Parte 2, 1
Parte 2
Aggiornamento: Settembre 2010
Controlli Automatici T
Sistemi Dinamici a Tempo Continuo
Prof. Lorenzo Marconi
DEIS-Università di Bologna
Tel. 051 2093788
Email: [email protected]
URL: www-lar.deis.unibo.it/~lmarconi
Prof. L. Marconi
Controlli Automatici T
Parte 2, 2
Sistema dinamico
Modello Matematico di un oggetto
fisico che interagisce con il mondo
circostante tramite due vettori di
variabili dipendenti dal tempo t
Variabili
di uscita
Variabili
di ingresso
Sistema Dinamico
Variabili di ingresso: azioni compiute sul sistema da agenti
esterni che ne influenzano il comportamento
Variabili di uscita: grandezze del sistema in esame che, per
qualche ragione, sono di interesse
Rapporto causa-effetto tra le variabili
Prof. L. Marconi
Controlli Automatici T
Parte 2, 3
Normalmente il valore dell’ingresso (causa) ad un certo istante
temporale non e’ sufficiente per determinare il valore
assunto dall’uscita (effetto) allo stesso istante
Variabili di stato: variabili che descrivono la “situazione interna”
del sistema (determinata dalla storia passata) necessarie per
determinare l’uscita
Ingressi
stato
uscita
Descritti dal modello matematico
Prof. L. Marconi
Controlli Automatici T
Parte 2, 4
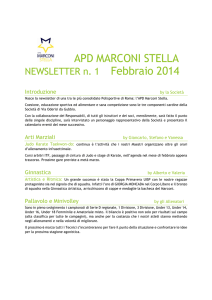
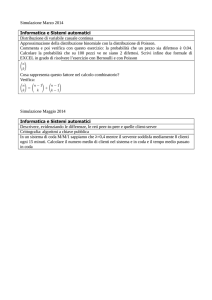
Esempi
Circuito RC
Ingresso: tensione
del generatore
Uscita: Tensione
della resistenza
Stato: Tensione
del condensatore
Prof. L. Marconi
Sistema meccanico
ai morsetti
Ingresso: forza motrice
ai capi
ai capi
Uscita: posizione del carrello
Stato: posizione e velocita’ del carrello
Controlli Automatici T
Parte 2, 5
Modello Matematico: rappresentazione di stato
• Dipendenza dell’uscita dall’ingresso e dallo stato:
Vettore uscita
Vettore stato
Vettore ingresso
• Evoluzione dello stato in funzione dell’ingresso e dello stato:
Equazione di stato
Derivata dello stato all’instante t
Dato
(valore dello stato all’istante iniziale) e dato
, sotto certe proprietà di regolarità di
,
allora l’equazione di stato definisce l’andamento di
Prof. L. Marconi
Controlli Automatici T
Parte 2, 6
…… Modello Matematico: rappresentazione di stato
n = ordine del modello
m = numero di ingressi
r = numero di uscite
Prof. L. Marconi
Controlli Automatici T
Parte 2, 7
Esempio Circuito RC
Dalla legge delle tensioni
e sapendo che
si ottiene
Avendo posto
Prof. L. Marconi
Controlli Automatici T
Esempio sistema meccanico
Parte 2, 8
Dalla legge di Newton si ha che
Quindi definendo
Si ottiene il modello matematico
dove
Prof. L. Marconi
Controlli Automatici T
Parte 2, 9
Classificazione sistemi dinamici
• Un sistema dinamico si dice
“SISO” (Single Input-Single Output) se r=m=1
“MIMO” (Multi Input-Multi Output) altrimenti
• Un sistema dinamico si dice
“strettamente proprio” o “puramente dinamico” nel caso
N.B. L’uscita dipende dall’ingresso
solo attraverso lo stato
“proprio” in caso contrario
• Un sistema dinamico si dice
“Stazionario” se le funzioni f e h non dipendono
esplicitamente dal tempo, ovvero
“Tempo variante” in caso contrario
Prof. L. Marconi
Controlli Automatici T
Parte 2, 10
….. Classificazione sistemi dinamici
• Un sistema dinamico si dice
“lineare” se le funzioni f e h dipendono linearmente
dalle variabili di stato e di ingresso, ovvero
dove
“non lineare” in caso contrario
Nota: Se il sistema e’ lineare e stazionario allora
Se il sistema e’ strettamente proprio,
Prof. L. Marconi
Controlli Automatici T
Parte 2, 11
Principi di modellistica
Problema: Determinare un modello matematico che approssimi
il comportamento di un sistema dinamico
Diversi approcci al problema (da seguire a seconda della complessità del
problema, del livello di dettaglio richiesto al modello, ecc.):
• Indagine diretta: Il sistema viene suddiviso in sottosistemi elementari il cui
modello matematico e’ facilmente identificabile e il modello complessivo viene
dedotto componendo i modelli dei sottosistemi elementari e applicando leggi
base della fisica. Applicabile a casi semplici in cui, sotto certe ipotesi, l’introspezione
fisica del sistema permette la modellazione.
