Prof. Vittorio Rocco
FLUIDODINAMICA
DELLE
MACCHINE
Università degli Studi di Roma Tor Vergata
Ingegneria Meccanica
s
POSTULATO DEL CONTINUO
Il più piccolo volume elementare δv che comprende una quantità
elementare di massa contenente un numero sufficientemente
grande di molecole per soddisfare il postulato del continuo è
definita particella di fluido.
P (x,y,z)
δv
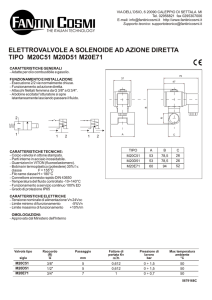
Si
consideri
un’elevata
quantità di massa racchiusa in
un volume V ed un punto P
(x,y,z) arbitrario all’interno di
tale volume. Si assuma che il
punto P sia circondato da un
volume elementare δv che
contiene
una
massa
elementare δm. Sia ρ il valor
medio delle densità della
massa racchiusa in δv.
ρ=δm/δv
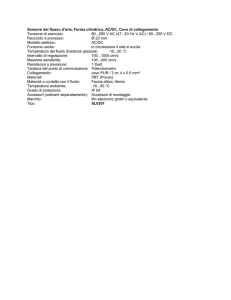
δm/δv
Restringendo δv intorno al
punto P e riportando in grafico il
rapporto δm/δv in funzione di δv
si osserva che δm/δv tende ad
un valore asintotico in relazione
alla omogeneità della materia.
Quando δv diventa molto
piccolo ovvero contiene un
Numero piccolo di molecole, il valore di δm/δv fluttua ampiamente
in relazione al numero di molecole che penetrano nel volume δv e
che lo abbandonano.
Il valore di δm/δv è quindi indeterminato.
Un fluido in una regione di spazio che contiene unicamente punti
nei quali la densità è sempre definita (ovvero nell’intorno di tali punti
esiste sempre un volume molto piccolo nel quale non vi è
fluttuazione delle proprietà) è definito continuo rispetto alla densità.
Un fluido che sia continuo rispetto a tutte le altre proprietà di
maggior
rilievo
è
inoltre
definito
continuo
senza
ulteriori
specificazioni.
Per quanto concerne i gas in accordo con la teoria cinetica, si deve
far riferimento ad un numero elevatissimo di molecole (si ricordi ad
esempio il numero di Avogadro = 6,02252*1023 molecole/mole).
All’interno di un gas le molecole si muovono molto rapidamente ed
in modo casuale.
Come risultato si hanno continue collisioni che, considerate
elastiche, possono portare ad un trasferimento totale o parziale di
energia cinetica tra una molecola ed un’altra.
Di conseguenza, come casi estremi, alcune possono aver velocità
pressoché nulle ed altre velocità molto elevate e tutte le altre,
evidentemente, valori della velocità (energia cinetica) compresi tra
questi estremi.
Dai metodi della meccanica statistica si sono derivate funzioni in
grado di rappresentare la distribuzione di velocità (Maxwell).
Per collisioni delle molecole di tipo elastico che hanno distribuzione
Maxwelliana della velocità, il libero cammino medio delle molecole
è:
λ=
2(πNd2)
Essendo:
N:il numero delle molecole per metro cubo
d: Il diametro delle molecole
Si calcola, ad esempio, che per l’azoto λ= 7,46*10-8 [m]
Per un gas che soddisfi il postulato del continuo, il libero cammino
medio λ può essere confrontato con una dimensione fisica
caratteristica L relativa ad un campo di moto.
Si definisce come numero di Knudsen :
Kn= λ / L
Molte proprietà, si ricordi, quali la viscosità, la conduttività termica, il
coefficiente di diffusione (proprietà di trasporto) sono connesse a λ.
Il postulato del continuo è applicabile a quei fluidi per i quali
Kn<<0,01
In caso contrario il gas deve essere trattato come un insieme
discreto di particelle.
DEFINIZIONE DI FLUIDO
Un fluido è definito come “continuo” che non può resistere ovvero
reagire, se in quiete, equilibrando uno sforzo di taglio.
In un solido perfetto, le forze che su di esso agiscono sono
bilanciate da quelle interne prodotte da deformazioni elastiche.
Pertanto vale la legge di Hook: lo sforzo è proporzionale alla
deformazione. In questo caso sia il modulo di rigidezza:
τ
N=
ΔL/L
che il modulo di elasticità sono ≠ 0.
Il modulo di elasticità è:
lim =
Δp
0
- Δp
= - v dp
dv
Δv/v
Il suo reciproco è il modulo di compressibilità
K-1=1/K=
- 1 dv
v dp
Un fluido perfetto ha N=0 e K≠0. Su un fluido perfetto si trasmettono
solo sforzi normali.
Si definisce un fluido perfetto un fluido perfettamente incomprimibile
da cui:
K=∞
In un gas perfetto non esistono forze intermolecolari; le interazioni
tra molecole derivano unicamente da collisioni elastiche ed
istantanee.
Un gas perfetto è un “mezzo” omogeneo comprimibile per il quale è
N=0. Si definiscono:
Modulo volumetrico di elasticità isotermo Kt
Modulo volumetrico di elasticità isoentropico Ks
da cui:
Kt = -v ∂p = p
∂v
t
e per una trasformazione isoentropica pvk=cost
Ks= -v
∂p = Kp
∂v
s
Essendo K=cp/cv
Inoltre Ks/Kt= K è il rapporto delle pendenze delle trasformazioni
isoentropiche ed isoterme nel piano p,v.
FLUIDI REALI
Nei fluidi reali, quando vi sia moto relativo tra le particelle,
insorgono sforzi di taglio che persistono fin quando esiste tale
condizione di moto.
Le forze viscose si manifestano, quindi, come forze di taglio tra
linee di corrente adiacenti.
Un fluido è definito Newtoniano se:
Ft = τ = μ dv
dy
ovvero quando lo sforzo di taglio τ dipende dalla viscosità μ e dal
gradiente normale di velocità.
CLASSIFICAZIONE DELLE MACCHINE A FLUIDO
DIFFERENTI POSSIBILI CRITERI
Secondo lo scambio di energia
motrici
Secondo le caratt. del fluido
idrauliche
termiche
Secondo il moto degli organi
che scambiano energia
alternative
rotative
Secondo l’andamento del flusso
del fluido
volumetriche
Secondo il percorso del fluido
Assiali
operatrici
dinamiche
Radiali
MACCHINA = ELEMENTO NEL QUALE SI REALIZZA UNO SCAMBIO
ENERGETICO TRA UN FLUIDO E GLI ORGANI MOBILI.
IMPIANTI MOTORI (FISSI E MOBILI)
Motrici: Il fluido che le attraversa trasmette parte della sua energia agli organi
mobili della macchina
Operatrici: La macchina mossa da adatto motore “opera” sul fluido che la
attraversa trasmettendogli parte del lavoro meccanico di cui
dispone
Idrauliche: Macchine in cui le energie connesse a modifiche termodinamiche
dei liquidi che le attraversano sono trascurabili rispetto agli
scambi energetici di tipo meccanico. In genere sono
caratterizzate da elevate sollecitazioni meccaniche.
Assiali: Il fluido percorre un canale fondamentalmente parallelo
all’asse di rotazione della macchina
Radiali: A flusso prevalentemente radiale
motrici
centripeta
operatrici
centrifughe
MACCHINE MOTRICI
FLUIDO
MOTORE
MOVIMENTO
ORGANO
MOTORE
TIPO DI FUNZIONAMENTO
MACCHINE VOLUMETRICHE
ALTERNATIVO
ALTERNATIVE
IDRAULICHE
ROTATIVO
ROTATIVE IDRAULICHE
(A INGRANAGGI A PALETTE
A ECCENTRICI)
LIQUIDO
ALTERNATIVO
MACCHINE DINAMICHE
TURBINE IDRAULICHE
(ASSIALI RADIALI MISTE)
ALTERNATIVE A VAPORE
(A STANTUFFI)
VAPORE
ROTATIVO
TURBINE A VAPORE
(ASSIALI E RADIALI)
ALTERNATIVO
MOTORI ALTERNATIVI
(A COMBUSTIONE
INTERNA/ESTERNA)
ROTATIVO
MOTORI ROTATIVI
(COMBUSTIONE INTERNA
TIPO WANKEL)
GAS
MACCHINE OPERATRICI
TURBINE A GAS
(ASSIALI, RADIALI)
FLUIDO
MOTORE
MOVIMENTO
ORGANO
MOTORE
TIPO DI FUNZIONAMENTO
MACCHINE VOLUMETRICHE
ALTERNATIVO
POMPE
ALTERNATIVE
ROTATIVO
POMPE
ROTATIVE VOLUMETRICHE
(A INGRANAGGI A PALETTE
ECC)
ALTERNATIVO
COMPRESSORI
ALTERNATIVI
(A STANTUFFO)
LIQUIDO
MACCHINE DINAMICHE
TURBOPOMPE
(ASSIALI RADIALI MISTE)
GAS
ROTATIVO
COMPRESSORI ROTATIVI
VOLUMETRICI
(ROOT A PALETTE A
ECCENTRICO)
TURBOCOMPRESSORI
(ASSIALI RADIALI)
Termiche: Operano su aeriformi, devono essere considerate le
leggi
che
termodinamicamente
condizionano
il
comportamento del fluido che le attraversa. L’aspetto
“termico” prevale nettamente nel comportamento
funzionale delle macchine motrici. Nelle operatrici le
variazioni termodinamiche sono una conseguenza dello
scambio energetico macchina-fluido.
Alternative: Macchine che hanno organi che interagiscono con il
fluido con un moto alternato tra due posizioni estreme.
Rotative: Macchine i cui organi scambiano energia con il fluido
durante un moto rotatorio attorno ad un asse (asse della
macchina).
Volumetriche: Macchine che operano su volumi successivi di fluido:
il fluido è introdotto ciclicamente in un certo spazio
messo a disposizione dalla macchina per scambiare, poi,
con essa lavoro.
Dinamiche: Non vi è discontinuità nell’introduzione del fluido nella
macchina: esso, infatti, fluisce continuamente attraverso
la macchina e durante questo passaggio scambia con
continuità lavoro con gli organi della macchina.
Gli ultimi due modi di operare hanno una diretta conseguenza sulla
potenzialità della macchina essendo il lavoro scambiato in un
determinato tempo direttamente legato alla portata di fluido che
attraversa la macchina
DIFFERENZA DI POTENZIALITA’
TRA TURBOMACCHINE E MACCHINE VOLUMETRICHE.
TEORIA DEL CONTINUO
Numero di Knudsen
Kn=
λ/L
λ= Libero cammino medio di una molecola
L= Dimensione caratteristica
IPOTESI DI CONTINUO:
Kn< 0.01
SISTEMA VOLUME DI CONTROLLO, SUPERFICIE DI
CONTROLLO
Si definisce “sistema” un prefissato ed identificabile agglomerato di
materia che non scambia massa con l’esterno.
Si definisce “volume di controllo” una porzione di spazio (volume)
attraverso il quale può passare un fluido, mentre la superficie che lo
racchiude è detta superficie di controllo. Si farà, in generale,
riferimento a volumi di controllo fissi o inerziali.
Avendo definito con N una generica proprietà estensiva di un
sistema di massa m, per una sostanza materiale che soddisfi
l’ipotesi di continuo
la corrispondente generica proprietà specifica è data da:
n=
lim
∆m
0
∆N
∆m
= dN
dm
dalla quale si ricava che:
N=
n dm
ovvero
sistema
N =
nρdV
Essendo V il volume occupato dal sistema
V
L’APPROCCIO LAGRANGIANO O DEL SISTEMA
Nella dinamica dei corpi rigidi le proprietà di ciascun corpo sono
specificate come una funzione del tempo. A causa dell’elevatissimo
numero di particelle individuali che costituiscono un flusso di massa
quest approccio è impraticabile. Per questo motivo le proprietà del
flusso vengono studiate e descritte in termini di posizione nello
spazio formando, così, un “campo delle proprietà”. Si assume, in tal
modo, che un punto nello spazio, pur costituendo una mera
posizione geometrica, attraverso il concetto di “campo delle
proprietà” diventa rappresentativo della proprietà del flusso in quel
punto.
Di conseguenza, ad esempio per la velocità, invece di impiegare
equazioni del tipo Vi = Vi(t) per una particella arbitraria di fluido, il
concetto di campo di proprietà consente di assegnare un valore di
V= V(x,y,z,t) a ciascun punto del regime di spazio considerato.
L’approccio Lagrangiano consiste, dunque, nel seguire ciascuna
particella lungo la sua traiettoria. Poiché le leggi basilari che
governano un flusso sono valide per un sistema di massa prefissata
, il criterio lagrangiano deve essere impiegato per ottenere le
espressioni delle equazioni di governo di un flusso applicabili a
determinate posizioni dello spazio (volume di controllo).
APPROCCIO EULERIANO O DEL VOLUME DI CONTROLLO
“L’attenzione” è concentrata su una determinata porzione di spazio.
Si determinano le proprietà del fluido che istantaneamente occupa
tale volume.
Poiché non seguiamo le particelle individualmente in funzione del
tempo le loro proprietà non vengono ottenute esplicitamente. Se
però si conosce il campo di velocità V(x,y,z,t) le traiettorie
attraverso tale
campo possono essere tracciate rendendo determinabili le
proprietà di ciascuna particella.
Nella maggior parte dei casi informazioni così dettagliate non sono,
tuttavia, richieste per cui l’approccio euleriano è perfettamente
soddisfacente.
Poiché le leggi basilari sono espresse con riferimento ad un
“sistema” occorre ricavare una relazione tra l’approccio euleriano e
quello lagrangiano che consenta di esprimere le leggi in termini di
variabili applicabili ad un volume di controllo.
DERIVATA SOSTANZIALE
Per quanto detto la derivata nel tempo della proprietà N di una
particella di fluido deve essere espressa in termini di descrizione
del campo delle proprietà del flusso.
La derivata nel tempo di una proprietà del flusso calcolata lungo la
traiettoria di una particella è detta derivata sostanziale.
In uno spazio lagrangiano le coordinate x,y,z di una particella sono
x= x(t);
y=y(t);
z
z=z(t)
t0+Δt
(x,y,z)
Δx
t0
Δz
Δy
y
x
Se N è una generica proprietà estensiva in una rappresentazione di
campo N=N(x,y,z,t).
