")
Fisica Generale
M. Fanti 1
Università degli Studi and INFN, Milano, Italy
ultimo aggiornamento:
1 [email protected]
28 maggio 2015
Prefazione
Questo testo è pensato come supporto per lo studio di un corso di Fisica
Generale per un Corso di Laurea scientifico, ma non di Fisica. Si presuppone
una conoscenza di nozioni matematiche di base, quali la trigonometria,
l’algebra vettoriale ed il calcolo differenziale (derivate e integrali).
I contenuti sono simili a quelli esposti a lezione, pertanto può fungere da
guida allo studio per gli studenti che frequentano il corso. Alcuni capitoli
o sezioni del testo sono indicati con un asterisco (*): contengono sviluppi
matematici più approfonditi e possono essere omessi ad una prima lettura.
Questo testo non è, e non intende essere, esaustivo: si consiglia quindi
l’approfondimento della materia e lo svolgimento di esercizi su altri libri di
testo.
L’accesso a questo documento è libero e gratuito, il materiale è scaricabile
da internet, è fotocopiabile parzialmente e/o integralmente, ed ulteriormente
distribuibile attraverso qualunque canale, purché senza scopi di lucro. La
distribuzione di questo documento da parte di qualunque associazione,
studentesca o non, va preventivamente concordata con l’autore, e comunque
non deve costituire fonte di guadagno o finanziamento per l’associazione
stessa.
dott. Marcello Fanti
ricercatore universitario
Università Statale di Milano
Indice
1 Introduzione
1.1 La materia e la sua struttura . . . . . . . . . . . . . . . . .
1.2 Realtà in continuo movimento . . . . . . . . . . . . . . . . .
1.3 Le interazioni fondamentali . . . . . . . . . . . . . . . . . .
1.3.1 La gravità . . . . . . . . . . . . . . . . . . . . . . .
1.3.2 Interazioni fra cariche elettriche . . . . . . . . . . . .
1.3.3 Interazioni elettriche e gravitazionali . . . . . . . . .
1.3.4 Campo elettrico e magnetico, onde elettromagnetiche
1.3.5 Interazioni nucleari: forte e debole . . . . . . . . . .
1.3.6 La fusione nucleare nelle stelle . . . . . . . . . . . .
1.4 L’energia . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5 Le leggi della Fisica e il metodo sperimentale . . . . . . . .
1.5.1 Ambiti di validità delle leggi fisiche . . . . . . . . . .
1.6 Il modello fisico . . . . . . . . . . . . . . . . . . . . . . . . .
1.7 Misure in Fisica . . . . . . . . . . . . . . . . . . . . . . . .
1.7.1 Unità di misura . . . . . . . . . . . . . . . . . . . .
1.8 Le costanti fondamentali della Fisica . . . . . . . . . . . . .
1.9 Incertezze nelle misure (*) . . . . . . . . . . . . . . . . . . .
1.9.1 Incertezze nelle quantità derivate . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
4
4
5
6
7
8
8
9
11
12
14
15
17
18
19
21
21
2 Cinematica unidimensionale
2.1 Posizione e spostamenti su una linea . . . . . . . . . . . . .
2.2 Legge oraria del moto . . . . . . . . . . . . . . . . . . . . .
2.3 Velocità media . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Velocità istantanea . . . . . . . . . . . . . . . . . . . . . . .
2.4.1 Spostamento come integrale della velocità istantanea
2.5 Accelerazione . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6 Riassunto dei concetti sul moto lungo una linea . . . . . . .
2.7 Unità di misura . . . . . . . . . . . . . . . . . . . . . . . .
2.8 Esercizi di cinematica unidimensionale . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
23
24
26
27
28
29
30
31
32
33
i
3 Derivazione e integrazione
3.1 Definizione di derivata . . . . . . . . . . . . .
3.1.1 Nota sulla simbologia delle derivate .
3.2 Definizione di integrale . . . . . . . . . . . .
3.2.1 Nota sulla variabile di integrazione . .
3.3 Principali regole di derivazione e integrazione
3.4 Variazione di una funzione di una variabile .
3.5 Derivate parziali . . . . . . . . . . . . . . . .
3.6 Variazione di una funzione di più variabili . .
3.6.1 Gradiente e matrice Hessiana . . . . .
3.7 Variazione di una funzione composta . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
37
37
38
38
39
40
41
42
42
43
44
4 Posizioni nello spazio
4.1 Misure angolari . . . . . . . . . . . . . . .
4.2 Posizione su un piano . . . . . . . . . . .
4.3 Posizione nello spazio . . . . . . . . . . .
4.3.1 Raggio vettore . . . . . . . . . . .
4.3.2 Coordinate cilindriche e sferiche .
4.4 Vettore spostamento . . . . . . . . . . . .
4.5 Angoli solidi . . . . . . . . . . . . . . . .
4.6 Digressione: misure di distanze stellari (*)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
46
46
49
50
51
52
53
55
56
5 Vettori
5.1 Vettori in fisica . . . . . . . . . . .
5.2 Operazioni elementari di vettori . .
5.3 Prodotto scalare di due vettori . .
5.4 Prodotto vettoriale di due vettori .
5.5 Transformazioni di vettori (*) . . .
5.6 Rotazioni e inversioni spaziali (*) .
5.7 Vettori e pseudo-vettori (*) . . . .
5.8 Calcolo tensoriale (*) . . . . . . .
5.8.1 Il tensore di Levi-Civita (*)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
59
59
60
60
62
64
65
66
67
68
6 Cinematica
6.1 Traiettoria e legge oraria . . . . . . . . . . . . . . . . . . . .
6.1.1 Successione di spostamenti infinitesimi . . . . . . . . .
6.2 Velocità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.1 Spostamento come integrale della velocità . . . . . . .
6.2.2 Velocità scalare . . . . . . . . . . . . . . . . . . . . . .
6.3 Accelerazione . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1 Variazione di velocità come integrale dell’accelerazione
69
69
70
72
72
73
73
74
ii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6.4
6.5
6.6
6.7
Rappresentazione grafica delle variabili cinematiche
Accelerazione tangenziale e centripeta . . . . . . .
6.5.1 Effetti dell’accelerazione tangenziale . . . .
6.5.2 Effetti dell’accelerazione centripeta . . . . .
Esercizi . . . . . . . . . . . . . . . . . . . . . . . .
Moto circolare intorno ad un asse . . . . . . . . . .
7 La legge di inerzia
7.1 La legge di inerzia . . . . . . . . . . . . . . .
7.1.1 Commento fondamentale sulla legge di
7.2 Il moto rettilineo uniforme . . . . . . . . . .
7.3 Come verificare la legge di inerzia? . . . . . .
.
.
.
.
.
.
. . . .
inerzia
. . . .
. . . .
8 Dinamica dei punti materiali
8.1 Le leggi della dinamica . . . . . . . . . . . . .
8.1.1 Alcuni commenti . . . . . . . . . . . . .
8.2 Unità di misura . . . . . . . . . . . . . . . . .
8.3 Forze e masse: commenti sulla legge di Newton
8.4 Integrazione del moto . . . . . . . . . . . . . .
8.5 Commenti sulla legge di azione-reazione . . . .
8.6 Quantità di moto . . . . . . . . . . . . . . . . .
8.7 Momento angolare, momento torcente . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
75
77
78
78
80
83
.
.
.
.
85
85
85
86
86
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
91
91
93
94
95
96
97
98
100
9 Forze costanti
9.1 Esempi di forze costanti . . . . . . . . . . . . . . . . .
9.1.1 Contro-esempi: forze non costanti . . . . . . .
9.2 Il moto uniformemente accelerato . . . . . . . . . . . .
9.2.1 Traiettoria . . . . . . . . . . . . . . . . . . . .
9.3 Esercizi sul moto rettilineo uniformemente accelerato .
9.4 Esercizi sui moti in un campo gravitazionale uniforme
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
102
102
103
103
105
107
109
.
.
.
.
.
.
.
113
. 113
. 114
. 117
. 119
. 122
. 122
. 124
10 Forze di contatto
10.1 Reazioni vincolari . . . . . . . . . . .
10.1.1 Esercizi sulle reazioni vincolari
10.2 Moti su un piano inclinato . . . . . .
10.3 Moto di un pendolo ideale . . . . . . .
10.4 Forze di attrito . . . . . . . . . . . . .
10.4.1 Attrito radente . . . . . . . . .
10.4.2 Attrito viscoso . . . . . . . . .
iii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
11 Campi di forza
127
11.1 Campi di forza . . . . . . . . . . . . . . . . . . . . . . . . . . 127
11.2 Forze gravitazionali . . . . . . . . . . . . . . . . . . . . . . . 128
11.2.1 Il campo gravitazionale . . . . . . . . . . . . . . . . . 129
11.3 Forze elettromagnetiche . . . . . . . . . . . . . . . . . . . . . 130
11.3.1 Unità di misura elettromagnetiche . . . . . . . . . . . 131
11.3.2 Campo elettrico generato da cariche ferme . . . . . . . 131
11.3.3 Confronto fra forza di Coulomb e forza gravitazionale 133
11.3.4 Campo magnetico generato da cariche in moto lento . 134
11.3.5 Moti “lenti” e dinamica dell’atomo . . . . . . . . . . . 134
11.3.6 Forze magnetiche e violazione del principio di
azione-reazione (*) . . . . . . . . . . . . . . . . . . . . 135
11.4 Campi di forza centrali . . . . . . . . . . . . . . . . . . . . . 136
11.4.1 Il “problema dei due corpi” . . . . . . . . . . . . . . . 136
11.4.2 Caso-limite: m1 m2 . . . . . . . . . . . . . . . . . . 137
11.4.3 Caso generale (*) . . . . . . . . . . . . . . . . . . . . . 138
11.4.4 Conservazione del momento angolare . . . . . . . . . . 139
11.5 Integrazione del moto in un campo di forze (*) . . . . . . . . 141
11.5.1 Integrazione con il metodo iterativo (*) . . . . . . . . 142
12 Lavoro ed energia
12.1 Lavoro di una forza . . . .
12.2 Energia cinetica . . . . . .
12.3 Potenza di una forza . . . .
12.4 Unità di misura . . . . . .
12.5 Problemi su lavoro, energia,
. . . . .
. . . . .
. . . . .
. . . . .
potenza
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
13 Forze conservative
13.1 Forze conservative . . . . . . . . . . . . . . .
13.2 Definizione dell’energia potenziale . . . . . .
13.2.1 Riferimento — o “zero” — dell’energia
13.3 Energia meccanica . . . . . . . . . . . . . . .
13.4 Regione cinematicamente accessibile . . . . .
13.5 Lavoro di forze “esterne” . . . . . . . . . . .
13.6 Energia potenziale di campi notevoli . . . . .
13.6.1 Campo di forza uniforme . . . . . . .
13.6.2 Campo gravitazionale uniforme . . . .
13.6.3 Campo di forza centrale . . . . . . . .
13.7 Energia potenziale di molti campi di forze . .
13.7.1 Energia potenziale gravitazionale . . .
13.7.2 Energia potenziale elettrostatica . . .
iv
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
146
. 146
. 149
. 150
. 150
. 151
. . . . . .
. . . . . .
potenziale
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
155
155
157
158
158
159
159
161
161
162
162
164
165
165
13.8 Forza come “meno” gradiente dell’energia potenziale . . . . . 166
13.9 Esercizi sull’energia meccanica . . . . . . . . . . . . . . . . . 171
13.10 Lavoro delle forze di attrito . . . . . . . . . . . . . . . . . . . 173
14 Matematica dei campi vettoriali
14.1 Generalità . . . . . . . . . . . . . . . . . . . . . . . .
14.2 Campi vettoriali . . . . . . . . . . . . . . . . . . . . .
14.3 Trasformazione vettoriale del gradiente (*) . . . . . . .
14.4 Integrali di linea e circuitazione di un campo vettoriale
14.5 Superfici orientate, definizione di flusso . . . . . . . . .
14.6 Campi solenoidali, flusso concatenato . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
15 Forze gravitazionali
15.1 Gravitazione universale . . . . . . . . . . . . . . . . . . . .
15.2 Il campo gravitazionale . . . . . . . . . . . . . . . . . . . .
15.3 Energia gravitazionale . . . . . . . . . . . . . . . . . . . . .
15.3.1 Campo centrale . . . . . . . . . . . . . . . . . . . .
15.3.2 Generalizzazione . . . . . . . . . . . . . . . . . . . .
15.4 Il Sistema Solare . . . . . . . . . . . . . . . . . . . . . . . .
15.5 Orbite circolari . . . . . . . . . . . . . . . . . . . . . . . . .
15.6 Conservazione del momento angolare . . . . . . . . . . . . .
15.7 Moti in un campo gravitazionale centrale . . . . . . . . . .
15.7.1 Costanti del moto . . . . . . . . . . . . . . . . . . .
15.7.2 Regione cinematicamente accessibile . . . . . . . . .
15.8 Soluzione generale del moto (*) . . . . . . . . . . . . . . . .
15.9 Esercizi sulle forze gravitazionali . . . . . . . . . . . . . . .
15.10 Come è stata scoperta la gravitazione universale? . . . . . .
15.11 Misura della costante G . . . . . . . . . . . . . . . . . . . .
15.12 Teorema di Gauss per il campo gravitazionale . . . . . . . .
15.12.1 Campo gravitazionale generato da una massa estesa
sferica . . . . . . . . . . . . . . . . . . . . . . . . . .
16 Urti
16.1 Urti . . . . . . . . . . . . . . . . . . . .
16.2 Urto totalmente inelastico . . . . . . . .
16.3 Urto elastico . . . . . . . . . . . . . . .
16.3.1 Caso unidimensionale . . . . . .
16.3.2 Caso bidimensionale — FINIRE
v
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
175
. 175
. 176
. 177
. 178
. 178
. 179
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
181
181
182
183
183
184
185
188
189
191
191
191
194
198
203
205
207
. 208
210
. 210
. 211
. 211
. 212
. 214
17 Forze elastiche
17.1 Forza elastica di una molla . . . . . . . . . .
17.2 Misure di massa con una molla . . . . . . . .
17.3 Oscillazioni di una molla . . . . . . . . . . . .
17.4 Moto oscillatorio armonico . . . . . . . . . .
17.5 Energia elastica . . . . . . . . . . . . . . . .
17.6 Esercizi sulle forze elastiche . . . . . . . . . .
17.7 Oscillazioni intorno ad un punto di equilibrio
17.8 Forze elastiche nei materiali . . . . . . . . . .
17.9 Modello delle reazioni vincolari (*) . . . . . .
17.10 Oscillazioni forzate . . . . . . . . . . . . . . .
17.10.1 Soluzione generale del moto . . . . . .
17.10.2 Condizioni iniziali . . . . . . . . . . .
17.10.3 Battimenti e risonanza . . . . . . . . .
17.10.4 Considerazioni energetiche (*) . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
217
217
218
219
220
223
224
226
230
232
235
235
237
238
240
18 Nozioni di fluidodinamica
18.1 I fluidi . . . . . . . . . . . . . . . . . . . . . . . . . .
18.1.1 Velocità di deriva e densità di un fluido . . .
18.1.2 Unità di misura della densità . . . . . . . . .
18.2 Forze di volume e di superficie . . . . . . . . . . . .
18.2.1 Pressione in un fluido . . . . . . . . . . . . .
18.2.2 Unità di misura della pressione . . . . . . . .
18.3 Pressione fluidostatica, legge di Stevin . . . . . . . .
18.3.1 Il barometro a mercurio di Torricelli . . . . .
18.3.2 Propagazione della pressione: legge di Pascal
18.3.3 Galleggiamento: la legge di Archimede . . . .
18.4 Altimetro a pressione . . . . . . . . . . . . . . . . .
18.5 Moto stazionario di un liquido: teorema di Bernoulli
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
242
242
242
244
245
246
247
248
250
250
251
253
256
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
traslazione
. . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
262
262
262
263
264
265
266
267
270
270
270
19 Nozioni di termodinamica
19.1 Temperatura . . . . . . . . . . . . . . . .
19.1.1 Temperatura empirica . . . . . . .
19.1.2 Legge-zero della termodinamica . .
19.1.3 Temperatura assoluta . . . . . . .
19.2 Teoria cinetica dei gas rarefatti . . . . . .
19.2.1 L’equazione di stato . . . . . . . .
19.2.2 Modello molecolare della pressione
19.3 Temperatura ed energia interna dei gas .
19.3.1 Temperatura ed energia cinetica di
19.3.2 Temperatura in una miscela di gas
vi
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
19.3.3 Temperatura ed energia interna . . . . . . . . . . . . . 272
19.3.4 Alcuni esempi . . . . . . . . . . . . . . . . . . . . . . 274
19.4 Temperatura ed energia interna nei solidi e nei liquidi (cenni) 275
19.4.1 Energia e temperatura nei solidi . . . . . . . . . . . . 276
19.5 Trasformazione adiabatica di un gas . . . . . . . . . . . . . . 277
19.5.1 Descrizione microscopica della trasformazione adiabatica279
19.5.2 Proprietà della trasformazione adiabatica . . . . . . . 280
19.5.3 Lavoro in una trasformazione adiabatica . . . . . . . . 282
19.6 Trasferimento di energia senza lavoro: il calore . . . . . . . . 282
19.6.1 Il calore: scambio di energia con processi microscopici 285
19.6.2 Unità di misura . . . . . . . . . . . . . . . . . . . . . 286
19.6.3 Meccanismi di scambio di calore . . . . . . . . . . . . 286
19.7 Lavoro e calore: primo principio della termodinamica . . . . . 288
19.8 Trasformazioni termodinamiche sui gas . . . . . . . . . . . . . 288
19.8.1 Trasformazione isoterma . . . . . . . . . . . . . . . . . 289
19.8.2 Trasformazione adiabatica . . . . . . . . . . . . . . . . 290
19.8.3 Trasformazione isobara . . . . . . . . . . . . . . . . . 291
19.8.4 Trasformazione isocora . . . . . . . . . . . . . . . . . 292
19.8.5 Trasformazioni cicliche . . . . . . . . . . . . . . . . . . 293
19.9 Capacità termica e calore specifico . . . . . . . . . . . . . . . 294
19.9.1 Capacità termica a volume costante e a pressione
costante . . . . . . . . . . . . . . . . . . . . . . . . . . 295
19.9.2 Misure di capacità termiche . . . . . . . . . . . . . . . 296
19.9.3 Capacità termica di un gas rarefatto . . . . . . . . . . 299
19.9.4 Capacità termica di un solido . . . . . . . . . . . . . . 301
19.10 Calori latenti . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
19.11 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 308
19.12 Temperatura ed energia interna (*) . . . . . . . . . . . . . . . 312
19.12.1 Principio di equipartizione dell’energia . . . . . . . . . 312
19.12.2 Gas monoatomico . . . . . . . . . . . . . . . . . . . . 313
19.12.3 Materiali solidi . . . . . . . . . . . . . . . . . . . . . . 313
19.12.4 Gas biatomico . . . . . . . . . . . . . . . . . . . . . . 315
20 Forze elettromagnetiche
20.1 Moti in campi elettrostatici . . . . . . . . . . .
20.1.1 Il potenziale elettrostatico . . . . . . . .
20.1.2 Esercizi di moti in campi elettrostatici .
20.2 Esperimento di Millikan . . . . . . . . . . . . .
20.3 Moto in un campo magnetico . . . . . . . . . .
20.3.1 Moto in un campo magnetico uniforme .
20.4 Spettrometro di massa . . . . . . . . . . . . . .
vii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
319
. 319
. 319
. 320
. 322
. 325
. 326
. 328
20.5 Acceleratori circolari . . . . . . . . . . . . . . . . . . . . . . . 330
21 Correnti elettriche
21.1 Conduttori elettrici . . . . . . . . . . . . .
21.2 Correnti elettriche microscopiche . . . . . .
21.2.1 Conduttori non ohmici . . . . . . . .
21.3 Corrente elettrica . . . . . . . . . . . . . .
21.4 La legge di Ohm . . . . . . . . . . . . . . .
21.4.1 Unità di misura . . . . . . . . . . .
21.5 Lavoro fatto sulle cariche in moto . . . . . .
21.6 Forze magnetiche su un circuito elettrico . .
21.6.1 Momento torcente su una spira in un
21.6.2 L’amperometro . . . . . . . . . . . .
334
. . . . . . . . . . 334
. . . . . . . . . . 335
. . . . . . . . . . 337
. . . . . . . . . . 338
. . . . . . . . . . 339
. . . . . . . . . . 340
. . . . . . . . . . 340
. . . . . . . . . . 341
campo uniforme 342
. . . . . . . . . . 343
22 Campi elettromagnetici
345
22.1 Premessa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
22.2 Equazioni del campo elettromagnetico . . . . . . . . . . . . . 346
22.2.1 Campi stazionari . . . . . . . . . . . . . . . . . . . . . 347
22.2.2 Campi variabili in assenza di cariche . . . . . . . . . . 348
22.2.3 Campi elettrici non conservativi . . . . . . . . . . . . 348
22.3 Campi elettrici statici . . . . . . . . . . . . . . . . . . . . . . 349
22.3.1 Deduzione della legge di Coulomb . . . . . . . . . . . 350
22.3.2 Campi elettrici statici nei conduttori . . . . . . . . . . 351
22.3.3 Cavità di un conduttore . . . . . . . . . . . . . . . . . 351
22.3.4 Costruzione di un campo elettrico uniforme . . . . . . 352
22.4 Dipoli elettrici . . . . . . . . . . . . . . . . . . . . . . . . . . 355
22.4.1 Forze elettriche agenti su un dipolo . . . . . . . . . . . 355
22.4.2 Potenziale elettrostatico prodotto da un dipolo . . . . 356
22.4.3 Interazioni molecolari . . . . . . . . . . . . . . . . . . 358
22.4.4 Polarizzazione dei materiali dielettrici . . . . . . . . . 360
22.5 Campi magnetici prodotti da correnti stazionarie . . . . . . . 361
22.5.1 Campo magnetico prodotto da un filo rettilineo . . . . 362
22.5.2 Campo magnetico prodotto da un solenoide rettilineo 364
22.6 Esercizi su campi elettromagnetici . . . . . . . . . . . . . . . 365
23 Onde elettromagnetiche
23.1 Premessa: che cos’è un’onda? . . . . . .
23.1.1 Le onde progressive . . . . . . .
23.1.2 Le onde piane . . . . . . . . . .
23.1.3 Le onde monocromatiche . . . .
23.1.4 Formalismo complesso delle onde
viii
368
. . . . . . . . . . . . 368
. . . . . . . . . . . . 368
. . . . . . . . . . . . 369
. . . . . . . . . . . . 370
monocromatiche (*) 372
23.2 Equazioni di Maxwell in forma differenziale
23.2.1 Dimostrazioni (*) . . . . . . . . . .
23.3 Equazioni di Maxwell nel vuoto . . . . . . .
23.4 Onde elettromagnetiche piane . . . . . . . .
23.4.1 Dimostrazioni (*) . . . . . . . . . .
23.5 Onde monocromatiche . . . . . . . . . . . .
23.5.1 Lo spettro elettromagnetico . . . . .
23.6 Energia di un’onda elettromagnetica . . . .
23.6.1 Intensità di radiazione . . . . . . . .
23.6.2 Dimostrazioni (*) . . . . . . . . . .
23.7 Onde elettromagnetiche sferiche . . . . . . .
23.7.1 Onde sferiche prodotte da una carica
23.8 Onde elettromagnetiche nella materia . . .
23.9 Assorbimento, emissione, dispersione . . . .
23.9.1 Assorbimento ed emissione . . . . .
23.9.2 Dispersione cromatica . . . . . . . .
23.10 Onde elettromagnetiche nei conduttori . . .
23.10.1 Dimostrazioni (*) . . . . . . . . . .
23.11 Esercizi sulle onde elettromagnetiche . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
oscillante
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
24 Ottica
24.1 Sovrapposizione di onde, interferenza . . . . . . . .
24.2 Principio di Huygens-Fresnel . . . . . . . . . . . .
24.3 Interferenza di sorgenti coerenti . . . . . . . . . . .
24.4 Raggio ottico . . . . . . . . . . . . . . . . . . . . .
24.5 Diffrazione da una fenditura . . . . . . . . . . . . .
24.6 Rifrazione e riflessione di un’onda elettromagnetica
24.6.1 Riflessione totale . . . . . . . . . . . . . . .
24.7 Dispersione cromatica . . . . . . . . . . . . . . . .
24.8 Esercizi di ottica . . . . . . . . . . . . . . . . . . .
ix
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
373
374
377
378
378
380
381
381
383
384
386
387
389
391
392
393
395
398
400
.
.
.
.
.
.
.
.
.
403
. 405
. 408
. 408
. 413
. 416
. 420
. 423
. 424
. 426
Capitolo 1
Introduzione
La Fisica è una scienza sperimentale quantitativa. Lo scopo della Fisica è
di trovare le leggi fondamentali che regolano tutti i fenomeni osservabili nel
nostro Universo.
Allo scopo di constestualizzare i contenuti di questo testo, conviene
iniziare con un riassunto della nostra conoscenza attuale dell’Universo. Si
tratterà necessariamente di una esposizione qualitativa, utile ad introdurre
una serie di concetti fondamentali (materia, massa, particelle, interazioni,
forze, energia, . . . ). La trattazione scientifica di questi concetti sarà il
contenuto dei capitoli successivi.
1.1
La materia e la sua struttura
Qualunque struttura presente nel nostro Universo — che sia un atomo, un
materiale solido, liquido, gassoso, che sia piccolo come un granello di sabbia,
o grande come un pianeta o una stella — è formato di materia.
Da qui in avanti parleremo spesso di “quantità di materia”. L’idea
intuitiva è che, più un oggetto è grosso, massiccio, difficile da sollevare o da
spostare, più contiene materia. Uno dei concetti fondamentali della fisica è
quello di massa: pur non potendolo definire esattamente, per il momento,
associamo il concetto di “massa di un oggetto” a quello di “quantità di
materia che costituisce un oggetto”. Più è grande la massa di un oggetto,
più è difficile metterlo in moto se è fermo, oppure frenarlo o fargli cambiare
direzione se è già in movimento.
1
CAPITOLO 1. INTRODUZIONE
—
M.FANTI 2
Figura 1.1: Stati di aggregazione degli atomi. Da sinistra a destra: solido
cristallino (ordinato) e vetroso (disordinato); liquido; gassoso.
Tutta la materia conosciuta nell’Universo è formata da particelle
fondamentali.
La materia a noi nota — solida, liquida, o gassosa — è formata di atomi.
Questi sono solitamente aggregati a formare molecole, o in alcuni casi cristalli.
Le possibili aggregazioni della materia sono schematicamente
rappresentate in Fig. 1.1.
• Lo stato solido ha forma e volume propri. La loro rigidità è dovuta al
fatto che le distanze interatomiche sono fisse. La geometria può essere
ordinata (cristalli) o disordinata (solidi “vetrosi”).
• Lo stato liquido ha volume definito ma non ha forma propria. Le
molecole sono vicine fra loro ma non sono rigidamente legate, quindi
possono spostarsi, purché ciascuna non invada il volume occupato da
un’altra.
• Lo stato gassoso non ha volume proprio né forma propria: il gas
può espandersi indefinitamente, occupando tutto il volume che ha a
disposizione. Un gas è formato da atomi o molecole rarefatti, che si
muovono in maniera relativamente libera nel volume disponibile —
anche se gli urti sono possibili.
I cristalli e le molecole sono aggregati di atomi, tenuti insieme dai “legami
chimici”.
Gli atomi non sono costituenti fondamentali: in effetti sono strutture
composte, come schematizzato in Fig. 1.2.
Un atomo ha una parte centrale, il nucleo, che porta sostanzialmente
tutta la massa dell’atomo. Intorno al nucleo si muovono gli elettroni. Dal
numero di elettroni Z (o “numero atomico”) dipendono tutte le proprietà
chimiche di un elemento. In effetti è proprio la struttura degli elettroni di
CAPITOLO 1. INTRODUZIONE
Figura 1.2:
—
M.FANTI 3
Struttura dell’atomo, con le dimensioni approssimative.
un atomo che consente di formare legami chimici con altri atomi, formando
le molecole.
Il nucleo è costituito di protoni e neutroni. Protone e neutrone hanno
masse molto simili, e circa 2000 volte maggiori della massa dell’elettrone:
mp ' mn ' 2000 me . Il numero dei protoni è sempre uguale al numero degli
elettroni, Z. Il numero dei neutroni è variabile: per nuclei leggeri protoni e
neutroni sono in uguale quantità, mentre per nuclei pesanti i neutroni sono
più numerosi, approssimativamente 1.5 volte più numerosi dei protoni. Il
numero totale di protoni e neutroni si chiama “numero di massa” A. In
natura esistono molti elementi chimici che, a parità di numero atomico Z,
hanno diversi numeri di massa A: si chiamano isotopi, e differiscono per il
numero di neutroni contenuti nel nucleo.
Protoni e neutroni sono a loro volta formati da tre particelle più piccole,
chiamate quarks. Secondo lo stato attuale della nostra conoscenza, gli
elettroni e i quarks sono particelle elementari, ovvero non sono costituite
da componenti più piccoli.
In effetti, la materia ordinaria che ci circonda, è per lo più “vuota”:
le dimensioni tipiche di un atomo (cioè il diametro della sua “nuvola di
elettroni”) sono circa di 10−10 m (un decimo di nanometro); tuttavia,
quasi tutta la materia dell’atomo è concentrata nel nucleo, che è 10 000
volte più piccolo (10−14 m). Quindi, la materia di un atomo occupa solo
1
= 10−12 del volume dell’atomo: un millesimo di miliardesimo!
(10 000)3
CAPITOLO 1. INTRODUZIONE
1.2
—
M.FANTI 4
Realtà in continuo movimento
La natura che ci circonda è caratterizzata da un continuo movimento. Molti
esempi cadono direttamente sotto la nostra esperienza comune: la caduta di
un oggetto, lo scorrere dell’acqua in un fiume o il soffiare del vento. . . Ma
anche il moto della Luna intorno alla Terra, dei pianeti intorno al Sole, delle
stelle in una galassia.
Vi sono poi molti altri fenomeni caratterizzati da movimenti, ma troppo
piccoli per cadere direttamente sotto i nostri sensi. Vediamo alcuni esempi.
In un liquido o in un gas apparentemente fermo, le molecole sono in
continuo movimento disordinato. Persino nei solidi, gli atomi non sono
fermi, ma vibrano, ciascuno intorno ad una sua posizione di equilibrio. La
percezione macroscopica che abbiamo di questi movimenti microscopici è la
temperatura: più un oggetto è “caldo”, più rapido è il moto delle molecole o
degli atomi che lo costituiscono.
I suoni che udiamo, sono in realtà onde acustiche, ovvero rapide
compressioni e rarefazioni del mezzo (aria), prodotte dalla vibrazione di una
sorgente sonora (uno strofinio, un motore, uno strumento musicale, . . . ), che
possono propagarsi nello spazio, fino a raggiungere le nostre orecchie.
Gli elettroni si muovono molto rapidamente all’interno dell’atomo,
tipicamente restando confinati intorno al nucleo. Tuttavia, in alcune
configurazioni della materia (per esempio nei metalli), esistono elettroni
meno legati all’atomo: essi possono quindi trasferirsi ad atomi vicini, e sotto
opportune condizioni possono acquisire un moto collettivo “medio” (o “di
deriva”), al netto dei singoli spostamenti caotici. L’effetto macroscopico è la
corrente elettrica.
1.3
Le interazioni fondamentali
Dunque l’Universo è in continuo movimento. I corpi celesti si muovono nello
Spazio. Le molecole e gli atomi di un qualunque materiale non sono mai fermi.
Anche le stesse particelle elementari non sono da pensare come “mattoni”
attaccati gli uni agli altri. Al contrario, esse sono in continua agitazione: gli
elettroni si muovono intorno ai nuclei atomici, i quarks si muovono all’interno
dei protoni e dei neutroni.
Che cosa aggrega le stelle in galassie, tiene i pianeti in orbita intorno
al Sole, tiene uniti nuclei, atomi e molecole? Che cosa impedisce loro di
“scappare via”?
CAPITOLO 1. INTRODUZIONE
—
M.FANTI 5
Figura 1.3: Sistemi legati dall’attrazione gravitazionale: il Sistema Solare
(a sinistra) e la galassia di Andromeda (a destra).
La materia resta “legata” a causa delle “interazioni”.
In generale, possiamo definire le “interazioni” come qualunque cosa che
modifichi il moto di oggetti. In Fisica classica, la grandezza associata alle
interazioni è la forza.
Un oggetto che può produrre interazione, crea nello spazio circostante un
campo di forza: qualunque altro oggetto che possa subire quell’interazione
“sente” la presenza del campo di forza.
1.3.1
La gravità
Grandi quantità di materia (pianeti, stelle, galassie, etc etc) sono tenute
insieme dalla interazione gravitazionale: essa è sempre attrattiva, e tanto più
intensa quanto più grandi sono le quantità di materia coinvolte.
I pianeti orbitano intorno al Sole (e non intorno alla Terra!) perché esso
è l’oggetto più massiccio del Sistema Solare (Fig. 1.3, sinistra): contiene da
solo il 99.9% della materia del Sistema Solare.
La forza gravitazionale è un’interazione a distanza, che si indebolisce
all’aumentare della distanza r fra oggetti, con una legge quadratica inversa:
1
∝ 2.
r
La nostra Galassia, la Via Lattea, contiene circa 400 miliardi di stelle,
si estende per circa 100 000 anni-luce, ovvero circa 1018 km (un miliardo di
miliardi di chilometri!), ed ha una massa stimata pari a 1012 volte (1000
miliardi di volte) la masse del Sole. La Via Lattea è simile in dimensioni alla
galassia di Andromeda (Fig. 1.3, destra). Questi sistemi sono tenuti insieme
dalla attrazione gravitazionale.
CAPITOLO 1. INTRODUZIONE
—
M.FANTI 6
La gravità governa il moto delle grandi strutture nell’Universo (sistemi
planetari, galassie, ammassi di galassie, . . . ), ma è del tutto ininfluente nella
descrizione di sistemi più piccoli, dalla roccia, giù fino alle molecole, agli
atomi e ai nuclei: in questi casi diventano dominanti altre interazioni.
1.3.2
Interazioni fra cariche elettriche
Molte particelle fondamentali sono dotate di una proprietà intrinseca
chiamata carica elettrica. Si tratta di una quantità dotata di segno, ovvero
può essere positiva o negativa. Due oggetti dotati di carica elettrica possono
interagire fra loro: se le due cariche elettriche hanno lo stesso segno, si
respingono; viceversa, se hanno segno opposto, si attraggono.
Anche l’interazione fra cariche elettriche è un’interazione a distanza.
Anch’essa, come la gravità, si indebolisce all’aumentare della distanza r fra
1
oggetti, con una legge quadratica inversa: ∝ 2 .
r
Ciascun elettrone porta una carica elettrica negativa, che si indica con −e,
mentre ciascun protone ha carica elettrica positiva +e. Ogni atomo contiene
lo stesso numero (Z) di elettroni e protoni: di conseguenza è elettricamente
neutro.
Durante processi chimici, o a causa di urti con altre particelle, può
accadere che un atomo perda (o acquisti) uno o più elettroni: in tal caso
forma uno ione, dotato di carica elettrica positiva o negativa, a seconda che
abbia perso o acquistato elettroni. Alcuni esempi di legami chimici sono
proprio formati in questo modo: se un atomo ha tendenza ad acquistare
elettroni ed un altro a cederli, formano rispettivamente uno ione negativo
ed uno positivo, che tendono poi ad attrarsi in quanto dotati di cariche di
segno opposto. L’esempio familiare a noi tutti è il cloruro di sodio, NaCl (è il
normalissimo sale da cucina). In effetti l’atomo di sodio tende a cedere un suo
elettrone, diventando uno ione Na+ , e l’atomo di cloro tende ad acquisirlo,
diventando uno ione Cl− .
Anche per gli atomi che non subiscono ionizzazione, la distribuzione di
carica al loro interno non è sempre simmetrica, anzi viene alterata dalla
vicinanza di altri atomi. Il risultato è che essi producono interazioni residue
con gli atomi vicini: esse sono responsabili della formazione delle molecole,
attraverso il “legame covalente”.
Le stesse molecole hanno interazioni mutue: esse non possono essere
spinte troppo vicine le une alle altre (interazione repulsiva), e nel caso
dei solidi non possono essere allontanate (interazione attrattiva). Questo
CAPITOLO 1. INTRODUZIONE
—
M.FANTI 7
è il motivo per cui i solidi non possono essere deformati, e i liquidi non
possono essere compressi. Lo stesso “principio di non compenetrabilità
della materia solida”, che esprime che due corpi solidi non possono
occupare una porzione di spazio comune, è conseguenza delle interazioni
elettriche degli atomi o delle molecole costituenti, che costituiscono la loro
rigidità. In ultima analisi, quindi, anche le interazioni “di contatto” sono
una manifestazione macroscopica dell’interazione elettromagnetica, che è
un’interazione a distanza!
Nei gas, le molecole sono molto rarefatte, pertanto le loro interazioni sono
più sporadiche: solo quando due molecole si avvicinano, nel loro moto caotico,
allora si urtano e rimbalzano via. Tuttavia, comprimendo molto un gas,
le distanze intermolecolari si riducono sempre più, rendendo più probabile
l’interazione: con una compressione sufficiente il gas può liquefarsi.
1.3.3
Interazioni elettriche e gravitazionali
Le interazioni elettriche fra oggetti carichi decrescono con la distanza,
1
secondo una legge quadratica inversa, ∝ 2 . Lo stesso vale per la
r
gravitazione. A parità di distanza, l’interazione elettrica è molto più forte
di quella gravitazionale: l’attrazione elettrica fra protone ed elettrone in un
atomo di idrogeno è 1039 volte (mille miliardi di miliardi di miliardi di miliardi
di volte!) più forte di quella gravitazionale.
D’altra parte, le interazioni elettriche residue fra aggregati elettricamente
neutri, come atomi e molecole, seguono una legge (almeno) cubica inversa,
1
∝ 3 , quindi si attenuano con la distanza molto più rapidamente della
r
interazione gravitazionale. Questo ha una conseguenza fondamentale: su
scale di distanza atomiche e molecolari l’interazione dominante è quella
elettrica, ma su scale più grandi (& 103 km, pianeti, stelle, sistemi planetari,
galassie, ammassi di galassie) l’interazione dominante è gravitazionale. Non
esistendo masse negative, un corpo non può mai essere “gravitazionalmente
neutro”: la gravità diminuisce sempre con una legge quadratica inversa
della distanza, e da certe scale di distanza in poi prevale sull’interazione
elettromagnetica.
CAPITOLO 1. INTRODUZIONE
1.3.4
Campo
elettrico
elettromagnetiche
—
e
M.FANTI 8
magnetico,
onde
Una carica elettrica produce nello spazio circostante un campo elettrico. Se la
carica elettrica è dotata di movimento, produce anche un campo magnetico.
Inoltre, ogni carica elettrica sente l’azione dei campi elettrici prodotti dalle
altre cariche circostanti. Se una carica è in movimento, sente anche l’azione
dei campi magnetici prodotti dalle altre cariche in movimento.
Questo vale anche per le correnti elettriche, che come abbiamo detto sono
dovute al movimento di elettroni. Esse producono campi magnetici, e sono
anche sensibili alla presenza di campi magnetici.
Esistono materiali dotati di magnetismo naturale: tipicamente si tratta
di minerali ferrosi. In essi, il moto degli elettroni intorno ai nuclei atomici
presenta un certo ordine, cosicché il loro effetto collettivo è quello di produrre
un campo magnetico, anche in assenza di correnti elettriche macroscopiche.
Se una carica elettrica si muove di moto oscillante, genera nello spazio
circostante un capo elettrico e un campo magnetico oscillanti. Questi hanno
una proprietà fondamentale: un campo elettrico variabile è sorgente di campo
magnetico; viceversa, un campo magnetico variabile è sorgente di campo
elettrico. Pertanto i due fenomeni si sostengono a vicenda, e il campo
elettromagnetico risultante può propagarsi anche lontano dalla sorgente (la
1
carica oscillante): la sua legge di attenuazione sarà ∝ . Questo tipo di
r
campo si chiama onda elettromagnetica.
Le onde elettromagnetiche costituiscono la luce visibile, le onde radio, le
microonde, i raggi ultravioletti e i raggi X. Nonostante la loro diversità, sono
tutti descritti dalle stesse leggi fisiche.
1.3.5
Interazioni nucleari: forte e debole
Le interazioni gravitazionali ed elettromagnetiche non sono le due sole forze
fondamentali della natura. In particolare, le interazioni elettromagnetiche
non sono assolutamente in grado di descrivere le proprietà dei nuclei atomici
e le reazioni che questi possono produrre.
I protoni hanno carica positiva, quindi tenderebbero a respingersi l’un
l’altro con forze elettriche, e il nucleo atomico si disgregherebbe. Dunque,
deve necessariamente esistere un’altra interazione, attrattiva e più forte della
repulsione elettrica. Inoltre, si osserva che nuclei atomici con molti protoni
per essere stabili necessitano di un numero sempre maggiore di neutroni.
CAPITOLO 1. INTRODUZIONE
—
M.FANTI 9
La notazione con cui si indicano i costituenti di un nucleo è A
Z X, essendo
X il simbolo chimico, e Z, A rispettivamente il numero atomico e di massa.
Mentre elementi relativamente leggeri, come l’elio (32 He , 42 He), il carbonio
(126 C), l’azoto, (147 N ), l’ossigeno (168 O) hanno A ' 2Z (cioè un ugual numero
di protoni e neutroni), elementi più pesanti tendono a A ' 2.5 Z. Un piccolo
difetto di neutroni rende il nucleo instabile. Un esempio noto è costituito
235
dall’uranio: l’isotopo 238
92 U è stabile, mentre l’isotopo 92 U tende a disgregarsi
— è “fissile”, infatti viene usato nelle centrali nucleari. In sintesi, il numero
dei neutroni è fondamentale per garantire la stabilità del nucleo.
Tutto ciò è oggi spiegato dall’interazione forte: essa agisce fra i quarks,
tenendoli uniti a formare i protoni e i neutroni, e a loro volta tiene questi
ultimi uniti all’interno dei nuclei.
Vi è poi una quarta interazione fondamentale, l’interazione debole che è
responsabile di reazioni nucleari in cui si ha la trasmutazione di protoni in
neutroni, o viceversa. Se in una reazione nucleare si produce un nucleo con
un rapporto troppo “sbilanciato” fra protoni e neutroni, può “riassestarsi”,
attraverso una o più trasformazioni del tipo:
n → p e− ν
oppure
p → n e+ ν
Le trasmutazioni p ↔ n sono sempre accompagnate dalla produzione di altre
particelle, che vengono “generate” a spese dell’energia del nucleo: fra queste,
oltre al familiare elettrone (e− ), possiamo trovare la sua anti-particella, il
positrone (e+ ), che ha le stesse proprietà dell’elettrone, a parte la carica
elettrica che è positiva! Il positrone non può esistere a lungo nella materia
ordinaria: appena viene prodotto può incontrare un elettrone di un atomo,
e nell’interazione che ne risulta entrambi si disgregano (si “annichilano”)
trasformandosi in energia elettromagnetica. Nelle interazioni deboli appare
sempre un’altra particella, il neutrino ν, che non possiede carica elettrica.
La descrizione dettagliata delle interazioni forte e debole è impossibile in
termini di dinamica classica, cioè usando i concetti di forza e accelerazione.
Queste due interazioni in effetti giocano il loro ruolo solo a livello subatomico, in un regime fisico che è descrivibile solo mediante la meccanica
quantistica. Ricordiamo che entrambe queste interazioni sono comunque
fondamentali in alcuni ambiti del nostro Universo.
1.3.6
La fusione nucleare nelle stelle
I processi nucleari che alimentano le stelle sono un esempio notevole di come
le quattro interazioni fondamentali (gravitazionale, elettromagnetica, forte e
CAPITOLO 1. INTRODUZIONE
Figura 1.4:
—
M.FANTI 10
La “fusione dell’idrogeno”, che alimenta le stelle.
debole) giochino ciascuna il suo ruolo.
Abbiamo già detto che le stelle contengono molta più materia dei pianeti.
In effetti, la forza di gravità che la massa di una stella applica a sè stessa,
sottopone il suo nucleo centrale a pressioni altissime. La materia nel nucleo
di una stella è estremamente compressa. Come conseguenza, la struttura
atomica ordinaria (in cui ogni atomo ha i suoi elettroni) collassa, e si
trasforma in un plasma: una sorta di “gas” in cui i nuclei atomici e gli
elettroni si comportano come oggetti distinti. In particolare, i nuclei atomici
possono muoversi e interagire liberamente, senza essere protetti dai rispettivi
gusci di elettroni.
Una stella trae la sua energia da reazioni di fusione nucleare, in cui nuclei
leggeri si “uniscono” per formare nuclei più pesanti. In queste reazioni
viene liberata una grande quantità di energia, grazie all’interazione forte,
che favorisce l’aggregazione dei nuclei leggeri. La reazione dominante è la
fusione dell’idrogeno, in cui 4 protoni (cioè nuclei di idrogeno), attraverso
una catena di processi, arrivano a produrre un nucleo di 4 He (due protoni e
due neutroni). La reazione è schematizzata in Fig. 1.4. Si può notare che il
primo processo è la fusione di due protoni che formano un nucleo di deuterio
(un protone e un neutrone).
La fusione di due protoni sarebbe estremamente sfavorita dalla repulsione
elettromagnetica, in quanto entrambi hanno carica elettrica positiva.
Tuttavia, grazie all’interazione debole, uno dei due protoni si trasmuta in
neutrone, la repulsione elettrica fra i due protoni viene meno, e la fusione
diventa possibile.
CAPITOLO 1. INTRODUZIONE
1.4
—
M.FANTI 11
L’energia
In generale, al movimento è associato il concetto di energia. Sempre
rimanendo sul qualitativo, più un oggetto è veloce, maggiore è la sua energia.
Un oggetto macroscopico che si muove è dotato di energia cinetica.
Abbiamo già detto che la temperatura di un materiale, a livello
microscopico, è dovuta all’agitazione degli atomi o molecole che lo
compongono: dunque anche la temperatura è associata a una forma di
energia, che si chiama energia termica.
Le interazioni hanno la capacità di modificare il moto di particelle
elementari o di oggetti macroscopici. Pertanto le interazioni possono
modificare (aumentando o diminuendo) l’energia cinetica. Per questa
ragione, attribuiamo anche alle interazioni una forma di energia, detta
energia potenziale, o anche energia di interazione. Il secondo nome
sembrerebbe più logico, ma il primo (“energia potenziale”) è in realtà quello
più usato in Fisica classica, perché esprime l’idea di un’energia che non è
ancora manifesta in un moto, è un’energia “in potenza”.
Un’interazione può essere attrattiva (come quella gravitazionale, o quella
elettrica fra cariche di segno opposto) oppure repulsiva (come quella elettrica
fra cariche di uguale segno). A seconda dei casi, all’energia potenziale si
attribuisce un segno: energia potenziale positiva per interazioni repulsive;
energia potenziale negativa per interazioni attrattive. Quando due oggetti,
o particelle, si allontanano altre un certo limite, la loro interazione tende
a diminuire, al limite annullandosi. In questa situazione, anche l’energia
potenziale si annulla.
Ripensando alle interazioni fondamentali, possiamo dunque parlare,
in particolare, di energia gravitazionale, energia elettromagnetica, energia
nucleare (quest’ultima associata all’interazione forte).
Anche i legami chimici, essendo dovuti all’interazione elettromagnetica,
costituiscono una forma di energia potenziale: tipicamente viene riferita come
energia chimica, o energia di legame.
I campi elettromagnetici possono propagarsi nello spazio, costituendo la
radiazione elettromagnetica. Anche ad essa è associata un’energia, detta
energia radiante.
L’energia dunque può assumere diverse forme. Si tratta di una quantità
estremamente versatile, che può cambiare di forma, trasformandosi fra
CAPITOLO 1. INTRODUZIONE
—
M.FANTI 12
potenziale, cinetica, termica, radiante, etc. Tuttavia, in tutte queste
trasformazioni, presenta una proprietà estremamente notevole:
l’energia totale di un sistema fisico si conserva
ovvero, se chiamiamo
Etot = [Ecinetica + Epotenziale + Etermica + Eradiante + Echimica + . . . ]
l’energia totale di un sistema, durante un qualunque processo fisico, o
chimico, possiamo scrivere qualcosa come:
f inale
iniziale
Etot
= Etot
Facciamo un esempio semplice, sulla trasformazione e conservazione
dell’energia. Supponiamo di sollevare un pesante blocco di ghiaccio da terra
e di appoggiarlo su una mensola (Fig. 1.5). Con la fatica fatta, abbiamo
ceduto energia gravitazionale all’oggetto. Poi il blocco scivola dalla mensola
e cade verso il basso, sempre più velocemente: la sua energia gravitazionale
diminuisce, convertendosi in energia cinetica. Quando arriva per terra si
rompe in pezzi, sparge gocce d’acqua e produce rumore. La sua energia
cinetica si è azzerata (alla fine è fermo), ma non è semplicemente scomparsa:
si è trasformata. Infatti:
• ha rotto i legami chimici che tenevano unite le sue molecole
(ha aumentato l’energia di legame, che è diventata quindi “meno
negativa”);
• ha aumentato la temperatura (energia termica) producendo una
parziale fusione;
• ha prodotto onde sonore (vibrazioni dell’aria).
1.5
Le leggi della Fisica e il metodo
sperimentale
Le osservazione in fisica devono essere oggettive e ripetibili.
In seguito ad una serie di osservazioni di un fenomeno naturale, si formula
un’ipotesi che spieghi in maniera coerente tutte le osservazioni. Si ottiene
cosı̀ una legge fisica.
—
energia
CAPITOLO 1. INTRODUZIONE
M.FANTI 13
energia termica
parziale fusione
energia vibrazionale
rumore
energia gravitazionale
energia cinetica
tempo
energia di legame
parziale frantumazione
sollevamento caduta
Figura 1.5:
Esempio di possibili trasformazioni dell’energia.
La legge fisica deve essere predittiva, ovvero deve permettere di prevedere
l’esito di ulteriori osservazioni, prima che queste vengano effettuate. Questo
aspetto è fondamentale: grazie ad esso è possibile mettere la legge alla
prova, ovvero progettare esperimenti in condizioni particolari, per vedere
se il risultato che si ottiene è quello previsto. In caso affermativo, la legge
viene confermata, e noi acquisiamo più confidenza che essa sia “giusta”.
Viceversa, può accadere che una legge fisica sia confutata da uno o più
esperimenti, che forniscono risultati in disaccordo con le previsioni. In tal
caso bisogna analizzare la situazione da due punti di vista.
• Occorre stabilire i limiti di validità della legge in esame. L’esperimento
che l’ha invalidata, ha messo in evidenza una sua inconsistenza interna
a livello generale? Ci sono ambiti in cui la legge può ancora essere
considerata valida, anche se come conveniente approssimazione di una
qualche legge più fondamentale?
• Se possibile, la legge va riformulata, per estendere i suoi limiti di
validità, cioè includere nelle sue previsioni sia le osservazioni che hanno
portato alla sua prima formulazione, sia quelle che l’hanno confutata.
Questo processo si chiama “metodo scientifico sperimentale”, ed è
schematizzato in Fig. 1.6.
CAPITOLO 1. INTRODUZIONE
osservazione
—
M.FANTI 14
osservazione
osservazione
osservazione
osservazione
nuova
legge
fisica
legge
fisica
previsione
legge fisica
confermata
esperimento
risultato
in accodo
con previsione
previsione
previsione
previsione
esperimento
esperimento
esperimento
risultato
in disaccodo
con previsione
legge fisica
confutata
Figura 1.6: Diagramma che schematizza il metodo scientifico: formulazione
di una legge che compendia una serie di osservazioni, esperimenti per
verificare le previsioni della legge, eventuale riformulazione della legge se
una previsione è disattesa da risultati sperimentali.
Vale la pena ricordare che il potere predittivo delle leggi fisiche ha
anche un’importante conseguenza di carattere applicativo, poiché consente
lo sviluppo tecnologico. Nel progetto di un qualunque apparato ci si basa
infatti su modelli fisici che dovrebbero descrivere il suo comportamento nelle
condizioni di utilizzo previste.
1.5.1
Ambiti di validità delle leggi fisiche
Per una legge fisica occorre sempre stabilire l’ambito di validità. Per esempio,
abbiamo a disposizione modelli che descrivono in modo più che ragionevole le
“interazioni di contatto”: il loro ambito di validità è quello in cui gli oggetti
sono formati da molti atomi, cosicché anziché osservare le singole interazioni
fondamentali fra gli atomi, si osserva il loro effetto collettivo.
Vediamo un altro esempio, molto più eclatante, di ambiti di validità.
Fino alla fine del 19◦ secolo, tutti i fenomeni fisici osservati erano ben
descritti da quella che oggi (più di un secolo dopo) chiamiamo “Fisica
Classica”: un insieme di leggi coerenti basati sulla Meccanica di Newton
e sulla Teoria dell’Elettromagnetismo di Maxwell — che sono gli argomenti
principali di questo testo, per inciso. A cavallo dei due secoli, i fisici si resero
CAPITOLO 1. INTRODUZIONE
—
M.FANTI 15
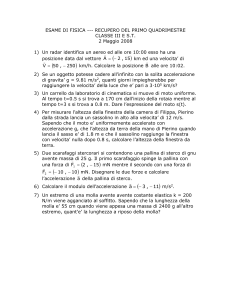
Figura 1.7:
Limiti di validità e ambiti di utilizzo di Fisica Classica,
Meccanica Quantistica, Relatività Ristretta, e Teoria dei Campi Quantistici.
conto che alcune particelle sub-atomiche possono raggiungere velocità molto
elevate — prossime alla velocità della luce c = 300 000 km/s: in queste
situazioni la meccanica newtoniana è inadeguata, e fu formulata la Teoria
della Relatività Ristretta. Pochi anni dopo (1920–1930), furono osservati
fenomeni che coinvolgono particelle elementari e loro interazioni a distanze
molto piccole, interatomiche o subatomiche: questi fenomeni risultavano
assolutamente inspiegabili con la Fisica Classica, ed anche in questo caso
fu stato necessario formulare una nuova teoria, la Meccanica Quantistica. Ad
oggi, per descrivere le interazioni fondamentali fra particelle elementari si usa
una teoria che è sia quantistica che relativistica, e va sotto il nome di Teoria
dei Campi Quantistici. Questa “mappa” delle teorie fisiche è schematizzata
in Fig. 1.7.
Attualmente pensiamo che la Teoria dei Campi Quantistici sia la più
generale teoria fisica. Ma è anche molto più complessa nel suo utilizzo e nelle
sue previsioni. Viceversa, per descrivere la vastità dei fenomeni che cadono
direttamente sotto i nostri sensi — fenomeni che implicano velocità molto
minori di c e oggetti molto più grandi di un atomo o una molecola — la
Fisica Classica è un’ottima (OTTIMA!!) approssimazione: pertanto entro
questi limiti di validità è una teoria corretta.
1.6
Il modello fisico
Le osservazioni in Fisica devono essere oggettive e ripetibili. Pertanto devono
essere sempre quantitative. Un esperimento non può dare come risultato che
“un oggetto è pesante o leggero”, o che “è veloce o lento”, oppure che è
CAPITOLO 1. INTRODUZIONE
misure di
osservabili
modello fisico
—
M.FANTI 16
deduzione dei
parametri
previsioni
{ osservabili }
{ parametri }
Figura 1.8:
Schema di utilizzo di un modello fisico
“caldo o freddo”: non sarebbe un risultato oggettivo (pesante rispetto a
cosa? etc. . . ). Piuttosto, il risultato deve essere formulato in termini di
“quanto pesa”, “quanto vale la sua velocità”, “quanto è la sua temperatura”,
e cosı̀ via. In altre parole il risultato di un esperimento deve essere espresso
da quantità numeriche. Questo è necessario per verificare se, eseguendo
nuovamente l’esperimento, il risultato viene ripetibile o meno.
Una legge fisica è espressa come un modello matematico, ovvero una
o più equazioni che mettono in relazione delle quantità osservabili — cioè
misurabili. Il modello può contenere altre quantità che sono parametri
intrinseci del sistema fisico, e che sono collegate alle quantità osservabili
da relazioni matematiche.
In generale, il modello fisico permette di ricavare i parametri da una serie
di misure degli osservabili; oppure, noti i parametri, permette di effettuare
previsioni sul comportamento del sistema fisico: vedi lo schema in Fig. 1.8.
Un esempio concreto può aiutare la comprensione. Consideriamo una
molla agganciata ad un estremo, disposta verticalmente; all’altro estremo
vengono appesi diversi oggetti, uno alla volta, e si osserva che la molla
subisce allungamenti maggiori se l’oggetto appeso è più pesante — il peso
P dell’oggetto è determinato con una bilancia. L’apparato è illustrato in
Fig. 1.9.
In questo esempio, gli osservabili sono i pesi P e le lunghezze `. Eseguendo
misure ripetute degli osservabili (cioè appendendo diversi pesi Pi e rilevando
diverse lunghezze `i ) e disponendole su un piano cartesiano si osserva una
dipendenza lineare, che consente di estrarre una legge fisica — ovvero un
modello: ` = `0 + α · P . I parametri del modello sono la costante α
e la “lunghezza a riposo” `0 . Essi possono essere ricavati dalle misure
effettuate. Inoltre, una volta noti i parametri, possiamo effettuare previsioni,
per esempio predire quale lunghezza la molla raggiungerebbe se appendessimo
CAPITOLO 1. INTRODUZIONE
—
l [mm]
0
0
0
0
1
1
1
1
2
2
2
2
3
3
3
3
l2
l1
4
4
4
4
5
5
5
5
6
6
6
6
M.FANTI 17
l4
l3
P1
P2
P3
P4
P [g]
Figura 1.9: Esempio di sistema fisico: una molla cui si possono appendere
diversi pesetti.
un certo peso, mai provato, o viceversa, quale peso sarebbe necessario per
raggiungere un dato allungamento.
Il modello fisico viene formulato per compendiare in maniera quantitativa
una serie di osservazioni. Il suo potere predittivo deve essere usato per
eseguire ulteriori esperimenti: se questi forniscono misure in disaccordo con
le previsioni del modello, quest’ultimo si dimostra inadeguato e deve essere
riformulato. Viceversa, se i nuovi risultati sperimentali sono in accordo con
le previsioni del modello, esso ne risulta più consolidato.
1.7
Misure in Fisica
Abbiamo già detto che le grandezze fisiche devono essere quantitative.
D’altra parte esprimerle tramite numeri e nient’altro non è sufficiente. Una
frase del tipo “la distanza Milano-Roma è 580” non ha senso: 580 cosa???
Chilometri? Centimetri? Miglia nautiche? Litri?? Chili?? Dollari???
Alcune di queste “proposte” sono palesemente assurde (litri, chili, . . . ). Altre
sarebbero accettabili (centimetri, miglia nautiche), perché fanno riferimento
a quantità che descrivono distanze, ma non giuste. La formulazione giusta è
“580 chilometri”.
In ogni caso è necessaria una specificazione.
In generale, quando si deve descrivere quantitativamente una grandezza
fisica X, si fornisce una misura. Per fare ciò, la si confronta con un’altra
grandezza X, ad essa omogenea, che si assume come campione, o unità di
misura, e si calcola quante volte X è contenuto in X. Se chiamiamo x il
risultato di questo calcolo, allora scriviamo la misura di X come:
X
|{z}
(grandezza fisica)
= |{z}
x
(misura)
X
|{z}
(unità di misura)
(1.1)
CAPITOLO 1. INTRODUZIONE
1.7.1
—
M.FANTI 18
Unità di misura
Per ogni grandezza fisica abbiamo a disposizione diverse unità di misura. In
Fisica è stato adottato il Sistema Internazionale di unità di misura (SI), in
cui le distanze si misurano in metri (m), i tempi in secondi (s), le masse
in kilogrammi (kg)(1) . Tuttavia, ai fini pratici, queste unità di misura
sono affiancate da altre, che sono multipli o sottomultipli. Per esempio,
la lunghezza di un mobile si misura più spesso in centimetri (cm), e una
distanza stradale in kilometri (km), le distanze interatomiche in nanometri
(nm, miliardesimi di metro). Analogamente, la durata delle lezioni si misura
in minuti (min) o in ore (h), i tempi nell’agricoltura si misurano in giorni o
mesi, la durata della vita umana in anni, i periodi storici in secoli. . . Anche
le masse possono essere misurate in grammi (g) o quintali, o tonnellate. . .
Le unità di misura del SI sono elencate nella seguente tabella. Alcune
grandezze hanno unità di misura fondamentali, e sono scritte in grassetto,
tutte le altre sono derivate, nel senso che l’unità di misura si deduce dalla
definizione della grandezza.
1
Molti Paesi del mondo hanno aderito al SI anche nella vita quotidiana —
un’importante eccezione è costituita dai Paesi anglosassoni, che usano ancora le yarde,
le miglia, le pinte, i galloni e i cucchiai da tè: so much for them!
CAPITOLO 1. INTRODUZIONE
—
M.FANTI 19
grandezza fisica
unità di misura
simbolo
nome
grandezze cinematiche
distanza, spostamento
m
metro
s
secondo
tempo
m/s
metri al secondo
velocità
accelerazione
m/s2
metri al secondo quadrato
grandezze dinamiche
massa
kg
chilogrammo
2
N = kg · m/s
Newton
forza
quantità di moto
kg · m/s
kg · m2 /s
momento angolare
momento meccanico
N·m
Newton per metri
J = N·m
Joule
energia, lavoro
potenza
W = J/s
Watt
grandezze elettromagnetiche
carica elettrica
C
Coulomb
campo elettrico
V/m
Volt su metro
potenziale elettrico
V = J/C
Volt
A = C/s
Ampere
corrente elettrica
−1 −1
campo magnetico
T = NC m s Tesla
1.8
Le costanti fondamentali della Fisica
Abbiamo visto che qualunque modello fisico contiene dei parametri, che
possono essere determinati con una o più misure delle grandezze osservabili.
Esistono in natura alcuni parametri che sono universali, nel senso che
— a quanto ne sappiamo — assumono gli stessi valori in qualunque parte
dell’Universo, e in qualunque condizione dinamica. Questi sono le costanti
fondamentali della Fisica. Le elenchiamo qui, per referenza a qualunque
problema incontreremo. Per ciascuna di esse, sono riportate tutte le cifre
non affette da incertezza: con questo intendiamo che un valore indicato
per esempio con x.xxx xxx · 10yy UdM è affetto da un’incertezza minore
di 0.000 001 · 10yy UdM.
CAPITOLO 1. INTRODUZIONE
simbolo
—
M.FANTI 20
valore
nome
G
6.674 · 10−11 N m2 kg−2
costante della gravitazione universale
g
9.806 m/s2
accelerazione gravitazionale
(valore medio alla superficie terrestre)
NA
6.022 141 · 1023
numero di Avogadro (particelle per mole)
kB
1.380 65 · 10−23 J K−1
costante di Boltzmann
R
8.314 47 J K−1
costante dei gas perfetti (R ≡ kB NA )
me
9.109 383 · 10−31 kg
massa dell’elettrone
mp
1.672 621 8 · 10−27 kg
massa del protone
mn
m[12 C]
12
1.674 927 4 · 10−27 kg
massa del neutrone
1.660 538 9 · 10−27 kg
unità di massa atomica
(1/12 della massa dell’atomo
e
1.602 176 6 · 10−19 C
12
C)
carica elettrica del protone
(−e carica elettrica dell’elettrone)
c
299 792 458 m/s
velocità della luce nel vuoto
0
8.854 187 817 · 10−12 C2 N−1 m−2
costante dielettrica del vuoto
1
4π0
8.987 551 788 · 109 N C−2 m2
µ0
12.566 370 614 · 10−7 N A−2
permeabilità magnetica del vuoto
1
(µ0 ≡ 2 )
c 0
h
6.626 070 · 10−34 J s
costante di Planck
~
1.054 571 7 · 10−34 J s
costante di Planck ridotta (~ ≡
h
)
2π
CAPITOLO 1. INTRODUZIONE
1.9
—
M.FANTI 21
Incertezze nelle misure (*)
Ogni misura di una grandezza fisica comporta sempre un margine di
incertezza.
Per esempio, se misuriamo la lunghezza di un tavolo con un metro
graduato in centimetri, possiamo dire che vale 150 cm. Possiamo essere
più precisi ed usare un metro graduato in millimetri: affermeremmo che la
lunghezza è 150.0 cm, a significare che non ci sono mm residui oltre ai 150 cm.
Oppure potremmo accorgerci che in realtà la lunghezza è 149.9 mm. Però
non potremo mai affermare che la lunghezza sia 150.0000 cm: vorrebbe dire
che siamo capaci di controllare fino a 1/10 000 di cm (cioè un millesimo di
mm, ovvero un micron), cosa palesemente assurda con un normale metro
graduato in mm.
Analogamente, possiamo misurare un intervallo di tempo con un
cronometro digitale, che mostra sul display cifre fino al centesimo di secondo.
Questo significa che per certo non siamo sensibili ai millesimi di secondo.
Occorre poi essere certi che il sistema che avvia e ferma il cronometro abbia
una precisione migliore del centesimo di secondo — se comandassimo il
cronometro a mano, sicuramente saremmo ben più imprecisi!
In generale, ogni misura fisica viene da uno strumento, e lo strumento
perfetto non esiste.
Ogni misura di grandezza fisica non fornisce un risultato esatto, bensı̀ un
valore affetto da un’incertezza. Questo fatto è inevitabile: tutt’al più il fisico
sperimentale può tentare di ridurre al minimo le incertezze delle sue misure,
ma eliminarle è impossibile.
Quando si fornisce una misura di una grandezza, occorre anche specificare
qual è il margine di incertezza che la affligge. Pertanto la scrittura in Eq. (1.1)
va completata cosı̀:
X
|{z}
(grandezza fisica)
1.9.1
= |{z}
x ±
(misura)
σx
|{z}
(incertezza)
X
|{z}
(1.2)
(unità di misura)
Incertezze nelle quantità derivate
Tipicamente, da grandezze direttamente misurate, se ne ricavano altre (dette
grandezze derivate): occorre quindi propagare le incertezze che affliggono le
grandezze misurate, a quelle derivate. Le tecniche di propagazione sono
varie, e parlarne adeguatamente è il di fuori del contesto di questo testo.
CAPITOLO 1. INTRODUZIONE
—
M.FANTI 22
Pertanto, senza dimostrazioni, riportiamo un approccio che funziona bene
quasi sempre.
Supponiamo di misurare n grandezze X1 , X2 , . . . , Xn , ottenendo quindi i
seguenti risultati:
X1 = (x1 ± σx1 ) X 1
X2 = (x2 ± σx2 ) X 2
..
..
..
..
.
.
.
.
Xn = (xn ± σxn ) X n
e da queste dobbiamo calcolare una grandezza derivata F che dipende da
X1 , X2 , . . . , Xn , ovvero è funzione di esse: F = F (X1 , X2 , . . . , Xn ). Il valore
che stimiamo per F è semplicemente
f = F (x1 , x2 , . . . , xn )
cioè introduciamo nella funzione F i valori x1 , x2 , . . . , xn misurati per
X1 , X2 , . . . , Xn . Qual è l’incertezza σf su f ? Essa deve derivare da tutte
le possibili variazioni di ciascuna delle xk , ciascuna entro il suo margine di
incertezza σxk . Per esempio, variando x1 di ±σx1 , f subisce una variazione
2 · (δf )1 = F (x1 + σx1 , x2 , . . . , xn ) − F (x1 − σx1 , x2 , . . . , xn )
(il 2 che moltiplica (δf )1 ci ricorda che x1 varia da x1 −σx1 a x1 +σx1 , dunque
ha una variazione totale di 2σx1 ). In generale, variando xk di ±σxk , f subisce
una variazione
2 · (δf )k = F (x1 , . . . , xk + σxK , . . . , xn ) − F (x1 , . . . , xk − σxK , . . . , xn )
Possiamo cosı̀ costruire n variazioni di f , (δf )1 , . . . , (δf )n :
tutte
contribuiscono alla variazione totale di f . La formula per combinarle è di
sommarle in quadratura: l’incertezza totale su f è
v
u n
uX
[(δf )k ]2
σf = t
k=1
v
u n
X
1u
t
=
[F (. . . , xk + σxK , . . . ) − F (. . . , xk − σxK , . . . )]2
2 k=1
(1.3)
Capitolo 2
Cinematica unidimensionale
In questo capitolo ci concentreremo sui moti unidimensionali, ovvero che
avvengono lungo una linea predefinita. Questo approccio è utile per
introdurre i concetti di posizione rispetto a un riferimento, velocità e di
accelerazione istantanee, e la matematica necessaria a discuterli — nella
fattispecie, il concetto di intervalli di tempo “infinitamente brevi” e le
operazioni di derivata e di integrale. Nei capitoli successivi affronteremo i
concetti, più utili in Fisica, di posizione e moto nello spazio tridimensionale.
Il moto di qualunque cosa (oggetto o particella elementare) è
caratterizzato da uno spostamento, ovvero da un cambiamento di posizione.
Tutte le posizioni sono riferibili come spostamenti rispetto ad una posizione
di riferimento. Nel descrivere un moto, però, solitamente si vuole anche
dire quanto rapidamente esso avviene. Più precisamente si vuole mettere
in relazione lo spostamento (proprietà geometrica) con un’altra quantità: il
tempo. Si parla perciò di velocità e di accelerazione. La cinematica è la
branca della fisica che definisce quantitativamente queste proprietà del moto
e le loro relazioni.
Inoltre, considereremo sempre il moto di oggetti che siano molto più
piccoli rispetto alle distanze che percorrono, in modo da poterli considerare
“puntiformi” — per esempio, biglie che rotolano lungo una pista, o automobili
che viaggiano sull’autostrada, o treni su una rotaia. L’idea generale
dell’approssimazione puntiforme è che la posizione dell’oggetto sia definito
solo dalla sua collocazione, e non per esempio dal suo orientamento, e quindi
che il suo movimento sia solo di natura traslatoria, e si possa trascurare
qualunque rotazione.
23
CAPITOLO 2. CINEMATICA UNIDIMENSIONALE —
s1
P1
s2
M.FANTI 24
P2
O
s3
P4
Γ
P3
s4
Figura 2.1:
Esempi di posizione lungo una linea. O è l’origine, che ha
per definizione coordinata = 0. Dato l’orientamento della linea, le posizioni
P1 , P2 hanno coordinate positive, s1 > 0 e s2 > 0, mentre P3 , P4 hanno
coordinate negative, s3 < 0 e s4 < 0. Le coordinate dei 4 punti presi ad
esempio sono tali che s4 < s3 < 0 < s1 < s2 .
2.1
Posizione e spostamenti su una linea
Per definire la posizione di un oggetto puntiforme su una linea Γ, è necessario
anzitutto scegliere un punto O di riferimento, che viene chiamato origine, e
un orientamento convenzionale. Ogni altro punto P può essere identificato in
modo univoco specificando la distanza s misurata lungo la linea Γ da O a P :
a questa si attribuisce segno + se per andare da O a P si segue l’orientamento
di Γ, segno − se si segue l’orientamento opposto. La grandezza s cosı̀ definita
si chiama coordinata del punto P lungo la linea orientata Γ.
Per esempio, in Fig. 2.1, è data la curva Γ con il suo orientamento
e l’origine O. I 4 punti indicati P1 , P2 , P3 , P4 hanno rispettivamente
coordinate s1 , s2 , s3 , s4 . Poiché i punti P1 , P2 si raggiungono da O seguendo
l’orientamento di Γ, la loro coordinata è positiva. Viceversa, i punti
P3 , P4 hanno coordinata negativa, perché si raggiungono da O seguendo
l’orientamento opposto a quello di Γ.
Se un oggetto puntiforme si sposta dalla posizione P1 , di coordinata
s1 , alla posizione P2 , di coordinata s2 , si definisce lo spostamento come la
differenza fra la coordinata di arrivo e quella di partenza:
∆s = s2 − s1
(2.1)
Anche lo spostamento è dotato di segno: se avviene lungo l’orientamento
di Γ, allora s2 > s1 , cioè ∆s > 0. Viceversa, se avviene con orientamento
opposto a quello di Γ, allora s2 < s1 e ∆s < 0.
CAPITOLO 2. CINEMATICA UNIDIMENSIONALE —
M.FANTI 25
Un esempio
Consideriamo un’automobile che viaggia lungo un’autostrada (senza svincoli o
raccordi nel tratto che ci interessa): per quanto l’autostrada possa fare delle
curve, o avere salite o discese, la posizione dell’automobile può essere definita
univocamente da una sola coordinata s, definita come la distanza, misurata lungo
l’autostrada, da un luogo preciso di riferimento. Cosı̀, per esempio, se l’autostrada
è la A1 (“AutoSole” Milano-Napoli) possiamo prendere come riferimento il casello
di Roma Est e da lı̀ misurare tutte le distanze. Inoltre l’autostrada può essere
percorsa in due direzioni, verso Milano o verso Napoli. Per specificare la direzione,
scegliamo un orientamento convenzionale dell’autostrada, per esempio da Sud
verso Nord, e attribuiamo un segno alle distanze: positivo se sono percorse nella
direzione convenzionale, negativo altrimenti. Cosı̀ per esempio la coordinata di
Firenze è positiva perché si trova a Nord di Roma, mentre la coordinata di Napoli
è negativa perché si trova a Sud di Roma. Assumendo che un solo percorso sia
possibile, senza varianti, le coordinate di qualunque luogo lungo l’autostrada sono
espresse come distanze dal casello di Roma Est: le coordinate di alcune città
saranno quelle espresse nella seguente tabella:
luogo
Milano
Parma
Bologna
Firenze
Arezzo
Roma
Frosinone
Napoli
coordinata s
579 km
452 km
363 km
273 km
195 km
0 km
−62 km
−197 km
Si noti che le città a Sud di Roma hanno coordinata negativa, per la convenzione
di orientamento Sud-Nord che abbiamo scelto.
Calcolare i seguenti spostamenti (con il loro segno): Roma-Firenze;
Roma-Napoli; Milano-Bologna; Arezzo-Parma, Napoli-Frosinone.
Risposta:
Roma-Firenze
∆s = 273 km − 0 km
= +273 km
Roma-Napoli
∆s = −197 km − 0 km
= −197 km
Milano-Bologna
∆s = 363 km − 579 km
= −216 km
Arezzo-Parma
∆s = 452 km − 195 km
= +257 km
Napoli-Frosinone ∆s = (−62) km − (−197) km = +135 km
Anche qui, a causa dell’orientamento convenzionale, gli spostamenti verso Nord
sono positivi, quelli verso Sud sono negativi. . . Attenzione: niente di ideologico, è
solo che siamo abituati alle carte geografiche con il Nord in alto. Se volete potete
cambiare l’orientamento dell’autostrada — e se non vi piace mettere l’origine a
Roma mettetela dove meglio credete — ridefinitevi tutte le coordinate con il nuovo
sistema di riferimento e ripetete l’esercizio.
CAPITOLO 2. CINEMATICA UNIDIMENSIONALE —
M.FANTI 26
s
s3
s4
s5
s6
s2
s7
s = s(t)
s1
s8
s9
t1
t2
t3
t4
t5
t6
t7
t8
t9
s10 t
11 t12
t10
s11
s12
t
Figura 2.2: Moto di un oggetto in funzione del tempo, rappresentato in un
grafico (tempo;spazio), (t; s). La coordinata si corrisponde all’istante ti , la
curva continua rappresenta la legge oraria s = s(t). In questo esempio, per
semplicità, gli istanti ti sono presi ad intervalli di tempo regolare, cioè sono
equispaziati.
2.2
Legge oraria del moto
Un oggetto che si sposta lungo una linea, modifica la sua coordinata s al
passare del tempo t, pertanto possiamo pensare a “mappare” la sua posizione
a diversi istanti di tempo t1 , t2 , . . . , tn , chiamando si la sua coordinata
all’istante ti : si otteniene una tabella del tipo:
t1
s1
t2
s2
t3
s3
t4
s4
...
...
tN
sN
che può anche essere rappresentata come un grafico, in Fig. 2.2.
Immaginando di infittire sempre più gli istanti ti a cui si rileva la coordinata
si si ottiene una successione continua di punti (t; s), che può essere
rappresentata come una funzione della coordinata s rispetto al tempo t:
s = s(t)
Questa funzione si chiama legge oraria del moto.
(2.2)
CAPITOLO 2. CINEMATICA UNIDIMENSIONALE —
2.3
M.FANTI 27
Velocità media
Quanto rapidamente si muove l’oggetto? Ovvero: qual’è la distanza che
percorre in un certo intervallo di tempo? La quantità che risponde a questa
domanda è la velocità media. Se un oggetto si trovava nella posizione (1)
all’istante t1 e poi si è spostato raggiungendo la posizione (2) all’istante t2 ,
ha percorso una distanza ∆s = s2 − s1 in un intervallo di tempo ∆t = t2 − t1 .
La sua velocità media è definita come:
v̄ =
s2 − s1
∆s
=
t2 − t1
∆t
(velocità media)
(2.3)
Esempi di velocità medie
Un’automobile percorre una distanza ∆s1 = 35 km alla velocità media v̄1 =
100 km/h, poi rallenta rapidamente a v̄2 = 80 km/h e percorre altri ∆s2 = 40 km.
Quanto tempo ha impiegato lungo il suo tragitto? Qual è la velocità media su tutto
il tragitto?
Risposta. Il tratto ∆s1 è stato percorso in un tempo ∆t1 = ∆s1 /v̄1 = 0.35 h,
mentre il tratto ∆s2 è stato percorso in un tempo ∆t2 = ∆s2 /v̄2 = 0.5 h. Dunque
il tempo totale è ∆t = ∆t1 + ∆t2 = 0.85 h. La lunghezza di tutto il tragitto
è ∆s = ∆s1 + ∆s2 = 75 km, quindi la velocità media lungo tutto il tragitto è
v̄ = ∆s/∆t = (75 km)/(0.85 h) ' 88.2 km/h.
Come si vede nell’esempio, la velocità media su un tragitto non è uguale
alle velocità medie calcolate su tratti più brevi del tragitto stesso. In effetti la
ragione è che il moto dell’oggetto è cambiato lungo il tragitto. Nell’esempio,
l’automobile ha rallentato. I dati del problema consentono solo di dire che
l’automobile era più veloce sul tratto ∆s1 e più lenta sul tratto ∆s2 , ma non
sappiamo se su ciascuno dei due tratti abbia tenuto un’andatura regolare
o abbia fatto accelerate o frenate. Per avere dettagli più precisi in merito
occorrerebbe suddividere a loro volta i tratti ∆s1 e ∆s2 in tratti più brevi. . .
Riconsideriamo la Fig. 2.2: la velocità media dal punto (1) al punto (7) è
ovviamente v̄1,7 = (s7 − s1 )/(t7 − t1 ). D’altra parte, segmentando l’intervallo
(1)–(7) in sottointevalli, cioè andando a considerare anche le posizioni
intermedie (2),. . . ,(6), possiamo definire velocità medie “più localizzate”, per
esempio v̄1,2 = (s2 − s1 )/(t2 − t1 ), v̄2,3 = (s3 − s2 )/(t3 − t2 ), etc. Ovviamente
queste sono diverse fra loro. Nell’esempio in esame, gli intervalli di tempo
sono tutti uguali: t2 − t1 = t3 − t2 = t4 − t3 = . . . : per questa scelta, a
velocità maggiori corrispondono spostamenti maggiori, e viceversa. Quindi
per esempio v̄1,2 > v̄2,3 > v̄3,4 : queste velocità medie sono tutte positive,
ma decrescono. Fra t4 e t5 l’oggetto praticamente non si è mosso, s4 = s5 ,
CAPITOLO 2. CINEMATICA UNIDIMENSIONALE —
M.FANTI 28
quindi in questo caso la velocità media è nulla: v̄4,5 = 0. Poi la coordinata
prende a decrescere, sempre più rapidamente, quindi da t5 in poi la velocità
media diventa negativa, e sempre più piccola: 0 > v̄5,6 > v̄6,7 > v̄7,8 > v̄8,9 .
L’oggetto sta tornando indietro.
Che cosa succede in particolare fra t4 e t5 ? Dalle misure di posizione
abbiamo s4 = s5 , ma nei tempi intermedi? Se il nostro campionamento
temporale fosse più fitto, forse potremmo vedere che dopo t4 l’oggetto sale
ancora un po’, poi si arresta un istante e poi comincia a scendere prima di
t5 ?
2.4
Velocità istantanea
Volendo avere una descrizione ancora più dettagliata occorrerebbe
suddividere il percorso in intervalli temporali ancora più piccoli: idealmente
vorremmo che essi diventassero infinitamente piccoli! Questo è ciò che in
analisi matematica si chiama passaggio al limite: nel nostro caso il limite
è per ∆t → 0. La velocità media è una proprietà dell’intervallo di tempo
∆t in cui la si misura, ma se ∆t → 0 gli estremi dell’intervallo tendono a
coincidere, e l’intervallo si riduce di fatto ad un istante. Pertanto, in questo
limite, la velocità si chiama velocità istantanea:
ds
∆s
=
(2.4)
∆t→0 ∆t
dt
Le quantità ds, dt indicano variazioni infinitesime di posizione e di tempo,
rispettivamente: è consuetudine, nella condizione di limite, sostituire la
notazione ∆ con la d. In analisi matematica, ∆s/∆t si chiama rapporto
incrementale. Il suo limite per ∆t → 0, ds/dt, si chiama derivata della
funzione s(t) rispetto alla variabile t.
Il passaggio al limite si può rappresentare graficamente come nella
Fig. 2.3: data la legge oraria s(t), la velocità istantanea può essere
visualizzata come il coefficiente angolare della retta tangente alla curva del
moto. A meno che il grafico di s(t) non sia una linea retta, la tangente
modifica la sua pendenza da un punto all’altro, perciò la velocità in generale
cambia: essa stessa è funzione del tempo. Quindi l’Eq. (2.4) va riscritta più
precisamente come:
v = lim
ds(t)
s(t + ∆t) − s(t)
=
∆t→0
∆t
dt
v(t) = lim
(2.5)
D’ora in poi, ogni volta che si parlerà di velocità si intenderà quella
istantanea, a meno che non sia altrimenti specificato.
CAPITOLO 2. CINEMATICA UNIDIMENSIONALE —
M.FANTI 29
∆t
s(t+∆t)
∆s
s(t)
t
t+∆t
∆s
Figura 2.3: Calcolo della velocità media v̄ =
e della velocità istantanea
∆t
ds
di un oggetto che si muove con una legge oraria s(t). La velocità
v =
dt
media può essere visualizzata come il coefficiente angolare della corda che
∆s
collega i punti (t; s(t)) e (t + ∆t; s(t + ∆t)), e pertanto vale v̄ =
. La
∆t
velocità istantanea invece è il coefficiente angolare della tangente alla curva
∆s
nel punto (t; s(t)), e vale v = lim
.
∆t→0 ∆t
2.4.1
Spostamento come integrale della velocità
istantanea
Le Eq. (2.3) e Eq. (2.5) consentono di calcolare la velocità — rispettivamente
media e istantanea — di un oggetto quando sia nota la sua legge oraria
s = s(t). Il procedimento si può anche invertire, ovvero si può ricavare uno
spostamento ∆s che avviene in un intervallo di tempo [t; t + ∆t] se è nota la
velocità in funzione del tempo, v(t).
Con riferimento alla Fig. 2.2, consideriamo dapprima le velocità medie
v̄0,1 , v̄1,2 , v̄2,3 , . . . , v̄n−1,n . Ovviamente
∆s = sn − s0 = v̄0,1 · ∆t0,1 + v̄1,2 · ∆t1,2 + v̄2,3 · ∆t2,3 + · · · + v̄n−1,n · ∆tn−1,n
n
X
=
v̄i−1,i · ∆ti−1,i
i=1
Anche qui possiamo immaginare di dividere l’intervallo di tempo [t; t + ∆t]
in un numero sempre maggiore di intervallini sempre più piccoli. Occorre
CAPITOLO 2. CINEMATICA UNIDIMENSIONALE —
M.FANTI 30
v
∆ti
v(ti )
∆si
ti
t
Figura 2.4:
Calcolo dello spostamento come integrale della velocità. Si
considerano molti piccoli intervallini ∆ti , in ciaascuno dei quali si assume
che la velocità istantanea vi sia praticamente uguale alla velocità media v̄i .
Questa approssimazione permette di scrivere lo spostamento nel tempo ∆ti
come ∆si = v̄i · ∆ti ' vi · ∆ti .
dunque considerare il passaggio al limite, per ∆tP
→ 0: le quantità v̄ · ∆t
diventano infinitesime e gli addendi nella somma ni=1 tendono all’infinito.
Questa operazione, in analisi matematica, si chiama integrale, e si scrive in
questa forma:
Z
t2
∆s = s(t2 ) − s(t1 ) =
v(t) dt
(2.6)
t1
e si legge “lo spostamento ∆s è pari all’integrale nel tempo della velocità
istantanea”.
Si può rappresentare graficamente questo concetto come in Fig. 2.4.
2.5
Accelerazione
Come si è visto, in generale la velocità cambia durante il moto, pertanto
può essere espressa come funzione del tempo: v = v(t). Pertanto è utile
definire una quantità che esprime quanto rapidamente cambia la velocità:
essa è l’accelerazione:
∆v
v(t + ∆t) − v(t)
dv(t)
= lim
=
∆t→0
∆t→0 ∆t
∆t
dt
a(t) = lim
(2.7)
CAPITOLO 2. CINEMATICA UNIDIMENSIONALE —
M.FANTI 31
L’accelerazione è dunque il rapporto fra la variazione di velocità ∆v ed il
tempo ∆t in cui essa ha luogo, nel limite di ∆t → 0. In altre parole,
l’accelerazione è la derivata della velocità rispetto al tempo.
Il formalismo è del tutto analogo a quello introdotto per definire la
velocità. Pertanto, senza ulteriori discussioni, possiamo affermare che la
variazione di velocità da un istante t1 ad un istante t2 può essere calcolata
se si conosce l’accelerazione in funzione del tempo, a = a(t):
Z t2
a(t) dt
(2.8)
∆v = v(t2 ) − v(t1 ) =
t1
Poiché la velocità, a sua volta, è derivata della posizione rispetto al tempo,
possiamo anche scrivere:
d ds(t)
d2 s(t)
dv(t)
=
=
a(t) =
dt
dt
dt
dt2
L’accelerazione è la derivata della derivata della posizione rispetto al tempo:
l’accelerazione è la derivata seconda della posizione rispetto al tempo.
2.6
Riassunto dei concetti sul moto lungo
una linea
In sintesi, la posizione di un oggetto lungo una linea orientata può essere
descritta con una singola coordinata s rispetto ad un punto di riferimento,
che avrà per definizione s = 0. La coordinata è positiva se per raggiungere il
punto dall’origine si deve seguire l’orientamento della linea; in caso contrario
la coordinata è negativa.
La distanza fra due posizioni (1) e (2), definite dalle coordinate s1 e s2 ,
è definita come ∆s = s2 − s1 . Si noti che in generale la linea è orientata,
vale a dire che ha senso scrivere s1 < s2 o viceversa. Pertanto ∆s può essere
positivo o negativo.
Il moto di un oggetto lungo la linea è completamente descritto dalla
legge oraria, espressa come funzione s(t). Essa, una volta nota, consente
di calcolare la posizione s dell’oggetto ad un qualunque istante t.
La velocità di moto dell’oggetto è definita come il rapporto fra uno
spostamento ∆s ed il tempo ∆t impiegato ad effettuarlo, nel limite ∆t → 0:
v(t) =
ds(t)
∆s
s(t + ∆t) − s(t)
= lim
= lim
∆t→0 ∆t
∆t→0
dt
∆t
CAPITOLO 2. CINEMATICA UNIDIMENSIONALE —
M.FANTI 32
La accelerazione dell’oggetto è definita come il rapporto fra la variazione
di velocità ∆v ed il tempo ∆t impiegato ad effettuarlo, nel limite ∆t → 0:
a(t) =
∆v
v(t + ∆t) − v(t)
dv(t)
= lim
= lim
∆t→0 ∆t
∆t→0
dt
∆t
Lo spostamento ∆s a sua volta è ottenibile come integrale della velocità:
t2
Z
∆s = s(t2 ) − s(t1 ) =
v(t) dt
t1
e la variazione di velocità è calcolabile come integrale dell’accelerazione:
Z
t2
∆v = v(t2 ) − v(t1 ) =
a(t) dt
t1
Come si vede sin da qui, le operazioni di derivazione e integrazione di una
funzione ricoprono un ruolo imprescindibile nella fisica. Per questo motivo
le principali regole vengono riportate nel Capitolo 3.
2.7
Unità di misura
Le distanze e gli spostamenti si misurano in metri (m). A seconda del
contesto si fa uso di multipli o sottomultipli del metro (1 cm=0.01 m ;
1 mm=0.001 m ; 1 km=1000 m ; etc. . . ). Analogamente, il tempo si misura
in secondi (s), oppure in altre unità più comode a seconda delle situazioni
(1 min=60 s ;1 h=60 min=3600 s).
In fisica si fa uso specialmente del Sistema Internazionale (SI) di unità di
misura, cui molti Paesi del mondo hanno aderito — un’importante eccezione
è costituita dai Paesi anglosassoni: too bad for them! Nel SI le unità di
misura per le grandezze cinematiche finora introdotte sono riassunte nella
seguente tabella:
grandezza fisica
distanza, spostamento
tempo
velocità
accelerazione
unità di misura
simbolo nome
m
metro
s
secondo
m/s
metri al secondo
m/s2
metri al secondo quadrato
CAPITOLO 2. CINEMATICA UNIDIMENSIONALE —
M.FANTI 33
Nella vita quotidiana, spesso le velocità sono espresse in chilometri all’ora,
km/h. Pertanto ricaviamo una volta per tutte la conversione fra metri al
secondo e chilometri all’ora. Poiché 1 h = 3600 s e 1 km = 1000 m, otteniamo
1000 m
1
che 1 km/h =
=
m/s, ovvero:
3600 s
3.6
1 m/s = 3.6 km/h
2.8
(2.9)
Esercizi di cinematica unidimensionale
Negli esercizi che seguono si farà abbondante uso di derivate e integrali. Può
essere utile consultare le regole di derivazione e integrazione e i casi notevoli
che sono riassunti in Sezione 3.3.
Esercizio 2.1. Un’automobile viagga alla velocità di 130 km/h. Calcolare la sua
velocità in unità di misura SI.
1
m/s = 36.11 m/s
Risposta : v = 130 km/h = 130 ·
3.6
Esercizio 2.2. Un oggetto, lanciato su un tavolo orizzontale con velocità iniziale
v0 = 2 m/s, rallenta fino a fermarsi dopo 3 secondi; durante il moto ha seguito
una legge oraria
s(t) = v0 t − αt2
Scrivere l’evoluzione temporale della velocità e dell’accelerazione. Calcolare α.
Quanto spazio è stato percorso in tutto?
Risposta. La velocità si ottiene derivando la posizione rispetto al tempo:
v(t) =
ds
d
=
v0 t − αt2 = v0 − 2αt
dt
dt
Derivando la velocità rispetto al tempo si ottiene l’accelerazione:
a(t) =
dv
d
=
(v0 − 2αt) = −2α
dt
dt
Sappiamo che a t1 = 3 s l’oggetto si è arrestato: quindi 0 = v(t = 3 s1 ) = v0 −2αt1 ,
v0
ovvero α =
= 0.3333 m/s2 . L’accelerazione è costante e negativa (cioè è una
2t1
decelerazione): a = −2α = −0.6667 m/s2 . Lo spazio totale percorso è
∆s = s(t1 ) − s(0) = v0 t1 − αt21 = (2 m/s)(3 s) − (0.3333 m/s2 )(3 s)2 = 3 m
Esercizio 2.3. Un’automobile che viaggia sull’autostrada, all’istante t = 0 si
trova al chilometro 286 con velocità
v0 =60 km/h, quando comincia ad accelerare,
t
con un’accelerazione a(t) = α 1 −
, per ∆t = 5 s, fino a raggiungere una
∆t
CAPITOLO 2. CINEMATICA UNIDIMENSIONALE —
M.FANTI 34
nuova velocità v1 = 80 km/h. Ricavare come la velocità v(t) e la posizione s(t)
evolvono nel tempo. Calcolare α e la nuova posizione s1 raggiunta nel tempo ∆t.
Risposta.
Anzitutto convertiamo tutti i dati in unità S.I.: s0 =
286 000 m; v0 = 16.67 m/s; v1 = 22.22 m/s.
La velocità si ottiene integrando l’accelerazione nel tempo, e tenendo conto
della condizione iniziale v0 :
Z
v(t) = v0 +
t
0
Z
0
dt a(t ) = v0 +
t2
= v0 + α t −
2∆t
0
0
t
t
t0
α (t0 )2
dt α 1 −
= v0 + αt −
∆t
∆t
2 0
0
Dopo un tempo ∆t, t = t1 = ∆t = 5 s. Per avere v(t1 ) = v1 deve essere
∆t
v1 − v0
v1 − v0 = α , quindi α = 2
= 2.222 m/s2 .
2
∆t
La posizione si ottiene integrando la velocità nel tempo, e tenendo conto della
condizione iniziale s0 :
Z t
Z t
t2
0
0
0
dt v(t ) = s0 +
dt v0 + α t −
s(t) = s0 +
2∆t
0
0
0 2
t
(t0 )3
(t )
−
= s0 + v0 t0 + α
2
6∆t 0
2
3
t
t
= s0 + v0 t + α
−
2
6∆t
Per calcolare s1 = s(t1 ), o introduciamo “brute force” tutti i dati nell’equazione
per s(t), oppure — visto che in questo caso possiamo — cerchiamo di semplificare
v1 − v0
un po’ la formula, tenendo presente che t1 = ∆t e α = 2
. Quindi s1 − s0 =
∆t
2
2
v0 ∆t + (v1 − v0 )∆t = (5 s) 16.67 m/s + (22.22 − 16.67) m/s = 101.9 m;
3
3
s1 = 286 102 m.
Esercizio 2.4. Un oggetto cade verso terra con una velocità che varia nel tempo,
secondo la legge:
v(t) =
g
1 − e−αt
α
essendo g = 9.806 m/s2 l’accelerazione che la gravità imprime a qualunque oggetto
che cade, e α un parametro che descrive il frenamento dovuto all’aria.
Si determini α sapendo che la velocità massima raggiunta dall’oggetto è vmax =
10 m/s. Si scriva la legge oraria del moto s = s(t), supponendo che a t = 0
sia s = 0, e l’andamento dell’accelerazione nel tempo, a = a(t). Si calcolino
l’accelerazione, la velocità istantanea e la distanza percorsa dopo 2 s.
CAPITOLO 2. CINEMATICA UNIDIMENSIONALE —
M.FANTI 35
Risposta. Dall’equazione per v(t) si nota che per t → +∞ e−αt → 0, quindi
g
g
v(t) → ≡ vmax . Si deduce che α =
= 0.9806 s−1 .
α
vmax
La legge oraria si ottiene integrando la velocità nel tempo. Definiamo l’origine
della coordinata nel luogo dove l’oggetto si trova a t = 0. Allora
Z t
Z t
Z t
g
0
0
0 −αt0
0
dt v(t ) =
dt e
s(t) =
dt −
α
0
0
0
"
# !
0 t
g
e−αt
g
e−αt − 1
=
t− −
=
t+
α
α
α
α
0
e−αt − 1
= vmax t +
α
Invece, l’accelerazione si ottiene derivando la velocità rispetto al tempo:
i
dv
d hg
=
1 − e−αt
dt
dt α
g
g d −αt −e
=
· αe−αt
=
α dt
α
= ge−αt
a(t) =
Per t = 2 s si trova e−αt = e−1.9612 = 0.1407, quindi:
a(t = 2 s) = ge−αt = (9.806 m/s2 ) · 0.1407 = 1.380 m/s2
v(t = 2 s) = vmax (1 − e−αt ) = (10 m/s)(1 − 0.1407) = 8.593 m/s
e−αt − 1
0.1407 − 1
s(t = 2 s) = vmax t +
= (10 m/s) 2 s +
= 12.24 m
α
0.9806 s−1
Esercizio 2.5. Un’automobile che viaggia alla velocità di 100 km/h inizia a
frenare gradualmente, fino a fermarsi. La frenata dura per 10 secondi, durante
i quali la velocità segnata dal tachimetro cala in modo regolare, indicando una
decelerazione costante. Quanto vale l’accelerazione? Quanto spazio percorre l’auto
durante la frenata? Qual è la velocità media dell’auto durante tutta la frenata?
Risposta. Anzitutto convertiamo la velocità iniziale in unità SI: v0 =
100
100 km/h =
m/s = 27.78 m/s.
3.6
Il moto è caratterizzato da un’accelerazione costante a — che dovrà risultare
negativa, trattandosi di una decelerazione.
dv
≡ a sia costante, quindi
La legge oraria della velocità deve essere tale che
dt
deve essere della forma v(t) = v0 + at. A t1 = 10 s l’auto si ferma, quindi deve
v0
essere v(t1 ) = v0 + at1 = 0, da cui a = −
= −2.778 m/s2 — negativa, come
t1
aspettato.
CAPITOLO 2. CINEMATICA UNIDIMENSIONALE —
M.FANTI 36
Lo spazio percorso si ottiene integrando la velocità nel tempo: ∆s =
t=t1
Z t1
a
at2
(v0 + at) dt = v0 t +
v(t)dt =
= v0 t1 + t21 Inserendo i dati
2 t=0
2
0
0
−2.778 m/s2
numerici, ∆s = (27.78 m/s)(10 s) +
(10 s)2 = 139 m.
2
∆s
∆s
La velocità media durante la frenata è v̄ =
=
= 13.9 m/s.
∆t
t1 − 0
Z
t1
Capitolo 3
Derivazione e integrazione
Vista l’importanza delle derivate e degli integrali, riassumiamo qui le
definizioni e le regole più utili.
3.1
Definizione di derivata
Anzitutto ricordiamo che, data una funzione f ≡ f (t), si definisce derivata
∆f
per ∆t → 0:
di f nel punto t il limite del rapporto incrementale
∆t
df (t)
df
∆f
≡
= lim
∆t→0 ∆t
dt
dt
(3.1)
Si ricorda che spesso, per brevità di scrittura e quando la notazione non
dia luogo ad ambiguità, la derivata può essere indicata con dei simboli di
apostrofo:
df (t)
d2 f (t)
f 0 (t) ≡
; f 00 (t) ≡
(3.2)
dt
dt2
Si chiama funzione primitiva di f (t) una funzione F (t) tale che la sua
derivata sia f (t), vale a dire:
F (t) è primitiva di f (t) ⇐⇒ f (t) = F 0 (t) ≡
dF (t)
dt
(3.3)
Se F (t) è una primitiva di f (t), anche qualunque funzione Fk (t) = F (t) + k,
con k costante indipendente da t, è primitiva di f (t). Per verificarlo
basta applicare la definizione di derivata, Eq. (3.1): infatti nel rapporto
incrementale ∆Fk = Fk (t+∆t)−Fk (t) = [F (t + ∆t) + k]−[F (t) + k] = ∆F .
37
CAPITOLO 3. DERIVAZIONE E INTEGRAZIONE —
3.1.1
M.FANTI 38
Nota sulla simbologia delle derivate
Nei corsi di analisi si suole indicare una funzione come f ≡ f (x) e le sue
derivate come f 0 (x), f 00 (x), . . . La notazione usata in Fisica è differente, e
non per questioni ideologiche, ma pratiche.
Molti problemi fisici hanno a che fare con quantità che cambiano nel
tempo, quindi la variabile non è più x, ma t. Potremmo chiamare le
funzioni f (t) e le loro derivate f 0 (t), f 00 (t), . . . quando questo non costituisca
ambiguità. Tuttavia, in Fisica si ha spesso a che fare con molte variabili
concomitanti, e non omogenee fra loro. Provate a pensare alla pressione
atmosferica, P . È noto che essa dipende dall’altitudine (che chiamiamo
z), quindi potremmo scrivere P (z). D’altra parte essa dipende anche
dalla posizione geografica — abbiamo regioni di bassa e alta pressione —
quindi dovremmo scrivere P (x, y, z), intendendo che x, y sono le coordinate
geografiche. Infine, tutto questo cambia nel tempo, quindi la nostra funzione
pressione sarà P (x, y, z, t). Volendo studiare come varia la pressione, usiamo
la sua derivata. Ma se scriviamo P 0 (x, y, z, t), come facciamo a capire se ne
stiamo studiando la variazione con il tempo in un luogo e a una quota precisi,
oppure la sua variazione con la quota in un luogo preciso, oppure ancora la
sua variazione da un luogo all’altro?
L’unico modo è introdurre un simbolo di derivata che espliciti la variabile
rispetto a cui si deriva.
df d2 f
, ... e
Cosı̀, quando si fanno derivate rispetto al tempo, si scrive ,
dt dt2
0
00
le notazioni f , f , . . . sono usate solo in determinati casi particolari, e sempre
previa spiegazione.
3.2
Definizione di integrale
Si definisce integrale fra t1 e t2 di una funzione f (t) il seguente limite(1) :
Z
t2
= lim
t1
N →∞
N
X
k=0
f t(k) · ∆t
dove ∆t =
t2 − t1
; t(i) = t1 + k∆t (3.4)
N
Il teorema fondamentale del calcolo infinitesimale garantisce che se è
nota la funzione primitiva F (t) di una data funzione f (t), allora è possibile
1
In questa definizione, per semplicità, si è scelto di dividere l’intervallo [t1 ; t2 ] in N
intervallini tutti uguali, di lunghezza ∆t; si può dare anche una definizione più generale,
in cui gli intervallini hanno lunghezze ∆t(i) diverse fra loro, purché tutte tendano a zero
nel limite N → ∞.
CAPITOLO 3. DERIVAZIONE E INTEGRAZIONE —
M.FANTI 39
calcolare qualunque integrale di f (t) mediante la formula:
Z t2
f (t) dt = F (t2 ) − F (t1 )
(3.5)
t1
In altre parole, “l’integrale è l’operazione inversa della derivata”. Questo
concetto l’abbiamo già toccato quando abbiamo parlato del rapporto fra
spostamenti e velocità: ebbene, è del tutto generale.
Per compattezza di scrittura, l’Eq. (3.5) viene spesso scritta nella forma:
Z t2
(3.6)
f (t) dt = [F (t)]tt21
t1
dove appunto si intende che [F (t)]tt21 ≡ F (t2 ) − F (t1 ).
3.2.1
Nota sulla variabile di integrazione
Z
t2
Una scrittura del tipo
dt f (t) non presenta nessuna ambiguità:
t1
l’intervallo di integrazione è definito dagli estremi t1 , t2 , e la “variabile di
integrazione” t scorre su tutto l’intervallo: t ∈ [t1 ; t2 ].
Spesso in Fisica l’estremo superiore di integrazione è visto come una
variabile: si pensi allo spazio come integrazione della velocità, o a
quest’ultima come integrazione dell’accelerazione. In tal caso, t è l’estremo
superiore di integrazione, e bisogna chiamare la variabile di integrazione in
modo diverso, per evitare confusioni: di solito la si indica con t0 :
Z t
Z t
0
0
s(t) = s(t0 ) +
dt v(t )
;
v(t) = v(t0 ) +
dt0 a(t0 )
t0
t0
(l’apicetto (0 ) NON VUOL DIRE DERIVATA, ça va sans dire. . . ).
Scritture come
Z t
s(t) = s(t0 ) +
dt v(t)
Zt0t
SBAGLIATE!
v(t) = v(t0 ) +
dt a(t)
t0
sarebbero fuorvianti: che cosa vuol dire che la variabile di integrazione t va
da t0 a t medesimo???
CAPITOLO 3. DERIVAZIONE E INTEGRAZIONE —
3.3
Principali regole
integrazione
di
M.FANTI 40
derivazione
e
Riassumiamo qui le principali regole di derivazione e di integrazione (qui per
compattezza di scrittura, chiamiamo f 0 (t) la derivata di f (t)).
funzione
derivata
primitiva
Z
0
f (t)
f (t)
F (t) (talvolta indicata con
f (t) + g(t)
f 0 (t) + g 0 (t)
F (t) + G(t)
αf (t)
αf 0 (t)
f (αt)
αf 0 (αt)
f (t)g(t)
f 0 (t)g(t) + f (t)g 0 (t)
g[f (t)]
g 0 [f (t)]f 0 (t)
αF (t)
1
· F (αt)
α
Z
F (t)g(t) − dt F (t)g 0 (t)
Z
g(u)
du 0 −1
f [f (u)]
dt f (t))
Elenchiamo anche la funzione derivata e la funzione primitiva di alcune
funzioni notevoli.
funzione
derivata
tα
αtα−1
1
t
−
ln(αt)
1
t
eαt
α · eαt
sin(ωt + φ)
ω · cos(ωt + φ)
cos(ωt + φ)
−ω · sin(ωt + φ)
1
t2
primitiva
tα+1
α+
1
t
ln
t0
(se α 6= −1)
(t0 arbitrario)
t ln(αt) − t
1 αt
e
α
1
− cos(ωt + φ)
ω
1
sin(ωt + φ)
ω
CAPITOLO 3. DERIVAZIONE E INTEGRAZIONE —
3.4
M.FANTI 41
Variazione di una funzione di una
variabile
Quanto varia una funzione f (t) se la variabile t è soggetta ad una variazione
∆t? In generale, per funzioni sufficientemente “regolari” (o “lisce”) — e
in Fisica siamo quasi sempre in questa situazione — la risposta viene dallo
sviluppo in serie di Taylor:
+∞
X
1 dk f (t)
(∆t)k
f (t + ∆t) =
k
k!
dt
k=0
(3.7)
1 00
1 000
2
3
= f (t) + f (t) · ∆t + f (t) · (∆t) + f (t) · (∆t) + · · ·
2
6
0
I termini in (∆t)k , al crescere dell’esponente k, diventano via via più piccoli
se ∆t è piccolo. Inoltre, il fattoriale k! al denominatore cresce rapidamente,
rendendo ulteriormente più piccoli i termini al crescere di k
Nel limite ∆t → 0 si considera di solito il termine ∝ (∆t):
f (t + dt) ' f (t) + f 0 (t) · dt + O (dt)2
(3.8)
dove ' ci ricorda che il risultato non è esatto, ma contiene
un’approssimazione, e O (dt)2 indica che l’“errore” commesso in questa
approssimazione è ∝ (dt)2 .
