Strumenti e Tecniche di Misura
Prof. Ing. Francesco Martelli, Ing. Alessandro Cappelletti PhD
Corso di Macchine – A.A. 2014-15
Pagina 1
Investigazione del flussi
Introduzione
Attraverso l’investigazione dei flussi è possibile risalire alle prestazioni delle
macchine per fare ciò sono disponibili due famiglie di strumenti:
Strumenti Sperimentali
Strumenti Numerici
Le procedure di lavoro si basano in generale sull'impiego integrato di attività
sperimentale e simulazioni numeriche.
Questo approccio si dimostra appropriato per affrontare e risolvere le problematiche
relative alle macchine in termini di:
•Accuratezza
•Costi/benefici
Corso di Macchine – A.A. 2014-15
Pagina 2
Strumenti di tipo Sperimentale
Gli strumenti sperimentali si possono dividere in due gruppi:
Banchi Prova od Apparati Sperimentali: Strutture dedicate alla prova dei
componenti le macchine o modelli delle stesse.
Strumenti di misura, sensori: sistemi per misurare le diverse grandezze
termofluidodinamiche di interesse;
Si noti che gli strumenti di misura sono impiegati anche nel controllo e
monitoraggio delle macchine e degli impianti.
Corso di Macchine – A.A. 2014-15
Pagina 3
Banchi Prova od Apparati Sperimentali
Banchi prova:
(GDV, banchi prova, combustione, etc..) struttura necessaria provare il modello della
macchina o parte di essa:
Gallerie del vento – tunnel idraulici
Laboratori dedicati
Macchine prototipo
Corso di Macchine – A.A. 2014-15
Pagina 4
Banchi Prova Sperimentali
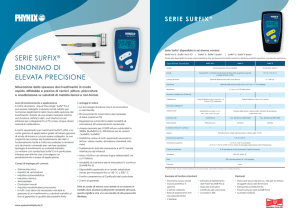
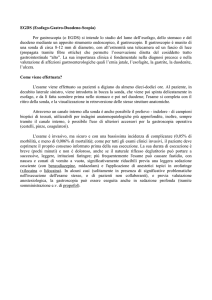
Low Speed Wind Tunnel
Technical Features
Wind Tunnel: blow-down open circuit, centrifugal
fan: electric power 100kW
Low Speed Wind Tunnel
GDV-DE
Test Section: Max. area 0.1 m2, Max. flow velocity
Mach 0.3
1 - Silencer Filter
2 – Centrifugal fan
3 – Rest Chamber
4 – First nozzle
7
6
5
4
3
2
Static
pressure taps
5 –Honeycomb box
6 – Second nozzle, inlet duct
1
7 – Test section
Total pressure
probe
Corso di Macchine – A.A. 2014-15
Pagina 5
Strumenti di Misura
Strumenti di misura, sensori, sistemi per misurare le diverse grandezze
termofluidodinamiche di interesse:
Misure tipiche di impianto Industriale (Freddo)
- Misure Coppia: Meccaniche di torsione
- Misure di Velocità di rotazione: (C · ω=Potenza)
-Misure di Temperatura: T,
-Misure di Portata: m
-Misure di Pressione: p (trasduttori di pressione)
-Misure di Velocità: u,v,w, u’,v’,w’
Misure tipiche di impianto Industriale (Caldo)
-Diagnostica della combustione
-Misure di Specie chimiche (OH, NO, CO, etc…),
-Analisi chimiche, composizione combustibile: gas cromatografo,
prodotti della combustione, mixing: sonde di prelievo gas
Corso di Macchine – A.A. 2014-15
Pagina 6
Strumenti di Misura
-Strumenti di misura, sensori,
sistemi per misurare le diverse grandezze termofluidodinamiche di interesse
in :
Misure tipiche da Apparato Sperimentale di Ricerca
-Misure di Pressione: p (trasduttori di pressione anche unsteady)
-Misure di Temperatura: T,
-Misure di Velocità: u,v,w, u’,v’,w’
-Visualizzazioni di Flusso
-Diagnostica della combustione (Composizione gas, fiamma , etc.)
-Misure di Specie chimiche (OH, NO, CO, etc…),
Corso di Macchine – A.A. 2014-15
Pagina 7
Strumenti di Misura
Strumenti di misura, sensori, sistemi per misurare le diverse grandezze
termofluidodinamiche di interesse:
- Misure di Portata: m (flange, venturimetri, boccagli, i più svariati,…)
-Coppia: Meccaniche di torsione
-Velocità di rotazione: (C · ω=Potenza )
- Misure di Temperatura: T, termocoppie, termoresistenze
- Misure di Pressione: p (trasduttori di pressione)
-Misure di Velocità: u,v,w, u’,v’,w’
- Sonde pneumatiche (1 holes, 3h, 5h) HW, PIV, LDV
- Misure di Specie chimiche (OH, NO, CO, etc…), Analisi chimiche, composizione
combustibile: gas cromatografo, prodotti della combustione, mixing: sonde di
prelievo gas
-Diagnostica della combustione:sistemispettroscopia laser, Laser Induced
Fluorescence (LIF)
Corso di Macchine – A.A. 2014-15
Pagina 8
Tecniche di misura
A livello industriale si hanno più comunemente:
•Misure di portata: flange tarate, boccagli, venturimetri, …
•Misure di temperatura: Termocoppie, Termoresistenze
•Misure di pressione: pressure taps + trasduttore
Corso di Macchine – A.A. 2014-15
Pagina 9
Tecniche di misura
Catena di acquisizione (di misura/calibrazione)
Sensore
Raccolta
/Cattura
della
grandezza
fisica
Trasd.
