Studio di funzione: legami tra funzione e
derivate - leggi orarie e moti di punti
materiali
Prof. Carlo Alberini
1 Preliminari
In Fisica, il compito della Meccanica (Classica)1 è quello di saper descrivere il moto di
un corpo e correlarlo alle proprie cause ed effetti in modo rigoroso (utilizzando, cioè il
linguaggio proprio della Matematica). In termini di domande poste, allora, la Meccanica
Classica cerca di rispondere a due domande relative al moto: come? e perché?
In particolare la Meccanica si compone della cinematica e della dinamica, ovvero
rispettivamente la scienza che si occupa della descrizione del moto (come?) e della scienza
che ha come intento di individuare il legame tra cause del moto e suoi effetti (perché?).
Tale descrizione del moto può vertere su sistemi rigidi (masse) o sistemi dinamici
(fluidi).
Parte essenziale della descrizione del moto è, infine, la scelta dell’osservatore che
descrive il moto stesso, con cui può essere solidale o meno. È charo, quindi, che i risultati
ottenuti circa la descrizione del moto dipendono fortemente dalla scelta dell’osservatore
fatta. In Fisica un osservatore, almeno in prima analisi, è l’insieme di due enti: riferimento
spaziale geometrico (terna cartesiana nello spazio, o piano cartesiano in due dimensioni) e
variabile temporale t . Tali enti consentono, dunque, di descrivere l’evoluzione nel tempo
di un dato sistema.
Non essendoci privilegi in tale scelta, ogni osservatore è equivalente ad un altro;
serviranno piuttosto in seguito delle leggi di correlazione tra i vari osservatori.
In Meccanica Classica, la geometria necessaria allo studio di un dato moto è quella
euclidea relativa alle nozioni di punto, retta, piano, ecc., con le debite attenzioni della
Fisica.
1 In
Fisica si definisce Meccanica Classica quella branca della Fisica stessa che studia il moto dei corpi.
Caratteristica fondamentale di questo moto è l’essere caratterizzato da velocità molto minori, in modulo,
rispetto alla velocità della luce, e studiare corpi macroscopici, ovvero di dimensioni “quotidiane”. Lo
studio del moto di corpi macroscopici spinti a velocità prossime a quella della luce è invece oggetto di
studio da parte della Meccanica Relativistica, ad opera di A. Einstein, mentre per lo studio del moto di
corpi microscopici spinti anch’essi a velocità prossime a quella della luce, si ha in Fisica il supporto della
Meccanica Quantistica.
1
Qualora si debba studiare il moto tridimensionale di un generico corpo C dotato di
massa m , il primo passo verso lo studio del proprio moto è quello di pensare tale corpo
C scomposto in tanti sotto - volumi ∆V la cui somma restituisca il volume V originario.
Immaginando il generico volume ∆V assimilabile ad un cubo (di dimensioni comunque
molto piccole!) è plausibile che tale volume valga:
∆V = ∆x · ∆y · ∆z
(1.1)
e, di conseguenza:
∑
∆Vi = Vt ot
(1.2)
i
z
σ(t )
y
C
x
Figura 1: Schematizzazione del moto di un corpo C nello spazio e della relativa traiettoria seguita
A questo punto è possibile immaginare di ridurre sempre più le dimensioni del ∆V sino
a farlo diventare “infinitesimo”. Tale operazione “infinitesima” è arbitrariamente illimitata
e può portare a assimilare il volume ∆V (continuando a ridurlo progressivamente di volume
e con un certo errore) al punto euclideo. Questa operazione, che per il momento stiamo
introducendo a livello puramente mentale, è formalizzata con linguaggio matematico dalle
scritture:
lim ∆x = d x,
∆x→0
lim ∆y = d y,
∆y→0
da cui
2
lim ∆z = d z
∆z→0
(1.3)
dV = d x · d y · d z
(1.4)
La differenza tra la scrittura ∆V e dV risiede proprio in questo: ∆V è una porzione
misurabile, seppur molto piccola, del volume di partenza, mentre dV è un volume infinitesimo, non più misurabile e così piccolo da essere assimilato - anche se con un certo
margine di errore - ad un punto euclideo.
