Fisica Applicata
Corso di Studi di Biotecnologie
Anno accademico 2004-2005
Appunti delle lezioni
(bozza)
Livio Narici
1
L’obiettivo principale di questo corso è rivedere ed approfodire alcune nozioni di fisica
sottolineando la loro importanza nella comprensione e descrizione di fenomeni e
strumentazione di uso biotecnologico.
Molta parte del corso (gli approfondimenti di fisica) può essere studiata sugli stessi testi
su cui si è lavorato per il corso di fisica. In queste note, oltre ai richiami di fisica, si è
tentato di riportare in modo semplice le descrizioni delle applicazioni di tali concetti al
mondo biotecnologico.
Questa è una prima stesura di queste note. L’indicazione di errori, e ogni suggerimento
per migliorare la chiarezza sarà assai gradito.
2
Richiamo della II legge di Newton
r
r
Fris = ma
r
Fris è la forza risultante applicata al corpo
mr è la massa (.. inerziale .. vedi dopo) del corpo
a è l’accelerazione del corpo
(1)
dove:
Per semplicità consideriamo il corpo puntiforme.
NOTA 1
m è la costante di proporzionalità fra la forza applicata sul corpo e
l’accelerazione del corpo. Descrive “l’inerzia” del corpo a mutare il suo stato di moto.
Ricordiamo la definizione di accelerazione:
r d r d2 r
a≡ v≡ 2 R
dt
dt
(2)
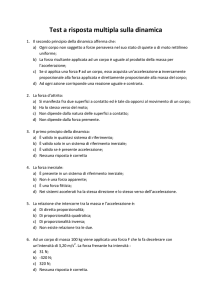
La (1) nelle tre dimensioni si può scrivere:
FrisX = mx˙˙
FrisY = my˙˙
FrisZ = mz˙˙
(3)
(4)
(5)
Dove il doppio punto indica la derivata seconda rispetto al tempo.
Z
F
R
Y
X
FIGURA 1
3
La forza peso sulla superficie della terra viene descritta dalla:
r
r
Fp = mg
(6)
La (6) è una approssimazione (ottima) della legge di gravitazione universale di Newton,
per un corpo di massa m sulla superficie della terra:
r
mM
FG = -G 2 T rˆ
r
(7)
r = RT + h
Dove G è la costante di gravitazione universale:
†
G = 6.67 x 10–11 Nm2/kg2
RT è il raggio della terra:
RT
= 6.37 x 106 m
M T è la massa della terra:
M T = 5.98 x 1024 kg
e h è la quota (misurata dalla superficie delle terra) del corpo di massa m.
Quindi essendo h << RT dal confronto tra (7) e (6) si trova:
(8)
FG @ m
GM T
≡ mg = F p
RT2
r
r
r
Dove, omettendo il segno di vettore, sono indicati i moduli di FG , Fp , g .
NOTA 2
come si nota dalla (8), la massa m che compare nella (6) descrive la
quantità di materia alla quale è proporzionale la forza con cui il corpo è attratto da
un’altro corpo (in questo caso la terra).
Se assumiamo che la forza peso sia l’unica forza agente sul corpo di massa m, cioè:
(9)
r
r
Fris = F p
4
la II legge di Newton ci dice che:
(10)
r
r
mg = ma
Abbiamo scritto la massa sempre con lo stesso simbolo, anche se, come indicato nelle
note 1 e 2, vengono descritte due caratteristiche del corpo in principio diverse ed
indipendenti. Questa assunzione è basata sul risultato di esperimenti (Eotvos, 1909;
Dicke, 1964; Braginsky, 1972) che hanno verificato la loro uguaglianza entro una parte
su 1012 (principio di equivalenza). Detto ciò possiamo semplificare le masse e scrivere:
(11)
r r
a=g
cioè in questo caso il corpo è in “caduta libera” e le (3-5) si semplificano:
FrisX = 0
FrisY = 0
FrisZ = -g
dove abbiamo assunto il sistema di riferimento della figura 1, e la forza peso diretta come
zˆ con verso opposto.
5
Richiami di attrito
Quando un corpo è posato su una superficie l’interazione con questa oppone una
“resistenza” allo scivolamento.
La descrizione dettegliata di questa “resistenza” è assai complicata, impossibile a trattare.
Coinvolge le interazioni tra gli strati molecolari delle superfici del libro e del piano che
entrano in contatto. Vedremo però che una descrizione del comportamento globale
macroscopico è assai semplice e sufficiente per molti degli scopi di laboratorio.
Si consideri un libro appoggiato su di un tavolo. Il peso del libro è equilibrato dalla
reazione vincolare del tavolo. Spingiamo ora il libro, applicando una forza F parallela al
tavolo. Si nota che fino a
|F| ≤ |F0|
il libro rimane fermo, oltre tale valore riusciamo a metterlo in moto. Se il libro fosse
maggiormente pressato contro il tavolo, supponiamo di aggiungerci del peso sopra, il
valore di |F0| aumenterebbe. Eseguendo misure abbastanza precise potremmo osservare
che al raddoppiare del peso del libro raddoppierebbe anche il valore della forza
orizzontale che si deve esercitare per muovere il libro. Potremmo cioè scrivere che
|F0| a |N|
dove N è la reazione vincolare del tavolo, che nel nostro caso è pari, cambiata di verso,
alla forza peso del libro:
N = - mg
In altre parole la forza necessaria a muovere il libro è proporzionale alla forza che tiene
unite le due superfici (quella del libro e quella del tavolo) a contatto. Questa forza è
proprio la reazione vincolare del tavolo, che solo in questo caso particolare è pari, in
modulo, alla forza peso. In generale la reazione vincolare è pari alla componente normale
al piano della forza risultante esterna applicata al corpo. Già nel prossimo esempio, dove
interverrà anche un’altra forza esterna, N ≠ -mg.
È intuitivo che tale “resistenza” al moto sia legata al materiale di cui sono costituiti il
libro e il tavolo, e alla finitura degli stessi (si alla differenza fra un tavolo di legno ben
levigata ed un tavolo dello stesso legno grezzo!).
Possiamo infine dire che questa forza annulla la nostra forza orizzontale, esercitando
quindi una forza uguale e contraria, sino ad un massimo dato da:
FAstatico
max = ms N
D’ora in avanti chiameremo questa forza FA , forza di attrito. Si noti che abbiamo
aggiunto il soprascritto statico ad indicare che la FA descritta sin’ora si esercita quando
† superfici a contatto. La proporzionalità con N si è
non c’e’ scorrimento fra le due
6
esplicitata inserendo il coefficiente µs detto coefficiente di attrito statico, che dipende
dalle caratteristiche delle superfici a contatto.
Per semplificare la notazione abbiamo anche eliminato i segni di modulo {| .. |}. D’ora in
avanti un vettore non in grassetto indicherà il modulo del vettore.
Nel caso di questo nostro primo esempio la forza orizzontale che si deve esercitare per
spostare il libro sul piano è quindi pari a µs mg. {domanda: c’è un modo per spostare il
libro esercitando una forza minore di µs mg ?}
Risolviamo questo semplice esercizio: qual è la minima forza necessaria a spostare
un corpo di massa m su un piano con il quale si genera un attrito descritto dal
coefficiente di attrito µs?
Si consideri la situazione descritta dalla seguente figura e si lasci libero l’angolo tra
la forza esterna F ed il piano.
N
F
Fsenq
q Fcosq
Y
X
mg
Affinchè il corpo si muova, la componente orizzontale della forza dovrà essere
maggiore del massimo attrito esercitabile.
La reazione vincolare N è pari in modulo alla componente normale al piano della
forza risultante esterna pplicata al corpo. Nel nostro caso, quindi (utilizzando un
sistema di riferimento come in figura)
N = mg - Fsenq
[si noti che mg - Fsenq > 0, altrimenti il libro si solleverebbe]
Per la seconda legge di Newton la condizione per il movimento è:
Fris(lungoX) > 0
F cosq - µs(mg – Fsenq) > 0
Abbiamo quindi:
F>
mmg
cosq + senq
Affinchè la forza sia minima il denominatore deve essere massimo. Calcoliamone la
derivata:
†
d
(cosq + msenq ) = -senq + m cosq
dq
Annullando la derivata troviamo l’angolo q0 che minimizza la forza:
†
-senq 0 + m cosq 0 = 0 fi m = tan q 0
7
†
Quindi:
F>
mmg
mmg
mmg
=
=
cosq 0 + senq 0 cos q (1+ m tan q 0 ) cos q 0 (1+ m 2 )
Dalla relazione trigonometrica cos2q + sen2q = 1 si ricava che (dividend per cos2q):
†
sen 2q
1
1
1+
=
fi cosq =
2
2
cos q cos q
1+ tan 2 q
e quindi ricordando che tanq0 = µ:
†
F>
mmg
1+ m 2
che è certamente minore di µmg come ci era stato richiesto.
