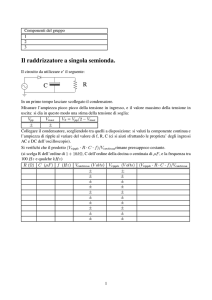
CAP. III – CONDIZIONI QUASI STAZIONARIE ‐ RETI ELETTRICHE IN REGIME SINUSOIDALE III.1 Bipoli fondamentali in condizioni quasi stazionarie Si considerino grandezze variabili nel tempo, ma abbastanza lentamente da poter “ragionevolmente” considerare le tensioni indipendenti dal percorso tra due morsetti A‐B e l’intensità di corrente indipendenti dalla sezione del tratto di conduttore . In tal caso si parlerà di bipoli in regime variabile quasi stazionario. 1 Si definirà resistore ideale in tali condizioni il bipolo (fig. III.1.1) per cui valga – con la convenzione dell’utilizzatore ‐ la relazione v(t)=Ri(t) qualunque siano i valori di tensione e corrente e qualunque sia l’istante di tempo considerato. Ogni bipolo per cui valga una relazione algebrica tra tensione e corrente viene classificato come adinamico. Un bipolo che presenti una caratteristica differenziale viene classificato dinamico. I bipoli dinamici fondamentali sono il condensatore ideale e l’induttore ideale. A
A
A
Φ(t)
QA
R v(t)
i(t)
B
v(t)
QB
i(t)
B
C
v(t)
L i(t)
B
fig. III..1.1 – Resistore, condensatore ed induttore ideali in condizioni quasi stazionarie Si definirà condensatore ideale, in condizioni quasi stazionarie2 (fig.III.1) il bipolo per cui valga, con la convenzione dell’utilizzatore, la relazione i(t)=dq/dt=Cdv/dt dove la i(t) è correlata alla variazione temporale della carica sulle armature del condensatore. Il coefficiente C (≥0) può essere in prima approssimazione considerato pari al rapporto tra carica QA (=‐QB)e tensione VAB in condizioni stazionarie (capacità del condensatore) (fig.III.1.1) . L’intensità della corrente elettrica in un condensatore è quindi in relazione differenziale con la tensione. Tale relazione è lineare, ma non è sufficiente a fornirci le informazioni per risalire al valore della tensione; infatti, considerando la convenzione dell’utilizzatore, si ha in un generico istante t1 1
Per richiami ed approfondimenti sulla considerazione di quasi‐stazionarietà si veda l’appendice A5.
Per un componente reale, questa condizione può essere ragionevolmente assunta se i morsetti A e B sono sufficientemente “lontani” (ma non troppo) dalla zona occupata dalle armature del condensatore. 2
1
t
dv
1 1
ic = C c ⇒ vc (t1 ) = ∫ ic dt + vc (to ) (III.1.1) dt
C t0
dove to è un qualsiasi istante di riferimento. Si vede quindi che può essere ricavata la tensione in un certo istante t1 solo se si conosce il valore della stessa in un istante precedente e l’andamento dell’intensità della corrente nell’intervallo tra gli istanti to e t1. Quindi la tensione non è funzione lineare dell’intensità di corrente, salvo che non sia nulla la tensione nell’istante di riferimento (condensatore a riposo). Definiremo induttore ideale in condizioni quasi stazionarie(3) il bipolo per cui valga, con la convenzione dell’utilizzatore, la relazione v(t)=dΦ/dt=Ldi/dt (fig.III.1.1) . Un induttore viene realizzato in pratica attraverso un avvolgimento costituito da un elevato numero di spire metalliche (solenoide); la tensione v(t) è correlata alla variazione temporale del flusso Φ del campo magnetico concatenato con la linea “quasi‐chiusa” costituita dall’avvolgimento stesso. Il coefficiente L può essere in prima approssimazione considerato pari al rapporto tra flusso ed intensità di corrente in condizioni stazionarie (coefficiente di autoinduzione o induttanza). La tensione ai capi di un induttore è in relazione differenziale con l’intensità della corrente. Tale relazione è lineare, ma non è sufficiente a fornirci le informazioni per risalire al valore dell’intensità di corrente; infatti, considerando la convenzione dell’utilizzatore, si ha in un generico istante t1 t
vL = L
diL
1 1
⇒ iL (t1 ) = ∫ v L dt + iL (t o ) (III.1.2) dt
L t0
dove to è un qualsiasi istante di riferimento. Si vede quindi che si può conoscere l’intensità della corrente in un certo istante t1 solo se si conosce il valore della stessa in un istante precedente e l’andamento della tensione nell’intervallo tra gli istanti to e t1. Quindi la grandezze intensità di corrente non è funzione lineare della tensione, salvo che non sia nulla l’intensità di corrente nell’istante di riferimento (induttore a riposo). Dalle caratteristiche integrali si deduce che se le tensioni applicate agli induttori e le intensità di corrente nei condensatori sono limitate (come nei casi reali), la tensione sui condensatori e la corrente negli induttori sono grandezze continue. Infatti se consideriamo la condizione t1→ to , avremo che gli integrali nelle caratteristiche, estesi ad intervalli infinitesimi, sono infinitesimi. In altri termini, lim(vc (t 0 − ε )) = v c (t 0 − ) = lim(v c (t 0 + ε )) = vc (t 0 + ) = vc (t 0 )
ε →0
ε →0
(III.1.3) lim(i L (t o − ε )) = i L (t o − ) = lim(i L (t o + ε )) = i L (t o + ) = i L (t o )
ε →0
ε →0
La tensione sul condensatore è in ogni istante legata all’energia elettrostatica immagazzinata dal condensatore e l’intensità di corrente nell’induttore è legata all’energia 3
Per un induttore reale costituito da un avvolgimento cilindrico di N spire di area S ed altezza h questa condizione può essere ragionevolmente raggiunta se i morsetti A e B sono a distanza molto minore di h e sono collegati ad un circuito configurando una “spira esterna” di area molto minore di NS. Vedasi appendice A5. 2
magnetica immagazzinata dall’induttore 1
1 2
2
wes (t ) = Cv c
wm = Lil (III.1.4) 2
2
Tali grandezze sono legate quindi allo stato energetico del bipolo e per tale motivo vengono spesso indicate come grandezze di stato. Esse possono essere anche considerate funzioni‐memoria. Tali grandezze di stato sono continue: se non lo fossero, avremmo discontinuità dell’energia, o meglio una variazione finita dell’energia in un intervallo infinitesimo; ciò implicherebbe la capacità del bipolo di assorbire o erogare potenza illimitata; ciò non è concepibile nei casi pratici. Generatori di potenza infinita possono essere tuttavia introdotti formalmente per l’analisi più ampia dei transitori nelle reti con modelli lineari.4 III.2 Reti con bipoli dinamici Si definisce ordine di una rete l’ordine del sistema (algebrico‐)differenziale completo associato alla rete in esame. L’ordine di una rete è quindi pari al numero di equazioni differenziali indipendenti del sistema fondamentale. Una rete costituita da soli bipoli adinamici è di ordine zero. Se la rete è costituita da soli bipoli adinamici normali essa sarà classificata come rete lineare e ad essa potranno essere applicate le considerazioni già fatte nel caso stazionario. Se una rete ha un solo condensatore o un solo induttore, comparirà una sola relazione differenziale e quindi avremo una rete del primo ordine. Se una rete ha più condensatori e/o induttori e/o parametri mutui (capacitivi e/o induttivi) occorrerà una analisi più attenta della rete per individuare il numero delle equazioni indipendenti. Ad esempio, occorrerà evidenziare la eventuale presenza di condensatori o induttori in serie o in parallelo. La “memoria” è legata ad esempio alla sola tensione su un condensatore, anche se questo può essere a sua volta visto come l’equivalente di condensatori in serie o in parallelo. In una rete dinamica di ordine N, ogni grandezza y(t) (tensione o intensità di corrente) può essere rappresentata da una equazione differenziale di ordine N; ai fini della unicità Vedere appendice A12, dove sono introdotti i generatori impulsivi ideali. Esempi di generatori reali classificati come impulsivi sono effettivamente in grado di erogare tensioni ed intensità di corrente molto elevate per intervalli di tempo brevissimi. Ad esempio il generatore di tensione ad impulso della Sala Alta tensione del DIEL (vedi App.A16) è in grado di erogare tensioni di 2.4 MV e intensità di corrente di 3kA per qualche microsecondo, con potenze istantanee dell’ordine dei gigawatt; l’energia erogabile tuttavia non può superare qualche decina di kilojoule (si pensi che una stufetta da 1kW in un’ora consuma 1 kWh, corrispondente a 3.6 MJ!) 4
3
della soluzione stessa a partire da un istante di tempo iniziale, il teorema di Cauchy richiede la conoscenza di N condizioni iniziali, cioè il valore iniziale della y(t) e delle sue (N‐
1) derivate. La ricerca delle condizioni iniziali può essere condotta a partire dai dati iniziali, ovverosia dai valori delle N grandezze di stato corrispondenti agli N bipoli a memoria indipendenti. Nel caso di reti di ordine zero, non sia ha ovviamente necessità di valutare alcuna condizione iniziale (rete “a risposta immediata”). Nel caso di rete di ordine N lineare, la soluzione è del tipo5 N
y (t ) = ∑ k i e λit + y p (t ) (III.2.1) i =1
dove la sommatoria rappresenta l’integrale generale dell’omogenea associata, λi le radici semplici6 dell’equazione algebrica associata; i valori delle N costanti “arbitrarie” ki si particolarizzano attraversi le condizioni iniziali; l’integrale particolare yp(t) si ricava dalla conoscenza del termine noto (“forzante”) dell’equazione differenziale. L’Analisi matematica ci fornisce numerosi strumenti per la identificazione dell’integrale particolare; osserviamo tuttavia che, nei casi di interesse dell’Ingegneria, per la presenza di inevitabili parametri dissipativi, le radici λi sono negative (7) o a parte reale negativa, per cui l’integrale particolare viene a identificarsi con la soluzione a “tempi lunghi” ossia con la soluzione “a regime”; questa è di immediata identificazione nei casi ricorrenti di regime stazionario e sinusoidale. 5
È da ritenere preliminarmente che i coefficienti, ossia i parametri R,L e C siano costanti rispetto al tempo. In presenza di componenti reali a parametri variabili nel tempo (es. parti in movimento) la soluzione del sistema fondamentale sarà in genere ardua. 6