In alcuni casi è utile estendere lo sviluppo in serie al termine ∝ (∆t)2
— per esempio quando t è un “punto stazionario” di f (t), cioè f 0 (t) = 0 —
ottenendo:
f (t + dt) ' f (t) + f 0 (t) · dt +
1 00
f (t) · (dt)2 + O (dt)3
2
(3.9)
Le Eq. (3.8) e Eq. (3.9) si scrivono spesso esprimendo direttamente la
variazione della funzione
df ≡ f (t + dt) − f (t) = f 0 (t) · dt + O (dt)2
(3.10)
oppure
df ≡ f (t + dt) − f (t) = f 0 (t) · dt +
1 00
f (t) · (dt)2 + O (dt)3 (3.11)
2
CAPITOLO 3. DERIVAZIONE E INTEGRAZIONE —
3.5
M.FANTI 42
Derivate parziali
Una funzione f può dipendere da diverse variabili. In tal caso, dovendo fare
una derivata, occorre specificare rispetto a quale variabile.
Per fissare le idee, consideriamo una funzione f ≡ f (x, y, z, t, . . . ). Per
ciascuna delle variabili x, y, z, t, . . . si può definire il limite del rapporto
incrementale, similmente a quanto fatto nell’Eq. (3.1):
∂f (x, y, z, t)
∂x
∂f (x, y, z, t)
∂y
∂f (x, y, z, t)
∂z
∂f (x, y, z, t)
∂t
∂f
∂x
∂f
≡
∂y
∂f
≡
∂z
∂f
≡
∂t
≡
f (x + ∆x, y, z, t) − f (x, y, z, t)
∆x→0
∆x
f (x, y + ∆y, z, t) − f (x, y, z, t)
= lim
∆y→0
∆y
f (x, y, z + ∆z, t) − f (x, y, z, t)
= lim
∆z→0
∆z
f (x, y, z, t + ∆t) − f (x, y, z, t)
= lim
∆t→0
∆t
=
lim
(3.12)
∂f ∂f
,
, . . . si leggono “derivata parziale di f rispetto a x, rispetto
∂x ∂y
a y, etc. . . ” Come si vede, nulla di concettualmente diverso dalla derivata
“ordinaria” definita in Eq. (3.1). Semplicemente, una particolare variabile di
cui f è funzione viene variata, mentre le altre sono mantenute fisse.
I simboli
3.6
Variazione di una funzione di più
variabili
Per una funzione di più variabili, f ≡ f (x1 , x2 , . . . , xn ), vale uno sviluppo in
serie di Taylor simile a quello dato nell’Eq. (3.7) per una sola variabile. La
forma generale è complicata da tutte le possibili combinazioni di variabili.
Qui ricordiamo solo l’espansione fino al primo ordine:
f (x1 + dx1 , . . . , xn + dxn ) ' f (x1 , . . . , xn )
n
X
∂f (x1 , . . . , xn )
· dxp
+
∂xp
p=1
+ O (2)
e al secondo ordine:
(3.13)
CAPITOLO 3. DERIVAZIONE E INTEGRAZIONE —
M.FANTI 43
f (x1 + dx1 , . . . , xn + dxn ) ' f (x1 , . . . , xn )
n
X
∂f (x1 , . . . , xn )
+
· dxp
∂xp
p=1
n
n
1 X X ∂ 2 f (x1 , . . . , xn )
+
· dxp dxq
2 p=1 q=1
∂xp ∂xq
(3.14)
+ O (3)
Anche qui ' ci ricorda che le espressioni contiengono delle approssimazioni,
e O (2) , O (3) indicano che l’“errore” commesso in queste approssimazioni
sono proporzionali a prodotti di dx1 , . . . , dxn in cui la somma di tutti gli
esponenti è rispettivamente 2 e 3.
Le Eq. (3.13) e Eq. (3.14) si scrivono spesso esprimendo direttamente la
variazione della funzione:
n
X
∂f
· dxp + O (2)
df =
∂x
p
p=1
(3.15)
oppure
n
n
n
X
1 X X ∂ 2f
∂f
· dxp +
· dxp dxq + O (3)
df =
∂xp
2 p=1 q=1 ∂xp ∂xq
p=1
3.6.1
(3.16)
Gradiente e matrice Hessiana
∂f
∂f ∂f
,
,...,
costituisce un
∂x1 ∂x2
∂xn
oggetto matematico a n componenti che si chiama gradiente di f e si indica
~
con ∇:
∂f
∂f
∂f
~
∇f ≡
,
, ... ,
(3.17)
∂x1 ∂x2
∂xn
La totalità delle derivate prime parziali,
∂ 2f
, con p, q =
∂xp ∂xq
1, . . . , n, costituisce un altro oggetto matematico a n × n componenti, che si
Analogamente, la totalità delle derivate seconde parziali,
CAPITOLO 3. DERIVAZIONE E INTEGRAZIONE —
chiama matrice Hessiana di f e si indica spesso con H:
∂ 2f
∂ 2f
∂ 2f
·
·
·
∂x1 ∂x1 ∂x1 ∂x2
∂x1 ∂xn
∂ 2f
∂ 2f
∂ 2f
·
·
·
∂x2 ∂xn
H[f ] ≡
∂x2.∂x1 ∂x2.∂x2 .
..
..
..
..
.
2
2
∂ 2f
∂ f
∂ f
···
∂xn ∂x1 ∂xn ∂x2
∂xn ∂xn
3.7
M.FANTI 44
(3.18)
Variazione di una funzione composta
Consideriamo una “funzione composta” f (u), in cui u = u(t). I valori di f
dipendono da t attraverso u: f ≡ f (u(t)). Abbiamo già visto nella Sezione 3.3
come trattare la derivata di una funzione composta:
df (u(t))
= f 0 (u(t)) · u0 (t)
dt
da cui si deduce che la variazione di f , al primo ordine dello sviluppo in serie
di Taylor, è
df ≡ f (u(t + dt)) − f (u(t)) = f 0 (u(t)) · u0 (t) · dt
df du
=
·
· dt
du dt
(3.19)
L’ultima scrittura è senz’altro suggestiva e facile da ricordare, dà l’illusione
che i dt e i du che compaiono ai numeratori e ai denominatori si possano
cancellare a due a due, lasciando la variazione df della funzione.
Trattando funzioni di più variabili, la casistica si arricchisce, ma non in
complicazione concettuale.
Supponiamo di avere una funzione di più variabili, f ≡ f (x1 , . . . , xn ),
in cui tutte le variabili dipendono a loro volta da una sola variabile t. È
un caso che in Fisica si incontra spesso(2) . Quindi, il valore di f dipende
indirettamente da t, attraverso le variabili x1 , . . . , xn . La variazione di f ,
2
Per esempio il valore della pressione P in un fluido potrebbe dipendere dalle coordinate
x, y, z in cui la vado a misurare con il manometro, quindi P ≡ P (x, y, z). Se al passare del
tempo t sposto il manometro, allora x ≡ x(t), y ≡ y(t), z ≡ z(t). Il manometro “sente”
una variazione di pressione nel tempo, cioè P dipende da t indirettamente, attraverso
x, y, z.
CAPITOLO 3. DERIVAZIONE E INTEGRAZIONE —
M.FANTI 45
al primo ordine dello sviluppo in serie di Taylor, è data dall’Eq. (3.15),
dxp
dove riscriveremo dxp facendo uso dell’Eq. (3.10): dxp =
dt. Si ottiene
dt
dunque:
df ≡ f (x1 (t + dt), . . . , xn (t + dt)) − f (x1 (t), . . . , xn (t))
n
X
∂f dxp
=
·
· dt
∂x
dt
p
p=1
(3.20)
Concludiamo con il caso più generale, in cui f ≡ f (x1 , . . . , xn ), e tutte
le variabili dipendono a loro volta da m altre variabili ξ1 , . . . , ξm , cioè
xp ≡ xp (ξ1 , . . . , ξm ). La variazione di f , al primo ordine, è sempre data
dall’Eq. (3.15), ma ora riscriveremo le variazioni dxp facendo uso ancora
m
X
∂xp
dξr . Mettendo insieme tutto si ottiene:
dell’Eq. (3.15): dxp =
∂ξr
r=1
df ≡ f (x1 (ξ1 + dξ1 , . . . , ξm + dξm ), . . . , xn (ξ1 + dξ1 , . . . , ξm + dξm ))
−f (x1 (ξ1 , . . . , ξm ), . . . , xn (ξ1 , . . . , ξm ))
(3.21)
m
n
X
∂f X ∂xp
·
· dξr
=
∂x
∂ξ
p
r
r=1
p=1
Capitolo 4
Posizioni nello spazio
Lo spazio fisico è tridimensionale. Per descrivere il moto nello spazio occorre
anzitutto definire la posizione. Tuttavia questa non può essere definita da
una sola coordinata, come fatto nel Capitolo 2.
Dalla geometria analitica sappiamo che è utile introdurre un sistema di
coordinate cartesiane, caratterizzato da un’origine O e tre assi ortogonali
x, y, z, rispetto al quale definire qualunque posizione. In alcuni casi il moto
avviene su un piano, pertanto il problema si riduce a bidimensionale e si può
fare uso di un sistema di coordinate cartesiane con un’origine O e due soli
assi x, y.
Sia nel caso tridimensionale che in quello bidimensionale, può presentarsi
utile l’uso di sistemi di coordinate alternative — non cartesiane, ma
altrettanto valide nel definire in modo univoco la posizione di un punto.
Esempi notevoli sono dati dalle coordinate polari, in cui la posizione di
un punto viene definita dalla distanza dall’origine e da una direzione;
quest’ultima è specificata mediante degli angoli rispetto ad assi di riferimento.
In questo capitolo riassumeremo le proprietà delle misure angolari,
quindi mostreremo l’uso delle coordinate cartesiane e polari, prima nel caso
bidimensionale, poi in quello tridimensionale.
4.1
Misure angolari
È consuetudine misurare gli angoli in gradi sessagesimali (o semplicemente
1
di
gradi), che si indicano con “◦ ”. Con questa convenzione, un grado è
360
angolo-giro, ovvero
angolo giro = 360◦
(4.1)
46
CAPITOLO 4. POSIZIONI NELLO SPAZIO
—
M.FANTI 47
90 o=π/2 rad
1 rad = 57.296 o
r
o
0o
360 o=2π rad
180 =π rad
r sin φ
s
φ
r cos φ
270 o=3π/2 rad
Figura 4.1:
Misure angolari.
Inoltre, per il grado si definiscono i sottomultipli primo d’arco e secondo
d’arco:
◦
1
0
primo d’arco
1 =
60
0
(4.2)
1
00
1 =
secondo d’arco
60
Misurando gli angoli in gradi, la lunghezza s di un arco di cerchio di
raggio r, sotteso da un angolo φ, si scrive:
s=
2π
· r · φ◦
360
(verifica: per φ = 360◦ l’arco diventa l’intera circonferenza, la cui lunghezza
2π
è 2πr). Il fattore
' 0.008727 rende questa scelta di misura angolare
360
poco pratica, in geometria e quindi anche in Fisica.
Si adotta quindi una unità di misura, il radiante, indicato con “rad”,
definito in modo che
angolo giro = 2π rad
(4.3)
In tal caso, la lunghezza s di un arco di cerchio di raggio r, sotteso da un
angolo φ, si scrive:
s = r · φ rad
(4.4)
molto più maneggevole!
CAPITOLO 4. POSIZIONI NELLO SPAZIO
—
M.FANTI 48
La conversione da gradi, primi, secondi a radianti si ricava confrontando
le definizioni Eq. (4.1), Eq. (4.2) con la definizione Eq. (4.3):
2π
rad
360
◦
1
2π
0
1 =
=
rad
60
21 600
◦
2π
1
00
=
rad
1 =
3600
1 296 000
◦
360
1 rad =
2π
1◦ =
= 1.745 · 10−2 rad
= 2.909 · 10−4 rad
= 4.848 · 10−6 rad
(4.5)
= 57.296◦
Esercizio 4.1. La Luna dista dalla Terra R = 384 400 km e ha un diametro
D = 3 474 km. Calcolare la dimensione angolare apparente della Luna vista dalla
Terra, esprimendo il risultato in gradi, primi, e radianti.
Risposta Cominciamo con il calcolo in radianti. La dimensione della Luna
è molto minore della sua distanza dalla Terra: D R. Quindi con ottima
approssimazione possiamo trattare D come se fosse un archetto di cerchio, anziché
D
un segmento. Pertanto, la dimensione angolare α si ricava come α =
=
R ◦
360
,
9.037 · 10−3 rad. La misura in gradi di ottiene sostituendo 1 rad =
2π
quindi α = 0.5178◦ ; per ottenere la misura in primi d’arco si moltiplica per 60:
α = 31.070 . La parte non intera (0.07) si può a sua volta esprimere in secondi
d’arco, moltiplicando ancora per 60: 0.070 · 60 ' 400 .
In conclusione, la dimensione angolare della Luna vista dalla Terra è
α = 9.037 · 10−3 rad = 0.5178◦ = 310 0400
Esercizio 4.2. Ripetere l’esercizio precedente, con Giove, il pianeta più luminoso
che vediamo. Il suo diametro è D = 140 000 km; come distanze dalla Terra
consideriamo quella di massimo avvicinamento, Rmin = 628·106 km, e di massimo
allontanamento, Rmax = 928 · 106 km.
D
Risposta. Il calcolo è identico: α =
. Quando la distanza è minima
R
la dimensione angolare α è massima, e viceversa. Quantitativamente, αmax =
D
D
= 2.229 · 10−4 rad ' 4600 e αmin =
= 1.509 · 10−4 rad ' 3100 .
Rmin
Rmax
In effetti, Giove appare puntiforme ad occhio nudo, ma già con un buon
binocolo si vede che è un dischetto. Con un telescopio da astronomo dilettante
se ne possono distinguere i principali dettagli della superficie.
CAPITOLO 4. POSIZIONI NELLO SPAZIO
—
M.FANTI 49
P
y
r
y^
O
φ
x^
x
Figura 4.2: Posizione in un sistema di riferimento cartesiano Oxy in due
dimensioni: (x, y) sono le coordinate cartesiane, (r; φ) sono le coordinate
polari.
Esercizio 4.3.
Ripetere l’esercizio per la stella Alpha Centauri, diametro
D = 1.7 ·
km e distanza R = 4.09 · 1013 km.
D
' 4.2 · 10−8 rad ' 0.00900 . Meno di un centesimo di
Risposta. α =
R
secondo d’arco. Nemmeno un ottimo telescopio a terra potrebbe vedere il disco
stellare, senza distorsioni.
106
4.2
Posizione su un piano
Per indicare in modo univoco la posizione su un piano è sufficiente scegliere un
sistema di riferimento cartesiano dotato di un’origine O e due assi ortogonali
x, y. Un qualunque punto P può essere individuato dalle coordinate
cartesiane (x, y) rispetto al sistema di riferimento — vd Fig. 4.2. In
particolare:
• la coordinata x è la distanza del punto P dall’asse y; il segno di x è
definito positivo se P sta a destra dell’asse y, negativo altrimenti;
• la coordinata y è la distanza del punto P dall’asse x; il segno di y è
definito positivo se P sta al di sopra dell’asse x, negativo altrimenti.
CAPITOLO 4. POSIZIONI NELLO SPAZIO
—
M.FANTI 50
La distanza r di P dall’origine O è data dal teorema di Pitagora:
p
r = x2 + y 2
(4.6)
La direzione del segmento OP può essere definita dall’angolo φ che esso forma
con l’asse x — vd Fig. 4.2. In tal caso, valgono le relazioni:
x = r cos φ
y = r sin φ
(4.7)
La coppia di valori (r; φ) costituisce le coordinate polari del punto P .
In astratto, la posizione del punto P rispetto all’origine O è indicata
~ , che contiene tutte le informazioni utili: o la coppia
da un raggio vettore r
cartesiana (x, y) oppure la coppia polare (r; φ). Si definisce modulo del raggio
vettore la distanza di P da O:
p
(4.8)
|~
r | = r = x2 + y 2
In generale, un raggio vettore è caratterizzato da un modulo e da una
direzione.
I due assi cartesiani x, y sono individuati da due direzioni, ma di per sè
non hanno un modulo. Pertanto è utile introdurre due versori, vale a dire due
vettori di modulo unitario, orientati come gli assi cartesiani: questi vengono
~ si scrive per convenzione
denotati come x̂, ŷ. Il generico raggio vettore r
come:
~ = x · x̂ + y · ŷ
r
(4.9)
4.3
Posizione nello spazio
La posizione nello spazio tridimensionale si descrive generalizzando quanto
fatto in due dimensioni. Si introduce un sistema di riferimento cartesiano
dotato di un’origine O e tre assi ortogonali x, y, z. Come fatto nel caso
bidimensionale, gli orientamenti dei tre assi possono essere rappresentati da
tre versori x̂, ŷ, ẑ. Una volta scelti gli orientamenti degli assi x, y — cioè i
versori x̂, ŷ — l’orientamento dell’asse z si sceglie convenzionalmente con la
“regola della mano destra”: disponendo la mano destra come in Fig. 4.3, con
le dita ricurve che vanno da x̂ a ŷ, il pollice definisce l’orientamento di ẑ.
Un qualunque punto P può essere individuato dalle coordinate cartesiane
(x, y, z) rispetto al sistema di riferimento — vd Fig. 4.3. In particolare:
CAPITOLO 4. POSIZIONI NELLO SPAZIO
—
M.FANTI 51
P
z
r
z^
z^
x^
O
x^
y^
x
y
O
y^
Figura 4.3:
Figura a sinistra: la “regola della mano destra” per definire
l’orientamento di ẑ una volta definiti quelli di x̂, ŷ. Figura a destra:
rappresentazione grafica del raggio vettore, che individua la posizione P
rispetto ad un’origine O e ad una terna di direzioni x̂, ŷ, ẑ.
• la coordinata x è la distanza del punto P dal piano yz; il segno di x è
definito positivo se P sta dalla parte del piano yz indicata dal versore
x̂, negativo altrimenti;
• la coordinata y è la distanza del punto P dal piano zx; il segno di y è
definito positivo se P sta dalla parte del piano zx indicata dal versore
ŷ, negativo altrimenti;
• la coordinata z è la distanza del punto P dal piano xy; il segno di z è
definito positivo se P sta dalla parte del piano xy indicata dal versore
ẑ, negativo altrimenti;
4.3.1
Raggio vettore
La posizione del punto P rispetto all’origine O è indicata da un raggio vettore
~ , o vettore posizione, che deve descrivere sia la distanza di P da O, sia la
r
direzione lungo la quale P viene visto da O. Il raggio vettore contiene tutte
le informazioni equivalenti alla terna cartesiana (x, y, z).
La distanza r di P dall’origine O è data dal teorema di Pitagora:
p
r = x2 + y 2 + z 2
(4.10)
CAPITOLO 4. POSIZIONI NELLO SPAZIO
—
z^
M.FANTI 52
z^
z^
r^
^
^
φ
φ
r^
θ r
z
y^
φ
y^
r
φ
x^
Figura 4.4:
^
θ
x^
Coordinate polari cilindriche (a sinistra) e sferiche (a destra).
Si definisce modulo del raggio vettore la distanza di P da O:
p
|~
r | = r = x2 + y 2 + z 2
(4.11)
La scomposizione cartesiana del raggio vettore si scrive
~ = x · x̂ + y · ŷ + z · ẑ
r
4.3.2
(4.12)
Coordinate cilindriche e sferiche
In molti problemi può essere utile definire il raggio vettore attraverso
coordinate polari, che indicano la direzione mediante angoli.
Quando un problema è caratterizzato da un asse di simmetria, si sceglie
l’asse z del sistema cartesiano lungo l’asse di simmetria e gli assi x, y su un
piano ortogonale. In tal caso, le coordinate x, y possono essere rimpiazzate da
una distanza r e da un angolo φ, come nel caso bidimensionale: la situazione
è indicata in Fig. 4.4 a sinistra. La conversione da (x, y) a (r; φ) è sempre:
x = r cos φ
y = r sin φ
(4.13)
La terna (r; φ; z) costituisce le coordinate cilindriche.
Viceversa, quando il problema è a simmetria sferica, la scelta degli assi
cartesiani è del tutto arbitraria. In tal caso r indica la distanza dall’origine
CAPITOLO 4. POSIZIONI NELLO SPAZIO
—
M.FANTI 53
P2
z2
r2
x2
r1 + r2
P1
y2
z1
r1
z^
x^
O
x1
Figura 4.5:
y^
y1
Composizione di due raggi vettori per componenti cartesiane.
O e si usano due angoli per definire la direzione, come in Fig. 4.4 a destra.
~ con il versore ẑ: pertanto
Si chiama θ l’angolo formato dal raggio vettore r
la coordinata cartesiana z deve essere data da z = r cos θ. Viceversa, la
~⊥ di r
~ sul piano (x, y) ha modulo |~
proiezione r
r⊥ | = r sin θ. Inoltre si definisce
~⊥ e il versore x̂. Pertanto le coordinate x, y sono
φ come l’angolo formato da r
esprimibili come x = |~
r⊥ | cos φ e y = |~
r⊥ | sin φ.
La terna (r; θ, φ) costituisce le coordinate sferiche. La conversione da
coordinate cartesiane a coordinate sferiche è data dalle seguenti formule:
x = r sin θ cos φ
y = r sin θ sin φ
z = r cos θ
(4.14)
Nelle coordinate sferiche, l’asse z si chiama asse polare, θ si chiama angolo
polare e φ angolo azimuthale.
4.4
Vettore spostamento
~ in Fig. 4.3 può essere inteso sia come posizione di P rispetto a
Il vettore r
O, sia come spostamento che è necessario compiere per muoversi da O a P .
~1 è lo spostamento da O a P1 , mentre r
~2
Con riferimento alla Fig. 4.5, r
è lo spostamento da P1 a P2 . È quindi naturale definire come somma di due
vettori spostamento il vettore spostamento che produce l’effetto finale: nella
CAPITOLO 4. POSIZIONI NELLO SPAZIO
P1
—
∆r = r2− r1
P2
z
r1
r2
z^
x^
y
O
x
Figura 4.6:
M.FANTI 54
y^
Differenza di due raggi vettori.
fattispecie lo spostamento da O a P2 (ovvero la posizione di P2 ) è definita da
~1 + r
~2 .
r
La somma di due vettori spostamento, in coordinate cartesiane, appare
particolarmente semplice: sempre guardando la Fig. 4.5, per spostarsi da O
~1 , poi da P1 a
a P2 occorre spostarsi prima da O a P1 seguendo il vettore r
~2 . Pertanto le coordinate cartesiane di P2 sono
P2 seguendo il vettore r
( x1 + x2 ; y1 + y2 ; z1 + z2 )
~1 + r
~2 .
Queste sono precisamente le componenti cartesiane del vettore r
Quindi, i vettori si sommano per componenti cartesiane:
~1 + r
~2 = (x1 + x2 ) · x̂ + (y1 + y2 ) · ŷ + (z1 + z2 ) · ẑ
r
(4.15)
In modo analogo, se le due posizioni P1 e P2 sono definite dai raggi vettori
~1 e r
~2 , come in Fig. 4.6, vuol dire che per spostarsi da O a P2 possiamo prima
r
~1 per arrivare a P1 , quindi seguire il vettore spostamento
seguire il vettore r
∆~
r per arrivare a P2 . Pertanto, per quanto appena detto,
~2 = r
~1 + ∆~
r
r
e questo ci consente di definire la differenza di due vettori spostamento:
~2 − r
~1
∆~
r=r
che per componenti cartesiane diventa:
~2 − r
~1 = (x2 − x1 ) · x̂ + (y2 − y1 ) · ŷ + (z2 − z1 ) · ẑ
r
(4.16)
CAPITOLO 4. POSIZIONI NELLO SPAZIO
—
M.FANTI 55
z^
dφ
∆Σ
r
dΣ
si
r
n
θ
∆Ω
θr
dθ
r dθ
r sin θ dφ
y^
φ
x^
Figura 4.7:
Sinistra: definizione di angolo solido. Destra: calcolo di un
angolo solido infinitesimo.
4.5
Angoli solidi
Gli angoli solidi sono misure di apertura di coni o conoidi. Un conoide come
quello raffigurato in Fig. 4.7(sinistra) intercetta su una sfera di raggio r una
superficie ∆Σ che è proporzionale a r2 , e all’apertura del conoide. Pertanto,
l’apertura del conoide viene definita come:
∆Ω =
∆Σ
r2
(4.17)
Gli angoli solidi si misurano in “stereo-radianti” (sterad). Poiché la superficie
totale di una sfera è Σsf era = 4πr2 , l’angolo solido totale è:
angolo solido totale = 4π sterad
(4.18)
Un angolo solido infinitesimo dΩ può essere espresso in coordinate
angolari sferiche. Guardando la Fig. 4.7(destra), la piccola area dΣ definita
dagli angoli dθ, dφ è rettangolare nel limite dθ → 0 , dφ → 0 , pertanto
può essere calcolata come prodotto dei suoi lati. Il lato sotteso da dθ è un
archetto di cerchio di raggio r, quindi vale r dθ; il lato sotteso da dφ è invece
un archetto di cerchio di raggio r sin θ, pertanto vale r sin θ dφ. L’area dΣ
quindi vale:
dΣ = (r dθ) · (r cos θ dφ) = r2 sin θ dθ dφ
CAPITOLO 4. POSIZIONI NELLO SPAZIO
—
M.FANTI 56
Figura 4.8: Spostamento apparente di una stella “vicina” rispetto alle stelle
“più lontane” che appaiono fisse sullo sfondo.
e quindi l’angolo solido dΩ che sottende dΣ vale
dΩ =
dΣ
r2
(4.19)
ovvero:
dΩ = sin θ dθ dφ
4.6
(4.20)
Digressione: misure di distanze stellari
(*)
Una tecnica per misurare la distanza di stelle “vicine” è il “metodo della
parallasse”, schematizzato in Fig. 4.8. A causa dello spostamento della Terra
intorno al Sole, una stella più vicina sembra spostarsi rispetto allo sfondo
delle stelle più lontane. Conoscendo il massimo spostamento della Terra,
pari al diametro dell’orbita, 2R⊕ = 300 · 106 km, e misurando l’angolo di
parallasse α, dello spostamento apparente della stella, si può determinare la
sua distanza D. Basta infatti trattare la distanza 2R⊕ come un archetto di
circonferenza di raggio D sotteso dall’angolo α, cosicché 2R⊕ = αD e quindi:
D =
2R⊕
α
(4.21)
La tecnica funziona bene finché l’angolo α di parallasse non diventa troppo
piccolo.
Esercizio 4.4. Il sistema stellare più vicina al Sistema Solare è quello di Alpha
Centauri, che dista 4.3 anni-luce. Un anno-luce è la distanza che la luce percorre in
CAPITOLO 4. POSIZIONI NELLO SPAZIO
—
M.FANTI 57
Figura 4.9:
Legge della “distanza quadratica inversa” per la luminosità
apparente di una stella.
un anno, viaggiando alla velocità c = 300 000 km/s. Qual è l’angolo di parallasse
di Alpha Centauri? Se il più piccolo angolo di parallasse che si riesce a misurare
con buona precisione è di 1/1000 di secondo d’arco, qual è la massima distanza
che si può misurare con il metodo della parallasse?
Risposte. Anzitutto, calcoliamo la lunghezza di un anno-luce. In un giorno
ci sono 24 h = 24 · 3600 s = 86 400 s. In un anno ci sono 365.25 giorni =
31 557 600 s. La luce percorre 300 000 km in un secondo, quindi in un anno fa
(300 000 km/s) × (31 557 600 s) = 9.467 · 1012 km — quasi 9 500 miliardi di km.
La distanza di Alpha Centauri in km è quindi D ' 4.3 × 9.5 · 1012 km =
4.09 · 1013 km. L’angolo di parallasse si ottiene trattando il diametro dell’orbita
terrestre, 2R, come un archetto sotteso dall’angolo α e con raggio D, quindi
2R⊕
2R⊕ = αD, da cui α =
= 7.33 · 10−6 rad. È un angolo molto piccolo, la
D
qual cosa ci consente l’approssimazione del diametro dell’orbita con un archetto.
Proviamo
l’angolo di parallassein gradi, primi e secondi d’arco.
ad esprimere
00
1 296 000 00
1
296
000
1 rad =
quindi α = 7.33 · 10−6 ·
' 1.5100 .
2π
2π
2π
L’angolo minimo di parallasse utile è αmin = (10−3 )00 = 10−3
rad '
1 296 000
−9
5 · 10
rad. Quindi la distanza massima misurabile con la parallasse è
2R⊕
parallasse
parallasse
Dmax
=
' 6 · 1016 km. Convertiamolo in anni-luce: Dmax
=
αmin
6 · 1016
anni-luce ' 6000 anni-luce.
9.5 · 1012
Osservazione. In questi calcoli abbiamo fatto approssimazioni numeriche che
possono apparire un po’ grossolane, specialmente nell’ultima parte. La ragione è
che quando si va a misurare angoli cosı̀ piccoli, come un millesimo di secondo
d’arco, la precisione è ormai degradata, quindi non a senso riportare risultati con
molte cifre.
CAPITOLO 4. POSIZIONI NELLO SPAZIO
—
M.FANTI 58
Un’altra tecnica per misurare le distanze stellari è basata sulla luminosità
apparente delle stelle. Ogni stella ha una luminosità assoluta I0 . In
maniera un po’ imprecisa, ma sufficiente al nostro scopo, diciamo che I0
è la “quantità di luce” emessa (oppure la quntità di energia irradiata in
onde eletromagnetiche) dalla stella in una certa unità di tempo. La stella
emette uniformemente in tutte le direzioni, dunque sull’angolo solido totale
di 4π sterad. Un osservatore lontano vede solo una piccola frazione della
luminosità: quella che viene raccolta dalla superficie sensibile Σ del suo
strumento di osservazione (per esempio lo specchio di un telescopio). Se
D è la distanza della stella, l’angolo solido di luce che viene raccolta dallo
Σ
strumento è Ω = 2 , pertanto la luminosità “apparente” della stella è
D
Σ 1
Ω
= I0
(4.22)
I app = I0
4π
4π D2
Cioè la luminosità apparente decresce come l’inverso della distanza al
quadrato (legge della “distanza quadratica inversa”, Fig. 4.9).
Se
conoscessimo la luminosità assoluta I0 , misurando la luminosità apparente
I app potremmo calcolare la distanza D della stella.
Esistono stelle particolari, le Cefeidi, che sono riconoscinbili perché sono
dotate di una pulsazione: con periodi che possono andare dai giorni ai
mesi, il loro diametro e la loro luminosità aumentano e poi diminuiscono,
ciclicamente. Dai meccanismi che regolano questo fenomeni, gli astrofisici
hanno capito che le luminosità assolute delle Cefeidi devono essere piuttosto
omogenee. Partendo dalle Cefeidi più vicine, si può misurare la loro distanza
D con la parallasse (Eq. (4.21)), quindi risalire alla loro luminosità assoluta
I0 mediante l’Eq. (4.22). Per le Cefeidi più lontane, non misurabili con
la parallasse, si può usare direttamente l’Eq. (4.22) per determinarne la
distanza, assumendo che la loro luminosità assoluta I0 sia la stessa di quelle
più vicine.
Esercizio 4.5. La stella Cefeide più vicina a noi è la Stella Polare. Con la
parallasse, si determina la sua distanza D1 ' 400 anni-luce. Nella galassia di
Andromeda sono state osservate stelle Cefeidi con pulsazioni simili alla Stella
Polare, quindi presumibilmente con luminosità assolute simili. La luminosità
apparente di tali stelle è circa 40 milioni di volte inferiore a quella della Stella
Polare. Quanto dista la galassia di Andromeda?
Risposta. Indicando con gli indici 1 e 2 rispettivamente la Stella Polare e una
I app
delle Cefeidi di Andromeda, abbiamo 1app ' 4 · 107 . Assumendo che I0 sia uguale,
I2
s
2
app
I1
D2
I1app
, ovvero D2 = D1
' D1 · 6300. La galassia di
deve essere app =
D1
I2
I2app
Andromeda dista circa 2.5 milioni di anni-luce.
Capitolo 5
Vettori
Abbiamo introdotto il concetto di vettore parlando di posizioni e spostamenti
nello spazio tri-dimensionale.
In effetti, molte quantità fisiche sono descritte tramite vettori: in generale
tutte quelle per cui è necessario definire, oltre alla grandezza, anche la
direzione. Nello studio della cinematica tridimensionale (Capitolo 6) avremo
a che fare con velocità e accelerazioni, che sono grandezze vettoriali. Anche
le forze, che introdurremo con lo studio della dinamica (Capitolo 8), sono
grandezze vettoriali.
Pertanto in questo capitolo esploreremo le proprietà delle grandezze
vettoriali e delle operazioni che possiamo fare con esse.
5.1
Vettori in fisica
In uno spazio 3-dimensionale si definisce un’origine O e un sistema di
assi cartesiani orientati lungo segmenti x̂, ŷ, ẑ, che costituiscono una base
ortonormale dello spazio vettoriale: hanno lunghezza unitaria e sono tutti
~ dotata di direzione
perpendicolari l’un l’altro. Una qualunque quantità A,
e lunghezza in questo spazio, può essere identificata attraverso le sue tre
componenti Ax , Ay , Az lungo le tre direzioni cartesiane, come illustrato in
Fig. 5.1.
La scomposizione lungo i versori di base si scrive:
~ = Ax x̂ + Ay ŷ + Az ẑ
A
(5.1)
Poiché
le
componenti
(Ax , Ay , Az )
sono
tutte
lungo direzioni perpendicolari, il modulo, o intensità, del vettore si ricava
dal teorema di Pitagora, e vale:
q
~
(5.2)
|A| = A2x + A2y + A2z
59
CAPITOLO 5. VETTORI
—
M.FANTI 60
Az
A
z^
x^
O
y^
Ay
Ax
Figura 5.1: Scomposizione di un vettore nelle sue componenti cartesiane
5.2
Operazioni elementari di vettori
~ e B,
~ di componenti (Ax , Ay , Az ) e (Bx , By , Bz ), si
Dati due vettori A
definiscono la somma, la differenza e il prodotto per un numero α come:
~ +B
~ = (Ax + Bx )x̂ + (Ay + By )ŷ + (Az + Bz )ẑ
A
~ −A
~ = (Ax − Bx )x̂ + (Ay − By )ŷ + (Az − Bz )ẑ
B
~ = (αAx )x̂ + (αAy )ŷ + (αAz )ẑ
αA
(5.3)
Si può vedere che la somma e la differenza hanno una rappresentazione
grafica come in Fig. 5.2.
Si tratta della cosiddetta “regola del
~
~ identificano un parallelogramma; la
parallelogramma”: i vettori A, B
~ + B,
~ l’altra diagonale dà
diagonale che parte dall’origine dà la somma A
~
~
la differenza A − B.
5.3
Prodotto scalare di due vettori
~ eB
~ come:
Definiamo il prodotto scalare di due vettori A
~ ·B
~ = Ax Bx + Ay By + Az Bz
A
(5.4)
CAPITOLO 5. VETTORI
—
M.FANTI 61
A +B
A
z^
x^
B−A
A
z^
B
^
y
B
^
y
x^
Figura 5.2: Somma e differenza di vettori
A xB
A
θ
B
A
θ
B A
θ B
BxA
(a)
(b)
(c)
Figura 5.3: Spiegazione geometrica del prodotto scalare (a) e vettoriale (b,c)
ovvero la somma dei prodotti componente per componente. È subito evidente
che il prodotto scalare è commutativo:
~ ·B
~ =B
~ ·A
~
A
Se i due vettori formano un angolo θ (vedi Fig. 5.3(a)), si può mostrare
che
~ ·B
~ = |A||
~ B|
~ cos θ
A
(5.5)
Per dimostrare questa proprietà, scegliamo gli assi cartesiani in modo che
~ e che il piano Oxy contenga il vettore B.
~
l’asse x giaccia lungo il vettore A
CAPITOLO 5. VETTORI
—
M.FANTI 62
Allora le componenti cartesiane dei due vettori sono
Ax ; Ay = 0 ; Az = 0
Bx ; By
; Bz = 0
~ ·B
~ = Ax Bx . Ora, per la
e il prodotto scalare diventa semplicemente A
~ = Ax ; inoltre l’angolo θ fra B
~ e A
~ può essere visto
scelta degli assi, |A|
~
~
come angolo fra B e l’asse x, quindi Bx = |B| cos θ. Da questo si deduce la
proprietà dell’Eq. (5.5).
~ con un vettore unitario
In particolare, il prodotto scalare di un vettore A
~ · û, dà la proiezione di A sulla direzione indicata da û:
û, A
~ · û
Au = A
(5.6)
Come importante conseguenza:
~ · x̂ = Ax
A
~ · ŷ = Ay
A
~ · ẑ = Az
A
(5.7)
Il prodotto scalare di due vettori perpendicolari è sempre nullo, essendo
π
in questo caso θ = e quindi cos θ = 0.
2
Le condizioni di ortonormalità per x̂, ŷ, ẑ possono ora essere riscritte:
|x̂| = 1
|ŷ| = 1
;
;
|ẑ| = 1
(5.8)
x̂ · ŷ = 0 ; x̂ · ẑ = 0 ; ŷ · ẑ = 0
5.4
Prodotto vettoriale di due vettori
~ ×B
~ è
Il prodotto vettoriale A
h
i
~ ×B
~
A
=
x
h
i
~ ×B
~
A
=
y
h
i
~ ×B
~
A
=
z
un vettore che ha per componenti:
(Ay Bz − Az By )
(Az Bx − Ax Bz )
(Ax By − Ay Bx )
(5.9)
CAPITOLO 5. VETTORI
—
M.FANTI 63
Questa scrittura è apparentemente complicata, ma può essere facilmente
x
ricordata pensando alle coordinate x, y, z in modo ciclico: xyz.
Si nota subito che il prodotto vettoriale è anti-commutativo, ovvero cambia
segno se si invertono i due vettori:
~ ×B
~ = −B
~ ×A
~
A
Se i due vettori formano un angolo θ (vedi Fig. 5.3(b,c)), si può dimostrare
~ ×B
~ è perpendicolare al piano individuato da A
~ e B,
~ ha modulo:
che A
~ × B|
~ = |A||
~ B|
~ sin θ
|A
(5.10)
ed è orientato secondo la “regola della mano destra”, cioè se le dita della
~ aB
~ — in questo ordine! — il pollice è diretto
mano destra puntano da A
~ × B.
~
come A
Per dimostrare queste proprietà, scegliamo gli assi cartesiani in modo che
~ e che il piano Oxy contenga il vettore B.
~
l’asse x giaccia lungo il vettore A
Allora le componenti cartesiane dei due vettori sono
Ax ; Ay = 0 ; Az = 0
Bx ; By
; Bz = 0
Le componenti del prodotto vettoriale diventano:
h
i
~
~
A×B
= (Ay Bz − Az By ) = 0
h
ix
~ ×B
~
A
= (Az Bx − Ax Bz ) = 0
y
h
i
~ ×B
~
A
= (Ax By − Ay Bx ) = Ax By
z
~ ×B
~ ha solo componente lungo z, quindi è perpendicolare al
Anzitutto, A
~ e B.
~ Inoltre, per la scelta degli assi, |A|
~ = Ax ;
piano Oxy che contiene A
~ eA
~ può essere visto come angolo fra B
~ e l’asse x, quindi
l’angolo θ fra B
~ sin θ. Da questo si deduce la proprietà dell’Eq. (5.10).
By = |B|
Il prodotto vettoriale di due vettori paralleli è nullo: infatti, se i vettori
hanno orientamenti concordi θ = 0, se hanno orientamenti opposti θ = π; in
ogni caso sin θ = 0.
Una proprietà interessante del prodotto vettoriale è che il suo modulo è
~ a B
~ —
uguale all’area del parallelogramma individuato dai due vettori A
~ sin θ è la proiezione di B
~ lungo la direzione perpendicolare a A,
~
infatti |B|
~ può essere pensata come la base del parallelogramma, e |B|
~ sin θ
quindi |A|
come l’altezza.
CAPITOLO 5. VETTORI
5.5
—
M.FANTI 64
Transformazioni di vettori (*)
~ che può essere parametrizzata
Un vettore in fisica non è solo una quantità A
da una tripletta di variabili reali (Ax , Ay , Az ). Occorre anche che gli elementi
di tale tripletta soddisfino precise proprietà di trasformazione quando si
effettui un cambiamento di coordinate. Vediamone i dettagli.
Quando si lavora sulle componenti, è utile introdurre una nomenclatura
numerica 1, 2, 3 al posto di x, y, z. Le regole di corrispondenza sono le
seguenti:
ê1 ≡ x̂
ê2 ≡ ŷ
ê3 ≡ ẑ
A1 ≡ Ax
A2 ≡ Ay
A3 ≡ Az
x1 ≡ x
x2 ≡ y
x3 ≡ z
Nello spazio 3-dimensionale, una posizione rispetto all’origine O è
~ . In un dato sistema
descritta da un vettore posizione, o raggio vettore, r
di coordinate, con assi lungo i versori ortonormali (vedi Eq. (5.8)) ê1 , ê2 , ê3
~ nelle sue componenti:
possiamo scomporre r
~=
r
3
X
xk êk
k=1
dove
~ · êk
xk = r
Con una diversa scelta di coordinate, avremmo versori ê01 , ê02 , ê03 e quindi
una scomposizione
3
X
~=
r
x0m ê0m
m=1
Che relazione c’è fra le componenti (x1 , x2 , x3 ) e (x01 , x02 , x03 )? Poiché:
~·
r
ê0i
=
3
X
x0m ê0m · ê0i = x0i
m=1
~ · ê0i =
r
3
X
xk êk · ê0i
k=1
otteniamo per confronto:
x0i
=
3
X
k=1
(ê0i · êk ) xk
(5.11)
CAPITOLO 5. VETTORI
—
M.FANTI 65
Analogamente si ottengono le trasformazioni inverse:
xk =
3
X
(êk · ê0i ) x0i
(5.12)
i=1
~ che può essere scomposta
In P
fisica, chiamiamo vettore una quantità A
3
come k=1 Ak êk , tale che le sue componenti (A1 , A2 , A3 ) si trasformino come
quelle di un raggio vettore quando si effettui un cambiamento di coordinate,
cioè:
3
X
0
Ai =
(ê0i · êk ) Ak
(5.13)
k=1
5.6
Rotazioni e inversioni spaziali (*)
Le quantità:
Rik = (ê0i · êk )
formano gli elementi di una matrice (3 × 3) R. Le Eq. (5.11) e Eq. (5.12)
possono essere scritte come:
X
X
Rik x0i
Rik xk
;
xk =
x0i =
k
k
da cui vediamo che la trasformazione inversa si ottiene scambiando i due
indici:
(R−1 )ki = (R)ik
oppure
R−1 = RT
ovvero la matrice R è ortogonale.
Si dimostra che le matrici ortogonali hanno tutte determinante ±1.
Tutte le rotazioni nello spazio hanno determinante +1: infatti, qualunque
rotazione di un angolo α attorno ad un asse può essere ridotta con continuità
alla trasformazione identica (α → 0), che ha determinante +1; essendo il
determinante una funzione continua degli elementi di matrice, che a loro
volta sono funzioni continue dell’angolo α, non può mai passare da +1 a −1.
Una trasformazione con det(R) = −1 non può essere una rotazione, o
una composizione di rotazioni. D’altronde queste trasformazioni esistono:
si pensi a una che inverte solo l’asse êp , lasciando gli altri invariati. La
corrispondente matrice sarebbe diagonale, con Rpp = −1 e Rkk = +1 ∀k 6= p.
Il suo determinante sarebbe −1. Inoltre, una trasformazione di questo tipo
composta con una o più rotazioni avrebbe sempre determinante −1.
CAPITOLO 5. VETTORI
—
M.FANTI 66
Nello spazio 3-dimensionale, una peculiare trasformazione che inverte i
tre assi ha matrice:
−1
0
0
x0 = −x
0
y 0 = −y
P = 0 −1
;
(5.14)
0
0 −1
z 0 = −z
quindi det(P) = −1. Questa trasformazione è chiamata inversione spazale
(o trasformazione di parità in fisica delle particelle e teoria dei campi).
5.7
Vettori e pseudo-vettori (*)
Non tutte le quantità che si trasformano come vettori sotto rotazioni fanno
lo stesso sotto inversioni spaziali. Vediamo un esempio semplice: il vettore
~ è un vettore per definizione: è in effetti il nostro prototipo
posizione r
di vettore. Quindi anche una sua variazione d~
r è un vettore. Poiché le
trasformazioni spaziali non alterano il flusso del tempo, dt è invariato, e la
d~
r
~=
è anch’essa un vettore. Ora consideriamo la velocità angolare
velocità v
dt
~ e la relazione v
~ =ω
~ ×r
~ tipica di un moto circolare. Essendo essa una
ω
relazione geometrica, non c’è ragione per cui essa cambi per trasformazioni
~ev
~
spaziali. Eppure, eseguendo una inversione spaziale, le componenti di r
~
cambiano segno (perché sono entrambi vettori), quindi le componenti di ω
~ deve rimanere invariato.
devono conservare il loro segno, cioè ω
Una quantità che si trasforma come vettore per rotazioni, ma rimane
invariata per riflessioni spaziali, si chiama pseudo-vettore, o vettore assiale.
In fisica ci sono diverse quantità di questo tipo. Nella tabella seguente
elenchiamo quantità fisiche, distinguendo se sono vettori o pseudo-vettori
(V o P rispettivamente) e motivando con un’equazione fisica il loro
comportamento sotto inversione spaziale.
CAPITOLO 5. VETTORI
5.8
—
~
r
vettore posizione
V
~
v
velocità
V
~a
accelerazione
V
~
ω
F~
~
p
~
L
τ~
~
E
~
B
J~
velocità angolare
forza
quantità di moto
momento angolare
momento meccanico
campo elettrico
campo magnetico
densità di corrente
P
V
V
P
P
V
P
V
M.FANTI 67
(per definizione)
d~
r
~=
v
dt
d~
v
~a =
dt
~ =ω
~ ×r
~
v
F~ = m~a
~ = m~
p
v
~
~×p
~
L=r
~ × F~
τ~ = r
~
F~ = q E
~
F~ = q~
v×B
J~ = nq~
vD
Calcolo tensoriale (*)
In uno spazio 3-dimensionale, usiamo
P la convenzione di soma implicita sugli
indici ripetuti (cioè ak bk significa
k ak bk ) e introduciamo il tensore δ di
Kronecker δij , definito da:
1 se i = j
δij =
0 se i 6= j
Identità ovvie sono:
δij Ai = Aj
;
δij Ai Bj = Ai Bi
~ è un oggetto scomponibile in una n-pla
Cosı̀ come un vettore A
(A1 , . . . , A3 ) che si trasforma secondo le leggi:
A0i = Rir Ar
possiamo definire un tensore di rango P come un oggetto scomponibile in
componenti a P indici: Ti1 ,...,iP che si trasforma secondo:
Ti01 ,...,iP = Ri1 r1 · · · RiP rP Tr1 ,...,rP
È immediato dimostrare che applicando una trasformazione ortogonale
~ eB
~ il loro prodotto scalare A
~ ·B
~ è invariante.
R a due vettori A
CAPITOLO 5. VETTORI
5.8.1
—
M.FANTI 68
Il tensore di Levi-Civita (*)
In uno spazio 3-dimensionale, introduciamo anche il tensore totalmente antisimmetrico di Levi-Civita di rango 3 ijk , definito in modo che 123 = 1 e che
esso cambi segno per qualunque scambio di due dei suoi indici:
klm = −kml = −lkm = −mlk
Per questa proprietà, tale tensore è nullo se due qualunque degli indici sono
uguali, ed è invariante per una permutazione ciclica dei tre indici:
klm = lmk = mkl
Le componenti cartesiane di un prodotto vettoriale possono essere scritte
come:
~ × B)
~ k = klm Al Bm
(A
~ e B
~ sono due vettori, allora possiamo mostrare che A
~ ×B
~ è
Se A
0
uno pseudo-vettore. Infatti, con un cambiamento di coordinate, Aj =
Rjr Ar e Bk0 = Rks Bs . La trasformazione è ortogonale, quindi Rip Rlp =
δil . Allora ijk A0j Bk0 = ijk Rjr Rks Ar Bs = (Rip Rlp )ljk Rjr Rks Ar Bs =
Rip ljk Rlp Rjr Rks Ar Bs . Mostriamo che ljk Rlp Rjr Rks = det(R)prs : entrambe
le espressioni sono totalmente antisimmetriche nei tre indici p, r, s, e per
(p, r, s) = (1, 2, 3) la prima è proprio det(R). Quindi abbiamo trovato che
~ × B)
~ 0 = ijk A0 B 0 = det(R)Rip prs Ar Bs = det(R)Rip (A
~ × B)
~ p
(A
i
j k
~ ×B
~ si
Per rotazioni, det(R) = +1 e abbiamo ottenuto che la quantità A
trasforma come un vettore.
Per inversioni spaziali, il termine det(R) = −1 produce un cambiamento
di segno di tutte le 3 componenti.
Un’identità molto utile è:
klm krs = δlr δms − δls δmr
Come esercizio, si provi ad usare questi strumenti di calcolo per mostrare
le identità:
~ · (A
~ × B)
~ =0
A
~ · (B
~ × C)
~ =B
~ · (C
~ × A)
~ =C
~ · (A
~ × B)
~
A
(a)
(b)
~ × (B
~ × C)
~ +B
~ × (C
~ × A)
~ +C
~ × (A
~ × B)
~ = 0 (c)
A
~ × (B
~ × C)
~ = B(
~ A
~ · C)
~ − C(
~ A
~ · B)
~
A
(d)
(5.15)
Capitolo 6
Cinematica
In questo capitolo estenderemo i concetti della cinematica — velocità ed
accelerazione, nonché le loro relazioni — al moto nello spazio tridimensionale.
Anche qui analizzeremo moti di oggetti che possono essere considerati
puntiformi, ovvero tali per cui il loro stato sia definito solo dalla posizione:
più precisamente dal raggio vettore, o vettore posizione, introdotto nel
Capitolo 4.
Vale la pena notare che la cinematica è solo descrittiva: definisce i concetti
di traiettoria, legge oraria, velocità, accelerazione, ma non indaga le cause
del moto. Esse vengono trattate dalla dinamica, introdotta nel Capitolo 8 e
sviluppata nei capitoli successivi.
6.1
Traiettoria e legge oraria
Il moto di un oggetto puntiforme nello spazio tridimensionale è descritto da
~ che cambia in funzione del tempo:
un vettore posizione r
~=r
~ (t)
r
(6.1)
~ occupati dall’oggetto nel suo
(vd Fig. 6.1).
L’insieme dei punti r
movimento si chiama traiettoria. La relazione fra posizione e tempo, espressa
dall’Eq. (6.1), si chiama invece legge oraria.
~ (t) alla
In un intervallo di tempo ∆t l’oggetto si sposta dalla posizione r
~ (t + ∆t), compiendo uno spostamento
posizione r
~ (t + ∆t) − r
~ (t)
∆~
r=r
(6.2)
che graficamente si può rappresentare come una corda congiungente due punti
sulla traiettoria, come in Fig. 6.1 (sinistra). Per tempi ∆t sempre più piccoli,
69
CAPITOLO 6. CINEMATICA
—
M.FANTI 70
dr
∆r
r(t)
r(t)
r(t+dt)
r(t+∆t)
z^
x^
O
z^
^
y
x^
O
y^
~=r
~ (t) di un oggetto puntiforme. A
Figura 6.1: Traiettoria e legge oraria r
~ (t) e r
~ (t+∆t) in due diversi istanti, separati dal tempo
sinistra: le posizioni r
~ (t + ∆t) − r
~ (t) è una corda che congiunge
∆t: il vettore-spostamento ∆~
r=r
i due punti sulla traiettoria. A destra: nel limite ∆t → 0 lo spostamento
infinitesimo d~
r è tangente alla traiettoria.
tale corda si avvicina sempre più alla traiettoria, tendendo alla retta tangente
alla traiettoria stessa. Nel limite ∆t → 0 lo spostamento infinitesimo d~
r è
dunque tangente alla traiettoria, come raffigurato in Fig. 6.1 (destra). Come
già detto in precedenza, mentre una variazione di una quantità viene indicata
con ∆, una variazione infinitesima viene indicata con d.
La distanza percorsa lungo la traiettoria è data dal modulo del vettore
spostamento infinitesimo d~
r:
ds = |d~
r|
(6.3)
6.1.1
Successione di spostamenti infinitesimi
Uno spostamento lungo la traiettoria può essere sempre scomposto in una
successione di spostamenti più piccoli.
Nella Fig. 6.2, a sinistra, un oggetto si sposta dalla posizione iniziale
~0 alla posizione finale r
~n , attraverso una successione ∆~
r
r1 , ∆~
r2 , . . . , ∆~
rn di
spostamenti più piccoli. Ciascuno produce un cambiamento di posizione:
CAPITOLO 6. CINEMATICA
∆r1
—
M.FANTI 71
∆r2
dr
r1
r0
r0
r2
rn
z^
x^
O
r
z^
x^
^
O
y
y^
Figura 6.2: Spostamento finito come successione di spostamenti pù piccoli
(a sinistra) e di spostamenti infinitesimi (a destra).
~1 = r
~0 + ∆~
r
r1
~2 = r
~1 + ∆~
r
r2
~3 = r
~2 + ∆~
r
r3
..
..
.
.
~n−1 = r
~n−2 + ∆~
r
rn−1
~n = r
~n−1 + ∆~
r
rn
Concatenando tutte queste relazioni si ottiene
~n = r
~0 +
r
n
X
∆~
ri
i=1
Aumentando il numero n di spostamenti, ciascuno di essi può essere reso
sempre più piccolo, al limite infinitesimo: ∆~
ri → d~
r . Contemporaneamente,
il numero di elementi della somma diventa infinito: n → +∞. Questa
situazione è rappresentata in Fig. 6.2 a destra: gli spostamenti infinitesimi
d~
r giacciono tutti sulla traiettoria. Come abbiamo già visto, nel caso limite
di una somma di infiniti termini infinitesimi, si usa il simbolo di integrale:
Z
~=r
~0 + d~
r
r
(6.4)
CAPITOLO 6. CINEMATICA
6.2
—
M.FANTI 72
Velocità
~1 alla posizione r
~2 , compie
Se un oggetto puntiforme si sposta dalla posizione r
uno spostamento:
~2 − r
~1
∆~
r=r
(6.5)
come raffigurato in Fig. 4.6. Se lo spostamento avviene in un tempo ∆t si
definisce la velocità vettoriale come rapporto fra ∆~
r e ∆t, nel limite ∆t → 0.
~ (t) =
v
~ (t + ∆t) − r
~ (t)
r
d~
r (t)
∆~
r
= lim
=
∆t→0
∆t→0 ∆t
∆t
dt
lim
(6.6)
Poiché lo spostamento infinitesimo d~
r è tangente alla traiettoria (vd
~ lo è.
Fig. 6.1), anche la velocità v
Anche la velocità si può scomporre in componenti cartesiane:
~ = vx · x̂ + vy · ŷ + vz · ẑ
v
Poiché i vettori si sommano e si sottraggono per componenti, l’Eq. (6.6) è
equivalente alle equazioni:
dx(t)
x(t + ∆t) − x(t)
∆x
= lim
=
∆t→0
∆t
∆t
dt
∆y
y(t + ∆t) − y(t)
dy(t)
= lim
= lim
=
∆t→0 ∆t
∆t→0
∆t
dt
dz(t)
z(t + ∆t) − z(t)
∆z
= lim
=
= lim
∆t→0
∆t→0 ∆t
∆t
dt
vx =
vy
vz
6.2.1
lim
∆t→0
(6.7)
Spostamento come integrale della velocità
Abbiamo visto in Sezione 6.1.1 e in Fig. 6.2 che uno spostamento ∆~
r può
essere scomposto in una successione di spostamenti infinitesimi, Eq. (6.4):
Z
∆~
r = d~
r
Dalla definizione di velocità, Eq. (6.6), possiamo esprimere lo spostamento
infinitesimo all’istante t come
~ (t)dt
d~
r=v
(6.8)
CAPITOLO 6. CINEMATICA
—
Pertanto lo spostamento finito può essere scritto:
Z t
~ (t0 )
~ (t) − r
~ (t0 ) =
dt0 v
∆~
r=r
M.FANTI 73
(6.9)
t0
oppure in coordinate cartesiane:
Z
t
∆x = x(t) − x(t0 ) =
Z
dt0 vx (t0 )
t0
t
∆y = y(t) − y(t0 ) =
t
Z 0t
∆z = z(t) − z(t0 ) =
dt0 vy (t0 )
(6.10)
dt0 vz (t0 )
t0
~ (t) è necessario conoscere
Notiamo che per calcolare la posizione finale r
~ (t0 ), oltre la velocità v
~ (t0 ) per tutti gli istanti
la posizione all’istante iniziale r
t0 ∈ [t0 ; t].
6.2.2
Velocità scalare
Si può definire anche la velocità scalare, come limite del rapporto fra lo
spostamento ds lungo la traiettoria e il tempo dt impiegato a percorrerlo:
v=
6.3
ds
|d~
r|
=
= |~
v|
dt
dt
(6.11)
Accelerazione
In maniera del tutto analoga si definisce l’accelerazione vettoriale, come il
rapporto fra la variazione di velocità ∆~
v e il tempo ∆t in cui essa ha luogo,
nel limite ∆t → 0. Scritto in forma vettoriale:
~a(t) =
~ (t + ∆t) − v
~ (t)
v
d~
v (t)
∆~
v
= lim
=
∆t→0
∆t→0 ∆t
∆t
dt
lim
e per componenti cartesiane:
(6.12)
CAPITOLO 6. CINEMATICA
—
M.FANTI 74
∆vx
vx (t + ∆t) − vx (t)
dvx (t)
= lim
=
∆t→0 ∆t
∆t→0
∆t
dt
vy (t + ∆t) − vy (t)
dvy (t)
∆vy
= lim
=
= lim
∆t→0
∆t→0 ∆t
∆t
dt
∆vz
vz (t + ∆t) − vz (t)
dvz (t)
= lim
= lim
=
∆t→0 ∆t
∆t→0
∆t
dt
(6.13)
ax =
ay
az
6.3.1
lim
Variazione di
dell’accelerazione
velocità
come
integrale
In presenza di accelerazione, la velocità subisce variazioni. Dalla definizione
di accelerazione, Eq. (6.12), possiamo esprimere la variazione infinitesima di
velocità all’istante t come
d~
v = ~a(t)dt
(6.14)
Quanto varia la velocità, da un istante t0 ad un istante t? Ragionando in
modo analogo a quanto fatto nelle Sezione 6.1.1 e Sezione 6.2.1, possiamo
immaginare di dividere l’intervallo di tempo fra t0 e t in intervallini
infinitesimi dt e scrivere:
~ (t0 + dt) = v
~ (t0 ) + ~a(t0 )dt
v
~ (t0 + 2dt) = v
~ (t0 + dt) + ~a(t0 + dt)dt
v
~ (t0 + 3dt) = v
~ (t0 + 2dt) + ~a(t0 + 2dt)dt
v
..
..
.
.
~ (t − dt) = v
~ (t − 2dt) + ~a(t − 2dt)dt
v
~
~
v (t) = v (t − dt) + ~a(t − dt)dt
Concatenando tutte queste relazioni si ottiene:
~ (t) = v
~ (t0 ) + ~a(t0 )dt + ~a(t0 + dt)dt + ~a(t0 + 2dt)dt + · · · + ~a(t − 2dt)dt + ~a(t − dt)dt
v
Anche qui abbiamo a che fare con una somma infinita di termini infinitesimi,
che si scrive in forma di integrale:
Z t
~ (t) − v
~ (t0 ) =
∆~
v=v
dt0 ~a(t0 )
(6.15)
t0
oppure in coordinate cartesiane:
CAPITOLO 6. CINEMATICA
—
Z
t
∆vx = vx (t) − vx (t0 ) =
Z
M.FANTI 75
dt0 ax (t0 )
t0
t
dt0 ay (t0 )
∆vy = vy (t) − vy (t0 ) =
t
Z 0t
∆vz = vz (t) − vz (t0 ) =
(6.16)
dt0 az (t0 )
t0
~ (t) è necessario conoscere la
Notiamo che per calcolare la velocità finale v
~ (t0 ), oltre l’accelerazione ~a(t0 ) per tutti gli istanti
velocità all’istante iniziale v
t0 ∈ [t0 ; t].
6.4
Rappresentazione grafica delle variabili
cinematiche
Riassumiamo i concetti introdotti finora. Un oggetto che si sposta nello
~ (t) ≡ (x(t), y(t), z(t)). La sua velocità,
spazio, all’istante t ha una posizione r
in forma vettoriale e per componenti cartesiane, è definita da:
x(t + dt) − x(t)
vx (t) =
dt
~ (t + dt) − r
~ (t)
r
y(t + dt) − y(t)
~ (t) =
v
;
vy (t) =
dt
dt
v (t) = z(t + dt) − z(t)
z
dt
mentre l’accelerazione è espressa come:
~a(t) =
~ (t + dt) − v
~ (t)
v
dt
;
vx (t + dt) − vx (t)
ax (t) =
dt
vy (t + dt) − vy (t)
ay (t) =
dt
a (t) = vz (t + dt) − vz (t)
z
dt
Per offrire un punto di vista diverso, possiamo rivedere queste definizioni da
un punto di vista grafico. Poiché le formule sono formalmente identiche per
CAPITOLO 6. CINEMATICA
a
—
v
M.FANTI 76
s
δs = v
δt
δv = a
δt
vδt = δs
aδt = δv
t
δt
t
δt
t
δt
Figura 6.3:
Rappresentazione grafica dell’evoluzione nel tempo di una
accelerazione a, una velocità v e una posizione s. In un tempo brevissimo δt,
la velocità varia di δv = aδt e la posizione di δs = vδt.
ciascuna componente cartesiana, anche le rappresentazioni grafiche devono
essere analoghe. Quindi consideriamo una generica coordinata s (che sarà
x o y o z) che evolve con una velocità v (rispettivamente vx , vy , vz ) ed
accelerazione a (rispettivamente ax , ay , az ).
La situazione è illustrata in Fig. 6.3.
In un tempo infinitesimo δt la variazione di velocità è δv = aδt; nello
stesso tempo la variazione di posizione è δs = vδt. Entrambe queste
espressioni sono rappresentate dall’area del trapezoide di larghezza δt e
altezza rispettivamente a e v.
δs
e l’accelerazione
Viceversa, la velocità si può ricavare come v =
δt
δv
come a = . La rappresentazione grafica di queste espressioni corrisponde
δt
alle pendenze (≡ coefficienti angolari) delle rette tangenti rispettivamente al
grafico (t; s) e (t; v).
In figura sono anche indicati i “punti di inversione” (in giallo), in cui si
inverte il moto: inizialmente s cresce col tempo, poi inizia a diminuire, poi
torna a crescere. A queste tre fasi corrispondono diversi segni della velocità:
prima positiva, poi negativa, poi di nuovo positiva. Nei punti di inversione
la velocità è istantaneamente nulla.
Infine è anche indicato (in verde) un istante in cui l’accelerazione è nulla:
CAPITOLO 6. CINEMATICA
—
M.FANTI 77
v(t)
a(t)
r(t)
v(t+∆t)
r(t+∆t)
v(t)
z^
x^
O
∆v
v(t+∆t)
y^
Figura 6.4:
Calcolo dell’accelerazione come variazione della velocità. A
~ (t) a v
~ (t + ∆t). È
sinistra: fra due istanti t e t + ∆t la velocità cambia da v
disegnata anche l’accelerazione ~a, con le due componenti: ~ak parallela alla
traiettoria (“tangenziale”) e ~a⊥ perpendicolare e diretta verso il centro di
curvatura (“centripeta”). A destra: calcolo grafico di ∆~
v , che in generale ha
una componente parallela alla traiettoria e l’altra ortogonale.
questo corrisponde ad un punto di stazionarietà nel grafico (t; v), come se la
velocità fosse “temporaneamente costante”.
6.5
Accelerazione tangenziale e centripeta
L’accelerazione è responsabile di un cambiamento della velocità vettoriale.
Un vettore può cambiare sia per modulo che per direzione.
~ (t) e v
~ (t + ∆t) sono tangenti alla
Come si vede dalla Fig. 6.4, le velocità v
traiettoria in due punti diversi. Se la traiettoria è curva, ∆~
v in generale ha
~ e l’altra ortogonale, diretta verso il centro
due componenti, una parallela a v
∆~
v
ha una componente ~ak parallela alla
di curvatura. Cosı̀ anche ~a = lim
∆t→0 ∆t
traiettoria (“tangenziale”) ed una componente ~a⊥ perpendicolare e diretta
verso il centro di curvatura (“centripeta”):
~a =
~ak + ~a⊥
|{z}
|{z}
tangenziale
centripeta
(6.17)
CAPITOLO 6. CINEMATICA
6.5.1
—
M.FANTI 78
Effetti dell’accelerazione tangenziale
L’accelerazione tangenziale è responsabile del cambiamento della velocità
scalare, v = |~
v |:
dv
= ak
(6.18)
dt
La quantità ak può essere positiva o negativa, a seconda che ~ak abbia
~ o opposto.
orientamento concorde con v
Per dimostrare l’Eq. (6.18) occorrono un po’ di calcoli con i prodotti
scalari. Anzitutto:
~a · v
~ = ~ak + ~a⊥ · v
~ = ~ak · v
~ = ak v
~ è nulla perché è il prodotto scalare di due vettori
(spiegazione: la parte ~a⊥ · v
~ è stata scritta come ak v poiché i due vettori
tra loro ortogonali; la parte ~ak · v
sono paralleli; il segno di ak tiene conto del loro orientamento relativo).
D’altra parte:
dvx
dvy
dvz
d~
v
~=
·v
vx +
vy +
vz
dt
dt
dt
dt
1 d(vx2 ) d(vy2 ) d(vz2 )
+
+
=
2
dt
dt
dt
1 d(v 2 )
1d 2
=
vx + vy2 + vz2 =
2 dt
2 dt
dv
=
v
dt
~a · v
~ =
df (t)
=
dt
d
df (t)
1 d[f (t)2 ]
, deducibile dalla regola generale
[f (t)g(t)] =
g(t) +
2 dt
dt
dt
dg(t)
f (t)
della Sezione 3.3).
dt
dv
Per confronto si trova ak v =
v, da cui si ricava immediatamente
dt
l’Eq. (6.18).
(spiegazione: si è sfruttata più volte l’identità matematica f (t)
6.5.2
Effetti dell’accelerazione centripeta
L’accelerazione centripeta ~a⊥ non modifica la velocità scalare, dunque non
può che modificare la direzione della velocità.
CAPITOLO 6. CINEMATICA
—
ds
r(t)
M.FANTI 79
dα
v(t)
v(t)
O
r(t+dt)
v(t+dt)
ρ dα
ρ
v(t+dt)
dv
C
Figura 6.5: Calcolo dell’accelerazione centripeta. La traiettoria, lungo un
archetto sufficientemente piccolo ds, può sempre essere approssimata con un
arco di circonferenza di raggio ρ, sotteso da un angolino dα.
Consideriamo il caso in cui ak = 0, cioè ci sia solo l’accelerazione
centripeta. In tal caso la velocità scalare v è costante. Con riferimento
alla Fig. 6.5, la traiettoria, lungo un archetto sufficientemente piccolo ds, può
sempre essere approssimata con un arco di circonferenza di raggio ρ, centrato
in un punto C. Si noti che ρ è il raggio di curvatura locale della traiettoria,
~ — analogamente il centro
che non ha niente a che fare con il raggio vettore r
di curvatura C non ha niente a che fare con l’origine O da cui misuriamo le
~ . Supponiamo che in un tempo infinitesimo dt l’oggetto compia
posizioni r
lungo la traiettoria uno spostamento lungo un archetto ds = v dt. Tale
archetto, visto dal centro della circonferenza che approssima la traiettoria, è
sotteso da un angolino dα, che soddisfa la relazione
ds = ρ dα
Allora
v dt = ds = ρ dα
=⇒
v
dα
=
dt
ρ
~ (t) e v
~ (t + dt) sono entrambi
Guardando la Fig. 6.5 (a destra), si nota che v
tangenti alla circonferenza di centro C e raggio ρ; pertanto sono ortogonali
~ (t) e v
~ (t + dt) è sempre
ai raggi della circonferenza, quindi l’angolino fra v
dα. Approssimando |d~
v | con l’archetto di circonferenza di raggio v e angolo
dα:
dα
a⊥
a⊥ dt = |d~
v | = v dα
=⇒
=
dt
v
Per confronto si ottiene:
v2
a⊥ =
(6.19)
ρ
CAPITOLO 6. CINEMATICA
—
M.FANTI 80
La quantità
dα
(6.20)
dt
si chiama velocità angolare, e indica quanto rapidamente nel tempo cambia
l’angolo che sottende l’arco di traiettoria ds. Incidentalmente, nei passaggi
appena svolti, abbiamo trovato anche la relazione fra velocità angolare,
velocità scalare e raggio di curvatura:
v
(6.21)
ω=
ρ
ω=
Usando questa relazione, l’Eq. (6.19) può anche essere scritta come
a⊥ = ω 2 ρ
6.6
(6.22)
Esercizi
Per calcolare le derivate e gli integrali in questi esercizi, possono essere d’aiuto
le tabelle in Sezione 3.3.
Esercizio 6.1. Un oggetto puntiforme si muove con la seguente legge oraria:
x(t) = A cos(ωt)
y(t) = Be−γt
z(t) = Ct3
Scrivere, per coordinate cartesiane, la velocità e l’accelerazione in funzione del
tempo.
Risposta. Per calcolare la velocità, basta derivare le coordinate cartesiane:
vx (t) =
vy (t) =
vz (t) =
dx
= −ωA sin(ωt)
dt
dy
= −γBe−γt
dt
dz
= 3Ct2
dt
e per calcolare l’accelerazione si derivano le velocità:
ax (t) =
ay (t) =
az (t) =
dvx
= −ω 2 A cos(ωt)
dt
dvy
= γ 2 Be−γt
dt
dvz
= 6Ct
dt
CAPITOLO 6. CINEMATICA
—
M.FANTI 81
Esercizio 6.2.
Un oggetto puntiforme si muove con una velocità che, in
coordinate cartesiane, vale:
vx (t) = ax t
( ax = 3 m/s2 )
vy (t) = uy eγt
( uy = 2.5 m/s ; γy = 0.1 s−1 )
vz (t) = 0
~0 ≡ (1 m, 0 m, 1 m). Calcolare la sua
All’istante t = 0 si trova nella posizione r
posizione al tempo t1 = 10 s.
Risposta. Per ottenere il vettore-spostamento ∆~
r occorre integrare ciascuna
componente della velocità:
Z t1
h a it1
x 2
dt vx (t) =
= 150 m
∆x =
t
2
0
0
Z t1
uy γt t1
dt vy (t) =
∆y =
= (25 m) e1 − e0 = 42.95 m
e
γ
0
0
Z t1
∆z =
dt vz (t) = 0
0
~1 = r
~0 + ∆~
La posizione finale si ottiene come r
r . Per coordinate cartesiane si
ottiene
x1 = x0 + ∆x = 151 m
y1 = y0 + ∆y = 42.95 m
z1 = z0 + ∆z = 1 m
Esercizio 6.3. Un oggetto che cade liberamente in verticale acquista velocità
sempre maggiori. In tempi pre-Galileiani, quando le leggi del moto non erano
ancora state formulate, c’era l’ipotesi — sbagliata — che la velocità v fosse
direttamente proporzionale allo spazio totale percorso s. Con il linguaggio
cinematico che abbiamo imparato, formuleremmo questa ipotesi cosı̀:
v(t) = α · s(t)
Si provi a dedurre la legge oraria del moto sotto questa ipotesi. Suggerimento:
ds
ds
scrivere v = , quindi si scriva la legge del moto come
= αdt, oppure si sfrutti
dt
s0
d ln(f (t))
f (t)
df
la proprietà della derivata del logaritmo
=
, essendo f 0 (t) ≡
.
dt
f (t)
dt
Se partisse da fermo, l’oggetto cadrebbe davvero?
ds
ds
= αs, che si può scrivere come
=
Risposta. La legge del moto è
dt
s
αdt. Mettendo un segno di integrale, con estremi opportuni, da entrambi i lati,
CAPITOLO 6. CINEMATICA
Z
s
otteniamo
s0
ds0
=α
s0
Z
t
0
dt , ovvero ln
0
—
s
s0
M.FANTI 82
= t. Risolvendo per s si trova:
s = s0 eαt
Approccio più formale (ma meno diretto): scriviamo la legge del moto cosı̀:
ds/dt
f 0 (t)
= α. Assomiglia molto alla forma
, ma attenzione: non possiamo porre
s(t)
f (t)
f ≡ s perché il logaritmo accetta come argomento solo numeri privi di dimensioni
s(t)
— non possiamo fare ln(s). Quindi poniamo f (t) =
, con s̄ una distanza
s̄
arbitraria. Allora
f 0 (t)
ds/dt
d ln(f (t))
=
=
=α
dt
f (t)
s(t)
La derivata di ln(f (t)) è una costante, α, quindi ln(f (t)) = αt + β (con β costante
s(t)
arbitraria), ovvero
= f (t) = eαt+β , infine s(t) = s̄eβ eαt . Risultato identico a
s̄
quello trovato con l’approccio più diretto — basta identificare s0 con ŝeβ .
ds(t)
= αs0 eαt ; se
Per rispondere all’ultima domanda: la velocità è v(t) =
dt
per t = 0 l’oggetto è fermo, l’unica possibilità è che sia α = 0, ma cosı̀ sarebbe
anche s(t) = 0 sempre, ovvero l’oggetto non entrerebe mai in movimento, cioè non
cadrebbe mai. Pur senza conoscere ancora il calcolo differenziale, Galileo aveva
intuito che una legge del moto v ∝ s non avrebbe mai funzionato.
Esercizio 6.4. Galileo, dopo ripetuti esperimenti, osservò una regolarità nella
“caduta dei gravi”: un oggetto, lanciato con velocità orizzontale v0 e libero di
cadere, si muove con una traiettoria curva, contenuta in un piano verticale.
Adottando su questo piano due coordinate cartesiane, con l’asse x̂ lungo v0 e l’asse
ẑ verso l’alto, la legge oraria osservata è sempre esprimibile come:
x(t) = v0 t
g
z(t) = − t2
2
Calcolare la velocità e l’accelerazione vettoriali, per componenti cartesiane, in un
generico istante t. Calcolare inoltre l’accelerazione tangenziale (ak ) e centripeta
(a⊥ ), il raggio di curvatura (ρ), e la velocità angolare (ω).
Risposta. La velocità, per componenti cartesiane, si calcola derivando x, y, z
rispetto a t:
vx (t) = v0
vz (t) = −gt
Derivando ancora rispetto a t si trova l’accelerazione, per componenti cartesiane:
ax (t) = 0
az (t) = −g
CAPITOLO 6. CINEMATICA
—
M.FANTI 83
~:
L’accelerazione tangenziale si può calcolare proiettando ~a su v
ak = ~a ·
~
v
g2t
= p 2
v
v0 + (gt)2
L’accelerazione centripeta si calcola di conseguenza:
s
s
q
2 t)2
(g
(gt)2
a⊥ =
=
g
a2 − a2k =
g2 − 2
1
−
2
v0 + (gt)2
v0 + (gt)2
v0 g
= p 2
v0 + (gt)2
Il raggio di curvatura si calcola da a⊥ =
ρ =
v2
=
a⊥
v2
ρ
v02 + (gt)2
v0 g
3/2
Infine, la velocità angolare si calcola come
ω =
v0 g
v
= 2
ρ
v0 + (gt)2
Osservazione. All’inizio (t = 0) l’accelerazione è solo centripeta: a⊥ =
g , ak = 0. Man mano che passa il tempo, ak cresce, tendendo a g; nel frattempo
a⊥ decresce, tendendo a 0; anche la velocità aumenta in modulo con una legge
complicata. Invece, in coordinate cartesiane, le componenti dell’accelerazione sono
tutte costanti, e anche l’evoluzione delle velocità è più semplice. La descrizione
del moto per componenti cartesiane è decisamente più semplice che scomponendo
lungo le direzioni tangente e ortogonale alla traiettoria. Anche questa idea è stata
un’altra delle innovazioni che dobbiamo a Galileo.
6.7
Moto circolare intorno ad un asse
Consideriamo un punto materiale che ruota intorno ad un asse û con velocità
angolare istantanea ω, come indicato in Fig. 6.6.
~ da un’origine O scelta sull’asse di rotazione.
Misuriamo la posizione r
~ e û, il raggio di curvatura del moto è
Essendo θ l’angolo fra r
r⊥ = r sin θ
e pertanto la velocità (scalare) del moto è:
v = ω r⊥ = ω r sin θ
CAPITOLO 6. CINEMATICA
—
r⊥
M.FANTI 84
v
r
ω
θ
O
Figura 6.6: Moto circolare
~ deve avere
Sempre dalla Fig. 6.6 si deduce che la velocità vettoriale v
~ e û. Queste considerazioni
direzione ortogonale al piano che contiene r
suggerscono di definire il tutto attraverso una relazione vettoriale.
Anzitutto, definiamo il vettore velocità angolare come
~ = ω û
ω
(6.23)
Ora è facile verificare che la relazione
~ =ω
~ ×r
~
v
(6.24)
soddisfa tutti i requisiti: basti pensare alle proprietà del prodotto vettoriale
descritte in Sezione 5.4. Direzione e verso sono ovviamente corretti. Inoltre,
se in un tempo dt il punto percorre un angolo ω dt, il suo spostamento lineare
è pari a ds = r⊥ ω dt = |~
r | sin θ ω dt, da cui si ricava che l’Eq. (6.24) è corretta
anche in modulo.
L’accelerazione in generale è:
~a = ω
~ ×v
~+
~
∂ω
~
×r
∂t
(6.25)
che nel caso di velocità angolare costante si riduce a:
~a = ω
~ ×v
~
(~
ω costante)
(6.26)
Capitolo 7
La legge di inerzia
7.1
La legge di inerzia
La prima legge della dinamica, o legge di inerzia, stabilisce il moto di un
oggetto nel caso ideale che esso non subisca influenze esterne.
Un oggetto, che non sia soggetto ad azioni esterne, non subisce
accelerazione:
~a = 0
La definizione di accelerazione, Eq. (6.12), ~a =
d~
v (t)
ci dice che
dt
d~
v
=0
dt
oppure, per componenti cartesiane,
dvy (t)
dvz (t)
dvx (t)
=0 ;
=0 ;
=0
dt
dt
dt
~ non cambia nel tempo: la velocità è una costante del
Quindi la velocità v
moto.
7.1.1
Commento fondamentale sulla legge di inerzia
La legge di inerzia ci insegna che il moto rettilineo uniforme è il moto
“naturale” di un oggetto: se osserviamo un oggetto dotato di moto con
velocità costante, non dobbiamo cercare cause esterne.
Viceversa, se in un moto riscontriamo delle accelerazioni, cioè delle
variazioni di velocità, allora devono essere all’opera degli agenti esterni che
le causano. Nel Capitolo 8 tratteremo questo caso.
85
CAPITOLO 7. LA LEGGE DI INERZIA
7.2
—
M.FANTI 86
Il moto rettilineo uniforme
La legge oraria si ottiene integrando la velocità nel tempo (vd Eq. (6.9)
oppure Eq. (6.10)):
Z t
Z t
0
0
~ (t ) = r
~ (t0 ) + v
~
~ (t) = r
~ (t0 ) +
dt0
dt v
r
t0
t0
~ costante,
(essendo v
può essere fattorizzato al di fuori dell’integrale).
Z t
dt0 = (t − t0 ), pertanto la legge oraria del moto è
Ovviamente
t0
semplicemente data da:
~ (t) = r
~0 + (t − t0 ) · v
~
r
(moto rettilineo uniforme)
(7.1)
oppure in coordinate cartesiane:
x(t) = x0 + (t − t0 ) · vx
y(t) = y0 + (t − t0 ) · vy
z(t) = z0 + (t − t0 ) · vz
(moto rettilineo uniforme)
(7.2)
La rappresentazione grafica della legge oraria del moto rettilineo uniforme,
per le tre componenti cartesiane, appare come nella Fig. 7.1.
Le Eq. (7.2) sono equazioni parametriche di una retta: infatti per valori
arbitrari di ∆t, i rapporti ∆x/∆y, ∆x/∆z, ∆z/∆y restano costanti, ovvero
la traiettoria non subisce variazioni di direzione.
Per riassumere, abbiamo trovato che un oggetto puntiforme non soggetto
ad accelerazioni si muove lungo una traiettoria rettilinea, con velocità v = |~
v|
costante — da cui il nome di moto rettilineo uniforme.
7.3
Come verificare la legge di inerzia?
Nel mondo reale è praticamente impossibile realizzare le condizioni di un
moto non soggetto ad azioni esterne: l’ambiente in cui viviamo è tutt’altro
che vuoto, ed ogni oggetto tende ad interagire in qualche modo con l’ambiente
che lo circonda:
• un oggetto, lanciato in aria, risente dell’azione del proprio peso: tende
a cadere;
CAPITOLO 7. LA LEGGE DI INERZIA
x
—
y
x(t)
z
y(t)
y0
t
z(t)
z0
x0
t0
M.FANTI 87
t0
t
t0
t
Figura 7.1: Grafici della legge oraria del moto rettilineo uniforme, per le tre
coordinate cartesiane x = x(t), y = y(t), z = z(t). La posizione (x0 , y0 , z0 )
è occupata all’istante t = t0 . La pendenza delle rette nei tre grafici dipende
dalle tre componenti cartesiane della velocità: i coefficienti angolari delle tre
rette sono rispettivamente vx , vy , vz . Nell’esempio di questa figura, vx e
vy sono positive — cioè x, y crescono nel tempo — e vx > vy . Invece vz è
negativa, cioè z decresce nel tempo.
• un oggetto, lanciato sulla superficie di un tavolo orizzontale, viene
frenato dallo sfregamento.
L’ambiente in cui viviamo non consente di verificare la legge di inerzia
direttamente, pertanto si arriva ad essa mediante un processo di astrazione.
Per esempio, si possono far slittare oggetti via via più lisci su superfici
orizzontali via via più levigate: ci accorgiamo che il moto è sempre frenato,
ma si approssima sempre più ad un moto uniforme; nel frattempo il
rumore dello strisciamento diventa sempre più debole, quindi deduciamo
che l’interazione con la superficie diventa sempre più debole.
Con
un’estrapolazione concettuale, affermiamo che se l’interazione con la
superficie scomparisse del tutto il moto sarebbe esattamente uniforme.
In effetti, si possono realizzare condizioni sperimentali molto simili a
quelle di oggetti esenti da forze esterne. L’esempio tipico è fare uso di
un piano orizzontale molto levigato, su cui vengono fatti scivolare oggetti
appoggiati su dischi di ghiaccio secco. Il ghiaccio secco si ottiene dall’anidride
carbonica (CO2 ) a temperature inferiori a −78◦ C. In condizioni di pressione
e temperatura ambiente passa dallo stato solido direttamente allo stato
gassoso, cioè “sublima”. Un disco di ghiaccio solido, a contatto con un
piano a temperatura ambiente, sublima, producendo un sottile strato di
CO2 gassoso su cui scivola praticamente senza venire frenato. Pertanto, un
oggetto di questo tipo si muove sul piano in condizioni praticamente libere.
CAPITOLO 7. LA LEGGE DI INERZIA
—
M.FANTI 88
z
t0t1
t2
t3
t4
t5
t6
t7
t8
t9
t10
x
Figura 7.2: Fotogrammi di un oggetto che cade a terra, scattati a intervalli
di tempo regolari. A sinistra: l’oggetto cade da fermo. A destra: l’oggetto
parte con una velocità orizzontale.
Osservandone il moto, si ottiene un’ottima approssimazione di moto rettilineo
uniforme.
Un’altra considerazione, più elaborata, ci può guidare allo stesso risultato.
Pensiamo dapprima ad un oggetto lasciato cadere da fermo e misuriamone il
moto. Orientiamo gli assi cartesiani in modo che ẑ sia orientato verso l’alto.
Si osserva che il moto è rettilineo e diretto verso il basso. Facendo diversi
fotogrammi a intervalli di tempo regolari, come in Fig. 7.2 a sinistra, si può
ricavare la sua legge oraria, che per componenti cartesiane, è:
x(t) = x0
y(t) = y0
1
z(t) = z0 − gt2
2
CAPITOLO 7. LA LEGGE DI INERZIA
—
M.FANTI 89
Calcolando velocità e accelerazione lungo la direzione ẑ, con l’ausilio delle
formule di derivazione descritte in Sezione 3.3 otteniamo:
vz =
dz
= −gt
dt
;
az =
dvz
= −g
dt
Il moto lungo ẑ non è uniforme: ha accelerazione −g ẑ. D’altra parte
sappiamo empiricamente che qualunque oggetto lasciato libero cade sotto
il suo peso. C’è un’azione esterna, indipendente dal singolo oggetto, che
agisce lungo la verticale — nella fattispecie, verso il basso. Niente di
nuovo. Viceversa, le prime due equazioni ci dicono che le coordinate x, y
non cambiano: non si osserva nessuno spostamento lungo le direzioni x̂, ŷ,
pertanto non abbiamo ragione di sospettare di azioni esterne all’oggetto che
agiscano in queste direzioni.
Misuriamo ora il moto di un oggetto lanciato in aria in direzione
~ 0 = v x̂. In questo
orizzontale con velocità iniziale v lungo la direzione x̂: v
caso il moto osservato ha una traiettoria parabolica, come in Fig. 7.2 a destra.
Anche qui, con fotogrammi presi a intervalli di tempo regolari, si ottiene la
legge oraria del moto, che per componenti è:
x(t) = x0 + vt
y(t) = y0
1
z(t) = z0 − gt2
2
Calcolando per componenti la velocità e l’accelerazione — sempre con le
formule della Sezione 3.3 — e omettendo la direzione ŷ per semplicità,
otteniamo:
dx
=v
dt
;
dz
= −gt
dt
;
vx =
vz =
dvx
=0
dt
dvz
az =
= −g
dt
ax =
Anche ora il moto lungo ẑ non è uniforme, ma questo non ci deve turbare:
sappiamo già che c’è un’azione esterna lungo la verticale. Il fatto che
l’accelerazione sia sempre la stessa (−g) è notevole: ci suggerisce che l’azione
esterna non dipende dalla diversa condizione iniziale. Invece, il moto lungo x̂
mantiene invariata la sua velocità iniziale; nello stesso tempo, come abbiamo
discusso prima, non abbiamo alcuna evidenza di azioni esterne che agiscano
lungo tale direzione.
Proviamo a riassumere per punti i passaggi logici. Analizzando il moto
di caduta di oggetti, sotto diverse condizioni iniziali (da fermi o con una
CAPITOLO 7. LA LEGGE DI INERZIA
—
M.FANTI 90
velocità iniziale orizzontale), ma nello stesso ambiente, abbiamo osservato le
seguenti cose:
• esiste un’azione esterna diretta lungo la verticale — più precisamente
verso il basso — che produce un’accelerazione costante g;
• tale azione influenza la componente del moto lungo la direzione ẑ,
in modo indipendente dalla condizione iniziale di quiete o di moto
orizzontale;
• la precedente osservazione ci suggerisce che i moti lungo direzioni
ortogonali (verticale e orizzontale in questo caso) possano essere trattati
indipendentemente;
• nel caso di caduta da fermo, non si innesca nessuna componente
orizzontale di moto; questo ci suggerisce che non esistano azioni esterne
in direzioni orizzontali;
• se il moto aveva una velocità iniziale in direzione orizzontale, essa viene
mantenuta invariata lungo la caduta;
• quindi, nelle direzioni orizzontali, non abbiamo azioni esterne e le
velocità non subiscono variazioni, ovvero non ci sono accelerazioni
orizzontali.
Incidentalmente, g = 9.8 m/s2 è l’accelerazione di gravità cui tutti i
corpi in prossimità della superficie terrestre sono soggetti — ne riparleremo
ampiamente in seguito.
Capitolo 8
Dinamica dei punti materiali
La cinematica descrive le caratteristiche del moto di un oggetto: legge oraria,
velocità accelerazione. La dinamica indaga le cause del moto.
Più precisamente, il moto di un oggetto è influenzato dalla sua
“interazione” con l’ambiente circostante. Tutto ciò che si trova nello spazio
intorno ad un oggetto può influire sul suo moto, o per contatto diretto, oppure
anche a distanza.
Abbiamo esempi ovvi di interazione per contatto, quando due oggetti si
urtano, o sfregano l’uno contro l’altro, o quando spingiamo o tiriamo un
oggetto. Tuttavia, esistono anche le interazioni a distanza — per esempio
quando una calamita attrae un oggetto di ferro, o quando un qualunque
oggetto cade al suolo: in questi casi il moto dell’oggetto subisce influenze
senza che nessun altro oggetto lo tocchi.
La dinamica mette in relazione il moto di un oggetto e le sue interazioni
con l’ambiente che lo circonda.
8.1
Le leggi della dinamica
Le leggi della dinamica sono il frutto di accurati studi sperimentali sul moto
degli oggetti e di un enorme sforzo intellettuale che ha fornito un metodo
matematico per darne una descrizione unificata. Dobbiamo la nostra attuale
conoscenza della dinamica a numerose menti del passato, fra cui è d’obbligo
ricordare Galileo Galilei e Isaac Newton.
Introdurre le leggi della dinamica con un approccio “storico” — cioè
ripercorrendo i ragionamenti ch hanno portato alla loro formulazione —
sarebbe di estremo interesse, ma richiederebbe uno sforzo notevole, che
esula da questo contesto. Scegliamo invece una esposizione assiomatica, per
ragioni di maggiore chiarezza. Con questo non vogliamo essere dogmatici:
91
CAPITOLO 8. DINAMICA DEI PUNTI MATERIALI —
M.FANTI 92
al contrario, l’insieme di questi assiomi deve la sua validità al fatto che
funzionano! Nel senso che consentono di spiegare i moti osservati, e anche di
predirli.
Enunciamo ora le leggi della dinamica:
[1] Legge di inerzia, o di Galileo.
Un oggetto puntiforme che non sia soggetto ad azioni esterne non
subisce accelerazioni: quindi resta in quiete (fermo) oppure si muove
di moto rettilineo uniforme.
[2] Forze e loro composizione.
Se un oggetto subisce una o più azioni esterne, queste sono descritte da
quantità vettoriali che si chiamano forze. Nel caso agiscano più azioni
esterne, ciascuna di esse è descrivibile da una forza F~i ; il loro effetto è
quello di produrre una forza risultante, pari alla somma vettoriale delle
singole forze:
X
F~ =
F~i
i
[3] Legge di Newton.
Ogni oggetto è dotato di una proprietà intrinseca che si chiama massa.
Un oggetto di massa m, sottoposto ad una forza F~ , oppure ad un
sistema di forze la cui risultante sia F~ , subisce un’accelerazione ~a,
data da
F~ = m~a
(8.1)
Riprenderemo bene questo concetto nella Sezione 8.3: per il momento
possiamo dire che la massa descrive l’inerzia di un oggetto, ovvero la
sua “resistenza” ad essere acceleato.
[4] Legge di azione-reazione.
Le forze agenti su un oggetto sono sempre dovute ad interazioni con
gli oggetti circostanti. A prescindere dalla natura di tali interazioni,
vale sempre una legge di reciprocità nelle interazioni fra oggetti: se
l’oggetto (1) produce sull’oggetto (2) una forza F~21 , allora l’oggetto
(2) necessariamente deve produrre una forza uguale e contraria F~12
sull’oggetto (1):
F~12 = −F~21
(8.2)
Inoltre, le forze F~12 , F~21 sono dirette lungo la linea retta che congiunge
gli oggetti (1) e (2). Questa legge è illustrata in Fig. 8.1.
CAPITOLO 8. DINAMICA DEI PUNTI MATERIALI —
M.FANTI 93
F12
(1)
(2)
F12(1)
(2) F
21
F21
(a)
(b)
F12
F12
F21 (2)
(1)
(1)
(2)
F21
(c)
(d)
Figura 8.1: Esempi di forze che soddisfano (a,b) o non soddisfano (c,d) il
principio di azione-reazione. L’oggetto (1) esercita una forza F~21 sull’oggetto
(2), il quale a sua volta produce una forza F~12 sull’oggetto (1). Nei casi (a,b)
le due forze sono uguali ed opposte: F~12 = −F~21 ; inoltre giacciono sulla retta
congiungente gli oggetti (1), (2). Quindi il principio di azione-reazione è
soddisfatto. In particolare, nel caso (a) si tratta di forze attrattive, mentre
nel caso (b) di forze repulsive. Nei casi (c,d) il principio di azione-reazione
non è soddisfatto: in (c), le forze giacciono sulla congiungente, ma non sono
uguali ed opposte (F~12 6= −F~21 ); in (d) le forze sono uguali ed opposte ma
non giacciono sulla congiungente.
8.1.1
Alcuni commenti
Questi “assiomi” meritano subito alcuni commenti.
Il primo assioma è la già citata legge di inerzia, introdotta nella
Sezione 7.1, e qui ripetuta per avere il quadro completo degli assiomi. Non
è semplicemente un caso particolare di F~ = m~a per F~ = 0. Esso infatti ci
dice che, in assenza di influenze esterne, gli stati di quiete e di moto rettilineo
uniforme sono altrettanto naturali per un oggetto. Non è necessario cercare
una causa esterna per giustificare che un oggetto, dotato di moto, continui a
mantenere la sua velocità inalterata.
Gli assiomi [2] e [3] servono a descrivere il moto di un oggetto, una volta
che siano note le azioni esterne — le forze F~i — e la sua massa m.
• Se conosciamo
la massa m di un oggetto e la forza F~ , o il sistema di
P
forze F~ = i F~i , agente su di esso, possiamo predire l’accelerazione ~a
CAPITOLO 8. DINAMICA DEI PUNTI MATERIALI —
M.FANTI 94
~
F~
d2 r
; quindi in linea di principio calcolare la
=
dt2
m
~ =r
~ (t) — riprenderemo questo discorso nella
legge oraria del moto r
Sezione 8.4.
cui è soggetto: ~a =
Viceversa:
• se conosciamo il sistema di forze F~i che agiscono su un oggetto e ne
misuriamo l’accelerazione ~a, possiamo dedurre la massa m;
• se conosciamo la massa m dell’oggetto e ne misuriamo
P l’accelerazione
~a, possiamo risalire alla risultante delle forze F~ = i F~i che agisono
su di esso.
Nessuno degli assiomi elencati qui ci dice come “predire” le forze F~i che
agiscono sul nostro oggetto. In effetti le forze hanno molte nature diverse:
forze elastiche, forze di attrito, forza di gravità, forze elettromagnetiche,
. . . Sarà compito di capitoli successivi descrivere le caratteristiche di ciascuna
di queste. In ogni caso, l’assioma [2] ci dice che la forza totale su un oggetto
è pari alla somma vettoriale delle varie forze, anche se queste sono di diverse
nature.
Inoltre, l’assioma [4], pur non entrando nel merito della natura delle
forze, fornisce un principio di reciprocità del tutto generale, che ci potrebbe
venire in aiuto, nel caso non fossimo in grado di calcolare la forza che (1)
produce su (2), ma sapessimo calcolare quella che (2) esercita su (1). Vedremo
poi (Sezione 8.6 e Sezione 8.7) che l’assioma [4] ha importanti conseguenze
rispetto all’esistenza di quantità conservate, ovvero costanti del moto.
8.2
Unità di misura
Nel Sistema Internazionale delle unità di misura (SI) la massa si misura in
chilogrammi, kg. Altre unità utili sono il grammo, g, e i suoi multipli e
sottomultipli:
tonnellata
quintale
chilogrammo
grammo
milligrammo
microgrammo
ton
q
kg
g
mg
µg
= 1000 kg
= 100 kg
= 10−3 kg
10−3 g = 10−6 kg
10−6 g = 10−9 kg
CAPITOLO 8. DINAMICA DEI PUNTI MATERIALI —
M.FANTI 95
Le forze nel SI si misurano in Newton, N. Il Newton è un’unità di misura
derivata, nel senso che si può esprimere attraverso le unità fondamentali di
lunghezza, tempo e massa: metri (m), secondi (s) e chilogrammi (kg). Si
definisce “Newton” la forza necessaria per imprimere una accelerazione di
1 m/s2 ad una massa di un chilogrammo.
N = kg m/s2
(8.3)
Un’altra unità di forza spesso usata è la dine, definita come la forza
necessaria per imprimere una accelerazione di 1 cm/s2 ad una massa di un
grammo
dine = g cm/s2
(8.4)
Essendo 1 kg = 1000 g e 1 m = 100 cm, si ricava subito la conversione fra
Newton e dine:
1 N = 105 dine
(8.5)
8.3
Forze e masse: commenti sulla legge di
Newton
La legge di Newton
F~ = m~a
introduce due concetti strettamente legati fra loro: quello di forza e quello
di massa.
• Una forza è una qualunque causa che produca una accelerazione su un
oggetto, vale a dire che ne modifichi la velocità (oppure che lo metta
in moto se era fermo).
• La massa quantifica la “resistenza” di un oggetto a modificare la propria
velocità.
La massa è legata ai concetti di “inerzia” e di “quantità di materia”.
Facciamo un esempio. Supponiamo di avere un carrello della spesa vuoto:
possiamo metterlo in moto con una leggera spinta, e anche fargli cambiare
direzione senza grande sforzo. In entrambi i casi stiamo alterando il suo stato
di moto: stiamo impartendo ad esso una accelerazione. Quando il carrello è
pieno diventa più faticoso metterlo in moto, e anche fargli cambiare direzione!
Ovviamente il carrello ha più inerzia, e ovviamente contiene più materia di
prima (c’è in più tutta la spesa fatta). In fisica, diciamo che il carrello
pieno ha una massa maggiore di quando era vuoto. Diciamo anche che per
CAPITOLO 8. DINAMICA DEI PUNTI MATERIALI —
M.FANTI 96
imprimere la stessa accelerazione al carrello pieno occorre più forza che per
il carrello vuoto.
Esercizio 8.1.
Un carrello della spesa, vuoto, ha una massa di 15 kg.
Spingendolo con una forza costante per un tempo di 1 s, da fermo arriva a muoversi
con una velocità di 2 m/s. Quanto vale la forza applicata? Alla fine della spesa,
nel carrello sono stati caricati 30 kg di prodotti. Applicando la stessa forza per
1 s, che velocità raggiunge? Per quanto tempo è necessario spingerlo, con la stessa
forza, affinché raggiunga la velocità di 2 m/s?
Risposta. Il carrello vuoto ha massa m0 = 15 kg: applicando una forza F
F
subisce un’accelerazione costante a0 =
, pertanto dopo un tempo ∆t0 = 1 s
m0
raggiunge una velocità v0 = a0 ∆t0 . La forza impressa deve essere F = m0 a =
v0
2 m/s
m0
= 15 kg ·
= 30 N.
∆t0
1s
A fine spesa, la massa del carrello è diventata m1 = 45 kg. Applicandovi
F
30 N
= 0.667 m/s2 .
la stessa forza F , si ottiene un’accelerazione a1 =
=
m1
45 kg
Spingendolo per ∆t0 = 1 s raggiunge una velocità a1 ∆t0 = 0.667 m/s. Per fargli
2 m/s
raggiungere la velocità di 2 m/s occorre spingerlo per un tempo
= 3 s.
0.667 m/s2
Esercizio 8.2. Un’automobile di massa m0 = 1.2 ton, con a bordo il conducente
di massa m1 = 80 kg, deve frenare improvvisamente: il suo impianto frenante
produce la massima decelerazione possibile, pari a a0 = 5 m/s2 . Se la stessa
automobile, con lo stesso conducente, dovesse anche trasportare altre 4 persone
della stessa massa e un carico di 400 kg, quale sarebbe la massima decelerazione
che può produrre?
Risposta. La massa dell’automobile in unità S.I. è m0 = 1200 kg. La forza
massima impressa dai freni deve essere F0 = (m0 + m1 )a0 = (1280 kg)(5 m/s2 ) =
6400 N. L’automobile con 5 persone e il carico ha una massa totale m0 =
(1200 + 5 · 80 + 400) kg = 2000 kg. L’impianto frenante è sempre lo stesso, dunque
F0
6400 N
F0 non è cambiata. La decelerazione sarà dunque a0 = 0 =
= 3.2 m/s2 .
m
2000 kg
8.4
Integrazione del moto
Abbiamo imparato che il moto di un oggetto è condizionato da azioni esterne
attraverso le forze. Il problema fondamentale della dinamica è ricavare la
~=r
~ (t) a partire dalla conoscenza delle forze agenti.
legge oraria del moto r
La legge di Newton (Eq. (8.1)) ci consente di ricavare l’accelerazione, una
volta che sia nota la risultante delle forze F~ :
d~
v
F~
= ~a =
dt
m
CAPITOLO 8. DINAMICA DEI PUNTI MATERIALI —
M.FANTI 97
Idealmente dunque si può ricavare la legge oraria della velocità, integrando
~a nel tempo:
Z
t
dt0 ~a(t0 )
t0
Z
1 t 0~ 0
~ (t0 ) +
= v
dt F (t )
m t0
~ (t) = v
~ (t0 ) +
v
(8.6)
In alcuni casi questa integrazione è possibile in forma analitica, sfruttando
le regole riassunte nella Sezione 3.3. Questa possibilità dipende dalla natura
della forza F~ agente. In molti casi l’integrazione analitica non è possibile,
pertanto si risolve il problema al computer, con metodi numerici.
Dall’Eq. (8.6) osserviamo subito una cosa: per conoscere la velocità
all’istante t, oltre a conoscere la forza F~ applicata in tutto l’intervallo di
~ (t0 ).
tempo [t0 ; t], occorre conoscere anche la velocità iniziale v
Per ricavare la legge oraria della posizione si procede in modo analogo,
~ nel tempo:
integrando v
Z
t
~ (t0 )
dt0 v
t0
#
Z 0
Z t "
1 t 00 ~ 00
0
~ (t0 ) +
~ (t0 ) +
dt F (t )
= r
dt v
m t0
t0
Z
Z 0
1 t 0 t 00 ~ 00
~ (t0 ) + v
~ (t0 )(t − t0 ) +
= r
dt
dt F (t )
m t0
t0
~ (t) = r
~ (t0 ) +
r
(8.7)
Anche qui vale il commento sulla possibilità di integrazione analitica: se
essa non è possibile, si può ricorrere a metodi numerici al computer.
~ (t), occorre “integrare due
Osserviamo che per calcolare la legge oraria r
volte” nel tempo: la prima integrazione consente di calcolare la velocità, la
quale a sua volta deve essere integrata per calcolare la posizione.
Inoltre, per risolvere il problema è necessario conoscere due condizioni
iniziali: la posizione e la velocità all’istante t0 .
8.5
Commenti sulla legge di azione-reazione
Le forze che agiscono su di un oggetto sono dovute ad interazioni con altri
oggetti circostanti. Queste interazioni possono avvenire sotto diverse forme.
Per esempio per urti, oppure a distanza. In ogni caso, vale un principio
CAPITOLO 8. DINAMICA DEI PUNTI MATERIALI —
M.FANTI 98
generale: se l’oggetto (1) produce una forza F~21 sull’oggetto (2), allora anche
l’oggetto (2) è in grado di produrre una forza F~12 sull’oggetto (1). E c’è di
più: queste due forze sono “uguali e contrarie”:
F~21 = −F~12
Almeno qualitativamente, l’idea di azione-reazione fa parte della nostra
esperienza quotidiana. Se una persona, seduta in ufficio alla sua scrivania
su una sedia con le rotelle, spinge le braccia in avanti contro il bordo del
tavolo, ottiene come effetto che per reazione “il tavolo la spinge indietro”.
Una nave a motore, con le sue eliche spinge l’acqua all’indietro, e come effetto
riceve una spinta in avanti. In modo del tutto simile, un aereo a reazione
raccoglie l’aria dall’apertura frontale dei suoi turbo-reattori, la comprime e la
scalda, facendola poi uscire all’indietro ad altissima velocità: come risultato
viene spinto fortemente in avanti e riesce a volare. Il nome stesso, “aereo a
reazione”, deriva proprio dal principio che stiamo descrivendo.
8.6
Quantità di moto
La legge di Newton ci porta a definire una quantità meccanica di importanza
fondamentale: la quantità di moto, anche chiamata impulso. Un oggetto di
~ possiede una quantità di moto
massa m e dotato di velocità v
~ = m~
p
v
(8.8)
La legge di Newton, F~ = m~a, si può scrivere in modo equivalente come:
d~
p
= F~
dt
(8.9)
Consideriamo due oggetti (1) e (2) che si scambiano forze F~1 e F~2 ciascuno
sull’altro, e supponiamo che non esistano altre forze esterne. Le due forze
soddisfano il principio di azione-reazione: F~1 = −F~2 , pertanto anche le
variazioni delle due quantità di moto sono tali che:
d~
p1
d~
p2
=−
dt
dt
Senza conoscere i dettagli delle forze scambiate fra (1) e (2), possiamo
comunque affermare che in un tempo ∆t le due quantità di moto sono variate
CAPITOLO 8. DINAMICA DEI PUNTI MATERIALI —
Z
t0 +∆t
dt
ciascuna di ∆~
pi =
t0
M.FANTI 99
d~
pi
(con i = 1, 2 per indicare ciascuno dei due
dt
oggetti), e quindi
∆~
p1 = −∆~
p2
(8.10)
ovvero la variazione di quantità di moto di un oggetto è compensata dalla
variazione di quantità di moto dell’altro oggetto. In altre parole, la quantità
~1 + p
~ 2 dei due oggetti non cambia, ma durante l’interazione
di moto totale p
viene scambiata da un oggetto all’altro.