• Black box: il sistema si considera come una “scatola nera” di cui occorre
identificarne il comportamento mediante l’analisi dei segnali di ingresso
(opportunamente variati) e delle rispettive uscite (analisi armonica). Utile in quei
casi dove la fisica del sistema e’ cosi’ complessa da non permettere una introspezione
• Gray box: Approccio misto: Sistema complessivo scomposto in diversi sottosistemi
interagenti, di cui alcuni modellati mediante introspezione fisica e altri mediante
l’analisi ingresso/uscita
Prof. L. Marconi
Controlli Automatici T
Parte 2, 12
Derivazione del modello mediante indagine diretta
L’analisi energetica del sistema risulta uno strumento utile per la
derivazione del modello matematico
Incremento/decremento
infinitesimale di energia interna
Potenza istantanea
La potenza (istantanea) fornita al sistema può:
• essere dissipata nel sistema
• variare il livello di energia accumulata nel sistema
• essere trasferita all'esterno, magari in un altro sistema fisico
Prof. L. Marconi
Controlli Automatici T
….. Derivazione del modello mediante indagine diretta
Parte 2, 13
• Dalla definizione di stato (grandezza che sintetizza la storia
passata del sistema utile al fine di calcolare l’uscita corrente)
sembra ragionevole scegliere, come variabili di stato, grandezze
che determinano quantità di energia accumulate nel sistema
(Variabili Energetiche)
•
In ogni dominio energetico (tranne quello termico) ci sono due
variabili energetiche e due meccanismi di accumulo dell’energia
che dipendono, ciascuno, da una sola delle due variabili
energetiche. Il prodotto delle due variabili energetiche
rappresenta la potenza in quel particolare dominio energetico
•
In ogni dominio energetico esiste un parametro che lega le due
variabili energetiche e che caratterizza il meccanismo di
dissipazione dell’energia in quel dominio
Prof. L. Marconi
Controlli Automatici T
Parte 2, 14
Considerazioni energetiche
Definizione delle variabili energetiche nei diversi domini fisici
Dominio
Elettrico
Meccanico
traslazionale
Meccanico
rotazionale
Fluidico
Termico
Prof. L. Marconi
Potenza
Variabili
Energetiche
tensione ai
capi di un
conduttore
corrente
attraverso un
conduttore
velocità
traslazionale
di un corpo
forza applicata
ad un corpo
velocità
rotazionale di
un corpo
coppia applicata
ad un corpo
pressione ai
capi di una
condotta
portata di una
condotta
flusso di calore
Controlli Automatici T
Parte 2, 15
…..Considerazioni energetiche
Dominio Elettrico
Tensione ai capi di conduttore
(il quadrato e’ proporzionale alla energia elettrica accumulata)
(accumulo capacitivo)
capacità
Corrente attraverso un conduttore
(il quadrato e’ proporzionale alla energia magnetica accumulata)
(accumulo induttivo)
induttanza
Parametro di dissipazione:
Resistenza elettrica
Prof. L. Marconi
Controlli Automatici T
Parte 2, 16
…..Considerazioni energetiche
Dominio Meccanico
Velocità (translazionale-rotazionale) di un corpo
(il quadrato e’ proporzionale alla energia cinetica accumulata)
(accumulo capacitivo)
massa
momento di inerzia
Forza-Coppia applicata ad un corpo
(il quadrato e’ proporzionale alla energia potenziale accumulata)
(accumulo induttivo)
Rigidità longitudinale
Rigidità torsionale
Parametro di dissipazione:
Coeff. attrito viscoso
Prof. L. Marconi
Controlli Automatici T
Parte 2, 17
…..Considerazioni energetiche
Dominio fluidico (Idraulico-Pneumatico)
Differenza di pressione ai capi di una condotta
(il quadrato e’ proporzionale alla energia cinetica accumulata)
(accumulo capacitivo)
Capacità fluidica
Portata di una condotta
