1. PROPAGAZIONE TEM
1.1 Campi TEM
1.2 Proprietà di un campo TEM
1.3 Cavo Coassiale
1.4 Stripline
2. PROPAGAZIONE QUASI TEM
2.1 Microstriscie
2.2 Campi quasi-TEM
2.3 Analisi e progetto di linee a microstriscia
2.4 Perdite nelle microstriscie
2.5 Dispersione nelle microstriscie
2.6 Discontinuità
2.7 Metodo delle differenze finite
3. PROPAGAZIONE IN STRUTTURE A PIU’ CONDUTTORI
3.1 Richiami sulle linee di trasmissione
3.2 Linee TEM a N+1 conduttori
3.3 Propagazione in strutture a N+1 Conduttori
3.4 Linee accoppiate
4. PROPRIETA’ GENERALI DELLE RETI
4.1 Matrice Z e Y
4.2 Matrice di Scattering
4.3 Matrice di Trasmissione
4.4 Proprietà delle reti due porte
4.5 Proprietà delle reti tre porte
4.6 Proprietà delle reti quattro porte
4.7 Esempi
5. DIVISORI, IBRIDI E ACCOPPIATORI IN TECNOLOGIA PLANARE
5.1 Divisore a T senza perdite
5.2 Divisore di Wilkinson
5.3 Ibrido a 90°
5.4 Ibrido ad anello
5.5 Accoppiatore a linee accoppiate
5.6 Accoppiatore multisezione
6. ADATTAMENTI BANDA LARGA
6.1 Larghezza di banda degli adattamenti
6.2 Linee con impedenza costante a tratti
6.3 Trasformatore binomiale
6.4 Trasformatore di Chebyshev
7. FILTRI A MICROONDE IN TECNOLOGIA PLANARE
7.1 Filtri a bassa frequenza
7.2 Trasformazioni di filtri
7.3 Implementazione a microonde di filtri passabasso – identità di Kuroda
7.4 Implementazione a microonde di filtri passabasso – filtri a scala
7.5 Prototipi di filtri passabanda ed eliminabanda con invertitori di impedenza
7.6 Implementazione a microonde di filtri passabanda – Filtri a linee accoppiate
7.7 Implementazione a microonde di filtri passabanda ed eliminabanda – Filtri a stub
7.8 Implementazione a microonde di filtri passabanda – Filtri a risuonatori accoppiati
1
8. GUIDE D’ONDA
8.1 Propagazione nelle guide d’onda metalliche
8.2 Guida d’onda rettangolare
8.3 Caratteristiche della propagazione nelle guide d’onda
8.4 Configurazione trasversa dei modi in guida
8.5 Potenza nelle guide
8.6 Eccitazione delle guide metalliche
8.7 Transizione guida-cavo coassiale
8.8 Perdite nelle guide
8.9 Indentificazione di un diaframma in guida d’onda
8.10 Accoppiamento tramite fori
8.11 Componenti in guida d’onda
8.12 Mode matching
8.13 Guida a pareti magnetiche
9. RISUONATORI IN LINEA DI TRASMISSIONE
APPENDICE I: TEOREMA DI RECIPROCITA’
APPENDICE II: TEOREMA DI EQUIVALENZA
2
1. PROPAGAZIONE TEM
1.1
Campi TEM
Consideriamo le equazioni di Maxwell in assenza di sorgenti, nel dominio della frequenza, per un
mezzo lineare e omogeneo:
∇ × E = − jωµ H
∇ × H = jωε E
(1.1)
Poichè ci interessa studiare la propagazione in una struttura guidante, la direzione di
propagazione, che assumiamo come direzione z di un sistema di riferimento (ix, iy, iz), dovrà
essere una direzione preferenziale del problema. Conviene quindi decomporre tutti i vettori
della (1.1) in una componente trasversa e una lungo z: E = E t + E z i z , e analogamente per H.
Allo stesso modo conviene separare la parte trasversa e quella longitudinale dell’operatore ∇ :
∂
∇ = ∇t + i z . Possiamo sostituire queste espressioni nelle equazioni di Maxwell (1.1):
∂z
∂
∇ × E = ∇t + i z × E = − jωµ H t − jωµ H z i z
∂z
∂ Et
∇t × E t + i z × ∂z + ∇t × ( Ez i z ) + 0 = − jωµ H t − jωµ H z i z
∇ × H t + i × ∂ H t + ∇ × ( H i ) = jωε E t + jωε E i
z
t
t
z z
z z
∂z
(1.2)
La forma (1.2) delle Equazioni di Maxwell è quella che utilizzeremo nel seguito. Cominciamo qui
ad occuparci di campi TEM (Trasversi ElettroMagnetici), ovvero campi per cui
Ez = 0
H z = 0
(1.3)
Per tali campi le (1.2) forniscono:
∂Et
∇t × E t + i z × ∂z = − jωµ H t
∇ × H t + i × ∂ H t = jωε E t
z
t
∂z
(1.4)
In ogni equazione (1.4) il primo termine è longitudinale, mentre gli altri sono trasversi.
Separando le componenti trasverse e longitudinali, segue:
∇t × E t = 0
∇t × H t = 0
(1.5)
∂ Et
i z × ∂z = − jωµ H t
i × ∂ H t = jωε E t
z
∂z
(1.6)
3
Deriviamo la prima delle (1.6), riscritta come
iz ×
∂ Et
× i z = − jωµ H t × i z
∂z
∂Et
= − jωµ H t × i z
∂z
rispetto a z:
∂2 Et
∂H t
= − jωµ
× iz
2
∂z
∂z
(1.7)
Infine, sostituendo la seconda delle (1.6) nella (1.7) si ottiene:
∂2 Et
∂H t
= − jωµ
× i z = − jωµ ( − jωε E t ) = −ω 2εµ E t
2
∂z
∂z
∂2 Et
+ ω 2εµ E t = 0
2
∂z
(1.8)
Introduciamo la costante k z2 = ω 2εµ che prende il nome di costante di propagazione e, in caso
di propagazione TEM coincide con la costante di propagazione del mezzo.
La soluzione dell’equazione (1.8) è
+
−
E t = E t 0 exp(− jk z z ) + E t 0 exp( jk z z )
+
(1.9)
−
con E t 0 , E t 0 vettori costanti.
L’equazione (1.8) e la soluzione (1.9) valgono per strutture con un dielettrico trasversalmente
omogeno.
Se il dielettrico non è trasversalmente omogeneo non possono esistere campi TEM. Infatti, in
questo caso, si ha almeno una interfaccia tra due mezzi con costante dielettrica diversa ma, in
presenza di costanti di propagazione differenti, i campi all’interfaccia tra i due mezzi non
rispettano la condizione di continuità in direzione longitudinale (la diversa velocità di
propagazione ai due lati dell’interfaccia produrrebbe lo scorrimento dei campi).
Rimane la possibilità che sulla sezione trasversa vi siano dei CEP su cui deve valere la condizione:
E ⋅ ic = 0
(1.10)
In assenza di conduttori, l’unica soluzione possibile è un’onda piana generica in direzione z,
soluzione che qui non interessa. Pertanto possiamo sempre supporre che vi siano uno o più
conduttori.
Per determinare la soluzione notiamo che dalla prima delle (1.5), ∇ t × E t = 0 , segue:
E t = −∇ t Φ (t , z )
(1.11)
4
e da ∇ ⋅ E = ∇ t ⋅ E t = 0 si ottiene:
∇t ⋅∇t Φ(t , z ) = ∇t2 Φ(t , z ) = 0
(1.12)
Le equazioni trovate sono esattamente le equazioni per la determinazione del campo elettrostatico
bidimensionale nella medesima struttura. In particolare, il potenziale Φ ha lo stesso ruolo del
potenziale elettrostatico, ed è quindi ovviamente definito a meno di una costante. Per mantenere
l’analogia sceglieremo Φ = 0 sul contorno all’infinito (nel caso di problemi aperti) e, ovviamente,
su tutti i conduttori che si estendono all’infinito. Per problemi chiusi, invece, assumeremo Φ = 0 sul
conduttore di chiusura del problema (conduttore di massa).
Per quanto riguarda gli altri conduttori, occorre imporre la condizione (1.10) che, in termini di Φ,
diventa, su (ciascun) contorno (connesso):
E ⋅ i c = ∇t Φ ⋅ i c =
∂Φ
=0
∂c
(1.13)
L’equazione (1.12) prende il nome di equazione di Laplace, e le sue soluzioni sono dette funzioni
armoniche.
Una funzione f(t) armonica in un dominio D, gode di varie proprietà tra cui:
a) Se P è un punto interno a D, allora f(P) è la media dei valori che la f(t) assume su di una
circonferenza (interna a D) di centro P.
b) Come conseguenza del punto precedente, il massimo e il minimo di f(t) in D sono punti della
frontiera di D, ∂D. Infatti se P fosse un massimo, f(P) non potrebbe essere la media dei valori della
funzione sulla circonferenza, analogamente se P fosse un minimo. Rimangono i punti sulla
frontiera che non soddisfano la a).
La condizione (1.13) implica che Φ è costante separatamente su ogni conduttore del contorno. Se il
contorno è singolo, ovvero abbiamo un solo conduttore, allora su di esso Φ = 0. Ma poichè
massimo e minimo devono trovarsi sul contorno, sono entrambi nulli e quindi Φ è nullo ovunque e
non vi sono campi TEM.
Se invece i conduttori sono due o più, vi è almeno un conduttore su cui Φ ≠ 0 e quindi esistono
campi TEM.
Se i conduttori sono N+1, possiamo fissare ad arbitrio N valori di potenziale sui conduttori,
ottenendo N diversi campi TEM, tra loro linearmente indipendenti. Poichè ogni campo TEM ha la
stessa costante di propagazione (1.8), questi N campi costituiscono una base dello spazio vettoriale
di tutti i campi TEM.
Nel seguito considereremo prima un singolo campo TEM in una struttura con due soli conduttori e
poi vedremo la relazione tra gli N campi di un caso con N+1 conduttori.
5
1.2
Proprietà di un campo TEM
Consideriamo una struttura con due conduttori, ad esempio un cavo coassiale (Fig. 1).
Figura 1. Struttura TEM con due conduttori: cavo coassiale.
In questo caso uno solo dei due conduttori (contrassegnato con C1 in Fig. 1), ha potenziale diverso
da zero. La soluzione sarà pertanto proporzionale, per ogni valore di z, al valore di Φ sul conduttore
C1. L’altro conduttore (C2) è il conduttore di riferimento con potenziale nullo:
Poniamo dunque:
Φ
C1 = costante = V ( z )
Φ C0 = 0
(1.14)
Poiché stiamo considerando un problema elettrostatico bidimensionale, nella (1.14) la variabile z è
un parametro, e, fissato il valore di z, il potenziale su C1 è una costante, V(z), rispetto alla sezione
trasversa.
Di conseguenza, la soluzione del problema sarà necessariamente proporzionale a V(z), perché da
V(z) dipende linearmente, e potrà essere scritta nella forma fattorizzata:
Φ(t , z ) = V ( z )ϕ (t )
(1.15)
Dove ϕ (t ) è la funzione armonica (reale) corrispondente a V(z) = 1, ossia Φ C = 1 e soluzione
1
dell’equazione ∇t2Φ(t , z ) = ∇t2V ( z )ϕ (t ) = V ( z )∇t2ϕ (t ) = 0
Di conseguenza
⇒ ∇t2ϕ (t ) = 0 .
E t = −∇ t Φ (t , z ) = −∇ t [V ( z )ϕ (t )] = V ( z )[ −∇ tϕ (t )]
da cui
E t = V ( z )e(t )
(1.16)
con e(t ) = −∇ tϕ (t )
Dalla (1.16) risulta che, oltre al potenziale, anche il campo elettrico trasverso è fattorizzato.
Sostituendo la (1.16) nella prima delle (1.6) si ottiene:
6
∂
[V ( z )e(t )] = − jωµ H t
∂z
dV ( z )
[i z × e(t )] = − jωµ H t
dz
iz ×
(1.17)
ovvero anche Ht è fattorizzato e può essere scritto nella forma
H t = I ( z )h(t )
(1.18)
Quindi, dalla (1.17), risulta:
dV ( z )
[i z × e(t )] = − jωµ I ( z)h(t )
dz
(1.19)
I vettori i z × e(t ) e h(t ) sono pertanto paralleli e quindi esiste una costante A tale che
Ah(t ) = i z × e(t )
(1.20)
Sostituendo le (1.16) e (1.18) nella seconda delle (1.6) si ha:
dI ( z )
[i z × h(t )] = jωεV ( z )e(t )
dz
(1.21)
Le (1.19) e (1.21) forniscono
dV
dz [ i z × e] = − jωµ I ( z )h
dI [i × h] = jωεV e
dz z
(1.22)
Tenendo presente la (1.20), che può essere scritta anche nella forma e(t ) = − Ai z × h(t ) , le (1.22)
fornisconio le equazioni delle linee di trasmissione:
ωµ
dV
− dz = j A I
− dI = jωε AV
dz
(1.23)
in cui ε e µ possono essere anche funzioni di z. Se sono costanti le (1.23) diventano le equazioni
standard dei telegrafisti con
C = ε A
µ
L = A
(1.24)
La costante di propagazione è data da β = ω LC = ω εµ , come trovato anche in precedenza (1.8,
1.9), e non dipende dalla costante A.
7
L’impedenza caratteristica è:
L
µ ζ
=
=
C
εA A
Z=
(1.25)
A è un parametro arbitrario costante sulla sezione trasversa. In generale è una funzione di z. E’
possibile scegliere a piacere l’impedenza caratteristica e ricavare, di conseguenza, il valore di A.
Tuttavia, nel caso di propagazione TEM esiste una definizione naturale dell’impedenza che
consente di interpretare le grandezze V ed I nelle (23) rispettivamente come la tensione e la corrente
sulla linea di trasmissione. In questo caso la capacità C definita nella (1.24) rappresenta la capacità
per unità di lunghezza relativa al problema elettrostatico bidimensionale.
Per calcolare A possiamo quindi richiedere che il flusso di potenza (attraverso la sezione trasversa
St )
P=
1
1
*
E × H ⋅ i z dS = VI * ∫ e × h ⋅ i z dS
∫
2 St
2
St
(1.26)
1
sia calcolabile mediante la linea di trasmissione (equivalente). Il che significa P = VI * ,
2
che implica, dalla (1.26)
∫ e × h ⋅ i dS = 1
(1.27)
z
St
Sostituendo la (1.20) nella (1.27) si ottiene
∫ e × h ⋅ i dS = 1
z
⇒
St
∫i
St
z
⋅ e × h dS = 1 ⇒
St
z
St
∫i
∫i
z
∫i
z
× e ⋅ h dS = 1 ⇒
St
1
× e ⋅ i z × e dS = 1
A
1
2
1
× e ⋅ i z × e dS = ∫ i z × e dS = 1
A St
A
e quindi
A = ∫ i z × e dS = ∫ e dS = ∫ ∇ tϕ
2
St
2
St
2
dS
(1.28)
St
In conclusione la costante A dipende solo dalla geometria dei conduttori.
8
1.3
Cavo coassiale
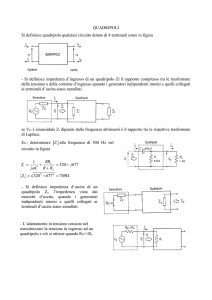
Figura 2. Geometria del cavo coassiale
Il cavo coassiale è costituito da un conduttore cilindrico a sezione circolare, coassiale ad un
conduttore esterno, anch’esso circolare. Il conduttore interno ha raggio a, il conduttore esterno ha
raggio b (Fig. 2), e la zona tra i due conduttori è riempita con un mezzo omogeneo di costante
dielettrica ε r . E’ evidente la convenienza di studiare i campi all’interno di un cavo coassiale
utilizzando un sistema di riferimento in coordinate cilindriche [(r, θ ) in Fig. 2]. Infatti, per
simmetria, il potenziale Φ è indipendente dall’angolo θ.
Per il cavo coassiale si ha dunque:
∇ t2ϕ (t ) = 0
1 ∂ ∂ϕ
r
=0
r ∂r ∂r
⇒
(1.29)
con le condizioni al contorno:
ϕ (a ) = 1
ϕ (b) = 0
(1.30)
Nella (1.29) è possibile eliminare 1/r al di fuori dal segno di derivata perché nel dominio di
interesse r è sempre diverso da zero (a < r < b):
∂ ∂ϕ
r
=0
∂r ∂r
⇒ r
∂ϕ
= k1
∂r
⇒
∂ϕ k1
=
∂r
r
(1.31)
con k1 costante.
Integrando la (1.30) si ottiene:
ϕ ( r ) = k1 ln( r ) + k 2
(1.32)
con k2 costante.
Le condizioni al contorno (1.30) forniscono:
9
ϕ (a) = k1 ln(a) + k2 = 1
ϕ (b) = k1 ln(b) + k2 = 0
⇒ k2 = − k1 ln(b)
(1.33)
Sostituendo la seconda delle (1.33) nella prima si ottiene
1
a
ln
b
La costante k2 è inutile perché il potenziale è definito a meno di una costante.
Quindi:
∂ϕ
∂
1
1 1
e = −∇ϕ (t ) = −
ir = −
ln(r ) i r =
ir
∂r
∂r a
r b
ln
ln
b
a
k1 ln(a ) − k1 ln(b) = 1 ⇒ k1 =
(1.34)
Per determinare il campo magnetico h e l’impedenza caratteristica occorre calcolare la costante A
(1.28). Si ha dunque:
A = ∫ e dS = ∫ ∇ tϕ
2
St
2
dS
St
In coordinate cilindriche:
b 2π
A=
1
b∫
ln 2 a
a
∫
0
1
rdrdθ =
r2
2π
1
2π
2π
ln(b) − ln(a )] =
dr =
[
∫
b r
b
b
ln 2 a
ln 2
ln
a
a
a
b
Quindi:
b
ln a 1 1
1
1
11 1
h = iz × e =
i z × ir =
iθ =
iθ
A
2π r
A r ln b
2π r ln b
a
a
1 1
e = r b i r
ln
a
1
h =
iθ
2π r
(1.35)
10
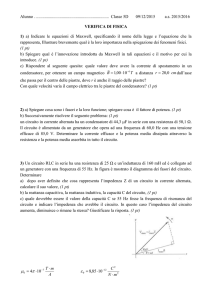
Figura 3. Campo elettrico e magnetico trasverso all’interno di un cavo coassiale.
L’impedenza caratteristica è data da:
Z=
ζ0
ζ
ζ b
b
=
ln =
ln
A 2π a 2π ε r a
(1.36)
e dipende dalla geometria della sezione trasversa.
La costante di propagazione dipende invece solo dal mezzo presente all’interno del coassiale:
β = ω ε r ε 0 µ = ε r k0
(1.37)
Il campo TEM è presente nel cavo coassiale a tutte le frequenze. Tuttavia, come vedremo nel
seguito, esistono anche altri campi che possono propagarsi nel cavo coassiale a partire da una certa
frequenza fL e, dato che il cavo coassiale viene utilizzato quando si propaga solo il campo TEM, la
frequenza più bassa fL a cui, oltre al campo TEM, si propaga anche un campo non TEM, determina
la frequenza limite di utilizzo del cavo coassiale. In particolare si ha:
fL =
c0
4π ε r ( re + ri )
(1.38)
Chiaramente, per determinare le caratteristiche di un cavo coassiale da impiegare in una determinata
applicazione, occorre stabilire un margine di sicurezza rispetto al valore di fL.
1.4
Stripline
Il cavo coassiale non si presta a realizzare circuiti, sia perchè la realizzazione di linee con
impedenza diversa è abbastanza difficoltoso (richiede dielettrici con varie costanti dielettriche, o la
realizzazione di strutture con raggi interni o esterni variabili), sia perchè è abbastanza complesso
connettere altri tratti di cavo coassiale in serie o in parallelo alla linea principale.
Questi problemi vengono superati utilizzando strutture di tipo planare, ovvero costituite da una
piastrina di materiale dielettrico (substrato), sulle cui facce vengono praticate delle metallizzazioni.
La principale struttura planare TEM è la stripline (Fig. 4), che è costituita da due substrati dello
stesso materiale, e in genere uguali, uniti insieme. La struttura è completamente metallizzata alle
due estremità, mentre al centro tra i due substrati è posta una ulteriore metallizzazione che ha lo
stesso ruolo del conduttore centrale di un cavo coassiale, ovvero quello di guidare il campo
elettromagnetico.
11
Figura 4. Stripline
Poichè le due metallizzazioni esterne sono idealmente infinite, esse sono allo stesso potenziale (il
potenziale nullo dell’infinito) e quindi equivalgono ad un unico conduttore. In un certo senso, si può
quindi dire che una stripline è l’equivalente planare di un cavo coassiale.
L’impedenza caratteristica di una stripline dipende esclusivamente dal rapporto tra la larghezza W
della linea di guida e lo spessore del substrato. Poichè quest’ultimo è fissato, è possibile modificare
l’impedenza caratteristica di una stripline semplicemente agendo su W.
Figura 5. Geometria di una stripline: sezione trasversa.
Risulta inoltre molto semplice collegare in uno stesso nodo tre o più linee in parallelo, in modo da
realizzare divisori oppure stub. Non è invece possibile collegare stub in serie.
Figura 6. Campo elettrico di un condensatore a facce piane parallele (a sinistra) e campo elettrico
vero di una stripline (a destra).
Uno svantaggio delle stripline è che non è possibile determinare in maniera semplice la
distribuzione del campo all’interno di tale struttura, diversamente, ad esempio, da un cavo coassiale.
Infatti, nonostante una stripline assomigli ad un condensatore a facce piane parallele, il campo non
risulta concentrato sotto la strip centrale (come in Figura 6a), ma deborda lateralmente (Figura 6b).
La capacità di una stripline è quindi maggiore, e di questo si può tenere conto introducendo una
larghezza efficace We, definita in modo che la capacità di una stripline di larghezza W sia pari a
quella di un condensatore a facce piane parallele di larghezza We.
C = 2ε r
We
ε0
h
(1.39)
12
Nella (1.39) il fattore 2 tiene conto che, nella struttura, consideriamo due consensatori in parallelo.
Per una stripline la costante di propagazione vale
β = ω ε r ε 0 µ = ω LC
da cui
ε r ε 0 µ = LC
(1.40)
⇒ L=
ε rε 0 µ
C
(1.41)
L’impedenza caratteristica è pertanto
Z=
ε ε µ 1
εε µ
L
1
1 ζ0 h
ζ0 =
= r 02 = r 0 = h
C
C
C
2 We ε r
2 ε r We
(1.42)
Dalla (1.42) è evidente che il problema si è spostato al calcolo di We. Da una analisi matematica del
problema si trova che, per una strip infinitamente sottile(1), la larghezza equivalente è molto ben
approssimata da
We = W +
4 ln 2
π
h
(1.43)
Il concetto della larghezza efficace è utile in molti casi, ed è quindi ampiamente usato. Ad esempio,
si assume che due stripline affiancate interagiscano in maniera consistente se la loro distanza è tale
che le loro larghezze We si sovrappongano, e sono invece abbastanza indipendenti se ciò non
avviene.
Per quanto riguarda i piani di massa, questi dovrebbero essere infiniti. Tuttavia si assume che, se la
distanza tra la stripline e il bordo di piani di massa è di almeno 6 volte la dimensione della zona
centrale (ovvero del più grande tra W ed h), allora il piano di massa si comporta come se
fosse infinito. Per distanze più piccole, ovviamente, l’approssimazione insita nel considerare
infinito un piano di massa che è in realtà finito risulta via via meno buona. Camunque tale
approssimazione risulta accettabile se la distanza è di almeno 4 volte la dimensione della zona
centrale.
Come per il cavo coassiale, anche per una stripline esiste una frequenza limite che può essere
calcolata a partire da We. Si trova che la frequenza limite deve essere significativamente più piccola
(60%–70%) di
fL =
c0
2We ε r
(1.44)
Ad esempio, una stripline in Teflon (εr = 2.2) con larghezza pari a 5 mm può essere usata sino a una
frequenza limite di circa 14 GHz, avendo utilizzato un margine di sicurezza del 30%. Per alzare la
frequenza limite occorre ridurre la larghezza della stripline. Ciò è possibile, mantenendo inalterata
l’impedenza, solo se si riduce proporzionalmente lo spessore del substrato.
Si vede cioè che lo spessore del substrato va scelto sulla base della massima frequenza a cui si vuole
utilizzare la struttura, oltrechè per considerazioni di tipo economico e costruttivo. Stripline a
1
Lo spessore tipico della metallizzazione è di 30–50 µm. L’ipotesi di metallizzazione infinitamente sottile è una
ragionevole approssimazione solo se W risulta molto più grande dello spessore, altrimenti occorre utilizzare espressioni
più complesse che tengono conto anche dello spessore.
13
frequenze molto elevate (100 GHz o più) richiederebbero substrati molto sottili. Poiché tali substrati
sono di difficile realizzazione (e di conseguenza costosi), ne segue che a tali frequenze si preferisce
utilizzare strutture guidanti diverse.
Il principale svantaggio dell’uso di una stripline è la necessità di avere un ulteriore piano di massa
al di sopra della struttura. Oltre a una certa maggiore difficoltà realizzativa, e al maggior costo
dovuto al substrato di elettrico che va posto sopra le linee di guida, quest’ulteriore piano di massa
impedisce completamente l’inserzione di componenti concentrati (sia passivi, sia attivi), e, inoltre,
non consente una messa a punto del circuito, mediante modifica meccanica delle linee di guida
(eliminazione o aggiunta di metallizzazione).
14
2. PROPAGAZIONE QUASI TEM
2.1
Microstriscie
Gli svantaggi della stripline sono legati alla presenza del secondo substrato e relativo piano di
massa. Ovviamente questi inconvenienti possono essere superati eliminando completamente sia il
dielettrico superiore, sia il piano di massa di chiusura, ottenendo una struttura che prende il nome di
microstriscia o microstrip. Naturalmente, per una tale struttura, l’ipotesi di dielettrico
trasversalmente omogeneo cade in quanto il campo elettromagnetico si sviluppa in parte tra la
microstriscia di guida e il piano di massa inferiore (quindi nel dielettrico), e in parte al di sopra della
microstriscia stessa, quindi nel vuoto. La propagazione in una microstrip non può quindi essere di
tipo TEM , almeno se la frequenza è maggiore di zero, il che è ovviamente il caso che ci interessa.
Figura 7. Microstriscia.
Se però le dimensioni trasverse della struttura (W ed h in Fig. 7) sono considerevolmente più
piccole della lunghezza d’onda, il campo elettromagnetico in una microstrip è molto simile a un
campo TEM, nel senso che le componenti longitudinali del campo elettrico e del campo magnetico
sono molto più piccole di quelle trasverse. Questo tipo di campo prende il nome di campo quasiTEM , e esiste, più o meno con le stesse caratteristiche, non solo in una microstrip, ma in
qualunque struttura planare con dielettrico non omogeneo, purchè tale struttura supporti, a
frequenza nulla, un campo elettrostatico.
Oltre ad avere le componenti longitudinali dei campi molto più piccole di quelle trasverse, la
principale caratteristica di un campo quasi-TEM è quella di avere una costante di propagazione
sostanzialmente indipendente dalla frequenza, e intermedia tra le costanti di propagazione dei
materiali che riempiono la struttura stessa. Se prendiamo in considerazione strutture prive di
perdite, la costante di propagazione β viene normalmente scritta nella forma
β = ε e β0
(2.1)
dove β0 è la costante di propagazione nel vuoto alla stessa frequenza, e la costante dielettrica
efficace εe assume un valore intermedio tra le costanti dielettriche relative dei vari mezzi. Per capire
meglio le caratteristiche della propagazione in una microstriscia, nel paragrafo precedente verranno
studiate le caratteristiche generali della propagazione quasi-TEM.
2.2
Campi quasi-TEM
Nelle strutture con un dielettrico trasversamente non omogeneo (come ad esempio nelle
microstriscie), non sono possibili campi TEM, eccetto che per frequenza nulla. E’ ragionevole
tuttavia supporre che, per basse frequenze, il campo sia molto simile ad un campo TEM ovvero:
- abbia le stesse caratteristiche trasverse;
15
- le componenti longitudinali siano sufficientemente piccole e possano essere tascurate.
Per studiare questo caso consideriamo le equazioni di Maxwell, di cui però cerchiamo direttamente
soluzioni che varino con z come exp(-jβz) in modo tale che:
∂
∂z
→ − jβ
(2.2)
La costante β è ovviamente da determinare.
Utilizzando le espressioni (1.2), e separando le componenti trasverse e quelle longitudinali, le
equazioni di Maxwell diventano, rispettivamente:
i z × (− j β E t ) + ∇t Ez × i z = − jωµ H t
i z × (− j β H t ) + ∇t H z × i z = jωε E t
(2.3)
∇t × E t = − jωµ H z i z
∇t × H t = jωε Ez i z
(2.4)
Per semplificare, sia pure in modo approssimato, queste equazioni, occorre valutare l’ordine di
grandezza delle derivate spaziali rispetto alle coordinate trasverse. Per fare ciò consideriamo una
funzione generica f(x) e sia
∆x un intervallo in cui questa funzione varia in modo significativo.
Si può scrivere in modo approssimato:
df ( x) f ( x + ∆x) − f ( x)
≈
∆x
dx
(2.5)
Dire che in ∆x la funzione f(x) varia in modo significativo equivale a dire che
f ( x + ∆x) − f ( x) = O[ f ( x)]
(2.6)
e quindi
df ( x)
f ( x)
=O
dx
∆x
(2.7)
Esempio
2π
f ( x) = sen
x
λ
Un intervallo ∆x è una frazione significativa di λ , ad esempio λ /8. Pertanto l’ordine di grandezza
2π
2π
di f’(x) valutato tramite la (2.7) è 8/ λ . In realtà f '( x) =
cos
x ed ha un ordine di
λ
λ
2π
grandezza pari a
che e’ perferttamente coerente con la stima precedente.
λ
Nel caso della microstriscia la scala di variazione che interessa è dell’ordine di grandezza di una
frazione di W o di h (Fig. 7). Detta “s” tale scala di variazione risulta:
16
E
∇t × E t = O t
s
E
∇ t Ez = O z
s
E t,z
Ricordando che H t , z = O
ζ
, per la prima delle (2.3) si ottiene:
i z × (− j β E t ) + ∇ t E z × i z = − jωµ H t
↓
2π
O Et
λ
↓
2π
λ
O E t
↓
2π
O Et
λ
↓
E
O z
s
↓
↓
ωµ O H t
↓
E
O z
s
↓
ωµ
O E t
ζ
E
O z
s
2π
(2.8)
↓
λ
O E t
Abbiamo detto che s è dell’ordine di grandezza di W e h. Quindi, se λ » max(W, h) il primo e il terzo
termine della (2.8), che dipendono da 1/ λ, sono trascurabili rispetto al secondo termine, che
dipende da 1/s. Dalla (2.8) rimane pertanto:
∇t Ez = 0
(2.9)
Analogamente dalla seconda delle (2.3) si ottiene
∇t H z = 0
(2.10)
Per quanto riguarda le (2.4)
∇ t × E t = − jωµ H z i z
↓
↓
E
E
O t O z
s
λ
(2.11)
Da cui deriva, per λ » s,
∇t × E t = 0
e, analogamente, ∇ t × H t = 0 .
In conclusione, con l’approssimazione di bassa frequenza, ossia che la lunghezza d’onda sia molto
maggiore rispetto alle dimensioni trasverse della struttura, si ottiene:
17
∇ t E z = 0
∇ t H z = 0
(2.12)
∇t × E t = 0
∇t × H t = 0
(2.13)
Dalla (2.12) deriva che Ez ed Hz sono costanti e quindi nulli (sono nulli all’infinito e quindi sono
nulli dappertutto), e dalla (2.13) che Et ed Ht sono separatamente irrotazionali. Mentre nel caso dei
campi TEM, Et ed Ht sono collegati dalle equazioni di Maxwell (1.4), nel caso quasi-TEM le
equazioni per Et ed Ht sono disaccoppiate.
Poiché le equazioni alle divergenze forniscono:
∇ t ⋅ E t = 0
∇ t ⋅ H t = 0
(2.14)
allora Et può essere deteminato risolvendo lo stesso problema elettrostatico del caso TEM,
ovviamente in una struttura che presenta un dielettrico non omogeno.
Occorre precisare che, dal momento che nel caso quasi-TEM Et ed Ht non sono collegati, sarà
necessario risolvere anche l’equazione per Ht. Tuttavia, per determinare Ht, non si risolve il
problema magnetostatico, che spesso risulta di difficile soluzione, ma si procede in modo indiretto.
In particolare, si risolve un secondo problema elettrostatico in una struttura con gli stessi conduttori
e con la stessa geometria della struttura guidante di partenza, ma con un dielettrico omogeneo (il
vuoto). In altre parole, la struttura utilizzata per il calcolo del campo Ht viene creata a partire dalla
struttura di partenza, sostituendo il vuoto al posto di tutti i dielettrici presenti. Nel caso della
microstriscia, ad esempio, il secondo problema elettrostatico è relativo alla struttura mostrata in
Figura 8, dove il dielettrico εr è stato sostituito dal vuoto.
E’ facile capire che il campo Ht è lo stesso nella struttura di partenza e nella struttura resa
(o )
(o)
omogenea, perché non dipende dal valore di εr. Chiamiamo E t , H t il campo calcolato nella
struttura resa omogenea. Questo campo è un campo TEM, e quindi, dalla soluzione del problema
(o )
(o)
elettrostatico, possiamo determinare E t e, di conseguenza, anche H t , perché nel caso TEM il
campo magnetico è legato al campo elettrico dalle equazioni di Maxwell (1.4). Per quanto detto,
(o)
H t = H t ed è quindi possibile deteminare il campo magnetico Ht dalla soluzione di un secondo
problema elettrostatico.
Figura 8. Microstriscia (sinistra) e struttura modificata per il calcolo del campo Ht
Dalla soluzione del probelma elettrostatico nella struttura con dielettrico inomogeneo trovo una
capacità C = ε A
18
C = ε r ε 0 ∫ e dS = ε r ε 0 ∫ ∇tϕ dS
2
2
St
(2.15)
St
Dalla soluzione del problema elettrostatico nella struttura resa omogenea, con il vuoto al posto del
dielettrico, trovo una capacità C0
C (o) = ε 0 ∫ e
(o ) 2
2
dS = ε 0 ∫ ∇tϕ ( o ) dS
St
(2.16)
St
In quest’ultimo caso risulta
β = ω ε 0 µ0 = ω L( o )C ( o )
→ L( o ) =
ε 0 µ0
(2.17)
C (o )
Poiché l’induttanza L, così come il campo magnetico Ht non dipende dal dielettrico, si ottiene:
L = L( o ) =
ε 0 µ0
(2.18)
C (o )
Noti C ed L per la struttura quasi-TEM di partenza (rispettivamente dalle (2.15 e 2.18) si ha:
β = ω LC = ω
ε 0 µ0
C
(o)
C = ω ε 0 µ0
C
= β0 ε e
C (o )
(2.19)
C
.
C (o)
Tutto questo discorso vale ovviamente a patto che la frequenza sia sufficientemente bassa (cioè λ »
max(W, h)). Per frequenze più alte la propagazione diventa dispersiva e insorgono dei campi le cui
componenti longitudinali non possono essere trascurate.
In conclusione si può dire che la costante dielettrica efficace è una media delle costanti dielettriche
relative dei vari mezzi, pesata sulla distribuzione del campo elettrico. In altri termini, nel calcolare
tale media, le zone in cui il campo elettrico è elevato pesano più delle zone in cui il campo elettrico
è piccolo. Nel caso di una microstrip, poichè il campo elettrico è principalmente concentrato tra la
striscia metallica di guida e il piano di massa (Fig. 9), la costante dielettrica efficace risulta più
vicina alla costante dielettrica del substrato piuttosto che a 1 (costante dielettrica relativa del vuoto).
Ovviamente, quanto più è larga la striscia di guida rispetto allo spessore del substrato, tanto più il
campo risulta confinato all’interno del substrato stesso, e quindi tanto più la costante dielettrica
efficace si avvicina a quella relativa del substrato.
con ε e =
Figura 9. Distribuzione del campo in una microstriscia.
19
2.3
Analisi e progetto di linee a microstriscia
Per una microstrip, e per tutte le altre strutture quasi-TEM, esistono un certo numero di espressioni
approssimate che legano la costante dielettrica efficace ai parametri geometrici ed elettromagnetici
della struttura. Tali espressioni hanno precisioni diverse, e complessità diversa: normalmente le
formule più precise sono anche quelle più complesse. Una espressione sufficientemente precisa
della costante dielettrica efficace per una microstriscia è la seguente:
ε + 1 εr −1
1
W
+
+ Ξ
εe = r
2
2
h
h
1 + 12 W
2
W
0.04
1
−
W
h
dove Ξ =
h
0
(2.20)
W
<1
h
W
≥1
h
Da tale espressione, e dall’andamento della costante dielettrica efficace al variare di W/h, riportato
in Figura 10, si vede immediatamente quando detto sopra relativamente alla interpretazione della
costante dielettrica efficace come media pesata delle costanti dielettriche relative. In particolare, εe
risulta maggiore della media aritmetica delle costanti dielettriche relative (il primo termine della
2.20 ), ed è tanto maggiore quanto più grande è il rapporto W/h, che (sotto radice) risulta a fattore
del secondo addendo della (2.20).
Figura 10. Andamento della costante dielettrica efficace per una microstrip.
Per linee molto larghe W»h, la costante dielettrica efficace tende ad εr. Ha quindi interesse la
differemza tra εe e εr , che è mostrata in Figura 11.
20
Figura 11. Valore del rapporto ε e ε r per una microstriscia.
La costante dielettrica efficace può anche essere espressa tramite il cosiddetto fattore di
riempimento q, definito da
ε e = qε r + (1 − q ) ⋅1
(2.21)
Per quanto riguarda l’impedenza di una microstriscia, questa è legata, oltre che alla costante
dielettrica efficace, anche al rapporto tra la larghezza della linea e lo spessore del substrato.
Analogamente alle stripline (1.37), anche per una microstriscia è utile definire una larghezza
efficace We, con la quale è possibile esprimere la capacità nella forma
C = εe
We
ε0
h
(2.22)
e quindi l’impedenza nella forma
Z=
ζ0 h
ε e We
(2.23)
Per calcolare la larghezza efficace possono essere utilizzate le equazioni seguenti, in dipendenza dal
valore di W/h
W
W + 1.393 + 0.667 ln + 1.444 h
h
We =
2π
8h W h
ln +
W 4h
W >h
W <h
(2.24)
Come già detto per εe, queste sono espressioni approssimate, ricavate a partire dai risultati di analisi
elettromagnetiche accurate, adattando a tali risultati delle espressioni semplici. In particolare, le
espressioni precedenti, e le altre che vedremo, forniscono risultati con un errore massimo del 2%.
La larghezza efficace di una microstriscia è evidentemente maggiore della sua larghezza fisica W,
ma la differenza dipende anche dal valore di W. Per microstrip abbastanza sottili (W<2h), tale
differenza è prossima a 2h, e poi aumenta con W. In Fig. 12 è riportata la differenza normalizzata
tra la larghezza efficace e quella vera, limitatamente al caso di microstrip larghe.
Anche per le microstrip la larghezza efficace può essere utilizzata per valutare se due microstrip
parallele interagiscono oppure no.
21
Figura 12. Allargamento di una microstriscia.
Una differenza sostanziale tra microstrip e stripline è nella sintesi, ovvero nella determinazione
della larghezza W necessaria per ottenere una data impedenza. Nel caso di una stripline, il
procedimento è molto semplice (tramite le equazioni 1.37 e 1.38), mentre la dipendenza di εe da W
in una microstrip rende molto più complicato invertire le equazioni di analisi.
Sono quindi state sviluppate delle equazioni di sintesi, che forniscono direttamente W in funzione
della impedenza Z0 che si vuole ottenere
Z 0 ε e > 89.91
W
8e A
= 2A
h e −2
(2.25)
Z 0 ε e < 89.91
W 2
ε −1
0.61
= B − 1 − ln ( 2 B − 1) + r
ln ( B − 1) + 0.39 −
ε r
h π
2ε r
(2.26)
con
Z0 ε r + 1 ε r − 1
0.11
+
0.23 +
60
2
εr +1
ε r
60π 2
B=
Z0 ε r
A=
Si noti che la scelta tra le due equazioni di sintesi 2.25 e 2.26 dipende da un parametro incognito,
ovvero εe, che dipende da W. Poiché εe < εr, se Z 0 ε r < 89.91 , può comunque essere usata la
seconda. Negli altri casi andrebbero utilizzate entrambe, per vedere, a posteriori, quale delle due è
applicabile. Tuttavia una stima del valore di εe è possibile (vedi Figg. 10, 11), e quindi, in genere, è
possibile valutare quale delle due equazioni è probabilmente quella da utilizzare.
2.4
Perdite nelle microstriscie
La presenza di perdite nel dielettrico o nel metallo conduce evidentemente ad una dissipazione di
potenza. Esaminiamo in dettaglio i due meccanismi.
Le perdite nel dielettrico possono essere modellate tramite una σd oppure una parte immaginaria di
εr. Non è però possibile utilizzare le espressioni generali delle linee con perdite nel dielettrico (che
invece valgono nei cavi coassiali e nelle stripline) in quanto le perdite ci sono solo in parte della
sezione trasversa. Se ne può tener conto (analogamente a quanto fatto per la costante dielettrica)
22
introducendo nel calcolo della costante di propagazione una conducibilità efficace σe, media pesata
delle conducibilità delle due zone, che può essere semplicemente calcolata tramite il fattore di
riempimento
σ e = qσ d + (1 − q ) ⋅ 0
(2.27)
in quanto la conducibilità dell’aria è pari a 0. Partendo dalla parte immaginaria di εr, occorre prima
ricavarsi la σd e poi calcolare σe. Tuttavia alcune espressioni di εe, come quelle da noi utilizzate,
consentono di calcolare la costante dielettrica efficace complessa utilizzando quest’espressione in
cui, al posto di εr, va inserita la costante dielettrica equivalente (complessa) del substrato, ovvero
quella che tiene conto delle perdite.
Più complesso è il discorso relativo alle perdite sul metallo. Dal discorso generale sulle perdite nei
conduttori, sappiamo che se il conduttore è un buon conduttore, ovvero se la sua conducibilità σc
soddisfa a
σc
>> 1
ωε 0ε c
(2.28)
dove εc è la costante dielettrica relativa del conduttore stesso, allora possiamo includere le perdite
nel modello delle linee di trasmissione aggiungendo una resistenza R per unità di lunghezza nel
modello circuitale di linea, oppure una attenuazione −jαc alla costante di propagazione della linea
con conducibilità infinita.
Nella valutazione di tali parametri occorre considerare che il campo nel conduttore risulta confinato
in una zona molto sottile vicino alla superficie del conduttore. La profondità di tale zona è
dell’ordine di grandezza di alcune volte la profondità di penetrazione (o skin depth)
δ=
2
ωµ0σ c
(2.29)
che per i conduttori e le frequenze di interesse è tipicamente dell’ordine dei micron. Pertanto
interverrà, nella valutazione di αc, sia lo spessore della metallizzazione, sia la eventuale tolleranza
di lavorazione (quest’ultima specie a frequenza elevata).
Trascurando la tolleranza di lavorazione, l’attenuazione αc per una microstrip può essere calcolata
da
αc =
Rs
Ki
Z 0We
(2.30)
dove Rs prende il nome di resistenza superficiale del metallo:
Rs =
1
σ cδ
(2.31)
ed è tipicamente dell’ordine dei mΩ , Z0 è l’impedenza caratteristica della linea a microstrip e Ki
tiene conto della effettiva distribuzione (non uniforme) della corrente che scorre nel conduttore.
Infatti la dissipazione dipende dal quadrato della corrente e, a parità di corrente media, la
dissipazione è più grande se la corrente è distribuita in maniera molto variabile. Una espressione
ragionevolmente approssimata per Ki, valida per spessori della metallizzazione di 30-50 μm, e per
spessori del dielettrico almeno dieci volte più grandi è
23
h
exp −4π
2
We h
h
K i = 128
1 + 2.18
h
W
W
4π
We
(2.32)
Nell’espressione di αc si osserva che l’attenuazione è inversamente proporzionale all’impedenza
caratteristica della linea. Infatti quanto più alta è tale impedenza, tanto più piccola è la corrente che
scorre sui conduttori per una data potenza trasmessa. Ovviamente, più piccola è la corrente, più
piccola è la dissipazione. Questa dipendenza dall’impedenza caratteristica è presente
sostanzialmente per tutte le strutture TEM e quasi-TEM.
Per quanto riguarda le costanti primarie in presenza di perdite sui conduttori, i valori di C ed L si
possono calcolare in assenza di perdite (in quanto le perdite sui conduttori, valutate secondo quanto
esposto in questo paragrafo, sono piccole). Anche l’eventuale G, che dipende solo dalle perdite nel
dielettrico, può essere calcolata assumendo i conduttori privi di perdite.
Resta il calcolo di R che si ottiene facilmente da
R
k 2 = ω 2 L − j C = ω 2 LC − j (ω RC )
ω
(2.33)
ricordando che in tali condizioni k = β − jα c = ω LC − jα c . Sviluppando segue:
k 2 = β 2 − α c2 − j 2 βα c ≅ ω 2 LC − j 2ωα c LC
(2.34)
avendo trascurato α c2 rispetto a β 2 , e, per confronto:
R = 2 Z 0α c
2.5
(2.35)
Dispersione nelle microstriscie
Anche per le microstrip esiste una frequenza limite di utilizzo, valutabile in maniera analoga a
quella delle stripline. Tuttavia, al contrario delle strutture TEM pure, la dipendenza dalla frequenza
è molto più complessa, in quanto anche le caratteristiche propagative di una microstriscia
dipendono da essa. Più precisamente, se la frequenza è molto più piccola della frequenza limite
fL =
c0
1
ε e 2We
(2.36)
allora costante dielettrica efficace, larghezza efficace, e quindi impedenza, sono indipendenti dalla
frequenza. Per frequenze più elevate, ovvero che siano una frazione significativa di fL, una
microstriscia può essere ancora trattata come una linea di trasmissione (e quindi utilizzando le
equazioni dei telegrafisti) ma i parametri di tale linea diventano dipendenti dalla frequenza, ovvero
la propagazione nella linea di trasmissione è dispersiva. Pertanto per una microstriscia, e più in
generale per qualunque struttura quasi-TEM, al variare della frequenza di utilizzo si ha dapprima
una zona in cui la propagazione è quella di una linea di trasmissione non dispersiva, poi la
propagazione diventa dispersiva, ma può essere ancora descritta mediante una linea di trasmissione,
dopo di che il campo nella microstriscia comincia ad avere componenti longitudinali non più
trascurabili e infine si supera la frequenza limite di utilizzo (2.36).
