REALIZZAZIONE E PROVE FUNZIONALI DI UN PROTOTIPO
DI GABBIA SOMMERGIBILE PER MARICOLTURA OFF-SHORE
LUCIO BARONE, SALVATORE FAUGNO, & ANNA MARTELLO*
Università degli Studi di Napoli Federico Il, Dipartimento di Ingegneria Agraria e Agronomia del Territorio, Sezione:
Meccanizzazione delle attività produttive, Via Università, 100, 80055 Portici (Na)
* Autore per la corrispondenza
Riassunto.
La gabbia di tipo sommergibile è stata progettata per impiego off-shore ed installata nel settembre 1997
nei pressi di Marina di Camerota (SA). La gabbia è realizzata con una struttura in acciaio zincato ed in
tubi di polietilene ad alta densità (HDPE) che supporta il sacco di rete. La parte superiore è composta
da un doppio anello con diametro di 10 m in tubolari di polietilene, irrigidito da una struttura
triangolare interna realizzata con profilati scatolari di acciaio zincato 200x200 mm. A ciascun angolo di
questa è inserita una piattaforma di lavoro. Un secondo anello poligonale di 18 lati è localizzato in basso
al disotto del sacco di rete ed è connesso alla struttura superiore con sei funi. Una zavorra è posizionata
al disotto di quest'anello.
Il sacco di rete della capacità di 500 m³ è in nylon con maglia di 15 mm ed è fissato con legacci alla
struttura.
L'affondamento della gabbia viene prodotto con l'immissione di acqua all'interno dei tubolari della
struttura triangolare di acciaio e l'emersione a seguito dell'espulsione di questa mediante impiego di aria
compressa.
La gabbia è stata installata nel settembre 1997 in un sito marino esposto con fondale di 45 m. Dopo
prove preliminari, effettuate con gabbia vuota, nel gennaio 1998 è stato attivato un primo ciclo di
produzione che ha riguardato la fase di ingrasso di orate. Nel novembre '98 è iniziato il secondo ciclo
produttivo con l'immissione di 40.000 spigole del peso medio di 60 g. Dalle verifiche e le prove
effettuate in mare per 14 mesi è possibile affermare che la nuova struttura presenta valide caratteristiche
di resistenza e di funzionalità ed ha dimostrato di essere affidabile nelle diverse condizioni
meteomarine, sia in galleggiamento che localizzata in profondità.
Introduzione
La ricerca svolta con l'obiettivo di sviluppare una tecnologia costruttiva di gabbie per maricoltura, per lo
sviluppo di allevamenti ittici lungo le nostre coste e quindi mirata ad individuare soluzioni ottimali in
relazione alle specifiche caratteristiche dell'ambiente, è stata orientata verso soluzioni per allevamenti offshore, in quanto, in questo caso, esistono ampie possibilità di reperimento di siti marini, dove le
condizioni si presentano favorevoli per qualità delle acque e anche per il ridotto impatto ambientale
dovuto alla dispersione naturale dei cataboliti (Beveridge, 1996, Huguenin, 1997). Peraltro il rischio
mareggiate è presente lungo le nostre coste, dove i vari tratti di mare, anche quelli parzialmente riparati,
presentano settori di traversia caratterizzati da fetch di notevole ampiezza e sono interessati
periodicamente da mareggiate di eccezionale violenza, come dimostrano i gravi danni subiti dalle
strutture lungo i litorali.
Una valutazione dei rischi cui sono sottoposte le strutture galleggianti negli impianti in mare aperto, o
in luoghi non sufficientemente protetti, per i possibili effetti delle onde sulle strutture e sui pesci, ha
orientato la ricerca verso la progettazione di sistemi sommergibili. Il sistema sommergibile permette di
sottrarre la sovrastruttura della gabbia all'impatto delle onde di superficie e del vento, che possono
assumere un carattere distruttivo, ma anche di evitare che la camera di allevamento sia danneggiata dal
movimento oscillatorio dell'acqua dovuto alla propagazione delle onde in profondità.