Se una radice ha λ molteplicità m, ad essa viene associata la combinazione di integrali indipendenti m
∑k t(
j =1
j
j −1) λt
e In caso contrario, anche in assenza di generatori, avremmo una crescita dell’”energia” del sistema. 7
4
III.2.1 Esempi di reti del primo ordine Ogni rete del primo ordine contiene in genere un solo bipolo a memoria indipendente (induttore o condensatore) oppure configurazioni riconducibili ad un solo bipolo equivalente (es. serie o parallelo di soli condensatori o soli induttori). Il resto della rete è di ordine zero e quindi riconducibile ad un generatore reale equivalente (di tensione o di corrente). Per risolvere quindi qualsiasi rete basterà fare riferimento ad una delle possibili reti elementari : a) generatore di tensione reale [generatore di corrente reale] alimentante un condensatore ideale (circuito RC serie [circuito RC parallelo]); b) generatore di tensione reale [generatore di corrente reale] alimentante un induttore ideale (circuito RL serie [circuito RL parallelo]). Si consideri come esempio il circuito RC serie (fig.III.2.1): R
vR +
C
vC
e vg
i
fig.III.2.1.1 – Circuito RC serie Si calcolino vc(t) ed ic(t) nei seguenti casi: 1) e(t)=0 per t<0, e(t)=E=10 V per t>0; C=1 mF; R=10 Ω; 2) e(t)=‐E=‐10V per t<0, e(t)=E=10 V per t>0; C=1 mF; R=1‐2‐10 Ω; 3) e(t)=‐E=‐10V per t<0, e(t)=E sen ωt (E=10 V; ω=314 rad/s) per t>0; C=1 mF; R=1‐2‐10 Ω; 4) e(t)=E sen ωt (E=10 V; ω=314 rad/s) per t<0, e(t)=E= e(t)=Ecos ωt per t>0; C=1 mF; R=1‐2‐
10 Ω. Il sistema fondamentale è il seguente: ⎧vg = vR + vC
⎪ v = e(t )
⎪ g
⎨ vR = Ri (III.2.1.1) ⎪
dv
⎪ i=C c
dt
⎩
Le equazioni differenziali nelle incognite di fig.III.2.1 sono 5
dv
⎧
e(t ) = RC c + vC
⎪
dt
⎪
(
)
d
v
−
v
d (e − Ri )
di
de
⎪
g
R
=C
⇒ i + RC = C (III.2.1.2) ⎨i = C
dt
dt
dt
dt
⎪
v
di
de
di
de
R
⎪
+C = C
⇒ vR + RC = RC
R
dt
dt
dt
dt
⎩⎪
Come si può osservare, qualunque sia la grandezza incognita, per la linearità del sistema, l’equazione algebrica associata all’omogenea è 1
1 + λ RC = 0 ⇒ λ = −
= − 100 s −1 ; τ = 10 ms (III.2.1.3) RC
La soluzione è del tipo vc (t ) = k v e
ic (t ) = k i e
−
−
t
τ
+ vcp (t )
t
τ
+ icp (t ) (III.2.1.4) τ = RC
Si osservi che, per t<0, nel primo caso la tensione sul condensatore è sempre nulla, nel secondo e terzo caso è pari a ‐10 V, nel quarto caso è sinusoidale e vale8 1
ωC
⎛
π
⎡ 1 ⎤⎞
sen⎜⎜ ωt − + arctg ⎢
⎥⎦ ⎟⎟
ω
RC
2
⎣
⎝
⎠
1
⎛
⎞
R2 + ⎜
⎟
(III.2.1.5) ⎝ ωC ⎠
1
⎛ π
⎡ 1 ⎤⎞
ωC
→ v c (0 − ) = E
sen⎜⎜ − + arctg ⎢
⎟⎟
2
⎣ ωRC ⎥⎦ ⎠
⎝ 2
⎛ 1 ⎞
2
R +⎜
⎟
⎝ ωC ⎠
v c (t ) t <0 = E
2
L’integrale particolare nel primo e nel secondo caso vale vcp(t)=E=10V, nel terzo caso vale 1
⎛
π
⎡ 1 ⎤⎞
ωC
v cp (t ) = E
sen⎜⎜ ωt − + arctg ⎢
⎟ (III.2.1.6) 2
ωRC ⎥⎦ ⎟⎠
2
⎣
⎝
1
⎛
⎞
R2 + ⎜
⎟
⎝ ωC ⎠
nel quarto caso vcp (t ) = E
1
ωC
⎛
π
⎡ 1 ⎤ ⎞ (III.2.1.7) cos⎜⎜ ωt − + arctg ⎢
⎥⎦ ⎟⎟
2
ω
2
RC
⎣
⎠
⎝
1
⎛
⎞
R2 + ⎜
⎟
⎝ ωC ⎠
In tutti i casi la costante vale k v = vc (0−) − vcp (0+) (III.2.1.8) 8
Essa può essere ricavata con il principio di identità dei polinomi trigonometrici o più rapidamente col metodo simbolico di cui nei paragrafi successivi. 6
Per quanto riguarda l’intensità di corrente , si osservi ancora che, per t<0, essa è sempre nulla nei primi tre casi, nel quarto caso è sinusoidale e vale ⎛
E
⎡ 1 ⎤ ⎞ (III.2.1.8) ic (t ) t <0 =
⎛ 1 ⎞
R +⎜
⎟
⎝ ωC ⎠
2
2
⎟⎟
sen⎜⎜ ωt + arctg ⎢
⎣ ωRC ⎥⎦ ⎠
⎝
10
1
9
0.9
8
0.8
corrente nel condensatore [A]
tensione sul condensatore [V]
L’integrale particolare dell’intensità di corrente nel primo e nel secondo caso è nullo, nel terzo caso vale ⎛
E
⎡ 1 ⎤⎞
icp (t ) =
sen⎜⎜ ωt + arctg ⎢
⎥⎦ ⎟⎟ (III.2.1.9) 2
ω
RC
⎣
⎠
⎝
⎛ 1 ⎞
R2 + ⎜
⎟
⎝ ωC ⎠
nel quarto caso ⎛
E
⎡ 1 ⎤⎞
cos⎜⎜ ωt + arctg ⎢
icp (t ) =
⎥ ⎟⎟ (III.2.1.10) 2
ω
RC
⎦⎠
⎣
⎝
1
⎞
⎛
R2 + ⎜
⎟
⎝ ωC ⎠
In tutti i casi la costante vale e (0 + ) − v c ( 0 − )
k i = ic (0+) − icp (0+) =
− icp (0+) (III.2.1.11) R
Nelle figg. III.2.1.2, III.2.1.3, III.2.1.4, fig.III.2.1.5 sono riportati i grafici relativi alla tensione sul condensatore sul condensatore ed alla intensità di corrente rispettivamente nel caso 1), nel caso 2), nel caso 3) e nel caso 4).. 7
6
5
4
3
0.7
0.6
0.5
0.4
0.3
2
0.2
1
0.1
0
0
0.01
0.02
0.03
0.04
0.05 0.06
tempo [s]
0.07
0.08
0.09
0.1
0
0
0.01
0.02
0.03
0.04
0.05 0.06
tempo [s]
0.07
0.08
0.09
0.1
fig.III.2.1.2 7
10
20
8
18
16
corrente nel condensatore [A]
tensione sul condensatore [V]
6
4
2
0
-2
-4
14
12
10
8
6
-6
4
-8
2
-10
-2
-1.5
-1
-0.5
0
tempo [s]
0.5
1
1.5
0
-2
2
-5
x 10
-1.5
-1
-0.5
fig.III.2.1.3 10
0
tempo [s]
0.5
1
1.5
2
-5
x 10
10
8
8
corrente nel condensatore [A]
tensione sul condensatore [V]
6
4
2
0
-2
-4
6
4
2
0
-6
-2
-8
-10
-0.02
-0.01
0
0.01
0.02
0.03 0.04
tempo [s]
0.05
0.06
0.07
-4
-0.02
0.08
-0.01
0
0.01
0.02
fig.III.2.1.4 0.03 0.04
tempo [s]
0.05
0.06
0.07
0.08
10
6
8
4
4
corrente nel condensatore [A]
tensione sul condensatore [V]
6
2
0
-2
-4
-6
0
-2
-4
-6
-8
-8
-10
-0.02
2
-0.01
0
0.01
0.02
tempo [s]
0.03
0.04
0.05
-10
-0.02
fig.III.2.1.5 -0.01
0
0.01
0.02
tempo [s]
0.03
0.04
0.05
8
Si consideri come ulteriore esempio il circuito RL parallelo (fig.III.2.1.6): ig
L
R
vL
j iL
iR
fig.III.2.1.6 – Circuito RL parallelo Il sistema fondamentale è il seguente: ⎧i g = i R + i L
⎪ i = j (t )
⎪ g
⎪
v
⎨ i R = L (III.2.1.12) R
⎪
di L
⎪
=
v
L
L
⎪⎩
dt
Le equazioni differenziali nelle incognite sono L diL
⎧
+ iL
j (t ) =
⎪⎪
R dt
(III.2.1.13) ⎨
d⎛
v ⎞
L dvL
dj
⎪vL = L ⎜ j − L ⎟ ⇒ vL = vL +
=L
⎪⎩
dt ⎝
R⎠
R dt
dt
L’equazione algebrica associata all’omogenea è L
R
1 + λ = 0 ⇒ λ = − (III.2.1.14) R
L
La soluzione è del tipo vL (t ) = kv e
iL (t ) = ki e
−
−
t
τ
+ vLp (t )
t
τ
+ iLp (t ) (III.2.1.15) τ = L/R
Le costanti arbitrarie si deducono dalla continuità della intensità di corrente nell’induttore e dal sistema fondamentale, “fotografato” allo 0+. iL (0+) = ki + iLp (0 + ) = iL (0+)
(III.2.1.16) vL (0+ ) = kv + vLp (0+ ) = kv + RiR (0 + ) = R[ j (0+) − iL (0+ )]
III.2.2 Esempi di reti del secondo ordine In una rete del secondo ordine sono presenti almeno due elementi a memoria indipendenti: due induttori (non riconducibili ad un induttore equivalente), due condensatori (non riconducibili a un condensatore equivalente), un induttore ed un condensatore. In tal caso, l’equazione algebrica caratteristica è di secondo grado; si può dimostrare (dalle proprietà dei polinomi) che le frequenze naturali sono reali e distinte nel caso di due induttori o di due condensatori; nel caso di un induttore ed un condensatore, 9
le frequenze naturali potrebbero essere distinte ma complesse coniugate, oppure coincidenti. In quest’ultimo caso occorrerà considerare un appropriato integrale generale per l’omogenea associata. Si consideri come primo esempio il circuito RLC serie (fig.III.2): R
L
vR +
vL
e vg
vC
C
i
Fig. III.2.2.1– Circuito RC serie dove il tratteggio indica un eventuale bipolo attivo adinamico equivalente. Il sistema fondamentale è il seguente: ⎧vg = vR + vC + vL
⎪
vg = e(t )
⎪
⎪⎪
vR = Ri
(III.2.2.1) ⎨
dvc
i
C
=
⎪
dt
⎪
⎪ v = L di
L
⎪⎩
dt
Le equazioni differenziali nelle incognite sono dv
e(t ) = Ri + L L + vC
dt
di
⎛
⎞
d ⎜ e − Ri − L ⎟
d (vg − vR − vL )
di
d 2i
de
dt ⎠
i=C
⇒ i + RC + LC 2 = C
=C ⎝
(III.2.2.2) dt
dt
dt
dt
dt
dvR
d 2 vR
de
vR + RC
+ LC 2 = RC
dt
dt
dt
2
dv
d v
d 2e
vL + RC L + LC 2L = LC 2
dt
dt
dt
dv
d 2v
vC = e − vR − vL ⇒ vC + RC C + LC 2C = e
dt
dt
Come si può osservare, qualunque sia la grandezza incognita, per la linearità del sistema, l’equazione algebrica associata all’omogenea è 10
2
R
R
1
1
⎛ R ⎞
± ⎜ ⎟ −
=−
± Δ =−
1 + RCλ + LCλ = 0 ⇒ λ± = −
τ±
LC
2L
2L
⎝ 2L ⎠
2
2
R
R
1
1
⎛ R ⎞
λ± = −
=−
± j Δ = − ± jω
± ⎜ ⎟ −
τ
LC
2L
2L
⎝ 2L ⎠
R
(Δ = 0)
λ=−
2L
(Δ < 0)
(Δ > 0)
(III.2.2.3) L’ultimo caso nella (III.2.2.3) corrisponde alla condizione “critica” R = Rc = 2
L
(III.2.2.4) C
La soluzione generica y(t) è del tipo y (t ) = k + e
−
t
τ+
+ k−e
⎛ 1
⎞
⎜ − + jω ⎟ t
τ
⎠
y (t ) = k + e ⎝
y (t ) = k1e
−
t
τ−
+ y p (t )
⎛ 1
⎞
⎜ − − jω ⎟ t
τ
⎠
+ k− e⎝
t
τ
−
+ k 2te
−
se Δ > 0
+ y p (t ) = e
−
t
τ
(k e
+
jωt
)
−
t
+ k − e − jωt + y p (t ) = ke τ sin (ωt + δ ) + y p (t )
9
se Δ < 0 ( ) t
τ
+ y p (t )
se Δ = 0
(III.2.2.5) Per valori di R non inferiori al valore “critico” la soluzione è aperiodica (doppio esponenziale, uno “veloce” seguito da uno più “lento”); al diminuire di R (fino al valore critico) la “velocità” del primo esponenziale aumenta. Per valori di R inferiori al valore critico la soluzione si presenta oscillatoria smorzata (funzione pseudoperiodica di pulsazione ω) . Per R tendente a zero (circuito non dissipativo) l’oscillazione tende ad essere permanente, con (pseudo)pulsazione massima ω R →0 = ω 0 =
1
(III.2.2.6) LC
Si calcolino vc(t) ed i (t) nei seguenti casi: 1) generatore a gradino : e(t)=‐V0 per t<0 (V0=0,1,2,3,4,5,6,7,8,9,10 V), e(t)=E=10 V per t>0; C=1 mF; L=20 mH; 2) commutazione della tensione del generatore da costante a sinusoidale e(t)=‐V0 per t<0 (V0=‐10,‐9,…..,0,1,…,9,10 V), e(t)=E sen ωt (E=10 V; ω=314 rad/s) per t>0; C=1 mF; Il valore critico della resistenza vale R = Rc = 2
L
= 4 5 ≅ 8.94 Ω C
9
Occorre notare che, nel caso di radici complesse coniugate, anche k+ e k‐ devono essere complesse coniugate, risultando così “reale” la gradezza y(t). 11
Caso 1) In fig. III.2.2.2 sono riportati, per i diversi casi del valore della tensione sul condensatore a t=0, i grafici della tensione sul condensatore e della intensità della corrente nell’induttore nel caso R=10 Ω. In fig. III.2.2.3 sono riportate le corrispondenti caratteristiche tensione corrente del condensatore (traiettorie)10 . In tal caso infatti la soluzione è aperiodica e vale vc (t ) = k v+ e
i (t ) = ki + e
−
−
t
τ+
+ kv− e
t
τ+
+ ki− e
−
−
t
τ−
+ vcp (t )
t
τ−
(III.2.2.7) + i p (t )