La descrizione del moto di un oggetto tridimensionale diventa, allora, la descrizione
del moto di ogni suo punto così concepito. Questa, seppur in veste molto ridotta, cerca
di introdurre l’ipotesi di punto massivo ipotizzata da I. Newton2
Osservazione 1.1 L’operazione di passaggio ∆V → dV deve essere tale da non comportare il trapasso dalla Meccanica Classica a quella Quantistica.
Possiamo concludere dicendo che:
Osservazione 1.2 Il legame tra dV e punto euclideo è detto errore, cioè approssimazione
tale da non influire sulle conclusioni di descrizione del moto; il suo connotamento è
pertanto positivo in Fisica.
Studiare il moto di un punto P così concepito nello spazio, significherà allora saper
calcolare, in componenti:
x = r x (t )
y = r y (t )
⃗
r (t ) =
z = r z (t )
(1.5)
in ogni istante di tempo t misurato, oppure saper calcolare istante per istante P = P (t ).
Il vettore ⃗r (t ) espresso nella (1.5), in componenti lungo gli assi cartesiani e dipendente
dal tempo t , si chiama vettore posizione e descrive, istante per istante, la traiettoria nello
spazio compiuta dal punto P . È chiaro, allora, che tale traiettoria rappresenta, in termini
matematici, una funzione che supporremo sufficientemente regolare e che vedremo sempre
espressa in componenti nella (1.5) secondo gli assi cartesiani di riferimento.
Osservazione 1.3 Può essere interessante, a questo punto, una osservazione sul concetto
di funzione in ambito fisico: dalla Matematica sappiamo che una funzione è una legge
che ad ogni elemento del dominio associa uno e un solo elemento del codominio. Ora, il
dominio di una traiettoria è l’intervallo di tempo in cui si decide di misurare le diverse
posizioni assunte dal corpo oggetto di studio e fissate mediante una terna cartesiana nello
spazio. Il fatto per cui, dunque, che l’elemento associato dal dominio al codominio debba
2 Sir
Isaac Newton (Woolsthorpe - by - Colsterworth, 25 dicembre 1642 - Londra, 20 marzo 1727) è
stato un matematico e fisico inglese. Tali date di riferimento sono date secondo il calendario Giuliano a
quel tempo vigente in Inghilterra; secondo il calendario Gregoriano, attualmente in vigore, Isaac Newton
sarebbe nato, invece, il 4 gennaio 1643 e deceduto il 31 marzo 1727.
3
essere unico si traduce in ambito fisico col fatto che il corpo oggetto di studio non può
occupare due posizioni spaziali distinte contemporaneamente. Questo è il presupposto
essenziale per poter parlare di Meccanica Classica. Tale concetto decade, ad esempio, in
Meccanica Quantistica in cui oggetti microscopici spinti a velocità prossime a quelle della
luce annullano il concetto di traiettoria stessa. Si pensi, ad esempio, ad un elettrone e −
che ruota attorno al proprio nucleo: questo modello è tipicamente quantistico più che
classico; un elettrone è localizzato in una regione di spazio denominata orbitale: ovvero
una regione di spazio in cui si ha la massima densità di probabilità di trovare almeno un
elettrone. L’approccio, allora, in Meccanica Quantistica per quanto riguarda lo studio dei
propri moti è di tipo probabilistico più che analitico.
Volendo, allora, descrivere il moto di un punto P così concepito nello spazio, allo
scorrere del tempo t si è portati a compilare una tabella come quella seguente:
t
x
y
z
t 0 + ∆t 0
t 1 + ∆t 1
t 2 + ∆t 2
x0
x1
x2
y0
y1
y2
z0
z1
z2
…
…
…
…
Tabella 1: Esempio di rilevazioni spaziali in determinati intervalli di tempo per il moto di un certo
punto P .
Come si può notare, l’osservazione non è mai istantanea, ma sempre basata su un
certo ∆t misurabile (anche se molto piccolo); anche in questo caso permane la presenza
di un certo errore nella rilevazione delle misurazioni effettuate.
Naturalmente, più piccolo sarà ∆t , maggiore sarà l’aderenza alla realtà passando
all’operazione lim ∆t . Non si può garantire tuttavia tale aderenza da un punto di vista
∆t →0
prettamente sperimentale.
La situazione fisica che stiamo introducendo può essere schematizzata a questo punto
dal grafico presentato in Figura 2 , in cui sono elencati tutti gli elementi sin qui introdotti.
