Problemi di Fisica per l’ammissione alla Scuola Galileiana 2016-2017
Problema 1
Sull’estremo di un’asta rigida unidimensionale, di massa trascurabile e lunghezza l = 0.1 m,
è fissato un corpo di massa m = 0.01 kg. L’altro estremo è vincolato al terreno nel punto
O. Sia H la verticale al terreno con origine O e α(t) l’angolo che al tempo t l’asta forma
rispetto ad H. Sia α0 ≡ α(0) e ω0 ≡ α̇(0) il modulo della velocità angolare dell’asta, a t = 0,
diretta lungo l’asse passante per O e perpendicolare sia ad H che all’asta. Un’applicazione
euristica del principio d’indeterminazione di Heisenberg implicherebbe
~
α0 ω0 ≥
,
(1)
2ml2
con ~ = 1.05 · 10−34 J s la costante di Planck razionalizzata h/(2π). Come vedremo, ammettendo tale disuguaglianza, si ha un limite sulla durata τ0 dello stato d’instabilità dell’asta prima della sua caduta a terra che è misurabile da un comune orologio. Definiamo,
convenzionalmente, τ0 con la relazione α(τ0 ) = 1 rad.
Il modulo della componente perpendicolare all’asta della forza gravitazionale che agisce sul
corpo è mg sin α(t). Per α(t) piccolo si ha sin α(t) ≈ α(t), per cui l’equazione del moto
diventa
d2 α(t)
l
= gα(t) ,
dt2
la cui soluzione, tenendo conto delle condizioni iniziali, è
1
1
α(t) = (α0 + ω0 τ )et/τ + (α0 − ω0 τ )e−t/τ ,
2
2
p
con τ := l/g. Al crescere di t il secondo termine diventa trascurabile, per cui, per il
presente scopo, si può porre
1
(2)
α(t) = (α0 + ω0 τ )et/τ .
2
Benché 1 rad non sia “piccolo”, risulta che τ0 è ben approssimato da (2). Sia f (α0 ) la
funzione che esprime la dipendenza di ω0 da α0 ottenuta imponendo che, per ogni α0 > 0 e
compatibilmente con (1), τ0 sia massimo. Sia τ̄0 tale massimo.
Determinare, assumendo la relazione (2),
1. f (α0 ) e la funzione τ̄0 = g(α0 );
2. il valore massimo di g(α0 ), verificando che in tal caso τ0 ≈ 3.6 s.
Soluzione Problema 1
1. Per ogni α0 > 0 il massimo di
τ0 = τ ln
2
,
α0 + ω0 τ
lo si ha per il valore minimo che ω0 può assumere compatibilmente con la (1), cioè
f (α0 ) =
~
.
2ml2 α0
Segue che, per qualsiasi α0 > 0, il corrispondente massimo di τ0 è
g(α0 ) = τ ln
2
.
α0 + f (α0 )τ
2. g(α0 ) è massimo quando h(α0 ) = α0 + f (α0 )τ è minimo. Questo corrisponde al valore
di k tale che la retta y = k sia tangente a h(α0 ), cioè tale che l’equazione
di secondo
p
grado α0 + f (α0 )τ = k abbia soluzioni α0± coincidenti. Si ha k = 2~τ /(ml2 ), da cui
s
1 l 4m2 l3 g ln
≈ 3.6 s .
g(α0± ) =
4 g
~2
Problema 2
Un disco di raggio R contiene una cavità cilindrica che lo attraversa passando per il suo
centro O. Il disco ruota attorno al suo asse centrale con velocità angolare ω
~ , mantenuta
costante da un motore. Una pallina sferica di massa m, il cui raggio coincide con quello
della base della cavità cilindrica, si trova a distanza R0 da O. Ad un certo istante la pallina,
precedentemente a riposo rispetto al disco, è lasciata libera di scorrere nella cavità.
Assumendo l’assenza d’attrito tra la pallina e la cavità, determinare
1. la velocità radiale della pallina all’uscita dalla cavità;
2. il lavoro totale fatto dal motore per mantenere ω
~ costante;
3. la massima potenza erogata dal motore durante il moto della pallina;
4. il tempo che impiega la pallina a raggiungere il foro d’uscita. Possono essere utili le
relazioni, valide per qualsiasi α ∈ R, sin(iα) = i(eα − e−α )/2, cos(iα) = (eα + e−α )/2,
con i l’unità immaginaria, definita come soluzione dell’equazione x2 + 1 = 0.
