Due tratti comuni nelle ricerche cognitive
◦ Impostazione meccanicistica: «spiegare» una
capacità o un comportamento significa «identificare
il meccanismo» che ne è responsabile
◦ Indipendenza dal supporto materiale: la
spiegazione non fa riferimento essenziale al
materiale di cui è fatto il sistema.
◦ Ciò che «conta» non è la natura materiale del
sistema bensì l’organizzazione di tale materiale (=
il meccanismo di funzionamento del sistema)
Meccanicismo + indipendenza dal supporto
materiale controllo di teorie sul
comportamento attraverso simulazioni
◦ Perché il sistema B genera il comportamento C?
◦ Ipotesi: il meccanismo che genera C è M
◦ Come controllare questa ipotesi?
◦ Si costruisce un altro sistema A (informatico o robotico)
che esegue, implementa, simula il meccanismo M e si
valuta se A riesce o meno a generare C
In caso affermativo si può corroborare l’ipotesi M
In caso contrario si può screditare M
Il comportamento degli animali non umani è
generato meccanicamente: automatico come un
«orologio composto solo di ruote e molle»
Non così quello degli esseri umani
«Si può senz’altro concepire una macchina
costruita in modo da proferire delle parole, e
addirittura da proferirne qualcuna a proposito di
azioni fisiche che determinino qualche
mutamento nei suoi organi: per esempio,
toccandola in un punto può domandare che cosa
gli si vuol dire; toccandola in un altro può gridare
che le si fa male, e via di seguito»
Secondo Cartesio le macchine, tuttavia, possono
reagire a un insieme limitato di circostanze
Gli esseri umani possiedono invece una ragione
universale, che permette loro di reagire
appropriatamente a qualsiasi circostanza si
ponga loro
«non si può concepire che [la macchina di cui
sopra] coordini le parole diversamente per
rispondere al senso di tutto ciò che si dirà in sua
presenza, come possono fare anche gli uomini
più ottusi»
21 tipi diversi di tessuti
biologici, ognuno
caratterizzato da una
particolare “proprietà vitale”
La materia vivente si mantiene
tale nonostante le forze
fisiche che tendono a
distruggerla
In natura esistono forze non
fisiche, che Dio ha infuso nei
sistemi viventi
Xavier Bichat
(1771-1802)
Spiegazione del
comportamento dei sistemi
viventi nei termini di entelechia
– forza vitale non fisica, non
spaziale, qualitativa
Hans Driesch
(1867-1941)
Ineludibile
riferimento a una
qualche forma di
forza vitale per
spiegare il
comportamento
dei sistemi viventi
Il comportamento
dei sistemi viventi
può essere
spiegato in
termini
puramente
meccanici
Scoperte di natura concettuale: le macchine
possono manifestare capacità prima ritenute di
esclusiva pertinenza dei sistemi viventi
Le macchine possono generare
comportamenti imprevedibili
Le macchine possono apprendere
Le macchine possono avere scopi
Scoperte di natura concettuale: le macchine
possono manifestare capacità prima ritenute di
esclusiva pertinenza dei sistemi viventi
Le macchine possono generare
comportamenti imprevedibili
Le macchine possono apprendere
Le macchine possono avere scopi
+
+
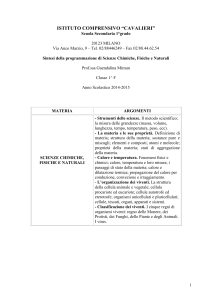
Tropismo positivo: il
sistema aumenta la
velocità del lato opposto
alla stimolazione
sensoriale, avvicinandosi
a esso
+
+
Tropismo negativo: il
sistema aumenta la
velocità del lato
corrispondente alla
stimolazione sensoriale,
allontanandosi da esso
Loeb (1900): spiegazione del
comportamento fototropico delle falene
Hammond and Meissner, 1912
«Mi sembra che l’effettiva costruzione di una
macchina eliotropica non fornisca sostegno
solo a una concezione meccanicistica delle
azioni volontarie e istintive degli animali, ma
anche alla mia teoria sull’eliotropismo, dato
che la teoria ha fornito le basi per la
costruzione della macchina.
