LABORATORIO DI FISICA I per Ingegneria
ESPERIENZE di laboratorio
1. Introduzione
Nelle esperienze di Laboratorio si studia sperimentalmente il moto di un punto materiale lungo
un piano inclinato e il moto di una massa sospesa verticalmente con una fune inestensibile avvolta in un
volano. Il fine e’ la verifica delle relazioni tra tempo e spazio , tra le grandezze derivate e la verifica
dell’accuratezza delle stesse.
Le misure ( spazi e tempi) verranno registate e la loro analisi verra’ effettuata attraverso programmi
disponibili in un computer
2. Brevi note sul funzionamento degli strumenti
a) Sonar
Le posizioni dell’oggetto verranno ottenute attraverso un Sonar acustico . Il metodo di
funzionamento base del Sonar e’ semplice (lo strumento usato e’ analogo a quello usato per la misura
della distanza per l’automatismo della messa a fuoco di un oggetto nelle vecchie macchine fotografiche
Polaroid). Il Sonar e’ costituito da un emettitore/ricevitore di segnali acustici (*).
: se il suono inviato incontra nella sua propagazione un oggetto viene riflesso. Se lo stesso stumento che
aveva emesso il segnale e’ in grado di ricevere il suono riflesso, misurando il tempo tra l’emissione e la
recezione del segnale si individua la posizione dell’oggetto se e’ nota la velocita’ di propagazione del
suono nell’aria ( ~342 m/s).
Per ottenere la misura non viene mandato un solo segnale ma un piccolo pacchetto di segnali
equispaziati nel tempo ad alta frequenza ( ~50KHz) in modo da richiedere di avere in risposta un
analogo pacchetto della stessa frequenza. Questo permette di non avere disturbi da altri rumori/suoni
presenti (di avere quindi un filtro). nella recezione del segnale inviato.
Per eseguire misure corrette con il Sonar è quindi necessario che il microfono (coincidente con
l’emettitore) rilevi nel campo di misura, solo onde riflesse dall’oggetto in misura. Le onde emesse, di
frequenza circa 50 kHz, formano un fascio conico di apertura angolare di circa 20° intorno all’asse
dell’emettitore-ricevitore che è regolabile in direzione. E’ necessario assicurarsi che il sonar rilevi
l’elemento da misurare lungo tutta la rotaia. Lo spazio davanti all’emettitore, cioè un cono di apertura
massima di 20º attorno all’asse del sensore, deve essere libero da oggetti non essenziali, per evitare
riflessioni indesiderate e minimizzare il rumore nella misura.
Al fine di non avere piu’ di un segnale sonoro ( pacchetto ) nel tragitto andata ritorno le distanze in
tempo tra due successive misure ( invii di un pacchetto) deve essere maggiore del tempo di andata e
ritorno tra il Sonar e l’oggetto. Per le misure proposte la frequenza massima disponibile sara’ di 33Hz .
Con 33 Hz si puo’ misurare la posizione di un oggetto posto a d(max)= ½*342*1/33 ~5m. Tale
frequenza e’ sufficinetemente bassa da permettere la non sovrapposizione del segnale del Sonar durante
le misure proposte: rilevare il segnale sonoro riflesso da una slitta che scivola su di un piano per una
distanza massima dal sonar e’ inferiore ai 2m.
La distanza minima che il sonar può rilevare è di circa 15 cm ( determinata dal tempo di conversione
del Sonar da emettitore a ricevitore). Gli strumenti hanno, sotto la testa sensibile, un cursore con due
posizioni per variare la sensibilità del microfono, gia’ opportunamente tarato.
