offerto da tali stadi e 𝜏𝑝 è la costante di tempo legata al polo a più bassa
frequenza, quello introdotto dal filtro passa basso attivo. Tale approssimazione è lecita poiché, come
verrà mostrato in seguito, il polo del filtro passa basso attivo è stato scelto in modo che il polo
dell’amplificatore chopper intervenga molto dopo l’attraversamento dell’asse 0dB del guadagno
d’anello complessivo: la cascata di questi due stadi è quindi in effetti approssimabile a un unico
blocco di guadagno a singolo polo.
Tagliando l’anello all’ingresso del primo stadio di guadagno, è possibile ricavare le tensioni presenti
a valle dei moltiplicatori analogici, all’ingresso dei blocchi di guadagno:
𝑚𝐹 = 𝑋(𝑓)𝐺1 𝐺𝑀1 ∗ (
𝛿(𝑓 − 𝑓0 ) − 𝛿(𝑓 + 𝑓0 )
𝐺1 𝐺𝑀1
)=
(𝑋(𝑓 − 𝑓0 ) − 𝑋(𝑓 + 𝑓0 )),
2𝑖
2𝑖
𝑚𝑄 = 𝑋(𝑓)𝐺1 𝐺𝑀1 ∗ (
𝛿(𝑓 − 𝑓0 ) + 𝛿(𝑓 + 𝑓0 )
𝐺1 𝐺𝑀1
)=
(𝑋(𝑓 − 𝑓0 ) + 𝑋(𝑓 + 𝑓0 )),
2
2
(il simbolo * indica in questo caso l’operazione di convoluzione in frequenza). In queste formule è
stato considerando che il segnale errore in ingresso viene moltiplicato per un segnale sinusoidale e
per uno cosinusoidale rispettivamente sui due cammini in parallelo. G1 è il guadagno del primo
27
stadio e GM1-2 è il guadagno dei moltiplicatori analogici fissata l’ampiezza dei due segnali di
riferimento in fase e in quadratura.
Dunque la tensione di uscita ad alta frequenza vale:
𝑌(𝑓) = 𝐺1 𝐺𝑀1 𝐺𝑀2 𝐴(𝑓) ∗ (
+𝐺1 𝐺𝑀1 𝐺𝑀2 𝐴(𝑓) ∗ (
𝑋(𝑓 − 𝑓0 ) − 𝑋(𝑓 + 𝑓0 )
𝛿(𝑓 − 𝑓0 ) − 𝛿(𝑓 + 𝑓0 )
)∗(
)+
2𝑖
2𝑖
𝑋(𝑓 − 𝑓0 ) + 𝑋(𝑓 + 𝑓0 )
𝛿(𝑓 − 𝑓0 ) + 𝛿(𝑓 + 𝑓0 )
)∗(
).
2
2
Sviluppando le formule si ottiene un’espressione da cui risulta chiaro come il guadagno del blocco
amplificante venga traslato in frequenza adattandosi alla frequenza del segnale in ingresso f0:
𝑌(𝑓) 𝐺1 𝐺𝑀1 𝐺𝑀2
=
∗ (𝐴(𝑓 − 𝑓0 ) + 𝐴(𝑓 + 𝑓0 )),
𝑋(𝑓)
2
dove
𝐴(𝑓 + 𝑓0 ) =
𝐴0
;
𝑖(𝑓 + 𝑓0 )
1+
𝑓𝑝
𝐴(𝑓 − 𝑓0 ) =
𝐴0
.
𝑖(𝑓 − 𝑓0 )
1+
𝑓𝑝
Sostituendo si ottiene:
𝑌(𝑓)
= 𝐺1 𝐺𝑀1 𝐺𝑀2 𝐴0
𝑋(𝑓)
𝑓
𝑓𝑝
.
2𝑓 𝑓 2 − 𝑓02
1+𝑖
−
𝑓𝑝
𝑓𝑝2 )
(
1+𝑖
Da qui, ipotizzando la presenza di una capacità parassita Cin afferente al nodo di terra virtuale a
causa del collegamento, si ricava il Gloop:
𝐺𝑙𝑜𝑜𝑝(𝑠) =
𝐶𝑓
𝐺1 𝐺𝑀1 𝐺𝑀2 𝐴0
∗
∗
𝐶𝑓 + 𝐶𝐼𝑁
𝑓02
1+ 2
𝑓𝑝
1 + 𝑠𝜏𝑝
1+𝑠
(
2𝜏𝑝
𝑓2
1 + 02
𝑓𝑝
.
+ 𝑠2
)
(
𝜏𝑝2
𝑓2
1 + 02
𝑓𝑝
)
Il guadagno d’anello del sistema presenta quindi uno spettro caratterizzato da un elevato guadagno
centrato intorno alla frequenza del segnale d’ingresso f0, come è possibile vedere in fig.2.6 dove è
rappresentato il Gloop in modulo e fase per 𝑓0 = 1𝑀𝐻𝑧. Il picco di guadagno è dato dalla coppia di
poli complessi coniugati a frequenza f0, ammesso che tale frequenza del segnale d’ingresso sia
maggiore della frequenza del polo dominante dell’anello. Il fattore di qualità della rete risulta
proporzionale alla frequenza d’ingresso, il che è prevedibile considerando che la larghezza di banda
del guadagno d’anello attorno al picco non dipende dalla frequenza.
28
Figura 2.6: Diagramma di modulo e fase del Gloop calcolato per 𝑓0 = 1𝑀𝐻𝑧.
Lo studio della stabilità del sistema può essere fatto considerando il criterio di Nyquist che ha
validità del tutto generale.
Riferendoci a fig.2.7, a frequenza nulla il guadagno d’anello è puramente reale. Poichè 𝑓𝑝 ≪ 𝑓0
interviene anzitutto lo zero a 𝑓𝑝 e il diagramma polare aumenta in modulo e fase. Con l’intervento
dei due poli complessi e coniugati a 𝑓0 il guadagno d’anello tende a zero e fa ciò con fase di -90°,
ovvero lungo l’asse immaginario. Il diagramma del Gloop non compie quindi alcun giro attorno al
punto −1 + 𝑖0 perciò il sistema è asintoticamente stabile.
Figura 2.7: Diagramma qualitativo di Nyquist del Gloop calcolato per 𝑓0 = 1𝑀𝐻𝑧.
Calcolato il guadagno d’anello, il cui valore elevato permette di trascurare il guadagno diretto, si può
ricavare il guadagno reale del sistema tra corrente in ingresso e tensione d’uscita come segue:
29
𝐺𝑟𝑒𝑎𝑙𝑒 (𝑠) =
𝐺𝑖𝑑𝑒𝑎𝑙𝑒
,
1
1−
𝐺𝑙𝑜𝑜𝑝 (𝑠)
con 𝐺𝑖𝑑𝑒𝑎𝑙𝑒 = −1/(𝑠𝐶𝑓 ).
Dunque si ottiene:
𝐺𝑟𝑒𝑎𝑙𝑒 (𝑠) =
𝛽
∗
𝑠𝐶𝑓
1 + 𝑠𝜏𝑝
𝑓2
(1 + 𝛽 + ( 02 )) + 𝑠𝜏𝑝 (2 + 𝛽) + 𝑠 2 𝜏𝑝2
𝑓𝑝
,
dove 𝛽 = 𝐺𝑙𝑜𝑜𝑝 (𝑓0 ) = 𝐶𝑓 /(𝐶𝑓 + 𝐶𝐼𝑁 ) ∗ 𝐺1 𝐺𝑀1 𝐺𝑀2 𝐴0 .
I diagrammi di Bode di modulo e fase del guadagno reale e di quello ideale sono riportati in fig.2.8
per tre valori di 𝑓0 = 1𝑀𝐻𝑧, 10𝑀𝐻𝑧, 100𝑀𝐻𝑧. Si nota come, alla frequenza di interesse f0, il
guadagno reale coincida con quello ideale. Si può inoltre vedere che la banda ad anello chiuso è
molto stretta attorno alla frequenza del segnale d’ingresso, filtrando così selettivamente il rumore.
Infine è possibile esprimere le tensioni in corrispondenza delle due uscite in continua del sistema, i
cui valori sono direttamente proporzionali alle componenti in fase e in quadratura del segnale di
corrente proveniente dal DUT e quindi forniscono direttamente l’informazione sulle componenti
reale e immaginaria dell’ammettenza incognita. Esse si ottengono a partire dall’uscita ad alta
frequenza semplicemente dividendo per il guadagno del moltiplicatore analogico finale, tenendo
conto che la componente sinusoidale della tensione VOUT proviene esclusivamente dal ramo in fase e
lo stesso vale per la componente cosinusoidale dal ramo in quadratura. Perciò, ipotizzando un
guadagno d’anello infinito, si trova:
𝑂𝑈𝑇𝐹 =
𝐼𝐼𝑁
1
∗
∗ sin(𝜑),
2𝜋𝑓0 𝐶𝑓 𝐺𝑀2
𝑂𝑈𝑇𝑄 =
𝐼𝐼𝑁
1
∗
∗ cos(𝜑).
2𝜋𝑓0 𝐶𝑓 𝐺𝑀2
30
Figura 2.8: Diagramma di Bode di modulo e fase del Greale con segnale d’ingresso a 1MHz, 10MHz, 100MHz.
Dall’analisi appena svolta risulta chiaro che il guadagno d’anello può essere approssimato a quello
di un sistema singolo polo, il circuito equivale infatti un integratore con la particolarità che la
frequenza dove il Gloop assume valore elevato non è sempre la continua ma cambia centrandosi in
corrispondenza della frequenza del segnale in ingresso.
Considerando il sistema realmente implementato, in particolare la presenza di due blocchi di
guadagno in cascata, si calcola il 𝐺𝑙𝑜𝑜𝑝(𝑓0 ), ovvero 𝛽, il guadagno dell’anello alla frequenza del
segnale d’ingresso:
𝐺𝑙𝑜𝑜𝑝 (𝑓0 ) = 𝐺1 ∗ 𝐺𝑀1 ∗ 𝐺𝑜𝑝𝑎𝑚𝑝.𝑐𝑜𝑝 ∗ 𝐺𝑖𝑛𝑡𝑒𝑔𝑟𝑎𝑡𝑜𝑟𝑒 ∗ 𝐺𝑀2 ∗
=7∗
𝐶𝑓
𝐶𝑓 + 𝐶𝐼𝑁
1
1
1
∗ 1700 ∗ 106 ∗
∗
~ 1,2 ∗ 107 .
10
10 100
I valori presenti sono quelli ottenuti con il dimensionamento dei diversi blocchi, supponendo nel
caso pessimo una capacit{ al nodo d’ingresso pari a 10pF e una capacit{ in retroazione pari a 100fF.
È inoltre possibile calcolare la banda ad anello chiuso del sistema, tenendo presente che il filtro
passa basso attivo è stato dimensionato con un polo a frequenza molto bassa e che tale polo è
dunque il polo dominante dell’anello.
𝐵𝑊𝑙𝑜𝑜𝑝 = 𝛽𝑓𝑝 = 𝐺𝑙𝑜𝑜𝑝 (𝑓0 ) ∗
1
,
2𝜋𝜏𝑝
dove 𝜏𝑝 , come è stato affermato all’inizio del capitolo, è la costante di tempo del polo dominante del
blocco integratore, data da:
𝜏𝑝 = 𝑅𝑓𝑖𝑙𝑡𝑟𝑜 𝐶𝑓𝑖𝑙𝑡𝑟𝑜 𝐴0𝑓𝑖𝑙𝑡𝑟𝑜 ,
31
come verrà spiegato in seguito.
Il prodotto guadagno-banda ottenuto dal dimensionamento del filtro è a 100Hz: la banda ad anello
chiuso del sistema complessivo è circa 100Hz con il dimensionamento effettuato (con 𝐶𝑖𝑛𝑔𝑟𝑒𝑠𝑠𝑜 =
10𝑝𝐹) e pari a 1kHz nel caso di 𝐶𝑖𝑛𝑔𝑟𝑒𝑠𝑠𝑜 = 1𝑝𝐹. Ovviamente si è fatto in modo che le altre
singolarità presenti siano tutte oltre tale frequenza al fine di non inficiare la stabilità del sistema.
Riassumendo, l’elemento dominante nel guadagno d’anello complessivo è il blocco integratore. Il
contributo al guadagno d’anello a frequenza f0 dei blocchi a esclusione dell’integratore risulta circa
1, come si vede dall’espressione di Gloop(0), nel caso la capacit{ d’ingresso sia 10pF. Di
conseguenza il guadagno d’anello a f0 è pari a circa 107 come il guadagno in continua
dell’integratore, e la banda ad anello chiuso è pari al prodotto guadagno-banda dell’integratore:
100Hz.
La fase a 100Hz della funzione di trasferimento del blocco integratore è -90°, il che assicura margine
di fase complessivo di circa 90° (come si vede in fig.2.7) fino alle frequenze in cui gli sfasamenti dei
moltiplicatori analogici o del differenziale di ingresso non diventano significativi. Il limite di banda
complessivo del sistema è appunto dato da questi ultimi elementi, il cui sfasamento introdotto
provoca un errore sulla tensione alle uscite a bassa frequenza. Il margine di fase può essere scritto
come:
𝑀𝐹 = 360° + 𝜑 (𝐺𝑙𝑜𝑜𝑝 (𝑓0 )) + 𝜑(𝑖𝑛𝑡𝑒𝑔𝑟𝑎𝑡𝑜𝑟𝑒) − 𝜑(𝑝𝑟𝑖𝑚𝑜 𝑠𝑡𝑎𝑑𝑖𝑜 (𝑓0 )) − 𝜑(𝑚𝑜𝑙𝑡𝑖𝑝𝑙𝑖𝑐𝑎𝑡𝑜𝑟𝑖 (𝑓0 )) =
~ 90° − 𝜑(𝑝𝑟𝑖𝑚𝑜 𝑠𝑡𝑎𝑑𝑖𝑜 (𝑓0 )) − 𝜑(𝑚𝑜𝑙𝑡𝑖𝑝𝑙𝑖𝑐𝑎𝑡𝑜𝑟𝑖 (𝑓0 )).
Il sistema attorno alla frequenza del segnale d’ingresso si comporta come un filtro passa banda
risonante del secondo ordine. La banda equivalente di rumore è:
𝐵𝑛 =
𝜋 𝑓0
∗ .
2 𝑄
Q rappresenta il fattore di qualità della rete e può essere ricavato dalla funzione di trasferimento
reale. Poichè 𝐺𝑙𝑜𝑜𝑝 (𝑓0 ) = 𝛽 è ragionevolmente elevato si ha:
𝑄=
𝑓0
.
𝑓𝑝 𝛽
Perciò la banda equivalente di rumore è costante al variare della frequenza d’indagine del DUT, f 0, e
vale:
𝐵𝑛 =
𝜋
∗ 𝑓 𝛽.
2 𝑝
Considerando il dimensionamento dei blocchi, la banda di rumore ottenuta è pari a 1,6kHz nel caso
pessimo (ovvero con 𝐶𝑖𝑛𝑔𝑟𝑒𝑠𝑠𝑜 = 1𝑝𝐹, situazione in cui il prodotto guadagno-banda dell’anello è
1kHz).
32
2.2. Analisi sul rumore
È necessario eseguire un’attenta analisi sul rumore presente nel circuito e su come esso interferisca
con la misura. Come è già stato detto in precedenza uno degli obiettivi nella progettazione del
presente circuito integrato è quello di ottenere elevata sensibilità per poter misurare anche le più
piccole correnti provenienti da DUT di ridotte dimensioni e quasi isolanti come molti campioni
biologici.
Nel capitolo relativo alla descrizione del sistema nel suo complesso è già stata spiegata la scelta di
utilizzare la tecnica del chopper perché il rumore flicker dei diversi blocchi presenti abbia impatto
trascurabile sul segnale. Ovviamente ciò è vero solo nella misura in cui la frequenza di chopper è
maggiore della frequenza di noise corner del rumore, e per i soli stadi compresi tra i due
moltiplicatori a onda quadra, ovvero il primo moltiplicatore analogico e l’amplificatore chopper. I
contributi di rumore presenti a valle di tale stadio vengono riportati in ingresso attenuati secondo il
guadagno dell’amplificatore stesso, risultando perciò trascurabili, come verrà ora mostrato.
La più piccola corrente misurabile è limitata dal rumore di corrente equivalente riportato in
ingresso al sistema:
𝐵𝑊
𝐼𝑅𝑀𝑆 ~√∫
0
2
𝑖𝐼𝑁
𝑑𝑓,
2
dove BW è la banda equivalente di rumore, 𝑖𝐼𝑁
è la densità spettrale di rumore di corrente in
ingresso. Per ridurre il valore rms del rumore occorre quindi ridurre la banda equivalente di
rumore BW e minimizzare il rumore equivalente in ingresso.
La riduzione della banda di rumore è già insita nella struttura del sistema: la funzione di
trasferimento ha infatti larghezza di banda di circa un kiloherz riuscendo al contempo ad ampificare
segnali fino a frequenze di centinaia di megaherz. Il rumore equivalente in ingresso è
principalmente dovuto al contributo del generatore equivalente di rumore di tensione all'ingresso
2
dell'amplificatore, di densità spettrale 𝑒𝑛𝑒𝑞
. E' possibile calcolare il suo effetto sul rumore di
tensione all’uscita del circuito all’interno della banda reazionata:
2 (𝜔)
𝑒𝑂𝑈𝑇
=
2
𝐶𝐼𝑁
2 (𝜔)
𝑒𝑛𝑒𝑞
(
+ 𝐶𝑓
) ,
𝐶𝑓
dove si considera il trasferimento non invertente del sistema, con CIN pari alla somma tra capacità in
ingresso al sistema e capacità parassita dei collegamenti. Il rumore equivalente di corrente in
ingresso è quindi dato da:
2
2 (𝜔)
2 (𝜔)(𝐶
2
𝑖𝐼𝑁
= 𝑒𝑛𝑒𝑞
𝐼𝑁 + 𝐶𝑓 ) 𝜔 .
È dunque ricavabile la risoluzione in termini di capacità incognita misurabile, imponendo che la
corrente di segnale sul DUT sia nel caso limite uguale al valore di corrente di rumore rms:
2
2 (𝜔)(𝐶 + 𝐶
2
𝑉 ∗ 𝜔 ∗ 𝐶 = √𝑒𝑛𝑒𝑞
𝐼𝑁
𝑓 ) 𝜔 ∗ 𝐵𝑛 ,
2
ipotizzando che 𝑒𝑛𝑒𝑞
sia bianco. Da qui si ottiene:
2
𝐶𝑙𝑖𝑚𝑖𝑡𝑒 =
2
√𝑒𝑛𝑒𝑞
(𝐶𝐼𝑁 + 𝐶𝑓 ) 𝐵𝑛
𝑉𝐷𝑈𝑇
33
.
I contributi al rumore bianco equivalente in ingresso al sistema sono dati dai blocchi presenti nel
cammino d’andata che non sono preceduti da stadi a elevato guadagno. Avendo l’amplificatore
chopper centrale un guadagno pari a circa 1700, il rumore del blocco integratore e del
moltiplicatore analogico finale hanno contributo trascurabile quando vengono riportati a monte
dello stadio amplificante, poiché sono pesantemente abbattuti. Si può eseguire il calcolo del
generatore di rumore che si confronta con il segnale d’ingresso tenendo dunque conto del solo
contributo dell’amplificatore d’ingresso a larga banda, del primo moltiplicatore analogico e del
rumore in ingresso dell’amplificatore chopperato, ottenendo la densit{ spettrale di rumore in
ingresso al sistema. È da notare che il rumore dello stadio ad alta banda d’ingresso è da considerarsi
alla frequenza d’ingresso 𝑓0, che si suppone maggiore della frequenza di noise corner dello stadio.
Inoltre la tecnica di chopper permette di considerare il rumore degli stadi compresi tra i due
moltiplicatori a interruttori alla frequenza di chopper stessa: il loro contributo di rumore sarà circa
pari al rumore bianco, avendo scelto la frequenza del chopper oltre la frequenza di noise corner
degli stadi considerati. La densità spettrale di rumore in ingresso nell’intorno di 𝑓0 vale:
2
2
= √𝑒𝑖𝑛.1𝑠𝑡𝑎𝑑𝑖𝑜
+
√𝑒𝑛𝑒𝑞
=
3,5𝑛𝑉
√𝐻𝑧
2
2
𝑒𝑖𝑛.𝑐𝑜𝑝
(5,4𝑛)2
𝑒𝑀1
(29,4𝑛)2
𝑉2
2+
√((1,7𝑛)
+
=
+
)
(
)
(𝐺𝑀1 𝐺1 )2 (𝐺𝑀1 𝐺1 )2
(𝐺𝑀1 𝐺1 )2 (𝐺𝑀1 𝐺1 )2 𝐻𝑧
,
in cui i valori ottenuti sono relativi alle simulazioni di rumore a seguito delle scelte dimensionali dei
2
diversi stadi. 𝑒𝑀1
è la densità spettrale di rumore in uscita al moltiplicatore analogico, calcolata a
partire dal trasferimento in uscita dei generatori di rumore equivalente dei singoli elementi
circuitali.
Come si è visto, la banda equivalente di rumore è pari a 1,6kHz perciò, con una capacità CIN pari a
10pF nel caso peggiore e un segnale di 1V applicato al DUT, si ottiene:
𝐶𝑙𝑖𝑚𝑖𝑡𝑒 = 1,4𝑎𝐹,
con capacità in ingresso di 10pF, applicando al DUT un segnale di 1V. E’ interessante considerare
questo risultato a confronto con altri lavori. In ambito commerciale lo stato dell’arte è
rappresentato, in termini di risoluzione di capacità, dalla struttura a ponte di Andeen-Hagerling
[18]: in questo caso è stata ottenuta una risoluzione di 1aF in particolari condizioni. L’alimentazione
del DUT è posta a 10V e la massima frequenza di indagine è 1kHz. Come caso di ricerca si consideri
un articolo recentemente accettato da “Sensors and Actuators” [19]. In esso si arriva a una
risoluzione di zeptofarad: parità di condizioni con il sistema considerato nel presente lavoro, la
risoluzione sarebbe di 0,3aF con banda di 1MHz. Come si può notare, la risoluzione ottenuta dal
circuito qui progettato è confrontabile con questi valori, permettendo però di indagare campioni su
banda molto più estesa.
Finora è stato calcolato il rumore equivalente in ingresso considerando come uscita V OUT, ovvero
l’uscita ad alta frequenza a valle del moltiplicatore finale. Poiché sono fondamentali anche le
informazioni sulle uscite in continua sui due cammini seno e coseno, che forniscono informazioni
separate sulle componenti in fase e in quadratura col segnale d’ingresso dell’impedenza indagata, è
importante analizzare come il rumore cambi riferendosi ai punti OUTF e OUTQ in fig.2.5. A tal fine è
possibile disegnare il circuito semplificandolo, come in fig.2.9.
34
Figura 2.9: Circuito semplificato per considerazioni sul rumore
presente in corrispondenza delle uscite a bassa frequenza (OUTDC).
L’uscita OUTDC “vede” come ramo di retroazione non solo la capacità Cf bensì anche il moltiplicatore
analogico finale. Il rumore del moltiplicatore impatta quindi direttamente sulla misura delle
componenti in fase e in quadratura dell’impedenza ignota in continua, dando un rumore
complessivo a bassa frequenza pari a:
2
2
2 (𝑓 )
(𝑓) = 𝑒𝑛𝑒𝑞
𝑒𝑂𝑈𝑇.𝐷𝐶
0 (1 +
2
(𝑓)
𝐶𝐼𝑁
𝑒𝑚𝑖𝑥𝑒𝑟
.
) +
2
𝐶𝑓
𝐺𝑀2
2
In tale espressione 𝑒𝑛𝑒𝑞
è proprio il rumore bianco equivalente di tensione presente all’ingresso del
sistema sul morsetto positivo, calcolato in precedenza considerando il contributo degli stadi
presenti sul cammino d’andata: i rumori di essi sono stati riportati in ingresso dividendoli per il
2
guadagno visto a monte da ogni blocco. Il rumore 𝑒𝑛,𝑒𝑞
è stato poi moltiplicato per il guadagno
2
ideale del sistema per giungere alle uscite OUTDC. Invece 𝑒𝐼𝑁,𝑚𝑖𝑥𝑒𝑟
è il rumore equivalente in
ingresso del moltiplicatore finale. Nell’ipotesi che 𝑓 ≪ 𝑓0, si è approssimato il rumore equivalente in
2
ingresso al cammino d’andata 𝑒𝑛𝑒𝑞
(𝑓) al suo valore a frequenza 𝑓0.
2
Come è stato osservato, il rumore 𝑒𝑛,𝑒𝑞
non risente del rumore flicker di nessuno degli stadi che
contribuiscono, invece il rumore del moltiplicatore non subisce alcun tipo di modulazione in
frequenza, ed è caratterizzato da un andamento decrescente con la frequenza attorno alla continua.
Riportando all’ingresso del sistema i due contributi di rumore considerati per le uscite in continua,
si vede che il rumore del moltiplicatore impatta in misura minore quanto più il guadagno ideale
(1 + 𝐶𝐼𝑁 /𝐶𝑓 ) è elevato. Anche per questa ragione, oltre al fine di avere un elevato guadagno ideale,
è preferibile dimensionare la capacità sul ramo di retroazione di valore basso.
Possiamo concludere che i segnali in uscita dal sistema sono in trade off tra loro: l’uscita ad alta
frequenza contiene un’informazione sovrapposta sulle parti reale e immaginaria dell’impedenza del
DUT, e che è alla frequenza del segnale d’ingresso. La comodità di disporre di uscite in continua con
le due componenti impedenziali separate è d’altra parte parzialmente limitata dal rumore del
moltiplicatore finale, che si confronta direttamente con tali segnali.
35
2.3. Aspetti critici nella struttura progettata
2.3.1.