(Loeb, 1918)
Possiamo sentirci a nostro agio nell’affermare
che non vi è maggior ragione di attribuire le
reazioni eliotropiche degli animali inferiori a
particolari forme di sensazione, per esempio
di intensità luminosa, di colore, di piacere, o
di curiosità, di quanta non ve ne sia di
attribuire le reazioni eliotropiche della
macchina del Sig. Hammond a sensazioni di
quel tipo»
(Loeb, 1918)
«L’instabilità delle forze vitali caratterizza
tutti i fenomeni vitali con un’irregolarità che li
distingue dai fenomeni fisici [che sono]
peculiari per la loro uniformità»
(Bichat, 1805)
William James, «Are we automata?» (1879):
opposizione tra automatismo e imprevedibilità
«Possiamo costruire [un sistema nervoso] che
reagirà in modo infallibile e certo, ma che sarà
per questo capace di reagire a un insieme molto
ristretto di cambiamenti ambientali.
D’altra parte possiamo costruire un sistema
nervoso potenzialmente adatto a rispondere a
una varietà infinita di minute caratteristiche della
situazione: ma la sua fallibilità sarà grande
quanto le sue capacità di elaborazione»
I veicoli di Braitenberg
Roberto Cordeschi, The Discovery of the Artificial.
Behavior, Mind and Machines Before and Beyond
Cybernetics, Kluwer Academic Publishers, Dordrecht
(2002)
“So a two-element synthetic animal is enough
to start with. The strange richness provided
by this particular sort of permutation
introduces right away one of the aspects of
animal behavior – and human psychology –
which M. speculatrix is designed to illustrate:
the uncertainty, randomness, free will or
independence so strikingly absent in most
well-designed machines.
Walter, W. G. (1950). An imitation of
life. Scientific American, 182(5), 42–45.
The fact that only a few richly interconnected
elements can provide practically infinite
modes of existence suggests that there is no
logical or experimental necessity to invoke
more than number to account for our
subjective conviction of freedom of will and
our objective awareness of personality in our
fellow men”
Walter, W. G. (1950). An imitation of
life. Scientific American, 182(5), 42–45.
L’imprevedibilità delle macchine «sta negli
occhi di chi guarda»:
◦ Il comportamento di semplici meccanismi che
reagiscono a cambiamenti ambientali può essere
imprevedibile se quei cambiamenti ambientali sono
imprevedibili
◦ Il comportamento di macchine dotate di molti
«tropismi» semplici sarà ancor più difficile da
prevedere
Scoperte di natura concettuale: le macchine
possono manifestare capacità prima ritenute di
esclusiva pertinenza dei sistemi viventi
Le macchine possono generare
comportamenti imprevedibili
Le macchine possono apprendere
Le macchine possono avere scopi
Secondo alcuni filosofi e fisiologi
del tempo, la reazione di una
macchina a certe condizioni
(ambientali o interne) è
determinata e immutabile
Le macchine non possono variare
nel tempo la loro risposta alle
stesse condizioni: non possono
apprendere
Anche gli animali più «semplici»
possono farlo, a vantaggio della
propria sopravvivenza
Il bambino non tocca per la seconda
volta il fuoco (James, 1890)
Come spiegare in termini
puramente meccanici la
capacità di
variare la risposta agli
stessi stimoli?
acquisire nuove
associazioni tra stimoli e
risposte?
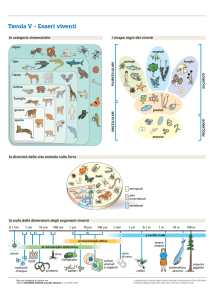
Riflesso condizionato
Lo stimolo X (es: vista del cibo) evoca la risposta
R (es: salivazione)
Lo stimolo X è presentato più volte assieme allo
stimolo Y (es: suono di una campanella)
La presentazione di Y diventa progressivamente
in grado di evocare R anche senza la
presentazione di X
Apparente acquisizione di una nuova
associazione (tra Y e R): come spiegarla in
termini meccanici?