Ripetiamo che questa circostanza si verifica solo se le uniche forze in
gioco sono quelle scambiate fra i due oggetti.
Riassumendo: quando due oggetti sono sottoposti solo alle reciproche forze
— cioè senza ulteriori forze esterne — la loro quantità di moto totale si
conserva, ovvero è una costante del moto.
Nella dimostrazione abbiamo usato la legge di azione-reazione, in
particolare il fatto che le forze agenti su (1) e su (2) siano uguali in modulo ed
opposte. Se ciò non è vero, per esempio come in Fig. 8.1(c), la conservazione
della quantità di moto viene violata.
Esercizio 8.3. Un pattinatore maleducato, di massa m1 = 80 kg, si muove sul
ghiaccio alla velocità di v1 = 3 m/s, quando improvvisamente dà uno spintone ad
un altro pattinatore di massa m2 = 65 kg, inizialmente fermo. In seguito alla
spinta questo prende a muoversi con velocità di v2 = 2 m/s nella stessa direzione.
Qual è la velocità del pattinatore maleducato dopo la spinta?
Risposta. Non sappiamo con quale forza il primo pattinatore ha spinto il
secondo, però possiamo usare la conservazione della quantità di moto. Per il
secondo pattinatore, la quantità di moto è cambiata di ∆p2 = m2 v2 = 130 kg m/s.
Pertanto per il primo deve essere cambiata di ∆p1 = −∆p2 . Chiamando v10 la sua
velocità dopo la spinta, deve quindi essere ∆p1 = m1 (v10 − v1 ) = −∆p2 , ovvero
130 kg m/s
∆p2
= 3 m/s −
= 1.375 m/s.
v10 = v1 −
m1
80 kg
Esercizio 8.4. Un soldato in addestramento spara un colpo di fucile contro
un sacco di sabbia. Il proiettile, con massa m = 25 g, viene sparato ad una
velocità di 250 m/s. Se il soldato ha massa M = 85 kg, con quale velocità rincula
all’indietro? Il sacco di sabbia ha una massa m0 = 30 kg: che velocità acquista
quando il proiettile si conficca in esso?
Risposta.
Prima dello sparo, la quantità di moto del sistema
soldato+proiettile è zero. Pertanto, tale deve essere anche dopo. La quantità di
moto del proiettile è p = mv = (0.025 kg) · (250 m/s = 6.25 kg · m/s. La stessa
CAPITOLO 8. DINAMICA DEI PUNTI MATERIALI —
M.FANTI 100
quantità di moto (all’indietro) viene quindi ceduta al soldato, che quindi rincula
p
6.25 kg · m/s
alla velocità
=
= 0.0735 m/s.
M
85 kg
Prima dell’impatto, il sacco è fermo, dunque non ha quantità di moto. Dopo
l’impatto, la quantità di moto del sistema sacco+proiettile deve essere la stessa
posseduta dal proiettile prima dell’impatto; inoltre il proiettile si conficca nel
sacco, quindi i due oggetti si muovono insieme. Pertanto, detta v 0 la velocità
del sacco dopo l’impatto, deve essere (m + m0 )v 0 = p. Risolvendo, si trova
6.25 kg · m/s
p
=
= 0.208 m/s.
v0 =
0
m+m
30.025 kg
Esercizio 8.5. Un oggetto di massa m = 10 kg cade al suolo da un’altezza
h = 1 m. Cosı̀ come l’oggetto è attratto dalla gravità terrestre, anche la Terra
è attrata dall’oggetto, con una forza di pari intensità ma di direzione opposta.
Quindi, che ci crediate o no, anche la Terra “cade verso l’alto”. Con quale velocità
la Terra “cade” al momento della collisione con l’oggetto? Occorre sapere che la
massa della Terra è M⊕ = 6 · 1024 km.
Risposta. L’oggetto si muove di moto uniformemente accelerato verso il basso,
secondo la legge ∆s = 21 gt2 . Quando colpisce il terreno, il tempo intercorso è tale
s
p
1 2
2h
che gt = h, ovvero t =
= 0.452 s. La sua velocità è v = gt = 2gh =
2
g
4.43 m/s. Quindi la sua quantità di moto è p = mv = 44.3 kg m/s. Anche la
Terra deve avere acquistato una uguale quantità di moto, verso l’alto: M⊕ v⊕ = p,
p
= 7.38 · 10−24 m/s.
pertanto la velocità acquistata dalla Terra è v⊕ =
M⊕
Ovviamente si tratta di una velocità estremamente piccola ed assolutamente non
rilevabile. Per questo il buon senso ci dice che “la Terra non cade verso l’alto, ma
se ne sta lı̀ dov’è”.
8.7
Momento angolare, momento torcente
~ e dotato di quantità di
Per un oggetto puntiforme situato nella posizione r
~
~ , si definisce il momento angolare L come:
moto p
~ =r
~×p
~
L
(spesso chiamato anche “momento della quantità di moto”).
Vediamo come questa quantità dinamica varia nel tempo:
~
dL
d
d~
r
d~
p
~) =
~+r
~×
=
(~
r×p
×p
dt
dt
dt
dt
~ ×p
~+r
~ × F~
= v
(8.11)
CAPITOLO 8. DINAMICA DEI PUNTI MATERIALI —
M.FANTI 101
Nell’ultima espressione, il primo termine è identicamente nullo: infatti si
~ ). Invece, il
tratta del prodotto vettoriale di due vettori paralleli (~
v e p
secondo termine viene definito come momento torcente (o anche “momento
meccanico”, o ancora “momento della forza”):
~ × F~
τ~ = r
(8.12)
Quindi l’equazione che regola l’evoluzione del momento angolare diventa:
~
dL
= τ~
dt
(8.13)
Consideriamo due oggetti (1) e (2) che si scambiano forze F~1 e F~2 ciascuno
sull’altro, e supponiamo che non esistano altre forze esterne. Le due forze
soddisfano il principio di azione-reazione: F~1 = −F~2 , inoltre entrambe sono
dirette lungo la direzione congiungente i due oggetti. Le variazioni dei
momenti angolari dei due oggetti sono:
~i
dL
~i × F~i
=r
dt
(con i = 1, 2 per indicare ciascuno dei due oggetti), pertanto la variazione
~1 +L
~ 2 è:
del momento angolare totale L
~1 +L
~ 2)
d(L
~1 × F~1 + r
~2 × F~2 = (~
~2 ) × F~1 = 0
=r
r1 − r
dt
Nella seconda uguaglianza abbiamo introdotto F~1 = −F~2 . La terza
uguaglianza si ottiene sfruttando la proprietà che F~1 è parallela alla direzione
~2 ): pertanto abbiamo
congiungente i due oggetti, che è lungo il vettore (~
r1 − r
un prodotto vettoriale fra due vettori paralleli, che è sempre nullo.
Riassumendo: quando due oggetti sono sottoposti solo alle reciproche forze
— cioè senza ulteriori forze esterne — il loro momento angolare totale si
conserva, ovvero è una costante del moto.
Nella dimostrazione abbiamo usato la legge di azione-reazione, in
particolare il fatto che la forza fra (1) e (2) sia parallela alla linea congiungente
i due oggetti. Se ciò non è vero, per esempio come in Fig. 8.1(d), la
conservazione del momento angolare viene violata.
Capitolo 9
Forze costanti
In diversi problemi, il moto è caratterizzato da una forza costante F~ (che può
anche essere la risultante di più forze) applicata ad un oggetto puntiforme di
massa m.
In questi casi, la legge di Newton F~ = m~a dice che il moto è caratterizzato
da un’accelerazione costante:
~a =
F~
m
costante
(9.1)
e si chiama per questo moto uniformemente accelerato.
È una situazione notevole: una delle poche in cui l’integrazione del moto il
calcolo della traiettoria possono essere risolti in maniere analitica — e anche
semplice! La trattazione è svolta in Sezione 9.2.
Prima di affrontarla, elenchiamo alcuni esempi di forze costanti —
ricordando che in molti altri casi non lo sono affatto!
9.1
Esempi di forze costanti
Vediamo alcuni esempi notevoli:
~ uniforme, cioè
• un oggetto di massa m in un campo gravitazionale g
uguale dappertutto nello spazio: pertanto l’oggetto, nel suo moto, pur
~, e
cambiando la sua posizione, risente sempre dello stesso valore di g
pertanto la forza agente è costante:
F~g = m~g
(~g uniforme)
(è il caso di qualunque oggetto che si muova in prossimità della
superficie terrestre)
102
CAPITOLO 9. FORZE COSTANTI
—
M.FANTI 103
~ uniforme:
• un oggetto con carica elettrica q in un campo elettrico E
anche qui la forza agente sull’oggetto è costante:
~
F~e = q E
~ uniforme)
(E
• un oggetto di massa m e carica elettrica q in un campo gravitazionale
~ uniforme: la forza agente su di
~ uniforme e in un campo elettrico E
g
esso è la somma vettoriale delle due forze gravitazionale ed elettrica:
~
F~ = m~g + q E
~ uniformi)
(~g , E
• un oggetto che si muove in presenza di un attrito radente contro una
superficie solida: la forza di attrito è costante e diretta sempre nel verso
opposto del movimento:
~
v
F~attr = −Fattr
|~
v|
~
v
è un versore che serve per definire la direzione e
|~
v|
l’orientamento della forza); in questo caso la forza opera finché l’oggetto
è in moto.
(il termine
9.1.1
Contro-esempi: forze non costanti
La ituazione di forze costanti non è la normalità, anzi! Vediamo qui alcuni
degli innumerevoli contro-esempi.
Un oggetto di carica elettrica q che si muove in un campo magnetico
~ subisce una forza F~ = q~
~ Nonostante il campo B
~ sia
uniforme B
v × B.
~,
uniforme, la forza non è costante: infatti è sempre perpendicolare a v
quindi produce un’accelerazione centripeta, che modifica la direzione della
velocità, e pertanto anche la direzione della forza cambia. Il moto in un
campo magnetico verrà ridiscusso nella Sezione 20.3.1.
Le forze di attrito viscoso si oppongono al moto e aumentano con la
~ , vd Sezione 10.4.2).
velocità (F~attr = − (η + η 0 |~
v |) v
Le forze elastiche si oppongono allo spostamento da una posizione di
~eq ), vd Capitolo 17).
equilibrio (F~el = −k(~
r−r
9.2
Il moto uniformemente accelerato
L’Eq. (6.12):
~a =
d~
v (t)
dt
CAPITOLO 9. FORZE COSTANTI
—
M.FANTI 104
oppure le Eq. (6.13):
ax =
dvx (t)
dt
;
ay =
dvy (t)
dt
;
az =
dvz (t)
dt
ci dicono come cambia la velocità nel tempo. Dalle formule della Sezione 3.3
sappiamo
che l’integrale di una funzione costante è una funzione lineare,
Z
a dt = at, pertanto:
~ (t) = v
~ 0 + (t − t0 ) · ~a
v
(moto uniformemente accelerato)
(9.2)
oppure in coordinate cartesiane:
vx (t) = vx,0 + (t − t0 ) · ax
vy (t) = vy,0 + (t − t0 ) · ay
vz (t) = vz,0 + (t − t0 ) · az
(9.3)
La legge oraria del moto si ottiene integrando
le Eq. (9.2), oppure Eq. (9.3).
Z
1
Usando le regole della Sezione 3.3:
dt (v + at) = vt + at2 . Si ricava che
2
la legge oraria è:
1
~ (t) = r
~0 + (t − t0 ) · v
~ 0 + ~a · (t − t0 )2
r
2
(moto uniformemente accelerato)
(9.4)
oppure in coordinate cartesiane:
1
x(t) = x0 + (t − t0 ) · vx,0 + ax · (t − t0 )2
2
1
y(t) = y0 + (t − t0 ) · vy,0 + ay · (t − t0 )2
2
1
z(t) = z0 + (t − t0 ) · vz,0 + az · (t − t0 )2
2
(9.5)
La rappresentazione grafica della legge oraria del moto uniformemente
accelerato, per la componente cartesiana z, appare come nella Fig. 9.1.
CAPITOLO 9. FORZE COSTANTI
—
az
z
vz
az (t)
M.FANTI 105
vz (t)
z(t)
t0
t0
t
t0
t
vz,0
t
z0
Figura 9.1:
Grafici dell’evoluzione temporale dell’accelerazione (a
sinistra), della velocità (al centro) e della posizione (a destra) di un moto
uniformemente accelerato. In figura è rappresentata la coordinata z; grafici
analoghi valgono per x, y. L’accelerazione in questo esempio è positiva:
quindi la velocità cresce linearmente nel tempo, e la posizione ha un
andamento parabolico con la concavità verso l’alto.
9.2.1
Traiettoria
Per capire la forma della traiettoria, conviene orientare gli assi cartesiani in
modo che ẑ sia parallelo a ~a, in tal caso:
ax = ay = 0
;
az ≡ a
e le componenti della velocità lungo x, y sono costanti: vx = vx,0 e vy = vy,0 .
~ 0 , cosicché:
Possiamo inoltre scegliere ŷ ortogonale alla velocità iniziale v
vy = 0
La legge oraria in coordinate cartesiane diventa quindi:
x(t) = x0 + t · vx,0
y(t) = y0
1
z(t) = z0 + t · vz,0 + a · t2
2
(per semplicità di calcolo abbiamo assunto t0 = 0). Il grafico della legge
oraria, per le tre coordinate, è illustrato in Fig. 9.2.
Abbiamo quindi due casi:
~ 0 è nulla, oppure parallela all’accelerazione ~a. In
• La velocità iniziale v
tal caso, anche vx,0 = 0; l’oggetto si muove solo lungo ẑ, cioè è un moto
CAPITOLO 9. FORZE COSTANTI
x
—
y
x(t)
M.FANTI 106
z
y(t)
y0
z(t)
x0
t0
t
t0
t
t0
t
z0
Figura 9.2: Grafici della legge oraria del moto uniformemente accelerato,
per le tre coordinate cartesiane x = x(t), y = y(t), z = z(t). L’orientamento
degli assi cartesiani è stato scelto in modo che l’accelerazione ~a sia lungo
~ 0 non abbia componente lungo l’asse y. In
l’asse z e che la velocità iniziale v
questo modo il grafico della legge oraria x(t) è una retta (non c’è accelerazione
lungo x) mentre quello di y(t) è una retta orizzontale (non c’è velocità lungo
y). Invece, in grafico della legge oraria z(t) è una parabola: nell’esempio,
az > 0, cosicché la concavità è verso l’alto — per az < 0 la concavità sarebbe
stata verso il basso. La posizione (x0 , y0 , z0 ) è occupata all’istante t = t0 .
rettilineo: si chiama moto rettilineo uniformemente accelerato. Esso è
caratterizzato da:
a
z(t) = z0 + vz,0 t + t2
2
vz (t) = vz,0 + at
~ 0 ha una componente ortogonale all’accelerazione
• La velocità iniziale v
x − x0
~a. Allora vx = vx,0 6= 0; si può ricavare t =
dalla 1a equazione
vx,0
e sostituirlo nella 3a , ottenendo:
2
a x − x0
x − x0
z = z0 + vz,0
+
vx,0
2
vx,0
Allora z ha una dipendenza quadratica da x, quindi la traiettoria è una
parabola con l’asse parallelo a ẑ. La concavità della parabola è rivolta
verso +ẑ o −ẑ a seconda che sia a > 0 o a < 0.
CAPITOLO 9. FORZE COSTANTI
9.3
Esercizi
sul
moto
uniformemente accelerato
—
M.FANTI 107
rettilineo
Ricordiamo le leggi orarie del moto uniformemente accelerato, nel caso
particolare che esso avvenga lungo una linea retta. Possiamo scegliere il
sistema di coordinate Oxyz in modo che l’asse x sia orientato lungo la
direzione del moto: le Eq. (9.5), Eq. (9.3) si riducono a:
1
x(t) = x0 + v0 · (t − t0 ) + a · (t − t0 )2
2
v(t) = v0 + a · (t − t0 )
(9.6)
(lungo y, z non c’è moto).
Esercizio 9.1. Una pallina rotola giù per una rotaia inclinata, partendo da
ferma. Per scendere di una lunghezza ` = 1.5 m impiega un tempo t = 5 s.
Assumendo che il moto sia uniformemente accelerato, calcolare l’accelerazione a.
Che velocità ha raggiunto?
Risposta. Poiché la pallina parte da ferma, la relazione fra la distanza `
1
percorsa e il tempo impiegato è ` = at2 . Da qui si può ricavare l’accelerazione
2
2`
3m
2
a = 2 =
= 0.12 m/s . La velocità finale pertanto è v = at =
t
25 s2
2
0.12 m/s · 5 s = 0.6 m/s.
Esercizio 9.2. Consideriamo sempre la pallina e la rotaia dell’esempio
precedente. Lungo la discesa, a distanze intermedie x1 = 50 cm, x2 = 1 m,
sono poste delle fotocellule collegate a cronometri, che rilevano tempi di passaggio
di t1 = 2.89 s e t2 = 4.08 s rispettivamente. Queste osservazioni confermano che
il moto sia effettivamente “uniformememnte accelerato”?
Risposta. Con l’accelerazione calcolata, ci si aspetta che le distanze percorse
1
dopo un tempo tk siano xk = at2k ; dunque, al tempo t1 = 2.89 s risulterebbe
2
x1 = 0.501 m, e a t2 = 4.08 s risulterebbe x2 = 0.999 m. Queste previsioni sono
in accordo entro 1 mm con le posizioni dei cronometri.
Commento. Un accordo entro 1 mm è accettabile? Con quale precisione
è nota la posizione delle fotocellule? Qual è la precisione dei cronometri? Per
concludere se l’osservazione è in accordo con l’ipotesi di moto uniformemente
accelerato bisognerebbe investigare questi quesiti. Purtroppo ciò va al di là dello
scopo di questo testo. . .
Esercizio 9.3. Un carrello scende lungo una rotaia con moto uniformemente
accelerato. Partendo da fermo, impiega t = 10 s per percorrere ` = 5 m. Lo stesso
carrello, se lanciato dal basso con una velocità v0 , risale la rotaia fino a fermarsi
dopo una distanza `0 = 3 m. Calcolare v0 .
CAPITOLO 9. FORZE COSTANTI
—
M.FANTI 108
Risposta.
Come negli esempi precedenti, si può calcolare l’accelerazione
2`
del carrello in discesa: a = 2 = 0.1 m/s2 . Per calcolare v0 occorre
t
sapere con che legge si muove il carrello in salita. Si tratta di un modo
“uniformemente decelerato”, ovvero uniformemente accelerato con accelerazione
negativa. L’accelerazione è caratteristica del sistema carrello-rotaia, pertanto
sarà la stessa che aveva in discesa, a parte il segno. Possiamo scrivere quindi
a
x(t) = v0 t − t2 , esplicitando il segno − davanti ad a. Il tempo t0 a cui il carrello
2
si arresta è dato dalla legge della velocità, v(t) = v0 − at, in cui si ponga v(t0 ) = 0,
v0
quindi: t0 =
. Introducendo t0 nella legge di x(t), e imponendo x(t0 ) = `0 ,
a
a
v2
v2
v2
si ottiene `0 = v0 t0 − (t0 )2 = 0 − 0 = 0 . Risolvendo per v0 , abbiamo
2
a
2a
2a
p
√
v0 = 2a`0 = 0.6 m2 /s2 = 0.775 m/s.
Esercizio 9.4. Riprendiamo l’esempio già proposto in Sezione 8.3, aggiungendo
una domanda finale — quella più interessante per ogni automobilista.
Un’automobile di massa m0 = 1.2 ton, con a bordo il conducente di massa
m1 = 80 kg, deve frenare improvvisamente: il suo impianto frenante produce la
massima decelerazione possibile, pari a a0 = 5 m/s2 . Se la stessa automobile,
con lo stesso conducente, dovesse anche trasportare altre 4 persone della stessa
massa e un carico di 400 kg, quale sarebbe la massima decelerazione che può
produrre? Se inizialmente l’auto viaggiava alla velocità di 130 km/h, calcolare
lo spazio necessario ad arrestarsi, in entrambi i casi.
Risposta. La massa dell’automobile in unità S.I. è m0 = 1200 kg. La forza
massima impressa dai freni deve essere F0 = (m0 + m1 )a0 = (1280 kg)(5 m/s2 ) =
6400 N. L’automobile con 5 persone e il carico ha una massa totale m0 =
(1200 + 5 · 80 + 400) kg = 2000 kg. L’impianto frenante è sempre lo stesso, dunque
F0
6400 N
F0 non è cambiata. La decelerazione sarà dunque a0 = 0 =
= 3.20 m/s2 .
m
2000 kg
Per rispondere all’ultima domanda, calcoliamo anzitutto il tempo di frenata:
è il tempo t necessario per passare dalla velocità iniziale, v0 = 130 km/h =
36.11 m/s, a velocità nulla. La legge oraria per la velocità è v = v0 − at, da
v0
a
v2
. In tale tempo, lo spazio percorso è ∆x = v0 t − t2 = 0 . Quando
cui t =
a
2
2a
l’auto ha su solo il guidatore a = 5 m/s2 , dunque ∆x = 130 m. Quando l’auto ha
4 passeggeri e il carico, a = 3.2 m/s2 , dunque ∆x = 204 m.
CAPITOLO 9. FORZE COSTANTI
9.4
—
Esercizi sui moti in
gravitazionale uniforme
M.FANTI 109
un
campo
In prossimità della superficie terrestre, la forza gravitazionale su un oggetto
di massa m è uniforme e diretta verso il basso:
F~ = −mg ẑ
(g = 9.81 m/s2 )
Se la gravità è l’unica forza agente, allora l’accelerazione è indipendente dalla
massa:
~a =
F~
= −g ẑ
m
Esercizio 9.5. Un oggetto di massa m cade da fermo nel campo gravitazionale
terrestre. Che distanza ha percorso, e che velocità ha raggiunto, dopo 1 secondo?
Risposta. Si fa semplicemente uso delle componenti-z delle Eq. (9.5) e
Eq. (9.3):
g
∆z = − t2 = −4.9 m
2
;
vz = −gt = −9.81 m/s
Esercizio 9.6. Un oggetto di massa m cade da fermo dall’altezza h = 1 m
nel campo gravitazionale terrestre. Quanto tempo dura la sua caduta? Con che
velocità raggiunge il suolo? Come cambierebbero queste risposte, se l’altezza della
caduta fosse h0 = 2 m?
Risposta. Si tratta di un moto uniformemente accelerato con ~a = −g ẑ.
L’oggetto parte da fermo, pertanto le componenti della velocità lungo le direzioni
orizzontali x, y sono e restano nulle. Il moto è quindi rettilineo lungo la verticale.
Scegliamo l’origine (z = 0) al livello del suolo, cosicché il valore iniziale di z è
z0 = h. La legge oraria è data dalla componente lungo z delle Eq. (9.5):
g
z = h − t2
2
g
L’oggetto tocca terra quando z = 0, dunque deve essere 0 = h − t2 : risolvendo
2
per t si trova
s
2h
t=
= 0.45 s
g
La velocità con cui l’oggetto cade è data dalla componente lungo z delle Eq. (9.3):
all’istante in cui tocca il suolo abbiamo:
p
vz = −gt = − 2gh = −4.43 m/s
Il segno − di vz significa che la velocità ha direzione opposta al’orientamento
dell’asse z.
CAPITOLO 9. FORZE COSTANTI
—
M.FANTI 110
che la velocità finale, sono proporzionali a
√ Sia il tempo impiegato a cadere,
0 = 2 m, entrambi aumenterebbero di un fattore
h.
Se
la
caduta
fosse
stata
da
h
√
2, diventando rispettivamente 0.64 s e 6.26 m/s
Esercizio 9.7. Un oggetto di massa m cade dall’altezza h = 1 m nel campo
gravitazionale terrestre. La sua velocità iniziale è orizzontale e vale vx0 = 2 m/s.
Quanto tempo dura la sua caduta? Quanto è spostato il punto in cui cade, rispetto
alla posizione in cui cadrebbe partendo da fermo?
Risposta. Si tratta sempre di un moto uniformemente accelerato con ~a =
−g ẑ, però ora la velocità iniziale ha una componente ortogonale alla accelerazione.
Quindi il moto non è più rettilineo — anzi sappiamo che è parabolico. Il problema
va affrontato in due dimensioni. Scegliamo l’origine degli assi cartesiani al livello
del suolo, nel punto dove cadrebbe l’oggetto se partisse da fermo. La legge oraria
è data dalle componenti x, z delle Eq. (9.5):
g
z = h − t2
2
;
x = vx0 t
Il tempo impiegato a cadere si ricava sempre dalla legge oraria di z, imponendo
z = 0, cioè esattamente come nell’esempio precedente: il risultato è ovviamente
identico:
s
2h
t=
= 0.45 s
g
ovvero il tempo impiegato a cadere non cambia se il moto aveva una componente
iniziale di velocità orizzontale. Lo spostamento del punto di caduta rispetto alla
caduta verticale è:
s
2h
= 0.90 m
∆x = vx0 t = vx0
g
Esercizio 9.8. Un oggetto di massa m viene sparato dall’altezza h = 1 m
nel campo gravitazionale terrestre. La sua velocità iniziale è obliqua, con una
componente verticale vz0 = 3 m/s e una orizzontale vx0 = 2 m/s. Quanto tempo
dura la sua caduta? Quanto è spostato il punto in cui cade, rispetto alla posizione
in cui cadrebbe partendo da fermo?
Risposta. Anche qui si tratta di un moto uniformemente accelerato con
~a = −g ẑ, con traiettoria parabolica. Il problema si affronta in due dimensioni.
Scegliamo l’origine degli assi cartesiani al livello del suolo, nel punto dove cadrebbe
l’oggetto se partisse da fermo. La legge oraria è data dalle componenti x, z delle
Eq. (9.5):
g
z = h + vz0 t − t2
2
;
x = vx0 t
La durata del volo si ricava sempre imponendo z = 0 e risolvendo per t, però questa
volta c’è una componente iniziale della velocità verticale che cambia il risultato.
CAPITOLO 9. FORZE COSTANTI
—
M.FANTI 111
L’equazione da risolvere è gt2 − 2vz0 t − 2h = 0. Si tratta di una equazione di 2◦
grado nell’incognita t, che ha due soluzioni:
p
2 + 2gh
vz0 ± vz0
t± =
g
p
2 + 2gh
p
vz0 − vz0
2 + 2gh > v ),
La soluzione t− =
è negativa (essendo
vz0
z0
g
pertanto si riferirebbe ad un tempo anteriore alle condizioni iniziali, cioè a
prima che il proiettile venisse sparato. Per questa ragione viene scartata, e ci
concentriamo su quella positiva:
p
2 + 2gh
vz0 + vz0
t+ =
= 0.85 s
g
Lo spostamento del punto di caduta rispetto alla caduta verticale è:
∆x = vx0 t+ = 1.70 m
Osservazione. Notiamo che il tempo di caduta è maggiore rispetto ai casi
precedenti, nonostante l’altezza iniziale sia la stessa: h = 1 m. La ragione sta nel
fatto che il proiettile era dotato di una velocità iniziale con una componente vz0
diretta verso l’alto. Pertanto prima di iniziare a cadere, è effettivamente salito.
Per sapere di quanto è salito, dobbiamo trovare l’istante in cui la sua velocità
verticale si è annullata. La legge oraria di tale velocità è
vz = vz0 − gt
vz0
da cui si ricava che abbiamo vz = 0 all’istante t =
= 0.31 s. A tale istante il
g
g
proiettile ha raggiunto un’altezza h + vz0 t − t2 = 1.46 m.
2
Esercizio 9.9. Un oggetto di massa m viene sparato dall’altezza del suolo nel
campo gravitazionale terrestre. La sua velocità iniziale v0 = 5 m/s è obliqua,
e forma un angolo α con l’orizzontale. Calcolare qual è l’angolo ottimale per
massimizzare la “gittata”, ovvero la distanza a cui il proiettile tocca il suolo.
Quindi calcolare la gittata.
Risposta. Scegliamo il sistema di riferimento cartesiano con l’origine nel
punto dove viene sparato il proiettile. Il problema è bidimensionale. Le componenti
della velocità iniziale sono
vx0 = v0 cos α
;
vz0 = v0 sin α
La legge oraria è:
g
z = vz0 t − t2
2
;
x = vx0 t
CAPITOLO 9. FORZE COSTANTI
—
M.FANTI 112
g L’istante in cui il proiettile impatta il suolo è dato da z = 0, quindi t vz0 − t =
2
0. Questa equazione è di 2◦ grado e ha due soluzioni. Una è t = 0, che coincide
con l’istante in cui il proiettile viene sparato: non è quella che cerchiamo. L’altra
è
2vz0
2v0
t=
=
sin α
g
g
La gittata quindi vale
∆x = vx0 t = v0 cos α ·
v2
2v0
sin α = 0 · 2 sin α cos α
g
g
E qui occorre conoscere la trigonometria. . . in particolare, la relazione
2 sin α cos α = sin(2α). Per massimizzare ∆x, occorre massimizzare sin(2α).
Questo si ottiene per 2α = π/2, ovvero per α = π/4 (45 gradi). In tal caso la
gittata è
v2
∆x = 0 = 2.55 m
g
Esercizio 9.10. I delfini tursiopi sono veloci nuotatori: possono lanciarsi a
grandi velocità ed emergere dall’acqua con salti alti anche 10 metri. Anche i
pinguini non se la cavano male: battendo le ali sott’acqua possono acquisire una
buona velocità e balzare fuori dall’acqua fino a 3 metri di altezza, cosa che permette
loro di salire rapidamente sulle rive ghiacciate. Con quale velocità devono nuotare
questi animali, per raggiungere queste altezze?
Risposta. Chiamiamo v0 la velocità che l’animale riesce a tenere in acqua.
Appena esce dall’acqua non può più spingersi, quindi è soggetto solo alla forza di
gravità che lo tira verso il basso con accelerazione g. Dall’istante t = 0 in cui esce
g
dall’acqua, il suo moto è governato dalle leggi orarie v = v0 − gt e h = v0 t − t2 .
2
La massima altezza è raggiunta quando la velocità si annulla: 0 = v0 − gt, quindi
v0
g
tmax =
. L’altezza raggiunta a questo istante è hmax = v0 tmax − t2max =
g
2
2
2
p
v
v0 g v0
v0 −
= 0 . Ovvero, v0 = 2ghmax .
g
2 g
2g
p
Per il delfino, hmax = 10 m, quindi v0 =
2(9.806 m/s2 )(10 m) =
14.00 m/s ' 50 km/h.
p
Per il pinguino, hmax = 3 m, quindi v0 = 2(9.806 m/s2 )(3 m) = 7.67 m/s '
28 km/h.
Capitolo 10
Forze di contatto
Le forze di contatto sono quelle che sperimentiamo quando due oggetti
entrano in contatto fra loro.
Nell’introduzione abbiamo già detto che la materia (solida, liquida, o
gassosa che sia) è sostanzialmente “vuota”, nel senso che le masse occupano
una frazione di volume minuscola (Sezione 1.1). Inoltre tutte le interazioni,
a livello elementare fra atomi e molecole, sono di natura elettromagnetica,
dunque sono “interazioni a distanza” (Sezione 1.3.2).
Quindi, a livello fondamentale le interazioni di contatto non esistono.
Esse sono in effetti la manifestazione macroscopica di una combinazione
di interazioni fondamentali. Tuttavia, descriverle in questo modo sarebbe
estremamente complicato e poco utile ai fini pratici, pertanto è preferibile
una trattazione più empirica. Il limite di validità di questa trattazione è dato
dalle dimensioni dei sistemi fisici descritti: devono essere formati da molti
atomi, affinché gli effetti locali di ciascuno di essi si diluiscano con quelli degli
atomi circostanti.
10.1
Reazioni vincolari
Le reazioni vincolari entrano in funzione quando un oggetto rigido entra in
contatto con un altro oggetto rigido. Poiché entrambi sono indeformabili,
non possono compenetrarsi.
Al livello atomico e molecolare abbiamo già discusso nella Sezione 1.3.2
che cosa succede: gli atomi hanno interazioni elettriche che li tengono
“in posizione”, ovvero non possono schiacciarsi gli uni contro gli altri, nè
allontanarsi gli uni dagli altri. Per una descrizione un po’ più approfondita
rimandiamo alla Sezione 17.8.
113
CAPITOLO 10. FORZE DI CONTATTO
—
M.FANTI 114
Al livello macroscopico, diamo una descrizione più empirica, e diciamo
che gli oggetti solidi, quando entrano in contatto diretto, manifestano forze
repulsive, perpendicolari alla superficie di contatto, che impediscono la
compenetrazione. Per esempio, se appoggiamo un oggetto di massa m su
un tavolo orizzontale, esso sta fermo. Quindi la risultante delle forze agenti
su di esso deve essere nulla. Sappiamo che su di esso agisce la forza di gravità,
diretta verso il basso: F~g = −mg ẑ. Deve quindi esistere un’altra forza che
la contrasti esattamente, in modo che la risultante sia nulla. Questa è la
reazione vincolare opposta dal tavolo: F~vinc = −F~g .
Un altro esempio: un treno viaggia con velocità v su una rotaia, che
descrive un tratto curvo ad arco di cerchio, con raggio di curvatura ρ.
Dalle nozioni di cinematica, Sezione 6.5.2, sappiamo che un cambiamento di
direzione implica la presenza di un’accelerazione centripeta. Precisamente,
v2
, quindi deve esistere una forza centripeta
l’Eq. (6.19) ci dice che a⊥ =
ρ
v2
F⊥ = m . In questo caso è la reazione vincolare della rotaia a produrre
ρ
tale forza: essa costringe il treno a seguire un percorso curvo, pertanto deve
imprimere su di esso una forza!
Anche un oggetto attaccato ad una corda e trattenuto da essa subisce
una forza vincolare. In tal caso essa è costituita dalla tensione della corda.
10.1.1
Esercizi sulle reazioni vincolari
Consideriamo qui alcuni esempi di forze vincolari.
Esercizio 10.1. Una locomotiva di massa m = 80 ton percorre una curva di
raggio ρ = 100 m alla velocità v = 75 km/h. Calcolare l’accelerazione centripeta e
la reazione vincolare della rotaia.
Risposta. Anzitutto convertiamo le misure in unità del S.I.: m = 80 ton =
v2
8 · 104 kg; v = 75 km/h = 20.83 m/s. L’accelerazione centripeta è a⊥ =
=
ρ
−2
4.339 ms . La reazione vincolare è Fvinc = ma⊥ = 3.47 · 105 N.
Esercizio 10.2. Un’automobile di massa m = 1.5 ton percorre a velocità v una
curva il cui raggio di curvatura è ρ = 50 m. La forza centripeta massima che i
pneumatici possono imprimere alla vettura è F⊥max = 8 · 103 N. Qual è la velocità
massima v max che l’automobile può sostenere senza sbandare?
Risposta: la forza centripeta impressa dai pneumatici
r è F⊥ =
r in curva
2
F⊥max ρ
v
F⊥ ρ
m . Ovviamente deve essere F⊥ < F⊥max , quindi v =
<
=
m
m
sρ
8 · 103 N · 50 m
= 16.33 m/s = 58.79 km/h.
1500 kg
CAPITOLO 10. FORZE DI CONTATTO
—
M.FANTI 115
Esercizio 10.3. Una massa m = 100 g si muove con moto circolare, legata
ad una corda di lunghezza ` = 50 cm, che può sopportare una tensione massima
Tmax = 100 N. Qual è la velocità angolare massima che la massa può avere, senza
rompere la corda? Quanto impiegherebbe a fare un giro? Quanti giri farebbe in un
secondo?
Risposta. La massa è dotata di un’accelerazione centripeta a⊥ = ω 2 `,
quindi è soggetta ad una forza centripeta F⊥ = ma⊥ = mω 2 ` che è data dalla
2
tnsione T della corda:
s quindi T = mω `. La velocità angolare massima è quindi
r
Tmax
100 N
ωmax =
=
= 44.72 rad/s. Il tempo necessario per
m`
(0.1 kg)(0.5 m)
2π rad
fare un giro sarebbe T =
= 0.1405 s. Quindi in un secondo farebbe
ω
1s
n=
= 7.12 giri.
T
Esercizio 10.4. Una massa m = 5 kg è appesa verticalmente ad una corda.
Calcolare la tensione della corda.
Risposta. La forza di gravità cui la massa è soggetta è Fg = mg =
5 kg · 9.81 ms−2 = 49.05 N. Essa deve essere contrastata dalla tensione del
filo, che quindi deve avere la stessa intensità, e ovviamente direzione opposta.
Pertanto la tensione vale T = Fg = 49.05 N.
Esercizio 10.5.
Tre corde solo collegate insieme come in Fig. 10.1(a), e
sottoposte a tensioni T1 , T2 , T3 mediante delle masse appese m1 = 130 g, m2 =
120 g, m3 = 50 g. Calcolare gli angoli θ12 , θ23 , θ13 con cui si dispongono le tre
corde.
Risposta. Intanto le tensioni devono equilibrare le forze-peso delle masse,
quindi si possono calcolare come T1 = m1 g, T2 = m2 g, T3 = m3 g. Le tre corde si
disporranno in modo da realizzare l’equilibrio, quindi con notazione vettoriale deve
essere T~1 + T~2 + T~3 = 0. Ricaviamo T~3 = −(T~1 + T~2 ): quindi il suo modulo quadro
deve essere:
T32 = T~3 · T~3 = (T~1 + T~2 ) · (T~1 + T~2 )
= T~1 · T~1 + T~2 · T~2 + 2T~1 · T~2 = T 2 + T 2 + 2T1 T2 cos θ12
1
cos θ12 =
2
T32 − (T12 + T22 )
2T1 T2
Nel nostro caso, cos θ12 =
m23 − (m21 + m22 )
= −0.923, ovvero θ12 = 2.747 rad =
2m1 m2
157.4◦ .
Procediamo in modo del tutto analogo per gli altri angoli. Troviamo quindi
m21 − (m22 + m22 )
cos θ23 =
= 0, cioè θ23 = 1.571 rad = 90◦ , e cos θ13 =
2m2 m3
m22 − (m21 + m23 )
= −0.3846, cioè θ13 = 1.966 rad = 112.6◦ .
2m1 m3
CAPITOLO 10. FORZE DI CONTATTO
θ12 θ
23
—
T
T
T
θ13
m2
M.FANTI 116
m3
m
T
m1
m2
m1
(a)
(b)
Figura 10.1:
(c)
Esercizi sulle tensioni.
Commento. Una piccola verifica, per controllare di non aver commesso sbagli:
θ12 + θ23 + θ23 = 360◦ . Bene, era quello che ci aspettavamo!
Esercizio 10.6. Una massa m = 5 kg è appesa a due corde, che formano con la
verticale angoli di 80◦ — come in Fig. 10.1(b). Calcolare la tensione delle corde.
Risposta. La forza di gravità, Fg = mg = 5 kg · 9.81 ms−2 = 49.05 N, deve
essere bilanciata dalla risultante delle due tensioni. Ciascuna di queste può essere
scomposta nelle sue componenti orizzontale, Th = T sin θ e verticale, Tv = T cos θ,
essendo θ = 80◦ = 1.396 rad. Le componenti orizzontali si bilanciano fra loro,
mentre quelle verticali si sommano e contrastano Fg ; dunque Fg = 2Tv = 2T cos θ.
Fg
mg
Risolvendo, T =
=
= 141.0 N.
2 cos θ
2 cos θ
Osservazione. Nonostante le corde siano due, la loro tensione per tenere
su la massa di 5 kg è maggiore di quella trovata nel caso di una sola corda. La
ragione sta nel grande angolo formato dalle corde con la verticale: buona parte
delle tensioni sono disposte orizzontalmente e si contrastano fra loro, mentre le
componenti verticali (che servono a sorreggere la massa) sono in proporzione
piccole: Tv = T cos θ. In effetti, quando è possibile, è meglio realizzare una
configurazione con un angolo θ più piccolo: questo è quello che fanno gli scalatori
quando devono attrezzare una sosta in parete. Viceversa, in altri casi, un grande
angolo θ è d’obbligo: si pensi per esempio ad un lampione stradale, sospeso in
mezzo da due cavi ancorati a due edifici sui lati opposti della strada: in tal caso
i cavi sono quasi orizzontali, cioè θ è molto vicino a 90◦ e la tensione è molto
grande. In tal caso il cavo e i suoi ancoraggi devono essere molto robusti.
Esercizio 10.7. Su una carrucola è disposta una corda, ai cui estremi sono
ancorate due masse m1 = 5 kg e m2 = 6 kg, il tutto nel campo gravitazionale alla
superficie terrestre — vedi Fig. 10.1(c). Calcolare l’accelerazione delle masse e la
tensione della corda.
Risposta. La tensione della corda T è uguale agli estremi, e in entrambi i
casi è diretta verso l’alto, per contrastare la forza di gravità. Su m1 agisce una
CAPITOLO 10. FORZE DI CONTATTO
—
M.FANTI 117
Fvinc
m
Fg = mg sin θ
Fg
T m
T
Fg = mg sin θ
m’
θ Fg
m’g
θ
Figura 10.2:
θ Fg
θ
Moto su un piano inclinato
forza risultante F1 = m1 g − T . Abbiamo scelto come orienatmento convenzionale
quello verso il basso, per m1 : quindi per m2 sceglieremo quello verso l’alto, visto
che se m1 scende, m2 sale, e viceversa. Quindi la forza su m2 è F2 = T − m2 g.
La forza risultante sul sistema è F = F1 + F2 = (m1 − m2 )g =
F
−1 kg · 9.81 ms−2 = −9.81 N. L’accelerazione del sistema è a =
=
m1 + m2
m1 − m2
g
= −0.892 ms−2 . È negativa: dunque m1 accelera verso l’alto (come da
m1 + m2
aspettarsi, visto che è più leggera di m2 ).
Per la tensione della corda: la massa m1 è soggetta ad una forza totale F1
e subisce accelerazione a, quindi deve essere m1 a = F1 = m1 g − T , ovvero
T = m1 (g − a) = 5 kg · (9.81 ms−2 ) − (−0.892 ms−2 ) = 53.51 N. Lo stesso
risultato si poteva ottenere anche ragionando sull’accelerazione di m2 .
10.2
Moti su un piano inclinato
Consideriamo un piano molto levigato, inclinato di un angolo θ rispetto
all’orizzontale, e appoggiato su di esso un oggetto di massa m libero di
scivolare sul piano — come in Fig. 10.2 (a sinistra). Le forze in gioco sono
due: la forza di gravità, diretta verso il basso, e la reazione del vincolo,
ortogonale al piano. Scomponiamo la forza di gravità lungo due direzioni:
parallela e ortogonale al piano:
Fgk = mg sin θ
;
Fg⊥ = mg cos θ
La reazione vincolare Fvinc deve essere esattamente opposta a Fg⊥
— altrimenti l’oggetto non starebbe sul piano, ma si solleverebbe o
sprofonderebbe in esso. Quindi la forza risultante è parallela al piano e vale
esattamente Fgk = mg sin θ.
Questo risultato si può verificare sperimentalmente, collegando l’oggetto
sul piano ad un altro, di massa m0 , mediante un filo. Se l’oggetto di massa m0
CAPITOLO 10. FORZE DI CONTATTO
—
M.FANTI 118
è appeso in verticale, su di esso tutta la forza di gravità Fg0 = m0 g è efficace.
Analizziamo il sistema cosı̀ costituito, aiutandoci con la Fig. 10.2 (a destra).
Come orientamento positivo scegliamo quello della forza Fgk agente su m.
La forza totale F agente su m è costituita da Fgk e dalla tensione T del filo,
che ha direzione opposta:
F = mg sin θ − T
La forza totale F 0 agente su m0 è costituita da Fg0 (con segno − perché tira
in direzione opposta rispetto a Fgk ) e dalla tensione del filo T (questa volta
con segno + perché tira nella direzione di Fgk )
F 0 = −m0 g + T
La forza totale sul sistema è
Fsist = F + F 0 = mg sin θ − m0 g
l’accelerazione del sistema è data da
asist =
F + F0
m sin θ − m0
=
g
m + m0
m + m0
Scegliendo opportunamente le masse m, m0 e/o l’angolo θ si può realizzare
una condizione di equilibrio, se m0 = m sin θ.
Esercizio 10.8. Una rotaia inclinata di lunghezza ` = 1.5 m forma un angolo
θ = 20◦ con l’orizzontale. Un carrellino scende lungo la rotaia, partendo da fermo
dall’estremo più alto: quanto tempo impiega per arrivare all’estremo più basso?
Risposta. Sul carrello agiscono la forza di gravità, Fg = mg, e la reazione
del vincolo Fvinc = mg cos θ. La prima può essere scomposta nelle direzioni
perpendicolare e parallela alla rotaia: Fg⊥ = mg cos θ e Fgk = mg sin θ. Fvinc
e Fg⊥ si annullano, resta dunque Fgk , diretta lungo la rotaia e verso il basso.
Fgk
Pertanto l’accelerazione del carrello è a =
= g sin θ, indipendente dalla massa
m
m del carrello. Numericamente, a = 3.36 ms−2 . L’accelerazione è costante,
quindi la legge oraria del moto è x = 12 at2 ; la distanza da percorrere è `, quindi
r
2`
t=
= 0.946 s.
a
Esercizio 10.9. Un’automobile di massa m0 = 1.5 ton con a bordo il conducente
di massa m1 = 80 kg può frenare con una decelerazione massima a0 = 4 m/s2 ,
se la strada è in piano. Qual è la forza sviluppata dall’impianto frenante? Qual
è la decelerazione se la strada è in discesa, con una pendenza di 10◦ ? Qual è
CAPITOLO 10. FORZE DI CONTATTO
—
M.FANTI 119
la massima pendenza possibile della strada, oltre la quale l’auto non riesce più a
frenare?
Risposta. La massa totale di auto+guidatore è m0 = m0 + m1 = 1580 kg. La
forza dell’impianto frenante è F 0 = m0 a0 = 6320 N.
Quando l’auto è in discesa, su di essa agisce anche la componente della
gravità parallela alla strada: Fgk = m0 g sin θ, quindi l’accelerazione dell’auto è
m0 g sin θ − F 0
a=
. Si è scelto come positivo l’orientamento in discesa, cosicché
m0
0
F ha segno negativo. Svilupando i calcoli, a = g sin θ−a0 = (9.806 m/s2 ) sin(10◦ )−
4 m/s2 = −2.297 m/s2 . È negativa, quindi l’auto effettivamente decelera, ma molto
meno che in piano.
Quando l’auto non riesce più a frenare, vuol dire che l’accelerazione diventa
m0 g sin θ − F 0
positiva, cioè a =
> 0. Questo accade se m0 g sin θ > F 0 , cioè
0
m
a0
F0
= 0.4079, ovvero θ > 0.42 rad = 24◦ .
sin θ > 0 =
mg
g
10.3
Moto di un pendolo ideale
Un pendolo ideale è costituito da un filo inestensibile di lunghezza ` e di
massa trascurabile, fissato ad un ancoraggio immobile ad un estremo, e
con una massa puntiforme m appesa all’altro estremo, il tutto in un campo
gravitazionale g uniforme. La posizione del pendolo può essere descritta con
l’angolo θ che il filo forma con la verticale, come in Fig. 10.3.
Sappiamo per esperienza che un pendolo in posizione verticale sta fermo,
mentre se viene spostato prende ad oscillare avanti e indietro intorno alla
posizione verticale. In questa sezione studiamo il meccanismo fisico che ne
governa il moto.
Sulla massa m agiscono la forza di gravità, Fg = mg, diretta verticalmente
verso il basso, e la tensione del filo, che contrasta la componente della forza di
gravità parallela al filo stesso, Fk = mg cos θ. Pertanto, l’unica forza agente
è la componente di Fg perpendicolare al filo: F⊥ = mg sin θ. Questa produce
F⊥
= g sin θ.
sulla massa un’accelerazione a⊥ =
m
Studiamo l’equazione del moto della quantità x = ` sin θ, che definisce la
distanza del pendolo dall’asse verticale. La sua accelerazione è la proiezione
orizzontale di a⊥ , cioè ax = a⊥ cos θ. Quindi abbiamo un’equazione del moto:
d2 x
x
≡
a
=
g
sin
θ
cos
θ
=
g
cos θ
x
dt2
`
(da perfezionare)
dove le quantità sono per ora espresse tutte in modulo. Un’osservazione
più attenta ci mostra che ax è sempre in verso opposto allo spostamento x,
CAPITOLO 10. FORZE DI CONTATTO
—
M.FANTI 120
l θ
m
x
F = mg sin θ
F = mg cos θ
θ
Fg = mg
Figura 10.3:
Schema del pendolo.
pertanto una formulazione più corretta è:
g
d2 x
= − cos θ · x
(10.1)
2
dt
`
L’equazione
non ammette una soluzione analitica, poiché cos θ =
r
x 2
1−
.
`
Tuttavia, se ci limitiamo ad oscillazioni piccole, cioè con |x| `, possiamo
assumere cos θ ' 1: con questa approssimazione, l’equazione del moto
diventa
g
d2 x
= − ·x
(10.2)
2
dt
`
Questa è un’equazione del moto molto peculiare, che ricorre spesso in molti
problemi fisici, quando si abbia a che fare con moti di oscillazione.
L’accelerazione è direttamente proporzionale allo spostamento, e orientata
al suo opposto.
Ora, noi conosciamo funzioni che possiedono proprio la proprietà che ci
serve: una derivata seconda proporzionale alla funzione stessa, ma di segno
opposto. Si tratta delle funzioni trigonometriche seno e coseno. In effetti:
d
[cos(ωt + φ)] = −ω sin(ωt + φ)
dt
d2
d
[cos(ωt + φ)] = −ω [sin(ωt + φ)] = −ω 2 cos(ωt + φ)
2
dt
dt
CAPITOLO 10. FORZE DI CONTATTO
—
M.FANTI 121
pertanto la forma più generale della soluzione del moto, per l’Eq. (10.2), è:
x(t) = X cos(ωt + φ)
(10.3)
purché si assuma:
r
g
(10.4)
`
La quantità ω si chiama frequenza angolare (o anche pulsazione) e si misura in
“radianti al secondo” (rad/s). Essa dipende dai parametri fisici del sistema:
la lunghezza del pendolo ` e l’accelerazione di gravità g.
ω =
Il moto del pendolo è periodico: questo significa che esiste una durata
temporale T — il periodo — tale che per ciascun istante t valgono:
x(t + T ) = x(t)
v(t + T ) = v(t)
dx(t)
v(t) ≡
dt
In effetti le funzioni trigonometriche sono periodiche di 2π nel loro
argomento: cos(α) = cos(α + 2π). Nel nostro caso, ciò si scrive
x(t) = X cos(ωt + φ) = X cos(ωt + φ + 2π)
2π
= X cos ω t +
+φ
ω
2π
= x t+
ω
ovvero il periodo è:
2π
T =
= 2π
ω
s
`
g
(10.5)
Questa è la famosa legge del pendolo, per piccole oscillazioni. Il periodo
del pendolo è determinato unicamente dalla sua lunghezza `, oltre che
dall’accelerazione di gravità g. Questa legge permette di costruire un moto
periodico con grande precisione: per questa ragione, per molto tempo gli
orologi più precisi sono stati appunto quelli a pendolo.
Mentre ω (e quindi T ) sono collegati a grandezze fisiche del sistema
(g, `), i parametri X, φ invece sono determinati dalle condizioni iniziali:
x0 = x(t = 0) e v0 = v(t = 0). In effetti, dall’Eq. (10.3) e dalla sua derivata,
per t = 0 si trova:
x0 = x(t = 0) = X cos(φ)
v0 = v(t = 0) = −Xω sin(φ)
CAPITOLO 10. FORZE DI CONTATTO
—
M.FANTI 122
Moltiplicando la prima condizione per ω si ottiene ωx0 = ωX cos(φ);
facendone il quadrato, e sommandovi il quadrato della seconda condizione
(ricordando l’identità trigonometrica cos2 + sin2 = 1) si ottiene (ωx0 )2 +
v02 = ω 2 X 2 , ovvero
r
v 2
0
2
X =
x0 +
ω
10.4
Forze di attrito
Esistono in natura numerose forze, che vengono genericamente chiamate
attriti, che tendono a rallentare il moto di oggetti. Tipicamente si tratta
di situazioni in cui un oggetto macroscopico, nel suo moto, sfrega contro
il mezzo circostante in cui si muove, per esempio viaggiando nell’aria o
nell’acqua, oppure strisciando su una superficie. In tutti questi casi, gli atomi
dell’oggetto interagiscono — cioè scambiano forze e trasferiscono quantità di
moto — con gli atomi del mezzo circostante. L’effetto netto di queste forze
è di rallentare l’oggetto in movimento.
Una descrizione microscopica degli attriti è in generale molto complessa.
Tuttavia alcuni casi standard sono descritti bene da leggi empiriche.
10.4.1
Attrito radente
L’attrito radente si ha quando un oggetto in movimento striscia su una
superficie solida. Sperimentalmente, la forza di attrito radente ha le seguenti
proprietà:
• è sempre diretta in direzione opposta allo spostamento;
• è indipendente dalla velocità;
• dipende dalla natura dei materiali a contatto (l’oggetto che striscia e
la superficie su cui striscia) attraverso un coefficiente di attrito αattr ;
• è direttamente proporzionale alla reazione vincolare Fvinc prodotta
dalla superficie sull’oggetto strisciante.
Queste caratteristiche possono essere espresse da una formula vettoriale:
d~
r
F~attr = −αattr Fvinc
dr
(10.6)
d~
r
dove d~
r è lo spostamento elementare, cosicché il versore
è usato per
dr
indicare la direzione dello spostamento.
CAPITOLO 10. FORZE DI CONTATTO
—
M.FANTI 123
Calcoliamo il moto di un oggetto di massa m, nel campo gravitazionale
terrestre g, che scivola con attrito giù per un piano inclinato ad un angolo
θ rispetto all’orizzontale — la situazione è sempre quella della Fig. 10.2 (a
sinistra).
Le forze in gioco sono 3:
• la forza gravitazionale Fg = mg diretta verso il basso: essa ha
due componenti: quella parallela al piano, Fgk = mg sin θ, e quella
perpendicolare ad esso Fg⊥ = mg cos θ;
• la reazione vincolare opposta dal piano: essa è ortogonale al piano
e contrasta la componente ortogonale della forza gravitazionale: in
modulo, Fvinc = Fg⊥ = mg cos θ;
• la forza di attrito: parallela al piano, in direzione opposta al moto, e
di modulo Fattr = αattr Fvinc
La risultante delle forze è diretta parallelamente al piano e vale
Ftot = Fgk − Fattr = mg (sin θ − αattr cos θ)
(dove si è scelto convenzionalmente il verso positivo come orientato verso il
basso lungo la direzione di massima pendenza del piano).
Si tratta dunque di un moto uniformemente accelerato.
Ovviamente questo risultato ha senso solo se Ftot ≥ 0 — l’attrito contrasta
la forza di gravità, ma non può prevalere su di essa, altrimenti “tirerebbe su”
la massa lungo il piano. Il caso limite, Ftot = 0, si ha quando la forza di attrito
è tale da contrastare esattamente la componente della forza di gravità lungo il
piano. Variando l’inclinazione θ del piano fino a trovare questa condizione, si
può fare una misura del coefficiente di attrito: chiamando θlim l’angolo-limite
che realizza questa condizione si trova:
αattr =
sin θlim
= tan θlim
cos θlim
Esercizio 10.10. Un oggetto viene appoggiato su un piano, inizialmente
orizzontale; questo viene poi inclinato lentamente, fino al punto che l’oggetto
comincia a scivolare. L’angolo-limite, sotto il quale non c’è scivolamento, è θlim =
35◦ . Quanto vale il coefficiente di attrito? Qual è l’accelerazione dell’oggetto, se il
piano viene inclinato ad un angolo θ = 45◦ ? Quanto varrebbe questa accelerazione,
in assenza di attrito?
Risposta. Il coefficiente di attrito si ricava da αattr = tan θlim =
Ftot
tan(35◦ ) = 0.7. L’accelerazione è a =
= g (sin θ − αattr cos θ) =
m
CAPITOLO 10. FORZE DI CONTATTO
—
M.FANTI 124
π
π
(9.806 m/s2 ) sin − 0.7 cos
= 2.080 m/s2 . In assenza di attrito (αattr = 0)
4
4
π
si otterrebbe a = g sin θ = (9.806 m/s2 ) sin = 6.934 m/s2 .
4
Commento. Si noti che tutti questi risultati sono indipendenti dalla massa
dell’oggetto. La ragione è che sia la forza di gravità che la forza di attrito radente
sono proporzionali a m.
10.4.2
Attrito viscoso
L’attrito viscoso si manifesta quando un oggetto si muove attraverso un
mezzo fluido (cioè liquido o gassoso). In tal caso, empiricamente si osserva
che il mezzo oppone una forza frenante al moto, in direzione opposta a questo,
~ di movimento:
che cresce con la velocità v
~
F~attr = − (η + η 0 |~
v |) v
(10.7)
I coefficienti η, η 0 si chiamano coefficienti di attrito viscoso e dipendono dalla
forma dell’oggetto che si muove, dalla sua superficie e dal mezzo fluido in cui
si muove. In generale, per un oggetto affusolato è dominante la componente
−η~
v ; la componente ∝ v 2 entra in gioco per oggetti poco aerodinamici, o in
moto veloce.
L’andamento con la velocità degli attriti viscosi può essere compreso
qualitativamente immaginando che cosa succede quando un oggetto solido
si muove in un fluido. L’oggetto si trascina con sè le molecole adiacenti alla
sua superficie laterale, e si crea spazio spostando le molecole che incontra
davanti a sè. Analizziamo separatamente i due casi.
• Superficie laterale. Il numero di molecole adiacenti all’oggetto è
proporzionale alla superficie laterale: nmol ∝ Σlat . Ciascuna molecola
in un tempo δt subisce un’interazione con l’oggetto, che ne altera la
~ mol ' F~mol δt. L’interazione oggetto-molecola
quantità di moto di δ p
D
E è
~ : F~mol ∝
ragionevolmente proporzionale alla velocità dell’oggetto, v
~ . Quindi nel tempo δt l’oggetto ha ceduto alle molecole una quantità
v
~ ' nmol hδ p
~ mol i ∝ v
~ δt, cioè ha subito una forza netta
di moto totale δ p
~
δ
p
∝ −~
v.
F~attr = −
δt
• Superficie frontale. Il numero di molecole incontrate dall’oggetto
nel tempo δt è proporzionale alla superficie frontale Σf ront e allo
spazio percorso δs = vδt: δnmol ∝ Σf ront vδt. Ciascuna molecola
subisce un urto con l’oggetto, acquistando una quantità di moto
CAPITOLO 10. FORZE DI CONTATTO
—
M.FANTI 125
~ mol ∝ v
~ . Quindi
proporzionale alla velocità dell’oggetto urtante, δ p
nel tempo δt l’oggetto ha ceduto alle molecole una quantità di moto
~ ' δnmol hδ p
~ mol i ∝ v~
totale δ p
v δt, cioè ha subito una forza netta
~
δ
p
~.
∝ −v v
F~attr = −
δt
Un oggetto che cade all’interno di un fluido, nel campo gravitazionale
terrestre, è soggetto a due forze:
• la forza gravitazionale, Fg = mg;
• la forza di attrito viscoso, Fattr = −ηv − η 0 v 2
(abbiamo scelto per convenzione il verso positivo diretto verso il basso). La
forza totale agente è quindi:
Ftot = Fg + Fattr = mg − ηv − η 0 v 2
Anche senza integrare il moto, possiamo farci un’idea qualitativa di ciò che
succede. Quando la velocità è piccola, la forza di gravità è dominante e
l’accelerazione è a ' g, verso il basso. Man mano che la velocità aumenta, la
forza di attrito cresce sempre più, fino a diventare pari alla forza di gravità:
a questo punto la risultante delle forze è nulla e la velocità si mantiene
costante. Per trovare la velocità-limite vlim , basta porre Ftot = 0, ovvero
η 0 v 2 + ηv − mg = 0. Questa
è un’equazione di 2◦ grado che ammette due
p
−η ± η 2 + 4mgη 0
. Scartando la soluzione negativa, che
soluzioni: vlim =
2η 0
non ha significato fisico, otteniamo:
r
mg
(per ηv trascurabile)
p
η0
−η + η 2 + 4mgη 0
vlim =
'
(10.8)
2η 0
mg
0
2
(per η v trascurabile)
η
Esercizio 10.11. Un paracadutista di massa m1 = 65 kg indossa un paracadute
di massa m0 = 8 kg (compreso zaino e tutto); dopo aver aperto il paracadute,
si stabilizza ad una velocità di discesa di v1 = 15 km/h. Con che velocità
scenderebbe un suo collega di massa m2 = 90 kg, usando un modello di paracadute
identico? Per risolvere l’esercizio occorre sapere che in questo caso l’attrivo viscoso
è proporzionale al quadrato della velocità.
CAPITOLO 10. FORZE DI CONTATTO
—
M.FANTI 126
Risposta.
Facciamo uso direttamente dell’equazione
della velocità-limite,
s
(m0 + m1 )g
Eq. (10.8). Per il primo paracadutista v1 =
, da cui potremmo
η0
ricavare η 0 . In realtà possiamo procedere evitando
s questo calcolo: scriviamo
(m0 + m2 )g
, e dividiamole:
l’equazione per il secondo paracadutista, v2 =
η0
s
s
v2
(m0 + m2 )
(90 + 8) kg
=
=
= 1.159. Abbiamo supposto la stessa η 0 ,
v1
(m0 + m1 )
(65 + 8) kg
poiché i paracaduti sono identici. In conclusione: v2 = v1 · 1.159 = 17.4 km/h.
Capitolo 11
Campi di forza
11.1
Campi di forza
La forza F~ agente su un oggetto dipende dall’ambiente in cui l’oggetto si
trova. Abbiamo più volte detto che la forza su un oggetto è causata dagli
altri oggetti che stanno intorno ad esso. Non c’è da stupirsi se ci si accorge,
con diverse misure, che spostando il nostro oggetto nello spazio — cioè
modificando la sua posizione e distanza rispetto a tutto ciò che lo circonda
— la forza agente su di esso cambi. In molti casi la forza dipende dunque
dalla posizione:
F~ = F~ (~
r)
(11.1)
e si chiama per questo forza posizionale. In tal caso la funzione F~ (~
r ) si
chiama campo di forza.
Per “esplorare” un campo di forze, il procedimento — applicato o
concettuale che sia — è quello di porre un oggetto chiamato “sonda” in varie
posizioni e misurare la forza che su di esso agisce, per esempio misurandone
l’accelerazione.
La nostra “sonda” in generale può subire azioni diverse, sia per ciò che le
causa (i diversi oggetti circostanti) sia per la loro natura (effetti elettrici,
magnetici, gravitazionali, . . . ). Ciascuna di queste è descrivibile con un
campo di forza F~k (~
r ). Ricordando che le forze si compongono secondo la
somma vettoriale, anche il campo di forze risultante seguirà la stessa legge di
composizione:
X
F~tot (~
r) =
F~k (~
r)
(11.2)
k
Qui di seguito introduciamo alcuni campi di forza notevoli, di cui faremo
uso nel seguito.
127
CAPITOLO 11. CAMPI DI FORZA
F12
m1
—
m1
r12
F21
r1
m2
r1 − r2
Figura 11.1:
distanza r12 .
11.2
m2
r1
r2
O
M.FANTI 128
r2
O
Forza gravitazionale fra due masse m1 , m2 separate da una
Forze gravitazionali
La gravità è una forza che agisce su qualunque oggetto dotato di massa, ed è
causata dalla presenza di altre masse. La gravità governa i moti dei pianeti
nel Sistema Solare e il moto dei satelliti intorno ai pianeti. Approfondiremo
questi moti nel Capitolo 15: qui per ora ci limitiamo ad enunciare le principali
proprietà della gravità.
Due oggetti di masse m1 , m2 , posti a distanza r12 , e di estensione molto
minore rispetto alla loro distanza (“puntiformi”), subiscono un’attrazione
reciproca descritta dalla legge della gravitazione universale:
m1 m2
(11.3)
F12 = G 2
r12
essendo G la “costante di Newton”, o “costante di gravitazione universale”,
il cui valore è:
G = 6.674 · 10−11 Nm2 kg−2
(11.4)
La forza F~12 applicata a m1 da m2 , e la forza F~21 applicata a m2 da m1 ,
sono dirette come in Fig. 11.1(sinistra). Aiutandosi con la Fig. 11.1(destra),
possiamo scrivere in forma vettoriale:
m1 m2
~2 )
(~
r1 − r
F~12 = −G
~2 |3
|~
r1 − r
m1 m2
~1 )
(~
r2 − r
F~21 = −G
~2 |3
|~
r1 − r
(11.5)
da cui è evidente che queste due forze rispettano il principio di azionereazione: sono opposte (F~12 = −F~21 ) e dirette lungo la linea congiungente le
~1 − r
~2 ).
masse m1 , m2 (linea definita dal vettore-differenza r
CAPITOLO 11. CAMPI DI FORZA
—
M.FANTI 129
~ , in presenza di una massa mk posta in
Una massa-sonda m0 posta in r
~k , “sente” una forza gravitazionale data da
r
~−r
~k
m0 mk
r
F~0,k = −G 2 r̂k0 = −Gm0 mk
~k |3
rk,0
|~
r−r
(11.6)
La forza totale generata da N masse “puntiformi” m1 , m2 , . . . , mN poste nelle
~1 , r
~2 , . . . , r
~N è:
posizioni r
!
N
X
X
~
~
r
−
r
k
(11.7)
F~0 =
F~0,k = m0 −G
mk
~k |3
|~
r−r
k=1
k
~ della sonda: quindi è un campo
che ovviamente è funzione della posizione r
di forza.
11.2.1
Il campo gravitazionale
La fattorizzazione di m0 fuori dalla sommatoria nell’Eq. (11.7), suggerisce
di definire il campo gravitazionale in maniera indipendente dalla massa della
sonda:
X
~−r
~k
r
~ (~
mk
(11.8)
g
r ) = −G
~k |3
|~
r
−
r
k
~
e tale che la forza gravitazionale su un oggetto di massa m nella posizione r
sia:
F~g = m~g (~
r)
(11.9)
Un’osservazione: l’Eq. (11.8) dice che i campi gravitazionali si sommano
vettorialmente: questa è una conseguenza della somma vettoriale delle forze.
Si noti che se l’unica forza agente sull’oggetto è quella gravitazionale,
l’accelerazione dell’oggetto è indipendente dall’oggetto stesso:
~a =
F~g
~ (~
=g
r)
m
(11.10)
Questa è una proprietà molto peculiare: solo il campo gravitazionale la
possiede.
CAPITOLO 11. CAMPI DI FORZA
q
—
M.FANTI 130
Fm
Fe
q v
E
B
Figura 11.2:
11.3
~ e forza magnetica F~m = q~
~
Forza elettrica F~e = q E
v × B.
Forze elettromagnetiche
Oggetti dotati di carica elettrica q possono subire forze elettriche e forze
magnetiche descritte da:
h
i
~ r) + v
~ r)
~ × B(~
F~em = q E(~
(11.11)
~ e B
~ sono rispettivamente il campo elettrico e il
dove i campi vettoriali E
campo magnetico. Queste forze sono schematizzate in Fig. 11.2.
~ r ), dipende in generale
Si noti che la componente elettrica della forza, q E(~
~ r ),
dalla posizione dell’oggetto; invece la componente magnetica, q~
v × B(~
~ r )) che dalla velocità v
~.
dipende sia dalla posizione (attraverso B(~
Un’altra peculiarità della forza magnetica è che essa è sempre ortogonale
~ Quindi
~ × B.
alla velocità — come conseguenza del prodotto vettoriale v
non produce mai accelerazione tangenziale. Quindi non può mai alterare il
modulo della velocità v = |~
v |, mentre in generale produce deflessioni nella
traiettoria.
L’accelerazione di un oggetto di massa m dotato di carica q, in presenza
di un campo elettromagnetico, è:
~a =
i
q h~
F~em
~ r)
~ × B(~
=
E(~
r) + v
m
m
(11.12)
~ è prodotto da tutti gli altri oggetti dotati di carica
Il campo elettrico E
che si trovano nello spazio circostante. Se questi sono in moto, allora
~ Anche per i campi
contribuiscono a formare anche il campo magnetico B.
elettrico e magnetico vige la proprietà di composizione vettoriale. Il k-esimo
~ k (~
~ un campo elettrico E
oggetto carico produce nella posizione r
r ) e un campo
CAPITOLO 11. CAMPI DI FORZA
—
M.FANTI 131
~ k (~
~ una
magnetico B
r ): questi producono su una carica-sonda q0 posta in r
forza:
h
i
~
~
~
~ × Bk (~
F0,k (~
r ) = q0 Ek (~
r) + v
r)
Quindi la forza risultante sulla carica-sonda è:
i
X
Xh
~
~
~
~
~
F0 (~
r) =
F0,k (~
r ) = q0
Ek (~
r ) + v × Bk (~
r)
k
k
"
= q0
#
X
~ k (~
E
r)
"
~×
+ q0 v
k
#
X
~ k (~
B
r)
k
L’ultima scrittura è formalmente identica all’Eq. (11.11), purché si
identifichino:
X
~ tot (~
~ k (~
E
r) =
E
r)
k
~ tot (~
B
r) =
X
~ k (~
B
r)
(11.13)
k
11.3.1
Unità di misura elettromagnetiche
La carica elettrica si misura in Coulomb (C); il campo elettrico in “Newton su
Coulomb” (N/C); il campo magnetico si misura in Tesla (T ≡ NC−1 m−1 s).
11.3.2
Campo elettrico generato da cariche ferme
Due cariche elettriche “puntiformi” q1 , q2 in quiete si attraggono se sono di
segni opposti, si respingono se sono dello stesso segno. Inoltre, detta r12 la
distanza che le separa, la forza elettrica agente fra esse è data dalla legge di
Coulomb:
1 q1 q2
(q1 , q2 in quiete)
(11.14)
F12 =
2
4π0 r12
essendo
1
= 8.98755179 · 109 N m2 C−2 ' 9 · 109 N m2 C−2
4π0
(11.15)
(il che significa che 0 = 8.85418782 · 10−12 C2 N−1 m−2 — ma l’Eq. (11.15) è
più facile da ricordare, specialmente nella sua forma approssimata!)
CAPITOLO 11. CAMPI DI FORZA
—
F12
q1
q1
r12
F21
r1
M.FANTI 132
F12
r12
r1
q2
r2
F21
q2
r2
O
O
q1, q2 concordi
q1, q2 discordi
Figura 11.3: Forza elettrica “coulombiana”, fra due cariche elettriche q1 , q2
separate da una distanza r12 . A sinistra: cariche dello stesso segno dànno
una forza repulsiva. A destra: cariche di segno opposto dànno una forza
repulsiva.
Si noti la notevole similitudine fra forze elettriche e forze gravitazionali
(vd Eq. (11.3)). Tuttavia vi è una differenza fondamentale: la forza
gravitazionale è sempre attrattiva; invece la forza elettrica è:
• repulsiva se le cariche q1 , q2 hanno lo stesso segno (ovvero, entrambe
positive, oppure entrambe negative);
• attrattiva se le cariche q1 , q2 hanno segno opposto (ovvero, una positiva
e una negativa).
La forza F~12 applicata a q1 da q2 , e la forza F~21 applicata a q2 da q1 ,
sono dirette come in Fig. 11.3. Ragionando come per le forze gravitazionali,
possiamo scrivere in forma vettoriale:
q 1 q2
1
~2 )
(~
r1 − r
~2 |3
4π0 |~
r1 − r
1
q 1 q2
~1 )
=
(~
r2 − r
~2 |3
4π0 |~
r1 − r
F~12 =
F~21
(11.16)
da cui è evidente che anche le forze coulombiane rispettano il principio
di azione-reazione: sono opposte (F~12 = −F~2 1) e dirette lungo la linea
~1 − r
~2 ).
congiungente le masse m1 , m2 (linea definita dal vettore-differenza r
CAPITOLO 11. CAMPI DI FORZA
—
M.FANTI 133
~ “sente” la forza elettrica di una carica qk
Una carica-sonda q0 posta in r
~k :
posta in r
~−r
~k
1 q0 qk
1
r
F~0,k =
r̂k0 =
q0 qk
(11.17)
2
~k |3
4π0 rk,0
4π0
|~
r−r
pertanto la carica qk genera nello spazio circostante un campo elettrico:
~−r
~k
qk r
~ k (~
E
r) =
~k |3
4π0 |~
r−r
(qk in quiete)
(11.18)
che si chiama campo elettrostatico, perché l’espressione è valida a rigore solo
per qk ferma. In realtà è valida con buona approssimazione anche se qk si
muove con velocità vk c — essendo c = 300 000 km/s = 3 · 108 m/s la
velocità della luce.
11.3.3
Confronto fra forza di Coulomb e forza
gravitazionale
La forza gravitazionale Eq. (11.3) è molto più debole della forza di Coulomb
Eq. (11.14).
Come semplice esempio, consideriamo l’atomo di idrogeno. È formato
da un protone (carica e = 1.602 · 10−19 C e massa mp = 1.67 · 10−27 kg)
e da un elettrone (carica −e e massa me = 9.11 · 10−31 kg) che gli orbita
attorno. Il raggio dell’orbita dello stato più stabile dell’atomo di idrogeno(1)
è il cosiddetto raggio di Bohr: a0 = 5.29 · 10−11 m. Come sono le intensità
delle due forze (chiamiamole FC e FG )? Quale delle due è dominante, e di
quanto?
FC
FG
1 e2
= 8.24 · 10−8 N
=
2
4π0 a0
me mp
= G 2 = 3.63 · 10−47 N
a0
(11.19)
Su scala atomica, la forza di Coulomb è 1039 volte (mille miliardi di miliardi
di miliardi di miliardi di volte) più forte di quella gravitazionale! Nessuna
sorpresa, dunque, che nella fisica atomica la gravità non venga nemmeno
considerata.
1
Va detto che nel modello che stiamo descrivendo ogni raggio è possibile. D’altra
parte, la meccanica quantistica ci insegna che non tutte le orbite sono possibili: l’atomo
può esistere solo in alcune configurazioni, che corrispondono a precisi livelli energetici
“quantizzati”. Questo pone vincoli anche sulle dimensioni dell’atomo.
CAPITOLO 11. CAMPI DI FORZA
11.3.4
—
M.FANTI 134
Campo magnetico generato da cariche in moto
lento
Una carica qk dotata di moto lento (vk c) e non accelerato o poco accelerato
c2
rispetto alle distanze in gioco (|~ak | ), genera intorno a sè un
distanze
campo magnetico della forma:
1
~ k (~
~k × E
v
r)
c2
~ k × (~
~k )
qk v
r−r
=
2
3
~k |
4π0 c
|~
r−r
~ k (~
B
r) =
(11.20)
d~
vk c2
)
(vk c ; ~k |
dt |~
r−r
La costante
1
vale esattamente
4π0 c2
1
= 10−7 TC−1 ms = 10−7 NC−2 s2
2
4π0 c
11.3.5
(11.21)
Moti “lenti” e dinamica dell’atomo
Vediamo se l’atomo di idrogeno, nel “modello
descritto in
di Bohr”
2
d~
c
v
Sezione 11.3.3, soddisfa le condizioni v c e .
dt
|∆~
r|
1 e2
La forza coulombiana fra protone ed elettrone è FC =
. Essa deve
4π0 a20
me ve2
essere uguale alla forza centripeta sull’elettrone: F⊥ =
. Uguagliando
a0
le
due
espressioni
si
ricava
s
s
1
e2
(1.602 · 10−19 C)2
ve =
=
9 · 109 NC−2 m2
'
4π0 me a0
(9.11 · 10−31 kg)(5.29 · 10−11 m)
2.2 · 106 m/s. Sicuramente una velocità elevata, ma piccola rispetto alla
ve
velocità della luce:
' 7 · 10−3 .
c
v2
L’accelerazione centripeta è a⊥ = e . Anche senza calcolarne il valore,
a0
vediamo già che all’interno dell’atomo, dunque per distanze ∆r ≈ a0 ,
v2
c2
abbiamo a⊥ = e . Quindi siamo nell’ambito di moto “poco
a0
∆r
accelerato”.
CAPITOLO 11. CAMPI DI FORZA
—
M.FANTI 135
Giusto per completezza di esercizio, calcoliamo l’accelerazione: a⊥ =
(2.2 · 106 m/s)2
' 9 · 1022 m/s2 . Decisamente grande! Ma “piccola”
5.29 · 10−11 m
nell’ambito delle dimensioni dell’atomo.
11.3.6
Forze magnetiche e violazione del principio di
azione-reazione (*)
Approfittiamo qui per anticipare una tematica che riprenderemo con lo studio
dell’elettromagnetismo. Consideriamo due cariche q1 , q2 , poste nelle posizioni
~1 , r
~2 e dotate di velocità v
~ 1, v
~ 2 . Proviamo a calcolare le forze magnetiche
r
che esercitano l’una sull’altra.
~ un campo magnetico:
La carica q1 produce nella posizione generica r
~ 1 (~
B
r) =
~ 1 × (~
~1 )
r−r
q1 v
~1 |3
4π0 c2 |~
r−r
il quale esercita una forza F~21 su q2 pari a
~ 1 (~
~2 × B
F~21 = q2 v
r2 )
Già qui possiamo notare qualcosa di inaspettato: per le proprietà del
~ 2 , quindi la direzione
prodotto vettoriale, F~21 è sempre perpendicolare a v
della forza magnetica dipende dal moto della carica che la subisce. Viceversa,
dal principio di azione-reazione, la forza fra q1 e q2 dovrebbe essere sempre
diretta lungo la linea che congiunge le due cariche,indipendentemente da
come queste si muovono!
Ma andiamo oltre e sviluppiamo ulteriormente i nostri calcoli. Ricordiamo
~ × (B
~ × C)
~ = B(
~ A
~ · C)
~ − C(
~ A
~ · B).
~
a questo punto una identità vettoriale: A
Allora otteniamo:
~1 )]
v1 × (~
r2 − r
q1 q2 v~2 × [~
2
3
~1 |
4π0 c
|~
r2 − r
~ 2 · (~
~1 )
~ 1 · v~2
q 1 q2
v
r2 − r
v
~1
~1 )
v
− (~
r2 − r
=
~1 |3
~1 |3
4π0 c2
|~
r2 − r
|~
r2 − r
F~21 =
Qui vediamo meglio quello che già abbiamo accennato: una componente della
forza (la seconda) è allineata lungo la congiungente le due cariche (infatti è
~2 − r
~1 ); un’altra componente invece è parallela alla velocità v
~1
diretta come r
~ 1.
della sorgente del campo magnetico B
Non solo! Possiamo ripetere tutti i calcoli per ottenere F~12 , ovvero la
forza che q2 produce su q1 . In verità, è sufficiente scambiare gli indici 1 ↔ 2
CAPITOLO 11. CAMPI DI FORZA
—
M.FANTI 136
ovunque:
~ 2 (~
~1 × B
F~12 = q1 v
r1 )
~2 )]
q1 q2 v~1 × [~
v2 × (~
r1 − r
=
2
3
~1 |
4π0 c
|~
r2 − r
~1 )]
q1 q2 v~1 × [~
v2 × (~
r2 − r
= −
2
3
~1 |
4π0 c
|~
r2 − r
Ora sommiamo le due forze e usiamo ancora l’identità vettoriale di cui sopra:
~1 )] − v~1 × [~
~1 )]
q1 q2 v~2 × [~
v1 × (~
r2 − r
v2 × (~
r2 − r
2
3
~1 |
4π0 c
|~
r2 − r
~1 ) × (~
q1 q2 (~
r2 − r
v1 × v~2 )
=
2
~1 |3
4π0 c
|~
r2 − r
F~21 + F~12 =
A meno di condizioni molto particolari, abbiamo trovato che F~21 + F~12 6= 0.
Le forze magnetiche violano il principio di azione-reazione, sia per i valori
delle forze che per le loro direzioni. In altre parole, realizzano sia la situazione
(c) che la situazione (d) della Fig. 8.1.
11.4
Campi di forza centrali
Un campo di forza si chiama centrale se la sua dipendenza dalla posizione è
esprimibile nella forma:
F~ (~
r ) = F (r)r̂
(11.22)
~ /r. In un campo centrale, l’intensità della
dove abbiamo posto r = |~
r | e r̂ = r
forza dipende solo dalla distanza r dalla sorgente della forza stessa. Invece
la direzione della forza è la stessa del raggio vettore r̂.
11.4.1
Il “problema dei due corpi”
I campi di forza centrali sono comuni in molti problemi di fisica. Questa è
una conseguenza del principio di azione-reazione, e dell’isotropia dello spazio
— ovvero, tutte le direzioni sono equivalenti.
~1 e r
~2 , che
Consideriamo due oggetti puntiformi (1) e (2) posti in r
interagiscono scambiandosi forze secondo il principio di azione-reazione.
Chiamiamo F~12 , F~21 rispettivamente la forza che (2) produce su (1) e quella
che (1) produce su (2). Queste forze devono essere fra loro opposte (F~12 =
−F~21 ) e dirette verso la linea congiungente i due oggetti:
F~12 , F~21
~1 )
parallele a (~
r2 − r
CAPITOLO 11. CAMPI DI FORZA
—
M.FANTI 137
Inoltre, la loro intensità può dipendere (e in generale dipende!) dalla distanza
~1 ):
fra i due oggetti, ma non deve dipendere dalla direzione di (~
r2 − r
~1 |)
|F~12 | = |F~21 | = F (|~
r2 − r
Se ci fosse una dipendenza dalla direzione, vorrebbe dire che gli stessi
oggetti, ruotati nello spazio in modo da mantenere la distanza invariata,
interagirebbero con diversa intensità, ovvero che lo spazio in cui si trovano
avrebbe una “preferenza” intrinseca per certe direzioni piuttosto che altre,
quindi non sarebbe isotropo.
Tutto ciò si può scrivere come:
~2 − r
~1
r
~1 |)
F~21 = F (|~
r2 − r
~1 |
|~
r2 − r
(11.23)
Analogamente, scambiando i ruoli dei due oggetti, ovvero invertendo gli
indici 1, 2, possiamo scrivere:
~1 − r
~2
r
~2 |)
F~12 = F (|~
r1 − r
~2 |
|~
r1 − r
(11.24)
~2 | = |~
~1 |, le due equazioni scritte soddisfano
Si noti che, essendo |~
r1 − r
r2 − r
automaticamente il principio di azione-reazione: F~21 = −F~12 .
Ovviamente, le forze gravitazionali (Eq. (11.5)) e quelle coulombiane
(Eq. (11.16)) hanno questa forma. Le forze magnetiche invece no: anche
senza affrontare la Sezione 11.3.6, sappiamo che esse dipendono dalle velocità,
e questo introduce delle direzioni “particolari”, violando quindi l’ipotesi di
~ quindi F~m deve sempre essere
isotropia. Più in dettaglio, F~m = q~
v × B,
~
~ , a prescindere da dove sia la sorgente del campo B.
ortogonale a v
11.4.2
Caso-limite: m1 m2
Ora, supponiamo che l’oggetto (1) sia molto più massivo dell’oggetto
(2): m1 m2 . In tal caso l’accelerazione di (1) è molto più piccola
F
=
dell’accelerazione di (2): chiamando F = |F~12 | = |F~21 |, |~a1 | =
m1
m2 F
m2
=
|~a2 | quindi |~a1 | |~a2 |. In questo caso, con buona
m1 m2
m1
approssimazione, possiamo considerare l’oggetto (1) come fermo, e scegliere
la sua posizione come origine del nostro sistema di riferimento. Indicando con
CAPITOLO 11. CAMPI DI FORZA
—
M.FANTI 138
~ la generica posizione dell’oggetto (2), l’espressione della forza prodotta da
r
(1) su (2) prende la forma: F~ (~
r ) = F (r)r̂ quindi il campo di forza prodotto
da (1) è appunto centrale. L’approssimazione m1 m2 si può incontrare in
diversi casi. Per esempio, per satelliti artificiali (m2 ≈ 103 ∼ 104 kg) che
orbitano intorno alla Terra (m1 ' 6 · 1024 kg), oppure per elettroni che si
muovono intorno ad un nucleo atomico (me /mnucleo ≈ 10−4 ).
11.4.3
Caso generale (*)
Vediamo ora come affrontare il caso generale. Per fissare le idee, supponiamo
m1 ≥ m2 — anche se non è necessario. Definiamo per brevità la separazione
fra i due oggetti:
~ ≡ r
~2 − r
~1
r
;
~1 |
r ≡ |~
r | = |~
r2 − r
Calcoliamo le accelerazioni dei due oggetti: dall’Eq. (11.23) e Eq. (11.24)
otteniamo
~
~2
F~21
F (r) r
d2 r
=
=
2
dt
m2
m2 r
2
~
~
~1
F (r) r
dr
F12
=
= −
2
dt
m2
m1 r
Sottraendo la seconda equazione alla prima abbiamo:
~
~ 2 d2 r
~1
~
d2 r
1
d2 r
1
r
+
=
− 2 =
F (r)
2
2
dt
dt
dt
m2 m1
r
Possiamo definire la “massa ridotta”
µ ≡
m1 m2
m1 + m2
e ottenere
µ
~
~
d2 r
r
= F (r)
2
dt
r
Questo significa che, misurando la posizione di (2) rispetto a (1), questa
evolve nel tempo secondo una legge fisica “efficace”: è come se l’oggetto (2)
avesse una massa µ e fosse soggetto ad un campo di forza centrale F~ = F (r)r̂.
m2
Si noti che nel caso-limite m1 m2 , µ =
' m2 , cioè la massa
1 + m2 /m1
ridotta diventa pari alla massa m2 e ci si riduce a quanto già ottenuto nella
sezione precedente.
CAPITOLO 11. CAMPI DI FORZA
—
M.FANTI 139
Esempi di masse ridotte
Calcoliamo la massa ridotta per alcuni sistemi tipici.
• Sistema protone-elettrone: me = 9.11 · 10−31 kg , mp = 1.673 · 10−27 kg ;
mp me
quindi µpe =
= 9.105 · 10−31 kg = (99.95%) me .
mp + me
• Sistema Sole-Terra: m⊕ = 6 · 1024 kg , m = 2 · 1030 kg ; quindi
m m⊕
µ⊕ =
= 5.99998 · 1024 kg = (99.9997%) m⊕ .
m + m⊕
• Sistema Sole-Giove: mX = 2 · 1027 kg , m = 2 · 1030 kg ; quindi
m mX
µX =
= 1.998 · 1027 kg = (99.9%) mX .
m + mX
• Sistema Terra-Luna: m$ = 7.35 · 1022 kg , m⊕ = 6 · 1024 kg ; quindi
m⊕ m$
µ⊕$ =
= 7.28 · 1022 kg = (98.8%) m$ .
m⊕ + m$
11.4.4
Conservazione del momento angolare
Una caratteristica notevole dei moti in un campo centrale è che in essi il
momento angolare si conserva, cioè è una costante del moto. Questa è una
conseguenza diretta del fatto che la forza F~ è sempre diretta come il raggio
~ , pertanto il momento meccanico è sempre nullo: τ~ = r
~ × F~ = 0.
vettore r
~
dL
= τ~ (vd Sezione 8.7) otteniamo
Poiché
dt
~
dL
=0
dt
(campo di forza centrale)
(11.25)
La conservazione del momento angolare ha importanti conseguenze sul
moto, che aiutano ad integrare le equazioni e trovare la legge oraria.
Anzitutto la traiettoria giace sempre su un piano. Infatti, scegliamo gli assi
~ cosicché Lx = Ly = 0.
cartesiani in modo che l’asse z sia diretto lungo L,
Poiché
~ = m~
~
L
r×v
(11.26)
~ deve essere ortogonale a r
~ , quindi r
~ deve giacere sul piano Oxy, ovvero
L
~ quindi
~ deve essere ortogonale a L,
z = 0. D’altra parte anche la velocità v
vz = 0. In conclusione, l’oggetto non può uscire dal piano Oxy, pertanto la
sua traiettoria sarà sempre contenuta su questo piano.
Questa considerazione ci consente di lavorare con le coordinate polari r, φ,
introdotte nella Sezione 4.2, Eq. (4.7)
CAPITOLO 11. CAMPI DI FORZA
—
M.FANTI 140
x = r cos φ
y = r sin φ
(11.27)
Introduciamo la velocità angolare ω e la velocità radiale vr :
ω=
dφ
dt
;
vr =
dr
dt
e calcoliamo le componenti vx , vy della velocità in coordinate polari:
dr
d(cos φ)
dφ
d(r cos φ)
=
cos φ + r
= vr cos φ − r sin φ
dt
dt
dt
dt
= vr cos φ − ωr sin φ
dr
d(sin φ)
dφ
d(r sin φ)
=
sin φ + r
= vr sin φ + r cos φ
=
dt
dt
dt
dt
= vr sin φ + ωr cos φ
vx =
vy
(11.28)
La conservazione del momento angolare implica che la componente-z
dell’Eq. (11.26)
Lz = m(xvy − yvx )
(11.29)
è costante. In coordinate polari
xvy − yvx = (r cos φ)(vr sin φ + ωr cos φ) − (r sin φ)(vr cos φ − ωr sin φ)
= ωr2
(le parti in rvr hanno segni opposti e si cancellano, le parti in ωr2 si sommano
— si ricordi cos2 + sin2 = 1). Quindi:
ωr2 =
L
= costante
m
(campo centrale)
(11.30)
Riassumiamo quanto trovato finora. Il moto in un campo di forza centrale
è caratterizzato dalla conservazione del momento angolare. Di conseguenza
la traiettoria giace su un piano. Inoltre la velocità angolare ω è sempre
inversamente proporzionale al quadrato della distanza dal centro della forza:
1
ω ∝ 2.
r
Per fare un esempio notevole, queste proprietà sono riscontrabili nelle
orbite dei pianeti intorno al Sole.
CAPITOLO 11. CAMPI DI FORZA
11.5
—
M.FANTI 141
Integrazione del moto in un campo di
forze (*)
Nella Sezione 8.4 la forza era stata espressa come funzione del tempo,
F~ = F~ (t), ad indicare che in generale essa non è costante. Tuttavia, in
molti problemi di fisica abbiamo a che fare con moti in campi di forza, dove
la forza agente su un oggetto dipende dalla posizione in cui esso si trova:
F~ = F~ (~
r ) — in tal caso la dipendenza dal tempo è in realtà dovuta allo
~=r
~ (t), quindi F~ = F~ (~
spostamento dell’oggetto: r
r (t)).
In alcuni casi, la forza dipende anche dalla velocità dell’oggetto — è il
~ ). Infine,
caso delle forze magnetiche. Quindi potremmo scrivere F~ = F~ (~
r, v
~
~, v
~ potrebbe anche cambiare con il tempo:
la dipendenza funzionale di F da r
è il caso in cui l’ambiente esterno in cui l’oggetto si muove subisce variazioni
sostanzialmente indipendenti dal moto dell’oggetto stesso. Quindi, nella sua
forma più generale, dovremmo scrivere
d~
r
~, , t
F~ = F~ r
(11.31)
dt
In presenza di campi di forza, la formulazione del problema della dinamica
è la seguente:
2
~
d~
r
dr
1 ~
F~
~, , t
=
= F r
dt2
m
m
dt
(11.32)
~
~
r
(t
)
=
r
0
0
~ (t0 ) = v
~0
v
La prima equazione è una equazione differenziale del secondo ordine nella
~ (t). Ciò significa anzitutto che l’incognita non è una
funzione incognita r
grandezza numerica (come nelle equazioni algebriche per esempio), ma è
appunto una funzione. Essa compare nell’equazione sia direttamente, che
attraverso le sue derivate (da cui il nome “equazione differenziale”). In questo
caso l’ordine massimo della derivata è il secondo.
Come già detto, per risolvere il problema, è necessario conoscere le
d~
r
~ e di v
~=
condizioni iniziali, cioè i valori di r
all’istante iniziale t0 . Senza
dt
di queste non è possibile trovare la legge oraria.
L’analisi matematica fornisce teoremi che garantiscono l’esistenza e
~ = r
~ (t) del sistema Eq. (11.32), sotto condizioni
l’unicità della soluzione r
molto generali, che nei problemi di fisica sono sempre soddisfatte.
CAPITOLO 11. CAMPI DI FORZA
—
M.FANTI 142
In pratica, la capacità di trovare soluzioni esatte è limitata a poche
categorie di problemi, che descriveremo nei prossimi capitoli.
11.5.1
Integrazione con il metodo iterativo (*)
Nel caso non fossimo capaci di calcolare in maniera analitica gli integrali
che compaiono nell’Eq. (8.6) e Eq. (8.7), ecco come potremmo idealmente
procedere al computer:
[0] Definiamo due quantità vettoriali per posizione e velocità, assegnando
~ = r
~0 e v
~ = v
~ 0 . Definiamo inoltre la
loro i valori iniziali: r
variabile-tempo assegnandole il suo valore iniziale: t = t0
d~
r
~
~
~ , , t , calcoliamo F~ nella
[1] Dalla legge fisica della forza, F = F r
dt
condizione attuale dell’oggetto, quindi calcoliamo l’accelerazione ~a =
F~
cui l’oggetto è sottoposto.
m
~ e r
~ dopo un intervallino di tempo δt
[2] Calcoliamo i nuovi valori di v
“molto piccolo” — idealmente dovrebbe essere infinitesimo, ma questo
non è fattibile con il computer:
~ ←− r
~+v
~ · δt
r
~ ←− v
~ + ~a · δt
v
[3] Aggiorniamo anche la variabile-tempo:
t ←− t + δt
e reiteriamo il processo dal punto [1].
In tal modo si può costruire una tabella di valori
t0
t0 + δt
t0 + 2δt
t0 + 3δt
..
.
~ (t0 )
r
~ (t0 + δt)
r
~ (t0 + 2δt)
r
~ (t0 + 3δt)
r
..
.
~ (t0 )
v
~ (t0 + δt)
v
~ (t0 + 2δt)
v
~ (t0 + 3δt)
v
..
.
per incrementi temporali δt arbitrariamente piccoli.
Questo approccio funzionerebbe bene solo se gli incrementi temporali δt
fossero infinitesimi. In pratica ciò è irrealizzabile. L’effetto è che ad ogni
y
CAPITOLO 11. CAMPI DI FORZA
—
M.FANTI 143
2
1.5
1
0.5
0
-0.5
-1
-1.5
-2
-2 -1.5 -1 -0.5
0
0.5
1
1.5
2
x
Figura 11.4:
Grafico ottenuto con l’integrazione numerica del moto.
~ calcolate all’istante t vengono utilizzate
iterazione la forza F~ e la velocità v
come se fossero costanti su un intervallino di tempo [t; t + δt]. L’errore che si
commette ad ogni iterazione con questa approssimazione va ad accumularsi
a quelli precedenti, ed il risultato spesso peggiora di precisione man mano
che si procede nell’iterazione.
Quando si debba realizzare un simile approccio al computer, si ricorre a
tecniche di calcolo che riducono gli errori. Qui non ne parliamo diffusamente,
accenniamo solo l’idea che sta alla base. Essa consiste nel raffinare ciascuna
~, r
~ con il metodo
delle iterazioni, calcolando dapprima i “nuovi” valori per v
del punto [2], e poi mediandoli con i valori precedenti. Cosı̀ si usano dei
valori che dovrebbero essere validi in un punto intermedio fra t e t + δt: con
questi si ri-calcola la forza F~ in un punto intermedio e si ripete il punto [2].
In generale i risultati sono molto più stabili.
Come esempio, consideriamo un campo di forza
Fx = −
(x2
x
+ y 2 )3/2
;
Fy = −
(x2
y
+ y 2 )3/2
CAPITOLO 11. CAMPI DI FORZA
—
M.FANTI 144
agente su una massa m = 1 con condizioni iniziali:
x0 = 1.5 ; y0 = 0
;
vx,0 = 0 ; vy,0 = 0.5
e incremento di tempo δt = 0.1. Le unità sono tutte arbitrarie.
Il risultato è mostrato nel grafico in Fig. 11.4. Come si può osservare, il
risultato non è niente male! Questo è uno dei pochi moti in campi di forza
che ammette una soluzione analitica: l’orbita è di forma ellittica, e quello che
abbiamo ottenuto ha proprio la forma giusta. Poiché l’incremento temporale
è tenuto fisso, si può intuire anche la velocità del moto: maggiore quando le
posizioni successive sono più lontane fra loro.
I valori numerici ottenuti iterando sono mostrati nella seguente tabella.
CAPITOLO 11. CAMPI DI FORZA
t=0.000
t=0.100
t=0.200
t=0.300
t=0.400
t=0.500
t=0.600
t=0.700
t=0.800
t=0.900
t=1.000
t=1.100
t=1.200
t=1.300
t=1.400
t=1.500
t=1.600
t=1.700
t=1.800
t=1.900
t=2.000
t=2.100
t=2.200
t=2.300
t=2.400
t=2.500
t=2.600
t=2.700
t=2.800
t=2.900
t=3.000
t=3.100
t=3.200
t=3.300
t=3.400
t=3.500
t=3.600
t=3.700
t=3.800
t=3.900
x=1.500
x=1.498
x=1.491
x=1.480
x=1.464
x=1.444
x=1.419
x=1.390
x=1.356
x=1.317
x=1.273
x=1.224
x=1.170
x=1.110
x=1.045
x=0.974
x=0.896
x=0.813
x=0.723
x=0.626
x=0.522
x=0.410
x=0.291
x=0.165
x=0.033
x=-0.100
x=-0.225
x=-0.323
x=-0.358
x=-0.317
x=-0.221
x=-0.103
x=0.023
x=0.148
x=0.268
x=0.382
x=0.490
x=0.592
x=0.687
x=0.776
y=0.000
y=0.050
y=0.100
y=0.149
y=0.199
y=0.247
y=0.295
y=0.341
y=0.387
y=0.431
y=0.474
y=0.514
y=0.553
y=0.589
y=0.622
y=0.651
y=0.677
y=0.697
y=0.712
y=0.720
y=0.720
y=0.710
y=0.687
y=0.647
y=0.585
y=0.495
y=0.366
y=0.191
y=-0.021
y=-0.227
y=-0.396
y=-0.522
y=-0.614
y=-0.679
y=-0.723
y=-0.752
y=-0.769
y=-0.775
y=-0.773
y=-0.764
—
vx=0.000
vx=-0.044
vx=-0.089
vx=-0.134
vx=-0.179
vx=-0.225
vx=-0.271
vx=-0.318
vx=-0.366
vx=-0.415
vx=-0.465
vx=-0.516
vx=-0.570
vx=-0.625
vx=-0.682
vx=-0.741
vx=-0.803
vx=-0.868
vx=-0.935
vx=-1.006
vx=-1.079
vx=-1.153
vx=-1.226
vx=-1.288
vx=-1.324
vx=-1.294
vx=-1.113
vx=-0.664
vx=0.029
vx=0.684
vx=1.070
vx=1.222
vx=1.252
vx=1.225
vx=1.173
vx=1.112
vx=1.048
vx=0.984
vx=0.921
vx=0.860
M.FANTI 145
vy=0.500
vy=0.499
vy=0.497
vy=0.493
vy=0.488
vy=0.481
vy=0.472
vy=0.461
vy=0.449
vy=0.434
vy=0.416
vy=0.396
vy=0.372
vy=0.344
vy=0.312
vy=0.275
vy=0.230
vy=0.178
vy=0.116
vy=0.040
vy=-0.052
vy=-0.168
vy=-0.315
vy=-0.507
vy=-0.760
vy=-1.098
vy=-1.521
vy=-1.932
vy=-2.091
vy=-1.877
vy=-1.473
vy=-1.088
vy=-0.782
vy=-0.549
vy=-0.368
vy=-0.227
vy=-0.114
vy=-0.021
vy=0.055
vy=0.120
Capitolo 12
Lavoro ed energia
12.1
Lavoro di una forza
Consideriamo un oggetto puntiforme che si muove con una legge oraria
~=r
~ (t)
r
soggetto ad una forza, o ad un sistema di forze con risultante F~ .
In un intervallo di tempo molto piccolo (al limite, infinitesimo) dt, esso
percorre uno spostamento
~ dt
d~
r=v
Si definisce lavoro elementare della forza F~ lungo lo spostamento d~
r il
prodotto scalare:
dL = F~ · d~
r
(12.1)
(vd Fig. 12.1). Data la proprietà del prodotto scalare (Eq. (5.5)) il lavoro si
può anche scrivere come:
dL = F ds cos α
(12.2)
essendo F = |F~ | il modulo della forza, ds = |d~
r | lo spostamento lungo la
~
traiettoria, e α l’angolo fra il vettore-forza F e e il vettore-spostamento d~
r.
Poiché F cos α è la componente della forza F~ parallela allo spostamento
d~
r , si può inoltre scrivere:
dL = Fk ds
(12.3)
Le tre equazioni sono del tutto equivalenti: a seconda dei casi si sceglie quella
più utile. In particolare, l’Eq. (12.3) ci dice che solo la componente della forza
parallela allo spostamento compie lavoro.
La componente di una forza perpendicolare allo spostamento non compie
lavoro.
146
CAPITOLO 12. LAVORO ED ENERGIA
—
M.FANTI 147
(2)
F
Γ
α
dr
dr α
F
(1)
Γ’
Figura 12.1: Lavoro elementare dL = F~ · d~
r = F ds cos α fatto dalla forza
~
F lungo uno spostamento d~
r . R Il lavoro su un percorso Γ orientato, da (1)
a (2), è calcolabile come L = Γ d~
r · F~ . In generale il risultato dipende dal
R
R
percorso, cioè Γ d~
r · F~ 6= Γ0 d~
r · F~ .
A seconda che l’angolo α sia acuto o ottuso (vd Fig. 12.1), cos α è positivo
o negativo. Abbiamo le seguenti possibilità:
π
α<
⇐⇒ cos α > 0 ⇐⇒ dL > 0
2
α=
π
⇐⇒ cos α = 0 ⇐⇒ dL = 0
2
α>
π
⇐⇒ cos α < 0 ⇐⇒ dL < 0
2
Alcuni esempi
~ è sempre perpendicolare alla velocità v
~,
La forza magnetica, F~L = q~
v × B,
~ dt. Pertanto essa non compie mai lavoro
dunque anche allo spostamento d~
r=v
— l’angolo α è sempre π/2.
Le forze di attrito sono sempre dirette lungo il moto, ma con orientamento
opposto: dunque α = π e dL = F~attr · d~
r < 0, sempre. Quindi le forze di attrito
producono sempre lavoro negativo.
Un oggetto che si muove nel campo gravitazionale terrestre, con velocità
~
v ≡ (vx , vy , vz ), sente una forza verso il basso F~g = −mg ẑ. Lo spostamento
~ dt. Il lavoro elementare è dL = F~g · d~
elementare è d~
r = v
r = −mgvz dt: può
CAPITOLO 12. LAVORO ED ENERGIA
—
M.FANTI 148
essere negativo, positivo, o nullo a seconda che l’oggetto stia salendo (vz > 0), stia
scendendo (vz < 0), oppure sia nel punto di inversione (in cui istantaneamente
vz = 0).
Per un oggetto puntiforme che si sposta da (1) a (2) lungo una linea
Γ (Fig. 12.1), il lavoro della forza agente su di esso si scrive integrando
l’Eq. (12.1):
Z
L = d~
r · F~
(12.4)
Γ
Nella formula gli estremi (1), (2) non sono indicati esplicitamente: sono
impliciti nell’indicazione della linea Γ. Si noti che in generale il lavoro L
lungo una linea dipende dalla scelta della linea, anche a parità di estremi (1)
e (2), cioè considerata una linea Γ0 che va da (1) a (2) con percorso diverso
(Fig. 12.1), in generale può essere
Z
Z
d~
r · F~
d~
r · F~ 6=
Γ0
Γ
Esempio
Consideriamo un campo di forza F~ (~
r ) dato da:
F~ (x, y, z) = κz x̂
e un oggetto che si sposta dal punto A ≡ (xA , yA , zA ) al punto B ≡ (xB , yB , zB ). I
percorsi possibili sono infiniti: consideriamo due possibilità.
(1) Lo spostamento avviene prima lungo x̂, poi lungo ŷ, infine lungo ẑ. Poiché
la forza è parallela a x̂, solo il primo tratto di spostamento produce lavoro:
Z xB
dx κz = κzA (xb − xa )
L=
xA
(la forza dipende solo dalla coordinata z, quindi è costante in questo tratto,
z = zA , e l’integrazione è banale).
(2) Lo spostamento avviene prima lungo ẑ, poi lungo x̂, infine lungo ŷ. Anche
qui l’unico tratto in cui si compie lavoro è quello lungo x̂; questa volta però
lo spostamento lungo ẑ è già avvenuto, quindi z = zB , e si ottiene
Z xB
L=
dx κz = κzB (xb − xa )
xA
Ovviamente nei due casi il lavoro è diverso, anche se gli estremi del percorso
coincidono.