La variazione di tale proprietà del sistema (particella) durante
l’incremento di tempo ∆t può essere approssimata da una serie di
Taylor troncata al I ordine come segue:
ΔNsistema= N(t0+Δt)-N(t0)=
∂N Δx
∂x t0
+
∂N
∂y
Dividendo per ∆t e per ∆t
dN
dt
=
sistema a t0
Δy +
∂N Δz +
∂z t0
t0
∂N
∂t
Δt
t0
0 si ha
lim
Δt
0
N(t0+Δt)-N(t0)
Δt
In uno spazio lagrangiano per il sistema è x=x(t) da cui:
(a)
lim
∆t
0
∆x
∆t
=
sistema
dx
dt
=
u(t0)
Essendo u(t0) la velocità della particella in direzione x al tempo t0.
Similmente si ottengono v(t0) e w(t0) rispettivamente per le direzioni
y e z.
Da cioè discende che (equazione (a)):
dN
dt
=
sistema a t0
∂N + ∂N u + ∂N v + ∂N w
∂t
∂x
∂y
∂z
che è la derivata sostanziale della arbitraria proprietà N che per
questo motivo è simbolicamente indicata come
DN
Dt
∂N Variazione locale
∂t per effetti di non
stazionarietà
∂N ; ∂N ; ∂N
∂x ∂y ∂z
Variazione di N per
variazione di
posizione: variazione
convettiva associata
a: u,v,w
Il termine DN che segue la variazione della proprietà N in riferimenDt
to al sistema in movimento è stato così espresso in termini di
descrizione del campo di proprietà tramite la sua derivata. Poiché il
campo di proprietà è direttamente connesso ad una descrizione
euleriana del flusso, la derivata sostanziale mette in relazione
l’approccio lagrangiano di descrizione del flusso con quello
euleriano.
ESEMPIO DESCRITTIVO DELLA DERIVATA SOSTANZIALE
DELLA VELOCITA’
∂C dt
∂z
CQt
CQt+At
Q
DC
CPt
P
dCt
P
Cpt
Dc = dc + ∂c dt = ∂c dx + ∂c dy + ∂c dz + ∂c dt
∂t
∂x
∂y
∂z
∂t
Dc = ax i + ay j + azk
ax = dcx = ∂cx + cx ∂cx + cy ∂cx + cz ∂cz
dt
∂t
∂x
∂y
∂z
ay = dcy = ∂cy + cx ∂cy + cy ∂cy + cz ∂cy
dt
∂t
∂x
∂y
∂z
az = dcz = ∂cz + cx ∂cz + cy ∂cz + cz ∂cz
dt
∂t
∂x
∂y
∂z
DERIVATA TOTALE E SOSTANZIALE
Derivata totale rispetto al tempo dc/dt
dc = ∂c + ∂c dx + ∂c dy + ∂c dz
dt
∂t
∂x dt
∂y dt
∂z dt
Significato di ∂c/∂t è la derivata nel tempo in una posizione fissa
ovvero una derivata locale. Se ci muoviamo lungo la corrente del
flusso si può scrivere la “derivata seguendo il movimento” ovvero la
derivata sostanziale.
Dc = ∂c + vx ∂c + vy ∂c + vz ∂c
Dt
∂t
∂x
∂y
∂z
In questo caso si ha che rispettivamente:
dx dy dz
dt
dt dt
Sono vx, vY e vZ in quanto corrispondono alle componenti delle
velocità v della particella nello spazio x,y,z, anzi, in un certo punto
dello spazio, sono infatti le componenti delle velocità locale del
fluido.
Nei corpi rigidi la proprietà di ciascuna particella o del corpo sono
specificate come funzione del tempo. Nella meccanica dei fluidi è
evidente che tale approccio è impensabile o, quanto meno, poco
pratico.
Le proprietà del flusso sono quindi descritte in termini di una
posizione nello spazio, stabilendo così un campo di proprietà. Le
proprietà dello spazio sono quindi quelle del fluido che attraversa
tale spazio. Il concetto di campo di proprietà consente quindi di
assegnare un valore della proprietà v=v(x,y,z,t) ad ogni posizione
nella porzione di spazio considerata. In questo modo V è una
funzione di (x,y,z,t) invece che delle particelle di fluido.
RELAZIONE GENERALE TRA APPROCCIO LAGRANGIANO
(SISTEMA) ED EULERIANO (VOLUME DI CONTROLLO)
OBIETTIVO:Come esprimere la velocità di variazione di una
arbitraria proprietà estensiva di un sistema in termini di
variazione di quella proprietà in un volume di controllo.
y
V
x
n
z
v
v(x,y,z,t)
Stato del sistema al tempo t
I
II
III
Superficie di contorno del volume di controllo V
In figura è rappresentato un campo di velocità v(x,y,z,t) misurato rispetto al
sistema di coordinate x,y,z. A e V sono rispettivamente la superficie di
contorno ed il volume di controllo.
All’istante t il sistema costituito dalle sezioni I e II occupa esattamente lo
spazio definito dal volume di controllo V.
All’istante t+∆t il sistema occupa lo spazio definito dalle regioni II e III.
Pertanto al limite la variazione della proprietà arbitraria del sistema si ha:
lim
∆N = dN =
∆t 0 ∆tsist dt sist
Velocità di variazione
della proprietà
estensiva N del
sistema al tempo t.
=
Velocità di variazione
di N per la massa
contenuta nel volume
di controllo
La variazione di N è calcolata lungo la traiettoria del sistema e
dunque si ha:
derivata totale dN
=
dt sistema
DN
Dt
= derivata sostanziale
da cui:
DN = lim
Dt
∆t 0
Nt+∆t + Nt ; essendo dN= nρdV si ha:
∆t
(Nt+∆t)sistema = (NII + NIII)t+∆t =
nρdV
+
nρdV
II
(Nt)sistema = (NI + NII)t
=
III
nρdV
I
+
t+∆t
nρdV
II
t
Notando che il limite della somma equivale alla somma dei limiti si
ottiene:
DN = lim
Dt ∆t 0
nρdV
II
t+∆t
∆t
nρdV
II
lim
t
+ ∆t 0
nρdV - lim nρdV
III t+∆t ∆t 0 I
t
∆t
∆t
Nel limite per ∆t
0 la regione II diventa coincidente con il volume
di controllo V e quindi il primo termine a 2° membro
∆ρ∂
∂ nρdV
∂t v
(1)
Il valore del secondo termine si può determinare notando che
l’integrale esprime la valutazione dell’entità della proprietà N che
nell’intervallo ∆t interessa la regione III. Questa corrisponde
all’entità della proprietà N che nello stesso intervallo di tempo ha
abbandonato il volume di controllo.
Si ha quindi
= dNIII
nρdV t+ ∆t
III
t+ ∆t
Dividendo per ∆t e portando al limite si ottiene la velocità istantanea
con la quale N abbandona il volume di controllo.
lim
nρdV
III
∆t
t+∆t
=
dN
dt
= velocità di efflusso di N
Poiché dN= ndm la velocità di efflusso di N è espressa dal prodotto
del flusso di massa dmu per il valore specifico di N
dN
dt
=
u
ndmu
Il flusso di massa uscente dal volume di controllo V può essere
espresso in termini di ρ e V, nonché dell’area di passaggio di A. Ai
fini della valutazione della portata occorre però valutare la
componente della velocità ortogonale, localmente, alla superficie di
efflusso; si adotta quindi il concetto di superficie orientata di
versore n ortogonale e positivo se uscente da detta superficie:
dA= ndA, da cui
dm= ρVdA = ρV cos α dA
si ha quindi:
dN = nρV dAu
e di conseguenza:
lim
∆t
nρdV
III
∆t
0
=
t+∆t
dN
dt u
Au
=
nρV dA
Au
Questa espressione trasforma l’originale integrale di volume in un
integrale di superficie esteso alla superficie di efflusso. In modo
analogo può essere espresso il 3° termine della relazione (1) che
esprime il flusso entrante in V della proprietà N. Poiché il verso
della velocità forma con il versore normale alla superficie di
ingresso un angolo 90° si ha:
dmi= - ρV cosα dA; - dN =
dt in
- lim
Δt
nρdV
0
I
∆t
Ain
t
nρVdA
Ain
Dalle due ultime relazioni si ha in definitiva che:
dN
dt
Au
u
dN
dt
Ai
=
nρVdA
i
A=Au+Ai
esprimendo, in tal modo, con il solo ultimo integrale il contributo a
DN/Dt dovuto ai flussi di massa uscenti ed entranti. Ad una
“accelerazione del sistema” corrisponde, quindi, un incremento di
DN/Dt dovuto ad un flusso in uscita
ingresso.
maggiore del flusso in
y
n
α
α<90°
v
Superficie di controllo A
x
Flusso di massa in uscita dal volume di controllo
y
α>90°
n
v
α
Superficie di controllo A
x
Flusso di massa in ingresso al volume di controllo
Raggruppando i vari termini si ha:
DN
Dt
=
∂
∂t
nρdV +
V
nρVdA
A
La velocità istantanea di variazione di una qualsiasi proprietà
estensiva di un sistema al tempo t può essere espressa mediante
due effetti: il primo relativo al volume di controllo e l’altro relativo
alla superficie di controllo.
Il primo termine esprime la velocità di variazione di N all’interno del
volume di controllo al tempo t; il secondo termine esprime la
velocità netta di efflusso della proprietà N attraverso la superficie di
controllo allo stesso istante di tempo.
Questa equazione mette, quindi, in relazione, in modo del tutto
generale, la variazione della proprietà arbitraria estensiva N di un
sistema (caratterizzato da un flusso) con un volume di controllo
che, nel caso più frequente di forma invariante nel tempo ed in
condizioni inerziali, consente di non tener conto della derivata
parziale fuori del segno d’integrale. Si ha cioè (le coordinate del
volume di integrazione non variano nel tempo rispetto ad una terna
inerziale di riferimento).
DN =
Dt
∂(nρ)dV +
∂t
V
nρVdA
A
Esempio: continuità. Seguendo un sistema che si sposta lungo una
traiettoria, la massa non cambia e quindi DN/Dt= D(massa)/Dt =0
(conservazione della massa).
PRINCIPALI EQUAZIONI DI BILANCIO
MASSA
QUANTITA’ DI MOTO
ENERGIA
MOMENTO DELLA QUANTITA’ DI MOTO
I BILANCIO DI MASSA (CONTINUITA’)
n
n
A2
A1
Assegnato il volume di controllo, la proprietà estensiva considerata
M è definita, in un certo istante, tramite la sua grandezza specifica
da
M= ρdV
V
In assenza di fenomeni relativistici e termonucleari, per un certo
fluido, riferendosi al volume di controllo (costante nel tempo)
d
dt
ρdV + ρVdA = 0
V
A
∂ ρdV = d ρdV
∂t
dt
V
V
Come si ricava dall’equazione generale prima trovata sostituendo M
a N ed essendo n=1.
Dalla forma integrale dell’equazione di bilancio della massa
ricaviamo ora l’espressione in forma differenziale nel caso di moto
unidimensionale.
Ricordiamo il lemma di Gauss
“Un campo vettoriale integrato su una superficie può essere
integrato nel volume racchiuso se ad esso si sostituisce la sua
divergenza”.
Se V è il nostro campo vettoriale (velocità) si avrà che:
vdA =
A
_ (V) dV
essendo l’operatore
V
=i
che come è noto applicato ad
uno scalare ne fornisce il
gradiente (vettore) e applicato a
un vettore ne fornisce la
divergenza (scalare)
Il termine di flusso presente
nella continuità diventa allora:
ρVdA =
A
(
∂ +j∂ +k∂
∂x ∂y
∂z
ρV )dV
V
Nel caso di moto unidimensionale si ha l’equazione:
∂ ρdV
∂t
+
V
∂ ρdV
(
V
+
∂( ρVx )dV = 0
∂t
V
ρV )dV = 0
∂x
V
diventa:
∂ρ
∂t
+
∂( ρVx )
∂x
dV = 0
V
“Se l’integrale è = 0 è =0 il suo integrando”
∂ρ
∂t
∂ρ
∂t
+
+
∂( ρVx )
∂x
ρ ∂Vx
∂x
=0
FORMA DIFFERENZIALE
(moto unidimensionale non stazionario)
+ Vx ∂ρ = 0
∂x
IMPORTANZA DELLA FORMA DIFFERENZIALE CASO DI
SEZIONE VARIABILE
x
∂( ρA )
∂t
+ ∂( ρVxA ) = 0
∂x
EQUAZIONE DI CONTINUITA’
Si consideri un elemento di volume stazionario
x+Δx, y+Δy, z+Δz
z
ρVx/x
ρVx/x+Δx
y
Δy
Δx
velocità di
accumulo
della materia
=
velocità di
ingresso della
materia
-
x
velocità di
uscita della
materia
Portata entrante = (ρVx)/x ∆y ∆z
Portata uscente = (ρVx)/x+∆x ∆y ∆z
Velocità di accumulo della materia nell’elemento di volume
considerato è:
(∆x ∆y ∆z) ( ∂ρ/∂t)
il bilancio di materia è
(∆x ∆y ∆z) ( ∂ρ/∂t)= ∆y ∆z[(ρVx)/x - (ρVx)/x+∆x]+∆x ∆z[(ρVy)/y (ρVy)/y+∆y]+∆x ∆y[(ρVz)/z - (ρVz)/z+∆z]
dividendo per ∆x ∆y ∆z e portando al limite ∆x ∆y e ∆z si ha
( ∂ρ/∂t)= -
∂ ( ρVx )
∂x
+
∂ ( ρVy )+ ∂
∂y
∂z
D(dm) = 0 =
Dt
(
ρVz )
D(ρdV)
Dt
( ∂ρ/∂t)= -
ρV
Δz
BILANCIO DELLA QUANTITA’ DI MOTO
(volume di controllo costante e fisso o inerziale)
N=
ρvdV
ρv = “densità della proprietà”
V
Per un sistema e Festerne = DM
Dt
(M = quantità di moto)
VARIAZIONE DELLA GRANDEZZA
FLUSSO CONVETTIVO
d ρvdV
dt
V
v(ρv dA)
A
FLUSSO DIFFUSIVO
(azione delle forze esterne)
τ dA
A
FLUSSO CONVETTIVO =”convezione della proprietà”= velocità per
densità della proprietà
FLUSSO DIFFUSIVO= Interazione con le forze esterne escluse
quelle di campo (ad. es. interazioni con le pareti di un condotto)
τ = tensore degli sforzi= sforzi normali + tangenziali sforzi
tangenziali legati dalla viscosità (fluidi newtoniani) al moto del fluido
τ = μdv nell’unidimensionale
dy
v
y
superficie in movimento
è da evidenziare la natura
molecolare del processo di
trasporto della quantità di
moto.