†
Consideriamo ora un caso diverso, che ci consentirà di ripetere gli stessi concetti, e
considerare anche le situazioni dinamiche in cui le due superfici a contatto si muovono
l’una rispetto all’altra.
Si provi a poggiare un libro su una tavola di legno e ad alzare un lato della tavola
aumentandone gradualmente l’angolo di inclinazione. Chiamiamo q quest’angolo
(attenzione, questo angolo descrive una variabile diversa da quella descritta dal q
precedente!)
FIGURA 2
8
Il libro rimarrà fermo sul piano fino al raggiungimento di un determinato valore q0 ,
quindi inizierà a scivolare. Questa osservazione, e la nostra conoscenza della II legge di
Newton ci permette di fare alcune considerazioni già viste prima ed alcune nuove.
(i) Per q < q0 l’attrito tra il libro ed il piano esercita una forza lungo il piano (di modulo
pari a FA ) uguale in modulo alla reazione vincolare della tavola, cioè la componente della
forza peso lungo il piano (mgsenq). Tale forza di attrito ha verso contrario a quella della
componente della forza peso lungo il piano e quindi annulla la forza risultante lungo il
piano sul libro. Il libro è in quiete (se volete in questo caso si può applicare la I legge di
Newton).
(ii) Al variare di q<q0, quindi, FA NON è costante: aumenta in modulo all’aumentare di
q, come mgsenq.
(iii) Per q > q0 la forza di attrito non è più sufficiente ad annullare la componente della
forza peso lungo il piano: il libro comincia ad accelerare verso il basso.
Nella situazione limite q=q0, ritroviamo la relazione precedente:
FAstatico
max = ms N = ms mgcos(q )
Proseguendo nel nostro esperimento, supponiamo di utilizzare una inclinazione del piano
costante q1 > q0 . Il corpo scivola. Se misurassimo il suo moto {domanda: cosa dovremmo
†
misurare?} ci accorgeremmo che il moto è uniformemente accelerato e che la sua
accelerazione è minore di quella che ci si aspetterebbe se non si considerasse l’attrito
{domanda: qual è questa accelerazione?}. In questo caso essendo costante l’inclinazione
(e quindi la componente della forza peso lungo il piano, mgsen q1 , possiamo concludere
che:
†
(iv) la forza di attrito NON dipende dalla velocità di scivolamento del corpo. Infatti, se
ciò fosse vero, il mutare della forza di attrito con la velocità che aumenta causerebbe un
cambiamento nella forza risultante applicata al corpo ed una conseguente variazione di
accelerazione (II legge di Newton).
Nuovamente. Anche in questo caso dinamico, la forza di attrito dipenderà dalla forza con
la quale le due superfici sono “tenute assieme” (di nuovo la reazione vincolare del piano)
e dalle caratteristiche delle due superfici a contatto.
Ripetendo le misure descritte sopra per diversi valori di q > q0 è infatti possibile
osservare che:
(v) per i valori di q > q0 la forza di attrito varia come la reazione vincolare del piano,
cioè la componente della forza peso normale al piano (mgcosq).
9
Queste osservazioni si possono riassumere in un semplice modello. La forza di attrito FA
“finchè possibile” annulla la forza F che tende a far scivolare il corpo (in questo caso F=
mgsenq). Al di sopra di un valore massimo di F, la forza di attrito non riesce più ad
aumentare e rimane costante, al variare della velocità del corpo, mentre varia come la
componente della forza peso normale al piano, al variare di q. Quanto detto si può
facilmente descrivere nel seguente modo (sia F la risultante delle forze esterne sul corpo
lungo il piano)
FA = F
FAstatico
max = ms N = ms mgcos(q )
dinamico
FA max = md N = msmgcos(q )
FAdinamico
= md N = md mgcos(q )
max
†
†
†
(se
(se
(se
(se
q < q0 , o, più in generale, F < F0)
q = q0 , o, più in generale, F = F0)
q = q0 , o, più in generale, F = F0)
q > q0 , o, più in generale, F > F0)
Dove abbiamo introdotto il coefficiente di attrito dinamico, del tutto analogo al
precedente, ma che descrive l’attrito in condizioni, appunto, dinamiche (cioè con le due
superfici a contatto in moto tra di loro).
Questo coefficiente dipenderà ancora dalle caratteristiche delle due superfici dei corpi
che vengono a contatto. Nel caso dinamico scriveremo, analogamente a prima:
(12)
FA = md N = msmgcos(q )
La direzione di FA è quella del moto ed il verso è quello opposto al moto. Si verifica che,
date le due superfici a contatto, il valore di m è costante.
† casi “max” (vedi di sopra) si distinguono solo dalla presenza o meno del
Si noti che i due
moto e quindi dai coefficienti di attrito.
Nella (12), l’intensità della forza di attrito può facilmente misurarsi dai nostri esperimenti
con diversi q > q0 {domanda: come?}.
Abbiamo quindi ritrovato i concetti esposti prima e abbiamo anche notato alcune
proprietà della forza di attrito “durante lo scivolamento”, ad esempio che FA non dipende
dalla velocità di scivolamento.
NOTA 3
Si faccia particolare attenzione al fatto che descrivendo la forza di attrito
viene sempre omesso il sottoscritto “max” e non è spesso esplicito se siamo in una
situazione statica o dinamica (si trova, ad esempio, FA = µN). In una situazione statica
questo può portare a grossolani errori. È ovvio, infatti, che la relazione scritta prima è in
ogni caso valida SOLO se il corpo sta già scivolando, o in situazioni alquanto particolari,
quando cioè è presente una forza esterna che l’attrito bilancia. Se questo venisse
dimenticato ci troveremmo a descrivere una situazione impossibile, dove, ad esempio, un
corpo appoggiato su un piano orizzontale (e quindi con mgsenq=0), si troverebbe ad
accelerare, per la II legge di Newton, con una accelerazione pari a FA/m.
Si torni ora alle due forze di attrito “max” descritte prima:
10
FAstatico
max = ms N = ms mgcos(q )
dinamico
FA max = md N = md mgcos(q )
†
†
Si noti che queste due forze non sono uguali. Dal punto di vista formale questo è ovvio in
quanto i due coefficienti di attrito sono diversi occorre però convincersene.
Si torni all’esempio iniziale, del libro sul piano inclinato. Misure accurate faranno
osservare che
dinamica
FAstatica
max ≥ FA max
Cioè che l’attrito statico massimo che può esercitarsi fra due superfici è maggiore del
valore di attrito che al massimo si può esercitare quando le due superfici a contatto
scivolano l’una rispetto†all’altra.
NOTA 4
Quanto appena scritto è facilmente osservabile. Si pensi di voler spostare
una cassa. La forza che si deve esercitare per iniziare a muoverla è maggiore di quella
che si deve esercitare per mantenerla in moto uniforme.
Possiamo quindi concludere che
mstatico ≥ mdinamico
Per riassumere scriviamo quindi le equazioni relative al nostro libro (usando il sistema di
riferimento in figura 2).
(13)
(14)
FrisX = mgsenq - md mgcosq = maX (≡ m˙x˙)
FrisY = -mgcos q + N = 0 = maY (≡ m˙y˙)
Dove abbiamo considerato il fatto che non vi è moto lungo y.
†
Il segno ‘-‘ nel secondo membro della (13) (FA = -mmgcosq) è stato scelto osservando
†
che FA ha verso sempre opposto al moto. Si noti che:
Il fatto che FA abbia verso opposto al moto NON ci dice nulla circa la relazione tra tale
verso ed il verso della forza esterna F agente sul corpo (nel nostro esempio F = mgsenq)
r
r
{domanda: si trovino esempi in cui F è concorde/discorde con FA }
Alcuni moti presentano quindi delle rdiscontinuità nelle equazioni che li descrivono,
dovute al cambiamento di segno di FA . Si pensi, ad esempio, al moto del nostro libro
“lanciato” verso le x < 0 (“l’alto”) che raggiunge una quota massima e quindi torna
indietro.
11
Moti in un mezzo resistivo
Ci sono attriti che si comportano diversamente da quelli appena descritti, tipici dello
“scivolamento” tra due superfici.