CAPITOLO 12. LAVORO ED ENERGIA
12.2
—
M.FANTI 149
Energia cinetica
Una forza F~ su un oggetto produce in un tempo dt una variazione di velocità
d~
v data da:
d~
v
= F~
m
dt
Nello stesso tempo, l’oggetto compie uno spostamento dato da:
~ dt
d~
r=v
Possiamo scrivere il lavoro elementare della forza come:
d~
v
∆~
v
dL = F~ · d~
r=m
· d~
r = lim m
· ∆~
r
∆t→0
dt
∆t
∆~
r
∆~
v · ∆~
r
= lim m∆~
v·
= lim m
∆t→0
∆t→0
∆t
∆t
~
= md~
v·v
~ può essere espanso in coordinate cartesiane:
Il prodotto scalare d~
v·v
~ = vx dvx + vy dvy + vz dvz
d~
v·v
Ora data una generica quantità α ed una sua variazione ∆α, la variazione di
α2 si può scrivere:
∆ α2 = (α + ∆α)2 − α2 = α2 + 2α · ∆α + (∆α)2 − α2
= 2α · ∆α + (∆α)2 = (2α + ∆α)∆α
Se ora consideriamo il limite ∆α → 0, nel termine (2α + ∆α) la parte ∆α
diventa trascurabile, cosicché troviamo
d(α2 ) = 2α dα
Allora riscriviamo:
d(vx2 + vy2 + vz2 )
d(vx2 ) d(vy2 ) d(vz2 )
~ = vx dvx + vy dvy + vz dvz =
d~
v·v
+
+
=
2
2
2
2
d(v 2 )
=
2
Mettendo insieme tutto, troviamo:
m
dL = d(v 2 ) = d
2
mv 2
2
CAPITOLO 12. LAVORO ED ENERGIA
—
M.FANTI 150
Questo suggerisce di definire una nuova quantità: l’energia cinetica E di
un oggetto puntiforme, come:
mv 2
(12.5)
2
Il risultato che abbiamo appena trovato è che un lavoro elementare produce
una variazione elementare di energia cinetica:
E=
dL = dE
(12.6)
Integrando lungo un percorso Γ, si ottiene che il lavoro totale è pari alla
variazione totale di energia cinetica:
m 2
2
L = ∆E =
vfinale − viniziale
(12.7)
2
12.3
Potenza di una forza
Consideriamo una forza F~ che compie un lavoro elementare dL su uno
spostamento infinitesimo d~
r , che ha luogo in un intervallino di tempo dt
anch’esso infinitesimo.
Si definisce potenza il rapporto fra il lavoro elementare dL e il tempo dt
impiegato per compierlo:
dL
W =
(12.8)
dt
sviluppando l’espressione del lavoro elementare, Eq. (12.1), troviamo:
d~
r
F~ · d~
r
= F~ ·
dt
dt
~
~
= F ·v
W =
quindi
~
W = F~ · v
12.4
(12.9)
Unità di misura
L’unità di misura del lavoro è il Joule: 1 J = 1 N · m. Una forza di 1 N,
applicata ad un oggetto che si sposta di 1 m nella stessa direzione della forza
applicata, compie un lavoro di 1 J.
Siccome un lavoro produce una variazione di energia cinetica, L = ∆E,
anche l’energia cinetica si misura in Joule. Per esempio, una massa di 1 kg
che si muove alla velocità di 1 m/s, possiede un’energia cinetica di 0.5 J.
L’unità di misura della potenza è il Watt: 1 W = 1 J/s. Una forza che
compie un lavoro di 1 Joule in 1 secondo produce una potenza di 1 Watt.
CAPITOLO 12. LAVORO ED ENERGIA
12.5
—
M.FANTI 151
Problemi su lavoro, energia, potenza
Esercizio 12.1. Un oggetto di massa m, inizialmente fermo in una posizione
xA , soggetto ad una forza
F~ = F x̂
comincia a muoversi fino a raggiungere la posizione xB . Che velocità ha
acquistato?
Soluzione 1. Risolviamo l’equazione del moto. L’oggetto parte da fermo e la
forza (e quindi anche l’accelerazione) è diretta verso x̂. Quindi non c’è niente che
produca movimento nelle direzioni ŷ, ẑ: possiamo trattare il problema in una sola
dimensione. L’accelerazione è:
a=
d2 x
F
=
2
dt
m
Pertanto la velocità in funzione del tempo è:
Z t
F
F
v(t) = v(0) +
dt0
= t
m
m
0
(a è costante e per v(t = 0) = 0). La posizione in funzione del tempo è
Z t
F 2
x(t) = x(0) +
dt0 v(t0 ) = xA +
t
2m
0
Quindi l’oggetto raggiunge la posizione xB ad un tempo t tale che x(t) = xB , ovvero
r
2m(xB − xA )
F 2
t
=⇒
tB =
xB − xA =
2m
F
La velocità in tale istante è:
F
v(tB ) = tB =
m
r
2F (xB − xA )
m
Soluzione 2. La forza è diretta lungo x̂ ed è costante, quindi il lavoro sul
tratto A → B è
Z xB
dx F = F (xB − xA )
L=
xA
che è uguale alla variazione di energia cinetica ∆E. Poiché inizialmente l’oggetto
è fermo, EA = 0, dunque
r
m 2
2F (xB − xA )
vB = EB = L = F (xB − xA )
=⇒
vB =
2
m
Commento. Ovviamente i due risultati sono identici. Però la soluzione 2
è più rapida. In problemi in cui non si debba risolvere la legge del moto, ma sia
sufficiente conoscere le velocità, l’uso dell’energia cinetica può agevolare di molto
i calcoli.
CAPITOLO 12. LAVORO ED ENERGIA
—
M.FANTI 152
Esercizio 12.2. L’esempio precedente si complica, non appena si inserisca una
forza che varia con la posizione. Se l’oggetto di massa m, inizialmente fermo in
una posizione xA = 0, subisce una forza
F~ = βxx̂
(β > 0)
con quale velocità raggiunge la posizione xB ?
Soluzione 1. Il lavoro fatto dalla forza lungo il percorso è
Z B
Z xB
β
~
L=
F · d~
r=
βx dx = (x2B − x2A )
2
A
xA
La variazione di energia cinetica è ∆E = L. Essendo vA = 0, deve essere anche
β
m 2
= ∆E = (x2B − x2A ), ovvero:
EA = 0, quindi vB
2
2
r
β 2
vB =
(x − x2A )
m B
Soluzione 2. Risolviamo l’equazione del moto. Pronti?
L’oggetto parte da fermo e la forza (e quindi anche l’accelerazione) è diretta
verso x̂. Quindi non c’è niente che produca movimento nelle direzioni ŷ, ẑ:
possiamo trattare il problema in una sola dimensione. L’accelerazione è:
a=
d2 x
F
β
=
= x
dt2
m
m
La derivata seconda di x è proporzionale a x. Ricordando che
d2
αt = α2 eαt , una possibile soluzione è proprio:
quindi che dt
2 e
r !
β
αt
−αt
x(t) = A+ e + A− e
α=
m
d
dt
eαt = αeαt , e
Dunque α è fissato dai parametri del problema (β della forza, m dell’oggetto)
mentre A± dipendono dalle condizioni iniziali. A t = 0 deve essere x = xA ,
dunque A+ + A− = xA . Inoltre, a t = 0, v = 0. Poiché
dx(t)
= α A+ eαt − A− e−αt
dt
deve essere α(A+ − A− ) = 0, ovvero A+ = A− . Con la condizione precedente
xA
troviamo A+ = A− =
, cosicché:
2
xA αt
x(t) =
e + e−αt
2
xA
v(t) =
α eαt − e−αt
2
v(t) =
Ora occorre ricavare t (o meglio, eαt ) dalla prima equazione, imponendo x(t) = xB ,
ed inserirlo nella seconda, per ricavare vB . È possibile, anzi siete invitati a
provare. . . Naturalmente il calcolo è molto più lungo che nella “Soluzione 1”.
CAPITOLO 12. LAVORO ED ENERGIA
—
M.FANTI 153
Esercizio 12.3. Un’automobile di massa m = 1.5 ton ha un motore di potenza
W = 50 kW. Supponiamo — anche se è abbastanza irrealistico — che durante
l’accelerazione il motore eroghi potenza costante. Se l’auto parte da ferma, quanto
tempo impiega a raggiungere la velocità di v = 100 km/h? Qual è la legge oraria
della velocità e dello spazio percorso? Nel trattare il problema si trascuri l’attrito
dell’aria — anche questo è abbastanza irrealistico. . .
Risposta. Anzitutto convertiamo le grandezze in SI: 1 h = 3600 s e
1000 m
1 km = 1000 m, quindi v = 100 km/h = 100
= 27.78 m/s. Inoltre
3600 s
m = 1.5 ton = 1500 kg e W = 50 kW = 50 000 W. L’energia cinetica
dell’auto ferma è zero, quando l’auto va a 100 km/h la sua energia cinetica è
1500
m 2
v =
(27.78 m/s)2 = 5.788 · 105 J. Poiché la potenza è supposta
E =
2
2
costante, possiamo scrivere ∆E = W · ∆t, ovvero:
∆t =
E
5.788 · 105 J
=
= 11.6 s
W
5 · 104 W
Poiché la potenza W è costante, conviene ottenere la legge oraria della velocità
da quella dell’energia cinetica. In un tempo dt il motore compie un lavoro
dL = W dt = dE, quindi E(t) = W t. Allora,
r
r
2E
2W t
v(t) =
=
m
m
A dispetto di quello che si poteva pensare intuitivamente, la velocità non cresce
linearmente con il tempo, dunque il moto NON è uniformemente accelerato. La
ragione sta nell’espressione W = F v della potenza: a parità di potenza erogata, la
forza F (e quindi l’accelerazione) è maggiore per velocità più basse. Per trovare
lo
spazio percorso
in un tempo t, si deve integrare la velocità. Ricordando che
Z √
Z
1 3/2 2 3/2
t dt = dt t1/2 =
t = t , otteniamo:
3/2
3
r
Z
2 2W 3/2
∆s(t) = v(t) dt =
t
3
m
Esercizio
12.4.
Un’automobile con potenza W = 50 kW accelera
sull’autostrada, fino a raggiungere una velocità limite v1 = 170 km/h: non riesce
ad andare più veloce perché l’attrito con l’aria contrasta la forza del motore. A
queste velocità è ragionevole parametrizzare l’attrito come Fattr = −η 0 v 2 , diretto in
direzione opposta al movimento. Quanto vale η 0 ? Quanta energia impiega l’auto
per percorrere 100 km alla velocità v1 ? Quanta energia impiegherebbe a percorrere
la stessa distanza se viaggiasse a velocità v2 = 130 km/h?
Risposta. La potenza dissipata dalla forza di attrito è Wattr = Fattr v = −η 0 v 3 .
Se l’auto non riesce ad aumentare la sua velocità vuol dire che la potenza del motore
è esattamente contrastata dalla potenza dissipata per attrito: W + Wattr = 0,
CAPITOLO 12. LAVORO ED ENERGIA
—
M.FANTI 154
1000
W
. Convertiamo la velocità in SI: v1 = 170 km/h = 170
m/s =
3600
v13
5 · 104 W
47.22 m/s. Otteniamo η 0 =
= 0.475 Ns2 m−2 .
(47.22 m/s)3
Per viaggiare a velocità costante, il motore deve erogare una forza che contrasti
la forza di attrito: F1 = +η 0 v12 = (0.475 Ns2 m−2 )(47.22 m/s)2 = 1059 N. Il
lavoro della forza (e quindi l’energia necessaria) su ∆` = 100 km = 105 m è
L1 = F1 ∆` = 1.059 · 108 J — circa 100 milioni di Joule.
Se la velocità viene ridotta a v2 = 130 km/h = 36.11 m/s, la forza del motore
deve essere F2 = +η 0 v22 = 619 N. Anche il lavoro si riduce: L2 = F2 ∆` =
6.19 · 107 J, cioè circa 60 milioni di Joule . . . e si risparmia circa il 40% di
carburante!
ovvero η 0 =
Capitolo 13
Forze conservative
13.1
Forze conservative
Consideriamo un campo di forza
F~ = F~ (~
r)
Ci sono alcuni importanti casi di campi di forze in cui il lavoro calcolato
dalla posizione (1) alla posizione (2) non dipende dal cammino percorso Γ.
In tal caso si parla di forze conservative — la ragione di questo nome sarà
chiara a breve. In tal caso quindi
Z
d~
r · F~ =
Z
Γ
Γ0
d~
r · F~ =
Z
(2)
d~
r · F~
(forze conservative)
(13.1)
(1)
(vd Fig. 13.1). Nell’ultimo membro dell’equazione il segno di integrale non
R (2)
viene scritto con la curva (Γ o Γ0 ) bensı̀ con gli estremi ( (1) ), ad indicare
che sono l’unica informazione rilevante ai fini del calcolo.
Sempre con riferimento alla Fig. 13.1, notiamo che invertendo
l’orientamento della curva Γ0 lo spostamento d~
r lungo di essa cambia segno,
per cui la stessa cosa succede anche al lavoro elementare: dL → −dL (1) .
Questo discorso funziona solo se F~ non dipende dal movimento. Per i campi di
forze, F~ ≡ F~ (~
r ), che non dipende dall’orientamento di d~
r . Per le forze magnetiche F~L =
~ pertanto invertire il movimento produce un’inversione di F~L , ma “fortunatamente”
q~
v × B,
F~L · d~
r = 0 sempre, quindi il problema non si pone. Un altro contro-esempio: le forze di
attrito sono sempre F~attr ∝ −d~
r ; anche in questo caso, invertire
il moto Zsignifica invertire
Z
la forza, e F~attr · d~
r < 0 sempre. Quindi in questo caso
d~
r · F~ 6= −
d~
r · F~ , e tutto
1
−Γ0
il ragionamento salta!
155
Γ0
CAPITOLO 13. FORZE CONSERVATIVE
—
M.FANTI 156
(2)
(2)
Γ
Γ
dr α
dr α
F
F
F
α
(1)
dr
Γ’
(1)
−Γ’
F
α
dr
Figura 13.1: Il lavoro di una
dipende dagli estremi (1)
R forza conservativa
R
~
~
e (2) ma non dal percorso: Γ d~
r · F = Γ0 d~
r · F . Invertendo l’orientamento
0
0
di
H Γ Otteniamo una linea chiusa Γ ∪ (−Γ ) lungo la quale il lavoro è nullo:
d~
r · F~ = 0.
Integrando su tutto il percorso:
Z
Z
~
d~
r · F~
d~
r·F =−
−Γ0
Γ0
Ora l’unione delle due curve Γ e −Γ0 formano un percorso chiuso Γ ∪ (−Γ0 ):
dall’Eq. (13.1) troviamo
Z
Z
Z
Z
~
~
~
d~
r · F~
r·F +
d~
r · F = d~
d~
r·F −
0 =
−Γ0
Γ
Γ0
Γ
Z
=
d~
r · F~
Γ∪(−Γ0 )
Il lavoro di una forza conservativa lungo un percorso chiuso è sempre nullo.
L’integrale di
H un vettore lungo un percorso chiuso si chiama circuitazione,
e si indica con . Pertanto il risultato trovato si può scrivere come:
I
d~
r · F~ = 0
(forze conservative)
(13.2)
L’argomentoHpuò essere anche rovesciato. Se una forza è tale che per ogni
percorso chiuso d~
r · F~ = 0, allora lungo un qualunque percorso aperto Γ il
R
suo lavoro Γ d~
r · F~ non dipende dal percorso, ma solo dagli estremi, dunque
la forza è conservativa.
CAPITOLO 13. FORZE CONSERVATIVE
M.FANTI 157
A
U’(A)
O’
—
U’(B)
U’(O)
O
U(A)
B
U(B)
Figura 13.2: Definizione di
R Oenergia potenziale: dato un punto di riferimento
O si definisce U (A) = A d~
r · F~ . Cambiando riferimento in O0 , si
R O0
ottiene una nuova definizione U 0 (A) = A d~
r · F~ , legata alla precedente
0
0
da U (A) = U (A) + U (O). Il lavoro da A a B si può scrivere come
L(A → B) = U (A) − U (B).
13.2
Definizione dell’energia potenziale
Scelto un punto di riferimento O, si definisce l’energia potenziale U (A) di un
generico punto A come il lavoro da A a O:
Z O
U (A) =
d~
r · F~
(forze conservative)
(13.3)
A
Nell’integrale solo gli estremi A, O sono specificati, poiché il percorso è
indifferente.
Il punto O ha per convenzione energia potenziale nulla.
Date due generiche posizioni A, B nello spazio, il lavoro da A a B
può essere calcolato lungo un qualunque percorso, poiché la forza F~ è
conservativa. Pertanto scelgo un percorso che passi per O (vd Fig. 13.2):
Z O
Z B
~
L(A → B) =
d~
r·F +
d~
r · F~
A
O
Z O
Z O
=
d~
r · F~ −
d~
r · F~
A
= U (A) − U (B)
B
CAPITOLO 13. FORZE CONSERVATIVE
—
M.FANTI 158
ovvero:
L(A → B) = U (A) − U (B) = −∆U
13.2.1
(forze conservative)
(13.4)
Riferimento — o “zero” — dell’energia
potenziale
Modificando il punto di riferimento da O a O0 (vd Fig. 13.2), ovviamente
anche la definizione di energia potenziale cambia:
0
Z
O0
d~
r · F~
U (A) =
(13.5)
A
La relazione fra le due definizioni U e U 0 è però semplice: se consideriamo
infatti un percorso da A a O0 che passi per O troviamo:
0
Z
O0
U (A) =
d~
r · F~ =
Z
O
d~
r · F~ +
A
A
Z
O0
d~
r · F~ = U (A) + U 0 (O)
O
quindi una ridefinizione del riferimento modifica l’energia potenziale per una
costante additiva:
U 0 (A) = U (A) + U 0 (O)
(13.6)
L’energia potenziale è sempre definita a meno di una costante additiva
arbitraria.
Si noti che l’Eq. (13.3):
L(A → B) = U (A) − U (B)
è valida per qualunque scelta del riferimento: se usiamo un riferimento O0
e quindi una definizione U 0 di energia potenziale, come in Eq. (13.5), i
termini aggiuntivi U 0 (O) che compaiono in Eq. (13.6) si elidono per differenza.
Questo risultato non è inatteso: il lavoro da A a B non deve dipendere dalla
scelta di O.
13.3
Energia meccanica
Per un oggetto che si muove soggetto a forze conservative si definisce l’energia
meccanica come la somma di energia cinetica ed energia potenziale:
E =E +U =
m 2
v + U (~
r)
2
(13.7)
CAPITOLO 13. FORZE CONSERVATIVE
—
M.FANTI 159
dove l’ultima forma ci ricorda che l’energia cinetica E = 12 mv 2 dipende solo
dal moto dell’oggetto, mentre l’energia potenziale U (~
r ) dipende solo dalla
sua posizione.
Unendo i risultati di Eq. (12.7) e Eq. (13.4), che qui riportiamo insieme:
L = ∆E
;
L = −∆U
otteniamo la legge di conservazione dell’energia meccanica:
∆E = ∆ (E + U ) = 0
(13.8)
Il moto di un oggetto su cui agiscono solo forze conservative è tale da
conservare l’energia meccanica, pari alla somma di energia cinetica ed energia
potenziale. (Ora finalmente è chiaro il motivo del nome “forze conservative”).
13.4
Regione cinematicamente accessibile
Per campi di forze conservative l’energia meccanica E è una costante del
moto. Inoltre sappiamo che E ≥ 0 sempre, e E = E − U (~
r ). Quindi possiamo
scrivere la seguente disuguaglianza:
U (~
r) ≤ E
(13.9)
Questa disequazione, oltre che esprimere una relazione fra energia potenziale
ed energia meccanica, può essere letta come una condizione che definisce la
regione accessibile cinematicamente.
~ in cui U (~
La situazione è illustrata in Fig. 13.3: tutti i punti r
r ) > E sono
proibiti. Le regioni in cui U (~
r ) ≤ E sono tutte cinematicamente permesse.
Nel caso a sinistra, solo una regione è effettivamente percorsa (quella con
colore uniforme): se l’oggetto vi si trova all’istante iniziale, resta confinato lı̀
per sempre. Altre regioni con U (~
r ) ≤ E (come quella tratteggiata) restano
inaccessibili, perché separate da una “barriera di energia potenziale”. Nel
caso a destra, si vede che il moto è confinato per valori bassi di energia
meccanica, ma può deconfinarsi per valori più alti.
13.5
Lavoro di forze “esterne”
Sia F~ cons un campo di forze conservative, e supponiamo di applicare una
forza esterna F~ est che sposta la nostra “sonda” da un punto A a un punto
B. Possiamo pensare di regolare F~ est in modo che la sonda in A sia ferma,
e che arrivata in B sia di nuovo ferma. Pertanto la sua energia cinetica alla
CAPITOLO 13. FORZE CONSERVATIVE
—
M.FANTI 160
U(r)
U(r)
E
r
E
r
E
Figura 13.3: Regione cinematicamente accessibile al moto: solo i valori di
~ tali che U (~
r
r ) ≤ E sono ammessi (in figura l’asse orizzontale rappresenta
tutto lo spazio tri-dimensionale, anche se per esigenze grafiche appare come
uni-dimensionale). A sinistra: due regioni sono cinematicamente permesse,
ma non si può passare dall’una all’altra. A destra: per valori bassi
dell’energia meccanica il moto è confinato (sistema legato); per valori più
alti il moto può raggiungere distanze infinite (sistema non legato).
fine non è cambiata: ∆E = 0. Il lavoro totale di tutte le forze (F~ cons e F~ est )
deve quindi essere nullo:
Z B
cons
est
L (A → B) + L (A → B) =
d~
r · F~ cons + F~ est = ∆E = 0
A
ovvero
Lest (A → B) = −Lcons (A → B)
(se ∆E = 0)
(13.10)
Dov’è andato il lavoro Lest fatto dalle forze esterne? È stato “speso” per
contrastare le forze conservative, ok. . . Può essere “recuperato”?
L’Eq. (13.4), Lcons (A → B) = U (A) − U (B) = −∆U , insieme
all’Eq. (13.10), ci fornisce la risposta. Infatti esse dànno:
Lest (A → B) = ∆U = U (B) − U (A)
(se ∆E = 0)
(13.11)
Quindi il lavoro delle forze esterne è stato “immagazzinato nel campo di
forze” in forma di energia potenziale, ∆U . Successivamente questa può essere
restituita in forma di energia cinetica, dalle forze conservative, ∆E = −∆U .
Supponiamo ora che su un oggetto agiscano forze conservative la cui
risultante sia F~ cons , insieme ad altre forze “esterne” con risultante F~ est , non
CAPITOLO 13. FORZE CONSERVATIVE
—
M.FANTI 161
necessariamente conservative. Il lavoro totale fatto dal sistema di forze è:
Z
Z
Z cons
cons
est
r
(13.12)
· d~
r + F~ est · d~
F~
+ F~
· d~
r = F~
L=
Per le forze conservative
Z possiamo scrivere il lavoro come variazione di energia
cons
F~ cons · d~
r = −∆U . Indichiamo il lavoro delle forze
potenziale: L
=
Z
esterne come Lest = F~ est · d~
r . Pertanto:
L = −∆U + Lest
(13.13)
L’energia cinetica subisce una variazione
∆E = L = −∆U + Lest
(13.14)
In altre parole, tutte le forze producono una variazione di energia cinetica
(ovviamente!), mentre solo le forze conservative producono una variazione di
energia potenziale. La variazione di energia meccanica E = E + U è quindi
esprimibile come ∆E = ∆E + ∆U , ovvero:
Z
est
∆E = L = F~ est · d~
r
(13.15)
Riassumendo: il lavoro di forze “esterne” — ovvero non associabili
all’energia potenziale — produce una variazione dell’energia meccanica.
13.6
Energia potenziale di campi notevoli
13.6.1
Campo di forza uniforme
L’esempio più semplice di campo di forza conservativo è il campo di forza
uniforme: F~ è uguale in direzione ed intensità in tutti i punti dello spazio.
In questo caso, il lavoro da un punto A a un punto B è semplicemente
Z B Z B
~
~
~A )
d~
r = F~ · (~
rB − r
L(A → B) =
F · d~
r=F ·
A
A
~ , può essere fattorizzato al di fuori
(spiegazione: essendo F~ indipendente da r
Z B
dell’integrale; poi,
d~
r è semplicemente una successione di spostamenti
A
infinitesi contigui d~
r da A fino a B, il cui effetto totale è lo spostamento da
~B − r
~A ).
A a B, descritto dal vettore r
Una possibile scelta di energia potenziale può semplicemente essere:
~
U (~
r ) = −F~ · r
(campo di forza uniforme)
(13.16)
che soddisfa la relazione L(A → B) = U (~
rA ) − U (~
rB ).
CAPITOLO 13. FORZE CONSERVATIVE
13.6.2
—
M.FANTI 162
Campo gravitazionale uniforme
In prossimità della superficie terrestre, una massa m sente un’attrazione
gravitazionale
F~g = −mg ẑ
uniforme, com buona approssimazione. Applicando quanto detto nella
sezione precedente (Eq. (13.16)), possiamo quindi introdurre l’energia
~ = mg ẑ · r
~ = mgz, quindi
gravitazionale: Ug = −F~g · r
U (~
r ) = mgz
(campo gravitazionale uniforme)
(13.17)
Spesso si indica con h la quota (altezza) rispetto ad un dato riferimento, per
cui la stessa formula si trova in moltitesti nella forma
U (~
r ) = mgh
13.6.3
(campo gravitazionale uniforme)
(13.18)
Campo di forza centrale
Un campo di forza F~ (~
r ) si dice centrale se la sua dipendenza dalla posizione
spaziale ha la forma:
~
r
(13.19)
F~ (~
r ) = F (r)r̂
r ≡ |~
r | ; r̂ ≡
r
Un campo di forza gravitazionale generato da una massa puntiforme, oppure
un campo di forza coulombiano generato da una carica puntiforme ferma,
sono ottimi e notevoli esempi di campi di forza centrali: la loro forma è:
K
F~ (~
r ) = 2 r̂
r
(13.20)
(se si tratta di forza gravitazionale fra due masse m1 , m2 , allora K ≡
−Gm1 m2 ; se invece si tratta di forza elettrica coulombiana fra due cariche
q1 q2
q1 , q2 , allora K ≡
).
4π0
I campi di forza centrali sono sempre conservativi.
Dimostriamolo.
Anzitutto, cominciamo con il calcolo del lavoro
~ar
~ + d~
elementare dL per uno spostamento da r
r:
F (r)
~ · d~
dL = F~ · d~
r = F (r)r̂ · d~
r=
r
r
r
CAPITOLO 13. FORZE CONSERVATIVE
—
M.FANTI 163
Nella Sezione 12.2 abbiamo già visto come trattare forme differenziali del
~ · d~
tipo r
r o r dr:
2
~·r
~
r
r
~ · d~
r
r=d
=d
= r dr
2
2
Pertanto si trova:
dL = F (r)dr
È un risultato notevole! Il lavoro elementare dipende solo dalla distanza
radiale r e dalla sua variazione dr, non dalla direzione di d~
r . La ragione sta
proprio nella forma radiale del campo di forza. In effetti, il prodotto scalare
r̂ · d~
r ha come effetto quello di proiettare lo spostamento vettoriale d~
r sulla
direzione radiale r̂: la componente radiale di d~
r è precisamente dr.
Pertanto, il calcolo del lavoro da (1) a (2) è:
Z
Z r2
~
L =
F · d~
r=
F (r)dr
Γ
r1
che ovviamente non dipende dalla linea Γ ma solo dagli estremi (1) e (2) —
anzi, solo dalle loro distanze radiali r1 , r2 dal centro.
Pertanto il campo di forza radiale è conservativo. L’energia potenziale
può essere descritta partendo da una distanza di riferimento r0 dal centro,
alla quale essa è convenzionalmente nulla. Allora, alla generica distanza r
dal centro, essa deve valere:
Z r0
U (r) =
F (r0 )dr0
(13.21)
r
Si tratta di un integrale in una sola variabile: che sia calcolabile con una
formula analitica o in maniera numerica dipende dalla forma di F (r), poco
importa: l’importante è che sia ben definito in modo non ambiguo.
1
, come quelli dell’Eq. (13.20), il riferimento dove
r2
U (r0 ) = 0 viene scelto per r0 → +∞. Allora
+∞
Z +∞
K
K
K
0
U (r) =
dr = − 0
=
0
2
(r )
r r
r
r
Per campi centrali ∝
quindi:
U (r) =
K
r
( campo centrale con F (r) =
K
)
r2
(13.22)
CAPITOLO 13. FORZE CONSERVATIVE
13.7
—
M.FANTI 164
Energia potenziale di molti campi di
forze
Supponiamo che su un oggetto agiscano molti campi di forze
P conservative,
F~1 (~
r ), . . . F~n (~
r ). La risultante delle forze sull’oggetto è F~ = i F~i . Vogliamo
mostrare che
• anche il campo di forza risultante è conservativo;
• l’energia potenziale del campo di forza risultante è la somma delle
energie potenziali dei singoli campi.
Per dimostrare il primo punto
I basta ricorrere alla circuitazione: essendo
tutti i campi F~i conservativi, d~
r · F~i = 0 per qualunque i, pertanto:
I
d~
r · F~ =
!
I
X
d~
r·
F~i
=
i
XI
d~
r · F~i = 0
i
Inoltre, per ciascun Zcampo F~i deve esistere una funzione energia
B
potenziale Ui (~
r ) tale che
d~
r · F~i (~
r ) = Ui (~
rA ) − Ui (~
rB ). Pertanto:
A
Z
!
B
L(A → B) =
d~
r·
X
A
F~i (~
r)
=
XZ
i
i
!
=
X
Ui (~
rA )
i
B
d~
r · F~i (~
r) =
A
X
(Ui (~
rA ) − Ui (~
rB ))
i
!
−
X
Ui (~
rB )
i
Basta quindi definire:
U (~
r) =
X
Ui (~
r)
(13.23)
i
per ottenere:
Z
L(A → B) =
d~
r · F~ (~
r ) = U (~
rA ) − U (~
rB )
quindi l’Eq. (13.23) definisce esattamente un’energia potenziale per il campo
di forza risultante.
CAPITOLO 13. FORZE CONSERVATIVE
13.7.1
—
M.FANTI 165
Energia potenziale gravitazionale
Abbiamo visto in Sezione 11.2.1 che una configurazione di N masse
~1 , r
~2 , . . . , r
~N produce nello spazio un
m1 , m2 , . . . , mN poste in posizioni r
campo gravitazionale
~ (~
g
r ) = −G
X
mk
k
~−r
~k
r
~k |3
|~
r−r
~ sente una forza
Per quanto detto finora, una massa-sonda m0 in posizione r
gravitazionale
~ (~
F~0 = m0 g
r) =
N X
k=1
Gm0 mk
~k )
(~
r−r
−
~k |3
|~
r−r
che deve essere conservativa, in quanto somma di forze conservative.
L’energia potenziale è la somma di tutte le energie potenziali associate a
ciascuna delle masse mk . Ciascuna di queste vale:
U0,k (~
r ) = −G
m0 mk
~k |
|~
r−r
quindi
U0 (~
r ) = −G m0
N
X
k=1
mk
~k |
|~
r−r
(13.24)
L’energia potenziale gravitazionale della massa-sonda è sempre
proporzionale a m0 . Questo suggerisce di definire il potenziale gravitazionale
Φg (~
r)
N
X
mk
Φg (~
r ) = −G
(13.25)
~k |
|~
r−r
k=1
in modo che per una qualunque massa-sonda m0 si abbia:
U0 (~
r ) = m0 Φg (~
r)
13.7.2
(13.26)
Energia potenziale elettrostatica
Possiamo ripetere il ragionamento tale e quale per le forze elettrostatiche.
Una configurazione di N cariche q1 , q2 , . . . , qN , ferme o in moto lento, poste
~1 , r
~2 , . . . , r
~N , produce nello spazio un campo elettrostatico
in posizioni r
~ r) =
E(~
~−r
~k
1 X
r
qk
~k |3
4π0 k
|~
r−r
CAPITOLO 13. FORZE CONSERVATIVE
—
M.FANTI 166
~ sente una forza elettrostatica
Una carica-sonda q0 in posizione r
N X
1
q
q
0
k
~ r) =
~k )
F~0 = q0 E(~
(~
r−r
~k |3
4π
r
−
r
0 |~
k=1
che deve essere conservativa, in quanto somma di forze conservative.
L’energia potenziale è la somma di tutte le energie potenziali associate a
ciascuna delle cariche qk . Ciascuna di queste vale:
q 0 qk
1
U0,k (~
r) =
~k |
4π0 |~
r−r
quindi
N
X
1
qk
U0 (~
r) =
q0
~k |
4π0
|~
r−r
k=1
(13.27)
L’energia
potenziale
elettrostatica
della
carica-sonda è sempre proporzionale a q0 . Questo suggerisce di definire il
potenziale elettrostatico Φe (~
r)
Φe (~
r) =
N
1 X qk
~k |
4π0 k=1 |~
r−r
(13.28)
in modo che per una qualunque carica-sonda q0 si abbia:
U0 (~
r ) = q0 Φe (~
r)
13.8
Forza come “meno”
dell’energia potenziale
(13.29)
gradiente
Consideriamo un campo di forza conservativo F~ (~
r ) e due posizioni molto
~er
~ + d~
~a
vicine, r
r . Il lavoro elementare fatto dalla forza nel percorso da r
~ + d~
r
r è
dL = F~ · d~
r = U (~
r ) − U (~
r + d~
r)
~ e d~
Lavoriamo su U (~
r + d~
r ) − U (~
r ), scomponendo r
r in componenti
cartesiane:
U (~
r + d~
r ) − U (~
r ) = U (x + dx, y + dy, z + dz) − U (x, y, z)
= [U (x + dx, y + dy, z + dz) − U (x + dx, y + dy, z)]
+ [U (x + dx, y + dy, z) − U (x + dx, y, z)]
+ [U (x + dx, y, z) − U (x, y, z)]
∂U
∂U
∂U
=
dx +
dy +
dz
∂x
∂y
∂z
CAPITOLO 13. FORZE CONSERVATIVE
—
M.FANTI 167
Questi passaggi meritano una spiegazione dettagliata. La prima uguaglianza
è ovvia. La seconda uguaglianza si ottiene dalla prima aggiungendo e
togliendo i termini U (x + dx, y + dy, z) e U (x + dx, y, z). La terza si ottiene
sfruttando la definizione di derivata:
f (x + dx) − f (x)
df (x)
=
dx
dx
applicata rispettivamente alle tre coordinate x, y, z. Poiché la funzione U
dipende da più variabili, si introduce il simbolo di derivata parziale ∂, per
indicare che la variazione di U avviene variando una sola delle coordinate
alla volta:
U (x + ∆x, y, z) − U (x, y, z)
∂U
≡ lim
∆x→0
∂x
∆x
U (x, y + ∆y, z) − U (x, y, z)
∂U
≡ lim
∆y→0
∂y
∆y
∂U
U (x, y, z + ∆z) − U (x, y, z)
≡ lim
∆z→0
∂z
∆z
(13.30)
Le tre derivate parziali appena introdotte possono essere combinate in una
quantità vettoriale, che si chiama gradiente:
~ = ∂U x̂ + ∂U ŷ + ∂U ẑ
∇U
∂x
∂y
∂z
(13.31)
Ricapitolando quanto abbiamo trovato:
dL = F~ · d~
r
−dL = U (~
r + d~
r ) − U (~
r) =
∂U
∂U
∂U
dx +
dy +
dz
∂x
∂y
∂z
~ · d~
= ∇U
r
e per confronto:
~
F~ = −∇U
(13.32)
Riassumendo: se la forza F~ è conservativa, si può definire un’energia
potenziale U (~
r ), che è funzione della posizione. Il gradiente dell’energia
potenziale, cambiato di segno, è pari alla forza.
Un esempio della relazione fra forza e energia potenziale è illustrato in
Fig. 13.4 — per esigenza grafiche lo spazio è supposto bidimensionale, e le
CAPITOLO 13. FORZE CONSERVATIVE
—
M.FANTI 168
Figura 13.4:
Esempio di grafico di un’energia potenziale U (x, y) e del
~ . L’energia potenziale è una quantità numerica,
campo di forza F~ = −∇U
pertanto può essere rappresentata come “quota” in un grafico 3-dimensionale
(a sinistra), o come mappa con curve di livello e “colori geografici” (a destra).
La forza è un vettore, quindi ha un’intensità e una direzione, che vengono
rappresentate in ogni punto da segmenti rossi.
coordinate sono x, y. Come si vede, al forza è sempre orientata verso energie
potenziali decrescenti, lungo la massima pendenza; maggiore è la pendenza,
più fitte sono le curve di livello dell’energia potenziale, più grande è l’intensità
della forza.
Esercizio 13.1. Calcolare il campo di forza per ciascuna delle seguenti energie
potenziali:
U1 (x, y, z) = αx + βy + γz
U2 (x, y, z) = Ax2 + Bxy + Cy 2
K
U3 (x, y, z) = p
2
x + y2 + z2
Soluzione. Usiamo le formule Fx = −
∂U
∂U
∂U
; Fy = −
; Fz = −
. Il
∂x
∂y
∂z
primo caso è immediato:
F1,x = −α
;
F1,y = −β
;
F1,z = −γ
(campo di forza uniforme)
Anche il secondo è semplice
F2,x = −(2Ax + By)
;
F2,y = −(Bx + 2Cy)
;
F2,z = 0
CAPITOLO 13. FORZE CONSERVATIVE
—
M.FANTI 169
p
Per calcolare il terzo inseriamo la variabile ausiliaria r = x2 + y 2 + z 2 —
K
che altro non è se non la distanza dall’origine — cosicché U3 = . Ora calcoliamo
rp
∂U3
∂U3 ∂r
∂U3
K
∂r
∂ x2 + y 2 + z 2
F3,x = −
= −
. Poi,
= − 2 ; inoltre
=
=
∂x
∂r ∂x
∂r
r
∂x
∂x
x
1
p
2x = . Per le altre due coordinate si procede in modo analogo.
2
2
2
r
2 x +y +z
Il risultato è
F3,x = K
x
r3
;
F3,y = K
y
r3
;
F3,z = K
z
r3
Questa forma di campo di forza è MOLTO IMPORTANTE: è quella dei campi
gravitazionali e dei campi elettrostatici.
Per concludere questo argomento, diamo infine un criterio per verificare
se un campo di forza F~ (~
r ) è conservativo.
Se lo è, allora è possibile definire un’energia potenziale U (~
r ) tale che
~
F~ = −∇U
Se ciò è vero, allora, sfruttando la proprietà di commutazione delle derivate
parziali:
∂ ∂
∂
∂ ∂
U=
U =⇒
Fy =
∂x ∂y
∂y ∂x
∂x
∂ ∂
∂ ∂
∂
U=
U =⇒
Fz =
∂y ∂z
∂z ∂y
∂y
∂ ∂
∂ ∂
∂
U=
U =⇒
Fx =
∂z ∂x
∂x ∂z
∂z
∂
Fx
∂y
∂
Fy
∂z
∂
Fz
∂x
Quindi:
F~ conservativa
⇐⇒
∂Fy
∂Fx
=
∂x
∂y
∂Fz
∂Fy
=
∂y
∂z
∂Fx = ∂Fz
∂z
∂x
(13.33)
~
Esercizio 13.2. Consideriamo un campo di forze della forma F~ (~r) = r~ × A,
~ è una quantità vettoriale che non dipende da r
~ . È un campo di forza
dove A
conservativo?
CAPITOLO 13. FORZE CONSERVATIVE
—
M.FANTI 170
~
Risposta. Scegliamo un riferimento cartesiano con l’asse ẑ paarllelo ad A.
~
Cosı̀ facendo, in coordinate cartesiane A ≡ (0, 0, A). Le componenti cartesiane di
F~ sono
Fx = Ay z − Az y = −Ay
Fy = Az x − Ax z =
Ax
Fz = Ax y − Ay x =
0
Allora:
∂Fy
= A
∂x
∂Fz
= 0
∂y
∂Fx
= 0
∂z
∂Fx
= −A
∂y
∂Fy
= 0
∂z
∂Fz
= 0
∂x
;
;
;
quindi una delle tre condizioni dell’Eq. (13.33) (la prima) non è soddisfatta: il
campo pertanto non è conservativo.
Esercizio 13.3. Consideriamo un campo di forza le cui componenti cartesiane
sono
Fx =
k(x − y)
Fy =
k(y − x)
Fz = −2kz
È conservativo? Se sı̀ costruire un’energia potenziale.
Risposta. Calcoliamo le derivate parziali:
∂Fy
= −k
∂x
∂Fz
= 0
∂y
∂Fx
= 0
∂z
;
;
;
∂Fx
= −k
∂y
∂Fy
= 0
∂z
∂Fz
= 0
∂x
Le condizioni dell’Eq. (13.33) sono tutte soddisfatte, dunque il campo di forza
è conservativo. Costruiamo l’energia potenziale. Scegliamo come riferimento
Z (0,0,0)
Z (x,y,z)
~
l’origine, (0, 0, 0). Ricordiamo che U (x, y, z) =
d~
r · F (~
r) = −
d~
r·
(x,y,z)
(0,0,0)
F~ (~
r ). Il cammino da (0, 0, 0) a (x, y, z) può essere scelto a piacere. Scegliamo
dunque un cammino del tipo
(0, 0, 0) → (0, 0, z) → (x, 0, z) → (x, y, z)
CAPITOLO 13. FORZE CONSERVATIVE
—
M.FANTI 171
Ora:
Z
(0,0,z)
(0,0,0)
Z (x,0,z)
Z
(0,0,z)
(x,y,z)
d~
r · F~
Z
z
0
Fz (0, 0, z )dz = −2k
=
Z
x
0
Z
0
0
d~
r · F~
=
(x,0,z)
x
Fx (x , 0, z)dx = k
=
Z
z 0 dz 0 = −kz 2
0
0
d~
r · F~
z
Z
0
y
Fy (x, y 0 , z)dy 0 = k
0
Z
0
y
x0 dx0 =
k 2
x
2
(y 0 − x)dy 0 =
0
k 2
y − kxy
2
dunque
Z
(x,y,z)
U (x, y, z) = −
(0,0,0)
d~
r · F~ = −
Z
(0,0,z)
(0,0,0)
d~
r · F~ +
Z
(x,0,z)
d~
r · F~ +
(0,0,z)
Z
(x,y,z)
(x,0,z)
k
(x − y)2
= − −kz 2 + (x2 + y 2 − 2xy) = k z 2 −
2
2
13.9
Esercizi sull’energia meccanica
Esercizio 13.4. Quanta energia è necessaria per sollevare di 100 m una massa
di una tonnellata, nel campo gravitazionale alla superficie terrestre?
Risposta. La variazione dell’energia gravitazionale è ∆Ug = mg∆h =
(1000 kg)(9.806 m/s2 )(100 m) = 9.806 · 105 J — quasi un MegaJoule. Il lavoro
fatto dalla forza gravitazionale è Lg = −∆Ug . Il meccanismo che solleva applica
una forza esterna che si oppone alla forza di gravità: F~ est = −F~g , pertanto compie
anche lavoro di segno opposto: Lest = −Lg = ∆Ug .
Esercizio 13.5. Un trattore di massa m0 = 1 ton traina un rimorchio carico
di tronchi di massa m1 = 5 ton su per una strada di montagna, con una pendenza
di 15◦ rispetto all’orizzontale. La potenza del trattore è W = 80 kW. Qual è la
velocità (supposta costante) con cui il trattore riesce a salire?
Risposta. Abbiamo due forze in gioco: la forza gravitazionale, che è
conservativa, e quindi ammette un’energia potenziale; inoltre, la forza del motore
del trattore, che ha la funzione di forza esterna.
La potenza fa variare
dUg
dE
dE
l’energia meccanica: W =
=
+
, essendo Ug = (m0 + m1 )gh
dt
dt
dt
l’energia gravitazionale. Se la velocità è costante, l’energia cinetica non cambia,
dE
= 0, quindi tutta la potenza del motore va a modificare solo l’energia
dt
dUg
dh
dh
W
gravitazionale: W =
= (m0 + m1 )g . Si deduce che
=
=
dt
dt
dt
(m0 + m1 )g
8 · 104 J
= 1.360 m/s. Poiché la strada ha una pendenza di
(6 · 103 kg)(9.806 m/s2 )
π
θ = 15◦ = 15
rad = 0.2618 rad, ad una variazione ∆h di quota corrisponde una
180
!
d~
r · F~
CAPITOLO 13. FORZE CONSERVATIVE
—
M.FANTI 172
∆h
lunghezza ∆` tale che ∆h = ∆` sin θ, ovvero ∆` =
= 3.864 ∆h. Si deduce che
sin θ
1 dh
la velocità del trattore sulla strada è v =
= 3.864 · 1.360 m/s = 5.254 m/s.
sin θ dt
Per esprimere la velocità in km/h, moltiplichiamo per 3.6: v = 18.9 km/h.
Un atomo di 126 C viene completamente ionizzato, quindi
immesso in un campo elettrico uniforme E = 105 N/C che lo accelera per la
lunghezza di 1 cm. Se inizialmente era fermo, che velocità raggiunge?
Risposta. Si potrebbe affrontare il problema in vari modi. Un approccio
potrebbe essere risolvere l’equazione del moto e trovare la legge oraria — il che
è facile, perché la forza è costante.
Invece, osserviamo che l’unica forza è quella elettrica, che è conservativa.
Quindi possiamo utilizzare la conservazione dell’energia meccanica. Chiamiamo
x la distanza percorsa dallo ione. L’energia potenziale (elettrostatica) è Ue (x) =
Z 0
Z x
dx0 Fe = −
dx0 qE = −qEx. L’energia meccanica, E = E + Ue (x) deve
Esercizio 13.6.
x
0
conservarsi, ed il suo valore iniziale è nullo, poiché lo ione è fermo e abbiamo
scelto il riferimento dell’energia potenziale in modo che Ue sia nullo per x = 0.
Quindi alla fine dell’accelerazione deve r
essere Er= −Ue (`) = qE`. La velocità
2E
2qE`
m
=
.
finale si ricava da E = v 2 , quindi v =
2
m
m
Ora inseriamo i valori numerici. La massa dell’atomo di 126 C è m =
12 · (1.6605 · 10−27 kg) = 1.9926 · 10−26 kg. L’atomo viene completamente
ionizzato, quindi perde 6 elettroni ed acquista una carica elettrica q = +6e =
6s· (1.602 · 10−19 C) = 9.612 · 10−19 C.
Quindi la velocità vale v =
2(9.612 · 10−19 C)(105 N/C)(0.01 m)
= 3.106 · 105 m/s.
1.9926 · 10−26 kg
Esercizio 13.7. Un paracadutista di massa m = 80 kg (compresa l’attrezzatura),
scende col paracadute aperto alla velocità costante v = 20 km/h. Qual è la potenza
dissipata dal’attrito con l’aria?
Risposta. Abbiamo due forze agenti: quella gravitazionale, che è conservativa,
e quella dell’attrito, che trattiamo come forza esterna. L’energia gravitazionale
è Ug = mgh. La potenza dissipata dall’attrito fa variare l’energia meccanica:
dUg
dE
dE
dE
Wattr =
=
+
. Poiché la velocità è costante,
= 0. Quindi
dt
dt
dt
dt
dUg
dh
Wattr =
= mg
= −mgv (il segno − esprime il fatto che il paracadutista
dt
dt
sta scendendo, quindi h diminuisce col tempo). Inserendo i valori numerici, con
v = 20 km/h = 5.555 m/s, troviamo Wattr = −(80 kg)(9.806 m/s2 )(5.555 m/s) =
−4 358 W = −4.358 kW. Il segno − nella potenza indica che si tratta appunto di
potenza dissipata, ovvero sottratta al sistema meccanico.
Esercizio 13.8. Un oggetto di massa m = 5 kg rotola giù per un piano inclinato
di pendenza θ = 35◦ , partendo da fermo da un’altezza di h1 = 5 m. Questo piano
CAPITOLO 13. FORZE CONSERVATIVE
—
M.FANTI 173
è raccordato in fondo con un altro piano inclinato di uguale pendenza, in salita.
L’oggetto risale su questo piano fino a raggiungere un’altezza h2 = 4 m. Calcolare
il lavoro fatto dalle forze di attrito durante tutto il percorso. Calcolare la forza di
attrito, assumendo che sia costante lungo il percorso. Perché questa assunzione è
ragionevole?
Risposta. Sono in azione due forze: quella gravitazionale (conservativa)
e quella di attrito, che trattiamo come forza esterna. Pertanto la variazione
totale di energia meccanica è esprimibile come lavoro dell’attrito: Lattr =
∆E. Siccome all’inizio e alla fine la velocità è nulla, l’energia cinetica non
ha subito variazioni: ∆E = 0. Quindi Lattr = ∆Ug , essendo Ug = mgh
l’energia potenziale gravitazionale. Troviamo quindi Lattr = mg(h2 − h1 ) =
(5 kg)(9.806 m/s2 )(−1 m) = −49.03 J; è negativo, come c’era da aspettarsi.
h1
5m
Il percorso fatto dalla massa sul primo piano è `1 =
=
=
sin θ
sin(0.6109 rad)
h2
=
8.717 m. Analogamente, il percorso sul secondo piano è `2 =
sin θ
4m
= 6.974 m. Il percorso totale è ` = `1 + `2 = 15.69 m, quindi
sin(0.6109 rad)
Lattr
−49.03 J
la forza di attrito deve valere Fattr =
=
= −3.125 N. Il segno −
`
15.69 m
indica che è diretta in verso opposto allo spostamento.
L’assunzione che Fattr sia costante lungo il percorso è ragionevole, perché si
tratta di attrito radente su una superficie di inclinatazione costante: ricordiamo
infatti che Fattr = αattr Fvinc = αattr mg cos θ.
13.10
Lavoro delle forze di attrito
Le forze di attrito si oppongono sempre al movimento:
F~attr ∝ −d~
r
pertanto compiono sempre lavoro negativo:
dLattr = F~attr · d~
r<0
(13.34)
il che porta sempre ad una diminuzione di energia cinetica: ∆E < 0.
D’altra parte,
le forze di attrito non possono mai essere conservative:
I
ovviamente
d~
r · F~attr < 0. Quindi non possiamo introdurre un’energia
potenziale U tale che ∆E = −∆U .
Quindi le forze di attrito producono sempre una diminuzione di
energia meccanica. D’altra parte, sappiamo che l’attrito provoca sempre
surriscaldamento: i freni delle automobili e dei treni possono diventare
roventi; i meteoriti che cadono sulla Terra, per la frizione con l’atmosfera
CAPITOLO 13. FORZE CONSERVATIVE
—
M.FANTI 174
terrestre, si scaldano fino a diventare incandescenti (stelle cadenti) e spesso
si disintegrano prima di raggiungere la superficie terrestre.
In effetti, l’attrito trasforma l’energia meccanica in energia termica.
Capitolo 14
Matematica dei campi vettoriali
Fino ad ora abbiamo usato più volte il concetto di “campo”. Abbiamo parlato
di campi di forza, di campo gravitazionale, elettrico, magnetico, . . . In questo
capitolo introduciamo in maniera sistematica le operazioni matematiche che
si possono fare sui campi, con particolare attenzione ai campi vettoriali.
Di particolare rilevanza sono i concetti di integrale di linea (Sezione 14.4)
e di flusso (Sezione 14.5, Sezione 14.6) di un campo vettoriale. L’integrale
di linea di fatto l’abbiamo già introdotto parlando del lavoro di una forza
(Sezione 12.1, Eq. (12.4)), qui lo generalizziamo ad un campo vettoriale
qualunque. Il concetto di flusso è molto utile nella trattazione di campi
gravitazionali generati da masse estese (Sezione 15.12). Entrambi (integrale
di linea e flusso) diventano necessari e imprescindibili per comprendere
la natura dei campi elettromagnetici, che tratteremo nei Capitolo 22 e
Capitolo 23.
14.1
Generalità
In fisica, si chiama campo una quantità che sia funzione della posizione
spaziale.
In particolare, un campo vettoriale è una funzione della posizione spaziale
a valori vettoriali — ovvero una quantità vettoriale che può variare da punto
~ r ). In molti casi,
a punto — cioè qualcosa che può essere scritto come A(~
~
la forza F~ agente su un oggetto dipende esclusivamente dalla posizione r
occupata dall’oggetto stesso: In tal caso, la funzione F~ (~
r ) è un campo di
forza.
Analogamente, si definisce campo scalare una funzione dello spazio a
valori numerici — qualcosa che si può scrivere come ψ(~
r ). Le quantità
scalari hanno la proprietà che non cambiano il loro valore per trasformazioni
175
CAPITOLO 14. MATEMATICA DEI CAMPI VETTORIALI — M.FANTI 176
(a)
(b)
(c)
Figura 14.1: (a) linea di campo (o di flusso); (b) l’assurdo incrocio di due
linee di campo; (c) un tubo di flusso
~ è una quantità scalare.
spaziali. Per esempio, il modulo di un vettore, |A|,
~ ·B
~ fra due vettori è uno scalare. Molte quantità fisiche
Il prodotto scalare A
(massa, pressione, temperatura,. . . ) sono scalari. Ma una componente di un
vettore, o una coordinata spaziale, non è uno scalare, perché viene alterata
da trasformazioni spaziali.
14.2
Campi vettoriali
Un campo vettoriale è una funzione della posizione spaziale a valori vettoriali
— ovvero una quantità vettoriale che può variare da punto a punto — cioè
~ r ).
qualcosa che può essere scritto come A(~
Una linea di campo (o linea di flusso) è una linea tale che in ogni suo punto
la tangente è parallela al campo vettoriale, come mostrato in Fig. 14.1(a).
Due linee di campo non possono mai incrociarsi — altrimenti nel punto di
incrocio avremmo due valori del campo vettoriale, con direzioni diverse, come
in Fig. 14.1(b).
Un tubo di flusso è una regione di spazio delimitata da un insieme di linee
di campo, come in Fig. 14.1(c).
CAPITOLO 14. MATEMATICA DEI CAMPI VETTORIALI — M.FANTI 177
14.3
Trasformazione vettoriale del gradiente
(*)
Abbiamo più volte fatto uso del gradiente di un campo scalare ψ(x, y, z),
definito da:
∂ψ
∂ψ
∂ψ
~
∇ψ =
x̂ +
ŷ +
ẑ
(14.1)
∂x
∂y
∂z
Vogliamo mostrare che questo oggetto, che abbiamo detto essere un vettore,
si trasforma effettivamente come un vettore. Per fare questo, utilizziamo
la notazione numerica 1, 2, 3 per le tre direzioni cartesiane, come spiegato in
Sezione 5.5: le tre coordinate sono chiamate x1 , x2 , x3 e i tre versori ê1 , ê2 , ê3 ,
cosicché l’Eq. (14.1) diventa
~ =
∇ψ
3
X
êk
k=1
∂ψ
∂xk
Se scegliessimo un diverso sistema di coordinate con assi ê01 , . . . ê03 , applicando
la definizione Eq. (14.1) scriveremmeo:
~ 0ψ =
∇
3
X
m=1
ê0m
∂ψ
∂xm
Le vecchie coordinate (x1 , . . . , x3 ) sono collegate alle nuove (x01 , . . . , x03 )
dall’Eq. (5.12), quindi:
3
X
∂ψ
∂xk ∂ψ
=
∂x0m
∂x0m ∂xk
k=1
Abbiamo usato la “regola di Leibnits”, o “regola della catena”1 . Ma le
Eq. (5.12) sono lineari, quindi
∂xk
= (êk · ê0m )
∂x0m
e
3
X
∂ψ
∂ψ
=
(ê0m · êk )
0
∂xm
∂xk
k=1
~
Abbiamo trovato che le componenti di ∇ψ
si trasformano secondo le
Eq. (5.13), il che significa che il gradiente di un campo scalare è un campo
vettoriale.
Ve la ricordate? Se modifichiamo la coordinata x0m di una quantità dx0m , lasciando
le altre coordinate x0s (s 6= m) invariate, induciamo variazioni su tutti le coordinate xk
∂xk
0
date da dxk = ∂x
0 dxm , che a loro volta producono una variazione di ψ(x1 , . . . , xn ) pari a
m
P ∂ψ
P ∂xk ∂ψ 0
dψ = k ∂xk dxk = k ∂x0 ∂xk dxm
1
m
CAPITOLO 14. MATEMATICA DEI CAMPI VETTORIALI — M.FANTI 178
A
A
θ
θ
dr
dr
Figura 14.2: Integrale di linea
14.4
Integrali di linea e circuitazione di un
campo vettoriale
~
Data una linea orientata Γ, l’integrale di linea di un campo vettoriale A
lungo Γ è:
Z
Z
~
~ cos θ
A · d~
r = |A|dl
Γ
Γ
dove dl è un segmento infinitesimo sulla linea Γ, e θ è l’angolo fra il vettore
~ e la tangente a Γ, considerando anche l’orientamento di questa, come in
A
~ va calcolato
Fig. 14.2. Si intende che, sotto il segno di integrale, il valore di A
nel punto dove si trova il segmento dl.
Se Γ è una linea chiusa, l’integrale si chiama circuitazione e si scrive:
I
~ · d~
A
r
Γ
H
~ · d~
Un campo che soddisfi la proprietà Γ A
r = 0 per qualunque linea chiusa
Γ è detto irrotazionale.
Integrale di linea e circuitazione sono operazioni lineari, cioè
Z
Z
Z
~
~
~
~ · d~
(aA + bB) · d~
r = a A · d~
r+b B
r
14.5
Superfici orientate, definizione di flusso
Una porzione infinitesimale di superficie dΣ può essere orientata, lungo la
direzione ad essa perpendicolare. Introducendo il versore perpendicolare n̂,
~ = n̂dΣ l’elemento di superficie orientato. Per una superficie
chiamiamo dΣ
estesa Σ, l’orientamento deve essere continuo, cioè n̂ non deve passare da
una parte all’altra mentre ci si sposta lungo la superficie, come in Fig. 14.3).
Per convenzione, le superfici chiuse sono sempre orientate verso l’esterno
(Fig. 14.3(a)). Per superfici delimitate da una linea chiusa (bordo) orientata
CAPITOLO 14. MATEMATICA DEI CAMPI VETTORIALI — M.FANTI 179
^
n
^
n
^
^
n
dΣ
n
dΣ
dΣ
^
n
dΣ
^
n
dΣ
^
dΣ
dΣ
n
dΣ
^
n
(a)
(b)
Figura 14.3:
Esempi di superfici orientate: in ogni punto si definisce
un versore n̂ ortogonale alla superficie. A sinistra: superficie chiusa, con
n̂ diretto verso l’esterno. A destra: superficie “concatenata” ad una linea
chiusa orientata Γ; l’orientamento della superficie è definito con la “regola
della mano destra”.
Γ, l’orientamento convenzionale è quello della “regola della mano destra”: se
si mette la mano destra con le dita che seguono l’orientamento del bordo,
il pollice dà l’orientamento della superficie (Fig. 14.3(b)). In tal caso la
superficie si dice concatenata alla linea Γ.
~ e una superficie orientata Σ, chiamiamo
Dato un campo vettoriale A
~
flusso di A attraverso Σ la quantità:
Z
Z
~
~
~
~
ΦΣ (A) =
dΣ · A =
dΣ n̂ · A
(14.2)
Σ
Σ
~ va calcolato nel punto
(si intende che sotto il segno di integrale, il valore di A
dove si trova la superficie dΣ!)
Ovviamente il flusso è una operazione lineare, cioè
~ + bB)
~ = aΦ(A)
~ + bΦ(A)
~
Φ(aA
14.6
Campi solenoidali, flusso concatenato
Un campo tale che il suo flusso attraverso una qualunque superficie chiusa è
nullo si dice solenoidale.
CAPITOLO 14. MATEMATICA DEI CAMPI VETTORIALI — M.FANTI 180
^
n
^
n
Σ1
dΣ
^
n
dΣ
dΣ
Γ
^
n
Σ2
^
n
dΣ
dΣ
Figura 14.4: Flusso concatenato per un campo solenoidale
~
Consideriamo una linea chiusa orientata Γ e un campo solenoidale A.
Quindi scegliamo due superfici Σ1 e Σ2 concatenate a Γ. Allora:
~ = ΦΣ2 (A)
~
ΦΣ1 (A)
La dimostrazione segue dalla Fig. 14.4. Le due superfici Σ1 e Σ2 formano
una superficie chiusa Σch , ma la convenzione dell’orientamento non è
rispettata: Σ1 è orientata verso l’esterno, Σ2 verso l’interno. Perché Σch
sia completamente orientata verso l’esterno, occorre invertire l’orientamento
di Σ2 , cambiando cosı̀ segno al flusso attraverso di essa:
~ = ΦΣ1 (A)
~ + −ΦΣ2 (A)
~
0 = ΦΣ (A)
ch
il che prova l’affermazione.
Abbiamo trovato che il flusso non dipende dalla scelta della superficie
concatenata: l’unica cosa importante è il suo bordo Γ. Per questa ragione
possiamo definire il flusso concatenato ad una linea chiusa orientata Γ come
il flusso attraverso una qualunque superficie ad essa concatenata.
Si ricordi che tutto ciò ha senso solo per campi solenoidali.
Capitolo 15
Forze gravitazionali
La forza di gravità produce attrazione fra qualunque coppia di oggetti dotati
di massa. È responsabile della caduta di un oggetto verso il basso, ma anche
del moto orbitale della Luna intorno alla Terra, del moto dei pianeti intorno
al Sole, dell’aggregazione delle stelle in galassie. . . Come si vede, una sola
legge può descrivere in modo coerente fenomeni a prima vista molto diversi
fra loro.
15.1
Gravitazione universale
La legge della gravitazione universale, formulata da Isaac Newton, è il primo
esempio di “teoria unificata” della fisica.
Essa si formula cosı̀: Due oggetti di masse m1 e m2 , sufficientemente
piccoli rispetto alla distanza R che li separa, si attraggono con una forza
proporzionale al prodotto delle masse, e inversamente proporzionale al
quadrato della loro distanza:
F =G
m1 m2
R2
(15.1)
La direzione di tale forza è lungo la retta che congiunge le due masse. La
costante di proporzionalità G si chiama “costante gravitazionale universale”
o “costante di Newton” ed è indipendente dalla natura delle masse. Il suo
valore è:
G = 6.67384 · 10−11 Nm2 kg−2
(15.2)
181
CAPITOLO 15. FORZE GRAVITAZIONALI
15.2
—
M.FANTI 182
Il campo gravitazionale
~ : poiché
Consideriamo un oggetto puntiforme di massa m0 , posizionato in r
useremo questa massa per calcolare (o misurare) la forza gravitazionale
prodotta da altre masse, chiamiamo m0 massa-sonda.
La massa-sonda m0 sente la forza gravitazionale prodotta da un insieme
di altre masse puntiformi m1 , . . . , mn , poste rispettivamente nelle posizioni
~1 , . . . , r
~n .
r
L’intensità della forza gravitazionale prodotta da mi su m0 è data
~i |:
dall’Eq. (15.1), in cui la distanza fra le due masse è data da |~
r−r
Fi0 = G
mi m0
~i |2
|~
r−r
Questa è un’espressione scalare. Per combinare le azioni di tutte le masse
m1 , . . . , mn occorre trovare l’espressione vettoriale per la forza. Essa deve
essere orientata lungo la direzione che congiunge le masse m0 e mi , e diretta
verso quest’ultima, poiché è sempre attrattiva. Pertanto F~i0 è diretta come
~i ).
−(~
r−r
mi m0
~i )
(~
r−r
(15.3)
F~i0 = −G
~i |3
|~
r−r
La forza gravitazionale totale prodotta dal sistema di masse m1 , . . . , mn su
m0 è
X mi
~i )
(~
r−r
(15.4)
F~0 (~
r ) = −Gm0
3
~
|~
r
−
r
|
i
i
dove la scrittura F~0 (~
r ) enfatizza che essa dipende sia dalla massa m0 che
~.
dalla posizione r
Qualunque sia la distribuzione delle masse m1 , . . . , mn , la forza su m0
è sempre proporzionale ad m0 . Questo suggerisce di definire un’altra
quantità, indipendente dalla massa-sonda: il campo gravitazionale definito
come F~0 (~
r )/m0 :
X mi
~ (~
~i )
g
r ) = −G
(~
r−r
(15.5)
~i |3
|~
r−r
i
Questo dipende solo dalla posizione relativa del punto in cui lo si calcola
rispetto al sistema di masse m1 , . . . , mn che lo generano.
Vale la pena di fare un’osservazione: se la massa-sonda non risente di
~ coincide
altre forze oltre a quelle gravitazionali, il campo gravitazionale g
con l’accelerazione della massa-sonda:
~a =
F~0
~
=g
m0
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 183
Questa caratteristica è unica per la forza gravitazionale. La ragione risiede
nella identità fra la massa come inerzia dell’oggetto e come capacità di sentire
forze gravitazionali.
15.3
Energia gravitazionale
La forza gravitazionale è conservativa. Quindi ammette un’energia potenziale
U (~
r ), tale che l’energia meccanica E = E + U (~
r ) sia costante per un oggetto
in moto nel campo gravitazionale.
Abbiamo già visto questo risultato nel Capitolo 13 (in particolare
Sezione 13.6.3, Eq. (13.22)). Ripetiamo il ragionamento, per autoconsistenza
di questo capitolo.
15.3.1
Campo centrale
Consideriamo il campo gravitazionale centrale generato da una massa M , per
semplicità posta nell’origine O del nostro riferimento. La forma del campo
gravitazionale diventa relativamente semplice:
~ (~
g
r ) = −GM
~
r
r3
(15.6)
~ lungo
Vogliamo calcolare il lavoro L fatto dalla forza gravitazionale F~ = m0 g
una linea Γ dalla posizione (1) alla posizione (2). Cominciamo con il calcolo
~ar
~ + d~
del lavoro elementare dL per uno spostamento da r
r:
~ · d~
r
r
dL = F~ · d~
r = −GM m0 3
r
Nella Sezione 12.2 abbiamo già visto come trattare forme differenziali del
~ · d~
tipo r
r o r dr:
2
~·r
~
r
r
~ · d~
r
r=d
=d
= r dr
2
2
Pertanto si trova:
dr
dL = F~ · d~
r = −GM 2
r
È un risultato notevole! Il lavoro elementare dipende solo dalla distanza
radiale r e dalla sua variazione dr, non dalla direzione di d~
r . La ragione
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 184
~ (~
di questo è che il campo g
r ) ha direzione radiale e dipendenza radiale.
~
Qualunque campo f (~
r ) = f (r)r̂ darebbe questo risultato.
Ora possiamo integrare il lavoro elementare sulla linea Γ da (1) a (2):
Z
Z r2
dr
1
1
L =
F~ · d~
r = −GM m0
−
= GM m0
2
r2 r1
r1 r
Γ
(il calcolo dell’integrale è stato effettuato usando la funzione primitiva di
1/r2 , che è −1/r). In breve, L non dipende dalla curva Γ ma solo dagli
estremi (1) e (2) — anzi, solo dalle loro distanze radiali r1 , r2 dal centro.
Quindi un campo gravitazionale radiale prodotto da una massa
puntiforme M è conservativo. L’energia potenziale U deve soddisfare la
relazione
1
1
−
U (1) − U (2) = L ( (1) → (2) ) = GM m0
r2 r1
La scelta ovvia è:
U (r) = −
15.3.2
GM m0
r
(15.7)
Generalizzazione
Essendo conservativa la forza gravitazionale prodotta da una massa
puntiforme, anche quella
P prodotta da un sistema di masse lo è.
In effetti, se F~ = i F~i , allora il lavoro lungo una curva Γ da A a B è
Z
Z X !
XZ
~
~
~r
~
~
L =
F · d~
r=
Fi · d~
r=
F~i · d~
Γ
Γ
i
i
Γ
(per l’ultimo passaggio: l’integrale di una somma è pari alla somma degli
integrali — vd regole in Sezione 3.3). Ora F~i è prodotta dalla massa i-esima,
~i . Pertanto, dall’Eq. (15.7), per traslazione,
che si trova nella posizione r
Z
1
1
~
~
~i |) − U (|~
~i |) = Gmi m0
−
Fi · d~
r = U (|~
rA − r
rB − r
~i | |~
~i |
|~
rB − r
rA − r
Γ
quindi
L = Gm0
X
i
mi
1
1
−
~i | |~
~i |
|~
rB − r
rA − r
CAPITOLO 15. FORZE GRAVITAZIONALI
Figura 15.1:
—
M.FANTI 185
Orbite dei pianeti del Sistema Solare.
~A e r
~B , e non dalla curva Γ. L’energia
Il lavoro dipende solo dai punti estremi r
potenziale gravitazionale è
X mi
U (r) = −Gm0
(15.8)
~
|~
r
−
r
|
i
i
Il potenziale gravitazionale è definito come:
X mi
Φ(r) = −G
~i |
|~
r−r
i
15.4
(15.9)
Il Sistema Solare
Il Sistema Solare è costituito dal Sole, al centro, da quattro piccoli pianeti
rocciosi (Mercurio, Venere, Terra, Marte), quattro grandi pianeti gassosi
(Giove, Saturno, Urano, Nettuno), diversi “planetoidi” (Plutone, Eris, Sedna,
. . . ), i satelliti dei pianeti (la Luna, Phobos e Deimos che orbitano intorno a
Marte, le decine di satelliti dei pianeti gassosi), e infine una miriade di oggetti
più piccoli (asteroidi, comete, . . . ) dislocati fino a distanze molto grandi. Le
orbite degli otto pianeti e quella di Plutone sono rappresentate in scala, in
Fig. 15.1: sono tutte approssimativamente circolari e approssimativamente
co-planari.
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 186
In realtà sono ellittiche, con il Sole in un fuoco, e alcune (specialmente
quella di Plutone) si discostano sensibilmente dal piano orbitale della Terra.
Un’orbita ellittica è caratterizzata da una distanza minima rmin e una
distanza massima rmax dal centro di gravità (il Sole, nel caso dei pianeti). I
punti di minima e massima distanza si chiamano perielio e aphelio. Un’orbita
ellittica è parametrizzata dall’eccentricità, definita come
=
rmax − rmin
rmax + rmin
(eccentricità)
Plutone e gli altri planetoidi sono quelli con l’eccentricità più elevata. Eris
ha il perielio a rmin ∼ 6 · 109 km e l’aphelio a rmax ∼ 16 · 109 km; per Sedna
rmin ∼ 11·109 km e l’aphelio a rmax ∼ 140·109 km! I parametri dei principali
oggetti del Sistema Solare sono riassunti in Tabella 15.1.
A rigore, tutti gli oggetti del Sistema Solare contribuiscono a generare il
campo gravitazionale, secondo l’Eq. (15.5). Nella pratica, i satelliti risentono
solo dell’attrazione gravitazionale del “loro” pianeta: l’orbita della Luna è
controllata sostanzialmente dal campo gravitazionale generato dalla Terra.
Viceversa, allontanandosi da un pianeta, l’effetto gravitazionale di gran lunga
dominante è quello del Sole, che contiene più del 99.9% della massa totale del
Sistema Solare. Per convincersi di queste affermazioni, basta costruire una
mappa del potenziale gravitazionale generato dai corpi del Sistema Solare,
facendo uso dell’Eq. (15.9).
Il risultato è in Fig. 15.2. Si assume che tutti i pianeti giacciano
su un piano (approssimazione abbastanza ragionevole). Il Sole sta al
centro, le coordinate sul piano orizzontale sono espresse in unità di distanza
Sole-Terra (A.U., “astronomical units”). L’asse verticale rappresenta il
potenziale gravitazionale. Il grosso “pozzo gravitazionale” al centro è l’effetto
gravitazionale del Sole; gli effetti dei singoli pianeti sono visibili come i piccoli
“pozzetti” aghiformi. In figura sono ben visibili quelli di Giove, Saturno,
Urano e Nettuno. Quelli dei 4 pianeti interni si confondono col pozzo del
Sole. È chiaro che, fatte salve le immediate vicinanze di un pianeta, tutto
l’effetto gravitazionale è dato dal Sole.
Per queste ragioni, è utile e motivato concentrarsi sul campo
gravitazionale generato da un solo corpo celeste (pianeta o stella che sia) —
ricordandosi però che questa approssimazione è infondata se si vuole studiare
per esempio la dinamica di una galassia.
Sole
Mercurio
Venere
Terra
Marte
Giove
Saturno
Urano
Nettuno
Plutone
'
♀
⊕
♂
X
Y
Z
[
\
oggetto celeste
57.9
108.2
149.6
227.9
778.3
1 427.0
2 871.0
4 497.1
5 913.0
0.390
0.723
1
1.524
5.203
9.539
19.18
30.06
39.53
distanza dal Sole
(106 km) (A.U.)
massa
(kg)
(M⊕ )
30
1.989 · 10
333 000
3.301 · 1023 0.0552
4.867 · 1024
0.815
24
5.972 · 10
1
6.417 · 1023
0.107
1.899 · 1027
318
5.685 · 1026
95.2
8.682 · 1025
14.5
26
1.024 · 10
17.1
1.471 · 1022 0.0025
0.166 · 10−6
2.448 · 10−6
3.003 · 10−6
0.323 · 10−6
954.8 · 10−6
285.9 · 10−6
43.66 · 10−6
51.51 · 10−6
0.007 · 10−6
(M )
88.87
0.243
224.70
0.615
365.25
1
686.97
1.881
4 332.59 11.862
10 759.22 29.457
30 799.10 84.323
60 190.03 164.791
90 465
247.680
periodo orbitale
(giorni)
(anni)
0.206
0.007
0.017
0.093
0.048
0.054
0.047
0.009
0.249
eccen.
7.00
3.39
0.00
1.85
1.31
2.48
0.77
1.77
17.14
incl.
(gradi)
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 187
Tabella 15.1:
Parametri dei principali oggetti del Sistema Solare: masse,
distanze dal Sole e periodi orbitali. L’acronimo A.U. (“astronomical units”)
indica la distanza Sole-Terra.
CAPITOLO 15. FORZE GRAVITAZIONALI
Figura 15.2:
15.5
—
M.FANTI 188
Potenziale gravitazionale Φg del Sistema Solare.
Orbite circolari
In un campo gravitazionale centrale
~ (~
g
r ) = −GM
~
r
r3
sono possibili orbite circolari, con una velocità costante in modulo, e una
velocità angolare ω, che dipendono dal raggio R dell’orbita.
Un’orbita circolare di raggio R percorsa a velocità v è caratterizzata da
una velocità angolare ω e un’accelerazione centripeta a⊥ date da:
v
ω =
R
;
a⊥
v2
=
= ω2R
R
Pertanto deve esistere una forza centripeta, diretta verso il centro, F⊥ =
ma⊥ = mω 2 R, che deve essere fornita dall’attrazione gravitazionale della
CAPITOLO 15. FORZE GRAVITAZIONALI
massa M : Fg =
—
M.FANTI 189
GM m
. Uguagliando le due espressioni si ottiene:
R2
mω 2 R = m
GM
R2
ovvero:
ω 2 R3 = GM
(15.10)
Si può anche scrivere un’espressione equivalente in cui, al posto di ω, compare
2π
:
il periodo orbitale T =
ω
R3
GM
=
(15.11)
2
T
4π 2
15.6
Conservazione del momento angolare
Una caratteristica notevole dei moti in un campo gravitazionale centrale
~ (~
g
r ) = −GM
~
r
r3
è che in essi il momento angolare si conserva, cioè è una costante del moto.
Questa è una conseguenza diretta del fatto che la forza F~ è sempre diretta
~ , pertanto il momento meccanico è sempre nullo:
come il raggio vettore r
~
dL
~ × F~ = 0. Poiché
= τ~ (vd Sezione 8.7) otteniamo
τ~ = r
dt
~
dL
=0
dt
(campo gravitazionale centrale)
(15.12)
La conservazione del momento angolare ha importanti conseguenze sul
moto, che aiutano ad integrare le equazioni e trovare la legge oraria.
Anzitutto la traiettoria giace sempre su un piano. Infatti, scegliamo gli assi
~ cosicché Lx = Ly = 0.
cartesiani in modo che l’asse z sia diretto lungo L,
Poiché
~ = m~
~
L
r×v
(15.13)
~ deve essere ortogonale a r
~ , quindi r
~ deve giacere sul piano Oxy, ovvero
L
~ quindi
~ deve essere ortogonale a L,
z = 0. D’altra parte anche la velocità v
vz = 0. In conclusione, l’oggetto non può uscire dal piano Oxy, pertanto la
sua traiettoria sarà sempre contenuta su questo piano.
Questa considerazione ci consente di lavorare con le coordinate polari r, φ,
introdotte nella Sezione 4.2, Eq. (4.7)
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 190
x = r cos φ
y = r sin φ
(15.14)
Introduciamo la velocità angolare ω e la velocità radiale vr :
ω=
dφ
dt
;
vr =
dr
dt
e calcoliamo le componenti vx , vy della velocità in coordinate polari:
dr
d(cos φ)
dφ
d(r cos φ)
=
cos φ + r
= vr cos φ − r sin φ
dt
dt
dt
dt
= vr cos φ − ωr sin φ
dr
d(sin φ)
dφ
d(r sin φ)
=
sin φ + r
= vr sin φ + r cos φ
=
dt
dt
dt
dt
= vr sin φ + ωr cos φ
vx =
vy
(15.15)
La conservazione del momento angolare implica che la componente-z
dell’Eq. (15.13)
Lz = m(xvy − yvx )
(15.16)
è costante. In coordinate polari
xvy − yvx = (r cos φ)(vr sin φ + ωr cos φ) − (r sin φ)(vr cos φ − ωr sin φ)
= ωr2
(le parti in rvr hanno segni opposti e si cancellano, le parti in ωr2 si sommano
— si ricordi cos2 + sin2 = 1). Quindi:
ωr2 =
L
= costante
m
(campo gravitazionale centrale)
(15.17)
Riassumiamo quanto trovato finora. Il moto in un campo di forza centrale
è caratterizzato dalla conservazione del momento angolare. Di conseguenza
la traiettoria giace su un piano. Inoltre la velocità angolare ω è sempre
inversamente proporzionale al quadrato della distanza dal centro della forza:
1
ω ∝ 2.
r
CAPITOLO 15. FORZE GRAVITAZIONALI
15.7
—
M.FANTI 191
Moti in un campo gravitazionale
centrale
Consideriamo il campo generato da una massa M , e per comodità scegliamo
l’origine O del nostro riferimento coincidente con la posizione di M .
L’espressione del campo gravitazionale è data nell’Eq. (15.6):
~ (~
g
r ) = −GM
~
r
r3
Il moto di una massa-sonda in un campo gravitazionale centrale ammette
sempre una soluzione analitica. Abbiamo già trattato il caso particolare
dell’orbita circolare. Qui analizziamo i casi più generali.
15.7.1
Costanti del moto
Abbiamo visto che il moto in un campo gravitazionale centrale è
caratterizzato da due costanti del moto:
• l’energia meccanica:
E = E + U (r) =
m 2 GM m
v −
2
r
(15.18)
• il momento angolare:
~ = mωr2
L = |L|
(15.19)
La conservazione del momento angolare garantisce che l’orbita giaccia su un
piano che contiene il centro di gravità (come spiegato in Sezione 15.6).
15.7.2
Regione cinematicamente accessibile
L’energia potenziale è sempre definita negativa:
U (r) = −
GM m
<0
r
Nel limite r → +∞, cioè quando l’oggetto orbitante si allontani
infinitamente dal centro di gravità, l’energia potenziale tende ad annullarsi:
U (r) −−−−−→ 0.
r→+∞
Inoltre sappiamo che l’energia cinetica è sempre positiva: E ≥ 0. D’altra
parte, per ogni moto dotato di momento angolare, l’energia cinetica non
può mai annullarsi — altrimenti sarebbe v = 0 e quindi si annullerebbe il
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 192
~ nelle sue
momento angolare. Più in dettaglio: scomponiamo la velocità v
L
componenti radiale e azimuthale, rispettivamente vr e vφ = ωr =
. Ora,
mr
2
m
L
m 2
m
vr + vφ2 ≥ vφ2 =
E = v2 =
, ovvero
2
2
2
2mr2
E ≥
L2
2mr2
Ora però, detta E l’energia meccanica del sistema, E = E − U (r) =
GM m
. Quindi la disuguaglianza trovata per E diventa:
E+
r
L2
GM m
≤ E
−
2
2mr
r
(15.20)
Questa disequazione definisce la regione cinematicamente accessibile al moto.
La situazione è quella illustrata in Fig. 15.3(a sinistra). Sia l’energia
L2
GM m
, che il termine
sono raffigurati in funzione
potenziale, U (r) = −
r
2mr2
della distanza r dal centro di gravità. La prima è negativa ed attrattiva,
mentre il secondo è positivo e produce un effetto repulsivo: per questo viene
chiamato potenziale centrifugo. I due termini hanno dunque caratteristiche
opposte. Tuttavia, a causa della diversa dipendenza da r, a grande distanze
1
domina l’energia potenziale (∝ − ), mentre più vicino al centro di gravità è
r
1
preponderante il potenziale centrifugo (∝ + 2 ).
r
Per un’energia meccanica E < 0 il moto è confinato e presenta una
distanza minima e una distanza massima. Queste si possono ricavare
direttamente dall’Eq. (15.20), nel caso-limite dell’uguaglianza. Si ottiene
−2mEr2 − 2GM m2 r + L2 = 0
le cui due soluzioni sono:
p
GM m2 − (GM m2 )2 + 2mEL2
rmin =
−2mE
p
GM m2 + (GM m2 )2 + 2mEL2
rmax =
−2mE
(E<0)
(15.21)
Nel caso-limite in cui (GM m2 )2 + 2mEL2 = 0, le due soluzioni diventano
identiche: rmin = rmax . Quindi un solo valore di r è possibile, e l’orbita
diventa necessariamente circolare.
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 193
L2
2mr2
E>0
Ec <0
E>0
E<0
Ec <0
r
E<0
U(r) = − GMm
r
Figura 15.3:
A sinistra: grafico dell’energia potenziale U (r) (in rosso),
L2
(in verde), e della loro somma (in blu), in
del “potenziale centrifugo”
2mr2
funzione della distanza r dal centro di gravità. La regione cinematicamente
accessibile è indicata con colore uniforme per un caso E < 0 (moto
confinato), e con un tratteggio per E > 0 (moto non confinato). A destra:
esempi di orbite nel campo gravitazionale. Per E < 0 le orbite sono chiuse
ed ellittiche (circolari come caso-limite), mentre per E > 0 sono aperte
(paraboliche o iperboliche).
Per un’energia meccanica E > 0 il moto non è confinato, l’oggetto può
arrivare a distanza infinita, però esiste sempre una valore minimo della
distanza, oltre il quale non è possibile avvicinarsi ulteriormente. Questo
valore si trova come fatto per il caso E < 0, però ora, con E > 0, solo una
delle soluzioni dell’Eq. (15.21) è positiva, e quindi fisicamente sensata:
p
−GM m2 + (GM m2 )2 + 2mEL2
(E>0)
(15.22)
rmin =
2mE
È interessante notare che, sia per orbite confinate (E < 0) che per orbite
aperte (E > 0), l’oggetto non può mai raggiungere il centro di gravità. Il
potenziale centrifugo lo impedisce. In particolare, i pianeti, pur attratti dal
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 194
Sole, non possono cadervi sopra, cosı̀ come la Luna non può cadere sulla
Terra.
15.8
Soluzione generale del moto (*)
Le proprietà esposte nelle sezioni precedenti consentono di semplificare di
molto la soluzione delle equazioni del moto.
Anzitutto, grazie alla conservazione del momento angolare, il problema
da tridimensionale diventa bidimensionale. L’Eq. (15.17) consente di ridurre
ulteriormente il problema ad una dimensione: riscriviamo le equazioni della
L
velocità, Eq. (15.15), esprimendo ω =
:
mr2
L
sin φ
mr
L
cos φ
= vr sin φ +
mr
vx = vr cos φ −
vx
(15.23)
e poi deriviamole rispetto a t, per ottenere le componenti dell’accelerazione.
dvr
Useremo la notazione ar =
. Pronti? Attenti ai calcoli!
dt
dvx
d
L
ax =
=
vr cos φ −
sin φ
dt
dt
mr
L
L
ω cos φ +
vr sin φ
= ar cos φ − vr ω sin φ −
mr
mr2
dvy
d
L
ay =
=
vr sin φ +
cos φ
dt
dt
mr
L
L
= ar sin φ + vr ω cos φ −
ω sin φ −
vr cos φ
mr
mr2
Ora moltiplichiamo la prima equazione per cos φ e la seconda per sin φ e
sommiamo:
L
L2
ax cos φ + ay sin φ = ar −
ω = ar − 2 3
mr
mr
(tutti i termini in cos φ sin φ appaiono con segni opposti e si cancellano,
mentre per gli altri ricordiamo sempre che cos2 + sin2 = 1).
Ora ragioniamo sulla forza centrale: F~ = F (r)r̂, quindi per componenti:
max = Fx = F (r) cos φ
may = Fy = F (r) sin φ
CAPITOLO 15. FORZE GRAVITAZIONALI
allora ax cos φ + ay sin φ =
—
M.FANTI 195
F (r)
e quindi mettendo tutto insieme:
m
d2 r
L2
F (r)
+
=
a
=
r
dt2
m
m2 r3
(15.24)
Questa è l’equazione radiale del moto in un campo centrale. Risolvendola,
si trova la legge oraria r = r(t) che dice come evolve nel tempo la distanza
L
dal centro di forza. Dopodiché la velocità angolare, ω =
può essere
mr2
integrata per ottenere la legge oraria φ = φ(t).
Utilizzando la conservazione dell’energia meccanica, il problema può
L
, l’energia cinetica si
essere ulteriormente semplificato. Esprimendo ωr =
mr
può scrivere:
m 2 m 2 m
m
L2
v = vr + (ωr)2 = vr2 +
2
2
2
2
2mr2
= E − U (r)
E =
da cui si ricava:
vr2
2
L2
=
E − U (r) −
m
2mr2
ovvero:
r
L2
dr
= vr = ± E − U (r) −
(15.25)
dt
2mr2
Il vantaggio di questa equazione, rispetto all’Eq. (15.24), è che qui la derivata
appare solo al primo ordine: in generale questo rende l’integrazione più
agevole, specialmente se deve essere svolta in modo numerico. Tuttavia c’è
un’ambiguità nel segno di vr , che deriva dal fatto che l’energia cinetica non
contiene informazioni sulla direzione della velocità.
Senza risolvere l’equazione del moto, Eq. (15.24) o Eq. (15.25), si può
comunque scrivere un’equazione differenziale per la traiettoria, che metta in
relazione r, φ. Osserviamo che per una qualunque grandezza A(r) si può
dA
dA dφ
dA
dA L
=
·
=
ω=
·
. In altre parole possiamo scrivere
porre
dt
dφ dt
dφ
dφ mr2
una identità operatoriale
d
L d
≡
dt
mr2 dφ
(valida per moti in campo radiale)
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 196
quindi
d2 r
d
=
2
dt
dt
d
r
dt
L d
=
mr2 dφ
L d
r
mr2 dφ
1
du
Ora osserviamo che se poniamo u = , allora
r
dφ
d2 r
L 2 2 d2 u
u≡
=
−
u
dt2
m2 dφ2
=−
1
r
1 dr
, quindi
r2 dφ
L2 2 d2 u
F (1/u) L2 3
+ 2 u , ovvero
u
=
m2 dφ2
m
m
m F (1/u)
1
d2 u
+u=− 2
u≡
(15.26)
2
2
dφ
L
u
r
Sostituendo nell’Eq. (15.24) si ottiene −
Questa equazione prende una forma particolarmente semplice nel caso
GM m
gravitazionale, essendo F (r) = − 2 , ovvero F (1/u) = −GmM u2 .
r
Pertanto,
d2 u
Gm2 M
+
u
=
≡A
dφ2
L2
la cui soluzione (provare per credere!) è u(φ) = A0 cos φ + A. Passando al
raggio r si trova:
1
Gm2 M
r(φ) =
A≡
(15.27)
A + A0 cos φ
L2
dove A0 dipende dalle condizioni iniziali e per convenzione viene scelto ≥ 0.
Prima di analizzare il caso generale, consideriamo il caso particolare
A0 = 0. In questo caso, r è ovviamente indipendente da φ, quindi l’orbita è
circolare, con raggio
L2
r=
(15.28)
Gm2 M
r4
2πmr2
si ottiene r = 4π 2
ovvero:
Considerando che L = mωr2 =
T
GM T 2
r3
GM
=
2
T
4π 2
oppure ω 2 r3 = GM
che è la 3a legge di Keplero per il caso di orbita circolare.
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 197
L’energia meccanica dell’oggetto in orbita è calcolabile dalla somma
GM m
m 2
dell’energia potenziale U = −
e dell’energia cinetica E =
v =
r
2
m 2 2
1 GM m
ω r =
. Si noti la coincidenza: per l’orbita circolare U = −2E.
2
2 r
Quindi l’energia meccanica è
E =U +E =−
1 GM m
2 r
Tornando al caso generale, riprendiamo l’Eq. (15.27) e distinguiamo tre
casi:
• A0 < A: in tal caso il denominatore è sempre positivo ed il moto è
1
e un raggio minimo
confinato: c’è un raggio massimo rmax =
A − A0
1
rmin =
.
A + A0
• A0 = A: il denominatore può annullarsi per cos φ = −1, quindi il raggio
1
diventa infinito: esiste sempre un raggio minimo rmin =
ma non
2A
un raggio massimo, l’orbita si allontana indefinitamente dal centro di
gravità.
• A0 > A: in tal caso il denominatore può annullarsi per cos φ = −
A
,
A0
A
: poiché questa
A0
situazione non è fisica — darebbe r < 0 — questa zona angolare è
A
proibita, il moto deve essere confinato a cos φ ≥ −
A0
ma può anche diventare negativo se cos φ < −
L’Eq. (15.27) descrive una traiettoria conica (cioè ellittica, o parabolica,
o iperbolica) con il centro di gravità in un fuoco. Per capirlo, passiamo alle
coordinate cartesiane:
cos φ
A0 cos φ + A
sin φ
y = r sin φ =
A0 cos φ + A
x = r cos φ =
CAPITOLO 15. FORZE GRAVITAZIONALI
Dalla 1a si può ricavare cos φ =
A
. Lavorando poi sulla 2a :
1 − A0 x
—
M.FANTI 198
Ax
cos φ
e anche A0 cos φ + A =
=
1 − A0 x
x
Ay
sin φ = y(A0 cos φ + A) =
1 − A0 x
2
Ay
1 − cos2 φ = sin2 φ =
1 − A0 x
2
2
Ay
Ax
=
1−
1 − A0 x
1 − A0 x
2
2
(1 − A0 x) − (Ax) = (Ay)2
La geometria analitica ci insegna che un’equazione di 2◦ grado nelle
coordinate x, y descrive effettivamente una conica.
15.9
Esercizi sulle forze gravitazionali
Il valore di G è molto piccolo! In effetti, la gravità è la più debole delle forze
esistenti in natura. Nell’interazione fra atomi, molecole, ma anche fra oggetti
di uso quotidiano, ha effetti del tutto trascurabili.
Esercizio 15.1. Calcolare la forza gravitazionale agente fra due masse di 1 kg,
poste alla distanza di 1 m l’una dall’altra.
Risposta. applicando l’Eq. (15.1) si ottiene F = 6.67384 · 10−11 N.
Allora, come fa la gravità a tenere insieme i sistemi planetari? La risposta
sta nelle enormi masse che caratterizzano i pianeti e soprattutto le stelle.
Esercizio 15.2.
Un oggetto, lasciato cadere in prossimità della superficie
terrestre, si muove di moto uniformemente accelerato verso il basso: l’accelerazione
misurata è g = 9.81 ms−2 . Approssimando la Terra come una sfera di raggio
R⊕ = 6 371 km, calcolarne la massa M⊕ . Nota: nel calcolo si deve assumere che
tutta la massa della Terra, anziché distribuita nel volume sferico del pianeta, sia
concentrata nel centro. Questa assunzione, per quanto possa sembrare assurda,
in effetti produce un risultato esatto. Questa è una conseguenza del teorema di
Gauss, che verrà enunciato e dimostrato nella Sezione 15.12.
Risposta. Un oggetto cade con accelerazione g, pertanto se m è la sua massa,
è soggetto ad una forza mg. Tale forza è dovuta all’attrazione gravitazionale fra le
due masse in gioco, m e M⊕ , pertanto è calcolabile con l’Eq. (15.1):
mg = G
mM⊕
2
R⊕
=⇒
M⊕ =
2
gR⊕
G
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 199
Osserviamo che il risultato non dipende dalla massa m dell’oggetto. Inserendo i
dati si trova
M⊕ = 5.97 · 1024 kg
La massa della Terra è circa 6000 miliardi di miliardi di tonnellate!
Esercizio 15.3. La Luna impiega 27.322 giorni per compiere un’orbita completa
intorno alla Terra. Assumendo che l’orbita sia perfettamente circolare, calcolare
la distanza Terra-Luna R⊕$ .
Risposta. La Luna compie una traiettoria circolare, quindi è soggetta ad
una accelerazione centripeta a = ω 2 R⊕$ . La velocità angolare è calcolabile dal
periodo T = 27.322 giorni = 2 360 621 s (1 giorno=24 ore; 1 ora=60 minuti;
1 minuto=60 secondi =⇒ 1 giorno=86 400 secondi)
ω=
2π
= 2.6617 · 10−6 rad/s
T
Detta m la massa della Luna, la forza centripeta mω 2 R deve essere uguale alla
forza gravitazionale fra Terra e Luna:
r
r
2
mM
GM
3 GM⊕ T
3
⊕
⊕
mω 2 R⊕$ = G 2
=⇒
R⊕$ =
=
ω2
4π 2
R⊕$
Facendo uso di M⊕ = 5.97 · 1024 kg calcolata nell’esempio precedente, ed inserendo
gli altri dati, troviamo:
R⊕$ = 3.83 · 108 m = 383 000 km
Esercizio 15.4. La distanza Terra-Sole è misurata pari a R⊕ = 149.60·106 km.
La Terra impiega un anno (cioè circa 365.25 giorni) a compiere un’intera orbita
intorno al Sole. Assumendo che l’orbita sia perfettamente circolare, calcolare la
massa del Sole M .
Risposta.
L’accelerazione centripeta della Terra intorno al Sole è
a = ω 2 R⊕ , essendo ω = 2π/T , e T = 31 557 600 s (ricordiamo
che 1 giorno=86 400 secondi). Uguagliando la forza centripeta M⊕ ω 2 R⊕
all’attrazione gravitazionale si trova:
M⊕ ω 2 R⊕ = G
M M⊕
2
R⊕
=⇒
M =
3
ω 2 R⊕
G
=
3
4π 2 R⊕
GT 2
Inserendo i dati si trova:
M = 1.99 · 1030 kg
La massa del Sole è 2 miliardi di miliardi di miliardi di tonnellate! Ovvero, circa
333 000 masse terrestri!
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 200
Esercizio 15.5. A causa del principio di azione-reazione, se il Sole attrae la
Terra anche la Terra attrae il Sole. In effetti entrambi ruotano intorno ad un
centro comune, il loro baricentro. Qual è il raggio dell’orbita solare? NOTA:
questo esercizio è abbastanza accademico: infatti per calcolare il moto del Sole
bisognerebbe, insieme alla Terra, considerare tutti gli altri pianeti del Sistema
Solare. Qui stiamo “facendo finta” che il sistema Terra-Sole sia isolato.
Risposta. La distanza Terra-Sole è R⊕ = 149.60 · 106 km. Chiamiamo R⊕
e R rispettivamente i raggi delle orbite terrestre e solare. Essi sono le distanze
dal baricentro comune, pertanto devono soddisfare la relazione R⊕ M⊕ = R M .
Inoltre R⊕ + R = R⊕ . Eliminando R⊕ fra le due equazioni si trova:
M
M⊕
R 1 +
= R⊕ =⇒ R =
R⊕
M⊕
M⊕ + M Nella somma M⊕ + M la massa della Terra è del tutto trascurabile! Con ottima
approssimazione possiamo scrivere
M⊕
R '
R
= 3 · 10−6 · R⊕ = 449 km
M ⊕ In un anno il Sole compirebbe un’orbita di raggio 449 km — molto piccola rispetto
al proprio raggio, che è 696 000 km: per rendere l’idea, è 109 volte il raggio della
Terra, oppure quasi il doppio della distanza Terra-Luna.
Osservazione. Proviamo a ripetere il ragionamento considerando il Sole e
Giove, che è il pianeta più grosso del Sistema Solare, e trascurando tutti gli altri
pianeti. La distanza Sole-Giove è RX ' 779 · 106 km, la massa di Giove è
MX = 1.899 · 1027 kg (circa 318 volte la massa terrestre). In questo caso, il raggio
dell’orbita solare intorno al baricentro Sole-Giove è:
MX
1
R '
RX =
779 · 106 km ' 742 000 km
MX + M
1049
Il centro attorno cui orbita il Sole è appena esterno alla sua superficie.
Esercizio 15.6. Un satellite artificiale si chiama “geostazionario” se ha
un’orbita equatoriale, ed il suo periodo orbitale coincide con il periodo di rotazione
terrestre, cosicché il satellite sta sempre sulla verticale dello stesso luogo sulla
superficie terrestre. A che altezza dal suolo si trova? Con che velocità si muove?
Risposta. Detto R il raggio della sua orbita, la sua accelerazione centripeta
GM
deve essere a⊥ = ω 2 R =
. Confrontando con l’accelerazione di gravità alla
R2
2
R⊕
GM⊕
2
superficie terrestre, g =
,
troviamo
ω
R
=
g
con R⊕ = 6 371 km e
2
R2
R⊕
2π
2π
ω=
=
= 7.27 · 10−5 rad/s. Quindi
T
86 400 s
2 1/3
gR⊕
R=
= 4.223 · 107 m ' 42 000 km
ω2
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 201
L’altezza dal suolo è R − R⊕ = 3.586 · 107 m ' 36 000 km. La velocità orbitale è
v = ωR ' 3 km/s.
Esercizio 15.7.
La Stazione Spaziale Internazionale (International Space
Station, ISS) ha una massa m = 450 000 kg e si muove su un’orbita
approssimativamente circolare intorno alla Terra, ad un’altezza dal suolo h =
420 km. Si calcoli il periodo T della sua orbita e la sua velocità v. Assumendo che
tutte le sue componenti siano state lanciate da basi equatoriali, quanta energia è
stata necessaria per metterla in orbita?
Risposta. Il raggio dell’orbita della ISS è R = R⊕ + h ' (6371 + 420) km =
GM⊕
4π 2
6.791 · 106 m. Potremmo calcolare il periodo dalla relazione
=
R, ma
R2
T2
possiamo anche semplificarci la vita, se confrontiamo l’accelerazione centripeta
GM⊕
GM⊕
a⊥ = ω 2 R =
della ISS con l’accelerazione di gravità g =
2 . Eliminando
2
R
R⊕
GM⊕ fra queste due espressioni si trova:
ω2R = g
2
R⊕
= 8.63 m/s2
R2
s
2
R⊕
2π
= 1.13 · 10−3 rad/s e quindi T =
= 5 570 s — la ISS compie
R3
ω
un’orbita intera intorno alla Terra in circa un’ora e mezza! In effetti, a volte è
possibile vederla ad occhio nudo, la sera quando siamo già in ombra ma la ISS
è ancora illuminata dai raggi solari: appare come una stella molto brillante ed in
rapidissimo movimento, che “sorge” e “tramonta” in pochi minuti. La sua velocità
orbitale è v = ωR = 7.65 · 103 m/s — circa 27,500 km/h, ovvero un po’ più di
7 km/s. Veloce, no? Per confronto, un aereo di linea viaggia ad una velocità di
crociera di 900 km/h.
Per la domanda sull’energia ragioniamo cosı̀: quando il materiale era ancora
GM m
m
a Terra, la sua energia meccanica era E0 = U0 + E0 = −
+ (ω⊕ R⊕ )2 ,
R⊕
2
dove il secondo termine, di energia cinetica, è calcolato considerando la rotazione
2π
2π
terrestre, con ω⊕ =
=
= 7.27 · 10−5 rad/s. Abbiamo rispettivamente
T⊕
86 400 s
da cui ω =
U0 = −
g
GM m
= −2.815 · 1013 J
R⊕
E0 =
;
m
(ω⊕ R⊕ )2 = 4.827 · 1010 J
2
Analogamente da quando la ISS si trova in orbita,
U =−
GM m
= −2.641 · 1013 J
R
;
E=
m
(ωR)2 = 1.325 · 1013 J
2
L’energia ceduta alla ISS per metterla in orbita è dunque ∆E = (U + E) − (U0 +
E0 ) = 1.494·1013 J. È interessante calcolare separatamente le variazioni di energia
potenziale e cinetica: ∆U = 0.174 · 1013 J e ∆E = 1.320 · 1013 J. Contrariamente a
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 202
quanto ci si poteva aspettare, la maggior parte di energia non viene impiegata nel
“sollevare” la ISS fino all’orbita, ma nel darle la velocità sufficiente a rimanere
sull’orbita!
Esercizio 15.8. Supponiamo che le orbite della Terra e di Marte siano circolari,
con raggi rispettivamente R⊕ = 149.6 · 106 km e R♂ = 227.9 · 106 km. Si vuole
lanciare un’astronave dalla Terra, che parta tangente ad essa, e con un’orbita
ellittica raggiunga al proprio aphelio l’orbita di Marte. Con che velocità v⊕ deve
partire? Con che velocità v♂ raggiungerà l’orbita di Marte? Quanto tempo impiega
l’astronave per giungere a destinazione?
Risposta.
L’orbita dell’astronave è tangente a quella della Terra al
suo perielio, pertanto la sua velocità è ortogonale al raggio Sole-astronave.
L’ortogonalità si ha anche all’aphelio. Pertanto il momento angolare, che è
conservato, si può scrivere
L = m0 R⊕ v⊕ = m0 R♂ v♂
(essendo m0 la massa dell’astronave). La conservazione dell’energia meccanica
inoltre mi dà:
E=
GM m0
GM m0
m0 2
m0 2
v⊕ −
=
v♂ −
2
R⊕
2
R♂
Abbiamo un problema con due equazioni e due incognite: v⊕ e v♂ . Possiamo
eliminare v♂ dalla prima equazione — la più semplice — ottenendo
v♂ =
R⊕
v⊕
R♂
La seconda equazione diventa:
"
2 #
R
1
1
⊕
2
v⊕ 1 −
= 2GM
−
R♂
R⊕ R♂
2
R2 − R⊕
R − R⊕
2 ♂
v⊕
= 2GM ♂
2
R♂ R⊕
R
♂
1
2 R♂ + R⊕
v⊕
= 2GM
R♂
R⊕
s
2GM R♂
v⊕ =
R⊕ (R♂ + R⊕ )
Inserendo i dati per G = 6.67384 · 10−11 Nm2 kg−2 , M = 1.99 · 1030 kg, R⊕ , R♂
si trova
v⊕ = 3.274 · 104 m/s ' 32.7 km/s
v♂ = 2.149 · 104 m/s ' 21.5 km/s
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 203
Per rispondere all’ultima domanda usiamo la 3a legge di Keplero: il periodo T ,
R⊕ + R♂
lungo un’orbita completa di semiasse maggiore A =
= 188.8 · 106 km,
2
soddisfa l’equazione T 2 = K A3 ; analogamente l’orbita terrestre ha un periodo
A 3/2
2
3
T⊕ = 1 anno che soddisfa T⊕ = K R⊕ . Per confronto, T = T⊕
=
R⊕
1.42 anni. Questo sarebbe il periodo di un’orbita completa, ma visto che ci interessa
solo l’andata dalla Terra a Marte, cioè dal perielio all’aphelio, il tempo è a metà.
In conclusione, il viaggio dalla Terra a Marte dura 0.71 anni, ovvero 8 mesi e
mezzo.
15.10
Come è stata scoperta la gravitazione
universale?
Ai tempi di Newton, la conoscenza osservativa dei moti celesti era molto
approfondita. Galileo aveva dimostrato con l’osservazione che i pianeti girano
intorno al Sole, ed aveva scoperto quattro satelliti orbitanti intorno a Giove:
all’epoca chiamati “lune Medicee”, oggi nominati Io, Europa, Ganimede,
Callisto, o collettivamente “satelliti Galileiani”. Inoltre Johannes Kepler
aveva analizzato in grande dettaglio il moto dei pianeti, deducendo le tre
famose leggi:
• l’orbita di ogni pianeta è ellittica, con il Sole in un fuoco;
• il raggio vettore Sole-pianeta traccia aree uguali in tempi uguali —
qualitativamente diremmo che quando il pianeta è più vicino al Sole si
muove più rapidamente;
• per tutti i pianeti, il semi-asse maggiore A dell’ellisse e il periodo T
dell’orbita obbediscono alla legge universale
T2
=K
A3
essendo K una costante universale per tutti i pianeti.
Inoltre, la distanza Terra-Luna era nota, con una certa precisione. In
effetti, il raggio della Terra è noto sin dall’antichità (misura di Eratostene,
IV secolo a.C.). Dall’osservazione dell’ombra della Terra durante le eclissi di
Luna, si poteva dedurre la proporzione fra raggio terrestre e raggio lunare,
dunque anche il raggio della Luna era calcolabile. Infine, misurando l’angolo
sotto il quale si osserva il disco lunare dalla Terra (circa 0.5◦ ) si poteva risalire
alla distanza Terra-Luna.
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 204
Newton dunque aveva molti dati empirici alla mano: la formulazione della
gravitazione universale è stato il risultato dell’unificazione di tutte queste
osservazioni in un’unica teoria. Non solo: come si è detto, essa è in grado di
spiegare anche la caduta di oggetti verso la superficie terrestre.
Senza ripercorrere la via storica che ha portato Newton alla formulazione,
cerchiamo in modo logico di capire come arrivarci, con alcune semplificazioni.
• Semplifichiamo le leggi di Keplero, assumendo che le orbite siano
circolari — è un caso limite, naturalmente. Con raggio orbitale R
costante, la legge delle aree dice banalmente che la velocità angolare ω
non cambia lungo l’orbita. Chiamando M la massa del Sole e m quella
del pianeta, la forza centripeta sul pianeta deve essere
F = mω 2 R = m
4π 2
R
T2
La terza legge per orbite circolari può essere riscritta come T 2 = K R3 ,
cosicché per sostituzione di T 2 troviamo:
m
(15.29)
F = 4π 2 K 2
R
La legge della proporzionalità inversa al quadrato della distanza è già
trovata. La costante K è la stessa per tutti i pianeti, ma in generale
dipende dall’attrazione del Sole: in questa fase del ragionamento non
sappiamo ancora come.
• L’osservazione dei quattro satelliti Galileiani mostra orbite con raggi
diversi e periodi diversi, ma tutte obbediscono ad una legge T 2 =
KX R3 . Quindi anche l’attrazione di Giove deve seguire una legge 1/r2 .