Per fluidi non viscosi
τ=
τij = 0
δ11 0 0
0 δ22 0
0 0 δ33
δ11 = δ22 = δ33 = p
Lo sforzo di pressione è orientato in verso opposto alla normale
uscente (n) perché bilanciando il fluido si devono considerare come
forze esterne quelle che agiscono sul fluido (pareti o fluido esterno).
Fesp =
- pdA
A
FORZE ESTERNE DI CAMPO
Interessano l’intera
massa di fluido. Nel caso
considerato si riferiscono
alla sola accelerazione di
gravità.
Fes c = g ρdV
V
FORZE ESTERNE DI ATTRITO
Il principio di Newton
applicato ad un fluido che
attraversa un volume di
controllo.
Fesp+ Fesc + Fesa = Fes = DM/Dt
Fes =
d
dt
(ρv)dV + v(ρVdA) = DM
Dt
V
A
La derivata sostanziale della proprietà indica che un osservatore
solidale ad una particella vede cambiare la proprietà per effetti sia
locali sia convettivi.
Se si considera una direzione xi di versore ui si ha, se si trascurano
Fesc ed Fesa che lungo xi:
Fes ni pni dA
Per il teorema di Gauss
( u i ) dV u i ( v dA)
t
u ( v dA) ( u v)dV
i
i
A
V
pni dA
p
dV
xi
A
V
Nel caso di moto 1-D (ui=Vx=Vx)
( Vx2 )
p
u
V
dV
pn
dA
(
)
;
i
i
V
A
xi dV
x
p
( Vx )
; ( ui )dV
x
t
t
Riscrivendo l’equazione di bilancio si ha in definitiva:
( V x ) ( V x )
p
t
x
x
2
esplicitando i termini:
V
p
Vx
Vx
Vx2
2Vx x
da cui:
t
t
x
x
x
Vx (
V
V
V
p
Vx
x ) Vx x x
t
x
t
x
x
x
Nel caso 1-D cioè u sono gradienti lungo y e z ed allora il termine in
parentesi rappresenta l’equazione di continuità scritta in 1-D che è
D ( dV )
Per cui l’equazione finale è:
Ø
Dt
essendo
Vx
V
Vx x
x
t
Vx
V
V x
1 p
,ovvero,
Vx x
x
t
x
la derivata sostanziale della velocità operata lungo x
DVx p
Ø
Dt x
A
S
S
Trascurando gli effetti di campo ed in
condizioni di moto stazionario si ha essendo
Fes= τ (si ricordi che Fesp= -∫A pdA)
A
ndA ( v) v nds Ø
A S
s
La spinta esercitata dal fluido sulle pareti
(A+S)è
ndA
E quindi vale l’uguaglianza
A S
ndA
A S
=
( v) v nds
Principio di funzionamento dei turbogetti e degli endoreattori.
Sarebbe a rigore da considerare anche il tensore di sforzo normale
agente sulla superficie S che, nel caso degli endoreattori può
essere considerato se Ps>>Pa
Se Ps=Pa il propulsore è detto “adattato”.
EQUAZIONE DELL’IMPULSO
“La variazione della quantità di motodi un sistema materiale
nell’intervallo di tempo τ eguaglia la sommatoria degli impulsi di
tutte le forse ad esso applicate”
Q I
I j f j dt
dQ j f j dt
dQ
j fj
dt
p1
C1
dm
α1
p1
Ω1
C2
α2
Ω2
i
Si consideri il sistema materiale costituito dal fluido che attraversa
lo spazio controllato di un condotto limitato tra le due sezioni di area
Ω1 e Ω2
Ipotesi: moto unidimensionale stazionario
Indicata con dm la massa entrante nel condotto nel tempo dt la
variazione di quantità di moto associata allo spostamento
dell’elemento dm rispetto alla direzione orientata di riferimento i è:
dmc2i-dmc1i=dm(c2i-c1i)=dm(c2cosα2i-c1cosα1i)
(Σjfj)dt=dm(c2i-c1i)
Σjfj=m(c2i-c1i) (II Legge di Newton del moto)
FORZE APPLICATE AL SISTEMA
-dovute alle pressioni agenti sulle superfici dele sezioni Ω1 e Ω2 e
date da:
(P1 Ω1)i – (P2 Ω2)i = P1 Ω1cos α1i – P2 Ω2cos α2i
-la risultante F di tutte le forse applicate al fluido mediante la
superficie laterale del volume di controllo;
-la risultante ci di tutte le forze applicate all’interno del volume di
controllo (in quanto dovute al campo gravitazionale)
Con riferimento alla direzione orientata i l’equazione dell’impulso è :
[(P1 Ω1)i – (P2 Ω2)i +Fi + Gi]dt = dm(c2i-c1i)
(P1 Ω1)i – (P2 Ω2)i +Fi + Gi = m(c2cosα2i – c1cosα1i)
SPINTA IN UN CONDOTTO CURVO
Si consideri un condotto curvo rispetto al quale si vogliono calcolare
gli sforzi che il fluido che lo attraversa esercita sulle pareti:
Ipotesi: Moto unidimensionale stazionario
c2
a2x=π/2
F
a2y=0
a1x=0
c1
a1y=π/2
F= forza che i vincoli devono esercitare per mantenere il condotto in equilibrio
Essendo la vena libera nelle due sezioni si ha: p1=p2=0
Le due componenti nel piano della risultante delle forze applicate al
fluido dall’interno sono, in generale:
Fx= P2 Ω2cos α2x - P1 Ω1cos α1x + m(c2cosα2x – c1cosα1x) – Gx
Fx= P2 Ω2cos α2y - P1 Ω1cos α1y + m(c2cosα2y – c1cosα1y) – Gy
Nel caso in esame essendo
Gx= 0
Gy= -G
cosα2x=0
cosα1y =0
cosα1x=1
cosα2y=1
Si ha:
Fx= -mc1
Fy= mc2+G
F è l’azione che i vincoli del condotto devono esercitare per
mantenerlo in equilibrio. La spinta che il fluido esercita sulle pareti è
pari a –F.
ESEMPIO APPLICATIVO
Spinta assiale in una turbomacchina motrice assiale
Sezione al raggio medio y//
asse della macchina
y
p2
C2
p1
C1
X
In questo caso non possono essere trascurati i termini relativi all’azione esercitata dalla
pressione del fluido.
Definita con Ω1y e Ω2y le aree delle superfici anulari, giacenti in piani normali all’asse della
macchina, attraverso le quali il fluido entra nella palettatura e ne esce si ha:
-Fy = m (c1y – c2y) + p1 Ω1y – p2 Ω2y
Spinta su una pala di turbina idraulica tipo Pelton
α2
β2
c1
c2
Spinta nella pala “ferma”
-Fx= m (c1-c2cos α2) = m (c1+c2cos β2)
- Fx = mc (1 + cos )
β ≈10°
=
Per c1=c2=c
c 2 (1 cos )
Se la pala si muove di velocità u=c/2 nel moto relativo la pala vede dimezzata la velocità
del getto e quindi la spinta si riduce di circa ¼.
BILANCIO DEL MOMENTO DELLA QUANTITA’ DI MOTO
In questo caso
N ( r v ) dV M Q
v
( r v ) = momento della quantità di moto rispetto ad un punto per
unità di volume
AL
n
A1
A2
V=volume di controllo
A=Superficie di contorno
A=A1+A2+AL
A1+A2=superfici permeabili
alla materia
AL=superficie laterale del
condotto
r
O
DM Q
Dt
d
( r v ) dV ( r v )(v dA)
dt V
A
n versore orientato positivo se uscente dalla superficie
M Fest
DM Q
Dt
( r ) dA ( r g ) dV
A
V
Notare che DMQ è ricavabile dalla formulazione generale
Dt
DN d
ndV nv dA Sostituendo a nρ la densità della
Dt dt V
A
proprietà “momento della quantità di moto”).
Sia la velocità assoluta v
FORMULAZIONE DEL PROBLEMA NEL CASO GENERALE
VARIAZIONE DELLA GRANDEZZA
NEL VOLUME DI CONTROLLO
(TERMINE NON STAZIONARIO)
d
(r v)dV
dt V
(r v)(v dA)
FLUSSO CONVETTIVO
A
(r ) dA
FLUSSO DIFFUSIVO
(MOMENTO DELLE FORSE ESTERNE
ESCLUSE QUELLE CAMPO)
A
(r g )dV
MOMENTO DOVUTO ALLE FORZE
DI CAMPO
V
In assenza di viscosità
(r ) dA r pdA
A
In assenza di instazionarietà e supponendo trascurabili le forze di
campo
DM Q
Dt
M Fest r pdA ( r v )(v dA)
A
A
EQUAZIONE FONDAMENTALE DELLE TURBOMACCHINE
C=W+U
(V=C)
Girante di macchina
operatrice radiale
(Ipotesi di moto piano)
W2
c2
u2
AL
W1
u1
C1
Traiettoria di una particella nel
moto assoluto
Si suppone di considerare le superfici di ingresso e di uscita del
flusso leggermente distanti rispetto a quelle reali della macchina in
modo da poter ipotizzare che le velocità assolute siano uniformi.
Si noti anche che per ω=cost, nel moto assoluto le condizioni del
flusso non sono stazionarie
Bilancio del momento della quantità di moto rispetto al volume di
controllo (Condotto interpalare)
M Fest r pdA r pdA
A
AL
In quanto i soli sforzi normali, rispetto alle superfici di contorno A1
ed A2, non producono momento poiché hanno direzione passante
per l’asse di rotazione.
FLUSSO CONVETTIVO
(r c)(c dA) (r c) (c dA)
A1 A 2
Ma ρcdA = m , essendo ρdA la portata volumetrica entrante ed
uscente.
Nella regione di superficie A1 si ha, essendo dA = ndA
(r c)( n dA) m(r c)
1
A1
Nella regione di superficie A2 si ha invece:
(r c)(c ndA) m(r c)
A2
2
mr c 2 r c 1 Mp
r pndA M Fse mr c 2 r c 1 Mp
90- φ
φ2
r2
r1
C2
90- φ1
C1
φ1
Si ricorda che le uniche Fes agenti sono gli sforzi normali relativi alle
superfici laterali dei condotti intercalari.
Ovviamente nel considerare i segni bisogna tener conto della
risultante degli sforzi normali così applicati.
Nel caso di macchine operatrici è la macchina a fornire energia al
fluido e, pertanto, in tal caso la potenza scambiata risulta essere
negativa. In definitiva, secondo lo schema rappresentato in figura si
ha:
r c 2
r c 2 c 2 r2 sen ( 90 2 ) c 2 r2 cos 2
r c 1 c1 r1 sen ( 90 1 ) c1 r1 cos 1
Mp Mp m ( c 2 r2 cos 2 c1 r1 cos 1 )
c 2 cos 2 c 2 u
c
cos
c
1
1u
1
Mp m ( c 2 u r2 c1u r1 )
Potenza trasmessa
P = Mp ω =
m c2 u r2 c1u r1
r2 u 2
r
u
1
1
P mc2 u u 2 c1u u1
EQUAZIONE FONDAMENTALE DELLE TURBOMACCHINE
(Operatrici radiali)
P/m = Lavoro specifico trasmesso dalle pale = Lp
Lp è indipendente dalla natura del fluido anche per distribuzione non
uniforme delle velocità assolute se considero il valore medio delle
sezioni di ingresso e di uscita.
ALTRA FORMULAZIONE DELL’EQUAZIONE FONDAMENTALE
DELLE TURBOMACCHINE
C=U+W
W
C
α
U
w 2 u c cos c 2 sen 2
2
w 2 u 2 c 2 cos 2 2uc cos c 2 sen 2
u 2 c 2 cos 2 sen 2 2uc cos
u 2 c 2 2uc cos
Si considerino i due triangoli di velocità in ingresso ed in uscita
(pedici 1 e 2)
2u1c1 cos 1 c12 u12 w12
2u 2 c2 cos 2 c 22 u 22 w22
L p u 2 c 2 cos 2 u1c1 cos 1
c 22 c12 u 22 u12 w12 w22
2
2
2
ESPRESSIONE DELL’EQUAZIONE FONDAMENTALE IN
TERMINI DI VARIAZIONE DI ENERGIE CINETICHE SPECIFICHE
SPIEGAZIONE ELEMENTARE DELLA AZIONE DINAMICA TRA
LA CORRENTE E LE PALE
E’ noto dalla meccanica dei fluidi che la forza applicata alle pale si
esplica tramite la composizione di una corrente traslatoria e di una
corrente circolatoria. Se si escludono le forze derivate dall’attrito le
uniche che agiscono sono le forze di massa.
Un osservatore solidale ad una girante può individuare le seguenti
cause di forze che agiscono sulle pale:
1) La deviazione imposta dalla schiera al fluido.
A causa della curvatura delle pale, la velocità relativa del fluido
cambia direzione e per effetto della curvatura della traiettoria, si
manifestano forze di inerzia le cui componenti nella direzione del
moto della schiera danno luogo ad una spinta.
2) La variazione del valore della velocità relativa.
Se il condotto si restringe oppure si allarga, per effetto della
variazione della quantità di moto, dovuta alla variazione di velocità
relativa, nasce una reazione sulle pareti del condotto come in un
razzo. Questa reazione si manifesta sia se le pale sono curve, sia
se sono rettilinee.
3)La variazione della distanza delle particelle di fluido dall’asse di
rotazione.
SIGNIFICATO FISICO DEI DIVERSI TERMINI
W W
2
2
1
U U
2
2
2
2
2
2
1
C C
2
2
2
2
1
Trasformazione, nel moto relativo,
dell’energia cinetica in energia
potenziale
causata
dal
rallentamento del fluido
Aliquota di energia trasferita dalla
macchina al fluido che nel passare
da una sezione a raggio minore a
quella di uscita a raggio più
grande deve vincere la variazione
di velocità periferica. Tale termine
mostra come sia logico che le
macchine radiali operatrici siano di
tipo centrifugo.