Lo studio svolto sulle tipologie di gabbie galleggianti impiegate in Nord Europa come in Mediterraneo
e la ricerca condotta sull'impianto con gabbie sommergibili installato in mare aperto nello specchio
d'acqua antistante il porto di Marina di Camerota hanno consentito un confronto dei diversi sistemi offshore. Fra gli elementi a favore del sistema sommergibile vanno evidenziati non solo i motivi di
sicurezza, ma anche la possibilità di ricercare in immersione condizioni ambientali favorevoli in
relazione alle esigenze delle specie allevate (Barone et al., 1996, 1997,1998).
Sono stati realizzati tre prototipi di gabbie sommergibili differenti per concezione progettuale e
caratteristiche costruttive. In questa nota si riferisce sul primo prototipo costruito e sottoposto a
verifiche tecniche e funzionali.
Criteri di progetto
Lo studio di progetto delle gabbie realizzate è stato sviluppato tenendo conto delle condizioni
meteomarine delle zone possibili di installazione, delle esigenze proprie delle specie che vengono
allevate nell'area mediterranea e di fattori economici, ovvero, costi di costruzione e di gestione.
Per quanto riguarda le condizioni meteomarine le scelte progettuali e il dimensionamento delle strutture
sono state sviluppate in base a dati disponibili del moto ondoso e delle correnti per la loro azione sulla
gabbia e sul sistema di installazione.
Moto ondoso
Il moto ondoso interessa non solo la struttura in condizione di galleggiamento, ma anche, la struttura
sommersa per i moti rotazionali prodotti dalle onde in profondità. Infatti, il moto ondoso, mentre
propaga un'oscillazione verticale dello strato superficiale senza spostamento di materia, produce in
profondità un movimento delle particelle d'acqua intorno ad un centro d'oscillazione fisso, con
traiettorie che in acqua alta sono pressochè circolari. Tali traiettorie hanno diametro che diminuisce,
fino ad annullarsi, verso il basso. Alla superficie il diametro dell'orbita è uguale all'altezza d'onda e
diminuisce esponenzialmente con la profondità secondo la relazione:
Dz = He
-2πz/L
dove Dz è il diametro dell'orbita alla profondità z e L la lunghezza d'onda. La formula mostra che
l'ampiezza di oscillazione della massa d'acqua ad una data profondità è proporzionale all'altezza
dell'onda H e cresce con legge esponenziale con la lunghezza d'onda L.
Di conseguenza per le gabbie sommergibili la quota di immersione va definita in relazione ai valori delle
onde previste per il sito di installazione.
La determinazione del moto ondoso ed in particolare delle onde estreme in un dato sito richiede
l'analisi statistica del vento e delle onde registrati nel passato. Per il Tirreno meridionale esistono dati
relativi ad alcuni anni di registrazioni di ondametri posti allargo dell'isola di Ponza, al largo del porto di
Gioia Tauro e al largo della città di Sorrento (Caratelli et al., 1996). Il limite principale è che le serie
storiche sono brevi rispetto a quelle disponibili per il vento.
Per superare i limiti di analisi fondate su serie storiche di limitata lunghezza è stato seguito il metodo
della trasformazione vento-onde per cinque punti uniformemente localizzati al largo della costa della
provincia di Salemo (Caratelli, 1998). I risultati statistici indicano che i valori massimi di altezza
significativa in questa zona competono alla direzione 270°N che, per tempi di ritorno di 50 anni e 100
anni, danno valori rispettivamente di 7,76 e 8,38 m. In effetti, in Mediterraneo le onde di tempesta
hanno una lunghezza di 50-120 m, un'altezza di 5-6 m, un periodo di 6-10 s ed una velocità di 16-27
nodi.
Dall'espressione su riportata, che da il diametro dell'orbita in profondità in funzione delle caratteristiche
dell'onda, si ricava che alla profondità di L/9, Dz è approssimativamente dimezzata, e a L/2 Dz si
riduce a 0,04H.