• Dal moto della Luna intorno alla Terra, che avviene con periodo di
27.322 giorni, e dal raggio dell’orbita R⊕$ ' 380 000 km, si deduce che
l’accelerazione centripeta della Luna deve essere
a$ =
4π 2
R
' 2.7 · 10−3 m/s2
T 2 ⊕$
L’accelerazione alla superficie terrestre (quindi a R⊕ ' 6 400 km
dal centro della Terra) è g = 9.81 m/s2 . Confrontando a$ /g '
2.7 · 10−4 con (R⊕ /R⊕$ )2 ' 2.8 · 10−4 (ovviamente i calcoli qui sono
approssimati) si trova che anche i valori di a$ e g sono in accordo con
una legge 1/r2 , che questa volta riguarda l’attrazione della Terra.
F ⊕ = 4π 2 K⊕
m
R2
(15.30)
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 205
• Il principio di azione-reazione ci viene incontro: se il Sole attrae la
Terra, anche la Terra deve attrarre il Sole con forza uguale e contraria.
La forza che il Sole esercita sulla Terra è:
m⊕
F⊕ = 4π 2 K 2
R
Ipotizzando che la forza che la Terra esercita sul Sole sia della stessa
natura di quella esercitata sulla Luna e sugli oggetti vicini alla sua
superficie, essa deve essere pari a:
⊕
F
= 4π 2 K⊕
M
R2
⊕
Uguagliando F⊕ = F
si ottiene:
m⊕ K = M K⊕
M
K
= K⊕
m⊕
=⇒
Quindi le K che quantificano l’attrazione sono proporzionali alle masse
degli oggetti che causano l’attrazione:
4π 2 K = GM
4π 2 K⊕ = GM⊕
;
In particolare, la forza Terra-Sole risulta:
F ⊕ = G
M M⊕
2
R⊕
(15.31)
La costante universale G è ancora ignota.
15.11
Misura della costante G
Il valore di G è piuttosto difficile da ottenere, essendo la gravità cosı̀ debole
rispetto ad altre forze. L’idea di base è di partire dall’Eq. (15.1), e misurare
la forza agente fra masse note poste a distanza nota.
L’apparato utilizzato è una bilancia di torsione, come in Fig. 15.4. Due
masse leggere m, sospese agli estremi dell’apparato mobile, con braci di
lunghezza `, risentono l’attrazione gravitazionale di altre due masse M molto
più grosse.
L’apparato mobile è sospeso da un filo che ha costante di torsione elastica
k, cioè se il filo subisce una torsione di un angolo θ, esso esercita un’azione
elastica di richiamo dell’apparato pari a
τel = −kθ
(15.32)
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 206
Figura 15.4: Schema della bilancia di torsione di Cavendish, utilizzata per
misurare la costante G.
(k viene misurato sottoponendo il filo a momenti torcenti noti).
Le masse m subiscono forze gravitazionali
Fg = G
Mm
d2
(15.33)
ad opera delle masse M , essendo d la distanza che le separa. Il sistema viene
montato in modo tale che la congiungente m-M sia ortogonale ai bracci `,
cosicché il momento torcente gravitazionale è
τg = 2`Fg = G ·
2`mM
d2
(15.34)
La condizione di equilibrio, che non produce rotazioni, si ha quando il
momento torcente totale è nullo:
0 = τg + τel = G ·
2`mM
− kθ
d2
(15.35)
Pertanto, conoscendo m, M, k e misurando θ, d si può ricavare G. La misura
di θ viene effettuata osservando lo spostamento di un fascio di luce riflesso
da uno specchietto montato sull’apparato mobile.
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 207
^
n
r^
r^
dΣ
θ
r dΣ
^
^
n
^
r
n
dΩ
dΩ
(a)
(b)
Figura 15.5: Illustrazioni per la dimostrazione del teorema di Gauss
Questa misura fu condotta per la prima volta dal fisico inglese Henry
Cavendish a fine ’700.
15.12
Teorema di Gauss per il campo
gravitazionale
Nota: per comprendere questa sezione è necessario aver studiato e capito il
concetto di flusso di un campo vettoriale, spiegato nella Sezione 14.5. È anche
necessario conoscre il concetto di angolo solido, introdotto in Sezione 4.5.
~ attraverso
Il teorema di Gauss dice che il flusso del campo gravitazionale g
una superficie chiusa Σch è uguale alla massa totale racchiusa all’interno della
superficie, M (int) , moltiplicata per −4πG:
I
~ ·g
~ = −4πG · M (int)
dΣ
(15.36)
ΦΣch (~g ) =
Σch
Per dimostrare il teorema, consideriamo anzitutto il campo gravitazionale
generato da una massa puntiforme m. Senza perdita di generalità, possiamo
~
scegliere l’origine dove la massa è localizzata, cosicché il campo nel punto r
è:
Gm
~ = − 2 r̂
g
r
~ è:
e il suo flusso attraverso una superficie infinitesima dΣ
~ = − Gm r̂ · n̂ dΣ
~ · dΣ
g
r2
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 208
Ora, come mostrato in Fig. 15.5(a), r̂ · n̂ dΣ = cos θ dΣ = dΣ⊥ è pari alla
proiezione di dΣ perpendicolare alla direzione radiale r̂, quindi, chiamando
dΩ l’angolo solido sotto cui dΣ è vista dall’origine, dΣ⊥ = r2 dΩ, e:
~ = −Gm dΩ
~ · dΣ
g
Quando si integra su tutta la superficie Σch , se l’origine (e la massa m) è
all’interno della superficie, l’intero angolo solido è 4π, e il risultato è:
ΦΣch (~g ) = −4πGm
(m all’interno di Σch )
mentre, se l’origine è esterna, possiamo sempre dividere Σch in coppie di
superfici infinitesime che sono sottese dallo stesso angolo solido dΩ e dànno
contributi opposti al flusso (vedi Fig. 15.5(b)), cosicché il flusso totale è nullo:
ΦΣch (~g ) = 0
(m all’esterno di Σch )
Ora possiamo generalizzare il calcolo ad un generico campo gravitazionale
~ , prodotto da un qualunque P
g
sistema di masse.
P Per masse puntiformi
~ k e Φ(~g ) = k Φ(~gk ), essendo Φ(~gk ) =
~ = kg
m1 , . . . , mn decomponiamo g
−4πGmk se mk è interna, Φ(~gk ) = 0 altrimenti, ottenendo cosı̀ l’Eq. (15.36).
Il risultato può anche essere esteso a una distribuzione di masse con densità
ρ: in tal caso il teorema di Gauss si formula cosı̀:
Z
ΦΣch (~g ) = −4πG
dV 0 ρ(~
r0 )
(15.37)
(dentro Σch )
15.12.1
Campo gravitazionale generato da una massa
estesa sferica
Finora abbiamo trattato il campo gravitazionale come generato da masse
puntiformi — col che si intende molto piccole rispetto alle distanze fra esse.
Parlando del campo generato da un pianeta, o dal Sole, l’approssimazione
è buona? Per esempio: il raggio del Sole è circa 0.7·106 km, la distanza media
di Mercurio dal centro del Sole è di circa 60 · 106 km (circa 86 volte il raggio
del Sole). Possiamo considerare il Sole come “puntiforme”?
O ancora peggio: l’accelerazione di gravità g = 9.8 m/s2 , che
rileviamo sulla superficie della Terra, può essere davvero descritta dalla
2
legge GM⊕ /R⊕
?? La Terra, vista dalla sua superficie, non può certo
apparire puntiforme! Eppure il ragionamento di Newton, in cui confrontava
l’accelerazione di un oggetto che cade a terra con l’accelerazione centripeta
della Luna, funzionava bene. Perché?
CAPITOLO 15. FORZE GRAVITAZIONALI
—
M.FANTI 209
In effetti, una massa M sferica di raggio R genera al suo esterno (cioè per
distanze r > R dal proprio centro) un campo gravitazionale identico a quello
che genererebbe se fosse tutta concentrata al centro.
Questa è una diretta conseguenza del teorema di Gauss. In effetti, data
~ da essa generato deve essere
la simmetria della massa sferica, il campo g
radiale:
~ (~
g
r ) = g(r)r̂
pertanto se prendiamo una superficie sferica chiusa Σch di raggio r centrata
~ attraverso di essa deve essere
nel centro della massa sferica, il flusso di g
ΦΣch (~g ) = 4πr2 g(r)
~ è radiale, mentre il versore n̂ ortogonale alla superficie
(spiegazione: g
Σch coincide con r̂, dunque anch’esso radiale; inoltre essendo g(r) uniforme
ovunque sulla superficie Σch , è sufficiente moltiplicarlo per l’area della sfera,
cioè 4πr2 ).
Il teorema di Gauss ci dice che ΦΣch (~g ) = −4πGM (int) , quindi
confrontando:
g(r) = −
GM (int)
r2
;
~ =−
g
GM (int)
r̂
r2
Se r > R (cioè siamo esterni alla massa sferica) M (int) coincide con tutta la
massa.
Se invece ci troviamo all’interno della massa sferica (r < R) allora solo la
quantità di massa più interna contribuisce al campo gravitazionale, mentre
quella esterna non dà nessun effetto.
Capitolo 16
Urti
16.1
Urti
L’idea alla base dello studio degli urti è che gli oggetti siano sostanzialmente
liberi di muoversi sia prima che dopo l’urto, e che l’interazione abbia luogo
solo per un tempo relativamente breve, quando essi si sono avvicinati molto,
o quando entrano in contatto. In generale non si conoscono i dettagli
dell’interazione. Viceversa, le velocità iniziali e finali — quando cioè gli
oggetti sono abbastanza lontani da non interagire — sono costanti, e i moti
sono rettilinei uniformi.
Due oggetti puntiformi (1) e (2), di masse m1 , m2 entrano in collisione,
~ 1in , v
~ 2in . Vogliamo cercare di prevedere informazioni sul
con velocità iniziali v
~ 1out , v
~ 2out .
loro stato finale, ovvero sulle velocità v
La conservazione della quantità di moto ci dice che:
~ 1in + m2 v
~ 2in = m1 v
~ 1out + m2 v
~ 2out
m1 v
(16.1)
Questa è un’equazione vettoriale, quindi fornisce 3 equazioni algebriche: una
~ 1out che
per ciascuna direzione x, y, z. Le incognite però sono 6: infatti sia v
~ 2out possiedono 3 componenti. Quindi dobbiamo cercare altre condizioni, se
v
possibile.
Possiamo distinguere due casi-limite: quello dell’urto totalmente
inelastico, e quello dell’urto totalmente elastico. Quest’ultimo, a sua volta,
va trattato separatamente per il caso unidimensionale (due oggetti che si
muovono lungo una rotaia) che per quello tridimensionale.
210
CAPITOLO 16. URTI
16.2
—
M.FANTI 211
Urto totalmente inelastico
Nell’urto totalmente inelastico, l’energia non si conserva. I due oggetti, dopo
~ out : le incognite da
~ 1out = v
~ 2out ≡ V
l’urto, restano attaccati fra loro, pertanto v
6 si riducono a 3, quindi la conservazione della quantità di moto, Eq. (16.1),
è sufficiente a risolvere il problema. Il risultato è
~ out = m1 v
~ 1in + m2 v
~ 2in
(m1 + m2 )V
ovvero
~ 1in + m2 v
~ 2in
~ out = m1 v
(16.2)
V
m1 + m2
La dissipazione di energia cinetica si può calcolare come
hm
m1 + m2
m2 in 2 i
1
out 2
in 2
∆E =
V
−
v1 +
v2
2
2
"2
#
2
2
~ 2in
~ 1in · v
1 m21 (v1in ) + m22 (v2in ) + 2m1 m2 v
2
2
− m1 v1in − m2 v2in
=
2
m1 + m2
"
#
2
2
~ 1in · v
~ 2in − m1 m2 (v1in ) − m1 m2 (v2in )
1 2m1 m2 v
=
2
m1 + m2
2
m1 m2
~ 1in − v
~ 2in
v
= −
2(m1 + m2 )
16.3
Urto elastico
Nell’urto elastico, l’energia cinetica si conserva. Questa affermazione può
sembrare un po’ forte: se le forze sono conservative ciò che si conserva è
l’energia meccanica, non l’energia cinetica. D’altra parte, abbiamo ipotizzato
che gli oggetti interagiscano solo per un tempo relativamente breve, quando
sono vicini. Viceversa, quando sono lontani, non sono soggetti a forze,
quindi l’energia potenziale può essere considerata nulla. Volendo scrivere
la conservazione dell’energia meccanica, prima, durante e dopo l’urto,
scriveremmo:
in
inter
out
Etot
+ U in = Etot
+ U inter = Etot
+ U out
dove i suffissi in , inter , out si riferiscono rispettivamente allo stato iniziale,
alla condizione di interazione, e allo stato finale. Abbiamo detto che
U in = U out = 0, quindi anche senza sapere i dettagli dell’interazione (e
quindi la forma di U inter ) possiamo dire che
in
out
Etot
= Etot
CAPITOLO 16. URTI
—
M.FANTI 212
Applicata al nostro urto essa si scrive
m1 in 2 m2 in 2 m1 out 2 m2 out 2
=
+
v1 +
v2
v1
v2
2
2
2
2
(16.3)
È utile “rimaneggiare” un po’ questa equazione:
h
h
2
2 i
2
2 i
m1 v1in − v1out
= m2 v2out − v2in
~ 2in
~ 2in · v
~ 2out − v
~ 1out = m2 v
~ 2out + v
~ 1out · v
~ 1in − v
~ 1in + v
m1 v
(abbiamo sfruttato l’identità vettoriale (~a + ~b) · (~a − ~b) = a2 − b2 , facilmente
verificabile). Ora “rimaneggiamo” anche la conservazione della quantità di
moto, Eq. (16.1):
~ 2in
~ 2out − v
~ 1out = m2 v
~ 1in − v
m1 v
Sostituendo questa nella precedente, si ottiene:
~ 1in + v
~ 1out − v
~ 2out − v
~ 2in · v
~ 1in − v
~ 1out = 0
v
(16.4)
~ 1out , in cui di fatto non c’è urto, questa
~ 1in = v
Escludento il caso banale v
~ 1out )
~ 2out lungo la direzione di (~
~ 1out , v
v1in − v
equazione dà una condizione fra v
— quindi è una sola condizione. Insieme alla conservazione della quantità di
moto, ho 4 condizioni e 6 incognite.
16.3.1
Caso unidimensionale
Se gli oggetti che si urtano sono costretti a muoversi lungo una sola
dimensione (per esempio carrelli su una rotaia), allora il problema è
perfettamente risolvibile: le equazioni sono:
v1in + v1out = v2in + v2out
m1 (v1in − v1out ) = −m2 (v2in − v2out )
(16.5)
nelle due incognite v1out , v2out . La soluzione si può ottenere per sostituzione,
per esempio ricavando v1out = v2out − v1in + v2in dalla prima equazione e
introducendolo nella seconda. La soluzione è:
(m1 − m2 )v1in + 2m2 v2in
m1 + m2
(m2 − m1 )v2in + 2m1 v1in
=
m2 + m1
v1out =
v2out
(16.6)
CAPITOLO 16. URTI
—
M.FANTI 213
Vediamo alcuni casi notevoli:
• m1 = m2 : masse uguali:
v1out = v2in
v2out = v1in
;
ovvero le velocità “si scambiano” da prima a dopo l’urto.
• m1 m2 : una massa è estremamente più piccola dell’altra:
v1out ' −v1in + 2v2in
;
v2out ' v2in
ovvero la massa più grande m2 non subisce variazioni apprezzabili di
velocità; per studiare l’effetto sulla massa più piccola consideriamo
alcuni sotto-casi:
• m1 m2 e v2in = 0: la massa più grande è ferma e la più piccola la
colpisce; in questo caso
v1out ' −v1in
;
v2out ' 0
ovvero la massa piccola viene rimbalzata all’indietro, mentre la massa
grande resta indisturbata;
• m1 m2 e v1in = 0: la massa più piccola è ferma e la più grande la
colpisce; in questo caso
v1out ' 2v2in
;
v2out ' v2in
ovvero la massa piccola viene sparata in avanti a velocità doppia della
massa grande, mentre quest’ultima procede indisturbata.
• masse m1 , m2 qualunque, ma v2in = 0, ovvero l’oggetto (2) è inizialmente
fermo; in questo caso:
v1out =
m1 − m2 in
v
m1 + m2 1
;
v2out =
2m1
v in
m1 + m2 1
CAPITOLO 16. URTI
16.3.2
—
M.FANTI 214
Caso bidimensionale — FINIRE
Affrontiamo il caso generale solo nella condizione che l’oggetto (2) sia
~ 2in = 0. Il problema, cosı̀ facendo da tridimensionale si
inizialmente fermo: v
~ out
~ out
riduce a bidimensionale. Infatti, nello stato finale p
individuano un
1 ,p
2
in
~ out
~ out
~1 = p
deve
piano, e per la conservazione della quantità di moto, p
2
1 +p
giacere su tale piano.
Scegliamo come direzione di riferimento quella dell’oggetto incidente (1), e
misuriamo rispetto ad essa gli angoli θ1 , θ2 degli oggetti uscenti. Riscriviamo
l’Eq. (16.4) utilizzando le quantità di moto:
in
~1 + p
~ out
~ in
~ out
p
p
2
2 +p
1
~ out
~ in
=0
−
· p
1
1 −p
m1
m2
~ in
~ out
~ in
~ out
quindi poniamo p
=p
2 = 0; questo significa che p
2
1 −p
1 . Definiamo
m2
per comodità
= k. Allora
m1
~ in
~ out
~ in
~ out
~ in
~ out
0 = k p
− p
· p
1 +p
1
1 −p
1
1 −p
1
~ in
~ out
= (k − 1)~
pin
pout
· p
1 −p
1
1 + (k + 1)~
1
2
2
~ out
~ out
~ in
+ [(k + 1) − (k − 1)]~
pin
− (k + 1) p
= (k − 1) p
1
1 ·p
1
1
in 2
out 2
in out
= (k − 1) p1 − (k + 1) p1
+ 2p1 p1 cos θ1
Introduciamo poi la quantità x =
l’espressione:
pout
1
per semplificare ulteriormente
pin
1
2
(k + 1)x − 2x cos θ1 − (k − 1) = 0
m2
pout
k=
; x = 1in
m1
p1
(16.7)
Questa si può risolvere per cos θ1
cos θ1 =
(k + 1)x2 − (k − 1)
2x
(16.8)
oppure per x:
x=
cos θ1 ±
p
(cos θ1 )2 + k 2 − 1
k+1
(16.9)
L’andamento delle due variabili è mostrato in Fig. 16.1. È possibile
osservare tre diverse casistiche:
m2
• k=
> 1, ovvero la particella-proiettile è più leggera della particellam1
bersaglio.
—
M.FANTI 215
1
1
1
x = pout / pin
CAPITOLO 16. URTI
m2 /m1=50.00
0.8
m2 /m1=20.00
m2 /m1=10.00
m2 /m1=5.00
m2 /m1=2.00
m2 /m1=1.50
m2 /m1=1.10
m2 /m1=1.01
m2 /m1=1.00
m2 /m1=0.99
0.6
m2 /m1=0.90
m2 /m1=0.70
m2 /m1=0.50
m2 /m1=0.20
m2 /m1=0.10
m2 /m1=0.05
m2 /m1=0.02
m2 /m1=0.01
0.4
0.2
0
-1
-0.5
0
0.5
1
cos θ1
Figura 16.1:
Rappresentazione grafica della relazione fra la prazione di
pout
quantità di moto x = 1in e l’angolo di diffusione θ1 in un urto elastico, per
p1
m2
diversi valori del rapporto k =
. La massa m2 è supposta ferma prima
m1
dell’urto.
In questo caso, ogni angolo di diffusione è possibile: cos θ1 ∈ [−1; +1],
pout
ovvero θ1 ∈ [0, π]. Inoltre, per ciascun valore di θ1 il rapporto x = 1in è
p1
univocamente determinato. In effetti, una delle due soluzioni Eq. (16.9)
risulta negativa, il che è fisicamente privo di senso, pertanto resta
p
cos θ1 + (cos θ1 )2 + k 2 − 1
pout
1
=
(per k > 1)
pin
k+1
1
Nel caso-limite k 1 (cioè il bersaglio è molto più massivo del
proiettile) abbiamo pout
' pin
1
1 , ovvero l’urto modifica la direzione del
proiettile ma non la sua energia.
m2
= 1, ovvero la particella-proiettile e la particella-bersaglio
m1
hanno masse identiche.
Solo la diffusione “in avanti” è possibile: cos θ1 ∈ [0; +1], ovvero
• k =
CAPITOLO 16. URTI
—
M.FANTI 216
h πi
pout
θ1 ∈ 0, . Inoltre, il rapporto x = 1in è univocamente determinato
2
p1
pout
1
= cos θ1
pin
1
(per k = 1)
m2
< 1, ovvero la particella-proiettile è più pesante della
m1
particella-bersaglio.
Solo la diffusione in avanti è possibile; inoltre, per un dato angolo di
pout
diffusione θ1 , esistono due possibili valori per x = 1in :
p1
p
cos θ1 ± (cos θ1 )2 + k 2 − 1
pout
1
=
(per k < 1)
pin
k+1
1
• k =
L’intervallo ammesso degli angoli di diffusione è definito dalla
condizione (cos θ1 )2 ≥ 1 − k 2 , ovvero, ricordando che cos2 + sin2 = 1,
da
sin θ1 ≤ k
(per k < 1)
Capitolo 17
Forze elastiche
Le forze elastiche, in generale, sono forze che tendono ad opporsi a
spostamenti da una posizione di equilibrio, in maniera proporzionale agli
spostamenti stessi. Il loro effetto è di creare dei moti di oscillazione intorno
alla posizione di equilibrio, detti moti armonici.
17.1
Forza elastica di una molla
Una molla che viene tirata esercita una forza di richiamo, che tende a
riportarla alla sua lunghezza iniziale. Analogamente, se viene compressa
esercita una spinta che tende a contrastare la compressione. Più la molla
viene deformata, più la sua reazione diventa forte. Molte molle vengono
costruite in modo che la forza di reazione sia proporzionale alla deformazione:
detta `0 la lunghezza di una molla a riposo (cioè senza forze esterne agenti
su di essa) e ` la lunghezza attuale, la forza elastica è data da:
Fel = −k(` − `0 )
(17.1)
dove k è la costante di elasticità della molla. Il segno − sta ad indicare che ad
un allungamento (` > `0 ) corrisponde una reazione che tende ad accorciare
(Fel < 0), e viceversa, ad una compressione (` < `0 ) corrisponde una reazione
che tende ad allungare (Fel > 0): in ogni caso la forza elastica è diretta in
modo da tentare di ripristinare la lunghezza `0 .
Se si applica alla molla una forza esterna Fest , essa modifica la propria
lunghezza fino a realizzare una condizione di equilibrio. La nuova lunghezza
`eq deve essere tale che la forza elastica Fel compensi esattamente la forza
esterna Fest : Fel + Fest = 0. Ovvero:
Fest = −Fel = +k(`eq − `0 )
217
(17.2)
CAPITOLO 17. FORZE ELASTICHE
—
l [mm]
0
0
0
0
1
1
1
1
2
2
2
2
3
3
3
3
l2
l1
4
4
4
4
5
5
5
5
6
6
6
6
Figura 17.1:
M.FANTI 218
l4
l3
P1
P2
P3
P4
P [g]
Uso di una molla per misurare le masse.
Se la forza esterna è di trazione (Fest > 0) si ha un allungamento della
molla (` > `0 ). Viceversa, una forza di compressione (Fest < 0) produce un
accorciamento (` < `0 ). A parità di forza applicata Fest , una molla con k
elevato si allunga meno di una con k più piccolo: grandi k corrispondono a
molle “dure”, piccoli k a molle “morbide”.
17.2
Misure di massa con una molla
Un’applicazione ovvia è quella di usare una molla per misurare delle masse.
Una massa m nel campo gravitazionale terrestre è soggetta alla forza-peso
Fg = mg (g = 9.81 m/s2 ). Appendendo dunque una massa m ad una
molla con elasticità k, l’Eq. (17.2), applicata per Fest = mg, predice un
allungamento:
g
(17.3)
∆` = `eq − `0 = m
k
Quindi una molla può essere usata come bilancia, come in Fig. 17.1.
In effetti, si tratta di una bilancia di ottima precisione, purché la molla sia
davvero elastica, cioè purché Fel = −k(`−`0 ). Per verificare questa condizione
si può procedere idealmente nel seguente modo. Si costruiscono diversi
oggetti, tutti della stessa massa: l’omogeneità fra essi può essere ottenuta
per costruzione, quindi verificata appendendoli uno alla volta alla stessa
molla: se non si osservano differenze negli allungamenti ottenuti possiamo
affermare che effettivamente le masse siano omogenee. Fatto ciò, si possono
appendere n oggetti alla molla e si osserva l’allungamento ∆`: se esso è
sempre proporzionale al numero di oggetti appesi, possiamo affermare che la
molla sia elastica.
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 219
Una volta verificata l’elasticità della molla, una qualunque massa m può
essere misurata osservando l’allungamento prodotto sulla molla:
m=
k
· ∆`
g
(17.4)
k
Naturalmente occorre conoscere k e g, o più semplicemente il loro rapporto .
g
Questo può essere dedotto appendendo una massa-campione m (per esempio
1 g, o 1 kg, a seconda dell’elasticità della molla) e misurando l’allungamento
k
m
=
ottenuto ∆`. Ovviamente
. Pertanto, per qualunque massa m
g
∆`
appesa vale la relazione
m
· ∆`
(17.5)
m=
∆`
17.3
Oscillazioni di una molla
Consideriamo un oggetto di massa m attaccato ad una molla con costante di
elasticità k. Supponiamo dapprima che sul sistema non agiscano altre forze.
Per esempio, la molla sia disposta orizzontalmente lungo una rotaia, sulla
quale la massa m può scorrere senza attrito.
Il problema è unidimensionale. Definiamo l’origine O del sistema di
riferimento nel punto in cui la molla è in equilibrio, e l’asse x orientato
verso la direzione di allungamento della molla. Quindi x = ` − `0 e la forza
elastica dell’Eq. (17.1) diventa: Fel = −kx. Applicando la legge di Newton,
F = ma, otteniamo la seguente equazione del moto:
F
k
d2 x
=
=− x
2
dt
m
m
(17.6)
Come si muove la massa m? L’esperienza ci insegna che si tratta di un moto
oscillatorio. . . ma qui vogliamo verificare che le equazioni della dinamica lo
descrivono correttamente. Consideriamo una funzione x(t) = A cos(ωt + φ).
Dalle regole di derivazione della Sezione 3.3 sappiamo che:
d
[A cos(ωt + φ)] = −Aω sin(ωt + φ)
dt
d2
d
[A cos(ωt + φ)] =
[−Aω sin(ωt + φ)] = −Aω 2 cos(ωt + φ)
2
dt
dt
Pertanto:
d2
[A cos(ωt + φ)] = −ω 2 [A cos(ωt + φ)]
2
dt
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 220
Quindi possiamo concludere che la funzione
x(t) = A cos(ωt + φ)
soddisfa un’equazione identica all’Eq. (17.6), purché sia
r
k
ω=
m
(17.7)
(17.8)
pertanto l’Eq. (17.7) descrive esattamente la legge oraria dell’oscillazione
della molla.
Ora consideriamo il problema di una massa m appesa verticalmente ad
una molla di costante di elasticità k. Ora le forze in gioco sono due: la forza
elastica Fel = −k(` − `0 ) e la forza di gravità Fg = mg. Entrambe le forze
sono verticali, quindi il problema è comunque unidimensionale. La posizione
del sistema è identificata univocamente dalla lunghezza ` della molla, e
potremmo pensare di ricavare la legge oraria per ` = `(t). L’equazione del
moto sarebbe:
Fel + Fg
k
d2 `
=
= − (` − `0 ) + g
2
dt
m
m
Questa equazione è un po’ meno comoda di quella trovata per il moto
orizzontale, Eq. (17.6), a causa della presenza del termine g. Tuttavia
sappiamo dalla Sezione 17.2 che l’effetto della forza-peso è di spostare il
gm
. Pertanto scegliamo il sistema di
punto di equilibrio da `0 a `eq = `0 +
k
riferimento con l’asse z orientato verso il basso (in modo che allungamenti
della molla corrispondano a z crescenti) e con l’origine O nel punto di
equilibrio, cosicché z = ` − `eq . Con questa scelta l’equazione del moto
diventa:
d2 z
k
=− z
2
dt
m
del tutto identica all’Eq. (17.6). Pertanto anche la legge oraria deve essere
la stessa.
17.4
Moto oscillatorio armonico
Riconsideriamo l’equazione del moto Eq. (17.6), trovata per una molla
oscillante, e riportiamola qui:
d2 x
k
=− ·x
(17.9)
Fx = −kx
ovvero
dt2
m
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 221
Dimenticandoci della natura specifica del sistema (la molla), possiamo
astrarre l’analisi dinamica parlando semplicemente di un sistema con le
seguenti caratteristiche:
• esiste un punto di equilibrio in cui la forza è nulla;
• uno spostamento x dal punto di equilibrio produce una forza Fx ,
direttamente proporzionale allo spostamento, ma diretta nel verso
opposto;
• è caratterizzato da due parametri: la massa m e la costante elastica k.
Abbiamo già visto che la legge oraria del moto del sistema è
r
k
x(t) = A cos(ωt + φ)
;
ω=
m
(17.10)
Quindi la forza Fx (a causa del segno −) agisce da forza di richiamo, ovvero
tende a riportare il sistema verso la posizione di equilibrio: in pratica, il
sistema oscilla intorno ad essa.
Tale moto si chiama moto oscillatorio armonico. La sua rappresentazione
grafica è mostrata in Fig. 17.2, per diversi valori di ω, A, φ.
La quantità ω si chiama frequenza angolare (o anche pulsazione) e si
misura in “radianti al secondo” (rad/s). Essa dipende dai parametri fisici
del sistema (m, k) e non dalle condizioni iniziali.
La velocità si ricava derivando l’Eq. (17.10):
r
k
(17.11)
v(t) = −Aω sin(ωt + φ)
;
ω=
m
Le funzioni trigonometriche hanno una periodicità di 2π: cos(α) =
cos(α + 2π) e sin(α) = sin(α + 2π). Nel nostro caso, ciò significa che
2π
cos(ωt + φ) = cos(ωt + φ + 2π) = cos ω t +
+φ
ω
2π
x(t) = x t +
ω
altrettanto si può verificare che
2π
v(t) = v t +
ω
x(t)
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 222
T=2 , A=1 , φ=0
T=3 , A=1 , φ=0
T=2 , A=1.5 , φ=0
T=2 , A=1 , φ=π/4
3
2.5
2
1.5
1
0.5
0
-0.5
-1
-1.5
-2
-2
-1
0
1
2
3
4
5
6
7
8
t
Figura 17.2:
Esempi di moto oscillatorio armonico, per diversi valori di
periodo T , ampiezza A, fase φ.
Il moto oscillatorio armonico è dunque un moto periodico, nel senso che esiste
un intervallo di tempo T tale che la posizione e la velocità all’istante t sono
sempre uguali a quelle all’istante t + T :
x(t) = x(t + T )
v(t) = v(t + T )
per qualunque t
(17.12)
In particolare, nel moto oscillatorio armonico il periodo è dato da
T =
2π
ω
(17.13)
Si introduce anche la frequenza ν definita come il numero di oscillazioni
effettuate in 1 secondo:
1
ω
ν= =
(17.14)
T
2π
La legge oraria, Eq. (17.10), oltre alla frequenza angolare ω, contiene
anche i parametri A, φ.
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 223
Il parametro A si chiama ampiezza dell’oscillazione: poiché | cos(α)| ≤ 1,
A rappresenta effettivamente il massimo spostamento possibile dal punto di
equilibrio.
A e φ si ricavano dalle condizioni iniziali x0 , v0 :
x0 = x(0) = A cos(φ)
v0 = v(0) = −Aω sin(φ)
Moltiplicando la prima equazione per ω, facendone il quadrato e sommandola
al quadrato della seconda, si ottiene:
(x0 ω)2 + v02 = (Aω)2 cos2 φ + sin2 φ
e sfruttando l’identità trigonometrica cos2 φ + sin2 φ = 1 si ottiene:
r
v02
2
A = x0 + 2
(17.15)
ω
17.5
Energia elastica
La forza elastica è conservativa.
In effetti, qualunque problema
unidimensionale
è conservativo, per definizione. L’integrale del lavoro,
Z
B
dx · F dipende solo dagli estremi, visto che il percorso da A a B in
A
una sola dimensione è obbligato.
Per calcolare l’energia potenziale scegliamo il riferimento O coincidente
con il punto di equilibrio, x = 0. L’energia potenziale nel punto x si calcola
come:
0 x
Z 0
Z x
x
k
0
0
0
0
U (x) =
dx F (x ) = −
(−kx )dx = k
= x2
2 0
2
x
0
0 x
Z x
1 2
x
x2
0
0
Una funzione primitiva di x è x , quindi
x dx =
=
. In
2
2 0
2
0
conclusione, l’energia potenziale elastica si scrive:
Uel (x) =
k 2
x
2
(17.16)
In un moto elastico, descritto dalle leggi orarie Eq. (17.10) e Eq. (17.11),
l’energia cinetica e potenziale valgono
m 2 m 2 2 2
E =
v = A ω sin (ωt + φ)
2
2
k 2
A cos2 (ωt + φ)
U =
2
x(t) [m]
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 224
0.1
0.05
0
-0.05
-0.1
-2
0
2
4
x(t) [m]
v(t) [m/s]
2
a(t) [m/s ]
Ec (t) [J] ( × 100)
6Uel(t) [J] (× 100)
8
t
Figura 17.3: Moto oscillatorio armonico: evoluzione nel tempo di posizione,
velocità, accelerazione, energia cinetica, energia potenziale (rispettivamente
x(t), v(t), a(t), Ec (t), Uel (t)). I parametri usati per questo esempio sono
A0 = 1 cm, T = 2 s, k = 10 N/m. Attenzione: le energie sono molto
piccole, nel grafico sono state moltiplicate per 100 per renderle più visibili.
e ricordando che mω 2 = k e che sin2 + cos2 = 1 la conservazione dell’energia
meccanica è manifesta.
Un esempio di moto armonico, con l’evoluzione temporale di tutte le
quantità cinematiche, è mostrato nel grafico della Fig. 17.3.
17.6
Esercizi sulle forze elastiche
Esercizio 17.1. Per mantenere una molla compressa di 1 cm, rispetto alla
sua posizione di equilibrio, è necessaria una forza di 0.2 N. Calcolare la costante
elastica della molla e l’energia elastica in essa immagazzinata.
Risposta. La forza applicata Fappl = 0.2 N si oppone alla forza elastica
per mantenere la molla ferma: Fel = Fappl . Quindi la costante elastica si può
Fappl
0.2 N
=
= 20 N/m.
calcolarecome k =
∆`
0.01 m
k
20 N/m
L’energia elastica è Uel = (∆`)2 =
(0.01 m)2 = 0.002 J.
2
2
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 225
Osservazione: calcolare l’energia elastica come Fappl ∆` sarebbe errato,
poiché nel processo di compressione la forza elastica, e quindi la forza applicata,
aumentano man mano che la molla si schiaccia.
Esercizio 17.2. Ad una molla di costante elastica k = 10 N/m viene appesa
una massa m, quindi questa viene spostata di 1 cm dalla sua posizione di equilibrio
e lasciata oscillare. Il periodo di oscillazione osservato è T = 2 s. Determinare
la frequenza angolare ω e il valore di m. Determinare inoltre i valori massimi di
velocità, accelerazione, energia cinetica e energia potenziale.
2π
k
Risposta. Anzitutto, ω =
= 3.1416 rad/s; quindi m =
=
T
ω2
10 N/m
= 1.013 kg. La velocità massima è vmax = A0 ω = 0.031416 m/s,
(3.1416 rad/s)2
mentre l’accelerazione massima è amax = A0 ω 2 = 0.0987 m/s. L’energia
k
potenziale massima è Umax = A20 = 5 · 10−4 J. L’energia cinetica massima è
2
m 2
= 5 · 10−4 J, ovviamente uguale all’energia potenziale massima.
Emax = vmax
2
I parametri di questo esercizio sono gli stessi del grafico in Fig. 17.3: potete
confrontare i valori numerici ottenuti con quelli che compaiono nel grafico.
Esercizio 17.3. Un oggetto di massa m = 1 kg viene appoggiato ad una molla
di costante elastica k = 15 N/m, disposta orizzontalmente; quindi la molla viene
compressa di ∆` = 20 cm, e poi lasciata andare. L’oggetto subisce la spinta
della molla finché questa si distende, poi quando la molla è tornata in equilibrio
l’oggetto se ne separa e continua a muoversi lungo una rotaia orizzontale. Quanto
lavoro occorre fare per comprimere la molla come descritto? Con che velocità viene
“sparato” l’oggetto?
Risposta. L’energia potenziale elastica della molla, inizialmente nulla, viene
aumentata durante la fase di compressione, fino ad un valore
U0 =
k
(∆`)2 = 0.5 · 15 N/m · (0.2 m)2 = 0.3 J
2
pertanto tale è anche il lavoro fatto dall’esterno. Durante l’espansione della molla,
l’energia meccanica E = E +U si conserva, pertanto l’energia potenziale si converte
man mano in energia cinetica. Quando la molla torna in equilibrio U = 0, pertanto
l’energia cinetica del proiettile sparato è
E=
m 2
v = 0.3 J
2
da cui la velocità risulta
r
v=
2E
=
m
s
2 · 0.3 J
= 0.77 m/s
1 kg
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 226
Esercizio 17.4. Un oggetto di 10 kg è dotato di una molla di massa trascurabile
attaccata alla parte inferiore. L’oggetto viene lasciato cadere dall’altezza di 1 m
(misurata dall’estremo inferiore della molla al suolo). Quando raggiunge il suolo,
la molla si comprime di 10 cm, quindi si estende e rilancia l’oggetto in alto.
Calcolare la costante k della molla.
Risposta. Le forze agenti solo la gravità e l’elasticità della molla: entrambe
sono conservative, pertanto E = E + Ug + Uel è costante. Inizialmente l’oggetto è
fermo (E = 0) e la molla è libera (Uel = 0), pertanto E = Ugin . Alla fine, l’oggetto è
di nuovo fermo (E = 0) e la molla è compressa, quindi E = Ugf in + Uelf in . Pertanto
Uelf in = Ugin − Ugf in = mg hin − hf in . Ora, nella caduta l’oggetto scende di 1 m
fino a quando la molla tocca il suolo, poi questa si comprime di δ = 10 cm, pertanto
la discesa totale è ∆h = hf in − hin = −1.1 m, e la variazione di energia potenziale
è ∆U = U f in −U in = mg∆h = (10 kg)(9.806 m/s2 )(−1.02 m) = −1.079 J. Quindi
2Uelf in
2(1.079 J)
k
=
= 216 N/m
Uelf in = 1.079 J. Inoltre Uelf in = δ 2 , quindi k =
2
2
δ
(0.1 m)2
Esercizio 17.5. Un sasso di 500 g viene legato ad un filo elastico e fatto ruotare,
in modo che compia un giro al secondo; la lunghezza dell’elastico in questo caso è
`1 = 50 cm. Quindi la rotazione viene aumentata, arrivando a un giro e mezzo
al secondo; l’elastico si allunga fino a `2 = 55 cm. Calcolare la costante elastica
dell’elastico.
Risposta. Chiamiamo `0 la lunghezza a riposo dell’elastico. Quando l’oggetto
è in rotazione, l’elastico fornisce la forza centripeta, Fel = F⊥ , ovvero k(` − `0 ) =
mω 2 ` = m 4π 2 ν 2 ` — abbiamo chiamato ν la frequenza di rotazione — quanti giri
per unità di tempo — e ω = 2πν la velocità angolare di rotazione. Nelle due
condizioni di rotazione abbiamo:
k(`1 − `0 ) = 4π 2 mν12 `1
;
k(`2 − `0 ) = 4π 2 mν22 `2
due equazioni nelle due incognite k, `0 . Possiamo eliminare facilmente `0
per sottrazione, ottenendo k(`2 − `1 ) = 4π 2 m `2 ν22 − `1 ν12 , da cui: k =
`2 ν 2 − `1 ν12
4π 2 m 2
. Ora sostituiamo i valori numerici, con ν1 = 1 Hz e ν2 = 1.5 Hz:
`2 − `1
(0.55 m)(1.5 Hz)2 − (0.5 m)(1 Hz)2
k = 4π 2 (0.5 kg)
= 291 N/m.
0.05 m
17.7
Oscillazioni intorno ad un punto di
equilibrio
Le forze elastiche possono essere utilizzate in una grande varietà di problemi
fisici: quelli caratterizzati da oscillazioni intorno ad un punto di equilibrio.
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 227
Consideriamo un oggetto puntiforme soggetto a campi di forze
conservative, con risultante F~ (~
r ).
Si definisce punto di equilibrio del sistema di forze come una posizione
~
req tale che l’oggetto, posizionato lı̀ in quiete, lı̀ rimanga. Perché ciò accada,
~=r
~eq sia F~ (~
occorre che in r
req ) = 0: infatti se cosı̀ è, non c’è accelerazione,
la velocità resta nulla come era inizialmente, quindi l’oggetto non si muove.
Un punto di equilibrio si definisce stabile se l’oggetto, in seguito ad un
piccolo spostamento, tende a muoversi intorno al punto di equilibrio.
Facciamo alcuni esempi: una pallina sferica, posta in fondo ad una ciotola,
inizialmente sta ferma nel punto più fondo: quello è il suo punto di equilibrio.
Se uno la perturba, spostandola o urtandola, essa acquista un moto intorno
al punto di equilibrio: si tratta quindi di un equilibrio stabile.
Se la stessa pallina viene posta in quiete su di un piano orizzontale, oppure
(con molta attenzione!) appoggiata in cima ad un pallone, essa resta lı̀:
quindi anche in questi casi si trova nel suo punto di equilibrio. Tuttavia, in
questi casi non si tratta di un equilibrio stabile. Se viene urtata, nel caso
del piano prosegue con un moto rettilineo uniforme (almeno finché non viene
frenata. . . ) mentre nell’altro caso rotola lontano dal punto di equilibrio.
Teniamo presente che la stabilità dell’equilibrio è sempre relativa alle
perturbazioni applicate: anche la pallina nella ciotola, se urtata troppo
violentemente, può saltare fuori dal bordo della ciotola!
L’equilibrio stabile può essere compreso ricorrendo all’energia potenziale
~eq che costituisca un minimo locale della funzione
U (~
r ). Qualunque punto r
~eq è un punto di minimo
U (~
r ) è un punto di equilibrio stabile. Infatti, se r
~eq :
per U , vuol dire che tutte le derivate di U (~
r ) sono nulle in r
∂U
∂U
∂U
=0
;
=0
;
=0
∂x r~=~req
∂y r~=~req
∂z r~=~req
~ (vedi Sezione 13.8 e Eq. (13.32)), la forza in r
~eq
e quindi, poiché F~ = −∇U
~eq resta lı̀.
è nulla. Cioè, un oggetto posto in quiete in r
L’oggetto, in quiete nel punto di equilibrio, possiede energia meccanica
pari alla sua energia potenziale U (~
req ), visto che la sua energia cinetica è
nulla. Quando viene perturbato, acquista energia meccanica:
~eq , la sua energia potenziale U aumenta (altro
• se viene spostato da r
non può fare, visto che era al minimo);
• se viene messo in movimento, acquista energia cinetica E (che prima
era nulla).
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 228
U(r)
2
k(r − req )
+ U(req )
2
r
req
E
Figura 17.4:
Energia potenziale di legami fra due atomi che formano
una molecola, in funzione della distanza interatomica r. Intorno al punto
di equilibrio req l’energia potenziale può essere approssimata come un
paraboloide (disegnato come parabola, per esigenze grafiche).
In ogni caso si trova ad avere un’energia meccanica
E = E + U (~
r ) > U (~
req )
Chiamiamo ∆E = E − U (~
req ) l’energia che abbiamo ceduto all’oggetto per
perturbarlo da suo stato di equilibrio. Poiché l’energia meccanica si conserva
e E = E − U (~
r ) non può mai essere negativa, la regione di spazio accessibile
è limitata dalla condizione:
U (~
r) ≤ E
oppure
U (~
r ) − U (~
req ) ≤ ∆E
ed il moto è dunque confinato in tale regione.
Come esempio, consideriamo l’energia potenziale raffigurata in Fig. 17.4:
è la tipica “energia di legame” fra due atomi che formano una molecola.
C’è un mimimo per una distanza interatomica r = req , che rappresenta il
punto di equilibrio della molecola. Per r < req l’energia potenziale sale molto
rapidamente: significa che avvicinare i due atomi oltre la loro distanza di
equilibrio è sempre più faticoso. Viceversa, per r > req l’energia potenziale
sale fino a raggiungere un livello-limite: significa che allontanare i due atomi
dalla loro distanza di equilibrio richiede energia, ma con un’energia sufficiente
si possono allontanare all’infinito, ovvero si spezza la molecola.
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 229
Scegliamo un sistema di riferimento cartesiano con l’origine O centrata
~eq . Con un opportuno orientamento degli assi, in un piccolo intorno di
in r
~eq la forma dell’energia potenziale può sempre essere approssimata come un
r
paraboloide:
2 2 2 ∂ U
∂ U
∂ U
1
2
2
x +
y +
z 2 + O (3)
U (~
r ) ' U (~
req ) +
2
2
2
∂x
∂y
∂z 2
(17.17)
kx 2 ky 2 kz 2
= U (~
req ) + x + y + z + O (3)
2
2
2
(tutte le derivate seconde sono calcolate al punto di equilibrio, e O (3) indica
ulteriori termini dello sviluppo in serie, che sono almeno di ordine 3 negli
esponenti di x, y, z). L’approssimazione parabolica è rappresentata dalla
linea tratteggiata in Fig. 17.4.
Quindi, la forza per componenti cartesiane, in prossimità dell’equilibrio,
diventa:
∂U
= −kx x
∂x
∂U
= −
= −ky y
∂y
∂U
= −
= −kz z
∂z
Fx = −
Fy
Fz
(17.18)
Abbiamo appena trovato che in prossimità di un punto di equilibrio stabile
la forza agente ha la forma di una forza elastica.
Le equazioni del moto prendono la forma:
d2 x
kx
= − x
2
dt
m
d2 y
ky
= − y
dt2
m
d2 z
kz
= − z
dt2
m
(17.19)
Ogni componente del moto può essere integrata indipendentemente,
ottenendo:
CAPITOLO 17. FORZE ELASTICHE
x(t) = Ax cos(ωx t + φx )
y(t) = Ay cos(ωy t + φy )
—
r
kx
m
!
r
ky
m
!
kz
m
!
ωx =
ωy =
r
z(t) = Az cos(ωz t + φz )
ωz =
M.FANTI 230
(17.20)
Il moto tridimensionale è una composizione di tre moti oscillatori armonici.
Ciascuno di questi ha però una frequenza angolare propria: ωx , ωy , ωz , dovuta
al fatto che le tre “costanti elastiche” kx , ky , kz sono diverse.
Naturalmente, tutto quanto detto sinora è valido solo finché
l’approssimazione parabolica descrive bene l’energia potenziale, ovvero
in prossimità del punto di equilibrio. Aumentando l’energia meccanica
E, la zona cinematicamente accessibile si allarga, e l’approssimazione
dell’Eq. (17.17) non sussiste più, come si può vedere anche graficamente
nella Fig. 17.4.
17.8
Forze elastiche nei materiali
La capacità di reagire alle deformazioni con una forza proporzionale ed
opposta ad esse si chiama elasticità.
L’elasticità non è una caratteristica delle sole molle. Anzi, caratterizza
tutti i fenomeni in cui ci sia un “rimbalzo”. Per esempio, un pallone che
cade al suolo (Fig. 17.5), durante l’urto si deforma, ma a causa della sua
elasticità riacquista velocemente la sua forma: la parte che si era schiacciata
ritorna in posizione, “spingendo via” il terreno. Per il principio di azionereazione, riceve dal terreno una spinta uguale e contraria che lo fa rimbalzare.
Normalmente la durata temporale del rimbalzo è molto breve, ma filmando
il rimbalzo del pallone con una videocamera e riguardandolo in moviola
rallentata, il comportamento diventa evidente. Anche nell’urto fra palle di
biliardo succede la stessa cosa. Ovviamente le palle da biliardo sono molto
più rigide di un pallone, quindi la loro deformazione è molto minore.
In generale, parlando di oggetti solidi, intendiamo oggetti in cui gli atomi
costituenti siano fra loro strettamente legati, in modo tale che le distanze
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 231
Figura 17.5: Fotogrammi di un pallone che rimbalza: quando raggiunge il
suolo, a contatto con esso si schiaccia. Poi, per le sue proprietà elastiche,
si deforma in maniera opposta, allungandosi, e quindi spingendosi via dal
terreno. In volo riacquista la forma sferica.
reciproche fra qualunque coppia di essi siano immutabili. La situazione
è analoga a quella di un traliccio o di una impalcatura: si tratta sempre
di strutture che devono la loro rigidità al fatto che i giunti sono connessi
da sbarre indeformabili, che li tengono a distanze ben definite. Tuttavia,
il concetto di “indeformabile” è sempre relativo alle forze che vengono
applicate. Tralicci ed impalcature possono oscillare in balia di un forte vento:
evidentemente non sono “assolutamente rigidi”. Però la loro struttura fa sı̀
che, cessato il vento, ritornino alla loro posizione originale — un po’ come
una molla: la resistenza dei tralicci è appunto di natura elastica. Se le forze
diventano più intense, la struttura può non riuscire più a resistere e si può
rompere: è ciò che a volte succede ai tralicci in seguito ad una abbondante
nevicata: le forze elastiche del traliccio reggono la spinta del vento ma non
riescono a sopportare il peso della troppa neve accumulatasi.
Tutto questo accade anche ai legami atomici (o molecolari) che dànno
rigidità ad un solido. La palla da biliardo ci appare solida: sicuramente
non riusciamo a schiacciarla fra le dita come faremmo con una palla da
tennis. Tuttavia, quando essa urta un ostacolo solido, gli atomi vicini alla
sua superficie vengono schiacciati un po’ all’interno: le distanze interatomiche
vengono leggermente compresse. Poiché gli atomi sono tutti tenuti in
posizione da una complessa rete di forze elastiche, appena possono essi
tornano in posizione. La palla da biliardo, nella zona dove aveva subito lo
schiacciamento, ripristina la sua forma originaria e cosı̀ facendo si spinge via
dall’ostacolo, ovvero rimbalza. Anche l’ostacolo ha gli stessi comportamenti:
dove la palla lo urta, esso viene temporaneamente compresso: le forze che
tengono in posizione gli atomi che lo compongono, appena possono tendono
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 232
a ripristinare la sua forma iniziale.
Se l’urto avviene troppo forte la palla si può spaccare: in questo caso
le forze in gioco — quelle con cui l’ostacolo ha deformato la palla — sono
troppo forti e i legami atomici non hanno resistito. Quest’ultimo caso può
essere compreso guardando di nuovo alla Fig. 17.4: se l’urto è molto forte,
l’energia meccanica E aumenta, e per l’energia potenziale non è più valida
l’approsimazione parabolica. Se l’energia meccanica diventa troppo grande
(E > 0), gli atomi si liberano dal legame molecolare.
17.9
Modello delle reazioni vincolari (*)
Le forze elastiche possono essere presenti anche in assenza di urti e rimbalzi.
Se appoggiamo un oggetto pesante su un piano orizzontale, esso sta fermo:
evidentemente la risultante delle forze agenti su di esso è nulla. D’altra parte,
su di esso agisce sicuramente la forza di gravità. Quindi, deve esserci una
forza uguale ed opposta che la contrasta: essa è ovviamente prodotta dal
piano su cui l’oggetto appoggia, e si chiama reazione del vincolo — il vincolo
è ciò che “vincola” appunto l’oggetto ad una data posizione: ovviamente il
piano stesso in questo caso.
Anche la reazione del vincolo è di natura elastica. In effetti, il peso
dell’oggetto appoggiato, produce uno schiacciamento locale del piano, cioè le
distanze interatomiche vengono compresse. Le forze elastiche che tengono in
posizione gli atomi del piano tendono ad opporsi a questo schiacciamento: il
risultato collettivo è che producono la reazione vincolare, che tiene l’oggetto
in equilibrio.
Le reazioni vincolari prodotte da oggetti solidi sono modellabili in termini
di campi di forza, F~ (~
r ), con le seguenti caratteristiche:
• al di fuori dall’oggetto-vincolo la forza deve essere nulla;
• a contatto con l’oggetto-vincolo la forza deve essere repulsiva,
ortogonale alla superficie del vincolo, e con caratteristiche elastiche;
• la parte di spazio all’interno dell’oggetto-vincolo deve essere
inaccessibile — quest’ultimo requisito va inteso in senso lato: essendo
la reazione vincolare di natura elastica, è possibile una piccola
deformazione che renda accessibile una piccola porzione della zona
“proibita”, durante il contatto.
Consideriamo
un vincolo costituito da un piano (idealmente indefinito. . . ). Orientiamo
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 233
gli assi cartesiani in modo che il piano Oxy giaccia sul vincolo e che la zona
z < 0 sia inaccessibile. Se introduciamo un’energia potenziale della forma:
(per z > 0)
0
U (x, y, z) =
(17.21)
k z 2 (per z < 0)
2
~ , quindi per componenti:
La forza si ricava come F~ = −∇U
Fx = 0
Fy = 0
Fz =
0 (per z > 0)
−kz (per z < 0)
(17.22)
La forza agisce solo lungo la direzione ortogonale al piano, inoltre “entra
in funzione” solo quando si entra in contatto con il vincolo (z ≤ 0) ed è
repulsiva (Fz > 0). Inoltre, più rigido è l’ostacolo, maggiore è la costante di
elasticità k.
Una forza siffatta è ovviamente conservativa. La penetrazione nella
“zona inaccessibile” dipende dall’energia dell’oggetto incidente e dalla sua
direzione iniziale. Supponiamo che esso abbia massa m e velocità incidente
~ i ≡ (xix , viy , viz ), con viz < 0 perché è in avvicinamento. Durante l’urto le
v
componenti vx , vy non subiscono variazioni perché la forza vincolare non ha
componenti lungo il piano. Invece la velocità vz subisce una variazione data
da:
Fz
kz
dvz
= az =
=−
(z < 0)
(17.23)
dt
m
m
Poiché inizialmente viz < 0 e invece az > 0, ad un certo punto deve essere
vz = 0. In tali condizioni l’energia cinetica dell’oggetto incidente deve essere
minima. La variazione di energia cinetica è dunque:
∆E =
m 2
m 2
m 2
2
2
2
vix + viy
−
vix + viy
+ viz
= − viz
2
|2
{z
} |2
{z
}
E0
Ei
L’energia totale E = E + U prima dell’urto vale semplicemente E = Ei . Al
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 234
k
momento di massima penetrazione essa vale E = E0 + z02 , quindi deve essere
2
k
Ei = E0 + z02
2
m 2
k 2
z0 = −∆E = viz
2
2
r
m
z0 = −
|viz |
k
È evidente che per valori di k sempre più grandi la penetrazione massima z0
diminuisce: quindi un maggiore k corrisponde ad un vincolo più rigido.
Alla fine dell’urto, le componenti della velocità parallele al piano non sono
cambiate, mentre quella ortogonale ha cambiato segno ma è in valore assoluto
pari alla componente iniziale, per la conservazione dell’energia. Quindi:
vf x = vix
vf y = viy
vf z = −viz
Durante l’urto, il moto lungo la direzione z è descritto dalla soluzione
dell’Eq. (17.23). Trattandosi di un moto armonico sappiamo già che essa è
della forma:
!
r
k
t+φ
z(t) = z0 cos
m
La durata ∆t dell’urto è calcolabile come la differenza fra gli istanti ti e tf in
cui l’oggetto incidente entra in contatto e si stacca con il vincolo. In entrambi
i casi deve essere
l’argomento del coseno deve essere variato
"r z(t) =#0, quindi
r
k
k
t+φ =
∆t quindi
di π: π = ∆
m
m
r
∆t = π
m
k
Nel caso di vincoli più rigidi, k è più grande e quindi la durata dell’urto è
minore. Incidentalmente, questo fatto cade sotto l’esperienza quotidiana,
anche se non siamo dotati di apparecchiature sofisticate per misurare la
durata dell’urto. Il rumore di una pallina di acciaio che rimbalza sul
pavimento è più acuto di quello che farebbe un pallone da basket. In effetti
la frequenza ν del suono emesso è inversamente proporzionale alla durata
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 235
1
temporale dell’urto: ν ∝
. La pallina di acciaio è più rigida, dunque ha
∆t
un k maggiore e quindi un ∆t minore, pertanto emette suoni a frequenza più
alta — più acuti, appunto.
17.10
Oscillazioni forzate
Consideriamo un oggetto di massa m, sottoposto ad una forza elastica
di costante k e contemporaneamente ad una forza esterna Fest che varia
nel tempo, in modo armonico, con frequenza angolare ω. Per descrivere
il problema, limitiamoci ad un caso unidimensionale. Chiamando x lo
spostamento dal punto di equilibrio, la forza elastica può essere scritta come:
Fel = −kx
(17.24)
Invece la forza esterna ha una forma del tipo:
Fest = F0 cos(ωt)
(17.25)
L’equazione del moto del sistema è:
m
d2 x
= −kx + F0 cos(ωt)
dt2
(17.26)
Un’equazione del genere si chiama equazione differenziale lineare non
omogenea. L’incognita è la funzione x(t). La “non omogeneità” deriva dalla
presenza del termine F0 cos(ωt) che non contiene la funzione incognita x(t).
17.10.1
Soluzione generale del moto
La teoria delle equazioni differenziali insegna che la soluzione generale
dell’Eq. (17.26) è data dalla soluzione generale x0 (t) dell’equazione omogenea,
d2 x 0
m 2 = −kx0 , sommata ad una soluzione particolare x(t) dell’equazione
dt
non omogenea. La ragione è evidente: se
d 2 x0
= −kx0
dt2
d2 x
m 2 = −kx + F0 cos(ωt)
dt
m
sommando le due equazioni si ottiene
d2
m 2 (x0 (t) + x(t)) = −k (x0 (t) + x(t)) + F0 cos(ωt)
dt
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 236
ovvero x0 (t) + x(t) soddisfa l’Eq. (17.26).
La soluzione generale dell’equazione omogenea è nota: si tratta del moto
oscillatorio armonico, pertanto
r !
k
(17.27)
x0 (t) = A0 cos(ω0 t + φ0 )
ω0 ≡
m
dove ω0 dipende dalle caratteristiche del sistema (k, m), mentre A0 , φ0
verranno fissate imponendo le condizioni iniziali per x, v.
Per la soluzione particolare, è facile verificare che l’Eq. (17.26) può essere
soddisfatta da una funzione della forma
x(t) = A cos(ωt + φ)
(17.28)
dove ω è esattamente la frequenza angolare della forza esterna Fest — dunque,
d2 x
in generale diversa da ω0 . Per sostituzione diretta, si ottiene 2 = −ω 2 x,
dt
quindi:
(−mω 2 + k)A cos(ωt + φ) = F0 cos(ωt)
che è automaticamente soddisfatta se
F0
F0
=
2
k − mω
m (ω02 − ω 2 )
φ = 0
A =
Riassumento, la soluzione generale dell’Eq. (17.26) è data da x0 (t) + x(t),
ovvero:
r !
F0
k
x(t) = A0 cos(ω0 t + φ0 ) +
cos(ωt)
ω0 ≡
(17.29)
2
2
m (ω0 − ω )
m
È da notare che il moto si compone di due moti armonici, con frequenze
angolari ω0 e ω. Più la frequenza angolare forzante ω si avvicina alla
frequenza angolare propria ω0 , maggiore risulta l’ampiezza della seconda
componente del moto.
CAPITOLO 17. FORZE ELASTICHE
17.10.2
—
M.FANTI 237
Condizioni iniziali
Consideriamo come condizione iniziale il sistema da fermo:
F0
0 = x(0) = A0 cos(φ0 ) +
m (ω02 − ω 2 )
dx
0 = v(0) =
= −A0 ω0 sin(φ0 )
dt t=0
Dalla 2a equazione si deduce φ0 = 0, ovvero cos(φ0 ) = 1, quindi la 1a
F0
. In questo caso, la legge oraria è dunque:
equazione dà A0 = −
m (ω02 − ω 2 )
F0
[cos(ωt) − cos(ω0 t)]
m (ω02 − ω 2 )
2F0
ω0 + ω
ω0 − ω
=
sin
t sin
t
m(ω0 + ω)(ω0 − ω)
2
2
x(t) =
(17.30)
dove nell’ultima uguaglianza
l’identità trigonometrica
si è sfruttata
α+β
α−β
cos α − cos β = −2 sin
sin
.
2
2
La rappresentazione grafica del moto armonico forzato è mostrata in
Fig. 17.6, per diversi valori della frequenza angolare forzante.
Dall’Eq. (17.30) possiamo notare alcune caratteristiche generali:
ω0 − ω
ω0 + ω
t sin
t oscilla fra −1 e +1, quindi
• La parte sin
2
2
l’ampiezza massima che il moto oscillatorio può raggiungere è
2F
2F0
0
=
Amax = (17.31)
m(ω0 + ω)(ω0 − ω)
m|ω02 − ω 2 |
• L’ampiezza massima è direttamente proporzionale alla forza massima
applicata, F0 — il che è abbastanza intuitivo!
• L’ampiezza massima dipende dalla differenza |ω02 − ω 2 |: questa si
trova al denominatore, quindi, più la frequenza angolare forzante ω
si avvicina alla frequenza propria ω0 , maggiore diventa l’ampiezza
dell’oscillazione.
• Il caso particolare ω = ω0 si chiama “risonanza” e va trattato a parte,
vedi sezione successiva.
CAPITOLO 17. FORZE ELASTICHE
—
ω 0 =10.000000 , ω =10.000000
1
x(t)
M.FANTI 238
ω 0 =10.000000 , ω =9.500000
ω 0 =10.000000 , ω =9.000000
0.8
ω 0 =10.000000 , ω =5.000000
0.6
0.4
0.2
0
-0.2
-0.4
0
5
10
15
20
25
t
Figura 17.6: Esempi di moto oscillatorio armonico forzato, con frequenza
angolare propria ω0 , per diversi valori della frequenza angolare forzante ω.
Si nota che per omega, ω0 molto differenti (curva rossa) il moto appare
disordinato e con ampiezza piccola. Più ω si avvicina a ω0 , più appare
il fenomeno del “battimento” (curve verde e blu), e più cresce l’ampiezza
massima. Quando ω = ω0 , l’ampiezza cresce indefinitamente, linearmente
con il tempo.
17.10.3
Battimenti e risonanza
Consideriamo in particolare il caso in cui ω sia vicino a ω0 , cosicché
l’espressione (ω0 − ω) al denominatore diventa “piccola” e l’ampiezza di
oscillazione diventa “grande”. Il moto può essere visto come un’oscillazione
con frequenza angolare
ωosc =
ω0 + ω
2
(cioè la media aritmetica delle frequenze angolari propria e forzante) la cui
ω0 − ω
ampiezza di oscillazione è modulata dal termine sin
t . La frequenza
2
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 239
angolare ed il periodo della modulazione sono dati da
ω0 − ω
2
2π
4π
=
=
ωmod
ω0 − ω
ωmod =
Tmod
Essendo ω, ω0 “vicini”, ωmod ωosc , e il periodo di modulazione è del
periodo di oscillazione.
Questo tipo di moto è chiamato battimento. L’effetto si può vedere il
Fig. 17.6 (curve verde e blu).
Consideriamo ora il caso-limite in cui la frequenza angolare forzante si
approssima sempre più alla frequenza angolare
del
moto libero: ω → ω0 . In
ω0 − ω
ω0 − ω
t '
t e l’Eq. (17.30)
questo caso, possiamo approssimare sin
2
2
diventa:
F0
x(t) =
sin (ω0 t) t
(17.32)
2mω
In questo caso, il moto è descritto da un’oscillazione di frequenza angolare
ω0 e con ampiezza che cresce linearmente con il tempo t. L’effetto si può
vedere il Fig. 17.6 (curva gialla). L’oscillazione diventa sempre più ampia. . .
fino a che la forza elastica non ce la fa più e il sistema si rompe. Questo è il
fenomeno della risonanza.
La risonanza ha diverse applicazioni pratiche.
Abbiamo visto che gli atomi o le molecole in un solido sono tenuti
in posizione dalle interazioni microscopiche, che per piccoli spostamenti
dalle posizioni di equilibrio possono essere approssimate con forze elastiche.
Pertanto, gli atomi possiedono delle frequenze angolari “proprie” ωi (possono
essere anche più di una), con cui oscillano intorno ai propri punti di equilibrio.
Se il solido viene eccitato dall’esterno con una frequenza angolare ω est pari
a una delle frequenze angolari ωi , si verifica il fenomeno della risonanza, e il
solido si può spezzare. Questa è la spiegazione per cui i vetri possono essere
infranti con dei suoni, oppure in campo medico, i calcoli renali possono essere
frantumati con gli ultrasuoni. I suoni sono vibrazioni dell’aria, si tratta di
trovare quindi la frequenza di vibrazione giusta.
Anche passando ai casi macroscopici, una costruzione civile, come un
ponte o un palazzo, è dotata di una sua elasticita‘, pertanto possiede
frequenze proprie di vibrazione. Se un agente esterno (per esempio un
terremoto) agisce sulla struttura con una sollecitazione di frequenza pari
a una delle frequenze proprie, può provocarne il crollo.
CAPITOLO 17. FORZE ELASTICHE
17.10.4
—
M.FANTI 240
Considerazioni energetiche (*)
Abbiamo visto che un sistema soggetto a forza elastica possiede un’energia
potenziale
k 2
x
2
(vedi Eq. (17.16) in Sezione 17.5), oltre ad una energia cinetica
m
E = v2
2
Guardando i grafici in Fig. 17.6 è chiaro che l’energia meccanica E = Uel + E
non si conserva: per esempio, dove x(t) raggiunge un massimo o un minimo
locale, v(t) è istantaneamente nulla, dunque E = Uel , ma essendo tali
massimi/minimi diversi fra loro non possono avere gli stessi valori di Uel .
D’altra parte, nel moto forzato agisce una forza esterna Fest , quindi non
dobbiamo aspettarci una conservazione dell’energia meccanica: in generale
dE
infatti
= Fest v 6= 0. Dall’Eq. (17.30) possiamo ricavare:
dt
F0
v(t) =
[−ω sin(ωt) + ω0 sin(ω0 t)]
2
m(ω0 − ω 2 )
F02
West = Fest (t)v(t) =
[−ω cos(ωt) sin(ωt) + ω0 cos(ωt) sin(ω0 t)]
m(ω02 − ω 2 )
h ω
i
ω0
ω0
F02
−
sin(ωt)
+
sin((ω
−
ω
)t)
+
sin((ω
+
ω
)t)
=
0
0
m(ω02 − ω 2 )
2
2
2
Uel (x) =
(abbiamo
applicato
l’identità
trigonometrica
sin(β − α) + sin(β + α)
cos α sin β =
).
2
Tutti i termini fra le parentesi quadre oscillano in modo sinusoidale,
ciascuno con diversa frequenza angolare, con medie temporali nulle. Pertanto
possono produrre aumenti o diminuzioni dell’energia meccanica, ma in media
hWest i = 0
In caso risonante, ω = ω0 , va discusso a parte. In questo caso, v(t) va
ricavato dall’Eq. (17.32):
F0
2mω
F0
v(t) =
2mω
F02
= Fest (t)v(t) =
2mω
x(t) =
West
sin(ωt) t
[sin(ωt) + ωt cos(ωt)]
sin(ωt) cos(ωt) + ωt cos2 (ωt)
CAPITOLO 17. FORZE ELASTICHE
—
M.FANTI 241
Il primo termine fra le parntesi quadre oscilla con media temporale nulla,
hsin(ωt) cos(ωt)i = 0. Invece il secondo termine ha media non nulla, poiché
2
1
cos (ωt) = . Pertanto possiamo scrivere
2
hWest i '
F02 ωt
F2
·
− 0t
2mω 2
4m
Proviamo a vedere il risultato da un altro punto di vista: dall’Eq. (17.32)
F0
l’ampiezza di oscillazione cresce linearmente col tempo: A(t) =
t,
2mω
pertanto l’energia meccanica del sistema, valutata come Uel al punto di
masima ampiezza, risulta
2
k F0
k F02 2
E '
t
t
=
2 2mω
2 4m2 ω 2
F02 2
=
t
8m
dE
F2
' 0 t, che è coerente con il
dt
4m
valore trovato per hWest i — come doveva!
(abbiamo sostituito k = ω 2 m). Quindi
Capitolo 18
Nozioni di fluidodinamica
18.1
I fluidi
La materia può trovarsi negli stati solido o fluido.
Lo stato solido è definito come quello in cui le distanze fra i singoli punti
materiali del sistema (atomi o molecole) sono costanti. Va specificato che
tale definizione è relativa al sistema di forze cui il sistema è sottoposto:
nessun sistema è assolutamente solido, anche i cristalli più rigidi sono uno
stato di equilibrio di atomi e/o molecole, che può essere perturbato (per
esempio innescando oscillazioni) o rotto. Il “solido” è un materiale per cui
l’approssimazione di rigidità è ragionevole e può essere usata per descrivere
correttamente le sue proprietà.
Un fluido è un materiale che non è solido, quindi può essere deformato.
Se il materiale ammette solo deformazioni che ne conservano il volume, allora
diciamo che è un liquido. Se invece è possibile anche modificare il volume,
oltre che la forma, il fluido si chiama gas.
18.1.1
Velocità di deriva e densità di un fluido
In un fluido — liquido o gas — la materia occupa un dato volume V . Volendo
studiare le proprietà interne del fluido, si potrebbe pensare di scomporlo
in tutti i suoi elementi costituenti (atomi o molecole), descrivendo il moto
~k e la sua velocità v
~ k , nonché le
di ciascuno attraverso la sua posizione r
loro reciproche interazioni. Una siffatta descrizione è impraticabile, poiché il
numero di molecole è decisamente troppo grande!
Esempio: numero di molecole d’acqua
Quante molecole ci sono in un litro di acqua? E che volume occupano un milione
di molecole di acqua?
242
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 243
Risposta. Un litro di acqua ha una massa m = 1 kg. Per calcolare il
numero di molecole, occorre conoscere la massa della molecola, mH2 O . Questa
è composta da un atomo di ossigeno (massa mO = 16 u.m.a. = 26.56 · 10−27 kg)
e da due atomi di idrogeno (massa mH = 1.67 · 10−27 kg), pertanto mH2 O =
mO + 2mH = 29.90 · 10−27 kg. Quindi il numero di molecole di acqua in un litro è
1 kg
(1 `)
NH2 O =
= 3.34 · 1025 .
mH2 O
Il volume “efficace” di una molecola di acqua può essere calcolato come V mol =
1`
= 2.99 · 10−26 ` ' 3 · 10−29 m3 . Quindi per contenere 106 molecole occorre
(1 `)
NH2 O
√
un volume δV ' 3 · 10−23 m3 , ovvero un cubetto di lato δL = 3 δV ' 3 · 10−8 m =
30 nm.
Nel trattare i fluidi, si assume che la materia sia “diluita” nel volume V ,
anziché concentrata in elementi quasi puntiformi. Il volume V può essere
idealmente suddiviso in tantissimi elementini δV . Questi devono essere
sufficientemente piccoli (δV V ), in modo da poter essere pensati come
“quasi infinitesimi”, per poter dare una descrizione continua del fluido. Ma
allo stesso tempo i δV devono essere sufficientemente grandi da contenere un
elevato numero di costituenti del fluido, in modo che ciascun volumetto possa
essere descritto attraverso le proprietà cinematiche medie dei suoi costituenti.
Se ogni costituente i-esimo del volumetto è dotato di massa mi e velocità
~ i , La massa totale del volumetto δV è:
v
X
mi
(18.1)
δm =
i∈δV
(dove i ∈ δV sta ad indicare che nella somma consideriamo solo i costituenti
che si trovano in δV ), e la quantità di moto totale è:
X
~ =
~i
δp
mi v
(18.2)
i∈δV
Quindi definiamo la velocità media (o velocità di deriva) del volumetto δV
~ i dei costituenti, “pesate” per le loro masse mi :
come la media delle velocità v
X
~i
mi v
~ = h~
u
vi =
i∈δV
X
(velocità di deriva)
(18.3)
mi
i∈δV
cosicché possiamo scrivere la relazione
~ = δm · u
~
δp
(18.4)
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 244
che ci consente di trattare il volumetto δV come un oggetto unico.
È noto che le quantità medie (come la velocità di deriva, Eq. (18.3))
assumono valori più stabili se il numero di valori mediati è più grande. er
questo il numero di costituenti entro δV deve essere elevato. Ciononostante,
il volumetto δV può essere mantenuto piccolo rispetto al volume V totale.
L’esempio fatto sulle molecole di acqua dovrebbe dare un’idea della validità
di questa ipotesi.
È ragionevole supporre che la massa δm di fluido contenuta nel volumetto
δV sia proporzionale a δV — raddoppiando il volumetto raddoppierebbe
anche la massa di fluido in esso contenuta — pertanto possiamo scrivere:
δm = ρ · δV
(ρ ≡ densità)
(18.5)
dove la quantità ρ cosı̀ introdotta è la densità del fluido.
In generale la densità può variare da un punto all’altro del fluido: se si
tratta di un gas, questo può avere zone più compresse o più rarefatte, che
possono anche cambiare nel tempo
ρ = ρ(~
r ; t)
(nei gas)
(18.6)
Viceversa, nei liquidi ρ è uniforme nello spazio, ed in condizioni stabili di
temperatura anche costante nel tempo.
ρ = costante
18.1.2
(nei liquidi)
(18.7)
Unità di misura della densità
Dalla definizione, Eq. (18.5) risulta che la densità nel S.I. si misura in kg/m3 .
Un’altra unità molto comune, in quanto più pratica, è g/cm3 . Essendo
1 kg = 1000 g e 1 m3 = (100 cm)3 = 106 cm3 , ricaviamo che
1 g/cm3 = 1000 kg/m3
(18.8)
La densità dell’acqua, alla temperatura di 4◦ C, è 1 g/cm3 . Questo numero
cosı̀ “tondo” non è un caso. In effetti, la massa di 1 kg è definita precisamente
come la massa di una quantità di acqua pura (H2 O) che occupa il volume
di 1 litro (≡ 10−3 m3 ) alla temperatura di 4◦ C. Anche questa temperatura
non è casuale: è quella alla quale il volume dell’acqua è minimo. In effetti,
scaldando l’acqua al di sopra di tale temperatura, ma anche raffreddandola
al di sotto di essa, essa si dilata.
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 245
^
z
^
y
forze di volume
Figura 18.1:
18.2
^
x
forze di pressione
Forze di volume (a sinistra) e di superficie (a destra).
Forze di volume e di superficie
Dovendo studiare la dinamica di un fluido, occorre introdurre una descrizione
delle forze che si adatti a questa “materia diluita” che stiamo trattando.
Quindi non possiamo pensare ad una forza applicata ad un “punto materiale”.
Piuttosto, dobbiamo ragionare sul sistema di forze che agisce su un volumetto
δV di fluido. Distinguiamo due tipologie di forze (vedi Fig. 18.1).
• Forze di volume: agiscono su tutti i costituenti (molecole, atomi) del
fluido; il volumetto δV di fluido ne sente l’effetto collettivo. L’esempio
più ovvio — al quale ci limiteremo — è la forza di gravità agente su
δV , il cui effetto globale sarà
δ F~g = δm~g = ρ~g δV
(18.9)
• Forze di superficie: agiscono solo sulla superficie Σch che racchiude
il volumetto δV .
Tipicamemente, queste forze sono un effetto
macroscopico (o collettivo) di tutte le interazioni elementari fra
i costituenti (molecole o atomi) di fluido all’interno e all’esterno
del volumetto δV . Queste interazioni sono a corto raggio, quindi
interessano solo i costituenti vicini fra loro. Pertanto, per l’effetto che
esse hanno su δV , contano solo quelle fra i costituenti che si trovano in
prossimità (subito all’interno, o subito all’esterno) della superficie Σch .
Elaboriamo meglio il secondo caso. Possiamo pensare a due tipi di forze di
superficie: ortogonali alla superficie e parallele ad essa. Queste ultime sono
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 246
di natura viscosa, essendo dovute all’attrito fra strati di fluido che scorrono
l’uno sull’altro. Abbiamo già parlato di attrito viscoso in Sezione 10.4.2,
riferendoci al moto di un oggetto solido in un fluido. Le stesse forze esistono
fra porzioni contigue del fluido, e per la loro natura dipendono dalla differenza
di velocità delle porzioni di fluido a contatto, in maniera lineare o quadratica.
18.2.1
Pressione in un fluido
Qui ci concentriamo sulle forze di superficie ortogonali alla superficie.
Sperimentalmente si osserva che per una piccola porzione di superficie δΣ, la
forza dδF è proporzionale a δΣ
δFP = P · δΣ
( P ≡ pressione )
(18.10)
e sempre diretta verso l’interno del volumetto δV . Entrambe queste proprietà
sono comprensibili, se si pensa a queste forze come dovute alla totalità di urti
che la superficie δΣ subisce da parte dei costituenti del fluido circostante.
La costante di proporzionalità P che compare nell’Eq. (18.10) si chiama
pressione. Essa può cambiare da un luogo all’altro del fluido, ma non cambia
se modifichiamo l’orientamento della superficie δΣ.
La superficie Σch che delimita δV è ovviamente una superficie chiusa.
È consuetudine dare un “orientamento” alle superfici chiuse, assegnando in
ogni punto un versore n̂ perpendicolare ad esse e diretto verso l’esterno; con
questa convenzione, si può riscrivere l’Eq. (18.10) in forma vettoriale:
δ F~P = −(P · δΣ)n̂
( P ≡ pressione )
(18.11)
Scegliamo il volumetto δV di forma parallelepipeda, come in Fig. 18.1,
con lati δx, δy, δz. Inoltre consideriamo il fluido immerso in un campo
gravitazionale in prossimità della superficie terrestre, cosicché
~ = −g ẑ
g
δ F~g = −ρg δV ẑ
Studiamo le forze di pressione agenti su δV lungo le 3 componenti cartesiane.
Lungo la direzione x, la pressione agisce sulle due superfici di area δy · δz
collocate in x e in x + δx: sulla prima agisce in direzione +x̂, sulla seconda
in direzione −x̂. Quindi la forza di pressione totale lungo x su δV è:
δFP,x = P (x, y, z)(δy · δz) − P (x + δx, y, z)(δy · δz)
∂P (x, y, z)
(δx · δy · δz)
' −
∂x
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 247
Analogamente possiamo trovare le forze di pressione lungo y, z,:
δFP,y = P (x, y, z)(δx · δz) − P (x, y + δy, z)(δx · δz)
∂P (x, y, z)
' −
(δx · δy · δz)
∂y
δFP,z = P (x, y, z)(δx · δy) − P (x, y, z + δz)(δx · δy)
∂P (x, y, z)
' −
(δx · δy · δz)
∂z
Osserviamo che tutte le espressioni contengono un termine (δx · δy · δz) che
è pari al volume δV .
Mettendo insieme tutto possiamo quindi scrivere la forza totale agente su
δV per componenti cartesiane:
∂P (x, y, z)
δV
∂x
∂P (x, y, z)
= −
δV
∂y
∂P (x, y, z)
= −
δV − ρg δV
∂z
δFx = −
δFy
δFz
(18.12)
Nota di formalismo vettoriale
δ F~ è un forza, quindi sarebbe simpatico condensare le tre equazioni cartesiane
Eq. (18.12) in una forma vettoriale. In effetti, si può fare: le tre derivate parziali
∂P
∂P
∂P
,
,
possono essere viste come le tre componenti di un vettore, che si
∂x
∂y
∂z
chiama “gradiente di P ”, e che si indica come:
∂P
∂P
∂P
~
,
,
(18.13)
∇P ≡
∂x
∂y
∂z
A questo punto, le Eq. (18.12) si possono riscrivere in maniera compatta come:
~ + ρ~g δV
δ F~ = −∇P
(18.14)
18.2.2
Unità di misura della pressione
Dalla definizione, Eq. (18.10), risulta che la pressione è una forza agente su
una superficie unitaria.
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 248
L’unità di misura di pressione è il Pascal (Pa):
1 Pa = 1 N/m2
(18.15)
(1 Pa è la pressione che esercita una forza di 1 N applicata ad una superficie
di 1 m2 ). Nelle trasmissioni meteorologiche si fa spesso uso dell’ettoPascal,
hPa, definito da
1 hPa = 100 Pa
La “pressione atmosferica standard” (misurata alla latitudine di 45◦ al
livello del mare, alla temperatura di 15◦ C) è spesso usata come unità di
misura di pressione e si indica con Atm. Non è però un’unità S.I. La sua
conversione in Pascal è
1 Atm = 101 325 Pa
18.3
(18.16)
Pressione fluidostatica, legge di Stevin
Un fluido è considerato in equilibrio quando ciascuno dei suoi volumetti δV in
cui l’abbiamo idealmente diviso è in equilibrio rispetto al fluido circostante(1) .
Per un fluido in equilibrio, la forza totale δ F~ agente su δV (cfr Eq. (18.12))
deve essere nulla. Questo significa che le forze di superficie devono bilanciare
le forze di volume. Dalle Eq. (18.12) si deduce quindi:
∂P (x, y, z)
= 0
∂x
∂P (x, y, z)
= 0
∂y
∂P (x, y, z)
= −ρg
∂z
(18.17)
Quindi la pressione varia solo con l’altezza (z).
Per i liquidi, in cui ρ è uniforme ovunque, si deduce la legge di Stevin
(Fig. 18.2(sinistra)): se un liquido alla sua superficie è sottoposto alla
pressione P0 , ad una profondità h la pressione risulta
P (h) = P0 + ρgh
1
(nei liquidi)
(18.18)
Questo non significa che tutte le sue molecole siano ferme: esse saranno invece in moto
caotico e si urteranno continuamente. Però la loro velocità vettoriale media (o “velocità
~ ≡ h~
di deriva”) u
v i sarà in media nulla.
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
P0
M.FANTI 249
∆P
∆P
h
h
∆P
1 Atm
P(h)
Figura 18.2: Leggi fluidostatiche: legge di Stevin (a sinistra); barometro di
Torricelli (al centro); legge di Pascal (a destra).
(è immediato verificare che questa soluzione soddisfa le Eq. (18.17)).
Esercizio 18.1. Un subacqueo si immerge in apnea fino ad una profondità
h = 15 m. Assumendo che alla superficie dell’acqua la pressione sia di 1 Atm,
quant’è la pressione sentita dal subacqueo?
Risposta. Si applica direttamente la legge di Stevin, con P0 = 101 325 Pa,
h = 15 m, ρ = 1000 kg/m3 , g = 9.806 m/s2 . Il risultato è P (h) = (101 325 Pa) +
(1000 kg/m3 )(9.806 m/s2 )(h = 15 m) = 248 415 Pa. Possiamo esprimere il
248 415
Atm = 2.45 Atm.
risultato in atmosfere, dividendo per 101 325: P (h) =
101 325
Esercizio 18.2. Una diga di un bacino artificiale è larga L = 50 m; il livello
dell’acqua è h = 80 m rispetto al fondo dell’invaso. Qual è la forza totale
che l’acqua accumulata nell’invaso esercita sulla diga? Si assuma una densità
dell’acqua ρ = 1000 kg/m3 e una densità dell’aria ρ0 = 1.3 kg/m3 .
Risposta. La forza dell’acqua sulla diga è dovuta alla pressione, la quale
aumenta con la profondità h0 : detta P0 la pressione atmosferica che agisce sulla
superficie dell’acqua, la pressione dell’acqua è P (h0 ) = P0 + ρgh0 . Immaginiamo di
dividere la superficie verticale della diga in tanti strati orizzontali di larghezza L e
altezza infinitesima dh0 . La forza su ciascuno di essi è dF 0 = P (h0 ) L dh0 , quindi
la forza totale sulla diga prodotta dall’acqua è
Z
Facqua =
h
0
0
Z
P (h ) L dh = L
0
= LH P0 +
2
0
dh
0
Lh2
h
(h0 )2
P0 + ρgh = LH P0 + Lρg
2
0
h
0
ρg
Analogamente si può ragionare per la forza prodotta dalla pressione atmosferica a
valle della diga:
Faria = LH P0 +
Lh2 0
ρg
2
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 250
Lh2
La forza totale è F = Facqua − Faria =
ρ − ρ0 g. Si nota che P0 si cancella
2
— come ci si sarebbe aspettato, visto che il suo effetto è uguale a monte e a
(50 m)(80 m)2
valle della diga. Inserendo i valori numerici si trova F =
[(1000 −
2
3
2
9
1.3) kg/m ](9.806 m/s ) = 1.57 · 10 N.
18.3.1
Il barometro a mercurio di Torricelli
Un’applicazione storica della legge di Stevin è il barometro di Torricelli,
ideato per misurare la pressione atmosferica. Il funzionamento è illustrato
in Fig. 18.2(centro). Una bacinella contiene del mercurio (Hg, densità
ρ = 13 579 kg/m3 ), esposto alla pressione dell’aria. Un tubo lungo e sottile
viene riempito completamente di mercurio, tappato, quindi immesso nella
bacinella con l’apertura in basso e stappato. Parte del mercurio defluisce dal
tubo nella bacinella, lasciando quindi il vuoto nella parte superiore del tubo.
Per la legge di Stevin, la pressione all’interno del mercurio dipende solo
dalla quota. In particolare, al livello della superficie esposta all’aria, deve
valere P0 = 1 Atm (da determinare!), sia all’esterno che all’interno del tubo.
D’altra parte, applicando sempre la legge di Stevin al mercurio dentro il
tubo, si deduce che P0 = ρgh. Pertanto, misurando h si ottiene P0 . Il valore
misurato da Torricelli era h = 760 mm (“760 millimetri di mercurio”). Da
questo valore si ricaverebbe 1 Atm = (13 579 kg/m3 )(9.806 m/s2 )(0.76 m) '
101 200 Pa. Il risultato differisce di una parte su mille dal valore standard
— discrepanza accettabile per le misure dell’epoca.
Esercizio 18.3. La scelta del mercurio, nel barometro di Torricelli, non era
casuale: si tratta infatti del materiale liquido più pesante a disposizione. Quanto
sarebbe stata alta la colonnina di liquido se si fosse usata dell’acqua?
Risposta. La densità dell’acqua è 1000 kg/m3 . Occorre trovare un valore
di h tale che 1 Atm = 101 325 Pa = (1000 kg/m3 )(9.806 m/s2 ) h, ovvero
101 325 Pa
= 10.33 m. Decisamente meno pratico!
h=
(1000 kg/m3 )(9.806 m/s2 )
18.3.2
Propagazione della pressione: legge di Pascal
Un’altra conseguenza della legge di Stevin è la legge di Pascal: se ad un
liquido racchiuso in un contenitore si applica in un punto una variazione
di pressione ∆P , questa variazione si propaga ovunque nel liquido, con lo
stesso valore, indipendentemente dalla quota e dalla direzione. La situazione
è illustrata in Fig. 18.2(destra).
Per capire il motivo, supponiamo che la variazione di pressione venga
applicata ad una quota z0 . La legge di Stevin dice che ad ogni quota z la
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 251
pressione deve essere
P (z) = P (z0 ) + ρg(z0 − z)
Questa relazione deve essere vera per qualunque valore di P (z0 ), pertanto se
questa varia di ∆P , lo stesso deve fare P (z) per qualunque quota z.
Le macchine idrauliche sono importanti applicazioni pratiche della legge
di Pascal. Con riferimento sempre alla Fig. 18.2(destra), posso pensare di
applicare la pressione ∆P attraverso uno stantuffo con sezione Σ0 , cui è
applicata una forza F0 = ∆P · Σ0 . La pressione ∆P si propaga ovunque,
anche ad altri stantuffi con sezione Σ0 . Su questi quindi si esercita una forza
Σ0
F0 . Se Σ0 > Σ0 , la forza ottenuta, F 0 , può essere resa
F 0 = ∆P · Σ0 =
Σ0
molto maggiore di quella applicata, F0 .
Attenzione però: non stiamo “creando energia dal nulla”! Se il pistone
su cui agisco col la forza F0 si sposta di una distanza ∆`0 , sto compiendo
un lavoro L0 = F0 · ∆`0 . Corrispondentemente, il pistone di sezione
Σ0 si sposterà di ∆`0 , che può essere calcolato come segue: il pistone di
sezione Σ0 sposta un volume di liquido ∆V = Σ0 ∆`0 , che deve a sua volta
spostare lo stantuffo di sezione Σ0 , quindi deve essere anche ∆V = Σ0 ∆`0 ;
Σ0
∆`0 . Se abbiamo costruito la macchina in modo che
quindi ∆`0 =
Σ0
0
0
0
Σ0 < Σ , ne risulta
che
∆`< ∆`0 .Il lavoro fatto dalla forza F è quindi
0
Σ
Σ0
F0 ·
∆`0 = L0 . In conclusione, una macchina
L0 = F 0 · ∆`0 =
Σ0
Σ0
idraulica può amplificare una forza, ma non un lavoro.
Il lavoro compiuto
18.3.3
Galleggiamento: la legge di Archimede
Un oggetto di volume V , immerso in un fluido di densità ρ nel campo
~ , riceve dalle forze di superficie del fluido una spinta totale
gravitazionale g
~
F~gall = −ρV g
(18.19)
Questa legge è nota come legge di Archimede, che la formulò più o meno cosı̀:
“un oggetto immerso in un fluido riceve da esso una spinta verso l’alto di
intensità pari al peso del fluido che occuperebbe il suo volume”.
Possiamo fornire una spiegazione intuitiva ed efficace di questa legge.
La spinta F~gall che il fluido applica all’oggetto è una forza di superficie,
pertanto essa dipende solo dalla superficie che separa l’oggetto dal fluido, e
non dalla natura e composizione dell’oggetto stesso. Se l’oggetto immerso
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 252
fosse fatto esattamente della stessa sostanza del fluido, esso dovrebbe stare
in equilibrio — immaginiamoci per esempio che il fluido sia acqua e l’oggetto
sia un palloncino sottilissimo pieno d’acqua: non c’è ragione per cui l’acqua
circostante dovrebbe spingere in su o in giù l’acqua del palloncino. Ma
~;
l’oggetto di fluido sente una forza di gravità pari a F~gf luido = m~g = ρV g
se sta in equilibrio, vuol dire che la spinta del fluido circostante deve essere
~ , con il che l’Eq. (18.19) è dimostrata.
opposta: F~gall = −F~gf luido = −ρV g
Anche la legge di Archimede è una conseguenza della legge di Stevin.
È facile capirlo pensando ad un oggetto paralellepipedo, o cilindrico, con
altezza h e base Σ. Le forze di pressione sulle superfici laterali si bilanciano
esattamente. La forza di pressione agente sulla superficie superiore è
diretta verso il basso e vale F~ sopra = −P sopra Σẑ. Analogamente, la forza
di pressione agente sulla superficie inferiore è diretta verso l’alto e vale
F~ sotto = +P sotto Σẑ. La legge di Stevin ci dice inoltre che P sotto = P sopra ρgh.
Infine ricordiamo che il volume dell’oggetto è V = hΣ. Mettendo insieme
tutto si trova che la forza totale è F~ sopra + F~ sotto = +(ρgh)Σẑ = +ρV g ẑ,
dunque diretta verso l’alto e in accordo quantitativo con l’Eq. (18.19).
Dalla legge di Archimede risulta un effetto di galleggiamento: il peso
apparente di un oggetto in un fluido è inferiore a quello reale. Chiamando ρ0
la densità dell’oggetto, la forza totale agente su di esso è:
~
F~tot = F~g + F~gall = (ρ0 − ρ)V g
(18.20)
Se l’oggetto è più denso del fluido (ρ0 > ρ) esso viene attratto verso il basso,
ma più debolmente; se invece è meno denso (ρ0 < ρ) esso viene spinto verso
l’alto.
Esercizio 18.4. La densità di un iceberg è ρ0 = 0.917 g/cm3 , mentre quella
dell’acqua in cui galleggia è ρ = 1 g/cm3 . Quanta è la frazione di volume
dell’iceberg che emerge dall’acqua?
Risposta. Chiamiamo V il volume totale dell’iceberg, e Vimm il volume
immerso. La forza di gravità sull’iceberg è Fg = −ρ0 V g (diretta verso il basso),
mentre la spinta di Archimede è data solo dalla parte sommersa: Fgall = ρVimm g
(diretta verso l’alto). La condizione di equilibrio si ha quando la risultante
delle forze si annulla: Fg + Fgall = 0. Ciò avviene se ρVimm = ρ0 V , ovvero
ρ0
Vimm
=
= 0.917. La frazione di volume dell’iceberg che emerge dall’acqua è
V
ρ
V − Vimm
quindi
= 0.083: poco più dell’8%.
V
. . . Da cui il modo di dire “vediamo solo la punta dell’iceberg”, tipicamente per
significare che la situazione è molto peggiore di quello che appare a prima vista.
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 253
Esercizio 18.5. Una grossa chiatta, di superficie Σ = 200 m2 , con le fiancate
verticali e il fondo piatto, quando è scarica è immersa nell’acqua di 30 cm.
Calcolare la massa della chiatta. La chiatta viene caricata con 200 ton di carico,
di quanto risulta immersa?
Risposta. Chiamiamo h0 = 0.3 m la parte immersa della chiatta. Il volume
immerso è Vimm = Σh0 = 60 m3 , la spinta di Archimede è Fgall = ρVimm g. Questa
deve bilanciare esattamente la forza di gravità Fg = −m0 g. Quindi la massa della
chiatta è m0 = ρVimm = (1000 kg/m3 )(60 m3 ) = 60 000 kg = 60 ton.
Dopo il carico, la massa totale è mtot = 260 ton = 260 000 kg. La parte
immersa himm si calcola allo stesso modo: il volume immerso Vimm = Σhimm
deve essere tale che la spinta di Archimede bilanci il peso: ρVimm g = mtot g, quindi
mtot
Vimm
mtot
260 000 kg
Vimm =
e himm =
=
=
= 1.3 m.
ρ
Σ
ρΣ
(1000 kg/m3 )(200 m2 )
18.4
Altimetro a pressione
La pressione atmosferica dipende da “quanto pesa” l’aria che sta sopra di noi.
Ci aspettiamo che, salendo di quota, ci sia meno aria sopra di noi, e dunque
che la pressione atmosferica diminuisca. Questo è un fatto noto, che può
essere utilizzato per misurare la quota, per esempio durante un’escursione in
montagna.
La terza delle Eq. (18.17) ci permette di essere più quantitativi.
Riscriviamola per comodità
dP
= −ρg
dz
(18.21)
La densità dei gas però non è uniforme: essa è regolata dall’equazione di
stato
P V = nRT
(18.22)
essendo P la pressione del gas, V il volume che occupa, T la temperatura
(in gradi Kelvin), n il numero di moli, R = 8.314 Nm/K la costante dei
gas perfetti. Possiamo ricavare ρ dall’equazione di stato: un volume V che
contiene n moli ha una massa n·A, essendo A la massa di una mole. Pertanto
ρ=
nA
A
=
P
V
RT
(18.23)
L’atmosfera terrestre è composta al 78% di azoto (molecola N2 , massa
molare AN2 = 28 g) e al 21% di ossigeno (molecola O2 , massa molare
AO2 = 32 g), con un rimanente 1% di altri gas, dominati dall’argon (molecola
monoatomica Ar, massa molare AAr = 40 g). Pertanto la massa molare della
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 254
miscela si può calcolare come una media pesata dei gas componenti, tenendo
conto delle loro percentuali.
A =
78 AN2 + 21 AO2 + 1 AAr
= 28.96 g = 0.02896 kg
100
La densità dell’atmosfera terrestre può essere calcolata dall’Eq. (18.23) per
temperatura e pressione fissate. Ci sono diversi standard in proposito, ne
elenchiamo alcuni(2) qui in tabella:
standard
IUPAC-STP
SATP
NIST
temperatura
(◦ C)
(K)
0 273.15
25 298.15
20 293.15
pressione
(Atm) (105 Pa)
0.987
1
0.987
1
1
1.013
densità
(kg/m3 )
1.28
1.17
1.20
Normalmente si assume ρ = 1.3 kg/m3 .
Usando l’Eq. (18.23), l’Eq. (18.21) si può riscrivere come:
Ag
dP
= −
P
dz
RT
(18.24)
che è un’equazione differenziale nella funzione incognita P (z). Si potrebbe
pensare di integrare questa equazione — e da un punto di vista matematico è
Ag
z
−
possibile: la soluzione sarebbe P (z) = e RT , provare per credere! Tuttavia
sarebbe fuorviante, perché cosı̀ facendo si sta implicitamente assumento che
la temperatura T sia uguale a qualunque altezza — il che è notoriamente
sbagliato!
Pertanto, consci del fatto che l’Eq. (18.24) è applicabile solo per dislivelli
∆z sui quali si possa assumere che T è uniforme, procediamo in maniera
dP
con un rapporto di differenze finite
approssimata, sostituendo la derivata
dz
∆P
, e scrivendo
∆z
RT ∆P
∆z = −
(18.25)
Ag
P
| {z }
λ
2
IUPAC=“International Union of Pure and Applied Chemistry”; STP=“Standard
Temperature and Pressure”; SATP=“Standard Ambient Temperature and Pressure”;
NIST=“National Institute of Standards and Technology”
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 255
Figura 18.3: Andamento della temperatura media atmosferica in funzione
della quota sul livello del mare.
Ad una temperatura T = 273 K (pari a circa 0◦ C) si ottiene λ ' 7990 m.
Per T = 300 K (corrispondente a circa 27◦ C) λ ' 8780 m.
È quindi chiaro che l’Eq. (18.25) può essere usata per calcolare un
dislivello ∆z, misurando la pressione P alla partenza e le sue variazioni
∆P . Tuttavia occorre conoscere anche la temperatura della colonna d’aria,
altrimenti la stima di ∆z può essere grossolana.
Possiamo tentare un calcolo un po’ più raffinato, introducendo il gradiente
termico medio, ovvero la variazione media di temperatura con l’altezza.
Nella parte bassa dell’atmosfera, la troposfera (fino a ∼ 13 km di quota,
vd Fig. 18.3), la temperatura si abbassa al crescere dell’altezza, di circa 6.5
gradi ogni 1000 metri:
α=−
dT
' 6.5 · 10−3 K/m
dz
ovvero T (z) = T0 − αz, con T0 ' 20◦ C ' 293 K al livello del mare.
L’Eq. (18.24) si può scrivere come:
dP
P
= −
Ag dz
R T0 − αz
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 256
che si può integrare:
P
Z
dP 0
Ag z dz 0
= −
0
R 0 T0 − αz 0
P0 P
Ag
z
P
[ln(T0 − αz 0 )]0
[ln P 0 ]P0 =
Rα Ag
T0 − αz
P
=
ln
ln
P0
Rα
T0
Ag
T0 − αz Rα
P (z) = P0
T0
Z
Questa può essere invertita per ricavare l’altezza z sul livello del mare:
Rα
Rα
T0
P Ag
z=
' 0.19
1 −
α
P0
Ag
18.5
Moto stazionario di un liquido: teorema
di Bernoulli
Consideriamo un liquido in moto stazionario. Questo significa che è possibile
~ , pari alla media vettoriale delle velocità delle
definire una velocità di deriva u
~ = h~
molecole, u
v i, che può variare da un punto ad un altro del liquido, ma
non dipende dal tempo:
~ = u
~ (~
u
r)
(18.26)
Supponiamo inoltre che il liquido scorra in un tubo sottile, cosicché in
~ possa essere considerata uniforme in
ogni sezione Σ del tubo la velocità u
tutti i punti.
dV
, si chiama
Il volume di liquido che scorre nell’unità di tempo, P ≡
dt
portata. Se attraverso una sezione Σ il liquido scorre con velocità u, in un
tempo dt passa un volumetto dV = Σ · u dt (vd Fig. 18.4), quindi la portata
si può calcolare come
dV
= Σu
(portata)
(18.27)
dt
Essendo il liquido incomprimibile, il volume dV che attraversa una data
sezione Σ1 deve essere lo stesso che attraversa qualunque altra sezione Σ2 .
Pertanto la portata attraverso le due sezioni deve essere uguale:
P =
PΣ1 = PΣ2
(18.28)
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 257
Σ1
u1
z1
u dt
Σ2 u2
dV
Σ
z2
Σ3
u3
Figura 18.4:
z3
Tubo percorso da un liquido in moto stazionario.
Se cosı̀ non fosse, si avrebbe nel tempo un aumento o una diminuzione del
volume di liquido compreso fra le sezioni Σ1 e Σ2 — il che è assurdo, visto
che questo volume è definito dalla geometria del tubo.
L’Eq. (18.28) può essere riscritta come:
Σ1 u1 = Σ2 u2
(18.29)
Se la sezione è maggiore, la velocità è più bassa, e viceversa. Nell’esempio di
Fig. 18.4, Σ1 > Σ3 > Σ2 , pertanto deve essere u1 < u3 < u2 .
Analizziamo la dinamica del movimento del liquido. Consideriamo un
volumetto δV di liquido, soggetto alla forza totale (Eq. (18.14)):
~ + ρ~g δV
δ F~ = −∇P
La massa è δm = ρ δV , pertanto l’accelerazione del volumetto è:
~
δ F~
∇P
d~
u
~
= ~a =
= −
+g
dt
δm
ρ
(18.30)
Ciò significa che nel tempo dt la velocità del volumetto è cambiata di una
quantità d~
u = ~a dt. Ma nello stesso tempo, il volumetto si è spostato di
~
d~
r = u dt, e quindi si viene a trovare in una posizione diversa, dove la
velocità media (che è supposta stazionaria, ricordiamo) è definita con un
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 258
~ (~
~ (~
valore diverso, secondo l’Eq. (18.26): u
r )+d~
u=u
r +d~
r ). Quindi possiamo
vedere d~
u da due punti di vista diversi: come variazione della velocità a causa
delle forze agenti, oppure a causa del cambiamento di posizione. Per l’ipotesi
di stazionarietà, i due risultati devono essere identici:
~a dt = d~
~ (~
~ (~
u = u
r + d~
r) − u
r)
~ , il primo membro diventa
Se facciamo il prodotto scalare con u
!
~
~
∇P
d~
r · ∇P
d~
r
~ · ~a dt =
~ dt = −
~
u
· −
+g
+ d~
r·g
dt
ρ
ρ
mentre il secondo diventa:
~ · d~
u
u = ux dux + uy duy + uz duz = d
2
u
= d
2
u2x
2
+d
u2y
2
+d
u2z
2
Ora,
∂P
∂P
∂P
~
+ dy
+ dz
d~
r · ∇P
= dx
∂x
∂y
∂z
D’altra parte,
P (~
r + d~
r ) − P (~
r ) = P (x + dx, y + dy, z + dz) − P (x, y, z)
= [P (x + dx, y + dy, z + dz) − P (x + dx, y + dy, z)]
+ [P (x + dx, y + dy, z) − P (x + dx, y, z)]
+ [P (x + dx, y, z) − P (x, y, z)]
∂P
∂P
∂P
dx +
dy +
dz
=
∂x
∂y
∂z
quindi
~
d~
r · ∇P
= dP
dP
P
~ = −g ẑ,
Inoltre, ρ per i liquidi è uniforme, quindi
=d
. Infine, g
ρ
ρ
~ = −g dz. Mettendo tutto insieme si trova:
quindi d~
r·g
2
u
P
d
+ + gz
= 0
(18.31)
2
ρ
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 259
e quindi la quantità fra parentesi è uniforme lungo il tubo che trasporta il
liquido. Questo risultato va sotto il nome di teorema di Bernoulli.
Per analizzare il flusso di liquido in un tubo, si fa uso del teorema di
Bernoulli e della costanza della portata: date due sezioni Σ1 , Σ2 , abbiamo
(sezione 1)
(sezione 2)
Σ1 u1 = Σ2 u2
P1
u2 P2
+
+ gz1 = 2 +
+ gz2
2
ρ
2
ρ
u21
Normalmente le quote z1 , z2 e le sezioni Σ1 , Σ2 sono note, perché dipendono
dalla costruzione del tubo (vd Fig. 18.4). L’uso di queste equazioni può essere
molteplice:
• si conoscono le pressioni P1 , P2 e si ricavano le velocità u1 , u2 ;
• si conoscono pressione e velocità ad una sezione (per esempio P1 , u1 ) e
si ricavano quelle attraverso un’altra sezione;
• si conoscono le velocità u1 , u2 e si ricavano le pressioni P1 , P2 .
Esercizio 18.6. Si vuole travasare dell’olio da un grosso recipiente a delle
damigiane, mediante l’uso di un imbuto conico, che ha diametro superiore D1 =
15 cm e diametro inferiore D2 = 2 cm. La densità dell’olio è ρ = 0.9 g/cm3 .
Il livello dell’olio nell’imbuto viene mantenuto costante a h = 10 cm durante la
mescita. Quanto tempo occorre per riempire una damigiana di 5 litri? Si assuma
un flusso stazionario e si trascurino gli attriti.
Risposta. Bisogna ovviamente calcolare la portata P dell’imbuto. Questa è
uguale attraverso le sezioni superiore e inferiore: P = Σ1 u1 = Σ2 u2 , essendo
D1,2 2
Σ1,2 = π
. Quindi occorre conoscere le velocità con cui l’olio fluisce. Il
2
teorema di Bernoulli ci dice che:
u22 − u21 P2 − P1
+
= g(z1 − z2 )
2
ρ
Ora, la pressione ad entrambi gli estremi è quella atmosferica, quindi P1 = P2 .
2
Σ2
D2
Inoltre z1 − z2 = h è noto. Infine, possiamo esprimere u1 =
u2 =
u2 .
Σ
D
1
1
s
4 !