Soluzione Problema 2
1. Sia S il sistema di riferimento solidale con il disco, e ~r il raggio vettore in S che
origina nel centro O del disco. Sia ~vr la velocità radiale della pallina a distanza r
da O. In S, che non è inerziale, si osservano due forze apparenti che agiscono sulla
pallina: quella centrifuga F~c = mω 2~r e quella di Coriolis F~Coriolis = −2m~ω × ~vr (il cui
modulo è 2mωvr ), che agisce in senso tangenziale ed il cui verso è opposto a quello di
rotazione. La forza di Coriolis è sempre ortogonale al moto della pallina, dunque non
compie lavoro agendo su di essa. La sua azione sulla pallina si riflette con l’azione della
pallina sulle pareti della guida, opponendosi cosı̀ al moto del disco. La forza centrifuga
è lineare in ~r, differendo solo per il segno da quella elastica. Quindi la variazione di
energia potenziale è kr2 /2, con k = mω 2 . Poiché a distanza R0 dal centro del disco
la pallina ha velocità nulla, segue che la differenza d’energia cinetica della pallina nel
punto a distanza r da O e quella nel punto a distanza R0 da O, misurata in S, è mvr2 /2.
Eguagliando questa alla variazione di energia potenziale, mω 2 (r2 − R02 )/2, si ha
q
vr = ω r2 − R02 ,
che all’uscita dal foro risulta
q
vR = ω R2 − R02 .
2. Sia L(r) il lavoro complessivo fatto dal motore quando la pallina è a distanza r ≥ R0 dal
centro del disco. Non essendoci attriti si ha che L(r) è pari alla variazione dell’energia
cinetica della pallina relativamente ai punti della cavità distanti r e R0 da O. Il modulo
della velocità iniziale della pallina, misurato nel sistema di riferimento inerziale solidale
con il laboratorio, è
vi = ωR0 .
Per determinare il modulo della velocità finale ~vf , anch’esso misurato nel sistema di
riferimento inerziale solidale con il laboratorio, si osservi che ~vf = ~vR + ~vT , dove ~vT è
la velocità tangenziale al disco nel punto
p d’uscita della pallina dalla cavità. Poiché ~vR
e ~vT sono perpendicolari, si ha vf = vR2 + vT2 . D’altronde, vT = ωR, quindi
q
q
2
2
2
2
vf = ω (R − R0 ) + (ωR) = ω 2R2 − R02 ,
da cui
L(R) = mvf2 /2 − mvi2 /2 = mω 2 (R2 − R02 ) .
3. Mostriamo due modi di derivare la potenza massima, Pmax , erogata dal motore per
mantenere la velocità del disco costante. Denotiamo con P (r) la potenza erogata dal
motore quando la pallina è a distanza r dal centro del disco. Si noti che Pmax = P (R).
Si ha
dL(r)
dL(r) dr
dL(r)
P (r) =
=
=
vr .
dt
dr dt
dr
p
Poiché L(r) = mω 2 (r2 − R02 ), si ha P (r) = 2rmω 3 r2 − R02 , da cui
q
3
Pmax = 2Rmω R2 − R02 .
L’altro modo di determinare P (r), e quindi Pmax , è ricordare che P (r) = F~M (r)·~vT (r) =
FM (r)ωr, dove F~M (r) è la forza impressa dal motore sulla pallina e ~vT (r) la velocità
tangenziale della pallina nel punto distante r da O. D’altronde, il ruolo del motore è
mantenere ω
~ costante, bilanciando la forza di Coriolis che spinge la pallina sulla guida
imprimendo una forza tangenziale opposta al verso di rotazione del disco. Segue che
F~M = −F~C , da cui
q
3
~
P (r) = −FC · ~vT (r) = 2rmω r2 − R02 .
~ C,
Si noti che si sarebbe potuta utilizzare anche la relazione equivalente P (r) = −~ω · M
~ C è il momento della forza di Coriolis, rispetto all’asse di rotazione del disco,
dove M
~ C . Si ha
M
~ C = ~r × F~C = −2m~r × (~ω × ~vr ) = −2m(~vr · ~r)~ω = −2mrvr ω
M
~ ,
dove si è utilizzata la relazione ~a × (~b × ~c) = (~c · ~a)~b − (~b · ~a)~c, valida per tre vettori
arbitrari ~a, ~b, ~c. Quindi
q
~ C = 2rmω 3 r2 − R02 .