Incremento di energia cinetica nel
moto assoluto. Tale energia viene
poi convertita in energia potenziale
(incremento di pressione) nel
diffusore
NELLE TURBOMACCHINE OPERATRICI ASSIALI
LP = u(C2U-C1U)
Essendo per ipotesi (in una sezione cilindrica relativa ad un
determinato valore del raggio, ad es. raggio medio)
r1=r2 e quindi u1=u2=u
si ha anche
w12 w22 c 22 c12
Lp
2
2
PRINCIPIO DI CONSERVAZIONE DELL’ENERGIA APPLICATO
ALLE MACCHINE
V1
Condotto di immissione
Q
macchina
W
La macchina raffigurata può
scambiare con l’esterno la
potenza termica Q e la
potenza meccanica W
Condotto di scarico
V2
Ipotesi:
-Assenza di reazioni chimiche o nucleari
-Sistema di riferimento assoluto
-Moto 1.D nelle sezioni 1 e 2
Per un volume di controllo (compreso tra le sezioni 1 e 2):
“La somma delle potenze entranti nel sistema eguaglia la somma
delle potenze uscenti, a meno di eventuali accumuli di energia nel
volume di controllo”
Seguendo l’impostazione generale del problema di bilancio di una
grandezza, si può scrivere, in base al I principio della
termodinamica riferito ad un valore unitario della massa de Q W
che:
DE
Q W
Dt
N n Etot ( e)dV
Ovvero essendo
V
Per e=energia per unità di massa =
u
v2
2
gz
v2
v2
DE d
u gz dV u gz V dA Q W
Dt dt V
2
2
A
Il lavoro fatto dal volume di controllo sulla superficie di controllo
(pareti che delimitano il volume di controllo) è definito positivo.
Tale lavoro è di due tipi:
-Lavoro fatto su organo mobile all’interno del volume di controllo Ws
-Lavoro effettuato dalla forza di superficie nelle sezioni in cui il
fluido attraversa il contorno della superficie. Tale lavoro è detto
lavoro di pulsione Wn
n
v
d F pd A
(forza
esercitata
dal
fluido
sulle
pareti
contorno) da cui
w n p v d A pv v d A
Il lavoro totale è quindi
wn wn
A
pv v d A
A
Il seno del prodotto scalare da il segno al termine Wn
di
L’equazione dell’energia prima scritta si può quindi, riscrivere:
2
v12
v22
L gz 2 gz1 vdp LW
1
2
2
Questa formulazione che lega il lavoro solo a grandezze di tipo
meccanico è di particolare utilità per i fluidi incomprimibili, per i
quali, considerando v=cost.
il termine
2
vdp v p
2
p1
1
Questo termine non è infatti influenzato se non in piccolissima
misura, dalle variazioni di temperatura e, quindi, dall’introduzione di
calore nel sistema.
Per fluidi comprimibili tale termine è invece notevolmente
influenzato dalle variazioni di temperatura dovuta al calore
introdotto, o, in trasformazioni adiabatiche al calore sviluppato a
causa della viscosità e quindi dell’attrito interno al fluido.
In assenza di scambio di lavoro (con riferimento ad un condotto
fisso) e di fenomeni di attrito l’equazione dell’energia si può scrivere
2
1
dp
1 2
c 2 c12 g z 2 z1 0
2
Che è la ben nota equazione di Bernoulli, anche attenibile
dall’equazione del moto (stazionario) di un fluido attraverso un
volume di controllo elementare.
Per uno spostamento elementare in condizioni di moto
unidimensionale si ha, infatti, in condizioni stazionarie in assenza di
attriti
1
dp cdc gdz 0
p+dp
i
c+dc
c
p+dp
s
p
Ω
z
Ω+dΩ
z+dz
L’equazione del moto prima scritta (detta equazione di Eulero)
derivata dalla II legge di Newton, può facilmente essere integrate
per un fluido incomprimibile, fornendo
1
Nella quale
p0 s p01 g z 2 z1
1 2
p0 p c
2
è detta pressione di ristagno
L’equazione di Eulero è ottenibile anche nel modo seguente: si
considerino le forze di pressione agenti sia sulle superfici aperte
che su quelle laterali lungo la direzione i tg ad s
1)superfici aperte
2)superfici laterali
La risultante è
p d p dp dp pd
dp
p
d pd
dp
Considerando l’ascissa curvilinea s, la forze di massa agiscono per
una variazione di quota con s pari a dz/ds, da cui
Risultante forze di massa
Essendo
dmg
dz
ds
dm ds
Si può allora scrivere
dm
dz
dc
dp dmg
ds
dt
(Valida per condotti fissi ed in assenza di sforzi superficiali
tangenziali dovuti all’attrito)
d c c c ds
a
dt t s dt
Per moto stazionario il modulo di tale accelerazione è
dc dc ds
dt ds dt
Ma nel punto
ds
c per cui
dt
dc dc
c
dt ds
Con l’ipotesi di moto stazionario si ha
dz
dc
E quindi
dmc
dp dmg
ds
ds
dc
dp
dz
dp 1
dz
c
g
g
ds
dm
ds
ds
ds
Da cui
cdc
dp
gdz
DEDUZIONE DELL’EQUAZIONE FONDAMENTALE DELLE
TURBOMACCHINE DALL’EQUAZIONE DELL’ENERGIA
SCRITTA NEL MOTO RELATIVO
Ipotesi: flusso adiabatico, stazionario trascurabilità degli effetti
gravitazionali
Equazione dell’energia nel riferimento assoluto lungo una linea di
corrente
v 22 v12
L h2 h1
2
(scritta per macchine operatrici)
Nel moto relativo l’osservatore solidale con la girante, vede il fluido
muoversi con velocità w dal raggio r1 al raggio r2
Una particella di fluido è in tal caso soggetta a:
accelerazione centripeta ac
accelerazione di Coriolis aco
a co 2 w
ac w
Essendo r il raggio orientato nel sistema (girante) sottoposto a moto
rotatorio.
L’accelerazione di Coriolis, agendo ortogonalmente al verso del
moto w non produce lavoro sul fluido lungo una linea di corrente
Nel moto relativo l’equazione dell’energia è nelle ipotesi prima
specificate:
LR
w 22 w 12
h 2 h1
2
In essa LR è il lavoro compiuto sul fluido dovuto alla presenza delle
forze centrifughe nel suo spostamento dalla sezione 1 alla sezione
2 nell’intervallo di tempo t2-t1
2
r2
r wdt
t2
LR
1
t1
r1
t2
LR
2
rwdt
t1
Essendo wdt=dr
E ω2=cost
LR 2 rdr 2 rdr
r22 r12
u 22 u 12
LR
2
2
2
Si ottiene allora:
u 22 u12 w12 w22
h2 h1
2
2
Dall’equazione dell’energia scritta rispetto ad un riferimento
assoluto è anche come scritto in precedenza:
v 22 v12
L h2 h1
2
dalla quale, sostituendo h2-h1, si ottiene in definitiva
w12 w22 u 22 u12 v 22 v12
L
2
2
2
Espressione dello scambio di lavoro (operatrice) già ritrovato in
precedenza per altra strada.
Q=σV=cost è un caso particolare dell’equazione di conservazione
della massa che in queste condizioni di definisce equazione di
continuità
MOTO UNIFORME IN REGIME LAMINARE (MOTO ALLA
POISEUILLE, 1846)
Lo studioso Navier (1823) attribuì gli sforzi dissipativi al solo effetto
della viscosità, per cui
dv
dy
Essendo τ lo sforzo tangenziale in un punto all’interno della massa
fluida
Il coefficiente
dovuto alla viscosità del fluido, in definitiva,
caratterizza il maggiore o minore lavoro che occorre disperdere per
ottenere un movimento relativo tra due strati di fluido contigui.
Se ci riferiamo ad un condotto cilindrico a sezione circolare di
raggio r0 e di lunghezza l, si ha un
h
r0
τ
Vmax
L
dislivello psicrometrico h e, quindi, una pendenza psicrometrica
I=h/l. La simmetria del condotto consente di affermare che tutti i
punti situati al generico raggio r<r0 abbiano la stessa velocità v. Gli
strati posizionati a raggi >r esplicano sul fluido sottostante e per
l’intera circonferenza un’azione di contrasto o ritardatrice che per
unità di lunghezza è:
2r
dv
dr
La forza agente sul fluido in movimento è, per unità di lunghezza:
r 2
4
r 2 I
L
Essendovi equilibrio in condizioni di moto uniforme si ha:
r 2 I 2r
dv
dV
0
dr
I
rdr
2
Se si integra si ottiene:
v
I 2
r cos t
4
La costante di integrazione (integrale particolare) si determina per
r=r0, cioè alla parete, ove è per definizione (è fisicamente vero!) v=0
Il valore ottenuto di tale costante è
I 2
r0
4
per cui
I 2
che fornisce l’andamento della velocità con il
(r0 r 2 )
4
raggio all’interno di un condotto che, stante il grado dell’equazione,
v
mostra che lungo il diametro la legge di distribuzione della velocità
è parabolica. Al centro della condotta si ha
v
I 2
r0 v max
4
la portata è
h r 0 2
2
Q 2rvdr
r
r
rdr
0
2
L
0
0
r0
da cui:
La velocità media è
r02
essendo
V
si ha che:
Q
h 4 4
r0
Ir0
8 L
8
V
Q
2
Ir0
8
v max
ricordando che
1
v max
2
introducendo ancora il raggio idraulico
si ha:
termine,
V
2
R I
2
2
I 2
r0
4
r02 1
R
r0
2r0 2
che, assumendo come valore costante il
si può scrivere:
V cos t R 2 I
che coincide con quanto sperimentalmente trovato da Pouseuille.
Conferma cioè che nelle condizioni in cui vennero fatte le
esperienze sugli sforzi tangenziali, effettivamente questi ultimi
erano determinati da un flusso ben ordinato per il quale le lamine
liquide sono ritenute scorrere l’una nell’altra con l’effetto che
essendo in reciproco contrasto svolgono una mutua azione di
rallentamento ed accelerazione
Per un fluido che si muove in moto laminare in cui le traiettorie delle
particelle sono rettilinee e parallele esiste la legge di Newton che
stabilisce che i fluidi (detti appunto newtoniani) in queste condizioni
lo sforzo di taglio su una superficie tangente alla direzione della
corrente è proporzionale alla derivata della velocità in una direzione
n normale alla superficie su cui si ha lo sforzo.
Riguardo alla dipendenza di μ dalla temperatura si verifica che:
-Lo sforzo necessario ad allontanare le molecole tra loro vincendo
le attrazioni molecolari è predominante nei liquidi e decresce al
crescere della temperatura;
-Lo scambio di molecole tra gli strati di fluido per effetto dei moti di
agitazione predomina nei gas ed aumenta al crescere di T.
Da ciò si deduce come la viscosità all’aumentare della temperatura
diminuisce nei liquidi ed aumenta nei gas.
Nei liquidi, dei due fattori che causano la viscosità predomina quello
definito “attrito interno”.
F
0 v
0
lim
essendo F
la forza che si
esercita sull’areola .Pertanto τ
caratterizza uno sforzo di taglio
puntuale
V
v
v+Δv
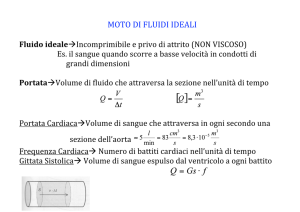
ESPERIENZA DI REYNOLDS (1883)
d
a
b
Si hanno due recipienti A e B collegati da un tubo trasparente
attraverso il quale passa acqua con un flusso continuo dovuto al
dislivello d che viene mantenuto atra A e B.
Vi è un altro recipiente contenente un liquido colorato di uguale
densità dell’acqua. Il flusso da C ha la stessa velocità di quello tra a
e B.
Il diametro di d è molto piccolo ed il diametro del tubo che collega A
e B è anch’esso non troppo grande, si vede che al suo interno si
forma un filetto colorato rettilineo parallelo all’asse. Se si aumenta d
si osserva che oltre un certo limite, aumentando la velocità, il filetto
non è più rettilineo ma appare fluttuante. Il moto ordinato laminare
diventa instabile (moto di transizione). Ad un’ulteriore crescita di d
si osserva che l’ondeggiamento del filetto colorato si accentua e il
filetto stesso si disperde lungo il suo percorso nel tubo,
diffondendosi rapidamente al suo interno. Il regime di moto diventa
turbolento e la velocità delle particelle (di ciascuna) cambia in
modulo e direzione. Istante per istante per cui le loro traiettorie non
sono più rettilinee.
In queste condizioni di moto non è possibile identificare le traiettorie
mentre può ancora essere definita una velocità media locale Vm
data dal fatto che essendovi una componente fluttuante della
velocità istantanea, quest’ultima è ad ogni istante fornita dalla
somma delle velocità medie e della velocità fluttuante v
Vist V m v
Il valor medio delle velocità fluttuante nel tempo ha evidentemente
modulo nullo.
Identificato un periodo di tempo T si ha, quindi,
1
vdt 0
TT
Dato il carattere assolutamente casuale dei moti di agitazione, la
velocità fluttuante può essere scomposta nelle tre componenti u,v,w
i cui valori medi nel tempo sono ancora nulli:
1 '
u dt 0
TT
1 '
v dT 0
TT
1
'
w
dt 0
TT
L’azione di mescolamento che la turbolenza induce ha per effetto di
ridurre le differenze di velocità da punto a punto nella sezione. Ciò
significa che vi è tra i diversi punti di una sezione esiste un intenso
moto migratorio di massa di fluida e, quindi, un più elevato scambio
di quantità di moto rispetto alle condizioni di moto laminare per le
quali è la sola viscosità a determinare lo scambio di q.di m.
In questo caso alla resistenza viscosa vanno aggiunte anche quelle
dovute all’intenso scambio di quantità di moto
VmT=VmL
Nel moto laminare il rapporto tra la velocità massima e velocità
media è,in genere. per una tubazione circolare uguale a 2 mentre
nel caso di moto turbolento vale 1.15-1.25.
Si desume da ciò che la turbolenza genera sforzi tangenziali molto
più elevati di quelli dovuti alla sola viscosità. Quindi, se si
confrontano gli sforzi di natura viscosa Fv e quelli di natura
turbolenta FT può verificarsi che gli uni possano prevalere rispetto
agli altri.
Sia U la componente nella direzione
del moto della velocità di una
particella che si trova direzione del
n
Ks
dδ
moto su una areola dδ. Gli sforzi
turbolenti giacciono sulla direzione
del moto ma sono dovuti alla
direzione del moto
variazione della quantità di moto
trasportata
ortogonalmente
direzione del moto. Si ha
Ft t mu
da cui
um
u m uVn d
t
Ft
mu
t
alla
V
Fv
d
n
da cui
Ft Vn ud Vn u
v
v
Fv
d
n
n
Poiché è molto difficile misurare e calcolare ognuno dei termini che
appaiono in quest ultima relazione, si possono fare considerazioni,
per riconoscere quando prevalgono gli uni o gli altri sforzi (Tt o Fv),
di carattere medio. Si considerano, quindi, le dimensioni dei singoli
termini della relazione trovata per formulare il numero di Reynolds
Re
V 2
V
L
VL
Il numero di Re è, quindi, il parametro che individua il tipo di moto
che si ha nella corrente: dato un certo fluido (viscosità cinematica
v= μ/ρ) che scorre con una certa velocità media (v) in un condotto
di una certa forma e dimensione (L), il moto sarà turbolento o
viscoso a seconda che il numero di Re della corrente è maggiore o
minore di un valore determinato dalla sperimentazione. Ad
esempio, per condotti cilindrici, ad L va sostituito il diametro D e
quindi Re
quando
R>2300
VD ,
si passa alle condizioni di moto turbolento
Per poter generalizzare tale valutazione si può ricorrere al raggio
idraulico R=area/perimetro e scrivere
Re
VD
D 2
In questo caso (per una sezione circolare è R 4 /D D / 4 )
il valore critico di Re per il passaggio al moto turbolento è pari a
~500.