Come si può notare in Figura 2 si è definito anche il vettore ∆⃗r , ovvero il vettore spostamento che rappresenta l’incremento di spostamento del punto P in un certo intervallo
di tempo ∆t .
Tale vettore, come si può constare, è il risultato ottenuto mediante la legge del
parallelogrammo dalla differenza tra i vettori posizione ⃗r (t + ∆t ) e ⃗r (t ). In formule:
∆⃗
r =⃗
r (t + ∆t ) −⃗
r (t )
(1.6)
Allo scorrere del tempo t , nei relativi ∆t i , si potranno allora descrivere diversi vettori
del tipo ∆⃗r , tutti consecutivi fra di loro e che descriveranno una poligonale che, a priori,
non coincide con la traiettoria reale seguita dal punto P . Per avere aderenza tra poligonale
tracciata e traiettoria effettivamente percorsa serviranno ∆⃗r sempre più piccoli.
4
z
P (t )
b
∆⃗
r =⃗
r (t + ∆t ) −⃗
r (t )
⃗
r (t )
b
⃗
r (t + ∆t )
P (t + ∆t )
σ(t )
y
x
Figura 2: Schematizzazione del moto di un punto massivo P nello spazio e relativi vettori inerenti il
proprio moto
Capita, allora, che la lunghezza dei vettori ∆⃗r , se pensati in intervalli di tempo molto
ravvicinati tra loro, ovvero con la solita condizione lim ∆t , diventi pressoché confrontabile
∆t →0
con la lunghezza (a questo punto infinitesima) della corrispondente traiettoria effettivamente percorsa nel medesimo d t , che indicheremo con d σ. Formalizzando meglio, allora,
tale concetto si ha:
lim |∆⃗
r | = dr ∼
= dσ
∆t →0
(1.7)
Una schematizzazione di questo modo di procedere si ha nella Figura 3 in cui vengono
messi a confronto diversi d r con i corrispondenti d σ.
2 Velocità istantanea
Per approdare al concetto di velocità istantanea, bisogna prima definire la velocità media.
Ricordando che in Fisica la velocità è rappresentata da un vettore, per introdurre il
concetto di velocità media, partendo dalla (1.6), è sufficiente notare che il punto P coprirà
lo spostamento ∆⃗r in un certo intervallo di tempo ∆t . Pertanto, il vettore velocità media
(in simboli: < ⃗
v >) riferito al tempo misurato ∆t sarà definito come:
<⃗
v >=
∆⃗
r ⃗
r (t + ∆t ) −⃗
r (t )
=
∆t
∆t
5
(2.1)
d s1 B
d s2
b
A
b
r⃗1
d r⃗2
d r⃗1
r⃗2
b
C
d s3
d r⃗3
r⃗3
b
D
σ(t )
r⃗4
b
O
Figura 3: Schematizzazione della poligonale generata dai vettori d⃗r i confrontati con i corrispondenti
d σi in intervalli di tempo d t i . È chiaro, in questo caso, che il modulo dei vettori d⃗
r i è del
tutto confrontabile con i corrispondenti d σi .
Osservazione 2.1 Tale velocità è solo una media all’interno del proprio ∆t . Il moto
può, infatti, essere vario all’interno di tali ∆t .
Relativamente ad un istante, la velocità istantanea, appunto, sarà calcolata, allora,
per un certo ∆t → 0, ovvero:
⃗
∆⃗
r
r (t + ∆t ) −⃗
r (t ) d⃗
r
= lim
=
=⃗
v
∆t →0 ∆t
∆t →0
∆t
dt
lim
(2.2)
Osservazione 2.2 La (2.2) esprime un limite importantissimo: attraverso la condizione
∆t → 0 è possibile calcolare la variazione (in un tempo infinitesimo) del vettore posizione
⃗
r (t ). Tale variazione, in linguaggio matematico, di definisce derivata rispetto al tempo,
ed è da leggersi proprio come la variazione del vettore posizione ⃗r (t ) istante per istante.
La (2.2) definisce, pertanto, la velocità istantanea del punto P istante per istante.
Osservazione 2.3 Siamo approdati al concetto di derivata di una funzione (in una
variabile, cioè il tempo t ) da un punto di vista esclusivamente fisico.