R
X
C1
C2
Y
nessuno stimolo nesssuna risposta
Z
R
X
stimolo X risposta R
C1
C2
Y
Z
R
X
+++
C1
---
Y
stimolo X risposta R
stimolo Y: C1 si carica elettricamente
C2
Z
R
X
+++
C1
---
Y
stimolo Y risposta R
C2
Z
R
X
C1
C2
Y
Z
C1 si scarica a ogni stimolo Y: il sistema «dimentica»
l’associazione tra Y e R
R
X
C1
C2
Y
Z
Cosa succederà se condizioniamo Z nello stesso modo
di Y?
Cosa succederà se a volte accompagniamo la
stimolazione Y (dopo il condizionamento) con la
stimolazione Z?
Scoperte di natura concettuale: le macchine
possono manifestare capacità prima ritenute di
esclusiva pertinenza dei sistemi viventi
Le macchine possono generare
comportamenti imprevedibili
Le macchine possono apprendere
Le macchine possono avere scopi
Una mosca sbatte per ore contro il vetro di una
finestra. Perché?
Interpretazione finalistica:
La «causa» sta nel raggiungimento di una certa
condizione futura (l’uscita dalla finestra, il
raggiungimento di fonti di luce, …)
Un evento futuro causerebbe dunque un
comportamento precedente a esso
Nessun meccanismo fisico può essere «mosso» da
eventi futuri
Quindi, le macchine non possono essere dirette a uno
scopo
Eppure la falena di Loeb e i robot di Grey
Walter tendono al raggiungimento di
condizioni future
◦ Sono «ostinati»: se li si allontana dall’obiettivo,
tenderanno ad avvicinarsi di nuovo a esso
◦ Se li facciamo partire da posizioni diverse,
tenderanno ad arrivare a destinazione seguendo
percorsi diversi
meccanismi a retroazione negativa: in grado
di ridurre continuamente la differenza tra lo
stato di cose corrente e uno stato desiderato
Esempi:
il regolatore di Watt
la macchina
fototropica di
Hammond e Miessner
i sistemi di
puntamento per le
armi contraeree della
II guerra mondiale
«Qualsiasi forma di comportamento rivolto a
uno scopo richiede retroazione negativa»
dall’obiettivo (es: fonte di luce) giunge al
sistema un segnale che ne determina
movimenti correttivi
Secondo RWB, se il sistema effettua
movimenti di correzione esagerati, ne
risulterà un comportamento oscillatorio
simile a quello dei pazienti con danno
cerebellare
«Abbiamo ristretto il senso dell’espressione
‘comportamento teleologico’ applicandola soltanto
alle reazioni orientate a uno scopo che sono
controllate dall’errore della reazione – ovvero, in ogni
momento, dalla differenza tra lo stato del sistema e
lo stato finale interpretato come obiettivo.
L’espressione ‘comportamento teleologico’ è dunque
sinonima dell’espressione ‘comportamento
controllato da retroazione negativa’, e attraverso una
connotazione sufficientemente ristretta ne guadagna
in precisione.
Sulla base di questa definizione limitata, la teleologia
non si oppone al determinismo bensì alla nonteleologia. Sia i sistemi teleologici sia quelli non
teleologici sono deterministici.
Principali obiezioni:
◦ I sistemi a retroazione negativa hanno sì un
obiettivo, ma è un obiettivo imposto dal progettista;
al contrario, i sistemi viventi sono in grado di
attribuirsi autonomamente obiettivi
◦ L’obiettivo è sensoriale. Un sistema di questo tipo
non è in grado di perseguire obiettivi di carattere
astratto o in assenza di segnali sensoriali.