L’integrale particolare della tensione sul condensatore è costante e pari a E (l’induttore si comporta come un cortocircuito), quello dell’intensità di corrente è nullo (il condensatore si comporta come un aperto). Le costanti di integrazione si ricavano dalle condizioni iniziali vc (0+ ) = k v+ + k v − + E = vc (0−) = V0
i (0+ ) = k i + + k i − = i (0−) = 0
dvc
dt
=
0+
k
k
i (0 + )
= 0 = − v+ + − v−
C
τ+
τ−
(III.2.2.8) k
k
1
di
v (0 + ) 1
= L
= v g (0+) − vc (0+) − v R (0+ ) = [E − V0 − Ri (0+ )] = − i + + − i −
dt 0+
L
L
L
τ+
τ−
[
]
fig. III.2.2.2– Circuito RLC alimentato con tensione a gradino ‐ Tensione sul condensatore ed intensità di corrente, caso 1 (transitorio aperiodico) Si nota (per estrapolazione) che tutte le traiettorie tendono al punto (E,0). 10
12
fig. III.2.2.3 – Circuito RLC – Caso aperiodico – Caratteristica tensione‐ corrente del condensatore (traiettorie) In fig.III.2.2.4 è riportato il grafico della tensione sul condensatore al variare di R dal 20% al 200% del valore critico (con condizioni iniziali di riposo). In tal caso si mettono in evidenza anche le soluzioni pseudoperiodiche: vC (t ) = k + e
−
−
t
τ+
+ k−e
−
t
τ−
+ vC p (t )
se R > Rc
t
vC (t ) = ke sin (ωt + δ ) + vC p (t )
vC (t ) = k1e
se R < Rc (III.2.2.9) τ
−
t
τ
+ k 2te
−
t
τ
+ vC p (t )
se R = Rc
Le costanti arbitrarie si determinano con le condizioni iniziali vC (0) = 0 = k + + k − + E
vC (0) = 0 = k sin (δ ) + E
vC (0) = 0 = k1 + E
dvc
dt
dvc
dt
dvc
dt
=
0+
se R < Rc
se R = Rc
k
k
i (0 + )
= 0 = − v+ + − v−
C
τ+
τ−
=
i (0 + )
= 0 = kω cos (δ )
C
=
i (0 + )
k
= 0 = − 1 + k2
C
τ+
0+
0+
se R > Rc
se R > Rc
se R > Rc
(III.2.2.10) →δ =
π
2
, k = −E
se R = Rc
Per l’intensità di corrente si avrà nel caso aperiodico, i (0 + ) = k i + + ki − = i (0 − ) = 0
di
v (0 + ) 1
1
k
k = L
= vg (0+) − vc (0+) − vR (0+) = [E − V0 − Ri (0+)] = − i+ + − i−
τ+
τ−
dt 0+
L
L
L
[
]
con facile estensione agli altri casi. 13
fig.III.2.2.4 – Circuito RLC alimentato da tensione costante‐ Tensione e intensità di corrente nel condensatore al variare del valore di R. Condizioni iniziali di riposo. Nella condizione pseudoperiodica, la tensione sul condensatore può essere superiore (fino al doppio) della tensione del generatore. In questo caso è evidente che non è verificata la proprietà di non‐amplificazione. Caso 2) In fig. III.2.2.5 sono riportati, per i diversi casi del valore della tensione sul condensatore a t=0, i grafici della tensione sul condensatore e della intensità della corrente nell’induttore nel caso R=10 Ω. In tal caso infatti la soluzione è aperiodica e vale vc (t ) = k v+ e
i (t ) = ki + e
−
−
t
τ+
+ kv− e
t
τ+
+ ki− e
−
−
t
τ−
+ vcp (t )
t
τ−
(III.2.2.11) + i p (t )
Gli integrali particolari sono sinusoidali e valgono ⎛
⎡⎛
1 ⎞⎤⎞
⎜
⎜ ωL −
⎟ ⎟
⎢
π
ωC ⎠ ⎥⎥ ⎟
vcp (t ) = E
sen⎜⎜ ωt − − arctg ⎢ ⎝
2
R
2
⎥⎟
⎢
1 ⎞
⎛
⎜⎜
R 2 + ⎜ ωL −
⎥ ⎟⎟
⎢
⎟
⎦⎠
⎣
⎝
ωC ⎠
⎝
1
ωC
⎛
⎡⎛
1 ⎞⎤⎞
⎜
⎢ ⎜ ωL − ωC ⎟ ⎥ ⎟
π
⎜
⎝
⎠⎥⎟
sen⎜ − − arctg ⎢
→ vcp (0+ ) = E
2
R
2
⎥⎟
⎢
1 ⎞
⎛
⎜⎜
R 2 + ⎜ ωL −
⎥ ⎟⎟
⎢
⎟
⎦⎠
⎣
⎝
ωC ⎠
⎝
1
ωC
→
dvcp
dt
=
0+
(III.2.2,12) ⎛
⎡⎛
1 ⎞⎤⎞
⎜
⎢ ⎜ ωL − ωC ⎟ ⎥ ⎟
⎠⎥⎟
sen⎜⎜ − arctg ⎢ ⎝
2
R
⎥⎟
⎢
1 ⎞
⎛
⎜⎜
R 2 + ⎜ ωL −
⎥ ⎟⎟
⎢
⎟
⎦⎠
⎣
⎝
ωC ⎠
⎝
E /C
14
⎛
⎡⎛
1 ⎞⎤⎞
⎜
⎢ ⎜ ωL − ωC ⎟ ⎥ ⎟
⎜
⎠⎥⎟
sen⎜ ωt − arctg ⎢ ⎝
2
R
⎢
⎥⎟
1 ⎞
⎛
⎜⎜
R 2 + ⎜ ωL −
⎢⎣
⎥⎦ ⎟⎟
⎟
⎝
⎠
ωC ⎠
⎝
E
i p (t ) =
→ i p (0 + ) =
→ di p
dt
=
0+
⎛
⎡⎛
1 ⎞⎤⎞
⎜
⎜ ωL −
⎟ ⎟
⎢
E
ωC ⎠ ⎥⎥ ⎟
sen⎜⎜ − arctg ⎢ ⎝
2
R
⎢
⎥⎟
⎛ 1 ⎞
⎜⎜
R2 + ⎜
⎢
⎥ ⎟⎟
⎟
⎣
⎦⎠
⎝
⎝ ωC ⎠
(III.2.2.13) ⎛
⎡⎛
1 ⎞⎤⎞
⎜
⎢ ⎜ ωL − ωC ⎟ ⎥ ⎟
π
⎜
⎝
⎠⎥⎟
sen⎜ − arctg ⎢
2
R
2
⎢
⎥⎟
1 ⎞
⎛
⎜
R 2 + ⎜ ωL −
⎜
⎢
⎥ ⎟⎟
⎟
⎣
⎦⎠
⎝
ωC ⎠
⎝
ωE
fig.III.2.2.5 – Circuito RLC con commutazione della tensione da costante a sinusoidale ‐ Tensione sul condensatore ed intensità di corrente, caso 2 (transitorio aperiodico) Le costanti di integrazione si ricavano dalle condizioni iniziali vc (0+ ) = k v+ + k v − + vcp (0+) = vc (0−) = V0
i ( 0 + ) = k i + + k i − + i p (0 + ) = i ( 0 − ) = 0
dvc
dt
=
0+
dvcp
k
k
i (0 + )
= 0 = − v+ + − v− +
τ+
τ−
C
dt
(III.2.2.14) 0+
di
k
k
di
v (0 + ) 1
1
= L
= v g (0+ ) − vc (0+ ) − vR (0+) = [E − V0 − Ri(0+)] = − i + + − i − + p
τ+
τ − dt
dt 0+
L
L
L
[
]
0+
Anche nel caso 2) si potrà constatare che la tensione sul condensatore può essere maggiore della tensione prevista a regime, sia nel caso aperiodico che in quello pseudoperiodico; poiché in quest’ultimo caso è presente una componente oscillante, è opportuno prevedere (per il dimensionamento dei componenti reali) un valore massimo della tensione pari al triplo (non più al doppio) della tensione prevista a regime. 15
III.3 Osservazioni generali sulla dinamica delle reti lineari (*) Riprendendo quanto già detto in precedenza, il sistema fondamentale per una rete di l lati consta di l equazioni topologiche (sempre algebriche) e di l equazioni caratteristiche di cui N=NL+NC equazioni differenziali relativi a nL ed nc induttori e condensatori indipendenti, nonché eventualmente conto a parte di bipoli dinamici di altro tipo (es. doppi bipoli corrispondente a mutuo accoppiamento induttivo o capacitivo). Nel caso di sistema lineare a coefficienti costanti, la soluzione è nota a meno di n costanti arbitrarie, che andranno valutate in base al teorema di unicità di Cauchy, cioè in base alla determinazione del valore della funzione e delle sue n‐1 derivate. Per ricavare le condizioni iniziali della funzione (in genere non si tratta di una funzione a memoria) si considera la scrittura (foto) del sistema all’istante t0=0+. In tale istante sono incognite quasi tutti i valori tranne quelli delle n funzioni di stato, note dallo 0‐.Inoltre sono incogniti i valori allo 0+ delle n derivate che compaiono nelle caratteristiche dinamiche. In definitiva abbiamo n equazioni ai valori (algebrici) delle (l‐n) grandezze e delle n derivate allo 0+. Il sistema è determinato e quindi siamo in grado di conoscere allo 0+: - i valori delle n grandezze di stato; - i valori delle l‐n grandezze non di stato - i valori delle n derivate prime delle grandezze di stato. Se occorre conoscere le derivate prime delle grandezze non di stato o le derivate seconde delle grandezze di stato, basta considerare il sistema di 2l equazioni ottenuto derivando una ad una le equazioni del sistema fondamentale. In questo sistema derivato, letto allo 0+, conosciamo le derivate delle grandezze di stato dal ragionamento precedente e quindi possiamo conoscere allo 0+: - i valori delle derivate delle l‐n grandezze non di stato - i valori delle n derivate seconde delle grandezze di stato. Tale ragionamento può essere ripetuto fino a conoscere il valore iniziale della derivata di ordine (n‐1). La suddetta formulazione può essere espressa direttamente in forma “circuitale”. Lo schema elettrico corrisponde infatti al sistema fondamentale e può essere letto in ogni istante, in particolare allo 0+. La “foto” del sistema allo 0+ vede quindi i valori delle funzioni note (in genere i generatori) valutate allo 0+ ed i valori delle grandezze di stato note in quanto continue dallo 0‐. Per il principio di sostituzione, possiamo quindi inserire al posto dei condensatori generatori di tensione v(0‐), al posto degli induttori, generatori di corrente. La rete in tal modo diventa “resistiva” e ad essa possono essere applicate tutte le proprietà delle reti lineari. 16
Possono essere quindi ricavate tutte le grandezze della rete allo (0+). Restano altresì determinate i valori iniziali delle derivate prime delle grandezze di stato. Al sistema fondamentale “derivato” corrisponde lo schema “derivato” con gli stessi bipoli (generatori e resistori), con tensioni e correnti “derivate”; i valori delle derivate per i generatori sono noti dal primo sistema. Possono quindi essere ricavate le altre grandezze derivate. Si procede in tal modo qualunque sia l’ordine del sistema. Il principio di sostituzione ci permette di “truccare” la foto del sistema non solo allo 0+ (per la determinazione delle costanti arbitrarie), ma in qualsiasi istante t, sostituendo ai condensatori un generatore di tensione vc(t) e agli induttori un generatore di corrente iL(t). La rete diventa in questo modo resistiva e possono essere facilmente valutate, con gli ordinari metodi: a) le intensità di corrente ic(t) nei condensatori; b) le tensioni vL(t) sugli induttori. Queste grandezze risulteranno quindi in relazione algebrica con le grandezze dei “generatori”, in particolare con le vc(t) e le iL(t); le relazioni differenziali potranno essere quindi organizzate come segue: dvc
⎧
⎪ic (t ) = C dt = a1vc (t ) + a 2 i L (t ) + a 3 x g (t ) (α )
⎨
di
⎪v L (t ) = L L = b1v c (t ) + b2 i L (t ) + b3 x g (t )
(β )
dt
⎩
dove sono indicate le costanti di proporzionalità dei singoli contributi dovuti ai generatori noti [indicati genericamente con xg(t)] e ai generatori fittizi corrispondenti ai condensatori ed agli induttori. Da notare che dalle relazioni del tipo (α) si possono esprimere le correnti negli induttori in funzione delle tensioni sui condensatori e della loro derivata prima: dv
1 ⎛
⎞
i L (t ) = ⎜ a1vc (t ) + C c + a3 x g (t ) ⎟ dt
a2 ⎝
⎠
La sostituzione, nelle equazioni del tipo (β) di una relazione di questo tipo e della sua derivata dx g ⎞
d 2 vc
di L
1 ⎛ dvc
⎜ a1
⎟ =
+
+
C
a
3
2
dt ⎟⎠
dt
a 2 ⎜⎝ dt
dt
porta ad equazioni differenziali nelle sole vc ;in un circuito con una sola L ed una sola C, ad una equazione del secondo ordine in vc dx g ⎞
d 2v
dv
1 ⎛ dv
1 ⎛
⎞
⎟⎟ = b1vc (t ) + b2
L ⎜⎜ a1 c + C 2c + a3
⎜ a1vc (t ) + C c + a3 x g (t ) ⎟ + b3 x g (t )
dt
a 2 ⎝ dt
dt ⎠
a2 ⎝
dt
⎠
2
dx
(a b + b2 a3 )
d vc (La1 − b2 C ) dvc (a 2 b1 + b2 a1 )
La
g
vc (t ) = 2 3
x g (t ) − 3
+
−
2
LC
dt
LC
LC
LC dt
dt
L’integrale particolare, nella vc, può essere valutato a partire dal secondo membro di quest’ultima equazione, con gli ordinari metodi dell’Analisi matematica; ricordiamo che, 17
