Capitolo18
LEGAME COSTITUTIVO
18. LEGAME COSTITUTIVO
Si è visto che le equazioni differenziali di equilibrio:
∂σ xx ∂σ yx ∂σ zx
+ Fx
+
+
∂z
∂y
∂x
(e analoghe)
non consentono – da sole – di determinare le tensioni σ ij .
Anche le equazioni differenziali di congruenza deformazioni – spostamento:
1 ∂u x ∂u x
+
2 ∂x
∂x
ε xx =
(e analoghe)
non consentono – da sole – di determinare spostamenti e deformazioni.
Osserviamo che entrambi i sistemi di equazioni valgono indipendentemente dal materiale.
Per rendere determinato il problema, occorre introdurre ulteriori relazioni, che colleghino i due
sistemi. Tali relazioni sono denominate “equazioni costitutive” o “equazioni di legame”. Esse
legano le tensioni alle deformazioni e caratterizzano il materiale del corpo.
Ciò che si intende per “materiale” nella meccanica dei solidi è in realtà un modello ideale di
comportamento (materiale elastico, plastico, viscoso, elasto-plastico, visco-plastico, …). È compito
della tecnica delle costruzioni stabilire quale di questi modelli rappresenta meglio il materiale reale
della struttura nella situazione specifica.
Es. L’acciaio ha un comportamento elastico ai normali livelli di sollecitazione; elasto-plastico se le
sollecitazioni superano certi limiti; plastico se la temperatura diventa molto alta (incendi) e così
via.
In termini molto generali, il legame costitutivo può definirsi come una relazione fra la tensione
all’istante attuale t e la precedente storia della deformazione. Si può scrivere:
(1)
σ ij (t ) = Fij (ε hk , τ )
i, j, h, k = x, y, z
dove Fij è un funzionale della deformazione definito in [− ∞, t ] e dove τ è il generico istante
precedente a t.
Ci occupiamo ora del materiale elastico, caso particolare della (1) in cui la tensione all’istante t
dipende solo dalla deformazione allo stesso istante, qualunque sia stata la storia precedente (si dice
che il materiale elastico “non ha memoria”).
129
Capitolo18
LEGAME COSTITUTIVO
Omettendo ormai di evidenziare t, possiamo scrivere per tale materiale:
σ ij = f ij (ε hk )
(2)
ed in forma esplicita:
i, j, h, k = x, y, z
σ xx = f xx (ε xx , ε yy , ε zz , ε xy , ε xz , ε yz )
σ xy = f xy (ε xx , ε yy , ε zz , ε xy , ε xz , ε yz )
ecc.
Caso particolare notevole è il materiale elastico lineare, in cui le funzioni (2) sono lineari:
(3)
σ ij = Σ h ,k E ijhk ε hk
i, j, h, k = x, y, z
ed esplicitamente:
σ xx = E xxxx ε xx + E xxyyε yy + E xxzz ε zz + E xxxy ε xy + E xxxz ε xz + E xxyzε yz
σ xy = E xyxx ε xx + E xyyyε yy + E xyzzε zz + E xyxyε xy + E xyxzε xz + E xyyzε yz
ecc.
I coefficienti E ijhk possono in generale variare da punto a punto. Se sono costanti, si dice che il
corpo è omogeneo.
I coefficienti E ijhk sono in teoria 34 = 81.
Però: σ ij = σ ji → E ijhk = E jihk ; ε hk = ε kh → E ijhk = E ijkh e quindi i coefficienti distinti si riducono a
36.
Il legame elastico può anche introdursi per via energetica, col seguente procedimento risalente a
Green:
Definiamo elastico un materiale per il quale esista una funzione potenziale delle deformazioni
ϕ (ε ij ) , denominata densità di energia potenziale elastica, tale che il legame costitutivo possa
scriversi:
(4)
σ ij =
∂ϕ (ε ij )
∂ε ij
Il legame elastico lineare è il caso particolare in cui ϕ (ε ij ) è la forma quadratica:
(5)
ϕ (ε ij ) = Σ i , j,h ,k E ijhk ε ijε hk
1
2
(i, j, h, k = x, y, z)
Applicando la (4) si ottiene infatti σ ij = Σ h ,k E ijhk ε hk , coincidente con la (3).