2gh
D2
2
Quindi abbiamo: u2 1 −
= 2gh, ovvero u2 =
=
D1
1 − (D2 /D1 )4
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 260
s
2
2(9.806 m/s2 )(0.1 m)
D2
= 1.4 m/s. La portata è P = Σ2 u2 = π
u2 =
4
1 − (2/15)
2
3.1415927 (0.01 m)2 (1.4 m/s) = 4.398 · 10−4 m3 /s. Il volume da riempire è
V
V = 5 ` = 5 · 10−3 m3 , quindi il tempo necessario è ∆t =
= 11.37 s.
P
Esercizio 18.7. In un tubo orizzontale di sezione variabile scorre dell’alcool
etilico (ρ = 0.81 g/cm3 ). Ai capi del tubo la pressione P1 è pari a quella
atmosferica, il diametro del tubo è D1 = 1 cm e la velocità è u1 = 1 m/s. In
una parte centrale il diametro si stringe fino a D2 : quanto deve valere D2 perché
la pressione P2 si dimezzi rispetto a P1 ? È possibile trovare un diametro ancora
più stretto D3 affinché la pressione si annulli?
Risposta. Il tubo è orizzontale, quindi la quota z è uguale ovunque,
1
u2 − u21
e l’equazione di Bernoulli si scrive:
(P1 − P2 ) = 2
, quindi u22 =
ρ
2
s
2
P1
u21 + (P1 − P2 ). Per avere P2 = 0.5 P1 occorre che u2 =
u21 +
=
ρ
ρ
s
1.013 · 105 Pa
(1 m/s)2 +
= 11.23 m/s. Dalla conservazione della portata,
810 kg/m3
s
2
2
r
D1
D2
u1
1 m/s
π
u1 = π
u2 , si trova che D2 = D1
= (1 cm)
=
2
2
u2
11.23 m/s
0.298 cm.
s Per avere P3s = 0, si ragiona nello stesso modo: deve essere u3 =
P1
1.013 · 105 Pa
u21 + 2
(1 m/s)2 + 2
=
= 15.84 m/s. Quindi D3 =
ρ
810 kg/m3
s
r
u1
1 m/s
D1
= (1 cm)
= 0.251 cm.
u3
15.84 m/s
Osservazione. Si potrebbe pensare che, con sezioni ancora più piccole, si
ottengano velocità ancora più elevate, dunque pressioni negative — il che è privo
di senso fisico! Quello che succede nella realtà, è che per P → 0 il liquido inizia a
“bollire”, producendo dunque bolle di gas. Queste non sono più a densità costante,
quindi il sistema non è più nelle condizioni di applicare le equazioni di Bernoulli
e della portata.
Esercizio 18.8. La superficie dell’acqua di un bacino artificiale si trova a quota
1800 m sul livello del mare. Una condotta forzata raccoglie acqua dal fondo del
bacino e la porta ad una centrale elettrica situata a quota 1200 m sul livello del
mare. Calcolare la velocità di uscita dell’acqua.
Risposta. Come sempre si usa l’equazione di Bernoulli, per le quote z1 =
1800 m e z2 = 1200 m:
u2 P2
u21 P1
+
+ gz1 = 2 +
+ gz2
2
ρ
2
ρ
CAPITOLO 18. NOZIONI DI FLUIDODINAMICA —
M.FANTI 261
Abbiamo due incognite, u1 , u2 , e una sola equazione. Apparentemente mancano
i dati per scrivere l’equazione della portata. Tuttavia è logico considerare u1 =
0, essendo la sezione a quota z1 (l’intera superficie dello specchio d’acqua)
sicuramente mooolto maggiore della sezione a quota z2 (la sezione della condotta
al livello della centrale). Per le pressioni, possiamo assumere P2 − P1 =
ρ0 g(z1 − z2 ), con ρ0 = 1.3 kg/m3 la densità dell’aria: si ottiene P2 − P1 =
(1.3 kg/m3 )(9.806 m/s2 )(600 s
m) = 7649 Pa.
∆P
In conclusione, u2 =
2 g∆z −
= 216.8 m/s.
Una piccola
ρ
osservazione: se avessimo trascurato la differenza di pressione dovuta all’atmosfera
terrestre, avremmo trovato 217.0 m/s.
Capitolo 19
Nozioni di termodinamica
19.1
Temperatura
La temperatura è una proprietà empirica degli oggetti, che associamo alle
sensazioni di “caldo” e “freddo”. Come per ogni altra grandezza fisica,
occorre darne una definizione quantitativa, in modo da renderla una quantità
misurabile.
19.1.1
Temperatura empirica
Ciò che si osserva, sperimentalmente, è che un oggetto (solido o liquido),
quando si scalda tende a dilatarsi, mentre quando si raffredda tende a
contrarsi. La colonnina di mercurio di un termometro è un noto esempio.
Possiamo usare questa proprietà di dilatazione per definire la temperatura.
Prima di tutto occorrono dei punti di riferimento. Per esempio definiamo
che:
• la condizione in cui acqua e ghiaccio coesistono alla pressione
atmosferica (punto crioscopico) corrisponde a 0◦ C (0 gradi Celsius);
• la condizione in cui l’acqua bolle alla pressione atmosferica (punto
ebullioscopico) corrisponde a 100◦ C (100 gradi Celsius).
Supponiamo che la colonnina del mercurio di un termometro, posta a
contatto con ghiaccio fondente, abbia lunghezza `0 , e posta a contatto con
acqua bollente si allunghi fino a `100 . Se, messa a contatto con un oggetto,
262
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 263
raggiunge lunghezza `, allora definiamo la temperatura t(1) dell’oggetto come:
t = 100
` − `0 ◦
C
`100 − `0
(temperatura empirica in scala Celsius)
(19.1)
Questa è la definizione della temperatura empirica in scala Celsius. È una
definizione corretta, perché si mostra essere ripetibile.
È poi possibile verificare che anche altri materiali (diversi dal mercurio)
hanno leggi di dilatazione ben precise. Per esempio, una sbarra rigida, che
abbia lunghezza `1 a temperatura t1 , passando alla temperatura t2 cambia
la sua lunghezza arrivando al `2 : si verifica per sperimentazione che
∆` ≡ `2 − `1
∆` = α` `1 ∆t
(19.2)
∆t ≡ t2 − t1
Il coefficiente α` si chiama coefficiente di dilatazione termica lineare, ed è
caratteristico del materiale, ma indipendente dalla lunghezza iniziale `1 e
dalle temperature t1 , t2 — almeno per variazioni ∆t non troppo estese.
Analogamente, un solido o un liquido che passa dalla temperatura t1 alla
temperatura t2 subisce una variazione di volume da V1 a V2 , secondo la legge
empirica
∆V ≡ V2 − V1
∆V = αV V1 ∆t
(19.3)
∆t ≡ t2 − t1
Il coefficiente αV si chiama coefficiente di dilatazione termica volumetrica.
Anch’esso è caratteristico del materiale, ma indipendente dal volume iniziale
e dalle temperature t1 , t2 — almeno per variazioni ∆t non troppo estese.
Sfruttando la dilatazione termica di diversi materiali si possono costruire
termometri di varie nature. Tutti possono essere tarati ai punti crioscopico
ed ebullioscopico. Tuttavia, per escursioni termiche elevate, diversi materiali
non riproducono necessariamente le stesse misure di temperatura.
19.1.2
Legge-zero della termodinamica
Abbiamo definito la temperatura di un oggetto come una quantità che
si misura ponendolo in contatto con un altro oggetto (il termometro) ed
osservando i cambiamenti di quest’ultimo.
1
Qui usiamo la variabile t per indicare la “temperatura empirica”: quando definiremo
la temperatura assoluta in scala Kelvin faremo uso della variabile T . In questa sezione
non trattiamo il tempo, quindi l’uso di t per la temperatura empirica non dovrebbe creare
confusione.
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 264
In effetti, quando il termometro viene posto a contatto con l’oggetto, si
osserva che la colonnina di mercurio si modifica, poi dopo un po’ di tempo si
stabilizza. Ciò che assumiamo tacitamente, è che dopo una fase transitoria,
le temperature del termometro e dell’oggetto da misurare si uniformino.
In questo modo, i cambiamenti osservati nel termometro forniscono una
misura non solo della temperatura del termometro stesso, ma anche di quella
dell’oggetto.
Questa assunzione viene spesso enunciata come la legge-zero della
termodinamica:
“Se due oggetti, uno più caldo ed l’altro più freddo, vengono posti in
contatto termico, dopo una fase transitoria essi si stabilizzeranno avendo la
stessa temperatura”
19.1.3
Temperatura assoluta
Un caso particolare è costituito dai gas. Essi, se tenuti a pressione costante,
per variazioni di temperatura ∆t subiscono variazioni di volume ∆V tali che
∆t
∆V
(19.4)
=
V P
t + t0
Viceversa, se contenuti in un recipiente a volume costante, per variazioni di
temperatura ∆t subiscono variazioni di pressione ∆P tali che
∆P
∆t
(19.5)
=
P V
t + t0
Le notazioni della forma [· · · ]X sono introdotte per specificare che la variabile
X è considerata costante.
Entrambe le leggi hanno una validità sperimentale su un intervallo
di temperature piuttosto vasto, non dipendono dal gas utilizzato, e la
“temperatura di riferimento” t0 è comune alle due leggi e non dipende dalla
composizione del gas. Facendo diverse misure di volume a pressione costante,
o di pressione a volume costante, si può ricavare il valore di t0 : in scala Celsius
si trova:
t0 = 273.15 ◦ C
(19.6)
Le Eq. (19.4) e Eq. (19.5) suggeriscono di ridefinire la temperatura,
riassorbendo t0 : si ottiene cosı̀ la temperatura assoluta, misurata in scala
Kelvin:
T = t + t0
(19.7)
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 265
cosicché le due leggi dei gas diventano semplicemente:
∆V
∆T
∆P
∆T
=
;
=
V P
T
P V
T
(19.8)
Si può andare oltre, e ridefinire la temperatura mediante una delle
Eq. (19.8).
Da queste due leggi empiriche si può già derivare una equazione di
stato del gas. Immaginiamo di avere una condizione iniziale di un gas
a temperatura T0 , pressione P0 , che occupa un volume V0 . Possiamo
considerare una successione di due trasformazioni.
• La prima è una trasformazione isobara, cioè a pressione costante. La
variazione di volume ∆V = V − V0 è legata ad una variazione di
T 0 − T0
V − V0
=
, ovvero:
temperatura ∆T = T 0 − T0 da
V0
T0
V
T0
=
V0
T0
• La seconda è una trasformazione isocora, cioè a volume costante. La
variazione di pressione ∆P = P − P0 è legata ad una variazione di
P − P0
T − T0
, ovvero:
temperatura ∆T = T − T 0 da
=
P0
T0
P
T
= 0
P0
T
Combinando i due risultati si ottiene
PV
T
19.2
= costante
PV
T
= , ovvero
P0 V 0
T0
(gas rarefatti)
Teoria cinetica dei gas rarefatti
In questo capitolo trattiamo sistemi fisici caratterizzati dai cosiddetti gas
perfetti, o gas ideali. Essi sono costituiti da molecole sufficientemente
rarefatte, tali che il loro moto, all’interno del volume a disposizione,
si possa considerare sostanzialmente libero.
Questa è ovviamente
un’approssimazione: in effetti le molecole possono urtarsi fra loro
scambiandosi energia e quantità di moto, ma l’idea è che ciò avvenga solo
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 266
quando due molecole si avvicinano molto: prima e dopo l’urto possono essere
considerate come particelle libere. Inoltre assumiamo che il volume occupato
dalle molecole sia trascurabilmente piccolo rispetto al volume a disposizione
del gas.
19.2.1
L’equazione di stato
Lo stato di un gas perfetto può essere descritto attraverso grandezze
“collettive”, o “macroscopiche”: cioè che ne dànno le caratteristiche globali,
senza entrare nel dettaglio dello stato cinematico delle singole molecole. Tali
grandezze sono:
• il volume V occupato dal gas;
• la pressione P esercitata dal gas sulle pareti che lo contengono;
• la temperatura T del gas.
Esprimendo la temperatura in scala Kelvin, i gas perfetti sono tutti
caratterizzati da una legge empirica, detta equazione di stato, che mette
in relazione le tre quantità V, P, T :
P V = N kT
(19.9)
essendo N il numero di molecole che costituiscono il gas, e k la costante di
Boltzmann, che si misura pari a
k = 1.3806488 · 10−23 JK−1
(19.10)
Probabilmente avete già incontrato questa equazione nella forma:
P V = nRT
(19.11)
essendo n il numero di moli e R la costante dei gas perfetti. Poiché una mole
è definita come un numero di Avogadro (NA = 6.02214129 · 1023 ) di molecole,
ovviamente N = NA · n, quindi la relazione fra R e k è:
R = k · NA = 8.314 JK−1
(19.12)
Mentre la forma Eq. (19.11) è usata in chimica, la forma Eq. (19.9) è
quella più utile in fisica, poiché ci interessa comprendere il comportamento
macroscopico in termini di moto molecolare.
Per dare un’idea delle grandezze in gioco, consideriamo un volume V =
1 m3 di gas atmosferico, alla pressione P = 1 Atm = 1.013 · 105 Pa ed
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 267
δV
v (i),prima
v (i)
v (i),prima
v (i)
(i)
Σ
v (i),dopo
v (i) δt
v (i),dopo
Figura 19.1:
A sinistra: urto elastico di una molecola di gas contro
(i)
la parete: la componente v⊥ della velocità perpendicolare alla parete viene
riflessa, mentre quella parallela resta immutata. A destra: costruzione del
volumetto δV (i) , definito in modo che se la i-esima molecola vi si trova dentro,
può urtare la parete nel tempo δt.
alla temperatura assoluta T = 300 K (circa 27◦ C). L’equazione di stato,
PV
'
Eq. (19.9), ci permette di calcolare il numero di molecole: N =
kT
2.5 · 1025 — 25 milioni di miliardi di miliardi! Il gas atmosferico è costituito
al 78% di azoto (N2 ) e al 21% di ossigeno (O2 ), entrambi in forma di
molecole biatomiche. La dimensione lineare di tali molecole è dell’ordine di
≈ 0.1 nm = 10−10 m. La molecola è sostanzialmente unidimensionale, però
può ruotare su sè stessa, quindi possiamo attribuire a ciascuna molecola un
“volume efficace” ≈ (10−10 m)3 ≡ 10−30 m3 . Dunque il volume totale efficace
ef f
occupato da tutte le molecole è Vmol
≈ 2.5 · 10−5 m3 — 25 parti per milione
del volume totale!
In questo senso il gas è “rarefatto”.
19.2.2
Modello molecolare della pressione
La pressione P prodotta da un gas contro le pareti del recipiente che lo
contiene è interpretabile come l’effetto netto di tantissimi urti che le singole
molecole del gas producono contro le pareti. Ad ogni urto, la molecola
rimbalza indietro, quindi subisce una variazione di quantità di moto ∆~
p:
per il principio di azione-reazione, anche la parete deve subire una variazione
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 268
di quantità di moto opposta −∆~
p. L’effetto complessivo di tantissimi urti
produce la pressione P che si osserva sulla parete.
~ (i) la quantità di moto della i-esima molecola prima dell’urto.
Chiamiamo p
Cominciamo con l’assumere — ragionevolmente — che l’urto contro la parete
~ (i)
sia perfettamente elastico e che alteri solo la componente p
⊥ ortogonale alla
parete stessa, che cambia quindi di segno, come in Fig. 19.1 (a sinistra):
(i)
= 0
(i)
~⊥
= −2~
p⊥ = −2mi v
∆~
pk
∆~
p⊥
(i)
(i)
Qual è la probabilità δP (i) che la i-esima molecola urti effettivamente la
parete in un intervallino di tempo δt? L’urto può avvenire solo se la
~ (i) diretta verso la parete, ed
molecola ha una componente della velocità v
in più se è sufficientemente vicina ad essa da raggiungerla entro il tempo
δt: precisamente, la distanza D(i) di tale molecola dalla parete deve essere
inferiore ad un massimo:
(i)
(i)
D(i) < Dmax
≡ δt · v⊥
Questo definisce un volumetto δV (i) — una specie di strato subito all’interno
della superficie Σ del contenitore del gas — dato da
(i)
(i)
δV (i) = Dmax
Σ = δt · v⊥ Σ
come illustrato in Fig. 19.1 (a destra).
Nel suo moto, la molecola può trovarsi ovunque nel volume V che ha a
disposizione, senza particolari luoghi preferenziali. Pertanto la probabilità
che si trovi entro δV (i) è pari a δV (i) /V . Anche la direzione del moto della
molecola è casuale: può avvicinarsi o allontanarsi dalla parete. Quindi la
probabilità che vada ad urtare è ulteriormente ridotta di un fattore 1/2. In
totale:
(i)
v⊥ Σ
1 δV (i)
(i)
= δt
(19.13)
δP =
2 V
2V
(i)
Ogni urto produce sulla parete una variazione di quantità di moto 2p⊥ =
(i)
2mi v⊥ . L’effetto totale si ottiene sommando su tutte le molecole, pesando
ogni contributo della somma con la probabilità che l’urto avvenga nel tempo
δt:
h i2
(i)
mi v⊥ Σ
X
X
(i)
δptot =
δP (i) · 2mi v⊥ = δt
V
i
i
Σ X h (i) i2
= δt
mi v⊥
V i
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 269
~ (i) della i-esima molecola è del tutto causale: la direzione
La velocità v
ortogonale alla parete (⊥) e le due direzioni parallele (k1 e k2) sono
equiprobabili. Poiché
(i) 2 h (i) i2 h (i) i2 h (i) i2
= v⊥ + vk1 + vk2
v
eh visto
molecole, è ragionevole assumere che
i2 che sommiamo su tantissime
(i) 2
(i)
v⊥
contribuisca con 1/3 di v
, quindi possiamo scrivere
δptot = δt
1 Σ X (i) 2
mi v
3V i
Una quantità di moto totale δptot ceduta nel tempo δt alla superficie Σ
δptot
significa una forza F tot =
su Σ, ovvero una pressione
δt
P =
δptot
1 X (i) 2
F tot
=
=
mi v
Σ
Σ · δt
3V i
In conclusione, abbiamo trovato un’equazione di stato:
PV =
1 X (i) 2 1 2 mi v
= N mv
3 i
3
(19.14)
Il prodotto pressione per volume di un gas ideale è pari a 1/3 del numero di
molecole N , per il valore medio della massa per la velocità al quadrato hmv 2 i
Il risultato è notevole: mediante una trattazione “microscopica” della
dinamica delle molecole del gas, abbiamo trovato una relazione fra grandezze
macroscopiche: la pressione, il volume, e la velocità quadratica media delle
molecole.
L’Eq. (19.14) supporta perfettamente l’equazione di stato empirica
Eq. (19.9):
P V = N kT
fornendoci però una comprensione più approfondita. In particolare dà una
interpretazione dinamica della temperatura, che altrimenti restava definita
solo a livello empirico. Infatti, confrontando le due equazioni vediamo subito
che deve essere:
2
mv = 3kT
(19.15)
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
19.3
M.FANTI 270
Temperatura ed energia interna dei gas
Il modello molecolare ci ha permesso di trovare una relazione fra la
temperatura T di un gas e l’agitazione delle molecole che lo compongono,
attraverso la relazione hmv 2 i = 3kT . È abbastanza facile notare la
m
somiglianza con la formula dell’energia cinetica, v 2 .
2
In effetti, la temperatura è legata all’energia microscopica dei singoli
costituenti del gas. Nelle seguenti sezioni approfondiamo questo legame.
19.3.1
Temperatura ed energia cinetica di traslazione
La quantità hmv 2 i che compare nell’Eq. (19.15) è ovviamente legata
mi 2
v . In verità, una
all’energia cinetica delle molecole del gas: Ei =
2 i
molecola può essere un oggetto complesso, formato da più atomi, dunque
non necessariamente puntiforme. Come tale, oltre ad avere un movimento
di traslazione, può essere dotato anche di rotazione. La sua energia cinetica
dipende sia dal moto traslatorio che da quello rotatorio, e la componente
mi 2
v è legata solo al moto traslatorio. Pertanto, si definisce l’energia cinetica
2 i
traslatoria esattamente la quantità
EiT =
mi 2
v
2 i
(energia cinetica traslatoria)
(19.16)
e quindi possiamo affermare che
T 3
E = kT
2
(19.17)
Cioè, la temperatura T è una manifestazione macroscopica dell’energia
cinetica traslatoria delle molecole.
19.3.2
Temperatura in una miscela di gas
È interessante analizzare che cosa succede quando il gas è formato da una
miscela. Nella
trattazione
della Sezione 19.2.2, che ci ha portato a scrivere
2
l’Eq. (19.15), mv = 3kT , non abbiamo mai ipotizzato l’uguaglianza delle
masse delle molecole. Ogni molecola aveva la sua massa mi , ed in linea di
principio potevano anche essere tutte diverse! Ne segue chel’Eq. (19.17),
T 3
E = kT , deve sempre essere valida, per qualunque miscela di gas.
2
Consideriamo ora una miscela di due gas — chiamiamoli (1) e (2) —
in cui le molecole hanno masse m(1) e m(2) . Che cosa possiamo dire sulle
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 271
energie cinetiche traslatorie medie E T (1) , E T (1) di ciascuno dei due gas?
Se fossero diverse, saremmo tentati di definire due temperature T (1) , T (2) ,
per ciascuno dei due gas coesistenti nella miscela:
2 E T (1)
2 E T (2)
(1)
(2)
T =
; T =
(è sensato???)
3 k
3 k
In realtà, quando i due gas si sono miscelati, anche le loro temperature
diventano identiche. Vediamo perché.
Consideriamo un urto fra due generiche molecole del gas (1) e del gas (2).
~ (1) , v
~ (2) le velocità delle molecole dopo l’urto. Ora consideriamo
Chiamiamo v
il sistema-2-molecole, che ha massa totale m(1)+(2) = m(1) + m(2) , e quantità
~ (1)+(2) = p
~ (1) + p
~ (2) . Possiamo definire la sua “velocità” come:
di moto totale p
~ (1)+(2) =
v
~ (1)+(2)
~ (1) + m(2) v
~ (2)
p
m(1) v
=
m(1)+(2)
m(1) + m(2)
~ (1)+(2) non cambia da
Per la conservazione della quantità di moto nell’urto, v
prima a dopo l’urto, pertanto possiamo dire che essa, anche se calcolata dalle
velocità dopo l’urto, dipende dalle velocità prima dell’urto. Le direzioni di
~ (1) , v
~ (2) dopo l’urto sono completamente casuali! Pertanto anche la loro
v
velocità relativa
~ =v
~ (1) − v
~ (2)
w
π
~ forma con v
~ (1)+(2) può essere < o
ha direzione casuale. L’angolo α che w
2
π
> con uguale probabilità, per cui è altrettanto probabile avere cos α > 0
2
o cos α < 0. Ne consegue che, mediando su tanti urti,
~ ·v
~ (1)+(2) = |w|
~ · |~
w
v (1)+(2) | · cos α = 0
Ora sviluppiamo questa espressione:
(1) (1)
~ + m(2) v
~ (2)
m v
(1)+(2)
(1)
(2)
~ ·v
~
~ −v
~
w
= v
·
m(1) + m(2)
2
(1) (2)
2
~ ·v
~
m(1) v (1) − m(2) v (2) + m(2) − m(1) v
=
m(1) + m(2)
Essendo le velocità completamente casuali, mediando su tanti urti anche
2
(1) (2) ~ ·v
~
v
= 0. Inoltre, m(i) v (i) = 2E T (i) . Ne segue che
T (1) T (2) E
= E
ovvero i due gas della miscela hanno uguale temperatura T (1) = T (2) .
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
19.3.3
M.FANTI 272
Temperatura ed energia interna
L’energia interna di un gas rarefatto è data dalla totalità delle energie
cinetiche delle sue molecole:
X
E =
Ei = N hEi
(19.18)
i
Nel caso di gas mono-atomici (cioè i cui atomi non si legano in molecole),
l’energia cinetica è legata al solo moto di traslazione delle molecole:
2
(gas monoatomico)
(19.19)
m v (i) = 2E (i)
Pertanto l’Eq. (19.15) può essere riscritta come:
3
hEi = kT
2
(gas monoatomico)
(19.20)
quindi collegando la temperatura (quantità macroscopica) all’energia cinetica
media degli atomi del gas.
L’energia interna di un gas mono-atomico è quindi pari a
3
E = N hEi = N kT
2
(gas monoatomico)
(19.21)
Il legame fra temperatura ed energia interna è estendibile anche ai gas
molecolari, le cui molecole sono formate da due o più atomi. La situazione
è più complessa, poiché la molecola non è più assimilabile ad un punto
materiale, avendo una struttura spaziale. In questi casi, l’energia cinetica ha
m
sia una componente di traslazione, v 2 , sia una componente di rotazione.
2
Per valutare l’effetto di quest’ultima, si devono contare i “gradi di libertà” ν
della molecola stessa, ovvero in quanti modi gli atomi della molecola possono
essere spostati, mantenendo però invariate le loro distanze reciproche — cioè
la molecola viene considerata come un oggetto “rigido”.
Consideriamo dapprima una molecola mono-atomica (un atomo!): esso
può essere collocato arbitrariamente in una qualunque posizione spaziale
(x, y, z), pertanto ha ν = 3 gradi di libertà.
Poi consideriamo una molecola biatomica, i cui atomi si trovino alle
coordinate (x1 , y1 , z1 ) e (x2 , y2 , z2 ). Queste
sono in tutto 6, ma non sono tutte
p
arbitrarie, perché la distanza r12 = (x1 − x2 )2 + (y1 − y2 )2 + (z1 − z2 )2 fra
i due atomi è fissata, pertanto pone un vincolo: i gradi di libertà si calcolano
come
ν = (numero di coordinate) − (numero di vincoli)
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 273
Nel caso della molecola biatomica, ν = 6 − 1 = 5. Si può anche pensare
che si può collocare il primo atomo arbitrariamente nella posizione spaziale
(x1 , y1 , z1 ) (3 gradi di libertà), mentre il secondo può solo trovarsi sulla
superficie di una sfera centrata sul primo atomo e di raggio r12 (2 gradi
di libertà, poiché una posizione su una sfera può essere descritta da due sole
coordinate, per esempio gli angoli polare e azimuthale θ, φ).
Infine consideriamo una molecola triatomica. Di nuovo, le coordinate
dei 3 atomi sono in tutto 9:
(x1 , y1 , z1 ), (x2 , y2 , z2 ), (x3 , y3 , z3 ),
però
ci sono 3 vincoli, dati dalle distanze interatomiche rij =
p
(xi − xj )2 + (yi − yj )2 + (zi − zj )2 (per r12 , r23 , r13 rispettivamente).
Quindi i gradi di libertà sono ν = 9 − 3 = 6. Anche qui possiamo ragionare
pensando che il primo atomo viene posto arbitrariamente nella posizione
spaziale (x1 , y1 , z1 ) (3 gradi di libertà), il secondo su una sfera centrata sul
primo e di raggio r12 (2 gradi di libertà). Il terzo deve trovarsi a distanze
r13 e r23 dai primi due, e questo individua un cerchio che giace su un piano
ortogonale all’asse che congiunge i due atomi: la posizione su un cerchio può
essere indivuduata da una sola coordinata, per esempio l’angolo azimuthale
φ, quindi un solo grado di libertà. In totale, 3 + 2 + 1 = 6 gradi di libertà.
Per molecole con 4 o più atomi, i gradi di libertà non aumentano più.
Infatti, fissate le posizioni dei primi 3 atomi (6 gradi di libertà come già
detto), ogni atomo ulteriore i-esimo ha 3 coordinate (xi , yi , zi ) che devono
soddisfare (almeno) 3 vincoli, dati dalle distanze r1i , r2i , r3i .
Senza dare la dimostrazione, riportiamo un risultato di meccanica
statistica, secondo cui l’energia cinetica media di una molecola è
proporzionale al numero totale dei gradi di libertà. Per il gas mono-atomico
1 2
mv , e ν = 3. Quindi la coastante di proprzionalità
ovviamente hEi =
2
1
fra ν e hEi deve essere :
6
ν 2
hEi =
mv
(19.22)
6
Riassumendo tutto in una tabella, la situazione è quindi la seguente:
gas
ν (gradi di libertà)
energia cinetica
monoatomico
3
hEi =
biatomico
5
hEi =
triatomico (o più complesso)
6
1 2
mv
2
5 2
mv
6
hEi = mv 2
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
L’Eq. (19.14) può essere riscritta come
utilizzando l’Eq. (19.22):
E = N hEi =
ν
PV
2
;
M.FANTI 274
2
PV
mv
= 3
.
N
3 (monoatomico)
5 (biatomico)
ν=
6 (triatomico o più)
Confrontando con l’Eq. (19.9), P V
P (i)
E
kT
i
hEi =
=ν
=
N
2
Quindi,
(19.23)
= N kT , vediamo che deve valere:
3
kT (monoatomico)
2
5
kT (biatomico)
2
3kT
(19.24)
(triatomico o più)
La temperatura è una misura dell’energia cinetica media hEi delle molecole.
19.3.4
Alcuni esempi
Consideriamo alcuni esempi di gas. I gas monoatomici sono tipicamente
costituiti dagli “elementi nobili”, per esempio l’elio (He), il neon (Ne), l’argon
(Ar), . . . Molti gas con cui abbiamo a che fare hanno molecole biatomiche:
l’idrogeno (H2 ), l’ossigeno (O2 ), l’azoto (N2 ). . . Due esempi di molecola
triatomica sono il biossido di carbonio (o anidride carbonica, CO2 ) e il vapore
acqueo (H2 O).
Utilizzando le formule introdotte nelle sezioni precedenti, calcoliamo le
proprietà cinetiche di questi gas, ad una temperatura assoluta T = 300 K
(pari a 26.85 ◦ C, una temperatura ambiente . . . un po’ estiva). Le formule
ν
che useremo sono hEi = kT e mv 2 = 3kT . La massa molecolare è data in
2
1
della massa del carbonio
“unità di massa atomica” (u.a.), definita come
12
12
6 C:
1 u.a. = 1.660 538 9 · 10−27 kg
(19.25)
p
La velocità è espressa come “velocità quadratica media”, hv 2 i.
I risultati sono elencati nella seguente tabella (siete ovviamente invitati
a verificare i calcoli!):
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
gas
elio
neon
idrogeno
ossigeno
azoto
biossido di carbonio
vapore acqueo
molecola
He
Ne
H2
O2
N2
CO2
H2 O
monoatomica
monoatomica
biatomica
biatomica
biatomica
triatomica
triatomica
M.FANTI 275
p
massa
hEi
hv 2 i
−26
−20
u.a. 10
kg 10
J km/s
4 0.66
0.621
1.37
10 1.66
0.621
0.87
2 0.33
1.035
1.94
32 5.31
1.035
0.48
28 4.65
1.035
0.52
44 7.31
1.243
0.41
18 2.99
1.243
0.64
Vale la pena di notare che a temperatura ambiente la velocità quadratica
media delle molecole di gas è dell’ordine del chilometro al secondo!!! Se il
nostro gas è racchiuso in un volume cubico di 1 m di lato, ogni molecola urta
le pareti circa 1000 volte in un secondo.
Inoltre, alla pressione atmosferica P ' 105 Pa, un volume di 1 m3
deve contenere un numero di molecole che secondo l’equazione di stato è
PV
= 2.4 · 1025 . Quindi il numero di urti al secondo sulle pareti
N =
kT
del nostro recipiente cubico è dell’ordine di 1028 — vuol dire 10 miliardi di
miliardi di miliardi di urti al secondo! All’inizio di questa sezione, abbiamo
detto: “La pressione P prodotta da un gas contro le pareti del recipiente
che lo contiene è interpretabile come l’effetto netto di tantissimi urti che le
singole molecole del gas producono contro le pareti.” Ora dovrebbe essere
chiaro che l’ipotesi di partenza è perfettamente attinente alla realtà.
19.4
Temperatura ed energia interna nei
solidi e nei liquidi (cenni)
Nelle sezioni precedenti abbiamo visto che un gas rarefatto possiede
un’energia interna, data dalla totalità delle energie cinetiche molecolari, la
cui manifestazione macroscopica è la temperatura
E = N hEi =
ν
N kT
2
(gas rarefatti)
In effetti, anche nei solidi e nei liquidi abbiamo una relazione fra la
temperatura T e l’energia interna E. Qui però la situazione è complicata
dal fatto che gli atomi, o le molecole, del sistema sono interagenti. Quindi
l’energia meccanica del sistema, oltre ad avere una componente cinetica,
dipende anche dalle energie potenziali delle mutue interazioni. La loro forma
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 276
in generale è complessa, pertanto la dipendenza fra le variabili macroscopiche
P, V, T si complica.
Imaginiamo di avere un solido, o un liquido alla temperatura T . Ciascuno
dei suoi costituenti (molecole o atomi) è dotato sia di un’energia cinetica Ei
che di un’energia potenziale U , quindi di un’energia meccanica Eipart = Ei +Ui .
Quando la sua temperatura T aumenta, anche l’energia cinetica media hEi
aumenta, vale a dire che i costituenti si muovono più rapidamente. Parimenti
anche la loro energia potenziale media hU i deve aumentare: senza entrare in
dettagli quantitativi, una maggiore energia cinetica consente ai costituenti di
raggiungere posizioni spaziali che prima erano cinematicamente proibite, cioè
caratterizzate da un’energia potenziale maggiore. D’altra parte, un’energia
potenziale media maggiore significa minore legame fra i costituenti: in
effetti l’effetto macroscopico è la dilatazione termica, di cui abbiamo parlato
all’inizio del capitolo.
Il tutto è reversibile: una diminuzione di temperatura comporta una
diminuzione dell’energia cinetica, ed allo stesso tempo dell’energia potenziale
dei costituenti.
Possiamo quindi sintetizzare quello che avviene con questo schema logico:
aumento di hEi
aumento di T ⇐⇒
⇐⇒ aumento di E
aumento di hU i
Seppure in maniera qualitativa, concludiamo che anche nei solidi o nei
liquidi un aumento (o diminuzione) della temperatura è associato ad un
aumento (o diminuzione) dell’energia interna.
19.4.1
Energia e temperatura nei solidi
Nel caso dei solidi, esiste in molti casi una relazione semplice fra E e T .
Questa può essere capita pensando al solido come ad un reticolo di atomi,
~ eq ≡ (xeq , y eq , z eq ). La forza
ciascuno in una sua posizione di equilibrio r
totale esercitata su questo atomo dagli atomi circostanti può essere molto
complicata, ma abbiamo visto nella Sezione 17.7 che per piccoli spostamenti
dall’equilibrio essa può essere descritta come una forza elastica della forma:
Fx = −kx (x − xeq )
Fy = −ky (y − y eq )
Fz = −kz (z − z eq )
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 277
Pertanto l’atomo oscilla attorno al suo punto di equilibrio con moti armonici
nelle 3 direzioni:
p
x(t) = xeq + Ax cos (ωx t + φx )
(ωx = kx /m)
q
y(t) = y eq + Ay cos (ωy t + φy )
(ωy = ky /m)
p
z(t) = z eq + Az cos (ωz t + φz )
(ωz = kz /m)
Ogni oscillazione, lungo un dato asse i ∈ {x, y, z} è caratterizzata da
m 2 2 2
un’energia cinetica Ei =
ω A sin (ωi t + φi ), quindi — ricordando che
2 i i
2 1
sin = , troviamo
2
hEi i =
ki 2
A
4 i
Similmente, l’energia potenziale è Ui =
hUi i =
k2 2
A cos2 (ωi t + φi ), e quindi:
2 i
ki 2
A
4 i
Si conclude che per ogni atomo,
hEi = hU i
3
Ora, se associamo l’energia cinetica alla temperatura come hEi = kT ,
2
l’energia meccanima media è E part = 2 hEi = 3kT , e si ricava
E = 3N kT
(solidi)
(19.26)
Questa legge è nota come legge di Dulong e Petit, ed è valida per una grande
varietà di solidi.
19.5
Trasformazione adiabatica di un gas
Ora consideriamo un gas rarefatto, che occupa un volume V alla pressione
P . Supponiamo che il volume del gas venga variato di una quantità δV , per
esempio spostando una parete del recipiente che lo contiene.
Sia Σ la superficie della parete che si sposta, δ` il suo spostamento —
definito positivo se il volume aumenta — cosicché δV = Σ · δ` (vd Fig. 19.2
a sinistra). La forza esterna Fest applicata alla parete deve contrastare la
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 278
δl
V
v (i),prima
v (i),prima
v (i),prima
v (i),prima
Σ
u
v (i),dopo
v (i),dopo
u
v (i),dopo
v (i),dopo
Figura 19.2:
A sinistra: rarefazione di un gas, la variazione di volume è
δV = Σ·δ`. Al centro e a destra: variazione della velocità v (i) di una molecola
(i)
di gas che urta la parete mobile: se u > 0 (rarefazione) v⊥ dopo l’urto è
(i)
diminuita; se invece u < 0 (compressione) v⊥ dopo l’urto è aumentata.
pressione interna P , quindi Fest = Σ · P , diretta verso l’interno. Il lavoro
fatto dalla forza esterna è dunque:
δLest = −Fest δ` = −P · δV
(19.27)
Se il gas si comprime questo lavoro è positivo, cioè la forza esterna spende
energia. Dove va questa energia? Viceversa, se il gas si espande, la forza
esterna fa lavoro negativo, e la pressione del gas compie lavoro positivo: a
spese di quale energia?
Sappiamo che il gas è dotato di un’energia interna
X
ν
E=
E (i) = N hEi = P V
2
i
(19.28)
Se il gas scambia energia solo attraverso il lavoro esterno, la
compressione/rarefazione di chiama adiabatica.
Sotto l’ipotesi di
trasformazione adiabatica, evidentemente il lavoro delle forze esterne è unico
responsabile della variazione dell’energia interna:
δE = −P δV
(19.29)
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
19.5.1
M.FANTI 279
Descrizione microscopica della trasformazione
adiabatica
Analizziamo ora la trasformazione adiabatica da un punto di vista
microscopico. Chiamiamo δt il tempo in cui avviene lo spostamento della
parete e u la velocità con cui si sposta, definita positiva se la parete si
allontana e il gas si espande, cosicché:
δV = Σδ` = Σ · uδt
Tutte le molecole che urtano la parete nel tempo δt subiscono un urto elastico:
la componente della velocità ortogonale alla parete, v⊥ , inverte la direzione,
ma subisce anche un aumento se la parete si sposta verso l’interno, una
diminuzione se si sposta verso l’esterno. Per la i-esima molecola, la velocità
dopo l’urto è legata a quella prima dell’urto da:
(i),dopo
v⊥
(i),dopo
vk
(i),prima
= −v⊥
=
+ 2u
(i),prima
vk
(i),dopo
(i),prima
(vd Fig. 19.2, al centro e a destra). La relazione fra v⊥
e v⊥
si
ricava dalle formule dell’urto elastico, Sezione 16.3.1, Eq. (16.6), nel casolimite in cui la massa M dell’oggetto urtato (la parete) è enormemente più
grande della massa m della molecola.
Quindi il quadrato della sua velocità, (v (i) )2 , ha subito una variazione:
2
2
v (i),dopo − v (i),prima
2 2
(i),dopo
(i),prima
= v⊥
− v⊥
∆ (v (i) )2 =
(i),prima
= −4v⊥
u + 4u2
(i)
' −4v⊥ u
(i)
L’ultimo passaggio (') è motivato perché u v⊥ (la velocità di spostamento
della parete è molto più piccola della velocità delle molecole).
Una variazione di (v (i) )2 comporta una variazione dell’energia cinetica
della molecola:
m (i)
∆E (i) = ∆ (v (i) )2 = −2mv⊥ u
2
Di quanto varia l’energia totale del gas, nel tempo δt? Occorre sommare
(i)
v⊥ Σ
(i)
(i)
tutti i contributi ∆E , pesando ciascuno per la probabilità δP = δt
2V
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 280
che la molecola urti la parete mobile nel tempo δt. Pertanto
!
(i)
X
X
v
Σ
(i)
(i)
(i)
⊥
δE =
δP · ∆E =
δt
−2mv⊥ u
2V
i
i
Σ · uδt X
(i)
= −
m(v⊥ )2
V
i
δV 2 = − N mv⊥
V
δV N 2 = −
mv
V 3
2
(nell’ultimo passaggio abbiamo ricordato che v⊥
contribuisce in media per
N 2
mv ,
1/3 di v 2 ). Ora inseriamo l’equazione di stato Eq. (19.14), P V =
3
ottenendo dunque:
δE = −δV · P
che coincide con l’Eq. (19.29), ottenuta dalla conservazione dell’energia.
Riassumendo: nella Sezione 19.5, ipotizzando che il lavoro esterno δLest =
−P δV trasferisse energia al gas, avevamo dedotto che δE = −P δV . In
questa sezione, abbiamo analizzato il comportamento del gas durante una
variazione di volume δV , e abbiamo visto che gli urti elastici delle molecole
contro la parete in movimento provocano una variazione dell’energia cinetica
media delle molecole stesse. L’effetto totale riproduce esattamente il risultato
trovato in precedenza.
19.5.2
Proprietà della trasformazione adiabatica
Ora studiamo le proprietà della trasformazione adiabatica:
ν
δLest = δE = δ(P V )
2
ν
−P δV =
[P δV + V δP ]
2
(ν + 2)P δV = −νV δP
ovvero
ν+2
ν
δV
δP
=−
V
P
(19.30)
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 281
È utile definire un parametro γ:
5/3 (gas monoatomico)
ν+2
7/5 (gas biatomico)
γ=
=
ν
4/3 (gas triatomico o più)
L’Eq. (19.30) si può integrare ricordando che
δ (ln x). Quindi:
(19.31)
d ln x
1
δx
= , cosicché
=
dx
x
x
δV
δP
+
= γδ [ln V ] + δ [ln P ]
V
P
= δ [γ ln V ] + δ [ln P ] = δ [ln (V γ )] + δ [ln P ]
= δ [ln (V γ ) + ln P ] = δ [ln (P V γ )]
0 = γ
In altre parole, ln (P V γ ) non subisce variazione, quindi
P V γ = costante
(trasformazione adiabatica)
(19.32)
Questa equazione è di importanza fondamentale.
Essa descrive il
comportamento di un gas rarefatto in una trasformazione adiabatica, cioè
quando la sua energia viene alterata solamente dal lavoro di una forza
esterna. Passando da uno stato (1) ad uno stato (2), un aumento di volume
produce una diminuzione della pressione; viceversa, una diminuzione di
volume produce un aumento di pressione; la relazione fra pressione e volume
è tale che fra lo stato iniziale (1) e lo stato finale (2) vale la relazione:
P1 V1γ = P2 V2γ
(trasformazione adiabatica)
(19.33)
Utilizzando l’equazione di stato Eq. (19.9), possiamo esprimere P o V in
N kT
funzione di T , nell’Eq. (19.32). Per esempio, scrivendo P =
otteniamo:
V
T V (γ−1) = costante
oppure scrivendo V =
Tγ
(trasformazione adiabatica)
(19.34)
N kT
otteniamo:
P
= costante
(trasformazione adiabatica)
(19.35)
P (γ−1)
Le Eq. (19.32), Eq. (19.34), Eq. (19.35) sono tutte equivalenti, in quanto
collegate dall’equazione di stato Eq. (19.9). La forma T V (γ−1) = costante,
in particolare, ci informa che se il volume V diminuisce, la temperatura T
aumenta (e viceversa). Questo è consistente con l’ipotesi che abbiamo fatto,
che l’energia interna E subisca variazioni solo a causa del lavoro esterno Lest :
se abbiamo una compressione, V diminuisce e Lest è positivo, dunque deve
aumentare l’energia interna, ovvero deve aumentare la temperatura.
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
19.5.3
M.FANTI 282
Lavoro in una trasformazione adiabatica
Abbiamo visto come calcolare il lavoro elementare fatto sul gas in una
trasformazione adiabatica:
δLest = −P δV
Quanto vale il lavoro esterno est fatto lungo una trasformazione adiabatica
reale, quando il volume varia da V1 a V2 ? Per rispondere bisogna integrare il
lavoro elementare lungo tutta la trasformazione:
Z V2
Z V2
P dV
δLest = −
Lest =
V1
V1
dove P varia al variare di V , in modo da mantenere costante la quantità
P V γ.
Si può calcolare il risultato anche considerando la variazione dell’energia
interna E del gas:
ν
ν
Lest = ∆E = ∆
N kT = N k ∆T
2
2
Ora, resta da calcolare ∆T . Sappiamo che P V = N kT , pertanto:
Lest = ∆E =
ν
(P2 V2 − P1 V1 )
2
Questa scrittura può essere poco pratica, perché per utilizzarla occorre
conoscere P, V all’inizio e allafinedella trasformazione. Pertanto è utile
γ
V1
riscriverla, esprimendo P2 = P1
:
V2
" #
(γ−1)
ν
V1
Lest = ∆E = P1 V1
−1
(19.36)
2
V2
In caso di compressione, V2 < V1 e quindi ∆E > 0, come ci si aspetta.
Viceversa, in caso di rarefazione ∆E < 0.
19.6
Trasferimento di energia senza lavoro:
il calore
Nelle sezioni precedenti abbiamo visto che un gas rarefatto possiede
un’energia interna, data dalla totalità delle energie cinetiche molecolari, la
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 283
E
ν
cui manifestazione macroscopica è la temperatura: hEi =
= kT Questo
N
2
concetto è estendibile anche ai liquidi e ai solidi, anche se in questo caso i
costituenti sono interagenti, pertanto oltre all’energia cinetica media, hEi,
occorre considerare anche l’energia potenziale media hU i. Abbiamo anche
osservato che, durante un’espansione o compressione, l’energia interna può
essere alterata mediante un lavoro fatto dall’esterno δLest :
δE = δLest = −P δV
e ne abbiamo dato la spiegazione microscopica per i gas rarefatti.
Tuttavia, sappiamo che la temperatura — e quindi l’energia interna di
un gas — possono essere alterate anche senza fare alcun lavoro dall’esterno.
Per esempio, sappiamo che se un gas, tenuto a volume costante, viene messo
a contatto con un altro oggetto più caldo, o più freddo, la temperatura
del gas aumenterà, o diminuirà, rispettivamente. Dunque, la sua energia
interna cambia. Ma non c’è un lavoro che spieghi questo. Ciò significa che
il gas è in grado di scambiare energia con altri oggetti anche attraverso altri
meccanismi.
Esempio: scambio di energia fra gas a volume costante
Due recipienti identici di volume V contengono aria (quindi gas biatomico) alla
pressione P in , a due diverse temperature T1in , T2in (per es. T2in > T1in ). I recipienti
sono separati fra loro da una sottile parete che non si può spostare. Il tutto è isolato
dall’ambiente circostante. Dopo un certo tempo le temperature dei due gas si sono
uniformate ad un valore intermedio T f in . Quanto vale T f in ? Come sono cambiate
le pressioni e le energie interne dei due gas?
Risposta. Per ciascun gas, in qualunque momento, vale l’equazione di stato
P V = N kT e la relazione temperatura-energia, che nel caso biatomico (ν = 5) è
5
E = N kT . Poiché il sistema dei due gas è isolato, si presume che la sua energia
2
totale debba conservarsi:
E1in + E2in = E1f in + E2f in
5
5
N1 kT1in + N2 kT2in =
N1 kT f in + N2 kT f in
2
2
(il numero di molecole N1,2 di ciascun gas ovviamnte non cambia) da cui si ricava:
T f in =
N1 T1in + N2 T2in
N1 + N2
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 284
La variazione di pressione di ciascun gas è:
∆P1 =
∆P2 =
kN1
V
kN2
V
k
V
k
T f in − T2in = −
V
T f in − T1in
=
N1 N2
T2in − T1in
N1 + N2
N1 N2
T2in − T1in
N1 + N2
La variazione di energia interna di ciascun gas invece è:
∆E1 =
∆E2 =
5
5 N1 N2
T2in − T1in
kN1 T f in − T1in =
k
2
2 N1 + N2
5
5 N1 N2
T2in − T1in
kN2 T f in − T2in = − k
2
2 N1 + N2
Osservazioni. Come ci si aspettava, T f in è intermedio fra T1in e T2in (è una
media pesata dei due valori iniziali). Le due pressioni, inizialmente uguali, ora
sono diverse: il gas (1) si è riscaldato (T f in > T1in ), quindi a parità di volume
deve avere aumentato la pressione, mentre il gas (2) l’ha diminuita. Inoltre le
energie dei due gas sono cambiate: quella del gas (2) è diminuita, mentre quella
del gas (1) è aumentata di una pari quantità. Però la parete divisoria non si è
mossa, quindi questo scambio di energie non è attribuibile ad un lavoro.
Consideriamo un altro esempio: un gas rarefatto che viene mantenuto a
temperatura costante e subisce una variazione di volume, dunque compie un
lavoro. Che cosa fornisce l’energia necessaria a compiere questo lavoro?
Esempio: espansione isoterma di un gas
Un gas rarefatto occupa inizialmente un volume V1 e si trova a temperatura
T . Successivamente viene lasciato espandere fino a raggiungere un volume
V2 , mantenendo invariata la sua temperatura. Qual è il lavoro fatto dal gas
sull’ambiente circostante? Di quanto è variata la sua energia interna E?
Risposta. Il lavoro elementare
fatto dal gas si può calcolare come δL = P δV .
Z
V2
Il lavoro totale quindi è L =
P dV . Sappiamo che durante l’espansione P
V1
cambia, diminuendo all’aumentare di V , secondo la legge P V = N kT , con T
costante. Quindi il lavoro fatto dal gas è:
Z V2
N kT
V2
V2
L =
dV = N kT [ln(V )]V1 = N kT ln
V
V1
V1
Per un’espansione, V2 > V1 , dunque il lavoro fatto dal gas è positivo. Viceversa,
per una compressione il lavoro fatto dal gas è negativo — ovvero l’ambiente fa
ν
un lavoro esterno sul gas. L’energia interna del gas è E = N kT . Essendo T
2
costante, l’energia interna non cambia.
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 285
Osservazione. Il gas ha compiuto un lavoro, dunque ha ceduto energia
all’ambiente. Ma la sua energia interna non è cambiata. Evidentemente, qualche
altro meccanismo ripristinava l’energia del gas, man mano che questo ne cedeva
all’ambiente tramite il lavoro.
Il confronto fra la variazione di energia interna, δE, e il lavoro fatto
da un sistema sull’ambiente, δL, può essere generalizzato anche ai liquidi e
ai solidi. Un qualunque oggetto, posto in contatto con un altro a diversa
temperatura, altera la propria temperatura, e dunque la propria energia
interna E. A rigore, i solidi e i liquidi, al variare della temperatura, subiscono
variazioni di volume δV = αV · V · δT (vd Eq. (19.3)), quindi se l’ambiente
circostante è a pressione P , compiono un lavoro δLint = P δV , ovvero
subiscono un lavoro esterno δLest = −δLint = −P · αV V δT . In questo
caso non possiamo dire che il lavoro sia nullo. Però, se questo lavoro fosse
l’unico responsabile di una variazione di energia interna, avremmo subito un
problema. Consideriamo un oggetto che si sta scaldando: δT > 0, quindi
deve essere anche δE > 0 (anche se in generale la dipendenza fra δT e δE
può essere non banale. . . ). D’altronde, si deve anche dilatare, cioè δV > 0,
quindi “subisce un lavoro esterno negativo”, δLest < 0. Se questo fosse l’unico
responsabile della variazione di energia interna, avremmo δE = −P δV < 0,
il che è contraddittorio con δT > 0.
Anche qui, dobbiamo ammettere che ci siano altri meccanismi (che non
siano il lavoro) per alterare l’energia interna di un oggetto.
19.6.1
Il calore: scambio di energia con processi
microscopici
Ricordiamo che l’energia interna è la somma di tutte le energie meccaniche
di atomi o molecole che costituiscono il nostro sistema. Poiché questi
costituenti sono in continua agitazione, si urtano fra di loro e con i costituenti
dell’ambiente che circonda il nostro sistema. Nel fare questo necessariamente
si scambiano energia. Ma questi scambi sono tutti a livello microscopico, e
non corrispondono ad uno spostamento macroscopico netto, pertanto non
possono essere associati ad un lavoro. Eppure esistono.
L’effetto netto di questi scambi microscopici è comunque quello di alterare
l’energia interna del sistema. Esso si chiama calore.
Il “calore” è lo scambio di energia fra un sistema e l’ambiente circostante,
dovuto unicamente agli urti microscopici dei suoi componenti (atomi o
molecole) con quelli dell’ambiente.
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 286
Il calore non è una proprietà intrinseca del sistema (cosı̀ come non lo è il
lavoro): una frase del tipo “un sistema possiede una quantità di calore Q” è
priva di senso. Il calore è una quantità di energia scambiata con l’ambiente.
Se provoca un aumento dell’energia interna E si dice che è positivo, altrimenti
negativo:
δQ = δE
(se δL = 0)
(19.37)
19.6.2
Unità di misura
Essendo il calore una forma di scambio di energia, al pari del lavoro, esso si
misura in Joule (J).
Storicamente si usava una diversa unità di misura: la kilocaloria
(kCal). Essa è definita come la quantità di calore necessaria per elevare
la temperatura di 1 kg di acqua distillata da 14.5◦ C a 15.5◦ C (gradi Celsius).
Sperimentalmente si rileva che essa vale:
1 kCal = 4.186 · 103 J
19.6.3
(19.38)
Meccanismi di scambio di calore
Il calore può venire scambiato fra più sistemi, o fra porzioni dello stesso
sistema, con diversi meccanismi.
Se due sistemi (1) e (2) sono a contatto, e T2 > T1 , i costituenti di (2) sono
mediamente più energetici dei costituenti di (1): hE2 i > hE1 i. Urtandosi tra
loro, è più probabile che i componenti di (2) cedano parte della loro energia
ai componenti di (1), pertanto hE2 i tende a diminuire e hE1 i tende a crescere.
Ne risulta come effetto macroscopico che T2 diminuisce e T1 aumenta, finché
non si raggiunge un equilibrio. Questo meccanismo si chiama conduzione del
calore.
Esiste una legge empirica che descrive la potenza trasmessa tramite
conduzione termica, cioè il calore scambiato nell’unità di tempo, fra due
sistemi a temperature T1 , T2 , separati da un materiale divisorio di superficie
Σ e spessore h:
WQ =
Σ
δQ
= k (T2 − T1 )
δt
h
La costante k si chiama conducibilità termica. I metalli sono dotati di valori
di k relativamente elevati (per l’acciaio k = 14 Wm−1 K−1 , per l’alluminio k =
230 Wm−1 K−1 , per il rame k = 400 Wm−1 K−1 ), quindi sono buoni conduttori
termici. Il vetro è più “isolante” (k = 1 Wm−1 K−1 ). Alcuni materiali sono
stati sviluppati apposta per essere molto isolanti (per lana di vetro o lana di
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 287
roccia, k = 0.04 Wm−1 K−1 ); per poliuretano espanso, k = 0.024 Wm−1 K−1 ).
Anche l’aria secca è un buon isolante: k = 0.026 Wm−1 K−1 .
Per sistemi fluidi (liquidi o gas) si può anche verificare il meccanismo
della convezione. Porzioni più calde del fluido, per esempio scaldate da una
sorgente di calore localizzata, sono dotate di maggiore energia cinetica, quindi
tendono ad allontanarsi di più. Inoltre, il fluido più caldo si espande, quindi
diventa più leggero (cioè la sua densità diminuisce), e quindi per la spinta di
Archimede tende a salire, lasciando posto alle porzioni di fluido più fredde.
Queste ultime, dunque, si avvicinano alla sorgente di calore, e quando sono
sufficientemente vicine, a loro volta si riscaldano e risalgono. Si innescano
cosı̀ dei moti ciclici, che hanno come effetto quello di propagare il calore più
rapidamente della semplice conduzione.
Infine, ogni oggetto che si trovi a temperatura T (espressa in gradi
Kelvin!) emette radiazione elettromagnetica, la quale trasporta energia
(come si vedrà nella Sezione 23.6). Pertanto l’oggetto emette energia per
irraggiamento. La legge che descrive la potenza irradiata, per un oggetto a
temperatura T e con superficie totale Σ, è:
W rad = σ ΣT 4
essendo σ = 5.6703 · 10−8 Wm−2 K−4 una costante fisica universale, detta
costante di Stefan-Boltzmann, è un parametro che dipende dalla natura
della superficie dell’oggetto, si chiama emittanza, e sta nell’intervallo ∈]0; 1[
(estremi esclusi).
Se l’ambiente che circonda l’oggetto si trova a temperatura Tamb ,
anch’esso irradia, e parte della sua radiazione viene assorbita dall’oggetto,
secondo una legge
4
W abs = σ ΣTamb
Quindi la potenza totale assorbita dall’oggetto è
4
W abs − W rad = σ Σ Tamb
− T4
Si noti che l’emittanza dell’oggetto in questione è la stessa sia per
l’irraggiamento (W rad ) che per l’assorbimento (W abs ). Questo fatto non è
un caso: deve essere cosı̀, per garantire che, quando l’oggetto è in equilibrio
termico con l’ambiente (T = Tamb ), lo scambio di energia sia nullo.
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
19.7
M.FANTI 288
Lavoro e calore: primo principio della
termodinamica
Arrivati a questo punto, la formulazione di una legge fondamentale della
fisica, il primo principio della termodinamica, diventa relativamente semplice.
Un sistema può alterare la sua energia interna E in due modi: o mediante
un lavoro macroscopico δL fatto sull’ambiente esterno, oppure scambiando
calore δQ con esso. Le convenzioni per i segni sono le seguenti:
δL > 0
δL < 0
il sistema fa lavoro sull’ambiente (dunque gli cede energia)
il sistema subisce lavoro dall’ambiente (dunque ne riceve energia)
δQ > 0
δQ < 0
il sistema assorbe calore dall’ambiente (dunque ne riceve energia)
il sistema cede calore all’ambiente (dunque gli cede energia)
Con queste premesse, la variazione di energia del sistema può sempre
essere scritta come
δE = δQ − δL
(19.39)
Questa equazione è la formulazione del primo principio della termodinamica,
e consente di trattare allo stesso tempo scambi di energia macroscopici e
microscopici.
Nel caso in cui il lavoro fatto dal sistema corrisponda ad una variazione
di volume, allora abbiamo visto che δL = P δV , pertanto il primo principio
può essere riscritto come:
δE = δQ − P δV
19.8
(19.40)
Trasformazioni termodinamiche sui gas
In generale, lo stato di un gas può essere espresso con due delle tre variabili
P, V, T — note due di esse, la terza può sempre essere ricavata dall’equazione
di stato, P V = N kT . È consuetudine scegliere le variabili V, P come
indipendenti, cosicché lo stato di un sistema può essere rappresentato
graficamente come un punto sul piano cartesiano di assi V, P .
Una trasformazione termodinamica è un passaggio continuo da uno stato
iniziale (V1 , P1 ) ad uno stato finale (V2 , P2 ). In questa sezione considereremo
trasformazioni che sono costituite da una successione di stati in equilibrio.
Questo significa che in ogni stato intermedio, tutte le parti del sistema sono
in equilibrio tra loro, cosicché i valori di P e T sono uniformi.
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
P
M.FANTI 289
P
δL
δL
(2)
(1)
(1)
(2)
L>0
V1
L<0
δV
V2
V
V2
δV
V
V1
Z
Figura 19.3:
V2
Lavoro elementare δL = P δV e lavoro totale L =
P dV
V1
di una trasformazione, rappresentati nel piano (V, P ).
Qualunque trasformazione che comporti variazioni di volume implica che
il sistema esegue un lavoro sull’ambiente esterno:
δL = P δV
Z V2
L =
P dV
(19.41)
V1
La prima espressione descrive il lavoro elementare per una variazione
infinitesima δV di volume. La seconda invece è il lavoro totale fatto dallo
stato iniziale allo stato finale. Entrambi sono rappresentabili graficamente
come aree nel piano (V, P ), come mostrato in Fig. 19.3. Quando la
trasformazione viene eseguita nel verso di aumentare il volume, il lavoro
è positivo, altrimenti è negativo.
Esaminiamo alcune trasformazioni notevoli sui gas.
19.8.1
Trasformazione isoterma
La trasformazione isoterma è realizzata con un’espansione o una
compressione del gas mentre questo viene mantenuto a temperatura costante
mediante un termostato. L’apparato può essere schematizzato come in
Fig. 19.4. Le curve della trasformazione isoterma sono iperboli equilatere
P V = costante sul piano (V, P ).
ν
Poiché E = N kT , questo significa che l’energia interna E non varia,
2
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 290
P
Q
Q
T2
T
T
Q=L>0
∆E = 0
Q=L<0
∆E = 0
T3
T1
V
Figura 19.4:
Trasformazione isoterma, realizzata ponendo il serbatoio di
gas a contatto con un termostato a temperatura T costante. A sinistra:
espansione; al centro: compressione. A destra, il grafico della trasformazione
isoterma sul piano (V, P ), per diversi valori di temperatura T1 < T2 < T3 .
quindi deve essere
δQ = P δV
(isoterma)
Il lavoro fatto in una trasformazione isoterma fra i volumi V1 e V2 si calcola
con l’ausilio dell’equazione di stato, P V = N kT :
Z V2
Z V2
N kT
dV = N kT [ln(V )]VV21
L =
P dV =
V
V1
V1
cioè:
L = N kT ln
V2
V1
(isoterma)
(19.42)
La quantità di calore scambiata con il termostato deve essere
V2
Q = L = N kT ln
(isoterma)
V1
affinché E resti costante.
19.8.2
Trasformazione adiabatica
Abbiamo già esaminato la trasformazione adiabatica nella Sezione 19.5. Essa
può essere realizzata con un serbatoio di gas perfettamente isolante, che non
scambi calore con l’ambiente, come in Fig. 19.5. Se c’è n’espansione, il gas
fa lavoro (L > 0) e quindi la sua energia interna deve diminuire (E < 0), e
cosı̀ la sua temperatura.
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 291
P
T3
T2
Q=0
L>0
∆E < 0
Q=0
L<0
∆E > 0
T1
V
Figura 19.5:
Trasformazione adiabatica, realizzata con un serbatoio di
gas perfettamente isolato dall’ambiente.. A sinistra: espansione; al centro:
compressione. A destra, il grafico della trasformazione adiabatica sul piano
5
(V, P ), per γ = (gas monoatomico). Sono presenti anche tre isoterme, per
3
diversi valori di temperatura T1 < T2 < T3 , per indicare che ad un aumento
di volume corrisponde una diminuzione di temperatura.
Nel piano (V, P ) la trasformazione adiabatica è una curva definita da
ν+2
γ
P V = costante
γ=
ν
Poiché è sempre γ > 1, la curva adiabatica è sempre “più ripida” delle curve
isoterme, come indicato nella Fig. 19.5 a destra.
Il lavoro compiuto dal gas è
#
" (γ−1)
ν
V1
−1
L = P1 V1
2
V2
19.8.3
Trasformazione isobara
La trasformazione isobara è caratterizzata da una pressione P costante. Si
può realizzare con un serbatoio in cui una parete sia mobile (quindi in grado
di adattarsi a variazioni di volume) ma sia operata in modo da mantenere una
pressione costante sul gas. Per esempio, si può usare un pistone di sezione
Σ che si può muovere verticalmente, su cui è appoggiata una massa M :
Mg
cosicché la pressione esercitata sul gas sia sempre P =
, come mostrato
Σ
in Fig. 19.6.
A causa dell’equazione di stato, P V = N kT , un aumento (o
diminuzione) di volume deve essere necessariamente causato da un aumento
(o diminuzione) di temperatura.
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 292
P
Q
Q
T2
T3
T1
Q>0
L>0
∆E > 0
Q<0
L<0
∆E < 0
V
Figura 19.6:
Trasformazione isobara, realizzata ponendo il serbatoio di
gas a contatto con una sorgente di calore, e sottoponendo il pistone ad una
pressione P costante. A sinistra: espansione; al centro: compressione. A
destra, il grafico della trasformazione isobara sul piano (V, P ): sono disegnate
anche diverse curve isoterme per diverse temperature, T1 < T2 < T3 , per
mostrare che al crescere di T anche V aumenta.
Il lavoro fatto in una trasformazione isoterma fra i volumi V1 e V2 è
banalmente
L = P (V2 − V1 )
(isobara)
(19.43)
L’energia interna E varia come
ν
P ∆V
ν
N k ∆T = N k
2
2
Nk
ν
=
P (V2 − V1 )
(isobara)
2
∆E =
Pertanto il calore scambiato con l’ambiente è:
ν
Q = ∆E + L =
+ 1 P (V2 − V1 )
2
19.8.4
(isobara)
Trasformazione isocora
La trasformazione isocora avviene a volume costante, pertanto una variazione
∆P di pressione è necessariamente causata da una variazione ∆T di
temperatura, tale che
∆P =
Nk
∆T
V
(isocora)
Il lavoro è per definizione nullo: L = 0. Quindi:
ν
ν
Q = ∆E = N k∆T = V ∆P
2
2
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 293
P
Q
Q
T2
T3
T1
Q<0
L=0
∆E < 0
Q>0
L=0
∆E > 0
V
Figura 19.7:
Trasformazione isocora, realizzata ponendo un serbatoio
di gas a volume V costante a contatto con una sorgente di calore. A
sinistra: riscaldamento; al centro: raffreddamento. A destra, il grafico della
trasformazione isocora sul piano (V, P ): sono disegnate anche diverse curve
isoterme per diverse temperature, T1 < T2 < T3 , per mostrare che al crescere
di T anche P aumenta.
19.8.5
Trasformazioni cicliche
Una trasformazione si chiama ciclica se lo stato iniziale coincide con lo stato
finale. Nel piano (V, P ) ciò significa che V2 ≡ V1 e P2 ≡ P1 , come indicato
nella Fig. 19.8, a sinistra.
Una trasformazione ciclica può sempre essere pensata come la
concatenazione di due trasformazioni, Γ1 e Γ2 , la prima che porta il sistema
da uno stato A a uno stato B, la seconda che lo riporta dallo stato B allo
stato A. Per fissare le idee, supponiamo che Γ1 produca un’espansione e Γ2
una compressione.
Il lavoro totale della trasformazione può essere a sua volta scomposto in
due successivi lavori:
Z
L1 =
P dV > 0
(espansione)
Γ1
Z
L2 =
P dV < 0
(compressione)
Γ2
In generale, L1 6= L2 , come si può notare dalel rappresentazioni grafiche in
Fig. 19.8, al centro. Ne risulta un lavoro netto
L = L1 + L2
rappresentabile come l’area sul piano (V, P ) rachiusa dal grafico della
trasformazione ciclica. Il lavoro netto può essere positivo o negativo, a
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
Γ1
P
P
P
M.FANTI 294
P
B
L = L1 + L2
A
Γ2
L1 > 0
V
L2 < 0
V
V
V
Figura 19.8:
Trasformazione ciclica. A sinistra, scomposizione in due
trasformazioni Γ1 e Γ2 . Nelle due figure centrali, le rappresentazioni grafiche
dei lavori L1 e L2 svolti nelle due trasformazioni Γ1 e Γ2 . A destra, il lavoro
totale della trasformazione ciclica, rappresentabile graficamente come l’area
del piano (V, P ) rachiusa dal grafico della trasformazione.
seconda che l’espansione avvenga rispettivamente a pressioni più alte o più
basse della compressione:
P (espansione) > P (compressione)
P (espansione) < P (compressione)
⇐⇒ L(ciclo) > 0
⇐⇒ L(ciclo) < 0
(grafico in senso orario)
(grafico in senso antiorario)
Poiché nella trasformazione ciclica lo stato iniziale coincide con lo stato
finale, la variazione di energia interna su un ciclo deve essere nulla:
∆E (ciclo) = 0
(19.44)
Ne consegue che su un ciclo il calore totale Q(ciclo) assorbito dal sistema deve
essere uguale al lavoro L(ciclo) fatto dal sistema:
Q(ciclo) = L(ciclo)
19.9
(19.45)
Capacità termica e calore specifico
Abbiamo visto che cedere calore ad un oggetto significa aumentare la sua
energia interna (δE = δQ) e quindi la sua temperatura, di una quantità δT .
In generale il legame fra δE e δT è complesso.
Si definisce capacità termica C di un oggetto il rapporto fra il calore δQ
ad esso ceduto e la variazione δT di temperatura che ne risulta:
C =
δQ
δT
(19.46)
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 295
Da un punto di vista concettuale, la capacità termica può essere pensata
come la “resistenza” di un oggetto al subire variazioni di temperatura. Più
C è grande, più difficile è scaldare o raffreddare l’oggetto.
Va notato che, in generale, C non è una costante, ma dipende
dalla temperatura a cui si opera, specialmente per grandi variazioni
di temperatura.
Per variazioni di temperatura contenute, C è
approssimativamente costante, e si può scrivere
∆Q = C ∆T
(19.47)
A parità di temperatura T , l’energia interna E deve essere direttamente
proporzionale alla quantità di materia presente nel sistema, cioè alla sua
massa — raddoppiando la massa, raddoppia il numero di costituenti del
sistema. Poiché hE part i è funzione di T e E = N hE part i, deve anche
raddoppiare E. Pertanto viene utile definire il calore specifico c di una
sostanza come la sua capacità termica per una massa unitaria (cioè di 1 kg):
c =
C
m
(19.48)
Ne deriva che la relazione fra un calore scambiato δQ e la variazione di
temperatura δT è:
∆Q = m c ∆T
(19.49)
Dalla definizione di kCal data nella sezione precedente risulta che
cH2 O (14.5◦ C) = 4.186 · 103 JK−1 kg−1 .
19.9.1
Capacità termica a volume costante e a
pressione costante
Si deve far notare che, nel definire capacità termica e calore specifico,
occorre specificare le condizioni di lavoro: in particolare, se il calore viene
ceduto mantenendo il sistema a pressione costante (tipicamente, la pressione
dell’ambiente), oppure a volume costante. Il risultato è diverso, perché nel
primo caso il sistema subisce una variazione di volume
δV = αV V δT
pertanto compie anche un lavoro sull’ambiente.
Vediamo i dettagli. Dal primo principio della termodinamica, formulato
come nell’Eq. (19.40), si ottiene:
δQ = δE + P δV
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 296
Se la trasformazione avviene a volume costante (isocora) allora δV = 0 e la
capacità termica a volume costante vale:
CV =
δE
δT
(19.50)
Se la trasformazione avviene a pressione costante (isobara), δQ = δE +
αV P V δT , quindi la capacità termica a pressione costante vale:
CP =
δE
+ αV P V = CV + αV P V
δT
(19.51)
Quando si misura la capacità termica di un liquido o di un solido, la
sua dilatazione è inevitabile, pertanto solitamente si misura direttamente
CP . Viceversa, i modelli fisici che cercano di predire il valore della capacità
termica sono considerati a volume costante, in modo da assumere δQ = δE,
quindi considerano CV . L’Eq. (19.51) consente di calcolare una delle due
conoscendo l’altra.
Passando ai calori specifici, la relazione fra cP e cV si ottiene dividendo
m
per la massa m dell’oggetto, e introducendo la densità di massa ρ = :
V
cP = cV + α V
P
ρ
(19.52)
Esercizio 19.1. Calcolare la differenza fra cP e cV per il ferro e per l’acqua.
Risposta. I valori necessari per cP , αV , ρ si possono trovare tabulati su vari
libri, o su internet. Assumiamo P = 1 Atm = 101325 Pa e costruiamo la seguente
tabella:
materiale
ferro
acqua a 15◦ C
cP (J K−1 kg−1 )
444
4186
αV (K−1 )
35 · 10−6
210 · 10−6
ρ (kg/m3 )
7874
1000
cP − cV (J K−1 kg−1 )
0.00045
0.021
Come si vede, la differenza fra cP e cV è molto piccola. Per il ferro,
cP − cV
cP − cV
= 10−6 , una parte su un milione. Per l’acqua invece
= 5 · 10−6 ,
cP
cP
5 parti su un milione. In entrambi i casi, si tratta di variazioni ben più piccole
della precisione sperimentale e anche dell’accuratezza dei modelli teorici.
19.9.2
Misure di capacità termiche
La misura delle capacità termiche, o dei calori specifici, presenta una
∆Q
, la variazione di temperatura ∆T
problematica generale: nel rapporto
∆T
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M
T
(2)
M.FANTI 297
T(1)
Figura 19.9:
Misure di capacità. A sinistra: calorimetro a mulinello
per misurare la capacità termica dell’acqua. A destra: calorimetro delle
mescolanze, per misurare la capacità termica di un oggetto (2) immerso in
acqua (1).
è direttamente misurabile, mentre invece il trasferimento di calore ∆Q non
è associato a fenomeni macroscopici, quindi deve essere dedotto da altre
osservazioni.
Sappiamo che ∆T è collegato alla variazione di energia interna, ∆E. In
alcuni casi, l’idea è di sostituire uno scambio di calore ∆Q (non misurabile)
con un lavoro ∆Lattr fatto dall’esterno, per esempio mediante attriti, in modo
da non modificare il volume. Il primo principio della termodinamica, scritto
come
∆E = ∆Q + ∆Lattr
∆E
non dipende da come ∆E è realizzato. Se
∆T
∆Q
∆E
non abbiamo variazioni di volume, C =
=
. Se lo stesso ∆E è
∆T
∆T
realizzato mediante un lavoro di attriti, ∆E = ∆Lattr , e questo è misurabile.
∆Lattr
Pertanto si trova C =
, e C risulta calcolabile.
∆T
Il calore specifico di un liquido può essere misurato come indicato in
Fig. 19.9, a sinistra. La massa M , inizialmente posta ad un’altezza h, viene
lasciata cadere, azionando un mulinello che viene frenato dalle forze di attrito
del liquido. Per calcolare il lavoro dell’attrito, Lattr , è sufficiente misurare
la velocità finale vf in della massa M e lavorare sull’energia meccanica
della massa M . L’energia potenziale iniziale, M gh, anziché convertirsi
M 2
completamente in energia cinetica finale
v , viene in parte dissipata in
2 f in
ci suggerisce che il rapporto
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 298
attriti sul liquido, quindi:
Lattr = M gh −
M 2
v
2 f in
Ne segue che l’energia interna del liquido aumenta di:
∆E liquido = Lattr = M gh −
M 2
v
2 f in
Nello stesso tempo, il termometro misura una variazione di temperatura ∆T
del liquido. Pertanto si può misurare la capacità termica del liquido, come:
C liquido
M
M gh − vf2in
∆E
2
=
=
∆T
∆T
Come si vede, tutte le quantità (M, h, vf in , ∆T ) sono direttamente
misurabili, quindi C liquido è calcolabile. Poi, conoscendo la massa m del
C liquido
liquido
liquido, si può risalire al calore specifico c
=
.
m
In questa maniera si può misurare
cH2 O = 4186 JK−1 kg−1
In generale, le misure di capacità termiche si effettuano ponendo in
contatto termico due oggetti a temperature diverse ed aspettando che essi
si portino alla stessa temperatura. In particolare, si può scegliere un liquido
(1) la cui capacità termica C (1) sia nota (per esempio l’acqua, come spiegato
precedentemente), ed immergervi un oggetto (2) di cui si vuole determinare
la capacità termica C (2) . L’apparato è illustrato nella Fig. 19.9, a destra.
Si misurano le temperature iniziali T (1) del liquido e T (2) dell’oggetto,
quindi si immerge l’oggetto e si osserva la temperatura del liquido, aspettando
che si stabilizzi su un nuovo valore finale T f in . Quando non cambia più,
possiamo essere certi che anche la temperatura dell’oggetto ha raggiunto lo
stesso valore. Durante questo processo, il liquido ha acquisito una quantità
di calore
∆Q(1) = C (1) T f in − T (1)
che è calcolabile. Nello stesso tempo, l’oggetto ha scambiato una quantità di
calore
∆Q(2) = C (2) T f in − T (2)
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 299
Ora deve essere ∆Q(1) = −∆Q(2) , quindi possiamo calcolare
C (2) = −
f in
∆Q(1)
− T (1)
(1) T
=
C
T f in − T (2)
T (2) − T f in
Conoscendo la massa m(2) dell’oggetto, si risale al suo calore specifico
C (2)
c(2) = (2) .
m
Riportiamo bnella seguente tabella alcuni valori di calori specifici.
Materiale
Calore specifico a pressione costante
(J K−1 kg−1 )
Piombo
128
Tungsteno
134
Rame
386
Alluminio
880
Acciaio
502
Ferro
444
Ottone
377
Vetro
840
Granito
790
Diamante
502
Grafite
720
Ghiaccio
2220
Acqua
4186
Acqua di mare
3900
Alcool etilico
2430
Mercurio
139
Anidride carbonica
838
Aria (secca)
1005
Aria (umidità 100%)
1030
Azoto
1042
Ossigeno
920
Idrogeno
14435
Elio
5190
19.9.3
Capacità termica di un gas rarefatto
ν
Per un gas rarefatto l’energia interna è E = N kT , pertanto la capacità
2
termica a volume costante è:
ν
CV = N k
(gas rarefatti)
(19.53)
2
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 300
Ora ricordiamo l’equazione di stato, P V = N kT . La dilatazione a
Nk
Nk
V
pressione costante è data ovviamente da δV =
δT . Esprimendo
= ,
P
P
T
si trova
δV =
V
δT
T
(gas rarefatti, dilatazione a pressione costante)
e quindi per confronto
αV =
1
T
Quindi, sempre dall’equazione di stato, αV P V = N k. Pertanto, la capacità
termica a pressione costante è:
ν
(gas rarefatti)
(19.54)
+ 1 Nk
CP =
2
Si noti che CV , CP dipendono dalla natura del gas, attraverso i “gradi
di libertà” ν della molecola: dunque, molecole più complesse (biatomica,
triatomica), hanno capacità termiche più elevate rispetto ai gas monoatomici.
Questo fatto si capisce se consideriamo che la temperatura è legata all’energia
cinetica traslazionale delle molecole, mentre l’energia interna contiene anche
l’energia cinetica di rotazione delle molecole. Poiché questi contributi si
equipartiscono, a causa degli urti fra molecole, per un dato aumento di
temperatura occorre produrre un aumento di energia cinetica traslazionale
(sempre lo stesso) ma anche un aumento di energia cinetica rotazionale, che
è maggiore per le molecole più complesse.
Invece, la differenza tra capacità termica a pressione costante e a volume
costante è indipendente dalla natura del gas:
C P − CV = N k
(gas rarefatti)
(19.55)
Per i gas, si è soliti definire anche il calore molare: è simile al calore
specifico, solo che anziché riferito ad una massa unitaria, viene riferito ad
una mole di molecole, N = NA . Sicome NA k = R, il calori molari di un gas
a volume costante e a pressione costante risultano essere:
CVmol =
CPmol
=
ν
R
2
ν
2
(gas rarefatti)
+1 R
(19.56)
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 301
Esercizio 19.2. Utilizzando le formule dei calori molari, si calcolino i calori
specifici a pressione costante dei gas O2 , N2 , H2 , He, CO2 , e si confrontino i
risultati con quelli sperimentali mostrati nella Sezione 19.9.2. ν
Risposta. Il calore molare a pressione costante è CPmol =
+ 1 R. Per
2
passare al calore specifico, occorre conoscere il peso molecolare, m, di ciascun gas.
M
Una massa M di gas contiene un numero di moli n =
, pertanto la sua
m NA
ν
M
e il suo calore specifico
capacità termica è CP = n CPmol =
+1 R ·
2
m NA
CP
ν
ν
R
k
cP =
=
=
+1 ·
+1
. Quindi, costruiamo una tabella come
M
2
m NA
2
m
segue:
Gas
O2
N2
H2
He
CO2
ν
5
5
5
3
6
m (u.a.)
32
28
2
4
44
m (kg)
5.312 · 10−26
4.648 · 10−26
0.332 · 10−26
0.664 · 10−26
7.304 · 10−26
cP (K/(K kg))
910
(920)
1040
(1042)
14559
(14435)
5200
(5190)
756
(838)
Il valore sperimentale è indicato fra parentesi nell’ultima colonna. L’accordo
è ottimo per tutti i gas, tranne per l’anidride carbonica: il valore sperimentale è
838 K/(K kg).
19.9.4
Capacità termica di un solido
Abbiamo visto nella Sezione 19.4.1 che per molti solidi vale la relazione
E = 3N kT
(solidi di Dulong-Petit)
pertanto la capacità termica di questi solidi è
C = 3N k
(solidi di Dulong-Petit)
(19.57)
(solidi di Dulong-Petit)
(19.58)
e il calore molare (N = NA ) risulta:
C mol = 3R
Esercizio 19.3. Usando la formula di Dulong-Petit, si calcolino i calori specifici
a pressione costante dei seguenti materiali solidi: piombo, tungsteno, rame,
alluminio, ferro, vetro, granito, diamante, grafite, ghiaccio. Si confrontino i
risultati con i valori sperimentali della tabella in Sezione 19.9.2. Si commenti
qualitativamente il valore sperimentale per l’acciaio (lega di ferro e carbonio, max
1%).
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 302
Soluzione. La formula di Dulong-Petit tratta moli di atomi, che sono
considerati puntiformi. Per i metalli semplici, dalla formula del calore molare
C mol = 3R, si può passare al calore specifico se si conosce la massa atomica
C mol
3k
m: basta usare c =
=
. Per il diamante e la grafite, si può usare
NA m
m
la massa atomica del carbonio. Per materiali composti, si può tentare di usare
una media pesata delle masse atomiche degli elementi costituenti. La molecola
del ghiaccio è formata da 2 atomi di idrogeno (mH = 1 u.a.) e 1 di ossigeno
2 · 1 + 1 · 16
(mO = 16 u.a.), pertanto si potrebbe assumere mghiaccio =
= 6 u.a..
3
Il vetro comune è ottenuto fondendo diossido di silicio (SiO2 ) e poi facendolo
solidificare in tempi troppo rapidi perché si formi la struttura cristallina. Anche
qui, possiamo assumere una massa atomica media: essendo mSi = 28 u.a. troviamo
1 · 28 + 2 · 16
mvetro =
= 20 u.a.. Il granito è ancora più complicato, trattandosi
3
di una miscela di diverse molecole, di cui prevalentemente SiO2 al 74% e Al2 O3 al
2 · 27 + 3 · 16
= 20.4 u.a. —
14%. La massa atomica media di Al2 O3 è mAl2 O3 =
5
praticamente identica a quella di SiO2 . Trascurando i composti minori del granito,
possiamo assumere una massa atomica media mgranito = 20 u.a.. Proviamo a
vedere che succede . . .
Materiale
Piombo (Pb)
Tungsteno (W)
Rame (Cu)
Alluminio (Al)
Ferro (Fe)
Vetro (SiO2 )
Granito (SiO2 , AL2 O3 )
Diamante (C)
Grafite (C)
Ghiaccio (H2 O)
m (u.a.)
207
184
64
27
56
20
20
12
12
6
m (kg)
3.436 · 10−25
3.054 · 10−25
1.062 · 10−25
0.448 · 10−25
0.930 · 10−25
0.332 · 10−25
0.332 · 10−25
0.199 · 10−25
0.199 · 10−25
0.100 · 10−25
cP (K/(K kg))
120
(128)
136
(134)
390
(386)
924
(880)
445
(444)
1247
(840)
1247
(790)
2078
(502)
2078
(720)
4157
(2220)
Il valore sperimentale è indicato fra parentesi nell’ultima colonna.
Commenti. L’accordo fra la previsione di Dulong-Petit e il dato sperimentale
è ottimo per i metalli con massa atomica elevata. Tuttavia si nota che si discosta
sensibilmente per l’alluminio, e ancora di più per il diamante, che pure non
contengono elementi diversi: la ragione sta nella loro massa atomica, molto
piccola, e nel forte legame fra gli atomi. Questo fatto viene approfondito nella
Sezione 19.12.3. Anche per i materiali composti considerati, la previsione di
Dulong-Petit non è applicabile.
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
19.10
M.FANTI 303
Calori latenti
Finora abbiamo associato uno scambio di calore δQ di un sistema con
l’ambiente, ad una variazione δT del sistema stesso.
Ci sono situazioni in cui invece la temperatura non cambia, ma si modifica
invece lo stato fisico del sistema: è il caso in cui un materiale passa dallo stato
solido allo stato liquido, o a quello gassoso. In tali situazioni, lo scambio di
calore è evidente dalla variazione di temperatura dell’ambiente circostante,
oppure di un altro materiale posto a contatto.
Facciamo alcuni esempi.
Esempio: acqua in ebollizione
Una pentola d’acqua viene messa sul fuoco, e nell’acqua è immerso un termometro.
La temperatura dell’acqua cresce, fino a raggiungere 100◦ C (gradi Celsius), poi si
stabilizza e a questo punto l’acqua comincia a bollire. Sappiamo che il fuoco cede
calore all’acqua: il fatto è manifesto, dal fatto che prima di bollire la temperatura
dell’acqua aumentava, dunque anche la sua energia interna aumentava, mentre
su di essa non veniva fatto lavoro. Quindi questo aumento doveva essere causato
da un trasferimento di calore. Quando l’acqua comincia a bollire, la temperatura
non aumenta più, eppure il fuoco resta acceso, quindi continua a trasferire calore,
cioè a cedere energia. Dove va questa energia? Nel frattempo si osserva che parte
dell’acqua forma le bolle, ovvero passa dallo stato liquido allo stato gassoso.
Esempio: ghiaccio fondente
L’esempio precedente può essere ripreso usando un blocco di ghiaccio viene
preso dal freezer e messo in una pentola sul fuoco. Inizialmente la temperatura
del ghiaccio era quella del freezer (diciamo −18◦ C). Dopo un po’ di tempo il
ghiaccio comincia a fondere e nella pentola si raccoglie dell’acqua. La temperatura
dell’acqua e del ghiaccio residuo a contatto con essa viene misurata e risulta 0◦ C.
Poi la temperatura resta stabile a questo valore (mentre il fuoco resta acceso) finché
tutto il ghiaccio si è sciolto. Solo quando non c’è più ghiaccio, la temperatura
dell’acqua comincia a salire. Anche qui, sappiamo che il fuoco cede calore, ma
quando acqua e ghiaccio coesistono, la loro temperatura non cambia.
In entrambi gli esempi fatti, il sistema riceve energia (sotto forma di
calore) ma la sua temperatura non cambia. Invece, parte del sistema passa
da solido a liquido, oppure da liquido a gassoso.
Il processo può anche essere invertito. Per esempio, se si prende un
recipiente pieno d’acqua e lo si mette nel freezer, e si misura la temperatura
nel tempo, si osserva che essa scende dal valore ambientale fino ad arrivare
a 0◦ C, poi parte dell’acqua comincia a ghiacciare ma la temperatura non
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
Figura 19.10:
M.FANTI 304
Esperimento del ghiaccio che si scioglie nell’olio.
cambia più, fino a che tutta l’acqua si è ghiacciata, e solo allora la
temperatura ricomincia a scendere.
Consideriamo ora un esperimento un po’ più quantitativo.
Esperimento: ghiaccio fondente
Un blocco di ghiaccio (sistema (1)) viene immerso in olio caldo (sistema (2)) per
del tempo. Dopo un po’ di tempo si osserva che parte del ghiaccio si è sciolto,
formando acqua che si deposita sul fondo (acqua e olio non si mescolano). Il
tutto è immerso in un recipiente isolato dotato di due termometri: uno misura la
temperatura T (1) dell’acqua sul fondo, l’altro la temperatura T (2) dell’olio.
Svolgimento e osservazioni. Ora descriviamo che cosa succede durante
l’esperimento, aiutandoci con la Fig. 19.10.
Da quando viene immerso il ghiaccio, la temperatura dell’olio T (2) diminuisce
(“l’olio si raffredda”). Interpretiamo questo dicendo che, essendo l’olio a
temperatura maggiore del ghiaccio, gli cede energia sotto forma calore.
Dopo un certo tempo, il ghiaccio comincia a fondere, e sul fondo si accumula
acqua, la cui temperatura T (1) viene misurata. Si osserva che, durante la fusione
del ghiaccio, T (2) continua a diminuire, mentre invece T (1) resta costante a
0◦ C = 273.15 K. Il calo di T (2) indica che l’olio continua a cedere calore al
ghiaccio. Chiamando C (2) la capacità termica dell’olio, possiamo quantificare
il calore scambiato attraverso la variazione di temperatura dell’olio: ∆Q(1) =
(2)
−∆Q(2) = −C (2) ∆T (2) La variazione di temperatura ∆Tf usione che avviene fra
l’inizio e la fine della fusione del ghiaccio permette di calcolare quanta energia è
stata ceduta al ghiaccio.
(1)
(2)
∆Qf usione = −C (2) ∆Tf usione
(2)
Inoltre, si osserva sperimentalmente che ∆Tf usione è direttamente proporzionale
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 305
alla massa m(1) del ghiaccio iniziale:
(2)
∆Tf usione = −Km(1)
La costante di proporzionalità K che abbiamo introdotto ha un significato
puramente empirico, al momento, ma è comunque misurabile. Da questa
vorremmo estrarre qualche informazione più fondamentale. Possiamo ricavare
l’energia necessaria per sciogliere una massa unitaria di ghiaccio:
(1)
λF
=
∆Qf usione
m(1)
(2)
= −
C (2) ∆Tf usione
m(1)
= K C (2)
Quando il ghiaccio si è fuso completamente, la temperatura T (1) dell’acqua
comincia a salire, intanto che la temperatura T (2) dell’olio continua a scendere.
Questo è comprensibile, in termini di capacità termica dell’acqua: C (1) ∆T (1) =
∆Q(1) = −∆Q(2) = −C (2) ∆T (2) Incidentalmente, misurando ∆T (1) e ∆T (2) ,
e conoscendo la capacità termica dell’acqua, C (1) = m(1) c(1) = m(1) ·
(4186 Jkg−1 K−1 ), si può risalire alla capacità termica C (2) , dell’olio, necessaria
al calcolo di λF .
Conclusione. Da questo esperimento si impara che per fondere il ghiaccio è
necessario somministrare energia, e che questa non si manifesta in un aumento di
temperatura. È inoltre possibile misurare questa energia, in particolare per unità
di massa di ghiaccio che si fonde. La quantità λF cosı̀ introdotta si chiama “calore
latente di fusione”.
Occorre ricordare che in un sistema denso (liquido o solido), l’energia
interna ha una componente cinetica e una potenziale: quest’ultima deriva
dalle interazioni fra atomi e molecole del sistema stesso. Nei solidi, i
costituenti sono legati fra loro più strettamente che nei liquidi, pertanto la
loro energia potenziale è minore nei solidi. Nei gas l’energia potenziale può
essere considerata nulla, perché non ci sono interazioni, se non durante gli
urti. Schematicamente possiamo scrivere
hU i(solido) < hU i(liquido) < hU i(gas) ≡ 0
Quando il ghiaccio si fonde, parte delle molecole che prima erano legate
nella fase solida passano alla fase liquida, quindi sono meno legate di prima.
Questo significa che l’energia potenziale aumenta, e cosı̀ anche l’energia
interna. Analogamente, quando l’acqua bolle, parte delle molecole passa alla
fase gassosa, e quindi si slega completamente, aumentando ancora l’energia
interna.
Questa situazione non può essere descritta attraverso le capacità termiche,
perché non c’è variazione di temperatura. Si introducono invece i calori
latenti.
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 306
Figura 19.11:
Variazione della temperatura durante la cessione di calore
ad una sostanza: le parti di curva che sale si riferiscono al riscaldamento
di una fase omogenea (solida, liquida, gassosa), mentre i tratti orizzontali
descrivono la fusione e la vaporizzazione.
Il calore latente di fusione λF è la quantità di calore ∆Q necessaria per
fare passare una massa unitaria (1 kg) di materiale dallo stato solido allo
stato liquido.
Analogamente, il calore latente di vaporizzazione λV è la quantità di calore
∆Q necessaria per fare passare una massa unitaria (1 kg) di materiale dallo
stato liquido allo stato gassoso.
Se immaginiamo di prendere una sostanza solida di massa m e di cederle
calore, possiamo dividere il processo in 5 parti, come schematizzato nella
Fig. 19.11.
(1) Inizialmente il solido si scalda: la sua temperatura aumenta secondo la
legge:
δQ
(riscaldamento del solido)
m csolido
Il processo va avanti finché parte del solido comincia a fondere.
δT =
δQ
C solido
=
(2) Quando è iniziata la fusione, la temperatura si stabilizza. Il calore
assorbito ha l’effetto di far passare sempre più materiale dalla fase
solida alla fase liquida. La quantità di massa che si fonde è data dalla
relazione:
δQ
δmf usione =
(fusione del solido)
λF
Il processo continua finché resta del materiale nella fase solida.
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 307
(3) Quando tutto il materiale si è fuso, un’ulteriore somministrazione di
calore fa aumentare la temperatura del liquido, secondo la legge:
δT =
δQ
C liquido
=
δQ
m cliquido
(riscaldamento del liquido)
Il processo va avanti finché parte del liquido comincia a bollire.
(4) Quando è iniziata l’ebollizione, la temperatura si stabilizza di nuovo.
Il calore assorbito ha l’effetto di far passare sempre più materiale dalla
fase liquida alla fase gassosa. La quantità di massa che si vaporizza è
data dalla relazione:
δmvaporizzazione =
δQ
λV
(vaporizzazione del liquido)
Il processo continua finché resta del materiale nella fase liquida.
(5) Dopo che tutto il materiale è passato allo stato gassoso, una ulteriore
somministrazione di calore fa aumentare la temperatura del gas,
secondo la legge:
δT =
δQ
δQ
=
gas
C
m cgas
(riscaldamento del gas)
Il fatto che durante la fusione e l’ebollizione la temperatura sia costante,
è di grande utilità pratica, perché consente di costruire termostati, ovvero
sistemi a temperatura costante. Il fatto che le scale termometriche siano
tarate sul ghiaccio fondente (0◦ C) e sull’acqua bollente (100◦ C) è un esempio
notevole.
Riportiamo nella tabella che segue le temperature di fusione e di
ebollizione e i rispettivi calori latenti di alcune sostanze.
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
sostanza
Idrogeno
Elio
Ossigeno
Azoto
Acqua
Alcool etilico
Mercurio
Alluminio
Ferro
Tungsteno
Rame
Zolfo
19.11
fusione
temp. (K) cal. lat. (kJ/kg)
14.15
58
3.45
1.25
54
13.9
63
25.7
273.15
333.5
159
108
234
11
933
327
1811
247
3695
192
1356
207
388
54
M.FANTI 308
ebollizione
temp. (K) cal. lat. (kJ/kg)
20.15
455
4.22
21
90
213
77
200
373.16
2272
351.4
855
630
294
2743
10500
3134
6070
6203
4200
2868
4730
718
1406
Esercizi
Esercizio 19.4. Un volume di 1 m3 di azoto si trova inizialmente alla pressione
di 1 Atm e alla temperatura di 25 ◦ C, quindi viene compresso in maniera adiabatica
fino a che il suo volume si sia dimezzato. Calcolare l’energia interna prima e dopo
la compressione. Quanto vale la temperatura finale?
ν
Risposta. L’energia interna è legata alla temperatura da E = N kT , essendo
2
ν = 5 per l’azoto. Il numero di molecole N non è dato, ma si ricava dall’equazione
ν
di stato, P V = N kT , quindi E = P V . Poiché all’inizio P in = 101 325 Pa e
2
V in = 1 m3 , si trova
E in =
ν in in
P V = 2.533 · 105 J
2
ν+2
7
La trasformazione adiabatica è tale che P V γ resta costante, con γ =
= =
ν
5
in γ
V in
V
5
f in
3
f in
in
1.4. Poiché V
=
= 0.5 m , si ottiene P
=P
= 2.674·10 Pa.
2
V f in
L’energia interna finale si calcola sempre con la stessa formula:
E f in =
ν f in f in
P V
= 3.343 · 105 J
2
E f in
T f in
Da questa calcoliamo T f in : deve essere in = in , con T in = (25+273.15) K =
E
T
298.15 K. Quindi:
T f in =
E f in in
T = 393.50 K = 120.35◦ C
E in
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 309
Esercizio 19.5. Un volume di 1 ` di gas Argon (gas monoatomico) si trova
inizialmente alla pressione atmosferica e a temperatura di 15◦ C, quindi viene posto
a contatto con una sorgente di calore, fino a che la sua pressione è diventata pari a
150 kPa, mentre il suo volume rimane costante. Qual è la sua temperatura finale?
Quanto calore ha assorbito dalla sorgente?
Risposta. La legge dei gas, P V = N kT , a volume costante, ci dice
∆P
∆T
che ∆P V = N k∆T . Pertanto,
=
. La variazione di pressione è
P
T
∆P = (1.5 − 1.01325) · 105 Pa = 4.8675 · 104 Pa. La temperatura iniziale è
T in = (15 + 273.15) K = 288.15 K. Pertanto, la temperatura finale è:
∆T
= T in
f in
in
T
= T
∆P
= 138.43 K
P in
+ ∆T = T
in
∆P
1 + in
P
= 426.59 K = 153.44◦ C
Per trovare il calore assorbito, utilizziamo la prima legge della termodinamica:
∆E = ∆Q − ∆L, dove nel nostro caso ∆L = 0 perché non c’è variazione di
ν
volume. Occorre quindi valutare ∆E = N k∆T . Per l’argon, ν = 3. Inoltre,
2
PV
, quindi dalle condizioni iniziali:
Nk =
T
ν P in V in
∆T = 73.01 J
2 T in
Esercizio 19.6. Lo stesso volume di Argon dell’esercizio precedente, con le
stesse condizioni iniziali, viene tenuto a pressione costante e lasciato espandere,
mentre gli viene ceduta la stessa quantità di calore. Che temperatura e che volume
raggiunge?
Risposta. Al contrario del caso precedente, qui il gas si espande, quindi compie
un lavoro ∆L = P ∆V . Inoltre, a pressione costante, N k∆T = P ∆V
, quindi
ν
ν
ν
∆E = N k∆T = P ∆V . Si deduce che ∆Q = ∆E + ∆L =
+ 1 P ∆V , da
2
2
2
cui:
ν
∆Q = 4.323 · 10−4 m3 = 0.4323 `
∆V =
(ν + 2)P
∆Q = ∆E =
V f in = V in + ∆V = 1.4323 `
La temperatura finale si ricava da P V = N kT e, a pressione costante, P ∆V =
N k∆T , da cui:
∆T
T f in
∆V
= 124.57 K
V in
= T in + ∆T = 412.73 K = 139.57◦ C
= T in
Osservazione. Rispetto all’esercizio precedente, l’aumento di temperatura è
minore: la ragione è che parte dell’energia assorbita come calore è stata convertita
in lavoro.
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 310
Esercizio 19.7. Quanto calore è necessario estrarre da 1 m3 di CO2 che si trova
inizialmente a pressione atmosferica, affinché la sua temperatura passi da 25◦ C a
0◦ C, mentre il suo volume resta costante? Come cambia il risultato, se invece si
mantiene costante la pressione?
Risposta. Si possono usare
termiche a volume e a pressione
ν le capacità
ν
costante, CV = N k e CP =
+ 1 N k. Per le molecole triatomiche ν = 6.
2
2
P in V in
= 339.8 K. Quindi:
N k si può ricavare dall’equazione di stato: N k =
T in
[∆Q]V
= CV ∆T = 3N k∆T = −2.549 · 104 J
[∆Q]P
= CP ∆T = 4N k∆T = −3.398 · 104 J
Esercizio 19.8. 200 g di zuppa di verdura bollente (100◦ C) viene versata in
una scodella a temperatura ambiente (20◦ C). La scodella si scalda, fino a essersi
termalizzata con la zuppa alla temperatura Tf in . Trattando la zuppa come se fosse
acqua (stesso calore specifico), la scodella come un oggetto di massa 450 g e calore
specifico 1000 J/(kg K), e trascurando la dispersione di calore nell’aria, quanto
vale Tf in ?
Risposta. Chiamiamo (1) la zuppa e (2) la scodella. Il calore ∆Q ceduto dalla
zuppa alla scodella vale:
(1)
C (1) Tin − Tf in = ∆Q = C (2) Tf in − T (2)
essendo C (1) = m(1) c(1) = (0.2 kg)(4186 JK−1 kg−1 ) = 837.2 J/K e C (2) =
m(2) c(2) = (0.45 kg)(1000 JK−1 kg−1 ) = 450 J/K. Si ricava quindi:
(1)
Tf in
(2)
C (1) Tin + C (2) Tin
=
= 72.03◦ C
C (1) + C (2)
Osservazione. In questo esercizio non ci siamo preoccupati di scrivere le
temperature in gradi Kelvin. La ragione è che in questo problema solo le variazioni
∆T sono importanti.
Esercizio 19.9. La zuppa a 70◦ C dell’esercizio precedente “fuma”, ovvero parte
di essa evapora. Quanta parte di essa deve evapoarre, affinché quella che rimane
sia alla temperatura di 30◦ C?
Risposta. Quando una massa δm passa dallo stato liquido a quello gassoso,
sottrae una quantità di calore δQ = λV δm alla fase liquida, la quale quindi si
λV δm
δQ
=
. Occorre quindi integrare questa
raffredda, secondo l’equazione δT =
mc
c m
equazione, dalla temperatura iniziale T in a quella finale T f in :
Z Tf in
Z
mf in
λV
λV mf in dm
f in
in
=
∆T = T
−T
=
dT =
c min m
c
min
T in
c
∆T
mf in = min · e λV
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 311
Trattando la zuppa come fosse acqua, c = 4186 J/(K kg) e λV = 2.272 · 106 J/kg.
Essendo ∆T = −40 K, si ricava mf in = min · 0.93 = 0.186 kg. Quindi devono
evaporare 14 g di acqua.
Esercizio 19.10. Una pentola con 5 ` di acqua a una temperatura iniziale di
20◦ C viene messa sul fuoco, e lasciata lı̀ finché l’acqua non è evaporata tutta.
Quanta energia ha ceduto il fornello? Se la potenza del fornello è di 3 kW, quanto
tempo impiega l’acqua a bollire? Quanto tempo occorre perché evapori tutta?
Risposta. L’acqua viene prima portata ad ebollizione, quindi evapora. La
massa di acqua è m = 5 kg, quindi la sua capacità termica è C = c m =
(4186 J/(K kg))(5 kg) = 20 930 J/K. Per portare la temperatura da 20◦ C a 100◦ C
è quindi necessaria un’energia pari a ∆E1 = C ∆T = 1.6744 · 106 J. L’energia
per fare evaporare tutta l’acqua è ∆E2 = m · λV = (5 kg)(2.272 · 106 J/kg) =
1.136·107 J. L’energia totale spesa in tutto il processo è ∆E1 +∆E2 = 1.303·107 J.
Chiamiamo W = 3000 W la potenza del fornello. Il tempo impiegato per
∆E1
portare a ebollizione l’acqua è ∆t1 =
= 558 s ' 9.3 min. Da quando inizia a
W
∆E2
= 3787 s ' 1.05 h perché sia tutta evaporata.
bollire, occorre un tempo ∆t2 =
W
Esercizio 19.11. Due cubetti di ghiaccio di massa 5 g ciascuno, a temperatura
di −18◦ C vengono messi in una tazzina di caffé bollente (20 g di caffé a 100◦ C).
Trascurando la capacità termica della tazzina, qual è la temperatura finale del
caffé? Che cosa succede se si usano invece 5 cubetti?
Risposta. Trattiamo il caffé come acqua, e dividiamo il processo in 3 fasi.
Fase 1. Il caffé cede una quantità di calore ∆Q1 al ghiaccio, per portarlo
da −18◦ C a 0◦ C.
Quindi ∆Q1 = mghiaccio cghiaccio ∆T1ghiaccio =
(0.01 kg)(2220 JK−1 kg−1 )(18 K) = 399.6 J. La temperatura del caffé si
∆Q1
399.6 J
abbassa di ∆T1caf f e = − caf f e acqua = −
=
(0.02 kg)(4186 JK−1 kg−1 )
m
c
−4.78 K.
Fase 2. Il ghiaccio si scioglie tutto, quindi assorbe un calore ∆Q2 =
mghiaccio λghiaccio
= (0.01 kg)(3.335 · 105 Jkg−1 ) = 3336 J.
La
F
∆Q
2
temperatura del caffé si abbassa di ∆T2caf f e = − caf f e acqua =
m
c
3336 J
−
= −39.8 K.
(0.02 kg)(4186 JK−1 kg−1 )
Fase 3. Il ghiaccio ormai è sciolto, quindi abbiamo 5 g di acqua a 0◦ C e 20 g di caffé
a (100 − 4.78 − 39.8)◦ C = 55.4◦ C. L’acqua a 0◦ C assorbe una quantità di
calore ∆Q3 per arrivare ad una temperatura finale Tf in , nello stesso tempo
il caffé cede la stessa quantità di calore per arrivare alla stessa temperatura:
mghiaccio cacqua (Tf in − 0◦ C) = ∆Q3 = mcaf f e cacqua (55.4◦ C − Tf in )
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 312
da cui:
Tf in =
mghiaccio (0◦ C) + mcaf f e (55.4◦ C)
= 44.3◦ C
mghiaccio + mcaf f e
Usando 5 cubetti, la massa totale del ghiaccio è mghiaccio = 0.025 g. Quindi
∆Q1 cresce di un fattore 5/2, e cosı̀ pure ∆T1 = −11.95◦ C. Anche ∆Q2 crescerebbe
di un fattore 5/2, e cosı̀ pure farebbe ∆T2 = −99.5◦ C. Quindi il calo totale della
temperatura del caffé sarebbe ∆T1 + ∆T2 = −111◦ C. Ma questo non è possibile,
perché il caffé diventerebbe ad un certo punto più freddo del ghiaccio e continuerebbe
a cedergli calore. Questo in pratica non può succedere. Ciò che invece accade è che
quando il caffé raggiunge 0◦ C si trova in equilibrio termico col ghiaccio fondente.
Alla fine ci sarà il caffé, un po’ annacquato, con un residuo di ghiaccio non sciolto.