nel caso di regime stazionario o sinusoidale, tale integrale può essere valutato per vie più brevi (es. con il metodo simbolico). Per quanto riguarda le frequenze naturali, esse possono essere ricavate dalla equazione algebrica associata all’omogenea delle (α)‐(β), ossia ⎧ dvc
⎪C dt − a1vc (t ) − a 2 i L (t ) = 0 (α ' )
⎨ di
⎪ L L − b1vc (t ) − b2 i L (t ) = 0
(β ' )
⎩ dt
Cλ − a1
− a2
= CLλ2 − ( La1 + Cb2 ) + (a1b2 − b1 a 2 ) = 0
− b1
L λ − b2
2
(a1b2 − b1a 2 )
( La1 + Cb2 )
⎛ ( La1 + Cb2 ) ⎞
λ1, 2 =
± ⎜
⎟ −
2 LC
2 LC
LC
⎝
⎠
L’esame di una grandezza di risposta y(t) (tensione o corrente in un ramo) ad una grandezza di ingresso o forzamento x(t) (generatore di tensione o di corrente) può essere condotta su una rete a riposo che abbia le seguenti proprietà: a) sia tempo‐invariante, ossia non si verificano variazioni nella topologia della rete o nel valore dei parametri caratteristici [ se la rete è tempo‐variante, occorrerà restringere l’esame della dinamica in ogni intervallo in cui la rete sia tempo‐ invariante ]; b) sia lineare, ossia costituita da bipoli la cui caratteristica risponda a requisiti di linearità; se una rete è costituita da bipoli fondamentali resistori, induttori (inizialmente scarichi) e condensatori (inizialmente scarichi), la rete è lineare; c) sia passiva, ossia vi sia solo un generatore (ingresso); se vi sono più generatori (più ingressi), la risposta potrà valutarsi dalla somma dei contributi legati ai singoli ingressi, se la rete è lineare. Nei casi suddetti la risposta prende il nome di evoluzione forzata: essa dipenderà dalla topologia della rete e dal forzamento. Se vi sono più forzamenti, l’evoluzione forzata sarà pari alla somma dei contributi dei singoli forzamenti. Nel caso di reti non a riposo nell’istante iniziale di osservazione della dinamica e sottoposte a forzamento nullo, la risposta prende il nome di evoluzione libera. Se la rete non è a riposo, essa non è lineare; infatti, nella caratteristica tensione‐corrente dei bipoli a memoria C ed L (convenzione dell’utilizzatore) t1
t1
dv
di
ic = C c ⇒ v c (t1 ) = ∫ ic dt + v c (t o ) v L = L L ⇒ i L (t1 ) = ∫ v L dt + i L (t o ) dt
dt
t0
t0
occorre precisare il “valore iniziale” della variabile di stato; le relazioni suddette sono lineari solo se tale valore è nullo. Si può dimostrare in generale che la risposta è pari alla somma dell’evoluzione libera e dell’evoluzione forzata (vedi app.A15). Nella caratterizzazione dinamica delle reti assumono un ruolo fondamentale sia le soluzioni della equazione algebrica associata all’omogenea (esprimibili come frequenze 18
naturali λk o attraverso le costanti di tempo τk =‐1/λk, reali o complesse coniugate) sia l’integrale particolare. Poiché le soluzioni λk sono negative o a parte reale negativa nei circuiti reali (dissipativi), l’integrale particolare può essere costituito, se individuabile, dalla soluzione secolare (a tempo infinito) ossia dalla soluzione a regime (es. stazionario, sinusoidale, periodico, etc). Nel caso di forzamento polinomiale, esponenziale o cisoidale (ossia costituito da una combinazione di funzioni esponenziali, trigonometriche ed iperboliche), la soluzione secolare sarà del tipo polinomiale, esponenziale o cisoidale; il principio di identità applicato al sistema differenziale ci permette di valutare completamente l’integrale particolare e quindi l’integrale completo. Laddove il forzamento non fosse del tipo suddetto o addirittura non esprimibile analiticamente (si pensi ad esempio ad una tensione indotta da un fulmine o, più semplicemente, al segnale derivante da un microfono), l’evoluzione delle grandezze nella rete potrà essere ricondotta a risposte canoniche o indiciali ossia a forzamenti‐tipo (“standard”). Forzamenti‐tipo fondamentali sono la sollecitazione “a gradino unitario” e la sollecitazione “ad impulso unitario”. La prima sembra più “accessibile” anche dal punto di vista sperimentale, la seconda si presenta più adatta ad una formulazione analitica compatta. Rientrano nelle sollecitazioni‐tipo gli impulsi di ogni ordine, ricavabili per derivazione successiva della funzione a gradino, nel senso delle distribuzioni. Per questa metodologia si rinvia all’app.A15. III.4 Grandezze periodiche – Grandezze sinusoidali Le funzioni periodiche del tempo a(t) sono caratterizzate da un periodo T tale che, per ogni t, sia a(t)=f(t+kT) con k intero qualsiasi. L’inverso del periodo f=1/T viene detto frequenza; f si misura in hertz [inverso del secondo]. Le funzioni periodiche sono caratterizzate da un valore massimo (o picco positivo) e da un valore minimo11, da un valore medio nel periodo e da un valore medio quadratico ( rms: root mean square) o valore efficace nel periodo Amedio
1
=
T
∫
t 0 +T
t0
a (t )dt
Arms = Aeff
1
= A=
T
t0 +T
∫a
2
(t )dt (III.4.1) t0
Le funzioni periodiche a valor medio nullo si dicono alternative. Una funzione alternativa rettangolare ha il valore efficace coincidente con il valore massimo. Una funzione sinusoidale del tipo ⎛ 2π
⎞
a(t ) =AM sen⎜
t + α ⎟ = AM sen(2πft + α ) = AM sen(ωt + α ) (III.4.2) ⎝T
⎠
è periodica di periodo T, frequenza f e pulsazione ω, fase iniziale α, è alternativa ed il suo valore efficace è pari a 11
Ovviamente una funzione costante è un caso banale di funzione periodica. 19
Aeff =
AM
= 0,707... AM (III.4.3) 2
Il punto di nullo più prossimo allo zero è l’istante t*=‐α/ω. Pertanto se α=0 la funzione è tipo seno, se α=π/2 la funzione è del tipo coseno. Una funzione b(t)=BM sen(ωt+β) è sfasata dell’angolo (β‐α) rispetto ad a(t); se tale angolo è positivo12 , b(t) è sfasata in anticipo rispetto a a(t), se è negativo è sfasata in ritardo rispetto ad a(t); se il suddetto angolo di sfasamento è nullo, le due grandezze si dicono in fase, se l’angolo di sfasamento è ±π le due grandezze si dicono in opposizione di fase, se l’angolo è ±π/2 le due grandezze si dicono in quadratura (in anticipo o ritardo). Osserviamo che a) il prodotto di una grandezza sinusoidale per una costante positiva [negativa] è una grandezza sinusoidale della stessa pulsazione ed in fase [opposizione di fase] g (t ) = PM sen(ωt + η ) = ka(t ) =kAM sen(ωt + α ) → PM =kAM ;η = α (III.4.4) b) la somma o la differenza di due funzioni sinusoidali della stessa pulsazione è una grandezza sinusoidale della stessa pulsazione c(t ) = CM senc(t ) = CM sen(ωt + γ ) = a (t ) + b(t ) = AM sen(ωt + α ) + BM sen(ωt + β )
CM sen ωt cos γ + CM cos ωt sen γ = AM sen ωt cos α + AM cos ωt sen α + BM sen ωt cos β + BM cos ωt senβ
CM cos γ = AM cos α + BM cos β
(III.4.5) CM sen γ = AM sen α + BM senβ
⇒ CM2 = AM2 + BM2 ; tg γ =
AM sen α + BM senβ
AM cos α + BM cos β
c) la derivata di una funzione sinusoidale è una funzione sinusoidale della stessa pulsazione in quadratura in anticipo d (t ) = DM sin (ωt + δ ) =
π⎞
π
da
⎛
= ωAM cos(ωt + α ) = ωAM sen⎜ ωt + α + ⎟ ⇒ DM = ωAM ; δ = α + (III.4.6). 2
2
dt
⎝
⎠
III.5 Il metodo simbolico – Operatori complessi Poiché il sistema fondamentale di una rete lineare prevede relazioni del tipo a),b),c) e d) sopra detto, se ne deduce che una soluzione sinusoidale di pulsazione ω è compatibile con un sistema in cui i generatori (i termini noti) siano sinusoidali della stessa pulsazione; applicando il principio di identità dei polinomi trigonometrici, si può anche concludere che la soluzione è unica; tutte le grandezze incognite hanno pulsazione ω. Le grandezze si diversificano quindi solo per l’ampiezza e la fase iniziale; possiamo quindi stabilire una corrispondenza biunivoca tra le funzioni sinusoidali e le coppie ordinate di numeri reali (numeri complessi) ossia i punti del piano cartesiano: a (t ) = AM sen (ωt + α ) ⇔ ( AM , α ) ⇔ A ( Ax = AM cos α , A y = AM sin α ) ⇔ AM e jα = Ax + jA y L’operatore di Eulero‐ De Moivre e , formalmente definito come jα
Si considera in genere la determinazione principale dello sfasamento, ossia (β−α)<π. 12
20
ejα =(cosα+jsenα) , è rappresentativo del punto sulla circonferenza di raggio unitario centrata nell’origine (fig.III.5.1). Esso è un operatore di rotazione: applicandolo ad un vettore Ā (fasore) o punto del piano della rappresentazione – corrispondente della grandezza sinusoidale a(t)‐ si ottiene un vettore Ā’ ruotato di α (fig.III.5.1). Se in particolare α=π/2, si ha ejα=j; un’altra rotazione di π/2 porta al vettore opposto ad Ā: infatti ejπ=j2=‐1; una ulteriore rotazione di π/2 ci porta ad una rotazione complessiva ej3π=j3=‐j corrispondente ad una rotazione (“negativa”) di ‐π/2: e‐jπ/2=‐j=1/j; una ulteriore rotazione di π/2 ci riporta sul vettore originario: ej2π=j4=1. In particolare, quindi, l’operatore j (comunemente detto immaginario) indica una rotazione di π/2 nel piano cartesiano. Per evidenziare questo concetto in modo ancor più elementare, si può osservare che il punto P≡(a,b)≡a+jb del piano può essere immaginato “raggiunto” a partire dall’origine percorrendo un tratto a lungo l’asse x (asse “reale”) e quindi un tratto b lungo una direzione ortogonale (asse y “immaginario”). Si può facilmente controllare che alle operazioni di addizione, sottrazione e moltiplicazione per costante nel dominio nel tempo corrispondono addizione, sottrazione e moltiplicazione per costante nel dominio della rappresentazione simbolica. Tali operazioni sono corrispondenti alle ordinarie operazioni tra vettori (moltiplicazione di un vettore per una costante, composizione di vettori con la regola del parallelogramma). g (t ) = k a (t ) ⇔ G = kA
c(t ) = a (t ) + b(t ) ⇔ C x = Ax + Bx ; C y = Ay + By ⇔ C = A + B ⇔ C = CM e jγ
(III.5.1)
Una importante ulteriore operazione vettoriale elementare è quella di rotazione, formalmente eseguibile con l’operatore di Eulero. Si può facilmente controllare che all’operazione di derivazione corrisponde una moltiplicazione per jω ovvero una rotazione di π/2 ed una modifica dell’ampiezza . N.B. Nella corrispondenza la coppia ordinata di numeri reali può essere sostituita (per tutti i fasori) da un valore univocamente legato all’ampiezza (ad esempio il valore efficace) e da un riferimento angolare qualsiasi. In generale le operazioni tra fasori corrispondono ad una rotazione e modifica di ampiezza. L’operatore che le descrive avrà la forma M& = M e jα = M x + jM y = M cos α + jMsenα con M modulo dell’operatore, α argomento dell’operatore. 21