Gestione della corrente continua
Un problema della struttura proposta è la gestione della corrente continua in ingresso dal DUT, che
può arrivare a 10nA per i campioni biologici in esame. L’unico elemento presente nel cammino di
retroazione infatti è la capacit{ Cf: l’anello risulta interrotto alle basse frequenze. Nasce così la
necessità di sintetizzare un’ulteriore rete di retroazione che prelevi la corrente in ingresso a bassa
frequenza e abbia effetto di annullarla, in modo che questa non interagisca con il circuito
retroazionato a valle. Si consideri lo schema in fig.2.10, dove G1 è il differenziale d’ingresso del
sistema e H(s) è la rete che deve garantire elevato guadagno d’anello in continua e un guadagno
nullo a partire dalla minima frequenza del segnale che si vuole misurare.
Figura 2.10: Rete di retroazione locale che preleva la corrente in
continua proveniente dal DUT.
Il guadagno d’anello della rete è dato da:
𝐺𝑙𝑜𝑜𝑝 = 𝐺1 𝐻(𝑠) ∗
1
,
2𝜋𝑅𝐶𝐼𝑁
essendo il blocco G1 a larga banda.
Considerando un blocco H(s) invertente, con guadagno a frequenza nulla pari a 106 e polo a
frequenza molto bassa, il cui progetto verrà presentato in seguito, il polo introdotto dalla serie RCin è dopo l’attraversamento dell’asse 0dB e l’anello di retroazione locale risulta stabile.
Il prodotto guadagno-banda dell’anello locale, che secondo il dimensionamento eseguito è pari a
quello del blocco H(s), risulta 1kHz. Questo valore deve essere confrontato con il prodotto
guadagno-banda dell’anello di retroazione complessivo del sistema, al massimo 1 kHz intorno alla
frequenza f0 del segnale d’ingresso: risulta evidente che i due anelli di retroazione non
interagiscono tra loro, ammesso di lavorare con frequenze di stimolo superiori alla decina di
kiloherz.
La rete di reazione locale per la gestione della corrente continua fa in modo che, a retroazione
attivata, tutta la corrente continua proveniente dal DUT sia prelevata dalla resistenza R, producendo
un effetto nullo sulla tensione in uscita al primo stadio.
36
Il dimensionamento della resistenza deve essere tale che questo prelievo di corrente da parte della
rete di reazione locale non avvenga per la corrente di segnale, alla frequenza f 0. Dimensionando con
tale frequenza pari a 100kHz, l’impedenza ad anello aperto in ingresso al sistema è pari a:
𝑍𝐼𝑁 =
1
= 1,6𝑀Ω.
2𝜋𝑓0 𝐶𝐼𝑁
Tale impedenza è ridotta del guadagno d’anello alla frequenza di lavoro, circa pari a 106 .
Considerando che l’operazionale che realizza il blocco H(s) presenta una bassa resistenza d’uscita e
non controllata in frequenza, occorre che la resistenza R sia molto maggiore dell’impedenza
d’ingresso del sistema ad anello chiuso a 𝑓0. È stata scelta 𝑅 = 10𝑀𝐻𝑧, garantendo ottimo margine
per questo dimensionamento.
2.3.2.
Propagazione dell’offset
L’inevitabile offset tra i componenti può avere effetti significativi nel circuito. L’offset può essere
considerato come un segnale differenziale, introdotto all’ingresso di ogni stadio a frequenza nulla.
Riferendosi al sistema complessivo, in fig.2.11, è facile capire che, considerando le numerose
operazioni di traslazione in frequenza effettuate nel circuito, la comparsa di offset produce la
presenza di armoniche alle frequenze di operazione dei moltiplicatori a interruttori e analogici. E’
utile perciò considerare come le quattro principali cause di offset, il primo stadio di guadagno a
larga banda, l’amplificatore chopperato, il filtro passa basso attivo e il moltiplicatore analogico
finale, influenzano le prestazioni del circuito.
L’offset dell’amplificatore posto a monte del primo moltiplicatore a interruttori subisce anzitutto lo
spostamento in frequenza del moltiplicatore a interruttori stesso e di quello analogico, giungendo
all’ingresso dell’amplificatore chopper alla frequenza 𝑓0 ± 𝑓𝑐𝑜𝑝𝑝𝑒𝑟 . A valle dello stadio di
amplificazione centrale tale offset subisce la demodulazione del moltiplicatore a interruttori e il
filtraggio passa basso del blocco integratore. Poiché quest’ultimo ha prodotto guadagno-banda a
frequenza molto bassa, 100Hz, è corretto considerare un contributo nullo dell’offset a valle di tale
stadio. Dunque l’anello di retroazione principale, caratterizzato dal picco alla frequenza del segnale
d’ingresso, non agisce alla frequenza a cui l’offset in ingresso risulta trasferito. Tuttavia, grazie
all’azione di filtraggio del blocco integratore alla fine del cammino d’andata, il contributo di tale
offset sulle uscite risulta trascurabile.
Analogo ragionamento può essere svolto per il contributo di offset dell’amplificatore centrale.
All’ingresso di esso il segnale utile è alla frequenza di chopper, 70kHz, mentre l’offset è introdotto in
continua. L’anello di retroazione dunque non avr{ alcun effetto sull’abbattimento dell’offset, il quale
sar{ trascurabile però sulle uscite grazie alla presenza dell’efficace filtraggio passabasso a cui tale
offset giunge modulato a 70kHz. Resta però da notare che, dato il guadagno non trascurabile
dell’amplificatore di chopper in continua, occorre verificare che l’offset in ingresso non faccia
saturare le uscite di tale stadio.
L’offset in ingresso al filtro passa basso attivo ha un effetto differente. Esso è in continua, così come
il segnale utile che subisce l’azione precedente del moltiplicatore analogico e dei due moltiplicatori
a interruttori. Essendo il segnale utile sovrapposto in frequenza all’offset, la retroazione
complessiva agisce sull’offset del filtro così come sul segnale. In altre parole, si ricordi che l’anello di
retroazione del sistema presenta un picco alla frequenza del segnale d’ingresso: poiché l’offset del
filtro attivo si riporta in ingresso al sistema proprio alla frequenza f0 (essendoci l’azione di
modulazione del moltiplicatore analogico finale), il contributo di tale offset è abbattuto dall’anello
37
di retroazione secondo il guadagno d’anello alla frequenza d’ingresso, molto elevato. Anche questo
contributo risulta di impatto trascurabile.
Lo stesso trattamento viene subito dall’offset del moltiplicatore finale, anch’esso sovrapposto in
frequenza al segnale utile, risultando in un contributo di rumore trascurabile sull’uscita ad alta
frequenza. E’ da notare tuttavia che quest’ultimo disturbo si confronta direttamente con il segnale
sulle uscite in DC.
Figura 2.11: Schema circuitale del sistema con i generatori di offset presenti sul cammino d’andata.
38
3. Realizzazione dell'integrato
Il percorso d’andata del circuito realizzato consiste, come è stato detto, nei diversi stadi di
amplificazione differenziale e nei blocchi che prima e dopo di esso realizzano la traslazione in
frequenza, necessaria per garantire un guadagno d’anello elevato alla frequenza del segnale di
ingresso. Nel presente capitolo verranno descritte le scelte progettuali e le funzioni di trasferimento
dei singoli blocchi presenti nel circuito, che è stato progettato in tecnologia CMOS con dimensione
litografica minima di 0,35um.
3.1. Stadio di ingresso
Figura 3.1: Stadio differenziale in ingresso, ad alta banda e
basso rumore.
Il segnale proveniente dal DUT viene mandato allo stadio di amplificazione in ingresso, che
disaccoppia il campione da analizzare dai blocchi presenti nel percorso d’andata. In particolare
questo stadio garantisce che i picchi di tensione introdotti dal moltiplicatore a interruttori presente
a valle non perturbino il DUT. Inoltre l’intero cammino d’andata è realizzato in modo pienamente
differenziale, dunque il primo stadio garantisce la conversione a double-ended del segnale inviato
sul DUT. I requisiti che lo stadio differenziale in questione deve garantire sono elevata banda, basso
rumore e basso offset. Infatti si desidera trattare correttamente segnali in ingresso fino alla
frequenza di 100MHz; inoltre il rumore equivalente in ingresso si confronta direttamente con il
39
segnale da amplificare. L’offset dello stadio di ingresso impatta negativamente sull’intero circuito in
quanto una tensione continua presente in ingresso viene moltiplicata a valle provocando la
presenza di armoniche alle frequenze multiple della frequenza in ingresso che potrebbero
autosostenersi nell’anello inficiando la misura. Per garantire ciò, è stata scelta una semplice
struttura differenziale, come quella in fig.3.1.
L’utilizzo di un numero molto limitato di transistori permette l’ottenimento di larga banda e basso
rumore bianco in ingresso, fattori essenziali di questo primo stadio. Il carico resistivo, oltre a
presentare basso rumore, permette di minimizzare l’offset. Il contributo al rumore bianco riportato
in ingresso allo stadio risulta essere, nel caso di carico attivo costituito da p-MOS in configurazione
transdiodo, pari a:
2
𝑒𝑛,𝑒𝑞
=
4𝐾𝑇𝛾
1
𝐼𝑡𝑎𝑖𝑙
1
∗ 2 = 4𝐾𝑇𝛾 ∗
∗ 2 ,
1/𝑔𝑚,𝑙𝑜𝑎𝑑 𝑔𝑚,𝑖𝑛
𝑉𝑜𝑢𝑡 − 𝑉𝑡 𝑔𝑚,𝑖𝑛
dove Itail è la corrente data dal generatore di coda, Vout è la tensione di polarizzazione dei nodi di
uscita e Vth è la tensione di soglia. Invece nel caso di carico passivo lo stesso contributo è minore a
pari condizioni di polarizzazione:
2
𝑒𝑛,𝑒𝑞
𝐼𝑡𝑎𝑖𝑙
2
= 4𝐾𝑇 ∗
,
2
𝑉𝑜𝑢𝑡 ∗ 𝑔𝑚,𝑖𝑛
ottenendo un rumore complessivo in ingresso:
2
𝑒𝑛,𝑒𝑞
= 2(
4𝐾𝑇𝛾
4𝐾𝑇
+
).
2
2
𝑔𝑚,𝑖𝑛 𝑅𝑙𝑜𝑎𝑑 ∗ 𝑔𝑚,𝑖𝑛
Per quanto riguarda l’offset, il contributo della coppia differenziale d’ingresso è calcolabile come
generatore equivalente Vos da porre in ingresso per annullare la differenza di corrente dI provocata
da mismatch fisici dei componenti:
𝑑𝐼 = 𝑔𝑚 ∗ 𝑉𝑜𝑠;
𝑑𝐼 = 𝑑(𝑘(𝑉𝐺𝑆 − 𝑉𝑡 )2 ) = 𝑑𝑘 ∗ 𝑉𝑜𝑑 2 + 𝑘 ∗ 2𝑉𝑜𝑑 ∗ 𝑑𝑉𝑡,
da cui
𝑉𝑜𝑠 (𝑚𝑜𝑠) =
𝑑𝑘 𝑉𝑜𝑑
∗
+ 𝑑𝑉𝑡.
𝑘
2
Il contributo del carico passivo, ipotizzando una differenza pari a dR tra le due resistenze di carico,
risulta dato da:
𝑉𝑜𝑠 ∗
𝑔𝑚,𝑖𝑛
∗ 2𝑅 = 𝐼 ∗ 𝑑𝑅;
2
𝑉𝑜𝑠 (𝑅) =
𝑉𝑜𝑑 𝑑𝑅
∗ .
2
𝑅
Perciò la varianza dell’offset totale dello stadio differenziale è:
2
2
𝜍𝑜𝑠
= 𝜍𝑉𝑡
+
𝜍 2 𝑘 𝑉𝑜𝑑2 𝜍𝑅2 𝑉𝑜𝑑2
∗
+ 2∗
.
𝑘2
4
𝑅
4
Il contributo della resistenza di carico risulta trascurabile dato l’elevato valore della resistenza fisica
rispetto alla resistenza equivalente dei transistori, 1/gm.
Per quanto riguarda il rumore flicker di questi ultimi, è da preferire una coppia di transistori in in
ingresso p-MOS piuttosto che n-MOS. Il carico inoltre, realizzato tramite resistenze fisiche e non
transistori, presenta un rumore 1/f molto minore di quello dei transistori.
Il guadagno e la banda ottenuti in tale stadio sono dati semplicemente da
40
𝐺 = 𝑔𝑚,𝑖𝑛 ∗ 𝑅𝑙𝑜𝑎𝑑 =
𝐵𝑊 =
2𝐼
2𝑉𝑅
𝑅𝑙𝑜𝑎𝑑 =
,
𝑉𝑜𝑑
𝑉𝑜𝑑
1
2𝜋𝑅𝑙𝑜𝑎𝑑 𝐶𝑜𝑢𝑡
.
I transistori in ingresso sono stati dimensionati per essere molto conduttivi, abbattendo così il
rumore e ottenendo alto guadagno a pari resistenza di carico. La resistenza di carico è stata scelta di
valore limitato al fine di massimizzare la banda dello stadio a scapito del guadagno in continua.
Compatibilmente con i limiti di dinamica, lo stadio è polarizzato a corrente elevata in modo da
massimizzare la transconduttanza dei transistori d’ingresso. Il dimensionamento scelto per questo
stadio è riportato nella seguente tabella.
𝑾
( )
𝑳 𝑰𝑵
Rload
Itail
500𝝁𝒎/0,5𝝁𝒎
500Ω
4mA
Il guadagno a frequenza nulla ottenuto è pari a circa 17dB e il primo polo è a 650MHz. Un limitato
guadagno è accettabile considerando che questo stadio ha come scopo principale quello di rendere
trascurabili gli effetti del moltiplicatore presente a valle sul DUT in ingresso e, come vedremo, non
contribuisce sostanzialmente all’elevato guadagno d’anello del sistema. La funzione di
trasferimento del primo stadio è rappresentata in fig.3.2.
17dB
|Guadagno|
frequenza
Figura 3.2: Modulo della funzione di trasferimento del primo stadio.
41
3.2. Moltiplicatori a interruttori
A valle del primo stadio, come è stato detto, vi è il moltiplicatore a interruttori che implementa
l’operazione di separazione in frequenza del segnale utile rispetto al rumore 1/f. Il segnale, alla
frequenza di analisi del DUT, viene modulato alla frequenza di chopping, 70kHz, maggiore della
frequenza di corner del rumore flicker introdotto a valle. In tal modo il segnale risulta a frequenza
diversa rispetto a quella del rumore flicker, introdotto lungo il cammino d’andata in quantit{
significativa a partire dal primo moltiplicatore analogico. Tale rumore non influenza le uscite a
bassa frequenza, poste dopo un secondo moltiplicatore a interruttori e un opportuno filtro passa
basso, a monte del moltiplicatore analogico finale, né quella ad alta frequenza. Ovviamente
l’operazione di chopping non deve di suo introdurre rumore 1/f: per questo la coppia di
moltiplicatori ora considerata presenta transistori usati come interruttori.
Il moltiplicatore a interruttori equivale a effettuare il prodotto del segnale per un’onda quadra alla
frequenza di chopping, i transistor sono usati come interruttori e implementano dunque
un’operazione non lineare. Il funzionamento del circuito è illustrato in fig.3.3. Nel circuito realizzato
la frequenza dell’onda quadra è molto minore della frequenza della sinusoide: in uscita si ottiene
un’onda sinusoidale modulata sull’onda quadra.
Figura 3.3: Principio di funzionamento del moltiplicatore a interruttori.
Gli interruttori sono stati realizzati tramite transmission gate ovvero due MOS, uno a canale p e uno
a canale n, posti in parallelo e comandati da segnali complementari.
In fig.3.4 vi sono le tensioni che comandano i gate del moltiplicatore: al fine di evitare di porre in
cortocircuito i due terminali di uscita del differenziale occorre fare in modo che le due fasi 𝜑1 e
𝜑2 non siano mai attive contemporaneamente. Si può notare come la prima e la terza onda quadra,
che comandano l’accensione degli n-MOS sulle due fasi, non sono mai alte contemporaneamente;
analogamente si evita la situazione in cui le onde quadre che comandano i p-MOS siano entrambe
basse.
Per come è realizzato il moltiplicatore switching, occorre considerare effetti di iniezione di carica,
legati al richiamo e all’allontanamento delle cariche che formano il canale nei MOS. I picchi di
tensione derivanti da ciò, alle frequenze multiple di quella a cui operano gli interruttori, devono
essere eliminati per evitare che l’anello di retroazione renda consistente la loro propagazione e che
essi abbiano effetto sulle uscite. Ciò è garantito dal filtro passa basso attivo presente dopo il
secondo moltiplicatore, che effettua l’attenuazione delle componenti in questione. I picchi sui
42
morsetti d’ingresso del circuito sono limitati a pochi microvolt, come si vedr{ dalle smulazioni,
grazie al primo stadio amplificante che disaccoppia DUT e moltiplicatore.
V(gate_n_fase 1)
V(gate_p_fase 1)
V(gate_n_fase 2)
V(gate_p_fase 2)
Figura 3.4: Onde quadre di comando dei transistori usati come interruttori nel moltiplicatore. Il duty
cycle è leggermente diverso dal 50% per evitare fenomeni di crossconduzione.
3.3. Moltiplicatore analogico
L’operazione di traslazione in frequenza, centrale nel funzionamento della topologia presentata in
questo lavoro, è effettuata tramite moltiplicatori analogici. Volendo lavorare con segnali in ingresso
fino a 100MHz, tali moltiplicatori devono essere operativi fino a frequenze elevate.
Il classico blocco moltiplicatore consiste nella cella di Gilbert. Come verrà spiegato nel capitolo
relativo allo sfasatore ad anello chiuso, celle di Gilbert realizzate con MOS introducono notevole
distorsione su segnali analogici e quindi sono tipicamente fatte lavorare in modalità switching,
fornendo grandi segnali agli ingressi. In ogni caso con transistori MOS se tale struttura è utilizzata
per processare piccoli segnali analogici, essa risulta limitata in dinamica ed eccessivamente
sensibile agli offset [12]. Il moltiplicatore analogico qui descritto garantisce un basso livello di
armoniche spurie rispetto a quelle introdotte da una moltiplicazione ideale. Esso è stato
dimensionato, come verrà mostrato, per ottenere prestazioni soddisfacenti in termini di banda,
rumore e per quanto possibile guadagno.
Il principio di funzionamento dello stadio progettato è descritto dal semplice circuito di fig.3.5. I
segnali in ingresso in banda base, VBB, e a frequenza f0, VLO, sono applicati rispettivamente tra source
e drain del MOS a canale n centrale e al suo gate. Il transistor centrale è polarizzato in regione
lineare se vale la seguente condizione:
𝑉𝐵𝐵 ≤ 𝑉𝐺 − 𝑉𝐿𝑂 − 𝑉𝑡 .
43
Figura 3.5: Transistor a canale n polarizzato in zona ohmica per effettuare la
moltiplicazione tra i segnali applicati al gate e tra source e drain.
In tal caso la corrente che scorre nel MOS considerato è:
2
𝑊
𝑉𝐷𝑆
𝐼𝐷 = 𝜇𝐶𝑜𝑥 ( ) ((𝑉𝐺𝑆 − 𝑉𝑇 )𝑉𝐷𝑆 −
),
𝐿
2
che per la semionda positiva di 𝑉𝐵𝐵 vale:
2
𝑊
𝑉𝐵𝐵
𝑉𝐵𝐵
𝑊
𝐼𝐷 = 𝜇𝐶𝑜𝑥 ( ) *(𝑉𝐺 + 𝑉𝐿𝑂 +
− 𝑉𝑆 − 𝑉𝑇 ) 𝑉𝐵𝐵 −
+ = 𝜇𝐶𝑜𝑥 ( ) (𝑉𝐿𝑂 𝑉𝐵𝐵 + (𝑉𝐺𝑆 − 𝑉𝑇 )𝑉𝐵𝐵 ).
𝐿
2
2
𝐿
Il primo termine dell’equazione appena scritta è la componente desiderata data dal prodotto dei
due segnali 𝑉𝐿𝑂 𝑒 𝑉𝐵𝐵 , mentre il secondo termine è una componente non voluta alla frequenza del
segnale 𝑉𝐵𝐵 .
Per moltiplicare due segnali sfruttando questo semplice principio occorre realizzare una rete che
legga la corrente che scorre nel MOS canale n: un buffer di corrente con ampia banda. Inoltre
occorre cancellare il termine non voluto alla frequenza del segnale VBB. Per leggere una corrente
può essere utilizzato il source di un MOS, per abbassare ulteriormente l’impedenza di tale lettore si
usa un sistema reazionato come quello in fig.3.6. Questo circuito si comporta da buffer di corrente
con guadagno unitario: il segnale di corrente in ingresso IN fluisce nel MOS Mc e alza il gate della
coppia M1 M2 cosicchè la corrente in ingresso a retroazione attivata viene prelevata totalmente
Ms1 e replicata in uscita. Il trasferimento di corrente tra IN e OUT ha il primo polo in
corrispondenza del prodotto guadagno-banda dell’anello di retroazione interna:
𝐺𝐵𝑊𝑃 = 𝑔𝑚1 𝑅𝐴 ∗
1
𝑓𝑇1
~
,
2𝜋𝑅𝐴 𝐶𝐴 2
dove RA e CA sono la resistenza e la capacità parassite afferenti al nodo A, e 𝑓𝑇1 è la frequenza ft di
Ms1 e Ms2. Il secondo polo del trasferimento di corrente è invece alla frequenza:
𝑓2 =
𝑔𝑚𝐶
~𝑓𝑇𝐶 .
2𝜋𝐶𝐼𝑁
44
Figura 3.6: Buffer di corrente con bassa impedenza d’ingresso ad elevata velocità: la tensione in
ingresso può essere controllata tramite il gate del transistor Mc.
Il guadagno d’anello risulta quindi stabile se
𝑉𝑜𝑑.𝐶 > 𝑉𝑜𝑑.𝑀1 ,
ottenendo un’impedenza d’ingresso del buffer di corrente pari a:
𝑍𝐼𝑁 =
1
.
𝑔𝑚𝐶 (1 + |𝐺𝑙𝑜𝑜𝑝|)
In fig.3.7 è mostrato lo schema circuitale del moltiplicatore analogico: il transistor M1 lavora in zona
ohmica e la tensione ai suoi terminali di source e di drain è controllata dalla tensione applicata al
gate di M2 e M3 che operano come follower. La corrente che scorre in M1, che equivale a una
resistenza di valore pari a circa l’inverso della sua transconduttanza e che quindi dipende dalla
tensione applicata al proprio gate, viene letta tramite gli specchi di corrente M4-M6 e M5-M7, e
riportata in uscita.
La dinamica di tensione in ingresso al moltiplicatore è limitata dall’uscita dalla zona di saturazione
dei MOS M2-M3 e M4-M5 e risulta:
𝑉𝐴 + 𝑉𝐵𝐵𝑚𝑎𝑥 ≤ 𝑉𝐷2 + 𝑉𝑇 ,
𝑉𝐴 − 𝑉𝐵𝐵𝑚𝑎𝑥 − 𝑉𝐺𝑆2 ≥ 𝑉𝑂𝐷4 .
Il range dinamico del segnale VBB viene esteso aumentando la tensione VD2-3 di drain dei transistor
M2 e M3 tramite un traslatore di livello costituito dal resistore RLS. Il condensatore CLS assicura la
presenza dell’anello di retroazione locale dei buffer di corrente ad alta frequenza.
45
Figura 3.7: Schema del moltiplicatore differenziale ad alta frequenza.
La corrente fornita in uscita dal buffer viene convertita in tensione dalle resistenze di carico. Il
fattore di conversione del moltiplicatore, definito come rapporto tra l’ampiezza del segnale in uscita
al moltiplicatore e l’ampiezza di un segnale in continua applicato come ingresso VBB è dato da:
𝑊
𝐺 = 𝜇𝐶𝑂𝑋 ( ) 𝑉𝐿𝑂 𝑅𝐿 ,
𝐿 1
dove VLO è la tensione applicata al gate del MOS ohmico M1. Tale definizione del guadagno è
adeguata considerando in particolare il secondo moltiplicatore analogico, ultimo blocco del
cammino d’andata, che prende come ingresso la tensione di uscita in continua e la modula con un
segnale a f0 la cui ampiezza è nota (si tratta dei segnali di riferimento sinusoidali).
Per eliminare il termine di corrente non voluto alla frequenza del segnale V BB l’intera struttura può
essere duplicata come in fig.3.8. Sfasando di 180 gradi il segnale applicato sul gate del transistor M1
della struttura inferiore si ottiene una corrente pari a:
𝑊
𝐼𝐷 = 𝜇𝐶𝑜𝑥 ( ) (−𝑉𝐿𝑂 𝑉𝐵𝐵 + (𝑉𝐺𝑆 − 𝑉𝑇 )𝑉𝐵𝐵 ),
𝐿
che sottratta alla corrente prodotta dal MOS M1 della parte superiore della struttura permette di
ottenere la cancellazione ai due nodi di uscita dei termini indesiderati (frecce rosse), mentre le
componenti legate al prodotto dei segnali (frecce blu) vengono sommate.
Si noti che, avendo uscite in corrente, il moltiplicatore non deve essere ulteriormente modificato per
effettuare l’operazione di somma tra i due segnali modulati alla frequenza d’ingresso sui due canali
seno e coseno, necessaria per ottenere il segnale in uscita ad alta frequenza che torna all’ingresso in
retroazione.
46
Il dimensionamento di questo stadio è stato eseguito con il fine di ottenere banda elevata di
funzionamento e guadagno per quanto possibile elevato ed è riportato, riferendosi a fig.3.7, nella
seguente tabella. In particolare, al fine di massimizzare la banda, i MOS posti a cascode M8 e M9, che
aumentando la resistenza d’uscita aumentano il guadagno dello stadio, non sono stati posti nel
circuito al fine di evitare la presenza di poli parassiti aggiuntivi. Inoltre il dimensionamento è stato
curato per ottenere basso rumore.
MOS-R-C
(W/L)-valore
Ibias
M1
10/0,35
M2-M3
617/0,7
1mA
M4-M5
25/0,35
1mA
M6-M7
50/0,35
2mA
CLS
300fF
RLS
10kΩ
60uA
RLOAD
250
2mA
Il guadagno atteso dal dimensionamento in tabella è il seguente:
𝑊
10
𝐺 = 𝜇𝐶𝑂𝑋 ( ) 𝑉𝐿𝑂 𝑅𝐿 = 170𝜇 ∗
∗ 500𝑚 ∗ 500 ∗ 2 = 2,4,
𝐿 1
0,35
dando in ingresso una sinusoide di ampiezza 1V e una tensione continua differenziale di 500mV e
facendo sì che gli specchi M4-M6 e M5-M7 convertano la corrente con un fattore di specchiamento
2.