Quando un corpo si muove in un fluido (aria, acqua, etc.) il fluido esercita una forza sul
corpo che tende a rallentarlo. C’è quindi una “resistenza” del mezzo al moto del corpo.
Anche in questo caso, come per le forze di contatto richiamate prima, le interazioni che
danno luogo a questa “resistenza” sono assai complesse. È comunque possibile, anche per
i moti in un mezzo resistivo, descrivere queste interazioni “globalmente” in modo
abbastanza semplice, anche se approssimato.
Iniziamo con l’osservare una caratteristica che distingue questa forma di attrito da quanto
visto in precedenza: FA in questo caso dipende dalla (..aumenta con la) velocità.
Questo può osservarsi lasciando cadere una pallina da ping pong, oppure, per aumentare
la visibilità del fenomeno, lanciandola (verso il basso, ad esempio, da una finestra).
Dall’istante in cui si lascia la pallina le uniche forze agenti sono la forza peso ed FA
Nel primo caso (pallina “lasciata cadere” e quindi con velocità iniziale nulla) si potrà
osservare come ad un primo rapido aumento di v seguirà un moto con v quasi costante.
Nel secondo caso (suppuniamo di lanciare la pallina verso il basso imprimendole una
elevata velocità iniziale verso il basso) potremmo probabilmente osservare un iniziale
rallentamento e poi, nuovamente, un moto con v costante (fra breve capiremo perchè è
necessario imprimere una “elevata” velocità verso il basso alla pallina per osservarne un
rallentamento, e sapremo anche quantificare “elevata”.
Se si considera che il fluido (aria) ed il corpo (pallina) sono sempre gli stessi, se ne
evince come i mutamenti di accelerazione del moto siano legati alla velocità.
Osservazioni quantitative permettono di determinare la forma funzionale di FA nel moto
in un mezzo resistivo:
(15)
r
FA = -bv n vˆ
Dove la direzione positiva è quella del moto. Si osserva che n ≈ 1 per velocità piccole
(esempio: pallina da ping pong, anche quando lanciata) e n ≈ 2 per velocità grandi (per
†
esempio proiettili).
Da ora in poi noi ci occuperemo solo di velocità piccole, quindi:
(16)
FA = - bv
Il coefficiente b dipende dalle dimensioni e dalla forma del corpo, così come dall’attrito
tra i diversi strati di fluido.
La dipendenza dalle caratteristiche del corpo può separarsi da quella legata alle
caratteristiche del fluido:
(17)
FA = -k h v
dove k descrive le caratteristiche del corpo, h (“viscosità”) quelle del fluido.
12
Per una piccola sfera di raggio R (legge di Stokes)
(18)
k=6pR
e quindi
(18b)
b=6πRh
(19)
FA = - 6 p R h v
Possiamo quindi definire le dimensioni di questi due parametri:
(20)
(21)
[k] = L
[h] = FT/L2 = M/(LT)
Nel sistema cgs si definisce 1 poise ≡ 1 g/(cm s).
La (19) è valida per gocce piccole e lente, ma non, ad esempio, per paracaduti acrobatici
o per proiettili. In questi casi FA µ - A v, dove A è la sezione trasversale (al moto) del
corpo.
Consideriamo una goccia di pioggia, piccola, in aria calma. Per applicare la II legge di
Newton dobbiamo prima determinare tutte le forze che agiscono sulla nostra goccia: la
forza peso, la forza di attrito e .. la spinta di Archimede. Ogni qual volta che si deve
studiare il moto di un corpo in un fluido si deve infatti considerare che, come recita il
principio di Archimede: un corpo immerso in un fluido riceve una spinta dal basso verso
l’alto pari al peso del fluido spostato.
(22)
Fris = mg - 6 π R h v - FArch
Si noti che anche la spinta di Archimede è stata inserita con il segno ‘-‘ in quanto diretta
dal basso verso l’alto, con verso opposto a g.
Dobbiamo ora scrivere FArch in funzione dei parametri del sistema. Indicando con V il
volume del corpo (la goccia) e con d’ la densità del fluido:
FArch = V d’ g
Inoltre
m=Vd
dove con d si è indicata la densità della goccia. Quindi:
(22b)
Ê d' ˆ
Fris = Vdg - 6 pR hv -Vd ' g = VdgÁ1- ˜ - 6 pRhv
Ë d¯
13
Quindi possiamo scrivere:
(22c)
Fris = mg'-6 pRhv
Dove
(22d)
Ê d' ˆ
g'= gÁ1 - ˜
Ë d¯
Si noti che il coefficiente in parentesi può essere negativo (quando d’>d, quando cioè il
corpo “galleggia”).
Si noti che possiamo scrivere la Fris (22c) come:
(22e)
Fris = Fext - FA
Cioè alla somma vettoriale (algebrica in questo caso, visto che il problema è
unidimensionale) delle forze esterne (forza peso e forza di Archimede) e della forza di
attrito.
Si scelga un sistema di riferimento orientato verso il basso (si osservi che il moto, se
inizialmente verticale, rimane verticale, e può quindi essere descritto in una unica
dimensione); si ricorda inoltre la seconda legge di Newton (F=ma=mdv/dt) che, con la
(22c) si scrive:
(23)
dv 6pRh
+
v - g'= 0
dt
m
NOTA 5
Si noti nella (23) che l’unica modifica apportata dall’inserimento della
†
spinta di Archimede
è g fi g’, dove g’ < g. Notate quindi che la spinta di Archimede
riduce l’effetto della gravità fino ad rendere il contributo di quest’ultima trascurabile (se
d’≈ d). Da ciò si comprende perchè gli astronauti si esercitino nelle piscine: è un ottima
simulazione della microgravità che incontreranno in orbita!
L’equazione (23) è una equazione differenziale di facile soluzione. La risolveremo, ma
cerchiamo prima di comprenderne le principali caratteristiche.
Consideriamo di applicarla al caso della nostra goccia di pioggia. Assumiamo, per
semplicità che questa parta da ferma, ed inizi il suo moto verticalmente, verso il basso.
Inizialmente quindi v=0. Quindi, nei primissimi istanti del moto possiamo scrivere:
14
(24)
dv
≡ a @ g'
dt
Cioè la nostra goccia è in caduta “libera”, dove le virgolette indicano la presenza della
spinta di Archimede (g’<g).
La (23) ci dice quindi che la goccia parte con accelerazione g’, quindi la sua velocità
comincia ad aumentare. Comicia quindi a contare il termine lineare in v [quello che
descrive il nostro attrito nella equazione (23)]. Mano a mano che la velocità cresce il
termine di attrito aumenta in valore assoluto e quindi
(24b)
dv
6pRh
≡ a = g'v
dt
m
È chiaro che in questo caso a non può mai diventare negativa (ci meraviglieremmo non
poco ad osservare una goccia che, lasciata cadere da ferma, dopo un po’ ricominciasse a
†
salire ….) {domanda:
in quali condizioni posso avere una accelerazione negativa?}. Al
massimo, quindi, il termine di attrito annullerà g’, e potremo scrivere:
(25)
dv
≡a=0
dt
Dal punto di vista delle forze in gioco, a questo punto la forza di attrito esercitata dal
fluido (aria) sul corpo (goccia) bilancia perfettamente la somma vettoriale tra la forza
peso e la spinta di Archimede, annullando la forza risultante. Il corpo da ora in poi si
muove di moto rettilineo uniforme. La sua velocità vlim si calcola facilmente annullando la
(24b):
(26)
vlim =
mg'
6pRh
Nella (26) abbiamo assunto un moto in cui su un corpo, piccolo e sferico, agisca, oltre
all’attrito, una forza esterna Fext
(27)
Fext = Fp - FArch = mg’
Se avessimo considerato una forza esterna qualsiasi ed un corpo qualsiasi si può
verificare molto facilmente che avremmo trovato [dalla (26), (27) e dalla definizione di b
(18b)]
(26b)
vlim =
Fext
b
15
La soluzione dell’equazione differenziale (facoltativo)
Riscriviamo ora la (23) utilizzando la (26):
(28)
È v
˘
dv
+ g' Í
-1˙ = 0
dt
Î vlim ˚
Definiamo ora il tempo t:
(29)
t=
vlim
g'
Si noti che t è il tempo che la goccia avrebbe impiegato per raggiungere vlim con
accelerazione costante e pari a g’. Inserendo la (29) nella (28):
(30)
dv 1
+ (v - vlim ) = 0
dt t
da cui posso scrivere:
v=v1
dv
1 t=t1
=
Ú
Ú dt
t t=0
v= 0 v - v lim
Per risolvere l’equazione differenziale cambio variabile di integrazione e pongo:
v – vlim = w
e quindi
dv = dw
w(v=v1) = v1 – vlim
w(v=0) = – vlim
w=v1 -v lim
Ú
w=- v lim
dw
1 t=t1
= - Ú dt
w
t t=0
Ricordando che l’integrale di dw/w è il lnw, possiamo scrivere:
ln
(v1 - v lim )
1
= - t1
-v lim
t
16
Elevando e ad entrambe i membri (e cambiando segno a denominatore e numeratore del
logaritmo):
vlim - v1
= e -t1 /t
vlim
v(t) = v lim (1- e-t / t )
(31)
Dove si sono omessi i sottoscritti di v1 e t1 in quanto tali valori sono arbitrari.