Dalla (5) si ha anche: E ijhk =
∂ 2ϕ
e questo, per il teorema di Schwartz, riduce il numero dei
∂ε ij ∂ε hk
coefficienti
∂ 2ϕ
∂ 2ϕ
=
→ E ijhk = E hkij
∂ε ij ∂ε hk ∂ε hk ∂ε ij
per cui i coefficienti distinti calano da 36 a 21.
130
Capitolo18
LEGAME COSTITUTIVO
Supponiamo inoltre che i coefficienti E ijhk siano tali da rendere la forma quadratica (5) definita
positiva. Ciò significa che per qualunque deformazione risulta:
1
Σ i , j,h ,k E ijhk ε ijε hk ≥ 0
2
e che l’uguaglianza a zero vale solo per deformazioni nulle.
LEGAME ELASTICO LINEARE ISOTROPO
Si è introdotto il legame elastico lineare:
(3)
σ ij = Σ h ,k E ijhk ε hk
i, j, h, k = x, y, z
facendolo corrispondere all’esistenza di una funzione potenziale quadratica:
(5)
ϕ (ε ij ) = Σ i , j,h ,k E ijhk ε ijε hk
1
2
(i, j, h, k = x, y, z)
Tenendo presenti le simmetrie:
E ijhk = E jihk ; E ijhk = E ijkh ; E ijhk = E hkij
i coefficienti E ijhk effettivamente distinti sono 21. Tale numero è esorbitante, sia per la loro
determinazione sperimentale, sia per i calcoli.
Una drastica riduzione (2 soli coefficienti) si ottiene ammettendo che il materiale sia isotropo.
Fisicamente, un materiale è isotropo se il suo comportamento non
dipende dalla direzione (estraendo un provino, i risultati sperimentali
non dipendono dalla direzione del provino).
Analiticamente, ricordando che i tre invarianti della deformazione
V
P
A
I ε , II ε , IIIε , sono espressioni il cui valore dipende solo dal punto P e non
dalla direzione degli assi, definiamo isotropo un materiale elastico per il quale la densità di energia
potenziale elastica può esprimersi in termini di invarianti:
(6)
ϕ (ε ij ) ≡ ϕ (I ε , IIε , IIIε )
Si potrebbe dimostrare che in un corpo isotropo le direzioni principali delle tensioni coincidono con
quelle delle deformazioni.
In un corpo elastico isotropo:
(6)
ϕ (ε ij ) ≡ ϕ (I ε , IIε , IIIε )
dove gli invarianti hanno le espressioni già viste:
131
Capitolo18
LEGAME COSTITUTIVO
I ε = ε xx + ε yy + ε zz
II ε = ε xx ε yy + ε yyε zz + ε zz ε xx − ε xy ε yx − ε xz ε zx − ε yzε zy
[ ]
IIIε = Det ε ij
(il primo invariante è lineare nelle ε ij , il secondo quadratico, il terzo cubico).
Se il legame è lineare, ϕ (ε ij ) deve essere una forma quadratica delle ε ij ; quindi non deve dipendere
da IIIε .
Per avere una forma quadratica nelle ε ij , in termini di invarianti, bisogna particolarizzare la (6)
come segue:
(7)
ϕ (ε ij ) ≡ C1 I ε2 + C 2 II ε
1
2
( C1 , C 2 , coefficienti)
La (7) è la densità di energia potenziale elastica di un corpo elastico, isotropo , lineare.