Conversione
della
grandezza
fisica in
segnale
elettrico
Corso di Macchine – A.A. 2014-15
Amplific
Filtro
PC
Anal./Dig.
Miglioramento segnale
elettrico
•
Acquisizione
•
Conversione da misura
elettrica a valore della
grandezza fisica
•
Post -Processing
Pagina 10
Le Misure In Combustione
(Chimica a caldo)
Composizione combustibile: Gas cromatografo
Prodotti della combustione, mixing: Sonde isocinetiche di prelievo gas
Specie chimiche (NO, CO, etc…)
Analisi chimiche
Sistemi di spettroscopia laser: (RAMAN)
Laser Induced Fluorescence (LIF)
Corso di Macchine – A.A. 2014-15
Pagina 11
Le misure di velocità
Mulinelli
Mulinelli (Turbinette ω = velocità)
LDA
Anemometria Laser Doppler
HWA
Anemometria a Filo Caldo
PIV
Pitot, 3F, 5F
LSV
Corso di Macchine – A.A. 2014-15
Velocimetria Planare
Sonde di Pressione 1D, 2D, 3D
Visualizzazioni di flusso a Lama di
Luce Laser
Pagina 12
Tubo di Pitot /Misure Velocità
Corso di Macchine – A.A. 2014-15
Pagina 13
Tubo di Pitot /Misure Velocità
Corso di Macchine – A.A. 2014-15
Pagina 14
Tubo di Pitot /Misure Velocità
Sonda di tipo totale - statica
E’ lo strumento più usato per misure di velocità nei fluidi.
Misurando pressione statica e totale la velocità
1
p1 + ρc12 = p0
2
c1 =
2( p0 − p1 )
ρ
NB: E’ necessario l’allineamento della
sonda con il flusso a meno di un
determinato angolo di insensibilità
Andamento della pressione statica
lungo lo stelo della sonda
Pb: Lettura della pressione statica. Esiste una localizzazione ideale delle prese di p. statica
che minimizza l’errore. In questo punto l’effetto dell’espansione sull’ogiva e dell’interferenza
dell’asta tendono a controbilanciarsi.
Corso di Macchine – A.A. 2014-15
Pagina 15
Le misure di Pressione
Misure di pressione Statica
Possibili fonti di errore:
l/d foro (u basse l/d <2)
Finitura (Spigoli vivi: no raccordi)
Orientamento e forma del raccordo
Dimensione massima (d=0.5-1.0 mm)
Disallineamento flusso
Curvatura e/o ostruzione del condotto
Misure di pressione Totale
Possibili fonti di errore:
Rallentamento isoentropico (M<1)
Sensibilità all’angolo di incidenza 10°- 40°
Re=UD/ν ⇒ err. Max 5%
Corso di Macchine – A.A. 2014-15
Pagina 16
Sonde Pneumatiche a 3 Fori (2D) o 5 fori (3D)
Le sonde a 3 fori misurano pressione statica, totale e la velocità (determinandone
l’angolo di yaw nel piano)
Le sonde a 5 fori determinano pressione statica, totale e la velocità (nelle tre
direzioni dello spazio).
Corso di Macchine – A.A. 2014-15
Pagina 17
Calibrazione di Sonde pneumatiche 2D – (1)
Il multitrasduttore equipaggiato con set di trasduttori di pressione opportuni.
Nel caso considerato trasduttori relativi da 10 Psi (circa 0,7 bar), necessari visto il valore
elevato della pressione dinamica di questo caso (u=259-270 m/s).
Sonda pneumatica
Pressione Camera di Calma
Pressione Foro Sinistro
Personal Computer
Pressione Foro Centrale
Pressione Foro Destro
Multi
Convertitore A/D
HIGH
Trasduttore
C1
C2
C3
C4
LOW
Presa di pressione CC
Termoresistenza
Catena di acquisizione
Corso di Macchine – A.A. 2014-15
Pressione Atmosferica
Multitrasduttore
Schema di collegamento
dei canali delle prese di
pressione ai trasduttori.
Pagina 18
Calibrazione di Sonde pneumatiche 2D – (1)
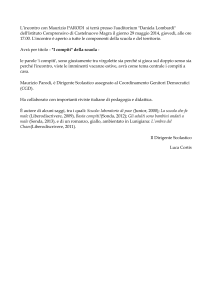
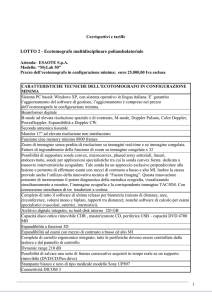
Curve di pressione sui 3 fori
Il grafico riporta l’andamento sul campo angolare di calibrazione delle pressioni misurate dai
tre fori della sonda(Sx, Centrale, Dx), nel caso di flusso alla massima velocità 270 m/s; gli
andamenti restano pressoché invariati nel caso delle altre due velocità considerate.
La sonda presenta una buona simmetria di funzionamento sul campo angolare -40°, +40 per
tutte le prese di pressione.
I fori destro e sinistro sono sensibili
all’angolo di yaw su un range angolare
di ca. 48°;
70
60
50
Pressione (kPa)
L’andamento del valore di pressione
misurato dal foro centrale fornisce una
curva sufficientemente simmetrica.