Il guadagno ottenuto dalle simulazioni è di circa 6dB dando in ingresso un segnale in continua
differenziale pari a 500mV su un ingresso e un segnale variabile in frequenza pari a 1V sull’altro,
come si vede in fig.3.9. La banda di questo stadio è adatta per lavorare fino a frequenze elevate
senza introdurre eccessivi sfasamenti, essendo maggiore di 250MHz. La dinamica differenziale
ottenuta in uscita al sistema è di 400mV, come si vede in fig.3.10, e risulta sufficiente per i segnali
presenti come si vedrà nel capitolo4. L’informazione sulla dinamica è stata ottenuta simulando con
un ingresso del moltiplicatore con tensione differenziale di 100mV e dando all’altro ingresso una
tensione differenziale variabile in ampiezza fino a 1V.
47
Figura 3.8: Schema del moltiplicatore differenziale ad alta frequenza con
cancellazione dei termini non voluti.
|FdT.moltiplicatore.analogico|
6,2dB
300MHz
Figura 3.9: Funzione di trasferimento del moltiplicatore analogico. L’ampiezza del segnale d’uscita è pari a 6dB
dando in ingresso un segnale differenziale in continua e un segnale variabile in frequenza differenziale di 1V.
48
Dinamica.out.mixer
150mV
0V
-150mV
Figura 3.10: Dinamica differenziale in uscita del moltiplicatore analogico.
3.4. Opamp chopper con gestione del modo
comune
L’operazionale centrale del cammino d’andata consiste in un classico folded cascode ed è
rappresentato in fig.3.11. I requisiti che esso deve soddisfare sono:
Elevato guadagno in continua, per abbattere il rumore degli stadi successivi e contribuire al
guadagno d’anello complessivo.
Polo oltre la frequenza di chopping, che a sua volta deve maggiore rispetto alla frequenza di
noise corner del rumore 1/f. Il segnale utile viene infatti portato alla frequenza di chopper,
e a quella frequenza deve essere amplificato correttamente, per poi essere riportato in
continua a valle del secondo moltiplicatore a interruttori.
I MOS di ingresso sono a canale n coerentemente con la necessità di avere elevato guadagno. Un
ingresso a p-MOS avrebbe favorito l’abbassamento del rumore 1/f, ma tale requisito non è
importante in questo stadio poiché il contributo di rumore alla frequenza del segnale è limitato
grazie alla tecnica di chopper.
Il guadagno dello stadio qui considerato è dato da:
𝐺=
𝑔𝑚,𝑖𝑛
∗ 2𝑅𝑜𝑢𝑡,
2
dove 𝑔𝑚,𝑖𝑛 è la transconduttanza dello stadio d’ingresso e Rout è la resistenza di uscita, calcolabile
semplicemente considerando che tutto il circuito opera in completa simmetria, essendo sia il
segnale d’ingresso che quello di uscita pienamente differenziali:
𝑅𝑜𝑢𝑡 = [(𝑟0.𝑙𝑜𝑎𝑑1 \\𝑟0.𝑖𝑛 ) + 𝑟0.𝑐𝑎𝑠𝑐𝑜𝑑𝑒 + 𝑔𝑚.𝑐𝑎𝑠𝑐𝑜𝑑𝑒 ∗ 𝑟0.𝑐𝑎𝑠𝑐𝑜𝑑𝑒 ∗ (𝑟0.𝑙𝑜𝑎𝑑1 \\𝑟0.𝑖𝑛 ) ]\\[𝑟0.𝑔𝑒𝑛.𝑐𝑜𝑟𝑟 ].
49
Figura 3.11: Struttura folded cascode dell’amplificatore centrale del sistema.
Il polo dell’amplificatore è tipicamente dato dal nodo di uscita:
𝑓𝑝 =
1
.
2𝜋𝑅𝑜𝑢𝑡𝐶𝑜𝑢𝑡
Guadagno e banda dello stadio sono in trade-off una volta fissato il prodotto guadagno-banda:
𝐺𝐵𝑊𝑃 =
𝑔𝑚,𝑖𝑛
.
2𝜋𝐶𝑜𝑢𝑡
Lavorando con la tecnica di chopper, il dimensionamento si esegue a partire dalla frequenza di noise
corner del rumore flicker dello stadio: a questa frequenza, 70kHz nello stadio considerato, il rumore
è circa bianco ed è quindi ragionevole spostare lì il segnale utile. Il polo dell’amplificatore deve
essere posto una decade dopo tale frequenza, infatti risulta a 700kHz con il dimensionamento
effettuato, in modo che il segnale alla frequenza di chopper sia amplificato con elevato guadagno.
Scelta la banda dell’amplificatore risulta il guadagno in continua (a patto di non modificare il
GBWP), pari a 1700.
Come si vedrà in seguito, volendo abbattere le componenti alla frequenza di chopper e i suoi
multipli, si è fissata la banda ad anello chiuso complessiva massima a 10kHz per un primo
dimensionamento. In tal modo le componenti di rumore portate alla frequenza di chopper
verrebbero abbattute di un fattore 7 e il secondo polo dell’anello, dovuto all’amplificatore
chopperato, si troverebbe due decadi circa oltre l’attraversamento dell’asse 0 dB.
Essendo fully differential, l’amplificatore centrale richiede la presenza di una rete che fissi la
tensione di modo comune in uscita. Essa è stata realizzata tramite capacità connesse al circuito con
interruttori, basandosi sulla rete di fig.3.12 utilizzabile per un semplice stadio differenziale. Se
durante la fase 2 la tensione di modo comune di uscita 𝑉𝑂𝑈𝑇,𝐶𝑀 sale rispetto alla tensone di gate del
generatore di coda 𝑉𝐺 , durante la fase 1 successiva la partizione di carica tra Cr e C0 tende a
ripristinare la differenza di potenziale corretta.
50
Figura 3.12: Circuito di gestione della tensione di modo comune in uscita.
L’azione del circuito è infatti distinta in due fasi: durante la fase 2 in figura avviene la precarica delle
capacità Cr, durante la fase 1 la tensione su C0 è modificata per raggiungere il valore (𝑉𝐶𝑀 − 𝑉𝐵 ). Nel
caso del folded cascode realizzato il circuito di retroazione agisce sulle correnti dei generatori del
ramo d’uscita.
In fig.3.13 è raffigurato il circuito equivalente e le due fasi di chiusura degli interruttori. Ipotizziamo
che l’amplificatore fully differential abbia guadagno 𝐴0 ~ ∞. E’ possibile scrivere il bilancio di carica
realizzato sulle capacità C0 e Cr:
1
𝑉𝑜𝑢𝑡𝐶𝑀 (𝑛) ∗ (𝐶0 + 𝐶𝑅 ) = 𝑉𝑜𝑢𝑡𝐶𝑀 (𝑛 − 1) ∗ 𝐶0 + 𝑉𝐶𝑀 (𝑛 − ) ∗ 𝐶𝑅 ,
2
da cui, considerando che VCM resta costante e passando al dominio della trasformata zeta, si ottiene
𝑉𝑜𝑢𝑡𝐶𝑀
𝐶𝑅
=
∗
𝑉𝐶𝑀
𝐶𝑅 + 𝐶0
1
.
𝐶 𝑧 −1
1− 0
𝐶0 + 𝐶𝑅
A frequenza nulla 𝜔 = 0 e 𝑧 = 𝑒 −𝑗𝜔 = 1, perciò:
𝑉𝑜𝑢𝑡𝐶𝑀 = 𝑉𝐶𝑀 .
La rete di gestione della tensione di modo comune viene fatta lavorare alla frequenza di 70kHz,
maggiore della banda ad anello chiuso del sistema, così che eventuali spike prodotti dagli
interruttori non influenzino il trattamento del segnale. Agli interruttori vengono dati gli stessi
segnali a onda quadra del chopper.
51
Figura 3.13: Circuito equivalente della rete per la gestione del modo comune.
Il dimensionamento dello stadio appena presentato è il seguente.
MOS-R-C
(W/L)-valore
Ibias
Min
200/0,5
500𝜇𝐴
Mload
520/0,5
1mA
Mcascode
512/0,5
500𝜇𝐴
Mgen.corr
240/0,5
500𝜇𝐴
C0
130fF
Cr
130fF
In fig.3.14 è rappresentato il trasferimento dell’amplificatore centrale ottenuto dalle simulazioni:
alla frequenza di chopping, 70kHz, il guadagno è pari a 65dB come in continua, e il prodotto
guadagno-banda dello stadio è pari a 650MHz. Dall’analisi di rumore si può osservare che la
frequenza di chopping è circa pari alla frequenza di noise corner del rumore: il sistema di chopper
risulta dunque efficace, in quanto alla frequenza a cui viene portato il segnale utile il contributo di
rumore introdotto dallo stadio amplificante è circa pari al solo rumore bianco.
52
|Guadagno|
65dB
70kHz
frequenza
Densità spettrale di rumore in ingresso
5,4𝑛𝑉/√𝐻𝑧
frequenza
Figura 3.14: Modulo della F.d.T dell’operazionale centrale e densità di rumore equivalente in ingresso.
3.5. Integratore con resistenza da 1,5GΩ
A monte del moltiplicatore analogico finale, come si vede in fig.2.5 è necessario uno stadio che
lavori come filtro passa basso attivo. Il guadagno di questo stadio deve essere molto alto in continua
ed esso deve introdurre un polo che esegua un filtraggio delle componenti non desiderate in
frequenza e fornisca il polo dominante dell’anello rendendolo stabile.
Come è stato già in parte spiegato, il filtro passa basso attivo posto a valle del secondo amplificatore
a interruttori ha svariate funzioni:
In corrispondenza delle uscite in continua, grazie alla tecnica di chopper, sono presenti il
segnale, correttamente modulato dalle operazioni di moltiplicazione e grazie a esse portato
a frequenza nulla, e il rumore flicker degli stadi a valle portato alla frequenza di chopper. Per
evitare che le componenti di rumore a tale frequenza e alle sue frequenze multiple
ricircolino lungo l’anello è opportuno filtrarle.
Poiché le uscite in continua sono a valle di un moltiplicatore a interruttori, i cui spike sono
inevitabili, è necessario eliminarli.
Infine, è proprio il blocco passa basso che, operando come integratore, fornisce il principale
contributo all’elevato guadagno d’anello in continua dell’intero sistema, nonché il polo
dominante che ne garantisce la stabilità.
53
Per queste esigenze, il blocco qui considerato deve avere elevato guadagno in continua e polo a
frequenza molto bassa. In particolare, il polo dominante dell’amplificatore chopperato deve essere a
frequenza molto maggiore rispetto al prodotto guadagno-banda dell’anello del sistema.
Figura 3.15: Classica struttura dell’integratore.
Dato il polo dominante dell’amplificatore chopperato, circa 700kHz, è stata scelta la frequenza di
chopper una decade prima, 70kHz, in modo che il segnale portato a quella frequenza sia nella banda
dell’amplificatore e quindi correttamente trattato. Volendo abbattere le componenti alla frequenza
di chopper e ai suoi multipli, si è fissata in un primo dimensionamento la banda ad anello chiuso
dell’anello complessivo a 10kHz. In tal modo le componenti di rumore portate alla frequenza di
chopper vengono abbattute di un fattore 7 e il secondo polo dell’anello, dovuto all’amplificatore
chopperato, si trova due decadi circa oltre l’attraversamento dell’asse 0 dB. Dunque, supponendo
inizialmente un contributo del resto del sistema al Gloop pari a 1000 (tale valore è in effetti
sovrastimato, come si vedrà ora), occorre che il blocco qui introdotto guadagni 1/1000 alla
frequenza cui si desidera porre la banda ad anello chiuso del sistema: il prodotto guadagno-banda
del filtro passa basso attivo deve essere pari a 10Hz.
La struttura del blocco integratore è in fig.3.15: la tensione in ingresso è convertita in corrente
tramite la resistenza R e integrata sulla capacità C. Il guadagno ideale dello stadio è semplicemente:
𝐺𝑖𝑑𝑒𝑎𝑙𝑒 = −
1
.
𝑠𝑅𝐶
Supponendo di utilizzare una capacità pari a 10pF (che nel dimensionamento finale è stata
modificata a 1pF, valore integrabile senza occupare un’area eccessivamente estesa), la resistenza da
porre è pari a 1,5GΩ per ottenere il trasferimento desiderato. Il guadagno d’anello è dato da:
𝐺𝑙𝑜𝑜𝑝 = −𝐴(𝑠) ∗
𝑅
1
𝑅 + 𝑠𝐶
= −𝐴(𝑠) ∗
𝑠𝐶𝑅
,
1 + 𝑠𝐶𝑅
dove A(s) è la funzione di trasferimento del blocco operazionale di guadagno, descritto
successivamente [Opamp con polo a bassa frequenza].
Il guadagno d’anello presenta quindi uno zero nell’origine, un polo in corrispondenza del polo
dominante del blocco di guadagno, nel nostro caso pochi Hz, e un polo alla frequenza data dalla
costante di tempo RC, ovvero 10Hz.
I diagrammi di Bode per l’analisi dell’integratore sono riportati in fig.3.16. Come è noto, il presente
stadio è retroazionato solo a medie frequenze: in continua il cammino di retroazione non è
conduttivo essendoci la sola capacità C lungo il cammino di retroazione, ad alta frequenza il
guadagno dell’operazionale decade. Il guadagno ideale vale ∞ in continua e 0 a frequenza infinita, e
interseca l’asse a 0dB alla frequenza data dalla costante di tempo RC. Il guadagno reale coincide con
quello ideale nel tratto a media frequenza, dove |Gloop|>1. A frequenze prossime alla continua il
54
guadagno reale diventa costante e si assesta al valore pari al guadagno in continua
dell’operazionale. Anche ad alta frequenza il guadagno reale proceder{ secondo l’andamento
A(s)/sRC, subendo le singolarità del guadagno dell’operazionale.
Figura 3.16: Diagrammi di Bode del modulo della funzione di trasferimento dell’integratore. A(s) è
la funzione di trasferimento dell’operazionale.
La funzione di trasferimento dell’integratore, ottenuta dalle simulazioni con il blocco che realizza la
resistenza da 1,5GΩ mostrato nel seguente sottocapitolo, è rappresentata in fig.3.17.
Considerando che il blocco di guadagno reale non ha guadagno in continua infinito, l’integratore
realizzato ha trasferimento che decresce a -20dB/dec a frequenze maggiori di 1/(2𝜋𝑅𝐶𝐴0 ),
garantendo l’attraversamento dell’asse 0dB alla frequenza desiderata:
𝑓0𝑑𝐵 = 𝐺𝐵𝑊𝑃 =
𝐴0
1
=
= 10𝐻𝑧.
2𝜋𝑅𝐶𝐴0 2𝜋𝑅𝐶
Con questa scelta si otterrebbe una banda ad anello chiuso del sistema complessivo pari a 10Hz nel
caso di capacit{ d’ingresso pari a 10pF, e pari a 100Hz nel caso di capacit{ d’ingresso pari a 1pF.
In effetti, a valle del dimensionamento degli altri blocchi, il requisito di prodotto guadagno-banda
dello stadio integratore è risultato eccessivamente stringente, permettendo la scelta di una capacità
in tale blocco pari a 1pF e ottenendo di conseguenza una banda ad anello chiuso del sistema pari a
100Hz nel caso di capacit{ afferente al nodo d’ingresso di 10pF, e pari a 1kHz con capacità di 1pF
(come è stato detto nel capitolo 2). Riassumendo, con un guadagno in continua dell’integratore pari
a 107 porta a un guadagno d’anello complessivo alla frequenza f0 di circa 107. Se la capacità posta
nell’integratore è pari a 1pF e la resistenza pari a 1,5GΩ, il prodotto guadagno-banda di questo
stadio risulta 100Hz e non 10Hz come è stato considerato per un primo dimensionamento di
massima. La banda ad anello chiuso del sistema compessivo è dunque proprio 100Hz (nel caso di
capacit{ d’ingresso di 10pF), essendo il contributo dell’integratore quello dominante per il
guadagno d’anello.
La fase dello stadio qui considerato è -90° a 100Hz, che assicura margine di fase complessivo di
circa 90° fino alle frequenze in cui gli sfasamenti dei moltiplicatori analogici e del differenziale
d’ingresso diventano significativi.
55
|Guadagno.integratore|
150dB
10-6Hz
10Hz
f
Figura 3.17: Funzione di trasferimento del blocco integratore. Si noti che il polo è a 10−6 𝐻𝑧 e che
l’attraversamento dell’asse 0dB avviene a 10Hz, come desiderato.
3.5.1.
Implementazione della resistenza da 1,5GΩ
Nel presente lavoro, la resistenza da 1,5GHz è ottenuta tramite un divisore di corrente, il cui blocco
principale è riportato in fig.3.18 e consiste in una pseudoresistenza realizzata tramite circuito MOSbipolare [13].
Figura 3.18: Struttura del riduttore di corrente.
Riferendosi al MOS a canale p con source-well e drain-gate in cortocircuito, è possibile scrivere le
seguenti relazioni sulla corrente che scorre. Se Vgs è negativa,
𝑊
𝐼𝐷 = 𝑘 ( ) (𝑉𝐺𝑆 − 𝑉𝑇 )2 ,
𝐿
𝑉𝐺𝑆
𝑊 (− 𝑉𝐺𝑆 )
𝐼𝐷 = 𝐼𝐷0 ( ) 𝑒 𝛼𝑈𝑇 (1 − 𝑒 𝑈𝑇 ) ,
𝐿
56
se il mos è saturo,
se il mos è sottosoglia.
Se invece Vgs è positiva, il dispositivo funziona come un diodo poiché la giunzione parassita drainwell conduce:
𝑉𝐺𝑆
𝐼𝐷 = 𝐽𝑆0 (2𝑇𝐸 + 𝑊(2𝑇 + 𝐸)) (𝑒 𝑈𝑇 − 1).
In queste formule Js0 è la densità di corrente di saturazione della giunzione drain-well, k è pari a
𝜇𝐶𝑜𝑥, W e L sono le dimensioni del canale, VT è la tensione di soglia, 𝑈𝑇 = 𝐾𝑇/𝑞 è la tensione
termica, 𝛼 è il coefficiente di sottosoglia, E e T sono rispettivamente la lunghezza e lo spessore della
diffusione di drain e source. Se 𝑊 ≫ 𝐸, 𝑇 la corrente di drain risulta proporzionale a W
indipendentemente dalla regione di polarizzazione. Dunque, due MOS come quello considerato
hanno le correnti in rapporto uguale al rapporto tra le larghezze di canale:
𝐼𝐷2 𝑊2
=
.
𝐼𝐷1 𝑊1
La semplice struttura con cui si può ottenere una resistenza di elevato valore è riportata sulla
sinistra in fig.3.18. Se T1 è largo M volte T2 la corrente di uscita si riduce di un fattore M. Mettendo
in cascata N stadi come quello in fig.3.18 si sintetizza una resistenza di valore:
𝑅𝑒𝑞𝑢𝑖𝑣𝑎𝑙𝑒𝑛𝑡𝑒 =
𝑉𝐼𝑁
= 𝑅𝐼𝑁 𝑀𝑁 .
𝐼𝑂𝑈𝑇
Lo schema proposto è favorevole anche dal punto di vista del rumore. Poiché di stadio in stadio la
corrente viene ridotta, il rumore termico della resistenza è ridotto di 𝑀2𝑁 e fornisce in uscita un
2
contributo equivalente a un resistore di valore 𝑅𝑒𝑞
. A questo rumore si aggiunge il rumore shot del
solo ultimo blocco, molto basso essendo bassa la corrente che vi scorre. Inoltre il rumore di
tensione dell’ultimo stadio produce un rumore di corrente aggiuntivo trascurabile, poiché
l’impedenza di tale blocco è elevata.
Il valore elevato della resistenza da 1,5GHz è stato ottenuto tramite la cascata di due blocchi
riduttori di corrente:
𝑅𝑒𝑞𝑢𝑖𝑣𝑎𝑙𝑒𝑛𝑡𝑒 = 𝑅𝐼𝑁 𝑀𝑁 = 1𝑀Ω ∗ 402 ~1,5𝐺Ω.
Il blocco di amplificazione impiegato è quello descritto nel sottocapitolo successivo [Opamp con
polo a bassa frequenza]. Esso presenta elevato guadagno in continua e quindi garantisce il
mantenimento della massa virtuale nei blocchi di riduzione della corrente. Inoltre il prodotto
guadagno-banda dell’operazionale impiegato, pari a 20MHz, risulta adeguato per un corretto
funzionamento della resistenza sintetizzata nella banda operativa dell’anello del sistema
complessivo, il cui attraversamento dell’asse 0dB avviene a meno di 10kHz.
In fig.3.19 è raffigurata la corrente nel blocco implementato in funzione della frequenza del segnale
di tensione in ingresso, ottenuta dalle simulazioni. Come si vede la corrente è costante fino a oltre
1MHz, e pari a
𝑖=
𝑉
1𝑉
=
= 666,6𝑝𝐴.
𝑅 1.5𝐺Ω
57
Corrente (R)
660pA
1MHz
Figura 3.19: Andamento in frequenza della corrente, nel blocco che realizza la resistenza da 1,5GΩ
3.5.2.
Struttura differenziale dell’integratore e rete di
gestione del modo comune
Si consideri, in fig.3.20, l’insieme del secondo moltiplicatore a interruttori e del blocco integratore
appena mostrato. Il valore medio della tensione presente al punto B non è che il modo comune
presente a monte del moltiplicatore digitale, nei punti A. Il punto B deve avere, in continua, una
tensione nulla, in modo che non scorra mediamente corrente nella resistenza del filtro passa basso
attivo e che esso non vada quindi incontro a saturazione. La retroazione complessiva del sistema
agisce introducendo un’onda quadra all’ingresso del moltiplicatore a interruttori alla frequenza di
chopper, in modo che la tensione continua in uscita sia nulla. Per ottenere ciò, procedendo a ritroso
lungo il cammino di andata, si nota la comparsa di un contributo differenziale aggiuntivo a f0
all’ingresso del sistema: si può vedere l’effetto della gestione della tensione media ai capi della
resistenza dell’integratore come un “offset” a f0 in ingresso.
Tale effetto non è presente se si mantiene tutto il cammino d’andata pienamente differenziale. Ciò
presenta diversi altri vantaggi: riduce gli errori dovuti ad asimmetrie, migliora la dinamica di
segnale e aumenta la linearità del moltiplicatore analogico finale.
58
Figura 3.20: Soluzione pienamente differenziale per il trattamento del segnale in ingresso all’integratore.
Considerando la struttura con cui è stata realizzata la resistenza da 1,5GΩ, i terminali di massa
virtuale dei blocchi di guadagno interni devono essere necessariamente posti alla stessa tensione a
cui è riferito anche il morsetto di ingresso invertente del filtro integratore. Per questo motivo la
struttura differenziale è stata realizzata come in fig.3.21(a sinistra): solo in tal modo il
trasferimento da Vd all’uscita è quello di un normale integratore: -1/sCR, e naturalmente in tal caso
se si entrasse sul morsetto IN+ si otterrebbe il trasferimento non invertente: 1+1/sCR. Rispetto a
una normale struttura pienamente differenziale, è necessario disporre dei morsetti IN+, la cui
tensione è fornita sulla massa virtuale degli amplificatori interni ai due blocchi che implementano le
resistenze dell’integratore.
Lavorando con segnali pienamente differenziali, la tensione di modo comune dell’integratore non è
gestita dalla retroazione complessiva del sistema. E’ dunque necessario l’inserimento di un circuito
che localmente esegua un monitoraggio della tensione di modo comune in uscita dal circuito, la
confronti con il valore desiderato, e piloti di conseguenza la tensione di modo comune in ingresso.
La retroazione di modo comune è stata realizzata con un circuito tempo continuo, preferito rispetto
a soluzioni commutate per evitare spike che si troverebbe direttamente nelle uscite in continua del
sistema, il cui schema a blocchi è riportato in fig.3.21(a destra). In fig.3.21 i blocchi HA sono gli
amplificatori del segnale differenziale in ingresso al sistema, le cui uscite sono mediate e inviate al
blocco amplificante HB che impone, sui morsetti non invertenti degli amplificatori sul cammino
d’andata, la tensione opportuna perché la tensione di modo comune in uscita sia pari a VCM,ref.
59
+
+
𝑉𝐶𝑀,𝐼𝑁 + 𝑉𝐷 /2
𝑉𝐶𝑀,𝐼𝑁 − 𝑉𝐷 /2
Figura 3.21: Struttura differenziale dell’integratore e schema a blocchi della rete di gestione del modo comune.
Consideriamo ancora la fig.3.21 (a sinistra): nella realizzazione pratica del circuito è ragionevole
ipotizzare che le costanti di tempo R1C1 e R2C2 siano diverse tra loro, soprattutto a causa di
mismatch di funzionamento accidentali dei due circuiti che sintetizzano le resistenze di elevato
valore. Ciò provoca un’interazione tra trasferimento differenziale e di modo comune di cui occorre
tenere conto.
E’ possibile scrivere i trasferimenti del segnale alle due uscite presenti:
𝑉𝑂𝑈𝑇+ = 𝑉𝑖𝑛+ − (𝑉𝑖𝑛. 𝑐𝑚 +
𝑉𝑑
1
− 𝑉𝑖𝑛+ ) ∗
;
2
𝑠𝐶1 𝑅1
𝑉𝑂𝑈𝑇− = 𝑉𝑖𝑛+ − (𝑉𝑖𝑛. 𝑐𝑚 −
𝑉𝑑
1
− 𝑉𝑖𝑛+ ) ∗
.