Per valutare i parametri al variare della frequenza si possono utilizzare delle espressioni
approssimate, che forniscono direttamente la costante dielettrica equivalente εe(f), e l’impedenza
24
caratteristica Z(f) al variare della frequenza, in funzione dei parametri geometrici, e di quelli
propagativi εe, We, Z0, valutati però a bassa frequenza. Se occorre la larghezza efficace, poi, questa
può essere calcolata da Z(f) e εe(f).
Per la costante dielettrica equivalente si ha:
εe ( f ) = εr +
ε e (0) − ε r
(2.37)
f2
1+ G 2
fp
dove fp = fL e G =
Z 0 − 50
− 0.004 Z 0
60
Per l’impedenza si ha invece:
Z ( f ) = Zs +
dove Z s =
Z0 − Zs
f2
1 + GM 2
fg
(2.38)
c
1
ζ
h
e fg = 0
ε r 2W
ε r W + 4 ln(2) h
π
mentre
G
GM =
Z 0 + 35 + 0.05 Z
0
20
W
h εr
W
h εr
>
2
3
≤
2
3
Dalle espressioni di costante dielettrica e impedenza al variare della frequenza, si vede che un ruolo
importante è giocato dalla frequenza limite fp e da fg, che però risulta più alta di fp. Infatti la
propagazione può essere considerata non dispersiva se la frequenza è molto più bassa di fp, o più
precisamente di fp/G (che sostanzialmente coincide con fp, salvo che per linee con impedenza
caratteristica molto bassa). In particolare, se f < 0.15fp/G, la variazione di costante dielettrica è del
2% della differenza εr − εe(0), e quindi l’errore che si commette in tal caso è quasi sempre
trascurabile. Per l’impedenza possono essere trascurate variazioni anche del 2-3%, e quindi si può
utilizzare l’impedenza statica Z0 se f < 0.25 fg/GM.
Notiamo infine che le frequenze limite aumentano se si riduce W, o si riduce εr.
2.6
Discontinuità
Studieremo come si può tenere conto della presenza di discontinuità nella configurazione
geometrica di una linea di trasmissione. Considereremo in dettaglio, e quantitativamente, il solo
caso di una microstriscia ma le considerazioni generali valgono anche per le altre strutture guidanti
che abbiamo considerato.
Per discontinuità nella configurazione geometrica intendiamo modifiche della forma dei conduttori,
come ad esempio cambi di larghezza, terminazioni brusche, giunzioni tra più linee, curve e così via.
Le discontinuità che hanno, invece, esattamente la forma trasversa della struttura, come ad esempio
discontinuità di materiale (e quindi di costante dielettrica) o conduttori elettrici che tappano un cavo
coassiale o una guida d’onda, non rientrano in tale classificazione e vengono trattati semplicemente
con un salto brusco di impedenza della struttura guidante, o con un collegamento in cortocircuito
dei due conduttori.
25
2.6.1 Terminazione aperta in microstriscia
La discontinuità più semplice è la terminazione brusca di una microstriscia (Fig. 1). In prima
approssimazione questa terminazione, alla quale la corrente che scorre nella microstriscia si annulla
bruscamente, può essere considerata come una terminazione aperta. Tuttavia, se è vero che la
corrente di conduzione si interrompe bruscamente, è altrettanto vero che oltre la terminazione è
presente una corrente di spostamento legata alla differenza di potenziale che ci sarà tra la
terminazione della microstriscia e il piano di massa (Figura 13).
Figura 13. Terminazione aperta in microstriscia vista dall’alto e in sezione.
Tale corrente di spostamento è responsabile di un accumulo di energia elettrica attorno alla
terminazione. Un miglior circuito equivalente della terminazione brusca sarà allora costituito da un
condensatore. In altri termini, un tratto di linea a microstriscia di lunghezza Lf dovrà essere
rappresentato con un tratto di linea di trasmissione di lunghezza Lf , terminato su un condensatore
Ca, ovvero su di una impedenza (elevata) pari a (jωCa)-1 (Figura 14a). Poiché la stessa impedenza
capacitiva può essere ottenuta con un piccolo tratto di linea chiuso su di un circuito aperto, una
rappresentazione della linea a microstriscia aperta del tutto equivalente a quella di linea più capacità
si ottiene considerando un unico tratto di linea (quindi senza la capacità) ma con una lunghezza
maggiore di quella fisica Lf, ovvero con un allungamento ∆L (Figura 14b).
Figura 14. Possibili circuiti equivalenti di una terminazione aperta.
L’allungamento ∆L dipende dalle caratteristiche geometriche ed elettromagnetiche della
microstriscia e puo’ essere calcolato in modo approssimato usanto la seguente espressione
a seguente espressione:
W
ε e + 0.3 h + 0.264
∆L = 0.412
h
ε e − 0.258 W + 0.813
h
(2.39)
26
Figura 15. Circuito equivalente di un terminazione aperta.
Nella maggior parte dei casi l’allungamento della terminazione aperta è sufficiente a fornire risultati
accurati. Tuttavia, se la linea è molto larga è necessario includere una resistenza alla fine del tratto
di linea aggiuntivo di lunghezza ∆L (come mostrato in Figura 15):
2
λ
Rirr = 90
Ω
We
(2.40)
Questa resistenza tiene conto della inevitabile perdita di potenza per irradiazione che si ha alla
terminazione stessa.
2.6.2 Salto di impedenza
Anche nel caso di un cambio brusco di larghezza di una microstriscia (Figura 16), come nel caso di
una terminazione aperta, si ha un accumulo di energia elettrica, che sarà però presente solo in
corrispondenza delle parti della linea più larga che si estende oltre la linea più sottile. La capacità
corrispondente (da collegarsi in parallelo alla giunzione delle due linee, ovvero in corrispondenza
della sezione A–A) potrà pertanto essere ottenuta a partire dalla capacità di una terminazione aperta
di larghezza pari alla linea più larga e riducendola del rapporto tra la linea più sottile e quella più
larga.
Figura 16. Salto di impedenza in microstriscia.
Si può ragionare anche in termini di allungamenti, il che fornisce un circuito equivalente
notevolmente più maneggevole. In particolare, si trova che la linea più larga si allunga di un tratto
∆L1, e quella più sottile si accorcia di un tratto ∆L2, come mostrato nella Figura 17.
27
Figura 17. Circuito equivalente di un salto di impedenza.
Allungamento e accorciamento sono diversi tra loro, e proporzionali entrambi all’allungamento ∆L0
di una terminazione aperta in una linea di larghezza pari alla linea più larga (W1 > W2 nel nostro
caso).
Se We1 e We2 sono le larghezze efficaci delle due linee, si ha:
∆L1 = ∆L0
We1
We1 + We 2
(2.41)
∆L2 = ∆L0
We 2
We1 + We 2
(2.42)
In particolare, si vede da tali espressioni che se una linea è molto più larga dell’altra, allora la linea
sottile mantiene inalterata la sua lunghezza, e quella larga subisce esattamente lo stesso
allungamento della corrispondente terminazione aperta.
2.6.3 Discontinuità trasverse
Le discontinuità viste fino ad ora risultano essere discontinuità longitudinali, ovvero estese solo nel
senso di propagazione del campo nella linea. Possono quindi essere trattate cambiando
semplicemente la lunghezza delle linee. Vi sono poi anche discontinuità trasversali, come ad
esempio curve o giunzioni tra più linee, che richiedono una maggiore cura. Per tali discontinuità,
infatti, occorre tener conto che le linee fisiche hanno una estensione trasversa finita, mentre il
modello linea di trasmissione (essendo monodimensionale) prevederebbe una estensione trasversa
infinitesima.
Si può tener conto di ciò mediante un passaggio intermedio tra la struttura fisica in microstrip e la
linea di trasmissione, trasformando prima la struttura fisica in un insieme di linee infinitesime
(mantenendo lunghezze e connessioni) corrispondenti alla mezzeria della struttura fisica.
Successivamente questo insieme di linee infinitesime viene trasformato nel circuito il linea di
trasmissione. In tal modo si ottiene il circuito equivalente in assenza di correzioni. Infine a tale
circuito vanno applicate le correzioni, che nel nostro caso saranno essenzialmente correzioni di
lunghezza.
28
Figura 18. Microstrip con giunzione a T (sinistra) e linee infinitesime corrispondenti.
In Figura 18a è riportato un esempio per un circuito con discontinuità longitudinali e stub. In Fig.
18b è riportato il circuito tracciato con linee infinitesime, ed il circuito effettivo è disegnato
tratteggiato. Si notino i punti che corrispondono a tutte le discontinuità (o meglio, ai punti centrali
delle stesse). Ogni tratto di linea infinitamente sottile diventa un tratto di linea di trasmissione (con
costanti opportune), e la sua lunghezza, senza correzioni, è quella tra i due punti. Il corrispondente
circuito equivalente è mostrato in Figura 19. Le lunghezze D1 e D2 sono (in assenza di correzioni) le
distanze tra il centro della giunzione a T e le due discontinuità di impedenza, mentre Ds, sempre in
assenza di correzioni, è la lunghezza dello stub misurata tra il centro della giunzione a T e
l’estremità della microstrip.
Figura 19. Circuito equivalente della rete in Figura 18 senza correzioni.
A questo punto vanno inserite le correzioni. Noi consideriamo qui solo la curva ad angolo retto e la
giunzione a T simmetrica, in cui il ramo passante ha la stessa larghezza da entrambi i lati. Per
quest’ultima, l’effetto principale è un accorciamento del ramo derivato, pari a
dT =
ζ0
Z1 ε e ,1
Z1
0.5 − 0.16
Z2
Z1
1 − ln h
Z 2
(2.43)
con Z1 impedenza caratteristica della linea principale e ε e ,1 la sua costante dielettrica efficace, e Z2
l’impedenza della linea derivata. Ovviamente, per quanto riguarda il circuito in Figura 18, occorre
poi tenere conto anche dell’allungamento dovuto alla terminazione aperta dello stub derivato, e
dell’allungamento/accorciamento dovuto ad i salti di impedenza Z0/Z1 sulla linea principale.
L’accorciamento del ramo derivato (2.43) può essere spiegato considerando che un segnale lanciato
su questo ramo, e prelevato sui due lati del ramo passante, non procede in realtà sul percorso al
centro delle linee, ma tende a seguire un percorso curvo (per accoppiamento capacitivo) il quale
risulta più corto del precedente.
Per quanto riguarda la curva ad angolo retto, invece, questa può essere pensata come una giunzione
a T simmetrica in cui uno dei lati del ramo passante è in realtà uno stub aperto di lunghezza fisica
pari a metà della larghezza del ramo derivato, come si vede dal disegno delle linee infinitamente
sottili di Figura 20.
29
Figura 20. Schema di una curva ad angolo retto in microstriscia.
Pertanto la lunghezza totale, calcolata sui centri delle microstrisce, va ridotta dell’accorciamento
della giunzione a T, e poi occorre aggiungere una impedenza capacitiva, pari all’impedenza di
ingresso dello stub, di lunghezza pari alla sua lunghezza fisica più l’allungamento di un circuito
aperto.
Gli stessi ragionamenti possono essere utilizzati per passare dal circuito in linea di trasmissione alla
struttura in microstrip (sintesi). Per prima cosa si determinano i valori delle lunghezze delle
microstrip senza correzioni. Ovviamente un allungamento (ad es., terminazione aperta) implica che
la lunghezza della microstrip da realizzare sia più corta, mentre un accorciamento (ad es., braccio
derivato della T) implica che la linea è più lunga. Dopodichè si traccia il circuito in microstrip con
linee infinitamente sottili e infine si tiene conto dello spessore delle microstrip (simmetricamente
dai due lati).
2.7
Metodo delle differenze finite
La tecnica delle differenze finite è una procedura impiegata per risolvere le equazioni differenziali
in modo numerico e si basa sull'approssimazione delle derivate con equazioni alle differenze finite.
Nel nostro caso questo metodo verrà utilizato per soluzione delle equazioni di Maxwell (o delle
equazioni per il potenziale) per una struttura guidante TEM o quasi-TEM.
Consideriamo come esempio una Stripline, che, come noto, è una struttura che supporta un campo
TEM.
Come è noto per lo studio delle caratteristiche di una struttura guidante TEM occorre risolvere un
problema elettrostatico bidimensionale. Partiamo dunque dalla sezione trasversa della stripline, che
è mostrata in Figura 21.
Figura 21. Sezione trasversa di una stripline
Per calcolare il campo nella stripline occorre risolvere l’equazione di Laplace:
∇t2ϕ ( x, y ) = 0
(2.44)
30
con le condizioni al contorno:
ϕ = 1
ϕ = 0
sul conduttore interno
sul conduttore esterno
(2.45)
La soluzione della (2.44) sarà ovviamente una funzione delle variabili continue x e y.
L’approssimazione che viene introdotta dalla tecnica delle differenze finite consiste nel valutare la
funzione ϕ ( x, y ) solamente nei punti di una griglia regolare di spaziatura ∆x, ∆y (Figura 22).
Figura 22. Schema di discretizzazione della sezione trasversa della stripline.
Applicando la formula di Taylor nei punti A, B, C, e D della griglia mostrata in Figura 22 si ottiene:
ϕ A ≅ ϕP +
∂ϕ
1 ∂ 2ϕ
(−∆x) +
(−∆x) 2
∂x P
2 ∂x 2 P
ϕC ≅ ϕ P +
∂ϕ
1 ∂ 2ϕ
(∆x) +
(∆x) 2
2
∂x P
2 ∂x P
∂ϕ
1 ∂ 2ϕ
(−∆y ) +
(−∆y ) 2
ϕB ≅ ϕP +
2
∂x P
2 ∂x P
ϕD ≅ ϕP +
(2.46)
∂ϕ
1 ∂ 2ϕ
(∆y ) +
(∆y ) 2
2
∂x P
2 ∂x P
Sommando membro a membro la prima con la seconda e la terza con la quarta si ottiene:
∂ 2ϕ
∂x 2
∂ϕ
∂y 2
P
1
(ϕ A + ϕC − 2ϕ P )
(∆x) 2
P
1
≅
(ϕB + ϕ D − 2ϕ P )
(∆y ) 2
≅
2
(2.47)
Quindi, sommando le (2.31)
∂ 2ϕ
∂ 2ϕ
+
∂x 2 P ∂y 2
= ∆ t2ϕ ≅
P
P
1
1
ϕ + ϕC − 2ϕ P ) +
(ϕ B + ϕ D − 2ϕ P )
2 ( A
(∆x)
(∆y ) 2
(2.48)
In tutti i punti P interni al dielettrico l’equazione di Laplace può essere sostituita dal secondo
membro della (2.48) eguagliato a zero:
31
1
1
ϕ + ϕC − 2ϕ P ) +
(ϕ B + ϕ D − 2ϕ P ) = 0
2 ( A
( ∆x )
( ∆y ) 2
(per ogni P interno)
Si osservi che, per ∆x = ∆y, la (2.48) può essere scritta nella forma ϕ P =
(2.49)
ϕ A + ϕ B + ϕC + ϕ D
4
, che è
coerente con la proprietà a) delle funzioni armoniche.
L’errore commesso con l’approssimazione (2.48) dipende dalla derivata quarta del potenziale
moltiplicata per (∆x)4 o (∆y)4 . Se i punti di campionamento vengono scelti anche sui conduttori
( ∆y è sottomultiplo di t e di 2h), in tali punti i valori di ϕ sono fissati dalle condizioni al contorno.
In pratica abbiamo sostituito l’equazione differenziale (2.44) con un sistema lineare di infinite
equazioni (il dielettrico è teoricamente illimitato in direzione x) formato dalle (2.49) (una equazione
per ogni punto P). E’ evidente che il sistema lineare dovrà essere opportunamente troncato ad un
numero finito di equazioni, a cui corrisponde un numero finito di punti P.
La simmetria della struttura considerata rispetto ad entrambi gli assi (si veda figura 21) consente di
ridurre il numero di equazioni.
Il potenziale ϕ è infatti simmetrico rispetto a x che rispetto a y:
ϕ ( x , y ) = ϕ ( − x, y )
ϕ ( x , y ) = ϕ ( x, − y )
(2.50)
Consideriamo, ad esempio, un punto P sull’asse x, come mostrato in figura 23:
Figura 23. Schema di discretizzazione con il punto P sull’asse x.
Per il punto P sull’asse x, risulta ovviamente ϕ D = ϕ B , pertanto ∆t2ϕ
P
può essere espresso solamente
in funzione di ϕ A , ϕC e ϕ B . Analogamente se il punto P appartiene all’asse y.
Come conseguenza di questa simmetria risulta che, se un punto P appartiene ad un certo quadrante
(assi inclusi), l’equazione di Laplace in quel punto riguarda solo i valori di potenziale nello stesso
quadrante. Quindi è sufficiente limitarsi alle sole equazioni di questo quadrante per risolvere il
sistema.
Una ulteriore conseguenza se il punto P appartiene all’asse x è che
∂ϕ ( x, y )
=0
∂y P
Infatti, dato che ϕ D = ϕ B
ϕ − ϕB
∂ϕ ( x, y )
= lim D
=0
∂y P ∆y →0 ∆y
⇒
∇ tϕ ⋅ i y
P
=0
⇒ e⋅iy
P
=0
(2.51)
32
Questo significa che, sull’asse x, il campo elettrico e è tutto tangente e quindi l’asse x può essere
sostituito da un CMP. Lo stesso discorso può essere fatto per l’asse y.
Come detto in precedenza, per poter risolvere il sistema (2.49) occorre troncare il numero di
equazioni ad un valore finito N. Avremo così un sistema lineare di N equazioni (una per ognuno
degli N punti P considerati) in N incognite (i valori del potenziale nei punti P). Il termine noto di
questo sistema è fornito dalle condizioni al contorno per il potenziale.
Ovviamente è necessario definire un criterio ragionevole per troncare le equazioni del sistema. A tal
proposito sappiamo che il campo elettrico decresce al crescere di |x| e quindi sarà possibile definire
un criterio che consenta di individuare un valore xM tale che
ϕ ( x, y ) = 0
per x > xM
Per determinare il valore di xM si procede per iterazioni successive dopo aver definito una soglia per
la quale si può assumere ϕ ≡ 0 (ad esempio se ϕ < 0.01 ).
Dopo aver calcolato il potenziale ϕ ( x, y ) la capacità C della struttura può essere determinata
utilizzando la (1.24) che equivale, dal punto di vista fisico, al calcolo dell’energia elettrica
1
1
2
We = CV 2 = ε ∫ e dS
2
2 St
(2.52)
Poiché V=1, costante sulla strip centrale, dalla 2.52 si ottiene:
C = ε ∫ e dS
2
(2.53)
St
Ricordiamo anche che, dalla (1.24), si ha
C = ε A = ε ∫ e dS = ε ∫ ∇tϕ dS
2
St
2
(2.54)
St
La tecnica delle differenze finite può essere utilizzata anche per determinare le caratteristiche di
strutture quasi TEM. In questo caso, è sufficiente risolvere due problemi elettrostatici, il primo nella
struttura di partenza per determinare C, e il secondo nella struttura resa omogenea (TEM), per
determinare C(o), e quindi L(o) = L.
Tuttavia nel caso quasi-TEM, per il calcolo del potenziale occorre modificare l’equazione (2.49) per
tenere conto dei diversi dielettrici presenti sulla sezione trasversa.
Se ci sono dielettrici diversi, l’equazione di Laplace (2.44) deve essere sostituita dalla seguente:
∇ t ⋅ [ε ( x, y )∇ tϕ ( x, y ) ] = 0
(2.55)
La equazione (2.55) consente di determinare l’equivalente della (2.49) per i punti all’interfaccia tra
due dielettrici, ovvero le condizioni di raccordo tra i due dielettrici. Chiaramente, nelle regioni
omogenee di ciascun dielettrico, continua a valere la (2.49).
Applichiamo dunque la (2.55) ad una superficie (intermedia tra due linee del reticolo, indicata con S
in figura 24) tagliata a metà dalla superficie di separazione tra due dielettrici diversi.
33
Figura 24 Schema per la valutazione delle equazioni di continuità all’interfaccia tra due dielettrici.
La curva γ tratteggiata racchiude la superficie S.
A questo punto integriamo la (2.55) sulla superficie S
∫ ∇ ⋅ (ε ∇ ϕ ) dS = 0
t
r
(2.56)
t
S
Per il teorema della divergenza dalla (2.56) si ottiene:
∫γ ε ∇ ϕ ⋅ i dl = ∫γ ε
r
t
n
r
∂ϕ
dl = 0
∂n
(2.57)
Possiamo dividere l’integrale (2.57) in 6 contributi (Figura 24, ipotizzando ∆x = ∆y)
tratto 1-2
tratto 2-3
tratto 3-4
tratto 4-5
tratto 5-6
tratto 6-1
1
∆x
∆x
1 ∆x
ε r (ϕ C − ϕ A )
∆x 2
1 ∆x
1 ( ϕC − ϕ A )
∆x 2
1
1(ϕ E − ϕ A ) ∆x
∆x
1 ∆x
1 (ϕ B − ϕ A )
∆x 2
1 ∆x
ε r (ϕ B − ϕ A )
∆x 2
ε r (ϕ D − ϕ A )
(2.58)
Risulta quindi, dalla (2.41)
1
2
1
2
1
2
1
2
ε r (ϕ D − ϕ A ) + ε r (ϕC − ϕ A ) + (ϕC − ϕ A ) + (ϕ E − ϕ A ) + (ϕ B − ϕ A ) + ε r (ϕ B − ϕ A ) = 0 (2.59)
da cui l’equazione:
ϕA =
ϕ E + ε rϕ D +
εr +1
( ϕC + ϕ B )
2
2 ( ε r + 1)
(2.60)
che vale per i punti di interfaccia. Ovviamente nelle regioni omogene continua a valere la (2.49).
34
3. PROPAGAZIONE IN STRUTTURE A PIU’ CONDUTTORI
3.1
Richiami sulle linee di trasmissione
Abbiamo visto che, nel caso di onde sinusoidali, le equazioni dei telegrafisti (o equazioni delle linee
di trasmissione) prendono la forma
dV ( z )
= jω LI ( z )
dz
dI ( z )
−
= jωCV ( z )
dz
−
(3.1)
dove V(z) e I(z) sono numeri complessi che rappresentano v(z,t) e i(z,t) rispettivamente (ovvero
tensione e corrente nel dominio della frequenza). Sappiamo anche che le (1) soddisfano l’equazione
delle onde
d 2V ( z )
+ β 2V ( z ) = 0
dz 2
con β 2 = ω 2 LC
(3.2)
ωL
.
β
Ricordiamo che la soluzione delle equazioni delle onde (6.2) e quindi delle (6.1) è stata data sia
nella forma viaggiante che nella forma stazionaria sia per la tensione V(z) che per la corrente I(z).
L e C prendono il nome di costanti primarie della linea di trasmissione e sono una induttanza per
unità di lunghezza e una capacità per unità di lunghezza. Z 0 , β prendono il nome di costanti
secondarie della linea di trasmissione.
Definiamo inoltre una impedenza caratteristica per la linea di trasmissione Z 0 =
•
Discontinuità
Si considera l’interfaccia di separazione tra due linee di trasmissione di impedenza caratteristica
rispettiva Z1 e Z2. Dalla continuità di campo elettrico e magnetico segue la continuità di tensione
e corrente all’interfaccia. La discontinuità viene caratterizzata tramite il coefficiente di
riflessione Γ = (Z2-Z1)/(Z2+Z1) e il coefficiente di trasmissione τ =1+ Γ.
•
Linea chiusa su un carico
Se una linea di trasmissione di impedenza caratteristica Z0 termina su un carico di impedenza di
ingresso Zin le proprietà del carico sono caratterizzate dal coefficiente di riflessione Γ = (ZinZ0)/(Zin+Z0).
•
Potenza complessa sulla linea
[
2
1
1
2
P( z ) = V ( z ) I * ( z ) =
V + 1 − Γ 2 j Im(Γe 2 jβz )
2
2Z 0
•
]
(3.3)
Impedenza di ingresso
35
Z in =
•
Vin
Z + jZ 0 tan( βL)
= Z0 C
I in
Z 0 + jZ C tan( βL)
Rapporto d’onda stazionaria
ROS =
3.2
(3.4)
1+ Γ
(3.5)
1− Γ
Linee TEM ad N+1 conduttori
Consideriamo il caso in cui le (3.1) e (3.2) vengano utilizzate per descrivere la propagazione in una
struttura con due soli conduttori che supporta un campo TEM (es: cavo coassiale e stripline). Una
volta fissato il riferimento z è possibile dimostrare che, al fine del calcolo delle costanti primarie C e
L della linea, il problema elettromagnetico è equivalente ad un problema elettrostatico
bidimensionale.
Nelle (3.1) V è dunque la differenza di potenziale tra i due conduttori (uno dei quali assunto a
potenziale nullo di riferimento) mentre I è la corrente concatenata con uno dei due conduttori.
C ha il significato di capacità del problema elettrostatico bidimensionale ed è quindi una capacità
per unità di lunghezza definita da
Q = CV
Q = ε ∫ e ⋅ i n dl
Γ
dove Q è la carica elettrostatica per unità di lunghezza sul conduttore (Fig. 3.1).
L’induttanza L è invece legata a Φ = LI che è il flusso per unità di lunghezza del campo magnetico
in direzione in e valutato sulla superficie s ∆z con ∆z che tende a zero (Fig. 3.2).
in
dl
Conduttore
Figura 3.1
x
Γ
S
Z
in
Figura 3.2
Il campo elettrostatico E è ovviamente proporzionale al potenziale. Se indichiamo con e il campo
per potenziale unitario, risulterà
E = V(z) e
(3.6)
dove e è ovviamente funzione delle sole coordinate trasverse x, y.
Per la similitudine tra problema elettromagnetico e problema elettrostatico, E(x,y,z) non è altro che
il campo elettrico che si propaga nella linea di trasmissione con una velocità di fase che dipende
solo dal mezzo omogeneo tra i conduttori.
Dalla (3.6) possiamo anche concludere che, nel caso di una linea di trasmissione costituita da due
conduttori in cui si propaga un campo TEM, il campo elettrico E è ovviamente tutto trasverso
36
rispetto alla direzione di propagazione z ed è fattorizzabile nel prodotto di due funzioni: V(z) e
e(x,y).
Il caso di N+1 conduttori è la generalizzazione del caso di due soli conduttori e il problema
elettromagnetico, per z fissata, è ancora equivalente ad un problema elettrostatico bidimensionale
con N+1 conduttori. Quindi, se abbiamo più di due conduttori (N+1 ad esempio), possiamo
scegliere un conduttore di riferimento a potenziale nullo e analizzare i casi in cui, volta per volta,
scegliamo potenziale Φ i unitario su un conduttore e nullo su tutti gli altri:
Φ i = 1
Φ j ≠i = 0
con Φ N +1 = 0
j = 1,..., N
(3.7)
(cond. di rifer.)
A ciascuna di queste N configurazioni corrisponde un campo TEM che si propaga con la velocità di
fase del mezzo omogeneo in cui si trovano i conduttori.
Dunque la costante di propagazione β è la stessa per tutti gli N modi TEM di base indipendenti e per
ciascuno di essi è possibile scrivere una relazione del tipo (6). Ne segue che qualunque campo dato
dalla sovrapposizione di questi N campi di base è un campo TEM con costante di propagazione β e
fattorizzabile come
N
E = ∑ Vi ( z ) e i ( x, y )
(3.8)
i =1
Possiamo dunque concludere che:
•
•
Qualunque configurazione di potenziale genera un campo TEM
N+1 conduttori forniscono N campi TEM indipendenti
Possiamo ora far riferimento alla generalizzazione delle equazioni (3.1) e (3.2) per il caso di N+1
conduttori. Il che equivale a descrivere la struttura tramite una matrice delle capacità C . Se
Φ N +1 = 0 è il conduttore di riferimento, le cariche per unità di lunghezza Qi su ciascun conduttore,
sono legate alle capacità per unità di lunghezza da
N
Qi = Ci 0Φ i + ∑ Cin (Φ i − Φ n )
(3.9)
n=1
dove
•
Ci 0 è la capacità del conduttore “i” riferita a massa.
•
Cin è la capacità mutua dei conduttori “i” ed “n”.
Consideriamo ora la configurazione di potenziale Φ n = δ in . Definiamo le capacità attive CiA , C jA
rispettivamente per il conduttore “i” e per i conduttori “j ≠ i”:
C iA =
C jA =
Qi
Φi
N
= C i 0 + ∑ C in
Qj
Φi
(3.10)
n =1
n≠i
Φ n =δ in
= −C ij
(3.11)
Φ n =δ in
37
Le (3.10) e (3.11) si ottengono facilmente dalla (3.9).
CiA , C jA rappresentano le capacità da inserire nell’equazione delle linee per descrivere tensione
e corrente sul conduttori “i” e “j” rispettivamente.
Esempio
i=1
Φ n = δ 1n
Φ1 =1
C12
#1
#2
Φ2=0
C 13
C 10
#4
#3
Φ3 =0
Φ4=0 (riferimento)
Le capacità attive per questa configurazione sono:
C1A = C10 + C12 + C13
C 2A = − C12
C3A = − C13
A questa configurazione delle Φ n corrisponde un campo TEM e C1A è la capacità da inserire nella
equazione delle linee per descrivere la propagazione di questo modo.
3.3
Propagazione in strutture con N+1 conduttori
Nel caso di strutture a più conduttori (N+1), le equazioni delle linee di trasmissione devono essere
scritte considerando vettori numerici di tensione e corrente con N componenti: V(z) e I(z). Si
introducono inoltre le matrici di capacità e induttanza statiche della struttura: C ed L .
Le equazioni delle linee generalizzate sono pertanto:
dV ( z)
= jω L ⋅ I ( z )
dz
d I ( z)
−
= jω C ⋅ V ( z )
dz
−
(3.12)
Per risolvere queste equazioni possiamo derivare la prima e sostiture nella seconda, ottenendo:
−
d 2V ( z)
= ω 2 L ⋅ C ⋅ V ( z)
2
dz
(3.13)
38
La soluzione generale della (2) (limitatamente alla sola onda progressiva) è del tipo
+
V ( z ) = V exp(− jβ z )
(3.14)
+
con V vettore costante e β da determinare.
La soluzione (3.14) costituisce un modo ovvero una configurazione di campo che:
a) può esistere da solo nella struttura;
b) si propaga con una velocità di propagazione unica.
+
Il vettore V
descrive la configurazione traversa del modo in quanto è proporzionale alle
condizioni al contorno usate per calcolare il campo elettrico normalizzato e.
Sostituendo la (3.14) nella equazione (3.13) si trova:
β2 +
L ⋅ C ⋅V = 2 V
ω
+
(3.15)
+
Poiché stiamo cercando vettori V diversi da zero la (3.15) è una equazione agli autovalori. Ad
2
ogni autovalore β
+
ω
2
e autovettore V della matrice L ⋅ C (di ordine N) corrisponde un modo
+
della struttura. Tale modo ha una configurazione di campo traversa determinabile da V e una
costante di propagazione pari a β. Ovviamente ciascun modo è definito a meno della sua ampiezza e
ha entrambi i versi di propagazione.
A questo punto occorre distinguere il caso TEM dal caso quasi-TEM.
Se la struttura accetta campi TEM (ovvero il dielettrico è trasversalmente omogeneo) allora
β = ω εµ per ogni modo. Pertanto la matrice L ⋅ C ha tutti gli autovalori uguali ed ogni vettore è
un autovettore. Da ciò segue che la matrice L ⋅ C è proporzionale alla matrice identità:
L ⋅ C = εµ0 I N
(3.16)
Questo significa che la sola conoscenza della matrice delle capacità C consente di calcolare tutte le
−1
grandezze di interesse poiché L = εµ C .
Nel caso quasi-TEM, invece, esistono solamente N modi (definiti sempre a meno di una costante)
ciascuno con la sua costante di propagazione2. Le costanti di propagazione sono gli autovalori della
(3.15) mentre gli autovettori forniscono ancora la configurazione trasversa del modo.
Anche nel caso quasi-TEM per descrivere la propagazione è sufficiente la conoscenza di sole
matrici di capacità. Infatti se sostituiamo tutti i dielettrici della struttura con il vuoto otteniamo una
−1
nuova struttura con matrici C A ed L A , che accetta modi TEM. Quindi L A = ε 0 µ0 C A . D’altra
parte la matrice L non dipende dal dielettrico (è una matrice di induttanze statiche) e quindi
L = L A . L’equazione agli autovalori diventa pertanto:
β2 +
β2
β2 +
−1
+
+
−1
+
ε 0 µ0 C A ⋅ C ⋅ V = 2 V → C A ⋅ C ⋅ V =
V → C A ⋅ C ⋅V = 2 V
ω
ε 0 µ 0ω 2
β0
−1
+
2
La somma di due modi quasi-TEM non è un modo in quanto i due modi componenti hanno ciascuno la propria
velocità di propagazione.
39
−1
+
C A ⋅ C ⋅V =
β2 +
+
V = ε eff V
2
β0
(3.17)
dove β0 è la costante di propagazione nel vuoto e l’autovalore fornisce direttamente la costante
dielettrica efficace del modo e quindi la sua costante di propagazione.
3.3.1 Corrente e impedenza - modi pari e dispari
La corrente può essere facilmente ricavata dalle equazioni delle linee. Dalla prima delle (3.12) si
ottiene infatti:
I ( z) = −
1 −1 dV ( z )
β −1 +
β
+
+
L
→ I = L V =
C AV
jω
dz
ω
ωε 0 µ0
Nel solo caso TEM, poichè C A =
+
I =
(3.18)
ε0
C e β = ω εµ0 , la (3.18) diventa
ε
ωβ
ω
+
+
C ⋅V = C ⋅V
2
ω εµ0
β
(3.19)
Dalla (3.19) è facile dedurre che l’impedenza caratteristica ha natura matriciale (si tratta della
+
+
grandezza che collega i vettori V e I ), e pertando è di difficile utilizzo.
Fanno eccezione i seguenti casi:
a) Un solo conduttore viene alimentato (possibile in genere solamente nel caso TEM)
In questo caso una definizione ragionevole di impedenza è il rapporto tra tensione e corrente su quel
conduttore. Nel caso TEM, per il conduttore p si ha:
+
+
I =
V
ω
β
+
C ⋅V → Z p = p+ = C pp
Ip ω
β
(3.20)
b) La struttura ha due conduttori simmetrici.
Le matrici C ed L coinvolte sono simmetriche e hanno i due elementi della diagonale principale
uguali. In tal caso conviene usare le seguenti configurazioni trasverse:
1
+
Vp =
1
1
+
Vd =
−1
(3.21)
che prendono il nome di modi pari e dispari. Questi sono ovviamente autovettori per il caso TEM
(tutte le configurazioni di campo trasverso costituiscono un modo e sono soluzione dell’equazione
agli autovalori). Nel caso quasi-TEM i modi pari e dispari sono invece i soli due autovettori e
quindi i due soli modi che si possono propagare nella struttura con costante di propagazione fornita
dai corrispondenti autovalori.
Per simmetria, anche la corrente sui due conduttori è proporzionale ai vettori (3.21) e pertanto il
rapporto tra tensione e corrente ha (a parte un segno) lo stesso valore per entrambi i conduttori e
questo valore viene assunto come impedenza caratteristica del modo.
La matrice delle capacità può essere ottenuta a partire dal diagramma delle capacità:
40
1
Ce
Cm
2
Ce
Figura 3.3: diagramma delle capacità per il caso N=2 con due conduttori uguali.
Q1 = C11V1 + C12V2
Sappiamo che Q = C ⋅ V →
ovvero, coerentemente con il diagramma delle
Q2 = C21V1 + C22V2
capacità in figura si ha:
C11 =
Q1
= Ce + C m
V1 V = 0
2
C22 =
Q2
V2
= Ce + C m
(3.22)
V1 = 0
C21 = C12 =
Q1
= − Cm
V2 V = 0
1
NB: Si osservi che C21 < 0 perché C21 è la carica sul conduttore 1 quando il conduttore 1 è a
massa ed è quindi una carica negativa opposta a quella presente sul conduttore 2, che è a
potenziale unitario.
Nel caso TEM si ha:
I1+ ω
ω Ce + Cm
+
+ = C ⋅V =
β −Cm
I 2 β
+
+
+
V1 ω (Ce + Cm )V1 − CmV2
⋅ =
Ce + Cm V2+ β (Ce + Cm )V2+ − CmV1+
− Cm
(3.23)
e, per il modo pari:
I1+ ω
1 +
ω (Ce + Cm ) − Cm + ω Ce +
+
+
V
=
V
con
V
=
+ = C ⋅V =
p
1 V
β (Ce + Cm ) − Cm
β Ce
I 2 β
(3.24)
mentre, per il modo dispari
I1+ ω
1
ω Ce + 2Cm +
+
V con Vd+ = V +
+ = C ⋅V =
β −Ce − 2Cm
−1
I 2 β
(3.25)
Dalle (3.24) e (3.25) si ottengono quindi
Zp =
β
β
; Zd =
ω Ce
ω (Ce + 2Cm )
(3.26)
41
che prendono rispettivamente il nome di impedenze caratteristiche di modo pari e dispari. Risulta
evidentemente che Zp è maggiore di Zd. Zp è prossimo a Zd quando C m << Ce ovvero quando i due
conduttori sono molto distanti. Se invece C m è grande (conduttori vicini) Zp sarà molto più grande
di Zd.
−1
Nel caso quasi-TEM interessa il calcolo della matrice C A ⋅ C :
−1
C A ⋅C =
1
C Ae (C Ae + 2C Am )
C Ae + C Am C Am Ce + Cm
C Ae + C Am −Cm
C Am
− Cm
Ce + Cm
(3.27)
L’equazione agli autovalori (3.17) fornisce la costante dielettrica efficace per il modo pari e per il
modo dispari.
Per il modo pari troviamo
1
1
1
1
ε effp = C −A1 C =
C Am Ce
C Ae + C Am
1
=
C Ae + C Am Ce
C Ae (C Ae + 2C Am ) C Am
(3.28)
C Ae + 2C Am Ce 1
Ce
C
=
=
→ ε effp = e
C Ae (C Ae + 2C Am ) C Ae + 2C Am C Ae 1
C Ae
mentre, per il modo dispari
ε effd =
Ce + 2Cm
C Ae + 2C Am
(3.29)
In modo analogo si procede per il calcolo della impedenza caratteristica; ricordando la definizione
di εeff (3.17), dalla (3.19) si ottiene:
+
I =
β 0 ε eff
β
+
+
C AV =
C AV
ωεµ
ωεµ
(3.30)
Da quest’ultima si ottiene, con procedimento analogo al caso TEM:
Zp =
Zd =
β0
ω C Ae ε effp
=
β0
ω C AeCe
β0
ω (C Ae + 2C Am ) ε effd
=
=
β
ω Ce
(3.31)
β0
ω (C Ae + 2C Am )(Ce + 2Cm )
=
β
ω (Ce + 2Cm )
(3.32)
Si osservi che, sia nel caso TEM che nel caso quasi TEM, le espressioni di Z per i modi pari e
dispari sono del tutto analoghe a quelle di una linea ad un solo conduttore, a patto di usare Ce e
Ce+2Cm come capacità. Ciò segue anche dalla manipolazione del diagramma delle capacità:
42
1
Cm
1
2
2C m
2C m
2
A
Ce
Ce
Ce
Ce
1
modo pari:
aprendo il circuito in A
1
2C m
2
Ce
2C m
Ce
2
A
Ce
Ce
1
modo dispari:
ponendo a massa il punto A
2C m
2C m
2
Ce
Ce
Figura 3.4: diagramma delle capacità per il caso N=2 con due conduttori uguali, analisi del modo
pari e del modo dispari.
3.4
Linee accoppiate
Consideriamo una struttura simmetrica costituita da due conduttori identici più uno di riferimento a
massa. Il diagramma delle capacità è mostrato in Figure 3.3 e 3.4 e l’analisi della struttura è stata
effettuata nel caso b) del paragrafo precedente. Come detto, questa struttura supporta due modi
indipendenti sia nel caso TEM che nel caso quasi-TEM. Possiamo scegliere i modi pari e dispari
(scelta obbligatoria nel caso quasi-TEM). In entrambi i casi abbiamo definito le impedenze
caratteristiche di modo pari e dispari (3.26 e 3.31, 3.32) e le rispettive costanti di propagazione:
TEM )
β p = β d = ω εµ0 = ε r β 0
q − TEM )
β = ε p β
eff
0
p
d
β0
β d = ε eff
(3.33)
Per quanto riguarda la propagazione dei modi pari e dispari in questo tipo di struttura valgono
ovviamente le equazioni delle linee con costanti β p / d e Z p / d .
Per il modo pari si ha dunque (i pedici 1 e 2 indicano i due conduttori):
V1 p ( z ) = V1 p (0) cos(β p z ) − jZ p I1p (0) sen( β p z )
V2p ( z ) = V2p (0) cos(β p z ) − jZ p I 2p (0) sen( β p z )
(3.34)
(e analoghe per le correnti)
43
Ovviamente V1 p = V 2p e I 1p = I 2p lungo tutte le linee.
Per quanto riguarda il modo dispari:
V1d ( z ) = V1d (0) cos( β d z ) − jZ d I1d (0) sen( β d z )
(3.35)
V2d ( z ) = V2d (0) cos( β d z ) − jZ d I 2d (0) sen( β d z )
con V2d = −V1d e I 2d = − I 1d lungo tutte le linee
Esempio 1: linee accoppiate in stripline (TEM)
W
W
h
W
h
εr
εr
Esempio 2: linee accoppiate in microstriscia (quasi-TEM)
W
h
W
εr
44
4. PROPRIETA’ GENERALI DELLE RETI
4.1
Matrice Z e Y.
Una rete N-porte può essere descritta da matrici N×N che legano le grandezze esterne. Sono ben
note le matrici di impedenza Z e di ammettenza Y definite da
V = Z ⋅ I , I = Y ⋅V
Ovviamente se Y è invertibile, allora Z = Y
(4.1)
−1
(altrimenti Z non esiste) e viceversa.
Si noti che il vettore I è formato da correnti entranti.
Se la rete è reciproca allora le matrici Z e Y sono simmetriche.
Se la rete è priva di perdite allora
Re( Ptot ) = 0
(4.2)
dove la potenza totale entrante vale:
Ptot =
1 H
1 H
1
I ⋅ V = I ⋅ Z ⋅ I = ∑ zi , j I i* I j
2
2
2 i, j
(4.3)
Poiché I è arbitrario, se si sceglie I n = I k δ nk (per ogni k = 1,…, N) dalla condizione (4.2) si trova:
Re( zkk ) = 0
Se invece si scelgono solamente le correnti I h e I k (h, k, generici) diverse da zero si ottiene:
1
Re ( Z hk I h* I k + Z kh I h I k* ) = 0
2
(4.4)
Se le due correnti sono tali che Ih = Ik segue Re {Z hk + Z kh } = 0 ; se le due correnti sono tali che Ih
= jIk segue Re { jZ hk − jZ kh } = 0 , ovvero: Re {Z hk } = − Re {Z kh } e Im {Z hk } = Im {Z kh }
Se, in particolare, la rete è reciproca dalla prima segue che Re {Z hk } = 0 e quindi, per una rete
reciproca e priva di perdite, gli elementi delle matrici Z e Y sono immaginari puri.
4.2
Matrice di Scattering
La matrice di scattering (diffusione) lega onde incidenti e onde riflesse. La definizione della matrice
di scattering per una rete N porte necessita della definizione di una impedenza caratteristica di
riferimento per ogni porta.
Nel seguito supporremo impedenze di riferimento uguali per tutte le porte (ma sono possibili anche
scelte differenti e si parla di matrice di scattering generalizzata).
−
+
La matrice S è tale che V = S ⋅ V
45
V1− S11 S12
−
V2 S 21 S 22
. = .
. .
− S
VN N 1 S N 2
... S1N V1
... S 2 N V2+
.
.
... S NN VN+
dove ovviamente: Sij =
+
Vi −
V j+
(4.5)
Vk+ = 0
k≠ j
In altre parole Sij viene determinato alimentando alla porta j con onda incidente unitaria e
misurando l’ampiezza dell’onda riflessa Vi − alla porta i, quando tutte le porte ad eccezione della
porta j non sono alimentate e quindi risultano chiuse su un carico adattato (cioè pari all’impendenza
caratteristica di riferimento scelta per le porte).
Sii è il coefficiente di riflessione alla porta “i” quando tutte le altre porte sono chiuse su un carico
adattato. Se S ii = 0 per ogni i, ovvero gli elementi diagonali della matrice (4.5) sono tutti nulli,
diremo che la rete è adattata a tutte le porte.
+
−
+
−
+
−
Tensioni e correnti alle porte valgono: V = V + V e I = I − I , ovvero Z 0 I = V − V , essendo
Z0 l’impedenza di riferimento. Da queste relazioni si può ottenere la relazione tra la matrice di
scattering S e Z (o Y ).