La (2.2), passando ai relativi componenti del vettore ⃗
v secondo la terna cartesiana
scelta e ai rispettivi moduli, si traduce nelle seguenti relazioni:
r x (t + ∆t ) − r x (t ) dr x
lim
=
= v x (t )
∆t →0
∆t
d
t
∆r d r
r y (t + ∆t ) − r y (t ) dr y
lim
=
=v =
lim
=
= v y (t )
∆t →0 ∆t
dt
∆t →0
∆t
dt
r (t + ∆t ) − r z (t ) d r z
lim z
=
= v z (t )
∆t →0
∆t
dt
6
(2.3)
A causa della sua definizione, il vettore velocità istantanea risulta - in ogni istante t tangente alla traiettoria descritta dal corpo in movimento. Modificando, a tal proposito,
la Figura 3 possiamo ricavare la Figura 4.
d⃗
r
=⃗
v (t )
dt
σ(t )
CD
b b
d⃗
r
=⃗
v (t )
dt
A B
b
b
r⃗1 r⃗2
r⃗3 r⃗
4
b
O
Figura 4: Rappresentazione del vettore velocità istantanea ⃗v (t ) e sua tangenza rispetto alla traiettoria
s(t ) percorsa dal corpo.
Osservazione 2.4 Nel caso in cui il vettore posizione ⃗r sia perpendicolare al vettore
velocità istantanea ⃗
v (t ) in ogni istante t , la traiettoria seguita dal corpo coincide con una
circonferenza e il moto diviene circolare.
3 Accelerazione istantanea
Seguendo lo schema adottato per la definizione del vettore velocità istantanea, definiamo
dapprima la accelerazione media misurata in un certo ∆t . Similmente a quanto fatto
nella sezione precedente, definiamo accelerazione media (in simboli < ⃗
a >) la variazione
di velocità in un certo ∆t di tempo. In formule:
<⃗
a >=
∆⃗
v ⃗
v (t + ∆t ) − ⃗
v (t )
=
∆t
∆t
(3.1)
Osservazione 3.1 Tale accelerazione è solo una media all’interno del proprio ∆t . Il
moto può, infatti, subire variazioni di accelerazione all’interno di tali ∆t .
Relativamente ad un istante, la accelerazione istantanea, appunto, sarà calcolata,
allora, per un certo ∆t → 0, ovvero:
lim
∆t →0
⃗
∆⃗
v
v (t + ∆t ) − ⃗
v (t ) d⃗
v
= lim
=
=⃗
a
∆t
→0
∆t
∆t
dt
(3.2)
Osservazione 3.2 La (3.2) esprime un limite importantissimo: attraverso la condizione
∆t → 0 è possibile calcolare la variazione (in un tempo infinitesimo) del vettore velocità
7
⃗
v (t ). Tale variazione, in linguaggio matematico, di definisce derivata rispetto al tempo,
ed è da leggersi proprio come la variazione del vettore velocità istantanea ⃗
v (t ) istante per
istante; nonché come derivata seconda del vettore posizione ⃗r (t ) fatta due volte rispetto al
tempo, cioè una prima variazione calcolata rispetto al tempo partendo da ⃗r (t ) e poi una
seconda variazione calcolata partendo dal vettore velocità istantanea ⃗
v (t ), sempre rispetto
al tempo. La (3.2) definisce, pertanto, la accelerazione istantanea del punto P istante per
istante. In forlmulazione analitica si scrive:
d d⃗
r
d2
d⃗
v
=
= 2⃗
r =⃗
a
dt dt dt dt
(3.3)
La (3.2), passando ai relativi componenti del vettore ⃗
a secondo la terna cartesiana
scelta e ai rispettivi moduli, si traduce nelle seguenti relazioni:
v x (t + ∆t ) − v x (t ) d v x
=
= a x (t )
lim
∆t →0
∆t
dt
∆v d v
v y (t + ∆t ) − v y (t ) d v y
lim
=
=a=
lim
=
= a y (t )
∆t →0
∆t →0 ∆t
dt
∆t
dt
v (t + ∆t ) − v z (t ) d v z
lim z
=
= a z (t )
∆t →0
∆t
dt
(3.4)
4 Moti rettilinei e lettura dei corrispondenti grafici
spazio - tempo, velocità - tempo e accelerazione tempo
Nelle sezioni precedenti sono state introdotte le principali caratteristiche di un moto generico nello spazio tridimensionale; riduciamo, ora, i gradi di libertà di un moto tanto
arbitrario sino a ridurli ad uno solo: introduciamo, cioè, i cosiddetti moti rettilinei, ovvero quella particolare classe di moti per cui la traiettoria seguita dal corpo in movimento
risulta essere una linea retta.