y
Ā’= Ā ejα
-1
1
α
cos α
α
sen α
1
Ā
x
fig. III.5.1 – Operatore ejα e sua applicazione ad un vettore del piano. III.6 Operatori di ammettenza e di impedenza Nel caso di resistori ideali su cui si è fatta la convenzione dell’utilizzatore, se l’intensità di corrente è sinusoidale di nota pulsazione ω e fase iniziale βR, anche la tensione è sinusoidale della stessa pulsazione ω e fase iniziale αR=βR; se si fosse adottata la convenzione del generatore, tensione e intensità di corrente sarebbero in opposizione di fase. Se la tensione su un condensatore è sinusoidale di nota pulsazione e fase iniziale αc, l’intensità di corrente assorbita ha la stessa pulsazione, ma ha una fase iniziale αc =βc+π/2, quindi in anticipo rispetto alla tensione. Se l’intensità di corrente in un induttore sinusoidale di nota pulsazione e fase iniziale αL, la tensione ha la stessa pulsazione, ma ha una fase iniziale incrementata di βc =αc+π/2, quindi in anticipo rispetto alla intensità di corrente. Le relazioni corrispondenti e la loro presentazione grafica sono appresso riportate. vR = RiR → VR = RI ⇔ VRM = RI RM α R = β R
dvc
dt
di
vL = L L
dt
ic = C
I c = jωCVc
⇔ I CM = ωCVCM β C = α C +
VL = jωLI L
⇔ VLM = ωLI LM α L = β L +
π
2
(III.6.1) π
2
22
ĪC
VL
VR
ĪL
αL
ĪR
βR=αR
VC
βC
αC
βL
fig.III.6.1 – Caratteristiche simboliche per i bipoli fondamentali Se consideriamo un circuito semplice costituito da un generatore ideale di tensione e(t)=EMsen(ωt+α), un resistore di resistenza R ed un condensatore di capacità C (v. fig.III.2), si ricava per la corrente erogata dal generatore l’espressione e(t ) = v R (t ) + vc (t ) ⇔ E = VR + Vc
v R = Ri R
⇔ V R = RI
dvc
⇔ I c = jωCVc
dt
X
jarctg c
EM
E
ja
R
I =
e
= IM e =
⇒ ic (t ) =
2
2
R − jX c
R + Xc
(III.6.2) ic = C
EM
R 2 + X c2
sen(ωt + arctg
Xc
)
R
dove Xc=1/ωC è la reattanza capacitiva. Nel metodo simbolico, il legame tra tensione e corrente per un bipolo si esprime nella forma (legge di Ohm alle grandezze simboliche, convenzione dell’utilizzatore): V = Z& I oppure I = Y&V (III.6.2) jα
V V e
Z& = = M jβ
I
IM e
(operatori di impedenza e di ammettenza) V
= M e j (α −β ) = Ze jϕ = R + jX
IM
(III.6.3) I
I
1
R
X
Y& = = M e j ( β −α ) = Ye jψ = e − jϕ = G + jB = 2
−j 2
2
V VM
Z
R +X
R + X2
L’argomento ϕ , per motivi che vedremo in seguito, prende il nome di angolo di potenza. La parte reale R dell’operatore di impedenza è l’operatore di resistenza, il coefficiente della parte immaginaria X è l’operatore di reattanza. L’impedenza si misura in ohm. 23
La parte reale G dell’operatore di ammettenza è l’operatore di conduttanza; il coefficiente dell’immaginario è l’operatore di suscettanza. L’ammettenza si misura in siemens. Da notare che G non è l’inverso di R e B non è l’inverso di X. Nel caso del resistore ideale si ha Ż=R+j0, Y& = G + j 0 , con R=1/G pari al valore di resistenza. La tensione è in fase con l’intensità di corrente. Nel caso dell’induttore ideale si ha Ż=0+j(XL), Y& = 0 + j (− B L ) , dove XL=ωL è la reattanza induttiva (mentre BL=1/ωL è la suscettanza induttiva). La tensione è in quadratura ed in anticipo rispetto all’intensità di corrente. Nel caso del condensatore ideale si ha Ż=0+j(‐XC), Y& = 0 + j ( BC ) , dove XC=1/ωC è la reattanza capacitiva (mentre BC=ωC è la suscettanza capacitiva). La tensione è in quadratura ed in ritardo rispetto all’intensità di corrente. Queste considerazioni inducono ad interpretare l’operatore di impedenza come una “serie” formata da un resistore ideale R e da un reattore ideale X (=XL‐XC), ovvero, con un grado di libertà, come un circuito RLC serie; l’operatore di ammettenza può essere a sua volta interpretato come un “parallelo” formato da un resistore ideale di conduttanza G e da un reattore ideale di suscettanza B (=BC‐BL), ovvero, con un grado di libertà, come un circuito RLC parallelo. Data la relazione tra i due operatori, si deduce che ad ogni circuito RLC serie corrisponde un circuito RLC parallelo13. I casi X=0 e B=0 corrispondono ai circuiti risonanti (serie e parallelo) equivalenti a resistori ideali (vedi prossimo paragrafo). Se R=X=0 siamo in presenza di un bipolo corto‐circuito ideale. Se G=B=0 siamo in presenza di un bipolo aperto ideale. La (III.6.3) può essere scritta per qualsiasi bipolo formalmente rappresentabile, non solo del tipo RLC. Può essere scritta anche per un generatore reale o ideale: in tal caso il bipolo non può essere ricondotto ad un circuito equivalente RLC.14 13
Ovviamente con diversi valori di R,L,C (>0) e con un grado di libertà sulla scelta di L e C. Può tuttavia essere sostituito da un circuito RLC se risulta R≥0, G≥0. 14
24
III. 7 Risonanza serie e parallelo Un circuito in regime sinusoidale, comunque complesso, nel quale siano presenti resistenze, induttanze e capacità e un solo elemento attivo si dice in risonanza quando rispetto al generatore che lo alimenta si comporta come un circuito puramente ohmico. Consideriamo per semplicità il circuito RCL serie illustrato in Fig.III.7.1. R
L
vR
+
vL
e vC
vg
C
i
. Fig. III.7.1 – Circuito RLC serie Consideriamo il funzionamento in regime sinusoidale di tale circuito. E
Il fasore rappresentativo della corrente è dato da I =
dove E = EM rappresenta il fasore Z& eq
⎛
⎝
relativo alla tensione del generatore e(t) = E m sen(ωt) e Zeq = R + j⎜ ω L −
1 ⎞
⎟ è ωC ⎠
l’impedenza equivalente della serie del resistore, dell’induttore e del condensatore. Il modulo del fasore corrente è: EM
IM =
2
1
⎛
⎞
R 2 + ⎜ ωL −
⎟
ωC ⎠
⎝
Consideriamo, ora, l’andamento del modulo della corrente IM al variare della pulsazione ω. È immediato verificare che il valore del modulo IM tende a zero per ω→0 e per ω→ +∞ , mentre assume il suo valore massimo in corrispondenza della pulsazione di risonanza 1
ω0 =
LC
E’ facile verificare che per tale valore della pulsazione la parte immaginaria dell’impedenza Z& eq è uguale a zero, perché la reattanza capacitiva è uguale a quella capacitiva, e quindi il modulo di Z& eq assume il valore minimo.Il valore della corrente alla EM
, cioè, alla corrente che si avrebbe se nel R
circuito vi fosse solo il resistore. Inoltre, alla risonanza è immediato verificare che la tensione del condensatore VC è l’opposto di quella dell’induttore VL , e quindi la tensione pulsazione di risonanza è quindi uguale a sul resistore è uguale a quella del generatore. 25
In definitiva, alla pulsazione di risonanza il circuito, rispetto alla tensione che lo alimenta, si comporta come se fosse puramente ohmico (la serie L‐C è equivalente ad un cortocircuito). Si osservi che valgono analoghe considerazioni per il circuito RLC parallelo. In questo caso tuttavia al posto della corrente va considerata la tensione sui tre carichi in parallelo (alla risonanza il parallelo LC si comporta come un circuito aperto). I circuiti risonanti, almeno da un punto di vista di principio, sono quelli che si utilizzano nelle telecomunicazioni quando si voglia selezionare un segnale di un data frequenza presente in tutto lo spettro che il sistema ricevente raccoglie. La selezione avviene facendo variare la frequenza di risonanza del sistema ricevente che si “accorda” con la frequenza cercata grazie al fatto che a quella frequenza si ha un picco di corrente. Occorre tuttavia ricordare, soprattutto nel caso di impianti di potenza, la tensione sul condensatore e sull’induttore –RLC serie‐ [l’intensità di corrente nel caso del circuito parallelo] potrebbe assumere valori elevati e quindi pericolosi. Infatti si può mostrare che il valore efficace della tensione sul condensatore [dell’intensità di corrente nell’induttore nel caso parallelo] è, alla pulsazione di risonanza, pari al valore efficace della tensione del generatore moltiplicato per il fattore di merito ω L
1
R
Qs = o =
[Q p = ω o RC =
] ω o RC
ωo L
R
che può assumere valori molto elevati per R tendente a zero [per R tendente a infinito]. Un circuito RLC può quindi assumere il ruolo di amplificatore passivo, non valendo più in generale le ipotesi di non amplificazione valide il regime stazionario15. III.8 Applicazione del metodo simbolico alle reti lineari L’applicazione del metodo simbolico a tutto il sistema fondamentale di una rete lineare alimentata da generatori isofrequenziali consente di trasformare un sistema differenziale (trigonometrico) di 2l equazioni in un sistema algebrico vettoriale. Si può operare quindi indifferentemente sia in forma geometrica (rappresentazione vettoriale) sia in forma strettamente algebrica (numeri complessi). In apparenza, dal punto di vista computazionale (anche dal punto di vista dell’impegno dello spazio di memoria di un calcolatore, a parità di precisione), ciò sembra un aggravio, in quanto si raddoppia il numero di equazioni “scalari” equivalenti. In realtà, si comprende subito che anche ad applicare il principio d’identità dei polinomi trigonometrici si arriva al raddoppio del numero di relazioni. L’aspetto più significativo è che le relazioni simboliche sono regolate attraverso operatori algebrici complessi (ammettenze, impedenze o, in generale, immettenze16), analogamente a quanto avveniva nel caso stazionario (in cui gli operatori algebrici erano reali). Quindi si possono trasferire le proprietà ricavate sulla base della linearità: sovrapposizione degli Si può mostrare che la proprietà di non amplificazione continua a valere anche in regime sinusoidale per le reti resistive e per le reti RL o RC, oppure solo L o solo C.