Applicando la (4) alla (7) e tenendo presenti le espressioni di I ε , II ε , si ha:
σ ij =
∂II
∂I
∂ϕ
∂ϕ ∂I ε
∂ϕ ∂IIε
=
⋅
+
⋅
= C1 I ε ⋅ ε + C 2 ⋅ ε
∂ε ij ∂I ε ∂ε ij ∂IIε ∂ε ij
∂ε ij
∂ε ij
E quindi:
(8)
σ xx
σ yy
σ
zz
σ xy
σ
xz
σ yz
= C1 (ε xx + ε yy + ε zz ) + C 2 (ε yy + ε zz ) = −C 2 ε xx + (C1 + C 2 )(ε xx + ε yy + ε zz )
= C1 (ε xx + ε yy + ε zz ) + C 2 (ε xx + ε zz ) = −C 2 ε yy + (C1 + C 2 )(ε xx + ε yy + ε zz )
= C1 (ε xx + ε yy + ε zz ) + C 2 (ε xx + ε yy ) = −C 2 ε zz + (C1 + C 2 )(ε xx + ε yy + ε zz )
= −C 2 ε yx = −C 2 ε xy
= −C 2 ε zx = −C 2 ε xz
= −C 2 ε zy = −C 2 ε yz
Riprendendo le (8) e ponendo: − C 2 = 2G , C1 + C 2 = λ , si ha:
(9)
σ xx
σ yy
σ
zz
σ xy
σ
xz
σ yz
= 2Gε xx + λ (ε xx + ε yy + ε zz )
= 2Gε yy + λ (ε xx + ε yy + ε zz )
= 2Gε zz + λ (ε xx + ε yy + ε zz )
= 2Gε xy
= 2Gε xz
= 2Gε yz
Le (8) sono le equazioni di Lamé. Esse esprimono il legame, elastico, lineare, isotropo.
Contengono due soli coefficienti, λ e G, detti coefficienti di Lamé. G è anche denominato “modulo
elastico tangenziale”.
132
Capitolo18
LEGAME COSTITUTIVO
λ e G possono in generale variare da punto a punto. Se sono costanti, il materiale costituente il
corpo è omogeneo e le (9) esprimono il legame elastico, lineare, omogeneo, isotropo (al quale ci
riferiremo).
Osservazioni.
1) Le (9) sono divisibili in due blocchi separati (le prime tre e le seconde tre). Quindi, se agiscono
solo σ xx ,σ yy ,σ zz , non vi sono ε xy , ε xz , ε yz e se agiscono σ xy , σ xz , σ yz non vi sono σ xx ,σ yy ,σ zz (e
analogamente scambiando σ ij con ε ij ).
2) Ogni σ ij ad indici distinti è proporzionale all’omologa ε ij . Quindi: σ xy = 0 ↔ ε xy = 0 ;
σ xz = 0 ↔ ε xz = 0 ; σ yz = 0 ↔ ε yz = 0
3) Ogni σ ij ad indici uguali dipende da tutte le ε ij ad indici uguali. Quindi: σ xx = 0 non significa
ε xx = 0 e analogamente per , σ yy , ε yy e , σ zz , ε zz .
Risolvendo le (8) rispetto alle ε ij otteniamo le relazioni inverse:
1
λ
ε xx = 2G σ xx − 2G + 3λ (σ xx + σ yy + σ zz )
1
λ
(σ xx + σ yy + σ zz )
σ yy −
ε yy =
2G
2G + 3λ
1
λ
(σ xx + σ yy + σ zz )
σ zz −
ε zz =
2G
2G + 3λ
1
ε xy = 2G σ xy
ε = 1 σ
yz 2G yz
ε xz = 1 σ xz
2G
Tali relazioni vengono usualmente scritte in modo diverso, utilizzando altri due coefficienti E
(“modulo di Young” o “modulo di elasticità normale”) e ν (“coefficiente di Poisson”), legati a λ e
G dalle espressioni:
E=
G (2G + 3λ )
;
G+λ
ν=
133
λ
2(G + λ )
Capitolo18
LEGAME COSTITUTIVO
ε xx
ε
yy
ε zz
ε xy
ε yz
ε xz
(9)
1
(σ xx − ν (σ xx + σ yy + σ zz ))
E
1
= (σ yy − ν (σ xx + σ yy + σ zz ))
E
1
= (σ zz − ν (σ xx + σ yy + σ zz ))
E
1
σ xy
=
2G
1
σ yz
=
2G
1
σ xz
=
2G
=
I coefficienti λ , G, E, ν , due soli dei quali sono indipendenti, hanno dimensioni forza/superficie,
ad eccezione di ν che è adimensionale. I loro valori sono soggetti a limitazioni teoriche,
confermate dall’esperienza. In particolare, per E e ν :
−1 < ν <
E>0;
1
2
(ad esempio, per l’acciaio si ha sperimentalmente ν = 0.3).