Ad esempio, per un'onda di altezza H = 5 m e per lunghezze di 60 e 90 m le ampiezze di oscillazione
alla profondità di 10m risultano rispettivamente di 1,75 m e di 2,50 m, mentre, alla profondità di 16 m
tali ampiezze si riducono a 0,93 m e 1,63 m rispettivamente.
Pertanto nel sistema sommergibile la valutazione della quota di immersione deve essere sviluppata
tenendo conto delle condizioni marine del luogo. Infatti, zone caratterizzate da lunghi fetch, come la
costa esposta a ponente dell'Italia meridionale, sono soggette a mareggiate caratterizzate da onde di
considerevole altezza e di lunghezza tale che si risentono in profondità producendo un moto
oscillatorio e sollecitazioni nelle strutture sommerse. Viceversa le violente tempeste, caratterizzate da
onde corte spinte da forti venti e caratterizzate da elevata energia, hanno un violento impatto sulle
strutture superficiali mentre la profondità di propagazione è limitata. Il moto ondoso che può
interessare rimpianto è stato analizzato in linea di massima con riferimento ai dati storici esistenti e alla
probabilità statistica che un dato evento possa ripetersi nel tempo. Il sistema sommergibile se da un lato
comporta una maggiore complessità costruttiva connessa al sistema di immersione ed emersione,
dall'altro, elimina sostanzialmente i problemi di valutazione delle sollecitazioni a fatica indotte dal vento
e dal moto ondoso sulle strutture e consente, infine, di limitare il calcolo alle spinte prodotte dalla
corrente ed a verifiche di resistenza soltanto per condizioni di moto ondoso di limitata entità.
Corrente marina
La conoscenza dell'andamento e dei valori dèlle correnti marine nel sito di installazione sono
interessanti per valutazioni inerenti il ricambio idrico all'interno della gabbia e per la dispersione dei
reflui dell'allevamento, i valori massimi previsti, invece, sono importanti ai fini progettuali.
Per quanto riguarda i valori di corrente marina, da prevedere per le probabili zone di installazione di
questo tipo di gabbia, risultano utili i valori rilevati alle varie quote nel golfo di Napoli, in diversi punti
da Monte di Procida a Punta Campanella, che indicano valori massimi di corrente che solo per brevi
intervalli hanno superato i 0,5 m/s.
Dati correntometrici rilevati al largo della costa tirrenica cosentina, riferiti al periodo estivo e rilevati a
profondità di -4m, -14m e -23m, mostrano valori medi delle velocità compresi tra 5,83 cm/s e 13,5
cm/s con picchi di breve durata di 0,3 m/s (Veltri et al., 1996).
Il calcolo della spinta è stato effettuato in base alla formula empirica (Rudi et al., 1988):
Fc = 1/2 Cd r V² A
dove Fc è la forza esercitata dalla corrente sul pannello di rete; Cd coefficiente adimensionale; r densità
dell'acqua; V velocità della corrente; A area derivante dalla proiezione degli elementi componenti la rete
su piano normale al vettore velocità.
Il coefficiente Cd può essere ricavato con la formula empirica (Milne, 1970) che approssima i valori
ricavati sperimentalmente per reti di diverso tipo:
Cd = 1 + 2,73 (d/a) + 3,12 (d/a)²
dove compare il rapporto di solidità dia, in cui "d" indica il diametro del filato della rete ed "a" la
lunghezza dei lati della maglia.
Il valore di corrente assunto a base del calcolo è stato fissato in 0,6m/s. Assumendo come spinta totale
la somma delle forze esercitate dalla corrente su tutti gli elementi che formano la superficie laterale del
sacco per una corrente di O, 7 m/s si è ottenuto un valore globale di spinta sul sacco di rete di 1340
daN.
Materiali e metodi
Caratteristiche costruttive
Il progetto di questo prototipo prevede nel telaio portante l'inserimento di una struttura in acciaio in
grado di assicurare l'assorbimento delle solle citazioni impresse dall'ambiente e di garantire la resistenza
del sistema gabbia anche in condizioni eccezionali.