(il quadrato e’ proporzionale alla energia potenziale accumulata)
(accumulo induttivo)
Induttanza fluidica
Parametro di dissipazione:
Resistenza fluidica
Prof. L. Marconi
Controlli Automatici T
Parte 2, 18
…..Considerazioni energetiche
Dominio Termico
Differenza di temperatura ai capi di un mezzo
(accumulo capacitivo)
Capacità termica
Parametro di dissipazione:
Resistenza termica
Prof. L. Marconi
Controlli Automatici T
Parte 2, 19
Tabella riassuntiva
Dominio
Accumulo
capacitivo
Accumulo
induttivo
Dissipazione
Elettrico
Meccanico
traslazionale
Meccanico
rotazionale
Fluidico
Termico
L’energia accumulata
dipende da:
Prof. L. Marconi
assente
variabili
ai morsetti
Variabili
passanti
Controlli Automatici T
Parte 2, 20
Derivazione modelli matematici di sistemi fisici con
considerazioni energetiche – scelta variabili di stato
La potenza (istantanea) fornita al sistema può:
• essere dissipata nel sistema
• variare il livello di energia accumulata nel sistema secondo
le due modalità viste
• essere trasferita all'esterno, magari in un altro sistema fisico
Dalla definizione di stato
(grandezza che sintetizza
la storia passata del
sistema utile al fine di
calcolare l’uscita corrente)
sembra
ragionevole
scegliere, come variabili di
stato,
grandezze
che
determinano quantità di
energia accumulate nel
sistema
(Variabili
Energetiche)
Prof. L. Marconi
Controlli Automatici T
Parte 2, 21
Derivazione modelli matematici di sistemi fisici con
considerazioni energetiche – calcolo equazioni differenziali
1) Scomposizione sistema complessivo in sottosistemi
elementari il cui modello matematico sia facilmente
derivabile (sotto opportune ipotesi)
Sistema elementare
Elementi di accumulo dell’energia
Problema: ricavare il modello di un sistema elementare (vedi dopo)
Prof. L. Marconi
Controlli Automatici T
….calcolo equazioni differenziali
Parte 2, 22
2) Composizione dei modelli matematici elementari mediante
principi base della fisica (conservazione dell’energia) per
derivare il modello complessivo:
Sistemi elettrici: leggi di Kirchoff per le tensioni
e per le correnti
Sistemi meccanici: Bilanciamento di Forze/Coppie
Sistemi idraulici: Equazioni di Bernoulli
La complessità dinamica di un sistema (numero di variabili
di stato) è legata al numero di elementi di accumulo presenti
Prof. L. Marconi
Controlli Automatici T
Parte 2, 23
Calcolo equazioni differenziali: Derivazione modelli elementari
Definendo
un generico parametro di accumulo (capacitivo o
induttivo) e con
due generiche variabili energetiche del
medesimo dominio energetico si ha che
Energia accumulata all’istante
Potenza fornita all’istante
Dalla relazione
si ottiene
ovvero
da cui
Prof. L. Marconi
Controlli Automatici T
Parte 2, 24
….. Derivazione modelli matematici di sistemi fisici con considerazioni
energetiche – calcolo equazioni differenziali
La relazione
rappresenta il modello
generalizzato del meccanismo di accumulo di energia per un
accumulatore elementare non dissipativo
Considerazioni:
•
equazione differenziale che lega le variabili energetiche
•
relazione generale indipendente dal dominio energetico
Prof. L. Marconi
Controlli Automatici T
Parte 2, 25
Modelli componenti elementari: accumulatori capacitivi
Condensatore
Ipotesi: assenza di resistenza e induttanza
Variabili energetiche:
corrente
tensione
Modello matematico:
Accumulo di energia:
Prof. L. Marconi
Controlli Automatici T
Parte 2, 26
….. Modelli componenti elementari: accumulatori capacitivi
Massa/inerzia
Ipotesi: assenza di attrito ed elasticità
Variabili energetiche:
forza/coppia
Velocità tras./rot.