La precisione della misura dello spazio dipende quindi dalla correttezza della velocita’ del suono
nell’aria e dalla precisione con cui viene individuato il tempo tra l’emissione e la recezione dell’onda
sonora:
1) La velocita’ del suono nell’aria dipende dalla temperatura e dalla pressione.: La velocita’ dipende
dalla temperatura v(m/sm/s/grado . Nei programmi istallati le misure di tempo
verranno automaticamente trasformate in spazio usando la velocita’ di propagazione del suono in
aria secca a 20 gradi. ( e’ in teoria possibile inserire l’informazione della temperatura e
Il suono e’ prodotto dalla vibrazione di una superficie; nel caso del Sonar in adozione la superficie e’
una delle pareti di un condensatore piano carico fatto oscillare attraverso l’applicazione di un campo
oscillante alla frequenza di vibrazione. Tale vibrazione produce una onda di pressione e depressione
che si propaga con un’onda longitudinale.
*
dell’umidita’ dell’aria ma non attivati nel test di laboratorio attuale). Il non corretto valore della
velocita’ di propagazione inserisce un errore sistematico nella misura delle distanze con il Sonar.
2) La precisione con cui viene individuata nel tempo l’onda sonora dipende dal sistema del ricevitore.
Tale precisione e’ ben maggiore ( ~ 10 volte migliore) del periodo T dell’onda emessa nel
pacchetto ( 50KHz i.e T= 1/50 KHz = 0.02 ms i.e s= 341 m/s *0.02 ms ~ 7 mm). Il Sonar con
il metodo di funzionamento adottato per il laboratorio permette una precizione delle misure in
spazio di 1mm .
b) Descrizione dell' apparato sperimentale per la prima e seconda esperienza.
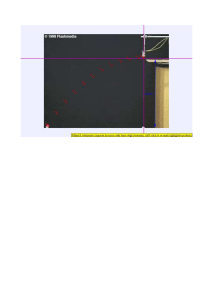
L’apparato sperimentale è costituito da una “guidovia a cuscino d’aria” schematicamente
rappresentata in Fig.1, il cui scopo è di realizzare il moto rettilineo ed uniforme di un oggetto, la
"slitta", virtualmente in assenza di attrito; da un piccolo elettromagnete montato sulla sommità della
guidovia e dal “Sonar” collegato all’altro estremo della guidovia. La guidovia è cosi’ composta:
- un tubo metallico lungo all’incirca 1.4 m a sezione rettangolare, sulla cui faccia superiore sono
praticati numerosi forellini predisposti per la fuoriuscita dell’aria compressa; il tubo costituisce il piano
sul quale si forma , al passaggio di una slitta opportunamente sagomata, un cuscino d’aria
sul quale la slitta stessa puo’ scorrere con attrito radente trascurabile.
- un basamento metallico sul quale il tubo è montato, che per mezzo di una vite micrometricaV puo’
variare la sua inclinazione rispetto al banco di lavoro, approssimativamente orizzontale. Un giro della
vite corrisponde ad una variazione di inclinazione 5’.
-un compressore d’aria, a portata variabile, collegato ad un estremo della guida tramite un manicotto
flessibile.
L' elettromagnete, posto all’estremità sinistra della guida, ha il compito di imprimere ad una slitta
munita di magnetino (cilindretto nero con riga rossa ) ferma sul piano un impulso predefinito e
riproducibile; ciò avviene rilasciando il pulsante a peretta collegato all' elettromagnete.
Elettrocalamita
Sonar
V
al compressore
al computer
Fig. 1
c) L’interfaccia LabPro
L’interfaccia LABPRO gestisce il flusso dei dati dai sensori al computer e digitalizza i dati provenienti
dai sensori analogici mediante il Convertitore Analogico Digitale (ADC).
I sensori devono essere collegati all’interfaccia connettendoli alla porta (digitale o analogica)
corrispondente del LabPro. I sensori utlizzati sono in grado di autoidentificarsi comunicando a
LABPRO e al computer il loro stato.
L’interfaccia è dotata di due porte di ingresso digitali (ad una di queste va connesso il sensore di
posizione) e di quattro porte di ingresso analogiche (ad una di queste va connesso il sensore di forza o il
termometro). Un ADC a 12 bit digitalizza i segnali analogici in ingresso;. una porta di collegamento
USB serve per collegare il computer al LabPro.L’interfaccia deve essere connessa alla rete di
alimentazione mediante il cavo in dotazione; i tre pulsanti dell’interfaccia servono per utilizzarla senza
il collegamento al computer in una modalità non prevista per questo laboratorio e non vanno mai
toccati. Una volta effettuati i collegamenti e accesa l’interfaccia, questa esegue una procedura di
inizializzazione che viene comunicata all’utente attraverso una sequenza sonora e l’accensione in
sequenza dei LED posti sotto al pulsante centrale. Alla fine della sequenza sonora l’interfaccia è pronta
ad acquisire dati.