19.12
Temperatura ed energia interna (*)
19.12.1
Principio di equipartizione dell’energia
Nelle sezioni precedenti abbiamo visto che un gas rarefatto possiede
un’energia interna, data dalla totalità delle energie cinetiche molecolari, la
cui manifestazione macroscopica è la temperatura
hEi =
ν
E
= kT
N
2
(gas rarefatti)
Possiamo riformulare questo risultato nella forma seguente, che va sotto il
nome di principio di equipartizione dell’energia.
In una sostanza che si trova a temperatura T , ciascun costituente
kT
elementare (atomo o molecola) possiede un’energia media E part pari a
2
per ogni grado di libertà.
E part
≡
E
kT
= ν·
N
2
(19.59)
Questa formulazione non aggiunge nulla di nuovo a quanto già detto per
i gas rarefatti, ma può essere estesa ad altri casi. Occorre in ogni caso
contare in modo giusto i gradi di libertà per ciascun costituente elementare,
considerando solo le quantità che possono alterarne l’energia meccanica.
Nelle sezioni seguenti, rivisitiamo alcuni casi già visti (gas monoatomico
e biatomico) ed introduciamo il caso nuovo dei solidi.
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
19.12.2
M.FANTI 313
Gas monoatomico
In un gas monoatomico rarefatto, l’unica energia meccanica è l’energia
m 2
vx + vy2 + vz2 . I gradi di libertà ad essa collegati
cinetica: E part ≡ E =
2
sono le tre componenti cartesiane della velocità, vx , vy , vz , quindi ν = 3. Il
principio di equipartizione, Eq. (19.59), ci dice che
3
E part = kT
2
(gas monoatomico)
(19.60)
Fin qui, niente di nuovo. . .
19.12.3
Materiali solidi
Un materiale solido è costituito da atomi, ciascuno posto in una posizione
ben precisa. Tale posizione è determinata dalle interazioni fra un particolare
atomo con tutti gli atomi circostanti, quindi dalla risultante delle forze
sull’i-esimo atomo prodotte dagli altri atomi k:
X
F~ik
F~i =
k
Essendo tali forze di natura elettrica, esse sono conservative, quindi sono
associabili ad un’energia potenziale:
X
~ i (~
~k )
Ui (~
ri ) =
Uik (~
ri ; r
;
F~i (~
ri ) = −∇U
ri )
k
~ieq in cui
La posizione di equilibrio dell’atomo i-esimo è definita dal punto r
F~i (~
rieq ) = 0, ovvero in cui l’energia potenziale Ui (~
ri ) ha un minimo. Abbiamo
visto nella Sezione 17.7 che in prossimità di un minimo, l’energia potenziale
può sempre essere approssimata come un paraboloide (vd Eq. (17.17)):
eq
eq
U (xi , yi , zi ) ' U (xeq
i , yi , zi )
kx
2
+ (xi − xeq
i )
2
ky
+ (yi − yieq )2
2
kz
+ (zi − zieq )2
2
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 314
da cui si deduce che la forza risultante sull’i-esimo atomo è di natura elastica:
∂Ui
= −kx (xi − xeq
i )
∂xi
∂Ui
= −
= −kx (yi − yieq )
∂yi
∂Ui
= −
= −kx (zi − zieq )
∂zi
Fi,x = −
Fi,y
Fi,z
In verità, gli atomi non sono esattamente “fermi” nel solido, ma oscillano
intorno ai loro punti di equilibrio con frequenze angolari
r
r
r
kx
ky
kz
ωx =
; ωy =
; ωz =
mi
mi
mi
Ogni atomo in totale ha ν = 6 gradi di libertà: 3 sono le componenti
vx , vy , vz della velocità (che entrano nell’energia cinetica), e 3 sono gli
eq
eq
spostamenti (xi − xeq
i ), (yi − yi ), (zi − zi ) dalla posizione di equilibrio
(che entrano nell’energia potenziale). Pertanto, il principio di equipartizione
dell’energia, Eq. (19.59), prevede che:
part E
= 3kT
(19.61)
Questa legge è nota come legge di Dulong e Petit, e fu derivata
sperimentalmente per molti solidi, prima di averne una spiegazione teorica.
In verità essa fallisce a basse temperature, a causa di effetti dovuti
alla meccanica quantistica. Qui possiamo solo dare una spiegazione un
po’ approssimativa. In meccanica quantistica, l’energia meccanica di un
oscillatore non può assumere qualunque valore reale, ma è “quantizzata”,
ovvero può assumere solo valori discreti. Precisamente:
1
part
~ωosc
(19.62)
Eosc = nosc +
2
dove nosc è un numero intero ≥ 0 e ωosc la frequenza angolare dell’oscillatore.
La quantità ~ è una costante fondamentale della Fisica
~ = 1.054 571 7 · 10−34 J s
(19.63)
~ω
L’energia ha un livello base
, sul quale si può solo aumentare di quantità
2
discrete ~ω. Chiaramente, essendo ~ molto piccola, questa “discretizzazione”
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 315
appare un continuo ad energie elevate, viceversa diventa pi˘‘ importante man
mano che si scende in energia, ovvero a basse temperature.
Ma c’è di più: in un solido, oltre alle vibrazioni dei singoli atomi
intorno ai loro punti di equilibrio, si possono innescare anche vibrazioni
“collettive” di gruppi di atomi, tipicamente con frequenze angolari tanto più
basse, quanto maggiori sono i gruppi di atomi che oscillano insieme. Questi
“modi vibrazionali” si chiamano fononi. Qui non li tratteremo in maniera
approfondita, vogliamo solo accennare che lenvibrazioni in un solido
hanno
o
(1)
(2)
(3)
(n)
uno spettro di frequenze angolari complicato ωosc , ωosc , ωosc , . . . . Qui ωosc
indica genericamente l’n-esimo modo vibrazionale, che può essere del singolo
atomo, o collettivo di un gruppo di atomi. Quando la temperatura T si
kT
(n)
diventano incompatibili con
abbassa, tutti i modi vibrazionali con ωosc
&
~
la temperatura (perché avrebbero un’energia minima troppo elevata) e quindi
vengono “spenti”. Tipicamente le vibrazioni individuali sono soppresse, e
restano quelle collettive, quindi il numero medio di gradi di libertà per atomo
hνi si riduce fortemente. L’effetto macroscopico è che la capacità termica
molare, C mol , anziché valere 3R, si abbassa con la temperatura, annullandosi
nel limite T → 0.
19.12.4
Gas biatomico
In un gas biatomico rarefatto, la situazione è ancora più complessa, e va
analizzata in tutti i suoi dettagli. Anzitutto abbiamo l’energia cinetica
traslazionale (cioè dovuta alla velocità nello spazio):
ET =
m 2
vx + vy2 + vz2
2
cui corrispondono i 3 gradi di libertà vx , vy , vz . Contiamo νT = 3 per le
traslazioni, quindi
3
hET i = kT
2
Poi abbiamo l’energia cinetica rotazionale ER , data dalle possibili
rotazioni intorno ad assi ortogonali all’asse della molecola — ovviamente una
rotazione intorno all’asse della molecola non produce movimento. Possiamo
individuare due assi di rotazione ortogonali fra loro e all’asse della molecola,
dunque altri due gradi di libertà, νR = 2, quindi
hER i = kT
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 316
Anche qui, nulla di nuovo. Però elaboriamo di più questa parte. . .
La molecola biatomica è formata da due atomi di masse m1 , m2 che
ruotano intorno ad un centro comune, descrivendo orbite di raggi r1 , r2 con
velocità angolare ω. Le loro velocità rotazionali sono v1,2 = ωr1,2 , quindi
l’energia cinetica rotazionale si può calcolare come:
ER =
ω2
ω2
1
m1 v12 + m2 v22 =
m1 r12 + m2 r22 =
I
2
2
2
La quantità I ≡ (m1 r12 + m2 r22 ) si chiama momento di inerzia. Il momento
angolare della molecola è invece
L = m1 v1 r1 + m2 v2 r2 = ω(m1 r12 + m2 r22 ) = ωI
L’energia cinetica rotazionale si può riscrivere come
ER =
ω2
L2
I =
2
2I
(19.64)
In meccanica quantistica, il momento angolare L è “quantizzato”, cioè non
può assumere qualunque valore reale, ma solo multipli interi della costante
di Planck ~ = 1.054 571 7 · 10−34 J s, quindi
L = nR ~
(19.65)
Segue che l’energia cinetica rotazionale è anch’essa quantizzata:
ER = n2R
~2
2I
(19.66)
~2
? Prendiamo il caso della molecola di idrogeno:
2I
le masse degli atomi sono m1 = m2 = mH = 1.67 · 10−27 kg, la distanza
rHH
interatomica è rHH = 0.07 nm, quindi r1 = r2 =
= 3.5 · 10−11 m. Risulta
2
~2
IH2 ' 4 · 10−48 m2 kg, ovvero
' 5 · 10−21 J. Questa è la più piccola
2IH2
energia cinetica rotazionale della molecola di idrogeno:
Quali sono i valori tipici di
(ER )min
H2 =
~2
' 1.2 · 10−21 J
2IH2
La temperatura ad essa corrispondente è
(TR )min
H2
(ER )min
H2
=
' 90 K
k
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
M.FANTI 317
In altre parole, al di sotto di questa temperatura (circa −183◦ C) non c’è
sufficiente energia per innescare il moto rotatorio, e quindi i corrispondenti
gradi di libertà sono “disattivati”.
Un calcolo analogo per la molecola di ossigeno (mO = 2.66 · 10−26 kg,
= 2.5 · 10−23 J, e
rOO = 0.12 nm) dà: IO2 ' 2 · 10−46 m2 kg, (ER )min
O2
quindi (TR )min
O2 ' 1.8 K. A causa del suo maggiore momento di inerzia,
la temperatura per innescare le rotazioni nella molecola di ossigeno è molto
più bassa.
Ma non è finita: il legame che unisce i due atomi non è rigido. Come
accennato nella Sezione 17.7, i due atomi hanno un’interazione la cui energia
potenziale presenta un minimo, in corrispondenza della loro distanza di
equilibrio (vd Fig. 17.4), quindi sono caratterizzati da una oscillazione, in
prima approssimazione elastica, intorno ad esso. In tal caso, sia l’energia
cinetica di oscillazione, Eosc , che l’energia potenziale Uosc contribuiscono
all’energia meccanica E part . La prima dipende dalla velocità di oscillazione
vosc , la seconda dallo spostamento δosc dal punto di equilibrio: quindi abbiamo
altri due gradi di libertà, νosc = 2. Ne consegue che
part Eosc = kT
Abbiamo già visto nel caso dei solidi che anche l’oscillazione degli atomi
è soggetta alle leggi quantistiche:
1
part
~ωosc
Eosc = nosc +
2
Si può calcolare quale sia la temperatura minima necessaria per innescare
una oscillazione:
min
part
(∆Eosc
)
~ω
=
k
h
Sperimentalmente, per la molecola di idrogeno, si osserva che
(Tosc )min =
~ωH2
' 1000 K
k
Una temperatura decisamente alta! A temperature ambiente il modo
vibrazionale non è innescato. Si può dedurre la frequenza angolare delle
oscillazioni: ωH2 ' 1.4 · 1014 rad/s.
(Tosc )min
H2 =
Riassumiamo: abbiamo νT = 3 gradi di libertà traslazionali, νR = 2 gradi
di libertà rotazionali, e νosc = 2 gradi di libertà vibrazionali. Ma alcuni non
si innescano, se la temperatura non è sufficiente. Possiamo riassumere la
situazione in questa tabella:
CAPITOLO 19. NOZIONI DI TERMODINAMICA —
temperatura
gradi di libertà
νT νR νosc ν
M.FANTI 318
energia interna
T . TR
3
—
—
3
3
E = N kT
2
TR T . Tosc
3
2
—
5
5
E = N kT
2
Tosc T
3
2
2
7
7
E = N kT
2
Capitolo 20
Forze elettromagnetiche
20.1
Moti in campi elettrostatici
20.1.1
Il potenziale elettrostatico
Abbiamo visto in Sezione 13.6.3 che le forze elettriche coulombiane sono
conservative. Inoltre, dalla Sezione 13.7, sappiamo che una composizione di
forze conservative produce un campo conservativo. Quindi, senza ulteriore
esitazione, possiamo affermare che
le forze elettrostatiche sono conservative.
~ , in presenza di altre cariche
Una carica-sonda q0 , posta in posizione r
~1 , . . . , r
~N , è soggetta ad un’energia potenziale
q1 , . . . , qN poste in posizioni r
N
X
qk
1
U0 (~
r ) = q0
~k |
4π0 |~
r−r
k=1
(20.1)
L’energia potenziale è dunque proporzionale alla carica-sonda q0 : questo
suggerisce di definire una quantità indipendente da q0 , per descrivere in
modo più generale il campo elettrostatico. Definiamo dunque il potenziale
U0 (~
r)
elettrostatico come Φ(~
r) =
, ovvero:
q0
N
1 X qk
Φ(~
r) =
~k |
4π0 k=1 |~
r−r
(20.2)
L’unità di misura del potenziale elettrostatico è il Volt (V). 1 Volt è la
differenza di potenziale che produce una variazione di energia di 1 Joule ad
319
CAPITOLO 20. FORZE ELETTROMAGNETICHE —
M.FANTI 320
una carica elettrica di 1 Coulomb. Quindi
1 V = 1 J/C
(20.3)
Finora abbiamo detto che i campi elettrici si misurano in N/C. In realtà
solitamente si indicano in V/m. Le due scelte sono del tutto equivalenti.
~ e U (~
Ricordando che F~ = q E
r ) = qΦ(~
r ), possiamo costruire una
corrispondenza fra le relazioni matematiche che collegano queste quantità:
potenziale elettrostatico
energia potenziale
Z
B
A
F~ · d~
r = U (~
rA ) − U (~
rB )
Z
B
A
~
F~ = −∇U
~ · d~
E
r = Φ(~
rA ) − Φ(~
rB )
~ = −∇Φ
~
E
~ su una
Da queste si ricava che il lavoro fatto dal campo elettrostatico E
carica q si può scrivere come:
Z B
~ · d~
E
r = q (Φ(A) − Φ(B))
(20.4)
Les (A → B) = q
A
20.1.2
Esercizi di moti in campi elettrostatici
Esercizio 20.1. Atomi di idrogeno vengono ionizzati, producendo protoni ed
elettroni sostanzialmente in quiete. Questi sono poi soggetti ad una differenza di
potenziale di 1000 V. Con quale velocità finale vengono emessi i protoni e gli
elettroni? Per rispondere, occorre conoscere massa e carica elettrica del protone e
dell’elettrone, che sono riportate in Sezione 11.3.3.
Risposta. Il lavoro fatto dal campo elettrostatico è in entrambi i casi L =
e∆Φ = (1.602·10−19 C)(1000 V) = 1.602·10−16 J. Poiché protoni ed elettroni sono
inizialmente fermi, la loro energia
r cinetica finale sarà Ee = Ep = L. La velocità si
m
2E
ricava da E = v 2 , ovvero v =
. Per i protoni, mp = 1.67 · 10−27 kg, dunque
2
m
vp = 4.38 · 105 m/s = 438 km/s. Per gli elettroni, me = 9.11 · 10−31 kg, dunque
ve = 1.88 · 107 m/s = 18 800 km/s.
Osservazione. Si tratta di velocità molto elevate. In questi casi conviene
v 2
sempre confrontarle con la velocità della luce, c = 300 000 km/s. Finché
1
c
i nostri calcoli restano attendibili. Altrimenti occorre rifarli utilizzando le equazioni
della relatività.
Esercizio 20.2. Un fascio di elettroni molto collimato viene prodotto accelerando
in direzione orizzontale gli elettroni, inizialmente fermi, con una differenza di
potenziale di ∆Φ = 100 V. Quindi il fascio viene iniettato in una zona lunga
CAPITOLO 20. FORZE ELETTROMAGNETICHE —
M.FANTI 321
` = 1 m, dove c’è un campo elettrico verticale uniforme Ez = +50 V/m, diretto
verso l’alto. Calcolare lo spostamento verticale ∆z degli elettroni e l’angolo α con
cui escono dalla zona di campo elettrico verticale.
Risposta. Gli elettroni inizialmente acquistano un’energia cinetica E =
e∆Φ = (1.602 · s
10−19 C)(102 V) = 1.602 · 10−17 J, quindi una velocità orizzontale
r
2E
2(1.602 · 10−17 J)
vx =
=
= 5.930 · 106 m/s. Quando entra nella zona
me
9.11 · 10−31 kg
di campo verticale, la sua velocità orizzontale non viene modificata. Invece la
velocità verticale, inizialmente nulla, evolve nel tempo per la presenza di una forza
−eEz
Fz = −eEz , pertanto vz =
t. Analogamente, lo spostamento verticale è dato
me
eEz 2
da ∆z = −
t .
2 me
`
Il tempo in cui gli elettroni restano nella zona di campo Ez è ∆t =
=
vx
1m
eEz
= 1.686 · 10−7 s. All’uscita, la velocità verticale è vz = −
∆t =
6
5.930 · 10 m/s
me
(1.602 · 10−19 C)(50 N/C)
(1.686 · 10−7 s) = 1.482 · 106 m/s. L’angolo di
−
9.11 · 10−31 kg
vz
−1 vz
deflessione è calcolabile come tan α =
= −0.25, vale a dire α = tan
=
vx
vx
◦
−0.245 rad ' −14 . La deflessione è negativa, cioè verso il basso: questo è
corretto, poiché Ez è verso l’alto, ma la carica degli elettroni è negativa.
eEz
eEz 2 me
Lo spostamento degli elettroni è ∆z = −
=
(∆t)2 = −
`
2 me
2 me 2e∆Φ
Ez `2
−
= −0.125 m = −12.5 cm.
4∆Φ
Esercizio 20.3. Nell’esercizio precedente si è trascurata la forza di gravità
agente sugli elettroni. Come si modifica il risultato, se la includiamo?
Risposta. Occorre modificare la forza, che da Fel = −eEz diventa F =
Fg
F
= 1+
=
Fel + Fg = −eEz − me g. Per rispondere alla domanda, calcoliamo
Fel
Fel
me g
(9.11 · 10−31 kg)(9.806 m/s2 )
1+
= 1 + 1.115 · 10−12 . Quindi l’errore che
1+
eEz
(1.602 · 10−19 )(50 N/C)
abbiamo commesso, trascurando la gravità, è di circa una parte su mille miliardi.
Poiché sia α che ∆z dipendono linearmente da F , questo “errore” li affligge nella
stessa misura. Dunque, nessun problema!
Esercizio 20.4. Si consideri il modello classico dell’atomo di idrogeno, costituito
da un elettrone che descrive un’orbita circolare intorno a un protone, con raggio
a0 = 5.29 · 10−11 m. Si calcolino l’energia cinetica e l’energia potenziale
dell’elettrone. Quant’è l’energia meccanica? Quanta energia occorre per ionizzare
l’atomo?
CAPITOLO 20. FORZE ELETTROMAGNETICHE —
M.FANTI 322
1 e2
. Questa deve essere pari alla
4π0 a20
v2
forza centripeta applicata all’elettrone: F = me e . Uguagliando, si trova dunque
a0
Risposta. La forza di Coulomb è F =
me ve2 =
1 e2
4π0 a0
Si noti la coincidenza: il primo termine è 2E, il secondo è −U . Pertanto l’energia
1
meccanica, E = E + U , può essere scritta come E = U oppure E = −E.
2
ATTENZIONE: questo vale solo per orbite circolari intorno ad un campo di forza
1
∝ 2!
r
1 e2
Calcoliamo dunque l’energia potenziale: U = −
= −(9 ·
4π0 a0
(1.602 · 10−19 C)2
U
109 NC−2 m2 )
= −4.366 · 10−18 J. Pertanto, E =
=
−11
5.29 · 10
m
2
−2.183·10−18 J. È negativa, come ci si aspetta per un sistema legato. Per “slegare”
il sistema occorre cedere dall’esterno un’energia almeno sufficiente a far diventare
E ≥ 0, quindi ionizzare l’atomo di idrogeno occorrono esattamente 2.183 · 10−18 J.
Osservazione: le energie negli atomi
L’energia di ionizzazione dell’atomo di idrogeno, trovata nell’esercizio, è molto
piccola rispetto al Joule. In effetti, in Fisica Atomica, si fa spesso uso di
un’unità di energia che non fa parte del S.I., ma è più idonea in questi contesti:
questa è l’elettron-volt, definita come l’energia cinetica acquisita da un elettrone
(o un protone) quando viene accelerato dalla differenza di potenziale di 1 V.
Evidentemente:
1 eV = 1.602 · 10−19 J
(20.5)
Esercizio 20.5. Esprimere l’energia di ionizzazione dell’atomo di idrogeno, in
elettron-volt.
Risposta. 2.183 · 10−18 J =
20.2
2.183 · 10−18
eV = 13.6 eV
1.602 · 10−19
Esperimento di Millikan
L’esperimento di Millikan ha consentito di osservare che la carica elettrica
non può assumere valori arbitrari, ma esiste in multipli interi di una quantità
di carica fondamentale — che è la carica del protone, +e, o dell’elettrone,
−e.
CAPITOLO 20. FORZE ELETTROMAGNETICHE —
Figura 20.1:
M.FANTI 323
Schema dell’esperimento di Millikan.
Nell’esperimento, molte goccioline d’olio, estremamente piccole e leggere,
vengono nebulizzate ed iniettate in una regione dove, oltre al campo
~ diretto
~ , esiste anche un campo elettrico uniforme E
gravitazionale g
verticalmente verso l’alto, generato da una differenza di potenziale ∆Φ
applicata a due lastre metalliche poste a distanza D. L’intensità del campo
∆Φ
, e si può regolare agendo sulla differenza di potenziale
elettrico vale E =
D
∆Φ.
Molte goccioline sono elettricamente neutre, e cadono sotto l’azione
della forza di gravità. Alcune goccioline, durante l’iniezione, si sono
elettrizzate, ovvero hanno acquistato o perso elettroni per sfregamento.
Pertanto possiedono una carica elettrica q, positiva se hanno perso elettroni,
negativa se ne hanno acquistati. Queste goccioline sentono l’azione sia
del campo gravitazionale che del campo elettrico. Regolando quest’ultimo
opportunamente, per una particolare gocciolina le due forze si possono
bilanciare, e la gocciolina resta sospesa a mezz’aria. Quantitativamente,
detta m la massa della gocciolina e q la sua carica elettrica,
F~g = −mg ẑ
F~e = qE ẑ
F~tot = (qE − mg)ẑ
e la condizione di equilibrio si trova per qE = mg. Pertanto si può risalire
alla carica elettrica
mg
(20.6)
q=
E
se si conosce la massa m. E qui il discorso si complica. . . In effetti, le
goccioline sono tutte diverse fra loro, e sono troppo piccole per poterne
misurare il diametro e calcolarne quindi la massa. Inoltre, c’è anche l’effetto
di “galleggiamento” della gocciolina nell’aria, che finora abbiamo trascurato.
CAPITOLO 20. FORZE ELETTROMAGNETICHE —
M.FANTI 324
Riaffrontiamo il tutto in maniera più precisa. Supponiamo che la
gocciolina abbia forma sferica (il che è sempre vero per goccioline piccole) e
4π 3
r e la sua massa
raggio r (da determinare!). Quindi il suo volume è V =
3
4π 3
è m = ρV =
r ρ. La forza di galleggiamento è
3
F~gall = ρ0 V g ẑ
(20.7)
con ρ0 la densità dell’aria (ρ0 ' 1.3 kg/m3 ). Infine, quando la gocciolina si
muove nell’aria, essa è soggetta ad un attrito viscoso, dato da
F~attr = −η~
v = −(6πµr)~
v
(20.8)
(legge di Stokes) essendo µ la viscosità dell’aria (µ = 1.81 · 10−5 kg m−1 s−1 ).
Infine, abbiamo la forza di gravità, F~g = −mg ẑ = −ρV g ẑ, e la forza
elettrica, F~e = qE ẑ. Tutte le forze sono orientate lungo la verticale, quindi
il moto è unidimensionale e possiamo omettere i vari ẑ.
La forza totale sulla gocciolina è quindi
Ftot = Fg + Fgall + Fattr + Fe
4π
= −(ρ − ρ0 )g r3 − (6πµ) r v + qE
3
(20.9)
Quando il campo E viene regolato per tenere in equilibrio una gocciolina,
v = 0 e la forza di attrito si annulla. La condizione di equilibrio è Ftot = 0,
cioè:
4π 3 (ρ − ρ0 )g
q =
r
(20.10)
3
E
dove però r è ancora ignoto. Per determinarlo, si spegne il campo E,
cosicché la gocciolina cade sotto l’effetto della gravità. Man mano che cade
la sua velocità aumenta, e cosı̀ pure Fattr , finché non raggiunge una velocitàlimite vlim in cui l’attrito bilancia esattamente la gravità. Questo accade per
4π
Fg +Fgall +Fattr = 0, ovvero (6πµ) r vlim = −(ρ−ρ0 )g r3 . La velocità-limite
3
deve essere:
2 (ρ − ρ0 )g 2
|vlim | =
r
(20.11)
9
µ
Misurandola, si può calcolare r e inserirlo nell’Eq. (20.10), cosı̀ finalmente si
ricava la carica q.
Misurando in questo modo i valori di q per diverse goccioline, si osserva
che essi sono tutti multipli interi di una carica e = 1.602 · 10−19 C. Pertanto
e assume il ruolo di unità di carica elettrica fondamentale.
CAPITOLO 20. FORZE ELETTROMAGNETICHE —
M.FANTI 325
Esercizio 20.6. Quanto sono piccole le goccioline dell’esperimento di Millikan?
Proviamo a stimarlo.
La carica elettrica minima di una gocciolina deve essere q = e. Supponiamo
che sia mantenuta in equilibrio da un campo elettrico generato da una differenza
di potenziale ∆Φ = 10 kV applicata attraverso uno spazio D = 1 cm. Quanto vale
la massa “apparente” (cioè compreso l’effetto del galleggiamento) della gocciolina?
Assumendo ρ = 0.9 g/cm3 , qual è il diametro della gocciolina?
∆Φ
104 V
Risposta. Il campo elettrico vale E =
=
= 106 V/m. La
D
0.01 m
eE
(1.602 · 10−19 C)(106 N/C)
=
massa apparente della gocciolina è mapp =
=
g
9.806 m/s2
mapp
1.634 · 10−14 kg = 1.634 · 10−11 g. Il volume della gocciolina è V =
=
ρr
− ρ0
4π 3
3 3V
1.818·10−11 cm3 . Essendo V =
r , il diametro della gocciolina è 2r = 2
=
3
4π
3.26 · 10−4 cm = 3.26 µm.
Esercizio 20.7. Continuando l’esercizio precedente, qual è la velocità-limite
di caduta della gocciolina considerata, in assenza di campo elettrico? Quanto
impiegherebbe ad attraversare tutta la zona di campo elettrico?
2 (ρ − ρ0 )g 2
Risposta. Abbiamo vlim =
r ' 2.87 · 10−4 m/s ' 0.3 mm/s. Per
9
µ
D
attraversare la zona di campo elettrico impiegherebbe un tempo ∆t =
' 33 s.
vlim
Un tempo abbastanza lungo, dunque, da poter permettere di osservarla bene.
20.3
Moto in un campo magnetico
Sperimentalmente si osserva che cariche elettriche in moto in una regione
di spazio contenente un campo magnetico sono soggette a forze, che deviano
la direzione del moto senza alterarne la velocità. Studi approfonditi di tali
fenomeni mostrano che la forza agente su una carica puntiforme q che si
~ può essere descritta quantitativamente dalla legge:
muove con velocità v
~
F~L = q~
v×B
(20.12)
~ in generale è una funzione della
nota come forza di Lorentz. Il vettore B
posizione occupata dalla carica q. L’Eq. (20.12) può essere usata come
~ misurando la forza agente su diverse
definizione del campo magnetico B:
cariche che passano per un dato punto con diverse velocità e direzioni, si
~ in quel punto.
possono misurare tutte le componenti di B
L’unità di misura del campo magnetico è il Tesla (T = N s C−1 m−1 ).
Dall’Eq. (20.12) si vede subito che F~L è ortogonale al piano contenente i
vettori. Quindi l’accelerazione non ha componente tangenziale: è puramente
CAPITOLO 20. FORZE ELETTROMAGNETICHE —
M.FANTI 326
B
FL
θ
v
R
v
B
λ
ω
B
R
(a)
(b)
(c)
Figura 20.2: Moto di una carica dovuto alla forza di Lorentz: (a) in un
~ generico; (b), (c) in un campo B
~ uniforme
campo B
centripeta. Come si è già visto in Sezione 6.5.2, questo significa che il modulo
della velocità è costante:
d|~
v|
dv
=
=0
dt
dt
~ (Fig. 20.2(a)), il suo modulo
~ eB
Inoltre, detto θ l’angolo fra i vettori v
è:
|F~L | = |qvB sin θ|
(20.13)
~ mentre è massimo
~ è parallelo (concorde o discorde) a B,
quindi è nullo se v
~
~ è ortogonale a B.
se v
20.3.1
Moto in un campo magnetico uniforme
~
Consideriamo ora il moto di una particella carica in un campo magnetico B
~ in due componenti v
~k e v
~ ⊥ , parallela
uniforme. Scomponiamo la velocità v
~
e ortogonale a B. L’Eq. (20.12) diventa:
d~
vk d~
v⊥
q
~ = qv
~
~k + v
~⊥ × B
~⊥ × B
+
=
v
dt
dt
m
m
~ è ortogonale a B,
~ quindi le equazioni del moto possono
~⊥ × B
D’altra parte v
~
essere separate nella direzione di B e nel piano ortogonale:
CAPITOLO 20. FORZE ELETTROMAGNETICHE —
M.FANTI 327
d~
vk
= 0
dt
q
d~
v⊥
~
~⊥ × B
=
v
dt
m
(20.14)
e ciascuna può essere risolta indipendentemente. La prima equazione
~
descrive un moto rettilineo uniforme nella direzione di B.
Analizziamo la seconda. Anzitutto, sappiamo che v⊥ = |~
v⊥ | non cambia
nel tempo (sappiamo che v è costante;
abbiamo appena visto che anche
q
2
vk è costante; quindi anche v⊥ = v − vk2 deve essere costante). Inoltre,
dall’accelerazione centripeta possiamo calcolare il raggio di curvatura R:
q
v2
v⊥ = a⊥ = ⊥
m
R
da cui:
R=
p⊥
mv⊥
=
qB
qB
Possiamo anche ricavare la velocità angolare: ω =
ω =
qB
m
(20.15)
v⊥
, quindi:
R
(20.16)
Possiamo ragionare anche sulle singole componenti cartesiane: scegliamo
~ cosicché B
~ = Bz ẑ. L’Eq. (20.12) diventa:
l’asse z parallelo al campo B,
dvx
q
qB
=
(vy Bz − vz By ) =
vy
dt
m
m
dvy
q
qB
=
(vz Bx − vx Bz ) = − vx
dt
m
m
dvz
q
=
(vx By − vy Bx ) = 0
dt
m
(20.17)
La terza equazione ci dice che vz è costante nel tempo. Le prime due
equazioni hanno per soluzione
qB
vx = v0 sin
t+Φ
m
(20.18)
qB
vy = v0 cos
t+Φ
m
CAPITOLO 20. FORZE ELETTROMAGNETICHE —
M.FANTI 328
come si può verificare per sostituzione diretta nelle Eq. (20.17).
q Qui v0 è una
costante di integrazione. Poiché sin2 + cos2 = 1, abbiamo che vx2 + vy2 = v0 ,
quindi v0 è il modulo della velocità sul piano (x, y).
Ricordiamo che
Z
Z Per trovare x, y occorre integrare vx , vy nel tempo.
1
dt cos(ωt + Φ) =
dt sin(ωt + Φ) = − cos(ωt + Φ) + costante e
ω
1
sin(ωt + Φ) + costante. Quindi:
ω
mv0
qB
x = x0 −
cos
t+Φ
qB
m
(20.19)
qB
mv0
sin
t+Φ
y = y0 +
qB
m
Le conclusioni che si traggono sono le stesse già viste: moto rettilineo
uniforme lungo l’asse z e moto circolare uniforme sul piano (x, y), con velocità
mv0
qB
v0 , raggio R =
e velocità angolare ω =
.
qB
m
La traiettoria della particella apparirà come raffigurata in Fig. 20.2(b,c):
~ k = 0 la traiettoria è circolare, altrimenti è elicoidale. Il raggio di
se v
~ è dato dall’Eq. (20.15).
curvatura della traiettoria sul piano ortogonale a B
Nel caso di traiettoria elicoidale, il passo dell’elica (ovvero la distanza fra due
successivi passaggi) è calcolabile cosı̀: in un tempo T = 2π/ω la particella
carica descrive un giro completo intorno all’asse dell’elica; nello stesso tempo
lo spostamento nella direzione assiale è dato da λ = vk T , ovvero da una delle
seguenti forme equivalenti:
λ=
20.4
2π mvk
vk
pk
2π vk
=
= 2πR
= 2πR
ω
qB
v⊥
p⊥
(20.20)
Spettrometro di massa
q
Lo spettrometro di massa è un apparato per misurare il rapporto
fra la
m
carica elettrica q e la massa m di una particella — tipicamente un atomo
ionizzato.
La misura è logicamente divisa in tre fasi: produzione e raccolta degli
ioni; selezione in velocità; analisi della massa, come indicato in Fig. 20.3.
CAPITOLO 20. FORZE ELETTROMAGNETICHE —
E (2)
M.FANTI 329
E (2)
zona (1)
raccolta ioni
E (1)
B
(2)
B
(2)
zona (2)
selezione velocita‘
x
B (3)
B
(3)
zona (3)
misura massa
B (3)
z
y
Figura 20.3:
Schema dello spettrometro di massa. Nella figura, i campi
magnetici vanno pensati come “uscenti” dal foglio. Le linee verdi sono le
traiettorie degli ioni selezionati in velocità, di cui si misura la massa. Le
linee rosse sono le traiettorie degli ioni scartati.
Nella prima fase, la sostanza da esaminare viene ionizzata, cosicché le sue
particelle (atomi o molecole) acquistano carica elettrica q e possono essere
~ (1) .
dunque raccolte ed accelerate da un campo elettrico E
Gli ioni vengono poi iniettati attraverso uno stretto ugello nella seconda
porzione dell’apparato: qui entrano come un fascio collimato e monodirezionale, ma con velocità v diverse fra loro, che dipendono dalla loro
condizione di moto iniziale al momento della ionizzazione e da come il campo
~ (1) ha agito su ciascuna di essa (quindi per esempio dalle loro
elettrico E
masse). La seconda fase della misura consiste nel selezionare la velocità
~ (2) ed un campo
v delle particelle, sottoponendole ad un campo elettrico E
(2)
~
magnetico B , entrambi uniformi, ortogonali fra loro e alla direzione del
moto. Per fissare le idee, possiamo orientare gli assi cartesiani in modo che
~ (2) e ŷ come B
~ (2) .
ẑ punti nella direzione del moto, x̂ sia orientato come E
La forza agente sullo ione di carica q è:
~2 + v
~2
~ ×B
F~ = q E
che scritta per componenti cartesiane, e tenendo conto dell’orientamento di
CAPITOLO 20. FORZE ELETTROMAGNETICHE —
M.FANTI 330
~ (2) , B
~ (2) , risulta:
E
dvx
= q Ex(2) + vy Bz(2) − vz By(2) = q E (2) − vz B (2)
dt
dvy
Fy = m
= q Ey(2) + vz Bx(2) − vx Bz(2) = 0
dt
dvz
Fz = m
= q Ez(2) + vx By(2) − vv Bx(2) = q vx B (2)
dt
Fx = m
~ = vz ẑ, cioè senza componenti vx , vy trasverse.
Gli ioni entrano con velocità v
Lungo ŷ non c’è forza, quindi il moto non subisce deviazioni. Lungo x̂
agiscono sia la forza elettrica che quella magnetica. In generale producono
deviazioni, a meno che non si bilancino esattamente: questo può avvenire
solo se
vz =
E (2)
B (2)
Gli ioni vengono poi iniettati nella terza parte dell’apparato attraverso uno
stretto ugello allineato con il precedente: quindi solo quelli che non hanno
subito deviazioni sono selezionati. La loro velocità è dunque nota.
Nell’ultima fase della misura, gli ioni selezionati in velocità sono soggetti
~ (3) , trasversale rispetto alla loro direzione di moto,
ad un campo magnetico B
pertanto descrivono un arco di traiettoria circolare. Un rivelatore misura il
raggio di curvatura R della traiettoria. Da questo, usando l’Eq. (20.15), si
può risalire alla quantità di moto:
p = qRB (3)
e da questa alla massa:
m =
20.5
p
qRB (3)
qRB (2) B (3)
= (2) (2) =
v
E /B
E (2)
Acceleratori circolari
Un’altra applicazione dei campi elettromagnetici è costituita dagli
acceleratori di particelle. Ci sono molti tipi di queste macchine. Una
particolare classe consiste negli acceleratori circolari: le particelle cariche
vengono accelerate da una forza accelerante prodotta da un campo elettrico
~ diretto nella direzione del moto delle particelle:
E
~
F~acc = q E
CAPITOLO 20. FORZE ELETTROMAGNETICHE —
M.FANTI 331
R
B
B
B B B
B
E
B
B
h
E
E
E
E
E
z
~
ρ
x
y
E
Figura 20.4:
Schema del ciclotrone.
Le particelle sono mantenute su un’orbita circolare da un campo magnetico
~ che produce una forza centripeta
B,
~
F~L = q~
v×B
In questo modo, le particelle passano più volte nelle stesse regioni interessate
dal campo elettrico, e ricevono ogni volta un’accelerazione. Il tutto viene
iterato fino a quando l’energia cinetica delle particelle non ha raggiunto il
valore voluto. A questo punto il campo magnetico viene spento e le particelle
vengono estratte.
Come esempio, descriviamo il ciclotrone. La struttura dell’acceleratore è
schematizzata in Fig. 20.4.
L’apparato è costituito da due strutture semicircolari cave (dette “le D”)
~ perpendicolare.
all’interno delle quali c’è un campo magnetico uniforme B,
Fra le due “D” c’è una stretta zona (“gap”) di larghezza h in cui viene
~ pilotato da un generatore oscillante di
generato un campo elettrico E,
frequenza ν. Per fissare le idee, scegliamo un riferimento cartesiano con
l’asse ẑ verticale e l’asse ŷ nella direzione del campo elettrico. Quindi, il
CAPITOLO 20. FORZE ELETTROMAGNETICHE —
M.FANTI 332
campi elettrico e magnetico sono:
~ = E0 cos(2πνt)ŷ
E
;
~ = −B ẑ
B
(20.21)
Le particelle vengono iniettate nel gap al centro della struttura, a t = 0,
~ che agisce per tutta la larghezza
dove sentono la forza accelerante F~acc = q E,
h, quindi produce un lavoro Lgap = qE0 h. Pertanto le particelle subiscono
un aumento di energia cinetica
∆Egap = qE0 h
(20.22)
~ imprime una traiettoria ad arco di cerchio sulle
Il campo magnetico B
particelle, con raggio di curvatura
p
ρ=
(20.23)
qB
e velocità angolare
q
B
m
quindi il tempo per percorrere un’intero giro è
ω=
T =
m
2π
= 2π
ω
qB
(20.24)
(20.25)
T
Dopo un tempo le particelle hanno completato mezzo giro e ri-attraversano
2
il gap, in direzione opposta. Affinché ricevano ancora un’accelerazione,
occorre che anche il campo elettrico abbia invertito l’orientamento. Dopo
T
esse riattraversano ancora il gap, nella
un altro intervallo di tempo
2
direzione originaria, quindi occorre che anche il campo elettrico sia tornato
all’orientamento iniziale.
1
ω
Quindi il campo elettrico deve oscillare con una frequenza ν =
=
.
T
2π
Qui è interessante notare che ω non subisce variazioni durante il processo
di accelerazione, poiché dipende solo da q, m, B (vd Eq. (20.24)), quindi la
frequenza del generatore non deve essere “aggiustata” durante l’accelerazione
— il che è decisamente vantaggioso!
L’energia raggiungibile con un ciclotrone è limitata dalle caratteristiche
costruttive: il particolare dall’intensità B del campo magnetico e dal raggio
R della regione in cui esso è presente, attraverso l’Eq. (20.23). Infatti
p2
troviamo dunque
ovviamente ρ < R, quindi p < qBR; scrivendo E =
m
Emax =
(qBR)2
2m
(20.26)
CAPITOLO 20. FORZE ELETTROMAGNETICHE —
M.FANTI 333
Esercizio 20.8. Un ciclotrone viene utilizzato per accelerare protoni (massa
mp = 1.67 · 10−27 kg, carica e = 1.602 · 10−19 C). I parametri sono i seguenti:
intensità del campo magnetico B = 1.5 T, raggio massimo R = 0.5 m, campo
elettrico massimo E0 = 106 N/C, gap h = 1 cm. Qual è l’energia massima Emax
raggiungibile per i protoni? Quanti giri fanno i protoni per arrivare all’energia
massima? Quanto tempo impiegano?
(qBR)2
Risposta. Inserendo i valori numerici troviamo Emax =
= 4.322 ·
2m
−12
10
J. Ad ogni attraversamento del gap l’energia aumenta di ∆Egap = qE0 h =
1.602 · 10−15 J; poiché in un giro il gap viene attraversato 2 volte, il numero
Emax
' 1 350. Il tempo per compiere un giro è
di giri necessario è Ngiri =
2∆Egap
m
T = 2π
= 4.367 · 10−8 s, quindi il tempo di accelerazione totale per raggiungere
qB
l’energia massima è tacc = Ngiri T = 5.89 · 10−5 s ' 60 µs.
Osservazione. Abbiamo trovato Emax = 4.322·10−12 J: è un numero piuttosto
piccolo, rispetto a energie “ordinarie”,rma per un protone è “poco” o è “molto”?
2E
= 7.19 · 107 m/s. Decisamente veloci
Proviamo a calcolare la velocità: v =
m
questi protoni!
Capitolo 21
Correnti elettriche
21.1
Conduttori elettrici
Esistono materiali in cui alcune particelle portatrici di carica elettrica non
sono strettamente vincolate a posizioni precise, ma hanno una certa libertà
di movimento. Facciamo alcuni esempi notevoli.
• Metalli: ogni atomo contiene molti elettroni, che occupano “orbite”
diverse. Gli elettroni delle orbite più interne sono saldamente vincolati
ai rispettivi atomi; viceversa, quelli delle orbite più esterne hanno un
legame più debole e possono migrare verso atomi vicini. Questi elettroni
sono detti elettroni di conduzione, e ciascuno porta una carica elettrica
−e.
• Semiconduttori: questi materiali hanno una struttura solida cristallina.
In essi, si distinguono elettroni di conduzione e di valenza: i primi si
comportano come nei metalli, mentre i secondi sono responsabili dei
legami chimici che dànno al materiale la struttura di reticolo cristallino,
e sono vincolati a stare nelle vicinanze dell’atomo di appartenenza.
Può accadere però che, a causa dell’agitazione termica, alcuni elettroni
di valenza si svincolino dall’atomo, diventando “di conduzione”, e
lasciando cosı̀ una lacuna (cioè un “vuoto”), cui corrisponde un eccesso
di carica positiva, +e. Un elettrone da un atomo vicino può andare
a colmare questa lacuna, lasciandone però una nell’atomo da cui
proviene. Il risultato effettivo è che nel semiconduttore abbiamo due
tipi di portatori di carica: gli elettroni (−e) e le lacune (+e).
• Soluzioni ioniche: si ottengono quando una sostanza cristallina viene
disciolta in acqua. I materiali cristallini sono aggregati da legami
334
CAPITOLO 21. CORRENTI ELETTRICHE
—
M.FANTI 335
ionici, che in acqua si spezzano formando ioni (per esempio NaCl →
Na+ +Cl− ). In questo caso gli stessi ioni fungono da portatori di carica.
21.2
Correnti elettriche microscopiche
Pensiamo ad un conduttore come ad un sistema di atomi, o molecole, separati
da spazio vuoto. In assenza di forze esterne, i portatori “liberi” di carica si
muovono fra gli atomi senza essere soggetti a forze dovute ai singoli atomi, se
~q,
non quando essi entrano nelle loro immediate vicinanze. Le loro velocità v
dovute all’agitazione termica, sono disordinate e vanno ugualmente in tutte
le direzioni, pertanto la loro media vettoriale è nulla:
h~
vq i = 0
(in assenza di forze esterne)
Viceversa, le velocità scalari medie hvq i sono molto elevate: possono andare
da 104 m/s a 106 m/s, a seconda della natura dei portatori “liberi”.
~ un portatore “libero”
In presenza di un campo elettrico applicato E,
~
~ e quindi ad una
di carica q è soggetto ad una forza elettrica Fq = q E,
accelerazione:
q ~
F~q
~aq =
=
E
mq
mq
essendo mq la massa del portatore. Ciò è vero finché il portatore può essere
considerato “libero”, ovvero finché non si trova nelle immediate vicinanze di
un atomo: quando ciò avviene, esso subisce una forza molto superiore, per
un intervallo di tempo molto breve, tanto che si può assimilare ad un urto.
Essendo totalmente casuali i parametri di tale urto, il portatore ne esce con
direzione del tutto casuale.
~ q(0) la velocità di un generico portatore appena uscito da un
Chiamiamo v
urto. Nell’intervallo di tempo ∆t che intercorre fra due successivi urti, la
distanza percorsa dal portatore è:
~
1 qE
1
~ q(0) ∆t +
~ q(0) ∆t + ~aq (∆t)2 = v
(∆t)2
∆~
r=v
2
2 mq
pertanto la sua velocità media fra due successivi urti è:
~q =
v
∆t q ~
∆~
r
~ q(0) +
=v
E
∆t
2 mq
Calcolando la media su molti portatori si trova:
D
E q
~
~q = v
~ q(0) +
v
h∆ti E
2mq
CAPITOLO 21. CORRENTI ELETTRICHE
—
M.FANTI 336
D
E
~ q(0) la media vettoriale dei portatori appena usciti da urti
Ora, essendo v
con atomi, essa è zero, a causa della direzione casuale. Invece h∆ti è il tempo
medio che intercorre fra due urti. Esso può essere utilizzato per definire il
libero cammino medio λ fra due urti:
λ ≡ h∆ti hvq i
Quindi abbiamo trovato che, in presenza di un campo elettrico applicato
~
E, i portatori acquisiscono una velocità media, detta velocità di deriva, pari
a:
q λ
~
~ ≡ h~
u
vq i = µE
µ≈
(21.1)
2mq hvq i
essendo µ la mobilità.
~ la velocità di deriva dei portatori di carica, q
In un conduttore, detta u
la loro carica elettrica e n la loro densità in volume, si definisce la densità di
corrente elettrica J~ come:
J~ = nq~
u
(21.2)
Dalla definizione di mobilità, Eq. (21.1), ricaviamo subito:
~ = σE
~
J~ = nqµE
(21.3)
dove σ è la conducibilità elettrica. La legge
~
J~ = σ E
(21.4)
è la legge di Ohm microscopica.
Esempio: conduzione nel rame
Consideriamo la conduzione nel rame: per ogni atomo esiste un elettrone che
agisce come portatore libero di carica. La densità in volume degli atomi di rame
si calcola conoscendo la densità del materiale ρ = 8.96 g/cm3 e il suo numero di
massa A = 63.546 g (ovvero il peso in grammi di una “mole” di atomi: una mole
corrisponde al numero di Avogadro NA = 6.022 · 1023 ). La densità di atomi in
volume, nCu , si ricava dall’equazione:
ρ = nCu
A
NA
da cui nCu = 8.5 · 1028 m−3 .
Sperimentalmente, la conducibilità elettrica del rame è σ = 6 · 107 (unità S.I.).
Poichè per ogni atomo c’è un solo elettrone portatore libero, allora la densità dei
CAPITOLO 21. CORRENTI ELETTRICHE
—
M.FANTI 337
portatori è n = nCu , e la loro carica elettrica è q = −e = −1.602 · 10−19 C. Da
questi dati ricaviamo la mobilità elettronica nel rame:
µe =
σ
= −4.4 · 10−3
nq
(unità S.I.)
Dall’Eq. (21.1) si deduce che per campi elettromotori ordinari, . 104 V/m, la
velocità di deriva è |~
u| . 40 m/s, molto inferiore alla velocità termica media degli
elettroni, hve i ≈ 106 m/s.
Il libero cammino medio degli elettroni è stimabile dall’Eq. (21.1) come λ ≈
8 · 10−8 m = 800 Å(1) . È interessante stimare la distanza interatomica media: se
nCu è la densità atomica, il volume medio a disposizione
r di un atomo è 1/nCu ,
1
≈ 2 Å. Il libero
quindi la distanza interatomica è stimabile come ≈ 3
nCu
cammino medio è molto più grande della distanza interatomica: questo è il senso
di portatori “liberi”!
Se il conduttore fosse dotato di più tipi di portatori, con cariche q1 , q2 , . . . ,
la definizione diventerebbe:
X
~i
J~ =
ni q i u
(21.5)
i
La mobilità di ciascun portatore è definita da:
~
~ i = µi E
u
e la conducibilità elettrica risulta quindi pari a
X
σ=
ni qi µi
(21.6)
(21.7)
i
Esempi di conduttori con più tipi di portatori sono i semiconduttori e le
soluzioni ioniche.
21.2.1
Conduttori non ohmici
Sperimentalmente, non tutti i conduttori sono ohmici, ovvero non seguono la
legge di Ohm. Ciò può sembrare strano, visto che apparentemente la legge di
Ohm è stata “dimostrata” in questa sezione. Riguardando la trattazione si
L’Ångstrom, indicato Å, è un’unità di lunghezza corrispondente a 10−10 m, spesso
usato in fisica atomica perché è dell’ordine di grandezza delle dimensioni dell’atomo. Dal
libero cammino medio λ si può stimare la sezione d’urto σ di interazione di un elettrone
1
libero con un atomo: σ = nλ
≈ 10−22 m2 = 106 barn (1 barn=10−24 cm2 ).
1
CAPITOLO 21. CORRENTI ELETTRICHE
—
M.FANTI 338
A
B
E
u
Σ
E
ds = u dt
Figura 21.1: Corrente elettrica come flusso di portatori di carica attraverso
una sezione Σ di un conduttore.
~ Ora, J~ = nq~
vede che la chiave sta nell’assunzione che J~ ∝ E.
u, e l’ipotesi
~
~ ∝ E è valida in molti casi. Tuttavia, in alcuni materiali (per esempio
che u
nei gas) la densità di portatori n non è costante: in presenza di campi forti,
la velocità dei portatori diventa tale da produrre fenomeni di ionizzazione
degli atomi, liberando cosı̀ altri portatori (effetto a valanga).
21.3
Corrente elettrica
Ora consideriamo un conduttore filiforme, di sezione trasversa Σ, cui viene
~ parallelo al conduttore. In esso, i portatori
applicato un campo elettrico E
~ anch’essa parallela
~ = σ E,
di carica acquisiscono una velocità di deriva u
al conduttore. Quindi attraverso la sezione Σ c’è un flusso netto di cariche
elettriche — vedi Fig. 21.1.
Si definisce corrente elettrica in un conduttore una quantità I pari al
rapporto fra la quantità di carica elettrica dQ che attraversa la sezione Σ, ed
il tempo dt in cui questo passaggio avviene:
I=
dQ
dt
(21.8)
Calcoliamo quanta carica elettrica dQ attraversa Σ in un tempo
~ u
~ , J~ hanno tutti
infinitesimo dt. Poiché il conduttore è filiforme, E,
orientamento uniforme lungo il conduttore. Il problema diventa quindi
unidimensionale, e possiamo omettere la notazione vettoriale.
Consideriamo un piccolo tratto di conduttore di lunghezza ds = u dt,
subito prima di Σ. Tutti i portatori che si trovano in esso attraverseranno la
sezione Σ entro il tempo dt. Detta n la loro densità in volume, e dV = Σ ds
il volume del trattino di conduttore, il numero dei portatori che attraversano
Σ nel tempo dt è dN = n dV = nΣ ds = nΣu dt, quindi la carica elettrica
CAPITOLO 21. CORRENTI ELETTRICHE
—
M.FANTI 339
totale che passa è
dQ = q dN = nq u Σ dt = J · Σ dt
Ne segue che
I = J ·Σ
21.4
(21.9)
La legge di Ohm
Per i conduttori “ohmici”, cioè quelli per cui vale la legge di Ohm
microscopica, Eq. (21.4), possiamo elaborare oltre il risultato. Introducendo
J = σE nell’Eq. (21.9), otteniamo
I = σΣE
a capi A, B del conduttore esiste una differenza di potenziale ∆Φ =
ROra,
B ~
~ d~s paralleli possiamo scrivere semplicemente:
E
· d~s, ed essendo E,
A
Z B
Z B
I
∆Φ ≡ VA − VB =
E ds =
Σ ds
A
A σ
Ora, la corrente I deve essere uguale attraverso tutte le sezioni del conduttore.
Se cosı̀ non fosse, ci sarebbero porzioni di conduttore dove entra più (o meno)
corrente di quanta ne esca, e quindi si avrebbe un accumulo di cariche positive
(o rispettivamente negative). Questo processo non può avere luogo, poiché
la loro repulsione elettrica le disperderebbe. Inoltre assumiamo anche che il
conduttore sia di materiale omogeneo, cosicché sigma sia uguale ovunque.
Infine consideriamo che la sezione Σ sia costante. Allora l’integrale diventa
semplicemente
Z B
Z B
I
`AB
I
Σ ds = Σ
ds =
I
σ
σΣ
A
A σ
Il risultato che abbiamo trovato è quindi:
`AB
∆Φ ≡ VA − VB =
I = RI
σΣ
(21.10)
E questa è la nota legge di Ohm (“macroscopica”, per distinguerla da quella
microscopica).
La quantità R che vi compare è la resistenza del conduttore, e si può
esprimere attraverso le dimensioni geometriche del conduttore (`, Σ) e la
conducibilità σ:
` 1
R =
·
(21.11)
Σ σ
Dato un certo materiale (conducibilità σ), la resistenza può essere regolata
scegliendo opportunamente la lunghezza ` (ove possibile) e la sezione Σ.
CAPITOLO 21. CORRENTI ELETTRICHE
21.4.1
—
M.FANTI 340
Unità di misura
La resistenza R si misura in Ohm (Ω=V/A). Quindi, la conducibilità σ si
misura in Ω−1 m−1 .
21.5
Lavoro fatto sulle cariche in moto
Il lavoro fatto su una carica q in un tempo dt è:
~ ·v
~ q dt
dLq = F~q · d~s = q E
Dunque il lavoro fatto in un tempo dt su un volumetto δV , contenente densità
~ , è:
di portatori di carica n con velocità di deriva u
~ dt δV = J~ · E
~ dt δV
dLδV = n δV hdLq i = nq~
u·E
La potenza δW , ceduta alle cariche contenute nel volumetto δV , vale
δW =
dLδV
~ δV
= J~ · E
dt
La potenza w, ceduta alle cariche per unità di volume (“densità di potenza”),
è:
dLδV
δW
~
=
= J~ · E
(21.12)
w =
δV
δV dt
Questa equazione è del tutto generale. Se il moto delle cariche avviene in
~ = |J~|·|E|
~ = JE.
~ = 1 J~. In questo caso, J~ · E
un conduttore ohmico, allora E
σ
La potenza ceduta alle cariche per unità di volume diventa quindi:
w =
δW
J2
= σ E2 =
δV
σ
(21.13)
In un conduttore filiforme, come quello in Fig. 21.1, la potenza totale
dissipata può essere calcolata considerando che il volume di un tratto di
conduttore di lunghezza ` e sezione trasversale Σ è V = `Σ, quindi:
W = V w = `Σ JE = `E · ΣJ
= ∆Φ I
Dalla legge di Ohm, ∆Φ = RI, Eq. (21.10), si ottiene quindi:
W = R I2 =
(∆Φ)2
R
(21.14)
CAPITOLO 21. CORRENTI ELETTRICHE
—
M.FANTI 341
nota come legge di Joule, o effetto Joule.
Nel conduttore ohmico la potenza ceduta alle cariche in moto non va ad
1~
~ = E
resta costante. Ciò che
aumentare la loro velocità di deriva: in effetti u
µ
avviene realmente è che ogni portatore di carica, finché si muove senza urtare
gli atomi, viene accelerato dal campo elettromotore. Ma ad ogni urto cede
l’energia acquisita al reticolo atomico. Il risultato macroscopico dell’effetto
Joule è infatti un surriscaldamento del conduttore.
21.6
Forze magnetiche
elettrico
su
un
circuito
Consideriamo un conduttore filiforme come quello di Fig. 21.1 percorso da
~ la forza di Lorentz
una corrente I. In presenza di un campo magnetico B
agisce sulle cariche in moto, producendo come effetto macroscopico una forza
netta sul conduttore.
Chiamando q la carica elettrica dei portatori e n la loro densità in volume,
in un trattino di conduttore di lunghezza ds e sezione trasversa Σ ci sono
dN = n ds Σ
~ = h~
portatori di carica che si muovono con una velocità media u
vq i. La forza
~
di Lorentz complessiva sul volumetto è data dal valore medio hFq i della forza
sul singolo portatore moltiplicato per il numero di portatori dN :
~ = nq~
~ Σ ds
dF~L = dN hF~q i = (n ds Σ)hq~
vq × Bi
u×B
Ora, nq~
u = J~ è parallelo a d~s (essendo il conduttore filiforme), quindi
~ Σ⊥ ds = d~s × B
~ J Σ = d~s × B
~I
J~ × B
Abbiamo quindi trovato la 2a formula di Laplace:
~
dF~L = Id~s × B
(21.15)
che descrive la forza agente su un tratto infinitesimo di conduttore di
lunghezza ds percorso da una corrente I. Il vettore d~s è tangente al
conduttore; si assume I > 0 se J~ ↑↑ d~s.
La forza su un circuito esteso si ottiene integrando la forma differenziale
dell’Eq. (21.15). Per un ramo di circuito che va da un punto A a un punto
B la forza magnetica è:
Z
B
F~L = I
~
d~s × B
A
(21.16)
CAPITOLO 21. CORRENTI ELETTRICHE
—
M.FANTI 342
D
FDA
^
n
FCD
A
B
C
B
^
θ n
FDA
a sin θ
FBC
FAB
B
a
a
θ
FBC
b
Figura 21.2: Forze magnetiche su una spira rettangolare
~ è uniforme l’integrale diventa:
Se B
−→ ~
F~L = I AB × B
Per un circuito chiuso la forza totale è:
I
~
~
FL = I d~s × B
~ è uniforme (poiché
che si annulla se B
21.6.1
H
d~s = 0).
Momento torcente su una spira in un campo
uniforme
Abbiamo già visto che su un circuito chiuso percorso da corrente I in un
~ la forza di Lorentz totale è nulla. Tuttavia
campo magnetico uniforme B
esiste un momento meccanico T~ .
Analizziamo il caso semplice della spira rettangolare disegnata in
~ i lati AB
Fig. 21.2. I lati BC e DA sono lunghi b e perpendicolari a B;
~ l’asse della spira n̂ forma un
e CD sono lunghi a e obliqui rispetto a B;
~
angolo θ col vettore B.
Usando l’Eq. (21.16) possiamo calcolare le forze agenti sui quattro lati
della spira. Le direzioni sono quelle indicate in Fig. 21.2. Le forze agenti sui
lati AB e CD sono opposte, hanno modulo
π
+θ
|F~AB | = |F~CD | = IaB sin
2
CAPITOLO 21. CORRENTI ELETTRICHE
—
M.FANTI 343
z
D
A
C
N
a
B
b
S
^
θ n
FDA
N
S
a
B
FBC
Figura 21.3: Schema dell’amperometro
ma non producono alcuna coppia. Le forze agenti sui lati BC e DA sono
opposte, hanno modulo
|F~BC | = |F~DA | = IbB
e producono una coppia:
τ = aF sin θ = I ab B sin θ
~
La direzione del momento torcente τ~ è ortogonale al piano contenente n̂, B
~
ed è tale da portare n̂ ad allinearsi con B. Tutto questo si può scrivere in
forma vettoriale cosı̀:
~ = IΣ
~ ×B
~
τ~ = (Iab)n̂ × B
(21.17)
~ la superficie orientata concatenata alla spira. Se al posto della
essendo Σ
spira ci fosse una bobina compatta formata da N spire sovrapposte, l’effetto
meccanico totale sarebbe la somma degli effetti su ciascuna spira della bobina,
ovvero:
~ = N IΣ
~ ×B
~
τ~ = N (Iab)n̂ × B
(21.18)
21.6.2
L’amperometro
In Fig. 21.3 è raffigurata una bobina rettangolare con N spire in cui circola
~ prodotto da
una corrente I. Il tutto è immerso in un campo magnetico B
un magnete permanente. Le espansioni polari sono sagomate in modo da
~ uniforme in modulo e di direzione
generare nelle loro vicinanze un campo B
CAPITOLO 21. CORRENTI ELETTRICHE
—
M.FANTI 344
radiale. La bobina può ruotare intorno all’asse z, ed in assenza di corrente
è tenuta in equilibrio nella posizione θ = 0 da una molla, che esercita un
momento torcente di tipo elastico:
τel = −kel θ
Quando nella bobina passa una corrente I, le forze agenti sui lati AB e
CD sono opposte, dirette lungo l’asse z e non producono alcuna coppia. Le
forze agenti sui lati BC e DA sono opposte, perpendicolari al piano della
bobina e valgono in modulo:
F = |F~BC | = |F~DA | = N IbB
La coppia prodotta è
τmagn = aF = N I ab B
e tende a far ruotare la bobina in senso orario se I > 0. La condizione di
equilibrio della bobina si trova per τel + τmagn = 0, ovvero:
I=
kel
θ = KA θ
N ab B
Questo dispositivo è alla base del funzionamento dell’amperometro, ovvero
lo strumento che misura correnti elettriche. Infatti, collegando alla bobina
un ago che segna l’angolo θ su un quadrante, si può dedurre la corrente che
circola nella bobina. La costante KA può essere dedotta dai parametri di
costruzione delllo strumento (N, a, b, B, kel ) oppure ricavata calibrandolo con
una corrente nota.
Capitolo 22
Campi elettromagnetici
22.1
Premessa
Abbiamo più volte introdotto la forza elettromagnetica, prodotta su una
~ e da un campo magnetico B
~ (cfr
carica elettrica q da un campo elettrico E
per es Eq. (11.11)). Per comodità la riportiamo qui:
h
i
~
~
~
~ × B(~
Fem = q E(~
r) + v
r)
(22.1)
Ricordiamo che qualunque carica elettrica qk è sorgente di un campo elettrico
~ k (~
~ k (~
E
r ); se essa è in movimento, produce anche un campo magnetico B
r ).
~ dello spazio, i campi elettrici e i campi magnetici si
In qualunque luogo r
sovrappongono come somma vettoriale:
~ r) =
E(~
X
~ r) =
B(~
X
~ k (~
E
r)
k
(22.2)
~ k (~
B
r)
k
L’elettromagnetismo è la branca della Fisica che descrive la forma dei
campi elettrico e magnetico generati da una configurazione di cariche. Si
tratta di una materia molto vasta, che qui non possiamo pensare di esporre
in maniera esaustiva. Ci limiteremo quindi ad alcuni casi particolari.
In Sezione 11.3 abbiamo anticipato la forma dei campi elettrici e magnetici
prodotti da cariche in quiete o in moto “lento e poco accelerato”:
|~
v| c
;
|~a| 345
c2
|∆~
r|
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 346
La forma generale dei campi elettrici e magnetici, e la loro dipendenza dalle
cariche che li producono, è molto più complicata. L’approssimazione di
“moto lento e poco accelerato” fallisce non appena le cariche acquistano
velocità ≈ 0.1c, o subiscono accelerazioni significative, o ancora i loro effetti
sono studiati a distanze “grandi” in relazione alle loro accelerazioni — cioè
c2
. Queste condizioni sono in effetti abbastanza comuni nella fisica
|∆~
r| |~a|
delle particelle elementari. L’ultima poi è particolarmente rilevante quando
si studino le onde elettromagnetiche.
22.2
Equazioni del campo elettromagnetico
Le equazioni del campo elettromagnetico sono state ricavate da J.C.Maxwell,
compendiando una grande varietà di risultati sperimentali sulle interazioni
elettriche e magnetiche. Esse sono espresse in forma integrale, attraverso
circuitazioni e flussi: quindi è necessario avere letto e capito il Capitolo 14,
dove queste operazioni matematiche sono definite.
~ =
Φch (E)
I
(int)
~ ·E
~ =Q
dΣ
0
~ =
Φch (B)
;
I
~ ·B
~ =0
dΣ
(22.3)
I
~ = −Φconc
d~
r·E
~
∂B
∂t
!
I
;
"
~ = µ0 Iconc + 0 Φconc
d~
r·B
~
∂E
∂t
!#
dove:
• Q(int) nella prima equazione è la carica elettrica totale contenuta
all’interno della superficie chiusa attraverso cui si calcola il flusso
~
Φch (E);
• Iconc nella quarta equazione è la corrente elettrica totale
H che fluisce
~
entro la linea chiusa lungo cui si calcola la circuitazione d~
r · B;
inoltre:
1
= 4π · 9 · 109 Nm2 C−2
0
;
µ0 = 4π · 10−7 Ns2 C−2
(22.4)
Come già fatto per le leggi della dinamica, accettiamole come assiomi,
confidando nel fatto che sono ampiamente supportate da innumerevoli
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 347
fatti sperimentali, e sono alla base di tutti gli apparati elettrotecnici che
utilizziamo quotidianamente. Insomma funzionano, e anche molto bene!
Proviamo a capire qualitativamente, da queste equazioni, che cosa genera
i campi elettrici e magnetici.
22.2.1
Campi stazionari
Cominciamo dapprima con situazioni stazionarie, in cui niente varia nel
∂(· · · )
= 0. Le
tempo: ciò significa che nelle Eq. (22.3) possiamo porre
∂t
equazioni diventano:
~ =
Φch (E)
I
(int)
~ ·E
~ =Q
dΣ
0
;
~ =
Φch (B)
I
~ ·B
~ =0
dΣ
(22.5)
I
~ =0
d~
r·E
I
;
~ = µ0 Iconc
d~
r·B
Da qui vediamo che:
~ e B
~ sono completamente indipendenti: campi
• le equazioni per E
elettrici e magnetici fanno vite separate e non si disturbano l’un l’altro;
• i campi elettrici sono creati dalla presenza di cariche elettriche,
Q(int)
~
attraverso Φch (E) =
; inoltre sono conservativi, come si deduce
0
I
~ = 0;
da d~
r·E
• i campi magnetici sono creati dalle correnti
I elettriche (cioè cariche
~ = µ0 Iconc ; inoltre,
elettriche in movimento), come descritto da d~
r ·B
~ = 0.
non esistono “cariche magnetiche”, come ci testimonia Φch (B)
In questo scenario, i campi elettrici e magnetici possono essere trattati
indipendentemente gli uni dagli altri. Pertanto, affronteremo i campi elettrici
nella Sezione 22.3 e seguenti, mentre tratteremo i campi magnetici nella
Sezione 22.5.
CAPITOLO 22. CAMPI ELETTROMAGNETICI
22.2.2
—
M.FANTI 348
Campi variabili in assenza di cariche
Ora mettiamoci nel caso completamente opposto: supponiamo che in una
regione di spazio non ci siano cariche elettriche, quindi Q(int) = 0 e Iconc = 0.
Le equazioni di Maxwell prendono la forma:
I
I
~
~
~
~
~ ·B
~ =0
Φch (E) = dΣ · E = 0
;
Φch (B) = dΣ
(22.6)
I
~ = −Φconc
d~
r·E
~
∂B
∂t
!
I
;
~ = 0 µ0 Φconc
d~
r·B
~
∂E
∂t
!
~
∂B
6= 0) dà luogo
che ci dicono che un campo magnetico variabile (
∂t
ad un campo elettrico non conservativo, e viceversa, un campo elettrico
~
∂E
variabile (
6= 0) dà luogo ad un campo magnetico. Questo scenario è
∂t
molto interessante! Proviamo a pensare ad un campo magnetico oscillante,
B ≈ cos(ωt). Il campo elettrico indotto dalla sua variazione sarà qualcosa
∂B
≈ sin(ωt). Questo a sua volta è variabile, quindi induce un
come E ≈ −
∂t
∂E
campo magnetico B ≈
≈ cos(ωt). E cosı̀ via. . . Quindi i campi elettrico
∂t
e magnetico si sostengono a vicenda. Come vedremo, questo fenomeno è la
base delle onde elettromagnetiche.
Discuteremo questo scenario nel Capitolo 23.
22.2.3
Campi elettrici non conservativi
Abbiamo
sempre trattato i campi elettrici come conservativi, cioè assumendo
I
~ = 0. Questo ci ha consentito di definire il potenziale elettrostatico
d~
r·E
Z B
~ Tuttavia possiamo porci un dubbio:
Φ, tale che Φ(A) − Φ(B) =
d~
r · E.
A
come fa un campo elettrico conservativo a produrre una corrente elettrica in
un circuito chiuso di resistenza R? Sul circuito viene dissipata una potenza
W = RI 2 (legge di Joule, Eq. (21.14)), che cosa fornisce questa potenza?
Se il campo elettrico è conservativo, su un circuito chiuso non può compiere
lavoro.
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 349
In effetti ci sono molti casi di campi elettrici non conservativi. A livello
fondamentale, la spiegazione sta nell’equazione di Maxwell scritta in modo
completo:
!
I
~
∂
B
~ = −Φconc
(22.7)
d~
r·E
∂t
Quando le cariche elettriche sono in moto, possono produrre correnti —
anche a livello atomico — e quindi campi magnetici. Se questi sono variabili
nel tempo — il che è ragionevole, visto che le cariche che li producono si
spostano
— allora possono indurre campi elettrici non conservativi, cioè con
I
~ 6= 0.
d~
r·E
Nella pratica, l’Eq. (22.7), detta legge di Faraday-Neumann, è
utilizzatissima per costruire macchine elettriche, come generatori di tensione
(“alternatori”) e motori (“a induzione”). Non sviluppiamo oltre questo
argomento, peraltro molto ricco.
22.3
Campi elettrici statici
Abbiamo visto (Sezione 22.2.1) che in condizioni stazionarie le equazioni per
il campo elettrico si disacoppiano da quelle per il campo magnetico.
Concentriamoci dunque sui soli campi elettrici.
(int)
~ = Q
Φch (E)
0
I
(22.8)
~ · d~
E
r = 0
La prima equazione va sotto il nome di legge di Gauss. Come fatto per
le forze gravitazionali (Sezione 15.12), essa può essere dedotta dalla legge di
1
Coulomb, che ha la stessa forma ∝ 2 . Tuttavia, la legge di Coulomb vale
r
solo per cariche puntiformi ferme, mentre la legge di Gauss ha validità del
tutto generale.
La seconda equazione — ricordiamolo — ci dice che il campo elettrico
statico è conservativo. Infatti, detta q una carica elettrica qualunque, la
~ e la sua circuitazione lungo un percorso chiuso è:
forza elettrica è F~ = q E,
I
I
~ · d~
F~ · d~
r=q
E
r=0
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 350
Cosı̀ come si può definire l’energia potenziale come:
Z B
F~ · d~
r
U (A) − U (B) =
A
allo stesso modo si definisce il potenziale elettrostatico Φ come:
Z B
~ · d~
E
r
Φ(A) − Φ(B) =
(22.9)
A
Le due equazioni Eq. (22.8) sono sufficienti ad analizzare qualunque
problema elettrostatico. Qui di seguito ci limitiamo ad analizzare alcuni
casi particolari:
• il campo Coulombiano generato da una carica puntiforme ferma;
• le proprietà dei campi elettrici nei conduttori;
• la costruzione di un campo elettrico uniforme.
22.3.1
Deduzione della legge di Coulomb
In condizioni statiche le equazioni di Maxwell consentono di ricavare la legge
di Coulomb, ovvero i campi elettrici della forma
~ = 1 q r̂
E
4π0 r2
In effetti, se la carica q è ferma, ogni direzione nello spazio è altrettanto valida
di tutte le altre, quindi il campo elettrico prodotto da q deve dipendere solo
dalla distanza r dalla carica, e deve essere orientato in modo radiale:
~ = E(r)r̂
E
~ è
Scegliamo quindi una superficie chiusa Σch di forma sferica e raggio r; dΣ
per convenzione ortogonale alla superficie e orientato verso l’esterno, quindi
~ = dΣr̂. Allora dΣ
~ ·E
~ = dΣ E(r) Chiamando dΩ l’angolo solido che
dΣ
~ ·E
~ = r2 E(r) dΩ. Integrando
sottende dΣ, abbiamo dΣ = r2 dΩ, quindi dΣ
su tutta la sfera si trova:
I
I
~ ·E
~ = dΩ r2 E(r) = r2 E(r) · 4π
dΣ
I
~ ·E
~ = q otteniamo
e confrontando con dΣ
0
1 q
E(r) =
4π0 r2
(c.v.d.)
CAPITOLO 22. CAMPI ELETTROMAGNETICI
22.3.2
—
M.FANTI 351
Campi elettrici statici nei conduttori
Abbiamo introdotto i conduttori elettrici in Sezione 21.1. Si tratta di
materiali in cui esistono particelle portatrici di carica che, il presenza di
forze elettriche, sono libere di muoversi. Per i conduttori ohmici, abbiamo
~ dalla
anche dedotto che la densità di corrente J~ è legata al campo elettrico E
legge di Ohm microscopica (Eq. (21.4)):
~
J~ = σ E
In questa sezione tratteremo le proprietà dei conduttori in condizioni
statiche, cioè in assenza di correnti. È evidente che in tali condizioni, il
campo elettrico all’interno del conduttore deve essere esattamente nullo:
~ = 0
E
all’interno del conduttore
Un’ulteriore conseguenza diretta è che tutto il conduttore è equipotenziale:
due punti
qualunque del conduttore hanno una differenza di potenziale
R
~
~ = 0 ovunque all’interno.
∆Φ = E · d~
r = 0, essendo E
Ogni porzione interna ad un conduttore è elettricamente neutra. Questa
è una conseguenza della legge di Gauss: dato un qualunque volumetto ∆V
completamente interno al conduttore,
e chiamata Σch la superficie che ne
H
~ · dΣ
~ = 0. Si noti che questo non
costituisce il bordo, Q(int) = 0 Σch E
significa che non esistono cariche elementari — sappiamo che ogni singolo
atomo è formato di particelle cariche — bensı̀ che ne esistono di positive e
negative in uguali quantità in modo da bilanciarsi.
Se un conduttore non è elettricamente neutro, ovvero se la carica elettrica
totale su di esso non è nulla, essa deve necessariamente essere localizzata sulla
sua superficie.
22.3.3
Cavità di un conduttore
Se il conduttore ha una cavità interna vuota (cavità elettrostatica), il campo
elettrostatico in essa è sempre nullo. Infatti, applicando la legge di Gauss ad
una superficie Σ che circonda tutta la cavità, come il Fig. 22.1(a), essendo
~ = 0 ovunque nel conduttore, segue che la carica totale disposta sulla
E
superficie della cavità deve essere nulla. Questo in sé non significa che
la carica sia nulla in ogni punto, potrebbero esserci cariche positive in
alcune zone e negative in altre, come indicato in Fig. 22.1(b). Ma se cosı̀
fosse, ci sarebbe un campo elettrostatico nella cavità, le cui linee di campo
partirebbero dai punti con cariche positive e si chiuderebbero sui punti con
cariche negative. Allora si potrebbe scegliere un percorso chiuso Γ orientato
CAPITOLO 22. CAMPI ELETTROMAGNETICI
−
+
+
+
−
−
−
Σ
+
++
− − −
−
+
+
+
(a)
−
−
—
M.FANTI 352
−
−
− − −
+
+
+
+
++
(b)
−
Γ
−
−
− − −
+
++
(c)
Figura 22.1: Campo elettrostatico in una cavità elettrostatica
δΣ
δΣ
δΣ
+Q
z
∆Φ
D
x
−Q
y
Σ
Figura 22.2:
Schema di un condensatore piano.
~ nella cavità; essendo E
~ = 0 nella parte di Γ nel conduttore,
come il campo
E
H
~ · d~
avremmo Γ E
r > 0, il che viola la legge della circuitazione nulla.
~ = 0 anche nella cavità.
Si conclude che deve essere E
Questo risultato è valido sempre, a prescindere da che cosa succede
all’esterno del conduttore: una cavità elettrostatica è quindi perfettamente
isolata dall’universo esterno, per questo viene detta schermo elettrostatico
totale.
22.3.4
Costruzione di un campo elettrico uniforme
Consideriamo un sistema formato da due lastre conduttrici piane parallele,
di superficie Σ e separate da una distanza D, come in Fig. 22.2. Questa
struttura si chiama condensatore, e le lastre armature.
Alle armature viene applicata una differenza di potenziale ∆Φ, che ha
l’effetto di trasportare una quantità di carica elettrica Q da un’armatura
all’altra. Per fissare le idee, supponiamo che l’armatura superiore porti carica
+Q e quella inferiore −Q.
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 353
~
Z Fra le armature deve esserci un campo elettrico E, in modo che ∆Φ =
~ Vogliamo mostrare che questo campo, lontano dai bordi delle
d~
r · E.
armature, è uniforme.
~ deve essere ortogonale alle
Anzitutto, per ragioni di simmetria, E
~k
armature stesse. Se cosı̀ non fosse, dovrebbe esistere una componente E
parallela alle armature. Immaginando di ruotare tutto il sistema di 180◦
~ k deve ruotare, diventando E
~ 0 = −E
~ k;
intorno al suo asse verticale, anche E
k
ma con questa rotazione otterremmo una configurazione di cariche identica
a quella iniziale. Com’è possibile che la stessa configurazione dia due campi
~ k = 0.
diversi? L’unica spiegazione è che sia E
Introducendo quindi gli assi cartesiani come in Fig. 22.2, possiamo dire
che la forma del campo è
~ = E(x, y, z) ẑ
E
Ora consideriamo una superficie cilindrica chiusa, come quella a sinistra
nella Fig. 22.2, con la base superiore all’interno dello spessore dell’armatura
superiore, la base inferiore in mezzo alle due armature, un’area di base
piccola, δΣ (al limite δΣ → 0), e applichiamo la legge di Gauss. Lungo
~ è parallelo a ẑ.
la superficie laterale del cilindro non c’è flusso, perché E
~ = 0.
La base superiore del cilindro è all’interno di un conduttore, quindi E
L’unico contributo al flusso è attraverso la base inferiore, che ha versore
~ = (E ẑ) · (δΣn̂) = −EδΣ.
ortogonale n̂ = −ẑ. Quindi il flusso vale Φ(E)
Questo risultato è indipendente dall’altezza del cilindro, cioè dalla coordinata
z alla quale si trova la base inferiore. Quindi E non dipende da z, in mezzo
alle armature:
~ = E(x, y) ẑ
E
(fra le armature)
Z
Z
~
Ne consegue che ∆Φ = E · d~
r = E(x, y) dz = E(x, y) ∆z = E(x, y) D.
Ora ∆Φ non può dipendere da x, y, poiché ciascuna delle armature è
conduttrice, quindi tutti i suoi punti si trovano allo stesso potenziale, a
prescindere da x, y. Quindi, all’interno delle armature, E non dipende da
x, y:
~ = E ẑ
E
;
E=
∆Φ
D
(uniforme fra le armature)
Studiamo anche il campo fuori dalle armature. Applichiamo la legge di
Gauss al cilindretto centrale della Fig. 22.2. Con ragionamenti analoghi ai
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 354
precedenti, possiamo concludere che anche al di fuori delle armature il campo
è diretto lungo z e uniforme. Al flusso contribuiscono solo le due basi del
cilindro, dando:
~ = δΣ E sopra − E dentro
Φ(E)
=
δq sup
0
dove si intende che δq sup è la parte di carica elettrica sulla superficie
dell’armatura superiore, racchiusa dal cilindretto.
Infine, applichiamo la legge di Gauss al cilindretto di destra della
Fig. 22.2. Troviamo che:
~ = δΣ E sopra − E sotto
Φ(E)
=
δq sup + δq inf
0
Queste equazioni possono valere per qualunque scelta di δΣ: visto che i
campi non dipendono da x, y, possiamo allargare δΣ fino ad includere (quasi)
tutta l’armatura (al limite lasciando fuori una piccola porzione per evitare
gli effetti-bordo). Dunque ragioniamo per δΣ ' Σ, e quindi δq sup ' Q e
δq inf ' −Q. Riscriviamo le due equazioni appena trovate:
Q
0
sopra
sotto
Σ(E
−E
) = 0
Σ(E sopra − E dentro ) =
In particolare, il campo “sopra” il condensatore e quello “sotto” devono
essere uguali, a prescindere dalla separazione D delle armature. Pensiamo
di avvicinare sempre più le due armature fino a che arrivino quasi a toccarsi
(D → 0): allora le loro cariche +Q e −Q dovrebbero compensarsi, ma
all’esterno avremmo sempre un campo E f uori = E sopra = E sotto . Come è
possibile? L’unica soluzione è che i campi esterni siano nulli. Se cosı̀ è, il
Q
.
campo interno è E dentro = −
0 Σ
Riassumiamo quanto abbiamo trovato:
• un condensatore piano, con armature di area Σ e separazione D,
produce al suo interno un campo elettrostatico uniforme, che vale
E =
∆Φ
Q
=
0 Σ
D
• all’esterno delle armature il campo elettrostatico è nullo;
(22.10)
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 355
+q
q0
+q
D
r
−q
θ
D
r+
r − r+
r
r − r−
−q
r−
O
Figura 22.3:
A sinistra: schema di un dipolo elettrico di cariche ±q
~ A destra: schema per il calcolo del potenziale elettrico
e separazione D.
generato da un dipolo.
• dall’equazione precedente si deduce che Q ∝ ∆Φ, sempre; pertanto si
definisce la capacità del condensatore
C =
22.4
0 Σ
Q
=
∆Φ
D
(22.11)
Dipoli elettrici
Un dipolo elettrico è costituito da un sistema di due cariche elettriche opposte
±q, poste ad una distanza D. Possiamo definire la separazione delle cariche
~ che va dalla carica −q alla carica +q
mediante un vettore-spostamento D,
(vedi Fig. 22.3).
Si definisce il momento di dipolo elettrico come
~
~ = qD
p
22.4.1
(22.12)
Forze elettriche agenti su un dipolo
~ posto in un campo elettrico
Consideriamo ora un dipolo elettrico p
~ r ). L’azione del campo sul dipolo può essere ricavata dall’energia
E(~
potenziale. Questa è calcolabile come somma delle due energie potenziali
associate alle cariche ±q che formano il dipolo. Facciamo riferimento alla
~
D
~± = r
~ ± , quindi
Fig. 22.3(sinistra). Le cariche si trovano nelle posizioni r
2
troviamo:
!
!
~
~
D
D
~ ·D
~ = p
~
~+
~−
~ · ∇Φ
U (~
r ) = qΦ r
− qΦ r
= q ∇Φ
2
2
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 356
~ = −∇Φ,
~
Ora però ricordiamo anche che E
quindi:
~
U = −~
p·E
(22.13)
Come si muove un dipolo in un campo elettrico?
L’energia meccanica E + U si conserva, e le forze elettriche agenti sul
dipolo in generale tendono ad aumentare l’energia cinetica, quindi a diminuire
l’energia potenziale. Questa diminuzione può avvenire in due modi: o
ruotando il dipolo, o spostandolo. Analizziamo i due casi.
~ e il dipolo p
~ , risulta
• Rotazione. Chiamando θ l’angolo fra il campo E
U = −p E cos θ
che per rotazione diventa minimo se cos θ è massimo, vale a dire θ = 0.
Quindi il dipolo tende ad allinearsi come il campo elettrico.
• Traslazione. Consideriamo il dipolo già allineato con il campo elettrico.
Quindi
U = −p E
Se il campo elettrico è uniforme, il dipolo non può modificare U , quindi
non sente forze. Viceversa, se il campo elettrico non è uniforme,
il dipolo, per minimizzare U , deve muoversi verso regioni di campo
elettrico più intenso — tipicamente quindi, avvicinandosi alla sorgente
del campo.
22.4.2
Potenziale elettrostatico prodotto da un dipolo
Il campo elettrostatico prodotto da un dipolo elettrico può essere calcolato
con l’ausilio del potenziale elettrostatico. Se conosciamo il potenziale
~ , possiamo sempre calcolare
elettrostatico Φdip (~
r ) prodotto da un dipolo p
~
~
il campo elettrostatico come Edip = −∇Φdip .
Per semplicità, scegliamo un sistema di riferimento con l’origine O al
centro del dipolo, come in Fig. 22.3(destra). Allora le cariche ±q sono
~
D
~± = ± . Ciascuna genera nello spazio un
localizzate rispettivamente in r
2
potenziale elettrostatico
Φ± (~
r) =
1
±q
~± |
4π0 |~
r−r
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 357
Ovviamente il potenziale del dipolo è la somma:
q
1
1
Φdip (~
r ) = Φ+ (~
r ) + Φ− (~
r) =
−
~+ | |~
~− |
4π0 |~
r−r
r−r
Potremmo sviluppare fino in fondo questo ragionamento, ma richiede calcoli
un po’ lunghi. Scegliamo quindi un altro approccio.
~ , posto nell’origine, produce un potenziale Φdip (~
Se il dipolo p
r ) (da
~ dello spazio, una carica elettrica puntiforme
determinare!) in ciascun punto r
~ si trova ad una energia potenziale
q0 posta in r
Uq0 ,dip = q0 Φdip (~
r)
L’energia potenziale Uq0 ,dip è caratteristica dell’interazione carica-dipolo, e
~ posto nel campo
può essere vista anche come l’energia potenziale del dipolo p
~
~ . Per l’Eq. (22.13),
elettrico Eq0 prodotto dalla carica q0 , posizionata in r
~
~ q0 prodotto da
essa vale Uq0 ,dip = −~
p · Eq0 . Ora, il campo elettrico E
q0 nell’origine O dove si trova il dipolo è dato dalla legge di Coulomb:
~ q0 (O) = − 1 q0 r2 r̂. Il segno “meno” deriva dal fatto che la direzione
E
4π0
che va dalla sorgente di campo (q0 ) al punto dove si sonda il campo (O) è
−r̂. Pertanto si trova:
1 q0
r̂
Uq0 ,dip = −~
p· −
4π0 r2
~ · r̂
q0 p
=
4π0 r2
Per confronto, si ricava la forma del potenziale generato dal dipolo:
~
1 r̂ · p
2
4π0 r
1 p cos θ
=
4π0 r2
Φdip (~
r) =
(22.14)
Da questa equazione si nota subito una cosa interessante: il potenziale
1
elettrostatico del dipolo decresce come 2 . Anche senza addentrarci nei
r
calcoli, deduciamo che il campo elettrico del dipolo — che si calcola con
1
il gradiente del potenziale — deve decrescere come 3 .
r
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 358
~1, p
~ 2 , esa
Se poi vogliamo calcolare l’energia potenziale fra due dipoli p
può essere scritta come
~ dip2 = p
~ dip2
~ 1 · ∇Φ
Udip1,dip2 = −~
p1 · E
~ 2 · r̂21
1
p
~
~1 · ∇
=
p
2
4π0
r12
Anche qui, senza addentrarci nei calcoli, capiamo che Udip1,dip2 ∝
1
, e quindi
3
r12
1
. I dettagli sono più
4
r12
complicati: dipendono dagli orientamenti dei due dipoli. Però ci interessa
notare che le forze elettrostatiche fra dipoli si attenuano con la distanza molto
più rapidamente che le forze fra cariche elettrica, che seguono invece la legge
1
di Coulomb, ∝ 2 .
r
che la forza fra essi deve andare come Fdip1,dip2 ∝
22.4.3
Interazioni molecolari
Molte molecole sono dotate di dipoli elettrici intrinseci. L’esempio più ovvio
è la molecola dell’acqua, H2 O: in essa i due atomi di idrogeno non sono
esattamente opposti rispetto all’atomo di ossigeno, ma formano un angolo,
dando alla molecola una forma leggermente a “V”; inoltre, i due elettroni dei
due atomi di idrogeno tendono ad avvicinarsi all’atomo di ossigeno, cosicché
questo assume un eccesso di carica negativa, lasciando gli atomi di idrogeno
con un eccesso di carica positiva. Pertanto la molecola dell’acqua è polare.
Altre molecole non hanno un dipolo intrinseco. Tuttavia, in presenza di
campi elettrici esterni la “nube di elettroni” (negativa) tende a spostarsi
in direzione opposta al campo elettrico (ricordiamo che per gli elettroni
~ creando cosı̀ uno sbilanciamento di cariche nella molecola, che
F~ = −eE),
acquista di fatto un dipolo elettrico. Il campo elettrico esterno alla molecola
potrebbe essere anche prodotto da molecole vicine.
Lo stesso meccanismo può avvenire anche fra atomi vicini: ciascuno
di essi, con il suo campo elettrico, induce un dipolo elettrico negli atomi
circostanti. In Fig. 22.4 è schematizzato un atomo: senza campi esterni
la nube elettronica è centrata intorno al nucleo, mentre in presenza di un
~ la nube elettronica si sposta in direzione opposta, creando
campo esterno E
~
~ = ZeD.
un dipolo elettrico indotto p
Si può costruire un modello semi-quantitativo di questa polarizzazione.
Supponiamo che la forza che tenderebbe a ri-centrare la nuvola elettronica
sul nucleo sia in prima approssimazione elastica: abbiamo visto nella
CAPITOLO 22. CAMPI ELETTROMAGNETICI
−Ze
D
+Ze
+Ze
—
M.FANTI 359
−Ze
E
Figura 22.4:
Polarizzazione di un atomo: in assenza di campi esterni (a
sinistra) la nube elettronica è simmetrica rispetto al nucleo e non c’è dipolo.
~ (a destra) la nube elettronica si sposta in
In presenza di un campo elettrico E
~ fra il baricentro
direzione opposta al campo, producendo una separazione D
delle cariche negative e il nucleo positivo.
Sezione 17.7 che questa ipotesi è ragionevole per spostamenti intorno ad
una condizione di equilibrio. Quindi, sulla nube elettronica (n.e.) agiscono
est
~ e una dovuta al
= −ZeE,
due forze: una dovuta al campo esterno, F~n.e.
nucleo
~ In questa espressione k è una
richiamo elastico del nucleo, F~n.e.
= +k D.
costante elastica efficace, che dipende dalla forma della nube elettronica e
dalle cariche del nucleo e della nube — ci aspetteremmo k ≈ (Ze)2 ; il segno
+ indica che la nube elettronica è attratta verso il nucleo, che si trova in
~ La forza totale sulla nube elettronica è:
direzione D.
~ + kD
~
F~n.e. = −ZeE
Affinché l’atomo sia in equilibrio con la sua nube elettronica questa forza
~ = Ze E.
~ Il dipolo indotto nell’atomo è quindi
deve essere nulla. Quindi D
k
2 2
~ = Z e E.
~ Non conoscendo bene la forma di k non possiamo
~ = ZeD
p
k
andare oltre nella trattazione, ma ci accontentiamo di dire che
~
~ = αE
p
(22.15)
~ La
ossia il dipolo indotto è proporzionale al campo elettrico applicato E.
costante α si chiama polarizzabilità atomica.
Una volta che molecole e/o atomi sono dotati di dipolo elettrico
(intrinseco o indotto che sia) essi si possono scambiare interazioni elettriche: i
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 360
−
+
−
+
+− −
+− +−
+− +−
+
Figura 22.5:
+
+− +−
+ − +−
−
+
+
−
+− +−
+− +−
+−
+−
+− +−
+−
+−
Polarizzazione di un dielettrico.
dipoli si orientano nelle direzioni più favorite, tendendo a diminuire l’energia
potenziale, e quindi ad avvicinarsi fra loro. Cosı̀ si formano i legami
molecolari.
Abbiamo notato già che tali legami devono avere una forza proporzionale
1
all’inverso del cubo della distanza, ∝ 3 , se sono fra un dipolo e ula carica
r
1
libera, oppure all’inverso della quarta potenza, ∝ 4 , se sono fra due dipoli.
r
Pertanto la loro intensità diminuisce rapidamente al crescere delle distanze,
e quindi può giocare un ruolo importante solo a distanze interatomiche o
intermolecolari.
22.4.4
Polarizzazione dei materiali dielettrici
Si chiamano genericamente dielettrici i materiali che non sono conduttori.
~ ad un dielettrico,
Quando viene applicato un campo elettrico esterno E
gli atomi e/o le molecole si polarizzano: se hanno un dipolo intrinseco lo
orientano in modo parallelo e concorde al campo elettrico; se non hanno un
dipolo intrinseco, formano un dipolo indotto, in direzione parallela e concorde
al campo elettrico. L’effetto collettivo di tutti questi dipoli elementari è di
produrre una parziale schermatura del campo elettrico.
Il meccanismo si può capire osservando la Fig. 22.5: in questo esempio
particolare, una carica elettrica +q posta all’interno di un dielettrico induce
una polarizzazione del medesimo. L’effetto netto è una concentrazione di
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 361
cariche negative elementari in prossimità della carica +q, il cui effetto quindi
~ = q r̂ per il campo non
risulta attenuato. Quindi la legge di Coulomb E
4π0 r2
può più essere valida. Il campo elettrico deve essere attenuato, pertanto essa
viene modificata come
~ =
E
q r̂
4π r2
( > 0 )
In generale, con lo stesso criterio, anche la legge di Gauss andrà modificata
in:
Q(int)
( > 0 )
(22.16)
Il valore di è caratteristico del materiale. In ogni caso è sempre >
0 , ad esprimere che la polarizzazione del dielettrico produce sempre una
diminuzione del campo elettrico.
~ =
Φch (E)
Un’importante applicazione della polarizzazione dei dielettrici è nella
costruzione di condensatori. Abbiamo visto nella Sezione 22.3.4, Eq. (22.11),
0 Σ
. Nella trattazione si assumeva
che la capacità di un condensatore è C =
D
che fra le due armature ci fosse il vuoto. Se invece queste vengono riempite
da un dielettrico di costante (ricordiamo, > 0 ), la capacità può essere
aumentata fino a
Σ
Q
=
(22.17)
C =
∆Φ
D
Riprenderemo l’argomento della polarizzazione dei dielettrici quando
studieremo le onde elettromagnetiche nei materiali.
22.5
Campi magnetici prodotti da correnti
stazionarie
Consideriamo la parte magnetica delle equazioni di Maxwell in regime
stazionario, Eq. (22.5):
~ = 0
Φch (B)
I
~ = µ0 Iconc
d~
r·B
(22.18)
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 362
La seconda equazione va sotto il nome di legge di Ampere. Analogamente
alla legge di Gauss per i campi elettrostatici, essa consente di calcolare i
campi magnetici prodotti da correnti elettriche in condizioni di simmetria
particolari.
Per calcolare campi magnetici con l’ausilio della legge di Ampere occorre
anzitutto sfruttare le simmetrie del problema, per porre vincoli sulla
forma del campo. L’idea è di applicare trasformazioni geometriche (come
traslazioni, rotazioni, . . . ) che lasciano il sistema di correnti invariato.
Quindi, anche il campo magnetico non deve subire modifiche. Una
trasformazione particolare, utile trattando i campi magnetici, è l’inversione
spaziale, che cambia segno alle tre coordinate cartesiane. Mentre i campi
vettoriali ordinari subiscono la stessa trasformazione sulle tre componenti
cartesiane, il campo magnetico, che è uno pseudo-vettore, mantiene le tre
componenti invariate. Ciò è evidente se si considera la forza di Lorentz:
~
F~ = q~
v×B
~ cambiano segno. Quindi le
Con l’inversione spaziale, le componenti di F~ e v
~
componenti di B devono rimanere invariate, per mantenere la validità della
forza di Lorentz — che, come già detto, è anche una definizione del campo
magnetico.
Vediamo alcuni esempi di calcolo di campo magnetico.
22.5.1
Campo magnetico prodotto da un filo rettilineo
Consideriamo un filo rettilineo molto lungo, percorso da una corrente costante
I. Qui, per “molto lungo”, intendiamo che le distanze r da esso, in cui
andiamo a calcolare il campo magnetico, sono molto minori della lunghezza
del filo, cosicché esso può al limite apparire come infinito.
Utilizziamo coordinate cilindriche con l’asse z lungo il filo (Fig. 22.6(a)).
Il sistema è invariante per traslazioni lungo z e per rotazioni intorno a z,
quindi:
∂
∂
=
=0
∂z
∂φ
~ attraverso la superficie cilindrica Σ. Grazie
Consideriamo il flusso di B
~ come:
alle invarianze rispetto a z e φ possiamo scrivere la solenoidalità di B
~ =
ΦΣ (B)
Bz πr2
| {z }
base superiore
+
Br 2πrh
| {z }
superficie laterale
+ (−Bz πr2 )
| {z }
base inferiore
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 363
I
z
Σ
Γ3
h
r
φ r
x
Γ
y
Σ
Js
r
h
Γ2
r
Γ1
h
h
z
z
P
y
x
(b)
(a)
Figura 22.6:
Calcolo di campi magnetici usando la legge di Ampere e il
~
flusso di B: filo infinito (a sinistra) e solenoide infinito (a destra).
da cui deduciamo che:
Br = 0
Consideriamo un generico punto P , e fissiamo l’asse x in modo che passi
per esso, cosicché le sue coordinate cartesiane sono (xP , 0, 0). Una rotazione
di 180◦ intorno all’asse y, seguita da un’inversione spaziale, lascia invariato
il sistema: infatti, l’asse del filo resta immutato e il verso della corrente
cambia segno due volte, prima con la rotazione e poi con l’inversione. Anche
il punto P resta invariato, poiché la rotazione lo porta in (−xP , 0, 0) e
~ nel punto P deve essere
l’inversione lo riporta in (xP , 0, 0). Allora il campo B
invariato. D’altra parte, la componente Bz cambia segno per rotazione, ma
resta invariata per inversione. L’unica spiegazione è che:
Bz = 0
Quindi il campo magnetico ha la forma:
~ = Bφ (r)φ̂
B
Per calcolarne l’intensità usiamo la legge di Ampere applicato alla linea chiusa
Γ:
I
~ · d~s = 2πrBφ (r)
µ0 I = B
Γ
da cui deduciamo
~ = µ0 I φ̂
B
2πr
(22.19)
CAPITOLO 22. CAMPI ELETTROMAGNETICI
22.5.2
—
M.FANTI 364
Campo magnetico prodotto da un solenoide
rettilineo
Un solenoide è un avvolgimento di N spire percorse da una corrente I intorno
ad un supporto cilindrico.
Detta 2L la lunghezza del solenoide, possiamo caratterizzare il solenoide
N
, cosicché per una porzione di solenoide di
con la densità di spire n =
2L
lunghezza ∆` il numero di spire è
∆N = n ∆`
e la corrente totale circolante in esse è
∆I = I ∆N = n I ∆`
Riferendoci alla Fig. 22.6(b), ed usando coordinate cilindriche, con l’asse
z lungo l’asse del cilindro, il sistema è invariante per traslazioni e rotazioni
lungo l’asse, quindi:
∂
∂
=
=0
∂z
∂φ
~ attraverso la superficie chiusa Σ, che è nullo per la
Calcoliamo il flusso di B
solenoidalità. I flussi attraverso le due basi si cancellano, rimane:
~ = 2πrhBr
0 = ΦΣ (B)
⇒
Br = 0
Applicando la legge di Ampere alla curva Γ1 , a cui non è concatenata nessuna
corrente, troviamo:
I
~ · d~s = 2πrBφ ⇒ Bφ = 0
0=
B
Γ1
Quindi il campo magnetico ha la forma:
~ = Bz (r)ẑ
B
Applicando la legge di Ampere alla curva Γ2 , a cui non è concatenata
nessuna corrente, troviamo:
I
~ · d~s = h[Bz (r = 0) − Bz (r)]
0=
B
Γ2
⇒
Bz (r) = Bz (r = 0) (r all’interno del cilindro)
Quindi il campo magnetico all’interno di un solenoide infinito è uniforme e
diretto lungo l’asse del cilindro.
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 365
Invece, considerando la curva Γ3 , cui è concatenata una corrente Iconc =
nIh, troviamo:
I
~ · d~s = h[Bz (r = 0) − Bz (r)]
B
µ0 nIh =
Γ3
⇒
Bz (r = 0) − Bz (r) = µ0 nI
(r all’esterno del cilindro)
Quindi anche il campo magnetico all’esterno del cilindro infinito è uniforme
e diretto lungo l’asse del cilindro.
Riassumendo, abbiamo trovato che il campo magnetico ha un valore
(int)
(est)
uniforme Bz
all’interno del solenoide, e un valore uniforme Bz
all’esterno; la differenza fra i due valori è Bz(int) − Bz(est) = µ0 nI.
Ora qui dobbiamo fare una congettura, che non dimostriamo(1) : il campo
all’esterno del solenoide deve essere nullo. Per capirlo, proviamo ad assumere
(est)
che Bz
6= 0. Avremmo dunque un campo magnetico non nullo che riempie
un volume che si estende all’infinito. Questo sarebbe vero per qualunque
raggio del solenoide, al limite anche quando il solenoide diventa infinitamente
piccolo, e questa cosa appare abbastanza assurda.
In conclusione, il campo magnetico generato dal solenoide infinito è:
~ = µ0 nI
B
~ = 0
B
(all’interno del solenoide)
(all’esterno del solenoide)
(22.20)
Per concludere, ricordiamo che un solenoide infinito, ovviamente, non
esiste. Un solenoide reale produce un campo magnetico come quello
rappresentato in Fig. 22.7.
22.6
Esercizi su campi elettromagnetici
Esercizio 22.1. Un condensatore piano ha armature di superficie Σ = 1 cm2 a
distanza D = 1 mm. Al suo interno viene creato un campo elettrico E = 105 V/m.
Qual è la differenza di potenziale ∆Φ necessaria fra le armature? Quant’è la carica
elettrica Q depositata su ciascuna delle armature?
Risposta.
Assumiamo l’approssimazione di campo elettrico uniforme,
ragionevole poiché D è piccolo rispetto a Σ. In questo caso, ∆Φ = E · D =
1
Si potrebbe dimostrare in maniera matematica che Bz (r = 0) = µ0 nI, ma
appesantiremmo la trattazione in maniera eccessiva.
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 366
B
z
Figura 22.7:
−L
+L
z
Campo magnetico generato da un solenoide reale.
(105 V/m) · (10−3 m) = 100 V. Per trovare Q occorre determinare la capacità
Q
0 Σ
C =
: essa si ricava dalla geometria del condensatore, C =
=
∆Φ
d
−12
2
−1
−2
−4
2
(8.854 · 10
C N m )(10 m )
= 8.854 · 10−13 C2 N−1 m−1 . La carica
10−3 m
elettrica è quindi Q = ∆Φ · C = 8.854 · 10−11 C.
Osservazione sulle unità di misura. Abbiamo usato tutte le unità di misura
del S.I., quindo la carica deve venire in Coulomb. Verifichiamo se ciò è vero.
Abbiamo visto che C è misurato in C2 N−1 m−1 . Ora, ∆Φ si misura in Volt, cioè
in Joule divisi per Coulomb: V = J/C = NmC−1 . Vediamo quindi che il prodotto
C · ∆Φ si misura effettivamente in Coulomb.
Esercizio 22.2. Come si modifica la capacità del condensatore dell’esercizio
precedente, se fra le armature, anziché il vuoto, c’è un materiale dielettrico con
costante r = 3.4 (per es. il plexiglass)? Per avere sempre un campo elettrico
E = 105 V/m, come variano ∆Φ e Q?
Risposta.
In presenza di dielettrici omogenei, tutte le equazioni che
contengono 0 vanno modificate, sostituendo 0 → ≡ r 0 . Pertanto, in
r 0 Σ
particolare, la capacità diventa C =
= 3.4 · 8.854 · 10−13 (unità S.I.) =
D
3.010 · 10−12 (unità S.I.). La differenza di potenziale non cambia: è sempre
∆Φ = D · E = 100 V. Invece cambia la carica sulle armature: Q = C · ∆Φ =
3.010 · 10−10 C.
Osservazione: sappiamo che l’effetto del dielettrico è di polarizzarsi,
schermando parzialmente le cariche elettriche. Pertanto, come abbiamo appena
visto, per realizzare lo stesso campo elettrico, è necessario depositare una carica
elettrica maggiore sulle armature.
Esercizio 22.3. Si vuole costruire un selettore di velocità come quello dello
spettrometro di massa (Sezione 20.4), che selezioni particelle cariche di velocità
CAPITOLO 22. CAMPI ELETTROMAGNETICI
—
M.FANTI 367
v = 105 m/s. Il campo elettrico E è realizzato applicando una differenza di
potenziale ∆Φ = 5 V fra due armature distanti D = 2 mm. Quanto vale il
campo elettrico E? Quanto deve valere il campo magnetico B? Quest’ultimo viene
realizzato con un solenoide, lungo 5 cm, su cui sono avvolte 1000 spire. Quanta
corrente I deve circolare nelle spire?
∆Φ
Risposte. Il campo elettrico vale E =
= 2.5 · 103 V/m — e deve essere
D
orientato perpendicolare alla direzione di volo, come sappiamo. Il campo magnetico
E
= 0.025 T — orientato perpendicolare sia alla direzione di volo
deve valere B =
v
1000
che al campo elettrico. Il solenoide ha densità di spire n =
= 2 · 104 m−1 .
5 cm
B
0.025 T
Poiché B = µ0 nI, deve essere I =
=
=
−7
µ0 n
(4π · 10 (unità S.I.))(2 · 104 m−1 )
0.995 A.
Esercizio 22.4. In una regione di spazio è creato un campo magnetico uniforme
B, mediante un solenoide con densità di spire n = 104 m−1 in cui circola una
corrente I = 150 A. Calcolare B. Un protone in questo campo descrive una
traiettoria ad arco di cerchio, con raggio di curvatura ρ = 2.5 cm. Calcolare la
quantità di moto p e la velocità v del protone.
Risposte. Il campo magnetico vale B = µ0 nI = 1.885 T. La quantità di moto
del protone si calcola con la formula p = ρqB, essendo q = e = 1.602 · 10−19 C.