P (r) = −~ω · M
4. Mostriamo due modi di determinare il tempo, tuscita , che impiega la pallina per raggiungere il foro d’uscita. Il primo modo consiste nel risolvere l’equazione del moto
soddisfatta dalla pallina. La forza centrifuga agisce come una forza elastica, lineare in
r, ma con segno opposto: F~c = k~r. L’equazione del moto è
a=
Fc
m
−→
a = ω2r ,
che, definendo ω̃ := iω, diventa a = −ω̃ 2 r e la cui soluzione è quella ben nota del
moto armonico, cioè r(t) = A cos(ω̃t + φ). Nel presente caso le condizioni iniziali sono
r(t = 0) = R0 = A cos φ, vr (t = 0) = 0 = −Aω̃ sin φ, ovvero A = R0 e φ = 0. Quindi
r(t) = R0 cos(ω̃t) = R0 cosh(ωt) ,
ed essendo tuscita soluzione dell’equazione r(t) = R, si ha
r R 1 hR
i
1
R 2
= ln
+
−1 .
tuscita = arccosh
ω
R0
ω
R0
R0
L’altro modo di determinare tuscita richiede il calcolo di un integrale
r Z R
i
dr
1 hR
R 2
tuscita =
= ln
+
−1 .
ω
R0
R0
R0 vr
Problema 3
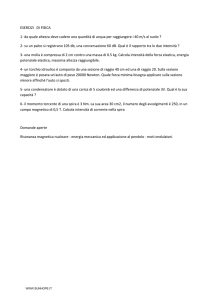
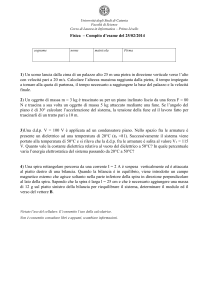
Figura 1: Spira superconduttrice con velocità ~v diretta verso un semipiano con campo
~ ortogonale al foglio.
magnetico B
Una spira quadrata di lato l e massa m si muove con velocità ~v verso un semipiano Π ove
~ uniforme, costante nel tempo, e ortogonale alla spira.
è presente un campo magnetico B
La spira ha resistenza nulla e coefficiente di autoinduzione L. La relazione tra la corrente i
~ del campo B
~ attraverso essa, la si ottiene considerando
indotta nella spira e il flusso Φ(B)
prima il caso in cui la spira abbia resistenza R. Tenendo conto del termine di autoflusso
~
~
Φ(B(i))
= Li, dove, in accordo con la legge di Ampère, B(i)
è il campo magnetico indotto
dalla corrente i, si ha
~
dΦ(B)
di
−
= Ri + L .
dt
dt
Effettuando il limite R → 0 e integrando l’espressione risultante, si ha
~ = Li ,
−Φ(B)
dove si è tenuto conto del fatto che nella spira non circola corrente fintanto che questa
è interamente fuori da Π. Sia x la lunghezza del tratto di spira in Π. Se x ≤ l, allora
~ = −Bxl, se x ≥ l allora Φ(B)
~ = −Bl2 .
Φ(B)
Determinare
1. il valore massimo, in funzione di v, del modulo della forza magnetica agente sulla
spira, nonché la minima velocità della spira necessaria affinché questa possa entrare
interamente in Π;
2. la durata dell’azione della forza magnetica sulla spira nel caso questa entri solo in parte
in Π.
Soluzione Problema 3
1. Nel caso x ≤ l la corrente indotta è i = Bxl/L, mentre per x ≥ l, si ha i = Bl2 /L.
La forza magnetica frena la spira fintanto che x < l. In tal caso la forza totale che
agisce sulla spira corrisponde a quella che agisce sul lato della spira perpendicolare a ~v
e interno a Π. La forza magnetica totale che agisce sui due lati della spira paralleli a ~v
è nulla in quanto le relative densità di corrente hanno verso opposto. Quando x ≥ l, le
forze magnetiche agenti sui quattro lati della spira si annullano a due a due. Quindi,
fintanto che x < l, la forza che agisce sulla spira è
l2 B 2~x
,
F~ = −ilB~ux = −
L
dove ~ux è il versore dell’asse x. Si osservi che F~ = −k~x, con k = l2 B 2 /L, quindi F~
è una forza elastica. Tale forza agisce sulla spira frenandola fintanto che questa non
entri interamente in Π. Per determinare il massimo di F è necessario distinguere due
casi. Il primo corrisponde al caso in cui v non è sufficentemente alta per far sı̀ che
la spira non venga respinta indietro, da cui segue che tale massimo lo si ottiene in
corrispondenza del valore massimo di x. Nel caso x ≥ l, il massimo di F lo si ottiene
per x = l. Per distinguere i due casi è necessario considerare l’energia cinetica della
spira. Uguagliando l’energia cinetica e quella potenziale elastica
1 2 1 2
mv = kxmax ,
2
2
otteniamo la massima penetrazione della spira
√
v mL
.