Si noti che per†t = 0 e per t fi • ritroviamo i risultati ricavati precedentemente.
Inoltre sviluppando in serie di Taylor per t piccoli (serie di Mac Laurin) otteniamo:
e-t / t ª 1-
(31b)
t
t
e quindi, inserendo la (31b) nella (31):
(31c)
†
v(t) = v lim
t
= g' t
t
cioè la velocità inizialmente cresce linearmente con accelerazione g’, come si può
apprezzare dal seguente grafico della (31), dove viene anche illustrato il significato di t,
come definito†dalla (29):
Derivando la (31) otteniamo l’accelerazione in funzione del tempo:
a(t ) =
= vlim
dv
d
= vlim (1- e -t/ t )
dt
dt
d
(-e- t/ t )
dt
17
È Ê 1 ˆ -t /t ˘
= vlimÍ-Á - ˜e ˙
Î Ë t¯
˚
=
vlim -t / t
e
t
Ricordando la definizione di t (29):
(32)
a(t ) = g' e-t /t
Possiamo anche ulteriormente integrare la (31) da t = 0, x = 0 ad un t = t1, x = x1
arbitrari.
v(t) ≡
dx
= v lim - vlime t /t
dt
x= x1
t=t1
t=t1
x= 0
t=0
t=0
Ú dx = vlim Ú dt - vlim Ú e- t/ t dt
sostituendo nell’ultimo integrale
t/t=z
dt = t dz
z(t=t1) = t1 / t
si ottiene
x= x1
t=t1
z=t1 / t
x= 0
t=0
z =0
Ú dx = vlim Ú dt - vlimt Ú e-z dz
x(t) = vlim t- vlim t (-)(e-t/t-1)
quindi
(33)
x(t) = vlim t + vlim t (e-t/t-1)
{domanda: si studino graficamente gli andamenti di x(t), v(t) e a(t)}
18
La sedimentrazione
Si considerino delle particelle di massa m in sospensione in un fluido in quiete. Sia
nuovamente d la densità delle particelle e d’ quella del fluido.
Le particelle tendono a salire (o a scendere) nel fluido con v costante a seconda del valore
di d’/d. Salgono se d’/d>1, g’<0, vedi (22d), scendono altrimenti.
Come visto precedentemente la forza esterna su una di queste particelle è pari a [vedi
(27) e (22e)]
Fext = Fp - FArch
Ê d' ˆ
Fext = mg'= mgÁ1 - ˜
Ë d¯
e la velocità limite è (26), (22d)
(34)
vlim
Ê d' ˆ
mgÁ1- ˜
Ë d¯
=
6pRh
dove abbiamo considerato l’ipotesi che le particelle siano piccole e sferiche. Nel caso di
particelle sferiche, la massa può scriversi in funzione della densità e del volume
(V=4/3"πR3):
(35)
m=
4 3
pR d
3
che inserita nella (34):
(36)
vlim
2 R 2 g(d - d' )
=
≡ vs
9
h
In questo tipo di problemi la velocità limite descritta dalla (34) o dalla (36) prende il
nome di velocità di sedimentazione vs.
Si nota dalla (36) che tale velocità dipende dalle caratteristiche del fluido (densità e
coefficente di viscosità) e da quelle delle particelle in sospensione (densità e raggio).
{domanda: quante e quali relazioni fisiche abbiamo utilizzato per giungere alla velocità
di sedimentazione?}.
Si può quindi osservare che, note le caratteristiche del fluido, una misura della velocità di
sedimentazione consente di misurare alcune proprietà delle particelle in sospensione. Per
19
misurare la sedimentazione è sufficiente misurare la posizione delle particelle nel
solvente in funzione del tempo.
Ad esempio la misura della sedimentazione libera degli eritrociti nel sangue (VES) è un
utile ed usato strumento diagnostico. La (36) ci fornisce una stima del valore di tale
velocità. Si considerino i seguenti valori:
R = 3.5 µm
d = 1.0995 g/cm3
d’ = 1.0265 g/cm3
h = 0.01 poise
[si ricorda: 1 poise = 1 g/(cm s)]
2 (3.5 ¥10 -4 ) 2 ¥9.8 ¥10 2 ¥(1.0995 -1.0265)
vs =
= 1.9 ¥10 -4 cm / s
9
0.01
cioè vs ≈ 7 mm/h. Questo, ovviamente, è solo un ordine di grandezza. La sedimentzione
nel sangue è infatti un fenomeno assai complesso che qui può essere trattato solo
approssimativamente. Ad esempio gli eritrociti non hanno forma sferica e tendono a
formare aggregati.
In un soggetto normale vs < 7 mm/h. Se questo valore dovesse alzarsi potrebbe essere
segno di una alterata aggregazione degli eritrociti o di una modificata composizione del
plasma, a causa, ad esempio, di uno stato infettivo.
In pratica la misura si esegue ponendo il sangue (con degli anticoagulanti) in una provetta
e misurando la posizione del menisco che separa gli eritrociti dal plasma ad intervalli di
10-20 minuti, e graficando il risultato in funzione del tempo.
È evidente come la VES possa essere un utile strumento diagnostico. Qui ne abbiamo
studiato le leggi fisiche che permettono di utilizzare tale strumento.
NOTA 6
Si noti, quindi, che ogni qual volta si vada a misurare, ad esempio, la VES
usando tale misura come strumento diagnostico, si sta di fatto studiando il moto degli
eritrociti (nel caso della VES) descritto dalla seconda legge di Newton.
20
Centrifughe
Abbiamo visto che la velocità di sedimentazione può essere bassa. Dalla (36) e, più in
generale, dalla dipendenza di vs da R e d intuiamo che questa tecnica potrebbe essere
assai utile, ad esempio, per separare diverse particelle presenti in una stessa soluzione. A
tal scopo sarebbe necessaria una vs più elevata. Dalla (26b) si osserva come, a parità di
coefficiente di attrito, e quindi una volta fissate particelle e fluido (si ricorda che b ≡
6πRh, nel caso di particelle sferiche), sia necessario aumentare Fext. A questo scopo si
ricorre all’uso di centrifughe.
La centrifuga è una apparecchiatura che permette di porre la provetta contenente la nostra
soluzione in rapida rotazione attorno ad un asse (vedi figura 3).
asse di rotazione
w
provetta
fluido
particella
r0
Figura 3
Richiamo dei sistemi di riferimento non inerziali
Per comprendere il meccanismo di funzionamento della centrifuga dobbiamo richiamare i
concetti relativi ai sistemi di riferimento non inerziali.
Un sistema di riferimento
r inerziale è un sistema di riferimento che si muove di moto
rettilineo uniforme ( a = o ) rispetto alle “stelle fisse”. Per tutto ciò che ci riguarda il
sistema del nostro laboratorio è un buon esempio di sistema di riferimento inerziale.
{domanda: perchè il pendolo di Focault dimostra che, ad un più attento esame, anche il
sistema di riferimento del laboratorio non è inerziale?}
In un sistema di riferimento inerziale valgono le leggi di Newton.
I sistemi accelerati rispetto ai sistemi di riferimento inerziali si dicono “non inerziali”. In
un sistema di riferimento “non inerziale” non valgono le leggi di Newton, a meno di non
introdurre le “forze fittizie”.