2
𝑠𝐶2 𝑅2
Perciò il trasferimento differenziale è dato da:
1
1
𝑉𝑑
1
1
𝑉𝑜𝑢𝑡. 𝑑𝑖𝑓𝑓 = 𝑉𝑜+ − 𝑉𝑜− = (𝑉𝑖𝑛. 𝑐𝑚 − 𝑉𝑖𝑛+ ) ∗ (
−
)−
∗(
+
),
𝑠𝑅2 𝐶2 𝑠𝑅1 𝐶1
2
𝑠𝑅2 𝐶2 𝑠𝑅1 𝐶1
mentre quello di modo comune è:
𝑉𝑜𝑢𝑡. 𝑐𝑚 =
𝑉𝑜+ + 𝑉𝑜−
𝑉𝑖𝑛+ − 𝑉𝑖𝑛. 𝑐𝑚
1
1
𝑉𝑑
1
1
= 𝑉𝑖𝑛+ +
∗(
+
)−
∗(
−
).
2
2
𝑠𝑅2 𝐶2 𝑠𝑅1 𝐶1
4
𝑠𝑅1 𝐶1 𝑠𝑅2 𝐶2
60
Come si nota, l’uscita differenziale dipende dal modo comune. Si ha dunque un “offset” sulle uscite
in continua (contributo indesiderato presente a causa del modo comune) pari a:
𝑉𝑂𝑆.𝐷𝐶 ~
(𝑉𝑖𝑛. 𝑐𝑚 − 𝑉𝑖𝑛+ )
𝐶𝐼𝑁 + 𝐶𝑓
∗
.
𝐴𝑐𝑜𝑝𝑝𝑒𝑟 ∗ 𝐺𝑀1 ∗ 𝐺1 ∗ 𝐺𝑀2
𝐶𝑓
Se la rete locale di gestione del modo comune fosse ideale, la tensione di modo comune in uscita
sarebbe quella di riferimento, 𝑉𝐶𝑀𝑟𝑒𝑓 , e la differenza tra la tensione IN+ e di ingresso di modo
comune sarebbe nulla cosicchè la tensione differenziale in uscita non sarebbe influenzata dal modo
comune in ingresso anche in presenza di un mismatch tra le costanti di tempo R1C1 e R2C2. Il
terminale Vcm.ref è posto a una tensione compatibile con la dinamica d’ingresso dello stadio
moltiplicatore analogico a valle.
Il guadagno dell’anello di modo comune nel caso semplice di R1C1=R2C2, rappresentato in fig.3.21
a destra, è dato da:
𝐺𝑙𝑜𝑜𝑝. 𝑐𝑚 = −𝐻𝐵 (𝑠) ∗ 𝐺𝐴.𝑟𝑒𝑎𝑙𝑒 (𝑠) = −𝐻𝐵 (𝑠) ∗
𝐺𝐴.𝑖𝑑𝑒𝑎𝑙𝑒 (𝑠)
1
~𝐻𝐵 (𝑠) (1 +
),
1
𝑠𝐶𝑅
1−
|𝐺𝑙𝑜𝑜𝑝𝑓𝑖𝑙𝑡𝑟𝑜𝐴 (𝑠)|
dove HB(s) è la funzione di trasferimento del blocco di guadagno nell’anello di retroazione di modo
comune e il guadagno d’anello del filtro passa basso è supposto molto elevato (𝐺𝑙𝑜𝑜𝑝𝑓𝑖𝑙𝑡𝑟𝑜𝐴 (𝑠) =
1
𝐻𝐴 (𝑠) ∗ (𝑅)/(𝑅 + 𝑠𝐶𝑅) ). Il guadagno d’anello del modo comune presenta quindi, nel caso di 𝐻𝐴
molto elevato, un polo nell’origine e uno zero alla frequenza 1/2𝜋𝑅𝐶~10𝐻𝑧. Il guadagno d’anello in
continua della rete di modo comune è molto elevato: pari a 𝐻𝐴 (0) ∗ 𝐻𝐵 (0): la presenza di un blocco
di guadagno HB in retroaione di modo comune è comunque necessario se si vuole disaccoppiare il
modo comune in ingresso e in uscita all’integratore.
Figura 3.22: Andamento del Gloop di modo comune dell’integratore.
Disegnando tale Gloop, fig.3.22, è facile rendersi conto dei requisiti richiesti al blocco con
trasferimento HB(s). Perché l’anello sia stabile esso deve tagliare l’asse 0dB a frequenza minore
rispetto a 𝑓𝑖𝑔 , corrispondente alle singolarità presenti ad alta frequenza, in particolare il prodotto
guadagno-banda degli operazionali del blocco integratore che vale circa 20MHz. L’amplificatore di
retroazione, di guadagno in continua pari a H0, deve dunque avere un polo a bassa frequenza, 𝑓𝑝𝑜𝑙𝑜 ,
minore di 1Hz, garantendo in tal modo l’attraversamento dell’asse 0dB per il Gloop di modo comune
a 1MHz, almeno una decade prima delle singolarità a 20MHz.
61
Con questo dimensionamento si limitano gli effetti di interferenza del modo comune sull’anello
differenziale. Infatti la banda ad anello chiuso dell’anello di gestione del modo comune è pari a
1MHz, molto maggiore rispetto a quello dell’anello differenziale complessivo, 10kHz (o meno
considerando il dimensionamento finale dell’integratore). Diverse costanti di tempo 𝑅1 𝐶1 𝑒 𝑅2 𝐶2
provocano il fatto che l’uscita differenziale dipenda anche dal modo comune in ingresso e che
quindi il guadagno differenziale sul segnale sia leggermente diverso da quello previsto. Tuttavia,
essendo il tempo di assestamento del cammino differenziale del sistema complessivo molto più
lento rispetto a quello del modo comune della rete locale, si può considerare il guadagno
differenziale costante rispetto alle variazioni del modo comune. Per avere banda ad anello chiuso
elevata occorre avere un blocco HB a elevato prodotto guadagno-banda, motivo per cui tale blocco è
stato realizzato con un operazionale e non con un semplice amplificatore differenziale.
Il Gloop ottenuto a valle del dimensionamento dello stadio è quello in fig.3.23, con il polo
nell’origine, il polo dell’operazionale nel cammino di retroazione di modo comune pari a 0,5Hz, lo
zero a 10Hz e l’attraversamento dell’asse 0dB a 1MHz.
Il trasferimento differenziale dell’integratore, simulato con la rete di gestione del modo comune qui
descritta e l’operazionale mostrato nel seguente sottocapitolo, è quello riportato in fig3.17.
|Gloop.cm|
90°
0,5Hz
f
10Hz
Fase (Gloop.cm)
1MHz
f
Figura 3.23: Modulo e fase del guadagno d’anello dell’integratore su modo comune, con rete di
gestione tempo-continuo.
62
3.6. Opamp con polo a bassa frequenza
Verrà spiegato ora nel dettaglio il blocco fondamentale che è stato impiegato per realizzare lo stadio
integratore descritto nel precedente sottocapitolo: un semplice amplificatore differenziale a due
stadi la cui topologia è in fig.3.24.
Il guadagno del circuito è semplicemente dato da:
𝐺 = (𝑔𝑚1 𝑅𝑜𝑢𝑡1 ) ∗ (𝑔𝑚2 𝑅𝑜𝑢𝑡2 ),
dove Rout1 e Rout2 sono le resistenze equivalenti rispettivamente sul drain del MOS Mload1 e
sull’uscita complessiva dello stadio, gm1 e gm2 le transconduttanze di M1 e M2.
Con il dimensionamento eseguito si raggiunge 𝐺 = 130𝑑𝐵. In particolare, una elevata resistenza di
uscita del secondo stadio è ottenuta grazie ai due MOS messi in configurazione cascode sul ramo
d’uscita. La stabilit{ di questo operazionale è garantita dalla presenza della capacità a cavallo del
MOS di guadagno del secondo stadio. Tale capacità è amplificata per effetto Miller introducendo il
polo dominante della risposta in frequenza dello stadio. Il prodotto guadagno banda vale quindi:
𝐺𝐵𝑊𝑃 = 𝐺 ∗ 𝐵𝑊 = (𝑔𝑚1 𝑅𝑜𝑢𝑡 1 ) ∗ (𝑔𝑚2 𝑅𝑜𝑢𝑡2 ) ∗
1
2𝜋𝐶𝑐𝑜𝑚𝑝 ∗ 𝑔𝑚2 𝑅𝑜𝑢𝑡2 ∗ 𝑅𝑜𝑢𝑡1
=
𝑔𝑚1
.
2𝜋𝐶𝑐𝑜𝑚𝑝
Il polo ad alta frequenza risulta dato invece da:
𝑓𝑝𝑜𝑙𝑜 𝑎𝑙𝑡𝑎 𝑓𝑟𝑒𝑞𝑢𝑒𝑛𝑧𝑎 =
𝑔𝑚2
.
2𝜋(𝐶01 + 𝐶02 )
Figura 3.24: Schema dell’amplificatore operazionale con polo a bassa frequenza.
È stato inoltre necessario porre una resistenza in serie alla capacità di compensazione, evitando in
tal modo che lo zero, introdotto dalla stessa capacità insieme al polo di compensazione a bassa
frequenza, fosse nel semipiano destro del piano di Gauss rendendo così instabile l’intero blocco.
Tale zero è a frequenza tale che:
1
1
=
+ 𝑅𝑐𝑜𝑚𝑝.
𝑔𝑚2 𝑠𝐶𝑐𝑜𝑚𝑝
63
La resistenza è stata quindi dimensionata per garantire
1
𝑔𝑚 − 𝑅𝑐𝑜𝑚𝑝
𝑓𝑧 =
< 0;
2𝜋𝐶𝑐𝑜𝑚𝑝
𝑅𝑐𝑜𝑚𝑝 >
1
.
𝑔𝑚
È interessante considerare una particolarità del dimensionamento della struttura qui presentata.
Figura 3.25: Circuito equivalente in prossimità del ramo Ccomp-Rcomp e singolarità a esso legate.
La capacità di compensazione provoca la presenza di un anello locale di retroazione, rappresentato
in fig.3.25. La funzione di trasferimento del Gloop locale può provocare instabilità, come si vede da
fig3.25(destra), dove il taglio dell’asse 0dB avviene con pendenza maggiore di 20dB/dec a causa
degli svariati poli parassiti presenti. In particolare, la capacità alla Miller fa si che il Gloop abbia uno
zero a frequenza 0 (punto A), il polo introdotto da tale capacit{ (nell’ipotesi che 𝐶𝑚𝑖𝑙𝑙𝑒𝑟 ≫ 𝐶𝑜1 , 𝐶𝑜2 )
è in figura nel punto B ed è a frequenza:
𝑓𝐵 =
1
.
2𝜋(𝐶𝑐𝑜𝑚𝑝 ) ∗ (𝑅𝑜1 + 𝑅𝑜2 )
Quando, in frequenza, la capacità di Miller ha completamente esaurito il suo effetto, intervengono
singolarità a frequenza elevata. Trascurando la resistenza sul ramo di compensazione si ottiene:
𝑓𝐶 =
1
𝑅 𝑅𝑜2
2𝜋(𝐶𝑜1 + 𝐶𝑜2 ) ∗ (𝑅 𝑜1+ 𝑅
)
𝑜1
𝑜2
;
𝑓𝐷 =
1
.
𝐶𝑜1 𝐶𝑜2
2𝜋 (𝐶 + 𝐶 ) ∗ (𝑅𝑐𝑜𝑚𝑝 )
𝑜1
𝑜2
Se il polo a 𝑓𝐷 non ci fosse, l’attraversamento dell’asse avverrebbe a -20dB/dec a frequenza:
𝑓𝐸 =
𝑔𝑚2
.
2𝜋(𝐶𝑜1 + 𝐶𝑜2 )
64
Perché il Gloop sia stabile occorre che l’attraversamento avvenga ancora con una pendenza di 20dB/dec, ovvero
1
𝐶 𝐶
2𝜋 (𝐶 𝑜1+ 𝑜2
𝐶 ) ∗ (𝑅𝑐𝑜𝑚𝑝 )
𝑜1
>
𝑔𝑚2
,
2𝜋(𝐶𝑜1 + 𝐶𝑜2 )
𝑜2
condizione favorita dalla presenza di Co1>Co2. Ovviamente occorre poi dimensionare i transistor
cascode del secondo stadio perché il polo parassita da essi introdotto, alla frequenza
1
2𝜋𝐶𝑔𝑠𝑐𝑎𝑠𝑐𝑜𝑑𝑒 ∗ 𝑔𝑚
1
,
𝑐𝑎𝑠𝑐𝑜𝑑𝑒
sia anch’esso oltre il punto di attraversamento dell’asse 0dB.
Si consideri la seguente tabella per il dimensionamento dello stadio amplificatore con prodotto
guadagno-banda a 20MHz il cui schema è in fig3.24.
MOS-R-C
(W/L)-valore
Ibias
M1
50/1
5𝜇𝐴
Mload1
100/1
5𝜇𝐴
M2
60/1
45𝜇𝐴
Mtail2
20/1
45𝜇𝐴
Ccomp
1pF
Rcomp
6,67kΩ
Co1
1pF
La funzione di trasferimento di tale blocco, basilare nella struttura del filtro passa basso attivo, è
stata ottenuta da simulazioni dell’operazionale in anello chiuso, retroazionandolo a buffer così
come è stato impiegato nel sistema complessivo. In fig.3.26 si nota la presenza del picco
indesiderato nel caso nel dimensionamento non si presti attenzione a quanto appena considerato.
Come si vede in figura, il blocco è stabile, con margine di fase pari 80 gradi. Il guadagno in continua
è dello stadio è circa 130dB, con prodotto guadagno-banda variabile a seconda del
dimensionamento della capacità di compensazione tra circa 600kHz e 20MHz. In particolare
l’attraversamento dell’asse 0dB avviene attorno a 20MHz per gli operazionali impiegati nella
realizzazione del blocco integratore e nella resistenza da 1,5GΩ; mentre è a più di una decade prima,
1MHz, nel caso dell’operazionale di retroazione di modo comune dell’integratore stesso, come è
stato mostrato nel precedente sottocapitolo.
65
|Guadagno|
130dB
10Hz
0dB; 10,5MHz
f
Fase
80°
|Guadagno|
600kHz, 0dB
0,1Hz
f
Figura 3.26: Diagrammi di Bode della funzione di trasferimento dell’amplificatore con polo a bassa frequenza, si
noti la presenza del picco (eliminato dimensionando opportunamente lo stadio) sotto l’asse a 0dB a frequenza
prossima al prodotto guadagno-banda (a) e l’elevato margine di fase (b).
66
4. Simulazioni sul sistema
complessivo
4.1. Riassunto delle prestazioni
Si riportano nella seguente tabella alcuni parametri fondamentali ottenuti dal progetto dei diversi
blocchi costituenti il sistema, spiegato nel dettaglio nel precedente capitolo.
Stadio
Guadagno in
continua
Banda
Densità spettrale di
rumore
Differenziale
d’ingresso
17dB
650MHz
1,7nV/√𝐻𝑧 in ingresso
@40kHz
Moltiplicatore
analogico
6dB con 1V in ingresso
250MHz
29,4nV/√𝐻𝑧 in uscita
@70kHz
Amplificatore
chopper
65dB
700kHz
5,4nV/√𝐻𝑧 in ingresso
@70kHz
Integratore
150dB
GBWP=100Hz
107nV/√𝐻𝑧 in uscita
@10kHz
Come è stato più volte affermato, la larghezza di banda ad anello chiuso del sistema complessivo è
pari a 100Hz e il guadagno d’anello alla frequenza f0 pari a 150dB nel caso di capacit{ d’ingresso
pari a 10pF. La banda è invece pari a 1kHz, con guadagno a centro banda di 170dB circa, se la
capacit{ d’ingresso è 1pF. Il rumore in ingresso equivale a una risoluzione di 1,4aF in capacit{.
4.2. Risultati delle simulazioni
Innanzitutto è stata eseguita una simulazione in anello aperto per testare preliminarmente il
comportamento del circuito. In fig.4.1 sono riportati i segnali nel tempo processati da un primo
moltiplicatore a interruttori, dal primo stadio di guadagno, da un secondo moltiplicatore a
67
interruttori e dal filtro passa basso il cui progetto è stato spiegato nel capitolo precedente. In questa
simulazione è stata omessa la modulazione del segnale operata dai moltiplicatori analogici ed è
stata considerata la sola moltiplicazione per il segnale a onda quadra. Per simulare le condizioni di
funzionamento del circuito nel suo complesso, che è stato considerato nelle simulazioni successive,
il segnale in ingresso dovrebbe essere a frequenza nulla (ovvero ciò che si ottiene a valle della
moltiplicazione del segnale in ingresso a f0 con il segnale di riferimeno alla stessa frequenza). Onde
evitare la saturazione dell’uscita, inevitabile considerando l’assenza in questa prima simulazione
dell’anello di reazione, la frequenza in ingresso non è nulla bensì pari a 1kHz.
Vin
t
500msec
Vout.primo.mixer
Vout.amplificatore
Vout.secondo.mixer
Vout.integratore
Figura 4.1: Andamento nel tempo dei segnali nel sistema ad anello aperto (a esclusione della
modulazione dei moltiplicatori analogici).
Come si vede in figura, il segnale in uscita dal primo moltipicatore a interruttori è l’inviluppo della
sinusoide in ingresso con l’onda quadra. Questo segnale è poi amplificato del guadagno in continua
dello stadio a larga banda. A valle della seconda moltiplicazione con l’onda quadra si vede la
sinusoide di partenza. Gli spike sono eliminati dal successivo filtro passa basso che, data la
frequenza del segnale in ingresso, in questo caso fornisce un modesto guadagno e introduce uno
sfasamento di -90°, essendo il suo polo a frequenza minore. La presenza di spike è giustificabile
dall’intervento delle capacità parassite dei transistori costituenti gli interruttori del moltiplicatore.
Tali capacità si scaricano sulla resistenza in ingresso al successivo stadio integratore con una
costante di tempo molto minore del periodo dell’onda quadra e sono quindi visibili. La presenza di
spike provoca un’alterazione della tensione continua presente a valle del secondo moltiplicatore a
interruttori, che risulta in un guadagno d’anello diverso da quello atteso. Tale variazione è
comunque trascurabile rispetto al valore di guadagno molto elevato alla frequenza di ingresso.
Si consideri ora la seguente simulazione nel tempo sul sistema completo retroazionato: la corrente
in ingresso al sistema è sinusoidale, alla frequenza di 1MHz, di ampiezza pari a 1nA di picco. In
fig.4.2 si vede il transitorio di assestamento del circuito: l’ampiezza dell’uscita differenziale cresce
da zero al valore di regime mentre la massa virtuale si porta a un’ampiezza picco picco di pochi
68
microvolt. Il valore di regime del segnale sull’uscita ad alta frequenza (differenziale tra i nodi di
uscita del moltiplicatore analogico) è pari a quello atteso dal calcolo del guadagno ideale del
sistema:
𝑉𝑂𝑈𝑇𝑑𝑖𝑓𝑓 = 2 ∗
𝑖𝐼𝑁
2𝑛𝐴
=
= 3,2𝑚𝑉𝑝 .
2𝜋𝐶𝑓𝑒𝑒𝑑 𝑓𝐼𝑁 2𝜋 ∗ 100𝑓𝐹 ∗ 1𝑀𝐻𝑧
La costante di tempo del transitorio in questa simulazione è pari a circa 1,5msec, corrispondente a
una banda ad anello chiuso del sistema di 100Hz che è coerente con il calcolo effettuato nel capitolo
relativo al progetto dello stadio integratore, nel caso di capacit{ dell’integratore pari a 10pF e
capacit{ d’ingresso pari a 1pF.
Si possono analizzare inoltre le tensioni presenti nei diversi punti del circuito, visibili in fig.4.3. Il
nodo di massa virtuale presenta un segnale ampio pochi microvolt. Come si vedrà dai risultati di
successive simulazioni, a transitorio completamente esaurito la tensione sulla massa virtuale è di
ampiezza trascurabile, coerentemente con il guadagno d’anello di circa 106 alla frequenza
considerata. Il segnale sulla massa virtuale è centrato intorno a 0V, dunque il circuito che preleva e
gestisce la corrente continua in ingresso è efficace.
Vout.differenziale
3,2mV
Vmassa.virtuale
<<10uV
Figura 4.2: Transitorio dell’uscita ad alta frequenza e di assestamento della massa virtuale a tensione circa
nulla.
Gli spike sul nodo di massa virtuale, dovuti al moltiplicatore a onda quadra del chopper, risultano
inferiori a 20uV, valore sostenibile da campioni biologici senza esserne perturbati. Il segnale in
uscita dal primo stadio differenziale è correttamente amplificato del guadagno in continua, pari a 7.
L’effetto del successivo moltiplicatore a interruttori è di modulare il segnale alla frequenza del
chopper, 70kHz.
A valle di tale stadio si considera il canale con i riferimenti cosinusoidali: essendo il segnale in
ingresso di corrente un seno, la retroazione agisce in modo che il segnale in uscita sia un coseno
69
(essendo il guadagno ideale tra corrente e tensione dato dalla impedenza della capacità di
retroazione) e che quindi il solo canale coseno sia attivo nel cammino d’andata. All’ingresso
dell’amplificatore centrale del canale con riferimenti cosinusoidali giunge dunque un segnale,
modulato alla frequenza di chopper attorno alla frequenza di 2MHz, essendoci l’effetto di
moltiplicazione per il segnale di riferimento sinusoidale a 1MHz. L’amplificatore filtra parzialmente
la componente a più alta frequenza e fornisce un guadagno di 1700 per quelle componenti a
frequenza inferiore rispetto al primo polo, ovvero il segnale utile portato a 70kHz. Il modo comune
in uscita all’amplificatore centrale (non mostrato in figura) è pari a pochi millivolt, come imposto
dalla rete di gestione a capacità commutate. I disturbi introdotti dalle commutazioni di tale rete
risultano del tutto trascurabili.
In ingresso all’integratore (fig.4.4) l’azione di modulazione e demodulazione alla frequenza di
chopper dovuta ai moltiplicatori a interruttori dovrebbe essere nulla sul segnale, perché i loro
effetti si compensano, tuttavia sono visibili spike alla frequenza doppia di 70kHz che giungono lì
principalmente a causa della banda finita dell’amplificatore chopperato. Gli spike alla frequenza di
chopper vengono filtrati e danno un valore medio diverso da zero a valle dell’integratore, il cui
effetto è del tutto trascurabile considerando l’elevato guadagno d’anello. Inoltre la componente a
2MHz, frequenza somma introdotta dalla moltiplicazione, giunge all’ingresso dell’integratore non
essendo completamente eliminata dall’amplificatore centrale che ha banda pari a 700kHz. Tale
componente si presenta come oscillazione residua sulle uscite in continua, fuori banda e attenuata
rispetto al segnale di 𝐴0 ∗ 2𝜋 ∗ 2𝑓0 ∗ 𝑅𝐶, dove 𝐴0 è il guadagno dell’integratore in continua.
L’integratore amplifica infatti il segnale utile, che si trova in continua. L’uscita differenziale in DC è
diversa da zero per il solo canale coseno, che rende conto della componente dell’impedenza del DUT
in fase con il segnale di stimolo in ingresso, ed è pari a 12mV. Il modo comune di tale tensione,
scelto compatibile con la dinamica in ingresso del successivo moltiplicatore analogico, è imposto
dalla rete di gestione locale a tempo continuo.
Come atteso, l’uscita seno in DC è invece praticamente nulla, essendo il transitorio quasi
completamente esaurito. Si consideri il residuo di tensione su tale uscita in continua: esso è dovuto
alla banda del moltiplicatore analogico finale, pari a 250MHz. L’effetto di tale banda finita è di
introdurre uno sfasamento alla frequenza di lavoro, in questo caso 1MHz. La retroazione tende ad
annullare questo effetto per mantenere la tensione sull’uscita ad alta frequenza correttamente
sfasata di 90 gradi rispetto al segnale in ingresso, come previsto dal trasferimento ideale
dell’amplificatore retroazionato tramite capacit{. Perciò compare una tensione non nulla sull’uscita
DC del canale seno, di ampiezza opportuna per compensare lo sfasamento del moltiplicatore, pari a:
𝑓0
∆𝜑𝑚𝑖𝑥𝑒𝑟 = 𝑎𝑟𝑐𝑡𝑎 𝑛 (
).
𝐵𝑊𝑚𝑖𝑥𝑒𝑟
Si ricava così il valore atteso sul canale seno considerando questo effetto:
𝑂𝑈𝑇. 𝑠𝑖𝑛. 𝐷𝐶. 𝑎𝑡𝑡𝑒𝑠𝑎 = 𝑂𝑈𝑇. 𝑐𝑜𝑠. 𝐷𝐶 ∗ sin(∆𝜑𝑚𝑖𝑥𝑒𝑟 ) = 12𝑚𝑉 ∗ sin (𝑎𝑟𝑐𝑡𝑎𝑛 (
1𝑀
)) = 47𝜇𝑉,
250𝑀
valore confermato dalla simulazione eseguita a transitorio completamente esaurito, mostrata in
seguito.
Si consideri infine la fig.4.5, che riporta il segnale di corrente in ingresso e il segnale di tensione
all’uscita differenziale. Tali segnali sono legati dal trasferimento reale del sistema, pari a:
70
𝐺𝑟𝑒𝑎𝑙𝑒 =
𝐺𝑖𝑑𝑒𝑎𝑙𝑒
,
1
1−
𝐺𝑙𝑜𝑜𝑝
𝐺𝑖𝑑𝑒𝑎𝑙𝑒 =
𝑉𝑂𝑈𝑇
1
=−
,
𝐼𝐼𝑁
𝑠𝐶𝑓
𝑉𝑂𝑈𝑇 = 3,2𝑚𝑉𝑝𝑝 @1𝑛𝐴, 1𝑀𝐻𝑧.
Il segnale di corrente sinusoidale provoca dunque un segnale di tensione cosinusoidale all’uscita del
sistema. La frequenza di tale segnale è pari a 1MHz, ottenuta dal prodotto tra il segnale in DC e il
segnale di riferimento alla frequenza del segnale d’ingresso, il che permette di chiudere
coerentemente l’anello di retroazione. Il modo comune del segnale in uscita ad alta frequenza è
imposto dalla polarizzazione del moltiplicatore finale stesso.