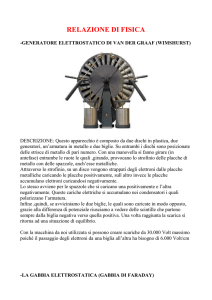
La gabbia realizzata è riportata in Fig. 1 e 2 .La struttura di sostegno superiore è di tipo misto in quanto
realizzata con elementi tubolari di acciaio e tubi di polietilene ad alta densità (HDPE). Precisamente si
compone di una struttura triangolare (Fig. 2.1a) in scatolari di acciaio 200x200x4 mm progettata per
sopportare tutte le sollecitazioni dinamiche trasmesse al sistema dall'ambiente e dal sistema di
ancoraggio; funge da collegamento e da supporto per i tubi di polietilene e assolve inoltre, la funzione
di cassa di zavorra variabile..
Fig. 1 -Struttura superiore gabbia sommergibile da 500 m³
Fig. 2- Gabbia sommergibile: 2.1 vista dall'alto; 2.2 vista laterale
Detto triangolo è composto da tre travi scatolari incernierate alle estremità a tre blocchi di collegamento
che determinano la connessione tra la struttura di acciaio e gli anelli circolari di polietilene. Tutti gli
elementi strutturali in acciaio, che raggiungono una massa complessiva di 1360 kg, sono zincati a caldo
per immersione.
Gli elementi in polietilene formano una corona circolare composta da due anelli concentrici (Fig. 2.1b),
l'esterno ha diametro medio di 10,08 m, l'interno di 9,64 m. Detti anelli di polietilene sono realizzati con
tubi HDPE PN10 da 200 mm di diametro e spessore di 12 mm pressurizzati e presentano un volume
complessivo di 1906 dm³, determinando in immersione una spinta di galleggiamento netta, ovvero
decurtata del peso proprio, pari a 11350 N.
Questa corona circolare sostiene superiormente il sacco di rete ed è collegata in basso tramite 6 funi ad
un anello di acciaio di 9,60 m di diametro. Il sacco di rete con superficie laterale cilindrica resta sospeso
fra questi due elementi ai quali è collegato mediante una serie di tiranti.
L'anello metallico inferiore (Fig. 2.2c) è realizzato in scatolare di acciaio 80x80x3mm, zincato a caldo,
ha una massa di 220 kg e, vuoto, presenta in immersione un assetto leggermente negativo. Detto anello
è collegato mediante 6 catene ad un serbatoio ausiliare di spinta (Fig. 2.2d) di circa 300 dm³ di capacità
che inferiormente sostiene gli elementi di zavorra.
La zavorra (Fig. 2.2e) è composta da 3 ruote di ghisa e da una catena per una massa complessiva di 560
kg.
La camera di allevamento (Fig. 2.2f) è costituita da un sacco di rete della capacità di 500 m³ di nylon
con maglia romboidale di 15 mm di lato prevista per l'immissione di avannotti di peso medio intorno ai
10 g.
Ai tre angoli del telaio metallico sono situate tre piattaforme di lavoro (Fig. 2.lg). Gli elementi di
supporto di queste piattaforme unitamente alle travi principali definiscono un esagono centrale di circa
2,70 m di lato. Lungo i lati dell'esagono è previsto il montaggio di una battagliola. I candelieri della
battagliola fungono anche da sostegno per una fascia verticale della rete, che, in galleggiamento, si eleva
sul livello del mare di circa 0,8 m e consente il distacco del pannello superiore della rete senza pericolo
di perdita di pesci. Detto esagono ha inoltre la funzione di supportare una seconda rete di dimensioni
ridotte per una fase di preingrasso con immissione di avannotti di pochi grammi.
Verifiche tecniche e prove funzionali
Nel settembre 1997 la gabbia è stata installata nella zona di mare antistante il porto di Marina di
Camerota (SA), alla distanza di circa 600 m dalla costa, caratterizzata da un fondale sabbioso con
profondità intorno ai 45 m. Il sito è esposto e soggetto ad un fetch di circa 450 km ad ovest e di 200
km a sud. Le perturbazioni di maggiore violenza sono quelle provenienti dal quadrante sud-ovest ed in
particolare quelle dovute al vento di Libeccio.