Osservazioni e casi particolari.
1) Cubetto infinitesimo (dx, dy, dz) sottoposto alla sola σ xx > 0 (costante)
Dalle (9):
dy
ε xx =
xx
xx
dx
σ xx
E
;
σ xx
ε yy = ε zz = −ν
ε xy = ε xz = ε yz
E
=0
= −νε xx ;
(deformazione)
2) Cubetto infinitesimo (dx, dy, dz) sottoposto a σ xy = σ yx > 0 (costante)
Dalle (9):
dy
ε xx = ε yy = ε zz = 0;
xy
xy
dx
yx
ε xy =
σ xy
2G
;
ε xz = ε yz = 0
(deformazione)
NB. Dal caso 1) si vede che, in presenza di una sola tensione normale (es. σ xx ), si ha ε xx =
cioè σ xx = Eε xx (legge di Hooke).
134
σ xx
E
e
Capitolo18
LEGAME COSTITUTIVO
Dal caso 2), si vede che, in presenza di una sola tensione tangenziale (es. σ xy ), si ha ε xy =
Ricordando che si era posto ε xy =
γ xy
2
σ xy
2G
.
( γ xy = scorrimento angolare) si può scrivere σ xy = Gγ xy
(formalmente analoga alla legge di Hooke).
IL PROBLEMA ELASTICO
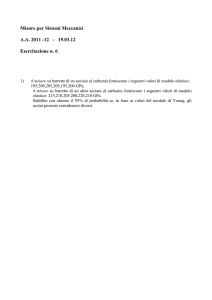
Per completare le equazioni occorre ancora introdurre le condizioni al contorno, che dipendono dai
vincoli. Supponiamo che il contorno A sia separabile in due parti, A u
u
Af
ed A f eventualmente somma di più parti separate. A u è la parte
vincolata. Su di essa sono assegnati gli spostamenti (eventualmente
V
Au
Af
A
nulli), mentre non sono note le forze. A f è la parte libera. Su di essa
Au
Af
sono assegnate le forze (eventualmente nulle), mentre non sono noti
gli spostamenti.
Quindi:
•
u x = u x , e analoghe, su A u , con u x , u y , u z funzioni assegnate;
•
σ xx n x + σ yx n y + σ zx n z = f x , su A f , con f x , f y , f z funzioni assegnate.
Il problema di un corpo elastico, lineare, omogeneo, isotropo, si pone così:
f
Dati: Fx , Fy , Fz , in V; f x , f y , f z , su A f ; u x , u y , u z , su A u .
z
Incognite: σ xx , σ xy ....; ε xx , ε xy ....; u x , u y , u z .
F
y
Equazioni:
x
•
∂σ xx ∂σ yx ∂σ zx
equilibrio:
+
+
+ Fx = 0 , e analoghe
∂x
∂y
∂z
•
congruenza: ε xx =
•
legame: σ xx = 2Gε xx + λ (ε xx + ε yy + ε zz ) , e analoghe (o le inverse)
1 ∂u x ∂u x
+
, e analoghe
2 ∂x
∂x
Condizioni al contorno:
•
su A f : σ xx n x + σ yx n y + σ zx n z = f x , e analoghe
•
su A u : u x = u x ; u y = u y ; u z = u z
Si può dimostrare che il problema ha una ed una sola soluzione.
135
Au
V
Af
Af
A
Au
f
Capitolo18
LEGAME COSTITUTIVO
NB. Il problema è lineare perché:
a) abbiamo ipotizzato deformazioni infinitesime;
b) b) abbiamo ipotizzato un legame costitutivo lineare.
136