Quindi
+
−
+
+
V = V + V = V + S ⋅V = ( I N + S ) ⋅V
V = Z ⋅I =
+
1
1
+
−
+
Z ⋅ (V − V ) =
Z ⋅ ( I N − S ) ⋅V
Z0
Z0
(4.6)
(4.7)
Dalle (4.6) e (4.7)
+
Z 0 ( I N + S ) ⋅ V = Z ⋅ ( I N − S ) ⋅V
+
(4.8)
Ossia
Z = Z 0 ( I N + S ) ⋅ ( I N − S ) −1
(4.9)
In modo analogo si ottiene la relazione inversa:
S = ( Z + Z 0 I N ) −1 ⋅ ( Z − Z 0 I N )
(4.10)
da cui segue che in una rete reciproca anche S è simmetrica.
Per determinare le condizioni per cui una rete è priva di perdite occorre calcolare la potenza
complessa entrante in termini di S e imporre che sia nulla:
46
Ptot =
=
1 H
1
+
−
+
−
I ⋅V =
(V − V ) H ⋅ (V + V ) =
2
2Z 0
1
+
+
+
+
( I N ⋅V − S ⋅V ) H ⋅ ( I N ⋅V + S ⋅V ) =
2Z0
(4.11)
1
+
+
=
(V ) H ( I N − S ) H ⋅ ( I N + S ) ⋅ V =
2Z0
=
1
+
H
H
+
(V ) H ( I N − S ⋅ S − S + S ) ⋅ V
2Z0
Se la rete è reciproca ovvero la matrice S è simmetrica, le matrici S H e S , hanno la stessa parte
reale e parti immaginarie opposte. Dunque prendendo la parte reale della (4.11):
Re( Ptot ) =
1
H
(V + ) H ( I N − S ⋅ S ) ⋅ V + = 0
2Z0
(4.12)
ovvero
H
S ⋅S = IN
(4.13)
Se la rete è priva di pertite le colonne della matrice S costituiscono un sistema ortonormale.
Esempio: analisi di una rete due porte
ΓΙΝ
Zs
I1
ΓL
I2
V1
V2
V1 +
V1
_
ZL
V2 +
V2
−
+
+
V1 = S11V1 + S12V2
−
+
+
V2 = S 21V1 + S 22V2
V2+
+
−
Γ
=
L V − → V2 = Γ LV2
2
−
+
+
+
Γ = V1 = S V1 + S V2 = S + S V2
11
12
11
12
IN V1+
V1+
V1+
V1+
_
(4.14)
(4.15)
sostituendo la prima delle (4.15) nella seconda delle (4.14) si ha:
V2+ =
S12 Γ L
V1+
1 − S 22 Γ L
(4.16)
47
e quindi
Γ IN = S11 +
4.3
S12 S 21Γ L
1 − S 22 Γ L
(4.17)
Matrice di Trasmissione
Per reti a due porte è utile considerare la matrice di trasmissione (o matrice ABCD) definita da
V1 = AV2 + BI 2
I1 = CV2 + DI 2
(4.18)
I
I
1
2
V
V
1
2
NB: la convenzione sulle correnti è diversa da quella usata per le matrici Z e Y .
La matrice di trasmissione di due, o N, reti in cascata è il prodotto matriciale delle singole matrici,
ordinate come il flusso di potenza (la prima matrice del prodotto è quella relativa all’ingresso).
I vari termini (A, B, C, D) si ottengono con l’uscita aperta o in corto; dalla (4.18) si ha:
A=
B=
V1
V2
V1
I2
,C=
I2 =0
, D=
V2 = 0
I1
V2
I1
I2
(4.19)
I2 =0
(4.20)
V2 = 0
A e D sono adimensionali, B è una impedenza, C è una ammettenza.
La matrice di trasmissione è evidentemente collegata a Z , a Y e a S . Per quanto riguarda la
relazione con Z partiamo da
V1 = Z11 I1 − Z12 I 2
V2 = Z 21 I1 − Z 22 I 2
(4.21)
con la diversa convenzione sulla corrente uscente I2.
Per definizione si ha:
A=
V1
V2
=
I 2 =0
I
Z11
,C= 1
V2
Z 21
=
I2 =0
1
Z 21
(4.22)
B e D richiedono V2=0 e, in tal caso, dalla prima delle (4.21) si ha I 2 =
Z 21
I1
Z 22
Pertanto:
B=
V1
I2
= Z11
V2 = 0
I1
I2
− Z12 =
V2 = 0
I
Z11Z 22
− Z12 , D = 1
I2
Z 21
=
V2 = 0
Z 22
Z 21
(4.23)
48
Per una rete reciproca (Z21=Z12) si ha
A
C
B
Z Z
Z Z
Z
Z
= AD − BC = 11 2 22 − 11 2 22 + 12 = 12 = 1
D
Z12
Z12
Z 21 Z 21
(4.24)
Se la rete è anche priva di perdite allora A, D sono reali e B, C immaginari puri (4.19, 4.20) perché
la matrice Z ha tutti gli elementi immaginari puri.
Ovviamente l’eguaglianza di due reti reciproche si ha se tre elementi della matrice di trasmissione
sono uguali. Se le reti sono anche speculari sono sufficienti due soli parametri (purchè non A e D) in
quanto in questo caso A=D.
Esempio 1: matrice di trasmissione di un tratto di linea di trasmissione
I
1
β
Z0
I
2
V
V
1
2
L
-L
Con l’uscita è aperta (I2=0) determino A e C:
0
AV2 = V1 = V (− L ) = V2 cos( β ( − L )) = V2 cos( β L ) → A= cos( β L )
1
1
1
CV2 = I1 = I ( − L ) = − j V2 sin( β ( − L )) = j V2 sin( β L ) → C = j sin( β L )
Z0
Z0
Z0
Con l’uscita in corto circuito (V2=0) determino A e C:
BI 2 = V1 = V ( − L ) = jZ 0 I 2 sin( β L ) → B = jZ 0 sin( β L )
DI 2 = I1 = I ( − L ) = I 2 cos( β L ) → D = cos( β L )
Esempio 2: matrice ABCD di una impedenza Z in serie
A=1
B=Z
C=0
D=1
Esempio 3: matrice ABCD di una ammettenza Y in parallelo
A=1
B=0
C=Y
D=1
Esempio 4: impedenza di ingresso di una rete due porte
49
I
Zs
I
1
2
V
V
1
ZL
2
Per definizione:
V2
+B
AV2 + BI 2
I2
AZ L + B
=
=
=
CV2 + DI 2 C V2 + D CZ L + D
I2
A
Z IN
4.4
(4.25)
Proprietà delle reti due porte
Una rete due porte può essere caratterizzata da una delle matrici viste nei paragrafi precedenti. Se la
rete è reciproca, la presenza di due relazioni (una relazione complessa) tra gli elementi di questa
matrice mostra che essa è costituita da 6 parametri reali. Pertanto è possibile costruire (ad una
frequenza fissata) un circuito equivalente contenente 6 gradi di libertà (ovvero 6 parametri liberi).
Due possibili circuiti equivalenti sono quello a T e quello a ∏.
Per il circuito a T si ha:
Z11 =
V1
I1
= Z A + Z C , Z 22 =
I2 =0
V2
I2
= Z B + Z C , Z12 = V2
I1
I1 = 0
I1
V1
ZA
ZB
ZC
= ZC
(4.26)
I2 =0
I2
V2
Figura 4.1
Dalle (2.1) si ottengono facilmente le relazioni inverse:
Z C = Z12
Z A = Z11 − Z12
(4.27)
Z B = Z 22 − Z12
Ovviamente se la rete è priva di perdite queste le tre impedenze ZA, ZB, ZC sono reattanze.
4.5
Proprietà delle reti tre porte
Le reti tre porte sono utilizzate come divisori (o sommatori), come circolatori o per altri scopi che
vedremo nel seguito.
La condizione ideale è quella di avere una rete tre porte priva di perdite ed adattata ad ogni porta.
Tutto ciò non è possibile se la rete è anche reciproca.
50
Infatti, per una rete adattata a tutte le porte e reciproca si ha:
S12 S13
0
S = S12 0 S 23
S13 S 23 0
(4.28)
Ma se la rete è anche priva di perdite occorre aggiungere la richiesta che le colonne siano
*
*
= S13 S 23
= 0 . Tuttavia, per
ortonormali (4.13). L’ortogonalità fornisce quindi S12 S13* = S12 S 23
soddisfare quest’ultima relazione almeno due parametri devono essere nulli e quindi una colonna
avrà tutti gli elementi nulli e non potrà avere norma unitaria. Il che impedisce di soddisfare la
(4.13).
Supponiamo invece che la rete sia non reciproca (cioè contenga, ad esempio, un materiale
anisotropo). In questo caso la forma generale della matrice di scattering è la seguente:
S12 S13
0
S = S 21 0 S 23
S31 S32 0
(4.29)
Quest’ultima rete è adattata a tutte le porte e la condizione di rete priva di perdite fornisce:
2
2
2
2
2
2
S12 S13* = 0
S 21 + S31 = 1
*
S 21S 23
=0
S12 + S32 = 1
*
S31S32
=0
S13 + S 23 = 1
(4.30)
Dalle (4.30) si osserva che sono possibili due soluzioni:
a) S12 = 0 → S 32 = 1 → S31 = 0 → S 21 = 1 → S 23 = 0 → S13 = 1
b) S13 = 0 → S 23 = 1 → S 21 = 0 → S 31 = 1 → S 32 = 0 → S12 = 1
Le reti corrispondenti sono dette circolatori ideali in quanto la potenza che entra ad una porta esce
alla successiva (tabella 4.1)
Tabella 4.1
Configurazione a)
Configurazione b)
Matrice di Scattering
0
S = 1
0
0
S = 0
1
0
0
1
1
0
0
0
0
1
0
2
2
Schema circuitale
1
0
1
1
3
3
Nelle matrici di scattering corrispondenti alle due configurazioni mostrate in tabella 4.1, i termini
diversi da zero possono sempre essere scelti pari ad 1 con una scelta opportuna del riferimento di
fase.
51
4.6
Proprietà delle reti quattro porte
Una rete quattro porte può essere reciproca, senza perdite e adattata a tutte le porte (S11 = S22 = S33
= S44 = 0). Si dimostra che ognuna di tali reti è un accoppiatore direzionale, ovvero una rete in cui
S14 = 0 e S23 = 0. La potenza che entra dalla porta 1 va in parte verso la porta 2 e in parte verso la
porta 3 mentre la porta 4 è isolata. Il simbolo di un accoppiatore direzionale è il seguente:
1
2
4
3
1
4
2
3
Figura 4.2
In genere la porta 1 è detta porta di ingresso, la 2 è detta porta di uscita (o porta passante), la porta 3
prende il nome di porta di accoppiamento e la porta 4 è la porta isolata. Un esempio tipico di
utilizzo di un accoppiatore direzionale è la misura dell’onda incidente e riflessa da un carico.
La matrice di scattering di un accoppiatore direzionale è la seguente:
0
S
12
S13
0
S12
S13
0
0
0
0
S 24
S34
0
S 24
S34
0
(4.31)
La rete quattro porte rappresentata dalla (4.31), reciproca e adattata a tutte le porte, è univocamente
determinata se conosco i 4 parametri complessi S12, S13, S24 e S34. Sono pertanto 8 i gradi di libertà.
Imponendo anche le condizioni di rete priva di perdite (4.13):
2
2
2
2
2
2
2
2
S12 + S13 = 1
(4.32)
S12 + S24 = 1
(4.33)
S13 + S34 = 1
(4.34)
S24 + S34 = 1
(4.35)
*
S12 S13* + S24 S34
=0
(4.36)
*
*
S12 S24
+ S13 S34
=0
(4.37)
Si dimostra facilmente che di queste 6 equazioni solamente 4 sono tra loro indipendenti. Si possono
scegliere ad esempio la (4.32), (4.33), (4.34) e la (4.36): segue che una rete reciproca, adattata a
tutte le porte e priva di perdite ha 4 gradi di libertà (4 parametri complessi, con 4 equazioni reali
indipendenti: nel seguito a, b, c, e d).
Dalle (4.32) e (4.33) si ottiene: S 24 = S13
(a)
Dalle (4.32) e (4.34) si ottiene: S12 = S34
(b)
Ponendo α = S12 e β = S13
→α 2 + β 2 = 1
(c)
E’ possibile fissare i piani di riferimento all’interno del componente in modo che S12 = S34 = α
52
reale (il che fissa le differenze tra gli spostamenti di 1 e 2 e di 3 e 4). Quest’ultima relazione blocca
due parametri liberi (due fasi reali). Inotre si può scrivere S13 = β e jϑ (che fissa la differenza tra gli
spostamenti di 1 e 3 e completa i gradi di libertà utilizzabili: β e θ fissati ).
Posto S24 = β e jϕ (ovviamente non posso scegliere
φ
visto che ho già completato i gradi di libertà
disponibili), la (4.36) diventa αβ e- jθ + β e jϕα = 0 ossia
e jϕ = e- j (θ +π ) → ϕ + θ = π (a meno di multipli di 2π)
(d)
Ricapitolando, posso scegliere liberamente i valori di β (oppure α ) e θ .
La scelta di θ è libera ma nella pratica si usano due soli casi:
•
Accoppiatore simmetrico ϕ = θ =
0
α
β e jθ
0
•
α
βe
0
0
0
0
β e jφ
α
jθ
π
2
0
β e jφ α
=
α jβ
0 0
0
α
0
jβ
0
0
0
jβ
α
0
jβ
α
0
(4.38)
0
- β
α
0
(4.39)
Accoppiatore antisimmetrico θ = 0, ϕ = π
0
α
β e jθ
0
α
β e jθ
0
0
0
0
β e jφ
α
0
β e jφ α
=
α β
0 0
0
α
β
0
0
0
0
-β
α
con α 2 + β 2 = 1
Con la scelta di θ (ossia di un piano di riferimento), l’unico gradi di libertà è β. Per l’accoppiatore
ideale β prende il nome di accoppiamento ed è espresso in decibel:
C = −20 log10 β
(4.40)
Per un accoppiatore non ideale si definiscono anche:
• Isolamento: I = −20 log10 S14
• Direttività: D = I − C = −20 log10
(4.41)
β
S14
(4.42)
1
Accoppiatori con C = 3 dB α = β =
vengono detti ibridi. Gli ibridi simmetrici sono detti
2
ibridi a 90° (sfasamento di 90° tra le porte 2 e 3), gli ibridi antisimmetrici (sfasamento di 180° tra le
porte 2 e 3) sono detti a T magica o “rat race”.
53
4.7
Esempi
Esempio 1: Giratore
Il più semplice esempio di componente NON RECIPROCO privo di perdite è il giratore, la cui
matrice di scattering è la seguente:
0
S=
− 1
1
0
In altri termini un giratore sfasa di 180° l’onda diretta e lascia inalterata l’onda riflessa.
Più in generale possiamo considerare gli sfasatori, ovvero reti che sfasino in modo diverso le due
onde diretta e riflessa. Tramite un giratore, almeno in linea di principio, possono essere realizzati
altri componenti non reciproci.
Esempio 2: Isolatore
Analizziamo ad esempio il seguente circuito, contenente due accoppiatori a 3dB a 90°:
in
π
1
2
1
1
2
j
Z0
1
2
1
2
j
2
j
2
out
j
2
Z0
2
j
Figura 4.3
-j
out
-j
2
j
2
2
π
j
Z0
2
0
Z0
1
2
1
2
1
2
1
2
1
in
Figura 4.4
Alimentiamo con un onda di ampiezza unitaria da sinistra (Figura 4.3). All’uscita del primo
j
1
accoppiatore si hanno come tensioni incidenti in ingresso al secondo accoppiatore
,
. La
2 2
54
1 j
prima produce sulle uscite del secondo accoppiatore delle tensioni pari a , . La seconda invece
2 2
−1 j
produce , . La tensione totale è quindi nulla sulla prima porta di uscita e si ha il passaggio
2 2
completo di potenza da sinistra (in) a destra (out).
Se invece si alimenta da destra (Figura 4.4) con un onda incidente unitaria, le onde incidenti da
− j 1
− j 1
sinistra sul primo accoppiatore sono
,
, e
e quelle sulle uscite rispettivamente
2 2
2 2
j 1
, . Pertanto tutta la potenza viene dissipata. Si è quindi ottenuto un isolatore, con matrice di
2 2
scattering:
0
S=
1
0
0
Esempio 3: Circolatore
Consideriamo ora il seguente schema:
π
j
A
2
j
j
2
j
2
2
j
?
C
B
1
2
1
1
1
2
2
1
2
0
Figura 4.5
e alimentiamo dalla porta inferiore di sinistra (porta C). Le tensioni incidenti sul secondo
j 1
j − 1 j 1
accoppiatore sono
,
e quelle in uscita rispettivamente , e , per cui ora tutta
2 2 2 2
2 2
la potenza va sul carico superiore (Figura 4.5). Se questo è costituito da un corto circuito la tensione
viene interamente riflessa e ci troviamo ad analizzare la seguente situazione:
-j
2
-j
2
A
-j
2
π
j
2
j
B
C
1
2
1
2
0
-1
2
-1
2
Figura 4.6
Ovverossia la potenza in ingresso da C esce tutta dal terminale A.
Si dimostra analogamente che la potenza in ingresso da A esce tutta dal terminale B (si veda schema
in Figura 4.3) e la potenza in ingresso da B esce tutta dal terminale C (si veda schema in Figura
4.4).
55
5. DIVISORI, IBRIDI e ACCOPPIATORI IN TECNOLOGIA PLANARE
5.1
Divisore a T senza perdite
Un divisore a T ha come circuito equivalente quello mostrato in Fig. 5.1.
Figura 5.1. Circuito equivalente del divisore a T senza perdite.
Ad esso in genere va aggiunta una reattanza jB in parallelo alla giunzione che tiene conto della
energia immagazzinata nei modi superiori alla giunzione stessa.
Se il circuito è privo di perdite, oltre che reciproco, non può essere adattato a tutte e tre le porte,
come detto nel paragrafo 4.5. Ciò che però è importante è che sia adattato l’ingresso, cioè la porta 1.
Quindi:
1
1
1
= +
Z 0 Z1 Z 2
(5.1)
Per ottenere l’adattamento (5.1) è comunque richiesto l’inserimento di elementi reattivi che
compensino jB (ovviamente su una banda di frequenze più o meno stretta). Nel seguito, per
semplicità, supporremo B=0, ipotizzando di aver provveduto preliminarmente a compensare tale
reattanza.
La potenza su ciascuno dei due rami di uscita vale:
1 VG
Pi =
2 Zi
2
(5.2)
essendo VG la tensione alla giunzione (ovvero V+ se vale la condizione di adattamento alla porta 1).
Risulta allora:
P1 Z 2
=
P2 Z1
⇒
1 P
1
1 Z
= 2 + 1 = 1 + 1
Z 0 Z 2 Z1 Z 2 P2
(5.3)
che, fissato il rapporto tra le potenze, consente di calcolare i valori di Z1 e Z2.
In molti casi le linee di uscita devono avere impedenza pari a Z0 e occorre quindi un trasformatore
λ
(ad esempio un tratto di linea ) su ciascuna delle due porte in uscita.
4
56
Z0
Z T1
Z0
V
+
λ
4
VG
Z T2
Z0
λ
4
Figura 5.2. Circuito equivalente del divisore a T senza perdite con trasformatori in uscita.
con Z T 1 = Z 1 Z 0 e Z T 2 = Z 2 Z 0 . Un divisore di potenza si avrà dunque con Z T 1 = Z T 2 = Z 0 2 .
Si osservi che, nel divisore reattivo, le porte di uscita non sono adattate ne isolate.
5.2
Divisore di Wilkinson
Il divisore di Wilkinson si ottiene aggiungendo al divisore a T una resistenza. Il risultato è una rete
adattata a tutte le porte, con le due uscite isolate e, per quanto riguarda la potenza in ingresso, privo
di perdite. La sola potenza dissipata è quella in ingresso dalle porte di uscita (cioè riflessa dagli
utilizzatori).
In Fig. 5.3 è mostrato lo schema in microstriscia di un divisore per due.
Z0
V+
porta 1
Z0
porta 2
ZT
ZT
λ
4
R
Z0
porta 3
Figura 5.3. Schema di un divisore di Wilkinson realizzato in microstrip.
Si dovranno determinare i valori di ZT e di R in modo da avere adattamento a tutte e tre le porte e
garantire l’isolamento tra le due porte di uscita (2 e 3).
Poiché la rete tre porte di un divisore di Wilkinson è simmetrica rispetto allo scambio delle porte 2 e
3, per progettarlo e analizzarne il funzionamento è opportuno ricorrere alla tecnica delle eccitazioni
pari e dispari, in cui una eccitazione generica viene decomposta nella somma di una eccitazione
simmetrica (pari) e di una antisimmetrica (dispari).
Poiché il circuito è reciproco e simmetrico, la matrice di scattering può essere ottenuta alimentando
solo la porta 2 (Fig. 5.4).
Per semplicità in Fig. 5.4 non sono mostrati i fili di ritorno delle linee di trasmissione, ovvero le
linee sono rappresentate come se fossero microstriscie e tutte le impedenze sono normalizzate
rispetto a Z0.
57
1
2
Z
2
R2
1
2
Vg2
R2
λ
4
1
3
Vg3
Figura 5.4. Schema del divisore di Wilkinson con alimentazione alle porte 2 e 3.
V gp2 = 2 V gd2 = 2
Vg 2 = 4
Una eccitazione con
può essere ottenuta come somma di p
e d
V g 3 = 2 V g 3 = −2
Vg 3 = 0
(ovvero lanciando sulle porte di uscita tensioni unitarie, una volta in fase e una in opposizione).
Esaminiamo ora separatamente le due eccitazioni:
a) eccitazione pari
Si ha V2 = V3, e la tensione sulle due linee è la medesima. Non vi è quindi corrente nei due rami
verticali e questi possono essere aperti (Fig. 5.5). Ne segue che la rete da analizzare è la seguente:
Z
2
1
2
1
Vg2
R2
λ
4
Figura 5.5. Circuito equivalente per l’eccitazione pari.
2
L’impedenza di ingresso alla porta 2 è Z
Γp =
V2−p
V2+p
= V2−p =
Z2
Z2
2
2
, quindi
−1
(5.3)
+1
2
ossia, se Z = 2 si ha V2−p = 0 .
Per quanto riguarda invece il valore di V1 consideriamo l’equazione delle linee con riferimento al
circuito in Fig. 5.5 (tensioni e correnti sono mostrate in Fig. 5.6):
2
I(0)
Z
1
2
1
Vg2
V(- λ )
V(0)
4
0
_λ
4
Figura 5.6. Circuito equivalente per l’eccitazione pari.
58
Dall’analisi del circuito in Figura 5.6 si ottiene:
V ( z ) = V (0) cos( β z ) − jZI (0) sen( β z )
λ
(5.4)
V (− ) = − jZI (0)(−1) = jZI (0)
4
Dato che Vgp2 = 2 e V2−p = 0 risulta V2 =
Vg 2
= 1 . Quindi:
2
λ
1
1
V (− ) = V2 = 1 = jZI (0) ⇒ I (0) =
=
4
jZ j 2
da cui, ovviamente,
2
V (0) = V1 = 2 I (0) =
j 2
Poiché stiamo alimentando dalla porta 2 (solo onda progressiva in uscita da 1) si ha:
− j2
V1−p =
2
(5.5)
(5.6)
(5.7)
b) eccitazione dispari
In questo caso V3 = -V2 , cioè la tensione sulle due linee è opposta e, per simmetria, i due rami
verticali possono essere cortocircuitati al centro.
Z
1
1
2
Vg2
R2
λ
4
Figura 5.7: Circuito equivalente per eccitazione dispari.
Alla porta 2, immediatamente a sinistra della resistenza, la linea ha impedenza infinita. Poiché sulla
porta 1 è presente un corto circuito, in questa configurazione risulta V1−d = 0 . L’impedenza di
ingresso alla porta due è invece R
2
(cioè R
2
in parallelo con una impedenza infinita), dunque
scegliendo R=2 si ha V2−d = 0 .
In conclusione:
S 22 =
V2−p + V2−d
V2+
⇒ S33 = 0
S 23 = S32 =
=0
(5.8)
(per simmetria)
V3−p + V3−d
V2+
=
V2−p − V2−d
V2+
=0
(5.9)
59
S21 = S12 =
V1−p + V1−d
+
2
V
− j2
2
2
=
+0
=−j
2
( = S31 = S13 )
(5.10)
A questo punto manca solo il valore di S11 per completare la matrice di scattering:
S11
−j
2
−j
2
−j
2
0
0
−j
2
0
0
(5.11)
Poiché risulta (conservazione dell’energia in una rete passiva):
2
2
2
S11 + S 21 + S31 ≤ 1
(5.12)
2
2
segue S11 = 0 perché S21 + S31 = 1 .
5.3
Ibrido a 90°
L’ibrido a 90° è un accoppiatore direzionale simmetrico (paragrafo 4.6) con uscite a -3dB, costituito
da linee lunghe λ
4
collegate in modo simmetrico, come mostrato in Fig. 5.8.
ZL
1
1
Porta 1
ZD
1
ZD
ZL
λ
Porta 2
4
1
Porta 4
Porta 3
λ
4
Figura 5.8. Schema planare in microstriscia dell’Ibrido a 90°.
La porta 1 è la porta di alimentazione, le porte 2 e 3 sono le porte di uscita mentre la porta 4 è
isolata.
Le quattro porte hanno impedenza normalizzata pari ad 1 e il circuito è simmetrico rispetto a due
assi (Fig. 5.8) in quanto il suo comportamento rimane invariato a seguito delle seguenti
trasformazioni: 1-4 e 2-3, 1-2 e 4-3, 1-3 e 4-2. Questo implica che, per caratterizzare in modo
completo la rete quattro porte, è sufficiente determinare la prima riga della matrice di scattering e
cioè quella corrispondente ad una alimentazione V1+ = 1, V p+ = 0, p ≠ 1 . La simmetria della rete
consiglia di decomporre tale eccitazione nella sovrapposizione di una eccitazione pari
V1+p = V4+p = 1 e di una eccitazione dispari
V1+d = −V4+d = 1 , che possono essere analizzate
2
2
separatamente.
(
)
(
)
60
Per quanto riguarda l’eccitazione pari non vi è corrente al centro dei tratti di impedenza ZD che
quindi possono essere divisi a metà con un circuito aperto. Per l’eccitazione dispari invece è nulla la
tensione al centro dei tratti di impedenza ZD e quindi a metà dei rami in derivazione può essere
posto un corto circuito.
Si ha quindi:
ZL
1
Porta 1
λ
ZD
ZD
λ
ZL
1
Porta 2
8
-jZD
-jZD
λ
4
4
Figura 5.9. Schema planare risultante per eccitazione pari e circuito equivalente.
ZL
1
1
Porta 1
λ
ZD
ZD
λ
ZL
Porta 2
8
jZD
jZD
λ
4
4
Figura 5.10. Schema planare risultante per eccitazione dispari e circuito equivalente.
La matrice ABCD per il caso pari (Fig. 5.9) vale:
1
j
ZD
0 0
j
1
ZL
jZL 1
j
0
ZD
− ZL
0
= ZD
1 j jZL
ZL ZD 2
jZL
− ZL
ZD
(5.13)
mentre quella per il caso dispari (Fig. 5.10) si ottiene cambiando il segno a ZD.
Dalle matrici ABCD è possibile determinare la matrice di Scattering utilizzando le seguenti formule
di trasformazione valide per una rete due porte:
Γ T
( A + B) − (C + D)
2
S=
con Γ =
; T=
( A + B) + (C + D)
( A + B) + (C + D)
T Γ
(5.14)
1
1
Infine, ricordando che V1−p / d = Γ p / dV1+p / d = Γ p / d e V2−p / d = Tp / dV1+p / d = Tp / d , dalla
2
2
sovrapposizione delle eccitazioni pari e dispari si ottiene
S11 =
−
−
−
−
V1− V1 p + V1d V1 p + V1d 1
1
1
=
=
= Γ p + Γd = ( Γ p + Γd )
+
+
+
1
2
2
2
V1 V1 p + V1d
−
−
−
−
V2− V2 p + V2 d V2 p + V2 d 1
1
1
S21 = + = +
=
= Tp + Td = (Tp + Td )
+
V1
V1 p + V1d
1
2
2
2
(5.15)
(5.16)
61
−
−
−
−
V3− V3 p + V3d V2 p − V2 d 1
S31 = + = +
=
= (Tp − Td )
1
2
V1
V1 p + V1+d
S41 =
−
−
−
−
V4− V4 p + V4 d V1 p − V1d 1
=
=
= ( Γ p − Γd )
1
2
V1+ V1+p + V1+d
(5.17)
(5.18)
Come detto l’ibrido a 90° è un accoppiatore direzionale simmetrico con uscite a -3dB e pertanto alla
frequenza di progetto si richiede che:
S11 = S41 = 0
(5.19)
S31 = − jS21
Dalla prima delle (5.19), utilizzando la (5.15) e la (5.18) segue immediatamente che Γ p = Γ d = 0
ovvero, per la (5.14):
( A + B) p = (C + D) p e
( A + B ) d = (C + D) d
(5.20)
Ma A=D sia per la matrice pari che per quella dispari (5.13) mentre B e C contengono solamente
ZD2 (e sono uguali per il caso pari e dispari). Quindi, dalle (5.20) rimane solamente B=C, ovvero:
ZL =
1
ZL
1
1
−
⇒
= 2 −1
2
2
ZL ZD
ZD
ZL
(5.21)
Per quanto riguarda invece la seconda delle (5.19), sfruttando la (5.16) e la (5.17) si ha:
⇒
(Tp − Td ) = − j (Tp + Td )
Tp (1 + j ) = Td (1 − j )
(5.22)
ovvero, per la (5.14):
( A + B)d 1 − j
=
( A + B) p 1 + j
(5.23)
che consente di determinare le impedenze. Sostituendo i valori di A e B ottenuti dalle (5.13) nella
(5.23) si ottiene infatti:
ZL
+ jZL
1− j
ZD
=
ZL
−
+ jZL 1 + j
ZD
⇒
2ZL
= 2ZL
ZD
⇒ ZD = 1
(5.24)
e, dalla (5.21)
ZL =
1
2
(5.25)
A questo punto sostituendo la (5.24) e la (5.25) nella (5.16) si ottiene il valore di S21, che completa
l’analisi:
62
1
1
1
1
S21 = (Tp + Td ) =
+
2
2 ( A + B) p ( A + B)d
1
−j
1
1
+
=
=
− ZL
ZL
2
2
+ jZL
+ jZL
ZD
ZD
(5.26)
In conclusione, la matrice di scattering del divisore ibrido a 90° è la seguente:
0 j 1 0
1 j 0 0 1
S =−
2 1 0 0 j
0 1 j 0
(5.27)
L’analisi in frequenza dell’ibrido a 90° si ottiene considerando le lunghezze elettriche delle linee
pari a
ϑ e non a π 2 . In particolare, si dimostra che questo tipo di struttura è a banda stretta e,
ipotizzando che ϑ = π
2
+ ∆ϑ , con ∆ϑ sufficientemente piccolo, nell’analisi del circuito si può
cos(ϑ ) = sen(∆ϑ ) ≅ ∆ϑ , sen(ϑ ) ≅ 1
porre
e
1 − cos(ϑ )
1 − ∆ϑ
2
≅
≅ (1 − ∆ϑ ) = (1 − ∆ϑ ) .
1 + cos(ϑ )
1 + ∆ϑ
Bande più larghe si possono ottenere con ibridi a più sezioni (Fig. 9.4), in cui la presenza di più
parametri liberi consente una ottimizzazione in frequenza.
tan(ϑ ) =
1
1
Porta 1
λ
1
Porta 2
4
1
Porta 4
Porta 3
λ
4
λ
4
Figura 5.11. Ibrido a 90° a due sezioni.
5.4
Ibrido ad anello
L’ibrido ad anello, detto anche “rat race”, è un accoppiatore direzionale antisimmetrico con uscite a
-3dB. Esso è costituito da un anello lungo 3λ e di impedenza caratteristica Z 0 2 , con quattro
2
porte equispaziate su mezza circonferenza e di impedenza Z0 (Fig. 5.12).
63
Porta 2
λ
Porta 1
Z0
4
Z0
Z0 2
λ
Porta 3
4
Z0
λ
4
Z0
Porta 4
Figura 5.12. Schema planare in microstriscia di un ibrido ad anello.
Un segnale in ingresso alla porta 1 (porta somma) si divide in fase tra le porte 2 e 3 mentre un
segnale in ingresso alla porta 4 (porta differenza) si divide in due segnali in opposizione di fase alle
porte 2 e 3. Le porte 1 e 4, così come le porte 2 e 3 sono isolate.
Come nel caso dell’Ibrido a 90°, l’analisi e il progetto di questo componente si ottiene
decomponendo l’analisi in quella relativa ad una eccitazione pari e ad una eccitazione dispari. Un
onda unitaria in ingresso alla porta 1 può essere decomposta nella somma di V1+p = V3+p = 1
e
2
V1+d = −V3+d = 1 a cui corrispondono rispettivamente le configurazioni in Fig. 5.13 (circuito aperto
2
o C.M.P in corrispondenza all’asse di simmetria) e in Fig. 5.14 (corto circuito o C.E.P. in
corrispondenza all’asse di simmetria).
(
(
)
)
1
1
2
Porta 1
Porta 2
λ
8
2
2
λ
3λ
8
4
Figura 5.13. Schema planare risultante per eccitazione pari.
1
1
2
Porta 1
Porta 2
λ
8
2
2
λ
3λ
8
4
Figura 5.14: Schema planare risultante per eccitazione dispari.
64
Le matrici ABCD per alimentazione dalla porta 1 sono:
1
Tp =
j 2
−1
j 2
;T d =
−1
j 2
j 2
1
(5.28)
Da queste si ottengono i parametri di scattering:
V1− = V4− = 0 ; V2− = V3− =
−j
2
(5.29)
Analogo procedimento può essere fatto per il caso di alimentazione dalla porta 4 (o
equivalentemente dalla porta 2). In questo caso i circuiti in Figg. 5.13 e 5.14 rimangono inalterati
ma le onde incidono da destra anzi che da sinistra. Le corrispondenti matrici ABCD sono:
−1
Tp =
j 2
1
j 2
; Td =
1
j 2
j 2
1
(5.30)
e risulta
V1− = V4− = 0 ; V2− = −V3− =
j
2
(5.31)
In conclusione la matrice di scattering dell’ibrido ad anello è la seguente:
0 1
− j 1 0
S=
2 1 0
0 −1
0
0 −1
0 1
1 0
1
(5.32)
NB: con l’alimentazione dalla porta 1 e dalla porta 4 sono state determinate la prima e la quarta
colonna della matrice di Scattering. Per simmetria, è immediato ricavare la terza colonna dalla
prima (S13=S31, S23=S41, S33=S11, S43=S21) e la seconda dalla quarta (S12=S34, S22=S44, S32=S14,
S42=S24)
5.5
Accoppiatore a linee accoppiate
Una sezione di linee accoppiate di lunghezza elettrica ϑ = β L costituisce, con una scelta opportuna
di ϑ e delle impedenze caratteristiche di modo pari e dispari, un accoppiatore direzionale
simmetrico(paragrafo 4) in cui la porta 1 è la porta di ingresso; la porta 2 è la porta passante; la
porta è la porta accoppiata e la 4 la porta isolata (Fig. 5.15). Supponiamo inizialmente che la
struttura sia di tipo TEM e quindi con β p = β d = ω ε r ε 0 µ0 .
65
Zp, Zd
Porta 1: Ingresso
Porta 2: passante
Porta 3: accoppiata
Porta 4: isolata
θ
Figura 5.15. Schema planare di una sezione di linee accoppiate di lunghezza elettrica ϑ = βL
Per determinare la matrice di scattering di questa rete 4 porte conviene utilizzare i modi pari e
dispari. Risulta pertanto, per ciascuna delle 4 porte (n=1,…,4),
Vn+ = Vnp+ + Vnd+
(5.33)
Vn− = Vnp− + Vnd−
D’altra parte, sia il modo pari, sia quello dispari, sono tali che ciascuna delle due linee di cui è
costituita la struttura, può essere considerata isolata (sia pure con la impedenza caratteristica e la
costante di propagazione del modo). Risulta pertanto:
+
V1−p
p V1 p
− = S +
V2 p
V2 p
+
V1−d
d V1d
− =S +
V2 d
V2 d
(5.34)
e analoghe per le porte 3 e 4:
+
V3−p
p V3 p
=
S
−
+
V4 p
V4 p
+
V3−d
d V3 d
=
S
−
+
V4 d
V4 d
(5.35)
p
d
dove S e S sono le matrici di scattering di una linea lunga ϑ = βL di impedenza caratteristica Zp
e Zd rispettivamente.
D’altra parte risulta:
V1 = V1 p + V1d
V3 = V3 p + V3d = V1 p − V1d
V2 = V2 p + V2 d
V4 = V4 p + V4 d = V2 p − V2 d
(5.36)
Valide sia per onde progressive che per onde riflesse. Invertendo le 5.36 si ottiene:
V1 + V3
V1 p =
2
V = V1 − V3
1d
2
e pertanto:
V2 + V4
V2 p =
2
V = V2 − V4
2 d
2
(5.37)
66
V1+
V1+p 1 V1+ + V3+ 1 1 0 1 0 V2+
=
+ = +
+
V
2
2 0 1 0 1 V3+
V
+
V
2
p
2
4
+
V4
(5.38)
V1+
V1+d 1 V1+ − V3+ 1 1 0 −1 0 V2+
=
+ = +
+
2
2 0 1 0 −1 V3+
V
V
−
V
2
4
2d
+
V4
(5.39)
Quindi usando le 5.33 e 5.34, le 5.38 e 5.39 si ottiene:
+
+
V1− V1−p V1−d
p V1 p
d V1d
=
+
=
+
S
S
+
− − −
+ =
V
V2 d
2
p
V2 V2 p V2 d
V1+
p 1 1 0 1 0
0 −1 0 V2+ 1 p
d 1 1
d
p
d
= S
+S
+ = S + S | S − S
2 0 1 0 −1 V3
2
2 0 1 0 1
+
V4
e, per le 5.36,
(
)
V1+
+
V2
V3+
+
V4
)
V1+
+
V2
V3+
+
V4
(5.40)
+
+
V3− V3−p V3−d V1−p V1−d
p V1 p
d V1d
=
+
=
−
=
−
S
S
+
− − − − −
+ =
V
V
V
V
V
V
4
2
2
p
p
p
4
V2 d
4d
2d
V1+
0 −1 0 V2+ 1 p
p 1 1 0 1 0
d 1 1
d
p
d
= S
−S
+ = S − S | S + S
2 0 1 0 −1 V3
2
2 0 1 0 1
+
V4
(
(5.41)
Dalle 5.40 e 5.41 si ottiene dunque la matrice di scattering della rete quattro porte:
1 S + S
S= p
2 S − S d
p
d
p
d
S −S
p
d
S + S
p
d
Ricordando che S e S sono le matrici di scattering di una linea lunga
ha:
S
p/d
=
1 Γ p / d
2 Tp / d
Tp / d
Γ p / d
(5.42)
ϑ
di impedenza Zp o Zd, si
(5.43)
dove
67
Γ p/d =
( Ap / d + B p / d ) − (C p / d + Dp / d )
( Ap / d + B p / d ) + (C p / d + D p / d )
Tp / d =
( Ap / d
2
+ B p / d ) + (C p / d + D p / d )
(5.44)
Sappiamo che, per una linea lunga ϑ
ABCDp / d
cos ϑ
= j
senϑ
Z p / d
jZ p / d senϑ
cos ϑ
(5.45)
quindi:
1
jsenϑ Z p / d −
Z p / d
Γ p/d =
1
2 cos ϑ + jsenϑ Z p / d +
Z p / d
2
Tp / d =
1
2 cos ϑ + jsenϑ Z p / d +
Z
p
/
d
(5.46)
(5.47)
La prima richiesta affinché la sezione di linee accoppiate si comporti come un accoppiatore
direzionale è che ci sia adattamento alla porta 1 (e quindi per simmetria anche a tutte le altre porte).
L’adattamento alla porta 1 richiede (5.42 e 5.43):
Γ p + Γd = 0
(5.48)
ossia
1
1
jsenϑ Z p −
jsen
Z
−
ϑ
d
Z p
Zd
+
=0
(5.49)
1
1
2 cos ϑ + jsenϑ Z p +
2 cos ϑ + jsenϑ Z d +
Zd
Z
p
1
1
1
1
1
1
2 cos ϑ Z p + Z p −
−
+ jsenϑ Z d + Z p −
+Zp +
Z
−
d
= 0 (5.50)
Z p Z p
Z d
Z p
Z p
Z d
La scelta Z p Z d = 1 (con impedenze normalizzate) annulla sia il coefficiente del cos ϑ , sia il
coefficiente del senϑ e quindi garantisce adattamento a tutte le frequenze.
Le 5.42 e 5.43 forniscono inoltre
1
S21 = (Tp + Td )
2
1
S31 = (Γ p − Γ d )
2
1
S41 = (Tp − Td )
2
(5.51)
68
e, poiché Z p Z d = 1
Γp =
jsenϑ ( Z p − Z d )
2 cos ϑ + jsenϑ ( Z p + Z d )
= −Γ d
(5.52)
2
Tp =
= Td
2 cos ϑ + jsenϑ ( Z p + Z d )
per cui, sostituendo nelle 5.51,
1
2
1− C2
S21 = (Tp + Td ) = Tp =
=
2
2 cos ϑ + jsenϑ ( Z p + Z d )
1 − C 2 cos ϑ + jsenϑ
jsenϑ ( Z p − Z d )
1
jCsenϑ
S31 = (Γ p − Γ d ) = Γ p =
=
2
2
2 cos ϑ + jsenϑ ( Z p + Z d )
1 − C cos ϑ + jsenϑ
(5.53)
1
S41 = (Tp − Td ) = 0
2
con
C=
Z p − Zd
(5.54)
Z p + Zd
L’accoppiamento S31 è massimo per ϑ =
π
2
e vale C (Fig. 5.16) . Si sceglie pertanto la lunghezza
della sezione di linee accoppiate in modo tale che risulti ϑ =
π
2
a centro banda (ossia alla
frequenza di progetto). Quindi
π
S21 ϑ = = − j 1 − C 2
2
π
S31 ϑ = = C
2
(5.55)
con uno sfasamento di 90° tra V2− e V3− (Fig. 5.17), che, in teoria, ne consente l’uso come ibrido a
90° (per C = 1/ 2 = −3dB ).
L’accoppiatore a linee accoppiate ha il vantaggio di separare fisicamente la linea accoppiata da
quella principale. Tuttavia, il valore dell’accoppiamento massimo C non può essere troppo grande.
Infatti C grande vorrebbe dire Zp molto grande rispetto a Zd (ossia Cm elevato in 3.26) e quindi le
linee potrebbero risultare troppo vicine e pertanto difficilmente realizzabili. Valori di
accoppiamento di
-8 dB sono spesso già troppo grandi per poter essere ottenuti.
69
1
0.8
S31( θ )
0.6
S21( θ )
0.4
0.2
0
0
0.5
1
1.5
2
2.5
3
θ
Figura 5.16: Ampiezza di S21 e S31 al variare della lunghezza elettrica per C = 0.4.
100
180
π
180
π
arg( S31( θ ) )
0
arg( S21( θ ) )
100
200
0
0.5
1
1.5
2
2.5
3
θ
Figura 5.17. Fase di S21 e S31 al variare della lunghezza elettrica per C = 0.4.
Fino ad ora abbiamo ipotizzato che le linee accoppiate siano state realizzate in una struttura che
supporta modi TEM. Ovviamente i risultati ottenuti non valgono più se la struttura non è
trasversalmente omogenea e supporta solamente modi quasi TEM. In questo caso la 5.45 (e di
conseguenza tutte le formule seguenti) devono essere modificate per tenere conto che β p ≠ β d e
quindi ϑ p ≠ ϑd .
Mentre per i valori di S21 ed S31 si possono continuare ad utilizzare, con buona approssimazione, le
5.53, la differenza tra le velocità di fase dei modi pari e dispari modifica in modo sostanziale il
valore dell’isolamento alla porta 4 (S41).
Infatti, nel caso TEM l’S41 è nullo perché Tp e Td sono uguali. In altri termini
70
1
1
1
V4− = (Tp − Td )V1+ = TpV1+ − TdV1+
2
2
2
(5.56)
Ma le due ampiezze T pV1+ e Td V1+ sono grandi e quindi V4− è la differenza di due numeri grandi e
uguali. E’ sufficiente quindi una piccola variazione relativa di una delle due tensioni, come ad
esempio quella dovuta alla diversa velocità di fase delle due onde pari e dispari, per degradare in
modo significativo la direttività.
D’altra parte nel caso quasi TEM Tp è diverso da Td perché ϑ p ≠ ϑd e la 5.56 non fornisce più zero.
Nel caso non sia possibile utilizzare strutture TEM, per migliorare il valore dell’isolamento e quindi
della direttività dell’accoppiatore direzionale a linee accoppiate, si può pensare di compensare la
differenza di velocità di fase tra il modo pari e il modo dispari. Nel caso di linee accoppiate in
microstriscia è possibile ricorrere all’uso di superstrati dielettrici o a substrati anisotropi in modo
da abbassare la differenza tra la ε eff e la ε effd (Fig. 5.18). In alternativa si può pensare a delle
modifiche circuitali come ad esempio all’inserimento di condensatori connessi in parallelo alle
estremità della sezione di linee accoppiate (Fig. 5.19). Il valore di CT viene determinato in modo
iterativo, attraverso una procedimento di sintesi per tentativi che coinvolge anche i parametri
geometrici della struttura (tipicamente la spaziatura tra le linee e la larghezza), in modo da
minimizzare l’S41 mantenendo inalterato il valore dell’accoppiamento a centro banda.
p
W
W
εr
h
Figura 5.18. Linee accoppiate in una microstriscia modificata con l’inserimento di un superstrato
dielettrico.
Zp, Zd
CT
CT
L
Figura 5.19. Modifica circuitale per la compensazione delle velocità di fase.
71
5.6
Accoppiatore multisezione
La banda passante di un accoppiatore a linee accoppiate può essere incrementata (se le velocità di
fase sono uguali) usando un trasformatore multisezione.