L’elevata prestazione in quanto a distorsione sull’uscita del sistema è confermata dallo spettro del
segnale in fig.4.6: la componente spettrale a frequenza 3MHz è 4 ordini di grandezza inferiore
rispetto a quella allla frequenza del segnale d’ingresso. La presenza di questa componente,
comunque trascurabile, è dovuta soprattutto alla distorsione del moltiplicatore finale e, essendo
fuori dalla banda retroazionata, non risulta abbattuta del guadagno d’anello del sistema. Le
armoniche pari sono trascurabili essendo il cammino d’andata pienamente differenziale.
La saturazione dell’uscita del circuito è prevista per segnali di 300mV, considerando la dinamica in
uscita del moltiplicatore finale, ovvero per segnali di corrente in ingresso molto maggiori rispetto a
quelli attesi da campioni biologici.
Vmassa.virtuale
<20uV
<<10uV
Vout.primo.stadio
1/(140kHz)
50uV
Vout.mixer.chopper
T=1/(1MHz)
Vout.mixer.analogico.cos
T=1/(2MHz)
2,5uV
Vout.opamp.centrale.cos
4,7mV
Figura 4.3: Segnali ottenuti nel sistema con una corrente in ingresso ampia 1nA, sinusoidale, a 1MHz: dalla
massa virtuale all’uscita dell’amplificatore chopper, centrale sul cammino d’andata.
71
Vin.integratore.cos
Vout.DC.cos
12mV
Vout.DC.sin
<100uV
Vin.integratore.cos
Vout.DC.cos
Vout.DC.sin
Figura 4.4: Segnali ottenuti nel sistema con una corrente in ingresso ampia 1nA, sinusoidale, a 1MH:
tensioni d’ingresso e uscita, in continua, dell’integratore sul canale coseno, e di uscita in continua
(idealmente nulla) sul canale seno.
72
Vout.diff
3,2mVp
Iin
1nA
Figura 4.5: Corrente in ingresso al sistema e tensione di uscita differenziale ad alta frequenza: come
atteso, le due risultano in quadratura.
1MHz, 3,18mV
3MHz, 413nV
5MHz, 8nV
Figura 4.6: Componenti spettrali presenti sull’uscita ad alta frequenza del sistema dando
in ingresso un segnale a 1MHz.
Sono state inoltre eseguite simulazioni per verificare il funzionamento del circuito nel caso
l’impedenza del DUT abbia diverse componenti resistive e capacitive. Per fare ciò è stata
semplicemente data una corrente sinusoidale in ingresso al sistema pari a 1nA a 1MHz con diverse
fasi. I risultati ottenuti sono raccolti nella seguente tabella e confermano il corretto trattamento dei
segnali. L’uscita in continua sul canale seno nel caso di corrente cosinusoidale eguaglia l’uscita in
continua sul canale coseno nel caso di corrente sinusoidale. Tali uscite sono uguali tra loro nel caso
di fase in ingresso pari a 45 gradi. Le uscite ad alta frequenza presentano stessa ampiezza al variare
73
della fase in ingresso. Si riportano le tensioni presenti alle uscite in continua e ad alta frequenza, al
variare della fase del segnale di corrente in ingresso.
𝜑 = 0°
𝑂𝑈𝑇𝐻𝐹
𝜑 = 45°
𝜑 = 90°
3,2mV
3,2mV
3,2mV
𝑂𝑈𝑇𝐷𝐶.𝑐𝑜𝑠
12,11mV
8,49mV
35uV
𝑂𝑈𝑇𝐷𝐶.𝑠𝑖𝑛
32uV
8,5mV
12,06mV
Sono state infine indagate diverse frequenze operative del circuito (fig.4.7-4.10): anche in questo
caso il sistema ha risposto secondo le aspettative. I seguenti risultati sono stati ottenuti da
simulazioni PSS: Periodic Steady State. L'algoritmo di simulazione consente di trovare efficacemente
il punto di lavoro di circuiti in cui sono presenti segnali periodici ad alta frequenza ma che
rispondono con costanti di tempo lente; ciò è ottenuto con successive simulazioni in transitorio
della durata di un periodo del segnale ad alta frequenza, adattando tra un'iterazione e l'altra le
condizioni iniziali del circuito, tramite l'algoritmo di Newton, in modo che restino invariate alla fine
della simulazione. In questo modo e' possibile arrivare ad una soluzione accurata del sistema,
simulando nel tempo pochi cicli del segnale ad alta frequenza (tipicamente meno di 10 [20]), al
contrario di quanto avviene nell'analisi in transitorio, che deve avere un tempo finale maggiore
delle costanti di tempo lente. Lo svantaggio di questo tipo di analisi e' che si perdono le
informazioni riguardanti il tempo che impiega il sistema per andare a regime, che tuttavia è stato
ampiamente descritto per frequenza d’ingresso di 1MHz da simulazione nel tempo in precedenza.
Nel circuito preso in esame vi sono piu' segnali periodici (quello alla frequenza di misura, quello di
chopper e quello per la gestione del modo comune dell'amplificatore differenziale); anche in questo
caso e' possibile utilizzare la simulazione PSS, avendo cura di impostarne il periodo in modo che sia
multiplo di tutti i periodi dei segnali in ingresso. Per minimizzare il tempo di simulazione si e'
quindi scelto di impostare la frequenza dei segnali piu' lenti in modo che sia un sottomultiplo intero
della frequenza del segnale in ingresso e pertanto la si e' impostata a 100kHz, per frequenze di
misura di 1MHz, 10MHz e così via.
Si consideri anzitutto il secondo e il terzo gruppo di segnali nel tempo (fig.4.7 e 4.8). Questi sono
l’andamento delle uscite del circuito e della massa virtuale a 1MHz e a 10MHz. La simulazione a
1MHz, trattata in precedenza nel transitorio, risulta coerenta con quanto ottenuto nella PSS. Si
osservi che il segnale in continua sul canale seno è di 43uV, coerente con il valore atteso dai calcoli.
Anche l’uscita ad alta frequenza con stimolo a 10MHz è quella attesa dai calcoli:
𝑉𝑂𝑈𝑇.𝑠𝑖𝑛𝑔𝑙𝑒 𝑒𝑛𝑑 =
2𝑛𝐴𝑝𝑝
𝑖𝐼𝑁
=
= 320𝜇𝑉𝑝𝑝 ,
2𝜋𝐶𝑓𝑒𝑒𝑑 𝑓𝐼𝑁 2𝜋 ∗ 100𝑓𝐹 ∗ 10𝑀𝐻𝑧
e tale uscita è ridotta di un fattore 10 rispetto a quella ottenuta con stimolo a 1MHz. Lo stesso vale
per la tensione in continua all’uscita del canale coseno: essa vale 12mV se la tensione in ingresso è a
1MHz e vale 1,2mV se l’ingresso è a 10MHz. Infine, osservando le uscite in continua a 10MHz, si può
notare la presenza di una componente di ampiezza trascurabile a 20MHz, residuo prevedibile
dell’operazione di moltiplicazione con il segnale di riferimento a 10MHz, che tuttavia non provoca
effetti apprezzabili sull’uscita ad alta frequenza.
74
La prima simulazione indaga invece il comportamento del circuito a 100kHz. In tal caso l’uscita del
canale coseno in continua e l’ampiezza di quella ad alta frequenza sono pari a 10 volte i valori
ottenuti dalla simulazione a 1MHz, con scarto trascurabile dovuto alla non linearità del
moltiplicatore finale.
L’ultima simulazione è stata fatta con segnale d’ingresso a 100MHz. Come si vede, la massa virtuale
è mantenuta e il sistema funziona effettivamente fino a questa frequenza, come desiderato nelle
specifiche del progetto. I valori ottenuti si discostano di quantità trascurabili rispetto a quelli attesi:
𝑉𝑂𝑈𝑇.𝑠𝑖𝑛𝑔𝑙𝑒 𝑒𝑛𝑑 =
2𝑛𝐴𝑝𝑝
= 32𝑢𝑉𝑝𝑝,
2𝜋 ∗ 100𝑓𝐹 ∗ 100𝑀𝐻𝑧
𝑉𝑂𝑈𝑇.𝐷𝐶.cos =
(𝑉𝑂𝑈𝑇.𝐷𝐶.cos @1𝑀𝐻𝑧)
= 120𝑢𝑉,
100
𝑉𝑂𝑈𝑇.𝑠𝑖𝑛𝑔𝑙𝑒 𝑒𝑛𝑑 |𝑚𝑖𝑠𝑢𝑟𝑎𝑡𝑎 = 31,5𝑢𝑉𝑝𝑝,
𝑉𝑂𝑈𝑇.𝐷𝐶.cos |𝑚𝑖𝑠𝑢𝑟𝑎𝑡𝑎 = 112,2𝑢𝑉.
Il fatto che la banda del moltiplicatore analogico sia limitata provoca, ad alta frequenza, un
abbassamento del guadagno di tale stadio e uno sfasamento introdotto dallo stesso. Lavorando
comunque prima del polo della funzione di trasferimento del moltiplicatore, l’impatto della fase sul
segnale in uscita prevale rispetto all’effetto del guadagno. In particolare lo sfasamento introdotto è
compensato dalla retroazione, che provoca la comparsa di un segnale non nullo sull’uscita in
continua del canale seno, quantificato in precedenza per la simulazione a 1MHz. Così si spiega la
presenza di una tensione sull’uscita DC del canale seno percentualmente rilevante, a 100MHz,
rispetto a quella del canale coseno. Quest’ultima risulta dunque inferiore rispetto a quella attesa, in
modo che l’uscita ad alta frequenza sia comunque dell’ampiezza corretta, garantita dall’elevato
guadagno d’anello.
75
freq(in)=100kHz
OUT.DC.sin
OUT.DC.cos
127,3mV
76uV
31,5mVpp
OUT.HF
-384,5mV
10𝜇𝑠𝑒𝑐
V.massa.virtuale
40uV
0V
Figura 4.7: Andamento nel tempo delle uscite in continua, ad alta frequenza e della massa virtuale del sistema
da simulazione PSS (a transitorio esaurito), con segnale d’ingresso a 100kHz.
freq(in)=1MHz
OUT.DC.cos
OUT.DC.sin
12,05mV
43uV
OUT.HF
1𝜇𝑠𝑒𝑐
3,2mVpp
-384,5mV
V.massa.virtuale
0V
5𝜇𝑠𝑒𝑐
Figura 4.8: Andamento nel tempo delle uscite in continua, ad alta frequenza e della massa virtuale del sistema da
simulazione PSS (a transitorio esaurito), con segnale d’ingresso a 1MHz.
76
400nVpp
OUT.DC.cos
freq(in)=10MHz
1,18mV
0,1𝜇𝑠𝑒𝑐
20nVpp
OUT.DC.sin
33uV
OUT.DC.cos
OUT.DC.sin
1,18mV
33uV
OUT.HF
320uVpp
0,1𝜇𝑠𝑒𝑐
-384,5mV
V.massa.virtuale
0V
Figura 4.9: Andamento nel tempo delle uscite in continua, ad alta frequenza e della massa virtuale del sistema da
simulazione PSS (a transitorio esaurito), con segnale d’ingresso a 10MHz.
77
freq(in)=100MHz
OUT.DC.cos
OUT.DC.sin
112,2uV
40,7uV
OUT.HF
31,5uVpp
10nsec
-384,5mV
V.massa.virtuale
0V
Figura 4.10: Andamento nel tempo delle uscite in continua, ad alta frequenza e della massa virtuale del sistema
da simulazione PSS (a transitorio esaurito), con segnale d’ingresso a 100MHz.
78
È infine stata testata l’efficacia del circuito come misuratore di un’impedenza incognita. All’ingresso
del sistema è stato posto dunque un generatore di tensione sinusoidale che stimola un parallelo RC.
La frequenza di stimolo è stata fatta variare nel range di frequenze di funzionamento del circuito, da
10kHz a 100MHz. L’ampiezza dello stimolo è pari a 1mV picco-picco, considerato sostenibile da
campioni biologici.
L’ammettenza da misurare, al variare della frequenza, è la seguente:
𝑌𝐷𝑈𝑇 =
1
𝑅𝐷𝑈𝑇
+ 2𝜋𝑓𝐼𝑁 𝐶𝐷𝑈𝑇 ,
dove è stato scelto 𝑅𝐷𝑈𝑇 = 10𝑀Ω e 𝐶𝐷𝑈𝑇 = 15𝑓𝐹 nella simulazione.
L’informazione sulla parte reale e immaginaria dell’ammettenza incognita è direttamente fornita dal
segnale presente sulle uscite in continua del circuito, OUTF e OUTQ in fig.2.5. Considerando che il
segnale di corrente in ingresso viene integrato sulla capacità di feedback, l’andamento della
tensione sulle uscite in continua in funzione della frequenza di stimolo rispecchia le attese. Infatti,
per come è strutturato il circuito, l’uscita in continua del canale seno è proporzionale alla parte
immaginaria dell’ammettenza incognita: considerando la sola capacità del DUT il trasferimento è
|
𝑉𝑂𝑈𝑇.𝐷𝐶.𝑠𝑖𝑛
𝐶𝐷𝑈𝑇
,
|=
𝑉𝐼𝑁
𝐶𝑓𝑒𝑒𝑑𝑏𝑎𝑐𝑘 𝐺𝑚𝑖𝑥𝑒𝑟 (𝑓)
indipendente dalla frequenza del segnale in ingresso. Invece, l’uscita in continua del canale coseno
rende conto della parte reale dell’impedenza: considerando la sola resistenza del DUT il
trasferimento è
|
𝑉𝑂𝑈𝑇.𝐷𝐶.𝑐𝑜𝑠
1
,
|=
𝑉𝐼𝑁
2𝜋𝑓𝐼𝑁 𝑅𝐷𝑈𝑇 𝐶𝑓𝑒𝑒𝑑𝑏𝑎𝑐𝑘 𝐺𝑚𝑖𝑥𝑒𝑟 (𝑓)
che decresce al crescere della frequenza del segnale in ingresso.
Naturalmente a partire da tali tensioni è immediato risalire alle componenti ignote di impedenza in
ingresso, date la frequenza di stimolo e la capacità posta in retroazione.
In fig.4.11 e 4.12 sono riportati l’andamento dell’ampiezza e della fase del segnale sull’uscita ad alta
frequenza, da confrontarsi con il trasferimento in tensione del sistema plottato da calcolo in
funzione della frequenza di stimolo secondo la seguente espressione:
1
2𝜋𝑓𝐼𝑁 𝐶𝑓𝑒𝑒𝑑𝑏𝑎𝑐𝑘
𝑉𝑂𝑈𝑇
=
,
1
𝑉𝐼𝑁
𝑅𝐷𝑈𝑇 \\
2𝜋𝑓𝐼𝑁 𝐶𝐷𝑈𝑇
con 𝐶𝑓𝑒𝑒𝑑𝑏𝑎𝑐𝑘 = 100𝑓𝐹, 𝐶𝐷𝑈𝑇 = 15𝑓𝐹, 𝑅𝐷𝑈𝑇 = 10𝑀Ω,
Si noti la presenza del polo nell’origine e dello zero a frequenza 1/(2𝜋𝑅𝐷𝑈𝑇 𝐶𝐷𝑈𝑇 ). Le differenze tra i
valori ottenuti dai calcoli e dalla simulazione sono trascurabili.
79
Figura 4.11: Andamento dell’ampiezza del segnale sull’uscita ad alta frequenza del sistema,
dovuto all’impedenza dell’RC-parallelo posto in ingresso.
Figura 4.12: Andamento della fase del segnale sull’uscita ad alta frequenza del sistema, dovuto
all’impedenza dell’RC-parallelo posto in ingresso.
80
5. Generazione dei segnali di
riferimento in fase e in quadratura
5.1. Requisiti ed errori
Figura 5.1: Schema per indagare l’impatto delle non idealità dei segnali di riferimento.
I segnali di interesse in uscita nel sistema complessivo sono il segnale ad alta frequenza a valle del
blocco che moltiplica i segnali in continua e i segnali di riferimento ad alta frequenza e che ne fa la
somma (nodo VOTOT in fig.5.1), ma anche le due tensioni a bassa frequenza a valle degli amplificatori
(nodi V2I e V2Q in fig.5.1). Le tensioni V2I e V2Q sono di valore direttamente proporzionale
all'impedenza del DUT nelle sue due componenti in fase e in quadratura con l'ingresso.
Nel presente paragrafo verrà considerato come le uscite del sistema vengono modificate in caso di
non idealità presenti nei segnali di riferimento ad alta frequenza, inviati ai moltiplicatori analogici
che eseguono la demodulazione e la modulazione del segnale proveniente dal DUT.
E' possibile considerare le due principali fonti di errore presenti nel sistema di generazione dei
segnali di riferimento. Tali non idealità, che modificano le uscite V2I, V2Q e VOTOT, sono la diversa
ampiezza del segnale seno e coseno di riferimento e un errore di fase tra essi rispetto ai 90 gradi
ideali. Come conseguenza vi è una modifica del guadagno con cui viene trattato il segnale
proveniente dal DUT, nonchè l'introduzione di una non linearità all'uscita del sistema, ovvero una
81
componente sinusoidale a frequenza vicina a quella in ingresso, con fase eventualmente diversa da
quella che si avrebbe idealmente. In particolare tale errore sulla fase delle uscite è funzione della
fase del segnale proveniente dal DUT rispetto alla fase della sinusoide di riferimento e quindi è
diverso a seconda dell'impedenza a priori incognita del DUT.
Si consideri innanzitutto il caso in cui i segnali di riferimento sono in quadratura, ma la loro
pulsazione 𝜔𝑚 sia diversa rispetto a quella del segnale d’ingresso 𝜔𝐼𝑁 , di una quantità pari a
∆𝜔 = (𝜔𝐼𝑁 − 𝜔𝑚 ) e le loro ampiezze C1 e C2 siano diverse.
Se il segnale in ingresso alla catena di stadi costituenti il blocco di andata di fig.5.1 è sinusoidale si
ha:
𝑉𝐴 = 𝐴𝐼𝑁 sin(𝜔𝐼𝑁 𝑡 + 𝜑𝐼𝑁 ),
𝜑𝐼 = 𝜑𝑄 = 0.
Si considerano inoltre i filtri AI e AQ come filtri passa basso ideali con guadagno in continua unitario
(per semplicità di calcolo) e frequenza di taglio minore di 𝜔𝑚 e maggiore di ∆𝜔, ottenendo per il
cammino in fase:
𝑉1𝐼 = 𝐴𝐼𝑁 𝐶1 sin(𝜔𝐼𝑁 𝑡 + 𝜑𝐼𝑁 ) ∗ sin(𝜔𝑚 𝑡) =
=
𝑉2𝐼 =
𝐴𝐼𝑁 𝐶1
cos((𝜔𝐼𝑁 − 𝜔𝑚 )𝑡 + 𝜑𝐼𝑁 ) − cos((𝜔𝐼𝑁 + 𝜔𝑚 )𝑡 + 𝜑𝐼𝑁 ),
2
𝐴𝐼𝑁 𝐶1
cos((𝜔𝐼𝑁 − 𝜔𝑚 )𝑡 + 𝜑𝐼𝑁 ),
2
𝐴𝐼𝑁 𝐶12
𝑉𝑂𝐼 = 𝑉2𝐼 ∗ sin(𝜔𝑚 𝑡) =
(sin((2𝜔𝑚 − 𝜔𝐼𝑁 )𝑡 − 𝜑𝐼𝑁 ) + sin(𝜔𝐼𝑁 𝑡 + 𝜑𝐼𝑁 )) .
4
Eseguendo analoghi calcoli sul cammino in quadratura si ottiene:
𝑉2𝑄 =
𝑉𝑂𝑄
𝐴𝐼𝑁 𝐶2
sin((𝜔𝐼𝑁 − 𝑤𝑚 )𝑡 + 𝜑𝐼𝑁 ),
2
𝐴𝐼𝑁 𝐶22
=
(sin((−2𝜔𝑚 + 𝜔𝐼𝑁 )𝑡 + 𝜑𝐼𝑁 ) + sin(𝜔𝐼𝑁 𝑡 + 𝜑𝐼𝑁 )).
4
Quindi l’uscita ad alta frequenza è:
𝑉𝑂𝑇𝑂𝑇 =
𝐴𝐼𝑁 𝐶12
C22
C22
[(1 + 2 ) sin(𝜔𝐼𝑁 𝑡 + 𝜑𝐼𝑁 ) + (1 − 2 ) sin((2𝜔𝑚 − 𝜔𝐼𝑁 )𝑡 − 𝜑𝐼𝑁 )] .
4
C1
C1
Si nota la presenza di una componente sinusoidale alla pulsazione (2𝜔𝑚 − 𝜔𝐼𝑁 ) che non ci sarebbe
nel caso ideale. Infatti quando 𝜔𝑚 = 𝜔𝐼𝑁 l’uscita del cammino in fase a frequenza nulla 𝑉2𝐼 è
proporzionale al coseno di 𝜑𝐼𝑁 , l’uscita del cammino in quadratura a frequenza nulla 𝑉2𝑄 è
proporzionale al seno di 𝜑𝐼𝑁 , ed è correttamente nulla nel caso 𝜑𝐼𝑁 = 0, ovvero quando il segnale
errore è una sinusoide pura. Nel caso di segnale in ingresso con 𝜑𝐼𝑁 qualunque e sistema ideale, le
due uscite a bassa frequenza sono direttamente legate a tale fase, e sono come atteso segnali
proporzionali all’impedenza del DUT. L’uscita ad alta frequenza non risente della componente
sinusoidale aggiuntiva solo nel caso in cui le ampiezze dei segnali di riferimento siano uguali. Nel
caso ciò non accada, la componente a frequenza (2𝜔𝑚 − 𝜔𝐼𝑁 ) è presente sull’uscita ad alta
frequenza, e risulta consistente nell’anello di retroazione complessivo (essendo ragionevolmente
entro la banda reazionata), provocando la presenza di armoniche che si autosostengono.
Ciò non costituisce un problema: usando lo stesso generatore sia per il segnale applicato al DUT che
per i riferimenti questa non linearità è facilmente eliminabile. Alla frequenza di interesse rimane
82
solo un errore sull'ampiezza del segnale di uscita compensato dall'elevato guadagno d'anello, come
verrà mostrato i seguito.
Si considerino ora i due segnali di riferimento a pulsazione 𝜔𝑚 diversa dalla pulsazione d’ingresso
𝜔𝐼𝑁 , che abbiano a differenza di prima la stessa ampiezza C e siano sfasati di una quantità diversa
dai 90 gradi che si vorrebbero idealmente. Se si considera 𝜑𝐼 = 0, 𝑒 𝜑𝑄 ≠ 0 il trattamento del
segnale sul cammino in fase non cambia rispetto a prima: l’uscita in continua vale:
𝑉2𝐼 =
𝐴𝐼𝑁 𝐶1
cos((𝜔𝐼𝑁 − 𝜔𝑚 )𝑡 + 𝜑𝐼𝑁 ).
2
Invece si ottiene per il cammino in quadratura:
𝑉1𝑄 = 𝐴𝐼𝑁 𝐶 sin(𝜔𝐼𝑁 𝑡 + 𝜑𝐼𝑁 ) sin(𝜔𝑚 𝑡 + 𝜑𝑄 ) =
=
𝐴𝐼𝑁 𝐶
sin((𝜔𝐼𝑁 − 𝜔𝑚 )𝑡 + 𝜑𝐼𝑁 − 𝜑𝑄 ) + sin((𝜔𝐼𝑁 + 𝜔𝑚 )𝑡 + 𝜑𝐼𝑁 + 𝜑𝑄 ),
2
𝑉2𝑄 =
𝐴𝐼𝑁 𝐶
sin((𝜔𝐼𝑁 − 𝜔𝑚 )𝑡 + 𝜑𝐼𝑁 − 𝜑𝑄 ),
2
𝑉𝑂𝑄 =
𝐴𝐼𝑁 𝐶 2
(sin((𝜔𝐼𝑁 − 𝜔𝑚 )𝑡 + 𝜑𝐼𝑁 − 𝜑𝑄 )) ∗ cos(𝜔𝑚 𝑡 + 𝜑𝑄 ) =
2
𝐴𝐼𝑁 𝐶 2
=
(sin((𝜔𝐼𝑁 − 2𝜔𝑚 )𝑡 + 𝜑𝐼𝑁 − 2𝜑𝑄 ) + sin(𝜔𝐼𝑁 𝑡 + 𝜑𝐼𝑁 ).
4
Perciò l’uscita ad alta frequenza risulta:
𝑉𝑂𝑇𝑂𝑇 =
𝐴𝐼𝑁 𝐶 2
(sin(𝜔𝐼𝑁 𝑡 + 𝜑𝐼𝑁 ) + 𝜑𝑄 cos((2𝜔𝑚 − 𝜔𝐼𝑁 )𝑡 − 𝜑𝐼𝑁 + 𝜑𝑄 )).
2
Come è facile notare, l’uscita a bassa frequenza 𝑉2𝑄 presenta una componente 𝜑𝑄 , aggiuntiva
rispetto alla componente utile 𝜑𝐼𝑁 , dovuta appunto allo sfasamento tra i due segnali di riferimento.
La componente cosinusoidale indesiderata presente all’uscita ad alta frequenza del sistema, inoltre,
dipende dall’errore di fase del segnale in quadratura sia in ampiezza che in fase. Anche nel caso
ideale in cui 𝜔𝑚 = 𝜔𝐼𝑁 , sull’uscita ad alta frequenza si nota la presenza di un errore sulla fase
dovuto a 𝜑𝑄 , che tuttavia non introduce non linearità nel sistema.
E’ poi necessario considerare che il sistema è complessivamente retroazionato. Il segnale in
ingresso ai blocchi costituenti il cammino di andata è dunque il solo segnale errore, come si vede in
fig.5.2.
Per quanto visto finora, le non idealità dei segnali di riferimento causano una componente in uscita
indesiderata a (2𝜔𝑚 − 𝜔𝐼𝑁 ), in aggiunta a quella desiderata a 𝜔𝐼𝑁 .