Nel caso si accenda il LED rosso si deve ripetere la procedura dopo avere controllato tutte le
connessioni. I collegamenti possono essere effettuati anche ad interfaccia accesa, ma è comunque buona
norma sconnettere tutti i cavi e l’alimentazione una volta terminata la sessione di laboratorio anche per
predisporre le postazioni per gli studenti subentranti senza che debbano intervenire i tecnici del
laboratorio per mettere in ordine la strumentazione. Acceso il computer con tutte le connessioni
sistemate si illumina un LED verde al centro del LabPro questo indica che il sistema funziona
correttamente.
d) Computer MacBook
L’interfaccia LabPro è collegata ad una delle porte USB di un computer Apple Macintosh- Mac Book.
Quando viene acceso il computer effettua il login automatico e attiva immediatamente il programma
Logger Pro necessario per la visualizzazione dei dati. Nel Mac sono inseriti altri programmi utili per la
sessione di laboratorio, sebbene tutto il lavoro si possa svolgere utilizzando il solo LoggerPro. Questi
programmi sono: NeoOffice (un programma integrato basato su OpenOffice di cui si utilizza il foglio di
calcolo), Plot (utilizzabile se si vuole fare visualizzazione di grafici di qualità migliore di quelli di
NeoOffice) e Magic Number Machine (una calcolatrice per semplici calcoli).
I MacBook non sono dotati di mouse ( chi lo possiede lo puo’ inserire e usare), ma hanno solo la
trackpad sotto alla quale è disponibile un solo tasto. Per ottenere le funzioni degli altri due tasti si opera
così: il secondo tasto si ottiene tenendo premuto il tasto “alt” mentre contemporaneamente si preme
quello della trackpad. Il terzo tasto si ottiene tenendo premuto il tasto “ctrl” mentre
contemporaneamente si preme quello della trackpad. Nulla vieta al docente di utilizzare un mouse USB
di sua proprietà. La tastiera del computer è quella americana. Nell’uso in italiano (quindi
principalmente per le annotazioni) ciò comporta una procedura a più tasti per inserire le accentate (Alt
Accento-Vocale)
§
Note ad uso degli utilizzatori di Windows.Per chiudere l’applicazione e uscire dal programma si deve
andare sotto il simbolo LoggerPro (o quellodell’applicazione) e far scendere la tendina e con il
comando Quit LoggerPro. Poi se si va sotto il simbolo della melaall’estrema sinistra della barra del
menu, scende una tendina che ha tra le opzioni Spegni e si spegne il computer. Siricorda che per
chiudere una finestra si può utilizzare il pallino rosso a sinistra. La finestra si
ridimensionatrascinandone l’angolo in basso a destra. In ogni caso è sempre possibile chiudere il
computer premendo nuovamente ilpulsante di accensione e scegliendo l’opzione appropriata fra quelle
presentate
§
3.
Operazioni sperimentali e presa dati.
Il programma Logger Pro si apre automaticamente all’accensione del computer e automaticamente
riconosce i sensori connessi all’interfaccia: sono comunque necessarie alcune operazioni preliminari al
fine di effettuare la corretta acquizione dati. Con il sensore di posizione connesso compaiono le colonne
dei dati e i grafici x(t) e v(t)
La prima operazione da effettuare è aprire il pannello Experiment/Data Collection....
Il pannello permette di scegliere la durata dell’acquisizione e la frequenza di campionamento.
La durata dell’acquisizione normalmente è di pochi secondi.
Con il sonar la frequenza deve essere regolata a circa 30 Hz ( 10 Hz e’ in figura). Se si imposta una
frequenza superiore alla massima possibile nella finestra compare l’indicazione con le massime
frequenze a cui possono lavorare i sensori collegati.