xmax =
Bl
Quindi, nel caso xmax ≤ l, il massimo del modulo della forza repulsiva è
r
m
Fmax = kxmax = Blv
.
L
Lo stesso risultato lo si ottiene utilizzando la conservazione dell’energia, cioè trasformando l’energia cinetica iniziale in energia magnetica della spira
r
r
1 2 1 2
m
m
mv = Limax −→ imax = v
−→ Fmax = Blimax = Blv
.
2
2
L
L
Nel caso xmax ≥ l, il massimo richiesto lo si ottiene ponendo x = l nell’espressione del
modulo della forza
B 2 l3
Fmax = kl =
.
L
Si noti che il caso x = l è incluso nella precedente espressione di Fmax . Questo è ovvio
se xmax = l. D’altronde, per tutte le v tali che xmax > l, si ha che il corrispondente
Fmax
√
2
è lo stesso di quello relativo al v tale che xmax = l, cioè vmin = Bl / mL. Questa è
l’espressione del modulo della velocità minima richiesta, che, sostituito nell’espressione
di Fmax per xmax ≤ l, riproduce l’espressione di Fmax per xmax ≥ l sopra riportata.
2. Se la spira non possiede sufficiente energia per entrare interamente in Π, questa viene
respinta
p elasticamente compiendo un semiperiodo di moto armonico con pulsazione
ω = k/m. Quindi
√
π
mL
t= =π
.
ω
Bl
Problema 4
Un corpo di massa m1 è tenuto fermo sulla faccia superiore di un cuneo, di massa m2 , inclinata di un angolo α rispetto al suo piano d’appoggio orizzontale. Calcolare l’accelerazione
del cuneo nell’istante in cui il corpo è lasciato libero, assumendo assenza d’attrito sia tra il
corpo e il piano inclinato che tra il cuneo e il suo piano d’appoggio.
Soluzione Problema 4
~ la forza normale tra
Sia ~a1 l’accelerazione iniziale del corpo, ~a2 quella iniziale del cuneo e N
il piano inclinato e il corpo. Si ha
m1 a1x = N sin α ,
m1 a1y = m1 g − N cos α ,
m2 a2x = −N sin α .
Sia t = 0 l’istante in cui il corpo è lasciato libero e t = T l’istante in cui questo raggiunge
il piano d’appoggio. Sia (x(t), y(t)) la posizione al tempo t del corpo rispetto al sistema
solidale con il cuneo. La condizione che il corpo rimanga a contatto con il piano inclinato
implica, per ogni 0 ≤ t ≤ T ,
y(t) − y(0)
a1y
=
= tan α .
x(t) − x(0)
a1x − a2x
Quindi
N=
m1 m2 g cos α
,
m2 + m1 sin2 α
da cui
a2x = −
m1 g sin α cos α
.
m2 + m1 sin2 α
Problema 5
Una cavità cilindrica, di spessore trascurabile, il cui asse è un segmento di retta, connette
due punti arbitrari della superficie terrestre, passando quindi attraverso di essa. Un corpo
è lasciato cadere all’interno della cavità. Si supponga che la Terra sia sferica e che la sua
densità di massa sia uniforme e pari a quella media, cioè ρm = 5.51 · 103 kg/m3 .
1. Determinare, trascurando fenomeni d’attrito, il tempo impiegato dal corpo per giungere
all’altro estremo della cavità.
2. L’analogo elettrostatico del precedente problema considera una sfera S 2 di massa nulla
ma con densità di carica uniforme ρc . Un particella di massa m e carica q, di segno
opposto a ρc , è lasciata libera all’inizio di una cavità cilindrica, di spessore trascurabile
e il cui asse è un segmento di retta, che connette due punti arbitrari di S 2 , passando
quindi attraverso di essa. Determinare la relazione che deve essere soddisfatta da ρc ,
m e q, tale per cui il tempo impiegato dalla carica per raggiungere l’altro estremo della
cavità coincida con quello considerato nella precedente domanda.