Valori di Pressione Sonda Prismatica UNI - 270 m/s
40
30
SX
P0=160.5 kPa
M0=0.80
Velocità=270 m/s
M=0.86
20
10
Centrale
DX
0
-10
-40
-32
-24
-16
-8
0
8
Angolo di Yaw (°)
16
24
32
40
Pressioni misurate, c= 270 m/s; sonda prismatica
Corso di Macchine – A.A. 2014-15
Pagina 19
Trasduttori : tipologie
• Strain gage
diversa conducibilità elettrica causata dalla deformazione
• Piezoelettrici
generazione differenza di potenziale quando sono soggetti ad una
deformazione meccanica
• Capacitivi alta risposta in frequenza
Corso di Macchine – A.A. 2014-15
Pagina 20
Le misure di Pressione
Misure di pressione non Stazionarie
Sistema : Foro/tubo/cavità/trasduttore ⇒ Calcolo della risposta in frequenza
della sonda
Problema: oscillazione e sfasamento del segnale, fattori:
Lunghezza tubo (minima)
Diametro del tubo (massima)
Cavità trasduttore (contenuta, Cavità con liquidi)
Corso di Macchine – A.A. 2014-15
Pagina 21
Velocimetria Laser Doppler
La velocimetria Laser Doppler (LDV) è una tecnica di misura della velocità
di un oggetto in movimento.
Si usa per la misura di componenti di velocità di un flusso in un
determinato punto di misura (Rif. Euleriano)
Principio di funzionamento: si illumina l’oggetto e si rileva il “Doppler shift”
(variazione della frequenza) della luce diffusa dall’oggetto in moto
Applicazione: consiste nel “raccogliere” e processare la luce diffusa da
particelle inseminanti che si assume siano in moto con il fluido
LDV è una Tecnica di misura :
•
NON-invasiva,
•
Notevole accuratezza
•
Elevata risoluzione spaziale.
Corso di Macchine – A.A. 2014-15
Pagina 22
Velocimetria Laser Doppler
Diverse configurazioni ottiche possono essere impiegati in quasi tutte le
applicazioni (misure).
Il più comune attualmente è quello indicato come: “Dual Beam” o configurazione
Doppler differenziale detto anche a modalità a frange che impiega due fasci laser
per ogni componente di velocità.
LDV a 2 Fasci Laser
Il sistema ottico comprende:
•Un sistema per dividere in 2 fasci
il laser originario
•Un sistema di lenti per mettere a
fuoco e intersecare i 2 fasci
(regione di misura)
Corso di Macchine – A.A. 2014-15
Pagina 23
LDV a 2 Fasci Laser
Il ricevitore ottico raccoglie e
concentra una porzione di luce
diffusa dalle particelle e dirige la
luce verso verso il Photodetector
•Il
Fotorilevatore
converte
l’energia luminosa in segnale
elettrico analogico
•La frequenza del segnale
risulta
proporzionale
alla
componente di velocità della
particella
•Un processore di segnale
estrae
l’informazione
di
frequenza dal segnale (da cui t)
e fornisce un valore digitale che
rappresenta la vel. Istantanea
della particella
Corso di Macchine – A.A. 2014-15
Forma del segnale
•
La figura mostra un segnale ideale (assenza di rumore di fondo) per
una particella che passa per il centro della regione di misura
•
La forma del segnale dipende dalla traiettoria della particella all’interno
del vol. di misura
•
La distribuzione dell’intensità luminosa nella regione di misura è di tipo
gaussiano
Pagina 24
Velocimetria Laser Doppler
Vantaggi della tecnica LDV nella misura della “time-history” u=u(t)
della velocità in un punto del campo di moto:
•
Regione di misura molto piccola (puntuale)
•
Elevata accuratezza della misura
•
Capacità di misurare ogni componente di velocità isolatamente
•
Misura accurata di elevate intensità di turbolenza anche di flussi
ricircolanti
•
Il sistema non richiede calibrazione
•
Assenza di sonda nel flusso (non intrusione, misura in ambienti “ostili”)
•
Elevata risposta in frequenza
Corso di Macchine – A.A. 2014-15
Pagina 25
Anemometria a Filo Caldo (HWA)
Misura puntuale intrusiva della velocità dei flussi gassosi
Corso di Macchine – A.A. 2014-15
Pagina 26
Sonde a filo diritto con estremità rivestite
Corso di Macchine – A.A. 2014-15
Pagina 27
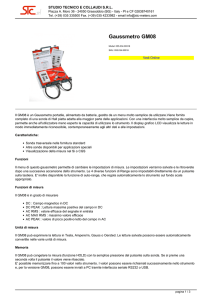
Principio di Funzionamento HWA
La Ue è la cosiddetta velocità efficace, cioè la “frazione” di velocità che effettivamente
influenza lo scambio termico, essa è in generale diversa dal modulo della velocità U.
Nel caso di una sonda reale, sia per la
lunghezza finita del filo, sia per la presenza
dei supporti, la situazione è più complessa.
A tale proposito si consideri la figura che
riporta un filo caldo investito da un flusso
avente una generica velocità U.