Che in un sistema di riferimento non inerziale non valgano le leggi di Newton, almeno
nella formulazione che conosciamo, è semplice da verificare. Si immagini di essere
seduti in un treno, il treno si muove con velocità costante (costante rispetto al suolo,
quindi anche rispetto al nostro laboratorio). Siamo quindi in un sistema di riferimento
inerziale. Il nostro peso è bilanciato dalla reazione della poltrona sulla quale siamo
seduti, non vi sono altre forze agenti. La mia accelerazione rispetto allo scompartimento
21
(che diventa in questo caso il mio laboratorio) è nulla. Le leggi di Newton sono
soddisfatte. Il treno frena. L’accelerazione del treno (negativa se il moto si svolgeva
lungo il verso positivo dell’asse di riferimento) rende il sistema di riferimento non
inerziale. La mia accelerazione rispetto allo scompartimento non sarebbe più nulla se non
mi tenessi con forza per non essere sbalzato in avanti. Eppure non c’è nessuna forza
esterna agente su di me, la risultante delle forze reali è ancora nulla: le leggi di Newton
non sono soddisfatte. Di fatto l’accelerazione del sistema di riferimento ha “mimato” la
presenza di una nuova forza, una forza fittizia. Per poter utilizzare le leggi di Newton in
un sistema di riferimento non inerziale c’è bisogno di considerare anche questa forza
fittizia.
Le leggi di Newton possono quindi essere utilizzate in un sistema di riferimento non
inerziale se si sommano alle forze reali anche quelle fittizie, pari al prodotto della massa
del corpo in studio, per l’accelerazione del sistema cambiata di segno.
Facciamo un esempio diverso. Consideriamo una stazione spaziale in orbita attorno alla
terra. Il corpo che dobbiamo studiare è all’interno della stazione spaziale, ed è in quiete
rispetto ad essa, in condizione di “assenza di peso”. Vediamo come si può studiarne il
moto da terra (sistema di riferimento inerziale) e dall’interno della stazione stessa
(sistema di riferimento non inerziale in quanto si muove di moto circolare uniforme (e
quindi con accelerazione centripeta non nulla) attorno alla terra.
Dalla terra. L’unica forza agente sul corpo è l’attrazione gravitazionale con la terra
(trascuriamo quella con la stazione spaziale, enormemente inferiore). Questa forza è
centrale e per la seconda legge di Newton è proporzionale alla accelerazione del corpo,
che è totalmente centripeta e costante in modulo. Il moto è quindi circolare uniforme.
Lungo la coordinata radiale (diretta dalla terra verso fuori) possiamo scrivere
(36b)
mM
v2
Fris = -G 2 = ma = -m
r
r
dove il secondo segno di uguale è la seconda legge di Newton.
†La forza gravitazionale è sempre presente. A questa va quindi aggiunta la
Dalla stazione.
forza fittizia (che viene detta centrifuga), pari all’accelerazione del sistema di riferimento
(centripeta) cambiata di segno e moltiplicata per la massa. Le due forze, quella reale e
quella fittizia, in un moto orbitale sono uguali e contrarie. La risultante è nulla. Dal
sistema di riferimento non inerziale l’astronauta osserva che il corpo è in quiete con la
stazione, e quindi che le leggi di Newton sono rispettate:
(36c)
Fris = -G
mM
v2
+
m
= ma = 0
r2
r
Questa relazione ci permette di capire la sensazione di “assenza di peso” provata dagli
astronauti in orbita: relativamente alla stazione orbitante la risultante delle forze è nulla!
†
22
Attenzione: la forza gravitazionale è certamente presente anche nella stazione spaziale, è
semplicemente bilanciata nel sistema non inerziale dalla forza fittizia centrifuga!
NOTA 7
All’inizio di questo corso si è fatto notare che le due masse che compaiono
nella legge di gravitazione universale e nella seconda legge di Newton (rispettivamente
massa gravitazionale ed inerziale) descrivono proprietà diverse dei corpi e sono dette
equivalenti a seguito di misurazioni assai precise. La, ormai frequente, immagine
dell’astronauta che fluttua immobile nella stazione spaziale a fianco del suo spazzolino da
denti, o di una scatoletta di cibo è di fatto una dimostrazione (grossolana ma convincente)
di tale equivalenza. Visti da terra, infatti, spazzolino da denti, scatoletta di cbo e
astronauta sono corpi per cui vale la (36b). Se le tre masse non fossero equivalenti
dovrebbero dipendere in modo diverso dai loro costituenti. In generale, quindi, i valori di
v ed r che soddisfano le (36b) nei tre casi dovrebbero essere diversi. Il rapporto mi/mg
dovrebbe infatti essere diverso. Nel nostro caso, invece, i tre corpi rimangono in quiete
tra di loro nel loro moto orbitale (spazzolino, scatoletta e astronauta sono fermi l’uno
rispetto agli altri) e dimostrano che la massa inerziale e gravitazionale sono equivalenti,
o, in altre parole che il rapporto mi/mg è uguale per tutte le masse, e quindi può essere
posto uguale ad uno attraverso una appropriata scelta di unità.
Perchè ci occupiamo di questo nel caso della nostra centrifuga? Abbiamo sino ad ora
studiato la sedimentazione nel sistema del nostro laboratorio, e siamo giunti a descrivere
il comportamento della velocità di sedimentazione in funzione di paramentri importanti
del nostro sistema. Ora ci accingiamo a mettere il nostro sistema in rotazione veloce, e il
nostro scopo è quello di studiarne il comportamento nel sistema rotante in modo da poter
utilizzare le relazioni che abbiamo trovato sino ad ora.
Consideriamo la particella di massa m a distanza r0 dall’asse di rotazione (vedi figura 3).
La centrifuga ruota con pulsazione angolare w (w ≡ 2πf, f ≡ frequenza di rotazione).
L’accelerazione centripeta della particella, misurata nel sistema inerziale del laboratorio è
pari a:
(37)
a = - w2r0
Dove con il segno ‘-‘ si indica che l’accelerazione è centripeta, diretta verso l’asse di
rotazione. Conseguentemente la forza fittizia è data da:
(38)
Ff = mw2r0
Si noti che questa forza è presente SOLO nel sistema di riferimento non inerziale.
Questa forza fittizia (38) agisce non solo sulla particella di massa m ma anche su tutte le
particelle del solvente. Si comporta, cioè, in modo analogo alla forza peso.
23
NOTA 8
Si osservi che la dizione “dal basso verso l’alto” nell’enunciazione del
principio di Archimede, presuppone che si conoscano questi due “versi”. Risulta intuitivo
coprendere come la definizione di “alto” e “basso” sia imprescindibilmente legata alla
forza peso (e quindi di gravità), che con il suo verso definisce univocamente il “basso”.
Se vi immaginaste nella provetta rotante, quindi nel sistema di riferimento non inerziale,
il vostro “basso” sarebbe certamente nella direzione radiale, verso l’esterno. La forza
fittizia in questo sistema di riferimento è, infatti, la forza apparentemente agente sulla
nostra massa e, all’interno della provetta, si comporta come la forza di gravità.
Il principio di Archimede ci dirà quindi che la particella riceve una spinta con verso
opposto al verso della forza fittizia, uguale alla forza che verrebbe esercitata su una
massa di solvente di volume pari a quello della particella. In questa ottica possiamo
riscrivere le equazioni che abbiamo trovato in precedenza, avendo cura di sostituire alla
accelerazione di gravità g, l’accelerazione centrifuga w2r0. Infatti (con i significati dei
simboli già utilizzati in precedenza):
Fext = Ff – FArch = Vdw2r0 – Vd’w2r0
(39)
Fext = Vw2r0(d – d’)
Vediamo che la (39) è identica alla (27) a meno della sostituzione
(40)
g fi w2r0.
Si sottolinea che si è totalmente trascurata la forza peso. La ammissibilità di questa
semplificazione verrà mostrata fra breve. Utilizzando la (40) nella (36) si ottiene:
(41)
2 R 2w 2r0 (d - d')
vs =
9
h
L’utilità delle centrifughe è sostanzialmente descritta dalla sostituzione (40). Mentre g è
di fatto una costante, sia w che r0 possono variare a piacere, entro certi limiti strumentali.
Abbiamo cioè uno strumento capace di aumentare vs e conseguentemente di diminuire i
tempi di sedimentazione. Il “vantaggio” di usare una centrifiga è descritto dalla Relative
Centrifugal Force (RCF):
(42)
w 2r0
RCF =
g
Questo rapporto per una tipica centrifuga (f ≈ 1500 giri/min, r0 ≈ 20 cm) è di circa 5 x
103! (e nelle ultra centrifughe arriva a quasi 106).
24
Centrifughe (valori indicativi)
Low
Velocità
2-6
Max RCF
6x103
high
18-25
6x104
ultra
40-80
6x105
giri al minuto x 10-3
Questi valori ci confermano che l’approssimazione fatta nel trascurare la forza peso è
perfettamente ammissibile {perchè?}
La (41) può essere scritta:
(43)
vs = S w2r0 ≡ S g RCF
dove si è introdotto il coefficiente di sedimentazione S
(44)
S=
2 R 2 (d - d' )
9
h
dove la relazione è “specializzata” per particelle sferiche, oppure, più in generale, dalla
(26b) e (39) che ricordiamo
Fext
b
(26b)
vlim =
(39)
Fext = Vw2r0(d – d’)
e dalla definizione di S (43) si ottiene:
(45)
S=
V (d - d' )
b
Si noti che il coefficiente di sedimentazione dipende solo dalle proprietà della particella e
del liquido.