Quindi si ottiene p = 7.549 · 10−21 kg m s−1 . La massa del protone è mp =
p
1.673 · 10−27 kg, quindi la velocità è v =
= 4.51 · 106 m/s.
mp
Capitolo 23
Onde elettromagnetiche
23.1
Premessa: che cos’è un’onda?
23.1.1
Le onde progressive
Che cosa intendiamo per “onda progressiva”? In generale, qualunque
proprietà ψ dello spazio che, al passare del tempo, si propaga traslando
~ e mantenendo la stessa forma. Questa
nello spazio con una data velocità u
“proprietà”, ψ, può essere una qualunque grandezza fisica (una pressione, una
temperatura, . . . ). Noi qui siamo interessati ai campi elettrici e magnetici,
ma in questa sezione stiamo sul generale.
Dunque abbiamo una proprietà ψ definita in qualunque punto dello
spazio, che può evolvere nel tempo, quindi abbiamo un campo ψ(~
r ; t).
Immaginiamo di “fotografare” la sua configurazione all’istante t = 0,
ottenendo quindi una funzione della posizione:
Ψ0 (~
r ) ≡ ψ(~
r ; t = 0)
(vd Fig. 23.1). Poi all’istante t ne facciamo un’altra istantanea, ottenendo
una nuova configurazione
Ψt (~
r ) ≡ ψ(~
r ; t)
Per la definizione data, le forme Ψ0 (~
r ) e Ψt (~
r ) devono differire solo per una
traslazione, definita dal vettore-spostamento
~ ≡ u
~t
s
~ , essa si deve
cioè, traslando la forma Ψ0 (~
r ) nello spazio di uno spostamento s
sovrapporre esattamente alla forma Ψt (~
r ).
368
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
ψ
s=ut
Ψ0 (r)
r0
Figura 23.1:
diverso t.
M.FANTI 369
Ψt (r)
rt
r
Due “istantanee” di un’onda piana, prese a t = 0 e a un
Esprimiamo in termini matematici questa proprietà. Un generico punto
~ , quindi se a t = 0 si trova
che si muove insieme all’onda possiede velocità u
~0 , all’istante t si trova in r
~t = r
~0 + u
~ t. Perché l’onda mantenga la stessa
in r
forma, deve essere
~ t)
Ψ0 (~
r0 ) = Ψt (~
rt ) = Ψt (~
r0 + u
da cui deduciamo che Ψt può essere sempre espressa in termini di Ψ0 cosı̀:
~ t)
Ψt (~
r ) = Ψ0 (~
r−u
e quindi che in maniera del tutto generale possiamo esprimere ψ(~
r ; t) come:
~ t)
ψ(~
r ; t) = Ψ0 (~
r−u
23.1.2
(23.1)
Le onde piane
Ora scegliamo un sistema di assi cartesiani in modo che l’asse z sia orientato
~ : quindi u
~ = uẑ. Possiamo dunque scrivere l’Eq. (23.1)
come la velocità u
come:
ψ(x, y, z; t) = Ψ(x, y, z − ut)
(abbiamo omesso il pedice “0” alla Ψ, visto che d’ora in poi non ci serve più).
Se Ψ (e quindi ψ) non dipendono dalle coordinate x, y, l’onda appare
identica a sè stessa su tutti i piani ortogonali alla direzione di propagazione
ẑ. In tal caso possiamo scrivere
ψ(z; t) = Ψ(z − ut)
(23.2)
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 370
e diciamo che è un’onda piana.
Ora, Ψ è funzione di un solo argomento, z − ut, quindi possiamo indicare
con Ψ0 la sua derivata, rispetto al suo unico argomento, senza ambiguità.
Possiamo scrivere:
d(z − ut)
∂ψ
= Ψ0 ·
= −u Ψ0
∂t
dt
∂ψ
d(z − ut)
= Ψ0 ·
= Ψ0
∂z
dz
ovvero
∂ψ
∂ψ
= −u
(23.3)
∂t
∂z
Quindi, la velocità u di propagazione dell’onda è definita dalle derivate
parziali di ψ rispetto a t e a z.
Un’altra forma, del tutto equivalente all’Eq. (23.2), può essere scritta
cosı̀:
z
(23.4)
ψ(z; t) = ϕ t −
u
(basta definire ϕ(ξ) ≡ Ψ (−uξ) per qualunque valore dell’argomento ξ).
Si può dimostrare che le funzioni che hanno la forma dell’Eq. (23.2)
sono tutte e sole quelle che soddisfano la seguente equazione differenziale
alle derivate parziali:
2
∂ 2ψ
2∂ ψ
=
u
(23.5)
∂t2
∂z 2
Che la forma Eq. (23.2) soddisfi l’Eq. (23.5) si può provare per sostituzione
diretta. In effetti, la funzione Ψ ora dipende da un solo argomento, quindi
possiamo chiamare Ψ0 , Ψ00 le sue derivate prima e seconda, rispetto all’unico
argomento, senza alcuna ambiguità. Allora:
∂ψ
= Ψ0 (z − ut)
∂z
∂ 2ψ
= Ψ00 (z − ut)
∂z 2
;
;
∂ψ
= −uΨ0 (z − ut)
∂t
∂ 2ψ
= u2 Ψ00 (z − ut)
∂t2
e l’Eq. (23.5) è soddisfatta.
23.1.3
Le onde monocromatiche
Un particolare tipo di onda piana è l’onda monocromatica.
Essa è definita come un’onda dotata di una oscillazione armonica nel
tempo con una frequenza di oscillazione ν precisa. Oscillazione armonica nel
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 371
tempo significa che ψ(z; t) ≈ cos(ωt + φ), dove la frequenza angolare ω è
collegata al periodo di oscillazione T e alla frequenza di oscillazione ν dalle
relazioni:
2π
ω =
= 2π ν
(23.6)
T
Poiché la forma dell’onda piana è del tipo Ψ(z − ut), l’onda monocromatica
in particolare deve essere della forma
ψ ≈ cos [k(z − ut) + φ]
essendo k una quantità che ha dimensioni come l’inverso di una lunghezza
— acciocché k(z − ut) sia un numero privo di dimensioni e possa quindi
essere argomento di un coseno. Occorre inoltre che compaia il termine ωt,
quindi deve essere ω = ku. Quindi un’onda piana monocromatica ha la forma
generale:
ω (23.7)
ψ(z; t) = A cos(kz − ωt + φ)
k =
u
Il parametro k si chiama numero d’onda. Il parametro A si chiama ampiezza
dell’onda.
Dalla forma dell’Eq. (23.7) si nota che l’onda monocromatica è periodica
sia nel tempo che nello spazio. In effetti, una variazione di 2π nell’argomento
2π
2π
del coseno può essere realizzata sia con ∆t =
, sia con ∆z =
. Il primo
ω
k
caso è il periodo T , già definito. Il secondo caso definisce la lunghezza d’onda:
λ =
Ricordando che k =
2π
k
(23.8)
ν
u
ω
= 2π si ottiene λ = , ovvero:
u
u
ν
λ·ν = u
(23.9)
relazione fondamentale che lega frequenza ν, lunghezza d’onda λ, e velocità
di propagazione u di un’onda monocromatica.
La forma dell’onda in funzione della posizione z e la sua evoluzione nel
tempo sono raffigurate in Fig. 23.2.
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 372
λ
z
t
z
z
t+T/2
z
z
t+T
z
z
t+3T/2
z
z
t+2T
Figura 23.2: Onda monocromatica: forma spaziale “fotografata” in diversi
istanti temporali (curve blu su asse z orizzontale) ed evoluzione temporale
in un punto z preciso (curva rossa su asse t verticale). Sono evidenziate la
lunghezza d’onda λ (azzurro) e il periodo T (rosa).
23.1.4
Formalismo
complesso
monocromatiche (*)
delle
onde
Nella trattazione matematica delle onde monocromatiche, è spesso utile
descrivere la quantità ψ come se assumesse valori complessi. Ricordando
che
eiα = cos α + i sin α
l’Eq. (23.7) può essere modificata in
ψ(z; t) = A ei(kz−ωt)
k =
ω u
(23.10)
dove anche A è una quantità complessa: A = |A|eiφ . Siccome in Fisica
classica tutte le quantità sono espresse da numeri reali(1) , solo la parte reale
1
Invece, in meccanica quantistica, la “funzione d’onda associata ad una particella è
intrisecamente complessa.
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 373
di ψ alla fine sarà di rilevanza. Ricordando che Re e−α = cos α, otteniamo:
Re [ψ(z; t)] = Re A ei(kz−ωt) = |A| Re ei(kz−ωt+φ)
= |A| cos(kz − ωt + φ)
con il che si ripristina la forma originaria dell’Eq. (23.7).
La ragione di trattare ψ come un numero complesso sta nella notevole
semplificazione che la funzione esponenziale fornisce, rispetto alle funzioni
trigonometriche. Per esempio, le dipendenze temporale (ωt) e spaziale (kz)
possono essere fattorizzate dalla fase φ:
ψ(z; t) = |A| ei(kz−ωt+φ) = |A| eikz e−iωt eiφ
∂
∂
e
si riducono a semplici fattori moltiplicativi:
∂z ∂t
∂
∂
ψ = ikψ
;
ψ = −iωψ
∂z
∂t
e le derivate parziali
L’equazione delle onde, Eq. (23.5), con il formalismo complesso, prende
la semplice forma:
2
∂ 2ψ
2∂ ψ
= u
∂t2
∂z 2
2
−ω ψ = −u2 k 2 ψ
da cui la relazione k =
23.2
ω
è manifesta.
u
Equazioni
differenziale
di
Maxwell
in
forma
Riprendiamo le equazioni di Maxwell, Eq. (22.3):
I
I
Q(int)
~
~
~
~
~ ·B
~ =0
Φch (E) = dΣ · E =
;
Φch (B) = dΣ
0
I
~ = −Φconc
d~
r·E
~
∂B
∂t
!
I
;
"
~ = µ0 Iconc + 0 Φconc
d~
r·B
~
∂E
∂t
!#
Nel capitolo precedente, la scrittura in “forma integrale” (con circuitazioni
e flussi) si è dimostrata utile per calcolare campi elettrici e magnetici in
configurazioni altamente simmetriche.
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 374
Tuttavia, in altre situazioni è più maneggevole un’altra scrittura, che
contiene derivate invece che integrali. Qui riportiamo le equazioni di Maxwell
in forma differenziale, dimostrando l’equivalenza con la forma integrale
successivamente.
ρ
∂Ex ∂Ey ∂Ez
+
+
=
∂x
∂y
∂z
0
∂Ez ∂Ey
∂Bx
−
= −
∂y
∂z
∂t
∂Ex ∂Ez
∂By
−
= −
∂z
∂x
∂t
∂Bz
∂Ey ∂Ex
−
= −
∂x
∂y
∂t
∂Bx ∂By ∂Bz
+
+
=0
∂x
∂y
∂z
(23.11)
∂Bz ∂By
∂Ex
−
= µ0 Jx + 0 µ0
∂y
∂z
∂t
∂Bx ∂Bz
∂Ey
−
= µ0 Jy + 0 µ0
∂z
∂x
∂t
∂Ez
∂By ∂Bx
−
= µ0 Jz + 0 µ0
∂x
∂y
∂t
Qui ricordiamo che J~ è la densità di corrente.Inoltre è stata introdotta la
densità di carica elettrica in volume
ρ=
23.2.1
δQ
δV
(23.12)
Dimostrazioni (*)
Cominciamo con i flussi attraverso superfici chiuse. Scegliamo una superficie
chiusa costituita da un parallelepipedo di spigoli infinitesimi dx, dy, dz
paralleli agli assi cartesiani, come nella Fig. 23.3, a sinistra. Allora, il calcolo
~ può essere suddiviso sulle 6 facce del parallelepipedo, dove si tiene
di Φch (E)
conto che l’orientamento del versore normale alla superficie selezione una
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 375
x
^
x
dy
dx
dz
dy
dz
^
y dz
dy
dx dx
^
z
z
y
Figura 23.3: Figure di ausilio per scrivere le equazioni di Maxwell in forma
differenziale.
~
precisa componente cartesiana di E.
~ = −dy dz Ex (x, y, z) + dy dz Ex (x + dx, y, z)
Φch (E)
−dx dz Ey (x, y, z) + dx dz Ey (x, y + dy, z)
−dx dy Ez (x, y, z) + dx dy Ez (x, y, z + dz)
∂Ex
dx
=
dy dz
∂x
∂Ey
dy
+dx dz
∂y
∂Ez
+dx dy
dz
∂z
∂Ex ∂Ey ∂Ez
+
+
= (dx dy dz)
∂x
∂y
∂z
Notiamo che δV = dx dy dz è il volumetto racchiuso nel parallelepipedo.
Chiamiamo δQ(int) = ρ δV la carica elettrica totale in esso contenuta.
(int)
~ = δQ
Pertanto, l’equazione Φch (E)
prende la forma
0
∂Ex ∂Ey ∂Ez
ρ
δV
+
+
= δV
∂x
∂y
∂z
0
da cui si ricava la prima delle Eq. (23.11). Il ragionamento per ricavare la
terza è identico.
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 376
I
~ =
Ora passiamo alle circuitazioni. Partiamo dall’equazione
d~
r·E
!
~
∂B
−Φconc
, e scegliamo per la circuitazione una linea chiusa rettangolare
∂t
di lati dy, dz paralleli agli assi cartesiani y, z, come nel secondo schema della
Fig. 23.3. Con la scelta fatta, la superficie concatenata alla linea chiusa è
orientata come x̂. La circuitazione si calcola come:
I
~ = dy [Ey (x, y, z) − Ey (x, y, zd z)] + dz [−Ez (x, y, z) + Ez (x, y + dy, z)]
d~
r·E
∂Ez ∂Ey
−
= dy dz
∂y
∂z
Invece il flusso concatenato si calcola solo considerando la componente lungo
~
∂B
:
x di
∂t
!
~
∂B
∂Bx
Φconc
= dy dz
∂t
∂t
Quindi l’equazione diventa:
∂Ez ∂Ey
∂Bx
−
= −
∂y
∂z
∂t
che è la componente-x del secondo gruppo di equazioni in Eq. (23.11). Con
ragionamenti del tutto analoghi si ottengono anche le componenti lungo y e
z, scegliendo come circuitazioni le altre due della Fig. 23.3. In generale, la
linea di circuitazione deve essere scelta in modo che il versore della superficie
concatenata sia orientato come uno dei tre versori cartesiani.
!#
"
I
~
∂
E
~ = µ0 Iconc + 0 Φconc
si elabora in
Anche l’equazione
d~
r·B
∂t
modo analogo. C’è un elemento in più da considerare, però: Iconc . Questa è
la corrente che attraversa la superficie concatenata alla linea di circuitazione.
A seconda di come è orientata tale superficie, si seleziona una componente
della densità di corrente, J~. Per esempio, per una linea di circuitazione che
giace sul piano (y, z), come la prima circuitazione della Fig. 23.3, la superficie
concatenata è orientata lungo x̂, pertanto la corrente cocatenata attraverso
la superficie δΣ = dy dz deve essere δIconc = dy dz Jx .
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
23.3
M.FANTI 377
Equazioni di Maxwell nel vuoto
Riprendiamo le equazioni di Maxwell, Eq. (23.11), e scriviamole in assenza
di cariche e correnti elettriche: ρ = 0 e J~ = 0.
∂Ex ∂Ey ∂Ez
+
+
=0
∂x
∂y
∂z
∂Ez ∂Ey
∂Bx
−
= −
∂y
∂z
∂t
∂By
∂Ex ∂Ez
−
= −
∂z
∂x
∂t
∂Bz
∂Ey ∂Ex
−
= −
∂x
∂y
∂t
;
∂Bx ∂By ∂Bz
+
+
=0
∂x
∂y
∂z
;
∂Bz ∂By
∂Ex
−
= 0 µ0
∂y
∂z
∂t
(23.13)
∂Ey
∂Bx ∂Bz
−
= 0 µ0
∂z
∂x
∂t
∂Ez
∂By ∂Bx
−
= 0 µ0
∂x
∂y
∂t
Poiché le quantità 0 , µ0 compaiono solo moltiplicate fra loro, si suole
porre
1
c2 =
(23.14)
0 µ0
1
µ0
ricordando i valori numerici
= 9 · 109 Nm2 C−2 e
= 10−7 Ns2 C−2 , si
4π0
4π
1
16
2 −2
= 9 · 10 m s , quindi
ottiene
0 µ0
c = 3 · 108 m/s
(23.15)
Sı̀, è proprio lei, la velocità della luce! Vedremo nel seguito perché entra
proprio qui.
La trattazione generale di queste equazioni è complessa e richiede una
matematica avanzata.
Qui affronteremo solo alcuni casi particolari: mostriamo che queste
equazioni presentano soluzioni matematiche in cui i campi elettrico e
magnetico si possono propagare nello spazio in forma di onde piane e onde
sferiche, con una velocità di propagazione pari alla velocità della luce, c.
Prima di procedere, facciamo subito notare che, ovviamente, le
~ che B
~ siano uniformi nello
Eq. (23.13) ammettono soluzioni in cui sia E
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 378
spazio e costanti nel tempo. D’altronde queste soluzioni, per quanto
matematicamente valide, sono fisicamente assurde e prive di interesse: che
cosa potrebbe mai aver prodotto dei campi uniformi in uno spazio infinito,
che peraltro sarebbero sempre esistiti???
23.4
Onde elettromagnetiche piane
~ B
~
Consideriamo una situazione di simmetria nello spazio, per cui i campi E,
non dipendano dalle coordinate x, y, per cui
~ ≡ E(z,
~ t)
E
~ ≡ B(z,
~
B
t)
;
Mostreremo in questa sezione che le equazioni di Maxwell, Eq. (23.13),
ammettono soluzioni che hanno la forma di onde piane, che si propagano
in direzione z con velocità pari a c:
~ ≡ E(z
~ − ct)
E
;
~ ≡ B(z
~ − ct)
B
(23.16)
Inoltre i campi elettrico e magnetico sono ortogonali fra loro e anche alla
direzione di propagazione.
~ ⊥ B
~
E
;
~ ×B
~ ↑↑ ẑ
E
(23.17)
Infine le loro intensità sono tali che, in ogni istante t e in ogni luogo z,
~ − ct)| = c |B(z
~ − ct)|
|E(z
(23.18)
Tutte queste condizioni si possono scrivere in forma vettoriale, come:
2
2
~ ×B
~ = E ~c = E ẑ
E
c2
c
23.4.1
(23.19)
Dimostrazioni (*)
Iniziamo dalle prime due equazioni del sistema Eq. (23.13). Per esempio
∂Ex
∂Ey
∂Ez
consideriamo quella per il campo elettrico:
+
+
= 0 Poiché
∂x
∂y
∂z
stiamo supponendo che il campo non dipenda da x, y, le prime due derivate
∂Ez
= 0.
parziali devono essere nulle, quindi deve essere nulla anche la terza:
∂z
In altre parole, Ez è uniforme in x, y, z. Abbiamo già detto che questa
soluzione non rientra in questo studio, per cui possiamo scartarla e assumere
Ez = 0.
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 379
~ Concludiamo quindi
In maniera del tutto analoga si può ragionare per B.
che
Ez = 0
;
Bz = 0
Ora, il campo elettrico che consideriamo esiste solo nelle sue componenti
~ quindi
Ex , Ey . Orientiamo gli assi in modo che l’asse x sia diretto come E,
Ey = 0. Riscriviamo i due sistemi di 3 equazioni ciascuno, tenendo conto
∂
∂
=0,
= 0 , Ez = 0 , Bz =
di tutte le condizioni ottenute finora:
∂x
∂y
0 , Ey = 0:
∂Bx
∂By
1 ∂Ex
0 = −
−
= 2
∂t
∂z
c ∂t
;
∂Ex
∂By
∂Bx
= −
= 0
∂z
∂t
∂z
(abbiamo omesso le terze equazioni di ciascun sistema, che darebbero le
identità 0 = 0).
∂Bx
∂Bx
=0e
= 0 ci dicono che Bx non dipende nè da
Le due equazioni
∂t
∂z
t, nè da z, quindi è uniforme e costante: come tale non verrà più considerato.
Assumiamo quindi Bx = 0. Finora abbiamo concluso che
~ = Ex (z, t) x̂
E
;
~ = By (z, t) ŷ
B
~ B
~ sono sempre ortogonali fra loro.
cioè E,
Le alre due equazioni sono:
e:
1 ∂Ex
∂By
= − 2
∂z
c ∂t
(23.20)
∂Ex
∂By
= −
∂z
∂t
(23.21)
Ora deriviamo l’Eq. (23.21) rispetto al tempo, e l’Eq. (23.20) rispetto a
z:
∂ ∂Ex
∂ ∂By
= −
∂t ∂z
∂t ∂t
∂ ∂By
1 ∂ ∂Ex
= − 2
∂z ∂z
c ∂z ∂t
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 380
Per confronto, si ottiene
∂ 2 By
1 ∂ 2 By
=
(23.22)
∂z 2
c2 ∂t2
Derivando invece l’Eq. (23.20) rispetto al tempo, e l’Eq. (23.21) rispetto a z,
e confrontandole, si otterrebbe invece:
∂ 2 Ex
1 ∂ 2 Ex
=
∂z 2
c2 ∂t2
Le
(23.23)
Eq.
(23.22)
e
Eq.
(23.23)
sono
1 ∂2
∂2
della stessa forma 2 ψ(z, t) = 2 2 ψ(z, t), che abbiamo conosciuto come
∂z
c ∂t
equazione delle onde, Eq. (23.5) nella Sezione 23.1.2. Pertanto ammettono
soluzioni della forma:
Ex (z, t) = f (z − ct)
By (z, t) = g(z − ct)
dunque sia Ex che By si propagano lungo la direzione z come onde progressive,
con velocità pari a c. Ma c’è di più: applicando per esempio l’Eq. (23.21),
e indicando con f 0 , g 0 le derivate delle funzioni f, g rispetto al loro unico
∂By
∂Ex
= f 0 (z − ct) e
= −c g 0 (z − ct), da cui si
argomento, abbiamo
∂z
∂t
deduce che
f 0 (z − ct) = c g 0 (z − ct)
ovvero f (· · · ) = c g(· · · ) + costante. Ricordiamo che nello studio di onde le
costanti non sono di interesse, quindi assumiamo f (· · · ) = c g(· · · ), il che
significa
Ex (z − ct) = c By (z − ct)
Con questo, tutte le asserzioni Eq. (23.16), Eq. (23.17), Eq. (23.18) sono
dimostrate.
23.5
Onde monocromatiche
La forma matematica di un’onda piana monocromatica, di frequenza ν, che
si propaga lungo ẑ, è:
~ = Emax cos (ωt − kz + φ) x̂
ω = 2π ν
E
(23.24)
2π
ω
Emax
~
k
=
=
cos (ωt − kz + φ) ŷ
B =
λ
c
c
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
Figura 23.4:
M.FANTI 381
Onda elettromagnetica piana monocromatica.
La situazione è illustrata in Fig. 23.4.
23.5.1
Lo spettro elettromagnetico
Le onde elettromagnetiche sono prodotte da molti meccanismi fisici, che
causano oscillazioni di cariche elettriche. A seconda di tali oscillazioni, la
frequenza ν emessa può assumere un ampio spettro di valori, come indicato
in Fig. 23.5.
La luce visibile dall’occhio umano occupa una banda piuttosto limitata:
la lunghezza d’onda λ va da circa 380 nm (luce violetta) a circa 770 nm (luce
rossa). Le frequenze corrispondenti si ottengono con la relazione
ν =
c
λ
(23.25)
e sono da circa 790 · 1012 Hz (violetto) a circa 400 · 1012 Hz (rosso).
Frequenze più basse (cioè onde più lunghe) corrispondono alla radiazione
infrarossa, alle microonde e alle onde radio. Viceversa, frequenze più alte
(cioè onde più corte) corrispondono alla radiazione ultravioletta, X e γ
(gamma).
23.6
Energia di un’onda elettromagnetica
~ B,
~ possiede un’energia e
Un’onda elettromagnetica, formata dai campi E,
trasporta un’energia. Quantitativamente, la densità di energia in volume è
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
Figura 23.5:
M.FANTI 382
Lo spettro elettromagnetico. Ricordiamo che λ =
c
.
ν
esprimibile come:
0 2
E + (cB)2
(23.26)
2
e il trasporto di energia è esprimibile attraverso il vettore di Poynting:
~ = 0 c2 E
~ ×B
~
S
(23.27)
uem =
Per un’onda piana, il vettore di Poynting è parallelo e concorde alla direzione
di propagazione: basti confrontare la sua definizione, Eq. (23.27), con
2
~ ×B
~ = E ẑ.
l’Eq. (23.19): E
c
Data una superficie Σ piana, orientata con un versore n̂ ad essa
ortogonale, la potenza dell’onda elettromagnetica che la attraversa è
Wrad =
dUrad
~ · n̂ Σ = |S|
~ Σ cos θ
= S
dt
(23.28)
~ sia uniforme su tutta la superficie Σ). Il suffisso rad sta per
(assumendo che S
“radiazione” — riferito alla radiazione elettromagnetica. Nell’ultima forma,
~ e il versore n̂ normale alla
θ è l’angolo formato fra il vettore di Poynting S
superficie, come in Fig. 23.6. La potenza Wrad è massima se θ = 0, vale a
~ cioè se la superficie Σ è ortogonale a S
~ e alla direzione di
dire se n̂ ↑↑ S,
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 383
^
z
^
n θ=0
Σ
^
z
θ
^
n
Σ
^
z
Σ
^
n
θ=π/2
Figura 23.6:
Orientamento di una superficie Σ rispetto alla direzione di
propagazione e al vettore di Poynting.
incidenza dell’onda. Viceversa, se la superficie Σ è parallela alla direzione di
propagazione, θ = π/2 e Wrad = 0.
~ non è uniforme, o se la superficie Σ non è piana, l’Eq. (23.28) si può
Se S
generalizzare come:
Z
dU
~
~
dΣ n̂ · S
(23.29)
= ΦΣ (S) =
dt
Σ
23.6.1
Intensità di radiazione
Le espressioni finora viste, Eq. (23.26) e Eq. (23.27), sono valide per
qualunque campo elettromagnetico: ora specializziamole per le onde
elettromagnetiche.
Sappiamo che E = cB, pertanto la densità di energa e il modulo del
vettore di Poynting diventano:
uem = 0 E 2
;
~ = 0 c E 2
|S|
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 384
Questi sono valori istantanei, che cambiano nel tempo a seconda delle
variazioni del campo elettrico E. Abbiamo osservato che in generale E oscilla
con frequenze che vanno da ≈ 103 Hz (onde radio lunghe), a ≈ 1024 Hz (raggi
γ) — vd Fig. 23.5. Poiché E = Emax cos(ωt + . . . ), i valori istantanei di
~ oscillano molto rapidamente nel tempo, e non hanno nessun uso
uem e |S|
D E
~ . Ora,
pratico. Per questo si considerano i loro valori medi, huem i e |S|
1
2
E 2 = Emax
cos2 (ωt − kz + φ), e ricordando che cos2 = , abbiamo che
2
2
2 Emax
E =
, pertanto:
2
E2
huem i = 0 max
(23.30)
2
Inoltre, si definisce l’intensità di radiazione I come:
D E
E2
~
I = |S|
= 0 c max
(23.31)
2
23.6.2
Dimostrazioni (*)
Consideriamo un’onda elettromagnetica piana, che si propaga nello spazio
in direzione ẑ, con il campo elettrico diretto lungo x̂ e il campo magnetico
diretto lungo ŷ — quindi Ey = Ez = 0 e Bx = Bz = 0.
Consideriamo un volumetto parallelepipedo δV di lati δx, δy, δz in cui
~ 1, . . . , v
~ N . Su
si trovino delle cariche elettriche q1 , . . . , qN dotate di velocità v
ciascuna di queste agisce una forza elettromagnetica
~ +v
~
~k × B
F~k = qk E
che quindi cede alla carica una potenza
~ ·v
~ k = qk E
~k
Wk = F~k · v
(ricordiamo che la forza magnetica non compie mai lavoro). La potenza
ceduta dall’onda elettromagnetica sul volumetto δV è
!
N
N
X
X
~
~k · E
δW =
Wk =
qk v
k=1
k=1
Chiamiamo n la densità in volume dei portatori di carica, cosicchè
N
X
~ k = N hq~
N = nδV . Ora ovviamente
qk v
v i = nδV hq~
v i. Possiamo
k=1
ricorrere alla densità di corrente, J~ = n hq~
v i, e scrivere:
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
~
δW = δV J~ · E
M.FANTI 385
(23.32)
~ = E x̂, quindi solo la componente Jx di J~ ci interessa.
Nel nostro caso, E
Per determinarla, usiamo l’equazione di Maxwell
∂Bz ∂By
∂Bx
−
= µ0 Jx + 0 µ0
∂y
∂z
∂t
Ricordando che Bz = 0 e Bx = 0, abbiamo:
Jx = −0
∂Ex
1 ∂By
−
∂t
µ0 ∂z
e quindi l’Eq. (23.32) diventa:
1 ∂By
∂Ex
δW = −δV 0
Ex +
Ex
∂t
µ0 ∂z
1 ∂(Ex By )
1
0 ∂(Ex2 )
∂Ex
+
− By
= −δV
2 ∂t
µ0
∂z
µ0
∂z
∂By
∂Ex
=−
, quindi:
∂z
∂t
0 ∂(Ex2 )
1 ∂(Ex By )
1
∂By
δW = −δV
+
+ By
2 ∂t
µ0
∂z
µ0
∂t
2 2
By
∂ 0 Ex
1 ∂(Ex By )
= −δV
+
+
∂t
2
2µ0
µ0
∂z
(23.33)
Ora dall’Eq. (23.21) sappiamo che
(23.34)
1
= c2 0 , e ricordando che E ≡ Ex e B ≡ By , riconosciamo
µ0
0 2
=
E + (cB)2 ≡ u, che coincide con la quantità in
2
Ora ponendo
By2
0 Ex2
+
2
2µ0
Eq. (23.26).
1 ∂(Ex By )
. Osserviamo che, essendo
µ0
∂z
~ = Ex x̂ e B
~ = By ŷ, otteniamo E
~ ×B
~ = Ex By (x̂× ŷ) = Ex By ẑ. Anche qui
E
~ = 1 EB ẑ.
riconosciamo il vettore di Poynting introdotto nell’Eq. (23.27): S
µ0
Resta da elaborare il termine
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 386
Quindi
δV ·
1 ∂(Ex By )
∂Sz
= δxδyδz
µ0
∂z
∂z
= δxδy (Sz (z + dz) − Sz (z))
~
= Φch (S)
~ attraverso la superficie chiusa che
L’ultimo passaggio esprime il flusso di S
~ k ẑ, tale
delimita il parallelepipedo di volume δV . Poiché per costruzione S
flusso ha contributi solo dalle superfici perpendicolari a ẑ, che sono appunto
quelle di lati δx, δy.
In conclusione, l’Eq. (23.34) può essere riscritta come:
δW + δV
i
∂ h 0
~ = 0
E 2 + (cB)2
+ Φch (S)
∂t 2
(23.35)
che può essere letta come
∂
∂
(energia meccanica) +
(energia elettromagnetica)
∂t
∂t
= −(flusso di energia elettromagnetica uscente per unità di tempo)
23.7
Onde elettromagnetiche sferiche
L’onda piana è un caso abbastanza ideale: in pratica non può esistere un’onda
infinitamente larga nelle direzioni x, y, proveniente da z ≈ −∞ e che viaggia
fino a z ≈ +∞.
Un altro caso, fisicamente più interessante, è quello di onda sferica,
formata da una perturbazione elettromagnetica che si propaga da una zona
centrale puntiforme verso tutte le direzioni. In questo caso, i risultati sono
abbastanza simili a quelli trovati per le onde piane: la propagazione è in
~ B
~ sono ortogonali fra loro e anche alla direzione
direzione radiale, i campi E,
~
|E|
= c. La differenza è che in questo
di propagazione, e stanno nel rapporto
~
|B|
1
caso si attenuano con la distanza, con un andamento ∝ . In formule:
r
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 387
~ = n̂E f (r − ct)
E
r
f
(r
−
ct)
~ = n̂B
B
cr
n̂E × n̂B = r̂
(23.36)
1
è consistente con il trasporto di energia
r
~ × B.
~
~ = c2 0 E
elettromagnetica descritto dal vettore di Poynting, S
1
~ ∝
~ attraverso una
Ovviamente si trova che |S|
. Se calcoliamo Φ(S)
r2
superficie sferica di raggio r, otteniamo
Si noti che l’andamento ∝
~ ≈ 4πr2 |S|
~
Φ(S)
che è indipendente da r.
23.7.1
Onde sferiche prodotte da una carica oscillante
Qual è la sorgente di un’onda elettromagnetica sferica?
Abbiamo visto che cariche elettriche in moto lento e poco accelerato
producono campi elettromagnetici che si attenuano con la distanza come
1
. Qui abbiamo appena detto che le onde elettromagnetiche si attenuano
r2
1
come . Che cosa c’è di diverso?
r
La differenza è che le onde sferiche sono prodotte da cariche elettriche in
moto accelerato: tipicamente da cariche elettriche oscillanti.
Una carica elettrica q, posta nell’origine, che si muove di moto oscillatorio
armonico lungo l’asse z, modifica la sua posizione come
zq (t) = zmax cos(ωt)
e quindi è soggetta ad una velocità vq e ad una accelerazione aq , dirette
entrambe nella direzione z, date da:
d
[zq (t)] = −zmax ω sin(ωt)
dt
d2
aq (t) =
[zq (t)] = −zmax ω 2 cos(ωt)
dt2
vq (t) =
È possibile calcolare(2) che questo sistema produce un campo elettrico e un
campo magnetico che, in coordinate sferiche, si possono scrivere cosı̀:
2
. . . ma qui non sarà dimostrato, perché i calcoli sono decisamente pesanti!
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 388
Figura 23.7: Onda elettromagnetica sferica prodotta da una carica elettrica
~ B
~ (rispettivamente arancione, azzurro); a
oscillante: a sinistra, vettori E,
destra, linee di campo.
q
~ r ; t) =
E(~
4π0 c2
"
q
4π0 c3
"
~ r ; t) =
B(~
1
aq sin θ
r (1 − βq cos θ)3
1
aq sin θ
r (1 − βq cos θ)3
vq βq ≡
c
#
θ̂
#rit
φ̂
(23.37)
rit
dove il suffisso “rit” significa “ritardato”: la velocità vq = βq c e
l’accelerazione aq della carica q vanno considerate non all’istante t a cui si
calcola il campo, ma ad un istante precedente
trit = t −
r
c
(23.38)
Il significato fisico di questo particolare è notevole: gli effetti elettromagnetici
della carica q non si propagano istantaneamente, ma in un tempo finito. Per
~ che dista r = |~
raggiungere una posizione r
r | da q impiegano un tempo
r
∆t = . Quindi gli effetti elettromagnetici viaggiano nello spazio con la
c
velocità della luce, c = 3 · 108 m/s.
La forma dell’onda sferica è mostrata in Fig. 23.7. L’intensità dei campi
è
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 389
• proporzionale all’accelerazione aq , dunque al quadrato della frequenza
angolare:
~ , |B|
~ ∝ ω2
|E|
• inversamente proporzionale alla distanza r:
~ , |B|
~ ∝
|E|
1
r
• massima all’“equatore” (cioè in direzioni ortogonali all’asse di
oscillazione ẑ della carica) e si attenua sempre più fino ad annullarsi ai
“poli” (sull’asse ẑ), secondo una legge
~ , |B|
~ ∝ sin θ
|E|
• modulata con frequenza angolare ω, pari a quella con cui oscilla la
r
carica q; a causa del “ritardo” , i campi a distanza r devono avere un
c
andamento
i
h ~ , |B|
~ ∝ cos ω t − r
|E|
c
1
che
(1 − βq cos θ)3
compare nelle Eq. (23.37). Per vq c (cioè moto molto più lento della
velocità della luce), βq 1 e il termine non dà alcun effetto. Viceversa, per
velocità paragonabili a quella della luce, la correzione scompare all’equatore
(cos θ = 0) mentre si massimizza in effetto ai poli (cos θ = ±1), dove diventa
1
1
in direzione +ẑ e
in direzione −ẑ. Per esempio, se la
3
(1 − βq )
(1 + βq )3
carica si muove verso +ẑ, βq > 0 e la correzione è > 1 in direzione +ẑ e < 1
in direzione −ẑ. In generale, l’intensità dei campi cresce nella direzione di
moto della carica, cala nella direzione opposta.
Un commento a parte merita il termine correttivo
23.8
Onde elettromagnetiche nella materia
Abbiamo visto nella Sezione 22.4.4 che nei materiali dielettrici, in presenza
~ le molecole e/o gli atomi subiscono una
di un campo elettrico applicato E,
polarizzazione, che tende a schermare in parte l’effetto del campo applicato.
Per descrivere in maniera macroscopica questo effetto si deve rimpiazzare la
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 390
costante 0 con un altro valore, > 0 . In questo modo la legge di Gauss
(int)
~ =Q
diventava Φch (E)
.
Per le onde elettromagnetiche si procede esattamente nello stesso modo.
Conviene introdurre la costante dielettrica relativa
r =
(23.39)
0
e l’indice di rifrazione:
n =
√
r
(23.40)
Essendo sempre > 0 , deve essere n > 1 sempre.
Partendo dalle Eq. (23.13), e sostituendo
n 2
1
≡
µ
−→
µ
=
µ
=
0 0
0
0 0 r
c2
c
si ottiene:
∂Ex ∂Ey ∂Ez
+
+
=0
∂x
∂y
∂z
∂Ez ∂Ey
∂Bx
−
=
−
∂y
∂z
∂t
∂By
∂Ex ∂Ez
−
= −
∂z
∂x
∂t
∂Ey ∂Ex
∂Bz
−
= −
∂x
∂y
∂t
;
∂Bx ∂By ∂Bz
+
+
=0
∂x
∂y
∂z
;
n 2 ∂E
∂Bz ∂By
x
−
=
∂y
∂z
c
∂t
(23.41)
2
∂Bx ∂Bz
n ∂Ey
−
=
∂z
∂x
c
∂t
n 2 ∂E
∂By ∂Bx
z
−
=
∂x
∂y
c
∂t
Queste equazioni sono formalmente identiche alle Eq. (23.13) valide nel
vuoto. Quindi anche le soluzioni devono essere identiche: esistono sempre
le onde, però la loro velocità di propagazione non è la velocità della luce c,
bensı̀:
c
(23.42)
u =
n
In generale u < c, poiché n > 1. Anche la relazione fra λ e ν si modifica:
c
nel vuoto
ν
λ =
(23.43)
c
nel dielettrico
nν
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 391
A parità di frequenza, le onde sono più corte nel dielettrico che nel vuoto, e
più è alto l’indice di rifrazione, più sono corte le onde.
L’indice di rifrazione dipende dal materiale dielettrico. In tabella sono
raccolti gli indici di rifrazione per alcuni materiali, misurati per una lunghezza
d’onda λ = 589 nm (luce gialla). I gas sono a P = 1 Atm, T = 0◦ C. I liquidi
sono a T = 20◦ C.
materiale
Aria
Idrogeno
Elio
Ossigeno
CO2
Acqua
Etere
Alcol etilico
Olio di oliva
Olio di cedro
23.9
n
1.000293
1.000132
1.000036
1.000272
1.00045
1.333
1.352
1.36
1.47
1.515
materiale
Ghiaccio
Vetro comune
Plexiglass
Vetro Crown
NaCl
Quarzo
Vetro Flint
Zaffiro
Diamante
n
1.309
1.46
1.49
1.517
1.53
1.544
1.627
1.76
2.419
Assorbimento, emissione, dispersione
La costante dielettrica dipende anche da come il campo varia nel tempo.
Per campi elettrici statici le molecole del dielettrico hanno il tempo di ruotare
e polarizzarsi. Per esempio, le molecole d’acqua H2 O possiedono un momento
di dipolo elettrico intrinseco: in presenza di campi elettrici statici, le molecole
si orientano e l’acqua acquista una polarizzazione netta notevole, tale per cui
~ = E
~ 0 cos(ωt) la
' 80. Ma se consideriamo campi alternati del tipo E
0
polarizzazione del dielettrico è in generale minore. Il tempo impiegato dai
dipoli molecolari intrinseci per ruotare e allinearsi è troppo lungo rispetto
al periodo di oscillazione del campo elettrico, per cui l’unico effetto di
polarizzazione è quello indotto sulle nubi elettroniche degli atomi e/o delle
molecole. Prendendo di nuovo ad esempio l’acqua, per campi alternati si
trova
' 1.7: decisamente inferiore rispetto al caso statico!
0
Inoltre, la polarizzabilità dipende dalla frequenza angolare ω del campo
elettrico. Per capirlo, basti pensare che essa dipende da una costante elastica
efficace k (vd Sezione 22.4.3), e quindi la nube elettronica ha delle frequenze
di oscillazione proprie ω1 , ω2 , . . . Se la frequenza esterna ω è prossima ad una
delle frequenze proprie ωk , per il fenomeno della risonanza (Sezione 17.10.3)
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
Figura 23.8:
sostanza.
M.FANTI 392
Righe spettrali di assorbimento e di emissione di una
la polarizzabilità può essere nettamente più elevata che per frequenze esterne
lontane da quelle proprie. Conviene quindi distinguere questi due casi.
23.9.1
Assorbimento ed emissione
Quando il campo esterno ha una frequenza vicina a una delle frequenze
intrinseche delle nubi elettroniche, l’oscillazione di queste ultime viene
eccitata per il fenomeno della risonanza. Di conseguenza molta radiazione
elettromagnetica viene assorbita, per queste frequenze specifiche. Viceversa,
quando viene meno la radiazione esterna, le nubi elettroniche, eccitate
su certe frequenze, emettono radiazione elettromagnetica che è dotata di
frequenza pari a quella delle cariche elettriche oscillanti che la producono.
Quindi ogni materiale è dotato di uno spettro di frequenze per cui si può
avere assorbimento e/o emissione di radiazione elettromagnetica.
In Fig. 23.8 viene schematizzato questo duplice fenomeno. Una sorgente
di luce bianca produce una radiazione che contiene tutte le frequenze. Il
passaggio della radiazione attraverso una sostanza eccita le nubi elettroniche
alle loro frequenze caratteristiche. Il risultato è che, se si guarda la luce in
direzione della sorgente, prevale l’assorbimento, visibile come delle “ombre”
per le frequenze caratteristiche. Se invece si guarda la luce ad un angolo
diverso, prevale l’emissione alle frequenze caratteristiche. Le frequenze di
assorbimento e di emissione sono però le stesse.
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
Figura 23.9:
M.FANTI 393
Righe spettrali di emissione dei diversi elementi chimici.
Potendo analizzare lo spettro di assorbimento o di emissione di un
materiale, è possibile avere informazioni molto precise sulla sua composizione
chimica. A scopo di esempio, in Fig. 23.9 sono illustrate le righe spettrali di
emissione degli elementi chimici.
23.9.2
Dispersione cromatica
Per ω lontano dalle frequenze angolari proprie ωk , si osserva in generale una
dipendenza della polarizzabilità, per
r cui ≡ (ω), oppure, lavorando con le
frequenze, ≡ (ν). Essendo n =
, anche l’indice di rifrazione è funzione
0
della frequenza — oppure della lunghezza d’onda:
n ≡ n(ν)
oppure
n ≡ n(λ)
(23.44)
La velocità di propagazione dell’onda elettromagnetica quindi dipende dalla
sua frequenza, oppure dalla lunghezza d’onda. Una legge empirica fornisce
una parametrizzazione ragionevolmente valida:
B
C
(23.45)
n(λ) = A + 2 + 4
λ
λ
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 394
Figura 23.10:
Variazione dell’indice di rifrazione n in funzione della
lunghezza d’onda λ, per diversi vetri. La zona colorata indica le lunghezze
d’onda della luce visibile.
c
Questa formula è valida per frequenze ν =
lontane dalle frequenze di
nλ
oscillazione proprie delle nubi elettroniche. In tali condizioni l’andamento è
descritto da una delle seguenti proprietà (tutte equivalenti fra loro):
• l’indice di rifrazione decresce all’aumentare della lunghezza d’onda;
• l’indice di rifrazione aumenta con la frequenza;
• la velocità dell’onda decresce all’aumentare della frequenza.
I valori di A, B, C dipendono dal materiale dielettrico, e possono essere
ricavati misurando n ad alcune lunghezze d’onda precise. La Fig. 23.10
mostra l’indice di rifrazione a diverse lunghezze d’onda, per diversi vetri.
In tabella mostriamo come varia con la lunghezza d’onda l’indice di
rifrazione dell’acqua e di due tipi di vetro (usati tipicamente per costruire
dispositivi fotografici).
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
materiale
Acqua
Vetro Crown
Vetro Flint
23.10
n
luce azzurra luce gialla
λ = 486 nm λ = 589 nm
1.337
1.333
1.524
1.517
1.639
1.627
Onde
conduttori
M.FANTI 395
luce rossa
λ = 656 nm
1.331
1.515
1.622
elettromagnetiche
nei
Nei conduttori, la presenza di forze elettromagnetiche produce densità di
corrente J~ (Eq. (21.4))
~
J~ = σ E
~
Partiamo di nuovo dalle Eq. (23.11) ponendo ρ = 0 e J~ = σ E:
∂Ex ∂Ey ∂Ez
+
+
=0
∂x
∂y
∂z
∂Ez ∂Ey
∂Bx
−
=
−
∂y
∂z
∂t
∂Ex ∂Ez
∂By
−
= −
∂z
∂x
∂t
∂Ey ∂Ex
∂Bz
−
= −
∂x
∂y
∂t
;
∂Bx ∂By ∂Bz
+
+
=0
∂x
∂y
∂z
;
∂Bz ∂By
∂Ex
−
= µ0 σEx + 0
∂y
∂z
∂t
(23.46)
∂B
∂Ey
∂Bz
x
−
= µ0 σEy + 0
∂z
∂x
∂t
∂B
∂B
∂E
y
x
z
−
= µ0 σEz + 0
∂x
∂y
∂t
~ nelle Eq. (23.46) altera profondamente la propagazione
La presenza di σ E
delle onde elettromagnetiche.
Prima di entrare nei dettagli, possiamo già notare che la presenza di una
densità di corrente provoca nel conduttore una dissipazione di potenza per
unità di volume, data dall’effetto Joule, Eq. (21.13):
J2
σ
Possiamo
figurarci
qualitativamente
che
cosa avviene: l’onda elettromagnetica si propaga in direzione z, portando
w = σ E2 =
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 396
con sè una quantità di potenza per unità di area data dal vettore di Poynting
(cfr Eq. (23.27)), quindi proporzionale a E 2 . Parte di questa potenza viene
dissipata per effetto Joule, in misura proporzionale a σE 2 . Quindi la frazione
∂E 2
∝ −E 2 ; per
di potenza dissipata è proporzionale alla potenza ricevuta:
∂z
questo E dovrebbe attenuarsi in maniera esponenziale con z: E ∝ e−z/δ , con
δ da determinare.
Qui consideriamo onde piane di frequenza angolare ω che si propagano in
“conduttori buoni”, cioè tali per cui la conducibilità σ è abbastanza elevata
da considerare σ 0 ω. La propagazione dei campi risulta essere del tipo:
r
σω
−
r
z
1 σω
2c2 0
z e
Ex = E0 cos ωt −
c 20
r
(23.47)
σω
−
r
z
1 σω
π
2c2 0
By = B0 cos ωt −
z−
e
c 20
4
Prima di dimostrare questi risultati, vediamone il significato.
• L’ampiezza dell’onda non è uniforme, ma si attenua con la penetrazione
z nel conduttore, in maniera esponenziale, secondo una legge e−z/δ ,
essendo
r
2c2 0
(23.48)
δ =
σω
La quantità δ si chiama “profondità della pelle” (in inglese, “skin
depth”), come se il conduttore avesse una “pelle” di spessore
caratteristico δ che può essere penetrata dalla radiazione. Tale
profondità diventa sempre più piccola al crescere della frequenza
angolare ω.
• Il numero d’onda k vale
1
k =
c
r
σω
20
quindi la velocità di propagazione dell’onda non è più c, bensı̀
r
ω
20 ω
u= =c
k
σ
(23.49)
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 397
La “profondità di pelle” ha conseguenze importanti sul piano tecnologico
e/o applicativo. Una di queste è che il passaggio nei conduttori di correnti
elettriche ad alta frequenza rimane confinato nella zona di conduttore vicina
alla superficie, limitando di fatto la sezione utile del conduttore, con il
conseguente aumento della sua resistenza. Proviamo a fare un esempio:
consideriamo un cavo elettrico di diametro D e lunghezza `. La sua sezione
π
trasversa è Σ0 = D2 , pertanto la sua resistenza è (vd Eq. (21.11))
4
R0 =
4` 1
` 1
=
Σ0 σ
πD2 σ
Questa equazione però è valida solo in corrente continua, oppure per ω ' 0.
Quando ω diventa grande, possiamo avere δ D e quindi la sezione efficace
che conduce diventa Σω ' πDδ, e la resistenza del cavo diventa:
` 1
` 1
=
Σω σ
πDδ σ
r
`
ω
=
2
πD 2c 0 σ
Rω =
Esempio: corrente alternata nel rame
Il rame ha una conducibilità σ = 6 · 107 (unità S.I.). Quanto vale la profondità
di pelle per le tipiche correnti alternate, ν1 = 50 Hz? E per un segnale a più alta
frequenza, tipo onde radio in modulazione di frequenza, ν2 = 100 MHz?
Risposta.
Anzitutto verifichiamo se siamo nelle condizioni di “buon
conduttore”. Abbiamo ω1 = 2πν1 = 314.16 rad/s, 0 ' 8.85 · 10−12 unità
S.I., quindi 0 ω1 ' 2.8 · 10−9 unità S.I.: decisamente non ci sono problemi
ad assumere σ 0 ω1 ! Per le alte frequenze abbiamo ν2 = 108 Hz, dunque
ω2 = 6.2932 · 108 rad/s, quindi 0 ω2 ' 5.6 · 10−3 unità S.I.: anche qui non c’è
problema!
s
2c2 0
' 9 · 10−3 m: circa
σω1
9 mm. Per impianti elettrici domestici, in cui i cavi hanno diametri di pochi
millimetri, non ci sono effetti pratici, ma per gli elettrodotti, che hanno cavi con
sezioni di svariati centimetri, ovviamente solo la parte esterna conduce.
Ora analizziamo i caso ν2 = 100 MHz: si ottiene δ2 ' 6.5µm. Qui decisamente
l’effetto è più importante.
Usiamo l’Eq. (23.48). A 50 Hz abbiamo δ1 =
Un’altra conseguenza è che la radiazione elettromagnetica non può
penetrare in profondità in un conduttore. Un conduttore costituisce un
ottimo schermo ai campi elettromagnetici: è la cosiddetta gabbia di Faraday.
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 398
Esempio: propagazione nel rame
Il rame ha una conducibilità σ = 6 · 107 (unità S.I.). Fino a quali frequenze
può essere considerato “buon conduttore”? (Usare come criterio σ > 10 ω0 ). Le
frequenze tipiche della luce visibile (da 400 · 1012 a 790 · 1012 Hz) soddisfano questo
criterio? Calcolare la “profondità di pelle” per la massima frequenza angolare
ottenuta e, se possibile, anche per le frequenze estreme della luce visibile.
σ
Risposta.
La massima frequenza angolare è ωmax = 0.1
=
0
6 · 107
(unità S.I.) ' 7 · 1017 rad/s, pari a una frequenza massima
0.1
8.85 · 10−12
ωmax
νmax =
' 1017 Hz. Sono frequenze ben più alte della luce visibile, siamo già
2π
nei raggi X (vd Fig. 23.5). Calcoliamo dunque la “profondità di pelle” per νmax ,
12
e anche per νrosso = 400 · 1012 Hz e νvioletto
r = 790 · 10
r Hz. Usiamo la formula
2c2 0
c2 0
Eq. (23.48) adattata per le frequenze: δ =
=
:
σω
π σν
ν = 1017 Hz ⇒ δ = 2.06 · 10−10 m ' 0.2 nm
ν = 790 · 1012 Hz ⇒ δ = 2.31 · 10−9 m ' 2.3 nm
ν = 400 · 1012 Hz ⇒ δ = 3.25 · 10−9 m ' 3.3 nm
Osservazione. Avete notato come la “profondità di pelle” sia piccola? Un
nanometro è pari a pochi multipli della distanza interatomica. Questo significa che,
per quanto si produca un foglio di rame sempre più sottile, esso non diventa mai
trasparente — bisognerebbe fare uno strato di spessore monoatomico o quasi.
23.10.1
Dimostrazioni (*)
La trattazione generale di questo problema è al di là dei nostri scopi. Qui
mostriamo un artifizio matematico che ci consente di farci un’idea.
Stiamo considerando un’onda di frequenza angolare ω, quindi sappiamo
che i campi hanno la forma
E = E0 cos(ωt − kz)
B = B0 cos(ωt − kz)
Per semplificare i calcoli, utilizziamo il formalismo complesso introdotto nella
Sezione 23.1.4. I campi si riscrivono come:
E = E0 ei(ωt−kz)
B = B0 ei(ωt−kz)
e portiamo avanti i nostri calcoli. Alla fine, qualunque soluzione otterremo,
dovremo considerare solo la sua parte reale, per avere un significato fisico.
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
Il termine “incriminato”, σE + 0
che
M.FANTI 399
∂E
, può essere manipolato, osservando
∂t
∂ei(ωt−kz)
∂E
= E0
= iω E0 ei(ωt−kz)
∂t
∂t
= iω E
Quindi:
∂E
σE + 0
∂t
= (σ + iω0 ) E =
' −i
σ
+ 1 iω0 E
iω0
σ
∂E
0
0 ω
∂t
Nell’ultimo passaggio abbiamo sfruttato l’ipotesi di “buon conduttore”,
σ 0 ω.
Con questo arrangiamento, le equazioni di campo nei conduttori,
Eq. (23.46), prendono una forma del tutto identica a quella delle equazioni
nel vuoto, Eq. (23.13), purché si faccia la sostituzione
σ
0 −→ ef f ≡ 0 −i
0 ω
ω
√
Nel vuoto, il numero d’onda k è collegato a ω da k =
= ω 0 µ0 . Nel
c
conduttore, deve sussistere una analoga relazione, con ef f :
r
r
σ 1
ef f √
√
0 µ0 = ω −i
k = ω ef f µ0 = ω
0
0 ω c
r
1 − i ωσ 1
= ± √
0 c
2
Quindi anche il numero d’onda k è espresso da un numero complesso. La
parte reale è quella che descrive la propagazione lungo z, e deve essere
positiva come nel caso dell’onda nel vuoto. Pertanto l’ambiguità di segno
(±) si risolve, scegliendo il segno +. Il campo elettrico prende la forma:
r
1 − i ωσ
i ωt −
z
i(ωt−kz)
c
2
0
E = E0 e
= E0 e
r
r
1 ωσ
1 ωσ
i ωt −
z −
z
c
2
c
2
0
0
= E e
e
0
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 400
Per tornare ai valori reali di E, basta prendere la parte reale dell’espressione
appena trovata.
Per concludere, calcoliamo anche il campo magnetico. Nel vuoto, B =
E
√
= E 0 µ0 . Nel conduttore quindi deve essere:
c
r
r
ef f 1
E 1 − i ωσ
√
B = E
=
0 c
c
0
2
π
−i
π
1−i
Ora, poiché √ = e 4 , si ottiene lo sfasamento di − col campo elettrico.
4
2
23.11
Esercizi sulle onde elettromagnetiche
Esercizio 23.1. Un’onda elettromagnetica monocromatica, di frequenza ν =
100 MHz, viaggia nel vuoto. Calcolare la lunghezza d’onda λ. Individuare nello
spettro elettromagnetico di che tipo di onda si tratta.
c
3 · 108 m/s
Risposta. Nel vuoto λ =
=
= 3 m. È un’onda-radio, in
ν
108 Hz
modulazione di frequenza (FM).
Esercizio 23.2. Che cosa succede alla velocità, alla frequenza e alla lunghezza
d’onda, quando l’onda dell’esercizio precedente attraversa un vetro, con indice di
rifrazione n = 1.5?
c
Risposta. La velocità viene ridotta a u =
= 2 · 108 m/s. La frequenza
n
u
c
λ0
non cambia. La lunghezza d’onda deve soddisfare λ =
=
=
(abbiamo
ν
nν
n
chiamato λ0 la lunghezza d’onda nel vuoto). Pertanto la lunghezza d’onda si riduce
a λ = 2 m.
Esercizio 23.3. La stessa onda-radio a ν = 100 MHz viene fatta passare
attraverso l’acqua del mare, che, essendo salina, è dotata di una conducibilità
σ = 5 Ω−1 m−1 . Inoltre l’indice di rifrazione è n = 1.333. Qual è la “profondità di
pelle”?
Risposta. Anzitutto occorre verificare se siamo in condizioni di “buon
σ
σ
conduttore”, ovvero se
=
1. La costante dielettrica relativa è
ω
2πr 0 ν
σ
5
=
r = n2 = 1.777. Si ottiene quindi
≈
8
2πr 0 ν
6.283 · 1.777 · 8.85 · 10−12
r · 10
2c2 =
103 , quindi no problem. . . La profondità di pelle si calcola come δ =
σω
r
p
0
c2 r 0 πσν = cn
= 3 · 10−2 m.
πσν
Osservazione. Abbiamo ottenuto una profondità di pelle di 3 cm! A causa
della sua salinità, l’acqua di mare non ammette comunicazioni via onde radio
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 401
FM. Per aumentare la profondità di pelle, occorre abbassare le frequenze, ovvero
aumentare la lunghezza d’onda.
Esercizio 23.4. Per le ragioni esposte nell’esercizio precedente, le comunicazioni
radio dei sommergibili devono usare frequenze più basse, tipicamente del chiloHertz. Assumiamo ν = 3 kHz. Quanto vale la profondità di pelle? Se il
sommergibile è a una profondità h = 10 m, di quanto si attenuano il campo elettrico
e la potenza della trasmissione?
r
p
2c2 Risposte. La profondità di pelle risulta δ =
=
c2 r 0 πσν =
σω
r
0
cn
= 5.48 m. Chiamando E0 il campo elettrico all’emissione, e E quello
πσν
E
= e−h/δ = e−10/5.48 = 0.16. La potenza è
uscente, la sua attenuazione è
E0
2
W ∝ E 2 , quindi la sua attenuazione è e−h/δ = e−2h/δ = 0.026.
Solo il 2.6% della potenza del segnale raggiunge la superficie del mare.
Esercizio 23.5. La potenza che la Terra riceve dalla radiazione solare è espressa
dalla “costante solare”, cioè la potenza ricevuta per unità di area perpendicolare
irradiata. Essa vale I = 1.36 kW/m2 . Qual è la potenza totale emessa dal Sole
(la distanza Terra-Sole è r⊕ = 150 milioni di km)? Qual è la potenza totale
ricevuta dalla Terra (il raggio della Terra è r⊕ = 6371 km)?
Risposte. Il Sole emette radiazione elettromagnetica isotropa, quindi la
potenza totale emessa si ottiene moltiplicando I per la superficie di una sfera
11
2
2
2
di raggio r⊕ : W = 4πr⊕
I = 12.57 · (1.5 · 10 m) · (1360 W/m ) =
26
3.845 · 10 W.
Per calcolare la potenza totale assorbita dalla Terra, schematizziamo questa
come se fosse un disco di raggio r⊕ posto perpendicolarmente alla radiazione solare.
Questa approssimazione può apparire grossolana, ma è corretta. Per convincersi,
basti pensare di porre questo disco esattamente fra il Sole e la Terra, tangente
a quest’ultima. Ovviamente assorbirebbe tutta la radiazione, lasciando la Terra
in ombra. Rimuovendo il disco, la Terra tornerebbe ad essere irradiata. Quindi
disco e Terra sono investiti esattamente dalla stessa potenza. La differenza sta
solo nel modo di fare i calcoli: il disco è una superficie piana perpendicolare alla
radiazione, quindi possiamo calcolare la potenza assorbita dal disco semplicemente
2I
6
2
2
17
come W⊕ = πr⊕
= 3.1416 · (6.371 · 10 m) · (1360 W/m ) = 1.734 · 10 W.
Esercizio 23.6. Calcolare il campo elettrico e magnetico massimi corrispondenti
alla costante solare dell’esercizio precedente.
CAPITOLO 23. ONDE ELETTROMAGNETICHE —
M.FANTI 402
E2
Risposta. Utilizziamo la relazione I = 0 c max . Pertanto ricaviamo
2
s
s
2I
2 · 1360 W/m2
Emax =
=
= 1012 V/m. Il
0 c
(8.85 · 10−12 (unità S.I.))(3 · 108 m/s)
Emax
campo magnetico è Bmax =
= 3.376 · 10−6 T.
c
Capitolo 24
Ottica
La luce visibile è formata da onde elettromagnetiche. Questo vale per tutta
la radiazione, dai raggi X alle onde radio.
Il comportamento della luce (e della radiazione elettromagnetica in
generale) nel vuoto e nei materiali è descrivibile pensando ai campi elettrico
e magnetico che la compongono.
Riassumiamo quanto sappiamo.
• Un’onda elettromagnetica si propaga con velocità
u =
8
c = 3 · 10 m/s nel vuoto
(24.1)
c
n
nel dielettrico
con n indice di rifrazione del dielettrico. In generale n > 1, quindi
u < c.
• I campi elettrico e magnetico sono ortogonali fra loro e alla direzione
della propagazione; le intensità dei campi sono collegate dalla relazione
c
nel vuoto
~
|E|
= u =
~
|B|
c nel vuoto
n
(24.2)
~ B,
~ per un’onda che si propaga in
La relazione vettoriale fra E,
direzione r̂, è:
403
CAPITOLO 24. OTTICA
—
~
~ = r̂ × E
B
u
M.FANTI 404
(24.3)
~ il campo magnetico
• D’ora in poi ci riferiremo al campo elettrico E;
è deducibile sempre da esso. Il piano individuato dalla direzione
~ si chiama piano di
di propagazione r̂ e dal campo elettrico E
polarizzazione dell’onda.
• Un’onda monocromatica è caratterizzata da una frequenza ν e una
lunghezza d’onda λ. L’intensità dei campi elettrico e magnetico ad
essa associati si può scrivere come
2π
r + φ
E(r; t) = E0 cos 2πνt −
λ
|
{z
}
fase
B(r; t) =
(24.4)
2π
E0
cos 2πνt −
r + φ
u
λ
|
{z
}
fase
(se assumiamo una propagazione per una distanza r dalla sorgente).
L’argomento della funzione coseno si chiama fase dell’onda: lo
indicheremo con Φ(1) :
Φ = 2πν t −
2π
r + φ
λ
(24.5)
• La relazione fra ν e λ è:
λ·ν = u =
1
c
nel vuoto
c nei dielettrici
n
(24.6)
Il termine φ (minuscolo) deriva dalla condizione della sorgente all’istante t = 0;
potrebbe essere eliminato ridefinendo l’istante t = 0 per una data sorgente, ma con molte
sorgenti in generale questo non è possibile, quindi preferiamo tenerlo.
CAPITOLO 24. OTTICA
—
M.FANTI 405
• Un’onda nel vuoto trasporta un flusso di energia per unità di tempo e
2~
~
~
unità di superficie, dato dal vettore di Poynting,
S = 0 c E
× B. Per
2
E
2π
~ × B|
~ = 0 cos2 2πνt −
onde monocromatiche, |E
z , e poiché
c
λ
1
il valore medio di cos2 è , otteniamo l’intensità media di un’onda
2
monocromatica come:
I =
dW
dΣ
=
0 c 2
E
2 0
(nel vuoto)
(24.7)
In un dielettrico, l’intensità si ottiene con le sostituzioni 0 → ≡ n2 0
c
e c → u ≡ , quindi:
n
I =
dW
dΣ
= n
0 c 2
E
2 0
(nei dielettrici)
(24.8)
• L’indice di rifrazione in un dielettrico è in generale una funzione della
lunghezza d’onda: n ≡ n(λ).
24.1
Sovrapposizione di onde, interferenza
La radiazione elettromagnetica è costituita dai campi elettrico e magnetico,
che si sommano come vettori. Questo ha conseguenze importanti sulla
composizione delle intensità di due onde elettromagnetiche. Si sarebbe
portati a dire che se due onde, di intensità I1 , I2 , raggiungono una stessa
zona di spazio, l’intensità totale sia I1 + I2 : bene, questo in generale è falso!
Consideriamo due onde elettromagnetiche monocromatiche, di frequenze
ν1 , ν2 e lunghezze d’onda λ1 , λ2 , emesse dalle sorgenti (1) e (2). Anzitutto,
assumiamo che le due onde viaggino nella stessa direzione, cosicché i due
~ 1, S
~ 2 siano allineati. Questa è la situazione più
vettori di Poynting S
vantaggiosa per avere sovrapposizione di intensità. Inoltre assumiamo che
~1 k E
~ 2.
i piani di polarizzazione delle due onde siano coincidenti, cioè che E
~1 k B
~ 2 . Quindi possiamo scrivere i campi senza l’uso
In tal modo anche B
della notazione vettoriale. Chiamate rispettivamente r1 e r2 le distanze di P
CAPITOLO 24. OTTICA
—
M.FANTI 406
(1)
P =
(2)
(1)
P =
(2)
Figura 24.1:
Esempi di interferenza costruttiva (in alto) e interferenza
distruttiva (in basso).
dalle sorgenti (1) e (2), i campi saranno della forma:
2π
E1 (P ; t)
E1 (P ; t) = A1 cos 2πν1 t −
r1 + φ1
;
B1 (P ; t) =
λ1
u
2π
E2 (P ; t)
r2 + φ2
E2 (P ; t) = A2 cos 2πν2 t −
;
B2 (P ; t) =
λ2
u
Il campo totale in P sarà
E(P ; t) = E1 (P ; t) + E2 (P ; t)
B(P ; t) = B1 (P ; t) + B2 (P ; t) =
E(P ; t)
u
L’intensità di ciascuna radiazione, se fosse isolata, sarebbe
0 c
I1 (P ) = n0 c [E1 (P ; t)]2 = n A21
2
0 c 2
2
I2 (P ) = n0 c [E2 (P ; t)] = n A2
2
Ora calcoliamo l’intensità complessiva.
I(P ) = n0 c [E(P ; t)]2 = n0 c [E1 (P ; t) + E2 (P ; t)]2
= n0 c [E1 (P ; t)]2 + [E2 (P ; t)]2 + 2E1 (P ; t)E2 (P ; t)
= n0 c A21 cos2 Φ1 + A22 cos2 Φ2 + 2A1 A2 cos Φ1 cos Φ2
Nell’ultima scrittura abbiamo indicato con Φ1 , Φ2 la fase di ciascuna onda:
2π
Φi ≡ 2πνi t −
ri + φi
λi
CAPITOLO 24. OTTICA
—
M.FANTI 407
2
1
cos
=
e applichiamo l’identità trigonometrica
2
n0 c 2
A = Ii .
2 cos Φ1 cos Φ2 = cos(Φ1 + Φ2 ) + cos(Φ1 − Φ2 ). Poi esprimiamo
2 i
Troviamo quindi
p
I(P ) = I1 + I2 + 2 I1 I2 [hcos(Φ1 + Φ2 )i + hcos(Φ1 − Φ2 )i]
Ora ricordiamo che
Ora, mediando sul tempo, otteniamo:
r1
r2
hcos(Φ1 ± Φ2 )i =
cos 2π(ν1 ± ν2 )t − 2π
±
+ (φ1 ± φ2 )
λ1 λ2
In generale, il valor medio di un coseno nel tempo è 0, a meno che l’argomento
del coseno sia indipendente da t. Questo succede nel caso particolare che si
stia considerando Φ1 − Φ2 e che sia ν1 = ν2 : in tal caso cos(Φ1 − Φ2 ) rimane
costante. In questo caso anche λ1 = λ2 . Si ottiene dunque
r1 − r2
+ (φ1 − φ2 ) ≡ cos[∆Φ]
cos(Φ1 − Φ2 ) = cos 2π
λ
Abbiamo trovato la seguente relazione per l’intensità totale:
I1 + I2
se ν1 6= ν2
p
I1 + I2 + 2 I1 I2 cos(∆Φ) se ν1 = ν2
I(P ) =
(24.9)
2π
∆Φ ≡
(r1 − r2 ) + (φ1 − φ2 )
λ
Quindi l’intensità risultante, per uguali frequenze, dipende dalla differenza
di fase. In particolare:
• Se i due campi sono in fase, ∆Φ = 2Kπ,
2π
2π
r1 − φ1 −
r2 − φ2 = 2Kπ
λ
λ
(K intero)
si ottiene il campo risultante massimo,
|E1 + E2 | = A1 + A2
Questo caso si chiama interferenza costruttiva. I campi si dicono
coerenti.
√
L’intensità è I(P ) = I1 + I2 + 2 I1 I2 (quindi maggiore di I1 + I2 ).
CAPITOLO 24. OTTICA
—
M.FANTI 408
• Se i due campi sono in opposizione di fase, ∆Φ = (2K + 1)π,
2π
2π
r1 − φ1 −
r2 − φ2 = (2K + 1)π (K intero)
λ
λ
si ottiene il campo risultante minimo,
|E1 + E2 | = |A1 − A2 |
Questo caso si chiama interferenza
√ distruttiva.
L’intensità è I(P ) = I1 + I2 − 2 I1 I2 (quindi minore di I1 + I2 ).
• Nel caso particolare in cui le ampiezze siano uguali (A1 = A2 ) e i campi
siano in opposizione di fase, l’interferenza è completamente distruttiva,
ovvero il campo risultante è nullo.
In questo caso anche l’intensità è nulla, I(P ) = 0.
Queste situazioni sono schematizzate nella Fig. 24.1.
24.2
Principio di Huygens-Fresnel
Un’onda elettromagnetica che si propaga nello spazio può essere visualizzata
come una successione di fronti d’onda. Ciascuno di questi è caratterizzato
da punti aventi tutti la stessa fase.
Il principio di Huygens-Fresnel afferma che tutti i punti su un fronte
d’onda si comportano da sorgenti puntiformi coerenti di onde sferiche
secondarie, che hanno frequenza e lunghezza d’onda uguali a quelle dell’onda
primaria; il fronte d’onda successivo è dato dalla somma algebrica di tutte le
onde secondarie, e ha la forma dell’inviluppo di queste.
Questo principio è in realtà ricavabile con calcoli matematici basati sulla
forma delle onde monocromatiche. Qui omettiamo la dimostrazione e lo
trattiamo come una legge sperimentale.
24.3
Interferenza di sorgenti coerenti
Consideriamo un fronte d’onda piano che colpisce uno schermo, in cui sono
praticate due piccole fenditure. Tutta l’onda viene assorbita dallo schermo,
tranne quelle porzioni che raggiungono le fenditure. Se la larghezza delle
fenditure è molto minore della lunghezza d’onda λ, esse possono essere
considerate come puntiformi. In base al principio di Huygens-Fresnel, le
due fenditura sono sorgenti coerenti di onde sferiche.
CAPITOLO 24. OTTICA
λ
—
M.FANTI 409
λ
Figura 24.2:
Fronti d’onda (piano a sinistra, sferico a destra) e loro
formazione dalla sovrapposizione delle onde sferiche secondarie (principio di
Huygens-Fresnel).
Tali onde sono formate da campi elettrici E1 (r1 , t), E2 (r2 , t) che si
sommano. Chiamando r1 , r2 le distanze di ciascuna fenditura da un generico
punto P in cui avviene la sovrapposizione (vd Fig. 24.3), la loro forma
matematica deve essere:
2π
r1
E1 (r1 ; t) = E0 cos 2πνt −
λ
(24.10)
2π
E2 (r2 ; t) = E0 cos 2πνt −
r2
λ
Diamo qualche spiegazione a queste due formule. Anzitutto si assume che
l’ampiezza massima di oscillazione dei campi sia E0 , uguale per entrambe
le onde. Ciò è giustificato dal fatto che le due fenditure ricevono la stessa
onda piana. Inoltre, anche la frequenza e la lunghezza d’onda devono essere
uguali. Infine, le sorgenti delle onde secondarie devono essere coerenti, poiché
si trovano sullo stesso fronte d’onda, quindi devono avere la stessa fase: in
termini matematici, per r1 = 0 e r2 = 0 l’argomento dei coseni deve essere lo
stesso.
In un generico punto P il valore del campo elettrico è la somma algebrica
di E1 , E2 :
CAPITOLO 24. OTTICA
—
P
r1
r2
D
D
θ
M.FANTI 410
r1 R
r2
∆r = D sin θ
λ
Figura 24.3:
A sinistra: sovrapposizione delle onde sferiche secondarie
provenienti dalle due fenditure; ogni riga blu rappresenta una cresta d’onda.
A destra: calcolo approssimato di |r1 − r2 | ' D sin θ per distanze R D.
E(P ; t) = E1 (r1 , t) + E2 (r2 , t)
2π
2π
r1 + cos 2πνt −
r2
= E0 cos 2πνt −
λ
λ
(24.11)
Possiamo
analizzare
un
po’ più in dettaglio le conseguenze dell’Eq. (24.11).Qui bisogna
ricordare
α+β
α−β
un’identità trigonometrica: cos(α) + cos(β) = 2 cos
cos
.
2
2
Quindi troviamo:
2π r1 + r2
2π r1 − r2
E(P ; t) = 2E0 cos 2πνt −
cos
(24.12)
λ
2
λ
2
2π r1 + r2
Esaminiamo questo risultato. Il termine cos 2πνt −
esprime
λ
2
CAPITOLO 24. OTTICA
—
M.FANTI 411
un’oscillazione nel tempo con frequenza ν. L’ampiezza di tale oscillazione è
data da
2π r1 − r2
E0 (P ) = 2E0 cos
λ
2
quindi ha un’intensità
I(P ) =
20 cE02
2
cos
2π r1 − r2
λ
2
(24.13)
che può variare da un valore massimo, quando l’argomento di cos2 è multiplo
intero di π, ad un valore nullo, quando l’argomento di cos2 è multiplo intero
dispari di π/2.
(K intero)
20 cE02 per r1 − r2 = K
λ
1
I(P ) =
(24.14)
λ (K intero)
per r1 − r2 = K +
0
2
La conclusione può essere anche compresa intuitivamente. Le due onde
sferiche secondarie percorrono cammini di lunghezza r1 , r2 per raggiungere
P.
• Se questi cammini differiscono per un numero intero di lunghezze
d’onda, ad una cresta della prima onda si sovrapporrà sempre una
cresta della seconda onda.
Questo caso si chiama interferenza
costruttiva.
• Se invece la differenza dei cammini contiene una mezza lunghezza
d’onda in più o in meno, ad una cresta della prima onda si sovrapporrà
sempre una valle della seconda onda.
Questo caso si chiama
interferenza distruttiva.
In Fig. 24.4 sono rappresentate diverse figure di interferenza, ottenute per
una stessa lunghezza d’onda λ = 1 (unità arbitrarie) e diverse separazioni
fra le fenditure D = 0.2, 0.5, 1, 2, 5, 10. Il calcolo è fatto al computer,
utilizzando l’Eq. (24.11).
Quando l’interferenza viene osservata da una distanza R grande rispetto
alla separazione D delle due fenditure, ad un angolo θ rispetto alla direzione
perpendicolare allo schermo, si può approssimare |r1 − r2 | ' D sin θ (vd
Fig. 24.3 a destra). L’Eq. (24.13) si può approssimare con:
CAPITOLO 24. OTTICA
—
M.FANTI 412
λ = 1 , D = 0.2
λ = 1 , D = 0.5
λ=1, D=1
λ=1, D=2
λ=1, D=5
λ = 1 , D = 10
Figura 24.4:
Figure di interferenza prodotte da due fenditure sottili,
separate da diverse distanze
√ D. La scala di colori raffigura il valore assoluto
del campo elettrico, |E| ∝ I.
CAPITOLO 24. OTTICA
I(θ) =
20 cE02
—
2
cos
D
π sin θ
λ
M.FANTI 413
(24.15)
Le condizioni di massimo e minimo, Eq. (24.14), possono essere riscritte
cosı̀:
λ
20 cE02 per sin θ = K
(K intero)
D
I(P ) =
(24.16)
1 λ
0
(K intero)
per sin θ = K +
2 D
Ovviamente per θ = 0 c’è sempre un massimo — il massimo centrale.
Possono esistere anche altri massimi, in direzioni diverse. Poiché sin θ ≤ 1,
D
i valori di K sono limitati da K ≤ . Se D < λ, è possibile solo K = 0,
λ
ovvero solo il massimo centrale.
Le direzioni di interferenza distruttiva esistono per valori di K tali che
λ
D 1
− . Per D < , tale condizione non è possibile, quindi in tutte le
K≤
λ
2
2
direzioni abbiamo propagazione.
24.4
Raggio ottico
L’onda piana è ovviamente un’astrazione. Abbiamo visto che ogni sorgente
elementare di onda elettromagnetica è una carica elettrica puntiforme
oscillante, che genera onde sferiche. I fronti d’onda sferici, visti a distanze
molto lontane dalla sorgente, possono apparire come fronti d’onda piani.
Un’onda elettromagnetica che viene emessa da una sorgente estesa piana
Σ, di dimensioni trasverse D λ produce un “raggio di luce”, che
per esperienza sappiamo propagarsi in direzione rettilinea ortogonale alla
superficie stessa.
Si chiama raggio ottico una porzione di onda piana di dimensione trasversa
D λ.
Vogliamo capire perché il raggio ottico si propaga in direzione ortogonale
alla superficie emittente Σ.
Secondo il principio di Huygens-Fresnel, ogni punto della sorgente Σ
è sorgente di un’onda secondaria sferica. Se la sorgente Σ è coerente e
monocromatica, il campo elettrico prodotto da ciascuno dei suoi punti a
CAPITOLO 24. OTTICA
—
M.FANTI 414
Σ
ρ
O2
O1
θ
∆r = ρ sin θ
O2
O1
Σ
Figura 24.5: Costruzione di un “raggio ottico”. Tutti i punti della sorgente
estesa Σ sono sorgenti coerenti di onde secondarie. Per θ > 0 è possibile
trovare una separazione ρ fra le sorgenti puntiformi (1), (2), tale che le onde
sono sfasate di λ/2 e quindi formano interferenza completamente distruttiva.
Per θ = 0 le onde dalle sorgenti puntiformi (1), (2) restano sempre coerenti.
2π
r . Consideriamo due punti O1 e O2 di Σ,
distanza r è ∝ cos 2πνt −
λ
separati da una distanza ρ, come in Fig. 24.5. I campi prodotti da essi in un
dato punto P , distante rispettivamente r1 , r2 da O1 , O2 , devono valere
2π
E1 ∝ cos 2πνt −
r1
λ
2π
r2
E2 ∝ cos 2πνt −
λ
La differenza di fase fra i due campi è:
∆Φ =
2π
(r1 − r2 )
λ
Osserviamo ora la propagazione da un punto P la cui distanza da Σ sia
molto maggiore delle dimensioni trasversa D. I segmenti r1 , r2 sono
CAPITOLO 24. OTTICA
—
M.FANTI 415
sostanzialmente paralleli, e possiamo approssimare |r1 − r2 | ' ρ sin θ. Quindi
la differenza di fase è
2π
∆Φ =
ρ sin θ
λ
Se θ 6= 0, è sempre possibile trovare un valore di ρ tale che la differenza di
fase sia esattamente ∆Φ = π: basta scegliere
λ
2 sin θ
In questo modo l’interferenza fra le due sorgenti puntiformi è sempre
totalmente distruttiva.
Chiaramente, più piccolo è θ, maggiore deve essere ρ. Se consideriamo
λ
. Siccome
θ > θmin , possiamo porre un limite superiore ρ < ρmax ≡
2 sin θmin
abbiamo supposto D λ, la maggior parte di punti di Σ deve avere altri
punti a distanza ρ con cui fare interferenza totalmente distruttiva. In maniera
D
semi-quantitativa, deve essere ρmax ≈ , cosicché per ogni punto di metà Σ
2
si può trovare un altro punto a distanza ρmax nell’altra metà di Σ con cui si
λ
formi un’interferenza totalmente distruttiva. Quindi troviamo sin θmin ≈ .
D
Possiamo concludere che in qualunque direzione θ tale che sin θ &
λ
l’interferenza di tutte le sorgenti puntiformi deve essere totalmente
D
distruttiva, dunque per questi angoli non c’è propagazione. Essendo
λ D, sin θmin deve essere molto piccolo, quindi possiamo lavorare
nell’approssimazione sin θmin ' θmin . L’apertura angolare totale del raggio
ottico, valutabile fra −θmin e +θmin , quindi vale
ρ=
∆θ ≈ 2
λ
D
(24.17)
Esempio: un raggio laser
Un raggio laser rosso (λR = 635 nm) viene emesso da una sorgente di dimensioni
trasverse D0 = 1 mm. Qual è la sua apertura angolare? Di quanto si è allargato
il raggio, ad una distanza di 10 m? Quali risultati avremmo, per un raggio verde
(λV = 532 nm) e un raggio blu (λB = 445 nm)?
λR
=
Risposta. La larghezza angolare del raggio rosso è ∆θR ' 2
D0
6.35 · 10−7 m
2
' 6·10−4 rad. A distanza di ` = 10 m dalla sorgente la dimensione
10−3 m
trasversa del fascio è valutabile come DR = ∆θR ` ' 6 mm.
CAPITOLO 24. OTTICA
—
M.FANTI 416
Per i raggi verde e blu i risultati sono ∆θV ' 5 · 10−4 rad, DR =' 5 mm,
∆θB ' 4 · 10−4 rad, DB =' 4 mm.
Osservazione: poiché la formula usata per ∆θ è approssimativa, abbiamo
usato il segno ' anziché =; per questo si è valutato che non abbia senso esprimere
i risultati con più di una cifra.
24.5
Diffrazione da una fenditura
Un fenomeno simile a quello dell’interferenza si ha quando la luce passa
attraverso un’unica fenditura, di larghezza D, che non può essere più
considerata puntiforme. In tal caso, ogni punto della fenditura può essere
considerato come una sorgente di onda sferica secondaria, secondo il principio
di Huygens-Fresnel.
Scegliamo un sistema di assi cartesiani con l’origine al centro della
fenditura e l’asse z nella direzione dell’onda incidente. La fenditura giace
sul piano x, y, e ha una sezione Σ. Ogni piccola area dΣ0 di fenditura,
0 0
centrata intorno
(x , y , 0) ∈ Σ, produce un’onda sferica E(r) =
a un punto
2π
r in ciascun punto P ≡ (x, y, z) posto a distanza
A dΣ0 E0 cos 2πνt −
λ
p
r =
(x − x0 )2 + (y − y 0 )2 + z 2 . Ci aspettiamo infatti che l’intensità del
campo elettrico dell’onda secondaria sia proporzionale al campo elettrico
incidente E0 e alla superficie emittente dΣ. Formalmente, quindi, il campo
elettrico totale in P si scrive come:
Z
2π p
0
0
2
0
2
2
(x − x ) + (y − y ) + z (24.18)
E(P ) = A E0
dΣ cos 2πνt −
λ
Σ
Il calcolo è in generale complesso, dipende dalla forma della fenditura, e
solitamente si può effettuare solo al computer.
In Fig. 24.6 sono rappresentate diverse figure di diffrazione, per una
fenditura di larghezza D = 2 (unità arbitrarie) e diverse lunghezze d’onda λ.
In generale, si nota che l’onda si propaga in diverse direzioni, ma presenta
sempre la massima intensità in avanti — cioè nella stessa direzione dell’onda
D
incidente. A seconda del rapporto
, possono esistere direzioni in cui
λ
l’intensità si annulla, e altre in cui resta significativa.
Questi comportamenti possono essere compresi in maniera semiqualitativa, anche senza addentrarsi nei calcoli matematici. In una generica
0 0
00 00
direzione
che distano fra loro
p θ, due punti (x , y ) e (x , y ) della fenditura
0
00
2
0
00
2
ρ = (x − x ) + (y − y ) hanno distanze r0 , r00 da un generico punto P
CAPITOLO 24. OTTICA
—
M.FANTI 417
λ = 0.2 , D = 2
λ = 0.5 , D = 2
λ=1, D=2
λ=2, D=2
λ=4, D=2
λ=8, D=2
Figura 24.6: Figure di diffrazione da fenditure di diverse larghezze√D. La
scala di colori raffigura il valore assoluto del campo elettrico, |E| ∝ I.
CAPITOLO 24. OTTICA
—
M.FANTI 418
che differiscono di |r0 − r00 | ' ρ sin θ. L’approssimazione (indicata con ') è
tanto migliore, quanto più la distanza di P dalla fenditura è grande rispetto
alle dimensioni della fenditura stessa. Se la coppia di punti (x0 , y 0 ) e (x00 , y 00 )
λ
è tale che |r0 − r00 | = , allora le onde secondarie emesse da essi formano
2
interferenza distruttiva. In termini di ρ, questa condizione si scrive come
λ
ρ=
.
2 sin θ
Ovviamente occorre che ρ sia più piccolo delle dimensioni della fenditura,
altrimenti non è possibile trovare due punti di distanza ρ nella fenditura.
D
Più precisamente, chiamando D la dimensione della fenditura, se ρ '
2
metà dei punti della fenditura fa interferenza distruttiva con l’altra metà,
D D
,
, ...
e la cancellazione è totale(2) . La stessa cosa succede se ρ '
4 6
D
D
in generale se ρ '
, con K 6= 0. Viceversa, se ρ '
, un terzo di
2K
3
D
, un quinto di fenditura resta
fenditura resta “non cancellato”; se ρ '
5
D
“non cancellato”. In generale, se ρ '
, con K 6= 0, c’è propagazione
2K + 1
1
residua, che deriva dal fatto che '
della radiazione uscente dalla
2K + 1
fenditura non viene cancellata.
λ
. Le condizioni di cancellazione totale e di
Ora ricordiamo che ρ =
2 sin θ
propagazione residua diventano:
λ
(K 6= 0)
cancellazione totale ⇐⇒ sin θ ' K
D
1 λ
propagazione ⇐⇒ sin θ ' K +
(K 6= 0)
2 D
(24.19)
Poiché sin θ ≤ 1, è possibile avere zone di cancellazione totale solo se λ ≤
D
D
D. Il numero di zone di cancellazione si ottiene scrivendo K ' sin θ ≤ ,
λ
λ
quindi sono
D
Nmin = Int
(24.20)
λ
2
Rammentiamo che non stiamo facendo un’analisi precisa: per esempio non abbiamo
fatto ipotesi sulla forma trasversa della fenditura. Per questo abbiamo usato i segni '
anziché =.
CAPITOLO 24. OTTICA
—
M.FANTI 419
L’intensità nelle direzioni in cui c’è propagazione può essere stimata in
1
della radiazione
maniera semi-quantitativa, ricordando che solo '
2K + 1
uscente dalla fenditura sopravvive. Poiché I ∝ E 2 , deve essere I(θ) '
2
1
I0
, essendo I0 una costante di proporzionalità. Ricordando che
2K + 1
λ
, otteniamo
sin θ ' (2K + 1)
2D
I(θ) '
I0
λ2
=
I
0
(2K + 1)2
4 D2 sin2 θ
(massimi secondari)
(24.21)
D
1
D 1
Il numero di massimi secondari si ottiene scrivendo K ' sin θ− ≤ − ,
λ
2
λ 2
quindi sono
D 1
−
Nmax = Int
(24.22)
λ
2
Esempio: calcolo del numero di frange
Se avete la vista buona, potete verificare i valori di Nmin , Nmax nella Fig. 24.6. I
D
valori di , insieme ai calcoli per Nmin , Nmax secondo le Eq. (24.22), Eq. (24.22),
λ
sono riportati nella seguente tabella:
D/λ
10
4
2
1
0.5
0.25
Nmin
10
4
2
1
0
0
Nmax
9
3
1
0
0
0
Il caso θ = 0 va trattato a parte: in questo caso ρ → +∞, quindi non è
mai possibile avere cancellazione.
L’intensità può essere stimata come fatto per i massimi secondari, ma qui
ricordiamo che tutta la radiazione dalla fenditura è coerente, quindi nessuna
porzione viene cancellata. Di conseguenza deve essere
CAPITOLO 24. OTTICA
I(θ) ' I0
—
(massimo centrale)
M.FANTI 420
(24.23)
In generale, la larghezza del massimo centrale della diffrazione è
esprimibile come la distanza fra i due
adiacenti, che si hanno per
minimi
λ
λ
sin θ = ± , ovvero per θ = ± sin−1
. L’apertura angolare del massimo
D
D
centrale vale quindi:
λ
−1
∆θmax = 2 sin
(24.24)
D
Si nota che, all’aumentare di D — o al diminuire di λ — la larghezza
del massimo centrale diventa sempre più collimata. Nel limite λ D,
∆θmax ' 0 e la propagazione avviene, nei fatti, solo in avanti, come abbiamo
trovato per il raggio ottico.
24.6
Rifrazione e riflessione di un’onda
elettromagnetica
Ora studiamo che cosa succede quando un raggio ottico — o un’onda piana
— attraversa un’interfaccia che separa due dielettrici, chiamati (1) e (2),
con diversi indici di rifrazione n1 , n2 . Per fissare le idee, supponiamo che
il raggio ottico provenga dal mezzo (1). La situazione è schematizzata in
Fig. 24.7: una parte del raggio ottico in generale viene riflessa, rimanendo in
(1), mentre un’altra parte passa al mezzo (2), dove si dice che viene rifratta.
Che cosa succede ai fronti d’onda durante la riflessione e la rifrazione?
Ricordiamoci che il fronte d’onda è definito come il luogo dei punti in cui
la fase dell’onda è sempre uguale. La fase è
Φ = 2πνt −
2π
r
λ
(24.25)
Per chiarezza, pensiamo al fronte d’onda che costituisce una cresta d’onda:
deve essere cos Φ = +1. Questo avviene per tutte le fasi multiple intere di
2π, Φ = 2Kπ. Due creste d’onda contigue hanno fasi che differiscono di 2π.
La frequenza ν non cambia nel passare dal mezzo (1) al mezzo (2). La
u
c
lunghezza d’onda invece si modifica: ricordando che λ = =
, abbiamo
ν
nν
λ1 =
1 c
n1 ν
;
λ2 =
1 c
n2 ν
CAPITOLO 24. OTTICA
—
n1
M.FANTI 421
n2
λ1
λ2
λ1
Figura 24.7:
Rifrazione e riflessione di un fromnte d’onda piano.
La differenza di fase fra due creste contigue, in un dato istante t, è
2π
∆r, da cui ∆r = λ. Distinguendo i mezzi (1), (2), troviamo:
2π = ∆Φ =
λ
1 c
λ =
nel mezzo (1)
1
n1 ν
∆r =
1 c
λ2 =
nel mezzo (2)
n2 ν
Guardiamo la Fig. 24.8, a sinistra. Se il raggio incidente forma un angolo
θ1 con la direzione ortogonale alla superficie, due creste d’onda contigue
λ1
intercettano la superficie in due punti distanti D =
. Da questi punti
sin θ1
partono due creste d’onda del raggio rifratto nel mezzo (2), che si propagano
λ2
in direzione θ2 . Anche in questo caso, D =
. Uguagliando le due
sin θ2
espressioni si trova
sin θ1
λ1
oppure
=
sin θ2
λ2
(24.26)
CAPITOLO 24. OTTICA
—
θ1
M.FANTI 422
θ1
λ1
λ1
D
D
λ2
θ2
θ’1
λ1
Figura 24.8:
Costruzione geometrica per ottenere le leggi della rifrazione
(a sinistra) e della riflessione (a destra). Gli angoli θ1 , θ2 , θ10 sono
rispettivamente gli angoli di incidenza, rifrazione e riflessione. In figura,
angoli con lo stesso colore sono uguali.
n1 sin θ1 = n2 sin θ2
(24.27)
Questa relazione è nota come legge della rifrazione, oppure legge di Snell.
Nel caso della riflessione, il raggio ottico riflesso si trova nello stesso mezzo
del raggio incidente (Fig. 24.8, a destra), quindi la lunghezza d’onda non
cambia, e gli angoli sono gli stessi:
sin θ1 = sin θ10
(24.28)
La legge di Snell fornisce la spiegazione di effetti ottici cui siamo tutti
abituati, quando un oggetto viene immerso in acqua (come raffigurato in
Fig. 24.9) o visto attraverso un vetro spesso. La spiegazione è sempre
CAPITOLO 24. OTTICA
—
M.FANTI 423
Figura 24.9:
Esempi dell’effetto della rifrazione. Poiché l’acqua ha un
indice di rifrazione > 1, una moneta immersa appare più vicina (a sinistra),
oppure una matita immersa appare “spezzata” (a destra).
la stessa: l’oggetto illuminato emette raggi ottici, che passando dall’acqua
all’aria subiscono una deviazione (linee rosse continue). Tuttavia, il nostro
cervello interpreta le immagini come se i raggi ottici fossero dritti (linee
tratteggiate), pertanto sembrano provenire da un punto diverso da quello
reale.
Inoltre, nella Fig. 24.9, solo due raggi ottici sono disegnati (in rosso); se
uno ne disegna di più, seguendo attentamente la legge di Snell, si rende conto
che i loro prolungamenti rettilinei (tratteggiati) non convergono esattamente
in un solo punto. Per questa ragione, le immagini viste attraverso l’acqua o
un vetro spesso appaiono sempre leggermente sfocate, e possono affaticare la
vista.
24.6.1
Riflessione totale
L’Eq. (24.27) per la rifrazione ci dice che minore èl’indice di rifrazione,
maggiore è l’angolo di rifrazione. Consideriamo il passaggio da un mezzo (1)
a un mezzo (2), tali che n1 > n2 — per esempio dal vetro all’aria. L’angolo
di rifrazione deve essere tale che
sin θ2 = sin θ1
n1
n2
n1
> 1, quindi sin θ2 > sin θ1 . Nello stesso
n2
tempo deve essere sin θ2 ≤ 1, quindi ci deve essere un limite superiore a sin θ1 .
Ora, stiamo considerando il caso
CAPITOLO 24. OTTICA
Figura 24.10:
in un vetro.
—
M.FANTI 424
Dispersione cromatica di un raggio di luce bianca che entra
Precisamente, possiamo scrivere:
n2
n2
sin θ
<
| {z 2} n1
n1
sin θ1 =
≤ 1
e questo è l’angolo massimo per avere una rifrazione.
24.7
Dispersione cromatica
Parlando di onde elettromagnetiche nei materiali dielettrici, abbiamo già
visto nella Sezione
r 23.9.2 che la costante dielettrica , e quindi l’indice di
rifrazione n =
, dipendono dalla frequenza ν dell’onda:
0
n ≡ n(ν)
(24.29)
In generale, n decresce all’aumentare di λ, quindi cresce all’aumentare di ν:
per frequenze più elevate abbiamo un indice di rifrazione maggiore, dunque
c
una velocità di propagazione u = minore.
n
Ne consegue che, nella legge di Snell per la rifrazione, Eq. (24.27), la
relazione fra gli angoli di incidenza (θ1 ) e di rifrazione (θ2 ) dipende dalla
frequenza della radiazione:
sin θ1
sin θ2
=
n2 (ν)
n1 (ν)
(24.30)
CAPITOLO 24. OTTICA
Figura 24.11:
un prisma.
—
M.FANTI 425
Dispersione cromatica di un raggio di luce bianca attraverso
Figura 24.12:
Formazione dell’arcobaleno.
Nel caso in cui il mezzo (1) sia l’aria, o il vuoto, n1 ' 1, indipendentemente
da ν. Per semplicità ribattezziamo n2 ≡ n: quindi si può scrivere
sin θ2 =
sin θ1
n(ν)
(24.31)
L’angolo di rifrazione è tanto più piccolo quanto più è grande la frequenza.
Nello spettro della luce visibile, per esempio, il colore meno deviato è il
rosso, quello più deviato il blu. L’effetto è quello mostrato in Fig. 24.10. La
scomposizione della luce bianca in uno spettro iridescente, mediante l’uso di
un prisma, come in Fig. 24.11, ne è una conseguenza. L’uso di strumenti
ottici basati su prismi consente di scomporre in righe spettrali la radiazione
emessa o assorbita da una sostanza, come già mostrato in Fig. 23.8 e Fig. 23.9.
Questa tecnica consente di estrarre informazioni sulla composizione chimica
di una sostanza.
La dispersione cromatica è anche all’origine degli arcobaleni. In seguito
ad un temporale, nell’aria restano sospese molte goccioline d’acqua di forma
sferica. I raggi del Sole, bianchi, vengono rifratti due volte (in entrata e in
CAPITOLO 24. OTTICA
—
M.FANTI 426
uscita della gocciolina) e riflessi una volta (all’interno della gocciolina), come
indicato in Fig. 24.12.
24.8
Esercizi di ottica
Esercizio 24.1. Un’onda elettromagnetica di frequenza ν = 500 · 1012 Hz viene
fatta passare attraverso un materiale trasparente. Con tecniche interferometriche
si misura la lunghezza d’onda, λ = 550 nm. Calcolare l’indice di rifrazione e la
costante dielettrica relativa del mezzo.
Risposta. La velocità di propagazione nel mezzo è u = λν = 2.75 · 108 m/s,
c
pertanto n = = 1.091 e r = n2 = 1.19.
u
Esercizio 24.2. Due oggetti (1) e (2) stanno a distanze r1 , r2 , molto simili, da
un punto di osservazione. Per verificare che le due distanze siano effettivamente
uguali, ci si serve di una sorgente di micro-onde di frequenza ν = 1010 Hz che
può emettere onde coerenti di uguale intensità nelle direzioni dei due oggetti.
Un ricevitore, vicino all’emettitore, misura l’intensità dell’onda riflessa. Quando
uno solo dei due oggetti viene irradiato, l’intensità misurata dal ricevitore è
I1 = I2 = 1.5 W/m2 . Quando entrambi gli oggetti vengono irradiati, l’intensità
complessiva misurata dal ricevitore è Itot = 4.5 W/m2 . Che cosa possiamo dire
delle distanze r1 , r2 ?
Risposta. Anzitutto, dal fatto che I1 = I2 possiamo dire che le distanze
dei due oggetti sono effettivamente simili: altrimenti per l’oggetto più lontano
dovrebbe osservarsi un’intensità riflessa minore. Poiché la radiazione è coerente,
le due intensità dovrebbero
combinarsi
secondo la legge dell’interferenza: Itot =
p
`1 − `2
I1 + I2 + 2 I1 I2 cos 2π
essendo `1,2 la distanza totale percorsa dall’onda
λ
in ciascun caso, quindi `1,2 = 2r1,2 per l’andata e il ritorno. Dai
√ dati, capiamo già
che r1 6= r2 , altrimenti avremmo osservato Itot = I1 + I2 + 2 I1 I2 = 6 W/m2 .
Possiamo dunque calcolare il coseno dello sfasamento, cos(∆Φ) ≡
`1 − `2
Itot − (I1 + I2 )
π
√
cos 2π
=
= 0.5. Da qui si deduce ∆Φ = 60◦ = rad —
λ
3
2 I1 I2
in realtà questo valore è definito a meno di un segno e di una periodicità di 2π.
`1 − `2
Possiamo quindi calcolare la differenza fra le distanze: ∆r = r1 − r2 =
=
2
∆Φ
λ
c
λ
=
. Per completare il calcolo ci occorre λ = = 0.03 m = 3 cm. Quindi
4π
12
ν
∆r = 0.25 cm = 2.5 mm.
Osservazione. Come si è già notato, il calcolo di ∆Φ è ambiguo: potremmo
aggiungere un qualunque multiplo intero di 2π e andrebbe comunque bene. Questa
∆Φ
,
ambiguità si riflette sulla misura delle distanze attraverso la relazione ∆r = λ
4π
ovvero variando ∆Φ di 2π, ∆r varierebbe di λ/2, cioè di mezza lunghezza d’onda.
Questa tecnica, chiamata interferometria, può solo misurare distanze che sono
CAPITOLO 24. OTTICA
—
M.FANTI 427
pari a frazioni di lunghezze d’onda, non multipli interi. Siccome la distanza
totale è andata+ritorno, la tecnica non può essere sensibile a multipli interi di
mezze lunghezze d’onda — in questo caso 1.5 cm — no surprise! Qui diventa
importante l’ipotesi che r1 , r2 siano “circa uguali”, nella fattispecie uno deve essere
ragionevolmente convinto che non differiscano per più di 1 cm circa.
Esercizio 24.3. Una lampadina emette una luce apparentemente bianca, che
viene passata attraverso una fenditura sottile, di larghezza nota D = 1 µm.
Nella figura di diffrazione si osserva il massimo centrale, bianco, più tre massimi
secondari di diversi colori, ad angoli rispettivamente θ1 = 42.5◦ , θ2 = 60.5◦ , θ3 =
77.2◦ . Evidentemente, la luce non era monocromatica, e la figura di diffrazione
consente di farne l’analisi spettrale. Perché il massimo centrale resta bianco?
Quali sono le lunghezze d’onda λ1 , λ2 , λ3 e le frequenze ν1 , ν2 , ν3 osservabili?
Che colori sono?
Risposta. Anzitutto, il fatto che i tre massimi secondari hanno colori diversi,
ci consente di associarli a diverse frequenze, e non a pensare, erroneamente,
che siano massimi secondari di diverso ordine della stessa frequenza. Inoltre,
è presumibile che per ciascuna delle frequenze si osservi il massimo secondario
3λ
più intenso, vale a dire il primo. La relazione da usare è sin θk =
,
2D
2
ovvero λk = D sin θk . Si trovano rispettivamente le lunghezze d’onda λ1 =
3
450 nm, λ2 = 580 nm, λ3 = 650 nm. Le frequenze corrispondenti sono
ν1 = 6.67 · 1012 Hz, ν2 = 5.17 · 1012 Hz, ν3 = 4.62 · 1012 Hz. Guardando la
Fig. 23.5 possiamo indovinare che i colori sono rispettivamente blu, giallo, rosso.
Il massimo centrale appare comunque bianco, poiché in quella direzione i tre colori
si continuano a sovrapporre.
Esercizio 24.4. Una sorgente coerente di micro-onde (“maser”) produce una
radiazione con frequenza ν = 5 · 1011 Hz, che incide ortogonalmente su una
fenditura di larghezza D, regolabile. La figura di diffrazione che si osserva in
uscita ha il primo minimo (interferenza distruttiva) ad un angolo θmin1 = 15◦ .
Quanto vale D? Quanti minimi e quanti massimi secondari ci sono nella figura
di diffrazione?
λ
Risposta. Ricordiamo che i minimi si hanno per angoli tali che sin θ = K ,
D
1 λ
mentre i massimi secondari per angoli tali che sin θ = K +
. Dunque ci
2 D
c
3 · 108 m/s
occorre λ =
=
= 6 · 10−4 m = 0.6 mm. Il primo minimo è tale
ν
5 · 1011 Hz
λ
λ
0.6 mm
che sin θmin1 =
, quindi deve essere D =
=
= 2.318 mm.
D
sin θmin1
0.2588
D
Il numero di minimi è Nmin = Int
= 3. Il numero di massimi secondari è
λ
CAPITOLO 24. OTTICA
—
M.FANTI 428
Nmax
D 1
= Int
= 3.
−
λ
2
Esercizio 24.5. Con i dati dell’esercizio precedente, di quanto è necessario
aprire la larghezza D, perché il massimo centrale della figura di diffrazione abbia
una larghezza ∆θ = 1◦ ?
∆θ
Risposta. Occorre che θmin1 =
= 0.5◦ = 8.727 · 10−3 rad. Quindi
2
0.6 mm
λ
=
D =
= 6.875 mm. Il numero di massimi secondari è
sin θmin1
0.2588
D 1
Nmax = Int
= 13.
−
λ
2
Esercizio 24.6. Una gabbia di Faraday è stata costruita per schermare una
regione di spazio da qualunque disturbo elettromagnetico esterno. Purtroppo ci si
accorge che nella parete della gabbia si è formata una fessura larga un millimetro.
All’interno, un’antenna posta esattamente di fronte alla fessura rileva un disturbo
di frequenza ν1 = 2 · 1013 Hz. Qual è l’angolo minimo θ1 per cui occorre spostare
l’antenna, per metterla al riparo dal disturbo? Come cambierebbe la risposta, se la
frequenza del disturbo fosse ν2 = 2 · 1012 Hz? E se invece fosse ν2 = 2 · 1011 Hz?
Risposta. Dobbiamo renderci conto di quanto è grande la lunghezza d’onda
c
rispetto alla fessura. Quindi calcoliamo λi =
, ottenendo rispettivamente
νi
λ1 = 0.015 mm, λ2 = 0.15 mm, λ3 = 1.5 mm. In tutti i casi si forma una
figura di diffrazione,
ilcui massimo centrale occupa la regione angolare compresa
λ
−1
fra ±θ = ± sin
. Spostando l’antenna di tale angolo θ, la si pone in una
D
zona dove la diffrazione è completamente distruttiva, dunque è protetta. Per le
λ1
λ2
λ3
tre frequenze si trova rispettivamente:
= 0.015,
= 0.15,
= 1.5. Nei
D
D
D
−2
primi due casi, l’angolo di spostamento è quindi θ1 = 1.5 · 10 rad = 0.86◦ ; θ2 =
λ3
0.1505 rad = 8.63◦ . Nell’ultimo caso
> 1, quindi non esiste un angolo a cui la
D
radiazione non arrivi.
Esercizio 24.7. Un raggio di luce passa dall’aria a un mezzo trasparente, con
angolo di incidenza θ1 = 45◦ , e viene rifratto con un angolo θ2 = 37◦ . La frequenza
della radiazione è ν = 400·1012 Hz. Quanto vale la lunghezza d’onda λ2 nel mezzo?
Risposta. Dagli angoli si può dedurre l’indice di rifrazione n2 del mezzo
sin θ1
(per l’aria si assume n1 = 1): n2 =
= 1.149. La lunghezza d’onda è
sin θ2
c
λ2 =
= 6.53 · 10−7 m = 653 nm.
n2 ν
")