Scomponiamo il vettore velocità U nelle tre componenti UT, UN, UB rispetto alla terna con assi
x, y contenuti nel piano della sonda. Esprimendo tali componenti in funzione degli angoli di
yaw α e di pitch β si ottiene :
U T = U sen α
Corso di Macchine – A.A. 2014-15
U N = U cosα cos β
U B = U cosα sen β
Pagina 28
Principio di Funzionamento HWA
Se la risposta del filo caldo fosse identica per le tre componenti di velocità allora il nostro
anemometro misurerebbe il modulo del vettore velocità del flusso,
U e = U = (U N2 + U T2 + U B2 )
1/ 2
In realtà la risposta alle tre componenti non è uguale: per cui la velocità effettiva e quindi
quella misurata è diversa da quella reale del flusso.
Relazione di Joergensen, ampiamente adottata, che stabilisce:
U e 2 = (U N2 + k 2U T + h 2U B2 ) = U 2 ( cos 2 α cos 2 β + k 2 sen 2 α + h 2 cos 2 α sen 2 β )
dove k e h sono i coefficienti di yaw e di pitch; questi:
•dipendono dall’aspect-ratio del filo l/D,
•risultano indipendenti dagli angoli di inclinazione del flusso rispetto al filo e dal modulo di
velocità.
•Valori tipici di k e h, per fili di tipo standard, sono rispettivamente 0.2 e 1.05.
In definitiva la tensione in uscita dipende dal modulo della velocità del flusso e dalla direzione
con cui essa incide sul filo, di conseguenza:
E = f (U e ) = f1 (U , α , β )
Corso di Macchine – A.A. 2014-15
Pagina 29
E = f (U e ) = f 1 (U , α , β )
E rappresenta quindi l’informazione del valore istantaneo della velocità efficace.
In pratica è necessario ricorrere ad una calibrazione diretta anche per la risposta angolare di
ogni singola sonda, questo porta alla:
determinazione di una curva di risposta all’angolo di yaw s(α) e di una curva di risposta
all’angolo di pitch g(β), che unitamente alla curva di risposta al modulo della velocità danno:
E = f c (U ) s(α ) g( β )
Resta da sottolineare il fatto che la sensibilità all’angolo
di yaw e di pitch è indipendente dalla velocità e dalla
direzione del flusso
Per la forma e la taratura della funzione fc (s, g)
si rende necessaria una fase di calibrazione:
La legge di King costituisce l’equazione più importante
da un punto di vista storico ed applicativo per la
funzione fc(U) , essa viene utilizzata con ottimi risultati,
sottoponendo a calibrazione le costanti A, B ed n.
E 2 = A + BU n
Corso di Macchine – A.A. 2014-15
Pagina 30
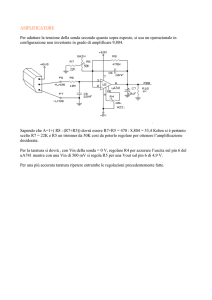
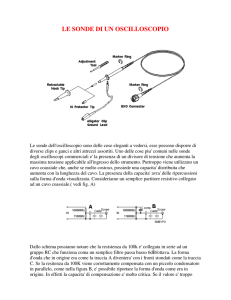
Calibrazione di una sonda per HWA
La Calibrazione di una sonda a filo caldo si effettua ponendola in un flusso con direzione nota
e modulo di velocità variabile, che costituisce la velocità di riferimento.
Operando in modo discreto si determina così una serie di coppie di valori velocitàtensione (Ur , E) che, in una fase successiva, vengono interpolati secondo una equazione
che può essere scelta fra:
I.
quelle di tipo “classico”, mantenendo così un legame alla fisica del problema
II.
oppure sulla base di considerazioni puramente matematiche.
H.w
Con questo secondo tipo di approccio si
considerano le sole coppie di valori (Ur , E)
e si cerca, con metodi matematici (minimi
quadrati, spline,..), l’equazione che meglio
le
approssima,
a
prescindere
da
considerazione
di
carattere
termofluidodinamico.
3
2
Unità di
Regolazione
del flusso
Compressor
1
Ugello
Scanivalve
Catena acquisizione
PC IBM
80386
Multimetro
Schema di una catena di calibrazione per sonda HWA
Corso di Macchine – A.A. 2014-15
Pagina 31
Particle Image Velocimetry (PIV)
Corso di Macchine – A.A. 2014-15
Pagina 32
Corso di Macchine – A.A. 2014-15
Pagina 33
Confronto fra Tecniche di Misura
Corso di Macchine – A.A. 2014-15
Pagina 34
VISUALIZZAZIONI
Corso di Macchine – A.A. 2014-15
Pagina 35
VISUALIZZAZIONI
Image from http://www.newtonlab.it/
Corso di Macchine – A.A. 2014-15
Pagina 36
VISUALIZZAZIONI
Image from http://www.newtonlab.it/
Credit: TAKESHI TAKAHARA/SCIENCE PHOTO LIBRARY
Corso di Macchine – A.A. 2014-15
Pagina 37
VISUALIZZAZIONI
Formazione di Ghiaccio
Image from http://facilities.grc.nasa.gov/irt/index.html
Corso di Macchine – A.A. 2014-15
Pagina 38
Laser Sheet Visualization - LSV
Corso di Macchine – A.A. 2014-15
Pagina 39
Corso di Macchine – A.A. 2014-15
Pagina 40
Corso di Macchine – A.A. 2014-15
Pagina 41
Low Speed Wind Tunnel
Components Aerodynamic Study:
Turbine cascades investigation
Burner Aerodynamics, Premixing system
Jets impingements
View of the converging duct and the
cascade from the flow discharge side
DLN – GT Burner
Corso di Macchine – A.A. 2014-15
Cascade outlet section
Pagina 42
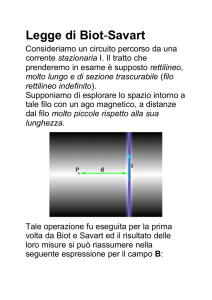
Low Speed Wind Tunnel: Turbine Cascade Investigation
Hot-wire Anemometry:
Measurements of Vortex Shedding and Wake Decay of a Turbine Inlet Guide Vane
Turbulence Intensity Map
S.S. wall
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
30
T.E.