Lo studio di tali moti verterà, allora, sulle modalità di percorrenza relativa a questa
particolare traiettoria (ovvero capire se il corpo la percorre sempre in un unico verso, se
inverte il proprio moto, se subisce variazioni di velocià e/o di accelerazione, ecc.).
Supponiamo, a questo punto, di dover studiare il moto rettilineo di un corpo C e di
averne già dedotto la corrispondente legge oraria. Supponiamo che tale legge sia del tipo:
s(t ) = t 3 − 2t 2 − 5t + 6
(4.1)
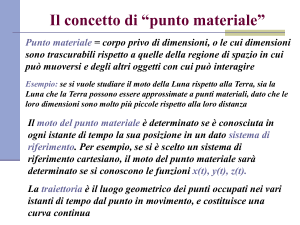
Il grafico corrispondente della (4.1) è dato in Figura 5.
Osservazione 4.1 Da notare le analogie con gli assi del grafico per i quali t corrisponde
all’asse delle ascisse per un generico piano cartesiano e s(t ) corrisponde all’asse delle
ordinate.
8
Osservazione 4.2 La (4.1) dichiara che lo spazio percorso dal corpo C dipende dal tempo
t come in essa descritto. Da notare il carattere funzionale, nonché polinomiale della (4.1)
nella variabile t .
Il grafico dato in Figura 5 è allora da leggersi nel modo seguente:
1. il corpo C si trova all’istante t = 0s a 6m dall’osservatore e ad esso si avvicina.
2. il corpo C intercetta l’osservatore all’istante t = 1s superandolo.
3. il corpo C si trova all’istante t = 2.120s a −4.061m dall’osservatore e in quell’istante
inverte il proprio moto.
4. il corpo C intercetta nuovamente l’osservatore all’istante t = 3s e da esso procede
continuando ad allontanarsi, percorrendo sempre una traiettoria rettilinea.
s(t )
8
6
b
A(0; 6)
s(t ) = t 3 − 2t 2 − 5t + 6
4
2
b
B (0.667; 2.074)
C (1; 0)
b
O
b
D(3; 0)
2
t
4
−2
−4
b
E (2.120; −4.061)
Figura 5: Rappresentazione analitica di legge oraria e corrispondente grafico spazio - tempo.
Osservazione 4.3 Rimane da capire cosa succeda all’istante t = 0.667 a 2.074m dall’osservatore.
Procedendo nello studio del moto del corpo C , accanto alla legge oraria che regola il
rapporto tra tempo trascorso e corrispondente spazio percorso, è possibile ricavare altre
due leggi orarie importantissime: quella che descrive la velocità posseduta dal corpo C
all’istante t , e quella che descrive l’accelerazione impressa al corpo C all’istante t : ovvero
la legge oraria della velocità istantanea e la legge oraria dell’accelerazione istantanea.
9
Dalla legge oraria (4.1) è possibile ricavare le altre due leggi orarie immaginando di
calcolare il limite proposto tanto nella (2.2) a pagina 6 - per quanto riguarda la corrispondente velocità istantanea - quanto nella (3.2) a pagina 7 - per quanto riguarda
l’accelerazione istantanea.
Dalla Analisi Matematica, si hanno, inoltre, formule decisamente agevoli ed immediate
(che logicamente vengono volutamente tralasciate in questa sede) per calcolare i limiti
in questione (che - dovendo essere calcolati per ogni istante t di definizione - risultano
decisamente improponibili).
Sfruttando, allora, queste formule - dette formule di derivazione, cioè formule che permettono (data una funzione di partenza) di ricavare l’andamento dei coefficienti angolari
delle rette ad essa tangenti in ogni suo punto - si ottengono le leggi orarie per la velocità
istantanea (proposta nella (4.2)) e per l’accelerazione istantanea (proposta nella (4.3)) in
ambito fisico.
Osservazione 4.4 È da ricordare, infatti, che il vettore velocità istantanea è tangente
alla relativa traiettoria in ogni istante t e il valore del suo modulo coincide con il valore
numerico calcolato nel limite proposto nella (2.2) a pagina 6. La stessa relazione vale per
il vettore ⃗
a nei confronti del vettore ⃗
v.