16 Il termine immettenza indica in generale il legame simbolico tra due qualsiasi grandezze in una rete. 15
26
effetti 17, espressioni del partitore di tensione e di corrente, impedenza e ammettenza equivalente, bipolo equivalente di Thévénin e Norton, metodo dei potenziali nodali e delle correnti di maglia, matrici descrittivi di n‐poli e doppi bipoli, ecc. Non potrà essere applicato il metodo simbolico al caso di bipoli con non‐linearità non eliminabili ovvero per le proprietà della rete non discendenti dalla linearità (es. le potenze, vedasi oltre)‐ Esempio Data la rete di fig.III.7.1.1, in regime sinusoidale, determinare iR(t)ed iL(t) nell’intervallo (‐∞,+∞). [ e(t)=E cos ωt; R=25Ω; L=0,1 H; C=100 μF; E=100 V;ω=250 rad/s] i
iL
vC
+
e
R
vR
L
vL
iR
fig.III.7.1.1 Occorre sempre tenere in mente il sistema fondamentale, valido per ogni t, essendo la rete tempo‐invariante: ⎧iR + iL − i = 0
⎪v + v − v = 0; v − v = 0
R
g
L
R
⎪⎪ c
⎨v g = e; v R = RiR
⎪
⎪v = L diL ; i = C dvc
⎪⎩ L
dt
dt
Va osservato che se i generatori sinusoidali non sono isofrequenziali, si può applicare il metodo simbolico più volte considerando di volta in volta i generatori di ugual frequenza e quindi sovrapponendo i risultati nel dominio del tempo. 17
27
1
106
=
= 40Ω
ωC 250 ⋅100
jX L
E ⋅ jX L
jX L
E
=
=
IR = I
R + jX L − jX + jRX L R + jX L X L X C + jR ( X L − X C )
C
R + jX L
X L = ωL = 25 Ω; X C =
E ⋅ XL
iR (t ) =
=
( X L X C ) + R (X L − X c )
2
2
2
2500
cos(ωt +
π
cos(ωt +
− arctg
π
2
− arctg
R( X L − X C )
)=
XLXc
π
−3
25 ⋅ (−15)
20
)=
cos(ωt + − arctg
)
25 ⋅ 40
2
8
73
2
25 40 + 25 15
E⋅R
R( X L − X C )
V
RI
I L = L = R ⇒ iL (t ) =
cos(ωt − arctg
)
2
2
2
XL Xc
jX L jX L
( X L X C ) + R (X L − X c )
iL (t ) =
2
2
2
2
−3
−3
20
20
) = 2.19 A
) ⇒ iL (0) =
cos(−arctg
cos(ωt − arctg
8
8
73
73
28
III.9 Potenze in regime sinusoidale – Conservazione della potenza complessa Consideriamo un bipolo di morsetti r‐s funzionante in regime sinusoidale. Consideriamo la potenza istantanea assorbita dal bipolo: prs (t ) = vrs (t ) ⋅ irs (t ) = VMrs sin (ωt + α rs )I Mrs sin (ωt + β rs ) =
VMrs I Mrs
[cos(α rs − β rs ) − cos(2ωt + α rs + β rs )] =
2
= Vrs I rs [cos(α rs − β rs ) − cos(2ωt + α rs + β rs )] =
=
(III.9.1) = Vrs I rs [cos(ϕ rs ) − cos(2ωt + 2α rs + ϕ rs )] = Pmrs + p frs (t )
La potenza istantanea quindi in genere non è una grandezza sinusoidale, ma è caratterizzabile da un valore medio Pm (detto potenza media, attiva o reale) e da una potenza fluttuante sinusoidale a pulsazione doppia. Vale il principio di conservazione per la potenza istantanea, la potenza media e la potenza fluttuante. L’energia assorbita da un bipolo in un intervallo Δt pari ad un multiplo intero di periodi risulta pari a PmΔt, in quanto il contributo della potenza fluttuante è nullo. Se l’intervallo Δt non fosse esattamente pari ad un multiplo intero di periodi, il contributo all’energia assorbita fornito dalla potenza fluttuante sarebbe tanto più trascurabile quanto più Δt è grande rispetto al periodo. La potenza media assorbita ha quindi un significato “energetico” e con essa si possono caratterizzare i bipoli elettrici ed avere significative informazioni sul “consumo”. Essa viene indicata quindi in watt. Ad esempio una stufa da 500 W, tenuta in funzione per un’ora, “consuma” 1.8 MJ. L’unità pratica usata per la indicazione dei consumi elettrici è il kWh (kilowattora); 1 kWh corrisponde al consumo di un’apparecchiatura da 1 kW tenuta in funzione per un’ora, quindi a 3.6 MJ. Essa si esprime come V I
Pm = M M cos ϕ = VI cos ϕ (III.9.2) 2
dove il termine cos ϕ prende il nome di fattore di potenza e V ed I sono i valori efficaci della tensione e dell’intensità di corrente. La potenza fluttuante non peso dal punto di vista energetico, ma è purtroppo significativa da altri punti di vista. Basti pensare che essa ha un valore massimo uguale o superiore alla potenza media e che, considerando un bipolo reale, le sollecitazioni meccaniche sono legate alla potenza istantanea. Ad esempio all’albero di un motore potrebbe essere applicata una coppia istantanea anche superiore alla coppia media; ciò porterebbe ad una sollecitazione di torsione intollerabile ovvero ad una sollecitazione “a fatica” che limiterebbe le prestazioni meccaniche a lungo termine. A ciò si aggiungano le vibrazioni trasmesse ed il rumore acustico (ronzio tipico a 100 Hz). 29
Nel caso di bipoli resistivi, la potenza media è pari a RI2, dove I è il valore “efficace” (come se considerassimo un caso stazionario), mentre nel caso di bipoli induttore (ϕ=π/2) e condensatore (ϕ=‐π/2) la potenza media è nulla . Per un circuito RLC l’angolo di potenza ϕ è compreso tra –π/2 e π/2 ed il fattore di potenza cosϕ tra 0 ed 1. Se risulta cosϕ<0 siamo sicuramente in presenza di un generatore o di un bipolo attivo (un bipolo si dirà passivo se in ogni condizione di funzionamento la potenza media assorbita risulterà non negativa). Si definisce potenza reattiva assorbita da un bipolo la quantità V I
Q = M M senϕ = VI senϕ (III.9.3) 2
dove ϕ è, al solito, la differenza tra le fasi iniziali della tensione (di valore efficace V) e della intensità di corrente (di valore efficace I). La potenza reattiva Q assorbita da un bipolo passivo ci dà indicazione se il bipolo è prevalentemente di tipo ohmico‐induttivo (Q>0) o di tipo ohmico‐capacitivo (Q<0). La potenza reattiva non ha un significato energetico, ma può determinare un funzionamento non ottimale degli elementi di un impianto elettrico oppure costringe ad aumentare i costi di realizzazione. Infatti il dimensionamento di un bipolo è legato alla potenza apparente o potenza nominale (compare sulla targa dei dispositivi) A = VI = P 2 + Q 2 (III.9.4) La potenza apparente è pari al prodotto del valore efficace della tensione per il valore efficace della corrente; essa è una quantità. Il suo valore è proporzionale al volume occupato dal dispositivo (la distanza tra i morsetti è proporzionale alla tensione mentre la sezione dei conduttori è proporzionale all’intensità della corrente) e quindi al suo costo. Per ridurre i costi occorrerà quindi diminuire (in valore assoluto) la potenza reattiva assorbita dal bipolo. Per ogni bipolo si può introdurre una grandezza complessa formale, detta potenza complessa, che abbia come modulo la potenza apparente e come argomento l’angolo di potenza ϕ. Considerando ad esempio il fasore della tensione per il coniugato del fasore dell’intensità di corrente si ha ~
P&rs = Vrs I rs = Vrs e jα rs I rs e − jβ rs = Vrs I rs (cos ϕ rs + jsenϕ rs ) = Prs + jQ rs (III.9.5) Poichè la potenza complessa è una potenza virtuale (le correnti coniugate soddisfano per loro conto al 1° principio di Kirchhoff), per il teorema di Tellegen essa si conserva. Ne consegue la conservazione anche delle potenze reattive in una rete. 30
III.8.1 Esercizio 1
+
R1
C
R2
e
ic
io
Fig.III.8.1.1 La rete di fig. III.8.1.1 è in regime sinusoidale; sia R1=20 Ω, R2=30 Ω, ω=500 rad/s, C=(1/6) mF; e(t)=EM sen ωt [EM=100 V], io(t)=IM cos ωt [IM=5 A]. Determinare a) l’intensità di corrente ic(t), b) la potenza complessa erogata dal generatore ideale di corrente. Applicando il metodo simbolico si ha 1
1
R(− jX c ) 30(− j12) − j 60
=
= 12 Ω; Z& RC =
=
E = 100; I 0 = j 5; X c =
=
ωC 500 ⋅ 1 ⋅10−3
R − jX c
30 − j12 5 − j 2
6
Applicando il teorema i Norton ai morsetti del condensatore, si ha RR
E
60
Z& eq = R p = 1 2 =
Ω; I cc = + I 0 = 5 + j 5;
R1 + R2
R1
5
I c = I cc
Z& eq
Z& eq − jX c
= (5 + j 5)
60
5
=
5 + j5
= 5 j ⇒ ic (t ) = 5 cos ωt 1− j
60
− j12
5
Vc = − jX c I c = 60 + j 0 ⇒ vc (t ) = 60 sen ωt
La potenza complessa erogata dal generatore ideale di corrente ~
V I0
&
P=
= − j150VAr 2
31
III.8.2 Esercizio 2
+
R1
L
e(t)
i1
A
R3
L
R2
iL
L
B
C
vc
Si consideri la rete di fig.III.8.2, in regime sinusoidale, alimentata dal generatore di tensione e(t) = EM sin ωt .(EM=340 V; ω=1000 rad/s ;R1=R3=400Ω; R2=200Ω; L=0,1H ; C=5 μF) 1) Si valuti la potenza complessa assorbita dal bipolo a destra dei morsetti A‐B. 1
1
X L = ωL = 1000 ⋅ 0,1 = 100Ω; X C =
=
= 200Ω
ωC 1000 ⋅ 5 ⋅10 −6
R ⋅ (R + j ( X L − X C ))
4− j
400(200 − j100)
Z& e = R1 + 2 3
= 800
= 400 +
R2 + (R3 + j ( X L − X C ))
6− j
600 − j100
I1 =
E 340 6 − j 17 6 − j
=
⋅
=
⋅
;
Z& e 800 4 − j 40 4 − j
I L = I1
R2
17 6 − j
400
17 1
4+ j
⋅
=
=
=
⋅
;
R2 + (R3 + j ( X L − X C )) 40 4 − j 600 − j100 10 4 − j
10
VC = − jX c I L = 20 ⋅ (1 − 4 j );
VAB = (R3 + j ( X L − X C ))I L = (200 − j100)
2− j
17 1
= 170
;
4− j
10 4 − j
V Iˆ
2 − j 4 − j 85
P&AB = AB L = 85
⋅
= ⋅ (2 − j ) = 17W − j8,5VAr
4 − j 10
10
2
17
17
17
− 200 ⋅
100 ⋅
200 ⋅
2
2
R3 I L2
X
I
X
I
−
100 = −17VAr
100 = 8,5VAr; Q =
100 = 17 W ; Q = L L =
C L
PR3 =
=
=
L
C
2
2
2
2
2
2
17
1⎞
⎛
iL (t ) = I L sen(ωt + arg(I L )) =
sen⎜ ωt + arctg ⎟;
10
4⎠
⎝
vc (t ) = VC sen(ωt + arg(VC )) = 20 ⋅ 17 sen(ωt + arctg (− 4));
32
III.8.3 Esercizio 3
C
+
+
i1 R
vC e1(t) vL L
iL +
e2(t) i2 fig.III.8.3
Si consideri la rete di fig.III.8.3, in regime sinusoidale, alimentata dai generatori di tensione e1(t) = E √2 sin ωt, e2(t) = E √2 cos ωt . (E=1 V; ω=100 rad/s ; R=2Ω; L=20 mH ; C=10 mF) 1) Si valuti la potenza complessa erogata da ciascuno dei generatori. La potenza erogata dai due generatori vale ~