E’ dunque possibile ipotizzare che il segnale errore in ingresso al cammino di andata del sistema sia
dato dalla somma di sole due componenti, a frequenza 𝜔𝐼𝑁 e (2𝜔𝑚 − 𝜔𝐼𝑁 ):
𝜀 = 𝑚 ∗ 𝑠𝑖𝑛(𝜔𝐼𝑁 𝑡 + 𝜑𝑚 ) + 𝑛 ∗ 𝑠𝑖𝑛((2𝜔𝑚 − 𝜔𝐼𝑁 )𝑡 + 𝜑𝑛 ),
dove m e 𝜑𝑚 sono il modulo e la fase della componente idealmente presente, a frequenza 𝜔𝐼𝑁 ,
mentre n e 𝜑𝑛 sono relative alla componente a (2𝜔𝑚 − 𝜔𝐼𝑁 ). Quest’ultima componente è, per
ipotesi, a bassa frequenza, ovvero entro la banda ad anello chiuso del sistema.
83
Figura 5.2 Schema per indagare le non idealità dei segnali di riferimento
considerando il sistema raezionato.
Se la corrente proveniente dal DUT è del tipo:
𝐼𝐼𝑁 = 𝐴𝐼𝑁 sin(𝜔𝐼𝑁 𝑡 + 𝜑𝐼𝑁 )
si ricava il sistema di equazioni che risolve il circuito come segue.
Si consideri anzitutto il caso in cui i due segnali sfasati di riferimento abbiano ampiezze diverse, il
cui rapporto sia 𝛾. E’ semplice scrivere la relazione tra il segnale errore e l’uscita a alta frequenza
ricordando l’espressione di VOTOT scritta in precedenza nel caso di ampiezze diverse del segnale di
riferimento, perciò:
𝑉𝑂𝑈𝑇 =
𝐴0
[𝑚(1 + 𝛾 2 ) sin(𝜔𝐼𝑁 𝑡 + 𝜑𝑚 ) + 𝑚(1 − 𝛾 2 ) sin((2𝜔𝑚 − 𝜔𝐼𝑁 )𝑡 − 𝜑𝑚 ) +
4
𝑛(1 + 𝛾 2 ) sin((2𝜔𝑚 − 𝜔𝐼𝑁 )𝑡 + 𝜑𝑛 ) + 𝑛(1 − 𝛾 2 )sin(𝑤𝐼𝑁 𝑡 − 𝜑𝑛 )].
Inoltre si può scrivere la relazione tra ingresso e uscita del sistema considerando la presenza del
blocco in retroazione, di guadagno 𝛽:
𝐴𝐼𝑁 sin(𝜔𝐼𝑁 𝑡 + 𝜑𝐼𝑁 ) − 𝛽𝑉𝑂𝑈𝑇 = 𝑚 ∗ 𝑠𝑖𝑛(𝜔𝐼𝑁 𝑡 + 𝜑𝑚 ) + 𝑛 ∗ 𝑠𝑖𝑛((2𝜔𝑚 − 𝜔𝐼𝑁 )𝑡 + 𝜑𝑛 ).
Il sistema formato dalle due equazioni appena scritte si risolve separando le componenti a
frequenze diverse.
Per quanto riguarda le componenti a pulsazione (2𝜔𝑚 − 𝜔𝐼𝑁 ) si può ricavare l’equazione:
−
𝛽𝐴0
[𝑚(1 − 𝛾 2 ) sin((2𝜔𝑚 − 𝜔𝐼𝑁 )𝑡 − 𝜑𝑚 ) + 𝑛(1 + 𝛾 2 ) sin((2𝜔𝑚 − 𝜔𝐼𝑁 )𝑡 + 𝜑𝑛 )] =
4
= 𝑛 ∗ 𝑠𝑖𝑛((2𝜔𝑚 − 𝜔𝐼𝑁 )𝑡 + 𝜑𝑛 ).
Da qui si può passare al regime fasoriale ottenendo:
−
𝛽𝐴0
∗ (𝑚(1 − 𝛾 2 )𝑒 −𝜑𝑚 + 𝑛(1 + 𝛾 2 )𝑒 𝜑𝑛 ) = 𝑛𝑒 𝜑𝑛 ,
4
84
da cui
−
𝛽𝐴0
∗ (𝑚(1 − 𝛾 2 )𝑒 −𝜑𝑚−𝜑𝑛 + 𝑛(1 + 𝛾 2 )) = 𝑛.
4
Risolvendo la parte immaginaria si ottiene:
𝜑𝑚 + 𝜑𝑛 = 0 + 𝑘𝜋 → 𝜑𝑚 = −𝜑𝑛 .
Riscrivendo la parte reale si ottiene:
−
𝛽𝐴0
∗ (𝑚(1 − 𝛾 2 ) + 𝑛(1 + 𝛾 2 )) = 𝑛.
4
Per quanto riguarda le componenti a pulsazione 𝑤𝐼𝑁 si può analogamente ricavare l’equazione:
𝐴𝐼𝑁 sin(𝜔𝐼𝑁 𝑡 + 𝜑𝐼𝑁 ) −
𝛽𝐴0
[𝑚(1 + 𝛾 2 ) sin(𝜔𝐼𝑁 𝑡 + 𝜑𝑚 ) + 𝑛(1 − 𝛾 2 ) sin(𝜔𝐼𝑁 𝑡 − 𝜑𝑛 )] =
4
= 𝑚 ∗ 𝑠𝑖𝑛(𝜔𝐼𝑁 𝑡 + 𝜑𝑚 ).
Passando, analogamente a quanto appena fatto, al regime fasoriale si ottiene:
𝐴𝐼𝑁 𝑒 𝜑𝐼𝑁 −
𝛽𝐴0
∗ (𝑚(1 + 𝛾 2 )𝑒 𝜑𝑚 + 𝑛(1 − 𝛾 2 )𝑒 −𝜑𝑛 ) = 𝑚𝑒 𝜑𝑚 ,
4
da cui
𝐴𝐼𝑁 𝑒 𝜑𝐼𝑁−𝜑𝑚 −
𝛽𝐴0
∗ (𝑚(1 + 𝛾 2 ) + 𝑛(1 − 𝛾 2 )𝑒 −𝜑𝑛 −𝜑𝑚 ) = 𝑚,
4
dove 𝜑𝑛 + 𝜑𝑚 = 0 per quanto visto prima.
Risolvendo la parte immaginaria si ottiene:
𝜑𝐼𝑁 − 𝜑𝑚 = 0 + 𝑘𝜋 → 𝜑𝐼𝑁 = 𝜑𝑚 .
Riscrivendo la parte reale si ha:
𝐴𝐼𝑁 −
𝛽𝐴0
∗ (𝑚(1 + 𝛾 2 ) + 𝑛(1 − 𝛾 2 )) = 𝑚.
4
Si può dunque ricavare le componenti m e n dalla risoluzione del seguente sistema:
𝛽𝐴0
𝛽𝐴0
(1 + 𝛾 2 )
(1 + 𝛾 2 )
𝑚
𝐴
4
4
[
] * + = * 𝐼𝑁 +.
𝑛
𝛽𝐴0
𝛽𝐴
0
0
(1 + 𝛾 2 )
(1 + 𝛾 2 )
1+
4
4
1+
Sostituendo m e n nell’espressione di VOUT si ricava finalmente:
𝑉𝑂𝑈𝑇
𝐴0 𝐴𝐼𝑁
=
4
𝛽𝐴0
(1 + 𝛾 2 )
4
(1 + 𝛾 2 ) +
𝛽𝐴0
𝛽𝐴0 2 2
[ (1 + 2 + ( 2 ) 𝛾 )
)
1+
𝛽𝐴0
(1 − 𝛾 2 )
4
−
(1 − 𝛾 2 )] sin(𝜔𝐼𝑁 𝑡 + 𝜑𝐼𝑁 ) +
𝛽𝐴0
𝛽𝐴0 2 2
1+ 2 +( 2 ) 𝛾
(
)
85
𝐴0 𝐴𝐼𝑁
+
4
𝛽𝐴0
(1 + 𝛾 2 )
4
(1 − 𝛾 2 ) +
𝛽𝐴0
𝛽𝐴0 2 2
[(1 + 2 + ( 2 ) 𝛾 )
)
1+
𝛽𝐴0
(1 − 𝛾 2 )
4
−
(1 + 𝛾 2 )] sin((2𝜔𝑚 − 𝜔𝐼𝑁 )𝑡 − 𝜑𝐼𝑁 ).
𝛽𝐴0
𝛽𝐴0 2 2
1+ 2 +( 2 ) 𝛾
(
)
Nel caso di stadio amplificante ideale, 𝐴0 → ∞ perciò:
𝑉𝑂𝑈𝑇 =
𝐴𝐼𝑁 1 + 𝛾 2
1 − 𝛾2
2)
(1
*(
+
𝛾
−
)
(
) (1 − 𝛾 2 )+ sin(𝜔𝐼𝑁 𝑡 + 𝜑𝐼𝑁 ) +
4
𝛽𝛾 2
𝛽𝛾 2
+
𝐴𝐼𝑁 1 + 𝛾 2
1 − 𝛾2
2)
(1
*(
−
𝛾
−
)
(
) (1 + 𝛾 2 )+ sin((2𝜔𝑚 − 𝜔𝐼𝑁 )𝑡 − 𝜑𝐼𝑁 ) =
4
𝛽𝛾 2
𝛽𝛾 2
=
𝐴𝐼𝑁
sin( 𝜔𝐼𝑁 𝑡 + 𝜑𝐼𝑁 ) + 0 sin((2𝜔𝑚 − 𝜔𝐼𝑁 ) 𝑡 − 𝜑𝐼𝑁 ).
𝛽
Per completezza riportiamo anche le tensioni sulle uscite in continua:
𝑉2𝐼 = 𝜀 ∗ sin(𝜔𝑚 𝑡) ∗ 𝐴0 ,
filtrata passa basso.
Perciò l’uscita in continua del cammino in fase è
𝐴0 𝐴𝐼𝑁
𝑉2𝐼 =
2
𝛽𝐴0 2
𝛾
2
cos((𝜔𝐼𝑁 − 𝜔𝑚 )𝑡 + 𝜑𝐼𝑁 ),
𝛽𝐴0
𝛽𝐴0 2 2
1+ 2 +( 2 ) 𝛾
(
)
1+
Mentre per quanto riguarda il cammino in quadratura:
𝑉2𝑄 = 𝜀 ∗ 𝛾 ∗ cos(𝜔𝑚 𝑡) ∗ 𝐴0 ,
𝑉2𝑄
𝐴0 𝐴𝐼𝑁 𝛾
=
2
filtrata passa basso.
𝛽𝐴
1 + 20
sin((𝜔𝐼𝑁 − 𝜔𝑚 )𝑡 + 𝜑𝐼𝑁 ).
𝛽𝐴0
𝛽𝐴0 2 2
1+
+(
) 𝛾
2
2
(
)
Come ci si attendeva, tutte le non idealità considerate risultano abbattute di un fattore
proporzionale al guadagno d’anello del sistema, 𝛽𝐴0 . In particolare, quando A0 tende all’infinito si
vede come la tensione sull’uscita ad alta frequenza sia quella ideale, alla sola frequenza del segnale
d’ingresso. Avendo ipotizzato il segnale sul cammino seno di ampiezza corretta e quello sul
cammino coseno ampio 𝛾, l’errore sull’ampiezza 𝑉2𝑄 risulta inversamente proporzionale a 𝛾.
Con A0 non infinito, anche nel caso ideale in cui 𝜔𝐼𝑁 = 𝜔𝑚 , l’uscita ad alta frequenza VOUT presenta
una componente alla frequenza (2𝜔𝑚 − 𝜔𝐼𝑁 = 𝜔𝐼𝑁 ) con fase opposta rispetto a quella del segnale
proveniente da DUT, che quindi distorce il segnale utile. La presenza di tale componente è
prevedibile dato il sistema retroazionato: infatti essa compensa l'errore dovuto all'ampiezza diversa
dei due segnali di riferimento distorcendo il segnale errore. In presenza di segnali di riferimento
con 𝜔𝐼𝑁 = 𝜔𝑚 e 𝛾 ≠ 1, l'uscita ad alta frequenza presenta quindi due componenti sinusoidali a
frequenza pari a quella in ingresso, con ampiezze e fasi diverse dal caso ideale. La fase della
componente indesiderata, in particolare, è pari a −𝜑𝐼𝑁 , ovvero alla differenza di fase tra il segnale
proveniente dal DUT e i segnali di riferimento in fase e in quadratura. Tale differenza di fase è
funzione dell’impedenza del DUT, e dunque ignota a priori.
86
Come si vede dal diagramma fasoriale in fig.5.3.a, la componente di errore con fase opposta rispetto
a quella del segnale in ingresso, presente a causa di ampiezze diverse dei segnali di riferimento, è
puramente sull'ampiezza del segnale d’uscita nel caso la fase del segnale in ingresso sia 0 o 90 gradi,
mentre vi è un aggiuntivo sfasamento nel caso la fase del segnale in ingresso sia intermedia. In
particolare se 𝜑𝐼𝑁 = 0° l’errore sulla fase è nullo mentre l’ampiezza del segnale errore si somma
direttamente all’ampiezza del segnale ideale in uscita, viceversa se 𝜑𝐼𝑁 =90° l’ampiezza del segnale
errore si sottrae direttamente a quella del segnale ideale.
Questo fenomeno ha impatto minimo sulle prestazioni del circuito. Poichè i due canali seno e
coseno sono a guadagno diverso, essendo i segnali di riferimento di ampiezze diverse, il guadagno
complessivo del sistema dipende dalla fase del segnale di ingresso (non linearità). Questo fenomeno
impatta però sul guadagno di andata e pertanto il suo effetto è ridotto del guadagno d'anello, molto
alto nel nostro caso.
Sempre considerando il sistema in anello chiuso, è possibile eseguire un’analisi analoga a quella
appena svolta per indagare l’impatto di uno sfasamento diverso da 90 gradi tra i segnali di
riferimento in quadratura.
In particolare si possono ricavare le uscite del sistema ipotizzando un segnale errore ε nel cammino
di andata del sistema complessivo in forma analoga a quello scritto sopra, in cui compare l'errore di
fase 𝜑𝑄 tra i segnali seno e coseno di riferimento. Anche in questo caso solo le componenti a 𝜔𝐼𝑁 e a
(2𝜔𝑚 − 𝜔𝐼𝑁 ) sono consistenti lungo l’anello. Esse sono uguali nel caso 𝛾 = 1, errore nullo
sull'ampiezza, e nel caso 𝜑𝑄 = 0, errore nullo sulla fase dei segnali di riferimento.
Come nel caso di errore sull'ampiezza dei segnali di riferimento, è possibile disegnare su un
diagramma fasoriale le diverse componenti sinusoidali presenti, fig.5.3.b. Anche in presenza di una
𝜑𝑄 non nulla l'errore sulla fase dell'uscita ad alta frequenza è funzione della fase del segnale in
ingresso, proveniente dal DUT, rispetto a quella del segnale sinusoidale di riferimento. L'errore di
fase impatta direttamente sul modulo e sulla fase del segnale in uscita ad alta frequenza.
Come per le altre fonti di non idealità, l'errore provocato sulle uscite del sistema è nullo se si
considera un guadagno infinito degli amplificatori sul cammino di andata e dunque un guadagno
d’anello infinito. Essendo un sistema reazionato, gli errori impattano sulle uscite abbattuti del
guadagno d'anello del sistema che nello schema a blocchi semplificato vale 𝛽𝐴0 .
L’eccezione a ciò è nella situazione limite di massimo errore possibile sulla fase, 𝜑𝑄 pari a 90 gradi,
in cui su entrambi i canali di riferimento si ha un segnale sinusoidale. In tal caso la sola componente
sinusoidale proveniente dal DUT viene amplificata nel cammino d'andata dell'anello e riportata in
retroazione all'ingresso provocando un segnale errore infinitesimo. La componente cosinusoidale
invece verrebbe moltiplicata per il riferimento seno e filtrata dall'amplificatore sul cammino
d'andata, risultando in un'uscita nulla e quindi in un segnale errore finito all'ingresso.
Dall’analisi appena svolta risultano condizioni ragionevoli sulla precisione richiesta nel circuito di
generazione dei segnali in quadratura. Ad esempio, accettando un errore dell’1% sul matching di
ampiezza tra i due segnali di riferimento, con 𝛽 = 0,1 e 𝐴0 = 106 (riferendosi a fig.5.2), si ottiene
un’ampiezza della componente indesiderata sull’uscita ad alta frequenza del sistema pari a 0,05
volte l’ampiezza della componente idealmente presente.
87
Segnale
Modulo
Fase
A
sin
1
𝜑𝑖𝑛
B
sin
~𝛾
−𝜑𝑖𝑛
Segnale
Modulo
Fase
A
sin
1
𝜑𝑖𝑛
B
-cos
𝜑𝑄2
𝜑𝑖𝑛
C
cos
𝜑𝑄
−𝜑𝑖𝑛 + 𝜑𝑄
D
-sin
𝜑𝑄
−𝜑𝑖𝑛 + 𝜑𝑄
Figura 5.3: (a): Rappresentazione fasoriale del segnale in ingresso (blu) e della componente di errore (rosso) con
fase opposta rispetto a quella del segnale in ingresso, presente a causa di ampiezze diverse dei segnali di
riferimento. (b): Rappresentazione faoriale del segnale (blu) e delle componenti di errore (rosso) dovute a un
errore 𝜑𝑄 di fase tra il segnale seno e coseno di riferimento.
5.2. Rete di generazione dei segnali di riferimento
5.2.1.
Struttura per fornire i segnali in quadratura
Il circuito realizzato nel cammino d’andata del circuito equivale a un amplificatore che deve operare
da pochi hertz fino a 100MHz. Per questo motivo i segnali di riferimento, forniti ai moltiplicatori
analogici di modulazione e demodulazione, richiedono un circuito in grado di fornire i segnali in
quadratura su tale vasto range di frequenze e l’operazione che deve svolgere il circuito che fornisce
il segnale seno e il segnale coseno è lo sfasamento di una sinusoide variabile in frequenza su svariati
ordini di grandezza.
Appare evidente che un circuito che esegua ciò direttamente, come in fig.5.4.a, è difficilmente
realizzabile in pratica: molto più semplice sarebbe operare anche in questo caso con dei traslatori in
frequenza in modo da generare i segnali in quadratura nell'intorno ristretto di una frequenza
fissata, come ad esempio nella struttura in fig.5.4.b. Essa consente di far lavorare lo sfasatore su un
range limitato di frequenze variabili: il segnale in ingresso varia tra frequenze elevate in modo che il
88
circuito sfasatore debba operare con un frequenze variabili al più del 50%. Il segnale in ingresso e
quello sfasato vengono poi traslati a bassa frequenza per ottenere i riferimenti desiderati nel range
1kHz-100MHz.
Figura 5.4: Schemi a blocchi per fornire segnali di riferimento in quadratura a frequenza
variabile (tra 0Hz e 100MHz) a partire da segnali in quadratura tra loro a frequenza fissa
(200MHz).
Una migliore alternativa realizzabile è mostrata in fig.5.5.
I segnali seno e coseno vengono generati alla frequenza fissa 𝛽, 200MHz, e sono poi moltiplicati per
un segnale sinusoidale a frequenza 𝛼, variabile tra 100MHz e 200MHz. In questo modo il circuito
sfasatore opera alla frequenza fissa di 200MHz, e come componenti in uscita alla frequenza
differenza si ottengono il seno e coseno alla frequenza variabile in ingresso, a valle di un
opportuno filtraggio passabasso che elimini la componente alla frequenza somma generata dalla
moltiplicazione (400MHz-500MHz).
Lo svantaggio di questa soluzone è la necessità di una notevole precisione in frequenza. Volendo
lavorare a frequenza 10kHz con segnale a frequenza fissa 200MHz occorre disporre di un segnale a
frequenza 𝛼 di 200,010kHz, requisito comunque compatibile con le prestazioni dei moderni
oscillatori.
89
Figura 5.5: Schema a blocchi corretto per fornire segnali di riferimento in quadratura a
frequenza variabile tra 0Hz e 100MHz a partire da segnali in quadratura a frequenza
𝛽 = 200𝑀𝐻𝑧 e da una sinusoide a frequenza variabile tra 𝛼 = 100𝑀𝐻𝑧 ÷ 200𝑀𝐻𝑧.
Si noti come non è possibile ottenere i segnali sfasati partendo dalla semplice modulazione del
segnale in banda base, come nello schema a blocchi di fig5.6. In questo modo il circuito sfasatore
opererebbe alla frequenza fissa 𝛽, 200MHz, e come componenti in uscita alla frequenza differenza
sembrerebbe possibile ottenere seno e coseno alla frequenza variabile in ingresso, 𝛼 = 0 ÷
100𝑀𝐻𝑧, ipotizzando un opportuno filtraggio passabasso che elimini la componente a frequenza
somma generata dalla moltiplicazione. Il vantaggio di avere due moltiplicatori su ognuno dei due
cammini di generazione sarebbe sulla precisione in frequenza del segnale seno e coseno generati:
un errore sulla differenza di frequenza 𝛼 − 𝛽 non impatterebbe sulla frequenza dei segnali di
riferimento nel caso di frequenza 𝛼 bassa, ad esempio 100kHz con segnali 𝛽 a 200MHz, perché tale
errore sarebbe compensato nelle due moltiplicazioni in cascata.
In realtà, considerando con attenzione le formule di Werner, è facile rendersi conto che questa
soluzione non è efficace: il segnale su uno dei due cammini alla frequenza variabile risulta nullo. A
meno del fattore ½ a moltiplicare, si ottiene per il canale che genera il seno:
sin 𝛼 ∗ sin 𝛽 ∗ sin 𝛽 = (cos(𝛼 − 𝛽) − cos(𝛼 + 𝛽)) ∗ sin 𝛽 =
= sin(𝛼) + sin(−𝛼 + 2𝛽) − sin(𝛼 + 2𝛽) − sin(−𝛼),
ovvero, alla frequenza differenza, si ottiene il segnale 2sin(𝛼). Mentre sul canale del coseno:
sin 𝛼 ∗ sin 𝛽 ∗ cos 𝛽 = (cos(𝛼 − 𝛽) − cos(𝛼 + 𝛽)) ∗ cos 𝛽 =
= cos(𝛼) + cos(𝛼 − 2𝛽) − cos(𝛼 + 2𝛽) − cos(𝛼),
ovvero un segnale cosinusoidale nullo alla frequenza 𝛼.
Figura 5.6: Soluzione non realizzabile per ottenere i segnali sfasati dalla semplice modulazione del segnale in
banda
90base.
5.2.2.
Circuiti sfasatori
Avendo considerato nel precedente paragrafo come fornire i segnali di riferimento in quadratura al
sistema alla frequenza f0 a cui si desidera indagare l’impedenza del DUT, resta ora da progettare il
circuito che genera tali segnali sfasati tra loro di 90 gradi. Sono state indagate due diverse soluzioni
circuitali, il cui progetto è riportato nell’appendice A. Da notare che per il primo prototipo non è
necessario integrare l’oscillatore on-chip, e si forniscono i segnali sfasati dall'esterno. Si è
approfondito comunque il progetto del circuito sfasatore perché averlo on-chip semplifica
notevolmente il setup sperimentale.
Supponendo che i segnali siano forniti al chip generandoli da un VCO, si potrebbe pensare di
sfruttare un semplice oscillatore ad anello per ottenere segnali in quadratura inclusi
nell’architettura stessa dell’oscillatore. L’oscillatore ad anello consiste in un numero dispari di stadi
a guadagno negativo posti in cascata e costituenti un anello chiuso: il segnale in uscita da ogni
stadio risulta ritardato rispetto a quello in ingresso potendo fornire, idealmente, uno sfasamento
controllato. In realtà la precisione sulla fase dei segnali analogici presenti non è elevata, escludendo
questa scelta dalla maggior parte dei moderni trasmettitori a radio-frequenza. Un’alternativa per
effettuare la sintesi diretta di segnali in quadratura dall’oscillatore, è quella di usare la cascata di
due blocchi VCO a rete LC simmetrici, sfruttando la migliore precisione sulla fase ottenuta con gli
oscillatori LC [14].
Considerando la struttura a sinistra in fig.5.7, la combinazione di una connessione diretta e
invertente tra i due stadi oscillatori forza i segnali differenziali in uscita da essi a oscillare in
quadratura. La struttura classica dell’oscillatore LC è in fig.5.7 a destra: l’oscillazione avviene alla
pulsazione di risonanza
ω=
1
√LC
,
dove L è l’induttore di carico dello stadio e C è la capacit{ parassita di drain e di gate dei transistor.
La precisione in frequenza di una struttura di questo tipo è limitata alla realizzazione di induttori
on-chip di elevata precisione o alla scelta di mettere induttanze esterne, perciò sono state indagate
soluzioni che non richiedono l’utilizzo di induttanze. Si genera il segnale in quadratura in un
circuito posto a valle dall’oscillatore, a partire dal segnale sinusoidale fornito dallo stesso. Il
progetto e le prestazioni di due diverse strutture per ottenere lo sfasamento desiderato sono
trattati in appendice A.
Figura 5.7: Cascata di due blocchi VCO per ottenere segnale in quadratura (sinistra). Struttura classica
dell’oscillatore LC (destra).
91
6. Conclusioni
Nel presente lavoro di tesi è stato presentato il progetto di un circuito integrato per analisi
spettroscopiche d’impedenza su larga banda. Le prestazioni ottenute hanno confermato
l’adeguatezza di questa struttura nell’indagine di campioni alla nanoscala fino a elevate frequenze.
Per ottenere requisiti di larga banda e alta sensibilit{ è stata implementata un’architettura circuitale
che prevede la demodulazione del segnale errore a bassa frequenza e la rimodulazione dello stesso
a valle di uno stadio amplificante; l’anello di retroazione è stato realizzato tramite una semplice
capacità, come nelle classiche topologie a transimpedenza. Per processare correttamente la parte
reale e immaginaria dell’impedenza d’ingresso, il cammino d’andata è stato distinto in due rami in
parallelo con segnali in fase e in quadratura con lo stimolo d’ingresso. La nuova struttura progettata
fa sì che la banda del sistema ad anello chiuso sia limitata ad un ristretto intervallo di frequenze
attorno a quella di analisi del DUT con numerosi vantaggi.