Si considera un accoppiatore direzionale a linee accoppiate con accoppiamento C << 1 . In questo
caso le 5.53 possono essere approssimate come segue ( 1 − C 2 ≈ 1 ):
S21 =
S31 =
1− C2
1 − C cos ϑ + jsenϑ
jCsenϑ
2
1 − C 2 cos ϑ + jsenϑ
≈ e − jϑ
(5.57)
≈ je
− jϑ
Csenϑ
Le 5.57 implicano che non vi è perdita di potenza per effetto del prelievo effettuato alla porta 3.
Ovviamente questo viola la conservazione della potenza ma costituisce, in molti casi, una buona
approssimazione.
Supponiamo ora di inserire due linee in cascata con accoppiamenti a centro banda pari a C1 e C2:
1
je -jθ C1 sin(θ)
e -jθe -jθje -jθ C2 sin(θ)
C1
θ
e
-jθ
e -jθje -jθ C2 sin(θ)
e
C2
-j2θ
θ
Figura 5.20. Linee accoppiate collegate in cascata.
Dallo schema in Fig. 5.20 risulta:
S21 ≈ e − j 2ϑ
S31 ≈ je − jϑ C 1 senϑ + je− j 3ϑ C 2 senϑ = je − jϑ senϑ C 1 +C 2 e − j 2ϑ
(5.58)
In generale, per un accoppiatore direzionale a linee accoppiate ad N stadi simmetrico (Fig. 5.21) si
ha (N dispari con C1=CN, C2=CN-1, …):
1
S31 ≈ 2je − jϑ senϑ C 1 cos( N − 1)ϑ + C 2 cos( N − 3)ϑ + ... + C M e − j ( N −1)ϑ
(5.59)
2
N +1
con M =
2
72
C1
C2
......
θ
θ
CM
θ
C N-1
CN
......
θ
θ
Figura 5.21. Accoppiatore a linee accoppiate multisezione ad N stadi.
La 5.59 è una serie di Fourier per l’accoppiamento S31 in funzione della frequenza. Pertanto è
possibile sintetizzare la risposta in frequenza desiderata, e quindi, ad esempio, incrementare la
banda passante, scegliendo i coefficienti di accoppiamento C1, C2, …, CM in modo opportuno.
73
6. ADATTAMENTI A BANDA LARGA
6.1
Larghezza di banda degli adattamenti
Lo schema di base di un adattamento è mostrato in Figura 6.1. La rete di adattamento è ovviamente
priva di perdite e ZL è il carico da adattare. Supponiamo che alla frequenza di progetto ω0 il
coefficiente di riflessione Γ = 0. Si vuole determinare la larghezza di banda dell’adattamento.
Γ
Z0
IIN
Rete di
Adattamento
ZL
Z IN
Figura 6.1. Schema di un adattamento.
Se ∆ω << ω 0 allora:
Z IN (ω + ∆ω ) ≈ Z IN (ω ) +
∂Z IN (ω )
∂R (ω )
∂X (ω )
∆ω ≈ Z IN (ω ) + IN
∆ω + j IN
∆ω
∂ω
∂ω
∂ω
(6.1)
Si può assumere che RIN non vari in modo apprezzabile con ω per cui RIN = Z0. Per quanto riguarda
invece la variazione della XIN con la frequenza si dimostra che (Teorema di Foster):
∂X IN (ω ) 4(We + Wm ) 4Wem
=
=
2
2
∂ω
I IN
I IN
(6.2)
Dove We, Wm, e Wem sono rispettivamente l’energia elettrica, quella magnetica e quella
elettromagnetica complessiva immagazzinata nella rete (per calcolare la larghezza di banda occorre
tenere conto anche dell’energia immagazinata nel carico). Quindi:
Z IN ≈ Z 0 + j
4Wem
I IN
2
∆ω
(6.3)
2
D’altra parte, poichè I IN =
2 PL
(la rete di adattamento è priva di perdite quindi PL è la potenza
RIN
dissipata sul carico ZL), si ha:
Z IN ≈ Z 0 + j 2∆ω
Wem
RIN
PL
A questo punto possiamo introdurre un “fattore di merito” Q =
(6.4)
ω0Wem
PL
e si ottiene
74
Z IN ≈ Z 0 + j
2 Z 0 ∆ω
ω0
Q
(6.5)
Q prende il nome di fattore di merito del circuito, considerato a vuoto, ovvero senza tenere conto
dell’effetto di carico della linea di alimentazione.
Se ∆ω << ω 0 si ha anche:
Γ=
Z IN − Z 0
∆ω
≈ jQ
Z IN + Z 0
ω0
(6.6)
La (6.6), fissato il valore massimo del coefficiente di riflessione Γ M , fornisce la banda passante
dell’adattamento:
2∆ω
ω0
6.2
≈
2Γ M
Q
(6.7)
Linee con impedenza costante a tratti
Se vengono utilizzate linee con impedenza costante a tratti e con discontinuità piccole tra i vari
tratti, è possibile una valutazione approssimata del coefficiente di riflessione all’ingresso
(approssimazione di piccole riflessioni).
Consideriamo come punto di partenza una struttura con due discontinuità (Figura 6.2):
Figura 6.2. Linea di trasmissione con due salti di impedenza (Z0 = 1).
Il coefficiente di riflessione alla seconda interfaccia vale:
Γ1 =
Z 2 − Z1
Z 2 + Z1
(6.8)
L’impedenza alla prima interfaccia è pertanto:
1 + ΓT
1 − ΓT
dove ΓT = Γ1 exp(−2 jθ )
Il coefficiente di riflessione corrispondente vale dunque:
Z IN = Z1
(6.9)
75
1 + ΓT
− Z0
Z (1 + ΓT ) − Z 0 (1 − ΓT )
Z IN − Z 0
1 − ΓT
=
=
= 1
Z IN + Z 0 Z 1 + ΓT + Z
Z1 (1 + ΓT ) + Z 0 (1 − ΓT )
1
0
1 − ΓT
Z1
Γ IN
(6.10)
Si può introdurre il parametro
Γ0 =
Z1 − Z 0
Z1 + Z 0
(6.11)
che prende il nome di “coefficiente di riflessione locale” e che sarebbe il coefficiente di riflessione
all’ingresso se la linea di impedenza Z1 fosse illimitata. Dalla (6.11) risulta:
Z1 = Z 0
1 + Γ0
1 − Γ0
(6.12)
Sostituendo la (6.12) nella (6.10) si ottiene:
1 + Γ0
(1 + ΓT ) − Z 0 (1 − ΓT ) 1 + Γ 1 + Γ − 1 − Γ 1 − Γ 2 Γ + Γ
1 − Γ0
( 0 )( T ) ( T )( 0 ) = ( 0 T )
=
=
1 + Γ0
Z0
(1 + ΓT ) + Z 0 (1 − ΓT ) (1 + Γ0 )(1 + ΓT ) + (1 − ΓT )(1 − Γ0 ) 2 + 2Γ0ΓT
1 − Γ0
Z0
Γ IN
(6.13)
Se i salti di impedenza sono piccoli allora anche i coefficienti di riflessione saranno piccoli e, a
denominatore della (6.13) possiamo trascurare il termine 2Γ 0ΓT rispetto a 2. Si ha quindi:
Γ IN ≈ Γ 0 + ΓT = Γ 0 + Γ1 exp(−2 jθ )
(6.14)
Figura 6.3. Linea di trasmissione con tre salti di impedenza (Z0 = 1) e due linee di lunghezza θ.
Nel caso di tre salti di impedenza (come mostrato in figura 6.2) definiamo i tre coefficienti di
riflessione locali:
Γ0 =
Z1 − Z 0
Z − Z2
Z − Z1
, Γ1 = 2
, Γ2 = 3
Z1 + Z 0
Z 2 + Z1
Z3 + Z 2
Per la (6.14), applicata agli ultimi due salti di impedenza, si ha:
Γ A ≈ Γ1 + Γ 2 exp(−2 jθ )
(6.15)
76
Sempre utilizzando la (6.14) applicata ai primi due salti di impedenza si ottiene:
Γ IN ≈ Γ 0 + Γ A exp(−2 jθ )
(6.16)
Infine, sostituendo la (6.15) nella (6.16)
Γ IN ≈ Γ 0 + [ Γ1 + Γ 2 exp(−2 jθ ) ] exp(−2 jθ ) = Γ 0 + Γ1 exp(−2 jθ ) + Γ 2 exp(−4 jθ )
(6.17)
L’espressione (6.14) è relativa a due salti di impedenza, ossia con una linea di lunghezza elettrica θ
(Figura 6.2): assumiamo N = 1; l’espressione (6.17) è relativa a tre salti di impedenza, ossia con due
linee di lunghezza elettrica θ (Figura 6.3): assumiamo N = 2. E’ possibile generalizzare le
approssimazioni (6.14) e (6.17) al caso di N linee, con N generico, tutte con la stessa lunghezza
elettrica θ. Si ha quindi (Figura 6.4):
N
* Γ IN ≈ ∑ Γ n exp(−2njθ )
(6.18)
n =0
con Γ n =
Z n +1 − Z n
, n =1, …, N; coefficienti di riflessione locale.
Z n+1 + Z n
(6.19)
Figura 6.3. Linea di trasmissione con N+1 salti di impedenza (Z0 = 1) e N linee di lunghezza θ.
Mediante la (6.18) è possibile sintetizzare qualsiasi coefficiente di riflessione al variare della
frequenza (θ), scegliendo opportunamente i valori dei coefficienti di riflessione locali Γ n , e
utilizzando un numero (N) “sufficiente” di linee. Infatti, una serie di Fourier, come la (6.18), è in
grado di rappresentare qualunque funzione purchè si usi un numero di termini sufficiente.
Sfruttando questo fatto, è chiaro che, tramite un trasformatore ad N sezioni, come quello mostrato in
Figura 6.3, è possibile realizzare un adattamento la larga banda del carico finale ZL.
Nei paragrafi successivi mostreremo come usare questa teoria per progettare “trasformatori
multisezione” per due delle risposte “passabanda” più usate: la risposta binomiale (maximally flat) e
la risposta di Chebyshev (equal ripple)
6.3
Trasformatore binomiale
Un trasformatore molto usato è quello che ha, alla frequenza centrale, N-1 derivate di |Γ(θ)| nulle
(filtro a massima piattezza). Per esso risulta dunque:
Γ(θ ) = A (1 + e−2 jθ ) = A e− jNθ 2 N ( cos θ )
N
| Γ(θ ) |= 2 N | A | cos θ
N
N
(6.20)
(6.21)
77
| Γ(θ ) |= 0 per θ =
π
2
che fissa la frequenza centrale (ovviamente quella per cui la lunghezza fisica
L = λ/4). Dalla (6.21) è poi evidente che le prime N-1 derivate sono nulle in θ =
π
.
2
Per determinare la costante A notiamo che, se la frequenza tende a zero, anche la lunghezza elettrica
θ tende a zero e quindi
| Γ(0) |=
Z L − Z0
= 2N | A |
ZL + Z0
(6.22)
Ricordando la formula binomiale (da cui il nome di trasformatore binomiale):
(a + b)
N
N
= ∑ a nb N −n
n =0 n
N
(6.23)
Si ottiene (con a = e-2jθ e b = 1)
N
N
N
Γ(θ ) = A (1 + e−2 jθ ) = A∑ e −2 jnθ
n =0 n
(6.24)
I valori (approssimati) di Γ n si ottengono confrontando con la (6.24) con la (6.18) ottenuta con la
approssimazione di piccole riflessioni:
N Z − Z0 1 N Z L − Z0 1
N!
Γn = A = L
=
N
N
n Z L + Z 0 2 n Z L + Z 0 2 ( N − n)!n !
(6.25)
A partire dai valori di Γ n si possono poi calcolare le impedenze Zn delle linee utilizzando le (6.19).
Ovviamente è possibile calcolare le impedenze Z n senza l’approssimazione di piccole riflessioni
utilizzando le equazioni delle linee per ogni “sezione” θ e risolvendole numericamente [Microwave
Filters, Impedance Matching Networks, and Coupling Structures, Artech House Books, Dedham,
Mass. 1980]. In particolare, la tabella 6.1 fornisce gli esatti valori di impedenza normalizzata per N
= 2, 3, 4, 5, 6, e per diversi valori dell’impedenza di carico normalizzata.
78
Tabella 6.1. Valori delle impedenze di progetto per un traformatore binomiale.
Sia Γ m il massimo accettabile di Γ(θ ) all’interno della banda scelta e θm la lunghezza elettrica a cui
si ha tale valore. Allora:
| Γ m |= 2 N | A | cos θ m
N
(6.26)
ovvero
1 Γm
θ m = cos
2 A
−1
1
N
= cos −1 Γ m
Γ(0)
1
N
La lunghezza elettrica è uguale a θ = β L =
Quindi
(6.27)
2π f
L
vf
→
f =
vf θ
2π L
π
vf
π
2
f0 = f =
2 2π L
vθ
f m = f (θ m ) = f m
2π L
che fornisce la banda passante bilatera:
79
∆ f 2 fm − f0
=
=
f0
f0
2
vf
θm −
2π L
vf
vf
4L
=2
v f 4L
4
θm − 1 = θm − 2
π
2π L v f
(6.28)
4L
∆f
si può determinare θ m e quindi Γ m (tramite la 6.26)
f0
e, da questo e da Γ 0 , si ottiene l’ordine N (6.27).
Viceversa a partire dalla banda richiesta
6.4
Trasformatore di Chebyshev
A differenza del trasformatore binomiale, il trasformatore di Chebyshev ottimizza la banda
dell’adattamento con la richiesta di un “ripple” fissato, infatti è anche detto “trasformatore
equiripple”. Se questo tipo di risposta può essere accettata, la banda di un trasformatore di
Chebyshev sarà sostanzialmente maggiore rispetto a quella di un trasformatore binomiale, a parità
di numero di sezioni N. Il trasformatore di Chebyshev viene progettato eguagliando la risposta
Γ(θ ) ad un polinomio di Chebyshev, che possiede le caratteristiche richieste per una risposta di
tipo “equiripple”.
6.3.1 Polinomi di Chebyshev
I polinomi di Chebyshev, denotati con Tn(x), sono dei polinomi dotati della proprietà di oscillare in
(-1, 1) per x ∈ (-1, 1) con n zeri e quindi n+1 tra massimi e minimi (Figura 6.4).
Figura 6.4. Polinomi di Chebishev.
I primi due polinomi sono:
T0 ( x) = 1
T1 ( x) = x
(6.29)
mentre i successivi si ottengono da:
Tn ( x) = 2 xTn−1 ( x) − Tn− 2 ( x)
(6.30)
Se in particolare poniamo x = cos (θ ) (possibile in |x| < 1) si ha:
80
Tn (θ ) = cos ( nθ )
(6.31)
oppure, equivalentemente, dato che θ = cos −1 ( x )
cos ( n cos −1 x )
Tn ( x) =
−1
cosh ( n cosh x )
x <1
x >1
(6.32)
che mostra più chiaramente le suddette proprietà.
Le proprietà di uguale oscillazione (equiripple) rende questi polinomi utili per ottenere coefficienti
di riflessione “ottimali” in base al criterio di Bode-Fano (un criterio che consente di fissare dei
limiti sulla possibilità di adattare, con una rete priva di perdite, un carico complesso su una
determinata banda) [X].
6.3.2 Trasformatore di Chebyshev
Un trasformatore equiripple a N sezioni può essere ottenuto con
Γ (θ ) = ATN ( um cos θ ) e − jNθ
(6.33)
in cui il termine e− jNθ serve ad ottenere un Γ (θ ) funzione solo di θ .
Il centro banda si ha per θ =
um cos θ m = 1
→
um =
π
2
e la banda passante θ m è tale che
1
cos θ m
(6.34)
infatti, per le proprietà dei polinomi di Chebyshev, siamo agli estremi della banda passante quando
l’argomento del polinomio TN vale 1.
A frequenza nulla ( θ = 0 ) si ha
1
Γ ( 0 ) = ATN ( um ) = ATN
cos θ m
(6.35)
e quindi
A=
Z L − Z0
Z L + Z0
1
1
TN
cos θ m
(6.36)
D’altra parte, dalla (6.33) è evidente che A = Γ m , cioè il massimo di Γ (θ ) in banda passante perché
max TN (θ ) = 1 , e quindi vale la relazione:
1 Z L − Z0 1
TN
=
cos θ m Z L + Z 0 Γ m
(6.37)
81
ovvero, usando la (6.32)
1
1
−1
TN
= cosh N cosh
cos θ m
cos θ m
(6.38)
Dalle (6.37) e (6.38) si ottiene:
1 Z L − Z0 1
cosh N cosh −1
=
cos θ m Z L + Z 0 Γ m
Z L − Z0 1
1
−1
N cosh −1
= cosh
cos θ m
Z L + Z0 Γm
Z L − Z0 1
1 1
−1
cosh −1
= cosh
cos θ m N
Z L + Z0 Γm
Z − Z 0 1
1
1
= cosh cosh −1 L
cos θ m
N
Z L + Z 0 Γ m
(6.39)
che, fissato N, collega la banda passante e il ripple massimo in banda.
I coefficienti si ottengono sviluppando il polinomio di Chebyshev ed uguagliandolo a Γ (θ ) oppure
da apposite tabelle (si veda ad esempio la tabella 6.2) [Microwave Filters, Impedance Matching
Networks, and Coupling Structures, Artech House Books, Dedham, Mass. 1980].
82
Tabella 6.2. Valori delle impedenze di progetto per un traformatore di Chebyshev.
83
7. FILTRI A MICROONDE IN TECNOLOGIA PLANARE
7.1
Filtri a bassa frequenza
I filtri a microonde vengono in genere costruiti a partire da un prototipo a bassa frequenza (e quindi
a costanti concentrate) che viene poi trasformato in un circuito a microonde. Pertanto esamineremo
dapprima il progetto di filtri LC.
Si definisce perdita di potenza PLR il reciproco del guadagno totale di potenza del filtro:
PLR =
Pincidente
1
=
Pcarico 1 − Γ(ω ) 2
(7.1)
Filtro
Zc
Γ(ω)
Figura 7.1. Schema di un filtro
La funzione Γ(ω) è una funzione Hermitiana [ovvero Γ(ω)= Γ*(-ω)] e quindi |Γ(ω)|2 è
necessariamente una funzione pari di ω e può essere scritta come rapporto di funzioni pari di ω:
2
Γ(ω ) =
M (ω 2 )
M (ω 2 ) + N (ω 2 )
(7.2)
M (ω 2 )
PLR = 1 +
N (ω 2 )
(7.3)
La funzione PLR(ω) dovrebbe essere pari a “1” nella banda passante del filtro e a “ ∞ ” fuori di
questa (Figura 7.2), e inoltre dovrebbe avere una fase lineare con la frequenza per evitare
distorsioni. Queste specifiche non sono però ottenibili e occorre approssimare PLR(ω) con un
andamento realizzabile in cui M ed N sono polinomi.
PLR
1
ωt
ω
Figura 7.2. Risposta ideale di un filtro passa-basso.
84
Per un filtro passa-basso consideriamo le seguenti configurazioni:
Filtro di Butterworth (o maximally flat)
Si può dimostrare che, per un filtro di Butterworth di ordine N, ossia con N componenti concentrati
di tipo induttanza o capacità, si ha:
ω
PLR = 1 + k
ωc
2N
2
(7.4)
dove ωc è la frequenza di taglio e 2N-1 derivate di PLR sono nulle per ω = 0.
Se si fissa la frequenza di taglio ωc come la frequenza in cui PLR = 3 dB allora k = 1.
Per ω >> ωc si ha:
ω
PLR ≈
ωc
2N
(7.5)
Ha interesse la velocità di aumento di PLR (che si misura in genere in dB per decade):
PLR (ω0 )
1
≈
PLR (10ω0 ) (10 )2 N
(7.6)
ossia una variazione di 20N dB/decade
Filtro di Chebyshev (o equi-ripple)
Per un filtro di Chebyshev di ordine N, ossia con N componenti concentrati di tipo induttanza o
capacità, si ha:
ω
PLR = 1 + k 2TN2
ωc
(7.7)
ωc è la frequenza di taglio e PLR ha un andamento oscillante tra 1 e 1+k2 nella banda passante del
filtro. Il valore di k2 fissa pertanto il ripple in tale zona.
Per ω >> ωc si ha:
k 2 2ω
PLR ≈
4 ωc
2N
(7.8)
k2
2N
( 2 ) più grande
4
(ovvero il filtro di Chebyshev attenua di più rispetto al corrispondente filtro di Butterworth dello
stesso ordine).
per cui la variazione è ancora di 20N dB/decade ma la risposta è sempre
85
Filtro a fase lineare
La fase della funzione di trasferimento di un filtro φ (ω ) entra nella risposta sfasando le varie
componenti armoniche di un segnale. Se φ (ω ) è lineare rispetto a ω tale sfasamento è costante,
altrimenti provoca una distorsione all’uscita. I filtri introdotti in precedenza (in particolare quello di
Chebyshev) hanno una fase non lineare.
Per ottenere una fase sufficientemente lineare (ma con un taglio della risposta molto meno netto)
occorre utilizzare filtri a “fase lineare” in cui
2N
ω
φ (ω ) = Aω 1 + p
ωc
ovvero si richiede che il comportamento di
(7.9)
φ (ω )
sia a “massima piattezza”.
ω
Per quanto riguarda la realizzazione, un filtro passabasso è costituito da condensatori in parallelo e
induttanze in serie e quindi può essere di due tipi:
Figura 7.3. Prototipi di filtri passabasso e definizione degli elementi. (a) prototipo che inizia con
elemento parallelo: g0 è una conduttanza (b) prototipo che inizia con elemento serie: g0 è una
resistenza.
In Figura 7.3:
conduttanza del generatore per il circuito in Figura 7.3(a)
g0 =
resistenza del generatore per il circuito in Figura 7.3(b)
induttanza normalizzata per gli induttori in serie
gk =
k=1,…, N
capacità normalizzata per i consensatori in parallelo
resistenza se g N è un consensatore in parallelo
g N +1 =
conduttanza se g N è un induttore in serie
Poiché la risposta in frequenza del filtro dipende dal rapporto reciproco delle impedenze, è sempre
possibile fissarne una. In genere si sceglie g0 = 1 (1 S o 1 Ω nei due casi) e, salvo che per i filtri di
Chebyshev con N pari anche il carico è unitario nei due casi (in S o Ω).
Esistono delle tabelle che forniscono i valori delle induttanze serie e delle capacità in parallelo per i
86
vari filtri (Tabelle 7.1 e 7.2), nonché il carico richiesto (che, ricordiamo, è in S o Ω, rispettivamente
nei due circuiti base (a) e (b) in Figura 7.3) se il filtro non ha uscita adattata. In quest’ultimo caso
occorre un opportuno circuito di adattamento (trasformatore λ/4 o simile) che però ha una risposta
in frequenza che può alterare quella del filtro. Conviene quindi evitare questo caso.
L’ordine del filtro va preventivamente scelto in modo da avere la richiesta attenuazione fuori banda.
I dati sono sempre relativi a ωc = 1 ma questo non lede la generalità in quanto è sempre possibile
scalare i componenti per modificare ωc.
N
1
2
3
4
5
6
7
8
9
10
g1
2.0000
1.4142
1.0000
0.7654
0.6180
0.5176
0.4450
0.3902
0.3473
0.3129
g2
1.0000
1.4142
2.0000
1.8478
1.6180
1.4142
1.2470
1.1111
1.0000
0.9080
g3
g4
g5
g6
g7
g8
g9
g10
g11
1.0000
1.0000
1.8478
2.0000
1.9318
1.8019
1.6629
1.5321
1.4142
1.0000
0.7654
1.6180
1.9318
2.0000
1.9615
1.8794
1.7820
1.0000
0.6180
1.4142
1.8019
1.9615
2.0000
1.9754
1.0000
0.5176
1.2470
1.6629
1.8794
1.9754
1.0000
0.4450
1.1111
1.5321
1.7820
1.0000
0.3902
1.0000
1.4142
1.0000
0.3473
0.9080
1.0000
0.3129
1.0000
Tabella 7.1. Elementi gn per un filtro “Maximally flat” per g0 = 1 e ωc = 1, N da 1 a 10.
87
Tabella 7.2. Elementi gn per un filtro di Chebyshev (equiripple) per g0 = 1, ωc = 1, N da 1 a 10.
7.2
Trasformazioni di filtri
Le tabelle disponibili sono normalizzate a g0 = 1 e ωc = 1. Per modificare tali valori basta ricordare
che le impedenze devono essere uguali nei due casi (quello normalizzato e quello “reale”) per avere
la stessa risposta. Più precisamente deve essere lo stesso il rapporto tra le impedenze.
Quindi, se un induttore vale L nel caso normalizzato, vuol dire che, alla frequenza di taglio unitaria,
deve essere:
ZL ZL
=
= jL
g0
1
(7.9)
essendo ZL la sua impedenza e 1 la resistenza (in entrambi i casi) della sorgente.
Nel filtro “reale” si dovrà avere la stessa impedenza alla frequenza di taglio ω c . Quindi il nuovo
valore di induttanza L sarà tale che
88
jL =
Z L Z L jω c L
=
=
1
R0
R0
(7.10)
per cui
L=
R0 L
ωc
e, analogamente C =
C
(7.11)
R0 ω c
essendo R0 il livello di impedenza necessario.
La scalatura di impedenza e frequenza di taglio può essere sempre eseguita, specie per i filtri a
microonde, al termine del progetto. Nell’esaminare quindi gli altri tipi di filtri si manterranno i
parametri normalizzati.
Trasformazione passa-basso/passa-alto
La trasformazione
ω=−
1
(7.12)
ω'
inverte i punti ω = 0 e ω = ∞ e quindi trasforma unfiltro passa-basso in un filtro passa-alto (PLR è
pari rispetto a ω quindi su di essa il segno negativo non ha alcun effetto).
Per quanto riguarda i componenti reattivi, nel caso di un passa-alto la loro impedenza deve variare
in modo opposto con la frequenza rispetto ad un filtro passa-basso.
Se nel caso passa-basso un componente ha impedenza a frequenza ω pari a jωL, nel caso passa-alto
1
dovrà avere la stessa impedenza a frequenza ω ' = − . Quindi per esso risulta:
ω
1
1
Z (ω ') = jω L = j − L =
1
ω'
jω '
L
(7.13)
Il componente diviene quindi un condensatore con capacità pari a 1/L.
Allo stesso modo, un condensatore C diviene un induttore con induttanza pari a 1/C.
Si noti che il segno meno nella trasformazione è necessario per avere il corretto segno delle
reattanze (ovvero per avere segno ed andamento in frequenza coerenti).
Trasformazione passa-basso/passa-banda
Consideriamo la trasformazione
ω=
1
1
ω '−
∆
ω'
(7.14)
,
che può essere scritta nella forma
2
(ω ') − ω ' ∆ ω − 1 = 0
(7.15)
89
Nella (7.15) ω = 1 e ω = −1 corrispondono (funzione pari) alla soluzione della equazione in quanto
ω = 1 e ω = −1 sono le frequenze di taglio del filtro passa-basso. Dobbiamo quindi vedere a cosa
corrispondono ω = ±1 per il filtro ottenuto con la trasformazione (7.14).
La (7.15) diventa:
2
(ω ' ) − ω ' ∆
per ω = 1
−1 = 0
con soluzioni
ω'=
∆
∆2
± 1+
2
2
2
(ω ' ) + ω ' ∆
→
' ∆
∆2
ω1 = + 1 +
2
2
∆2
' ∆
ω
=
−
1
+
2 2
2
(7.16)
per ω = −1
−1 = 0
con soluzioni
∆
∆2
ω ' = − ± 1+
2
2
→
'
∆
∆2
ω
=
−
+
1
+
3
2
2
∆
∆2
'
ω
=
−
−
1
+
4
2
2
(7.17)
ω1' e ω3' sono valori centrati attorno a 1, ω2' e ω4' sono valori centrati attorno a -1. In particolare
risulta: ω1' = −ω4' e ω3' = −ω2' .
Quindi la banda passante del filtro è un intervallo centrato su ω ' = 1 e i limiti della banda (cioè i
punti corrispondendi alla frequenza di taglio) sono ω1' e ω3' , cioè:
∆
∆2 ∆
∆2
, + 1+
− + 1 +
2 2
2
2
Risulta pertanto che ∆ = ω1' − ω3' è la larghezza di banda del filtro passabanda espressa in
percentuale di quella centrale, che è unitaria.
Per quanto riguarda i componenti, con la trasformazione passa-basso/passa-banda si ha:
jω L = j
L
1
1
ω '− L = jω ' +
∆
∆
ω'
1
∆
jω '
L
90
jωC = jω '
C
+
∆
1
∆
jω '
C
In conclusione un induttanza diventa un circuito risonante serie con induttanza L/∆ e capacità ∆/L;
una capacità diventa un circuito risonante parallelo con capacità C/∆ e induttanza ∆/C (Figura 7.4)
Figura 7.4. Trasformazione dei componenti per la trasformazione passa-basso
passa-banda.
Trasformazione passa-basso/elimina-banda
Per un filtro eliminabanda la trasformazione è la seguente:
ω = −∆ ω '−
1
ω '
−1
(7.18)
In questo caso l’induttanza diventa un circuito risonante parallelo con induttanza L∆ e capacità
1/ (L∆); la capacità diventa un circuito risonante serie con capacità C∆ e induttanza 1/(C∆) (Figura
7.5).
La scalatura dei nuovi componenti, relativi ad un passa-banda o elimina-banda centrato su ω’ = 1
viene effettuata nello stesso modo che per un filtro passa-basso. In particolare occorre passare da ω’
= 1 a ω’ = ω0 , ottenendo così un passa-banda (o elimina banda) centrato su ω0.
Figura 7.5. Trasformazione dei componenti per la trasformazione passa-basso
7.2
elimina-banda.
Implementazione a microonde di filtri passabasso – Identità di Kuroda
91
Figura 7.6. Prototipo di un filtro passabasso di ordine 3.
In figura 7.6 è mostrato un esempio di filtro passabasso a componenti concentrati. Tuttavia, ad alta
frequenza i componenti concentrati, quali condensatori e induttori, sono in genere molto difficili da
realizzare e, in ogni caso, quando è possibile realizzarli, questi sono in grado di coprire un intervallo
limitato di valori. Pertanto alle frequenze delle microonde le impedenze capacitive e induttive che
costituiscono il prototipo di un filtro vengono approssimate mediante componenti distribuiti,
realizzati mediante “linee di trasmissione”.
In particolare, sappiamo che uno stub di impedenza Z1 e di lunghezza fisica l, chiuso in corto
circuito, ha una impedenza di ingresso pari a
ωl
Z IN 1 = jZ 01 tan
c
(7.19)
Se lo stub è aperto l’impedenza di ingresso vale:
Z IN 2 = − jZ 2
1
ωl
tan
c
(7.19)
ωl
Quindi le reattanze utilizzabili hanno la corretta dipendenza, non da “ω” ma da Ω = tan , e la
c
relazione tra ω e Ω non è lineare. Possiamo accettare di usare ZIN1 e ZIN2 con alcune precisazioni.
1 l
Prima di tutto mettiamo in corrispondenza il segmento [0, 1] in “ω” con il segmento [0, tan ]
c
in “ Ω ” (Figura 7.7).
Figura 7.7. Corrispondenza tra ω e Ω .
1 l
Come detto, la trasformazione tra ω e Ω è non lineare. Tuttavia , se imponiamo tg = 1 ,
c
troviamo che la banda passante del filtro espressa in funzione di ω e Ω è la stessa (ovviamente
l’andamento in banda è leggermente diverso):
92
1 l
tg = 1
c
→
1 l π
=
c 4
→
l=
πc
4
=
λ
8
(7.20)
In conclusione, è possibile realizzare un filtro passabasso utilizzando il seguente schema:
Figura 7.8. Filtro passabasso realizzato tramite stub in linea di trasmissione.
Allo shema in Figura 7.8 corrisponde il seguente circuito:
Figura 7.9. Circuito equivalente del filtro passabasso di Figura 7.8.
Se la risposta del filtro in Figura 7.6 è una funzione F(ω), la risposta del filtro in Figura 7.8 e 7.9
sarà una funzione F(Ω) purchè Z1= L e Z2 = 1/C. Inoltre nei due casi la banda passante coincide
perché se ω varia tra 0 e 1 allora Ω varia tra 0 e 1 (7.20).
ωl
La trasformazione Ω = tan prende il nome di trasformazione di Richard. In Figura 7.10 è
c
mostrato il confronto tra la risposta di ampiezza di un filtro a componenti concentrati e di un filtro
in linea di trasmissione.
93
Figura 7.10. Risposta tipica di un filtro passa basso realizzato con componenti concentrati o con
linee di trasmissione.
Come si può vedere anche dalla figura 7.10, l’andamento di F(Ω) è periodico (per effetto della
realizzazione tramite linee di trasmissione) mentre F(ω) si attenua ad alta frequenza.
La scalatura (in frequenza e impedenza) di un filtro passabasso con questo tipo di implementazione
è ovvia:
•
•
Z1= L e Z2 = 1/C sono impedenze normalizzate e devono essere moltiplicate per Z0;
la lunghezza fisica degli stub è pari a λ/8 , con λ calcolato alla frequenza di taglio ωc.
Si noti che i valori normalizzati di L e C si ricavano dalle tabelle 7.1 e 7.2. In particolare, se si vuole
realizzare un filtro a massima piattezza (Tabella 7.1), per l’esempio in Figura 7.8, realizzato
secondo il prototipo in Figura 7.3(b), risulta N = 3, e quindi L = g1= g3 = 1, C = g2 = 2.
I filtri passabasso contengono solamente induttanze in serie e capacità in parallelo, che nella
implementazione in linea di trasmissione diventano rispettivamente stub in serie e stub in parallelo.
Tuttavia, nelle realizzazioni planari gli stub in serie sono difficili da realizzare e in microstriscia (o
stripline) non sono realizzabili.
E’ possibile trasformare gli stub in serie in stub in parallelo, mantenendo inalterata la risposta del
filtro, utilizzando le “identità di Kuroda”.
Consideriamo il filtro in Figura 7.8, se aggiungiamo a destra e a sinistra un tratto di linea di
impedenza “1” e di lunghezza λ/8, la risposta del filtro non cambia, e si ottiene il circuito in Figura
7.11.
94
Figura 7.11. Filtro passabasso realizzato tramite stub in linea di trasmissione.
E’ possibile trovare una equivalenza tra i due circuiti seguenti:
Figura 7.12. Circuiti equivalenti che illustrano una delle identità di Kuroda.
Per fare ciò, sarà necessario determinare i valori di ZA e ZB per i quali le matrici di trasmissione
delle due reti in Figura 7.12 sono uguali. Se le matrici di trasmissione dei blocchi (a) e (b) in figura
7.12 sono uguali è possibile sostituire il blocco (b) al blocco (a) nello schema in Figura 7.11 senza
modificare la risposta del filtro.
La matrice di trasmissione del blocco (a) in Figura 7.12 è la seguente:
1
0
jZ1Ω 1
1 jΩ
jΩ
1 − Z1Ω 2
1
1
=
1 1 + Ω2
1 + Ω 2 jΩ
ωl
con cos =
c
1
=
jΩ(1 + Z1 )
1
(7.21)
1
1 + Ω2
ωl
1 + tan 2
c
La matrice di trasmissione del blocco (b) in Figura 7.12 è la seguente:
1
1
jΩ
2
1+ Ω Z
A
jZ AΩ 1 0
1
jΩ
=
1
1
1 + Ω2
Z A
ZA 2
1− Z Ω
B
1
1
+
jΩ
Z A Z B
jZ AΩ
1
(7.22)
Le matrici 7.21 e 7.22 sono uguali se
Z A = 1 + Z1 = 1 + L
1
1
Z B = 1 + Z = 1 + L
1
(7.23)
Il circuito finale del filtro in linea di trasmissione, dopo aver applicato l’identità di Kuroda ai
blocchi a destra e a sinistra in Figura 7.11, è il seguente:
95
Figura 7.13. Filtro passabasso in linea di trasmissione con tutti gli stub in parallelo.
Dalle 7.23 risulta che ZA potrebbe essere troppo grande e quindi potrebbe richiedere linee troppo
sottili, difficili da realizzare o non realizzabili.
In generale l’identità di Kuroda si può scrivere nella forma:
con n 2 = 1 +
Z
L
Esempio: trasformazione di un filtro di ordine 5 con l’identità di Kuroda.
7.2
Implementazione a microonde di filtri passabasso – Filtri a scala
Consideriamo una linea di trasmissione corta (βl = θ << 1) e di impedenza ZH elevata (∼2, 3, 4)
chiusa su un carico ZC (Figura 7.12)
Figura 7.14. Linea corta con impedenza elevata ZH chiusa su un carico ZC.
L’impedenza di ingresso del circuito in Figura 7.14 è:
Z IN =
Z H Z C + jZ H tan ( β l )
Z H + jZ C tan ( β l )
(7.24)
96
A denominatore della (7.24) Z H >> jZ C tan ( β l ) quindi
Z IN =
Z H Z C + jZ H tan ( β l )
ωl
≈ Z C + jZ H tan ( β l ) ≈ Z C + jZ H β l = Z C + jZ H
c
Z H + jZ C tan ( β l )
(7.25)
L’ultima espressione della (7.25) è l’impedenza del seguente circuito:
Figura 7.15.
l
.
c
Se invece consideriamo una linea di trasmissione corta ma di impedenza piccola ZL << 1, chiusa su
un carico ZC (Figura 7.16), la sua ammettenza di ingresso può essere scritta nella forma:
Ossia una induttanza in serie di valore L = Z H
1
1
Z + j Z tan ( β l )
1 C
L
≈ 1 + j 1 tan β l ≈ 1 + j 1 β l = Z + j 1 ωl
YIN =
( )
C
ZL 1
ZC
ZL
ZC
ZL
ZL c
1
+ j
tan ( β l )
ZL
ZC
(7.26)
Figura 7.16. Linea corta di impedenza piccola ZL chiusa su un carico ZC.
L’ultima espressione della (7.26) è l’impedenza del seguente circuito:
Figura 7.17
97
l
.
Z Lc
Si osservi che nelle figure 7.14-7.17 il valore di ZC rappresenta quello che rimane del filtro a sinistra
del componente (L oppure C). In conclusione dal contronto tra le figure 7.14 e 7.15 e tra le figure
7.16 e 7.17, nelle approssimazioni poste (ZH >> 1, ZL << 1, e βl = θ << 1) si ottengolo le seguenti
equivalenze:
ossia una capacità in parallelo di valore C =
a) una linea corta di impedenza elevata equivale ad una induttanza serie:
b) una linea corta di impedenza piccola equivale ad una capacità parallelo:
Segue che, con una “cascata” di linee corte di impedenza elevata o piccola, è possibile realizzare un
filtro passabasso. Ovviamente la precisione del filtro aumenta al crescere del rapporto ZH/ZL e
quindi questo rapporto è scelto più grande possibile compatibilmente con i limiti tecnologici (la
larghezza minima realizzabile in microstriscia è dell’ordine di 100 micron con tecnologia a basso
costo, la larghezza massima è limitata dal fatto che una microstriscia troppo larga ha perdite elevate
per irradiazione, oltre al fatto che potrebbe non garantire la sola propagarzione quasi TEM).
l ωl
Si osservi che, alla frequenza ωc = 1, = c = θ , ossia la lunghezza elettrica della linea.
c
c
Quindi il valore dell’induttanza (normalizzata) sarà ZHθ (con ZH normalizzato e θ in radianti)
mentre il valore della capacità sarà θ/ZL. Queste ultime espressioni realizzano in modo automatico
la scalatura in frequenza del filtro.
Figura 7.16. Realizzazione planare in microstriscia di un filtro “stepped impedance” tre stadi.
Un grosso vantaggio di un filtro a scala (o “stepped impedance”) rispetto ad un filtro di Kuroda è
che ha un piccolissimo ingombo trasversale e, tutto sommato, anche longitudinale. Ad esempio, un
filtro di Kuroda di ordine 5 ha una lunghezza elettrica di circa 180°, mentre un filtro stepped
impedance di ordine 5 ha una lunghezza elettrica media intorno ai 150°.
Inoltre, mentre per un filtro di Kuroda la linea di impedenza ZA potrebbe non essere realizzabile
(impedenza troppo elevata), nel caso del filtro stepped impedance la realizzazione è garantita a
98
priori scegliendo ZL e ZH realizzabili. Ovviamente più grande è il rapporto ZH/ ZL più preciso sarà il
filtro.
D’altra parte, poiché non è possibile realizzare linee con ZH molto grande (linee troppo sottili), ne
ZL troppo piccolo (linee troppo larghe) il filtro stepped impedance è intrinsecamente impreciso.
Inoltre il filtro stepped impedance non è periodico e, superata la frequenza di taglio, si comporta
talvolta in modo imprevedibile.
7.3
Prototipi di filtri passabanda ed eliminabanda con invertitori di impedenza
7.3.1 Invertitori di impedenza
Un inverter di impedenza è una rete due porte che trasforma una impedenza in ammettenza e
viceversa. Il suo comportamento è quello mostrato in Figura 7.17
Figura 7.17. Schema di un inverter di impedenza.
Utilizzando la matrice di trasmissione si ha:
Z IN =
V1 AV2 + BI 2 AZ L + B
=
=
I1 CV2 + DI 2 CZ L + D
Imponendo Z IN
(7.27)
K2
=
si trova:
ZL
A=D=0
B/C = K2
D’altra parte se consideriamo una rete reciproca si ha AD – BC = 1, ossia –BC = 1 e, se la rete è
anche priva di perdite, segue: B = ± jK, C = ± j/K
Sono possibili due tipi di inverter di impedenza a seconda del segno scelto:
0
j
K
jK
0
(7.28)
99
0
j
−
K
− jK
0
Evidentemente un tale inverter è equivalente ad una linea lunga ±
(7.29)
π
(a tutte le frequenze) e di
2
impedenza K. Esistono anche inverter di ammettenza, caratterizzati da una ammettenza J, la cui
descrizione si ottiene semplicemente sostituendo K 1/J.
E’ sempre possibile inserire un inverter di impedenza in un circuito a patto di sostituire l’impedenza
Z a valle con K2/Z.
Inoltre è possibile inserire due inverter uguali ai due lati di una linea di lunghezza Ψ, purchè se ne
modifichi l’impedenza.
Figura 7.18. Equivalenza tra linee con inverter di impedenza.
La matrice di trasmissione del circuito a sinistra in Figura 7.18 è la seguente:
0
j
−
K
− jK cos Ψ
j sin Ψ
0
Z1
jZ1 sin Ψ 0
j
cos Ψ −
K
K
− jK cos Ψ 0
Z sin Ψ
j
= 1
Z1
1
−
−
j
cos
Ψ
sin
Ψ
K
K
K
− jK
=
0
jK 2
−
sin Ψ
− jK − cos Ψ
Z1
=
0
Z1
− j 2 sin Ψ
− cos Ψ
K
(7.30)
che è la matrice di trasmissione di una linea di lunghezza Ψ e di impedenza caratteristica K2/Z1
(Figura 7.18).
Figura 7.19.
E’ anche possibile cambiare i valori di impedenza caratteristica degli inverter, infatti per il circuito
in Figura 7.19 si ha la seguente matrice di trasmissione
100
K1
− jK1 cos Ψ 0
Z sin Ψ
j
−
1
Z
− j cos Ψ
sin Ψ K 2
K1
K1
K
jK K
− 1 2 sin Ψ
− jK 2 − 1 cos Ψ
K2
Z
=
0
Z
K2
sin Ψ
cos Ψ
−
− j
K1
K1 K 2
(7.31)
Nella (7.31) possiamo sostituire i valori K1 , K 2 , Z con K 1 , K 2 , Z purchè
K1 K 1
=
K2 K 2
K1 K 2 K 1 K 2
Z = Z
(7.32)
oppure, equivalentemente, in caso di inverter di ammettenza (J=1/K):
J2 J 2
=
J1 J 1
J1 J 2 Z = J 1 J 2 Z
(7.33)
7.3.2 Prototipi di filtri passabanda ed eliminabanda con invertitori di impedenza
Figura 7.20. (a) schema a due stadi di un prototipo passa basso; (b) schema a due stadi di un
prototipo passabanda; (c) schema a due stadi di un prototipo eliminabanda.
ω2 − ω1
è la larghezza di banda percentuale del filtro centrata su ω0 ( [ω2 − ω1 ] è
ω0
la banda passante), mentre i gk sono i coefficienti del prototipo passabasso [Figura 7.20(a), Tabelle
7.1 e 7.2].
I prototipi in Figura 7.20(b) e 7.20(c) non possono essere utilizzati per l’implementazione a
microonde. Tuttavia è possibile ottenere prototipi diversi, in cui tutti i circuiti risonanti LC (serie o
parallelo) siano in parallelo oppure in serie, utilizzando degli invertitori di ammettenza.
In Figura 7.20, ∆ =
101
− j
J
0
0
− jJ
(7.34)
Proprietà 1: Una ammettenza Y in parallelo diviene una impedenza in serie affiancata da due
inverter uguali.
1 0
Y 1
0
− jJ
−j
1 Z 0
J
0 1
0
− jJ
(7.35)
−j
J (7.36)
0
Eseguendo i prodotti tra le matrici, la matrice di trasmissione (7.36) diventa:
0
− jJ
−j
0
J
− jJZ − jJ
−j
−1
J = 2
−J Z
0
0
1
= (−1) 2
−1
J Z
0
1
(7.37)
Il termine “-1” nella (7.37) è un fattore che si può trascurare (non modifica la risposta del filtro) o,
al più, se ne può tenere conto con un trasformatore -1:1 posto in un punto qualunque.
Confrontando le matrici (7.35) e (7.37) otteniamo la relazione:
Y = J 2Z
(7.38)
che garantisce l’equivalenza tra i due circuiti mostrati nelle (7.35) e (7.36).