~
P&1 = E1I1 ; P&2 = E2 I 2 Le intensità di corrente possono essere valutate applicando il teorema di scomposizione; introducendo le impedenze viste dai due generatori agenti singolarmente, si ottiene: 1
= 1Ω
X L = ωL = 2Ω ; X c =
ωC
j4
R ⋅ jX L
=−j+
= 1 + j0
Z&1e = − jX c +
2 + j2
R + jX L
Z& 2 e = R +
I1 =
2
L/C
= 2+ = 2−2j
j( X L − X c )
j
1
1− 2 j
E1 E2
jX L
j
j2
j
−
= −
= 1−
=
&
&
1− j 1− j
Z1e Z 2 e j ( X L − X c ) 1 2 − 2 j j (2 − 1)
1+ 2 j 3
1
~
= +j
P&1 = E1I1 = 1
1+ j
2
2
I2 =
1 j2
E2 E1 jX L
j
−3− j
−
=
−
=
4
Z& 2e Z&1e R + jX L 2 − 2 j 1 2 + j 2
1
−3+ j
~
P&2 = E2 I 2 = j
=− −
4
4
1− 2 j − 3 − j
+
I L = I1 + I 2 =
1− j
4
j
3
4
=−
3
3
j3
= −j
2(1 − j ) 4
4
33
V C = − jX c I 1 =
2
3
⇒ v c (0 − ) = − V
2
3
V L = jX L I L =
V R = RI R =
− 1 − j3
1− j
−3− j
Q L = X L I L2 =
2
9
4
= 2.25 VA ; Q C = − X C I 12 = −
5
2
= −2.5 VA ; PR = RI 22 =
5
4
= 1.25 W
III.10 Applicazioni: il rifasamento dei carichi reattivi Per ottimizzare il dimensionamento dei sistemi di alimentazione – a parità di potenza media in gioco e quindi di energia – occorrerebbe che fosse Q=0. Tutti i bipoli dovrebbero essere modificati in maniera da avere tensione e correnti in fase. Ciò è in linea di principio possibile se tutti i generatori ideali sono in fase o in opposizione di fase. In tal caso sarebbe possibile “aggiungere” (in serie o in parallelo) una reattanza tale che la reattanza (o suscettanza) equivalente sia nulla, ossia i bipoli siano risonanti (rifasamento locale serie o parallelo). In genere questa soluzione risulta molto gravosa. Dal punto di vista industriale, un compromesso si ottiene considerando l’utenza (quasi sempre di tipo ohmico induttivo con angolo di potenza ϕ>26°) nel suo complesso ed inserendo un bipolo (condensatore in parallelo al carico) in maniera che l’Ente fornitore “veda” un fattore di potenza cosϕL>0,9 (ϕL<26°). Dal bilancio di potenza complessa o da considerazioni sul diagramma vettoriale delle grandezze simboliche otteniamo che il valore della capacità necessaria a rifasare un carico di potenza media Pm sotto tensione V vale P (tgϕ − tgϕ L )
C= m
ωV 2
III.10.1 Esercizio ie +
vL Fig.1 Si consideri la rete di fig. 1 in regime sinusoidale; sia R1= R2=50 Ω, L=100 mH, ω=500 rad/s, C=80μF; e(t)=EM sen ωt [EM=40 V]. Determinare R
e
R
L
C
34
a) la tensione sull’induttore vL(t) per t∈(‐∞,+∞) b) la potenza reattiva Qe erogata dal generatore c) a parità di potenza media erogata dal generatore, gli accorgimenti perché risulti Qe=0 Applicando il metodo simbolico si avrà E = 40; X L = ωL = 50Ω; X c =
1
= 25Ω; Z& R2 LC =
ωC
1
−
j
j
1
+
+
50 25 50
*
⎛ ⎛
⎛ 2
⎞ ⎞⎟
1
E
⎜
*
⎟ = Im⎜ E M
Qe = E M I eM sin ϕ e = Im P&e = Im E I e = Im⎜ E ⎜
⎜ 2
2
⎜ ⎜⎝ Z& R2 LC + R1 ⎟⎠ ⎟⎟
⎝
⎝
⎠
⎛ 1+ j ⎞
⎜⎜
⎟⎟
⎝ 100 + j 50 ⎠
−
j
1
+ j ωC +
R2
ωL
1
=
=
50
1+ j
50
1
j ( − arctg )
1+ j
1
2
VL = E
= 40
=8 5e
= 16 − 8 j;
= 40
50
2+ j
Z& R2 LC + R1
+ 50
1+ j
1
v L (t ) = 8 5 sen(ωt − arctg ) ;
2
4
E
(3 + j )
Ie =
=
&
Z R2 LC + R1 25
Z& R2 LC
( )
(
)
16
⎛ (1 + j )(2 − j ) ⎞ 16
= 16 ⋅ Im⎜
⎟ = Im(3 − j ) = − = −3,2 VA
5
5
5
⎝
⎠
*
*
⎞ 800
⎛1+
⎟=
⋅ Im⎜⎜
⎟ 50
⎝2+
⎠
*
j⎞
⎟ =
j ⎟⎠
48
; Pe = Re( P& ) =
= 9,6 W
5
Poiché risulta Qe<0, si può inserire un induttore (rifasamento generale). Se lo si inserisce in parallelo al generatore, il valore dell’induttanza dovrà essere tale che E M2
E M2
1600
QL =
= −Qe ⇒ L =
=
= 0,5 H 16
2 ⋅ ωL
2 ⋅ ω Qe
2 ⋅ 500 ⋅
5
Osservazione: Si potrebbe in alternativa operare sul parallelo LC (rifasamento locale); ricordiamo che la condizione Qe=0 corrisponde alla “risonanza” alla pulsazione assegnata. Deve essere quindi 1
1
L*C * = 2 =
= 4 ⋅ 10 −6 [ s 2 ]
250000
ω
4 ⋅ 10 −6
= 50mH − fissato C * = C = 80 μF , sarà L* =
80 ⋅ 10 −6
4 ⋅ 10 −6
*
*
= 40μF
− fissatoL = L = 100mH , sarà C =
100 ⋅ 10 −3
La condizione suddetta potrà essere ottenuta o disponendo un altro induttore da 100mH in parallelo ad L oppure disponendo un condensatore da 80 μF in serie a C. L’induttore di rifasamento è di induttanza molto inferiore al caso precedente. 35
(N.B. Vi sono infinite altre possibilità inserendo contemporaneamente un induttore in parallelo ad L ed un condensatore in serie a C). Inoltre, con la soluzione “locale” avremmo una potenza media erogata dal generatore pari a E M2 / 2
40 2
P=
=
= 8W R1 + R2 2 ⋅ 100
inferiore al caso precedente. Di qui la convenienza (a maggior ragione se la “resistenza equivalente R1” del generatore non è trascurabile rispetto ad R2) di operare un rifasamento locale. Questo accade ad esempio nel caso di utenze, nell’ambito di uno stesso impianto, molto lontane dal punto di fornitura. 36
III.11 Le reti trifase Sistema trifase : Per sistema polifase in regime sinusoidale si intende un collegamento di n‐poli (vedi lezione n.3) attraverso n linee o fasi caratterizzate da n intensità di correnti di linea ik(t) (k=1,2,…,n) (fig.III.11.1). L’alimentazione può consistere in n generatori stellati indipendenti, ek(t) con secondo morsetto 0 (centro stella) in comune. Le tensioni tra i poli v12(t), v23(t),…, vn1(t) si dicono concatenate. Considerato un n‐polo lineare in regime sinusoidale, i vettori (fasori) rappresentativi delle tensioni concatenate formano una figura chiusa, perché la somma di dette tensioni è sempre nulla. Lo stesso si può dire per i vettori rappresentativi delle ik(t). +
1
i1(t)
e
1(t)
+
i2(t)
e2(t)
2
0
in(t)
+
n
en(t)
fig.III.11.1 – Sistema polifase (n‐polo) Il sistema di trasmissione e distribuzione dell’energia elettrica in Italia è un sistema trifase. Esistono, per diverse applicazioni, sistemi con un numero di fasi superiore, in genere un multiplo di tre (6,12,48,…). Sistema puro e spurio : se gli n‐poli sono a stella di centro stella Y (fig.III.11.2), è possibile calcolare la tensione tra i centri stella utilizzando gli stessi metodi adoperati nel caso stazionario; indicando con ŻYk l’impedenza equivalente della singola linea, si ritrova (cfr. la formula di Millmann) n
E
∑1 Z& k
⎛ E − VY 0 ⎞
⎟⎟ (III.11.1); VY 0 = n Yk ; I k = ⎜⎜ k
&
1
⎝ Z Yk ⎠
∑1 Z&
Yk
si nota che in generale la tensione tra i centri stella non è nulla e l’intensità delle corrente di linea dipende dalle tensioni e dalle impedenze relative alle altre linee. E’ possibile imporre la condizione di nullo sulla tensione tra i centri stella collegandoli tra loro con un (n+1)‐
mo conduttore ( neutro) ideale. In questo caso il sistema si dice spurio (fig.III.11.3) e si avrà: ⎛E ⎞
VY 0 = 0 + j 0; I k = ⎜⎜ k ⎟⎟ (III.11.2) &
⎝ Z Yk ⎠
37
con intensità delle correnti della linea k indipendenti dai generatori e dalle impedenze relative alle altre linee. In Italia, ad esempio, il sistema trifase nazionale di bassa tensione (detto anche sistema di utilizzazione) è un sistema spurio: oltre ai tre conduttori di fase, normalmente indicati con la sequenza R‐S‐T, è disponibile un quarto conduttore “neutro” N (oltre ad un eventuale ulteriore conduttore di protezione P, normalmente non funzionale al sistema RSTN)18. Il sistema di distribuzione in media tensione è invece un sistema puro, con tre sole linee. 1
i1(t)
+
i2(t)
e2(t)
2
Y
0
+
n
e
n(t)
Fig.III.11.2 Sistema polifase puro +
e1(t)
+
e2(t)
1
i1(t)
i2(t)
2
Y
0
+
en(t)
in(t)
n
N
Fig.III.11.2 Sistema polifase spurio Sistemi simmetrici ed equilibrati: un sistema polifase si dice simmetrico (diretto o inverso) se le tensioni di alimentazione sono simmetriche (dirette o inverse) , ossia se i moduli sono uguali ed ogni tensione è in ritardo (in anticipo per la simmetria inversa) di 2π/n rispetto alla tensione che la precede nella sequenza. Se le tensioni sono simmetriche, i fasori rappresentano i lati di un poligono regolare. Se anche le correnti di linea sono 18
Nella realtà il conduttore di neutro potrà essere schematizzato con una impedenza (di neutro) normalmente di modulo
molto piccolo rispetto alle altre impedenze; la tensione tra i centri stella
n
E
∑1 Z& k
n
E Yk
≅ Z& N ∑ k
VY 0 = n
&
1
1
1 Z Yk
∑1 Z& + Z&
Yk
N
risulta piccola rispetto alle tensioni stellate e le intensità delle correnti di linea molto poco dipendenti dal valore dell’impedenza di neutro
38
simmetriche, ossia le impedenze equivalenti sono uguali tra loro, il sistema si dice equilibrato. In un sistema simmetrico ed equilibrato l’intensità di corrente nell’eventuale conduttore neutro è nulla19. n
n
E
1 n
∑1 Z& k Z& ∑ Ek ∑ Ek
E
1
VY 0 = n k =
= 1
= 0 + j 0 ; I k = k (III.11.3) n
1
n
Z& k
∑1 Z&
Z&
k
In fig.III.11.3 sono riportate, per un sistema trifase puro simmetrico diretto con impedenze di carico a stella, le relazioni tra tensioni stellate, tensioni concatenate e correnti di linea. Il poligono delle tensioni stellate forma un triangolo equilatero. Facendo poi corrispondere al centro stella 0 un punto del piano della rappresentazione simbolica e riportando a partire da esso i tre vettori simmetrici rappresentativi delle tensioni stellate del generatore, si possono rappresentare i punti 1,2 e 3 e quindi costruire le tensioni concatenate che a loro volta formano un triangolo equilatero e risultano in semplice relazione geometrica rispetto alle tensioni stellate. Infatti posto e1 (t ) = E 2 sen (ωt + α ) ↔ E1 = Ee jα
⎛
2 ⎞