Anzitutto l’elemento di guadagno opera sempre alla stessa frequenza indipendentemente da quella
di misura dell’impedenza, e garantisce così un guadagno d’anello elevato e costante su tutta la
banda di interesse. La banda di rumore è fortemente ridotta rispetto alle strutture classiche, in cui
il blocco d’andata amplifica in modo costante fino alla frequenza del suo polo. Il sistema di misura
qui presentato permette inoltre di analizzare l’impedenza incognita in modo distinto nelle sue
componenti in fase e in quadratura, i cui valori sono forniti nello stesso circuito di front-end
impiegato per prelevare il segnale proveniente dal DUT. Inoltre si ottiene la possibilità di combinare
la misura di correnti fino a frequenze di 100MHz con un rumore equivalente in ingresso pari a
3,5nV/√Hz e, di conseguenza, un’elevata risoluzione su svariate decadi di frequenza: 1,4 attoFarad
in termini di capacità.
È semplice eseguire un confronto tra la struttura realizzata e un amplificatore equivalente ideale a
singolo polo. L’architettura a modulazione-demodulazione progettata amplifica un segnale in
ingresso fino a frequenza di 100MHz con un complessivo guadagno d’andata 𝐴0 = 106 , costante su
tutto il range. Per fare lo stesso un amplificatore ideale dovrebbe presentare prodotto guadagnobanda pari a:
𝐺𝐵𝑊𝑃𝑒𝑞𝑢𝑖𝑣𝑎𝑙𝑒𝑛𝑡𝑒 = 𝐴0 ∗ 𝑓𝑓𝑢𝑛𝑧𝑖𝑜𝑛𝑎𝑚𝑒𝑛𝑡𝑜 𝑚𝑎𝑠𝑠𝑖𝑚𝑎 = 106 100𝑀𝐻𝑧 = 100𝑇𝐻𝑧,
il che non è ottenibile con le odierne tecnologie.
Nel suo complesso, il sistema realizzato consiste in un amplificatore retroazionato tramite capacità:
la particolarit{ implementata nel presente lavoro è che il guadagno d’anello è elevato alla sola
frequenza del segnale d’ingresso, indipendentemente dalla banda del blocco di guadagno presente
92
nel cammino d’andata, e che dunque il sistema si comporta come un integratore rispetto alla
frequenza centrale d’ingresso.
Per ottenere la traslazione in frequenza è stato progettato uno stadio di moltiplicazione analogica
con banda 250MHz. Il sistema inoltre comprende uno stadio di guadagno chopperato tramite
moltiplicatori a interruttori per limitare l’influenza del rumore 1/f. Questo stadio di guadagno
presenta prodotto guadagno-banda di circa 700MHz e frequenza di chopper pari a 70kHz. La banda
ad anello chiuso del sistema e l’elevato guadagno d’anello sono stati ottenuti grazie al progetto di
uno stadio a elevato guadagno in continua, maggiore di 130dB, e prodotto guadagno-banda pari a
100Hz. In particolare è stata realizzata una resistenza equivalente di 1,5GΩ tramite un blocco
integrato attenuatore di corrente.
È stato infine considerato il progetto del circuito che genera i segnali in fase e in quadratura per i
modulatori/demodulatori sul vasto range di frequenze di analisi. In particolare è stato trattato
analiticamente come le non idealità di tali riferimenti, in particolare un mismatch tra le ampiezze,
uno sfasamento diverso da 90 gradi e un mismatch di frequenza rispetto a quella desiderata,
impattano sulle prestazioni del sistema complessivo: risulta che essi sono abbattuti dell’elevato
guadagno d’anello intorno alla frequenza del segnale di stimolo. Inoltre sono stati progettati e
simulati due circuiti per generare i suddetti segnali sfasati di 90 gradi a frequenza variabile fino a
100MHz, confrontandone le prestazioni.
La funzionalità dei singoli blocchi e del circuito nel suo complesso sono state confermate da
numerose simulazioni al variare della frequenza e nel tempo. Il circuito progettato permette di
misurare correnti fino a frequenze di 100MHz con un rumore equivalente di tensione in ingresso
pari a 3,5nV/√Hz che permette di risolvere variazioni capacità di soli 1,4 attoFarad con una
risoluzione temporale di 1msec, applicando una tensione di 1V. Gli sviluppi futuri del presente
lavoro di tesi prevedono il layout e il test del circuito progettato, nonchè l’integrazione del circuito
di generazione dei segnali di riferimento qui presentato nel sistema complessivo. Tali segnali
vengono forniti esternamente in questo primo prototipo, tuttavia avere l’oscillatore e il circuito che
genera i segnali di riferimento on-chip semplifica notevolmente il setup sperimentale.
93
Bibliografia
[1] R. Pethig, Dielectric and Electronic Properties of Biological Materials, Wiley, 1979
[2] M. Carminati, Instrumentation for Electrical Detection in Biology and in Nanoelectrochemistry,
PhD Thesis – Politecnico di Milano, 2009
[3] Y. Feldman et al., Time Domain Dielectrical Spectroscopy Study of Biological Systems, IEEE, 2003
[4] S. Takashima, K. Asami, Y. Takahashi, Frequency Domain Studies of Impedance Characteristics of
Biological Cells using Micropipet Technique Erythrocyte, Biophys J., 1988
[5] S. Gawad, L. Schild, Ph. Renaud, Micromachined Impedance Spectroscopy Flowcytometer for Cell
Analysis and Particle Sizing, The Royal Society of Chemistry, 2001
[6] L. Fumagalli, G. Ferrari, M. Sampietro, G. Gomila, Quantitative Nanoscale Dielectric Microscopy of
Single-layer Supported Biomembranes, Nanoletters, 2009
[7] J.K. Abraham, H. Yoon, R. Chintakuntla, M. Kavdia, V.K. Varadan Nanoelectronicc Interface for
Lab-on-Chip devices, Nanobiotechnology, 2007
[8] F. Gozzini, Amplificatore Integrato a Transimpedenza per Applicazioni ad Altissima Sensibilità e
Larga Banda, Politecnico di Milano, 2005
[9] A. Molari, Derivatore in Tecnologia CMOS per Amplificatori a Transimpedenza ad Elevatissima
Sensibilità, Politecnico di Milano, 2006
[10] S. Agueli, Amplificatore Retroazionato a Modulazione-Demodulazione per Spettroscopia
d’Impedenza a Larga Banda, Politecnico di Milano, 2008
[11] Y. Iwasaki, Current to Voltage Converting Apparatus and Impedance Measuring Apparatus,
United States Patent US 7005918 B2
[12] Peter R. Kinget, Michiel S. J.Steyaert, A 1GHz CMOS Up-Conversion Mixer, IEEE Journal of solidstate circuits Vol 32, 1997
[13] F. Gozzini, G. Ferrari and M. Sampietro, Linear Transconductor With Rail-to-rail Input Swing for
Very Large Time Constant Applications, 2006
[14] P. Andreani, A. Bonfanti, L. Romanò, C. Samori, Analysis and Design of a 1,8GHz CMOS LC
Quadrature VCO, IEEE, 2002
[15] D. Lovelace, J. Durec, A Self Calibrating Quadrature Generator with Wide Frequency Range,
IEEE, 1997
94
[16] Amalan Nag, Low Power High Precision and Reduced Size CMOS Comparator for High Speed
ADC Design, ICIIS, 2010
[17] J. Xie, M.A. Do, K.S. Yeo, C.C. Boon, Analysis and Design of a RC Polyphase Network for
Quadrature Signal Generation in the 2,45GHz ISM Band, IEEE, 2007
[18] Andeen-Hagerling Inc. (USA), Model AH2500A
[19] M. Carminati, G. Ferrari, F. Guagliardo, M. Sampietro, Zeptofarad Capacitance Detection with a
Miniaturized CMOS Current Front-End for Nanoscale Sensors
[20] Virtuoso – SpectreRF Simulation Option User Guide, 2005
95
APPENDICE A: Sfasatori realizzati
I. Sfasatore ad anello chiuso
Come è stato detto, per una corretta analisi dell'impedenza del DUT anche nei casi estremi che essa
sia puramente resistiva o capacitiva, occorrono due segnali di riferimento sinusoidali sfasati di 90
gradi da fornire ai moltiplicatori analogici presenti sui due cammini paralleli che trattano il segnale.
I due riferimenti, sinusoide e cosinusoide, devono essere garantiti sull'intero range di frequenze di
analisi del DUT, fino a 100MHz. Nonostante l'elevato range di frequenze di lavoro, è possibile
generare i due segnali sfasati di 90 gradi a una frequenza fissa, 200MHz, ottenendo i due segnali
seno e coseno alla frequenza desiderata tramite moltiplicazione.
OUT(+45°)
IN(0°)
OUT(-45°)
Figura 0.1: Semplice schema a blocchi per ottenere un segnale sfasato di 90
gradi rispetto a quello in ingresso.
Una tecnica molto semplice per ottenere due segnali sfasati di 90° a una determinata frequenza
consiste nell'utilizzo di un filtro passa alto RC e un filtro passa basso RC, come si vede in fig.0.1.
Infatti se la frequenza dei poli è pari alla frequenza del segnale di ingresso il filtro passa alto
anticipa il segnale di 45 gradi e il passa basso lo ritarda della stessa quantità.
Lo svantaggio di utilizzare questa semplice struttura sta nel fatto che la frequenza polo introdotto
dal blocco passa alto e da quello passa basso non sono controllate da alcun anello di retroazione:
non idealità nei componenti reali provocano direttamente un errore sullo sfasamento del segnale di
riferimento, senza essere compensate in alcun modo.
Si consideri invece la struttura in fig.0.2: il segnale è inviato a due blocchi che lo sfasano ognuno di
45 gradi attenuandolo idealmente di un fattore complessivo pari a 6dB [15]. Il sistema è controllato
da un anello di retroazione, il che lo rende potenzialmente adattabile per sfasare segnali su un vasto
range di frequenze.
96
Figura 0.2: Struttura con due sfasamenti in cascata per ottenere un segnale in quadratura
con quello d’ingresso, con controllo in retroazione sulla fase.
Una possibile realizzazione di questo schema è riportata in fig.0.3. Cambiando la corrente si
modifica la transconduttanza del transistore e conseguentemente la frequenza del polo al suo
source. In particolare il segnale sinusoidale in ingresso è posto al gate di un transistor degenerato
con una capacità al source. La corrente di polarizzazione del transistor è fornita tramite un
generatore di corrente controllato dall’anello di retroazione. Il segnale ottenuto a valle di due
blocchi come quello descritto è inviato a un phase detector: questo è realizzato tramite
moltiplicatore analogico che fa il prodotto tra il segnale proveniente dall’ingresso del circuito e
quello ottenuto a valle dei blocchi sfasatori. La tensione in uscita al moltiplicatore è mandata a uno
stadio che la amplifica, fa da filtro passa basso sulle componenti armoniche indesiderate e la cui
tensione di uscita è fornita come tensione di controllo in retroazione. Idealmente l’anello di
retroazione agisce fornendo una tensione continua al gate dei generatori di corrente controllati in
tensione, che polarizzano gli stadi sfasatori, tale che i terminali d’ingresso dell’amplificatore passa
basso siano alla stessa tensione. In tal caso quei due punti sono posti in corto circuito virtuale e la
tensione differenziale di segnale in uscita al moltiplicatore a frequenza nulla è pari a zero: i due
segnali d’ingresso sono sfasati di 90 gradi.
Calcolo del guadagno d’anello
Anche al fine di comprendere meglio il funzionamento del circuito appena presentato, è utile
considerarne il calcolo del guadagno d’anello. Si far{ riferimento allo schematico semplificato di
fig.0.3.
Lo sfasamento introdotto da ogni stadio sfasatore è legato alla costante di tempo (1/𝑔𝑚,𝑠 ∗ 𝐶𝑆 ) e
vale:
∆𝜑|𝑠 = − arctan (𝐶𝑠 ∗
2𝜋𝑓
),
𝑔𝑚,𝑠
lo sfasamento totale dei due blocchi in cascata è dunque:
∆𝜑|𝑡𝑜𝑡 = 2 ∗ ∆𝜑|𝑠.
97
Figura 0.3: Schema del circuito sfasatore ad anello chiuso.
Idealmente la retroazione agisce in modo che 𝐶𝑠 ∗ 2𝜋𝑓/𝑔𝑚,𝑠 = 1, fornendo uno sfasamento
complessivo di 90 gradi:
∆𝜑|𝑡𝑜𝑡 = −2 arctan (𝐶𝑠 ∗
2𝜋𝑓
) = − 2 arctan(1) = −90°.
𝑔𝑚,𝑠
Si può considerare lo sfasamento introdotto sul segnale come somma di due contributi.
∆𝜑 = −90° + 𝑑𝜑, dove lo sfasamento ideale è di appunto 90 gradi mentre 𝑑𝜑 indica un ipotetico
errore rispetto a tale sfasamento.
Si calcola il segnale all’uscita del moltiplicatore tramite le formule di Werner:
1
sin 𝛼 ∗ sin 𝛽 = (cos(𝛼 − 𝛽) − cos(𝛼 + 𝛽)),
2
con 𝛼 − 𝛽 = ∆𝜑, perciò:
𝑉𝑚 =
𝐴2 𝑘
𝐴2 𝑘
∗ cos(∆𝜑) −
∗ cos(4𝜋𝑓𝑡 + ∆𝜑).
2 2
2 2
Il termine 𝐴2 /2, dove A è l’ampiezza del segnale d’ingresso, è legato al fatto che, se i due sfasatori
funzionano correttamente, essi forniscono complessivamente due poli reali alla precisa frequenza
del segnale d’ingresso, sfasandolo ognuno di 45 gradi. Il segnale ampio A viene quindi attenuato di
√2/2∗ √2/2 = 1/2, ovvero 6dB.
Il segnale all’uscita dell’amplificatore, filtrato passa basso, è:
𝑉𝑓 = −
𝐴2 𝑘
∗ cos(∆𝜑) ∗ 𝐴0 ,
2 2
considerando il filtro passa basso con guadagno in continua A0 e banda sufficientemente stretta da
tagliare la componente a 2f.
La corrente che risulta nel generatore controllato è:
𝐼𝑔 = 𝑔𝑚,𝑔 ∗ 𝑉𝑓 = −𝑔𝑚,𝑔 ∗
𝐴2 𝑘
∗ cos(∆𝜑) ∗ 𝐴0 .
2 2
Quando l’anello di reazione funziona correttamente tende ad annullare tale errore. Essendo il
sistema nell’intorno del punto di lavoro, la quantit{ 𝑑𝜑 risulta piccola, quindi cos(−90 + 𝑑𝜑) ≈ 𝑑𝜑.
Perciò la corrente nel generatore controllato, quando le due tensioni sinusoidali non sono sfasate
perfettamente di 90 gradi, cambia come segue:
98
𝑑𝐼𝑔 = −𝑔𝑚,𝑔 ∗
𝐴2 𝑘
∗ A0 ∗ 𝑑𝜑.
2 2
La variazione della corrente dei generatori provoca una variazione della transconduttanza dei
transistori S: si ottiene (𝑑𝑔𝑚,𝑠 )/𝑑𝜑, ovvero la variazione della transconduttanza degli sfasatori a
fronte di uno sfasamento diverso da 90 gradi per una quantità pari a 𝑑𝜑, dalla seguente
uguaglianza:
𝑑𝑔𝑚,𝑠 𝑑𝑔𝑚,𝑠 𝑑𝑉𝑔𝑠,𝑔
=
∗
.
𝑑𝜑
𝑑𝑉𝑔𝑠,𝑔
𝑑𝜑
Si ricava (𝑑𝑔𝑚,𝑠 )/(𝑑𝑉𝑔𝑠,𝑔 ), dove si è ipotizzato che la corrente del generatore indipendente di startup sia trascurabile rispetto a quella di polarizzazione del transistor S.
𝑔𝑚 =
𝑑𝐼
= 2𝑘(𝑉𝑔𝑠 − 𝑉𝑡),
𝑑𝑉𝑔𝑠
𝑑𝑔𝑚,𝑔
= 2𝑘𝑔 ,
𝑑𝑉𝑔𝑠,𝑔
𝑔𝑚,𝑠 = 2√𝑘𝑠 ∗ 𝐼, 𝑔𝑚,𝑔 = 2√𝑘𝑔 ∗ 𝐼,
𝑔𝑚,𝑠
𝑘𝑠
=√ ,
𝑔𝑚,𝑔
𝑘𝑔
𝑑𝑔𝑚,𝑠
= 2𝑘𝑔 √𝑘𝑠 /𝑘𝑔 = 2√𝑘𝑠 ∗ 𝑘𝑔 .
𝑑𝑉𝑔𝑠,𝑔
Si ricava (𝑑𝑉𝑔𝑠,𝑔 )/(𝑑𝜑):
𝑑𝑉𝑔𝑠,𝑔 = 𝑑𝑉𝑓 = −
𝐴2 𝑘
∗ 𝑑𝜑 ∗ A0 ,
2 2
𝑑𝑉𝑔𝑠,𝑔
𝐴2 𝑘
=−
∗ A0 .
𝑑𝜑
2 2
Perciò si ottiene come varia la transconduttanza di ogni sfasatore se i segnali d’ingresso e di uscita
non sono perfettamente sfasati di 90 gradi:
𝑑𝑔𝑚,𝑠 𝑑𝑔𝑚,𝑠 𝑑𝑉𝑔𝑠,𝑔
𝐴2 𝑘
=
∗
= 2√𝑘𝑠 ∗ 𝑘𝑔 ∗ (−
∗ A0 ).
𝑑𝜑
𝑑𝑉𝑔𝑠,𝑔
𝑑𝜑
2 2
Inoltre, come è stato detto, si ha che:
∆𝜑|𝑡𝑜𝑡 = −2 arctan (𝐶𝑠 ∗
2𝜋𝑓
),
𝑔𝑚,𝑠
con
𝐶𝑠 ∗
2𝜋𝑓
~1
𝑔𝑚,𝑠
poiché il sistema si trova nell’intorno del corretto punto di lavoro dove ogni sfasatore fornisce uno
sfasamento di 45 gradi.
99
Facendo la derivata della precedente equazione si ottiene come varia lo sfasamento ∆𝜑 di una
piccola quantità 𝑑𝜑 quando la transconduttanza degli sfasatori 𝑔𝑚,𝑠 viene modificata dall’anello di
reazione, nel caso ideale in cui l’equazione appena scritta sia valida:
𝑑𝜑
=
𝑑𝑔𝑚,𝑠
2𝐶𝑠 2𝜋𝑓
2
𝐶 2𝜋𝑓
1+( 𝑠
)
𝑔𝑚,𝑠
∗
1
2
𝑔𝑚,𝑠
~
1
𝑔𝑚,𝑠
.
Quindi il Gloop dell’intero circuito sfasatore è:
𝐺𝑙𝑜𝑜𝑝 = −
𝐴2
√𝑘𝑠 𝑘𝑔
𝑘 ∗ A0 ∗
.
2
𝑔𝑚,𝑠
Calcolo dell’errore sulla fase
Come è appena stato mostrato, nel caso di un ipotetico sistema ideale, con amplificatore a guadagno
infinito, si ha che la tensione Vm risulta essere nulla, come imposto dalla terra virtuale
dell’amplificatore. Tale situazione corrisponde ad avere una tensione differenziale su segnale nulla
all’uscita del moltiplicatore analogico, ovvero segnali all’ingresso di tale stadio sfasati di 90 gradi. A
retroazione attivata, la tensione Vf è quella necessaria per:
Provocare l’opportuna corrente nei generatori controllati,
Ottenere quindi la corretta transconduttanza nei due MOS sfasatori,
Posizionare i poli reali dei due blocchi sfasatori alla esatta frequenza del segnale in ingresso,
Indurre perciò la cascata di due sfasamenti di 45 gradi sul segnale,
Confermare una tensione Vm nulla chiudendo correttamente l’anello.
Una tensione Vm infinitesima in ingresso all’amplificatore sarebbe sufficiente, se esso avesse
guadagno infinito, a imporre la Vf corretta per ottenere il segnale sfasato di 90 gradi e confermare la
massa virtuale.
Le non idealità presenti nel circuito provocano la presenza di uno sfasamento rispetto ai 90 gradi
che si vorrebbero ottenere idealmente. Per esempio, considerando il guadagno A0 dell’amplificatore
non infinito, vi è una tensione residua all’ingresso dello stesso pari a 𝑉𝑓 /𝐴0 , dove Vf è la tensione
presente in uscita. Inoltre l’operazionale presenter{ un offset non eliminabile: l’anello di reazione fa
in modo che la tensione sulla massa virtuale sia nulla e quindi vi è una tensione uguale e contraria
all’offset che rende conto dell’errore presente sulla fase a causa di questo contributo. Infine i segnali
sinusoidali in ingresso al moltiplicatore risultano distorti a causa della catena di processamento
presente a monte, in particolare a causa dell’azione dei transistor che sfasano il segnale. Se tale
distorsione provoca la presenza di una tensione media non nulla sui segnali che vanno al
moltiplicatore, il segnale di controllo dell’anello risente di tale tensione provocando uno sfasamento
aggiuntivo indesiderato.
Consideriamo la seguente causa di errore di fase: il guadagno finito dell’amplificatore operazionale.
La tensione all’ingresso di tale stadio è data da:
𝑉𝑚 = 𝑉𝜖 =
100
𝑉𝑓
.
𝐴0
In tale formula Vf è la tensione opportuna per ottenere una corrente nel generatore controllato che
a sua volta provochi la corretta transconduttanza nei transistor sfasatori affinchè essi sfasino
ognuno 45 gradi. Da ciò si deduce che le prestazioni del circuito sono tanto migliori quanto più il
guadagno A0 dell’amplificatore è alto, infatti la condizione in cui Vf è circa la tensione corretta per
sfasare di 90 gradi, ma Vm non è nulla, corrisponde a un errore rispetto allo sfasamento ideale.
E’ possibile quantificare l’errore di fase residuo presente nel sistema. Secondo quanto affermato in
precedenza, la componente continua della tensione all’uscita del moltiplicatore è:
𝑉𝑚 =
𝐴2 𝑘
cos(∆𝜑),
2 2
uguaglianza in cui si tiene conto del fatto che il sistema si trova nell’intorno del punto di lavoro
corretto e che quindi il segnale ampio A sia attenuato complessivamente di un fattore 1/2.
A retroazione attivata, la tensione di controllo Vf è quella necessaria per avere i due poli dei blocchi
sfasatori alla esatta frequenza del segnale d’ingresso. Si ricava quindi lo sfasamento in effetti
ottenuto, che risulta essere 90 gradi solo quando la tensione Vm è nulla, cioè nel caso ideale:
∆𝜑𝑓𝑜𝑟𝑛𝑖𝑡𝑜 = arccos (𝑉𝑚 ∗
𝑉𝑓 2 2
2 2
∗ ) = arccos ( ∗ 2 ∗ ).
2
𝐴 𝑘
𝐴0 𝐴 𝑘
L’errore commesso sulla fase è invece dato da:
∆𝜑𝑒𝑟𝑟𝑜𝑟𝑒 = arcsin (𝑉𝑚 ∗
𝑉𝑓 2 2
2 2
∗ ) = arcsin ( ∗ 2 ∗ ),
2
𝐴 𝑘
𝐴0 𝐴 𝑘
pari a 0 quando Vm è nulla.
Progetto dello sfasatore
Si consideri nuovamente lo schematico semplificato di fig.0.3. È necessario porre un generatore
indipendente di corrente in parallelo a quello controllato. In tal modo il generatore indipendente
porta il sistema nell’intorno del punto di lavoro corretto, in cui ogni sfasatore sfasa di 45 gradi.
Invece la Vf e la conseguente corrente nel generatore controllato servono a stabilire con precisione
il punto di lavoro, grazie all’azione dell’anello di reazione. Se non si portasse il sistema nell’intorno
del punto di lavoro a prescindere dalla retroazione, i due transistor che sfasano si metterebbero a
operare in punti di lavoro scorretti. Anzitutto il circuito potrebbe non accendersi, essendo nulla la
corrente che scorrerebbe inizialmente nei transistor sfasatori. Anche a circuito acceso, inoltre, i poli
degli sfasatori divergerebbero allontanandosi dalla frequenza del segnale in ingresso, situazione in
cui ogni stadio sfasa di 45 gradi. Infatti, il polo di uno sfasatore si porterebbe a frequenza più alta,
con sfasamento indotto nullo, e quello dell’altro si porterebbe a frequenza più bassa di quella del
segnale, con sfasamento indotto di 90 gradi. Il funzionamento corretto dell’anello di reazione
sarebbe ancora garantito perché lo sfasamento complessivo sarebbe di 90 gradi, tuttavia esso
sarebbe fornito da uno solo dei due blocchi sfasatori è il segnale sarebbe pesantemente abbattuto.
Si consideri la funzione di trasferimento del semplice filtro passa basso, realizzato in questo caso
con i transistor degenerati di source da una capacità.
𝐹𝑑𝑇𝑝𝑎𝑠𝑠𝑎 𝑏𝑎𝑠𝑠𝑜 =
1
,
1 + 𝑠𝜏
|𝐹𝑑𝑇𝑝𝑎𝑠𝑠𝑎 𝑏𝑎𝑠𝑠𝑜 | =
1
√1 + 𝜔 2 𝜏 2
dove
101
,
𝜑𝑝𝑎𝑠𝑠𝑎 𝑏𝑎𝑠𝑠𝑜 = − arctan(𝜔𝜏),
𝜔𝜏 = 2𝜋𝑓𝑖𝑛 𝜏𝑝𝑜𝑙𝑜 =
2𝜋𝑓𝑖𝑛
𝑓𝑖𝑛
=
.
2𝜋𝑓𝑝𝑜𝑙𝑜 𝑓𝑝𝑜𝑙𝑜
In fig.0.4 sono disegnati modulo e fase del trasferimento in caso di componenti ideali. Come è noto,
se 𝑓𝑖𝑛 = 𝑓𝑝𝑜𝑙𝑜 𝜑 = −45° e |𝐺| = −3𝑑𝐵. Invece se 𝑓𝑖𝑛 ≪ 𝑓𝑝𝑜𝑙𝑜 𝜑 = 0° e |𝐺| = 0𝑑𝐵, ovvero il segnale
non è sfasato né attenuato. Infine se 𝑓𝑖𝑛 ≫ 𝑓𝑝𝑜𝑙𝑜 𝜑 = −90° e |𝐺| < 0𝑑𝐵, quindi il segnale viene
correttamente sfasato ma anche attenuato.