Dalla (43) si può vedere che le dimensioni di S sono quelle di un tempo (S = vs/w2r0).
Se misurato con l’unità di misura del Sistema Internazionale (s), S risulterebbe assai
piccolo. Si usa generalmente lo svedberg, pari a 10-13s.
A titolo di esempio il coefficiente di sedimentazione S dell’albumina e di un tipico virus
influenzale è (in svedberg) rispettivamente 5 e 7x102.
Usando una centrifuga con una velocità di rotazione pari a 2x104 giri al minuto ed un r0 =
0.2 m, si trova:
RCF ≈ 9 x 104
albumina:
vs ≈ 4 x 10-7 m/s
25
vs ≈ 6 x 10-5 m/s
virus influenzale
???Nel primo caso occorrono più di 40 min perchè il menisco della sospensione si sposti
di un millimetro, nel secondo caso sono sufficienti meno di 20 s.
Si può dimostrare che il coefficiente di attrito viscoso b può essere anche scritto in
funzione della temperatura assoluta T (relazione di Einstein – Stokes):
b=
(46)
RT kT
=
N 0D D
Dove
†
R è la costante dei gas ( R = 8.314 J/K mole)
T è la temperatura termodinamica assoluta
N0 è il numero di Avogadro (N0 = 6.022 x 1022 particelle/mole)
D è il coefficiente di Diffusione
k (= R /N0) è la†costante di Boltzmann (k = 1.381 x 10-23 J/K)
†
Dalla (43) e (46) si può scrivere:
†
(47)
vs = w 2 r0V (d - d')
N 0D
RT
Una centrifuga può essere usata per diversi scopi, ad esempio:
Separare una miscela di “corpuscoli” di diversa densità (centrifuga preparativa);
Analizzare la composizione di una sospensione, ad esempio determinando il peso
molecolare dei diversi componenti (centrifuga analitica).
La provetta si prepara con diversi strati di soluzione con densità crescente dalla cima
verso il fondo (ad esempio soluzioni di acqua e glucosio). Dalle equazioni precedenti si
vede che vs = 0 quando d = d’. Conseguentemente i diversi componenti la miscela
arresteranno la loro sedimentazione in diversi strati della soluzione, separandosi secondo
la densità.
Possiamo riscrivere la (47) ricordando che V = m/d:
(48)
vs = w 2 r0
d - d' N 0 D
m
d
RT
Essendo il peso molecolare pari a mN0:
26
(49)
M ≡ mN 0 =
RT 1 v s
w 2 r0 1- d' D
d
Misurando vs e conoscendo D si può quindi ricavare il peso molecolare M.
27
Elettroforesi
Un altro esempio di applicazione della seconda legge di Newton, attraverso la descrizione
della velocità limite in un mezzo resistivo (velocità di sedimentazione) in termini dei
parametri “microscopici del sistema, è l’elettroforesi.
Questa consiste nella
r migrazione di particelle cariche in sospensione sotto l’azione di un
camopo elettrico E esterno.
Se la carica di una particella è q la forza su di essa è quindi
(50)
r
r
Fe = qE
Assumendo che non vi siano altre forze, a parte l’attrito, agenti sul piano orizzontale,
potremo scrivere
(51)
r
r
Fext = Fe
Tutte le considerazioni fatte precedentemene sono quindi valide se si sostituisce mg’ con
Fe=qE. Dalla (26b):
(52)
vs =
qE
b
oppure, nel caso di particelle sferiche (18b):
(53)
vs =
qE
6 pRh
In pratica si immergono due elettrodi in una soluzione, ad esempio, di molecole proteiche
e si stabilisce una differenza di potenziale ∆V fra di essi. Ricordiamo che il campo
elettrico così generato è
(54)
E=
DV
L
dove L è la distanza fra i due elettrodi. Il campo E è (se si trascurano gli effetti ai bordi)
costante ed uniforme.
Nel caso dell’elettroforesi si introduce la mobilità elettroforetica:
(55)
me =
q
b
28
o, considerando particelle sferiche (18b):
(56)
me =
q
6pRh
e quindi
vs = m e E
Una attenzione particolare va posta nell’eseguire i calcoli numerici. Spesso le unità dei
valori riportati nelle tabelle sono “ibride”. Ad esempio
mm cm
s V
V
E è espresso in
cm
mm
vs è espressa in
s
m e è espresso in
Se si considerano valori tipici
m e = 0.5
mm cm
s V
L = 1 cm
∆V = 20 V
vs = m e E = m e
DV
mm cm 20V
= 0.5
= 10 µm/s
L
s V 1cm
Sfruttando le diverse velocità di migrazione (dovute alle dimensioni delle particelle e alla
loro carica) si possono quindi separare e analizzare quantitativamente le componenti di
una miscela ad esempio di amminoacidi.
29
Richiami di onde
Le dispense relative a questa sezione di corso non sono ancora pronte. Gli studenti sono
pregati di studiare le seguenti nozioni sul libro di testo di fisica dello scorso anno:
Onde trasversali e longitudinali.
Descrizione di un’ onda. Lunghezza d’onda, numero d’onda angolare, numero d’onda,
periodo, pulsazione e frequenza.
La velocità di propagazione dell’onda.
Energia e potenza di un onda in moto. Potenza trasferita.
Il principio di sovrapposizione.
Interferenza.
Onde stazionarie.
Onde acustiche.
Velocità del suono. Onda di pressione.
Interferenza sonora.
Intensità e livello sonoro.
La scala dei decibel.
Effetto Doppler.
30
Ultrasuoni
Sono definiti ultrasuoni quei suoni che hanno una frequenza superiore a quella udibile
dall’uomo. Per convenzione le onde sonore con f > 20 kHz vengono dette ultrasuoni. Si
ricorda che alcuni animali hanno soglie maggiori (cani 40 kHz, pipistrelli 80 kHz, farfalle
170 kHz).
Gli ultrasuoni possono essere generati da cristalli piezoelettrici o, più raramente,
magnetostrittivi. Questi cristalli “traducono” un campo elettrico o magnetico in
oscillazioni meccaniche della stessa frequenza e sono perciò definiti “trasduttori”.
In un cristallo piezoelettrico il campo elettrico periodico che viene applicato tende a
modificare le posizioni molecolari e produce sollecitazioni che a loro volta producono
una variazione periodica di una delle dimensioni del cristallo, cioè una vibrazione, che
genera una onda sonora.
I materiali magnetostrittivi si comportano analogamente sotto l’azione di un campo
magnetico periodico.
Entrambi i tipi di trasduttori hanno un funzionamento reversibile, cioè se sollecitati
meccanicamente a vibrare (per esempio da una onda sonora incidente) questi producono
un campo elettrico, o magnetico, della stessa frequenza, che possono quindi essere
rivelati e utilizzati per misurare le caratteristiche dell’onda incidente.
Vedremo che, considerando che molte delle tecniche ecografiche richiedono brevi
impulsi di onde ultrasonore, questa caratteristica permette di utilizzare un unico
trasduttore per la generazione e la rivelazione, modificando elettronicamente la gestione
del cristallo da generatore durante gli impulsi a rivelatore durante le pause fra gli impulsi.
Si possono generare/ricevere in questo modo onde di frequenza fino all’ordine del GHz
(109"Hz). Questo, in aria, corrisponde ad una lunghezza d’onda in aria pari a circa 3 x 10-7
m (si rcordi che la velocità del suono in aria è circa 340 m/s).
I generatori di ultrasuoni utilizzati in medicina hanno, ad esempio, intensità fra
≈10–4"W/cm2 e ≈102"W/cm2.
A causa di questi ultrasuoni delle differenze di pressioni istantanee dell’ordine di 10
atmosfere possono generarsi in punti distanti qualche decimo di millimetro. Si comprende
quindi come gli ultrasuoni possano dar luogo ad azioni meccaniche intense.
Queste sollecitazioni possono produrre, ad esempio nei liquidi, il fenomeno della
cavitazione. Questo produce delle “bolle” dove si genera un minimo di pressione. La
successiva scomparsa improvvisa di queste bolle, produce un fenomeno violento, che può
essere usato come sistema di pulizia, per frammentare i medicamenti usati nell’aerosol, o
persino per fratturare membrane cellulari e costituenti cellulari quali i cromosomi. Un
altro esempio dell’uso degli ultrasuoni è la litotrizione cioè l’azione frantumatrice di onde
meccaniche ultrasoniche impulsate, usata nella terapia dei calcoli.