Se, ad esempio, consideriamo per Y un cicuito risonante LC parallelo:
1
Y = j ωC −
ω L
(7.39)
allora, utilizzando la (7.38), si ha:
1
ωC −
ω L
Z = j
(7.40)
J2
che è un circuito risonante “LC serie” con induttanza C/J2 e capacità LJ2. In altre parole, è possibile
trasformare un circuito risonante “LC parallelo” in parallelo (Figura in 7.35) in un circuito risonante
“LC serie” in serie (Figura in 7.36), affiancato da due inverter di ammettenza (J) uguali.
102
In modo duale, un circuito risonante “LC serie” in parallelo di ammettenza
1
Y = j ωL −
ωC
−1
(7.41)
diviene, tramite la 7.38, un circuito risonante “LC parallelo” in serie, di impedenza
1
j ω L − ωC
Z=
2
J
−1
(7.42)
ossia con induttanza pari a C/J2 e capacità LJ2, affiancato da due inverter di ammettenza (J) uguali.
Proprietà 2: Una impedenza in serie Z diviene una ammettenza in parallelo affiancata da due
inverter uguali.
Figura 7.21. Equivalenza tra impedenza in serie e ammettenza in parallelo.
Procedendo in modo analogo a quanto fatto per la proprietà 1, si dimostra l’equivalenza tra i due
circuiti in Figura 7.21 con
Z=
Y
J2
(7.43)
Ne consegue che, un circuito risonante “LC serie” in serie di impedenza
1
Z = j ωL −
ωC
(7.44)
diviene un circuito risonante “LC parallelo” in parallelo di ammettenza
1
Y = jJ 2 ω L −
ωC
(7.45)
ovvero con capacità LJ2 e induttanza C/J2, affiancato da due inverter di ammettenza (J) uguali.
In modo duale, un circuito risonante “LC parallelo” in serie di impedenza
−1
1
Z = j ωC −
ω L
diviene, tramite la (7.43), un circuito risonante “LC serie” in parallelo, di ammettenza
(7.46)
103
Y=
J2
1
j ωC − ω L
(7.47)
ovvero con induttanza C/J2 e capacità LJ2, affiancato da due inverter di ammettenza (J) uguali.
Riassumendo i risultati delle proprietà 1 e 2 si ha:
a) Un circuito risonante “LC parallelo” in parallelo diventa un circuito risonante serie in serie con
induttanza C/J2 e capacità LJ2, affiancato da due inverter di ammettenza (J) uguali.
b) Un circuito risonante “LC serie” in parallelo diventa un circuito risonante parallelo in serie con
capacità LJ2 e induttanza C/J2, affiancato da due inverter di ammettenza (J) uguali.
c) Un circuito risonante “LC serie” in serie diventa un circuito risonante parallelo in parallelo con
capacità LJ2 e induttanza C/J2, affiancato da due inverter di ammettenza (J) uguali.
d) Un circuito risonante “LC parallelo” in serie diventa un circuito risonante serie in parallelo di
induttanza C/J2 e capacità LJ2, affiancato da due inverter di ammettenza (J) uguali.
In tutti questi casi, la frequenza di risonanza del circuito risonante LC non cambia ed è sempre pari
.
a ω0 = 1
LC
A partire dai prototipi in Figura 7.20 (b) e 7.20 (c), è possibile realizzare, ad esempio, un prototipo
di filtro passabanda utilizzando solo circuiti risonanti parallelo in parallelo [utilizzando la (c) e
applicandola ai circuiti risonanti serie in serie in Figura 7.20 (b)], o un prototipo di filtro
eliminabanda utilizzando solo circuiti risonanti serie in parallelo [utilizzando la (d) e applicandola
ai circuiti risonanti parallelo in serie in Figura 7.20 (c)]. Come si vedrà nei paragrafi successivi,
questi ultimi due prototipi sono realizzabili alle frequenze delle microonde.
In generale dopo una trasformazione completa di un prototipo di un filtro mediante le (a)-(d), si
ottiene un altro prototipo in cui tutti gli inverter di ammettenza sono uguali e tutti i circuiti risonanti
LC sono diversi tra loro. E’ però possibile ottenere anche circuiti LC tutti uguali (e inverter diversi).
Figura 7.22. Impedenza in serie con due inverter di ammettenza.
Infatti per il circuito in Figura 7.22 si ottiene la seguente matrice di trasmissione:
J2
0
− j
−j
−j
− j
0
0
0
0
J
1 Z
J1
J2 =
J1
J 2 = (−1) 1
0 1
J1
− jJ1 0
− jJ 2 0 − jJ1 − jJ1Z − jJ 2 0
J1 J 2 Z J
2
E’ quindi possibile sostituire Z con Z modificando J1 e J2 in J 1 e J 2 tali che:
(7.48)
J2 J 2
=
J1 J 1
J1 J 2 Z = J 1 J 2 Z
(7.49)
104
Dalle (7.49) per sostituzione si ha:
2
2 Z
J 1 = ( J1 ) Z
J 2 = J 1 J2 →
J1
( )
(J )
2
2
= ( J2 )
2
Z
Z
(7.50)
Figura 7.23. Ammettenza in parallelo con due inverter di ammettenza.
Analogamente, per una ammettenza in parallelo (Figura 7.23) si ha:
J 1
J
2
( )
2
( )
2
Y
Y
2 Y
= ( J2 )
Y
= ( J1 )
2
(7.51)
Infine, come già detto, è possibile cambiare anche la resistenza di carico, tenendo presente che,
come mostrato in Figura 7.24, l’impendenza di ingresso di un unverter di ammettenza chiuso su un
carico RL è data da 1/(J2RL).
Figura 7.24.
Esempio
Consideriamo il seguente filtro passabanda:
Figura 7.25. Prototipo di un filtro passabanda a 3 stadi.
con
105
1 gk
Yk = j ω − ω ∆
Z = j ω − 1 gk
k
ω ∆
k = 1,3
(7.52)
k =2
Si vuole trasformare il prototipo in Figura 7.25 in un filtro con 4 inverter e tre ammettenze in
parallelo uguali a
1 π
Yk = j ω −
ω2
k = 1, 2, 3
(7.53)
e con un carico unitario. Si vedrà nel prossimo paragrafo che questo nuovo prototipo può essere
utilizzato per l’implementazione di un filtro passabanda a linee accoppiate. Si osservi che, nella
(7.53), π/2 è il valore della capacità normalizzata, che determina univocamente il circuito risonante
parallelo, essendo fissata la frequenza di risonanza normalizzata, che è pari ad 1.
Il primo passo consiste nel trasformare Z2 in una ammettenza in parallelo di valore
1 π
Y = j ω −
ω2
1g
A partire da Z 2 = j ω − k , la Y parallela corrispondente viene calcolata utilizzando la (7.43):
ω ∆
1g
(7.54)
Y = J 2Z = j ω − k J 2
ω ∆
g
π
A questo punto possiamo scegliere k J 2 = che fornisce il valore degli inverter:
∆
2
π ∆
J=
(7.55)
2 gk
Il prototipo del filtro si trasforma dunque in
Figura 7.26.
Con riferimento alla Figura 7.26 occorre puntualizzare che un inverter di valore unitario non cambia
la risposta del filtro se inserito immediatamente prima o dopo un carico unitario.
A questo punto occorre trasformare i valori di Y1 e Y2 in Figura 7.26 nei valori corretti, ovvero in
circuiti risonanti LC parallelo con capacità normalizzata pari a π/2, modificando opportunamente
gli inverter adiacenti. In altre parole con riferimento alla (7.52) occorre passare da gk/∆ a π/2.
Y π∆
, si ha:
Utilizzando le (7.51), poiché =
Y 2gk
106
J1
J
2
( )
2
( )
= ( J1 )
2
Y
2 π∆
= ( J1 )
Y
2 gk
2
= ( J2 )
2
→
Y
2 π∆
= ( J2 )
Y
2 gk
J 1 = J1
→
J 2 = J2
π∆
2gk
(7.56)
π∆
2 gk
dove con J1 si intende l’inverter a sinistra e con J2 l’inverter a destra del circuito risonante parallelo.
Quindi per il primo inverter (alla sinistra di Y1) nel circuito in Figura 7.26 si ha:
π∆
J 1 = J1
2 g1
=1
π∆
2 g1
π∆
=
(7.56.1)
2 g1
Per il secondo inverter (alla destra di Y1) di valore J 2 =
J 2 = J2
π∆
2 g1
=
π∆
π∆
2g2
2 g1
=
π∆
2 g1 g 2
π ∆
2 g2
si ha:
(7.56.2)
Per il terzo inverter (alla sinistra di Y3) si ha:
J 3 = J3
π∆
2 g3
=
π∆
π∆
2 g2
2 g3
=
π∆
2 g 2 g3
(7.56.3)
Per il quarto inverter (alla destra di Y3) si ha infine:
J 4 = J4
π∆
2 g3
=
1
g4
π∆
2 g3
=
π∆
2 g3 g 4
(7.56.4)
Il prototipo finale è dunque il seguente:
Figura 7.27. Prototipo finale di un filtro passabanda a tre stadi con tutti i circuiti risonanti parallelo
uguali e con capacità normalizzata pari a π/2.
7.4
Implementazione a microonde di filtri passabanda – Filtri a linee accoppiate
Una sezione di linee accoppiate di lunghezza elettrica pari a 90° a centro banda può essere usata
come cella elementare di un filtro passabanda o eliminabanda se le due porte sono opportunamente
terminate. In Figura 7.28 è riportata la cella elementare per il filtro passabanda. Zp e Zd sono le
impedenze caratteristiche del modo pari e dispari rispettivamente, e θ è la lunghezza elettrica della
sezione di linee accoppiate (assumiamo θp = θd, che rappresenta una approssimazione solo nel caso
107
q-TEM). Le porte 2 e 3 sono aperte, la porta di ingresso è la porta 1 e la porta di uscita è la porta 4.
Ovviamente I2=I3=0.
A
1
Zp, Zd
B
θ
3
2
4
Figura 7.28. Cella elementare di un filtro passabanda a line accoppiate.
Per caratterizzare la cella elementare in Figura 7.28 posso calcolare la matrice delle impedenze
relativa al circuito tra le porte A e B, ovvero 1 e 4:
V1 = Z 11 I1 + Z14 I 4
V4 = Z 41 I1 + Z 44 I 4
(7.57)
Per calcolare tale matrice, si impone I4 = 0 e si alimenta dalla porta 1 con un generatore di corrente
di ampiezza unitaria, come mostrato in Figura 7.29.
I 1 =1A
Zp, Zd
2
3
θ
4
Figura 7.29. Configurazione circuitale per il calcolo della matrice Z.
1 1
Questa eccitazione si può decomporre in una eccitazionec di modo pari ( I1 p , I 3 p ) = , e in una
2 2
1 1
eccitazione dispari ( I1d , I 3 d ) = , − , sulle porte 1 e 3.
2 2
Quindi risulta (circuito aperto in entrambi i casi):
1
V1 p = − 2 jZ p cotg (θ )
V = − 1 jZ cotg (θ )
d
1d
2
(7.58)
E, per l’equazione delle linee, si ha:
V2 p = V1 p cos(θ ) − jZ p I1 p sin(θ ) = V4 p
V2 d = V1d cos(θ ) − jZ d I1d sin(θ ) = −V4 d
(7.59)
108
sostituendo le (7.58) nelle (7.59) si ottiene:
1
1
cos 2 (θ )
1
V2 p = − 2 jZ p cotg (θ ) cos(θ ) − jZ p I1 p sin(θ ) = − 2 jZ p sin(θ ) − jZ p 2 sin(θ ) = V4 p
2
V = − 1 jZ cotg (θ ) cos(θ ) − jZ I sin(θ ) = − 1 jZ cos (θ ) − jZ 1 sin(θ ) = −V
d
d 1d
d
d
4d
2 d
2
2
sin(θ )
2
(7.60)
ovvero:
1
cos 2 (θ ) + sin 2 (θ )
1
V
=
−
jZ
= − jZ p
= V4 p
p
2p
2
sin(θ )
2sin(θ )
2
2
1
V = − 1 jZ cos (θ ) + sin (θ ) = − jZ
= −V4 d
d
d
2 d
2
sin(θ )
2 sin(θ )
(7.61)
In conclusione:
1
V1 = V1 p + V1d = − 2 j cotg (θ )( Z p + Z d ) = Z11 = Z 44
V4 = V4 p + V4 d = V2 p − V2 d = − j ( Z p − Z d ) = Z 41 = Z14
2sin(θ )
(7.62)
In forma matriciale si ha:
VA
− j cos(θ )( Z p + Z d )
=
V 2sin(θ ) ( Z − Z )
B
d
p
posto cos(θ1 ) =
(Z p − Z d )
IA
cos(θ )( Z p + Z d ) I B
(7.63)
Z p − Zd
la matrice di trasmissione (ABCD) corrispondente alla 7.63 è la seguente
Z p + Zd
[D. M. Pozar – Microwave Engineering]:
cos(θ )
cos(θ1 )
1
− j(Z p − Zd )
2sin(θ )
− j ( Z p − Z d ) cos 2 (θ )
− 1
2sin(θ ) cos 2 (θ1 )
cos(θ )
cos(θ1 )
(
Se la banda è sufficientemente stretta θ ≈ π
(7.64)
)
, la matrice (7.64) è una buona approssimazione
2
della matrice di trasmissione della rete in Figura 7.30.
109
Figura 7.30. Circuito equivalente con inverter e linee.
La matrice di trasmissione della rete in figura 7.30 è la seguente:
cos(θ )
j sin(θ )
Z 0
jZ 0 sin(θ )
0
cos(θ )
− jJ
− j cos(θ )
J j sin(θ )
0 Z 0
jZ 0 sin(θ )
=
cos(θ )
1
JZ 0 +
cos(θ ) sin(θ )
JZ
0
=
j 1 sin 2 (θ ) − J cos 2 (θ )
2
JZ 0
1
j JZ 02 sin 2 (θ ) − cos 2 (θ )
J
(7.65)
1
JZ 0 +
cos(θ ) sin(θ )
JZ 0
π π π π
Se θ ≈ π ed, in particolare, nella banda − , + (ovvero in una banda massima del 50%),
2
2 8 2 8
2
si può porre sin(θ ) ≈ 1, cos (θ ) ≈ 0 , e, la matrice 7.65 può essere scritta nella forma:
1
j JZ 02
JZ 0 +
cos(θ )
JZ 0
1
1
j 2
JZ
+
cos(
θ
)
0
JZ
JZ
0
0
(7.66)
Confrontando la matrice (7.64) con la (7.66) si trova che, nella approssimazione di “banda stretta”,
la rete in Figura 7.30 è equivalente alla cella in Figura 7.28 purchè:
1
1
= JZ 0 +
JZ 0
cos(θ1 )
1
2
=
Z p − Z d JZ 02
→
Z p + Zd
Z p − Zd
= JZ 0 +
1
JZ 0
(7.67)
Si noti che, trattandosi di reti reciproche e prive di perdite (nel caso ideale), per garantire
l’equivalenza è sufficiente eguagliare due delle componenti della matrice.
Le (7.67) possono essere riscritte nella forma:
Z p − Z d = 2 JZ 02
1
1
2
2 3
( Z p − Z d ) = JZ 0 +
2 JZ 0 = 2 J Z 0 + 2Z 0
Z p + Z d = JZ 0 +
JZ 0
JZ 0
(7.68)
110
da cui segue:
Z = Z 1 + ( JZ ) + ( JZ ) 2
0
0
0
p
2
Z d = Z 0 1 − ( JZ 0 ) + ( JZ 0 )
(7.69)
che è la condizione richiesta per l’equivalenza tra il circuito con inverter e linee in Figura 7.30 e la
sezione di linee accoppiate.
Da quanto detto possiamo concludere che, una sequenza di N sezioni di linee accoppiate (si veda
Figura 7.31) è equivalente a N inverter e N-1 linee lunghe 2θ, tra loro alternate, con due linee
lunghe θ alle estremità (Figura 7.32).
Figura 7.31. Schema planare di un filtro a linee accoppiate con N = 4 sezioni di linee accoppiate in
cascata.
Figura 7.32. Circuito equivalente relativo allo schema planare mostrato in Figura 7.31.
Per studiare il circuito equivalente in Figura 7.32 consideriamo la matrice di trasmissione di una
linea lunga 2θ :
cos(2θ )
j sin(2θ )
Z 0
Se θ ≈ π
2
jZ 0 sin(2θ )
cos(2θ )
(7.70)
si ha:
cos(2θ ) ≈ −1
2l
∆ω ω0 2l
∆ω
sin(2θ ) = sin(π + ∆θ ) = − sin(∆θ ) ≈ −∆θ = −∆ω c = − ω c = − ω π
0
0
ω 2l
essendo a centro banda 0 = π con “l” lunghezza fisica di una sezione di linee accoppiate.
c
Sostituendo nella (7.70) si ottiene:
111
1
(−1)
∆ω
jZ ω π
0 0
jZ 0
∆ω
π
ω0
1
(7.71)
cui corrisponde la seguente matrice Z :
Z0
∆ω
jπ
ω0
Z =
Z0
∆ω
jπ
ω0
dato che
Y= j
∆ω
ω0
Z0
π ∆ω
+ j
∆ω
ω0
jπ
ω0
≈ Z0
∆ω
jπ ω
Z0
0
∆ω
jπ
ω0
<<
1 1
1 1
(7.72)
1
. La (7.72) è la matrice Z di una ammettenza in parallelo
∆ω
ω0
π
π
∆ω = j 2
∆ω
ω0 Z 0
2ω0 Z 0
(7.73)
che, nella approssimazione di banda stretta, è l’ammettenza di un circuito risonante parallelo con
π
π
(*), ovvero, in termini normalizzati (ω0 = 1, Z0 = 1 ), C = .
2ω0 Z 0
2
Le linee lunghe 2θ nel circuito in Figura 7.32 possono essere approssimate con circuiti risonanti
parallelo con capacità pari a π , e quindi il circuito in Figura 7.32 è il prototipo del filtro
capacità C =
2
passabanda mostrato in Figura 7.27, con tutti i circuiti risonanti parallelo uguali e con capacità pari
a π
. Questo significa che un filtro passabanda può essere realizzato con una sequenza di linee
2
accoppiate (del tipo in Figura 7.28), collegate in cascata come mostrato in Figura 7.31.
In particolare, sempre con riferimento al prototipo in Figura 7.27, per un filtro di ordine N si
avranno N circuiti risonanti parallelo ed N+1 inverter. Quindi saranno necessarie N+1 sezioni di
linee accoppiate (si vedano le Figure 7.30, 7.31, 7.32).
Il calcolo delle impedenze pari e dispari richieste per ciascuna sezione di linee accoppiate viene
effettuato tramite le (7.69).
(*) Per un circuito risonante parallelo LC si ha:
ω2
(ω − ωr )(ω + ωr ) , se
j
Y = jωC −
= jωC 1 − r2 = jωC
ω ≈ ωr =
ωL
ω2
ω
Y = jωC
(ω − ωr )(ω + ωr ) ≈ jω C (ω − ωr ) ( 2 ωr ) = j ω 2C (ω − ωr ) =
r
r
2
2
ω
ωr
ωr
1
LC
j 2C (ω − ωr )
112
Poiché nel prototipo del filtro si ha J ≈
π∆
essendo g un valore medio dei coefficienti del filtro e
2g
J un valore medio dei risultati inverter, allora dalle (7.68) per Z0 = 1 si ha:
Z p − Zd
2
Z p + Zd
=J≈
π∆
2g
= J 2 +1 = 1+
π∆
2
2g
Ossia valori elevati di ∆ richiedono linee molto sottili (impedenze elevate) e molto vicine (Zp e Zd
molto diversi con accoppiamento elevato), e quindi difficilmente realizzabili.
7.5
Implementazione a microonde di filtri passabanda ed eliminabanda – Filtri a stub
I circuiti risonanti serie e parallelo possono essere realizzati anche tramite stub lunghi circa λ/4. I
circuiti equivalenti di tali stub sono infatti celle LC serie (stub aperti) o parallelo (stub in corto
circuito). Utilizzando linee λ/4 per realizzare gli inverter è possibile ottenere filtri passabanda ed
eliminabanda. I prototipi che saranno utilizzati per questo tipo di implementazione hanno tutti gli
inverter uguali, secondo lo schema mostrato in Figura 7.33 (a) e (b), rispettivamente per il prototipo
del filtro eliminabanda e passabanda.
I valori di capacità e induttanza normalizzati nel prototipo passabanda in Figura 7.33 (a) sono
ottenuti utilizzando le (7.43), (7.44) e (7.45) con J = 1, per trasformare i circuiti risonanti LC serie
in serie, presenti nel prototipo di partenza [si veda Figura 7.20 (b) e Figura 7.25], in circuiti
risonanti LC parallelo in parallelo. Il prototipo risultante ha tutte le capacità dei circuiti risonanti
parallelo in parallelo pari a gk/∆ [Figura 7.33 (a)] e, di conseguenza, le induttanze pari a ∆/gk.
I valori di capacità e induttanza normalizzati nel prototipo eliminabanda in Figura 7.33 (b) sono
ottenuti utilizzando le (7.43), (7.46) e (7.47) con J = 1, per trasformare i circuiti risonanti LC
parallelo in serie, presenti nel prototipo di partenza [si veda Figura 7.20 (c)], in circuiti risonanti LC
serie in parallelo. Il prototipo risultante ha tutte le induttanze dei circuiti risonanti serie in parallelo
pari a 1/(gk∆) [Figura 7.33 (b)] e, di conseguenza, le capacità pari a gk∆.
Figura 7.33. Prototipi di un filtro passabanda (a) e eliminabanda (b) a tre stadi con tutti gli inverter
uguali.
113
Consideriamo dunque uno stub aperto di lunghezza elettrica θ (prossima a π
2
) e di impedenza
caratteristica Z0n. L’impedenza di ingresso dello stub è:
π
Z IN = − jZ 0 n cot θ = − jZ 0 n cot + ∆θ = jZ 0 n tan ( ∆θ ) ≈ jZ 0 n ∆θ
2
con ∆θ = ( β − β 0 ) l e β 0l =
π
(ossia l =
2
λ
4
(7.74)
a frequenza centrale).
Segue pertanto:
Z IN ≈ jZ 0 n ∆θ = jZ 0 n (ω − ω0 )
l
c
(7.75)
D’altra parte, per un circuito risonante LC serie, definita la frequenza di risonanza ω0 =
1
,
Ln Cn
si ha:
Z IN = jω Ln +
L ω ω
L (ω − ω0 )(ω + ω0 )
1
= j n − 0= j n
ω0ω
jωCn
Cn ω 0 ω
Cn
e, nell’ipotesi che ω ≈ ω0 , ricordando che ω0 =
Z IN ≈ 2 j
(7.76)
1
:
Ln Cn
Ln (ω − ω0 )
= 2 jLn (ω − ω0 )
Cn
ω0
(7.77)
Confrontando la (7.75) con la (7.77) si ottiene:
Ln = Z 0 n
Z
l
= 0n
2c 2ω0
ω0 l Z 0 n
c = 2ω
0
π Z0n π
2 = ω 4
0
(7.78)
da cui
Cn =
1
4
=
ω Ln πω0 Z 0 n
(7.79)
2
0
Z0n π
. Il
ω0 4
che consente di realizzare il prototipo di un filtro eliminabanda con tutti i circuiti risonanti “LC
serie” in parallelo (come quello in Figura 7.33 (b) per un filtro 3 stadi). Tuttavia, i valori di Ln
[Henry] nella (7.78) non sono normalizzati mentre i valori riportati nelle tabelle lo sono. Per
mantenere inalterata la risposta del filtro, l’impedenza normalizzata a frequenza ω0 deve essere
uguale all’impedenza normalizzata a frequenza 1, ossia:
Quindi con uno stub aperto posso ottenere un circuito risonante serie con induttanza Ln =
ω0 Ln
Z0
=
1
gn ∆
→ Ln =
Z0
ω0 g n ∆
(7.80)
Dalla (7.80) utilizzando la (7.78) è infine possibile ricavare le impedenze caratteristiche Z0n degli
stub:
114
Ln =
Z0n π
ω0 4
→ Z0 n =
4ω0 Ln
π
=
4Z0
π gn ∆
(7.81)
In conclusione, per implementare il prototipo di un filtro elimabanda, è possibile realizzare gli
inverter con delle linee di lunghezza elettrica 90° e impedenza caratteristica Z0, e i circuti risonanti
“LC serie” in parallelo con degli stub aperti, di lunghezza elettrica 90° e impedenza caratteristica
Z0n (Figura 7.34).
Figura 7.34. Circuito equivalente in linea di trasmissione del filtro eliminabanda in Figura 7.33 (b).
Ovviamente per questo tipo di implementazione i valori di Z0n non possono essere troppo grandi (ne
risulterebbero linee troppo sottili) per tanto sono realizzabili solo filtri eliminabanda con ∆
relativamente grande [e passabanda con ∆ piccolo (7.82)].
Per realizzare un filtro passabanda è possibile usare degli stub λ/4 chiusi in corto circuito o,
equivalentemente, degli stub aperti di lunghezza λ/2. Quest’ultima soluzione è da preferire, benchè
comporti un ingombro trasversale maggiore, perché evita di realizzare “via hole” nel substrato
dielettrico.
Per un passabanda con stub λ/4 chiusi in corto circuito si trova il seguente valore per l’impedenza
degli stub (Figura 7.35):
Z0 n =
π Z0∆
4 gn
(7.82)
Figura 7.35. Circuito equivalente in linea di trasmissione del filtro passabanda in Figura 7.33 (a).
Come detto, è possibile realizzare un filtro passabanda a stub anche utilizzando stub λ/2 aperti.
L’ammettenza di ingresso di uno stub λ/2 aperto è la seguente:
YIN = jY0 n tan ( β l )
(7.83)
Piochè stiamo considerando uno stub λ/2, a frequenza centrale si ha β 0l = π , e possiamo scrivere:
115
β l = β 0l + ( β − β 0 ) l = π + ( β − β 0 ) l
ovvero
YIN = jY0 n tan π + ( β − β 0 ) l = jY0 n tan ( β − β 0 ) l
ω − ω0 ω0 l
ω − ω0
π
≈ jY0 n ( β − β 0 ) l = jY0 n
= jY0 n
( ω − ω0 )
π = jY0 n
ω0
ω0 c
ω0
(7.84)
D’altra parte abbiamo visto (nota (*) a pagina 107) che, per un circuito risonante LC parallelo, in
prossimità della frequenza di centrale ω0 , si ha:
Y = j 2C (ω − ω0 )
(7.85)
Quindi confrontando la (7.85) con la (7.84) risulta:
2Cn = Y0 n
π
ω0
→ Cn =
π Y0 n
2ω0
(7.86)
La (7.86) fornisce una capacità in Farad, mentre i valori tabulati sono normalizzati e a frequenza 1.
Anche in questo caso è necessario imporre che l’impedenza nel caso normalizzato e nel caso non
normalizzato sia la stessa:
ω0Cn
Y0
7.6
=
gn
∆
π Y0 n
2ω0 = g n
Y0
∆
ω0
→
→
Y0 n =
2Y0 g n
π∆
→
Z0n =
π Z0∆
2gn
(7.87)
Implementazione a microonde di filtri passabanda – Filtri a risuonatori accoppiati
Un'altra implementazione di filtri passabanda è quella che si ottiene tramite risuonatori accoppiati.
In tecnologia planare tale implementazione è molto vantaggiosa in quanto l’accoppiamento può
essere facilmente ottenuto tramite gap sulla linea.
Figura 7.36: Implementazione di filtri a risuonatori accoppiati con realizzazione planare in
microstriscia (a); e circuito equivalente in linea di trasmissione (b).
116
In Figura 7.36 (b) è mostrato il circuito equivalente in linea di trasmisisone della struttura planare
in Figura 7.36 (a). Le linee di lunghezza elettrica θi sono “prossime” a λ/2 alla frequenza centrale
(quindi risuonano, in prossimità di tale frequenza, come circuiti risonanti parallelo con capacità
normalizzata pari a π/2) mentre i gap sono equivalenti a condensatori di ammettenza jB (che si
assume priva di perdite alle frequenze di interesse).
Il valore di B dipende ovviamente dai parametri del substrato (in caso di realizzazione planare in
microstriscia) e dalle dimensioni del gap. Le relazioni che collegano B ai parametri geometrici del
gap sono disponibili in [Microstrip Lines and Slotlines, Atech House, Boston].
Per ottenere il prototipo di un filtro passabanda è necessario che i vari gap possano fornire gli
inverter da inserire tra le linee (si vedano Figure 7.27 e 7.31).
Figura 7.37.
Consideriamo il circuito in Figura 7.37 che può essere facilmente “estratto” dallo schema in Figura
7.36 (b). Dimostreremo che questo circuito è equivalente ad un inverted di ammettenza. La sua
matrice di trasmissione è la seguente:
φ
cos
A B
2
C D =
j
φ
sin
2
Z0
φ
jZ 0 sin
2 1
φ 0
cos
2
sin φ
cos φ + 2 BZ
0
=
sin φ 1 − cos φ
+
j
2 Z 02 B
Z 0
1 + cos φ
j Z 0 sin φ −
2B
sin φ
cos φ +
2 BZ 0
( jB )
−1
1
φ
cos
2
j sin φ
2
Z0
φ
jZ 0 sin
2
=
φ
cos
2
(7.88)
La matrice di un inverter è
A B 0
=
C D − jJ
− j
J
0
(7.89)
L’equivalenza tra il circuito in Figura 7.37 e l’inverter di ammettenza richiede che le rispettive
matrici di trasmissione (7.88 e 7.89) siano uguali (è sufficiente eguagliare i coefficienti A e C
perché la rete è reciproca, priva di perdite e speculare):
117
sin φ
φ
A
cos
=
+
= 0 → tanφ = −2 BZ 0
2
BZ
0
C = − jJ = j sin φ + 1 − cos φ
2 Z 02 B
Z0
(7.89)
Sostituendo la prima delle (7.89) nella seconda
φ
2sin 2
1 − cos φ sin 2 φ − (1 − cos φ ) cos φ 1 − cos φ
2 = tan φ
− Z 0 J = sin φ −
=
=
=
φ
φ
tan φ
sin φ
sin φ
2
2sin cos
2
2
ovvero:
tanφ = −2 BZ 0
φ
tan 2 = − Z 0 J
Ricordando che tanφ =
(7.91)
2tan
φ
2 , usando le (7.91) segue
1 − tan 2
Z0 J
2
BZ 0 =
1 − ( Z0 J )
φ = −2 arctan Z J
( 0 )
(7.90)
φ
2
(7.92)
Se valgono le (7.92) il circuito in Figura 7.37 rappresenta un inverter. Si osservi che il valore di φ
è negativo. Ciò non è un problema se l’inverter è collegato ad una linea: sarà sufficiente ridurre di φ
/2 la linea stessa.
In conclusione, il circuito in Figura 7.36 equivale al seguente prototipo:
Figura 7.38.
che coincide con il prototipo utilizzato per il filtro passabanda a linee accoppiate (Figura 7.32).
In Figura 7.38, la lunghezza elettrica Φi è la stessa per tutti i tratti e vale π alla frequenza centrale.
Quindi, alla frequenza centrale, le lunghezze elettriche delle linee nello schema di partenza (Figura
7.36) sono:
118
θi = π +
φi
2
+
φi +1
2
(7.93)
dove tutti i valori di φi sono negativi.
I valori degli inverter Ji del prototipo in Figura 7.38 vengono calcolati come nelle 7.56 e quindi
sono espressi in fuzione di gn e ∆. Noti i valori di Ji si ottengono Bi e φi. Infine le dimensioni
geometriche dei gap si ottengono a partire dal valore della capacità Ci = Bi/ω0 [Microstrip Lines
and Slotlines, Atech House, Boston].
119
8. GUIDE D’ONDA
Le guide d’onda sono strutture metalliche chiuse, solitamente riempite con un dielettrico omogeneo,
con sezione trasversa costante, che vengono utilizzate per trasportare il segnale alle frequenze delle
microonde e oltre. Le guide d’onda, e in particolare le guide d’onda rettangolari e circolari (Figura
8.1), vengono utilizzate per svariate applicazioni: accoppiatori, divisori, isolatori, attenutatori e altri
componenti vengono comunemente realizzati in guida d’onda nel range di frequenze tra 1 GHz e
100 GHz.
(a)
(b)
Figura 8.1. Guida d’onda rettangolare (a) e circolare (b).
Grazie ai recenti sviluppi verso la miniaturizzazione e l’integrazione, molti dispositivi e circuiti a
microonde vengono realizzati in tecnologia planare (microstrip o stripline), che consente anche un
basso costo di produzione, piuttosto che in guida d’onda. Tuttavia, ancora oggi esistono diverse
applicazioni che richiedono l’uso di guide d’onda, che vengono impiegate, ad esempio, in sistemi
ad alta potenza, in sistemi ad onde millimetriche, e in applicazioni che richiedono elevate
prestazioni e basse perdite.
Come abbiamo visto nel paragrafo 1.1, una guida d’onda metallica non supporta la propagazione di
campi TEM poiché formata da un solo conduttore (ossia da un solo contorno connesso). I “modi”
che si propagano in una guida d’onda sono di tipo TE rispetto alla direzione di propagazione z
(trasverso elettrico con Ez = 0) e TM (trasverso magnetico con Hz = 0).
Per studiare le caratteristiche della propagazione in una guida d’onda occorre risolvere le equazioni
di Maxwell in assenza di sorgenti, con opporture condizioni al contorno. Per semplificare la
soluzione possiamo scrivere i campi in funzione dei due potenziali, Φ e Ψ, che prendono il nome di
potenziali di Hertz-Debye, e che descrivono, rispettivamente (e separatamente), tutti i campi di tipo
TE e quelli di tipo TM.
Si dimostra che i campi TE possono essere determinati risolvendo la seguente equazione (equazione
di Helmoltz) per il potenziale Φ :
∇ 2Φ + k 2Φ = 0
(8.1)
con
120
E t = −∇t × ( Φi z )
∂Φ
∇t
jωµ ∂z
1
Hz = −
∇t2 Φ
jωµ
Ht =
1
(8.2)
Dove k è in numero d’onda del mezzo che riempie il dominio di interesse, il pedice t indica la
coordinata trasversa, e si assume come direzione di propagazione l’asse z.
I campi TM possono essere determinati risolvendo la seguente equazione (equazione di Helmoltz)
per il potenziale Ψ :
∇2Ψ + k 2Ψ = 0
(8.3)
con
H t = ∇t × ( Ψi z )
∂Ψ
∇t
jωε ∂z
1
Ez = −
∇t2 Ψ
jωε
Et =
1
(8.4)
Ovviamente, alle 8.1 e 8.3 occorre aggiungere le condizioni al contorno.
Si può dimostrare la seguente proprietà 8.1:
Ogni campo elettromagnetico in assenza di sorgenti può sempre essere espresso come somma di un
campo TE e di un campo TM.
8.1
Propagazione nelle guide d’onda metalliche
Consideriamo una guida d’onda riempita con un dielettrico omogeneo. In questo caso i campi TE e
TM soddisfano separatamente le condizioni al contorno ovvero possono esistere nella struttura gli
uni indipendentemente dagli altri.
Cosi come abbiamo fatto nel caso della propagazione di campi TEM, anche per la propagazione di
campi TE e TM cerchiamo delle soluzioni fattorizzate delle equazioni di Maxwell.
Limitandoci ai campi trasversi Et e Ht, supponiamo dunque che esistano soluzioni del tipo:
E t = V ( z )e(t )
H t = I ( z )h(t )
(8.5)
Consideriamo inizialmente il caso TE. Dalle (8.2) risulta che, se il campo è fattorizzato, deve
esserlo anche il potenziale Φ. Possiamo quindi scrivere il potenziale nella forma:
Φ (t, z ) =
1
V ( z )Φ 0 (t )
kt
(8.6)
con kt costante da determinare.
Sostituendo le (8.5) e (8.6) nelle (8.2) si ottiene:
121
1
(
)
(
)
V
z
e
t
=
−
V ( z )∇t Φ 0 × i z
kt
jωµ I ( z )h(t ) = 1 ∂V ( z ) ∇ Φ
t
0
kt ∂z
(8.7)
Dalla prima delle (8.7) si ottiene:
e(t ) = −
1
∇t Φ 0 × i z
kt
(8.8)
ovvero:
i z × e(t ) = −i z ×
1
1
∇t Φ 0 × i z = − ∇t Φ 0
kt
kt
(8.9)
e, sostituendo la (8.9) nella seconda delle (8.7),
jωµ I ( z )h(t ) =
∂V ( z ) 1
∂V ( z )
[i z × e(t )]
∇t Φ 0 = −
∂z kt
∂z
(8.10)
La (8.10) ha soluzione solo se i vettori h e [i z × e(t )] sono proporzionali:
h = α [i z × e(t ) ]
(8.11)
se scegliamo α = 1 allora, dalla 8.10, si ottiene:
−
dV ( z )
= jωµ I ( z )
dz
(8.12)
Sostituendo le (8.5) e (8.6) nella (8.1):
∇ 2 [V ( z )Φ 0 (t ) ] + k 2V ( z )Φ 0 (t ) = 0
∂ 2V ( z )
V ( z )∇ Φ 0 (t ) +
Φ 0 (t ) + k 2V ( z )Φ 0 (t ) = 0
2
∂z
2
t
(8.13)
dividendo tutti i termini della (8.13) per “ V ( z )Φ 0 (t ) ” :
∇t2Φ 0 (t ) 1 ∂ 2V ( z )
+
+ k2 = 0
Φ0
V ∂z 2
∀ (t, z )
(8.14)
Il primo termine della (8.14) dipende solo dalla coordinate trasversa t, il secondo termine dipende
solo da z. Il terzo termine è costante.
La funzione di t e la funzione di z , ∀ ( t , z ) , sono tra loro indipendenti e, l’unico modo di sommarle
e ottenere una costante, è che esse stesse siano costanti. Poniamo dunque:
1 ∂ 2V ( z )
= −k z2
2
V ∂z
(8.15)
122
e, di conseguenza,
∇t2Φ 0 (t )
= k z2 − k 2
Φ0
(8.16)
con kz costante da determinare.
Sostituendo la (8.12) nella (8.15) risulta:
V ( z) = −
1 d 2V ( z )
1 d
jωµ dI ( z )
= − 2 [ − jωµ I ( z )] = 2
2
2
k z dz
k z dz
kz
dz
ovvero
−
dI ( z ) jk z2
=
V ( z)
dz
ωµ
(8.17)
La (8.12) e la (8.17) sono le equazioni delle linee di trasmissione, che possiamo riscrivere nella
forma:
dV ( z )
− dz = jωµ I ( z )
2
− dI ( z ) = jω k z V ( z )
2
dz
ω µ
(8.18)
con
L = µ
k z2
C
=
ω 2µ
(8.19)
La costante di propagazione è
ω LC = ω
µ k z2
ω2 µ
= kz
(8.20)
La costante kz, introdotta per separare l’equazione differenziale, è la costante di propagazione lungo
z. Quindi, se esistono campi TE fattorizzati, questi si propagano lungo z con una costante di
propagazione kz e soddisfano le equazioni delle linee per V(z) e I(z).
L’impedenza caratteristica è data dalla seguente espressione:
Z=
L ωµ
=
C
kz
(8.21)
Si osservi che, sulla scelta della impedenza caratteristica Z influisce la scelta della costante
arbitraria α, che abbiamo posto pari ad 1 senza imporre alcuna condizione, come invece è stato fatto
nel caso TEM (si veda 1.27). In altre parole, l’impedenza caratteristica è definita a meno di una
costante arbitraria. Di conseguenza, contrariamente a quanto visto per il caso TEM, Z non è
123
fisicamente una impedenza, e V(z) e I(z) non sono tensione e corrente sulla linea, ma prendono il
nome di “funzioni scalari di modo”.
A questo punto rimane da risolvere la (8.16) per determinare Φ0 :
∇t2Φ 0 (t )
+ k 2 = k z2
Φ0
∇ Φ0 + k Φ0 = k Φ0
2
t
2
2
z
(8.22)
→ ∇ Φ0 + ( k − k
2
t
2
2
z
)Φ
0
=0
Nella (8.6) abbiamo introdotto la costante kt, senza specificarne il significato. Scegliamo ora
kt2 = k 2 − k z2 .
La (8.22) diventa:
∇t2Φ 0 + kt2Φ 0 = 0
(8.23)
In conclusione, esistono campi TE fattorizzati se la (8.23) ha soluzione. La (8.23) prende il nome di
equazione agli autovalori e ha due incognite: Φ0 e kt. Una volta determinate queste due incognite si
conosce la forma del campo TE (da Φ0) e la sua costante di propagazione (da kt). Per risolvere la
(8.23) occorre includere le condizioni al contorno sulla parete di conduttore elettrico perfetto (caso
ideale in assenza di perdite) della guida d’onda.
Consideriamo dunque una guida d’onda ideale (Figura 8.2)
Figura 8.2.
La condizione al contorno per i campi TE è che il campo elettrico trasverso tangente al contorno
CEP sia nullo:
E t ⋅ i c = 0 → e ⋅ i c = 0 → ∇t Φ 0 × i z ⋅ i c = 0 → ∇t Φ 0 ⋅ i z × i c = 0 → ∇t Φ 0 ⋅ i n = 0 (8.24)
La (8.24) equivale a:
∂Φ 0
∂n
=0
(8.25)
C
In conclusione per i campi TE si ha:
∇t2 Φ 0 + kt2 Φ 0 = 0
∂Φ 0
∂n = 0
C
(8.26)
124
1
E t = V ( z )e(t ) = − k V ( z )∇t Φ 0 × i z
t
H t = I ( z )h(t ) = I ( z ) [i z × e(t ) ]
H z = − 1 V ( z ) ∇t2 Φ 0 = kt V ( z )Φ 0 (t )
jωµ kt
jωµ
(8.27)
In modo analogo cerchiamo campi TM fattorizzati, quindi, nel caso di campi TM si pone:
Et = V ( z )e(t )
H t = I ( z )h(t )
Ψ (t, z ) =
(8.28)
1
I ( z )Ψ 0 (t )
kt
e si ottiene:
1
e = − k ∇t Ψ 0 (t )
t
h = i × e = 1 ∇ Ψ (t ) × i
z
z
t
0
kt
(8.29)
Mentre, dalla (8.4), si ottiene:
Ez = −
1
jωε
1 I ( z) 2
1
kt I ( z ) Ψ 0
∇t Ψ 0 = −
jωε kt
jωε
∇t2 Ψ = −
(8.30)
In questo caso le equazioni delle linee sono:
dI ( z )
− dz = jωε V ( z )
2
− dV ( z ) = jω k z
2
dz
ω ε
I ( z)
(8.31)
con
C = ε
k z2
L
=
ω 2ε
(8.32)
Dale (8.31) si ottiene:
ω LC = k z
L kz
=
Z =
C ωε
(8.33)
Per determinare il potenziale Ψ0 occorre risolvere la seguente equazione agli autovalori:
∇t2 Ψ 0 + kt2 Ψ 0 = 0
(8.34)
125
Le condizioni al contorno per i campi TM sono due (oltre ad Et, in questo caso esiste anche Ez). Si
ha pertanto:
e ⋅ i c = 0 → ∇t Ψ 0 ⋅ i c = 0 →
∂Ψ 0
∂C
=0
(8.35)
C
e, dalla (8.30),
Ez
C
= 0 → kt Ψ 0 C = 0
(8.36)
Le condizioni al contorno 8.35 e 8.36 devono essere soddisfatte contemporaneamente:
∂Ψ 0
∂C = 0
C
k Ψ = 0
t 0C
(8.37)
Se kt ≠ 0, le due condizioni 8.37 forniscono
Ψ0 C = 0
(8.38)
Se invece kt = 0 deve valere la prima delle (8.37), ma in questo caso, dalla 8.34, risulta ∇ 2 Ψ 0 = 0 .
Riotteniamo dunque le equazioni per i modi TEM come caso particolare delle equazioni per i campi
TM quando il valore di kt è nullo.
Comunque, poiché sappiamo che in una guida d’onda non sono possibili modi TEM, per
determinare il potenziale Ψ 0 , che fornisce i modi TM in guida d’onda, si deve risolvere il seguente
problema agli autovalori:
2
2
∇t Ψ 0 + kt Ψ 0 = 0
Ψ 0 C = 0
(8.39)
8.1.1 Proprietà dell’espansione modale
Le equazioni (8.26) e (8.39), riportate anche di seguito:
∇t2 Φ 0 + kt2 Φ 0 = 0
∂Φ 0
∂n = 0
C
∇t2 Ψ 0 + kt2 Ψ 0 = 0
,
Ψ 0 C = 0
prendono il nome di equazioni agli autovalori, le cui soluzioni sono coppie (autovalore,
autofunzione). kt è l’autovalore, detto anche autovalore trasverso, e rappresenta fisicamente la
variazione trasversa del campo in guida. Le autofunzioni sono le soluzioni Φ 0 (per i modi TE) e
Ψ 0 per i modi TM.
Si dimostrano le seguenti proprietà per le equazioni agli autovalori nelle guide metalliche
(escludendo dunque i campi TEM):
126
1) Ogni autofunzione dà luogo ad un modo, ossia ad un campo che può esistere da solo nella
struttura guidante.
2) Gli autovalori kt2 sono reali positivi (escludendo i modi TEM).
Dimostriamo questa proprietà nel caso dei modi TE. Dalla (8.26) si ha:
∇t2Φ 0 = −kt2Φ 0
(8.40)
Moltiplicando primo e secondo membro della (8.40) per Φ*0 si ha:
Φ*0∇t2Φ 0 = −kt2 Φ 0
2
(8.41)
Φ*0∇t ⋅∇t Φ 0 = −kt2 Φ 0
2
(8.42)
Tenendo presente che:
∇t ⋅ ( Φ*0∇t Φ 0 ) = Φ*0∇t ⋅∇t Φ 0 + ∇t Φ*0 ⋅∇t Φ 0
(8.43)
ovvero
Φ*0∇t ⋅ ∇t Φ 0 = ∇t ⋅ ( Φ*0∇t Φ 0 ) − ∇t Φ*0 ⋅∇t Φ 0 = ∇t ⋅ ( Φ*0∇t Φ 0 ) − ∇t Φ 0
2
(8.44)
Confrontando la (8.42) con la (8.44) si ottiene:
− kt2 Φ 0 = ∇t ⋅ ( Φ*0∇t Φ 0 ) − ∇t Φ 0
2
2
(8.45)
Integrando primo e secondo membro della (8.45) sulla sezione trasversa della guida St, e applicando
il teorema della divergenza al primo termine del secondo membro:
∫ ( Φ ∇ Φ ) ⋅ i dl − ∫ ∇ Φ
− kt2 ∫ Φ 0 dS =
2
*
0
C ( ∂St )
St
− kt2 ∫ Φ 0 dS =
∫
2
C ( ∂St )
St
t
0
n
t
2
0
dS
(8.46)
St
Φ*0
∂Φ 0
2
dl − ∫ ∇t Φ 0 dS
∂n
St
(8.47)
Il primo termine a secondo membro della (8.47) è nullo per la condizione al contorno nella (8.26).