Figura 0.4: Modulo e fase del trasferimento di una semplice rete RC passa basso.
La corrente di polarizzazione e il rapporto di forma di ogni MOS sfasatore devono essere sufficienti
a permettere la commutazione della tensione sulla capacità di degenerazione legata al polo dello
sfasatore, 𝑔𝑚,𝑠 /(2𝜋𝐶𝑠 ). Per effettuare uno swing di tensione su segnale pari a dV essa necessita di
una corrente di segnale pari a:
𝑑𝐼𝐶𝑠 = 𝐶𝑠 𝑑𝑉 2𝜋𝑓𝑖𝑛 ,
con 𝑓𝑖𝑛 = 200𝑀𝐻𝑧, frequenza a cui vengono generati i segnali sfasati.
La corrente di segnale è naturalmente
𝑑𝐼𝐶𝑠 = 𝑔𝑚,𝑠 ∗ 𝑑𝑉𝑔𝑠,𝑠 ,
dove 𝑔𝑚,𝑠 = 2√𝑘𝑠 ∗ 𝐼𝑝𝑜𝑙𝑠 .
Inoltre si ha, nel punto di lavoro,
𝑔𝑚,𝑠
= 𝑓𝑖𝑛 .
2𝜋𝐶𝑠
Il disaccoppiamento dato dalla capacità del filtro passa alto posto lungo il cammino del segnale
sfasato è necessario per polarizzare nelle stesse condizioni i due transistor sfasatori. In tal modo
essi lavorano con la stessa tensione di source, minimizzando il mismatch tra le soglie per effetto
body. Si riduce inoltre la componente continua di tensione che altrimenti provocherebbe, a valle
della moltiplicazione, un'armonica residua a 200MHz sulla tensione di gate del generatore di
102
corrente controllato, non essendo il filtro passa basso posto a valle del moltiplicatore
sufficientemente selettivo per eliminarla del tutto. Infine una tensione continua all’ingresso del
moltiplicatore causerebbe la continua diminuzione della tensione di controllo dei MOS generatori di
corrente e quindi attenuazione del segnale sfasato. Il punto di equilibrio sarebbe, in tal caso, con il
segnale sfasato di ampiezza nulla.
Nel dimensionamento del filtro occorre verificare che l’impedenza offerta dalla capacit{ C s alla
frequenza di lavoro non risenta dell’impedenza dello stadio a valle, situazione che si verifica se:
𝐶𝑠 ≪ 𝐶𝐻𝑃 ,
1
𝑔𝑚,𝑠
≪ 𝑅𝐻𝑃 ,
con
𝑅𝐻𝑃 = 𝑅𝐻𝑃1 \\𝑅𝐻𝑃2 .
Si può infatti analizzare la semplice rete di fig.0.5 con il metodo delle costanti di tempo, ottenendo
𝜏𝑙𝑜𝑤 = 𝐶𝐻𝑃 (𝑅𝐻𝑃 \\ (
𝜏𝑖𝑔 =
1
𝑔𝑚,𝑠
)) + 𝐶𝑠 (
1
𝑔𝑚,𝑠
1
1
+
𝐶𝐻𝑃 𝑅𝐻𝑃
.
1
𝐶𝑠 (𝑅𝐻𝑃 \\ (
),
1
))
𝑔𝑚,𝑠
Dunque rispettando il vincolo di dimensionamento delle capacità e della resistenza del filtro, si
ottiene che il polo dominante della rete è dato dalla capacità del filtro stesso, che risulta efficace per
eliminare la tensione continua e polarizzare il gate del secondo MOS sfasatore, mentre esso non
influenza in alcun modo il polo a elevata frequenza, circa 200MHz.
Figura 0.5: Circuito equivalente al source del transistor sfasatore per il
calcolo delle singolarità introdotte.
Per limitare l'attenuazione del segnale lungo il cammino che lo sfasa i MOS sfasatori sono stati
dimensionati con bassa W, che implica bassa Cgs, e L non minima, che favorisce la partizione tra la
R0 e la 1/gm dei MOS stessi.
Il dimensionamento dei MOS sfasatori con L elevata presenta vantaggi anche dal punto di vista della
distorsione. La corrente che scorre nel MOS sfasatore è quella imposta dall'anello di reazione
perchè il polo gm/C sia posto alla frequenza del segnale in ingresso e perchè esso sia quindi sfasato
idealmente di 45 gradi. A pari corrente che vi scorre, un basso rapporto di forma del MOS sfasatore
fa si che la Vod dello stesso sia elevata e favorisce la corretta approssimazione di “piccolo segnale”
per il segnale in ingresso agli sfasatori, che quindi risulta meno distorto. La distorsione del MOS
sfasatore è data da:
𝐼𝑑𝑠 = 𝑘𝑉𝑔𝑠2 + 𝑔𝑚 𝑉𝑔𝑠 ,
103
𝜀𝑑𝑖𝑠𝑡𝑜𝑟𝑠𝑖𝑜𝑛𝑒 =
𝑔𝑚 𝑉𝑔𝑠
𝑘𝑉𝑔𝑠2
=
2𝑉𝑔𝑠
𝐼
=
.
2𝐼𝑉𝑔𝑠
𝑉𝑜𝑑
𝑉𝑜𝑑
Dunque se 𝑉𝑔𝑠 ≪ 𝑉𝑜𝑑 /2 l’approssimazione di piccolo segnale è valida.
Il dimensionamento scelto per gli elementi essenziali della parte del circuito appena descritta è il
seguente.
MOS-C
(W/L)-valore
S (sfasatore)
2/1
G (generatore di corrente)
1/1
CS
512/0,5
CHP
240/0,5
Igen.corr
10uA
Il moltiplicatore analogico che lavora come phase detector è stato realizzato con una Cella di Gilbert,
fig.0.6.
Il primo segnale da moltiplicare è dato al gate dello stadio inferiore. Esso modula la corrente
disponibile alle due coppie di transistori dello stadio superiore, che a loro volta sono comandate dal
secondo segnale da moltiplicare.
E' necessario far lavorare il moltiplicatore in condizioni di completo sbilanciamento. Infatti
l’operazione di moltiplicazione implementata con la classica struttura della cella di Gilbert si basa
sulla dipendenza lineare della transconduttanza del transistor bipolare rispetto alla corrente di
polarizzazione. Avendo invece i MOS una dipendenza quadratica della transconduttanza dalla
corrente di polarizzazione, per far lavorare la cella di Gilbert a MOS come moltiplicatore lineare, su
piccoli segnali analogici, sarebbero richieste complesse reti di compensazione [12].
E' stata utilizzata una replica della struttura della cella di Gilbert con gli ingressi invertiti in modo
da annullare le differenze di trattamento dei segnali nello stadio superiore e inferiore del
moltiplicatore stesso e minimizzare quindi l'offset sulla fase introdotto da questo stadio. Un
contributo aggiuntivo all'offset di fase del moltiplicatore è poi dovuto alle capacità parassite
presenti, che provocano uno sfasamento tra tensione al gate e corrente nello stadio differenziale
inferiore. Tale contributo è però trascurabile se si considera la doppia cella di Gilbert.
104
Figura 0.6: Moltiplicatore analogico realizzato come Cella di Gilbert per realizzare il phase detector. Struttura
replicata con ingressi invertiti per renderla simmetrica.
Si consideri il funzionamento del moltiplicatore in condizioni di completo sbilanciamento degli
ingressi. In tal caso i segnali da moltiplicare sarebbero due onde quadre e il moltiplicatore
lavorerebbe come una porta digitale che esegue la funzone logica EXOR tra gli ingressi. Si avrebbe
come guadagno per la componente a frequenza nulla in uscita:
𝐺𝑖𝑑𝑒𝑎𝑙𝑒 = 𝑉𝑑𝑑 ∗
∆𝑡
∆𝜑
= 𝑉𝑑𝑑 ∗
,
𝑇
2𝜋
ovvero il valore medio dell’onda quadra in uscita (che resta alta per un tempo ∆𝑡 ogni periodo), il
cui duty cycle dipende dallo sfasamento delle onde quadre in ingresso.
Nel caso della cella di Gilbert implementata con lo stadio moltiplicatore che lavora in condizioni di
sbilanciamento, il fattore di guadagno ottenuto è pari a:
𝐺 = 4𝑅𝑙𝑜𝑎𝑑 𝐼𝑡𝑎𝑖𝑙
∆𝜑 8.8𝑚𝑉
=
,
2𝜋
°
tenendo conto che la struttura è replicata e che l'uscita è differenziale.
105
Per ottenere le onde quadre da mandare al moltiplicatore che lavora come phase detector a partire
dai segnali sinusoidali sfasati di 90 gradi sono stati posti blocchi a elevato guadagno su entrambi i
cammini. Tali blocchi consistono in inverter posti in cascata. Sia il segnale seno che il segnale coseno
da esso generato sono inviati a un blocco con tre e uno con quattro inverter. In tal modo a partire
dal piccolo segnale sinusoidale si ottiene un'onda quadra tra l'alimentazione positiva e quella
negativa, nonchè la stessa onda sfasata di 180 gradi. Queste onde sono poste come segnale
pienamente differenziale in ingresso al mixer. Esso riceve quindi due segnali a onda quadra
differenziali compresi tra 3 V e -3 V, lavorando in condizioni di completo sbilanciamento. Dovendo
sbilanciare completamente un piccolo segnale sinusoidale, il ritardo introdotto da tali blocchi che
squadrano il segnale sinusoidale è notevole, tuttavia esso è lo stesso sul canale seno e su quello
coseno. Un ritardo sistematico non provoca dunque errore sulla fase tra i due segnali di interesse.
Per questo è stato scelto di utilizzare la semplice struttura data dalla cascata di inverter e non
strutture differenziali più complesse, come in [16], che consistono sostanzialmente in un
preamplificatore e uno stadio latch differenziale e richiedono la presenza di un clock esterno per
abilitare il latch.
L'amplificatore a valle del filtro (disegnato come blocco passa basso in fig.0.3) deve avere elevato
guadagno e banda limitata. La struttura di base utilizzata è quella del blocco descritto nel paragrafo
3.6, un amplificatore due stadi con uscita single end e compensazione effettuata tramite capacità di
Miller. L'elevato guadagno è necessario perchè l'intero sistema presenti un elevato guadagno
d'anello. L'amplificatore deve inoltre garantire il filtraggio passa basso del segnale in uscita dal
mixer: la componente a 400MHz (frequenza somma dei due segnali sfasati) deve essere eliminata
mentre la componente continua (frequenza differenza) è la tensione di pilotaggio dei due generatori
controllati. Nel caso la componente a 400MHz non sia attenuata completamente essa torna al
moltiplicatore e le armoniche a 200MHz e 400MHz si autosostengono nell'anello provocando
disturbo. Perchè l'amplificatore operazionale sia polarizzato correttamente, occorre che la tensione
in continua all'uscita dello stadio moltiplicatore non sia troppo elevata. Per ottenere una tensione di
polarizzazione di circa 400mV si è utilizzata la seguente condizione:
400𝑚𝑉 =
(𝑉𝑑𝑑 − 𝑅𝑙𝑜𝑎𝑑 𝐼𝑡𝑎𝑖𝑙 ) + 𝑉𝑑𝑑
.
2
L'utilizzo di una resistenza di carico del moltiplicatore di valore per quanto possibile elevato
permette di ottenere un maggiore guadagno d'anello in continua.
II. Sfasatore polifase RC realizzato
In alternativa alla complessa struttura descritta nel precedente capitolo, è stata indagata la
possibilità di modificare la semplice rete RC considerata in fig.0.1. Ciò che si ottiene è uno
sfasamento di 90 gradi più insensibile ai mismatch tra i componenti usati e alla differenza tra la
frequenza del segnale d’ingresso e quella del polo della rete RC [17].
Come è stato affermato all’inizio del precedente capitolo, facendo passare il segnale sinusoidale
attraverso due blocchi in parallelo, un filtro passa alto RC e un filtro passa basso RC, si ottiene
complessivamente uno sfasamento di 90 gradi.
106
Figura 0.7: Rete RC per ottenere segnali sfasati di 90 gradi (singolo stadio). Il segnale
differenziale di tensione (Iin+)-(Iin-) risulta in fase con l’uscita differenziale di tensione
(Iout1+)-(Iout1-) e in quadratura con (Qout1+)-(Qout1-).
Considerando la fig.0.7 le tensioni in uscita possono essere espresse come:
𝐼𝑂𝑈𝑇1+ =
1
𝐼 ,
1 + 𝑖𝜔𝑅1 𝐶1 𝐼𝑁+
𝐼𝑂𝑈𝑇1− =
1
𝐼 ,
1 + 𝑖𝜔𝑅1 𝐶1 𝐼𝑁−
𝑄𝑂𝑈𝑇1+ =
𝑖𝜔𝑅1 𝐶1
𝐼 ,
1 + 𝑖𝜔𝑅1 𝐶1 𝐼𝑁+
𝑄𝑂𝑈𝑇1− =
𝑖𝜔𝑅1 𝐶1
𝐼 .
1 + 𝑖𝜔𝑅1 𝐶1 𝐼𝑁−
Dunque le uscite differenziali 𝐼𝑂𝑈𝑇1 in uscita dal filtraggio RC, passa basso, e 𝑄𝑂𝑈𝑇1 in uscita dal
filtraggio CR, passa alto, sono:
𝐼𝑂𝑈𝑇1 =
1
𝐼 ,
1 + 𝑖𝜔𝑅1 𝐶1 𝐼𝑁
𝑄𝑂𝑈𝑇1 =
𝑖𝜔𝑅1 𝐶1
𝐼 .
1 + 𝑖𝜔𝑅1 𝐶1 𝐼𝑁
Il rapporto tra le due tensioni differenziali in uscita vale:
𝑄𝑂𝑈𝑇1
= 𝑖𝜔𝑅1 𝐶1 .
𝐼𝑂𝑈𝑇1
E’ chiaro che alla frequenza 1/R1C1 i segnali differenziali d’uscita hanno la stessa ampiezza pari a
1/√2, e che per ogni frequenza i due segnali d’uscita sono sfasati di 90 gradi.
Come è stato affermato nel capitolo relativo ai requisiti che i due segnali di riferimento in
quadratura devono soddisfare, è utile fare in modo che l’ampiezza di questi ultimi sia la stessa.
Occorre dunque fare in modo che ciò non accada solo alla precisa pulsazione 1/R1C1, bensì su un
intervallo maggiore di frequenze. Infatti la frequenza del polo della rete RC sarà sicuramente diversa
dalla frequenza del segnale IIN a causa delle non idealità dei componenti, non essendo il sistema
retroazionato in alcun modo.
107
Figura 0.8: Replica della rete RC su due stadi per ottenere segnali in quadratura con insensibilità ai mismatch.
Si può replicare la struttura appena considerata come in fig.0.8. La tensione in uscita dal primo
stadio RC è partizionata secondo le impedenze presenti tra i due stadi:
𝑍𝐼𝑁2
(1 + 𝑖𝜔𝑅1 𝐶1 )(1 + 𝑖𝜔𝑅2 𝐶2 )
=
.
𝑍𝐼𝑁2 + 𝑍𝑂𝑈𝑇1 (1 + 𝑖𝜔𝑅1 𝐶1 )(1 + 𝑖𝜔𝑅2 𝐶2 ) + 2𝑖𝜔𝑅1 𝐶2
Come si vede, tale partitore dipende molto dalla frequenza: a basse e alte frequenze esso tende a 0,
invece all’interno della banda compresa tra 1/𝑅1 𝐶1 e 1/𝑅2 𝐶2 esso vale circa ½.
Il rapporto tra le tensioni all’uscita della rete risulta, con due blocchi RC in cascata, pari a:
𝑄𝑂𝑈𝑇2
𝜔(𝑅2 𝐶2 + 𝑅1 𝐶1 )
=𝑖
.
𝐼𝑂𝑈𝑇2
1 + 𝜔 2 𝑅2 𝐶2 𝑅1 𝐶1
Dall’espressione appena scritta risulta chiaro che la differenza di fase tra l’uscita I e Q è pari a 90
gradi indipendentemente dalla frequenza, che le due uscite sono uguali in modulo in
corrispondenza delle due pulsazioni 1/R1C1 e 1/R2C2 e circa uguali in modulo all’interno
dell’intervallo considerato.
Rispetto a una semplice rete RC che fornisca uno sfasamento di 90 gradi un vantaggio della rete
considerata è che in presenza di mismatch tra resistenze e capacità, tale che le due costanti di
tempo R1C1 e R2C2 sono diverse, lo sfasamento ottenuto tra i due segnali in uscita è meno sensibile
a tale mismatch. Inoltre l’ampiezza dei due segnali in fase e in quadratura in uscita non è la stessa
solo a una precisa frequenza, bensì all’interno dell’intervallo di frequenze compreso tra i due poli
RC del primo e del secondo blocco.
III. Simulazioni sui due sfasatori
Si considerano ora le prestazioni dei due circuiti progettati per ottenere i segnali di riferimento in
quadratura: lo sfasatore retroazionato e la rete RC.
In fig.0.9 si può vedere il transitorio di accensione del circuito retroazionato. Grazie al generatore di
corrente indipendente utilizzato come start-up: la tensione di controllo si eleva dalla condizione in
cui nessun transistor porta corrente assestandosi al valore di regime controllato dall’anello e la
tensione differenziale a valle dello sfasamento si assesta al valore di regime.
108
Vcontrollo
-840mV
t
Vout.sfasata
24mV
t
Figura 0.9: Transitorio della tensione di controllo, al gate dei MOS sfasatori, e della tensione in uscita al
circuito sfasatore.
Le tensioni presenti nel circuito sono riportate in fig.0.10: la tensione di controllo è ormai a regime,
le onde quadre in ingresso al moltiplicatore sono sfasate di 90 gradi, così come i segnali sinusoidali
in ingresso al circuito e a valle dei due blocchi sfasatori. La tensione cosinusoidale nel presente
grafico ha ampiezza di 100mV picco-picco perché è stato posto uno stadio di guadagno che contrasti
l’attenuazione (maggiore di ½ considerando le numerose non idealità presenti) del segnale rispetto
a quello d’ingresso lungo il cammino di sfasamento.
Vcontrollo
-840mV
t
Vin.mixer.”sin”
Vin.mixer.”cos”
Vcos
Vsin
100mV
200mV
Figura 0.10: Andamento nel tempo a transitorio esaurito delle tensioni nel circuito sfasatore ad
anello chiuso.
Tramite simulazioni parametriche in anello aperto, è possibile ottenere la corrente che i MOS
sfasatori devono idealmente portare e la conseguente tensione di controllo presente al loro gate a
retroazione completamente attiva, proveniente dall’uscita del moltiplicatore. I risultati di tali
109
simulazioni sono riportati in fig.0.11: i valori ottenuti di corrente e tensione sono ideali nel senso
che garantiscono il posizionamento dato dal polo del MOS sfasatore 𝑓𝑝𝑜𝑙𝑜 = 𝑔𝑚,𝑠 /(2𝜋𝐶𝑠 ) alla
frequenza di 200MHz, frequenza del segnale in ingresso da sfasare.
Sfasamento
Sfasamento
18,5uA; 90°
-750mV; 90°
Vcontrollo
I.mos.sfasatore
Figura 0.11: Andamento dello sfasamento del segnale in uscita rispetto a quello in ingresso, al variare della
tensione di controllo e della corrente nel MOS sfasatore.
Come si vedrà ora, vi sono però due cause di non idealità del circuito che spostano tale punto di
lavoro facendo sì che, per ottenere uno sfasamento complessivo di 90 gradi, il polo dei MOS
sfasatori sia a frequenza diversa da quella del segnale d’ingresso. La conseguenza di ciò è che
l’ampiezza del segnale sfasato è minore dei -6dB attesi idealmente rispetto al segnale in ingresso.
La prima non idealità è la presenza di uno zero ad alta frequenza, dovuta alla capacità parassita tra
gate e source dei MOS sfasatori. Tale zero influenza la fase della tensione presente al source
attenuandone la discesa in frequenza. Il polo che lo stadio sfasatore deve introdurre sarà quindi a
frequenza minore rispetto a prima, e il modulo della tensione al source sarà più basso. Inoltre, gli
stadi di filtraggio passa alto sono stati dimensionati per non influenzare la frequenza del polo del
MOS sfasatore. Tuttavia essi introducono comunque uno sfasamento residuo che contrasta l’azione
del filtraggio gm/C dello sfasatore. Quest’ultimo polo si sposta dunque a frequenza minore per
fornire lo sfasamento aggiuntivo necessario a compensare l’effetto dei passa alto e garantire il
mantenimento della massa virtuale. Un’ultima causa di attenuazione del segnale è dovuta alla
partizione impedenziale tra la resistenza equivalente dei MOS sfasatori e l’impedenza
complessivamente afferente al loro source.
La tensione di controllo a cui si dispone il circuito a retroazione attivata è pari a -840mV. In
fig.0.12.a si può notare l’andamento, in funzione di tale tensione di controllo, del polo dello stadio
sfasatore per ottenere uno sfasamento di 90 gradi a 200MHz: a causa delle non idealità appena
mostrate esso si pone intorno a 118MHz. E’ inoltre riportato lo sfasamento fornito da tale stadio a
200MHz, che nel punto di lavoro reale è circa 53 gradi.
In fig.0.12.b si vede la risposta in frequenza del solo stadio sfasatore, preceduto dal filtro passa alto
che ne polarizza il gate, nel punto di lavoro. Lo sfasamento fornito è appunto 53 gradi e il modulo
del segnale in uscita è pari a -7dB, contro i -3dB attesi. A causa delle numerose non idealità che
causano attenuazioni incontrollate del segnale, mettere uno stadio di guadagno che ripristini
esattamente l’ampiezza del segnale d’ingresso sul cammino del segnale sfasato sarebbe
problematico: come è stato affermato in precedenza è fondamentale avere segnali di riferimento in
quadratura della stessa ampiezza nel sistema complessivo.
110
-800mV; 132MHz
BW
-840mV; 118MHz
-800mV; -51°
-890mV; 102MHz
Fase
-840mV; -53,5°
-890mV; -56,2°
Vcontollo
Fase
-53,5°
Modulo
frequenza
-7dB
frequenza
200MHz
Figura 0.12: (a): Andamento della frequenza del polo e dello sfasamento fornito dal MOS sfasatore in funzione
della tensione di gate. (b): Risposta in frequenza del blocco dato dal MOS sfasatore e dal filtro passa alto che ne
polarizza il gate, la frequenza 200MHz è evidenziata.
Il circuito appena descritto presenta il vantaggio di essere controllato in anello chiuso e adattabile
potenzialmente su un vasto range di frequenze. La struttura è però complessa e offset e parassitismi
ne limitano le prestazioni a tal punto che lo sfasatore realizzato tramite rete puramente passiva,
costituita da resistenze e capacità, descritta nel precedente sottocapitolo è risultata più adeguata.
111
∆𝜑(𝑄1 − 𝑄2 )
frequenza
∆𝜑(𝐼1 − 𝐼2 )
Figura 0.13: Andamento in frequenza dello sfasamento fornito dalla rete RC a due stadi sui due
segnali differenziali in uscita, che risultano in quadratura tra loro.
In fig.0.13 si vede come la fase dell’uscita differenziale “in fase” con il segnale d’ingresso, I OUT, passa
da 0 gradi a frequenza nulla a -180 gradi a frequenza infinita. La fase dell’uscita “in quadratura” con
il segnale d’ingresso, QOUT, varia invece da +90 gradi a -90 gradi in frequenza. La differenza tra le due
fasi è pari a 90 gradi per ogni frequenza, come desiderato.
200MHz
∆𝜑(𝐼 − 𝑄)
∆𝜑(𝐼1 − 𝐼2 )
∆𝜑(𝑄1 − 𝑄2 )
|𝐼|
|𝑄|
Figura 0.14: Andamento in frequenza (in particolare a 200MHz) dello sfasamento tra i due segnali differenziali in
uscita, dei due segnali in uscita rispetto al segnale in ingresso, e del modulo dei segnali in uscita.
112
In fig.0.14 è presente la differenza di fase di 90 gradi, garantita nel sistema reale solo fino a una
frequenza di centinaia di GHz a causa di singolarità che subentrano ad alta frequenza, nuovamente
la fase delle uscite della rete, e il modulo di tali uscite. Come si vede da fig.0.15 le due ampiezze sono
uguali con margine ragionevole per un vasto range di frequenze, il che permette di usare questa
semplice rete RC al fine di fornire i due segnali di riferimento sinusoidale e cosinusoidale nel
sistema complessivo, nonostante le tolleranze presenti sui valori di resistenza e capacità utilizzate
in questa struttura. In particolare, dimensionando la rete per avere i picchi delle ampiezze dei due
segnali in uscita in quadratura a 200MHz, si ottiene un matching dei moduli dei segnali stessi a
meno di 30mV dando 1V di ampiezza in ingresso, nell’intervallo di frequenze comprese tra 100MHz
e 300MHz.
Anche a valle di simulazioni che tengono conto del mismatch tra i componenti reali la rete ha buone
prestazioni, con un errore sul modulo minore di 0.5dB e un errore sulla fase molto minore di 0.5°
ipotizzando una tolleranza del 15% sul valore nominale di resistenze e capacità.
Lo svantaggio di questa rete è che al crescere del numero di stadi, scelta che permette di ottenere
una migliore omogeneità in ampiezza tra i segnali generati, il valore dell’ampiezza degli stessi
decresce. E’ inoltre consigliabile porre un buffer che isoli la rete RC dal circuito presente a valle, per
evitare interazioni tra le impedenze. Nel complesso, il circuito passivo RC presenta comunque un
ottimo compromesso tra semplicità architetturale e prestazioni.
|𝐼|
|𝑄|
200MHz
200MHz
30mV
Figura 0.15: Ampiezze dei segnali in uscita nell’intorno della frequenza d’interesse.
113