E’ da sottolineare che per condizioni sperimentali particolarmente
curate (tubo molto liscio) si può giungere a valori di Re~40.000 pur
rimanendo
in
perturbazione
moto
laminare,
(condizione
di
anche
moto
se
una
instabile)
leggerissima
determina
un
immediato passaggio a condizione di moto turbolento.
Sarebbe un controsenso parlare di moto uniforme in regime
turbolento in quanto, per definizione, è un regime nel quale la
velocità varia da punto a punto e da istante a istante. Facendo però
riferimento a valori medi locali della velocità della pressione e delle
altre grandezze si può lecitamente parlare di moto uniforme in
regime turbolento in quanto i valori medi non mutano nel tempo e
nello spazio. Si possono quindi estendere al regime turbolento gli
stessi concetti e le medesime formule del moto uniforme in regime
laminare.
In quest ultimo caso, tuttavia, si deve tener presente che la
viscosità (che macroscopicamente consente di valutare gli sforzi di
taglio e, puramente, definibile in condizioni di moto laminare) deve
essere corretta nelle equazioni del moto per tener conto del
fenomeno della turbolenza.
CONDIZIONI DI MOTO SVILUPPATO
In precedenza ci si è riferiti ad un moto, viscoso o turbolento,
completamente sviluppato che si estende, quindi, lungo tutto il
condotto. In realtà si deve tener conto delle condizioni di imbocco:
Inizialmente, per un condotto ben raccordato, la corrente è quasi
uniforme. Successivamente la forma uniforme del profilo di velocità
si restringe man mano che gli effetti viscosi si estendono più verso
l’asse della corrente. Si stabilisce, infine, una corrente laminare che
cresce di spessore fino ad occupare tutta la sezione ad una
distanza L dall’imbocco. Ciò si spiega notando che all’imbocco si
forma un sottile strato laminare che, appunto, si ispessisce via
via.Tale lunghezza stabilisce, quindi, il punto dal quale la corrente è
in moto sviluppato.
In figura è rappresentato il profilo di velocità che in condizioni di
moto sviluppato (che si raggiungono a piccole distanze
dall’imbocco, per cui in genere si trascura il tratto di lunghezza L) si
realizza per moto laminare e turbolento
turbolento
laminare
In prossimità delle pareti il liquido si muove in caso sotto l’azione
della sola presenza degli sforzi viscosi in una zona detta Substrato
laminare che è quello in cui il fluido si sposta senza essere
disturbato dalla turbolenza. Tale forza è comunque, sempre più
sottile al crescere della velocità e, quindi, del numero di Reynolds
SCABREZZA INTERNA DI PARETE
Se le scabrezze della parete restano all’interno di tale zona (sono
ricoperte dal suo spessore), esse non hanno influenza sul
movimento ed i caratteri macroscopici della turbolenza
Sia in regime di moto laminare che turbolento si verificano perdite di
energia. Per lo studio, tuttavia, di un flusso all’interno di una
tubazione le perdite di energia che interessano tutto il flusso
vengono schematizzate come concentrata alla parete. In pratica si
considera che tali perdite siano operanti solo il contorno e non in
tutto il fluido fra le particelle a contatto. Tale visione globale delle
perdite risiede nella necessità, come si vedrà nel seguito, di
valutare le perdite proprio in relazione alla “qualità” della superficie
delle pareti interne delle tubazioni.
Se si parla di perdita di energia, ricordando il legame tra τ0 e
pendenza piezometrica
p
p
z1 1 z 2 2
0
I RI
Si può scrivere in forma differenziale non più, quindi, per un valore
medio τ0 ma per il generico termine τ, in riferimento all’asse s del
condotto
p
d
z
ds
R
Se ai due valori di energia potenziale (di posizione e di pressione, si
aggiunge il termine di energia cinetica V2/2g si ha
che rappresenta la caduta di energia che
si ha nel condotto per unità di peso del
fluido, equivalente ad una perdita di
quantità di moto.
Evidentemente, se il moto è uniforme (v=cost) la caduta
piezometrica, è uguale alla perdita di energia per unità di peso. La
linea dell’energia è, in questo caso, parallela alla linea
piezometrica.
d
p v2
dE
(z )
ds
2g
ds
E’ da notare che, seppure le perdite di carico vengono considerate
come concentrate sulla superficie interna, quando vengono divise
per γρ ovvero considerate per unità di peso è come se, da un punto
di vista statistico, assegnassimo ad ogni particella una eguale
aliquota di “responsabilità” nelle perdite del flusso.
Avendo ottenuto che:
0
I
R
Si può constatare che le perdite di carico sono inversamente
proporzionali ad R il che vuol dire che a parità di lunghezza
conviene avere valori di R quanto più grandi sia possibile. Ciò
significa anche affermare che, per un certo valore della portata
m Vm
è importante minimizzare il rapporto
R
ovvero il valore
superficie/perimetro, che è infatti la più usata, di tipo circolare
REGIME DI MOTO IN UN CONDOTTO
Nelle applicazioni tecniche relative a flussi in tubazioni il numero di
reynolds è dell’ordine di varie migliaia o decine di centinaia di
migliaia per cui si suole definire il regime turbolento nelle
applicazioni idrauliche proprio come regime idraulico. In sostanza si
ha che nella quasi totalità dei casi lo studio delle correnti fluide
viene fatto in condizioni di regime turbolento.
Sempre in condizioni di moto uniforme della corrente, ma in regime
turbolento, a causa delle velocità fluttuanti che, su una superficie
piana, sono n’ e v’ si ha che, con riferimento ad un’area unitaria Au
normale al piano se l’elemento
y
è trasportato con velocità v’
u
si ha una stretta correlazione di
quest’ultima con il gradiente d U
x
dy
della velocità. Per effetto della componente v’ perverrà nell’elemento
di area unitaria normale al piano, un volume di liquido v’Au degli
strati vicini che possiede una velocità (dovuta al valore di u’) diverse
rispetto allo strato in cui si porta. Se nel successivo intervallo dt tale
volume assume la velocità di trasporto delle particelle nello strato in
cui è pervenuto, la sua massa
quantità di moto pari a
v ' Au subisce una variazione di
v ' Au u '
, se si ammette che sia proprio
u’ la differenza di velocità tra i due strati.
Se τ’ è lo sforzo tangenziale dovuto alla turbolenza si ha
' v ' Au u '
Omettendo di scrivere Au (essendo il suo valore unitario), si ha '
(sforzo di Reynolds). Non potendo effettuare valutazioni istantanee
si ha
'
1
u 'v 'dt
T T
v 'u '
Tale espressione afferma che, pur essendo la media nel tempo di u’
e v’ nulla in quanto singolarmente considerati, vi è uno sforzo
tangenziale che può aversi se, statisticamente, avviene che u’ e v’
abbiano lo stesso segno e, comunque, non si elidano tra loro. In
definitiva nell’interno della massa fluida agisce oltre allo sforzo
dU
dy
laminare
lo sforzo
1
u 'v 'dt
T T
dal che si ha dU 1 u 'v 'dt
dy
Ovviamente l’uno o l’altro dei due termini a secondo membro
T
T
prevalgono in funzione del regime di moto, viscoso o turbolento e, in
definitiva quindi, del numero di Re. Le difficoltà di stabilire la
relazione esistente tra
' '
u
v dt
e le condizioni di moto medio U
T
possono essere superate sia da osservazioni sperimentali che da
altre ipotesi (ordine di grandezza delle velocità fluttuanti rispetto al
valore della velocità media) per le quali, sempre per condizioni di
moto uniforme della corrente e per un campo di moto piano si ha
una dipendenza della velocità u, variabile da punto a punto sul
grafico del tipo
u
0
f (log y )
Tale funzione può essere meglio espressa da un’analisi
dimensionale
TURBOMACCHINE OPERATRICI
RADIALI
ASSIALI
Elevati valori di energia
trasferiti al fluido: (u22-u12)/2
consente di non raggiungere
alti valori delle velocità c e w.
Parità di lavoro trasmesso
adatte per alte portate
Robustezza strutturale (lo
spessore dei dischi non
interagisce
con
la
fluidodinamica).
necessarie quando siano
richieste: alta efficienza
(gruppi turbogas, turbogetti
etc.) elevate portate da
smaltire
(pompe
di
circolazione, soffianti di
altoforno).
Compattezza costruttiva
Ampio campo di variazione
funzionale rispetto al valore
nominale
Progetto semplificato per
applicazioni
che
non
richiedono alte efficienze
Vastissima
gamma:
da
pompe per elettrodomestici a
pompe per grossi impianti
(ad es. pompe di alimento).
Da turboraggianti centrifughe
a compressori per elevati
rapporti di compressione
Portata ed efficienza non
elevate.
elevata
efficienza:
perfezione con la quale la
palettatura opera sul fluido
Per
ottenere
levate
efficienze
occorre
un
progetto accurato della
forma della palettatura
Non potendosi avere alti
valori dell’energia trasferita
al fluido sono richiesti più
stadi
Il campo di funzionamento è
limitata dai fenomeni di
instabilità che insorgono per
eccessive variazioni della
portata.
PARAMETRI FONDAMENTALI DI UNA TURBOMACCHINA
-Portata (volumetrica o massica)
-Prevalenza
(energia
meccanica
acquisita
dal
fluido
nell’attraversare la macchina operatrice)
POMPE
Con riferimento a due sezioni 1 e 2 immediatamente a monte e a
valle della macchina ( ad es. flange di collegamento alle tubazioni di
aspirazione e di mandata)
Lc12
2
c22 c12
vdp g z2 z1 L p1, 2
2
1
L’energia meccanica trasferita al fluido è la prevalenza
2
c22 c12
Y
vdp g z2 z1
2
1
Essendo Lp1,2 il lavoro perduto;
c22 c12 p2 p1
Y
g z2 z1
2
2
Se la flange di collegamento hanno uguale diametro
Y
p2 p1
g z2 z1
2
se z1=z2
Y
p2 p1
Ym
PREVALENZA MANONOMETRICA
In generale
c22 c12
Y Ym g z2 z1
2
S’’
z’’
z2
S’
z1
z’
Nel tratto di tubazione s’-1
c12 c '2
2
g z1 z 0'
p 2 p1
gH ' p
Nel tratto di tubazione 2-s’’ si ha:
c ''2 c 22
p '' p 2
''
g z z2
gH '' p
2
Essendo gH’p e gH’’p la perdita di carico espressa in unità coerenti.
Sommando membro a membro e dalla relazione che esprime la
prevalenza si ha che:
c '2 c '2
p '' p '
''
'
g z z
g H'pH'p
Y
2
La prevalenza γ generata dalla pompa è spesa:
Per accelerare il fluido alla velocità c’’
Per innalzamento del dislivello z’’-z’ sotto la differenza di
pressioni p’’-p’
per vincere la resistenza passiva delle tubazioni g(H’’p-H’p).
In generale la prevalenza di una pompa è anche espressa in metri
di colonna del liquido su cui opera
Y=gH
COEFFICIENTI DIMENSIONALI (Teoria della similitudine per
studio su modelli)
numero di giri specifico (formulato da CAMERER per la pompa)
portata
velocità
QcD 2 (proporzionale alla sezione attraversata)
c H
(proporzionale all’energia potenziale)
Q
Q1 / 2
D
D 1/ 4
c
H
Per motivi di similitudine cinematica
cunD
da cui
u
H
D
n
n
Per una famiglia di macchine simili
Q1/ 2 / H 1/ 4
A
cos t
H 1/ 2 / n
PARAMETRI CHE CARATTERIZZANO LE PRESTAZIONI DI UNA
TURBOMACCHINA (COMPRESSORI DINAMICI)
rendimento η
salto entalpico totale ∆Htot
potenza di compressione
P
Variabili funzionali ( , N , D, m, 1 , a1 , k )
μ=viscosità
N=regime di rotazione
D=Diametro esterno della girante
m=portata massica
ρ1=densità in aspirazione
a1=velocità del suono in aspirazione
k=esponente della isoentropica
Dato l’elevato numero di parametri funzionali è difficile prevedere le
prestazioni della macchina in condizioni diverse da quelle del
progetto. Per verificare le prestazioni dei componenti al di fuori di
tali condizioni si deve tenere una metodologia di confronto dei
risultati in gran quantità.
La metodologia più seguita è basata sulla teoria della similitudine
dinamiche di flusso tra due condizioni tra due condizioni di
funzionamento di progetto e di prove. In tal modo si può stabilire in
quali
condizioni
due
fluidi,
in
condizioni
diverse,
possono
considerarsi dinamicamente simili.
Note le caratteristiche di progetto si possono ricavare le
corrispondenti caratteristiche del flusso similare (prova).
Lo studio in similitudine è di fondamentale importanza per l’utilizzo
di minime sperimentali ottenute su modelli della macchina. Si
verifica la similitudine dinamica del flusso tra due campi di moto
quando:
Si verifica un rapporto costante tra due velocità in punti
corrispondenti delle correnti e tra le velocità in punti
corrispondenti e la velocità di uno stesso organo della
macchina (ad es. velocità periferica della girante)
Le velocità in punti corrispondenti hanno stessa direzione
rispetto ad una qualsiasi direzione di riferimento
Stessa trasformazione subita dal gas nelle due condizioni di
flusso (stesso esponente della trasformazione)
Sono uguali nei due sistemi i rapporti di due tipi di forze agenti
su masse elementari di fluidi in punti corrispondenti ( forze di
inerzia, viscose, gravitazionali, elastiche).
Similitudine geometrica delle superfici di contatto del fluido nei
due sistemi (cioè rapporto costante tra lunghezze omologhe e
angoli omologhi uguali)
perché
si
verifichino
queste
condizioni,
occorre
imporre
l’uguaglianza di alcune grandezze dimensionali, derivate dalle
stesse relazioni funzionali, valide per le due condizioni di flusso.