Le macchine possono rappresentare
internamente aspetti dell’ambiente
Esempio ante litteram: il robot di Christopher
Longuet-Higgins (cit. in Johnson-Laird e in
Cordeschi 2002)
◦ Robot mobile su ruote
◦ Dispone al suo interno di una tavoletta delle stesse
proporzioni dell’ambiente in cui si muove - es: un tavolo
◦ Durante il movimento, grazie a un semplice dispositivo
meccanico, un cursore scorre sulla tavoletta interna in
una posizione corrispondente a quella del robot sul
tavolo
◦ Quando il cursore arriva al bordo della tavoletta il
sistema si ferma, evitando di cadere dal tavolo
La rappresentazione interna di una certa
caratteristica dell’ambiente può svolgere il
ruolo di segnale sensoriale interno
Il sistema può dunque reagire nel modo dei
sistemi a retroazione negativa anche in
assenza o in previsione di uno stimolo
sensoriale esterno, in qualche senso
«anticipandolo»
Es: il robot di Longuet-Higgins si ferma prima di cadere dal
tavolo sulla base di un segnale sensoriale interno
Le capacità di rappresentazione del robot di
Longuet-Higgins sono estremamente ridotte
Elementare circuito elettronico di memoria: il
flip-flop
Applicando un breve
stimolo a E1 il terminale
A2 si attiva,
e rimane attivato anche
dopo la fine dello
stimolo, finché non
viene stimolato E2
Il circuito «mantiene
memoria» dello stimolo
Una sequenza di flip-flop può fornire al
sistema la base per memorizzare numeri (in
numerazione binaria)
memoria degli odierni calcolatori digitali
stato del flip-flop 1
stato del flip-flop 2
stato del flip-flop 3
1
0
1
1
0
I valori di memoria (numeri) possono essere
interpretati come proposizioni, immagini, suoni,
...
I calcolatori odierni possono memorizzare testi
(dunque insiemi di proposizioni) rimanendo
essenzialmente sistemi numerici!
stato del flip-flop 1
stato del flip-flop 2
stato del flip-flop 3
1
0
1
1
0
Lo stimolo che attiva o
disattiva una certa cella di
memoria non deve
necessariamente provenire
da un sensore,
ma anche da altre parti
interne del sistema
meccanismi di
elaborazione di
rappresentazioni in
assenza di stimoli
sensoriali
apprendimento nei
calcolatori digitali
1
Riassumendo:
La memoria dei calcolatori digitali può
rappresentare «cose» di vario tipo: letture
sensoriali, proposizioni sul mondo esterno,
immagini, suoni rappresentare varie forme di
conoscenza
Gli stati della memoria del sistema possono
essere modificati automaticamente da altre parti
del sistema
Le rappresentazioni possono dunque essere
elaborate in modo automatico nei calcolatori
digitali
Esaminare “la congettura che ogni aspetto
dell’apprendimento o qualsiasi altra
caratteristica dell’intelligenza può in linea di
principio essere specificata con precisione
tale che diventi possibile costruire una
macchina che la simuli”
“Quello che propongo è … di partire da
attività più semplici, vale a dire da un
ambiente che non sia né ostile (ma solamente
indifferente) né complesso”, e di procedere
“attraverso passi non problematici” verso la
modellazione di “sistemi in grado di svolgere
le più avanzate attività umane – dimostrare
teoremi, comporre musica, o giocare a
scacchi”
Metodologia:
◦ trovare meccanismi per la risoluzione automatica di
problemi “semplici” in “ambienti non ostili”
◦ e provare ad applicarli a problemi meno semplici, e
in ambienti meno ostili
Metodi per la soluzione di rompicapi
“semplici” (la torre di Hanoi) e metodi per la
soluzione di rompicapi meno semplici
(giocare a scacchi, dimostrare teoremi,
interagire con l’ambiente)
La torre di Hanoi
Lupo-capra-cavolo
Manipolare rappresentazioni del problema
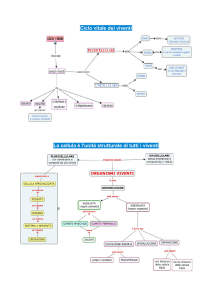
Raggiungere l’abitazione di un nostro amico
L’abitazione nostra e quella da raggiungere si
trovano entrambe in corrispondenza di un
incrocio
La città è fatta
a isolati
quadrati
Nord
Ovest
1
2
3
4
5
6
7
8
9
10
11
12
Sud
Est
Stato iniziale
Noi all’incrocio 12
Stato finale
Noi all’incrocio 2
Un NODO è una
rappresentazione
di uno stato di
cose
Noi all’incrocio 12
è possibile compiere al più quattro
operazioni: N, S, E, O
Per ognuna di queste operazioni
definiamo un operatore
Applicando l’operatore a uno stato di
cose, ne otteniamo un altro
◦ N sullo stato 12 8
S1
Noi allo
stato 12
N
S2
Noi allo stato 8
Consideriamo un insieme di stati S che
inizialmente corrisponde al solo stato
iniziale.