Il sistema di ancoraggio è stato realizzato con tre linee di ancoraggio a 120°. Ciascuna linea è composta
da due blocchi di ancoraggio di 5t ciascuno, da una boa sommersa di 1500 dm³ e da una boa di
tensione. In Fig. 3 è riportato schematicamente il sistema di ancoraggio e simultaneamente il
posizionamento della gabbia in galleggiamento e in profondità.
Sono state effettuate verifiche preliminari a gabbia vuota che hanno permesso di accertare il buon
comportamento della struttura sia per quanto riguarda l'assetto in condizione di galleggiamento e di
localizzazione in profondità, sia per quanto riguarda le operazioni di immersione ed emersione. In
particolare sono state effettuate prove di immersione ed emersione secondo le previste modalità
operative che vengono appresso descritte, valutando i tempi e le velocità e ricavando come si
modificano tali valori in base alla tecnica operativa.
Sulla base dei risultati positivi sui vari aspetti tecnici e funzionali nella gabbia è stato immesso un
quantitativo di orate adulte nel gennaio 1998 che hanno occupato la gabbia per diversi mesi.
Successivamente a partire dal novembre 1998 sono state immesse 40.000 spigole del peso medio di 60
g.
Fig. 3- Gabbia e sistema di ancoraggio: A) in superficie; D) in profondità; a) boe sommerse; b) boe di tensione; c)
ai blocchi di ancoraggio esterni.
Procedure operative
Assetto in superficie
La gabbia in superficie può assumere due differenti condizioni di galleggiamento che conferiscono
differente assetto e stabilità alla struttura, e precisamente:
- con serbatoio di spinta vuoto, (d in Fig. 2.2), l'azione della zavorra viene in parte contrastata dalla
spinta idrostatica prodotta dal serbatoio, per cui il sistema zavorra serbatoio dà luogo ad una forza
verso il basso che risulta di circa 230 daN. Tale condizione risulta vantaggiosa in condizioni di
lavoro, quando si richiedono le migliori condizioni di galleggiamento e di capacità portante
dell'anello superiore e quindi delle piattaforme di lavoro;
- con serbatoio inferiore di 300 dm³ pieno la struttura risente per intero della zavorra centrale che
complessivamente raggiunge la massa di 600 kg dando luogo ad una forza di circa 520 daN.
L'assetto in tal caso è caratterizzato, rispetto alla situazione precedente, da un aumento di 300 dm³
del volume della struttura immersa per cui risulta vantaggioso per quanto riguarda la stabilità, dato
l'incremento dell'azione stabilizzante del sistema di forze costituite dalla spinta idrostatica sull'anello
superiore e dalla massa di zavorra.
Operazione di immersione
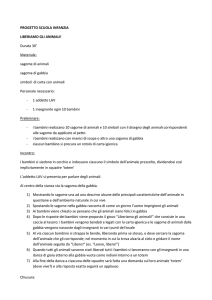
In Fig. 4 è riportato il grafico relativo all'operazione di immersione che dà l'andamento del
dislocamento e della spinta idrostatica nel tempo. Sono riportati, inoltre, per le varie fasi che
caratterizzano il fenomeno, i volumi di aria espulsi, valutati alla pressione di O,1 MPa ed i valori dalla
pressione interna al triangolo scatolare.
Fig. 4 -Curva di immersione.
Partendo da una condizione di pieno. galleggiamento, ovvero con serbatoio di spinta inferiore vuoto,
l'operazione di immersione prevede in una prima fase l'apertura di un'unica valvola di sfiato
caratterizzata da un foro di 1 mm e successivamente l'apertura di tre valvole di maggiore ampiezza
situate ai vertici del triangolo. Questo per evitare che la pressione, nei profilati scatolari della struttura
triangolare, dal valore iniziale di 0,24 MPa cali bruscamente producendo depressioni nel serbatoio
inferiore e nei tubi di plastica di collegamento. Con la fuoruscita di circa 800 dm³ di aria a pressione
atmosferica, fase a-b, si determina l'ingresso di 300 dm³ di acqua nel serbatoio inferiore e quindi un
aumento del dislocamento cui corrisponde un aumento del volume immerso. Quindi l'efflusso di aria
dalla valvola produce una progressiva riduzione della pressione interna con la progressiva risalita
dell'acqua nei tubi di collegamento al serbatoio inferiore. In questa fase, b-c, si ha l'espulsione di 1.100
dm³ di aria e la pressione dal valore di 0,23 MPa scende a 0,102 MPa.