Modello matematico:
Accumulo di energia:
Prof. L. Marconi
Controlli Automatici T
Parte 2, 27
….. Modelli componenti elementari: accumulatori capacitivi
Condotta Idraulica
Ipotesi: assenza di attrito ed inerzia nulla del fluido
Variabili energetiche:
portata
pressione
Modello matematico:
Accumulo di energia:
Prof. L. Marconi
Controlli Automatici T
Parte 2, 28
….. Modelli componenti elementari: accumulatori capacitivi
Parete
Ipotesi: assenza di dissipazione
variabile energetica:
= temperatura
Modello matematico:
Accumulo di energia:
Prof. L. Marconi
Controlli Automatici T
Parte 2, 29
Accumulatori capacitivi: tabella riassuntiva
Prof. L. Marconi
Controlli Automatici T
Parte 2, 30
Modelli componenti elementari: accumulatori induttivi
Induttore
Ipotesi: assenza di resistenza e capacità
Variabili energetiche:
corrente
tensione
Modello matematico:
Accumulo di energia:
Prof. L. Marconi
Controlli Automatici T
Parte 2, 31
……Modelli componenti elementari: accumulatori induttivi
Molla lineare/torsionale
Ipotesi: assenza di massa e attrito
Variabili energetiche:
forza/coppia
velocità tras./rot.
Modello matematico:
Accumulo di energia:
Prof. L. Marconi
Controlli Automatici T
Parte 2, 32
……Modelli componenti elementari: accumulatori induttivi
Condotta idraulica
Ipotesi: assenza di attrito e capacità
Variabili energetiche:
portata
pressione
Modello matematico:
Accumulo di energia:
Prof. L. Marconi
Controlli Automatici T
Parte 2, 33
Accumulatori induttivi: tabella riassuntiva
Prof. L. Marconi
Controlli Automatici T
Parte 2, 34
Modelli componenti elementari: dissipazione potenza
Ammortizzatore
Ipotesi: massa nulla, corpi rigidi
Variabili energetiche:
forza
velocità
Modello matematico:
Potenza istantanea dissipata:
Prof. L. Marconi
Controlli Automatici T
Parte 2, 35
….Modelli componenti elementari: dissipazione potenza
Resistore
Ipotesi: capacità e induttanze nulle
Variabili energetiche:
corrente
tensione
Modello matematico:
Potenza istantanea dissipata:
Prof. L. Marconi
Controlli Automatici T
Parte 2, 36
….Modelli componenti elementari: dissipazione potenza
Condotta idraulica
Ipotesi: condotta piena e inerzia del fluido nulla
Variabili energetiche:
portata
pressione
Modello matematico:
Potenza istantanea dissipata:
Prof. L. Marconi
Controlli Automatici T
Parte 2, 37
….Modelli componenti elementari: dissipazione potenza
Parete
Ipotesi: assenza di accumulo di calore interno
variabile energetica:
= temperatura
Modello matematico:
Potenza istantanea dissipata:
Prof. L. Marconi
Controlli Automatici T
Parte 2, 38
Dissipatori di potenza: tabella riassuntiva
Prof. L. Marconi
Controlli Automatici T
Parte 2, 39
Alcune considerazioni
– analogie tra modelli di sistemi fisici diversi e modelli di sistemi