In tal modo è possibile prevedere le prestazioni per una famiglia
di macchine simili e funzionanti in similitudine.
I parametri prestazionali più ricorrenti possono quindi, in funzione
delle variabili più citate, essere espressi dalle relazioni:
f1(Δh+0y, , N , D, m, , a, k )=0
f2
f3
, , N , D, m, , a, k 0
P, , N , D, m, , a, k 0
Mediante il teorema di Buckingam, le tre relazioni tra otto
grandezze possono essere trasformate in altrettante tra gruppi
dimensionali in numero inferiore ad otto.
Trattandosi di fenomeni meccanici, descrivibili con le tre grandezze
fondamentali L,M,T possiamo ridurre le otto grandezza derivate a
cinque gruppi dimensionali e quindi scrivere (in funzione delle tre
grandezze fondamentali o altre tre indipendenti e da esse deriva
f1’(π1 π2 π3 π4 π5)=0
f2’(----------------)=0
f3’(-----------------------)=0
In cui π1 π2 π3 π4 π5 sono i gruppi dimensionali
Esempio per ∆htot in funzione di D,N, ρ
π1=DxNy ρ1z(Δhtot) [L,T,M]
Dimensionalmente
D=[L’ T° M°];
N=[L° T-1M°]
htot L2T 2 M 0
1 L3T 0 M 1
Sostituendo si ha
L T M L T
1
0 X
0
0
1
M0
L
Y
3
T 0M 1
L T
Z
2
2
M 0 L0T 0 M 0
Si ha un sistema lineare in tre equazioni e tre incognite
x-3z+2=0
-y-2=0
z=0
x=-2
y=-2
z=0
da cui
Per cui
1 D 2 N 2 10 (H TOT )
H TOT
D2 N 2
Analogamente
2
D N1
2
a1
4
DN
;
m
3 3
D N1
;
5 K
Si ha quindi
h
m
a
f 2 tot 2 , 2
, 3
, 1 ,K 0
D N D N D N DN
ovvero
D 2 N D 3 N DN
htot
f
, 1,
,K
2
2
D N
a1
m
generalizzando le tre espressioni si ha
D 2 N D 3 N DN
htot
P
1
f
, ,
, 1,
,K
2
2
2 5
N D
D N
a
1
m
che esprimono tre relazioni funzionali tra gruppi dimensionali che
caratterizzano le prestazioni di una famiglia di macchine funzionanti
in similitudine di flusso.
Perché si verifichi ciò devono essere uguali
htot
P
, ,
2
2
1 N 3 D 5
D N
e quindi
gruppi adimensionali entro le parentesi
D 2 N
uD
Re
V
1wA wm
m
3
3
D N1 1D N u
ND u
Ma
a1 a1
Numero di Mach periferico
L
htot
u
N 2 D2
2
2
coefficiente di pressione
Le relazioni funzionali tra grandezze dimensionali si possono
scrivere sinteticamente
P
, , f (Re, , Ma, K )
3 5
1 N D
e quindi:
a parità di ηpol , si ha similitudine di flusso si hanno:
-stessi coefficienti di pressione e di portata
-stessi esponenti isoentropici e politropici
-stessi numeri di Mach periferico
-stessi numeri di Re di macchina
verificandosi tali condizioni risultano uguali anche i numeri di mach
e di Reynolds locali
ricordando che (condizione di uguaglianza della trasformazione)
s
p0
p0
k 1
k
k 1
k pol
1
1
e quindi
1/ 2
Q
A ns' n 3 / 4
H
che in forma dimensionale diventa:
nQ1 / 2
ns
cos t
3/ 4
(2 gH )
essendo
T 1 L3 / 2 T 1 / 2 L3 / 4 T 3 / 2 L3 / 4 L0T 0
ns rappresenta fisicamente il numero di giri al minuto di una
macchina operatrice che eroga una portata unitaria trasmettendo al
fluido una prevalenza unitaria.
E’ un numero che riunendo i principali parametri funzionali e
geometrici individua le caratteristiche basilari delle macchine,
permettendone n tal modo una classificazione in sua funzione
Si individuano, di conseguenza, dei campi di variazione di ns in
corrispondenza delle diverse soluzioni costruttive
ns è un numero crescente per configurazione di palettatura che
varino del tipo radiale al tipo assiale.
COEFFICIENTE DI PORTATA φ
E’ il rapporto tra una velocità media del fluido in una determinata
sezione (in genere la velocità assoluta nella sezione di uscita) ed
una velocità di riferimento (in genere la velocità periferica nella
sezione di uscita
RADIALI
c22
u2
ASSIALI
c2 a
um
ca
essendo
Q
D
4
2
a
Dr2
Dm
Dc Dr
um
2
2
ed
COEFFICIENTE DI PRESSIONE
2 gH
u2
essendo
energia potenziale ceduta all’unità di massa del fluido
energia cinetica
gH
dp
P
1 2
u
2
p
u
velocità
periferica
massima per macchine
radiali
velocità periferica media
per macchine assiali
CURVE CARATTERISTICHE DELLE POMPE CENTRIFUGHE
Grandezze di esercizio
numero di giri n
portata volumetrica G
prevalenza H
rendimento η
potenza assorbita p
I valori di tali grandezze sono in genere ottenuti per via
sperimentale. variabili indipendenti n e Q
Q
valvola di strozzamento
b
a
z1
Q
Fissato il valore di n, si fa variare la portata Q agendo sulla valvola
di strozzamento e si misurano:
-la portata volumetrica Q
-La prevalenza monometrica tra i manometri Ma e Mb posti sulle
due flange
-la potenza P assorbita dal motore
si trascurano in tal caso i termini relativi alla variazione di energia
2
2
c
c
B
A
cinetica
e posizionale (zB-zA)
2g
Si fa, così, coincidere la prevalenza erogata con quella
monometrica. La potenza effettivamente trasferita al fluido è:
Put
gQH
1000
[ KW ]
In generale si fa uso dell’equazione
Put
QH
1000/g 10
essendo
102
La potenza al giunto è invece
Fg Felel
Pel=Potenza del motore elettrico al Wattmetro
ηel=rendimento del motore elettrico
pompa
Pg
Pest
Pg essendo
pompa i v m 0,75 0,77
gQH
1000 pompa
Principali tipi di perdite:
m
m
-perdite per trafilamento v
masp
-perdite del rotore:
-perdite idrauliche
-perdite per attrito dei dischi ηi
-perdite per attriti meccanici ηm
In generale
pompa i
si può anche definire
pompa
Put
Put perdite
1
Per Q/Qn prevalgono le
perdite di ricircolo anche se in
0/0 sono più elevate anche
quelle meccaniche e di tra
filamento.
perdite meccaniche
P/Pass
trafilamento
idrauliche
per Q/Qn>1
ricircolo
potenza
effettivamente trasferita
al fluido
prevalgono
le
perdite
idrauliche per le elevate
velocità non più adeguata alla
conformazione
geometrica
della palettatura.
0.5
0.0
0.2
0.4
0.6
0.8
1
Q/Qn
H
[m]
24
CURVA CARATTERISTICA INTERNA
20
Hm
P 10
0.8
12
η
PKW
0.78
5
0.7
12
24
36
Q[l/]
Ricordiamo
(operatrici)
l’equazione
fondamentale
delle
turbomacchine
w12 w22 u 22 u12 v 22 v12
L
gH
2
2
2
TRACCIAMENTO DELLA CURVA CARATTERISTICA INTERNA
NEL CASO IDEALE (numero infinito di pale)
1
H (u 2 c 2 cos 2 u1c1 cos 1 )
g
1
H
u 2 c 2 cos 2
1 90
g
ipotesi: c1 gira nel piano perpendicolare meridiano (piano frontale)
girante con infinite pale di spessore infinitesimo completa assenza
di perdite moto unidimensionale stazionario.
u2
c2
α2
β2
w2
u1
α1
c1
w1
180-β2
w2
β2
c2
α2
u2
c 2 cos 2 c 2u
w2 cos 2 w2 cos(180 2 )
c 2u u 2 w2 cos 2
H
u2
1
u 2 (u 2 w2 cos 2 )
g
D2 n
60
Q w2 rD2 b2
w2 r w2 sen 2
Q w2 sen 2D2b2
H
1 D2 n D2 n
Q
cos 2
g 60 60
sen 2D2b2
2
1 D n
1 Q
cot g 2
H 2 n
g 60
g 60b2
ponendo:
1 D
K1 2
g 60
K2
2
1 1
g 60b2
La prevalenza teorica di una operatrice centrifuga varia con il
quadrato dei numeri di giri linearmente con la portata ed è funzione
delle caratteristiche geometriche della girante.
H
β2<90°
β2=90°
H=K,n2
β2>90°
Q
Per un assegnato valore del numero di giri n H∞ decresce con Q se
β2>90° (cotg β2<0)
H
H∞
H
c22 c12
Hm H
2g
Q
Prevalenza teorica H∞>>Hreale
GIRANTE CON NUMERO FINITO DI PALE ED ASSENZA DI
PERDITE
Fluido privo di attrito
moto instazionale
Il fluido pur trascinato dalla girante nel suo moto di rotazione
rispetto all’asse mantiene costante il suo orientamento rispetto
allo spazio fisso (condotto chiuso)
Si crea un vortice che avrà rispetto al centro di rotazione una
velocità angolare uguale ed opposta a quella della girante
(effetto inerziale dovuto alle azioni normali di pressione
esercitata dalle particelle circostanti)
Con il condotto aperto al moto di rotazione si sovrappone
quello unidimensionale (corrispondente al condotto aperto e
girante ferma) di attraversamento del condotto.
Nel caso di girante con condotti chiusi l’accelerazione di coriolis,
pur presente non ha efficacia in quanto si bilancia par la simmetria
del vortice. Nel caso ideale si produce quindi un vortice che mostra,
quindi, come anche in assenza di viscosità del fluido si produca una
distribuzione non uniforme della velocità e quindi della pressione
all’interno del vano interpalare.
Anche nel supporre il fluido ideale, la presenza di un numero finito
di pale altera sostanzialmente i triangoli di velocità a causa della
formazione del vortice.
c2z c2∞ u2
w2∞
w2z
u1
w1
c1
w2z
c2z
w2z
c2∞
1
H u 2 ( c 2 u )
g
Hz
∆c2u
1
1
u 2 (c 2uz ) u 2 (c 2u c 2u )
g
g
Si definisce fattore di scorrimento (SLIP FACTOR) e si indica in
genere con δ il rapporto
da cui
c 2 uz
1
c 2u
Hz H
Hz k1 n 2 k 2 nQ cot g 2
Per il calcolo di sono proposte molte formule tra le quali è da
ricordare quella dovuta al PFLEIDERER
z
z 1,6 4 2
60
con:
z=numero di pale
Beta=angolo di uscita (estrattivo) espresso in gradi
valori di teta molto discordi
si definiscono Beta costruttivo
Beta cinematico
ANDAMENTO TEORICO DELLA
PREVALENZA IN FUNZIONE
DELLA PORTATA CON NUMERO
FINITO DI PALE
Hz=δH∞
Hreale
Hmreale
Il lavoro trasmesso al fluido è
ancora differente da quello relativo
al caso di fluido viscoso con
assenza di perdite.
CURVA CARATTERISTICA REALE
Si ricordi che nel caso reale si hanno:
perdite di tipo meccanico
perdite di tipo idraulico
perdite di tipo volumetrico
Solo le perdite di tipo idraulico influenzano direttamente il valore
della prevalenza totale
Le altre perdite sono responsabili soltanto di una riduzione del
rendimento complessivo della pompa ma non alterano la
caratteristica interna H/Q
Le perdite di natura idraulica sono connesse con il moto del liquido
della pompa.
Sono:
-perdite per attrito
-perdite localizzate
perdite per attrito hp=KaQ2
Perdite localizzate dovute a brusche variazioni dell’angolo beta1
rispetto al valore di progetto detta Q* la portata di progetto
hp*=Kb(Q-Q*)2
La variazione di portata Q si traduce infatti in un diverso valore di
beta2 e di conseguenza in una brusca variazione che il fluido deve
subire all’ingresso
β 1’
’
c1
c1
c1’
c1
u1
β1
w1’
u1
β 1’
u1
w1 β1
Una variazione della portata Q (diminuzione da C1 a c11) determina
una variazione dell’angolo di ingresso cinematica di w da beta1 a
beta1primo. Il fluido quindi non entra nel condotto nelle stesse
condizioni cinematiche calcolati nel punto di progetto e rispetto alle
quali sono profilate le pale, generando in tal modo le perdite
determinate
H
H∞
Hz
perdite per urto
perdite per attrito
H
Hm
Q*
andamento perdite
totali
Q
Le perdite localizzate dovute all’ingresso nel rotore di hanno anche
in corrispondenza dell’ingresso di un eventuale distributore
palettato presente all’uscita della girante per guidare il fluido nel
diffusore (elemento statico per la conversione dell’energia cinetica
in energia potenziale)
Hz
hp*=hp1+hp2
ht=hp1+hp2+hp
hp
Q*
Q
*
Nel punto di progetto corrispondente alla portata Q , per quanto
detto in precedenza, si considerano nulle le perdite per “urto”
L’andamento delle curve H,q dipende quindi da:
Valore della portata di progetto
valore dell’angolo β2
ed è influenzato da:
-Numero di pale z (da cui dipende β)
-Dal tipo e dal disegno del diffusore
-forma e dimensione del condotto tra flangia di aspirazione e
girante
Se la curva presenta un punto di max. la sua posizione è
essenzialmente influenzata da β2 e da z.
E’ evidente che al diminuire di 180-β2 il punto di max si sposta
verso valori più piccoli della portata. In generale la curva presenta
un max di H per un valore di Q diverso da Q* per il quale sono
considerate nulle le perdite per urto.
Considerando diverse coppie di valori β2 e z si possono osservare
gli andamenti della curva H,G per i quali può non essere presente
un punto di max.
90
Hmax
180-β2
α=HQ=0
Hmax
0.86
60
0.94
30
α
HQ=0
1.0
0
5
10
15
Q
coppie di valori per β2 per curve sempre crescenti
Appare chiaro come per valori crescenti di β2 sia sempre più
accentuato il valore di alfa e, quindi, la possibilità di avere curve che
non presentano un massimo
GRADO DI REAZIONE ED INFLUENZA DEL VALORE
DELL’ANGOLO β2 SUL RENDIMENTO DELLA MACCHINA
Ricordando che
H
1
u 2 c 2u
g
Q D2 b2 c 2 r
e
Si vede che per un determinato valore di Q risulta fissato il valore di
c2r.