Per i modi TM si ottiene la stessa espressione (8.47) ma con Ψ0 al posto di Φ0 e il primo termine a
secondo membro è ancora nullo perché la condizione al contorno fornisce Ψ0|C = 0.
In conclusione, dalla (8.47), si ottiene:
∫∇Φ
t
kt2 =
2
0
dS
St
∫
2
Φ 0 dS
(8.48)
St
In (8.48) kt2 è il rapporto di due funzionali quadratici ed è quindi positivo (con l’esclusione dei
modi TEM).
127
Si può dimostrare che la (8.48) è una espressione variazionale per i modi TE, e, sotto opportune
condizioni, l’espressione analoga con con Ψ0 al posto di Φ0 è una espressione variazionale per i
modi TM.
3) Ad ogni autovalore corrisponde un autospazio di autofunzioni linermente indipendenti di
dimensione finita, in cui è sempre possibile scegliere una base ortonormale. La dimensione di
questo autospazio prende il nome di molteplicità dell’autovalore.
4) Definito il prodotto scalare tra due autofunzioni, fn e fm, come ( f n , f m ) = ∫ f n f m dS , risulta che
St
autofunzioni corrispondenti ad autovalori diversi sono ortogonali.
5) Modi TE e TM sono mutuamente ortogonali.
6) Le autofunzioni corrispondenti ai modi TE o TM costituiscono separamente un insieme
completo sulla sezione trasversa. Il che significa che qualunque campo TE in guida d’onda può
essere espresso come somma di modi TE, e qualunque campo TM può essere espresso come
somma di modi TM. Inoltre, per la proprieta 8.1, un generico campo in guida d’onda può essere
espresso come somma di un campo TE e di un campo TM.
8.2
Guida d’onda rettangolare
Figura 8.3. Sezione trasversa di una guida d’onda rettangolare.
In figura 8.3 è mostrata la sezione trasversa di una guida d’onda rettangolare di dimensioni a × b
con a > b.
8.2.1 Modi TE
Per determinarre i modi TE di questa guida dobbiamo risolvere la seguente equazione:
∇t2 Φ 0 + kt2 Φ 0 = 0
∂Φ 0
∂n = 0
C
(8.49)
L’equazione differenziale (8.49) alle derivate parziali può essere risolta con il metodo di
separazione delle variabili scegliendo cioè per Φ0 una soluzione nella forma:
Φ 0 ( x, y ) = X ( x)Y ( y )
(8.50)
Sostituendo la (8.50) nella (8.49) si ha:
∂ 2 Φ 0 ( x , y ) ∂ 2 Φ 0 ( x, y )
+
+ kt2 Φ 0 ( x, y ) = 0
2
2
∂x
∂y
128
Y ( y)
d 2 X ( x)
d 2Y ( y )
+
X
(
x
)
+ kt2 X ( x)Y ( y ) = 0
2
2
dx
dy
(8.51)
Dividendo la (8.51) per X(x)Y(y) si ottiene:
X ''( x ) Y ''( y )
+
+ kt2 = 0
X
Y
qualunque (x, y) con x e y variabili indipendenti
(8.52)
Il primo termine della (8.52) dipende solo dalla variabile x, il secondo termine dipende solo dalla
variabile y, mentre kt è costante. L’unica soluzione possibile, visto che i primi due termini sono
indipendenti tra di loro, è che ciascuno dei due sia uguale ad una costante:
X ''
2
X = − k x
Y '' = − k 2
y
Y
con kx e ky costanti e tali che k x2 + k y2 = kt2
X ''+ k x2 X = 0
2
Y ''+ k y Y = 0
(8.53)
(8.54)
Le condizione al contorno fornisce:
per y = 0
∂Φ 0
∂n
=
C
∂Φ 0
∂y
y =0
∂Φ 0
∂y
y =b
∂Φ 0
∂x
x =0
∂Φ 0
∂x
x =a
=0
→
X ( x)Y '(0) = 0
∀x
=0
→
X ( x)Y '(b) = 0
∀x
=0
→
Y( y ) X '(0) = 0
∀y
=0
→
Y( y ) X '(a ) = 0
∀y
per y = b
∂Φ 0
∂n
=
C
per x = 0
∂Φ 0
∂n
=
C
per x = a
∂Φ 0
∂n
=
C
Riassumendo, le condizioni al contorno sono:
X '(0) = X '(a) = 0
Y '(0) = Y '(b) = 0
(8.55)
La soluzione generale della (8.54) è:
129
X ( x) = Ax cos ( k x x ) + Bx sin ( k x x )
Y ( y ) = Ay cos ( k y y ) + By sin ( k y y )
(8.56)
Consideriamo dapprima la Y(y). Dalle (8.56) si ha:
Y '( y ) =
∂Y ( y )
= − Ay k y sin ( k y y ) + k y By cos ( k y y )
∂y
(8.57)
Quindi, utilizzando la seconda delle (8.55)
Y '(0) = −k y By = 0
(8.58)
Y '(b) = − Ay k y sin ( k y b ) + k y By cos ( k y b ) = 0
(8.59)
La (8.58) fornisce: ky = 0 e/oppure By = 0. In ogni caso il termine in seno della Y(y) in (8.56) è nullo.
Rimane dunque:
Y ( y ) = Ay cos ( k y y )
(8.60)
La (8.59) fornisce: Ay = 0 e/oppure ky sin(ky b) = 0. Tuttavia Ay deve necessariamente essere diverso
da zero altrimenti risulterebbe Y(y) = 0, e quindi, dalla (8.50), un potenziale nullo che non ammette
soluzioni. Si ha pertanto ky = 0 e ky b = mπ.
Si avranno dunque soluzioni diverse da zero se
ky =
mπ
b
m = 0, 1, …
(8.61)
Le possibili soluzioni per Y(y) sono dunque:
mπ y
Y ( y ) = Ay cos
b
(8.62)
Per quanto riguarda X(x) le condizioni al contorno forniscono:
X '(0) = 0
→
k x Bx = 0
X '(a) = 0
→
Ax k x sin(k x a) = 0
(8.63)
da cui:
kx =
nπ
a
n = 0, 1, …
(8.64)
La soluzione per X(x) sarà pertanto del tipo:
nπ x
X ( x) = Ax cos
a
(8.65)
Dalle (8.62) e (8.65) si ha infine:
nπ x
mπ y
Φ 0 ( x, y ) = X ( x )Y ( y ) = A cos
cos
a
b
(8.66)
130
con (8.53)
2
nπ mπ
k = k +k = +
a b
2
t
2
x
2
2
y
(8.67)
che sono gli autovalori trasversi.
La costante A nella (8.66) è una costante indeterminata. Introdurremo nel seguito una condizione di
normalizzazione per determinare A.
Nelle (8.66) e (8.67) la coppia di indici n = 0 e m = 0 porta ad un potenziale costante e quindi, in
corrispondenza, non esiste campo. Di conseguenza, per i modi TE si ha: n ≥ 0 e m ≥ 0 ma non
contemporaneamente nulli.
8.2.2 Modi TM
Escudendo i modi TEM che non esistono in guida, l’equazione per i modi TM è la seguente:
∇t2 Ψ 0 + kt2 Ψ 0 = 0
Ψ 0 C = 0
(8.68)
Come per i modi TE poniamo:
Ψ 0 ( x, y ) = X ( x)Y ( y )
La soluzione generale sarà del tipo:
X ( x) = Ax cos ( k x x ) + Bx sin ( k x x )
Y ( y ) = Ay cos ( k y y ) + By sin ( k y y )
con kt2 = k x2 + k y2
La condizione al contorno Ψ 0 ( x, y ) C = 0 fornisce:
X (0)Y ( y ) = 0
∀y
→ X (0) = 0
→
Ax = 0
X ( x)Y (0) = 0
∀x
→
Y (0) = 0
→
Ay = 0
X (a)Y ( y ) = 0
∀y
→ X (a) = 0
→
X (a) = Bx sin(k x a ) = 0
→
k x a = nπ
X ( x)Y (b) = 0
∀x
→
→
Y (b) = By sin(k y b) = 0
→
k y b = nπ
Y (b) = 0
Quindi, come nel caso TE,
2
nπ mπ
k = k +k = +
a b
2
t
2
x
2
2
y
mentre:
nπ x mπ y
Ψ 0 ( x, y ) = X ( x)Y ( y ) = A sin
sin
a b
(8.69)
131
Nella (8.69) n > 0 e m > 0, perché se anche uno solo dei due indici si annulla il potenziale è nullo.
Ricordiamo ora che (8.22):
k z2 = k 2 − kt2
(8.70)
Ad ognuno dei kt (n,m) corrisponde (almeno) una autofunzione Φ0(n,m) [o Ψ0(n,m)] e quindi
almeno un modo della guida d’onda.
Modi che hanno lo stesso autovalore trasverso kt prendono il nome di modi degeneri e si propagano
con la stessa velocità di fase (8.70). Da quanto detto sopra, in una guida rettangolare, i modi TEnm
sono degeneri con i modi TMnm per lo stesso valore della coppia (n,m).
In una guida d’onda esistono due tipi di degenerazioni:
a) Degenerazioni accidentali: dovute alle proprietà delle funzioni trigonometriche. Ad esempio, in
una guida rettangolare: i modi TEnm sono degeneri con i TMnm; e, se a = 2b il modo TE20 è
degenere con il modo TE01 (infatti kt,20 = kt,01 = (2π)/a).
b) Degenerazioni dovute a simmetria: presenti, ad esempio, in una guida quadrata, o in una guida
circolare.
8.3
Caratteristiche della propagazione nelle guide d’onda
Abbiamo visto nel paragrafo 8.1 che la propagazione dei modi TEnm in una guida d’onda metallica è
rappresentata da:
k z ,nm = ε r k02 − kt2,nm , Z nm =
ωµ
k z ,nm
che sono, rispettivamente, la costante di propagazione e l’impedenza caratteristica del modo n, m,
con ε r costante dielettrica relative del mezzo omogeneo che riempie la guida.
Per i modi TMnm si ha invece:
k z ,nm = ε r k02 − kt2,nm , Z nm =
k z ,nm
ωε
2
Nel caso di una guida rettangolare abbiamo visto che k
2
t , nm
2
nπ mπ
=
+
.
a b
In assenza di perdite (sia nel dielettrico che nei conduttori) occorre distinguere due casi:
a) ε r k02 > kt2,nm
k z ,nm = ε r k02 − kt2,nm
b) ε r k02 < kt2,nm
k z ,nm = − j k z ,nm = − j kt2, nm − ε r k02
Le funzioni scalari di modo V(z) e I(z) in guida soddisfano le equazioni delle linee (8.31) e risulta
pertanto:
V ( z ) = V + exp ( − jk z z )
(8.71)
132
Quindi nel caso a) il modo (n, m) si propaga in guida perché kz è reale positivo, mentre nel caso b)
kz è immaginario puro e il modo si attenua come
V ( z ) = V + exp ( − k z z )
(8.72)
In quest’ultimo caso il modo si attenua senza propagarsi e in assenza di perdite. Parleremo di modo
in “cutoff”. Per un modo in cutoff l’impedenza caratteristica è immaginaria pura ed è data dalla
seguenti espressioni:
•
Z=
•
Z=
ωµ
− j kz
− j kz
ωε
per i modi TE
per i modi TM
Ne consegue che non esiste potenza attiva associata ad un modo in “cutoff”.
Il fatto che un determinato modo (n, m) si propaghi o sia in cutoff dipende dalla relazione tra kt2,nm e
ε r k02 , quindi dipende dalla frequenza ( k02 ), dal mezzo omogeneo che riempie la guida ( ε r ) e dalla
geometria della struttura ( kt2,nm ).
In genere è comodo rappresentare la costante di propagazione in funzione della frequenza (o
viceversa) con delle curve che prendono il nome di diagramma di Brillouin. Limitiamoci per ora al
caso di kz reale positivo, che indichiamo con la costante β.
Dalla (8.70) si ha: k 2 = ω 2εµ = k z2 + kt2
ω (β ) =
β 2 + kt2
εµ
Fissato un determinato valore di kt , per ω → ∞ si ottiene un andamento asintotico lungo la retta
β
. In Figura 8.4 è mostrato il diagramma di Brillouin, ossia l’andamento della pulsazione ω
εµ
in funzione della costante di propagazione β = kz (per kz > 0)
ω=
Figura 8.4: Diagramma di Brillouin.
Come detto in precedenza, nella guida il modo (n, m) si propaga se ε r k02 > kt2,nm , ossia se
ω>
kt , nm
ε rε 0 µ
=
kt ,nm c0
εr
= ωt ,nm = 2π ft , nm
(8.73)
133
f t ,nm =
kt ,nm c0
2π ε r
prende il nome di frequenza di taglio (cut-off) del modo n,m. In una guida metallica
un determinato modo si propaga solo se la frequenza è superiore alla frequenza di taglio di questo
modo, per frequenza inferiore alla frequenza di taglio il modo è in cutoff. Chiaramente ogni modo
in guida ha una sua frequenza di taglio che dipende dall’autovalore trasverso.
•
A frequenza nulla nella guida non esistono modi che si propagano. Tutti i modo sono al di sotto
della frequenza di taglio, ossia in cutoff (a parte l’eventuale modo TEM che però in una guida
metallica con contorno trasverso semplicemente connesso non esiste).
•
La ft più bassa corrisponde all’autovalore più piccolo. Al di sotto di questa frequenza tutti i modi
in guida sono in cutoff.
E’ di interesse la situazione in cui nella guida si propaga un solo modo. L’unico modo che può
propagarsi da solo in un determinato intervallo di frequenza è quello con l’autovalore kt più piccolo
(Figura 8.4). Questo modo prende il nome di “modo fondamentale” della guida d’onda, mentre tutti
gli altri modi sono detti “modi superiori”. Chiamiamo ft1 la frequenza di taglio del modo
fondamentale e ft2 la frequenza di taglio del primo modo superiore. In una guida d’onda si propaga il
solo modo fondamentale se la frequenza è compresa tra ft1 e ft2.
Esempio: guida rettangolare
Nel caso di una guida rettangolare di dimensioni a × b, con a > b il modo fondamentale è il TE10, la
sua frequenza di taglio vale:
f t ,10 =
kt ,10 c0
2π ε r
=
π
2π ε r a
c0
(8.74)
2
Poichè alla frequenza di taglio si ha ε k = k
2
r 0
2π
λt ,10
=
2
t ,10
π
= , risulta:
a
1 π
, da cui λt ,10 = 2a ε r , ossia la lunghezza d’onda di taglio del modo fondamentale
εr a
in guida è dell’ordine di grandezza delle dimensioni trasverse della guida.
Il primo modo superiore in una guida rettangolare con a > b è il TE01 (se a < 2b) oppure il TE20 (se
π
2π π
=
a > 2b). Si ha infatti: kt ,01 = e kt ,20 =
.
a a
b
2
Per evitare la dispersione “geometrica”, cioè la dipendenza fortemente non lineare della relazione
tra ω e β in prossimità della frequenza di taglio (Figura 8.4), le frequenze di utilizzo di una guida
d’onda monomodale partono da ft1 + 20% ft1 (fino a ft2 − 20% ft2).
Oltre alla dispersione geometrica e alla dispersione cromatica (dovuta alla variazione della costante
dielettrica relativa con la frequenza), in una guida d’onda metallica esiste anche la dispersione
modale, che si osserva quando nella guida si propagano più modi alla stessa frequenza. In genere la
guida d’onda si usa sempre nel modo fondamentale ad eccezione dei casi in cui sia richiesta
solamente la trasmissione di potenza (ad esempio nel caso di Laser per lavorazioni meccaniche).
134
Nel diagramma di Brillouin si possono rappresentare anche le curve relative al cutoff dei modi. In
questo caso, per un modo in cutoff, kz è immaginario puro:
→ k z = − jα con α >0
k z2 < 0
Il valore di α in funzione della frequenza viene riportato nel secondo quadrante del diagramma di
Brillouin (Figura 8.5) e corrisponde ad un quarto di un ellisse:
k = k −k
2
z
2
2
t
→
−α = k − k
2
2
2
t
→
−α =
2
ω2
2
0
c
ε r − kt2
Figura 8.5: Diagramma di Brillouin. Primo quadrante: propagazione; secondo quadrante: cutoff.
Più grande è il valore di α, maggiore è l’attenuazione del modo in cutoff, pertanto, mentre la
frequenza inferiore di utilizzo di una guida d’onda monomodale è ft1 + 20% ft1 per evitare la
dispersione geometrica, la frequenza superiore si sceglie pari a ft2 − 20% ft2 per fare il modo che
l’attenuazione del primo modo superiore sia significativa. Quest’ultima condizione è
particolarmente utile in caso di difetti di costruzione.
Diagrammi come quello mostrato in Figura 8.5 possono essere disegnati per tutte le strutture
guidanti. Nel caso di un cavo coassiale il modo fondamentale è il modo TEM (presente a tutte le
frequenze), mentre il primo modo superiore è il primo modo TE, ossia il modo TE11 che ha una
lunghezza d’onda di taglio che è dell’ordine di grandezza della circonferenza media dei conduttori
λ11 ≅ π (Re+Ri). Quindi le frequenze di utilizzo del cavo coassiale nel modo fondamentale (il modo
TEM) vanno da frequenza nulla fino al 20% al di sotto della frequenza di taglio del primo modo
superiore, il TE11.
8.4
Configurazione trasversa dei modi in guida
Nelle equazioni (8.66) e (8.69) risulta che le autofunzioni di una guida rettangolare sono definite a
meno di una costante. Quindi, per ciascuna delle due equazioni precedenti si può imporre una
“condizione di normalizzazione” per la scelta di questa costante. Possiamo riscrivere le (8.66) e
(8.69) in una forma più esplicita:
nπ x
mπ y
TE
Φ 0,nm ( x, y ) = Anm
cos
cos
a
b
per i modi TE
(8.75)
135
nπ x mπ y
TM
Ψ 0,nm ( x, y ) = Anm
sin
sin
a b
per i modi TM
(8.76)
e determinare la costante A, sia per il caso TE che per il caso TM, a partire dalla seguente
condizione di normalizzazione sulla sezione trasversa della guida St:
∫
2
Φ 0,nm ( x, y ) dSt = 1
(8.77)
St
per modi TE, e analogamente per le autofunzioni TM.
Sostituendo la (8.75) nella (8.77) si ottiene:
(8.78)
nπ x
2 mπ y
∫0 cos a dx ∫0 cos b dy = 1
(8.79)
0 0
(A )
TE 2
nm
2
nπ x
mπ y
cos
cos
dxdy = 1
a
b
a b
(A ) ∫∫
TE 2
nm
a
b
2
Per m > 0 e n > 0 la (8.75) fornisce:
(A )
TE 2
nm
a b
=1
2 2
→
TE
Anm
=
2
ab
(8.80)
Per m = 1 e n = 0, e per m = 0 e n = 1 si ha invece:
(A )
TE 2
nm
ab
=1
2
→
TE
Anm
=
2
ab
(8.81)
In modo analogo per i modi TM si ottiene (ricordando che le soluzioni con m = 0 o n = 0 non sono
ammesse):
(A )
TM
nm
2
a b
=1
2 2
→
TM
Anm
=
2
ab
(8.82)
Per il modo fondamentale in guida rettangolare, il TE10, si ha:
A10TE =
2
ab
(8.83)
2
πx
Φ10 =
cos
ab
a
Mediante le equazioni (8.27) si ottiene il campo:
e10 = −
1
a
∇t Φ10 × i z = −
kt
π
h10 = i z × e10 =
2 π
2
π x
πx
sin
− sin
i x × i z =
( −i y )
ab a
ab
a
a
2
πx
sin
ix
ab
a
(8.84)
(8.85)
136
Figura 8.6: sezione trasversa di una guida d’onda rettangolare.
Il campo elettrico del modo fondamentale TE10 di una guida rettangolare è verticale (lungo l’asse
y) con il massimo al centro, ossia per x = a/2 e due nulli agli estremi (per x = 0 e per x = a) ed è
indipendente dalla variabile y. Il campo magnetico è invece orizzontale e presenta lo stesso tipo di
variazione del campo elettrico.
In figura 8.7a sono mostrate le configurazioni trasverse di alcuni modi della guida rettangolare. Si
osserva come, al crescere dell’ordine del modo, aumenta la variazione trasversa del campo.
Oltre alla guida rettangolare, un altro tipo di guida usata di frequente è la guida d’onda circolare. Il
modo fondamentale della guida d’onda circolare è il TE11, che tuttavia è costituito da una coppia
degenere (per simmetria di rotazione). La lunghezza d’onda di taglio del modo fondamentale di
guida circolare di raggio a è pari a λ11 = 3.412 a, ed è quindi dell’ordine di grandezza del diametro
della guida. La combinazione dei due modi TE11 degeneri ha forma analoga a quella di un singolo
modo, ma è ruotata di un angolo che può assumere qualunque valore, a seconda del rapporto tra le
ampiezze delle tensioni modali. Se le tensioni dei due modi hanno la stessa ampiezza e sono sfasate
di 90° si ottiene un modo rotante, utile in certe applicazioni. In genere però la degenerazione del
modo fondamentale è un aspetto negativo, perché piccole imperfezioni della guida possono
provocare rotazioni incontrollabili del campo. Per questo motivo la guida circolare è meno usata di
quella rettangolare , nonostante la sua maggiore semplicità costruttiva.
In figura 8.7b sono mostrate le configurazioni trasverse di alcuni modi della guida circolare. Anche
in questo caso, come nella guida rettangolare, è evidente che, al crescere dell’ordine del modo,
aumenta la variazione trasversa e la complessita del campo.
137
Figura 8.7a: configurazione trasversa di alcuni modi in guida rettangolare (le linee continue
rappresentano il campo elettrico e le linee tratteggiate il campo magnetico).
138
Figura 8.7b: configurazione trasversa di alcuni modi in guida circolare (le linee continue
rappresentano il campo elettrico e le linee tratteggiate il campo magnetico).
139
8.5
Potenza nelle guide
Per calcolare la potenza in una guida d’onda occorre calcolare il flusso del vettore di Poynting
attraverso la superficie trasversa St della guida (Figura 8.8).
Figura 8.8.
P( z ) =
1
*
E × H ⋅ i z dS
∫
2 St
(8.86)
Poichè le componenti longitudinali non contribuiscono al flusso di potenza, la (8.86) può essere
riscritta come:
P( z ) =
1
*
E t × H t ⋅ i z dS
∫
2 St
(8.87)
I campi trasversi in guida possono essere espressi come somma di modi, includendo ovviamente
nella sommatoria tutti i modi TE e tutti i modi TM (proprietà 6 – paragrafo 8.1.1):
Et =
Ht =
∑
Vn ( z )en (t )
∑
I n ( z )h n (t )
n ={TE}∪{TM }
n ={TE}∪{TM }
(8.88)
Sostituendo le (8.88) nella (8.87) si ottiene:
P( z ) =
1
Vn en × ∑ I m* h m ⋅ i z dS
∑
∫
2 St n
m
(8.89)
e, poichè Vn e Im dipendono solo da z
P( z ) =
1
Vn I m* ∫ e n × h m ⋅ i z dS
∑
2 n,m
St
(8.90)
Poiché i modi in guida sono ortonormali (per la proprietà 5 – paragrafo 8.1.1 e la condizione di
normalizzazione imposta nel paragrafo 8.4), si può dimostrare che:
∫e
n
× h m ⋅ i z dS = δ nm
St
140
Di conseguenza la (8.90) diventa:
1
1
Vn I m* δ nm = ∑ Vn I n*
∑
2 n,m
2 n
P( z ) =
(8.91)
Dalla (8.91) risulta che:
•
la potenza complessiva in guida è pari alla somma delle potenze trasportate da ciascun modo e
calcolate, per ciascun modo, sulla linea di trasmissione equivalente.
•
Non esiste accoppiamento di potenza tra i modi (purchè la guida sia ideale, ossia con pareti di
C.E.P.).
•
Un modo che si propaga trasporta potenza attiva, un modo in cutoff trasporta potenza reattiva.
Per una guida illimitata si ha:
In =
V
Z
n
TE / TM
n
(8.92)
+
n
Vn = V exp(− jk zn z )
Sostituendo le (8.92) nella (8.91) si ha
2
2
−2 k
2
−2 k
2
Vn+
Vn+ e zn
Vn+ e zn
Vn
P ( z ) = ∑ TE /TM = ∑
+ ∑
− ∑
TE / TM
2 jZ nTE
2 jZ nTM
n 2Z n
n[ prop .] 2 Z n
n _ TE [ cutoff ]
n _ TM [ cutoff ]
z
z
(8.93)
La potenza attiva dipende dai modi che si propagano, ed è costante, mentre la potenza reattiva
dipende solo dai modi in cutoff e decade con z.
8.6
Eccitazione delle guide metalliche
Prima di tutto ricordiamo la forma dei campi in assenza di sorgenti:
Modi TE
Modi TM
E t = V ( z )e(t )
E t = V ( z )e(t )
H t = I ( z )h(t )
H t = I ( z )h(t )
Hz =
kt
jωµ
V ( z )Φ 0 (t )
Ez = −
kt
jωε
I ( z )Ψ 0 (t )
Per i modi TE Hz dipende da V(z) mentre per i modi TM Ez dipende da I(z).
Se nella guida è presente solamente l’onda progressiva i campi TM in assenza di sorgenti possono
essere espressi come somma dei modi TM:
E t = ∑ Vn+ exp(− jk zn z )e n
n
H t = ∑ I n+ exp(− jk zn z )h n
(8.94)
n
141
e, considerando anche la componente z del campo elettrico, si ottiene:
E = E t + Ez i z = ∑ Vn+ exp(− jk zn z )e n + E zn i z
(8.95)
n
Tenendo conto che Ez dipende dalla funzione I(z) la (8.95) può essere scritta nella forma:
E = ∑ Vn+ exp(− jk zn z )e n + I n+ exp(− jk zn z )e$ zn i z
(8.96)
n
I+
1
E = ∑ Vn+ exp(− jk zn z ) e n + n+ e$ zn i z =∑ Vn+ exp(− jk zn z ) e n + TM e$ zn i z
Vn
Zn
n
n
(8.97)
E = ∑ Vn+ exp(− jk zn z ) [ en + ezn i z ] = ∑ Vn+ exp(− jk zn z )en
(8.98)
+
n
n
Analogamente, per i modi TE in assenza di sorgenti si ottiene:
E t = ∑ Vn+ exp(− jk zn z )e n
n
(8.99)
H = ∑ I n+ exp(− jk zn z )h n
+
n
+
dove h n contiene sia una component trasversa che una componente longitudinale Hz che dipende
dalla funzione V(z).
In conclusione:
Modi TE
Modi TM
E = ∑ Vn+ exp(− jk zn z )en
+
E = ∑ Vn+ exp(− jk zn z )en
+
n
n
H = ∑ I exp(− jk zn z )h
+
n
+
n
H = ∑ I n+ exp(− jk zn z )h n
+
n
n
+
en = etn + ezn i z
+
h n = htn
en = etn
h n = htn + hzn i z
+
+
Tabella 8.1.
dove ezn dipende dalla In(z) e hzn dipende dalla Vn(z).
Una guida d’onda viene di norma alimentata tramite un cavo coassiale, la cui anima viene inserita
all’interno della guida. Ma esistono anche altri modi per convogliare potenza all’interno di una
guida: ad esempio attraverso un foro o una apertura praticati in una parete, o mediante delle spire di
corrente. In generale, qualunque sia il tipo di “eccitazione” scelto per una guida, questo può essere
sempre ricondotto al caso generale del calcolo del campo generato da una opportuna distribuzione
di correnti elettriche e magnetiche presenti all’interno della guida.
Consideriamo pertanto una guida indefinita riempita con un dielettrico omogeneo e con delle
sorgenti (J, M) note e di estensione limitata all’interno (Figura 8.9).
142
Figura 8.9: Distribuzione di sorgenti in una guida rettangolare. Le sorgenti sono racchiuse
all’interno della superficie S tratteggiata.
Le sorgenti sono racchiuse all’interno della superficie S, tratteggiata in Figura 8.9, che è formata
dalla parete laterali della guida di conduttore elettrico perfetto e da due superfici interne indicate
con S1 e S2.
Per determinare i campi generati dalle sorgenti J, M è necessario distinguere due regioni:
1) la regione in cui sono contenute le sorgenti (z1 < z < z2 in Figura 8.9);
2) la regione della guida senza sorgenti (z < z1 e z > z2 in Figura 8.9).
In questo paragrafo ci occupiano del caso più semplice ossia il calcolo del campo generato dalle
sorgenti nella regione 2) dove non ci sono sorgenti. Per quanto detto in precedenza in questa
regione è possibile esprimente i campi sotto forma di espansione modale. In particolare si ha:
E = ∑ Vn+ exp(− jk zn z )e +n
n (TE ∪TM )
Vn+
+
H = ∑ I n+ exp(− jk zn z )h +n = ∑
exp(− jk zn z )h n
TE / TM
n (TE ∪TM )
n (TE ∪TM ) Z n
per z > z2
(8.100)
E = ∑ Vn− exp( jk zn z )e−n
n (TE ∪TM )
Vn−
−
H = ∑ I n− exp( jk zn z )h −n = ∑
exp( jk zn z )h n
TE / TM
n (TE ∪TM )
n ( TE ∪TM ) Z n
per z < z1
(8.101)
+
+
−
dove en = etn + ezn i z e h n = htn + hzn i z , mentre en = etn − ezn i z (perchè ezn dipende dalla funzione I(z)
−
e quindi cambia segno con z) e h n = −htn + hzn i z (perchè htn dipende dalla funzione I(z) e cambia
segno con z, mentre hzn dipende dalla funzione V(z) e quindi non cambia segno con z).
Nelle sommatorie in (8.100) e (8.101) sono inclusi sia i modi TE che i modi TM (tabella 8.1).
Conosciamo dunque la forma dei campi (8.100 e 8.101), e dobbiamo determinare i coefficienti Vn+ e
Vn− dell’espansione modale. Le incognite del nostro problema sono dunque i coefficienti Vn+ e Vn− ,
mentre i termini noti sono le correnti J e M.
Per determinare i coefficienti incogniti applico il teorema di reciprocità alla superficie S. Poiché la
parete laterale della guida è un conduttore elettrico perfetto il suo contributo al teorema di
reciprocità è nullo. Dobbiamo quindi valutare solo il contributo sulle superfici S1 e S2.
143
Le due configurazioni di campo sono:
a) una configurazione di campo [Ea, Ha] priva di sorgenti (Ja, Ma) = (0, 0) (in realtà le sorgenti
sono al di fuori del volume V contenuto nella superficie S) formata da un onda “riflessa” di
modulo unitario (Figura 8.9) proveniente da +∞:
E a = exp( jk zm z )e m−
1
a
−
H = Z exp( jk zm z )h m
m
(8.102)
b) una configurazione di campo [Eb, Hb] generato dalle sorgenti (Ja, Ma) = (J, M) ossia dalle
sorgenti note in guida. Quindi i campi [Eb, Hb] sono quelli forniti dalle equazioni (8.100) e
(8.101).
Il teorema di reciprocità fornisce la seguente relazione:
∫ ( E
a
b
b
×H −E ×H
a
) ⋅ dS = ∫ ( J
a
V
b
b
⋅E − J ⋅E
a
) dV − ∫ ( M
V
a
b
b
⋅H −M ⋅H
a
) dV
(8.103)
S
dove il volume V è racchiuso dalla superficie S.
Ricordiamo che l’integrale a primo membro della (8.103) è nullo:
i) se la superficie S è un conduttore elettrico perfetto;
ii) se la superficie S è un conduttore magnetico perfetto;
iii) se l’integrale è esteso a tutto lo spazio, ovvero la superficie S è una superficie all’infinito (per
semplicità si suppone una sfera di raggio infinito);
iv) se nel volume V non ci sono sorgenti;
v) se la superficie S racchiude tutte le sorgenti.
Per la proprietà i) l’integrale a primo membro della (8.103) è nullo sulla superficie laterale della
guida, e, poiché le sorgenti della configurazione a) di campo sono nulle, rimane:
∫ (E
a
b
b
×H −E ×H
S1 + S2
∫ (E
a
b
b
×H −E ×H
) ⋅ dS = ∫ ( J
a
) ⋅ dS = ∫ ( M
b
a
a
V
V
S1 + S2
b
b
⋅E − J ⋅E
a
b
⋅H − J ⋅E
a
) dV − ∫ ( M
V
a
a
b
b
⋅H −M ⋅H
) dV
a
) dV
(8.104)
Sostituendo le (8.102) nella (8.104) si ha:
∫ (E
S1 + S2
a
b
b
×H −E ×H
a
) ⋅ dS = −∫ J ⋅ e
V
−
m
−
1
−
M ⋅ h m exp( jk zm z )dV
Zm
(8.105)
Consideriamo ora separatamente i contributi all’integrale di superficie dovuti alle sezioni trasverse
S1 (per z = z1) e S2 (per z = z2):
z = z2 : primo termine dell’integrale su superficie in (8.105).
Il campo su S2 generato dalle sorgenti in guida è il campo che viaggia nella direzione positiva
dell’asse z. Dobbiamo quindi utilizzare per Hb l’espressione (8.100), mentre Ea è dato dalla (8.102).
La normale in è uguale a iz. Si ha pertanto:
144
∫ (E
a
×H
b
)
S2
Vn+
−
+
⋅ dS = ∫ exp( jk zm z2 )em × ∑
exp(− jk zn z2 )h n ⋅ i z dS =
n Zn
S2
Vn+
−
+
exp [ j (k zm − k zn ) z2 ] ∫ e m × h n ⋅ i z dS =
Zn
S2
=∑
n
(8.106)
Vn+
V+
V+
exp [ j (k zm − k zn ) z2 ] ∫ etm × htn ⋅ i z dS = ∑ n exp [ j (k zm − k zn ) z2 ] δ nm = m
Zn
Zm
n Zn
S2
=∑
n
z = z2 : secondo termine dell’integrale su superficie.
∫ (E
b
×H
a
S2
) ⋅ dS = ∫ ∑V
+
n
+
exp(− jk zn z )en ×
n
S2
1
−
exp( jk zm z )h m ⋅ i z dS =
Zm
+
n
V
+
−
exp [ − j (k zn − k zm ) z2 ] ∫ e n × h m ⋅ i z dS =
Zm
S2
=∑
n
Vn+
exp [ − j (k zn − k zm ) z2 ] ∫ etn × (− htm ) ⋅ i z dS =
Zm
S2
=∑
n
= −∑
n
= −∑
n
(8.107)
Vn+
exp [ − j (k zn − k zm ) z2 ] ∫ etn × htm ⋅ i z dS =
Zm
S2
V+
Vn+
exp [ − j (k zn − k zm ) z2 ] δ nm = − m
Zm
Zm
In conclusione:
∫ (E
a
b
b
×H −E ×H
a
S2
)
2Vm+
⋅ dS =
Zm
(8.108)
Per quanto riguarda il contributo su S1, con procedimento analogo, ricordando che ora z = z1 , che i
campi coinvolti sono quelli che viaggiano nella direzione negativa dell’asse z (forniti dalle 8.101) e
che la normale in è uguale a -iz (Figura 8.9), si ottiene:
×H
b
)
Vm−
⋅ dS =
exp(2 jz1k zm )
Zm
E ×H
a
)
⋅ dS =
∫ (E
a
S1
∫(
b
S1
Vm−
exp(2 jz1k zm )
Zm
ossia
∫ (E
a
b
b
×H −E ×H
a
) ⋅ dS = 0
(8.109)
S1
Sommando le (8.108) e (8.109) si ottiene:
∫ (E
S2 + S1
a
b
b
×H −E ×H
a
+
m
) ⋅ dS = 2ZV
m
e, sostituendo nella (8.105)
145
Vm+ = −
Zm
2
∫
V
1
−
−
M ⋅ h m exp( jk zm z )dV
J ⋅ em −
Zm
(8.110)
valida per ogni “m” ossia per ogni modo.
I valori di Vm− si ottengono utilizzando come campo di “prova” (configurazione “a” del teorema di
reciprocità) un onda “progressiva” unitaria che proviene da -∞ anzi che un onda riflessa che
proviene da +∞:
1
+
+
J ⋅ em −
M ⋅ h m exp(− jk zm z )dV
V
Zm
Vm− = −
Zm
2
8.7
Transizione guida-cavo coassiale
∫
(8.111)
Figura 8.9: Prototipo di una transizione guida d’onda – cavo coassiale.
Consideriamo una guida d’onda con un lato chiuso su un corto circuito, alimentata da un cavo
coassiale, in cui la corrente viaggia nel conduttore interno (Figura 8.10).
Figura 8.10: Schema di una transizione guida d’onda – cavo coassiale.
146
Questo tipo di transizione viene realizzata praticando un foro nella parete più larga della guida e
inserendo l’anima del cavo coassiale all’interno della guida. Con riferimento allo schema in Figura
8.10, ho a disposizione tre parametri per realizzare l’adattamento di impedenza: L, D, F. Ulteriori
parametri possono essere ottenuti modificando la forma del “probe” coassiale o modificando la
forma del “backshort”, ossia del corto circuito terminale (Figura 8.9).
In questo paragrafo verrà effettuata una analisi approssimata della transizione al fine di individuare i
principali criteri di progetto.
La posizione del “probe” rispetto alla coordinata trasversa (F in Figura 8.10) può essere utilizzata
per eccitare un determinato modo e/o impedire che un altro modo si ecciti.
Consideriamo per semplicità solamente i primi due modi, TE10 e TE20, in una guida rettangolare.
Ad esempio, scegliendo F = a/2, possiamo eccitare il TE10 (che ha un massimo per x = a/2) ma non
il TE20 (che ha un punto di nullo per x = a/2) (Figura 8.11).
Se l’alimentazione viene effettuata nel punto A o nel punto B in Figura 8.11 (o in qualunque altro
punto diverso da x = a/2) vengono eccitati contemporanetamente sia il modo TE10 che il modo
TE20. Se si vuole eccitare il modo TE20 ma non il modo TE10 occorre alimentare nei punti A e B
contemporaneamente ma con ampiezze opposte. Infatti, in quest’ultimo caso, per simmetria il modo
TE10 non viene eccitato.
Figura 8.11.
Il tratto di cavo coassiale che entra nella guida può essere considerato come una antenna che irradia
all’interno della guida, responsabile della eccitazione dei modi in guida. In altre parole, il “probe” di
lunghezza L, posizionato a x = F e z = D/2, che assumiamo per semplicità di diametro infinitesimo,
è una sorgente elettrica all’interno della guida.
147
Nel paragrafo precendente abbiamo visto che, per determinare i coefficienti incogniti in una guida
indefinita, è possibile utilizzare la (8.111):
che, nel nostro caso diventa
Vm+ = −
Zm
2
−
∫
V
J ⋅ em exp( jk zm z )dV
(8.112)
poiché il probe coassiale corrisponde ad una corrente elettrica.
Tuttavia, nel caso della transizione guida – cavo coassiale la guida non è indefinita, in quanto
terminata ad una estremità con un corto circuito. E’ possibile comunque tenere conto del corto
circuito tramite il teorema delle immagini e duplicare la sorgente elettrica all’interno della guida in
posizione z = -D/2 come mostrato in figura 8.12. La corrente immagine, parallela al C.E.P, sarà
ovviamente di segno opposto. Per il calcolo dei coefficienti incogniti in guida tramite la (8.112) la
corrente J sarà pertanto la somma di due contributi: la corrente equivalente al probe (I0) e la sua
immagine (-I0).
Figura 8.12.
Supponiamo inoltre di trovarci in un range di frequenze in cui nella guida si propaga solo il modo
fondamentale: in questo caso il solo modo TE10 generato dal “probe” coassiale si propaga
all’interno della guida, mentre tutti gli altri modi sono in cutoff. Per limitare il numero di modi in
cutoff eccitati dalla transizione scegliamo inoltre F = a/2. In questo modo escludiamo tutti i modi
che hanno un nullo in x = a/2. Gli altri modi superiori in cutoff, che si eccitano in prossimità del
probe, sono responsabili dell’accumulo di energia reattiva e contribuiscono alla parte immaginaria
della impedenza di ingresso.
Mediante la (8.112) calcoliamo ora il coefficiente del modo fondamentale che è responsabile del
+
−
trasporto di potenza attiva all’interno della guida. Poiché e10 = e10 , si ha:
V10+ = −
Z10
2
∫
V
+
J ⋅ e10 exp( jk z10 z )dV
(8.113)
Per semplicità, nella (8.113) consideriamo una corrente impulsiva sia lungo x che lungo z, ossia
trascuriamo il diametro dell’anima del cavo coassiale, che consideriamo infinitesimo. Pertanto la
(8.113) può essere riscritta come:
148
a
D
+
J ⋅ e10 exp( jk z10 z )δ x − δ z − dV
V
2
2
Z
a
D
+
− 10 ∫ J immagine ⋅ e10 exp( jk z10 z )δ x − δ z + dV
2 V
2
2
(8.114)
D + a
D
a
J , y, ⋅ e10 exp jk z10 dy
V
2
2
2
2
Z
D + a
D
a
− 10 ∫ J imm , y, − ⋅ e10 exp − jk z10 dy
V
2
2
2
2
2
(8.115)
V10+ = −
V10+ = −
Z10
2
Z10
2
∫
∫
+
Nella (8.115) la corrente J e il campo elettrico e10 hanno la stessa direzione (lungo l’asse y):
D + a
2
2
a
π x
J , y, ⋅ e10 = − J ( y )
sin
a = − J ( y)
2
ab
ab
2
2
a x=
(8.116)
2
La (8.115) diventa dunque:
V10+ = −
V10+ =
Z
= 10
2
Z10
2
Z10
2
Z
2
D
−
J ( y ) exp jk z10 dy − 10
b−L
2
2
ab
∫
b
2
D
+
J ( y ) exp − jk z10 dy (8.117)
b−L
2
ab
∫
b
2 b
D
D
J ( y ) exp jk z10 − exp − jk z10 d y =
∫
ab b − L
2
2
2
D b
2 j sin k z10 ∫ J ( y )d y
ab
2 b−L
(8.118)
In prima approssimazione possiamo assumere che la corrente J(y) vari in modo sinusoidale
sull’anima del cavo coassiale, che si può considerare come una antenna filiforme che irradia nello
spazio interno alla guida. Ovviamente J(y) = 0 per y = b-L perché la corrente all’estremità
dell’antenna è nulla (Figura 8.10), e dunque poniamo:
J ( y ) ≅ A sin β 0 [ y − (b − L)]
(8.119)
dove β 0 = ω ε 0 µ0 ipotizzando il vuoto all’interno della guida.
Per determinare l’ampiezza A nella (8.117) imponiamo che, per y = b, il flusso di J, Φ [ J (b)] , sia
pari alla corrente di alimentazione I0.
Se il raggio rc dell’antenna è molto più piccolo della lunghezza d’onda possiamo assumere una
densità di corrente costante e superficiale e quindi il flusso di J sarà dato da:
Φ [ J (b)] ≅ 2π rc J (b)
(8.120)
Tuttavia, poiché stiamo considerando una sorgente impulsiva sia lungo x che lungo z risulta, e
quindi di diametro infinitesimo, si ha:
Φ [ J (b)] ≅ J (b)
(8.121)
149
Per determinare A imponiamo dunque Φ [ J (b)] ≅ J (b) = I 0 :
J (b) = A sin β 0 L = I 0
→ A=
I0
sin β 0 L
(8.122)
Risulta quindi:
J ( y) =
I0
sin β 0 [ y − (b − L)]
sin β 0 L
(8.123)
Sostituendo la (8.123) nella (8.118)
V10+ =
Z10
2
I0
2
D b
2 j sin k z10 ∫ sin β 0 [ y − (b − L)] d y =
2 b−L
ab sin β 0 L
y =b
Z
= 10
2
I0
2
D cos β 0 [ y − (b − L) ]
2 j sin k z10 −
=
β0
ab sin β 0 L
2
y =b − L
(8.124)
I0
2
D cos β 0 L 1
+ =
2 j sin k z10 −
β0
β0
2
ab sin β 0 L
1 − cos β 0 L 2
D
= jZ10 I 0
sin k z10
2
β 0 sin β 0 L ab
=
Z10
2
D
= π l’eccitazione del modo TE10 è nulla (il corto circuito
2
D π
terminale viene “riportato” nel punto di alimentazione), mentre per k z10 = abbiamo il massimo
2 2
dell’eccitazione.
Dalla (8.124) risulta che, per k z10
La potenza attiva che fluisce nella direzione positiva dell’asse z (Figura 8.10), dovuta al modo TE10,
2
1
è data da P10 =
V10+ e deve essere uguale alla potenza fornita dal cavo coassiale
2 Z10
PING =
1
2
RING I 0 . Risulta quindi:
2
2
1
1
2
RING I 0 =
V10+
2
2 Z10
2
+
1 V10
→ RING ( L, D ) =
Z10 I 0 2
(8.125)
Imponendo RING ( L, D ) = Z 0 c , dove Z0c è l’impedenza caratteristica del cavo coassiale di
alimentazione, adatto (solo) la parte reale. D’altra parte nella trattazione fin qui fatta non abbiamo
considerato solo il modo che si propaga, uno responsabile del trasporto di potenza attiva in guida.