A
PS
10
T.E.
0
TIP
HUB - % Blade to Blade
20
SS
-10
-20
B
-30
Probe
positioning
10
20
30
40
50
60
70
80
90
T.E.
% Blade Span
Hot wire in spanwise
direction
Probe: Dantec 55P11
Acquisition frequency 30 kHz
Nozzle exit - Plane 2
5.3% chords downstream of T.E.
Grids points: 255
0
SS
-4
-8
T.E.
5
Probe
positioning
15
25
0
35
2
4
45
55
% Blade Span
6
8
10
12
14
65
16
18
75
20
85
95
6
2
P.S.
PS
T.E.
T.E.
-2
-6
TIP
PS
4
HUB - % Blade to Blade
8
TIP
T.E.
HUB - % Blade to Blade
Turbulence Intensity Map
SS
-10
5
15
25
45
55
% Blade Span
65
75
85
95
22
0
Nozzle exit - Plane 1
0.9% chords downstream of T.E.
Grid points: 285
Corso di Macchine – A.A. 2014-15
35
1
2
3
4
5
6
7
8
9
10 11 12 13 14 15
Nozzle exit – Plane 3
7.2% chords downstream of T.E.
Grid points:285
Pagina 43
Low Speed Wind Tunnel: Turbine Cascade Investigation
Pneumatic Probes (5H) esempi
5-Holes Probe: Secondary Flow Structure at the Outlet Turbine Inlet Guide Vane
Inlet condition Uin 41 m/s, Mach = 0.12, Reynolds =175000
Probe: the miniature five-hole head (∅ = 1.4 mm) has 0.1
mm bore pressure taps connected to a 150 mm capillary
tube with an internal diameter of ∅=0.12 mm
C
B
A
The secondary flow pattern is
dominated by the presence of the two
passage vortices:
A
B
•which are located at the hub and tip at
the trailing edge (passage A),
•but roll up close downstream of the
nozzle (passage B),
Plane 1
C
0.9% chords downstream of T.E.
•leaving the hub and tip regions and
displacing towards midspan (passage C).
93
75
50
25
7
% SPANWISE
Corso di Macchine – A.A. 2014-15
Pagina 44
Appendice
Corso di Macchine – A.A. 2014-15
Pagina 45
Calibrazione di Sonde pneumatiche 2D – (1)
Curve di pressione sui 3 fori
Il grafico riporta l’andamento sul campo angolare di calibrazione delle pressioni misurate dai
tre fori della sonda(Sx, Centrale, Dx), nel caso di flusso alla massima velocità 270 m/s; gli
andamenti restano pressoché invariati nel caso delle altre due velocità considerate.
La sonda presenta una buona simmetria di funzionamento sul campo angolare -40°, +40 per
tutte le prese di pressione.
I fori destro e sinistro sono sensibili
all’angolo di yaw su un range angolare
di ca. 48°;
L’andamento del valore di pressione
misurato dal foro centrale fornisce una
curva sufficientemente simmetrica.
70
60
50
Pressione (kPa)
In questo senso la prismatica
sperimentata non é particolarmente
adatta a flussi ad alta velocità, in
quanto il campo di calibrazione
angolare non è molto ampio.
Valori di Pressione Sonda Prismatica UNI - 270 m/s
40
30
SX
P0=160.5 kPa
M0=0.80
Velocità=270 m/s
M=0.86
20
10
Centrale
DX
0
-10
-40
-32
-24
-16
-8
0
8
Angolo di Yaw (°)
16
24
32
40
Pressioni misurate, c= 270 m/s; sonda prismatica
Corso di Macchine – A.A. 2014-15
Pagina 46
Calibrazione di Sonde pneumatiche 2D – (2)
Curve dei coefficienti di calibrazione
Le curve di calibrazione sono stati costruite considerando il seguente set di
coefficienti, [set(A)], che consente una riduzione diretta dei dati.
I coefficienti sono definiti come :
Cβ' =
'
CPd
=
Pd − Ps
P + Ps
Pc − d
2
'
=
CPt
Corso di Macchine – A.A. 2014-15
Pd + Ps
2
P0 − P
Pc −
Dove:
Ps = pressione foro sinistro
Pd = pressione foro destro
Pc = pressione foro centrale
P0 = pressione totale
P = pressione statica
Pc − P0
P0 − P
Pagina 47
Calibrazione di Sonde pneumatiche 2D – (3)
Di seguito vengono presentate in successione le curve dei coefficienti, funzione dell’angolo di
yaw, alle tre diverse velocità sperimentate. Caratteristica generale di queste curve, che
resterà subito evidente, è quella di essere pressoché insensibili ai valori di velocità.