elettrici
• utilizzate per trasferire esperienze tra settori disciplinari
• per studiare e simulare sistemi qualunque mediante circuiti
elettrici
– molto usato nel passato
– oggi sostituito da simulazione numerica
– allo stesso sistema fisico sono associabili diversi modelli matematici
• importanza delle specifiche e degli obiettivi di modellazione
– equazioni algebriche
• modelli statici
– equazioni differenziali
• modelli dinamici
Prof. L. Marconi
Controlli Automatici T
Costruzione di modelli per sistemi complessi
Parte 2, 40
– sistemi elettrici
• leggi di Kirchoff in corrente (ai nodi)
• leggi di Kirchoff in tensione (alle maglie)
– sistemi meccanici
• diagramma di corpo libero
– si tengono solo le masse
– gli elementi di collegamento sono sostituiti dalle relative
azioni
– un modo per risolvere problemi complessi è quello che sfrutta le
analogie tra domini fisici
• si riporta per analogia il sistema in esame ad uno equivalente
nel dominio nel quale l'analisi risulta più semplice o più vicina
alla cultura del progettista
– es. dominio elettrico per gli ingegneri della informazione
Prof. L. Marconi
Controlli Automatici T
….. Costruzione di modelli per sistemi complessi
Parte 2, 41
– la complessità dinamica di un sistema è legata al numero di
elementi di accumulo presenti
• la complessità dinamica si traduce nell'ordine di derivazione
massimo della variabile di uscita
– Attenzione
• due elementi di accumulo dello stesso tipo (capacitivo o
induttivo) non separati da elemento dissipativi o di accumulo di
tipo diverso vanno considerati come un unico elemento di
accumulo
– due condensatori in parallelo fanno un unico condensatore
di capacità somma delle due
– due masse collegate direttamente in modo rigido sono da
considerarsi equivalenti ad una sola massa di valore pari
alla somma delle due
Prof. L. Marconi
Controlli Automatici T
Parte 2, 42
Esempi di modellistica di sistemi complessi
Prof. L. Marconi
Controlli Automatici T
Parte 2, 43
Esempio VTOL
Momento d’inerzia rispetto
al centro di gravita’
Massa dell’aereo
Lunghezza ali
Dalla legge di Newton per le forze:
Dalla legge di Newton per i momenti:
con
Prof. L. Marconi
Controlli Automatici T
Parte 2, 44
Esempio pendolo
Massa del pendolo
Momento d’inerzia rispetto
al centro di rotazione
Coefficiente attrito viscoso
Dalla legge di Newton per i momenti:
ovvero
avendo posto
Prof. L. Marconi
Controlli Automatici T
Parte 2, 45
Modelli di sistemi elettromeccanici
Derivabili mediante le leggi base dell’elettromagnetismo. Queste
sono riconducibili a tre leggi fondamentali:
1. Una carica elettrica che fluisce entro un conduttore, ovvero
una corrente, genera un campo magnetico proporzionale alla
corrente stessa.