Per H∞ invece esiste un grado di libertà in quanto si possono
scegliere differenti soluzioni tali da realizzare il valore derivando H∞*.
Tali differenti soluzioni dipendono essenzialmente da β2
c2r
β2
w2
u2
c2
w2
β2
c2u
c2
u2
c2u
β2
β2
a)
w2
c2
β2
c2u
u2
β2
b)
c)
Supponendo (u2c2u)a,b,c=cost e c2r=cost
risulta evidente l’influenza di β2
Si osserva che:
A parità di u2 con la soluzione costruttiva c) (β2<90°) la girante è in
grado di trasmettere maggiore lavoro al fluido.
Il maggior lavoro trasmesso si traduce in un maggior valore
dell’energia cinetica da trasformare in energia potenziale nella parte
statorica (diffusore)
tale trasformazione (rallentamento) nel diffusore può diventare di
importanza preponderante rispetto all’incremento di energia
potenziale della girante.
La tecnologia della girante dipende da u2
Si definisce grado di reazione R il rapporto
u 22 u12 w12 w22
2g
2g
R
H
che, definito, in assenza di perdite e rispetto al moto supposto
unidimensionale, esprime il rapporto tra il valore dell’incremento di
pressione ottenuto nella girante rispetto al totale
1.0
R
R
Hp0t
0.5
c 22 c12
Hcin=
2g
0
R=Hp0t
1
Hinf
c2u
2
u2
Andamento di R in funzione di c2u/u2 (per u2=1) e di Hp0t Hcin nel
caso di funzionamento ideale con infinite pale.
R 0 .5
c 2u u 2
(β2=90°)
pale radiali
R 0 .5
c 2u u 2
(β2>90°)
pale rivolte all’indietro
R 0 .5
c 2u u 2
(β2<90°)
pale rivolte in avanti
c 2u
R 0.5 per
1
u2
u 22 u12 w12 w22
2
2
R
gH
H
1
1
u 2 c 2u u 22
g
g
( R=0.5
β2=90°)
se e solo se c1=c2r=w2
infatti:
w12 – w22= w12 - c12= u12
u 22 u12 u12
u 22
2
2
R
2 0.5
2
u2
2u 2
Da cui è dimostrato che se il condotto è disegnato in modo da
ottenere c2r=c1 la condizione di grado di reazione R=0.5 coincide
con il valore unitario del rapporto c2u/u2
Per β2>90°
-Angolo di deviazione tra c2 e c1 basso (favorevole ai fini delle
perdite nella palettatura rotorica)
-Angolo di divergenza del flusso basso (maggior sviluppo in
lunghezza del condotto) a parità di rapporto tra le sezioni di uscita e
di ingresso
-minore importanza dell’incremento di pressione dovuta alla
variazione di energia cinetica assoluta nel diffusore e quindi minima
importanza delle perdite connessa a questo organo della macchina.
Queste considerazioni fanno preferire soluzioni costruttive con
angoli (β2>90° e R>0.5)
E’ però da rilevare che all’aumentare di R:
-Aumenta la differenza di pressione tra valle e monte della girante
con conseguente aumento delle perdite per fughe e per ricircolo
-Aumenta u2 rispetto a c2 e di conseguenza le perdite per attrito del
disco
Complessivamente l’aumento di β2 e quindi di R (entro certi limiti)
comporta un incremento del rendimento della macchina in quanto il
fluido è meglio guidato e si riduce la possibilità di scollamento della
vena dalle pareti del condotto mobile.
IL DIFFUSORE
diffusori:
1. lisci
2. palettati
Nei diffusori lisci è demandata alla conformazione naturale che il
flusso viene ad assumere alla forte componente tangenziale di
velocità che possiede all’uscita della girante.
La funzione di rallentamento in un condotto che consiste in uno
spazio cilindrico. La non stazionarietà del flusso nel moto assoluto
ha un effetto negativo sulla fluidodinamica del diffusore nel quale
sono possibili distacchi delle vene.
Nei diffusori palettati, il fluido è, invece guidato da adatte
canalizzazioni create con palettature fisse che permettono un più
efficace e regolabile rallentamento del fluido.
LA POMPA INSERITA NEL CIRCUITO DETERMINAZIONE DEL
PUNTO EFFETTIVO DI FUNZIONAMENTO
Nota la “caratteristica interna della pompa” H,Q è necessario
conoscere la curva che rappresenta le perdite di carico del circuito
esterno (alla macchina) in funzione della portata detta “caratteristica
esterna”.
caratteristica interna
H
punto di funzionamento
Hpe
HU
caratteristica esterna (andamento delle
perdite con Q nel circuito esterno)
Q
siano H u z
p 2 p1
e Hpe= perdite di carico del circuito
La prevalenza fornita dalla pompa deve essere H=Hm+Hpe.
Il rapporto tra la prevalenza utile Hu e la prevalenza complessiva
fornita dalla pompa definisce il “rendimento della condotta”
c
Hu
H u H pe
CASO DI CIRCUITI COMPLESSI
SERBATOIO ALIMENTATO DA CONDOTTE IN PARALLELO
H
C
D
Re
RD
Hu=
B
QD
Qc
A
Qt=Qc+QD
Rc= caratteristica esterna condotta C
RD= caratteristica esterna condotta D
Rt= caratteristica esterna condotta D+C
H
Xt
punto
di
effettivo
Xt=
funzionamento della pompa
Qt*= Portata totale
Qc= portata condotta C
Hm
Hu
QD= portata condotta D
Q
Qc QD Qt*
Possibili variazioni di funzionamento agendo nelle valvole di
strozzamento.
Rt
DUE SERBATOI ALIMENTATI DALLA STESSA POMPA
VR
SB
CB
SA
CA
B
A
HuB
HuA
VR= valvola di strozzamento
RB RA
XB
Htot
XA
1
HuB
Rt
Xt
RA
RB
n
HuA
QB
QA
Qtot
Se la pompa alimentasse separatamente SA ed SB i punti di
funzionamento sarebbero rispettivamente xA ed xB.
se la pompa alimenta contemporaneamente i due serbatoi il suo
punto di funzionamento diventa xt ottenibile considerando la
caratteristica Rt applicata al punto 1 corrispondente ad una portata
nella condotta cA per la quale la pompa eroga una prevalenza pari
ad HuB, minima indispensabile perché si apra la valvola di ritorno
VR.
CASO DI DUE SERBATOI A QUOTE DIVERSE E CON UN
TRATTO DI TUBAZIONE IN COMUNE
H
RBC=caratteristica esterna della tubazione di
mandata al serbatoio a quota più elevata
T
RBD= caratteristica
esterna della tubazione
di mandata al serbatoio a
quota inferiore
YT
∆REB
∆’REB
XT = caso
precedente se
P REB=0
si somma
a MOP
O
n
M
REB
∆REB
caratteristica
esterna del tratto di
tubazione in
comune
∆’REB
Qt
Qxt Q
QXt=Portata relativa al caso di due serbatoi alimentati da una stessa
pompa e senza tubazione in comune
Qt=portata del caso in esame
LA REGOLAZIONE DELLE POMPE
1) Variazione della caratteristica esterna
2) Variazione della caratteristica interna
3) By-pass
Variazione della caratteristica esterna (strozzamento) (si agisce, in
genere, sulla mandata per problemi di cavitazione)
H
D
HD
HC
C
B
Hu
Hmin
QD
η
1.0
ηi
Agendo su V la portata si
riduce da Q0c0 a QD mentre
la prevalenza richiesta varia
da HC ad HD
0.5
0
ηcmin
ηgmin
Qt
Ricordando che il rendimento della condotta
c
prevalenzautile
Hu
Hc prevalenzarichiesta
e che il rendimento della pompa si assimila in genere al
rendimento idraulico (ηi)
pompa i
prevalenzarichiesta
lavoroall ' assedellamacchina
Il rendimento complessivo diventa
g i c
prevalenzautile
lavoroall ' assedellamacchina
OTTENIMENTO DI ηG IN FUNZIONE DELLA PORTATA Q ( a
n=cost)
Il rendimento ηi varia al variare del punto di funzionamento in
misura non considerevole.
Il rendimento ηc varia, invece in misura più ampia
Se la prevalenza utile fosse Hmin (punto B corrispondente al minimo
valore di Hutile) e la prevalenza erogata fosse Hc (punto C) Hc-HB
sarebbero le perdite di carico ed il rendimento della condotta
sarebbe (riferita alla presenza del punto B)
c
HB
H
c min B
HC
Hc
che è il rendimento della condotta riferito al minimo valore di H.
Si traccia quindi la curva ηc1min per tutti i punti di funzionamento.
Si possono allora ricavare i valori del rendimento complessivo ηg
per tutte le condizioni di funzionamento e, con riferimento ad Hmin si
definisce
g min i c min
Se ci si riferisce ad un punto generico D di funzionamento il
rendimento complessivo è
g i
i
Hu
Hu
i
HD
H u (H D H u )
H
H
H
H min
u i c min u g min u
H min ( HD H min ) H min
H min
H min
Ricavato dunque η
gmin
rispetto ad un punto di riferimento Hmin per
tutto il campo di funzionamento e noto ηi, si può facilmente
giungere, per le diverse condizioni di utilizzazione definite da Hu, al
rendimento complessivo η
g
dell’impianto che, come si vede, nella
regolazione per strozzamento dipende da η gmin che è sensibilmente
variabile con il punto di funzionamento così ottenibile.
VARIAZIONE DEL NUMERO DI GIRI
In questo caso non si altera la caratteristica esterna ma sui agisce
modificando la caratteristica interna della macchina.
H
n3
n1
ηI=cost
n2
Hu
In questo caso a parità di
prevalenza utile richiesta (ad
es. il salto geodetico tra due
serbatoi) si può ottenere una
variazione
della
portata
erogata
della
macchina
variando il suo regime di
rotazione.
Q1 Q2 Q3 Q
La caratteristica esterna resta inalterata e la prevalenza totale
richiesta aumenterà solo in funzione delle perdite che si
incrementano alfa Q2.
La variazione del numero di giri è però legata all’uso di un motore a
c.c. o si un sistema con inverter.
Il rendimento della condotta dato da Hu/H risulterà sempre
decrescente con la portata.
La variazione della velocità di rotazione può consentire di
mantenere il punto di funzionamento all’interno della curva di
massimo rendimento della pompa e quindi di avere in definitiva un
rendimento complessivo dell’impianto ηg=ηi*ηc migliore di quello
ottenibile nel caso di regolazione con valvola di strozzamento,
come
è
facilmente
osservabile
sovrapponendo
funzionamento che si ottengono con i due metodi.
i
punti
di
REGOLAZIONE MEDIANTE BY-PASS
H
A
1
1a
Hu
ηi
Q2
Q3
Q1
Q
La portata elaborata dalla pompa è Q1
“
ricircolata è
“
mandata è Q2
Q3
Con esclusione del by-pass la pompa funzionerà con la portata QA
e la prevalenza utile Hu con una prevalenza spesa per vincere le
perdite nella condotta HA-HU=Hp.a
Aprendo le valvole di by-pass, a causa della riduzione della portata
nel circuito esterno le perdite complessive saranno pari a
H2-Hu=Hp,2
Di conseguenza, non essendo variato il numero di giri della pompa,
la portata da essa elaborata sarà Q1 corrispondente alla prevalenza
richiesta H1=H1=Hu+Hp,2. La portata da by-passare per ottenere la
portata desiderata in mandata Q2 non sarà dunque data dalla
differenza QA-Q2 ma sarà
Q3=(Q1-Q2)<(QA-Q2)
POMPAGGIO
Il tratto AC è di funzionamento instabile. Si supponga trascurabile la
prevalenza di manica (condotta corta ed ampia)
H
A
2
T
C
1
Hu
Va
V2 V1
V
Confronto tra portata erogata e portata richiesta. Dal punto 1 al
punto 2 la portata diminuisce da v1 a v2. Se la pompa eroga una
portata maggiore di quella richiesta il livello aumenta ed il punto si
sposta verso A, ma se la richiesta è minore di Va il livello dovrebbe
salire cosa non possibile perché la prevalenza massima è HA.
In queste condizioni la pompa esce dallo stato di equilibrio
E
A
B
D
e si verifica una brusca inversione del verso della corrente ed il
serbatoio tende a svuotarsi e la prevalenza tende ad aumentare (BE) e quindi a riportarsi verso B; da questo punto in poi la prevalenza
aumenta da B a C e il flusso si inverte bruscamente, il serbatoio si
riempie di nuovo ed il fenomeno si ripete. La durata di
un’oscillazione dipende dalla grandezza del serbatoio di accumulo
(accumula energia sotto forma di prevalenza statica)
Allo scopo di evitare l’insorgere di tale fenomeno molto rischioso
per le sollecitazioni che induce nella macchina è di interessere
cercare:
a) in fase di progetto cercare di ottenere il punto Hmax il più a
sinistra possibile;
b) In sede di esercizio prevedere il punto di funzionamento il più
distante possibile la valore di Hmax per essere sicuri di avere
una ampia zona (trattiB-C) di autoregolazione della pompa
CAVITAZIONE
ALTEZZA DI ASPIRAZIONE
ricordando che
c 22 c12 w12 w22 u 22 u12 P
gH
2
2
2
appare evidente come il deltap ottenibile dalla macchina sia
funzione della densità del fluido.
Nei casi in sui risulti necessario che la bocca di aspirazione sia
collocata ad una quota superiore a quella del pelo libero del
serbatoio si ha che se la condotta di aspirazione è, all’avviamento,
vuota del liquido da pompare, quest ultima potrà innalzarsi di
un’altezza fornita da
H ' H
a
l
se ρa= densità dell’aria
ρl= densità del liquido
che nel caso di aria ed acqua indica che tale altezza si riduce ad
1/800 di quella ottenibile con la condotta di aspirazione ripiena
d’acqua. Ne segue di conseguenza, la pratica impossibilità di
avviamento o, come si dice, di adescamento autonomo della
macchina.
Ad evitare tale inconveniente appare indispensabile l’adozione di
una valvola di non ritorno inserita nel circuito alla estremità inferiore
della tubazione di aspirazione che ne impedisce lo svuotamento
all’atto dell’arresto.
E’ naturale che tale difficoltà è del tutto superabile quando , ove sia
possibile, la pompa viene installata “sotto battente”, e cioè, con il
livello del serbatoio più alto di quello di aspirazione della pompa.