Osservazione 4.5 Funzionalmente parlando, invece, il modulo di tali vettori coincide
numericamente con il valore del coefficiente angolare della retta tangente alla corrispondente funzione nell’istante considerato ed istante per istante (cfr. l’Appendice A per
ulteriori approfondimenti).
Per le velocità si ha, allora:
v(t ) = 3t 2 − 4t − 5
(4.2)
mentre per le accelerazioni si ha:
a(t ) = 6t − 4
(4.3)
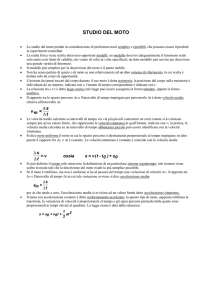
Riportiamo in Figura 6 i corrispondenti grafici delle funzioni appena enunciate in
riferimenti cartesiani velocità - tempo e accelerazione - tempo.
Cerchiamo, ora, di capire come si devono leggere i grafici delle Figure 5 e 6 e quali
sono i loro legami reciproci.
In Figura 5 si intuisce che il corpo in moto C parte all’istante 0s a 6m dall’osservatore
O , e ad esso si avvicina con |⃗
v | = 5 ms e con |⃗
a| = 4 m
(cfr. i valori assunti dalle funzioni
s2
relative di Figura 6 all’istante t = 0). Il segno “−” presente tanto nella velocità quanto
nell’accelerazione sta proprio a significare che il vettore velocità e il vettore accelerazione
hanno verso contrario rispetto a quello scelto per la traiettoria σ(t ); il corpo C è dunque
in avvicinamento, in accordo con le considerazioni fatte relativamente al grafico di Figura
5. Le condizioni appena date, valide per l’istante t = 0, vengono dette condizioni iniziali
del moto.
10
v(t )
a(t )
6
6
v(t ) = 3t 2 − 4t − 5
4
2
2
b
O
G(2.120; 0)
2
t
b
I (0.667; 0)
O
4
−2
t
2
−2
−4
b
−6
a(t ) = 6t − 4
4
−4
F (0; −5)
b
H (0; −4)
b
V (0.667; −6.333)
Figura 6: Rappresentazioni analitiche di leggi orarie relative al moto descritto in Figura 5 e
corrispondenti grafici velocità - tempo e accelerazione - tempo.
Allo scorrere del tempo, all’istante t = 0.667s si nota che il grafico della velocità
istantanea v(t ) in Figura 6 ha associato il valore −6.333 ms . Tale valore, a causa del
segno negativo risulta - funzionalmente parlando - il “più negativo” di tutti gli altri, tanto
che per istanti ad esso successivi la funzione (parabola) inizia a crescere. Questo punto che coincide con il vertice della parabola stessa - è definito in ambito funzionale punto di
minimo assoluto.
Sempre nello stesso istante t = 0.667s , il corrispondente grafico dell’accelerazione istantanea (una retta) interseca l’asse dei tempi associando, dunque, il valore 0 m
: in tale istante,
s2
allora, il corpo in moto C è dotato di accelerazione nulla; da questo istante in poi, tale
ente fisico continua a cresce positivamente senza sosta (rallentando, dapprima, il corpo C
sino a farlo fermare, quindi a fargli invertire il moto ed accelerandolo continuamente per
tutti gli istanti successivi nel verso opposto a quello seguito inizialmente e facendolo, quindi, procedere nel verso concorde a quello segnato dal riferimento relativo alla traiettoria
σ(t )).
Fino a questo istante il corpo in moto C si è continuamente avvicinato (significato
fisico del segno “−”) all’osservatore O , aumentando il modulo della propria velocità (il
modulo della velocità passa, infatti, da 5 ms a 6.333 ms ) anche se la corrispondente accelerazione va continuamente diminuendo in modulo; dall’istante t = 0.667s il corpo in moto
C continua a diminuire il modulo della propria velocità sino a raggiungere velocità nulla
11
all’istante t = 2, 120s a −4, 061m , “alle spalle” dell’osservatore O .