raggio
numero di spire
permeabilità magnetica
del materiale
Prof. L. Marconi
Controlli Automatici T
Parte 2, 46
….modelli di sistemi elettromeccanici
2. Un campo magnetico esercita una forza su qualunque carica
elettrica che si muove relativamente al campo magnetico stesso
Forza
entrante
Forza
entrante
3. Ogni volta che un conduttore e’ in moto relativo rispetto ad
un campo magnetico si stabilisce una differenza di potenziale
agli estremi del conduttore stesso
Prof. L. Marconi
Controlli Automatici T
Parte 2, 47
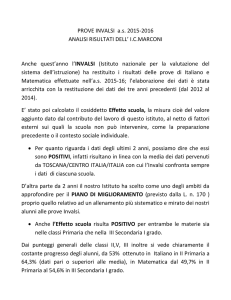
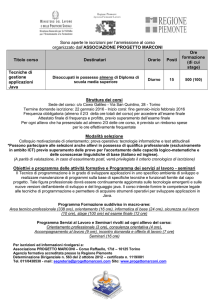
Esempio motore elettrico in cc (sistema elettro-meccanico)
Inerzia albero motore
Coeff. attrito viscoso
Coppia generata
Velocità angolare albero
Forza contro elettromotrice
Coppia di carico
Dinamica meccanica
Dinamica elettrica
Armatura
Accoppiamento
elettromeccanico
motore
Accoppiamentom
eccanoelettrico
Prof. L. Marconi
Controlli Automatici T
…. Esempio motore elettrico in cc
Parte 2, 48
Definendo
ovvero
Prof. L. Marconi
con
Controlli Automatici T
Parte 2, 49
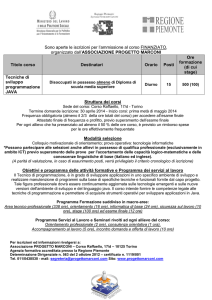
Esempio altoparlante magnetico
N
Bobina
S
Accoppiamento
elettromeccanico
cono
Accoppiamentom
eccanoelettrico
N
Accoppiamento EM:
Cono:
Accoppiamento ME:
Bobina:
Prof. L. Marconi
Controlli Automatici T
Parte 2, 50
……Altoparlante magnetico
con
Definendo quindi
Prof. L. Marconi
si ottiene
Controlli Automatici T
Parte 2, 51
Movimento ed equilibrio
Dato
e
e’ possibile determinare l’andamento
dello stato
(integrazione dell’equazione
differenziale) e di conseguenza l’andamento dell’uscita
e’ detta evoluzione (traiettoria) dello stato
Per sistemi stazionari pilotati da ingressi costanti e’ di interesse
calcolare le eventuali traiettorie dello stato e dell’uscita che
risultano costanti
tale che
e
e’ detto stato di equilibrio del sistema
Prof. L. Marconi
Controlli Automatici T
Parte 2, 52
Linearizzazione di un sistema non lineare
Il comportamento dinamico di un sistema non lineare nell’intorno
di un punto di equilibrio e’ ben descritto dal comportamento dinamico
del sistema ottenuto calcolando l’approssimazione lineare
nell’intorno del punto stesso
Trascurabili se
sono piccoli
Prof. L. Marconi
Controlli Automatici T
Parte 2, 53
Esempio: linearizzazione VTOL
Punto di equilibrio
Sistema linearizzato
Prof. L. Marconi
Controlli Automatici T
Parte 2, 54
Esempio: linearizzazione pendolo inverso
Punto di equilibrio:
con
Sistema linearizzato:
Prof. L. Marconi
Controlli Automatici T
Parte 2, 55
Sistemi lineari: principio di sovrapposizione degli effetti
Consideriamo un primo moto
E un secondo moto
Prof. L. Marconi
dato da
dato da
Controlli Automatici T
Parte 2, 56
….. Sistemi lineari: principio di sovrapposizione degli effetti
E’ allora immediato verificare che il moto corrispondente a
e’ dato da (principio di sovrapposizione degli effetti)
Come conseguenza di questo risultato si ha che il moto complessivo
di un sistema dinamico può essere ottenuto sommando il
movimento libero (
) e quello forzato (
)
Prof. L. Marconi
Controlli Automatici T
….. Sistemi lineari: principio di sovrapposizione degli effetti
Parte 2, 57
Alcune considerazioni:
• Il principio di sovrapposizione degli effetti e’ un fenomeno
tipicamente lineare che viene a decadere nel momento in cui le
dinamiche presentano non linearità
• Essendo
numeri arbitrari il principio di sovrapposizioni degli
effetti evidenzia come per i sistemi lineari il comportamento
ottenuto “per piccole perturbazioni” differisca da quello ottenuto
“per grandi perturbazioni” solo per un fattore di scala.
• Il contributo dello stato iniziale e dell’ingresso per sistemi lineari
può essere studiato separatamente.
Prof. L. Marconi
Controlli Automatici T