Cβ' =
Risposta angolare: Coefficienti C’ß
Pd − Ps
P + Ps
Pc − d
2
In termini di C’β, si nota una
discontinuità per valori di angolo di
yaw prossimi a +40° alle due velocità
più basse per cui il coefficiente
risulta negativo.
Coefficiente Cβ ' (setA) - Sonda Uni
25
20
15
10
Coefficiente Cb'
5
0
-5
-10
-15
230 set(A)
-20
250 set(A)
-25
270 set(A)
-30
-35
-40
-45
-40
-32
-24
-16
Corso di Macchine – A.A. 2014-15
-8
0
8
Angolo di Yaw (°)
16
24
32
40
Questo deriva dal fatto che sostituendo i
valori di pressione misurati nella
definizione di Cß’ si ha il denominatore
negativo poiché per angolo di yaw=+40° il
recupero di p. dinamica operato dal foro
centrale non è capace di superare la
media dei valori di pressione dal foro Dx e
Sx.
Questo fenomeno sparisce per la velocità
di 270m/s, alla quale la pressione sul
centrale torna ad essere predominante al
denominatore del Cß’.
Pagina 48
Calibrazione di Sonde pneumatiche 2D – (4)
Coefficienti di dinamica : C’Pd
C
'
Pd
=
Pd + Ps
2
P0 − P
Pc −
Le curve del C’pd - set(A), rappresentative dell’errore
relativo nella misura della pressione dinamica rispetto
ad un ipotetico tubo di Pitot allineato.
Per una sonda ideale allineata, tale coefficiente
dovrebbe essere 1.
Coefficienti Cpd' set(A) e Cps set(B) - Sonda Uni
0.9
230 set(A)
250 set(A)
0.8
270 set(A)
Coefficiente Cpd' - Cps
0.7
230 set(B)
250 set(B)
0.6
270 set(B)
0.5
0.4
0.3
Le curve mostrano un andamento circa
costante a +0.8 per un ristretto intervallo -8,
+6° dell’angolo di yaw.
Al di fuori di questo ristretto campo angolare
si hanno andamenti lineari decrescenti fino a
valori pressoché nulli, poiché il foro centrale
recupera sempre meno della quota cinetica e
uno dei due fori laterali diventa sempre più
una presa di totale.
Si noti che i valori del coefficiente C’pd set(A) risulta
negativo a +40° per i valori di velocità di 230 e 250
m/s. Questo coincide con quanto detto per il Cß’;
infatti, per i coefficienti set (A), il denominatore del Cß’
è uguale al numeratore del C’pd.
0.2
0.1
0
-0.1
-40
-32
-24
-16
-8
0
8
Angolo di Yaw (°)
Corso di Macchine – A.A. 2014-15
16
24
32
40
In generale si può affermare che la sonda presenta
una buona simmetria per entrambi i coefficienti
considerati.
Pagina 49
Calibrazione di Sonde pneumatiche 2D – (5)
Coefficiente di errore sulla pressione totale: C’Pt
'
CPt
P − P0
= c
P0 − P
Il coefficiente Cpt, è misura della differenza fra il valore di
pressione totale letta sul foro centrale della sonda e la
pressione totale effettiva.
Per una sonda ideale tale coefficiente dovrebbe avere
valore nullo per sonda allineata.
In particolare per yaw=0 il coefficiente
assume il valore teorico indice di un
completo recupero di pressione totale da
parte del foro centrale e di basse perdite
nell’efflusso dalla camera di calma allo
scarico.
Coefficiente Cpt set(A-B) - Sonda Uni
0.05
0.00
-0.05
-0.10
Coefficienet Cpt
-0.15
-0.20
Il coefficiente resta poi inferiore a -0.05
nell’intervallo -16, +12°.
-0.25
-0.30
-0.35
-0.40
230 set(A-B)
-0.45
250 set(A-B)
-0.50
270 set(A-B)
Infine si può notare
asimmetria delle curve.
una
leggera
-0.55
-0.60
-40
-32
-24
-16
Corso di Macchine – A.A. 2014-15
-8
0
8
Angolo di Yaw (°)
16
24
32
40
Pagina 50
Velocimetria Laser Doppler
La velocimetria Laser Doppler (LDV) è una tecnica di misura della velocità
di un oggetto in movimento.
Si usa per la misura di componenti di velocità di un flusso in un
determinato punto di misura (Rif. Euleriano)
Principio di funzionamento: si illumina l’oggetto e si rileva il “Doppler shift”
(variazione della frequenza) della luce diffusa dall’oggetto in moto
Applicazione: consiste nel “raccogliere” e processare la luce diffusa da
particelle inseminanti che si assume siano in moto con il fluido
Corso di Macchine – A.A. 2014-15
Pagina 51
Velocimetria Laser Doppler
LDV è una Tecnica di misura :
•
NON-invasiva,
•
Notevole accuratezza
•
Elevata risoluzione spaziale.
Elevata diffusione a livello di R&S e anche Industriale, permette misure in:
–
–
–
–
–
Flussi con elevati livelli di turbolenza
Flussi attorno oggetti fermi così come in movimento (rotori di turbomacchine)
Flussi a velocità sia molto elevata sia molto bassa
Flussi ad elevata temperatura
Flussi di fluidi in ambienti ostili e in spazi estremamente ristretti
Corso di Macchine – A.A. 2014-15
Pagina 52
Velocimetria Laser Doppler
Diverse configurazioni ottiche possono essere impiegati in quasi tutte le
applicazioni (misure).