per t = 3, 000s ,
con |⃗
v | = 10, 000 ms
e |⃗
a | = 14, 000 m
s2
C
−5
−4
−3
−2
per t = 2, 120s
con |⃗
v | = 0, 000 ms
e |⃗
a | = 8, 720 m
s2
−1
0
1
2
3
per t = 1, 000s
con |⃗
v | = 6, 000 ms
e |⃗
a | = 2, 000 m
s2
4
5
6
7
8
σ(t )
per t = 0, 000s ,
con |⃗
v | = 5, 000 ms
e |⃗
a | = 4, 000 m
s2
per t=0,667
con |⃗
v | = 6, 333 ms
e |⃗
a | = 0, 000 m
s2
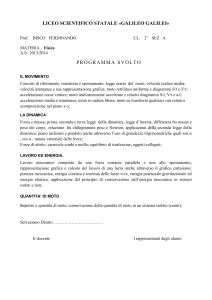
Figura 7: Rappresentazione realistica del moto del corpo
C in base alla traiettoria effettivamente
percorsa σ(t ) e relative modalità di percorrenza della stessa.
) il
Da questo istante in poi, a causa dell’accelerazione man mano accumulata (8, 720 m
s2
corpo C inverte il proprio moto per ritornare nuovamente in corrispondenza dell’osservatore O all’istante 3, 000s con |⃗
v | = 10, 000 ms e |⃗
a | = 14, 000 m
; da questo istante in poi il corpo
s2
C continua ad aumentare positivamente sia la propria velocità che la propria accelerazione
(allontanandosi, cioè, indefinitamente dall’osservatore O ).
Si può, allora, concludere che in corrispondenza degli zeri della funzione che descrive
il comportamento della velocità istantanea v(t ) si hanno inversioni di moto. Per preparare queste inversioni di moto, è però necessario che anche la funzione che descrive il
comportamento della accelerazione istantanea a(t ) presenti almeno uno zero (situato in
un istante di tempo t antecedente a quello corrispondente allo zero della funzione che
descrive il comportamento della velocità istantanea v(t )).
Infine, in corrispondenza degli zeri della funzione che descrive il comportamento della
velocità istantanea v(t ) si hanno, nel grafico della funzione che descrive il comportamento
della legge oraria spazio - tempo, o punti di massimo, o punti di minimo (come nel
nostro caso), vale a dire punti che hanno rispetto a tutti gli altri o ordinata minima o
ordinata massima. In corrispondenza, invece, degli zeri della funzione che descrive il
comportamento della accelerazione istantanea a(t ) si hanno nel corrispondente grafico
della funzione che descrive il comportamento della legge oraria s(t ) i cosiddetti punti di
flesso, ovvero quei punti in cui la funzione cambia la propria concavità con la propria
convessità.
12
Riflessioni analoghe si possono fare anche per i grafici rappresentativi delle funzioni
v(t ) e a(t ): in corrispondenza degli zeri della funzione che descrive il comportamento della
accelerazione istantanea a(t ) si hanno nel grafico della funzione che descrive il comportamento della velocità istantanea v(t ) - di nuovo - o punti di massimo, o punti di minimo
(come nel nostro caso), ecc.
13
A Interpretazione geometrica della derivata
In questo approfondimento verranno messi in luce sia la definizione che le principali caratteristiche geometriche delle derivate, ovvero quella serie di calcoli analitici che permettono
di ricavare, data una funzione f , di dominio e codominio noti, la corrispondente funzione
che descrive - punto per punto - l’incremento subito dalla funzione stessa. La derivata,
infatti, è sostanzialmente un incremento ed è sinonimo, per la funzione f , della propria
variazione.
y
r
6
5
4
3
→
A
2
1
b
−4
−3
−2
A
B
γ
yB → y A
b
−1
B
1
x
2
xB → x A
−1
3
4
5
−2
−3
−4
Figura 8: Rappresentazione schematica di una situazione funzionale adatta per la definizione del
concetto di derivata.
Considerando la situazione raffigurata in Figura 8 consideriamo una funzione γ (in
questo caso una parabola), di dominio e codominio noti, in cui sono fissati arbitrariamente due punti non coincidenti A e B , di coordinate, rispettivamente, (x a ; y a ) e (x B ; y B ).
Calcolando il coefficiente angolare della corrispondente retta secante si ottiene, come noto:
mr =
y A − yB
x A − xB
14
(A.1)
y
r
6
5
4
3
b
γ
A≡B
2
1
−4
−3
−2
x
−1
1
2
3
4
5
−1
−2
−3
−4
Figura 9: Rappresentazione schematica di una situazione funzionale e della corrispondente derivata
in un punto.