Costante di gravitazione universale: G = 6.67 · 10−11 m3 /(kg s2 ).
Costante di Coulomb: k = 8.99 · 109 kg m3 s−2 C−2 .
Soluzione Problema 5
1. Sia ~r il raggio vettore che origina nel centro della Terra e termina nel corpo, e x la
distanza tra il corpo e il punto di mezzo della cavità. L’invarianza di ρm sotto rotazioni
rispetto al centro della Terra e la legge di Gauss per il campo gravitazionale, implicano
che la forza che agisce sul corpo è dovuta alla sola massa interna alla sfera di raggio r,
cioè
r 3
M (r) = M
,
R
dove M è la massa della Terra e R il suo raggio. Quindi il corpo è soggetto alla forza
GM m~r
4
F~N = −
= − πGρm mr~ur ,
3
R
3
dove ~ur := ~r/r e ρm = 3M/(4πR3 ). La sua componente lungo l’asse della cavità è
FN x = −FN
x
4
= − πGρm mx ,
r
3
che ha la stessa forma della forza elastica. Segue che il corpo compie un moto armonico
di periodo
r
3π
TN =
≈ 5064 s ,
Gρm
e quindi raggiunge l’altro estremo della cavità nel tempo TN /2, cioè in circa 42 minuti.
2. Poiché la forza di Coulomb, F~C , ha la stessa dipendenza dalla distanza di quella
gravitazionale, segue che la sua componente lungo l’asse x della cavità è
4
FC x = πkρc qx .
3
Quindi la particella compie un moto armonico di periodo
r
3πm
.
TC =
kqρc
La relazione richiesta è soluzione dell’equazione TC = TN , cioè
G
q
ρc = − ρm = −3.79 · 10−17 kg−1 m−3 C2 .
m
k
Problema 6
Un concetto in relatività ristretta è quello di quadri-vettore, denotato A ≡ (A0 , A1 , A2 , A3 ). Il
P
prodotto scalare tra due quadri-vettori è definito dall’espressione A·B ≡ A0 B0 − 3k=1 Ak Bk .
Ad ogni particella è associabile il quadri-impulso P = (E, p~c), con E l’energia della particella,
p~ il suo impulso e c la velocità della luce. P soddisfa la relazione P 2 ≡ P · P = m2 c4 , dove m
è la massa propria della particella. Quest’ultima è una proprietà intrinseca della particella,
per cui il suo valore è indipendente dal sistema di riferimento scelto. Poiché il fotone ha
massa nulla, si ha P 2 = 0. Conseguentemente, essendo E = hν l’energia di un fotone, con ν
la sua frequenza e h la costante di Planck, si ha che il modulo del suo impulso è p = hν/c .
Si consideri un fotone, di lunghezza d’onda λ, che urta elasticamente contro un elettrone
a riposo di massa m, deviando di un angolo α rispetto alla sua traiettoria prima dell’urto.
Determinare la lunghezza d’onda del fotone dopo l’urto.
Soluzione Problema 6
Sia Pe (Pγ ) il quadri-impulso iniziale dell’elettrone (del fotone) e Pe0 (Pγ0 ) il suo quadri-impulso
dopo l’urto. La conservazione dell’energia e dell’impulso può essere espressa nella forma
Pe + Pγ = Pe0 + Pγ0 .
Consideriamo il sistema di riferimento solidale con l’elettrone, con asse delle x la retta
passante tra il fotone e l’elettrone prima dell’urto. Poiché in tale riferimento l’elettrone è a
riposo, si ha Pe = (mc2 , 0, 0, 0), ed essendo Pγ2 = 0, si ha Pγ = (hν, hν, 0, 0). Si noti inoltre
che dopo l’urto il fotone ha quadri-impulso Pγ0 = (hν 0 , hν 0 cos α, hν 0 sin α, 0).
È conveniente esprimere la conservazione del quadri-impulso nella forma
2
(Pe + Pγ − Pγ0 )2 = Pe0 .
Poiché Pγ2 = Pγ0 2 = 0 e Pe2 = Pe0 2 = m2 c4 , la precedente relazione si riduce a
Pe · (Pγ − Pγ0 ) = Pγ · Pγ0 ,
cioè
mc2 (ν − ν 0 ) = hνν 0 (1 − cos α) .
Quindi, essendo c = λν = λ0 ν 0 ,
λ0 = λ +
h
(1 − cos α) .
mc