Il più comune attualmente è quello indicato come: “Dual Beam” o configurazione
Doppler differenziale detto anche a modalità a frange che impiega due fasci laser
per ogni componente di velocità.
LDV a 2 Fasci Laser
Il sistema ottico comprende:
•Un sistema per dividere in 2 fasci
il laser originario
•Un sistema di lenti per mettere a
fuoco e intersecare i 2 fasci
(regione di misura)
Corso di Macchine – A.A. 2014-15
Pagina 53
LDV a 2 Fasci Laser
Il ricevitore ottico raccoglie e
concentra una porzione di luce
diffusa dalle particelle e dirige la
luce verso verso il Photodetector
•Il
Fotorilevatore
converte
l’energia luminosa in segnale
elettrico analogico
•La frequenza del segnale
risulta
proporzionale
alla
componente di velocità della
particella
•Un processore di segnale
estrae
l’informazione
di
frequenza dal segnale (da cui t)
e fornisce un valore digitale che
rappresenta la vel. Istantanea
della particella
Corso di Macchine – A.A. 2014-15
Forma del segnale
•
La figura mostra un segnale ideale (assenza di rumore di fondo) per
una particella che passa per il centro della regione di misura
•
La forma del segnale dipende dalla traiettoria della particella all’interno
del vol. di misura
•
La distribuzione dell’intensità luminosa nella regione di misura è di tipo
gaussiano
Pagina 54
Velocimetria Laser Doppler
Vantaggi della tecnica LDV nella misura della “time-history” u=u(t)
della velocità in un punto del campo di moto:
•
Regione di misura molto piccola (puntuale)
•
Elevata accuratezza della misura
•
Capacità di misurare ogni componente di velocità isolatamente
•
Misura accurata di elevate intensità di turbolenza anche di flussi
ricircolanti
•
Il sistema non richiede calibrazione
•
Assenza di sonda nel flusso (non intrusione, misura in ambienti “ostili”)
•
Elevata risposta in frequenza
Corso di Macchine – A.A. 2014-15
Pagina 55
Anemometria a Filo Caldo (HWA)
Misura puntuale intrusiva della velocità dei flussi gassosi
Corso di Macchine – A.A. 2014-15
Pagina 56
Sonde a filo diritto con estremità rivestite
Corso di Macchine – A.A. 2014-15
Pagina 57
Principio di Funzionamento HWA
Si consideri la relazione fondamentale di scambio termico convettivo e la definizione del
numero di Nusselt si ha:
•
Q = h c A(Tw − T∞ ) = Nu
kf
D
A( Tw − T∞ ) = f 2 ( Re) k f πl( Tw − T∞ )
dove A=πDl è l’area della superficie del filo caldo; rielaborando si ha:
•
Q
k f πl(Tw − T∞ )
ρUD
= f2
µ
(1)
Nell’ipotesi di flusso stazionario e che le quantità di calore disperse dal filo per irraggiamento
e per convezione libera siano trascurabili rispetto all’energia scambiata per convezione, si può
porre che la potenza termica (Q) nella sia uguale alla potenza elettrica dissipata dal filo
per effetto Joule.
Infatti come il filo è mantenuto caldo dal passaggio di una corrente i che attraversandolo
incontra una resistenza Rw, quindi:
•
Q = i 2 Rw
La resistenza Rw del filo è a sua volta funzione della temperatura
Corso di Macchine – A.A. 2014-15
Pagina 58
Principio di Funzionamento HWA
La resistenza Rw del filo è funzione della temperatura secondo una relazione del tipo :
[
]
R w = R0 1 + α 0 ( Tw − T0 ) + α 1 ( Tw − T0 ) +
2
In essa R0 è la resistenza del filo ad una data temperatura T0, tale valore viene fornito
dal costruttore unitamente alla costante α0 valutata a quella stessa temperatura.
Nelle applicazioni di anemometria a filo caldo la quantità Tw-T0 è spesso contenuta fra i
150-250 °C e il valore della costante α1 è dell’ordine di 10-7 i termini di ordine superiore
al primo in parentesi quadra della equazione vengono trascurati.
Rw = R0 [1 + α 0 (Tw − T0 )]
Per un filo di lunghezza finita si ha scambio termico conduttivo fra questo e i suoi
supporti, ciò determina una caduta della temperatura agli estremi del filo stesso.
=> In pratica si considera questo effetto valutando la resistenza Rw alla Tw
intesa come temperatura media del sensore.
Corso di Macchine – A.A. 2014-15
Pagina 59
Principio di Funzionamento HWA
Sostituendo le relazioni per Rw e R0 nella (1) si ottiene:
I 2 R w R0 α o
πk f l ( R w − R ∞ )
ρUD
= f2
µ
Supponendo che la temperatura statica del fluido T∞ non vari e quindi resti costante la
resistenza del filo (R∞ ), in base alla relazione sopra, si possono individuare le due modalità di
funzionamento di un anemometro a filo caldo:
1. mantenendo il valore della corrente i costante e l’informazione sul valore attuale
della velocità si ottiene dalla variazione della resistenza Rw,
2. operando a resistenza costante (CTA), cioè mantenendo costante la temperatura
Tw, e il valore attuale della velocità si ottiene dalla variazione della corrente, ed in
ultima analisi della tensione.