S = 12
12
Consideriamo un insieme di stati S che inizialmente
corrisponde al solo stato iniziale.
Generiamo e annotiamo tutti gli stati che risultano
dall’applicazione di tutte le operazioni ammissibili
a partire da ogni stato appartenente all’insieme S, e
chiediamoci se in questo insieme di stati risultanti
vi sia quello finale.
S = 12
N
8
12
O
11
Abbiamo trovato lo stato finale?
◦ No? Allora stabiliamo che l’insieme S costituisce non più
quello definito al passo 1, bensì l’insieme di tutti gli stati
generati al passo precedente; poi torniamo al punto 2.
◦ Sì? Allora annotiamo la sequenza di operazioni che, a partire
dallo stato iniziale, hanno permesso di raggiungere lo stato
finale. Questa sequenza di operazioni è la soluzione del
problema.
S = 12
S = {8, 11}
N
8
12
O
11
12
N
N
O
O
2
3
S
7
4
E
S
8
O
7
11
S
12
8
…
…
4
O
Soluzione = NNOO
N
O
O
2
3
S
7
4
E
S
12
N
8
O
7
11
S
12
8
…
…
4
O
Logic Theorist (Newell, Shaw, Simon 19551956)
General Problem Solver (Newell, Shaw, Simon
1957)
Programmi che eseguivano ricerche in alberi
di decisione per risolvere problemi di vario
tipo
◦ Dimostrazioni in logica proposizionale o predicativa
◦ Elaborazione del linguaggio naturale
◦ Esplorazione dell’ambiente
IA: intelligenza e cognizione come manipolazione
algoritmica di rappresentazioni
◦ Ricerche euristiche in alberi di decisione
◦ Ipotesi del sistema di simboli fisico (Newell e Simon)
Person: Pick up a big red block.
Computer: OK.
Person: Grasp the pyramid.
Computer: I don't understand which pyramid you mean.
Person (changing their mind): Find a block which is taller
than the one you are holding and put it into the box.
Computer: By "it", I assume you mean the block which is
taller than the one I am holding.
Computer: OK.
Person: What does the box contain?
Computer: The blue pyramid and the blue block.
Person: What is the pyramid supported by?
Computer: The box.
Person: How many blocks are not in the box?
Computer: Four of them.
Person: Is at least one of them narrower than the
one which I told you to pick up?
Computer: Yes, the red cube.
Turing (1950) considera la seguente tesi: “una
macchina non può mai fare qualcosa di
veramente nuovo”, ma solo ciò che le ordiniamo
di fare
Una variante migliore dell’obiezione dice che una
macchina non può mai ‘prenderci alla sprovvista’
Questa affermazione è una sfida più diretta e può
essere controbattuta direttamente. Le macchine
mi prendono alla sprovvista molto
frequentemente”
“Com’è comprensibile, abbiamo forti
reticenze ad attribuire la patente
d’intelligenza a una macchina che ci sembra
semplice. […]
Ci sono tuttavia delle situazioni in cui molte
delle nostre reticenze ad attribuire
intelligenza alle macchine vengono a cadere.
Di tanto in tanto, una macchina ci sembra più
capace e più efficace di quanto ci saremmo
aspettati in base a un esame superficiale delle
sue strutture.”
“Un simile evento ci stupisce e rimane impresso nella
nostra mente, e la sorpresa e l’impressione rimangono
in noi finché, mediante un’analisi o una ‘spiegazione’, il
senso di meraviglia poi non scompaia. […]
Allo stesso modo, i giudizi con i quali attribuiamo la
qualifica di intelligenza ad altri esseri umani dipendono
spesso da una nostra insufficienza analitica, e variano al
variare del nostro grado di comprensione.