La formula in (A.1) rappresenta l’incremento della retta r in funzione del proprio
coefficiente angolare. Riferendosi, ora, a quanto esposto nelle Osservazioni 4.4 e 4.5
a pagina 10 e seguenti limitatamente al concetto di velocità istantanea, tangenza di tale
vettore alla corrispondente traiettoria in ogni istante t e legami con le formule (2.1) e
(3.1) esposte a pagina 5 e a pagina 7, si ha che il corrispondente valore del coefficiente
angolare della retta tangente nel punto A di Figura 9 è dato dalla posizione limite della
precedente retta secante nel caso in cui A → B , ovvero nel caso in cui x A → x B .
In formule:
lim
x B →x A
′
y A − yB
=m
x A − xB
′
(A.2)
Definiamo il valore numerico m , se esiste ed è finito, derivata di γ nel punto A . Si
rimarca che tale valore rappresenta il coefficiente angolare della retta tangente ad una
funzione data in un suo punto e che tale valore numerico coincide - fisicamente parlando
- con il modulo del vettore velocità istantanea nel medesimo punto.
15
Osservazione A.1 L’impostazione rigorosa analitica, le definizioni di limite e derivata, le tecniche di calcolo annesse e i casi particolari più rilevanti verranno trattati
successivamente nei programma di matematica di I V e V Liceo Scientifico.
B Formule utili
In questa appendice vengono riportate le formule utili allo svolgimento di esercizi relativi
ai moti presentati in questa dispensa.
Moto rettilineo uniformemente accelerato con condizioni iniziali non nulle
1. a = 0.
2. v =
x1 − x0
= cost .
t1 − t0
3. x 1 = x 0 + v(t 1 − t 0 ).
con x 0 e t 0 condizioni iniziali del moto; x 1 e t 1 posizioni e tempi finali (da calcolare).
Moto rettilineo uniforme con condizioni iniziali non nulle
1. a =
v1 − v0
= cost .
t1 − t0
2. v 1 = v 0 + a(t 1 − t 0 ).
1
2
3. x 1 = x 0 + v 0 (t 1 − t 0 ) + a(t 1 − t 0 )2
con x 0 , v 0 e t 0 condizioni iniziali del moto; x 1 , v 1 e t 1 posizioni, velocità e tempi finali
(da calcolare).
16
Indice
1 Preliminari
1
2 Velocità istantanea
5
3 Accelerazione istantanea
7
4 Moti rettilinei e lettura dei corrispondenti grafici spazio - tempo, velocità - tempo e accelerazione - tempo
8
A Interpretazione geometrica della derivata
14
B Formule utili
16
Indice
17
Elenco delle figure
17
Elenco delle tabelle
18
Elenco delle figure
1
2
3
4
5
6
7
8
9
Schematizzazione del moto di un corpo C nello spazio e della relativa traiettoria seguita
Schematizzazione del moto di un punto massivo P nello spazio e relativi vettori inerenti
il proprio moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Schematizzazione della poligonale generata dai vettori d⃗
r i confrontati con i corrispondenti d σi in intervalli di tempo d t i . È chiaro, in questo caso, che il modulo dei vettori
d⃗
r i è del tutto confrontabile con i corrispondenti d σi . . . . . . . . . . . . . . . . . . .
Rappresentazione del vettore velocità istantanea ⃗
v (t ) e sua tangenza rispetto alla traiettoria s(t ) percorsa dal corpo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Rappresentazione analitica di legge oraria e corrispondente grafico spazio - tempo. . . .
Rappresentazioni analitiche di leggi orarie relative al moto descritto in Figura 5 e
corrispondenti grafici velocità - tempo e accelerazione - tempo. . . . . . . . . . . . . .
Rappresentazione realistica del moto del corpo C in base alla traiettoria effettivamente
percorsa σ(t ) e relative modalità di percorrenza della stessa. . . . . . . . . . . . . . .
Rappresentazione schematica di una situazione funzionale adatta per la definizione del
concetto di derivata. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Rappresentazione schematica di una situazione funzionale e della corrispondente derivata in un punto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
2
5
6
7
9
11
12
14
15
Elenco delle tabelle
1
Esempio di rilevazioni spaziali in determinati intervalli di tempo per il moto di un certo
punto P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
4