Corso di Macchine – A.A. 2014-15
Pagina 60
Principio di Funzionamento HWA
Esprimendo la potenza termica scambiata in termini di tensione si ha :
ρUD
E w2
= f2
k πl (Tw − T∞ )
Rw
µ f
dove Ew è la tensione ai capi del sensore risulta proporzionale al segnale di uscita E
dell’anemometro completo, infatti:
R + R L + Rw
E∝ 1
Ew
Rw
dove R1 e RL sono rispettivamente la resistenza del cavo di collegamento al ponte
anemometrico e delle antenne.
Operando a Temperatura costante e supponendo costanti le proprietà fisiche del fluido
rispetto alle sue variazioni di temperatura si ha:
E = f (U , T∞ )
E = f (U e )
Poiché la sensibilità dello strumento risulta strettamente legata alla temperatura
operativa del filo (Tw) è quindi opportuno operare ad elevati valori di “overheat” pur
mantenendo ben presenti i problemi di ossidazione e di “burn-out” connessi alle alte
temperature.
Corso di Macchine – A.A. 2014-15
Pagina 61
Principio di Funzionamento HWA
La Ue è la cosiddetta velocità efficace, cioè la “frazione” di velocità che effettivamente
influenza lo scambio termico, essa è in generale diversa dal modulo della velocità U.
Nel caso di una sonda reale, sia per la
lunghezza finita del filo, sia per la presenza
dei supporti, la situazione è più complessa.
A tale proposito si consideri la figura che
riporta un filo caldo investito da un flusso
avente una generica velocità U.
Scomponiamo il vettore velocità U nelle tre componenti UT, UN, UB rispetto alla terna con assi
x, y contenuti nel piano della sonda. Esprimendo tali componenti in funzione degli angoli di
yaw α e di pitch β si ottiene :
U T = U sen α
Corso di Macchine – A.A. 2014-15
U N = U cosα cos β
U B = U cosα sen β
Pagina 62
Principio di Funzionamento HWA
Se la risposta del filo caldo fosse identica per le tre componenti di velocità allora il nostro
anemometro misurerebbe il modulo del vettore velocità del flusso,
U e = U = (U N2 + U T2 + U B2 )
1/ 2
In realtà la risposta alle tre componenti non è uguale: per cui la velocità effettiva e quindi
quella misurata è diversa da quella reale del flusso.
Ricerche relative a questo aspetto hanno portato alla relazione di Joergensen, ampiamente
adottata, che stabilisce:
U e 2 = (U N2 + k 2U T + h 2U B2 ) = U 2 ( cos 2 α cos 2 β + k 2 sen 2 α + h 2 cos 2 α sen 2 β )
dove k e h sono i coefficienti di yaw e di pitch; questi:
•dipendono dall’aspect-ratio del filo l/D,
•risultano indipendenti dagli angoli di inclinazione del flusso rispetto al filo e dal modulo di
velocità.
•Valori tipici di k e h, per fili di tipo standard, sono rispettivamente 0.2 e 1.05.
In definitiva la tensione in uscita dipende dal modulo della velocità del flusso e dalla direzione
con cui essa incide sul filo, di conseguenza:
E = f (U e ) = f 1 (U , α , β )
Corso di Macchine – A.A. 2014-15
Pagina 63
E = f (U e ) = f 1 (U , α , β )
E rappresenta quindi l’informazione del valore istantaneo della velocità efficace.
In pratica è necessario ricorrere ad una calibrazione diretta anche per la risposta angolare di
ogni singola sonda, questo porta alla:
determinazione di una curva di risposta all’angolo di yaw s(α) e di una curva di risposta
all’angolo di pitch g(β), che unitamente alla curva di risposta al modulo della velocità danno:
E = f c (U ) s(α ) g( β )
Resta da sottolineare il fatto che la sensibilità all’angolo
di yaw e di pitch è indipendente dalla velocità e dalla
direzione del flusso
Per la forma e la taratura della funzione fc (s, g)
si rende necessaria una fase di calibrazione:
La legge di King costituisce l’equazione più importante
da un punto di vista storico ed applicativo per la
funzione fc(U) , essa viene utilizzata con ottimi risultati,
sottoponendo a calibrazione le costanti A, B ed n.
E 2 = A + BU n
Corso di Macchine – A.A. 2014-15
Pagina 64
Calibrazione di una sonda per HWA
La Calibrazione di una sonda a filo caldo si effettua ponendola in un flusso con direzione nota
e modulo di velocità variabile, che costituisce la velocità di riferimento.
Operando in modo discreto si determina così una serie di coppie di valori velocitàtensione (Ur , E) che, in una fase successiva, vengono interpolati secondo una equazione
che può essere scelta fra:
I.
quelle di tipo “classico”, mantenendo così un legame alla fisica del problema
II.
oppure sulla base di considerazioni puramente matematiche.
H.w
Con questo secondo tipo di approccio si
considerano le sole coppie di valori (Ur , E)
e si cerca, con metodi matematici (minimi
quadrati, spline,..), l’equazione che meglio
le
approssima,
a
prescindere
da
considerazione
di
carattere
termofluidodinamico.
3
2
Unità di
Regolazione
del flusso
Compressor
1
Ugello
Scanivalve
Catena acquisizione
PC IBM
80386
Multimetro
Schema di una catena di calibrazione per sonda HWA
Corso di Macchine – A.A. 2014-15
Pagina 65