Spesso scopriamo che un’attività che, svolta da altre
persone, ci pareva altamente intelligente, ci sembra
alquanto più banale quando noi stessi apprendiamo il
“trucco” che permette di praticarla”
Scoprire dimostrazioni di teoremi matematici,
comporre musica, progettare strutture
meccaniche e giocare a scacchi sarebbero
comunemente ritenute creative se il risultato
fosse originale e di alta qualità. …
… nessuno negherebbe che Whitehead e
Russell fossero creativi quando scrissero i
Principia Mathematica. Il loro libro è uno dei
prodotti intellettuali più significativi del
ventesimo secolo.”
“Se era creativo per Witehead e Russell scrivere
quei volumi, per il Logic Theorist può essere
creativo reinventarne larghe parti del secondo
capitolo, riscoprendo in molti casi proprio le
stesse dimostrazioni originariamente scoperte da
Whitehead e Russell. …
In almeno un caso, inoltre, il Logic Theorist ha
scoperto una dimostrazione di un teorema del
secondo capitolo che è più breve e più elegante
di quella pubblicata da Whitehead e Russell”
Supporto a una «concezione meccanicistica
della vita»
◦ macchina di Krueger
◦ robot di Grey Walter
Sostegno alla costruzione di teorie e al loro
controllo sperimentale
◦ Il cane fototropico di Hammond e Miessner vs. la
teoria di Loeb
◦ Newell e Simon
Sistema fisico B sul quale vengono condotti
esperimenti per controllare ipotesi
scientifiche a proposito di un altro sistema
fisico A
esperimenti su
Modello
conclusioni
teoriche su
Sistema
A
Simulazioni: macchine come modelli materiali
su cui svolgere esperimenti per trarre
conclusioni teoriche su un sistema vivente
esperimenti su
Macchina
conclusioni
teoriche su
Sistema
vivente
Sotto quali condizioni una macchina può
essere un «buon modello» per lo studio del
comportamento intelligente dei sistemi
viventi?
Simulazione: macchina il cui funzionamento è
fedelmente «basato» su una teoria
meccanicistica proposta per spiegare il
comportamento o una particolare capacità di
un sistema vivente
Il comportamento della macchina
(confrontato con quello del sistema vivente in
esame) fornisce basi empiriche per valutare la
plausibilità della teoria
sistema vivente V
formulazione
capacità CA
esibita da A nelle
condizioni EA
formulazione
confronto
spiegazione
descrizione di
meccanismo MA
capacità CV
esibita da V nelle
condizioni EV
spiegazione
controllo/scoperta
traduzione
descrizione di
meccanismo MV
istanziazione
istanziazione
sistema artificiale
A
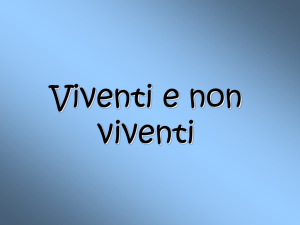
La chemiotassi dell’aragosta
Le fonti di nutrimento degli
astici (es. molluschi)
rilasciano scie chimiche
nell’acqua
Gli astici sono in grado di
risalirle fino alla sorgente
In base a quale meccanismo?
“our efforts represent the first
study of chemo-orientation in
turbulence at the same spatial
scale and indeed in the same
exact task and conditions as
the model animal.”
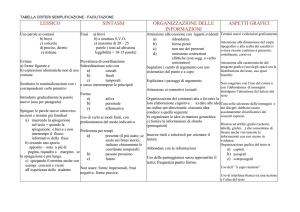
Chemiotassi
dell’astice: capacità
CV di raggiungere la
sorgente chimica (=
nutrimento)
Se l’antenna destra
segnala maggior
concentrazione chimica di
quella sinistra, il crostaceo
compie una piccola
deviazione verso destra
Viceversa per il lato
sinistro.