Nel tempo il fenomeno si sviluppa rapidamente nella fase iniziale, quindi sempre più lentamente col
diminuire della pressione interna e quindi della velocità di deflusso dell'aria dagli scatolari. La fase finale
risulta in pratica molto lenta in quanto la pressione interna scende quasi a zero, fase c-d. A questo
punto, per accelerare il processo ed evitare la formazione di sacche isolate di aria, è prevista l'apertura
delle tre valvole di sfiato situate ai vertici della struttura triangolare.
Con l'ingresso di acqua aumentano progressivamente il dislocamento della struttura e la spinta
idrostatica fin quando il dislocamento supera il valore 3580 daN, corrispondente alla spinta sull'intera
struttura immersa, e produce l'affondamento del sistema, fase d-e e d-f. La velocità di discesa risulta
crescente in quanto il dislocamento continua ad aumentare per l'ulteriore fuoriuscita di aria e per effetto
della compressione di quella interna. La velocità rimane comunque molto contenuta, infatti la
differenza fra dislocamento massimo e spinta idrostatica, tenuto conto anche degli effetti della
compressione sui tubolari di polietilene, non supera i 200 daN e viene bilanciata dalle resistenze
idrodinamiche del sistema per velocità modeste.
Le inclinazioni che si possono verificare in questa fase, come anche rilevato durante le prove, sono
limitate data la stabilità del sistema che è determinata dalle forze di spinta idrostatica, distribuite
uniformemente sul doppio anello di polietilene e dalla forza peso concentrata nella zavorra, situata
sull'asse centrale 15 m in basso.
I tempi relativi alle varie fasi sono dipendenti dall'ampiezza delle luci di scarico dell'aria. Si osserva
come la prima fase sia sufficientemente rapida, dati i valori elevati di pressione interna, mentre, la fase
successiva b-c, corrispondente all'ingresso di acqua nelle travi scatolari, evolve lentamente anche con
luci di scarico ampie. Tali luci di scarico si richiudono automaticamente una volta raggiunta una quota
prestabilita grazie all'inserimento di apposite valvole espressamente progettate.
Assetto in profondità
La condizione di equilibrio si determina fra le forze agenti sul sistema gabbia che sono il dislocamento,
la spinta idrostatica, la spinta idrodinamica prodotta dalla corrente ed il tiro delle funi di ormeggio. In
assenza di spinta idrodinamica l'assetto è quello in Fig. 3 (B). Nel caso di azione della spinta
idrodinamica sul sacco di rete e sul collare si determinerà una posizione di equilibrio caratterizzata da
un'inclinazione limitata, considerati i bassi valori della corrente in profondità, e ininfluente in quanto
non dà luogo a modificazioni del volume di allevamento; inoltre, data la localizzazione del centro di
spinta, del baricentro della struttura e della risultante del tiro delle funi, ne risulta una condizione di
sufficiente stabilità.
L'inserimento delle boe di tensione sui cavi di ormeggio, in relazione alloro dimensionamento e quindi
alla spinta esercitata ed al punto di attacco, può influire sulla profondità di localizzazione in
immersione.
Operazione di emersione
La fase di emersione viene determinata con l'immissione di aria compressa nei profilati scatolari che
fungono da casse di spinta.
Nel grafico di Fig. 5 è riportato l'andamento della spinta e del dislocamento col tempo e sono inoltre
indicati i volumi di aria immessi nelle diverse fasi ed i valori della pressione interna.
Fig. 5 -Curva di emersione.