150
8.8
Perdite nelle guide
Le perdite nelle guide d’onda possono essere di due tipi:
•
le perdite nel materiale che riempie la guida;
•
le perdite sulle pareti metalliche.
8.8.1 Perdite nel dielettrico
Si può tenere conto delle perdite nel dielettrico semplicemente considerando una costante dielettrica
complessa, ossia sostituendo nella trattazione fatta fino ad ora ε r = ε '− jε '' . Avremo quindi:
k 2 = ω 2 ( ε '− jε '') µ0
k z = k 2 − kt2
Z TE =
ωµ0
kz
Z TM =
kz
ωε
Analizziamo qui il caso di piccole perdite, ossia il caso in cui ε ' >> ε '' .
Si ha: k z = ω 2 ( ε '− jε '') µ0 − kt2 = ω 2ε ' µ0 − kt2 − jω 2ε '' µ0
posto k z 0 = ω 2ε ' µ0 − kt2 , se ε ' >> ε '' si ha:
1/ 2
ω 2ε '' µ0
k z = k z 0 1 − j 2
ω ε ' µ0 − kt2
ω 2ε '' µ0
≅ k z 0 1 − j
2 (ω 2ε ' µ0 − kt2 )
Per ω > ωt k z 0 = ω 2ε ' µ0 − kt2 è reale e il modo si propaga con piccolo perdite. Il diagramma di
Brillouin corrispondente è mostrato in Figura 8.13.
Figura 8.13: Diagramma di Brillouin di un modo generico per una guida riempita con un dielettrico
con piccole perdite.
151
In Figura 8.13 la zona in un intorno dell’origine sull’asse delle ascisse (tra le linee tratteggiate
corrispondenti alla frequenza di taglio) è “allargata” per mostrare l’andamento della curva. La parte
reale del kz rimane sostanzialmente inalterata.
Per ω = ωt k z = − jω 2ε '' µ0 =
1− j
ω 2ε '' µ0 ovvero α e β sono uguali (Figura 8.13).
2
Per ω < ωt k z 0 = − jα e k z20 = − kt2 + ω 2ε ' µ0 < 0 , e ha dunque:
ω 2ε '' µ0
ω 2ε '' µ0
k z ≅ − jα 1 − j
j
1
j
=
−
+
α
2
2
2
2(−α )
2(kt − ω ε ' µ0 )
e la curva corrispondente è mostrata in Figura 8.13. Al di sotto della frequenza di taglio, in presenza
di perdite, si osserva ancora una attenuazione, ma anche un fenomeno di propagazione. In questo
caso l’attenuazione non è più completamente reattiva (come nel caso senza perdite), ma esiste un
piccolo effetto di assorbimento di potenza attiva.
Ad eccezione che molto vicino alla frequenza di cutoff si può assumere che l’impedenza
caratteristica sia quella della guida senza perdite.
8.8.2 Perdite nei conduttori
I modi TE e TM della guida priva di perdite non sono più modi della guida se il conduttore che
costituisce la parete ha una conducibilità finita. Nella pratica le guide sono generalmente realizzate
in rame (σ = 5.88e+07), alluminio (σ = 3.53e+07), o acciaio (σ = 1e+07).
Sappiamo che, in una guida ideale, per un campo TE risulta Ez = 0, mentre il campo magnetico
trasverso produce una corrente elettrica superficiale longitudinale Jz sulla parte del C.E.P.
Consideriamo ora una guida che presenta delle perdite ohmiche sulle pareti (conducibilità σ finita)
e ipotizziamo di avere un campo TE. In prima approssimazione si può assumere di avere in questa
guida lo stesso campo magnetico del caso ideale. Tuttavia, poiché la conducibilità σ non è più
infinita, la corrente in questo caso non è più superficiale ma è presente anche all’interno dei
conduttori ed è presente anche un campo Ez dovuto alla corrente longitudinale Jz = σ E ossia Ez =
Jz/σ. Questo contraddice l’ipotesi che in una guida con perdite possa esistere un campo TE.
Se consideriamo una guida con perdite sulle pareti è necessario estendere la soluzione del problema
anche all’interno delle pareti. Si ottiene così una struttura non omogenea sul piano trasverso e il
problema che ne deriva è di difficile soluzione o non risolvibile. Si può allora cercare una soluzione
approssimata, ad esempio si può pensare di sostituire le condizione al contorno sul C.E.P. con una
condizione differmente che tenga conto delle perdite. Se le perdite sono piccole si potrebbe usare la
condizione di Leontovich sulla parete laterale, ma anche con questa condizione al contorno si
ottiene un problema non risolvibile.
Per risolvere in modo rigoroso il problema elettromagnetico relativo alla propagazione in una guida
con perdite sulle pareti si può ricorrere a opportune tecniche numeriche.
In alternativa, in caso di piccole perdite, per determinare una soluzione approssimata soddisfacente,
si può considerare la guida con pareti di buon conduttore come una piccola perturbazione del caso
ideale. Ci si aspetta che le soluzioni nel caso ideale e in quello “perturbato” siano molto simili e,
chiaramente, la soluzione “perturbata” tenderà a quella ideale quando la conducibilità σ tende
all’infinito.
152
Supponiamo di inserire all’interno di una guida ideale una sorgente che ecciti solamente il modo
TE10. In caso di piccole perdite, la stessa sorgente produrrà nella guida “perturbata” un campo
molto simile (punto per punto o comunque in zone limitate) al TE10 imperturbato.
La espressione del campo elettrico del modo TE10 nella guida imperturbata è la seguente:
E t10 = −
2
π x
+
sin
i yV exp ∈ ( − jk z10 z )
ab
a
(8.126)
La domanda che ci si pone a questo punto è: in cosa il campo perturbato e imperturbato sono
effettivamente simili, in cosa differiscono e di quanto?
-
Il campo nella guida ideale ha Etang = 0 sulla parete mentre il campo nella guida con perdite
NON può soddisfare questa condizione (in caso di piccole perdite sarà piccolo ma non nullo).
-
Nella guida ideale per il modo TE10 si ha Ez = 0. Nella guida “perturbata” Ez ≠ 0 (in caso di
piccole perdite Ez sarà piccolo ma non nullo).
Queste due differenze consentono comunque di affermare che, con ottima approssimazione, la
forma dei campi sulla sezione trasversa nella guida perturbata può essere considerata la stessa della
guida imperturbata. Esiste tuttavia una differenza molto più rilevante che consiste nel fatto che il
campo nella guida con perdite si attenua nella propagazione. Ovviamente ci si riferisce
principalmente ai modi che si propagano, mentre l’effetto è trascurabile per i modi in cutoff che, se
eccitati, rimangono concentrati in una zona limitata della guida.
Si può tenere conto con ottima approssimazione dell’effetto delle perdite nella propagazione
moltiplicando l’espressione del modo imperturbato per un fattore di attenuazione exp(-αc) (per
l’onda progressiva). La costante αc è dovuta alla potenza che si dissipa sulle pareti della guida che
non sono più di CEP. Questo suggerisce che, per il calcolo di αc, è possibile effettuare un bilancio
di potenza mediante il teorema di Poynting. A tal fine consideriamo un tratto di guida di lunghezza
∆z e applichiamo il teorema di Poynting al volume compreso tra 0 e ∆z e delimitato dalla parete
laterale della guida SL che supponiamo di buon conduttore, ossia con conducibilità finita σ, tale che
σ
ωε >> 1 . La superficie S che contiene il volume V è pertanto divisa in 3 parti, S(z = 0), S(z = ∆z)
e SL (Figura 8.14).
Figura 8.14.
Per il teorema di Poynting si ha dunque:
153
P (0) = P (∆z ) + Re ∫ S ⋅ i n dS
SL
(8.127)
L’integrale a secondo membro della (8.127) rappresenta la potenza che attraversa la parete laterale
della guida e cioè la potenza dissipata.
Consideriamo un modo “n” che si propaga (TE, TM o TEM non degenere) in una guida ideale in
assenza di perdite, si ha:
P( z ) =
1
1
2
Vn ( z ) =
Vn+
2Z n
2Z n
2
(8.128)
poiché V ( z ) = Vn+ exp(− jk zn z ) con kzn reale.
D’altra parte, fissato z il campo nella guida ideale e in quella con perdite sono molto simili e quindi
è possibile assumere che, per una guida con perdite l’espressione della potenza P(z) abbia la stessa
“forma” della (8.128) ossia:
P( z ) ≡ P( z ) =
1
2
Vn ( z )
2Z n
(8.129)
Nel modello scelto (8.129) si assume la Zn sia quella della guida ideale. Tuttavia è necessario
ricordare che, nel caso di guida con perdite, Vn ( z ) = Vn+ exp(−α c z ) e quindi la (8.129) fornisce:
P( z ) ≈
2
2
1
1
1
1
2
2
Vn ( z ) =
Vn ( z ) =
Vn+ exp(−α c z ) =
Vn+ exp(−2α c z )
2Z n
2Z n
2Z n
2Z n
(8.130)
Sostituendo la (8.130) nella (8.127) si ha:
2
1
1
1
2
*
Vn (0) =
Vn+ exp(−2α c ∆z ) + Re ∫ E tan × H tan ⋅ i n dS
S
2Z n
2Z n
2 L
(8.131)
dove E tan e H tan sono campo elettrico e magnetico tangenti alla parete laterale SL della guida con
perdite. Per calcolarli si può ricordare che il campo nella guida con perdite è molto simile al campo
nella guida ideale ad eccezione del campo elettrico tangente sulle pareti, che nella guida ideale è
(0)
nullo mentre nella guida con piccole perdite è piccolo ma non nullo. In altre parole, detti E tan e
(0)
(0)
H tan i campi tangenti alla parete laterale in una guida ideale, possiamo assumere che H tan ≅ H tan
(0)
mentre E tan ≠ E tan . Per calcolare E tan nella guida con perdite si può usare la condizione di
Leontovich:
E tan =
1+ j
σδ
( H tan × i n )
(8.132)
(0)
Poichè, come detto, H tan ≅ H tan dalla (8.132) si ottiene:
E tan ≅
1+ j
σδ
(H
0
tan
× in
)
(8.133)
(0)
(0)
Abbiamo quindi collegato E tan e H tan della guida “perturbata” a E tan e H tan della guida ideale. La
(8.131) diventa:
154
1
Vn+
2Z n
2
[1 − exp(−2α c ∆z )] =
*
1 1 + j
(0)
0
Re
H tan × i n × H tan ⋅ i n dS =
∫
S
L
2 σδ
(
) (
)
*
2
1 1 + j
1 1 + j
(0)
0
(0)
= Re
H tan × i n ⋅ H tan × i n dS = Re
H tan × i n dS
∫
∫
S
S
L
L
2 σδ
2 σδ
(
1
Vn+
2Z n
2
)(
[1 − exp(−2α c ∆z )] =
)
1
2σδ
(0) 2
∫
SL
H tan dS
(8.134)
(8.135)
L’integrale a secondo membro della (8.135) va calcolato su tutta la superficie laterale nel tratto ∆z.
Se nella (8.135) ∆z 0 si ha:
∆z → 0
exp(−2α c ∆z )
→1 − 2α c ∆z
(0) 2
∫
SL
(0) 2
H tan dS ≈ ∆z ∫ H tan dl
C
dove l’integrale a secondo membro è effettuato sulla curva C che è il contorno della superficie
trasversa.
Quindi per ∆z
1
Vn+
2Z n
2
( 2α
0 la (8.135) diventa:
c
)
∆z =
1
2σδ
(0) 2
∆z ∫ H tan dl
(8.136)
C
da cui:
αc =
1
(0) 2
∫
C
2σδ
H tan dl
1 +
Vn
Zn
(8.137)
2
(0)
Nella (8.137) H tan sarà proporzionale a V+, che è un parametro di ampiezza e quindi l’espressione
trovata per αc sarà indipendente da V+.
(0)
Il campo magnetico tangente H tan ha in generale due componenti, una trasversa e una longitudinale
(presente solo per i modi TE):
H tan = ( H t ⋅ i c ) i c + H z i z = I + ( h ⋅ i c ) i c + H z i z
(0)
(8.138)
Per i “modi” TM (o TEM) la componente Hz è nulla, quindi:
αc =
1
∫
2σδ
C
I+
2
2
h ⋅ i c dl
1
V
Zn
+ 2
n
=
1
1
2σδ Z n
∫
C
2
h ⋅ i c dl
(8.139)
Analizziamo la variazione della (8.139) al variare della frequenza:
δ=
2
ωµσ
→
1
σδ
=
ωµ
2σ
Assumiamo che la conducibilità σ sia costante nella banda di frequenza del modo.
155
∫
L’integrale
2
C
h ⋅ i c dl è indipendente dalla frequenza.
Quindi la dipendenza di αc dalla frequenza sarà del tipo:
αc ≈
1
ω ω
ω ω
≈
≈
δ (ω ) Z n (ω )
kz
ω 2 − ωt2
(8.140)
Quindi, per ω → ωt , α c → ∞ e, per ω → ∞ , α c → ∞ (Figura 8.15)
Figura 8.15. Andamento della attenuazione al variare della frequenza per i “modi” TM.
Per i “modi” TM in prossimità della frequenza di taglio l’attenuazione è molto forte e la guida è
inutilizzabile mentre l’attenuazione è minina per ω = 3 ωt .
Per i modi TE nella (8.138) abbiamo sia la componente trasversa che quella longitudinale del
campo magnetico percui:
αc =
1
2σδ
∫
C
I+
2
h ⋅ i c dl + ∫ H z dl
2
2
C
1 +
Vn
Zn
2
2
Hz
1
2
=
h
⋅
i
dl
+
dl
c
∫C V + 2
2σδ Z n ∫C
n
1
2
2
Hz
1 ∂Φ 0
αc =
dl + ∫
dl
C
+ 2
2σδ Z n ∫C ∂C
Vn
1
(8.141)
(8.142)
La dipendenza dalla frequenza della (8.142) è del tipo:
ω
−1
ωt
1
αc ≈ A
+B
2
ω
ω ω
−1
ωt
ωt ωt
(8.143)
con A e B costanti con la frequenza.
156
Figura 8.16. Andamento della attenuazione al variare della frequenza per i “modi” TE (curva nera).
L’andamento della attenuazione per i “modi” TE è mostrato in Figura 8.16. Il contributo “A”
∂Φ 0
∂Φ 0
dipende da
per cui, quando
= 0 , il contributo “A” è nullo e l’attenuazione diminuisce al
∂C
∂C
crescere della frequenza. Questa condizione si verifica per il modo TE01 della guida circolare, della
quale tuttavia non è il modo fondamentale.
Nella trattazione effettuata fino ad ora abbiamo calcolato le perdite nel dielettrico in una guida con
pareti di conduttore elettrico perfetto, e abbiamo calcolato le perdite nei conduttori in una guida con
un dielettrico privo di perdite. E’ però evidente che in una guida reale saranno presenti
contemporaneamente sia le perdite nel dielettrico sia le perdite nei conduttori. In entrambi i casi
abbiamo ipotizzato che le perdite siano piccole, ossia che per il dielettrico che riempie la guida sia
ε ' >> ε '' e che le pareti laterali siano di buon conduttore (generalmente rame, alluminio, acciaio).
Nella pratica può capitare che α diel e α c abbiano valori confrontabili e, in questo caso, assumiamo
che l’attenutazione complessiva α TOT sia la somma delle due attenuazioni ossia α TOT ≈ α diel + α c .
Chiaramente se α diel >> α c possiamo assumere che α TOT ≈ α diel , mentre se α c >> α diel allora
αTOT ≈ α c .
9.9
Identificazione di un diaframma in guida d’onda
Consideriamo un diaframma in guida d’onda rettangolare, ossia una apertura di forma generica
praticata in un setto di conduttore elettrico perfetto nella parete trasversa della guida (Figura 8.17).
Per semplicità ipotizziamo che il setto sia infinitamente sottile. Supponiamo che la frequenza
operativa sia tale da consentire la propagazione del solo modo fondamentale TE10 della guida
rettangolare. Tuttavia, il solo modo TE10 non può soddisfare le condizioni al contorno in
corrispondenza del setto con l’apertura. In particolare, questo tipo di discontinuità produce una
riflessione e una trasmissione, ma è anche “sorgente” di modi superiori in cutoff. In alte parole,
sulla superficie di conduttore elettrico perfetto del diaframma si inducono delle correnti elettriche (o
equivalentemente l’apertura sul setto può essere sostituito con delle correnti magnetiche
equivalenti) che in generale eccitano tutti i modi.
157
Figura 8.17. Diaframma di forma generica in guida d’onda: (a) sezione longitudinale; (b) sezione
trasversa.
Sulla parete di C.E.P del diaframma il campo elettrico tangente è nullo. Sulla apertura il campo
elettrico tangente sarà continuo. Di conseguenza, all’interfaccia, in corrispondenza del diaframma,
il campo elettrico sulla sezione trasversa è continuo. D’altra parte, il campo magnetico è continuo
sull’apertura ma, per la presenza di correnti elettriche superficiali, è discontinuo sulla parete di
conduttore elettrico perfetto del diaframma.
In termini di modi, se ipotizziamo che il diaframma, infinitamente sottile, sia posizionato a z = 0,
possiamo dire che le espansioni modali del campo elettrico immediatamente a destra (per z = 0+) e
immediatamente a sinistra (per z = 0-) del diagramma sono uguali.
In particolare il campo elettrico del modo TE10 è continuo attraverso il diaframma. In questo caso
una ammettenza in parallelo garantisce la continuità del campo elettrico trasverso e la discontinuità
del campo magnetico trasverso. Pertanto un diaframma di conduttore elettrico perfetto (ossia in
assenza di perdite) può essere rappresentato, dal punto di vista circuitale, con una ammettenza
immaginaria pura in parallelo (che garantisce la stessa V(z) a destra e a sinistra dell’ammettenza).
L’ammettenza sarà induttiva o capacitiva a seconda della forma del diaframma (figura 8.19).
Figura 8.18. Circuito equivalente di un diaframma in guida d’onda.
Si osservi che il circuito equivalente in linea di trasmissione mostrato in figura 8.18 può essere
utilizzato solamente per calcolare il modo fondamentale. Pertanto questo circuito consente di
calcolare il campo elettrico in guida solamente nelle regioni dove esiste il solo modo fondamentale
e cioè ad una distanza dal diaframma sufficiente da garantire che tutti i modi superiori in cutoff
158
eccitati dal diaframma abbiano ampiezze trascurabili. Solitamente si può assumere che a distanza
maggiore di un quarto di lunghezza d’onda guidata i modi superiori si siano attenuati.
Figura 8.19. Iridi in guida d’onda e circuito equivalente.
8.10
Accoppiamento tramite fori
L’utilizzo di fori consente di trasferire potenza tra due strutture guidanti o tra una struttura guidante
ed una cavità in modo “controllabile”. Consideriamo un foro, o una apertura, in uno schermo
infinitamente sottile di conduttore elettrico perfetto. Per il teorema di equivalenza (Appendice II)
questo foro (o apertura) è equivalente a due distribuzioni opposte di corrente magnetica situate in
corrispondenza del foro sulla superficie dello schermo C.E.P. (Figura 8.20). In altre parole, la
situazione “equivalente” consiste nel “metallizzare il foro” e sostituirlo con delle correnti
magnetiche equivalenti che irradiano in presenza dello schermo di conduttore elettrico perfetto.
Figura 8.20. Apertura in una schermo di conduttore elettrico perfetto: a sinistra è mostrata
l’applicazione del teorema di equivalenza e a destra la situazione equivalente con il foro
“metallizzato”.
159
Le correnti magnetiche ai lati del foro sono uguali ed opposte (Figura 8.20) e dipendono dal campo
elettrico tangente presente in corrispondenza del foro:
M 1 = −i n × E tg
(8.144)
con M 2 = − M 1 perchè la normale in su lati opposti del foro è opposta mentre il campo elettrico
tangente sul foro è continuo.
Se il foro è piccolo rispetto alla lunghezza d’onda la distribuzione di corrente magnetica superficiale
può essere sostituita da una sorgente dipolare posta al centro del foro. In particolare si ha un dipolo
magnetico di ampiezza M0 e, in generale, un dipolo elettrico ortogonale allo schermo di ampiezza
J0, che tiene conto delle eventuali correnti magnetiche ad anello. Se indichiamo con “zona 1” la
regione alla sinistra dello schermo in cui è presente un mezzo omogeneo di costante dielettrica ε1, e
con “zona 2” la regione alla destra dello schermo in cui è presente un mezzo omogeneo di costante
dielettrica ε2 (Figura 8.20), si ha:
M 1 = −M 2
(8.145)
J1
(8.146)
ε1
=−
J2
ε2
8.10.1 Teoria di Bethe
Supponiamo che nella zona "1" ci sia un campo (Eg, Hg) che "incide" sul foro. Questo campo è
detto "campo generatore" ed è il campo nella regione "1" in assenza del foro (ovvero con il foro
metallizzato). Se il foro è piccolo rispetto alla lunghezza d'onda si suppone (approssimazione di
Bethe) che le correnti equivalenti sul foro siano proporzionali al solo campo generatore. In altre
parole si suppone che la presenza del foro non perturbi i campi nel mezzo "1". Questa
approssimazione è l'opposto di quella di Kirchhoff che ipotizza un foro grande rispetto alla
lunghezza d'onda.
La teoria di Bethe afferma che, se ε1 = ε2, e se il foro è circolare di raggio r0 (o se Hg è un vettore
lungo una delle direzioni di simmetria del foro) si può porre:
M 2 = − jωµ0α m H g tang
J 2 = jωε 0α e E g n
(8.147)
dove i pedici “tang” e “n” indicano la componente tangente e la componente normale allo schermo
4
2
in cui è praticato il foro e, per un foro circolare, α m = r03 e α e = − r02 .
3
3
Esempio: foro nella parete trasversa di una guida d’onda.
Consideriamo una guida rettangolare interrotta da un setto C.E.P. contenente un foro (Figura 8.21)
di dimensioni piccole rispetto alla lunghezza d’onda, di raggio r0, posizionato in z = 0, e in alle
coordinate (x0, y0) sulla sezione trasversa. Vogliamo calcolare il coefficiente di riflessione e di
trasmissione per un modo TE10 che incide sullo schermo da sinistra (regione “1”).
Possiamo sostituire il foro con una coppia di dipoli per lato. In particolare, poichè per il TE10 si ha
Ez = 0, in questo caso non è presente il dipolo elettrico ma solo il dipolo magnetico M2, che dipende
dal campo magnetico generatore tangente al foro e, si ha M1 = -M2.
160
Se l’onda incidente ha ampiezza V+, il campo magnetico tangente sul foro, calcolato in assenza del
foro (cioè sullo schermo di conduttore elettrico perfetto senza il foro) è dato da:
Hg
tang
=
2V +
Z10
2
πx
sin 0 i x
ab
a
(8.148)
e dunque, per la prima delle (8.147), si ha:
M 2 = − jωµ0α m
2V +
Z10
2
π x
sin 0 i x
ab
a
(8.149)
Figura 8.21. Foro nella parete trasversa di una guida d’onda rettangolare: (a) sezione longitudinale;
(b) sezione trasversa.
Figura 8.22. Il foro è equivalente a due correnti magnetiche opposte e di uguale ampiezza che
irradiano in presenza dello schermo C.E.P.
Applicando il teorema delle immagini alla situazione mostrata in Figura 8.22, eliminiamo lo
schermo di C.E.P. e raddoppiamo le correnti magnetiche (Figura 8.23). Possiamo dunque calcolare
il coefficiente A10+ del TE10 trasmesso nella “regione 2” tramite il dipolo magnetico 2M2 che irradia
in una guida indefinita e priva di ostacoli, e il coefficiente A10− del campo “diffuso dal foro” nella
161
“regione 1” tramite il dipolo magnetico 2M1. Possiamo dunque usare le espressioni (8.110) e
(8.111). Ovviamente 2M1 e 2M2 sono uguali in modulo e opposte.
Figura 8.23. Situazione presente dopo l’applicazione del teorema delle immagini.
Quindi, per il calcolo del campo trasmesso A10+ nella regione “2” si ha come sorgente la corrente
magnetica
M
(2)
= 2 M 2 = −2 jωµ0α m H g tang = −2 jωµ0α m
2V +
Z10
2
π x
sin 0 i x
ab
a
(8.150)
L’ampiezza del TE10 trasmesso è pertanto (8.110):
(
)
(
)
1
1
(2)
−
(2)
−
− M ⋅ h10 dV = ∫ M ⋅ h10 dV
∫
2
2
1
1 (2)
(2)
−
−
M ⋅ h10δ ( x − x0 )δ ( y − y0 )δ ( z )dV = M ( x0 , y0 ) ⋅ h10 ( x0 , y0 ) =
∫
2
2
1 (2)
+
= − M ( x0 , y0 ) ⋅ h10 ( x0 , y0 )
2
A10+ = −
(8.151)
Poichè il foro è molto piccolo rispetto alla lunghezza d’onda nella (8.151) abbiamo considerato una
sorgente dipolare impulsiva in (x, y, z) = (x0, y0, 0). Sostituendo la (8.150) nella (8.151) si ottiene:
1 (2)
+
A10+ = − M ( x0 , y0 ) ⋅ h10 ( x0 , y0 ) =
2
1
2V + 2
π x 2
πx
= − −2 jωµ0α m
sin 0 i x ⋅
sin 0 i x =
2
Z10 ab
a ab
a
jωµ0α m 4
4 jk z10α m
πx
πx
=
sin 2 0 V + =
sin 2 0 V +
Z10 ab
ab
a
a
(8.152)
L’ampiezza del TE10 retro-diffuso dal foro nella regione “1” A10− (Figura 8.202) è uguale ad A10+ ,
perché M
A10− =
(
(1)
= −M
(2)
)
−
+
e h10 = − h10 (8.111):
(
)
1
1
1
(1)
+
(2)
−
(2)
−
M ⋅ h10 dV = ∫ − M ⋅ − h10 dV = ∫ M ⋅ h10 dV = A10+
∫
2
2
2
(8.153)
In conclusione il coefficiente di trasmissione nella regione “2” è dato da:
162
T=
A10+ 4 jk z10α m
πx
sin 2 0
=
+
V
ab
a
(8.154)
Per quanto riguarda il coefficiente di riflessione occorre aggiungere al campo retro-diffuso dal foro
il campo riflesso dallo schermo di conduttore elettrico perfetto, che avrà ampiezza -V+. Si ha
pertanto:
4 jk z10α m
−V + A10−
πx
Γ = + + + = −1 +
sin 2 0
V
V
ab
a
(8.155)
Dalla (8.155) è evidente che Γ > 1 ossia il modello del foro ottenuto dalla teoria di Bethe viola il
principio di causalità. Questa conclusione è abbastanza ovvia alla luce dell’approssimazione
introdotta nella teoria di Bethe. Infatti, il fatto di usare solamente il campo generatore, che non
dipende dal foro (cioè non dipende dal campo sul foro), per calcolare la corrente magnetica sul foro
(che invece per il teorema di equivalenza dipende dal campo sul foro), equivale a non tenere conto
della presenza del foro al fine del trasferimento di potenza tra la regione “1” e la regione “2”.
Nonostante questa approssimazione, i risultati della teoria di Bethe possono essere utilizzati per
ottenere dei risultati accettabili, ma con alcune precisazioni. In effetti, il valore del coefficiente di
trasmissione T ottenuto dalla teoria di Bethe (8.154), può essere utilizzato come una buona
approssimazione. Inoltre, è possibile ottenere delle informazioni utili anche a partire dalla (8.155),
che pure non soddisfa il principio di causalità. A tal fine osserviamo che, poiché A10− = A10+ , il foro
equivale ad una ammettenza in parallelo che indichiamo con Y (normalizzata) (Figura 8.24).
Figura 8.24. Circuito equivalente del foro in una parete trasversa di una guida rettangolare.
L’ammettenza Y è immaginaria pura perché il diaframma in cui è praticato il foro è di conduttore
elettrico perfetto e quindi non genera dissipazione di potenza. Vediamo dunque qual è il significato
della approssimazione introdotta con la teoria di Bethe in termini di circuito equivalente.
Il coefficiente di riflessione per il circuito in Figura 8.24 è dato da:
Γ=
1 − (1 + Y )
−Y
−1
=
=
1 + (1 + Y ) 2 + Y 1 + 2
Y
(8.156)
Se |Y| >>1 (prossimo ad un corto circuito) possiamo approssimare il coefficiente di riflessione al
primo ordine come:
−1
Γ=
−1
2
2
2
= − 1 + ≈ − 1 − = −1 +
2
Y
Y
Y
1+
Y
(8.157)
163
Poichè Y è immaginaria pura otteniamo anche in questo caso che Γ > 1 , ossia l’approssimazione al
primo ordine introdotta dalla (8.157) per |Y| >>1 equivale alla approssimazione di Bethe. D’altra
parte la forma della espressione (8.157) è identica alla forma della (8.155) e per confronto, ossia
eguagliando i coefficienti di riflessione ottenuti con la (8.155) e con la (8.157), si ha:
Y =−j
ab
(8.158)
πx
4k z10α m sin 0
a
2
Dalla (8.158) risulta che il foro è equivalente ad una capacità in parallelo.
Abbiamo dunque ricavato una espressione di Y a partire dal confronto tra due trattazioni ottenute
facendo la stessa approssimazione. Se calcoliamo il coefficiente di riflessione mediante la formula
esatta (8.156) utilizzando la Y fornita dalla (8.158), troviamo Γ < 1 , che rispetta il principio di
causalità garantendo il corretto trasporto di Potenza attraverso il foro.
8.10.2 Teoria di Collin
La teoria di Bethe non consente di rispettare la conservazione della potenza. Inoltre non tiene conto
dell'ambiente in cui i dipoli irradiano e infatti richiede la perfetta simmetria delle strutture. Nella
teoria di Bethe il principio di causalità non è soddisfatto perchè i dipoli dipendono solo dal campo
generatore e dalla geometria del foro e, poichè il campo generatore è calcolato in assenza del foro,
cioè con il foro "metallizzato", si perde il "connessione" tra le due zone collegate dal foro. Una
trattazione più accurata, chiamata teoria di Collin, può essere ottenuta includendo tra le cause dei
dipoli J ed M equivalenti al foro anche i "campi di reazione" ovvero i campi prodotti dai dipoli
stessi. In altre parole, occorre tenere conto del fatto che le correnti magnetiche in corrispondenza
dei dipoli dipendono anche dal campo in corrispondenza sul foro.
Nella teoria di Collin le espressioni (8.147) vengono pertanto modificate come segue:
(1)
(2)
M 2 = − jωµ0α m H g + H r ( M 1 ) − H r ( M 2 )
tang
J 2 = jωε 0α 2 E g + E ( J 1 ) − E ( J 2 )
n
(1)
r
(2)
r
(8.159)
Esempio: foro in una parete trasversa di una guida d’onda
Per un calcolo accurato dei dipoli elettrico e magnetico in corrispondenza del foro occorre
conoscere sia il campo incidente sul foro, in assenza del foro, sia i campi di reazione prodotti dal
foro. Ne consegue che la teoria di Collin, contrariamente alla teoria di Bethe, rispetta il principio di
conservazione della potenza perchè ora esiste un collegamento "fisico" tra le zone "1" e "2".
Sia dunque M2 la corrente sul foro nella regione "2" relativa alla teoria di Collin. Ipotizzando che
anche nella teoria di Collin h10 sia allineato con M2, otteniamo:
+
A10 =
1
2
π x
−
−
2 M 2 ⋅ h10δ (r − r0 )dV0 = M 2 ⋅ h10 = −
sin 0 M 2
∫
2
ab
a
(8.160)
A questo punto possiamo calcolare i campi di reazione:
164
− −
−
+
A10 h10 A10 (− h10 )
2
1
2
πx
π x
H =
=
=−
sin 0 M 2
sin 0 =
−
Z10
Z10
ab
Z10 ab
a
a
2
πx M
=
sin 2 0 2
ab
a Z10
(8.161)
+
+
A10 h10
2
1 2
πx
π x
=−
sin 0 M 2
sin 0 =
Z10
ab
Z10 ab
a
a
2
πx M
= − sin 2 0 2
ab
a Z10
(8.162)
(1)
r
(2)
Hr =
(2)
(1)
Ossia il campo di reazione nella regione "2" è opposto a quello nella regione "1": H r = − H r .
Risulta dunque:
(1)
(2)
M 2 = − jωµ0α m H g + H r ( M 1 ) − H r ( M 2 )
(1)
= − jωµ0α m H g + 2 H r ( M 1 )
tang
tang
=
4
π x
= − jωµ0α m H g +
M 2 sin 2 0 =
abZ10
a tang
= − jωµ0α m H g
tang
−
=
(8.163)
4 jωµ0α m
πx
M 2 sin 2 0
abZ10
a tang
da cui:
M 2 = M 2( Bethe ) −
4 jωµ0α m
πx
M 2 sin 2 0
abZ10
a
(8.164)
esplicitando rispetto alla corrente M2 si ottiene:
4 jk z10α m
π x
M 2 1 +
sin 2 0 = M 2( Bethe )
ab
a
M 2( Bethe )
M2 =
4 jk z10α m
π x
sin 2 0
1 +
ab
a
(8.165)
Quest'ultimo valore di M2 può essere utilizzato per calcolare il coefficiente di riflessione. Si ha:
4 jk z10α m
π x
sin 2 0
ab
a
Γ = −1 + A10− = −1 +
4 jk z10α m
π x
sin 2 0
1 +
ab
a
(8.166)
ossia Γ < 1 .
165
In termini di circuito equivalente si ha invece: Γ =
Y =−j
ab
πx
4k z10α m sin 0
a
−1
e, per confront con la (8.166) si ottiene:
2
1+
Y
che è identica alla (8.158).
2
8.11
Componenti in guida d’onda
Figura 8.25. Divisori di Potenza in guida d’onda (a) e (b).
166
Figura 8.26. Giunzione ibrida a 180° in guida d’onda rettangolare. Configurazione senza circuito di
adattamento alle porte 1 e 4.
Figura 8.27. Accoppiatore direzionale in guida d’onda.
167
Figura 8.28. Accoppiatore direzionale in guida d’onda.
Figura 8.29. Filtro passabanda a risuonatori accoppiati tramite iridi induttivi.
168
8.12
Mode Matching
La tecnica del “mode matching” è una tecnica numerica per la formulazione e soluzione di problemi
di valori al contorno in elettromagnetismo. Questa tecnica è utile quando la geometria della struttura
può essere identificata come la composizione di due o più regioni in cui esiste una soluzione ben
definita delle equazioni di Maxwell che soddisfa tutte le condizioni al contorno ad eccezione che
alla giunzione di separazione tra le varie regioni. La tecnica del mode matching viene utilizzata per
la soluzione di problemi legati alla presenza di discontinuità in guida d’onda (o in microstriscia) e
per la soluzione di problemi agli autovalori.
Si procede essenzialmente attraverso due passi:
1) Si espandono i campi incogniti nelle singole regioni in termini di modi.
2) Si impongono le condizioni di continuità dei campi alle interfacce di separazione tra le varie
regioni.
Dato che la forma funzionale dei modi è nota il problema consiste nel determinare i coefficienti
modali nelle varie regioni. In particolare la tecnica del “mode matching” sfrutta l’ortogonalità dei
modi nelle varie regioni e conduce ad un sistema di infinite equazioni lineari (da troncare
opportunamente), la cui soluzione fornisce i coefficienti incogniti.
Il mode matching può essere applicato per l’analisi di strutture come quelle mostrate in figura 8.25
e 8.26. Di seguito sono mostrati altri esempi di strutture a cui può essere applicato il mode
matching:
1) Cambio di altezza in guida d’onda rettangolare (le due guide hanno la stessa larghezza a),
mostrato in figura 8.30a.
2) Cambio di larghezza in guida d’onda rettangolare (le due guide hanno la stessa altezza b),
mostrato in figura 8.30b.
3) Biforcazione in guida d’onda rettangolare (la struttura ha larghezza a), mostrato in figura 8.30c.
Figura 8.30.
Come esempio consideriamo il caso 2) (che prende il nome di discontinuità sul piano H). La
truttura da analizzare è mostrata in figura 8.31. Consideriamo un campo incidente TE10 nella
regione “1”.
169
Figura 8.31. Discontinuità sul piano H in una guida d’onda rettangolare di altezza b.
Qualunque campo sia nella regione 1 che nella regione 2 può essere espresso come somma di modi.
La presenza della discontinuità, come già detto nei paragrafi precedenti, comporta l’insorgenza di
modi superiori:
-
Nella guida “1” avrò il modo TE10 progressivo e “tutti” i modi riflessi in direzione –z.
-
Nella guida “2” avrò tutti i modi progressivi in direzione +z.
-
Il termine noto è il modo TE10 incidente.
Per determinare i coefficienti dell’espansione modale nelle regioni “1” e “2” (figura 8.32) si
utilizzano le condizioni di continuità del campo elettrico e magnetico alla giunzione z = 0:
-
E ed H devono essere continui su tutto il tratto di lunghezza “a1” per z = 0− e 0 ≤ x ≤ a1
-
Etang = 0 per per z = 0+ e a1 ≤ x ≤ a2 nella guida “2”.
Possiamo osservare che il modo TE10 è omogeneo rispetto ad y e anche la struttura è omogenea
rispetto ad y (l’altezza b nei due tratti di guida è la stessa). Poiché la sorgente (il TE10 incidente) è
omogenea rispetto ad y in una struttura omogenea rispetto ad y, tutti i campi nella struttura saranno
costanti in y perché non esiste alcun fattore che produca una variazione lungo y. Da ciò consegue
che, nelle espansioni modali nelle regioni “1” e “2”, si dovranno includere solamente i modi TEn0
(in una guida rettangolare non esistono i modi TMn0) per i quali si ha:
en 0 = −
2
nπ x
sin
iy
ab
a
hn0 = i z × en0 =
2
nπ x
sin
ix
ab
a
(8.167)
(8.168)
170
Il campo elettrico nella regione “1” per z = 0− , è dato da:
E
(1)
= −Vinc+ (10)
∞
2
πx
2
nπ x
sin
i y − ∑ Vn−
sin
exp ( jk zn z ) i y
a1b
a1
a1b
a1
n =1
=
z =0
−
(8.169)
2
2
nπ x
πx
sin
i y − ∑ Vn−
sin
iy
a1b
a1
a1b
a1
n =1
∞
= −Vinc+ (10)
Il campo magnetico nella regione “1” all’interfaccia z = 0− fornisce:
H
(1)
2
πx ∞ − 2
nπ x
+
= I inc
sin
i
+
I
sin
exp ( jk zn z ) i x
∑
x
(10)
n
ab
n =1
a
a
b
a
1
1
1
1
(8.170)
z =0
−
Poichè:
I
+
inc (10)
=
−
n
I =−
Vinc+ (10)
Z10(1)
(8.171)
Vinc− (10)
Z n(1)
si ha:
H
(1)
=
Vinc+ (10) 2
π x ∞ Vn−
ix − ∑
sin
Z10(1) a1b
a1 n =1 Z n(1)
2
nπ x
ix
sin
a1b
a1
(8.172)
Nella guida “2” esiste solamente l’onda progressiva e si ha:
E
(2)
H
∞
2
mπ x
= ∑ Vm+ −
sin
exp ( jk zn z ) i y
a
b
a
m =1
2
2
(2)
Vm+
= ∑ (2)
m =1 Z m
∞
z = 0+
∞
2
mπ x
= ∑ Vm+ −
sin
i y
a
b
a
m =1
2
2
2
mπ x
sin
ix
a2b
a2
(8.173)
(8.174)
Nelle equazioni precedenti abbiamo indicato con Z k(i ) l’impedenza caratteristica del modo TEk0
relative alla guida “i”.
Imponiamo la continuità del campo elettrico e del campo magnetico per 0 ≤ x ≤ a1:
∞
2
mπ x
2
πx ∞ − 2
nπ x
= −Vinc+ (10 )
E (2) = ∑ Vm+ −
sin
sin
− ∑ Vn
sin
= E (1)
a
a
a
a
b
a
b
a
b
m =1
n =1
2
1
1
2
1
1
Vm+
(2)
m =1 Z m
∞
H (2) = ∑
+
2
mπ x Vinc (10) 2
π x ∞ Vn−
−∑
sin
= (1)
sin
a2
Z10 a1 b
a1 n =1 Z n(1)
a2 b
2
nπ x
sin
= H (1)
a1
a1 b
(8.175)
(8.176)
Sappiamo inoltre che il campo elettrico trasverso nella regione “2” per (z = 0+) è nullo per a1 ≤ x ≤
a2 ossia:
171
E
∞
2
mπ x
iy = 0
= ∑ Vm+ −
sin
a2 b
a
m =1
2
(2)
(8.177)
E’ possibile scrivere le (8.175) e (8.177) in forma compatta tramite la seguente equazione:
∞
∑V
+
m
m =1
2
mπ x
−
= E '( x)
sin
a2 b
a
2
per 0 ≤ x ≤ a2
1
πx ∞ − 1
nπ x
+
sin
sin
−
V
− ∑ Vn
inc (10)
a1 n =1
a1
a1
a1
dove E '( x) =
0
(8.178)
per x ∈ [ 0, a1 ]
(8.179)
per x ∈ [ a1 , a2 ]
Si ottengono dunque due condizioni, la continuità del campo magnetico (8.176) definita sulla
larghezza della guida “1”, e la continuità del campo elettrico (8.178) definita sulla larghezza della
guida “2”.
Sfruttando l’ortogonalità dei modi nella guida “1” moltiplichiamo l’equazione (8.176), ossia
1
pπ x
sin
e integriamo (per un “p”
l’equazione di continuità del campo magnetico, per
a1
a1
generico) lungo il tratto x ∈ [ 0, a1 ] , visto che l’equazione (8.176) è definita per x ∈ [ 0, a1 ] :
a1 ∞
Vm+
(2)
∫0 ∑
m =1 Z m
1
mπ x 1
pπ x
sin
sin
dx =
a2
a2
a1
a1
Vinc+ (10) 1
π x ∞ Vn−
= ∫ (1)
sin
− ∑ (1)
Z
a
a
10
1
1
0
n =1 Z n
a1
pπ x
1
nπ x 1
sin
sin
dx
a1
a1 a1
a1
per ogni “p”
(8.180)
Per il calcolo della (8.180) occorre distinguere due casi: p = 1 e p > 1.
Per p = 1 la (8.180) fornisce:
∞
Vm+
∑Z
m =1
(2)
m
kn1
6444=7444
8
a1
1
mπ x
πx
sin
sin
dx =
∫
a2
a1
a1a2 0
a
∞
Vinc+ (10) 1 a1 2 π x
Vn− 1 1
nπ x
πx
= (1)
sin
dx − ∑ (1) ∫ sin
sin
dx
∫
Z10 a1 0
a1
a1
a1
n =1 Z n a1 0
14243
14442444
3
=
a1
2
=δ n1
(8.181)
a1
2
ossia:
+
Vm+
∑
(2)
m =1 Z m
Vinc (10) 1 a1 ∞ Vn− 1 a1
1
km1 = (1)
−∑
δ n1
Z10 a1 2 n =1 Z n(1) a1 2
a1a2
Vm+
∑
(2)
m =1 Z m
Vinc (10 ) 1 V1− 1
1
km1 = (1)
−
Z10 2 Z1(1) 2
a1a2
∞
∞
(8.182)
+
(8.183)
172
Per p > 1 si ottiene invece:
V p−
1
kmp = − (1)
2Z p
a1a2
Vm+
∑
(2)
m =1 Z m
∞
a1
con kmp = ∫ sin
0
(8.184)
mπ x
pπ x
sin
dx
a2
a1
(8.185)
Per quanto riguarda l’equazione di continuità del campo elettrico (8.178), definita per x ∈ [ 0, a2 ] ,
1
qπ x
sin
a2
a2
questa viene moltiplicata per
(per ogni “q”) e poi integrata tra 0 e a2. Si ottiene
quindi:
=
a2
δ mq
2
64447444
8
a2
∞
1 +
mπ x
qπ x
Vm ∫ sin
sin
dx =
∑
a2
a2
m =1 a2
0
=
a1
1
a2
∫ E '( x) sin
0
(8.186)
a2
qπ x
qπ x
1
dx −
E '( x)sin
dx
∫
a2
a2
a2 a1
1444
424444
3
=0, perchè E '( x ) = 0 (D)
da cui:
∞
1 + a2
1
Vm δ mq =
∑
2
a2
m =1 a2
a1
∫ E '( x)sin
0
qπ x
dx
a2
→
Vq+
2
=
1
a2
a1
∫ E '( x) sin
0
qπ x
dx
a2
(8.187)
Sostituendo al posto di E '( x) l’espressione fornita dalla (8.179) si ottiene infine:
Vq+
2
1
1
H1qVin+c (10 ) +
a1a2
a1a2
=
∞
∑V
−
n
(8.188)
H nq
n =1
con
a1
H nq = ∫ sin
0
nπ x
qπ x
sin
dx
a1
a2
(8.189)
Ricapitolando abbiamo ottenuto il seguente sistema lineare:
∞ M Vm+
Vin+c (10) V1−
1
km1 =
−
∑ (2)
2 Z10(1) 2 Z1(1)
m =1 Z m a1a2
∞M +
V p−
Vm
1
kmp = − (1)
∑ (2)
2Z p
m =1 Z m a1a2
V +
∞N
q = 1 H V+ + 1
Vn− H nq
∑
1q inc (10)
2
a1a2
a1a2 n =1
p =1
p = 2, …, ∞ N
(8.190)
q = 1, …, ∞ M
173
Nella (8.190) le incognite sono indicate in rosso e sono i coefficienti Vn− e Vm+ mentre il termine
noto è il coefficiente del modo TE10 incidente, Vinc+ (10) . E’ evidente che la soluzione di questo
sistema lineare è possibile solo se le due sommatorie infinite vengono “opportunamente” troncate.
In particolare, la sommatoria in “n” viene troncata fino al termine N e la sommatoria in “m” fino al
termine M. Avrò dunque un sistema lineare di N+M equazioni, in N+M incognite.