Quando sia indispensabile sistemare la pompa ad un livello
superiore a quello del serbatoio, nasce l’esigenza, oltre al problema
di adescamento connesso all’avviamento, di conoscere quale
altezza massima di aspirazione può essere adottata.
A
Ha
Pa
La pressione pA nella sezione
di aspirazione della pompa,
calcolata in condizioni di moto
permanente è data da 2
c
p A p a gH A B gH p
2
Essendo Ha= dislivello tra pelo
libero serbatoio e bocca di
aspirazione.
Ca= velocità del liquido sulla
flangia di aspirazione
All’aumentare della somme dei
tre termini
HA, ca2/2, Hp
la pressione del liquido può
raggiungere il valore
corrispondente alla pressione di
equilibrio del liquido con il suo
vapore alla temperatura
esistente all’aspirazione.
Hp= altezza perduta per perdite di
carico nella tubazione
ρ densità del liquido
Quando si giunge ad un valore di pressione del liquido inferiore a
quella di saturazione a quella temperatura, si sviluppano in seno ad
esso bolle di vapore che, modificando le condizioni del flusso e
degli scambi energetici con la palettatura (a causa delle densità
molto diverse del fluido) può compromettere il funzionamento della
macchina. In tali condizioni si dice che la macchina entra in
“cavitazione”
a)Un primo effetto dovuto all’insorgere della cavitazione è la forte
riduzione della portata a causa della formazione di sacche di
vapore che ostacolano il passaggio del fluido.
b) Un secondo effetto di tipo
meccanico molto più grave, è
che le bolle di vapore,
passando
attraverso
la
girante in zona a più alta
pressione
collassano
(implodendo)
causando
sollecitazioni estremamente
elevate. Se il fenomeno si
sviluppa nei pressi di una
parete solida, ne consegue
un effetto di erosione che può
“butterare” la superficie in
questione.
In genere nelle pompe centrifughe la parte iniziale dell’estradosso
della pala dove le velocità sono più elevate e le pressioni più basse.
Allo scopo di evitare l’insorgere di tale fenomeno si deve essere
sicuri che in qualsiasi punto del circuito (ed in particolare
all’ingresso della girante) la pressione assoluta sia maggiore della
pressione di saturazione del liquido a quella temperatura.
L’analisi
deve
dunque
essere
condotta
considerando
separatamente gli abbassamenti di pressione nel circuito a monte e
quelli che si verificano all’ingresso della pompa stessa.
Tale analisi porta alla definizione di due parametri :
NPSH, richiesto (caratteristica della pompa)
NPSH, disponibile (caratteristica del circuito)
NPSH,R
Nella sezione della flangia di aspirazione il fluido possiede
un’energia pari a :
c A2
zA
2g
PA
in cui za indica la quota del baricentro della sezione di aspirazione.
In una sezione immediatamente prima dell’imbocco nella girante il
fluido ha una velocità c1 ed una pressione p1 per cui l’energia che
gli compete è:
c12
z1
2g
p1
Nel passaggio da A ad 1 si hanno delle perdite di carico pari a ζA,1
per cui
c A2
p1 c12
zA
z1 A,1
2g
2g
pA
pA c A2
c12
Z A Z 1
A,1
2
2g
p1
L’ingresso del fluido nel condotto mobile, a causa delle deviazione
della vena fluida, comporterà un abbassamento di pressione
proporzionale a w12/2g per cui
la minima pressione statica del fluido px è
w12
2
2g
px
p1
nella quale λ 2 è un coefficiente di proporzionalità.
L’abbassamento di pressione tra quella totale rilevata nella flangia e
quella statica minima nel corpo della pompa
p A c A2 p x c12
w12
A,1 2
z A z1
2g
2g
2g
definito NPSH,R ed è un dato caratteristico della pompa.
In generale la perdita associata alle velocità c1 vengono anche
espresse come
c13
c12
c12
A,1 si ha
,per cui, essendo 1
1
2
g
2
g
2g
c12
w12
NPSH , R 1
2
z1 z A
2g
2g
ed è una grandezza fornita dal costruttore della pompa.
VALUTAZIONE DELL’ NPSH,D
perché il fluido trattato dalla pompa non evapori nella sezione X
nella quale si ha il valore minimo della pressione statica del fluido è
necessario che risulti
px>ps
essendo ps la pressione di saturazione del liquido a quella
temperatura.
Perché ciò avvenga è necessario che il fluido abbia nella sezione A
una sovrappressione rispetto alla pressione di saturazione Ps
maggiore dell’abbassamento massimo che si ha nel corpo della
pompa.
Perché non si abbia evaporazione essendo
p A c A2 p x
NPSH , R
2g
si deve avere
p A c A2 p s
NPSH , R
2g
essendo
p A c A2 p s
NPSH , D
g
2
che rappresenta, nota la pressione di saturazione del liquido alla
temperatura di esercizio, l’altezza di aspirazione disponibile che,
POMPA AD ASSE ORIZZONTALE
A
Pc A,1
p A c A2
g
2
NPSH,D
22
NPSH,R
2g
c12
2g
Ps
Px
ANDAMENTO DELLA PRESSIONE NEL CORPO POMPA TRA
FLANGIA DI INGRESSO E GIRANTE (PRESSIONE DI
RISTAGNO)
c A2 p A c12
w12
1
2
2g
2g 2g
px
essendo zA=z1
Perché non ci sia cavitazione deve essere
px
ps
c A2
p A ps
c12
w12 p A c A2 p x
1
2
g
g
g
g
2
2
2
2
NPSH,D
NPSH,R
Se la pompa avesse avuta una disposizione diversa rispetto alla condotto a
(ad es. ad asse verticale) si sarebbe dovuto tenere conto anche della
variazione di quota nel calcolare NPSH,R. In tal caso il valore di NPSH,R
sarebbe stato più grande.
.Tra z=0 e A si ha:
p atm
A
c A2
h A p c
2g
pA
essendo ∆pc la perdita di
carico nella tubazione di
ammissione alla pompa
Ha
si ha di conseguenza che
Pa
p
P
c 3A p s
NPSH , D
atm h A Pc s
2g
pA
Dovendo essere NPSH,D>NPSH,R si ha
p atm
h A p c
ps
NPSH , R
da cui si ottiene che con patm, ∆pc e ps deve risultare
hA
p atm
ps
p c HPSH , R
e,quindi, noto il dato fornito dal costruttore per un certo punto di
funzionamento il valore di NPSH,R si ricava la massima possibile
altezza di aspirazione
ESEMPIO: per l’acqua a 20° ps/ γ=0,24m essendo patm/ γ=10,33m
si ha che
hA<10,33-0,24- ∆pe-NPSH,R
in relazione alle caratteristiche dell’impianto e della pompa in
genere 2<hA<6-7 [m]
COMPRESSORI CENTRIFUGHI
DEL TUTTO ANALOGHI NEL COMPORTAMENTO ALLE POMPE
CENTRIFUGHE (A MENO DEGLI EFFETTI DELLA COMPRIMIBILITA’ DEL
FLUIDO)
GRANDEZZE CARATTERISTICHE:
a) velocità di rotazione (più elevata rispetto alle pompe
centrifughe)
b) rapporto monometrico di compressione
c) portata di fluido che attraversa la macchina (portata
volumetrica o massica)
d) tipo di fluido aeriforme caratterizzato da
-peso molecolare
-rapporto cp/cv
-condizioni di pressione e temperatura all’ingresso della
macchina
La curva caratteristica interna si ricava allo stesso che per le pompe
centrifughe
Il campo di pratica applicazione del compressore è però delimitato
da due linee:
a) una linea detta di “pompaggio” che limita, per ogni numero
di giri, la minima portata ottenibile da un compressore
dinamico in funzionamento stabile
b) Una linea detta di “bloccaggio” o di “choking” che limita per
un determinato numero di n la massima portata ottenibile
senza penalizzare troppo il rendimento.
β
snaging
β=p2/p1=(rapporto di compressione per stadio)
1.9
4000giri/min
1.7
choking
3600
1.5
3240
2650
n
1.3
2520
2160
1.1
2000
6000
10000
14000
18000
22000
Q[m /h]
3
MAPPA DI FUNZIONAMENTO DI UN COMPRESSORE CENTRIFUGO
Le curve caratteristiche hanno un andamento che dipende dalle
condizioni di ingresso (p e T) del fluido nonché dalla sua natura
(peso molecolare, cp/cv=k).
La mappa deve essere quindi corredata da:
pressione all’aspirazione
temperatura all’aspirazione
peso molecolare del gas
il valore di n
il valore del fattore di comprimibilità z
C 22 C12
Infatti trascurando i termini cinetico (
)
e gravitazionale
2
( g[z2-z1]) la prevalenza effettiva , pari al lavoro scambiato tra fluido
e girante è dato da:
p2
H eff L1, 2 vdp Le
p1
o, più convenientemente da
H eff L12 h2 h1 Qe
che supponendo con buona approssimazione una trasformazione
adiabatica, diventa
T2
H eff L12 h2 h1 cpdT
T1
solo una parte del lavoro fornito ritrova però sotto forma di
incremento di energia potenziale termodinamica del fluido ma una
aliquota viene spesa per vincere le resistenze passive.
PREVALENZA POLITROPICA E RENDIMENTO POLITROPICO
pol
H pol
H eff
confronta i due lavori spesi per portare il fluido
nelle stesse condizioni finali diversamente da
atis.
La prevalenza politropica (o carico politropico) è l’energia che si
ritrova accumulata nel fluido sotto forma di incremento di energia
termodinamica potenziale tra i punti 1 e 2 di inizio e fine del
processo di compressione reale. Se n è l’esponente medio della
politropica costante tra i punti 1 e 2 si ha (per un gas perfetto)
pvn=cost e quindi
p
n
vdp
z1 RT1 2
p1
n 1
p1
p2
H pol
n 1
n
1
CARICO POLITROPICO
essendo z1= fattore di comprimibilità alle condizioni iniziali. Il
rendimento politropico è allora:
pol
H pol
H eff
nn1
n
z1 RT1 1
n 1
h2 h1
che con semplici passaggi diventa
pol
n k 1
n 1 k
che mostra come il rendimento politropico non dipende dal rapporto
di compressione p2/p1 ma solo da n e, cioè, dalla “qualità della
trasformazione”, attingendo valori via via più elevati quanto più n si
avvicina all’esponente k dell’adiabatica reversibile
PREVALENZA ISOENTROPICA E RENDIMENTO ISOENTROPICO
Prevalenza isoentropica = energia che si immagazzina nel fluido
per effetto di un processo di compressione adiabatico reversibile e
quindi isoentropico compiuto tra le stesse pressioni p1 e p2 relative
alla trasformazione reale
p2
H is vdp
che per pvk=cost è
p1
kk1
p
k
H is
z1 RT1 2 1
p1
k 1
is
H is
H eff
kk1
p
k
z1 RT1 2 1
p1
k 1
h2 h1
che dipende oltre che della macchina e dalla natura del fluido
anche dal rapporto di compressione p2/p1
k 1
k
p2
1
p1
n 1
n
p2
1
p1
scrivendo
pol
si ha anche
n k 1
n 1 k
n 1 k 1 da cui
n
k pol
si dimostra che
lim is
1
n k 1
pol
n 1 k
ηpol (“small stage efficiency”) acquista dunque il significato di
limite del rendimento isoentropica per β che tende a 1 e
quindi si potrà visualizzare in diagramma l’andamento di ηis al
variare di β partendo da punti che per β=1 corrispondono al
valore di ηpol
ηis
0.9
ηpol=0.9
n=1.465
ηpol=0.8
0.8
ANDAMENTO DEL
RENDIMENTO
ISOENTROPICO IN
FUNZIONE DEL
RAPPORTO DI
COMPRESSIONE β E
DEL VALORE DEL
RENDIMENTO
POLITROPICO
n=1.555
ηpol=0.7 n=1.689
0.7
0.6
1
2
3
4
β
5
∆Htot=Hc-Ha
pB
c c
2g
2
2
2
B
2
2
c
2g
2
B
M
C
A
Pest
A
c02
2g
0
p1
p0
h2-ha
h2-h1
c12
2g
Pest=pressione esterna= pA (di ristagno)
p0= pressione ingresso bocca di aspirazione (statica)
p1= pressione ingresso girante (statica)
p2= pressione uscita girante (statica)
pB= pressione uscita diffusore (statica)
Hc= entalpia di ristagno
Energia del fluido
in 2
in B
c 22
H c h2
2g
c B2
HB hB
2g
Tra uscita e ingresso girante (2-1) si ha
c12
c 22 c12
c 22
h h2
h1
h2 h1
2g
2g
2g
COMPRESSIONE REALE
ADIABATICA REALE
isoterma
p2
2
ds=0 isoentropica
1
p1
Nel piano p,V l’area 1-2-p2-p1
rappresenta il solo lavoro politropico
-La trasformazione reale 1-2 da p1 a
p2, essendo irreversibile, non può a
rigore essere rappresentata con una
linea su un piano termodinamico. Una
politropica di indice n costituisce una
accettabile approssimazione
2
Le vdp LW h2 h1
lavoro adiabatica reale
1
nn1
n
RT1 1 Lw
n 1
C
k n
cv
1 n
per una politropica di indice n
c cp
n
c cv
essendo c il calore specifico
lungo la politropica
k n
nn1 k n nn1
n
Lw cT2 T1
cv T2 T1 ; Le
RT1 1
cv 1
1 n
n 1
1
n
PRINCIPALI APPLICAZIONI DEI COMPRESSORI CENTRIFUGHI
ACCIAIERIE
Nella produzione dell’acciaio sono richiesti circa 50Nm3 di ossigeno
compressi a circa 40 bar per ogni tonnellata di acciaio prodotto.
DISTRIBUZIONE GAS NATURALE
In taluni casi oltre al trasporto vengono impiegati per la
reimmissione del gas in pozzi esauriti (quando la domanda
dell’utenza è inferiore alla disponibilità) come in un campo petroliero
algerino nel quale si iniettano circa 3-4 milioni di Nm3 al giorno
RAFFINERIE
IMPIANTO DI SINTESI
Le prime applicazioni dei compressori centrifughi si ebbero grazie
agli studi di BUCHI e RATEAU (1912-18) effettuati nella
sovralimentazione di motori alternativi di aviazione.
Gli scarsi valori della velocità periferica u2 non consentivano (al
massimo 100-150 m/s) il raggiungimento di elevate prestazioni (al
massimo valori di 1,2-1,25 di beta). Lo sviluppo successivo ha
consentito il raggiungimento di 4-4.5 come valori di beta con
velocità periferiche che raggiungono i 460-500 m/s consentendo
una notevole riduzione degli stadi richiesti.