Se invece entrambe le
antenne percepiscono
identica concentrazione,
allora l’animale prosegue
dritto davanti a sé.
sistema vivente V
formulazione
capacità CA
esibita da A nelle
condizioni EA
formulazione
confronto
spiegazione
capacità CV
esibita da V nelle
condizioni EV
spiegazione
descrizione di
meccanismo MA
descrizione di
meccanismo MV
traduzione
istanziazione
istanziazione
sistema artificiale
A
sistema vivente V
formulazione
capacità CA
esibita da A nelle
condizioni EA
formulazione
confronto
spiegazione
capacità CV
esibita da V nelle
condizioni EV
spiegazione
descrizione di
meccanismo MA
descrizione di
meccanismo MV
traduzione
istanziazione
istanziazione
sistema artificiale
A
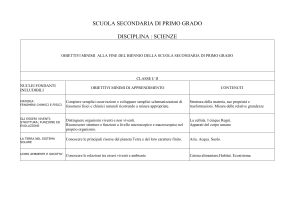
RoboLobster
sistema vivente V
formulazione
capacità CA
esibita da A nelle
condizioni EA
formulazione
confronto
spiegazione
capacità CV
esibita da V nelle
condizioni EV
spiegazione
descrizione di
meccanismo MA
descrizione di
meccanismo MV
traduzione
istanziazione
istanziazione
sistema artificiale
A
destinazione
partenza
60 cm
Distanza tra il punto di
partenza e la sorgente
chimica:
OK
100 cm
no
60 cm
100 cm
Perchè RoboLobster non è riuscito a
raggiungere la sorgente chimica da una
distanza di 100 cm?
◦ A causa dell’orientazione iniziale?
no
◦ A causa della distanza tra i sensori?
no
Il gradiente di concentrazione
non fornisce informazioni
sufficienti per guidare il
comportamento dell’aragosta
Il comportamento dell’aragosta
non può essere spiegato sulla
base del meccanismo ipotizzato
sistema vivente V
formulazione
capacità CA
esibita da A nelle
condizioni EA
formulazione
confronto
spiegazione
capacità CV
esibita da V nelle
condizioni EV
spiegazione
descrizione di
meccanismo MA
descrizione di
meccanismo MV
traduzione
istanziazione
istanziazione
sistema artificiale
A
indipendenza dal supporto materiale:
nessuna ragione di principio per negare che
sistemi distinti (viventi/non viventi)
implementino lo stesso meccanismo
Quali criteri per valutare se due sistemi
particolari A e V implementano lo stesso
meccanismo?
Dettagli implementativi: caratteristiche del
sistema artificiale che non sono vincolate
dall’ipotesi teorica
… ma che ciò nonostante hanno un impatto
sul comportamento del sistema
Esempio: distanza tra le antenne di
RoboLobster
Quali sono le
caratteristiche di
una “buona
spiegazione” nelle
scienze cognitive?
capacità CV
esibita da V nelle
condizioni EV
spiegazione
descrizione di
meccanismo MV
Astrazione e circostanze al
contorno
◦ Ambientali
Altri stimoli chimici?
Turbolenza dell’acqua?
◦ Fisiologiche
Assunzione di modularità: sistema
“isolato” rispetto all’influsso di altre
parti del sistema nervoso
Astrazione e circostanze al contorno in
Intelligenza Artificiale
◦ “Quello che propongo è di partire da attività più
semplici, vale a dire da un ambiente che non sia
né ostile (ma solamente indifferente) né
complesso” (Dartmouth 1956)
Descrizioni di oggetti
◦ es: la descrizione del meccanismo neurale che
permette ai ratti di orientarsi nei labirinti
Ruolo prevalentemente esplicativo e
predittivo
I modelli incorporano quote di astrazione e
idealizzazione rispetto all’oggetto descritto
In che senso un modello teorico astratto
può contribuire a spiegare il
comportamento di un sistema “concreto”?
Astrazione e circostanze al contorno
ambientali, fisiologiche, …
Anche l’explanandum è idealizzato!
◦ Explanandum: “Perché gli astici riescono
così efficientemente a raggiungere la
sorgente della scia chimica?”
◦ Troppo “semplicistico”: nemmeno gli astici
veri riescono sempre a raggiungere le
sorgenti chimiche!
Explanans idealizzato per
explanandum idealizzato
Astrazione e scelta di un particolare
livello di analisi
◦ Ipotesi: relazione tra stimoli sensoriali e
risposte motorie
◦ Grana molto “larga”: nessun riferimento ai
componenti intermedi che assicurano il
collegamento tra stimolazioni sensoriali e
risposte motorie. Es:
Meccanismi di controllo delle zampe
dell’animale?
Meccanismi chimici che assicurano il buon
funzionamento dei circuiti neurali?