Ovviamente si dovrà determinare un criterio per effettuare il troncamento delle due sommatorie,
ossia per determinare i valori di N ed M. In generale, il valore di N e M dipende dalla precisione che
si vuole ottenere e dalle risorse di calcolo disponibili. Tuttavia, non è detto che la precisione della
soluzione aumenti sempre all’aumentare di N ed M. Infatti, nei problemi che coinvolgono
discontinuità in guida d’onda possono essere presenti soluzioni instabili legate al fenomeno della
“convergenza relativa” che dipende dalla scelta di N ed M e dalla relazione tra N ed M.
Possiamo descrivere il problema della convergenza relativa con riferimento alla discontinuità sul
piano H (Figura 8.32) analizzata in precedenza in questo paragrafo. Abbiamo sostanzialmente
approssimato i campi nelle guide “1” e “2” con due serie di Fourier (le espansioni modali),
rispettivamente con N ed M termini. Questo significa che nella guida “1” si approssima il campo
vero con un campo a banda spaziale limitata pari a B1 = Nπ/a1 (il coefficiente più elevato
nell’argomento del seno nella serie modale). Analogamente, nella guida “2” si approssima il campo
vero con un campo a banda spaziale limitata di valore B2 = Mπ/a2.
Per “banda spaziale” si intende la velocità massima di variazione spaziale del campo sulla sezione
trasversa. Imporre la continuità del campo all’interfaccia di separazione tra le due guide equivale ad
imporre l’uguaglianza tra una funzione con una banda spaziale B1 (il campo nella guida “1”) e una
funzione con una banda spaziale B2 (il campo nella guida “2”). Se le due bande spaziali non sono
uguali il problema potrebbe diventare instabile (ossia il sistema lineare potrebbe avere un numero di
condizione molto elevato).
Di conseguenza, per garantire la stabilità della soluzione ottenuta con il “mode matching” occorre
che B1 = B2 ossia:
Nπ M π
=
a1
a2
→
N a1
=
M a2
(8.191)
Quindi se ad esempio a2/a1 = 2, N = 10, M = 20 fornisce una soluzione migliore rispetto a N = 20 e
M =20.
8.13
Guida a pareti magnetiche
E’ possibile descrivere la propagazione in una microstriscia di larghezza W, su un substrato di
altezza h e di costante dielettrica εr, mediante una guida a pareti magnetiche equivalente di altezza
h, larghezza Weff e costante dielettrica εeff, costituita da due pareti di C.E.P (sopra e sotto) delimitate
da due pareti laterali di C.M.P. (Figura 8.32).
174
Figura 8.32. Guida a pareti magnetiche equivalente ad una microstriscia.
La guida a pareti magnetiche ha come modo fondamentale un modo TEM, i suoi modi superiori
(TE e TM) sono molti simili ai modi superiori della microstriscia. Pertanto, la massima frequenza a
cui la propagazione in microstriscia è monomodale è molto vicina alla frequenza di taglio del primo
modo superiore nella guida a pareti magnetiche.
La guida a pareti magnetiche può essere utilizzata anche per analizzare, tramite la tecnica del “mode
matching” le discontinuità in microstriscia, che possono essere ricondotte a discontinuità in guida.
La geometria della guida a pareti magnetiche è mostrata in Figura 8.32. Per studiare l’equivalenza
con la microstriscia, determiniamo i modi della guida a pareti magnetiche le cui funzioni modali
sono indipendenti da y (poiché in una microstriscia l’altezza h è molto minore della lunghezza
d’onda, si può assumere che il campo in microstriscia sia indipendente da y).
Per i modi TEM si ha:
∂ 2φ ∂ 2φ
+
=0
∂x 2 ∂y 2
(8.192)
con le condizioni al contorno:
φ = 0
φ = 1
∂φ
=0
∂x
y=0
y=h
x=±
Weff
2
sul C.E.P.
(8.193)
sul C.M.P.
(8.194)
Poiché stiamo considerando campi costanti rispetto a y si ha
∂ 2φ
= 0 e quindi, per la (8.192), si ha
∂y 2
∂ 2φ
∂φ
= 0 , da cui segue
= costante . Tuttavia, per le condizioni al contorno (8.194) risulta
2
∂x
∂x
∂φ
∂ 2φ
= 0 . L’equazione
= 0 , con le condizioni al contorno (8.193), ha come soluzione una
∂x
∂y 2
funzione φ(y) lineare rispetto ad y. In particolare risulta φ(y)=y/h che soddisfa le condizioni (8.193).
anche
175
Quindi per il campo TEM si ha:
E=−
H=
V
iy
h
I
iy
Weff
mentre l’impedenza caratteristica è data da: Z 0 = ζ 0
h
Weff ε eff
che coincide con la (2.23).
Per i modi TM si ha:
∇t2 Ψ t + kt2 Ψ t = 0
Ψ t ( x, 0) = Ψ t ( x, h) = 0
E t ⋅ i c = 0 e Ez = 0 sulle pereti C.E.P.
∂Ψ t
∂x
H t ⋅ i c = H t ⋅ i y = 0 sulle pareti C.M.P.
x =±
Weff
2
=0
Poiché stiamo considerando campi costanti rispetto a y si ha
(8.195)
∂Ψ t
= costante ossia Ψ t è una
∂y
funzione lineare di y. Le soluzione della (8.195) sono del tipo:
Ψ t ( x, y ) = A( y ) cos ( k x x ) , A( y )sin ( k x x )
A(y) è necessariamente una funzione lineare di y, ma poichè deve annullarsi in y = 0 e y = h (8.195)
si ha A(y) = costante = 0, ossia Ψ t = 0 . Questo singnifica che nella guida a pareti magnetiche non
vi sono modi TM indipendenti da y.
Per i modi TE si ha:
∇t2 Φ t + kt2 Φ t = 0
∂Φ t
∂y
=0
E t ⋅ i c = 0 sulle pereti C.E.P.
(8.196)
y = 0,h
We ff
Φt x = ±
, y = 0
2
H t ⋅ i c = H t ⋅ i y = 0 e H z = 0 sulle pareti C.M.P.
∂Φ t
= costante , ossia Φ t è una
∂y
funzione lineare di y. Le soluzione della (8.196a) sono ancora del tipo:
Poiché stiamo considerando campi costanti rispetto a y si ha
Φ t ( x, y ) = A( y ) cos ( k x x ) , A( y ) sin ( k x x )
con A(y) funzione lineare di y. In questo caso la (8.196b) fornisce A’(0) = A’(h) = 0. Pertanto,
poiché A(y) è lineare, A’(y) è costante e vale 0, ossia A(y) = costante ≠ 0.
Imponendo le condizioni al contorno (8.196c) si ottiene:
176
Weff π
Weff
( 2n + 1) π
cos k x
= + nπ ⇒ k xWeff = π + 2nπ ⇒ k x =
= 0 ⇒ kx
2
2
2
Weff
Weff
Weff
2nπ
sin k x
= nπ ⇒ k xWeff = 2nπ ⇒ k x =
= 0 ⇒ kx
2
2
Weff
Quindi gli autovalori sono k x =
(8.197)
nπ
e, a seconda che n sia pari o dispari si ha una funzione seno
Weff
oppure coseno. A noi interessa solamente il caso in cui i campi trasversi sono pari in x e quindi Φ t
deve essere dispari. In tal caso si ha:
e=
h=-
2nπ x
2
cos
W
hWeff
eff
2
hWeff
2nπ x
cos
W
eff
(8.198)
10. RISUONATORI IN LINEA DI TRASMISSIONE
I risuonatori sono circuiti in grado di supportare soluzioni risonanti ossia soluzioni a regime
sinusoidale in assenza di sorgenti. I risuonatori vengolo largamente utilizzati negli oscillatori
sinusoidali e nei filtri. Inoltre molti dispositivi elettromagnetici (alcuni tipi di antenne ad esempio)
possono essere analizzati considerandoli analoghi a risuonatori. L’obiettivo di questo paragrafo è
quello di individuare quali circuiti in linea di trasmissione presentano soluzioni risonanti. Questi
circuiti devono essere necessariamente privi di perdite (perché la definizione di “risonanza” prevede
l’assenza di sorgenti). Successivamente si vedrà cosa accade alle soluzioni risonanti quando si tiene
conto che in un circuito reale sono presenti perdite.
La caratteristica dei circuiti risonanti è quella di avere dei componenti in grado di accumulare
energia elettrica e magnetica e di scambiarle nel tempo. Poiché su una “linea di trasmissione” è
possibile avere accumulo di energia elettrica e magnetica, evidentemente una linea di trasmissione
può essere utilizzata per realizzare un risuonatore, ovviamente sotto opportune condizioni.
Per valutare se e quando una linea di trasmissione è un risuonatore consideriamo una linea di
trasmissione priva di perdite alimentata da un generatore (di tensione) variabile nel tempo (Figura
9.1).
Figura 9.1. Linea di trasmissione alimentata da un generatore di tensione variabile nel tempo.
177
Supponiamo che il generatore venga acceso per t = 0, istante in cui la linea è a riposo. Se il
forzamento è sinusoidale è semplice calcolare tensione e corrente sulla linea. D’altra parte,
qualunque segnale v(t) può essere sempre espresso come somma di segnali sinusoidali mediante la
trasformata di Fourier. Quindi è possibile calcolare la soluzione anche in caso di v(t) generico.
Le risonanze fanno parte della soluzione transitoria delle equazioni delle linee di trasmissione nel
dominio del tempo. Per questo motivo conviene considerare il circuito in Figura 9.1 come un
sistema descritto mediante la sua funzione di trasferimento ingresso-uscita W(s), dove s è la
variabile della trasformata di Laplace.
∞
v( s ) = ∫ v(t ) exp(− st )dt
(9.1)
0
v(t ) = 0
per t < 0
Il passaggio dalla variabile s alla variabile ω avviene secondo la nota trasformazione s = jω.
Per il circuito in Figura 9.1 si ha:
V ( s) = Z ( s) I ( s)
ωL
Z (ω ) = jZ 0 tan
c
ω→
s
j
(9.2)
s
Z ( s ) = jZ 0 tan L
jc
Supponiamo che V(s) sia la causa e I(s) l’effetto nella relazione (9.2a), che riscriviamo dunque nella
forma:
I (s) =
V (s)
Z ( s)
(9.3)
Con riferimento alla (9.3), negli zeri di Z(s) si verificano le seguenti situazioni:
-
In assenza di tensione è possibile avere un corrente diversa da zero (si ha cioè risposta del
sistema in assenza di ingresso). Questa situazione che si pò verificare solo in assenza di perdite.
-
Se la tensione in ingresso ha ampiezza finita, l’uscita I(s) ha ampiezza infinita.
Avere una “uscita” finita senza ingresso oppure uscita infinita con ingresso finito significa trovarsi
in condizioni di risonanza.
D’altra parte, dalla analisi dei sistemi, sappiamo che i poli della fuzione di trasferimento (ovvero gli
zeri del suo denominatore) forniscono la variazione temporale dei cosiddetti “modi caratteristici”
del sistema, soluzioni in assenza di forzamento, che sono le risonanze.
Quindi l’equazione che determina la condizione di risonanza per il circuito in Figura 9.1 è
s
Z ( s ) = jZ 0 tan L = 0
jc
→
s
L = nπ
jc
→ s=
jc
nπ
L
→ ωnr =
c
nπ
L
(9.4)
Ovviamente in assenza di perdite le frequenze di risonanza ωnr sono reali.
178
La condizione (9.4) equivale a β L = nπ che è la condizione di risonanza per una linea chiusa in
corto circuito da entrambi i lati (in quanto V(s) = 0, Figura 9.1). In pratica la linea risuona a tutte le
frequenza per cui la lunghezza L è un multiplo intero di semilunghezze d’onda. Ovviamente nella
9.4 n > 0 perché non hanno senso frequenze negative (o nulle).
Consideriamo ora una rete più complessa come quella mostrata in Figura 9.2.
Figura 9.2.
Per determinare la risonanza di questa struttura scegliamo una sezione arbitraria (ad esempio
quella tratteggiata in Figura 9.2). Se applichiamo un generatore di tensione in serie la corrente
complessiva vale:
V
I = su ur
(9.5)
Z +Z
su ur
dove Z e Z sono calcolate con la convenzione dell’utilizzatore. Di conseguenza, una condizione
che fornisce risonanza è:
su ur
Z +Z =0
(9.6)
Le soluzioni della (9.6) non sono le uniche soluzioni possibili. Infatti utilizzando un generatore di
corrente al posto di un generatore di tensione, la tensione diventa l’uscita e la relazione
I
V = su ur
Y +Y
e un’altra condizione di risonanza è
su ur
Y +Y = 0
(9.7)
(9.8)
Le risonanze del sistema sono le soluzioni della (9.6) e della (9.8). D’altra parte risulta:
su ur
su ur 1 1 Z + Z
Y + Y = su + ur = suur
(9.9)
Z Z
ZZ
su ur
su ur
Pertanto, ogni zero di Z + Z = 0 è anche zero di Y + Y = 0 , purchè queste due impedenze non
vadano mai all’infinito (e viceversa). In questo caso si potrà (e si dovrà) usare una sola delle due
condizioni. Ad esempio, per il circuito in Figura 9.3a, scegliendo la sezione AA’, dovrò usare la
su ur
su
condizione Z + Z = 0 perchè a questa sezione la Y è infinita; mentre per il circuito in Figura 9.3b,
su ur
su
se scelgo la sezione BB’, dovrò usare la condizione Y + Y = 0 perchè a questa sezione la Z è
infinita. Se scelgo qualunque altra sezione (per entrambi i circuiti in Figura 9), per determinare tutte
le frequenze di risonanza dovrò usare entrambe le condizioni (9.8) e (9.9).
179
Figura 9.3. Esempi di risuonatori in linea di trasmissione.
Ovviamente, i valori delle risonanze non dipendono dalla sezione che scegliamo. Possiamo
facilmente dimostralo considerando una sezione generica AA’ di un risuonatore (Figura 9.4).
Figura 9.4. La sezione AA’ arbitraria divide il risuonatore in due reti prive di perdite.
Applichiamo il teorema di Poynting (in assenza di perdite) al circuito in Figura 9.4:
1 su 2
Z I = 2 jω (Wm1 − We1 )
2
1 uv 2
Z I = 2 jω (Wm 2 − We 2 )
2
(9.10)
dove Wm1 e We1 sono energia magnetica ed elettrica immagazinate nella rete “1” con riferimento
alla figura 9.4, mentre Wm2 e We2 sono energia magnetica ed elettrica immagazinate nella rete “2”.
Sommando membro a membro le 9.10 si ottiene:
1 su uv 2
Z + Z I = 2 jω (Wm − We )
2
(
)
(9.11)
Dove Wm = Wm1 + Wm2 è l’energia magnetica totale immagazinata nel risuonatore, e We = We1 + We2
è l’energia elettrica totale immagazinata nel risunatore.
su ur
Se alla sezione arbitraria AA’ si ha Z + Z = 0 , allora la quantità a secondo membro della 9.11,
calcolata su tutto il risuonatore, è nulla.
Tuttavia si può notare che il termine a secondo membro della 9.11 non dipende dalla sezione scelta.
In altre parole, se si cambia la sezione, si avranno impedenze diverse, una corrente I diversa, ma la
quantità 2 jω (Wm − We ) , che dipende solamente dal risuonatore, sarà sempre nulla.
180
suu uur
Per una sezione BB’ a cui si “misurano” Z ' e Z ' e una corrente I’ si ha ovviamente:
1 suu uuv
2
Z '+ Z ' I '
2
suu uur
ossia anche alla sezione BB’ si ha Z ' + Z ' = 0 .
0 = 2 jω (Wm − We ) =
(
)
Da quanto detto in precedenza risulta che, in condizioni di risonanza, le energie magnetica ed
elettrica complessive all’interno del risuonatore sono uguali: Wm = We e dunque Wem = We + Wm =
2We = 2Wm. Ad esempio per il circuito in Figura 9.5, l’energia elettrica complessiva è quella
immagazinata nella linea sommata a quella del condensatore, mentre l’energia magnetica
complessiva è solo quella immagazinata nella linea. In condizioni di risonanza si ha dunque: Wm =
Wm,linea = We,linea + We,condensatore = We.
Figura 9.5. Risuonatore in linea di trasmissione.
In assenza di perdite abbiamo trovato soluzioni risonanti del tipo s = jω0. In queste condizioni il
(
)
campo nel risuonatore varia nel tempo come: Re ( e st ) = Re e jω0t = cos (ω0t ) . Supponiamo invece
che s non sia immaginario puro, ovvero vi siano delle perdite nel risuonatore: s = jω0 − ω1 . In
questo caso il campo varierà nel tempo come: Re ( e st ) = cos (ω0t ) e −ω1t . Quindi, in presenza di
perdite, il campo nel risuonatore si attenua in modo esponenziale e
s j = ω0 + jω1
(9.12)
prende il nome di frequenza di risonanza complessa. Di conseguenza l’energia nel risuonatore
diminuirà esponenzialmente nel tempo: Wem (t ) = Wem (0)e −2ω1t per effetto della dissipazione di
Potenza. La potenza dissipata vale: Pd (t ) = −
dWem
= 2ω1Wem (t ) .
dt
Nella (9.12) la parte reale della frequenza complessa “ω0” è la frequenza delle oscillazioni
smorzate, mentre “ω1” è l’inverso della costante di tempo dello smorzamento del campo. Per una
soluzione di tipo oscillatorio smorzato, l’energia varia nel tempo e, a rigori, non si può più parlare
di energia media in un periodo. Se però si assume che ω1 << ω0 allora sia il campo elettromagnetico
che l’energia all’interno del risuonatore sono delle funzioni a banda stretta. In questo caso è ancora
possibile parlare di energia media valutata su un periodo, in quanto all’interno di ogni periodo della
oscillazione è possibile trascurare lo smorzamento. Quindi, la potenza dissipata in un periodo di
durata T = 2π/ω0 è:
TPd =
2π
ω0
2ω1Wem
→
2ω1
ω0
=
T Pd
2π Wem
(9.13)
181
Il rapporto 2ω1/ω0 è la misura della potenza dissipata in un periodo, ovvero della attenuazione del
campo nel risuonatore.
In una visione adimensionale del problema consideriamo la potenza dissipata in un periodo rispetto
alla energia “media” nello stesso periodo. Dalla (9.13) si ha:
TPd
2π
4πω1 2π
=
2ω1 =
=
Wem
Q
ω0
ω0
(9.14)
“Q” prende il nome di fattore di merito del risuonatore ed è definito (9.14) come:
Q=
ω0 ω0Wem
=
2ω1
Pd
(9.15)
Dalla (9.15) è evidente che, quanto più alto è il fattore di merito del risuonatore, tanto più piccole
sono le perdite e maggiore è il tempo che il campo permane all’interno del risuonatore. Per
calcolare il fattore di merito Q mediante la (9.15) occorre determinare sia ω0 che ω1, ossia risolvere
la equazione di risonanza con le perdite e cioè inserendo la frequenza complessa s j = ω0 + jω1 .
Tuttavia se Q >> 1 (ossia abbiamo un risuonatore con piccole perdite) è possibile utilizzare un
approccio “perturbativo” per l’analisi del risuonatore. Si procede cioè come segue:
-
Si calcolano ω0, Wem e i campi a partire dal risuonatore ideale (imperturbato) più simile possibile
al risuonatore con perdite.
-
Si calcolano le perdite inserendo nelle espressioni dei campi i valori calcolati per il risuonatore
imperturbato (Figura 9.6).
Figura 9.6.
Supponiamo di avere un risuonatore con una conducibilità piccola σ. Per il calcolo del fattore di
merito procedo come segue:
elimino la conducibilità σ e calcolo ω0, Wem e i campi (ossia, nel nostro caso, tensione e corrente
sulla linea di trasmissione equivalente) nel risuonatore ideale. Dopodichè la potenza dissipata Pd
può essere calcolata dalla seguente espressione:
1
Pd = G ∫ | V ( z ) |2 dz
2
(9.16)
182
Nel calcolo di Pd (9.16), la G è quella del risuonatore con perdite, mentre la V viene calcolata nel
risuonatore ideale (tecnica perturbativa).
L’errore che si commette con la tecnica perturbativa è dell’ordine di 1/(2Q), pertanto il
procedimento va verificato a posteriori.
Esempio:
L’esempio (b) in Figura 9.3 può essere utilizzato per rappresentare una microstriscia terminata agli
estremi con terminazioni aperte. La condizione di risonanza, da applicare alla sezione BB’ in
su ur
Figura 9.3 è Y + Y = 0 . Si ha:
su
Y =0
ur
Y = − jY0 cot ( β L )
Quindi la condizione di risonanza è
− jY0 cot ( β L ) = 0
β 0 ε eff L =
π
ω0,n
= 2
π
2
→ βL =
+ nπ →
ω0
c0
π
2
+ nπ
ε eff L =
π
2
+ nπ
+ nπ
ε eff L
c0
Le perdite in microstriscia sono abbastanza elevate e possono essere perdite nel dielettrico, perdite
nei conduttori, o perdite per irradiazione delle terminazioni aperte. Ne consegue che il fattore di
merito di un risuonatore in microstriscia è solitamente piuttosto basso (dell’ordine di 50-100).
Fattori di merito più elevati possono essere ottenuti utilizzando delle cavità risonanti metalliche: un
risonatore in guida d’onda è ad esempio una cavità risonante metallica. In generale, le cavità
risonanti sono costituite da un volume V racchiuso da una superficie metallica S. Le perdite in una
cavità risonante sono molto basse e si possono facilmente ottenere fattori di merito fino a 105.
Esempio: cavità risonante in guida rettangolare
Consideriamo una cavità risonante realizzata troncando una guida rettangolare di sezione a × b con
due pareti di C.E.P. Per determinare le risonanze dei modi di questa cavità, scegliamo una direzione
di propagazione arbitraria e identifichiamo questa direzione con l’asse z (Figura 9.7).
Figura 9.7. Cavità risonante in guida d’onda.
183
Figura 9.8. Circuito equivalente in linea di trasmissione per il generico modo (n, m) della cavità
rettangolare.
Sappiamo che sia per i modi TEnm che per i modi TMnm si ha:
2
k
2
z , nm
nπ mπ
= ω εµ −
−
a b
2
2
(9.17)
Il circuito equivalente in linea di trasmissione per ciascun modo della guida è mostrato in Figura
9.8. La condizione di risonanza per questo circuito fornisce:
tan ( k z ,nm L ) = 0
→ k z ,nm L = pπ
(9.18)
Sostituendo la (9.18) nella (9.17) si ottiene:
2
2
nπ mπ pπ
+
+
a b L
ωn2,m , pεµ =
2
(9.19)
che fornisce le frequenze di risonanza per i modi della cavità. Dalla equazione (9.19) si osserva
inoltre che a, b, ed L sono tra loro interscambiabili, ossia si ottengono le stesse frequenze di
risonanza anche con una scelta differente del sistema di riferimento.
Nella equazione (9.19) solo uno degli indici può essere diverso da zero, in caso contrario il campo
all’interno della cavità sarebbe nullo. Infatti, nel caso TE (rispetto alla direzione di propagazione z
scelta in Figura 9.7), in cui sono possibili le configurazioni (n = 1, m = 0) e (n = 0, m = 1), non si
può avere p = 0, in quanto all’interno della cavità avrei V(z) = 0 ossia Et = 0 e, poiché per il caso
TE Ez = 0, il campo elettrico E sarebbe nullo. Nel caso TM sono possibili le configurazioni (n = 1,
m = 1) e (n = 1, m = 1). Per p = 0, V(z) = 0 e quindi Et = 0, tuttavia ora Ez ≠ 0 e quindi è possibile
avere p = 0.
La frequenza di risonanza più bassa è detta risonanza fondamentale e, nell’ipotesi che L > a > b,
corrisponde a (n, m, p) = (1, 0, 1).
184
APPENDICE I: Teorema di reciprocità
Consideriamo un mezzo in cui sono presenti le sorgenti (J1, M1) che producono un campo (E1, H1) e
le sorgenti (J2, M2) che producono un campo (E2, H2).
Determineremo una relazione di tipo integrale tra i due campi. Il dominio di interesse è lo stesso,
l’unica cosa che differenzia i campi sono le sorgenti.
Le equazioni di Maxwell in un mezzo lineare, omogeneo nel tempo, non dispersivo nello spazio e
isotropo (per semplicità) forniscono:
∇ × E = − jωµ H − M
∇ × H = + jωε E + J
(1)
Per formulare il teorema di reciprocità si considera l’espressione [ E1 × H 2 − E2 × H1 ] e si calcola
la divergenza:
∇ ⋅ [ E1 × H 2 − E2 × H1 ] = ∇ ⋅ ( E1 × H 2 ) − ∇ ⋅ ( E2 × H1 ) =
= H 2 ⋅ ∇ × E1 − E1 ⋅ ∇ × H 2 − H1 ⋅ ∇ × E2 + E2 ⋅ ∇ × H1
(2)
Sostituendo le equazioni di Maxwell (1) nella (2) si ottiene:
∇ ⋅ [ E1 × H 2 − E2 × H1 ] =
H 2 ⋅ (− jωµ H1 − M 1 ) − E1 ⋅ (− jωε E2 + J 2 ) +
(3)
− H1 ⋅ (− jωµ H 2 − M 2 ) + E2 ⋅ (− jωε E1 + J1 )
Poiché in un mezzo isotropo ε e μ sono scalari
H 2 ⋅ µ H1 = H1 ⋅ µ H 2
E2 ⋅ ε E1 = E1 ⋅ ε E2
e la (3) diventa:
∇ ⋅ [ E1 × H 2 − E2 × H1 ] = − H 2 ⋅ M 1 − E1 ⋅ J 2 + H1 ⋅ M 2 + E2 ⋅ J1
(4)
Si osservi che la (4) può essere ricavata in modo analogo anche nell’ipotesi di mezzi anisotropi e
reciproci, e cioè tali che:
ε = εT
µ=µ
T
In questo caso si ha infatti
H 2 ⋅ µ ⋅ H1 = H1 ⋅ µ ⋅ H 2
E2 ⋅ ε ⋅ E1 = E1 ⋅ ε ⋅ E2
185
che consentono di semplificare la (3) per ottenere in modo analogo la (4).
A questo punto si integra la (4) su un volume V, limitato da una superficie S con normale uscente in
(Fig. 1)
in
S
V
Fig. 1
∫
∇ ⋅ [ E1 × H 2 − E2 × H1 ] dV =
V
∫(
− H 2 ⋅ M 1 − E1 ⋅ J 2 + H1 ⋅ M 2 + E2 ⋅ J1 ) dV
(5)
V
Applicando il teorema della divergenza si ha:
∫(
E1 × H 2 − E2 × H1 ) ⋅ i n dS =
S
∫(
− H 2 ⋅ M 1 − E1 ⋅ J 2 + H1 ⋅ M 2 + E2 ⋅ J1 ) dV
(6)
V
La (6) fornisce la forma più generale del teorema di reciprocità.
L’integrale di volume a secondo membro è esteso a tutto il volume V, anche se in realtà lo posso
considerare esteso solamente alla parte di V che contiene le sorgenti.
Il teorema di reciprocità costituisce uno strumento molto potente della teoria
dell’elettromagnetismo. Può essere utilizzato per dedurre altri teoremi, ovvero per calcolare i campi
generati da certe sorgenti in una certa regione, partendo da altri campi già noti, prodotti nella stessa
regione da sorgenti diverse (si veda ad esempio G. Conciauro: Introduzione alle Onde
Elettromagnetiche, Par. 4.5: “Simmetria della matrice di ammettenza di una giunzione”).
Nella (6) si può notare che, se l’integrale di superficie a primo membro è nullo, si ottiene la
seguente espressione:
∫(
V
E1 ⋅ J 2 − H1 ⋅ M 2 ) dV =
∫(
E2 ⋅ J1 − H 2 ⋅ M 1 ) dV
(7)
V
Ciascuno degli integrali in (7) prende il nome di integrale di reazione. Il teorema di reciprocità
nella formulazione (7) afferma che le reazioni dei campi sulle sorgenti sono uguali.
A questo punto ha senso valutare l’integrale a primo membro della (6) per verificare se, e sotto
quali condizioni, è nullo.
L’integrale a primo membro del teorema di reciprocità è nullo
a) se la superficie S è un conduttore elettrico perfetto
186
Infatti:
E1 × H 2 ⋅ i n = ( i n × E1 ) ⋅ H 2 = 0
E2 × H1 ⋅ i n = ( i n × E2 ) ⋅ H1 = 0
perchè la componente tangente del campo elettrico è nulla sulla superficie di un C.E.P.
b) se la superficie S è un conduttore magnetico perfetto
E1 × H 2 ⋅ i n = ( i n × H 2 ) ⋅ E1 = 0
E2 × H1 ⋅ i n = ( i n × H1 ) ⋅ E2 = 0
perchè la componente tangente del campo magnetico è nulla sulla superficie di un C.M.P.
c) se l’integrale è esteso a tutto lo spazio, ovvero la superficie S è una superficie all’infinito
(per semplicità si suppone una sfera di raggio infinito)
La funzione integranda a primo membro è:
E1 × H 2 ⋅ i r − E2 × H1 ⋅ i r
(8)
Su una sfera all’infinito vale la condizione di Sommerfeld:
1
E = ζ H × ir + o
r
(9)
1
r
Sostituendo la (9) nella (8) e ricordando che i campi sono O , si ha:
E1 × H 2 ⋅ i r − E2 × H1 ⋅ i r = E1 ⋅ H 2 × i r − E2 ⋅ H1 × i r =
1
1
1
1
1
= E1 ⋅ E2 + o − E2 ⋅ E1 + o = o 2
r
r
r
ζ
ζ
1
e dunque l’integrale
2
r
cioè l’integrando a primo membro della (6) va a zero più rapidamente di
è nullo perché la superficie di integrazione (la superficie della sfera all’infinito) va all’infinito come
r2 :
1
lim r 2 o 2 = 0
r →∞
r
d) se nel volume V non ci sono sorgenti
187
e) se la superficie S racchiude tutte le sorgenti
si suppone di avere delle sorgenti al finito e che queste siano racchiuse entro un volume V’
all’interno del volume V delimitato dalla superficie chiusa S (fig. 2)
in
S
V
S'
V'
Fig. 2
∫
In c) è stato dimostrato che
) = 0 , quindi
(
S∞
∫
(
S∞
)=
∫
(
) = 0 ma, poiché
V∞
l’integrale di volume dà contributo solamente nella zona dove ci sono le sorgenti e le sorgenti sono
presenti solo all’interno di V’, si ha:
0=
∫ ∫
∫ ∫ ∫
(
)=
V∞
(
).
V'
(
In conclusione
)=
(
)=
(
) = 0 , ovvero
S
V
V'
∫
(
) = 0 se S contiene tutte le
S
sorgenti.
In altre parole, se si deforma la superficie S senza incontrare sorgenti (a partire da una superficie
all’infinito), l’integrale esteso ad S vale sempre zero. Questo avviene perché la funzione integranda
nella zona in cui non ci sono sorgenti è una funzione solenoidale.
f) se la superficie S è una superficie di impedenza
su S vale una condizione di impedenza del tipo
E = Z in × H
→
in × H =
E
Z
E1 × H 2 ⋅ i n − E2 × H1 ⋅ i n = E1 ⋅ H 2 × i n − E2 ⋅ H1 × i n =
1
1
= E1 ⋅ − E2 − E2 ⋅ − E1 = 0
Z
Z
188
I.2 Applicazione del teorema di reciprocità
Si consideri un conduttore elettrico perfetto di superficie S. Se sulla superficie S si mettono delle
correnti superficiali impresse Js, il campo generato da queste correnti è identicamente nullo.
in
S
C.E.P
Js
Fig. 3
Per la dimostrazione di quanto detto sopra si utilizza il teorema di reciprocità. Il volume V è
costituito da tutto lo spazio ad eccezione del volume occupato dal C.E.P. La superficie S che
racchiude il volume V è la superficie all’infinito con normale uscente più la superficie del C.E.P.
con normale opposta ad in.
Sia il campo “1” quello generato delle correnti superficiali Js e il campo “2” quello di un dipolo
elementare arbitrario ( r 0 e i D qualunque):
J1 = J S
J 2 = I ∆z δ (r − r 0 ) i D
L’integrale di superficie a primo membro del teorema di reciprocità (6) è nullo (è nullo sulla
superficie all’infinito ed è nullo sulla superficie del C.E.P.). Si ha dunque:
∫(
E1 ⋅ J 2 − E2 ⋅ J1 ) dV = 0
V
Ma E2 ⋅ J1 = 0 , infatti il campo del dipolo sulla superficie del C.E.P. è ad esso normale, mentre
J1 = J S è tangente alla superficie del C.E.P. Rimane pertanto
∫
E1 ⋅ J 2 dV = 0 ossia E1 (r 0 ) ⋅ i D = 0 per qualunque valore di r 0 e di i D .
V
In conclusione E1 ≡ 0 in tutto lo spazio.
189
APPENDICE II: Teorema di equivalenza
Il teorema di equivalenza consente di sostituire, ai fini del calcolo del campo in una determinata
regione, la distribuzione di sorgenti vera (J, M) con una distribuzione superficiale equivalente.
Si consideri una superficie generica e regolare S che racchiude, tipicamente ma non
necessariamente, una distribuzione generica di sorgenti (J, M). Sia (E, H) il campo generato da
queste sorgenti.
(E, H)
in
S
( J, M )
Fig. 4
Si vuole dimostrare che all’esterno di S (zona verso cui punta la normale in) si ottiene lo stesso
campo (E, H), se si eliminano le sorgenti (J, M) all’interno di S e si sostituiscono con delle
opportune correnti superficiali
J s = i n × H = i n × H tg
(10)
M s = −i n × E = −i n × Etg
dove E ed H in (10) sono i campi di partenza sulla superficie S.
Inoltre tali sorgenti forniscono un campo nullo all’interno di S.
(E, H)
S
(0, 0) (J, M)
in
(J s , M s )
Fig. 5
Dimostrazione
Si consideri la seguente funzione vettoriale
190
(0, 0)
( f , g) =
( E , H )
all'interno di S
all'esterno di S
(11)
Si deve dimostare che la (11) è il campo elettromagnetico prodotto dalle sorgenti equivalenti. La
dimostrazione segue due passi:
1) si dimostra che la (11) è un campo elettromagnetico;
2) si dimostra che questo campo elettromagnetico soddisfa le condizioni del teorema di unicità ed è
pertanto l’unico campo elettromagnetico compatibile con le sorgenti equivalenti.
Una coppia di funzioni vettoriali è un campo elettromagnetico se soddisfa le equazioni di Maxwell.
All’interno di S la coppia (f, g)=(0, 0) soddisfa le equazioni di Maxwell omogenee (in assenza di
sorgenti); all’esterno di S la coppia (f, g), per costruzione, soddisfa le equazioni di Maxwell, le
eventuali condizioni al contorno e la condizione di Sommerfeld. Rimane da verificare se (f, g) è un
campo elettromagnetico anche sulla superficie S, cioè se soddisfa le condizioni di raccordo su S:
i n × ( H est − H int ) = J s
−i n × ( Eest − Eint ) = M s
(12)
Poiché Hint = 0 e Eint = 0 per ipotesi, le (12) sono soddisfatte dalla definizione (10).
In conclusione la coppia (11) è effettivamente un campo elettromagnetico compatibile con le
sorgenti equivalenti (10).
Si deve ora dimostrare che questo campo elettromagnetico è anche l’unico che le sorgenti
equivalenti producono. La dimostrazione è banale perché con le sorgenti equivalenti si ha un
problema esterno nel dominio della frequenza. Il campo in oggetto soddisfa le equazioni di
Maxwell e la condizione di irradiazione all’infinito e quindi, per il teorema di unicità, è l’unico
campo che risolve il problema.
II.1 Applicazioni del teorema di equivalenza (a)
Per il teorema di equivalenza, se si sostituiscono le sorgenti vere (J, M) con una distribuzione
superficiale equivalente (Js, Ms), all’interno di S il campo è nullo e all’esterno è uguale al campo di
partenza (E, H).
Se il campo all’interno di S è nullo, qualunque modifica del materiale dentro S non modifica il
campo: (0, 0) rimane la soluzione all’interno di S e il mezzo presente dentro la superficie S non
modifica le condizioni di raccordo alla superficie. Questo significa che qualunque cosa faccia
all’interno di S non perturba il campo all’esterno.
Quello che viene alterato è invece, come si vedrà, il contributo al campo delle correnti superficiali
equivalenti impresse (Js, Ms).
Si può pensare, ad esempio, di mettere all’interno di S un C.E.P. Il campo al di fuori di S non
cambia e all’interno rimane nullo.
191
(E, H)
in
S
C.E.P.
(J s , M s )
(0, 0)
Fig. 6
All’esterno di S dovrà essere pertanto, per il principio di sovrapposizione degli effetti:
)
)
( E , H )(Jvuoto
+ ( E , H )(Mvuoto
= ( E , H )(JCs .E . P.) + ( E , H )(MCs.E . P.)
s
s
D’altra parte in 1.1 è stato dimostrato che il contributo delle Js è nullo perché si tratta di correnti
impresse sulla superficie di un C.E.P., e quindi la sola corrente magnetica Ms genera il campo
all’esterno purchè posta sulla superficie di un C.E.P. (Fig. 7).
In modo duale la sola corrente elettrica Js dà contributo al campo all’esterno se all’interno di S
inserisco un C.M.P.
(E, H)
in
S
C.E.P.
Ms
Fig. 7
Come detto, nella situazione di Fig. 7, il campo all’esterno di S è rimasto inalterato e il campo
all’interno è ancora nullo. Quindi attraverso la superficie S del C.E.P. sono ancora discontinui sia il
campo elettrico sia quello magnetico tangenti (Etg, Htg). Da ciò segue che sulla superficie S ci sarà
una corrente elettrica pari a i n × H tg , indotta sul conduttore dalla corrente magnetica Ms, e tale da
garantire la corretta discontinuità del campo magnetico all’interfaccia S.
In sostanza la corrente magnetica impressa Ms induce sulla superficie del C.E.P. una corrente
elettrica i n × H tg che è uguale alla corrente elettrica equivalente impressa ed proprio quella
necessaria a produrre il campo corretto all’esterno.
Per quanto detto si hanno a disposizione le seguenti scelte: si mettono su S sia la corrente elettrica
che quella magnetica, oppure si mette la sola corrente magnetica e la si fa irradiare in presenza di un
C.E.P., con la conseguenza che il C.E.P. fornisce la corrente elettrica indotta necessaria a garantire
la discontinuità del campo magnetico.
192
A questo punto è possibile dare una interpretazione alternativa alla dimostrazione 1.1: una corrente
elettrica impressa su un C.E.P. induce una corrente elettrica superficiale esattamente uguale ed
opposta in modo tale che il campo totale irradiato sia nullo.
II.2 Applicazioni del teorema di equivalenza (b)
Si osservi che nella applicazione del teorema di equivalenza si devono eliminare solamente le
sorgenti poste all’interno di S. Le eventuali sorgenti poste all’esterno devono essere conservate se si
vuole mantenere lo stesso campo all’esterno.
A tal proposito si consideri l’esempio in Fig. 8.
(E, H)
J
S
in
C.E.P.
Fig. 8
La situazione di partenza consiste di una corrente J che irradia in presenza di un C.E.P. Si applica
dunque a questa situazione il teorema di equivalenza e, a tal fine, si sceglie una superficie S che
coincide con la superficie del C.E.P. Occorre fare attenzione alla direzione della normale ad S che
distingue tra volume interno ed esterno ad S. La corrente J è dunque situata all’esterno di S.
L’applicazione del teorema di equivalenza porta ad eliminare le eventuali sorgenti poste all’interno
di S e sostituirle con delle correnti superficiali equivalenti
J s = in × H
M s = −i n × E = 0 (perché il campo tangente sulla superficie del C.E.P. è nullo). In questo caso
non sono presenti sorgenti all’interno di S.
La situazione equivalente è dunque la seguente
193
(E, H)
J
S
in
Js
C.E.P.
Fig. 9
Ovviamente le correnti Js impresse sul C.E.P. producono campo nullo all’esterno. Dato che le Js
non producono campo si può pensare di eliminarle e la discontinuità del campo magnetico
tangenziale sarà garantita da correnti indotte sul C.E.P. esattamente uguali alle correnti impresse
che ho eliminato3.
A questo punto, come detto in precedenza, è possibile modificare il materiale all’interno di S senza
alterare il campo all’esterno. Di conseguenza, è possibile sostituire al C.E.P. il vuoto senza che il
campo all’esterno cambi e con il campo all’interno che si mantiene nullo (Fig. 10). In quest’ultimo
caso le correnti elettriche Js impresse producono campo all’esterno, e saranno queste correnti a
garantire la corretta discontinuità del campo magnetico alla superficie.
(E, H)
J
S
(0, 0)
in
Js
Fig. 10
Poiché le correnti impresse Js nella situazione mostrata in Fig. 10 sono uguali alle correnti indotte
nella situazione mostrata in Fig. 9, si può concludere che è possibile sostituire un C.E.P. con le
correnti elettriche superficiali indotte su di esso.
II.3 Applicazioni del teorema di equivalenza (c)
Tenendo presente la definizione di (Js, Ms) (10) è evidente che, per determinare le sorgenti
equivalenti è necessario conoscere il campo tangente sulla superficie e cioè occorre aver già risolto
il problema elettromagnetico.
Quindi si potrebbe pensare che il teorema di equivalenza sia inutilizzabile in quanto per poterlo
3
Le correnti sono indotte sul C.E.P per la presenza della corrente esterna J.
194
utilizzare è necessario conoscere il campo vero sulla superficie S.
In realtà il teorema di equivalenza viene usato in elettromagnetismo per risolvere una notevole
varietà di problemi e ad esempio può essere usato nei seguenti casi:
(a)
si conosce il campo sulla superficie S ma non al di fuori di S. Ad esempio perché è possibile
misurare il campo su S oppure approssimarne il valore.
E’ il caso della approssimazione di Kirchoff per fori di grandi dimensioni rispetto alla lunghezza
d’onda praticati in uno schermo C.E.P. L’approssimazione di Kirchoff consiste nel valutare il
campo elettrico sul foro come se lo schermo metallico non ci fosse. Infatti, se il foro è grande
l’interazione del campo incidente con gli spigoli del foro è limitata ad una zona vicina al foro e di
dimensioni piccole o confrontabili con la lunghezza d’onda (Fig. 11).
λ
Fig. 11
A questo punto si può pensare di studiare il caso di un campo incidente su uno schermo metallico
infinito sul quale è praticato un foro di grandi dimensioni rispetto alla lunghezza d’onda. Si applica
dunque l’approssimazione di Kirchoff.
Una volta nota l’approssimazione di Kirchoff per il campo vero sul foro è possibile applicare il
teorema di equivalenza per risolvere il problema relativo al calcolo del campo trasmesso oltre il
foro (Fig. 12).
195
S
S
in
in
JS
E inc
JS , M S
MS
JS
(a)
(b)
Fig. 12
A questo punto si applica il teorema di equivalenza alla superficie S che si appoggia sullo schermo
conduttore e si chiude all’infinito (Fig. 12a). Si possono distinguere due regioni sulla superficie S:
- la regione del foro, dove sia il campo elettrico che il campo magnetico sono diversi da zero, e si
ha:
J s = in × H
M s = −i n × E
-
dove E ed H sono i campi in corrispondenza del foro ma calcolati come se lo schermo C.E.P
non ci fosse.
la regione al di fuori del foro che è C.E.P. ed è quindi caratterizzata da campo elettrico tangente
nullo, e si ha:
J s = in × H
M s = −i n × E = 0
dove H è il campo magnetico vero (incognito) tangente allo schermo.
Poiché dall’approssimazione di Kirchoff si conosce solamente il campo in corrispondenza del foro,
la soluzione più ragionevole è quella di metallizzare il foro (par. 2.1) ed eliminare le correnti
196
elettriche superficiali impresse Js che ora generano campo nullo all’esterno di S. In conclusione, per
il calcolo del campo trasmesso oltre il foro, è possibile studiare il problema elettromagnetico
mostrato in Fig. 12b ossia con le sole correnti magnetiche equivalenti Ms presenti solo in
corrispondenza del foro e che irradiano in presenza di uno schermo C.E.P infinito.
(b)
Ovviamente se il foro è confrontabile con la lunghezza d’onda l’approssimazione di Kirchoff non è
più valida. In questo caso è comunque possibile usare il teorema di equivalenza utilizzando una
strada differente. Come detto, il foro è completamente caratterizzato dalla conoscenza del campo
tangente vero sul foro. In questo caso non conosco questo campo e non lo posso approssimare.
Come primo passo si applica il teorema di equivalenza alla superficie S che poggia sullo schermo
metallico, sia nella regione a sinistra, sia nella regione a destra del foro, e si chiude all’infinito (Fig.
13a).
Analogamente a quanto fatto nel caso (a) si può considerare la situazione equivalente mostrata in
Fig. 13b. La corrente magnetica equivalente M s = −i n × Etg in corrispondenza del foro, irradia in
presenza di un C.E.P infinito sia nella regione A che nella regione B. Ms è opposta nelle due regioni
perché la normale alla superficie S è opposta.
Per determinare il campo elettrico in corrispondenza del foro, e quindi la corrente magnetica
equivalente che consente di calcolare il campo in tutto lo spazio, si possono applicare le condizioni
di continuità del campo magnetico4 tangente sul foro:
H
( A)
= H inc +
H
( B)
=
∫
∫
( A)
G m ⋅ (− M s )dS
( B)
G m ⋅ M s dS
i n × H ( A) = i n × H ( B ) (Magnetic Field Integral Equation)
( A)
( B)
G m e G m sono le funzioni di Green per il campo magnetico rispettivamente nelle regioni A e B.
In pratica esse forniscono il campo magnetico generato da un dipolo elementare magnetico
posizionato in corrispondenza del foro.
4
La continuità del campo elettrico tangente sul foro è garantita per costruzione.
197
S
A
in
in
JS
JS
E inc
B
B
A
E inc
JS , M S
JS
(a)
JS , M S
MS
MS
JS
(b)
Fig. 13
198