La metodologia da eseguire prevede nella prima fase a-b l'immissione del quantitativo di aria necessario
perchè la spinta idrostatica eguagli e superi di poco il dislocamento della struttura. Si ha in tal modo lo
scarico delle sollecitazioni delle funi e si verifica un lento sollevamento della struttura che determina,
con la riduzione della pressione idrostatica, un fenomeno di progressiva espansione dell'aria immessa
nelle casse e, quindi, un progressivo aumento della spinta ascensionale. Precisamente l'immissione di
200 dm³ di aria 2,6 bar è sufficiente perche la spinta eguagli il dislocamento, l'immissione di 300 dm³ è
sufficiente a produrre un processo di risalita. A questo punto l'operazione di emersione prevede
l'arresto dell'immissione in quanto la riduzione di pressione con la risalita provoca un'espansione
dell'aria immessa e conseguentemente un progressivo svuotamento delle casse. Si verifica pertanto una
diminuzione progressiva del dislocamento che provoca un andamento della velocità di risalita che
cresce progressivamente fino a raggiungere il valore massimo nella fase di emersione. Di conseguenza il
fenomeno si evolve con un aumento delle velocità di ascesa che è limitato dalla resistenza idrodinamica.
poiche la resistenza idrodinamica è funzione del quadrato della velocità, il fenomeno evolve lentamente
e la velocità finale di ascesa rimane contenuta entro limiti accettabili.
Infatti operando in tal modo la forza risultante ascensionale può raggiungere il valore max superiore a
500 daN solo nella fase finale di emergenza. La velocità di risalita può inoltre essere contenuta entro i
limiti richiesti rallentando il processo di espulsione dell'acqua di zavorra dalle camere con riduzione
delle luci delle valvole di scarico.
Nelle prove condotte si è rilevato un valore massimo della velocità raggiunto nella fase finale di
emergenza contenuta in 1 m/s.
Conclusioni
La soluzione costruttiva adottata che impiega insieme tubolari in acciaio ed in polietilene risulta
originale in quanto associa i due elementi più diffusi nella costruzione delle gabbie.
L'acciaio assolve la funzione di assorbire le sollecitazioni impresse al sistema gabbia dall'ambiente e di
trasmetterle alle linee di ancoraggio, di garantire la resistenza strutturale nelle diverse condizioni di
lavoro ed anche in situazioni eccezionali. La corona in tubolari di polietilene, per la leggerezza del
materiale ed in quanto composta da 12 elementi o comparti separati, garantisce la galleggiabilità del
sistema anche nell'ipotesi di danneggiamento di alcuni elementi ed assicura un buon assetto in fase di
immersione ed emersione.
La struttura superiore in acciaio, che costituisce le casse di zavorra variabile, è suddivisa in sei
compartimenti che impediscono spostamenti del carico ed ha una posizione centrale rispetto all'anello
esterno.
Il sistema di immissione ed espulsione dell'aria e dell'acqua prevede numerosi punti di ingresso e di
scarico allo scopo di favorire l'uniformità nelle fasi di allagamento e di svuotamento dei comparti. Le
soluzioni sopra esposte assicurano una posizione centrale della forza risultante e quindi il contenimento
dell'inclinazione in limiti modesti.
Di conseguenza la maggiore complessità costruttiva evita gli inconvenienti delle forti inclinazioni che si
verificano in strutture sommergibili realizzate con il semplice criterio della immissione di acqua in anelli
tubolari del collare con libera possibilità di spostamento delle masse d'acqua.
I risultati delle verifiche effettuate ed il comportamento della gabbia nelle fasi di allevamento hanno
confermato l'affidabilità della struttura e la sua rispondenza tecnica e funzionale. In particolare le
piattaforme di lavoro installate e la configurazione della struttura di lavoro sono state ritenute valide
dagli operatori dell'impianto, sia per l'esecuzione delle fasi di alimentazione, sia per l'operazione di
prelievo del pesce.
La gabbia è stata prevista per un sistema di ancoraggio a tre punti con attacco in corrispondenza dei
vertici della struttura triangolare in acciaio. La quota di localizzazione in profondità dipende dalla
geometria del sistema di ancoraggio e dalla quota di localizzazione delle boe sommerse.