L’energia trasportata da una onda ultrasonica si attenua durante il passaggio nel mezzo.
La legge che descrive questo fenomeno è esponenziale:
(1)
I(x) = I0 e-ax
Vedremo che il coefficiente a è proporzionale alla frequenza dell’onda per la maggior
parte dei materiali biologici, fra circa 0.5 MHz e 15 MHz.
31
Flussimetria Doppler
Un uso degli ultrasuoni abbinato all’effetto Doppler, è quello della flussimetria, che ci
permette di misurare in modo non invasivo (senza l’inserimento di sonde meccaniche) la
portata dei vasi sanguigni.
Un trasduttore piezoelettrico trasmette un’onda ultrasonica a frequenza ns verso il vaso. Il
suono viene riflesso principalmente dai globuli rossi, che si stanno allontanando e viene
rivelato dal ricevitore piezoelettrico. Assumendo piccolo l’angolo tra la propagazione
dell’onda ed il vaso sanguigno potremo utilizzare le relazioni apprese la scorsa lezione.
La frequenza n’ con la quale un globulo rosso, in movimento, “percepirebbe” l’onda
emessa dal nostro generatore piezoelettrico è data da (si ricorda che siamo nel caso di
velocità della sorgente nulla, ws = 0, ricevitore che si allontana):
w - wR
w
n' = n
(2)
Dove w è la velocità del suono nel sangue, wR la velocità del “ricevitore” e n la frequenza
di emissione dell’onda alla sorgente. La riflessione si può quindi descrivere come
un’onda da una sorgente in moto (allontanamento) verso un ricevitore fermo (wR = 0):
n "= n '
(3)
w
w + ws
quindi inserendo la frequenza come “percepita” dai globuli rossi (2):
n "= n
(4)
w - wR w
w - wR
=n
w w + ws
w + ws
In questo caso avremo
(5)
†
wR = ws ≡ u
dove con u si è indicata la velocità dei globuli rossi. Inserendo (5) in (4) abbiamo:
(6)
n "= n
Ê
w-u
w -u + u- u
2u ˆ
=n
= n Á1 ˜
w+u
w+u
Ë w + u¯
Cioè la variazione di frequenza è data da:
(7)
Ê
2u ˆ
2u
Dn = n - n "= n - n Á1˜=n
Ë w + u¯
w+u
32
La frequenza di emissione e la variazione di frequenza sono noti. Dalla (7) possiamo
quindi ricavarci u.
2nu - (w + u)Dn = 0
2nu - wDn - uD n = 0
u(2n - Dn ) = wDn
e quindi:
(8)
u=w
Dn
2n - D n
La misura degli echi ultrasonici derivanti dalle riflessioni sulle superfici tessuto-liquido e
viceversa (le pareti dei vasi sanguigni) consente di ottenere il diametro dei vasi stessi.
Conseguentemente, oppurtunamente tarato, il flussimetro doppler fornisce una misura
diretta della portata dei vasi.
33
Ecografia
Dal corso di fisica ricordiamo che quando un’onda raggiunge superfici di separazione fra
mezzi diversi, si osservano i fenomeni della riflessione e della rifrazione (assumendo la
lunghezza d’onda molto più piccola delle dimensioni di tali superfici).
Considerando una incidenza normale, il tempo che l’onda impiega per raggiungere tale
superficie e tornare indietro al rivelatore è ovviamente il doppio di quello impiegato per
raggiungere l’interfaccia. Supponendo di avere due superfici di separazione consecutive,
si può, ad esempio, misurare la distanza dalla sorgente/rivelatore di entrambe le superfici,
e quindi la distanza fra esse.
Si osservi la figura 1. Vi sono rappresentate due superfici di separazione che potrebbero
rappresentare, ad esempio, un vaso sanguigno.
Figura 1
Ponendo un trasduttore piezoelettrico a contatto della pelle nella posizione y0 e generando
con esso un impulso ultrasonoro, posso misurare la distanza del vaso dalla cute (L1) e il
suo spessore (L2-L1) misurando gli echi di ritorno. Focalizziamoci ora sulla coordinata
y"="y0; si osservi la seguente figura (attenzione: la coordinata verticale è ora il tempo!)
Figura 2
34
Con i simboli usati in figura 1 vediamo che:
(9)
(10)
2L1 = vt1
2L2 = vt2
L1 = vt1/2
L2 = vt2/2
fi
fi
ed anche
(11)
∆L = v (t2 – t1) / 2
Dove v è la velocità del suono nel mezzo.
NOTA 1: si osservi che si è trascurata nelle equazioni (10) e (11) la differenza di velocità
del suono tra quella del vaso e quella del tessuto circostante.
L’ampiezza dei segnali riflessi contiene informazioni relative ai tessuti attraversati ed
all’attenuazione durante questo cammino.[vedi (1)]
Quanto illustrato in figura 2 è relativo alla sola coordinata x (la riflessione è normale!).
Cioè stiamo misurando la distanza delle due superfici di separazione lungo la retta y"="y0
ortogonale al nostro generatore/rivelatore. Se volessimo studiare come tali distanze si
modificano sopra o sotto tale retta (lungo ‘y’), dovremmo muovere il
generatore/rivelatore conseguentemente e ripetere la misura ragionando di nuovo come in
figura 2. Così facendo dovremmo osservare una molteplicità di “figure 2” ciascuna per
ogni misurazione. La stessa quantità di informazioni può essere contenuta in una sola
figura in cui l’ampiezza viene codificata in punti di diverso colore, o livelli di grigio, e
ciascuna misura viene riportata sulla stessa figura spostata coerentemente con lo
spostameno del generatore/ricevitore verso l’alto o il basso (figura 2). Osservando come
l’asse temporale sia uguale, a meno di un fattore di scala v/2 [vedi (9) e (10)] all’asse x:
Figura 3
Nel caso in figura 3 vediamo che le due superfici lungo la direzione “y” si muovono
verso il generatore/rivelatore e si avvicinano fra loro, come già sapevamo dalla figura 1.
Abbiamo quindi riprodotto la struttura interna del nostro vaso studiando gli echi
ultrasonici provenienti dalle interfaccie tessuto/vaso.
35
Questa tecnica può ovviamente essere utilizzata per studiare in modo non invasivo il
corpo umano.
Nel seguito si faranno alcune considerazioni legate a questa tecnica con particolare
riguardo alla visualizzazione non invasiva degli organi interni del corpo umano.
Attenuazione
Come accennato in precedenza, quando un ultrasuono si propaga in un mezzo, e quindi
anche nel corpo umano, viene attenuato. L’intensità dell’onda che si propaga, ad sempio
nella direzione x, abbiamo visto decresce esponenzialmente.
(1)
I(x) = I0 e-ax
da cui si possiamo ricavare che
(12)
1 I( x)
a = - ln
x
I0
Visto che i rapporti di ampiezze sono solitamente espressi in dB, il valore di a potrà
scriversi:
(13)
1
I(x)
a(dB cm -1 ) = - 10 log10
x
I0
1 I( x)
= - ln
[10 log10 e]= 4.343 a (cm -1 )
x
I0
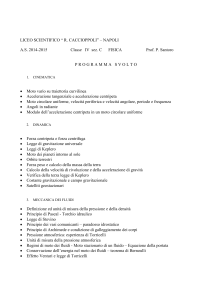
L’attenuazione degli ultrasuoni aumenta con la frequenza. Molti tessuti del corpo
attenuano in modo simile e mostrano una dipendenza con la frequenza quasi lineare (si
veda la figura 3, attenzione alla scala doppio-logaritmica!). Da ciò origina la regola
approssimata che ci dice che per molti tessuti molli:
(14)
a = 1 dB cm-1 MHz-1
36
Attenuazione in funzione della frequenza
Figura 3
È il caso di soffermare l’attenzione sulla (14), in particolare sul fatto che i decibel sono
una unità logaritmica. Può essere utile dalla (14) generare una tabella che dia a in diversi
casi:
Frequenza
(MHz)
a (dB/cm)
1
2
3
5
7
10
1
2
3
5
7
10
riduzione %
di intensità
(1 cm)
21
37
50
68
80
90
riduzione %
di intensità
(5 cm)
68
90
96.8
99.68
99.968
99.9990
Tabella 1
In tabella 1 (colonne 3 e 4) si è fatto uso delle relazioni (1) (13) e (14). Si noti la forte
dipendenza dell’attenuazione con la frequenza dell’onda.