4.
Analisi dei dati.
Prima esperienza: moto uniforme e uniformemente accelerato
Utilizzando il sistema descritto si procede alla:
-Verifica del moto uniforme di un corpo lungo un piano orizzontale data una velocita’ iniziale
( impulso fornito dall’elettrocalamita).Grafico spazio-tempo.
-Verifica della riproducibilita’ dell’impulso fornito dall’elettrocalamita ( varie misure di
velocita’ e plot delle velocita’ : valore medio , errore massimo , errore quadratico medio.
Verifica del moto uniformemente accelerato di un corpo lungo un piano inclinato (
l’elettrocalamita serve per mantenere fermo l’oggetto prima dello studio del moto cioe’ prima di ogni
insieme di misurazioni): grafico spazio tempo, grafico velocita’ tempo.
5. Introduzione
Il moto (quasi) uniforme si ottiene mettendo in piano la guidovia e dando un impulso alla slitta con il
magnete, dopo avere verificato che il sensore di posizione rilevi la slitta lungo tutto il percorso. In
queste condizioni si possono studiare la ripetibilità della misura, l’attrito presente nel moto e il teorema
delle forze vive.
L’unico sensore utilizzato è quello di posizione. Il moto risulterà comunque debolmente decelerato per
la presenza dell’attrito viscoso.
Per raccogliere le misure è sufficiente premere il tasto verde a destra sulla barra dei comandi di Logger
Pro. Durante l’acquisizione il tasto diventa rosso e premendolo di nuovo la si interrompe.
L’acquisizione dei dati del sensore di posizione è sufficientemente lenta da permettere la loro
visualizzazione mentre vengono acquisiti. I dati acquisiti (tempo e posizione) vengono elencati nelle
tabella a sinistra insieme alla velocità e all’accelerazione calcolate numericamente, mentre i grafici
vengono riportati a destra.
Gli ultimi dati acquisiti sono identificati sempre dall’etichetta “Latest”.
Per cancellare i dati inutilizzabili (tipicamente acquisiti prima che la slitta sia stata messa in
moto oppure dopo che ha urtato con il fermo di fine corsa) si deve utilizzare il comando Data/Strike
Through Cells dopo aver scelto in uno dei grafici l’intervallo di tempo in cui effettuare la
cancellazione. Per ottenere il grafico in scala visibile a questo punto si preme l’icona “Autoscale”.
A questo punto si ottiene la visualizzazione in figura
Utilizzare le possibili opzioni dei programmi quali :
- il grafico dell’accelerazione con il comando Insert/ Graphs o la distribuzione di una quantità con il
comando Insert/Additional Graphs/Histogram e operando la selezione richiesta dalle finestre di
dialogo.E’ necessario sistemare la visualizzazione ridimensionando le finestre, perché i nuovi grafici
saranno sovrapposti aglioriginali.
->Nel caso si scelga di fare un istogramma va scelto il valore dell’intervallo per la
visualizzazione perché il programma propone sempre il valore 1.
Premendo due volte all’interno del grafico di prima presentazione, compare una finestra con due
possibili scelte: “Graph Options” e “Axes Options”. Selezionando “Axes Options” si accede alle
opzioni per gli assi coordinati, mentre selezionando “GraphOptions” si accede a impostazioni di
visualizzazione del grafico.
Altre opzioni sono :
-> Attivare il grafico dell’accelerazione ...
-> Presentare grafici nei quali non compaia in ascissa la variabile
indipendente tempo. E’ possibile ad esempio costruire il grafico velocità in funzione della
posizione. A questo scopo bisogna premere sull’etichetta che indica la variabile indipendente
“Time” e scegliere la nuova variabile nella tendina che compare. Etc etc.
Qualsiasi grafico può essere modificato premendo due volte all’interno della sua area. Compare un
pannello simile a quella utilizzato con il grafico aggiuntivo istogramma che permette di scegliere le
opzioni di visualizzazione del grafico.