Il sistema di ancoraggio adottato, descritto e riportato in Fig. 3, assicura un perfetto posizionamento in
galleggiamento come in profondità nel senso che i possibili spostamenti della gabbia sono limitati e la
presenza delle boe sommerse e delle boe di tensione assicurano una sufficiente elasticità al sistema. Un
inconveniente di questo sistema sta nella eccessiva complessità che si traduce in un eccessivo costo di
materiale e di installazione, specialmente nell'ipotesi di installazione indipendente di singole gabbie.
Inoltre con questo sistema la quota della gabbia in immersione risulta condizionata dalla quota di
posizionamento delle boe sommerse. Pertanto per questo prototipo sono stati previsti anche differenti
sistemi di installazione con ancoraggio direttamente al fondo.
Questo prototipo si propone pertanto come una valida soluzione per gli allevamenti off-shore che
certamente si moltiplicheranno lungo le nostre coste e pertanto è stata già sviluppata una seconda
gabbia di maggiori dimensioni ma strutturalmente simile con un volume della camera di allevamento di
1200 m³. Per quanto riguarda la scelta del sistema sommergibile questa deriva da analisi dei rischi di
mareggiate che l'installazione di gabbie galleggianti in mare aperto comportano.
Gli studi progettuali e le esperienze condotte evidenziano come la realizzazione tecnicamente corretta e
ottimale di un impianto di allevamento off-shore richieda in relazione alle caratteristiche topografiche e
meteomarine del sito lo sviluppo di uno specifico progetto per quanto riguarda le caratteristiche
costruttive delle gabbie, il sistema di immersione e di installazione.
Ringraziamenti
Lavoro eseguito con il contributo P.O.P. 5.4.3 Regione Campania.
Bibliografia
BARONE L., FAUGNO S. & MARTELLO A. (1996). Subrnersible cages for seabrearn, installed offshore along the Tyrrhenian coast. Advantages and technical problerns. Atti del Convegno EAS Seabass and
Seabream Culture: Problems and Prospects , Verona 16-18 ottobre.
BARONE L., FAUGNO S. & MARTELLO A. (1997). Submersible cages for off-shore fish farming
along the Italian coasts. Atti del Convegno EAS- WAS Island Aquaculture and Tropical Aquaculture, Les Trois
Ilets, Martinica, FWI, 4-9 maggio.
BARONE L., FAUGNO S. & MARTELLO A. (1998). Analisi funzionale e sviluppo di moduli
impiantistici di maricoltura in gabbie sommergibili. Atti del Convegno MIPA 15-16 dicembre.
BEVERIDGE M. (1996). Cage Aquaculture. 2nd ed., Fishing News Books, Osney Mead Oxford,
England.
CARRATELLI E., SPULSI G. & VELTRI P. (1996). Misure correntometriche nei mari calabresi. Atti
12° congresso Associazione Italiana di Oceanografia e Limnologia, Isola di Vulcano, 18-21 settembre.
CARRATELLI PUGLIESE E. (1998). Piano di Prevenzione dei Rischi -Settore Mareggiate. Consorzio
InterUniversitario Grandi Rischi.
HUGUENIN J.E. (1997). The design, operations and economics of cage culture systems. Aquacult.
Engin. 16: 167-203.
MILNE P.H. (1970). Fish Farming: a Guide lo lhe Design and Conslruclion or Nel Enclosures. Marine
Resources, 1 HMSO, Edinburgh.
RUDI H., AARSNES J.V. & DARLE L.A. (1998). Environrnental forces on a floating cage systern,
mooring considerations. In: Aquaculture Engineering Technologies for the Future. Chem E Symposium Series
n.111, pp.97-122.
VELTRI P., FIORINI MOROSINI A., MAIOLO M. & PUGLIESE CARATELLI E. (1996) Indagine
su campo dello scarico di liquami in mare da una condotta sottomarina. XXV Convegno di Idraulica e
Costruzioni Idrauliche, Torino.