⎛
4 ⎞
j⎜α − π ⎟
2 ⎞
⎛
e2 (t ) = E 2 sen ⎜ ωt + α − π ⎟ ↔ E2 = Ee ⎝ 3 ⎠ (III.11.4) 3 ⎠
⎝
j⎜α − π ⎟
4 ⎞
⎛
e3 (t ) = E 2 sen ⎜ ωt + α − π ⎟ ↔ E3 = Ee ⎝ 3 ⎠
3 ⎠
⎝
si ha V12 = E1 3e
V23 = V12 e
−j
j
π
2π
3
4π
3
6
π⎞
⎛
↔ v12 (t ) = E 3 2 sen ⎜ ωt + α + ⎟
6⎠
⎝
= E1 3e
⎛π 2 ⎞
j⎜ − π ⎟
⎝6 3 ⎠
π 2 ⎞
⎛
↔ v12 (t ) = E 3 2 sen ⎜ ωt + α + − π ⎟ (III.11.5) 6 3 ⎠
⎝
⎛π 4 ⎞
j⎜ − π ⎟
⎝6 3 ⎠
π 4 ⎞
⎛
↔ v31 (t ) = E 3 2 sen ⎜ ωt + α + − π ⎟
6 3 ⎠
⎝
Il modulo della tensione concatenata si ottiene da quello della tensione stellata moltiplicandolo per √3. Tipicamente, ad una tensione concatenata di 380 V corrisponde una tensione stellata di 220 V. Con la (III.8.1) è possibile determinare la posizione sul piano del centro stella Y (spostamento del centro stella), le tensioni sulle impedenze e l’intensità delle correnti di linea (fig.III.11.4): V31 = V12 e
19
−j
= E1 3e
Questa considerazione è vera anche se il conduttore di neutro non è un cortocircuito ideale; infatti
n
E
1 n
∑1 Z& k
∑ Ek
Z& 1
k
VU 0 = n
=
= 0 + j0
n
1
1
1
+
∑1 Z& + Z& Z& Z& N
k
N
39
VY 0 =
n
Ek
1
n
Yk
∑ Z&
1
∑ Z&
1
; Ek' = Ek − VY 0
(III.11.6) Yk
Ek'
Ek' − jϕk
=
e
Ik =
Z&Yk Z&Yk
+
E1
+ E2
0
I1
1
Z&1Y
I2
2
+ E3
Z& 2Y
I3
3
Y
Z& 3Y
y
I3
I1
1
V31
3
E3'
Y
E3
E1'
E 2'
α
E1
0
x
E2
V23
I2
V12
2
Fig.III.11.4 Sistema trifase simmetrico Se si considera un carico a triangolo (o un carico a triangolo equivalente a quello della fig.III.11.4), le correnti di lato possono essere ricavate direttamente dalle tensioni concatenate (fig.III.11.5); le relazioni tra le impedenze a stella e quelle a triangolo possono essere ricondotte a quelle tra resistenze analoghe. 40
+
E1
+ E2
0
I1
1
Z&1Y
I2
2
+ E3
Z& 2Y
I3
3
Y
Z& 3Y
y
I3
I1
1
V31
3
E3'
Y
E3
E1'
E 2'
α
E1
0
x
E2
V23
I2
V12
2
Fig.III.11.4 Sistema trifase simmetrico; carico a stella 41
+
E1
+ E2
0
I1
1
Z&12
I2
2
+ E3
Z& 23
I3
3
Z& 31
J12
J 31
J 23
y
J 31
1
I1
V31
3
J 23
α
E3
E1
J 31
0
x
V12
E 2 J12
J12
I3
I2
J 23
V23
2
Fig.III.11.5 Sistema trifase simmetrico; carico a triangolo Nel caso di carico equilibrato (fig. III.11.6) Z1Y = Z 2Y = Z 3Y = Z Y ; Z12 = Z 23 = Z 31 = Z Δ = 3Z Y lo spostamento del centro stella è nullo; le intensità delle correnti di linea e di lato sono simmetriche e si ha I = 3 J . Si mantiene nella trasformazione l’angolo di potenza ϕ (nello schema a stella, tra tensione stellata e intensità di corrente di linea; nello schema a triangolo, tra tensione concatenata e corrente di fase). Si nota che la simmetria suggerisce di considerare uno schema base, da cui riportare le altre grandezze simmetriche. La pratica suggerisce di adottare lo schema equivalente stellato, per la opportunità di indicare con evidenza i centri stella 0 e Y, corrispondenti di punti fisici. Lo schema monofase equivalente è una semplificazione dello schema a stella, in cui si evidenzia un generico generatore stellato ed i carichi a stella o stella equivalente (fig.III.11.7) Nelle applicazioni, potranno essere utilmente carichi a triangolo solo se si è in presenza di carico equilibrato, esempio un motore trifase per sollevamento. La presenza tuttavia di un centro stella Y accessibile permette – se considerato opportuno – di poter collegare un conduttore neutro per i seguenti scopi: 42
a) consentire di mantenere una tensione pari alla tensione sui carichi pari alla tensione stellata dei generatori nel caso di carichi diversi (ad es. tre fabbricati) anche se statisticamente rappresentabili con carichi “confrontabili”. b) Consentirebbe di “sentire” un guasto su una linea di un’apparecchiatura che è rappresentabile come un carico equilibrato. +
E1
+ E2
0
I1
1
Z& Y
I2
2
+ E3
I3
3
Y
Z& Y
Z& Y
y
I1
V31
I1
E1 ϕ
J 31
E3 0≡Y α
E2
V23
J 12
x
V12
J 23
ϕ J12
I2
I3
I2
+
0
E1
+ E2
1
2
+ E3
3
I1
I2
I3
Z& Δ
J12
Z& Δ
J 23
Z& Δ
J 31
43
Fig.III.11.6 Sistema trifase simmetrico ed equilibrato +
E
1
I
Z& Y
Y
0
Fig.III.11.7 Schema monofase equivalente. Tensione (nominale) di sistema: in un sistema simmetrico ci si riferisce in genere al valore efficace della tensione concatenata ( tensione di sistema). Potenza nei sistemi trifase: in un sistema trifase simmetrico ed equilibrato la potenza fluttuante erogata dai generatori è nulla. Infatti, in questo caso, con le solite notazioni, p g (t ) = e1 (t )i1 (t ) + e2 (t )i2 (t ) + e3 (t )i3 (t ) =
4 ⎞
8 ⎞
⎛
⎛
= 3VI cos ϕ − VI cos(2ωt + α + β ) − VI cos⎜ 2ωt + α + β − π ⎟ − VI cos⎜ 2ωt + α + β − π ⎟ = 3VI cos ϕ
3 ⎠
3 ⎠
⎝
⎝
(III.8.7) costituendo i tre termini fluttuanti una terna simmetrica inversa e quindi a somma (istantanea) nulla. La potenza istantanea quindi coincide con la potenza media: la sollecitazione meccanica sull’albero dell’alternatore, legata alla coppia istantanea non ha quindi un termine di “fatica”, determinando così prestazioni decisamente migliori soprattutto in termini di durata. Lo stesso dicasi per il tripolo utilizzatore (es. un motore). Da ciò nasce l’esigenza di pianificare al meglio l’alimentazione di utenze monofasi sulle tre linee. Un sistema trifase simmetrico ed equilibrato equivale (vedi fig.III.11.7) a tre sistemi “monofasi”; quindi consentirebbe, a parità di energia trasmessa dal generatore al carico, un risparmio del 50% sui conduttori rispetto a tre sistemi monofasi. In un sistema spurio, il carico è di norma “quasi” equilibrato, il conduttore neutro può essere realizzato della stessa sezione dei conduttori di fase e quindi si ha un risparmio di 1/3 rispetto a tre sistemi monofase. 44
Teorema di Aron: in un sistema trifase puro (anche dissimmetrico e squilibrato), assegnate le tensioni (stellate) tra i morsetti ed il centro stella O’ del generatore, la potenza complessa assorbita da un carico (così come la potenza istantanea) può essere calcolata valutando le tensioni rispetto ad un riferimento qualsiasi O* (teorema di Aron o della invarianza della potenza rispetto al centro stella). Infatti ~
~
~
~
~
~
P& = E1' I1 + E2' I 2 + E3' I 3 = E1* − VO*O ' I1 + E2* − VO*O ' I 2 + E3* − VO*O ' I 3 =
(III.11.8); ~
~
~
~ ~ ~
~
~
~
= E1* I1 + E2* I 2 + E3* I 3 − VO*O ' I1 + I 2 + I 3 = E1* I1 + E2* I 2 + E3* I 3
(
(
) (
)
)
(
)
prendendo come riferimento O* il morsetto corrispondente ad una linea k , essa può essere quindi espressa con somma di solo due termini (essendo nullo Ek* )considerando il prodotto del fasore delle tensioni concatenate di una delle due linee rispetto alla terza linea k con il coniugato del fasore della corrente della linea. Per la misura della potenza media e della potenza reattiva in un sistema puro bastano quindi due wattmetri e due varmetri. Rifasamento Nei sistemi trifase si può procedere a rifasare un carico equilibrato, tipicamente ohmico‐
induttivo), che assorba una potenza P=3EIcosϕ inserendo una terna di condensatori a stella o a triangolo20; nel primo caso la terna di condensatori assorbirà la potenza reattiva Q
E2
= −3ωCY E 2 ⇒ CY = − Y 2 ; Q Υ = −3
Xc
3ωE
nel secondo caso QΔ
V2
= −3ωC ΔV 2 ⇒ C Δ = −
QΔ = −3
Xc
3ωEV 2
A parità di potenza reattiva si ha quindi che la capacità dei condensatori a triangolo è un terzo della capacità dei condensatori a stella. Volendo rifasare al valore Φ dell’angolo di potenza, il valore della capacità nella connessione a triangolo sarà Q
1
P(tgΦ − tgϕ )
CΔ = C y = − Y 2 =
3
3ωV
3ωV 2
Da tale espressione si evince l’opportunità di valutare la convenienza di un rifasamento a triangolo21. Dissimetrie nelle reti trifase: la presenza di carichi squilibrati e/o “monofasi”, i guasti transitori e/o ricorrenti, il comportamento non ideale dei componenti delle linee di tramissione, distribuzione ed utilizzazione dell’energia elettrica, portano alla progressiva dissimmetria delle grandezza man mano che ci si allontana dal generatore. Poiché una terna di correnti non simmetrica può essere scomposta in terne simmetriche (diretta, nei rari casi di carico ohmico‐capacitivo si inseriranno opportuni induttori. Ne consegue, di massima la convenienza di utilizzare collegamenti a triangolo. Nel caso di tensione‐medio alta, tuttavia, potrebbero intervenire considerazioni riguardo all’affidabilità dei componenti tali da far preferire la configurazione a stella, che comporta sollecitazioni e perdite più contenute negli isolanti.
20
21
45
inversa ed omopolare), dobbiamo tener conto, secondo i casi, di grandezze a sequenza inversa ed omopolare. L’uso delle componenti simmetriche per lo studio generale delle reti trifase è riportato nell’appendice A13. Distorsione di tensioni e correnti: il comportamento non lineare di alcuni carichi (es. convertitori per l’elettronica di potenza) e la presenza in rete di componenti non lineari (es. trasformatori in ferro, limitatori di tensione, ecc) comportano notevoli inconvenienti pratici e metodologici; ad esempio, non è più corretto l’uso del metodo simbolico. Tuttavia potrebbe essere esaminata la possibilità della scomposizione in serie di Fourier della grandezza in esame; va ricordato il diverso comportamento dei bipoli a memoria al variare della frequenza. Dissimetrie e distorsioni possono portare serie conseguenze sul funzionamento della rete; la loro limitazione è lo sforzo degli studiosi e dei tecnici del settore nel nome della qualità dell’energia. 46