L’intensità dell’ultrasuono si attenua a causa dell’assorbimento o della diffusione.
37
Assorbimento
Una della cause di attenuazione è l’assorbimento: parte dell’energia dell’onda si
trasforma in calore. Questo fenomeno è responsabile, ad esempio, degli aumenti di
temperatura cui fanno riferimento le ipertermie indotte da ultrasuoni.
Ci sono molti meccanismi alla base dell’assorbimento, ma principalmente questi possono
essere raggruppati in tre classi:
- Meccanismi ‘classici’ nei quali sono principalmente coinvolte forze viscose con una
dipendenza con la frequenza vicino a f2. Nel caso di tessuti biologici questi sono ritenuti
contributi minori.
- Rilassamenti molecolari, nei quali le fluttuazioni di temperatura e pressione causano
alterazioni reversibili nella configurazione molecolare. La dipendenza in frequenza è
vicino a f1, o leggermente maggiore. Questi sono ritenuti la causa principale per
l’assorbimento nei tessuti, con l’eccezione di ossa e polmoni (si veda la figura 3).
- Movimenti relativi, indotti dall’onda, di piccoli elementi di tessuto sono anche
considerati potenzialmente importanti. Questi possono avere una dipendenza con la
frequenza tra f1 e f2.
Si può aggiungere, inoltre, che ad un maggiore contenuto di proteine o minore contenuto
di acqua nei tessuti è solitamente associato con un maggiore assorbimento.
Diffusione
Le strutture nel corpo che possono produrre diffusione degli ultrasuoni sono di
dimensioni estremamente varie. Vanno dalle cellule (10 µm, circa 0.03l a 5 MHz, dove
si è usato vsuono = 1.7 x 103 m/s) alle superfici degli organi (ordine dei 10 cm, circa 300l a
5 MHz). C’è quindi un ‘range’ di ben 4 ordini di grandezza! Ovviamente diversi tipi di
diffusione occorrono a diversi livelli di strutture, vedi tabella che segue.
scala
dipendenza in
frequenza
diffusione
esempi
>> l, regione geometrica,
riflessione, rifrazione
f0 (nessuna dipendenza)
forte
≈ l, regione stocastica,
diffrazione
variabile
Media
<< l, regione di
“Rayleigh”
f4
Debole
Diaframma, vasi sanguigni
grandi, interfaccia tessuto
molle/osso, cisti …
E’ una componente di
diffusione presente in
molte situazioni
sangue
Tabella 2
Come ricordato sopra, nella regione geometrica - ad esempio l’interfaccia fra due mezzi
omogenei - la diffusione viene descritta dalle note leggi della riflessione e rifrazione.
Nel corpo non ci sono piani o superfici levigate, si può comunque osservare come, ad
esempio, il diaframma agisca in qualche modo come uno specchio, e talvolta possa
causare nella regione dei polmoni una seconda immagine di strutture che si trovano nel
38
fegato. Altre strutture, come cisti, o lo stesso occhio, producono rifrazioni che possono
essere ben descritti dall’ottica geometrica.
Come ci si aspetta, superfici di separazione tra tessuti caratterizzati da una grande
differenza in velocità del suono (vedi tabella 3) determinano i maggiori coefficienti di
riflessione R (vedi tabella 4). Quindi i polmoni attenuano molto (l’interfaccia ariapolmone produce una forte riflessione), e gli ultrasuoni penetrano con difficoltà ossa o
aria (e non sono in grado di visualizzare le strutture successive) come nei polmoni oppure
nel tratto gastrointestinale.
In termini qualitativi e generali possiamo dire che l’ecografia è una tecnica con una
elevata abilità di descrivere i confini tra tessuti con diverse velocità del suono.
Mezzo
velocità del suono (km/s)
Aria
Polmoni
Altri tessuti
Ossa
.34
1
1.4–1.7
3–4
Tabella 3
Superfici di separazione
R{10log10(R/Rperf)} dB
Air/solid
Tendini/grasso
Acqua/muscolo
Grasso/acqua
Muscolo/sangue
Muscolo/fegato
Reni/fegato
Sangue/cervello
≈0
≈ -20
≈ -26
≈ -29
≈ -31
≈ -37
≈ -42
≈ -50
Tabella 4
Si noti che le considerazioni fatte sopra ci fanno capire la motivazione dell’uso di gel per
interfacciare il generatore dell’ultrasuono con la pelle del soggetto in misura. Questo
serve infatti ad evitare una interfaccia aria/pelle che causerebbe una riflessione quasi
totale dell’ultrasuono ed una conseguente attenuazione drastica del segnale utilizzabile.
Le interazioni raggruppate nella regione stocastica sono predominanti nelle regioni
interne degli organi. In questa classe vengono descritte anche le interazioni su superfici
ruvide di organi estesi. Questa particolare classe di diffusione accompagna quindi spesso
tutti i processi diffusivi.
Nella regione di Rayleigh sono descritte interazioni degli ultrasuoni su cellule (per
esempio globuli rossi). L’intensità dello scattering è molto debole e segue un andamento
f4 .
39
La risoluzione
La risoluzione, sia assiale che laterale, ci descrive la distanza più piccola fra due oggetti
che può essere rivelata (nelle due direzioni).
La risoluzione assiale ha un limite teorico, stabilito dalla lunghezza d’onda
dell’ultrasuono. Come è facile intuire, comunque, due interfacce non possono essere
distinte se la loro distanza è minore della lunghezza dell’impulso utilizzata. Si noti che a
lunghezze d’onda minori (e quindi frequenze maggiori) possono anche corrispondere
impulsi di lunghezza minore, considerando che un impulso deve contenere almeno un
certo numero di lunghezze d’onda.
La risoluzione laterale è invece la capacità di distinguere strutture che giacciono su una
linea ortogonale alla propagazione dell’onda. Conseguentemente tale risoluzione sarà
limitata dalla dimensione del fascio: tanto più questo è sottile, tanto più sarà possibile
distinguere oggetti vicini. La collimazione del fascio dipende sia dal diametro del
cristallo che lo produce (minore il diametro, migliore la collimazione) che dalla
frequenza (maggiore la frequenza, migliore la collimazione).
Quindi in entrambe le direzioni una maggiore frequenza rende possibile una migliore
risoluzione. Considerando la maggiore attenuazione all’aumentare della frequenza, si
comprende come sia necessario un compromesso nella scelta della frequenza e
dell’intensità dell’ultrasuono.
Infatti una frequenza alta che migliora la risoluzione, si accompagna ad una attenuazione
molto maggiore (si ricordi che la figura 3 è in scala doppio logaritmica). In questo caso si
desidera una intensità iniziale molto alta per poter ‘vedere’ in profondità (e questo è
maggiormente vero se si considerano tutti i rumori ed i disturbi legati a questo tipo di
misura). Intensità di ≈ 80 W/cm2 divengono quindi necessarie. Ma dobbiamo tenere
presente anche le considerazioni che facevamo inizialmente sulla pericolosità degli
ultrasuoni. È quindi per evitare danneggiamenti ai tessuti (20 W/cm2 ad 1 MHz possono
già essere pericolosi) che si usa quindi una tecnica pulsata. Ad esempio 200 pulsazioni al
secondo di 5 µs l’una, comporta un tempo totale di trasmissione pari a 10-3 s e quindi gli
80 W/cm2 corrispondono ad una potenza dissipata nell’organismo di 0.08 W/cm2, al di
sotto del limite di pericolosità.
Come già accennato, la tecnica impulsata consente, fra l’altro, di utilizzare lo stesso
strumento (ad esempio un cristallo piezoelettrico) come generatore (durante l’emissione
degli impulsi) e come rivelatore (durante i periodi tra gli impulsi).
40
Richiami di ottica
Le dispense relative a questa sezione di corso non sono ancora pronte. Gli studenti sono
pregati di studiare le seguenti nozioni sul libro di testo di fisica dello scorso anno, e sugli
appunti presi a lezione:
Riflessione e rifrazione
Dispersione cromatica
Interferenza
Principio di Huygens
Diffrazione
Esperimento di Young
Intensità dell’interferenza da una doppia fenditura
Interferenza su pellicole sottili
Diffrazione
Diffrazione attraverso un foro circolare
Potere risolvente – Criterio di Rayleigh
Diffrazione da una doppia fenditura
Reticolo di diffrazione
Dispersione e potere risolvente per un reticolo
Diffrazione a raggi X
Spettrofotometria
41